Embed Size (px)
DESCRIPTION
iji
Citation preview

EST-10 Mecânica dos Sólidos ITA-2013 5.1
5
BARRAS SOB CARGA AXIAL Como foi apresentada no capítulo 1, a análise de qualquer problema de Mecânica dos
Sólidos está baseada nos três aspectos fundamentais: dinâmica (estática), cinemática
das deformações e relações constitutivas. Esses aspectos foram detalhados nos
capítulos 2, 3 e 4.
Dinâmica (estática): esse tópico nos fornece as equações de equilíbrio em
cada ponto ou do sólido como um todo. Os conceitos de vetor tensão e
estado de tensão num ponto são as novas quantidades matemáticas que
nos permitem descrever o comportamento num ponto do sólido.
Cinemática das deformações: esse tópico nos fornece as relações
deformações-deslocamento. O conceito de deformação específica nos
permite descrever o estado de deformação num ponto do sólido.
Relações constitutivas: os modelos matemáticos do sólido, como um
contínuo, relacionam as variáveis dinâmicas (tensões) com as variáveis
cinemáticas (deformações).
Nos próximos capítulos faremos uso das quantidades matemáticas descritas
acima na solução de alguns problemas fundamentais importantes na engenharia de
estruturas.
A seguir, desenvolveremos uma teoria simples, também conhecida como teoria
de engenharia, para a solução de extensão de barras. Uma barra é definida como um
elemento estrutural cuja geometria é tal que possui um eixo longitudinal e a maior
dimensão da seção transversal é pequena comparada com o seu comprimento

EST-10 Mecânica dos Sólidos ITA-2013 5.2
longitudinal. Estudaremos as barras prismáticas e as barras com seção transversal
variando gradualmente ao longo do eixo longitudinal sob carregamento axial. Desde
que as restrições dessa teoria sejam satisfeitas, os resultados obtidos através de seu
uso se mostram muito satisfatório, do ponto de vista de engenharia, com aqueles
observados experimentalmente e também com aqueles obtidos através de teorias
mais avançadas.
5.1 PRINCÍPIO DE SAINT-VENANT Na maioria das vezes as cargas aplicadas sobre elementos estruturais são forças de
contato (forças de superfície). Em geral essas forças são transmitidas ao elemento
estrutural em pontos discretos, como conexões por meio de pinos, parafusos ou rebites.
Nesses casos, a distribuição real de tensões em torno desses pontos é tão complicada
que uma descrição precisa da distribuição de forças é muito difícil. Felizmente, na
maioria das vezes podemos considerar o efeito da distribuição dessas forças em
regiões um pouco afastada dos pontos de aplicação das cargas, como informação
suficiente para o estudo do comportamento geral do elemento estrutural.
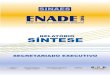
Considere, por exemplo, o caso ilustrado na figura 5.1. Foram desenhadas
grades idênticas, com linhas horizontais e verticais, sobre a superfície das duas barras.
(a)
(b)
Figura 5.1 (a) Barra com carga concentrada na extremidade; (b) Barra com carga distribuída na extremidade.

EST-10 Mecânica dos Sólidos ITA-2013 5.3
As barras são iguais, mas uma é carregada com uma carga axial concentrada
por meio de um pino através de um furo na sua extremidade enquanto que a outra
recebe uma carga axial distribuída, com resultante igual à carga concentrada, por meio
de um dispositivo rígido na sua extremidade. Assim, a maneira de se aplicar as forças
sobre as duas barras é diferente, mas a resultante é a mesma: uma força axial P
atuando ao longo do eixo que passa pelos centróides das seções transversais da barra.
Na região próxima da aplicação das forças as deformações são muito diferentes
nas duas barras, como podemos observar pela severa distorção nas linhas da grade
desenhada sobre cada uma das barras. Porém, nas regiões um pouco afastadas da
vizinhança da aplicação das cargas, as deformações são essencialmente as mesmas
nas duas barras: os quadrados são deformados em retângulos, praticamente iguais.
Aparentemente, as únicas diferenças significantes no comportamento são os efeitos
localizados próximos da região de aplicação das cargas. Se esses elementos
estruturais são longos e esbeltos, as deformações gerais das duas barras e as
distribuições de tensões são aproximadamente as mesmas nas regiões afastadas da
aplicação das cargas.
A idéia essencial demonstrada pelo exemplo acima foi estabelecida por Saint-
Venant, em 1855, como um princípio:
“Duas distribuições diferentes de cargas atuando sobre a mesma região de um
corpo, tem essencialmente os mesmos efeitos, em termos de tensão e deformação,
sobre partes do corpo que estão suficientemente longe da área de aplicação das
cargas, desde que essas distribuições de forças tenham a mesma resultante”.
Esse princípio se aplica não somente a elementos estruturais carregados
axialmente, mas a todos os tipos de carregamento. Como regra geral, para as barras,
consideramos que a distância da região de aplicação de cargas onde esse princípio se
aplica, deve ser no mínimo igual à maior dimensão da seção transversal. Essa regra é
baseada em observações experimentais e em alguns casos confirmada
matematicamente pela teoria da elasticidade.

EST-10 Mecânica dos Sólidos ITA-2013 5.4
5.2 BARRAS PRISMÁTICAS SOB CARGA AXIAL Uma barra prismática é um elemento estrutural que possui um eixo longitudinal reto e
seção transversal constante ao longo do seu comprimento. A maior dimensão da seção
transversal é pequena comparada com o seu comprimento longitudinal. São elementos
estruturais sujeitos a cargas axiais largamente usados em estruturas como treliças, em
pontes e edifícios. São também usadas como elementos estruturais do sistema de
comando de algumas aeronaves.
A teoria que será desenvolvida a seguir, para a análise desses elementos
estruturais de geometria e carregamento simples, a qual apresenta resultados muito
bons do ponto de vista de engenharia, é baseada nas seguintes hipóteses:
a) Os pontos de aplicação de cargas e das reações de apoio estão a distâncias
razoáveis do ponto de interesse.
b) A seção transversal da barra é arbitrária, mas é uniforme ou possui uma variação
pequena e gradual na direção axial; se mudanças abruptas na seção transversal
existir, os centróides de todas a seções transversais devem poder ser unidos pela
reta que constitui o eixo axial da barra.
c) O material da barra é homogêneo ou o módulo de elasticidade E é função apenas
da coordenada axial. Não é essencial, porque podemos ter uma barra constituída
de materiais diferentes.
d) Todas as cargas aplicadas e reações de apoio são geometricamente posicionadas
em linha paralela com o eixo axial.
e) A magnitude da carga axial de compressão é menor que a carga crítica de
flambagem da barra.
f) As componentes transversais das tensões normais y e z são desprezíveis
comparadas com a tensão axial x
g) As seções transversais permanecem planas e normais ao eixo longitudinal após a
deformação; o eixo longitudinal permanece reto após a deformação. Ou seja, as
seções transversais permanecem paralelas entre si após a deformação.
As hipóteses (f) e (g) tem sido verificadas experimentalmente.

EST-10 Mecânica dos Sólidos ITA-2013 5.5
O problema a ser estudado é o seguinte: seja a barra da figura 5.2 com uma
força axial P aplicada na sua extremidade livre. Por simplicidade, considere fixa a outra
extremidade.
Figura 5.2 Barra prismática sob carregamento axial
A seguir faremos uso dos três aspectos fundamentais da Mecânica dos Sólidos,
já estudados nos capítulos 2,3, e 4. Por uma questão didática, eles serão aplicados na
seguinte ordem:
Cinemática da deformação
Devido ao tipo de carregamento, espera-se que a barra venha a se alongar ou
contrair na direção axial. Com base na hipótese (g), vamos assumir que a deformação
possa ser descrita como a seguir:
1) o eixo longitudinal permanece reto após a deformação e
2) as seções transversais permanecem planas e normais ao eixo longitudinal após
a deformação (essas seções continuam paralelas após a deformação).
Assim, as seções transversais se deslocam somente na direção axial. A figura
5.3 mostra a barra em estudo, antes e após a deformação.

EST-10 Mecânica dos Sólidos ITA-2013 5.6
Figura 5.3 (a) Antes da deformação; (b) Após a deformação.
Como as seções permanecem planas e paralelas após a deformação, a posição
dos seus pontos na configuração deformada pode ser dada apenas pelas coordenadas
*x e * *x x . Duas seções vizinhas são mostradas em detalhe na figura 5.4.
Figura 5.4 (a) Seções transversais vizinhas, antes da deformação; (b) As mesmas seções após a deformação

EST-10 Mecânica dos Sólidos ITA-2013 5.7
Da figura 5.4 vemos que um segmento de reta AB de comprimento x antes da
deformação se transforma em * *A B com comprimento *x após a deformação.
Da definição (3.1) de deformação longitudinal escrevemos
*
0limx x
x x
x
ou
*
x
dx dx
dx
. (5.1)
De (5.1) escrevemos
* 1 xdx dx . (5.2)
O alongamento total , figura 5.3, de uma extremidade da barra de comprimento L em
relação à outra extremidade é dado por
*
0
L
xL L dx . (5.3)
Em decorrência da hipótese (g) temos a seguinte relação deformação-
deslocamento
x
du
dx , (5.4)
onde as componentes de deformação e de deslocamento são funções apenas da
coordenada axial x da seção transversal, ou seja, independem das coordenadas y e z
dos pontos dessa seção.
Portanto, a deformação x é constante sobre a seção transversal.

EST-10 Mecânica dos Sólidos ITA-2013 5.8
Estática
Considere a região da barra à direita da seção de “corte” S, na figura 5.2, como
um diagrama de corpo-livre para determinarmos os esforços internos resultantes, a
partir do equilíbrio do corpo, conforme a figura 5.5.
Figura 5.5 Diagrama de corpo livre para determinação da força interna N.
Do equilíbrio na direção axial x escrevemos
0 0xF N P N P , (5.5)
onde N é a força normal interna resultante, atuando sobre a seção S e do equilíbrio dos
momentos em relação ao ponto G, concluímos que essa força N atua
perpendicularmente à seção transversal e é colinear com a força externa aplicada P.
Então, não existem momentos fletores atuando na seção S. Isso está de acordo com a
descrição da deformação da barra, ou seja, as seções transversais permanecem planas
e normais ao eixo longitudinal, o qual continua reto, após a deformação.
Como a seção de “corte” S é arbitrária entre as extremidades da barra da figura
5.2, concluímos que a força normal interna resultante N é constante ao longo do eixo x
nesse caso.
A força N é a resultante das forças N distribuídas sobre a seção S, atuando
sobre áreas elementares A , como na figura 5.6.

EST-10 Mecânica dos Sólidos ITA-2013 5.9
Figura 5.6 Forças N atuando sobre áreas elementares A da seção transversal.
Como já foi visto no capítulo 2, a intensidade da força N sobre cada ponto do
plano S pode ser dada pela componente normal x do vetor tensão atuando no ponto e
associado ao plano S. Então escrevemos
xN A . (5.6)
Se, na figura 5.6 considerarmos uma barra prismática, extraída da barra original, de
seção A , paralela ao eixo longitudinal x, podemos supor que as tensões normais y e
z sobre as suas laterais são desprezíveis, pois a barra original é muito estreita e suas
superfícies laterais são livres de tensão aplicada. Portanto, de acordo com a hipótese
(f), podemos assumir
0y z . (5.7)
A figura 5.7 apresenta a seção transversal S ampliada e um detalhe de uma
área elementar A .
Figura 5.7 Detalhe da seção transversal S com o sistema de sistema de coordenadas xyz associado : (a) força elementar N sobre a área elementar A ; (b) força resultante N sobre o seu ponto de aplicação G.

EST-10 Mecânica dos Sólidos ITA-2013 5.10
A força normal N é a resultante dessas forças N atuando sobre cada área
elementar A . No limite, com A tendendo a zero, podemos escrever, a partir de (5.6)
x
S
N dA . (5.8)
De (5.5) e (5.8) escrevemos
x
S
N P P dA . (5.9)
A partir da figura 5.7 temos
y xM z N z A (5.10)
z xM y N y A . (5.11)
No limite com 0A , os momentos resultantes em relação aos eixos y e z são
escritos a seguir, a partir das equações (5.10) e (5.11), e eles são iguais aos momentos
da força resultante N em relação aos mesmos eixos, respectivamente:
y x
S
M N z z dA (5.12)
z x
S
M N y y dA . (5.13)
A partir das equações (5.12) e (5.13), as coordenadas do ponto de aplicação da
força normal resultante N sobre a seção transversal, segundo o sistema de
coordenadas xyz adotado, são dadas por
x x
S S
x
S
z dA z dA
zN dA
(5.14)
x x
S S
x
S
y dA y dA
yN dA
(5.15)

EST-10 Mecânica dos Sólidos ITA-2013 5.11
A equação (5.5) e a força externa sendo colinear com a resultante normal interna N
(ausência de momentos fletores) asseguram o equilíbrio do diagrama de corpo-livre da
barra em estudo.
Relações constitutivas
A descrição do comportamento do material da barra será feita supondo-se que
ele seja linearmente elástico e isotrópico. Então, a partir do capítulo 4, escrevemos
1x x y zE
1y y x zE
1z z x yE
. (5.16)
Pela hipótese (f) assumimos que 0y z . Então,
xx E
xy xE
xz xE
. (5.17)
Consideraremos agora na nossa análise materiais linearmente elástico,
isotrópico e homogêneo, o que constitui a maioria dos materiais usados em
estruturas. Portanto, o módulo de elasticidade E é constante, em todos os pontos da
barra.
Como x independe de y e z devido à hipótese (g) e E é constante sobre toda a
seção transversal, a partir da primeira equação (5.17), temos

EST-10 Mecânica dos Sólidos ITA-2013 5.12
x x xE independe de y e z. (5.18)
Com (5.18) nas equações (5.8), (5.14) e (5.15), podemos escrever
x x x
S S
S
N NN dA dA
AdA
. (5.19)
x
S S
x
S S
zdA zdA
zdA dA
(5.20)
x
S S
x
S S
ydA ydA
ydA dA
. (5.21)
Das equações (5.20) e (5.21) observamos que, nesse caso, as coordenadas do
ponto de aplicação da resultante normal N são as coordenadas do centróide da seção
transversal. Então, se considerarmos o sistema de coordenadas cartesianas associado
à seção transversal com origem no centróide da seção, temos
0 0S S
y z ydA zdA , (5.22)
e assim, os momentos yM e zM se tornam nulos para qualquer valor de x .
Isso significa que uma distribuição uniforme (constante) de tensão x sobre a
seção transversal é representada por uma força normal N, colinear com a força externa,
atuando no centróide da seção com nenhum momento fletor.
Se o material não for homogêneo a distribuição de tensão não será uniforme
sobre a seção transversal e nesse caso a força resultante normal interna N ainda deve
ser colinear coma força externa P para que não ocorra flexão mas, o seu ponto de
aplicação não será mais no centróide da seção, e suas coordenadas são obtidas pelas
equações (5.14) e (5.15) (veja exemplos 5.12 e 5.13).

EST-10 Mecânica dos Sólidos ITA-2013 5.13
Substituindo (5.19) em (5.17), obtemos
x
N
EA
y z
N
EA . (5.23)
Com a primeira equação de (5.23) em (5.3), o alongamento total da barra se escreve
0
L N NLdx
EA EA . (5.24)
Se a força normal interna N for constante por trechos da barra, podemos escrever de
um modo mais geral
1 1 2 1
1 1
1 2
01 1 2 2
n n
n
L L L L Ln
L Ln n
NN Ndx dx dx
E A E A E A
(5.25)
ou
1 1 2 2
1 1 2 2
n n
n n
N LN L N L
E A E A E A , (5.26)
onde os sinais de cada parcela dependerão do sinal da força normal N, a qual é positiva
se for tração e negativa se for compressão.
Da relação deformação-deslocamento (5.4) temos
x
du P du duEA P
dx EA dx dx . (5.27)
Derivando-se (5.27) em relação a x, obtemos a equação de equilíbrio,escrita em
termos de deslocamento, para uma barra prismática de material isotrópico, linear-
elástico e homogêneo, com uma carga axial aplicada na sua extremidade

EST-10 Mecânica dos Sólidos ITA-2013 5.14
2
20
d uEA
dx . (5.28)
Para a solução dessa equação diferencial devemos aplicar as condições de contorno
0 ou
x
x A
u u
x ou x L
duEA P
dx
(5.29)
Exemplo 5.1
A barra da figura abaixo consiste de duas partes cilíndricas com seções
transversais circulares a um eixo comum passando pelos centróides das seções. Ela é
feita de uma liga de aço-carbono com 6 230 10 / 200E lb in GPa e tensão de
escoamento 3 20 70 10 / 480lb in MPa . Determine o alongamento total produzido
pelas cargas axiais aplicada nos pontos B e D.

EST-10 Mecânica dos Sólidos ITA-2013 5.15
Solução
a) Diagrama de corpo livre para a seção transversal entre D e C:
Do equilíbrio, temos: 1 1000N lb
b) Diagrama de corpo livre para a seção transversal entre D e B:
Do equilíbrio, temos: 2 1000N lb
c) Diagrama de corpo livre para a seção transversal entre D e A:
Do equilíbrio, temos: 3 3800 1000 0 1800N N lb

EST-10 Mecânica dos Sólidos ITA-2013 5.16
d) Alongamento total da barra:
Da equação (5.24), escrevemos
3 31 1 2 2
1 1 2 2 3 3
N LN L N L
E A E A E A
1 11 26
1 1
1000 120,00815
30 10 1 8
N Lin
E A
2 22 26
2 2
1000 50,00151
30 10 3 16
N Lin
E A
3 33 26
3 3
1800 50,00272
30 10 3 16
N Lin
E A
1 2 3 0,00815 0,00151 0,00272 0,0124 in
Comentário:
O resultado obtido é válido se o nível de tensão atuante for menor que a tensão
de escoamento do material, 3 20 70 10 lb in :
2 3 211 02
1
100020400 70 10
1 8
Nlb in lb in
A
2 3 222 02
2
10009050 70 10
3 16
Nlb in lb in
A
2 3 23
3 023
180016300 70 10
3 16
Nlb in lb in
A
▲

EST-10 Mecânica dos Sólidos ITA-2013 5.17
Exemplo 5.2
A barra da figura abaixo é feita de um material linearmente elástico. As partes AB
e BC são ambas cilíndricas com um eixo axial comum. As extremidades A e B são
rigidamente fixadas antes da carga P ser aplicada através de um colar rígido no ponto
B. A carga é assumida atuando ao longo do eixo longitudinal da barra. Determinar a
tensão normal nas seções transversais de cada parte da barra.
Solução
a) Reações dos suportes:
Equilíbrio 0 0x A CF R R P (a)
Temos 1 equação e 2 incógnitas.

EST-10 Mecânica dos Sólidos ITA-2013 5.18
b) Forças normais internas:
1
1
0 0x C
C
F R N
N R
2
2
0 0x C
C
F R P N
N P R
c) Alongamento total da barra:
1 2 0 onde:
1 11
1
2 22
2
N L
EA
N L
EA
1 1 2 2 1 1 2 2
1 2 1 2
0 0N L N L N L N L
EA EA A A
Substituindo os resultados do item (b), escrevemos
1 2
1 2
0C CR L P R L
A A
(c)
d) Cálculo das reações dos suportes:
Agora, temos duas equações, (a) e (c), e duas incógnitas, ou seja,
0A CR R P
1 2 1 2
1 2 2 1 1 2
0C CC
R L P R L PA LR
A A A L A L

EST-10 Mecânica dos Sólidos ITA-2013 5.19
Substituindo em (a), obtemos
1 2 2 1
2 1 1 2 2 1 1 2
0A A
PA L PA LR P R
A L A L A L A L
e) Tensões normais nas seções transversais da barra:
Substituindo os resultados para as reações acima nas equações obtidas no item (b),
escrevemos
1 21 1
2 1 1 2C
PA LN R N
A L A L
1 2 2 12 2 2
2 1 1 2 2 1 1 2C
PA L PA LN P R N P N
A L A L A L A L
1 1 2 21 1
1 1 2 1 1 2 2 1 1 2
1N PA L PL
A A A L A L A L A L
2 2 1 12 2
2 2 2 1 1 2 2 1 1 2
1N PA L PL
A A A L A L A L A L
Comentário:
Como tínhamos apenas uma equação de equilíbrio e duas incógnitas tivemos
que escrever uma outra equação. Para escrevermos essa outra equação tivemos que
considerar a deformação da barra e a equação constitutiva do material. Desse modo, o
problema se tornou possível e determinado. ▲

EST-10 Mecânica dos Sólidos ITA-2013 5.20
5.3 BARRAS DE SEÇÃO TRANSVERSAL COM VARIAÇÃO
GRADUAL SOB CARGA AXIAL
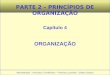
Vamos considerar agora uma barra com seção transversal variando gradualmente ao
longo do eixo longitudinal x, sob uma carga axial 0P aplicada na sua extremidade livre e
uma carga axial f que varia ao longo do eixo x, como na figura 5.8. A carga f é dada em
unidade de força por unidade de comprimento.
Figura 5.8 (a) Barra com carregamento axial e seção variável; (b) Diagrama de corpo livre para determinação da força normal interna N(x); (c) Força interna normal sobre a região à esquerda da seção de “corte” em x; (d) Diagrama de corpo livre de uma porção elementar de comprimento x da barra.
As hipóteses (a)-(g) descritas na seção 5.2 se aplicam também nesse problema.
A hipótese (b) diz que a variação das seções transversais ao longo do eixo longitudinal
deve ser pequena e gradual. Segundo uma recomendação nas páginas 76-77 do livro
“Mechanics of Material”, 4ª edição, de Gere & Timoshenko, o ângulo entre os lados da
barra deve ser menor que 20º , porque para esse ângulo, a tensão xP
A em uma
seção transversal arbitrária é 3% menor que aquela determinada por métodos mais
avançados. Quanto menor o ângulo entre as laterais da barra, menor será esse erro.

EST-10 Mecânica dos Sólidos ITA-2013 5.21
Do equilíbrio da barra, podemos escrever para os diagramas de corpo livre da
figura 5.8
0 00 ( ) ( ) 0 ( ) ( )xF N x f L x P N x P f L x (5.30)
e
0 ( )( ) 0x x x xF A A A f x . (5.31)
Desprezando-se o produto dos incrementos, 0x A , reescrevemos (5.31)
0x xA A f x . (5.32)
Dividindo (5.32) por x e tomando o limite com 0x
0 0 0lim lim lim 0 0x x
x xx x x
dA dAA f A f
x x dx dx
. (5.33)
ou
0x
dA f
dx . (5.34)
Pela hipótese (f), podemos assumir
0y z ,
ou seja, ( ) ( )x x
duE x E x
dx . Substituindo na equação (5.34), escrevemos
( ) ( ) 0d du
E x A x fdx dx
. (5.35)

EST-10 Mecânica dos Sólidos ITA-2013 5.22
Quando ( )E x e ( )A x são constantes ao longo da barra, a equação (5.35) se
simplifica para
2
20
d uEA f
dx (5.36)
e a condições de contorno são dadas por
0
0
u u
x ou x L ou
duEA P
dx
(5.37)
As equações (5.35) ou (5.36) são válidas em qualquer ponto de coordenada
0 x L ao longo da barra. Das hipóteses (c) e (g) podemos assumir que a tensão
x é uniforme (independe das coordenadas y e z) sobre a área A(x), ou seja, da
equação (5.19) escrevemos
( )
( )x
N x
A x . (5.38)
A deformação x também será uma função apenas da coordenada x e é dada por
( ) ( )
( ) ( ) ( )x
x
x N x
E x E x A x
, (5.39)
onde ( )E x indica que o módulo de elasticidade E é uma função apenas de x. Isso é
uma decorrência da hipótese (c).
Então o alongamento total da barra para o comprimento L é dado por
0 0
( )
( ) ( )
L L
x
N xdx dx
E x A x . (5.40)

EST-10 Mecânica dos Sólidos ITA-2013 5.23
Exemplo 5.3
Uma barra cônica, como da figura abaixo, é feita de um material com módulo de
elasticidade E, constante em todos os pontos, e peso específico . Determinar o
deslocamento de sua extremidade, devido á ação da gravidade. A variação das seções
transversais é muito pequena.
Solução
a) Força normal interna:
Neste caso a carga aplicada varia linearmente com a coordenada medida ao
longo do eixo longitudinal da barra.

EST-10 Mecânica dos Sólidos ITA-2013 5.24
A força peso ( )W y é calculada a seguir:
0 0r rxx y
y L L
O volume do cone de altura y é dado por
21( )
3V y x y .
Substituindo a expressão de x em função de y, escrevemos
2 230 0
2
1 1( ) ( )
3 3
r rV y y y V y y
L L
A força peso ( )W y é dada por
230
2( ) ( ) ( )
3
rW y V y W y y
L
Do equilíbrio do diagrama de corpo livre acima, escrevemos
230
2( ) ( ) ( )
3
rN y W y N y y
L
b) Deslocamento da extremidade livre:
Da equação (5.39), escrevemos

EST-10 Mecânica dos Sólidos ITA-2013 5.25
0
( )
( ) ( )
L N ydx
E y A y .
Com E é constante ,2
2 202
( )r
A y x yL
e 2
302
( )3
rN y y
L
na equação acima, obtemos
2 230
2 2 20 00
1 1
3 3
L Lr L yy dy dy
E L r y E
2
6
L
E
▲
5.4 BARRAS SOB EFEITO TÉRMICO
Como vimos na seção 4.6, uma variação de temperatura produz uma expansão ou
contração do sólido. No caso das barras a deformação que nos interessa é no sentido
longitudinal, ou seja, à deformação dada pela equação (5.1) acrescentamos a parcela
devido ao efeito térmico e escrevemos
xx T
E
. (5.41)
Da equação (5.41) observamos que
x xE T . (5.42)
A equação (5.41) nos dá a deformação específica longitudinal total, ou seja, uma
parcela devida à ação de forças (deformação mecânica) e uma parcela devida à
variação de temperatura (efeito térmico) e assim, definimos
xmec T T
E
. (5.43)

EST-10 Mecânica dos Sólidos ITA-2013 5.26
Então, podemos escrever
x mec T . (5.44)
Consideremos agora o seguinte problema: seja uma barra reta conforme a figura
5.9, com uma extremidade fixa e a outra livre, sob efeito de uma variação de
temperatura T .
Figura 5.9 Alongamento de uma barra devido a efeito térmico.
Nesse caso, temos
0mec T T . (5.45)
A parcela de deformação mecânica é nula porque não tem nenhuma força atuando
sobre a barra, apenas uma variação de temperatura T . Portanto, de (5.44) temos
0x xT T . (5.46)
O alongamento da barra, ou o deslocamento da sua extremidade livre em
relação à fixa, é dado pela equação (5.3) e considerando a (5.45)
0 0
L L
x T Tdx Tdx TL . (5.47)

EST-10 Mecânica dos Sólidos ITA-2013 5.27
Se substituirmos (5.46) em (5.42) obtemos
0x xE T T . (5.48)
Portanto, nesse caso, houve deformação da barra, mas sem o desenvolvimento de
tensão sobre os seus pontos.
Consideremos agora, a barra do problema anterior com as duas extremidades
fixas, conforme a figura 5.10, sujeita a uma variação de temperatura T .
Figura 5.10 Barra com as extremidades fixas e sob efeito térmico.
Da figura 5.10(a) vemos que os deslocamentos das extremidades da barras são nulos,
portanto, o seu alongamento longitudinal também será nulo. Assim, escrevemos
00 0
L
x xdx . (5.49)
Substituindo (5.49) em (5.42) obtemos
0x xE T E T . (5.50)
Então, nesse caso, ocorre o desenvolvimento de tensão normal de compressão nos
pontos da barra.

EST-10 Mecânica dos Sólidos ITA-2013 5.28
Em geral, na literatura, essa tensão que se originou devido ao efeito térmico é
denominada de tensão térmica, mas esse termo não é apropriado, porque na verdade
ela ocorre devido à força de reação do vínculo que fixa as extremidades da barra.
Portanto, essa tensão é o resultado da ação de uma força (no caso uma reação de
apoio), o que é coerente com o conceito de tensão.
Poderíamos fazer o seguinte raciocínio com a barra da figura 5.10: imaginemos
que a extremidade A seja liberada para se deslocar. Então, devido ao efeito térmico
temos da equação (5.47)
T TL . (5.51)
Da figura 5.10(c) podemos imaginar que a reação de apoio AR produza um
deslocamento mec no sentido oposto ao de T a fim de manter o deslocamento
resultante em A nulo, pois esse é um suporte fixo. Assim, a partir da equação (5.24),
escrevemos
Amec
R L
EA . (5.52)
Como o deslocamento total é nulo, temos
0mec T mec T . (5.53)
Substituindo (5.51), (5.50) em (5.53), obtemos
A AR L RTL E T
EA A . (5.54)
Comparando (5.54) com (5.50), temos
Ax
RE T
A , (5.55)
O que nos mostra que a tensão normal x , de compressão nesse caso, é devido à
ação da força de reação do apoio, mas originada do efeito térmico.

EST-10 Mecânica dos Sólidos ITA-2013 5.29
EXEMPLOS COMPLEMENTARES
Exemplo 5.4
Uma coluna de aço A-36 é usada para apoiar as cargas simétricas de dois pisos
de um edifício. Determinar o deslocamento vertical de seu topo A se 1 40P Kip ,
2 62P Kip e a coluna tem área de seção transversal de 223, 4 pol .
(1 Kip = 1000 lb)
.

EST-10 Mecânica dos Sólidos ITA-2013 5.30

EST-10 Mecânica dos Sólidos ITA-2013 5.31
▲

EST-10 Mecânica dos Sólidos ITA-2013 5.32
Exemplo 5.5
O eixo de bronze C86100 está submetido às cargas axiais mostradas.
Determinar o deslocamento da extremidade A em relação à extremidade C se os
diâmetros de cada segmentos são 0,75ABd pol , 2BCd pol e 0,5CDd pol .

EST-10 Mecânica dos Sólidos ITA-2013 5.33
▲

EST-10 Mecânica dos Sólidos ITA-2013 5.34
Exemplo 5.6
O conjunto consiste de uma haste CB de aço A-36 e de uma haste BA de
alumínio 6061-T6, cada uma com diâmetro de 1 pol. Determinar as cargas aplicadas 1P
e 2P se A desloca-se 0,08 pol para a direita e B desloca-se 0,02 pol para a esquerda
quando as cargas são aplicadas. Os comprimento de cada segmento sem alongamento
são mostrados na figura. Desprezar o tamanho das conexões em B e C e supor que
sejam rígidas.

EST-10 Mecânica dos Sólidos ITA-2013 5.35
▲

EST-10 Mecânica dos Sólidos ITA-2013 5.36
Exemplo 5.7
A treliça consiste de três elementos feitos de aço A-36 com área de seção
transversal de 20,75 pol . Determinar a maior carga P que pode ser aplicada de modo
que o apoio de rolete B não se desloque mais do que 0,03 pol.

EST-10 Mecânica dos Sólidos ITA-2013 5.37

EST-10 Mecânica dos Sólidos ITA-2013 5.38
▲

EST-10 Mecânica dos Sólidos ITA-2013 5.39
Exemplo 5.8
Resolver o exemplo 5.7 quando a carga P atua em C verticalmente para baixo.

EST-10 Mecânica dos Sólidos ITA-2013 5.40
▲

EST-10 Mecânica dos Sólidos ITA-2013 5.41
Exemplo 5.9
A coluna central B do conjunto tem comprimento original 124,7 mm, enquanto os
postes A e C têm comprimentos de 125 mm. Supondo que as tampas superior e inferior
sejam consideradas rígidas, determinar a tensão normal média em cada coluna. As
colunas são feitas de alumínio e têm área de seção transversal de 2400mm .
70alumE GPa .

EST-10 Mecânica dos Sólidos ITA-2013 5.42

EST-10 Mecânica dos Sólidos ITA-2013 5.43
▲

EST-10 Mecânica dos Sólidos ITA-2013 5.44
Exemplo 5.10
O suporte é preso à parede por três parafusos de aço A-36 em B, C e D. Cada
parafuso tem diâmetro de 0,5 pol e comprimento não deformado de 2 pol. Supondo que
seja aplicada uma força de 800 lb sobre o suporte como mostrado, determinar a
distância s que o topo do suporte se afasta da parede no parafuso D. Supor, também,
que o parafuso não sofra cisalhamento; ao contrário, a força vertical de 800 lb é
suportada pela extremidade A. Admitir, por fim, que a parede e o suporte sejam rígidos.
É mostrada uma deformação exagerada dos parafusos.

EST-10 Mecânica dos Sólidos ITA-2013 5.45

EST-10 Mecânica dos Sólidos ITA-2013 5.46

EST-10 Mecânica dos Sólidos ITA-2013 5.47
▲

EST-10 Mecânica dos Sólidos ITA-2013 5.48
Exemplo 5.11
Um cilindro tubular de aço circunda um cilindro maciço de cobre e a montagem
está sujeita a uma carga axial de 50000 lb como mostra a figura. A área da seção
transversal do cilindro de aço é 23 pol , enquanto à do cilindro de cobre é 210 pol .
Ambos cilindros tem o mesmo comprimento antes da cargas ser aplicada. Determine o
aumento de temperatura do sistema total necessário para colocara toda a carga
aplicada, sobre o cilindro de cobre. A placa no topo da montagem é rígida.
6 2 616 10 / 9,3 10 / ocobre cobreE lb pol F
6 2 630 10 / 6,5 10 / oaço açoE lb pol F

EST-10 Mecânica dos Sólidos ITA-2013 5.49

EST-10 Mecânica dos Sólidos ITA-2013 5.50
▲

EST-10 Mecânica dos Sólidos ITA-2013 5.51
Exemplo 5.12
Uma barra é composta de uma série de tiras estreitas de um material e coladas
juntas de modo que no final resulta numa barra laminada com uma seção retangular.
Cada uma das tiras é de uma material linearmente elástico, mas o módulo de
elasticidade varia de tira para tira através da largura da barra de acordo com a função
0 1E E kx D . Uma placa rígida é fixada à extremidade livre e uma carga P é
aplicada como mostrado. Determine x tal que as seções transversais planas
permaneçam planas e perpendiculares ao eixo da barra conforme ela se alonga.

EST-10 Mecânica dos Sólidos ITA-2013 5.52

EST-10 Mecânica dos Sólidos ITA-2013 5.53

EST-10 Mecânica dos Sólidos ITA-2013 5.54
▲

EST-10 Mecânica dos Sólidos ITA-2013 5.55
Exemplo 5.13
O conjunto consiste em um elemento de alumínio 6061-T6 e um elemento de
latão C83400. O conjunto está sobre uma base rígida e sobre ele também existe uma
placa rígida para se aplicar a carga. Determinar a distância d em que a força P deve ser
colocada sobre a placa rígida no topo, de modo que essa placa permaneça horizontal
quando os materiais se deformarem. Cada elemento tem largura de 8 pol e eles não
estão unidos. 3 310,0 10 14,6 10al laE Ksi E Ksi

EST-10 Mecânica dos Sólidos ITA-2013 5.56

EST-10 Mecânica dos Sólidos ITA-2013 5.57
▲
REFERÊNCIAS
1. Crandall, S. H.; Dahl, N. C.; Lardner, T. J.; An Introduction to the Mechanics of
Solids, McGraw-Hill, NY, 2a. edição, 1972
2. Hibbeler, R. C., Resistência dos Materiais, Pearson Education do Brasil, SP, 5ª
edição, 2006
3. Timoshenko, S.P.; Gere, J.E.; Mecânica dos Sólidos,Livros Técnicos e
Científicos Editora, RJ, 1994
4. Wempner, G., Mechanics of Solids, PWS Publishing Company, Boston, MA, 1995