Embed Size (px)
Citation preview

27 a 31 de Maio de 2002 – Universidade de Brasília – UnB Brasília, DF – Brasil Jornadas Sul-Americanas de Engenharia Estrutural
ANÁLISE ESTÁTICA NÃO-LINEAR DE CABOS UTILIZANDO O MÉTODO DOS ELEMENTOS FINITOS
Paulo Alexandre de Oliveira, Universidade Federal do Paraná, Brasil. Roberto Dalledone Machado, D. Eng., Universidade Federal do Paraná, Brasil.
Mildred Ballin Hecke, D. Sc., Universidade Federal do Paraná, Brasil. RESUMO No presente estudo, é feita uma análise comparativa entre dois elementos de cabo presentes na literatura. É apresentado um elemento finito isoparamétrico de cabo com dois nós, desenvolvido a partir de uma formulação variacional empregada comumente no Método dos Elementos Finitos. Também é apresentado o elemento de catenária desenvolvido a partir de expressões exatas oriundas da equação da catenária elástica. Verifica-se o comportamento estático desses elementos quando submetidos a algumas condições de carregamento. A análise é não linear e o processo iterativo é determinado através do Método de Newton-Raphson. Finalmente, é feita uma comparação dos resultados obtidos verificando algumas vantagens na utilização desses elementos em situações práticas. Palavras Chave: Método dos Elementos Finitos, Elementos de Cabos, Análise Não-Linear. ABSTRACT In the present study, a comparative analysis between two cable elements in the literature is made. An isoparametric cable finite element with two nodes, developed from a variacional formulation in the Finite Elements Method, is presented. The catenary element developed from exact expressions originating from the equation of the elastic catenary is also presented. The static behavior of those elements is verified when submitted to some load conditions. The analysis is non linear and the convergence of results is obtained through the Newton-Raphson Method. Finally, a comparison of the obtained results is made, verifying some advantages in the use of those elements in practical situations. Key words: Finite Elements Method, Cable Elements, Non Linear Analysis.
X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
1
1 INTRODUÇÃO
Supõe-se que Galileo tenha sido o primeiro a investigar a forma curva de um cabo suspenso sob seu próprio peso em meados do século XVII. Sua contribuição, no entanto, se restringiu a apontar a similaridade entre esta curva e uma parábola. Mais tarde, em 1691, a solução desta curva, que hoje é admitida como sendo a catenária, foi primeiramente publicada pelo eminente grupo de geógrafos e matemáticos composto pelos irmãos James e John Bernoulli, Leibnitz e Huigens. O cabo parabólico recebeu considerável atenção, não somente por causa de sua formulação matemática mais simplificada, mas também porque, em muitas situações, tal como em pontes suspensas, uma parcela substancial do carregamento é uniformemente distribuída ao longo do vão, de acordo com Irvine[5].
Até a metade do século XX, as pesquisas se restringiam ao desenvolvimento de expressões analíticas através das quais se tentava avaliar a flexibilidade e a deformabilidade de cabos sujeitos a carregamentos distribuídos e concentrados. Tais expressões esbarravam na impossibilidade da superposição de soluções tendo em vista o seu comportamento não linear. Com o aparecimento dos computadores, soluções obtidas através de métodos iterativos começaram a ser apresentadas. O procedimento adotado inicialmente era dividir o cabo em vários segmentos finitos. A partir de valores iniciais arbitrados para a tensão em um extremo do cabo, calculava-se o resíduo para a outra extremidade usando as condições de equilíbrio em um método iterativo em cada segmento discretizado. Os valores iniciais eram ajustados até que o resíduo fosse reduzido abaixo de limites aceitáveis.
Michalos e Birnstiel [13], em 1960, propuseram um método numérico de tentativa e erro baseado no que eles chamaram “string polygon aproach”. Neste método, a geometria curva do cabo é aproximada por vários segmentos retos e o carregamento distribuído é substituído por cargas concentradas equivalentes aplicadas nas intersecções destes segmentos.
O’Brien e Francis [14], em 1964, apontaram algumas deficiências no tratamento teórico do método de Michalos e Birnstiel [13] e apresentaram uma formulação numérica baseada nas expressões analíticas da catenária elástica. As equações de equilíbrio estático para segmentos de cabo são resolvidas através de um processo de sucessivas aproximações, nas quais a flecha do cabo tem um tratamento exato. Jennings [8], em 1965, propôs a reformulação de algumas expressões usadas por O’Brien e Francis [14] que acelerariam a convergência dos resultados.
Nas soluções aproximadas pelo Método dos Elementos Finitos, Leonard [11], em 1973, propôs a utilização de elementos curvilíneos em substituição ao uso de elementos retos no Método dos Elementos Finitos. Ele destacou a necessidade de se modelar a geometria curva do cabo com elementos curvilíneos tornando dispensável o uso de um grande número de pequenos elementos retilíneos.
Em 1975, em continuidade aos estudos de soluções numéricas para cabos, Henghold e Russell [4] desenvolveram uma formulação variacional em que se podia prever a configuração de equilíbrio para cabos suspensos considerando não linearidades geométricas. Desta formulação resultou um elemento finito isoparamétrico de cabo com três nós.
Ozdemir [16], em 1978, apresentou algumas deficiências na formulação apresentada por Henghold que induzem deformações no comprimento do elemento de cabo. Ele propôs uma interpolação independente para avaliar o comprimento do elemento deformado e deste modo não permitir distorções na deformação do elemento. Ozdemir [16], ao propor a formulação de um elemento de cabo com dois nós, possibilitou de maneira simples a avaliação das respostas obtidas de seu elemento através das formulações Lagrangiana Total e Atualizada.
No mesmo ano, Peyrot e Goulouis [17] propuseram um método bastante similar ao descrito por Campbell, em 1970, baseado no trabalho desenvolvido por O’Brien e Francis [14] e [15], em 1964 e 1968 respectivamente, para o cálculo da resposta estática de sistemas flexíveis. Segundo Peyrot e Goulouis [17], através desta técnica, poderia se prever o efeito do peso próprio, de ventos
X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
2
longitudinais ou diagonais, cargas de gelo e mudanças de temperatura em cabos suspensos usados em linhas de transmissão de energia.
Também em 1978, Judd e Wheen [9], publicaram um processo alternativo de tentativa e erro no qual o valor inicial da tração horizontal Tx do cabo é calculado e então para valores incrementais de Tx, a correspondente intensidade de cargas aplicadas é deduzida para uma configuração conhecida. Neste trabalho, serão apresentados alguns exemplos onde foi aplicado o método.
H. B. Jayaraman e W. C. Knudson [7], em 1981, reapresentaram o elemento de catenária já proposto por O’Brien e Francis [14] e demonstraram a sua aplicabilidade em problemas estáticos e dinâmicos.
Em 1982, B. A. Schrefler e S. Odorizzi [19] apresentaram a formulação unificada de um elemento bidimensional de viga ou de cabo, para análise não linear, empregando a aproximação Lagrangiana total. A formulação permite qualquer intensidade de deformação em elementos retos ou curvos.
A. M. Abdel-Ghaffar e H. M. Ali [1], em 1995, desenvolveram um elemento finito não linear para a análise de pontes estaiadas sob carregamentos estáticos e dinâmicos usando a formulação Lagrangiana total. Foi introduzido e proposto um elemento finito de cabo isoparamétrico com 4 nós para a idealização dos cabos na ponte.
L. Y. Lu, S. L. Chan e Z. H. Lu [12], em 1997, propuseram uma aproximação analítica no cálculo da resposta não linear de cabos elásticos sob carregamentos externos complexos. O efeito da temperatura no cabo também foi considerado. Através de métodos analíticos, são apresentadas soluções exatas para a resposta estática de um cabo suspenso sujeito a carregamentos complexos.
R. Karoumi [10], em 1999, apresentou a formulação do elemento de catenária com dois nós apresentado inicialmente por O’Brien e Francis [14]. Ele sugeriu o emprego do elemento na análise estática e dinâmica de pontes suspensas ou estaiadas.
2 HIPÓTESES SIMPLIFICADORAS
Admite-se, no presente trabalho, que o cabo considerado tem seção transversal uniforme. Considera-se que o módulo de elasticidade utilizado é a média ponderada do valor dos módulos de elasticidade dos materiais que compõem o cabo e participam ativamente na resistência mecânica. O módulo de elasticidade assim obtido é constante, relacionando tensões e deformações dentro de um limite de proporcionalidade, de acordo com a Lei de Hooke. Expansões e contrações da seção transversal, associadas a mudanças no comprimento do cabo e os efeitos do coeficiente de Poisson são considerados desprezíveis. A rigidez à flexão do cabo é ignorada. Admite-se que o cabo é perfeitamente flexível e resiste a carregamentos aplicados desenvolvendo somente tensões longitudinais. Segue-se, conseqüentemente, que a resultante em qualquer seção transversal é tangente à configuração curva do cabo e passa pelo centróide da seção. Considera-se que os carregamentos externos não são aplicados repentinamente, focalizando, deste modo, apenas o equilíbrio estático dos elementos de cabo.
3 FORMULAÇÃO VARIACIONAL PARA UM ELEMENTO DE CABO
Com relação aos índices utilizados adotou-se a seguinte convenção: 1. Índice superior esquerdo - denota o tempo da configuração na qual ocorre a variável. 2. Índice inferior esquerdo - denota o tempo da configuração de referência na qual
ocorre a variável. 3. Índice superior direito - denota a posição dos nós. 4. Índice superior direito entre parêntesis - indica que a variável está associada com
uma configuração intermediária no processo iterativo.
X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
3
5. Índice inferior direito - denota as componentes do vetor ou do tensor de segunda ordem.
6. Índice inferior direito seguido de vírgula - denota diferenciação. Na mecânica do contínuo, o equilíbrio entre forças externas aplicadas e forças internas
provenientes da resistência mecânica do material sempre é feito na configuração deformada da estrutura. No entanto, para cabos suspensos, a configuração deformada é desconhecida devido a grandes deslocamentos e grandes rotações que ocorrem à medida que se processa a deformação.
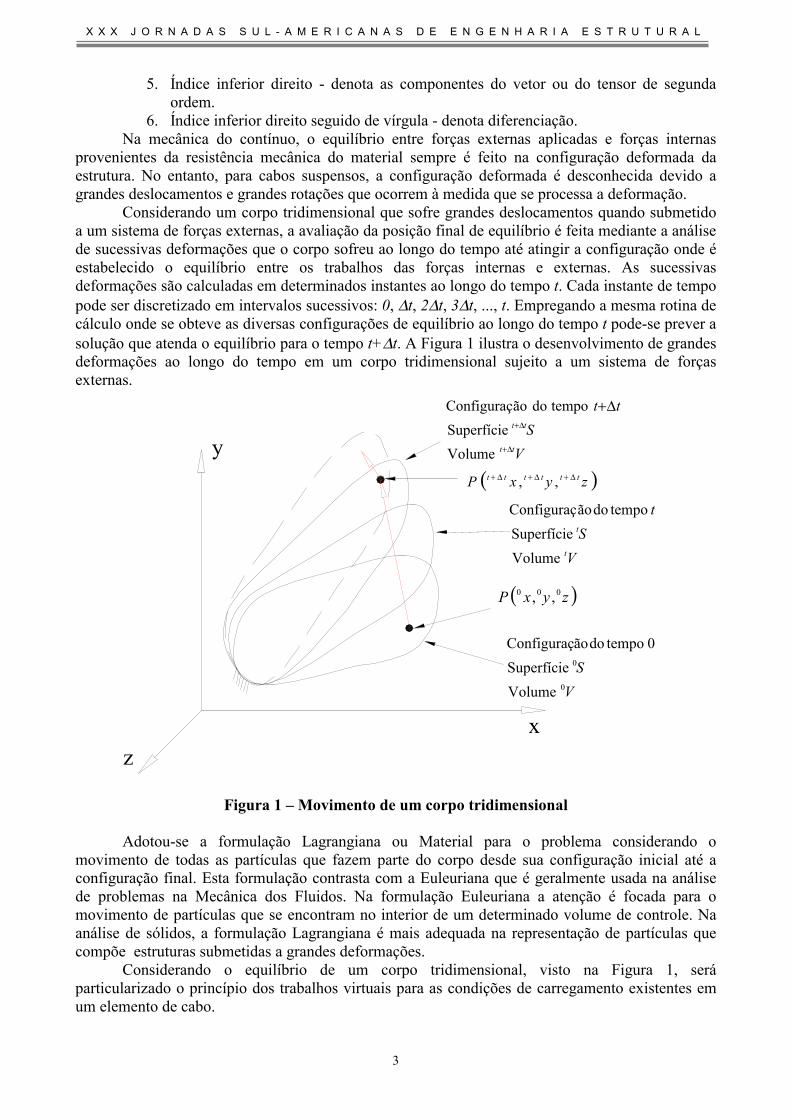
Considerando um corpo tridimensional que sofre grandes deslocamentos quando submetido a um sistema de forças externas, a avaliação da posição final de equilíbrio é feita mediante a análise de sucessivas deformações que o corpo sofreu ao longo do tempo até atingir a configuração onde é estabelecido o equilíbrio entre os trabalhos das forças internas e externas. As sucessivas deformações são calculadas em determinados instantes ao longo do tempo t. Cada instante de tempo pode ser discretizado em intervalos sucessivos: 0, ∆t, 2∆t, 3∆t, ..., t. Empregando a mesma rotina de cálculo onde se obteve as diversas configurações de equilíbrio ao longo do tempo t pode-se prever a solução que atenda o equilíbrio para o tempo t+∆t. A Figura 1 ilustra o desenvolvimento de grandes deformações ao longo do tempo em um corpo tridimensional sujeito a um sistema de forças externas.
y
xz
( )zyxP 000 ,,
( )zyxP tttttt ∆+∆+∆+ ,,
VS
t
t
t
Volume Superfície
tempodo ãoConfiguraç
VS
0
0
Volume Superfície
0 tempodo ãoConfiguraç
VS
tt
tt
tt
∆+
∆+
∆+
Volume Superfície
tempodo ãoConfiguraç
Figura 1 – Movimento de um corpo tridimensional
Adotou-se a formulação Lagrangiana ou Material para o problema considerando o
movimento de todas as partículas que fazem parte do corpo desde sua configuração inicial até a configuração final. Esta formulação contrasta com a Euleuriana que é geralmente usada na análise de problemas na Mecânica dos Fluidos. Na formulação Euleuriana a atenção é focada para o movimento de partículas que se encontram no interior de um determinado volume de controle. Na análise de sólidos, a formulação Lagrangiana é mais adequada na representação de partículas que compõe estruturas submetidas a grandes deformações.
Considerando o equilíbrio de um corpo tridimensional, visto na Figura 1, será particularizado o princípio dos trabalhos virtuais para as condições de carregamento existentes em um elemento de cabo.

X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
4
O equilíbrio de um corpo tridimensional pode ser expresso em coordenadas cartesianas pela equação do movimento de Cauchy da seguinte maneira:
( ) ( ) 3,2,1, 0 ==−+∂
∂ ∆+∆+∆+∆+
∆+
jixBx i
ttj
tttt
itt
ijtt
&&ρσ
(1) onde σij representa as tensões desenvolvidas nas seis faces de um pequeno cubo elementar no interior do corpo situado em xi, Bj representa a força de corpo (peso próprio) por unidade de massa, ρ representa a massa específica do material em xi, e ix&& a aceleração de uma partícula na posição xi. É importante salientar que o equilíbrio acontece sempre na configuração final t+∆t.
A equação de equilíbrio é verificada em todos os pontos do volume do corpo tridimensional. A correspondente formulação variacional é obtida a partir da multiplicação da equação (1) por uma variação arbitrária δuj, com a integração desse produto em todo o volume do corpo. Tal variação δuj deve ser consistente com a condições de contorno inicialmente estabelecidas:
( ) 0=
−+
∂∂ ∆+∆+∆+∆+
∆+
∆+
∫∆+
VduxBx
ttj
Vi
ttj
tttt
itt
ijtt
tt
δρσ
&&
(2) Integrando por partes a equação (2), obtém-se o seguinte resultado, também verificado por
H. Ozdemir [16]:
( ) ( ) RVdux
ux
tt
V
tti
jttj
ittij
tt
tt
∆+∆+∆+∆+
∆+ =
∂∂+
∂∂
∫∆+
δδσ21
(3)
( )∫∫∆+∆+
∆+∆+∆+∆+∆+∆+∆+ −+=V
ttji
ttj
tttt
A
ttjij
tttt
tttt
VduxBAduR δρδσ &&
(4) A fim de particularizar a equação (3) para cabos, é preciso definir o elemento como sendo
um componente estrutural que obedece as hipóteses simplificadoras descritas anteriormente, destacando-se:
• O elemento é capaz de desenvolver tensões somente na direção normal à sua seção transversal;
• Esta tensão normal é uniforme em toda área da seção transversal; • A área da seção transversal permanece constante durante a deformação.
Deste modo, apenas uma única variável independente, definida ao longo do comprimento do cabo, é necessária para fornecer a resposta estática ou dinâmica em qualquer configuração no tempo.
Usando uma variável s medida ao longo do comprimento do cabo, associada a uma configuração inicial indeformada, a equação (3) pode ser reescrita da seguinte forma:
RsAd tt
S
ts
ttts
ttt
t
∆+∆+∆+ =∫ εδσ (5)
onde A é a área da seção transversal do cabo indeformado, t+∆ttσs é a tensão definida pelo segundo
tensor de Piolla-Kirchoff, t+∆ttεs é a deformação de Green-Lagrange, na configuração t+∆t medidos
na configuração de referência t. As direções de t+∆ttσs e t+∆
ttεs são ambas normais à seção
transversal do cabo.

X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
5
−
=
=
∆+∆+
∆+∆+∆+
121
2
sdsd
sdsd
t
tt
sttt
t
tt
nntt
sttt
ε
σσ
(6)
A equação (5) representa o trabalho interno virtual para um elemento de cabo de uma forma onde é possível se fazer a linearização visando a aplicação de métodos iterativos conforme se verá mais adiante.
4 O ELEMENTO DE CABO PROPOSTO POR OZDEMIR.
Segundo Ozdemir [16], a partir da equação (5) que representa o trabalho virtual interno de um elemento de cabo, pode-se obter a solução em uma configuração t+∆t. Mas em vista do fato de que a equação (5) é não linear em seus deslocamentos, é necessário recorrer a esquemas iterativos. O procedimento usado por Ozdemir foi linearizar a equação (5), resolver as equações resultantes e obter soluções aproximadas do problema não linear. Este processo iterativo é repetido até se atingir a convergência em uma norma pré-estabelecida.
Denotando por u(k) o deslocamento de um ponto no cabo desde o local ocupado no tempo t até o local ocupado pelo ponto no tempo t+∆t, expresso da seguinte forma:
( ) ( ) ( )1−∆+∆+ −= kttkttk xxu (7)
para k sendo o número de iterações no processo e t+∆tx(0) sendo algum valor inicial da solução t+∆tx. Assumindo que a relação constitutiva possa ser linearizada para se obter:
( ) ( ) ( ) ( ) ( )( ){ } 0111
=−∆+∆+−∆+−∆+∆+ ⋅++= ααε
ασσ kktt
sttt
kttt
ks
ttt
ks
ttt ux
ddE
(8) a linearização da equação (5) em t+∆tx(k-1) é:
( ) ( )( ){ }
( ) ( ) ( )( ){ }
( )( ){ }( ) ( ) ( )( ){ }∫
∫
∫
==
−∆+∆+−∆+
=−∆+∆+
=−∆+∆+−∆+
=−∆+∆+−∆+∆+
⋅+⋅++
⋅+⋅
⋅++
⋅+=
S
tkktts
ttt
ks
ttt
tktts
ttt
S
kktts
ttt
kttt
tktts
ttt
S
ks
ttt
tt
t
t
t
sAduuxdd
dd
sAduxdd
uxddE
sAduxddR
00
11
01
011
011
βα
α
β
α
δαβεαβ
σ
δαεα
βεβ
δαεα
σ
(9)
Segundo L. Elgoltz [3], α e β são parâmetros que assumem valores quaisquer no diferencial de uma função ou na variação de um funcional. Para um funcional da forma v[y(x)], ou mais complexo, dependente de várias funções ou de funções de várias variáveis, pode-se definir sua variação como a derivada do funcional v[y(x)+α.δy] em relação a α, para α=0.
A avaliação das integrais na equação (9) requer um conhecimento de duas configurações do elemento: a configuração de referência tχ na qual as variáveis independentes são medidas, e a
X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
6
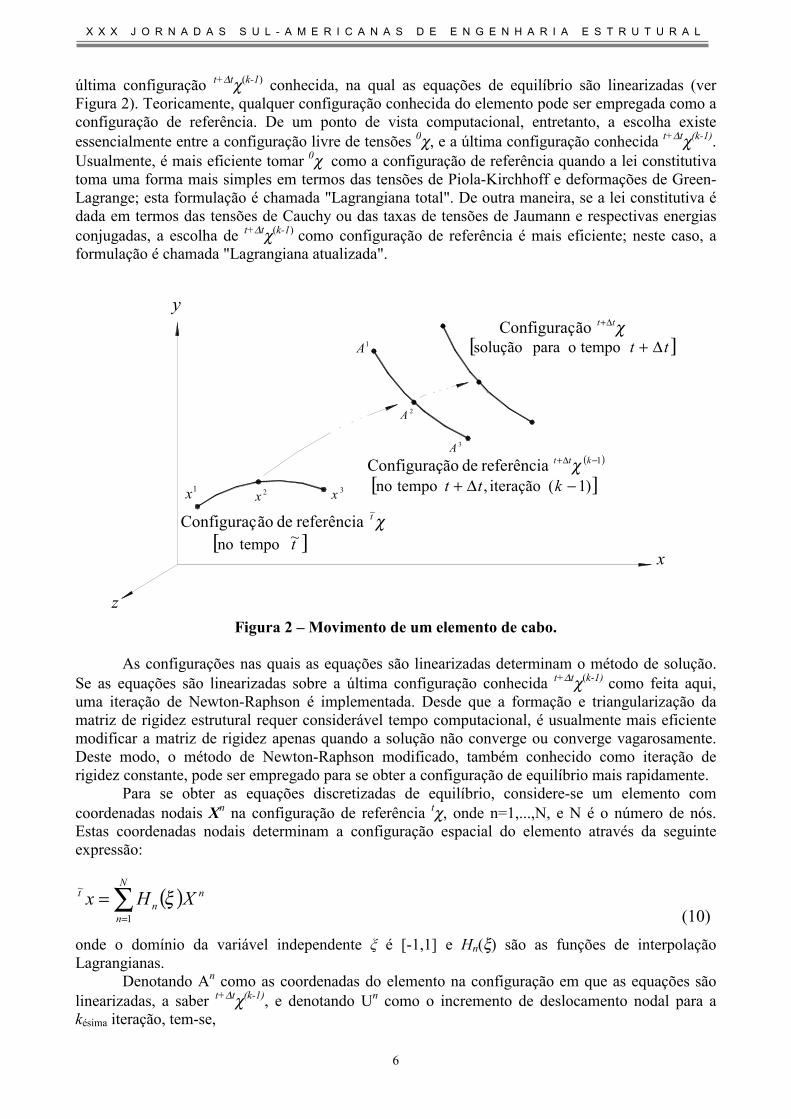
última configuração t+∆tχ(k-1) conhecida, na qual as equações de equilíbrio são linearizadas (ver Figura 2). Teoricamente, qualquer configuração conhecida do elemento pode ser empregada como a configuração de referência. De um ponto de vista computacional, entretanto, a escolha existe essencialmente entre a configuração livre de tensões 0χ, e a última configuração conhecida t+∆tχ(k-1). Usualmente, é mais eficiente tomar 0χ como a configuração de referência quando a lei constitutiva toma uma forma mais simples em termos das tensões de Piola-Kirchhoff e deformações de Green-Lagrange; esta formulação é chamada "Lagrangiana total". De outra maneira, se a lei constitutiva é dada em termos das tensões de Cauchy ou das taxas de tensões de Jaumann e respectivas energias conjugadas, a escolha de t+∆tχ(k-1) como configuração de referência é mais eficiente; neste caso, a formulação é chamada "Lagrangiana atualizada".
χt~ referência de ãoConfiguraç[ ]t~ tempono
[ ])1( iteração, tempono −∆+ ktt
( )1 referência de ãoConfiguraç −∆+ ktt χ
χtt ∆+ão Configuraç[ ]tt ∆+ tempoo para solução
1x 2x 3x
1A
2A
3A
y
x
z
Figura 2 – Movimento de um elemento de cabo.
As configurações nas quais as equações são linearizadas determinam o método de solução. Se as equações são linearizadas sobre a última configuração conhecida t+∆tχ(k-1) como feita aqui, uma iteração de Newton-Raphson é implementada. Desde que a formação e triangularização da matriz de rigidez estrutural requer considerável tempo computacional, é usualmente mais eficiente modificar a matriz de rigidez apenas quando a solução não converge ou converge vagarosamente. Deste modo, o método de Newton-Raphson modificado, também conhecido como iteração de rigidez constante, pode ser empregado para se obter a configuração de equilíbrio mais rapidamente.
Para se obter as equações discretizadas de equilíbrio, considere-se um elemento com coordenadas nodais Xn na configuração de referência tχ, onde n=1,...,N, e N é o número de nós. Estas coordenadas nodais determinam a configuração espacial do elemento através da seguinte expressão:
( )∑=
=N
n
nn
t XHx1
~ξ
(10) onde o domínio da variável independente ξ é [-1,1] e Hn(ξ) são as funções de interpolação Lagrangianas.
Denotando An como as coordenadas do elemento na configuração em que as equações são linearizadas, a saber t+∆tχ(k-1), e denotando Un como o incremento de deslocamento nodal para a késima iteração, tem-se,

X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
7
( ) ( )∑=
−∆+ =N
n
nn
ktt ArHx1
1
(11)
( ) ( ) ( ) ( )∑=
−∆+∆+ =−=N
n
nn
kttkttk UHxxu1
1 ξ (12)
As matrizes t+∆ttBM e t+∆t
tBG ficam definidas da seguinte maneira, conforme Ozdemir [16]:
( ){ } 0=∆+∆+∆+ ⋅+= αδαε
αδ ux
ddUB tt
stttM
ttt
(13)
( ) ( ){ }0
0=
=∆+∆+∆+
⋅+⋅+=
βαδαβε
αβδ uux
dd
ddUBU tt
stttG
ttt
T
(14)
cujas dimensões (tamanho da matriz) são respectivamente (1 x 3N) e (3N x 3N), respectivamente. Usando a notação:
( )
( ) ( ){ } 21
,,
21
Hh
I...IIH
ξξ
ξ
ξ
xxD
dd
Hddh
HHH
ttTtttt
nn
N
∆+∆+∆+ =
=
=
=
(15)
onde I é a matriz identidade (3 x 3), obtem-se:
+
−⋅
⋅
=
⋅
⋅
=
∆+∆+
∆+∆+
==
− ∆+
∆+
∆+
∆+
∆+
∆+∆+
==−
∆+∆+
∆+∆+
∑ ∫
∑ ∫
Mtt
ttt
tT
Mtt
ttt
t
N
ntt
Ttt
tt
ttT
ttntt
tt
Gtt
t
N
n
ttttntt
tt
Mtt
t
Bsd
sdBsd
sd
dD
xDx
hD
hsd
dsdsdB
dxD
hsd
dsdsdB
n
n
~
~
~
~
01
1
,,~~~
011 ,~~~
hI1
h1
α
ξ ξξ
α
ξ
ξ
ξξ
ξξ
(16)
Referindo-se à equação (9), as matrizes de rigidez são desta forma dadas por:
( ) sdBEABK tM
ttt
S
ttt
TM
tttM
tt
t
~~~~∆+∆+∆+∆+ ⋅⋅= ∫ (17)
( ) sdBAK tG
ttt
SNN
tttG
tt
t
~~~∆+∆+∆+ ⋅= ∫ σ
(18)
X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
8
O vetor de forças aplicadas nos nós t+∆tF é também calculado via matriz Mtt
t B∆+~ :
( ) sdBAF tM
ttt
SNN
ttt
tt
t
~~~∆+∆+∆+ ⋅= ∫ σ
(19)
4.1 MATRIZ DE RIGIDEZ PARA O ELEMENTO DE 2 NÓS.
Denotando tL como o comprimento do elemento em um tempo t, e definindo os cossenos
diretores da seguinte forma:
LAAa tt
tttttt
∆+
∆+∆+∆+ −=
12
( )( )Ttttttt aac ∆+∆+∆+ =
( )( )
−
−=
∆+∆+
∆+∆+∆+
cccc
C tttt
tttttt
Deste modo, obtem-se para as equações (16):
( ) TttTttttt
tt
Mtt
t aaLL
LB ∆+∆+∆+
∆+∆+ −
= 1
~~
−
−
=∆+
IIII
LB tG
ttt
2
~~1
Consequentemente, a matriz de rigidez t+∆tK é
Gtt
Mtttt KKK ∆+∆+∆+ +=
−
−
+
=∆+
∆+∆+
∆+
∆+∆+
IIII
LPC
LL
LEAK t
ttttt
t
tt
tt
ttttt
~~
3
~~
(20)
A matriz de rigidez acima é geral não sendo empregada em sua montagem nenhuma equação constitutiva específica. Assumindo que a tensão de Piola-Kirchhoff, s
tt σ∆+0 , e a deformação de
Green-Lagrange, stt ε∆+
0 , estão relacionadas linearmente de acordo com a seguinte expressão:
stt
stt E εσ ∆+∆+ = 00
(21) Desta forma, a matriz de rigidez é dada por

X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
9
−
−
+
=∆+
∆+∆+
∆+∆+
IIII
LPC
LL
LAEK
tttt
tt
tttt
00
3
0 (22)
A importância desta equação é que nenhuma das quantidades envolvidas estão referidas à configuração tχ; em outras palavras, a matriz de rigidez é independente da escolha da configuração de referência. Uma ilustração complementar desta ocorrência é que quando tχ coincide com t+∆tχ, e implementando uma formulação Lagrangiana Atualizada, então a equação (22) pode ser escrita da seguinte forma:
−
−
+= ∆+
∆+∆+∆+
∆+
∆+∆+∆+
IIII
LPC
LEAK tt
tttttt
tt
tttttt
5 O ELEMENTO DE CATENÁRIA
Para um elemento de cabo suspenso em um plano vertical, conforme mostra a Figura 3, as relações exatas entre as distâncias vertical a e horizontal b e as componentes de forças aplicadas nos nós, são as seguintes, conforme Karoumi [10]:
−+
+−= iy
i
jjyi
x TTTT
wEALTa ln10
(23)
( )w
TTTTEAw
bij
ij −+−= 22
21
(24) onde 0L é o comprimento indeformado do elemento, E, o módulo de elasticidade, A, a área de seção transversal, w, uma carga uniformemente distribuída no cabo, T i e T j, as forças de tração aplicadas nos nós i e j, respectivamente.
Pode-se escrever as equações (23) e (24) em função apenas das componentes de T i nos eixos cartesianos, Tx
i e Tyi:
( )iy
ix TTaa ,=
(25)
( )iy
ix TTbb ,=
(26) pois Tx
i, Tyi, Tx
j, Tyj, T i e T j estão relacionadas da seguinte maneira:
iy
jy TLwT −= 0
(27)
ix
jx TT −= (28)
22 iy
ix
i TTT += (29)
22 jy
jx
j TTT += (30)

X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
10
iy
i Tu ,2
xi nó
ix
i Tu ,1
y
jy
j Tu ,2
jx
j Tu ,1
j nó
w
Figura 3 – Elemento de catenária
Diferenciando as equações (25) e (26) e rescrevendo os resultados através de notação matricial tem-se:
iyi
y
ixi
x
iyi
y
ixi
x
dTTbdT
Tbdb
dTTadT
Tada
∂∂+
∂∂=
∂∂+
∂∂=
(31)
=
∂∂
∂∂
∂∂
∂∂
=
iy
ix
iy
ix
iy
ix
iy
ix
dTdT
dTdT
Tb
Tb
Ta
Ta
dbda
F (32)
onde F é chamada matriz de flexibilidade incremental. A matriz de rigidez K’ é obtida pela inversão de F:
==′ −
43
211FKkkkk
(33)
A matriz de rigidez tangente K relaciona o incremento do vetor de forças nodais ∆p={∆Txi,
∆Tyi, ∆Tx
j, ∆Tyj }T ao incremento do vetor de deslocamentos nodais ∆u={∆u1
i, ∆u2i, ∆u1
j, ∆u2j}T.
puK ∆=∆ (34)
Para o elemento de cabo com quatro graus de liberdade, obtém-se a seguinte matriz de rigidez tangente e o correspondente vetor de forças internas p.
X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
11
=
−−−
−−−
=
jy
jx
iy
ix
TTTT
ksimétricokk
kkkkkkk
p
K
4
21
424
2121
(35)
Na montagem das matrizes K’ e K, e do vetor de forças p, pode-se utilizar as seguintes expressões derivadas da equação (25) e (26):
20
4
32
0
1
1111Fdet
1Fdet
1
11Fdet
1
1Fdet
1
−−
++
+−−=
++−=
−−==
++−=
ij
ix
i
iy
j
jy
ix
i
iy
j
jy
i
iy
j
jy
ix
ij
ix
i
iy
j
jy
TTwT
TT
TT
wTa
TT
TT
wEAL
TT
TT
wTak
TTwTkk
TT
TT
wEALk
(36)
No cálculo da matriz de rigidez tangente K, as forças Txi e Ty
i devem ser determinadas primeiro. Utilizando um processo iterativo, dadas as posições dos nós, valores iniciais para as forças Tx
i e Tyi são arbitradas. Com base nas equações da catenária, esses valores iniciais para Tx
i e Tyi
podem ser calculados através das seguintes expressões:
+−=
−=
LbwT
waT
iy
ix
0
senhcosh
2
2
ϕϕ
ϕ (37)
−−= 13 onde 2
220
abLϕ
(38) Segundo Jayaraman e Knudson [7], quando o comprimento indeformado 0L é menor que o
comprimento da corda AB, um valor conservativo igual a 0,2 para ϕ pode ser utilizado. A partir dos valores de Tx
i e Tyi, através das equações (27) a (30), determina-se Tx
j e Tyj, T i e
T j. Por meio das equações (23) e (24), obtém-se valores residuais para a posição dos nós do elemento, expressos no vetor {∆a, ∆b }T. Calcula-se o correspondente resíduo para o vetor de forças, através da seguinte expressão:
X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
12
( ) ( )
∆∆
+
=
∆∆
′=
∆∆
+
iy
ix
k
iy
ix
k
iy
ix
iy
ix
TT
TT
TT
ba
TT
1
K
(39)
onde k é o número de iterações e K’ é dado pelas equações (33) e (36). O processo iterativo, realizado para cada elemento de cabo, termina quando ∆a e ∆b forem
menores que uma norma pré-estabelecida. Este processo fornece a matriz de rigidez tangente e o vetor elementar de cargas para cada elemento que, arranjados de uma maneira global, com a participação de todos os graus de liberdade da estrutura, são incorporados em métodos de solução não-lineares como o método de Newton-Raphson, utilizado neste trabalho.
6 VERIFICAÇÕES NUMÉRICAS.
6.1 EXEMPLO 1 – CABO PRÉ-TENSIONADO COM CARREGAMENTO DISTRIBUÍ-
DO TRANSVERSAL.
Esta aplicação foi investigada por Ozdemir [16] em 1978, e por Jamayaran [7] em 1981
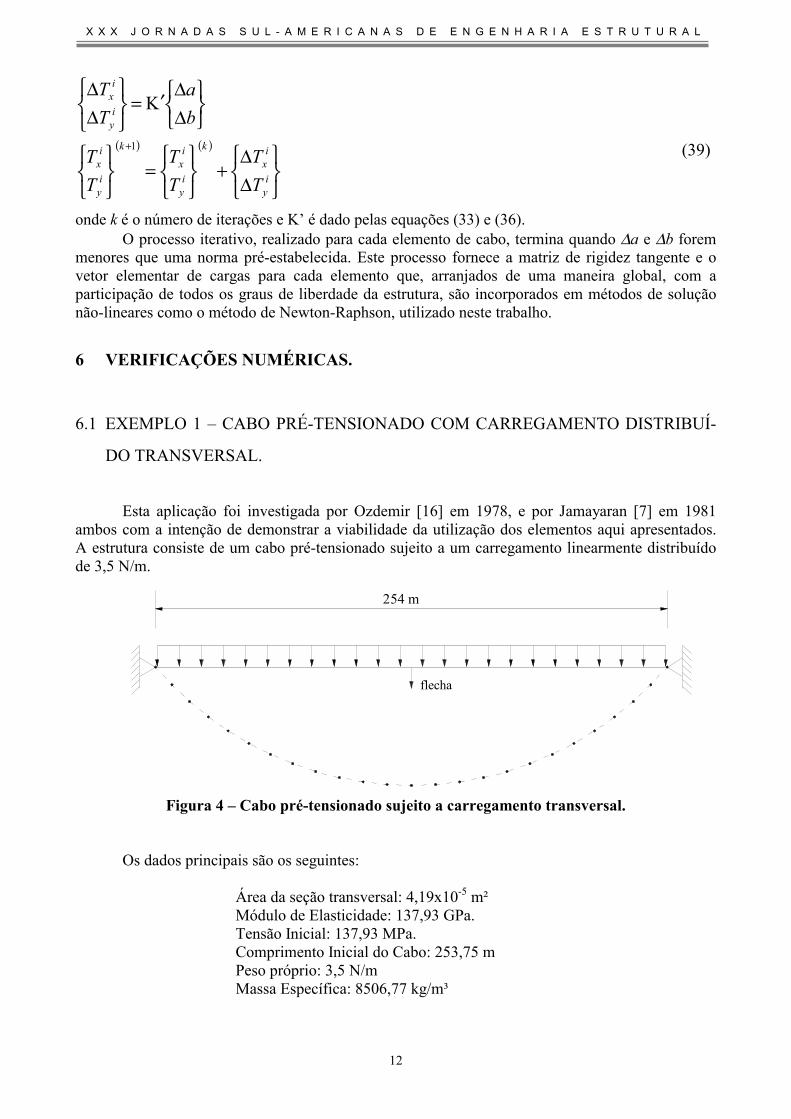
ambos com a intenção de demonstrar a viabilidade da utilização dos elementos aqui apresentados. A estrutura consiste de um cabo pré-tensionado sujeito a um carregamento linearmente distribuído de 3,5 N/m.
m 542
flecha
Figura 4 – Cabo pré-tensionado sujeito a carregamento transversal.
Os dados principais são os seguintes:
Área da seção transversal: 4,19x10-5 m² Módulo de Elasticidade: 137,93 GPa. Tensão Inicial: 137,93 MPa. Comprimento Inicial do Cabo: 253,75 m Peso próprio: 3,5 N/m Massa Específica: 8506,77 kg/m³

X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
13
O comprimento indeformado do cabo foi calculado supondo que ele esteja trabalhando dentro da região elástica do gráfico tensão-deformação. Como o cabo está esticado em um vão de 254 m sob uma tensão de 137,93 MPa, através de seu módulo de elasticidade pode-se relacionar o estado de tensões com a correspondente deformação e, a partir daí, obter seu comprimento indeformado que neste caso seria 253,75 m.
Empregando as formulações Lagrangiana Total e Atualizada, o cabo foi discretizado utilizando 24 elementos de 2 nós perfazendo um total de 25 nós com três graus de liberdade cada. Como configuração inicial foi escolhida a reta horizontal que une os dois apoios. Para o carregamento do peso próprio, o programa convergiu para a configuração de equilíbrio após sete iterações utilizando a formulação Lagrangiana Atualizada. A flecha obtida foi igual a 3,3419 m. Para a formulação Lagrangiana Total, a convergência foi obtida também após sete iterações e o valor obtido para flecha foi de 3,3411 m.
Empregando no mesmo experimento, dois elementos de catenária com 2 nós cada, definindo a mesma configuração inicial estabelecida para os elementos de formulação Lagrangiana Total e Atualizada, o programa convergiu mais rapidamente e a flecha obtida foi de 3,3381 m.
Todos os resultados, aqui obtidos, coincidiram bem com os resultados publicados por Ozdemir [16], que utilizou 12 elementos de três nós e obteve uma flecha de 3,3426 m, e Jayaraman e Knudson [7], que empregando o elemento de catenária, obtiveram uma flecha de 3,3434 m.
Fazendo variar o carregamento distribuído externo, obteve-se vários deslocamentos nos dois elementos aqui mencionados, com os quais se confeccionou o gráfico mostrado na Figura 5, onde é empregado um parâmetro de carga igual à razão entre o carregamento distribuído aplicado e o carregamento distribuído inicial de 3,5 N/m.
0
2
4
6
8
10
12
0 2 4 6 8 10 12
Flecha [m]
Parâ
met
ro d
e C
arga
Elemento de CatenáriaFormulação Lagrangiana AtualizadaFormulação Lagrangiana TotalReferência [16]
Figura 5 – Variação da flecha com o aumento do carregamento.
X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
14
6.2 EXEMPLO 2 – CABO SUSPENSO COM CARREGAMENTO DISTRIBUÍDO
TRANSVERSAL.
Esta aplicação foi publicada por Judd e Wheen [9] em 1978, com o intuito de demonstrar o
método por eles proposto e de comparar seus resultados com o de outros autores. Aqui será feito o mesmo com os elementos da formulação Lagrangiana Total e Atualizada e do elemento de catenária.
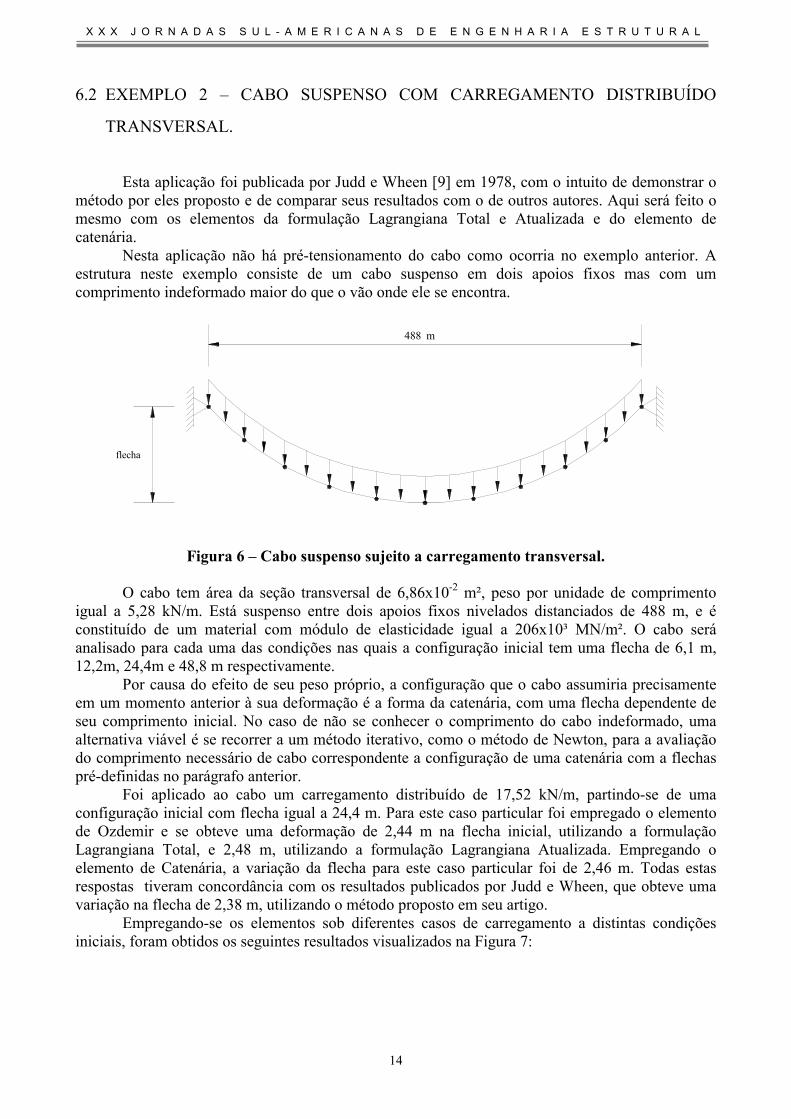
Nesta aplicação não há pré-tensionamento do cabo como ocorria no exemplo anterior. A estrutura neste exemplo consiste de um cabo suspenso em dois apoios fixos mas com um comprimento indeformado maior do que o vão onde ele se encontra.
Figura 6 – Cabo suspenso sujeito a carregamento transversal. O cabo tem área da seção transversal de 6,86x10-2 m², peso por unidade de comprimento
igual a 5,28 kN/m. Está suspenso entre dois apoios fixos nivelados distanciados de 488 m, e é constituído de um material com módulo de elasticidade igual a 206x10³ MN/m². O cabo será analisado para cada uma das condições nas quais a configuração inicial tem uma flecha de 6,1 m, 12,2m, 24,4m e 48,8 m respectivamente.
Por causa do efeito de seu peso próprio, a configuração que o cabo assumiria precisamente em um momento anterior à sua deformação é a forma da catenária, com uma flecha dependente de seu comprimento inicial. No caso de não se conhecer o comprimento do cabo indeformado, uma alternativa viável é se recorrer a um método iterativo, como o método de Newton, para a avaliação do comprimento necessário de cabo correspondente a configuração de uma catenária com a flechas pré-definidas no parágrafo anterior.
Foi aplicado ao cabo um carregamento distribuído de 17,52 kN/m, partindo-se de uma configuração inicial com flecha igual a 24,4 m. Para este caso particular foi empregado o elemento de Ozdemir e se obteve uma deformação de 2,44 m na flecha inicial, utilizando a formulação Lagrangiana Total, e 2,48 m, utilizando a formulação Lagrangiana Atualizada. Empregando o elemento de Catenária, a variação da flecha para este caso particular foi de 2,46 m. Todas estas respostas tiveram concordância com os resultados publicados por Judd e Wheen, que obteve uma variação na flecha de 2,38 m, utilizando o método proposto em seu artigo.
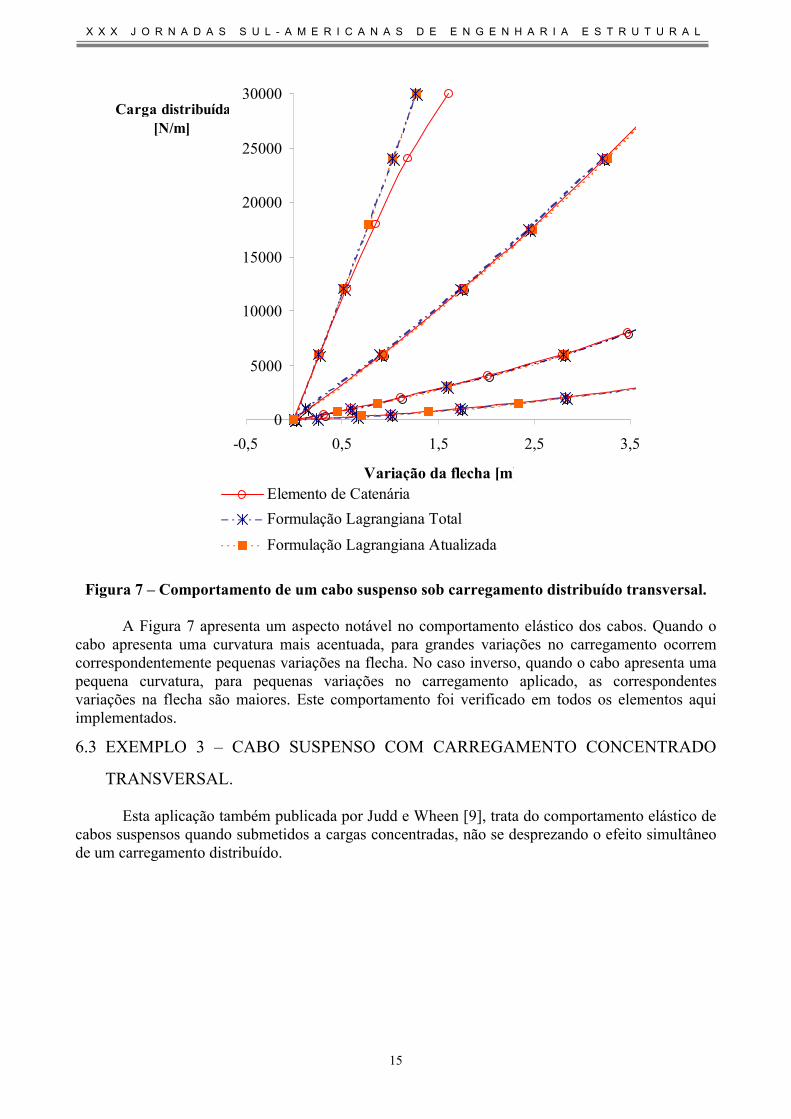
Empregando-se os elementos sob diferentes casos de carregamento a distintas condições iniciais, foram obtidos os seguintes resultados visualizados na Figura 7:
m 488
flecha
X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
15
0
5000
10000
15000
20000
25000
30000
-0,5 0,5 1,5 2,5 3,5
Variação da flecha [m]
Carga distribuída[N/m]
Elemento de CatenáriaFormulação Lagrangiana TotalFormulação Lagrangiana Atualizada
Figura 7 – Comportamento de um cabo suspenso sob carregamento distribuído transversal. A Figura 7 apresenta um aspecto notável no comportamento elástico dos cabos. Quando o
cabo apresenta uma curvatura mais acentuada, para grandes variações no carregamento ocorrem correspondentemente pequenas variações na flecha. No caso inverso, quando o cabo apresenta uma pequena curvatura, para pequenas variações no carregamento aplicado, as correspondentes variações na flecha são maiores. Este comportamento foi verificado em todos os elementos aqui implementados.
6.3 EXEMPLO 3 – CABO SUSPENSO COM CARREGAMENTO CONCENTRADO
TRANSVERSAL.
Esta aplicação também publicada por Judd e Wheen [9], trata do comportamento elástico de cabos suspensos quando submetidos a cargas concentradas, não se desprezando o efeito simultâneo de um carregamento distribuído.

X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
16
m 305
m 30,5inicial flecha =
m 221 m 831
P
Ci Figura 8 – Cabo suspenso sujeito a carregamento concentrado P.
Inicialmente o cabo foi discretizado utilizando 10 elementos em sua configuração
indeformada considerando uma flecha inicial de 30,5 m. Os dados principais da estrutura conforme apresentado na Figura 8 são os seguintes:
Área da seção transversal: 5,48x10-4 m². Peso por unidade de comprimento: 46 N/m. Módulo de Elasticidade: 130x10³ MN/m².
Foi medido o deslocamento vertical do cabo no ponto de aplicação do carregamento concentrado P. Empregando 10 elementos de Ozdemir, o deslocamento vertical do ponto Ci na configuração deformada do cabo para uma carga de 35,6 kN foi de 6,49 m utilizando a formulação Lagrangiana Total, e de 6,50 m, utilizando a formulação Lagrangiana Atualizada. Empregando-se na mesma discretização os elementos de catenária, para o mesmo carregamento de 35,6 kN, obteve-se um deslocamento vertical para o ponto Ci de 5,85 m.
Neste caso, o resultado obtido através do elemento de catenária se aproximou mais do resultado publicado por Judd, que obteve um deslocamento vertical de 5,64 m no ponto Ci.
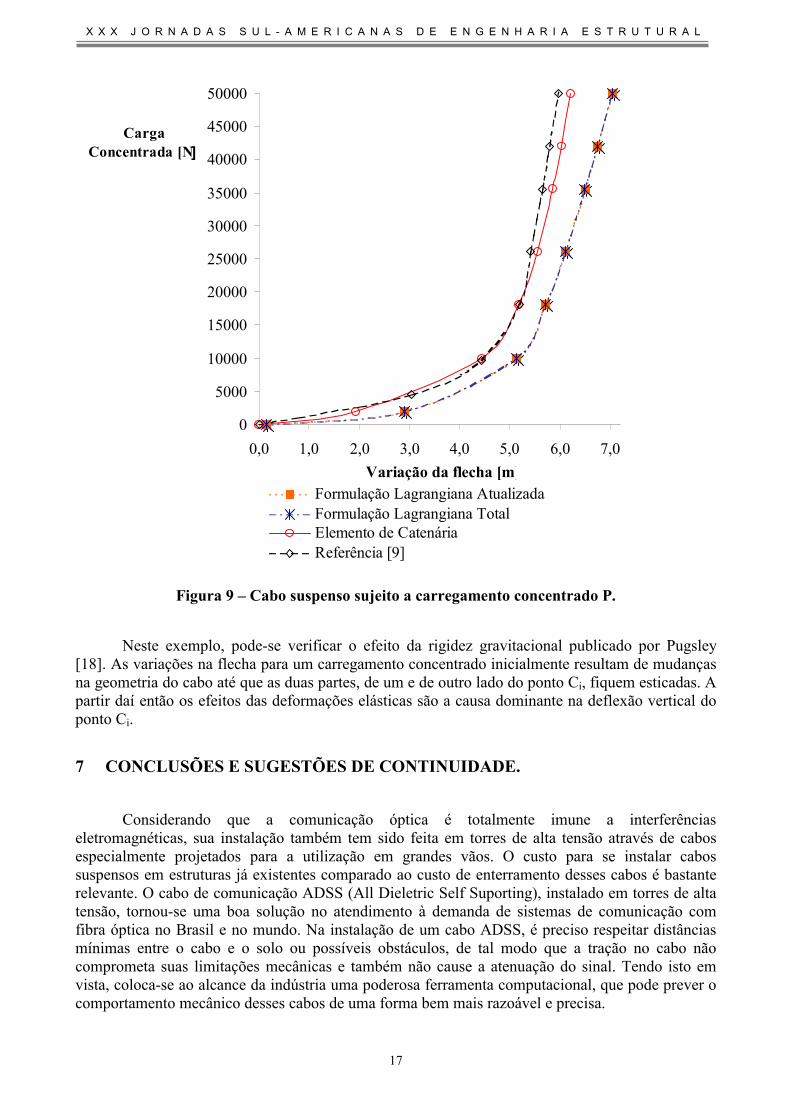
Fazendo varia o carregamento, nesta mesma configuração, encontrou-se os resultados apresentados no gráfico Figura 9:
X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
17
0
5000
10000
15000
20000
25000
30000
35000
40000
45000
50000
0,0 1,0 2,0 3,0 4,0 5,0 6,0 7,0Variação da flecha [m]
Carga Concentrada [N]
Formulação Lagrangiana AtualizadaFormulação Lagrangiana TotalElemento de CatenáriaReferência [9]
Figura 9 – Cabo suspenso sujeito a carregamento concentrado P.
Neste exemplo, pode-se verificar o efeito da rigidez gravitacional publicado por Pugsley
[18]. As variações na flecha para um carregamento concentrado inicialmente resultam de mudanças na geometria do cabo até que as duas partes, de um e de outro lado do ponto Ci, fiquem esticadas. A partir daí então os efeitos das deformações elásticas são a causa dominante na deflexão vertical do ponto Ci.
7 CONCLUSÕES E SUGESTÕES DE CONTINUIDADE.
Considerando que a comunicação óptica é totalmente imune a interferências eletromagnéticas, sua instalação também tem sido feita em torres de alta tensão através de cabos especialmente projetados para a utilização em grandes vãos. O custo para se instalar cabos suspensos em estruturas já existentes comparado ao custo de enterramento desses cabos é bastante relevante. O cabo de comunicação ADSS (All Dieletric Self Suporting), instalado em torres de alta tensão, tornou-se uma boa solução no atendimento à demanda de sistemas de comunicação com fibra óptica no Brasil e no mundo. Na instalação de um cabo ADSS, é preciso respeitar distâncias mínimas entre o cabo e o solo ou possíveis obstáculos, de tal modo que a tração no cabo não comprometa suas limitações mecânicas e também não cause a atenuação do sinal. Tendo isto em vista, coloca-se ao alcance da indústria uma poderosa ferramenta computacional, que pode prever o comportamento mecânico desses cabos de uma forma bem mais razoável e precisa.

X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
18
Neste trabalho, são apresentadas duas formulações distintas na análise não linear de cabos suspensos. A partir da formulação variacional clássica empregada no Método dos Elementos Finitos, são desenvolvidos elementos de cabo com dois nós. Estes elementos podem ser implementados de acordo com a formulação Lagrangiana Total, onde as tensões e as deformações são medidas na configuração de referência, ou segundo a formulação Lagrangiana Atualizada, onde as tensões e as deformações são medidas na última configuração deformada conhecida. Também é apresentada a formulação do elemento de catenária oriundo de expressões exatas da catenária elástica.
São observadas diferenças muito pequenas nos resultados obtidos entre os elementos das formulações Lagrangiana Total e Atualizada, e o elemento de catenária. No entanto, devido à maior simplicidade no tratamento matemático de sua formulação, o elemento de catenária requer menor esforço computacional do que qualquer um dos elementos oriundos de formulações variacionais.
Os resultados obtidos nas aplicações com carregamento distribuído, para os elementos aqui apresentados, foram bem semelhantes e consistentes com outros resultados publicados na literatura. Para carregamentos concentrados o elemento de catenária apresentou uma resposta mais consistente com os resultados de outros métodos publicados. Uma análise mais crítica poderia ser feita de posse de resultados de ensaios práticos para confrontação com estes resultados numéricos.
É possível verificar que as variações na flecha, para pequenas alterações no carregamento exteno, são maiores para cabos com menor curvatura, do que para cabos com configuração menos curva.
Para ambos os elementos, pode-se modelar o efeito da rigidez gravitacional do cabo. Enquanto que, para carregamentos distribuídos, variações na flecha são provenientes principalmente de deformações elásticas do material, para carregamentos concentrados, variações na flecha são antes resultado de mudanças na geometria do cabo, para depois serem provenientes de deformações elásticas no material.
O presente trabalho, teve o apoio financeiro da Capes e da Furukawa Industrial S.A., para os quais, os autores prestam aqui seus agradecimentos.
8 REFERÊNCIAS BIBLIOGRÁFICAS:
[1] Abdel-Ghaffar, A. M., Ali H. M. “Modeling the nonlinear seismic begavior of cable-stayed bridges with passive control bearings”. Computers & Structures, vol. 54, n. 3, pp. 461-492, 1995. [2] Bathe, K. “Finite Element Procedures”. Prentice-Hall, Inc., 1996. [3] Elsgoltz, L. “Equaciones diferenciales y cálculo variacional”. Editora Mir, Moscou, 1977. [4] Henghold, W. M.; Russell, J. J. “Equilibrium and natural frequencies of cable structures (a nonlinear finite element approach)”. Computers and Structures, vol. 6, pp. 267-271, 1975. [5] Irvine, M. “Statics of suspend cables”. Journal of the Engineering Mechanics Division, vol. 101, n. EM3, pp. 187-205, 1975. [6] Irvine, M. “Cable Structures”. Cambridge, Mass: MIT Press, 1981. [7] Jayaraman, H. B., Knudson, W. C. “A curved element for analysis of cable structures”. Computers & Structures, vol. 14, n. 3-4, pp. 325-333, 1981. [8] Jennings, A. Discussion of “Cable movements under two-dimensional loads”. Journal of the Structural Division, vol. 91, n. ST1, pp. 307-311, 1965.
X X X J O R N A D A S S U L - A M E R I C A N A S D E E N G E N H A R I A E S T R U T U R A L
19
[9] Judd, B. J.; Wheen, R. J. Nonlinear cable behavior. Journal of the Structural Division, vol. 104, n. ST3, 1978. [10] Karoumi, R. Some Modeling aspects in the nonlinear finite element analysis of cable supported bridges. Computer & Structures, vol. 71, n. 4, pp. 397-412, 1999. [11] Leonard, J. W. “Nonlinear dynamics of curved cable elements”. Journal of the Engineering Mechanics Division, vol. 99, n. EM3, pp. 616-629, 1973. [12] Lu, L. Y.; Chan, S. L.; Lu, Z. H. “An analytical approach for nonlinear response of elastic cable under complex loads”. Structural Engineering and Mechanics, vol. 5, n. 3, pp. 329-338, 1997. [13] Michalos, J., Birnstiel, C. “Movements of a cable due to changes in loading”. Transactions, ASCE, vol. 127, n. 3368, pp. 267-303, 1962. [14] O’Brien, W. T., Francis, A. J. “Cable movements under two-dimensional loading”, Journal of Structural Division, vol. 90, n. ST3, pp. 89-123, 1964. [15] O’Brien, W. T. “Behavior of loaded cable systems”. Journal of the Structural Division, vol. 94, n. ST10, 1968. [16] Ozdemir, H. “A finite element approach for cable problems”. International Journal of Solids Structures, vol. 15, pp. 427-437, 1978. [17] Peyrot A. H., Goulois, A. M. “Analysis of flexible transmission lines”. Journal of the Structural Division, vol. 104, pp. 763-779, 1978. [18] Pugsley, A. G. “The gravity stiffness of a suspension bridge cable”. Quarterly Journal Mechanics and Applied Mathematics, vol. 5, pp. 385-394, 1952. [19] Schrefler, B. A., Odorizzi, S. “A Total Lagrangian geometrically non-linear analysis of combined beam and cable structures”. Computers & Structures, vol. 17, n. 1, pp. 115-127, 1983.





























