Embed Size (px)
Citation preview
PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS
Programa de Pós Graduação em Engenharia Mecânica
Mestrado em Engenharia Mecânica
ESTUDO CINEMÁTICO DE SUSPENSÕES VEICULARES
DO TIPO EIXO DE TORÇÃO
Vinícius Leal
Belo Horizonte 2007
Vinícius Leal
ESTUDO CINEMÁTICO DE SUSPENSÕES VEICULARES
DO TIPO EIXO DE TORÇÃO
Dissertação apresentada ao Programa de Pós-Graduação em
Engenharia Mecânica da Pontifícia Universidade Católica de
Minas Gerais, como requisito parcial para obtenção do título de
Mestre em Engenharia Mecânica.
Orientador: Prof. Janes Landre Junior, D. Sc.
Belo Horizonte
2007
FICHA CATALOGRÁFICA
Elaborada pela Biblioteca da Pontifícia Universidade Católica de Minas Gerais
Leal, Vinícius
L435e Estudo cinemático de suspensões veiculares do tipo eixo de torção / Vinícius
Leal. Belo Horizonte, 2007.
170 f. : il.
Orientador: Janes Landre Junior
Dissertação (Mestrado) – Pontifícia Universidade Católica de Minas Gerais.
Programa de Pós-Graduação em Engenharia Mecânica.
1. Automóveis – Molas e suspensão. 2. Veículos a motor – Dinâmica – Molas
e suspensão. 3. Convergência. I. Landre Junior, Janes. II. Pontifícia Universidade
Católica de Minas Gerais. Programa de Pós-Graduação em Engenharia Mecânica.
III. Título.
CDU: 629.113
Vinícius Leal
Estudo cinemático de suspensões veiculares do tipo eixo de torção.
Dissertação apresentada ao Programa de Pós-Graduação em Engenharia Mecânica
da Pontifícia Universidade Católica de Minas Gerais, como requisito parcial para
obtenção do título de Mestre em Engenharia Mecânica.
_________________________________________ Janes Landre Junior (Orientador) – PUC Minas.
_________________________________________ Marcelo Becker – PUC Minas
_________________________________________ Ernani Sales Palma – PUC Minas
_________________________________________ Marco Túlio Corrêa de Faria – UFMG
AGRADECIMENTOS
• À minha mãe pela dedicação e incentivo à minha educação e crescimento
profissional;
• À Ana Flávia pelo incentivo, paciência e colaboração nos momentos difíceis;
• Ao meu amigo e orientador, Prof. Dr Janes Landre Jr. pelo grande apoio e
paciência em toda minha carreira acadêmica e profissional.
Resumo
Atualmente as suspensões traseiras do tipo eixo de torção viraram uma tendência
em veículos comerciais leves, devido à sua simplicidade e baixo custo de fabricação
aliada a um bom desempenho em serviço.
As propriedades elásticas deste tipo de suspensão determinam sua performance. As
variações cinemáticas relativas a esta concepção, são provocadas principalmente
devido ao comportamento elástico de sua travessa principal. A altura do centro de
giro da suspensão e o desempenho cinemático está diretamente relacionado ao
perfil da travessa principal.
O presente trabalho tem como objetivo principal estudar a influência da geometria do
perfil da travessa de suspensões traseiras do tipo eixo de torção no comportamento
elastocinemático da suspensão, utilizando o método dos elementos finitos como
ferramenta. Este trabalho apresenta uma correlação entre o perfil principal da
suspensão e a altura do centro de giro comentando sobre a atitude do veículo em
manobras.
Para se adquirir total conhecimento do comportamento elástico da travessa, são
analisados oito perfis atualmente aplicados no mercado e avaliado as curvas de
convergência e camber em movimentos simétricos e assimétricos da suspensão.
Chegando-se, portanto, à algumas importantes conclusões relativas ao
comportamento da suspensão induzido pela travessa.
Para validação da metodologia numérica utilizada, foi realizada uma prova
experimental sobre um veículo atualmente em produção e comparado com os
resultados obtidos.
A partir dos conhecimentos adquiridos coma as análises supracitadas, torna-se
possível equacionar a dinâmica dos movimentos da suspensão, e assim analisar o
seu comportamento e as influencias direcionais sobre o veículo como um todo ainda
na fase de concepção do projeto.
A análise desenvolvida neste trabalho pode auxiliar o projetista tanto nas análises
preliminares de projeto quanto no processo de desenvolvimento de melhorias e de
reprojeto de suspensões veiculares do tipo eixo de torção.
Palavras–chave: Eixo de torção, Elastocinemática, Suspensões veiculares, eixo de
torção, elastocinematismo, centro de giro, convergência, camber.
Abstract
Nowadays the torsion beam rear suspensions have become a tendency in light
commercial vehicles due to its simplicity and manufacturing low costs, allied to its
packaging and functionality. The elastic properties of this type of suspension
determine its performance. The present work has a main objective, to study the
influence of the geometry of the cross section member in the wheel travel behavior of
the suspension, using the finite element method (FEM) as a tool. The height of the
body roll center and the kinematical performance of this kind of suspension is related
to the cross section member. This work presents a relation between the cross section
geometry and the height of the body roll center, discussing about camber and toe-in
variation.
Keywords: Vehicle suspension, torsion beam, twist beam, elastokinematics, roll
center, toe-in, camber, travel wheel.
LISTA DE ABREVIATURAS
ed. – Edição;
n. – número;
p. – página;
Séc – Século;
Eq – Equação.
LISTA DE SIGLAS
DIN - Deutsches Institut für Normung;
ISO - International Organization for Standardization;
NHTSA – National Highway Traffic Safety Administration;
SAE - Society of Automotive Engineering;
FEM – Finite Element Method.
LISTA DE SÍMBOLOS
a – Distância entre centro de gravidade e centro de massa;
b – Distância entre o centro do eixo dianteiro e o centro de gravidade;
B – Bitola;
Bh – Altura do centro de giro da carroceria;
Cα - Fator de proporcionalidade;
c - Distância entre o centro do eixo traseiro e o centro de gravidade;
D – Diâmetro da roda;
Fa – Força longitudinal devido à aceleração do veículo;
FI – Força de reação longitudinal devido a inércia da massa suspensa;
Fεw – Força vertical geradora de camber;
Fyf – Força lateral sobre o eixo dianteiro;
Fyr– Força lateral sobre o eixo traseiro;
g – Aceleração da gravidade;
hR0 – Altura do centro de giro;
i – Relação de distância entre eixos;
Ix – Inércia de área da travessa em relação ao eixo X.
Iz – Inércia de área da travessa em relação ao eixo Z.
Iwb – Centro instantâneo de giro da roda em relação à carroceria;
Iwg - Centro instantâneo de giro da roda em relação ao solo;
Kε - Coeficiente de camber de rolagem;
Ks – Rigidez à rolagem;
L – Distância entre eixos;
Ltotal – Comprimento total do veículo;
M – Massa suspensa;
Ma – Momento centrifugo;
MC – Momento centrifugo relativo à massa não suspensa;
Me – Momento relativo à força lateral;
Mrt – Momento de reação à rolagem;
Mrt – Momento gerado devido à diferença de tamanho das abas dos perfis C.
O – Ponto do centro dos coxins;
P – Pólo da suspensão;
r – Raio da curva;
R – Força de reação a terra;
R1 – Momento de resistência ao avançamento;
Rae – Carga na roda externa;
Rai - Carga na roda interna;
R0 – Centro de giro;
SM – Centro de giro real;
V – Velocidade tangencial;
W – Peso sobre eixos;
Wr – Peso sobre eixo traseiro;
α - Ângulo de escorregamento;
α1 - Ângulo formado na conexão de perfis “C” com os braços oscilantes;
δv0 – Ângulo de convergência estático total;
εw – Ângulo de camber;
ϕ - Ângulos de rotação da carroceria;
µ - Coeficiente de atrito;
θ - Ângulo de rolagem da carroceria.
sumário
1. INTRODUÇÃO .......................................................................................................................................... 10
1.1. CONTEXTO GERAL ............................................................................................................................... 10
1.2. MOTIVAÇÃO ........................................................................................................................................ 11
2. OBJETIVOS............................................................................................................................................... 12
2.1. OBJETIVO GERAL ................................................................................................................................ 12
2.2. OBJETIVOS ESPECÍFICOS ..................................................................................................................... 12
3. REVISÃO BIBLIOGRÁFICA.................................................................................................................. 13
3.1. HISTÓRICO .......................................................................................................................................... 13
3.2. SOLUÇÕES ATUAIS .............................................................................................................................. 17
4. REVISÃO TEÓRICA ................................................................................................................................ 37
4.1. CONCEITOS FUNDAMENTAIS................................................................................................................ 37
4.2. RIDE .................................................................................................................................................... 38
4.3. HANDLING ........................................................................................................................................... 40
4.3.1. COMPORTAMENTO EM CURVA ............................................................................................................. 42
4.3.1.1. EQUAÇÕES DE CURVA ......................................................................................................................... 42
4.3.1.2. ROLAGEM DA CARROCERIA ................................................................................................................. 46
4.3.1.3. CARGA DINÂMICA NAS RODAS ............................................................................................................ 49
4.4. SUSPENSÕES AUTOMOTIVAS – AMBIENTAÇÃO .................................................................................... 51
4.4.1. PARÂMETROS CINEMÁTICOS DE SUSPENSÕES ...................................................................................... 52
4.4.1.1. DISTÂNCIA ENTRE EIXOS ..................................................................................................................... 52
4.4.1.2. BITOLA ................................................................................................................................................ 54
4.4.1.3. CENTRO E EIXO DE GIRO ..................................................................................................................... 57
4.4.1.4. CAMBER .............................................................................................................................................. 63
4.4.1.5. CONVERGÊNCIA .................................................................................................................................. 69
4.4.2. CONSIDERAÇÕES SOBRE PROJETO DE SUSPENSÕES .............................................................................. 75
4.4.2.1. COMPLIANCE STEER ............................................................................................................................ 75
4.4.2.2. “SQUAD” E “DIVE” .............................................................................................................................. 76
4.5. MANOBRAS DE HANDLING ................................................................................................................... 78
5. METODOLOGIA ...................................................................................................................................... 83
5.1. NUMÉRICA .......................................................................................................................................... 83
5.1.1. INTRODUÇÃO ...................................................................................................................................... 83
5.1.2. DESCRIÇÃO DO MODELO FEM ............................................................................................................ 84
5.2. EXPERIMENTAL ................................................................................................................................... 92
6. JUSTIFICATIVA DA METODOLOGIA UTILIZADA ............ ............................................................ 96
7. RESULTADOS .......................................................................................................................................... 98
7.1. SUSPENSÃO PADRÃO: COMPARAÇÃO NUMÉRICO – EXPERIMENTAL ..................................................... 98
7.2. PERFIL PROPOSTO 1 .......................................................................................................................... 105
7.2.1. PERFIL 1 - CENTRO DE GIRO .............................................................................................................. 105
7.2.2. PERFIL 1 - MOVIMENTO VERTICAL SIMÉTRICO – CAMBER E CONVERGÊNCIA.................................... 107
7.2.3. PERFIL 1 - MOVIMENTO VERTICAL ASSIMÉTRICO – CAMBER E CONVERGÊNCIA ............................... 109
7.3. PERFIL PROPOSTO 2 .......................................................................................................................... 110
7.3.1. PERFIL 2 - CENTRO DE GIRO .............................................................................................................. 110
7.3.2. PERFIL 2 - MOVIMENTO VERTICAL SIMÉTRICO – CAMBER E CONVERGÊNCIA.................................... 112
7.3.3. PERFIL 2 - MOVIMENTO VERTICAL ASSIMÉTRICO – CAMBER E CONVERGÊNCIA ............................... 114
7.4. PERFIL PROPOSTO 3 .......................................................................................................................... 115
7.4.1. PERFIL 3 - CENTRO DE GIRO .............................................................................................................. 115
7.4.2. PERFIL 3 - MOVIMENTO VERTICAL SIMÉTRICO – CAMBER E CONVERGÊNCIA.................................... 117
7.4.3. PERFIL 3 - MOVIMENTO VERTICAL ASSIMÉTRICO – CAMBER E CONVERGÊNCIA ............................... 119
7.5. PERFIL PROPOSTO 4 .......................................................................................................................... 120
7.5.1. PERFIL 4 - CENTRO DE GIRO .............................................................................................................. 120
7.5.2. PERFIL 4 - MOVIMENTO VERTICAL SIMÉTRICO – CAMBER E CONVERGÊNCIA.................................... 122
7.5.3. PERFIL 4 - MOVIMENTO VERTICAL ASSIMÉTRICO – CAMBER E CONVERGÊNCIA ............................... 124
7.6. PERFIL PROPOSTO 5 .......................................................................................................................... 125
7.6.1. PERFIL 5 - CENTRO DE GIRO .............................................................................................................. 125
7.6.2. PERFIL 5 - MOVIMENTO VERTICAL SIMÉTRICO – CAMBER E CONVERGÊNCIA.................................... 127
7.6.3. PERFIL 5 - MOVIMENTO VERTICAL ASSIMÉTRICO – CAMBER E CONVERGÊNCIA ............................... 129
7.7. PERFIL PROPOSTO 6 .......................................................................................................................... 130
7.7.1. PERFIL 6 - CENTRO DE GIRO .............................................................................................................. 130
7.7.2. PERFIL 6 - MOVIMENTO VERTICAL SIMÉTRICO – CAMBER E CONVERGÊNCIA.................................... 133
7.7.3. PERFIL 6 - MOVIMENTO VERTICAL ASSIMÉTRICO – CAMBER E CONVERGÊNCIA ............................... 134
7.8. PERFIL PROPOSTO 7 .......................................................................................................................... 136
7.8.1. PERFIL 7 - CENTRO DE GIRO .............................................................................................................. 136
7.8.2. PERFIL 7 - MOVIMENTO VERTICAL SIMÉTRICO – CAMBER E CONVERGÊNCIA.................................... 138
7.8.3. PERFIL 7 - MOVIMENTO VERTICAL ASSIMÉTRICO – CAMBER E CONVERGÊNCIA ............................... 140
7.9. COMPARAÇÃO E DISCUSSÃO DOS RESULTADOS ................................................................................. 141
7.9.1. MOVIMENTO VERTICAL SIMÉTRICO - CAMBER .................................................................................. 143
7.9.2. MOVIMENTO VERTICAL SIMÉTRICO – CONVERGÊNCIA ...................................................................... 145
7.9.3. MOVIMENTO VERTICAL ASSIMÉTRICO – CAMBER ............................................................................. 147
7.9.4. MOVIMENTO VERTICAL ASSIMÉTRICO – CONVERGÊNCIA .................................................................. 151
7.9.5. CENTRO DE GIRO ............................................................................................................................... 156
8. CONCLUSÕES ........................................................................................................................................ 160
9. SUGESTÕES PARA TRABALHOS FUTUROS .................................................................................. 165
10. REFERÊNCIAS ....................................................................................................................................... 166
10
1. INTRODUÇÃO
1.1. CONTEXTO GERAL
Considerando a competitividade do mercado automotivo atual, a busca por
soluções de baixo custo, que atendam a todas as exigências de qualidade, tornou-se
essencial no processo de desenvolvimento de produtos. Os princípios de produção
em grande escala tornaram-se um limitador de complexidade de componentes,
devido principalmente às dificuldades encontradas no processo de fabricação.
Atualmente, o cenário econômico globalizado gera uma busca constante por
soluções com qualidade e que ao mesmo tempo seja viável de produção em série.
No mercado automotivo este cenário impõe uma agilidade no projeto de veículos
ainda maior, obrigando um alto grau de especialização no departamento de
engenharia, para produzir resultados rápidos, simples, de baixo custo e por fim, que
satisfaçam as expectativas dos usuários de veículos automotores.
Suspensões do tipo eixo de torção são um exemplo deste cenário
competitivo. Este tipo de solução apresenta talvez a concepção mais simples de
suspensões, no ponto de vista de processo de fabricação, dentre todas as soluções
presentes atualmente no mercado, ao mesmo tempo, apresenta um ótimo
desempenho quando aplicada em veículos comerciais leves. Criou-se, portanto, uma
tendência no mercado mundial, devido às facilidades e aos baixos custos atuais de
produção de peças estampadas em série. Esta solução apresentou-se como a de
11
melhor relação entre custo benefício no mercado, gerando a necessidade, portanto,
de conhecimentos aprofundados nas variáveis de projeto relativas a esta concepção.
1.2. MOTIVAÇÃO
Um grande desafio no projeto de suspensões consiste em alcançar as
características geométricas ótimas, mantendo a qualidade do componente em todos
os requisitos do projeto. As características elásticas dos elementos das suspensões
do tipo eixo de torção definem o comportamento do componente. Neste tipo de
suspensão a movimentação das rodas traseiras, provocam deformações em sua
travessa principal, tal deformação influencia na posição das rodas interferindo, por
fim, na dirigibilidade e conforto do veículo.
Grande parte dos projetos de suspensões do tipo eixo de torção são
atualmente realizados através do método das tentativas, utilizando algoritmos ou
simplesmente através de alterações geométricas manuais múltiplas, a fim de se
atingir a configuração geométrica ideal.
A travessa principal deste tipo de suspensão é o componente mais importante
em relação à atitude do veículo em manobras. A principal motivação deste trabalho é
a compreensão da influência do perfil no comportamento do conjunto da suspensão,
visando otimizar o processo de desenvolvimento e modificações de suspensões
traseiras do tipo eixo de torção, suprindo assim a agilidade requerida pelo mercado
atual.
12
2. OBJETIVOS
2.1. OBJETIVO GERAL
O presente trabalho tem como objetivo principal estudar a influência da
geometria do perfil da travessa principal no comportamento elastocinemático de
suspensões traseiras do tipo eixo de torção.
2.2. OBJETIVOS ESPECÍFICOS
• Estudar as etapas de projeto de suspensões posteriores do tipo eixo de
torção, abordando principalmente a influência do perfil da travessa principal no
comportamento dos ângulos de convergência e camber;
• Desenvolver um modelo FEM para análises elastocinemáticas e
efetuar uma correlação com resultados experimentais;
• Realizar um estudo de levantamento do centro de giro, através do
método dos elementos finitos;
• Verificar a influência do perfil da travessa principal na altura do centro
de giro da suspensão e comprovar a influência desta variável no comportamento dos
ângulos de camber e convergência;
• Otimizar o processo de desenvolvimento/modificação de suspensões
traseiras do tipo eixo de torção, a partir do ajuste do modelo numérico obtido.
13
3. REVISÃO BIBLIOGRÁFICA
3.1. HISTÓRICO
No século XVIII, o engenheiro francês Nicolas Joseph Cugnot (1725 - 1804)
criou o que pode ter sido o primeiro veículo automotor propulsionado da história
(Gillespie, 1992). O veículo, conforme ilustrado na figura 1, que continha um motor a
vapor, foi desenvolvido unicamente para fins militares. Neste primeiro momento, a
única preocupação de Cugnot em relação às suspensões automotivas era estrutural,
isto é, Cugnot preocupava-se basicamente em resistir aos esforços provenientes dos
carregamentos do veículo e também aos esforços provenientes do acidentado solo
da época. A suspensão do veículo era coligada rigidamente ao chassi, não havendo
nenhuma preocupação com o conforto dos passageiros e tampouco com a
estabilidade do veículo.
Figura 1: Triciclo de Cugnot.
Fonte: Gillespie, 1992
Entretanto as primeiras necessidades de desenvolvimento de suspensões
surgiram no séc. XIII A.C. com as charretes da Grécia antiga, mais tarde também
14
utilizadas pelos Romanos – Figura 2 (Dixon, 1996). Tais charretes, quando utilizadas
em confrontos, tinham sérios problemas de estabilidade, pois atingiam altas
velocidades quando puxadas por cavalos, normalmente dois, exigindo assim muita
habilidade do condutor para se manter erguido, devido aos altos níveis de
acelerações que o atingiam. Outro problema enfrentado na época foi o transporte de
pessoas eminentes, pois as carruagens eram extremamente desconfortáveis, sendo
praticamente impossível transportar pessoas sentadas, com conforto, com eixos
ligados de forma rígida à carroceria. A solução, neste tempo, era o transporte de
personalidades no ombro de escravos, garantindo assim o mínimo de conforto.
Figura 2: Charrete romana.
Fonte: vroma, 2006
Durante séculos conviveram-se com estas dificuldades, até que, no século
XVII, anterior à invenção de Cugnot, nasceram os primeiros projetos de suspensões
veiculares, também em carruagens, visando o conforto dos ocupantes. Nesta época
utilizavam-se molas de aço unidas com tiras de couro à carroceria eliminando
finalmente a união rígida entre eixo e carroceria - figura 3.
15
Figura 3: Carruagem Séc. XVII.
Fonte: Okabe; 2006
No século XVIII, em paralelo à invenção de Cugnot, surgiram os primeiros
veículos utilizando molas em cada uma das rodas. Isto foi possível devido ao
advento das tecnologias dos processos de fabricação como forjamento e têmpera
em aços. Obtive-se, desta forma, grandes ganhos em conforto, possibilitando o
transporte em longas distâncias, viabilizando o advento dos veículos automotores.
Poucos anos depois, já no século XIX, com o advento das corridas
automotoras e principalmente para fins militares, muitos estudos surgiram para o
desenvolvimento de suspensões. Vários tipos de soluções foram apresentadas afim
de se garantir conforto, durabilidade e segurança, atingindo velocidades cada vez
maiores. As mais variadas soluções foram estudadas; diversos tipos de mola foram
usadas com variadas formas: flexão, espiral, barras de torção. Diversas opções de
materiais foram empregadas como couro, madeira, aço, borracha, etc. Novas
soluções foram surgindo, assim como os problemas foram aparecendo,
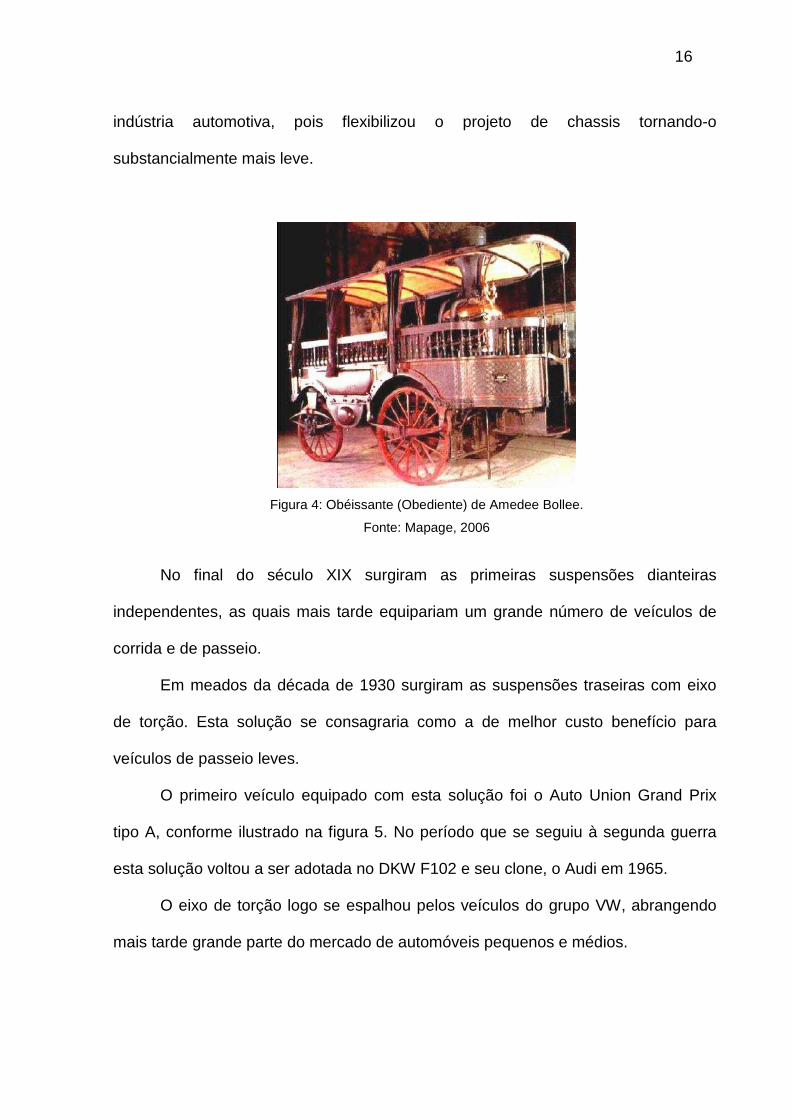
aumentando-se assim o grau de complexidade das suspensões. A Figura 4 ilustra
uma das primeiras concepções de suspensões veiculares com sucesso - o
Obéissante de Amédée Bollée (1874) - o projeto previa uma carroceria suspensa
nas quatro rodas, independente, molas duplas elípticas na frente e planas na
traseira, também opostas. Este projeto foi um passo muito importante para a
16
indústria automotiva, pois flexibilizou o projeto de chassis tornando-o
substancialmente mais leve.
Figura 4: Obéissante (Obediente) de Amedee Bollee.
Fonte: Mapage, 2006
No final do século XIX surgiram as primeiras suspensões dianteiras
independentes, as quais mais tarde equipariam um grande número de veículos de
corrida e de passeio.
Em meados da década de 1930 surgiram as suspensões traseiras com eixo
de torção. Esta solução se consagraria como a de melhor custo benefício para
veículos de passeio leves.
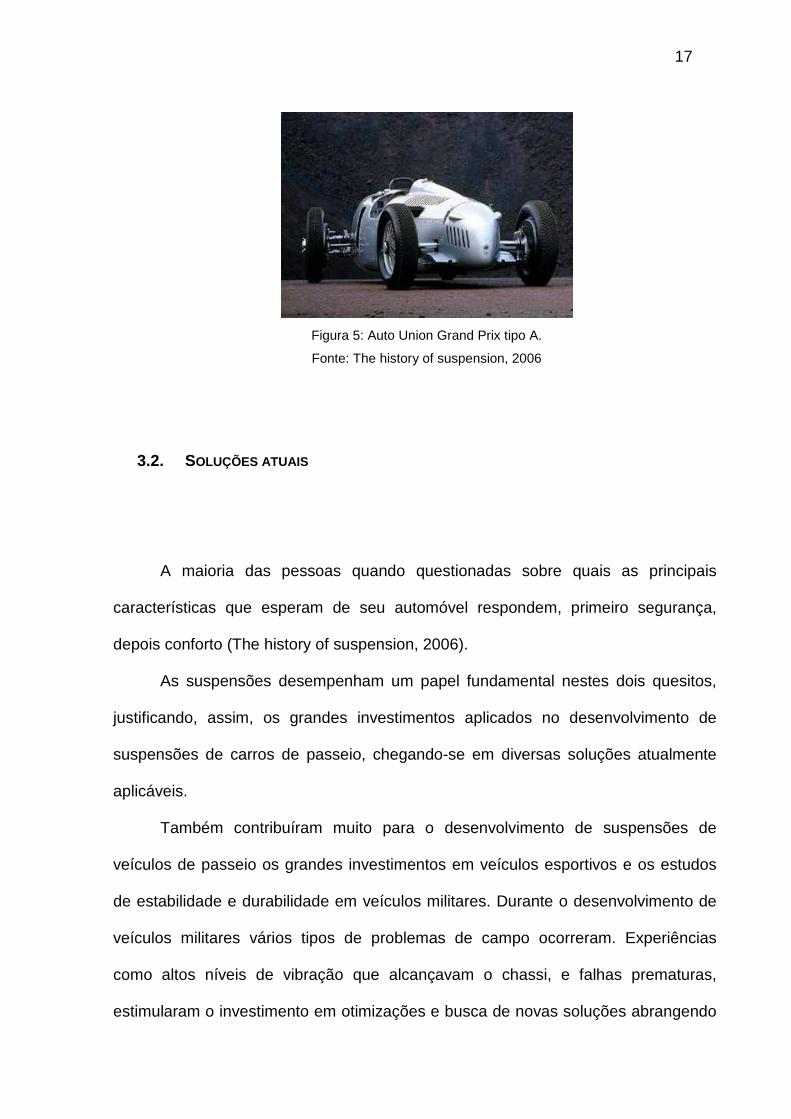
O primeiro veículo equipado com esta solução foi o Auto Union Grand Prix
tipo A, conforme ilustrado na figura 5. No período que se seguiu à segunda guerra
esta solução voltou a ser adotada no DKW F102 e seu clone, o Audi em 1965.
O eixo de torção logo se espalhou pelos veículos do grupo VW, abrangendo
mais tarde grande parte do mercado de automóveis pequenos e médios.
17
Figura 5: Auto Union Grand Prix tipo A.
Fonte: The history of suspension, 2006
3.2. SOLUÇÕES ATUAIS
A maioria das pessoas quando questionadas sobre quais as principais
características que esperam de seu automóvel respondem, primeiro segurança,
depois conforto (The history of suspension, 2006).
As suspensões desempenham um papel fundamental nestes dois quesitos,
justificando, assim, os grandes investimentos aplicados no desenvolvimento de
suspensões de carros de passeio, chegando-se em diversas soluções atualmente
aplicáveis.
Também contribuíram muito para o desenvolvimento de suspensões de
veículos de passeio os grandes investimentos em veículos esportivos e os estudos
de estabilidade e durabilidade em veículos militares. Durante o desenvolvimento de
veículos militares vários tipos de problemas de campo ocorreram. Experiências
como altos níveis de vibração que alcançavam o chassi, e falhas prematuras,
estimularam o investimento em otimizações e busca de novas soluções abrangendo
18
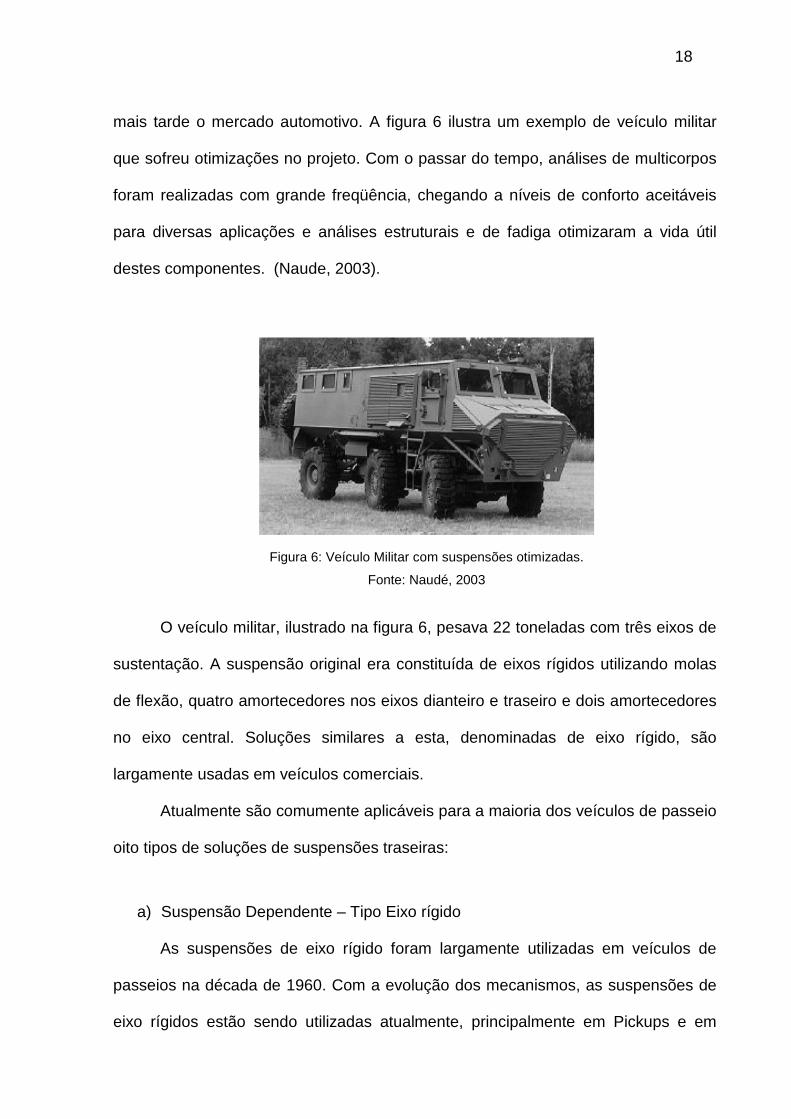
mais tarde o mercado automotivo. A figura 6 ilustra um exemplo de veículo militar
que sofreu otimizações no projeto. Com o passar do tempo, análises de multicorpos
foram realizadas com grande freqüência, chegando a níveis de conforto aceitáveis
para diversas aplicações e análises estruturais e de fadiga otimizaram a vida útil
destes componentes. (Naude, 2003).
Figura 6: Veículo Militar com suspensões otimizadas.
Fonte: Naudé, 2003
O veículo militar, ilustrado na figura 6, pesava 22 toneladas com três eixos de
sustentação. A suspensão original era constituída de eixos rígidos utilizando molas
de flexão, quatro amortecedores nos eixos dianteiro e traseiro e dois amortecedores
no eixo central. Soluções similares a esta, denominadas de eixo rígido, são
largamente usadas em veículos comerciais.
Atualmente são comumente aplicáveis para a maioria dos veículos de passeio
oito tipos de soluções de suspensões traseiras:
a) Suspensão Dependente – Tipo Eixo rígido
As suspensões de eixo rígido foram largamente utilizadas em veículos de
passeios na década de 1960. Com a evolução dos mecanismos, as suspensões de
eixo rígidos estão sendo utilizadas atualmente, principalmente em Pickups e em
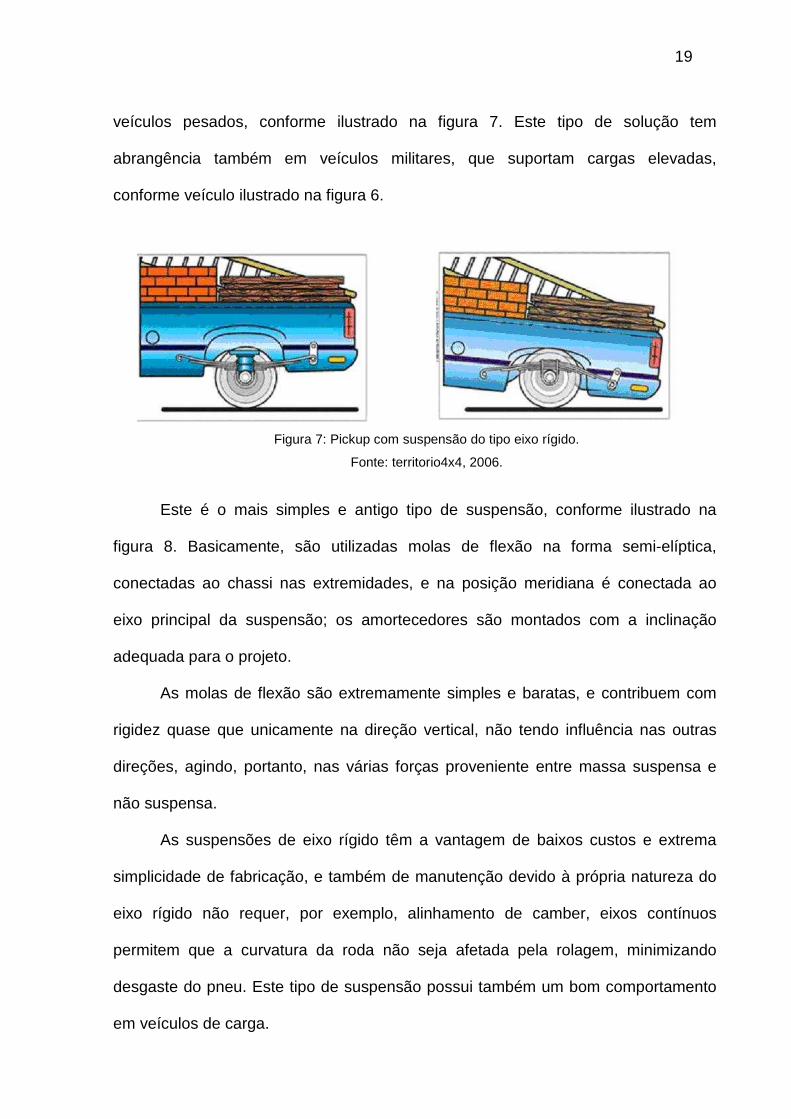
19
veículos pesados, conforme ilustrado na figura 7. Este tipo de solução tem
abrangência também em veículos militares, que suportam cargas elevadas,
conforme veículo ilustrado na figura 6.
Figura 7: Pickup com suspensão do tipo eixo rígido.
Fonte: territorio4x4, 2006.
Este é o mais simples e antigo tipo de suspensão, conforme ilustrado na
figura 8. Basicamente, são utilizadas molas de flexão na forma semi-elíptica,
conectadas ao chassi nas extremidades, e na posição meridiana é conectada ao
eixo principal da suspensão; os amortecedores são montados com a inclinação
adequada para o projeto.
As molas de flexão são extremamente simples e baratas, e contribuem com
rigidez quase que unicamente na direção vertical, não tendo influência nas outras
direções, agindo, portanto, nas várias forças proveniente entre massa suspensa e
não suspensa.
As suspensões de eixo rígido têm a vantagem de baixos custos e extrema
simplicidade de fabricação, e também de manutenção devido à própria natureza do
eixo rígido não requer, por exemplo, alinhamento de camber, eixos contínuos
permitem que a curvatura da roda não seja afetada pela rolagem, minimizando
desgaste do pneu. Este tipo de suspensão possui também um bom comportamento
em veículos de carga.
20
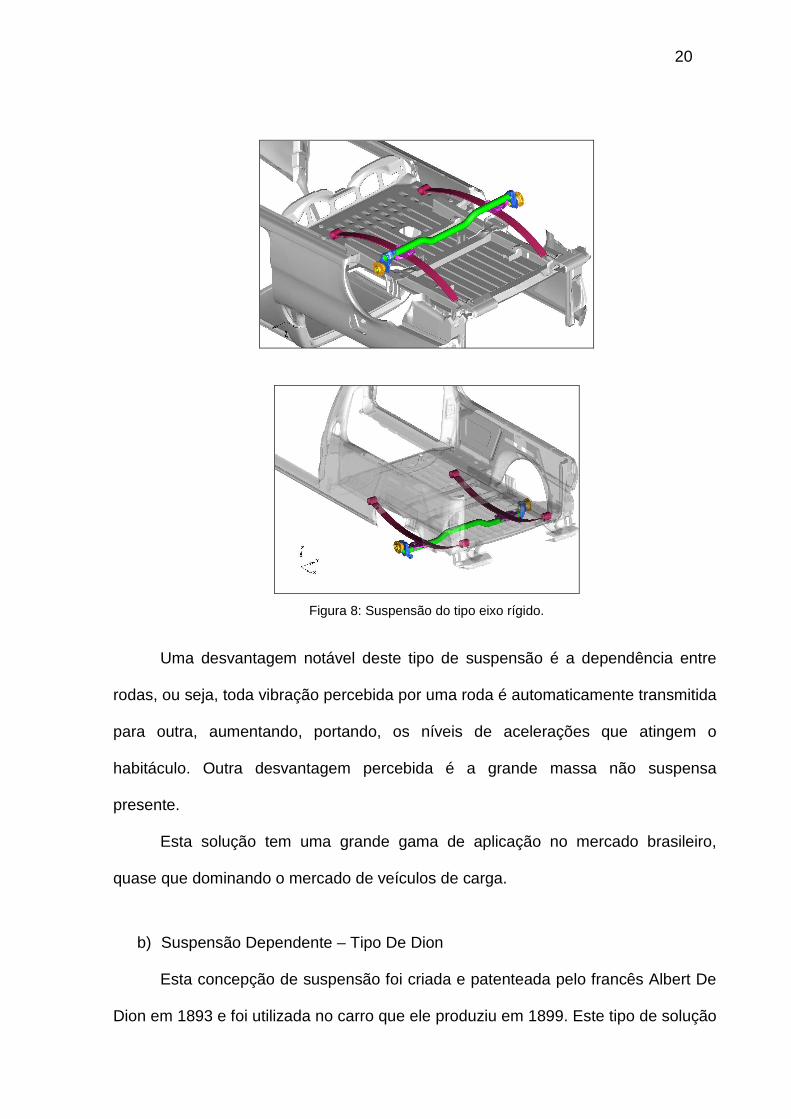
Figura 8: Suspensão do tipo eixo rígido.
Uma desvantagem notável deste tipo de suspensão é a dependência entre
rodas, ou seja, toda vibração percebida por uma roda é automaticamente transmitida
para outra, aumentando, portando, os níveis de acelerações que atingem o
habitáculo. Outra desvantagem percebida é a grande massa não suspensa
presente.
Esta solução tem uma grande gama de aplicação no mercado brasileiro,
quase que dominando o mercado de veículos de carga.
b) Suspensão Dependente – Tipo De Dion
Esta concepção de suspensão foi criada e patenteada pelo francês Albert De
Dion em 1893 e foi utilizada no carro que ele produziu em 1899. Este tipo de solução
21
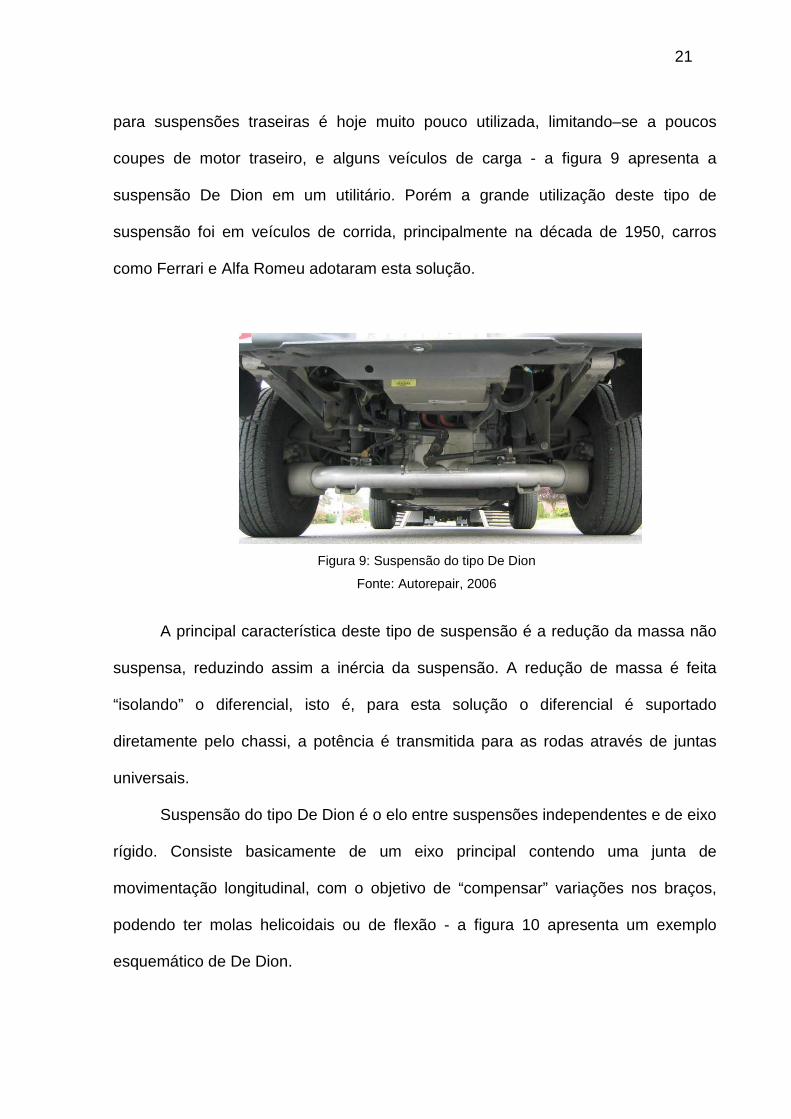
para suspensões traseiras é hoje muito pouco utilizada, limitando–se a poucos
coupes de motor traseiro, e alguns veículos de carga - a figura 9 apresenta a
suspensão De Dion em um utilitário. Porém a grande utilização deste tipo de
suspensão foi em veículos de corrida, principalmente na década de 1950, carros
como Ferrari e Alfa Romeu adotaram esta solução.
Figura 9: Suspensão do tipo De Dion
Fonte: Autorepair, 2006
A principal característica deste tipo de suspensão é a redução da massa não
suspensa, reduzindo assim a inércia da suspensão. A redução de massa é feita
“isolando” o diferencial, isto é, para esta solução o diferencial é suportado
diretamente pelo chassi, a potência é transmitida para as rodas através de juntas
universais.
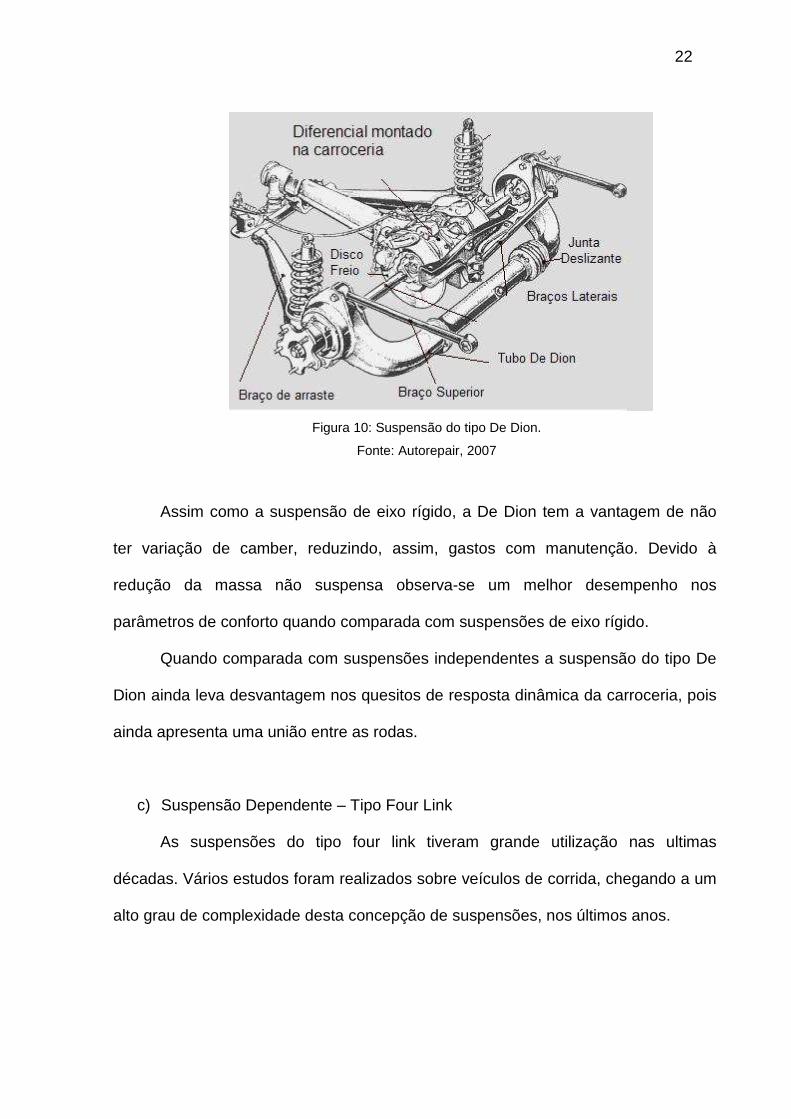
Suspensão do tipo De Dion é o elo entre suspensões independentes e de eixo
rígido. Consiste basicamente de um eixo principal contendo uma junta de
movimentação longitudinal, com o objetivo de “compensar” variações nos braços,
podendo ter molas helicoidais ou de flexão - a figura 10 apresenta um exemplo
esquemático de De Dion.
22
Figura 10: Suspensão do tipo De Dion.
Fonte: Autorepair, 2007
Assim como a suspensão de eixo rígido, a De Dion tem a vantagem de não
ter variação de camber, reduzindo, assim, gastos com manutenção. Devido à
redução da massa não suspensa observa-se um melhor desempenho nos
parâmetros de conforto quando comparada com suspensões de eixo rígido.
Quando comparada com suspensões independentes a suspensão do tipo De
Dion ainda leva desvantagem nos quesitos de resposta dinâmica da carroceria, pois
ainda apresenta uma união entre as rodas.
c) Suspensão Dependente – Tipo Four Link
As suspensões do tipo four link tiveram grande utilização nas ultimas
décadas. Vários estudos foram realizados sobre veículos de corrida, chegando a um
alto grau de complexidade desta concepção de suspensões, nos últimos anos.
23
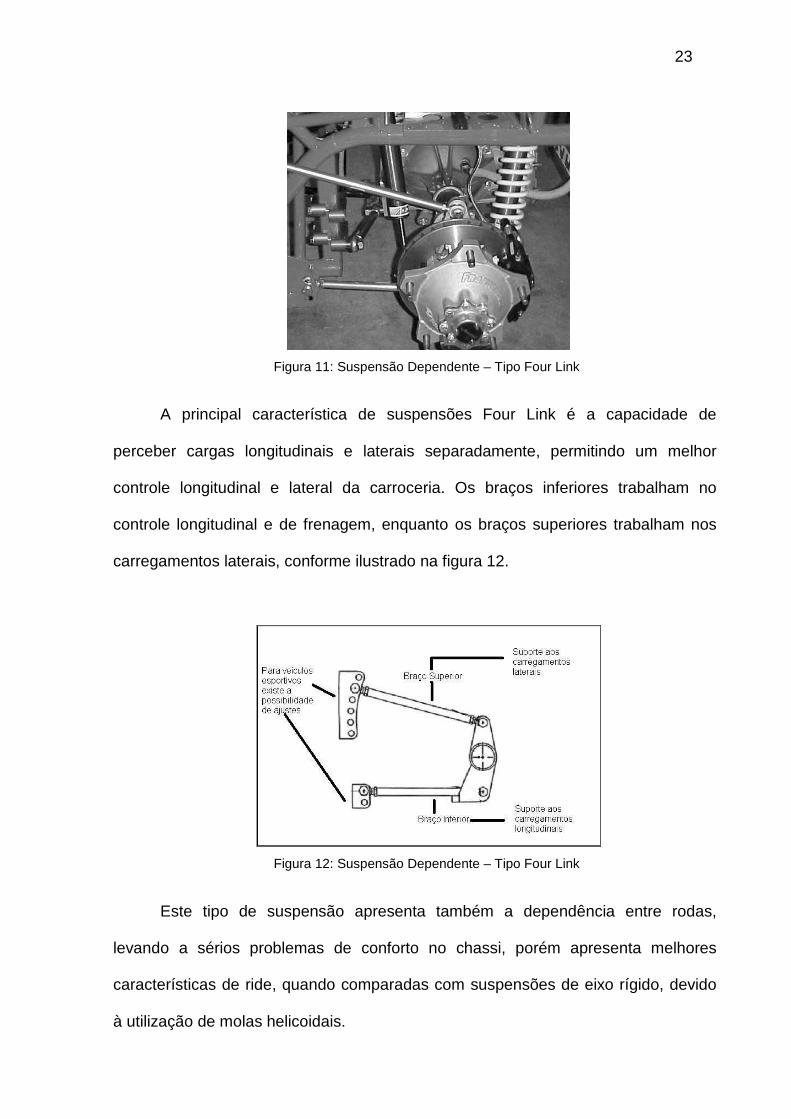
Figura 11: Suspensão Dependente – Tipo Four Link
A principal característica de suspensões Four Link é a capacidade de
perceber cargas longitudinais e laterais separadamente, permitindo um melhor
controle longitudinal e lateral da carroceria. Os braços inferiores trabalham no
controle longitudinal e de frenagem, enquanto os braços superiores trabalham nos
carregamentos laterais, conforme ilustrado na figura 12.
Figura 12: Suspensão Dependente – Tipo Four Link
Este tipo de suspensão apresenta também a dependência entre rodas,
levando a sérios problemas de conforto no chassi, porém apresenta melhores
características de ride, quando comparadas com suspensões de eixo rígido, devido
à utilização de molas helicoidais.
24
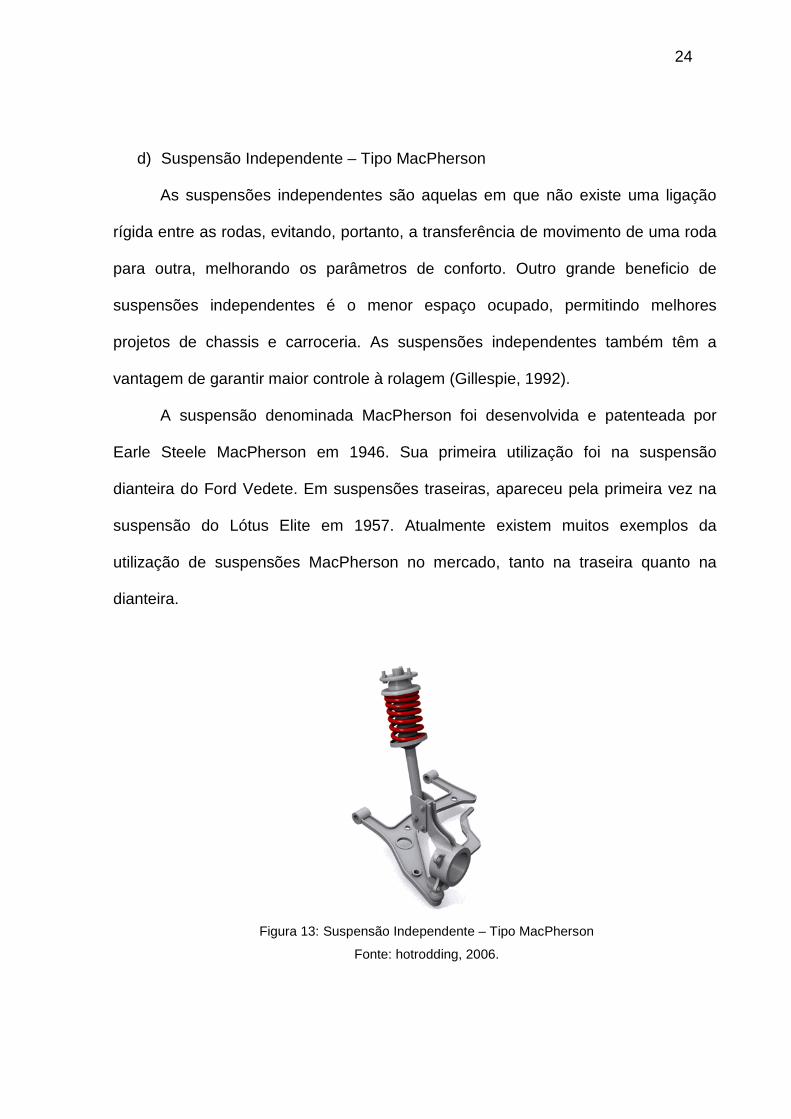
d) Suspensão Independente – Tipo MacPherson
As suspensões independentes são aquelas em que não existe uma ligação
rígida entre as rodas, evitando, portanto, a transferência de movimento de uma roda
para outra, melhorando os parâmetros de conforto. Outro grande beneficio de
suspensões independentes é o menor espaço ocupado, permitindo melhores
projetos de chassis e carroceria. As suspensões independentes também têm a
vantagem de garantir maior controle à rolagem (Gillespie, 1992).
A suspensão denominada MacPherson foi desenvolvida e patenteada por
Earle Steele MacPherson em 1946. Sua primeira utilização foi na suspensão
dianteira do Ford Vedete. Em suspensões traseiras, apareceu pela primeira vez na
suspensão do Lótus Elite em 1957. Atualmente existem muitos exemplos da
utilização de suspensões MacPherson no mercado, tanto na traseira quanto na
dianteira.
Figura 13: Suspensão Independente – Tipo MacPherson
Fonte: hotrodding, 2006.
25
Este é um exemplo simples de suspensões independentes, sua simplicidade
é uma das grandes vantagens das MacPherson. A facilidade de confecção e
montagem leva a um baixo custo de produção chegando a patamares similares a
suspensões de eixo rígido.
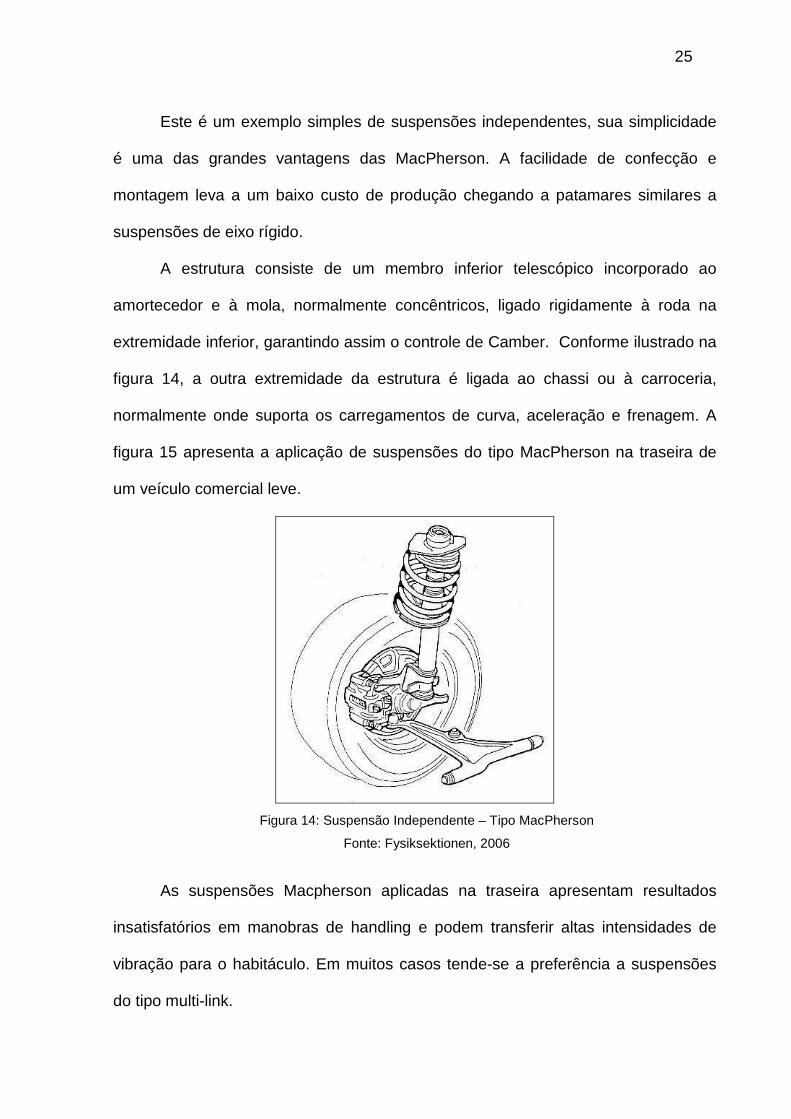
A estrutura consiste de um membro inferior telescópico incorporado ao
amortecedor e à mola, normalmente concêntricos, ligado rigidamente à roda na
extremidade inferior, garantindo assim o controle de Camber. Conforme ilustrado na
figura 14, a outra extremidade da estrutura é ligada ao chassi ou à carroceria,
normalmente onde suporta os carregamentos de curva, aceleração e frenagem. A
figura 15 apresenta a aplicação de suspensões do tipo MacPherson na traseira de
um veículo comercial leve.
Figura 14: Suspensão Independente – Tipo MacPherson
Fonte: Fysiksektionen, 2006
As suspensões Macpherson aplicadas na traseira apresentam resultados
insatisfatórios em manobras de handling e podem transferir altas intensidades de
vibração para o habitáculo. Em muitos casos tende-se a preferência a suspensões
do tipo multi-link.
26
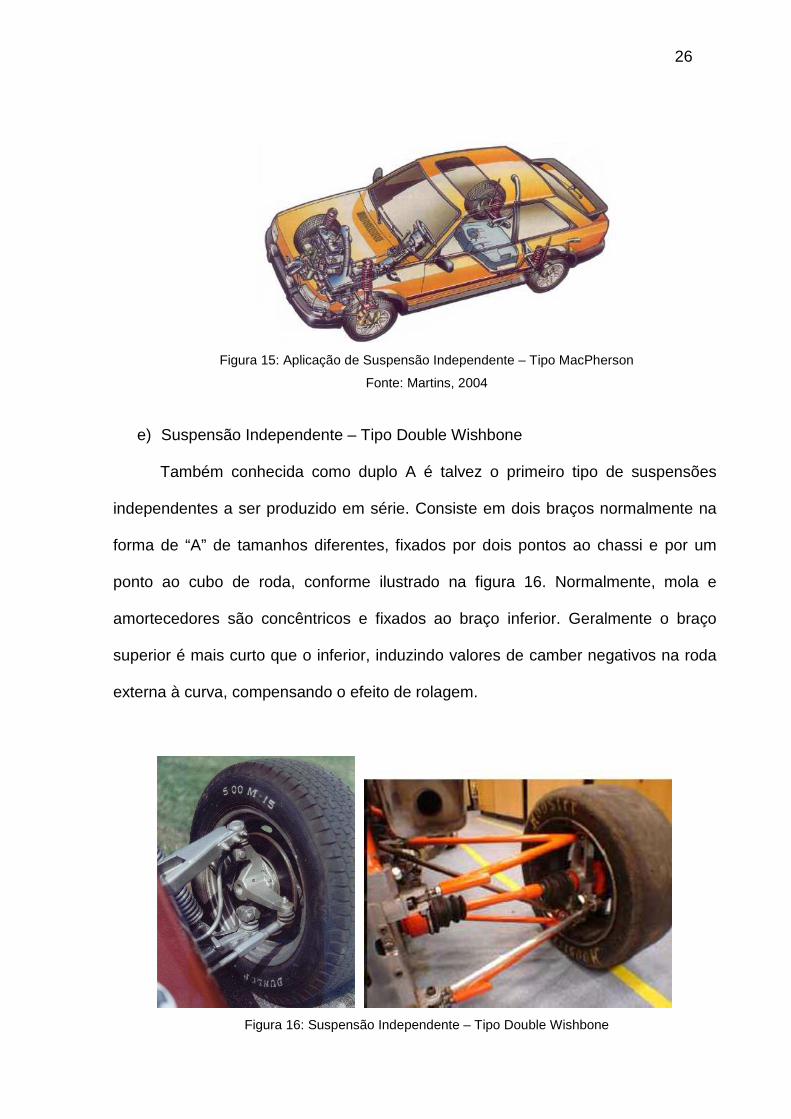
Figura 15: Aplicação de Suspensão Independente – Tipo MacPherson
Fonte: Martins, 2004
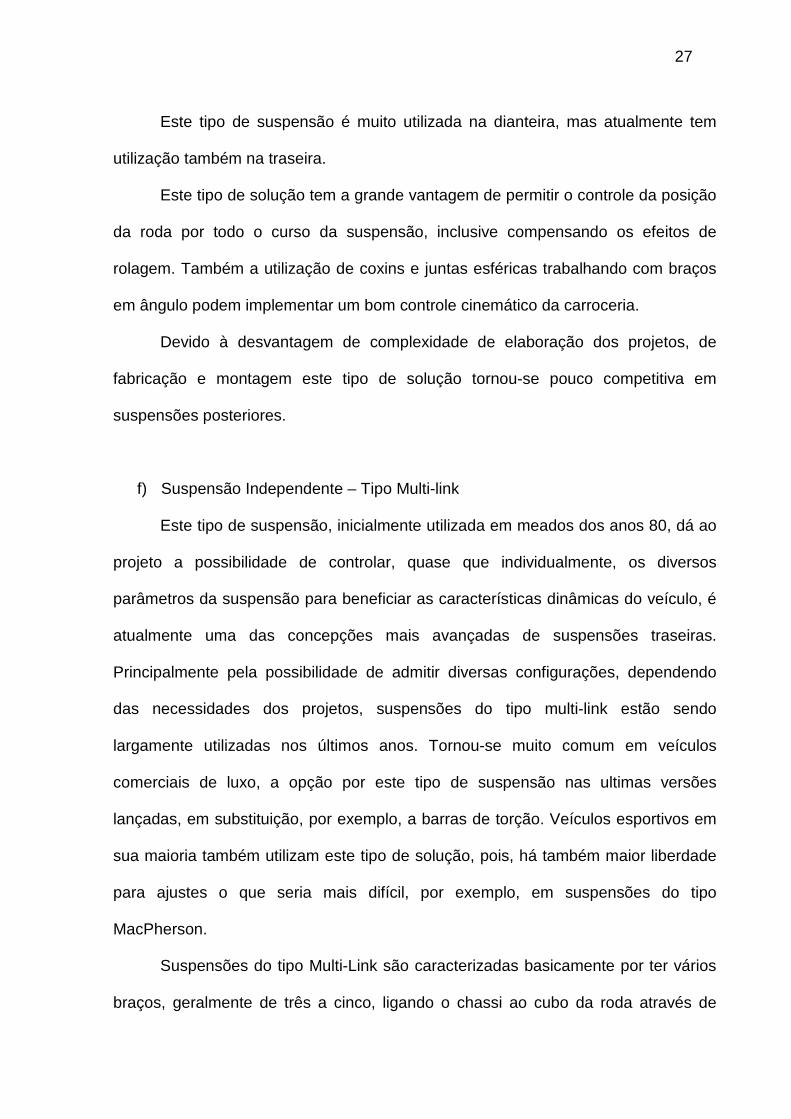
e) Suspensão Independente – Tipo Double Wishbone
Também conhecida como duplo A é talvez o primeiro tipo de suspensões
independentes a ser produzido em série. Consiste em dois braços normalmente na
forma de “A” de tamanhos diferentes, fixados por dois pontos ao chassi e por um
ponto ao cubo de roda, conforme ilustrado na figura 16. Normalmente, mola e
amortecedores são concêntricos e fixados ao braço inferior. Geralmente o braço
superior é mais curto que o inferior, induzindo valores de camber negativos na roda
externa à curva, compensando o efeito de rolagem.
Figura 16: Suspensão Independente – Tipo Double Wishbone
27
Este tipo de suspensão é muito utilizada na dianteira, mas atualmente tem
utilização também na traseira.
Este tipo de solução tem a grande vantagem de permitir o controle da posição
da roda por todo o curso da suspensão, inclusive compensando os efeitos de
rolagem. Também a utilização de coxins e juntas esféricas trabalhando com braços
em ângulo podem implementar um bom controle cinemático da carroceria.
Devido à desvantagem de complexidade de elaboração dos projetos, de
fabricação e montagem este tipo de solução tornou-se pouco competitiva em
suspensões posteriores.
f) Suspensão Independente – Tipo Multi-link
Este tipo de suspensão, inicialmente utilizada em meados dos anos 80, dá ao
projeto a possibilidade de controlar, quase que individualmente, os diversos
parâmetros da suspensão para beneficiar as características dinâmicas do veículo, é
atualmente uma das concepções mais avançadas de suspensões traseiras.
Principalmente pela possibilidade de admitir diversas configurações, dependendo
das necessidades dos projetos, suspensões do tipo multi-link estão sendo
largamente utilizadas nos últimos anos. Tornou-se muito comum em veículos
comerciais de luxo, a opção por este tipo de suspensão nas ultimas versões
lançadas, em substituição, por exemplo, a barras de torção. Veículos esportivos em
sua maioria também utilizam este tipo de solução, pois, há também maior liberdade
para ajustes o que seria mais difícil, por exemplo, em suspensões do tipo
MacPherson.
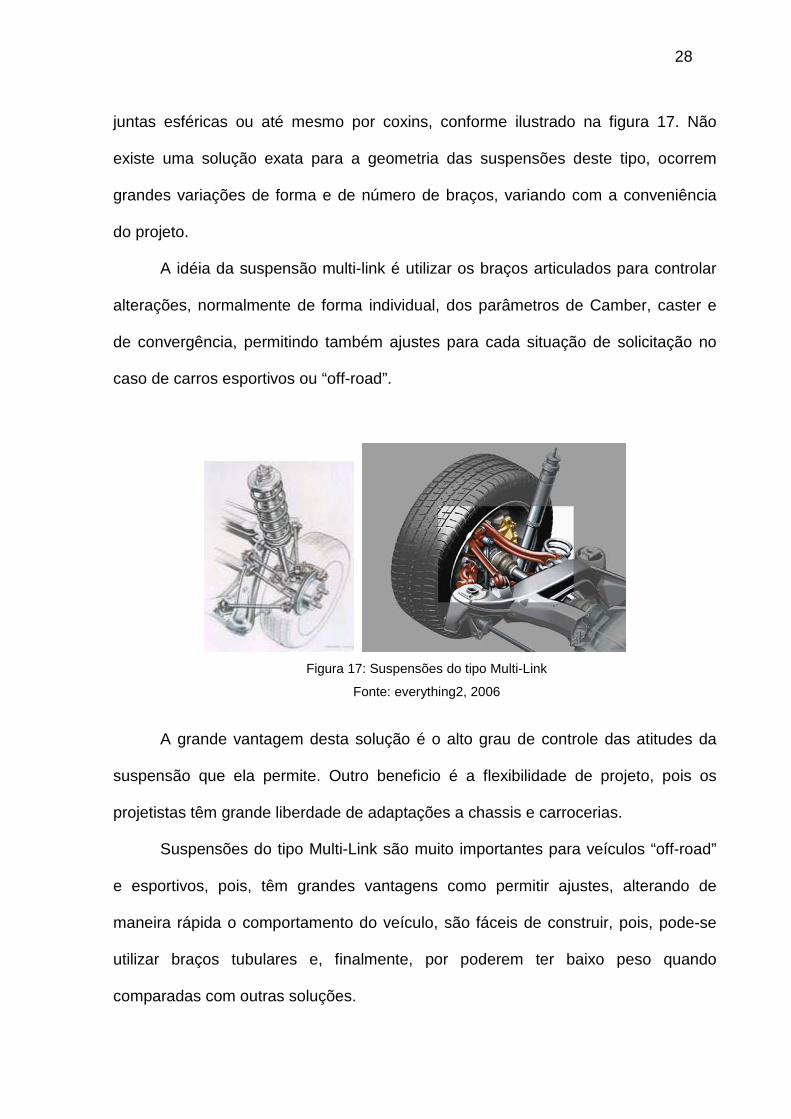
Suspensões do tipo Multi-Link são caracterizadas basicamente por ter vários
braços, geralmente de três a cinco, ligando o chassi ao cubo da roda através de
28
juntas esféricas ou até mesmo por coxins, conforme ilustrado na figura 17. Não
existe uma solução exata para a geometria das suspensões deste tipo, ocorrem
grandes variações de forma e de número de braços, variando com a conveniência
do projeto.
A idéia da suspensão multi-link é utilizar os braços articulados para controlar
alterações, normalmente de forma individual, dos parâmetros de Camber, caster e
de convergência, permitindo também ajustes para cada situação de solicitação no
caso de carros esportivos ou “off-road”.
Figura 17: Suspensões do tipo Multi-Link
Fonte: everything2, 2006
A grande vantagem desta solução é o alto grau de controle das atitudes da
suspensão que ela permite. Outro beneficio é a flexibilidade de projeto, pois os
projetistas têm grande liberdade de adaptações a chassis e carrocerias.
Suspensões do tipo Multi-Link são muito importantes para veículos “off-road”
e esportivos, pois, têm grandes vantagens como permitir ajustes, alterando de
maneira rápida o comportamento do veículo, são fáceis de construir, pois, pode-se
utilizar braços tubulares e, finalmente, por poderem ter baixo peso quando
comparadas com outras soluções.

29
Projetos de suspensões Muti-link são sempre muito complexos. Análises de
multicorpos e de elementos finitos são necessárias para a definição do projeto,
tornando o custo de desenvolvimento geralmente alto. Devido a esta complexidade,
geram-se potenciais pontos de falha na concepção inicial da suspensão. Outro
inconveniente desta solução é o custo de fabricação e montagem para veículos
comerciais, devido ao grau de precisão geométrica e do número de coxins utilizados.
Normalmente este tipo de suspensão é mais cara quando comparada com outras
suspensões independentes.
g) Suspensão Independente – Tipo Braço Arrastado
Este tipo de suspensão aplicada na traseira é hoje muito pouco utilizada por
veículos comerciais. Sua utilização inicial foi na década de 70, com um conceito um
pouco modificado em relação à solução atual.
É um tipo particular de suspensão independente que consiste de um braço
longitudinal, triangular ou não, que está ligado na sua extremidade móvel às rodas,
conforme ilustrado na figura 18.
Figura 18: Aplicação de Suspensão Independente – Tipo Braço Arrastado
Fonte: Martins, 2004
30
O mau resultado desta solução deve-se à falta completa de compensação da
rolagem, considerando que a cambagem das rodas acompanha a inclinação da
carroceria, e a variação do caster, ficando, por momentos, desigual entre uma roda e
outra, o que gera o indesejado fenômeno de shimmy (Martins, 2004).
Este tipo de solução tem vasto emprego no mercado brasileiro, sendo
empregado pela primeira vez em 1996.
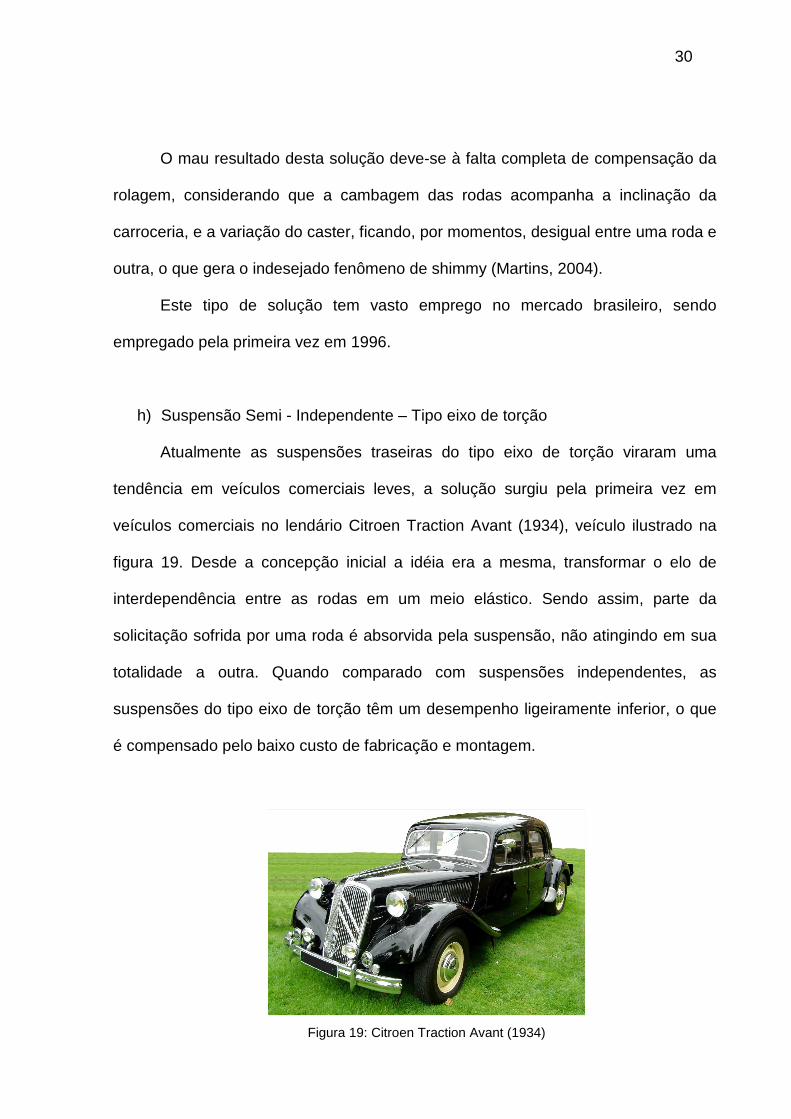
h) Suspensão Semi - Independente – Tipo eixo de torção
Atualmente as suspensões traseiras do tipo eixo de torção viraram uma
tendência em veículos comerciais leves, a solução surgiu pela primeira vez em
veículos comerciais no lendário Citroen Traction Avant (1934), veículo ilustrado na
figura 19. Desde a concepção inicial a idéia era a mesma, transformar o elo de
interdependência entre as rodas em um meio elástico. Sendo assim, parte da
solicitação sofrida por uma roda é absorvida pela suspensão, não atingindo em sua
totalidade a outra. Quando comparado com suspensões independentes, as
suspensões do tipo eixo de torção têm um desempenho ligeiramente inferior, o que
é compensado pelo baixo custo de fabricação e montagem.
Figura 19: Citroen Traction Avant (1934)
31
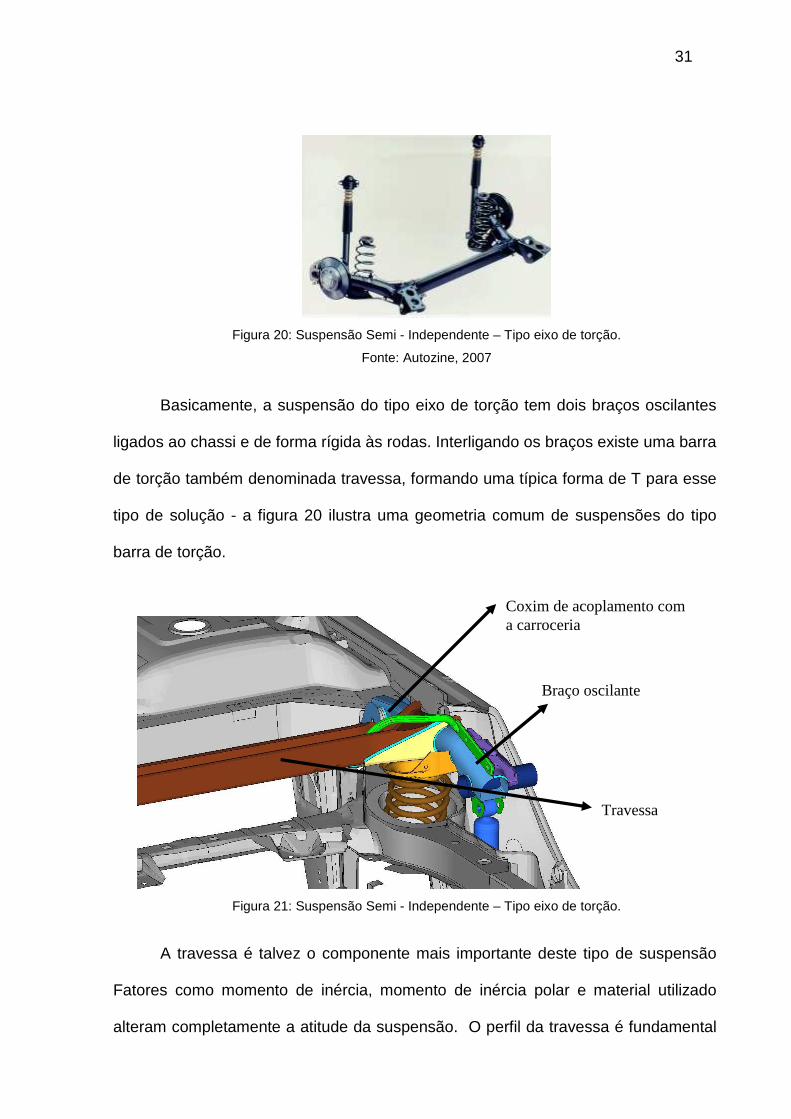
Figura 20: Suspensão Semi - Independente – Tipo eixo de torção.
Fonte: Autozine, 2007
Basicamente, a suspensão do tipo eixo de torção tem dois braços oscilantes
ligados ao chassi e de forma rígida às rodas. Interligando os braços existe uma barra
de torção também denominada travessa, formando uma típica forma de T para esse
tipo de solução - a figura 20 ilustra uma geometria comum de suspensões do tipo
barra de torção.
Figura 21: Suspensão Semi - Independente – Tipo eixo de torção.
A travessa é talvez o componente mais importante deste tipo de suspensão
Fatores como momento de inércia, momento de inércia polar e material utilizado
alteram completamente a atitude da suspensão. O perfil da travessa é fundamental
Braço oscilante
Travessa
Coxim de acoplamento com a carroceria
32
no controle de parâmetros como centro de giro da suspensão, reação vertical das
rodas e convergência. Ao mesmo tempo, a travessa tem um aspecto estrutural
crítico. Como ela está sujeita a grandes rotações, levando a grandes deformações, o
dimensionamento à fadiga torna-se uma etapa complexa na definição da geometria
da barra, principalmente na região de conexão com o braço oscilante que
geralmente ocorre variações na seção do perfil. Nesta região, em muitos casos são
acrescentados reforços estruturais, devido ao alto índice de concentração de
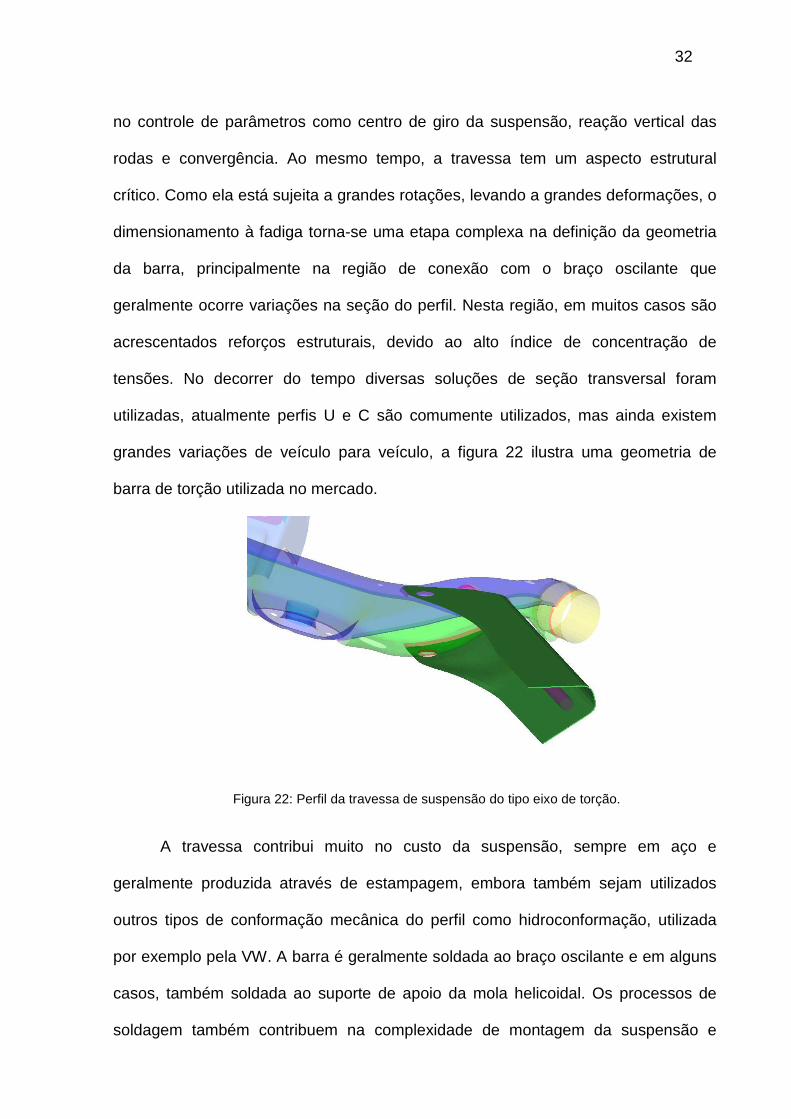
tensões. No decorrer do tempo diversas soluções de seção transversal foram
utilizadas, atualmente perfis U e C são comumente utilizados, mas ainda existem
grandes variações de veículo para veículo, a figura 22 ilustra uma geometria de
barra de torção utilizada no mercado.
Figura 22: Perfil da travessa de suspensão do tipo eixo de torção.
A travessa contribui muito no custo da suspensão, sempre em aço e
geralmente produzida através de estampagem, embora também sejam utilizados
outros tipos de conformação mecânica do perfil como hidroconformação, utilizada
por exemplo pela VW. A barra é geralmente soldada ao braço oscilante e em alguns
casos, também soldada ao suporte de apoio da mola helicoidal. Os processos de
soldagem também contribuem na complexidade de montagem da suspensão e
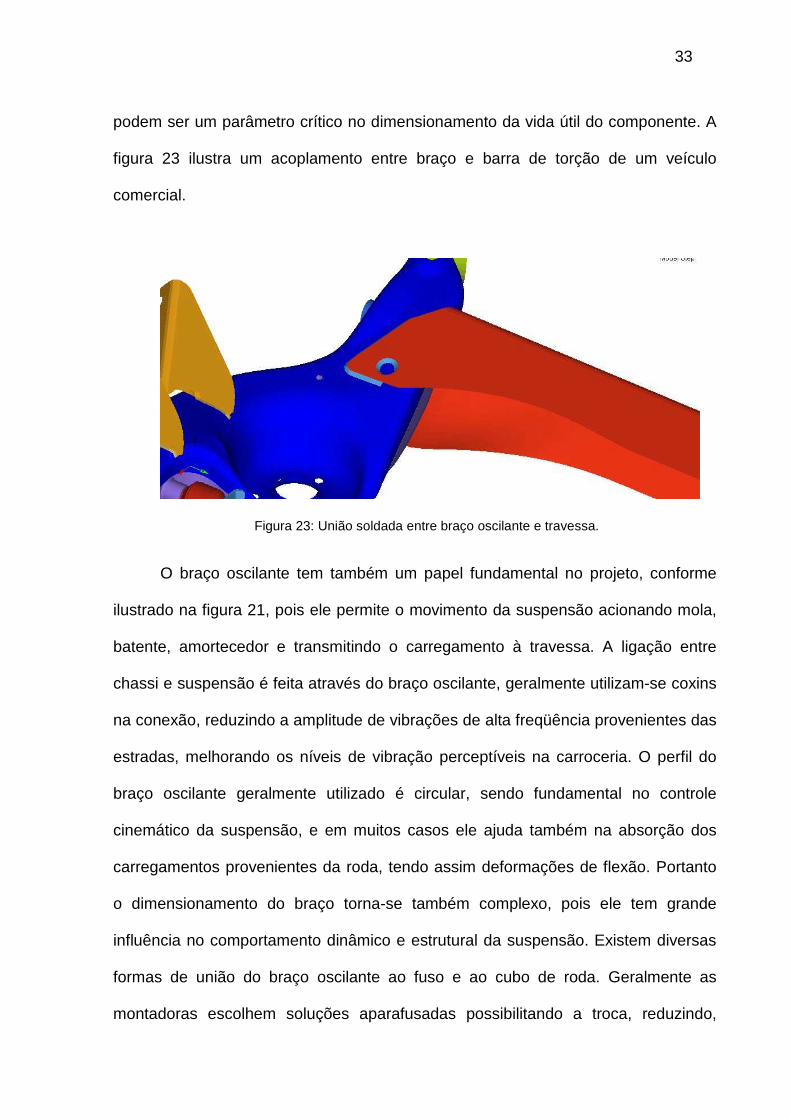
33
podem ser um parâmetro crítico no dimensionamento da vida útil do componente. A
figura 23 ilustra um acoplamento entre braço e barra de torção de um veículo
comercial.
Figura 23: União soldada entre braço oscilante e travessa.
O braço oscilante tem também um papel fundamental no projeto, conforme
ilustrado na figura 21, pois ele permite o movimento da suspensão acionando mola,
batente, amortecedor e transmitindo o carregamento à travessa. A ligação entre
chassi e suspensão é feita através do braço oscilante, geralmente utilizam-se coxins
na conexão, reduzindo a amplitude de vibrações de alta freqüência provenientes das
estradas, melhorando os níveis de vibração perceptíveis na carroceria. O perfil do
braço oscilante geralmente utilizado é circular, sendo fundamental no controle
cinemático da suspensão, e em muitos casos ele ajuda também na absorção dos
carregamentos provenientes da roda, tendo assim deformações de flexão. Portanto
o dimensionamento do braço torna-se também complexo, pois ele tem grande
influência no comportamento dinâmico e estrutural da suspensão. Existem diversas
formas de união do braço oscilante ao fuso e ao cubo de roda. Geralmente as
montadoras escolhem soluções aparafusadas possibilitando a troca, reduzindo,

34
assim, os custos de manutenção, quando necessário. A figura 24 ilustra uma típica
solução de aparafuzamento da estrutura de junção rígida com a roda.
Figura 24: Estrutura de fixação do fuso da roda.
Faz parte também de suspensões do tipo eixo de torção um reforço
normalmente estampado para apoiar a mola helicoidal, comumente chamado de
prato de mola, a outra extremidade da mola é apoiada diretamente na carroceria.
Também é necessário um reforço na base do amortecedor onde geralmente coincide
com o apoio do batente, a figura 25 ilustra as regiões de suporte de mola
amortecedor e batente. Estes reforços são importantíssimos no dimensionamento
estrutural da suspensão, geralmente com chapas de alta espessura, variando entre
três e seis mm. Estes reforços são responsáveis por suportar os altos
carregamentos provenientes da mola e do batente.
Estrutura de fixação do fuso da roda
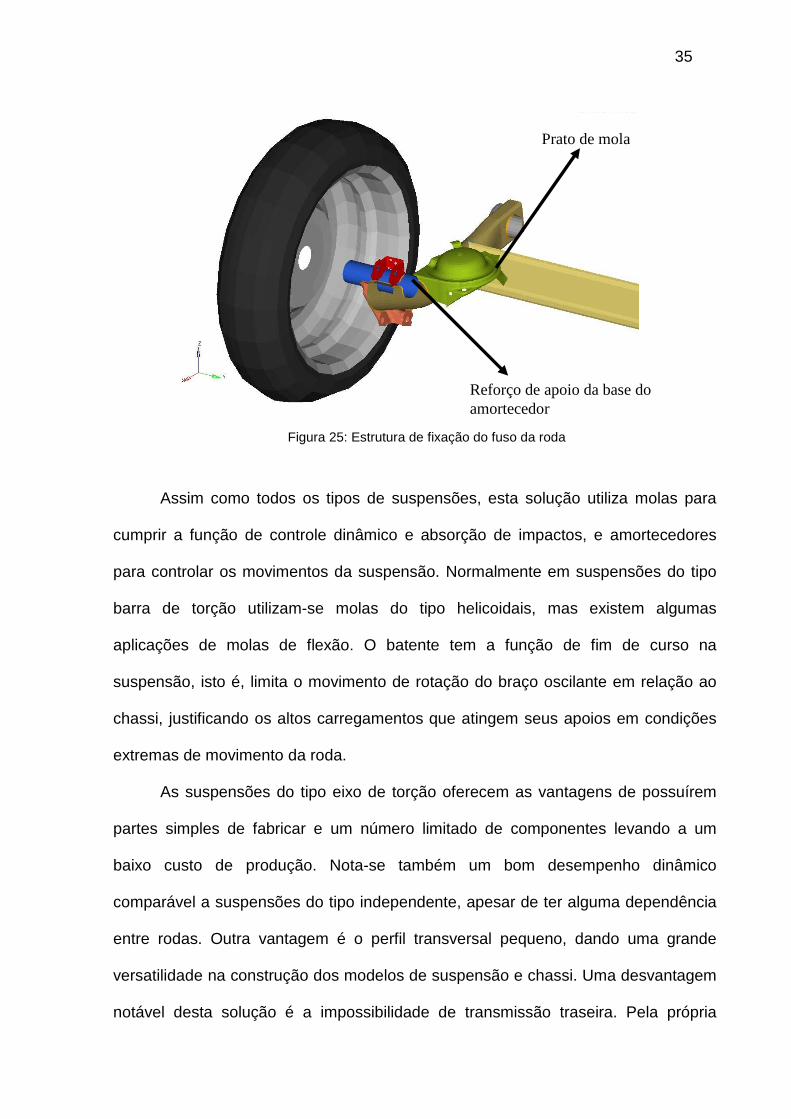
35
Figura 25: Estrutura de fixação do fuso da roda
Assim como todos os tipos de suspensões, esta solução utiliza molas para
cumprir a função de controle dinâmico e absorção de impactos, e amortecedores
para controlar os movimentos da suspensão. Normalmente em suspensões do tipo
barra de torção utilizam-se molas do tipo helicoidais, mas existem algumas
aplicações de molas de flexão. O batente tem a função de fim de curso na
suspensão, isto é, limita o movimento de rotação do braço oscilante em relação ao
chassi, justificando os altos carregamentos que atingem seus apoios em condições
extremas de movimento da roda.
As suspensões do tipo eixo de torção oferecem as vantagens de possuírem
partes simples de fabricar e um número limitado de componentes levando a um
baixo custo de produção. Nota-se também um bom desempenho dinâmico
comparável a suspensões do tipo independente, apesar de ter alguma dependência
entre rodas. Outra vantagem é o perfil transversal pequeno, dando uma grande
versatilidade na construção dos modelos de suspensão e chassi. Uma desvantagem
notável desta solução é a impossibilidade de transmissão traseira. Pela própria
Prato de mola
Reforço de apoio da base do amortecedor

36
natureza de geometria, este tipo de suspensão é utilizável apenas em veículos de
tração dianteira. Sua maior limitação funcional é o fato de levar as rodas a
acompanhar em parte a rolagem em curvas, gerando ângulos positivos de camber
na roda externa, o que pode levar à perda de estabilidade do veículo. (Martins
2004).
Com sua excelente relação entre custo e beneficio, as suspensões do tipo
eixo de torção conquistaram o mercado, ocupando, por exemplo, a maior parte do
mercado brasileiro, a figura 26 apresenta algumas das soluções atualmente em
produção.
Figura 26: Suspensões do tipo barra de torção
37
4. REVISÃO TEÓRICA
4.1. CONCEITOS FUNDAMENTAIS
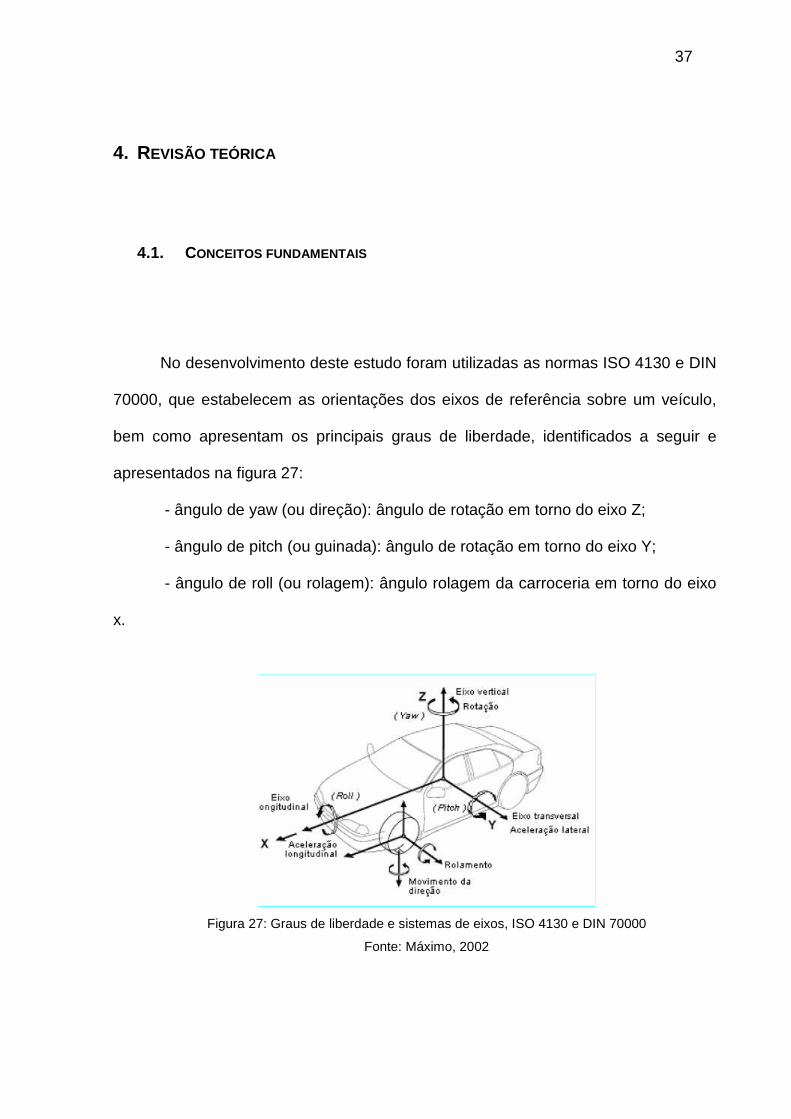
No desenvolvimento deste estudo foram utilizadas as normas ISO 4130 e DIN
70000, que estabelecem as orientações dos eixos de referência sobre um veículo,
bem como apresentam os principais graus de liberdade, identificados a seguir e
apresentados na figura 27:
- ângulo de yaw (ou direção): ângulo de rotação em torno do eixo Z;
- ângulo de pitch (ou guinada): ângulo de rotação em torno do eixo Y;
- ângulo de roll (ou rolagem): ângulo rolagem da carroceria em torno do eixo
x.
Figura 27: Graus de liberdade e sistemas de eixos, ISO 4130 e DIN 70000
Fonte: Máximo, 2002
38
As respostas de deslocamento e variações angulares apresentadas em cada
um dos graus de liberdade, estabelecem as características de conforto e
dirigibilidade de um veículo.
4.2. RIDE
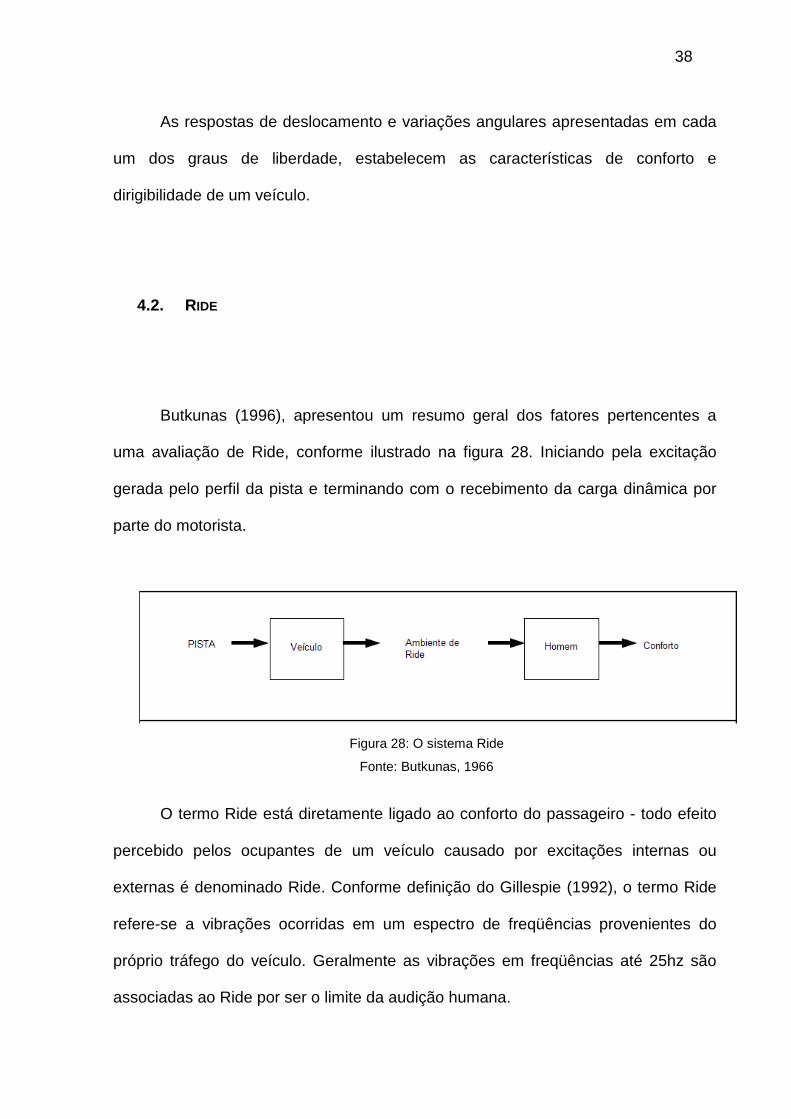
Butkunas (1996), apresentou um resumo geral dos fatores pertencentes a
uma avaliação de Ride, conforme ilustrado na figura 28. Iniciando pela excitação
gerada pelo perfil da pista e terminando com o recebimento da carga dinâmica por
parte do motorista.
Figura 28: O sistema Ride
Fonte: Butkunas, 1966
O termo Ride está diretamente ligado ao conforto do passageiro - todo efeito
percebido pelos ocupantes de um veículo causado por excitações internas ou
externas é denominado Ride. Conforme definição do Gillespie (1992), o termo Ride
refere-se a vibrações ocorridas em um espectro de freqüências provenientes do
próprio tráfego do veículo. Geralmente as vibrações em freqüências até 25hz são
associadas ao Ride por ser o limite da audição humana.
39
O veículo é um sistema dinâmico extremamente complexo, apesar das
imperfeições dos terrenos serem as principais causas de excitação ao se tratar de
Ride, existem diversas outras fontes, como excitações provenientes do conjunto
motor, câmbio, assim como a partir de um desbalanceamento mínimo no conjunto
rodas e suspensões.
Perseguim (2005), escreveu sobre a subjetividade na obtenção dos
parâmetros de conforto, pois “o ser humano é um sistema com complexidade muito
maior, que através dos sinais de excitação, de suas características físicas e de seu
estado psicológico obtém sensações relativas a conforto”, tornando, portanto,
complexa a obtenção de limites de aceitabilidade. Perseguim completa, “uma grande
quantidade de testes foram realizados para correlacionar a avaliação subjetiva do
ser humano”. Hoje, com a grande exigência do mercado, padrões extremamente
rigorosos estão sendo adotados em relação aos parâmetros de Ride.
No processo de desenvolvimento de veículos, atualmente, tornou-se
fundamental o estudo de conforto. Sobretudo no momento de desenvolvimento de
suspensões, é essencial a atenção com este tópico.
Em veículos comerciais leves, podem-se citar diversos fatores que geram
ride, em resumo apontam-se as seguintes fontes geradoras como principais
(Patrício, 2006):
a) Irregularidades de pista
b) Vibrações relacionadas às fontes embarcadas (motor/cambio/motores
elétricos);
c) Conjunto pneu/roda;
d) Conjunto de direção;
e) Motor;
40
Projetos estruturais também são uma importante causa de distúrbios.
Componentes com baixo valor de rigidez dinâmica e com pontos de fixações
inadequados podem causar problemas graves de conforto.
Na fase de projeto de suspensões é fundamental observar todos os pontos
que podem afetar o ride, podendo-se citar alguns exemplos:
a) Rigidez e posicionamento do ponto de fixação à carroceria;
b) Acoplamento de freqüências com a carroceria;
c) Caracterização dos coxins;
d) Rigidez dinâmica dos coxins;
e) Caracterização elastocinemática da suspensão (principalmente dianteira).
4.3. HANDLING
O termo em inglês Handling, basicamente é a resposta de um veículo a um
comando do condutor, estando, portanto, diretamente relacionado com a
dirigibilidade. Sobretudo, o handling é a habilidade do veículo realizar manobras, o
estudo de como ele faz isto, e a percepção do motorista em relação ao
comportamento do veículo. Deste modo o motorista e o veículo formam um sistema
de malha fechada, significando que o motorista observa direção, posição e outras
variáveis de movimento e altera seu comando para obter o movimento desejado.
Podem-se dividir os carregamentos que agem sobre o veículo em: Os
relacionados com inércia e aerodinâmica e aqueles provenientes da estrada.
Portanto o estudo detalhado do comportamento do veículo em curva, frenagem e
superando algum tipo de obstáculo como ondulações na estrada, é primordial para a
41
análise de handling. Nestes pontos, as suspensões automotivas estão trabalhando
em conjunto com a carroceria, desempenhando um papel fundamental na resposta
do veículo. Em todos estes casos, a força predominante para o comportamento do
veículo é decorrente da reação dos pneus, trabalhando, portanto, o
elastocinematismo da suspensão, definindo, assim, a reação na carroceria,
determinando por fim a resposta do veículo.
Os especialistas, atualmente, para homologação final de um veículo aplicam
uma série de ensaios e manobras sobre o automóvel. Basicamente é avaliada a
resposta do veículo a situações cotidianas, porém extremas. Exemplos típicos deste
tipo de prova são os ensaios tipo “Slalon” e curva de raio constante, algumas destas
manobras são apresentadas no tópico 5.4.
As duas manobras citadas no parágrafo anterior são em regime permanente,
isto é, não há variação nas condições de excitação do sistema.
Conforme definição da Sociedade dos engenheiros da mobilidade (SAE),
temos:
“Regime permanente existe quando a resposta do veículo a um estímulo de
controle, do tipo periódico (ou constante) e/ou de distúrbio, não varia durante um
tempo considerável. O movimento associado a esta resposta é chamado de resposta
em estado permanente”.
Por outro lado:
“Regime transiente existe quando a resposta em movimento às forças
externas relativas ao veículo ou as posições das ações de controle variam como
tempo”.
42
4.3.1. Comportamento em curva
4.3.1.1. Equações de curva
Um veículo em curva em altas velocidades estará sujeito a acelerações
laterais, como conseqüência surgirão forças laterais e ângulos de escorregamento.
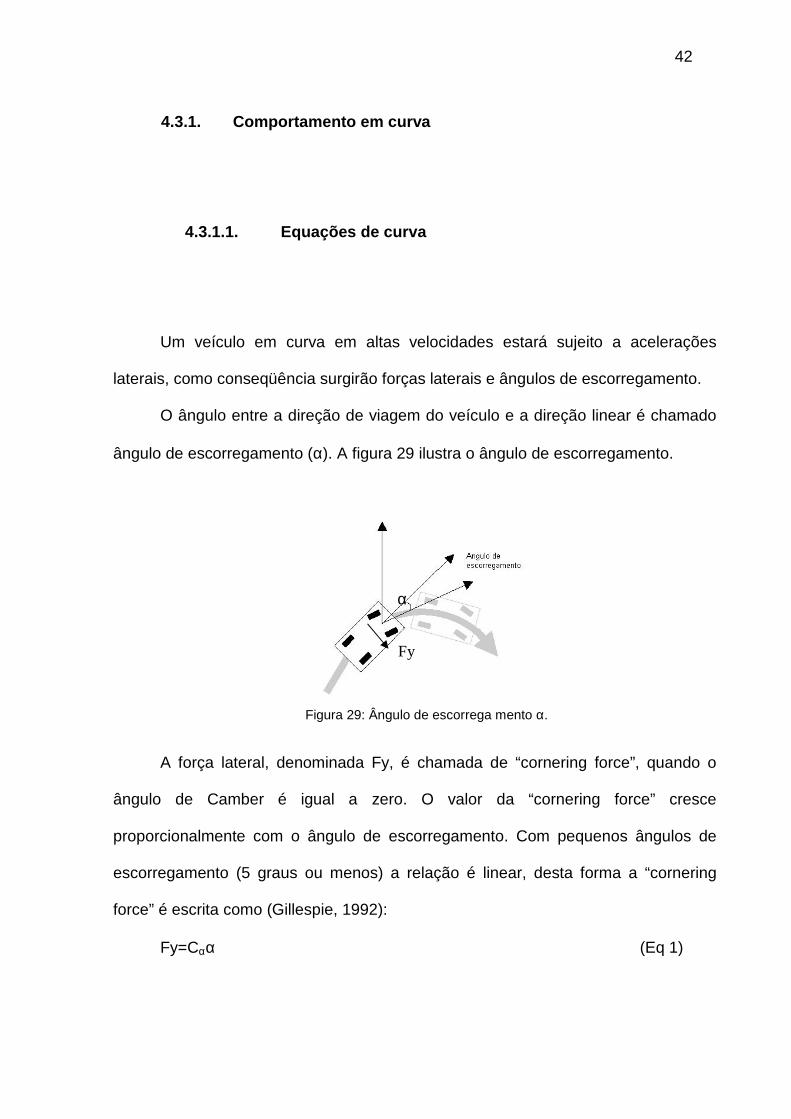
O ângulo entre a direção de viagem do veículo e a direção linear é chamado
ângulo de escorregamento (α). A figura 29 ilustra o ângulo de escorregamento.
Figura 29: Ângulo de escorrega mento α.
A força lateral, denominada Fy, é chamada de “cornering force”, quando o
ângulo de Camber é igual a zero. O valor da “cornering force” cresce
proporcionalmente com o ângulo de escorregamento. Com pequenos ângulos de
escorregamento (5 graus ou menos) a relação é linear, desta forma a “cornering
force” é escrita como (Gillespie, 1992):
Fy=Cαα (Eq 1)
α
Fy

43
Figura 30: Variação da força lateral em função do ângulo de escorregamento.
Fonte: (Gillespie, 1992)
O fator de proporcionalidade Cα é conhecido como rigidez de curva e é
definido como a inclinação da curva de força lateral versus o ângulo de
escorregamento, conforme ilustrado na figura 30.
A variável Cα depende basicamente das características dos pneus. Muitas
variáveis no projeto interferem no valor de Cα, afetando diretamente em curvas de
baixo ângulo de escorregamento e na força lateral.
Uma forma comum de formulação de equações de curvas é através do
“bicycle model vehicle”, conforme modelo ilustrado na figura 31. Os modelos
matemáticos são derivados da aplicação da segunda lei de Newton.
Figura 31:Bicycle model
Fonte: Vehicle Model for Sideslip Estimation, 2006
Cα
44
Para a formulação matemática, assumem-se pequenos ângulos e
desconsidera-se a diferença angular entre as rodas internas e externas. Assim, por
conveniência, as duas rodas da frente podem ser representadas por uma roda,
considerando um ângulo de esterçamento δ, com a força lateral Fy equivalente para
ambas as rodas.
Para um veículo trafegando para frente com velocidade V, aplicando-se a
segunda lei de Newton, a soma das forças na direção lateral deverá ser igual à
massa multiplicada ao valor da aceleração centrípeta.
r
MVFFF yryfy
2
=+=∑ (eq 2)
Sendo:
Fyf= Força lateral no eixo frontal;
Fyr= Força lateral no eixo traseiro;
M= Massa do veículo;
V= Velocidade tangencial do veículo;
r= Raio da curva.
Pode-se concluir, também, que a soma dos momentos gerados pelas forças
laterais nas rodas dianteira e traseira devem ser igual a zero, condição necessária
para equilíbrio do veículo em relação ao centro de gravidade.
Fyf b sen(δf+δ) - Fyr c=0 (eq 3)
Assim, considerando o angulo de esterçamento igual a zero teremos:
)(b
cFF yryf =
Substituindo na equação 3, chega-se

45
b
LF
b
cbF
b
cF
r
MV yryryr =+=+= )(
)1(2
(eq 4)
)(2
r
V
L
bMFyr = (eq 5)
Sendo:
b – Distância entre o centro do eixo dianteiro e o centro de gravidade;
c - Distância entre o centro do eixo traseiro e o centro de gravidade;
L – Distancia entre eixos; (L=b+c)
A razão L
bM é a massa suspensa suportada pelo eixo traseiro (
g
Wr), portanto
a força lateral desenvolvida pelo eixo traseiro é igual a g
Wr vezes a força lateral
neste momento.
Sendo:
g = Aceleração da gravidade.
Com as forças laterais desenvolvidas pode-se concluir que o ângulo de
escorregamento na roda traseira rα é:
grC
VW
r
rr
α
α2
= (eq – 6)
Onde:
L = Distância entre eixos;
rCα = Rigidez de curva relativa à roda traseira;
46
4.3.1.2. Rolagem da carroceria
Quando um veículo desenvolve uma manobra de curva, a força centrifuga Fy
agindo no centro de gravidade da massa suspensa gera, por fim, uma força de
reação nos pneus em contato com o solo na direção contrária. Um momento é
gerado na carroceria do veículo tendendo a transferir peso para as rodas externas à
curva, ao mesmo tempo devido à flexibilidade da suspensão ocorre um efeito de
rolagem da carroceria em relação ao solo (Heisler, 1989). Em oposição à rolagem da
carroceria as suspensões dianteira e traseira irão oferecer resistência. As
suspensões para tal efeito prevêem dispositivos, como barras anti-rolagem, para
assegurar a rigidez à rolagem adequada.
A rolagem relativa à massa suspensa pode ser representada pelas seguintes
variáveis:
a) Momento centrífugo em torno do eixo de giro (Ma) gerado pelas forças
laterais conforme discutido no item 4.3.1.1:
Ma=Fy•a (eq 7)
Onde:
Fy= Forças laterais atuantes no centro de gravidade da massa suspensa;
a= Distância entre o centro de gravidade e o centro de giro da massa
suspensa.
b) Momento de deslocamento transversal gerado pelo deslocamento da massa
não suspensa:
Mb=w•a•θ (eq 8)
47
Onde:
w= Massa não suspensa;
θ= Ângulo de rolagem da carroceria;
Portanto, o momento de rolagem (M) pode ser escrito da seguinte forma:
M= Fy•a + w•a•θ; (eq 9)
c) Irá contribuir, também, para a transferência de carga das rodas internas para
as rodas externas, o momento (Mc), gerado devido à força centrífuga
aplicada, agora, no eixo de rolamento, decompondo parte para o eixo
dianteiro parte para o eixo traseiro, agindo nos centros de rolamento. O
produto de cada componente pela respectiva altura do centro de rolamento ao
solo, fornece um momento que, embora não cause inclinação de carroceria,
colabora na transferência de carga entre as rodas do eixo.
d) Outra parcela (Md) pode ser causada pelos elementos estabilizadores
instalados nas suspensões. Dependendo do tipo empregado, ele aumentará a
transferência de carga entre as rodas de uma suspensão e reduzirá a
inclinação da carroceria, podendo também aumentar a inclinação da
carroceria reduzindo a transferência de carga entre as rodas do eixo. Sua
utilização tem importância muito grande no comportamento em curvas, e é
uma solução muito empregada pelos fabricantes de automóveis para atenuar
tendências indesejáveis dos veículo em curvas.
A rigidez à rolagem da carroceria (Ks) pode, portanto, ser escrita da seguinte
forma:
θM
Ks = (eq 10)
48
Onde:
M = Momento de rolagem;
θ= Ângulo de rolagem da carroceria;
A rigidez à rolagem pode ser diferente entre os eixos, devido à diferença de
flexibilidade entre as suspensões.
A força lateral, agindo através do centro de giro, produz um momento (Me) em
relação ao solo, devido à ocorrência da transferência de peso das rodas internas
para as externas à curva. A reação desta transferência de peso é a resistência ao
momento Mrt.
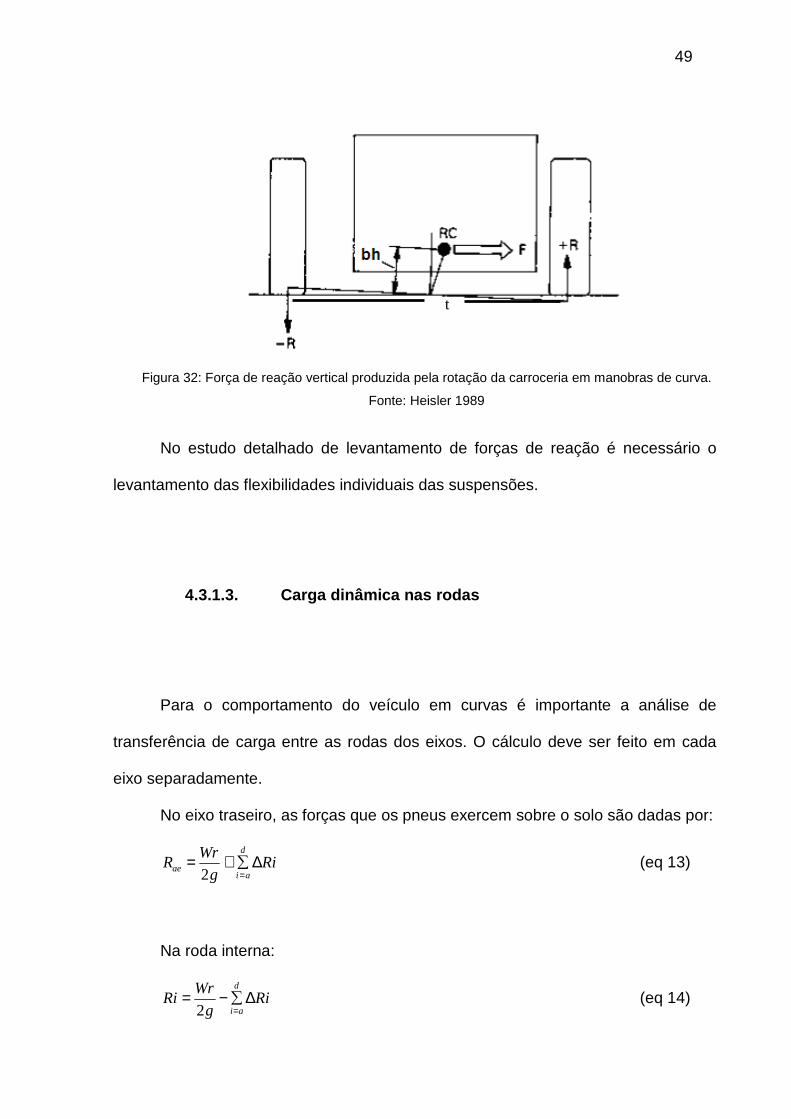
Mrt=Fy•bh (eq 11)
Portanto:
t
bhW
t
bhFR y µ== (eq 12)
Onde:
bh = Altura do centro de giro da carroceria;
t= bitola.
µ= Coeficiente de aderência lateral entre pneu e solo.
Conforme ilustrado na figura 32, R é a força de reação vertical produzida pela
rotação da carroceria em manobras de curva. Os valores de R são, portanto,
fundamentais no dimensionamento de uma suspensão, pois a partir dele pode-se
levantar, por exemplo, os níveis de deslocamento assimétrico entre as rodas.
49
Figura 32: Força de reação vertical produzida pela rotação da carroceria em manobras de curva.
Fonte: Heisler 1989
No estudo detalhado de levantamento de forças de reação é necessário o
levantamento das flexibilidades individuais das suspensões.
4.3.1.3. Carga dinâmica nas rodas
Para o comportamento do veículo em curvas é importante a análise de
transferência de carga entre as rodas dos eixos. O cálculo deve ser feito em cada
eixo separadamente.
No eixo traseiro, as forças que os pneus exercem sobre o solo são dadas por:
Rig
WrR
d
aiae ∆∑+=
=2 (eq 13)
Na roda interna:
Rig
WrRi
d
ai∆∑−=
=2 (eq 14)
t
50
Sendo:
Rae= Carga na roda externa;
Wr= Carga da massa não suspensa sobre eixo traseiro;
Ri= Variação de carga nas rodas do eixo, conforme tópicos a, b, c e d do item
4.3.1.2.
Um veículo quando realiza uma manobra de curva pode desempenhar
comportamentos neutros, sobresterçantes ou subesterçantes, conforme descrito
abaixo
- Subesterçante.
Condição onde as rodas traseiras têm maior aderência do que as dianteiras
durante uma manobra de curva. Gerando um fenômeno de instabilidade na parte
frontal do veiculo. Conforme ilustrado na figura 33.
Figura 33: Comportamento Subesterçante
Fonte: Champcarworldseries, 2007
- Sobresterçante
Condição onde as rodas traseiras têm menor aderência do que as dianteiras
durante uma manobra de curva. Gerando um fenômeno de instabilidade na parte
traseira do veiculo. Conforme ilustrado na figura 34.
51
Figura 34: Comportamento Sobresterçante
Fonte: Champcarworldseries, 2007
- Neutro
Condição onde não ocorrem comportamentos Sobresterçante e
Subesterçante, gerando uma condição de estabilidade, permitindo um movimento
suave em curva.
4.4. SUSPENSÕES AUTOMOTIVAS – AMBIENTAÇÃO
Basicamente, uma suspensão automotiva tem as seguintes funções
(Gillespie, 1992):
• Isolar o chassi das irregularidades da pista, através da atuação de seus
elementos elásticos e de amortecimento, quando do movimento vertical das rodas;
• Permitir que as rodas, uma vez determinados os seus ângulos em uma
manobra, os mantenham o mais fielmente possível;
• Suportar as reações impostas pelos pneus, transmitir acelerações e suportar
frenagens, bem como forças laterais e momentos decorrentes desses esforços;
• Reagir à tendência de rolagem da carroceria;
52
• Manter os pneus em contato com o solo, mesmo sob pequenas variações de
carregamento.
Ou seja, três características básicas devem ser atendidas para que o projeto
da suspensão tenha sido bem executado:
• Permitir isolamento individual de uma excitação por parte da roda excitada,
sem sua transmissão para as demais;
• Permitir o controle de rolagem da carroceria, que não deve ser excessivo,
pois, representa grande deslocamento do centro de massa do veículo, o que pode
prejudicar sua manobrabilidade, nem muito pequeno, pois isto seria conseqüência
de um enrijecimento do sistema e, por conseguinte, afetaria o conforto;
• Ter uma geometria tal que o camber seja minimamente alterado quando o
veículo passa por manobras de aceleração, frenagem, curva e pela excitação da
pista.
4.4.1. Parâmetros cinemáticos de suspensões
4.4.1.1. Distância entre eixos
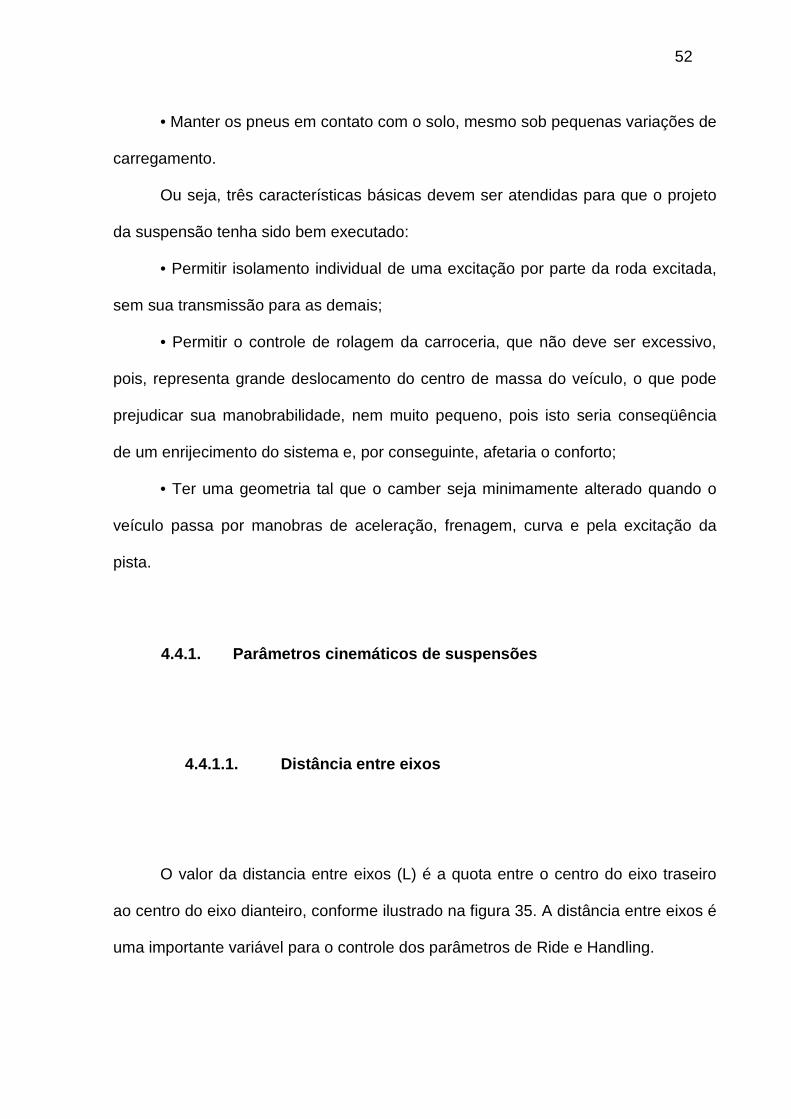
O valor da distancia entre eixos (L) é a quota entre o centro do eixo traseiro
ao centro do eixo dianteiro, conforme ilustrado na figura 35. A distância entre eixos é
uma importante variável para o controle dos parâmetros de Ride e Handling.
53
Figura 35: Distância entre eixos (L)
Fonte: Desertrides, 2007
Com altos valores de distancia entre eixos, torna-se possível realizar uma boa
relação de peso, viabilizando a acomodação de passageiros entre eixos. A
distribuição de cargas entre eixos é uma importante variável em relação aos
parâmetros de handling, tem grande influência em condições de aceleração,
frenagem e comportamento em curva, pois a variável interfere nos índices de
aderência da roda de tração e no momento de inércia do veículo. Daniel Martins
(2005) também cita como vantagens na utilização de valores elevados de bitolas a
diminuição na tendência de variação desta variável, e a possibilidade de utilização
de molas mais brandas o que potencializa os parâmetros de ride.
Por outro lado, baixos valores de distancia entre eixos, conforme citado por
Reimpell (1986), traz um melhor comportamento na entrada de curvas e diminui o
ângulo de esterçamento par curvas de mesmo raio.
A definição de distancia entre eixos depende da geometria e do tipo do
veículo em questão, existe uma importante relação (i) que pode ser levada em
consideração na definição deste parâmetro.
Ltotal
Li = (eq 15)
Sendo:
L - Distancia entre eixos
L
54
Ltotal – Comprimento total do veículo
Em grande parte dos veículos comerciais os valores de i variam entre 0.56 e
0.72, mas podendo ocorrer em coupes com valores inferiores a 0.56 e em veículos
pequenos valores ligeiramente superiores a 0.72 (Reimpell 1986).
4.4.1.2. Bitola
Por definição, o valor (B) bitola é a distancia na coordenada y entre os
contatos dos pneus direito e esquerdo, com o solo, podendo haver variações de
bitola entre eixos.
A dimensão da bitola nos eixos dianteiro e traseiro tem influência decisiva no
comportamento do veículo em curvas e na tendência de rolagem da carroceria.
Pode-se afirmar que o valor da bitola deve ser tão maior quanto possível (Reimpell
1986).
Usa-se uma razão de bitola devendo ser, obviamente, maximizada:
Btotal
Bib = (eq – 16)
Sendo:
B - bitola
Btotal – Largura total do veículo
Para a maioria das suspensões independentes e para suspensões semi-
independentes do tipo eixo de torção, ocorre uma variação de bitola em função do
curso vertical da suspensão. Como descrito por Reimpell (1986) a variação da bitola
55
é função de características funcionais da suspensão. No caso de eixo de torção a
altura do centro de giro tem influência fundamental neste parâmetro. Devido a
características como atitude do veículo em curvas, desgaste dos pneus e resistência
à rolagem, torna-se fundamental a definição da variação de bitola do veículo ainda
na fase de concepção do projeto.
A variação de bitola pode ser medida, experimentalmente, através do
deslocamento vertical em todo o curso da suspensão, podem-se fixar duas placas
paralelas no ponto da roda a terra, aplica-se o deslocamento vertical da suspensão,
de rebote (posição S1) à compressão (posição S2), mede-se então o deslocamento
lateral dinâmico das placas.
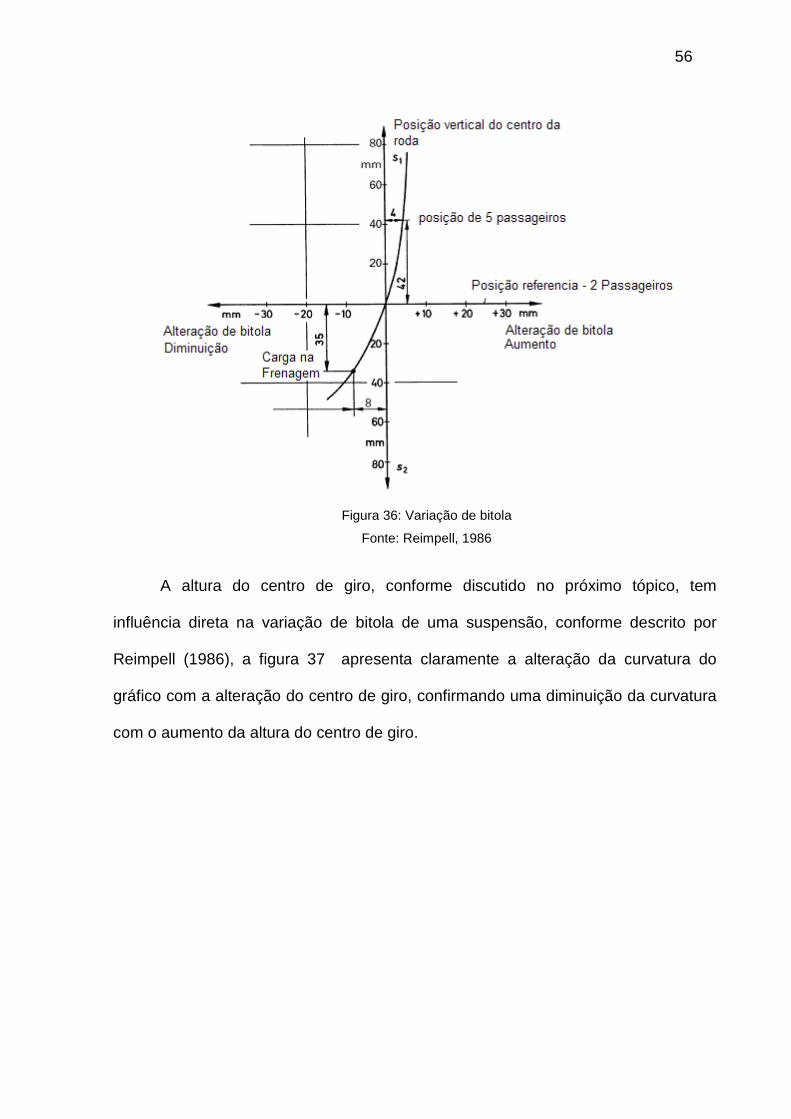
A figura 36 apresenta uma variação típica de bitola de uma suspensão. Parte-
se da posição de projeto da suspensão, normalmente carregamento similar a três
passageiros, onde considera-se o “zero” de variação de bitola. A variação de bitola
∆b, aparece no eixo X do gráfico, apresentando valores positivos, à direita, como
aumento de bitola e valores negativos, à esquerda, como redução de bitola. Traça-
se, por fim, a curva de variação de bitola fazendo variar o curso da suspensão (eixo
Y) desde a posição mínima, denominada rebote (S2), até o ponto de carregamento
máximo permissível da suspensão denominado Compressão (s1).
56
Figura 36: Variação de bitola
Fonte: Reimpell, 1986
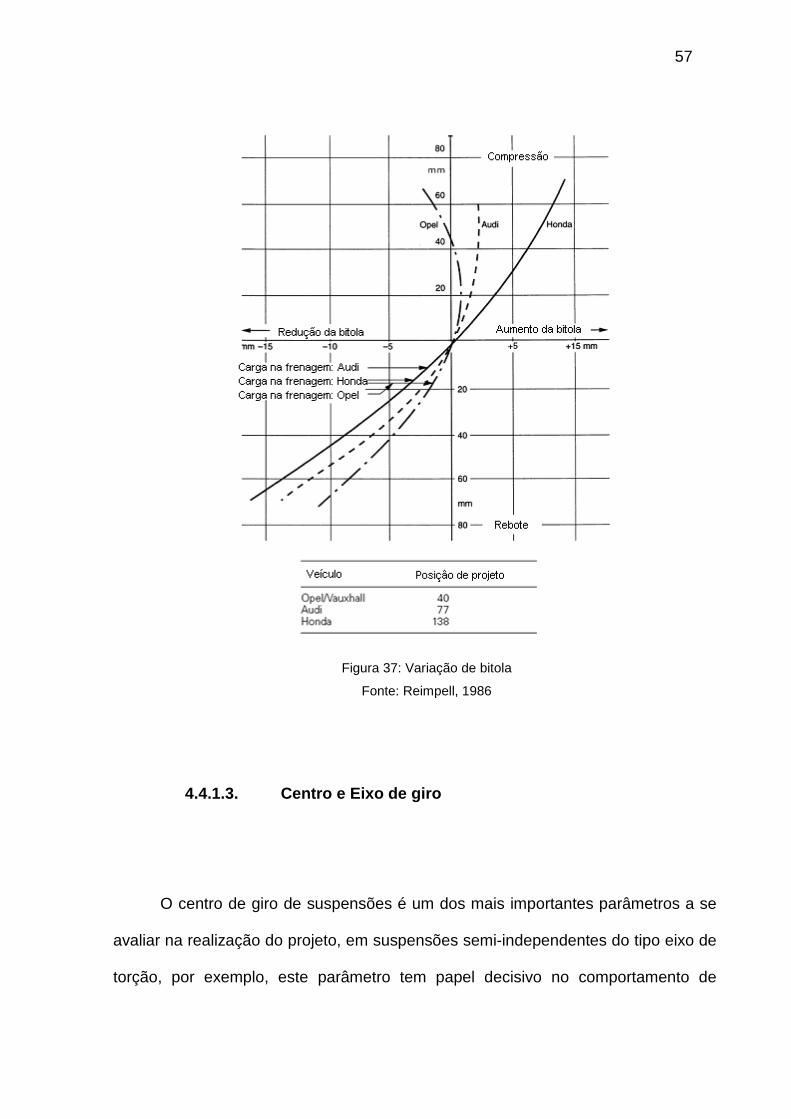
A altura do centro de giro, conforme discutido no próximo tópico, tem
influência direta na variação de bitola de uma suspensão, conforme descrito por
Reimpell (1986), a figura 37 apresenta claramente a alteração da curvatura do
gráfico com a alteração do centro de giro, confirmando uma diminuição da curvatura
com o aumento da altura do centro de giro.
57
Figura 37: Variação de bitola
Fonte: Reimpell, 1986
4.4.1.3. Centro e Eixo de giro
O centro de giro de suspensões é um dos mais importantes parâmetros a se
avaliar na realização do projeto, em suspensões semi-independentes do tipo eixo de
torção, por exemplo, este parâmetro tem papel decisivo no comportamento de
58
camber, convergência e bitola, tendo portando, grande influência nos parâmetros de
ride e handling do veículo.
O centro de giro é o ponto no centro do veículo (em vista frontal) e no “centro”
do eixo em vista lateral ao redor do qual a carroceria inicia o giro na ação de forças
laterais e o qual as forças laterais são absorvidas entre o eixo e carroceria (Reimpell,
1986). Heisler (1989) faz a seguinte definição: O centro de giro de um sistema de
suspensão refere-se ao centro em relação ao solo relativo ao qual a carroceria girará
instantaneamente. A posição atual do centro de giro varia com a geometria da
suspensão e com o ângulo de rolagem.
O eixo de giro é a linha de união entre o centro de giro da suspensão dianteira
e o centro de giro da suspensão traseira. Geralmente as suspensões dianteiras têm
alturas de centro de giros inferiores do que as traseiras, gerando uma inclinação do
veículo. Os fatores que determinam a inclinação do centro de giro dependerão
principalmente da altura do centro de gravidade e da distribuição de peso entre os
eixos.
Para compreensão do significado das coordenadas do centro de giro, Heisler
(1989) divide o sistema de suspensão de um veículo em três partes, o solo (G)
agente que promove a força de reação sobre o veículo, a carroceria como massa
suspensa (M) suportada pelas rodas (W). Se um corpo suspenso entre dois pares de
rodas é capaz de girar relativo ao solo, podem-se apontar três centros de giro
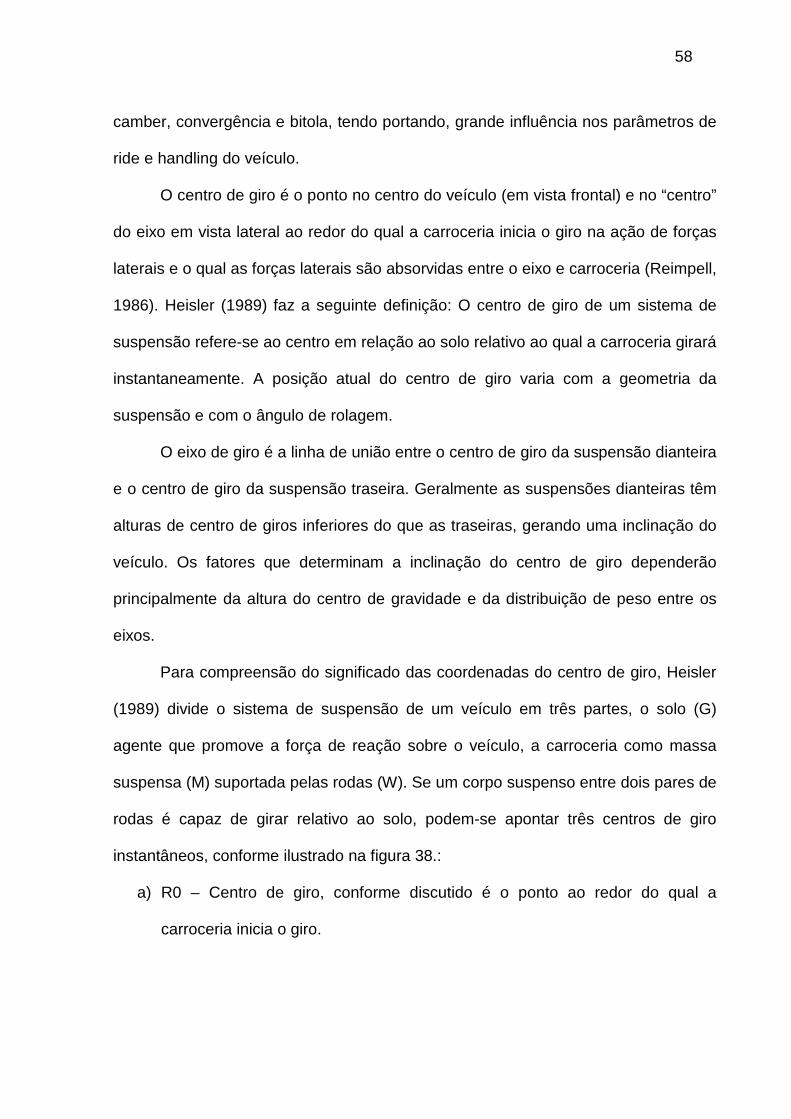
instantâneos, conforme ilustrado na figura 38.:
a) R0 – Centro de giro, conforme discutido é o ponto ao redor do qual a
carroceria inicia o giro.
59
b) Iwb – Centro instantâneo de giro da roda relativa à carroceria, ao redor do
qual a roda realiza um movimento de pivô, conforme ilustrado na suspensão
independente da figura 38.
c) Iwg - Centro instantâneo de giro da roda relativa ao solo, o qual é o centro de
contato entre o pneu e o solo. A roda, portanto, realiza movimentos laterais
em seu topo em relação a este ponto.
Figura 38: centros de giro instantâneos
Fonte: Heisler 1989
Em uma manobra de curva, a carroceria tende a girar gerando forças de
reação em relação ao solo. Ocorre então na suspensão um movimento de
compressão nas rodas externas à curva e um movimento de rebote nas rodas
internas, para a suspensão independente, ilustrada na figura 38, ocorre, portanto,
uma inclinação oposta entre os dois braços, realizando um movimento de pivô.
Gera-se também um movimento lateral no topo das rodas internas e externas em
relação ao ponto Iwg1 e iwg2, na direção oposta à rolagem da carroceria.
Ocorrem então dois movimentos na geometria da suspensão para a
efetivação da rolagem da carroceria:
a) Na mesma proporção do giro da carroceria os pontos de centros instantâneos
de giro da rodas Iwb1 e Iwb2 giram em torno dos pontos a terra Iwg1 e Iwg2.
M
60
b) Os centros instantâneos Iwb1 e Iwb2 giram, de forma circular, ao redor do
ponto de interseção da projeção das linhas, proveniente dos pontos a terra
Iwg1 e Iwg2.
A rotação de ambos os braços em torno dos centros instantâneos Iwg1 e
Iwg2, conforme ilustrado, produzirá um arco que tangencia o circulo produzido pelo
movimento dos braços ao redor dos centros instantâneos de giro, relativos à
carroceria Iwb1 e Iwb2. Neste caso, a interseção, no ponto R0, o qual é gerado
através da interseção das linhas produzidas pela união dos centros de giro é
denominado de centro de giro da suspensão.
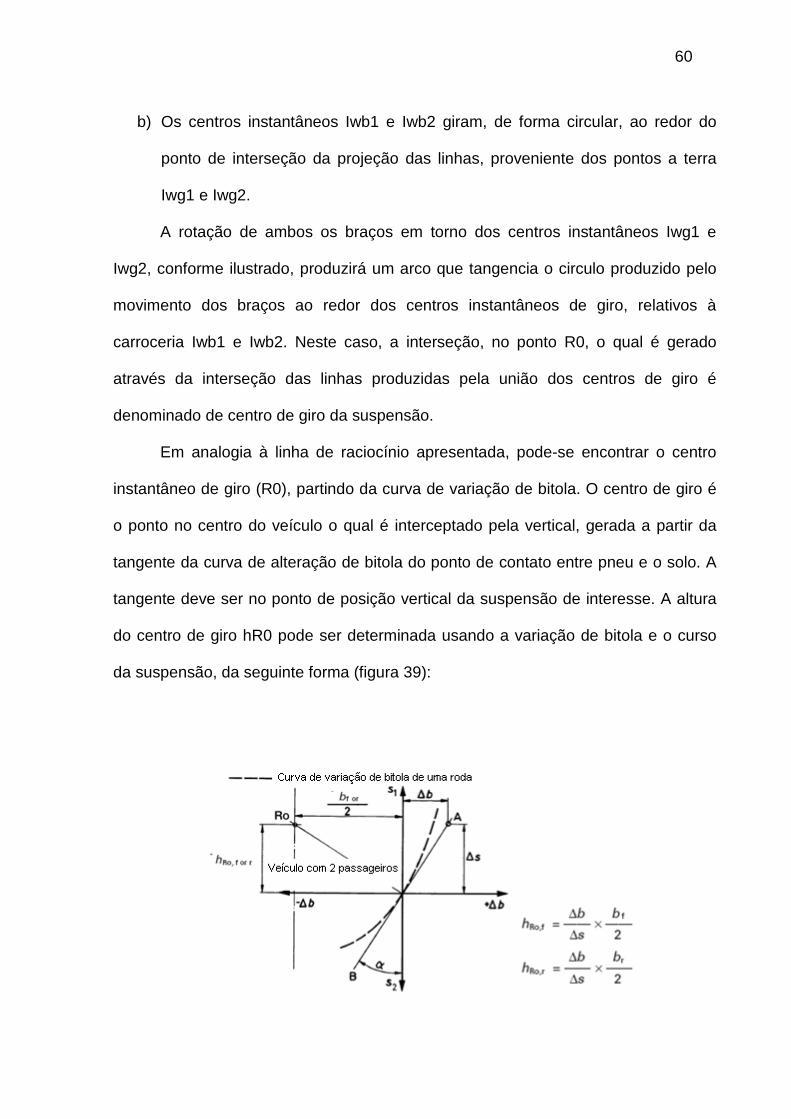
Em analogia à linha de raciocínio apresentada, pode-se encontrar o centro
instantâneo de giro (R0), partindo da curva de variação de bitola. O centro de giro é
o ponto no centro do veículo o qual é interceptado pela vertical, gerada a partir da
tangente da curva de alteração de bitola do ponto de contato entre pneu e o solo. A
tangente deve ser no ponto de posição vertical da suspensão de interesse. A altura
do centro de giro hR0 pode ser determinada usando a variação de bitola e o curso
da suspensão, da seguinte forma (figura 39):
61
Figura 39: Curva de variação de Bitola de uma roda
Fonte: Reimpell, 1986
αtan5.0
0 =•
=∆∆
b
hR
s
b (eq – 17)
Ou seja a altura do centro de giro é o ponto presente na reta normal à
tangente à curva de alteração de bitola quando Y=0.
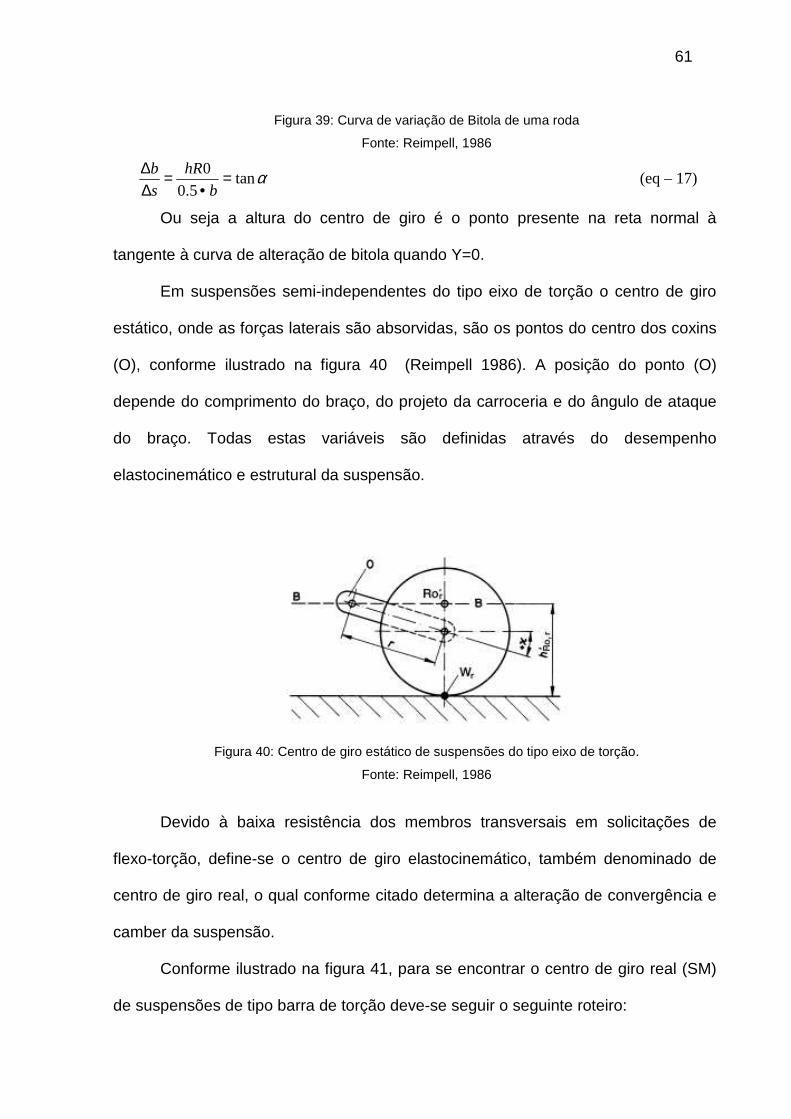
Em suspensões semi-independentes do tipo eixo de torção o centro de giro
estático, onde as forças laterais são absorvidas, são os pontos do centro dos coxins
(O), conforme ilustrado na figura 40 (Reimpell 1986). A posição do ponto (O)
depende do comprimento do braço, do projeto da carroceria e do ângulo de ataque
do braço. Todas estas variáveis são definidas através do desempenho
elastocinemático e estrutural da suspensão.
Figura 40: Centro de giro estático de suspensões do tipo eixo de torção.
Fonte: Reimpell, 1986
Devido à baixa resistência dos membros transversais em solicitações de
flexo-torção, define-se o centro de giro elastocinemático, também denominado de
centro de giro real, o qual conforme citado determina a alteração de convergência e
camber da suspensão.
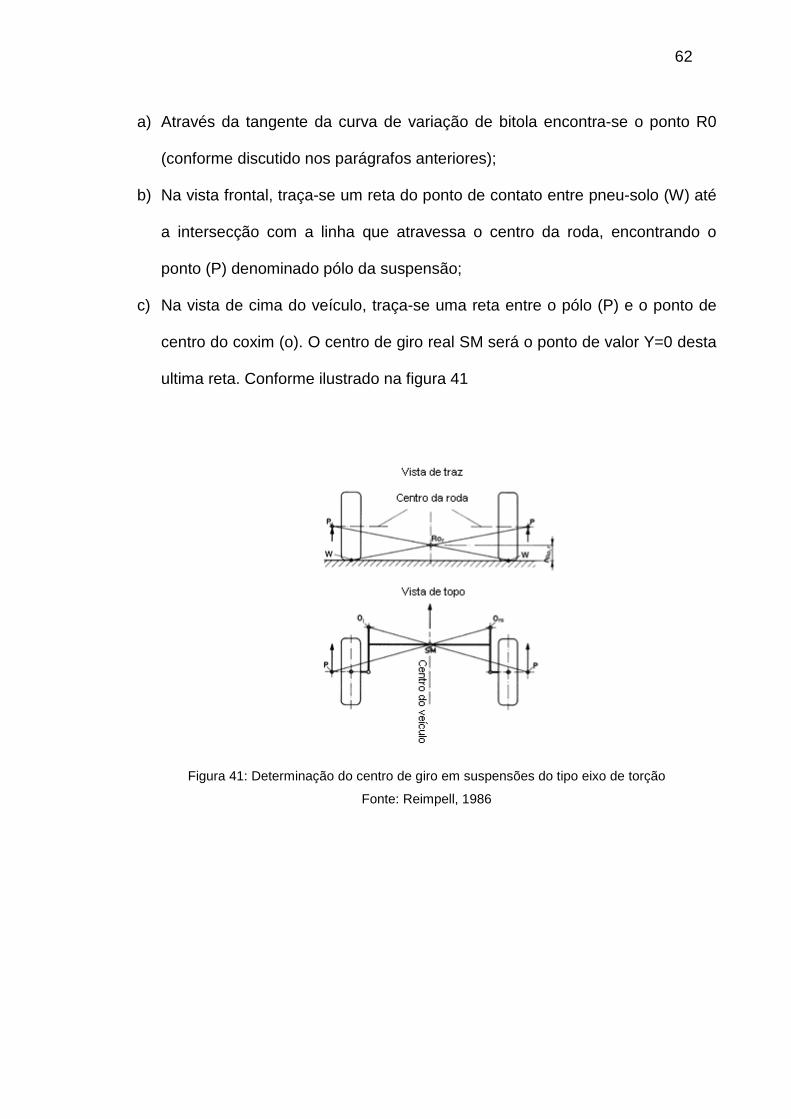
Conforme ilustrado na figura 41, para se encontrar o centro de giro real (SM)
de suspensões de tipo barra de torção deve-se seguir o seguinte roteiro:
62
a) Através da tangente da curva de variação de bitola encontra-se o ponto R0
(conforme discutido nos parágrafos anteriores);
b) Na vista frontal, traça-se um reta do ponto de contato entre pneu-solo (W) até
a intersecção com a linha que atravessa o centro da roda, encontrando o
ponto (P) denominado pólo da suspensão;
c) Na vista de cima do veículo, traça-se uma reta entre o pólo (P) e o ponto de
centro do coxim (o). O centro de giro real SM será o ponto de valor Y=0 desta
ultima reta. Conforme ilustrado na figura 41
Figura 41: Determinação do centro de giro em suspensões do tipo eixo de torção
Fonte: Reimpell, 1986
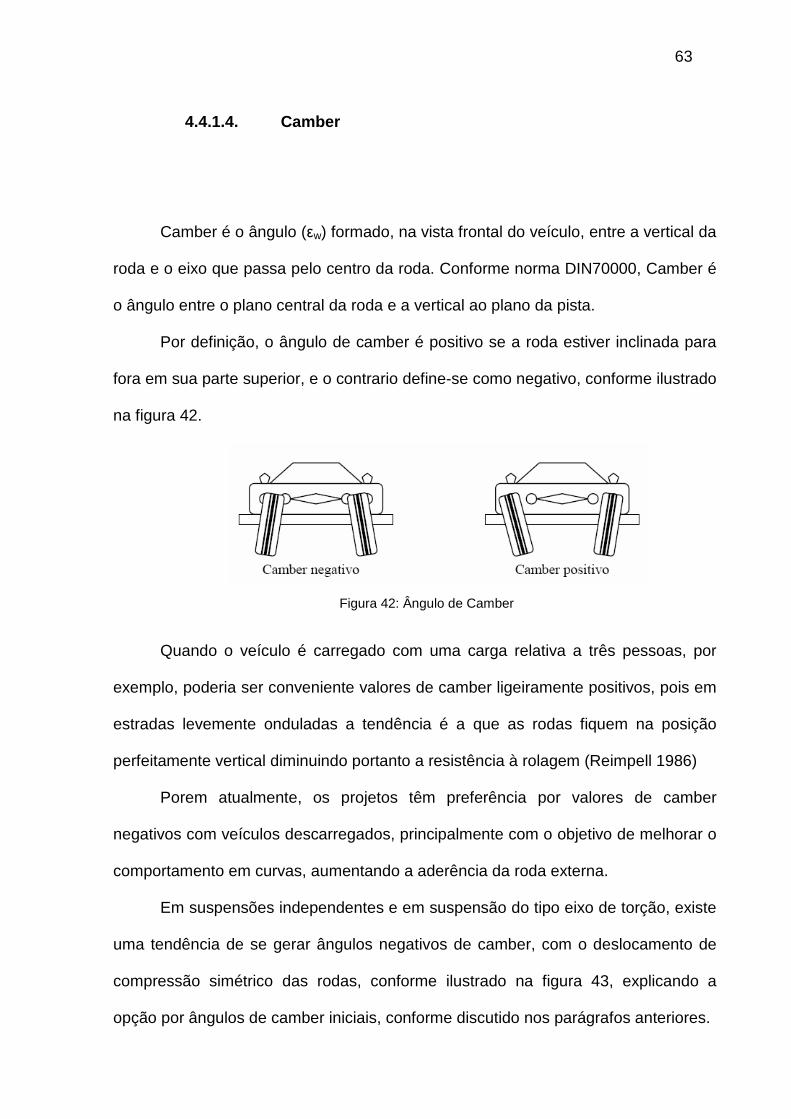
63
4.4.1.4. Camber
Camber é o ângulo (εw) formado, na vista frontal do veículo, entre a vertical da
roda e o eixo que passa pelo centro da roda. Conforme norma DIN70000, Camber é
o ângulo entre o plano central da roda e a vertical ao plano da pista.
Por definição, o ângulo de camber é positivo se a roda estiver inclinada para
fora em sua parte superior, e o contrario define-se como negativo, conforme ilustrado
na figura 42.
Figura 42: Ângulo de Camber
Quando o veículo é carregado com uma carga relativa a três pessoas, por
exemplo, poderia ser conveniente valores de camber ligeiramente positivos, pois em
estradas levemente onduladas a tendência é a que as rodas fiquem na posição
perfeitamente vertical diminuindo portanto a resistência à rolagem (Reimpell 1986)
Porem atualmente, os projetos têm preferência por valores de camber
negativos com veículos descarregados, principalmente com o objetivo de melhorar o
comportamento em curvas, aumentando a aderência da roda externa.
Em suspensões independentes e em suspensão do tipo eixo de torção, existe
uma tendência de se gerar ângulos negativos de camber, com o deslocamento de
compressão simétrico das rodas, conforme ilustrado na figura 43, explicando a
opção por ângulos de camber iniciais, conforme discutido nos parágrafos anteriores.
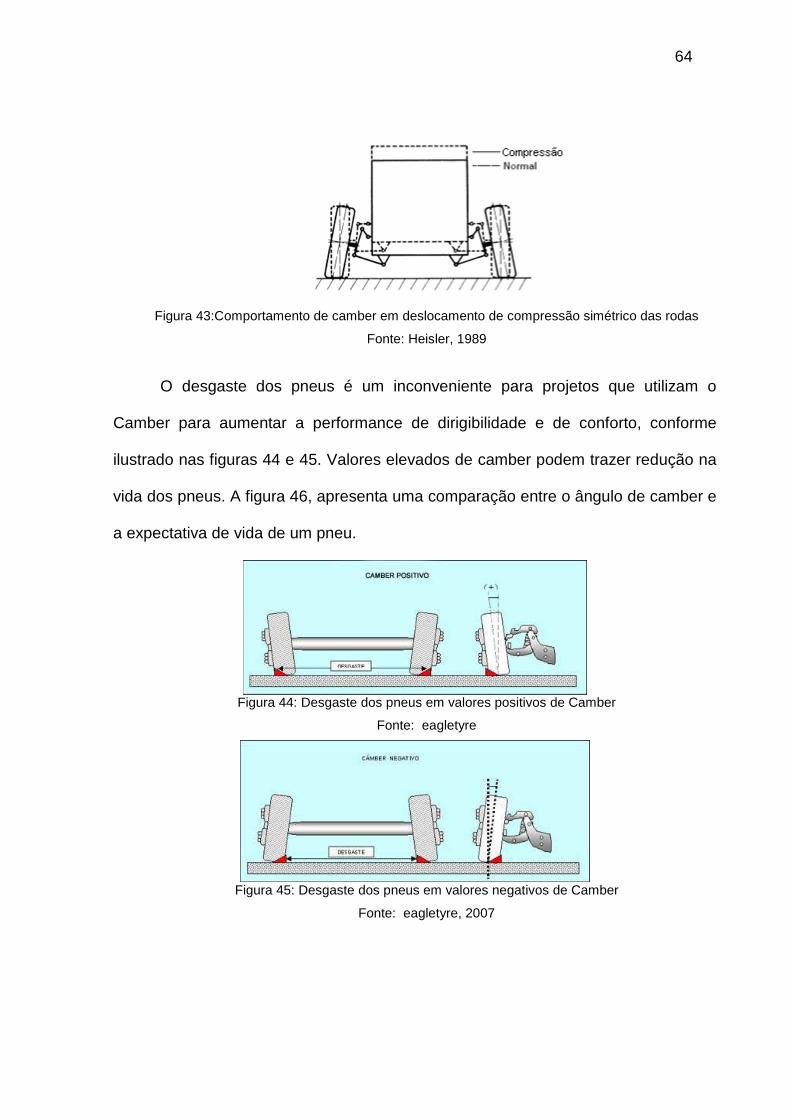
64
Figura 43:Comportamento de camber em deslocamento de compressão simétrico das rodas
Fonte: Heisler, 1989
O desgaste dos pneus é um inconveniente para projetos que utilizam o
Camber para aumentar a performance de dirigibilidade e de conforto, conforme
ilustrado nas figuras 44 e 45. Valores elevados de camber podem trazer redução na
vida dos pneus. A figura 46, apresenta uma comparação entre o ângulo de camber e
a expectativa de vida de um pneu.
Figura 44: Desgaste dos pneus em valores positivos de Camber
Fonte: eagletyre
Figura 45: Desgaste dos pneus em valores negativos de Camber
Fonte: eagletyre, 2007
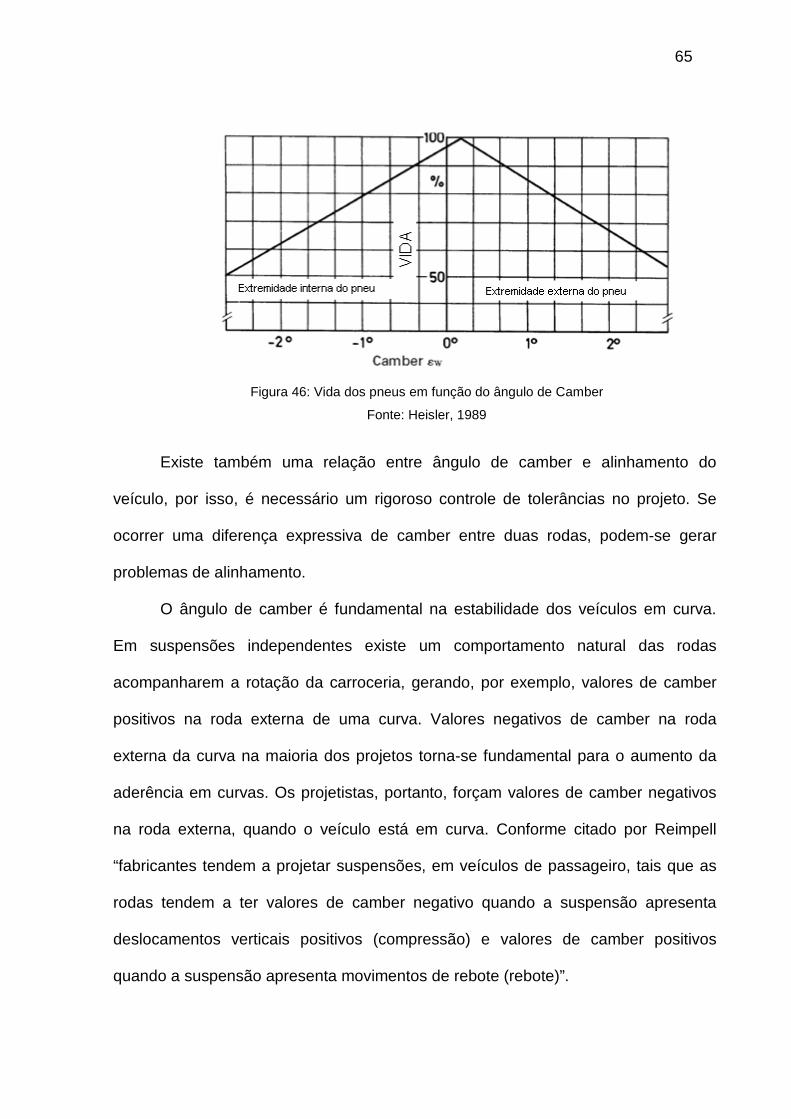
65
Figura 46: Vida dos pneus em função do ângulo de Camber
Fonte: Heisler, 1989
Existe também uma relação entre ângulo de camber e alinhamento do
veículo, por isso, é necessário um rigoroso controle de tolerâncias no projeto. Se
ocorrer uma diferença expressiva de camber entre duas rodas, podem-se gerar
problemas de alinhamento.
O ângulo de camber é fundamental na estabilidade dos veículos em curva.
Em suspensões independentes existe um comportamento natural das rodas
acompanharem a rotação da carroceria, gerando, por exemplo, valores de camber
positivos na roda externa de uma curva. Valores negativos de camber na roda
externa da curva na maioria dos projetos torna-se fundamental para o aumento da
aderência em curvas. Os projetistas, portanto, forçam valores de camber negativos
na roda externa, quando o veículo está em curva. Conforme citado por Reimpell
“fabricantes tendem a projetar suspensões, em veículos de passageiro, tais que as
rodas tendem a ter valores de camber negativo quando a suspensão apresenta
deslocamentos verticais positivos (compressão) e valores de camber positivos
quando a suspensão apresenta movimentos de rebote (rebote)”.
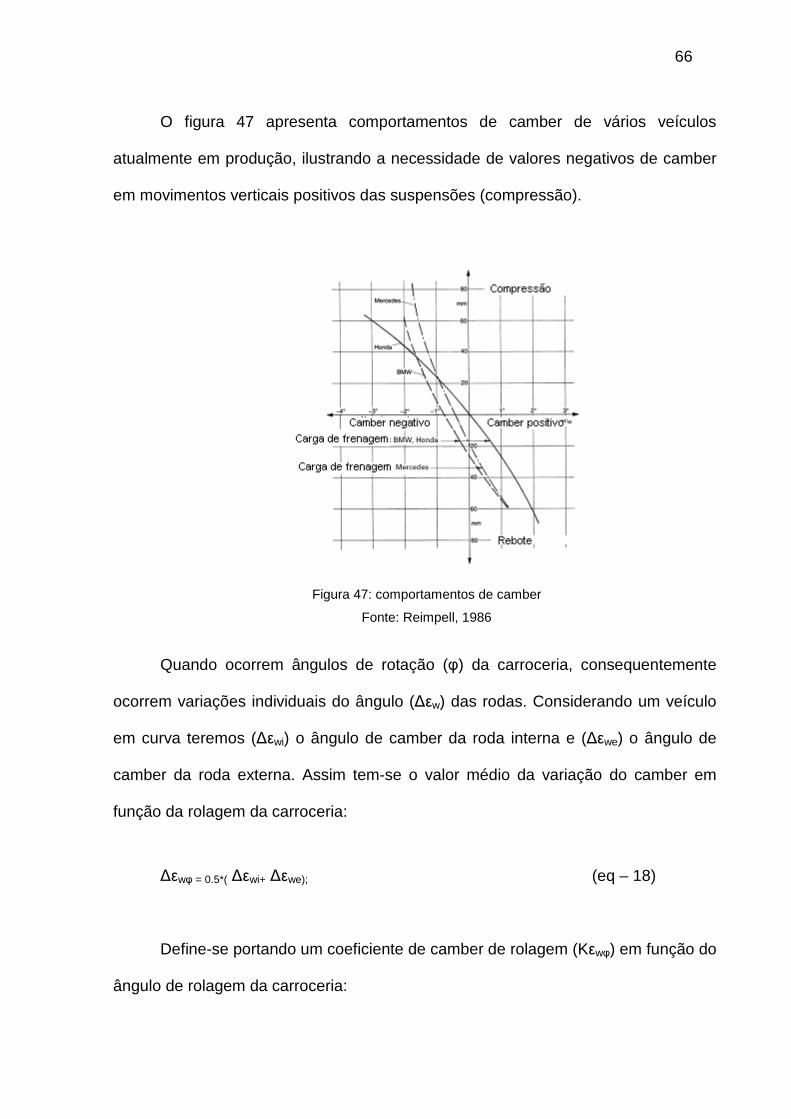
66
O figura 47 apresenta comportamentos de camber de vários veículos
atualmente em produção, ilustrando a necessidade de valores negativos de camber
em movimentos verticais positivos das suspensões (compressão).
Figura 47: comportamentos de camber
Fonte: Reimpell, 1986
Quando ocorrem ângulos de rotação (φ) da carroceria, consequentemente
ocorrem variações individuais do ângulo (∆εw) das rodas. Considerando um veículo
em curva teremos (∆εwi) o ângulo de camber da roda interna e (∆εwe) o ângulo de
camber da roda externa. Assim tem-se o valor médio da variação do camber em
função da rolagem da carroceria:
∆εwφ = 0.5*( ∆εwi+ ∆εwe); (eq – 18)
Define-se portando um coeficiente de camber de rolagem (Kεwφ) em função do
ângulo de rolagem da carroceria:
67
ϕεωεωϕd
dK = (eq – 19)
Ângulos de camber das rodas internas e externas provocados pelos
movimentos de rolagem da carroceria podem ser definidos pelas seguintes
equações:
εwi=εw0+∆εwi (eq – 20)
εwe=εw0+∆εwe (eq – 21)
Forças verticais nas rodas surgem devido aos ângulos de rolagem da
carroceria, sendo:
Fεwi = Fzwi sen(εwi); (eq – 22)
Fεwe = Fzwe sen(εwe); (eq – 23)
Sendo:
Fεwe = Força sobre a roda externa gerando camber positivo;
Fεwi = Força sobre a roda interna gerando camber negativo;
Fzwe , Fzwi = Forças verticais;
Conforme ilustrado na figura 48, as forças verticais criam indesejáveis
componentes, gerando uma tendência de ângulos positivos de camber na roda
externa, demonstrando o acompanhamento da carroceria pelas rodas.
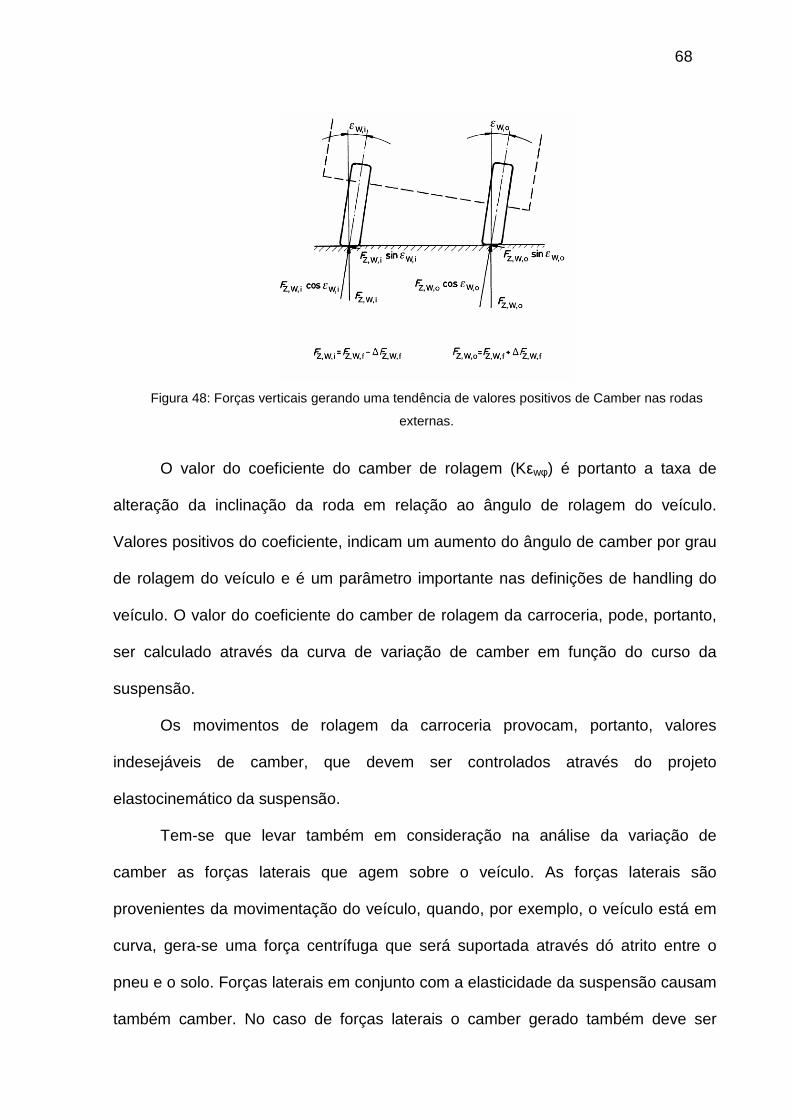
68
Figura 48: Forças verticais gerando uma tendência de valores positivos de Camber nas rodas
externas.
O valor do coeficiente do camber de rolagem (Kεwφ) é portanto a taxa de
alteração da inclinação da roda em relação ao ângulo de rolagem do veículo.
Valores positivos do coeficiente, indicam um aumento do ângulo de camber por grau
de rolagem do veículo e é um parâmetro importante nas definições de handling do
veículo. O valor do coeficiente do camber de rolagem da carroceria, pode, portanto,
ser calculado através da curva de variação de camber em função do curso da
suspensão.
Os movimentos de rolagem da carroceria provocam, portanto, valores
indesejáveis de camber, que devem ser controlados através do projeto
elastocinemático da suspensão.
Tem-se que levar também em consideração na análise da variação de
camber as forças laterais que agem sobre o veículo. As forças laterais são
provenientes da movimentação do veículo, quando, por exemplo, o veículo está em
curva, gera-se uma força centrífuga que será suportada através dó atrito entre o
pneu e o solo. Forças laterais em conjunto com a elasticidade da suspensão causam
também camber. No caso de forças laterais o camber gerado também deve ser
69
evitado a favor da estabilidade do veículo, pois novamente há uma tendência de
valores de camber positivos na roda externa.
4.4.1.5. Convergência
De acordo com a norma DIN 70000, o ângulo de convergência estático δv0 é
o ângulo entre o plano central do veículo na direção longitudinal e a linha de
interseção do plano central de uma das rodas com o plano a terra. É positivo quando
a parte frontal das rodas aponta para o centro do veículo e negativo quando
apontam para fora.
Para realização de uma análise de valores, considerando-se a distancia entre
a parte frontal das rodas como X e a distancia entre a parte posterior das rodas
como Y, conforme ilustrado na figura 49. Se existe valores diferentes de zero na
subtração de X por Y, têm-se valores de convergência. Se X-Y<0 tem-se
convergência positiva da suspensão, por outro lado, se encontram valores positivos
nesta subtração considera-se como convergência negativa também denominado de
divergência.
O ângulo de convergência total (δv0) é a soma dos ângulos das rodas direita
e esquerda. Este valor é em muitos casos dado em milímetros considerando a
subtração:
r∆=X-Y (eq – 24)
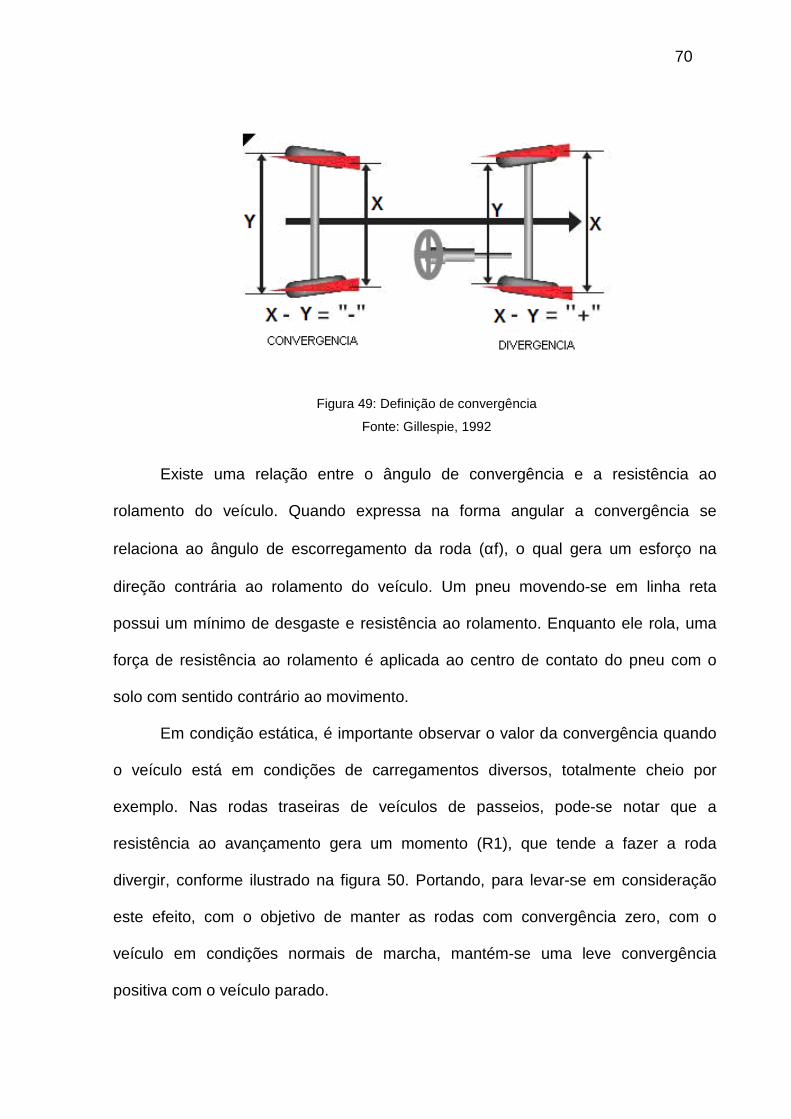
70
Figura 49: Definição de convergência
Fonte: Gillespie, 1992
Existe uma relação entre o ângulo de convergência e a resistência ao
rolamento do veículo. Quando expressa na forma angular a convergência se
relaciona ao ângulo de escorregamento da roda (αf), o qual gera um esforço na
direção contrária ao rolamento do veículo. Um pneu movendo-se em linha reta
possui um mínimo de desgaste e resistência ao rolamento. Enquanto ele rola, uma
força de resistência ao rolamento é aplicada ao centro de contato do pneu com o
solo com sentido contrário ao movimento.
Em condição estática, é importante observar o valor da convergência quando
o veículo está em condições de carregamentos diversos, totalmente cheio por
exemplo. Nas rodas traseiras de veículos de passeios, pode-se notar que a
resistência ao avançamento gera um momento (R1), que tende a fazer a roda
divergir, conforme ilustrado na figura 50. Portando, para levar-se em consideração
este efeito, com o objetivo de manter as rodas com convergência zero, com o
veículo em condições normais de marcha, mantém-se uma leve convergência
positiva com o veículo parado.
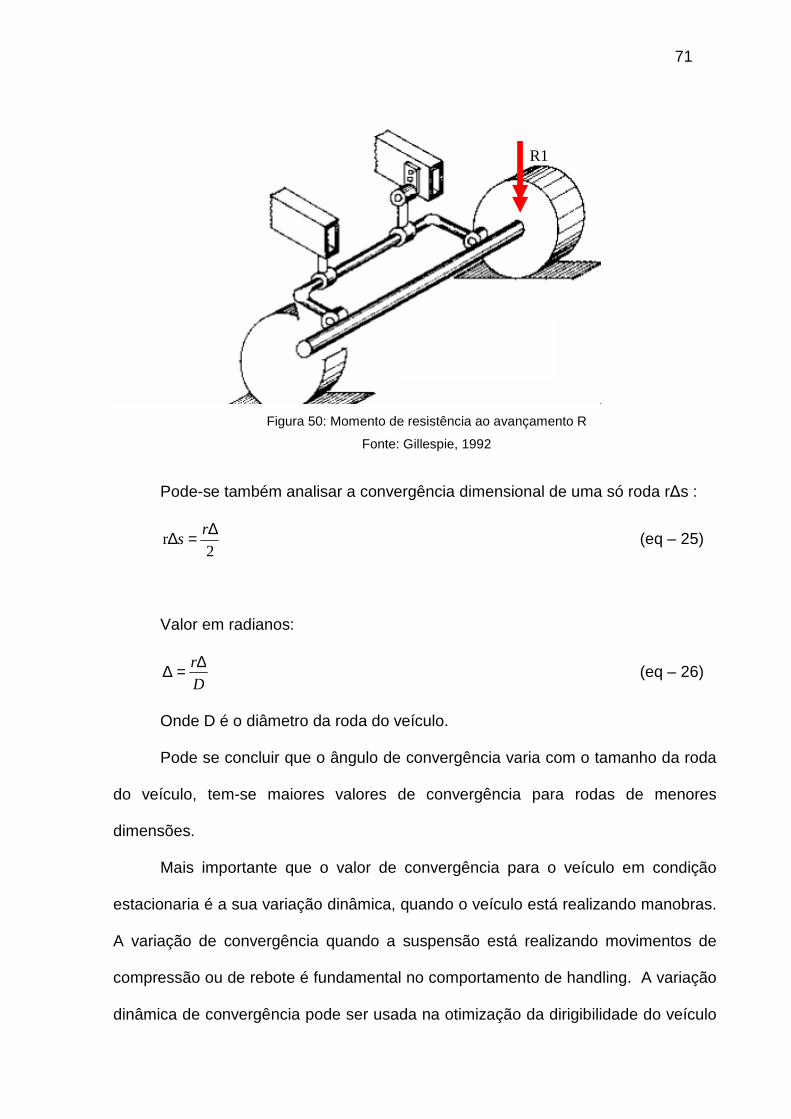
71
Figura 50: Momento de resistência ao avançamento R
Fonte: Gillespie, 1992
Pode-se também analisar a convergência dimensional de uma só roda r∆s :
2r
∆=∆ rs (eq – 25)
Valor em radianos:
D
r∆=∆ (eq – 26)
Onde D é o diâmetro da roda do veículo.
Pode se concluir que o ângulo de convergência varia com o tamanho da roda
do veículo, tem-se maiores valores de convergência para rodas de menores
dimensões.
Mais importante que o valor de convergência para o veículo em condição
estacionaria é a sua variação dinâmica, quando o veículo está realizando manobras.
A variação de convergência quando a suspensão está realizando movimentos de
compressão ou de rebote é fundamental no comportamento de handling. A variação
dinâmica de convergência pode ser usada na otimização da dirigibilidade do veículo
R1
72
e nas condições de segurança, por outro lado, valores inadequados de convergência
podem trazer prejuízos graves ao projeto.
Agindo sobre a convergência, atua-se diretamente sobre o comportamento do
veículo em curva (subesterçante ou sobresterçante), sendo, portanto, um dos mais
importantes parâmetros a serem ajustados para uma boa atitude em curva do
veículo.
Para evitar o desgaste excessivo dos pneus e resistência elevada à rolagem
ou para reduzir a instabilidade do veículo, é importante minimizar a variação
dinâmica de convergência em manobras de frenagem e aceleração, isto é, é
importante evitar variações de convergência em movimentos verticais da suspensão,
com as rodas em movimento vertical simétrico. A figura 51 apresenta possíveis
curvas de alteração de convergência em manobras de variação simétrica. No eixo Y
apresenta-se a variação do curso da suspensão da posição de rebote (S1) à posição
de compressão (S2), em quanto no eixo X apresenta-se a variação de convergência
em minutos, valores à direita consideram-se como ângulos positivos de
convergência enquanto valores à esquerda do eixo das ordenadas apresentam-se
os valores negativos ou divergência. Atingir a curva ideal de convergência é uma
tarefa difícil para os projetistas, pois as variáveis de geometria afetam as variações
de camber, por exemplo, outro problema são as tolerâncias no processo de
fabricação que podem ter grande influência na variação dinâmica da convergência.
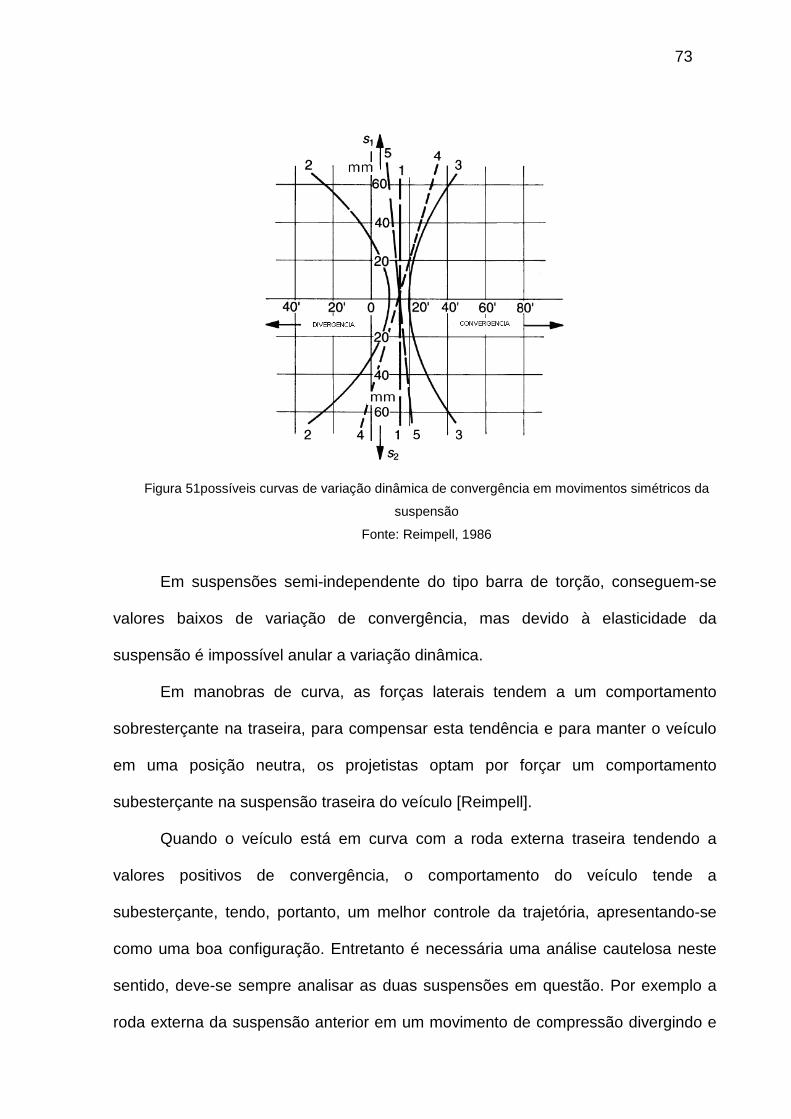
73
Figura 51possíveis curvas de variação dinâmica de convergência em movimentos simétricos da
suspensão
Fonte: Reimpell, 1986
Em suspensões semi-independente do tipo barra de torção, conseguem-se
valores baixos de variação de convergência, mas devido à elasticidade da
suspensão é impossível anular a variação dinâmica.
Em manobras de curva, as forças laterais tendem a um comportamento
sobresterçante na traseira, para compensar esta tendência e para manter o veículo
em uma posição neutra, os projetistas optam por forçar um comportamento
subesterçante na suspensão traseira do veículo [Reimpell].
Quando o veículo está em curva com a roda externa traseira tendendo a
valores positivos de convergência, o comportamento do veículo tende a
subesterçante, tendo, portanto, um melhor controle da trajetória, apresentando-se
como uma boa configuração. Entretanto é necessária uma análise cautelosa neste
sentido, deve-se sempre analisar as duas suspensões em questão. Por exemplo a
roda externa da suspensão anterior em um movimento de compressão divergindo e
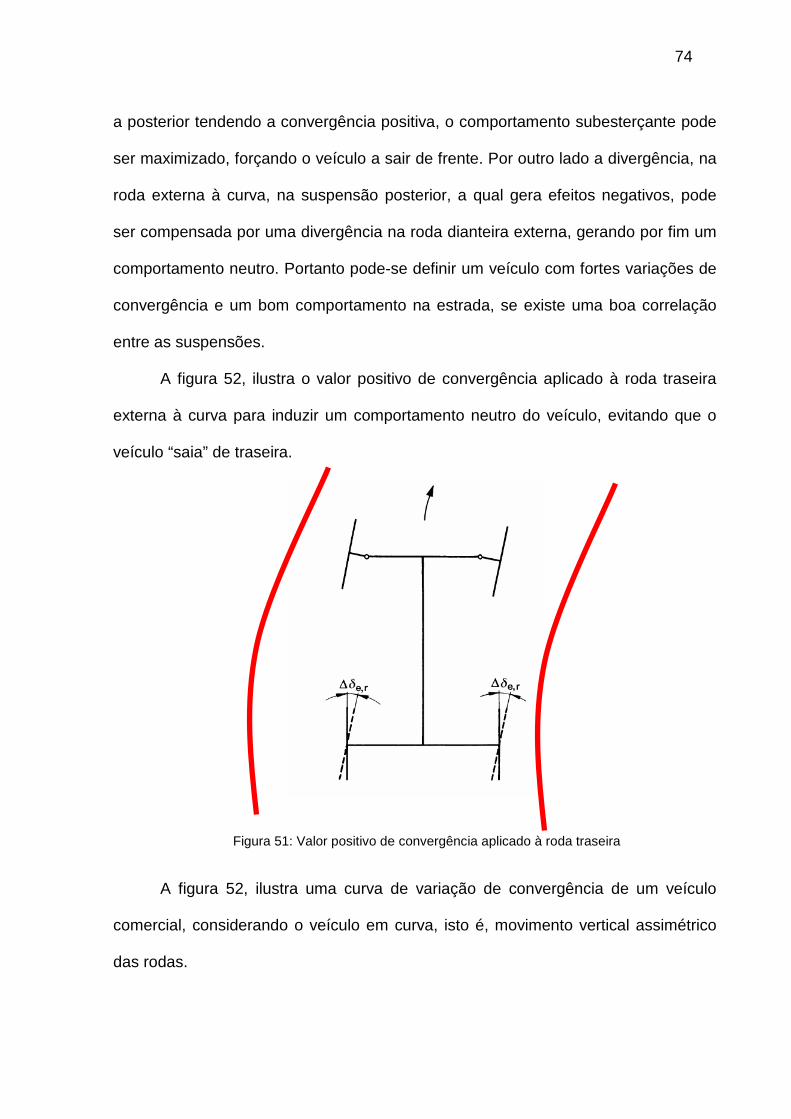
74
a posterior tendendo a convergência positiva, o comportamento subesterçante pode
ser maximizado, forçando o veículo a sair de frente. Por outro lado a divergência, na
roda externa à curva, na suspensão posterior, a qual gera efeitos negativos, pode
ser compensada por uma divergência na roda dianteira externa, gerando por fim um
comportamento neutro. Portanto pode-se definir um veículo com fortes variações de
convergência e um bom comportamento na estrada, se existe uma boa correlação
entre as suspensões.
A figura 52, ilustra o valor positivo de convergência aplicado à roda traseira
externa à curva para induzir um comportamento neutro do veículo, evitando que o
veículo “saia” de traseira.
Figura 51: Valor positivo de convergência aplicado à roda traseira
A figura 52, ilustra uma curva de variação de convergência de um veículo
comercial, considerando o veículo em curva, isto é, movimento vertical assimétrico
das rodas.
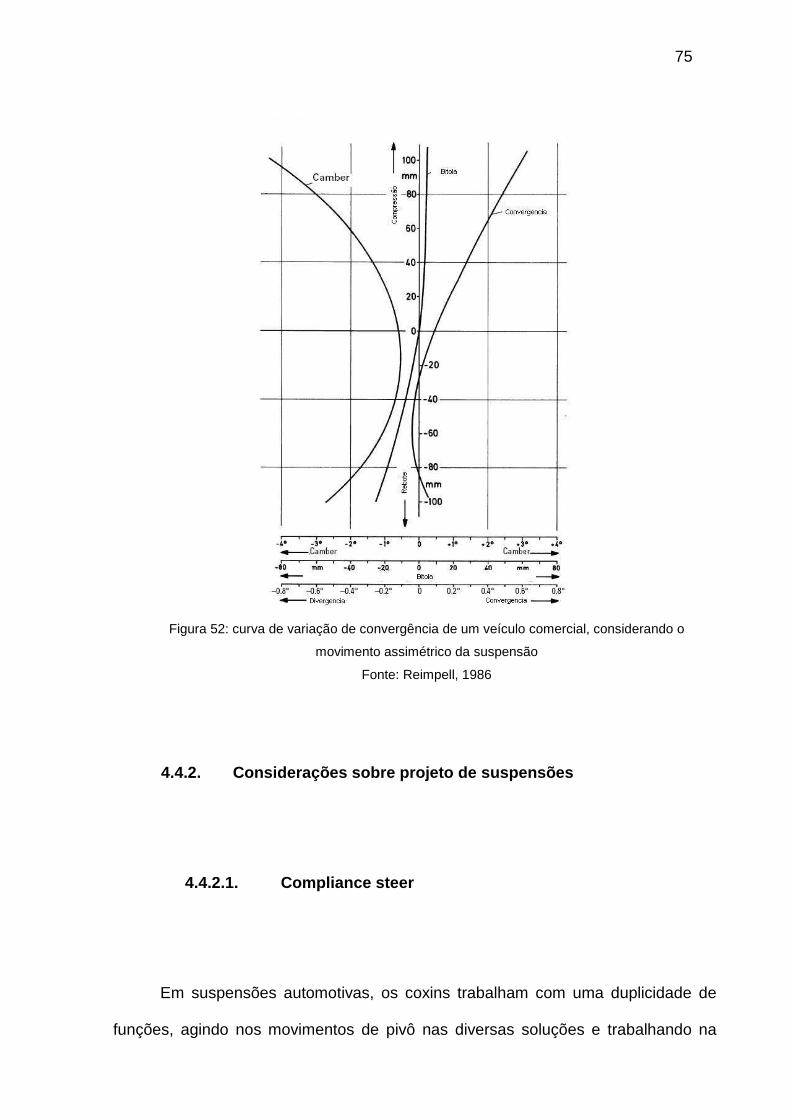
75
Figura 52: curva de variação de convergência de um veículo comercial, considerando o
movimento assimétrico da suspensão
Fonte: Reimpell, 1986
4.4.2. Considerações sobre projeto de suspensões
4.4.2.1. Compliance steer
Em suspensões automotivas, os coxins trabalham com uma duplicidade de
funções, agindo nos movimentos de pivô nas diversas soluções e trabalhando na
76
redução de transmissão de ruídos para a carroceria, incrementando as
características de ride do veículo. O tipo do material envolvido e a geometria dos
coxins determinam as características funcionais do componente.
A força centrífuga quando o veículo está em uma manobra de curva, pode
produzir acelerações laterais de 0.7 a 8.0g, as quais são suficiente para comprimir e
distorcer os elementos em borracha, chegando a descentralizar os coxins (Heisler,
1989).
As distorções causadas pelos esforços excessivos que chegam às
suspensões, podem causar alterações nos parâmetros cinemáticos. Esta alteração
causada pela deformação elástica dos membros de borracha da suspensão é
conhecida como compliance steer.
Compliance steer é notado em manobras de curva com acionamento de
freios, chegando, portanto, aos coxins, forças laterais e longitudinais causando
grandes distorções, podendo levar a alterações nos parâmetros cinemáticos das
suspensões causando o indesejado fenômeno sobresterçante.
Esta é mais uma variável a ser considerada no projeto cinemático de
suspensões, alguns projetos inserem novos componentes no conjunto da
suspensão, com o objetivo exclusivo de reduzir estes efeitos.
4.4.2.2. “ Squad” e “dive ”
Todos os veículos, devido à sua massa suspensa, sofrem transferência de
massa quando submetidos às alterações instantâneas de acelerações. Alterações
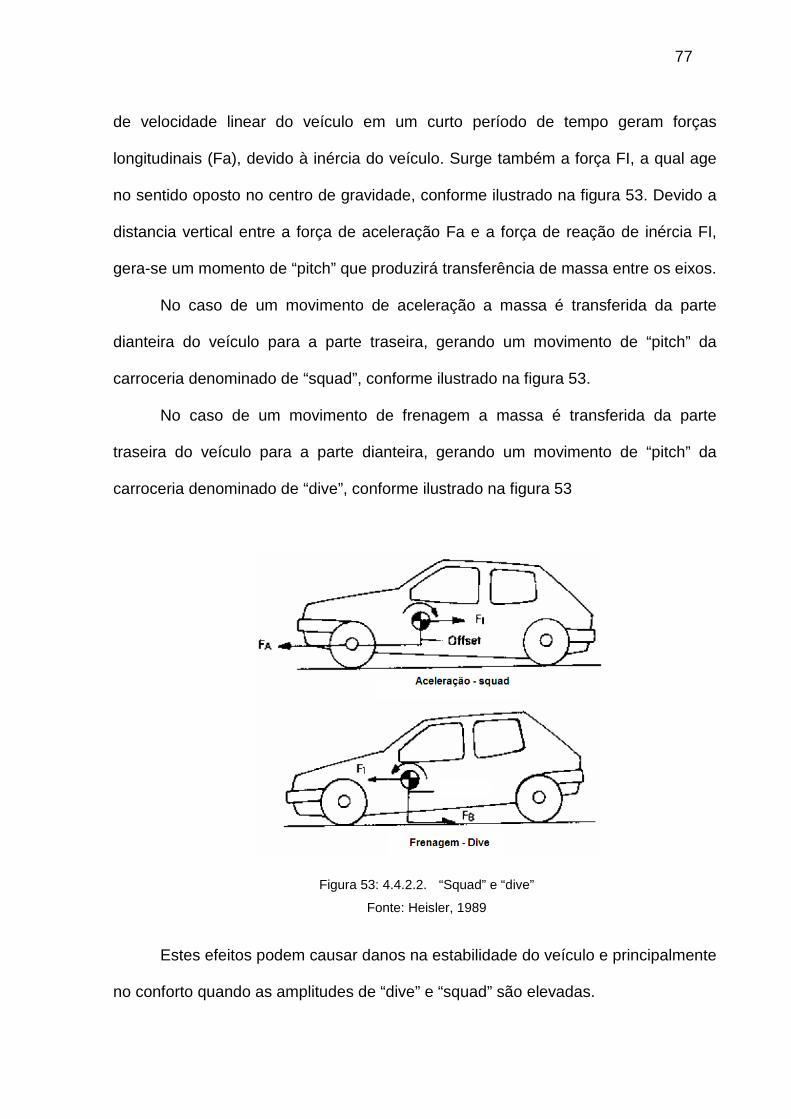
77
de velocidade linear do veículo em um curto período de tempo geram forças
longitudinais (Fa), devido à inércia do veículo. Surge também a força FI, a qual age
no sentido oposto no centro de gravidade, conforme ilustrado na figura 53. Devido a
distancia vertical entre a força de aceleração Fa e a força de reação de inércia FI,
gera-se um momento de “pitch” que produzirá transferência de massa entre os eixos.
No caso de um movimento de aceleração a massa é transferida da parte
dianteira do veículo para a parte traseira, gerando um movimento de “pitch” da
carroceria denominado de “squad”, conforme ilustrado na figura 53.
No caso de um movimento de frenagem a massa é transferida da parte
traseira do veículo para a parte dianteira, gerando um movimento de “pitch” da
carroceria denominado de “dive”, conforme ilustrado na figura 53
Figura 53: 4.4.2.2. “Squad” e “dive”
Fonte: Heisler, 1989
Estes efeitos podem causar danos na estabilidade do veículo e principalmente
no conforto quando as amplitudes de “dive” e “squad” são elevadas.
78
Esta é mais uma variável a ser considerada no projeto cinemático de
suspensões, alguns projetos inserem novos componentes, no conjunto da
suspensão, com o objetivo exclusivo de reduzir estes efeitos.
4.5. MANOBRAS DE HANDLING
Para homologação de um veículo, faz-se uma série de ensaios práticos com o
objetivo de se chegar a uma validação final dos requisitos em que a categoria do
automóvel se enquadra. Para avaliação das atitudes dos veículos em manobras,
algumas normas internacionais sugerem ensaios homologativos, os quais
normalmente são requisitos finais por parte das montadoras e instituições
avaliadoras. É importante observar que algumas das manobras são consideradas
como aspectos de segurança e são utilizadas como instrumentos legais em diversos
países.
Nos Estados Unidos existe uma unidade reguladora chamada NHTSA
gerenciada pelo governo deste país, utilizando normas internacionais e normas
internas desenvolvidas, para garantir a segurança em automóveis. São realizadas
portanto provas experimentais desde “crash tests”, simulando impactos de veículos a
diversas velocidades, até manobras de handling, garantindo que os veículos
comercializados têm um mínimo de segurança.
Em relação a manobras de handling, normalmente as montadoras utilizam as
normas SAE, ISO, NHTSA e normas internas realizando uma seqüência de
manobras padronizadas.
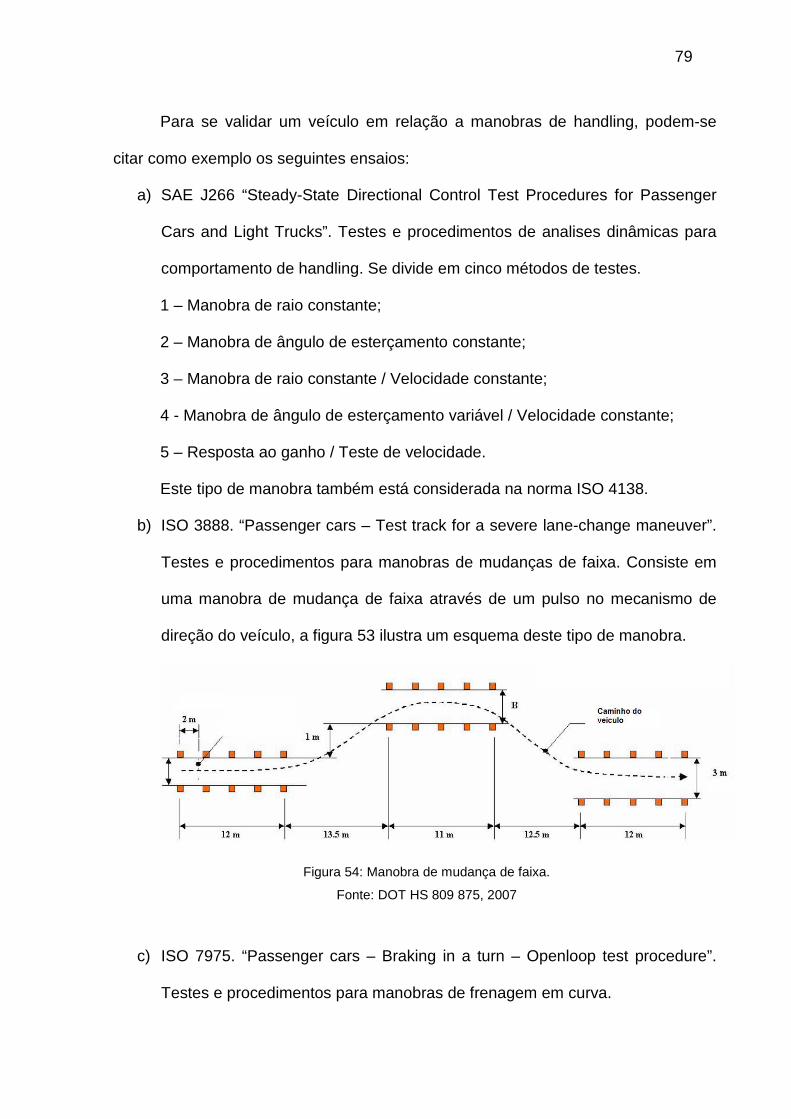
79
Para se validar um veículo em relação a manobras de handling, podem-se
citar como exemplo os seguintes ensaios:
a) SAE J266 “Steady-State Directional Control Test Procedures for Passenger
Cars and Light Trucks”. Testes e procedimentos de analises dinâmicas para
comportamento de handling. Se divide em cinco métodos de testes.
1 – Manobra de raio constante;
2 – Manobra de ângulo de esterçamento constante;
3 – Manobra de raio constante / Velocidade constante;
4 - Manobra de ângulo de esterçamento variável / Velocidade constante;
5 – Resposta ao ganho / Teste de velocidade.
Este tipo de manobra também está considerada na norma ISO 4138.
b) ISO 3888. “Passenger cars – Test track for a severe lane-change maneuver”.
Testes e procedimentos para manobras de mudanças de faixa. Consiste em
uma manobra de mudança de faixa através de um pulso no mecanismo de
direção do veículo, a figura 53 ilustra um esquema deste tipo de manobra.
Figura 54: Manobra de mudança de faixa.
Fonte: DOT HS 809 875, 2007
c) ISO 7975. “Passenger cars – Braking in a turn – Openloop test procedure”.
Testes e procedimentos para manobras de frenagem em curva.
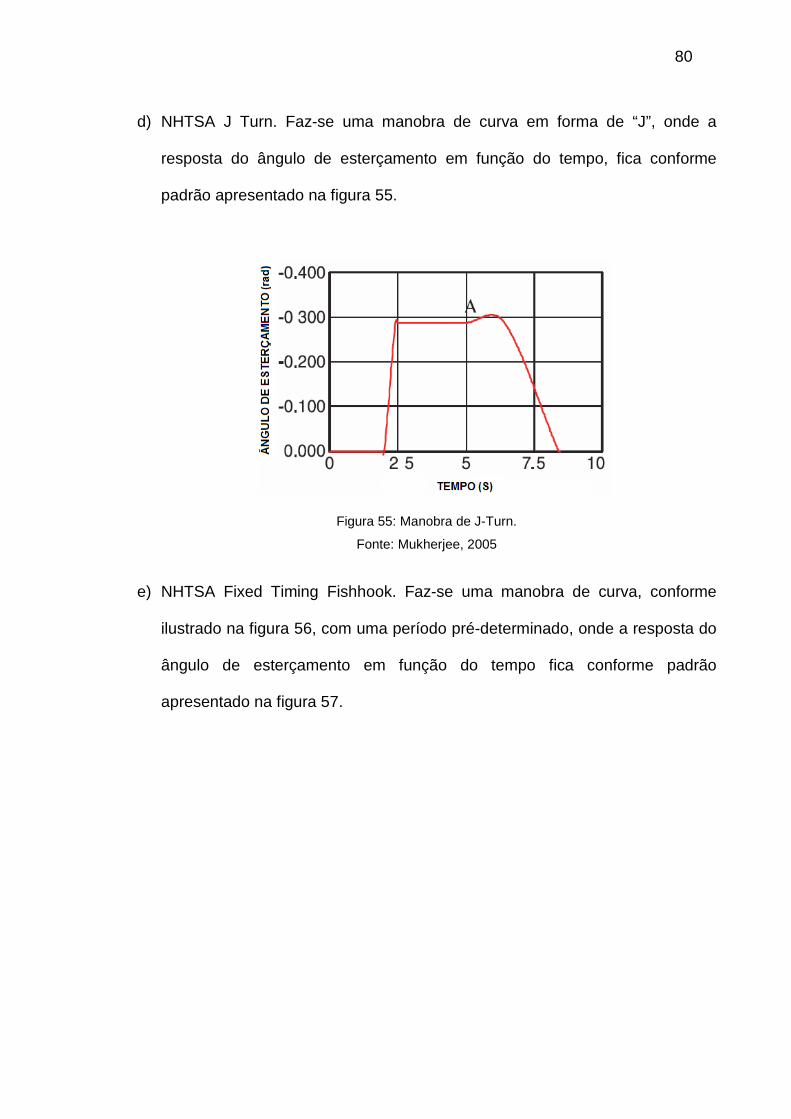
80
d) NHTSA J Turn. Faz-se uma manobra de curva em forma de “J”, onde a
resposta do ângulo de esterçamento em função do tempo, fica conforme
padrão apresentado na figura 55.
Figura 55: Manobra de J-Turn.
Fonte: Mukherjee, 2005
e) NHTSA Fixed Timing Fishhook. Faz-se uma manobra de curva, conforme
ilustrado na figura 56, com uma período pré-determinado, onde a resposta do
ângulo de esterçamento em função do tempo fica conforme padrão
apresentado na figura 57.
81
Figura 56: Manobra de Fixed Timing Fishhook resposta transiente.
Fonte: Schultz, 2005
Figura 57: Manobra de Fixed Timing Fishhook resposta transiente.
Fonte: Mukherjee, 2005
f) Acelerações e frenagem retilínea
Por fim é importante a análise do comportamento do veículo em manobras de
aceleração e frenagem em linha reta as normas ISO e NHTSA prevêem estas
manobras.
82
São analisados por fim, dados como acelerações laterais em função de
acelerações longitudinais, deslizamento dos pneus, instabilidade subjetiva, com o
objetivo de avaliar as características de handling do veículo, chegando-se a um
laudo homologativo. Conforme comentado nos tópicos anteriores os
comportamentos dos veículos em todas estas manobras são ditados principalmente
pelo comportamento cinemático das suspensões, isto é, a atitude da suspensão
pode comprometer a homologação final do veículo.
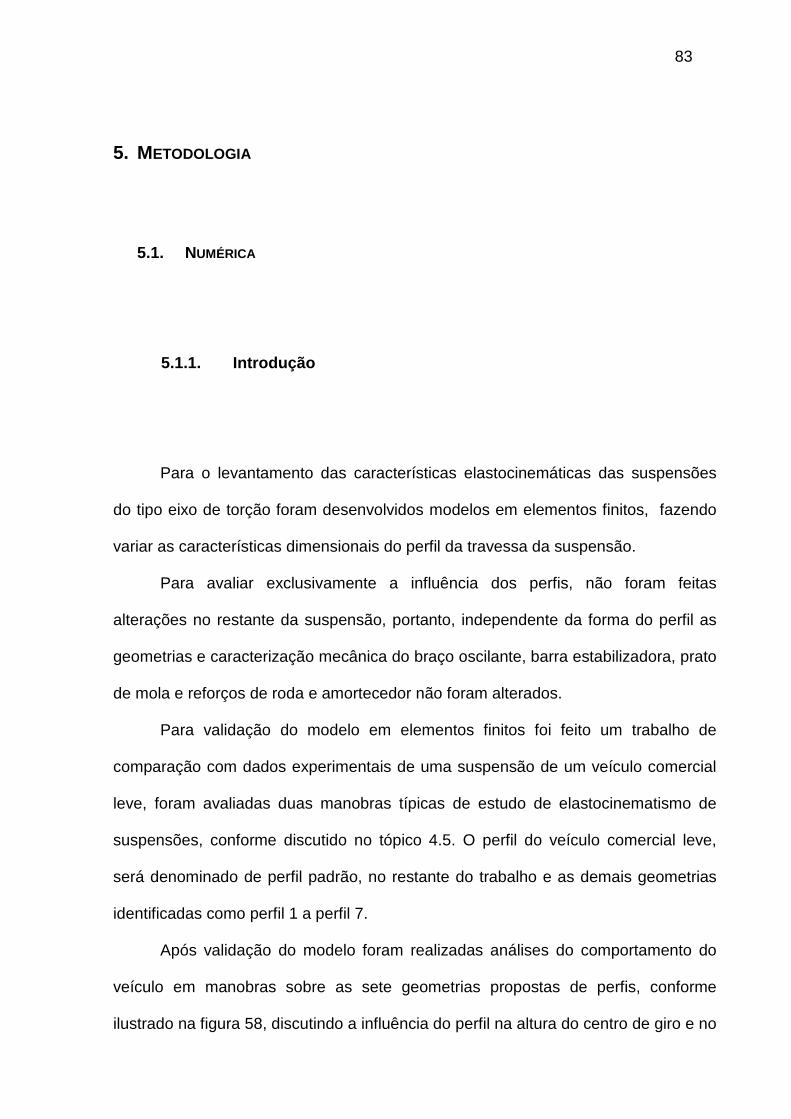
83
5. METODOLOGIA
5.1. NUMÉRICA
5.1.1. Introdução
Para o levantamento das características elastocinemáticas das suspensões
do tipo eixo de torção foram desenvolvidos modelos em elementos finitos, fazendo
variar as características dimensionais do perfil da travessa da suspensão.
Para avaliar exclusivamente a influência dos perfis, não foram feitas
alterações no restante da suspensão, portanto, independente da forma do perfil as
geometrias e caracterização mecânica do braço oscilante, barra estabilizadora, prato
de mola e reforços de roda e amortecedor não foram alterados.
Para validação do modelo em elementos finitos foi feito um trabalho de
comparação com dados experimentais de uma suspensão de um veículo comercial
leve, foram avaliadas duas manobras típicas de estudo de elastocinematismo de
suspensões, conforme discutido no tópico 4.5. O perfil do veículo comercial leve,
será denominado de perfil padrão, no restante do trabalho e as demais geometrias
identificadas como perfil 1 a perfil 7.
Após validação do modelo foram realizadas análises do comportamento do
veículo em manobras sobre as sete geometrias propostas de perfis, conforme
ilustrado na figura 58, discutindo a influência do perfil na altura do centro de giro e no
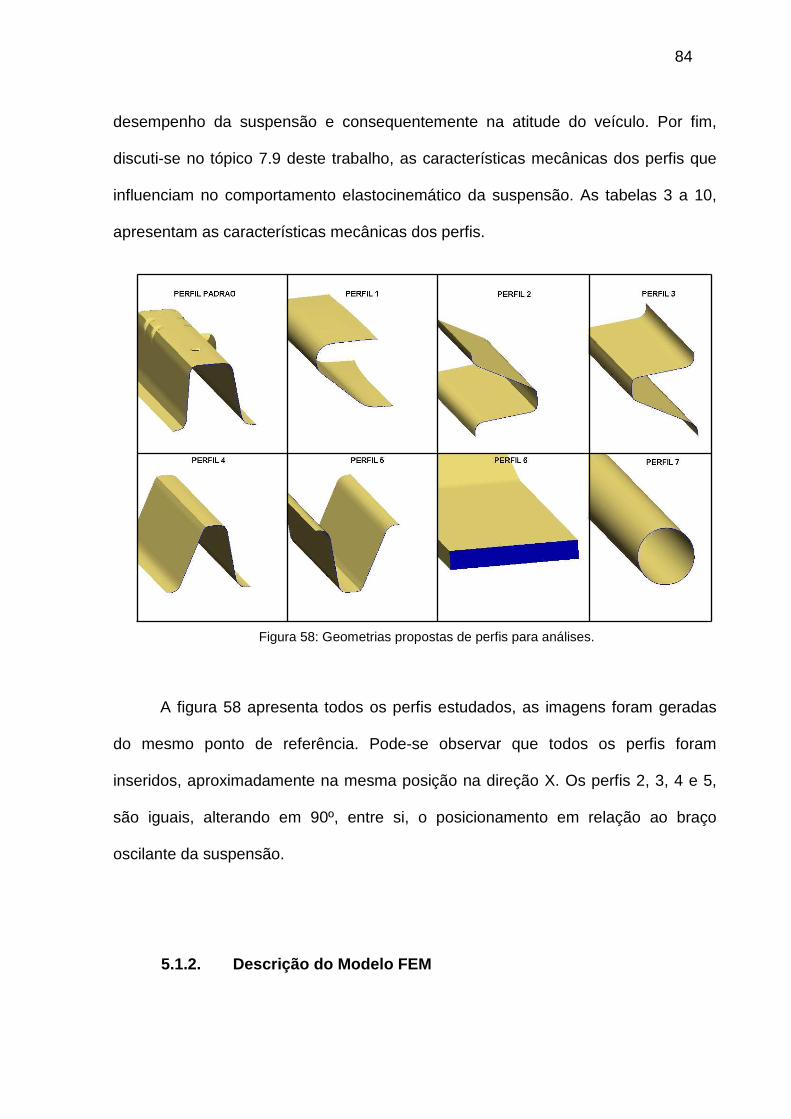
84
desempenho da suspensão e consequentemente na atitude do veículo. Por fim,
discuti-se no tópico 7.9 deste trabalho, as características mecânicas dos perfis que
influenciam no comportamento elastocinemático da suspensão. As tabelas 3 a 10,
apresentam as características mecânicas dos perfis.
Figura 58: Geometrias propostas de perfis para análises.
A figura 58 apresenta todos os perfis estudados, as imagens foram geradas
do mesmo ponto de referência. Pode-se observar que todos os perfis foram
inseridos, aproximadamente na mesma posição na direção X. Os perfis 2, 3, 4 e 5,
são iguais, alterando em 90º, entre si, o posicionamento em relação ao braço
oscilante da suspensão.
5.1.2. Descrição do Modelo FEM
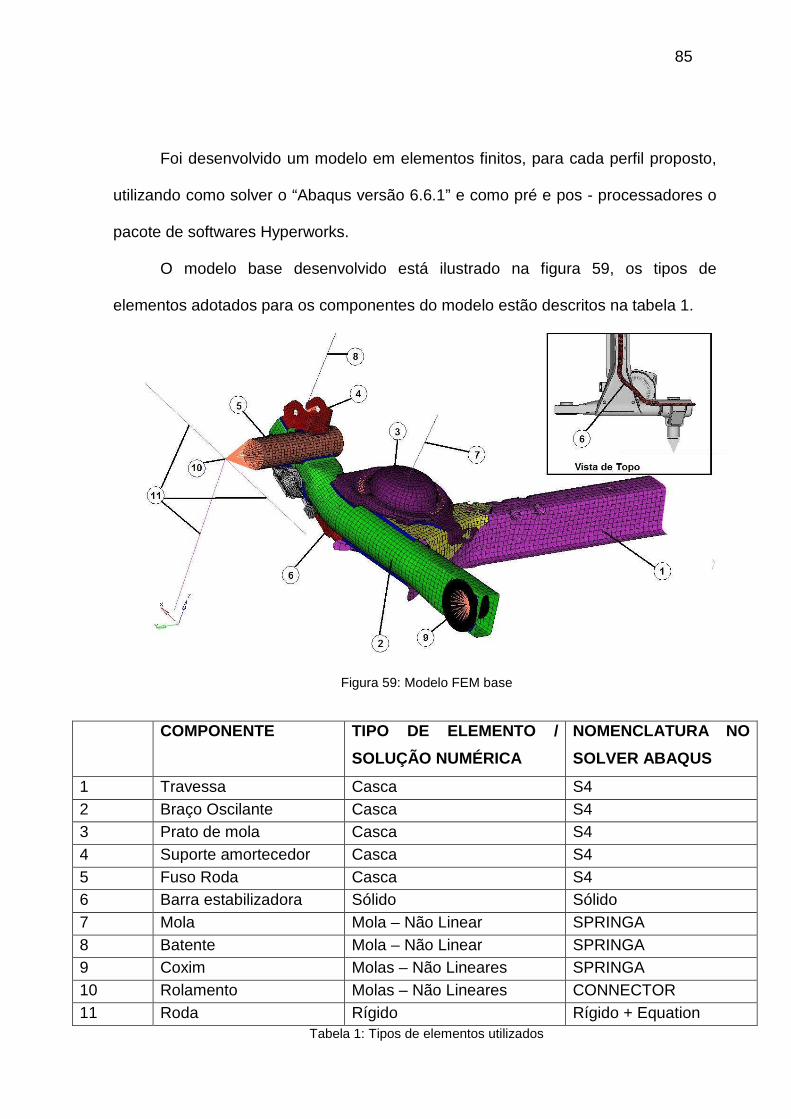
85
Foi desenvolvido um modelo em elementos finitos, para cada perfil proposto,
utilizando como solver o “Abaqus versão 6.6.1” e como pré e pos - processadores o
pacote de softwares Hyperworks.
O modelo base desenvolvido está ilustrado na figura 59, os tipos de
elementos adotados para os componentes do modelo estão descritos na tabela 1.
Figura 59: Modelo FEM base
COMPONENTE TIPO DE ELEMENTO /
SOLUÇÃO NUMÉRICA
NOMENCLATURA NO
SOLVER ABAQUS
1 Travessa Casca S4 2 Braço Oscilante Casca S4 3 Prato de mola Casca S4 4 Suporte amortecedor Casca S4 5 Fuso Roda Casca S4 6 Barra estabilizadora Sólido Sólido 7 Mola Mola – Não Linear SPRINGA 8 Batente Mola – Não Linear SPRINGA 9 Coxim Molas – Não Lineares SPRINGA 10 Rolamento Molas – Não Lineares CONNECTOR 11 Roda Rígido Rígido + Equation
Tabela 1: Tipos de elementos utilizados
86
Para o desenvolvimento dos modelos, foi tomada apenas a região de
resposta linear dos materiais, já que a resposta aos esforços sobre o veículo, em
uma análise elastocinemática, da suspensão não deve ocorrer dentro da fase
plástica do material, já que isto comprometeria o comportamento do veículo. A tabela
2 apresenta um resumo das características inseridas para os materiais metálicos:
COMPONENTE MÓDULO DE
ELASTICDADE
[MPa]
COEFICIENTE
DE POISON
ESPESSURA
[mm]
Travessa 205.000 0.3 4.0
Braço Oscilante 205.000 0.3 3.0
Prato de mola 205.000 0.3 2.0
Suporte
amortecedor
205.000 0.3 2.8
Fuso Roda 205.000 0.3 3.0
Tabela 2: Características inseridas para os materiais metálicos
Quanto aos coxins, molas e batentes, a curva de resposta de cada
componente foi obtida a partir de ensaios experimentais, fornecidos pelos
respectivos fabricantes. Assim realizados já que sua resposta é dependente não
apenas dos materiais utilizados como também da geometria de cada um.
Para os coxins, foram modeladas seis molas conforme os graus de liberdade
correspondentes.
Quanto às molas e os batentes, estes foram simulados utilizando elementos
de mola axial não linear, considerando apenas o grau de liberdade relativo à tração
e compressão dos mesmos. Vale ressaltar que este procedimento foi possível
devido ao uso do software abaqus.
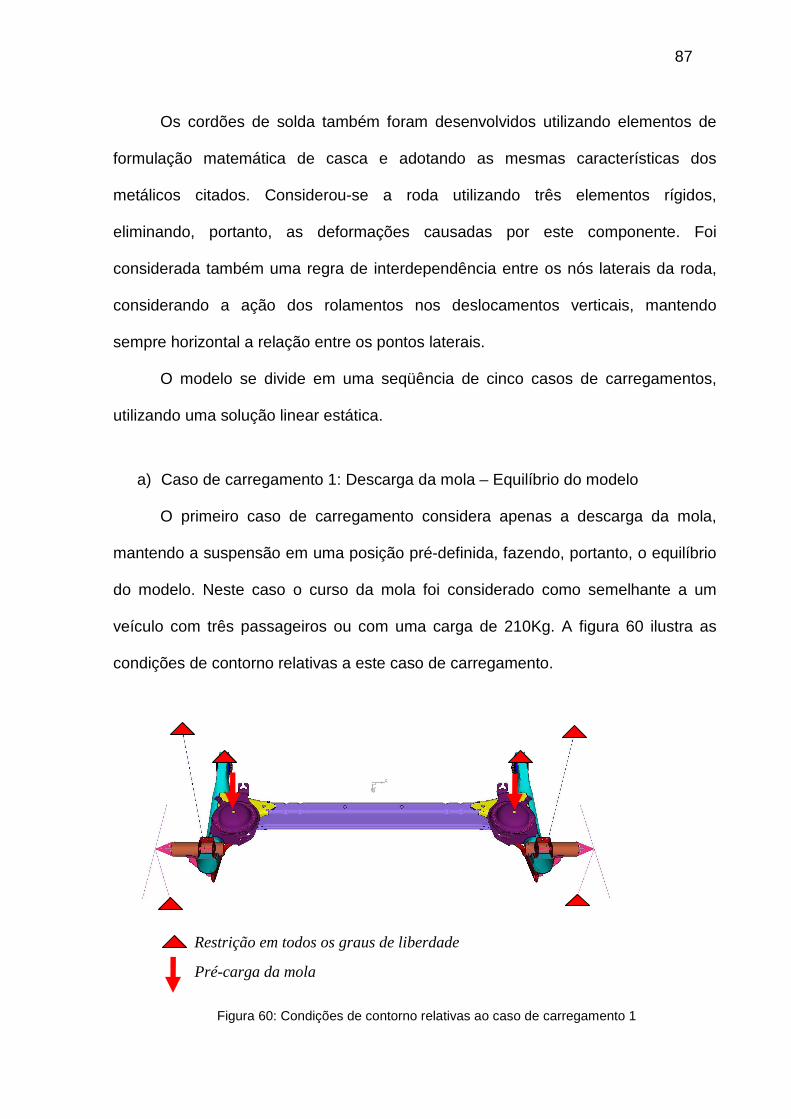
87
Os cordões de solda também foram desenvolvidos utilizando elementos de
formulação matemática de casca e adotando as mesmas características dos
metálicos citados. Considerou-se a roda utilizando três elementos rígidos,
eliminando, portanto, as deformações causadas por este componente. Foi
considerada também uma regra de interdependência entre os nós laterais da roda,
considerando a ação dos rolamentos nos deslocamentos verticais, mantendo
sempre horizontal a relação entre os pontos laterais.
O modelo se divide em uma seqüência de cinco casos de carregamentos,
utilizando uma solução linear estática.
a) Caso de carregamento 1: Descarga da mola – Equilíbrio do modelo
O primeiro caso de carregamento considera apenas a descarga da mola,
mantendo a suspensão em uma posição pré-definida, fazendo, portanto, o equilíbrio
do modelo. Neste caso o curso da mola foi considerado como semelhante a um
veículo com três passageiros ou com uma carga de 210Kg. A figura 60 ilustra as
condições de contorno relativas a este caso de carregamento.
Figura 60: Condições de contorno relativas ao caso de carregamento 1
Restrição em todos os graus de liberdade Pré-carga da mola
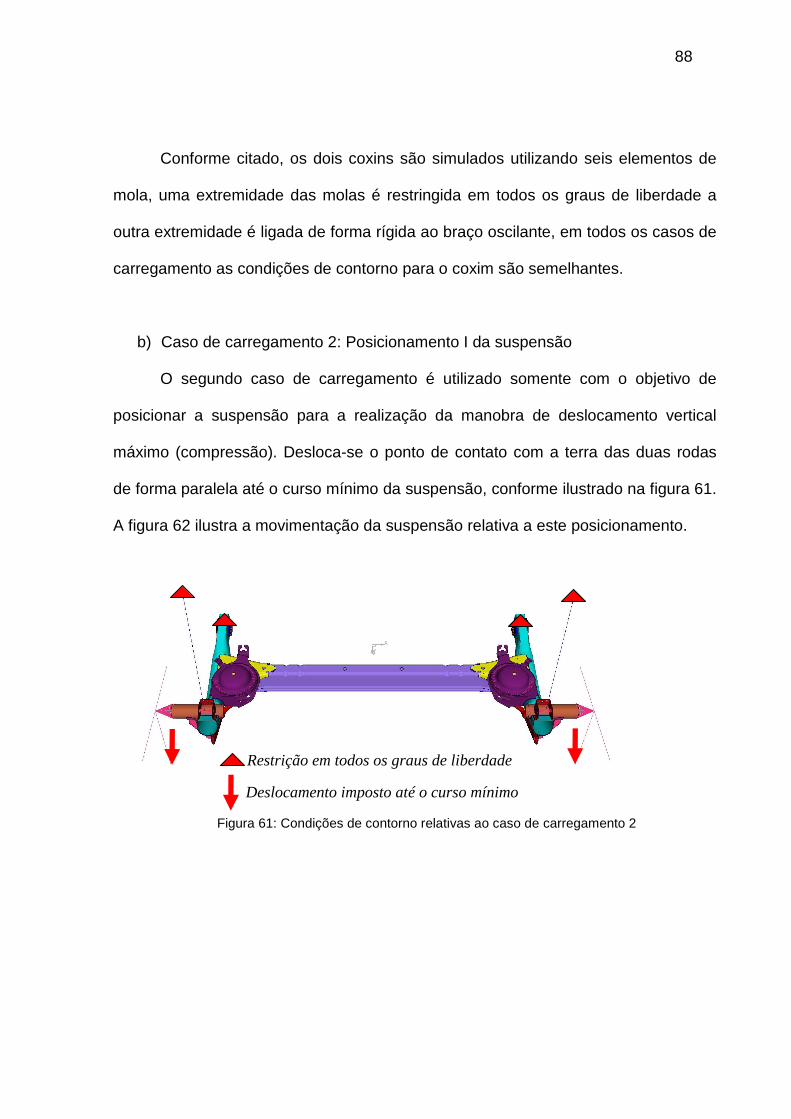
88
Conforme citado, os dois coxins são simulados utilizando seis elementos de
mola, uma extremidade das molas é restringida em todos os graus de liberdade a
outra extremidade é ligada de forma rígida ao braço oscilante, em todos os casos de
carregamento as condições de contorno para o coxim são semelhantes.
b) Caso de carregamento 2: Posicionamento I da suspensão
O segundo caso de carregamento é utilizado somente com o objetivo de
posicionar a suspensão para a realização da manobra de deslocamento vertical
máximo (compressão). Desloca-se o ponto de contato com a terra das duas rodas
de forma paralela até o curso mínimo da suspensão, conforme ilustrado na figura 61.
A figura 62 ilustra a movimentação da suspensão relativa a este posicionamento.
Figura 61: Condições de contorno relativas ao caso de carregamento 2
Restrição em todos os graus de liberdade Deslocamento imposto até o curso mínimo
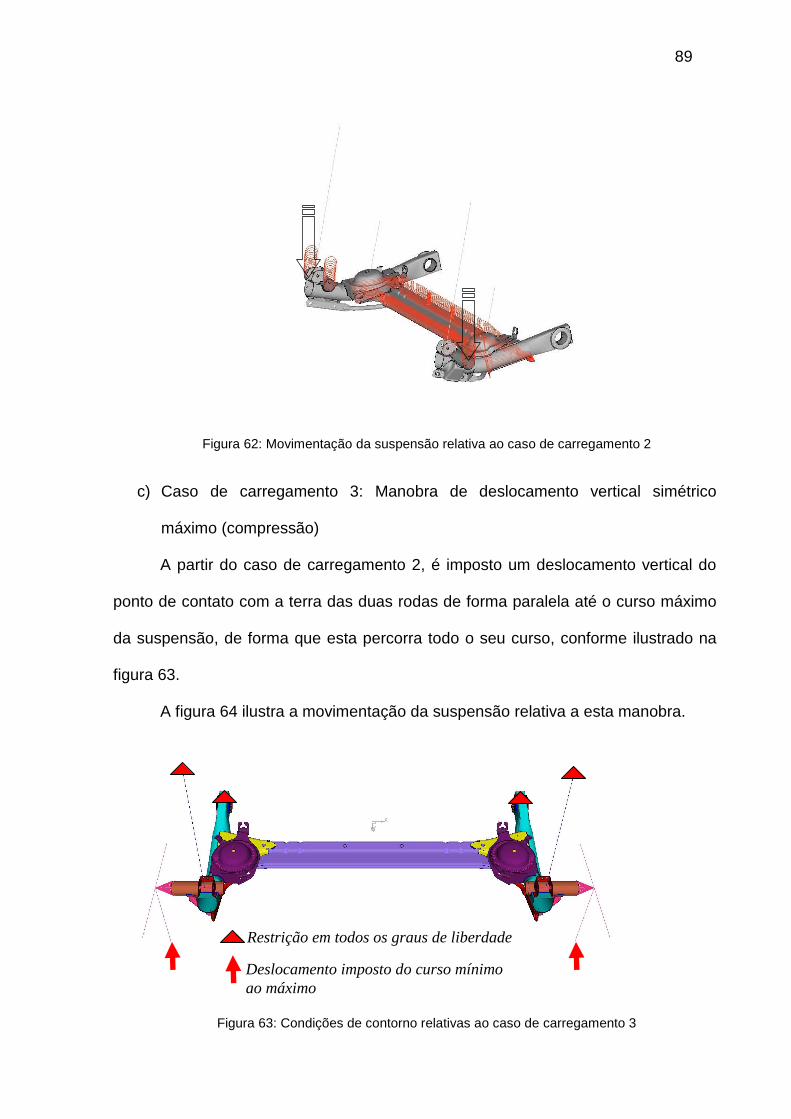
89
Figura 62: Movimentação da suspensão relativa ao caso de carregamento 2
c) Caso de carregamento 3: Manobra de deslocamento vertical simétrico
máximo (compressão)
A partir do caso de carregamento 2, é imposto um deslocamento vertical do
ponto de contato com a terra das duas rodas de forma paralela até o curso máximo
da suspensão, de forma que esta percorra todo o seu curso, conforme ilustrado na
figura 63.
A figura 64 ilustra a movimentação da suspensão relativa a esta manobra.
Figura 63: Condições de contorno relativas ao caso de carregamento 3
Restrição em todos os graus de liberdade Deslocamento imposto do curso mínimo ao máximo
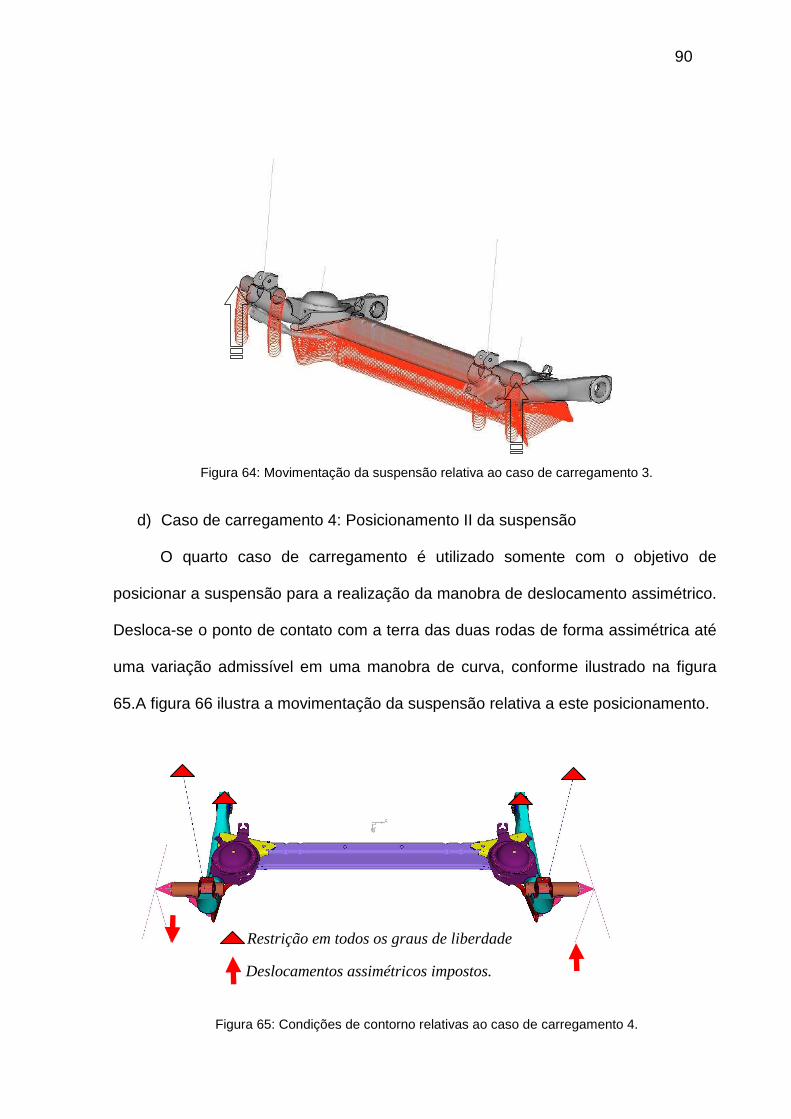
90
Figura 64: Movimentação da suspensão relativa ao caso de carregamento 3.
d) Caso de carregamento 4: Posicionamento II da suspensão
O quarto caso de carregamento é utilizado somente com o objetivo de
posicionar a suspensão para a realização da manobra de deslocamento assimétrico.
Desloca-se o ponto de contato com a terra das duas rodas de forma assimétrica até
uma variação admissível em uma manobra de curva, conforme ilustrado na figura
65.A figura 66 ilustra a movimentação da suspensão relativa a este posicionamento.
Figura 65: Condições de contorno relativas ao caso de carregamento 4.
Restrição em todos os graus de liberdade Deslocamentos assimétricos impostos.
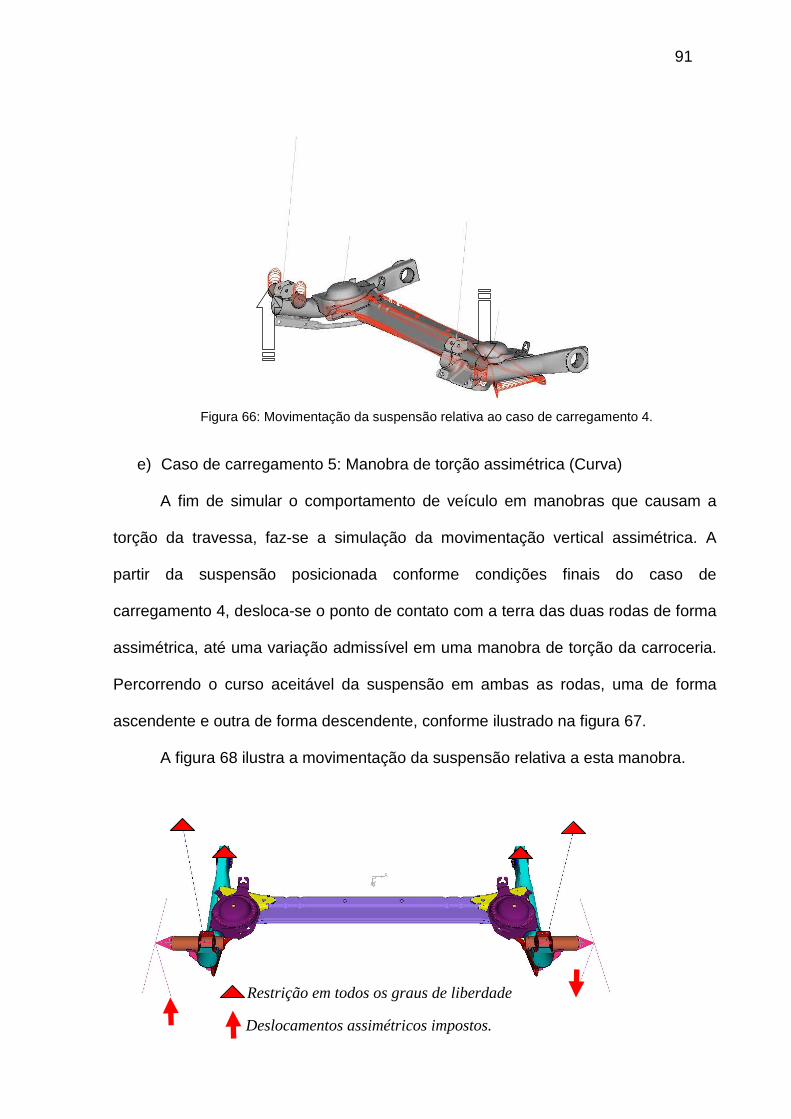
91
Figura 66: Movimentação da suspensão relativa ao caso de carregamento 4.
e) Caso de carregamento 5: Manobra de torção assimétrica (Curva)
A fim de simular o comportamento de veículo em manobras que causam a
torção da travessa, faz-se a simulação da movimentação vertical assimétrica. A
partir da suspensão posicionada conforme condições finais do caso de
carregamento 4, desloca-se o ponto de contato com a terra das duas rodas de forma
assimétrica, até uma variação admissível em uma manobra de torção da carroceria.
Percorrendo o curso aceitável da suspensão em ambas as rodas, uma de forma
ascendente e outra de forma descendente, conforme ilustrado na figura 67.
A figura 68 ilustra a movimentação da suspensão relativa a esta manobra.
Restrição em todos os graus de liberdade Deslocamentos assimétricos impostos.
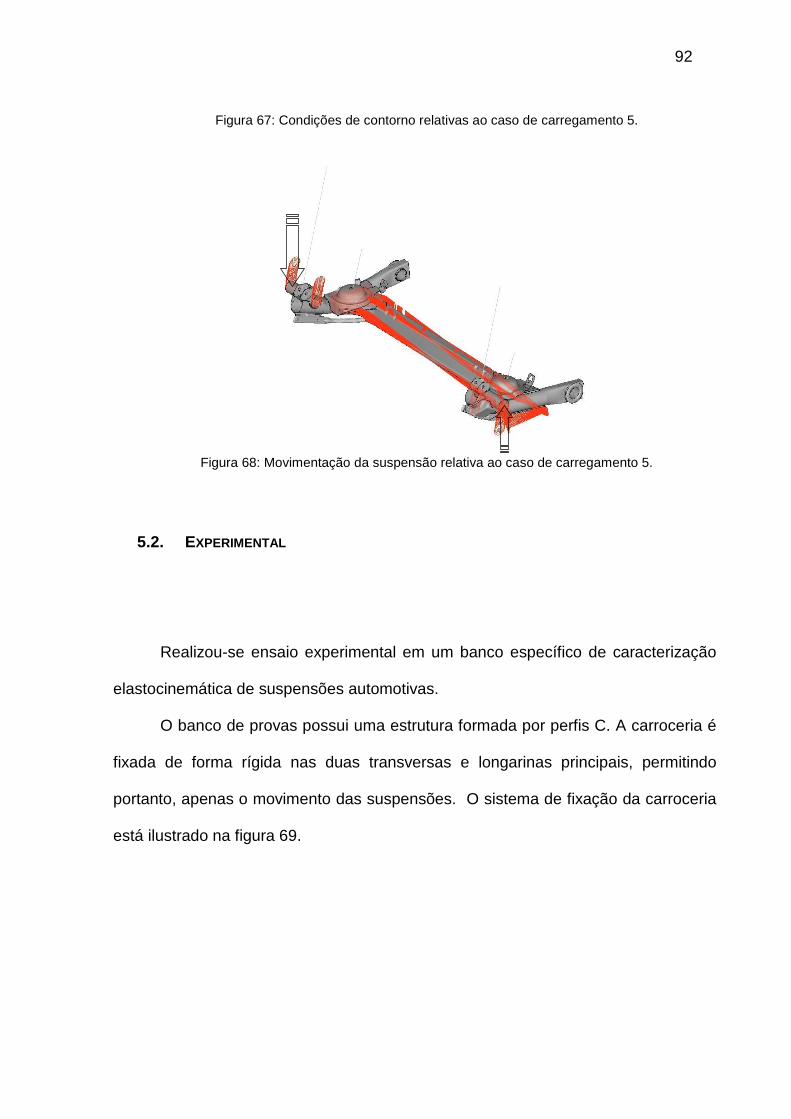
92
Figura 67: Condições de contorno relativas ao caso de carregamento 5.
Figura 68: Movimentação da suspensão relativa ao caso de carregamento 5.
5.2. EXPERIMENTAL
Realizou-se ensaio experimental em um banco específico de caracterização
elastocinemática de suspensões automotivas.
O banco de provas possui uma estrutura formada por perfis C. A carroceria é
fixada de forma rígida nas duas transversas e longarinas principais, permitindo
portanto, apenas o movimento das suspensões. O sistema de fixação da carroceria
está ilustrado na figura 69.
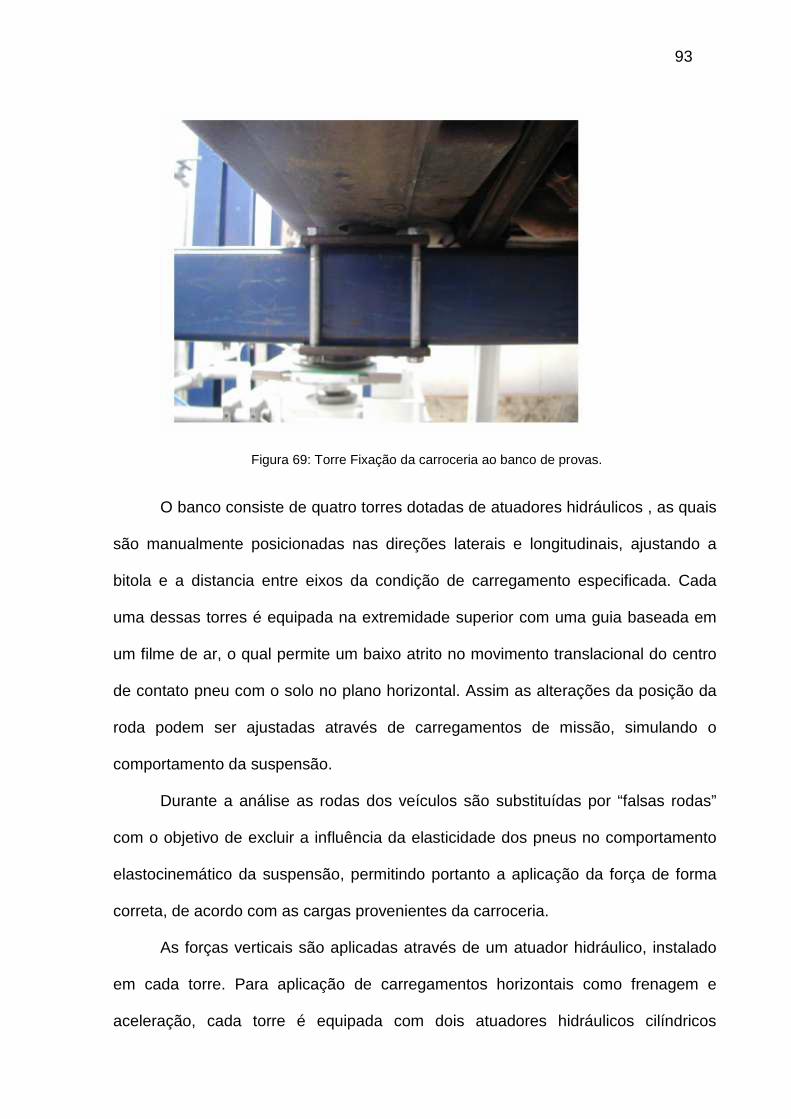
93
Figura 69: Torre Fixação da carroceria ao banco de provas.
O banco consiste de quatro torres dotadas de atuadores hidráulicos , as quais
são manualmente posicionadas nas direções laterais e longitudinais, ajustando a
bitola e a distancia entre eixos da condição de carregamento especificada. Cada
uma dessas torres é equipada na extremidade superior com uma guia baseada em
um filme de ar, o qual permite um baixo atrito no movimento translacional do centro
de contato pneu com o solo no plano horizontal. Assim as alterações da posição da
roda podem ser ajustadas através de carregamentos de missão, simulando o
comportamento da suspensão.
Durante a análise as rodas dos veículos são substituídas por “falsas rodas”
com o objetivo de excluir a influência da elasticidade dos pneus no comportamento
elastocinemático da suspensão, permitindo portanto a aplicação da força de forma
correta, de acordo com as cargas provenientes da carroceria.
As forças verticais são aplicadas através de um atuador hidráulico, instalado
em cada torre. Para aplicação de carregamentos horizontais como frenagem e
aceleração, cada torre é equipada com dois atuadores hidráulicos cilíndricos
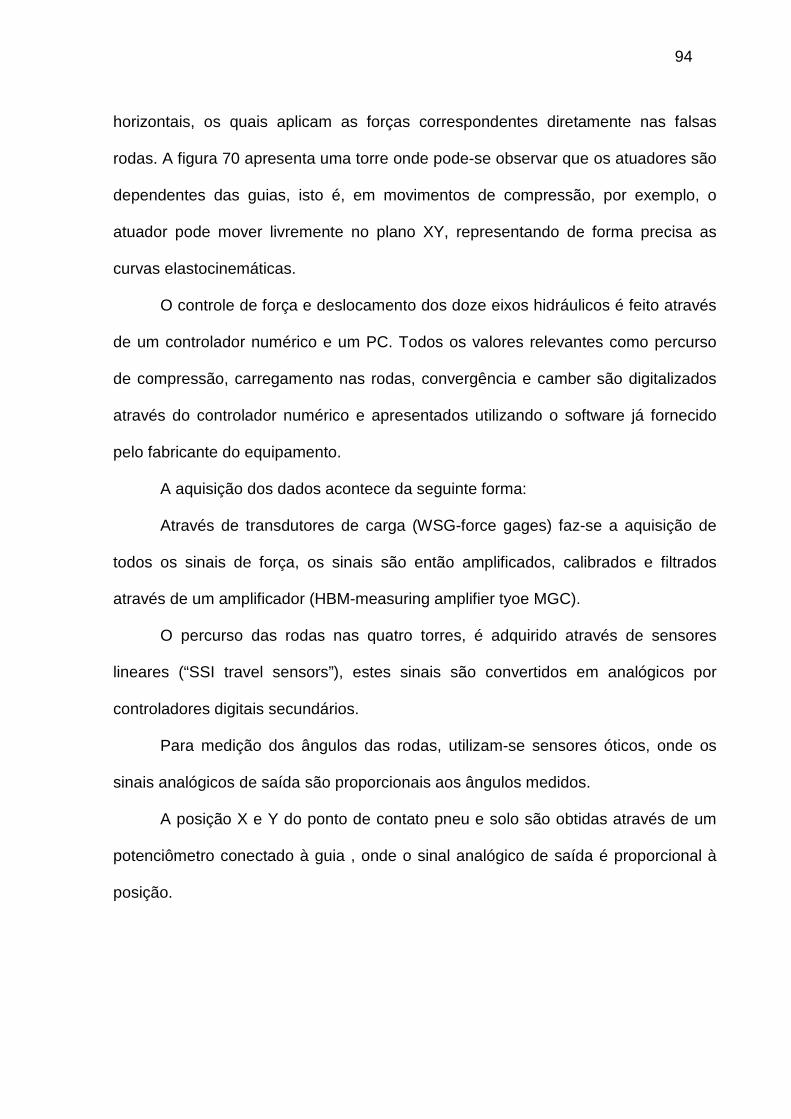
94
horizontais, os quais aplicam as forças correspondentes diretamente nas falsas
rodas. A figura 70 apresenta uma torre onde pode-se observar que os atuadores são
dependentes das guias, isto é, em movimentos de compressão, por exemplo, o
atuador pode mover livremente no plano XY, representando de forma precisa as
curvas elastocinemáticas.
O controle de força e deslocamento dos doze eixos hidráulicos é feito através
de um controlador numérico e um PC. Todos os valores relevantes como percurso
de compressão, carregamento nas rodas, convergência e camber são digitalizados
através do controlador numérico e apresentados utilizando o software já fornecido
pelo fabricante do equipamento.
A aquisição dos dados acontece da seguinte forma:
Através de transdutores de carga (WSG-force gages) faz-se a aquisição de
todos os sinais de força, os sinais são então amplificados, calibrados e filtrados
através de um amplificador (HBM-measuring amplifier tyoe MGC).
O percurso das rodas nas quatro torres, é adquirido através de sensores
lineares (“SSI travel sensors”), estes sinais são convertidos em analógicos por
controladores digitais secundários.
Para medição dos ângulos das rodas, utilizam-se sensores óticos, onde os
sinais analógicos de saída são proporcionais aos ângulos medidos.
A posição X e Y do ponto de contato pneu e solo são obtidas através de um
potenciômetro conectado à guia , onde o sinal analógico de saída é proporcional à
posição.
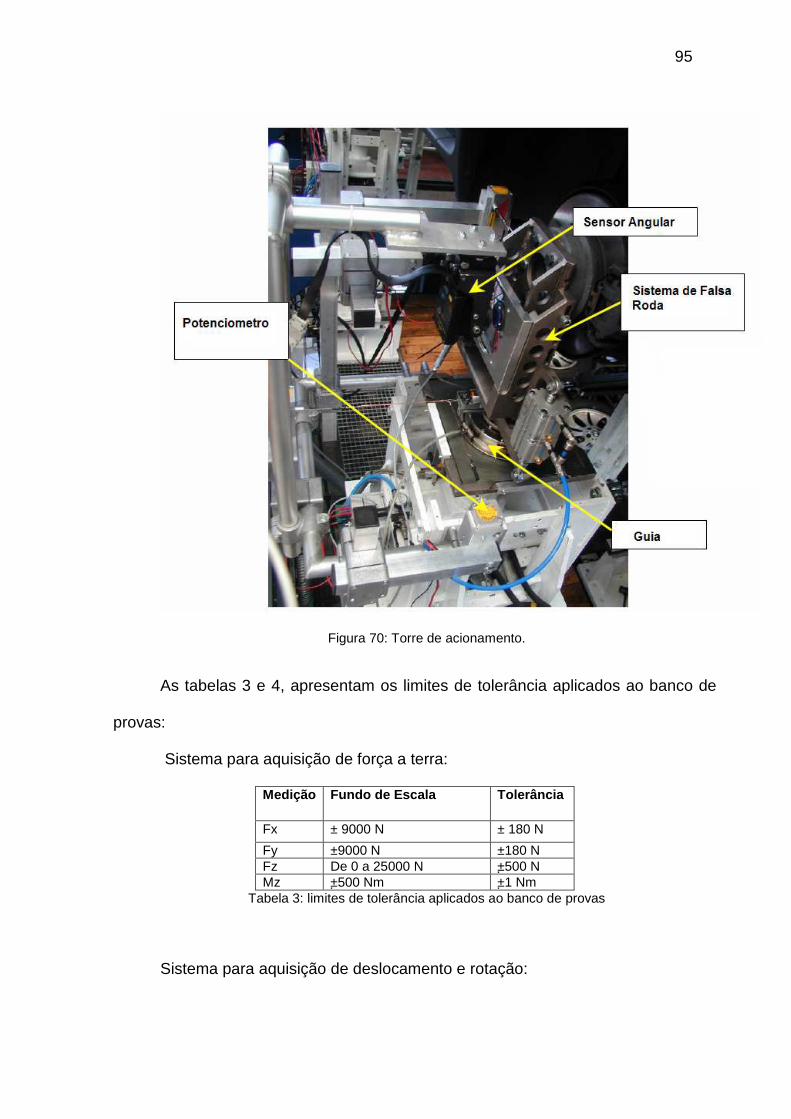
95
Figura 70: Torre de acionamento.
As tabelas 3 e 4, apresentam os limites de tolerância aplicados ao banco de
provas:
Sistema para aquisição de força a terra:
Medição
Fundo de Escala
Tolerância
Fx ± 9000 N ± 180 N
Fy ±9000 N ±180 N Fz De 0 a 25000 N ± 500 N Mz ± 500 Nm ± 1 Nm
Tabela 3: limites de tolerância aplicados ao banco de provas
Sistema para aquisição de deslocamento e rotação:
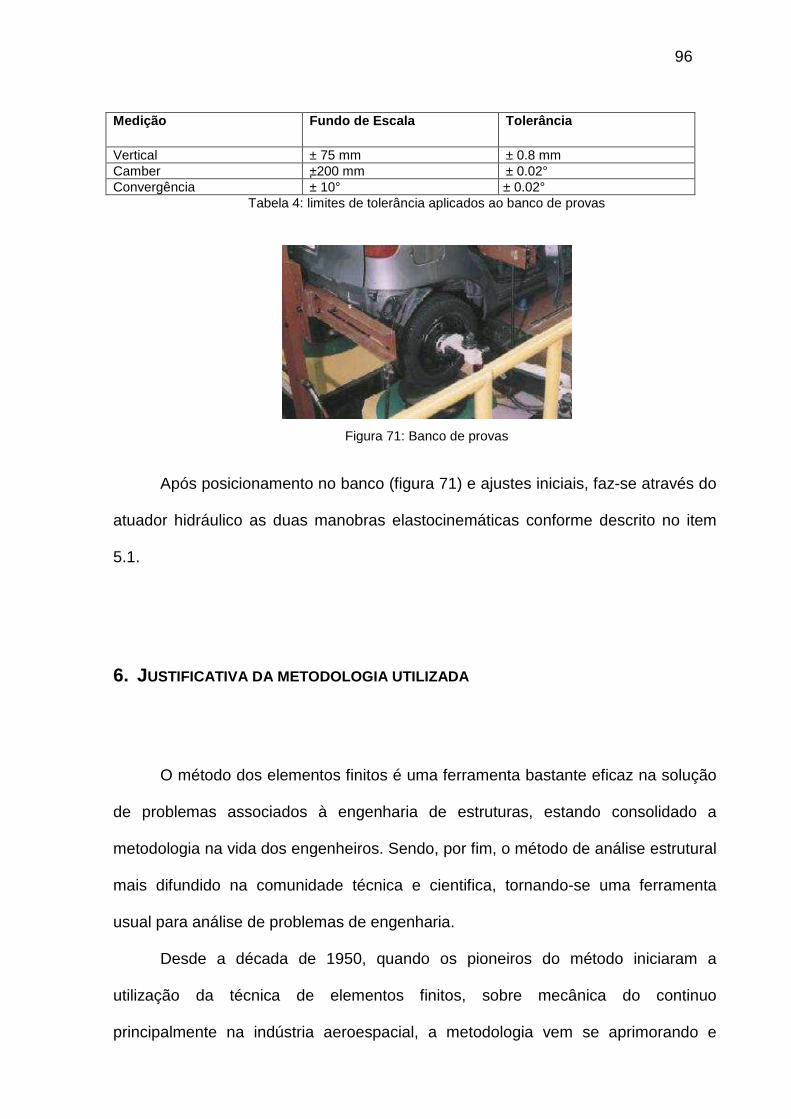
96
Medição Fundo de Escala Tolerância
Vertical ± 75 mm ± 0.8 mm Camber ± 200 mm ± 0.02° Convergência ± 10° ± 0.02°
Tabela 4: limites de tolerância aplicados ao banco de provas
Figura 71: Banco de provas
Após posicionamento no banco (figura 71) e ajustes iniciais, faz-se através do
atuador hidráulico as duas manobras elastocinemáticas conforme descrito no item
5.1.
6. JUSTIFICATIVA DA METODOLOGIA UTILIZADA
O método dos elementos finitos é uma ferramenta bastante eficaz na solução
de problemas associados à engenharia de estruturas, estando consolidado a
metodologia na vida dos engenheiros. Sendo, por fim, o método de análise estrutural
mais difundido na comunidade técnica e cientifica, tornando-se uma ferramenta
usual para análise de problemas de engenharia.
Desde a década de 1950, quando os pioneiros do método iniciaram a
utilização da técnica de elementos finitos, sobre mecânica do continuo
principalmente na indústria aeroespacial, a metodologia vem se aprimorando e
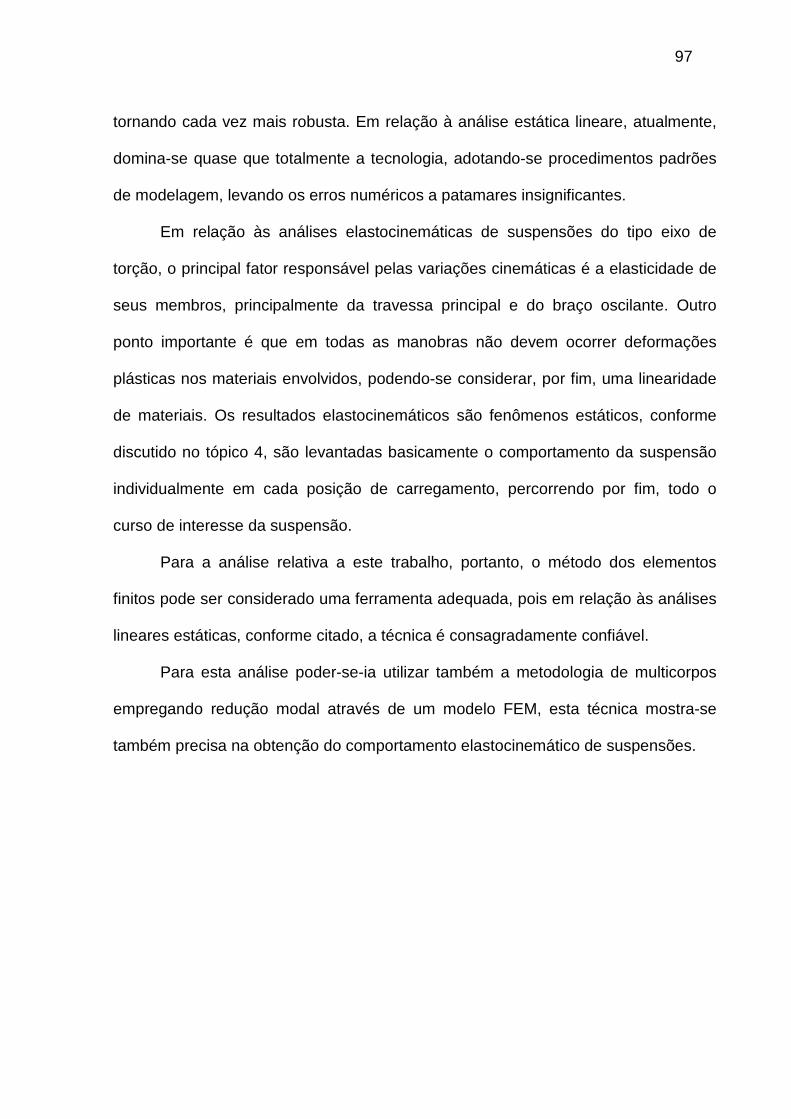
97
tornando cada vez mais robusta. Em relação à análise estática lineare, atualmente,
domina-se quase que totalmente a tecnologia, adotando-se procedimentos padrões
de modelagem, levando os erros numéricos a patamares insignificantes.
Em relação às análises elastocinemáticas de suspensões do tipo eixo de
torção, o principal fator responsável pelas variações cinemáticas é a elasticidade de
seus membros, principalmente da travessa principal e do braço oscilante. Outro
ponto importante é que em todas as manobras não devem ocorrer deformações
plásticas nos materiais envolvidos, podendo-se considerar, por fim, uma linearidade
de materiais. Os resultados elastocinemáticos são fenômenos estáticos, conforme
discutido no tópico 4, são levantadas basicamente o comportamento da suspensão
individualmente em cada posição de carregamento, percorrendo por fim, todo o
curso de interesse da suspensão.
Para a análise relativa a este trabalho, portanto, o método dos elementos
finitos pode ser considerado uma ferramenta adequada, pois em relação às análises
lineares estáticas, conforme citado, a técnica é consagradamente confiável.
Para esta análise poder-se-ia utilizar também a metodologia de multicorpos
empregando redução modal através de um modelo FEM, esta técnica mostra-se
também precisa na obtenção do comportamento elastocinemático de suspensões.
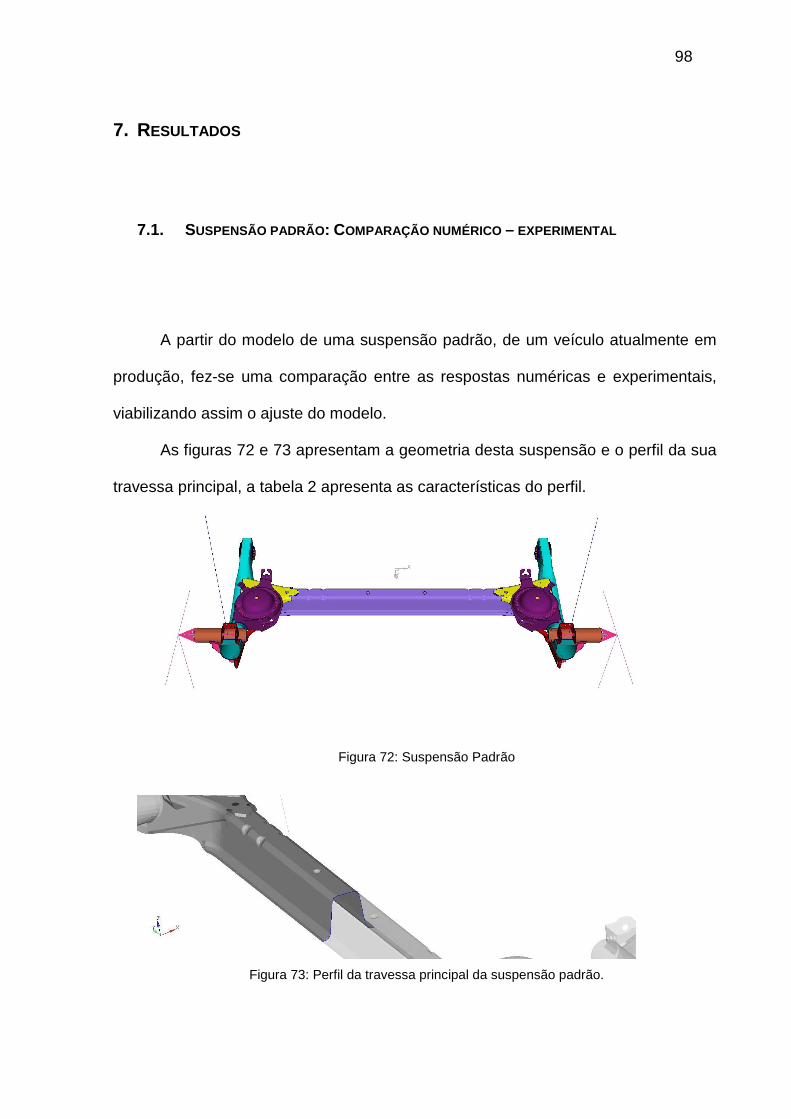
98
7. RESULTADOS
7.1. SUSPENSÃO PADRÃO : COMPARAÇÃO NUMÉRICO – EXPERIMENTAL
A partir do modelo de uma suspensão padrão, de um veículo atualmente em
produção, fez-se uma comparação entre as respostas numéricas e experimentais,
viabilizando assim o ajuste do modelo.
As figuras 72 e 73 apresentam a geometria desta suspensão e o perfil da sua
travessa principal, a tabela 2 apresenta as características do perfil.
Figura 72: Suspensão Padrão
Figura 73: Perfil da travessa principal da suspensão padrão.
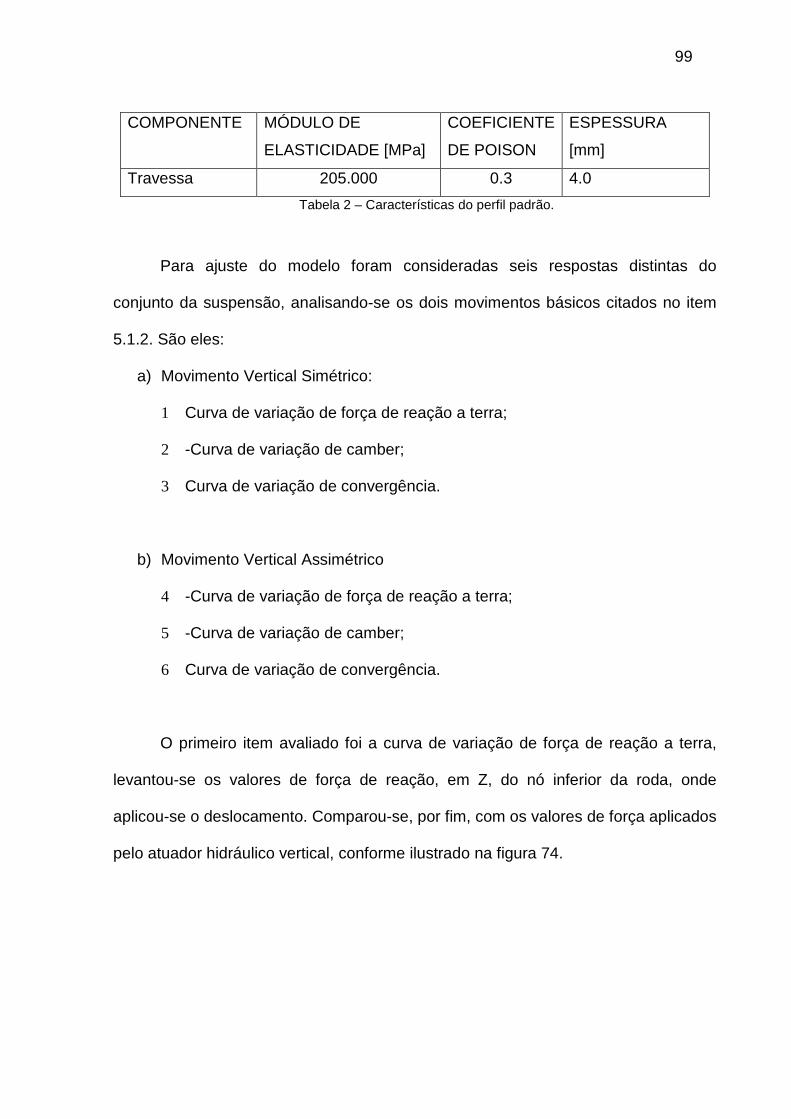
99
COMPONENTE MÓDULO DE
ELASTICIDADE [MPa]
COEFICIENTE
DE POISON
ESPESSURA
[mm]
Travessa 205.000 0.3 4.0
Tabela 2 – Características do perfil padrão.
Para ajuste do modelo foram consideradas seis respostas distintas do
conjunto da suspensão, analisando-se os dois movimentos básicos citados no item
5.1.2. São eles:
a) Movimento Vertical Simétrico:
1 Curva de variação de força de reação a terra;
2 -Curva de variação de camber;
3 Curva de variação de convergência.
b) Movimento Vertical Assimétrico
4 -Curva de variação de força de reação a terra;
5 -Curva de variação de camber;
6 Curva de variação de convergência.
O primeiro item avaliado foi a curva de variação de força de reação a terra,
levantou-se os valores de força de reação, em Z, do nó inferior da roda, onde
aplicou-se o deslocamento. Comparou-se, por fim, com os valores de força aplicados
pelo atuador hidráulico vertical, conforme ilustrado na figura 74.
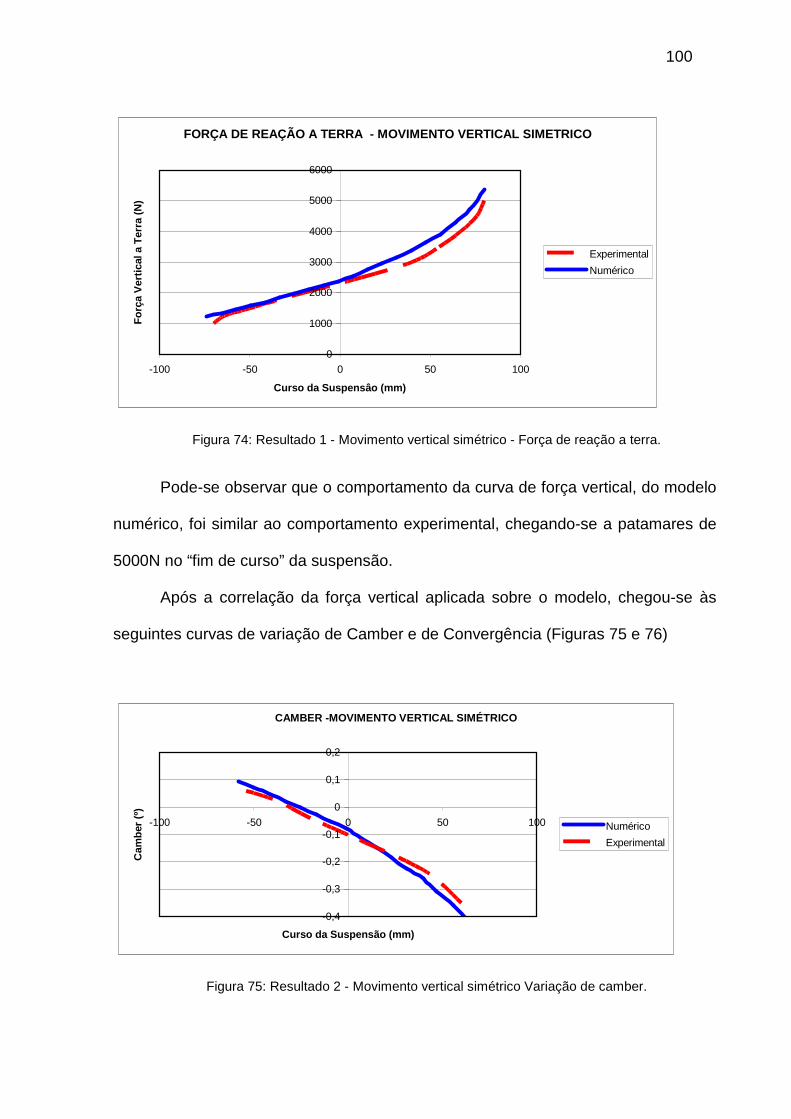
100
FORÇA DE REAÇÃO A TERRA - MOVIMENTO VERTICAL SIMET RICO
0
1000
2000
3000
4000
5000
6000
-100 -50 0 50 100
Curso da Suspensâo (mm)
For
ça V
ertic
al a
Ter
ra (
N)
Experimental
Numérico
Figura 74: Resultado 1 - Movimento vertical simétrico - Força de reação a terra.
Pode-se observar que o comportamento da curva de força vertical, do modelo
numérico, foi similar ao comportamento experimental, chegando-se a patamares de
5000N no “fim de curso” da suspensão.
Após a correlação da força vertical aplicada sobre o modelo, chegou-se às
seguintes curvas de variação de Camber e de Convergência (Figuras 75 e 76)
CAMBER -MOVIMENTO VERTICAL SIMÉTRICO
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
-100 -50 0 50 100
Curso da Suspensão (mm)
Cam
ber
(º)
Numérico
Experimental
Figura 75: Resultado 2 - Movimento vertical simétrico Variação de camber.
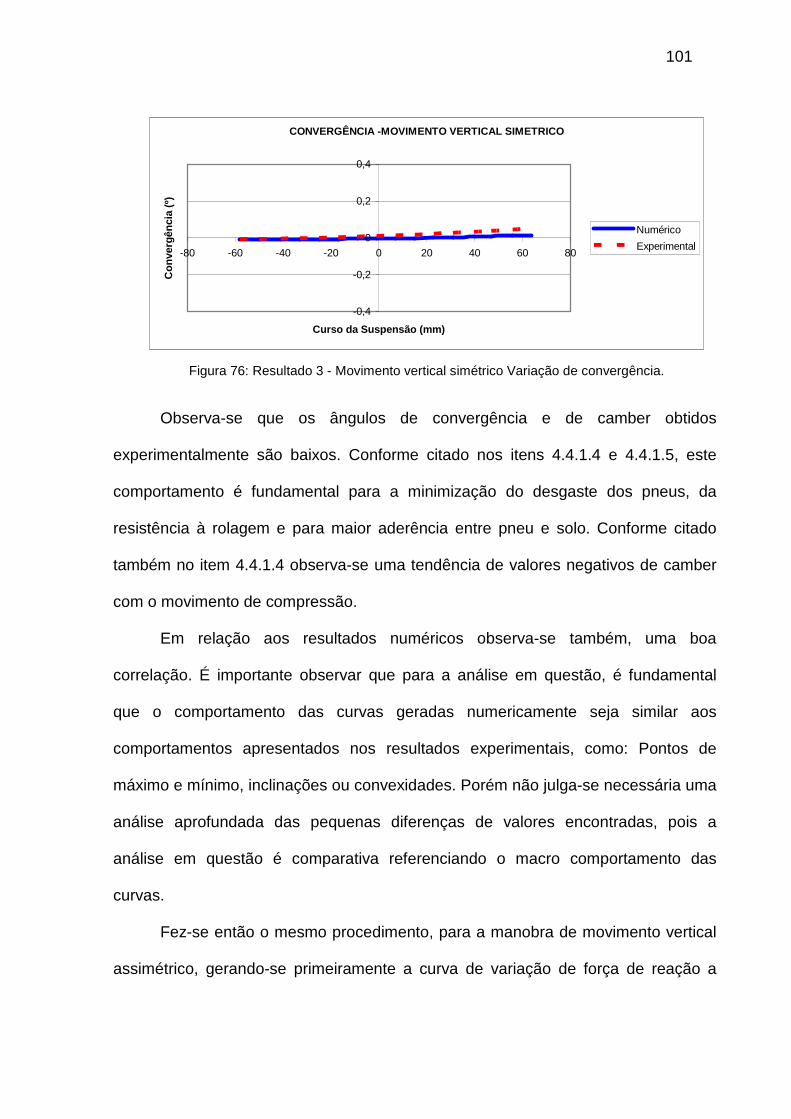
101
CONVERGÊNCIA -MOVIMENTO VERTICAL SIMETRICO
-0,4
-0,2
0
0,2
0,4
-80 -60 -40 -20 0 20 40 60 80
Curso da Suspensão (mm)
Con
verg
ênci
a (º
)
Numérico
Experimental
Figura 76: Resultado 3 - Movimento vertical simétrico Variação de convergência.
Observa-se que os ângulos de convergência e de camber obtidos
experimentalmente são baixos. Conforme citado nos itens 4.4.1.4 e 4.4.1.5, este
comportamento é fundamental para a minimização do desgaste dos pneus, da
resistência à rolagem e para maior aderência entre pneu e solo. Conforme citado
também no item 4.4.1.4 observa-se uma tendência de valores negativos de camber
com o movimento de compressão.
Em relação aos resultados numéricos observa-se também, uma boa
correlação. É importante observar que para a análise em questão, é fundamental
que o comportamento das curvas geradas numericamente seja similar aos
comportamentos apresentados nos resultados experimentais, como: Pontos de
máximo e mínimo, inclinações ou convexidades. Porém não julga-se necessária uma
análise aprofundada das pequenas diferenças de valores encontradas, pois a
análise em questão é comparativa referenciando o macro comportamento das
curvas.
Fez-se então o mesmo procedimento, para a manobra de movimento vertical
assimétrico, gerando-se primeiramente a curva de variação de força de reação a
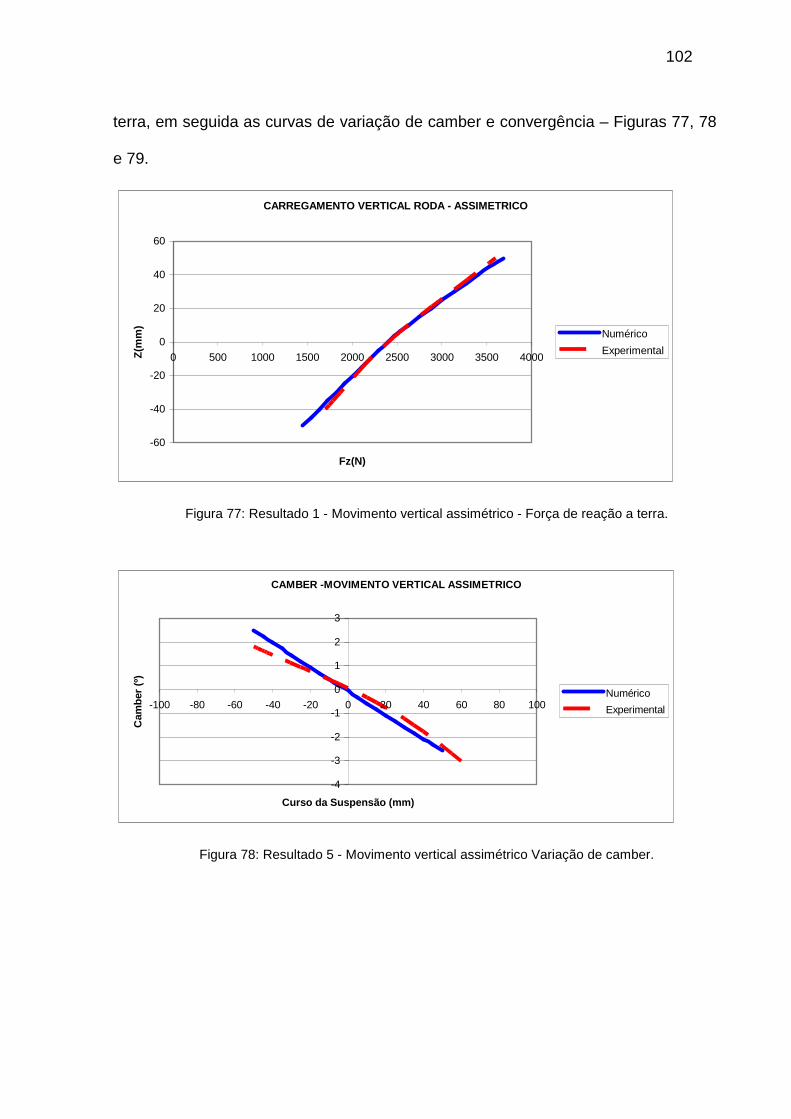
102
terra, em seguida as curvas de variação de camber e convergência – Figuras 77, 78
e 79.
CARREGAMENTO VERTICAL RODA - ASSIMETRICO
-60
-40
-20
0
20
40
60
0 500 1000 1500 2000 2500 3000 3500 4000
Fz(N)
Z(m
m)
Numérico
Experimental
Figura 77: Resultado 1 - Movimento vertical assimétrico - Força de reação a terra.
CAMBER -MOVIMENTO VERTICAL ASSIMETRICO
-4
-3
-2
-1
0
1
2
3
-100 -80 -60 -40 -20 0 20 40 60 80 100
Curso da Suspensão (mm)
Cam
ber
(º)
Numérico
Experimental
Figura 78: Resultado 5 - Movimento vertical assimétrico Variação de camber.
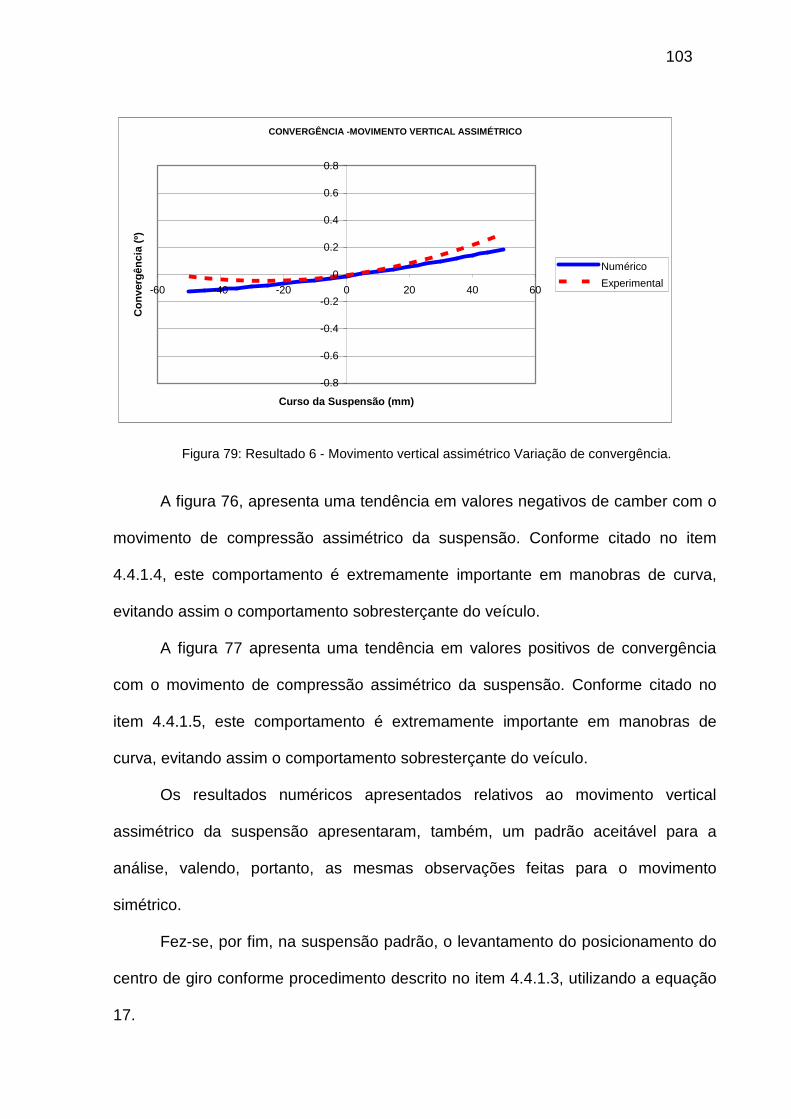
103
CONVERGÊNCIA -MOVIMENTO VERTICAL ASSIMÉTRICO
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
-60 -40 -20 0 20 40 60
Curso da Suspensão (mm)
Con
verg
ênci
a (º
)
Numérico
Experimental
Figura 79: Resultado 6 - Movimento vertical assimétrico Variação de convergência.
A figura 76, apresenta uma tendência em valores negativos de camber com o
movimento de compressão assimétrico da suspensão. Conforme citado no item
4.4.1.4, este comportamento é extremamente importante em manobras de curva,
evitando assim o comportamento sobresterçante do veículo.
A figura 77 apresenta uma tendência em valores positivos de convergência
com o movimento de compressão assimétrico da suspensão. Conforme citado no
item 4.4.1.5, este comportamento é extremamente importante em manobras de
curva, evitando assim o comportamento sobresterçante do veículo.
Os resultados numéricos apresentados relativos ao movimento vertical
assimétrico da suspensão apresentaram, também, um padrão aceitável para a
análise, valendo, portanto, as mesmas observações feitas para o movimento
simétrico.
Fez-se, por fim, na suspensão padrão, o levantamento do posicionamento do
centro de giro conforme procedimento descrito no item 4.4.1.3, utilizando a equação
17.
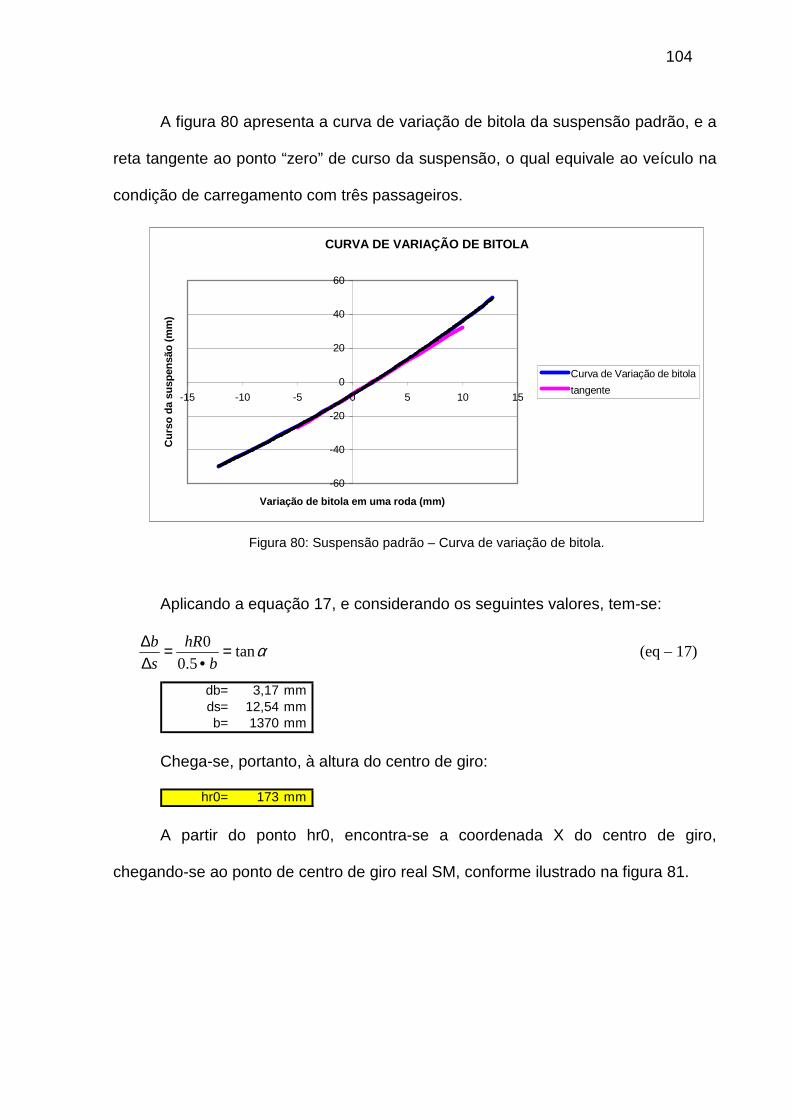
104
A figura 80 apresenta a curva de variação de bitola da suspensão padrão, e a
reta tangente ao ponto “zero” de curso da suspensão, o qual equivale ao veículo na
condição de carregamento com três passageiros.
CURVA DE VARIAÇÃO DE BITOLA
-60
-40
-20
0
20
40
60
-15 -10 -5 0 5 10 15
Variação de bitola em uma roda (mm)
Cur
so d
a su
spen
são
(mm
)
Curva de Variação de bitola
tangente
Figura 80: Suspensão padrão – Curva de variação de bitola.
Aplicando a equação 17, e considerando os seguintes valores, tem-se:
αtan5.0
0 =•
=∆∆
b
hR
s
b (eq – 17)
db= 3,17 mmds= 12,54 mmb= 1370 mm
Chega-se, portanto, à altura do centro de giro:
hr0= 173 mm
A partir do ponto hr0, encontra-se a coordenada X do centro de giro,
chegando-se ao ponto de centro de giro real SM, conforme ilustrado na figura 81.
105
Figura 81 – Posicionamento do ponto SM do perfil padrão
7.2. PERFIL PROPOSTO 1
7.2.1. Perfil 1 - Centro de giro
A figura 82 ilustra o modelo da suspensão, quando utilizado o perfil 1 e a
tabela 3 apresenta as características consideradas para este perfil.
Figura 82: Perfil da travessa principal da suspensão com perfil 1.
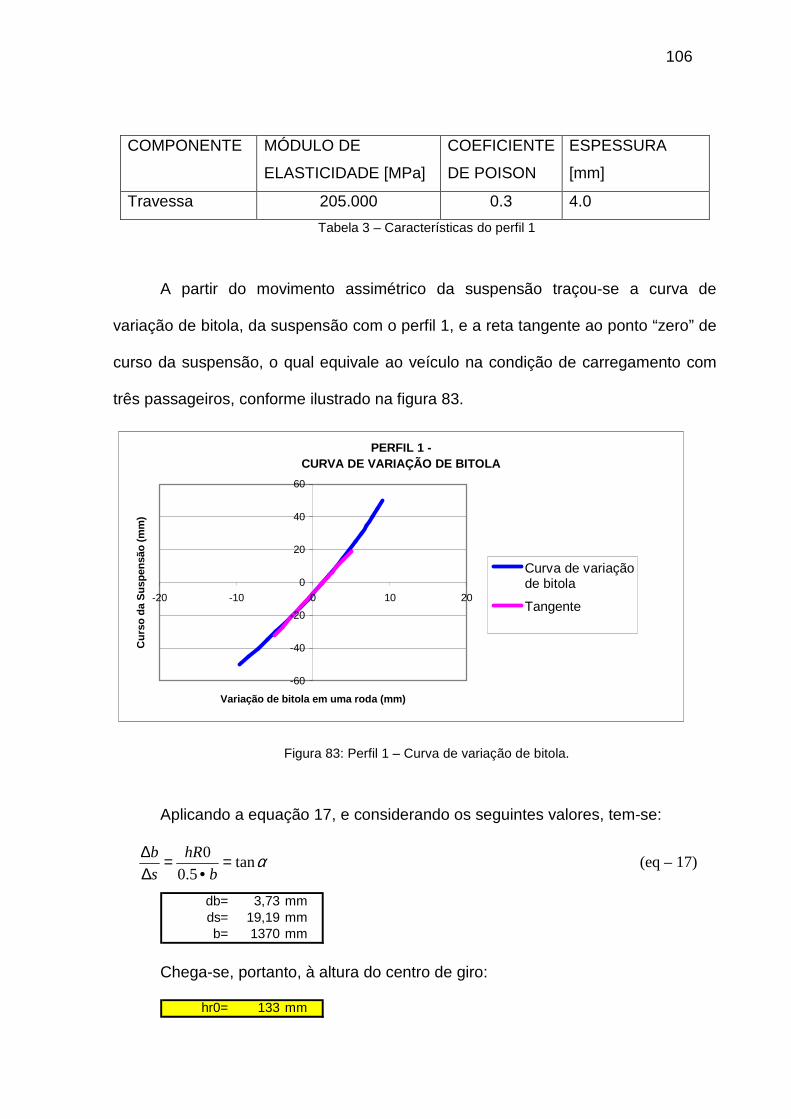
106
COMPONENTE MÓDULO DE
ELASTICIDADE [MPa]
COEFICIENTE
DE POISON
ESPESSURA
[mm]
Travessa 205.000 0.3 4.0
Tabela 3 – Características do perfil 1
A partir do movimento assimétrico da suspensão traçou-se a curva de
variação de bitola, da suspensão com o perfil 1, e a reta tangente ao ponto “zero” de
curso da suspensão, o qual equivale ao veículo na condição de carregamento com
três passageiros, conforme ilustrado na figura 83.
PERFIL 1 -CURVA DE VARIAÇÃO DE BITOLA
-60
-40
-20
0
20
40
60
-20 -10 0 10 20
Variação de bitola em uma roda (mm)
Cur
so d
a S
uspe
nsão
(mm
)
Curva de variaçãode bitola
Tangente
Figura 83: Perfil 1 – Curva de variação de bitola.
Aplicando a equação 17, e considerando os seguintes valores, tem-se:
αtan5.0
0 =•
=∆∆
b
hR
s
b (eq – 17)
db= 3,73 mmds= 19,19 mmb= 1370 mm
Chega-se, portanto, à altura do centro de giro:
hr0= 133 mm
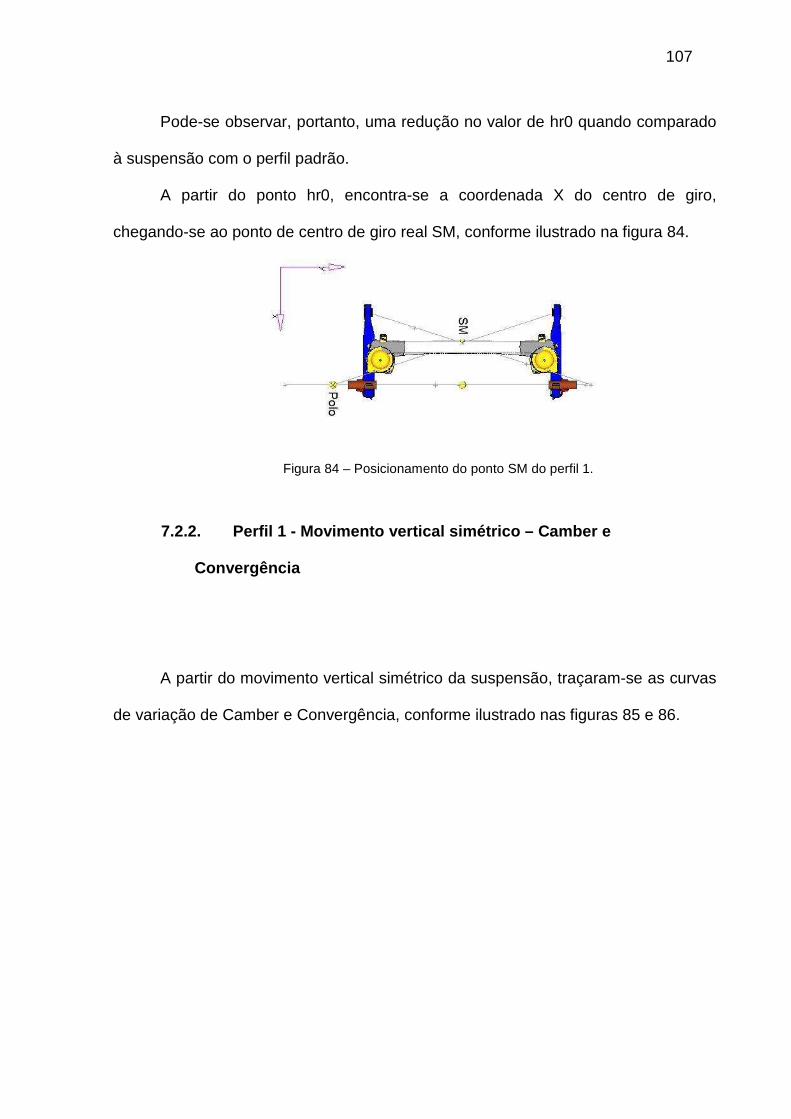
107
Pode-se observar, portanto, uma redução no valor de hr0 quando comparado
à suspensão com o perfil padrão.
A partir do ponto hr0, encontra-se a coordenada X do centro de giro,
chegando-se ao ponto de centro de giro real SM, conforme ilustrado na figura 84.
Figura 84 – Posicionamento do ponto SM do perfil 1.
7.2.2. Perfil 1 - Movimento vertical simétrico – Ca mber e
Convergência
A partir do movimento vertical simétrico da suspensão, traçaram-se as curvas
de variação de Camber e Convergência, conforme ilustrado nas figuras 85 e 86.
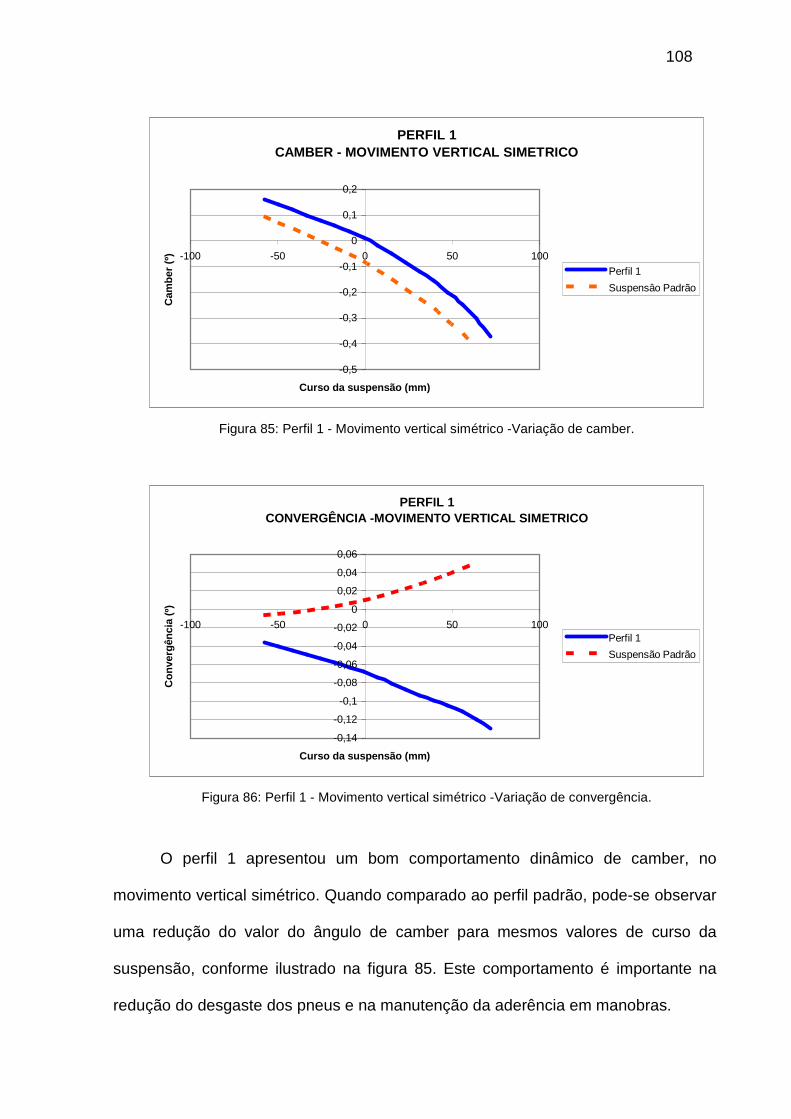
108
PERFIL 1CAMBER - MOVIMENTO VERTICAL SIMETRICO
-0,5
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
-100 -50 0 50 100
Curso da suspensão (mm)
Cam
ber
(º)
Perfil 1
Suspensâo Padrão
Figura 85: Perfil 1 - Movimento vertical simétrico -Variação de camber.
PERFIL 1 CONVERGÊNCIA -MOVIMENTO VERTICAL SIMETRICO
-0,14
-0,12
-0,1
-0,08
-0,06
-0,04
-0,02
0
0,02
0,04
0,06
-100 -50 0 50 100
Curso da suspensão (mm)
Con
verg
ênci
a (º
)
Perfil 1
Suspensão Padrão
Figura 86: Perfil 1 - Movimento vertical simétrico -Variação de convergência.
O perfil 1 apresentou um bom comportamento dinâmico de camber, no
movimento vertical simétrico. Quando comparado ao perfil padrão, pode-se observar
uma redução do valor do ângulo de camber para mesmos valores de curso da
suspensão, conforme ilustrado na figura 85. Este comportamento é importante na
redução do desgaste dos pneus e na manutenção da aderência em manobras.
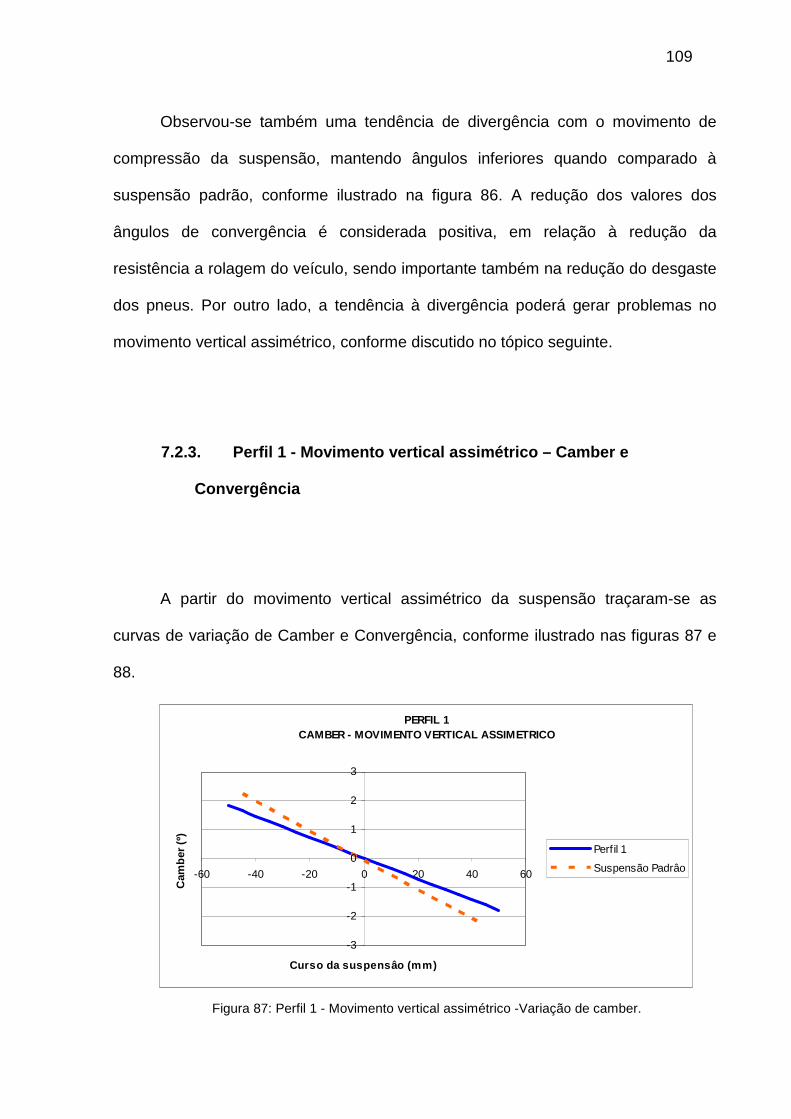
109
Observou-se também uma tendência de divergência com o movimento de
compressão da suspensão, mantendo ângulos inferiores quando comparado à
suspensão padrão, conforme ilustrado na figura 86. A redução dos valores dos
ângulos de convergência é considerada positiva, em relação à redução da
resistência a rolagem do veículo, sendo importante também na redução do desgaste
dos pneus. Por outro lado, a tendência à divergência poderá gerar problemas no
movimento vertical assimétrico, conforme discutido no tópico seguinte.
7.2.3. Perfil 1 - Movimento vertical assimétrico – Camber e
Convergência
A partir do movimento vertical assimétrico da suspensão traçaram-se as
curvas de variação de Camber e Convergência, conforme ilustrado nas figuras 87 e
88.
PERFIL 1 CAMBER - MOVIMENTO VERTICAL ASSIMETRICO
-3
-2
-1
0
1
2
3
-60 -40 -20 0 20 40 60
Curso da suspensâo (mm)
Cam
ber (
º)
Perfil 1
Suspensão Padrâo
Figura 87: Perfil 1 - Movimento vertical assimétrico -Variação de camber.
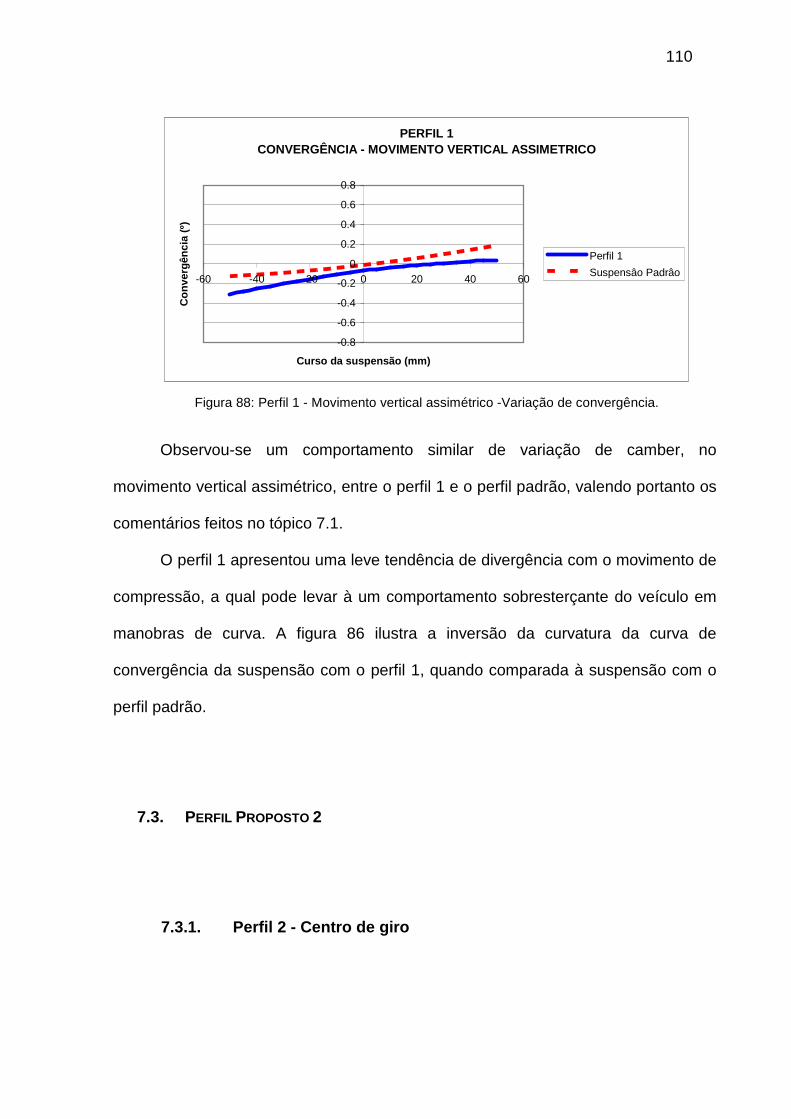
110
PERFIL 1CONVERGÊNCIA - MOVIMENTO VERTICAL ASSIMETRICO
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
-60 -40 -20 0 20 40 60
Curso da suspensão (mm)
Con
verg
ênci
a (º
)
Perfil 1
Suspensâo Padrâo
Figura 88: Perfil 1 - Movimento vertical assimétrico -Variação de convergência.
Observou-se um comportamento similar de variação de camber, no
movimento vertical assimétrico, entre o perfil 1 e o perfil padrão, valendo portanto os
comentários feitos no tópico 7.1.
O perfil 1 apresentou uma leve tendência de divergência com o movimento de
compressão, a qual pode levar à um comportamento sobresterçante do veículo em
manobras de curva. A figura 86 ilustra a inversão da curvatura da curva de
convergência da suspensão com o perfil 1, quando comparada à suspensão com o
perfil padrão.
7.3. PERFIL PROPOSTO 2
7.3.1. Perfil 2 - Centro de giro
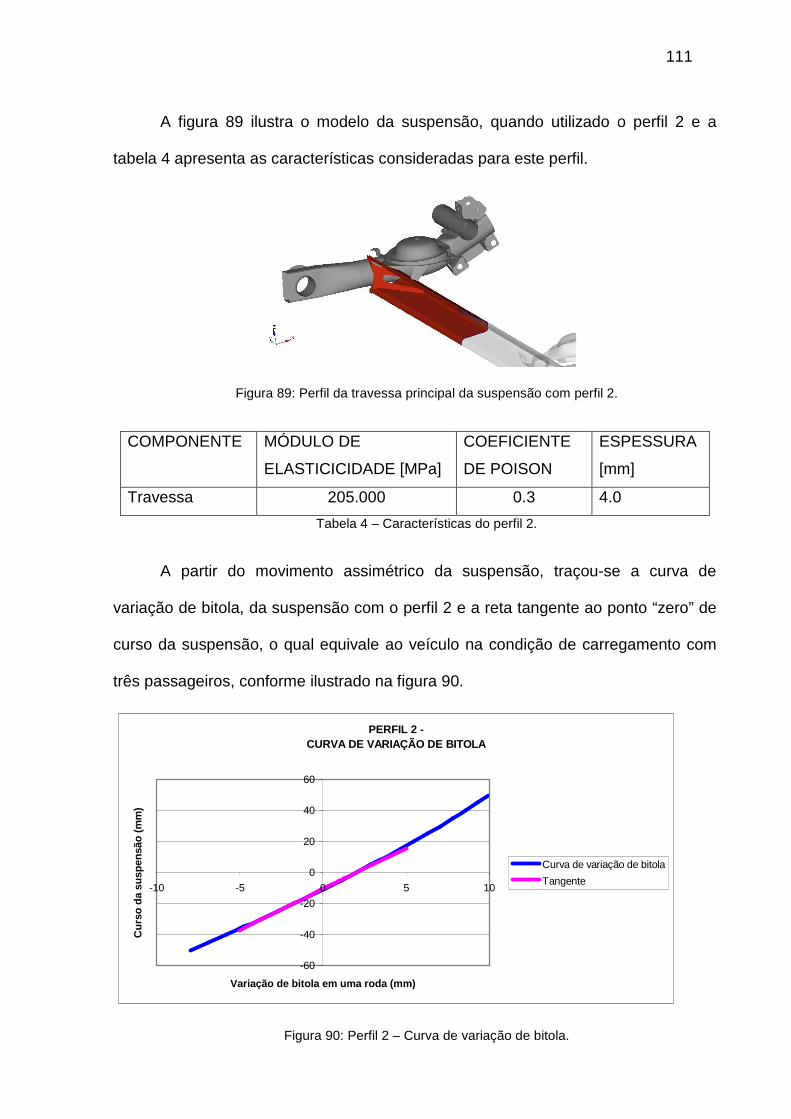
111
A figura 89 ilustra o modelo da suspensão, quando utilizado o perfil 2 e a
tabela 4 apresenta as características consideradas para este perfil.
Figura 89: Perfil da travessa principal da suspensão com perfil 2.
COMPONENTE MÓDULO DE
ELASTICICIDADE [MPa]
COEFICIENTE
DE POISON
ESPESSURA
[mm]
Travessa 205.000 0.3 4.0
Tabela 4 – Características do perfil 2.
A partir do movimento assimétrico da suspensão, traçou-se a curva de
variação de bitola, da suspensão com o perfil 2 e a reta tangente ao ponto “zero” de
curso da suspensão, o qual equivale ao veículo na condição de carregamento com
três passageiros, conforme ilustrado na figura 90.
PERFIL 2 - CURVA DE VARIAÇÃO DE BITOLA
-60
-40
-20
0
20
40
60
-10 -5 0 5 10
Variação de bitola em uma roda (mm)
Cur
so d
a su
spen
são
(mm
)
Curva de variação de bitola
Tangente
Figura 90: Perfil 2 – Curva de variação de bitola.
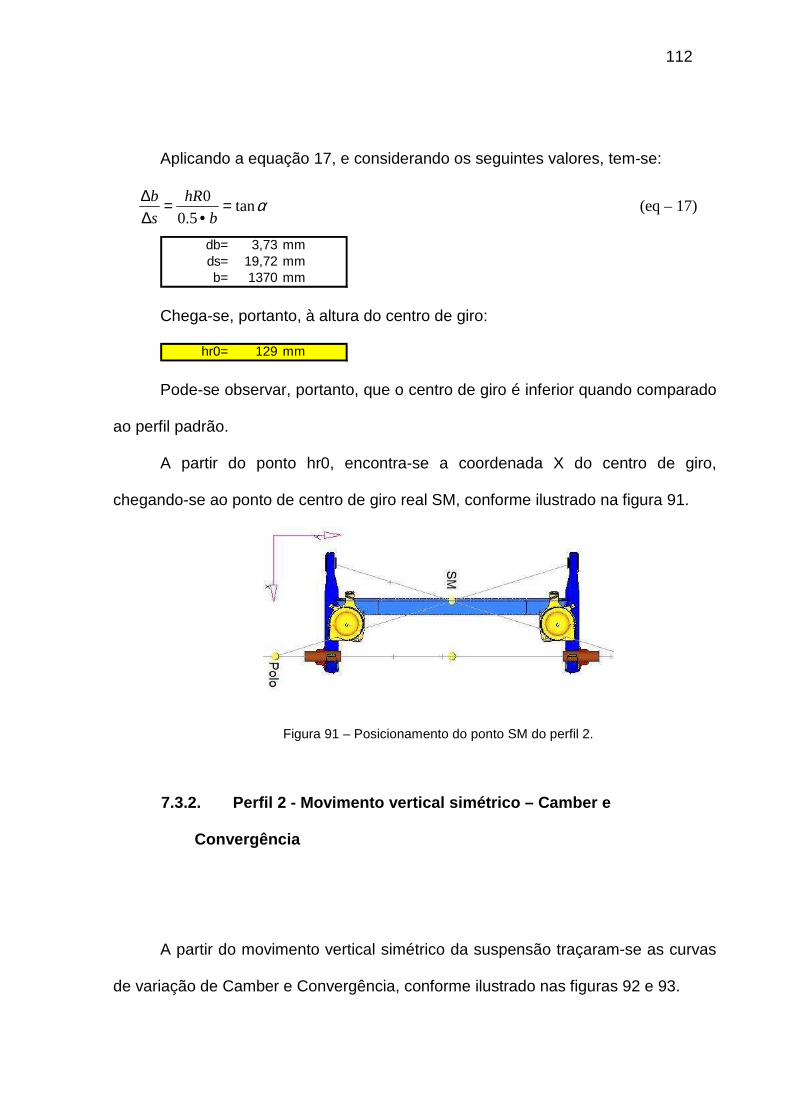
112
Aplicando a equação 17, e considerando os seguintes valores, tem-se:
αtan5.0
0 =•
=∆∆
b
hR
s
b (eq – 17)
db= 3,73 mmds= 19,72 mmb= 1370 mm
Chega-se, portanto, à altura do centro de giro:
hr0= 129 mm
Pode-se observar, portanto, que o centro de giro é inferior quando comparado
ao perfil padrão.
A partir do ponto hr0, encontra-se a coordenada X do centro de giro,
chegando-se ao ponto de centro de giro real SM, conforme ilustrado na figura 91.
Figura 91 – Posicionamento do ponto SM do perfil 2.
7.3.2. Perfil 2 - Movimento vertical simétrico – Ca mber e
Convergência
A partir do movimento vertical simétrico da suspensão traçaram-se as curvas
de variação de Camber e Convergência, conforme ilustrado nas figuras 92 e 93.
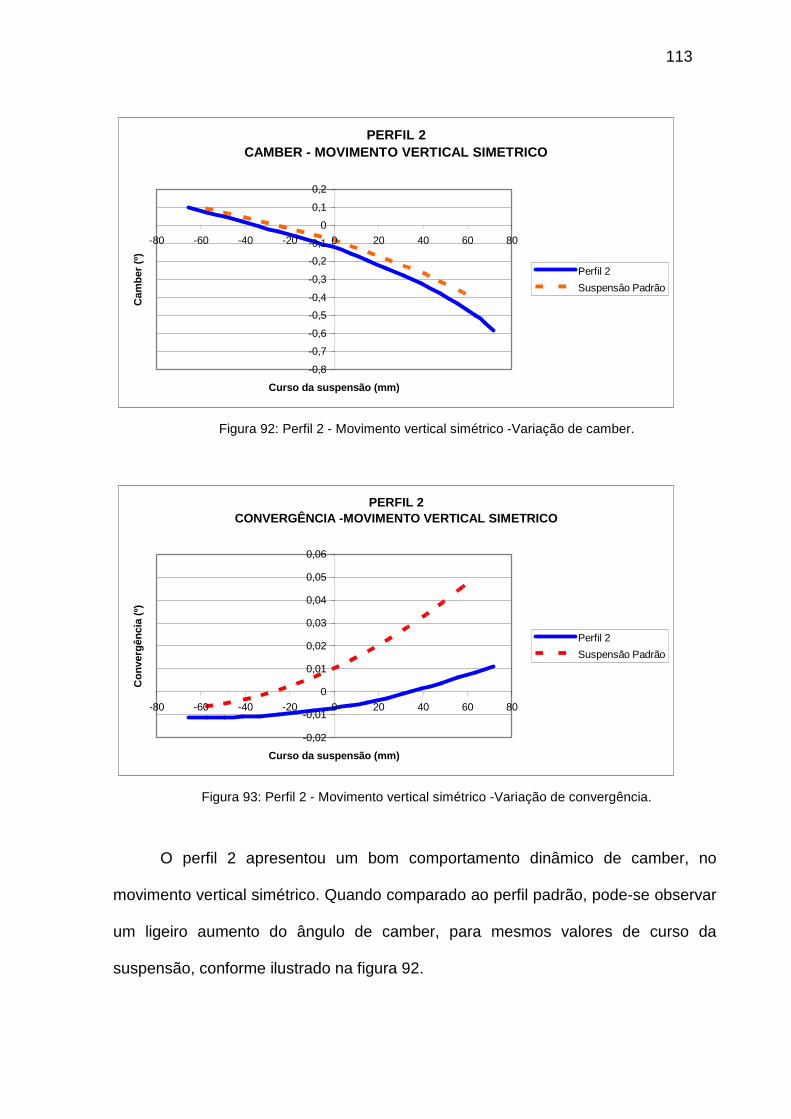
113
PERFIL 2CAMBER - MOVIMENTO VERTICAL SIMETRICO
-0,8
-0,7
-0,6
-0,5
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
-80 -60 -40 -20 0 20 40 60 80
Curso da suspensão (mm)
Cam
ber
(º)
Perfil 2
Suspensâo Padrão
Figura 92: Perfil 2 - Movimento vertical simétrico -Variação de camber.
PERFIL 2 CONVERGÊNCIA -MOVIMENTO VERTICAL SIMETRICO
-0,02
-0,01
0
0,01
0,02
0,03
0,04
0,05
0,06
-80 -60 -40 -20 0 20 40 60 80
Curso da suspensão (mm)
Con
verg
ênci
a (º
)
Perfil 2
Suspensão Padrão
Figura 93: Perfil 2 - Movimento vertical simétrico -Variação de convergência.
O perfil 2 apresentou um bom comportamento dinâmico de camber, no
movimento vertical simétrico. Quando comparado ao perfil padrão, pode-se observar
um ligeiro aumento do ângulo de camber, para mesmos valores de curso da
suspensão, conforme ilustrado na figura 92.
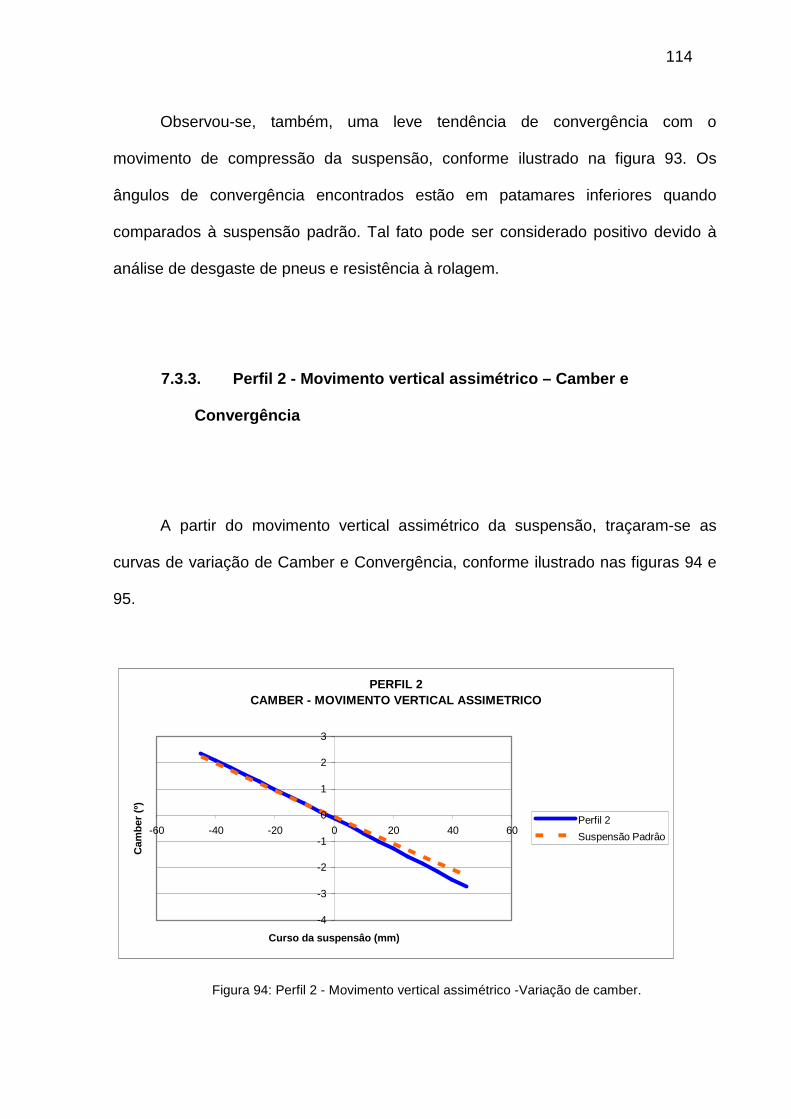
114
Observou-se, também, uma leve tendência de convergência com o
movimento de compressão da suspensão, conforme ilustrado na figura 93. Os
ângulos de convergência encontrados estão em patamares inferiores quando
comparados à suspensão padrão. Tal fato pode ser considerado positivo devido à
análise de desgaste de pneus e resistência à rolagem.
7.3.3. Perfil 2 - Movimento vertical assimétrico – Camber e
Convergência
A partir do movimento vertical assimétrico da suspensão, traçaram-se as
curvas de variação de Camber e Convergência, conforme ilustrado nas figuras 94 e
95.
PERFIL 2 CAMBER - MOVIMENTO VERTICAL ASSIMETRICO
-4
-3
-2
-1
0
1
2
3
-60 -40 -20 0 20 40 60
Curso da suspensâo (mm)
Cam
ber
(º)
Perfil 2
Suspensão Padrâo
Figura 94: Perfil 2 - Movimento vertical assimétrico -Variação de camber.
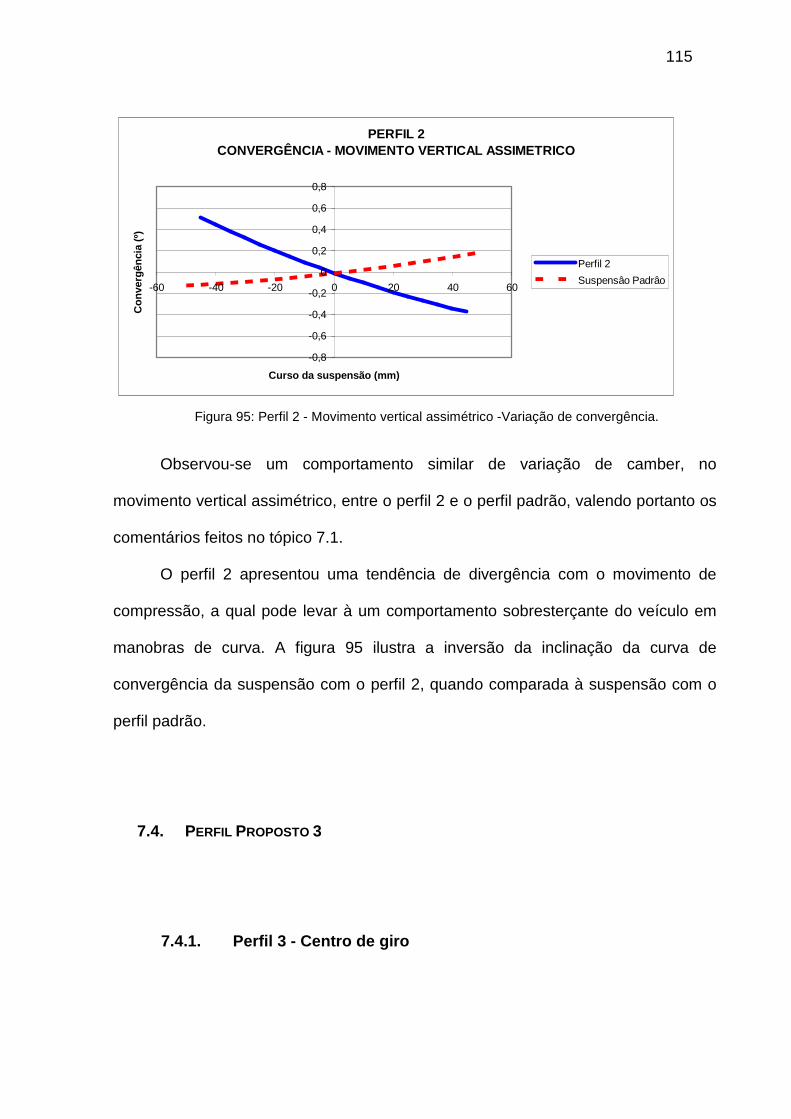
115
PERFIL 2CONVERGÊNCIA - MOVIMENTO VERTICAL ASSIMETRICO
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
-60 -40 -20 0 20 40 60
Curso da suspensão (mm)
Con
verg
ênci
a (º
)
Perfil 2
Suspensâo Padrâo
Figura 95: Perfil 2 - Movimento vertical assimétrico -Variação de convergência.
Observou-se um comportamento similar de variação de camber, no
movimento vertical assimétrico, entre o perfil 2 e o perfil padrão, valendo portanto os
comentários feitos no tópico 7.1.
O perfil 2 apresentou uma tendência de divergência com o movimento de
compressão, a qual pode levar à um comportamento sobresterçante do veículo em
manobras de curva. A figura 95 ilustra a inversão da inclinação da curva de
convergência da suspensão com o perfil 2, quando comparada à suspensão com o
perfil padrão.
7.4. PERFIL PROPOSTO 3
7.4.1. Perfil 3 - Centro de giro
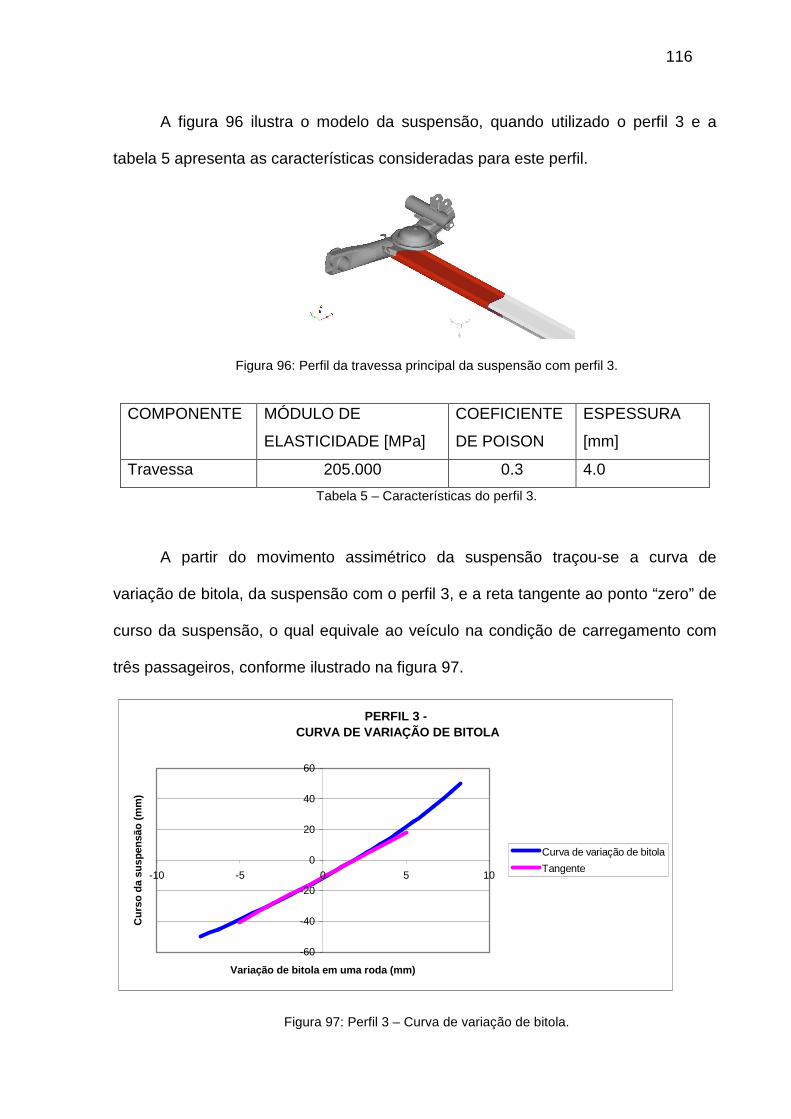
116
A figura 96 ilustra o modelo da suspensão, quando utilizado o perfil 3 e a
tabela 5 apresenta as características consideradas para este perfil.
Figura 96: Perfil da travessa principal da suspensão com perfil 3.
COMPONENTE MÓDULO DE
ELASTICIDADE [MPa]
COEFICIENTE
DE POISON
ESPESSURA
[mm]
Travessa 205.000 0.3 4.0
Tabela 5 – Características do perfil 3.
A partir do movimento assimétrico da suspensão traçou-se a curva de
variação de bitola, da suspensão com o perfil 3, e a reta tangente ao ponto “zero” de
curso da suspensão, o qual equivale ao veículo na condição de carregamento com
três passageiros, conforme ilustrado na figura 97.
PERFIL 3 - CURVA DE VARIAÇÃO DE BITOLA
-60
-40
-20
0
20
40
60
-10 -5 0 5 10
Variação de bitola em uma roda (mm)
Cur
so d
a su
spen
são
(mm
)
Curva de variação de bitola
Tangente
Figura 97: Perfil 3 – Curva de variação de bitola.
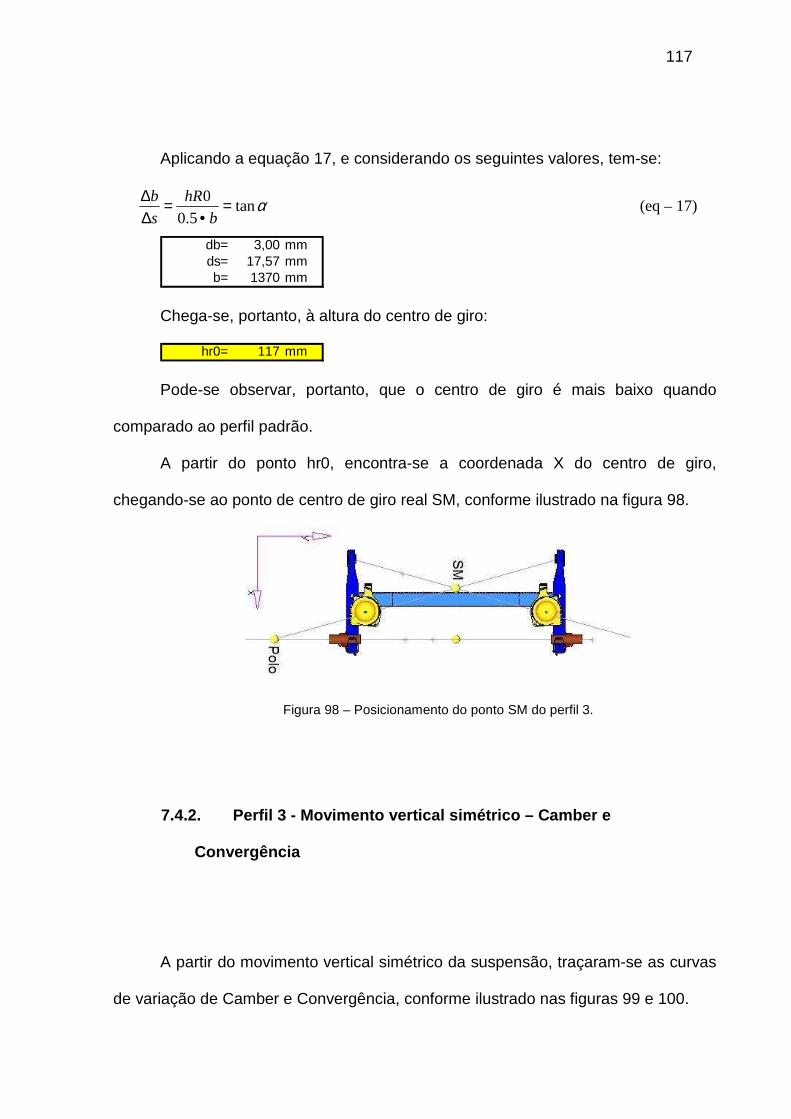
117
Aplicando a equação 17, e considerando os seguintes valores, tem-se:
αtan5.0
0 =•
=∆∆
b
hR
s
b (eq – 17)
db= 3,00 mmds= 17,57 mmb= 1370 mm
Chega-se, portanto, à altura do centro de giro:
hr0= 117 mm
Pode-se observar, portanto, que o centro de giro é mais baixo quando
comparado ao perfil padrão.
A partir do ponto hr0, encontra-se a coordenada X do centro de giro,
chegando-se ao ponto de centro de giro real SM, conforme ilustrado na figura 98.
Figura 98 – Posicionamento do ponto SM do perfil 3.
7.4.2. Perfil 3 - Movimento vertical simétrico – Ca mber e
Convergência
A partir do movimento vertical simétrico da suspensão, traçaram-se as curvas
de variação de Camber e Convergência, conforme ilustrado nas figuras 99 e 100.
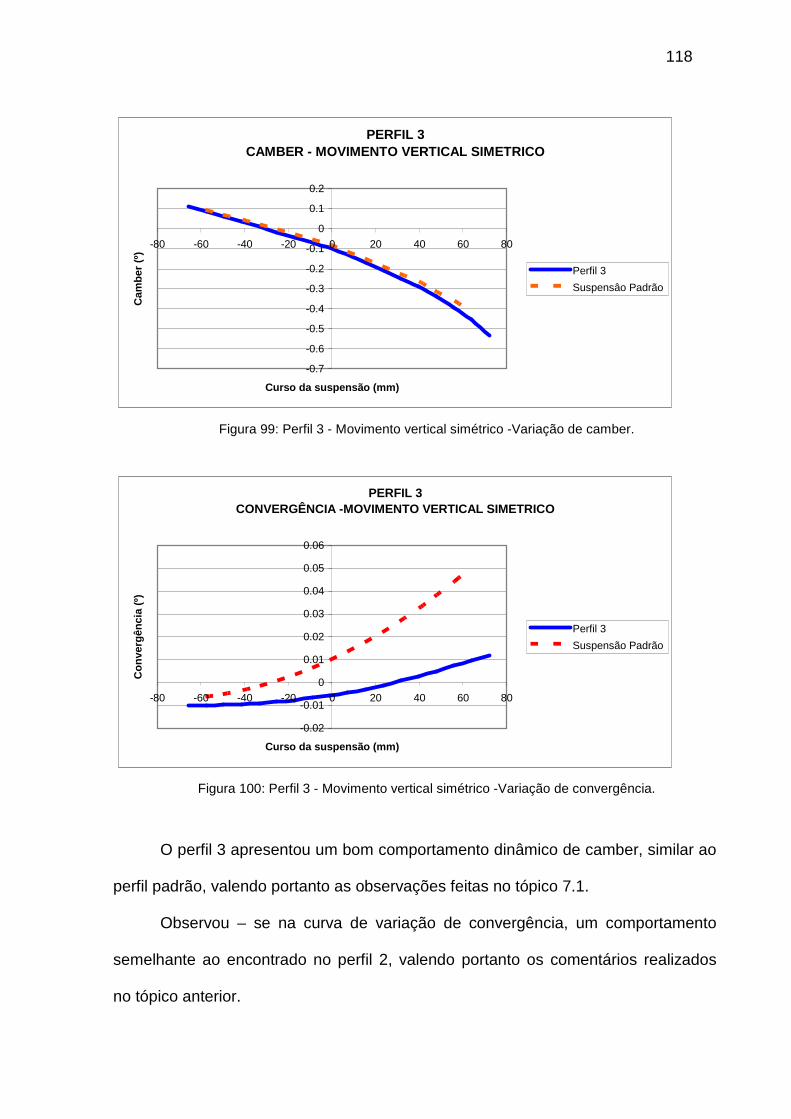
118
PERFIL 3CAMBER - MOVIMENTO VERTICAL SIMETRICO
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
-80 -60 -40 -20 0 20 40 60 80
Curso da suspensão (mm)
Cam
ber
(º)
Perfil 3
Suspensâo Padrão
Figura 99: Perfil 3 - Movimento vertical simétrico -Variação de camber.
PERFIL 3 CONVERGÊNCIA -MOVIMENTO VERTICAL SIMETRICO
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
-80 -60 -40 -20 0 20 40 60 80
Curso da suspensão (mm)
Con
verg
ênci
a (º
)
Perfil 3
Suspensão Padrão
Figura 100: Perfil 3 - Movimento vertical simétrico -Variação de convergência.
O perfil 3 apresentou um bom comportamento dinâmico de camber, similar ao
perfil padrão, valendo portanto as observações feitas no tópico 7.1.
Observou – se na curva de variação de convergência, um comportamento
semelhante ao encontrado no perfil 2, valendo portanto os comentários realizados
no tópico anterior.
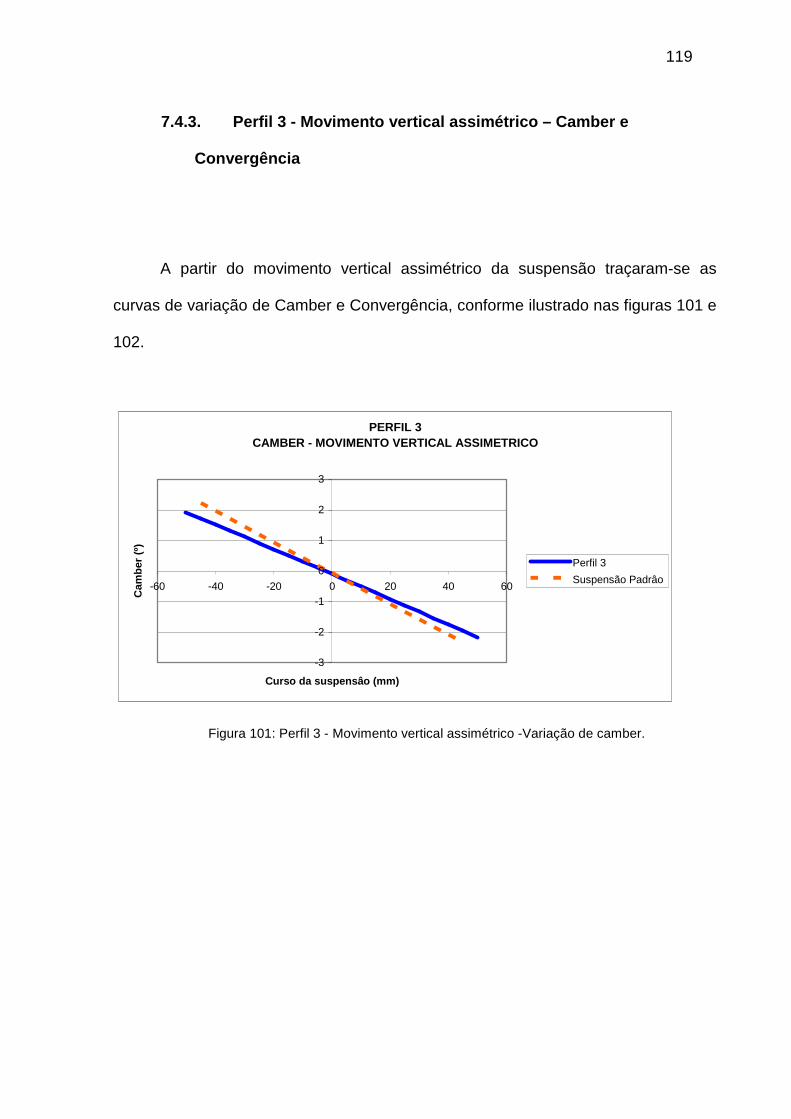
119
7.4.3. Perfil 3 - Movimento vertical assimétrico – Camber e
Convergência
A partir do movimento vertical assimétrico da suspensão traçaram-se as
curvas de variação de Camber e Convergência, conforme ilustrado nas figuras 101 e
102.
PERFIL 3 CAMBER - MOVIMENTO VERTICAL ASSIMETRICO
-3
-2
-1
0
1
2
3
-60 -40 -20 0 20 40 60
Curso da suspensâo (mm)
Cam
ber
(º)
Perfil 3
Suspensão Padrâo
Figura 101: Perfil 3 - Movimento vertical assimétrico -Variação de camber.
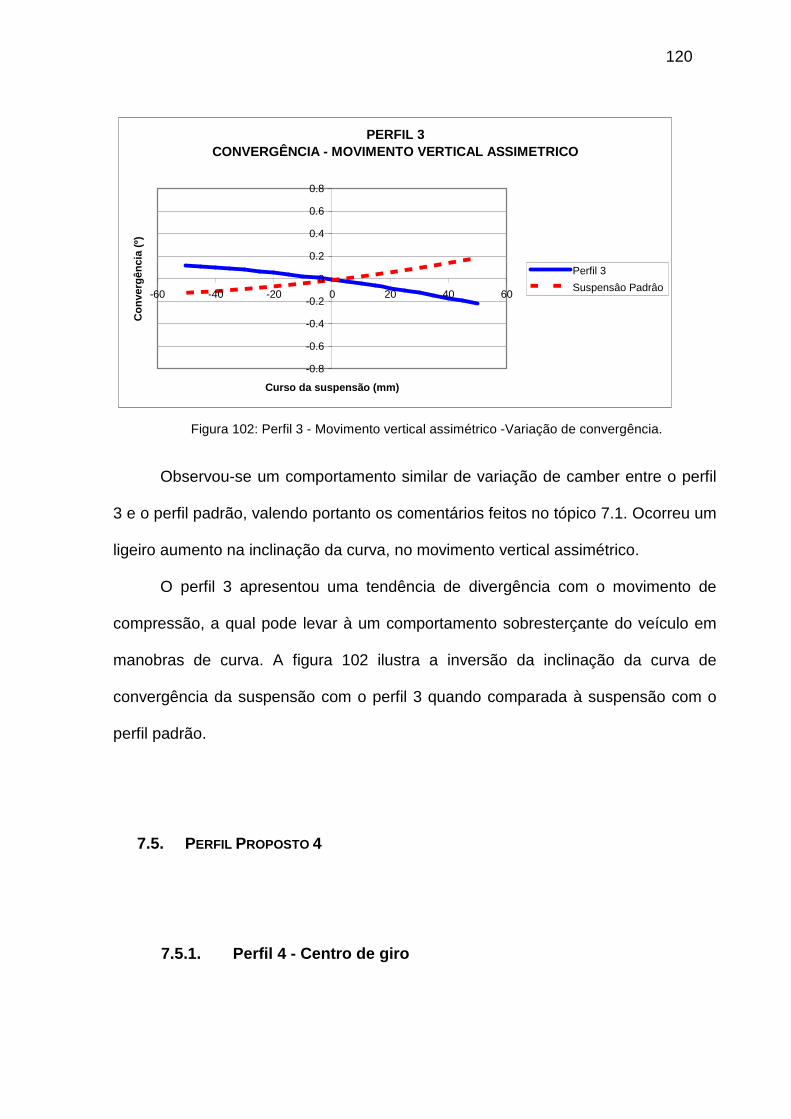
120
PERFIL 3CONVERGÊNCIA - MOVIMENTO VERTICAL ASSIMETRICO
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
-60 -40 -20 0 20 40 60
Curso da suspensão (mm)
Con
verg
ênci
a (º
)
Perfil 3
Suspensâo Padrâo
Figura 102: Perfil 3 - Movimento vertical assimétrico -Variação de convergência.
Observou-se um comportamento similar de variação de camber entre o perfil
3 e o perfil padrão, valendo portanto os comentários feitos no tópico 7.1. Ocorreu um
ligeiro aumento na inclinação da curva, no movimento vertical assimétrico.
O perfil 3 apresentou uma tendência de divergência com o movimento de
compressão, a qual pode levar à um comportamento sobresterçante do veículo em
manobras de curva. A figura 102 ilustra a inversão da inclinação da curva de
convergência da suspensão com o perfil 3 quando comparada à suspensão com o
perfil padrão.
7.5. PERFIL PROPOSTO 4
7.5.1. Perfil 4 - Centro de giro
121
A figura 103 ilustra o modelo da suspensão, quando utilizado o perfil 4 e a
tabela 6 apresenta as características consideradas para este perfil.
Figura 103: Perfil da travessa principal da suspensão com perfil 4.
COMPONENTE MÓDULO DE
ELASTICIDADE [MPa]
COEFICIENTE
DE POISON
ESPESSURA
[mm]
Travessa 205.000 0.3 4.0
Tabela 6 – Características do perfil 4.
A partir do movimento assimétrico da suspensão traçou-se a curva de
variação de bitola, da suspensão com o perfil 4, e a reta tangente ao ponto “zero” de
curso da suspensão, o qual equivale ao veículo na condição de carregamento com
três passageiros, conforme ilustrado na figura 104.
PERFIL 4 - CURVA DE VARIAÇÃO DE BITOLA
-60
-40
-20
0
20
40
60
-10 -5 0 5 10
Variação de bitola em uma roda (mm)
Cur
so d
a su
spen
são
(mm
)
Curva de variação de bitola
Tangente
Figura 104: Perfil 4 – Curva de variação de bitola.
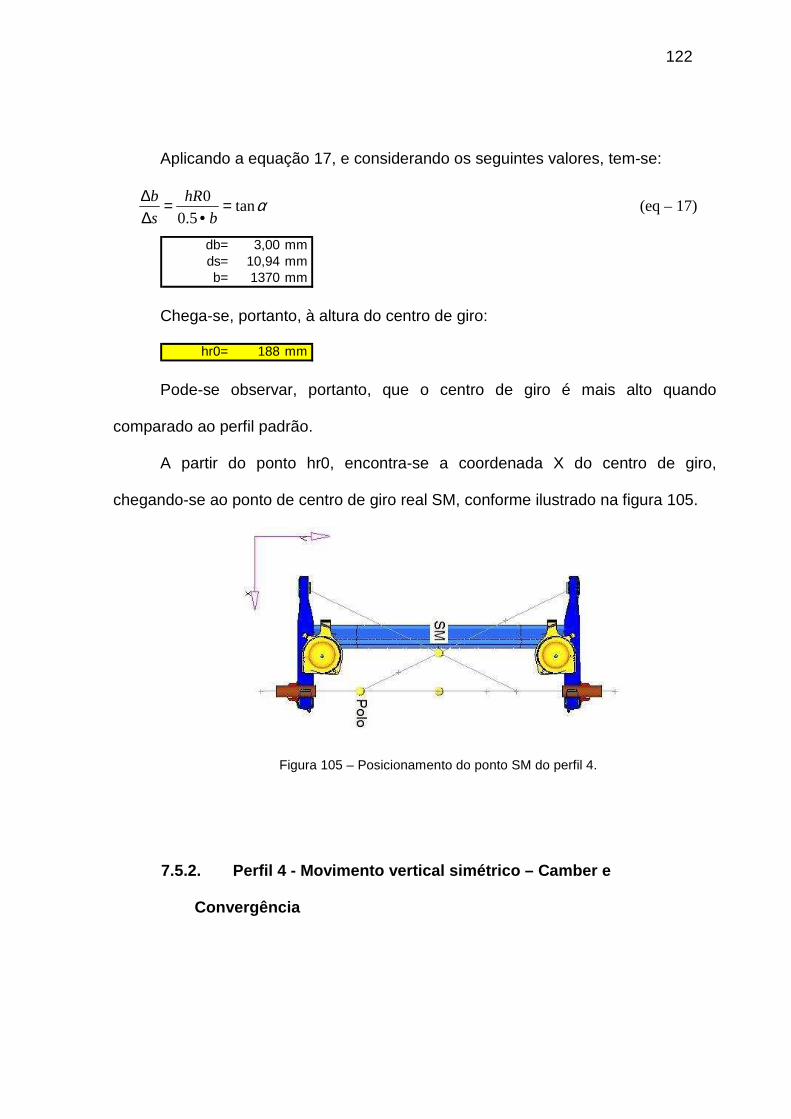
122
Aplicando a equação 17, e considerando os seguintes valores, tem-se:
αtan5.0
0 =•
=∆∆
b
hR
s
b (eq – 17)
db= 3,00 mmds= 10,94 mmb= 1370 mm
Chega-se, portanto, à altura do centro de giro:
hr0= 188 mm
Pode-se observar, portanto, que o centro de giro é mais alto quando
comparado ao perfil padrão.
A partir do ponto hr0, encontra-se a coordenada X do centro de giro,
chegando-se ao ponto de centro de giro real SM, conforme ilustrado na figura 105.
Figura 105 – Posicionamento do ponto SM do perfil 4.
7.5.2. Perfil 4 - Movimento vertical simétrico – Ca mber e
Convergência
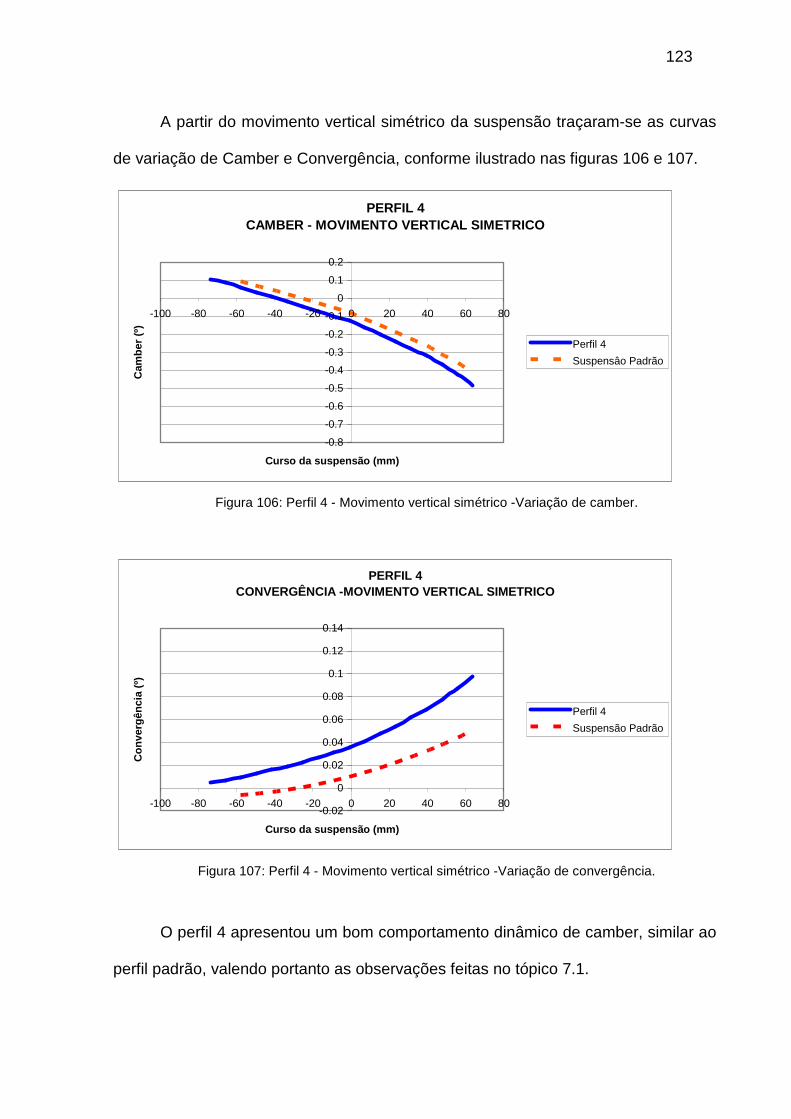
123
A partir do movimento vertical simétrico da suspensão traçaram-se as curvas
de variação de Camber e Convergência, conforme ilustrado nas figuras 106 e 107.
PERFIL 4CAMBER - MOVIMENTO VERTICAL SIMETRICO
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
-100 -80 -60 -40 -20 0 20 40 60 80
Curso da suspensão (mm)
Cam
ber
(º)
Perfil 4
Suspensâo Padrão
Figura 106: Perfil 4 - Movimento vertical simétrico -Variação de camber.
PERFIL 4 CONVERGÊNCIA -MOVIMENTO VERTICAL SIMETRICO
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
-100 -80 -60 -40 -20 0 20 40 60 80
Curso da suspensão (mm)
Con
verg
ênci
a (º
)
Perfil 4
Suspensão Padrão
Figura 107: Perfil 4 - Movimento vertical simétrico -Variação de convergência.
O perfil 4 apresentou um bom comportamento dinâmico de camber, similar ao
perfil padrão, valendo portanto as observações feitas no tópico 7.1.
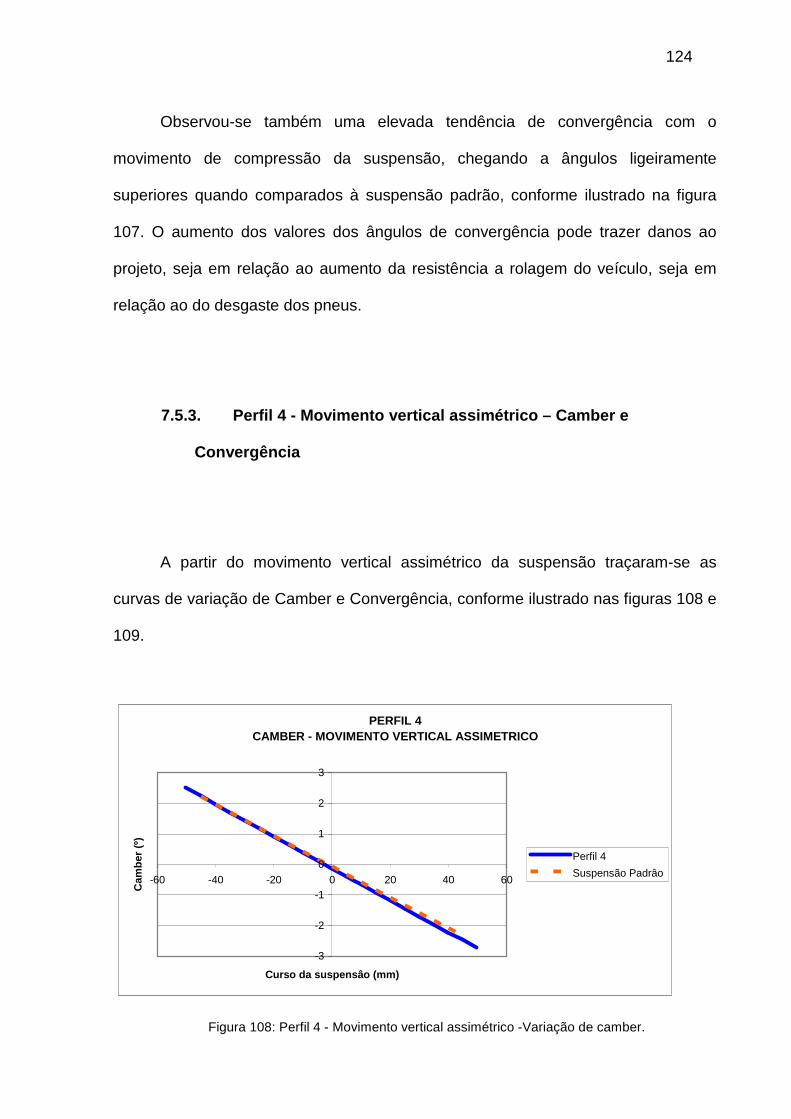
124
Observou-se também uma elevada tendência de convergência com o
movimento de compressão da suspensão, chegando a ângulos ligeiramente
superiores quando comparados à suspensão padrão, conforme ilustrado na figura
107. O aumento dos valores dos ângulos de convergência pode trazer danos ao
projeto, seja em relação ao aumento da resistência a rolagem do veículo, seja em
relação ao do desgaste dos pneus.
7.5.3. Perfil 4 - Movimento vertical assimétrico – Camber e
Convergência
A partir do movimento vertical assimétrico da suspensão traçaram-se as
curvas de variação de Camber e Convergência, conforme ilustrado nas figuras 108 e
109.
PERFIL 4 CAMBER - MOVIMENTO VERTICAL ASSIMETRICO
-3
-2
-1
0
1
2
3
-60 -40 -20 0 20 40 60
Curso da suspensâo (mm)
Cam
ber
(º)
Perfil 4
Suspensão Padrâo
Figura 108: Perfil 4 - Movimento vertical assimétrico -Variação de camber.
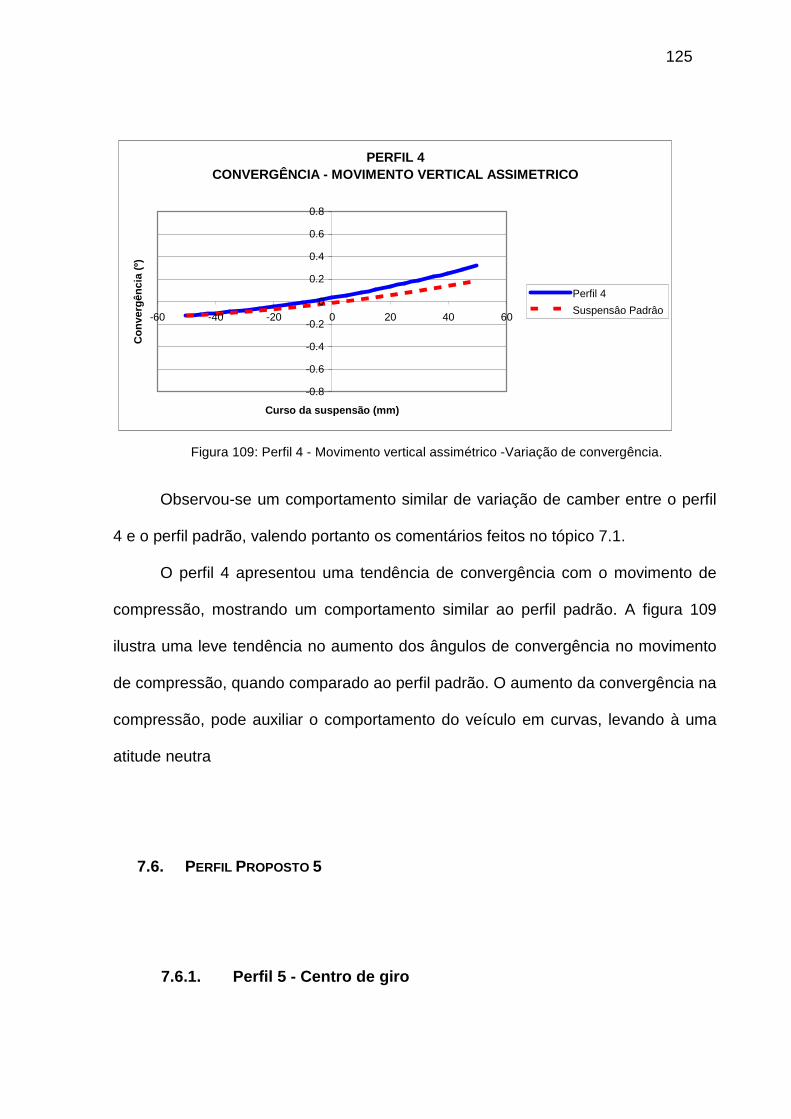
125
PERFIL 4CONVERGÊNCIA - MOVIMENTO VERTICAL ASSIMETRICO
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
-60 -40 -20 0 20 40 60
Curso da suspensão (mm)
Con
verg
ênci
a (º
)
Perfil 4
Suspensâo Padrâo
Figura 109: Perfil 4 - Movimento vertical assimétrico -Variação de convergência.
Observou-se um comportamento similar de variação de camber entre o perfil
4 e o perfil padrão, valendo portanto os comentários feitos no tópico 7.1.
O perfil 4 apresentou uma tendência de convergência com o movimento de
compressão, mostrando um comportamento similar ao perfil padrão. A figura 109
ilustra uma leve tendência no aumento dos ângulos de convergência no movimento
de compressão, quando comparado ao perfil padrão. O aumento da convergência na
compressão, pode auxiliar o comportamento do veículo em curvas, levando à uma
atitude neutra
7.6. PERFIL PROPOSTO 5
7.6.1. Perfil 5 - Centro de giro
126
A figura 110 ilustra o modelo da suspensão, quando utilizado o perfil 5 e a
tabela 7, apresenta as características consideradas para este perfil.
Figura 110: Perfil da travessa principal da suspensão com perfil 5.
COMPONENTE MÓDULO DE
ELASTICIDADE [MPa]
COEFICIENTE
DE POISON
ESPESSURA
[mm]
Travessa 205.000 0.3 4.0
Tabela 7 – Características do perfil 5.
A partir do movimento assimétrico da suspensão, traçou-se a curva de
variação de bitola, da suspensão com o perfil 5, e a reta tangente ao ponto “zero” de
curso da suspensão, o qual equivale ao veículo na condição de carregamento com
três passageiros, conforme ilustrado na figura 111.
PERFIL 5 - CURVA DE VARIAÇÃO DE BITOLA
-60
-40
-20
0
20
40
60
-10 -5 0 5 10
Variação de bitola em uma roda (mm)
Cur
so d
a su
spen
são
(mm
) Curva de variação de bitola
Tangente
Figura 111: Perfil 5 – Curva de variação de bitola.
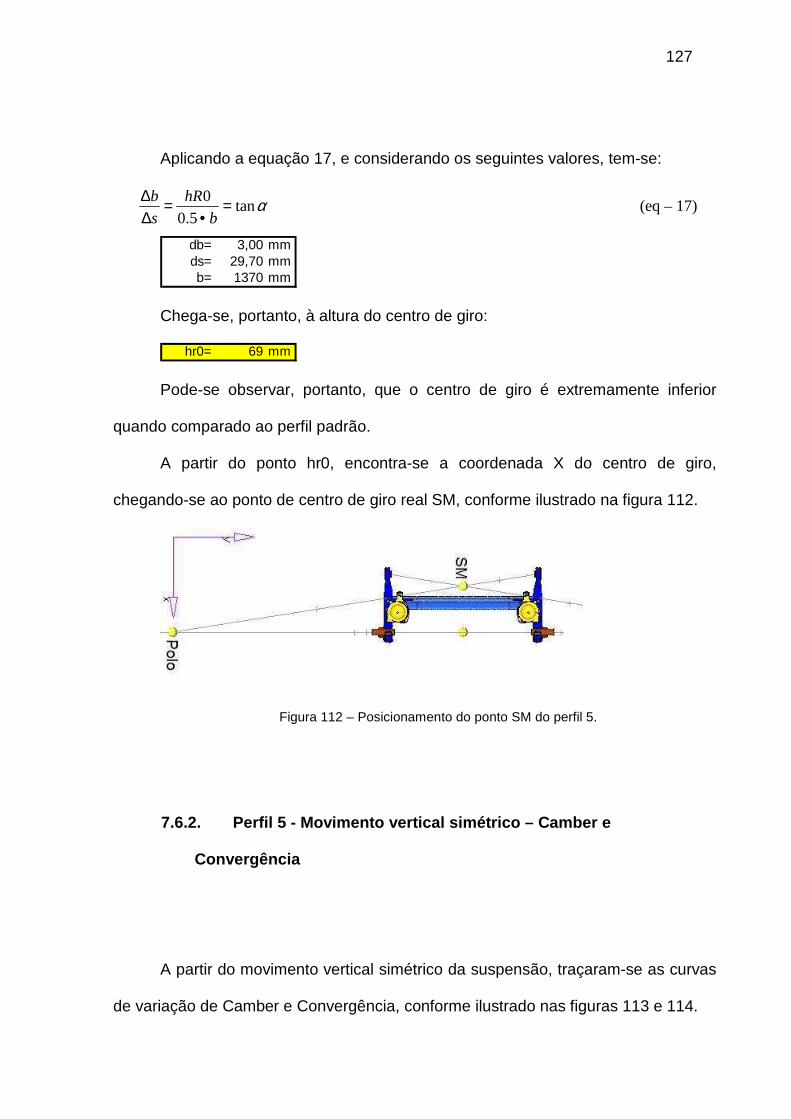
127
Aplicando a equação 17, e considerando os seguintes valores, tem-se:
αtan5.0
0 =•
=∆∆
b
hR
s
b (eq – 17)
db= 3,00 mmds= 29,70 mmb= 1370 mm
Chega-se, portanto, à altura do centro de giro:
hr0= 69 mm
Pode-se observar, portanto, que o centro de giro é extremamente inferior
quando comparado ao perfil padrão.
A partir do ponto hr0, encontra-se a coordenada X do centro de giro,
chegando-se ao ponto de centro de giro real SM, conforme ilustrado na figura 112.
Figura 112 – Posicionamento do ponto SM do perfil 5.
7.6.2. Perfil 5 - Movimento vertical simétrico – Ca mber e
Convergência
A partir do movimento vertical simétrico da suspensão, traçaram-se as curvas
de variação de Camber e Convergência, conforme ilustrado nas figuras 113 e 114.
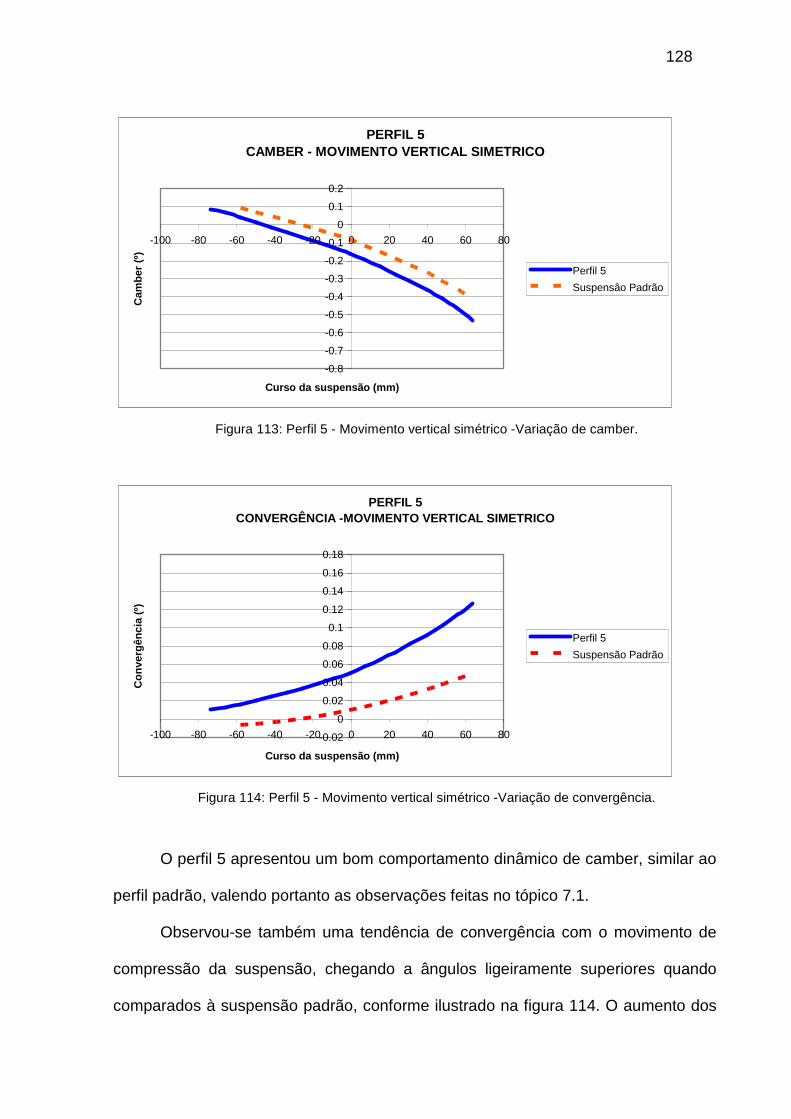
128
PERFIL 5CAMBER - MOVIMENTO VERTICAL SIMETRICO
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
-100 -80 -60 -40 -20 0 20 40 60 80
Curso da suspensão (mm)
Cam
ber
(º)
Perfil 5
Suspensâo Padrão
Figura 113: Perfil 5 - Movimento vertical simétrico -Variação de camber.
PERFIL 5 CONVERGÊNCIA -MOVIMENTO VERTICAL SIMETRICO
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
-100 -80 -60 -40 -20 0 20 40 60 80
Curso da suspensão (mm)
Con
verg
ênci
a (º
)
Perfil 5
Suspensão Padrão
Figura 114: Perfil 5 - Movimento vertical simétrico -Variação de convergência.
O perfil 5 apresentou um bom comportamento dinâmico de camber, similar ao
perfil padrão, valendo portanto as observações feitas no tópico 7.1.
Observou-se também uma tendência de convergência com o movimento de
compressão da suspensão, chegando a ângulos ligeiramente superiores quando
comparados à suspensão padrão, conforme ilustrado na figura 114. O aumento dos
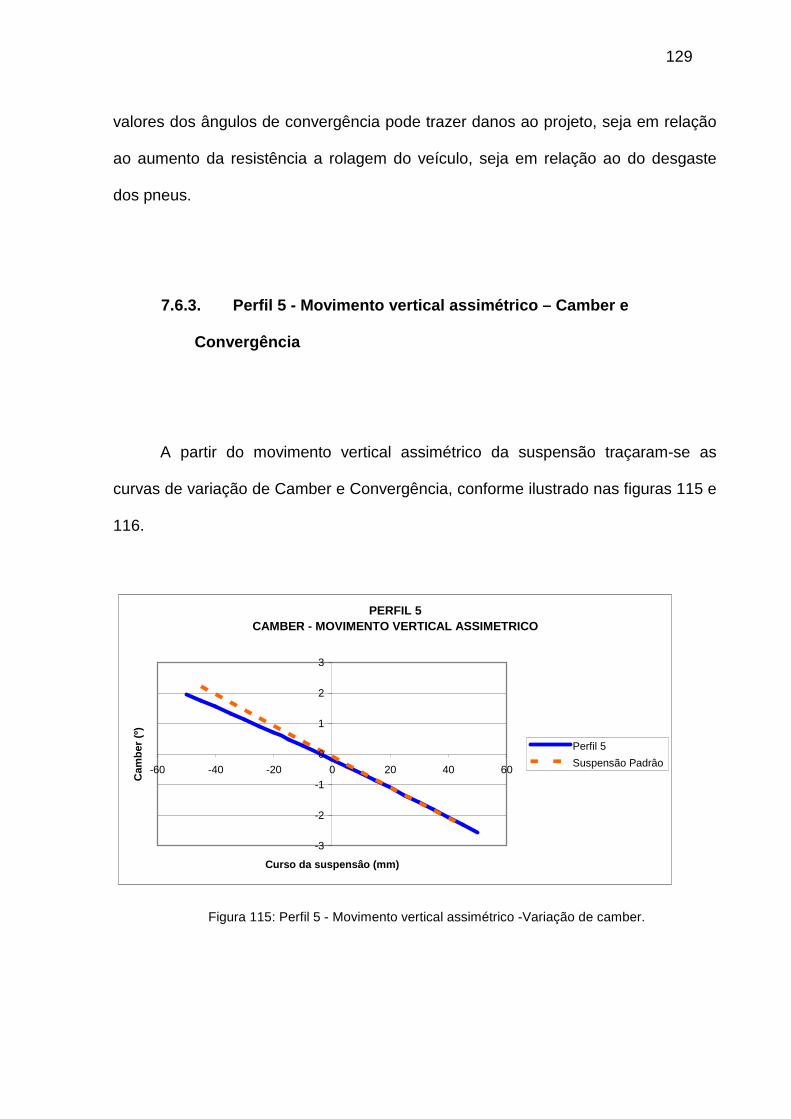
129
valores dos ângulos de convergência pode trazer danos ao projeto, seja em relação
ao aumento da resistência a rolagem do veículo, seja em relação ao do desgaste
dos pneus.
7.6.3. Perfil 5 - Movimento vertical assimétrico – Camber e
Convergência
A partir do movimento vertical assimétrico da suspensão traçaram-se as
curvas de variação de Camber e Convergência, conforme ilustrado nas figuras 115 e
116.
PERFIL 5 CAMBER - MOVIMENTO VERTICAL ASSIMETRICO
-3
-2
-1
0
1
2
3
-60 -40 -20 0 20 40 60
Curso da suspensâo (mm)
Cam
ber
(º)
Perfil 5
Suspensão Padrâo
Figura 115: Perfil 5 - Movimento vertical assimétrico -Variação de camber.
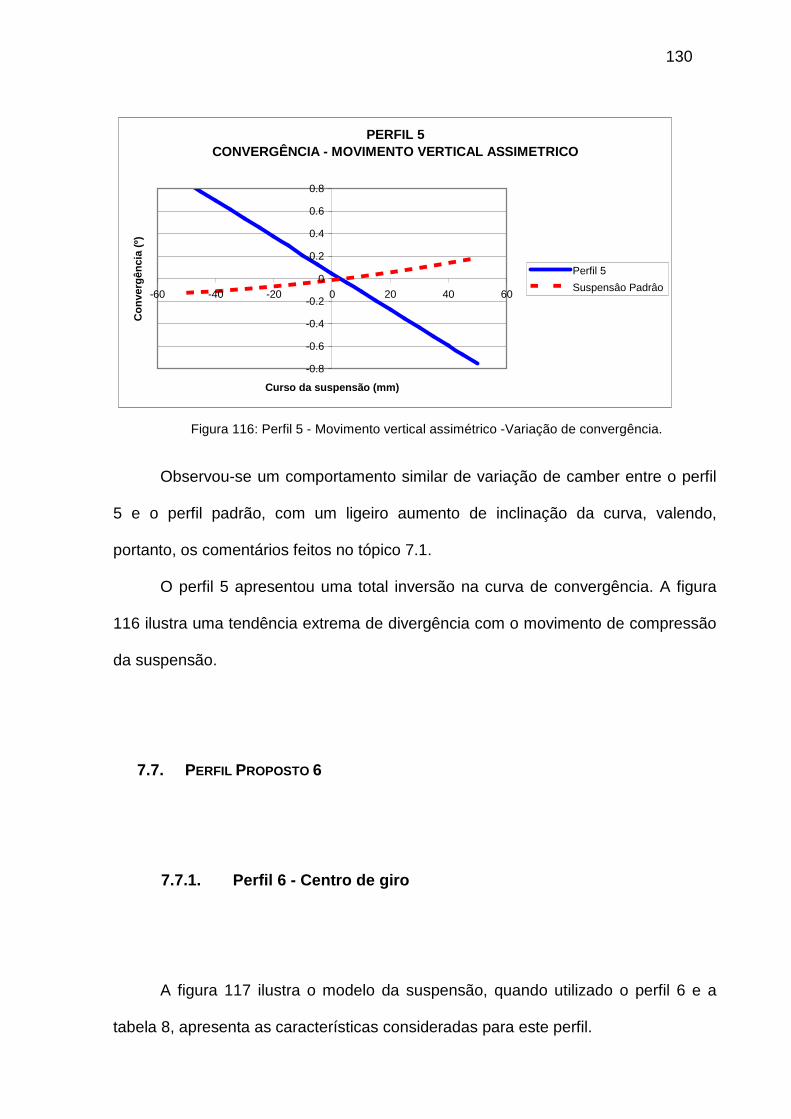
130
PERFIL 5CONVERGÊNCIA - MOVIMENTO VERTICAL ASSIMETRICO
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
-60 -40 -20 0 20 40 60
Curso da suspensão (mm)
Con
verg
ênci
a (º
)
Perfil 5
Suspensâo Padrâo
Figura 116: Perfil 5 - Movimento vertical assimétrico -Variação de convergência.
Observou-se um comportamento similar de variação de camber entre o perfil
5 e o perfil padrão, com um ligeiro aumento de inclinação da curva, valendo,
portanto, os comentários feitos no tópico 7.1.
O perfil 5 apresentou uma total inversão na curva de convergência. A figura
116 ilustra uma tendência extrema de divergência com o movimento de compressão
da suspensão.
7.7. PERFIL PROPOSTO 6
7.7.1. Perfil 6 - Centro de giro
A figura 117 ilustra o modelo da suspensão, quando utilizado o perfil 6 e a
tabela 8, apresenta as características consideradas para este perfil.
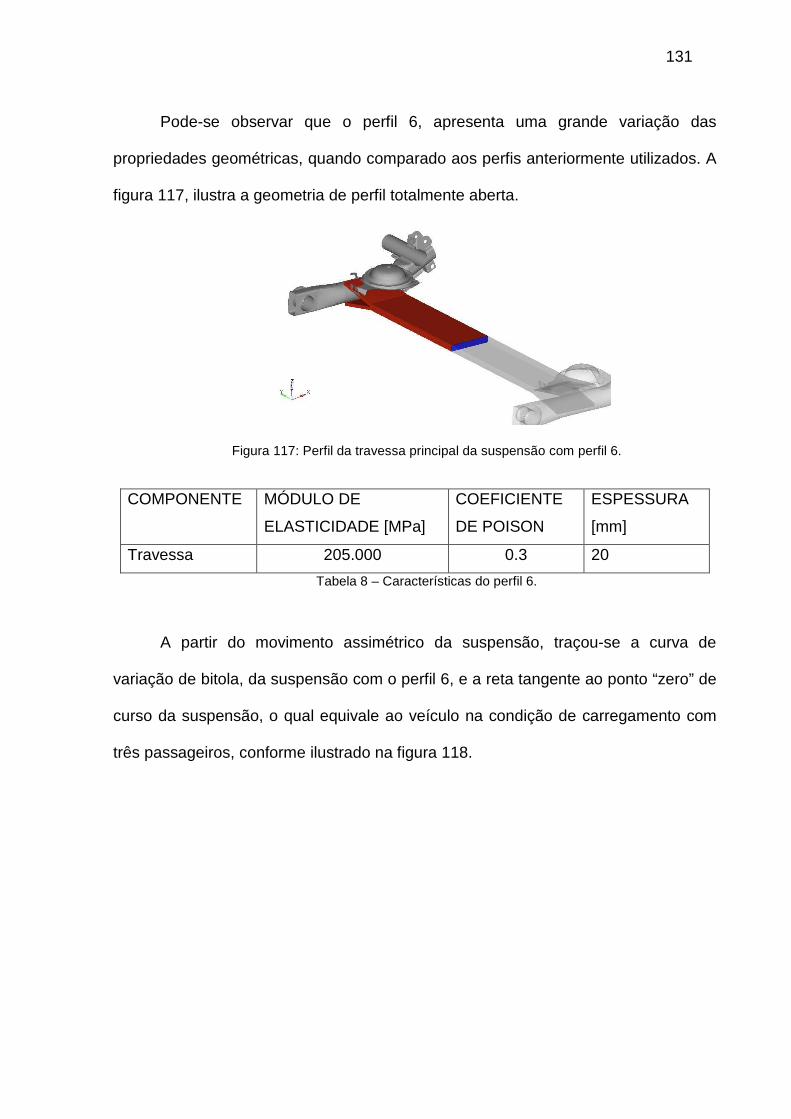
131
Pode-se observar que o perfil 6, apresenta uma grande variação das
propriedades geométricas, quando comparado aos perfis anteriormente utilizados. A
figura 117, ilustra a geometria de perfil totalmente aberta.
Figura 117: Perfil da travessa principal da suspensão com perfil 6.
COMPONENTE MÓDULO DE
ELASTICIDADE [MPa]
COEFICIENTE
DE POISON
ESPESSURA
[mm]
Travessa 205.000 0.3 20
Tabela 8 – Características do perfil 6.
A partir do movimento assimétrico da suspensão, traçou-se a curva de
variação de bitola, da suspensão com o perfil 6, e a reta tangente ao ponto “zero” de
curso da suspensão, o qual equivale ao veículo na condição de carregamento com
três passageiros, conforme ilustrado na figura 118.
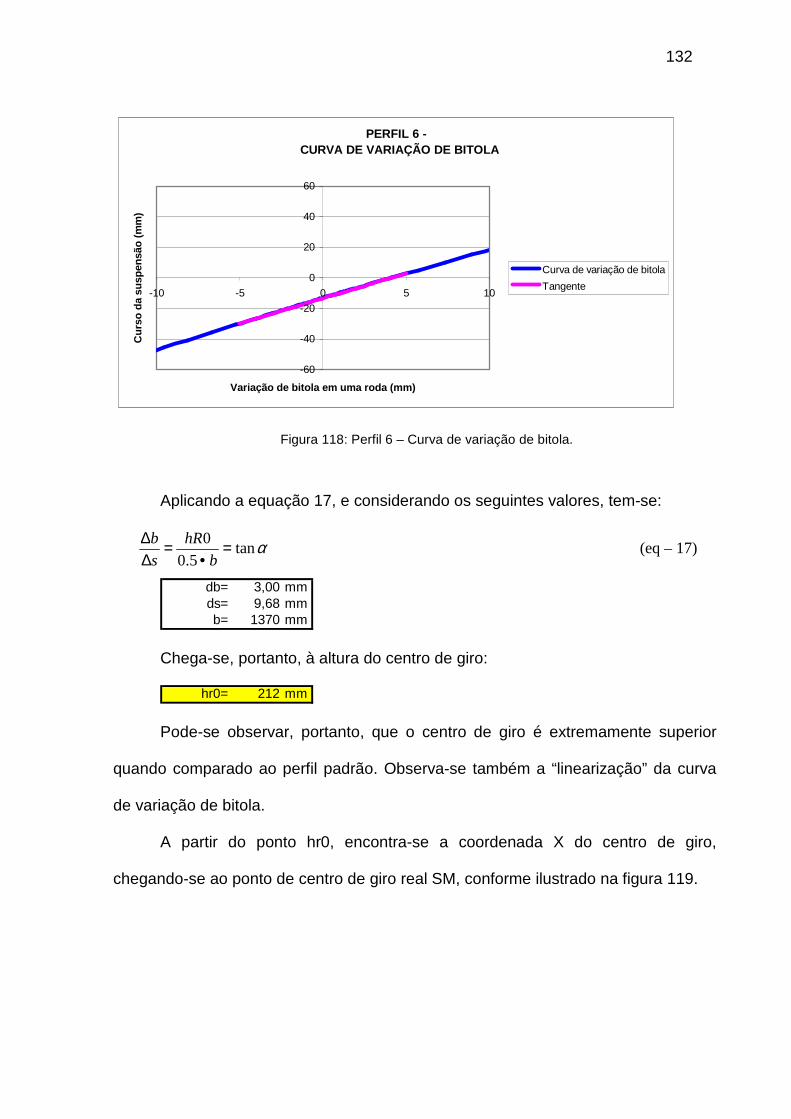
132
PERFIL 6 - CURVA DE VARIAÇÃO DE BITOLA
-60
-40
-20
0
20
40
60
-10 -5 0 5 10
Variação de bitola em uma roda (mm)
Cur
so d
a su
spen
são
(mm
)
Curva de variação de bitola
Tangente
Figura 118: Perfil 6 – Curva de variação de bitola.
Aplicando a equação 17, e considerando os seguintes valores, tem-se:
αtan5.0
0 =•
=∆∆
b
hR
s
b (eq – 17)
db= 3,00 mmds= 9,68 mmb= 1370 mm
Chega-se, portanto, à altura do centro de giro:
hr0= 212 mm
Pode-se observar, portanto, que o centro de giro é extremamente superior
quando comparado ao perfil padrão. Observa-se também a “linearização” da curva
de variação de bitola.
A partir do ponto hr0, encontra-se a coordenada X do centro de giro,
chegando-se ao ponto de centro de giro real SM, conforme ilustrado na figura 119.
133
Figura 119 – Posicionamento do ponto SM do perfil 6.
7.7.2. Perfil 6 - Movimento vertical simétrico – Ca mber e
Convergência
A partir do movimento vertical simétrico da suspensão, traçaram-se as curvas
de variação de Camber e Convergência, conforme ilustrado nas figuras 120e 121.
PERFIL 6CAMBER - MOVIMENTO VERTICAL SIMETRICO
-2.5
-2
-1.5
-1
-0.5
0
0.5
-80 -60 -40 -20 0 20 40 60 80
Curso da suspensão (mm)
Cam
ber
(º)
Perfil 6
Suspensâo Padrão
Figura 120: Perfil 6 - Movimento vertical simétrico -Variação de camber.
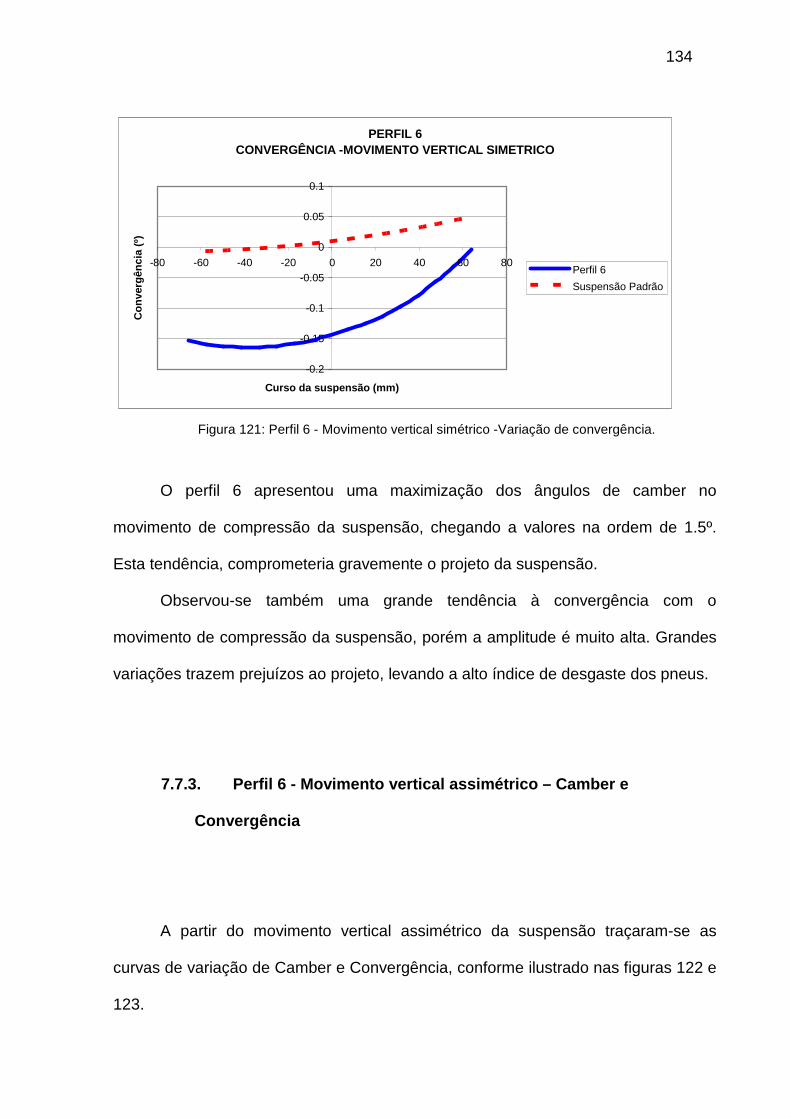
134
PERFIL 6 CONVERGÊNCIA -MOVIMENTO VERTICAL SIMETRICO
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
-80 -60 -40 -20 0 20 40 60 80
Curso da suspensão (mm)
Con
verg
ênci
a (º
)
Perfil 6
Suspensão Padrão
Figura 121: Perfil 6 - Movimento vertical simétrico -Variação de convergência.
O perfil 6 apresentou uma maximização dos ângulos de camber no
movimento de compressão da suspensão, chegando a valores na ordem de 1.5º.
Esta tendência, comprometeria gravemente o projeto da suspensão.
Observou-se também uma grande tendência à convergência com o
movimento de compressão da suspensão, porém a amplitude é muito alta. Grandes
variações trazem prejuízos ao projeto, levando a alto índice de desgaste dos pneus.
7.7.3. Perfil 6 - Movimento vertical assimétrico – Camber e
Convergência
A partir do movimento vertical assimétrico da suspensão traçaram-se as
curvas de variação de Camber e Convergência, conforme ilustrado nas figuras 122 e
123.
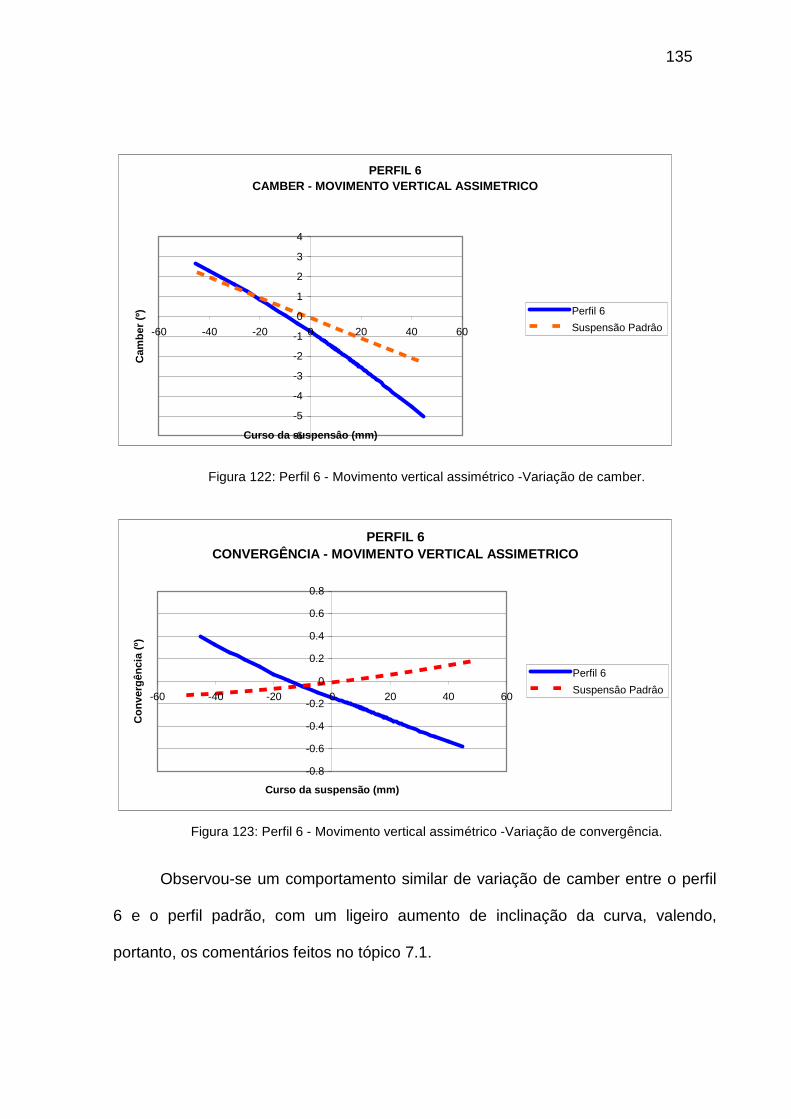
135
PERFIL 6 CAMBER - MOVIMENTO VERTICAL ASSIMETRICO
-6
-5
-4
-3
-2
-1
0
1
2
3
4
-60 -40 -20 0 20 40 60
Curso da suspensâo (mm)
Cam
ber
(º) Perfil 6
Suspensão Padrâo
Figura 122: Perfil 6 - Movimento vertical assimétrico -Variação de camber.
PERFIL 6CONVERGÊNCIA - MOVIMENTO VERTICAL ASSIMETRICO
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
-60 -40 -20 0 20 40 60
Curso da suspensão (mm)
Con
verg
ênci
a (º
)
Perfil 6
Suspensâo Padrâo
Figura 123: Perfil 6 - Movimento vertical assimétrico -Variação de convergência.
Observou-se um comportamento similar de variação de camber entre o perfil
6 e o perfil padrão, com um ligeiro aumento de inclinação da curva, valendo,
portanto, os comentários feitos no tópico 7.1.
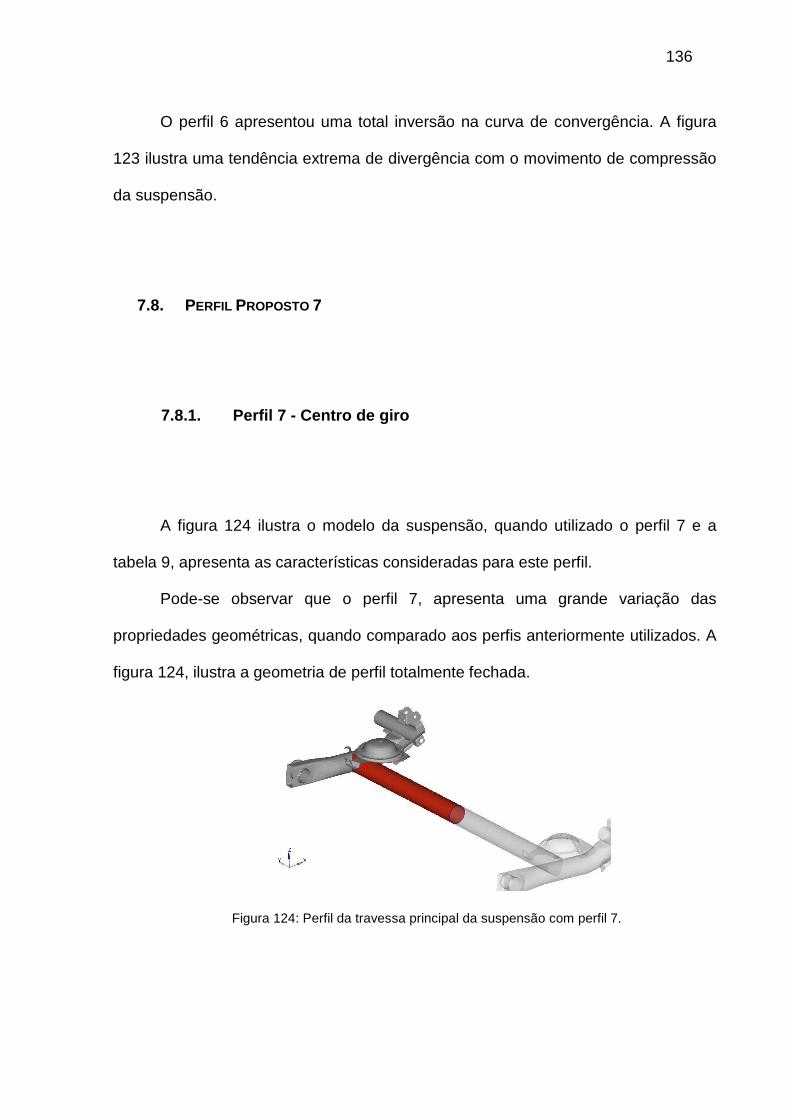
136
O perfil 6 apresentou uma total inversão na curva de convergência. A figura
123 ilustra uma tendência extrema de divergência com o movimento de compressão
da suspensão.
7.8. PERFIL PROPOSTO 7
7.8.1. Perfil 7 - Centro de giro
A figura 124 ilustra o modelo da suspensão, quando utilizado o perfil 7 e a
tabela 9, apresenta as características consideradas para este perfil.
Pode-se observar que o perfil 7, apresenta uma grande variação das
propriedades geométricas, quando comparado aos perfis anteriormente utilizados. A
figura 124, ilustra a geometria de perfil totalmente fechada.
Figura 124: Perfil da travessa principal da suspensão com perfil 7.
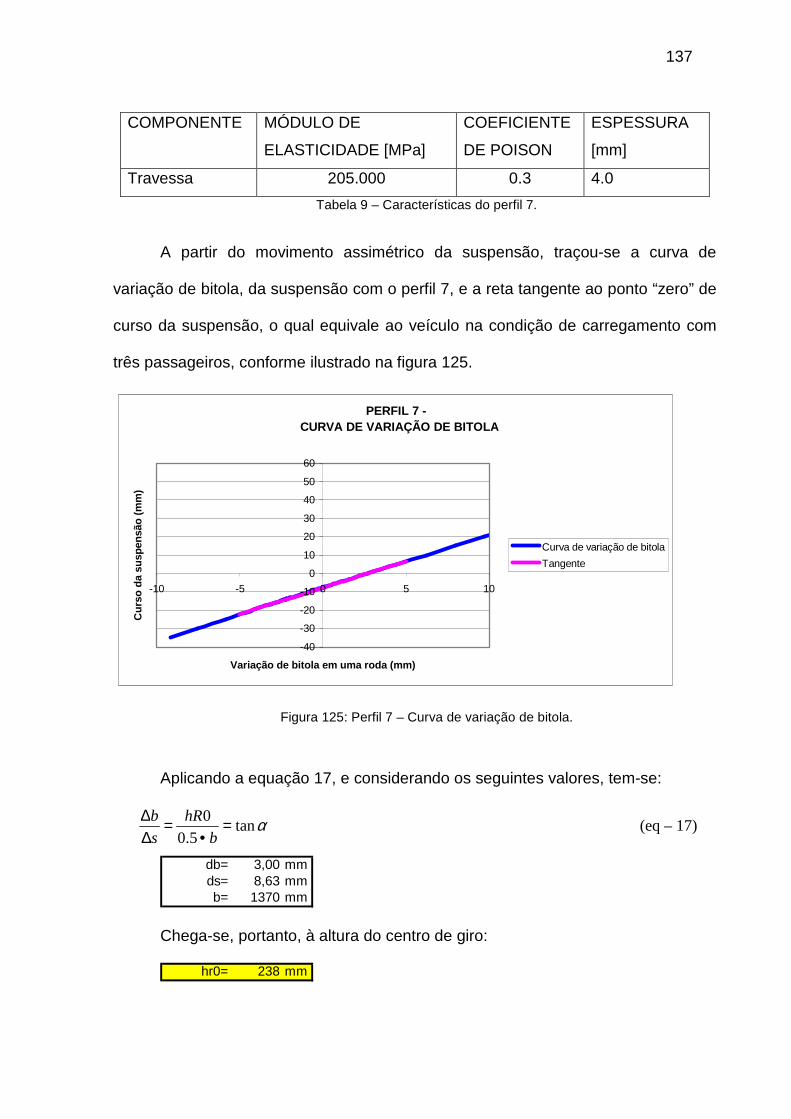
137
COMPONENTE MÓDULO DE
ELASTICIDADE [MPa]
COEFICIENTE
DE POISON
ESPESSURA
[mm]
Travessa 205.000 0.3 4.0
Tabela 9 – Características do perfil 7.
A partir do movimento assimétrico da suspensão, traçou-se a curva de
variação de bitola, da suspensão com o perfil 7, e a reta tangente ao ponto “zero” de
curso da suspensão, o qual equivale ao veículo na condição de carregamento com
três passageiros, conforme ilustrado na figura 125.
PERFIL 7 - CURVA DE VARIAÇÃO DE BITOLA
-40
-30
-20
-10
0
10
20
30
40
50
60
-10 -5 0 5 10
Variação de bitola em uma roda (mm)
Cur
so d
a su
spen
são
(mm
)
Curva de variação de bitola
Tangente
Figura 125: Perfil 7 – Curva de variação de bitola.
Aplicando a equação 17, e considerando os seguintes valores, tem-se:
αtan5.0
0 =•
=∆∆
b
hR
s
b (eq – 17)
db= 3,00 mmds= 8,63 mmb= 1370 mm
Chega-se, portanto, à altura do centro de giro:
hr0= 238 mm
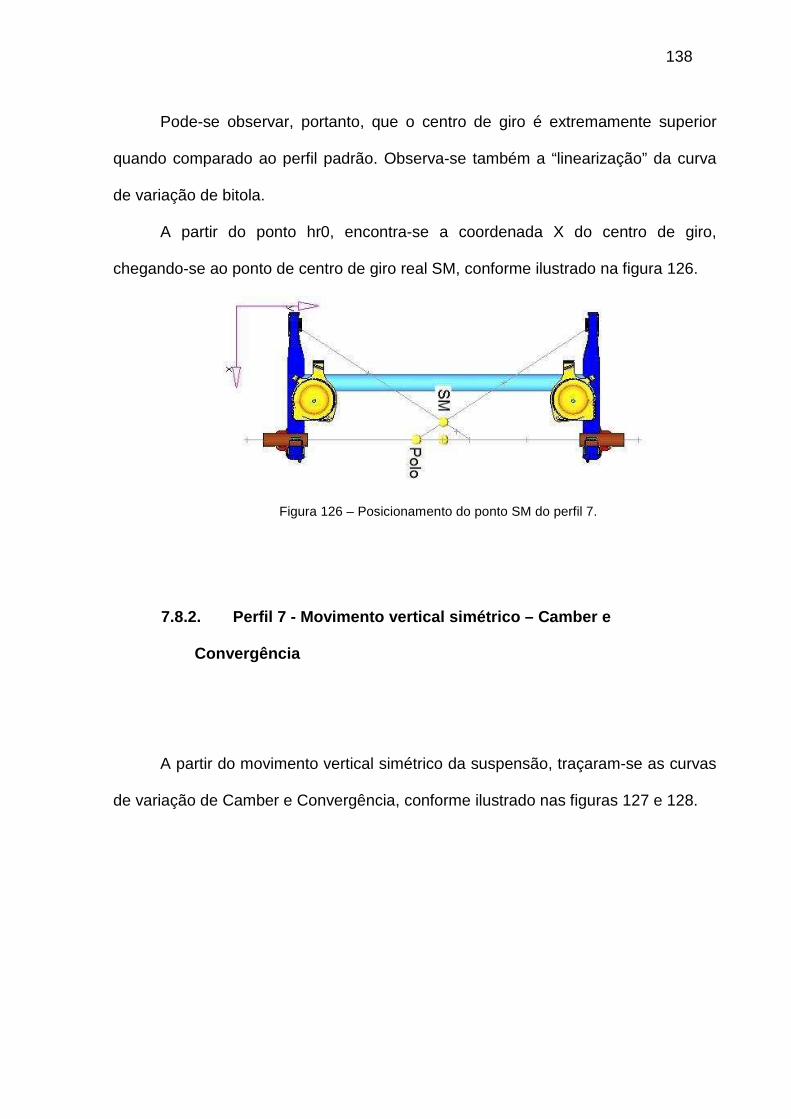
138
Pode-se observar, portanto, que o centro de giro é extremamente superior
quando comparado ao perfil padrão. Observa-se também a “linearização” da curva
de variação de bitola.
A partir do ponto hr0, encontra-se a coordenada X do centro de giro,
chegando-se ao ponto de centro de giro real SM, conforme ilustrado na figura 126.
Figura 126 – Posicionamento do ponto SM do perfil 7.
7.8.2. Perfil 7 - Movimento vertical simétrico – Ca mber e
Convergência
A partir do movimento vertical simétrico da suspensão, traçaram-se as curvas
de variação de Camber e Convergência, conforme ilustrado nas figuras 127 e 128.
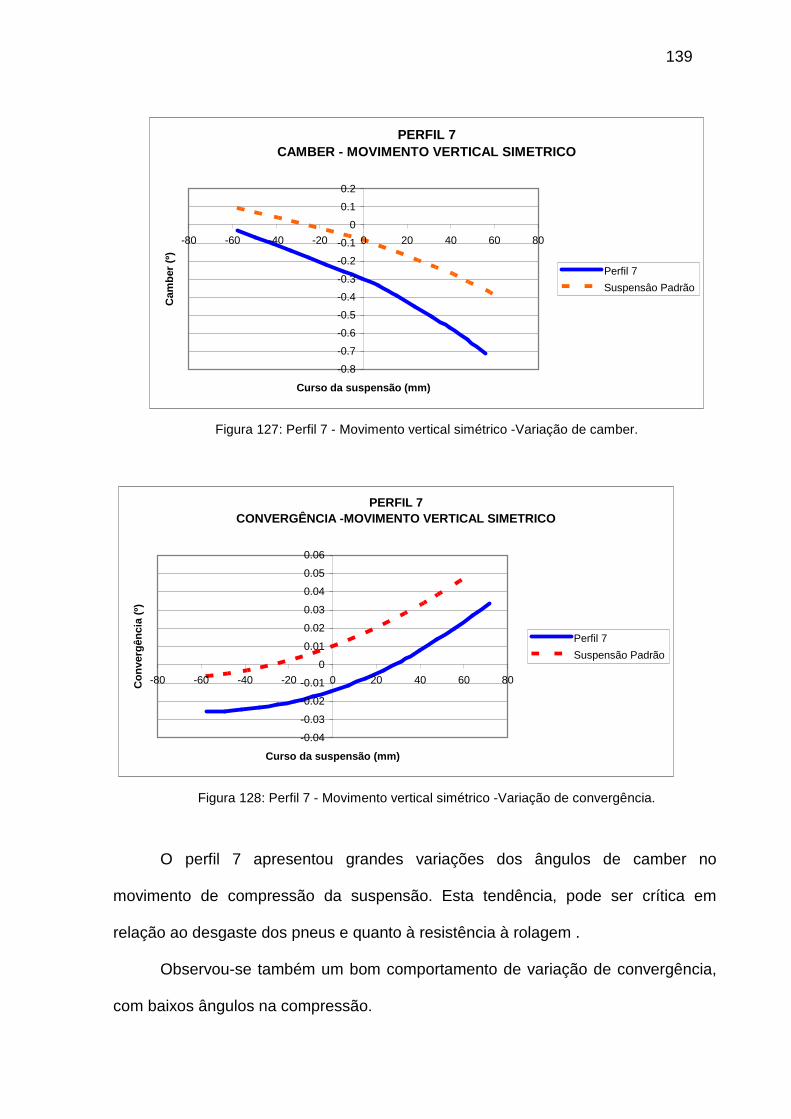
139
PERFIL 7CAMBER - MOVIMENTO VERTICAL SIMETRICO
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
-80 -60 -40 -20 0 20 40 60 80
Curso da suspensão (mm)
Cam
ber
(º)
Perfil 7
Suspensâo Padrão
Figura 127: Perfil 7 - Movimento vertical simétrico -Variação de camber.
PERFIL 7 CONVERGÊNCIA -MOVIMENTO VERTICAL SIMETRICO
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
-80 -60 -40 -20 0 20 40 60 80
Curso da suspensão (mm)
Con
verg
ênci
a (º
)
Perfil 7
Suspensão Padrão
Figura 128: Perfil 7 - Movimento vertical simétrico -Variação de convergência.
O perfil 7 apresentou grandes variações dos ângulos de camber no
movimento de compressão da suspensão. Esta tendência, pode ser crítica em
relação ao desgaste dos pneus e quanto à resistência à rolagem .
Observou-se também um bom comportamento de variação de convergência,
com baixos ângulos na compressão.
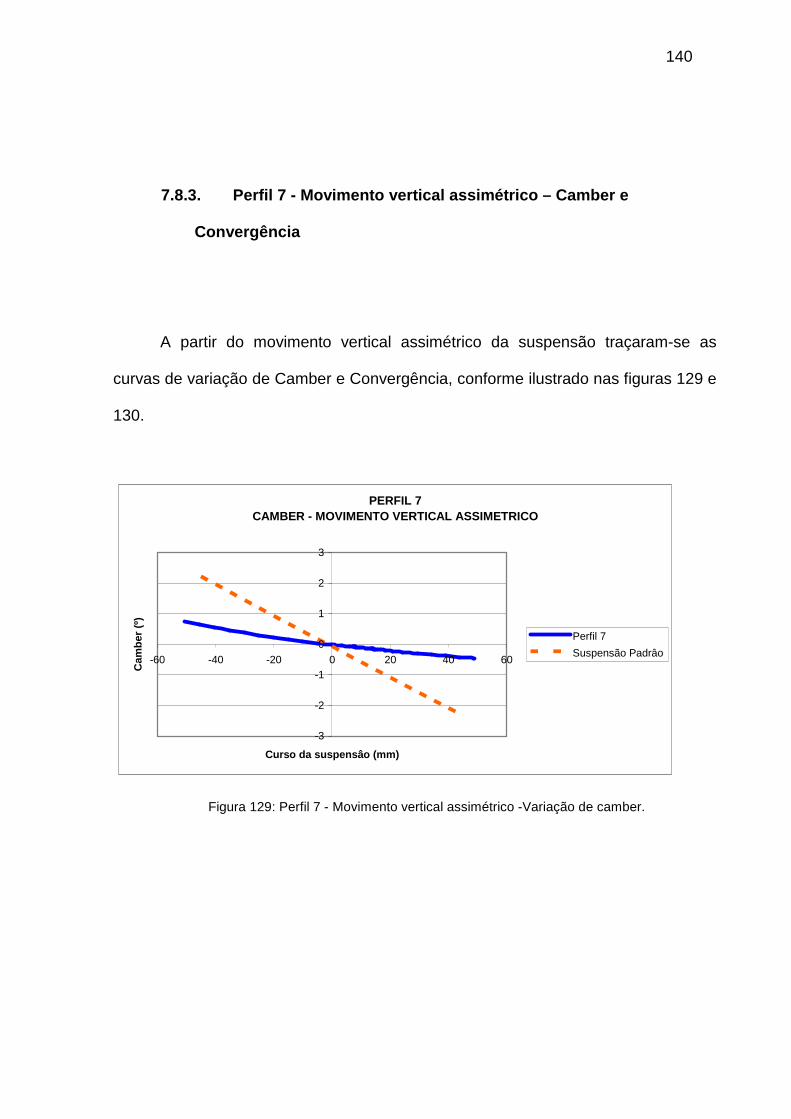
140
7.8.3. Perfil 7 - Movimento vertical assimétrico – Camber e
Convergência
A partir do movimento vertical assimétrico da suspensão traçaram-se as
curvas de variação de Camber e Convergência, conforme ilustrado nas figuras 129 e
130.
PERFIL 7 CAMBER - MOVIMENTO VERTICAL ASSIMETRICO
-3
-2
-1
0
1
2
3
-60 -40 -20 0 20 40 60
Curso da suspensâo (mm)
Cam
ber
(º)
Perfil 7
Suspensão Padrâo
Figura 129: Perfil 7 - Movimento vertical assimétrico -Variação de camber.
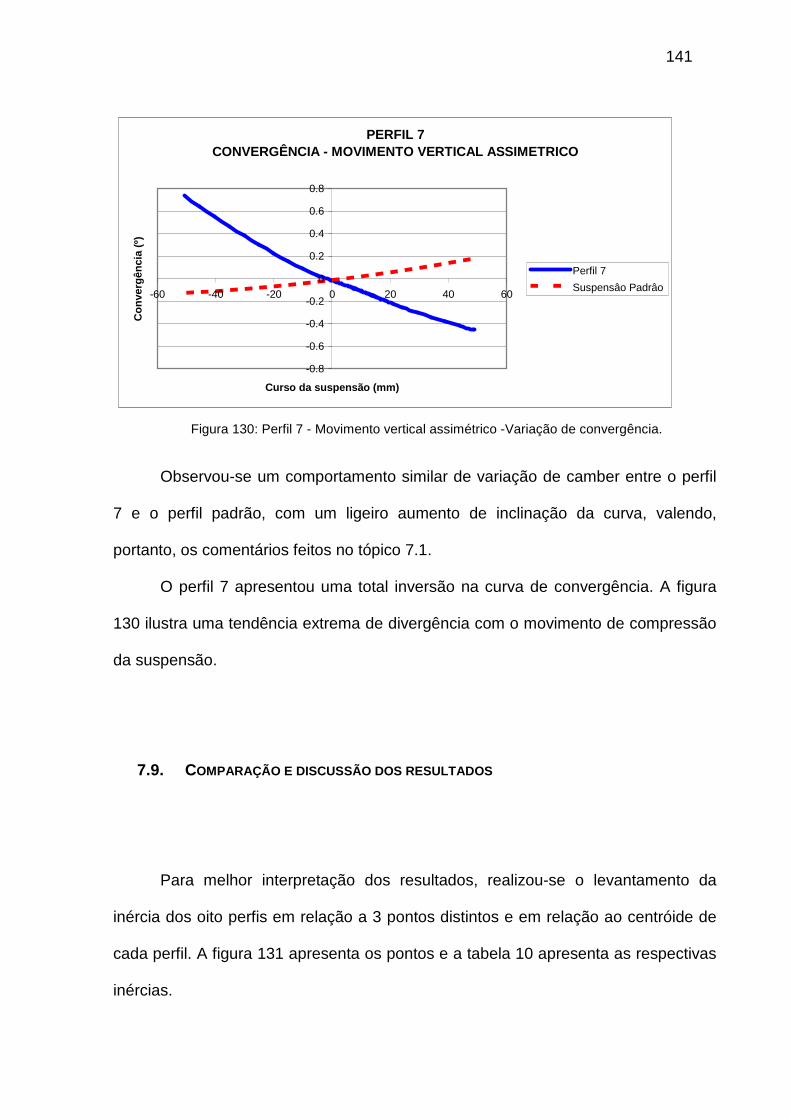
141
PERFIL 7CONVERGÊNCIA - MOVIMENTO VERTICAL ASSIMETRICO
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
-60 -40 -20 0 20 40 60
Curso da suspensão (mm)
Con
verg
ênci
a (º
)
Perfil 7
Suspensâo Padrâo
Figura 130: Perfil 7 - Movimento vertical assimétrico -Variação de convergência.
Observou-se um comportamento similar de variação de camber entre o perfil
7 e o perfil padrão, com um ligeiro aumento de inclinação da curva, valendo,
portanto, os comentários feitos no tópico 7.1.
O perfil 7 apresentou uma total inversão na curva de convergência. A figura
130 ilustra uma tendência extrema de divergência com o movimento de compressão
da suspensão.
7.9. COMPARAÇÃO E DISCUSSÃO DOS RESULTADOS
Para melhor interpretação dos resultados, realizou-se o levantamento da
inércia dos oito perfis em relação a 3 pontos distintos e em relação ao centróide de
cada perfil. A figura 131 apresenta os pontos e a tabela 10 apresenta as respectivas
inércias.
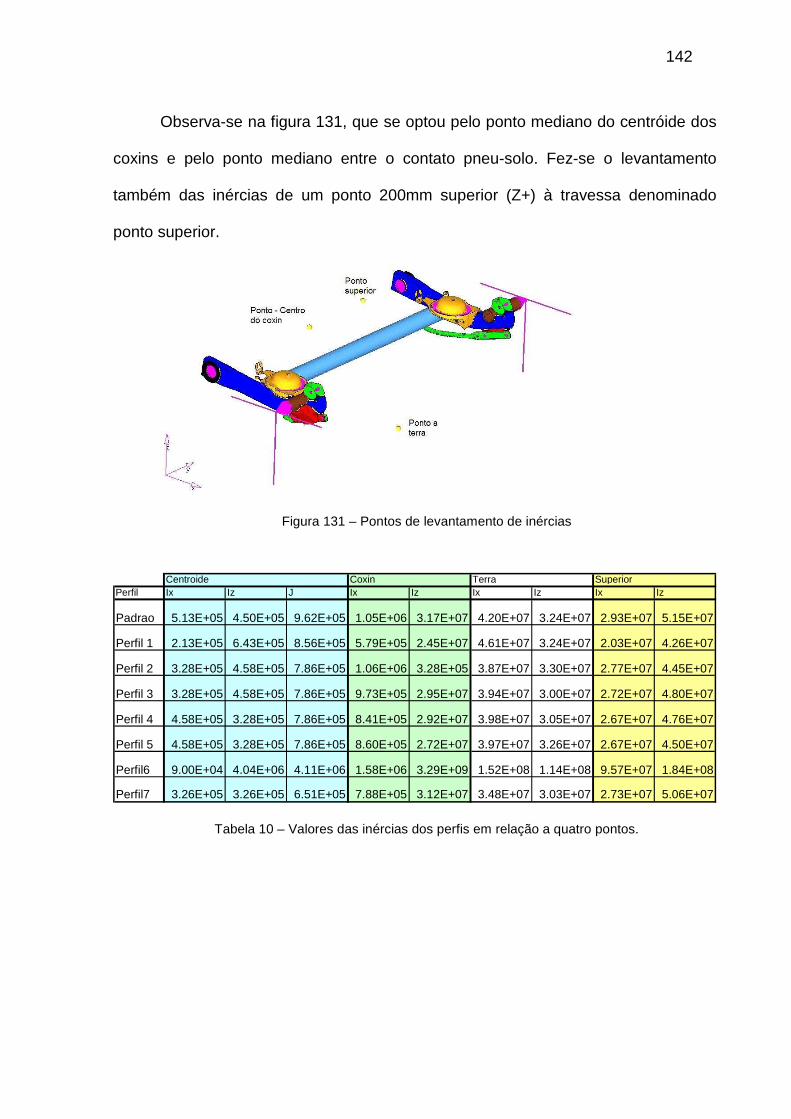
142
Observa-se na figura 131, que se optou pelo ponto mediano do centróide dos
coxins e pelo ponto mediano entre o contato pneu-solo. Fez-se o levantamento
também das inércias de um ponto 200mm superior (Z+) à travessa denominado
ponto superior.
Figura 131 – Pontos de levantamento de inércias
Centroide Coxin Terra SuperiorPerfil Ix Iz J Ix Iz Ix Iz Ix Iz
Padrao 5.13E+05 4.50E+05 9.62E+05 1.05E+06 3.17E+07 4.20E+07 3.24E+07 2.93E+07 5.15E+07
Perfil 1 2.13E+05 6.43E+05 8.56E+05 5.79E+05 2.45E+07 4.61E+07 3.24E+07 2.03E+07 4.26E+07
Perfil 2 3.28E+05 4.58E+05 7.86E+05 1.06E+06 3.28E+05 3.87E+07 3.30E+07 2.77E+07 4.45E+07
Perfil 3 3.28E+05 4.58E+05 7.86E+05 9.73E+05 2.95E+07 3.94E+07 3.00E+07 2.72E+07 4.80E+07
Perfil 4 4.58E+05 3.28E+05 7.86E+05 8.41E+05 2.92E+07 3.98E+07 3.05E+07 2.67E+07 4.76E+07
Perfil 5 4.58E+05 3.28E+05 7.86E+05 8.60E+05 2.72E+07 3.97E+07 3.26E+07 2.67E+07 4.50E+07
Perfil6 9.00E+04 4.04E+06 4.11E+06 1.58E+06 3.29E+09 1.52E+08 1.14E+08 9.57E+07 1.84E+08
Perfil7 3.26E+05 3.26E+05 6.51E+05 7.88E+05 3.12E+07 3.48E+07 3.03E+07 2.73E+07 5.06E+07
Tabela 10 – Valores das inércias dos perfis em relação a quatro pontos.
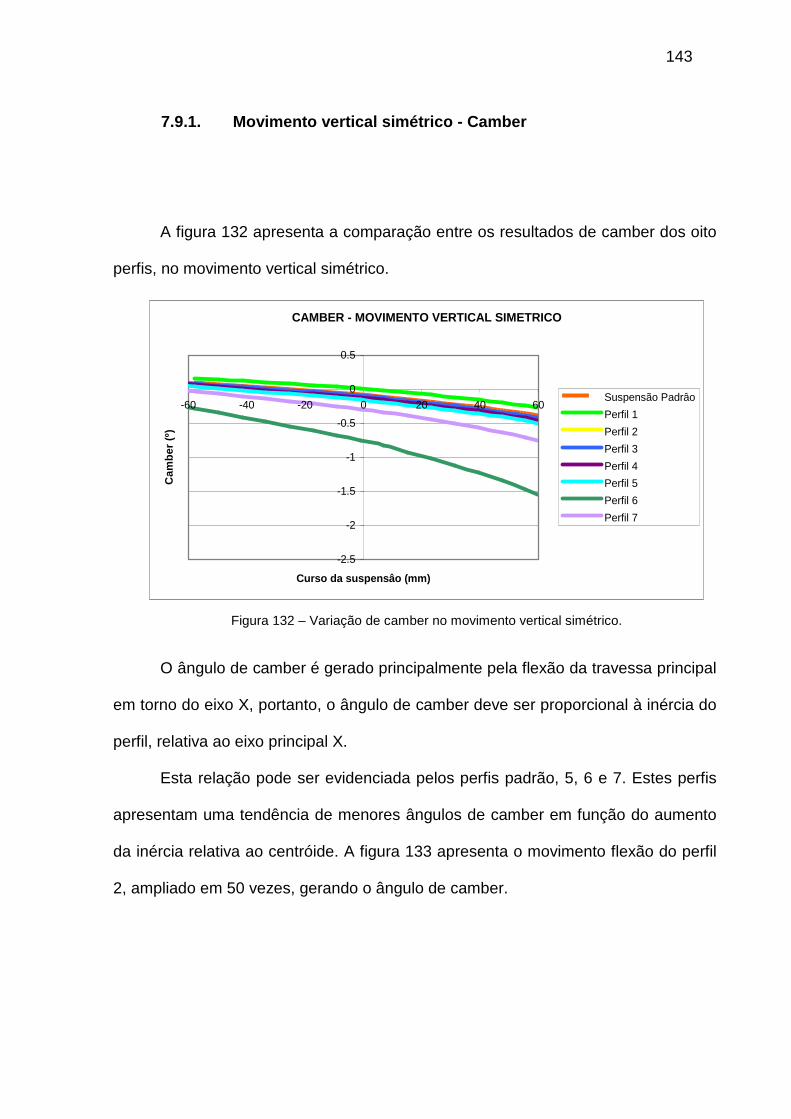
143
7.9.1. Movimento vertical simétrico - Camber
A figura 132 apresenta a comparação entre os resultados de camber dos oito
perfis, no movimento vertical simétrico.
CAMBER - MOVIMENTO VERTICAL SIMETRICO
-2.5
-2
-1.5
-1
-0.5
0
0.5
-60 -40 -20 0 20 40 60
Curso da suspensâo (mm)
Cam
ber
(º)
Suspensão Padrâo
Perfil 1
Perfil 2
Perfil 3
Perfil 4
Perfil 5
Perfil 6
Perfil 7
Figura 132 – Variação de camber no movimento vertical simétrico.
O ângulo de camber é gerado principalmente pela flexão da travessa principal
em torno do eixo X, portanto, o ângulo de camber deve ser proporcional à inércia do
perfil, relativa ao eixo principal X.
Esta relação pode ser evidenciada pelos perfis padrão, 5, 6 e 7. Estes perfis
apresentam uma tendência de menores ângulos de camber em função do aumento
da inércia relativa ao centróide. A figura 133 apresenta o movimento flexão do perfil
2, ampliado em 50 vezes, gerando o ângulo de camber.
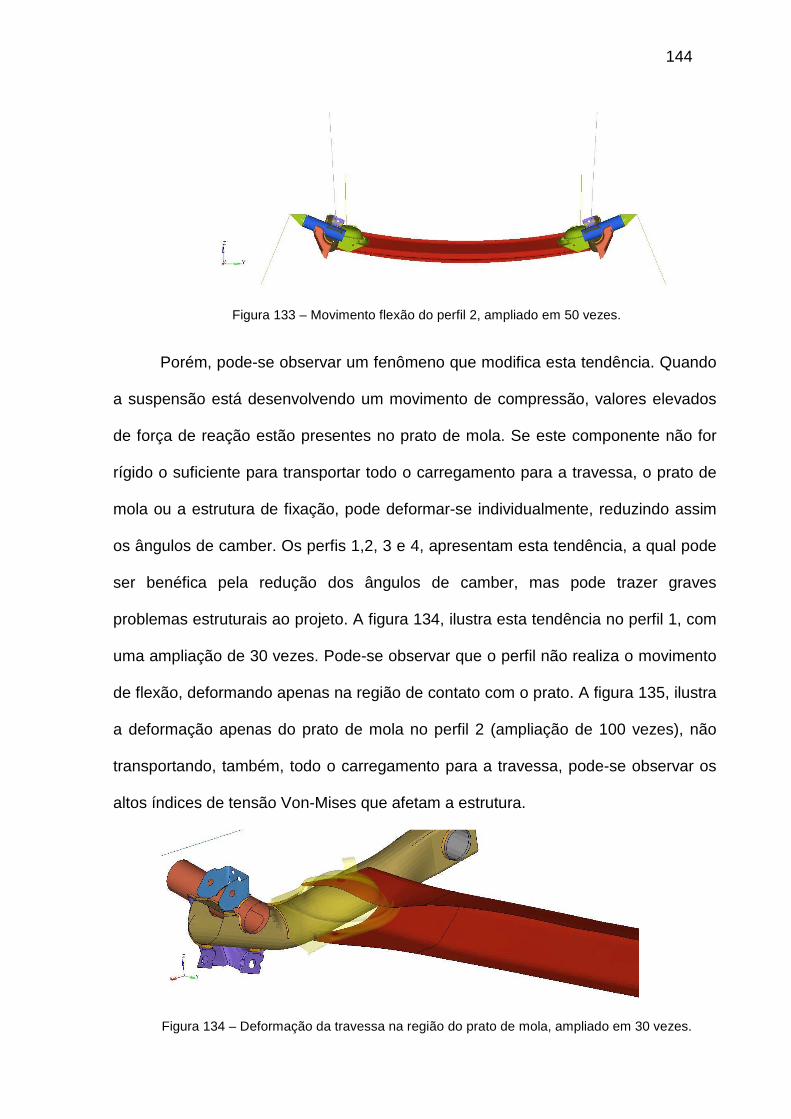
144
Figura 133 – Movimento flexão do perfil 2, ampliado em 50 vezes.
Porém, pode-se observar um fenômeno que modifica esta tendência. Quando
a suspensão está desenvolvendo um movimento de compressão, valores elevados
de força de reação estão presentes no prato de mola. Se este componente não for
rígido o suficiente para transportar todo o carregamento para a travessa, o prato de
mola ou a estrutura de fixação, pode deformar-se individualmente, reduzindo assim
os ângulos de camber. Os perfis 1,2, 3 e 4, apresentam esta tendência, a qual pode
ser benéfica pela redução dos ângulos de camber, mas pode trazer graves
problemas estruturais ao projeto. A figura 134, ilustra esta tendência no perfil 1, com
uma ampliação de 30 vezes. Pode-se observar que o perfil não realiza o movimento
de flexão, deformando apenas na região de contato com o prato. A figura 135, ilustra
a deformação apenas do prato de mola no perfil 2 (ampliação de 100 vezes), não
transportando, também, todo o carregamento para a travessa, pode-se observar os
altos índices de tensão Von-Mises que afetam a estrutura.
Figura 134 – Deformação da travessa na região do prato de mola, ampliado em 30 vezes.
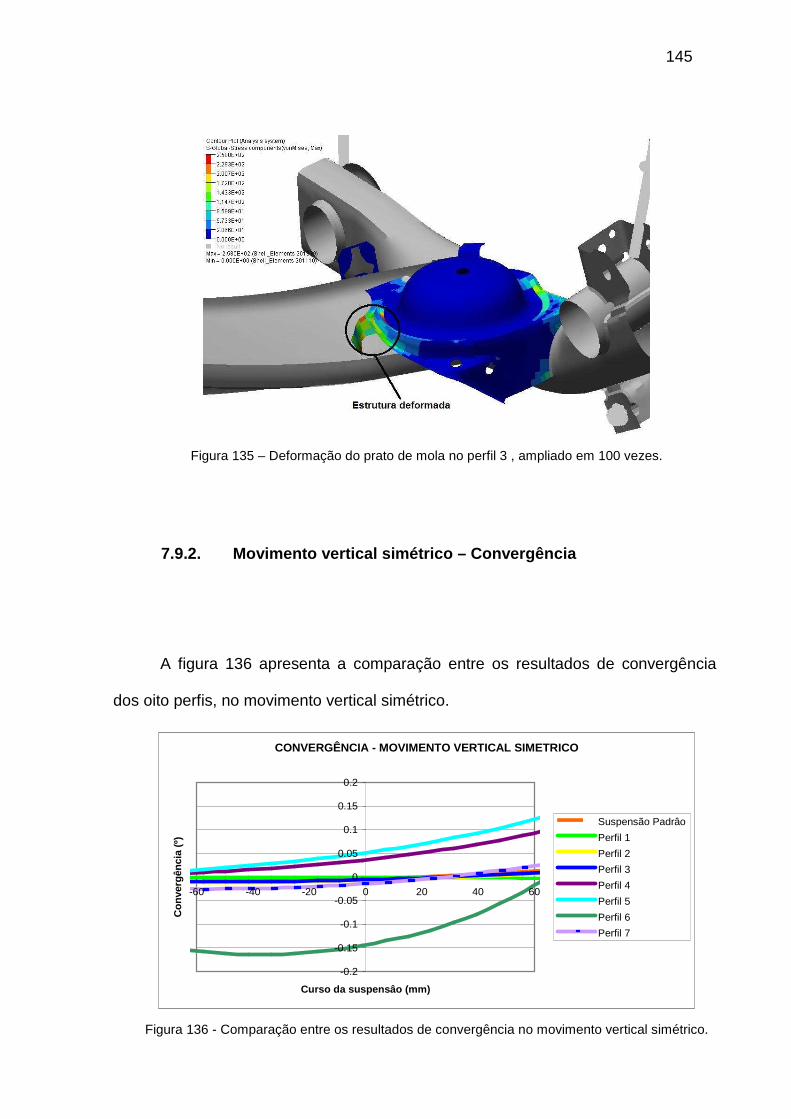
145
Figura 135 – Deformação do prato de mola no perfil 3 , ampliado em 100 vezes.
7.9.2. Movimento vertical simétrico – Convergência
A figura 136 apresenta a comparação entre os resultados de convergência
dos oito perfis, no movimento vertical simétrico.
CONVERGÊNCIA - MOVIMENTO VERTICAL SIMETRICO
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
-60 -40 -20 0 20 40 60
Curso da suspensâo (mm)
Con
verg
ênci
a (º
)
Suspensão Padrâo
Perfil 1
Perfil 2
Perfil 3
Perfil 4
Perfil 5
Perfil 6
Perfil 7
Figura 136 - Comparação entre os resultados de convergência no movimento vertical simétrico.
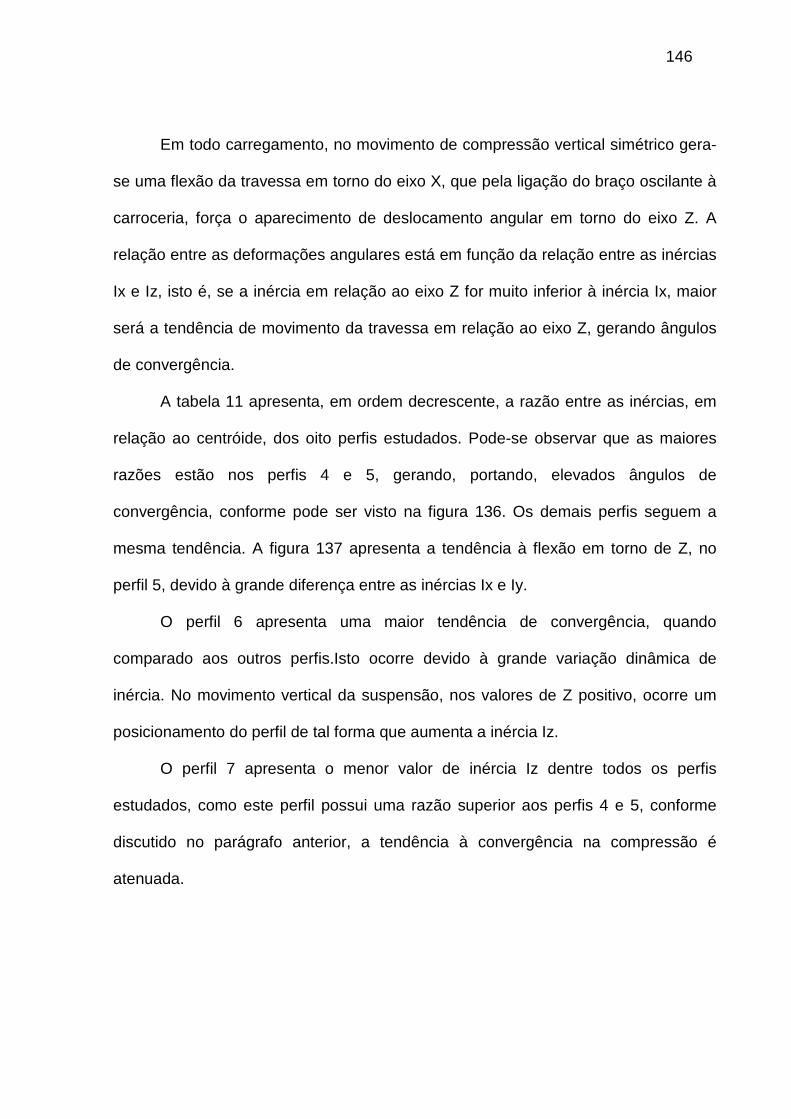
146
Em todo carregamento, no movimento de compressão vertical simétrico gera-
se uma flexão da travessa em torno do eixo X, que pela ligação do braço oscilante à
carroceria, força o aparecimento de deslocamento angular em torno do eixo Z. A
relação entre as deformações angulares está em função da relação entre as inércias
Ix e Iz, isto é, se a inércia em relação ao eixo Z for muito inferior à inércia Ix, maior
será a tendência de movimento da travessa em relação ao eixo Z, gerando ângulos
de convergência.
A tabela 11 apresenta, em ordem decrescente, a razão entre as inércias, em
relação ao centróide, dos oito perfis estudados. Pode-se observar que as maiores
razões estão nos perfis 4 e 5, gerando, portando, elevados ângulos de
convergência, conforme pode ser visto na figura 136. Os demais perfis seguem a
mesma tendência. A figura 137 apresenta a tendência à flexão em torno de Z, no
perfil 5, devido à grande diferença entre as inércias Ix e Iy.
O perfil 6 apresenta uma maior tendência de convergência, quando
comparado aos outros perfis.Isto ocorre devido à grande variação dinâmica de
inércia. No movimento vertical da suspensão, nos valores de Z positivo, ocorre um
posicionamento do perfil de tal forma que aumenta a inércia Iz.
O perfil 7 apresenta o menor valor de inércia Iz dentre todos os perfis
estudados, como este perfil possui uma razão superior aos perfis 4 e 5, conforme
discutido no parágrafo anterior, a tendência à convergência na compressão é
atenuada.
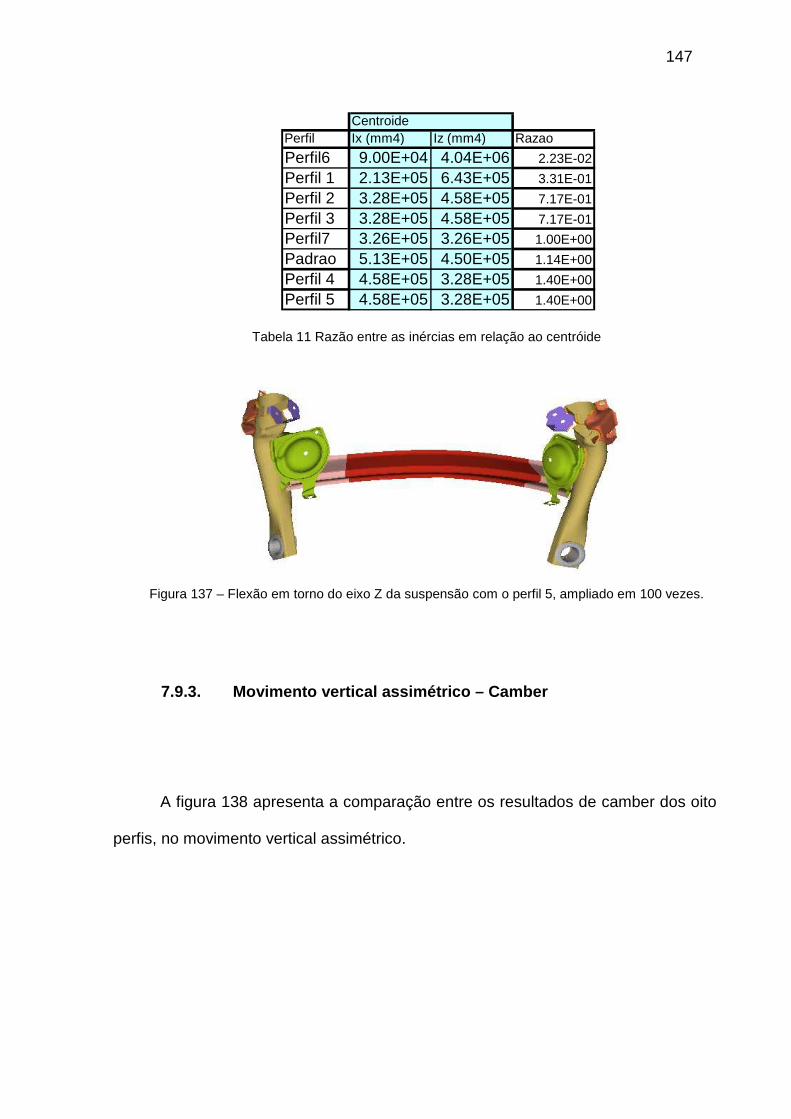
147
CentroidePerfil Ix (mm4) Iz (mm4) Razao
Perfil6 9.00E+04 4.04E+06 2.23E-02
Perfil 1 2.13E+05 6.43E+05 3.31E-01
Perfil 2 3.28E+05 4.58E+05 7.17E-01
Perfil 3 3.28E+05 4.58E+05 7.17E-01
Perfil7 3.26E+05 3.26E+05 1.00E+00
Padrao 5.13E+05 4.50E+05 1.14E+00
Perfil 4 4.58E+05 3.28E+05 1.40E+00
Perfil 5 4.58E+05 3.28E+05 1.40E+00
Tabela 11 Razão entre as inércias em relação ao centróide
Figura 137 – Flexão em torno do eixo Z da suspensão com o perfil 5, ampliado em 100 vezes.
7.9.3. Movimento vertical assimétrico – Camber
A figura 138 apresenta a comparação entre os resultados de camber dos oito
perfis, no movimento vertical assimétrico.
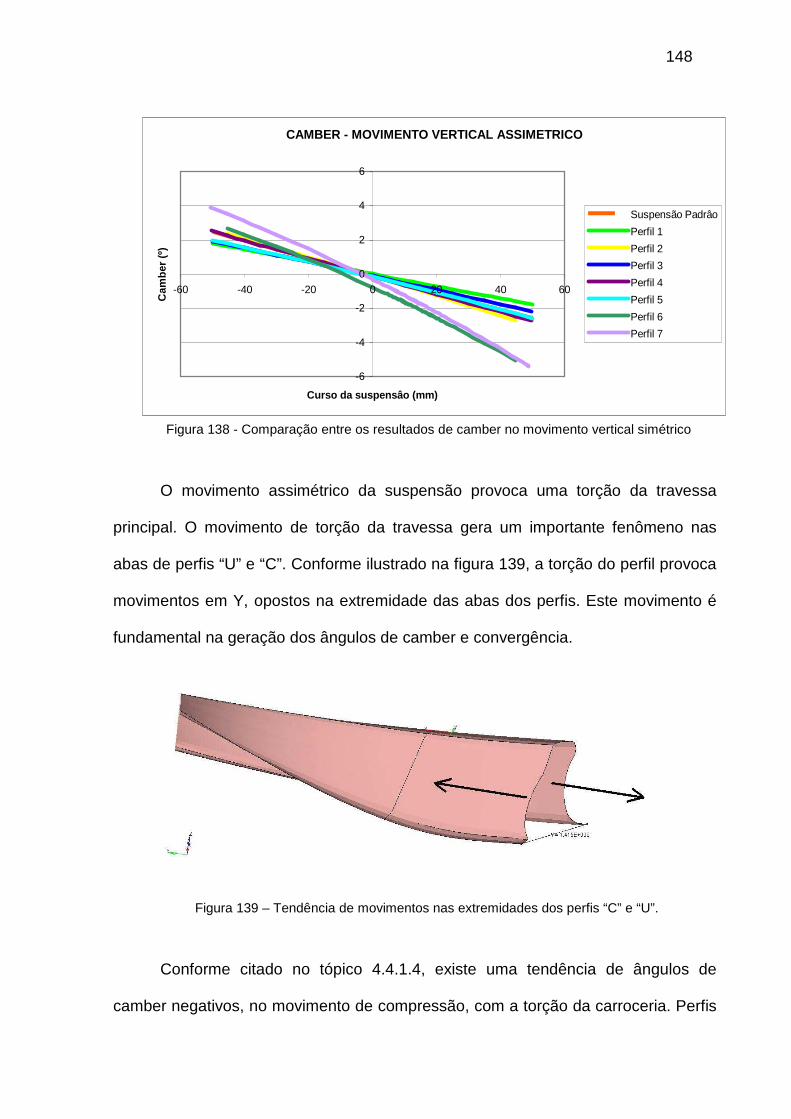
148
CAMBER - MOVIMENTO VERTICAL ASSIMETRICO
-6
-4
-2
0
2
4
6
-60 -40 -20 0 20 40 60
Curso da suspensâo (mm)
Cam
ber
(º)
Suspensão Padrâo
Perfil 1
Perfil 2
Perfil 3
Perfil 4
Perfil 5
Perfil 6
Perfil 7
Figura 138 - Comparação entre os resultados de camber no movimento vertical simétrico
O movimento assimétrico da suspensão provoca uma torção da travessa
principal. O movimento de torção da travessa gera um importante fenômeno nas
abas de perfis “U” e “C”. Conforme ilustrado na figura 139, a torção do perfil provoca
movimentos em Y, opostos na extremidade das abas dos perfis. Este movimento é
fundamental na geração dos ângulos de camber e convergência.
Figura 139 – Tendência de movimentos nas extremidades dos perfis “C” e “U”.
Conforme citado no tópico 4.4.1.4, existe uma tendência de ângulos de
camber negativos, no movimento de compressão, com a torção da carroceria. Perfis
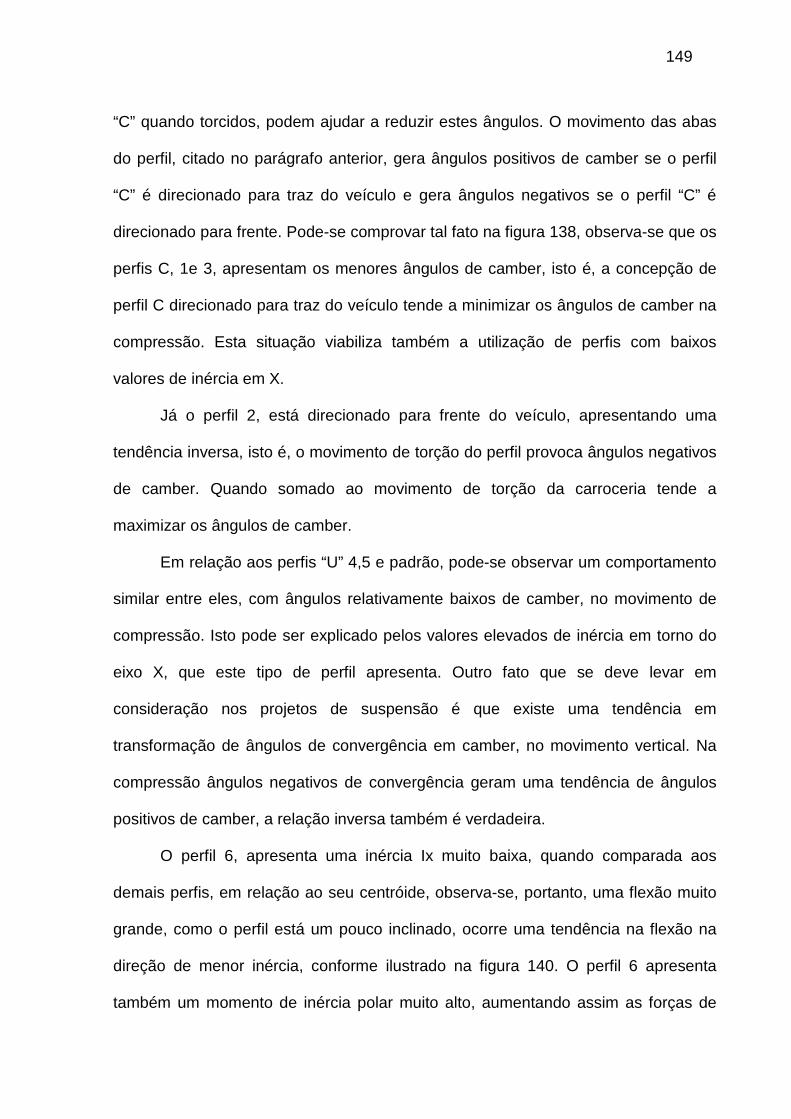
149
“C” quando torcidos, podem ajudar a reduzir estes ângulos. O movimento das abas
do perfil, citado no parágrafo anterior, gera ângulos positivos de camber se o perfil
“C” é direcionado para traz do veículo e gera ângulos negativos se o perfil “C” é
direcionado para frente. Pode-se comprovar tal fato na figura 138, observa-se que os
perfis C, 1e 3, apresentam os menores ângulos de camber, isto é, a concepção de
perfil C direcionado para traz do veículo tende a minimizar os ângulos de camber na
compressão. Esta situação viabiliza também a utilização de perfis com baixos
valores de inércia em X.
Já o perfil 2, está direcionado para frente do veículo, apresentando uma
tendência inversa, isto é, o movimento de torção do perfil provoca ângulos negativos
de camber. Quando somado ao movimento de torção da carroceria tende a
maximizar os ângulos de camber.
Em relação aos perfis “U” 4,5 e padrão, pode-se observar um comportamento
similar entre eles, com ângulos relativamente baixos de camber, no movimento de
compressão. Isto pode ser explicado pelos valores elevados de inércia em torno do
eixo X, que este tipo de perfil apresenta. Outro fato que se deve levar em
consideração nos projetos de suspensão é que existe uma tendência em
transformação de ângulos de convergência em camber, no movimento vertical. Na
compressão ângulos negativos de convergência geram uma tendência de ângulos
positivos de camber, a relação inversa também é verdadeira.
O perfil 6, apresenta uma inércia Ix muito baixa, quando comparada aos
demais perfis, em relação ao seu centróide, observa-se, portanto, uma flexão muito
grande, como o perfil está um pouco inclinado, ocorre uma tendência na flexão na
direção de menor inércia, conforme ilustrado na figura 140. O perfil 6 apresenta
também um momento de inércia polar muito alto, aumentando assim as forças de

150
reação a terra, elevando por fim as deformações nos braços oscilantes, contribuindo
também para a elevação dos ângulos de camber. É importante observar que valores
de inércia polar muito elevados, podem inviabilizar o projeto, pois deve existir uma
relação entre a força de reação a terra (R) e o curso vertical da suspensão.
Figura 140 – Flexão do perfil 6
O perfil 7, na torção tem o comportamento similar a perfis C, da maneira a
qual o perfil foi conectado ao braço, ocorre uma tendência a ângulos positivos de
camber na compressão. A figura 141 apresenta o perfil circular torcido, com a escala
Y aumentada em 20 vezes. Pode-se observar que ocorre uma tendência de
avançamento na aba inferior da conexão do perfil, gerando uma rotação do braço
chegando-se, por fim, a elevados ângulos de camber. Outro fator que contribui para
o aumento do ângulo de camber é a baixa inércia do perfil Ix em relação ao seu
centróide.
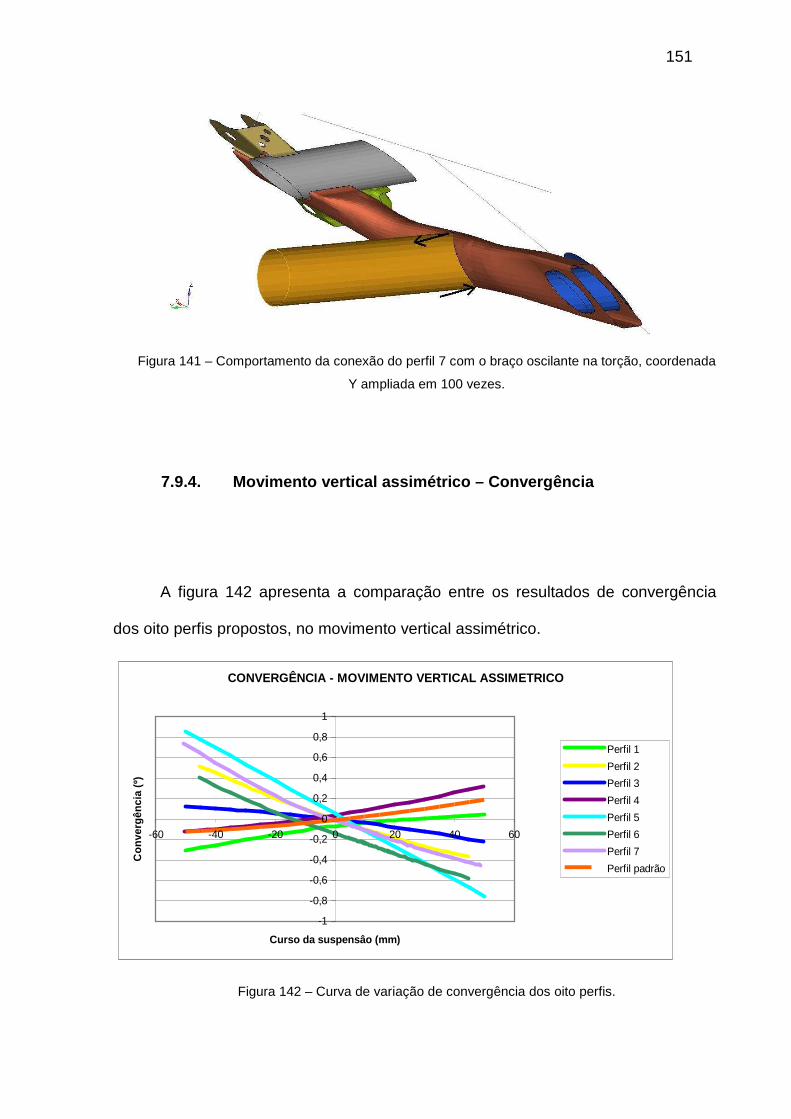
151
Figura 141 – Comportamento da conexão do perfil 7 com o braço oscilante na torção, coordenada
Y ampliada em 100 vezes.
7.9.4. Movimento vertical assimétrico – Convergênci a
A figura 142 apresenta a comparação entre os resultados de convergência
dos oito perfis propostos, no movimento vertical assimétrico.
CONVERGÊNCIA - MOVIMENTO VERTICAL ASSIMETRICO
-1
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
1
-60 -40 -20 0 20 40 60
Curso da suspensâo (mm)
Con
verg
ênci
a (º
)
Perfil 1
Perfil 2
Perfil 3
Perfil 4
Perfil 5
Perfil 6
Perfil 7
Perfil padrão
Figura 142 – Curva de variação de convergência dos oito perfis.
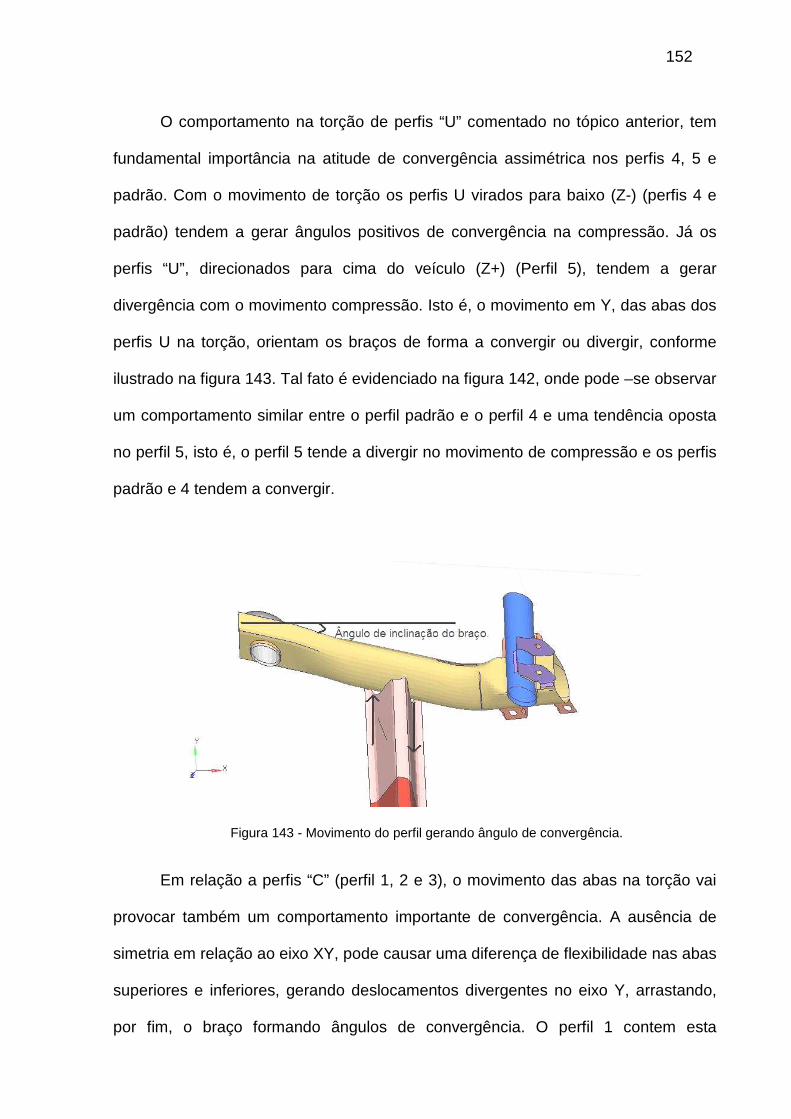
152
O comportamento na torção de perfis “U” comentado no tópico anterior, tem
fundamental importância na atitude de convergência assimétrica nos perfis 4, 5 e
padrão. Com o movimento de torção os perfis U virados para baixo (Z-) (perfis 4 e
padrão) tendem a gerar ângulos positivos de convergência na compressão. Já os
perfis “U”, direcionados para cima do veículo (Z+) (Perfil 5), tendem a gerar
divergência com o movimento compressão. Isto é, o movimento em Y, das abas dos
perfis U na torção, orientam os braços de forma a convergir ou divergir, conforme
ilustrado na figura 143. Tal fato é evidenciado na figura 142, onde pode –se observar
um comportamento similar entre o perfil padrão e o perfil 4 e uma tendência oposta
no perfil 5, isto é, o perfil 5 tende a divergir no movimento de compressão e os perfis
padrão e 4 tendem a convergir.
Figura 143 - Movimento do perfil gerando ângulo de convergência.
Em relação a perfis “C” (perfil 1, 2 e 3), o movimento das abas na torção vai
provocar também um comportamento importante de convergência. A ausência de
simetria em relação ao eixo XY, pode causar uma diferença de flexibilidade nas abas
superiores e inferiores, gerando deslocamentos divergentes no eixo Y, arrastando,
por fim, o braço formando ângulos de convergência. O perfil 1 contem esta
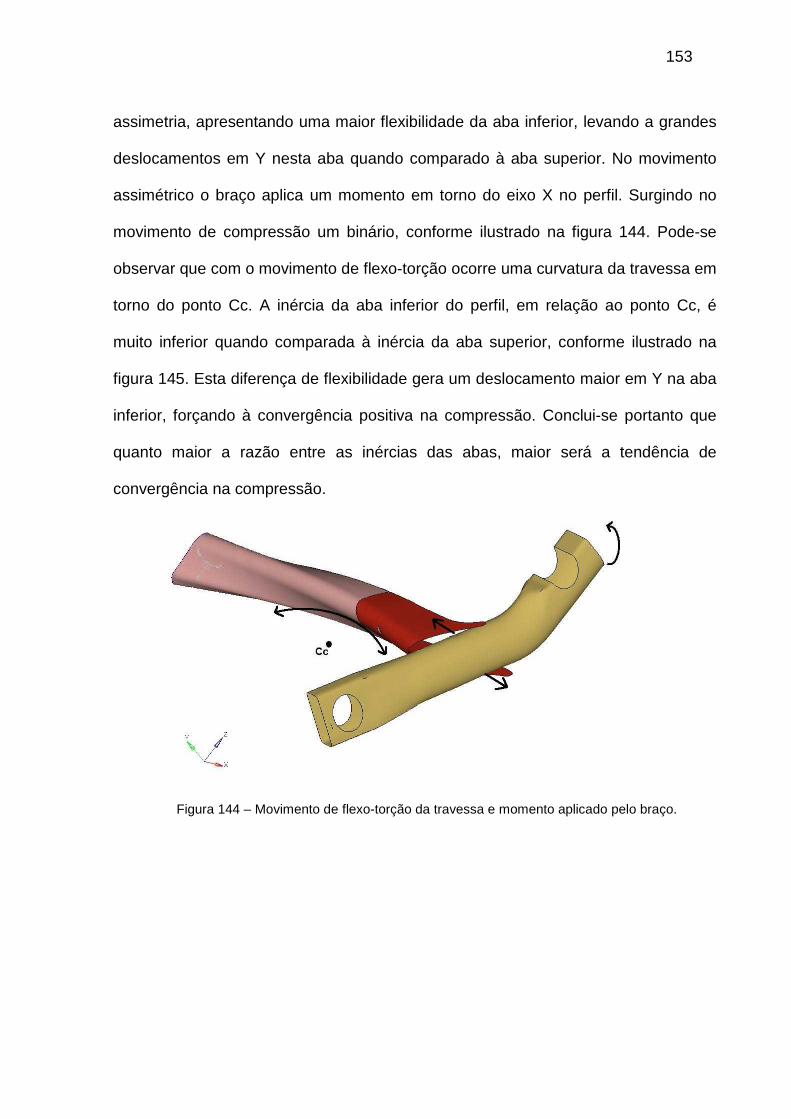
153
assimetria, apresentando uma maior flexibilidade da aba inferior, levando a grandes
deslocamentos em Y nesta aba quando comparado à aba superior. No movimento
assimétrico o braço aplica um momento em torno do eixo X no perfil. Surgindo no
movimento de compressão um binário, conforme ilustrado na figura 144. Pode-se
observar que com o movimento de flexo-torção ocorre uma curvatura da travessa em
torno do ponto Cc. A inércia da aba inferior do perfil, em relação ao ponto Cc, é
muito inferior quando comparada à inércia da aba superior, conforme ilustrado na
figura 145. Esta diferença de flexibilidade gera um deslocamento maior em Y na aba
inferior, forçando à convergência positiva na compressão. Conclui-se portanto que
quanto maior a razão entre as inércias das abas, maior será a tendência de
convergência na compressão.
Figura 144 – Movimento de flexo-torção da travessa e momento aplicado pelo braço.
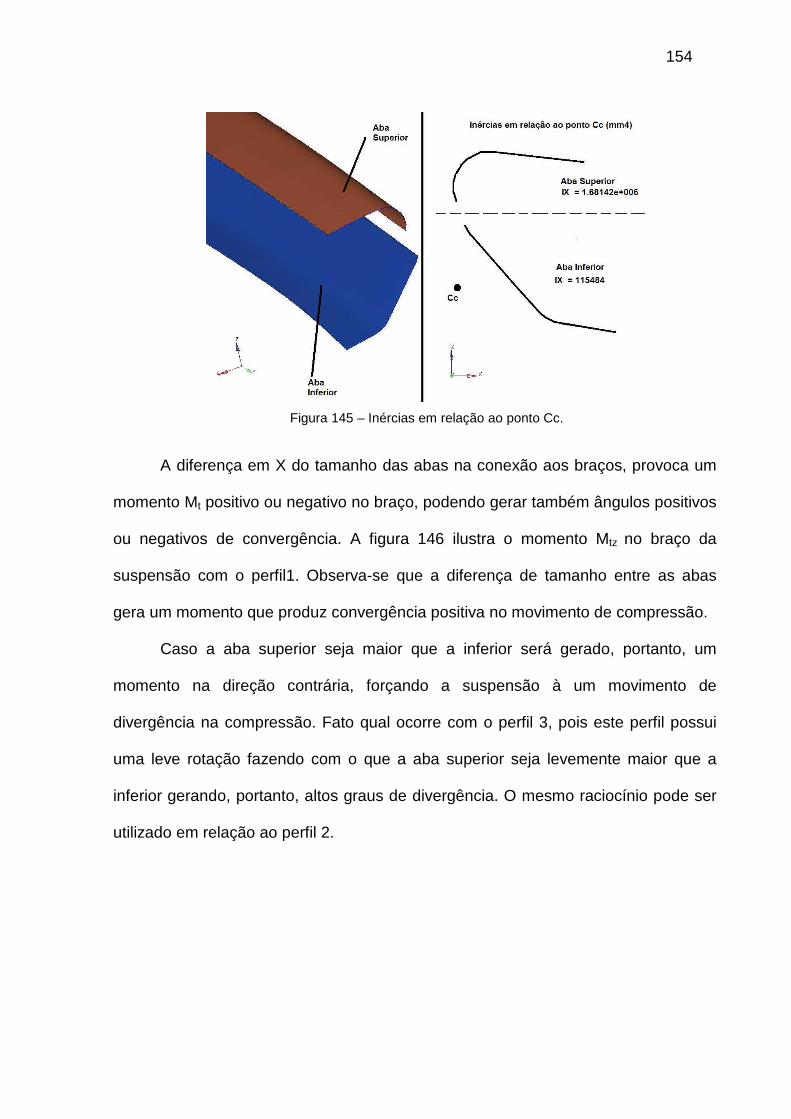
154
Figura 145 – Inércias em relação ao ponto Cc.
A diferença em X do tamanho das abas na conexão aos braços, provoca um
momento Mt positivo ou negativo no braço, podendo gerar também ângulos positivos
ou negativos de convergência. A figura 146 ilustra o momento Mtz no braço da
suspensão com o perfil1. Observa-se que a diferença de tamanho entre as abas
gera um momento que produz convergência positiva no movimento de compressão.
Caso a aba superior seja maior que a inferior será gerado, portanto, um
momento na direção contrária, forçando a suspensão à um movimento de
divergência na compressão. Fato qual ocorre com o perfil 3, pois este perfil possui
uma leve rotação fazendo com o que a aba superior seja levemente maior que a
inferior gerando, portanto, altos graus de divergência. O mesmo raciocínio pode ser
utilizado em relação ao perfil 2.
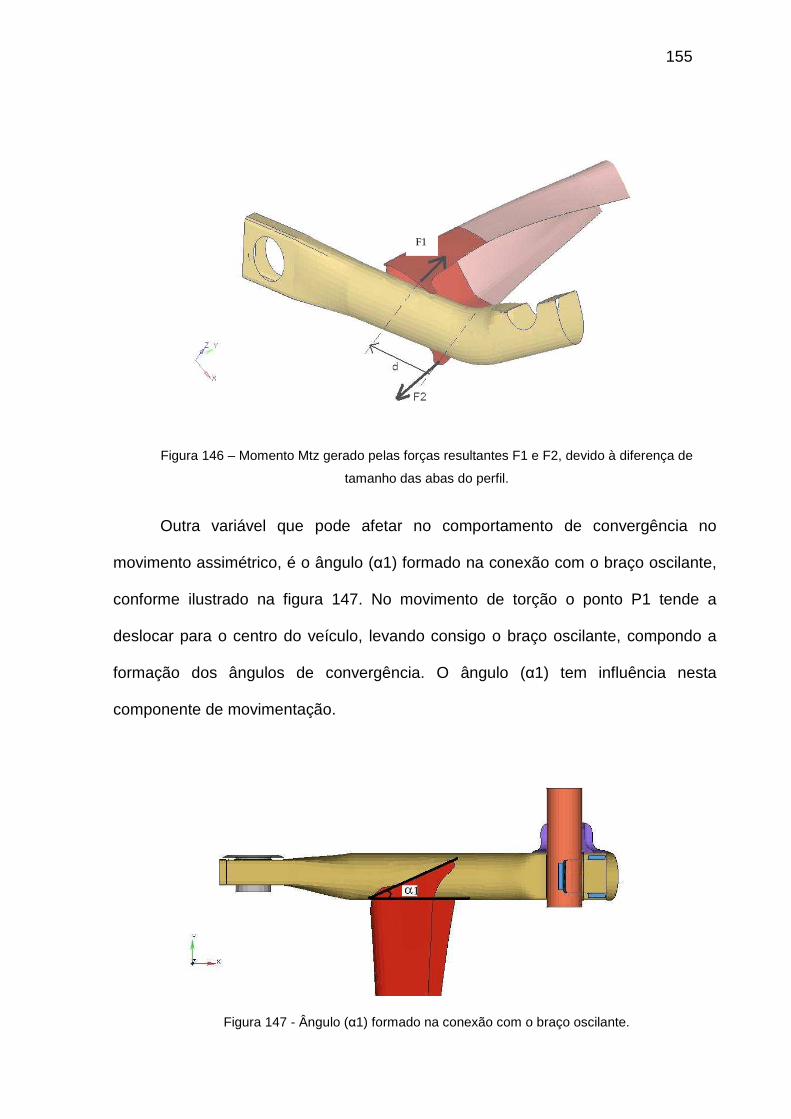
155
Figura 146 – Momento Mtz gerado pelas forças resultantes F1 e F2, devido à diferença de
tamanho das abas do perfil.
Outra variável que pode afetar no comportamento de convergência no
movimento assimétrico, é o ângulo (α1) formado na conexão com o braço oscilante,
conforme ilustrado na figura 147. No movimento de torção o ponto P1 tende a
deslocar para o centro do veículo, levando consigo o braço oscilante, compondo a
formação dos ângulos de convergência. O ângulo (α1) tem influência nesta
componente de movimentação.
Figura 147 - Ângulo (α1) formado na conexão com o braço oscilante.
1
F1
156
O perfil 6, devido à sua geometria, possui uma inércia muito baixa em uma
direção, quando o perfil torce este tende a reduzir Iz e aumentar Ix. Justificando,
portanto, a divergência na compressão.
Os perfis 6 e 7, apresentam ângulos de camber muito elevados, no
movimento de rotação da suspensão, quanto maior o ângulo de camber maior a
componente de força na direção Y, aumentando, portanto, o momento em torno do
eixo Z que causa divergência. O perfil 6 não tem um valor elevado de Iz, gera-se,
portanto, divergência na compressão.
7.9.5. Centro de giro
a) Variação assimétrica de camber
A figura 148 apresenta a curva de variação de bitola, relativa aos oito perfis
estudados. A tabela 12 apresenta a altura do centro de giro de cada perfil em ordem
crescente.
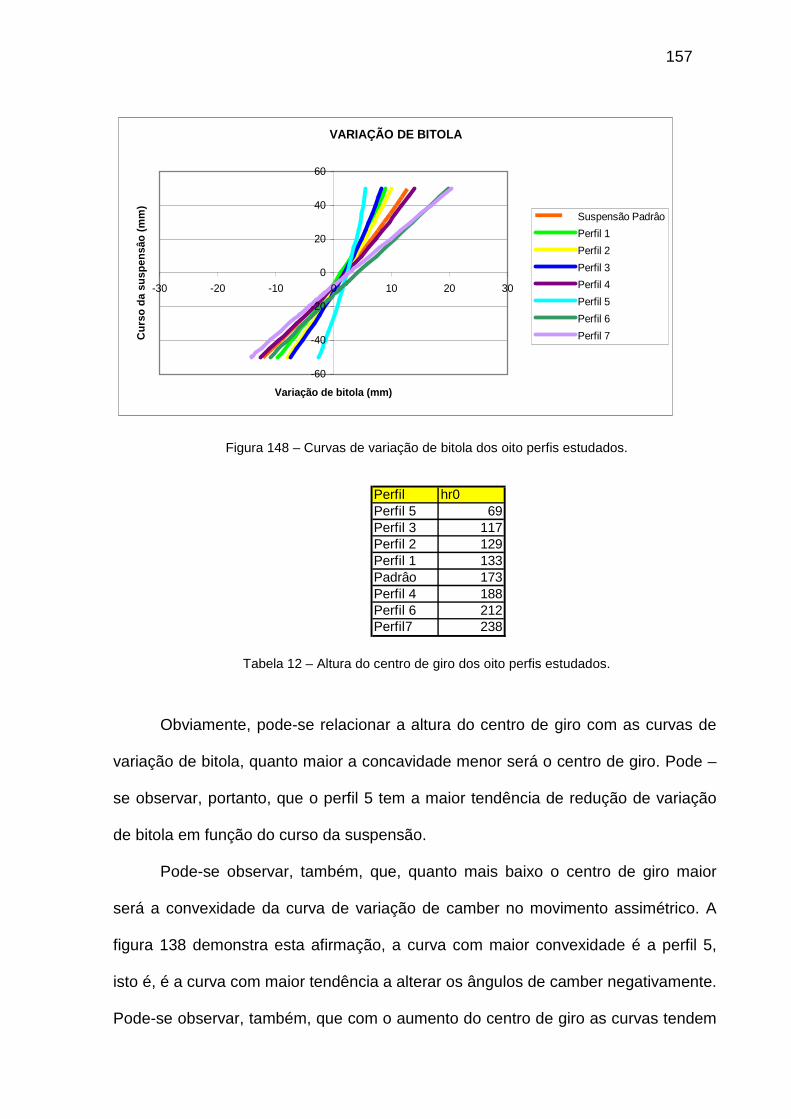
157
VARIAÇÃO DE BITOLA
-60
-40
-20
0
20
40
60
-30 -20 -10 0 10 20 30
Variação de bitola (mm)
Cur
so d
a su
spen
sâo
(mm
) Suspensão Padrâo
Perfil 1
Perfil 2
Perfil 3
Perfil 4
Perfil 5
Perfil 6
Perfil 7
Figura 148 – Curvas de variação de bitola dos oito perfis estudados.
Perfil hr0Perfil 5 69Perfil 3 117Perfil 2 129Perfil 1 133Padrâo 173Perfil 4 188Perfil 6 212Perfil7 238
Tabela 12 – Altura do centro de giro dos oito perfis estudados.
Obviamente, pode-se relacionar a altura do centro de giro com as curvas de
variação de bitola, quanto maior a concavidade menor será o centro de giro. Pode –
se observar, portanto, que o perfil 5 tem a maior tendência de redução de variação
de bitola em função do curso da suspensão.
Pode-se observar, também, que, quanto mais baixo o centro de giro maior
será a convexidade da curva de variação de camber no movimento assimétrico. A
figura 138 demonstra esta afirmação, a curva com maior convexidade é a perfil 5,
isto é, é a curva com maior tendência a alterar os ângulos de camber negativamente.
Pode-se observar, também, que com o aumento do centro de giro as curvas tendem
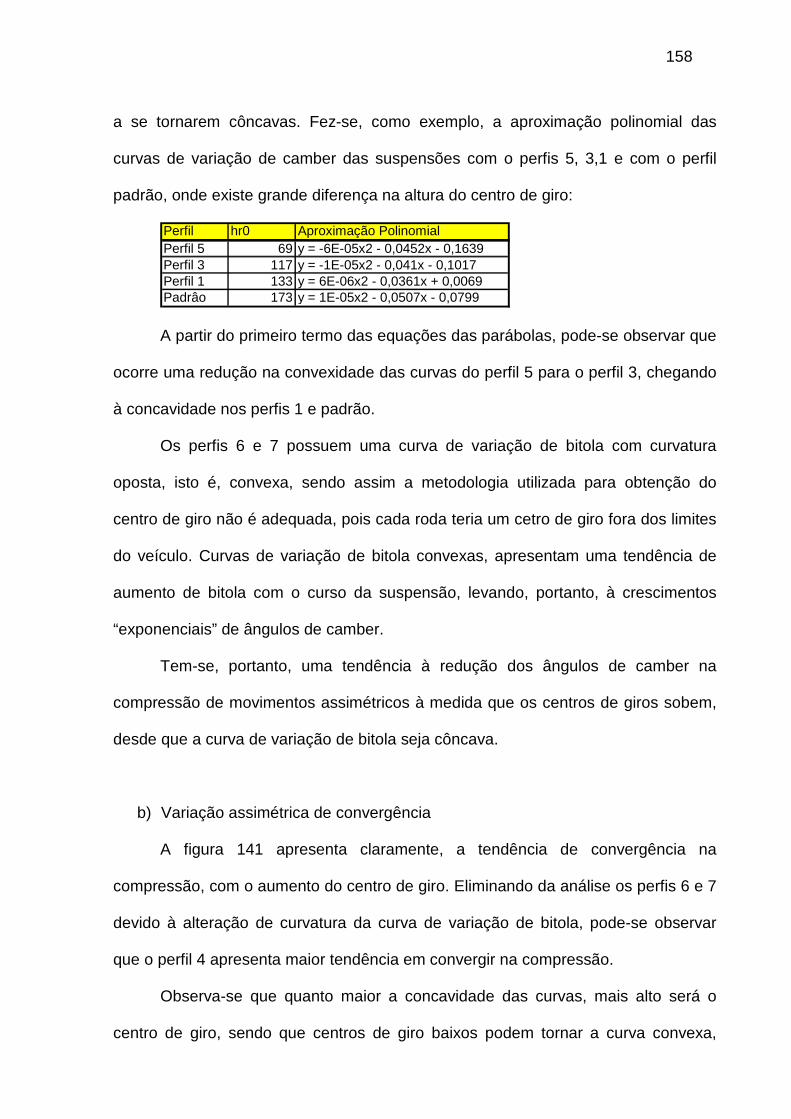
158
a se tornarem côncavas. Fez-se, como exemplo, a aproximação polinomial das
curvas de variação de camber das suspensões com o perfis 5, 3,1 e com o perfil
padrão, onde existe grande diferença na altura do centro de giro:
Perfil hr0 Aproximação PolinomialPerfil 5 69 y = -6E-05x2 - 0,0452x - 0,1639Perfil 3 117 y = -1E-05x2 - 0,041x - 0,1017Perfil 1 133 y = 6E-06x2 - 0,0361x + 0,0069Padrâo 173 y = 1E-05x2 - 0,0507x - 0,0799
A partir do primeiro termo das equações das parábolas, pode-se observar que
ocorre uma redução na convexidade das curvas do perfil 5 para o perfil 3, chegando
à concavidade nos perfis 1 e padrão.
Os perfis 6 e 7 possuem uma curva de variação de bitola com curvatura
oposta, isto é, convexa, sendo assim a metodologia utilizada para obtenção do
centro de giro não é adequada, pois cada roda teria um cetro de giro fora dos limites
do veículo. Curvas de variação de bitola convexas, apresentam uma tendência de
aumento de bitola com o curso da suspensão, levando, portanto, à crescimentos
“exponenciais” de ângulos de camber.
Tem-se, portanto, uma tendência à redução dos ângulos de camber na
compressão de movimentos assimétricos à medida que os centros de giros sobem,
desde que a curva de variação de bitola seja côncava.
b) Variação assimétrica de convergência
A figura 141 apresenta claramente, a tendência de convergência na
compressão, com o aumento do centro de giro. Eliminando da análise os perfis 6 e 7
devido à alteração de curvatura da curva de variação de bitola, pode-se observar
que o perfil 4 apresenta maior tendência em convergir na compressão.
Observa-se que quanto maior a concavidade das curvas, mais alto será o
centro de giro, sendo que centros de giro baixos podem tornar a curva convexa,
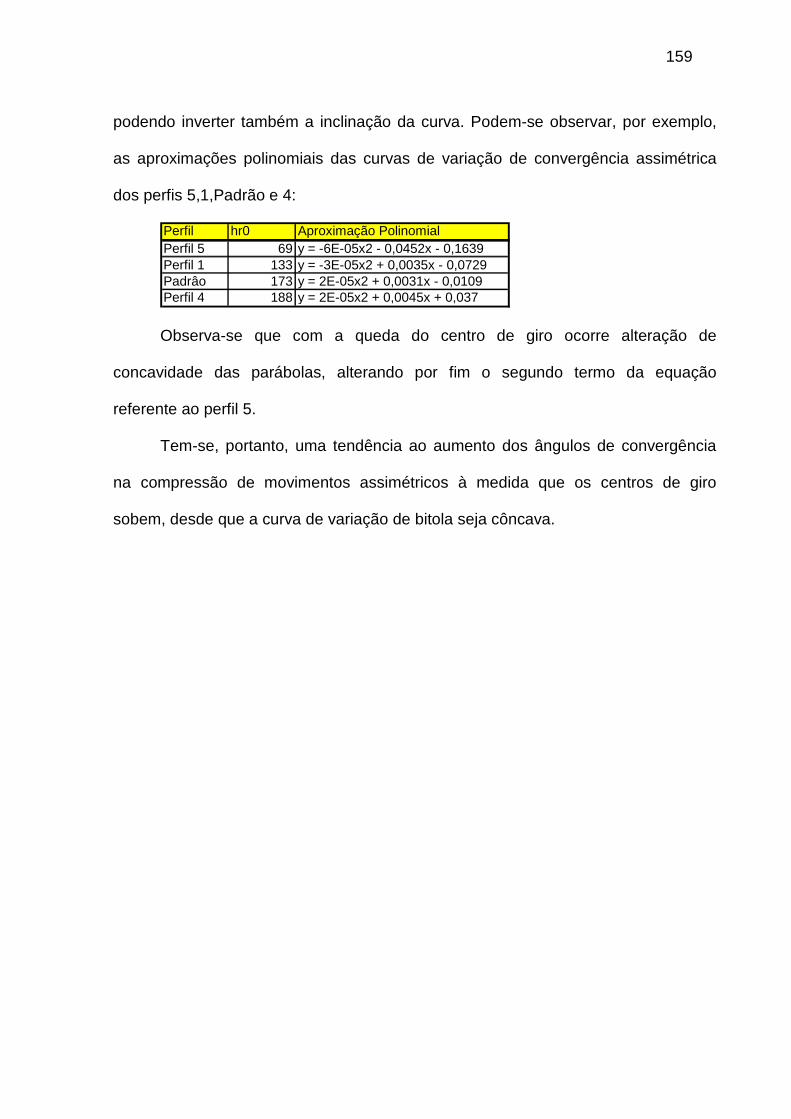
159
podendo inverter também a inclinação da curva. Podem-se observar, por exemplo,
as aproximações polinomiais das curvas de variação de convergência assimétrica
dos perfis 5,1,Padrão e 4:
Perfil hr0 Aproximação PolinomialPerfil 5 69 y = -6E-05x2 - 0,0452x - 0,1639Perfil 1 133 y = -3E-05x2 + 0,0035x - 0,0729Padrâo 173 y = 2E-05x2 + 0,0031x - 0,0109Perfil 4 188 y = 2E-05x2 + 0,0045x + 0,037
Observa-se que com a queda do centro de giro ocorre alteração de
concavidade das parábolas, alterando por fim o segundo termo da equação
referente ao perfil 5.
Tem-se, portanto, uma tendência ao aumento dos ângulos de convergência
na compressão de movimentos assimétricos à medida que os centros de giro
sobem, desde que a curva de variação de bitola seja côncava.
160
8. CONCLUSÕES
O comportamento cinemático de suspensões automotivas é fundamental na
atitude do veículo na realização de manobras diversas. Na fase de projeto de
veículos é essencial realizar o levantamento da posição das rodas em todo o curso
da suspensão, analisando cada manobra individualmente.
Em suspensões do tipo eixo de torção, é fundamental a realização de
análises cinemáticas na concepção do projeto. Os movimentos de flexo-torção, da
travessa principal, ditam o comportamento cinemático da suspensão, alterando
profundamente a atitude do veículo em manobras. Portanto, neste tipo de
suspensão, os movimentos simétricos, provocando flexão pura da travessa e os
movimentos assimétricos, gerando torção da travessa, são essenciais na
caracterização cinemática da suspensão.
A metodologia apresentada para a realização das manobras
elastocinemáticas, supracitadas, apresentou-se adequada. Pôde-se observar que o
modelo em elementos finitos apresentou comportamentos semelhantes aos
resultados encontrados nas provas experimentais. Observou-se, portanto, um
comportamento de variação de camber e convergência em função do curso da
suspensão similar entre o modelo em elementos finitos e as respostas
experimentais. Conclui-se que o modelo desenvolvido é capaz de perceber, de
forma adequada, variações de comportamento de camber e convergência, em
função da alteração do perfil da travessa principal.
Conforme analisado no tópico 7.9, deste trabalho, podem-se observar
grandes variações cinemáticas em função da alteração do perfil da travessa. Existe
161
uma grande sensibilidade, das curvas de camber e convergência devido à pequenas
alterações no perfil da travessa. Podem-se citar:
a) Movimento vertical simétrico – Camber
Pôde-se observar, principalmente, que duas variáveis afetam os ângulos de
camber em movimentos simétricos da suspensão:
1 – Inércia da travessa (Ix):
Conforme discutido no tópico 7.9.1, os perfis apresentam uma tendência
de menores ângulos de camber em função do aumento da inércia relativa
ao centróide do perfil.
2 – Rigidez de apoio à mola:
Pôde-se observar que, devido aos altos valores de força de reação
presentes na estrutura de fixação da mola, podem ocorrer deformações
desta estrutura individualmente, reduzindo assim os ângulos de camber.
Podendo, inclusive, alterar a tendência discutida no item 1.
b) Movimento vertical simétrico – Convergência
Pôde-se concluir que a principal variável causadora de convergência, em
movimentos simétricos, é a relação entre os momentos de inércia Iz e Ix em relação
ao centróide dos perfis. Quanto menor for a inércia Iz em relação à inércia Ix, maior
será o movimento da travessa em relação ao eixo Z, gerando ângulos de
convergência, conforme discutido no tópico 7.9.2.
Perfis com baixa inércia Iz, tendem a apresentar maiores ângulos de
convergência.
c) Movimento vertical assimétrico – Camber
162
No movimento de torção do perfil, é possível concluir que algumas variáveis
afetam o comportamento de camber da suspensão, conforme discutido no tópico
7.9.3, podem-se citar:
1 – Movimento das abas de perfis “C”:
Conforme ilustrado na figura 139, a torção do perfil C provoca movimentos
em Y, opostos na extremidade das abas extremas. Este movimento reduz
a tendência a ângulos negativos de camber, com o giro da carroceria,
quando o perfil está “direcionado” para X positivo, ou seja, para traz do
veículo. Esta situação viabiliza a utilização de perfis com baixos valores de
inércia em X.
Caso o perfil C seja direcionado para frente do veículo, induzirá o efeito
contrário, maximizando os ângulos de camber.
2 – Momento de Inércia (Ix) da travessa :
Pôde-se concluir que valores de inércia (Ix) muito baixos, gera altos
ângulos de camber. É importante avaliar a variação de inércia Ix em
função da torção do perfil, pois, com a deformação do perfil, pode ocorrer
uma alteração nos valores de inércia Ix e Iz.
3 – Momento de Inércia Polar (J) da travessa:
Momentos de inércia polar elevados podem sobrecarregar o braço
oscilante, forçando-o a deformar. Tal fato gera elevados valores de
camber negativo.
d) Movimento vertical assimétrico – Convergência
A variação da convergência no movimento de torção da travessa mostrou-se
como um fenômeno complexo. Conforme discutido no tópico, 7.9.3, várias variáveis
afetam tal comportamento:
163
1 – Movimento das abas de perfis “U”:
Perfis U virados para baixo (Z-) tendem a gerar ângulos positivos de
convergência na compressão. Já os perfis “U”, direcionados para cima do
veículo (Z+) tendem a gerar divergência com o movimento de compressão
da suspensão. Tal fato ocorre devido aos movimentos em Y, opostos na
extremidade das abas extremas, gerado devido à torção do perfil.
2 – Assimetria das abas de perfis “C”:
Perfis “C” assimétricos, em relação ao eixo XY, causam uma diferença de
flexibilidade nas abas superiores e inferiores, gerando deslocamentos
divergentes no eixo Y, no movimento de flexo-torção da travessa.
Conforme discutido no tópico 7.9.4, quanto maior for a razão de
flexibilidades da aba inferior pela superior, maior será a tendência de
convergência na compressão.
3 – Relação entre os tamanhos das abas dos perfis “C” :
Conforme ilustrado na figura 146, a diferença de tamanho entre as abas
gera um momento que direcionará o braço em um movimento de
convergência ou divergência na compressão.
4 – Ângulo de conexão de perfis C ao braço oscilante:
Conforme ilustrado na figura 147, o ângulo (α1) tem uma pequena parcela
na composição do ângulo de camber, influenciando na movimentação em
Y, no vértice de perfis C.
5 – Variação dinâmica de inércia Iz:
É importante avaliar a variação de inércia Iz em função da torção do perfil,
pois, com a deformação do perfil, pode ocorrer uma alteração nos valores
164
de inércia Ix e Iz. Valores baixos de Iz provocam maiores variações de
convergência.
6 – Componente de força na direção Y:
Quanto maior o ângulo de camber maior será a componente de força Y a
terra, isto é, maior será o carregamento em Y o qual provoca
convergência.
Pode-se concluir, por fim, que o centro de giro da suspensão tem uma relação
com o comportamento das curvas de camber e convergência no movimento
assimétrico, podem-se citar:
1 – Camber:
Tendência à redução dos ângulos de camber na compressão de
movimentos assimétricos à medida que os centros de giros sobem, desde
que a curva de variação de bitola seja côncava.
2 – Convergência:
Tendência ao aumento dos ângulos de convergência na compressão de
movimentos assimétricos à medida que os centros de giro sobem, desde
que a curva de variação de bitola seja côncava.
165
9. SUGESTÕES PARA TRABALHOS FUTUROS
• Elaboração de uma metodologia numérica para definição dos perfis de
travessas principais de suspensões do tipo eixo de torção. Automatizando
o processo de projetos de novas suspensões. Tendo como entrada a
geometria inicial do braço oscilante e a caracterização da mola da
suspensão.
• Otimização do projeto da suspensão padrão, inserindo um perfil “c”
assimétrico. Possibilitando assim um maior controle dos parâmetros
cinemáticos.
• Realização de uma análise da influência da travessa no comportamento
da suspensão, quando submetida a carregamentos longitudinais extremos
– Frenagem.
• Realização de uma análise de flexibilidade da travessa em função de uma
análise de fadiga do conjunto.
• Realização de um projeto de suspensão “ideal” em termos cinemáticos.
Atendendo aos requisitos de handling.
• Realização de um estudo de influência das características elásticas e
geométricas do braço oscilante no comportamento cinemático das
suspensões.
• Realização de um estudo de influência das características hyperelásticas e
geométricas dos coxins no comportamento cinemático das suspensões.
• Estudo detalhado do comportamento elástico de perfis abertos. Analisando
os diversos produtos de inércia de perfis simétricos e assimétricos.
166
10. REFERÊNCIAS
Autorepair, Disponível em <http http://autorepair.about.com/library/graphics/ > Acesso em: 15 de janeiro de.2007. Autozine, 2006 Disponível em< www.autozine.org/technical_school/suspension/ > Acesso em: 25 de março de.2007. Bardini, R., Hiller, M., 1999, The Contribution of Occupant and Vehicle Dynamics Simulation to Testing Occupant Safety in Passenger Cars During Rollover , SAE technical paper series 1999-01-0431. Bastow, D., e Howard G., 1997, Car Suspension and Handling , 3ªPress, London, and SAE, Warrendale, ISBN 0-7273-0318X, 362p. Barreto, M.,2005, Dinâmica longitudinal: Efeitos da geometria da susp ensão nas mudanças de atitude da massa suspensa e os esforços nos elementos da suspensão. Dissertação de Mestrado, USP, São Paulo, SP, Brasil. Butkunas A. A., 1996, Power spectral Density and Ride. Daniel M., 2004, Sistemas de suspensão e direção , Apostila do curso de pos graduação em engenharia automotiva, UFSC. DOT HS 809 875, 2005, Disponível em <http://www-nrd.nhtsa.dot.gov/vrtc/ca/capubs/NHTSA > Acesso em: 2 de abril de 2007. Champcarworldseries, 2006, Disponível em <http://www.champcarworldseries.com/Tech/Understeer. asp> Acesso em: 29 de março de.2007 Dahlberg, E., 1999, Yaw Instability Due to Longitudinal Load Transfer D uring Braking in a Curve, SAE technical paper series 1999-01-2952 Dennis P., 2000, Elimination of Roll, Squat, and Dive Through Bias ed Suspension Response, SAE technical paper series 2000-01-1632. Desertrides, 2006 Disponível em <http://www.desertrides.com/reference/images/terms/ > Acesso em: 02 de abril de.2007 Deschamps E.,2000, Fundamental Physics Behind New Suspension Concept f or Automobiles, SAE technical paper series 2000-01-1647.
167
Dixon, J. C., 1996, Tires, Suspension and Handling , 2ª ed., Society of Automotive Engineers, Warrendalle, ISBN 1-56091-831-4, 621p. Eagletyre , 2006, Disponível em <http://www.eagletyre.com/informes-tecnicos-de-neumaticos-llantas-para-camiones.htm > Acesso em: 12 de janeiro de.2007 Erdogan L., Guenther A., 1999, Suspension Parameter Measurement Using Side-Pull Test To Enhance Modeling of Vehicle Roll, SAE technical paper series 1999-01-1323. Everett R., Brown l D., Crolla A., 2000, Investigation of a Roll Control System for an Off-road Vehicle, SAE technical paper series 2000-01-1646. Everything2 , 2006 Disponível em <http://www.everything2.com/index.pl?node=multilink% 20suspension > Acesso em: 12 de janeiro de.2007. Ewbank C, Allton D., Whitehead P., 2000, Torsion Beam Rear Suspension With Toe-Controlled Compliant Hubs, SAE technical paper series 2000-01-0094. Fysiksektionen , 2006 Disponível em <http://www.f.kth.se/~f95-lsa/ > Acesso em: 15 de janeiro de.2007. Gary J. Heydinger, 2000, Analysis of Vehicle Response Data Measured During Severe Maneuvers, SAE technical paper series 2000-01-1644. Gerrard, M., 1999, Roll Centres and Jacking Forces in Independent Suspensions - A First Principles Explanation and a Designer’s Toolkit, SAE technical paper series 1999-01-0046. Gillespie, T. D.,1992, Fundamentals of Vehicle Dynamics , Society of Automotive Engineers SAE, Warrendalle, ISBN 1-56091-199-9, 495p. Gorder K., Janitor W., 1999, Vehicle Dynamics Fingerprint Process, SAE technical paper series 1999-01-0117. Gorder K., David T., Basas J., 2000, Steering and Suspension Test and Analysis, SAE technical paper series 2000-01-1626. Heisler, H. MSc., Second edition , 2002, Advanced vehicle technology , ISBN 0 7506 51318 Hotrodding, 2006 Disponível em <http://www.popularhotrodding.com/tech/0604_rear_sus pension_guide/ > Acesso em: 12 de janeiro de.2007. Hussien, A., Shabana A., 1999, Finite Element Dynamic Analysis Of The Rear Axle System, SAE technical paper series 1999-01-0735.
168
Kan H., Kawaura T., Iki M., 1983, The Development of the Suspension System Used on the Nissan Stanza — A New Front-Whee-Drive Compact Car, SAE technical paper series 830980, Kazemi R., 2000, Improving the Ride & Handling Qualities of a Passen ger Car via Modification of its Rear Suspension Mechanism, SAE technical paper series 2000-01-1630. Kenneth, Bruce, 2000, The history of suspension, http://www.citroen.mb.ca/citroenet/html/s/suspensio n1.html. Kim H., Do W., 2002, The Stability Analysis of Steering and Suspension Parameters on Hands Free Motion, SAE technical paper series 2002-01-0620. Knable, J., 1999, Design of a Multilink Independent Front Suspension for Class A Motor Homes, SAE technical paper series 1999-01-3731. Krishna R., Kroppe J., Anderson V., 2000, Flexibility Effects Of Control Arms & Knuckle On Suspension – A Finite Element Vs. Rigid Body Comparative Analysis, SAE technical paper series 2000-01-3446 Lin Y., Zhan W., Liu Y., Zhong X., 2000, Dynamics Simulation Research on Rigid-Elastic Coupling System of Car Suspension, SAE technical paper series 2000-01-1622. Mapage, 2006 Disponível em: < http://mapage.noos.fr/fholvoet/images/ > Acesso em: 8 Dezembro de.2006. Mota, D. S., 2005, Modelagem de uma suspensão veicular com elementos n ão lineares e comparação de seu desempenho com um mode lo semi-ativo , Dissertação de Mestrado, universidade estadual de campinas, faculdade de engenharia mecânica. Máximo, Luiz F. B., 2002, Estudo do comportamento dinâmico de um veículo de passageiros em manobras de handling , Dissertação de Mestrado, Pró-reitoria de Pesquisa e Pós-graduação, PUC Minas, Belo Horizonte, MG, Brasil. Moline D., Vaduri S., Harry L., 2000, Fidelity of Vehicle Models Using Roll Center Principles, SAE technical paper series 2000-01-0693. Naudé, A.F., Snyman, J.A., 2003, “Optimisation of road vehicle passive suspension systems – Part 2. Qualification and case study ”, Applied Mathematical Modelling. NHTSA Práticas, 2006, Disponivel em <www-nrd.nhtsa.dot.gov/ >, acesso em: 19 de abril de.2007. Okabe, Eduardo P., 2003, Metodologia de projeto para desenvolvimento de suspensão veicular , Dissertação de Mestrado, Faculdade de Engenharia Mecânica, Universidade Estadual de Campinas.
169
Patrício, Lucio f., 2005, Desenvolvimento matemático e implementação numérica de um modelo tridimensional para a determinação das respostas dinâmicas de um veículo automotor , Dissertação de Mestrado, Pró-reitoria de Pesquisa e Pós-graduação, PUC Minas, Belo Horizonte, MG, Brasil. Perseguin O., 2005, Dinâmica veicular relativa ao ride de veículos e mé tricas para sua avaliação . Rao S., Roccaforte D., Campbell R., 2002, Developing an ADAMS Model of an Automobile Using Test Data, SAE technical paper series 2002-01-1567. Reimpell, J., Stoll, H., 1996, The Automotive Chassis: Engineering Principles,Society of Automotive Engineers , Warrendalle, ISBN 1-56091-736-9,410p. Sampson J., Thomas A., 1999, ULSAS - Improving Performance Through Light Weight Automotive Suspension Systems: Phase 1 - Ben chmarking and Initial Design Concepts, SAE technical paper series 1999-01-1311. Saturnino, Leonardo J. M., 2004, Desenvolvimento de ferramentas para definição, análise e avaliação de desempenho de veí culos automotivos , Dissertação de Mestrado, Pró-reitoria de Pesquisa e Pós-graduação, PUC Minas, Belo Horizonte, MG, Brasil. Schultz G., 2005, Steering and handling testing using roadway simulat or technology , Applied Research Associates, Inc., Aberdeen, MD 21001, USA. Shimatani, H., Murata, S., Watanabe, K.,Kaneko, T., Sakai, H., 1999, Development of Torsion Beam Rear Suspension with Toe Control Li nks, SAE technical paper series 1999-01-0045 Sugiura H.,2005, First Order Analysis for automotive suspension desi gn , R&D review of Toyota CRDL, Vol 37 N1. Tak T., Chung T., 2000, An Optimal Design Software For Vehicle Suspension Systems, SAE technical paper series 2000-01-1618. Territorio4x4 2006, Disponível em <http://www.territorio4x4.com.br/imagens/ > Acesso em: 3 agosto de.2006. The history of suspension 2006, Disponível em: < http://www.citroenet.org.uk/miscellaneous/suspensio n/suspension5.html > Acesso em: 28 Novembro de.2007. Tinel L., 2006, Advanced Linear and Nonlinear Multi-Scale Modeling of Composite Structures with DIGIMAT & ABAQUS . Application to Engineering Plastics and Thermoplastic Elastomers Structures, 2006 ABAQUS Users’ Conference.
170
Vehicle Model for Sideslip Estimation, 2006 Disponivel em < http://www-cdr.stanford.edu/dynamic/estimationGPS/veh_model.ht ml> Acesso em: 12 de janeiro de.2007 Vianna, E., 2006, Estudo da influência do levantamento de eixos em ve ículos comerciais no desempenho na frenagem e na estabilid ade direcional . Dissertação de Mestrado, USP, São Paulo, SP, Brasil. Vroma, 2006. Disponível em: < http://www.vroma.org/images/ >. Acesso em: 3 agosto de.2006. Wilmes, M., 2006, Automotive Engineering IIKinematics and Compliance Test Rig . Worldautosteel, 2006 disponível em <http://www.worldautosteel.org/ulsas/Twistbeam/ > Acesso em: 12 de dezembro de 2006.


![Classificando Comportamentos Sociais em Redes Veiculares · Classificando Comportamentos Sociais em Redes Veiculares | SBRC 2016 | 7 Trabalhos Relacionados [Marco Fiore et al., 2008]](https://img.document.onl/doc/110x75/5be6d83909d3f246788b8d77/classificando-comportamentos-sociais-em-redes-classificando-comportamentos-sociais.jpg)


























