Embed Size (px)
Citation preview
Estabilidade entrada-saıda (externa).
ENGC33: Sinais e Sistemas II
Departamento de Engenharia Eletrica - DEEUniversidade Federal da Bahia - UFBA
03 de dezembro de 2014
Prof. Tito Luís Maia Santos 1/ 39

Sumario
1 Apresentacao
2 BIBO estabilidade - tempo contınuo
3 BIBO estabilidade - tempo discreto
4 Observacoes
5 Criterios de Estabilidade Estrada-Saıda
6 Comentarios Finais
Prof. Tito Luís Maia Santos 2/ 39

Sumario
1 Apresentacao
2 BIBO estabilidade - tempo contınuo
3 BIBO estabilidade - tempo discreto
4 Observacoes
5 Criterios de Estabilidade Estrada-Saıda
6 Comentarios Finais
Prof. Tito Luís Maia Santos 3/ 39
Apresentacao
Objetivos da aula de hoje:
Apresentar o conceito de estabilidade entrada-saıda (BIBO -
Bounded-Input Bounded-Output ).
Prof. Tito Luís Maia Santos 4/ 39

Sumario
1 Apresentacao
2 BIBO estabilidade - tempo contınuo
3 BIBO estabilidade - tempo discreto
4 Observacoes
5 Criterios de Estabilidade Estrada-Saıda
6 Comentarios Finais
Prof. Tito Luís Maia Santos 5/ 39
BIBO estabilidade - tempo contınuoDefinicao
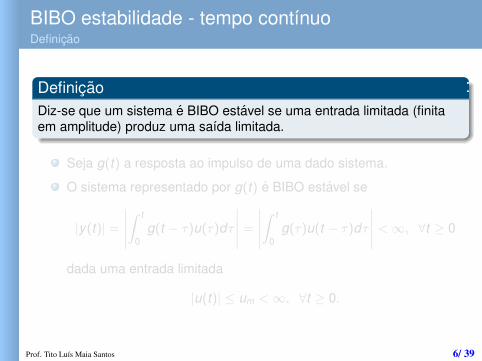
Definicao
Diz-se que um sistema e BIBO estavel se uma entrada limitada (finitaem amplitude) produz uma saıda limitada.
Seja g(t) a resposta ao impulso de uma dado sistema.
O sistema representado por g(t) e BIBO estavel se
|y(t)| =
∣
∣
∣
∣
∣
ˆ t
0
g(t − τ)u(τ)dτ
∣
∣
∣
∣
∣
=
∣
∣
∣
∣
∣
ˆ t
0
g(τ)u(t − τ)dτ
∣
∣
∣
∣
∣
< ∞, ∀t ≥ 0
dada uma entrada limitada
|u(t)| ≤ um < ∞, ∀t ≥ 0.
Prof. Tito Luís Maia Santos 6/ 39

BIBO estabilidade - tempo contınuoDefinicao
Definicao
Diz-se que um sistema e BIBO estavel se uma entrada limitada (finitaem amplitude) produz uma saıda limitada.
Seja g(t) a resposta ao impulso de uma dado sistema.
O sistema representado por g(t) e BIBO estavel se
|y(t)| =
∣
∣
∣
∣
∣
ˆ t
0
g(t − τ)u(τ)dτ
∣
∣
∣
∣
∣
=
∣
∣
∣
∣
∣
ˆ t
0
g(τ)u(t − τ)dτ
∣
∣
∣
∣
∣
< ∞, ∀t ≥ 0
dada uma entrada limitada
|u(t)| ≤ um < ∞, ∀t ≥ 0.
Prof. Tito Luís Maia Santos 6/ 39

BIBO estabilidade - tempo contınuoTeoremas
Teorema 1.
Um sistema SISO (Single-Input Single-Output) relaxado com a saıdadescrita por
y(t) =
ˆ t
0
g(t − τ)u(τ)dτ
e BIBO estavel se e somente se g(t) for absolutamente integravel, ouseja,
ˆ
∞
0
|g(t)| ≤ M < ∞
Prova (condicao suficiente).
Note que
|y(t)| =
∣
∣
∣
∣
∣
ˆ t
0
g(τ)u(t − τ)dτ
∣
∣
∣
∣
∣
≤
ˆ t
0
|g(τ)||u(t − τ)|dτ
≤ um
ˆ t
0
|g(τ)|dτ ≤ umM < ∞.Prof. Tito Luís Maia Santos 7/ 39

BIBO estabilidade - tempo contınuoTeoremas
Teorema 1.
Um sistema SISO (Single-Input Single-Output) relaxado com a saıdadescrita por
y(t) =
ˆ t
0
g(t − τ)u(τ)dτ
e BIBO estavel se e somente se g(t) for absolutamente integravel, ouseja,
ˆ
∞
0
|g(t)| ≤ M < ∞
Prova (condicao suficiente).
Note que
|y(t)| =
∣
∣
∣
∣
∣
ˆ t
0
g(τ)u(t − τ)dτ
∣
∣
∣
∣
∣
≤
ˆ t
0
|g(τ)||u(t − τ)|dτ
≤ um
ˆ t
0
|g(τ)|dτ ≤ umM < ∞.Prof. Tito Luís Maia Santos 7/ 39
BIBO estabilidade - tempo contınuoTeoremas
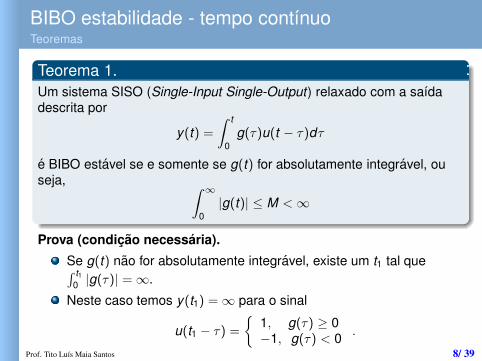
Teorema 1.
Um sistema SISO (Single-Input Single-Output) relaxado com a saıdadescrita por
y(t) =
ˆ t
0
g(τ)u(t − τ)dτ
e BIBO estavel se e somente se g(t) for absolutamente integravel, ouseja,
ˆ
∞
0
|g(t)| ≤ M < ∞
Prova (condicao necessaria).
Se g(t) nao for absolutamente integravel, existe um t1 tal que´ t1
0|g(τ)| = ∞.
Neste caso temos y(t1) = ∞ para o sinal
u(t1 − τ) =
{
1, g(τ) ≥ 0−1, g(τ) < 0
.
Prof. Tito Luís Maia Santos 8/ 39
BIBO estabilidade - tempo contınuoTeoremas
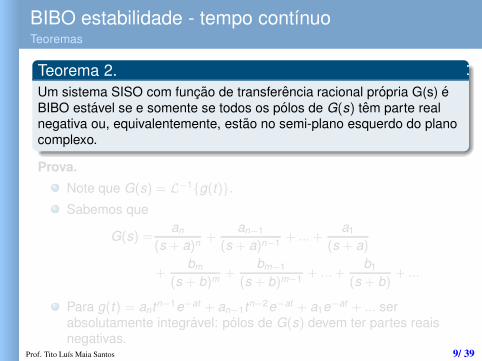
Teorema 2.
Um sistema SISO com funcao de transferencia racional propria G(s) e
BIBO estavel se e somente se todos os polos de G(s) tem parte realnegativa ou, equivalentemente, estao no semi-plano esquerdo do plano
complexo.
Prova.
Note que G(s) = L−1{g(t)}.
Sabemos que
G(s) =an
(s + a)n+
an−1
(s + a)n−1+ ...+
a1
(s + a)
+bm
(s + b)m+
bm−1
(s + b)m−1+ ...+
b1
(s + b)+ ...
Para g(t) = antn−1e−at + an−1tn−2e−at + a1e−at + ... ser
absolutamente integravel: polos de G(s) devem ter partes reaisnegativas.
Prof. Tito Luís Maia Santos 9/ 39
BIBO estabilidade - tempo contınuoTeoremas
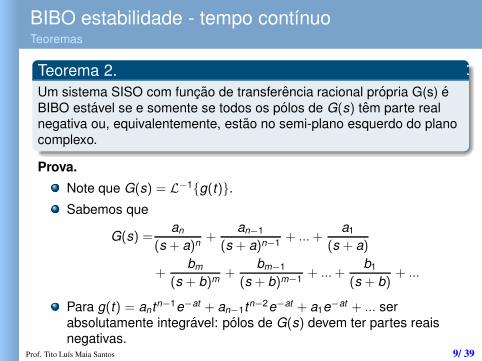
Teorema 2.
Um sistema SISO com funcao de transferencia racional propria G(s) e
BIBO estavel se e somente se todos os polos de G(s) tem parte realnegativa ou, equivalentemente, estao no semi-plano esquerdo do plano
complexo.
Prova.
Note que G(s) = L−1{g(t)}.
Sabemos que
G(s) =an
(s + a)n+
an−1
(s + a)n−1+ ...+
a1
(s + a)
+bm
(s + b)m+
bm−1
(s + b)m−1+ ...+
b1
(s + b)+ ...
Para g(t) = antn−1e−at + an−1tn−2e−at + a1e−at + ... ser
absolutamente integravel: polos de G(s) devem ter partes reaisnegativas.
Prof. Tito Luís Maia Santos 9/ 39

Sumario
1 Apresentacao
2 BIBO estabilidade - tempo contınuo
3 BIBO estabilidade - tempo discreto
4 Observacoes
5 Criterios de Estabilidade Estrada-Saıda
6 Comentarios Finais
Prof. Tito Luís Maia Santos 10/ 39

BIBO estabilidade - tempo discretoDefinicao
Definicao
Diz-se que um sistema e BIBO estavel se uma entrada limitada (finita
em amplitude) produz uma saıda limitada.
Seja g[n] a resposta ao impulso de uma dado sistema.
O sistema representado por g[n] e BIBO estavel se
|y [n]| =
∣
∣
∣
∣
∣
n∑
0
g[n − k ]u[k ]
∣
∣
∣
∣
∣
=
∣
∣
∣
∣
∣
n∑
0
g[k ]u[n − k ]
∣
∣
∣
∣
∣
< ∞, ∀k ≥ 0
dada uma entrada limitada
|u[n]| ≤ um < ∞, ∀n ≥ 0.
Prof. Tito Luís Maia Santos 11/ 39
BIBO estabilidade - tempo discretoDefinicao
Definicao
Diz-se que um sistema e BIBO estavel se uma entrada limitada (finita
em amplitude) produz uma saıda limitada.
Seja g[n] a resposta ao impulso de uma dado sistema.
O sistema representado por g[n] e BIBO estavel se
|y [n]| =
∣
∣
∣
∣
∣
n∑
0
g[n − k ]u[k ]
∣
∣
∣
∣
∣
=
∣
∣
∣
∣
∣
n∑
0
g[k ]u[n − k ]
∣
∣
∣
∣
∣
< ∞, ∀k ≥ 0
dada uma entrada limitada
|u[n]| ≤ um < ∞, ∀n ≥ 0.
Prof. Tito Luís Maia Santos 11/ 39

BIBO estabilidade - tempo discretoTeoremas
Teorema 1.
Um sistema SISO (Single-Input Single-Output) relaxado com a saıdadescrita por
y [n] =
n∑
k=0
g[n − k ]u[k ]
e BIBO estavel se e somente se g[n] for absolutamente somavel, ouseja,
∞∑
k=0
|g[k ]| ≤ M < ∞
Prova (condicao suficiente).
|y [n]| =
∣
∣
∣
∣
∣
n∑
k=0
g[k ]u[n − k ]
∣
∣
∣
∣
∣
≤
n∑
k=0
|g[k ]||u[n − k ]|
≤ um
n∑
k=0
|g[k ]| ≤ umM < ∞.
Prof. Tito Luís Maia Santos 12/ 39

BIBO estabilidade - tempo discretoTeoremas
Teorema 1.
Um sistema SISO (Single-Input Single-Output) relaxado com a saıdadescrita por
y [n] =
n∑
k=0
g[n − k ]u[k ]
e BIBO estavel se e somente se g[n] for absolutamente somavel, ouseja,
∞∑
k=0
|g[k ]| ≤ M < ∞
Prova (condicao suficiente).
|y [n]| =
∣
∣
∣
∣
∣
n∑
k=0
g[k ]u[n − k ]
∣
∣
∣
∣
∣
≤
n∑
k=0
|g[k ]||u[n − k ]|
≤ um
n∑
k=0
|g[k ]| ≤ umM < ∞.
Prof. Tito Luís Maia Santos 12/ 39

BIBO estabilidade - tempo discretoTeoremas
Teorema 1.
Um sistema SISO (Single-Input Single-Output) relaxado com a saıda descrita
por
y[n] =
n∑
k=0
g[k]u[n − k]
e BIBO estavel se e somente se g[n] for absolutamente somavel, ou seja,
∞∑
k=0
|g[k]| ≤ M < ∞
Prova (condicao necessaria).
Se g[n] nao for absolutamente somavel, existe um k1 tal que∑k1
k=0 |g[k]| = ∞.
Neste caso temos y[k1] → ∞ para o sinal
u[k1 − k] =
{
1, g[k] ≥ 0
−1, g[k] < 0.
Prof. Tito Luís Maia Santos 13/ 39
BIBO estabilidade - tempo discretoTeoremas
Teorema 2.
Um sistema SISO com funcao de transferencia pulsada racional propria
G(z) e BIBO estavel se e somente se todos os polos de G(z) temmodulo menor do que 1 ou, equivalentemente, estao no interior do
cırculo unitario do plano complexo.
Prova.
Note que G[z] = Z−1{g[n]}.
Sabemos que
G(z) =aqz
(z − a)q+
aq−1z
(z − a)q−1+ ...+
a1z
(z − a)
+bmz
(z − b)m+
bm−1z
(z − b)m−1+ ...+
b1z
(z − b)+ ...
Neste caso, g[n] tera fatores na forma “an”, “nan−1”,... (polos
relacionados a “a”); “bn”, “nbn−1”, ..., (polos relacionados a “b”)...
Assim, g[n] e absolutamente somavel se |a| < 1, |b| < 1, ...Prof. Tito Luís Maia Santos 14/ 39

BIBO estabilidade - tempo discretoTeoremas
Teorema 2.
Um sistema SISO com funcao de transferencia pulsada racional propria
G(z) e BIBO estavel se e somente se todos os polos de G(z) temmodulo menor do que 1 ou, equivalentemente, estao no interior do
cırculo unitario do plano complexo.
Prova.
Note que G[z] = Z−1{g[n]}.
Sabemos que
G(z) =aqz
(z − a)q+
aq−1z
(z − a)q−1+ ...+
a1z
(z − a)
+bmz
(z − b)m+
bm−1z
(z − b)m−1+ ...+
b1z
(z − b)+ ...
Neste caso, g[n] tera fatores na forma “an”, “nan−1”,... (polos
relacionados a “a”); “bn”, “nbn−1”, ..., (polos relacionados a “b”)...
Assim, g[n] e absolutamente somavel se |a| < 1, |b| < 1, ...Prof. Tito Luís Maia Santos 14/ 39
Sumario
1 Apresentacao
2 BIBO estabilidade - tempo contınuo
3 BIBO estabilidade - tempo discreto
4 Observacoes
5 Criterios de Estabilidade Estrada-Saıda
6 Comentarios Finais
Prof. Tito Luís Maia Santos 15/ 39

ObservacoesCaso MIMO
Teorema 3.
Um sistema MIMO com uma matriz de transferencia G(s) e BIBO estavelse e somente se todos os polos de G(s) tem tem parte real negativa.
Teorema 4.
Um sistema MIMO com uma matriz de transferencia pulsada G(z) e
BIBO estavel se e somente se todos os polos de G(z) tem modulomenor do que 1.
Prof. Tito Luís Maia Santos 16/ 39
ObservacoesRelacao autovalores - polos
Dado um sistema na forma
x(t) = Ax(t) + Bu(t)
y(t) = Cx(t) + Du(t)
sabemos que
G(s) = C(sI − A)−1B + D =1
det(sI − A)C[Adj(sI − A)]B + D.
Todos polos de G(s) sao autovalores de A.
Os autovalores de A nao sao necessariamente polos de G(s)(podem ocorrer cancelamentos).
Prof. Tito Luís Maia Santos 17/ 39

ObservacoesRelacao autovalores - polos
Dado um sistema na forma
x [k + 1] = Ax [k ] + Bu[k ]
y [k ] = Cx [k ] + Du[k ]
sabemos que
G(z) = C(zI − A)−1B + D =1
det(zI − A)C[Adj(zI − A)]B + D.
Todos polos de G(z) sao autovalores de A.
Os autovalores de A nao sao necessariamente polos de G(z)(podem ocorrer cancelamentos).
Prof. Tito Luís Maia Santos 18/ 39
Sumario
1 Apresentacao
2 BIBO estabilidade - tempo contınuo
3 BIBO estabilidade - tempo discreto
4 Observacoes
5 Criterios de Estabilidade Estrada-Saıda
6 Comentarios Finais
Prof. Tito Luís Maia Santos 19/ 39

Criterios de Estabilidade Estrada-SaıdaCriterio de Routh
Considere um sistema descrito por:
G(s) =b0sm + b1sm−1 + ...+ bm−1s + bm
a0sn + a1sn−1 + ...+ an−1s + an.
Para verificar a estabilidade, devemos saber se as raızes da
equacao
a0sn + a1sn−1 + ...+ an−1s + an = 0
possuem parte real negativa.
Sem perda de generalidade, vamos assumir que an 6= 0 e a0 6= 0.
Deve-se notar que e necessario atender a0 > 0, a1 > 0, ..., an > 0
(mesmo sinal).
Prof. Tito Luís Maia Santos 20/ 39

Criterios de Estabilidade Estrada-SaıdaCriterio de Routh
Partindo do polinomio a seguir:
a0sn + a1sn−1 + ...+ an−1s + an = 0
vamos utilizar a tabela abaixo.
sn a0 a2 a4 a6 ...
sn−1 a1 a3 a5 a7 ...
sn−2 b1 b2 b3 b4 ...
sn−3 c1 c2 c3 c4 ......
......
s2 e1 e2
s1 f1s0 g0
Prof. Tito Luís Maia Santos 21/ 39

Criterios de Estabilidade Estrada-SaıdaCriterio de Routh
Partindo do polinomio a seguir:
a0sn + a1sn−1 + ...+ an−1s + an = 0
vamos utilizar a tabela abaixo.
sn a0 a2 a4 a6 ...
sn−1 a1 a3 a5 a7 ...
sn−2 b1 b2 b3 b4 ...
sn−3 c1 c2 c3 c4 ......
......
s2 e1 e2
s1 f1s0 g0
b1 =a1a2 − a0a3
a1
Prof. Tito Luís Maia Santos 22/ 39

Criterios de Estabilidade Estrada-SaıdaCriterio de Routh
Partindo do polinomio a seguir:
a0sn + a1sn−1 + ...+ an−1s + an = 0
vamos utilizar a tabela abaixo.
sn a0 a2 a4 a6 ...
sn−1 a1 a3 a5 a7 ...
sn−2 b1 b2 b3 b4 ...
sn−3 c1 c2 c3 c4 ......
......
s2 e1 e2
s1 f1s0 g0
b1 =a1a2 − a0a3
a1, b2 =
a1a4 − a0a5
a1
Prof. Tito Luís Maia Santos 23/ 39

Criterios de Estabilidade Estrada-SaıdaCriterio de Routh
Partindo do polinomio a seguir:
a0sn + a1sn−1 + ...+ an−1s + an = 0
vamos utilizar a tabela abaixo.
sn a0 a2 a4 a6 ...
sn−1 a1 a3 a5 a7 ...
sn−2 b1 b2 b3 b4 ...
sn−3 c1 c2 c3 c4 ......
......
s2 e1 e2
s1 f1s0 g0
b1 =a1a2 − a0a3
a1, b2 =
a1a4 − a0a5
a1, b3 =
a1a6 − a0a7
a1
Prof. Tito Luís Maia Santos 24/ 39
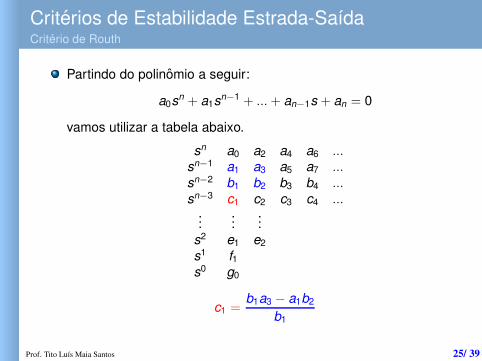
Criterios de Estabilidade Estrada-SaıdaCriterio de Routh
Partindo do polinomio a seguir:
a0sn + a1sn−1 + ...+ an−1s + an = 0
vamos utilizar a tabela abaixo.
sn a0 a2 a4 a6 ...
sn−1 a1 a3 a5 a7 ...
sn−2 b1 b2 b3 b4 ...
sn−3 c1 c2 c3 c4 ......
......
s2 e1 e2
s1 f1s0 g0
c1 =b1a3 − a1b2
b1
Prof. Tito Luís Maia Santos 25/ 39

Criterios de Estabilidade Estrada-SaıdaCriterio de Routh
Partindo do polinomio a seguir:
a0sn + a1sn−1 + ...+ an−1s + an = 0
vamos utilizar a tabela abaixo.
sn a0 a2 a4 a6 ...
sn−1 a1 a3 a5 a7 ...
sn−2 b1 b2 b3 b4 ...
sn−3 c1 c2 c3 c4 ......
......
s2 e1 e2
s1 f1s0 g0
c1 =b1a3 − a1b2
b1, c2 =
b1a5 − a1b3
b1
Prof. Tito Luís Maia Santos 26/ 39
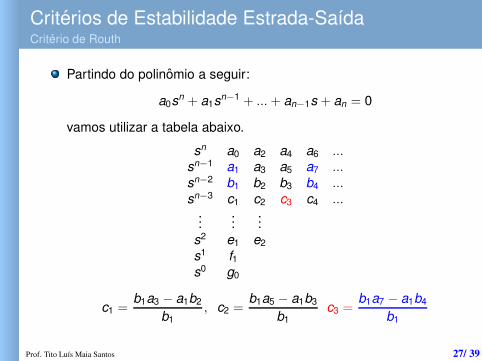
Criterios de Estabilidade Estrada-SaıdaCriterio de Routh
Partindo do polinomio a seguir:
a0sn + a1sn−1 + ...+ an−1s + an = 0
vamos utilizar a tabela abaixo.
sn a0 a2 a4 a6 ...
sn−1 a1 a3 a5 a7 ...
sn−2 b1 b2 b3 b4 ...
sn−3 c1 c2 c3 c4 ......
......
s2 e1 e2
s1 f1s0 g0
c1 =b1a3 − a1b2
b1, c2 =
b1a5 − a1b3
b1c3 =
b1a7 − a1b4
b1
Prof. Tito Luís Maia Santos 27/ 39

Criterios de Estabilidade Estrada-SaıdaCriterio de Routh
Partindo do polinomio a seguir:
a0sn + a1s
n−1 + ...+ an−1s + an = 0
vamos utilizar a tabela abaixo.
sn a0 a2 a4 a6 ...
sn−1 a1 a3 a5 a7 ...
sn−2 b1 b2 b3 b4 ...
sn−3 c1 c2 c3 c4 ......
......
s2 e1 e2
s1 f1s0 g0
O numero de raızes com parte real positiva corresponde ao numero
de mudanca de sinais da primeira coluna.
Pode-se multiplicar uma linha por uma constante real positiva.
Prof. Tito Luís Maia Santos 28/ 39

Criterios de Estabilidade Estrada-SaıdaCriterio de Routh
Partindo do polinomio a seguir:
a0sn + a1s
n−1 + ...+ an−1s + an = 0
vamos utilizar a tabela abaixo.
sn a0 a2 a4 a6 ...
sn−1 a1 a3 a5 a7 ...
sn−2 b1 b2 b3 b4 ...
sn−3 c1 c2 c3 c4 ......
......
s2 e1 e2
s1 f1s0 g0
O numero de raızes com parte real positiva corresponde ao numero
de mudanca de sinais da primeira coluna.
Pode-se multiplicar uma linha por uma constante real positiva.
Prof. Tito Luís Maia Santos 28/ 39
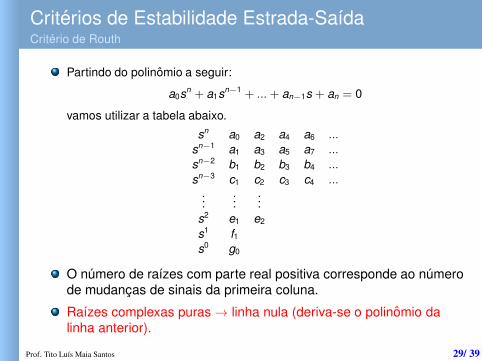
Criterios de Estabilidade Estrada-SaıdaCriterio de Routh
Partindo do polinomio a seguir:
a0sn + a1sn−1 + ...+ an−1s + an = 0
vamos utilizar a tabela abaixo.
sn a0 a2 a4 a6 ...
sn−1 a1 a3 a5 a7 ...
sn−2 b1 b2 b3 b4 ...
sn−3 c1 c2 c3 c4 ......
......
s2 e1 e2
s1 f1s0 g0
O numero de raızes com parte real positiva corresponde ao numerode mudancas de sinais da primeira coluna.
Raızes complexas puras → linha nula (deriva-se o polinomio dalinha anterior).
Prof. Tito Luís Maia Santos 29/ 39
Criterios de Estabilidade Estrada-SaıdaCriterio de Routh
Partindo do polinomio a seguir:
a0sn + a1s
n−1 + ...+ an−1s + an = 0
vamos utilizar a tabela abaixo.
sn a0 a2 a4 a6 ...
sn−1 a1 a3 a5 a7 ...
sn−2 b1 b2 b3 b4 ...
sn−3 c1 c2 c3 c4 ......
......
s2 e1 e2
s1 f1s0 g0
O numero de raızes com parte real positiva corresponde ao numero
de sinais da primeira coluna.
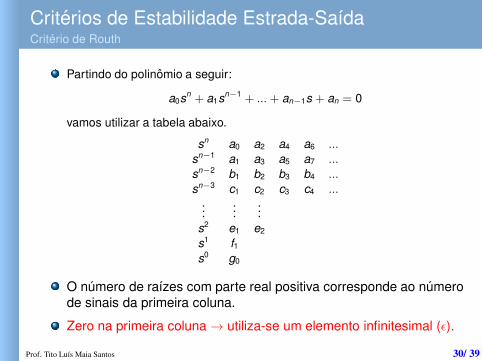
Zero na primeira coluna → utiliza-se um elemento infinitesimal (ǫ).
Prof. Tito Luís Maia Santos 30/ 39

Criterios de Estabilidade Estrada-SaıdaCriterio de Routh
Partindo do polinomio a seguir:
a0sn + a1s
n−1 + ...+ an−1s + an = 0
vamos utilizar a tabela abaixo.
sn a0 a2 a4 a6 ...
sn−1 a1 a3 a5 a7 ...
sn−2 b1 b2 b3 b4 ...
sn−3 c1 c2 c3 c4 ......
......
s2 e1 e2
s1 f1s0 g0
O numero de raızes com parte real positiva corresponde ao numero
de sinais da primeira coluna.
Para verificar a estabilidade relativa fazemos s = s + σ (s = s − σ ).
Prof. Tito Luís Maia Santos 31/ 39
Criterios de Estabilidade Estrada-SaıdaCriterio de Jury-Blanchard
Partindo do polinomio a seguir:
P(z) = αnzn + αn−1zn−1 + ...+ α1z + α0 = 0
vamos utilizar a tabela abaixo.
z0 z1 ... zk ... zn
1 α0 α1 ... αn−k ... αn
2 αn αn−1 ... αk ... α0
3 β0 β1 ... βn−k ... βn
4 βn βn−1 ... βk ... β0
......
......
...
2n − 5 γ0 γ1 γ2 γ3
2n − 4 γ3 γ2 γ1 γ0
2n − 3 ρ0 ρ1 ρ2
2n − 2 ρ2 ρ1 ρ0
Prof. Tito Luís Maia Santos 32/ 39

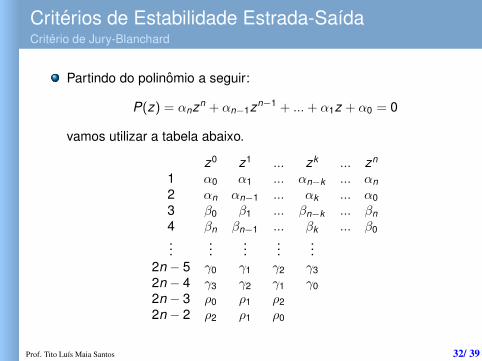
Criterios de Estabilidade Estrada-SaıdaCriterio de Jury-Blanchard
Partindo do polinomio a seguir:
P(z) = αnzn + αn−1zn−1 + ...+ α1z + α0 = 0
vamos utilizar a tabela abaixo.
z0 z1 ... zk ... zn
1 α0 α1 ... αn−k ... αn
2 αn αn−1 ... αk ... α0
3 β0 β1 ... βn−k ... βn
4 βn βn−1 ... βk ... β0
......
......
...
2n − 5 γ0 γ1 γ2 γ3
2n − 4 γ3 γ2 γ1 γ0
2n − 3 ρ0 ρ1 ρ2
2n − 2 ρ2 ρ1 ρ0
βk = det
[
α0 αn−k
αn αk
]
γk = det
[
β0 βn−1−k
βn−1 βk
]
ρi = det
[
θ0 θ3−i
θ3 θi
]
Prof. Tito Luís Maia Santos 33/ 39

Criterios de Estabilidade Estrada-SaıdaCriterio de Jury-Blanchard
Partindo do polinomio a seguir:
P(z) = αnzn + αn−1z
n−1 + ...+ α1z + α0 = 0
vamos utilizar a tabela abaixo.
z0 z1 ... zk ... zn
1 α0 α1 ... αn−k ... αn
2 αn αn−1 ... αk ... α0
3 β0 β1 ... βn−k ... βn
4 βn βn−1 ... βk ... β0
......
......
...
2n − 5 γ0 γ1 γ2 γ3
2n − 4 γ3 γ2 γ1 γ0
2n − 3 ρ0 ρ1 ρ2
2n − 2 ρ2 ρ1 ρ0
Regra 1: P(1) > 0.
Prof. Tito Luís Maia Santos 34/ 39
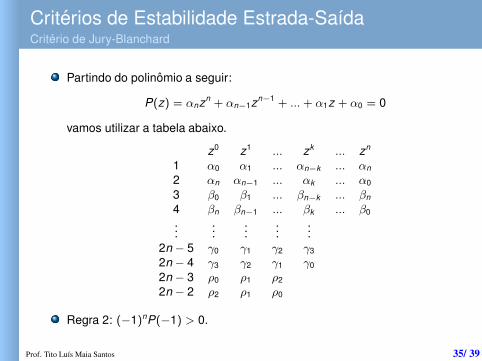
Criterios de Estabilidade Estrada-SaıdaCriterio de Jury-Blanchard
Partindo do polinomio a seguir:
P(z) = αnzn + αn−1z
n−1 + ...+ α1z + α0 = 0
vamos utilizar a tabela abaixo.
z0 z1 ... zk ... zn
1 α0 α1 ... αn−k ... αn
2 αn αn−1 ... αk ... α0
3 β0 β1 ... βn−k ... βn
4 βn βn−1 ... βk ... β0
......
......
...
2n − 5 γ0 γ1 γ2 γ3
2n − 4 γ3 γ2 γ1 γ0
2n − 3 ρ0 ρ1 ρ2
2n − 2 ρ2 ρ1 ρ0
Regra 2: (−1)nP(−1) > 0.
Prof. Tito Luís Maia Santos 35/ 39

Criterios de Estabilidade Estrada-SaıdaCriterio de Jury-Blanchard
Partindo do polinomio a seguir:
P(z) = αnzn + αn−1z
n−1 + ...+ α1z + α0 = 0
vamos utilizar a tabela abaixo.
z0 z1 ... zk ... zn
1 α0 α1 ... αn−k ... αn
2 αn αn−1 ... αk ... α0
3 β0 β1 ... βn−k ... βn
4 βn βn−1 ... βk ... β0
......
......
...
2n − 5 γ0 γ1 γ2 γ3
2n − 4 γ3 γ2 γ1 γ0
2n − 3 ρ0 ρ1 ρ2
2n − 2 ρ2 ρ1 ρ0
Regra 3: |αN | > |α0|.
Prof. Tito Luís Maia Santos 36/ 39
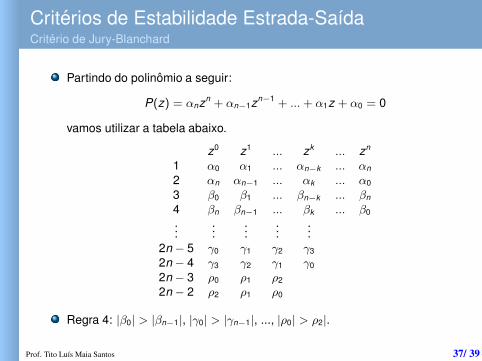
Criterios de Estabilidade Estrada-SaıdaCriterio de Jury-Blanchard
Partindo do polinomio a seguir:
P(z) = αnzn + αn−1z
n−1 + ...+ α1z + α0 = 0
vamos utilizar a tabela abaixo.
z0 z1 ... zk ... zn
1 α0 α1 ... αn−k ... αn
2 αn αn−1 ... αk ... α0
3 β0 β1 ... βn−k ... βn
4 βn βn−1 ... βk ... β0
......
......
...
2n − 5 γ0 γ1 γ2 γ3
2n − 4 γ3 γ2 γ1 γ0
2n − 3 ρ0 ρ1 ρ2
2n − 2 ρ2 ρ1 ρ0
Regra 4: |β0| > |βn−1|, |γ0| > |γn−1|, ..., |ρ0| > ρ2|.
Prof. Tito Luís Maia Santos 37/ 39

Sumario
1 Apresentacao
2 BIBO estabilidade - tempo contınuo
3 BIBO estabilidade - tempo discreto
4 Observacoes
5 Criterios de Estabilidade Estrada-Saıda
6 Comentarios Finais
Prof. Tito Luís Maia Santos 38/ 39
Comentarios Finais
Nesta aula discutiu-se sobre os conceitos de estabilidade
entrada-saıda.
Na proxima aula:
Discutiremos sobre estabilidade interna.
Prof. Tito Luís Maia Santos 39/ 39