Embed Size (px)
Citation preview

UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
FILLIPE LUCCHIN PAUKNER
COMPARAÇÃO DO CONTROLE DO INVERSOR TRIFÁSICO
CONECTADO À REDE COM FILTRO LCL CONSIDERANDO O
AMORTECIMENTO PASSIVO E ATIVO
DISSERTAÇÃO
PATO BRANCO
2016

FILLIPE LUCCHIN PAUKNER
COMPARAÇÃO DO CONTROLE DO INVERSOR TRIFÁSICO
CONECTADO À REDE COM FILTRO LCL CONSIDERANDO O
AMORTECIMENTO PASSIVO E ATIVO
Dissertação apresentada ao Programa de Pós-Graduação em Engenharia Elétrica - PPGEE, da Universidade Tecnológica Federal do Paraná - UTFPR, Campus Pato Branco, como requisito parcial para obtenção do título de Mestre em Engenharia. Orientador: Prof. Dr. Jean Patric da Costa Coorientador: Prof. Dr. Emerson Giovani Carati
PATO BRANCO
2016

Ficha Catalográfica elaborada por Suélem Belmudes Cardoso CRB9/1630 Biblioteca da UTFPR Campus Pato Branco
P323c Paukner , Fillipe Lucchin.
Comparação do controle do inversor trifásico conectado à rede com filtro LCL considerando o amortecimento passivo e ativo / Fillipe Lucchin Paukner. -- 2016.
83 f. : il. ; 30 cm Orientador: Prof. Dr. Jean Patric da Costa Coorientador: Emerson Giovani Carati Dissertação (Mestrado) - Universidade Tecnológica Federal do Paraná.
Programa de Pós-Graduação em Engenharia Elétrica. Pato Branco, PR, 2016.
Bibliografia: f. 85 – 89.
1. Inversores elétricos. 2. Filtros elétricos. 3. Conversores de corrente elétrica. I. Costa, Jean Patric da, orient. II. Carati, Emerson Giovani, coorient. III. Universidade Tecnológica Federal do Paraná. Programa de Pós-Graduação em Engenharia Elétrica. IV. Título.
CDD 22. ed. 621.3

Ministério da Educação Universidade Tecnológica Federal do Paraná
Câmpus Pato Branco Diretoria de Pesquisa e Pós-Graduação
Programa de Pós-Graduação em Engenharia Elétrica
TERMO DE APROVAÇÃO
Título da Dissertação n° 042
Comparação do Controle do Inversor Trifásico Conectado à Rede com Filtro LCL Considerando o Amortecimento Passivo e Ativo
por
Fillipe Lucchin Paukner
Dissertação apresentada às oito horas e trinta minutos do dia onze de março de dois mil e dezesseis, como requisito parcial para obtenção do título de MESTRE EM ENGENHARIA ELÉTRICA. Programa de Pós-Graduação em Engenharia Elétrica (Área de Concentração: Sistemas e Processamento de Energia), Universidade Tecnológica Federal do Paraná, Câmpus Pato Branco. O candidato foi arguido pela Banca Examinadora composta pelos professores abaixo assinados. Após deliberação, a Banca Examinadora considerou o trabalho APROVADO. Banca examinadora:
Prof. Dr. Jean Patric da Costa UTFPR/PB (Orientador)
Prof. Dr. Emerson Giovani Carati UTFPR/PB
__________________________________ __________________________________ Prof. Dr. Helder Tavares Camara Prof. Dr. Rafael Cardoso Danfoss Solar Inverters/DK UTFPR/PB
*A Folha de Aprovação assinada encontra-se na Coordenação do Programa de Pós-Graduação em Engenharia Elétrica.
Prof. Dr. Ricardo Vasques de Oliveira Coordenador do PPGEE

So Long, and Thanks for All the fish! (ADAMS, 1999).

Duas coisas são infinitas: o universo e a estupidez
humana. Mas, no que respeita ao universo, ainda
não adquiri a certeza absoluta.
Albert Einstein

AGRADECIMENTOS
Foram dois anos de trabalho que me permitiram obter novos conhecimen-
tos e me tornar um verdadeiro engenheiro. Gostaria de agradecer aos meus colegas
de mestrado por todas as discussões, conversas e auxílio em meio às dificuldades.
Agradeço também por todas as piadas e brincadeiras que atuam no sentido de nos
mantermos humanos. Agradeço à minha noiva, que foi o grande suporte e apoio em
meio às dificuldades vivenciadas nesses dois anos. Obrigado por seu apoio incondici-
onal e sua maneira sempre alegre de me confortar. Agradeço aos meus pais e irmão,
que me apoiaram nessa decisão de continuar meus estudos numa cidade que nem
conhecia e que estavam sempre dispostos a me escutar em momentos de dificuldade.
Agradeço ao meu orientador, Dr. Jean Patric da Costa, por todos os ensinamentos
transmitidos nesses dois anos. Agradeço também aos demais professores do PPGEE
que fomentaram a base de conhecimentos necessários para que esse título de mestre
fosse alcançado. Por fim, agradeço a Deus, que em todos os momentos de minha
vida tem guiado meus caminhos e me auxiliado a viver uma vida de princípios bem
estabelecidos.

RESUMO
Lucchin Paukner, Fillipe. Comparação do Controle do Inversor Trifásico Conectadoà Rede com Filtro LCL Considerando o Amortecimento Passivo e Ativo. 2016. 89f. Dissertação de Mestrado - Programa de Pós Graduação em Engenharia Elétrica,Universidade Tecnológica Federal do Paraná, Pato Branco, PR, 2016.
Sistemas de geração distribuída conectados à rede devem atender as especificaçõestécnicas de conexão no que tange à injeção de corrente harmônica na rede elétrica.No intuito de satisfazer tais requerimentos de rede, filtros passivos são utilizados parainterfacear o inversor fotovoltaico e a rede. Essa dissertação compara a resposta ca-racterística do tradicional filtro indutivo (filtro L) com o filtro Indutivo-Capacitivo-Indutivo(filtro LCL). É mostrado que o aumento da indutância permite uma supressão sufici-ente do ripple de corrente proveniente da frequência de chaveamento do inversor. Ofiltro LCL no entanto, proporciona uma melhor atenuação harmônica, o que permitereduzir o tamanho do filtro. A grande desvantagem do filtro LCL é sua impedância,que é caracterizada por um pico de ressonância próximo da frequência de corte dofiltro, a qual deve ser amortecida para evitar a instabilidade. Técnicas passivas e ati-vas podem ser utilizadas para amortecer a ressonância do filtro LCL. Para abordarestas questões, esta dissertação apresenta uma comparação do controle de correntedo inversor trifásico conectado à rede com filtro L e com filtro LCL, discutindo a uti-lização de amortecimento passivo e ativo para diferentes regiões de frequência deressonância. A partir dos modelos matemáticos, desenvolveu-se uma metodologiade projeto dos controladores e o comportamento dinâmico do sistema operando emmalha fechada foi investigado. Para validar os estudos desenvolvidos ao longo dessetrabalho, resultados experimentais são apresentados utilizando uma plataforma expe-rimental trifásica de 5kW. Os principais componentes e suas funções são discutidasno decorrer do trabalho. Resultados experimentais são obtidos para verificar as aná-lises teóricas e ilustrar o desempenho do inversor trifásico fotovoltaico conectado àrede elétrica com filtro L e filtro LCL. É mostrado que a frequência de ressonância e afrequência de amostragem do sistema podem ser relacionadas de maneira a se cal-cular uma frequência crítica, abaixo da qual é essencial realizar o amortecimento dofiltro LCL. Ainda, os resultados experimentais mostram que o amortecimento ativo porresistor virtual, embora apresente um desenvolvimento simples, é eficaz para amor-tecer a ressonância do filtro LCL e permitir que o sistema opere estável dentro dosparâmetros pré-determinados.
Palavras-chave : Inversor Conectado à rede, Filtro L e LCL, Amortecimento Passivo eAtivo.

ABSTRACT
Lucchin Paukner, Fillipe. Comparison Control of Three-Phase Grid Connected Inverterwith LCL Filter Considering Passive and Active Damping. 2016. 89 p. Master Thesis -Post-Graduation Program in Electrical Engineering,Federal Technological University ofParaná, Pato Branco, PR, 2014.
Distributed generation systems must fulfill standards specifications of current harmo-nics injected to the grid. In order to satisfy these grid requirements, passive filters areconnected between inverter and grid. This work compares the characteristic responseof the traditional inductive (L) filter with the inductive-capacitive-inductive (LCL) filter. Itis shown that increasing the inductance L leads to a good ripple current suppressionaround the inverter switching frequency. The LCL filter provides better harmonic atte-nuation and reduces the filter size. The main drawback is the LCL filter impedance,which is characterized by a typical resonance peak, which must be damped to avoidinstability. Passive or active techniques can be used to damp the LCL resonance. Toaddress this issue, this dissertation presents a comparison of current control for PVgrid-tied inverters with L filter and LCL filter and also discuss the use of active andpassive damping for different regions of resonance frequency. From the mathematicalmodels, a design methodology of the controllers was developed and the dynamic beha-vior of the system operating in closed loop was investigated. To validate the studiesdeveloped during this work, experimental results are presented using a three-phase5kW experimental platform. The main components and their functions are discussedin this work. Experimental results are given to support the theoretical analysis and toillustrate the performance of grid-connected PV inverter system. It is shown that theresonant frequency of the system, and sampling frequency can be associated in orderto calculate a critical frequency, below which is essential to perform the damping of theLCL filter. Also, the experimental results show that the active buffer per virtual resistor,although with a simple development, is effective to damp the resonance of the LCLfilter and allow the system to operate stable within predetermined parameters.
Keywords : Grid Connected inverter, L and LCL Filter, Passive and Active Damping.

LISTA DE FIGURAS
Figura 1: Matriz energética global - 2008. . . . . . . . . . . . . . . . . . . 19
Figura 2: Sistema híbrido com acoplamento CC. . . . . . . . . . . . . . . 26
Figura 3: (a) Esquemático resumido de um sistema fotovoltaico. (b) Filtro
indutivo Trifásico. (c) Filtro indutivo-capacitivo-indutivo trifásico . 27
Figura 4: Configurações de arranjos fotovoltaicos: (a) Módulo Integrado;
(b) string; (c) multistring; (d) inversor central. . . . . . . . . . . . 28
Figura 5: Inversor trifásico conectado à rede com filtro indutivo . . . . . . 32
Figura 6: Inversor trifásico conectado à rede com filtro indutivo-capacitivo-
indutivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Figura 7: Comparação da resposta em frequência do inversor conectado
à rede com filtro L e com filtro LCL. . . . . . . . . . . . . . . . . 36
Figura 8: Classificação de métodos de controle de corrente em inversores. 38
Figura 9: Diagrama de blocos de controle VOC para controle de potência
ativa e reativa em coordenadas síncronas dq. . . . . . . . . . . 40
Figura 10: (a) Conversor de potência trifásico conectado à rede elétrica.
(b) Circuito equivalente em cooredanadas αβ. . . . . . . . . . . 42
Figura 11: Resultado de simulação para as correntes de saída do inversor
com filtro L. Iphase = 8, 166Apico e potência projetada de P = 2, 2kW 46
Figura 12: Resultados de simulação para variados valores de corrente inje-
tada na rede para o filtro L projetado. Diminuição da THDi com
o aumento da potência . . . . . . . . . . . . . . . . . . . . . . . 46
Figura 13: Resultados de simulação para as correntes de saída após o filtro
L. Iphase = 8, 166Apico e a potência projetada P = 2, 2kW . . . . 49
Figura 14: Resultados de simulação para variados valores de corrente in-
jetada na rede com o filtro LCL projetado. Diminuição da THDi
com o aumento da potência . . . . . . . . . . . . . . . . . . . . 50

Figura 15: Métodos variados de amortecimento passivo mediante a utiliza-
ção de resistores em série ou em paralelo com os componentes
do filtro LCL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Figura 16: Resposta em frequência da corrente da rede pela tensão do
inversor mediante a variação do Resistor Rd, em série com o
capacitor do filtro LCL . . . . . . . . . . . . . . . . . . . . . . . . 52
Figura 17: Resposta em frequência da corrente da rede pela tensão do
inversor mediante a variação do Resistor RL1, em série com o
indutor L1 do filtro LCL . . . . . . . . . . . . . . . . . . . . . . . 53
Figura 18: Resposta em frequência da corrente da rede pela tensão do
inversor mediante a variação do Resistor RL2, em série com o
indutor L2 do filtro LCL . . . . . . . . . . . . . . . . . . . . . . . 54
Figura 19: (a) Amortecimento ativo baseado em resistor virtual. (b) Amor-
tecimento ativo baseado em filtro digital. . . . . . . . . . . . . . 55
Figura 20: Diagrama de controle resumido do controlador de corrente com
amortecimento ativo utilizando o método de resistor virtual. . . . 57
Figura 21: Variação da frequência de ressonância com o aumento da indu-
tância da rede. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Figura 22: Regulador de corrente da rede - equivalente monofásico. (a)
Malha de controle da corrente da rede sem amortecimento ativo
(malha única). (b) Malha de controle de corrente da rede com
amortecimento ativo baseado numa malha de realimentação de
corrente do capacitor (malha em cascata) . . . . . . . . . . . . 61
Figura 23: Resposta em frequência referente à função de transferência da
malha de controle de corrente da rede tanto para o caso sem
amortecimento (malha única) quanto para o caso utilizando amor-
tecimento ativo (malha em cascata) em que fres > fcrit. . . . . . 62
Figura 24: Resposta em frequência referente à função de transferência da
malha de controle de corrente da rede tanto para o caso sem
amortecimento (malha única) quanto para o caso utilizando amor-
tecimento ativo (malha em cascata) em que fres < fcrit. . . . . . 63

Figura 25: Lugar das raízes para a função de transferência de controle da
corrente em malha única (sem amortecimento). (a) fres < fcrit.
(b) fres > fcrit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Figura 26: (a) Lugar das raízes da realimentação da corrente do capaci-
tor ic. (b) Lugar das raízes usando o controlador em cascata
quando fres < fcrit para variações de ganho de amortecimento
ativo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Figura 27: Projeto da Plataforma experimental. . . . . . . . . . . . . . . . . 66
Figura 28: Plataforma experimental desenvolvida. . . . . . . . . . . . . . . 67
Figura 29: Resultados experimentais de conexão à rede do inversor trifá-
sico com filtro indutivo. P = 2.2kW , V CC = 400V , V ab = 220V
e Ia = Ib = Ic = 5.8A. Corrente em coordenadas abc estão em
fase com as correntes da rede. L = 3.2mH . . . . . . . . . . . . 68
Figura 30: Resultados experimentais de conexão à rede do inversor trifá-
sico com filtro indutivo-capacitivo-indutivo sem a utilização de
amortecimento. P = 2.2kW , V CC = 400V , V ab = 220V e
Ia = Ib = Ic = 5.8A. L1 = 1.6mH, C = 10uF e L2 = 0.24mH. . 69
Figura 31: (a) Resultados de simulação para dois degraus na corrente de
referência. (b) Resultados experimentais para realizar a compa-
ração da resposta aos dois degraus na corrente com o resultado
de simulação anterior. P = 2.2kW , V CC = 400V , V ab = 220V e
Ia = Ib = Ic = 5.8A. L1 = 1.6mH, C = 10uF e L2 = 0.24mH. . 70
Figura 32: Resultados experimentais de conexão à rede do inversor trifá-
sico com filtro indutivo-capacitivo-indutivo utilizando amorteci-
mento passivo. P = 2.2kW , V CC = 400V , V ab = 220V e
Ia = Ib = Ic = 5Ap. Componentes do filtro: L1 = 1.6mH,
C = 10uF e L2 = 0.24mH. . . . . . . . . . . . . . . . . . . . . . 71
Figura 33: Resultados experimentais de conexão à rede do inversor tri-
fásico com filtro indutivo-capacitivo-indutivo utilizando amorte-
cimento passivo. P = 2.2kW , V CC = 400V , V ab = 220V e
Ia = Ib = Ic = 5.8A. A Corrente Ia está em fase com a tensão
da fase a. L1 = 1.6mH, C = 10uF e L2 = 0.24mH. . . . . . . . 71

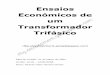
Figura 34: Eficiência do conversor medida com um Analisador de potência
de precisão da Yokogawa, para o caso em que se está utilizando
amortecimento passivo e fres > fcrit . . . . . . . . . . . . . . . . 72
Figura 35: Resultados experimentais de conexão à rede do inversor tri-
fásico com filtro indutivo-capacitivo-indutivo utilizando amorte-
cimento ativo. P = 2.2kW , V CC = 400V , V ab = 220V e
Ia = Ib = Ic = 5Ap. Componentes do filtro: L1 = 1.6mH,
C = 10uF e L2 = 0.24mH. . . . . . . . . . . . . . . . . . . . . . 73
Figura 36: Resultados experimentais de conexão à rede do inversor trifá-
sico com filtro indutivo-capacitivo-indutivo utilizando amorteci-
mento ativo por resistor virtual. P = 2.2kW , V CC = 400V ,
V ab = 220V e Ia = Ib = Ic = 5.8A. L1 = 1.6mH, C = 10uF e
L2 = 0.24mH. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Figura 37: Eficiência do conversor medida com um Analisador de potência
de precisão da Yokogawa, para o caso em que se está utilizando
amortecimento ativo e fres > fcrit. . . . . . . . . . . . . . . . . . 74
Figura 38: Simulação de conexão à rede do inversor trifásico com filtro
indutivo-capacitivo-indutivo sem amortecimento para o caso em
que fres < fcrit. P = 1.3kW , V CC = 400V , V ab = 220V e
Ia2 = 3.5A. L1 = 1.6mH, C = 20uF e L2 = 1.6mH. . . . . . . . 74
Figura 39: Simulação de conexão à rede do inversor trifásico com filtro
indutivo-capacitivo-indutivo com amortecimento ativo por resis-
tor virtual para o caso em que fres < fcrit. P = 1.3kW , V CC =
400V , V ab = 220V e Ia2 = 3.5A. L1 = 1.6mH, C = 20uF e
L2 = 1.6mH. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Figura 40: Resultados experimentais de conexão à rede do inversor trifá-
sico com filtro indutivo-capacitivo-indutivo utilizando amorteci-
mento ativo por resistor virtual quando fres < fcrit. P = 1.3kW ,
V CC = 400V , V ab = 220V e Ia2 = 3.5A. L1 = 1.6mH,
C = 20uF e L2 = 1.6mH. . . . . . . . . . . . . . . . . . . . . . . 76

Figura 41: (a) Resultados experimentais utilizando L1 = 1.6mH, C = 20uF
e L2 = 0.24mH fres > fcrit. P = 1.3kW , V CC = 400V , V ab =
220V e Ia2 = 3.5A. (b) varaiação de parâmetro: L2 é au-
mentado até 1.6mH de maneira que fres < fcrit. P = 1.3kW ,
V CC = 400V , V ab = 220V e Ia2 = 3.5A. . . . . . . . . . . . . . 77
Figura 42: Comparação do amortecimento da ressonância do filtro LCL:
sem amortecimento; com amortecimento passivo e com amor-
tecimento ativo via realimentação da corrente do capacitor. . . . 78

LISTA DE TABELAS
1 Fator de potência operacional nos pontos de conexão - Submódulo 3.6
do PROREDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2 Requisitos para a conexão de sistemas de geração distribuída à rede
elétrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3 Parâmetros utilizados no projeto do filtro indutivo . . . . . . . . . . . . . 45
4 Definição dos requisitos para Cálculo do Filtro LCL . . . . . . . . . . . . 48
5 Componentes do filtro LCL projetado . . . . . . . . . . . . . . . . . . . . 48
6 Funções de transferência em coordenadas síncronas dq e em coorde-
nadas αβ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
7 Componentes passivos e frequência de ressonância - Filtro LCL . . . . 61
8 Ganhos do controlador. . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
9 Resultados relativos às normas de conexão . . . . . . . . . . . . . . . . 80

LISTA DE SIGLAS E ABREVIATURAS
THD Total Harmonic Distortion.
THDi Total Harmonic Distortion of Current.
THDv Total Harmonic Distortion of Voltage.
ANEEL Agência Nacional de Energia Elétrica.
CA Corrente Alternada.
CC Corrente Contínua.
COBEP Brazilian Power Electronics Conference.
COPEL Companhia Paranaense de Energia.
dB Decibel.
DSP Digital Signal Processor .
Filtro L Filtro Indutivo.
Filtro LCL Filtro Indutivo-Capacitivo-Indutivo.
GD Geração Distribuída.
GEE Gases do efeito estufa.
IEC International Electrotechnical Commission.
IEEE Institute of Electrical and Electronics Engineers.
IGBT Insulated Gate Bipolar Transistor.
L Indutivo.
LC Indutivo-Capacitivo.
LCL Indutivo-Capacitivo-Indutivo.
MPPT Maximum Power Point Tracking.
NPC Neutral Point Clamped .
PI Proporcional Integral.
PRODIST Procedimentos de Distribuição.
PROREDE Procedimentos de Rede.
PWM Pulse Width Modulation.
RMS Root Mean Square.
SVPWM PWM Space Vector.
VOC Voltage Oriented Control .

ZOH Zero-Order-Hold.

LISTA DE SÍMBOLOS
L Indutância por fase do inversor com filtro L
R Resistência por fase do inversor com filtro L
ia Corrente da Fase A para o inversor com filtro L
ib Corrente da Fase B para o inversor com filtro L
ic Corrente da Fase C para o inversor com filtro L
V ag Tensão da Fase A da rede
V bg Tensão da Fase B da rede
V cg Tensão da Fase C da rede
V a Tensão da Fase A do inversor com filtro L
V b Tensão da Fase B do inversor com filtro L
V c Tensão da Fase C do inversor com filtro L
id1 Corrente de eixo direto que flui pelo indutor L1 do filtro LCL
iq1 Corrente de eixo em quadratura que flui pelo indutor L1 do filtro LCL
Vfd Tensão de eixo direto do capacitor do filtro LCL
Vfq Tensão de eixo em quadratura do capacitor do filtro LCL
id2 Corrente de eixo direto que flui pelo indutor L2 do filtro LCL
iq2 Corrente de eixo em quadratura que flui pelo indutor L2 do filtro LCL
RL1 Resistência intrínseca do indutor L1 do filtro LCL
Rc Resistência intrínseca do indutor Capacitor do filtro LCL
Cf Capacitância do capacitor do filtro LCL
RL2 Resistência intrínseca do indutor L1 do filtro LCL
Vd Tensão de eixo direto do inversor
Vq Tensão de eixo em quadratura do inversor
Vgd Tensão de eixo direto da rede
Vgq Tensão de eixo em quadratura da rede
Vi Tensão do inversor
ω Frequência angular da rede
ωres Frequência angular de ressonância
f Frequência da rede

igd Corrente em eixo direto da rede
igq Corrente em eixo em quadratura da rede
kp Ganho Proporcional
ki Ganho Integral
idref Corrente de referência em eixo direto
iqref Corrente de referência em eixo em quadratura
ei Erro do controlador de corrente
ωb Largura de Banda do controlador
VL Tensão Média no indutor
∆t Variação de tempo
∆i Variação da Corrente
Ih Corrente harmônica
∆ip Ripple de Corrente no indutor
PminPotência mínima injetada na rede
Vpcc Tensão no Ponto de Conexão
ma Índice de Modulação
Zb Impedância Base
Pb Potência Base
Cb Capacitância Base
ωbaseFrequência Angular Base
Imax Corrente Máxima de saída do inversor
∆I2 Ripple Máximo de Corrente no Indutor L2
∆I1 Ripple Máximo de Corrente no Indutor L1
ka fator de atenuação de corrente harmônica
fres Frequência de ressonância
fsw Frequência de Chaveamento
Rd Resistor de Amortecimento da ressonância
ωcrit Frequência angular crítica
fcrit Frequência crítica
KDp Ganho proporcional de Amortecimento

SUMÁRIO
1 INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.1 ANÁLISE ENERGÉTICA MUNDIAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.2 CONTRIBUIÇOES DO TRABALHO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.3 ESTRUTURA DO TRABALHO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2 INVERSOR TRIFÁSICO CONECTADO À REDE COM FILTRO L OU LCL . . . 26
2.1 DIAGRAMA GERAL DE UM SISTEMA DE GERAÇÃO FOTOVOLTAICO. . . . 27
2.2 O CONVERSOR CC-CA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.3 FILTRO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.4 MODELAGEM MATEMÁTICA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.4.1 Modelo por Espaço de estados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.4.2 Modelo por função de transferência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.5 CONSIDERAÇÕES FINAIS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3 PROJETO DO CONTROLADOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.1 CONTROLE DA CORRENTE DO INVERSOR TRIFÁSICO . . . . . . . . . . . . . . . 37
3.1.1 Projeto do Filtro Indutivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.1.1.1 Exemplo de Projeto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.1.1.2 Resultados de simulação para o Filtro L . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.1.2 Projeto para o Filtro Indutivo-Capacitivo-Indutivo . . . . . . . . . . . . . . . . . . . . . . . 47
3.1.2.1 Resultados de simulação do filtro LCL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.2 AMORTECIMENTO DA RESSONÂNCIA DO FILTRO LCL . . . . . . . . . . . . . . . . 50
3.2.1 Amortecimento Passivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.2.2 Amortecimento Ativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.3 REGIÕES DE AMORTECIMENTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.4 CONSIDERAÇÕES FINAIS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4 ANÁLISE EXPERIMENTAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66

4.1 DESCRIÇÃO DA BANCADA EXPERIMENTAL DESENVOLVIDA . . . . . . . . . . 66
4.2 INVERSOR CONECTADO À REDE COM FILTRO L . . . . . . . . . . . . . . . . . . . . . 67
4.3 CONEXÃO À REDE COM FILTRO LCL - FRES > FCRIT - SEM AMORTE-
CIMENTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.4 CONEXÃO À REDE COM FILTRO LCL - FRES > FCRIT - AMORTECI-
MENTO PASSIVO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.5 CONEXÃO À REDE COM FILTRO LCL - FRES > FCRIT - AMORTECI-
MENTO ATIVO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.6 CONEXÃO À REDE COM FILTRO LCL - FRES < FCRIT - AMORTECI-
MENTO ATIVO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.7 VARIAÇÃO DA INDUTÂNCIA DA REDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.8 COMPARAÇÃO DE AMORTECIMENTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.9 CONSIDERAÇÕES FINAIS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5 CONCLUSÕES E SUGESTÕES PARA TRABALHOS FUTUROS . . . . . . . . . . 81
5.1 CONCLUSÕES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.2 SUGESTÕES PARA TRABALHOS FUTUROS . . . . . . . . . . . . . . . . . . . . . . . . . . 83
REFERÊNCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88

19
1 INTRODUÇÃO
1.1 ANÁLISE ENERGÉTICA MUNDIAL
A história da energia se confunde com a história do homem, no que tange
à sua evolução. A descoberta da capacidade de realizar trabalho se inicia com a utili-
zação da própria força física, passa ao domínio da energia térmica através do fogo e
da posterior utilização da energia proveniente de outros elementos da natureza como
a água (hidráulica), o vento (eólica), ou mesmo a força motriz animal. O desenvol-
vimento energético está intimamente ligado ao benefício do homem, sua busca por
conforto e seu desenvolvimento tecnológico.
Com o desenvolvimento das máquinas a vapor, culminando com o domínio
da energia proveniente do petróleo e da energia elétrica, o homem deu um largo passo
no desenvolvimento tecnológico, e no entanto, tornou-se completamente dependente
da produção de energia para manutenção da vida. A maior parte da geração de ener-
gia provém de fontes esgotáveis (combustíveis fósseis), as quais são responsáveis
por afetar as condições climáticas do planeta devido à poluição.
Estudos publicados pelo IPCC (2011) apontam que as emissões de gases
do efeito estufa (GEE) resultantes da prestação de serviços de energia, contribuem
significativamente para o aumento da concentração de gases de efeito estufa na at-
mosfera. O estudo ainda ressalta que a concentração pode alcançar níveis superiores
a 600 partes por milhão, o que resultaria num aumento superior a 3,6o C na tempera-
tura média do planeta no século XXI.
A Figura 1 apresenta o cenário energético mundial no ano de 2008 (IPCC,
2011). Segundo o gráfico, 85% da matriz energética é proveniente de combustíveis
fósseis. Se não forem implantadas iniciativas que alterem esse padrão, o objetivo
de manter um aumento máximo da temperatura em 2oC no século XXI se tornará
inalcançável (IEA, 2012).
Como a implantação de novas formas de produção energética é importante
para reverter a dependência global por combustíveis fósseis, deve-se verificar possi-

1.1 Análise energética mundial 20
Figura 1: Matriz energética global - 2008.
Fonte: Adaptado de IPCC (2011)
bilidades diferenciadas que favoreçam a utilização de energias renováveis, como por
exemplo, a utilização de grandes centrais geradoras baseadas em energia renovável,
ou ainda através da geração distribuída.
Na geração distribuída a central geradora é instalada perto da carga de
consumo, localizada na rede de distribuição ou após o sistema de medição do con-
sumidor (ACKERMANN et al., 2001). Ela deve suprir a demanda local ou ainda auxiliar
no fornecimento de energia para o resto do sistema, podendo derivar tanto de fontes
renováveis como não renováveis (GUEDES, 2006).
A conexão de sistemas de geração distribuída à rede elétrica é uma tendên-
cia mundial, pois a geração próxima ao ponto de consumo reduz os custos associados
ao transporte de energia. Essa conexão à rede em edificações permite que a carga
gerada por equipamentos de ar condicionado em centros comerciais, que possuem
uma curva de carga mais expressiva no período diurno, seja atendida principalmente
pela geração local. Esse aumento da disponibilidade energética pode atuar como um
mecanismo de promoção da eficiência energética (GT-GDSF, 2009).
Em 17 de abril de 2012 a ANEEL publicou a resolução normativa no 482
que estabelece as condições gerais para o acesso de microgeração (até 100kW) e
minigeração (até 1MW) distribuída aos sistemas de distribuição de energia elétrica,
além de estabelecer o sistema de compensação de energia elétrica, segundo o qual,
a energia ativa gerada por unidade consumidora com micro ou minigeração compense
o consumo de energia elétrica. A norma abrange fontes como a fotovoltaica, eólica,
hídrica e biomassa. O microgerador tem condições facilitadas de conexão à rede, mas

1.1 Análise energética mundial 21
não pode vender a energia excedente que é transformada em crédito a ser usado nos
36 meses seguintes. A norma ainda estabelece prazo de 240 dias para as distribui-
doras atenderem os pedidos de conexão, desde que não haja impedimentos técnicos.
Entretanto, as normas para a ligação à rede da geração distribuída são elaboradas
pelas próprias companhias de distribuição, conforme determinação da ANEEL.
Sistemas de geração distribuída utilizam conversores de potência para re-
alizar a conexão do sistema de geração diretamente com a rede elétrica. São com-
postos, portanto, pela central geradora (solar fotovoltaica, eólica, biomassa, etc.), um
conversor de potência que converta a tensão gerada para uma tensão contínua capaz
de carregador um barramento de capacitores e um inversor que converta a tensão
contínua para tensão alternada sincronizada à rede.
Tais conversores são compostos por chaves semicondutoras, que utilizam
uma frequência de chaveamento na ordem de alguns kilo Hertz. Esse chaveamento
provoca o surgimento de componentes harmônicas de corrente em valores múltiplos
da frequência de chaveamento utilizada.
Na utilização de conversores de potência em sistemas de geração distri-
buída ainda torna-se necessário utilizar um filtro de corrente que faça o acoplamento
do sistema de geração com a rede elétrica, e seja capaz de atenuar as componentes
harmônicas de alta frequência.
A topologia de filtro mais comum é a aplicação de um filtro indutivo (Filtro L)
como interface entre a rede e o inversor, como utilizado em Schonardie et al. (2010).
Em comparação ao uso do filtro L, o filtro indutivo-capacitivo-indutivo (Filtro LCL) apre-
senta melhor atenuação de frequências harmônicas de corrente, sem aumentar de
forma significativa o consumo de energia reativa na frequência da rede. De fato, filtros
LCL apresentam tamanho reduzido quando comparado ao filtro L, o que reduz custos
e perdas operacionais (LINDGREN; SVENSSON, 1998). Entretanto, filtros LCL apresen-
tam como desvantagem a existência de um pico de ressonância na frequência de corte
do filtro, a qual deve ser amortecida como discutida em inúmeras publicações. A im-
pedância do filtro LCL vista pelo conversor é similar à existente para o filtro L quando
se considera uma região de baixas frequências (inferior à frequência de corte do filtro
LCL). Até próxima à frequência de ressonância, o filtro LCL proporciona uma atenu-
ação de -20 dB/década. Para frequências superiores à frequência de ressonância, o
filtro LCL proporciona uma atenuação de -60 dB/década.

1.1 Análise energética mundial 22
Os estudos realizados nessa dissertação abordam o controle do inversor tri-
fásico utilizando filtros indutivos e filtros indutivos-capacitivos-indutivos como interface
com a rede elétrica. Portanto, conhecer as características de cada topologia torna-se
necessário. Para o caso do filtro LCL, sua maior desvantagem é a ressonância do filtro,
que pode levar o sistema de controle à instabilidade. Nesse sentido, inúmeros estudos
foram realizados para se entender o comportamento do sistema quando conectado à
rede elétrica.
Em Liserre et al. (2005) os autores apresentam um procedimento passo a
passo de projeto de filtro LCL para inversores conectados à rede com uma metodolo-
gia de controle simplificada similar à realizada para o filtro L.
Em Wessels et al. (2008), os autores apresentam uma investigação de amor-
tecimento ativo da ressonância do filtro LCL utilizando-se do conceito de resistor virtual
aplicado ao controle de retificadores PWM conectados à rede elétrica. A investigação
é realizada para diferentes valores dos parâmetros do filtro LCL. O conceito de resis-
tor virtual é baseado na ideia de emular um resistor real em série com o capacitor
do filtro LCL usando uma malha de controle baseada na realimentação da corrente
do capacitor em cascata com a malha principal do controle de corrente. Como não é
utilizado nenhum resistor virtual, e portanto não há a utilização de um amortecimento
passivo, perdas adicionas não são geradas, embora seja necessário a utilização de
mais sensores.
O projeto passo a passo de um controlador com realimentação da cor-
rente do capacitor para inversores conectados à rede com filtro LCL é apresentado
em Bao et al. (2014). Os autores determinam regiões satisfatórias dos parâmetros do
controlador baseados em parâmetros como a margem de ganho, margem de fase e
erro de estado estacionário.
Em (DANNEHL et al., 2009) e em (PARKER et al., 2014) são apresentadas li-
mitações para a utilização do controle de corrente em coordenadas síncronas. Os
autores apresentam um estudo relativo à estabilidade do sistema baseando-se na
frequência de ressonância do filtro LCL e na frequência de amostragem do sistema.
Ainda, para que este estudo possa ser realizado, torna-se necessário co-
nhecer as normas técnicas que discutem a conexão de sistemas de geração distri-
buída à rede elétrica. Dentre as principais normas e padrões internacionais, pode-se
citar por exemplo a recomendação IEEE 519 (IEEE, 1993) e a recomendação IEEE

1.1 Análise energética mundial 23
1547 (IEEE, 2005).
A legislação atual brasileira para conexão da geração distribuída à rede
elétrica é baseada na resolução normativa no 482 de 17 de abril de 2012 da ANEEL.
Essa resolução foi responsável por estabelecer efetivamente a geração distribuída em
território nacional.
Essa resolução estabeleceu as condições gerais de acesso à microgera-
ção (até 100kW) e minigeração (de 100kW a 1MW) distribuída aos sistemas de ener-
gia elétrica, além de implantar no Brasil o já mundialmente consolidado net metering
(compensação de energia gerada pela consumida) que estabelece um sistema no
qual a energia ativa injetada pela unidade consumidora com geração distribuída seja
cedida por meio de empréstimo gratuito à distribuidora local de energia, sendo poste-
riormente compensada com o consumo de energia ativa, podendo gerar créditos os
quais apresentam validade de 36 meses.
A partir da publicação dessa resolução normativa, as distribuidoras ficaram
responsáveis por adequar seus sistemas comerciais e elaborar normas técnicas refe-
rentes ao acesso à micro e minigeração distribuída com prazo de adequação até o fim
do ano de 2012. A norma ainda institui que os custos de reforço no sistema de dis-
tribuição devem ser integralmente arcados pelas distribuidoras sem que o custo seja
repassado ao consumidor que pede a ligação de seu sistema de geração distribuída
à rede.
No estado do Paraná, a Companhia Paranaense de energia (COPEL) de-
senvolveu a Norma Técnica Copel 905200 referente ao acesso de micro e minigeração
distribuída ao sistema da Copel (COPEL, 2012). Essa norma é baseada nas seções
3.7 do PRODIST e as seções 2.8 e 3.6 do PROREDE.
Essa dissertação utiliza as normas de conexão à rede para parametrizar
as características necessárias do sistema experimental desenvolvido. Os principais
pontos abordados são relativos ao Fator de Potência, frequência da rede, taxa de
distorção harmônica de corrente (THDi) e tensão no ponto de conexão. Tais pontos
são evidenciados a seguir.
A faixa de tensão em operação normal, segundo o PRODIST deve estar
limitada entre 91% da tensão de conexão e 105% da tensão de conexão.
Conforme Submódulo 3.6 do PROREDE, nos pontos de conexão à rede
básica, os acessantes devem manter o fator de potência nas faixas especificadas na

1.2 CONTRIBUIÇOES DO TRABALHO 24
Tabela 1.Tabela 1: Fator de potência operacional nos pontos de conexão - S ubmódulo 3.6 doPROREDE
Tensão Nominal do ponto de conexão Faixa de fator de potência345kV ≤ V n 0,98 indutivo a 1,0
69kV ≤ V n < 345kV 0,95 indutivo a 1,0V n < 69kV 0,92 indutivo a 0,92 capacitivo
As normas brasileiras de conexão à rede não estabelecem um índice refe-
rente à taxa de distorção harmônica de corrente, mas existem normas internacionais
que regulamentam limites para a distorção harmônica total de corrente.
A IEC 61727 e a IEEE 1547 apresentam como limite máximo de THD de
corrente o valor de 5% em relação à corrente total.
De acordo com o Módulo 8 do PRODIST, as instalações conectadas ao
sistema de distribuição, devem operar dentro de limites de frequência situados entre
59,9Hz e 60,1Hz em condições normais de operação e em regime permanente. Em
caso de distúrbios no sistema de distribuição, e havendo disponibilidade de geração
para restaurar o equilíbrio carga-geração, deve-se garantir que a frequência retorne
para a faixa de 59,5Hz a 60,5Hz num prazo de 30 segundos. Com relação aos limites
de variação de frequência:
• não é permitido exceder 66Hz ou ser inferior a 56,5Hz em condições extremas;
• pode permanecer acima de 62Hz por no máximo 30 segundos e acima de 63,5
Hz por no máximo 10 segundos;
• pode permanecer abaixo de 58,5 Hz por no máximo 10 (dez) segundos e abaixo
de 57,5 Hz por no máximo 05 (cinco) segundos.
A Tabela 2 apresenta um resumo geral dos requisitos para a conexão de
sistemas de geração distribuída à rede elétrica baseado nas normas IEC 61727, IEEE
1547 e no PRODIST.
1.2 CONTRIBUIÇOES DO TRABALHO
Esta dissertação apresenta uma comparação da resposta dinâmica em ma-
lha fechada de inversores trifásicos conectados à rede, analisando três situações dis-
tintas. A primeira utiliza um filtro indutivo como acoplamento entre o inversor e a rede;

1.3 ESTRUTURA DO TRABALHO 25
Tabela 2: Requisitos para a conexão de sistemas de geração distribu ída à rede elétrica
IEC61727 IEEE1547 PRODISTInjeção de componente
contínua máxima1% 0.5% −
THDimáxima
5% 5% −
Fatorde potência mínimo
90% − 92%
Tempo máximo deoperação ilhada (s)
2 2 −
Tempo de reconexãoà rede (s)
20− 300 300 −
Faixa de frequência (Hz)para operação normal
59 < f < 61 59, 3 < f < 60, 5 59, 5 < f < 60, 5
Tempo máximo fora dafaixa de frequência (s)
0, 2 0, 163 30
Faixa de tensãopara operação normal
85% ≤ V < 110% 88% ≤ V < 110% 91% ≤ V < 105%
a segunda utiliza o filtro indutivo-capacitivo-indutivo (LCL) com uma frequência de res-
sonância acima da frequência crítica, a qual é discutida em Parker et al. (2014) e será
apresentada no decorrer deste trabalho; a terceira situação é referente ao uso do fil-
tro LCL com frequência de ressonância abaixo da frequência crítica, situação esta
em que o amortecimento da ressonância é obrigatório. Além disso, esta dissertação
apresenta um estudo comparativo do amortecimento passivo e ativo da frequência de
ressonância do filtro LCL.
As concepções principais destas análises foram desenvolvidas inicialmente
em Paukner et al. (2015a) e na presente dissertação novas evidências teóricas e ex-
perimentais que confirmam as análises prévias são incluídas, revelando que o amorte-
cimento ativo com o controlador apresentado pode efetivamente mitigar os problemas
relativos à ressonância do filtro LCL.
1.3 ESTRUTURA DO TRABALHO
Esta dissertação é organizada da seguinte maneira: no capítulo 2 o in-
versor trifásico conectado à rede é estudado, e o acoplamento com filtro L e LCL é
discutido, resultando na obtenção dos modelos matemáticos do inversor com filtro L e
LCL. O projeto do controlador de corrente é mostrado no capítulo 3, assim como um
estudo relativo ao amortecimento da ressonância do filtro LCL, que culmina em um

1.3 ESTRUTURA DO TRABALHO 26
estudo que avalia a necessidade do amortecimento do filtro LCL, tendo como base a
frequência de ressonância do filtro e a frequência de amostragem e chaveamento do
controlador. Resultados experimentais para a validação dos estudos desenvolvidos
são apresentados no capítulo 4. As conclusões e propostas para trabalhos futuros
são apresentadas no Capítulo 5.

27
2 INVERSOR TRIFÁSICO CONECTADO À REDE COM FILTRO L OU LCL
Este capítulo discute as características do inversor trifásico conectado à
rede elétrica em um sistema de geração distribuída.
Segundo Chiradeja (2005) a geração distribuída promete gerar eletricidade
com alta eficiência e baixa poluição, além de ser instalada próximo às cargas, dife-
rentemente das grandes centrais elétricas. O autor ainda comenta que tecnologias
variadas de geração distribuída estão em diferentes fases de desenvolvimento, como
por exemplo a utilização de microturbinas, sistemas fotovoltaicos, sistemas de energia
eólica, turbinas de gás e células de combustível.
A integração da Geração Distribuída (GD) na rede elétrica pode resultar em
benefícios variados como a redução das perdas nas linhas de transmissão, redução
de impactos ambientais, o aumento da eficiência energética global (CHIRADEJA, 2005).
Uma revisão de literatura a respeito da geração distribuída, suas configu-
rações e aplicações é realizado em (NEHRIR et al., 2011). Em um sistema híbrido de
geração, diferentes fontes primárias de geração são integradas. Uma das formas de
realizar essa integração é através de um acoplamento CC, como o apresentado na
Figura 2.
Fonte deEnergia CA
Fonte deEnergia CC
Sistema deArmazenamento
de energia
ConversãoCA/CC
Circuito deInterface
ConversãoCC/CC
(se necessário)
ConversãoCC/CA
Rede50/60 Hz
Cargas CA
Barramento CC Barramento CA
Figura 2: Sistema híbrido com acoplamento CC.
Fonte: Adaptado de ( NEHRIR et al., 2011)

2.1 Diagrama Geral de um sistema de geração fotovoltaico 28
Como discutido acima, as variadas fontes de energia apresentadas por
Chiradeja (2005) podem ser integradas utilizando por exemplo o esquema de aco-
plamento CC apresentado por (NEHRIR et al., 2011).
A seção a seguir apresenta um breve estudo de como interfacear um sis-
tema de geração fotovoltaico com a rede elétrica.
2.1 DIAGRAMA GERAL DE UM SISTEMA DE GERAÇÃO FOTOVOLTAICO
A Figura 3 (a) apresenta o esquemático resumido de um sistema fotovol-
taico composto pelo arranjo fotovoltaico, o conversor CC-CC, o Barramento CC, o
Inversor trifásico e o filtro de interface entre o conversor e a rede.
ElétricaRedeBarramentoArranjo
Fotovoltaico CC-CCConversor
FILTRO
L
L
L
ia
ib
ic
(a)
Filtro Indutivo
L1
L1
L1
i1
L2
L2
L2
Cf ic
Rc
i2
(b)
(c)
CC CC-CAConversor
Filtro Indutivo-Capacitivo-Indutivo
Figura 3: (a) Esquemático resumido de um sistema fotovoltaico. (b) Filtro indutivo Trifá-sico. (c) Filtro indutivo-capacitivo-indutivo trifásico
Sistemas de geração fotovoltaica para conexão com a rede elétrica costu-

2.1 Diagrama Geral de um sistema de geração fotovoltaico 29
mam apresentar quatro arranjos variados (Araújo, 2010): Módulo Integrado, em linha
(String), Multilinhas (Multistring) e Inversor central, os quais estão representados na
Figura 4.
Em Teodorescu et al. (2011) é descrito o uso típico de cada tipo de arranjo
fotovoltaico:
• Módulo integrado: Potência típica entre 50−400W , utilizado em pequenas plantas
fotovoltaicas (um único painel).
• Inversor em linha: Potência típica entre 0, 4 − 2kW para pequenas plantas foto-
voltaicas com painéis conectados numa única linha.
• Inversores Multilinha: Potência típica entre 1, 5− 6kW para plantas fotovoltaicas
conectadas costumeiramente em duas linhas.
• Mini Inversor Central: Potência típica superior a 6kW para plantas fotovoltaicas
com topologia trifásica utilizadas em grandes coberturas ou em pequenas Usinas
Solares.
• Inversor Central: Potência típica entre 100 − 1000kW para plantas fotovoltaicas
com topologia trifásica utilizadas em grandes Usinas Solares.
(a) (b) (c) (d)
Figura 4: Configurações de arranjos fotovoltaicos: (a) Módulo Inte grado; (b) string; (c)multistring; (d) inversor central.
Fonte: Adaptado de Teodorescu et al. (2011)
A geração fotovoltaica apresenta como problema principal a variação da
potência gerada com a alteração das condições climáticas uma vez que as caracterís-

2.2 O conversor CC-CA 30
ticas do conjunto fotovoltaico variam com a irradiação solar e a temperatura (ALI et al.,
2012).
O rastreio do ponto de máximo potência (MPPT) dos painéis fotovoltaicos é
fundamental para que se extraia a máxima potência possível do arranjo. Em Ali et al.
(2012) são apresentadas 30 técnicas de MPPT para sistemas fotovoltaicos.
2.2 O CONVERSOR CC-CA
O conversor CC-CA, também chamado de inversor é o elemento chave
para a conexão de sistemas de geração distribuída à rede elétrica. Para o caso da
utilização com geração fotovoltaica, ele é responsável por converter a corrente con-
tínua fornecida pelos painéis fotovoltaicos em corrente alternada sincronizada à rede
elétrica (TEODORESCU et al., 2011).
Os inversores são baseados principalmente em duas famílias de conver-
sores estáticos: Ponte H e NPC (Neutral Point Clamped). A família de Conversores
em Ponte H ou Ponte Completa é uma importante referência no desenvolvimento de
conversores de potência.
Em Meersman et al. (2010) é apresentado uma revisão bibliográfica de in-
versores trifásicos. O autor apresenta as seguintes topologias:
• Topologia de inversores trifásico a 3 fios.
• Topologia de inversores trifásico a 4.
• Topologia de inversores multiníveis.
A topologia de inversores trifásicos a 4 fios ainda se subdivide em inverso-
res a 4 fios com barramento dividido, inversores trifásicos a 4 braços e inversores tri-
fásicos a 4 fios usando 3 inversores monofásicos em ponte H (MEERSMAN et al., 2010).
Já a topologia de inversores multiníveis se subdivide em Topologia de in-
versores multiníveis cascateados, topologia de inversores multiníveis com diodo gram-
peado e topologia de inversores multiníveis com capacitores grampeados (chamado
também de flying capacitor inverter ) (MEERSMAN et al., 2010).
A utilização de inversores trifásicos para conexão de sistemas de geração
à rede elétrica comercial é preferível para se evitar o desbalanceamento de tensão

2.3 Filtro 31
na rede trifásica, de maneira que é encorajado a adição de sistemas de geração com
potência acima de 5 KVA em países como a Bélgica por exemplo (MEERSMAN et al.,
2010).
Deve-se evitar o máximo possível situações que possam diminuir a eficiên-
cia do conversor, como por exemplo a utilização de amortecimento passivo, que será
discutido nos próximos capítulos.
A topologia de inversor trifásico selecionada para ser utilizada neste tra-
balho consiste em um inversor a 3 fios com 6 chaves semicondutoras, chamado de
inversor trifásico de ponte completa já apresentado na Figura 3.
O estudo apresentado nessa dissertação é focado no controle do conversor
CC-CA, de maneira que outras formas de geração poderiam ser utilizadas em detri-
mento à fotovoltaica, bastando-se realizar o interfaceamento com o barramento CC,
como apresentado na Figura 2.
A seção a seguir discute as topologias de filtros utilizados como interface
entre o conversor CC-CA e rede elétrica.
2.3 FILTRO
Inversores costumam utilizar modulações PWM com frequência de comu-
tação de 2kHz a 20kHz, as quais geram componentes harmônicas de alta frequência
que podem produzir distúrbios em equipamentos conectados à rede (HILL; KAPOOR,
1998). Essas componentes harmônicas são interferências indesejáveis no sinal se-
noidal na saída do conversor.
Associadas às harmônicas geradas pela modulação, surgem outros proble-
mas como a degradação do fator de potência, as distorções nas formas de onde de
corrente e tensão, o aquecimento de elementos reativos e as irradiações de ondas
eletromagnéticas (ALEX-SANDER; BRAZ, 2008).
Para diminuir esses efeitos, utiliza-se filtros de corrente para a conexão do
inversor com a rede, permitindo a atenuação das harmônicas de ordem superior, de
maneira a atender as normas relativas à qualidade do sinal a ser injetado na rede.
Diversas topologias de filtros podem ser utilizados para reduzir os proble-
mas relacionados às Harmônicas de corrente na saída dos conversores. Utiliza-se
principalmente as seguintes topologias de filtros:

2.4 Modelagem Matemática 32
• Indutivo (L)
• Indutivo-Capacitivo (LC)
• Indutivo-Capacitivo-Indutivo (LCL).
A topologia mais comum é a aplicação de um filtro L como interface entre a
rede e o inversor, como utilizado em (SCHONARDIE et al., 2010).
Filtros LCL também passaram a ser utilizados uma vez que apresentam
maior atenuação das frequências harmônicas sem aumentar significativamente o con-
sumo de potência reativa na frequência fundamental da rede quando comparados a
filtros L, além de possuir tamanho inferior ao filtro L, o que reduz os custos e as perdas
de operação (DANNEHL et al., 2007).
Para o filtro LCL, a impedância vista pelo conversor em baixas frequên-
cias é a mesma dada pelo caso do filtro L, de maneira que até próximo à frequência
de ressonância, a atenuação é de cerca de 20 dB/década, enquanto que para altas
frequências, a atenuação como esperada é de 60 dB/década, uma vez que trata-se de
um filtro de 3a ordem.
A seguir será apresentada uma modelagem matemática do inversor trifá-
sico conectado à rede utilizado o filtro indutivo e o filtro capacitivo como interface. Tais
análises serão utilizadas em seguida no projeto de controle do inversor.
2.4 MODELAGEM MATEMÁTICA
Esta seção apresenta a modelagem Matemática do inversor trifásico conec-
tado à rede elétrica com filtro L e com filtro LCL.
O inversor normalmente é conectado à rede elétrica utilizando-se de um
filtro indutivo como o apresentado na Figura 5 ou um filtro indutivo-capacitivo-indutivo
como o da Figura 6.
2.4.1 Modelo por Espaço de estados
Analisando o circuito apresentado na Figura 5 é possível obter as equações
de malha do circuito fazendo La = Lb = Lc = L e Ra = Rb = Rc = R em que (L) é
o valor da indutância por fase e (R) é o valor da resistência por fase. Tais equações

2.4 Modelagem Matemática 33
S1
S2
S3
S4
S5
S6
L
L
L
Vag
Vbg
Vcg
Va
Vc
Vb
ia
ib
ic
Barramento
CC
Figura 5: Inversor trifásico conectado à rede com filtro indutivo
Fonte: Autoria Própria
S1
S2
S3
S4
S5
S6
L1
L1
L1
Vag
Vbg
Vcg
Va
Vc
Vb
i1
L2
L2
L2
Cf
i2
ic
Rc
Barramento
CC
Figura 6: Inversor trifásico conectado à rede com filtro indutivo-ca pacitivo-indutivo
Fonte: Autoria Própria
podem ser agrupadas em matrizes no intuito de se obter as equações de estado do
sistema, como mostrado na equação (1).
−L L 0
0 −L L
L 0 −L
.
dia/dtdib/dtdic/dt
=
R −R 0
0 R −R
−R 0 R
.
ia
ib
ic
+
+
−1 1 0
0 −1 1
1 0 −1
.
V ag
V bg
V cg
+
1 −1 0
0 1 −1
−1 0 1
.
V a
V b
V c
(1)
Convertendo a equação (1) para coordenadas síncronas obtém-se o mo-
delo em espaço de estados apresentado na equação (2).

2.4 Modelagem Matemática 34
ddt
(
id
iq
)
=
( −R/L ω
−ω −R/L
)
.
(
id
iq
)
+
+
(
1/L 0
0 1/L
)
.
(
ud
uq
)
+
(
−1/L 0
0 −1/L
)
.
(
Vd
Vd
) (2)
O mesmo pode ser realizado para o caso do inversor com filtro LCL. Obtém-
se inicialmente as equações de malha, e aplicando as transformadas de Clark e Park
pode-se obter o modelo em espaço de estados apresentado na equação (3), que é
equivalente ao modelo apresentado em (TEODORESCU et al., 2011).
ddt
id1
iq1
Vfd
Vfq
id2
iq2
=
−RL1+Rc
L1ω − 1
L10
Rc
L10
−ω −RL1+Rc
L10 − 1
L10
Rc
L1
1Cf
0 0 ω − 1Cf
0
01Cf
−ω 0 0 − 1Cf
−Rc
L20 − 1
L20 −RL2−Rc
L2ω
0 −Rc
L20 − 1
L2−ω −RL2−Rc
L2
·
id1
iq1
Vfd
Vfq
id2
iq2
+
+
1L1
0
01L1
0 0
0 0
0 0
0 0
·
Vd
Vq
+
0 0
0 0
0 0
0 0
− 1L2
0
0 − 1L2
·
Vgd
Vgq
(3)
A seção seguinte apresenta uma modelagem por função de transferência
do inversor conectado à rede elétrica.
2.4.2 Modelo por função de transferência
A função de transferência da corrente injetada na rede pela corrente do
inversor quando se está analisando um inversor com filtro L é dada pela equação (4).
Esta função de transferência é obtida para um inversor monofásico considerando-se a
rede como um curto circuito.
GL(s) =i (s)
Vi (s)=
1
Ls(4)

2.4 Modelagem Matemática 35
Em coordenadas síncronas, as equações diferenciais do inversor com filtro
L são representadas pela equação (5).
L · diddt
= ωLiq + Vgd − Vid
L · diqdt
= −ωLid + Vgq − Viq
(5)
A função de transferência da corrente da rede pela tensão no inversor
quando considerando-se a utilização de um filtro LCL sem as resistências intrínse-
cas aos componentes do filtro é dada por (6) de maneira similar ao realizado para
o caso do filtro L. Esta análise em que as resistências intrínsecas não são conside-
radas é realizada para garantir a análise do pior caso relativo ao amortecimento da
ressonância do filtro LCL.
Gi2(s) =i2(s)
Vi(s)=
1
(L1L2Cf )s3 + (L1 + L2)s(6)
Em contrapartida, a função de transferência da corrente da rede pela tensão
do inversão com filtro LCL quando considera-se a resistência série do capacitor do
filtro é dada por (7). Esta análise é importante para comparar o amortecimento passivo
causado pela inserção de um resistor em série com o capacitor com filtro com técnicas
de amortecimento ativo.
Gi2r(s) =CfRfs+ 1
(L1L2Cf )s3 + (L1 + L2)(CfRfs2 + s)(7)
Outra importante função de transferência a ser analisada é a função de
transferência da corrente do capacitor pela tensão do inversor, a qual é dada por (8).
Gic(s) =ic(s)
Vi(s)=
L2Cfs
(L1L2Cf )s2 + (L1 + L2)(8)
Para a utilização de uma malha de amortecimento em cascata, é necessário
analisar a função de transferência de i2(s) por ic(s), a qual é dada por (9).
Gi2(s)
Gic(s)=
i2(s)
ic(s)=
1
(L2Cf )s2(9)
Transformando as funções de transferência (6), (8) e (9) para o domínio de
tempo discreto, são obtidos respectivamente as funções de transferência (10), (11) e
(12).

2.5 Considerações finais 36
A transformação por zero-order-hold (ZOH) com período de amostragem
igual a Ts = 1/fs é utilizada nas funções de transferência (6) e (8).
Já a função de transferência (9) é discretizada utilizando-se de uma trans-
formação invariante ao impulso uma vez que a corrente da rede e do capacitor são
amostradas no mesmo instante de tempo.
Gi2(z) =i2(z)Vi(z)
= Ts(L1+L2)(z−1)
− sin(ωresTs)ωres(L1+L2)
(z−1)z2−2z cos(ωresTs)+1
(10)
Gic(z) =ic(z)
Vi(z)=
sin(ωresTs)
ωres(L1)
(z − 1)
z2 − 2z cos(ωresTs) + 1(11)
Gi2(z)
Gic(z)=
i2(z)
ic(z)=
1
L2Cf
Ts2z
(z − 1)2(12)
Onde ωres =√
(L1 + L2)/(L1L2Cf ) é a frequência angular de ressonância
em radianos por segundo.
A Figura 7 mostra a comparação entre a resposta em frequência do filtro
LCL e de um filtro L em que o valor da indutância é igual a soma das indutâncias
do filtro LCL. Deve-se notar que para baixas frequências (região da banda passante
ωb), ambos os filtros se comportam de maneira similar, o que permite a realização do
controle da corrente de um inversor com filtro LCL utilizando-se do mesmo método de
controle de corrente projetado para o caso do filtro L, uma vez que a banda passante
de ambos os filtros é projetada da mesma maneira.
2.5 CONSIDERAÇÕES FINAIS
Este capítulo apresentou um sistema de geração elétrica conectado à rede,
dando ênfase ao estudo do conversor trifásico e ao filtro de conexão à rede Elétrica
que são essenciais em um sistema de geração distribuída, como apresentado na Fi-
gura 2.
Como exemplo de aplicação do sistema, apresentou-se um sistema de ge-
ração fotovoltaica. Como o estudo apresentado nessa dissertação é focado no con-
trole da inversor conectado à rede, qualquer sistema de geração conectado ao barra-
mento CC pode ser utilizado.

2.5 Considerações finais 37
102
103
104
105
-150
-100
-50
0
50
100
150
Frequ (Hz)ência
Magn
itu
de
(dB
)
Filtro L
Filtro LLC
Figura 7: Comparação da resposta em frequência do inversor cone ctado à rede comfiltro L e com filtro LCL.
Apresentou-se ainda um breve estudo sobre o filtro indutivo e o filtro indutivo-
capacitivo-indutivo, que são utilizados nas abordagens teóricas e experimentais dessa
dissertação. Para isso, modelos matemáticos do inversor trifásico conectado à rede
com filtro indutivo e também com filtro indutivo-capacitivo-indutivo foram analisados.
Este modelos serão utilizados no capítulo seguinte para se realizar o projeto de con-
trole da corrente do inversor trifásico conectado à rede elétrica.

38
3 PROJETO DO CONTROLADOR
Quando fontes de energia renovável são conectadas na rede através de
conversores, costuma-se realizar o controle da corrente a ser injetada na rede de
maneira a permitir o controle tanto da potência ativa quanto da potência reativa trocada
entre o conversor e a rede.
Este capítulo aborda a implementação do controle da corrente do inversor
na conexão com a rede elétrica, assim como discute as dificuldades existentes ao se
utilizar o filtro LCL como acoplamento entre o inversor e a rede, o qual, como será
visto, apresenta um pico de ressonância que pode levar o sistema à instabilidade.
3.1 CONTROLE DA CORRENTE DO INVERSOR TRIFÁSICO
Em Teodorescu et al. (2011) é apresentada uma classificação de variadas
topologias de controle da corrente de um inversor conectado à rede, como apresen-
tado na Figura 8 a seguir.
Para o estudo proposto, selecionou-se a utilização de um controlador PI
clássico que pode ser utilizado para controlar a corrente em inversores conectados à
rede. No entanto, essa solução apresenta duas principais desvantagens:
• O controlador PI não é capaz de seguir uma referência senoidal sem erro em
estado estacionário.
• O controlador PI possui baixa capacidade de rejeição de distúrbio devido à baixa
performance da ação integral quando o distúrbio é um sinal periódico.
Assim, para superar as limitações do controlador proporcional integral com
referências senoidais, o controlador é implementado em coordenadas dq com veloci-
dade angular ω = 2πf onde f representa a frequência da rede. Essa metodologia de
controle recebe o nome de Voltage Oriented Control VOC.
O controle VOC é baseado na ideia de desacoplar instantaneamente as
componentes de corrente injetadas em componente direta (eixo d) e em quadratura

3.1 Controle da corrente do inversor trifásico 39
Método deControle de
corrente
ControladorOn/Off
Histerese
PreditivoOtimizado
ModulaçãoPWM
Linear
PI
PreditivoDead-beat
RessonanteRepetitivo
Não Linear
Controle Passivo
Lógica Fuzzy
Figura 8: Classificação de métodos de controle de corrente em inver sores.
Fonte: Adaptado de Teodorescu et al. (2011)
(eixo q).
As equações de tensão em espaço vetorial quando representadas no eixos
direto e em quadratura podem ser lidas como (13).
Vgd = ud + Ldigddt
+R · igd − ω · L · igqVgq = uq + Ldigq
dt+R · igq + ω · L · igd
(13)
A equação (13) mostra que a componente de tensão direta depende da
componente de corrente injetada direta, assim como a componente de tensão em qua-
dratura depende da componente de corrente injetada em quadratura. Portanto, con-
trolando a corrente com realimentação negativa é possível controlar o inversor como
sendo uma fonte de tensão. Entretanto, existem termos de acoplamento em ambas
as equações, os quais precisam ser compensados utilizando controle por antecipa-
ção (feedforward control). A mesma consideração pode ser aplicada para a tensão
da rede, que também deve ser compensada por controle por antecipação (GIGLIA et al.,
2007).
O controle por antecipação é utilizada para diminuir a porção do controlador

3.1 Controle da corrente do inversor trifásico 40
dependente do controle da corrente. Os termos de acoplamento e a tensão da rede
atuam como um distúrbio no controlador, o que pode ser compensado utilizando-se
do controle por antecipação. Deve-se deixar claro no entanto, que o termo de desa-
coplamento não possui grande influência na saída do controlador. Seu valor, corres-
pondente à multiplicação do valor do indutor pelo frequência angular da rede e pela
corrente que flui pelo indutor, representa menos de 1% da ação de controle. Já a
ação feedforward da tensão da rede deve ser utilizada apenas se a conexão à rede for
realizada de maneira abrupta diretamente na tensão da rede. Para testes em que a
conexão é realizada partindo de uma situação de curto-circuito e subindo a tensão do
ponto de conexão até a tensão da rede (com a utilização de um Variac por exemplo),
é preferível não utilizar a ação feedforward, pois ela pode atuar como um distúrbio,
principalmente se as medições da tensão da rede forem realizadas após o Variac.
As componentes direta e em quadratura da tensão podem ser representa-
das pela equação (14).
Vid = ωLigq + Vgd + ud
Viq = −ωLigd + Vgq + uq
(14)
Fazendo a substituição da equação (14) em (5) e realizando a análise no
domínio da frequência, é possível obter a função de transferência (15), a qual é similar
à já apresentada em (4).
GL(s) =ig (s)
u (s)=
1
Ls(15)
O controlador Proporcional Integral é usado para controlar o erro da cor-
rente, levando seu valor a um valor nulo, de maneira que ud e uq podem ser expressa-
dos por (16).
ud = kp · (idref − igd) + ki∫
(idref − igd) · dtuq = kp · (iqref − igq) + ki
∫
(iqref − igq) · dt(16)
A função de transferência do controlador PI pode ser expressada como a
saída u pela entrada ei = iref − imedida, resultando em (17).
u
ei=
kps+ kis
(17)

3.1 Controle da corrente do inversor trifásico 41
Realizando a discretização do controlador PI pelo método da transforma-
ção bilinear (18), também chamada de método Tustin, é possível obter a função de
transferência no domínio discreto (19) a partir da função de transferência (17), o que,
quando convertido para equações de diferenças resulta na equação (20).
s =2
Ts
· 1− z−1
1 + z−1(18)
Gc(z) =u (z)
e (z)=
2kp (1− z−1) + kiTs (1 + z−1)
2 (1− z−1)(19)
u [n] = e [n]
(
kp +kiTs
2
)
− e [n− 1]
(
kp −kiTs
2
)
+ u [n− 1] (20)
As componentes Vid e Viq são convertidas para coordenadas αβ sincroniza-
das com a tensão da rede elétrica e então são utilizadas na modulação PWM Space
Vector (SVPWM).
A Figura 9 apresenta o diagrama do controle VOC nas componentes diretas
e em quadratura para o controlador descrito acima, o qual permite controlar a potência
ativa e reativa (PQ) injetadas na rede.
PWM
Filtro
Rede
CC
AC
abc
dqPLL
θ
+
-PI
PI
ωL
- Lω
+
+
Vgd
Vgq
ud
uq
+
-Iabc V gabc
PI
PI
Idref
Iqref
+Pref
-
+Qref
-
Q
P Igd
Igq
Vid
Viq
Figura 9: Diagrama de blocos de controle VOC para controle de potênc ia ativa e reativaem coordenadas síncronas dq.
Os ganhos do controlador PI podem ser calculados definindo-se a largura
de banda do controlador ωb e a razão de amortecimento do sistema ζ utilizando-se das
equações (21) and (22). Estas equações são obtidas após a realização de operações

3.1 Controle da corrente do inversor trifásico 42
algébricas e da utilização das funções de transferências do controlador PI (17) e da
função de transferência do inversor conectado à rede com filtro L (15).
kp =2ζωbL
√
2ζ2 + 1 +√
(1 + 2ζ2)2 + 1
(21)
ki =ωb
2L
2ζ2 + 1 +√
(1 + 2ζ2)2 + 1(22)
O método de controle apresentado acima pode ser utilizado tanto para o
controle do inversor conectado à rede com filtro L, quanto com filtro LCL, quando a
largura de banda do controlador for similar para ambos os casos. No caso da utilização
do filtro LCL, a frequência do pico de ressonância deve ser mantida longe da banda
de frequência do controlador.
Entretanto, como será mostrado nas seções seguintes, a rede elétrica apre-
senta uma indutância desconhecida, que pode diminuir a frequência de ressonância
do filtro LCL uma vez que ela é considerada em série com o indutor L2 do filtro LCL,
de maneira que é importante prevenir que ela se aproxime da largura de banda do
controlador mediante um projeto adequado dos componentes do filtro. Isso deve ser
realizado para evitar que o controlador seja levado para uma região de instabilidade.
Esse efeito será discutido em maiores detalhes na seção 3.3.
A seguir será apresentado uma metodologia de projeto para especificação
de um filtro indutivo e de um filtro capacitivo. Para a verificar a validade do projeto,
realizou-se simulações de controle de corrente em malha fechada utilizando a meto-
dologia de controle apresenta acima.
3.1.1 Projeto do Filtro Indutivo
No intuito de reduzir os problemas relacionados às harmônicas geradas
pelo conversor CC-CA, variadas topologias de filtro podem ser adicionadas à saída do
conversor (GABE et al., 2009). Para garantir que o filtro seja eficiente e com um volume
aceitável, a distorção harmônica total de tensão (THDv) e a distorção harmônica total
de corrente (THDi) são usualmente limitadas em determinado valor, normalmente
baseado nas normas e padrões existentes.
Para se garantir que as normas serão atendidas, pode-se utilizar indutores

3.1 Controle da corrente do inversor trifásico 43
com valor de indutância alta, que no entanto, podem ser tornar construtivamente in-
viáveis, ou ainda, deteriorar a resposta dinâmica do sistema como consequência de
quedas de tensão no indutor. Em adição, devido à sua baixa eficiência, o filtro pode
não atender os requisitos para conexão à rede elétrica (MARANDI et al., 2012; CHA; VU,
2010).
O filtro indutivo normalmente é projetado utilizando como especificação o
ripple de corrente do indutor. Depois disso, a THDi é verificada por simulação, de
maneira a analisar se as normas de conexão são atendidas. Caso não sejam, o filtro
é reprojetado.
Esta dissertação apresenta um procedimento para projeto de filtro indutivo
para conversores trifásicos conectados à rede baseado nos padrões de THDi. O
objetivo é desenvolver um procedimento que não requeira projetos iterativos.
Em Nardi (2014), o valor quadrático médio (RMS) da corrente no indutor
em um período fundamental é definido. Este valor representa a soma da corrente
fundamental com as componentes harmônicas de corrente Ihrms, a qual é originada
pelo ripple de corrente do indutor. Para relacionar as componentes harmônicas de
corrente com a THDi, uma aproximação é utilizada. Para isso, o pior caso é seleci-
onado: utiliza-se o maior ripple num período da frequência fundamental. Portanto, os
cálculos que se seguem podem ser aplicados para todo valor médio de corrente num
período Ts do sinal PWM. Estas considerações são feitas para o conversor trifásico
apresentado na Figura 10 (a).
Vcc
Figura 10: (a) Conversor de potência trifásico conectado à rede e létrica. (b) Circuitoequivalente em cooredanadas αβ.
Fonte: Autoria Própria

3.1 Controle da corrente do inversor trifásico 44
Em um inversor trifásico como mostrado na Figura 10 (a), a modulação
PWM Space Vector pode ser aplicada utilizando sequência simétrica, a qual contribui
para diminuir o ripple de corrente de saída do inversor e portanto, diminui a THDi uma
vez que a frequência de saída dos sinal PWM é o dobro da frequência de chaveamento
utilizada.
O valor da indutância é obtido considerando-se o circuito equivalente em
coordenadas αβ apresentado na Figura 10 (b), da qual é obtida a tensão média no
indutor num período Ts, o qual é utilizado na equação (23).
VL ·∆t = L ·∆i (23)
Para determinar o valor do ripple de corrente o pior cenário é utilizado, o
qual pode ser descrito como o valor de pico de um sinal triangular. O valor é obtido
no momento de pico da corrente na modulação simétrica. O valor obtido pode ser
utilizado para cada fase do sistema.
A metodologia de projeto do filtro indutivo para conversores monofásicos
é apresentada por (NARDI, 2014) e relaciona a Distorção harmônica total de corrente
(THDi) com o ripple de corrente no indutor. Essa relação á apresentada na equação
(24).
Ih =∆ip√3
(24)
A corrente mínima injetada é calculada utilizando-se da equação (25), para
um sistema trifásico. Escolhendo uma THDi máxima de 5% calcula-se Ih através da
equação (26), que relaciona a THDi desejada com a corrente que passa através do
indutor (I1).
I1 =Pmin
3 · Vpcc
(25)
Ih = THDi · I1 (26)
O índice de modulação ma é calculado pela equação (27).
ma = Vpcc ·√2/
V CC (27)

3.1 Controle da corrente do inversor trifásico 45
Em Nardi (2014) é mostrado que para uma modulação unipolar, num sis-
tema monofásico, o filtro indutivo pode ser projetado pela equação (28).
L =ma · V CC · (1−ma)
∆ip · 2 · fs(28)
A mesma metodologia apresentada pelos autores em (NARDI, 2014) é utili-
zada para desenvolver uma metodologia de projeto para o filtro indutivo num sistema
trifásico. Entretanto, algumas considerações devem ser incluídas para permitir a reali-
zação desse projeto.
Para a modulação Space Vector, a frequência de chaveamento de saída é
o dobro da frequência de chaveamento nas chaves semicondutoras (fs).
A tensão CC nos indutores pode ser representada pelo pior caso, dada por
2/3 · V CC.
Realizando estas alterações na equação (28), é possível obter a equação
(29), a qual é utilizada para projetar um filtro indutivo para conversores trifásicos co-
nectados à rede.
L =2
3· ma · V CC · (1−ma)
∆ip · 4 · fs(29)
3.1.1.1 Exemplo de Projeto
Esta seção apresenta o procedimento passo a passo utilizado para projetar
o filtro indutivo para conversores trifásicos conectados à rede.
Os passos a seguir devem ser realizados para o projeto do filtro indutivo:
• Determine a tensão utilizada no barramento CC (V CC);
• Determine a tensão RMS por fase utilizada no ponto de conexão à rede (Vpcc);
• Determine a mínima potência injetada na rede (Pmin);
• Determine a frequência de chaveamento (fs);
• Finalmente, selecione a máxima Distorção Harmônica de Corrente desejada no
ponto de conexão THDi.

3.1 Controle da corrente do inversor trifásico 46
As especificações escolhidas são: V CC = 400V ; fs = 9, 9kHz; Pmin =
2, 2kW e Vpcc = 127V .
Calcula-se a corrente por fase fazendo Ifase = 5, 774A, a qual tem valor de
pico Ip = 8, 166Apico.
Selecionando uma THDi máxima de 5%, calcula-se Ih = THDi · Ifase =
0, 289Arms. Então, o ripple de corrente tem valor ∆Ip = 0, 5A.
O índice de modulação pode ser calculado usando V CC e Vpcc e pode ser
expressado como ma = 0, 449.
Com os resultados é possível calcular indutância do filtro utilizando a equa-
ção (29), obtendo como resultado o valor L = 3.29mH.
A tabela 3 apresenta os parâmetros utilizados para projetar o filtro indutivo.Tabela 3: Parâmetros utilizados no projeto do filtro indutivo
Parâmetros ValorV CC(V ) 400Vpcc(V ) 127P (kW ) 2,2fs(kHz) 9,9THDi(%) 5L(mH) 3,3
3.1.1.2 Resultados de simulação para o Filtro L
Utilizando as especificações apresentadas na seção 3.1.1.2 e o valor do
filtro projetado, realizou-se simulações para verificar o valor da THDi no ponto de
conexão. A seguir são apresentados esses resultados de simulação. A Figura 11
apresenta as correntes injetadas na rede. A THDi calculada pelo programa de simu-
lação PSIM R© é de 4.53%, de acordo com as especificações de projeto - THDi < 5%.
A Figura 12 apresenta o valor da THDi para variados valores de potência injetada a
rede. No momento em que a mínima potência injetada na rede é de P = 2, 2kW e
Ifase = 8, 166Apico é alcançado, obtém-se uma THDi de valor abaixo de 5%, como
projetado. Ifase inicia com valor 2, 166Apico e depois de 0, 1s um degrau de 2A é reali-
zado. O processo se repete a cada 0, 1s até t = 0, 5s. Em t = 0, 4s, Ifase = 8, 166Apico e
a potência projetada de P = 2, 2kW é alcançada. Neste momento a THDi apresenta
valores inferiores a 5% como projetado.

3.1 Controle da corrente do inversor trifásico 47
0.12 0.14 0.16 0.18 0.2T (s)empo
0
-10
-20
10
20Va/10
Ia Ib Ic
C(A
)(V
)o
rren
te&
Ten
são
Figura 11: Resultado de simulação para as correntes de saída do inve rsor com filtro L.Iphase = 8, 166Apico e potência projetada de P = 2, 2kW
Fonte: Autoria Própria
0 0.1 0.2 0.3 0.4 0.5T (s)empo
0
-5
-10
-15
5
10
15
Iap=2.16A
Iap=4.16A
Iap=6.16AIap=8.16A
Iap=10.16A
THDi=16.8%THDi=8.79%
THDi=5.98%
THDi=4.53%
THDi=3.66%
P=2.2kW
Figura 12: Resultados de simulação para variados valores de corren te injetada na redepara o filtro L projetado. Diminuição da THDi com o aumento da potência
Fonte: Autoria Própria

3.1 Controle da corrente do inversor trifásico 48
3.1.2 Projeto para o Filtro Indutivo-Capacitivo-Indutivo
Existem inúmeros artigos que apresentam metodologias de projeto de fil-
tro LCL (LISERRE et al., 2005; REZNIK et al., 2014; PENA-ALZOLA et al., 2014; TANG et al.,
2015). Nesse trabalho utilizou-se as metodologias apresentadas em Liserre et al.
(2005) e Reznik et al. (2014).
Inicialmente, determina-se a impedância e capacitância base através das
equações (30) e (31).
Zb =V CC2
Pb
(30)
Cb =1
ωbase.Zb
(31)
Determina-se a corrente máxima de saída do inversor através da equação
(32).
Imax=Pbase.
√2
3.Vfase
(32)
Uma vez que deseja-se uma THDi máxima de 5% na saída do indutor do
lado da rede, calcula-se a corrente máxima através da equação (33).
∆I2 = Imax.5% (33)
Os autores propõe um fator de atenuação de corrente harmônica chamada
de ka sugerindo um valor de 20% em seus exemplos. Dessa forma, o ripple de corrente
máximo sobre o indutor L1 é dado pela equação (34) e o valor do indutor do lado do
conversor (L1) pode ser calculado pela equação (35).
∆I2 = ka ·∆I1 (34)
L1 =VCC
6.fsw.∆I1(35)
Para o projeto do capacitor, a máxima variação do fator de potência vista
pela rede é escolhida como 5% conforme equação (36).

3.1 Controle da corrente do inversor trifásico 49
Cf = 0.05 · Cb (36)
O valor do indutor do lado da rede (L2) é uma fração do indutor do lado do
conversar (L1), dependente do fator de atenuação de corrente harmônica ka escolhido
conforme equação (37).
L2 = ka · L1 (37)
Com os valores calculados, determina-se a frequência de ressonância do
filtro pela equação (38).
fres =1
2.π.
√
L1 + L2
Cf .L1.L2
(38)
A frequência de ressonância fres deve estar dentro dos limites estabeleci-
dos em (39).
10 · frede < fres < 0.5 · fsw (39)
Portanto, utilizando os valores presentes na Tabela 4, obtém-se os valores
dos componentes do filtro LCL que são apresentados na Tabela 5.Tabela 4: Definição dos requisitos para Cálculo do Filtro LCL
Parâmetros ValorV CC(V ) 400Pb(kW ) 6fs(kHz) 9,9ka(%) 5
Tabela 5: Componentes do filtro LCL projetado
Parâmetros ValorL1(mH) 1,2Cf (µF ) 10L2(µH) 240fres(kHz) 3,56

3.1 Controle da corrente do inversor trifásico 50
3.1.2.1 Resultados de simulação do filtro LCL
Utilizando as especificações apresentadas na seção 3.1.2 e os valores pro-
jetados para o filtro LCL, realizou-se simulações para verificar o valor da THDi no
ponto de conexão. A seguir são apresentados esses resultados de simulação.
A Figura 13 apresenta as correntes injetadas na rede. A THDi calculada
pelo programa de simulação PSIM R© é de 3.44%, de acordo com as especificações
de projeto - THDi < 5%.
Para a potência injetada na rede de P = 6kW e Ifase = 22, 2Apico, obtém-se
uma THDi de valor abaixo de 3,44%. Deve-se notar no entanto, que o filtro se mostra
sobre projetado, como é possível ver pela Figura 14 que apresenta os valor de THDi
para variados valores de potência injetada a rede. Ifase inicia com valor 5Apico e depois
de 0, 1s um degrau de 5A é realizado. Em t = 0, 2s um degrau de 4A é dado. Um
novo degrau de 4A ocorre em t = 0, 3s. Finalmente em t = 0, 4s ocorre um degrau
de corrente de 4, 2A de maneira que a corrente de pico na saída seja de 22, 2A para
atender a potência projetada. Note que a partir de t = 0, 3s quando o pico da corrente
é de 18A, a THDi já está abaixo de 5%.
0.125 0.1375 0.15 0.1625 0.175 0.1875 0.2 0.2125
T (s)empo
0
-10
-20
-30
10
20
30
Va/5
Ia Ib Ic
Corr
ente
(A)
&T
ensã
oV(
)
Figura 13: Resultados de simulação para as correntes de saída após o filtro L. Iphase =
8, 166Apico e a potência projetada P = 2, 2kW
Fonte: Autoria Própria
A seção seguinte apresenta um estudo da ressonância do filtro LCL, bem
como técnicas de amortecimento dessa ressonância.

3.2 Amortecimento da Ressonância do Filtro LCL 51
0 0.1 0.2 0.3 0.4 0.5T (s)empo
0
-10
-20
-30
10
20
30P=6kW
Iap=5A
THDi=15.1%
Iap=10A
Iap=14AIap=18A
Iap=22,2A
THDi=7.62%
THDi=5.44%
THDi=4.23%
THDi=3.44%
Figura 14: Resultados de simulação para variados valores de corren te injetada na redecom o filtro LCL projetado. Diminuição da THDi com o aumento da potência
Fonte: Autoria Própria
3.2 AMORTECIMENTO DA RESSONÂNCIA DO FILTRO LCL
A possível instabilidade da malha de controle de corrente é causada por
uma impedância nula resultante do pico de ressonância do filtro LCL, como já foi mos-
trado na figura 7 (TEODORESCU et al., 2011).
A frequência de ressonância do filtro LCL fres pode ser calculada usando-se
a equação (40).
fres =ωres
2.π=
1
2.π.
√
L1 + L2
Cf · L1 · L2
(40)
Uma análise baseada apenas em considerações qualitativas poderia levar
à um amortecimento excessivo da ressonância, o que gera um aumento desneces-
sário de perdas (para o caso da utilização do amortecimento passivo), ou ainda um
amortecimento insuficiente da ressonância. O amortecimento apropriado dessas di-
nâmicas do filtro LCL pode ser obtido pela modificação da estrutura do filtro com a
adição de elementos passivos, ou atuando diretamente nos parâmetros ou estrutura

3.2 Amortecimento da Ressonância do Filtro LCL 52
do controlador utilizado no conversor. A primeira opção recebe o nome de amorteci-
mento passivo enquanto que a segunda opção é conhecida como amortecimento ativo
(TEODORESCU et al., 2011).
3.2.1 Amortecimento Passivo
O amortecimento passivo causa um decréscimo na eficiência geral do sis-
tema em decorrência das perdas associadas a ele, as quais são em parte causadas
por harmônicos de baixa frequência presentes nas variáveis de estado e em outra
parte causadas pelos harmônicos na frequência de chaveamento. O amortecimento
passivo reduz a eficiência do filtro, uma vez que é muito difícil inserir o amortecimento
de maneira seletiva nas frequências em que o filtro está ressonando devido à impedân-
cia nula dele. Como consequência, o amortecimento passivo sempre está presente no
filtro (em decorrência das resistências intrínsecas aos componentes) e a atenuação na
frequência de chaveamento do filtro acaba sendo comprometida (TEODORESCU et al.,
2011).
Segundo Pena-Alzola et al. (2013), o método mais adotado para garantir a
estabilidade de inversores conectados à rede com filtro LCL ainda é o amortecimento
passivo.
O amortecimento passivo é obtido através da inclusão de componentes
resistivos no filtro LCL, tanto em série quanto em paralelo com os indutores ou com
o capacitor do filtro, como apresentado na Figura 21. As resistências intrínsecas aos
componentes do filtro LCL também podem atuar realizando o amortecimento passivo
da ressonância do filtro.
O método de amortecimento passivo mais comum e eficaz é a utilização de
um resistor em série com o capacitor do filtro LCL. O cálculo do valor desse resistor
pode ser realizado através de (41) como mostrado em Pena-Alzola et al. (2013).
Rd =1
3 · ωres · Cf
(41)
Deve ser enfatizado que a inclusão de componentes resistivos ao filtro LCL
diminui a eficiência do inversor, uma vez que eles atuam como cargas conectadas ao
sistemas, causando perdas por efeito Joule.
A Figura 16 apresenta a resposta em frequência referente à corrente no

3.2 Amortecimento da Ressonância do Filtro LCL 53
L1 L2
Cf
R R
Rd
R1 R2
R3
Vi Vg
L1 L2
Figura 15: Métodos variados de amortecimento passivo mediante a u tilização de resis-tores em série ou em paralelo com os componentes do filtro LCL.
indutor L2 em relação à tensão no inversor utilização de amortecimento passivo via
inserção de um resistor em série com o capacitor. Note o efeito do amortecimento a
medida que o valor do resistor Rd (em série com o capacitor) aumenta. Quanto maior
o valor de Rd, maior será o amortecimento e menor a atenuação das altas frequências.
Além disso, as perdas de potência aumentam com o aumento de Rd.
−300
−250
−200
−150
−100
−50
0
50
100
150
200
Ma
gn
itu
de
(d
B)
102
103
104
105
106
107
108
−270
−225
−180
−135
−90
Fa
se
(de
g)
Frequ (Hz)ência
Rd=0
Rd=0.001
Rd=0.01
Rd=0.1
Rd=1
Rd=10
Amortec mento Passivo − variação do valor do resistor Ri d
Figura 16: Resposta em frequência da corrente da rede pela tensã o do inversor mediantea variação do Resistor Rd, em série com o capacitor do filtro LCL

3.2 Amortecimento da Ressonância do Filtro LCL 54
A Figura 17 apresenta a resposta em frequência referente à corrente no
indutor L2 em relação à tensão no inversor e utilização de amortecimento passivo via
inserção de um resistor em série com o indutor L1. Note o efeito do amortecimento a
medida que o valor do resistor RL1 aumenta. No entanto, a inserção do resistor atua
também na atenuação de baixas frequências, o que não é desejado.
−100
−50
0
50
100
Magnitude (
dB
)
100
101
102
103
104
105
−270
−180
−90
0
Fase
(deg)
Amortec mento Passivo − variação do valor do resistor Ri L1
Frequ (Hz)ência
RL1=0
RL1=0.001
RL1=0.01
RL1=0.1
RL1=1
RL1=5
RL1=10
Figura 17: Resposta em frequência da corrente da rede pela tensã o do inversor mediantea variação do Resistor RL1, em série com o indutor L1 do filtro LCL
Já a Figura 18 apresenta a resposta em frequência referente à corrente no
indutor L2 em relação à tensão no inversor e utilização de amortecimento passivo via
inserção de um resistor em série com o indutor L2. Note o efeito do amortecimento a
medida que o valor do resistor RL2 aumenta. Note no entanto o efeito da inserção do
resistor em relação às baixas frequências.
Os diagramas de Bode apresentados nas Figuras 17 e 18 mostram que a
inserção de um resistor em série com o indutor do filtro LCL diminui a região linear de
decaimento de 20 dB/década, o que pode influenciar no desenvolvimento do controle
de corrente, uma vez que este é implementado de maneira a se comportar como
um filtro indutivo. Sendo assim, realizar o amortecimento a partir da inserção de um

3.2 Amortecimento da Ressonância do Filtro LCL 55
−100
−50
0
50
100
Magnitude (
dB
)
101
102
103
104
105
−270
−180
−90
0
Fase
(deg)
Frequ (Hz)ência
RL2=0
RL2=0.001
RL2=0.01
RL2=0.1
RL2=1
RL2=5
RL2=10
Amortec mento Passivo − variação do valor do resistor Ri L2
Figura 18: Resposta em frequência da corrente da rede pela tensã o do inversor mediantea variação do Resistor RL2, em série com o indutor L2 do filtro LCL
resistor em série com o capacitor do filtro é mais apropriado para o controle do inversor
do que a realização do amortecimento pela inserção de um resistor em série com os
indutores.
Segundo Teodorescu et al. (2011), a seleção da melhor solução de amorte-
cimento passivo é uma tarefa desafiadora quando a frequência de ressonância é baixa
e o amortecimento acaba não tendo apenas influência na atenuação do filtro, mas tam-
bém na amplitude de harmônicas próximas à frequência de ressonância e, portanto,
no conteúdo harmônico como um todo, sendo neste caso um problema bastante não
linear.
Outros métodos avançados de amortecimento passivo são discutidos em
Pena-Alzola et al. (2013) e Huang et al. (2014).
3.2.2 Amortecimento Ativo
Os métodos de amortecimento ativo podem ser classificados em duas clas-
ses principais:
• baseados em controle multi malha;
• baseados em filtros.
No primeiro caso, o amortecimento é realizado pelo controle de mais variá-

3.2 Amortecimento da Ressonância do Filtro LCL 56
veis de estado do sistema, as quais podem ser medidas ou estimadas (TEODORESCU et al.,
2011).
A segunda classe de métodos de amortecimento ativo é baseado no uso de
controladores de ordem maior (que atuam como filtros) para regular não apenas as di-
nâmicas de baixa frequência, mas também realizar o amortecimento frequências mais
altas (TEODORESCU et al., 2011). Esses filtros podem ser projetados para a utilização
como amortecimento ativo utilizando diferentes abordagens. Uma possível aborda-
gem consiste no projeto de um filtro analógico, normalmente um filtro Notch, e então
aplicar uma transformação bilinear para realizar a transformação do domínio contínuo
para o discreto.
A Figura 19 apresenta dois diagramas de blocos de controle de corrente
com amortecimento ativo. Em (a) é apresentado o amortecimento ativo baseado em
resistor virtual, enquanto que em (b) apresenta-se o diagrama de blocos de controle de
corrente com amortecimento ativo baseado em filtros digitais. Em ambos os diagramas
o distúrbio de tensão da rede e sua compensação não são apresentados.
+- PI
VrefIrefG (s)d G (s)f
H(s)
+-
k
Planta
Controlador comamortecimento
Ativo
(a)
+- PI
VrefIrefG (s)d G (s)f
Planta
(b)
G (s)AD
Controlador comamortecimento
Ativo
i
i
Figura 19: (a) Amortecimento ativo baseado em resistor virtual. (b ) Amortecimento ativobaseado em filtro digital.

3.2 Amortecimento da Ressonância do Filtro LCL 57
O amortecimento ativo é uma opção mais atrativa para estabilizar o sistema
sem a adição de perdas de potência, especialmente em situações de alta potência
(HUANG et al., 2014). Ele é obtido sem a inclusão de componentes resistivos no filtro,
utilizando-se de malhas de controle em cascata, ou ainda, através da utilização de
filtro digitais.
Um dos métodos mais renomados e utilizados é o uso do chamado resis-
tor virtual, que costuma ser implementado através da realimentação da corrente do
capacitor utilizando de um ganho proporcional, ou ainda através da realimentação da
tensão do capacitor, utilizando-se de um controlador proporcional derivativo.
No chamado resistor virtual, a corrente do capacitor é realimentada na ma-
lha do controlador e multiplicada por um ganho que emula a presença de um resistor
real conectado ao filtro LCL.
O conceito de resistor virtual e sua implementação foram propostos inicial-
mente por Dahono et al. (2001) para o caso de utilização de um filtro LC. Segundo o
autor, embora a utilização de um resistor no amortecimento das oscilações transientes
de um circuito LC seja bem conhecido, o método não é praticável em aplicações de
alta potência. A partir dessa ideia, o autor desenvolve o conceito de resistor virtual
como um algoritmo de controle que simula a função de um resistor em um circuito
LC. Dessa forma, como não existe nenhum resistor real, a eficiência do circuito não é
comprometida.
A maneira como o algoritmo de controle será aplicado para simular o resis-
tor virtual depende de como se pretende conectar o resistor ao circuito, podendo ser
em série ou em paralelo com os componentes do filtro, como já foi apresentado na
Figura 15.
A implementação de um resistor virtual em paralelo com um indutor do filtro
ou com o capacitor do filtro necessitam de um bloco derivativo. Entretanto, o ruído de
alta frequência pode gerar variações súbitas na saída do atuador em decorrência das
características do controlador derivativo (DAHONO et al., 2001; DAHONO, 2002).
Já a implementação de resistor virtual conectado em série com o indutor
ou capacitor do filtro não necessitam de um bloco derivativo e, portanto, possuem um
projetado mais simples (DAHONO et al., 2001).
No entanto, deve-se utilizar um sensor de corrente para realizar a medição
de corrente do capacitor e permitir a realimentação da mesma na malha de controle

3.2 Amortecimento da Ressonância do Filtro LCL 58
principal.
Nos resultados apresentados nesta dissertação, o amortecimento ativo é
realizado e analisado utilizando-se do conceito de resistor virtual baseado na reali-
mentação da corrente do capacitor, realizando-se um controlador em cascata.
O diagrama resumido de controle da corrente da rede com a utilização de
amortecimento ativo por resistor virtual via realimentação da corrente do capacitor é
mostrado na Figura 20.
+-
+- PI
Idref
I dg
ud Igd
+-
+-
Iqref uq Igq
PII qg
Filtro LCL
Filtro LCL
AtivoAmortecimento
Compensa orddo Realimentação da
Corrente do Capacitor
Figura 20: Diagrama de controle resumido do controlador de corren te com amorteci-mento ativo utilizando o método de resistor virtual.
Existem ainda variadas maneiras diferentes de se implementar o amorteci-
mento ativo da ressonância do filtro LCL, como por exemplo, a utilização de um com-
pensador de avanço-atraso (lead-lag block) proposto inicialmente por Blasko e Kaura
(1997). Este método utiliza a medição da tensão no capacitor do filtro e sua reali-
mentação na malha de corrente utilizando-se de um compensador de avanço-atraso,
o qual pode ser substituído por um filtro passa-altas. Maiores detalhes de implemen-
tação dessa topologia de amortecimento ativo são apresentados em Malinowski et al.
(2005).
Outro método interessante de se realizar o amortecimento ativo foi proposto
em Liserre et al. (2004), o qual utiliza um algoritmo genético. Diferente dos métodos
anteriores, esse método não utiliza sensores extras, diminuindo o custo final do pro-
duto. Esse método utiliza apenas algumas informações específicas do sistema como
um todo, para permitir a solução de problemas de estabilidade. O Objetivo deste mé-
todo é encontrar o ponto de operação ideal em que os polos de alta frequência do
sistema estão satisfatoriamente amortecidos mantendo a largura de banda do contro-
lador desejada. Para isso, utiliza-se um filtro de amortecimento ativo Dd(z)i apresen-
tado na equação (42) semelhante a um filtro digital IIR cujos coeficientes aj(i) e bj(i)

3.3 Regiões de Amortecimento 59
são determinados pelo algoritmo genético.
Dd(z)i =a4(i)z
4 + a3(i)z3 + a2(i)z
2 + a1(i)z1 + a0(i)
b4(i)z4 + b3(i)z3 + b2(i)z2 + b1(i)z1 + b0(i)(42)
O capítulo seguinte apresenta uma análise de estabilidade de um sistema
de geração conectado à rede mediante a utilização de um filtro LCL.
3.3 REGIÕES DE AMORTECIMENTO
Alguns artigos mostram que o controle da corrente da rede de um inversor
trifásico conectado na rede é instável quando analisado no domínio de tempo contínuo
(TWINING; HOLMES, 2002), (ABDEL-RAHIM; QUAICOE, 1994), mas, como mostrado inicial-
mente por Teodorescu et al. (2003), a estabilidade pode ser obtida mediante escolha
cuidadosa dos componentes passivos do filtro LCL.
Deve se notar entretanto, que o procedimento de análise no domínio do
tempo contínuo ignora a natureza discreta da implementação de controle em DSP
(Digital Signal Processor ), como a amostragem e o chaveamento mediante PWM
(YIN et al., 2013). É importante portanto considerar o atraso na malha de controle
para permitir correta representação dos efeitos da amostragem digital (DANNEHL et al.,
2009). Em Parker et al. (2014) e Dannehl et al. (2009) são apresentados alguns estu-
dos relativos à estabilidade do sistema no domínio de tempo discreto. Em Dannehl et al.
(2009) é efetuado o estudo da variação da estabilidade analisando-se uma frequên-
cia de ressonância fixa, variando-se a frequência de amostragem do sistema. Já em
Parker et al. (2014), são identificadas regiões de estabilidade do sistema baseadas
numa razão entre a frequência de amostragem e a frequência de ressonância do filtro
LCL, mostrando ainda a existência de uma frequência de ressonância crítica que pode
ser calculada por (44).
ωcrit = π/(3·Ts) (43)
fcrit = 1/(6·Ts) (44)
Quando a impedância da rede aumenta, existe um decréscimo no valor da
frequência de ressonância, podendo variar até um valor limite, pois, sendo L2 expres-

3.3 Regiões de Amortecimento 60
sado como a soma L2 + Lg, da equação (40) identifica-se essa diminuição no valor
da frequência. A Figura 21 apresenta a variação da frequência de ressonância em
decorrência do aumento da indutância da rede, considerando-se um filtro LCL com os
parâmetros semelhantes aos presentes na Tabela 7.
0 5 10 15 20 25 30 35 40 45 501500
2000
2500
3000
3500
Lg / L2
Fên
cia d
e R
esso
nân
cia
req
u(H
z)
Figura 21: Variação da frequência de ressonância com o aumento da indutância da rede.
Selecionando uma frequência de amostragem de 9,9kHz, igual à utilizada
na frequência de chaveamento das chaves semicondutoras, e usando a equação (44),
obtém-se o valor da frequência de ressonância crítica igual a fcrit = 1.65kHz para o
sistema em questão.
Assim sendo, como a indutância da rede pode levar a frequência de res-
sonância para um valor abaixo da frequência crítica, como mostrado na Figura 21,
torna-se necessário realizar o amortecimento da frequência de ressonância para que
o sistema possa se comportar de maneira estável.
A Figura 22 (a) apresenta a malha de controle da corrente da rede sem
amortecimento ativo (malha única) e a Figura 22 (b) apresenta a malha de controle de
corrente da rede com amortecimento ativo baseado numa malha de realimentação de
corrente do capacitor (malha em cascata), como discutido por Parker et al. (2014).
Para a realização dessa análise de estabilidade a função de transferência
do controlador PI (16) foi transformada para coordenadas αβ no intuito de se realizar
a análise de estabilidade em um sistema desacoplado, o que permite a utilização das

3.3 Regiões de Amortecimento 61
funções de transferências previamente apresentadas.
O procedimento para realizar a conversão do controlador PI de coordena-
das síncronas para coordenadas αβ é mostrado em Zmood et al. (2001). A malha de
controle resultante obtém a mesma resposta referente à equação (16), mas centrada
ao redor de uma frequência de controle alvo como pode ser visto na equação (45)
(ZMOOD et al., 2001).
uαβ
eiαβ= kp +
ki · ss2 + ω2
(45)
A Tabela 6 apresenta a função de transferência do controlador PI em coor-
denadas dq e em coordenadas αβ.Tabela 6: Funções de transferência em coordenadas síncronas dq e em coordenadasαβ.
Coordenadas síncronas dq Coordenadas estacionárias αβ
udq
eidq= kp·s+ki
s
uαβ
eiαβ= kp +
ki·ss2+ω2
Já o inversor é modelado como um ganho linear V CC com um atraso de
amostragem z−1 em decorrência do atraso de transporte do sinal PWM.
O sinal i∗2(z) representa a corrente de referência da rede e i2(z) representa
a corrente medida da rede.
Adicionalmente, é necessário utilizar a função de transferência de tempo
discreto do filtro LCL relativo à corrente da rede pela tensão do inversor representada
pela equação (10), assim como as funções de transferência da corrente do capacitor
pela tensão do inversor (11) e finalmente, a relação existente entre elas dada pela
equação (12), uma vez que as malhas de controle estão em cascata.
A função de transferência Gc(z) representa o controlador PI em coordena-
das αβ discretizado mediante a utilização do método Tustin, já mostrado na equação
(18).
A Tabela 7 apresenta os componentes passivos de um filtro LCL com frequên-
cia de ressonância acima da frequência crítica e também de um filtro LCL com a
frequência de ressonância abaixo da frequência crítica calculada, de maneira a per-
mitir a comparação do comportamento do sistema para cada um dos casos.
Para avaliar a estabilidade do controlador de corrente em relação à frequên-

3.3 Regiões de Amortecimento 62
+-G (z)c z
-1VDC G (z)i2i2*(z) i2(z)
(a)
+-G (z)c VDC G (z)ici2*(z) i2(z)+-
K
I2(z)
Ic(z)
(b)
z-1
Figura 22: Regulador de corrente da rede - equivalente monofásico . (a) Malha de con-trole da corrente da rede sem amortecimento ativo (malha única). ( b) Malha de controlede corrente da rede com amortecimento ativo baseado numa malha d e realimentação decorrente do capacitor (malha em cascata)
.Tabela 7: Componentes passivos e frequência de ressonância - Filtr o LCL
fres > fcrit fres < fcritParâmetros Valor ValorL1(mH) 1,2 1,6Cf (mH) 10 20L2(mH) 0,24 1,6fres(kHz) 3,56 1,26
cia de ressonância do filtro LCL, a resposta em frequência de malha fechada do sis-
tema sem amortecimento (malha única) é comparada com a resposta em frequência
em malha fechada do sistema com amortecimento ativo baseado na realimentação da
corrente do capacitor (malha em cascata).
A Figura 23 mostra a comparação entre a malha de controle única e a
malha em cascata quando fres > fcrit e a Figura 24 mostra a comparação entre os
dois controladores quando fres < fcrit.
Quando fres > fcrit é possível selecionar ganhos que estabilizam o sistema
mesmo sem o uso de amortecimento ativo, uma vez que a resposta em magnitude do
sistema cruza o eixo de 0dB antes de se chegar à frequência de ressonância, na qual
ocorre uma variação abrupta de fase. A inserção da malha de amortecimento ativo,
neste caso, garante a redução do pico de ressonância e da variação abrupta de fase.
Ainda, a resposta em magnitude é deslocada em relação à resposta em magnitude do
sistema em malha única.
Já para o caso em que fres < fcrit, não existem valores de ganhos que le-

3.3 Regiões de Amortecimento 63
vem a resposta em magnitude abaixo de 0dB antes de se chegar à frequência de res-
sonância, de forma que ocorrerá a variação abrupta de fase em tal frequência, o que
é uma situação de instabilidade para qualquer ganho de controladores (PARKER et al.,
2014). Portanto, o uso de alguma forma de amortecimento da ressonância do filtro
LCL é necessária.
0
50
100
150
100
101
102
103
-1440
-1080
-720
-360
0
Frequ (Hz)ência
Diagrama de Bode Corrente da Rede / Tensão no Inversor-
Single LoopDual Loop
Mag
nit
ude
(dB
)F
ase
(deg
)
Figura 23: Resposta em frequência referente à função de transf erência da malha decontrole de corrente da rede tanto para o caso sem amorteciment o (malha única) quantopara o caso utilizando amortecimento ativo (malha em cascata) em qu e fres > fcrit.
A Figura 25 (a) mostra o movimento de polos em malha fechada referente
ao controlador de malha única para o caso em que fres < fcrit. Já a Figura 25 (b) apre-
senta essa movimentação quando fres > fcrit. Na Figura 25 (a) os polos ressonantes
são originados fora do círculo unitário e se distanciam do círculo de raio unitário com
o aumento do ganho proporcional. Portanto, não existem ganhos possíveis que pos-
sam estabilizar este sistema. Na Figura 25 (b), mesmo sem o uso de amortecimento
passivo ou ativo é possível encontrar ganhos que estabilizem o sistema, uma vez que
os polos ressonantes se movem para dentro do círculo de raio unitário.
A Figura 26 (a) mostra o lugar das raízes relativo à malha de realimentação
da corrente do capacitor. Já a Figura 26 (b) apresenta o movimento de polos de
malha fechado relativo ao controlador em cascata quando fres < fcrit, e a utilização de
amortecimento é essencial para garantir a estabilidade do sistema. Na Figura 26 (b),
com a inserção do amortecimento ativo, os polos ressonantes são trazidos para dentro

3.3 Regiões de Amortecimento 64
0
50
100
150
101
102
103
-630
-540
-450
-360
-270
-180
-90
Mag
nit
ud
e (
dB
)
Single LoopDual Loop
Diagrama de Bode Corrente da Rede / Tensão no Inversor-
Fas
e(d
eg)
Frequ (Hz)ência
Figura 24: Resposta em frequência referente à função de transf erência da malha decontrole de corrente da rede tanto para o caso sem amorteciment o (malha única) quantopara o caso utilizando amortecimento ativo (malha em cascata) em qu e fres < fcrit.
do círculo de raio unitário e, à medida que os ganhos de amortecimento aumentam,
eles são novamente levados para fora do círculo. Portanto, é evidente que existe uma
faixa de ganho de amortecimento que estabiliza o sistema.
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Eixo Real
Eix
o I
mag
inár
io
-1.5 -1 -0.5 0 0.5 1 1.5-1.5
-1
-0.5
0
0.5
1
Eixo Real
Eix
o I
mag
inár
io
Figura 25: Lugar das raízes para a função de transferência de con trole da corrente emmalha única (sem amortecimento). (a) fres < fcrit. (b) fres > fcrit.
Os ganhos do controlador são calculados para o exemplo em que fres >
fcrit relativo à Tabela 7 usando um fator de amortecimento unitário e uma largura de
banda do controlador da ordem de 3770rad/s. O ganho proporcional que multiplica
a realimentação da corrente do capacitor e atua como resistor virtual referente ao

3.4 Considerações finais 65
-1 -0.5 0 0.5 1 1.5
-1
-0.5
0
0.5
1
Eixo Real
Eix
o I
mag
inár
io
-1.5 -1 -0.5 0 0.5 1 1.5
-1
-0.5
0
0.5
1
Eix
o I
mag
inár
io
Eixo Real
Figura 26: (a) Lugar das raízes da realimentação da corrente do ca pacitor ic. (b) Lugardas raízes usando o controlador em cascata quando fres < fcrit para variações deganho de amortecimento ativo.
amortecimento ativo é calculado usando a equação (46) (PARKER et al., 2014). A Tabela
8 apresenta os ganhos calculados.
KDp(min) =kp · L1L1 + L2
(46)
Tabela 8: Ganhos do controlador.
kp ki KDp
5,589 4244 4,9
3.4 CONSIDERAÇÕES FINAIS
Este capítulo apresentou a modelagem do controlador de corrente do inver-
sor trifásico conectado à rede elétrica. Foi discutido os aspectos de implementação do
controlador PI em coordenadas síncronas, bem como seu equacionamento e forma de
implementação. Mostrou-se que o mesmo controlador é aplicável tanto para o controle
do inversor com filtro L quanto com filtro LCL.
Em seguida, a ressonância do filtro LCL foi estudada. Apresentou-se pos-
síveis soluções de amortecimento passivo e ativo para a ressonância. O método de
amortecimento ativo por realimentação da corrente do capacitor utilizando-se de um
resistor virtual foi selecionado como o alvo principal deste estudo.
Por fim, foi realizada uma análise de estabilidade do controle do inversor co-
nectado à rede com filtro LCL. Discutiu-se a existência de regiões de amortecimento
assim como da existência de uma frequência crítica, abaixo da qual torna-se funda-

3.4 Considerações finais 66
mental realizar o amortecimento da ressonância do filtro LCL.
Deve-se ficar claro no entanto, que o controle projetado foi desenvolvido e
testado para o caso apresentado e se mostrou estável nessa região. Não garante-se a
estabilidade do sistema, uma vez que o controle não é robusto em relação a variações
paramétricas.
O capítulo seguinte apresenta os resultados experimentais de conexão do
sistema de geração à rede elétrica.

67
4 ANÁLISE EXPERIMENTAL
Neste capítulo serão apresentados os resultados experimentais e de simu-
lação do controle de corrente de um conversor CC-CA conectado à rede elétrica.
4.1 DESCRIÇÃO DA BANCADA EXPERIMENTAL DESENVOLVIDA
A bancada experimental utilizada para a realização dos testes experimen-
tais relativos ao estudo de controle de corrente de um conversor CC-CA conectado à
rede elétrica foi planejada conforme a Figura 27.
ia1 ib1 ic1
Placa de mediçãode corrente inversor
Vdc
Placa de medição
de Tensão CC
FILTRO
L / LCL
R
E
D
E
Va Vb Vc
Placa de medição
de Tensão
ia2 ib2 ic2
Placa de medição
de corrente inversor
Instrumentaçãoe tratamento
de sinais
PWM
Sistemade Geração
Elétrica
Variadorde Indutância
Ti28335DSP
Figura 27: Projeto da Plataforma experimental.
Ela é composta por um inversor de tensão de 10kV A e de um retificador tri-
fásico não controlado, utilizada para alimentar o barramento CC com tensão suficiente
para que o inversor possa ser conectado à rede elétrica.
A conexão com a rede é realizada através de um filtro L ou LCL que é
conectado a um Variac. Assim, é possível realizar testes de maneira que a tensão de
saída do Variac suba até que possua a mesma tensão da rede. A utilização do Variac
ainda permite verificar o comportamento do controle com a variação da indutância da
rede.
O inversor utilizado neste trabalho é uma unidade comercial da Semikron,
composto de um inversor com 3 braços em ponte-H que utiliza módulos IGBT modelos
SKM50GB063D. Seu Barramento CC foi modificado para suportar uma tensão de até
900 V.

4.2 Inversor conectado à rede com filtro L 68
Para realizar o controle de corrente do inversor, utiliza-se um processador
digital de sinais TMS320F28335 da Texas Instruments. Tanto a frequência de amostra-
gem dos sensores de tensão e corrente quanto a frequência de chaveamento utilizada
no sinal SVPWM foram escolhidas com o valor de 9900 Hz para garantir a existência
de um número inteiro de 165 amostras dentro do período de 60 Hz do sinal da rede.
As correntes do filtro, correntes da rede e tensão da rede são medidas utilizando-se
sensores Hall. A Figura 28 apresenta a bancada experimental desenvolvida e utilizada
na obtenção dos resultados experimentais.
Figura 28: Plataforma experimental desenvolvida.
As seções seguintes apresentam os resultados de conexão à rede elétrica
do sistema de geração desenvolvido.
4.2 INVERSOR CONECTADO À REDE COM FILTRO L
A Figura 29 apresenta os resultados de conexão de um inversor trifásico
com filtro L à rede elétrica. Para uma potência injetada de 2, 2kW foi utilizado um
filtro indutivo de 3, 2mH por fase. As correntes são controladas em Ia = Ib = Ic =
5, 8Arms, e a tensão de linha da rede é V linha = 220V . Utilizou-se uma tensão de
barramento de V CC = 400V .
Os resultados experimentais foram analisados em MATLAB para se calcular
a THDi no ponto de conexão. Os testes apresentaram uma THDi da ordem de 10%,
o que é o dobro do aconselhado nas normas internacionais.
Comparando-se com as simulações apresentadas na seção 3.1.1, conclui-

4.3 Conexão à rede com filtro LCL - fres > fcrit - sem amortecimento 69
Ia Ib Ic
Vag
Figura 29: Resultados experimentais de conexão à rede do inversor trifásico com filtroindutivo. P = 2.2kW , V CC = 400V , V ab = 220V e Ia = Ib = Ic = 5.8A. Correnteem coordenadas abc estão em fase com as correntes da rede. L = 3.2mH
se que o projeto do filtro indutivo deve ser realizado considerando-se imperfeições
existentes nos parâmetros da rede e do próprio conversor. Como o projeto havia sido
realizado para uma rede ideal e sem a análise de imperfeições do conversor CC-CA,
o resultado de THDi apresentado na simulação que era abaixo de 5% não se repetiu
experimentalmente.
4.3 CONEXÃO À REDE COM FILTRO LCL - FRES > FCRIT - SEM AMORTECI-MENTO
Para testar a conexão à rede com filtro LCL, simulou-se o sistema completo
e verificou-se que os ganhos projetados permitiam que o sistema operasse de maneira
estável. A seguir passou-se para a fase de obtenção de resultados experimentais.
A Figura 30 apresenta os resultados experimentais de conexão de um in-
versor trifásico com filtro LCL sem a utilização de amortecimento à rede elétrica. A
frequência de ressonância do filtro está acima da frequência crítica, fres > fcrit, como
apresentado na Tabela 7. Quando o indutor do lado da rede apresenta um valor baixo
comparado com o indutor do lado do conversor, a indutância intrínseca da rede tende
a diminuir a frequência de ressonância do filtro, levando esta para próximo da região
de largura de banda do controlador, o que permite observar situações em que efeitos

4.4 Conexão à rede com filtro LCL - fres > fcrit - amortecimento passivo 70
da ressonância aparecem.
Ia1
Ia2
VabVag
Figura 30: Resultados experimentais de conexão à rede do inversor trifásico com filtroindutivo-capacitivo-indutivo sem a utilização de amortecimento. P = 2.2kW , V CC =
400V , V ab = 220V e Ia = Ib = Ic = 5.8A. L1 = 1.6mH, C = 10uF e L2 =
0.24mH.
A resposta ao degrau do sistema foi utilizada para permitir uma comparação
entre os resultados de simulação e os resultados experimentais, o que permite validar
o projeto dos ganhos do controlador, uma vez que os requisitos do projeto (largura
de banda do controlador de 3770rad/s e a razão de amortecimento do sistema igual
a 1) foram atendidas. A Figura 31 apresenta a comparação entre os resultados de
simulação e experimentais para o caso em que fres > fcrit e não há amortecimento.
4.4 CONEXÃO À REDE COM FILTRO LCL - FRES > FCRIT - AMORTECIMENTOPASSIVO
Em seguida, decidiu-se verificar o comportamento do sistema quando se
está utilizando amortecimento passivo. A simulação foi realizada para verificar o com-
portamento do sistema considerando a inserção de resistores de 2, 2Ω em série com
os capacitores do filtro LCL. Este resultado de simulação é apresentado na Figura 32.
Tendo verificado o funcionamento estável do sistema mediante os resulta-
dos de simualçao obtidos, passou-se à fase experimental.
A Figura 33 apresenta os resultados de conexão à rede elétrica de um
inversor trifásico com filtro LCL utilizando resistores de amortecimento passivo em
série com o capacitor do filtro LCL no intuito de amortecer a ressonância do filtro.

4.4 Conexão à rede com filtro LCL - fres > fcrit - amortecimento passivo 71
0-100-200
100200
Vag
0-5
-10
510
I1a
0 0.05 0.1 0.15 0.2 0.25 0.3T (s)empo
0-5
-10
510
I2a
(a) Simulação
(b) Experimental
Vag
I1a
I2a
Figura 31: (a) Resultados de simulação para dois degraus na corren te de referência. (b)Resultados experimentais para realizar a comparação da resposta aos dois degraus nacorrente com o resultado de simulação anterior. P = 2.2kW , V CC = 400V , V ab =
220V e Ia = Ib = Ic = 5.8A. L1 = 1.6mH, C = 10uF e L2 = 0.24mH.
Para uma potência injetade de P = 2.2kW , e utilizando uma largura de banda do
controlador de 3770rad/s, é possível identificar a presença da sétima harmônica sobre
o sinal de saída.
Para analisar a eficiência do conversor e verificar a influência do amorte-
cimento passivo na eficiência do sistema, utilizou-se de um analisador de potência
de precisão da Yokogawa Eletrica Corporation, obtendo-se o resultado apresentado

4.4 Conexão à rede com filtro LCL - fres > fcrit - amortecimento passivo 72
0
-200
-400
200
400
0
-5
-10
5
0.1 0.125 0.15 0.175 0.2
Tempo (s)
0
-5
5
Vag Vab
Ia1 Ib1 Ic1
Ia2 Ib2 Ic2
Figura 32: Resultados experimentais de conexão à rede do inversor trifásico com filtroindutivo-capacitivo-indutivo utilizando amortecimento passivo. P = 2.2kW , V CC =
400V , V ab = 220V e Ia = Ib = Ic = 5Ap. Componentes do filtro: L1 = 1.6mH,C = 10uF e L2 = 0.24mH.
Ia1
Ia2
VabVag
Figura 33: Resultados experimentais de conexão à rede do inversor trifásico com filtroindutivo-capacitivo-indutivo utilizando amortecimento passivo. P = 2.2kW , V CC =
400V , V ab = 220V e Ia = Ib = Ic = 5.8A. A Corrente Ia está em fase com a tensãoda fase a. L1 = 1.6mH, C = 10uF e L2 = 0.24mH.
na Figura 34, em que pode-se verificar uma eficiência de 95,7% do conversor, sendo
necessário uma potência de 2,233 kW na barramento para se inserir na rede uma
potência de 2.137 kW.
4.5 Conexão à rede com filtro LCL - fres > fcrit - amortecimento ativo 73
Figura 34: Eficiência do conversor medida com um Analisador de potên cia de precisãoda Yokogawa, para o caso em que se está utilizando amortecimento pa ssivo e fres >
fcrit
4.5 CONEXÃO À REDE COM FILTRO LCL - FRES > FCRIT - AMORTECIMENTOATIVO
O experimento realizado anteriormente com amortecimento passivo foi re-
petido substituindo os resistores de amortecimento pela malha de realimentação da
corrente do capacitor descrita no capítulo 3. Inicialmente simulou-se o sistema com-
pleto com a inserção da malha de amortecimento. O resultado apresentado na Figura
35 permite notar que o sistema se comporta de maneira semelhante entre os casos
com amortecimento passivo e ativo.
A Figura 36 apresenta os resultados de conexão do sistema à rede elétrica
enquanto que a Figura 37 mostra a eficiência do conversor quando utilizando amor-
tecimento ativo. A eficiência do conversor passou para 96,1% substituindo o amorte-
cimento passivo pelo ativo, o que diminuiu as perdas de potência no conversor, uma
vez que o amortecimento ativo não utiliza componentes passivos extras conectados
ao filtro.
4.6 CONEXÃO À REDE COM FILTRO LCL - FRES < FCRIT - AMORTECIMENTOATIVO
Como apresentado no capítulo 3, quando a frequência de ressonância do
filtro LCL está abaixo da frequência crítica, amortecer o pico de ressonância do filtro é

4.6 Conexão à rede com filtro LCL - fres < fcrit - amortecimento ativo 74
0
-200
-400
200
400
Vag Vab
0
-5
-10
5
10
Ia1 Ib1 Ic1
0.1 0.125 0.15 0.175 0.2
Tempo (s)
0
-2.5
-5
2.5
5
Ia2 Ib2 Ic2
Figura 35: Resultados experimentais de conexão à rede do inversor trifásico com fil-tro indutivo-capacitivo-indutivo utilizando amortecimento ativo. P = 2.2kW , V CC =
400V , V ab = 220V e Ia = Ib = Ic = 5Ap. Componentes do filtro: L1 = 1.6mH,C = 10uF e L2 = 0.24mH.
Ia1
Ia2
VabVag
Figura 36: Resultados experimentais de conexão à rede do inversor trifásico com filtroindutivo-capacitivo-indutivo utilizando amortecimento ativo por res istor virtual. P =
2.2kW , V CC = 400V , V ab = 220V e Ia = Ib = Ic = 5.8A. L1 = 1.6mH, C = 10uF
e L2 = 0.24mH.
fundamental para a estabilidade do sistema.
Para verificar a veracidade dessa constatação, simulou-se o sistema utili-
zando um filtro LCL em que L1 = 1.6mH, C = 20uF e L2 = 1.6mH, resultando numa
frequência de ressonância fres = 1.26kHz inferior à frequência crítica, sem a presença
de amortecimento passivo ou ativo. A simulação foi realizada variando-se os ganhos
do controlador para tentar encontrar algum ganho que estabilizasse o sistema, mas o

4.6 Conexão à rede com filtro LCL - fres < fcrit - amortecimento ativo 75
Figura 37: Eficiência do conversor medida com um Analisador de potên cia de precisãoda Yokogawa, para o caso em que se está utilizando amortecimento at ivo e fres > fcrit.
resultado sempre divergia, como é possível verificar no resultado de simulação apre-
sentado na Figura 38.
0
-200
-400
200
400
0K
-5K
-10K
5K
10K
0 0.1 0.2 0.3 0.4 0.5Tempo (s)
0K
-5K
-10K
5K
10K
Vag Vab
Ia1 Ib1 Ic1
Ia2 Ib2 Ic2
Figura 38: Simulação de conexão à rede do inversor trifásico com filtr o indutivo-capacitivo-indutivo sem amortecimento para o caso em que fres < fcrit. P = 1.3kW ,V CC = 400V , V ab = 220V e Ia2 = 3.5A. L1 = 1.6mH, C = 20uF e L2 = 1.6mH.
Entretanto, inserindo-se a malha de amortecimento ativo por resistor virtual,
o sistema passa a se comportar de maneira estável, como é mostrado no resultado de
simulação apresentado na Figura 39.
A Figura 40 mostra os resultados de conexão à rede do inversor com filtro

4.7 Variação da Indutância da Rede 76
0
-200
-400
200
400
0
-2.5
-5
-7.5
2.5
5
0.1 0.125 0.15 0.175 0.2
Tempo (s)
0-2.5
-5-7.5
2.55
7.510
Vag Vab
Ia1 Ib1 Ic1
Ia2 Ib2 Ic2
Figura 39: Simulação de conexão à rede do inversor trifásico com filtr o indutivo-capacitivo-indutivo com amortecimento ativo por resistor virtual p ara o caso em quefres < fcrit. P = 1.3kW , V CC = 400V , V ab = 220V e Ia2 = 3.5A. L1 = 1.6mH,C = 20uF e L2 = 1.6mH.
LCL com os componentes passivos apresentados na Tabela 7 em que fres < fcrit.
Uma vez que os resultados experimentais convergiram, confirma-se a efetividade e
performance do amortecimento ativo via resistor virtual por realimentação da corrente
do capacitor. Essa técnica portanto foi capaz de amortecer a ressonância do filtro
LCL, fazendo com que o sistema se comporta-se de maneira estável.
4.7 VARIAÇÃO DA INDUTÂNCIA DA REDE
A Figura 41 apresenta resultados de conexão à rede de inversores com filtro
LCL considerando-se uma variação na indutância da rede. Na Figura 41 (a), a corrente
é controlada usando um filtro LCL com frequência de ressonância acima da frequên-
cia crítica, com os mesmo ganhos previamente calculados. Repete-se o experimento
inserindo um indutor em série com o indutor L2 do filtro, o que diminui a frequência de
ressonância do filtro até abaixo da frequência de ressonância, sem alterar os ganhos
do controlador. A Figura 41 (b), apresenta esse resultado. É importante notar que
mantendo os ganhos calculados para o primeiro filtro, o sistema conseguiu se com-
portar de maneira estável mesmo com a mudança nos parâmetros do filtro. Os testes
foram realizados para uma corrente mais baixa do que nos resultados anteriores.

4.8 Comparação de amortecimento 77
Ia1
Ia2
VabVag
Figura 40: Resultados experimentais de conexão à rede do inversor trifásico com filtroindutivo-capacitivo-indutivo utilizando amortecimento ativo por res istor virtual quandofres < fcrit. P = 1.3kW , V CC = 400V , V ab = 220V e Ia2 = 3.5A. L1 = 1.6mH,C = 20uF e L2 = 1.6mH.
4.8 COMPARAÇÃO DE AMORTECIMENTO
O efeito da ressonância do filtro LCL não é facilmente visível, ficando mais
evidente em situações críticas como baixa corrente controlada ou então alto índice de
modulação em decorrência de uma diminuição da tensão do barramento. Além disso,
como já foi discutido, a indutância série da rede tem grande influência na variação
desse parâmetro, podendo levar o sistema à instabilidade.
Para compreender os efeitos da ressonância, buscou-se observá-la expe-
rimentalmente. Além disso, achou-se importante realizar uma comparação entre o
efeito de amortecer a ressonância do filtro LCL com amortecimento passivo ou ativo.
Assim, a Figura 42 apresenta esse resultado de comparação. Primeiramente o sis-
tema começa a sofrer influência da ressonância a medida que o índice de modu-
lação começa a aumentar demais (diminuição da tensão do Barramento). Em se-
guida, ativou-se os resistores de amortecimento passivo para realizar o amortecimento
da ressonância. Para efeito de comparação, desliga-se o amortecimento passivo e
insere-se a malha de amortecimento ativo de resistor virtual baseada na realimenta-
ção da corrente do capacitor. Nota-se que que os resultados de amortecimento são
semelhantes. Entretanto, o amortecimento ativo não adiciona perdas de potência no
circuito, embora possa aumentar o custo final do sistema em decorrência de mais
sensores de medição das variáveis do sistema.

4.9 Considerações finais 78
(a)
(b)
Figura 41: (a) Resultados experimentais utilizando L1 = 1.6mH, C = 20uF e L2 =
0.24mH fres > fcrit. P = 1.3kW , V CC = 400V , V ab = 220V e Ia2 = 3.5A.(b) varaiação de parâmetro: L2 é aumentado até 1.6mH de maneira que fres < fcrit.P = 1.3kW , V CC = 400V , V ab = 220V e Ia2 = 3.5A.
4.9 CONSIDERAÇÕES FINAIS
Este capítulo apresentou os resultados experimentais desenvolvidos du-
rante o desenvolvimento deste trabalho, assim como apresentou uma breve descrição
da bancada experimental desenvolvida para que as análises teóricas estudadas pu-
dessem ser verificadas experimentalmente.
Foram apresentados resultados de controle do inversor trifásico conectado

4.9 Considerações finais 79
Sem amortecimento
Amortecimento Passivo
Realimentação da Corrente do CapacitorAmortecimento ativo por
Figura 42: Comparação do amortecimento da ressonância do filtro L CL: sem amorte-cimento; com amortecimento passivo e com amortecimento ativo via r ealimentação dacorrente do capacitor.

4.9 Considerações finais 80
à rede elétrica tanto com filtro indutivo, quanto com filtro indutivo-capacitivo-indutivo
realizando-se testes sem e com amortecimento (passivo e ativo), de acordo com as
regiões de estabilidade apresentadas na seção 3.3.
Verificou-se pelos resultados que a metodologia de amortecimento ativo
apresentada pode substituir o amortecimento passivo, uma vez que os resultados são
semelhantes para as duas topologias de amortecimento.
Deve-se notar, no entanto, que a utilização do amortecimento ativo por re-
sistor virtual é preferível por garantir uma melhora no rendimento global do conversor.
Além disso, evita-se a utilização de 3 componentes passivos extras. Como desvanta-
gem, cita-se a necessidade de medição de outra variável do sistema, como a corrente
do capacitor por exemplo, para se implementar uma malha de amortecimento em cas-
cata com a malha de controle da corrente.
Para a verificação da influência da frequência de ressonância em relação
à frequência crítica (que é proveniente da frequência de amostragem do sistema),
realizou-se experimentos em duas situações possíveis: fres > fcrit e fres < fcrit. Para
a primeira situação, como demostrado no capítulo 3, o amortecimento da ressonância
não é essencial, uma vez que é possível estabelecer ganhos do controlador de cor-
rente que estabilizam o sistema, o que foi verificado na prática com a conexão à rede
elétrica sem utilização de nenhuma amortecimento externo ao sistema (passivo ou
ativo). Já para a segunda situação, como esperado, não conseguiu-se encontrar ga-
nhos que estabilizassem o sistema, sendo portanto necessário utilizar alguma forma
de amortecimento. Dessa forma, com a inserção do amortecimento ativo por resis-
tor virtual baseado na realimentação da corrente do capacitor, conseguiu-se realizar
a conexão do sistema à rede elétrica e inserir potência na rede de maneira estável.
Os testes de variação da indutância da rede permitiram notar que dentro da faixa de
valores utilizado, o sistema se comportou de maneira estável.
A tabela 9 seguir apresenta um resumo dos resultados obtidos através de
uma análise das normas citadas na Introdução desta dissertação.
Como apresentado na tabela, nota-se que a única norma que não foi aten-
dida é relativa à de THDi. Um projeto dos filtros considerando imperfeições na rede
e no restante do sistema deveria ser utilizado para se conseguir atender essa norma.
Ainda, um controlador repetitivo poderia ser utilizado. Uma vez que a malha de amor-
tecimento para o caso do filtro LCL permite a operação estável do sistema, o projeto

4.9 Considerações finais 81
Tabela 9: Resultados relativos às normas de conexão
Filtro L Filtro LCL - passivo Filtro LCL - ativoTHDi máxima 10% 12% 12%
Fator de potência ≈ 1 ≈ 1 ≈ 1Frequência (Hz) ≈ 60 ≈ 60 ≈ 60
Tensão noponto de conexão
≈ 220V linha ≈ 220V linha ≈ 220V linha
de um controlador repetitivo fica simplificado.
As demais normas foram atendidas. O fator de potência pode ser contro-
lado com a inserção de corrente iq. Quando a corrente iq de referência tem valor nulo,
obtém-se um fator de potência unitário.
Como pode ser visto nas Figuras 34 e 37, a frequência no ponto de conexão
é muito próxima de 60 Hz.
Analisando-se as mesmas duas imagens, nota-se que a tensão no ponto
de conexão variava entre 217 V de linha a 220 V de linha. Essa manutenção em 220
V é possível uma vez que se estava usando um Variac no ponto de conexão. Caso
fosse realizada a conexão direta na rede, om o aumento da potência ativa inserida
na rede, aumenta-se a tensão no ponto de conexão. Caso essa tensão chegasse a
um ponto superior à norma, torna-se necessário inserir potência reativa para abaixar
a tensão no ponto de conexão, desde que atenda-se um fator de potência mínimo de
92%.
A próxima seção apresenta as principais conclusões desse trabalho, bem
como uma sugestão para possíveis trabalhos futuros.

82
5 CONCLUSÕES E SUGESTÕES PARA TRABALHOS FUTUROS
5.1 CONCLUSÕES
O filtro indutivo aparenta ser capaz de atenuar as harmônicas de corrente
de inversores conectados à rede de acordo com as normas internacionais (IEEE, 1993)
e (IEEE, 2005), mas, com o aumento da potência inserida na rede, a utilização do filtro
indutivo pode ficar construtivamente impraticável, pois com o aumento da corrente,
aumenta-se a espessura do fio utilizado no indutor, de maneira que seu tamanho e
peso podem ser um problema para a utilização em inversores comerciais.
O filtro indutivo-capacitivo-indutivo consegue atenuar ainda melhor as harmô-
nicas de corrente, além de utilizar componentes passivos com tamanho inferior aos
utilizados no filtro indutivo e permitindo ainda a utilização da mesma metodologia de
controle de corrente baseada no filtro indutivo, uma vez que ambos os filtros possuem
características semelhantes para baixas frequências (como a utilizada na largura de
banda do controlador). Deve-se notar entretanto, que a ressonância do filtro LCL é
uma desvantagem do ponto de vista da estabilidade, de maneira que se não for amor-
tecida pode levar o sistema à instabilidade em nos casos em que a frequência de
ressonância é inferir à frequência crítica do sistema.
Mesmo que o filtro LCL introduza uma frequência acima da frequência de
ressonância, a indutância da rede pode acabar diminuindo a frequência de ressonân-
cia do filtro LCL, uma vez que trata-se de um valor desconhecido. Para o caso em que
a frequência de ressonância do filtro LCL é inferior à frequência crítica, foi mostrado
que a utilização de amortecimento é obrigatório e que a técnica de amortecimento
ativo por resistor virtual baseado na realimentação da corrente do capacitor é eficaz
para garantir a estabilidade do sistema, além do fato dela se comportar de maneira
semelhante à inserção de um resistor real para amortecimento passivo.
Projetar o filtro de interface à rede de maneira que a frequência de resso-
nância seja superior à frequência crítica garante maior segurança uma vez que se está
trabalhando numa região de controle em que a escolha apropriada de ganhos do con-
trolador garantem a estabilidade do sistema. No entanto, as variações nos parâmetros

5.1 CONCLUSÕES 83
da rede podem levar a frequência de ressonância para baixo da frequência crítica, de
maneira que a utilização de uma técnica de amortecimento deveria ser sempre consi-
derada quando se utiliza um filtro LCL.
Para o caso em que fres < fcrit, a estabilidade só é garantida se houver o
amortecimento da ressonância. Caso ainda assim ocorram variações nos parâmetros
da rede, a estabilidade pode não ser garantida pelo amortecimento projetado. Assim
sendo, um projeto robusto relacionado à variação da indutância da rede deveria ser
adotado.
Usualmente o projeto do controlador é realizado de maneira independente
ao projeto do filtro. O filtro normalmente é projetado para atender uma taxa de distor-
ção harmônica e ripple de corrente desejado enquanto que o controlador é projetado
para se permitir uma operação estável. Assim, mesmo que o sistema opere em uma
região em que o amortecimento não é necessário, este estudo considera uma malha
de amortecimento ativo para o caso do sistema passar a operar em uma região em
que fres < fcrit.
Um projeto de filtro que esteja atrelado ao projeto do controlador seria uma
opção mais eficiente de projeto.
Os ganhos do controlador projetado permitiram a operação estável do in-
versor conectado na rede, apesar do aumento da indutância da rede em série com o
indutor L2 do filtro LCL, o que valida a eficácia do projeto do controlador e da malha
de amortecimento ativo via resistor virtual baseado na realimentação da corrente do
capacitor.
Com relação aos testes experimentais realizados, notou-se que para en-
saios de conexão com a rede em que a tensão do ponto de conexão vai subindo
passo a passo até a tensão nominal da rede, é preferível não utilizar a parcela de con-
trole por antecipação da tensão da rede, uma vez que esta parcela atuará como um
distúrbio ao invés de compensar o distúrbio que é a tensão da rede. Numa conexão
instantânea com a rede, no entanto, faz-se necessário utilizar dessa parcela de con-
trole por antecipação, pois a ação de controle proveniente do erro do controlador de
corrente não consegue compensar de maneira instantânea o distúrbio que é causado
pela tensão no ponto de conexão.
Esta dissertação apresentou o projeto do controlador de corrente para um
inversor trifásico fotovoltaico conectado à rede com filtro L ou filtro LCL. Técnicas de

5.2 Sugestões para trabalhos futuros 84
amortecimento passivo e ativo da ressonância do filtro LCL foram discutidos e re-
sultados experimentais de comparação foram apresentados para apoiar as análises
teóricas realizadas e para estudar a performance de um inversor trifásico conectado à
rede num sistema de geração distribuída.
Ademais, como resultado deste trabalho, obteve-se duas publicações no
13th Brazilian Power Electronics Conference - COBEP 2015 intituladas “Dynamic Beha-
vior of the PV Grid-Connected Inverter Based on L and LCL Filter with Active Damping
Control” e “Inductive Filter Design for Three-Phase Grid Connected Power Converters”
(PAUKNER et al., 2015a) e (PAUKNER et al., 2015b).
5.2 SUGESTÕES PARA TRABALHOS FUTUROS
Como complemento ao trabalho desenvolvido nesta dissertação, sugere-se
para trabalhos futuros:
• Implementar o amortecimento ativo utilizando como realimentação a tensão do
capacitor usando um condensador de avanço-atraso.
• Implementar o amortecimento ativo sem a utilização de sensores extras.
• Implementar o amortecimento ativo utilizando Algoritmo Genético.
• Realizar novas análises de estabilidade relativas ao controle da corrente no in-
dutor L1.
• Implementação de outros controladores ótimos para este tipo de sistema.
• Implementação do controle de corrente com amortecimento ativo por modos des-
lizantes.

85
REFERÊNCIAS
ABDEL-RAHIM, N.; QUAICOE, J.E. Modeling and analysis of a feedback control stra-tegy for three-phase voltage-source utility interface systems. In: Industry Applicati-ons Society Annual Meeting, 1994., Conference Record of the 1 994 IEEE. [S.l.:s.n.], 1994. p. 895–902 vol.2.
ACKERMANN, Thomas; ANDERSSON, Goran; SODER, Lennart. Dis-tributed generation: a definition1. Electric Power Systems Research ,v. 57, n. 3, p. 195 – 204, 2001. ISSN 0378-7796. Disponível em:<http://www.sciencedirect.com/science/article/pii/S0378779601001018>.
ADAMS, Douglas. So Long, and Thanks for All the Fish (Hitchhiker’sGuide to the Galaxy) . Del Rey, 1999. ISBN 9780345391834. Disponível em:<http://amazon.com/o/ASIN/0345391837/>.
ALEX-SANDER, A. L.; BRAZ, J. Cardoso Filho. Analise de filtros passivos para retifica-dores de tres niveis e alta potencia. In: VIII Conferecia Internacional de AplicacoesIndustriais . [S.l.: s.n.], 2008.
ALI, A.N.A.; SAIED, M.H.; MOSTAFA, M.Z.; ABDEL-MONEIM, T.M. A survey of maxi-mum ppt techniques of pv systems. In: Energytech, 2012 IEEE . [S.l.: s.n.], 2012. p.1–17.
BAO, Chenlei; RUAN, Xinbo; WANG, Xuehua; LI, Weiwei; PAN, Donghua; WENG,Kailei. Step-by-step controller design for lcl-type grid-connected inverter with capacitorcurrent-feedback active-damping. Power Electronics, IEEE Transactions on , v. 29,n. 3, p. 1239–1253, March 2014. ISSN 0885-8993.
BLASKO, V.; KAURA, V. A novel control to actively damp resonance in input lc filter ofa three-phase voltage source converter. Industry Applications, IEEE Transactionson , v. 33, n. 2, p. 542–550, Mar 1997. ISSN 0093-9994.
CHA, Hanju; VU, Trung-Kien. Comparative analysis of low-pass output filter for single-phase grid-connected photovoltaic inverter. In: Applied Power Electronics Confe-rence and Exposition (APEC), 2010 Twenty-Fifth Annual IEEE . [S.l.: s.n.], 2010. p.1659–1665. ISSN 1048-2334.
CHIRADEJA, P. Benefit of distributed generation: A line loss reduction analysis. In:2005 IEEE/PES Transmission Distribution Conference Exposition: Asia and Pa-cific . [S.l.: s.n.], 2005. p. 1–5. ISSN 2160-8636.
COPEL. Manual de Acesso de Geração de Distribuida ao Sistema da Cop el.[S.l.], 2012. Norma Técnica Copel.

Referências 86
DAHONO, P.A. A control method to damp oscillation in the input lc filter. In: PowerElectronics Specialists Conference, 2002. pesc 02. 2002 IEEE 33 rd Annual . [S.l.:s.n.], 2002. v. 4, p. 1630–1635.
DAHONO, P.A.; BAHAR, Y.R.; SATO, Y.; KATAOKA, T. Damping of transient oscillationson the output lc filter of pwm inverters by using a virtual resistor. In: Power Electronicsand Drive Systems, 2001. Proceedings., 2001 4th IEEE Internatio nal Conferenceon . [S.l.: s.n.], 2001. v. 1, p. 403–407 vol.1.
DANNEHL, J.; FUCHS, F.W.; HANSEN, S. Pwm rectifier with lcl-filter using differentcurrent control structures. In: Power Electronics and Applications, 2007 EuropeanConference on . [S.l.: s.n.], 2007. p. 1–10.
DANNEHL, J.; WESSELS, C.; FUCHS, F.W. Limitations of voltage-oriented pi currentcontrol of grid-connected pwm rectifiers with lcl filters. Industrial Electronics, IEEETransactions on , v. 56, n. 2, p. 380–388, Feb 2009. ISSN 0278-0046.
GABE, I.J.; MONTAGNER, V.F.; PINHEIRO, H. Design and implementation of a robustcurrent controller for vsi connected to the grid through an lcl filter. Power Electronics,IEEE Transactions on , v. 24, n. 6, p. 1444–1452, June 2009. ISSN 0885-8993.
GIGLIA, G.; PUCCI, M.; SERPORTA, C.; VITALE, G. Experimental comparison ofthree-phase distributed generation systems based on voc and dpc control techniques.In: Power Electronics and Applications, 2007 European Conferenc e on . [S.l.: s.n.],2007. p. 1–12.
GT-GDSF. Estudos e Propostas de utilizacao de geracao fotovoltaica con ectadaa rede, em particular em edificacoes urbanas. [S.l.], 2009.
GUEDES, L.M. Localizacao e Dimensionamento de Unidades de Geracao Distr i-buida em Redes de Distribuicao Radiais. Dissertação (Dissertacao de Mestradoem Engenharia Eletrica,) — Departamento de Engenharia Eletrica, Universidade deBrasÃlia, Julho 2006. Publicacao 263/06, BrasÃlia, DF, 95 p.
HILL, W.A.; KAPOOR, S.C. Effect of two-level pwm sources on plant power systemharmonics. In: Industry Applications Conference, 1998. Thirty-Third IAS AnnualMeeting. The 1998 IEEE . [S.l.: s.n.], 1998. v. 2, p. 1300–1306 vol.2. ISSN 0197-2618.
HUANG, Min; BLAABJERG, F.; LOH, Poh Chiang. The overview of damping methodsfor three-phase grid-tied inverter with llcl-filter. In: Power Electronics and Applicati-ons (EPE’14-ECCE Europe), 2014 16th European Conference on . [S.l.: s.n.], 2014.p. 1–9.
IEA. Wolrd Energy Outlook 2012 . [S.l.], 2012.
IEEE. Ieee recommended practices and requirements for harmonic control in electricalpower systems. IEEE Std 519-1992 , p. 1–112, April 1993.
IEEE. IEEE Standard Conformance Test Procedures for Equipment Interco nnec-ting Distributed Resources with Electric Power Systems . 2005. 1-54 p.

Referências 87
IPCC. IPCC Special Report on Renewable Energy Sources and Climate Chan geMitigation. [S.l.], 2011. Prepared by Working Group III of the Intergovernmental Panelon Climate Change [O. Edenhofer, R. Pichs-Madruga, Y. Sokona, K. Seyboth, P. Mats-choss, S. Kadner, T. Zwickel, P. Eickemeier, G. Hansen, S. Schlömer, C. von Stechow(eds)].
LINDGREN, M.; SVENSSON, J. Control of a voltage-source converter connected tothe grid through an lcl-filter-application to active filtering. In: Power Electronics Spe-cialists Conference, 1998. PESC 98 Record. 29th Annual IEEE . [S.l.: s.n.], 1998.v. 1, p. 229–235 vol.1. ISSN 0275-9306.
LISERRE, M.; AQUILA, A.D.; BLAABJERG, F. Genetic algorithm-based design of theactive damping for an lcl-filter three-phase active rectifier. Power Electronics, IEEETransactions on , v. 19, n. 1, p. 76–86, Jan 2004. ISSN 0885-8993.
LISERRE, M.; BLAABJERG, F.; HANSEN, S. Design and control of an lcl-filter-basedthree-phase active rectifier. Industry Applications, IEEE Transactions on , v. 41, n. 5,p. 1281–1291, Sept 2005. ISSN 0093-9994.
MALINOWSKI, M.; KAZMIERKOWSKI, M.P.; SZCZYGIEL, W.; BERNET, S. Simplesensorless active damping solution for three-phase pwm rectifier with lcl filter. In: In-dustrial Electronics Society, 2005. IECON 2005. 31st Annual Co nference of IEEE .[S.l.: s.n.], 2005. p. 5 pp.–.
MARANDI, D.; SOWMYA, T.N.; BABU, B.C. Comparative study between unipolar andbipolar switching scheme with lcl filter for single-phase grid connected inverter system.In: Electrical, Electronics and Computer Science (SCEECS), 2012 IEEE Stud ents’Conference on . [S.l.: s.n.], 2012. p. 1–4.
MEERSMAN, Bart; RENDERS, Bert; DEGROOTE, Lieven; VANDOORN, Tine; KOO-NING, Jeroen De; VANDEVELDE, Lieven. Overview of three-phase inverter topologiesfor distributed generation purposes. In: i-SUP 2010 : Innovation for Sustainable Pro-duction, Proceedings . [S.l.: s.n.], 2010. p. 24–28.
NARDI, Cleidimar. Dimensionamento de filtros l para conversores de potencia conec-tados a rede. In: . [S.l.: s.n.], 2014.
NEHRIR, M. H.; WANG, C.; STRUNZ, K.; AKI, H.; RAMAKUMAR, R.; BING, J.; MIAO,Z.; SALAMEH, Z. A review of hybrid renewable/alternative energy systems for electricpower generation: Configurations, control, and applications. IEEE Transactions onSustainable Energy , v. 2, n. 4, p. 392–403, Oct 2011. ISSN 1949-3029.
PARKER, S.G.; MCGRATH, B.P.; HOLMES, D.G. Regions of active damping control forlcl filters. Industry Applications, IEEE Transactions on , v. 50, n. 1, p. 424–432, Jan2014. ISSN 0093-9994.
PAUKNER, F.L.; CARATI, E.G.; CARDOSO, R.; STEIN, C.M.O.; COSTA, J.P. da. Dy-namic behavior of the pv grid-connected inverter based on l and lcl filter with activedamping control. In: Power Electronics Conference (COBEP), 2015 Brazilian . [S.l.:s.n.], 2015.

Referências 88
PAUKNER, F.L.; NARDI, C.; CARATI, E.G.; CARDOSO, R.; STEIN, C.M.O.; COSTA,J.P. da. Inductive filter design for three-phase grid connected power converters. In:Power Electronics Conference (COBEP), 2015 Brazilian . [S.l.: s.n.], 2015.
PENA-ALZOLA, R.; LISERRE, M.; BLAABJERG, F.; SEBASTIAN, R.; DANNEHL, J.;FUCHS, F.W. Analysis of the passive damping losses in lcl-filter-based grid converters.Power Electronics, IEEE Transactions on , v. 28, n. 6, p. 2642–2646, June 2013.ISSN 0885-8993.
PENA-ALZOLA, R.; LISERRE, M.; BLAABJERG, F.; ORDONEZ, M.; YANG,Yongheng. Lcl-filter design for robust active damping in grid-connected converters. In-dustrial Informatics, IEEE Transactions on , v. 10, n. 4, p. 2192–2203, Nov 2014.ISSN 1551-3203.
REZNIK, A.; SIMOES, M.G.; AL-DURRA, A.; MUYEEN, S.M. Lcl filter design andperformance analysis for grid-interconnected systems. Industry Applications, IEEETransactions on , v. 50, n. 2, p. 1225–1232, March 2014. ISSN 0093-9994.
SCHONARDIE, M.F.; RUSELER, A.; COELHO, R.F.; MARTINS, D.C. Three-phasegrid-connected pv system with active and reactive power control using dq0 transfor-mation. In: Industry Applications (INDUSCON), 2010 9th IEEE/IAS Internati onalConference on . [S.l.: s.n.], 2010. p. 1–6.
TANG, Y.; YAO, W.; LOH, P.C.; BLAABJERG, F. Design of lcl-filters with lcl resonancefrequencies beyond the nyquist frequency for grid-connected converters. Emergingand Selected Topics in Power Electronics, IEEE Journal of , PP, n. 99, p. 1–1, 2015.ISSN 2168-6777.
TEODORESCU, R.; BLAABJERG, F.; LISERRE, M.; DELL’AQUILA, A. A stable three-phase lcl-filter based active rectifier without damping. In: Industry Applications Con-ference, 2003. 38th IAS Annual Meeting. Conference Record o f the . [S.l.: s.n.],2003. v. 3, p. 1552–1557 vol.3.
TEODORESCU, R.; LISERRE, M.; RODRIGUEZ, P. Grid Converters for Photovol-taic and Wind Power Systems . [S.l.]: Jhon Wiley & Sons, 2011.
TWINING, E.; HOLMES, D.G. Grid current regulation of a three-phase voltage sourceinverter with an lcl input filter. In: Power Electronics Specialists Conference, 2002.pesc 02. 2002 IEEE 33rd Annual . [S.l.: s.n.], 2002. v. 3, p. 1189–1194 vol.3.
WESSELS, C.; DANNEHL, J.; FUCHS, F.W. Active damping of lcl-filter resonance ba-sed on virtual resistor for pwm rectifiers - stability analysis with different filter parame-ters. In: Power Electronics Specialists Conference, 2008. PESC 2008. IEEE . [S.l.:s.n.], 2008. p. 3532–3538. ISSN 0275-9306.
YIN, Jinjun; DUAN, Shanxu; LIU, Bangyin. Stability analysis of grid-connected inverterwith lcl filter adopting a digital single-loop controller with inherent damping characte-ristic. Industrial Informatics, IEEE Transactions on , v. 9, n. 2, p. 1104–1112, May2013. ISSN 1551-3203.

Referências 89
ZMOOD, D.N.; HOLMES, D.G.; BODE, G.H. Frequency-domain analysis of three-phase linear current regulators. Industry Applications, IEEE Transactions on , v. 37,n. 2, p. 601–610, Mar 2001. ISSN 0093-9994.