Embed Size (px)
Citation preview
EFEITO DO TOQUE SUAVE E DA EFEITO DO TOQUE SUAVE E DA INFORMAINFORMAÇÇÃO VISUAL NO ÃO VISUAL NO
CONTROLE DA POSICONTROLE DA POSIÇÇÃO EM PÃO EM PÉÉDE ADULTOSDE ADULTOS
Thatia Regina BonfimPaula Favaro Polastri
José Angelo Barela
Instituto de Biociências – Universidade Estadual Paulista - Rio ClaroRevista Brasileira de Educação Física e Esporte
v.20, n.1, p.15-25, jan/mar 2006
UNIVERSIDADE FEDERAL DE SANTA MARIAUNIVERSIDADE FEDERAL DE SANTA MARIA
CENTRO DE EDUCACENTRO DE EDUCAÇÇÃO FÃO FÍÍSICA E SICA E DESPORTOSDESPORTOS
LABORATLABORATÓÓRIO DE BIOMECÂNICARIO DE BIOMECÂNICA

Atividade Atividade muscularmuscular
InformaInformaçção ão SensorialSensorial
OrientaOrientaçção Corporalão Corporal
INTRODUINTRODUÇÇÃOÃO
Fonte:Fonte: Horak e Macpherson (1996)

InformaInformaçção ão SensorialSensorial
INTRODUINTRODUÇÇÃOÃO
VisualVisual
SomatosenssorialSomatosenssorial
VestibularVestibular
Corpo Corpo HumanoHumano
Segmentos CorporaisSegmentos Corporais
AlinhamentoAlinhamento
Atividade Atividade MuscularMuscular
Apropriada Apropriada àà tarefatarefa
Sistema de Sistema de Controle PosturalControle Postural
Fonte:Fonte:
Barela (2000), Schöner (1991)
TarefaTarefa

OrientaOrientaçção dos ão dos segmentos segmentos corporaiscorporais
EstEstíímulos mulos SensoriaisSensoriais
Funcionamento do Funcionamento do Controle PosturalControle Postural
INTRODUINTRODUÇÇÃOÃO
Fonte:Fonte: Jeka e Lackner (1995) Fonte:Fonte: Jeka, Oie e Kiemel (2000)
Tarefa ATarefa A
Tarefa BTarefa B
OrganizaOrganizaçção do ão do sistema sistema ““xx””
OrganizaOrganizaçção do ão do sistema sistema ““yy””

ManipulaManipulaçção dos ão dos estestíímulosmulos
Controle Postural Controle Postural xx
InformaInformaçção Sensorialão Sensorial
INTRODUINTRODUÇÇÃOÃO

Paradigma da Paradigma da ““sala msala móóvelvel””
ManipulaManipulaçção da informaão da informaçção ão visualvisual
INTRODUINTRODUÇÇÃOÃO
ManipulaManipulaçção da informaão da informaçção ão somatosenssorialsomatosenssorial
EstratEstratéégia do gia do toque suavetoque suave

Investigar o efeito do toque suave sobre a Investigar o efeito do toque suave sobre a oscilaoscilaçção corporal de adultos jovens na ão corporal de adultos jovens na postura de ppostura de péé, em diferentes condi, em diferentes condiçções ões
visuais.visuais.
ObjetivoObjetivo
INTRODUINTRODUÇÇÃOÃO
GRUPO DE ESTUDOGRUPO DE ESTUDO
�� NNúúmero de Indivmero de Indivííduos:duos: 8 (oito)
�� CaracterCaracteríística:stica: adultos jovens
�� Idade MIdade Méédia:dia: 21 ± 1,8 anos
�� CondiCondiçção:ão: sem comprometimentos neurológico, músculo-esquelético e/ou sistema vestibular.
METODOLOGIAMETODOLOGIA

INSTRUMENTOS PARA A COLETAINSTRUMENTOS PARA A COLETA
�� ““sala msala móóvelvel””
�� ““barra de toquebarra de toque””
�� equilequilííbriobrio
METODOLOGIAMETODOLOGIA

INSTRUMENTOS PARA A COLETAINSTRUMENTOS PARA A COLETA
METODOLOGIAMETODOLOGIA

INSTRUMENTOS PARA A COLETAINSTRUMENTOS PARA A COLETA
““SALA MSALA MÓÓVELVEL””
Dimensões: Dimensões: (2,1m x 2,1m x 2,1m)(2,1m x 2,1m x 2,1m)
Estrutura: Estrutura: rodas sobre trilhos, paredes internas com listras rodas sobre trilhos, paredes internas com listras verticais em preto e branco, lâmpada acesa durante toda a verticais em preto e branco, lâmpada acesa durante toda a coletacoletaMovimento: Movimento: sistema de servosistema de servo--mecanismo controlado por um mecanismo controlado por um programa especprograma especíífico (fico (Compumotor Motion Architect Compumotor Motion Architect for for Windows)Windows)
METODOLOGIAMETODOLOGIA

INSTRUMENTOS PARA A COLETAINSTRUMENTOS PARA A COLETA
““SALA MSALA MÓÓVELVEL””
FreqFreqüüência de movimentaência de movimentaçção: ão: 0,2 Hz (freq0,2 Hz (freqüüência natural do ência natural do corpo humano segundo corpo humano segundo SoamesSoames e e AthaAtha, 1982);, 1982);
Amplitude: Amplitude: 1 cm1 cm
DuraDuraçção: ão: 60 segundos60 segundos
METODOLOGIAMETODOLOGIA

INSTRUMENTOS PARA A COLETAINSTRUMENTOS PARA A COLETA
Sistema Compumotor
Sala móvel
METODOLOGIAMETODOLOGIA

INSTRUMENTOS PARA A COLETAINSTRUMENTOS PARA A COLETA
““BARRA DE TOQUEBARRA DE TOQUE””
Transdutor de forTransdutor de forçça: a: Alfa Alfa InstrumentsInstruments –– S5S5
ForForçça vertical: a vertical: 1 N1 N
FreqFreqüüência: ência: 100 Hz100 Hz
METODOLOGIAMETODOLOGIA

INSTRUMENTOS PARA A COLETAINSTRUMENTOS PARA A COLETA
““BARRA DE TOQUEBARRA DE TOQUE””
PosiPosiçção: ão: na frente do indivna frente do indivííduoduo
Ângulo do cotovelo: Ângulo do cotovelo: 165165ºº
Altura da barra: Altura da barra: trocânter trocânter maiormaior
Sistema:Sistema: OPTOTRAK 3020OPTOTRAK 3020
METODOLOGIAMETODOLOGIA

INSTRUMENTOS PARA A COLETAINSTRUMENTOS PARA A COLETA
Barra de toque
METODOLOGIAMETODOLOGIA

INSTRUMENTOS PARA A COLETAINSTRUMENTOS PARA A COLETA
EQUILEQUILÍÍBRIOBRIO
3 emissores infravermelhos: 3 emissores infravermelhos: cabecabeçça, entre as esca, entre as escáápulas e pulas e porporçção inferior do troncoão inferior do tronco
Sistema: Sistema: OPTOTRAK 3020OPTOTRAK 3020
FreqFreqüüência: ência: 100 Hz100 Hz
Distância: Distância: 3,2 m3,2 m
METODOLOGIAMETODOLOGIA

INSTRUMENTOS PARA A COLETAINSTRUMENTOS PARA A COLETA
Aquisição para dados equilíbrio
infravermelhos
METODOLOGIAMETODOLOGIA
PROCEDIMENTOS PARA A COLETAPROCEDIMENTOS PARA A COLETA
Distância indivDistância indivííduoduo--parede: parede: 1 m1 m
Alvo de olhar: Alvo de olhar: tentativas com visãotentativas com visão
Olhos fechados:Olhos fechados: tentativas sem visãotentativas sem visão
DescalDescalççosos
METODOLOGIAMETODOLOGIA

PROCEDIMENTOS PARA A COLETAPROCEDIMENTOS PARA A COLETA
Seis condiSeis condiçções:ões:
1) Sem Visão/Sem Toque (SVST);2) Sem Visão/Com Toque (SVCT);3) Com Visão/Sem Toque/Sem Movimento da Sala (CVSTSM);4) Com Visão/Com Toque/Sem Movimento da Sala (CVCTSM);5) Com Visão/Sem Toque/Com Movimento da Sala (CVSTCM);6) Com Visão/Com Toque/Com Movimento da Sala (CVCTCM).
METODOLOGIAMETODOLOGIA

PROCEDIMENTOS PARA A COLETAPROCEDIMENTOS PARA A COLETA
Três tentativas por condiTrês tentativas por condiçções:ões:
18 tentativas3 blocos de 6 tentaivasOrdem definida por sorteioTempo: 60 segundosIntervalo entre tentativas: 10 segundosIntervalo entre blocos: 1 minuto
METODOLOGIAMETODOLOGIA

TRATAMENTO DOS DADOSTRATAMENTO DOS DADOS
MATLABMATLAB
Amplitude mAmplitude méédia de osciladia de oscilaçção ão ânteroântero--posteriorposterior
Ganho: Ganho: amplitude da oscilaamplitude da oscilaçção corporalão corporalamplitude da oscilaamplitude da oscilaçção da sala mão da sala móóvelvel
METODOLOGIAMETODOLOGIA

ANANÁÁLISE ESTATLISE ESTATÍÍSTICASTICA
METODOLOGIAMETODOLOGIA
Duas anDuas anáálises de variância (ANOVA)lises de variância (ANOVA)
Post hoc Post hoc ((TukeyTukey))
Programa SPSSPrograma SPSS
NNíível de significância: 5%vel de significância: 5%

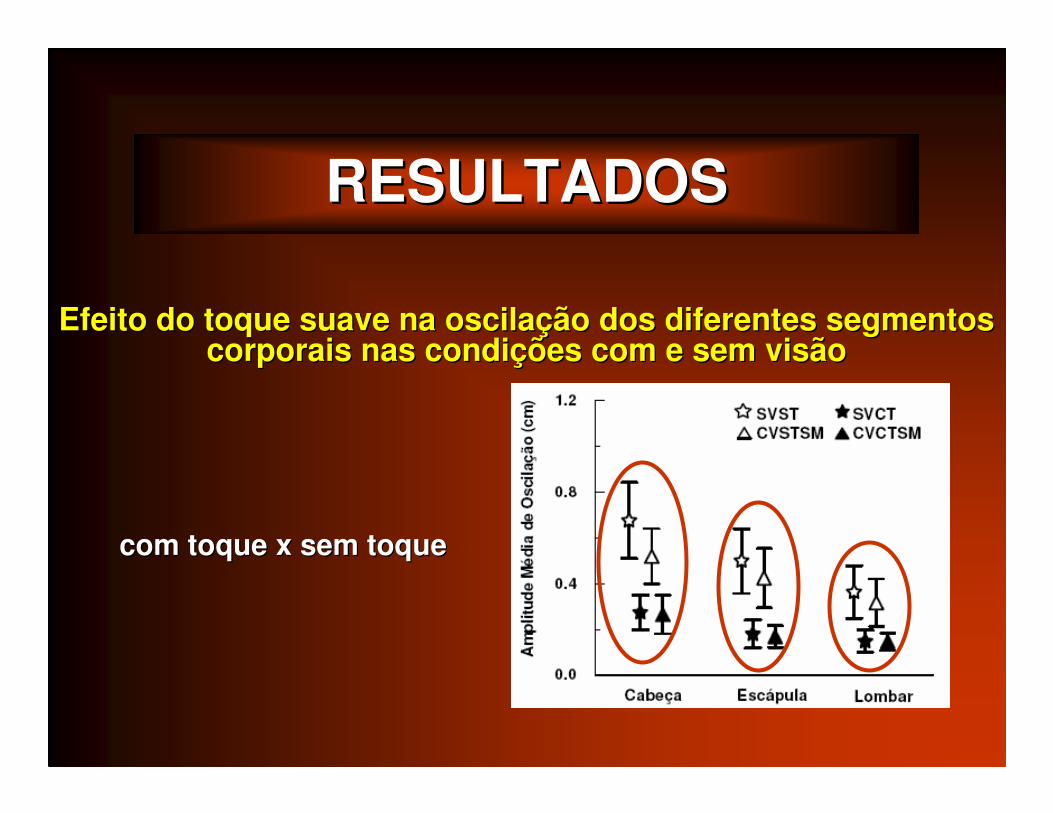
Efeito do toque suave na oscilaEfeito do toque suave na oscilaçção dos diferentes segmentos ão dos diferentes segmentos corporais nas condicorporais nas condiçções com e sem visãoões com e sem visão
RESULTADOSRESULTADOS
Efeito do toque suave na oscilaEfeito do toque suave na oscilaçção dos diferentes segmentos ão dos diferentes segmentos corporais nas condicorporais nas condiçções com e sem visãoões com e sem visão
RESULTADOSRESULTADOS
com toque x sem toquecom toque x sem toque

Efeito do toque suave na oscilaEfeito do toque suave na oscilaçção dos diferentes segmentos ão dos diferentes segmentos corporais nas condicorporais nas condiçções com e sem visãoões com e sem visão
RESULTADOSRESULTADOS
DiferenDiferençças entre segmentosas entre segmentos
Sem toqueSem toque

Efeito do toque suave na oscilaEfeito do toque suave na oscilaçção dos diferentes segmentos ão dos diferentes segmentos corporais nas condicorporais nas condiçções com e sem visãoões com e sem visão
RESULTADOSRESULTADOS
DiferenDiferençças entre segmentos as entre segmentos
Com toqueCom toque

Efeito do toque suave na oscilaEfeito do toque suave na oscilaçção dos diferentes segmentos ão dos diferentes segmentos corporais nas condicorporais nas condiçções com e sem visãoões com e sem visão
RESULTADOSRESULTADOS
Visão x Sem visãoVisão x Sem visão

Efeito do toque suave na oscilaEfeito do toque suave na oscilaçção corporal e sua relaão corporal e sua relaçção ão com o movimento da sala mcom o movimento da sala móóvelvel
(sem toque)(sem toque)
RESULTADOSRESULTADOS
cabecabeççaa
escescáápulapula
lombarlombar

Efeito do toque suave na oscilaEfeito do toque suave na oscilaçção corporal e sua relaão corporal e sua relaçção ão com o movimento da sala mcom o movimento da sala móóvelvel
(com toque)(com toque)
RESULTADOSRESULTADOS
cabecabeççaa
escescáápulapula
lombarlombar

Efeito do toque suave na oscilaEfeito do toque suave na oscilaçção corporal e sua relaão corporal e sua relaçção ão com o movimento da sala mcom o movimento da sala móóvelvel
(com toque)(com toque)
RESULTADOSRESULTADOS
com toque x sem toquecom toque x sem toque

Efeito do toque suave na oscilaEfeito do toque suave na oscilaçção corporal e sua relaão corporal e sua relaçção ão com o movimento da sala mcom o movimento da sala móóvelvel
(com toque)(com toque)
RESULTADOSRESULTADOS
Entre segmentosEntre segmentos

Efeito do toque suave na oscilaEfeito do toque suave na oscilaçção corporal e sua relaão corporal e sua relaçção ão com o movimento da sala mcom o movimento da sala móóvelvel
(com toque)(com toque)
RESULTADOSRESULTADOS
Entre segmentosEntre segmentos

DISCUSSÃODISCUSSÃO
Toque suave reduz a oscilaToque suave reduz a oscilaçção corporal ão corporal independentemente da disponibilidade da informaindependentemente da disponibilidade da informaçção ão
visualvisual
Fonte:Fonte: Clapp e Wing (1999); Jeka e Lackner (1994) (1995)

DISCUSSÃODISCUSSÃO
Indica que a inIndica que a informação somatossensorial adicional fornecida através do toque suave é utilizada como
uma referência de orientação externa para a melhora do controle da postura
Fonte:Fonte: Jeka e Lackner (1994) (1995) Jeka et al., 1997)

DISCUSSÃODISCUSSÃO
A relação observada entre a oscilação corporal e o padrão de forças na ponta do dedo indica que os indivíduos utilizam mudanças leves na força de contato do dedo para obter informação sobre a direção da oscilação corporal, a qual permite
atenuação da oscilação através de ativação muscular postural apropriada.
Fonte:Fonte: Jeka e Lackner (1995)

DISCUSSÃODISCUSSÃO
A relação observada entre a oscilação corporal e o padrão de forças na ponta do dedo indica que os indivíduos utilizam mudanças leves na força de contato do dedo para obter informação sobre a direção da oscilação corporal, a qual permite
atenuação da oscilação através de ativação muscular postural apropriada.
Fonte:Fonte: Jeka e Lackner (1995)

DISCUSSÃODISCUSSÃO
Com a adição do toque utilizando o membro superior, esta informação fornece referência para um controle mais efetivo do segmento tronco e a cabeça passa a ter um comportamento mais independente do tronco.

DISCUSSÃODISCUSSÃO
Sendo assim, parece que com a adição de uma informação somatossensorial ocorre alteração no
relacionamento entre os segmentos corporais, indicando diferente padrão coordenativo entre os segmentos durante a manutenção da posição em
pé ereta.

DISCUSSÃODISCUSSÃO
Sendo assim, parece que com a adição de uma informação somatossensorial ocorre alteração no
relacionamento entre os segmentos corporais, indicando diferente padrão coordenativo entre os segmentos durante a manutenção da posição em
pé ereta.

DISCUSSÃODISCUSSÃO
A utilizaA utilizaçção da informaão da informaçção sensorial pelo sistema ão sensorial pelo sistema
de controle postural de controle postural éé dependente do contexto em dependente do contexto em
que determinada tarefa que determinada tarefa éé realizada, realizada,
principalmente, em relaprincipalmente, em relaçção ão àà disponibilidade de disponibilidade de
informainformaçções sensoriais, ou seja, ões sensoriais, ou seja, não não éé posspossíível vel
determinar predominância de um canal sobre determinar predominância de um canal sobre
outrooutro, pois ela ocorre de diferentes maneiras em , pois ela ocorre de diferentes maneiras em
situasituaçções especões especííficasficas..

DISCUSSÃODISCUSSÃO
Por exemplo:
Manipulação da informação visual: “sala móvel”
Resposta: maior oscilação corporal
Aumento da informação somatossensorial: contato
Resposta: influência da informação visual diminuída
Fonte: Fonte: Lishman e Lee (1973)

DISCUSSÃODISCUSSÃO
A redução do efeito da movimentação da sala na oscilação corporal na condição em que há
disponibilidade do toque suave, indica que o sistema de controle postural parece designar pesos
diferentes às informações sensoriais disponíveis.
Fonte: Fonte: Jeka, Oie e Kiemel (2000)

DISCUSSÃODISCUSSÃO
Como o sistema de controle postural combina Como o sistema de controle postural combina
estas diferenestas diferençças entre informaas entre informaçções sensoriais ões sensoriais
para estimar e controlar a posipara estimar e controlar a posiçção corporal?ão corporal?
Como o sistema de controle postural determina Como o sistema de controle postural determina
qual informaqual informaçção sensorial ão sensorial éé relevante para a relevante para a
manutenmanutençção da postura?ão da postura?

DISCUSSÃODISCUSSÃO
CVSTCM > SVST > CVSTSMCVSTCM > SVST > CVSTSM

DISCUSSÃODISCUSSÃO
O sistema de controle postural não consegue ignorar uma informação sensorial disponível,
mesmo que esta informação indique uma situação ilusória.
DISCUSSÃODISCUSSÃO
Parece que um aspecto crucial para que estas situações de conflito e ilusão sejam resolvidas é
a exposição repetitiva às mesmas condições, quando o sistema parece aprender a ignorar a
informação errônea
Fonte:Fonte: Barela, Godoi, Freitas Júnior e Polastri (2000)

DISCUSSÃODISCUSSÃO
O processo de integração sensorial envolve diminuir o peso de informações disponíveis, porém irrelevantes ou que indicam situações errôneas, e aumentar o peso de outras que indicam situações corretas e, portanto, mais
relevantes para a ação a ser realizada
Fonte: Fonte: Jeka, Oie e Kiemel (2000)

CONCLUSÃOCONCLUSÃO
A contribuição de cada canal sensorial depende do contexto e da informação que cada um fornece para aquela situação. Os resultados indicam que neste
processo nenhum canal sensorial predomina sobre os demais, mas que em condições específicas esta predominância de um ou outro canal sensorial pode
ocorrer, visando um adequado funcionamento do sistema de controle postural.

CONCLUSÃOCONCLUSÃO
Esta referência proveniente do toque suave pode inclusive sobrepor os efeitos da manipulação da
informação visual através da sala móvel no controle postural, indicando um dinâmico relacionamento
entre as informações sensoriais disponíveis e utilizadas para o controle de uma dada ação motora.

CONCLUSÃOCONCLUSÃO
Deste modo, a utilização das informações sensoriais pelo sistema de controle postural depende do
contexto e da relevância das informações disponíveis para que o objetivo da tarefa seja alcançado.

REFERÊNCIASREFERÊNCIASBARELA, J.A. Estratégias de controle em movimentos complexos: Ciclo percepção-ação no controle postural. Revista Paulista de Educação Física, São Paulo, p.79-88, 2000. Suplemento 3.BARELA, J.A.; GODOI, D.; FREITAS JÚNIOR, P.B.; POLASTRI, P.F. Visual information and body sway coupling ininfants during sitting acquisition. Infant Behavior &Development, Norwood, v.23, p.285-97, 2000.CLAPP, S.; WING, A.M. Light touch contribution to balance in normal bipedal stance. Experimental Brain Research, Berlin, v.125, p.521-4, 1999.FREITAS JÚNIOR, P.B.; BARELA, J.A. Postural control as a function of self- and object-motion perception. Neuroscience Letters, Amsterdam, v.369, p.64-8, 2004.HOLDEN, M.; VENTURA, J.; LACKNER, J.R. Stabilization of posture by precision contact ofthe index finger. Journal Vestibular Research, New York, v.4, p.285-301, 1994.HORAK, F.B., MacPHERSON, J.M. Postural orientation and equilibrium. In: ROWELL, L.B.; SHEPHERD, J.T. (Eds.). Handbook of physiology. New York: Oxford University Press, 1996. p.255-92.JEKA, J.J.; LACKNER, J.R. Fingertip contact influences human postural control. ExperimentalBrain Research, Berlin, v.100, p.495-502, 1994._____. The role of haptic cues from rough and slippery surfaces in human postural control. Experimental Brain Research, Berlin, v.103, p.267-76, 1995.

REFERÊNCIASREFERÊNCIAS
JEKA, J.J.; OIE, K.S.; KIEMEL, T. Multisensory information for human postural control:integrating touch and vision. Experimental Brain Research, Berlin, v.134, p.107-25, 2000.JEKA, J.J.; OIE, K.; SCHÖNER, G.; DIJKSTRA, T.; HENSON, E. Position and velocity coupling of postural sway to somatosensory drive. Journal of Neurophysiology, Washington, v.79, n.4, p.1661-74, 1998.JEKA, J.J.; SCHÖNER, G.; DIJKSTRA, T.; RIBEIRO, P.; LACKNER, J.R. Coupling of fingertip somatosensory information to head and body sway. Experimental Brain Research, Berlin, v.113, p.475-83, 1997.KRISHNAMOORTHY, V.; SLIJPER, H.; LATASH, M.L. Effects of different types of light touch on postural sway. Experimental Brain Research, Berlin, v,147, p.71-9, 2002.LEE, D.N.; LISHMAN, J.R. Visual proprioceptive control of stance. Journal of Human Movement Studies, London, v.1, p.87-95, 1975.LISHMAN, J.R.; LEE, D.N. The autonomy of visual kinaesthesis. Perception, London, v.2, n.3, p.287-94, 1973.POLASTRI, P.F.; BARELA, J.A. Perception-action coupling in infants with Down syndrome:effects of experience and practice. Adapted Physical Activity Quarterly, Champaign, v.22, p.39-56, 2005.RILEY, M.A.; STOFFREGEN, T.A.; MICHAEL, J.G.; TURVEY, M.T. Postural stabilization forthe control of touching. Human Movement Science, Amsterdam, v.18, p.795-817, 1999.

REFERÊNCIASREFERÊNCIAS
SCHÖNER, G. Dynamic theory of action-perception patterns: the “moving room” paradigm.Biological Cybernetics, Berlin, v.64, p.455-62, 1991.SOAMES, R.W.; ATHA, J. The spectral characteristics of postural sway behavior. European Journal of Applied Physiology, Heidelberg, v.49, n.2, p.169-77, 1982.STREEPEY, J.W.; ÂNGULO-KINZLER, R.M. The role of task difficulty in the control ofdynamic balance in children and adults. Human Movement Science, Amsterdam, v,21, p.423-38, 2002.WOOLLACOTT, M.; DEBÛ, B.; MOWATT, M. Neuromuscular control of posture in the infant and child: Is vision dominant? Journal of Motor Behavior, Washington, v.19, p.167-86, 1987.

OBRIGADO PELA ATENOBRIGADO PELA ATENÇÇÃO!!ÃO!!
pranke.pranke.cefdcefd@@gmailgmail.com.com
Gabriel Ivan PrankeGabriel Ivan Pranke
Grupo de Estudo e Pesquisa em ReabilitaGrupo de Estudo e Pesquisa em Reabilitaçção Vestibularão Vestibular
LaboratLaboratóório de Biomecânicario de Biomecânica
Universidade Federal de Santa MariaUniversidade Federal de Santa Maria





![carta de cores · 2019-08-14 · O EQUITONE [pictura] oferece um acabamento de cor lisa ultramate para conseguir um aspeto arquitetónico de alto nível. De toque suave e sedoso na](https://img.document.onl/doc/110x75/5e2622c6fdbcc5762a1213af/carta-de-cores-2019-08-14-o-equitone-pictura-oferece-um-acabamento-de-cor-lisa.jpg)