Embed Size (px)
Citation preview

30 May 2007
1
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
Co-Evolução da Morfologia e
Controle de Robôs Móveis Simulados
Utilizando Realidade Virtual
Milton Roberto Heinen
Fernando S. Osório
Apresentado por:Apresentado por:
Prof. Dr. Fernando S. Prof. Dr. Fernando S. OSÓRIOOSÓRIO - - PPG Computação Aplicada / UnisinosPPG Computação Aplicada / Unisinos
UNISINOS - RS - BrasilUNISINOS - RS - BrasilUniversidade do Vale do Rio dos SinosUniversidade do Vale do Rio dos Sinos
RBV - Rede Brasileira de Visualização / FINEPRBV - Rede Brasileira de Visualização / FINEPCAPESCAPES

30 May 2007
2
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
1. Motivação / Histórico
> Robôs Articulados
2. Simulação Virtual Realística
> Simulação Física: Sensores, Cinemática, Dinâmica,
Corpos Rígidos Articulados
3. LegGen - Robôs com Pernas > Simulador + Algoritmos Genéticos > Evolução do controle das articulações > Resultados das simulações
4. Evolução da Morfologia
> Resultados das simulações
5. Conclusões e Perspectivas
Agenda

30 May 2007
3
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
1. PREVIOUS WORKS - AUTONOMOUS ROBOTS
* Virtual Reality Environment and Simulation of Legged Robots "Uso de Realidade Virtual para a Simulação do Caminhar em Robôs Móveis" SVR 2006 - Belém, Brazil
* Evaluate different Robot Models (hardware configurations) "Applying Genetic Algorithms to Control Gait of Physically Based Simulated Robots" IEEE WCCI / CEC 2006 - Vancouver, Canadá
* Evaluate different Fitness Functions "Gait Control Generation for Physically Based Simulated Robots using Genetic Algorithms" IBERAMIA / SBIA 2006 - Ribeirão Preto, SP
* Robot, Vehicles and Human Simulation "Increasing Reality in VR Applications: Physical and Behavioral Simulation" Virtual Concept Summer School - Nov. 2006 - Porto Alegre, RS / VC2006 Cancun

30 May 2007
4
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
Mobile Articulated Robots: Walking Machines... Insects, Animals, Humans
1. MOTIVATION - AUTONOMOUS ROBOTS

30 May 2007
5
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
Mobile Articulated Robots: Walking Machines... Insects, Animals, Humans
DogHorse ...TetrapodHexapod
1. MOTIVATION - AUTONOMOUS ROBOTS

30 May 2007
6
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
2. ROBOT SIMULATION
Simulation of Robots: 3D Realistic Virtual Environments
SimRob3D developed at Unisinos

30 May 2007
7
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
2. ROBOT SIMULATION
Simulation of Robots: 3D Realistic Virtual Environments- Sensors: infrared, sonar, bumpers, gyro (accelerometers), GPS, compass, light and vision sensors, etc. - Actuators: wheels, legs and arms with angular motors (joints) - Physics: collision, kinematics, rigid body dynamics
Simulation of Autonomous Robots:- Robot Control Architectures Implementation
SimRob3D developed at Unisinos Webbots developed by Cyberbotics

30 May 2007
8
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
3. LEGGEN - ROBOT SIMULATION
Simulation of 3D Realistic Virtual Legged Robots LEGGEN Simulator
Genetic Evolved Control of Articulated Robots (w/legs)

30 May 2007
9
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
3. LEGGEN - ROBOT SIMULATION
Simulation of 3D Realistic Virtual Legged Robots LEGGEN Simulator - Tools:
1. OSG - Open Scene Graph (OpenGL + Extensions) [ http://www.openscenegraph.org/ ]
2. ODE - Open Dynamics Engine Rigid Body Physics Simulation
(gravity, inertia, friction, collision, joints, etc) [ http://www.ode.org/ ]
3. GALib - Genetic Algorithms Simulation [ http://www.lancet.mit.edu/ga/ ]
4. Robot Control FSM: Finite State Machine = Sense + Act

30 May 2007
10
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
3. LEGGEN - ROBOT SIMULATION
Simulation of 3D Realistic Virtual Legged Robots LEGGEN Simulator - Tools:
1. OSG - Open Scene Graph (OpenGL + Extensions) [ http://www.openscenegraph.org/ ]
2. ODE - Open Dynamics Engine

30 May 2007
11
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
3. LEGGEN SIMULATOR - GA
Genetic Algorithms Simulation
Genome:
* FSM: Table of Target States (Sequence of Actions) * Target angles + Reference Angular velocity * Adjust velocity * Fitness Function: Sensor based

30 May 2007
12
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
3. LEGGEN SIMULATOR - GA
Genetic Algorithms Simulation

30 May 2007
13
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
3. LEGGEN SIMULATOR
Simulation main goals:
- Evaluate different Robot Models (hardware configurations) IEEE WCCI / CEC 2006 - Vancouver, Canadá
- Evaluate different Fitness Functions IBERAMIA / SBIA 2006 - Ribeirão Preto, SP
Robot Models
Boston Dynamics
Evaluate different robot models in order to select a better hardware configuration

30 May 2007
14
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
3. LEGGEN SIMULATOR
Simulation - main goals of this study:
Evaluate different Fitness Functions 1: F=D 2: F=D/(1+B)
Fitness FunctionsOptimize:WalkingDistance (D)
D = Distance :The average number of paws touching the groundbi = paw's bumpersN = No. of bumper reads
1
2 B = Bumpers L = No. of legs
Optimize:- Distance - Bumber: Half of the paws touching the ground

30 May 2007
15
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
3. LEGGEN SIMULATOR
Fitness Functions
Optimize:- Distance- Bumbers- Gyro
3
G = Sum of x, y, z instability (Gyroscope)
4 Optimize:- Distance- Gyro
Simulation - main goals of this study:
Evaluate different Fitness Functions 1: F=D 2: F=D/(1+B) 3: F=D/(1+G+B) 4: F=D/(1+G)

30 May 2007
16
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
3. LEGGEN SIMULATOR
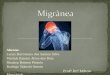
Simulation RESULTS:
Evaluate different Fitness Functions1: F=D 2: F=D/(1+B) 3: F=D/(1+G+B) 4: F=D/(1+G)
1: 2:
3:
4:
Mean (μ) and std. deviation (σ): 30 experiments for each configuration

30 May 2007
17
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
3. LEGGEN SIMULATOR
Simulation RESULTS:
Evaluate different Robot Models

30 May 2007
18
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
3. LEGGEN SIMULATOR
Simulation RESULTS:
Evaluate different Robot Models

30 May 2007
19
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
3. LEGGEN SIMULATOR - Results
Simulation Results:

30 May 2007
20
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
3. LEGGEN SIMULATOR - Results
Simulation RESULTS:
Tetrapod Video - Distance, Gyro

30 May 2007
21
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
3. LEGGEN SIMULATOR - Results
Simulation RESULTS: Tetrapod Video - 2 a 2

30 May 2007
22
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
3. LEGGEN SIMULATOR - Results
Simulation RESULTS: Tetrapod Video - "bloopers"

30 May 2007
23
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
4. EVOLVING THE MORPHOLOGY
Main idea:- Evolve robots structure and control at the same time- Morphology:
Why we are obligated to pre-define these parameters?

30 May 2007
24
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
4. EVOLVING THE MORPHOLOGY
Evolve robots structure and control at the same time
Does it works??

30 May 2007
25
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
4. EVOLVING THE MORPHOLOGY
Evolve robots structure and control at the same time
Does it works? Yes...it seems to work!

30 May 2007
26
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
5. CONCLUSIONS
Conclusions...
- We achieved very good results in the robot control (stable/robust)
- Genetic Algorithms helped us to study and design better robots: Joints, Actuators, Sensors, Speed x Stability x Cost
- Genetic Algorithms + 3D Physically Realistic Simulation + Evolved Finite State Machine Control + Fitness Function selection + Hardware configuration = LEGGEN Framework

30 May 2007
27
Co-Evolução da Morfologia e Controle de Robôs Móveis Simulados
Utilizando Realidade VirtualMilton Heinen e Fernando Osório
FUTURE WORK
Next steps... Autonomous parking control model (SEVA) integrated with LEGGEN control model [ IEEE WCCI / IJCNN 2006 ]