Bruna Nunes
Geometria Diferencial de Superfcies e o Teorema de
Gauss-Bonnet
Florianpolis 2010
Bruna Nunes
Geometria Diferencial de Superfcies e o Teorema de
Gauss-Bonnet
Trabalho de concluso de curso apresentado na Universidade
Federal de Santa Catarina para a obteno do ttulo de licenciada em
MatemticaEliezer Batista
Orientador:
Universidade Federal de Santa Catarina
Florianpolis 2010
Esta Monograa foi julgada adequada como TRABALHO DE CONCLUSO DE
CURSO no Curso de Matemtica Habilitao Licenciatura, e aprovada em
sua forma nal pela Banca Examinadora designada pela Portaria n
02/CCM/11.o
Banca Examinadora:
Prof. Nereu Estanislau Burin Professor da disciplina
Prof. Eliezer Batista Orientador
Prof. Fernando de Lacerda Mortari
Prof. Gustavo Adolfo Torres Fernandes da Costa
Sumrio
Introduo 1 Superfcies Regulares Parametrizadas
p.5 p.7 p.7 p.17 p.20 p.20 p.23 p.25
1.1 Superfcies Regulares . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 1.2 Mudana de Parmetros . . . . . . . . . . . . . .
. . . . . . . . . . . . 1.3 Funes Diferenciveis em Superfcies . . .
. . . . . . . . . . . . . . . . 1.3.1 Funes reais diferenciveis em
superfcies . . . . . . . . . . . . 1.3.2 Funes diferenciveis entre
superfcies . . . . . . . . . . . . . . 1.4 Plano Tangente e
diferencial de uma aplicao . . . . . . . . . . . . . .
2 Primeira Forma Fundamental, Aplicao Normal e Segunda Forma
Fundamental
p.33 2.1 Primeira Forma Fundamental . . . . . . . . . . . . . .
. . . . . . . . . p.33 2.2 Aplicao Normal de Gauss . . . . . . . .
. . . . . . . . . . . . . . . . p.42 2.3 Segunda Forma Fundamental
. . . . . . . . . . . . . . . . . . . . . . . p.49 p.54 3.1
Curvatura Normal . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . p.54 3.2 Curvatura Gaussiana e Mdia . . . . . . . . . . . .
. . . . . . . . . . . p.62 p.76 4.1 Isometrias e o Teorema
Egregium(Gauss) . . . . . . . . . . . . . . . . . p.76 4.2 Derivada
Covariante e Transporte Paralelo . . . . . . . . . . . . . . . .
p.87 4.3 Geodsicas . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . p.93
3 Curvaturas
4 Geometria Intrnseca das Superfcies
4.3.1 Curvatura Geodsica . . . . . . . . . . . . . . . . . . . .
. . . . p.955 Teorema de Gauss-Bonnet
p.99 5.1 Preliminares . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . p.99 5.2 Teorema de Gauss-Bonnet (Verso
Local) . . . . . . . . . . . . . . . . . p.113 p.120 p.121
Consideraes Finais Referncias
5
Introduo
A geometria diferencial o estudo da geometria usando as tcnicas
do clculo diferencial e integral. Neste trabalho faremos um estudo
sobre a geometria diferencial de superfcies, provavelmente a parte
mais interessante e representativa da geometria diferencial,
entretanto, algumas propriedades das curvas aparecem de maneira
natural no estudo das superfcies. Curvas e superfcies so objetos
que qualquer pessoa pode ver, e muitas das questes que podem ser
levantadas sobre estes objetos so bvias e naturais. A geometria
diferencial preocupa-se com a formulao matemtica de algumas dessas
questes e usando as tcnicas do clculo diferencial, procura
encontrar respostas para elas. Nosso trabalho est organizado em 5
captulos no primeiro captulo, na seo 1.1, apresentamos a denio de
superfcie regular e a partir desse conceito comeamos a caracterizar
o comportamento dessas superfcies, demonstramos alguns resultados e
identicamos algumas superfcies regulares. Na seo 1.2, mostramos que
um ponto pode ser coberto por mais de uma parametrizao. Na seo 1.3,
apresentamos duas aplicaes diferenciveis sobre e entre superfcies.
Com a denio de superfcies regulares podemos garantir a existncia de
um plano tangente em todos os pontos da superfcie na seo 1.4,
denimos plano tangente. O estudo das propriedades locais de uma
superfcie regular est diretamente ligado ao estudo de duas formas
quadrticas, a primeira e segunda forma fundamentais, que sero
apresentadas no segundo captulo. A primeira forma fundamental, seo
2.1, nos permite o clculo de algumas questes mtricas, tais como,
comprimento de arco, ngulo entre curvas e reas de regies sobre a
superfcie. Na seo 2.2, comeamos nosso estudo sobre a geometria da
aplicao de Gauss e na seo 2.3, apresentamos a denio da segunda
forma fundamental sobre um specto algbrico. No captulo 3, na seo
3.1, apresentamos a interpretao geomtrica da segunda forma
fundamental, as curvaturas. Na seo 3.2, denimos as curvaturas de
mdias e gaussianas. No captulo 4, comeamos o estudo da geometria
intrnseca das superfcies, ou seja, a
6
parte da geometria diferencial que depende apenas da primeira
forma fundamental. Na seo 4.1, denimos isometria e demonstramos o
famoso teorema egregium de Gauss, que mostra que a curvatura
gaussiana uma caracterstica intrnseca da superfcie. Na seo 4.2,
denimos a derivada covariante e transporte paralelo e na 4.3,
denimos geodsica e curvatura geodsica. No ltimo captulo,
demonstramos a verso local do teorema de Gauss-Bonnet, mas antes
disso, na seo 5.1, denimos ndice de rotao, homotopia e demonstramos
o teorema do ndice de rotao e por m, na seo 5.2, demonstramos a
verso local do teorema de Gauss-Bonnet. Para concluir, podemos
dizer que objetivo maior do nosso trabalho estudar as superfcies
regulares de modo que possamos entender alguns conceitos e
resultados, para por m, demonstrarmos o teorema de
Gauss-Bonnet.
7
1
Superfcies Regulares Parametrizadas
Neste captulo, comearemos o nosso estudo das superfcies
regulares. Inicialmente, podemos dizer que uma superfcie um
subconjunto de R que se assemelha a uma parte de R numa vizinhana
de qualquer ponto, tal como a superfcie da Terra, embora esfrica,
parece plana a um observador nela colocado, que consegue ver
somente at linha do horizonte. Na seo 1.1 vamos denir superfcies
regulares utilizando o conceito de parametrizao local, ou seja,
tomamos um ponto p de uma superfcie e uma vizinhana aberta desse
ponto contida na superfcie e assim construmos uma aplicao com
domnio em um aberto do R e imagem em pontos da vizinhana de p. A
partir da, comearemos a caracterizar e identicar superfcies
regulares, demonstrando alguns resultados e fazendo alguns
exemplos. No entanto, dado um ponto p de uma superfcie regular S,
esse pode ser coberto por mais de uma parametrizao. Assim, na seo
1.2 mostraremos como fazer a troca de coordenada, ou seja, como
passar de uma parametrizao para outra. Na seo 1.3, mostraremos que
possvel denir a noo de diferenciabilidade para uma funo denida
sobre uma superfcie regular e assim, na seo 1.4 deniremos plano
tangente e diferencial de uma aplicao.3 2 2
1.1
Superfcies Regulares
Denio 1.1. Seja S R3 um subconjunto de R3 , diz-se que S uma
superfcie regular se as trs condies a seguir so satisfeitas:(i) Se
p S , V R3 , vizinhana de p e uma aplicao X : U V S
diferencivel,
8
onde U R2 um aberto. Ou seja, seX(u, v) = (x(u, v), y(u, v),
z(u, v))
ento as funes componentes de X , x(u, v), y(u, v), z(u, v)
possuem derivadas parciais de todas as ordens em U ; (ii) A aplicao
X do item (i) um homeomorsmo entre U e V S , ou seja, X possui uma
inversa X 1 : V S U que contnua, isto , existe um aberto W R3
contendo V S e uma funo contnua f : W R2 cuja restrio X 1 ; (iii)
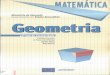
Para todo q = (u, v) U , a diferencial dXq : R2 R3 injetiva.
Figura 1: O ponto q U levado pela aplicao X em um ponto da
vizinhana de p S. A aplicao X uma parametrizao local ou um sistema
de coordenadas locais em uma vizinhana V S de p, chamada de
vizinhana coordenada. Vamos analisar o que a denio 1.1 nos diz
sobre o comportamento de uma superfcie regular. A condio de
diferenciabilidade em (i) bastante natural se nossa inteno tratar
de geometria diferencial em S. A condio (ii) impe que a aplicao X
um homeomorsmo e sua injetividade exclui a possibilidade de
autointersees em superfcies regulares. Em (iii), temos que e so
derivadas parciais das componentes de X calculadas no ponto q = (u
, v ), que correspondem s colunas da matriz Jacobiana JX(u, v), que
a matriz da aplicao linear relativa as bases cannicas de R e R .X u
X v 0 0 2 3
9
JX(u, v) =
x u y u z u
x v y v z v
= X u X v
.
Por comodidade vamos denotar por X e por X . A condio (iii)
equivalente as seguintes armaes:X u u X v v
Os vetores coluna, X e X , da matriz Jacobiana so linearente
independentes; X X = 0(vetor nulo); A matriz JX(u, v) tem posto 2,
ou seja um dos determinantes jacobianosu v u v
(x, y) = (u, v)
deve ser diferente de zero em q = (u, v).
x u y u
x v y v
,
(y, z) = (u, v)
y u z u
y v z v
,
(x, z) = (u, v)
x u z u
x v z v
Ento, a condio (iii) exclui a possibilidade de existir bicos em
uma superfcie regular e assim garante a existncia de um plano
tangente em todo os pontos de S, veremos isso na seo 1.4. Vejamos
um exemplo de uma superfcie regular.Exemplo 1.1. A esfera unitria
S2 = {(x, y, z) R3 : x2 + y2 + z 2 = 1} uma superfcie
regular.Mostraremos que X1 : U R2 R3 , dada por X1 (u, v) = (u, v,
+ 1 (u2 + v2 )), com U = {(u, v) R2 : u2 + v2 < 1}, uma
parametrizao de S2 . Podemos observar que a imagem da parametrizao
X1 a parte aberta de S2 acima do plano xy. Podemos observar que as
funes componentes de X1 so diferenciveis, j que temos que u2 + v2
< 1, logo a condio (i) da denio de superfcie regular vericada.
Seja um ponto qualquer (x, y, z) X1 (U ) S 2 , com X1 (U ) S 2 =
{(x, y, z) S 2 : 1 x2 + y 2 < 1 e z > 0} e zermos X1 (x, y,
z) (x, y) temos u e v bem denidos de 1 maneira nica por u = x e v =
y, logo X1 bijetiva. E X1 a projeo de X1 (U ) S em U , que contnua.
Logo a condio (ii) vericada.
10
Para vericar a condio (iii) basta observar que a matriz
jacobiana JX1 (u, v) = 1 0 u 1(u2 +v 2 )
0 1 v 1(u2 +v 2 )
tem posto 2. Agora cobriremos toda esfera utilizando
parametrizaes similares, como a parametrizao X2 : U R2 R3 dada por
X2 (u, v) = (u, v, 1 (u2 + v2 )), (u, v) U . Podemos observar que
X1 (U ) X2 (U ) cobre a esfera menos o equador {(x, y, z) R3 /x2 +
y2 = 1, z = 0}. Para cobrir toda a esfera, juntamente com X1 e X2 ,
utilizamos os planos xz e zy e denimos as seguintes
parametrizaes:X3 (u, v) = (u, + 1 (u2 + v 2 ), v), X4 (u, v) = (u,
X5 (u, v) = (+ 1 (u2 + v 2 ), v), 1 (u2 + v 2 ), u, v),
X6 (u, v) = ( 1 (u2 + v 2 ), u, v).
Figura 2: Parametrizaes locais da esfera.Assim, vericamos que a
esfera uma superfcie regular.
Nem sempre fcil mostrar que uma superfcie regular utilizando a
denio 1.1, sendo assim, demonstraremos alguns resultados que
facilitam na vericao se uma superfcie ou no regular. Antes disso
vamos denir alguns conceitos.Denio 1.2. Dada uma aplicao
diferencivel F : V R3 R, com V aberto,
11
dizemos que p V um se dFp no sobrejetora, que equivalente a
dizer que Fx = Fy = Fz = 0 calculadas em p. E F (p) dito ser um
.
ponto singular
Denio 1.3. Dada F : V R3 se a no um valor singular de F .
valor singular R e a R, dizemos que a um valor regular de F
Figura 3: Valor regular de f .Proposio 1.1. Se f : U R2 R uma
funo diferencivel em um conjunto aberto U , ento o grco da f , isto
, o subconjunto de R3 dado por {(u, v, f (u, v)) : (u, v) U } uma
superfcie regular.Demonstrao.2 3
Seja X(u, v) = (u, v, f (u, v)), vamos mostrar que a aplicao X :
U R R uma parametrizao do grco, cuja vizinhana coordenada cobre
todos os pontos do grco. A parametrizao X , dada por X(u, v) = (u,
v, f (u, v)), possui todas as suas componentes diferenciveis, logo
a condio (i) vericada. Para vericar a condio (ii), podemos
inicialmente observar que cada ponto (x, y, z) do grco imagem por X
de um nico ponto q = (u, v) U , onde (u, v) = (x, y). Portanto X
bijetiva. Mas X a restrio ao grco de f da projeo de R sobre o plano
xy, que contnua, logo X contnua. A condio (iii) tambm vericada,
pois a matriz Jacobiana de X igual a1 3 1
1 fu
0
JX(u, v) = 0
1 fv
12
e tem posto 2 para todo (u, v) U . Portanto o grco da f uma
superfcie regular. Antes de demonstrarmos a prxima proposio vamos
enunciar o teorema da aplicao inversa. Teorema 1.1 (Teorema da
aplicao inversa). Seja F : U R R de classe Cn n k
(k 1) e seja p U tal que F (p) um isomorsmo linear em Rn . Ento
existem
abertos V U vizinhana de p e W Rn vizinhana de F (p) tal que F
|V : V W um difeomorsmo de classe C k .
Proposio 1.2. Dada uma funo f : V R3 R diferencivel e a f (U )
um valor regular de f , ento a imagem inversa f 1 (a) uma superfcie
regular.
Seja p = (x , y , z ) um ponto de f (a) = {(x, y, z) R : f (x,
y, z) = a}. Como a um valor regular de f , temos que alguma das
derivadas parcias no nula, vamos supor sem perda de generalidade
que (p) = 0. Denimos agora uma aplicaoDemonstrao.0 0 0 1 3 f z
: V R3 R3 (x, y, z) (x, y, f (x, y, z)).
A diferencial de em p dada por dp = f z
1 0f (p) x
0 1f (p) y
0 0f (p) z
e det(d ) = (p) = 0. Ento pelo Teorema da Funo Inversa, existem
abertos W V e W (V ), contendo p e (p), respectivamente, tal que :
W W inversvel e : W W diferencivel (ver gura 4). As funes
coodenadas de so diferenciveis e dadas por X(u, v, t), y(u, v, t) e
z(u, v, t). Comop 1 2 1 2 1 2 1 1
(u, v, t) = 1 (u, v, t) = (x(u, v, t), y(u, v, t), z(u, v, t)) =
(x, y, f (x, y, z)),
13
vemos que x(y, v, t) = u e y(u, v, t) = v. Em particular, como
z(u, v, t) diferencivel, a funo w denida na interseco de W com o
plano xy, dada por1
w(x, y) = z(u, v, a)
tambm diferencivel.
Figura 4: Os pontos da superfcie f
1
(a)
so levados por F no plano z = a.1 1 1
Pela proposio 1.1, o grco de w uma superfcie regular. Ora,
observando-se que o grco de w nada mais do que o conjunto f (a) W ,
segue-se que f (a) W uma vizinhana coordenada de p. Como p foi
tomado arbritariamente, conclu'-se que f (a) uma superfcie regular,
como desejado.1 1
Exemplo 1.2. Seja o elipside dado por x2 + y2 + z2 = 1. Vamos
denir uma funo a b c y2 x2 z2 diferencivel f (x, y, z) = a2 + b2 +
c2 1. Podemos notar que 0 um valor regular de f, j que as derivadas
parciais fx = 2x , fy = 2y e fz = 2z se anulam simultaneamente a2
b2 c2 1 somente no ponto (0, 0, 0), que no pertence a f (0).2 2
2
Ento, o elipside dado por S = f 1 (0) uma superfcie regular.
Exemplo 1.3. Seja o hiperbolide de duas folhas dado por x2 y2 +
z 2 = 1. Vamos denir uma funo diferencivel f (x, y, z) = x2 y2 + z
2 1. Podemos notar que 0 um valor regular de f , j que as derivadas
parciais fx = 2x, fy = 2y e fz = 2z se anulam simultneamente
somente no ponto (0, 0, 0), que no pertence a f 1 (0).Ento, o
hiperbolide de duas folhas dado por S = f 1 (0) uma superfcie
regular.
No exemplo acima podemos notar que uma superfcie regular pode
ser desconexa.
14
Antes de demonstrarmos a seguinte proposico vamos enunciar o
Teorema da Funo Implcita.Teorema 1.2. Seja V R3 e F (x, y, z) uma
funo real com derivadas parciais contnuas em V . Seja (x0 , y0 , z0
) V tal que F (x0 , y0 , z0 ) = 0 e Fz (x0 , y0 , z0 ) = 0. Ento
existem vizinhanas B de (x0 , y0 ) e J de z0 , tais que B J V e uma
nica funo g : B J satisfazendo F (x, y, g(x, y)) = 0, (x, y) B .
Alm disso, g possui derivadas parciais dadas por:gx = Fx ; Fz gy =
Fy . Fz
A proposio seguinte apresenta ferramentas para mostrarmos que um
conjunto de R no uma superfcie regular. Tambm podemos ver essa
proposio como se fosse a recproca local da proposico 1.1.3
Proposio 1.3. Dada uma superfcie regular S R3 , qualquer ponto p
S possui uma vizinhana V em S , tal que V o grco de uma funo
diferencivel que tem uma das seguintes formas:z = f (x, y), y = f
(x, z), x = f (y, z).
Demonstrao.2 3
Se S uma superfcie regular, ento dado p S, U R e X : U R R dada
por X(u, v) = (x(u, v), y(u, v), z(u, v)) tal que p X(U ) e q = X
(p), como na denio 1.1. Pela condio (iii) da denio 1.1, um dos
determinantes jacobianos , , no se anula em X (p) = q. Suponhamos
sem perda de generalidade que = 0, e consideremos a seguinte
aplicao: X : U R , onde a projeo (x, y, z) = (x, y). Ento X(u, v) =
(x(u, v), y(u, v), z(u, v)) = (x(u, v), y(u, v)), mas = 0, logo
pelo teorema da funo inversa existem abertos W U e W X(U ),
vizinhana de q e de X(q) respectivamente, tal que2 1 (z,x) (u,v) 1
(x,y) (y,z) (u,v) (u,v) (x,y) (u,v) 2 (x,y) (u,v) 1 2
( X)1 : W2 W1 (x, y) (u(x, y), v(x, y))
diferencivel (ver gura 5).
15
Figura 5: A aplicao leva pontos de R em R .3 2
Considere agorax x x X ( X)1 (, y ) = X(u(, y ), v(, y )) =
(x(u(, y ), v(, y )), y(u(, y ), v(, y )), z(u(, y ), v(, y ))). x
x x x x x
Mas( X) ( X)1 (, y ) = (, y ) x x = (x(u(, y ), v(, y )), y(u(,
y ), v(, y ))), x x x x
portanto x = x(u(, y), v(, y)) e y = y(u(, y), v(, y)). x x x x
Logo,X ( X)1 (, y ) = X(u(, y ), v(, y )) x x x = (, y , z(u(, y ),
v(, y ))), x x x
Seja V = X(W ), ento temos1
X ( X)1 : W2 V (x, y) (x, y, z(x, y)).
Logo V localmente um grco. Mostramos para um dos casos, os
outros so de forma anloga, porm ao invs de considerarmos : (x, y,
z) = (x, y), utilizamos : (x, y, z) (x, z) e : (x, y, z) (y, z).1
2
Exemplo 1.4. Seja o cone de uma folha C dado por z = + x2 + y2 ,
com (x, y) R2 .
16
Vamos supor que C seja uma superfcie regular, logo pela proposio
1.3 ele deve ser em uma vizinhana V do ponto (0, 0, 0) C o grco de
uma funo diferencivel com uma das seguintes formas: x = f (y, z), y
= g(x, z), z = h(x, y). Mas as duas primeiras formas podem ser
descartadas, j que as projees do cone sobre os planos xz e yz no so
injetivas. Basta ento analisar a ltima forma, z = h(x, y) = + x2 +
y2 que no diferencivel em (0, 0). Ento C no uma superfcie
regular.
Proposio 1.4. Seja p S um ponto de uma superfcie regular S e
seja uma aplicao X : U R2 R3 com p X(U ) tal que as condies (i) e
(iii) da denio1.1 sejam satisfeitas. Suponha que X seja bijetiva.
Ento X 1 contnua.Demonstrao.
Seja X(u, v) = (x(u, v), y(u, v), z(u, v)), com (u, v) U e q U
arbitrrio. Podemos armar que (q) = 0, j que X satisfaz as condies
(i) e (iii) da denico 1.1. Vamos considerar a projeo(x,y) (u,v)
: R3 R2 (x, y, z) (x, y)
Pelo teorema da funo inversa, existem W vizinhana de q U e W
vizinhana X(q) R tal que X aplica W difeomorcamente sobre W .
Usando agora a suposio que X bijetiva. Ento, restrita a X(W ),1 2 2
1 2 1
X 1 = ( X)1 . X 1 X1
a composio de aplicaes contnuas, logo contnua em q. Como q
arbitrio, contnua.
Exemplo 1.5. Seja uma circunferncia C no plano xz centrada no
ponto (a, 0, 0), com raio r, onde 0 < r < a dada por C = {(x,
y, z) : (x a)2 + z 2 = r2 , y = 0}. Se rotacionarmos essa
circunferncia em torno do eixo z obtemos um toro,dado por:X(, ) =
((a + r cos ) cos , (a + r cos ) sin , r sin ),
onde U = {(, ) : 0 < < 2, 0 < < 2}. Sabendo que o
toro uma superfcie regular vamos mostrar que a aplicao X uma
parametrizao do toro.
17
A condio (i) da denio 1.1 vericada, visto que as funes
componentes de X so diferenciveis. Temos queX = (r sin cos , r sin
sin , r cos ) X = ((a + r cos )( sin ), (a + r cos ) cos , 0),
ento||X X || = = = r2 (a + r cos )2 cos2 cos2 + r2 (a + r cos )2
sin2 cos2 + r2 (a + r cos )2 sin2 r2 (a + r cos )2 (cos2 cos2 +
sin2 cos2 + sin2 )
= r(a + r cos ).
Como 0 < r < a temos que X e X so vetores linearmente
independentes, vericando a condio (iii). Basta agora vericarmos a
condio (ii), no entanto pela proposio 1.4 isso equivalente a
mostrar que X bijetiva. Podemos observar que, se x2 + y2 a, ento
< < 3 , e se x2 + y2 a, 2 2 ento 0 < ou 3 2. Logo, dado
(x, y, z), isto determina de maneira nica, 2 20 < < 2.
Conhecendo , x e y determinamos sin e cos . Isto determina de
maneira nica, 0 < < 2 . Logo X bijetiva. Portanto X uma
parametrizao do toro.
1.2
Mudana de Parmetros
Pela denio de superfcie regular, todo ponto p S est coberto por
uma parametrizao X : U R S que um homeomorsmo, mas nem sempre
existe uma nica parametrizao que cubra determinado ponto p S. Nosso
objetivo descobrir como estas parametrizaes esto relacionadas, ou
seja, dado um ponto p pertencente a duas vizinhanas coordenadas com
parmetros (u, v) e (u, v), vamos mostrar como transformar de (u, v)
para (u, v) e vice-versa.2
18
interressante ver como fazer troca de um sistema de coordenadas
para outro, pois nos prximos captulos vamos apresentar conceitos
que no dependem do sistema de coordenadas escolhido.Proposio 1.5.
Seja S uma superfcie regular e duas parametrizaes X1 : U1 R2 S e X2
: U2 R2 S de S , com p S tal que p X1 (U1 )X2 (U2 ) = V . Ento a
mudana de coordenadas h = X 1 X2 um difeomorsmo, isto , h
diferencivel e tem uma inversa diferencivel h1 .
A aplicao h = X X a composio de homeomorsmos, logo h um
homeomorsmo. Sejam as duas parametrizaes X e X dadas
por:Demonstrao.1 2 1 2
X1 (u, v) = (x(u, v), y(u, v), z(u, v)) X2 (, v ) = (x(, v ),
y(, v ), z(, v ) u u u u
Vamos provar que h diferencivel. Seja r X (V ) e dena q = h(r).
Como X (u, v) = (x(u, v), y(u, v), z(u, v)) uma parametrizao,
podemos supor, renomeando os eixos caso necessrio, que (q) = 0.
Estendemos X a uma aplicao F : U R R denida por1 2 1 (x,y) (u,v) 1
1 3
F (u, v, t) = (x(u, v), y(u, v), z(u, v) + t),
com (u, v) U e t R. Ou seja, F leva um cilindro vertical C sobre
U em uma espcie de cilndro vertical sobre X (U ). A restrio F | = F
(u, v, 0) = X (u, v).1 1 1 1 U1 {0} 1
A matriz Jacobiana dada por:det(JF ) =1
JF (u, v, t) =
x u y u z u
x v y v z v
0
0 1
, e seu determinante
x y x y (x, y) = . u v v u (u, v)q (x,y) (u,v)
Em particular, se q = (q, 0) U R, ento det(JF ) = (q) = 0. Pelo
teorema da funo inversa existem abertos W e W , com W vizinhana de
q = (q, 0) U R e W vizinhana de F (q ) = X (q) tal que F : W W
existe e 1 2 1 1 2 1 1 2 1
19
Figura 6: A aplicao h = X2
1 1
X2
.2
diferencivel em W . Provemos que h diferencivel em r: observe
que W vizinhana de X (r), pois2
X1 (q) = X1 (h(r)) = X1 X1 1 X2 (r) = X2 (r).
Temos que X contnua em U e r U , logo existe uma vizinhana W de
r em U tal que X (W ) W . Pelo teorema da funo inversa, existem
abertos W e W , com W vizinhana de q U e W vizinhana de r U , tal
que F : W W existe e diferencivel em W . Ento h = F X diferencivel
em r U , j que X uma parametrizao de S. Como h| = F X | , h
restrito a W uma composio de aplicaes diferenciveis e portanto
diferencivel. Em particular, h diferencivel em r.2 2 2 2 2 2 2 2 1
2 1 1 2 2 1 2 2 1 1 1 2 2 W2 1 2 W2 2
Exemplo 1.6. Seja uma esfera S2 unitria, parametrizada de duas
formas:Pelas coordenadas esfricas (, ), onde o complemento da
latitude e a longintude, sendoX1 (, ) = (sin cos , sin sin , cos
)
e U = {(, ) : 0 < < , 0 < < 2}. Pela projeo
estereogrca : S2 {PN } R2 , que leva pontos p = (x, y, z) da esfera
menos o plo norte PN = (0, 0, 1) sobre o plano xy. Seja (x, y, z) =
(u, v), ento
20
obtemos uma parametrizao X2 fazendo 1 : R2 S2 {PN }, dada porX2
(u, v) = 2v u2 + v 2 1 2u , , u2 + v 2 + 1 u2 + v 2 + 1 u2 + v 2 +
1 ,
com (u, v) R2 {(0, 0)}. Vamos considerar a parte da esfera S2
onde y > 0. Ento, usando essas duas parametrizaes, temos1 X1 (x,
y, z) = 1 X2 (x, y, z) =
arccos(z), arccotg y x , 1z 1z .
x y
Logo,h = X1 1 X2 = X 1 (X2 (u, v)) =1 1 h1 = X2 X1 = X2 (X1 (,
)) =
u2 + v 2 1 u , arcotg 2 + v2 + 1 u v sin cos sin sin , . 1 cos 1
cos arccos
que so diferenciveis.
1.3
Funes Diferenciveis em Superfcies
Nesta seo vamos tratar de dois tipos de aplicaes sobre S, uma
funo f e uma aplicao , dadas por f : V S R e : V S S , com S, S , S
superfcies regulares. Primeiramente vamos denir sob que condies
essas aplicaes so diferenciveis em um ponto p da superfcie e em
seguida vamos mostrar que a diferenciabilidade de f e de no
dependem da escolha da parametrizao.1 2 1 2
1.3.1
Funes reais diferenciveis em superfcies
Denio 1.4. Uma funo f : V S R,com S uma superfcie regular,
diferencivel em p S se dada uma parametrizao X : U R2 S com p X(U )
V , temos que f X : U R2 R diferencivel em X 1 (p) = q .
21
Figura 7: A aplicao f diferencivel em p se f X diferencivel em X
Vejamos um exemplo de uma funo f : S R diferencivel.
1
1
(p)
.
Exemplo 1.7. Seja p0 = (x0 , y0 , z0 ) um ponto xo de uma
superfcie regular S , a distncia euclidiana em R3 desse ponto a
qualquer ponto p S dado pord:S R p (x x0 )2 + (y y0 )2 + (z z0 )2
.
No entanto, d no diferencivel em (x0 , y0 , z0 ), ento vamos
considerar a funo d2 distncia ao quadrado, dada por
d2 : S R p (x x0 )2 + (y y0 )2 + (z z0 )2 .
Seja um cilindro parametrizado porX : U R2 R3 X(u, v) = (cos u,
sin u, v),
com U : {(u, v) R2 : 0 < u < 2, < v < }. Seja um
ponto xo p0 = (0, 1, 0) do cilndro, fazendo a composiod2 X = (cos
u)2 + (sin u 1)2 + v 2 = cos2 u + sin2 u 2 sin u + 1 + v 2 = 2 2
sin u + v 2 ,
22
nota-se que d2 X diferencivel para qualquer (u, v) U e em
particular, em X 1 (p) para p um ponto qualquer do cilindro.
Proposio 1.6. A denio de funo diferencivel independe da escolha
da parametrizao.Demonstrao.
SejamX1 : U1 R2 S X2 : U2 R2 S
duas parametrizaes de S. Seja f : S R diferencivel em p X (U ) X
(U ) = W , em relao a X . Ento f X diferencivel em X (p) X (W ) U .
Mas pela proposio 1.5, h = X X : X (W ) X (W ) tambm diferencivel,
logo a composta f X h = f X X X = f X diferencivel em X (p) 1 1 2 2
1 1 1 1 1 1 1 1 1 2 1 2 1 1 2 1 1 2 1 2 1 X2 (W ) U2 .
Figura 8: A aplicao diferencivel f independe da parametrizao de
S.
231.3.2 Funes diferenciveis entre superfcies
Denio 1.5. Seja : V1 S1 S2 , com S1 e S2 superfcies regulares e
V1 conjunto aberto de S1 . Dizemos que diferencivel em p V1 se dada
duas parametrizaesX1 : U1 R2 S1 X2 : U2 R2 S21 com p X1 (U1 ), e
(p) X2 (U2 ), temos que : X2 X1 : U1 U2 diferencivel 1 em X1
(p).
Figura 9: A aplicao diferencivel em p se diferencivel em X
1
1
(p)
.
24
Exemplo 1.8. Seja a esfera unitria R2 dada por x2 + y2 + z 2 =
1, com parametrizao X1 , onde x = sin cos , y = sin sin , z = cos e
U1 = (0, ) (0, 2).Vamos denir a seguinte funo : R3 R3 (x, y, z) =
(ax, by, cz),
ou seja, os pontos da esfera so levados em pontos sobre o
elipside dado por x2 + y2 + a b z2 = 1, com parametrizao X2 , onde
x = a sin cos , y = b sin sin , z = c cos e c2 U2 = (0, ) (0, 2).2
2
Ento fazendo a composio (, ) = X2 1 X1 (, ) = X2 1 X2 (, ) = (,
), logo diferencivel.
Proposio 1.7. A denio de diferenciabilidade entre superfcies
regulares independe da escolha da parametrizao.
Sejam S , S superfcies regulares e : S S uma aplicao
diferencivel em um ponto p de S de acordo com as parametrizaes X de
S e Y de S . Suponha que X , Y sejam outras parametrizaes de S , S
respectivamente. Vamos mostrar que, de acordo com estas
parametrizaes, tambm diferencivel em p. De fato, observe que Y X =
Y Y Y X X X = h Y X h . Como h , h e Y X so diferenciveis, sua
composio tambm o . Logo, Y X diferencivel em X (p), donde
diferencivel em p com relao s parametrizaes X e Y .Demonstrao.1 2 1
2 1 1 1 1 2 2 2 1 2 1 2 2 1 2 1 1 1 1 1 1 2 2 1 1 1 1 1 1 1 2 1 1 1
1 2 2 1 2 2 2
25
Figura 10: A aplicao diferencivel independe da parametrizao.1.4
Plano Tangente e diferencial de uma aplicao
Como havamos mencionado anteriormente a condio (iii) da denio de
superfcie regular nos garante a existncia de um plano tangente em p
S. Nessa seo mostraremos que para cada ponto p S, o conjunto de
vetores tangentes as curvas parametrizadas de S passando por p,
constituem um plano, que denotaremos por T S . Vamos analisar o que
acorre com as curvas sobre superfcies. Sejam, Entendemos por vetor
tangente a S em um ponto p S, o vetor tangente (0) de uma curva
parametrizada : ( , ) S, com (0) = p.p
X : U R2 S
, uma parametrizao de S : ( , ) U , curva em U : ( , ) S , curva
em S passando por p, onde = X
Se X uma parametrizao de S e curva U tal que = , ento esse vetor
(0) dado por:(0) = X (0) (0) = dX((0)) (0) = d (X )(0). dt
Portanto, a derivada dXq mapeia os vetores velocidade de curvas
passando por (0) =
26
em vetores velocidade das suas respectivas imagens em p = X(q),
vejamos a gura a seguir:q
Figura 11: O vetor (0) tangente curva no ponto p = (0).Denio
1.6. O plano tangente a uma superfcie regular S em p o conjunto de
vetores velocidade das curvas em S passando por p, com p S ,
denotado por Tp S . Proposio 1.8. Seja uma parametrizao X : U R2 S
de uma superfcie regular S em p, tal que X(q) = p. Ento o conjunto
de vetores tangentes S em p o subespao vetorial Tp S = dXq(R2 ) R3
de dimenso 2.
Primeiramente vamos mostrar que T S = dXq(R ) R . Seja w T S,
logo existe uma curva : ( , ) S, com (0) = p e (0) = w. Por denio
tambm temos uma curva : ( , ) U , com (0) = q e (0) = v, tal que =
X . TemosDemonstrao.p 2 3 p
(0) = X (0) d (X )(0) = dX(0) (0) (0) = dt = dXq(v) dXq (R2
).
Portanto, T S dXq(R ) R . Por outro lado seja w = dXq(v), (t) =
vt + q em U , com t ( , ), (0) = q ep 2 3
27
(0) = v
. Considere = X (t), ento(0) = X (0) = X((0)) = X(q) = p (0) =
dX((0))( (0)) = dXq(v) = w Tp S.
Portanto, dXq(R ) T S. Logo T S = dXq(R ) R . Precisamos mostrar
agora que T S um espao vetorial. Sejam W e W vetores de T S, ento2
p p 2 3 p 1 2 p
1 : ( , ) S; 2 : ( , ) S;
1 (0) = p, 2 (0) = p,
1 (0) = w1 2 (0) = w2
e1 : ( , ) U ; 2 : ( , ) S; dXq(1 (0)) = w1 dXq(2 (0)) = w2
Como X um homeomorsmo temos que X(q) = p. Seja uma curva (t) = q
+ t( (0) + (0)) em U , com t (, ) e > 0. Consideramos a curva em
S1 2
: (, ) S (t) = X (t)
Ento,(0) = X (0) = X((0)) = X(q) = p (0) = dX((0))( (0)) = dXq(
(0)) = dXq(1 (0) + 2 (0)) = dXq(1 (0)) + dXq(2 (0)) = w1 + w2 Tp
S
Seja a curva (t) = q + t (0) em U , com t (, ), e consideramos a
curva : (, ) S
28
(t) = X (t)
Ento,(0) = X (0) = X((0)) = X(q) = p (0) = dX((0))( (0)) = dXq(
(0)) = W1 Tp S
Logo T S um espao vetorial. Como S uma superfcie regular, a
condio (iii) da denio1.1 nos diz que dXq injetiva, logo ker(dXq) =
0. Logo, T S tem dimenso 2.p p
Uma equao paramtrica de um plano tangente a S em um ponto p = (x
, y , z ) dada por (x, y, z) = (x , y , z ) + rX (p ) + sX (p ),
com r, s R. O plano ca bem denido pela juno de um de seus pontos a
dois vetores linearmente independentes. E a escolha de uma
parametrizao X determina uma base {X (p), X (p)} para o plano
tangente, chamada de base coordenada a X . No entanto, T S no
depende da escolha de X.0 0 0 0 0 0 0 u 0 v 0 u v p
Exemplo 1.9. Sabemos pela proposio 1.1, que se a um valor
regular de uma funo : V R3 R diferencivel ento f 1 (a) o grco de
uma superfcie regular. Ento vamos escrever a equao do plano
tangente a f 1 (a) em um ponto p da superfcie. Para isso
precisaremos utilizar o gradiente de de f em p, denotado por f
(p).Temos que f (p) ortogonal a Tp f 1 (a) em p f 1 (a). Vamos
mostrar que Tp f 1 (a) = ker f (p). Seja w Tp f 1 (a), logo : ( , )
f 1 (a); t (t) f : ( , ) R (0) = p; (0) = w
Mas, (f )(t) = a ento(f ) (0) = f ((0)).( (0)) = f (p)(w) =
0.
Portanto, w ker f (p) e Tp f 1 (a) ker f (p).
29
Seja agora w ker f (p), logo f (p)(w) = 0. Vamos supor sem perda
de generalidade quef z
= 0, ento existe uma funo
: U R2 R. (x, y) (x, y),
tal que, localmente a superfcie seja o grco de . Dena a
parametrizao localX : U R2 R3 (x, y) (x, y, (x, y))
e : R3 R2 (x, y, z) (x, y)
Seja p = (x0 , y0 , z0 ) e w = (w1 , w2 , w3 ), logo (w) : (w1 ,
w2 ). Sejam as curvas : ( , ) U t (x0 , y0 ) + t(w1 , w2 ) = (x0 +
tw1 , y0 + tw2 )
e = X. : ( , ) f 1 (a) t (x0 + tw1 , y0 + tw2 , (x0 + tw1 , y0 +
tw2 ))
tal que f (t) = a , t e(0) = (x0 , y0 , (x0 , y0 )) = p (0) =
(w1 , w2 , (x0 , y0 )w1 + (x0 , y0 )w2 ). x y
Podemos observar que (0) Tp f 1 (a), ento precisamos mostrar que
(x0 , y0 )w1 + x (x0 , y0 )w2 = w3 . No entanto, w kerf (p), logo w
e f (p) so ortogonais, ento y< f (p), w >= 0 f f f (p)w1 +
(p)w2 + (p)w3 = 0 x y zf x f z
w3 =
w1
f y f z
w2 .
30
Pelo teorema da funo implcita Logo kerf (p) Tp f 1 (a).
x
x = f e z
f
y
y = f , portanto w3 = z
f
w + w2 x 1 y
.
Portanto, Tp f 1 (a) = ker f (p). Em outras palavras, Tp f 1 (a)
formada precisamente pelos vetores de R3 que so ortogonais a f (p).
Ento, w Tp f 1 (a) temos que w f (p), tomando p = (x0 , y0 , z0 ) e
w = (x x0 , y y0 , z z0 ) temos a equao de Tp f 1 (a) em p dada
por< f (p), w >= 0 f f f (p)(x x0 ) + (p)(y y0 ) + (p)(z z0 )
= 0. x y z
Quando provamos a igualdade Tp f 1 (a) = ker f (p) podemos
garantir a recproca, que se < f (p), w >= 0, ou seja, se w
satisfaz a sua equao f (p)(x x0 ) + f (p)(y y0 ) + x y f (p)(z z0 )
= 0, ento necessriamente w Tp S . Esta equao poderia a priori ser z
satisfeita por vetores de fora do plano tangente, mas mostrando que
Tp f 1 (a) = ker f (p) garantimos que no.
Como j denimos plano tangente, podemos falar da diferencial das
aplicaes denidas na seo 1.3.Denio 1.7. Seja uma superfcie regular S
e uma funo f : V S R diferencivel em V , a cada p V associamos uma
aplicao linear df p : Tp S R que chamada a diferencial de f em p,
que denimos:Seja wp Tp S e : t ( , ) S uma curva diferencivel tal
que (0) = p e d (0) = wp , ento a curva = f diferencivel e df p(wp
) = (0) = dt (f )(0), com (0) = f (p).
Denio 1.8. Sejam S1 e S2 superfcies regulares e uma aplicao : V1
S1 S2 contnua e diferencivel em V1 , a cada p V1 denimos a aplicao
lineardp : Tp S1 T(p) S2
atuando em um vetor wp Tp S1 da seguinte forma: Seja : t ( , )
S1 diferencivel, com (0) = p e (0) = wp , entodp (wp ) = (0) = d (
)(0), dt
com = , (0) = (p).
31
As denies 1.7 e 1.8 so anlogas, assim a proposio a seguir ser
demonstrada para um dos casos, o outro pode ser feito usando o
mesmo raciocnio.Proposio 1.9. A diferencial dp : Tp S1 T(p) S2
linear e no depende da escolha da curva que passa por p com vetor
tangente wp .
Seja uma curva : ( , ) S , com (0) = p e = , seja tambm X
parametrizao de S em uma vizinhana de p e X uma parametrizao de S
em uma vizinhana de (p). Primeiramente vamos mostrar que no depende
da escolha da curva que passa por p. SejamDemonstrao.1 1 1 2 2
1 : ( , ) R3 ; 2 : ( , ) R3 ;
1 (0) = p; 2 (0) = p;
1 (0) = w 2 (0) = w
d1 (0) (1 (0)) = dp (1 (0)) = dp (w) d2 (0) (2 (0)) = dp (2 (0))
= dp (w)
Portanto, d no depende da curva passando por p. Podemos
reescrever = X X X X , mas sabemos que X a mudana de parmetros,
logo = X h X . Seja agora a curva = X (t), com t ( . ). Entop 2 1 2
1 2 1 1 1 1 1 1
1 2 X1
=h
= X2 h (t) (0) =
d (X2 h )(0) = dX2(r) dhq (0) dt
Sejam w , w1
2
Tp S1 R
,
e as curvasw1 = 1 (0), w2 = 2 (0),
1 : ( , ) S1 , 2 : ( , ) S2 , 1 : ( , ) U, 2 : ( , ) U,
32
entodp (w1 + w2 ) = dp dX1(q) (1 (0) + 2 (0)) = dX2(r) dhq (1
(0) + 2 (0)) = dX2(r) (dhq (1 (0)) + dX2(r) (dhq (2 (0)) = dp
dX1(q) (1 (0)) + dp dX1(q) (2 (0)) = dp (w1 ) + d(w2 ).
Portanto a diferencial d linear.p
33
2
Primeira Forma Fundamental, Aplicao Normal e Segunda Forma
Fundamental
A primeira coisa que um habitante de uma superfcie, com alguma
curiosidade pela geometria, talvez queira saber, como medir a
distncia entre dois pontos da superfcie. Logo, na seo 2.1 iremos
apresentar a primeira forma fundamental, permitindo o clculo de
medidas sobre a superfcie sem fazer meno ao espao ambiente onde est
a superfcie. Assim como a taxa de variao do vetor tangente a uma
curva mede o quo essa curva deixa de ser reta, na seo 2.1
estenderemos essa idia para superfcies regulares, isto , tentaremos
medir o quo rapidamente uma superfcie S deixa de ser plana,
introduzindo ento a aplicao normal de Gauss. Na seo 2.3
apresentaremos a segunda forma fundamental, uma forma quadrtica que
est relacionada com a aplicao normal de Gauss.2.1 Primeira Forma
Fundamental
At aqui, estudamos as superfcies regulares do ponto de vista da
diferenciabilidade. Nessa seo apresentaremos a primeira forma
quadrtica, denominada primeira forma fundamental, que nos permite
efetuar alguns clculos geomtricos, tais como o comprimento de
arcos, ngulos entre curvas e reas de regies na superfcie.Denio 2.1.
Seja S uma superfcie regular e Tp S o plano tangente a S no ponto
p. A forma quadrtica Ip denida por:Ip : Tp S R w Ip (w) =< w, w
>p = ||w||2 0
chamada de
primeira forma fundamental.
34
Como podemos observar, a primeira forma fundamental basicamente
o produto interno usual do R restrito aos vetores tangentes a S.
Vamos agora expressar a primeira forma fundamental na base {X , X }
associada a parametrizao X(u, v) em p. Seja o vetor w T S, faamos
uma curva tal que (0) = p e (0) = w e3 u v p
: ( , ) U R2 t (t) = (u(t), v(t))
dada por = X , tal que (0) = q, com X(q) = p. Notemos ainda que
t ( , ) teremos (t) = X ((t)) (t) = X ((t))u (t) + X ((t))v (t),
onde (t) = (u (t), v (t)). Assim,1 u v
Ip (w) = < w, w >p = < (0), (0) >(0) = < Xu
((0))u (0) + Xv ((0))v (0), Xu ((0))u (0) + Xv ((0))v (0) >p =
< Xu , Xu >p u + 2 < Xu , Xv > u v + < Xv , Xv >
v .2 2
Vamos denotar E =< X , X >, F =< X , X > e G =< X
, X >, que chamaremos de coecientes da primeira forma
fundamental. Vejamos agora alguns exemplos.u u u v v v
Exemplo 2.1. O plano que passa por um dado ponto p e tem a direo
dos vetores w1 = (a, b, c) e w2 = (d, e, f ) unitrios e ortogonais
parametrizado por X(u, v) = p+uw1 +vw2 .Logo, Xu = w1 e Xv = w2 .
AssimE = < Xu , Xu >=< w1 , w1 >= 1 F = < Xu , Xv
>=< w1 , w2 >= 0 G = < Xv , Xv >=< w2 , w2 >=
1
Exemplo 2.2. Seja um cilindro vertical, parametrizado por X(u,
v) = (cos u, sin u, v), com U = {(u, v) R2 : 0 < u < 2, <
v < }.
35
Logo, Xu = ( sin u, cos u, 0) e Xv = (0, 0, 1). AssimE = < Xu
, Xu >= sin2 u + cos2 u = 1 F = < Xu , Xv >= 0 G = < Xv
, Xv >= 1
Exemplo 2.3. A esfera S parametrizada em coordenadas esfricas
dada porX(, ) = (r sin cos , r sin sin , r cos ),
com 0 < < e 0 < < 2. Logo, X = (r cos cos , r cos
sin , r sin ) e X = (r sin sin , r sin cos , 0). AssimE = < X ,
X >= r2 F = < X , X >= 0 G = < X , X >= r2 sin2
Agora que conhecemos a primeira forma fundamental podemos
estudar questes geomtricas sobre uma superfcie regular, como
havamos citado anteriormente. Vejamos ento como calcular
comprimentos de arcos, ngulos e reas em S. O comprimento de arco de
uma curva denida em um intervalo dado por:b
L() =a
|| (t)||dt.
Vamos considerar uma superfcie regular S e uma parametrizao X :
U S, com U R . E sejam as curvas2
(t) : (a, b) U (t) : (a, b) S
tal que (t) = X (t) = X(u(t), v(t)), ento (t) = X u (t) + X v
(t) Entou v
|| (t)|| = = =
< (t), (t) > I(t) ( (t)) < Xu , Xu > (u (t))2 + 2
< Xu , Xv > u (t)v (t)+ < Xv , Xv > (v (t))2
36
Usando os coecientes da primeira forma fundamental temos:||
(t)|| = E(u (t))2 + F u (t)v (t) + G(v (t))2 .
Ento,L() =a
b
E(u (t))2 + F u (t)v (t) + G(v (t))2 dt.
Exemplo 2.4. Seja a esfera S de raio r dada no exemplo anterior.
Temos os seguintes coecientes da primeira forma fundamental E = r2
,F = 0 e G = r2 sin2 . Ento o comprimento de arco de uma curva
contida na esfera b
L((t)) =a b
E( (t))2 + 2F (t) (t) + G( (t))2 dt r2 ( (t))2 + r2 sin2 ( (t))2
dt.a
=
Vamos xar = Logo,
2
e e variar = t, com t (0, 2), ento (t) = 0 e (t) = 1.2 2
r2 sin2 dt = r 2 0 que o comprimento do equador de S . L((t))
=
dt = rt|2 = 2r 00
Exemplo 2.5. Seja o cilindro vertical, parametrizado por X(u, v)
= (r cos u, r sin u, v) que vimos no exemplo 2.2. Temos os
seguintes coecientes da primeira forma fundamental: E = r2 , F = 0
e G = 1.Vamos considerar a curva (t) contida no cilindro, com u(t)
= t, 0 < t < 2 e v(t) = v0 xo, dessa forma teremos uma
circunferncia contida no cilindro. Seja v(t) = 0 e u(t) = t, 0 <
t < 2, ento o comprimento de arco 2
L() =0
Eu (t)2 + Gu (t)v (t) + F v (t)2 dt,
mas u (t) = 1 e v (t) = 0 ento2
L() =0
r2 dt = rt|2 = 2r 0
No caso anterior a varivel v era xa e a u variava, no entanto
podemos tomar
37
u(t) = u0 xo e v(t) = t, com a < t < b e a, b R. Assim, u
(t) = 0 e v (t) = 1, entob
Gdt =a
b
L() =a
dt = t|b = (b a) a
que o comprimento de um segmento vertical contido no
cilindro.
Nos exemplos 2.1 e 2.2 podemos perceber que os coecientes da
primeira forma fundamental so os mesmos no plano e no cilindro de
raio unitrio. Isso no mera coincidncia, esse assunto ser tratado na
seo 4.1. Vamos dar agora apenas uma justicativa geomtrica para
isso. Seja uma folha de papel plana, por exemplo, se enrolarmos a
folha teremos um cilindro, de modo bvio, sem deformaes. Se traarmos
uma curva na folha plana, depois de enrolada, torna-se uma curva no
cilndro e como no houve deformaes, o comprimento de ambas as curvas
coincidem. Com efeito, a transformao geomtrica do plano no cilndro
que referimos acima um difeomorsmo especial, como veremos na seo
4.1.
Figura 12: Curva no plano transformada numa curva no cilndro.
Vejamos agora como medir ngulos entre curvas em uma superfcie. Seja
S uma superfcie regular e X uma parametrizao de S. Sejam (t) = X e
(t) = X curvas em S que se interceptam em um ponto t = t , no ponto
p = X(q) = (t ) = (t ). O ngulo entre curvas em p, denido como o
ngulo entre 0 e formado pelos vetores (t ) e (t ), ou seja, o ngulo
entre 0 e tal que:1 1 2 2 0 1 0 2 0 1 0 2 0
cos =
< 1 (t0 ), 2 (t0 ) > ||1 (t0 )||||2 (t0 )||
Agora vamos reescrever a denio acima usando os coecientes da
primeira forma fudamental.
38
Temos1 (t) = (u1 (t), v1 (t))2 (t) = (u2 (t), v2 (t)),
1 (t0 ) = Xu u1 (t0 ) + Xv v1 (t0 ) 2 (t0 ) = Xu u2 (t0 ) + Xv
v2 (t0 )
ento= Eu1 (t0 )u2 (t0 ) + F (u1 (t0 )v2 (t0 ) + v1 (t0 )u2 (t0
)) + Gv1 (t0 )v2 (t0 ).
< 1 (t0 ), 2 (t0 ) > = < Xu , Xu > u1 (t0 )u2 (t0 )+
< Xu , Xv > (u1 (t0 )v2 (t0 ) + v1 (t0 )u2 (t0 ))+ < Xv ,
Xv
Temos ainda que||1 (t0 )|| = = = < 1 (t0 ), 1 (t0 ) > <
Xu , Xu > (u1 (t0 ))2 + 2 < Xu , Xv > u1 (t0 )v1 (t0 )+
< Xv , Xv > (v1 (t0 ))2 E(u1 (t0 ))2 + 2F u1 (t0 )v1 (t0 ) +
G(v1 (t0 ))2
e||2 (t0 )|| = = = < 2 (t0 ), 2 (t0 ) >2 2 Xu (u2 (t0 ))2
+ 2Xu Xv u2 (t0 )v2 (t0 ) + Xv (v2 (t0 ))2
E(u2 (t0 ))2 + 2F u2 (t0 )v2 (t0 ) + G(v2 (t0 ))2 .
Obtemos assim o ngulo , por comodidade vamos omitir o ponto de
aplicao t da frmula abaixo,0
= arccos
Eu1 u2 + F (u1 v2 + v1 u2 ) + Gv1 v2 (E(u1 )2 + 2F u1 v1 + G(v1
)2 )(E(u2 )2 + 2F u2 v2 + G(v2 )2 )
Exemplo 2.6. Dada uma superfcie regular S e uma parametrizao X
de S em uma vizinhana do ponto p S passando por p, tais que seus
vetores tangentes so Xu e Xv . Ento ca denido por: = arccos < Xu
, Xv > F = arccos . ||Xu ||||Xv || EG
Uma outra questo mtrica que podemos tratar com a primeira forma
fundamental
39
a denio de rea de uma regio limitada de uma superfcie regular S.
Seja S uma superfcie regular, X : U R S uma parametrizao de S e R S
uma regio limitada de S, de forma que, R a imagem por X de uma
regio Q U limitada. Vamos considerar uma partio P que divide Q em
um nmero nito de regies Q e consequentemente teremos um nmero nito
de R parties de R. Ento X(Q ) = R . Temos que:2 ij ij ij ij
ui = ui ui1 vj = vj vj1
Agora vamos aproximar a rea da regio X(Q ) pela rea do
paralelogramo em T S, onde p = (u , v ). Os vetores w e w em T S,
so imagens dos lados dos retngulos Q , tal queij p i1 j1 1 2 p
ij
w1 = ui Xu w2 = vj Xv
A rea do paralelogramo gerado por w e w :1 2
Aij = ||w1 w2 || = ||ui Xu vj Xv || = ui vj ||Xu Xv ||
Figura 13: A rea R aproximada pela rea do paralelogramo T S com
lados w e w .ij p 1 2
A rea da superfcie ser dada quando o nmero de parties Q tenderem
a innito,ij
40
ou seja, quando a norma das parties tenderem a zero. Logo,A = =
=Q |P |0
lim lim
AijRij P
|P |0
ui vj ||Xu Xv ||Rij P
du dv||Xu Xv ||,
onde |P | = sup{u v : R P } Podemos mostrar que a rea de regies
contidas em S independente da parametrizao X , mas para isso
precisamos utilizar o seguinte teorema de mudana de variveis para
integrais mltiplas, cuja demonstrao no ser feita neste trabalho.i j
ij
Teorema 2.1. Seja f uma aplicao integrvel sobre Q,sendo Q uma
regio fechada e limitada do plano uv. Seja Q uma regio fechada e
limitada do plano uv e uma aplicao (u,v) h : Q Q. Se h for uma
bijeo com derivadas parciais contnuas em Q e se (,) no uv , ento se
anula em Qf (u, v) du dv =Q Q
f (u(, v ), v(, v )) u u
(u, v) d d. u v (, v ) u
Temos que h : Q Q.
(u,v) (,) uv
a matriz jacobiana da mudana de parmetros h = X 1 X , com
Assim, usando o teorema 2.1 temos u v ||Xu Xv || d d = Q Q
||Xu Xv ||
(u, v) d d u v (, v ) u
=Q
||Xu Xv || du dv.
Ento a integral envolvida para calcular rea de regies contidas
numa superfcie independe da parametrizao.Denio 2.2. Seja R S uma
regio limitada de uma superfcie regular, contida em uma vizinhana
coordenada de uma parametrizao X : U R2 S .
41
O nmero positivo dado porA(R) =Q
||Xu Xv || du dv,
com X(Q) = R, chamado
rea de R.
Agora que denimos a rea de R, podemos escrev-la usando os
coecientes da primeira forma fundamental. Primeiramente podemos
notar que||Xu Xv || = ||Xu ||||Xv || sin(u, v)
e< Xu , Xv >= ||Xu ||||Xv || cos(u, v).
Ento,||Xu Xv ||2 + < Xu , Xv >2 = ||Xu ||2 ||Xv ||2 sin2
(u, v) + ||Xu ||||Xv || cos2 (u, v) = ||Xu ||2 ||Xv ||2
Assim,||Xu Xv || = ||Xu ||2 ||Xv ||2 < Xu , Xv >2 =
EG F
Logo,A(R) =
EG F 2 du dv.
Exemplo 2.7. Seja S uma esfera de raio r dada por X(, ) = (r sin
cos , r sin sin , r cos ), com 0 < < e 0 < < 2.Vamos
calcular a rea total da esfera:2 0 2
A(R) =0
EG F 2 d d r2 sin d d
=0 0 2
= r20 2
(0
sin d) d
= r20 2
( cos + cos 0) d 2 d = 4r2 .0
= r2
Exemplo 2.8. Seja T2 um toro dado por X(, ) = ((a+r cos ) cos ,
(a+r cos ) sin , r sin ),
42
onde U = {(, ) R2 : 0 < < 2, 0 < < 2}. Vamos
calcular a rea dessa superfcie. Primeiramente vamos calcular os
coecientes da primeira forma fundamental:X = (r sin cos , r sin sin
, r cos ) X = ((a + r cos ) sin , (a + r cos ) cos , 0).
LogoE =< X , X > = r2 sin2 cos2 + r2 sin2 sin2 + r2 cos2 =
r2 sin2 (cos2 + sin2 ) + r2 cos2 = r2 F =< X , X > = r(a + r
cos ) sin cos sin r(a + r cos ) sin sin cos = 0 G =< X , X >
= (a + r cos )2 sin2 + (a + r cos )2 cos2 = (a + r cos )2 .
Portanto, EG F 2 = Ento a rea do toro
r2 (a + r cos )2 = r(a + r cos ).
2
2
A(R) =0 2 0
r(a + r cos )dd2
= r0 2 0 2
(a + r cos )d d2
= r0 2 0
ad +0
cos d d
= r0 2
a| + sin |2 d 0 0 a2d0
= r
= 2ar(|2 ) 0 = 4 2 ar.
2.2
Aplicao Normal de Gauss
Comearemos essa seo discutindo em que sentido e quando possvel
orientar uma superfcie regular.
43
Temos que {X , X } formam uma base para o plano tangente T S.
Ento para todo ponto p X(U ) S, podemos encontrar um vetor normal
unitrio a T S, dado por:u v p p
N (p) =
Xu Xv . ||Xu Xv ||
Denio 2.3. Seja S uma superfcie regular, V S um conjunto aberto.
Chamamos a aplicao N : V S R3 de campo diferencial de vetores
normais. Denio 2.4. Uma superfcie S dita orientvel se existe um
campo de vetores unitrios denidos em toda a superfcie. Ou seja,
existe uma aplicao diferencivel e contnuaN : S S2 p N (p), p S
Denio 2.5. A aplicao normal de Gauss a aplicao N : S S2 R3 dada
X localmente por N (p) = ||Xu Xv || , onde S2 a esfera unitria. u
Xv
A aplicao normal de Gauss une todos os vetores normais unitrios
a superfcie S, fazendo com que tenham a mesma origem, formando um
subconjunto da esfera unitria, como mostra a gura a seguir.
Figura 14: Aplicao normal de Gauss. O vetor N (p) normal a T S
em p e a T S , ou seja T S e T S so paralelos, logo podem ser
identicados como os mesmos espaos vetoriais. Vamos estudar agora a
variao de N , ou seja, a derivada de N . Como T S e T S so
paralelos, ento a derivada de aplicao normal dN (p) : T ST S pode
ser vista como uma aplicao linear em T S . E age sobre a superfcie
da seguinte forma:p N (p) 2 p N (p) 2 p N (p) 2 p N (p) 2 p
44
Seja : ( , ) S, com (0) = p e consideramos a curva parametrizada
N (t) = N (t), equivale a restringir o campo vetorial N a curva
(t), formando assim um curva em S , dada pelos extremos dos vetores
N (t). Temos que N (t) = N (t), ento o vetor tangente a N (t) em N
(p) dado por:2
N (t) = dN(t) (t) N (0) = dNp (0),
mede a taxa de variao do vetor normal N restrita a curva (t),
medindo o quanto a superfcie se afasta do plano tangente T S, em um
vizinhana de p S.p
Figura 15: A aplicao dN (p) mede a variao de N (p). Vejamos
alguns exemplos:Exemplo 2.9. Seja um plano com a seguinte
parametrizao, ax + by + cz + d = 0, sabemos que o vetor (a,b,c) um
vetor normal ao plano , logo o vetor normal unitrio ao plano em p
dado por:N (p) = (a, b, c) (a, b, c) = , 2 + b2 + c 2 ||(a, b, c)||
a
que o mesmo vetor para todo p S . Portanto dN (p) = 0, p S .
45
Figura 16: No plano o vetor N (p) constante para todo ponto p,
logo dN
p
=0
.
Exemplo 2.10. Seja S2 uma esfera de raio r dada por {(x, y, z)
R3 : x2 +y2 +z 2 = r2 }. Vamos considerar apenas a parametrizao do
hemisfrio norte da esfera, X(u, v) = (u, v, r2 (u2 + v 2 )), com
(u, v) U e U = {(u, v) R2 : u2 + v 2 < r2 }.u v Temos que Xu =
1, 0, r2 (u2 +v2 ) e Xv = 0, 1, r2 (u2 +v2 ) .
O vetor normal unitrio N= Xu Xv = ||Xu Xv || u v , , r r r2 (u2
+ v 2 ) r .
Seja p = (x, y) X(U ), ento N ( x , y , z ). Esse resultado
tambm vlido para todo r r r 2 pS . Vamos considerar a curva em S2
dada por (t) = (x(t), y(t), z(t)), com (0) = p e (0) = w. Restrito
a curva temos que1 N ((t)) = N (t) = (x(t), y(t), z(t)) r 1 dN (
(0)) = dN (w) = N (0) = (w), p S, w Tp S. r
No entanto, para cobrir a esfera precisamos das outras cinco
parametrizaes, que obteremos o mesmo resultado.
46
Figura 17: Na esfera de raio r, temos dN (w) =
1 (w) r
.
Exemplo 2.11. Seja um cilindro dado por {(x, y, z) R3 : x2 + y2
= 1}. Temos a seguinte parametrizao do cilindro: X(u, v) = cos u,
sin u, v, onde U = {(u, v) R2 : 0 < u < 2, < v < }.
Logo,Xu = ( sin u, cos u, 0) Xv = (0, 0, 1).
Fazendo os devidos cculos, obtemos N = (cos u, sin u, 0), ou
seja, N = (x, y, 0). Considerando uma curva qualquer no cilindro,
(t) = (x(t), y(t), z(t)), temos que (t) = (x (t), y (t), z (t)). Se
restringirmos o vetor normal N (t) = (x(t), y(t), 0) temos dN (
(t)) = N (t) = (x (t), y (t), 0). Se a curva for uma reta no
cilindro paralela ao eixo Oz , teremos que o vetor w1 tangente a
curva tambm ser paralelo ao eixo Oz , logo dN (w1 ) = 0.
47
Figura 18: Se a curva paralela ao eixo Oz o vetor N (p)
constante para todo ponto p , logo dN = 0.p
Agora se a curva for paralela ao plano xy, teremos o vetor w2
tangente a curva, onde dNp (w2 ) = w2 .
Figura 19: Se a curva paralela ao eixo xy, dN (w ) = w .p 2
2
Vamos usar a seguinte notao, se w T S e {X , X } uma base de T
S, ento w pode ser escrito como combinao linear dos vetores da
basep u v p
w = w u X u + w v Xv ,
wu , wv R
edNp (w) = dNp (wu Xu + wv Xv ) = wu dNp (Xu ) + wv dNp (Xv ) =
wu Nu + wv Nv .
Proposio 2.1. A diferencial dNp : Tp S Tp S da aplicao normal de
Gauss uma aplicao linear auto-adjunta.Demonstrao.p
.
Seja S uma superfcie regular com X(u, v) uma parametrizao de S
em
48
J sabemos pela proposio 1.9 que dN linear, ento temos apenas que
mostrar que dN auto-adjunta. Temos que {X , X } a base associada a
T S e sejam w e w vetores de T S que tambm formam uma base {w , w }
para T S. Teremos que mostrar quep p u v p 1 2 p 1 2 p
< dNp (w1 ), w2 >=< w1 , dNp (w2 ) > .
Masu v w 1 = w 1 Xu + w 1 Xv , u v w 2 = w 2 Xu + w 2 Xv , u v
w1 , w1 R u v w2 , w2 R
combinao linear dos vetores da base. Eu v dNp (w1 ) = w1 Nu + w1
Nv u v dNp (w2 ) = w2 Nu + w2 Nv ,
ento temosu v < dNp (w1 ), w2 > = < dNp (w1 ), w2 Xu +
w2 Xv > u v = w2 < dNp (w1 ), Xu > +w2 < dNp (w1 ), Xv
> u u v v u v = w2 < w1 Nu + w1 Nv , Xu > +w2 < w1 Nu +
w1 Nv , Xv > u u u v v u = w2 w1 < Nu , Xu > +w2 w1 <
Nv , Xu > +w2 w1 < Nu , Xv > v v + w2 w1 < Nv , Xv
>
eu v < dNp (w2 ), w1 > = < dNp (w2 ), w1 Xu + w1 Xv
> v u u v v u = w1 < w2 Nu + w2 Nv , Xu > +w1 < w2 Nu +
w2 Nv , Xv > u u u v v u = w1 w2 < Nu , Xu > +w1 w2 <
Nv , Xu > +w1 w2 < Nu , Xv > v v + w1 w2 < Nv , Xv
>
Para que < dN (w ), wp 1
2
>=< dNp (w2 ), w1 >
, pelas expresses acima temos queu
< Nv , Xu >=< Nu , Xv > .
Sabemos que N ortogonal a X e X ento < N, Xu v
>= 0
e < N, X
v
>= 0
,
49
derivando euv
< N, Xv >=< Nu , Xv > + < N, Xvu >= 0 u <
N, Xv >=< Nv , Xu > + < N, Xuv >= 0. v
Mas < N, X >=< N, X >, ento < N , X Ento dN uma
aplicao auto-adjunta.vu v p
u
>=< Nu , Xv >
.
Agora que provamos que a diferencial dN p = T S T S
auto-adjunta, podemos associar a ela uma forma bilinear simtrica,
ou seja B : T S T S R, dada porB(u, v) =< dN (u), w > e assim
associar uma forma quadrtica, nesse caso Q : T S R dada por Q(v) =
B(v, v) =< dN p(v), v >.p p p p p p
2.3
Segunda Forma Fundamental
Nesta seo vamos denir a segunda forma fundamental sob um aspecto
algbrico, e no prximo captulo veremos uma interpretao
geomtrica.Denio 2.6. A forma quadrtica IIp , denida em Tp S por IIp
= < dN p(v), v > chamada a segunda forma fundamental de S em
p.
Podemos observar que na denio da segunda forma fundamental
utilizamos a forma quadrtica Q apenas por conveno, veremos o porqu
mais adiante. A partir de agora vamos considerar que todas as
parametrizaes X : U R S so compatveis com a orientao de S, ou seja,
em X(U ), N = . Vamos calcular a segunda forma fundamental em um
vetor (t) em T S. Sejam X(u, v) uma parametriza de p S e (t) =
X(u(t), v(t)) uma curva parametrizada em S, com (0) = p. Para
simplicar a notao, convencionaremos que todas as funes que aparecem
abaixo indicam seus valores no ponto p. Temos que = X u + X v e2 Xu
Xv ||Xu Xv || p u v
N (t) = N ((t)) = N (u(t), v(t)) dN ( ) = N (u (t), v (t)) = Nu
u + Nv v .
50
Mas N , Nu
v
Tp S
entoNu = a11 Xu + a21 Xv Nv = a12 Xu + a22 Xv
portantodN ( ) = (a11 Xu + a21 Xv )u + (a12 Xu + a22 Xv )v = Xu
(a11 u + a12 v ) + Xv (a21 u + a22 v )
isto ,dN u vu v
=
a11 a12 a21 a22
u v
.
Isso mostra que na base {X , X }, dN dada pela matriz (a ), i, j
= 1, 2, chamada de matriz de Weingarten. Note que esta matriz no
necessariamente simtrica, a no ser que {X , X } seja uma base
ortonormal. Por outro lado, a expresso da segunda forma fundamental
na base {X , X } dada porij u v u v
IIp ( ) = < dN p( ), > = < Nu u + Nv v , Xu u + Xv v
> = (u < Nu , Xu > +u v < Nu , Xv > +v u < Nv ,
Xu > +v < Nv , Xv >).2 2
No entanto, < N , Xu
v
>=< Nv , Xu >2
, ento2
IIp ( ) = (u < Nu , Xu > +2u v < Nu , Xv > +v <
Nv , Xv >).
Vamos denotare = < Nu , Xu >, f = < Nu , Xv >, f =
< Nv , Xu >, g = < Nv , Xv >,
51
que chamaremos de coecientes da segunda forma fundamental. Ento
temos a seguinte expresso:IIp ( ) = eu + 2f u v + gv2 2
Vamos obter agora os valores de a em termos dos coecientes da
primeira e da segunda forma fundamental.ij
e = < Nu , Xu >=< a11 Xu + a21 Xv , Xu >= a11 <
Xu , Xu > +a21 < Xv , Xu > f = < Nu , Xv >=< a11
Xu + a21 Xv , Xv >= a11 < Xu , Xv > +a21 < Xv , Xv >
f = < Nv , Xu >=< a21 Xu + a22 Xv , Xu >= a21 < Xu ,
Xu > +a22 < Xv , Xu > g = < Nv , Xv >=< a21 Xu +
a22 Xv , Xv >= a21 < Xu , Xv > +a22 < Xv , Xv >
.
Substituindo os coecientes da primeira forma fundamental nas
expresses acima obtemos:e = a11 E + a21 F f = a11 F + a21 G f = a21
E + a22 F g = a21 F + a22 G
As relaes acima podem ser expressas em forma matricial: e f f g
= a11 a21 a12 a22 E F F G ,
logo,1
a11 a21 a12 a22
=
e f f g
E F F G
.
No entanto,1
E F F G
=
1 EG F 2
G F
F E
,
52
ento podemos calcular a ,a ,a e a :11 21 12 22
a11 =
f F eG EG F 2
a12 =
gF f G EG F 2
a21 =
eF f E EG F 2
a22 =
f F gE EG F 2
Para efeito de futuros clculos, o procedimento para encontrar os
coecientes da segunda forma fundamental ser o seguinte: Temos que
< N, X >=< N, X >= 0, entou v
< N, Xu > = < Nu , Xu > + < N, Xuu >= 0 u <
N, Xv > = < Nv , Xv > + < N, Xvv >= 0 v < N, Xu
> = < Nv , Xu > + < N, Xuv >= 0. v
Das equaes acima temos que: < Nu , Xu >= < N, Xuu >
< Nv , Xv >= < N, Xvv > < Nv , Xu >= < N, Xuv
> .
Logo podemos escrever os coecientes da segunda forma fundamental
da seguinte forma:e = < N, Xuu >= = f = = g = = Xu X v 1 ,
Xuu = Xu Xv , Xuu ||Xu Xv || ||Xu Xv || det (Xu , Xv , Xuu ) EG F 2
Xu Xv 1 < N, Xuv >= , Xuv = Xu Xv , Xuv ||Xu Xv || ||Xu Xv ||
det (Xu , Xv , Xuv ) EG F 2 Xu X v 1 < N, Xvv >= , Xvv = Xu
Xv , Xvv ||Xu Xv || ||Xu Xv || det (Xu , Xv , Xvv ) . EG F 2u v uu
u v uu u v uv v
Utilizamos a notao < X X , X >= det(X , X , X ), < X X
, X >= det(X , X , X ) e < X X , X >= det(X , X , X ),
onde (X , X , X ), (X , X , X ) e (X , X , X ) so matrizes formadas
pelas componentes dos vetores X ,X e X , X ,X e X , X ,X e X ,
respectivamente, na base cannica do R .u v uv u v vv u v vv u v uu
u uv u v vv v u v uu u v uv u vv 3
53
Vejamos um exemplo:Exemplo 2.12. Seja um cilindro C dado por
X(u, v) = (cos u, sin u, v), com U = {(u, v) R2 : 0 < u < 2,
< v < }.Vamos calcular os coecientes da segunda forma
fundamental. Primeiramente temos que Xu = ( sin u, cos u, 0) e Xv =
(0, 0, 1), entoXuu = ( cos u, sin u, 0) Xuv = (0, 0, 0) Xvv = (0,
0, 0).
Logo, det(Xu , Xv , Xuu ) = det(Xu , Xv , Xuv ) = 0 det(Xu , Xv
, Xvv ) = 0 sin u 0 cos u 0 0 1 = cos2 u sin2 u = 1 cos u sin u
0
Portanto, os coecientes da segunda forma fundamental sodet(Xu ,
Xv , Xuu ) = 1 EG F 2 f = 0 e = g = 0.
No prximo captulo iremos apresentar uma interpretao geomtrica
para a segunda forma fundamental e fazer alguns exemplos.
54
3
Curvaturas
3.1
Curvatura Normal
Antes de denirmos curvatura para superfcies, vamos analisar a
denio de curvatura de uma curva. Primeiramente vamos denir o que
uma curva parametrizada pelo comprimento de arco. Denio 3.1. Uma
curva diferencivel parametrizada : I R chamada regular3
se (t) = 0 para todo t I .
Denio 3.2. Seja : (a, b) R3 uma curva parametrizada
diferencivel, ou seja, para cada t (a, b) existe um vetor no nulo
(t). Diz-se que parametrizado pelo comprimento de arco se, para
cada t0, t1 (a, b), com t0 t1, o comprimento de arco da curva de t0
a t1 igual a t1 t0 . Ou seja,t1
s(t) =t0
|| (t)||dt = t1 t0 ,
assim || (t)|| = 1, t (a, b).
Se considerarmos como a posio de uma partcula, ento ser
parametrizado pelo comprimento de arco signica que essa partcula
esta se movendo com velocidade constante igual a 1. Seja : (a, b) R
uma curva parametrizada pelo comprimento de arco s, como o vetor
tangente (t) unitrio, o mdulo da derivada segunda || (s)|| mede a
variao do ngulo que as tangentes vizinhas fazem com a tangente em
s. Ou seja, || (s)|| d uma medida do quo rapidamente a curva se
afasta, em uma vizinhana de s, da tangente em s.3
55
Figura 20: Vetores velocidade de uma curva. Ento vamos denir
curvatura de uma curva em s.Denio 3.3. Seja : (a, b) R3 uma curva
parametrizada pelo comprimento de arco s (a, b). O numero || (s)||
= k(s) chama-se curvatura de em s.
Agora vamos considerar uma curva parametrizada pelo comprimento
de arco contida em uma superfcie regular S, tal que (s) = p, (s) o
vetor tangente a em p e k(s) = || (s)|| a curvatura de em s. Seja o
ngulo entre N (s), vetor normal a S em p, e (s).Denio 3.4. A
curvatura normal denida por em p S dada por Kn = k cos , ou seja Kn
(, s) =< N (s), (s) >.
Podemos observar que K o comprimento da projeo do vetor (s)
sobre a normal a superfcie em p, com sinal dado pela orientao N de
S em p.n
56
Figura 21: A curvatura normal K .n
Como K d a componente do vetor curvatura (s) de segundo a normal
N (s) superfcie, se esses vetores forem colineares, isto , se a
normal principal curva no instante s tiver a direo normal superfcie
em (s), ento o valor absoluto de K igual a curvatura de nesse
ponto. Vamos agora expressar Kn em termos dos coecientes da segunda
forma fundamental. Seja uma curva parametrizada pelo comprimento de
arco s contida em uma superfcie S. Podemos notar que (s) pertence a
T S e ortogonal a N (s) = N (s), ento < (s), N (s) >= 0,
derivando temosn n (s)
< (s), N (s) > + < (s), N (s). (s) > = 0 Kn(, s) =
< (s), dN(s) ( (s)) > Kn(, s) = +II(s) ( (s)).
Podemos dizer ento que a curvatura normal no ponto (s) de uma
curva regular contida em S, cuja tangente nesse ponto o vetor (s),
igual ao valor que obtemos aplicando a segunda forma fundamental II
em (s). Isso mostra o porque que usamos o sinal () na denio 2.7.
Teorema 3.1 (Teorema de Meusnier). Todas as curvas que possuem o
mesmo vetor(s)
velocidade em p S , possuem a mesma curvatura normal em p.
Demonstrao.
J demonstramos na aplicao acima. Note que a curvatura normal
K
n
57
em p S s depende da direo tangente a curva passando por p. O
teorema acima nos permite falar em curvatura normal ao longo de uma
dada direo em p. Vejamos a seguinte denio: Denio 3.5. Uma seo
normal C a uma superfcie S determinada por v T S av p
curva de interseo de S com o plano Pv gerado por v e N (p).
Figura 22: Seo normal C a uma superfcie S.v
Em uma vizinhana de p, uma seo normal de S em p uma curva
regular plana em S , cujo vetor normal em p N (p) ou zero, portanto
a sua curvatura igual ao valor absoluto da curvatura normal segundo
v em p. Alm disso, o sinal de K muda conforme a concavidade da
superfcie no ponto, ou seja, se a concavidade aponta no sentido de
N (p) ento positiva, se aponta no sentido oposto negativa. Assim o
teorema de Meusnier arma que o valor absoluto da curvatura normal
em p de uma curva (s) igual a curvatura da seo normal de S em p,
segundo (0). Logo para estudar as curvaturas normais em p S basta
analisar as curvaturas das sees normais. Vejamos alguns
exemplos:n
Exemplo 3.1. Como vimos no exemplo 2.8, num plano temos dNp = 0
para qualquer curva passando por p em . E para qualquer p obtemos
um plano formado por N (p) e vp , cujas sees normais so retas em ,
que possuem curvatura nula.Tambm temos que a segunda forma
fundamental o numero resultante do produto interno de dN (p)
aplicada ao vetor tangente a p, que ser nulo em todos os pontos p ,
estando de acordo com o fato de dNp = 0.
58
Figura 23: Sees normais no plano so retas, tendo assim curvatura
nula.Exemplo 3.2. No cilindro reto, dado por {(x, y, z) R3 : x2 +y2
= 1}, as sees normais em um ponto p variam de uma reta paralela ao
eixo do cilindro, de uma famlia de elpses at a um crculo
perpendicular ao eixo do cilindro. Assim as curvaturas normais
variam de 0, na reta, a 1, no crculo. Caso fosse um cilindro de
raio r, iria variar de 0 a 1 . rComo vimos exemplo 2.11 os vetores
w1 e w2 correspondem s direes das curvaturas normais 0 e 1,
respectivamente, logo a segunda forma fundamental assume seu valor
mximo em w1 e mnimo em w2 .
Figura 24: Sees normais no cilindro variam de uma reta paralela
ao eixo do cilindro, uma famlia de elpses at a um crculo
perpendicular ao eixo do cilindro. Podemos observar no exemplo
acima que a segunda forma fundamental assume um mximo e um mnimo,
vamos deixar isso mais claro. Seja um plano P que contm v e N (p),
girando em torno de N (p). Como v um vetor unitrio, quando giramos
P em torno de N (p), v descreve em T S um crculo de raio 1.v v
p
59
Figura 25: Circunferncia S descrita pelo vetor unitrio v em T
S.1 p
Para contrurmos uma seo normal basta tomarmos uma direo em T S,
ento K pode ser visto como uma aplicao contnuap
n
Kn (p) : S1 Tp S R v Kn (p)(v) = IIp (v).
Vamos usar agora o seguinte teorema:Teorema 3.2. Seja D R2 um
conjunto fechado e limitado, ou seja compacto, e seja uma funo f :
D R contnua em D. Ento f assume seu valor mximo absoluto e mnimo
absoluto.
Sabemos que S um compacto, assim se K est denida em S , ento
pelo teorema acima existem e ,e T S tal que K (p)(e ) valor mximo e
K (p)(e ) valor mnimo. Voltemos a aplicao linear dN : T S T S.
Sabemos que dN esta associado a uma forma bilinear simtrica B : T S
T S R, dada por B (v, w) = < dN (v), w >, e1 n 1 1 2 p n 1 n
2 p p p p p p p p p
Bp (v, v) = IIp (v) = < dNp (v), v >,
onde II (v) : T S R. Usando o resultado que dN um operador
auto-adjunto, conclumos que B simtrica, pois v, w T S, temos quep p
p p p
B(v, w) = < dNp (v), w >= < v, dNp (w) >= < dNp
(w), v >= B(w, v).
Seja e
1
Tp S
vetor unitrio tal que B(e , e ) = < dN (e ), e1 1 1
1
>= K1
, onde K o1
60
mximo da funo K . Seja tambm e T S um vetor unitrio tal que e e
e {e , e , N } seja uma base orientada positivamente. Temos que v T
S com ||v|| = 1 pode ser escrito como v = cos te + sin te . Logo,
B(v, v) = cos t(B(e , e )) + 2 cos t sin t(B(e , e )) + sin t(B(e ,
e )), masn 2 p 1 2 1 2 p 1 2 2 1 1 1 2 2 2 2
B(e1 , e1 ) = K1 = b11 B(e1 , e2 ) = b12 B(e2 , e2 ) = b22 .
Ento dena a funo b(t) = cos tb + 2 cos t sin tb + sin tb = B (v,
v). Em t = 0 a funo b atinge seu valor mximo, portanto b (0) = 0.
Logo,2 11 12 2 22 p
b (t) = 2 cos t sin tb11 + 2( sin2 t + cos2 t)b12 + 2 sin t cos
tb22 .
Portanto,b (0) = 2b12 = 0 b12 = 0 B(v, v) = b(t) = cos2 tb11 +
sin2 tb22 .
Como K o mximo, ento b(t) = cos tK1 2 2 2 22 2 22 2
1
+ sin2 tb22 K1
, mas2 22
cos2 tK1 + sin2 tb22 cos2 K1 + sin2 tK1 sin2 t(K1 b22 ) 0 K1 b22
.
Ento, t, B(e , e ) = b = cos tb + sin tb cos tK + sin b = b(t) =
B(v, v). Logo, a curvatura normal K (p)(e ) a menor possvel, ento,
K (p)(e ) = K , onde K o mnimo da funo K . Temos ento que {e , e }
uma base ortonormal, tal que, II atinge o mximo K em e e mnimo K em
e . Finalmente, vejamos que e e e so autovetores de dN . Temos
que,22 2 1 n 2 n 2 2 2 n 1 2 p 1 1 2 2 1 2 p
dNp (e1 ) = a11 e1 + a12 e2 dNp (e2 ) = a21 e1 + a22 e2 .
61
Mas,K1 = B(e1 , e1 ) =< dNp (e1 ), e1 > = < a11 e1 +
a12 e2 , e1 > = a11
Temos que,B(e1 , e2 ) = 0 = < dNp (e1 ), e2 > = < a11
e1 + a12 e2 , e2 > = a12
eB(e2 , e1 ) = 0 = < dNp (e2 ), e1 > = < a21 e1 + a22
e2 , e1 > = a21 .
Tambm temos queK2 = B(e2 , e2 ) =< dNp (e2 ), e2 > = <
a21 e1 + a22 e2 , e2 > = a22
Logo, dN (e ) = a e = K e , dN (e ) = a e = K e , o que mostra
que e , e so autovetores de dN como armado. Seus autovalores so K e
K respectivamente. Alm disso, K e K , com K K , so valores extremos
da curvatura normal em p, ou seja, o mximo e o mnimo que a segunda
forma fundamental II restrita ao crculo unitrio de T S pode
assumir. Denio 3.6. O mximo K e o mnimo K da curvatura normal, so
chamados curvaturas principais em p. As direes correspondentes,
isto , as direes dadas pelos autovetores e e e so chamadas direes
principais em p. No plano e na esfera, todas as direes em todos os
pontos so principais, isto vem dop 1 11 1 1 1 p 2 22 2 2 2 1 2 p 1
2 1 2 1 2 p p 1 2 1 2
62
fato que a segunda forma fundamental, em todos os pontos,
restrita a vetores unitrios constante. Assim, todas as direes so
extremos para a curvatura normal. J no caso do cilindro, os
autovetores v e w fornecem as direes principais em p,
correspondendo s curvaturas principais 1 e 0, respectivamente.
Denio 3.7. Uma curva regular e conexa dita uma linha de curvatura
de S se,para todo ponto p , digamos (t0 ) = p, temos que (t0 ) uma
direo principal.
Teorema 3.3 (Olinde Rodrigues). Uma condio necessria e suciente
para que uma curva regular e conexa em S seja uma linha de
curvatura de S existir uma curva : s [0, 1] R tal que N (s) = (s)
(s).Demonstrao.
Se N (s) = (s) (s) ento (s) autovetor de dN , portanto temos que
(s) direo principal, logo (s) linha de curvatura. Agora se (s)
linha de curvatura temos que (s) = K ou (s) = K .(s) 1 2 1 2 p
Agora que conhecemos as curvaturas principais K e K em p S,
podemos calcular facilmente a curvatura normal segundo uma direo v
T S. Vejamos como fazer isso: Se v T S e ||v|| = 1, como e e e
formam uma base ortonormal de T S, temos v = e cos + e sin , onde o
ngulo de e a v na orientao de T S . A curvatura normal K na direo
de v dada porp 1 2 p 1 2 1 p n
Kn = IIp (v) = < dNp (v), v > = < dNp (e1 cos + e2 sin
), e1 cos + e2 sin > = + < e1 K1 cos + e2 K2 sin , e1 cos +
e2 sin > = K1 cos2 < e1 , e1 > +K1 cos sin < e1 , e2
> + K2 cos sin < e2 , e1 > +K2 sin2 < e2 , e2 > = K1
cos2 + K2 sin2 .
Essa ltima expresso conhecida como a frmula de Euler.3.2
Curvatura Gaussiana e Mdiap p p 1 2
Dada a diferencial da aplicao normal de Gauss dN : T S T S e a
base {e , e } de T S de autovetores de dN . J vimos que podemos
associar uma matriz a dN relacionadap p p
63
a essa base, que nesse caso ser dada por uma matriz diagonal, e
os elementos da diagonal so os autovalores associados a e e e .1
2
Denio 3.8. Seja p S e seja dNp : Tp S Tp S a diferencial da
aplicao de Gauss. O determinante de dNp chamado curvatura Gaussiana
K de S em p. Em termos das curvaturas principaisK = K1 K2
Denio 3.9. Seja p S e seja dNp : Tp S Tp S a diferencial da
aplicao de Gauss. O oposto da metade do trao de dNp chamado de
curvatura mdia H de S em p. Em termos das curvaturas principaisH=
K1 + K2 2
Podemos expressar a curvatura Gaussiana K e a curvatura mdia H
em termos da primeira e da segunda formas fundamentais.
Primeiramente vamos lembrar que a matriz [a ] relacionada a dN tem
os seguintes coecientes:ij p
a11 =
f F eG EG F 2
a12 =
gF f G EG F 2
a21 =
eF f E EG F 2
a22 =
f F gE EG F 2
Assim,det [aij ] = = = = = f F gE gF f G eF f E f F eG 2 2 2 EG
F EG F EG F EG F 2 f 2 F 2 f gEF ef F G + egEG egF 2 + f gEF + ef F
G f 2 EG (EG F 2 )2 f 2 F 2 + egEG egF 2 f 2 EG (EG F 2 )2 f 2 (GE
F 2 ) + eg(EG F 2 ) (EG F 2 )2 eg f 2 . EG F 2
Logo,K=
eg f 2 . EG F 21 2
Para o clculo da curvatura mdia, lembremos que K e K so
autovalores de dN . Portanto, K satisfaz dN (e ) = K e e K satisfaz
dN (e ) = K e . Logo1 p 1 1 1 2 p 2 2 2
64
det[dNp + KI] = 0 det
, ou seja,a11 a12 a21 a22 + k 0 0 k = det a11 + k a21 a12 a22 +
k =0
(a11 + k)(a22 + k) a21 a12 = 0 a11 a22 + a11 k + a22 k + k 2 a21
a12 = 0 k 2 + k(a11 + a22 ) + (a11 a22 a21 a12 ) = 0
Como K e K so razes da equao acima, conclumos que1 2
1 1 H = (K1 + K2 ) = (a11 + a22 ) 2 2 1 f F eG f F gE = + 2 2 EG
F EG F 2 eG 2f F + gE = . 2(EG F 2 )
Sabemos que H =
a11 +a22 2
, logo 2H = a
11
+ a22
, substituindo na equao acima temos
k 2 + 2Hk + K = 0, k= 2H 4H 2 4K k = H H 2 K. 2
Com essa relao podemos notar que conhecendo a curvatura mdia e
Gaussiana podemos obter facilmente as curvaturas principais. Agora
usando as curvaturas principais K e K podemos classicar os pontos
de uma superfcie S.1 2
Denio 3.10. Um ponto de uma superfcie S chamado1. 2. 3.
Elptico se det(dN ) > 0, ou seja, K(p) > 0. Logo, Kp
1
e K2 so ambas negativas
ou ambas positivas;
contrrios;
Hiperblico se det(dN ) < 0, ou seja, K(p) < 0.p p p
Logo, K1 e K2 possuem sinais
Parablico se det(dN ) = 0, com dN
= 0, ou seja K(p) = 0 e H(p) = 0. Logo,
uma das curvaturas principais no nula e a outra nula;
4. Planar se dNp = 0, ou seja K(p) = 0 e H(p) = 0. Logo, K1 e K2
so ambas nulas.
65
Figura 26: Classicao dos pontos sobre uma superfcie.Denio 3.11.
Se em p S , K1 = K2 , ento p chamado ponto umblico de S , em
particular, os pontos planares (K1 = K2 = 0) so pontos
umblicos.
Vamos ver como Gauss introduziu o conceito de curvatura, dando
uma interpretao geomtrica da curvatura em termos da aplicao normal
N : S S . Vejamos algumas denies: Denio 3.12. Diz-se que uma base
{w , w } T S positiva se {w , w , w w }2 1 2 p 1 2 1 2
tem a mesma orientao da base cannica em R3 , caso contrrio {w1 ,
w2 } uma base .
negativa
Denio 3.13. Sejam S e S duas superfcies regulares orientadas e
seja : S S uma aplicao diferencivel e suponha que para algum p S ,
dp seja no singular. Dizemos que preserva a orientao em p se dada
uma base positiva {w1 , w2 } Tp S , ento {dp (w1 ), dp (w2 )} uma
base positiva em T(p) S . Se {dp (w1 ), dp (w2 )} no uma base
positiva, dizemos que reverte a orientao em p.
Como a superfcie S e a esfera unitria pertencem a R , assim uma
orientao N em S induz uma orientao N em S .3 2
66
Seja p S tal que dN no singular. Como para uma base {w , w },p 1
2
dNp (w1 ) dNp (w2 ) = det(dNp )(w1 w2 ) = Kw1 w2 ,
a aplicao de Gauss N preserva a orientao em p S se K(p) > 0 e
reverte a orientao em p S se K(p) < 0. Ou seja, dada uma
orientao para T S, essa induz uma orientao para pequenas curvas
fechadas em S, ao redor de p, quando aplicada N a essas curvas pode
acontecer duas coisas:p
1. Se p um ponto elptico em S, seja V uma vizinhana conexa de p
tal que K(q) > 0, q V e seja : [0, l] V um curva fechada ao
redor de p. Neste caso a imagem de por N ter a mesma orientao.
Figura 27: Em pontos elpticos a aplicao de Gauss preserva a
orientao. 2. Se p um ponto hiperblico em S, seja V uma vizinhana
conexa de p tal que K(q) < 0, q V e seja : [0, l] V uma curva
fechada ao redor de p. Neste caso a imagem de por N ter orientao
oposta.
Figura 28: Em pontos hiperblicos a aplicao de Gauss inverte a
orientao. Agora vamos mostrar a interpretao geomtrica da curvatura
Gaussiana K .
67
Faremos a conveno de que a rea de uma regio contida em uma
vizinhana conexa V , onde K = 0, e a rea da sua imagem por N tem o
mesmo sinal se K > 0 em V , e sinais opostos se K < 0 em V ,
usando o fato acima.Proposio 3.1. Seja S uma superfcie regular, p S
tal que a curvatura Gaussiana K(p) = 0, e seja V uma vizinhana
conexa de p onde K no muda de sinal. EntoK(p) = lim A , A0 A
onde A a rea de uma regio conexa B V contendo p, A a rea da
imagem de B pela aplicao normal de Gauss N : S S2 , e o limite
tomado atravs de uma sequncia de regies Bn que convergem para p, no
sentido em que para toda bola centrada B(p, r) em p, existe n
sucientemente grande, tal que, Bn B(p, r) S .
Figura 29: Sequncia de regies B que convergem para p.n
Demonstrao.
Seja X : U R S uma parametrizao de S, tal que p X(U ) V. Sabemos
que a rea A de B dada por2
A=B
||Xu Xv ||dudv.
E a rea A de N (B) dada porA =B
||Nu Nv ||dudv.
68
Figura 30: A regio N (B) imagem de B pela aplicao normal de
Gauss.a11
J vimos que como N e N so vetores de T S, podemos escrev-los
como N X + a X e N = a X + a X . Usando a denio de K , temosu v p u
21 v v 12 u 22 v
u
=
A =B
||Nu Nv ||dudv =B
||(a11 Xu +a21 Xv )(a12 Xu +a22 Xv )||dudv =B
K||Xu Xv ||dudv.
Ento,A lim B A0 A B
limB0 =B
K||Xu Xv ||dudv ||Xu Xv ||dudvB
limB0
=
K||Xu Xv || = K. ||Xu Xv ||
Vejamos agora alguns exemplos:Exemplo 3.3. Temos que os
coecientes da primeira forma fundamental e da segunda forma
fundamental do plano, so E = 1, F = 0, G = 1 e e = 0, f = 0, g = 0,
respectivamente. Usando esses coecientes podemos calcular a
curvatura Gaussiana e Mdia 2K= eg f =0 EG F 2 e H= eG 2f F + gE =
0. 2(EG F 2 )
Exemplo 3.4. Seja T2 um toro dado por X(, ) = ((a+r cos ) cos ,
(a+r cos ) sin , r sin ), onde U = {(, ) R2 : 0 < < 2, 0 <
< 2}. Vamos calcular a curvatura Gaussiana dos pontos do toro T2
.Do exemplo 2.8 temos que os coecientes da primeira forma
fundamental so E = r2 , F = 0 e G = (a + r cos )2 . Basta agora
calcular os coecientes da segunda forma
69
fundamental.X = (r sin cos , r sin sin , r cos ) X = ((a + r cos
) sin , (a + r cos ) cos , 0) X = (r cos cos , r cos sin , r sin )
X = ((a + r cos ) cos , (a + r cos ) sin , 0) X = (r sin sin , r
sin cos , 0)
Logo, E agora os coecientes da segunda forma fundamental:r sin
cos det(X , X , X ) = r cos cos r sin sin r cos sin r cos 0 r sin
(a + r cos ) sin (a + r cos ) cos
= r2 cos2 sin2 (a + r cos ) + r2 cos2 sin2 (a + r cos ) + + r2
cos2 cos2 (a + r cos ) + r2 sin2 sin2 (a + r cos ) = r2 cos2 (a + r
cos ) + r2 sin2 (a + r cos ) = r2 (a + r cos ),
r sin cos det(X , X , X ) = r sin sin
r sin sin r sin cos
r cos 0 0
(a + r cos ) sin (a + r cos ) cos
= r(a + r cos ) sin sin cos r(a + r cos ) sin sin cos = 0, r sin
cos det(X , X , X ) = (a + r cos ) sin r sin sin (a + r cos )
cos
r cos 0 0
(a + r cos ) cos (a + r cos ) sin = r(a + r cos )2 cos .
= r(a + r cos )2 sin2 cos + r(a + r cos )2 cos2 cos
70
Logo os coecientes da segunda forma fundamental sodet(X , X , X
) r2 (a + r cos ) = =r r(a + r cos ) EG F 2 det(X , X , X ) f = =0
EG F 2 det(X , X , X ) r(a + r cos)2 cos g = = = (a + r cos ) cos
r(a + r cos ) EG F 2 e =
A curvatura Gaussiana,K= eg f 2 cos r(a + r cos ) cos = . = 2 2
(a + r cos )2 EG F r(a + r cos ) r
Da expresso acima podemos notar que: Se 0 < < Se = Se 2 3
2 2
ou
3 2
< < 2 , ento a curvatura Gaussiana K > 0;
ou = , ento a curvatura Gaussiana K = 0; 23 2
= 1 + (3u2 3v 2 )2
F = < Xu , Xv >= 6vu(3u2 3v 2 ) G = < Xv , Xv >= 1 +
36v 2 u2 .
Ento, EG F 2 = 1 + 9u4 + 18u2 v2 + 9v4 .
73
Agora vamos calcular os coecientes da segunda forma
fundamental:1 0 3u2 3v 2 det(Xu , Xv , Xuu ) = 0 1 0 0 6vu 6u =
6u,
1 0 3u2 3v 2 det(Xu , Xv , Xuv ) = 0 1 0 0 6vu 6v = 6v,
1 0 3u2 3v 2 det(Xu , Xv , Xvv ) = 0 1 0 0 6vu 6u = 6u.
Logodet(Xu , Xv , Xuu ) 6u , = 2 4 + 18u2 v 2 + 9v 4 EG F 1 + 9u
det(Xu , Xv , Xuv ) 6v f = , = 2 4 + 18u2 v 2 + 9v 4 EG F 1 + 9u
det(Xu , Xv , Xvv ) 6u g = = . 2 4 + 18u2 v 2 + 9v 4 EG F 1 + 9u e
=
A curvatura GaussianaK= 36(u2 + v 2 ) eg f 2 = EG F 2 (1 + 9u4 +
18u2 v 2 + 9v 4 )2
Podemos notar da expresso acima que no ponto (0, 0) a curvatura
Gaussiana K = 0, ou seja (0, 0, 0) um ponto planar. E todos os
outros pontos hiperblicos, pois K < 0. A curvatura mdia dada
por:H = = = = eG 2f F + gE 2(EG F 2 ) 6u(1 + 36v 2 u2 ) +
(12v)(6vu(3u2 3v 2 )) + (6u)(1 + (3u2 3v 2 ) ) 2(1 + 9u4 + 18u2 v 2
+ 9v 4 ) 2 6u + 216v 2 u3 72v 2 u(3u2 3v 2 ) (6u)(1 + 9u4 18u2 v 2
+ 9v 4 ) 2(1 + 9u4 + 18u2 v 2 + 9v 4 ) 2 6u + 216v 2 u3 216v 2 u3 +
216v 4 u 6u 54u5 + 108u3 v 2 54uv 43 3 3
2
2(1 + 9u4 + 18u2 v 2 + 9v 4 ) 2 27u5 + 81v 4 u + 54u3 v 2 = 3 .
(1 + 9u4 + 18u2 v 2 + 9v 4 ) 2
74
Exemplo 3.6. Seja uma superfcie dada pelo grco de uma funo
diferencivel, com a seguinte parametrizao X(u, v) = (u, v, f (u,
v)), com (u, v) R2 .Temos queXu = (1, 0, fu ) Xv = (0, 1, fv ) Xuu
= (0, 0, fuu ) Xvv = (0, 0, fvv ) Xuv = (0, 0, fuv ).
Logo, E =< Xu , Xu >= 1 + (fu )2 1 + (fv )2 . Temos
que
F =< Xu , Xv >= fu fv
G =< Xv , Xv >=
1 0 det(Xu , Xv , Xuu ) = 0 1
fu fv = fuu ,
0 0 fuu 1 0 det(Xu , Xv , Xuv ) = 0 1 fu fv = fuv ,
0 0 fuv 1 0 fu det(Xu , Xv , Xvv ) = 0 1 fv = fvv . 0 0 fvv
Logo os coecientes da segunda forma fundamental soe = det(Xu ,
Xv , Xuu ) = EG F 2 det(Xu , Xv , Xuv ) = EG F 2 det(Xu , Xv , Xvv
) = EG F 2 fuu 1 + (fu )2 + (fv )2 fuv 1 + (fu )2 + (fv )2 fvv 1 +
(fu )2 + (fv )2
f =
g =
A curvatura Gaussiana K= eg f 2 fuu fvv fuv = 2. 2 EG F (1 + (fu
)2 + (fv )2 )
75
A curvatura mdia H= eG 2f F + gE fuu (1 + fv 2 ) 2fuv fu fv +
fvv (1 + (fu )2 ) = . 3 2(EG F 2 ) 2(1 + (f )2 ) + (f )2 ) 2u v
76
4
Geometria Intrnseca das Superfcies
4.1
Isometrias e o Teorema Egregium(Gauss)
Os coecientes da primeira forma fundamental no plano e no
cilindro so os mesmos, como vimos nos exemplos 2.1 e 2.2 . Como j
havamos comentado isso no mera coincidncia, essa transformao
geomtrica do plano no cilindro que referimos anteriormente se trata
de um difeomorsmo especial, como veremos em seguida. Denio 4.1. Uma
aplicao : S S uma isometria se um difeomor1 2
smo e para todo ponto p S e todos os pares w1 , w2 Tp S temos
< w1 , w2 >p = < dp (w1 ), dp (w2 ) >(p) . Diz-se que
as superfcies S1 e S2 so isomtricas.
Em outras palavras, uma isometria se a diferencial d preserva o
produto interno:Ip (w) =< dp (w), dp (w) >= Ip (dp (w)), w Tp
S.
Denio 4.2. Uma aplicao : V1 S1 S2 denida em uma vizinhana V1 de
p, com p S1 , uma isometria local em p se V2 vizinhana de (p) S2
tal que : V1 V2 seja uma isometria. Se p S1 for possvel estabelecer
uma isometria local, ento S1 e S2 so localmente isomtricas.
Podemos mostrar que se : S S um difeomorsmo e existe uma
isometria local para todo ponto p S , ento uma isometria global. No
entanto, podem existir duas superfcies que sejam localmente
isomtricas, sem que sejam globalmente isomtricas. Vejamos um
exemplo:1 2 1
Exemplo 4.1. Seja um plano dado por X(u, v) = p0 + uw1 + vw2 e
um cilindro C dado por, X(u, v) = (cos u, sin u, v), com U = {(u,
v) R2 : 0 < u < 2, < v < }.Vamos mostrar que : X X 1 :
X(U ) X(U ) uma isometria.
77
Figura 33: A aplicao uma isometria.Temos que Xu = w1 e Xv = w2 .
Os coecientes da primeira forma fundamental so E = 1, F = 0 e G =
1, como vimos no exemplo 2.1. Tambm temos que X u = ( sin u, cos v,
0) e X v = (0, 0, 1). Os coecientes da primeira forma fundamental
so E = 1, F = 0 e G = 1, como vimos no exemplo 2.2. Seja um ponto p
X(U ), sejam os vetores v1 , v2 Tp X(U ) e p0 = (u0 , v0 ). Logo,1
2 1 2 v1 = v1 Xu + v1 Xv = dX(u0 , v0 )(v1 , v1 ) 1 2 1 2 v2 = v2
Xu + v2 Xv = dX(u0 , v0 )(v2 , v2 ).
E d(p) = dX(X 1 (p))dX 1 (p) = dX(u0 , v0 )dX 1 (p). Ento1 2 1 2
d(p)(v1 ) = dX(u0 , v0 )(v1 , v1 ) = v1 X u + v1 X v 1 2 1 2
d(p)(v2 ) = dX(u0 , v0 )(v2 , v2 ) = v2 X u + v2 X v
Temos ento que1 2 1 2 I(p)(d(p)(v1 ), d(p)(v2 )) = < v1 X u +
v1 X v , v2 X u + v2 X v > 1 1 1 2 = v1 v2 < X u , X u >
+v1 v2 < X u , X v > 2 1 2 2 + v1 v2 < X v , X u > +v1
v2 < X v , X v > 1 1 2 2 = v1 v2 + v1 v2 .
78
Por outro lado1 2 1 2 Ip (v1 , v2 ) = < v1 Xu + v1 Xv , v2 Xu
+ v2 Xv > 2 2 2 1 1 2 1 1 = v1 v2 < Xu , Xu > +v1 v2 <
Xu , Xv > +v1 v2 < Xv , Xu > +v1 v2 < Xv , Xv > 1 1
2 2 = v1 v2 + v1 v2 .
Com as expresses acima podemos concluir que Ip (v1 , v2 ) = I(p)
(d(p)(v1 ), d(p)(v2 )). Logo o plano localmente isomtrico ao
cilindro.
O plano no globalmente isomtrico ao cilindro, j que o cilindro
nem mesmo homeomorfo a um plano. Vejamos um argumento intuitivo:
Qualquer curva simples e fechada no plano pode ser encolhida
continuamente at torna-se um ponto sem deixar o plano. Tal
propriedade preservada por homeomossmos. No entanto, o cilindro no
possui essa propriedade, o que contradiz a existncia de um
homeomorsmo entre o plano e o cilindro.
Figura 34: C pode ser deformada continuamente em um ponto sem
abandonar p, o que no ocorre com C S Vamos pensar no plano como uma
folha de papel, quando transformamos essa folha em um cilindro, a
folha foi simplesmente arqueada, tendo modicado apenas sua relao
com o ambiente em que esta inserido, R . Ou seja, sua caracterstica
intrnseca preservada. Vamos agora generalizar o argumento dado
acima para obter um critrio para isometrias locais em termos de
coordenadas locais.3
Proposio 4.1. Se existirem parametrizaes X : U R2 S e X : U R2 S
tais que E = E , F = F e G = G em U ento a aplicao = X X 1 : X(u) S
uma isometria local.
79
Demonstrao.
Seja p X(U ) e v, w T S, logop
v = v1 Xu + v2 Xv = dX(X 1 (p)) (v1 , v2 ) w = w1 Xu + w2 Xv =
dX(X 1 (p)) (w1 , w2 ).
Temos que d(p) = dX(X
1
(p))dX 1 (p)
, logo
d(p)(v) = dX(X 1 (p))(v1 , v2 ) = v1 X u + v2 X v d(p)(w) = dX(X
1 (p))(w1 , w2 ) = w1 X u + w2 X v .
EntoIp (v, w) = < v1 Xu + v2 Xv , w1 Xu + w2 Xv > = v1 w1
< Xu , Xu > +v1 w2 < Xu , Xv > +v2 w1 < Xv , Xu >
+v2 w2 < Xv , Xv > = v1 w1 E + (v1 w2 + v2 w1 )F + v2 w2
G
eI(p) (d(p))(v), d(p))(w)) = < v1 w1 < X u , X u > +v1
w2 < X u , X v > + v2 w1 < X v , X u > +v2 w2 < X v
, X v > = v1 w1 E + (v1 w2 + v2 w1 )F + v2 w2 G.
Como E = E, F = F e G = G, ento I (v, w) = I uma isometria
local.p
(p) (d(p)(v), d(p)(w))
. Logo
Exemplo 4.2. Seja um catenide e um helicide dados porX(u, v) =
(a cosh v cos u, a cosh v sin u, av),
com U = {(u, v) R2 : 0 < u < 2, < v < } eX(u, v) =
(cos u, v sin u, au),
com {U : (u, v) R2 : 0 < u < 2, < v < },
respectivamente. Vamos fazer a seguinte mudana de parmetros, u = u,
v = a sinh v, com 0 < u < 2 e < v < . Que possvel,
visto que X bijetiva e o Jacobiano (u, v) = (u, v)u u v u u v v
v
=
1
0
= a cosh v,
0 a cosh v
80
que nunca se anula. Assim uma nova parametrizao do helicide X(u,
v) = (a sinh v cos u, a sinh v, au). Temos queXu = (a cosh v sinh
u, a cosh v cosh u, 0) Xv = (a sinh v cos u, a sinh v sin u, a) X u
= (a sinh v sinh u, a sinh v cosh u, a) X v = (a cosh v cos u, a
cosh v sin u, 0).
Ento os coecientes da primeira forma fundamental do catenide e
do helicide so E = a2 cosh2 v , F = 0, G = a2 cosh2 v e E = a2
cosh2 v , F = 0, G = a2 cosh2 v , logo pela proposio 4.1 temos que
o catenide e o helicide so localmente isomtricos.1
1 Retirado
de [2]
81
Figura 35: Transformao do Helicide no Catenide.Exemplo 4.3. Seja
um cone C de uma folha, dado por z = +K x2 + y2 , com (x, y) =
0.
z Temos que cot = x2 +y2 = K.
82
O cone menos uma geratriz pode ser "rolado"sobre um pedao de um
plano formando um setor plano, que dado por um conjunto aberto U :
{(, ) R2 , 0 < < , 0 < = L1 f = < Xuv , N >= L2 g =
< Xvv , N >= L3 .
Denio 4.3. Os coecientes k para i, j, k = 1, 2 so chamados de
smbolos de Christofij fel.