Embed Size (px)
Citation preview

Diego de Freitas Marinho
Proposta de uma Cama Funcional Controladapor Sensor de Pressão
Londrina

Diego de Freitas Marinho
Proposta de uma Cama Funcional Controlada porSensor de Pressão
Trabalho de Conclusão de Curso apresentado aoDepartamento de Engenharia Elétrica da Uni-versidade Estadual de Londrina, como requi-sito parcial à conclusão do Curso de EngenhariaElétrica.
Orientador: Prof. Dr. Walter Germanovix
Londrina

Diego de Freitas Marinho
Proposta de uma Cama Funcional Controlada porSensor de Pressão
Trabalho de Conclusão de Curso apresentado aoDepartamento de Engenharia Elétrica da Uni-versidade Estadual de Londrina, como requi-sito parcial à conclusão do Curso de EngenhariaElétrica.
Trabalho aprovado. Londrina, ____ de Novembro de 2014:
Prof. Dr. Walter GermanovixOrientador
Prof. Dr. Marcelo Carvalho TosinExaminador
Prof. Dr. Ernesto Fernando FerreyraRamírez
Examinador
Londrina

Dedico a todos aqueles que de alguma forma estiveram e estão próximos de mim, fazendo esta
vida valer cada vez mais a pena

Agradecimentos
Agradeço a Deus por ter me dado saúde para seguir em frente e conquistar esta difícil
etapa da minha vida.
Agradeço minha família pela formação do meu caráter e pela confiança que deposita-
ram em mim fazendo com que nunca desistisse do objetivo final que era obter um diploma de
Engenheiro em uma Universidade Estadual.
Agradeço também minha namorada, pois esteve ao meu lado me dando muita força em
todos os momentos de dificuldade.
Agradeço aos meus amigos Rafael Marcon, Ricardo Henrique Motta, Vitor Muller
Anunciato, Renan de Sousa Pedracini, Lucas do Santos Claudino, Lucas da Silva Dias, Augusto
Almeida Marques, Felipe Laburu e Gabriel Rezende Germanovix, pois foram os principais res-
ponsáveis em fazer desses cinco anos em Londrina um período que jamais esquecerei.
Agradeço todos os professores do curso por compartilharem seus conhecimentos. Agra-
decimento especial ao meu professor orientador de TCC Walter Germanovix por ter sido uma
pessoa presente durante todo o trabalho. Sou muito grato aos técnicos Luiz Fernando Schmidt
e Luiz Carlos Mathias pela ajuda e atenção que sempre tiveram.
Agradeço a Universidade Estadual de Londrina pelo grande aprendizado pessoal e
profissional que obtive nestes cinco anos.

Resumo
Este trabalho consiste na proposta de uma cama funcional controlada por sistemasde pressão (sopro e sucção), direcionada a usuários portadores de tetraplegia ou qualquertipo de imobilidade que o incapacite de usar os braços. Devido suas limitações motorasestas pessoas possuem uma grande dificuldade em realizar tarefas simples do cotidiano.Por isso, esta interface homem-máquina será capaz de realizar estas tarefas, com o obje-tivo de proporcionar maior independência, qualidade de vida e inclusão social. O sistemadesenvolvido pode ser dividido em alguns blocos: aquisição e condicionamento do sinal,posicionador por temporização e acionamento das tarefas. Inicialmente utiliza-se um trans-dutor de pressão para transformar a pressão exercida pelo usuário em tensão elétrica. Estesinal resultante necessita de um circuito de condicionamento capaz de amplificar e gerardois sinais binários, um deles representando o sopro e o outro a sucção. Os dois sinais sãoconectados a duas portas do microcontrolador STM32F100RBT6B, que identifica soproou sucção e realiza, através de um software, determinadas ações. Outro bloco do sistema éo posicionador por temporização. Ele controla a inclinação da cama através do periféricoTIM (Advanced-Control Timers) do microcontrolador. Quando este estado é acionada pelousuário, inicia-se o contador e após um tempo pré-determinado que a cama esta se mo-vendo a função é desativada. O motor DC utilizado será acionado utilizando um circuitotransistorizado ponte H. As demais tarefas serão acionadas utilizando relês.
Palavras-chaves: Tetraplegia, Cama Eletromecânica, Sopro, Sucção, Independência, Qua-lidade de Vida, Inclusão Social, Microcontrolador.

Abstract
This work is the proposal of a functional bed controlled by pressure systems (blow-ing and suction) directed the holders users tetraplegia or any kind of immobility that makesit unable to use his arms. Due its limitations these people have great difficulty perform-ing simple daily tasks. So this man-machine interface will be able to perform these tasksusing only blowing and suction, with the goal of providing greater independence, qualityof life and social inclusion. This system can be divided into few blocks: acquisition andsignal conditioning, angle meter and drive tasks. Initially a pressure transducer is used totransform the pressure exerted by the user on voltage. This requires a resulting signal condi-tioning circuit capable of amplifying and generate two binary signals, one representing theblowing and another the suction. The two signals are connected to two ports of the micro-controller STM32F100RBT6B, which identifies and performs blowing or suction througha software, certain actions. Another system part is the positioner for timing. It controls theslope of the bed through the peripheral microcontroller TIM. When this task is triggered bythe user, it starts the counter and, after a predetermined time, the bed movement disabled.A H-bridge is used to drive the DC motor. The other tasks are triggered using relays.
Key-words: Tetraplegia, electromechanical Bed, Blowing, Sucking, Independence, Qualityof Life, Social Inclusion, Microcontroller.

Lista de ilustrações
Figura 1 – Padronização da Classificação Neurológica da Lesão Medular segundo a As-sociação Americana de Lesão Medular - ASIA. . . . . . . . . . . . . . . . 20
Figura 2 – Classificação do tipo de lesão medular . . . . . . . . . . . . . . . . . . . . 21
Figura 3 – Esquema simplificado do projeto (VECCHI, 2005) . . . . . . . . . . . . . . 23Figura 4 – Projeto da cama hospitalar (GUIMARÃES, 2011) . . . . . . . . . . . . . . 24Figura 5 – Ilustração do sistema (REGATTIERI, ) . . . . . . . . . . . . . . . . . . . . 25Figura 6 – Tela de configuração (CÚNICO; CUNHA, 2008) . . . . . . . . . . . . . . 26Figura 7 – Sistema desmontado (CÚNICO; CUNHA, 2008) . . . . . . . . . . . . . . . 27Figura 8 – Display de LEDs (FERREIRA, 2008) . . . . . . . . . . . . . . . . . . . . 28Figura 9 – Protótipo montado (FERREIRA, 2008) . . . . . . . . . . . . . . . . . . . . 29
Figura 10 – Diagrama de blocos ilustrando o conceito do funcionamento do sistema pro-posto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Figura 11 – Comparador Sopro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Figura 12 – Comparador Sucção . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34Figura 13 – Divisor de tensão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Figura 14 – Circuito montado em protoboard . . . . . . . . . . . . . . . . . . . . . . . 36Figura 15 – Esquemático do circuito de condicionamento . . . . . . . . . . . . . . . . . 36Figura 16 – Layout da PCI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37Figura 17 – Placa do circuito impresso . . . . . . . . . . . . . . . . . . . . . . . . . . . 37Figura 18 – Layout do display de LEDs . . . . . . . . . . . . . . . . . . . . . . . . . . 39Figura 19 – Display de LEDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40Figura 20 – Máquina de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Figura 21 – Máquina de estado do projeto . . . . . . . . . . . . . . . . . . . . . . . . . 41Figura 22 – 2 sucções e 1 sopro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42Figura 23 – 1 sucção . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42Figura 24 – Estado das inclinações do motor . . . . . . . . . . . . . . . . . . . . . . . 43Figura 25 – Estado da cama após um sopro . . . . . . . . . . . . . . . . . . . . . . . . 43Figura 26 – Fluxograma no modo Handler do sopro . . . . . . . . . . . . . . . . . . . 44Figura 27 – Fluxograma no modo Handler da sucção . . . . . . . . . . . . . . . . . . . 45Figura 28 – Fluxograma no modo Handler do TIM . . . . . . . . . . . . . . . . . . . . 46Figura 29 – Fluxograma no modo Thread . . . . . . . . . . . . . . . . . . . . . . . . . 47Figura 30 – Fluxograma do bloco de execução do motor . . . . . . . . . . . . . . . . . 48Figura 31 – Acionamento do motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50

Figura 32 – Circuito de acionamento das tarefas . . . . . . . . . . . . . . . . . . . . . . 51Figura 33 – Esquemático do medidor de posição angular . . . . . . . . . . . . . . . . . 52
Figura 34 – Motor DC com caixa de redução . . . . . . . . . . . . . . . . . . . . . . . 56Figura 35 – Servo motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56Figura 36 – Motor de passo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Figura 37 – Pinagem do componente MPX5100DP (Freescale Semiconductor, 2010) . . 65Figura 38 – 𝑉𝑂𝑈𝑇 X Pressão diferencial (Freescale Semiconductor, 2010) . . . . . . . . 66Figura 39 – Estrutura interna do microcontrolador STM32F100 (STMICROELETRO-
NICS, 2012) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Figura 40 – Tabela de interrupção (STMICROELETRONICS, 2012) . . . . . . . . . . . 69Figura 41 – Diagrama de blocos do TIM (STMICROELETRONICS, 2012) . . . . . . . 70Figura 42 – Amplificador operacional . . . . . . . . . . . . . . . . . . . . . . . . . . . 71Figura 43 – Comparador não-inversor . . . . . . . . . . . . . . . . . . . . . . . . . . . 72Figura 44 – Comparador inversor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73Figura 45 – Amplificador inversor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73Figura 46 – Amplificador de instrumentação . . . . . . . . . . . . . . . . . . . . . . . 74Figura 47 – Ponte H . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75Figura 48 – Q1 e Q3 conduzindo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75Figura 49 – Q2 e Q4 conduzindo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76Figura 50 – Situações proibidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76Figura 51 – Pinagem do CI L293d (Texas Instruments, 2004) . . . . . . . . . . . . . . . 77Figura 52 – Princípio de funcionamento do motor cc . . . . . . . . . . . . . . . . . . . 78

Lista de tabelas
Tabela 1 – Classificação em graus de força muscular . . . . . . . . . . . . . . . . . . . 19
Tabela 2 – Valores de tensão na saída do sensor . . . . . . . . . . . . . . . . . . . . . 32Tabela 3 – Valores de tensão na saída do sensor e do amplificador de instrumentação . . 33Tabela 4 – Tensão na saída dos comparador sopro . . . . . . . . . . . . . . . . . . . . 34Tabela 5 – Tensão na saída dos comparador sucção . . . . . . . . . . . . . . . . . . . 34Tabela 6 – Valores de tensão na saída dos divisores . . . . . . . . . . . . . . . . . . . 35Tabela 7 – Pinos utilizados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Tabela 8 – Estados da máquina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40Tabela 9 – Condições de funcionamento do motor (Texas Instruments, 2004) . . . . . . 50Tabela 10 – Características do transistor BC547A (Fairchild Semiconductor, 2002) . . . 51
Tabela 11 – Características do sensor de pressão . . . . . . . . . . . . . . . . . . . . . 66

Lista de abreviaturas e siglas
TA Tecnologia Assistiva
TIC Tecnologias de Informação e Comunicação
MICRO Microcontrolador
Amp Op Amplificador Operacional
CI Circuito Integrado
LED Light Emitting Diode
PCI Placa de Circuito Impresso
ARM Advanced RISC Machine
TIM Advanced-Control Timers
NVIC Nested Vectored Interrupt Controller
EXTI External interrupt/event controller
ISR Interrupt Service Routine
A/D Conversor Analógico-Digital

Sumário
I Sobre o Trabalho 13
1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.2 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.3 Justificativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.4 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
II Revisão Bibliográfica 18
2 Lesão medular espinhal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Descrição de Alguns Sistemas Propostos . . . . . . . . . . . . . . . . . . 223.1 Sistema ativado por sistemas de voz . . . . . . . . . . . . . . . . . . . . . . . 223.2 Projeto de Cama Hospitalar Acionada Por Movimentos Faciais . . . . . . . . . 233.3 Cama mecanizada para pessoas tetraplégicas . . . . . . . . . . . . . . . . . . . 243.4 Mouse controlado por sistemas de pressão (sopro) . . . . . . . . . . . . . . . . 263.5 Interface de sopro e sucção para controle de cadeira de rodas . . . . . . . . . . 27
III Experimento funcional da cama e seu Modelo Elétrico 30
4 Descrição do Sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.1 Transdutor de Pressão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.2 Circuito de Condicionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.2.1 Amplificador de Instrumentação . . . . . . . . . . . . . . . . . . . . . 324.2.2 Comparador de Tensão . . . . . . . . . . . . . . . . . . . . . . . . . . 334.2.3 Divisor de Tensão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.2.4 Desenvolvimento da PCI . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.3 Microcontrolador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.4 Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.4.1 Display de LEDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.4.2 Funcionamento do Sistema . . . . . . . . . . . . . . . . . . . . . . . . 404.4.3 Descrição do Programa . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.4.3.1 Handler Sopro (bloco de permissão) . . . . . . . . . . . . . 444.4.3.2 Handler Sucção (bloco de transição) . . . . . . . . . . . . . 454.4.3.3 Handler TIM . . . . . . . . . . . . . . . . . . . . . . . . . . 46

4.4.3.4 Thread (bloco de ação) . . . . . . . . . . . . . . . . . . . . . 464.4.3.5 Bloco de execução do Motor . . . . . . . . . . . . . . . . . . 47
4.4.4 Posicionador por Temporização . . . . . . . . . . . . . . . . . . . . . 484.5 Circuitos de Acionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.5.1 Acionamento do Motor . . . . . . . . . . . . . . . . . . . . . . . . . . 504.5.2 Acionamento das Outras Tarefas . . . . . . . . . . . . . . . . . . . . . 51
4.6 Medidor de Posição Angular . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
IV Discussão e Conclusão 54
5 Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 555.1 Discussão dos Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 555.2 Considerações finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Referências . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
APÊNDICE A Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61A.1 Função Main . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
APÊNDICE B Conceitos Fundamentais . . . . . . . . . . . . . . . . . . . . . 65B.1 Transdutor de pressão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65B.2 Microcontrolador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
B.2.1 NVIC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68B.2.2 EXTI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69B.2.3 TIM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
B.3 Amplificador Operacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71B.3.1 Comparador de tensão . . . . . . . . . . . . . . . . . . . . . . . . . . 71B.3.2 Amplificador inversor . . . . . . . . . . . . . . . . . . . . . . . . . . . 73B.3.3 Amplificador de instrumentação . . . . . . . . . . . . . . . . . . . . . 73
B.4 Ponte H . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74B.4.1 Funcionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
B.5 Motor DC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76B.5.1 Funcionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
B.6 Relê . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78

Parte I
Sobre o Trabalho

14
1 Introdução
1.1 Introdução
A tetraplegia é uma paralisação dos membros inferiores e superiores que se da devido aum danos ao sistema nervoso central ou periférico. O dano causa à vítima a perda do uso total ouparcial dos braços e pernas. Quando o individuo perde totalmente a sensibilidade nos membroseste poderá ficar acamado durante várias horas ao dia. Sua qualidade de vida será maior se estepossuir uma cama que contenha uma interface que possibilite a utilização de alguns recursosque facilitem tarefas do dia-a-dia.
A lesão da medula espinal é um dos mais graves acometimentos que pode afetar o serhumano e com enorme repercussão física, psíquica e social (Ministério da Saúde, 2012). Porisso, além do apoio dos familiares e amigos é importante o envolvimento da pessoa imóvel coma chamada tecnologia assistiva.
Tecnologia Assistiva (TA) é um termo ainda novo, utilizado para identificar todo o arse-nal de recursos e serviços que contribuem para proporcionar ou ampliar habilidades funcionaisde pessoas com deficiência e, consequentemente, promover a independência do indivíduo e suainclusão (BERSCH, 2013).
São considerados recursos de Tecnologia Assistiva, portanto, desde artefatos simples,como uma colher adaptada, uma bengala ou um lápis com uma empunhadura mais grossa parafacilitar a preensão, até sofisticados sistemas computadorizados, utilizados com a finalidade deproporcionar uma maior independência e autonomia à pessoa com deficiência (FILHO TEÓ-FILO A. E DAMASCENO, 2002).
Os sistemas computadorizados que englobam a TA são denominados de Tecnologias deInformação e Comunicação (TIC).
Existem diversas maneira de utilização das TIC como Tecnologia Assistiva:
∙ Sistemas auxiliares ou prótese para a comunicação: Em alguns casos o uso da tecnologiaé a única maneira pela qual diversas pessoas podem comunicar-se com o mundo exterior.
∙ Controle do ambiente: Quando o indivíduo com comprometimento motor utiliza a TICpara controle do ambiente, isto é, comandar remotamente aparelhos eletrodomésticos,acender e apagar luzes, abrir e fechar portas, enfim, ter um maior controle e independêncianas atividades da vida diária.
∙ Recurso de acessibilidade na educação: Utilização das TIC como recurso de acessibili-dade na educação.

Capítulo 1. Introdução 15
∙ Inserção no mundo do trabalho profissional: Pessoas com deficiência conseguem se inse-rir em um ambiente profissional com o auxilio da TIC.
∙ Prevenção de lesões: Utilização da TIC na prevenção de doenças que são susceptíveis àpessoas com deficiência.
Para que as pessoas com diferentes graus de comprometimento motor e/ou de comuni-cação e linguagem possam usufruir os recursos proporcionados pelas TIC é necessário que hajaalgum tipo de adaptação física e de hardware ou então softwares especiais de acessibilidade.
Alguns exemplos de softwares especiais de acessibilidade: Computador que tem seuscomandos controlados por sopros no microfone; Mouse como acionador da varredura de soft-
ware especial; Acionamento pelo microfone por meio de brinquedos de pressão; Controle daseta do mouse apenas com o movimento da cabeça.
Devido às melhoria que a TIC pode proporcionar aos pacientes imóveis, foi proposta aideia de uma cama eletromecânica que possui alguns comandos controlados por sopro e suc-ção. Esta interface é especifica para pessoas com tetraplegia ou portadora de imobilidade quenecessitam ficar em uma cama durante um grande período do dia.
Como essas pessoas não conseguem utilizar os braços, elas controlaram as tarefas utili-zando apenas o sopro e a sucção.
Estes indivíduos passam grande parte do dia em uma cama. Numa cama convencionalele iria depender de outra pessoa para realizar qualquer ação, mesmo sendo a mais simples pos-sível. Portanto, pensando em sua independência e qualidade de vida a proposta de uma camafuncional controlada por sensor de pressão realizá, utilizando o sopro e a sucção, alguns recur-sos da TA, mais especificamente as TIC. Utilizando esta interface ele será capaz de controlaro ambiente, solicitar a ajuda de alguém caso necessite e controlar a inclinação da cama, comapenas sopros e sucções.
O Sistema será capaz de: movimentar a cama com três possíveis inclinações (30o, 45o,60o); ligar e desligar a televisão; solicitar a ajuda de alguma pessoa e acender e apagar a luz doambiente.
Todas essas tarefas estão inseridas na ideia das TIC utilizadas para controle do ambiente.Isto o faz ter um maior controle e independência nas atividades da vida diária.
A função de alterar a inclinação da cama além de estar no contexto de controle e in-dependência das atividades ainda pode ser utilizada para prevenir uma lesão muito comum emindivíduos tetraplégicos, a úlcera por pressão (Escara).
As úlceras por pressão são definidas como lesões de pele ou partes moles originadasbasicamente pela obstrução sanguínea. Qualquer posição mantida por um paciente durante umlongo período de tempo pode provocar lesão tecidual. A compressão diminui o fluxo sanguíneolocal facilitando o surgimento de lesão por falta de suprimento sanguíneo para um tecido enecrose (IRION, 2005; SMELTZER, Suzanne C; BARE, Brenda G, 2005).

Capítulo 1. Introdução 16
Portanto, a inclinação da cama algumas vezes ao dia poderá reduzir a força de cisa-lhamento e a pressão em algumas partes do corpo do paciente, ajudando a prevenir úlcera porpressão. Por exemplo, na inclinação de 30o a maior pressão corporal estará sob a região glútea,aliviando a pressão em outa parte do corpo. Porém, é preciso salientar que esta medida apenasauxilia na prevenção das escaras, sendo então necessário tomar todas as medidas preventivascitadas acima.
Neste trabalho, que faz parte do Projeto de Pesquisa, INOVAÇÃO TECNOLÓGICA,Projeto - 08060, intitulado: TRANSDUÇÃO E PROCESSAMENTO DE SINAIS ANALÓGI-COS COM INSTRUMENTAÇÃO ELETRÔNICA E MICROPROCESSADORES, utiliza-seum sensor de pressão para transformar as pressões do sopro e da sucção em tensão elétrica.Como a tensão resultante do sensor possui pequena amplitude faz-se o uso do amplificador deinstrumentação para aumentar o seu nível da tensão. A lógica dos acionamentos das tarefas érealizada por um software. Para esta aplicação, foi utilizado dois sinais binários em duas portasdo microcontrolador, onde um sinal representa o sopro e o outro a sucção. Estes sinais bináriosrepresentam nível lógico baixo quando a tensão é 0𝑉 e alto quando a tensão é 3, 3𝑉 , pois essessão os valores de operação do microcontrolador. Então a tensão analógica da saída do amplifi-cador precisa ser convertida em sinal digital. Para isto, usa-se o amplificador operacional comocomparador de tensão, gerando sinal binário para o sopro e para a sucção.
O software possui quatro estados possíveis (movimentar a cama, ligar e desligar a tele-visão, solicitar a ajuda de alguma pessoa e acender e apagar a luz do ambiente). Essas tarefassão acionadas a partir de lógicas cujas entradas são o sopro e sucção. A sucção é utilizadapara escolher qual tarefa o usuário deseja executar e o sopro faz com que portas de saída docontrolador acione tal função.
1.2 Motivação
A lesão da medula espinal é um dos mais graves acometimentos que pode afetar o serhumano e com enorme repercussão física, psíquica e social. Por isso é de extrema importânciainvestimentos tecnológicos em pesquisas que possam contribuir para proporcionar ou ampliarhabilidades funcionais de pessoas com este tipo de deficiência e consequentemente promovervida independente e inclusão.
1.3 Justificativa
As grandes limitações das pessoas com tetraplegia ou portadores de imobilidade aliadoao imenso avanço tecnológico faz com que se busque alternativas que visam melhorar cada vezmais a qualidade de vida desses indivíduos.
A interface homem-máquina desenvolvida desempenhará um papel importante aos in-divíduos que ficam acamados durante várias horas do dia. Com apenas o sopro e a sucção eles

Capítulo 1. Introdução 17
executarão tarefas que o ajudarão nos aspectos referentes à independência e qualidade de vida.
1.4 Objetivos
O objetivo do projeto é o desenvolvimento de uma cama eletromecânica controlada porsopro e sucção capaz, de proporcionar à pessoa com tetraplegia maior independência, qualidadede vida e inclusão social, através da ampliação de sua comunicação e controle de seu ambiente.
O sistema possui uma interface homem-máquina capaz de acionar quatro tarefas queauxilia no dia-a-dia de um individuo imóvel, proporcionando maior qualidade de vida.
Os objetivos do presente projeto são: desenvolver uma interface homem-máquina, mon-tar um protótipo e realizar os testes elétricos. Primeiramente, desenvolver a interface onde ousuário irá realizar os sopros e as sucções para selecionar as tarefas implementadas com auxiliovisual de um display de LEDs. Em seguida, montar o protótipo e realizar os testes elétricos.

Parte II
Revisão Bibliográfica

19
2 Lesão medular espinhalA medula espinhal consiste no segmento mais caudal do Sistema Nervoso Central,
distribuindo-se da base do crânio até uma região afunilada da medula, denominada cone medu-lar, no nível da primeira vértebra lombar.
A denominação tetraplegia é usada quando existe acometimento dos segmentos cervi-cais com subseqüente diminuição da função motora e sensitiva dos membros superiores, tronco,membros inferiores e órgãos pélvicos (NORONHA, 2008).
Uma lesão recebe o nome de incompleta quando existe função (sensitiva e/ou motora)abaixo do nível neurológico, incluindo os segmentos sacrais; já na lesão completa não se ob-serva atividade sensitiva ou motora abaixo do nível neurológico.
De acordo com o nível de força muscular, os músculos-chave são distribuídos em umaescala de graus de força muscular variando de 0 a 5, como mostra a tabela 1.
Classificação Características0 Paralisia total1 Contração palpável ou visível2 Movimento ativo sem oposição da força gravidade3 Movimento ativo contra a força de gravidade4 Movimento ativo contra alguma resistência5 Movimento ativo contra grande resistência
NT Não testável
Tabela 1 – Classificação em graus de força muscular

Capítulo 2. Lesão medular espinhal 20
A padronização da classificação neurológica da lesão medular é esquematizada na Fig.1.
Figura 1 – Padronização da Classificação Neurológica da Lesão Medular segundo a Associação Americana deLesão Medular - ASIA.

Capítulo 2. Lesão medular espinhal 21
A tabela 2 mostra uma tabela com a classificação do tipo de lesão medular.
Figura 2 – Classificação do tipo de lesão medular

22
3 Descrição de Alguns Sistemas Pro-postos
Pesquisas realizadas, mostram que existem muitos produtos direcionados à pessoas comimobilidade total dos membros (exemplo: tetraplegia).
Neste contexto, encontra-se camas eletromecânicas que realizam inclinações, evitando oaparecimento de úlceras por pressão, além de trazer maior independência. Esta função pode seracionada de diversas maneiras, como controle remoto, painel eletrônico e movimentos faciais.
Também existem sistemas que comandam aparelhos eletrodomésticos, por reconheci-mento de voz, por exemplo.
O projeto da cama eletromecânica controlada por sistemas de pressão é a junção deprojetos que já existem. Um sistema microprocessado embutido na cama, executará inclinaçõesna mesma e controlará eletrodomésticos e dispositivos inseridos em seu ambiente, usando osopro e a sucção.
Nesta seção será apresentado alguns exemplos de interfaces homem-máquina que visammelhorar a qualidade de vida de pessoas com imobilidade total, desenvolvidas por outros pes-quisadores. Estas interfaces podem estar embarcadas a qualquer equipamento que possa fazerparte do cotidiano do deficiente motor. Os equipamentos possuem duas funções principais. Aprimeira é prover independência nas simples tarefas diárias, como andar em uma cadeira de ro-das, inclinar a cama e ligar a televisão. A outra, se refere a funções terapêuticas, como preveniro aparecimento de Escaras.
Alguns exemplos de equipamentos que podem ser usufruídos, por meio de uma inter-face, por tais indivíduos são: cama eletromecânica, cadeira de rodas e mouse. Além disso, asinterfaces podem ser utilizadas para acionar (ligar e desligar) eletroeletrônicos, eletrodomés-ticos e dispositivos, como: televisor, ar condicionado, rádio, lâmpada e outros equipamentosafins.
Foram desenvolvidas várias maneiras de um indivíduo com imobilidade interagir comas interfaces. Algumas delas são: sistemas de pressão(sopro e/ou sucção), comando de voz,movimentos faciais e língua.
3.1 Sistema ativado por sistemas de voz
É um sistema de apoio a deficientes físicos ativado por comandos de voz.O sistema reconhece comandos de voz, num dos formatos aceitos pela placa reconhe-
cedora de voz (frases), e realiza a discagem telefônica ou realiza o comando de aparelhos ele-trodomésticos pré-selecionados (VECCHI, 2005).

Capítulo 3. Descrição de Alguns Sistemas Propostos 23
Inicialmente, um sistema reconhece a voz do usuário a partir de um microfone e geraem sua saída os pulsos de reconhecimento das frases em um sinal de voz de saída. Este sinal desaída indica se a frase foi dita corretamente pela pessoa.
O chip reconhecedor de voz aciona o microcontrolador, que controla os equipamentos,como ilustra a Fig. 3.
Figura 3 – Esquema simplificado do projeto (VECCHI, 2005)
O chip reconhecedor de voz envia comandos para o microcontrolador e este controla ocelular, o telefone fixo e a televisão.
Cada frase gera uma combinação de saídas na placa reconhecedora de voz. Somente umdos sinais da saída está ativo por vez.
Para comandar um telefone sem fio utilizou-se um decodificador em alguns pinos desaída do microcontrolador. Ligado ao decodificador está uma matriz de transistores e cada tran-sistor representa uma tecla.
O comando de eletrodomésticos é realizado através do protocolo infravermelho RC5 -Philips. Um LED infravermelho é ligado ao pino do microcontrolador.
3.2 Projeto de Cama Hospitalar Acionada Por Movimentos
Faciais
O projeto consiste em uma cama hospitalar com movimentos controlados por meio deleitura facial.
O Sistema de Reconhecimento Facial se dá por meio da comparação de determinadostraços faciais e uma base de dados, mediante o contraste de determinadas características a partirde uma imagem digital proveniente de uma fonte de vídeo (GUIMARÃES, 2011).

Capítulo 3. Descrição de Alguns Sistemas Propostos 24
Para detectar o movimento da cabeça do usuário, compara-se duas imagens consecuti-vas. A imagem atual é dividida em seções. Cada seção da imagem é comparada com uma áreasimilar da imagem anterior.
Quatro imagens independentes são criadas para determinar o movimento (L=esquerdo,R=direita, U=acima, D=abaixo).
Quando o usuário, por exemplo, movimenta a cabeça à direita o número de pixels di-ferentes de zero é proporcional a área de movimento. O valor dos pixels indica a intensidadedo deslocamento. Como no algoritmo as matrizes têm uma resolução menor que a imagemoriginal, a detecção do movimento se torna muito mais rápida.
A Fig. 4 mostra o projeto da cama hospitalar.
Figura 4 – Projeto da cama hospitalar (GUIMARÃES, 2011)
3.3 Cama mecanizada para pessoas tetraplégicas
O protótipo consiste de uma cama eletromecânica que permita a melhora de vida detetraplégicos, em relação aos longos períodos em que permanecem acamadas numa mesmaposição, através de sistema mecânico e eletroeletrônico, inclinações que permitem o alívio dacompressão, evitando assim a formação de úlceras por pressão conhecidas como escaras.
A Inclinação é realizada através de acionamento eletrônico, que proporciona inclinaçõesà direita e à esquerda, com intervalos de 5 em 5 graus, até 45 graus. A cabeceira terá inclinaçãode até 90 graus, sendo acionado por sistema mecânico através de manivela (REGATTIERI, ).

Capítulo 3. Descrição de Alguns Sistemas Propostos 25
A Fig. 5 abaixo apresenta as partes e componentes do projeto.
Figura 5 – Ilustração do sistema (REGATTIERI, )
Descrição:
∙ 2,03 metros de comprimento e 0,875 metros de largura.
∙ A altura do leito é ajustável, com altura mínima de 0,5 metros e altura máxima de 0,76metros.
∙ O leito da cama inclina-se à direita e a esquerda de 0o à 45o, obtendo-se intervalos de 5o
em 5o.
∙ A cabeceira é removível com 0,29 metros de altura e 0,875 metros de largura.
∙ O encosto das costas inclina-se de 0 até 90 graus.
∙ A peseira possui altura de 0,39 metros de altura e 0,875 metros de largura.
∙ As grades laterais de proteções possuem 0,39 metros de altura 1,350 metros de compri-mento e são removíveis.
∙ Contém painel eletrônico portátil do controle das funções, ligado por meio de cabo, per-mitindo o acesso em qualquer lado da cama.
∙ A cama é alimentada a partir da rede elétrica de 110 V/ 60Hz.
∙ A capacidade é de pessoas de até 150 kg.

Capítulo 3. Descrição de Alguns Sistemas Propostos 26
3.4 Mouse controlado por sistemas de pressão (sopro)
Devido a similaridade de comando, em relação ao projeto proposto neste trabalho deconclusão de curso, é apresentado o "mouse controlado por sistemas de pressão (sopro)".
A aquisição do sinal é feita através de dois sensores de pressão. Os dados dos sensoressão amplificados, convertidos para forma digital e enviados para o computador através de ummicrocontrolador. A comunicação entre o computador e o equipamento é feita através de umaporta USB.
No computador, um software especializado faz a interpretação dos sinais recebidos.Para que seja possível a digitação de textos, o sistema também disponibiliza um teclado virtual.De forma geral, os usuários podem realizar as mais diversas tarefas, como navegar na Internet,escrever e-mails e digitar textos (CÚNICO; CUNHA, 2008).
A Fig. 6 mostra a tela de configuração do software de controle do mouse.
Figura 6 – Tela de configuração (CÚNICO; CUNHA, 2008)
Opções de configuração:
∙ Velocidade do clique;
∙ Velocidade de deslocamento do cursor;
∙ Velocidade do clique duplo;
∙ Selecionar qual mangueira vai ser responsável por qual movimento;
∙ Escolher se o clique será feito através de um sopro ou uma sucção.
A Fig. 7 ilustra o sistema.

Capítulo 3. Descrição de Alguns Sistemas Propostos 27
Figura 7 – Sistema desmontado (CÚNICO; CUNHA, 2008)
3.5 Interface de sopro e sucção para controle de cadeira
de rodas
O protótipo consiste no controle de uma cadeira de rodas por sopro e sucção.Inicialmente, o transdutor de pressão recebe o sopro ou a sucção do usuário. O sinal de
saída do transdutor é condicionado para ser processado na unidade de controle. O microcon-trolador, processa o sinal oriundo do condicionador, identificando se o comando recebido foide sopro ou sucção e envia os sinais elétricos de saída para os dois estágios seguintes, que irãocomandar o movimento da cadeira e dar um retorno visual acerca do estado atual da condu-ção (display de LEDs) ao condutor. Um demultiplexador recebe sinais de duas portas de saídado microcontrolador para acender o LED correto no display, indicando estado de repouso dacondução, ou uma velocidade numa dada direção. O controle do motor é feito por duas ondasPWM geradas pelo microcontrolador (FERREIRA, 2008).
O sistema possui as seguintes opções de direções: seguir para frente, seguir para trás,virar à direita, virar à esquerda e mais quatro outras direções. E três velocidades possíveis:velocidade baixa, velocidade media e velocidade alta. Cada direção pode ser percorrida por trêsvelocidades, totalizando vinte e quatro opções.

Capítulo 3. Descrição de Alguns Sistemas Propostos 28
Estas opções estão ilustradas no display de LEDs, da Fig. 19.
Figura 8 – Display de LEDs (FERREIRA, 2008)
A seleção da direção se dá através de sopros e sua mudança no display de LEDs ocorreciclicamente, segundo o sentido horário de movimento no display.
A escolha da velocidade se dá através de sucções sucessivas, indo da velocidade derepouso até a maior velocidade.
Portanto, após a determinação da direção, da velocidade e de um tempo pré-estabelecido,o movimento tem início.
Para encerrar o movimento deve-se realizar dois sopros consecutivos, ou sucções até avelocidade de repouso.
A Fig. 9 mostra o protótipo da cadeira.

Capítulo 3. Descrição de Alguns Sistemas Propostos 29
Figura 9 – Protótipo montado (FERREIRA, 2008)

Parte III
Experimento funcional da cama e seuModelo Elétrico

31
4 Descrição do Sistema
O diagrama de blocos do sistema é esquematizado conforme a Fig. 10. Posteriormente,serão descritos os detalhes de cada bloco.
A Fig. 10 ilustra o conceito geral de funcionamento do sistema.
Figura 10 – Diagrama de blocos ilustrando o conceito do funcionamento do sistema proposto

Capítulo 4. Descrição do Sistema 32
O primeiro bloco, denominado transdutor de pressão, recebe o sopro ou a sucção etransforma em tensão elétrica. O segundo bloco, o circuito de condicionamento, é usado paraadequar o sinal da saída do transdutor de pressão, gerando dois sinais binários, um represen-tando o sopro e o outro a sucção, a ser processado pelo microcontrolador. Ele é constituídode três circuitos: o circuito amplificador de instrumentação, que fornece um ganho ao sinal desaída do transdutor de pressão, o circuito comparador, que tem a função de gerar os dois sinaisbinários, e o circuito divisor de tensão, que diminui a amplitude dos sinais binários à nível deoperação do microcontrolador. O terceiro bloco, o microcontrolador, processa os dois sinaisbinários do bloco anterior, identificando se ação recebida foi de sopro ou sucção e envia ossinais elétricos de saída para o bloco de acionamento. O quarto bloco, circuito de acionamento,é responsável por acionar, com auxílio de um painel visual (display de LEDs), as quatro tarefasdo sistema. Ele possui dois circuitos acionadores: o circuito acionador do motor, que aciona omesmo utilizando a ponte H, e o acionador das demais tarefas, que as aciona através do relê. Oquinto bloco, o software, consiste na lógica de controle das tarefas do sistema.
4.1 Transdutor de Pressão
O transdutor de pressão é o dispositivo responsável em transformar o sopro ou sucçãoem tensão elétrica. O transdutor utilizado no projeto foi o MPX5100 - Case 867C.
Os valores de tensão na saída do transdutor está esquematizado na tabela 2.
𝑉𝑂𝑈𝑇−𝑆𝐸𝑁𝑆𝑂𝑅(𝑚𝑉 )Nenhum Estímulo 191,5
Sopro 350Sucção 70
Tabela 2 – Valores de tensão na saída do sensor
4.2 Circuito de Condicionamento
O bloco de condicionamento do sinal é sub-dividido em três partes: amplificador deinstrumentação, comparador de tensão e divisor de tensão.
4.2.1 Amplificador de Instrumentação
O amplificador utilizado foi o de instrumentação INA122. Ele foi escolhido por motivosdidáticos e de aprendizagem.
Conforme a tabela 2, o sinal analógico na saída do transdutor de pressão varia aproxi-madamente de 70𝑚𝑉 a 190𝑚𝑉 , portanto o uso do amplificador se faz necessário.
A tabela 3 mostra os valores experimentais de tensão na saída do amplificador de ins-trumentação.

Capítulo 4. Descrição do Sistema 33
𝑉𝑂𝑈𝑇−𝐼𝑁𝐴122(𝑉 )Nenhum Estímulo 2,25
Sopro 4,2Sucção 0,854
Tabela 3 – Valores de tensão na saída do sensor e do amplificador de instrumentação
4.2.2 Comparador de Tensão
O amplificador operacional escolhido foi o LM324.O microcontrolador necessita de dois sinais binários, representando sopro e sucção.
Porém o sinal proveniente do amplificador de instrumentação é analógico, devendo ser trans-formado em digital. Para isto são utilizados dois comparadores de tensão. Um comparador gerao sinal binário que representa o sopro, este será denominado comparador sopro. O outro com-parador gera o sinal binário da sucção, que será chamado de comparador sucção.
Comparador soproO comparador sopro irá transformar o sinal analógico da saída do amplificador de instru-
mentação em sinal digital, podendo ser 0𝑉 ou 5𝑉 . Quando ocorrer sopro a saída do comparadordever saturar positivamente, ou seja, 5𝑉 . Se não ocorrer nenhum estímulo a saída dever ser 0𝑉 .
A entrada não inversora do comparador representa a tensão de saída do amplificador deinstrumentação e a inversora representa a tensão de referência, como ilustra a Fig. 11.
Figura 11 – Comparador Sopro
Para saturar positivamente, a entrada não inversora tem que ser maior do que a entradainversora. Como a tensão da saída do amplificador de instrumentação, quando ocorre sopro, é4, 2𝑉 , a tensão de referência deve ser menor do que este valor. A tensão escolhida foi 3, 3𝑉 .

Capítulo 4. Descrição do Sistema 34
A tabela 4 mostra a tensão experimental na saída do comparador sopro para os três tiposde ações.
𝑉𝑆𝑂𝑃𝑅𝑂(𝑉 )Nenhum Estímulo 0
Sopro 4,44Sucção 0
Tabela 4 – Tensão na saída dos comparador sopro
Comparador sucçãoDa mesma maneira que o comparador sopro, o comparador sucção irá transformar o
sinal da saída do amplificador de instrumentação em 0𝑉 ou 5𝑉 . Quando ocorrer sucção, a saídado comparador dever saturar positivamente, ou seja, 5𝑉 . Se não ocorrer nenhum estímulo asaída dever ser 0𝑉 .
A entrada não inversora do comparador representa a tensão de referência e a inversorarepresenta a tensão de saída do amplificador de instrumentação, como ilustra a Fig. 12.
Figura 12 – Comparador Sucção
Para saturar positivamente, a entrada inversora tem que ser menor do que a entrada não-inversora. Como a tensão da saída do amplificador de instrumentação quando ocorre sucção é0, 854𝑉 , a tensão de referência deve ser maior do que este valor. A tensão escolhida foi 1𝑉 .
A tabela 5 mostra a tensão experimental na saída do comparador sucção para os trêstipos de ações.
𝑉𝑆𝑈𝐶𝑂(𝑉 )Nenhum Estímulo 0
Sopro 4,44Sucção 0
Tabela 5 – Tensão na saída dos comparador sucção

Capítulo 4. Descrição do Sistema 35
4.2.3 Divisor de Tensão
O sinal digital gerado pelos comparadores possuem amplitude maior do que as portasdo microcontrolador suportam, portanto utilizou-se dois divisores de tensão. A Fig. 13 ilustra odivisor.
Figura 13 – Divisor de tensão
Aplicando a equação do divisor de tensão:
𝑉𝑂𝑈𝑇 = 4, 44 2,2𝑘2,2𝑘+820
= 3, 205𝑉
Assim, a tensão resultante está apta à ser aplicada nas portas do microcontrolador, comomostra a tabela 6.
𝑉𝑆𝑂𝑃𝑅𝑂(𝑉 ) 𝑉𝑆𝑈𝐶(𝑉 )Nenhum Estímulo 0 0
Sopro 3,2 0Sucção 0 3,2
Tabela 6 – Valores de tensão na saída dos divisores
4.2.4 Desenvolvimento da PCI
Primeiramente, foram feitos testes em laboratório. O circuito de condicionamento jun-tamente com o transdutor de pressão foi montado em protoboard, como ilustra a Fig. 14.
Como os resultados experimentais estavam de acordo com o esperado, deu-se início aconstrução da PCI.

Capítulo 4. Descrição do Sistema 36
Figura 14 – Circuito montado em protoboard
Inicialmente foi montado o esquema eletrônico do circuito de condicionamento no soft-
ware de simulação Orcad, como mostra a Fig. 15.
Figura 15 – Esquemático do circuito de condicionamento
Em seguida, o circuito foi roteado. A Fig. 16 ilustra o layout da placa.

Capítulo 4. Descrição do Sistema 37
Figura 16 – Layout da PCI
A Fig. 17 mostra a placa de circuito impresso do circuito aquisição e condicionamentodo sinal:
Figura 17 – Placa do circuito impresso
4.3 Microcontrolador
O microcontrolador escolhido para este projeto foi o STM32F100RBT6B. Este é umdispositivo de arquitetura ARM, da família Cortex-M3 de 32 bits, fabricado pela ST.

Capítulo 4. Descrição do Sistema 38
Este dispositivo processa, em duas portas de entrada, os dois sinais digitais oriundos dobloco de condicionamento, mais especificamente do divisor de tensão, e controla as tarefas queserão desempenhadas pelo sistema.
A tabela 7 mostra os pinos do microcontrolador que foram utilizados:
PINO GPIO ENTRADA/SAÍDASOPRO 3 GPIOA ENTRADA
SUCÇÃO 4 GPIOA ENTRADAFUNÇÃO_AMBIENTE 0 GPIOC SAÍDA
FUNÇÃO_LAZER 1 GPIOC SAÍDAFUNÇÃO_NECESSIDADE 2 GPIOC SAÍDA
FUNÇÃO_MOTOR 3 GPIOC SAÍDAESTADO_FUNÇÃO_AMBIENTE 4 GPIOC SAÍDA
ESTADO_FUNÇÃO_LAZER 5 GPIOC SAÍDAESTADO_FUNÇÃO_NECESSIDADE 6 GPIOC SAÍDA
INCLINAÇÃO_CAMA_0𝑂 7 GPIOC SAÍDAINCLINAÇÃO_CAMA_30𝑂 10 GPIOC SAÍDAINCLINAÇÃO_CAMA_45𝑂 11 GPIOC SAÍDAINCLINAÇÃO_CAMA_60𝑂 12 GPIOC SAÍDA
ACIONAR_MOTOR 13 GPIOB SAÍDAACIONAR_MOTOR 14 GPIOB SAÍDAACIONAR_MOTOR 15 GPIOB SAÍDA
Tabela 7 – Pinos utilizados
4.4 Software
O bloco software é sub-dividido em quatro partes: display de LEDs, funcionamento dosistema, descrição do programa e posicionador por temporização.
4.4.1 Display de LEDs
O sistema possui, resumidamente, dois modos. Um modo é usado para indicar o estadoatual do sistema e o outro sinaliza se o estado está sendo executado ou não.
Para visualizar o estado atual e se o mesmo está ativo ou não é necessário um display
circular. Esse display é formado por onze LEDs. Os LEDs maiores (azul) indicam o estado atuale os menores (vermelho) simbolizam se o estado atual está sendo executado pelo sistema. Onzeresistores de 100Ω são utilizados para limitar a corrente sobre os LEDs.

Capítulo 4. Descrição do Sistema 39
O layout do roteamento do display está ilustrado na Fig. 18.
Figura 18 – Layout do display de LEDs

Capítulo 4. Descrição do Sistema 40
A Fig. 19 mostra o display de LEDs.
Figura 19 – Display de LEDs
4.4.2 Funcionamento do Sistema
O funcionamento do sistema é baseado em uma máquina de estado. Ela possui doisblocos. O primeiro bloco é o de transição dos estados e o segundo é o bloco de ações no estado.
O bloco de transição dos estados é utilizado para mudar o estado do programa, medianteuma ação pré determinada. Neste caso, as ações que mudam o estado são as interrupções daEXTI e do TIM.
O bloco de ações no estado é aquele que testa qual estado o programa se encontramomentaneamente, assim que o teste for verdadeiro o software executa suas linhas de código.
A Fig. 20 ilustra o funcionamento de uma máquina de estado.Neste projeto foi utilizada uma máquina de quatro estados, como mostra a tabela 8:
Estado 1 MotorEstado 2 NecessidadeEstado 3 LazerEstado 4 Ambiente
Tabela 8 – Estados da máquina
O bloco de transição é constituído por duas lógicas: uma que escolhe o estado a serexecutado pelo software e a outra que ativa esta função escolhida. Para que o programa execute

Capítulo 4. Descrição do Sistema 41
Figura 20 – Máquina de estado
um determinado estado é preciso escolher a função que se queira e em seguida permitir que obloco de ação a ative. Observe que, para ativar ou desativar uma determinada tarefa seu estadodeve estar selecionado.
As transições dos estados da máquina é realizada por duas funções de interrupção doEXTI. Nos dois casos a EXTI é configurada para gerar uma interrupção em borda de subida.Os sinais externos que geram estas bordas são: sopro e sucção. Ou seja, quando o usuáriosopra, o programa é interrompido e a função de interrupção do EXTI 1 é executada. Da mesmamaneira ocorre com a sucção, o programa é interrompido e a função de interrupção do EXTI 2é executada.
A função de interrupção acionada pela sucção é utilizada para escolher um estado e afunção acionada pelo sopro é a que ativa ou desativa este estado.
O projeto possui dois LEDs para cada tarefa, como ilustra a Fig. 21:
Figura 21 – Máquina de estado do projeto
Os LEDs maiores simbolizam os estados a serem escolhidos e os LEDs menores se os

Capítulo 4. Descrição do Sistema 42
mesmos estão ativos ou não. Na Fig. 21, observa-se que a função motor esta selecionada, porémnão ativada.
Agora, suponha-se que o usuário realizou duas sucções e um sopro, em relação ao es-quema anterior. Situação ilustrada na Fig. 22:
Figura 22 – 2 sucções e 1 sopro
A Fig. 23 mostra o esquemático se ocorrer mais uma sucção.
Figura 23 – 1 sucção
Observa-se que o estado selecionado foi de Lazer para Ambiente , porém o lazer conti-nuou ativo. Se quisesse desativar a tarefa Lazer teria que realizar um sopro com Lazer selecio-nado.
A lógica de acionamento das inclinações da cama é a mesma, porém foi adicionado,além de sopro e sucção, dois sopros consecutivos. Quando o estado motor está selecionado,então a mesma pode ser ativada ou não. Se for ativado, tem-se a opção de movimentá-lo nosentido horário ou anti-horário, inclinação crescente ou decrescente, respectivamente. Para in-clinar a cama no sentido crescente basta ao usuário realizar um sopro, e se preferir o sentido

Capítulo 4. Descrição do Sistema 43
anti-horário deve-se realizar dois sopros consecutivos. É razoável afirmar que existe uma submáquina de estado dentro da função motor, como ilustra a Fig. 24:
Figura 24 – Estado das inclinações do motor
A função motor está selecionada e o estado de inclinação 0o está ativo, pois é a condiçãoinicial da cama.
Se ocorrer um sopro a cama se inclinará 30o, como mostra a Fig. 25:
Figura 25 – Estado da cama após um sopro
Da mesma maneira, se o usuário realizar dois sopros a cama volta para seu estado inicial,como ilustra a Fig. 24.
4.4.3 Descrição do Programa
Nesta seção será explicado o funcionamento do programa por meio de fluxogramas.Primeiramente, deve ser explicado os modos de operação do núcleo do processador.
O núcleo Cortex-M3 possui dois modos de operação: Thread e Handler. O modo Thread équando o processador executa o programa no loop do sistema embarcado (loop infinito). Omodo Handler é quando o processador está executando uma rotina de interrupção ou uma rotinaque trata de uma exceção do sistema. O programa possui três Handlers: sopro, sucção e TIM.Como já foi descrito, o programa desenvolvido possui os dois modos de operação.
Como já explicado no funcionamento do sistema, a máquina de estado possui dois blo-cos: ação e transição. O bloco transição pode ser dividido em dois sub-blocos, o que faz atransição dos estados e o que permite que o bloco de ação execute o estado atual do sistema.
Fazendo uma conversão dos blocos da máquina de estado para os modos do programa,tem-se: O bloco de ação equivale ao modo Thread. Os blocos de transição e permissão equiva-lem ao Handler sucção e Handler sopro, respectivamente.
Serão apresentados cinco fluxogramas: Handler sopro, Handler sucção, Thread, Han-
dler TIM e o execução do MOTOR.O Handler sopro (bloco de permissão) é utilizado para atualizar uma variável de estado,
ela é responsável por permitir que o modo Thread (bloco de ação) execute o estado atual do

Capítulo 4. Descrição do Sistema 44
sistema. O Handler sucção (bloco de transição) é a função que realiza a transição de estados,atualizando o estado atual do sistema. O Handler TIM é responsável por desligar o motor naangulação correta. O Thread (bloco de ação) é o loop embarcado do sistema. Se a variável deestado permitir (através de um sopro), o programa testa qual é o estado atual da máquina eexecuta esse estado (tarefa). O bloco de execução da tarefa MOTOR é o que liga o motor einicia o contador para que no final do tempo de contagem o motor seja desligado, através doHandler TIM. O tempo que o contador permanece contando é o tempo que a cama leva parainclinar no ângulo correto.
4.4.3.1 Handler Sopro (bloco de permissão)
O fluxograma que representa o modo Handler sopro é ilustrado na Fig. 26.
Figura 26 – Fluxograma no modo Handler do sopro
Esta função de interrupção é responsável por permitir que o bloco de ação execute oestado atual do sistema. A permissão é controlada por uma variável de estado denominadaATIVA_ESTADO. O ATIVA_ESTADO possui dois estados possíveis: ON e OFF. Portanto,segundo o fluxograma, quando ocorrer um sopro a função de interrupção Handler sopro seráexecutada e a variável de estado ATIVA_ESTADO mudará para ON. A implicação dessa mu-dança será vista no fluxograma Thread (bloco de ação).
Outra utilidade dessa interrupção se dá quando o estado atual do sistema é MOTOR.A variável NUMERO_SOPRO indica o sentido da inclinação. Se NUMERO_SOPRO é igual aum, a inclinação é crescente; se for maior do que um, a inclinação é decrescente. Então, quandoocorre um sopro e o estado atual é MOTOR a variável NUMERO_SOPRO incrementa e ficaigual a um. Se dentro de um tempo pré determinado ocorrer outro sopro a variável de contagemincrementa novamente, resultando em dois. Os detalhes serão vistos no bloco de execução doestado MOTOR.
Assim que o Handler sopro é executado, o fluxo de execução retorna para o modoThread (bloco de ação).

Capítulo 4. Descrição do Sistema 45
4.4.3.2 Handler Sucção (bloco de transição)
O fluxograma da Fig. 27 ilustra o Handler da sucção.
Figura 27 – Fluxograma no modo Handler da sucção
Esta função de interrupção é utilizada para mudar o estado atual do sistema. Porém, istonão significa que o programa irá executar sua tarefa, pois, para isto, é necessário que a variávelde estado ATIVA_ESTADO seja ON e isto quem realiza é a função de interrupção do sopro(Handler sopro).

Capítulo 4. Descrição do Sistema 46
4.4.3.3 Handler TIM
O fluxograma da Fig. 28 ilustra o Handler do TIM.
Figura 28 – Fluxograma no modo Handler do TIM
Assim que a função MOTOR é selecionada (estado atual MOTOR + Handler sopro), asconfigurações da interrupção do TIM são ativadas e a cama começa inclinar. Enquanto ocorre oprocesso de inclinação, no sentido horário ou anti-horário, o contador está em fase de contagem.Quando o valor do registrador contagem for igual ao do registrador comparador, ocorre umainterrupção do TIM. Na função de interrupção do TIM, as configurações da interrupção sãodesativadas e o motor é desligado na angulação determinada.
O funcionamento da interrupção do TIM encontra-se no apêndice B.2.3.
4.4.3.4 Thread (bloco de ação)
O fluxograma da Fig. 29 ilustra o programa no modo Thread.Observando o fluxograma, nota-se que o fluxo de execução realiza infinitos testes na
variável de estado ATIVA_ESTADO. Quando ela for ON, o programa verifica e encontra qualé o estado atual do sistema, executa sua respectiva tarefa e muda o valor da variável paraOFF, em seguida, o programa retorna para o início do loop e volta a testar a variável. ComoATIVA_ESTADO mudou para OFF o programa não testa e nem executa nenhuma tarefa do sis-tema, ou seja, o software fica, simplesmente, testando a variável de estado ATIVA_ESTADO.Assim fica, até que, por meio de uma interrupção do sopro, a variável ATIVA_ESTADO mudapara ON e realiza o ciclo descrito anteriormente.

Capítulo 4. Descrição do Sistema 47
Figura 29 – Fluxograma no modo Thread
4.4.3.5 Bloco de execução do Motor
O fluxograma da Fig. 30 ilustra o bloco de execução do estado MOTOR. No Handler
sopro, representado pela Fig. 26, a variável ATIVA_ESTADO vai para ON e, se o estado damáquina for motor, a variável NUMERO_SOPRO é incrementada, indo para 1. Portanto, anali-sando o fluxograma da Fig. 29 e 26, o fluxo de execução irá processar este bloco.
O delay é um loop finito que dura aproximadamente 3s. Sua função é esperar este tempoe ao final verificar qual é a quantidade de sopros. Se durante os 3s ocorrer mais Handler dosopro, a variável NUMERO_SOPRO passará de 1 para 2. Se o número de sopros for 1 a variávelESTADO_CAMA é ON, se for 2 ela será OFF. O ESTADO_CAMA igual a ON significa que acama irá inclinar e igual a OFF ela desinclina. A configuração da interrupção do TIM faz comque o contador inicialize a contagem, até ocorrer sua interrupção, desconfigurando a interrupçãoe parando a contagem. O tempo de contagem é o tempo que o motor fica em funcionamento.

Capítulo 4. Descrição do Sistema 48
Figura 30 – Fluxograma do bloco de execução do motor
Terminado o ciclo de execução, o programa retorna ao início do loop do sistema embarcado.
4.4.4 Posicionador por Temporização
O usuário pode escolher três níveis de inclinação da cama: 30o, 45o ou 60o.O grau de inclinação da cama é controlado por software. Quando o motor começa a
girar, um contador interno do microcontrolador inicia uma contagem, e conta até a inclinaçãoda cama chegar ao grau desejado. Neste momento, o contador encerra a contagem e o motorpara de girar, posicionando a cama na inclinação desejada.
O nível de inclinação da cama é controlado pela interrupção do TIM do microcontro-lador. Quando a tarefa "movimentar cama"é acionada, o software irá habilitar as configuraçõesdo TIM e setar a porta que aciona o motor. A partir desse instante o contador do TIM começaa contar de 0 até o valor do autoreload. Assim que essa contagem se igualar ao valor do regis-

Capítulo 4. Descrição do Sistema 49
trador de comparação, o programa executa, instantaneamente, a função de interrupção do TIM.Esta função desabilita as configurações do TIM, assim como, reseta a porta do micro, fazendocom que o motor pare de funcionar e o registrador de contagem do TIM pare de contar. Quandoa opção inclinação crescente é acionada, um sopro, ou inclinação decrescente, dois sopros, ociclo descrito acima se repetirá.
A inclinação da cama pode ser realizada utilizando informações de funcionamento dopróprio motor, como velocidade angular. Ou então, pode-se contar o tempo de cada inclinaçãode forma experimental. O resultado em ambas as maneiras será o tempo em que o motor da camapermanecerá girando. Para programar esse tempo deve-se modificar os valores dos registradoresPSC (Prescaler) e CNT (Counter) do periférico TIM do micro.
Supondo que o motor leve 0,5 segundos para sair de uma posição inicial de 0o e chegara 30o, então deve-se programar os registradores com os valores calculados a seguir.
Adotando um valor de 2400 para o registrador Prescaler.
𝐶𝐾_𝐶𝑁𝑇 = 𝐶𝐾_𝑃𝑆𝐶𝑃𝑆𝐶
𝐶𝐾_𝐶𝑁𝑇 = 24𝑀2400
= 10𝑘𝐻𝑧
𝑇_𝐶𝑁𝑇 = 1𝐶𝐾_𝐶𝑁𝑇
𝑇_𝐶𝑁𝑇 = 10−4
𝐶𝑁𝑇 = 𝑡𝑇_𝐶𝑁𝑇
𝐶𝑁𝑇 = 0,510−4 = 5000
onde:
∙ CK _ PSC é a frequência de operação do núcleo do processador
∙ CK _ CNT é a frequência de operação dividida pelo Prescaler
∙ T _ CNT é o tempo que o contador leva para realizar uma contagem
Deve-se ter um certo cuidado com os valores calculados para os registradores PSC eCNT, pois eles são de 16 bits, ou seja, seu máximo valor é 65536.
Precisam ser calculados três valores de tempo: 0o a 30o, 30o a 45o e 45o a 60o.
4.5 Circuitos de Acionamento
O sistema possui dois blocos de acionamento: o acionamento do motor e o acionamentodas outras tarefas.

Capítulo 4. Descrição do Sistema 50
O microcontrolador controla os acionamentos do sistema enviando sinais ao bloco deacionamento que o usuário deseja ativar. Como a corrente que flui dos pinos de saída do con-trolador possuem pequenas amplitudes (20𝑚𝐴) é preciso inserir circuitos amplificadores decorrente.
4.5.1 Acionamento do Motor
Neste projeto foi utilizado o circuito integrado L293d.Para acionar o motor DC é necessário uma corrente maior do que a porta do microcon-
trolador pode fornecer. Por isso, utiliza-se o circuito ponte H para amplificar a corrente de saídado controlador. Além disso, a ponte H torna possível que o motor gire nos dois sentidos.
Dois pinos de saída do microcontrolador são ligados à duas entradas (2 e 7) do circuitoeletrônico ponte H (CI L293d). Então, o sinal recebe ganho de corrente e é conectado ao motor.O esquemático que mostra as ligações entre o microcontrolador, o CI L293d e o motor estãoilustradas na Fig. 31.
Figura 31 – Acionamento do motor
O sentido de giro do motor depende dos dois sinais de saída do processador. Como é umsinal binário, existem quatro possíveis combinações. As combinações e os respectivos sentidosde giro do motor estão ilustrados na tabela 9.
Pin 1 Pin 2 Pin 7 Sentido de giroalto baixo alto horárioalto alto baixo anti-horárioalto baixo baixo paradoalto alto alto parado
baixo - - parado
Tabela 9 – Condições de funcionamento do motor (Texas Instruments, 2004)
Capítulo 4. Descrição do Sistema 51
4.5.2 Acionamento das Outras Tarefas
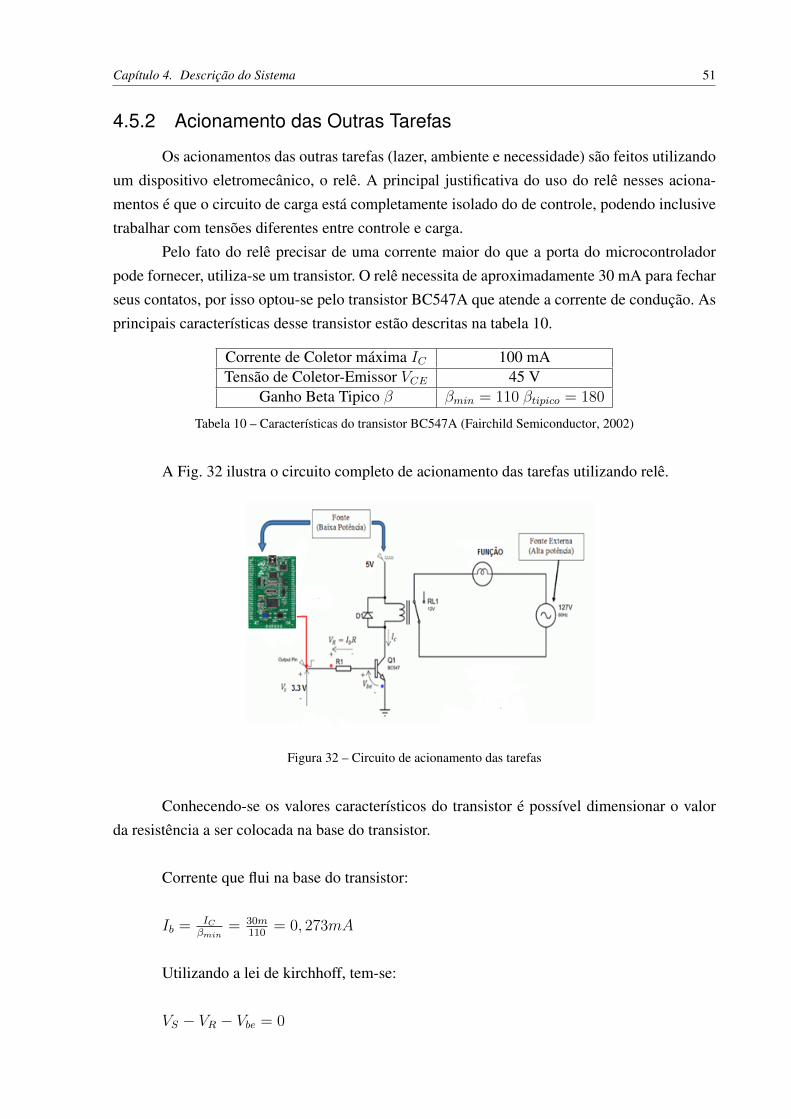
Os acionamentos das outras tarefas (lazer, ambiente e necessidade) são feitos utilizandoum dispositivo eletromecânico, o relê. A principal justificativa do uso do relê nesses aciona-mentos é que o circuito de carga está completamente isolado do de controle, podendo inclusivetrabalhar com tensões diferentes entre controle e carga.
Pelo fato do relê precisar de uma corrente maior do que a porta do microcontroladorpode fornecer, utiliza-se um transistor. O relê necessita de aproximadamente 30 mA para fecharseus contatos, por isso optou-se pelo transistor BC547A que atende a corrente de condução. Asprincipais características desse transistor estão descritas na tabela 10.
Corrente de Coletor máxima 𝐼𝐶 100 mATensão de Coletor-Emissor 𝑉𝐶𝐸 45 V
Ganho Beta Tipico 𝛽 𝛽𝑚𝑖𝑛 = 110 𝛽𝑡𝑖𝑝𝑖𝑐𝑜 = 180
Tabela 10 – Características do transistor BC547A (Fairchild Semiconductor, 2002)
A Fig. 32 ilustra o circuito completo de acionamento das tarefas utilizando relê.
Figura 32 – Circuito de acionamento das tarefas
Conhecendo-se os valores característicos do transistor é possível dimensionar o valorda resistência a ser colocada na base do transistor.
Corrente que flui na base do transistor:
𝐼𝑏 = 𝐼𝐶𝛽𝑚𝑖𝑛
= 30𝑚110
= 0, 273𝑚𝐴
Utilizando a lei de kirchhoff, tem-se:
𝑉𝑆 − 𝑉𝑅 − 𝑉𝑏𝑒 = 0
Capítulo 4. Descrição do Sistema 52
3, 3 − 0, 91𝑚 ·𝑅− 0, 7 = 0
𝑅 = 3,3−0,70,273𝑚
= 9, 52𝑘Ω
Uma vez que o valor de Beta varia em função de 𝑉𝐶𝐸 e da temperatura, é convenienteescolher um valor comercial menor do que o valor encontrado:
𝑅1 = 9, 1𝑘Ω
O diodo D1 em paralelo com a bobina do relê tem a função de suprimir a correnteinduzida quando se desliga o relê. O diodo encontra-se inversamente polarizado quando o tran-sistor conduz, mas quando o transistor é desligado o diodo é polarizado diretamente pela tensãoinduzida na bobina, fornecendo um caminho para a corrente de desmagnetização.
Portanto, quando deseja-se acionar alguma função, um pino do microcontrolador é le-vado a nível lógico alto (3,3 V), via software, polarizando o transistor. Isso faz com que circuleuma corrente (𝐼𝐶) na bobina do relê que é suficientemente grande a ponto de produzir um campomagnético que produz uma força eletromagnética que atrai os contatos elétricos, fechando o cir-cuito conectado a ele.
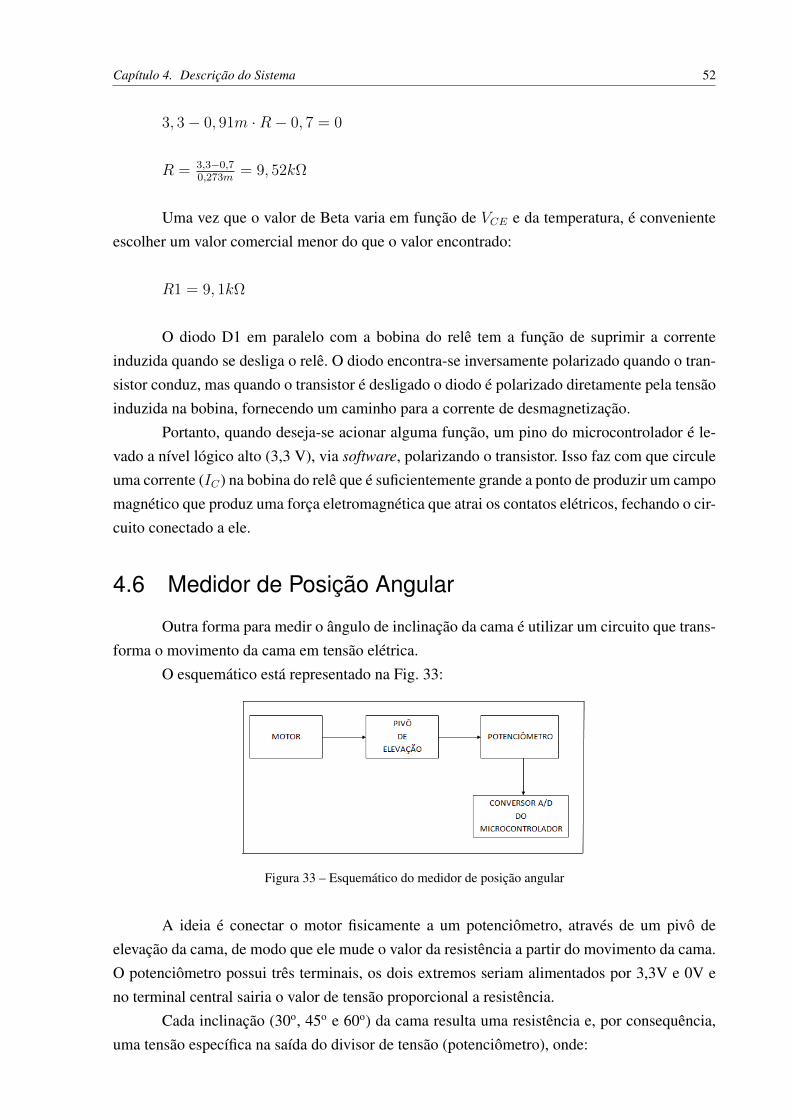
4.6 Medidor de Posição Angular
Outra forma para medir o ângulo de inclinação da cama é utilizar um circuito que trans-forma o movimento da cama em tensão elétrica.
O esquemático está representado na Fig. 33:
Figura 33 – Esquemático do medidor de posição angular
A ideia é conectar o motor fisicamente a um potenciômetro, através de um pivô deelevação da cama, de modo que ele mude o valor da resistência a partir do movimento da cama.O potenciômetro possui três terminais, os dois extremos seriam alimentados por 3,3V e 0V eno terminal central sairia o valor de tensão proporcional a resistência.
Cada inclinação (30o, 45o e 60o) da cama resulta uma resistência e, por consequência,uma tensão específica na saída do divisor de tensão (potenciômetro), onde:

Capítulo 4. Descrição do Sistema 53
𝑉60o > 𝑉45o > 𝑉30o
e0 ≤ 𝑉60o , 𝑉45o , 𝑉30o ≤ 3, 3𝑉
O sinal resultante do divisor de tensão seria conectado ao conversor analógico digital(A/D) do microcontrolador. O A/D iria converter a tensão analógica em digital a cada período detempo pré-determinado. Então, o loop principal testa continuamente se a tensão já convertida éigual a tensão correspondente de algum ângulo (𝑉60o , 𝑉45o , 𝑉30o). Se a condição for verdadeira,o programa desliga o motor.
Por exemplo, o usuário escolhe a opção inclinar a cama de 0o para 30o. A resistência dopotenciômetro cresce a medida que a cama se inclina e, consequentemente a tensão do divisortambém vai aumentando. Quando essa tensão for igual a tensão pré-estabelecida do ângulo de30o (𝑉30o) o motor vai parar de funcionar.
A seguir será explicado, resumidamente, o funcionamento do conversor A/D.O conversor A/D presente no STM32F100xx, são do tipo aproximação sucessiva e pos-
suem um circuito de amostragem ou "sample and hold"em sua entrada.O circuito equivalente do "sample and hold"é constituído por, basicamente, um capaci-
tor e uma resistência de entrada. O sinal a ser convertido deve carregar totalmente o capacitor,assim seu nível de tensão será bem próximo do sinal amostrado. Após isto o conversor de 12bits irá adquirir o sinal, convertendo-o para o domínio digital.
O tempo de conversão é a soma do tempo de amostragem e do tempo de aquisição. Otempo de amostragem é o tempo necessário para o circuito de "sample and hold"obter umaamostra confiável do sinal. O tempo de aquisição é o tempo necessário para que o conversorrealize as aproximações sucessivas e converta o sinal amostrado pelo "sample and hold"em umvalor digital de 12 bits.

Parte IV
Discussão e Conclusão

55
5 Conclusão
5.1 Discussão dos Resultados
O protótipo que será desenvolvido irá melhorar significativamente a qualidade de vidados indivíduos tetraplégicos devido as várias tarefas que o sistema poderá executar.
O bloco de recepção e condicionamento do sinal funcionou exatamente como o espe-rado. Ele gera em suas duas saídas dois sinais binários (0 ou 3,3V) representando o sopro e asucção que aciona as tarefas controladas pelo micro. Porém, durante os testes ocorreu um pro-blema. Os dois fios que eram conectados às duas portas de entrada do micro estavam atuandocomo duas antenas, gerando interferência na placa de LEDs. A solução para este problema foia utilização de dois fios envolvidos por uma malha de cobre. Esta malha é conectada ao terrafazendo com que toda interferência eletromagnética flua por lá, deixando o sistema imune àinterferência.
O Software funcionou de forma condizente com o esperado. As transições dos estadosda máquina foram realizadas pela sucção, e as ativações dos estados foram realizados pelosopro.
O posicionador por temporização atuou de forma correta. O motor DC girava duranteum tempo programado e parava de girar ao final deste tempo. Não foi possível observar o po-sicionador por temporização movimentar uma mini-cama, pois o motor DC não possuía torquesuficiente para movimentar a mini-cama. As opções para solucionar o problema são: utilizaruma caixa de redução ou substituir o motor DC pelo servo motor ou pelo motor de passo.

Capítulo 5. Conclusão 56
Caixa de ReduçãoA caixa de redução consiste em uma conjunto de engrenagens. O objetivo da caixa de
redução é diminuir a velocidade e aumentar o torque do motor.A figura 34 ilustra um motor DC acoplado a uma caixa de redução.
Figura 34 – Motor DC com caixa de redução
Servo MotorO Servo motor apresenta movimento proporcional a um comando, ou seja: recebe um
sinal de controle, verifica a posição atual e atua no sistema indo para a posição desejada. Estesmotores possuem liberdade de apenas 180o.
A figura 35 ilustra o servo motor.
Figura 35 – Servo motor

Capítulo 5. Conclusão 57
Motor de PassoO motor de passo é usado quando algo tem que ser posicionado muito precisamente ou
rotacionado em um ângulo exato, como será o caso da cama.A figura 36 ilustra o motor de passo.
Figura 36 – Motor de passo
O posicionador por temporização da cama será realizado pelo periférico TIM do micro.Esta medida pode ser realizada utilizando informações de funcionamento do próprio motor,como velocidade angular. Ou então, pode-se contar o tempo de cada inclinação de forma ex-perimental. Como o tempo de funcionamento do motor é programável, pode-se programar osistema para três diferentes angulações de acordo com o gosto do usuário. Como o protótipofinal ainda não está pronto não é possível estabelecer o tempo necessário para cada variação deinclinação.
Neste projeto foram implementadas quatro tarefas que o usuário pode executar, porémo software desenvolvido é baseado em uma Máquina de Estados. Isto torna o sistema flexívelà adição de outros estados. Para isto, deve-se adicionar outro estado ao bloco de transição e aobloco de ação. Para finalizar à adição de mais um estado ao sistema, inclui-se um relê referenteao acionamento da tarefa. Uma tarefa muito interessante que pode, futuramente, ser incluída noprojeto seria um sistema de atendimento de telefone, nele o usuário poderia atender o telefone,utilizando o sopro e a sucção.
O programa desenvolvido é não bloqueante, ou seja, o único loop existente é o do Sis-tema Embarcado. Assim, nenhum processo bloqueia o fluxo de execução de forma que possaexistir a possibilidade de um loop infinito ocorrer (bloqueio).
A forma como se programa também pode ser dividido em duas: Pooling e Interrupção.Pooling são testes periódicos que ocorrem em uma determinada Flag ou porta do micro afimde realizar um processo, ou seja, o software realiza contínuos testes e se uma condição prédeterminada for satisfeita então um processo é disparado. A interrupção é quando o próprio

Capítulo 5. Conclusão 58
hardware detecta esta condição. O problema do Pooling é a perda de tempo de processamento,este perde um tempo precioso realizando testes enquanto poderia estar executando outras partesmais úteis do código. O Código desenvolvido é baseado em interrupções do TIM e da EXTI.
5.2 Considerações finais
Devido a efeitos didáticos optou-se em fabricar e testar cada placa separadamente. Fo-ram desenvolvidas três placas de circuito impresso: uma para a recepção e condicionamentodo sinal, outra que representa a lógica de acionamento das tarefas simbolizada por LEDs e aúltima que aciona o motor DC e as três tarefas implementadas. Esta metodologia de construçãoindependente foi de suma importância no decorrer do projeto, pois ocorreram problemas técni-cos nos circuitos, cuja solução teria tido uma dificuldade significativamente maior se o sistemafosse composto por apenas um circuito impresso.
O sistema final foi composto pelas três placas de circuito impresso, o microcontroladore mais uma fonte simétrica de ±5𝑉 . Para o desenvolvimento de um protótipo mais elaborado eelegante seria ideal a compactação das três placas e do microcontrolador em uma única placa decircuito impresso. Nesta placa também estaria englobada o circuito da fonte simétrica de tensão.O resultado seria um sistema embarcado que realizaria o conjunto de tarefas predefinidas.
Para o inicio dos testes mais reais com seres humanos ainda falta muito empenho eestudo. Basicamente, necessita-se construir um protótipo mais elaborado com um motor maispotente e a construção de uma cama articulada com tamanho real.

59
Referências
BERSCH, R. 2013. Disponível em: <http://www.assistiva.com.br-/Introducao Tecnologia Assistiva.pdf>. Citado na página 14.
BRAGA, N. C. Eletrônica Básica para Mecatrônica. 1 edição. ed. São Paulo, SP, Brasil: EdgarBlucher, 2001. ISBN 7897769810345. Citado na página 74.
CÚNICO, M.; CUNHA, J. C. da. Mouse controlado por sistema de pressão para indivíduosportadores de tetraplegia. In: SPRINGER. IV Latin American Congress on BiomedicalEngineering 2007, Bioengineering Solutions for Latin America Health. [S.l.], 2008. p.1024–1027. Citado 3 vezes nas páginas 7, 26 e 27.
Fairchild Semiconductor. BC547 - Switching and Applications. [S.l.], 2002. Citado 2 vezesnas páginas 9 e 51.
FERREIRA, C. L. L. Interface de Sopro e Sucção para Controle de Cadeira de Rodas.65 p. Dissertação (Mestrado em Engenharia Elétrica) — Universidade Estadual de Londrina,Londrina, PR, Brasil, maio 2008. Citado 4 vezes nas páginas 7, 27, 28 e 29.
FILHO TEÓFILO A. E DAMASCENO, L. L. G. As novas tecnologias e a tecnologiaassistiva: utilizando os recursos de acessibilidade na educação especial. Fortaleza, Anais do IIICongresso Ibero-americano de Informática na Educação Especial, 2002. 2002. Citado napágina 14.
Freescale Semiconductor. MPX5100 - Integrated Silicon Pressure Sensor On-Chip SignalConditioned, Temperature Compensated and Calibrated. [S.l.], 2010. Citado 3 vezes naspáginas 8, 65 e 66.
GUIMARÃES, D. S. Projeto de cama hospitalar acionada por movimentos faciais. FATEC-SP,2011. julho 2011. Citado 3 vezes nas páginas 7, 23 e 24.
IRION. Feridas: novas abordagens, manejo clínico e atlas em cores. [S.l.], 2005. Citado napágina 15.
Ministério da Saúde. Diretrizes de Atenção à Pessoa com Lesão Medular. [S.l.], 2012. Citadona página 14.
NORONHA, J. Levantamento epidemiológico dos casos de lesão medular espinhal traumáticaatendidos em unidade de reabilitação de goiânia–goiás [dissertação]. Goiânia, GO:Universidade Católica de Goiás, Programa de Pós-Graduação em Ciências Ambientais eSaúde, 2008. 2008. Citado na página 19.
RADABAUGH, M. P. A report to the president and the congress of the united state, nationalcouncil on disability. In: Study on the Financing of Assistive Technology Devices of Servicesfor Individuals with Disabilities. [S.l.: s.n.], 1993. Nenhuma citação no texto.
REGATTIERI, C. R. Cama mecanizada para pessoas tetraplégicas. Citado 3 vezes nas páginas7, 24 e 25.

Referências 60
SIEMENS. MOTORES DE CORRENTE CONTÍNUA. [S.l.], 2006. Citado 2 vezes nas páginas77 e 78.
SMELTZER, Suzanne C; BARE, Brenda G. Tratado de enfermagem médico-cirúrgico. [S.l.],2005. Citado na página 15.
SMITH, S. A. S. K. C. Microeletrônica. 4 edição. ed. [S.l.]: MAKRON Books, 2000. Citadona página 71.
STMICROELETRONICS. Manual (UM0919) - STM32VLDISCOVERY. [S.l.], 2012. Citado 4vezes nas páginas 8, 67, 69 e 70.
Texas Instruments. L293d - QUADRUPLE HALF-H DRIVERS. [S.l.], 2004. Citado 4 vezesnas páginas 8, 9, 50 e 77.
VECCHI, G. S. Sistema de apoio a deficientes físicos ativado por comandos de voz. 83 p.Trabalho de Conclusão de Curso — Universidade Federal do Rio de Janeiro, Rio de Janeiro,RJ, Brasil, dezembro 2005. Citado 3 vezes nas páginas 7, 22 e 23.

61
APÊNDICE A – Software
A.1 Função Main

APÊNDICE A. Software 62

APÊNDICE A. Software 63
APÊNDICE A. Software 64

65
APÊNDICE B – Conceitos Fundamen-tais
B.1 Transdutor de pressão
Transdutor é um dispositivo que converte um sinal de uma forma física para um si-nal correspondente de outra forma física. O sensor pode converter uma grandeza não elétrica(velocidade, posição, temperatura, pH, pressão) em uma grandeza elétrica (corrente, tensão,resistência).
No projeto foi utilizado um transdutor de pressão, cuja função é receber uma pressãomecânica sobre a superfície e transformar em um sinal elétrico.
O transdutor de pressão escolhido foi o MPX5100 - Case 867C, que trabalha dento dafaixa de pressão exercida por sopro e sucção de uma pessoa.
Esse sensor é piezoresistivo, ou seja, são sensores monolíticos formados de um únicocristal de silício. A força exercida pela pressão na estrutura do material pode deformá-lo, au-mentando ou diminuindo seu tamanho. Essa deformação no material causa uma alteração naresistência, tornando possível à transformação da pressão em grandezas elétricas.
A Fig. 37 ilustra a característica física de montagem do dispositivo.
Figura 37 – Pinagem do componente MPX5100DP (Freescale Semiconductor, 2010)

APÊNDICE B. Conceitos Fundamentais 66
A tabela 11 mostra as principais característica do sensor de pressão:
CaracterísticasValor Unidade
Sensibilidade 45 𝑚𝑉𝑘𝑃𝑎
Alimentação Mínima 4,74 𝑉Alimentação típica 5 𝑉
Alimentação Máxima 5,25 𝑉
Tabela 11 – Características do sensor de pressão
O gráfico da Fig. 38 mostra a relação da tensão resultante pela pressão diferencial.
Figura 38 – 𝑉𝑂𝑈𝑇 X Pressão diferencial (Freescale Semiconductor, 2010)
Função de transferência do dispositivo:
𝑉𝑂𝑈𝑇 = 𝑉𝑆𝑂𝑈𝑅𝐶𝐸.[(𝑃.0, 009) + 0, 04] (B.1)
B.2 Microcontrolador
Os microcontroladores são microprocessadores que podem ser programados para fun-ções especificas. Eles possuem um processador, memória e periféricos de entrada/saída. Nor-malmente eles são embarcados no interior de dispositivos para controlar as funções ou ações doproduto.
O nível de complexidade de processamento e memória do microcontrolador dependeda aplicação. Ele pode ser utilizado em um simples relógio ou até mesmo em um complexosistema de controle de motores automotivos.
A Fig. 39 ilustra a estrutura interna do microcontrolador STM32F100RBT6B.

APÊNDICE B. Conceitos Fundamentais 67
Figura 39 – Estrutura interna do microcontrolador STM32F100 (STMICROELETRONICS, 2012)
As principais características do dispositivo são:
∙ Arquitetura ARM;
∙ Família Cortex M-3;
∙ 𝑓𝑀𝐴𝑋 = 24𝑀𝐻𝑧;
∙ 128𝑘𝐵𝑦𝑡𝑒𝑠 de memória Flash;
∙ 8𝑘𝐵𝑦𝑡𝑒𝑠 de memória SRAM;
Uma importante característica do microcontrolador é a interrupção. Foram utilizadas asinterrupções da EXTI e do TIMER.
Quando ocorre uma interrupção o programa para, momentaneamente, e executa a funçãode interrupção, depois de executada, o programa volta e continua executando do lugar onde tinhaparado.

APÊNDICE B. Conceitos Fundamentais 68
B.2.1 NVIC
O NVIC (Nested vectored interrupt controller) faz parte do núcleo do processador eé quem gerencia as exceções geradas pelo processador, pelos periféricos e por dispositivosexternos.
As interrupções possuem diferentes níveis de prioridade e sub-prioridade.O NVIC possui suporte a interrupções aninhadas (Nested) e vetorizadas. É aninhável
porque interrupções com maior nível de prioridade podem interromper a execução de interrup-ções com menor prioridade. E vetorizada porque existe uma tabela com os endereços de cadauma das rotinas de interrupção (Handlers) do sistema.
O Cortex-M3 salva e restaura os registradores necessários para entrar e sair de uma ISR(Interrupt Service Routine), ajudando reduzir a latência para a execução da ISR.
Portanto, seus principais recursos são:
∙ 68 linhas de interrupção (não incluindo os dezesseis linhas de interrupção Cortex TM-M3);
∙ 16 níveis de prioridade programáveis;
∙ Exceção de baixa latência e manipulação de interrupção;
∙ Implantação de sistema de registros de controle.

APÊNDICE B. Conceitos Fundamentais 69
A Fig. 40 mostra algumas linhas de interrupção.
Figura 40 – Tabela de interrupção (STMICROELETRONICS, 2012)
B.2.2 EXTI
O EXTI (External interrupt/event controller) é composto de até 20 detectores de bordapara gerar interrupção. Cada detector pode ser configurado independente, para selecionar o cor-respondente evento de disparo (ascendente, descendente ou ambos) (STMICROELETRONICS,2012).
Suas principais características são:
∙ Disparo independente em cada interrupção de evento;
∙ Geração de até 20 eventos software / pedidos de interrupção;
∙ Bit de status dedicado para cada linha de interrupção.
A interrupção do EXTI pode ser configurado para uma borda de subida , descida ouambas de uma porta da GPIO.

APÊNDICE B. Conceitos Fundamentais 70
B.2.3 TIM
Eles podem ser usados para uma variedade de fins, incluindo a medição do comprimentode impulso dos sinais de entrada (input capture), geração de formas de onda de saída (output
compare e PWM) e interrupção.A Fig. 41 mostra a estrutura interna do TIM.
Figura 41 – Diagrama de blocos do TIM (STMICROELETRONICS, 2012)
Este periférico possui um Prescaler, ele pode dividir a frequência de operação do núcleodo processador por qualquer valor entre 1 e 65536, pois baseia-se em um contador de 16 bits. Elepode ser modificado durante a execução, portanto a nova relação do divisor é tida no próximoevento de atualização.
O contador (CNT) conta de 0 até o valor de Autoreload (registrador de 16 bits), emseguida o contador volta pra 0 e reinicia a contagem.
Para gerar uma interrupção do TIM deve-se escolher um numero para o comparadorque esteja entre 0 e o valor de autoreload, assim, toda vez que o contador chegar neste valor oprograma é interrompido e executa-se a função de interrupção do TIM, voltando para a linha decódigo anterior ao evento.
Deve-se configurar o Prescaler e o Autoreload afim de se obter um tempo exato parauma determinada aplicação, seja ela interrupção, PWM ou qualquer outra função do periférico.

APÊNDICE B. Conceitos Fundamentais 71
B.3 Amplificador Operacional
O amplificador operacional é projetado para operar como um sensor da diferença entreos sinais de tensão aplicados em seus dois terminais de entrada, multiplicando-se esse valor porum numero A que resulta em uma tensão que aparece no terminal de saída (SMITH, 2000).
A Fig. 42 ilustra seu simbolo elétrico:
Figura 42 – Amplificador operacional
Parâmetros do amplificador operacional:
∙ 𝑉+ : entrada não-inversora
∙ 𝑉− : entrada inversora
∙ 𝑉𝑆+ : alimentação positiva
∙ 𝑉𝑆+ : alimentação negativa
∙ 𝑉𝑂𝑈𝑇 : saída
∙ 𝐴 : ganho em malha aberta
Sua equação característica é:
𝑉𝑂𝑈𝑇 = (𝑉+ − 𝑉−) · 𝐴 (B.2)
Os amplificadores operacionais podem operar em vários modos: sem realimentação,realimentação positiva e realimentação negativa.
B.3.1 Comparador de tensão
Os comparadores de tensão são circuitos que utilizam amp op em malha aberta, semrealimentação, ou seja, com 𝐴𝑉 → ∞ O valor de 𝑉𝑂𝑈𝑇 é determinado apenas pela alimentaçãodo dispositivo.

APÊNDICE B. Conceitos Fundamentais 72
Estes circuitos farão a comparação entre dois sinais distintos ou entre um sinal dis-tinto e uma referência. Se a referência entre os sinais for positiva, ou seja, quando a entradanão-inversora é maior do que a entrada inversora, o dispositivo irá saturar (devido 𝐴𝑉 → ∞)forçando a saída ficar com valor igual à alimentação positiva do amp op 𝑉𝑆+. Se ocorrer ocontrario, a saída sera igual à alimentação negativa 𝑉𝑆+.
Os comparadores são classificados de acordo com a localização da tensão de compara-ção (𝑉𝐼𝑁 ), eles podem ser: não-inversor e inversor.
Os comparadores não-inversores possuem a tensão de comparação na entrada não in-versora, como ilustra a Fig. 43. Observando a equação B.2, pode-se afirmar que se a tensão decomparação for maior do que a tensão de referência (𝑉𝑅), a saída sera positiva e igual a alimen-tação positiva. Se a tensão de comparação for menor, a saída sera negativa e igual a alimentaçãonegativa.
Figura 43 – Comparador não-inversor
Resumindo este comparador em relações, tem-se:
𝑉𝐼𝑁 > 𝑉𝑅 ⇒ 𝑉𝑂𝑈𝑇 = 𝑉+
𝑉𝐼𝑁 < 𝑉𝑅 ⇒ 𝑉𝑂𝑈𝑇 = 𝑉−
O comparador inversor possui a tensão de comparação na entrada inversora, como mos-tra a Fig. 44. Da mesma maneira que o comparador não-inversor, pode-se concluir que, se atensão de comparação for maior do que a tensão de referência (𝑉𝑅), a saída sera negativa e iguala alimentação negativa. Se a tensão de comparação for menor, a saída sera positiva e igual aalimentação positiva.
𝑉𝐼𝑁 > 𝑉𝑅 ⇒ 𝑉𝑂𝑈𝑇 = 𝑉−
𝑉𝐼𝑁 < 𝑉𝑅 ⇒ 𝑉𝑂𝑈𝑇 = 𝑉+

APÊNDICE B. Conceitos Fundamentais 73
Figura 44 – Comparador inversor
B.3.2 Amplificador inversor
O amplificador inversor é um circuito que utiliza o Amp Op no modo realimentaçãonegativa, como ilustra a Fig. 45.
Figura 45 – Amplificador inversor
A tensão de saída é obtida pela multiplicação da entrada por um ganho constante, fixadopelo resistor de entrada 𝑅1 e o resistor de realimentação 𝑅𝑓 . Como a entrada do circuito estana porta inversora, o sinal da saída é invertida em relação à entrada. A equação esta descritaabaixo:
𝑉𝑂 = −𝑅𝑓
𝑅1
𝑉𝐼 (B.3)
B.3.3 Amplificador de instrumentação
O amplificador de instrumentação é um tipo especial de Amp Op, como mostra a Fig.46:
Sua equação esta descrita abaixo:
𝑉0 = (𝑉 +𝐼𝑁 − 𝑉 −
𝐼𝑁)𝐺 (B.4)
onde:

APÊNDICE B. Conceitos Fundamentais 74
Figura 46 – Amplificador de instrumentação
𝐺 = 5 + 200𝑘𝑅𝐺
Suas características particulares são:
∙ Impedância de entrada muito elevada;
∙ Impedância de saída bem reduzida;
∙ Ganho de malha aberta superior ao dos Amp Ops comuns;
∙ Elevada rejeição a sinais de modo comum;
∙ Ganho diferencial ajustável.
B.4 Ponte H
Para determinadas aplicações utilizando um motor DC exigi-se altas potências e, nor-malmente, a utilização dos dois sentidos do motor. Para isto, o uso de um microcontrolador setorna insuficiente, pois ele fornece um baixo nível de corrente em sua porta de saída, além denão possuir a tensão adequada para acionar um motor. Para solucionar estes problemas citados,utiliza-se um circuito eletrônico denominado de ponte H (BRAGA, 2001).
Utilizando a ponte H torna-se possível que o motor gire tanto para um sentido quanto ooutro, ainda fornecer corrente e tensão ao motor DC.
Seu circuito pode ser constituído por qualquer componente que simule chave liga-desliga, porém nesta explicação será utilizado transistores bipolares, como ilustra a Fig. 47.

APÊNDICE B. Conceitos Fundamentais 75
Figura 47 – Ponte H
B.4.1 Funcionamento
Quando os transistores estão sem sinais nas suas bases, nenhum deles conduz e nenhumacorrente circula pelo motor.
Quando uma tensão, proveniente do microcontrolador, é aplicada nas bases de Q1 e Q3,estes transistores conduzirão e a corrente circulará no sentido indicado na Fig. 48, fazendo omotor girar no sentido direto.
Figura 48 – Q1 e Q3 conduzindo

APÊNDICE B. Conceitos Fundamentais 76
Para o motor girar no sentido indireto, como mostra a Fig. 49, é necessário inverter osentido da corrente. Para isto, basta polarizar os transistores Q2 e Q4 levando-os ao corte.
Figura 49 – Q2 e Q4 conduzindo
Porém, necessita-se tomar duas precauções que podem levar a bateria a um curto-circuito, queimando os transistores. Estas situações são aquelas em que os transistores Q1 eQ3 conduzem ao mesmo tempo ou em que Q2 e Q4 conduzem simultaneamente, como é ilus-trado na Fig. 50.
Figura 50 – Situações proibidas
Neste projeto foi utilizado o circuito integrado L293d. A Fig. 51 ilustra a pinagem desteCI.
B.5 Motor DC
Motor DC ou motor de corrente contínua é uma máquina capaz de converter energia me-cânica em energia elétrica (gerador) ou energia elétrica em mecânica (motor). Para esta aplica-

APÊNDICE B. Conceitos Fundamentais 77
Figura 51 – Pinagem do CI L293d (Texas Instruments, 2004)
ção a máquina será usada como motor, ou seja, irá transformar energia elétrica em movimento.O motor de corrente contínua é composto de duas estruturas magnéticas:
∙ Estator (enrolamento de campo ou imã permanente);
∙ Rotor (enrolamento da armadura).
O estator é a parte estática da máquina, montada em volta do rotor, de forma que omesmo possa girar internamente. Ele é composto de uma estrutura ferromagnética com pólossalientes aos quais são enroladas as bobinas que formam o campo, ou de um ímã permanente(SIEMENS, 2006).
O rotor é a parte girante, montada sobre o eixo da máquina. O rotor é um eletroímãconstituído de um núcleo de ferro com enrolamentos em sua superfície que são alimentados porum sistema mecânico de comutação. Esse sistema é formado por um comutador, solidário aoeixo do rotor, que possui uma superfície cilíndrica com diversas lâminas às quais são conectadosos enrolamentos do rotor; e por escovas fixas, que exercem pressão sobre o comutador e quesão ligadas aos terminais de alimentação. O propósito do comutador é o de inverter a correntena fase de rotação apropriada de forma a que o conjugado desenvolvido seja sempre na mesmadireção (SIEMENS, 2006).
B.5.1 Funcionamento
O Estator é constituído por imas permanentes e o rotor é uma bobina de fio de cobreesmaltado. O princípio de funcionamento do motor cc esta ilustrado na Fig. 52.
Uma corrente elétrica circula na bobina e produz campos magnéticos, ela se comportacomo um ímã permanente, com seus pólos N (norte) e S (sul) como mostrados na figura.
Inicialmente a bobina se encontra na posição (a) da Fig. 52, porém como os polos opos-tos se atraem, a bobina tende a girar no sentido anti-horário, como ilustrado em (b) na Fig.52.

APÊNDICE B. Conceitos Fundamentais 78
Figura 52 – Princípio de funcionamento do motor cc
A bobina continua girando para a esquerda, até que alcança os polos opostos dos imãsfixos (estator). Nesta posição o rotor se encontra em equilíbrio estável, ou seja, a força resultantee o torque são nulos, então inverte-se o sentido da corrente, afim de trocar os polos da bobina.
Na nova configuração, os polos iguais do rotor e do estador estão muito próximos e aforça de repulsão é intensa. Como o rotor apresenta um momento angular "para a esquerda", elecontinua girando no sentido anti-horário, como mostrado em (d) na Fig. 52.
Toda vez que os polos de mesmo nome do rotor e do estator se encontram, o sentido dacorrente se inverte, fazendo com que a bobina continue girando no sentido anti-horário, comodescrito acima.
A inversão do sentido da corrente (comutação), no momento oportuno, é condição in-dispensável para a manutenção dos torques ”favoráveis”, os quais garantem o funcionamentodos motores (SIEMENS, 2006).
B.6 Relê
O relê é um dispositivo eletromecânico, formado por um magneto móvel, que se deslocaunindo dois contatos metálicos.
Quando uma corrente circula pela bobina, um campo magnético é formado na mesmaatraindo um ou uma série de contatos fechando ou abrindo circuitos.
Assim que para de circular corrente na bobina o campo magnético é cessado, fazendocom que os contatos voltem para a posição original. Os relês podem ter as seguintes configu-rações: NA (normalmente aberto), NF (normalmente fechado) ou ambos, neste caso com umcontato comum (C).
Os contatos NA (normalmente aberto) são os que estão abertos enquanto a bobina nãoestá energizada e que fecham, quando a bobina recebe corrente. Os NF (normalmente fechado)

APÊNDICE B. Conceitos Fundamentais 79
abrem-se quando a bobina recebe corrente, ao contrário dos NA. O contato central ou C é ocomum, ou seja, quando o contato NA fecha é com o C que se estabelece a condução e ocontrário com o NF.