Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO
CENTRO TECNOLÓGICO DEPARTAMENTO DE ENGENHARIA ELÉTRICA
PROJETO DE GRADUAÇÃO
Balanço técnico entre cascatas subsíncronas e inversores de frequência para controle de velocidade de motores de média tensão
FRANCO QUELUCCI VALE
VITÓRIA – ES Julho/2011
FRANCO QUELUCCI VALE
Balanço técnico entre cascatas subsíncronas e inversores de frequência para controle de velocidade de motores de média tensão
Parte manuscrita do Projeto de Graduação do aluno Franco Quelucci Vale, apresentado ao Departamento de Engenharia Elétrica do Centro Tecnológico da Universidade Federal do Espírito Santo, para obtenção do grau de Engenheiro Eletricista.
VITÓRIA – ES Julho/2011
FRANCO QUELUCCI VALE
Balanço técnico entre cascatas subsíncronas e inversores de frequência para controle de velocidade de motores de média tensão
COMISSÃO EXAMINADORA: ___________________________________ Wilson Correia Pinto de Aragão Filho, D. Sc. Orientador ___________________________________ Gilberto Costa Drumond Souza, Ph. D. Examinador ___________________________________ Flávio Ferro, Engenheiro Eletricista Examinador
Vitória - ES, 10, Julho, 2011

4
DEDICATÓRIA
A toda minha família e todos aqueles que me passaram força e confiança.

5
AGRADECIMENTOS
Agradeço a Deus pela paciência e determinação para cumprimento deste
trabalho.
Agradeço ao engenheiro Thiago Vasconcelos da Vale pela escolha deste
tema para projeto, assim como todos os engenheiros e técnicos também da Vale
com quem adquiri diversos conhecimentos sobre este assunto durante meu estágio.
Agradeço ao meu professor orientador por se comprometer a me ajudar
nessa tarefa.
Agradeço a minha família pela confiança em todo tempo.
6
LISTA DE FIGURAS
Figura 1.1 - Sistema VARIBLOC para variação de velocidade .............................. 17
Figura 1.2 - Sistema de variação por variador Hidráulico.............................................18
Figura 1.3 - Variador eletromagnético .........................................................................19
Figura 1.4 - Esquemático básico de um inversor de freqüência ..................................20
Figura 1.5 - Modelo genérico do inversor de freqüência...............................................21
Figura 1.6 - Circuito básico de uma cascata subsíncrona.............................................22
Figura 1.7 - Cascata subsíncrona ................................................................................22
Figura 2.1 - Cicloconversor monofásico de 3 pulsos e sua forma de onda.................24
Figura 2.2 - Ponte retificadora a diodo e forma de onda retificada................................26
Figura 2.3 - Retificador controlado a tiristor e forma de onda de saída.........................27
Figura 2.4 - Circuito VSI.................................................................................................28
Figura 2.5 - Circuito CSI.................................................................................................29
Figura 2.6 - Circuito inversor...........................................................................................32
Figura 2.7 - Ondas senoidal e triangular para geração do PWM....................................33
Figura 2.8 - Geração de PWM para um sistema 3φ ......................................................34
Figura 2.9 - Variação de tensão e frequência para controle de velocidade....................37
Figura 2.10 - Região de enfraquecimento de campo......................................................37
Figura 2.11 - Variação da potência em relação à variação da frequência......................38
Figura 2.12 - Visão ortogonal entre campo e armadura da máquina CC.......................39
Figura 2.13 - Expressão do torque para motores de corrente contínua.........................39
Figura 2.14 - Tranformação de 3φ -> 2φ e geração de ��� e ���....................................40
Figura 2.15 - Expressão do torque para controle vetorial...............................................40
Figura 2.16- Diagrama vetorial para variáveis do motor de indução após tranformada
........................................................................................................................................40
Figura 2.17 - Equivalente do motor de indução.............................................................41
Figura 2.18 - Inversor CSI controlado a SCR e sem PWM.............................................42
Figura 2.19 - Inversor CSI controlado à GTO.................................................................43
Figura 2.20 - Inversor de 2 níveis controlado à IGBT.....................................................43
Figura 2.21 - Inversores de 3 níveis à IGCT e IGBT respectivamente...........................44
Figura 2.22 - Detalhe de um sistema multinível com vários enrolamentos secundários e
detalhe de uma célula de potência.................................................................................44
7
Figura 2.23 - Combinação de células de potência para formação de média tensão...45
Figura 3.1- Cascata elétrica com retificação por conversor rotativo..............................48
Figura 3.2 - Controle de velocidade com circuito de rotor chopper................................49
Figura 3.3 - Cascata subsíncrona...................................................................................51
Figura 3.4 - Cascata subsíncrona (Megadrive cascade)................................................54
Figura 3.5 - Detalhes do circuito de retificação ............................................................55
Figura 3.6 - Detalhes do circuito inversor.......................................................................55
Figura 3.7 - Relação torque/velocidade com controle do ângulo (α) de disparo...........55
Figura 3.8 - Detalhes do sistema de controle da cascata..............................................57
Figura 4.1 - Inversor de frequência de média tensão Robicon da Siemens.................62
Figura 4.2 - Visão interna da cascata subsíncrona utilizada pela Vale..........................63
Figura 4.3 - Levantamento de paradas (quantidade) dos conversores de média tensão
nos últimos anos. ..........................................................................................................64
Figura 4.4 - Efeito de harmônicos nos retificadores de 6, 12 e 24 pulsos.....................66
Figura 4.5 - Comparação do efeito dos harmônicos de 5ª e 7ª ordem em retificadores
de 6 e 12 pulsos.............................................................................................................67
Figura 4.6 - Diagrama unifilar do filtro sintonizado de harmônicos................................68
Figura 5.1 - Detalhe dos anéis coletores do motor de indução de rotor bobinado.......72
Figura5.2 - Fluxo de potência na cascata subsíncrona e no motor de indução.
........................................................................................................................................76

8
LISTA DE TABELA
Tabela 4.1 – Características dos drives Inversor de freqüência de média tensão e
cascata subsíncrona...............................................................................................70
Tabela 5.1 - Levantamento de falhas na Cascata subsíncrona..............................73

9
SIMBOLOGIA
A= ampère
Hz= hertz
r.p.m.= rotações por minuto
V= volts
VA= volt ampére
W= watts
10
GLOSSÁRIO
CSI- Current source inverter (inversor de corrente imposta)
GTO – Gate turn off thyristor (tiristor comutável pelo gatilho)
IGBT – Insulated gate bipolar transistor (transistor bipolar com gatilho isolado)
IGCT – Integrated gate commutated thyristor (tiristor comutável com gatilho
integrado)
PWM – Pulse width modulation (modulação por largura de pulso)
SCR – Silicon controlled rectifier (retificador controlado a silício)
SGCT – Symmetrical gate commutated thyristor (tiristor comutável com gatilho
simétrico)
THD - Total harmonic distortion (distorção harmônica total)
VSI - voltage source inverter (inversor de tensão imposta)

11
SUMÁRIO
DEDICATÓRIA................................................................................................... 4
AGRADECIMENTOS......................................................................................... 5
LISTA DE FIGURAS.......................................................................................... 6
LISTA DE TABELA............................................................................................ 8
SIMBOLOGIA..................................................................................................... 9
GLOSSÁRIO........................................................................................................ 10
SUMÁRIO............................................................................................................ 11
RESUMO.............................................................................................................. 14
1 INTRODUÇÃO................................................................................................. 15
1.1 Histórico ....................................................................................................16
1.1.1 Variadores mecânicos ........................................................................16
1.1.2 Variadores hidráulicos.............................................................................17
1.1.3 Variadores eletromecânicos....................................................................18
1.1.4 Variadores eletroeletrônicos....................................................................19
1.2 Aspectos construtivos e de funcionamento ...............................................20
1.2.1 Inversor de frequência ............................................................................20
1.2.2 Cascata subsíncrona ..............................................................................21
1.3 Objetivo do trabalho ..................................................................................23
2 INVERSOR DE FREQUÊNCIA.......................................................................24
2.1 Conversores de frequência.........................................................................24
2.2 inversor de frequência ..............................................................................25
2.2.1 O funcionamento.....................................................................................25
2.2.2 Retificadores controlados e não controlados...........................................25
2.2.3 Link DC....................................................................................................27
2.2.3.1 Tensão imposta (VSI)...........................................................................28
2.2.3.2 Corrente Imposta (CSI).........................................................................28
2.2.4 Harmônicos em motores de indução.......................................................29
2.2.5 Parte Inversora........................................................................................32
2.2.5.1 Modulação por largura de pulso (PWM)...............................................32
2.2.6 Controle de velocidade ...........................................................................34
12
2.2.6.1 Controle escalar ...................................................................................36
2.2.6.2 Controle vetorial ...................................................................................38
2.2.7 Inversor de frequência de média tensão .................................................42
2.2.7.1 Topologias ............................................................................................42
2.2.8 Controle(comando) do inversor de frequência de média tensão ......... .46
2.3 Aplicação em foco ......................................................................................46
2.4 Resumo........................................................................................................46
3 CASCATA SUBSÍNCRONA ..............................................................................48
3.1 O funcionamento..........................................................................................48
3.1.1 Sistema rotativo de conexão cascata........................................................48
3.1.2 Controle estático pela resistência rotórica ...............................................49
3.1.3 Circuito da cascata subsíncrona ..............................................................50
3.1.3.1 Harmônicos na cascata subsíncrona ....................................................53
3.1.4 Cascata subsíncrona de média tensão(MEGADRIVE CASCADE).........53
3.1.5 Proteção e controle ..................................................................................56
3.1.5.1 Sistema de controle ...............................................................................56
3.1.5.1.1 Controle em malha (loop) aberta ........................................................57
3.1.5.1.2 Controle em malha (loop) fechada.............. .......................................57
3.1.5.1.3 Proteção e monitoramento..................................................................58
3.2 Aplicação em foco........................................................................................58
3.3 Resumo ......................................................................................................59
4 ESTUDO COMPARATIVO................................................................................60
4.1 Introdução ....................................................................................................60
4.2 Sobre a empresa ..........................................................................................60
4.3 Comparação .................................................................................................61
4.3.1 Aspectos construtivos e valores de carga .................................................61
4.3.2 Manutenções preventivas e corretivas ......................................................63
4.3.3 Variação de velocidade .............................................................................65
4.3.4 Harmônicos ...............................................................................................65
4.3.5 Dispositivos de chaveamento ....................................................................68
4.3.6 Considerações (tabela de Comparação) ...................................................69

13
5 ANÁLISE DE UM PROBLEMA PRÁTICO OCORRENDO COM A
CASCATA SUBSÍNCRONA..................................................................................72
5.1 Introdução ...................................................................................................72
5.2 Relatório de falhas .....................................................................................73
5.2 Análise técnica dos problemas com a cascata subsíncrona........................75
6 CONCLUSÕES.....................................................................................................79
ANEXO - CONTROLE (COMANDO) DO INVERSOR DE FREQUÊNCIA DE
MÉDIA TENSÃO ....................................................................................................80
REFERÊNCIAS BIBLIOGRÁFICAS.................................................................. 84
14
RESUMO
Considerando a grande aplicabilidade dos motores elétricos nos
processos industriais e a necessidade de otimização de suas funções tanto para
efeitos de produção quando para economia de energia elétrica, o estudo de
melhores técnicas de acionamento tem se tornado significativo.
O objetivo deste trabalho visa a comparar duas tecnologias existentes
para acionamento e controle de velocidade de motores de indução de média
tensão: o inversor de freqüência e a cascata subsíncrona.
Serão levantadas informações referentes à tecnologia desses
equipamentos e suas vantagens e desvantagens numa certa aplicação industrial.
15
1 Introdução
Atualmente, 70% da energia elétrica produzida pelo homem é consumida por
parques industriais. Deste total, 50% são consumidos por motores elétricos, dando a
estes uma certa importância neste aspecto.
Com o passar do tempo nas plantas industriais houve uma crescente
necessidade de otimização dos processos, necessidade aliada à sustentabilidade e
eficiência energética.
Antigamente, dos motores elétricos encontrados nas indústrias os de
corrente continua recebiam uma certa preferência. Por apresentar facilidades para
se trabalhar com velocidades e torques variáveis por exemplo, a demanda por essas
máquinas era bem maior comparada a dos motores de corrente alternada.
Entretanto certas características construtivas dos motores CC , como a
presença de comutadores e escovas sempre exigiram atenção no que diz respeito a
manutenção. Estas peças sofrem constantemente com desgastes e por gerarem
centelhas, são inviáveis em ambientes sensíveis a explosão, por exemplo.
Os motores de corrente alternada, ou de indução, destacam-se dos de
corrente continua por serem mais leves, mais baratos e construtivamente mais
simples à manutenção. Mas referente a suprir cargas com velocidade variável
sempre levou desvantagem pela certa complexidade exigida.
Com o desenvolvimento da eletrônica de potência e surgimento de
dispositivos semicondutores de potência como o IGCT e GTO que podem operar
cargas elevadíssimas, o acionamentos dessas máquinas se tornou mais simples.
Neste trabalho será comparada a tecnologia do inversor de freqüência assim
como da cascata subsíncrona no que diz respeito ao controle de velocidade dos
motores de indução de média tensão.
16
1.1 Histórico
Em aplicações industriais pode-se dizer que o rendimento dos motores
elétricos em relação ao acionamento de suas carga é da ordem de 85% (motores de
pequena potência). Isto é, 15% da energia elétrica produzida é transformada em
perdas nos motores, dando uma certa importância econômica à questão do
acionamento. Existem atualmente diversos tipos de conversores utilizados para
acionamento e controle de velocidade de motores, tanto de corrente contínua(CC)
quando de corrente alternada(CA), visando eficiência de operação e economia de
energia. Com o passar do tempo o desenvolvimento dos dispositivos eletrônicos e
de potência permitiram um grande avanço nessa área. Em relação ao controle de
velocidade e torque, em um motor CC, esses parâmetros podem ser reajustados
independentemente pela corrente de armadura (rotor) e pelo fluxo de magnetização
(estator), o que permite grande precisão. Nos motores CA, foi desenvolvido o
controle escalar, que controla velocidade e torque pela relação tensão por
freqüência(V/F), e o controle vetorial, onde a corrente de campo (fluxo magnético) e
a corrente rotórica tornam-se ortogonais pela decomposição da corrente estatórica,
e assim se obtêm características similares ao acionamento das máquinas CC.
Historicamente, pode-se dizer que o acionamento e o controle de velocidade
de motores elétricos evoluíram, passando pelas seguintes tecnologias :
- Variadores mecânicos
- Variadores hidráulicos
- Variadores eletromecânicos
- Variadores eletroeletrônicos
1.1.1 Variadores mecânicos
Foram os primeiros sistemas de variação de velocidade de motores elétricos
conhecido. São sistemas simples de serem construídos, além de serem baratos. São
ainda utilizados no mercado em processos que necessitam de pequenas variações
de velocidade ou apenas ajuste para uma velocidade diferente das velocidades
nominais dos motores.
17
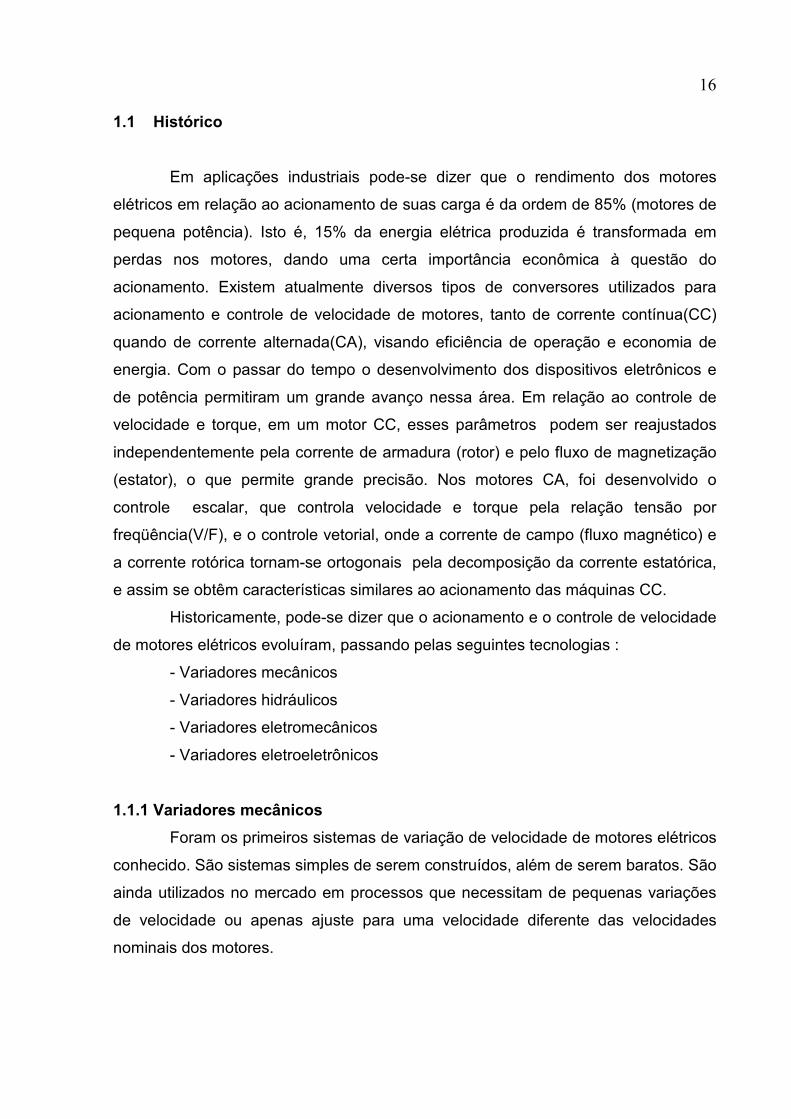
Um método conhecido de variador é o utilizado pelo VARIBLOC, conforme
detalhes na figura 1.1. O VARIBLOC um sistema mecânico que utiliza polias pré-
ajustáveis e correias em “V” que possibilitam a variação da velocidade final do
conjunto motor elétrico e sistema mecânico redutor.
Fig1.1- Sistema VARIBLOC para variação de velocidade
Detalhes da figura :
1- Dispositivo angular de variação 2- Polias ajustáveis 3- Correias em V 4- Tampa do rolamento com furo roscado M12X1 5- Meia carcaça do variador 6- Redutor final 7- Flange de saída 8- Motor de acionamento
1.1.2 Variadores hidráulicos ou hidrodinâmicos
Pode-se exemplificar o funcionamento do variador hidráulico da seguinte
maneira. Caso fosse colocado um ventilador ligado de frente para um outro
desligado, o fluxo de ar gerado pelo primeiro ventilador acionaria o segundo, e caso
não existisse perdas nesse processo, o segundo ventilador rodaria com a mesma
rotação do primeiro. Caso se coloque uma folha de papelão entre os dois
ventiladores, pode-se aumentar ou diminuir a velocidade do segundo ventilador

18
conforme se desejasse. O funcionamento dos variadores hidráulicos é feito desta
mesma forma, no entanto, em vez de ar usa-se óleo como fluido, e em vez de
hélices, são usados discos aletados que são alojados em uma caixa fechada,
montados sobre dois eixos independentes conforme é mostrado na figura 1.2.
Dentro da caixa é colocado óleo até um nível determinado[1].
Fig1.2- Sistema de variação por variador Hidráulico[1].
1.1.3 Variadores eletromagnéticos
Os Variadores Eletromagnéticos podem ser refrigerados a ar ou a água, e a
velocidade é ajustável segundo um sistema de correntes parasitárias. Existem três
formas construtivas de variador: Com duas pontas de eixo, onde um variador é
acoplado indiretamente ao motor através de acoplamento ou polia, com motor
flangeado, onde o variador é acoplado diretamente ao motor e Integral, onde o
variador e motor formam um único conjunto. Este tipo de forma construtiva tem
limitações e é utilizado normalmente em equipamentos de potências inferiores a
20CV,raras são as exceções.
Os variadores eletromagnéticos são uma combinação de um motor de
indução CA tipo gaiola de esquilo, de velocidade constante e um sistema de
velocidade variável com flange ou eixo de entrada para acoplamento do motor, com
bobina de campo estacionária funcionando sob o princípio de correntes parasitárias.
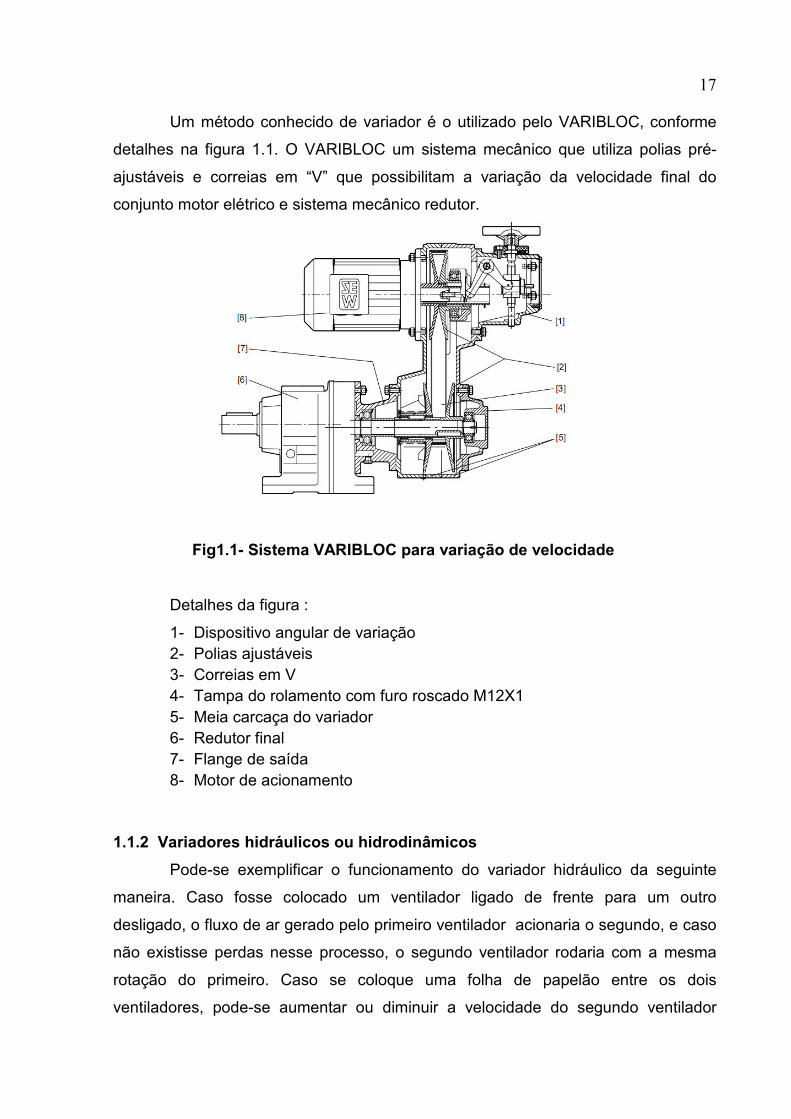
Os variadores de velocidade eletromagnéticos são de escorregamento
ajustável, isto é, o controle de velocidade de saída é feito mediante um módulo
19
conversor CA-CC que energiza a bobina de campo do variador. Controlando os
níveis de tensão da fonte CC, regula-se a velocidade mínima até a máxima. A figura
1.3 ilustra um exemplo deste variador [2].
Fig1.3- Variador eletromagnético
1.1.4 Variadores eletroeletrônicos
Os variadores eletroeletrônicos, que são tema do trabalho, se
desenvolveram gradativamente com a evolução dos semicondutores de potência
como Tiristores, IGCT, GTO. Em geral utilizam uma eletrônica de potência especifica
para acionamento dos respectivos motores elétricos de corrente continua como de
corrente alternada, cada qual projetado para diversos interesses e aplicações.
Alguns conversores são projetados apenas para atender partida de motores
como os soft-startes, outros para partida e gerenciamento de cada estagio de
velocidade como os inversores de freqüência.
Uma visão mais abrangente como os variadores eletroeletrônicos atuam em
suas respectivas cargas será abordada com o decorrer deste trabalho.
20
1.2 Aspectos construtivos e de funcionamento
1.2.1 Inversor de freqüência
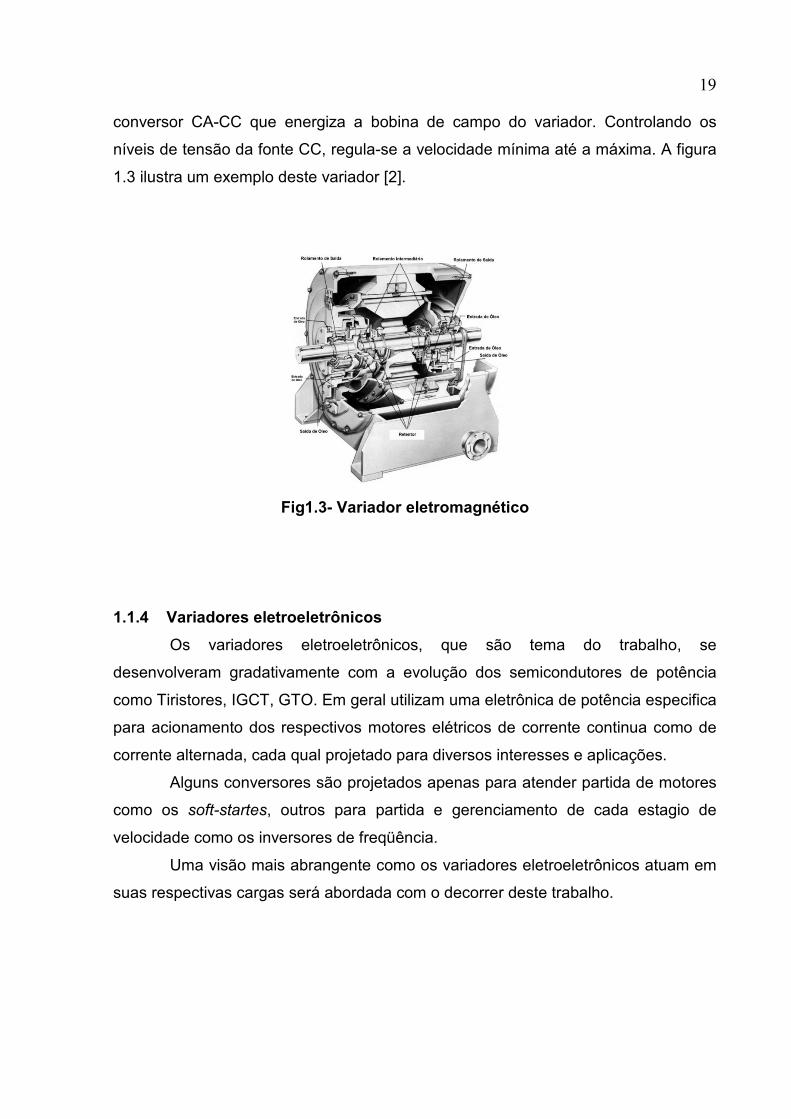
O inversor de freqüência é um conversor estático de freqüência que utiliza
tensão e frequência da rede de alimentação para gerar uma nova forma de onda de
tensão com valor eficaz e freqüência pré-ajustáveis para suas cargas, no caso
motores elétricos assíncronos (indução, de gaiola de esquilo) ou motores síncronos.
Na maioria dos casos, os motores de indução são os mais utilizados, desta forma
eles serão a principal carga neste trabalho.
Para tal feito ele realiza uma conversão inicial CA-CC através de pontes
retificadoras, e posteriormente outra CC- CA através de um circuito inversor.
Desta forma, pode-se dizer que o inversor de frequência resume-se de
acordo com a figura 1.4:
Fig1.4- Esquemático básico de um inversor de freqüência.
A parte retificadora como já dito, é responsável por transformar o sinal
alternado da rede em contínuo, e realiza esta tarefa de maneira controlada ou não
controlada, dependendo necessariamente dos dispositivos de potência (tiristores ou
diodos) que serão utilizados para tal.
O link DC é a parte intermediária do inversor de freqüência,e que apresenta
o sinal contínuo que será convertido para um sinal CA com tensão e freqüência pré-
ajustáveis. Este Link DC pode ser uma fonte de tensão ou uma fonte de corrente,
dependendo da tecnologia implantada.
A parte inversora (circuito inversor) propriamente dita utiliza tiristores ou
transistores de potência para geração de tensão e freqüência alternadas. Para tanto
21
possui um sistema de controle microprocessado que calcula a lógica de
chaveamento dos semicondutores. Um detalhe curioso é que o termo “inversor de
frequência” trata-se apenas do circuito inversor deste conversor de frequência, mas
por vicio de linguagem, com o tempo passou a se referir a todo o conjunto
retificador, link DC e inversor.
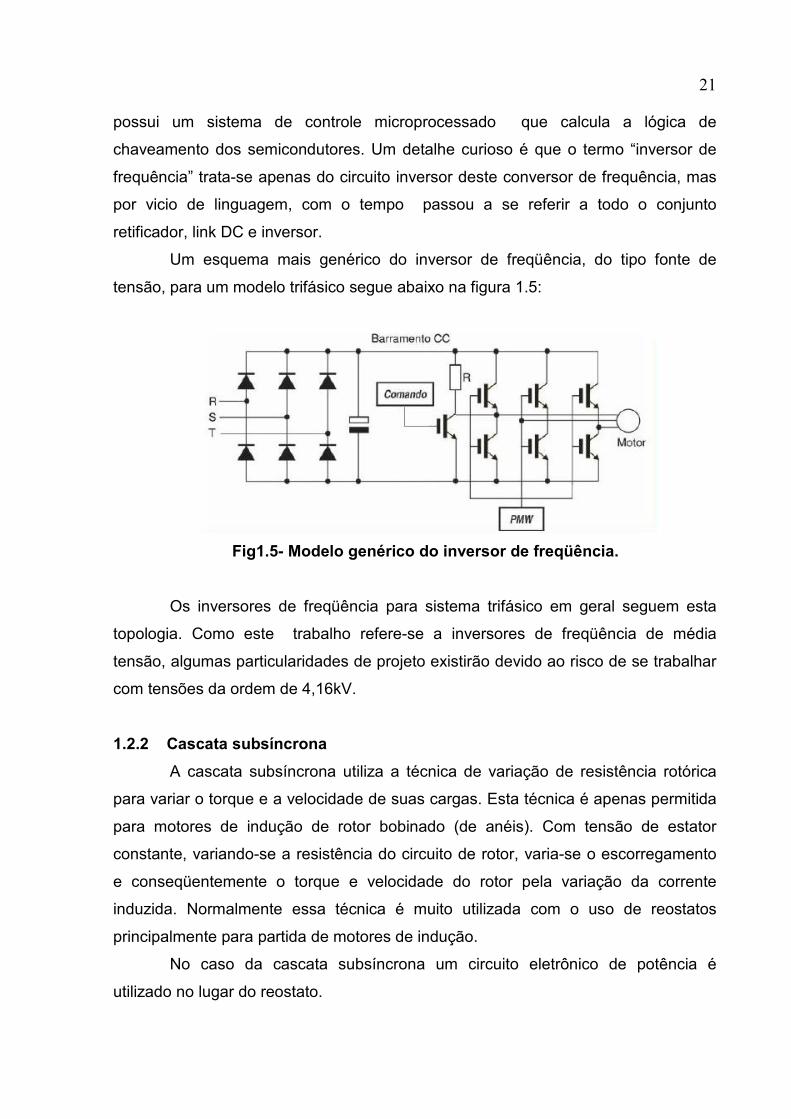
Um esquema mais genérico do inversor de freqüência, do tipo fonte de
tensão, para um modelo trifásico segue abaixo na figura 1.5:
Fig1.5- Modelo genérico do inversor de freqüência.
Os inversores de freqüência para sistema trifásico em geral seguem esta
topologia. Como este trabalho refere-se a inversores de freqüência de média
tensão, algumas particularidades de projeto existirão devido ao risco de se trabalhar
com tensões da ordem de 4,16kV.
1.2.2 Cascata subsíncrona
A cascata subsíncrona utiliza a técnica de variação de resistência rotórica
para variar o torque e a velocidade de suas cargas. Esta técnica é apenas permitida
para motores de indução de rotor bobinado (de anéis). Com tensão de estator
constante, variando-se a resistência do circuito de rotor, varia-se o escorregamento
e conseqüentemente o torque e velocidade do rotor pela variação da corrente
induzida. Normalmente essa técnica é muito utilizada com o uso de reostatos
principalmente para partida de motores de indução.
No caso da cascata subsíncrona um circuito eletrônico de potência é
utilizado no lugar do reostato.
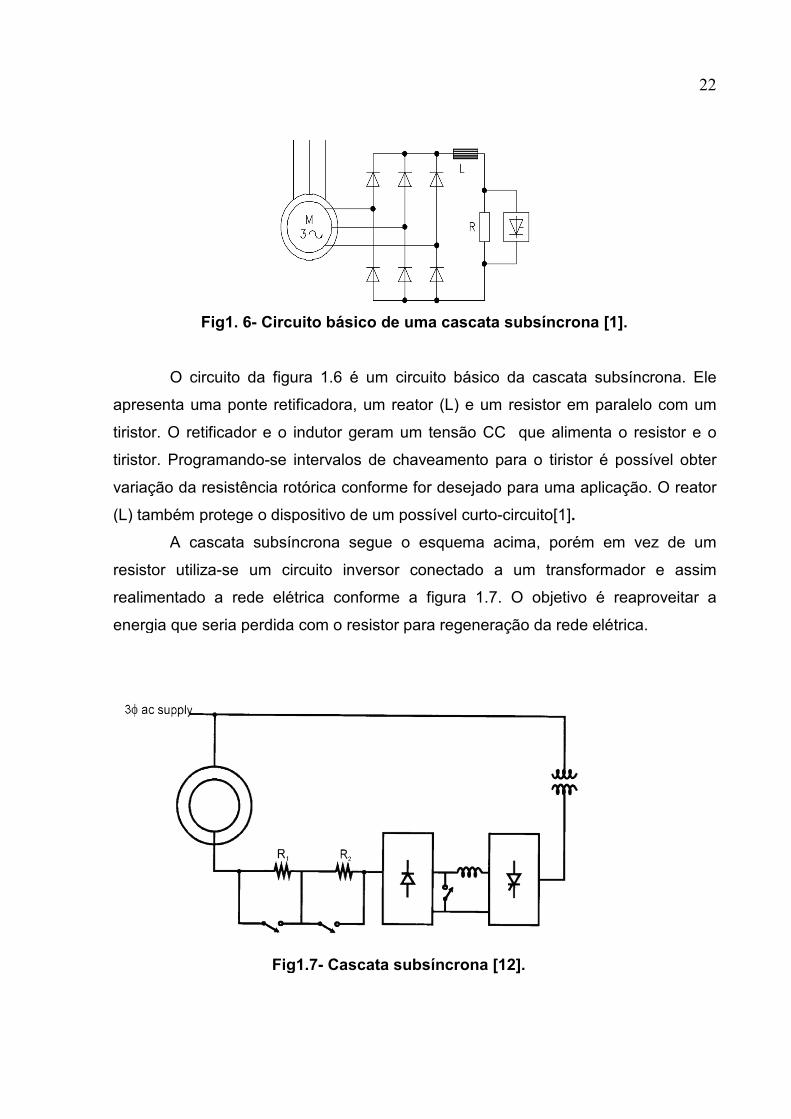
Fig1. 6- Circuito básico
O circuito da figura
apresenta uma ponte retificadora, um reator
tiristor. O retificador e o indutor geram um tensão CC que alimenta o resistor e
tiristor. Programando-se intervalos de chaveamento para o
variação da resistência rotórica conforme for desejado para uma aplicação.
(L) também protege o dispositivo de um possível curto
A cascata subsíncrona segue o e
resistor utiliza-se um circuito inversor conectado a um transformador e assim
realimentado a rede elétrica
energia que seria perdida c
Fig
Circuito básico de uma cascata subsíncrona
circuito da figura 1.6 é um circuito básico da cascata subsíncrona. Ele
apresenta uma ponte retificadora, um reator (L) e um resistor em paralelo com um
tiristor. O retificador e o indutor geram um tensão CC que alimenta o resistor e
se intervalos de chaveamento para o tiristor é possível obter
variação da resistência rotórica conforme for desejado para uma aplicação.
(L) também protege o dispositivo de um possível curto-circuito[1].
A cascata subsíncrona segue o esquema acima, porém em vez de um
se um circuito inversor conectado a um transformador e assim
realimentado a rede elétrica conforme a figura 1.7. O objetivo é reaproveitar a
energia que seria perdida com o resistor para regeneração da rede
Fig1.7- Cascata subsíncrona [12].
22
de uma cascata subsíncrona [1].
da cascata subsíncrona. Ele
(L) e um resistor em paralelo com um
tiristor. O retificador e o indutor geram um tensão CC que alimenta o resistor e o
tiristor é possível obter
variação da resistência rotórica conforme for desejado para uma aplicação. O reator
.
squema acima, porém em vez de um
se um circuito inversor conectado a um transformador e assim
. O objetivo é reaproveitar a
da rede elétrica.

23
A cascata subsíncrona aciona motores de indução a anéis da ordem de
4.16kV. Detalhes mais específicos e relevantes serão melhores apresentados
posteriormente.
1.3 Objetivo do trabalho
Essas duas tecnologias para acionamento e controle de velocidade de
motores de indução de média tensão são utilizadas pela empresa Vale nas suas
usinas de pelotização para acionamento dos motores de média tensão que
alimentam os ventiladores do fornos. São equipamentos de extrema importância
para o processo pois qualquer dano e imprevisto de ambos geram perdas de
produção com custos bem significativos. As cascatas subsíncronas utilizadas foram
adquiridos da ABB e tratam-se de equipamentos bem antigos e a sua utilização
andou sendo questionada pelos engenheiros da Vale responsáveis por manutenção
devido a alguns transtornos que tem gerado. Os inversores de freqüência de média
tensão são tanto das empresas ABB como SIEMENS, e apresentam particularidades
de projeto devido isto. Como são equipamentos mais novos no mercado geram um
certo conforto ao cliente como em caso de se adquirir peças para reposição e outras
vantagens. O objetivo deste trabalho é não só apresentar as duas tecnologias, mas
obter uma conclusão do melhor equipamento a ser utilizado nesta aplicação, assim
como levantar argumentos que sejam eficazes para uma possível substituição.

24
2 - Inversor de frequência
2.1 Conversores de frequência
Um conversor de frequência estático é um equipamento responsável por
transformar uma forma de onda com tensão e frequência fixas em outra forma de
onda com tensão e freqüência pré-estabelecidas para um determinado motor
elétrico. Os conversores de freqüência estáticos podem operar por conversão direta,
como nos cicloconversores, ou por conversão indireta, como nos inversores de
frequência onde há existência de um circuito intermediário [3].
A conversão direta é considerada conversão CA-CA, nela a tensão e
freqüência comutada é obtida diretamente do sinal de rede. Neste método de
conversão a freqüência gerada será sempre menor que a freqüência da rede. A
figura 2.1 ilustra o circuito de um cicloconversor e sua forma de onda gerada a partir
da rede respectivamente.
Fig2.1- Cicloconversor monofásico de 3 pulsos e sua forma de onda.

25
2.2 Inversor de frequência
O inversor de frequência é um conversor de frequência que trabalha por
conversão indireta. A conversão indireta é do tipo CA-CC-CA onde há presença de
um link DC ou “Elo CC”. A vantagem desta conversão é que a freqüência da forma
de onda construída não esta limitada a freqüência da rede [4].
Os inversores de freqüência em geral operam motores elétricos em diversas
aplicações como: Correias transportadoras, prensas hidráulicas, ventiladores,
bombas de uso geral, moinhos de rolos, dentre outros, onde variação de velocidade
mediante a variação de freqüência é altamente requisitada num processo de
produção. Mas também é utilizado em sistema elétricos onde há apenas a
necessidade de conversão de formas de onda de tensão e corrente, como no caso
de usinas geradoras de energia e subestações.
2.2.1 O funcionamento
Conforme mostrado anteriormente, o inversor de freqüência apresentam três
estágios diferentes para realizar uma conversão de tensão e freqüência e atender
uma solicitada carga. Estes são a retificação, link DC e inversão. Cada estágio
apresenta características próprias e podem variar de projeto para atender diferentes
aplicações.
2.2.2 Retificadores controlados e não controlados
A função dos retificadores é transformar um sinal antes alternado em
contínuo. Para isso ele usa uma eletrônica a base de diodos ou tiristores para forçar
o fluxo de corrente em apenas um sentido do circuito. De acordo com os interesses
de retificação estes retificadores podem ser do tipo controlado ou não-controlado.
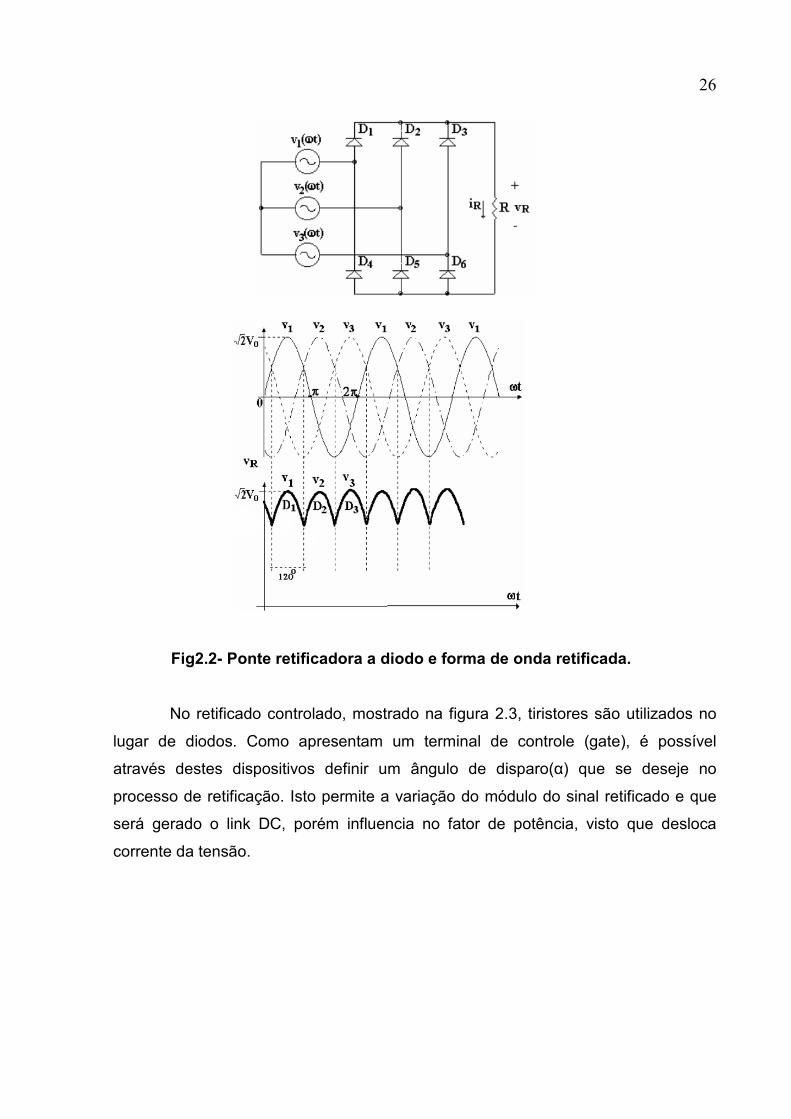
Nos retificadores não-controlados, diodos são dispostos em ponte refletindo
para apenas valores positivos toda a tensão de entrada conforme ilustrado na figura
2.2. Outra característica é que o fator de potência na saída é unitário (não deslocam
corrente da tensão), mas não possibilitam nenhum tipo de regeneração [3].
26
Fig2.2- Ponte retificadora a diodo e forma de onda retificada.
No retificado controlado, mostrado na figura 2.3, tiristores são utilizados no
lugar de diodos. Como apresentam um terminal de controle (gate), é possível
através destes dispositivos definir um ângulo de disparo(α) que se deseje no
processo de retificação. Isto permite a variação do módulo do sinal retificado e que
será gerado o link DC, porém influencia no fator de potência, visto que desloca
corrente da tensão.

27
Fig2.3- Retificador controlado a tiristor e forma de onda de saída.
Uma característica interessante desta ponte retificadora é que ela pode ser
tanto utilizada como retificador quanto como inversor, basta definir o ângulo(α) de
disparo do tiristor. Quanto se estabelece limite de condução de 0º a 90º o arranjo
dos tiristores trabalha como retificador, e quando se limita de 90º a 180º ele trabalha
como inversor. Um exemplo de vantagem que esta característica possibilita é num
caso de uma frenagem regenerativa a energia poder ser devolvida para a rede [3].
2.2.3 Link DC
O link DC ou “Elo CC” é o estágio do inversor responsável por entregar
tensão ou corrente contínua(CC) para a região inversora do drive. Os links DC que
geram tensão constante são conhecidos com VSI (tensão imposta) e os que geram
corrente constante como CSI (corrente imposta). Cada um possui características
relevantes a serem destacadas.

28
2.2.3.1 Tensão imposta (VSI)
Os inversores que trabalham por tensão imposta geralmente usam
retificadores não controlados com diodos na entrada e em seguida um capacitor
para retirar todas as variações de tensão da saída do retificador e assim gerar um
sinal de tensão lisa. Neste caso a carga que determina o nível de corrente que o link
DC fornecerá. A figura 2.4 ilustra um circuito VSI.
Fig2.4- Circuito VSI [4].
Considerando a carga indutiva (motor de indução), haverá troca de energia
reativa do capacitor para o motor, visto que o retificador a diodos fornece apenas
potência ativa.
Devido a natureza do retificador, há formação de harmônicos nos terminais
que abastecem o inversor. O circuito em ponte de diodos aliado ao capacitor do Elo
CC geram deformação na tensão de entrada gerando harmônicos geralmente de 5º
e 7º ordem para os retificadores 6 pulsos. Alguns projetos utilizam tecnologia de 12
pulsos com transformador de duplo secundário para reduzir o conteúdo das
harmônicos [4].
2.2.3.2 Corrente imposta (CSI)
Nos inversores de freqüência que trabalham por corrente imposta o circuito
de retificação é controlado por tiristores e o link DC constitui-se de um indutor ligado
em série com o retificador formando uma fonte de corrente que alimenta a parte
inversora. Assim, a tensão será definida pela carga agora. A figura 2.5 ilustra um
circuito CSI.
29
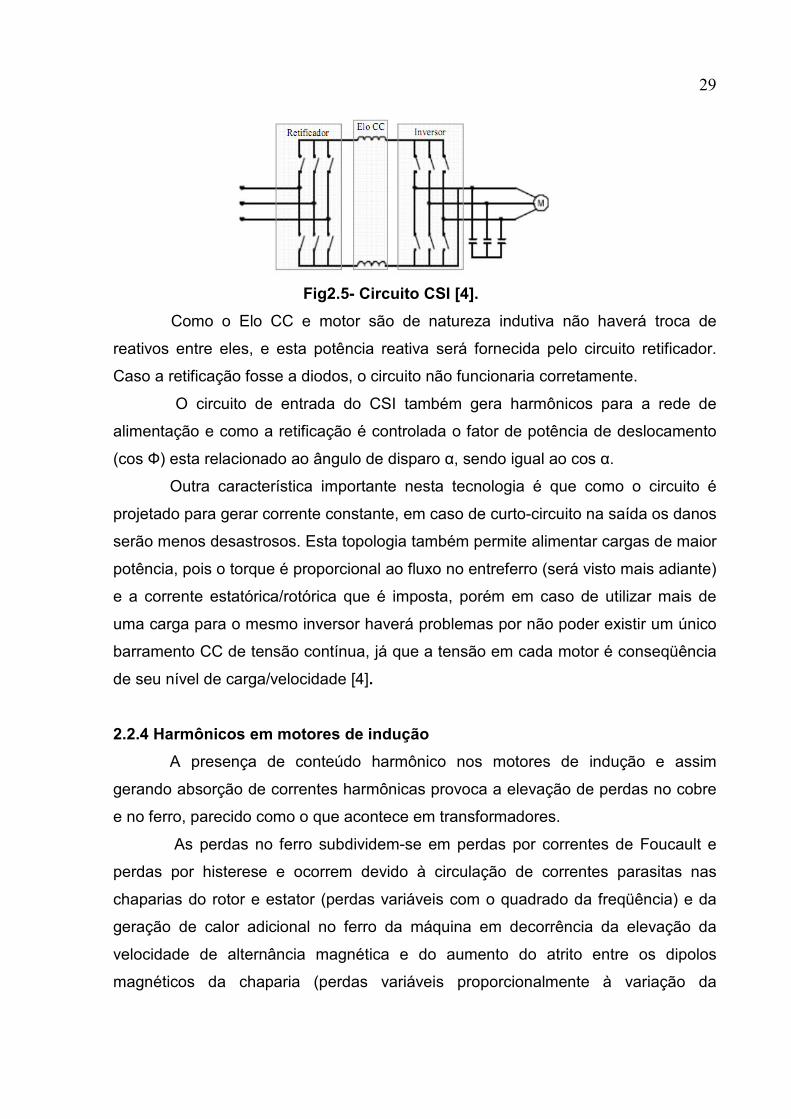
Fig2.5- Circuito CSI [4].
Como o Elo CC e motor são de natureza indutiva não haverá troca de
reativos entre eles, e esta potência reativa será fornecida pelo circuito retificador.
Caso a retificação fosse a diodos, o circuito não funcionaria corretamente.
O circuito de entrada do CSI também gera harmônicos para a rede de
alimentação e como a retificação é controlada o fator de potência de deslocamento
(cos Ф) esta relacionado ao ângulo de disparo α, sendo igual ao cos α.
Outra característica importante nesta tecnologia é que como o circuito é
projetado para gerar corrente constante, em caso de curto-circuito na saída os danos
serão menos desastrosos. Esta topologia também permite alimentar cargas de maior
potência, pois o torque é proporcional ao fluxo no entreferro (será visto mais adiante)
e a corrente estatórica/rotórica que é imposta, porém em caso de utilizar mais de
uma carga para o mesmo inversor haverá problemas por não poder existir um único
barramento CC de tensão contínua, já que a tensão em cada motor é conseqüência
de seu nível de carga/velocidade [4].
2.2.4 Harmônicos em motores de indução
A presença de conteúdo harmônico nos motores de indução e assim
gerando absorção de correntes harmônicas provoca a elevação de perdas no cobre
e no ferro, parecido como o que acontece em transformadores.
As perdas no ferro subdividem-se em perdas por correntes de Foucault e
perdas por histerese e ocorrem devido à circulação de correntes parasitas nas
chaparias do rotor e estator (perdas variáveis com o quadrado da freqüência) e da
geração de calor adicional no ferro da máquina em decorrência da elevação da
velocidade de alternância magnética e do aumento do atrito entre os dipolos
magnéticos da chaparia (perdas variáveis proporcionalmente à variação da
30
freqüência). As perdas no cobre devido circulação de correntes harmônicas nos
enrolamentos (tanto nas bobinas do estator quanto na gaiola e/ou enrolamentos do
rotor) também são consideráveis.
Outra conseqüência da presença de harmônicos nos motores elétricos trata-
se do efeito pelicular (corrente circulando na superfície do condutor) que ocorre nos
condutores dos enrolamentos do estator fazendo com que as correntes de
freqüência mais elevada circulem quase que totalmente na periferia da seção do
cobre, o que aumenta a resistência efetiva de tais condutores e eleva as perdas de
energia.
Um outro efeito indesejável e prejudicial à operação dos motores está no
fato de que harmônicos de sequência negativa, fundamentalmente a de ordem 5
(além da 11ª, a 17ª, etc.), geram torque em sentido oposto ao gerado pela onda
fundamental, gerando torques resistentes (interpretado como acréscimo de carga no
eixo), provocando absorção de corrente adicional no estator [5].
Pode-se resumir os efeitos negativos da existência de correntes Harmônicas:
- Sobreaquecimento de capacitores, provocando disruptura de dielétrico.
- Perdas em transformadores devido ao aumento do efeito pelicular, histerese e
correntes de foucalts.
- Sobreaquecimento de transformadores devido ao aumento do valor rms da
corrente.
- Sobreaquecimento de cabos e dispositivos de uma instalação elétrica, devido ao
aumento da impedância aparente com a freqüência.
- Interferência em telecomunicações e circuitos de controle (cabos de força e
controle).
Outro efeito do aparecimento de harmônicos é a mudança no conceito de
fator de potência(FP). Tradicionalmente o fator de potência mede o quanto tensão e
corrente estão fora de fase. Para isso geralmente calculamos o cos Ф1 (fator de
deslocamento) que indica o quanto a corrente esta atrasada ou adiantada da tensão.
A existência de harmônicos afeta o resultado final da potência aparente
criando um novo componente no cálculo do fator de potência:
�� � �� �� ����������� � ��� �� ����� çã�

31
Onde o fator de distorção (cosθ) trata-se da relação entre corrente
fundamental e corrente total harmônica e pode ser calculado pela seguinte
expressão:
��� � � �√������ (1);
� ! � "∑ $%&'� ∞()�$*+,
(2);
- � ./0 Ф�√������ (3);
Onde THD é conhecido como “Taxa de Distorção Harmônica ” que calcula
toda a contribuição das componentes harmônicas no sistema [6].
A corrente 1%&' representa a corrente eficaz harmônica total menos a
fundamental. A corrente fundamental é representada por 1�&'.
O fator de potência considerando as componentes de distorção e
deslocamento é dado conforme a expressão (3).
No inversor de freqüência a componente de distorção é inversamente
proporcional a quantidades de pulsos de retificação, portanto quanto maior a
quantidade de pulsos, a corrente fundamental será muito menor em relação a
corrente total.
As causas do aparecimento de harmônicos na corrente de linha drenada da
rede elétrica em geral são dadas pela presença de cargas não-lineares como:
Circuitos retificadores em: fontes de alimentação chaveadas, carregadores
de bateria, reatores eletrônicos de lâmpadas fluorescentes, conversores para
acionamento de máquinas elétricas; controladores de potência por ângulo de fase;
lâmpadas de descarga de gás;
Dentre as razões pelas quais as harmônicas devem ser reduzidas :
Principais:
Regulação imposta por instituições regulamentadoras (ex:IEC, IEEE,
CENELEC, ANSI, dentre outras);
Especificações e expectativas do mercado;

32
Secundárias :
Aumento do fator de potência com, conseqüente aumento da potência
disponível;
Redução de corrente de neutro (eliminação da 3ª harmônica que circula pelo
neutro);
Redução da capacidade nominal necessária para sistemas ininterruptos de
energia(UPS/nobreak) [6];
2.2.5 Parte inversora
O estágio inversor como já dito anteriormente, é responsável por transformar
o formato de onda contínuo do link DC em alternado para alimentação dos motores.
Funciona através de uma ponte controlada a semicondutores de potência, como
mostra a figura 2.6, geralmente transistores ou tiristor, que pelo chaveamento pré-
programado destes componentes possibilita sintetizar uma forma de onda bem
próxima de uma senoidal e com tensão e frequência pré-definida.
Fig2.6- Circuito inversor.
Para isto o inversor de frequência apresenta circuitos digitais
microcontrolados que utilizam técnicas de modulação por largura de pulso (PWM)
para gerar essa forma de onda na saída.
2.2.5.1 Modulação por largura de pulso (PWM)
Modulação é uma técnica para se obter algum tipo de sinal através de um
conjunto de amostras de sinais. A modulação por largura de pulso (PWM) consiste
de amostras de pulsos de amplitude fixa e largura proporcional a tensão no instante
da amostragem [7].

33
No inversor de freqüência, a técnica de modulação PWM senoidal é
normalmente utilizada.
Nesta técnica, um sinal senoidal de referência é comparado com um sinal
triangular, e desta comparação é retirado os instantes a serem disparados os
semicondutores conforme mostra a figura 2.7.
Fig2.7- Ondas senoidal e triangular para geração do PWM [8].
A tensão senoidal é chamada de tensão de controle. Sua freqüência deve
ser igual à componente fundamental da tensão a que se deseja aplicar ao motor e
sua amplitude proporcional a amplitude da tensão que se deseja aplicar. Os pulsos
PWM são gerados a partir desta comparação. Na onda senoidal, amplitude e
freqüência são variáveis. Na onda triangular, cuja amplitude e freqüência são fixas, a
freqüência define a freqüência de pulsos PWM.
Quando a amplitude da tensão de controle for maior que a amplitude da
triangular, o sinal PWM está em nível alto(+2�). Quando ocorre o inverso, o sinal
está em nível baixo.
Para o caso de um circuito trifásico, os sinais PWM necessários para
comandar o motor são obtidos através da comparação entre uma triangular e três
ondas senoidais, de mesma frequência e amplitude, defasadas de 120º. O processo
de geração de sinais PWM é o mesmo, mas cada tensão é responsável pelo
comando dos tiristores de um braço. A figura 2.8 ilustra a geração do PWM para
tensão de linha e de fase.

34
Fig2.8- Geração de PWM para um sistema 3φ.
Um detalhe importante a ser observado é que a qualidade do sinal de saída
esta diretamente relacionada a modulação. As frequências de referência geralmente
variam de 0 a 90Hz, porém a freqüência da onda triangular deve ser bem mais
elevada (entre 1kHz a 10kHz). Desta forma, quanto maior a frequência da portadora,
maior a quantidade de pulsos nos tiristores e assim mais definida a tensão de saída
[8].
2.2.6 Controle de velocidade
Antes de se falar das técnicas de controle de velocidade utilizadas pelo
inversor de freqüência, primeiro será mostrado como se controla a velocidade de um
motor de indução de corrente alternada. A seguir seguem as seguintes expressões
para velocidade e escorregamento nos motores de indução:
3� � �45'6 (1)
� � 7�8797� : 39 � ;1 = �>3� (2)
35
Onde :
39 = Velocidade de rotação do motor (rotor) em rpm (rotações por minuto).
3� = Velocidade de rotação síncrona (estatórica) em rpm.
s = fator de escorregamento.
f =frequência da rede elétrica em Hertz (geralmente 60Hz).
p = número de polos do motor (2,4,6 .. assim por diante).
Pela fórmula (1) percebe-se que a velocidade síncrona do motor, isto é,
velocidade de campo magnético girante do estator é proporcional à frequência da
tensão de alimentação e inversamente proporcional à quantidade de polos do motor.
Na segunda equação(2) tem-se a expressão para escorregamento. O
princípio de funcionamento dos motores de indução está ligado a existência de
escorregamento entre a velocidade do campo do estator e velocidade do rotor,
devido ao fato que sem escorregamento não existe corrente induzida no rotor, e
assim torque de giro.
Percebe-se que a velocidade do motor (39) está diretamente relacionada à
velocidade síncrona, e esta, relacionada a freqüência. É desta forma que os
inversores de freqüência atingem velocidades distintas para os motores, agindo
diretamente nesta freqüência.
Serão levantadas outras fórmulas referentes à potência e ao torque do
motor indução:
2� � 4,44 3 Ф� ;3>
� � 2� 1 ���B ;4>
� � � C ;5>
� � E ФF 1G ���B ;6>
Onde :
2� = Tensão no estator.
P = Potência ativa.
T = Torque no eixo.
ФF = Fluxo magnético.
B = Ângulo de defasamento entre tensão e corrente.
36
K = constante de torque.
ω = velocidade angular.
N = número de espiras.
1 = corrente de campo (estator).
1G= corrente rotórica.
Nas equações (3) e (6) percebe-se que tanto torque quanto tensão estão
relacionados ao fluxo magnético (ФF> e seguem a seguinte proporção:
ФF : IJ ' ;7>
Considerando Ir e cosφ constantes, podemos dizer que o torque do motor de
indução também acompanha essa proporcionalidade.
Assim, pode-se concluir que para os inversores modificarem a velocidade
dos motores de indução sem influenciar o torque de giro da máquina, é necessária
variação na tensão do estator proporcional à variação que será realizada na
freqüência. Esta técnica de controle de velocidade é conhecida como controle
escalar que será tratada melhor a seguir [8].
2.2.6.1 Controle escalar
Como foi apresentado, quando é necessário variar a velocidade do motor em
uma respectiva aplicação, os inversores variam a frequência que alimenta esta
carga. Como em uma aplicação típica a constância do torque é importante, o
inversor varia a tensão de alimentação proporcional à variação dada à freqüência. A
variação da tensão é realizada pelo ajuste do PWM de chaveamento dos tiristores
do estágio de inversão e a freqüência pela reconfiguração da onda portadora
triangular.
Em sistemas com controle escalar, obtém-se precisão de 0,5% da rotação
nominal sem variação de carga, e de 3% a 5% com variação de carga de 0 a 100%
do torque nominal. É geralmente utilizado em motores de indução convencionais
sem sistema de realimentação de velocidade (tacogerador acoplado ao motor) em
malha fechada. A variação V/f é feita linearmente até a freqüência nominal do motor

37
(50/60 Hz), acima desta, a tensão que já é nominal permanece constante e há então
apenas a variação da freqüência que é aplicada ao enrolamento do estator como
mostra a figura 2.9 [1].
Fig2.9- Variação de tensão e freqüência para controle de velocidade [1].
A área acima da freqüência nominal é conhecida como região de
enfraquecimento de campo, ou seja, o fluxo começa a decrescer e, portanto, o
torque também começa a diminuir. A curva conjugado por velocidade fica conforme
a figura 2.10 [1].
Fig2.10- Região de enfraquecimento de campo [1].
Assim, o conjugado permanece constante até a freqüência nominal e a partir
disto começa a decrescer. Percebe-se na figura 2.11 que a potência de saída do
conversor de freqüência comporta-se da mesma forma que a variação V/f , cresce
linearmente até a freqüência nominal e permanece constante acima desta.

38
Fig2.11- Variação da potência em relação à variação da freqüência [1].
O problema do controle escalar é que em determinadas aplicações onde se
exige dinâmica e precisão de torque, esse controle torna-se não muito eficiente. Um
exemplo é o problema de controle de torque em baixas velocidades, considerando-
se que o fluxo deve permanecer constante(V/f= constante). Isso significa que em
baixas velocidades deve-se ter baixa freqüência e baixa tensão. Uma tensão muito
baixa pode-se ser dissipada na resistência do estator e assim não haverá tensão
suficiente para magnetizar o restante do circuito. Visando essas aplicações
desenvolveu-se o controle vetorial, para possibilitar de forma mais minuciosa,
controle de velocidade para cada instante de operação do motor [9].
2.2.6.2 Controle vetorial
Em aplicações onde se faz necessário alto desempenho dinâmico (respostas
rápidas e alta precisão), o motor elétrico deverá fornecer essencialmente um
controle preciso de torque para uma faixa extensa de condições de operações. Para
tais aplicações os acionamentos de corrente contínua sempre representaram uma
solução ideal, pois a proporcionalidade da corrente de campo (fluxo) e de armadura
(torque) num motor de corrente contínua proporciona um meio para o controle de
torque [1].
Nos motores de corrente, contínua conforme figura abaixo, devido a forma
que é construído, existe ortogonalidade nas componentes de corrente responsáveis
pela geração de campo magnético e torque, assim possibilitando maior precisão
para controle.
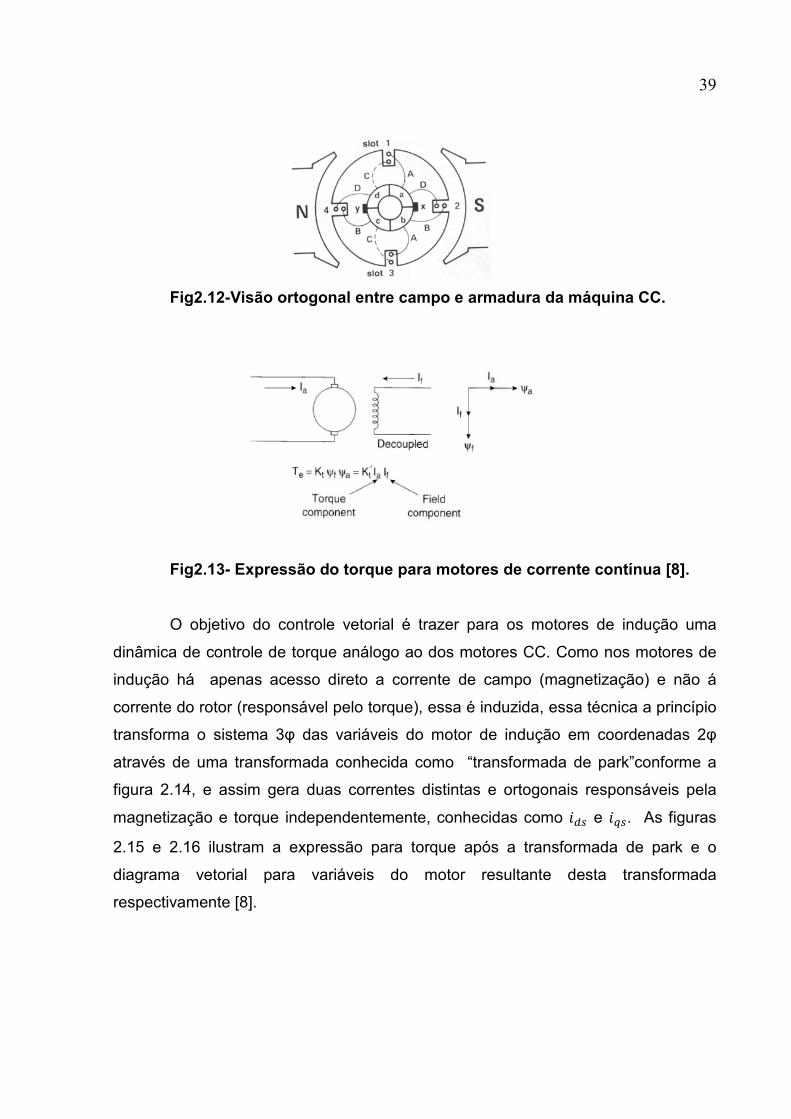
A figura 2.12 mostra o esquema para motor CC de excitação independente e
a figura 2.13 a expressão respectiva para torque:
39
Fig2.12-Visão ortogonal entre campo e armadura da máquina CC.
Fig2.13- Expressão do torque para motores de corrente contínua [8].
O objetivo do controle vetorial é trazer para os motores de indução uma
dinâmica de controle de torque análogo ao dos motores CC. Como nos motores de
indução há apenas acesso direto a corrente de campo (magnetização) e não á
corrente do rotor (responsável pelo torque), essa é induzida, essa técnica a princípio
transforma o sistema 3φ das variáveis do motor de indução em coordenadas 2φ
através de uma transformada conhecida como “transformada de park”conforme a
figura 2.14, e assim gera duas correntes distintas e ortogonais responsáveis pela
magnetização e torque independentemente, conhecidas como ��� e ���. As figuras
2.15 e 2.16 ilustram a expressão para torque após a transformada de park e o
diagrama vetorial para variáveis do motor resultante desta transformada
respectivamente [8].

Fig2.14- Tranformação de 3
Fig2.15 Expressão do torque para controle vetorial
Fig2.16-Diagrama vetorial para variáveis do motor de indução após
transformada [8].
Tranformação de 3φ -> 2φ e geração de ids
Expressão do torque para controle vetorial
iagrama vetorial para variáveis do motor de indução após
40
e ids e iqs [8].
Expressão do torque para controle vetorial [8].
iagrama vetorial para variáveis do motor de indução após
41
Isso possibilita algumas vantagens em relação ao controle escalar:
- Elevada precisão de regulação de velocidade.
- Alto desempenho dinâmico.
- Controle de torque linear para aplicações de posição ou de tração.
-Operação suave em baixa velocidade e sem oscilações de torque, mesmo
com variações de carga [10].
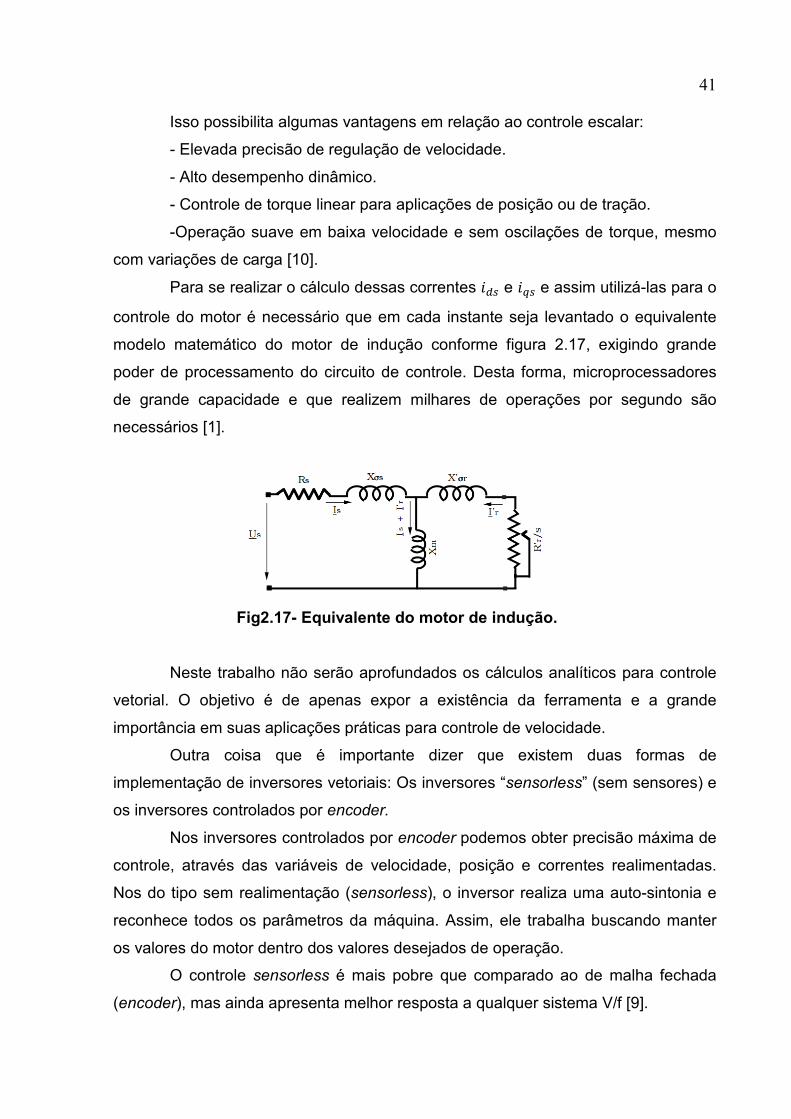
Para se realizar o cálculo dessas correntes ��� e ��� e assim utilizá-las para o
controle do motor é necessário que em cada instante seja levantado o equivalente
modelo matemático do motor de indução conforme figura 2.17, exigindo grande
poder de processamento do circuito de controle. Desta forma, microprocessadores
de grande capacidade e que realizem milhares de operações por segundo são
necessários [1].
Fig2.17- Equivalente do motor de indução.
Neste trabalho não serão aprofundados os cálculos analíticos para controle
vetorial. O objetivo é de apenas expor a existência da ferramenta e a grande
importância em suas aplicações práticas para controle de velocidade.
Outra coisa que é importante dizer que existem duas formas de
implementação de inversores vetoriais: Os inversores “sensorless” (sem sensores) e
os inversores controlados por encoder.
Nos inversores controlados por encoder podemos obter precisão máxima de
controle, através das variáveis de velocidade, posição e correntes realimentadas.
Nos do tipo sem realimentação (sensorless), o inversor realiza uma auto-sintonia e
reconhece todos os parâmetros da máquina. Assim, ele trabalha buscando manter
os valores do motor dentro dos valores desejados de operação.
O controle sensorless é mais pobre que comparado ao de malha fechada
(encoder), mas ainda apresenta melhor resposta a qualquer sistema V/f [9].
42
2.2.7 Inversor de freqüência de média tensão
O desenvolvimento e as pesquisas em tecnologias de acionamento em
média tensão(1kV a 7kV) têm se tornado significativos nos últimos anos visto a
importância dada à eficiência nestes níveis de potência.
Em relação aos inversores de freqüência que trabalham sob esses níveis de
tensão, duas soluções para se trabalhar com elevadas tensões são freqüentemente
usadas nos projetos de inversores.
Uma delas é a conexão em série de módulos de inversores de baixa tensão
até que se alcance a tensão requerida pelo motor. Para isso é usado um
transformador de enrolamentos múltiplos e tecnologias de baixa tensão conectadas
em série.
Outra solução é a utilização de semicondutores de potência para tensões
elevadas, variando de 3,3KV a 6,5KV, para implementações de dois ou três níveis
de inversão, isto é, que apresentam apenas dois ou três níveis de tensões no
circuito. Por exemplo, em um circuito de três níveis tem-se a tensão máxima obtida
no circuito intermediário, metade dessa tensão e tensão zero [4].
Os semicondutores utilizados nestes circuitos são os transistores de
potência (IGBT) ou tiristores de potência (IGCT, GTO e SGCT), cada um utilizado
conforme as necessidades de projeto.
2.2.7.1 Topologias
Serão citadas a seguir algumas topologias para inversores de freqüência de
média tensão. Topologias que utilizam técnicas de 2 ou 3 níveis, ou multiníveis para
inversores VSI ou CSI.
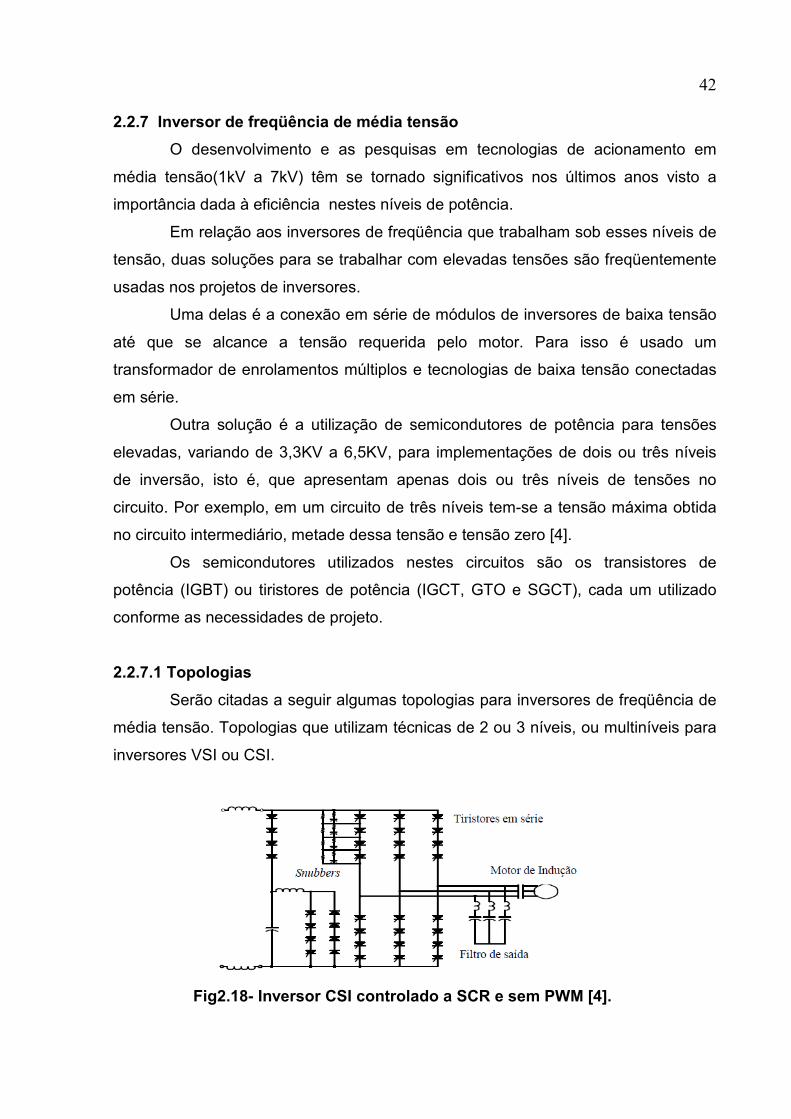
Fig2.18- Inversor CSI controlado a SCR e sem PWM [4].

43
A topologia da figura 2.18 foi uma das primeiras introduzidas no mercado e
data dos anos 80. É conhecida como CSI com capacitores auxiliares ou CACSI.
Caracteriza-se por um retificador controlado a silício (SCR), um grande indutor no
link DC, um inversor SCR e um grande filtro capacito, utilizado para auxiliar na alta
velocidade de chaveamento da parte inversora. Essa topologia foi decaindo nas
aplicações industriais, pois além de não usar PWM necessita de um grande
capacitor[4]. Uma observação é a presença de “snubbers” que são responsáveis
pela proteção dos semicondutores contra as oscilações bruscas impostas pelos
chaveamentos[11].
Fig2.19- Inversor CSI controlado à GTO [4].
A figura 2.19 mostra uma topologia introduzida no final dos anos 80,
conhecida por Inversor de corrente imposta com modulação por largura de
pulsos(PWM CSI). Caracteriza-se por um retificador SCR, indutor no link DC, GTO’s
no circuito inversor e um filtro capacitivo de tamanho médio na saída [4].
Fig2.20- Inversor de 2 níveis controlado à IGBT [4].
Topologia de dois níveis, caracterizada por utilizar um retificador a diodo,um
grande capacitor para o Link DC, e IGBT’s conectados em série no circuito inversor
44
conforme ilustrada na figura 2.20. É raramente encontrada no mercado de média
potência.
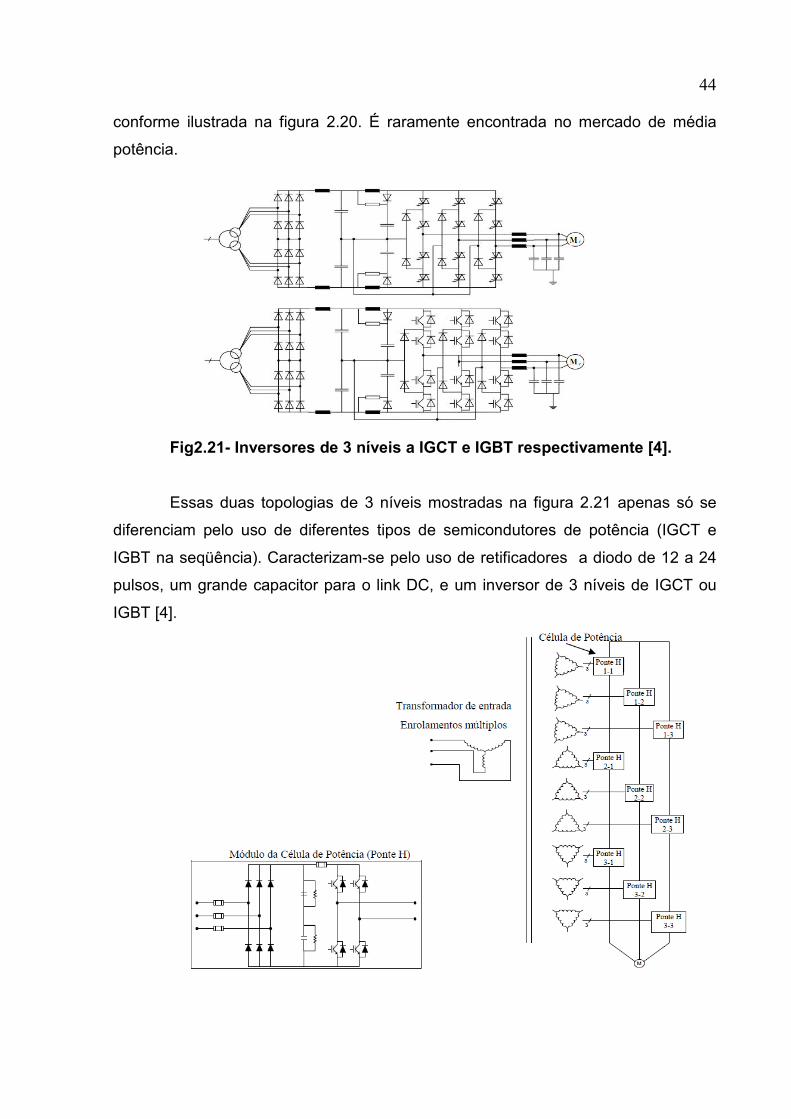
Fig2.21- Inversores de 3 níveis a IGCT e IGBT respectivamente [4].
Essas duas topologias de 3 níveis mostradas na figura 2.21 apenas só se
diferenciam pelo uso de diferentes tipos de semicondutores de potência (IGCT e
IGBT na seqüência). Caracterizam-se pelo uso de retificadores a diodo de 12 a 24
pulsos, um grande capacitor para o link DC, e um inversor de 3 níveis de IGCT ou
IGBT [4].
45
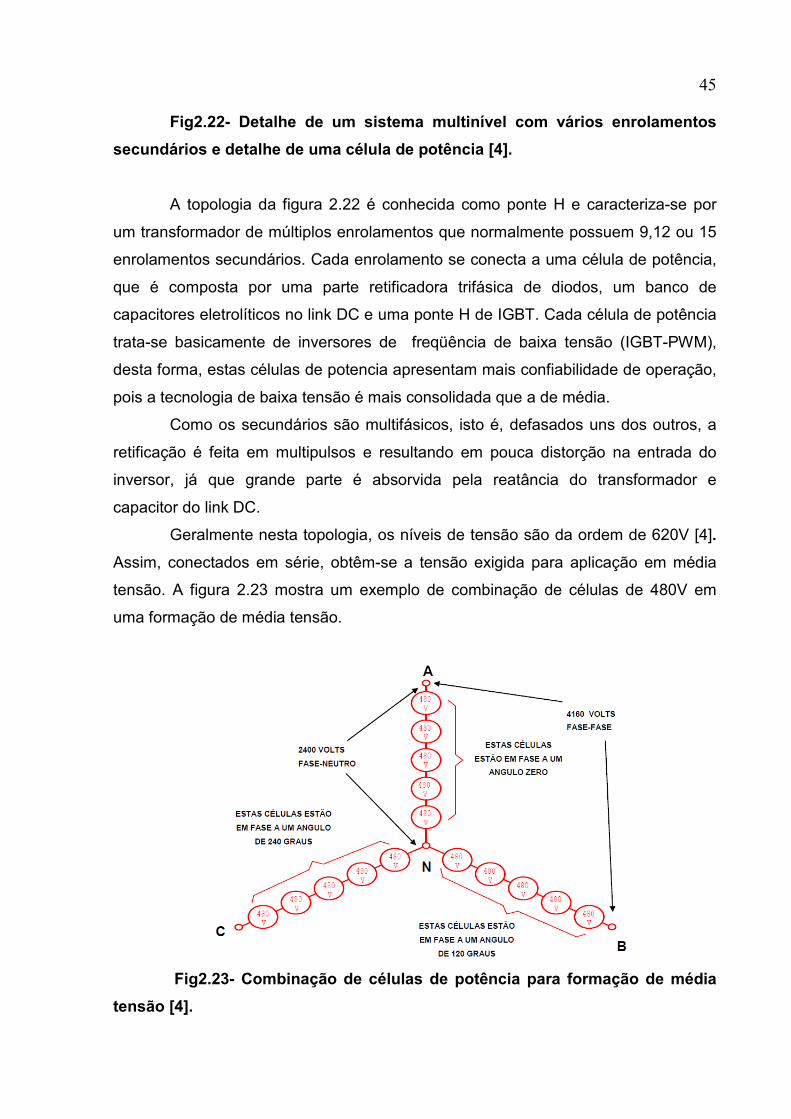
Fig2.22- Detalhe de um sistema multinível com vários enrolamentos
secundários e detalhe de uma célula de potência [4].
A topologia da figura 2.22 é conhecida como ponte H e caracteriza-se por
um transformador de múltiplos enrolamentos que normalmente possuem 9,12 ou 15
enrolamentos secundários. Cada enrolamento se conecta a uma célula de potência,
que é composta por uma parte retificadora trifásica de diodos, um banco de
capacitores eletrolíticos no link DC e uma ponte H de IGBT. Cada célula de potência
trata-se basicamente de inversores de freqüência de baixa tensão (IGBT-PWM),
desta forma, estas células de potencia apresentam mais confiabilidade de operação,
pois a tecnologia de baixa tensão é mais consolidada que a de média.
Como os secundários são multifásicos, isto é, defasados uns dos outros, a
retificação é feita em multipulsos e resultando em pouca distorção na entrada do
inversor, já que grande parte é absorvida pela reatância do transformador e
capacitor do link DC.
Geralmente nesta topologia, os níveis de tensão são da ordem de 620V [4].
Assim, conectados em série, obtêm-se a tensão exigida para aplicação em média
tensão. A figura 2.23 mostra um exemplo de combinação de células de 480V em
uma formação de média tensão.
Fig2.23- Combinação de células de potência para formação de média
tensão [4].

46
2.2.8 Controle (comando) do inversor de frequência de média tensão (ver
anexo)
2.2.9 Aplicação em foco
Na Vale, os inversores de freqüência são responsáveis pelo acionamento
dos motores que controlam os ventiladores responsáveis pelo dinâmica do ar no
processo de queima de pelotas nos fornos das Usinas de pelotização. Eles
apresentam grande desempenho nesta aplicação e são extremamente interessantes
dentre os interesses da operação devido à diversidade de velocidade que atendem
quando são requisitados, podendo atender variações de zero à velocidade nominal,
além de controle de torque. Nesta aplicação é esperado dos inversores
confiabilidade e eficiência, para tanto recebem uma série de acompanhamentos que
envolvem inspeções, manutenções preventivas e corretivas, buscando ao máximo
possível preveni-los de qualquer tipo de dano.
2.3 Resumo
O inversor de freqüência de média tensão é um conversor de freqüência
desenvolvido para acionar e variar velocidade de motores de corrente alternada
(indução e síncronos) de média tensão. Como os motores CA na indústria passaram
a ser bem mais viáveis em aplicações industriais, foi se necessário criar um sistema
que permitisse variação de velocidade com precisão para controle de torque da
mesma forma que se existe nos acionamentos de motores de corrente contínua.
Os inversores de freqüência são divididos em três módulos mais
importantes: A retificação, link DC e o circuito inversor, cada um de grande
importância na realização da conversão de freqüência. A retificação permite
conversão do sinal alternado de entrada CA em pulsos de tensão e corrente
contínua. O link DC trata esses pulsos para se obter uma melhor qualidade da forma
de onda CC. O circuito inversor realiza a conversão da forma de onda contínua do
link DC em um sinal alternado novamente, com módulo e freqüência ajustável,
utilizando técnica de modulação PWM para chaveamento de semicondutores de
potência para realização desta tarefa.
47
O inversor de freqüência é totalmente monitorado por um circuito de controle
inteligente que não só checa o circuito de potência (força) como controla o inversor
de freqüência de acordo com cada exigência de processo.
48
3 Cascata subsíncrona
3.1 O funcionamento
Como apresentado anteriormente, a cascata subsíncrona utiliza a técnica de
variação de velocidade pela variação do escorregamento em motores de indução de
rotor bobinado. Além disso, o projeto da cascata visa o aproveitamento da energia
que seria perdida no escorregamento, devolvendo-a ao circuito de alimentação.
O princípio do controle de velocidade consiste na introdução de uma
contratensão no rotor contrária à f.e.m (força eletromotriz) induzida. O efeito é
equivalente àquele para variação da resistência rotórica. Quanto maior a
contratensão, maior deve ser a f.e.m induzida no rotor para que o conjugado seja
mantido [1].
3.1.1 Sistema rotativo de conexão cascata
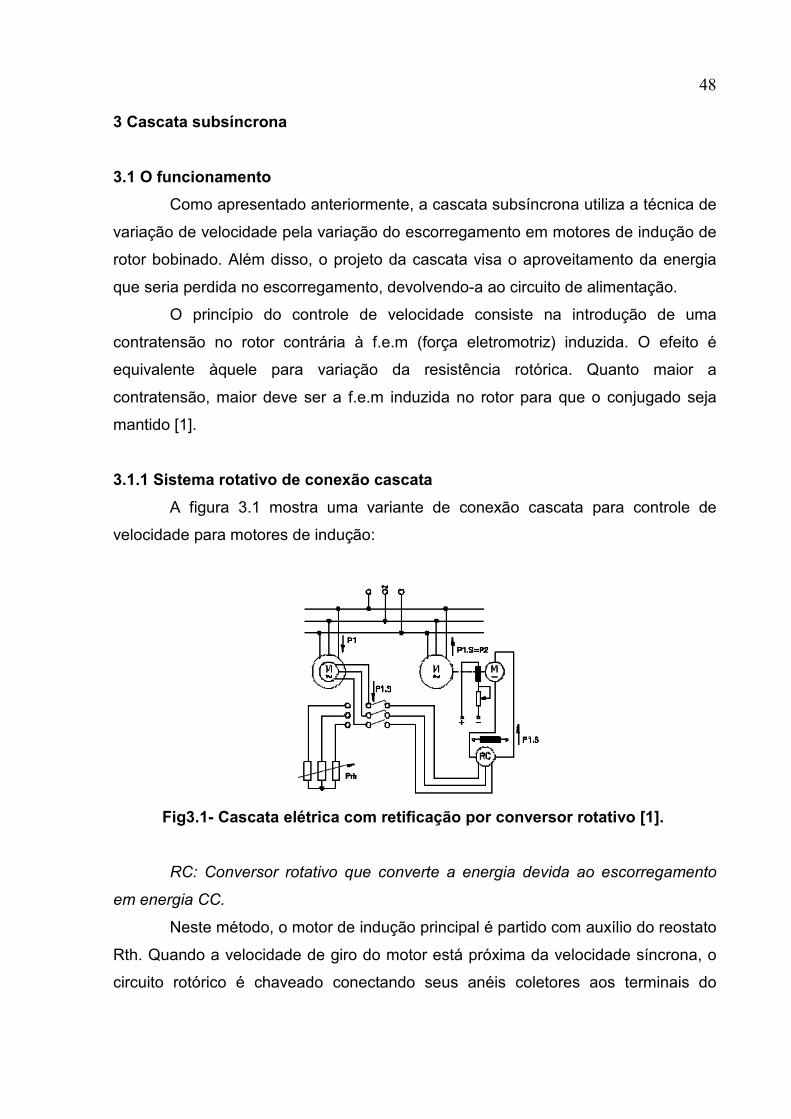
A figura 3.1 mostra uma variante de conexão cascata para controle de
velocidade para motores de indução:
Fig3.1- Cascata elétrica com retificação por conversor rotativo [1].
RC: Conversor rotativo que converte a energia devida ao escorregamento
em energia CC.
Neste método, o motor de indução principal é partido com auxílio do reostato
Rth. Quando a velocidade de giro do motor está próxima da velocidade síncrona, o
circuito rotórico é chaveado conectando seus anéis coletores aos terminais do

49
conversor rotativo, que gira a uma velocidade síncrona correspondente à freqüência
de escorregamento. No lado CC, o conversor rotativo é conectado à armadura do
motor CC, e este motor é acoplado a um gerador CA conectado a rede elétrica. O
controle de velocidade se dá pela variação da corrente de campo do motor CC. Um
aumento na corrente de campo e, portanto, aumento da f.c.e.m do motor, acarreta a
diminuição da velocidade do motor CC e da corrente de armadura do conversor
rotativo, e assim, redução na corrente CA que flui no rotor do motor principal. Um
decréscimo na corrente rotórica resulta em uma queda no torque do motor principal
e aumento da sua velocidade.
Desta forma, a energia transferida do estator para o rotor, devido ao
escorregamento, no motor de indução principal, por meio do conversor rotativo, do
motor auxiliar CC e gerador CA, é devolvida à rede de alimentação e possibilita o
controle de velocidade do motor de indução [1].
3.1.2 Controle estático pela resistência rotórica
Este método utiliza a variação da resistência rotórica para variação da
corrente induzida no rotor e assim controle de velocidade. Através do chaveamento
de um semicondutor IGBT (chopper) ligado em paralelo com um resistor, é possível
levantar valores diferentes de resistência rotórica no acionamento do motor. A figura
3.2 ilustra este método.
Fig3.2- Controle de velocidade com circuito de rotor chopper [12].
50
Este sistema torna-se não muito eficiente porque a energia do
escorregamento que não gera trabalho no motor é toda descarregada no resistor.
Porém, apresenta a vantagem de se obter alto torque de partida com baixa corrente
rotórica, além de bom fator de potência para ampla gama de controle de velocidade.
O estator da máquina é conectado diretamente à linha de alimentação, e no
circuito do rotor a corrente induzida 1� é retificada pela ponte de diodos. A tensão DC
é convertida para fonte de corrente por um grande indutor L� ligado em série e assim
abastece o chopper à IGBT e o resistor R ligado em paralelo. O chopper é modulado
por largura de pulso com ciclo (duty cycle) δ= ton/T, onde: ton= tempo ligado e T=
Período. Quando o IGBT é desligado, o resistor é conectado ao circuito e a corrente
1� do link DC flui por ele. Quando o chopper é ligado, o resistor é curto circuitado e a
corrente 1� é bypassada.
Por esse controle temos agora uma resistência equivalente M5=(1-δ)R entre
os pontos A e B. Desta forma, o torque desenvolvido e a velocidade da máquina
podem ser controlados pela variação do ciclo(duty cyclo) do chopper. Esse controle
eletrônico da resistência rotórica é definitivamente vantajoso comparado ao controle
reostático, porém se mantém o problema da baixa eficiência. Este esquema pode
ser utilizado em aplicações de controle de velocidade para limitadas faixas de
velocidade, onde penalidades por falta de eficiência não são tão agravantes [12].
3.1.3 Circuito da cascata subsíncrona
O Circuito da cascata subsíncrona, conforme mostra a figura 3.3, é similar
ao circuito de rotor chopper, porém em vez de se desperdiçar energia em uma
resistência o circuito é projetado para realimentar a rede elétrica. Desta forma, a
cascata subsíncrona apresenta uma parte de inversão de freqüência conectada a
um transformador e assim conectado à rede.

51
Fig3.3- Cascata subsíncrona [12].
A cascata subsíncrona é usualmente utilizada em bombas ou compressores,
sistemas onde a variação de velocidade é normalmente limitada. Esta característica
a torna não muito eficiente, devido ao fato de se estar amarrada a potência de
escorregamento. Essa potência é cada vez menor quando se aproxima da
velocidade síncrona [12].
Porém, uma grande vantagem desse sistema é que ele permite controle de
torque e velocidade parecido com o controle das máquinas CC.
O fluxo do entreferro do motor encontra-se estável pela alimentação
constante do estator. Desprezando o ângulo de comutação da parte retificadora e
considerando Id como componente fundamental (harmonic free), pode-se dizer que
a corrente rotórica está em fase com a tensão rotórica. Desta forma conclui-se que o
torque do motor é diretamente proporcional à componente fundamental de corrente
do rotor. Em operação estável, a tensão retificada de escorregamento (2�) e a
tensão que abastece o circuito inversor (2N) serão equilibradas pela corrente 1�. A
tensão 2� será proporcional ao escorregamento e a corrente I� será proporcional ao
torque [12].
Simplificando velocidade e torque podem-se escrever as seguintes
expressões :
2� � �.QR%� S 2T (i)

52
Onde n1 é a relação de espiras (transformação) entre estator e rotor, 2T é a
tensão de linha do estator,e S é o escorregamento em pu. A tensão 2U é dada por :
2U � �.QR%� 2T V��� WV (ii)
Onde n2 é a relação de transformação entre o transformador e a parte de
inversão do circuito e α o ângulo de disparo, geralmente entre 90º a 180º. Em um
sistema equilibrado, em caso ideal, pode-se relacionar (i) com (ii) e assim obter-se:
S � %*%� V��� WV (iii) e
CG � C&;1 = V��� WV) (iv)
Assumindo que ��/�4 =1.
A equação (iv) indica que a velocidade no eixo do motor (CG) pode ser
controlada entre zero e a velocidade síncrona (C&), pelo controle do ângulo de
disparo α. Em velocidade zero, a tensão 2� é máxima para α= 180º, e em velocidade
síncrona 2�=0 quando α=90º. Desprezando as perdas, as seguintes equações de
potência podem ser escritas:
S �X � 2N 1� (v)
�9 � ;1 = S>�X � �& C9 � �� C& ;1 = S> Y4Z[ (vi)
Onde �X é a potência no entreferro, �9 é a potência mecânica no eixo do
motor e p é o número de polos. Combinando as equações acima:
�� � IN $\] ^+ Y_
4[ (vii)
Substituindo nas equações (ii) e (iii)
53
�� � �.QR I`^+ %* 1� Y_
4[ (viii)
Esta equação que indica que o torque é proporcional à corrente 1�.
Mostrando que o sistema apresenta características semelhantes às de um motor CC
de excitação independente. O fluxo do entreferro é constante e o torque é
proporcional à corrente 1� [12].
3.1.3.1 Harmônicos na Cascata subsíncrona
O circuito de retificação assim como a parte inversora da cascata geram
harmônicos. Esses harmônicos são refletidos para o estator do motor através do
transformador. Desta forma, perdas serão geradas e torques harmônicos serão
produzidos. Os harmônicos de 5ª e 7ª ordem produzem os maiores efeitos.
Cada componente harmônica no rotor cria um campo magnético girante cujo
sentido de rotação depende da ordem da harmônica. Por exemplo, harmônicos de 5ª
ordem (sequência negativa) geram sentido de giro oposto ao sentido de giro do
rotor, já a de 7ª ordem geram no mesmo sentido [12].
Um dado importante a ser colocado é que a partir de harmônicos de 7ª
ordem, o efeito pelicular começa a ter efeitos já consideráveis nos circuitos elétricos
[5].
3.1.4 Cascata subsíncrona de Media tensão (MEGADRIVE CASCADE)
A estrutura da cascata subsíncrona utilizada pela VALE para acionamento
de motores de média tensão segue o esquemático da figura 3.4:

Fig3.4- Cascata subsíncrona
Com este conversor é possível variação de velocidade de 30% a 97% da
nominal, porém na Vale, a sua instalação é projetada para variações de 75% à
100%. Para inicializar o drive em uma velocidade mínima
reostato, o qual é desligad
por um retificador controlado a tiristor, um reator no circuito intermediário, e um
inversor controlado a tiristor.
O retificador, mostrado na figura 3.5
e gera assim valor de tensão trifásica com magnitude e freqüência proporcionais ao
escorregamento. O inversor, também de seis pulsos,
controla a potência que será recuperada
Diferentemente do inversor de freqüência, a cascata subsíncrona não utiliza PWM
em seu circuito inversor, e as comutações dos semicondutores acontecem em
freqüência de 60Hz (comutação natural).
Cascata subsíncrona (Megadrive cascade)
Com este conversor é possível variação de velocidade de 30% a 97% da
nominal, porém na Vale, a sua instalação é projetada para variações de 75% à
100%. Para inicializar o drive em uma velocidade mínima de operação é utilizado um
, o qual é desligado durante a operação da cascata. O conversor é formado
por um retificador controlado a tiristor, um reator no circuito intermediário, e um
inversor controlado a tiristor.
, mostrado na figura 3.5, é formado por uma ponte de 6 pulsos,
ssim valor de tensão trifásica com magnitude e freqüência proporcionais ao
escorregamento. O inversor, também de seis pulsos, como mostra a figura 3.6
controla a potência que será recuperada à rede pelo transformador
Diferentemente do inversor de freqüência, a cascata subsíncrona não utiliza PWM
em seu circuito inversor, e as comutações dos semicondutores acontecem em
freqüência de 60Hz (comutação natural).
54
(Megadrive cascade) [13].
Com este conversor é possível variação de velocidade de 30% a 97% da
nominal, porém na Vale, a sua instalação é projetada para variações de 75% à
de operação é utilizado um
o durante a operação da cascata. O conversor é formado
por um retificador controlado a tiristor, um reator no circuito intermediário, e um
é formado por uma ponte de 6 pulsos,
ssim valor de tensão trifásica com magnitude e freqüência proporcionais ao
como mostra a figura 3.6,
rede pelo transformador [13].
Diferentemente do inversor de freqüência, a cascata subsíncrona não utiliza PWM
em seu circuito inversor, e as comutações dos semicondutores acontecem em
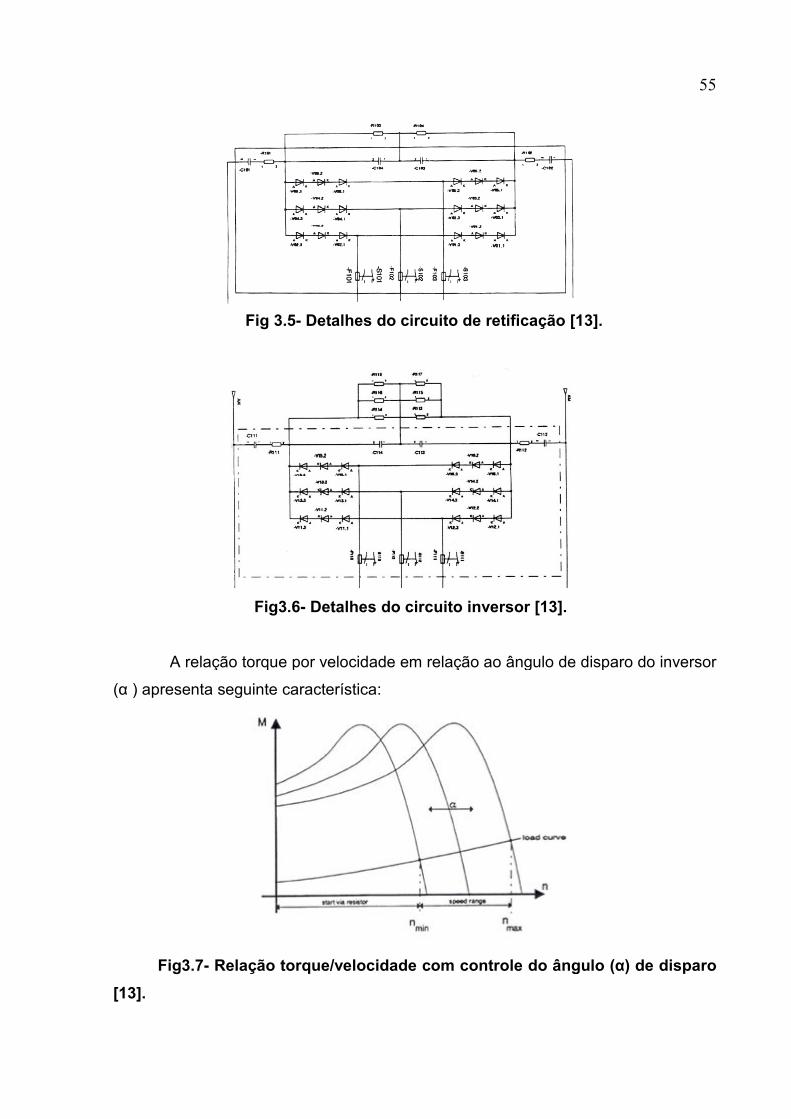
Fig 3.
Fig3
A relação torque por velocidade em relação ao ângulo de disparo do inversor
(α ) apresenta seguinte caracter
Fig3.7- Relação torque/velocidade com controle do ângulo (
[13].
.5- Detalhes do circuito de retificação [13].
3.6- Detalhes do circuito inversor [13].
A relação torque por velocidade em relação ao ângulo de disparo do inversor
(α ) apresenta seguinte característica:
Relação torque/velocidade com controle do ângulo (
55
[13].
A relação torque por velocidade em relação ao ângulo de disparo do inversor
Relação torque/velocidade com controle do ângulo (α) de disparo

56
A figura 3.7 mostra que para uma variação do ângulo α, temos
conseqüentemente variação no valor do escorregamento(S) e assim variação na
potência final que será enviada a carga (�G>, considerando �G � �X S, e �X ����ê��� �� ��� �. Para aumento do ângulo há diminuição de S e da potência no
eixo do rotor (�G>. Para diminuição de α a análise é equivalente e contrária. Percebe-
se ainda que a relação entre torque e velocidade para variação do ângulo de disparo
é a mesma que em um sistema apenas com resistores variáveis acoplados ao
circuito rotórico.
3.1.4 Proteção e controle
3.1.4.1 Sistema de controle
Similar ao inversor de freqüência, a cascata subsíncrona também apresenta
um circuito inteligente responsável pelo monitoramento do drive como pode-se ver
na figura 3.8. Além de atuar no controle de chaveamento dos circuitos de retificação
e inversão, informações referentes a operação, controle de velocidade e proteção do
equipamento são processadas por esse circuito. Ele apresenta três estados de
controle e os define como: controle em loop aberto (open Loop control), controle em
loop fechado (closed Loop control) e proteção e monitoramento(protection and
monitoring). Estes estados serão melhor esclarecidos a seguir.
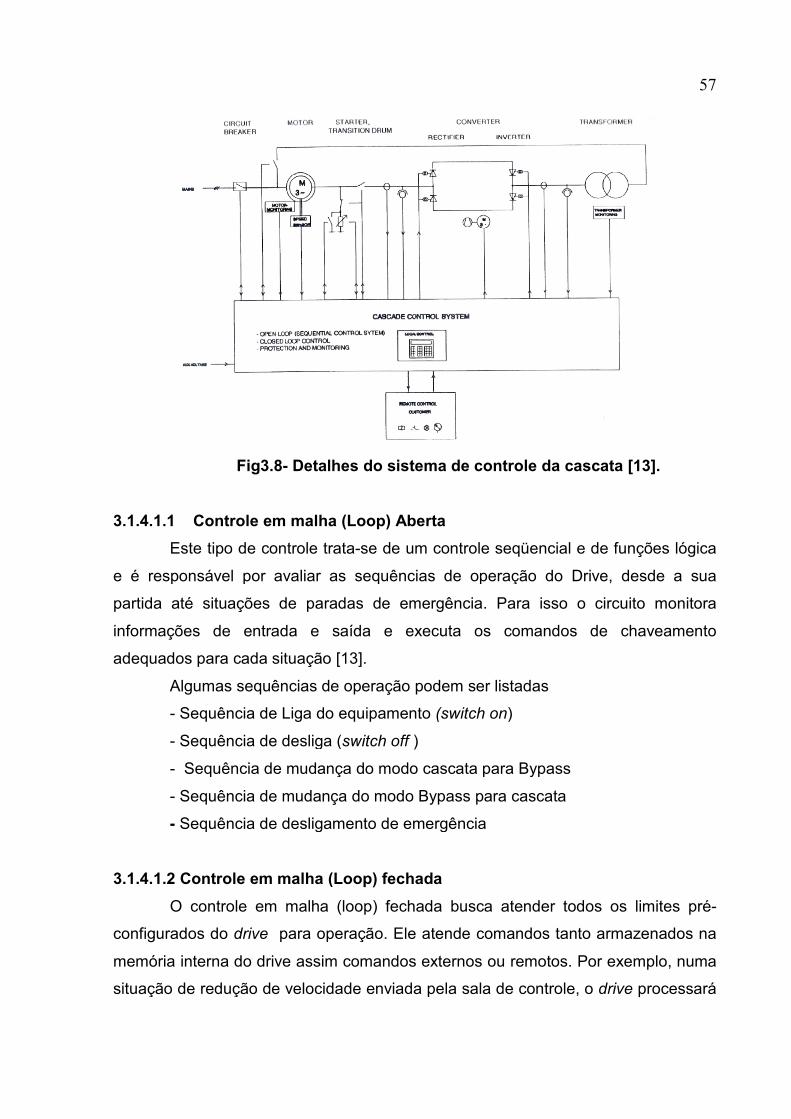
Fig3.8-
3.1.4.1.1 Controle em
Este tipo de controle trata
e é responsável por avaliar as sequências de operação do Drive, desde a sua
partida até situações de paradas de emergência. Para isso o circuito monitora
informações de entrada e
adequados para cada situação
Algumas sequências de operação podem ser listadas
- Sequência de Liga do equipamento
- Sequência de desliga (
- Sequência de mudança do modo cascata
- Sequência de mudança do modo Bypass para cascata
- Sequência de desligamento de emergência
3.1.4.1.2 Controle em malha (
O controle em malha (
configurados do drive para operação. Ele atende
memória interna do drive assim comandos externos ou remotos. Por exemplo
situação de redução de velocidade enviada pela sala de controle
- Detalhes do sistema de controle da cascata
Controle em malha (Loop) Aberta
Este tipo de controle trata-se de um controle seqüencial e de funções lógica
e é responsável por avaliar as sequências de operação do Drive, desde a sua
partida até situações de paradas de emergência. Para isso o circuito monitora
informações de entrada e saída e executa os comandos de chaveamento
adequados para cada situação [13].
Algumas sequências de operação podem ser listadas
Sequência de Liga do equipamento (switch on)
Sequência de desliga (switch off )
Sequência de mudança do modo cascata para Bypass
Sequência de mudança do modo Bypass para cascata
Sequência de desligamento de emergência
malha (Loop) fechada
malha (loop) fechada busca atender todos os limites pré
para operação. Ele atende comandos tanto armazenados na
memória interna do drive assim comandos externos ou remotos. Por exemplo
situação de redução de velocidade enviada pela sala de controle
57
Detalhes do sistema de controle da cascata [13].
se de um controle seqüencial e de funções lógica
e é responsável por avaliar as sequências de operação do Drive, desde a sua
partida até situações de paradas de emergência. Para isso o circuito monitora
saída e executa os comandos de chaveamento
para Bypass
busca atender todos os limites pré-
comandos tanto armazenados na
memória interna do drive assim comandos externos ou remotos. Por exemplo, numa
situação de redução de velocidade enviada pela sala de controle, o drive processará

58
este novo valor de velocidade(set point) e assim configurará uma nova sequência de
gatilhos dos tiristores [13].
3.1.4.1.3 Proteção e monitoramento
Este estado de controle trata de acompanhar todos os riscos oferecidos ao
drive pelo circuito de potência. E assim monitora em cada instante se a cascata esta
operando dentro dos limites configurados. Informações importantes de
monitoramento:
- Sobrecorrente no rotor.
- Sobrecorrente no transformador e sobrecarga.
- Sobtensão e sobretensão no drive.
- Situação de ventilação.
Em casos de condições de operação fora dos limites, a decisão de continuar
operando ou trip (desligamento e bloqueio) do conversor é realizado pelo controle
seqüencial [13].
3.2 Aplicação em foco
Assim como os inversores de freqüência de média tensão, as cascatas
subsíncronas são utilizadas para controle de velocidade dos motores responsáveis
pelo acionamento dos ventiladores do processo de queima de pelotas nos fornos
das usinas. Também são de grande importância para o processo de pelotização
onde qualquer parada nestes conversores acarretam perdas significativas. Na Vale
são utilizados da seguinte forma: Os motores de média tensão (motores de indução
de rotor bobinado) são partidos com o auxílio de reostatos liquidos. Desta forma a
inércia do motor é quebrada e este sofre aceleração até 75% da velocidade nominal.
Chegando a este nível de velocidade um sistema de manobra é acionado e o circuito
rotórico antes conectado ao reostato passa a ser acoplado à cascata subsíncrona,
que passa a monitorar a variação de velocidade até 100% da nominal. Como o
projeto da cascata subsíncrona foi realizado para este nível de velocidade apenas, o
drive só opera velocidades dentro desta faixa podendo ser danificado para outros
valores. Assim não possibilita partida do motor e nem operação em baixas
velocidades como os inversores de freqüência realizam. Existe dois modos de
operação conhecidos : modo cascata de operação e modo Bypass.
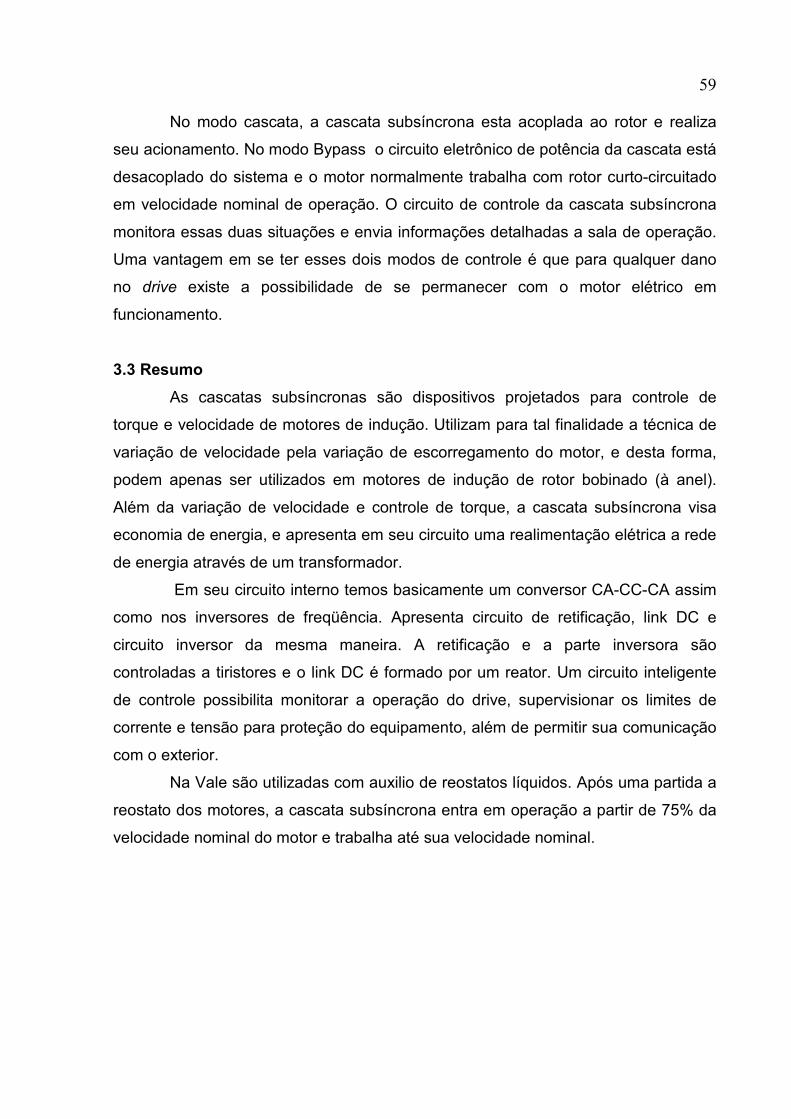
59
No modo cascata, a cascata subsíncrona esta acoplada ao rotor e realiza
seu acionamento. No modo Bypass o circuito eletrônico de potência da cascata está
desacoplado do sistema e o motor normalmente trabalha com rotor curto-circuitado
em velocidade nominal de operação. O circuito de controle da cascata subsíncrona
monitora essas duas situações e envia informações detalhadas a sala de operação.
Uma vantagem em se ter esses dois modos de controle é que para qualquer dano
no drive existe a possibilidade de se permanecer com o motor elétrico em
funcionamento.
3.3 Resumo
As cascatas subsíncronas são dispositivos projetados para controle de
torque e velocidade de motores de indução. Utilizam para tal finalidade a técnica de
variação de velocidade pela variação de escorregamento do motor, e desta forma,
podem apenas ser utilizados em motores de indução de rotor bobinado (à anel).
Além da variação de velocidade e controle de torque, a cascata subsíncrona visa
economia de energia, e apresenta em seu circuito uma realimentação elétrica a rede
de energia através de um transformador.
Em seu circuito interno temos basicamente um conversor CA-CC-CA assim
como nos inversores de freqüência. Apresenta circuito de retificação, link DC e
circuito inversor da mesma maneira. A retificação e a parte inversora são
controladas a tiristores e o link DC é formado por um reator. Um circuito inteligente
de controle possibilita monitorar a operação do drive, supervisionar os limites de
corrente e tensão para proteção do equipamento, além de permitir sua comunicação
com o exterior.
Na Vale são utilizadas com auxilio de reostatos líquidos. Após uma partida a
reostato dos motores, a cascata subsíncrona entra em operação a partir de 75% da
velocidade nominal do motor e trabalha até sua velocidade nominal.

60
4 Estudo comparativo
4.1 Introdução
O objetivo de se comparar os acionamentos elétricos (drives) de média
tensão (Inversor de frequência e Cascata subsíncrona), é, através de informações
teóricas de construção e práticas de operação, obter-se uma conclusão de qual
conversor se adequaria melhor em um sistema de acionamento de um ventilador
movido por motor de indução. Além das características de operação, como o quanto
de variação de velocidade, acelerações e paradas o drive suporta, informações
referentes a custos com manutenção, tamanho, das peças de reposição, danos na
rede elétrica causados por distorção harmônica, dentre outros, são pontos
fundamentais a serem levantados quando se quer escolher o melhor equipamento
para sua aplicação.
Neste capítulo serão colocadas frente a frente muitas informações já
apresentadas nos capítulos anteriores ao se apresentar os drives separadamente.
Serão levantadas também algumas características, como vantagens e
desvantagens, além de problemas encontrados na VALE quando esses
equipamentos estão em operação.
No fim deste trabalho espera-se que se tenham informações seguras e
plausíveis para se tomar as melhores medidas e decisões de escolha dentro dos
padrões da engenharia.
4.2 Sobre a empresa
A Empresa Vale é uma mineradora. Em sua logística estão a extração do
minério de ferro das minas, tratamento dessa matéria prima e exportação. Para
tratamento dessa matéria prima (minério de ferro) ela apresenta um complexo de
usinas chamado de “Usinas de pelotização” com a finalidade de transformar o
minério de ferro “fino” em pelotas (“bolas”), pois o minério com esta característica
tem maior eficiência na produção de aço, por exemplo, ao passar por um “Alto forno”
em um processo siderúrgico.
Nas usinas, o minério fino, antes de tornar-se pelota, geralmente é moído,
filtrado e assado, num processo que requer muita engenharia de controle e de
manutenção. Para ser assado, o minério fino passa por um grande forno que chega
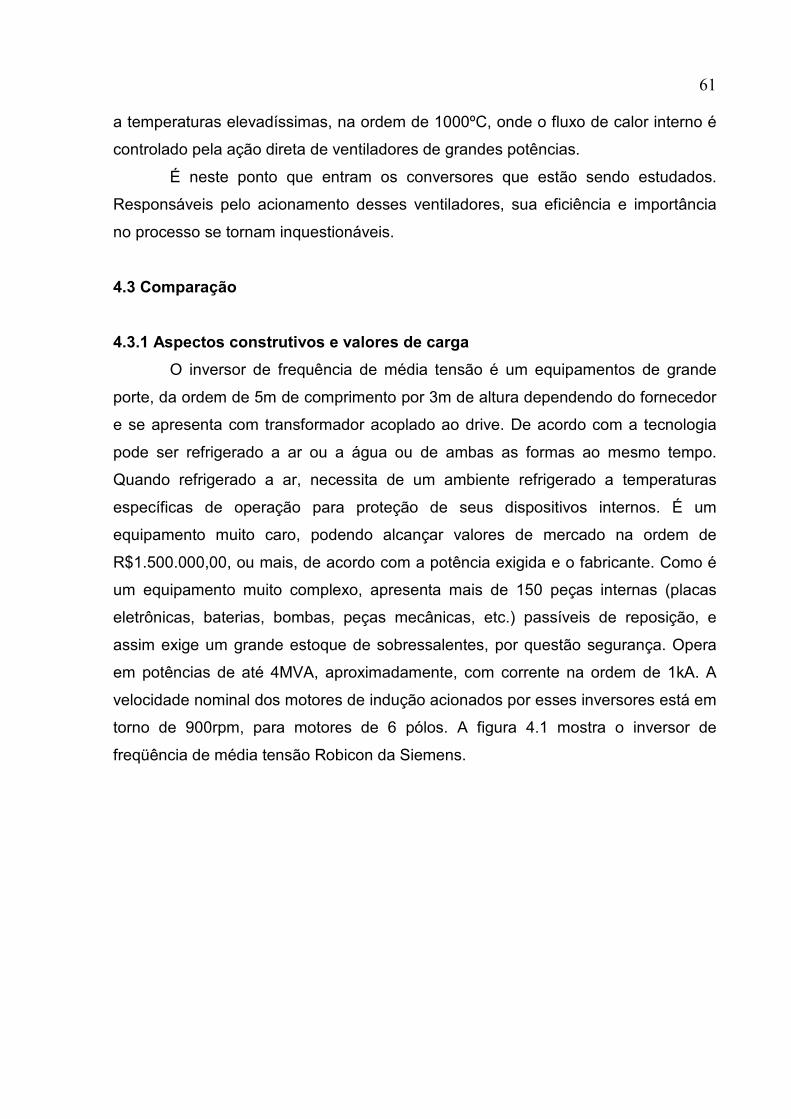
61
a temperaturas elevadíssimas, na ordem de 1000ºC, onde o fluxo de calor interno é
controlado pela ação direta de ventiladores de grandes potências.
É neste ponto que entram os conversores que estão sendo estudados.
Responsáveis pelo acionamento desses ventiladores, sua eficiência e importância
no processo se tornam inquestionáveis.
4.3 Comparação
4.3.1 Aspectos construtivos e valores de carga
O inversor de frequência de média tensão é um equipamentos de grande
porte, da ordem de 5m de comprimento por 3m de altura dependendo do fornecedor
e se apresenta com transformador acoplado ao drive. De acordo com a tecnologia
pode ser refrigerado a ar ou a água ou de ambas as formas ao mesmo tempo.
Quando refrigerado a ar, necessita de um ambiente refrigerado a temperaturas
específicas de operação para proteção de seus dispositivos internos. É um
equipamento muito caro, podendo alcançar valores de mercado na ordem de
R$1.500.000,00, ou mais, de acordo com a potência exigida e o fabricante. Como é
um equipamento muito complexo, apresenta mais de 150 peças internas (placas
eletrônicas, baterias, bombas, peças mecânicas, etc.) passíveis de reposição, e
assim exige um grande estoque de sobressalentes, por questão segurança. Opera
em potências de até 4MVA, aproximadamente, com corrente na ordem de 1kA. A
velocidade nominal dos motores de indução acionados por esses inversores está em
torno de 900rpm, para motores de 6 pólos. A figura 4.1 mostra o inversor de
freqüência de média tensão Robicon da Siemens.
62
Fig4.1- Inversor de frequência de média tensão Robicon da Siemens.
A cascata subsíncrona também é um drive complexo, um pouco menor que
o inversor, mas também necessitando de cuidados referentes a refrigeração e
manutenção. Seus valores de potência e de velocidade são similares ao do inversor
de freqüência. As cascatas subsíncronas da Vale são refrigeradas a ar e ficam em
uma sala especial com ar- condicionado. Problemas de parada do drive já foram
relatados por desarme desse sistema de ar-condicionado. Como é um equipamento
antigo e não mais fabricado, obter- se qualquer sobressalente tornou-se algo
impraticável. Os 2 únicos drives que a Vale possui ainda utilizam sobressalentes de
drives antigos que foram substituídos por inversores. Seu preço individual seria
menos de R$1.000.000,00 se compararmos com os Inversores de freqüência, porém
deve-se levar em conta que a cascata subsíncrona opera num conjunto: Reostato
de partida e drive cascata subsíncrona, assim para qualquer comparação de preço
deve-se levar em consideração esse detalhe. O preço de um reostato que trabalha
nesta faixa de potência está na ordem de R$100.000,00 a R$300.000,00. A figura
4.2 mostra uma visão interna do drive (Megadrive cascade).
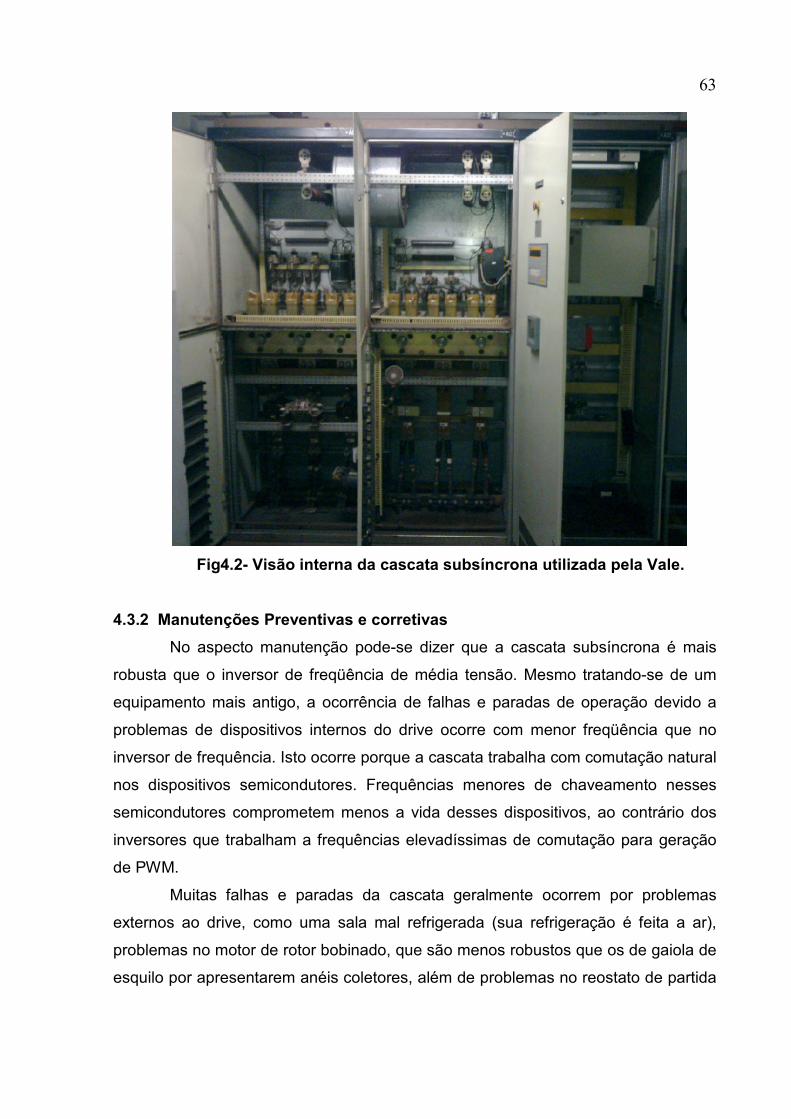
63
Fig4.2- Visão interna da cascata subsíncrona utilizada pela Vale.
4.3.2 Manutenções Preventivas e corretivas
No aspecto manutenção pode-se dizer que a cascata subsíncrona é mais
robusta que o inversor de freqüência de média tensão. Mesmo tratando-se de um
equipamento mais antigo, a ocorrência de falhas e paradas de operação devido a
problemas de dispositivos internos do drive ocorre com menor freqüência que no
inversor de frequência. Isto ocorre porque a cascata trabalha com comutação natural
nos dispositivos semicondutores. Frequências menores de chaveamento nesses
semicondutores comprometem menos a vida desses dispositivos, ao contrário dos
inversores que trabalham a frequências elevadíssimas de comutação para geração
de PWM.
Muitas falhas e paradas da cascata geralmente ocorrem por problemas
externos ao drive, como uma sala mal refrigerada (sua refrigeração é feita a ar),
problemas no motor de rotor bobinado, que são menos robustos que os de gaiola de
esquilo por apresentarem anéis coletores, além de problemas no reostato de partida
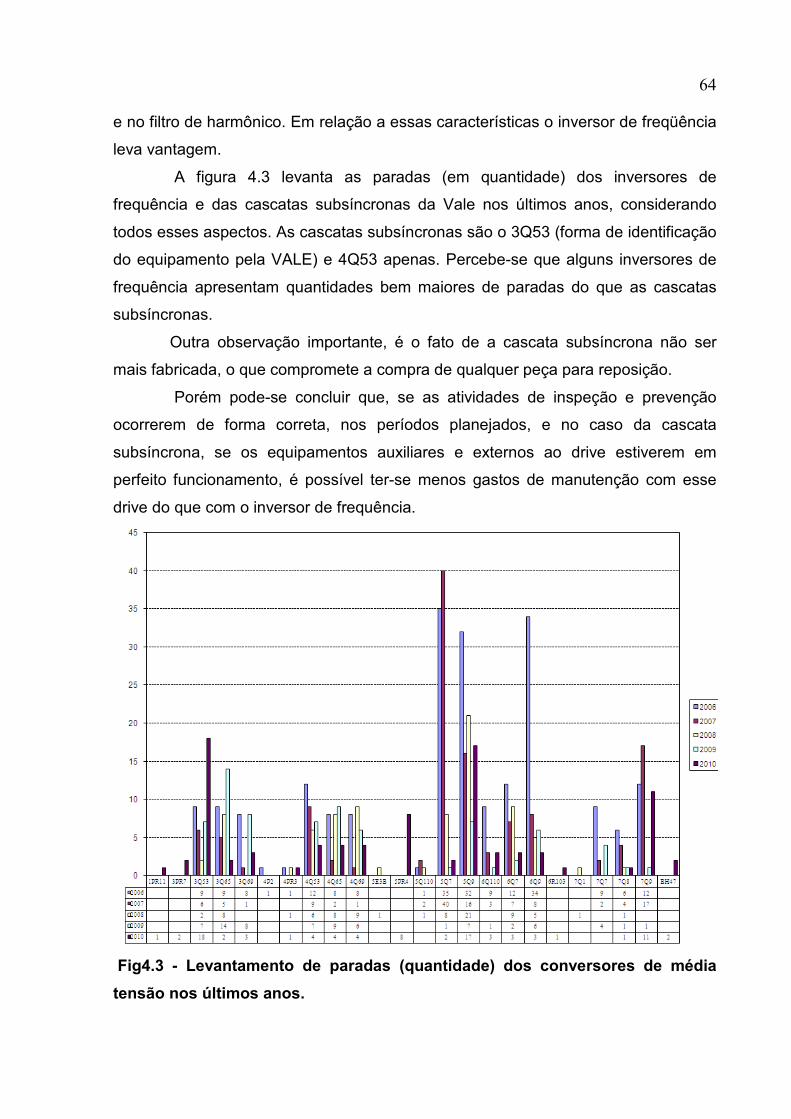
64
e no filtro de harmônico. Em relação a essas características o inversor de freqüência
leva vantagem.
A figura 4.3 levanta as paradas (em quantidade) dos inversores de
frequência e das cascatas subsíncronas da Vale nos últimos anos, considerando
todos esses aspectos. As cascatas subsíncronas são o 3Q53 (forma de identificação
do equipamento pela VALE) e 4Q53 apenas. Percebe-se que alguns inversores de
frequência apresentam quantidades bem maiores de paradas do que as cascatas
subsíncronas.
Outra observação importante, é o fato de a cascata subsíncrona não ser
mais fabricada, o que compromete a compra de qualquer peça para reposição.
Porém pode-se concluir que, se as atividades de inspeção e prevenção
ocorrerem de forma correta, nos períodos planejados, e no caso da cascata
subsíncrona, se os equipamentos auxiliares e externos ao drive estiverem em
perfeito funcionamento, é possível ter-se menos gastos de manutenção com esse
drive do que com o inversor de frequência.
Fig4.3 - Levantamento de paradas (quantidade) dos conversores de média
tensão nos últimos anos.
65
4.3.3 Variação de velocidade
Em relação à variação de velocidade em um determinado processo, pode-se
concluir que os inversores de freqüência suprem demandas de velocidade não
atendidas pela cascata subsíncrona.
A tecnologia dos inversores de freqüência possibilita a partida de seus
motores de indução (gaiola de esquilo) com controle de torque e dos níveis da
corrente de partida sem necessidade de auxílio externo, diferente do caso da
cascata, que só parte com auxílio de reostato. Abrir mão desse suporte à partida é
inviável para a cascata subsíncrona, pois ela teria que tratar com correntes
elevadíssimas induzidas no rotor do motor no momento da partida.
Além de uma partida bem controlada os inversores de freqüência
possibilitam entregar às suas respectivas cargas quaisquer velocidades e torques
que sejam do interesse do processo. O desenvolvimento do controle vetorial permitiu
trabalhar-se com corrente de campo (fluxo) e corrente de armadura (torque) como
se estivesse controlando uma máquina CC.
A cascata subsíncrona perde, desta forma, na faixa de velocidade em que
pode variar suas cargas, pois não propicia controle para baixas velocidades, o que já
restringe suas aplicações. Para a faixa de velocidade na qual possibilita controle, a
cascata realiza esta tarefa de forma eficiente com controle de torque simples, como
em máquinas CC e sem necessidade de técnicas complexas como o controle
vetorial, além de regenerar grande parte da energia elétrica que seria perdida no
rotor, uma característica não encontrada no inversor de frequência. A única forma de
aproveitamento da energia elétrica por parte do inversor seria em um caso de
frenagem regenerativa. Alguns fabricantes de inversores de freqüência fornecem
essa função.
4.3.4 Harmônicos
O inversor de freqüência e a cascata subsíncrona são equipamentos não
lineares e desta forma geram distorção harmônica na rede elétrica pelas quais são
abastecidas. Partindo-se então do princípio de que qualquer drive vai poluir a rede
elétrica, quer-se comparar qual deles apresenta a melhor tecnologia para reduzir ou
eliminar tais harmônicos.
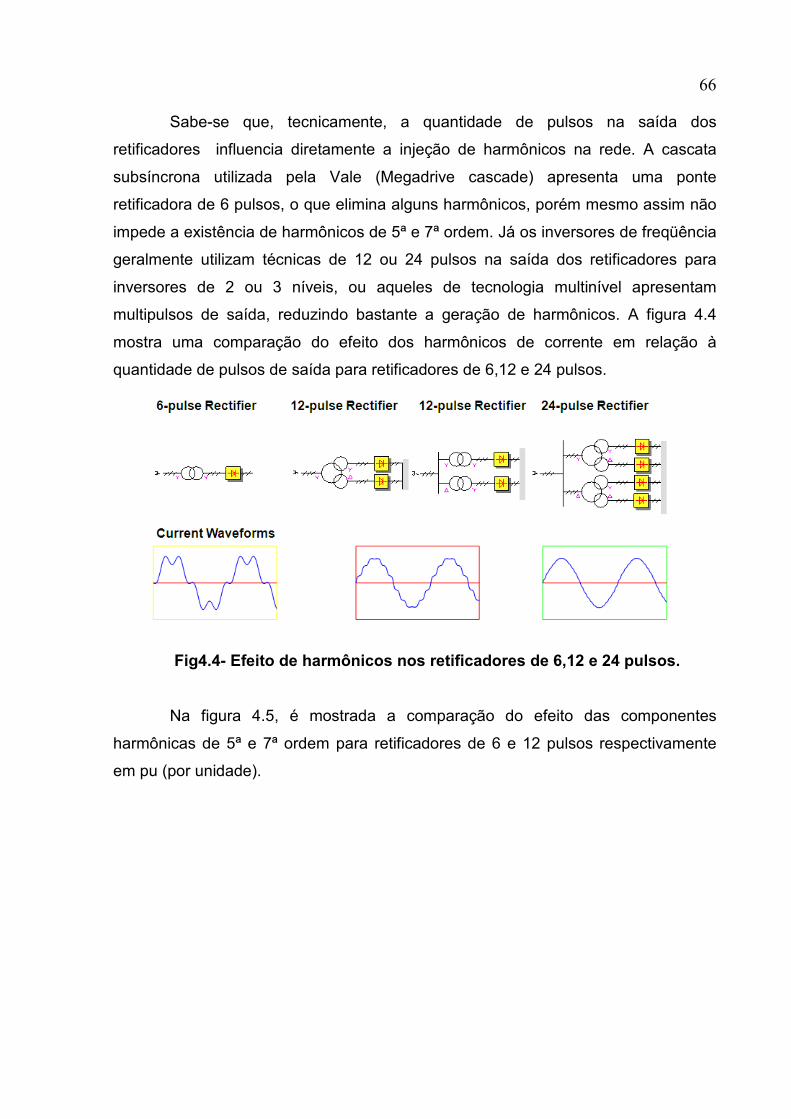
66
Sabe-se que, tecnicamente, a quantidade de pulsos na saída dos
retificadores influencia diretamente a injeção de harmônicos na rede. A cascata
subsíncrona utilizada pela Vale (Megadrive cascade) apresenta uma ponte
retificadora de 6 pulsos, o que elimina alguns harmônicos, porém mesmo assim não
impede a existência de harmônicos de 5ª e 7ª ordem. Já os inversores de freqüência
geralmente utilizam técnicas de 12 ou 24 pulsos na saída dos retificadores para
inversores de 2 ou 3 níveis, ou aqueles de tecnologia multinível apresentam
multipulsos de saída, reduzindo bastante a geração de harmônicos. A figura 4.4
mostra uma comparação do efeito dos harmônicos de corrente em relação à
quantidade de pulsos de saída para retificadores de 6,12 e 24 pulsos.
Fig4.4- Efeito de harmônicos nos retificadores de 6,12 e 24 pulsos.
Na figura 4.5, é mostrada a comparação do efeito das componentes
harmônicas de 5ª e 7ª ordem para retificadores de 6 e 12 pulsos respectivamente
em pu (por unidade).
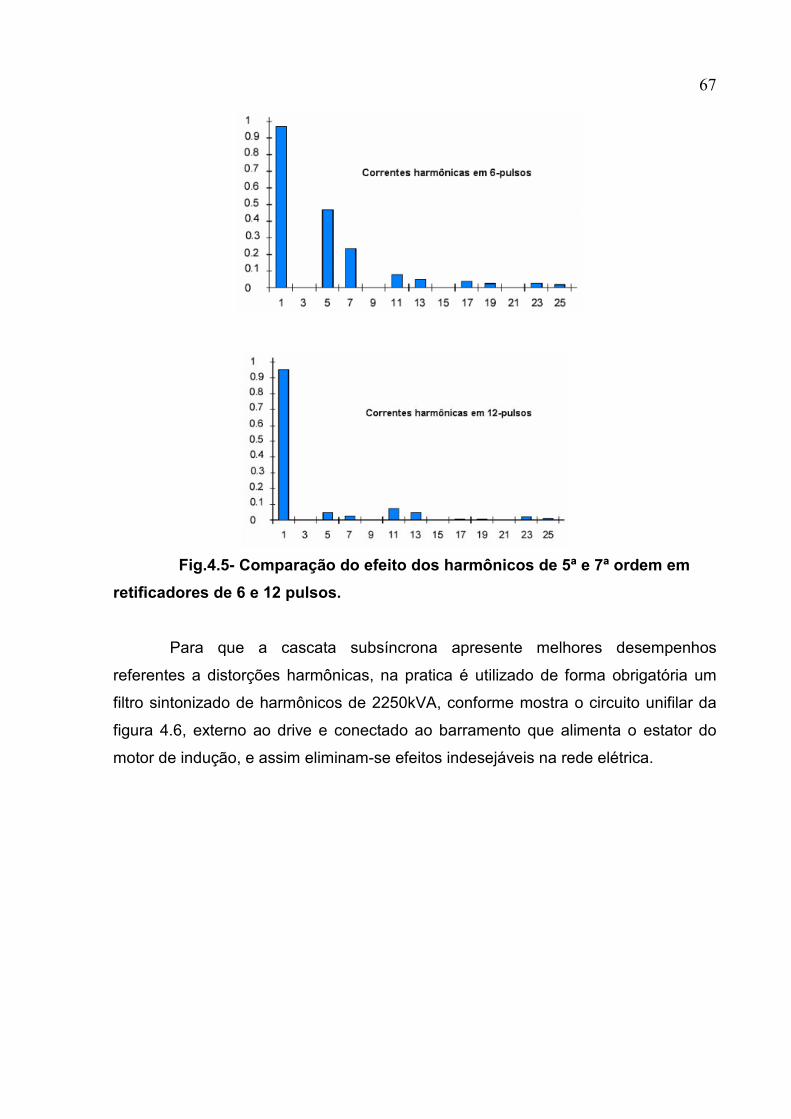
67
Fig.4.5- Comparação do efeito dos harmônicos de 5ª e 7ª ordem em
retificadores de 6 e 12 pulsos.
Para que a cascata subsíncrona apresente melhores desempenhos
referentes a distorções harmônicas, na pratica é utilizado de forma obrigatória um
filtro sintonizado de harmônicos de 2250kVA, conforme mostra o circuito unifilar da
figura 4.6, externo ao drive e conectado ao barramento que alimenta o estator do
motor de indução, e assim eliminam-se efeitos indesejáveis na rede elétrica.
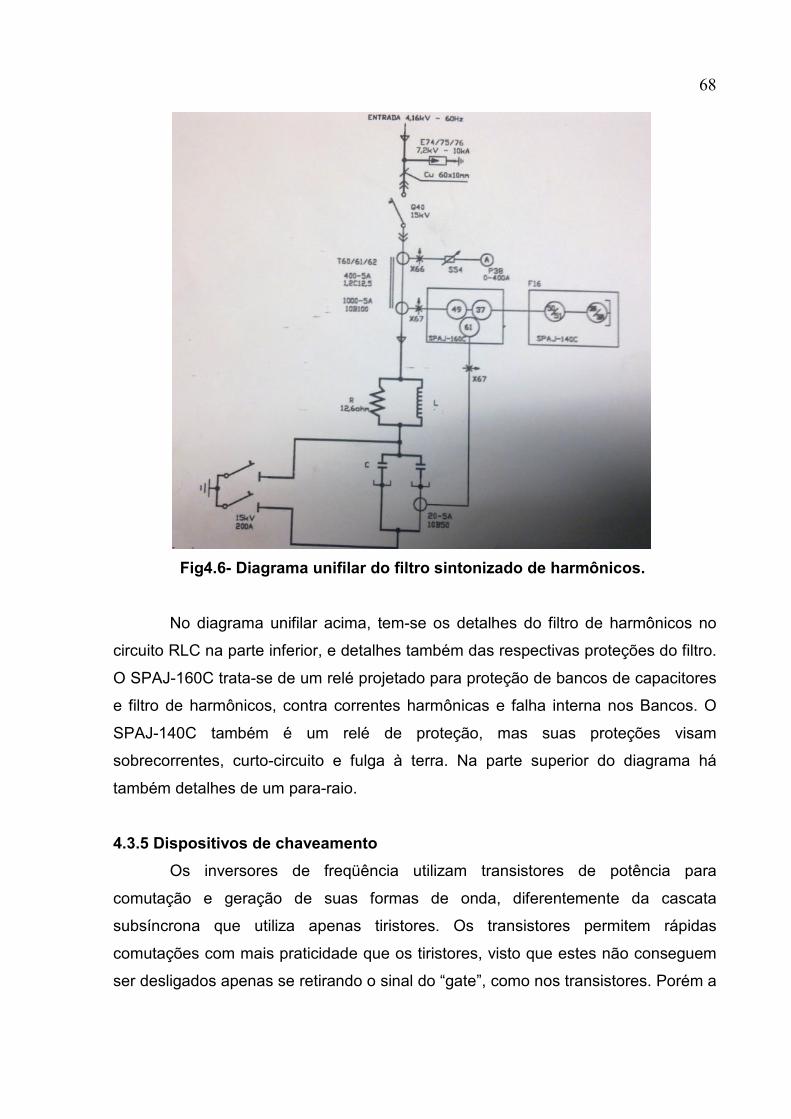
68
Fig4.6- Diagrama unifilar do filtro sintonizado de harmônicos.
No diagrama unifilar acima, tem-se os detalhes do filtro de harmônicos no
circuito RLC na parte inferior, e detalhes também das respectivas proteções do filtro.
O SPAJ-160C trata-se de um relé projetado para proteção de bancos de capacitores
e filtro de harmônicos, contra correntes harmônicas e falha interna nos Bancos. O
SPAJ-140C também é um relé de proteção, mas suas proteções visam
sobrecorrentes, curto-circuito e fulga à terra. Na parte superior do diagrama há
também detalhes de um para-raio.
4.3.5 Dispositivos de chaveamento
Os inversores de freqüência utilizam transistores de potência para
comutação e geração de suas formas de onda, diferentemente da cascata
subsíncrona que utiliza apenas tiristores. Os transistores permitem rápidas
comutações com mais praticidade que os tiristores, visto que estes não conseguem
ser desligados apenas se retirando o sinal do “gate”, como nos transistores. Porém a

69
tecnologia dos tiristores quando se refere a tensões elevadas (acima de 500A e 1kV)
é mais difundida que a dos transistores.
Desta forma, alguns fabricantes de inversor de freqüência utilizam os
tiristores GTO e IGCT para comutação nos seus circuitos de inversão, pois estes
semicondutores além de serem bons para elevadas tensões possuem característica
de comutação com se fossem transistores.
Na cascata subsíncrona, como trabalha com comutação natural em seu
circuito inversor, os semicondutores são submetidos a baixas frequências de
comutação e desta forma, os tiristores atendem muito bem a esta finalidade.
Para se desligar os tiristores, técnicas de comutação utilizando ressonância
LC (ou circuito RLC amortecidos) forçam a corrente e/ou tensão a zero, cortando
desta forma o dispositivo [17].
4.3.6 Considerações (Tabela de comparação)
Podem-se resumir algumas características dos dois drives, na seguinte
tabela, para efeito de comparação.
ASPECTO
TECNOLÓGICO
INVERSOR DE
FREQUENCIA
Pto
(inv.)
CASCATA
SUBSÍNCRONA
Pto
(casc.)
Níveis de
Potência,corrente e
velocidade dos
motores acionados.
Entre 2 a 4MVA , 1kA de
corrente e 900 rpm.
0
Idem
0
Tipo de motor
acionado
Motor de indução de gaiola
de esquilo
+1
Motor de Indução de rotor
bobinado (com anel)
0
Níveis de
velocidade
controlada
Permite controle de
velocidade de 0 a 100% da
velocidade nominal do
motor podendo superá-la
em alguns casos.
+1
Permite controle,
normalmente, entre 75% a
100% da velocidade
nominal do motor. Necessita
de reostato para partida.
-1

70
Manutenção
Apresenta muitas falhas
devido a danos de
dispositivos internos. Exige
estoque de sobressalente
para reposição de suas
peças. Sobressalentes
obtidos pelo fornecedor do
próprio drive.
-1
É mais robusto que os
inversores apresentando
menos falhas por
dispositivos internos.
Também exige estoque de
sobressalentes, porém este
equipamento não é mais
fabricado, dificultando a
manutenção.
0
Harmônicos
Tecnologia complexa de
12 a 24 pulsos e
multiníveis, reduz
significativamente a
injeção de harmônicos na
rede elétrica.
+1
Utilizam retificadores de 6
pulsos. Componentes
harmônicos de 5ª e 7ª
ordem interferem no
sistema. Há necessidade de
um filtro de harmônicos
externo para redução de
distorções na rede.
0
Economia de
Energia
Todo controle de energia é
decorrente da eficiência
com que o inversor de
frequência exerce o
controle de torque e
velocidade. Alguns drives
utilizam técnicas de
frenagem regenerativa.
0
A cascata subsíncrona é
projetada para devolver à
rede elétrica grande parte
da energia perdida com a
variação do
escorregamento.
+1
Semicondutores de
potência/freqüência
de chaveamento
transistores de potência e
tristores
(IGCT,IGBT,GTO).
Chaveiam em altas
freqüências (dezenas de
kHz)(PWM).
-1
tiristores de potência.
Chaveiam na freqüência da
rede elétrica (60hz).
Comutação natural.
+1
Tabela 4.1– Características dos drives Inversor de freqüência de média tensão
e cascata subsíncrona.
71
Considerando :
+1 = Desempenho bom;
0 = Desempenho mediano;
-1 = Desempenho ruim;
Compara-se o desempenho dos conversores para os aspectos tecnológicos acima, e
assim, somando-se todos os pontos, resulta:
Inversor de frequência = +1
Cascata subsíncrona = +1
Pode-se concluir desta comparação que não há predominância de vantagem de um
conversor em relação a outro, mas que, mesmo a cascata subsíncrona sendo um
equipamento mais antigo e menos complexo, ainda apresenta muitas vantagens de
desempenho comparada ao inversor de frequência. Assim, para um processo
operacional em que seu limite de velocidade de controle seja suficiente, pode ser
muito bem escolhida para acionamento. Supõe-se ainda, um sistema eficiente de
manutenção do motor de rotor bobinado, do filtro sintonizado e do reostato de
partida.
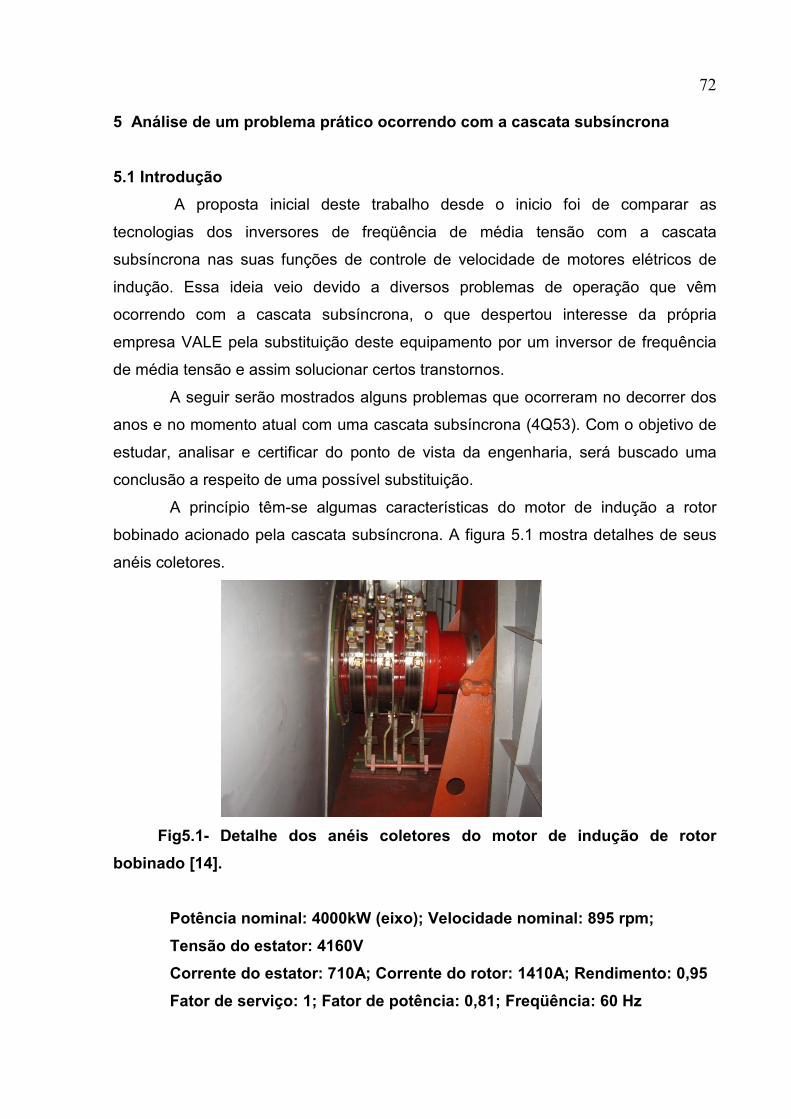
72
5 Análise de um problema prático ocorrendo com a cascata subsíncrona
5.1 Introdução
A proposta inicial deste trabalho desde o inicio foi de comparar as
tecnologias dos inversores de freqüência de média tensão com a cascata
subsíncrona nas suas funções de controle de velocidade de motores elétricos de
indução. Essa ideia veio devido a diversos problemas de operação que vêm
ocorrendo com a cascata subsíncrona, o que despertou interesse da própria
empresa VALE pela substituição deste equipamento por um inversor de frequência
de média tensão e assim solucionar certos transtornos.
A seguir serão mostrados alguns problemas que ocorreram no decorrer dos
anos e no momento atual com uma cascata subsíncrona (4Q53). Com o objetivo de
estudar, analisar e certificar do ponto de vista da engenharia, será buscado uma
conclusão a respeito de uma possível substituição.
A princípio têm-se algumas características do motor de indução a rotor
bobinado acionado pela cascata subsíncrona. A figura 5.1 mostra detalhes de seus
anéis coletores.
Fig5.1- Detalhe dos anéis coletores do motor de indução de rotor
bobinado [14].
Potência nominal: 4000kW (eixo); Velocidade nominal: 895 rpm;
Tensão do estator: 4160V
Corrente do estator: 710A; Corrente do rotor: 1410A; Rendimento: 0,95
Fator de serviço: 1; Fator de potência: 0,81; Freqüência: 60 Hz
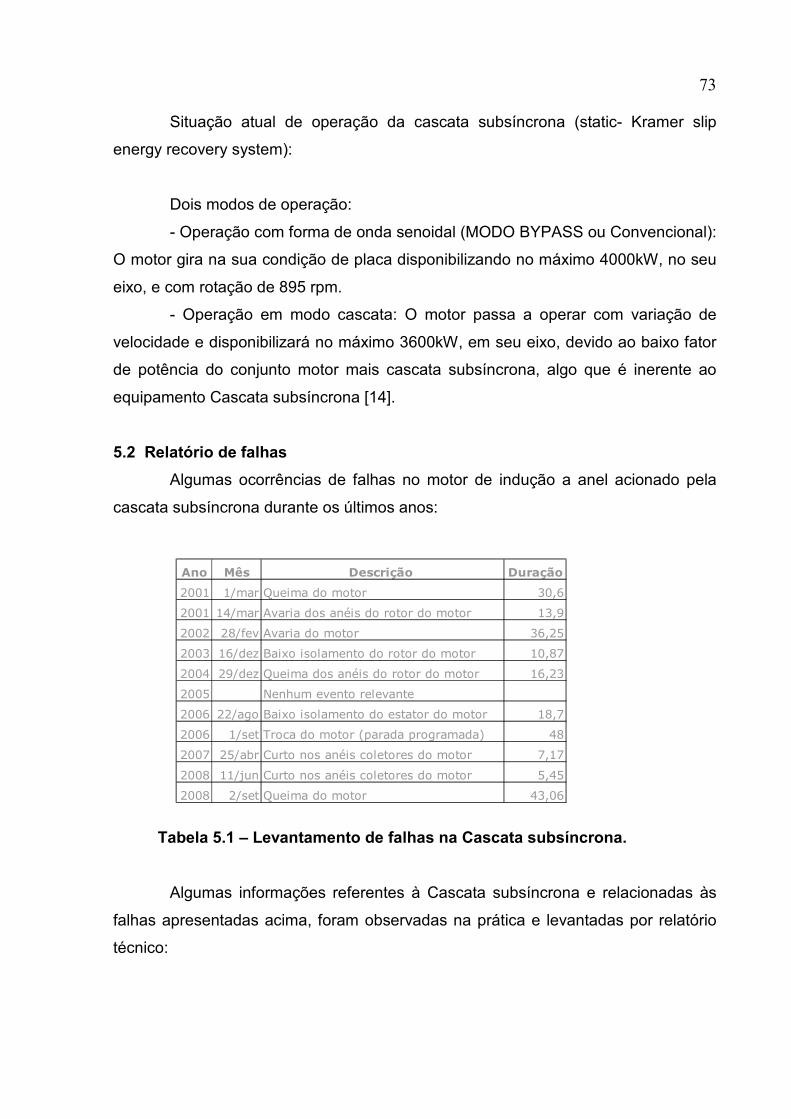
73
Situação atual de operação da cascata subsíncrona (static- Kramer slip
energy recovery system):
Dois modos de operação:
- Operação com forma de onda senoidal (MODO BYPASS ou Convencional):
O motor gira na sua condição de placa disponibilizando no máximo 4000kW, no seu
eixo, e com rotação de 895 rpm.
- Operação em modo cascata: O motor passa a operar com variação de
velocidade e disponibilizará no máximo 3600kW, em seu eixo, devido ao baixo fator
de potência do conjunto motor mais cascata subsíncrona, algo que é inerente ao
equipamento Cascata subsíncrona [14].
5.2 Relatório de falhas
Algumas ocorrências de falhas no motor de indução a anel acionado pela
cascata subsíncrona durante os últimos anos:
Tabela 5.1 – Levantamento de falhas na Cascata subsíncrona.
Algumas informações referentes à Cascata subsíncrona e relacionadas às
falhas apresentadas acima, foram observadas na prática e levantadas por relatório
técnico:
Ano Mês Descrição Duração
2001 1/mar Queima do motor 30,6
2001 14/mar Avaria dos anéis do rotor do motor 13,9
2002 28/fev Avaria do motor 36,25
2003 16/dez Baixo isolamento do rotor do motor 10,87
2004 29/dez Queima dos anéis do rotor do motor 16,23
2005 Nenhum evento relevante
2006 22/ago Baixo isolamento do estator do motor 18,7
2006 1/set Troca do motor (parada programada) 48
2007 25/abr Curto nos anéis coletores do motor 7,17
2008 11/jun Curto nos anéis coletores do motor 5,45
2008 2/set Queima do motor 43,06

74
(1) A cascata subsíncrona foi definida para efetuar recuperação de energia
quando o motor (rotor) estiver operando com potência elevada. Foi constatado que
no modo cascata com correntes rotóricas elevadas (acima de 1410A e freqüência de
53,3Hz) o sistema entra em vibração possivelmente originado por problemas no
sistema de controle.
(2) Quando da operação em baixa carga com alto escorregamento pode
ocorrer uma elevação na corrente do rotor. Se esta corrente não for limitada pelo
sistema de controle pode provocar aquecimento excessivo no circuito elétrico do
rotor e consequentemente danos ao mesmo.
(3) Além disso verifica-se que o motor 4Q53 possui controle por tiristores no
circuito do rotor, o que provoca uma distorção na corrente bastante acentuada.
Recomenda-se verificar o circuito de controle para limitar a máxima corrente do rotor
em até 1410A e enquanto essa situação (limitação na corrente do rotor) não for
concluída, manter o motor 4Q53 operando de forma convencional, ou seja, com a
cascata desligada.
(4) Deve-se verificar por que o motor 4Q53 está operando em potência
abaixo de 3000kW, visto que esta condição provoca uma alta densidade de corrente
nos anéis do motor provocando um desgaste excessivo nos mesmos (da ordem de
1mm/dia). Caso esta condição operacional seja definitiva deve-se definir uma nova
quantidade, e se necessário um outro tipo de escovas para serem utilizadas no rotor
do motor 4Q53. Por outro lado se a operação, no futuro, em baixa potência for
definitiva recomenda-se a substituição do motor.
(5) Para se obter confiabilidade em motores com escovas deve-se trabalhar
com a densidade constante de corrente nas escovas para garantir uma temperatura
de trabalho constante nas mesmas e conseqüentemente diminuir os desgastes. Com
a cascata ligada ao rotor não é possível atingir essa condição adequada de trabalho
[14].

75
5.3 Análise técnica dos problemas com a cascata subsíncrona
Com base nos conhecimentos adquiridos neste trabalho pode-se comentar
os problemas apresentados acima :
1- A princípio deve-se garantir que o drive não trabalhe com correntes acima
do dimensionado, pois isso gera maior aquecimento no motor. Em relação a
vibrações é possível que o nível de harmônicas esteja acima do projetado por
problemas no filtro de harmônicos, ocorrendo certo nível de ruído que provoca
vibrações.
2- A cascata subsíncrona não foi projetada para trabalhar em baixas
velocidades, apenas entre 75% a 100% da velocidade nominal do motor. Como a
potência entregue a ela segue a relação �G � �� S, quando ela é forçada a trabalhar
com maiores escorregamentos (menores velocidades), a tensão rotórica aumenta.
Desta forma, realmente é importante que o circuito de controle e proteção certifique-
se que o valor de corrente esteja dentro dos valores de projeto. Para se trabalhar
com menores rotações, os Inversores de freqüência se enquadrariam melhor.
3- A cascata subsíncrona apresenta sistema de retificação de 6 pulsos a
tiristores e isto permite existência de harmônicos, principalmente de 5ª e 7ª ordem.
Esses harmônicos caso não sejam contidos, podem provocar aumento de corrente e
aquecimento do motor (perdas no ferro por corrente de Foucault e histerese, alem de
correntes parasitas). É necessário verificar se o filtro de harmônicos externo à
cascata está em condições adequadas de funcionamento para conter essas
distorções. O circuito de controle realmente deve limitar possíveis sobrecorrentes
para proteção do equipamento e do motor de indução também. Os inversores de
freqüência neste caso seriam mais vantajosos pois a sua construção é projetada
para se reduzir drasticamente o efeito de harmônicos tanto no motor quanto na rede
elétrica.
4- O fluxo de potência no motor e na cascata subsíncrona é mostrado na
figura 5.2.
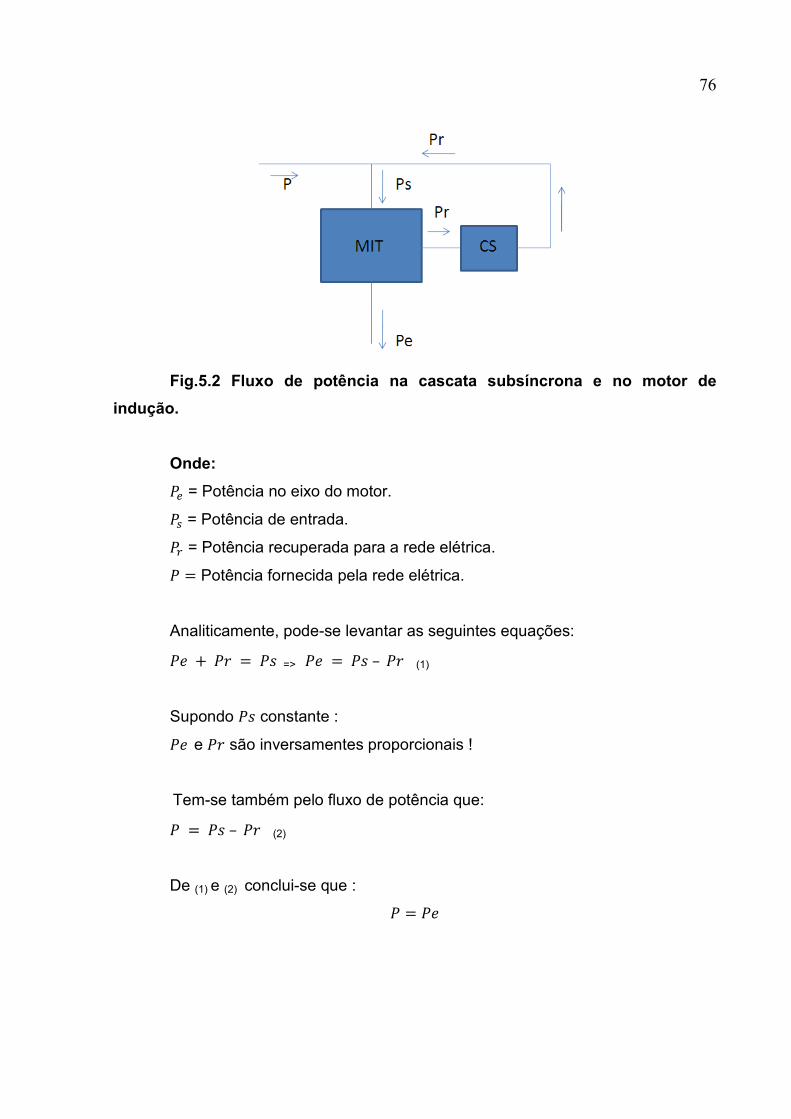
76
Fig.5.2 Fluxo de potência na cascata subsíncrona e no motor de
indução.
Onde:
�& = Potência no eixo do motor.
�� = Potência de entrada.
�G = Potência recuperada para a rede elétrica.
� � Potência fornecida pela rede elétrica.
Analiticamente, pode-se levantar as seguintes equações:
�� b � � �� => �� � �� – � (1)
Supondo �� constante :
�� e � são inversamentes proporcionais !
Tem-se também pelo fluxo de potência que:
� � �� – � (2)
De (1) e (2) conclui-se que :
� � ��
77
A energia rotórica não é perdida (como no MIT de gaiola (rotor em curto-
modo Bypass)) e sim, regenerada à rede elétrica. Por isso: � � ��. O sistema drena
apenas a potência no eixo da rede!
Continuando:
�� � �� – � e �� � � � � (� � �� de� � � � f��������)
• ��2 � �2 � ��ái � ���ái ;S2 � S�í�> • ��1 � �1 � ��í� � ���í� ;S1 � S�á�>
Velocidade máxima :
S2 � S�í� , ��2 , � � � �í�,
P�2 � �� – � �í� �k ; se ���ái � 4000mn, caso MIT gaiola.
��2 o ���ái � 4000mn �k
��2 � 3600mn.
: 3600kW devido ao baixo fp, mas também devido ao Smín da cascata, que
é maior que o S do MIT gaiola para 4000kW.
Velocidade mínima:
S1 � S�ái , ��1 , � � � �ái , ;��1 o ��2> ��1 � �� – � �ái �k
��1 o ��2 � 3600mn.
Quando se afirma que o motor está operando em potências abaixo de
3000kW (�&) (podendo chegar a um mínimo de 0,75 � 3600 � 2700mn), isso significa
que mais potência está sendo recuperada (�G) para a rede elétrica, considerando a
potência de entrada (��) aproximadamente constante. Desta forma pode-se concluir
que realmente um fluxo maior de corrente está passando pelos anéis coletores, mas
seria uma corrente prevista. Do ponto de vista da manutenção é importante verificar
se as manutenções preventivas e corretivas sobre os anéis coletores estão sendo
realizadas de forma adequada. Por exemplo, níveis mínimos de pressão com que as
escovas geralmente trabalham, se não forem atendidos, podem gerar maiores
resistências à corrente, e com isso, escovas e anéis podem ser danificadas por

78
excessivo aquecimento.Desta forma, se o motor e a cascata foram bem projetadas
para funcionarem como um sistema integrado, não haveria razão para substituição
do motor, pois os anéis e as escovas teriam sido bem dimensionadas. Se há
problemas de aquecimento excessivo, deve-se suspeitar da deficiência na eficácia
da manutenção (especialmente anéis, escovas e porta-escovas).
5- Realmente, para se ter temperatura de trabalho constante nos anéis deve-
se trabalhar com densidade de corrente constante, e com a cascata ligada isso se
torna inviável. A questão a ser analisada é que a função da cascata subsíncrona é
justamente a variação de velocidade nos motores, e a variação de densidade de
corrente nos anéis é inerente à variação de velocidade. Desta forma conclui-se que
para se ter variação de velocidade deve-se esperar variação de corrente nos anéis
coletores e o projeto de escolha deste motor deve basear-se nisso. Se não, não faria
sentido a utilização da cascata subsíncrona caso não se desejasse variar a
velocidade.
Mediante os problemas levantados nesse relatório técnico pode-se concluir
que se o sistema cascata subsíncrona, o motor de indução de rotor bobinado e o
filtro de harmônicos estiverem operando dentro das condições de projeto e as
manutenções devidas estiverem sendo realizadas de forma correta, muitos
problemas como os apresentados poderiam ser eliminados. A primeira coisa é não
forçar a cascata subsíncrona a entregar velocidades abaixo daquela mínima
velocidade de projeto. É importante verificar as condições do filtro de harmônicos, e
se realmente está reduzindo as componentes de freqüências danosas à rede que já
são esperadas pela topologia da cascata subsíncrona. Manutenções preventivas e
corretivas são de extrema importância nos motores de rotor bobinado, pois a
utilização de anéis coletores com escovas já possui um histórico negativo quanto a
avarias no motor. Caso estes fatores sejam bem observados e acompanhados é
possível ter bons resultados de operação com a utilização desse conversor estático
aplicado à variação de velocidade de motores de indução trifásicos.

79
6 Conclusões
Diante de todas as comparações realizadas entre os conversores inversor
de freqüência e cascata subsíncrona não se pode dizer que uma tecnologia é melhor
do que a outra para o controle de velocidade dos motores de indução de média
tensão, mas ambas executam bem suas tarefas para aquilo que são projetadas. O
que deve ser avaliado na hora de se escolher uma dessas tecnologias é qual delas
se enquadra melhor em uma aplicação específica, o que está ligado a um desejo
operacional.
Pode-se concluir, como foi levantado, que o inversor de freqüência de média
tensão é bem mais versátil do que a cascata subsíncrona para uma aplicação
industrial, pois possibilita maiores faixas de velocidade, independência para partida e
controle mais eficiente de harmônicas. Mas, em uma aplicação que não se requeira
tanta precisão e variação de velocidade a cascata subsíncrona torna-se eficiente e o
uso do inversor de freqüência seria desnecessário.
Deve-se também destacar que um bom serviço de manutenção,
especialmente sobre o motor e filtro de harmônicos, é de extrema importância para o
funcionamento dos conversores, e que qualquer avaria do conversor relacionado à
deficiência deste serviço não deve ser ligado ao desempenho e à eficiência do drive.

80
Anexo
Controle (comando) do inversor de freqüência de média tensão
Os inversores de freqüência de média tensão, devido ao fato de trabalharem
com tensões e correntes elevadíssimas são caracterizados por um certa
complexidade de projeto, considerando não só seu sistema de controle (comando)
como a importância dada a proteção do equipamento e principalmente a segurança
das pessoas que trabalharão diretamente com eles.
Para fins didáticos, detalhes de um inversor de média tensão utilizado pela
Vale, o PERFECT HARMONY da ROBICON, serão levantados para apresentar suas
características relacionadas a proteção e controle . Este inversor utiliza tecnologia
multinível com células de potência.
Fig. Típico lay out do inversor perfect harmony – tipo seccional [15].
A figura acima representa o inversor de frequência com suas respectivas
divisões para circuitos de força e controle. A alimentação de média tensão é dada no
gabinete de entrada e assim alimenta um transformador com vários enrolamentos
secundários. Desta forma as células de potência são abastecidas com baixa tensão.
Todo este sistema é controlado e monitorado pelo gabinete de controle, que abriga
tanto as placas de controle como as conexões de saída do inversor.

81
No inversor, cada célula contém suas próprias placas de controle (cell
control board) que se comunicam com o sistema mestre (Master control system)
através de um ligação por fibra óptica. Essa ligação é a única conexão entre as
células e o controle mestre localizado no gabinete de controle, portanto cada célula
é totalmente isolada do controle principal.
O gabinete de controle contém módulos eletrônicos de controle central do
sistema Harmônico (Harmony), e como dito anteriormente é física e eletronicamente
isolado da média tensão por questão de segurança [15]
A seguir uma vista interna e externa do gabinete de controle:
Fig. Vista interna e externa do gabinete de controle/saída [15].
Sistema de controle Mestre (Master)
O controle Mestre localizado dentro do gabinete de controle consiste de 3
grupos básicos de componentes. A Placa de interface de força (Power Interface
Board) contém a Placa de controle microprocessada (Microprocessor control Board)
que monitora e controla a operação global do sistema. A alimentação para ambas as
placas acima vem de uma fonte chaveada residente na Placa de interface de força.
A Placa de controle microprocessada contém o módulo do sistema (system
module), o qual pode ser desconectado se, por qualquer razão, a Placa de controle
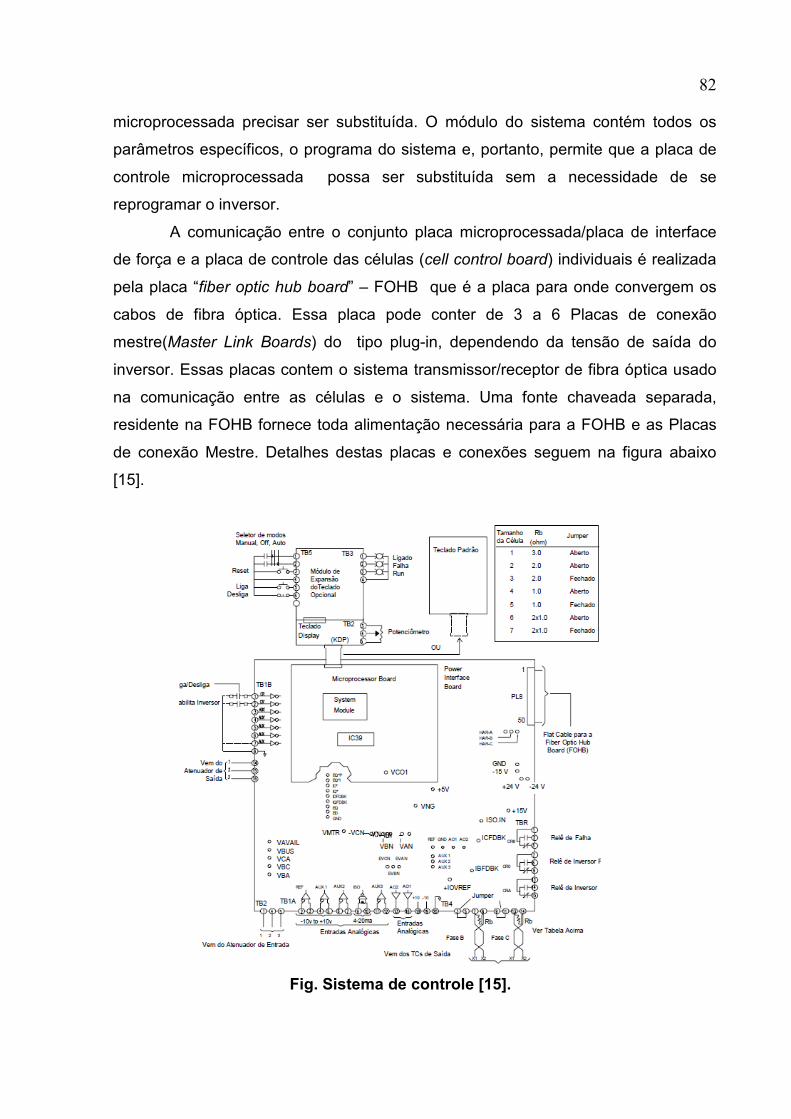
82
microprocessada precisar ser substituída. O módulo do sistema contém todos os
parâmetros específicos, o programa do sistema e, portanto, permite que a placa de
controle microprocessada possa ser substituída sem a necessidade de se
reprogramar o inversor.
A comunicação entre o conjunto placa microprocessada/placa de interface
de força e a placa de controle das células (cell control board) individuais é realizada
pela placa “fiber optic hub board” – FOHB que é a placa para onde convergem os
cabos de fibra óptica. Essa placa pode conter de 3 a 6 Placas de conexão
mestre(Master Link Boards) do tipo plug-in, dependendo da tensão de saída do
inversor. Essas placas contem o sistema transmissor/receptor de fibra óptica usado
na comunicação entre as células e o sistema. Uma fonte chaveada separada,
residente na FOHB fornece toda alimentação necessária para a FOHB e as Placas
de conexão Mestre. Detalhes destas placas e conexões seguem na figura abaixo
[15].
Fig. Sistema de controle [15].
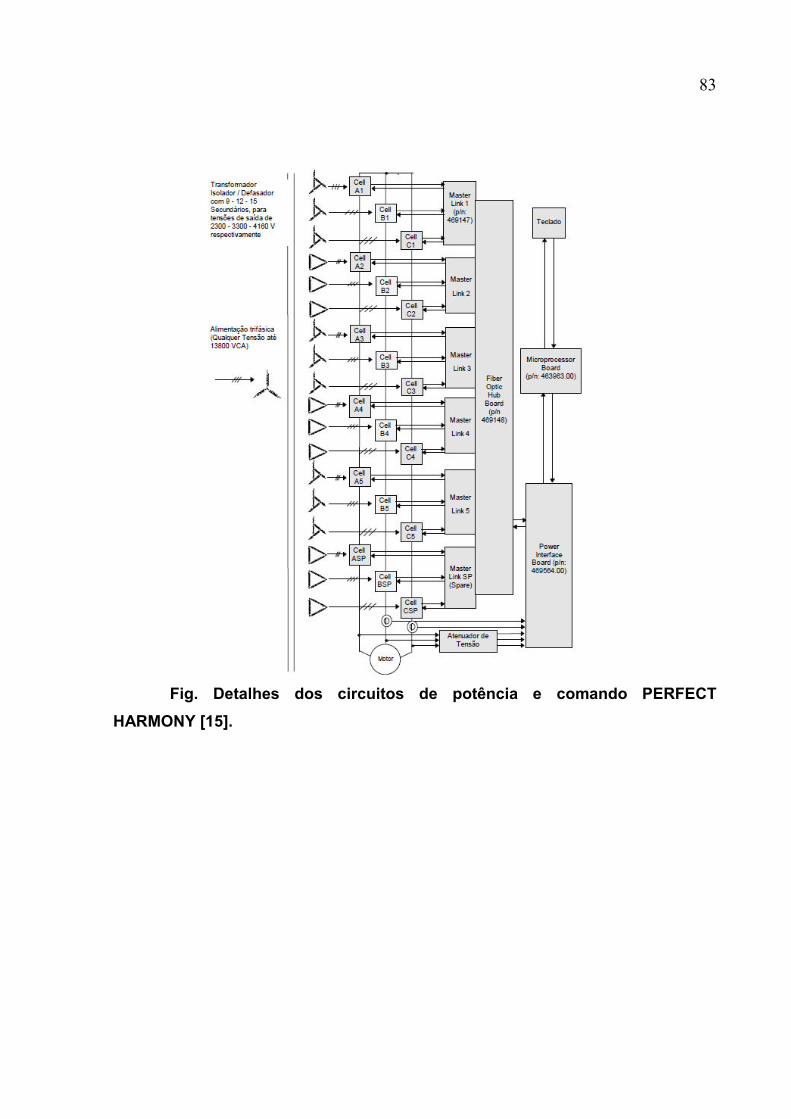
83
Fig. Detalhes dos circuitos de potência e comando PERFECT
HARMONY [15].
84
REFERÊNCIAS BIBLIOGRÁFICAS
[1] Weg Indústrias LTDA, Centro de treinamento de Clientes. Variação de
Velocidade , Módulo 2.2010. Disponível :
http://www.ebah.com.br/content/ABAAAAy_sAC/motores-weg-modulo-2
[2] Grupo Vorax, Manutenção de variadores de velocidade eletromagnéticos.
2010.Disponivel:
http://www.vorax.com.br/servicos-automacao-e-ionamento.php?exibeintegra=15
[3] Técnicas de controle para motores de indução com acionamento a freqüências
variáveis.2011.Diponível:
http://www.feelt.ufu.br/pastas/Controle_de_motores/Acionamento_freq_var.pdf
[4] GRIPP JUNIOR, P.E. Projeto de Graduação UFES – Estudo das tecnologias e
aplicações dos inversores de freqüência de média tensão. vitória, 2005.
[5] A Moderna eficientização energética e seus possíveis efeitos sobre o
desempenho operacional de equipamentos e instalações elétricas. Distorções
Harmônicas – Uma revisão de conceitos gerais. Eng Marcos Isoni.2001.
Disponível:
http://www.engeparc.com.br/Harmonicas%20e%20Eficiencia%20Energetica.pdf
[6] “Low-Cost Line-Harmonic Reduction”, Seminário 7 do APEC’95. Eletrônica de
potência 1. Prof.Aragão. Fator de potência nos retificadores. 2010.
[7] MUNIZ, Professor Rogério Carvalho. Princípio de comunicações. Volume 3.
Vitória, 2003.
[8] Controle de velocidade – Motor de Indução. Professora Jussara Farias fardin, aula 25.Vitória, 2010.
[9] Inversor de freqüência – Descrição do Funcionamento.2010. Disponivel:
http://www.faatesp.edu.br/publicacoes/Inversores_de_Frequencia.pdf
[10] WEG - Guia de Aplicação de Inversores de freqüência – CFW09.2010
[11] UDESC, Eletrônica de potência II, capítulo 9. Professor Cassiano
Rech.2010.Disponível:
http://www.joinville.udesc.br/portal/professores/yales/materiais/snubber.pdf
[12] BOSE, B.K. Power eletronics and ac drives. New Jersey : Prentice-Hall, 1986.

85
[13] ABB (ASEA BROWN BOVERI); ADS (Automação Drivers Sistemas); Dirceu
Gonçalves Ferreira- Treinamento Cascata Subsíncrona.2010.
[14] Estudo de viabilidade de substituição do acionamento do ventilador 4Q53-
VALE.2010
[15] ASI Robicon, Industrial Power Control ; Serie Perfect Harmony – Inversores de
Frequência- Células Tamanho 00-05 (Refrigerados a Ar)(400HP até 3000HP)
“Manual do Usuário”.2010.
[16] FITZGERALD, A. E.; KINGSLEY JUNIOR, C.; UMANS, S. D. Máquinas Elétricas
– Com introdução a eletrônica de potência. 6. Ed. Bookman, 2006.
[17] Instituto Newton C. Braga – Conheça o GTO e IGCT (ART 122).2010.
Disponível:
http://www.newtoncbraga.com.br/index.php/como-funciona/878-conheca-o-gto-
e-igct-rt122.html





























