Embed Size (px)
Citation preview

Disciplina:Instrumentação e Controle de
Sistemas Mecânicos
Teoria de ControleParte 2
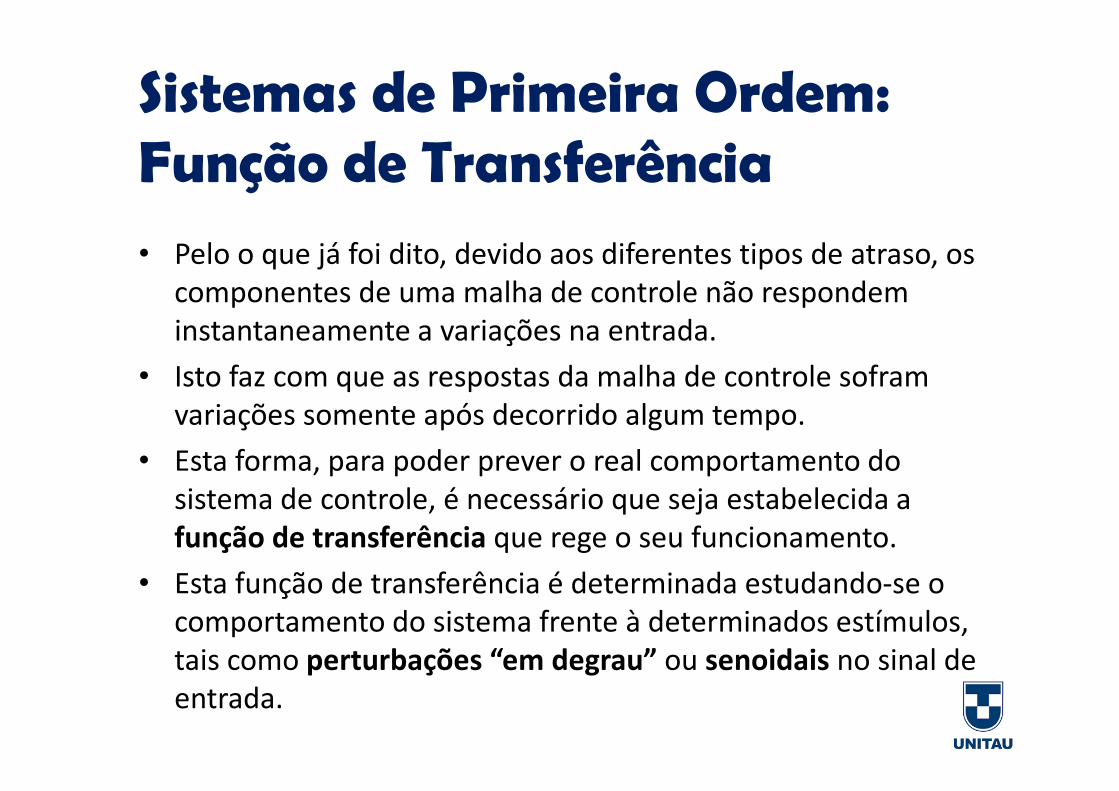
Sistemas de Primeira Ordem: Função de Transferência• Pelo o que já foi dito, devido aos diferentes tipos de atraso, os
componentes de uma malha de controle não respondem instantaneamente a variações na entrada.
• Isto faz com que as respostas da malha de controle sofram variações somente após decorrido algum tempo.
• Esta forma, para poder prever o real comportamento do sistema de controle, é necessário que seja estabelecida a função de transferência que rege o seu funcionamento.
• Esta função de transferência é determinada estudando-se o comportamento do sistema frente à determinados estímulos, tais como perturbações “em degrau” ou senoidais no sinal de entrada.
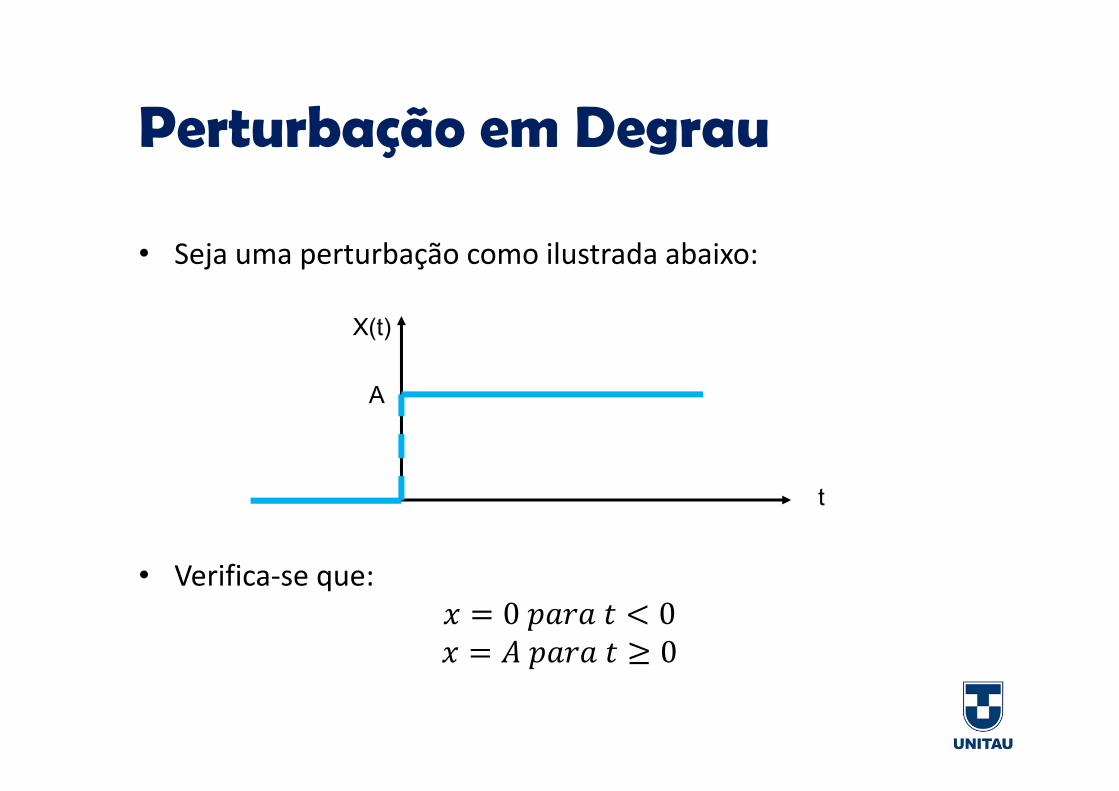
• Um sistema de grande importância no estudo de sistemas de controle é o denominado “sistema de primeira ordem”. A partir de sua análise são obtidas definições e conclusões chave para o entendimento de outros sistemas.
• Os sistemas de primeira ordem são representados por uma equação diferencial de primeira ordem. Para analisar a resposta com relação ao estímulo de entrada, necessita-se resolver esta equação diferencial.
• A resolução pode ser feita através de métodos clássicos ou através das Transformadas de Laplace.
Perturbação em Degrau
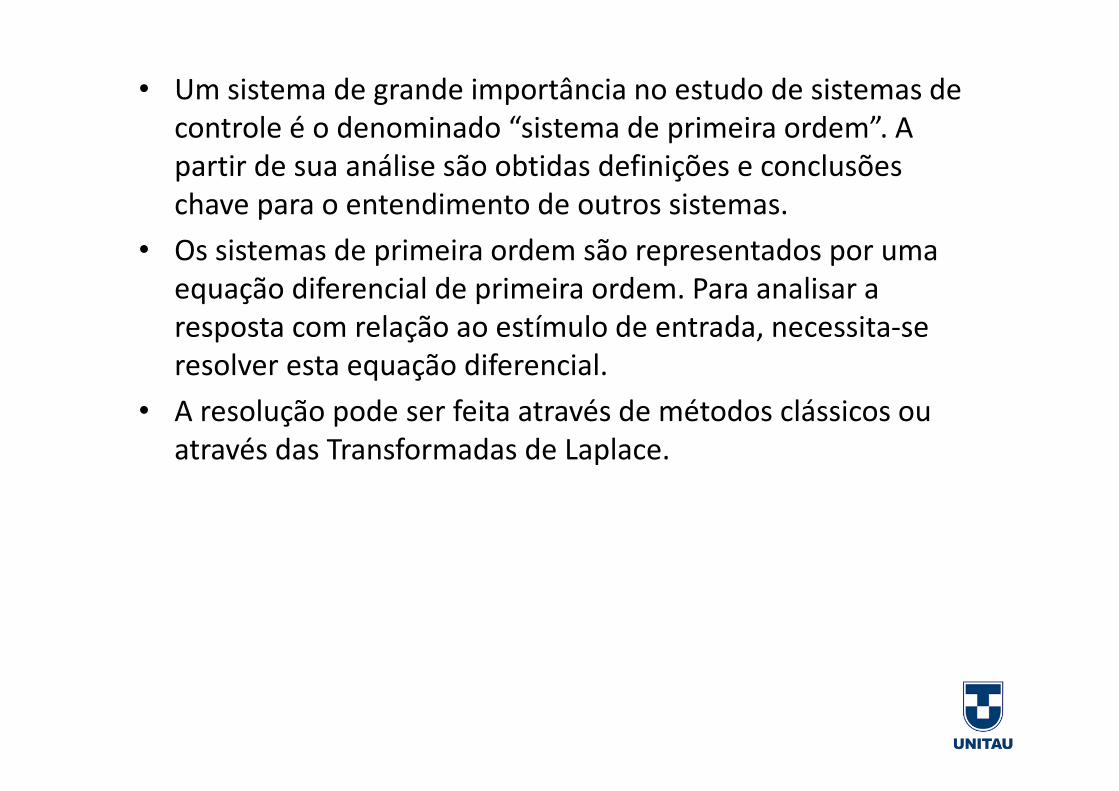
• Seja uma perturbação como ilustrada abaixo:
• Verifica-se que:푥 = 0푝푎푟푎푡 < 0푥 = 퐴푝푎푟푎푡 ≥ 0
t
X(t)
A
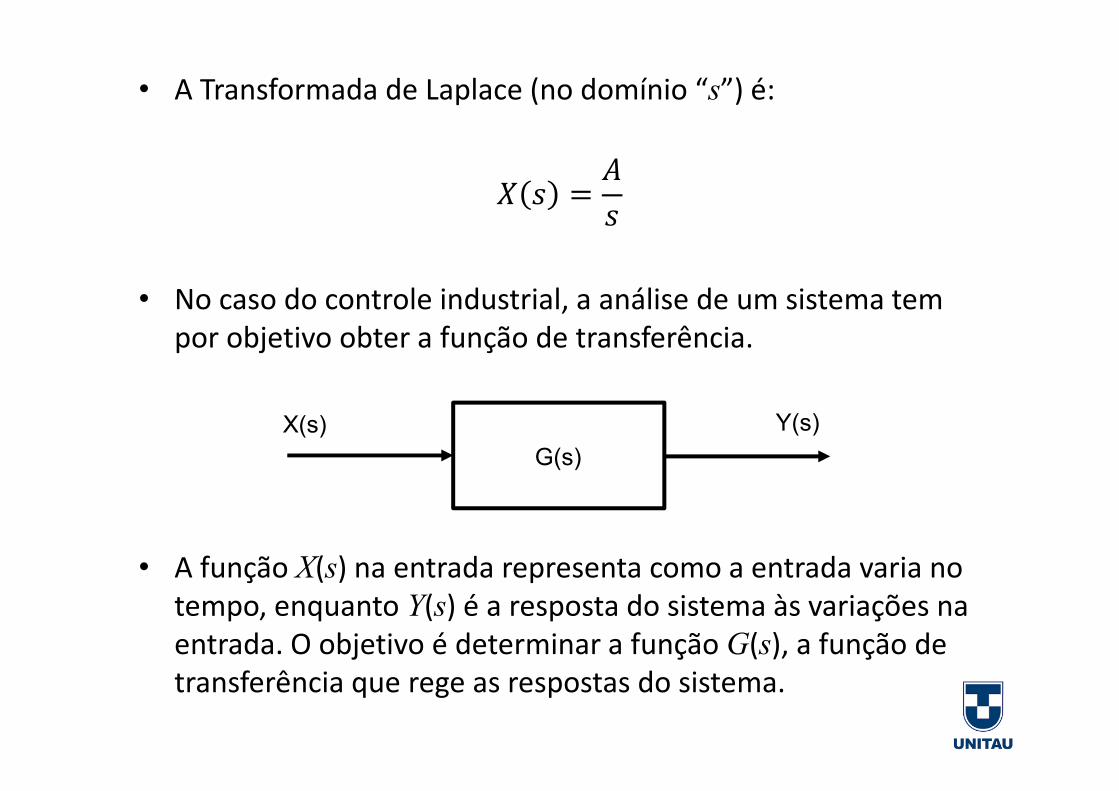
• A Transformada de Laplace (no domínio “s”) é:
푋 푠 =퐴푠
• No caso do controle industrial, a análise de um sistema tem por objetivo obter a função de transferência.
• A função X(s) na entrada representa como a entrada varia no tempo, enquanto Y(s) é a resposta do sistema às variações na entrada. O objetivo é determinar a função G(s), a função de transferência que rege as respostas do sistema.
X(s) Y(s)G(s)
• Para isto, analisa-se as respostas Y(s) do sistema para algumas diferentes funções típicas X(s) na entrada. A análise indica como é a função G(s).
Recordando Transformada de Laplace
• A Transformada de Laplace é uma metodologia matemática que simplifica grandemente a resolução de equações diferenciais.
• Isto porque a equação diferencial é uma equação cuja incógnita é uma função apresentada na forma de derivada, e no controle industrial, a relação entre alterações de entrada e as respectivas respostas dos sistemas de controle é descrita com fidelidade através de equações diferenciais.
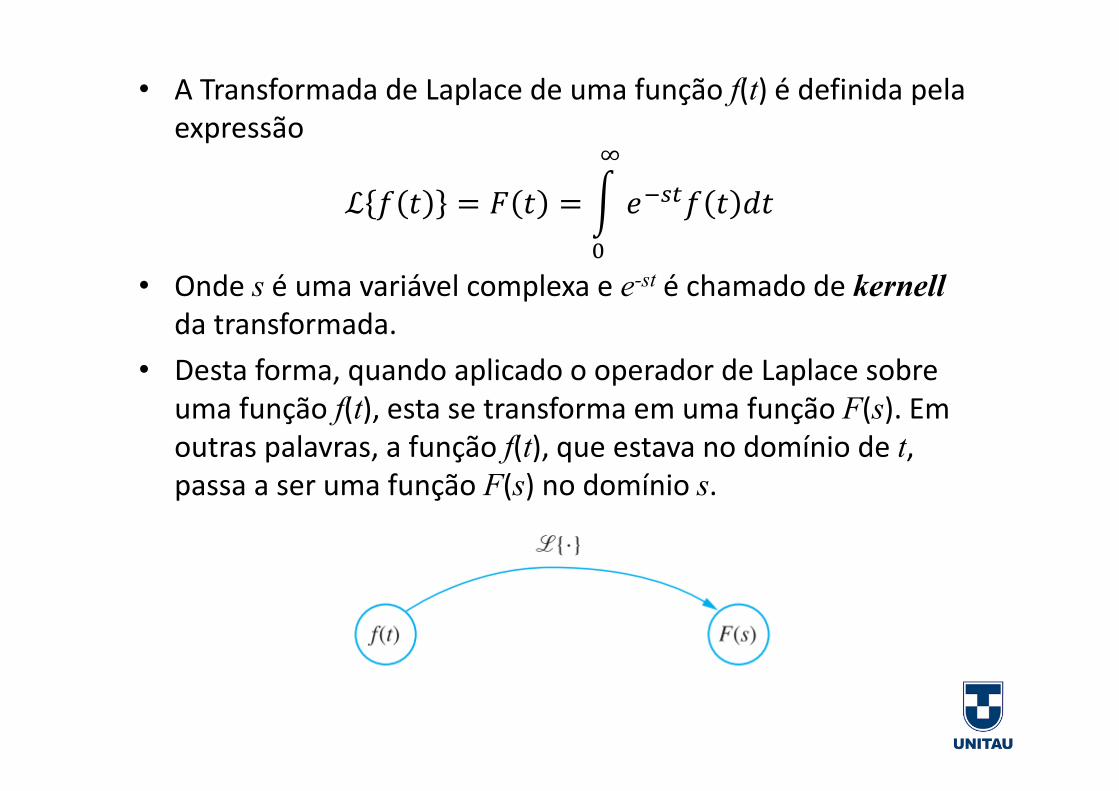
• A Transformada de Laplace de uma função f(t) é definida pela expressão
ℒ 푓 푡 = 퐹 푡 = 푒 푓 푡 푑푡
• Onde s é uma variável complexa e e-st é chamado de kernellda transformada.
• Desta forma, quando aplicado o operador de Laplace sobre uma função f(t), esta se transforma em uma função F(s). Em outras palavras, a função f(t), que estava no domínio de t, passa a ser uma função F(s) no domínio s.
• Observa-se que:
a) Como o limite superior da integral é infinito, trata-se de uma integral imprópria.
b) Uma vez que o limite inferior é zero, isto significa que o comportamento de f(t) para t 0 é desprezado. Na maior parte das aplicações de engenharia isto não é problema, uma vez que estas são, na maioria absoluta das vezes, sistemas físicos nos quais as funções estão relacionadas ao tempo.
c) Existe como trabalhar com t 0 se empregada a Transformada de Laplace Bilateral, mas esta não será vista aqui.
• Exemplo: Seja uma função f(t) = c. Então, aplicando o conceito de transformada de Laplace, temos que
ℒ 푐 = 푒 푐푑푡 = −푐. 푒푠
∞
0
ℒ 푐 = lim→
−푐. 푒푠
− −푐푠
ℒ 푐 =푐푠
• A seguir, são apresentadas as Transformadas de Laplace mais utilizadas na área de controle:
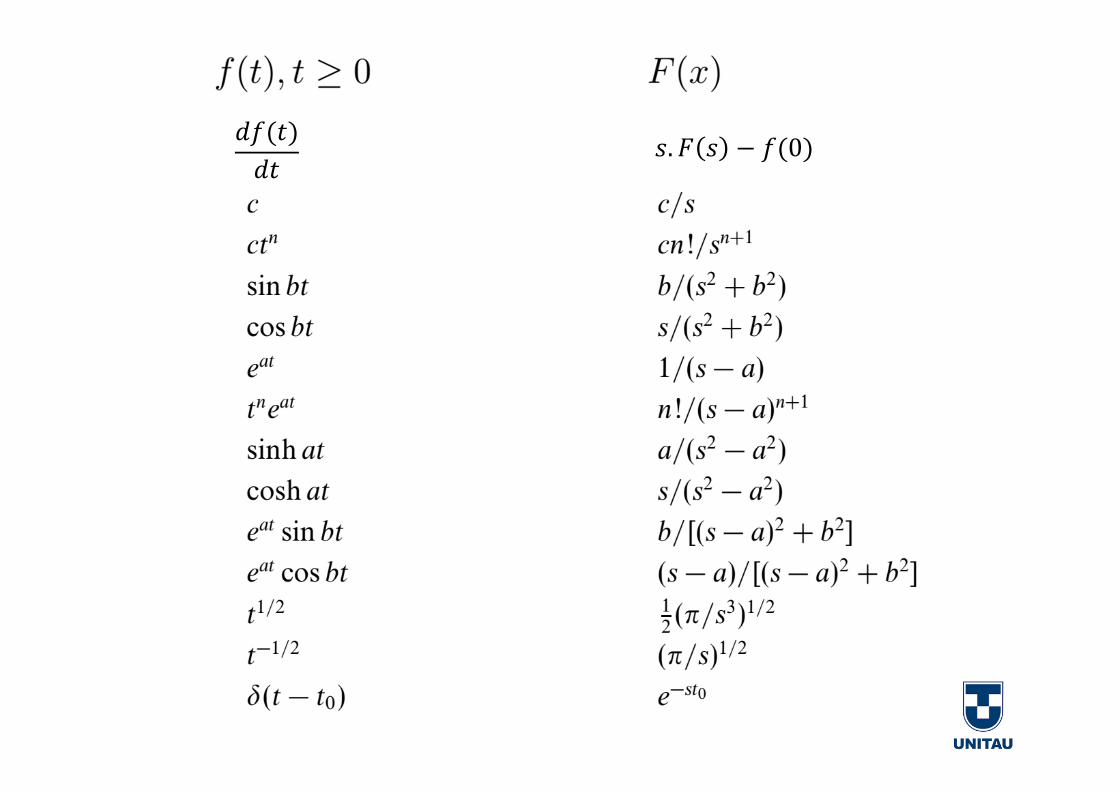
푑푓(푡)푑푡
푠.퐹 푠 − 푓(0)
Sistemas de Primeira Ordem continuação
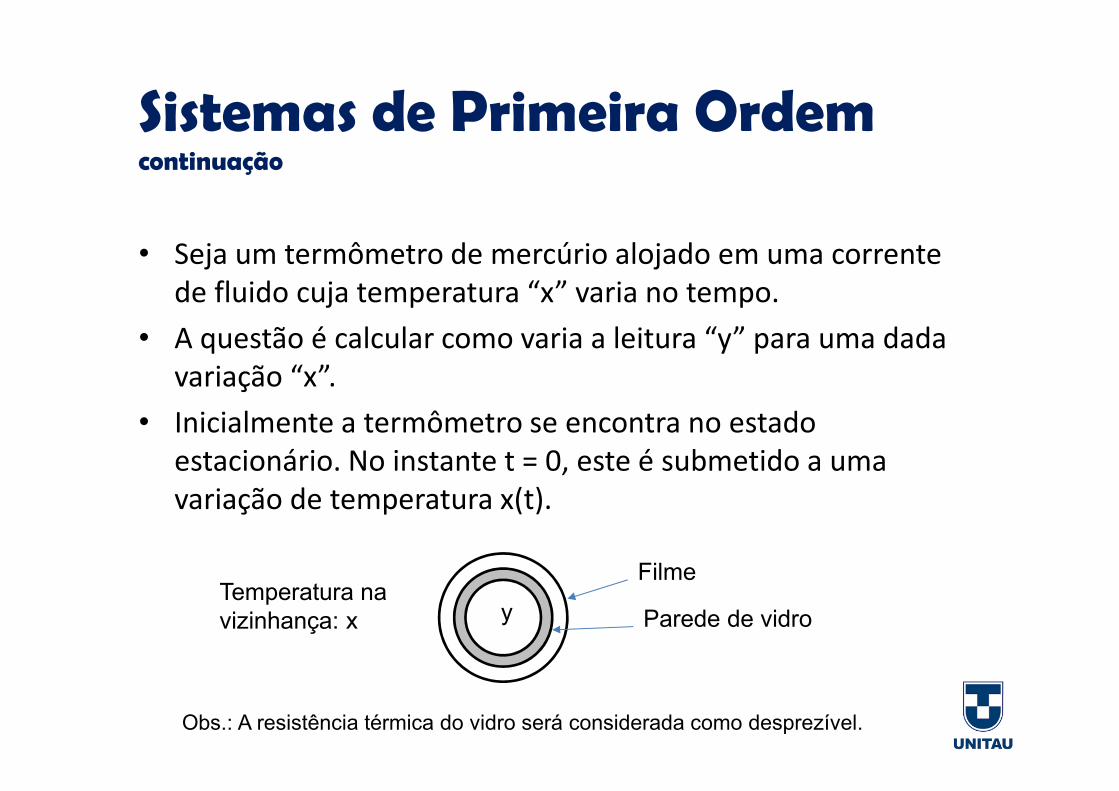
• Seja um termômetro de mercúrio alojado em uma corrente de fluido cuja temperatura “x” varia no tempo.
• A questão é calcular como varia a leitura “y” para uma dada variação “x”.
• Inicialmente a termômetro se encontra no estado estacionário. No instante t = 0, este é submetido a uma variação de temperatura x(t).
Filme
Parede de vidroTemperatura na vizinhança: x y
Obs.: A resistência térmica do vidro será considerada como desprezível.
• No estado estacionário: entrada – saída = acumulação.
ℎ.퐴. 푥 − 푦 − 0 = 푚.퐶.푑푦푑푡
• Onde
• A: área da superfície do bulbo (m2)• C: capacidade térmica do mercúrio (kcal/kg.oC)• m: massa do mercúrio (kg)• t: tempo (segundo)• h: coeficiente de transferência do filme (kcal/s.m2.oC)
• O calor que é transferido para o mercúrio faz com que este suba através do bulbo, registrando a temperatura correspondente.
• Esta equação é uma equação diferencial de primeira ordem:
ℎ.퐴. 푥 − 푦 − 0 = 푚.퐶.푑푦푑푡
• Pode ser reescrita da seguinte forma, em regime estacionário, onde a variação de y no tempo é nula:
ℎ.퐴 푥푠 − 푦푠 = 0
• Onde xs e ys são as temperaturas x e y no estado estacionário.
• A equação nos diz que, no estado estacionário, a temperatura lida no termômetro é a mesma da vizinhança.
• Subtraindo uma equação da outra:
ℎ.퐴. 푥 − 푦 − ℎ.퐴 푥푠 − 푦푠 = 푚.퐶.푑푦푑푡
ℎ.퐴. 푥 − 푥푠 − 푦 − 푦푠 = 푚.퐶.푑푦푑푡
• Lembrando que푑푦푑푡
=푑 푦 − 푦푠
푑푡
• pois ys é constante, a equação pode ser reescrita como
ℎ.퐴. 푥 − 푥푠 − 푦 − 푦푠 = 푚.퐶.푑 푦 − 푦푠
푑푡
• Denominado x – xs de X, e y – ys de Y, tem-se
ℎ.퐴. 푋 − 푌 = 푚.퐶.푑푌푑푡
• Para agrupar as constantes, faz-se = (m.C)/(h.A), sendo denominada de constante do tempo, ficando
푋 − 푌 = 휏.푑푌푑푡⇒ 푋 = 푌 + 휏.
푑푌푑푡
• Aplicando-se Laplace aos dois termos da equação, tem-se a chamada Função de Transferência do sistema em análise, no domínio “s”:
푋 푠 = 푌 푠 + 휏. 푠.푌(푠)
푋 푠 = 푌 푠 × 1 + 휏. 푠
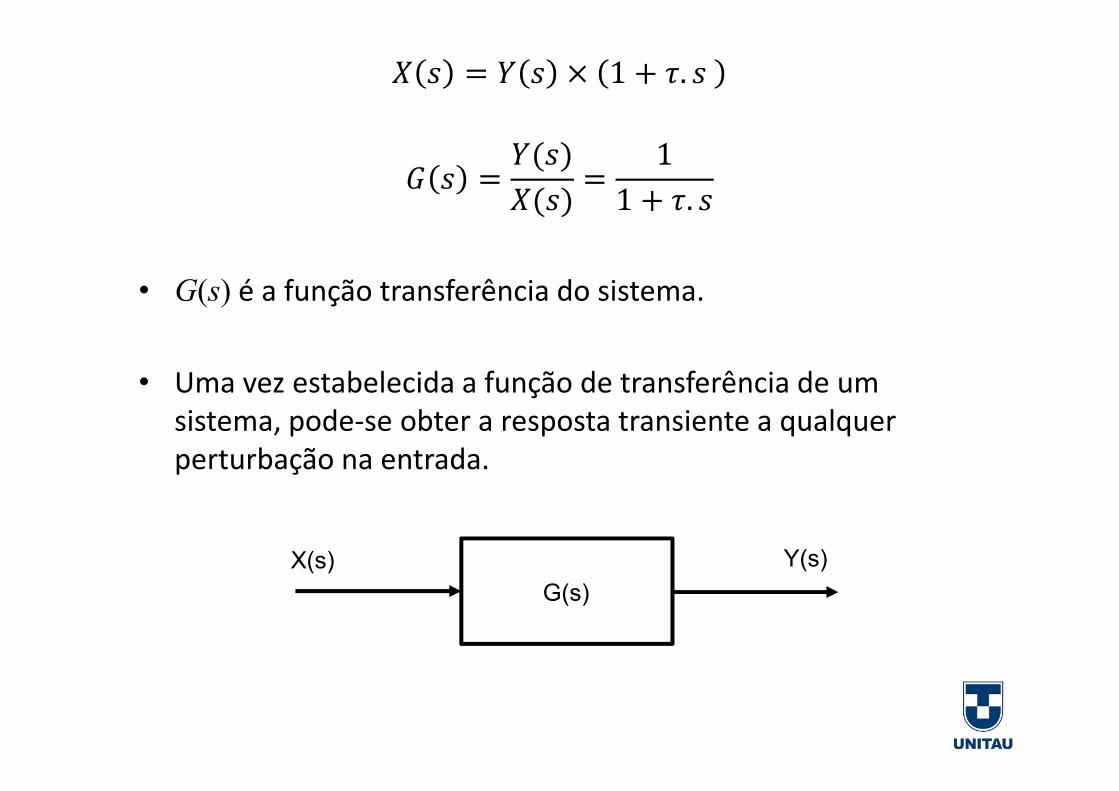
푋 푠 = 푌 푠 × 1 + 휏. 푠
퐺 푠 =푌(푠)푋(푠)
=1
1 + 휏. 푠
• G(s) é a função transferência do sistema.
• Uma vez estabelecida a função de transferência de um sistema, pode-se obter a resposta transiente a qualquer perturbação na entrada.
X(s) Y(s)G(s)
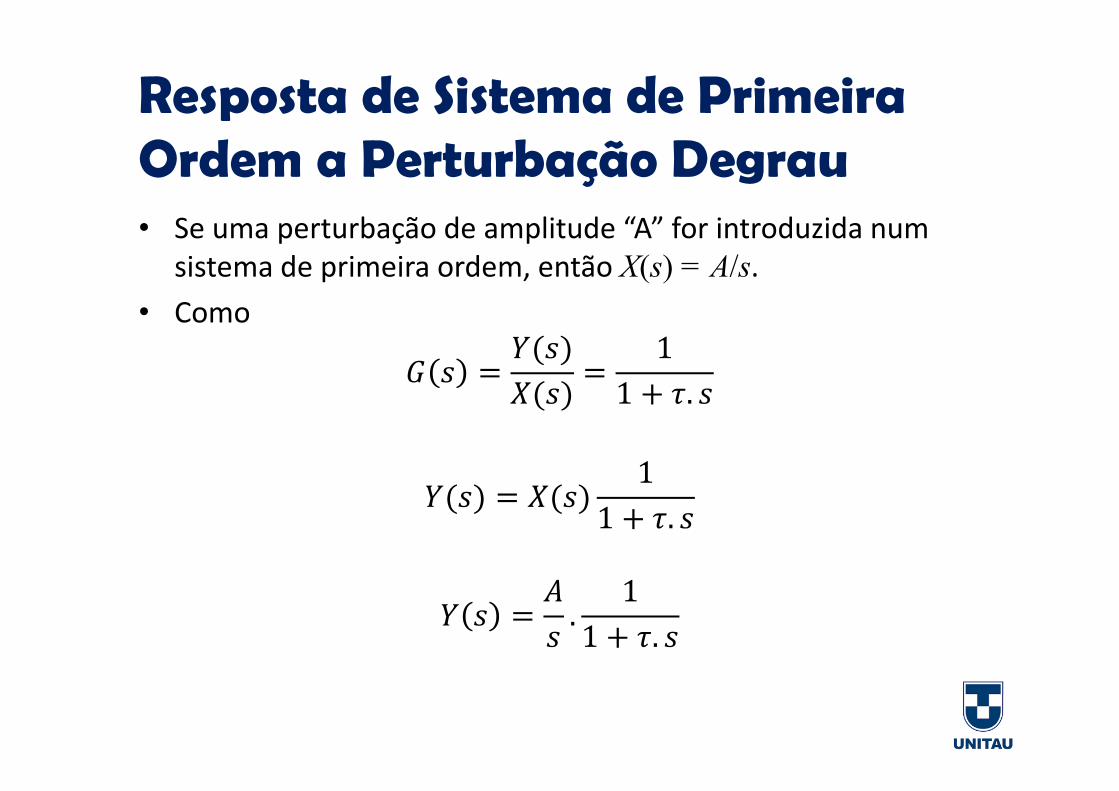
Resposta de Sistema de Primeira Ordem a Perturbação Degrau• Se uma perturbação de amplitude “A” for introduzida num
sistema de primeira ordem, então X(s) = A/s.• Como
퐺 푠 =푌(푠)푋(푠)
=1
1 + 휏. 푠
푌(푠) = 푋(푠)1
1 + 휏. 푠
푌 푠 =퐴푠
.1
1 + 휏. 푠
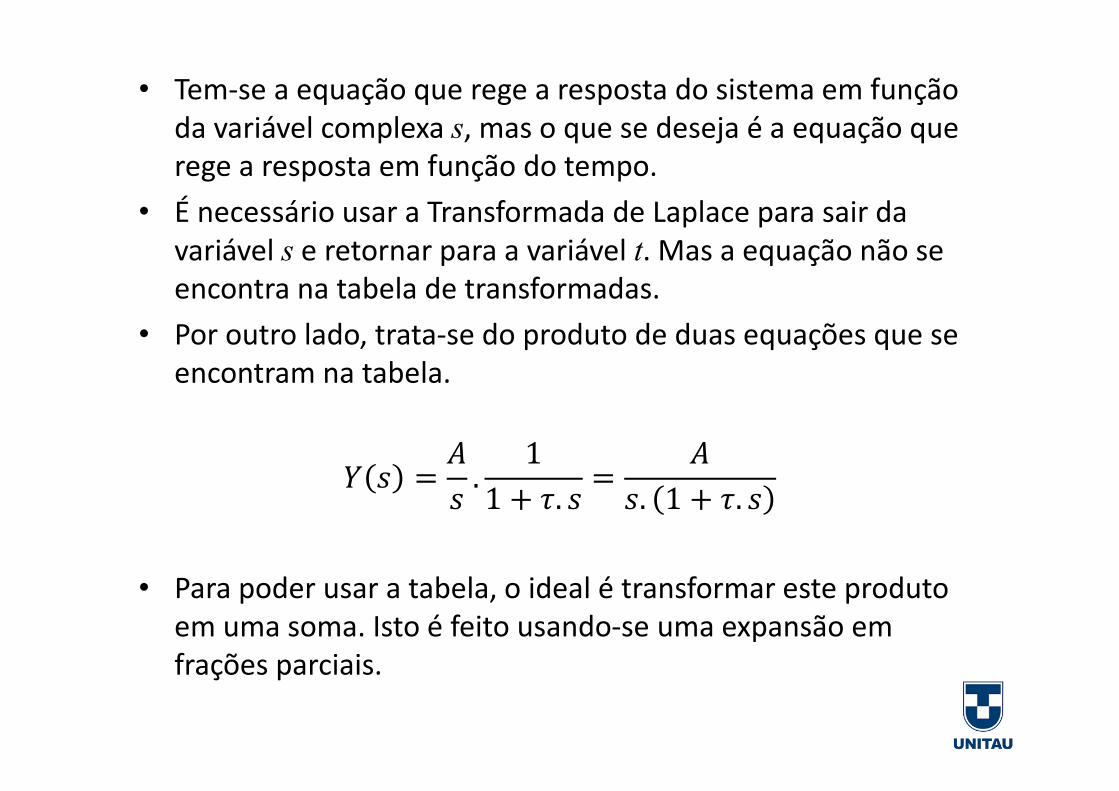
• Tem-se a equação que rege a resposta do sistema em função da variável complexa s, mas o que se deseja é a equação que rege a resposta em função do tempo.
• É necessário usar a Transformada de Laplace para sair da variável s e retornar para a variável t. Mas a equação não se encontra na tabela de transformadas.
• Por outro lado, trata-se do produto de duas equações que se encontram na tabela.
푌 푠 =퐴푠
.1
1 + 휏. 푠=
퐴푠. 1 + 휏. 푠
• Para poder usar a tabela, o ideal é transformar este produto em uma soma. Isto é feito usando-se uma expansão em frações parciais.
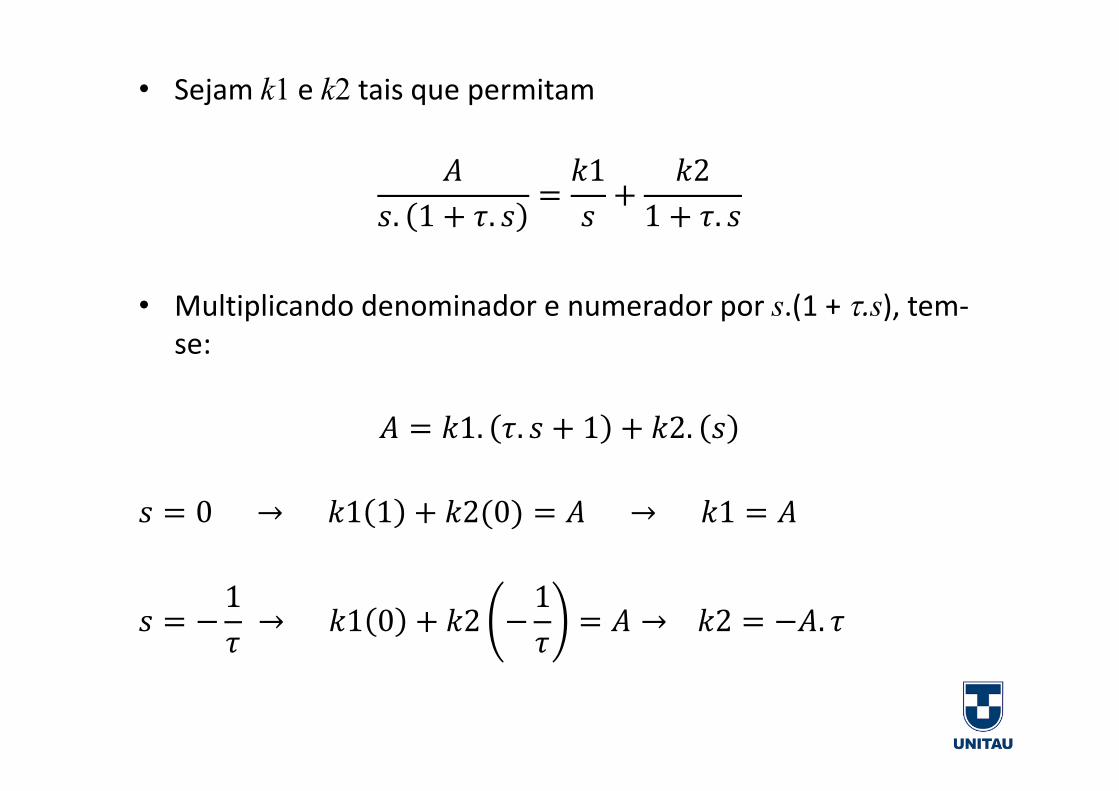
• Sejam k1 e k2 tais que permitam
퐴푠. 1 + 휏. 푠
=푘1푠
+푘2
1 + 휏. 푠
• Multiplicando denominador e numerador por s.(1 + .s), tem-se:
퐴 = 푘1. 휏. 푠 + 1 + 푘2. 푠
푠 = 0 → 푘1 1 + 푘2(0) = 퐴 → 푘1 = 퐴
푠 = −1휏→ 푘1 0 + 푘2 −
1휏
= 퐴 → 푘2 = −퐴. 휏
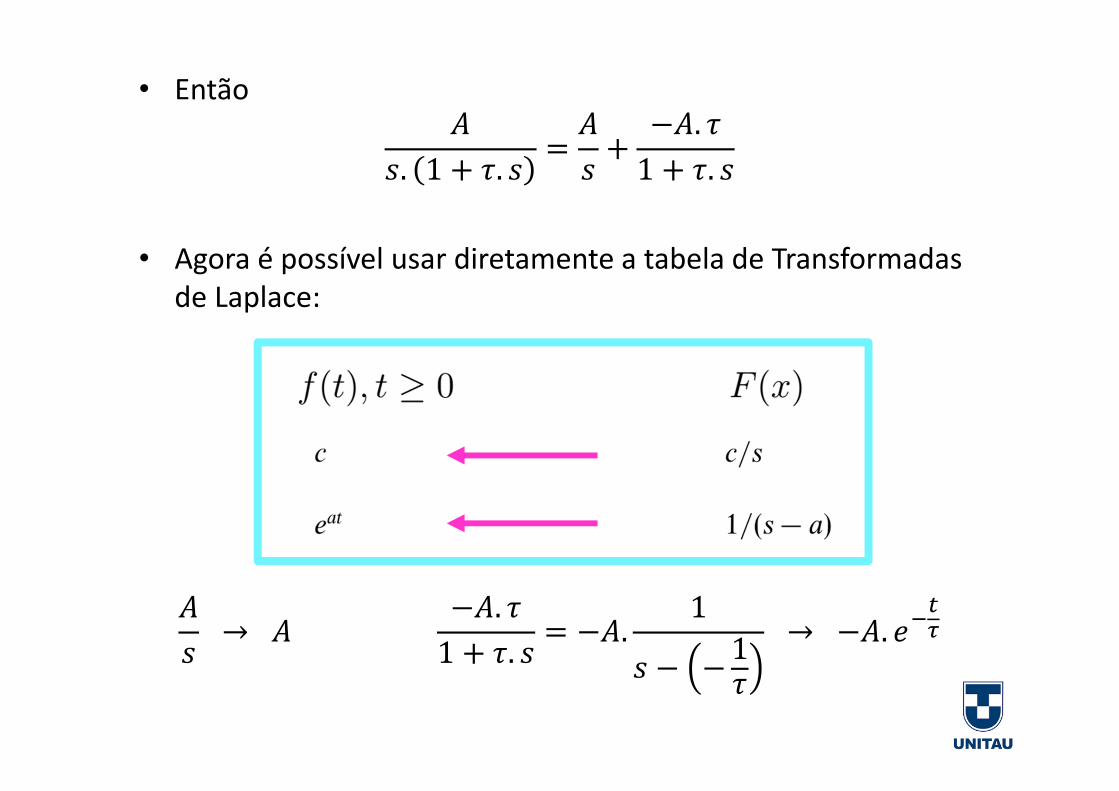
• Então퐴
푠. 1 + 휏. 푠=퐴푠
+−퐴. 휏
1 + 휏. 푠
• Agora é possível usar diretamente a tabela de Transformadas de Laplace:
퐴푠→ 퐴
−퐴. 휏1 + 휏. 푠
= −퐴.1
푠 − −1휏→ −퐴. 푒
퐴푠→ 퐴
−퐴. 휏1 + 휏. 푠
= −퐴.1
푠 − −1휏→ −퐴. 푒
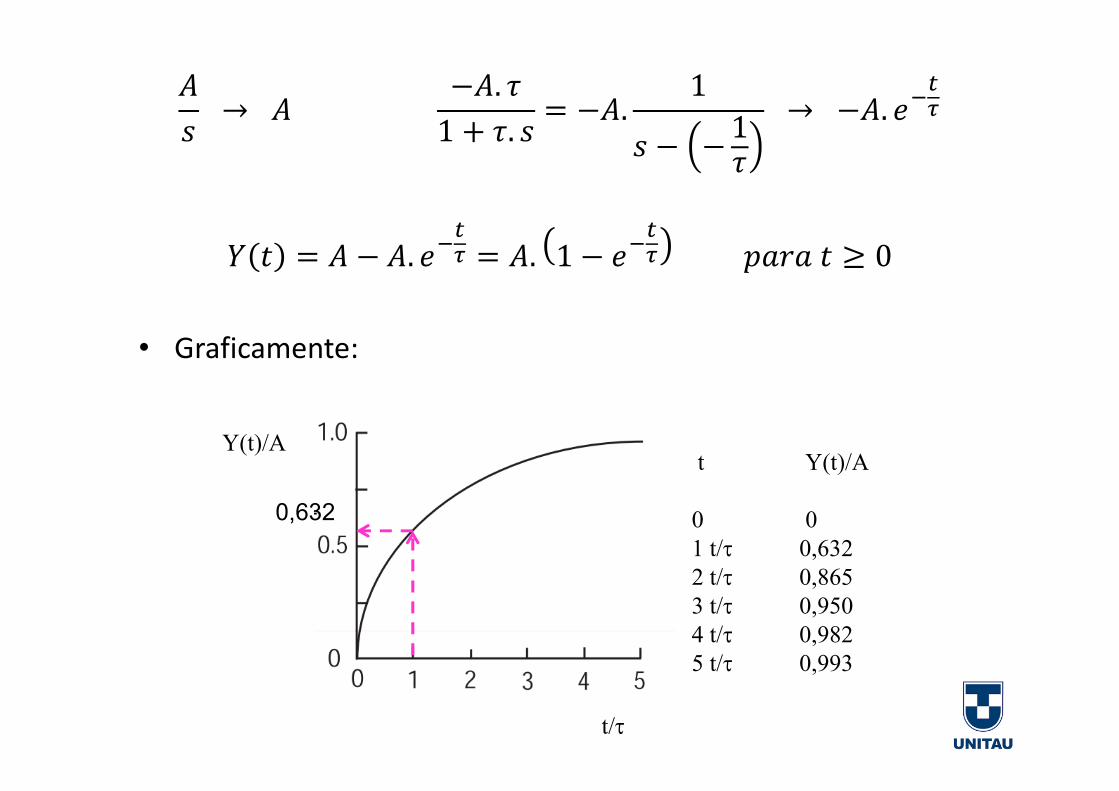
푌 푡 = 퐴 − 퐴. 푒 = 퐴. 1 − 푒 푝푎푟푎푡 ≥ 0
• Graficamente:
t/
t Y(t)/A
0 01 t/ 0,6322 t/ 0,8653 t/ 0,9504 t/ 0,9825 t/ 0,993
Y(t)/A
0,632
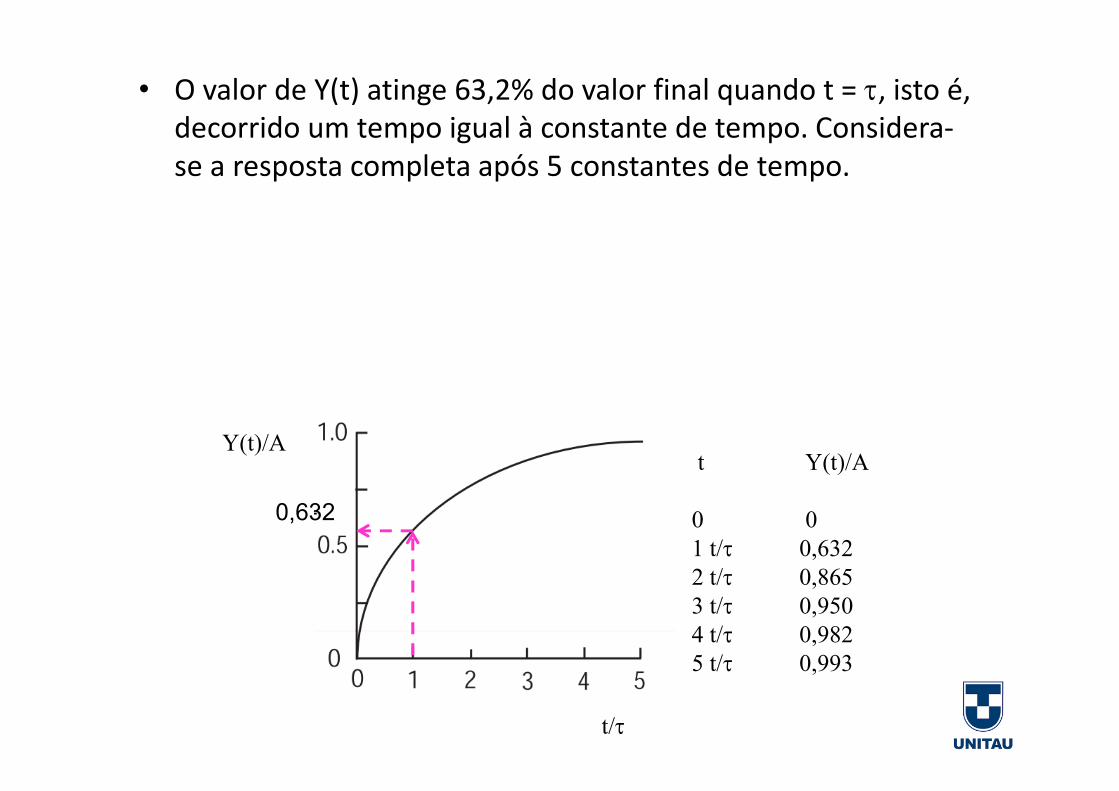
• O valor de Y(t) atinge 63,2% do valor final quando t = , isto é, decorrido um tempo igual à constante de tempo. Considera-se a resposta completa após 5 constantes de tempo.
t/
t Y(t)/A
0 01 t/ 0,6322 t/ 0,8653 t/ 0,9504 t/ 0,9825 t/ 0,993
Y(t)/A
0,632
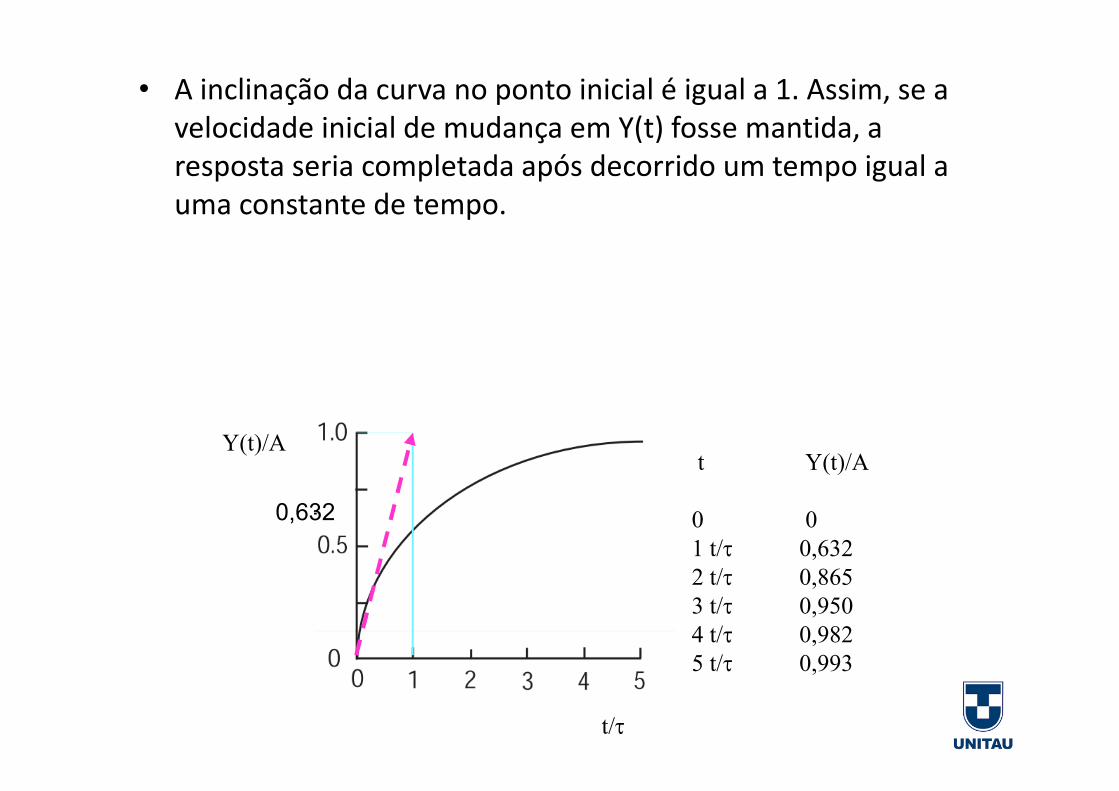
• A inclinação da curva no ponto inicial é igual a 1. Assim, se a velocidade inicial de mudança em Y(t) fosse mantida, a resposta seria completada após decorrido um tempo igual a uma constante de tempo.
t/
t Y(t)/A
0 01 t/ 0,6322 t/ 0,8653 t/ 0,9504 t/ 0,9825 t/ 0,993
Y(t)/A
0,632
Bibliografia
Egídio Alberto Bega, Gerard Jean Delmee, Pedro Estéfano Cohn, Roberval Bulgarelli, Ricardo Koch, Vitor Schmidt FinkelInstrumentação Industrial, Editora Interciência, 3ª Edição, 2011.