Embed Size (px)
Citation preview

Heloisa Reis Leal
Operaccedilotildees Booleanas na Modelagem por Pontos
Dissertaccedilatildeo de Mestrado
Dissertaccedilatildeo apresentada como requisito parcial para obtenccedilatildeo do tiacutetulo de Mestre pelo Programa de Poacutes-Graduaccedilatildeo em Informaacutetica da PUC-Rio
Orientadores Prof Waldemar Celes Filho Prof Luiz Velho
Rio de Janeiro agosto de 2004
Heloisa Reis Leal
Operaccedilotildees Booleanas na Modelagem por Pontos
Dissertaccedilatildeo apresentada como requisito parcial para obtenccedilatildeo do tiacutetulo de Mestre pelo Programa de Poacutes-Graduaccedilatildeo em Informaacutetica da PUC-Rio Aprovada pela Comissatildeo Examinadora abaixo assinada
Prof Waldemar Celes Filho Orientador
Departamento de Informaacutetica-PUC-Rio
Prof Luiz Velho Co-orientador
Instituto de Matemaacutetica Pura e Aplicada (IMPA)
Prof Bruno Feijoacute Departamento de Informaacutetica-PUC-Rio
Prof Marcelo Dreux Departamento de Mecacircnica-PUC-Rio
Prof Paulo Cezar Pinto Carvalho Instituto de Matemaacutetica Pura e Aplicada (IMPA)
Prof Joseacute Eugecircnio Leal Coordenador Setorial do Centro Teacutecnico Cientiacutefico - PUC-Rio
Rio de Janeiro 3 de agosto de 2004
Todos os direitos reservados Eacute proibida a reproduccedilatildeo total ou parcial do trabalho sem autorizaccedilatildeo da universidade da autora e do orientador
Heloisa Reis Leal Graduou-se em Ciecircncia da Computaccedilatildeo pela Universidade Federal de Minas Gerais (UFMG) em abril de 1992 Trabalhou como Analista de Sistemas na empresa Telecomunicaccedilotildees de Minas Gerais SA (TELEMIG) entre 1993 e 1997 onde atuou no desenvolvimento de sistemas de controle da rede telefocircnica de Minas Gerais Trabalhou como Analista de Sistemas no Tribunal de Justiccedila do Estado de Minas Gerais (TJMG) entre 1998 e 2001 onde atuou no desenvolvimento de sistemas controle de processos e controle de equipamentos Desde 2002 trabalha no Serviccedilo Federal de Processamento de Dados (SERPRO) desenvolvendo sistema de controle da Malha Fiscal do Imposto de Renda - Pessoa Fiacutesica
Ficha Catalograacutefica
Leal Heloisa Reis
Operaccedilotildees booleanas na modelagem por pontos
Heloisa Reis Leal orientadores Waldemar Celes Filho
Luiz Velho ndash Rio de Janeiro PUC Departamento de
Informaacutetica 2004
75 f il 30 cm
Dissertaccedilatildeo (mestrado) ndash Pontifiacutecia
Universidade Catoacutelica do Rio de Janeiro Departamento de
Informaacutetica
Inclui referecircncias bibliograacuteficas
1 Informaacutetica ndash Teses 2 Computaccedilatildeo graacutefica
interativa 3 Modelagem 3D 4 Modelagem por pontos 5
Operaccedilotildees booleanas I Celes Filho Waldemar II Velho
Luiz III Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Departamento de Informaacutetica III Tiacutetulo
CDD 004
Agrave minha matildee Tetecirc Daacutelton e Lucas
Agradecimentos Aos meus orientadores Waldemar Celes e Luiz Velho pelo apoio dedicaccedilatildeo e paciecircncia que tornaram este trabalho possiacutevel Agrave PUC-Rio pelo apoio financeiro Aos membros da banca examinadora pelas correccedilotildees e sugestotildees Agrave Cristina Griner chefe de projeto do SERPRO pelo apoio compreensatildeo e ajuda Aos meus professores de mestrado pelos conhecimentos transmitidos Agrave Mauren Paola Ruthner pela amizade e colaboraccedilatildeo durante todo o mestrado Aos colegas do Departamento de Informaacutetica da PUC-Rio pelos momentos compartilhados Agrave minha matildee pela revisatildeo do texto desta dissertaccedilatildeo e pelo total apoio sem o qual este trabalho natildeo seria possiacutevel Agrave Daacutelton e Tetecirc meus queridos irmatildeos pelo apoio incentivo e colaboraccedilatildeo
Resumo
Leal Heloisa ReisCeles Waldemar (Orientador) Operaccedilotildees Booleanas na Modelagem por Pontos Rio de Janeiro 2004 75p Dissertaccedilatildeo de Mestrado - Departamento de Informaacutetica Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Operaccedilotildees booleanas em modelagem 3D satildeo usadas para criar novos
modelos ou para modificaacute-los Na maioria dos tipos de representaccedilatildeo de objetos
3D estas operaccedilotildees satildeo bastante complexas Nos uacuteltimos anos tem sido muito
explorado um novo tipo de modelagem a modelagem por pontos que apresenta
muitas vantagens em relaccedilatildeo agraves outras representaccedilotildees como maior simplicidade
e eficiecircncia Dois trabalhos exploram as operaccedilotildees booleanas na modelagem
por pontos o trabalho de Adams e Dutreacute e o trabalho de Pauly et al Dada a
grande importacircncia deste novo tipo de modelagem e do uso de operaccedilotildees
booleanas esta dissertaccedilatildeo apresenta uma introduccedilatildeo agrave modelagem por pontos
implementa o algoritmo proposto em Adams e Dutreacute com algumas melhorias e o
compara com o meacutetodo de Pauly et al
Palavras-chave
Modelagem 3D Modelagem por pontos Operaccedilotildees Booleanas
Computaccedilatildeo Graacutefica Interativa
Abstract
Leal Heloisa Reis Celes Waldemar(Advisor) Boolean Operations on Point-based models Rio de Janeiro 2004 75p MSc Dissertation - Departamento de Informaacutetica Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Boolean operations are used to create or modify models These operations
in the majority of 3D object representations are very complex In the last years a
significant trend in computer graphics has been the shift towards point sampled
3D models due to their advantages over other representations such as simplicity
and efficiency Two recent works present algorithms to perform interactive
boolean operations on point-based models the work by Adams and Dutreacute and
the work by Pauly et Al Due to great importance of this novel representation
and of the use of boolean operations the present work makes an introduction to
point-based representation implements the algorithm proposed by Adams and
Dutreacute with some improvements and compares this implementation with the work
by Pauly et al
Palavras-chave
3D Modeling Point-based Modeling Boolean Operation Interactive
Computer Graphics
Sumaacuterio
1 Introduccedilatildeo 15
2 Trabalhos relacionados 18
3 Modelagem por Pontos 20 31 Ideacuteia da Representaccedilatildeo 20 32 Tipos de distribuiccedilatildeo dos surfels 22 33 Estrutura de multi-resoluccedilatildeo 22 34 Dados que um surfel pode conter 23 35 Aquisiccedilatildeo do modelo 23 351 Aquisiccedilatildeo da geometria 23 352 Aquisiccedilatildeo da textura 24 353 Correccedilatildeo das falhas da aquisiccedilatildeo 25 36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto) 25 37 Visualizaccedilatildeo do modelo 26 38 Ediccedilatildeo do modelo 28
4 Operaccedilotildees Booleanas com Pontos 29 41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por
pontos 29 42 Meacutetodo de Adams e Dutreacute 33 421 Modelo por Pontos em Adams e Dutreacute 33 422 Algoritmo de Operaccedilotildees Booleanas 34 43 Meacutetodo de Pauly 39 431 Modelo em Pauly 40 432 Algoritmo de Operaccedilotildees Booleanas 40 44 Validade da Regra 2 43
5 Melhorias Propostas 47 51 Descriccedilatildeo do algoritmo 47 511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo 48
512 Teste DentroFora 52 513 Criaccedilatildeo do modelo resultado 54 52 Implementaccedilatildeo 55 521 Estruturas de Dados 57
6 Resultados 61 61 Testes 61 62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas 68
7 Conclusatildeo 71 71 Trabalhos Futuros 72
8 Referecircncias Bibliograacuteficas 73
11
Lista de figuras
Figura 1 Um modelo por pontos e sua visualizaccedilatildeo 21 Figura 2 A superfiacutecie modelada por surfels O surfel em destaque tem raio de
alcance rt e normal n 22 Figura 3 Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting 26 Figura 4 Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida
retirou-se outro cubo e por uacuteltimo retirou-se o cilindro 29 Figura 5 A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs
operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo
diferenccedila e interseccedilatildeo 30 Figura 6 (a) Dois modelos A e B (b) Posicionados de forma que A tem uma parte
dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd 31 Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais
proacuteximo a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo
x eacute classificado como fora senatildeo seraacute classificado como dentro 32 Figura 8 Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de
interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo 33 Figura 9 Um objeto representado por pontos com suas normais e sua quadtree
correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes
cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo
noacutes cheios noacutes que conteacutem pontos 35 Figura 10 Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a
parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os
surfels 36 Figura 11 Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais
proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores 38 Figura 12 Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o
caso de Arestas Vivas do objeto agrave esquerda 39 Figura 13 Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo e
convergem para o ponto de interseccedilatildeo 42 Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em
q1 e o plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute
12
mais proacuteximo a q1 e q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute
dois novos pontos de partida para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r
que eacute uma aproximaccedilatildeo melhor de q 43 Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o
ponto y de C Se o produto interno entre a normal em y e o vetor que liga y a
x for maior que zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C 44 Figura 16 As curvas vermelhas satildeo o Eixo Medial da curva em preto 45 Figura 17 Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em vermelho)
Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
45 Figura 18 A figura mostra o diagrama de Voronoi de uma amostragem de pontos
S Da mesma forma que a amostragem aproxima a curva os veacutertices de
Voronoi aproximam o Eixo Medial 46 Figura 19 Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os
mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno 48 Figura 20 O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro
do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a
regiatildeo que conteacutem os surfels 49 Figura 21 O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c
a classificaccedilatildeo do noacute a eacute propagada para o noacute b 50 Figura 22 Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do
modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente 50 Figura 23 Quadtree classificada 51 Figura 24 A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a
normal n definem as retas que dividem o noacute 52 Figura 25 Duas circunferecircncias e suas quadtrees correspondentes 53 Figura 26 a modelos natildeo se intersectam b modelo intersecta noacutes fora c
modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes
fora 54 Figura 27 Software PointShop 3D com dois modelos carregados na sua cena 56 Figura 28 Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees
booleanas 57 Figura 29 Modelo do PointShop Igea 62 Figura 30 Resultado da uniatildeo de duas Igeas 63 Figura 31 Resultado da interseccedilatildeo de duas Igeas 63 Figura 32 Resultado da diferenccedila entre duas Igeas 64
13
Figura 33 Modelo do PointShop MaxPlanck 65 Figura 34 Modelo do PointShop Male 66 Figura 35 Resultado da Uniatildeo do modelo Male com MaxPlanck 66 Figura 36 Resultado da interseccedilatildeo do modelo Male com o MaxPlanck 67 Figura 37 Resultado da diferenccedila do modelo Male do modelo MaxPlanck 67
14
Lista de tabelas
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas 42
Tabela 2- Nuacutemero de surfels dos modelos resultantes 64 Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas
Igeas 65
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck
e Male 68 Tabela 5- Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os
modelos MaxPlanck e Male 68
15
1 Introduccedilatildeo
O mundo digital estaacute conquistando cada vez mais espaccedilo nos meios de
comunicaccedilatildeo Sons imagens viacutedeos digitais satildeo miacutedias muito usadas em
diversas aacutereas como entretenimento medicina desenho industrial engenharia
arquitetura educaccedilatildeo arte ciecircncia entre outras Podemos citar alguns
exemplos dentro destas aacutereas como jogos efeitos especiais filmes digitais
visualizaccedilatildeo cientiacutefica viacutedeo-conferecircncia comeacutercio na internet Nos uacuteltimos anos
verificamos que o modelo 3D vem se tornando um novo meio de comunicaccedilatildeo
digital Com o desenvolvimento da tecnologia de aquisiccedilatildeo e do processamento
de modelos 3D ele vem sendo cada vez mais utilizado Jogos 3D animaccedilotildees
aplicaccedilotildees em realidade virtual visualizaccedilatildeo cientiacutefica aplicaccedilotildees para aacuterea
meacutedica e odontoloacutegica criaccedilatildeo de reacuteplicas para estudo e preservaccedilatildeo do
patrimocircnio histoacuterico sistemas CADCAM cataacutelogos de modelos 3D na Web para
comercializaccedilatildeo criaccedilatildeo de protoacutetipos para arquitetura engenharia satildeo alguns
exemplos de aplicaccedilotildees que usam modelos 3D
A aacuterea que estuda a representaccedilatildeo de um modelo 3D no computador eacute
chamada de modelagem em computaccedilatildeo graacutefica Existem diversos tipos de
modelagem para as diversas aplicaccedilotildees que usam um modelo 3D como por
exemplo representaccedilotildees poligonais como malhas triangulares que satildeo
geralmente usadas na aacuterea de entretenimento Este trabalho explora um novo
tipo de modelagem a modelagem por pontos
A modelagem por pontos comeccedilou a ser largamente explorada nesta
deacutecada e trata-se de uma aacuterea muito promissora em computaccedilatildeo graacutefica dadas
agraves vaacuterias e grandes vantagens em relaccedilatildeo aos outros tipos de representaccedilatildeo
como esquema de representaccedilatildeo CSG (Constructive Solid Geometry) [1] ou
malhas poligonais Dentre as principais vantagens podemos citar grande
simplicidade e flexibilidade boa performance robustez Mas a principal
vantagem desta modelagem que foi o fator que impulsionou o seu grande
desenvolvimento nesta deacutecada eacute que esta modelagem por pontos eacute a melhor
opccedilatildeo para tratar os dados de saiacuteda de equipamentos de aquisiccedilatildeo de modelos
3D O uso destes equipamentos tem aumentado muito nesta deacutecada A
16
tecnologia destes equipamentos tem progredido muito e eles tecircm se tornado
mais baratos A tendecircncia eacute que o uso destes equipamentos se torne o mais
utilizado meio de obtenccedilatildeo de modelos 3D Isto porque construir modelos 3D
bastante detalhados por meio de um software de modelagem eacute muito trabalhoso
O processo de aquisiccedilatildeo de modelos por meio destes equipamentos automatiza
este processo de construccedilatildeo
No trabalho com modelos 3D frequumlentemente satildeo usadas as operaccedilotildees
booleanas que satildeo operaccedilotildees de uniatildeo interseccedilatildeo ou diferenccedila No esquema
de representaccedilatildeo CSG estas operaccedilotildees fazem parte da representaccedilatildeo do
objeto Estas operaccedilotildees tambeacutem podem ser usadas para criar novos modelos ou
para alteraacute-los Na maioria dos tipos de representaccedilatildeo de objetos 3D estas
operaccedilotildees satildeo bastante complexas
A simplicidade da representaccedilatildeo por pontos permite que as operaccedilotildees
booleanas sejam realizadas com facilidade se compararmos com a realizaccedilatildeo
destas operaccedilotildees em outros tipos de representaccedilatildeo como malhas poligonais
Motivada pelas vantagens desta modelagem e pela utilidade destas operaccedilotildees
esta dissertaccedilatildeo apresenta uma introduccedilatildeo geral de modelagem por pontos e
trabalha mais especificamente com operaccedilotildees booleanas em objetos
modelados por pontos Dois trabalhos que exploram as operaccedilotildees booleanas na
modelagem por pontos seratildeo abordados o trabalho de Adams e Dutreacute [2] e o
trabalho de Pauly et al [3] O presente trabalho implementa o meacutetodo de Adams
e Dutreacute com algumas melhorias e faz uma comparaccedilatildeo entre o meacutetodo de Pauly
[3] e o meacutetodo de Adams e Dutreacute [2] com nossas melhorias
Como contribuiccedilotildees dadas por este trabalho apresentamos
- um estudo sobre modelagem por pontos
- um estudo sobre operaccedilotildees booleanas com pontos
- proposta de melhorias ao algoritmo proposto por Adams e Dutreacute [2]
- comparaccedilatildeo dos dois meacutetodos propostos para realizar estas operaccedilotildees
meacutetodo de Pauly et al [3] e de Adams e Dutreacute [2]
Este trabalho vem apresentado nesta dissertaccedilatildeo organizada em sete
capiacutetulos conforme descrito resumidamente a seguir
O capiacutetulo 2 cita alguns trabalhos sobre modelagem por pontos que estatildeo
relacionados a este trabalho
O capiacutetulo 3 apresenta uma visatildeo geral do modelo por pontos e explica
melhor alguns trabalhos citados no capiacutetulo 2
17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Heloisa Reis Leal
Operaccedilotildees Booleanas na Modelagem por Pontos
Dissertaccedilatildeo apresentada como requisito parcial para obtenccedilatildeo do tiacutetulo de Mestre pelo Programa de Poacutes-Graduaccedilatildeo em Informaacutetica da PUC-Rio Aprovada pela Comissatildeo Examinadora abaixo assinada
Prof Waldemar Celes Filho Orientador
Departamento de Informaacutetica-PUC-Rio
Prof Luiz Velho Co-orientador
Instituto de Matemaacutetica Pura e Aplicada (IMPA)
Prof Bruno Feijoacute Departamento de Informaacutetica-PUC-Rio
Prof Marcelo Dreux Departamento de Mecacircnica-PUC-Rio
Prof Paulo Cezar Pinto Carvalho Instituto de Matemaacutetica Pura e Aplicada (IMPA)
Prof Joseacute Eugecircnio Leal Coordenador Setorial do Centro Teacutecnico Cientiacutefico - PUC-Rio
Rio de Janeiro 3 de agosto de 2004
Todos os direitos reservados Eacute proibida a reproduccedilatildeo total ou parcial do trabalho sem autorizaccedilatildeo da universidade da autora e do orientador
Heloisa Reis Leal Graduou-se em Ciecircncia da Computaccedilatildeo pela Universidade Federal de Minas Gerais (UFMG) em abril de 1992 Trabalhou como Analista de Sistemas na empresa Telecomunicaccedilotildees de Minas Gerais SA (TELEMIG) entre 1993 e 1997 onde atuou no desenvolvimento de sistemas de controle da rede telefocircnica de Minas Gerais Trabalhou como Analista de Sistemas no Tribunal de Justiccedila do Estado de Minas Gerais (TJMG) entre 1998 e 2001 onde atuou no desenvolvimento de sistemas controle de processos e controle de equipamentos Desde 2002 trabalha no Serviccedilo Federal de Processamento de Dados (SERPRO) desenvolvendo sistema de controle da Malha Fiscal do Imposto de Renda - Pessoa Fiacutesica
Ficha Catalograacutefica
Leal Heloisa Reis
Operaccedilotildees booleanas na modelagem por pontos
Heloisa Reis Leal orientadores Waldemar Celes Filho
Luiz Velho ndash Rio de Janeiro PUC Departamento de
Informaacutetica 2004
75 f il 30 cm
Dissertaccedilatildeo (mestrado) ndash Pontifiacutecia
Universidade Catoacutelica do Rio de Janeiro Departamento de
Informaacutetica
Inclui referecircncias bibliograacuteficas
1 Informaacutetica ndash Teses 2 Computaccedilatildeo graacutefica
interativa 3 Modelagem 3D 4 Modelagem por pontos 5
Operaccedilotildees booleanas I Celes Filho Waldemar II Velho
Luiz III Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Departamento de Informaacutetica III Tiacutetulo
CDD 004
Agrave minha matildee Tetecirc Daacutelton e Lucas
Agradecimentos Aos meus orientadores Waldemar Celes e Luiz Velho pelo apoio dedicaccedilatildeo e paciecircncia que tornaram este trabalho possiacutevel Agrave PUC-Rio pelo apoio financeiro Aos membros da banca examinadora pelas correccedilotildees e sugestotildees Agrave Cristina Griner chefe de projeto do SERPRO pelo apoio compreensatildeo e ajuda Aos meus professores de mestrado pelos conhecimentos transmitidos Agrave Mauren Paola Ruthner pela amizade e colaboraccedilatildeo durante todo o mestrado Aos colegas do Departamento de Informaacutetica da PUC-Rio pelos momentos compartilhados Agrave minha matildee pela revisatildeo do texto desta dissertaccedilatildeo e pelo total apoio sem o qual este trabalho natildeo seria possiacutevel Agrave Daacutelton e Tetecirc meus queridos irmatildeos pelo apoio incentivo e colaboraccedilatildeo
Resumo
Leal Heloisa ReisCeles Waldemar (Orientador) Operaccedilotildees Booleanas na Modelagem por Pontos Rio de Janeiro 2004 75p Dissertaccedilatildeo de Mestrado - Departamento de Informaacutetica Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Operaccedilotildees booleanas em modelagem 3D satildeo usadas para criar novos
modelos ou para modificaacute-los Na maioria dos tipos de representaccedilatildeo de objetos
3D estas operaccedilotildees satildeo bastante complexas Nos uacuteltimos anos tem sido muito
explorado um novo tipo de modelagem a modelagem por pontos que apresenta
muitas vantagens em relaccedilatildeo agraves outras representaccedilotildees como maior simplicidade
e eficiecircncia Dois trabalhos exploram as operaccedilotildees booleanas na modelagem
por pontos o trabalho de Adams e Dutreacute e o trabalho de Pauly et al Dada a
grande importacircncia deste novo tipo de modelagem e do uso de operaccedilotildees
booleanas esta dissertaccedilatildeo apresenta uma introduccedilatildeo agrave modelagem por pontos
implementa o algoritmo proposto em Adams e Dutreacute com algumas melhorias e o
compara com o meacutetodo de Pauly et al
Palavras-chave
Modelagem 3D Modelagem por pontos Operaccedilotildees Booleanas
Computaccedilatildeo Graacutefica Interativa
Abstract
Leal Heloisa Reis Celes Waldemar(Advisor) Boolean Operations on Point-based models Rio de Janeiro 2004 75p MSc Dissertation - Departamento de Informaacutetica Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Boolean operations are used to create or modify models These operations
in the majority of 3D object representations are very complex In the last years a
significant trend in computer graphics has been the shift towards point sampled
3D models due to their advantages over other representations such as simplicity
and efficiency Two recent works present algorithms to perform interactive
boolean operations on point-based models the work by Adams and Dutreacute and
the work by Pauly et Al Due to great importance of this novel representation
and of the use of boolean operations the present work makes an introduction to
point-based representation implements the algorithm proposed by Adams and
Dutreacute with some improvements and compares this implementation with the work
by Pauly et al
Palavras-chave
3D Modeling Point-based Modeling Boolean Operation Interactive
Computer Graphics
Sumaacuterio
1 Introduccedilatildeo 15
2 Trabalhos relacionados 18
3 Modelagem por Pontos 20 31 Ideacuteia da Representaccedilatildeo 20 32 Tipos de distribuiccedilatildeo dos surfels 22 33 Estrutura de multi-resoluccedilatildeo 22 34 Dados que um surfel pode conter 23 35 Aquisiccedilatildeo do modelo 23 351 Aquisiccedilatildeo da geometria 23 352 Aquisiccedilatildeo da textura 24 353 Correccedilatildeo das falhas da aquisiccedilatildeo 25 36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto) 25 37 Visualizaccedilatildeo do modelo 26 38 Ediccedilatildeo do modelo 28
4 Operaccedilotildees Booleanas com Pontos 29 41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por
pontos 29 42 Meacutetodo de Adams e Dutreacute 33 421 Modelo por Pontos em Adams e Dutreacute 33 422 Algoritmo de Operaccedilotildees Booleanas 34 43 Meacutetodo de Pauly 39 431 Modelo em Pauly 40 432 Algoritmo de Operaccedilotildees Booleanas 40 44 Validade da Regra 2 43
5 Melhorias Propostas 47 51 Descriccedilatildeo do algoritmo 47 511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo 48
512 Teste DentroFora 52 513 Criaccedilatildeo do modelo resultado 54 52 Implementaccedilatildeo 55 521 Estruturas de Dados 57
6 Resultados 61 61 Testes 61 62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas 68
7 Conclusatildeo 71 71 Trabalhos Futuros 72
8 Referecircncias Bibliograacuteficas 73
11
Lista de figuras
Figura 1 Um modelo por pontos e sua visualizaccedilatildeo 21 Figura 2 A superfiacutecie modelada por surfels O surfel em destaque tem raio de
alcance rt e normal n 22 Figura 3 Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting 26 Figura 4 Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida
retirou-se outro cubo e por uacuteltimo retirou-se o cilindro 29 Figura 5 A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs
operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo
diferenccedila e interseccedilatildeo 30 Figura 6 (a) Dois modelos A e B (b) Posicionados de forma que A tem uma parte
dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd 31 Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais
proacuteximo a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo
x eacute classificado como fora senatildeo seraacute classificado como dentro 32 Figura 8 Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de
interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo 33 Figura 9 Um objeto representado por pontos com suas normais e sua quadtree
correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes
cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo
noacutes cheios noacutes que conteacutem pontos 35 Figura 10 Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a
parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os
surfels 36 Figura 11 Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais
proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores 38 Figura 12 Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o
caso de Arestas Vivas do objeto agrave esquerda 39 Figura 13 Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo e
convergem para o ponto de interseccedilatildeo 42 Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em
q1 e o plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute
12
mais proacuteximo a q1 e q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute
dois novos pontos de partida para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r
que eacute uma aproximaccedilatildeo melhor de q 43 Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o
ponto y de C Se o produto interno entre a normal em y e o vetor que liga y a
x for maior que zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C 44 Figura 16 As curvas vermelhas satildeo o Eixo Medial da curva em preto 45 Figura 17 Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em vermelho)
Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
45 Figura 18 A figura mostra o diagrama de Voronoi de uma amostragem de pontos
S Da mesma forma que a amostragem aproxima a curva os veacutertices de
Voronoi aproximam o Eixo Medial 46 Figura 19 Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os
mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno 48 Figura 20 O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro
do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a
regiatildeo que conteacutem os surfels 49 Figura 21 O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c
a classificaccedilatildeo do noacute a eacute propagada para o noacute b 50 Figura 22 Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do
modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente 50 Figura 23 Quadtree classificada 51 Figura 24 A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a
normal n definem as retas que dividem o noacute 52 Figura 25 Duas circunferecircncias e suas quadtrees correspondentes 53 Figura 26 a modelos natildeo se intersectam b modelo intersecta noacutes fora c
modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes
fora 54 Figura 27 Software PointShop 3D com dois modelos carregados na sua cena 56 Figura 28 Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees
booleanas 57 Figura 29 Modelo do PointShop Igea 62 Figura 30 Resultado da uniatildeo de duas Igeas 63 Figura 31 Resultado da interseccedilatildeo de duas Igeas 63 Figura 32 Resultado da diferenccedila entre duas Igeas 64
13
Figura 33 Modelo do PointShop MaxPlanck 65 Figura 34 Modelo do PointShop Male 66 Figura 35 Resultado da Uniatildeo do modelo Male com MaxPlanck 66 Figura 36 Resultado da interseccedilatildeo do modelo Male com o MaxPlanck 67 Figura 37 Resultado da diferenccedila do modelo Male do modelo MaxPlanck 67
14
Lista de tabelas
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas 42
Tabela 2- Nuacutemero de surfels dos modelos resultantes 64 Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas
Igeas 65
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck
e Male 68 Tabela 5- Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os
modelos MaxPlanck e Male 68
15
1 Introduccedilatildeo
O mundo digital estaacute conquistando cada vez mais espaccedilo nos meios de
comunicaccedilatildeo Sons imagens viacutedeos digitais satildeo miacutedias muito usadas em
diversas aacutereas como entretenimento medicina desenho industrial engenharia
arquitetura educaccedilatildeo arte ciecircncia entre outras Podemos citar alguns
exemplos dentro destas aacutereas como jogos efeitos especiais filmes digitais
visualizaccedilatildeo cientiacutefica viacutedeo-conferecircncia comeacutercio na internet Nos uacuteltimos anos
verificamos que o modelo 3D vem se tornando um novo meio de comunicaccedilatildeo
digital Com o desenvolvimento da tecnologia de aquisiccedilatildeo e do processamento
de modelos 3D ele vem sendo cada vez mais utilizado Jogos 3D animaccedilotildees
aplicaccedilotildees em realidade virtual visualizaccedilatildeo cientiacutefica aplicaccedilotildees para aacuterea
meacutedica e odontoloacutegica criaccedilatildeo de reacuteplicas para estudo e preservaccedilatildeo do
patrimocircnio histoacuterico sistemas CADCAM cataacutelogos de modelos 3D na Web para
comercializaccedilatildeo criaccedilatildeo de protoacutetipos para arquitetura engenharia satildeo alguns
exemplos de aplicaccedilotildees que usam modelos 3D
A aacuterea que estuda a representaccedilatildeo de um modelo 3D no computador eacute
chamada de modelagem em computaccedilatildeo graacutefica Existem diversos tipos de
modelagem para as diversas aplicaccedilotildees que usam um modelo 3D como por
exemplo representaccedilotildees poligonais como malhas triangulares que satildeo
geralmente usadas na aacuterea de entretenimento Este trabalho explora um novo
tipo de modelagem a modelagem por pontos
A modelagem por pontos comeccedilou a ser largamente explorada nesta
deacutecada e trata-se de uma aacuterea muito promissora em computaccedilatildeo graacutefica dadas
agraves vaacuterias e grandes vantagens em relaccedilatildeo aos outros tipos de representaccedilatildeo
como esquema de representaccedilatildeo CSG (Constructive Solid Geometry) [1] ou
malhas poligonais Dentre as principais vantagens podemos citar grande
simplicidade e flexibilidade boa performance robustez Mas a principal
vantagem desta modelagem que foi o fator que impulsionou o seu grande
desenvolvimento nesta deacutecada eacute que esta modelagem por pontos eacute a melhor
opccedilatildeo para tratar os dados de saiacuteda de equipamentos de aquisiccedilatildeo de modelos
3D O uso destes equipamentos tem aumentado muito nesta deacutecada A
16
tecnologia destes equipamentos tem progredido muito e eles tecircm se tornado
mais baratos A tendecircncia eacute que o uso destes equipamentos se torne o mais
utilizado meio de obtenccedilatildeo de modelos 3D Isto porque construir modelos 3D
bastante detalhados por meio de um software de modelagem eacute muito trabalhoso
O processo de aquisiccedilatildeo de modelos por meio destes equipamentos automatiza
este processo de construccedilatildeo
No trabalho com modelos 3D frequumlentemente satildeo usadas as operaccedilotildees
booleanas que satildeo operaccedilotildees de uniatildeo interseccedilatildeo ou diferenccedila No esquema
de representaccedilatildeo CSG estas operaccedilotildees fazem parte da representaccedilatildeo do
objeto Estas operaccedilotildees tambeacutem podem ser usadas para criar novos modelos ou
para alteraacute-los Na maioria dos tipos de representaccedilatildeo de objetos 3D estas
operaccedilotildees satildeo bastante complexas
A simplicidade da representaccedilatildeo por pontos permite que as operaccedilotildees
booleanas sejam realizadas com facilidade se compararmos com a realizaccedilatildeo
destas operaccedilotildees em outros tipos de representaccedilatildeo como malhas poligonais
Motivada pelas vantagens desta modelagem e pela utilidade destas operaccedilotildees
esta dissertaccedilatildeo apresenta uma introduccedilatildeo geral de modelagem por pontos e
trabalha mais especificamente com operaccedilotildees booleanas em objetos
modelados por pontos Dois trabalhos que exploram as operaccedilotildees booleanas na
modelagem por pontos seratildeo abordados o trabalho de Adams e Dutreacute [2] e o
trabalho de Pauly et al [3] O presente trabalho implementa o meacutetodo de Adams
e Dutreacute com algumas melhorias e faz uma comparaccedilatildeo entre o meacutetodo de Pauly
[3] e o meacutetodo de Adams e Dutreacute [2] com nossas melhorias
Como contribuiccedilotildees dadas por este trabalho apresentamos
- um estudo sobre modelagem por pontos
- um estudo sobre operaccedilotildees booleanas com pontos
- proposta de melhorias ao algoritmo proposto por Adams e Dutreacute [2]
- comparaccedilatildeo dos dois meacutetodos propostos para realizar estas operaccedilotildees
meacutetodo de Pauly et al [3] e de Adams e Dutreacute [2]
Este trabalho vem apresentado nesta dissertaccedilatildeo organizada em sete
capiacutetulos conforme descrito resumidamente a seguir
O capiacutetulo 2 cita alguns trabalhos sobre modelagem por pontos que estatildeo
relacionados a este trabalho
O capiacutetulo 3 apresenta uma visatildeo geral do modelo por pontos e explica
melhor alguns trabalhos citados no capiacutetulo 2
17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Todos os direitos reservados Eacute proibida a reproduccedilatildeo total ou parcial do trabalho sem autorizaccedilatildeo da universidade da autora e do orientador
Heloisa Reis Leal Graduou-se em Ciecircncia da Computaccedilatildeo pela Universidade Federal de Minas Gerais (UFMG) em abril de 1992 Trabalhou como Analista de Sistemas na empresa Telecomunicaccedilotildees de Minas Gerais SA (TELEMIG) entre 1993 e 1997 onde atuou no desenvolvimento de sistemas de controle da rede telefocircnica de Minas Gerais Trabalhou como Analista de Sistemas no Tribunal de Justiccedila do Estado de Minas Gerais (TJMG) entre 1998 e 2001 onde atuou no desenvolvimento de sistemas controle de processos e controle de equipamentos Desde 2002 trabalha no Serviccedilo Federal de Processamento de Dados (SERPRO) desenvolvendo sistema de controle da Malha Fiscal do Imposto de Renda - Pessoa Fiacutesica
Ficha Catalograacutefica
Leal Heloisa Reis
Operaccedilotildees booleanas na modelagem por pontos
Heloisa Reis Leal orientadores Waldemar Celes Filho
Luiz Velho ndash Rio de Janeiro PUC Departamento de
Informaacutetica 2004
75 f il 30 cm
Dissertaccedilatildeo (mestrado) ndash Pontifiacutecia
Universidade Catoacutelica do Rio de Janeiro Departamento de
Informaacutetica
Inclui referecircncias bibliograacuteficas
1 Informaacutetica ndash Teses 2 Computaccedilatildeo graacutefica
interativa 3 Modelagem 3D 4 Modelagem por pontos 5
Operaccedilotildees booleanas I Celes Filho Waldemar II Velho
Luiz III Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Departamento de Informaacutetica III Tiacutetulo
CDD 004
Agrave minha matildee Tetecirc Daacutelton e Lucas
Agradecimentos Aos meus orientadores Waldemar Celes e Luiz Velho pelo apoio dedicaccedilatildeo e paciecircncia que tornaram este trabalho possiacutevel Agrave PUC-Rio pelo apoio financeiro Aos membros da banca examinadora pelas correccedilotildees e sugestotildees Agrave Cristina Griner chefe de projeto do SERPRO pelo apoio compreensatildeo e ajuda Aos meus professores de mestrado pelos conhecimentos transmitidos Agrave Mauren Paola Ruthner pela amizade e colaboraccedilatildeo durante todo o mestrado Aos colegas do Departamento de Informaacutetica da PUC-Rio pelos momentos compartilhados Agrave minha matildee pela revisatildeo do texto desta dissertaccedilatildeo e pelo total apoio sem o qual este trabalho natildeo seria possiacutevel Agrave Daacutelton e Tetecirc meus queridos irmatildeos pelo apoio incentivo e colaboraccedilatildeo
Resumo
Leal Heloisa ReisCeles Waldemar (Orientador) Operaccedilotildees Booleanas na Modelagem por Pontos Rio de Janeiro 2004 75p Dissertaccedilatildeo de Mestrado - Departamento de Informaacutetica Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Operaccedilotildees booleanas em modelagem 3D satildeo usadas para criar novos
modelos ou para modificaacute-los Na maioria dos tipos de representaccedilatildeo de objetos
3D estas operaccedilotildees satildeo bastante complexas Nos uacuteltimos anos tem sido muito
explorado um novo tipo de modelagem a modelagem por pontos que apresenta
muitas vantagens em relaccedilatildeo agraves outras representaccedilotildees como maior simplicidade
e eficiecircncia Dois trabalhos exploram as operaccedilotildees booleanas na modelagem
por pontos o trabalho de Adams e Dutreacute e o trabalho de Pauly et al Dada a
grande importacircncia deste novo tipo de modelagem e do uso de operaccedilotildees
booleanas esta dissertaccedilatildeo apresenta uma introduccedilatildeo agrave modelagem por pontos
implementa o algoritmo proposto em Adams e Dutreacute com algumas melhorias e o
compara com o meacutetodo de Pauly et al
Palavras-chave
Modelagem 3D Modelagem por pontos Operaccedilotildees Booleanas
Computaccedilatildeo Graacutefica Interativa
Abstract
Leal Heloisa Reis Celes Waldemar(Advisor) Boolean Operations on Point-based models Rio de Janeiro 2004 75p MSc Dissertation - Departamento de Informaacutetica Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Boolean operations are used to create or modify models These operations
in the majority of 3D object representations are very complex In the last years a
significant trend in computer graphics has been the shift towards point sampled
3D models due to their advantages over other representations such as simplicity
and efficiency Two recent works present algorithms to perform interactive
boolean operations on point-based models the work by Adams and Dutreacute and
the work by Pauly et Al Due to great importance of this novel representation
and of the use of boolean operations the present work makes an introduction to
point-based representation implements the algorithm proposed by Adams and
Dutreacute with some improvements and compares this implementation with the work
by Pauly et al
Palavras-chave
3D Modeling Point-based Modeling Boolean Operation Interactive
Computer Graphics
Sumaacuterio
1 Introduccedilatildeo 15
2 Trabalhos relacionados 18
3 Modelagem por Pontos 20 31 Ideacuteia da Representaccedilatildeo 20 32 Tipos de distribuiccedilatildeo dos surfels 22 33 Estrutura de multi-resoluccedilatildeo 22 34 Dados que um surfel pode conter 23 35 Aquisiccedilatildeo do modelo 23 351 Aquisiccedilatildeo da geometria 23 352 Aquisiccedilatildeo da textura 24 353 Correccedilatildeo das falhas da aquisiccedilatildeo 25 36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto) 25 37 Visualizaccedilatildeo do modelo 26 38 Ediccedilatildeo do modelo 28
4 Operaccedilotildees Booleanas com Pontos 29 41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por
pontos 29 42 Meacutetodo de Adams e Dutreacute 33 421 Modelo por Pontos em Adams e Dutreacute 33 422 Algoritmo de Operaccedilotildees Booleanas 34 43 Meacutetodo de Pauly 39 431 Modelo em Pauly 40 432 Algoritmo de Operaccedilotildees Booleanas 40 44 Validade da Regra 2 43
5 Melhorias Propostas 47 51 Descriccedilatildeo do algoritmo 47 511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo 48
512 Teste DentroFora 52 513 Criaccedilatildeo do modelo resultado 54 52 Implementaccedilatildeo 55 521 Estruturas de Dados 57
6 Resultados 61 61 Testes 61 62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas 68
7 Conclusatildeo 71 71 Trabalhos Futuros 72
8 Referecircncias Bibliograacuteficas 73
11
Lista de figuras
Figura 1 Um modelo por pontos e sua visualizaccedilatildeo 21 Figura 2 A superfiacutecie modelada por surfels O surfel em destaque tem raio de
alcance rt e normal n 22 Figura 3 Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting 26 Figura 4 Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida
retirou-se outro cubo e por uacuteltimo retirou-se o cilindro 29 Figura 5 A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs
operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo
diferenccedila e interseccedilatildeo 30 Figura 6 (a) Dois modelos A e B (b) Posicionados de forma que A tem uma parte
dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd 31 Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais
proacuteximo a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo
x eacute classificado como fora senatildeo seraacute classificado como dentro 32 Figura 8 Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de
interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo 33 Figura 9 Um objeto representado por pontos com suas normais e sua quadtree
correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes
cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo
noacutes cheios noacutes que conteacutem pontos 35 Figura 10 Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a
parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os
surfels 36 Figura 11 Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais
proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores 38 Figura 12 Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o
caso de Arestas Vivas do objeto agrave esquerda 39 Figura 13 Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo e
convergem para o ponto de interseccedilatildeo 42 Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em
q1 e o plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute
12
mais proacuteximo a q1 e q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute
dois novos pontos de partida para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r
que eacute uma aproximaccedilatildeo melhor de q 43 Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o
ponto y de C Se o produto interno entre a normal em y e o vetor que liga y a
x for maior que zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C 44 Figura 16 As curvas vermelhas satildeo o Eixo Medial da curva em preto 45 Figura 17 Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em vermelho)
Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
45 Figura 18 A figura mostra o diagrama de Voronoi de uma amostragem de pontos
S Da mesma forma que a amostragem aproxima a curva os veacutertices de
Voronoi aproximam o Eixo Medial 46 Figura 19 Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os
mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno 48 Figura 20 O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro
do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a
regiatildeo que conteacutem os surfels 49 Figura 21 O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c
a classificaccedilatildeo do noacute a eacute propagada para o noacute b 50 Figura 22 Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do
modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente 50 Figura 23 Quadtree classificada 51 Figura 24 A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a
normal n definem as retas que dividem o noacute 52 Figura 25 Duas circunferecircncias e suas quadtrees correspondentes 53 Figura 26 a modelos natildeo se intersectam b modelo intersecta noacutes fora c
modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes
fora 54 Figura 27 Software PointShop 3D com dois modelos carregados na sua cena 56 Figura 28 Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees
booleanas 57 Figura 29 Modelo do PointShop Igea 62 Figura 30 Resultado da uniatildeo de duas Igeas 63 Figura 31 Resultado da interseccedilatildeo de duas Igeas 63 Figura 32 Resultado da diferenccedila entre duas Igeas 64
13
Figura 33 Modelo do PointShop MaxPlanck 65 Figura 34 Modelo do PointShop Male 66 Figura 35 Resultado da Uniatildeo do modelo Male com MaxPlanck 66 Figura 36 Resultado da interseccedilatildeo do modelo Male com o MaxPlanck 67 Figura 37 Resultado da diferenccedila do modelo Male do modelo MaxPlanck 67
14
Lista de tabelas
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas 42
Tabela 2- Nuacutemero de surfels dos modelos resultantes 64 Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas
Igeas 65
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck
e Male 68 Tabela 5- Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os
modelos MaxPlanck e Male 68
15
1 Introduccedilatildeo
O mundo digital estaacute conquistando cada vez mais espaccedilo nos meios de
comunicaccedilatildeo Sons imagens viacutedeos digitais satildeo miacutedias muito usadas em
diversas aacutereas como entretenimento medicina desenho industrial engenharia
arquitetura educaccedilatildeo arte ciecircncia entre outras Podemos citar alguns
exemplos dentro destas aacutereas como jogos efeitos especiais filmes digitais
visualizaccedilatildeo cientiacutefica viacutedeo-conferecircncia comeacutercio na internet Nos uacuteltimos anos
verificamos que o modelo 3D vem se tornando um novo meio de comunicaccedilatildeo
digital Com o desenvolvimento da tecnologia de aquisiccedilatildeo e do processamento
de modelos 3D ele vem sendo cada vez mais utilizado Jogos 3D animaccedilotildees
aplicaccedilotildees em realidade virtual visualizaccedilatildeo cientiacutefica aplicaccedilotildees para aacuterea
meacutedica e odontoloacutegica criaccedilatildeo de reacuteplicas para estudo e preservaccedilatildeo do
patrimocircnio histoacuterico sistemas CADCAM cataacutelogos de modelos 3D na Web para
comercializaccedilatildeo criaccedilatildeo de protoacutetipos para arquitetura engenharia satildeo alguns
exemplos de aplicaccedilotildees que usam modelos 3D
A aacuterea que estuda a representaccedilatildeo de um modelo 3D no computador eacute
chamada de modelagem em computaccedilatildeo graacutefica Existem diversos tipos de
modelagem para as diversas aplicaccedilotildees que usam um modelo 3D como por
exemplo representaccedilotildees poligonais como malhas triangulares que satildeo
geralmente usadas na aacuterea de entretenimento Este trabalho explora um novo
tipo de modelagem a modelagem por pontos
A modelagem por pontos comeccedilou a ser largamente explorada nesta
deacutecada e trata-se de uma aacuterea muito promissora em computaccedilatildeo graacutefica dadas
agraves vaacuterias e grandes vantagens em relaccedilatildeo aos outros tipos de representaccedilatildeo
como esquema de representaccedilatildeo CSG (Constructive Solid Geometry) [1] ou
malhas poligonais Dentre as principais vantagens podemos citar grande
simplicidade e flexibilidade boa performance robustez Mas a principal
vantagem desta modelagem que foi o fator que impulsionou o seu grande
desenvolvimento nesta deacutecada eacute que esta modelagem por pontos eacute a melhor
opccedilatildeo para tratar os dados de saiacuteda de equipamentos de aquisiccedilatildeo de modelos
3D O uso destes equipamentos tem aumentado muito nesta deacutecada A
16
tecnologia destes equipamentos tem progredido muito e eles tecircm se tornado
mais baratos A tendecircncia eacute que o uso destes equipamentos se torne o mais
utilizado meio de obtenccedilatildeo de modelos 3D Isto porque construir modelos 3D
bastante detalhados por meio de um software de modelagem eacute muito trabalhoso
O processo de aquisiccedilatildeo de modelos por meio destes equipamentos automatiza
este processo de construccedilatildeo
No trabalho com modelos 3D frequumlentemente satildeo usadas as operaccedilotildees
booleanas que satildeo operaccedilotildees de uniatildeo interseccedilatildeo ou diferenccedila No esquema
de representaccedilatildeo CSG estas operaccedilotildees fazem parte da representaccedilatildeo do
objeto Estas operaccedilotildees tambeacutem podem ser usadas para criar novos modelos ou
para alteraacute-los Na maioria dos tipos de representaccedilatildeo de objetos 3D estas
operaccedilotildees satildeo bastante complexas
A simplicidade da representaccedilatildeo por pontos permite que as operaccedilotildees
booleanas sejam realizadas com facilidade se compararmos com a realizaccedilatildeo
destas operaccedilotildees em outros tipos de representaccedilatildeo como malhas poligonais
Motivada pelas vantagens desta modelagem e pela utilidade destas operaccedilotildees
esta dissertaccedilatildeo apresenta uma introduccedilatildeo geral de modelagem por pontos e
trabalha mais especificamente com operaccedilotildees booleanas em objetos
modelados por pontos Dois trabalhos que exploram as operaccedilotildees booleanas na
modelagem por pontos seratildeo abordados o trabalho de Adams e Dutreacute [2] e o
trabalho de Pauly et al [3] O presente trabalho implementa o meacutetodo de Adams
e Dutreacute com algumas melhorias e faz uma comparaccedilatildeo entre o meacutetodo de Pauly
[3] e o meacutetodo de Adams e Dutreacute [2] com nossas melhorias
Como contribuiccedilotildees dadas por este trabalho apresentamos
- um estudo sobre modelagem por pontos
- um estudo sobre operaccedilotildees booleanas com pontos
- proposta de melhorias ao algoritmo proposto por Adams e Dutreacute [2]
- comparaccedilatildeo dos dois meacutetodos propostos para realizar estas operaccedilotildees
meacutetodo de Pauly et al [3] e de Adams e Dutreacute [2]
Este trabalho vem apresentado nesta dissertaccedilatildeo organizada em sete
capiacutetulos conforme descrito resumidamente a seguir
O capiacutetulo 2 cita alguns trabalhos sobre modelagem por pontos que estatildeo
relacionados a este trabalho
O capiacutetulo 3 apresenta uma visatildeo geral do modelo por pontos e explica
melhor alguns trabalhos citados no capiacutetulo 2
17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Agrave minha matildee Tetecirc Daacutelton e Lucas
Agradecimentos Aos meus orientadores Waldemar Celes e Luiz Velho pelo apoio dedicaccedilatildeo e paciecircncia que tornaram este trabalho possiacutevel Agrave PUC-Rio pelo apoio financeiro Aos membros da banca examinadora pelas correccedilotildees e sugestotildees Agrave Cristina Griner chefe de projeto do SERPRO pelo apoio compreensatildeo e ajuda Aos meus professores de mestrado pelos conhecimentos transmitidos Agrave Mauren Paola Ruthner pela amizade e colaboraccedilatildeo durante todo o mestrado Aos colegas do Departamento de Informaacutetica da PUC-Rio pelos momentos compartilhados Agrave minha matildee pela revisatildeo do texto desta dissertaccedilatildeo e pelo total apoio sem o qual este trabalho natildeo seria possiacutevel Agrave Daacutelton e Tetecirc meus queridos irmatildeos pelo apoio incentivo e colaboraccedilatildeo
Resumo
Leal Heloisa ReisCeles Waldemar (Orientador) Operaccedilotildees Booleanas na Modelagem por Pontos Rio de Janeiro 2004 75p Dissertaccedilatildeo de Mestrado - Departamento de Informaacutetica Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Operaccedilotildees booleanas em modelagem 3D satildeo usadas para criar novos
modelos ou para modificaacute-los Na maioria dos tipos de representaccedilatildeo de objetos
3D estas operaccedilotildees satildeo bastante complexas Nos uacuteltimos anos tem sido muito
explorado um novo tipo de modelagem a modelagem por pontos que apresenta
muitas vantagens em relaccedilatildeo agraves outras representaccedilotildees como maior simplicidade
e eficiecircncia Dois trabalhos exploram as operaccedilotildees booleanas na modelagem
por pontos o trabalho de Adams e Dutreacute e o trabalho de Pauly et al Dada a
grande importacircncia deste novo tipo de modelagem e do uso de operaccedilotildees
booleanas esta dissertaccedilatildeo apresenta uma introduccedilatildeo agrave modelagem por pontos
implementa o algoritmo proposto em Adams e Dutreacute com algumas melhorias e o
compara com o meacutetodo de Pauly et al
Palavras-chave
Modelagem 3D Modelagem por pontos Operaccedilotildees Booleanas
Computaccedilatildeo Graacutefica Interativa
Abstract
Leal Heloisa Reis Celes Waldemar(Advisor) Boolean Operations on Point-based models Rio de Janeiro 2004 75p MSc Dissertation - Departamento de Informaacutetica Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Boolean operations are used to create or modify models These operations
in the majority of 3D object representations are very complex In the last years a
significant trend in computer graphics has been the shift towards point sampled
3D models due to their advantages over other representations such as simplicity
and efficiency Two recent works present algorithms to perform interactive
boolean operations on point-based models the work by Adams and Dutreacute and
the work by Pauly et Al Due to great importance of this novel representation
and of the use of boolean operations the present work makes an introduction to
point-based representation implements the algorithm proposed by Adams and
Dutreacute with some improvements and compares this implementation with the work
by Pauly et al
Palavras-chave
3D Modeling Point-based Modeling Boolean Operation Interactive
Computer Graphics
Sumaacuterio
1 Introduccedilatildeo 15
2 Trabalhos relacionados 18
3 Modelagem por Pontos 20 31 Ideacuteia da Representaccedilatildeo 20 32 Tipos de distribuiccedilatildeo dos surfels 22 33 Estrutura de multi-resoluccedilatildeo 22 34 Dados que um surfel pode conter 23 35 Aquisiccedilatildeo do modelo 23 351 Aquisiccedilatildeo da geometria 23 352 Aquisiccedilatildeo da textura 24 353 Correccedilatildeo das falhas da aquisiccedilatildeo 25 36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto) 25 37 Visualizaccedilatildeo do modelo 26 38 Ediccedilatildeo do modelo 28
4 Operaccedilotildees Booleanas com Pontos 29 41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por
pontos 29 42 Meacutetodo de Adams e Dutreacute 33 421 Modelo por Pontos em Adams e Dutreacute 33 422 Algoritmo de Operaccedilotildees Booleanas 34 43 Meacutetodo de Pauly 39 431 Modelo em Pauly 40 432 Algoritmo de Operaccedilotildees Booleanas 40 44 Validade da Regra 2 43
5 Melhorias Propostas 47 51 Descriccedilatildeo do algoritmo 47 511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo 48
512 Teste DentroFora 52 513 Criaccedilatildeo do modelo resultado 54 52 Implementaccedilatildeo 55 521 Estruturas de Dados 57
6 Resultados 61 61 Testes 61 62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas 68
7 Conclusatildeo 71 71 Trabalhos Futuros 72
8 Referecircncias Bibliograacuteficas 73
11
Lista de figuras
Figura 1 Um modelo por pontos e sua visualizaccedilatildeo 21 Figura 2 A superfiacutecie modelada por surfels O surfel em destaque tem raio de
alcance rt e normal n 22 Figura 3 Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting 26 Figura 4 Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida
retirou-se outro cubo e por uacuteltimo retirou-se o cilindro 29 Figura 5 A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs
operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo
diferenccedila e interseccedilatildeo 30 Figura 6 (a) Dois modelos A e B (b) Posicionados de forma que A tem uma parte
dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd 31 Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais
proacuteximo a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo
x eacute classificado como fora senatildeo seraacute classificado como dentro 32 Figura 8 Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de
interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo 33 Figura 9 Um objeto representado por pontos com suas normais e sua quadtree
correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes
cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo
noacutes cheios noacutes que conteacutem pontos 35 Figura 10 Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a
parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os
surfels 36 Figura 11 Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais
proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores 38 Figura 12 Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o
caso de Arestas Vivas do objeto agrave esquerda 39 Figura 13 Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo e
convergem para o ponto de interseccedilatildeo 42 Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em
q1 e o plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute
12
mais proacuteximo a q1 e q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute
dois novos pontos de partida para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r
que eacute uma aproximaccedilatildeo melhor de q 43 Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o
ponto y de C Se o produto interno entre a normal em y e o vetor que liga y a
x for maior que zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C 44 Figura 16 As curvas vermelhas satildeo o Eixo Medial da curva em preto 45 Figura 17 Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em vermelho)
Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
45 Figura 18 A figura mostra o diagrama de Voronoi de uma amostragem de pontos
S Da mesma forma que a amostragem aproxima a curva os veacutertices de
Voronoi aproximam o Eixo Medial 46 Figura 19 Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os
mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno 48 Figura 20 O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro
do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a
regiatildeo que conteacutem os surfels 49 Figura 21 O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c
a classificaccedilatildeo do noacute a eacute propagada para o noacute b 50 Figura 22 Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do
modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente 50 Figura 23 Quadtree classificada 51 Figura 24 A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a
normal n definem as retas que dividem o noacute 52 Figura 25 Duas circunferecircncias e suas quadtrees correspondentes 53 Figura 26 a modelos natildeo se intersectam b modelo intersecta noacutes fora c
modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes
fora 54 Figura 27 Software PointShop 3D com dois modelos carregados na sua cena 56 Figura 28 Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees
booleanas 57 Figura 29 Modelo do PointShop Igea 62 Figura 30 Resultado da uniatildeo de duas Igeas 63 Figura 31 Resultado da interseccedilatildeo de duas Igeas 63 Figura 32 Resultado da diferenccedila entre duas Igeas 64
13
Figura 33 Modelo do PointShop MaxPlanck 65 Figura 34 Modelo do PointShop Male 66 Figura 35 Resultado da Uniatildeo do modelo Male com MaxPlanck 66 Figura 36 Resultado da interseccedilatildeo do modelo Male com o MaxPlanck 67 Figura 37 Resultado da diferenccedila do modelo Male do modelo MaxPlanck 67
14
Lista de tabelas
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas 42
Tabela 2- Nuacutemero de surfels dos modelos resultantes 64 Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas
Igeas 65
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck
e Male 68 Tabela 5- Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os
modelos MaxPlanck e Male 68
15
1 Introduccedilatildeo
O mundo digital estaacute conquistando cada vez mais espaccedilo nos meios de
comunicaccedilatildeo Sons imagens viacutedeos digitais satildeo miacutedias muito usadas em
diversas aacutereas como entretenimento medicina desenho industrial engenharia
arquitetura educaccedilatildeo arte ciecircncia entre outras Podemos citar alguns
exemplos dentro destas aacutereas como jogos efeitos especiais filmes digitais
visualizaccedilatildeo cientiacutefica viacutedeo-conferecircncia comeacutercio na internet Nos uacuteltimos anos
verificamos que o modelo 3D vem se tornando um novo meio de comunicaccedilatildeo
digital Com o desenvolvimento da tecnologia de aquisiccedilatildeo e do processamento
de modelos 3D ele vem sendo cada vez mais utilizado Jogos 3D animaccedilotildees
aplicaccedilotildees em realidade virtual visualizaccedilatildeo cientiacutefica aplicaccedilotildees para aacuterea
meacutedica e odontoloacutegica criaccedilatildeo de reacuteplicas para estudo e preservaccedilatildeo do
patrimocircnio histoacuterico sistemas CADCAM cataacutelogos de modelos 3D na Web para
comercializaccedilatildeo criaccedilatildeo de protoacutetipos para arquitetura engenharia satildeo alguns
exemplos de aplicaccedilotildees que usam modelos 3D
A aacuterea que estuda a representaccedilatildeo de um modelo 3D no computador eacute
chamada de modelagem em computaccedilatildeo graacutefica Existem diversos tipos de
modelagem para as diversas aplicaccedilotildees que usam um modelo 3D como por
exemplo representaccedilotildees poligonais como malhas triangulares que satildeo
geralmente usadas na aacuterea de entretenimento Este trabalho explora um novo
tipo de modelagem a modelagem por pontos
A modelagem por pontos comeccedilou a ser largamente explorada nesta
deacutecada e trata-se de uma aacuterea muito promissora em computaccedilatildeo graacutefica dadas
agraves vaacuterias e grandes vantagens em relaccedilatildeo aos outros tipos de representaccedilatildeo
como esquema de representaccedilatildeo CSG (Constructive Solid Geometry) [1] ou
malhas poligonais Dentre as principais vantagens podemos citar grande
simplicidade e flexibilidade boa performance robustez Mas a principal
vantagem desta modelagem que foi o fator que impulsionou o seu grande
desenvolvimento nesta deacutecada eacute que esta modelagem por pontos eacute a melhor
opccedilatildeo para tratar os dados de saiacuteda de equipamentos de aquisiccedilatildeo de modelos
3D O uso destes equipamentos tem aumentado muito nesta deacutecada A
16
tecnologia destes equipamentos tem progredido muito e eles tecircm se tornado
mais baratos A tendecircncia eacute que o uso destes equipamentos se torne o mais
utilizado meio de obtenccedilatildeo de modelos 3D Isto porque construir modelos 3D
bastante detalhados por meio de um software de modelagem eacute muito trabalhoso
O processo de aquisiccedilatildeo de modelos por meio destes equipamentos automatiza
este processo de construccedilatildeo
No trabalho com modelos 3D frequumlentemente satildeo usadas as operaccedilotildees
booleanas que satildeo operaccedilotildees de uniatildeo interseccedilatildeo ou diferenccedila No esquema
de representaccedilatildeo CSG estas operaccedilotildees fazem parte da representaccedilatildeo do
objeto Estas operaccedilotildees tambeacutem podem ser usadas para criar novos modelos ou
para alteraacute-los Na maioria dos tipos de representaccedilatildeo de objetos 3D estas
operaccedilotildees satildeo bastante complexas
A simplicidade da representaccedilatildeo por pontos permite que as operaccedilotildees
booleanas sejam realizadas com facilidade se compararmos com a realizaccedilatildeo
destas operaccedilotildees em outros tipos de representaccedilatildeo como malhas poligonais
Motivada pelas vantagens desta modelagem e pela utilidade destas operaccedilotildees
esta dissertaccedilatildeo apresenta uma introduccedilatildeo geral de modelagem por pontos e
trabalha mais especificamente com operaccedilotildees booleanas em objetos
modelados por pontos Dois trabalhos que exploram as operaccedilotildees booleanas na
modelagem por pontos seratildeo abordados o trabalho de Adams e Dutreacute [2] e o
trabalho de Pauly et al [3] O presente trabalho implementa o meacutetodo de Adams
e Dutreacute com algumas melhorias e faz uma comparaccedilatildeo entre o meacutetodo de Pauly
[3] e o meacutetodo de Adams e Dutreacute [2] com nossas melhorias
Como contribuiccedilotildees dadas por este trabalho apresentamos
- um estudo sobre modelagem por pontos
- um estudo sobre operaccedilotildees booleanas com pontos
- proposta de melhorias ao algoritmo proposto por Adams e Dutreacute [2]
- comparaccedilatildeo dos dois meacutetodos propostos para realizar estas operaccedilotildees
meacutetodo de Pauly et al [3] e de Adams e Dutreacute [2]
Este trabalho vem apresentado nesta dissertaccedilatildeo organizada em sete
capiacutetulos conforme descrito resumidamente a seguir
O capiacutetulo 2 cita alguns trabalhos sobre modelagem por pontos que estatildeo
relacionados a este trabalho
O capiacutetulo 3 apresenta uma visatildeo geral do modelo por pontos e explica
melhor alguns trabalhos citados no capiacutetulo 2
17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Agradecimentos Aos meus orientadores Waldemar Celes e Luiz Velho pelo apoio dedicaccedilatildeo e paciecircncia que tornaram este trabalho possiacutevel Agrave PUC-Rio pelo apoio financeiro Aos membros da banca examinadora pelas correccedilotildees e sugestotildees Agrave Cristina Griner chefe de projeto do SERPRO pelo apoio compreensatildeo e ajuda Aos meus professores de mestrado pelos conhecimentos transmitidos Agrave Mauren Paola Ruthner pela amizade e colaboraccedilatildeo durante todo o mestrado Aos colegas do Departamento de Informaacutetica da PUC-Rio pelos momentos compartilhados Agrave minha matildee pela revisatildeo do texto desta dissertaccedilatildeo e pelo total apoio sem o qual este trabalho natildeo seria possiacutevel Agrave Daacutelton e Tetecirc meus queridos irmatildeos pelo apoio incentivo e colaboraccedilatildeo
Resumo
Leal Heloisa ReisCeles Waldemar (Orientador) Operaccedilotildees Booleanas na Modelagem por Pontos Rio de Janeiro 2004 75p Dissertaccedilatildeo de Mestrado - Departamento de Informaacutetica Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Operaccedilotildees booleanas em modelagem 3D satildeo usadas para criar novos
modelos ou para modificaacute-los Na maioria dos tipos de representaccedilatildeo de objetos
3D estas operaccedilotildees satildeo bastante complexas Nos uacuteltimos anos tem sido muito
explorado um novo tipo de modelagem a modelagem por pontos que apresenta
muitas vantagens em relaccedilatildeo agraves outras representaccedilotildees como maior simplicidade
e eficiecircncia Dois trabalhos exploram as operaccedilotildees booleanas na modelagem
por pontos o trabalho de Adams e Dutreacute e o trabalho de Pauly et al Dada a
grande importacircncia deste novo tipo de modelagem e do uso de operaccedilotildees
booleanas esta dissertaccedilatildeo apresenta uma introduccedilatildeo agrave modelagem por pontos
implementa o algoritmo proposto em Adams e Dutreacute com algumas melhorias e o
compara com o meacutetodo de Pauly et al
Palavras-chave
Modelagem 3D Modelagem por pontos Operaccedilotildees Booleanas
Computaccedilatildeo Graacutefica Interativa
Abstract
Leal Heloisa Reis Celes Waldemar(Advisor) Boolean Operations on Point-based models Rio de Janeiro 2004 75p MSc Dissertation - Departamento de Informaacutetica Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Boolean operations are used to create or modify models These operations
in the majority of 3D object representations are very complex In the last years a
significant trend in computer graphics has been the shift towards point sampled
3D models due to their advantages over other representations such as simplicity
and efficiency Two recent works present algorithms to perform interactive
boolean operations on point-based models the work by Adams and Dutreacute and
the work by Pauly et Al Due to great importance of this novel representation
and of the use of boolean operations the present work makes an introduction to
point-based representation implements the algorithm proposed by Adams and
Dutreacute with some improvements and compares this implementation with the work
by Pauly et al
Palavras-chave
3D Modeling Point-based Modeling Boolean Operation Interactive
Computer Graphics
Sumaacuterio
1 Introduccedilatildeo 15
2 Trabalhos relacionados 18
3 Modelagem por Pontos 20 31 Ideacuteia da Representaccedilatildeo 20 32 Tipos de distribuiccedilatildeo dos surfels 22 33 Estrutura de multi-resoluccedilatildeo 22 34 Dados que um surfel pode conter 23 35 Aquisiccedilatildeo do modelo 23 351 Aquisiccedilatildeo da geometria 23 352 Aquisiccedilatildeo da textura 24 353 Correccedilatildeo das falhas da aquisiccedilatildeo 25 36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto) 25 37 Visualizaccedilatildeo do modelo 26 38 Ediccedilatildeo do modelo 28
4 Operaccedilotildees Booleanas com Pontos 29 41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por
pontos 29 42 Meacutetodo de Adams e Dutreacute 33 421 Modelo por Pontos em Adams e Dutreacute 33 422 Algoritmo de Operaccedilotildees Booleanas 34 43 Meacutetodo de Pauly 39 431 Modelo em Pauly 40 432 Algoritmo de Operaccedilotildees Booleanas 40 44 Validade da Regra 2 43
5 Melhorias Propostas 47 51 Descriccedilatildeo do algoritmo 47 511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo 48
512 Teste DentroFora 52 513 Criaccedilatildeo do modelo resultado 54 52 Implementaccedilatildeo 55 521 Estruturas de Dados 57
6 Resultados 61 61 Testes 61 62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas 68
7 Conclusatildeo 71 71 Trabalhos Futuros 72
8 Referecircncias Bibliograacuteficas 73
11
Lista de figuras
Figura 1 Um modelo por pontos e sua visualizaccedilatildeo 21 Figura 2 A superfiacutecie modelada por surfels O surfel em destaque tem raio de
alcance rt e normal n 22 Figura 3 Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting 26 Figura 4 Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida
retirou-se outro cubo e por uacuteltimo retirou-se o cilindro 29 Figura 5 A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs
operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo
diferenccedila e interseccedilatildeo 30 Figura 6 (a) Dois modelos A e B (b) Posicionados de forma que A tem uma parte
dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd 31 Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais
proacuteximo a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo
x eacute classificado como fora senatildeo seraacute classificado como dentro 32 Figura 8 Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de
interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo 33 Figura 9 Um objeto representado por pontos com suas normais e sua quadtree
correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes
cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo
noacutes cheios noacutes que conteacutem pontos 35 Figura 10 Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a
parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os
surfels 36 Figura 11 Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais
proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores 38 Figura 12 Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o
caso de Arestas Vivas do objeto agrave esquerda 39 Figura 13 Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo e
convergem para o ponto de interseccedilatildeo 42 Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em
q1 e o plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute
12
mais proacuteximo a q1 e q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute
dois novos pontos de partida para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r
que eacute uma aproximaccedilatildeo melhor de q 43 Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o
ponto y de C Se o produto interno entre a normal em y e o vetor que liga y a
x for maior que zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C 44 Figura 16 As curvas vermelhas satildeo o Eixo Medial da curva em preto 45 Figura 17 Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em vermelho)
Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
45 Figura 18 A figura mostra o diagrama de Voronoi de uma amostragem de pontos
S Da mesma forma que a amostragem aproxima a curva os veacutertices de
Voronoi aproximam o Eixo Medial 46 Figura 19 Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os
mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno 48 Figura 20 O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro
do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a
regiatildeo que conteacutem os surfels 49 Figura 21 O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c
a classificaccedilatildeo do noacute a eacute propagada para o noacute b 50 Figura 22 Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do
modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente 50 Figura 23 Quadtree classificada 51 Figura 24 A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a
normal n definem as retas que dividem o noacute 52 Figura 25 Duas circunferecircncias e suas quadtrees correspondentes 53 Figura 26 a modelos natildeo se intersectam b modelo intersecta noacutes fora c
modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes
fora 54 Figura 27 Software PointShop 3D com dois modelos carregados na sua cena 56 Figura 28 Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees
booleanas 57 Figura 29 Modelo do PointShop Igea 62 Figura 30 Resultado da uniatildeo de duas Igeas 63 Figura 31 Resultado da interseccedilatildeo de duas Igeas 63 Figura 32 Resultado da diferenccedila entre duas Igeas 64
13
Figura 33 Modelo do PointShop MaxPlanck 65 Figura 34 Modelo do PointShop Male 66 Figura 35 Resultado da Uniatildeo do modelo Male com MaxPlanck 66 Figura 36 Resultado da interseccedilatildeo do modelo Male com o MaxPlanck 67 Figura 37 Resultado da diferenccedila do modelo Male do modelo MaxPlanck 67
14
Lista de tabelas
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas 42
Tabela 2- Nuacutemero de surfels dos modelos resultantes 64 Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas
Igeas 65
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck
e Male 68 Tabela 5- Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os
modelos MaxPlanck e Male 68
15
1 Introduccedilatildeo
O mundo digital estaacute conquistando cada vez mais espaccedilo nos meios de
comunicaccedilatildeo Sons imagens viacutedeos digitais satildeo miacutedias muito usadas em
diversas aacutereas como entretenimento medicina desenho industrial engenharia
arquitetura educaccedilatildeo arte ciecircncia entre outras Podemos citar alguns
exemplos dentro destas aacutereas como jogos efeitos especiais filmes digitais
visualizaccedilatildeo cientiacutefica viacutedeo-conferecircncia comeacutercio na internet Nos uacuteltimos anos
verificamos que o modelo 3D vem se tornando um novo meio de comunicaccedilatildeo
digital Com o desenvolvimento da tecnologia de aquisiccedilatildeo e do processamento
de modelos 3D ele vem sendo cada vez mais utilizado Jogos 3D animaccedilotildees
aplicaccedilotildees em realidade virtual visualizaccedilatildeo cientiacutefica aplicaccedilotildees para aacuterea
meacutedica e odontoloacutegica criaccedilatildeo de reacuteplicas para estudo e preservaccedilatildeo do
patrimocircnio histoacuterico sistemas CADCAM cataacutelogos de modelos 3D na Web para
comercializaccedilatildeo criaccedilatildeo de protoacutetipos para arquitetura engenharia satildeo alguns
exemplos de aplicaccedilotildees que usam modelos 3D
A aacuterea que estuda a representaccedilatildeo de um modelo 3D no computador eacute
chamada de modelagem em computaccedilatildeo graacutefica Existem diversos tipos de
modelagem para as diversas aplicaccedilotildees que usam um modelo 3D como por
exemplo representaccedilotildees poligonais como malhas triangulares que satildeo
geralmente usadas na aacuterea de entretenimento Este trabalho explora um novo
tipo de modelagem a modelagem por pontos
A modelagem por pontos comeccedilou a ser largamente explorada nesta
deacutecada e trata-se de uma aacuterea muito promissora em computaccedilatildeo graacutefica dadas
agraves vaacuterias e grandes vantagens em relaccedilatildeo aos outros tipos de representaccedilatildeo
como esquema de representaccedilatildeo CSG (Constructive Solid Geometry) [1] ou
malhas poligonais Dentre as principais vantagens podemos citar grande
simplicidade e flexibilidade boa performance robustez Mas a principal
vantagem desta modelagem que foi o fator que impulsionou o seu grande
desenvolvimento nesta deacutecada eacute que esta modelagem por pontos eacute a melhor
opccedilatildeo para tratar os dados de saiacuteda de equipamentos de aquisiccedilatildeo de modelos
3D O uso destes equipamentos tem aumentado muito nesta deacutecada A
16
tecnologia destes equipamentos tem progredido muito e eles tecircm se tornado
mais baratos A tendecircncia eacute que o uso destes equipamentos se torne o mais
utilizado meio de obtenccedilatildeo de modelos 3D Isto porque construir modelos 3D
bastante detalhados por meio de um software de modelagem eacute muito trabalhoso
O processo de aquisiccedilatildeo de modelos por meio destes equipamentos automatiza
este processo de construccedilatildeo
No trabalho com modelos 3D frequumlentemente satildeo usadas as operaccedilotildees
booleanas que satildeo operaccedilotildees de uniatildeo interseccedilatildeo ou diferenccedila No esquema
de representaccedilatildeo CSG estas operaccedilotildees fazem parte da representaccedilatildeo do
objeto Estas operaccedilotildees tambeacutem podem ser usadas para criar novos modelos ou
para alteraacute-los Na maioria dos tipos de representaccedilatildeo de objetos 3D estas
operaccedilotildees satildeo bastante complexas
A simplicidade da representaccedilatildeo por pontos permite que as operaccedilotildees
booleanas sejam realizadas com facilidade se compararmos com a realizaccedilatildeo
destas operaccedilotildees em outros tipos de representaccedilatildeo como malhas poligonais
Motivada pelas vantagens desta modelagem e pela utilidade destas operaccedilotildees
esta dissertaccedilatildeo apresenta uma introduccedilatildeo geral de modelagem por pontos e
trabalha mais especificamente com operaccedilotildees booleanas em objetos
modelados por pontos Dois trabalhos que exploram as operaccedilotildees booleanas na
modelagem por pontos seratildeo abordados o trabalho de Adams e Dutreacute [2] e o
trabalho de Pauly et al [3] O presente trabalho implementa o meacutetodo de Adams
e Dutreacute com algumas melhorias e faz uma comparaccedilatildeo entre o meacutetodo de Pauly
[3] e o meacutetodo de Adams e Dutreacute [2] com nossas melhorias
Como contribuiccedilotildees dadas por este trabalho apresentamos
- um estudo sobre modelagem por pontos
- um estudo sobre operaccedilotildees booleanas com pontos
- proposta de melhorias ao algoritmo proposto por Adams e Dutreacute [2]
- comparaccedilatildeo dos dois meacutetodos propostos para realizar estas operaccedilotildees
meacutetodo de Pauly et al [3] e de Adams e Dutreacute [2]
Este trabalho vem apresentado nesta dissertaccedilatildeo organizada em sete
capiacutetulos conforme descrito resumidamente a seguir
O capiacutetulo 2 cita alguns trabalhos sobre modelagem por pontos que estatildeo
relacionados a este trabalho
O capiacutetulo 3 apresenta uma visatildeo geral do modelo por pontos e explica
melhor alguns trabalhos citados no capiacutetulo 2
17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Resumo
Leal Heloisa ReisCeles Waldemar (Orientador) Operaccedilotildees Booleanas na Modelagem por Pontos Rio de Janeiro 2004 75p Dissertaccedilatildeo de Mestrado - Departamento de Informaacutetica Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Operaccedilotildees booleanas em modelagem 3D satildeo usadas para criar novos
modelos ou para modificaacute-los Na maioria dos tipos de representaccedilatildeo de objetos
3D estas operaccedilotildees satildeo bastante complexas Nos uacuteltimos anos tem sido muito
explorado um novo tipo de modelagem a modelagem por pontos que apresenta
muitas vantagens em relaccedilatildeo agraves outras representaccedilotildees como maior simplicidade
e eficiecircncia Dois trabalhos exploram as operaccedilotildees booleanas na modelagem
por pontos o trabalho de Adams e Dutreacute e o trabalho de Pauly et al Dada a
grande importacircncia deste novo tipo de modelagem e do uso de operaccedilotildees
booleanas esta dissertaccedilatildeo apresenta uma introduccedilatildeo agrave modelagem por pontos
implementa o algoritmo proposto em Adams e Dutreacute com algumas melhorias e o
compara com o meacutetodo de Pauly et al
Palavras-chave
Modelagem 3D Modelagem por pontos Operaccedilotildees Booleanas
Computaccedilatildeo Graacutefica Interativa
Abstract
Leal Heloisa Reis Celes Waldemar(Advisor) Boolean Operations on Point-based models Rio de Janeiro 2004 75p MSc Dissertation - Departamento de Informaacutetica Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Boolean operations are used to create or modify models These operations
in the majority of 3D object representations are very complex In the last years a
significant trend in computer graphics has been the shift towards point sampled
3D models due to their advantages over other representations such as simplicity
and efficiency Two recent works present algorithms to perform interactive
boolean operations on point-based models the work by Adams and Dutreacute and
the work by Pauly et Al Due to great importance of this novel representation
and of the use of boolean operations the present work makes an introduction to
point-based representation implements the algorithm proposed by Adams and
Dutreacute with some improvements and compares this implementation with the work
by Pauly et al
Palavras-chave
3D Modeling Point-based Modeling Boolean Operation Interactive
Computer Graphics
Sumaacuterio
1 Introduccedilatildeo 15
2 Trabalhos relacionados 18
3 Modelagem por Pontos 20 31 Ideacuteia da Representaccedilatildeo 20 32 Tipos de distribuiccedilatildeo dos surfels 22 33 Estrutura de multi-resoluccedilatildeo 22 34 Dados que um surfel pode conter 23 35 Aquisiccedilatildeo do modelo 23 351 Aquisiccedilatildeo da geometria 23 352 Aquisiccedilatildeo da textura 24 353 Correccedilatildeo das falhas da aquisiccedilatildeo 25 36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto) 25 37 Visualizaccedilatildeo do modelo 26 38 Ediccedilatildeo do modelo 28
4 Operaccedilotildees Booleanas com Pontos 29 41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por
pontos 29 42 Meacutetodo de Adams e Dutreacute 33 421 Modelo por Pontos em Adams e Dutreacute 33 422 Algoritmo de Operaccedilotildees Booleanas 34 43 Meacutetodo de Pauly 39 431 Modelo em Pauly 40 432 Algoritmo de Operaccedilotildees Booleanas 40 44 Validade da Regra 2 43
5 Melhorias Propostas 47 51 Descriccedilatildeo do algoritmo 47 511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo 48
512 Teste DentroFora 52 513 Criaccedilatildeo do modelo resultado 54 52 Implementaccedilatildeo 55 521 Estruturas de Dados 57
6 Resultados 61 61 Testes 61 62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas 68
7 Conclusatildeo 71 71 Trabalhos Futuros 72
8 Referecircncias Bibliograacuteficas 73
11
Lista de figuras
Figura 1 Um modelo por pontos e sua visualizaccedilatildeo 21 Figura 2 A superfiacutecie modelada por surfels O surfel em destaque tem raio de
alcance rt e normal n 22 Figura 3 Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting 26 Figura 4 Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida
retirou-se outro cubo e por uacuteltimo retirou-se o cilindro 29 Figura 5 A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs
operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo
diferenccedila e interseccedilatildeo 30 Figura 6 (a) Dois modelos A e B (b) Posicionados de forma que A tem uma parte
dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd 31 Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais
proacuteximo a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo
x eacute classificado como fora senatildeo seraacute classificado como dentro 32 Figura 8 Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de
interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo 33 Figura 9 Um objeto representado por pontos com suas normais e sua quadtree
correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes
cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo
noacutes cheios noacutes que conteacutem pontos 35 Figura 10 Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a
parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os
surfels 36 Figura 11 Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais
proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores 38 Figura 12 Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o
caso de Arestas Vivas do objeto agrave esquerda 39 Figura 13 Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo e
convergem para o ponto de interseccedilatildeo 42 Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em
q1 e o plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute
12
mais proacuteximo a q1 e q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute
dois novos pontos de partida para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r
que eacute uma aproximaccedilatildeo melhor de q 43 Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o
ponto y de C Se o produto interno entre a normal em y e o vetor que liga y a
x for maior que zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C 44 Figura 16 As curvas vermelhas satildeo o Eixo Medial da curva em preto 45 Figura 17 Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em vermelho)
Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
45 Figura 18 A figura mostra o diagrama de Voronoi de uma amostragem de pontos
S Da mesma forma que a amostragem aproxima a curva os veacutertices de
Voronoi aproximam o Eixo Medial 46 Figura 19 Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os
mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno 48 Figura 20 O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro
do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a
regiatildeo que conteacutem os surfels 49 Figura 21 O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c
a classificaccedilatildeo do noacute a eacute propagada para o noacute b 50 Figura 22 Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do
modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente 50 Figura 23 Quadtree classificada 51 Figura 24 A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a
normal n definem as retas que dividem o noacute 52 Figura 25 Duas circunferecircncias e suas quadtrees correspondentes 53 Figura 26 a modelos natildeo se intersectam b modelo intersecta noacutes fora c
modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes
fora 54 Figura 27 Software PointShop 3D com dois modelos carregados na sua cena 56 Figura 28 Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees
booleanas 57 Figura 29 Modelo do PointShop Igea 62 Figura 30 Resultado da uniatildeo de duas Igeas 63 Figura 31 Resultado da interseccedilatildeo de duas Igeas 63 Figura 32 Resultado da diferenccedila entre duas Igeas 64
13
Figura 33 Modelo do PointShop MaxPlanck 65 Figura 34 Modelo do PointShop Male 66 Figura 35 Resultado da Uniatildeo do modelo Male com MaxPlanck 66 Figura 36 Resultado da interseccedilatildeo do modelo Male com o MaxPlanck 67 Figura 37 Resultado da diferenccedila do modelo Male do modelo MaxPlanck 67
14
Lista de tabelas
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas 42
Tabela 2- Nuacutemero de surfels dos modelos resultantes 64 Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas
Igeas 65
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck
e Male 68 Tabela 5- Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os
modelos MaxPlanck e Male 68
15
1 Introduccedilatildeo
O mundo digital estaacute conquistando cada vez mais espaccedilo nos meios de
comunicaccedilatildeo Sons imagens viacutedeos digitais satildeo miacutedias muito usadas em
diversas aacutereas como entretenimento medicina desenho industrial engenharia
arquitetura educaccedilatildeo arte ciecircncia entre outras Podemos citar alguns
exemplos dentro destas aacutereas como jogos efeitos especiais filmes digitais
visualizaccedilatildeo cientiacutefica viacutedeo-conferecircncia comeacutercio na internet Nos uacuteltimos anos
verificamos que o modelo 3D vem se tornando um novo meio de comunicaccedilatildeo
digital Com o desenvolvimento da tecnologia de aquisiccedilatildeo e do processamento
de modelos 3D ele vem sendo cada vez mais utilizado Jogos 3D animaccedilotildees
aplicaccedilotildees em realidade virtual visualizaccedilatildeo cientiacutefica aplicaccedilotildees para aacuterea
meacutedica e odontoloacutegica criaccedilatildeo de reacuteplicas para estudo e preservaccedilatildeo do
patrimocircnio histoacuterico sistemas CADCAM cataacutelogos de modelos 3D na Web para
comercializaccedilatildeo criaccedilatildeo de protoacutetipos para arquitetura engenharia satildeo alguns
exemplos de aplicaccedilotildees que usam modelos 3D
A aacuterea que estuda a representaccedilatildeo de um modelo 3D no computador eacute
chamada de modelagem em computaccedilatildeo graacutefica Existem diversos tipos de
modelagem para as diversas aplicaccedilotildees que usam um modelo 3D como por
exemplo representaccedilotildees poligonais como malhas triangulares que satildeo
geralmente usadas na aacuterea de entretenimento Este trabalho explora um novo
tipo de modelagem a modelagem por pontos
A modelagem por pontos comeccedilou a ser largamente explorada nesta
deacutecada e trata-se de uma aacuterea muito promissora em computaccedilatildeo graacutefica dadas
agraves vaacuterias e grandes vantagens em relaccedilatildeo aos outros tipos de representaccedilatildeo
como esquema de representaccedilatildeo CSG (Constructive Solid Geometry) [1] ou
malhas poligonais Dentre as principais vantagens podemos citar grande
simplicidade e flexibilidade boa performance robustez Mas a principal
vantagem desta modelagem que foi o fator que impulsionou o seu grande
desenvolvimento nesta deacutecada eacute que esta modelagem por pontos eacute a melhor
opccedilatildeo para tratar os dados de saiacuteda de equipamentos de aquisiccedilatildeo de modelos
3D O uso destes equipamentos tem aumentado muito nesta deacutecada A
16
tecnologia destes equipamentos tem progredido muito e eles tecircm se tornado
mais baratos A tendecircncia eacute que o uso destes equipamentos se torne o mais
utilizado meio de obtenccedilatildeo de modelos 3D Isto porque construir modelos 3D
bastante detalhados por meio de um software de modelagem eacute muito trabalhoso
O processo de aquisiccedilatildeo de modelos por meio destes equipamentos automatiza
este processo de construccedilatildeo
No trabalho com modelos 3D frequumlentemente satildeo usadas as operaccedilotildees
booleanas que satildeo operaccedilotildees de uniatildeo interseccedilatildeo ou diferenccedila No esquema
de representaccedilatildeo CSG estas operaccedilotildees fazem parte da representaccedilatildeo do
objeto Estas operaccedilotildees tambeacutem podem ser usadas para criar novos modelos ou
para alteraacute-los Na maioria dos tipos de representaccedilatildeo de objetos 3D estas
operaccedilotildees satildeo bastante complexas
A simplicidade da representaccedilatildeo por pontos permite que as operaccedilotildees
booleanas sejam realizadas com facilidade se compararmos com a realizaccedilatildeo
destas operaccedilotildees em outros tipos de representaccedilatildeo como malhas poligonais
Motivada pelas vantagens desta modelagem e pela utilidade destas operaccedilotildees
esta dissertaccedilatildeo apresenta uma introduccedilatildeo geral de modelagem por pontos e
trabalha mais especificamente com operaccedilotildees booleanas em objetos
modelados por pontos Dois trabalhos que exploram as operaccedilotildees booleanas na
modelagem por pontos seratildeo abordados o trabalho de Adams e Dutreacute [2] e o
trabalho de Pauly et al [3] O presente trabalho implementa o meacutetodo de Adams
e Dutreacute com algumas melhorias e faz uma comparaccedilatildeo entre o meacutetodo de Pauly
[3] e o meacutetodo de Adams e Dutreacute [2] com nossas melhorias
Como contribuiccedilotildees dadas por este trabalho apresentamos
- um estudo sobre modelagem por pontos
- um estudo sobre operaccedilotildees booleanas com pontos
- proposta de melhorias ao algoritmo proposto por Adams e Dutreacute [2]
- comparaccedilatildeo dos dois meacutetodos propostos para realizar estas operaccedilotildees
meacutetodo de Pauly et al [3] e de Adams e Dutreacute [2]
Este trabalho vem apresentado nesta dissertaccedilatildeo organizada em sete
capiacutetulos conforme descrito resumidamente a seguir
O capiacutetulo 2 cita alguns trabalhos sobre modelagem por pontos que estatildeo
relacionados a este trabalho
O capiacutetulo 3 apresenta uma visatildeo geral do modelo por pontos e explica
melhor alguns trabalhos citados no capiacutetulo 2
17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Abstract
Leal Heloisa Reis Celes Waldemar(Advisor) Boolean Operations on Point-based models Rio de Janeiro 2004 75p MSc Dissertation - Departamento de Informaacutetica Pontifiacutecia Universidade Catoacutelica do Rio de Janeiro
Boolean operations are used to create or modify models These operations
in the majority of 3D object representations are very complex In the last years a
significant trend in computer graphics has been the shift towards point sampled
3D models due to their advantages over other representations such as simplicity
and efficiency Two recent works present algorithms to perform interactive
boolean operations on point-based models the work by Adams and Dutreacute and
the work by Pauly et Al Due to great importance of this novel representation
and of the use of boolean operations the present work makes an introduction to
point-based representation implements the algorithm proposed by Adams and
Dutreacute with some improvements and compares this implementation with the work
by Pauly et al
Palavras-chave
3D Modeling Point-based Modeling Boolean Operation Interactive
Computer Graphics
Sumaacuterio
1 Introduccedilatildeo 15
2 Trabalhos relacionados 18
3 Modelagem por Pontos 20 31 Ideacuteia da Representaccedilatildeo 20 32 Tipos de distribuiccedilatildeo dos surfels 22 33 Estrutura de multi-resoluccedilatildeo 22 34 Dados que um surfel pode conter 23 35 Aquisiccedilatildeo do modelo 23 351 Aquisiccedilatildeo da geometria 23 352 Aquisiccedilatildeo da textura 24 353 Correccedilatildeo das falhas da aquisiccedilatildeo 25 36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto) 25 37 Visualizaccedilatildeo do modelo 26 38 Ediccedilatildeo do modelo 28
4 Operaccedilotildees Booleanas com Pontos 29 41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por
pontos 29 42 Meacutetodo de Adams e Dutreacute 33 421 Modelo por Pontos em Adams e Dutreacute 33 422 Algoritmo de Operaccedilotildees Booleanas 34 43 Meacutetodo de Pauly 39 431 Modelo em Pauly 40 432 Algoritmo de Operaccedilotildees Booleanas 40 44 Validade da Regra 2 43
5 Melhorias Propostas 47 51 Descriccedilatildeo do algoritmo 47 511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo 48
512 Teste DentroFora 52 513 Criaccedilatildeo do modelo resultado 54 52 Implementaccedilatildeo 55 521 Estruturas de Dados 57
6 Resultados 61 61 Testes 61 62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas 68
7 Conclusatildeo 71 71 Trabalhos Futuros 72
8 Referecircncias Bibliograacuteficas 73
11
Lista de figuras
Figura 1 Um modelo por pontos e sua visualizaccedilatildeo 21 Figura 2 A superfiacutecie modelada por surfels O surfel em destaque tem raio de
alcance rt e normal n 22 Figura 3 Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting 26 Figura 4 Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida
retirou-se outro cubo e por uacuteltimo retirou-se o cilindro 29 Figura 5 A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs
operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo
diferenccedila e interseccedilatildeo 30 Figura 6 (a) Dois modelos A e B (b) Posicionados de forma que A tem uma parte
dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd 31 Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais
proacuteximo a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo
x eacute classificado como fora senatildeo seraacute classificado como dentro 32 Figura 8 Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de
interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo 33 Figura 9 Um objeto representado por pontos com suas normais e sua quadtree
correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes
cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo
noacutes cheios noacutes que conteacutem pontos 35 Figura 10 Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a
parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os
surfels 36 Figura 11 Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais
proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores 38 Figura 12 Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o
caso de Arestas Vivas do objeto agrave esquerda 39 Figura 13 Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo e
convergem para o ponto de interseccedilatildeo 42 Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em
q1 e o plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute
12
mais proacuteximo a q1 e q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute
dois novos pontos de partida para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r
que eacute uma aproximaccedilatildeo melhor de q 43 Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o
ponto y de C Se o produto interno entre a normal em y e o vetor que liga y a
x for maior que zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C 44 Figura 16 As curvas vermelhas satildeo o Eixo Medial da curva em preto 45 Figura 17 Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em vermelho)
Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
45 Figura 18 A figura mostra o diagrama de Voronoi de uma amostragem de pontos
S Da mesma forma que a amostragem aproxima a curva os veacutertices de
Voronoi aproximam o Eixo Medial 46 Figura 19 Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os
mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno 48 Figura 20 O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro
do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a
regiatildeo que conteacutem os surfels 49 Figura 21 O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c
a classificaccedilatildeo do noacute a eacute propagada para o noacute b 50 Figura 22 Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do
modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente 50 Figura 23 Quadtree classificada 51 Figura 24 A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a
normal n definem as retas que dividem o noacute 52 Figura 25 Duas circunferecircncias e suas quadtrees correspondentes 53 Figura 26 a modelos natildeo se intersectam b modelo intersecta noacutes fora c
modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes
fora 54 Figura 27 Software PointShop 3D com dois modelos carregados na sua cena 56 Figura 28 Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees
booleanas 57 Figura 29 Modelo do PointShop Igea 62 Figura 30 Resultado da uniatildeo de duas Igeas 63 Figura 31 Resultado da interseccedilatildeo de duas Igeas 63 Figura 32 Resultado da diferenccedila entre duas Igeas 64
13
Figura 33 Modelo do PointShop MaxPlanck 65 Figura 34 Modelo do PointShop Male 66 Figura 35 Resultado da Uniatildeo do modelo Male com MaxPlanck 66 Figura 36 Resultado da interseccedilatildeo do modelo Male com o MaxPlanck 67 Figura 37 Resultado da diferenccedila do modelo Male do modelo MaxPlanck 67
14
Lista de tabelas
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas 42
Tabela 2- Nuacutemero de surfels dos modelos resultantes 64 Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas
Igeas 65
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck
e Male 68 Tabela 5- Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os
modelos MaxPlanck e Male 68
15
1 Introduccedilatildeo
O mundo digital estaacute conquistando cada vez mais espaccedilo nos meios de
comunicaccedilatildeo Sons imagens viacutedeos digitais satildeo miacutedias muito usadas em
diversas aacutereas como entretenimento medicina desenho industrial engenharia
arquitetura educaccedilatildeo arte ciecircncia entre outras Podemos citar alguns
exemplos dentro destas aacutereas como jogos efeitos especiais filmes digitais
visualizaccedilatildeo cientiacutefica viacutedeo-conferecircncia comeacutercio na internet Nos uacuteltimos anos
verificamos que o modelo 3D vem se tornando um novo meio de comunicaccedilatildeo
digital Com o desenvolvimento da tecnologia de aquisiccedilatildeo e do processamento
de modelos 3D ele vem sendo cada vez mais utilizado Jogos 3D animaccedilotildees
aplicaccedilotildees em realidade virtual visualizaccedilatildeo cientiacutefica aplicaccedilotildees para aacuterea
meacutedica e odontoloacutegica criaccedilatildeo de reacuteplicas para estudo e preservaccedilatildeo do
patrimocircnio histoacuterico sistemas CADCAM cataacutelogos de modelos 3D na Web para
comercializaccedilatildeo criaccedilatildeo de protoacutetipos para arquitetura engenharia satildeo alguns
exemplos de aplicaccedilotildees que usam modelos 3D
A aacuterea que estuda a representaccedilatildeo de um modelo 3D no computador eacute
chamada de modelagem em computaccedilatildeo graacutefica Existem diversos tipos de
modelagem para as diversas aplicaccedilotildees que usam um modelo 3D como por
exemplo representaccedilotildees poligonais como malhas triangulares que satildeo
geralmente usadas na aacuterea de entretenimento Este trabalho explora um novo
tipo de modelagem a modelagem por pontos
A modelagem por pontos comeccedilou a ser largamente explorada nesta
deacutecada e trata-se de uma aacuterea muito promissora em computaccedilatildeo graacutefica dadas
agraves vaacuterias e grandes vantagens em relaccedilatildeo aos outros tipos de representaccedilatildeo
como esquema de representaccedilatildeo CSG (Constructive Solid Geometry) [1] ou
malhas poligonais Dentre as principais vantagens podemos citar grande
simplicidade e flexibilidade boa performance robustez Mas a principal
vantagem desta modelagem que foi o fator que impulsionou o seu grande
desenvolvimento nesta deacutecada eacute que esta modelagem por pontos eacute a melhor
opccedilatildeo para tratar os dados de saiacuteda de equipamentos de aquisiccedilatildeo de modelos
3D O uso destes equipamentos tem aumentado muito nesta deacutecada A
16
tecnologia destes equipamentos tem progredido muito e eles tecircm se tornado
mais baratos A tendecircncia eacute que o uso destes equipamentos se torne o mais
utilizado meio de obtenccedilatildeo de modelos 3D Isto porque construir modelos 3D
bastante detalhados por meio de um software de modelagem eacute muito trabalhoso
O processo de aquisiccedilatildeo de modelos por meio destes equipamentos automatiza
este processo de construccedilatildeo
No trabalho com modelos 3D frequumlentemente satildeo usadas as operaccedilotildees
booleanas que satildeo operaccedilotildees de uniatildeo interseccedilatildeo ou diferenccedila No esquema
de representaccedilatildeo CSG estas operaccedilotildees fazem parte da representaccedilatildeo do
objeto Estas operaccedilotildees tambeacutem podem ser usadas para criar novos modelos ou
para alteraacute-los Na maioria dos tipos de representaccedilatildeo de objetos 3D estas
operaccedilotildees satildeo bastante complexas
A simplicidade da representaccedilatildeo por pontos permite que as operaccedilotildees
booleanas sejam realizadas com facilidade se compararmos com a realizaccedilatildeo
destas operaccedilotildees em outros tipos de representaccedilatildeo como malhas poligonais
Motivada pelas vantagens desta modelagem e pela utilidade destas operaccedilotildees
esta dissertaccedilatildeo apresenta uma introduccedilatildeo geral de modelagem por pontos e
trabalha mais especificamente com operaccedilotildees booleanas em objetos
modelados por pontos Dois trabalhos que exploram as operaccedilotildees booleanas na
modelagem por pontos seratildeo abordados o trabalho de Adams e Dutreacute [2] e o
trabalho de Pauly et al [3] O presente trabalho implementa o meacutetodo de Adams
e Dutreacute com algumas melhorias e faz uma comparaccedilatildeo entre o meacutetodo de Pauly
[3] e o meacutetodo de Adams e Dutreacute [2] com nossas melhorias
Como contribuiccedilotildees dadas por este trabalho apresentamos
- um estudo sobre modelagem por pontos
- um estudo sobre operaccedilotildees booleanas com pontos
- proposta de melhorias ao algoritmo proposto por Adams e Dutreacute [2]
- comparaccedilatildeo dos dois meacutetodos propostos para realizar estas operaccedilotildees
meacutetodo de Pauly et al [3] e de Adams e Dutreacute [2]
Este trabalho vem apresentado nesta dissertaccedilatildeo organizada em sete
capiacutetulos conforme descrito resumidamente a seguir
O capiacutetulo 2 cita alguns trabalhos sobre modelagem por pontos que estatildeo
relacionados a este trabalho
O capiacutetulo 3 apresenta uma visatildeo geral do modelo por pontos e explica
melhor alguns trabalhos citados no capiacutetulo 2
17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Sumaacuterio
1 Introduccedilatildeo 15
2 Trabalhos relacionados 18
3 Modelagem por Pontos 20 31 Ideacuteia da Representaccedilatildeo 20 32 Tipos de distribuiccedilatildeo dos surfels 22 33 Estrutura de multi-resoluccedilatildeo 22 34 Dados que um surfel pode conter 23 35 Aquisiccedilatildeo do modelo 23 351 Aquisiccedilatildeo da geometria 23 352 Aquisiccedilatildeo da textura 24 353 Correccedilatildeo das falhas da aquisiccedilatildeo 25 36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto) 25 37 Visualizaccedilatildeo do modelo 26 38 Ediccedilatildeo do modelo 28
4 Operaccedilotildees Booleanas com Pontos 29 41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por
pontos 29 42 Meacutetodo de Adams e Dutreacute 33 421 Modelo por Pontos em Adams e Dutreacute 33 422 Algoritmo de Operaccedilotildees Booleanas 34 43 Meacutetodo de Pauly 39 431 Modelo em Pauly 40 432 Algoritmo de Operaccedilotildees Booleanas 40 44 Validade da Regra 2 43
5 Melhorias Propostas 47 51 Descriccedilatildeo do algoritmo 47 511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo 48
512 Teste DentroFora 52 513 Criaccedilatildeo do modelo resultado 54 52 Implementaccedilatildeo 55 521 Estruturas de Dados 57
6 Resultados 61 61 Testes 61 62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas 68
7 Conclusatildeo 71 71 Trabalhos Futuros 72
8 Referecircncias Bibliograacuteficas 73
11
Lista de figuras
Figura 1 Um modelo por pontos e sua visualizaccedilatildeo 21 Figura 2 A superfiacutecie modelada por surfels O surfel em destaque tem raio de
alcance rt e normal n 22 Figura 3 Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting 26 Figura 4 Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida
retirou-se outro cubo e por uacuteltimo retirou-se o cilindro 29 Figura 5 A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs
operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo
diferenccedila e interseccedilatildeo 30 Figura 6 (a) Dois modelos A e B (b) Posicionados de forma que A tem uma parte
dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd 31 Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais
proacuteximo a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo
x eacute classificado como fora senatildeo seraacute classificado como dentro 32 Figura 8 Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de
interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo 33 Figura 9 Um objeto representado por pontos com suas normais e sua quadtree
correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes
cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo
noacutes cheios noacutes que conteacutem pontos 35 Figura 10 Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a
parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os
surfels 36 Figura 11 Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais
proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores 38 Figura 12 Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o
caso de Arestas Vivas do objeto agrave esquerda 39 Figura 13 Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo e
convergem para o ponto de interseccedilatildeo 42 Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em
q1 e o plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute
12
mais proacuteximo a q1 e q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute
dois novos pontos de partida para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r
que eacute uma aproximaccedilatildeo melhor de q 43 Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o
ponto y de C Se o produto interno entre a normal em y e o vetor que liga y a
x for maior que zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C 44 Figura 16 As curvas vermelhas satildeo o Eixo Medial da curva em preto 45 Figura 17 Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em vermelho)
Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
45 Figura 18 A figura mostra o diagrama de Voronoi de uma amostragem de pontos
S Da mesma forma que a amostragem aproxima a curva os veacutertices de
Voronoi aproximam o Eixo Medial 46 Figura 19 Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os
mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno 48 Figura 20 O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro
do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a
regiatildeo que conteacutem os surfels 49 Figura 21 O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c
a classificaccedilatildeo do noacute a eacute propagada para o noacute b 50 Figura 22 Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do
modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente 50 Figura 23 Quadtree classificada 51 Figura 24 A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a
normal n definem as retas que dividem o noacute 52 Figura 25 Duas circunferecircncias e suas quadtrees correspondentes 53 Figura 26 a modelos natildeo se intersectam b modelo intersecta noacutes fora c
modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes
fora 54 Figura 27 Software PointShop 3D com dois modelos carregados na sua cena 56 Figura 28 Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees
booleanas 57 Figura 29 Modelo do PointShop Igea 62 Figura 30 Resultado da uniatildeo de duas Igeas 63 Figura 31 Resultado da interseccedilatildeo de duas Igeas 63 Figura 32 Resultado da diferenccedila entre duas Igeas 64
13
Figura 33 Modelo do PointShop MaxPlanck 65 Figura 34 Modelo do PointShop Male 66 Figura 35 Resultado da Uniatildeo do modelo Male com MaxPlanck 66 Figura 36 Resultado da interseccedilatildeo do modelo Male com o MaxPlanck 67 Figura 37 Resultado da diferenccedila do modelo Male do modelo MaxPlanck 67
14
Lista de tabelas
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas 42
Tabela 2- Nuacutemero de surfels dos modelos resultantes 64 Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas
Igeas 65
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck
e Male 68 Tabela 5- Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os
modelos MaxPlanck e Male 68
15
1 Introduccedilatildeo
O mundo digital estaacute conquistando cada vez mais espaccedilo nos meios de
comunicaccedilatildeo Sons imagens viacutedeos digitais satildeo miacutedias muito usadas em
diversas aacutereas como entretenimento medicina desenho industrial engenharia
arquitetura educaccedilatildeo arte ciecircncia entre outras Podemos citar alguns
exemplos dentro destas aacutereas como jogos efeitos especiais filmes digitais
visualizaccedilatildeo cientiacutefica viacutedeo-conferecircncia comeacutercio na internet Nos uacuteltimos anos
verificamos que o modelo 3D vem se tornando um novo meio de comunicaccedilatildeo
digital Com o desenvolvimento da tecnologia de aquisiccedilatildeo e do processamento
de modelos 3D ele vem sendo cada vez mais utilizado Jogos 3D animaccedilotildees
aplicaccedilotildees em realidade virtual visualizaccedilatildeo cientiacutefica aplicaccedilotildees para aacuterea
meacutedica e odontoloacutegica criaccedilatildeo de reacuteplicas para estudo e preservaccedilatildeo do
patrimocircnio histoacuterico sistemas CADCAM cataacutelogos de modelos 3D na Web para
comercializaccedilatildeo criaccedilatildeo de protoacutetipos para arquitetura engenharia satildeo alguns
exemplos de aplicaccedilotildees que usam modelos 3D
A aacuterea que estuda a representaccedilatildeo de um modelo 3D no computador eacute
chamada de modelagem em computaccedilatildeo graacutefica Existem diversos tipos de
modelagem para as diversas aplicaccedilotildees que usam um modelo 3D como por
exemplo representaccedilotildees poligonais como malhas triangulares que satildeo
geralmente usadas na aacuterea de entretenimento Este trabalho explora um novo
tipo de modelagem a modelagem por pontos
A modelagem por pontos comeccedilou a ser largamente explorada nesta
deacutecada e trata-se de uma aacuterea muito promissora em computaccedilatildeo graacutefica dadas
agraves vaacuterias e grandes vantagens em relaccedilatildeo aos outros tipos de representaccedilatildeo
como esquema de representaccedilatildeo CSG (Constructive Solid Geometry) [1] ou
malhas poligonais Dentre as principais vantagens podemos citar grande
simplicidade e flexibilidade boa performance robustez Mas a principal
vantagem desta modelagem que foi o fator que impulsionou o seu grande
desenvolvimento nesta deacutecada eacute que esta modelagem por pontos eacute a melhor
opccedilatildeo para tratar os dados de saiacuteda de equipamentos de aquisiccedilatildeo de modelos
3D O uso destes equipamentos tem aumentado muito nesta deacutecada A
16
tecnologia destes equipamentos tem progredido muito e eles tecircm se tornado
mais baratos A tendecircncia eacute que o uso destes equipamentos se torne o mais
utilizado meio de obtenccedilatildeo de modelos 3D Isto porque construir modelos 3D
bastante detalhados por meio de um software de modelagem eacute muito trabalhoso
O processo de aquisiccedilatildeo de modelos por meio destes equipamentos automatiza
este processo de construccedilatildeo
No trabalho com modelos 3D frequumlentemente satildeo usadas as operaccedilotildees
booleanas que satildeo operaccedilotildees de uniatildeo interseccedilatildeo ou diferenccedila No esquema
de representaccedilatildeo CSG estas operaccedilotildees fazem parte da representaccedilatildeo do
objeto Estas operaccedilotildees tambeacutem podem ser usadas para criar novos modelos ou
para alteraacute-los Na maioria dos tipos de representaccedilatildeo de objetos 3D estas
operaccedilotildees satildeo bastante complexas
A simplicidade da representaccedilatildeo por pontos permite que as operaccedilotildees
booleanas sejam realizadas com facilidade se compararmos com a realizaccedilatildeo
destas operaccedilotildees em outros tipos de representaccedilatildeo como malhas poligonais
Motivada pelas vantagens desta modelagem e pela utilidade destas operaccedilotildees
esta dissertaccedilatildeo apresenta uma introduccedilatildeo geral de modelagem por pontos e
trabalha mais especificamente com operaccedilotildees booleanas em objetos
modelados por pontos Dois trabalhos que exploram as operaccedilotildees booleanas na
modelagem por pontos seratildeo abordados o trabalho de Adams e Dutreacute [2] e o
trabalho de Pauly et al [3] O presente trabalho implementa o meacutetodo de Adams
e Dutreacute com algumas melhorias e faz uma comparaccedilatildeo entre o meacutetodo de Pauly
[3] e o meacutetodo de Adams e Dutreacute [2] com nossas melhorias
Como contribuiccedilotildees dadas por este trabalho apresentamos
- um estudo sobre modelagem por pontos
- um estudo sobre operaccedilotildees booleanas com pontos
- proposta de melhorias ao algoritmo proposto por Adams e Dutreacute [2]
- comparaccedilatildeo dos dois meacutetodos propostos para realizar estas operaccedilotildees
meacutetodo de Pauly et al [3] e de Adams e Dutreacute [2]
Este trabalho vem apresentado nesta dissertaccedilatildeo organizada em sete
capiacutetulos conforme descrito resumidamente a seguir
O capiacutetulo 2 cita alguns trabalhos sobre modelagem por pontos que estatildeo
relacionados a este trabalho
O capiacutetulo 3 apresenta uma visatildeo geral do modelo por pontos e explica
melhor alguns trabalhos citados no capiacutetulo 2
17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

512 Teste DentroFora 52 513 Criaccedilatildeo do modelo resultado 54 52 Implementaccedilatildeo 55 521 Estruturas de Dados 57
6 Resultados 61 61 Testes 61 62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas 68
7 Conclusatildeo 71 71 Trabalhos Futuros 72
8 Referecircncias Bibliograacuteficas 73
11
Lista de figuras
Figura 1 Um modelo por pontos e sua visualizaccedilatildeo 21 Figura 2 A superfiacutecie modelada por surfels O surfel em destaque tem raio de
alcance rt e normal n 22 Figura 3 Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting 26 Figura 4 Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida
retirou-se outro cubo e por uacuteltimo retirou-se o cilindro 29 Figura 5 A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs
operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo
diferenccedila e interseccedilatildeo 30 Figura 6 (a) Dois modelos A e B (b) Posicionados de forma que A tem uma parte
dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd 31 Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais
proacuteximo a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo
x eacute classificado como fora senatildeo seraacute classificado como dentro 32 Figura 8 Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de
interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo 33 Figura 9 Um objeto representado por pontos com suas normais e sua quadtree
correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes
cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo
noacutes cheios noacutes que conteacutem pontos 35 Figura 10 Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a
parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os
surfels 36 Figura 11 Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais
proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores 38 Figura 12 Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o
caso de Arestas Vivas do objeto agrave esquerda 39 Figura 13 Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo e
convergem para o ponto de interseccedilatildeo 42 Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em
q1 e o plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute
12
mais proacuteximo a q1 e q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute
dois novos pontos de partida para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r
que eacute uma aproximaccedilatildeo melhor de q 43 Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o
ponto y de C Se o produto interno entre a normal em y e o vetor que liga y a
x for maior que zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C 44 Figura 16 As curvas vermelhas satildeo o Eixo Medial da curva em preto 45 Figura 17 Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em vermelho)
Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
45 Figura 18 A figura mostra o diagrama de Voronoi de uma amostragem de pontos
S Da mesma forma que a amostragem aproxima a curva os veacutertices de
Voronoi aproximam o Eixo Medial 46 Figura 19 Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os
mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno 48 Figura 20 O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro
do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a
regiatildeo que conteacutem os surfels 49 Figura 21 O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c
a classificaccedilatildeo do noacute a eacute propagada para o noacute b 50 Figura 22 Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do
modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente 50 Figura 23 Quadtree classificada 51 Figura 24 A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a
normal n definem as retas que dividem o noacute 52 Figura 25 Duas circunferecircncias e suas quadtrees correspondentes 53 Figura 26 a modelos natildeo se intersectam b modelo intersecta noacutes fora c
modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes
fora 54 Figura 27 Software PointShop 3D com dois modelos carregados na sua cena 56 Figura 28 Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees
booleanas 57 Figura 29 Modelo do PointShop Igea 62 Figura 30 Resultado da uniatildeo de duas Igeas 63 Figura 31 Resultado da interseccedilatildeo de duas Igeas 63 Figura 32 Resultado da diferenccedila entre duas Igeas 64
13
Figura 33 Modelo do PointShop MaxPlanck 65 Figura 34 Modelo do PointShop Male 66 Figura 35 Resultado da Uniatildeo do modelo Male com MaxPlanck 66 Figura 36 Resultado da interseccedilatildeo do modelo Male com o MaxPlanck 67 Figura 37 Resultado da diferenccedila do modelo Male do modelo MaxPlanck 67
14
Lista de tabelas
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas 42
Tabela 2- Nuacutemero de surfels dos modelos resultantes 64 Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas
Igeas 65
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck
e Male 68 Tabela 5- Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os
modelos MaxPlanck e Male 68
15
1 Introduccedilatildeo
O mundo digital estaacute conquistando cada vez mais espaccedilo nos meios de
comunicaccedilatildeo Sons imagens viacutedeos digitais satildeo miacutedias muito usadas em
diversas aacutereas como entretenimento medicina desenho industrial engenharia
arquitetura educaccedilatildeo arte ciecircncia entre outras Podemos citar alguns
exemplos dentro destas aacutereas como jogos efeitos especiais filmes digitais
visualizaccedilatildeo cientiacutefica viacutedeo-conferecircncia comeacutercio na internet Nos uacuteltimos anos
verificamos que o modelo 3D vem se tornando um novo meio de comunicaccedilatildeo
digital Com o desenvolvimento da tecnologia de aquisiccedilatildeo e do processamento
de modelos 3D ele vem sendo cada vez mais utilizado Jogos 3D animaccedilotildees
aplicaccedilotildees em realidade virtual visualizaccedilatildeo cientiacutefica aplicaccedilotildees para aacuterea
meacutedica e odontoloacutegica criaccedilatildeo de reacuteplicas para estudo e preservaccedilatildeo do
patrimocircnio histoacuterico sistemas CADCAM cataacutelogos de modelos 3D na Web para
comercializaccedilatildeo criaccedilatildeo de protoacutetipos para arquitetura engenharia satildeo alguns
exemplos de aplicaccedilotildees que usam modelos 3D
A aacuterea que estuda a representaccedilatildeo de um modelo 3D no computador eacute
chamada de modelagem em computaccedilatildeo graacutefica Existem diversos tipos de
modelagem para as diversas aplicaccedilotildees que usam um modelo 3D como por
exemplo representaccedilotildees poligonais como malhas triangulares que satildeo
geralmente usadas na aacuterea de entretenimento Este trabalho explora um novo
tipo de modelagem a modelagem por pontos
A modelagem por pontos comeccedilou a ser largamente explorada nesta
deacutecada e trata-se de uma aacuterea muito promissora em computaccedilatildeo graacutefica dadas
agraves vaacuterias e grandes vantagens em relaccedilatildeo aos outros tipos de representaccedilatildeo
como esquema de representaccedilatildeo CSG (Constructive Solid Geometry) [1] ou
malhas poligonais Dentre as principais vantagens podemos citar grande
simplicidade e flexibilidade boa performance robustez Mas a principal
vantagem desta modelagem que foi o fator que impulsionou o seu grande
desenvolvimento nesta deacutecada eacute que esta modelagem por pontos eacute a melhor
opccedilatildeo para tratar os dados de saiacuteda de equipamentos de aquisiccedilatildeo de modelos
3D O uso destes equipamentos tem aumentado muito nesta deacutecada A
16
tecnologia destes equipamentos tem progredido muito e eles tecircm se tornado
mais baratos A tendecircncia eacute que o uso destes equipamentos se torne o mais
utilizado meio de obtenccedilatildeo de modelos 3D Isto porque construir modelos 3D
bastante detalhados por meio de um software de modelagem eacute muito trabalhoso
O processo de aquisiccedilatildeo de modelos por meio destes equipamentos automatiza
este processo de construccedilatildeo
No trabalho com modelos 3D frequumlentemente satildeo usadas as operaccedilotildees
booleanas que satildeo operaccedilotildees de uniatildeo interseccedilatildeo ou diferenccedila No esquema
de representaccedilatildeo CSG estas operaccedilotildees fazem parte da representaccedilatildeo do
objeto Estas operaccedilotildees tambeacutem podem ser usadas para criar novos modelos ou
para alteraacute-los Na maioria dos tipos de representaccedilatildeo de objetos 3D estas
operaccedilotildees satildeo bastante complexas
A simplicidade da representaccedilatildeo por pontos permite que as operaccedilotildees
booleanas sejam realizadas com facilidade se compararmos com a realizaccedilatildeo
destas operaccedilotildees em outros tipos de representaccedilatildeo como malhas poligonais
Motivada pelas vantagens desta modelagem e pela utilidade destas operaccedilotildees
esta dissertaccedilatildeo apresenta uma introduccedilatildeo geral de modelagem por pontos e
trabalha mais especificamente com operaccedilotildees booleanas em objetos
modelados por pontos Dois trabalhos que exploram as operaccedilotildees booleanas na
modelagem por pontos seratildeo abordados o trabalho de Adams e Dutreacute [2] e o
trabalho de Pauly et al [3] O presente trabalho implementa o meacutetodo de Adams
e Dutreacute com algumas melhorias e faz uma comparaccedilatildeo entre o meacutetodo de Pauly
[3] e o meacutetodo de Adams e Dutreacute [2] com nossas melhorias
Como contribuiccedilotildees dadas por este trabalho apresentamos
- um estudo sobre modelagem por pontos
- um estudo sobre operaccedilotildees booleanas com pontos
- proposta de melhorias ao algoritmo proposto por Adams e Dutreacute [2]
- comparaccedilatildeo dos dois meacutetodos propostos para realizar estas operaccedilotildees
meacutetodo de Pauly et al [3] e de Adams e Dutreacute [2]
Este trabalho vem apresentado nesta dissertaccedilatildeo organizada em sete
capiacutetulos conforme descrito resumidamente a seguir
O capiacutetulo 2 cita alguns trabalhos sobre modelagem por pontos que estatildeo
relacionados a este trabalho
O capiacutetulo 3 apresenta uma visatildeo geral do modelo por pontos e explica
melhor alguns trabalhos citados no capiacutetulo 2
17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

11
Lista de figuras
Figura 1 Um modelo por pontos e sua visualizaccedilatildeo 21 Figura 2 A superfiacutecie modelada por surfels O surfel em destaque tem raio de
alcance rt e normal n 22 Figura 3 Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting 26 Figura 4 Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida
retirou-se outro cubo e por uacuteltimo retirou-se o cilindro 29 Figura 5 A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs
operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo
diferenccedila e interseccedilatildeo 30 Figura 6 (a) Dois modelos A e B (b) Posicionados de forma que A tem uma parte
dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd 31 Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais
proacuteximo a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo
x eacute classificado como fora senatildeo seraacute classificado como dentro 32 Figura 8 Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de
interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo 33 Figura 9 Um objeto representado por pontos com suas normais e sua quadtree
correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes
cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo
noacutes cheios noacutes que conteacutem pontos 35 Figura 10 Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a
parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os
surfels 36 Figura 11 Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais
proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores 38 Figura 12 Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o
caso de Arestas Vivas do objeto agrave esquerda 39 Figura 13 Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo e
convergem para o ponto de interseccedilatildeo 42 Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em
q1 e o plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute
12
mais proacuteximo a q1 e q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute
dois novos pontos de partida para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r
que eacute uma aproximaccedilatildeo melhor de q 43 Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o
ponto y de C Se o produto interno entre a normal em y e o vetor que liga y a
x for maior que zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C 44 Figura 16 As curvas vermelhas satildeo o Eixo Medial da curva em preto 45 Figura 17 Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em vermelho)
Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
45 Figura 18 A figura mostra o diagrama de Voronoi de uma amostragem de pontos
S Da mesma forma que a amostragem aproxima a curva os veacutertices de
Voronoi aproximam o Eixo Medial 46 Figura 19 Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os
mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno 48 Figura 20 O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro
do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a
regiatildeo que conteacutem os surfels 49 Figura 21 O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c
a classificaccedilatildeo do noacute a eacute propagada para o noacute b 50 Figura 22 Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do
modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente 50 Figura 23 Quadtree classificada 51 Figura 24 A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a
normal n definem as retas que dividem o noacute 52 Figura 25 Duas circunferecircncias e suas quadtrees correspondentes 53 Figura 26 a modelos natildeo se intersectam b modelo intersecta noacutes fora c
modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes
fora 54 Figura 27 Software PointShop 3D com dois modelos carregados na sua cena 56 Figura 28 Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees
booleanas 57 Figura 29 Modelo do PointShop Igea 62 Figura 30 Resultado da uniatildeo de duas Igeas 63 Figura 31 Resultado da interseccedilatildeo de duas Igeas 63 Figura 32 Resultado da diferenccedila entre duas Igeas 64
13
Figura 33 Modelo do PointShop MaxPlanck 65 Figura 34 Modelo do PointShop Male 66 Figura 35 Resultado da Uniatildeo do modelo Male com MaxPlanck 66 Figura 36 Resultado da interseccedilatildeo do modelo Male com o MaxPlanck 67 Figura 37 Resultado da diferenccedila do modelo Male do modelo MaxPlanck 67
14
Lista de tabelas
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas 42
Tabela 2- Nuacutemero de surfels dos modelos resultantes 64 Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas
Igeas 65
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck
e Male 68 Tabela 5- Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os
modelos MaxPlanck e Male 68
15
1 Introduccedilatildeo
O mundo digital estaacute conquistando cada vez mais espaccedilo nos meios de
comunicaccedilatildeo Sons imagens viacutedeos digitais satildeo miacutedias muito usadas em
diversas aacutereas como entretenimento medicina desenho industrial engenharia
arquitetura educaccedilatildeo arte ciecircncia entre outras Podemos citar alguns
exemplos dentro destas aacutereas como jogos efeitos especiais filmes digitais
visualizaccedilatildeo cientiacutefica viacutedeo-conferecircncia comeacutercio na internet Nos uacuteltimos anos
verificamos que o modelo 3D vem se tornando um novo meio de comunicaccedilatildeo
digital Com o desenvolvimento da tecnologia de aquisiccedilatildeo e do processamento
de modelos 3D ele vem sendo cada vez mais utilizado Jogos 3D animaccedilotildees
aplicaccedilotildees em realidade virtual visualizaccedilatildeo cientiacutefica aplicaccedilotildees para aacuterea
meacutedica e odontoloacutegica criaccedilatildeo de reacuteplicas para estudo e preservaccedilatildeo do
patrimocircnio histoacuterico sistemas CADCAM cataacutelogos de modelos 3D na Web para
comercializaccedilatildeo criaccedilatildeo de protoacutetipos para arquitetura engenharia satildeo alguns
exemplos de aplicaccedilotildees que usam modelos 3D
A aacuterea que estuda a representaccedilatildeo de um modelo 3D no computador eacute
chamada de modelagem em computaccedilatildeo graacutefica Existem diversos tipos de
modelagem para as diversas aplicaccedilotildees que usam um modelo 3D como por
exemplo representaccedilotildees poligonais como malhas triangulares que satildeo
geralmente usadas na aacuterea de entretenimento Este trabalho explora um novo
tipo de modelagem a modelagem por pontos
A modelagem por pontos comeccedilou a ser largamente explorada nesta
deacutecada e trata-se de uma aacuterea muito promissora em computaccedilatildeo graacutefica dadas
agraves vaacuterias e grandes vantagens em relaccedilatildeo aos outros tipos de representaccedilatildeo
como esquema de representaccedilatildeo CSG (Constructive Solid Geometry) [1] ou
malhas poligonais Dentre as principais vantagens podemos citar grande
simplicidade e flexibilidade boa performance robustez Mas a principal
vantagem desta modelagem que foi o fator que impulsionou o seu grande
desenvolvimento nesta deacutecada eacute que esta modelagem por pontos eacute a melhor
opccedilatildeo para tratar os dados de saiacuteda de equipamentos de aquisiccedilatildeo de modelos
3D O uso destes equipamentos tem aumentado muito nesta deacutecada A
16
tecnologia destes equipamentos tem progredido muito e eles tecircm se tornado
mais baratos A tendecircncia eacute que o uso destes equipamentos se torne o mais
utilizado meio de obtenccedilatildeo de modelos 3D Isto porque construir modelos 3D
bastante detalhados por meio de um software de modelagem eacute muito trabalhoso
O processo de aquisiccedilatildeo de modelos por meio destes equipamentos automatiza
este processo de construccedilatildeo
No trabalho com modelos 3D frequumlentemente satildeo usadas as operaccedilotildees
booleanas que satildeo operaccedilotildees de uniatildeo interseccedilatildeo ou diferenccedila No esquema
de representaccedilatildeo CSG estas operaccedilotildees fazem parte da representaccedilatildeo do
objeto Estas operaccedilotildees tambeacutem podem ser usadas para criar novos modelos ou
para alteraacute-los Na maioria dos tipos de representaccedilatildeo de objetos 3D estas
operaccedilotildees satildeo bastante complexas
A simplicidade da representaccedilatildeo por pontos permite que as operaccedilotildees
booleanas sejam realizadas com facilidade se compararmos com a realizaccedilatildeo
destas operaccedilotildees em outros tipos de representaccedilatildeo como malhas poligonais
Motivada pelas vantagens desta modelagem e pela utilidade destas operaccedilotildees
esta dissertaccedilatildeo apresenta uma introduccedilatildeo geral de modelagem por pontos e
trabalha mais especificamente com operaccedilotildees booleanas em objetos
modelados por pontos Dois trabalhos que exploram as operaccedilotildees booleanas na
modelagem por pontos seratildeo abordados o trabalho de Adams e Dutreacute [2] e o
trabalho de Pauly et al [3] O presente trabalho implementa o meacutetodo de Adams
e Dutreacute com algumas melhorias e faz uma comparaccedilatildeo entre o meacutetodo de Pauly
[3] e o meacutetodo de Adams e Dutreacute [2] com nossas melhorias
Como contribuiccedilotildees dadas por este trabalho apresentamos
- um estudo sobre modelagem por pontos
- um estudo sobre operaccedilotildees booleanas com pontos
- proposta de melhorias ao algoritmo proposto por Adams e Dutreacute [2]
- comparaccedilatildeo dos dois meacutetodos propostos para realizar estas operaccedilotildees
meacutetodo de Pauly et al [3] e de Adams e Dutreacute [2]
Este trabalho vem apresentado nesta dissertaccedilatildeo organizada em sete
capiacutetulos conforme descrito resumidamente a seguir
O capiacutetulo 2 cita alguns trabalhos sobre modelagem por pontos que estatildeo
relacionados a este trabalho
O capiacutetulo 3 apresenta uma visatildeo geral do modelo por pontos e explica
melhor alguns trabalhos citados no capiacutetulo 2
17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

12
mais proacuteximo a q1 e q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute
dois novos pontos de partida para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r
que eacute uma aproximaccedilatildeo melhor de q 43 Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o
ponto y de C Se o produto interno entre a normal em y e o vetor que liga y a
x for maior que zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C 44 Figura 16 As curvas vermelhas satildeo o Eixo Medial da curva em preto 45 Figura 17 Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em vermelho)
Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
45 Figura 18 A figura mostra o diagrama de Voronoi de uma amostragem de pontos
S Da mesma forma que a amostragem aproxima a curva os veacutertices de
Voronoi aproximam o Eixo Medial 46 Figura 19 Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os
mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno 48 Figura 20 O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro
do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a
regiatildeo que conteacutem os surfels 49 Figura 21 O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c
a classificaccedilatildeo do noacute a eacute propagada para o noacute b 50 Figura 22 Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do
modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente 50 Figura 23 Quadtree classificada 51 Figura 24 A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a
normal n definem as retas que dividem o noacute 52 Figura 25 Duas circunferecircncias e suas quadtrees correspondentes 53 Figura 26 a modelos natildeo se intersectam b modelo intersecta noacutes fora c
modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes
fora 54 Figura 27 Software PointShop 3D com dois modelos carregados na sua cena 56 Figura 28 Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees
booleanas 57 Figura 29 Modelo do PointShop Igea 62 Figura 30 Resultado da uniatildeo de duas Igeas 63 Figura 31 Resultado da interseccedilatildeo de duas Igeas 63 Figura 32 Resultado da diferenccedila entre duas Igeas 64
13
Figura 33 Modelo do PointShop MaxPlanck 65 Figura 34 Modelo do PointShop Male 66 Figura 35 Resultado da Uniatildeo do modelo Male com MaxPlanck 66 Figura 36 Resultado da interseccedilatildeo do modelo Male com o MaxPlanck 67 Figura 37 Resultado da diferenccedila do modelo Male do modelo MaxPlanck 67
14
Lista de tabelas
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas 42
Tabela 2- Nuacutemero de surfels dos modelos resultantes 64 Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas
Igeas 65
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck
e Male 68 Tabela 5- Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os
modelos MaxPlanck e Male 68
15
1 Introduccedilatildeo
O mundo digital estaacute conquistando cada vez mais espaccedilo nos meios de
comunicaccedilatildeo Sons imagens viacutedeos digitais satildeo miacutedias muito usadas em
diversas aacutereas como entretenimento medicina desenho industrial engenharia
arquitetura educaccedilatildeo arte ciecircncia entre outras Podemos citar alguns
exemplos dentro destas aacutereas como jogos efeitos especiais filmes digitais
visualizaccedilatildeo cientiacutefica viacutedeo-conferecircncia comeacutercio na internet Nos uacuteltimos anos
verificamos que o modelo 3D vem se tornando um novo meio de comunicaccedilatildeo
digital Com o desenvolvimento da tecnologia de aquisiccedilatildeo e do processamento
de modelos 3D ele vem sendo cada vez mais utilizado Jogos 3D animaccedilotildees
aplicaccedilotildees em realidade virtual visualizaccedilatildeo cientiacutefica aplicaccedilotildees para aacuterea
meacutedica e odontoloacutegica criaccedilatildeo de reacuteplicas para estudo e preservaccedilatildeo do
patrimocircnio histoacuterico sistemas CADCAM cataacutelogos de modelos 3D na Web para
comercializaccedilatildeo criaccedilatildeo de protoacutetipos para arquitetura engenharia satildeo alguns
exemplos de aplicaccedilotildees que usam modelos 3D
A aacuterea que estuda a representaccedilatildeo de um modelo 3D no computador eacute
chamada de modelagem em computaccedilatildeo graacutefica Existem diversos tipos de
modelagem para as diversas aplicaccedilotildees que usam um modelo 3D como por
exemplo representaccedilotildees poligonais como malhas triangulares que satildeo
geralmente usadas na aacuterea de entretenimento Este trabalho explora um novo
tipo de modelagem a modelagem por pontos
A modelagem por pontos comeccedilou a ser largamente explorada nesta
deacutecada e trata-se de uma aacuterea muito promissora em computaccedilatildeo graacutefica dadas
agraves vaacuterias e grandes vantagens em relaccedilatildeo aos outros tipos de representaccedilatildeo
como esquema de representaccedilatildeo CSG (Constructive Solid Geometry) [1] ou
malhas poligonais Dentre as principais vantagens podemos citar grande
simplicidade e flexibilidade boa performance robustez Mas a principal
vantagem desta modelagem que foi o fator que impulsionou o seu grande
desenvolvimento nesta deacutecada eacute que esta modelagem por pontos eacute a melhor
opccedilatildeo para tratar os dados de saiacuteda de equipamentos de aquisiccedilatildeo de modelos
3D O uso destes equipamentos tem aumentado muito nesta deacutecada A
16
tecnologia destes equipamentos tem progredido muito e eles tecircm se tornado
mais baratos A tendecircncia eacute que o uso destes equipamentos se torne o mais
utilizado meio de obtenccedilatildeo de modelos 3D Isto porque construir modelos 3D
bastante detalhados por meio de um software de modelagem eacute muito trabalhoso
O processo de aquisiccedilatildeo de modelos por meio destes equipamentos automatiza
este processo de construccedilatildeo
No trabalho com modelos 3D frequumlentemente satildeo usadas as operaccedilotildees
booleanas que satildeo operaccedilotildees de uniatildeo interseccedilatildeo ou diferenccedila No esquema
de representaccedilatildeo CSG estas operaccedilotildees fazem parte da representaccedilatildeo do
objeto Estas operaccedilotildees tambeacutem podem ser usadas para criar novos modelos ou
para alteraacute-los Na maioria dos tipos de representaccedilatildeo de objetos 3D estas
operaccedilotildees satildeo bastante complexas
A simplicidade da representaccedilatildeo por pontos permite que as operaccedilotildees
booleanas sejam realizadas com facilidade se compararmos com a realizaccedilatildeo
destas operaccedilotildees em outros tipos de representaccedilatildeo como malhas poligonais
Motivada pelas vantagens desta modelagem e pela utilidade destas operaccedilotildees
esta dissertaccedilatildeo apresenta uma introduccedilatildeo geral de modelagem por pontos e
trabalha mais especificamente com operaccedilotildees booleanas em objetos
modelados por pontos Dois trabalhos que exploram as operaccedilotildees booleanas na
modelagem por pontos seratildeo abordados o trabalho de Adams e Dutreacute [2] e o
trabalho de Pauly et al [3] O presente trabalho implementa o meacutetodo de Adams
e Dutreacute com algumas melhorias e faz uma comparaccedilatildeo entre o meacutetodo de Pauly
[3] e o meacutetodo de Adams e Dutreacute [2] com nossas melhorias
Como contribuiccedilotildees dadas por este trabalho apresentamos
- um estudo sobre modelagem por pontos
- um estudo sobre operaccedilotildees booleanas com pontos
- proposta de melhorias ao algoritmo proposto por Adams e Dutreacute [2]
- comparaccedilatildeo dos dois meacutetodos propostos para realizar estas operaccedilotildees
meacutetodo de Pauly et al [3] e de Adams e Dutreacute [2]
Este trabalho vem apresentado nesta dissertaccedilatildeo organizada em sete
capiacutetulos conforme descrito resumidamente a seguir
O capiacutetulo 2 cita alguns trabalhos sobre modelagem por pontos que estatildeo
relacionados a este trabalho
O capiacutetulo 3 apresenta uma visatildeo geral do modelo por pontos e explica
melhor alguns trabalhos citados no capiacutetulo 2
17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001
13
Figura 33 Modelo do PointShop MaxPlanck 65 Figura 34 Modelo do PointShop Male 66 Figura 35 Resultado da Uniatildeo do modelo Male com MaxPlanck 66 Figura 36 Resultado da interseccedilatildeo do modelo Male com o MaxPlanck 67 Figura 37 Resultado da diferenccedila do modelo Male do modelo MaxPlanck 67
14
Lista de tabelas
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas 42
Tabela 2- Nuacutemero de surfels dos modelos resultantes 64 Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas
Igeas 65
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck
e Male 68 Tabela 5- Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os
modelos MaxPlanck e Male 68
15
1 Introduccedilatildeo
O mundo digital estaacute conquistando cada vez mais espaccedilo nos meios de
comunicaccedilatildeo Sons imagens viacutedeos digitais satildeo miacutedias muito usadas em
diversas aacutereas como entretenimento medicina desenho industrial engenharia
arquitetura educaccedilatildeo arte ciecircncia entre outras Podemos citar alguns
exemplos dentro destas aacutereas como jogos efeitos especiais filmes digitais
visualizaccedilatildeo cientiacutefica viacutedeo-conferecircncia comeacutercio na internet Nos uacuteltimos anos
verificamos que o modelo 3D vem se tornando um novo meio de comunicaccedilatildeo
digital Com o desenvolvimento da tecnologia de aquisiccedilatildeo e do processamento
de modelos 3D ele vem sendo cada vez mais utilizado Jogos 3D animaccedilotildees
aplicaccedilotildees em realidade virtual visualizaccedilatildeo cientiacutefica aplicaccedilotildees para aacuterea
meacutedica e odontoloacutegica criaccedilatildeo de reacuteplicas para estudo e preservaccedilatildeo do
patrimocircnio histoacuterico sistemas CADCAM cataacutelogos de modelos 3D na Web para
comercializaccedilatildeo criaccedilatildeo de protoacutetipos para arquitetura engenharia satildeo alguns
exemplos de aplicaccedilotildees que usam modelos 3D
A aacuterea que estuda a representaccedilatildeo de um modelo 3D no computador eacute
chamada de modelagem em computaccedilatildeo graacutefica Existem diversos tipos de
modelagem para as diversas aplicaccedilotildees que usam um modelo 3D como por
exemplo representaccedilotildees poligonais como malhas triangulares que satildeo
geralmente usadas na aacuterea de entretenimento Este trabalho explora um novo
tipo de modelagem a modelagem por pontos
A modelagem por pontos comeccedilou a ser largamente explorada nesta
deacutecada e trata-se de uma aacuterea muito promissora em computaccedilatildeo graacutefica dadas
agraves vaacuterias e grandes vantagens em relaccedilatildeo aos outros tipos de representaccedilatildeo
como esquema de representaccedilatildeo CSG (Constructive Solid Geometry) [1] ou
malhas poligonais Dentre as principais vantagens podemos citar grande
simplicidade e flexibilidade boa performance robustez Mas a principal
vantagem desta modelagem que foi o fator que impulsionou o seu grande
desenvolvimento nesta deacutecada eacute que esta modelagem por pontos eacute a melhor
opccedilatildeo para tratar os dados de saiacuteda de equipamentos de aquisiccedilatildeo de modelos
3D O uso destes equipamentos tem aumentado muito nesta deacutecada A
16
tecnologia destes equipamentos tem progredido muito e eles tecircm se tornado
mais baratos A tendecircncia eacute que o uso destes equipamentos se torne o mais
utilizado meio de obtenccedilatildeo de modelos 3D Isto porque construir modelos 3D
bastante detalhados por meio de um software de modelagem eacute muito trabalhoso
O processo de aquisiccedilatildeo de modelos por meio destes equipamentos automatiza
este processo de construccedilatildeo
No trabalho com modelos 3D frequumlentemente satildeo usadas as operaccedilotildees
booleanas que satildeo operaccedilotildees de uniatildeo interseccedilatildeo ou diferenccedila No esquema
de representaccedilatildeo CSG estas operaccedilotildees fazem parte da representaccedilatildeo do
objeto Estas operaccedilotildees tambeacutem podem ser usadas para criar novos modelos ou
para alteraacute-los Na maioria dos tipos de representaccedilatildeo de objetos 3D estas
operaccedilotildees satildeo bastante complexas
A simplicidade da representaccedilatildeo por pontos permite que as operaccedilotildees
booleanas sejam realizadas com facilidade se compararmos com a realizaccedilatildeo
destas operaccedilotildees em outros tipos de representaccedilatildeo como malhas poligonais
Motivada pelas vantagens desta modelagem e pela utilidade destas operaccedilotildees
esta dissertaccedilatildeo apresenta uma introduccedilatildeo geral de modelagem por pontos e
trabalha mais especificamente com operaccedilotildees booleanas em objetos
modelados por pontos Dois trabalhos que exploram as operaccedilotildees booleanas na
modelagem por pontos seratildeo abordados o trabalho de Adams e Dutreacute [2] e o
trabalho de Pauly et al [3] O presente trabalho implementa o meacutetodo de Adams
e Dutreacute com algumas melhorias e faz uma comparaccedilatildeo entre o meacutetodo de Pauly
[3] e o meacutetodo de Adams e Dutreacute [2] com nossas melhorias
Como contribuiccedilotildees dadas por este trabalho apresentamos
- um estudo sobre modelagem por pontos
- um estudo sobre operaccedilotildees booleanas com pontos
- proposta de melhorias ao algoritmo proposto por Adams e Dutreacute [2]
- comparaccedilatildeo dos dois meacutetodos propostos para realizar estas operaccedilotildees
meacutetodo de Pauly et al [3] e de Adams e Dutreacute [2]
Este trabalho vem apresentado nesta dissertaccedilatildeo organizada em sete
capiacutetulos conforme descrito resumidamente a seguir
O capiacutetulo 2 cita alguns trabalhos sobre modelagem por pontos que estatildeo
relacionados a este trabalho
O capiacutetulo 3 apresenta uma visatildeo geral do modelo por pontos e explica
melhor alguns trabalhos citados no capiacutetulo 2
17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

14
Lista de tabelas
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas 42
Tabela 2- Nuacutemero de surfels dos modelos resultantes 64 Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas
Igeas 65
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck
e Male 68 Tabela 5- Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os
modelos MaxPlanck e Male 68
15
1 Introduccedilatildeo
O mundo digital estaacute conquistando cada vez mais espaccedilo nos meios de
comunicaccedilatildeo Sons imagens viacutedeos digitais satildeo miacutedias muito usadas em
diversas aacutereas como entretenimento medicina desenho industrial engenharia
arquitetura educaccedilatildeo arte ciecircncia entre outras Podemos citar alguns
exemplos dentro destas aacutereas como jogos efeitos especiais filmes digitais
visualizaccedilatildeo cientiacutefica viacutedeo-conferecircncia comeacutercio na internet Nos uacuteltimos anos
verificamos que o modelo 3D vem se tornando um novo meio de comunicaccedilatildeo
digital Com o desenvolvimento da tecnologia de aquisiccedilatildeo e do processamento
de modelos 3D ele vem sendo cada vez mais utilizado Jogos 3D animaccedilotildees
aplicaccedilotildees em realidade virtual visualizaccedilatildeo cientiacutefica aplicaccedilotildees para aacuterea
meacutedica e odontoloacutegica criaccedilatildeo de reacuteplicas para estudo e preservaccedilatildeo do
patrimocircnio histoacuterico sistemas CADCAM cataacutelogos de modelos 3D na Web para
comercializaccedilatildeo criaccedilatildeo de protoacutetipos para arquitetura engenharia satildeo alguns
exemplos de aplicaccedilotildees que usam modelos 3D
A aacuterea que estuda a representaccedilatildeo de um modelo 3D no computador eacute
chamada de modelagem em computaccedilatildeo graacutefica Existem diversos tipos de
modelagem para as diversas aplicaccedilotildees que usam um modelo 3D como por
exemplo representaccedilotildees poligonais como malhas triangulares que satildeo
geralmente usadas na aacuterea de entretenimento Este trabalho explora um novo
tipo de modelagem a modelagem por pontos
A modelagem por pontos comeccedilou a ser largamente explorada nesta
deacutecada e trata-se de uma aacuterea muito promissora em computaccedilatildeo graacutefica dadas
agraves vaacuterias e grandes vantagens em relaccedilatildeo aos outros tipos de representaccedilatildeo
como esquema de representaccedilatildeo CSG (Constructive Solid Geometry) [1] ou
malhas poligonais Dentre as principais vantagens podemos citar grande
simplicidade e flexibilidade boa performance robustez Mas a principal
vantagem desta modelagem que foi o fator que impulsionou o seu grande
desenvolvimento nesta deacutecada eacute que esta modelagem por pontos eacute a melhor
opccedilatildeo para tratar os dados de saiacuteda de equipamentos de aquisiccedilatildeo de modelos
3D O uso destes equipamentos tem aumentado muito nesta deacutecada A
16
tecnologia destes equipamentos tem progredido muito e eles tecircm se tornado
mais baratos A tendecircncia eacute que o uso destes equipamentos se torne o mais
utilizado meio de obtenccedilatildeo de modelos 3D Isto porque construir modelos 3D
bastante detalhados por meio de um software de modelagem eacute muito trabalhoso
O processo de aquisiccedilatildeo de modelos por meio destes equipamentos automatiza
este processo de construccedilatildeo
No trabalho com modelos 3D frequumlentemente satildeo usadas as operaccedilotildees
booleanas que satildeo operaccedilotildees de uniatildeo interseccedilatildeo ou diferenccedila No esquema
de representaccedilatildeo CSG estas operaccedilotildees fazem parte da representaccedilatildeo do
objeto Estas operaccedilotildees tambeacutem podem ser usadas para criar novos modelos ou
para alteraacute-los Na maioria dos tipos de representaccedilatildeo de objetos 3D estas
operaccedilotildees satildeo bastante complexas
A simplicidade da representaccedilatildeo por pontos permite que as operaccedilotildees
booleanas sejam realizadas com facilidade se compararmos com a realizaccedilatildeo
destas operaccedilotildees em outros tipos de representaccedilatildeo como malhas poligonais
Motivada pelas vantagens desta modelagem e pela utilidade destas operaccedilotildees
esta dissertaccedilatildeo apresenta uma introduccedilatildeo geral de modelagem por pontos e
trabalha mais especificamente com operaccedilotildees booleanas em objetos
modelados por pontos Dois trabalhos que exploram as operaccedilotildees booleanas na
modelagem por pontos seratildeo abordados o trabalho de Adams e Dutreacute [2] e o
trabalho de Pauly et al [3] O presente trabalho implementa o meacutetodo de Adams
e Dutreacute com algumas melhorias e faz uma comparaccedilatildeo entre o meacutetodo de Pauly
[3] e o meacutetodo de Adams e Dutreacute [2] com nossas melhorias
Como contribuiccedilotildees dadas por este trabalho apresentamos
- um estudo sobre modelagem por pontos
- um estudo sobre operaccedilotildees booleanas com pontos
- proposta de melhorias ao algoritmo proposto por Adams e Dutreacute [2]
- comparaccedilatildeo dos dois meacutetodos propostos para realizar estas operaccedilotildees
meacutetodo de Pauly et al [3] e de Adams e Dutreacute [2]
Este trabalho vem apresentado nesta dissertaccedilatildeo organizada em sete
capiacutetulos conforme descrito resumidamente a seguir
O capiacutetulo 2 cita alguns trabalhos sobre modelagem por pontos que estatildeo
relacionados a este trabalho
O capiacutetulo 3 apresenta uma visatildeo geral do modelo por pontos e explica
melhor alguns trabalhos citados no capiacutetulo 2
17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

15
1 Introduccedilatildeo
O mundo digital estaacute conquistando cada vez mais espaccedilo nos meios de
comunicaccedilatildeo Sons imagens viacutedeos digitais satildeo miacutedias muito usadas em
diversas aacutereas como entretenimento medicina desenho industrial engenharia
arquitetura educaccedilatildeo arte ciecircncia entre outras Podemos citar alguns
exemplos dentro destas aacutereas como jogos efeitos especiais filmes digitais
visualizaccedilatildeo cientiacutefica viacutedeo-conferecircncia comeacutercio na internet Nos uacuteltimos anos
verificamos que o modelo 3D vem se tornando um novo meio de comunicaccedilatildeo
digital Com o desenvolvimento da tecnologia de aquisiccedilatildeo e do processamento
de modelos 3D ele vem sendo cada vez mais utilizado Jogos 3D animaccedilotildees
aplicaccedilotildees em realidade virtual visualizaccedilatildeo cientiacutefica aplicaccedilotildees para aacuterea
meacutedica e odontoloacutegica criaccedilatildeo de reacuteplicas para estudo e preservaccedilatildeo do
patrimocircnio histoacuterico sistemas CADCAM cataacutelogos de modelos 3D na Web para
comercializaccedilatildeo criaccedilatildeo de protoacutetipos para arquitetura engenharia satildeo alguns
exemplos de aplicaccedilotildees que usam modelos 3D
A aacuterea que estuda a representaccedilatildeo de um modelo 3D no computador eacute
chamada de modelagem em computaccedilatildeo graacutefica Existem diversos tipos de
modelagem para as diversas aplicaccedilotildees que usam um modelo 3D como por
exemplo representaccedilotildees poligonais como malhas triangulares que satildeo
geralmente usadas na aacuterea de entretenimento Este trabalho explora um novo
tipo de modelagem a modelagem por pontos
A modelagem por pontos comeccedilou a ser largamente explorada nesta
deacutecada e trata-se de uma aacuterea muito promissora em computaccedilatildeo graacutefica dadas
agraves vaacuterias e grandes vantagens em relaccedilatildeo aos outros tipos de representaccedilatildeo
como esquema de representaccedilatildeo CSG (Constructive Solid Geometry) [1] ou
malhas poligonais Dentre as principais vantagens podemos citar grande
simplicidade e flexibilidade boa performance robustez Mas a principal
vantagem desta modelagem que foi o fator que impulsionou o seu grande
desenvolvimento nesta deacutecada eacute que esta modelagem por pontos eacute a melhor
opccedilatildeo para tratar os dados de saiacuteda de equipamentos de aquisiccedilatildeo de modelos
3D O uso destes equipamentos tem aumentado muito nesta deacutecada A
16
tecnologia destes equipamentos tem progredido muito e eles tecircm se tornado
mais baratos A tendecircncia eacute que o uso destes equipamentos se torne o mais
utilizado meio de obtenccedilatildeo de modelos 3D Isto porque construir modelos 3D
bastante detalhados por meio de um software de modelagem eacute muito trabalhoso
O processo de aquisiccedilatildeo de modelos por meio destes equipamentos automatiza
este processo de construccedilatildeo
No trabalho com modelos 3D frequumlentemente satildeo usadas as operaccedilotildees
booleanas que satildeo operaccedilotildees de uniatildeo interseccedilatildeo ou diferenccedila No esquema
de representaccedilatildeo CSG estas operaccedilotildees fazem parte da representaccedilatildeo do
objeto Estas operaccedilotildees tambeacutem podem ser usadas para criar novos modelos ou
para alteraacute-los Na maioria dos tipos de representaccedilatildeo de objetos 3D estas
operaccedilotildees satildeo bastante complexas
A simplicidade da representaccedilatildeo por pontos permite que as operaccedilotildees
booleanas sejam realizadas com facilidade se compararmos com a realizaccedilatildeo
destas operaccedilotildees em outros tipos de representaccedilatildeo como malhas poligonais
Motivada pelas vantagens desta modelagem e pela utilidade destas operaccedilotildees
esta dissertaccedilatildeo apresenta uma introduccedilatildeo geral de modelagem por pontos e
trabalha mais especificamente com operaccedilotildees booleanas em objetos
modelados por pontos Dois trabalhos que exploram as operaccedilotildees booleanas na
modelagem por pontos seratildeo abordados o trabalho de Adams e Dutreacute [2] e o
trabalho de Pauly et al [3] O presente trabalho implementa o meacutetodo de Adams
e Dutreacute com algumas melhorias e faz uma comparaccedilatildeo entre o meacutetodo de Pauly
[3] e o meacutetodo de Adams e Dutreacute [2] com nossas melhorias
Como contribuiccedilotildees dadas por este trabalho apresentamos
- um estudo sobre modelagem por pontos
- um estudo sobre operaccedilotildees booleanas com pontos
- proposta de melhorias ao algoritmo proposto por Adams e Dutreacute [2]
- comparaccedilatildeo dos dois meacutetodos propostos para realizar estas operaccedilotildees
meacutetodo de Pauly et al [3] e de Adams e Dutreacute [2]
Este trabalho vem apresentado nesta dissertaccedilatildeo organizada em sete
capiacutetulos conforme descrito resumidamente a seguir
O capiacutetulo 2 cita alguns trabalhos sobre modelagem por pontos que estatildeo
relacionados a este trabalho
O capiacutetulo 3 apresenta uma visatildeo geral do modelo por pontos e explica
melhor alguns trabalhos citados no capiacutetulo 2
17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

16
tecnologia destes equipamentos tem progredido muito e eles tecircm se tornado
mais baratos A tendecircncia eacute que o uso destes equipamentos se torne o mais
utilizado meio de obtenccedilatildeo de modelos 3D Isto porque construir modelos 3D
bastante detalhados por meio de um software de modelagem eacute muito trabalhoso
O processo de aquisiccedilatildeo de modelos por meio destes equipamentos automatiza
este processo de construccedilatildeo
No trabalho com modelos 3D frequumlentemente satildeo usadas as operaccedilotildees
booleanas que satildeo operaccedilotildees de uniatildeo interseccedilatildeo ou diferenccedila No esquema
de representaccedilatildeo CSG estas operaccedilotildees fazem parte da representaccedilatildeo do
objeto Estas operaccedilotildees tambeacutem podem ser usadas para criar novos modelos ou
para alteraacute-los Na maioria dos tipos de representaccedilatildeo de objetos 3D estas
operaccedilotildees satildeo bastante complexas
A simplicidade da representaccedilatildeo por pontos permite que as operaccedilotildees
booleanas sejam realizadas com facilidade se compararmos com a realizaccedilatildeo
destas operaccedilotildees em outros tipos de representaccedilatildeo como malhas poligonais
Motivada pelas vantagens desta modelagem e pela utilidade destas operaccedilotildees
esta dissertaccedilatildeo apresenta uma introduccedilatildeo geral de modelagem por pontos e
trabalha mais especificamente com operaccedilotildees booleanas em objetos
modelados por pontos Dois trabalhos que exploram as operaccedilotildees booleanas na
modelagem por pontos seratildeo abordados o trabalho de Adams e Dutreacute [2] e o
trabalho de Pauly et al [3] O presente trabalho implementa o meacutetodo de Adams
e Dutreacute com algumas melhorias e faz uma comparaccedilatildeo entre o meacutetodo de Pauly
[3] e o meacutetodo de Adams e Dutreacute [2] com nossas melhorias
Como contribuiccedilotildees dadas por este trabalho apresentamos
- um estudo sobre modelagem por pontos
- um estudo sobre operaccedilotildees booleanas com pontos
- proposta de melhorias ao algoritmo proposto por Adams e Dutreacute [2]
- comparaccedilatildeo dos dois meacutetodos propostos para realizar estas operaccedilotildees
meacutetodo de Pauly et al [3] e de Adams e Dutreacute [2]
Este trabalho vem apresentado nesta dissertaccedilatildeo organizada em sete
capiacutetulos conforme descrito resumidamente a seguir
O capiacutetulo 2 cita alguns trabalhos sobre modelagem por pontos que estatildeo
relacionados a este trabalho
O capiacutetulo 3 apresenta uma visatildeo geral do modelo por pontos e explica
melhor alguns trabalhos citados no capiacutetulo 2
17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

17
O capiacutetulo 4 apresenta operaccedilotildees booleanas com pontos e os dois
meacutetodos para realizaacute-las na modelagem por pontos meacutetodo de Pauly et al [3] e
de Adams e Dutreacute [2]
O capiacutetulo 5 apresenta algumas melhorias ao algoritmo de Adams e Dutreacute
[2] e a nossa implementaccedilatildeo deste algoritmo
O capiacutetulo 6 traz os resultados obtidos
E finalmente o capiacutetulo 7 encerra o trabalho com uma conclusatildeo e com
possiacuteveis trabalhos futuros
Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Trabalhos relacionados 18
2 Trabalhos relacionados
O primeiro pesquisador a propor o uso de pontos como primitiva graacutefica foi
Levoy em [4] Ele propotildee o uso de pontos como primitiva de renderizaccedilatildeo e
discute a conversatildeo dos outros modelos para o modelo por pontos
Nos uacuteltimos anos vaacuterios trabalhos importantes tecircm sido realizados na aacuterea
em diversos segmentos em visualizaccedilatildeo podemos destacar os trabalhos de
Pfister [5] e de Zwicker [6] que usam pontos como primitiva de renderizaccedilatildeo e
com resultados praacuteticos interativos muito bons
Em [7] Pauly et al propotildeem algoritmos para modelagem multi-resoluccedilatildeo
em modelos por pontos
Os trabalhos de Curless [8] e Rusinkiewicz [9] discutem os meacutetodos de
aquisiccedilatildeo que consistem em obter uma amostragem de pontos da superfiacutecie do
objeto real por meio de equipamentos como por exemplo o scanner 3D
Nas operaccedilotildees booleanas a interseccedilatildeo das superfiacutecies dos modelos
iniciais seraacute parte do modelo resultado e para ser representada corretamente
precisa ser reconstruiacuteda A reconstruccedilatildeo da superfiacutecie tambeacutem eacute usada na
visualizaccedilatildeo de um modelo Um trabalho significativo na aacuterea de reconstruccedilatildeo de
superfiacutecies estaacute em [10] de N Amenta etal Este trabalho apresenta uma
soluccedilatildeo praacutetica com garantias teoacutericas para este problema e uma heuriacutestica para
o tratamento de arestas vivas a questatildeo mais difiacutecil desta aacuterea Um exemplo
de uma aresta viva eacute o encontro de dois planos natildeo coincidentes
Frequumlentemente a interseccedilatildeo citada acima (interseccedilatildeo entre os modelos iniciais)
gera uma aresta viva (seccedilatildeo 4223)
O algoritmo aqui implementado eacute um plugin para o software PointShop 3D
[11] de Zwicker et al software de ediccedilatildeo de modelos com pontos O PointShop
tem seu coacutedigo aberto documentaccedilatildeo e trabalha com plugins Ele permite a
visualizaccedilatildeo e ediccedilatildeo interativa do modelo por pontos Eacute o uacutenico software livre
disponiacutevel com estas caracteriacutesticas Esta implementaccedilatildeo na forma de um plugin
facilitou muito o trabalho pois natildeo foi necessaacuterio implementar a visualizaccedilatildeo do
modelo 3D Aleacutem disso o Pointshop conteacutem tambeacutem um plugin com a
implementaccedilatildeo do meacutetodo de Pauly et al [3] discutido nesta dissertaccedilatildeo A
Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Trabalhos relacionados 19
execuccedilatildeo dos dois plugins que realizam operaccedilotildees booleanas pocircde ser
comparada
Os trabalhos aqui discutidos satildeo o de Bart Adams e Philip Dutreacute [2] e de
Pauly et al[3] que apresentam meacutetodos diferentes para realizaccedilatildeo de
operaccedilotildees booleanas com pontos Adams e Dutreacute utilizam octrees [1] e Pauly
Kd-Tree [16] e MLS (Moving Least Squares) [18] Estes algoritmos satildeo
discutidos no capiacutetulo 4
O trabalho de Sara F Frisken [12] apresenta um algoritmo para realizar
operaccedilotildees em octree de forma mais eficiente Como estas operaccedilotildees estatildeo
presentes em todo o nosso algoritmo este trabalho certamente oferece uma
forma de otimizaccedilatildeo mas que natildeo foi implementada
Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Modelagem por Pontos 20
3 Modelagem por Pontos
A computaccedilatildeo graacutefica natildeo lida diretamente com o objeto ou com o
fenocircmeno fiacutesico lida com modelos graacuteficos ou geomeacutetricos Modelos graacuteficos
satildeo estruturas computacionais (abstratas) que capturam aspectos de objetos de
interesse para uma aplicaccedilatildeo como forma cor textura etc Se apenas a forma
ou a geometria do objeto eacute relevante temos modelos geomeacutetricos
Estes modelos satildeo usados em vaacuterias aplicaccedilotildees em computaccedilatildeo graacutefica
como roboacutetica visatildeo computacional simulaccedilotildees realistas anaacutelises estruturais
prototipagem projeto e manufatura de produtos eletromecacircnicos arquitetura
Existem vaacuterios tipos de modelos graacuteficos Esta dissertaccedilatildeo trata de um tipo
muito em voga atualmente que eacute o modelo por pontos
Neste capiacutetulo daremos uma visatildeo geral do modelo por pontos
Introduziremos este modelo e seu processo de criaccedilatildeo Seraacute apresentado o que
eacute um modelo por pontos e o conceito de surfel [5] introduziremos os tipos de
distribuiccedilatildeo dos surfels uma estruturaccedilatildeo aplicada a estes surfels e dados que
eles podem conter As quatro proacuteximas subseccedilotildees (Ideacuteia da representaccedilatildeo
Tipos de distribuiccedilatildeo dos surfels Estrutura de multi-resoluccedilatildeo e Dados que um
surfel pode conter) tratam destes toacutepicos Um modelo por pontos pode ser criado
a partir da conversatildeo de outros tipos de modelagem NURBS por exemplo para
o modelo por pontos ou a partir de um processo de aquisiccedilatildeo Esta uacuteltima forma
de criaccedilatildeo pode ser dividida em duas etapas aquisiccedilatildeo do modelo reconstruccedilatildeo
da superfiacutecie As subseccedilotildees 35 e 36 tratam destas duas etapas
respectivamente A ediccedilatildeo do modelo 3D eacute tratada brevemente na subseccedilatildeo 38
e a sua visualizaccedilatildeo na subseccedilatildeo 37 A apresentaccedilatildeo do processo de aquisiccedilatildeo
(seccedilatildeo 35) eacute baseada no tutorial de W T Correcirca [13] A etapa de ediccedilatildeo 3D
consiste em operaccedilotildees para mudanccedila da cor textura ou forma do modelo Para
esta etapa enfocaremos as operaccedilotildees booleanas que modificam a forma do
modelo ou criam novos modelos
31 Ideacuteia da Representaccedilatildeo
Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Modelagem por Pontos 21
Figura 1 [20] -Um modelo por pontos e sua visualizaccedilatildeo
Um modelo por pontos representa um objeto atraveacutes de seu contorno Eacute
um tipo de representaccedilatildeo B-Rep (Boundary Representation) [1] Este contorno
consiste em uma superfiacutecie 2D posicionada no espaccedilo 3D Na modelagem por
pontos ela eacute representada por um conjunto de pontos 3D que satildeo uma
amostragem dos (infinitos) pontos que formam a superfiacutecie contiacutenua (Figura 1) A
amostragem pode ser obtida de diversas maneiras Uma delas o processo de
aquisiccedilatildeo progrediu muito nos uacuteltimos anos e este foi um dos fatores que tornou
muito importante o desenvolvimento deste modelo por pontos Outra forma de
gerar amostragem eacute fazer uma conversatildeo de um outro modelo NURBS por
exemplo para o modelo por pontos
Estes pontos satildeo denominados surfels e podem conter aleacutem da posiccedilatildeo
3D outras informaccedilotildees como normal agrave superfiacutecie cor textura raio de alcance A
Figura 2 mostra um conjunto de surfels representando uma superfiacutecie No surfel
em destaque podemos ver o raio de alcance rt e a normal n agrave superfiacutecie
Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Modelagem por Pontos 22
Figura 2 [5] A superfiacutecie modelada por surfels O surfel em destaque tem raio de alcance
rt e normal n
Como o modelo natildeo armazena qualquer informaccedilatildeo sobre a conexatildeo entre
os surfels a reconstruccedilatildeo da superfiacutecie contiacutenua a partir dele pode exigir
algumas restriccedilotildees na amostragem (seccedilatildeo 36)
32 Tipos de distribuiccedilatildeo dos surfels
Existem dois tipos de distribuiccedilatildeo dos surfels na modelagem por pontos
uniforme e natildeo uniforme Na distribuiccedilatildeo uniforme cada um deles descreve
partes de mesmo tamanho da superfiacutecie Na natildeo uniforme cada surfel armazena
a informaccedilatildeo de seu raio de alcance que eacute o raio do disco que este surfel
representa
A distribuiccedilatildeo uniforme tem a vantagem de ser mais simples e natildeo ser
necessaacuterio armazenar o raio de alcance do disco mas ela apresenta a seguinte
desvantagem se o modelo possui regiotildees com muito detalhe e regiotildees com
pouco detalhe ele teraacute que manter uma alta densidade mesmo nas regiotildees de
poucos detalhes
33 Estrutura de multi-resoluccedilatildeo
Um objeto pode ser representado em vaacuterios niacuteveis de detalhes Por
exemplo podemos representar um mesmo objeto com vaacuterias resoluccedilotildees
diferentes Este conceito pode ser aplicado ao modelo por pontos Desta forma
um modelo eacute representado por uma estrutura hieraacuterquica (uma aacutervore por
exemplo) onde em cada niacutevel temos uma representaccedilatildeo do objeto em uma
Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Modelagem por Pontos 23
determinada resoluccedilatildeo Em [7] Pauly et al propotildeem algoritmos para modelagem
multi-resoluccedilatildeo em modelos por pontos
34 Dados que um surfel pode conter
Cada surfel armazena sua localizaccedilatildeo e pode tambeacutem conter informaccedilotildees
como a cor ou coordenadas de textura Se a amostragem natildeo for uniforme o
surfel conteacutem a informaccedilatildeo do raio de alcance que eacute o raio de um disco cujo
centro eacute a posiccedilatildeo do surfel O surfel pode tambeacutem conter o vetor normal agrave
superfiacutecie e assim o surfel pode ser visto como um disco orientado A superfiacutecie
tambeacutem pode ser vista como uma superfiacutecie orientada
35 Aquisiccedilatildeo do modelo
Esta introduccedilatildeo sobre aquisiccedilatildeo do modelo aqui apresentada baseia-se no
tutorial de W T Correcirca [13]
O processo de aquisiccedilatildeo consiste em obter uma amostragem de pontos da
superfiacutecie do objeto real por meio de equipamentos como por exemplo o
scanner 3D Eacute uma aacuterea que tem progredido muito nos uacuteltimos anos A
resoluccedilatildeo e a precisatildeo dos equipamentos de aquisiccedilatildeo tecircm melhorado bastante
e o custo deles reduzido de forma significativa Isso possibilita que a aquisiccedilatildeo
de modelos 3D seja usada em aplicaccedilotildees de desenho industrial arte ou em
produtos para a aacuterea de entretenimento O consequumlente maior uso destes
equipamentos criou a necessidade de avanccedilos no tratamento dos seus dados de
saiacuteda que satildeo um conjunto de pontos
Este processo pode ser dividido em trecircs partes [13] aquisiccedilatildeo da
geometria aquisiccedilatildeo da textura e correccedilatildeo de falhas da aquisiccedilatildeo
351 Aquisiccedilatildeo da geometria
Existem vaacuterios meacutetodos de aquisiccedilatildeo da geometria Curless [8] e
Rusinkiewicz [9] classificaram estes meacutetodos em trecircs categorias meacutetodos por
contato transmissatildeo e reflexatildeo
O meacutetodo por contato toca a superfiacutecie do objeto com uma sonda e grava
a posiccedilatildeo Este meacutetodo do qual o Coordinate Measuring Machines (CMMs) eacute
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001
Modelagem por Pontos 24
um exemplo eacute bastante preciso mas eacute muito lento e natildeo adequado a objetos
fraacutegeis
Meacutetodos por transmissatildeo projetam ondas de energia sobre o objeto e
gravam a energia transmitida Por exemplo tomografia computadorizada que
projeta ondas de raio-x sobre o objeto e mede a quantidade de radiaccedilatildeo que
passa atraveacutes dele O resultado eacute um modelo geomeacutetrico de alta resoluccedilatildeo Este
meacutetodo pode captar detalhes do objeto que natildeo satildeo visiacuteveis de fora do objeto
Por outro lado ele eacute caro e arriscado
Meacutetodos por reflexatildeo podem ser oacuteticos ou natildeo-oacuteticos Natildeo-oacuteticos incluem
radares que medem a distacircncia a um objeto enviando microondas ou ondas
sonoras para o objeto e gravando o tempo que a onda gasta para retornar Estes
meacutetodos natildeo satildeo muito precisos nem raacutepidos
Meacutetodos por reflexatildeo oacuteticos podem ser passivos ou ativos Meacutetodos oacuteticos
passivos natildeo interagem com o objeto e incluem teacutecnicas de visatildeo computacional
como shape-from-shading stereo triangulation optical flow e meacutetodos de
decomposiccedilatildeo para video streams Estes meacutetodos raramente constroem
modelos precisos e sua maior aplicaccedilatildeo eacute em reconhecimento de objetos
Meacutetodos oacuteticos ativos projetam luz sobre um objeto de maneira estruturada
e atraveacutes da reflexatildeo da luz determinam a forma do objeto Exemplos satildeo depth
from defocus photometric stereo projected-light triangulation time of flight
Meacutetodos por reflexatildeo oacuteticos ativos tecircm muitas vantagens sobre os passivos tecircm
um melhor desempenho quando natildeo existe textura satildeo mais baratos e mais
robustos e produzem uma amostragem precisa
352 Aquisiccedilatildeo da textura
Idealmente noacutes gostariacuteamos de ter uma completa descriccedilatildeo de como um
ponto da superfiacutecie reflete a luz dependendo do vetor normal a esta superfiacutecie
da direccedilatildeo do raio de luz incidente e do comprimento de onda Tal descriccedilatildeo eacute
conhecida como Bidirectional Reflectance Distribution Function (BRDF) Medir
BRDFs com precisatildeo eacute um problema difiacutecil
Pode-se ter uma aproximaccedilatildeo da aquisiccedilatildeo de cores do objeto tirando
fotos dele O objeto eacute fotografado e a cor de cada ponto da superfiacutecie eacute obtida a
partir de um mapeamento das fotos 2D para o modelo 3D Para mapear a
fotografia agrave geometria precisamos conhecer os paracircmetros de projeccedilatildeo da
cacircmera e a sua posiccedilatildeo no momento em que a foto foi batida Para cada ponto
Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Modelagem por Pontos 25
3D do modelo encontramos sua projeccedilatildeo 2D no plano da cacircmera e associamos
a cor do pixel nesta projeccedilatildeo agrave cor do ponto 3D
353 Correccedilatildeo das falhas da aquisiccedilatildeo
O processo de aquisiccedilatildeo deixa frequumlentemente buracos no modelo devido
a ruiacutedos no processo ou agrave impossibilidade de aquisiccedilatildeo de determinadas partes
de uma superfiacutecie Estes buracos devem ser corrigidos Pode-se usar por
exemplo um filtro de passa-baixa para remoccedilatildeo de ruiacutedos [14] Meacutetodos de
difusatildeo geomeacutetrica tecircm sido aplicados para preenchimento dos buracos [15] A
correccedilatildeo das falhas eacute tida como um preacute-processamento para o processo de
reconstruccedilatildeo da superfiacutecie contiacutenua (seccedilatildeo 36)
36 Reconstruccedilatildeo da superfiacutecie (contiacutenua) a partir do modelo (discreto)
A reconstruccedilatildeo da superfiacutecie contiacutenua consiste em a partir de um conjunto
natildeo estruturado de pontos obter um modelo contiacutenuo desta superfiacutecie Esta
reconstruccedilatildeo eacute frequumlentemente exigida para um modelo por pontos Na sua
visualizaccedilatildeo podemos desejar focar qualquer parte do modelo Para fazermos
operaccedilotildees booleanas com os modelos podemos querer determinar exatamente
onde eles se intersectam
No entanto natildeo precisamos ter necessariamente a representaccedilatildeo contiacutenua
de todo o objeto ao mesmo tempo A reconstruccedilatildeo desta superfiacutecie a partir dos
pontos amostrados pode ser feita no momento que for mais adequado agrave
aplicaccedilatildeo Na visualizaccedilatildeo a reconstruccedilatildeo pode ser feita na projeccedilatildeo 2D da
parte do modelo em foco (seccedilatildeo 37) Para operaccedilotildees booleanas pode-se
reconstruir apenas a aacuterea da interseccedilatildeo dos modelos
Este processo de reconstruccedilatildeo de superfiacutecie tem sido muito estudado em
modelagem geomeacutetrica e geometria computacional nos uacuteltimos anos O trabalho
mais importante desta aacuterea eacute o trabalho de Amenta et al [10] que foi a primeira
soluccedilatildeo com garantias demonstraacuteveis para este problema de reconstruccedilatildeo de
superfiacutecie A seccedilatildeo 44 explica estes conceitos e o trabalho [10] Este trabalho
demonstra que teoricamente para que a reconstruccedilatildeo da superfiacutecie (contiacutenua) a
partir das amostras seja correta a amostragem deve ser adequada Ele usa o
conceito de ldquoEixo Medialrdquo para definir o que eacute uma amostragem adequada
Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Modelagem por Pontos 26
(seccedilatildeo 44) Em duas dimensotildees os veacutertices de Voronoi de uma amostragem
densa aproximam o ldquoEixo Medialrdquo da amostragem
Por meio deste conceito de Eixo Medial [1016] obtecircm-se paracircmetros
teoacutericos para a definiccedilatildeo de amostragem adequada e baseado neste conceito
o algoritmo apresentado em [10] traz uma soluccedilatildeo praacutetica para o problema
obtendo uma malha poligonal a partir do modelo por pontos
O PointShop 3D [11] software de ediccedilatildeo de modelos por pontos utilizado
nesta pesquisa faz quando necessaacuterio a reconstruccedilatildeo da superfiacutecie Para isso
o PointShop 3D explora a vizinhanccedila local (surfels vizinhos de acordo com suas
posiccedilotildees) Ele usa o conceito de Eixo Medial para justificar seu meacutetodo de
reconstruccedilatildeo da superfiacutecie que na praacutetica apresenta resultados bastante
satisfatoacuterios apesar de teoricamente natildeo ter garantias [16]
37 Visualizaccedilatildeo do modelo
A primeira abordagem para visualizaccedilatildeo de um modelo por pontos foi
construir uma malha de poliacutegonos a partir dos surfels e renderizaacute-la Mas a
construccedilatildeo de malhas a partir dos surfels eacute um processo muito caro e lento
principalmente para modelos complexos Na tentativa de obter uma visualizaccedilatildeo
interativa do modelo por pontos estatildeo sendo estudadas teacutecnicas que utilizam
surfels como primitiva de visualizaccedilatildeo A ideacuteia foi apresentada inicialmente por
Levoy [4]
Figura 3 [21] -Modelo por pontos e sua renderizaccedilatildeo usando Surface Splatting
Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Modelagem por Pontos 27
O objetivo da renderizaccedilatildeo a partir dos surfels eacute projetaacute-los na tela e
reconstruir as superfiacutecies de forma contiacutenua sem buracos Para que esta
renderizaccedilatildeo seja amplamente utilizada deve-se ter cuidado com o uso de
memoacuteria e com a qualidade da imagem gerada Teacutecnicas recentes como Surface
Splatting [6] faz a renderizaccedilatildeo interativamente com qualidade (Figura 3)
comparada a outros meacutetodos de renderizaccedilatildeo como Image Based Rendering
Em geral a visualizaccedilatildeo do modelo por pontos pode ser dividida nas seguintes
etapas
- warping - projeccedilatildeo em perspectiva de cada ponto do modelo na tela
processo anaacutelogo agrave projeccedilatildeo de veacutertices dos triacircngulos na malha triangular Se
um pixel da tela estiver contido em mais de uma projeccedilatildeo de surfels (vizinhos)
ou seja mais de um ponto cobre este pixel os atributos destes pontos seratildeo
combinados
- shading por ponto - o processo de shading eacute realizado para cada ponto
visiacutevel (os pontos que natildeo satildeo vistos do ponto de vista em questatildeo devem ser
retirados) Qualquer modelo local de shading pode ser aplicado Uma nova
teacutecnica foi proposta em Surface Splatting [6]
- reconstruccedilatildeo da imagem ndash pixels que natildeo ldquoreceberamrdquo projeccedilatildeo de
nenhum ponto formam buracos na imagem Esta imagem deve ser reconstruiacuteda
sem buracos sem aliasing e as superfiacutecies devem ser reconstruiacutedas de forma
contiacutenua e devem ser ldquosuavizadasrdquo (smooth surface)
Os algoritmos de renderizaccedilatildeo por pontos podem tratar a questatildeo de
buracos na visualizaccedilatildeo de trecircs formas [17]
Detecccedilatildeo e preenchimento de buracos no espaccedilo da tela pontos satildeo
projetados na tela e pixels que natildeo receberam pontos satildeo detectados (buracos)
Para preencher estes buracos que natildeo receberam pontos eacute feita uma
interpolaccedilatildeo entre os vizinhos
Geraccedilatildeo de mais pontos a superfiacutecie eacute interpolada no espaccedilo do modelo
para garantir que todos os pixels recebam pelo menos a projeccedilatildeo de um ponto
Splatting um surfel eacute projetado na tela e sua contribuiccedilatildeo eacute espalhada de
forma diferenciada para os pixels vizinhos Agrave medida em que o vizinho se torna
mais distante a contribuiccedilatildeo do surfel diminui
Raumlsaumlnen faz uma analogia do processo de renderizaccedilatildeo proposto em [6]
com o mapeamento de textura [15] No mapeamento de textura para um
determinado pixel da tela satildeo encontrados os pontos da textura que afetam este
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001
Modelagem por Pontos 28
pixel Num sentido inverso em splatting para um determinado surfel (que
representa a textura) satildeo encontrados os pixels da tela que este surfel afeta
38 Ediccedilatildeo do modelo
Ediccedilatildeo de um modelo 3D consiste em operaccedilotildees que modificam
caracteriacutesticas deste modelo como cor textura forma ou criam novos modelos
O software PointShop 3D [11] software de ediccedilatildeo de modelos por pontos 3D
implementa vaacuterias destas operaccedilotildees (ver seccedilatildeo 52)
Para modificar a forma de um modelo ou criar um novo satildeo muito usadas
as operaccedilotildees booleanas que eacute o nosso enfoque nesta dissertaccedilatildeo Na
modelagem CSG (Constructive Solid Geometry) as operaccedilotildees booleanas satildeo
usadas juntamente com primitivas soacutelidas para definir um modelo No entanto
em alguns tipos de modelos estas operaccedilotildees satildeo difiacuteceis como por exemplo
em malhas poligonais Com pontos elas podem ser feitas interativamente [32]
Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 29
4 Operaccedilotildees Booleanas com Pontos
Operaccedilotildees booleanas satildeo as operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila
definidas na teoria matemaacutetica de conjuntos Estas operaccedilotildees satildeo aplicadas em
modelos soacutelidos para alteraacute-los ou para criar novos modelos A Figura 4 abaixo
mostra a criaccedilatildeo de trecircs novos modelos a partir de quatro modelos iniciais
Figura 4 [22] Trecircs modelos novos foram criados a partir dos quatro iniciais (esfera
cilindro dois cubos) O primeiro eacute a esfera menos um cubo em seguida retirou-se outro
cubo e por uacuteltimo retirou-se o cilindro
Estas operaccedilotildees satildeo aplicadas em objetos modelados por pontos em dois
trabalhos no trabalho de Bart Adams e Philip Dutreacute [2] e no trabalho de Pauly
et Al [3] Neste capiacutetulo a seccedilatildeo 41 apresenta a parte comum aos dois
trabalhos e as seccedilotildees 42 e 43 apresentam as particularidades de cada um A
seccedilatildeo 44 discute uma questatildeo natildeo explicitada em nenhum dos dois trabalhos
41 Meacutetodos para realizar operaccedilotildees booleanas em objetos modelados por pontos
A Figura 5 mostra o resultado do meacutetodo de Adams[2] operaccedilotildees de
uniatildeo diferenccedila e interseccedilatildeo de objetos soacutelidos 3D modelados por pontos
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001
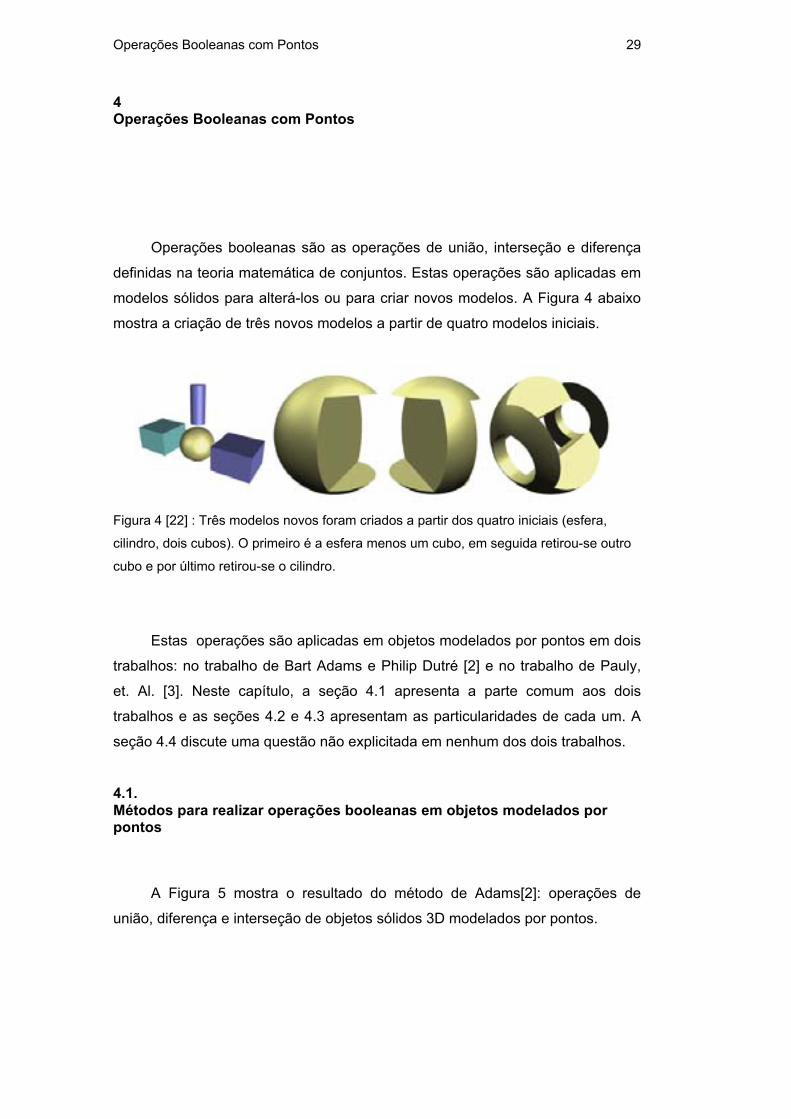
Operaccedilotildees Booleanas com Pontos 30
Figura 5 [2]-A partir de dois modelos por pontos uma heacutelice e uma cabeccedila as trecircs operaccedilotildees booleanas satildeo mostradas da esquerda para a direita uniatildeo diferenccedila e interseccedilatildeo
Sejam A e B objetos 3D soacutelidos modelados por pontos Definem-se os
seguintes elementos
Af ndash superfiacutecie (contorno) de A que estaacute fora de B
Ad ndash superfiacutecie (contorno) de A que estaacute dentro de B
Bf ndash superfiacutecie (contorno) de B que estaacute fora de A
Bd ndash superfiacutecie (contorno) de B que estaacute dentro de A
O resultado da operaccedilatildeo booleana entre A e B seraacute um modelo C cuja
superfiacutecie de contorno pode ser determinada pela seguinte regra [2] que aqui
chamamos de Regra 1
Regra 1 A U B Af + Bf
A cap B Ad + Bd
A ndash B Af + Bd (com a orientaccedilatildeo invertida)
B ndash A Ad (com a orientaccedilatildeo invertida) + Bf
A Figura 6 mostra as operaccedilotildees com dois modelos A e B
(a) (b)
Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 31
(c) (d)
Figura 6 [22] (a) Dois modelos A e B (b) Posicionados de forma que A tem
uma parte dentro de B eacute mostrado o resultado A U B Af + Bf (c) Resultado de A ndash B Af
+ Bd (d) Resultado de A cap B Ad + Bd
Bart [2] e Pauly [3] apresentam dois meacutetodos para determinar os
elementos acima Estes dois meacutetodos satildeo construiacutedos a partir dos seguintes
conceitos os elementos Af Ad Bf Bd satildeo uma parte da superfiacutecie modelada por
pontos e portanto satildeo conjuntos de surfels Para determinaacute-los eacute necessaacuteria
entatildeo a classificaccedilatildeo de um surfel (que pode se resumir agrave classificaccedilatildeo de um
ponto que eacute o seu centro) de uma superfiacutecie como dentro ou fora de um outro
modelo Os dois meacutetodos utilizam a seguinte regra para esta classificaccedilatildeo aqui
denominada Regra 2
Regra 2 Dado um ponto x qualquer um volume V determinado por uma superfiacutecie
de contorno S uma amostragem P da superfiacutecie S um ponto p є P que eacute a
amostra mais proacutexima a x um vetor np normal agrave S em p e orientado para fora de
S temos que
(x ndash p) np gt 0 x notinV
Ou seja para classificar um ponto em relaccedilatildeo a um modelo verificamos o
produto interno entre a normal em p (surfel mais proacuteximo a x) e o vetor (x - p)
se este produto interno for maior que zero x natildeo pertence ao volume V e seraacute
classificado como fora senatildeo seraacute classificado como dentro De maneira
ainda mais informal se a normal em p apontar para a direccedilatildeo oposta a x x seraacute
classificado como dentro se apontar para x x seraacute classificado como fora
A Figura 7 mostra a Regra 2
Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 32
Figura 7 Para classificar o ponto x encontra-se o surfel p (com normal np) mais proacuteximo
a x Se o produto interno entre np e (x ndash p) for maior que zero entatildeo x eacute classificado como
fora senatildeo seraacute classificado como dentro
A validade da Regra 2 eacute discutida na Seccedilatildeo 44 Uma das restriccedilotildees
teoacutericas para garantir-lhe a validade eacute que a superfiacutecie seja suave
Cada um dos dois meacutetodos daacute um tratamento diferente para o uso desta
regra Pauly usa a regra diretamente encontrando o surfel mais proacuteximo a um
ponto e classificando este ponto a partir deste surfel Ele utiliza tambeacutem a
representaccedilatildeo impliacutecita MLS (Moving Least Squares [18]) para casos em que a
Regra 2 poderia falhar e para tratamento de interseccedilotildees [3] Seu meacutetodo vale
para modelos soacutelidos ou natildeo soacutelidos O meacutetodo de Adams e Dutreacute [2] utiliza
octrees [1] criando uma classificaccedilatildeo dos noacutes da octree a partir desta Regra 2
Os pontos satildeo entatildeo classificados de acordo com o noacute da octree que o conteacutem
Este segundo meacutetodo aplica-se somente a modelos soacutelidos Os dois meacutetodos
seratildeo descritos em detalhes nas seccedilotildees abaixo
Como um surfel eacute considerado um disco podemos dizer que surfels de
dois modelos diferentes podem se intersectar A interseccedilatildeo destes dois surfels
corresponde agrave interseccedilatildeo destes dois discos Estes surfels geram problemas
para visualizaccedilatildeo se forem acrescentados ao resultado sem um tratamento
especiacutefico apresentaratildeo artefatos natildeo desejaacuteveis na renderizaccedilatildeo do modelo
resultado (Figura 8) se natildeo forem acrescentados ao resultado deixaratildeo buracos
no modelo
Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 33
Figura 8 [2] -Interseccedilatildeo de duas esferas agrave esquerda sem nenhum tratamento de interseccedilatildeo agrave direita apoacutes o tratamento de interseccedilatildeo
Aleacutem disso nem sempre esta interseccedilatildeo forma uma superfiacutecie suave
Esta interseccedilatildeo pode formar uma aresta viva (seccedilatildeo 4223) gerando
problemas tambeacutem para o uso da Regra 2 que eacute vaacutelida apenas para superfiacutecies
suaves Eacute necessaacuterio entatildeo fazer um tratamento desta superfiacutecie de interseccedilatildeo
(formada por surfels originados de diferentes modelos) O tratamento de cada
um dos meacutetodos para este caso seraacute tambeacutem abaixo apresentado
42 Meacutetodo de Adams e Dutreacute
O meacutetodo aplica-se somente a modelos soacutelidos Para determinaccedilatildeo dos
elementos da aqui chamada Regra 1 (seccedilatildeo 41) este meacutetodo utiliza uma octree
[1] que subdivide o espaccedilo do modelo em trecircs fora dentro ou no contorno do
modelo Estes espaccedilos satildeo determinados pela classificaccedilatildeo dos noacutes da octree a
partir da Regra 2 Tambeacutem eacute usado o meacutetodo TINN - Triangle Inequality Nearest
Neighbour [19] - para otimizar a pesquisa dentro do noacute A seguir descrevemos o
modelo usado neste meacutetodo apresentando os dados associados aos pontos o
tipo de distribuiccedilatildeo e o algoritmo que realiza as operaccedilotildees
421 Modelo por Pontos em Adams e Dutreacute
Os surfels neste meacutetodo contecircm as seguintes informaccedilotildees posiccedilatildeo do
surfel xs orientaccedilatildeo do surfel ns e raio de alcance do surfel rs O surfel pode ser
pensado como um disco ortogonal a ns com centro xs e raio rs O raio eacute
escolhido de tal forma que a projeccedilatildeo dos discos no plano da imagem se
sobreponham
Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 34
Os objetos representados satildeo soacutelidos A distribuiccedilatildeo dos surfels eacute
uniforme embora o algoritmo natildeo exija esta condiccedilatildeo Para cada soacutelido eacute
definido um rmax = Max rs o raio de alcance do maior surfel pertencente agrave
superfiacutecie do soacutelido Como o raio eacute escolhido de tal forma que a projeccedilatildeo dos
discos no plano da imagem se sobreponham o controle da amostragem eacute
entatildeo ligado agrave renderizaccedilatildeo
422 Algoritmo de Operaccedilotildees Booleanas
Utilizando objetos modelados da forma descrita acima o meacutetodo realiza
operaccedilotildees de uniatildeo interseccedilatildeo e diferenccedila com modelos soacutelidos Supondo dois
modelos soacutelidos S1 e S2 O algoritmo pode ser dividido nas seguintes etapas
Criaccedilatildeo de uma octree para cada modelo Teste Dentro-Fora Tratamento da
interseccedilatildeo Estas etapas satildeo apresentadas nas proacuteximas seccedilotildees
4221 Criaccedilatildeo de uma octree para cada modelo
Eacute criada uma octree [1] para cada modelo A criaccedilatildeo de uma octree eacute feita
da seguinte forma
Gera-se a ldquoCaixa envolventerdquo caixa alinhada com os eixos que conteacutem
todo o modelo A ldquoCaixa envolventerdquo corresponde ao noacute raiz da octree Este noacute
conteacutem inicialmente todos os surfels do modelo Em seguida o noacute raiz eacute
dividido em oito noacutes filhos Os surfels satildeo distribuiacutedos entre estes oito noacutes Cada
um deles caso contenha surfels eacute dividido novamente em 8 filhos e seus surfels
satildeo redistribuiacutedos entre eles Este processo eacute repetido recursivamente enquanto
o nuacutemero de surfels do noacute for maior que zero ou ateacute uma profundidade maacutexima
preacute-definida da octree ser alcanccedilada
Cada noacute da octree deve ser classificado O objetivo desta classificaccedilatildeo eacute
determinar que parte da octree estaacute dentro do modelo e que parte estaacute fora Os
noacutes da octree satildeo entatildeo classificados como ldquodentrordquo ldquoforardquo e ldquocontornordquo
Podemos ilustrar esta classificaccedilatildeo em 2D a Figura 9 mostra uma quadtree
classificada
Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 35
Figura 9-Um objeto representado por pontos com suas normais e sua quadtree correspondente classificada os noacutes cinza claro estatildeo dentro do modelo noacutes cinza mais escuro estatildeo fora do modelo e noacutes com cinza intermediaacuterio satildeo noacutes cheios noacutes que conteacutem pontos
O noacutes que conteacutem surfels satildeo classificados como ldquocontornordquo Para
classificar um noacute vazio existem trecircs casos
o noacute vazio tem apenas um vizinho-irmatildeo natildeo vazio
o noacute vazio tem mais de um vizinho-irmatildeo natildeo vazio
o noacute vazio natildeo tem vizinhos-irmatildeos natildeo vazios
No primeiro caso o noacute vazio eacute classificado pelo seu vizinho natildeo vazio No
segundo caso considera-se qualquer um dos vizinhos natildeo vazios No terceiro
caso classifica-se primeiro os noacutes vizinhos e eacute dada a mesma classificaccedilatildeo para
o noacute vazio Como cada noacute natildeo folha de uma octree tem pelo menos um noacute filho
natildeo vazio sempre pode ser feita a classificaccedilatildeo dos noacutes vazios A classificaccedilatildeo
eacute feita da seguinte forma dentre os surfels do vizinho-irmatildeo escolhido encontra-
se o surfel mais proacuteximo ao noacute a ser classificado Se a normal deste surfel
aponta para o noacute vazio a ser classificado entatildeo ele eacute classificado como ldquoforardquo
Se a normal aponta no sentido contraacuterio entatildeo ele eacute classificado como ldquodentrordquo
De maneira mais formal sejam cv e cc coordenadas dos centros do noacute vazio e
do noacute contorno respectivamente Seja s o surfel mais proacuteximo ao noacute vazio e ns
a normal em s Se ( cv - cc )٠ ns gt 0 ( produto interno entre a normal em s e o
vetor cv - cc for maior que zero ) o noacute vazio seraacute classificado como ldquoforardquo
Senatildeo seraacute classificado como ldquodentrordquo
Em geral os noacutes ldquocontornordquo satildeo subdivididos em trecircs partes uma que estaacute
fora do modelo uma que estaacute dentro do modelo e uma terceira que conteacutem os
surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo de dois planos paralelos que
Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 36
dividem o noacute Para determinar estes planos calcula-se o vetor nm igual agrave
meacutedia das normais dos surfels do noacute nm = sum ns sum ns onde ns eacute a normal de
cada surfel do noacute
Em seguida encontra-se o surfel com maior produto interno entre a sua
normal e a normal meacutedia d1=Max(nm ٠ ns) Este surfel juntamente com a normal
meacutedia define um dos planos Encontra-se tambeacutem o surfel com menor produto
interno entre a sua normal e a normal meacutedia d2=Min(nm ٠ ns) Este surfel
juntamente com a normal meacutedia define o outro plano A Figura 10 mostra a
divisatildeo de um noacute de uma quadtree nas trecircs partes dentro do modelo fora do
modelo e no ldquocontornordquo
Esta subdivisatildeo aplica-se apenas a noacutes que conteacutem surfels cujas direccedilotildees
natildeo variem em mais de 90 graus Caso isso ocorra ele natildeo seraacute subdividido Ou
seja se um noacute possuir dois vetores normais (de dois surfels diferentes) que
formem um acircngulo maior que 90 graus ele natildeo seraacute subdividido
Figura 10 [2] -Divisatildeo de noacute de contorno a parte agrave esquerda estaacute fora do modelo a parte agrave direita estaacute dentro do modelo e a faixa intermediaacuteria conteacutem os surfels
4222 Teste Dentro-Fora
O Teste Dentro-Fora faz a classificaccedilatildeo dos surfels de um modelo como
ldquodentrordquo ou ldquoforardquo de outro modelo Portanto aplicaremos este mesmo teste duas
vezes uma para o modelo S1 em relaccedilatildeo ao modelo S2 e outra para S2 em
relaccedilatildeo a S1 Vamos mostrar o teste Dentro-Fora para o caso da classificaccedilatildeo
dos surfels do modelo S1 em relaccedilatildeo a S2
Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 37
No item anterior foram criadas duas octrees uma para o modelo S1 e
outra para o modelo S2 Chamemos de A e B as octrees de S1 e S2
respectivamente Para classificar S1 em relaccedilatildeo a S2 inicialmente eacute feita uma
avaliaccedilatildeo da posiccedilatildeo de A em relaccedilatildeo a B A e B podem estar nas seguintes
situaccedilotildees
- A natildeo intersecta B
- A intersecta apenas noacutes ldquoforardquo de B
- A intersecta apenas noacutes ldquodentrordquo de B
- A intersecta noacutes ldquoforardquo e noacutes ldquodentrordquo de B
Para testar estas situaccedilotildees os noacutes satildeo aumentados de rmax o raio do
maior surfel do modelo soacutelido Isto eacute feito para compensar o fato de que o surfel
natildeo eacute apenas um ponto mas sim considerado como um disco
No primeiro e no segundo caso todos os surfels de A satildeo classificados
como ldquoforardquo No terceiro caso todos os surfels de A satildeo classificados como
ldquodentrordquo
No quarto caso temos que percorrer a octree A Comeccedilando pelo noacute raiz
percorre-se os filhos deste noacute Para cada filho os quatro testes acima satildeo feitos
Se o noacute filho encontra-se em um dos trecircs primeiros casos a classificaccedilatildeo eacute dada
como foi citada acima Se um filho estaacute no quarto caso e natildeo eacute um noacute folha
repete-se recursivamente o mesmo procedimento para seus filhos ateacute encontrar-
se um noacute folha Para um noacute que estaacute no quarto caso e eacute folha percorre-se a lista
de surfels que este noacute conteacutem classificando cada um destes surfels Seja sa um
surfel desta lista Para este caso percorre-se a octree B para classificar sa
Primeiramente encontramos o noacute de B que conteacutem sa Se este noacute de B foi
dividido testa-se de acordo com esta divisatildeo do noacute se o surfel sa estaacute na parte
do noacute que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se sa estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo se sa estaacute na parte
intermediaacuteria ou se o noacute de B natildeo foi subdividido em planos encontra-se sb que
eacute o surfel pertencente a este noacute de B que estaacute mais proacuteximo de sa sa seraacute
entatildeo classificado de acordo com sb Se ( sa - sb )٠ nb gt 0 sa eacute classificado
como ldquoforardquo senatildeo eacute classificado como ldquodentrordquo Se os discos de sb e sa se
intersectam sa eacute marcado como interseccedilatildeo Para encontrar sb o algoritmo
implementa o meacutetodo TINN ndash Triangle Inequality Nearest Neighbour [19]
Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 38
4223 Tratamento da interseccedilatildeo
Os surfels de A que intersectam surfels de B satildeo classificados como
ldquointerseccedilatildeordquo Se eles natildeo forem incluiacutedos no modelo resultado o soacutelido resultado
teraacute buracos Se eles forem incluiacutedos sem algum tratamento eles natildeo
representaratildeo adequadamente a regiatildeo Em geral o surfel sa (um surfel
ldquointerseccedilatildeordquo de A) eacute dividido em dois pelo plano que conteacutem o surfel sb (surfel de
B que sa intersecta) uma parte que estaacute fora de B e outra que estaacute dentro de B
Dependendo da operaccedilatildeo que estaacute sendo realizada vamos querer manter uma
destas partes do surfel sa no modelo resultado Seja xa a posiccedilatildeo do surfel sa e o
surfel sa uma circunferecircncia de centro xa e raio ra igual ao raio de alcance de sa
O plano que conteacutem o surfel sb define uma corda desta circunferecircncia como
mostra a Figura 11 O surfel sa seraacute substituiacutedo por um surfel menor que
ultrapassa esta corda de uma distacircncia e definida pelo usuaacuterio Para cobrir
completamente a interseccedilatildeo seratildeo adicionados surfels menores que cruzam a
corda de interseccedilatildeo
Figura 11 -Interseccedilatildeo do surfel s e do plano que passa pelo surfel t o surfel mais proacuteximo a s O surfel s eacute substituiacutedo por trecircs surfels menores
Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 39
O tratamento de interseccedilatildeo proposto por Adams e Dutreacute [2] natildeo soacute evita
os buracos mas tambeacutem cria uma forma de renderizaccedilatildeo de arestas vivas A
colocaccedilatildeo de vaacuterios pequenos surfels na regiatildeo da interseccedilatildeo permite esta
correta renderizaccedilatildeo das ldquoarestas vivasrdquo Desta forma o problema das arestas
vivas eacute resolvido na modelagem (Figura 12) A vantagem de se resolver o caso
na modelagem eacute que natildeo eacute necessaacuterio fazer um tratamento especial na
renderizaccedilatildeo para que mostre esta aresta viva Diferente do tratamento feito
em Pauly (seccedilatildeo 431) que resolve esta questatildeo em tempo de renderizaccedilatildeo
Aleacutem disso o tratamento resolve alguns casos onde a Regra 2 poderia falhar
(veja em Validade da Regra 2-seccedilatildeo 44)
Figura 12 [2] -Agrave direita eacute mostrado o resultado do tratamento de interseccedilatildeo para o caso de Arestas Vivas do objeto agrave esquerda
43 Meacutetodo de Pauly
O meacutetodo aplica-se a objetos soacutelidos e natildeo soacutelidos Os modelos podem ser
obtidos a partir de diferentes entradas como nuvem de pontos irregulares ou por
meio de scanners 3D Cria um modelo hiacutebrido destes objetos usa o modelo por
pontos juntamente com a representaccedilatildeo impliacutecita Moving Least Squares - MLS
[18] Realiza operaccedilotildees booleanas com pontos e utiliza adicionalmente MLS
para alguns casos de classificaccedilatildeo de surfels e no tratamento de interseccedilatildeo A
seguir apresentamos as caracteriacutesticas do modelo por pontos deste meacutetodo e o
algoritmo que realiza as operaccedilotildees
Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 40
431 Modelo em Pauly
O modelo eacute uma estrutura hiacutebrida de pontos com a representaccedilatildeo impliacutecita
Moving Least Squares - MLS [18] Esta estrutura eacute usada para fazer operaccedilotildees
booleanas e tambeacutem operaccedilotildees de free-form (natildeo abordadas nesta
dissertaccedilatildeo) Para operaccedilotildees booleanas a representaccedilatildeo MLS permite que a
curva de interseccedilatildeo entre os modelos seja reconstruiacuteda e surfels sejam
colocados nesta curva e em alguns casos de classificaccedilatildeo de surfels mostrados
na seccedilatildeo 432 Para este modelo natildeo existem restriccedilotildees quanto agrave forma do
objeto
Os surfels contecircm informaccedilotildees sobre sua posiccedilatildeo e sua normal Aleacutem
disso surfels podem conter informaccedilotildees adicionais como textura cor
propriedades de materiais
A distribuiccedilatildeo dos surfels eacute natildeo-uniforme e a amostragem eacute
aproximadamente adequada (Veja seccedilatildeo 44)
432 Algoritmo de Operaccedilotildees Booleanas
O algoritmo classifica surfels de um modelo como ldquodentrordquo ou ldquoforardquo de
outro modelo Antes de colocarmos como eacute feita esta classificaccedilatildeo devemos
acrescentar que Pauly estende esta classificaccedilatildeo para modelos que natildeo satildeo
soacutelidos Ou seja mesmo um modelo natildeo soacutelido divide o espaccedilo da cena (espaccedilo
em que se encontra o modelo) em dois sub-espaccedilos dentro ou fora do modelo
Pauly faz esta subdivisatildeo da seguinte forma
Como a superfiacutecie que determina o modelo eacute orientada (conteacutem vetores
normais agrave superfiacutecie que apontam para ldquoforardquo do modelo) Pauly considera que
um modelo natildeo soacutelido divide o espaccedilo em dois sub-espaccedilos um ldquoforardquo do
modelo (os vetores normais apontam para este sub-espaccedilo) e um que estaacute
ldquodentrordquo do modelo (os vetores normais apontam para direccedilatildeo oposta a este sub-
espaccedilo) Por exemplo um plano eacute representado como um conjunto de surfels
contidos num determinado espaccedilo geomeacutetrico plano π Cada surfel conteacutem um
vetor normal direcionado Este modelo divide entatildeo o espaccedilo em dois sub-
espaccedilos o sub-espaccedilo que eacute apontado por estes surfels (considerado ldquoforardquo do
modelo) e o sub-espaccedilo que estaacute na direccedilatildeo oposta (considerado ldquodentrordquo do
modelo) Desta forma ele aplica as classificaccedilotildees de ldquodentrordquo e ldquoforardquo de um
modelo tambeacutem a modelos natildeo soacutelidos A partir desta consideraccedilatildeo as
Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 41
operaccedilotildees booleanas satildeo realizadas com os modelos natildeo soacutelidos da mesma
forma que com os modelos soacutelidos
Para determinar esta classificaccedilatildeo (dentro ou fora do modelo) Pauly utiliza
a Regra 2 Para pesquisa do surfel mais proacuteximo o meacutetodo usa a estrutura Kd-
tree [16] e tambeacutem o algoritmo ANN [16] No entanto o meacutetodo apresenta uma
restriccedilatildeo da Regra 2 ela soacute deve ser usada para classificaccedilotildees de pontos x se
a distacircncia x-p for maior que o espaccedilamento da amostragem local ηp em p
Este espaccedilamento da amostragem local ηp em p eacute um caacutelculo aproximado da
distacircncia meacutedia entre os surfels vizinhos a p Se x estaacute muito proacuteximo agrave
superfiacutecie a classificaccedilatildeo pode falhar Neste caso ele calcula o ponto exato de
S mais proacuteximo a x usando a projeccedilatildeo MLS (ldquoMoving Least Squaresrdquo)
Por questotildees de melhoria de desempenho utiliza-se o fato de que sendo
Ωp (x) a classificaccedilatildeo do ponto x em relaccedilatildeo agrave amostragem P tem-se que Ωp (x)
= Ωp (xrsquo) para todos os pontos de xrsquo que estatildeo dentro da esfera de centro x e
raio igual a x-p - ηp (onde p eacute o surfel mais proacuteximo e ηp eacute o espaccedilamento
local da amostragem em p acima citado) Ou seja sendo x um ponto qualquer p
o surfel mais proacuteximo a x ηp eacute o espaccedilamento local da amostragem em p se
desenharmos uma esfera com centro x e raio igual a x-p - ηp temos que
todos os pontos xrsquo que estatildeo dentro da esfera teratildeo a mesma classificaccedilatildeo de x
Desta forma o nuacutemero de vezes que a classificaccedilatildeo eacute feita (pesquisando-se o
surfel mais proacuteximo ao ponto e usando a Regra 2) diminui em ateacute 90 Assim
em geral a classificaccedilatildeo de um surfel eacute obtida a partir do seu surfel vizinho
Dados
S1 a superfiacutecie MLS de contorno que define o modelo A
S2 a superfiacutecie MLS de contorno que define o modelo B
P1 o conjunto de surfels que representa a superfiacutecie S1
P2 o conjunto de surfels que representa a superfiacutecie S2
Ωp1 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P1
Q1 o subconjunto de P1 que vai compor o resultado
Ωp2 (x) a classificaccedilatildeo do ponto p em relaccedilatildeo a uma amostragem P2
Q2 o subconjunto de P2 que vai compor o resultado
Os conjuntos Q1 e Q2 satildeo obtidos por meio da Tabela 1 mostrada abaixo
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001
Operaccedilotildees Booleanas com Pontos 42
Tabela 1 Classificaccedilatildeo para operaccedilotildees booleanas
Para o tratamento de interseccedilatildeo neste meacutetodo satildeo computados pontos
que caem exatamente na curva de interseccedilatildeo e estes satildeo acrescentados ao
modelo resultado Estes pontos satildeo determinados de forma que a densidade da
amostragem vai crescendo agrave medida que os surfels se aproximam da curva de
interseccedilatildeo e convergem para este ponto de interseccedilatildeo como mostra a Figura
13
(a) (b) (c)
Figura 13 - Os novos surfels satildeo colocados exatamente na curva de interseccedilatildeo
e convergem para o ponto de interseccedilatildeo
A Figura 14 mostra o processo de encontrar os surfels que caem nesta
curva de interseccedilatildeo Inicialmente satildeo encontrados todos os pontos de Q1 e Q2
que estatildeo proacuteximos agrave curva de interseccedilatildeo por meio da funccedilatildeo de distacircncia do
operador de projeccedilatildeo MLS Em seguida procura-se todos os pares mais
proacuteximos (q1 є Q1 q2 є Q2 ) e computa-se o ponto q na curva de interseccedilatildeo da
seguinte forma (veja a Figura 14)Seja r o ponto na linha de interseccedilatildeo dos dois
planos tangentes em q1 e q2 e que estaacute mais proacuteximo a estes dois pontos isto eacute
que minimiza a distacircncia ||r-q1|| + ||r-q2|| r eacute a primeira aproximaccedilatildeo de q e agora
pode ser projetado sobre S1 e S2 para obter dois novos pontos de partida q1rsquo e q2
rsquo
para a iteraccedilatildeo Este procedimento pode ser repetido iterativamente ateacute que os
pontos q1 e q2 convirjam ao ponto q na curva de interseccedilatildeo Normalmente este
processo requer menos de trecircs iteraccedilotildees
Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 43
(a) (b)
(c)
Figura 14 (a) Suponhamos a reta que eacute a interseccedilatildeo do plano tangente a S1 em q1 e o
plano tangente a S2 em q2 O ponto r eacute o ponto desta reta que estaacute mais proacuteximo a q1 e
q2 (b) r eacute projetado sobre S1 e S2 obtendo-se q1acute e q2acute dois novos pontos de partida
para nova iteraccedilatildeo (c) A nova iteraccedilatildeo gera r que eacute uma aproximaccedilatildeo melhor de q
Pauly faz o tratamento de arestas vivas em tempo de renderizaccedilatildeo Ele
faz uma alteraccedilatildeo no renderizador Marca os surfels de interseccedilatildeo e ao
renderizaacute-los satildeo cortados para gerar uma aresta viva
44 Validade da Regra 2
Os dois meacutetodos analisados nesta dissertaccedilatildeo utilizam a seguinte regra
para a classificaccedilatildeo de um surfel
Regra 2 dado um volume V determinado por uma superfiacutecie de contorno
S uma amostragem P da superfiacutecie S um ponto x qualquer um ponto p є P que
eacute a amostra mais proacutexima a x um vetor ny normal a S em p e orientado para
fora de S temos que (x ndash p) np gt 0 x notinV
Em [16] eacute colocado que esta regra eacute tirada da seguinte propriedade da
geometria diferencial (aqui chamada Propriedade 1)
Propriedade 1 Dado um volume V determinado por uma superfiacutecie de
contorno S contiacutenua e duplamente diferenciaacutevel um ponto x qualquer um ponto
Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 44
y є S que eacute o ponto de S mais proacuteximo a x um vetor ny normal a S em y e
orientado para fora de S temos que (x ndash y) ny gt 0 x notinV
A Figura 15 ilustra esta propriedade
Figura 15 Para verificar se o ponto x estaacute fora de um contorno C encontra-se o ponto y
de C Se o produto interno entre a normal em y e o vetor que liga y a x for maior que
zero entatildeo x estaacute fora de C senatildeo estaacute dentro de C
Pauly assume que tendo uma amostragem P da superfiacutecie S podemos
usar a Propriedade 1 substituindo y por p o surfel mais proacuteximo ao ponto x (x ndash
p) np gt 0 x notinV (Regra 2) Esta amostragem P em seu trabalho eacute
(aproximadamente) uma ldquoamostragem adequadardquo Tambeacutem seu tratamento de
interseccedilatildeo cria uma aproximaccedilatildeo dela (seccedilatildeo 43) Empiricamente a
ldquodiscretizaccedilatildeo da propriedaderdquo eacute vaacutelida a partir desta suposiccedilatildeo Mas isso natildeo foi
demonstrado teoricamente em seu trabalho
Pauly coloca em [16] que natildeo existe ainda uma teoria matemaacutetica rigorosa
de amostragem anaacuteloga a teoria de Fourier para superfiacutecies discretas
A melhor aproximaccedilatildeo teoacuterica para esta aacuterea eacute o uso do Eixo Medial que
foi colocado em [10] Vamos descrever este trabalho brevemente nesta seccedilatildeo
Este trabalho apresenta um algoritmo de reconstruccedilatildeo de superfiacutecie que parte de
uma amostragem adequada (abaixo definida) de pontos e obteacutem uma malha
que eacute topologicamente equivalente agrave superfiacutecie do objeto e agrave medida que a
densidade da amostragem cresce a saiacuteda converge para esta superfiacutecie
Para definir amostragem adequada o trabalho parte do conceito de Eixo
Medial
Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 45
ldquoEixo Medialrdquo de uma superfiacutecie 2D posicionada no R3 eacute o conjunto
(fechado) de pontos pi para os quais buscando-se o ponto da superfiacutecie que
estaacute mais proacuteximo a pi mais de um ponto pertencentes a esta superfiacutecie satildeo
encontrados A Figura 16 abaixo ilustra o Eixo Medial em 2D
Figura 16 [10] As curvas de cor mais clara satildeo o Eixo Medial da curva em preto
Em duas dimensotildees os veacutertices de Voronoi de uma amostragem densa
aproximam o ldquoEixo Medialrdquo da amostragem (mas esta propriedade natildeo se
estende a 3D) A Figura 17 mostra o Eixo Medial em 3D
Figura 17 [10] Em 3D geralmente o Eixo Medial eacute uma superfiacutecie 2D (em cor mais
clara) Aqui o quadrado eacute o Eixo Medial da superfiacutecie transparente que o contorna
Podemos definir agora a amostragem adequada da seguinte forma
Supondo uma superfiacutecie suave que quer dizer uma 2-manifold duplamente
diferenciaacutevel posicionada no R3 uma ldquoamostragem adequadardquo desta superfiacutecie eacute
aquela na qual a densidade da amostragem eacute (pelo menos) inversamente
proporcional agrave distacircncia ao ldquoEixo Medialrdquo A Figura 18 mostra uma amostragem
adequada
Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Operaccedilotildees Booleanas com Pontos 46
Figura 18 [10] A figura mostra o diagrama de Voronoi de uma amostragem de pontos S
Da mesma forma que o a amostragem aproxima a curva os veacutertices de Voronoi
aproximam o Eixo Medial
Na praacutetica na reconstruccedilatildeo da superfiacutecie uma aproximaccedilatildeo deste ldquoEixo
Medialrdquo eacute computada (devido agrave dificuldade de computaacute-lo exatamente e em
alguns casos ateacute impossibilidade)
Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Melhorias Propostas 47
5 Melhorias Propostas
No capiacutetulo 4 apresentamos dois meacutetodos que realizam operaccedilotildees
booleanas em modelos por pontos o meacutetodo de Adams e Dutreacute [2] e o meacutetodo
de Pauly[3] Para esta dissertaccedilatildeo usamos o meacutetodo de Adams e Dutreacute [2] e
propomos as seguintes melhorias
- Alteramos o momento em que eacute feita a classificaccedilatildeo da octree Fazemos
esta classificaccedilatildeo durante a sua criaccedilatildeo Os noacutes filhos de um noacute pai P qualquer
satildeo classificados logo apoacutes a criaccedilatildeo de todos estes filhos de P
independentemente do restante da octree ter sido criada Isso pode ser feito
porque a octree eacute construiacuteda na ordem raiz-esquerda-direita (preorder
traversal) e portanto apoacutes todos os filhos de um noacute pai serem criados a parte
necessaacuteria da octree para a classificaccedilatildeo destes filhos jaacute estaacute criada
- A classificaccedilatildeo da octree eacute otimizada classificando-se os cantos dos seus
noacutes como dentro ou fora do modelo Na classificaccedilatildeo de um noacute n1 a partir de seu
vizinho n2 se os cantos que satildeo comuns a n1 e n2 tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute Assim diminuiacutemos o nuacutemero de pesquisas
pelo surfel mais proacuteximo que eacute a parte criacutetica da classificaccedilatildeo dos noacutes da octree
em termos de tempo de processamento
- Acrescentamos um valor miacutenimo (maior que zero) para o nuacutemero de
surfels contidos em um noacute que eacute uma das condiccedilotildees de parada na criaccedilatildeo da
octree Verificamos que desta forma diminui-se a chance de erro na classificaccedilatildeo
de partes criacuteticas como ldquoarestas vivasrdquo
Uma comparaccedilatildeo entre a nossa implementaccedilatildeo e a de Pauly tambeacutem seraacute
feita no capiacutetulo 6
51 Descriccedilatildeo do algoritmo
O algoritmo implementado para esta dissertaccedilatildeo baseado no meacutetodo de
Adams e Dutreacute [2] pode ser dividido nas seguintes partes Criaccedilatildeo e
classificaccedilatildeo de uma octree para cada modelo Teste DentroFora Criaccedilatildeo do
modelo resultado Natildeo foi implementado tratamento especial algum de
interseccedilatildeo para o nosso plugin As proacuteximas seccedilotildees apresentam estas partes
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001
Melhorias Propostas 48
511 Criaccedilatildeo e classificaccedilatildeo de uma octree para cada modelo
As ideacuteias do algoritmo satildeo aqui ilustradas em 2D mas a extensatildeo delas
para 3D eacute feita facilmente
Para cada modelo a octree eacute criada e classificada da seguinte forma
Figura 19-Quadtree classificada Os noacutes mais escuros estatildeo fora do modelo os mais claros dentro e os em tom intermediaacuterio satildeo noacutes de contorno
Gera-se uma ldquocaixa envolventerdquo do modelo contendo todos os surfels e
cria-se o noacute raiz da octree que corresponde a esta ldquocaixa envolventerdquo Este noacute
raiz eacute subdividido em oito filhos e seus surfels satildeo distribuiacutedos entre eles Ao
inveacutes de testarmos os valores de xy e z para cada surfel a fim de determinar
para qual filho ele iraacute utilizamos listas auxiliares Primeiro os surfels satildeo
subdivididos em dois grupos pelos valores de x e armazenados em uma lista
auxiliar Em seguida cada uma das listas eacute subdividida pelo valor de y e as
quatro listas obtidas seratildeo subdivididas pelo valor de z Ao final teremos 8 listas
de surfels cada uma delas pertencente a um filho
Cada noacute seraacute entatildeo novamente subdividido enquanto contiver um nuacutemero
de surfels gt nmin (valor preacute-definido) ou enquanto a profundidade da aacutervore lt pmax
(valor preacute-definido) Na figura 19 pmax = 3 e nmin = 3
Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Melhorias Propostas 49
Figura 20-O noacute cheio eacute dividido em trecircs partes agrave esquerda a regiatildeo estaacute dentro do modelo agrave direita estaacute fora e entre as duas linhas que dividem o noacute estaacute a regiatildeo que conteacutem os surfels
Os noacutes cheios recebem um tratamento especial Eles satildeo subdivididos em
trecircs partes da seguinte forma uma que estaacute fora do modelo outra que estaacute
dentro e uma que conteacutem os surfels Esta subdivisatildeo eacute feita por meio da criaccedilatildeo
de dois planos paralelos que dividem o noacute Para determinar estes planos
calcula-se o vetor nm igual agrave meacutedia das normais dos surfels do noacute nm = sum ns
sum ns onde ns eacute a normal de cada surfel do noacute Em seguida encontra-se o
surfel com maior produto interno entre a sua normal e a normal meacutedia
d1=Max(nm ٠ ns) Este surfel juntamente com a normal meacutedia define um dos
planos Encontra-se tambeacutem o surfel com menor produto interno entre a sua
normal e a normal meacutedia d2=Min (nm ٠ ns) Este surfel juntamente com a normal
meacutedia define o outro plano (Figura 20) Se o noacute conteacutem surfels de superfiacutecies de
orientaccedilotildees diferentes ele natildeo seraacute subdividido ou seja os planos coincidiratildeo
com os planos que delimitam o proacuteprio noacute Este teste foi implementado da
seguinte forma escolhe-se um surfel qualquer do noacute Calcula-se o produto
interno entre a normal deste surfel e as outras normais dos outros surfels deste
noacute Se algum produto interno for menor que zero este noacute natildeo seraacute subdividido
Apoacutes a etapa de subdivisatildeo classificam-se os oito cantos deste noacute como
dentro ou fora do modelo por meio da classificaccedilatildeo de um ponto que
descreveremos na sub-seccedilatildeo 5111
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001
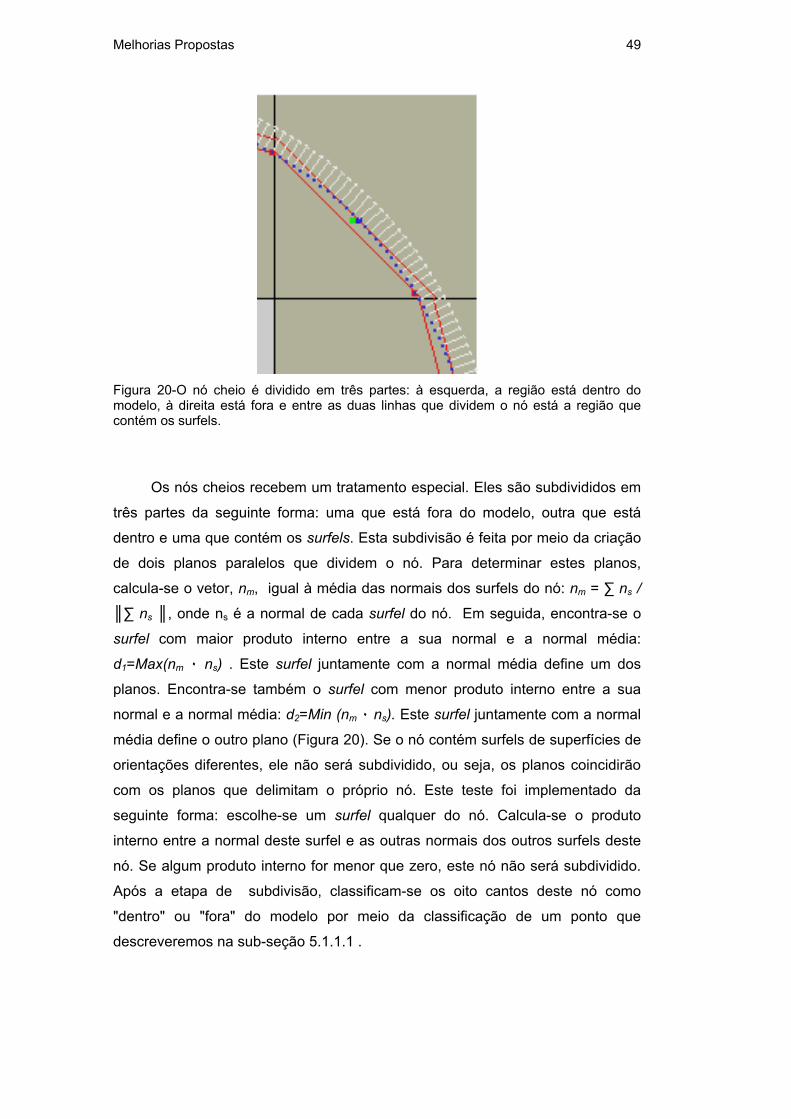
Melhorias Propostas 50
a b
c d
Figura 21-O noacute a eacute classificado pelo noacute c o noacute d tambeacutem eacute classificado pelo noacute c a classificaccedilatildeo do noacute a eacute propagada para o noacute b
Jaacute os noacutes vazios da octree seratildeo classificados como ldquodentrordquo ou ldquoforardquo do
modelo da seguinte forma cada noacute folha vazio eacute classificado a partir de um de
seus irmatildeos vizinhos adjacentes Se ele possuir um vizinho adjacente cheio ele
seraacute classificado por este vizinho se natildeo possuir os vizinhos adjacentes seratildeo
classificados primeiro e ele teraacute esta mesma classificaccedilatildeo (Figura 21) Como tem
que existir sempre pelo menos um noacute cheio entre os filhos de um noacute pai entatildeo
sempre esta classificaccedilatildeo poderaacute ser feita Com a classificaccedilatildeo de todos os
filhos tem-se tambeacutem a classificaccedilatildeo dos cantos do noacute pai
Mf03c003fmx a b
Figura 22-Os cantos a e b do noacute cheio possuem a mesma classificaccedilatildeo fora do modelo Esta classificaccedilatildeo foi dada ao noacute vazio adjacente
Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Melhorias Propostas 51
Para classificar um noacute vazio por meio de um noacute cheio verificam-se os
cantos comuns destes dois noacutes se todos os cantos tiverem a mesma
classificaccedilatildeo esta seraacute dada ao noacute vazio (Figura 22) Se houver classificaccedilotildees
diferentes escolhe-se o surfel do noacute cheio mais proacuteximo ao noacute vazio faz-se o
produto interno entre a normal deste surfel e o vetor que liga o centro do noacute
cheio ao centro do noacute vazio (ou o vetor que liga o surfel ao centro do noacute vazio)
Se o produto interno for maior que zero o noacute eacute classificado como ldquoforardquo senatildeo eacute
classificado como ldquodentrordquo Para encontrar o surfel (pertencente a um noacute cheio)
mais proacuteximo ao noacute vazio existem dois casos
- O noacute cheio eacute folha percorre-se toda a lista de surfels e escolhe o surfel
mais proacuteximo da fronteira entre o noacute cheio e o vazio
- O noacute cheio natildeo eacute um noacute folha percorrem-se os filhos do noacute cheio ou seja
esta pesquisa eacute feita descendo na octree a partir do noacute cheio procurando o
surfel mais proacuteximo agrave fronteira do pai com o noacute vazio a ser classificado
Classificando o centro do noacute vazio todo o noacute deve ter a mesma
classificaccedilatildeo pois este noacute natildeo conteacutem surfels Para encontrar o surfel do noacute
vazio mais proacuteximo da fronteira entre o noacute cheio e o vazio basta testar o valor da
coordenada se a fronteira eacute o lado direito do noacute cheio escolhe-se o surfel com
maior coordenada lsquoxrsquo se eacute o lado esquerdo escolhe-se o surfel com menor lsquoxrsquo
se lado superior surfel com maior lsquoyrsquo etc A seguir apresentamos a classificaccedilatildeo
de um ponto qualquer pertencente a um noacute cheio
Figura 23- Quadtree classificada
Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Melhorias Propostas 52
5111 Classificaccedilatildeo de um ponto de um noacute cheio
Figura 24 [2] A normal n eacute a normal meacutedia e os surfels s1 e s2 juntamente com a normal
n definem as retas que dividem o noacute O ponto a estaacute fora do modelo e o ponto b estaacute
dentro do modelo
Para um ponto localizado dentro do noacute faz-se o seguinte teste se o noacute foi
dividido testa-se de acordo com a divisatildeo do noacute se o ponto estaacute na parte do noacute
que estaacute dentro do modelo ele eacute classificado como ldquodentrordquo se o ponto estaacute na
parte que estaacute fora do modelo ele eacute classificado como ldquoforardquo (Figura 24) se o
ponto estaacute na parte que conteacutem os surfels encontra-se o surfel s pertencente ao
noacute mais proacuteximo do ponto e o classifica de acordo com s seja ns a normal em s
cs a coordenada de s cp a coordenada do ponto Se (cp - cs )٠ ns gt 0 o ponto
seraacute classificado como ldquoforardquo Senatildeo seraacute classificado como ldquodentrordquo
Se o noacute natildeo foi dividido em planos esta classificaccedilatildeo a partir do surfel
mais proacuteximo seraacute sempre feita
512 Teste DentroFora
Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Melhorias Propostas 53
Figura 25-Duas circunferecircncias e suas quadtrees correspondentes
O Teste DentroFora classifica os surfels de um modelo como dentro ou
fora de outro modelo ou na sua interseccedilatildeo Este teste foi aqui implementado
exatamente como foi proposto em Adams e Dutreacute [2] exceto que natildeo foi
implementado o meacutetodo TINN - Triangle Inequality Nearest Neighbour [19]
Cada octree eacute percorrida verificando-se se os seus noacutes ou surfels estatildeo dentro
fora ou no contorno do outro modelo (Figura 25) Sejam A e B duas octrees e
queremos classificar a octree A As duas octrees (AB) satildeo percorridas partindo
da raiz
Para cada noacute de A existem quatro casos (Figura 26) Para testar estas
situaccedilotildees os boxes dos noacutes satildeo aumentados de rmax o raio do maior surfel do
modelo Isto eacute feito para compensar o fato de que o surfel natildeo eacute apenas um
ponto mas sim considerado como um disco
Os quatro casos satildeo
Se o noacute de A natildeo intersecta B entatildeo todos os surfels deste noacute satildeo
classificados como fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo fora do modelo
todos os surfels deste noacute satildeo fora
Se o noacute de A intersecta apenas noacutes de B que estatildeo dentro do modelo
todos os surfels deste noacute satildeo dentro
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001
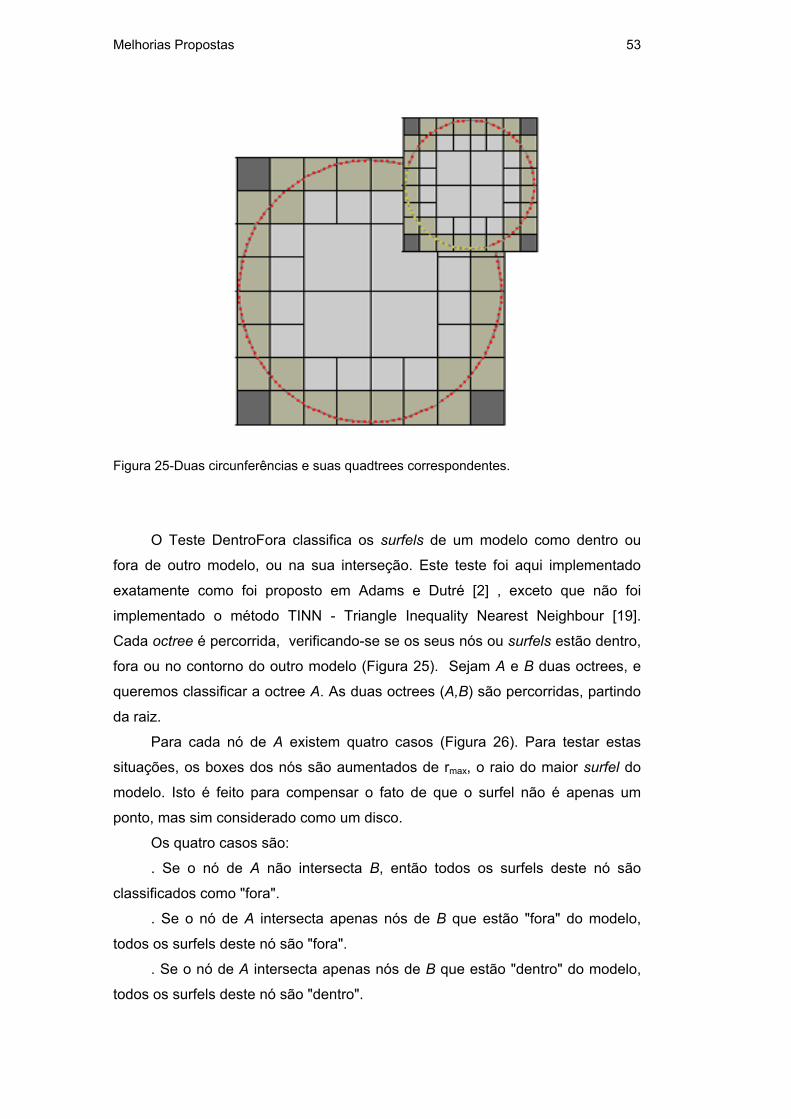
Melhorias Propostas 54
Se o noacute de A intersecta noacutes de B que estatildeo dentro e tambeacutem noacutes de B
que estatildeo fora testa-se se este noacute de A eacute ou natildeo folha Se natildeo for folha
percorre-se os filhos deste noacute de A ateacute encontrar um noacute folha cheio que
intersecta B Para cada surfel sa deste noacute folha de A encontra-se o surfel de B
mais proacuteximo e classifica-se a coordenada de sa da forma apresentada na seccedilatildeo
5111 Seja sb o surfel usado na classificaccedilatildeo de sa Se os discos de sb e sa
se intersectam sa eacute classificado como ldquointerseccedilatildeordquo
(a) (b)
(c) (d)
Figura 26- a modelos natildeo se intersectam b modelo intersecta noacutes fora c modelo intersecta apenas noacutes dentro d modelo intersecta noacutes dentro e noacutes fora
513 Criaccedilatildeo do modelo resultado
Um novo modelo eacute criado com os seguintes surfels (de acordo com a
operaccedilatildeo booleana escolhida pelo usuaacuterio - veja Regra 1 da seccedilatildeo 41)
Uniatildeo - surfels de A que estatildeo fora de B + surfels de B que estatildeo fora de A
Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Melhorias Propostas 55
Interseccedilatildeo - surfels de A que estatildeo dentro de B + surfels de B que estatildeo
dentro de A
Diferenccedila A-B - surfels de A que estatildeo fora de B + surfels de B que estatildeo
dentro de A (com orientaccedilatildeo invertida)
Como natildeo foi implementado tratamento especial algum de interseccedilatildeo para
o nosso plugin os surfels que se intersectam satildeo mantidos no modelo resultado
final sem modificaccedilotildees
Descrito o algoritmo vejamos a seguir a sua implementaccedilatildeo
52 Implementaccedilatildeo
Este algoritmo foi implementado na forma de um plugin para o software
PointShop 3D [11] Este plugin foi desenvolvido na linguagem C e no sistema
operacional Windows
A escolha deste tipo de implementaccedilatildeo permitiu-nos usar o software
PointShop para os testes do algoritmo Estes testes foram feitos com os modelos
disponibilizados para o PointShop [11] Nesta seccedilatildeo apresentaremos o software
PointShop e as principais estruturas de dados usadas em nosso plugin
O Pointshop eacute um software aberto com seu coacutedigo disponiacutevel e preparado
para trabalhar com plugins Eacute um software de ediccedilatildeo de modelos 3D por pontos
Ele permite aleacutem de visualizar o modelo alterar as suas caracteriacutesticas como
cor brilho e fazer mapeamento de textura iluminaccedilatildeo filtragem (Figura 27)
Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Melhorias Propostas 56
Figura 27-Software PointShop 3D com dois modelos carregados na sua cena
Aleacutem disso pode-se criar uma cena com vaacuterios modelos e visualizaacute-los de
qualquer ponto de vista Implementa o virtual trackball para rotacionaacute-los e
transladaacute-los Usa uma iluminaccedilatildeo simples direcional A sua arquitetura eacute
extensiacutevel permite que o usuaacuterio adicione seus proacuteprios componentes ao
sistema Possui trecircs tipos de componentes
ldquoToolsrdquo fornece funcionalidades para ediccedilatildeo interativa de superfiacutecie Satildeo
disponibilizados na ldquotoolbarrdquo
Plugins fornece funcionalidades para processar em um soacute passo
modelos ou partes deles selecionadas Satildeo disponibilizados no menu ldquoPluginsrdquo
Renderes fornece funcionalidades de display para os modelos
Para esta dissertaccedilatildeo foi escolhida a construccedilatildeo do componente Plugin
por adequar-se agrave nossa proposta e ser a mais simples de ser construiacuteda O
PointShop [11] jaacute conteacutem uma tool que executa operaccedilotildees booleanas e
deformaccedilatildeo free-form sobre os modelos carregados na cena usando o meacutetodo
de Pauly [3] apresentado no capiacutetulo 4 O nosso plugin Operaccedilotildees Booleanas
implementa o algoritmo descrito na seccedilatildeo anterior baseado na proposta de
Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Melhorias Propostas 57
Adams e Dutreacute [2] Uma comparaccedilatildeo entre o nosso plugin e a tool de Pauly [3] eacute
feita no capiacutetulo 6
Figura 28-Menu do PointShop com o plugin e as opccedilotildees para operaccedilotildees booleanas
Para se executar o plugin o usuaacuterio precisa carregar dois modelos na
cena do PointShop acionar o plugin informando a operaccedilatildeo que seraacute executada
O plugin executaraacute o algoritmo acima proposto e carregaraacute o resultado na cena
do Pointshop retirando os modelos anteriores
521 Estruturas de Dados
Como vimos o software PointShop [11] trabalha com modelos por pontos
Um modelo deste software descrito na seccedilatildeo 42 conteacutem todas as informaccedilotildees
que o algoritmo proposto em Bart [2] necessita Abaixo relacionamos as
Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Melhorias Propostas 58
principais estruturas de dados do PointShop usadas no plugin e as principais
estruturas de dados do nosso plugin
As principais classes do PointShop usadas no plugin satildeo
Classe Scene
Classe Objects
Classe SurfelColections
Classe Surfel
Classe StatusBar
Classe Transformer
A hierarquia de dados eacute a seguinte a Scene conteacutem vaacuterios Objects os
quais conteacutem SurfelColections Cada SurfelColections conteacutem Surfels que
suportam uma ou mais propriedades tais como cor difusa cor especular
Classe Scene Classe que representa uma cena que conteacutem modelos
Classe Object Um modelo eacute representado pela classe Object que
conteacutem uma SurfelCollection e as matrizes de transformaccedilatildeo para rotaccedilatildeo
escala e translaccedilatildeo Cada Object eacute identificado pelo seu nome que eacute uacutenico na
Scene O meacutetodo getUniqueName retorna um nome uacutenico Cada Object tem sua
proacutepria matriz de transformaccedilatildeo que pode ser modificada com setRotation
rotate setPosition translate setScale e scale Objects podem ser copiados com
copy Objects consiste em um conjunto de surfels os quais podem ser
recuperados pela getSurfelCollection O Object pode ser ativado com
setActiveObject e recuperado com getActiveObject
Objects podem ser adicionados ou removidos com addObject e
removeObject Os Objects podem ser obtidos pela getFirstObject e
getNextObject
Classe SurfelCollection representa o conjunto de surfels de um modelo
Cada surfelcollection consiste em um conjunto de surfels (SurfelInterface) de
tamanho obtido por getNofSurfels Os surfels podem ser recuperados com
getFirstSurfel getCurrentSurfel e getNextSurfel
A SurfelCollection conteacutem um PropertyDescriptor e uma SurfelList
A SurfelList eacute uma lista duplamente encadeada de surfels Possui os
atributos firstSurfel lastSurfel currentSurfel que satildeo ponteiros para uma
SurfelInterface nSurfels que eacute o nuacutemero de Surfels
A SurfelInterface define a API para os surfels que satildeo os menores
elementos que compotildeem um Object Podem ser considerados como pontos com
uma normal que define a orientaccedilatildeo do ciacuterculo (ou elipse) que seraacute desenhado
Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Melhorias Propostas 59
tatildeo logo o surfel seja renderizado Tem como atributos dois ponteiros (next e
prev) para SurfelInterface
PropertyDescriptor consiste em ateacute 32 valores descrevendo quais as
propriedades a SurfelInterface suporta
Classe Surfel classe que representa o surfel
Classe StatusBar classe que imprime mensagens na tela Os plugins
podem mandar mensagens para o usuaacuterio pela StatusBar
Mensagens texto podem ser impressas com showMessage O progresso
de uma operaccedilatildeo pode ser indicado com setProgress ou resetProgress
Classe Transformer representa a transformaccedilatildeo entre sistemas de
coordenadas Esta classe fornece meacutetodos para transformar pontos e vetores
entre os diferentes sistemas de coordenadas do Pointshop
A seguir apresentamos as principais estruturas de dados do plugin
Operaccedilotildees Booleanas
As principais estruturas de dados do plugin satildeo boundingbox tree no
lista_surfel surfel
Boundingbox conteacutem dois pontos 3D que definem uma caixa que conteacutem
o modelo um ponto com menores coordenadas xy e z e outro ponto com
maiores xyz
Tree representa a octree do modelo Cada registro conteacutem um ponteiro
para um noacute e oito ponteiros para as 8 octrees filhas
No representa um noacute da octree Conteacutem os seguintes dados
- localizaccedilatildeo do noacute que eacute o canto inferior esquerdo do noacute
- lista_surfel (preenchida apenas para noacutes folha cheios)
- quantidade de surfels do noacute
- classificaccedilatildeo do noacute como dentro fora ou contorno
- classificaccedilatildeo do noacute em relaccedilatildeo a outro modelo
- indica se o noacute eacute folha ou natildeo
- vetor que eacute a meacutedia das normais dos surfels do noacute
- ponto que eacute a meacutedia das localizaccedilotildees dos surfels do noacute
- surfel que tem (entre todos os surfels do noacute) o maior produto interno
entre a sua normal e a normal meacutedia
- surfel que tem (entre todos os surfels do noacute) o menor produto interno
entre a sua normal e a normal meacutedia
- produto interno maacuteximo e miacutenimo entre as normais dos surfels do noacute e a
normal meacutedia deste noacute
Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Melhorias Propostas 60
- indica se o noacute conteacutem surfels com normais em sentido oposto (produto
interno entre elas eacute menor que zero)
- classificaccedilatildeo dos oito cantos do noacute
lista_surfels lista em que cada registro conteacutem um apontador para um
surfel e um apontador para o proacuteximo registro
surfel representa o surfel da octree Conteacutem a classificaccedilatildeo em relaccedilatildeo a
outro modelo e um ponteiro para o surfel do Poinshop
Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Resultados 61
6 Resultados
Neste capiacutetulo apresentamos os testes realizados com o plugin para o
PointShop implementado para esta dissertaccedilatildeo a comparaccedilatildeo deste plugin com
o plugin de Pauly [3] e a comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute [2] e o
meacutetodo de Pauly [3]
61 Testes
Os testes foram feitos em um PC x86 Family 6 261600 KB de RAM sem
placa graacutefica sistema operacional Windows 2000 O plugin foi implementado na
linguagem C
Os modelos usados para os testes satildeo modelos disponibilizados no
PointShop [11] Vale lembrar que o meacutetodo implementado em nosso plugin eacute
restrito a modelos soacutelidos e portanto foram usados apenas estes modelos
soacutelidos para os testes
O modelo na Figura 29 que eacute um dos modelos disponibilizados no
PointShop [11] foi usado para mostrar o resultado das operaccedilotildees realizadas
pelo plugin implementado nesta dissertaccedilatildeo O modelo Igea eacute um modelo soacutelido
que conteacutem 134345 surfels
Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Resultados 62
Figura 29-Modelo do PointShop Igea
Para realizar as operaccedilotildees este modelo foi carregado na cena do
PointShop duas vezes e um deles colorido de vermelho As Figuras 30 31 32
mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo e diferenccedila
respectivamente Os nuacutemeros de surfels dos modelos resultantes satildeo mostrados
na Tabela 2
Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Resultados 63
Figura 30-Resultado da uniatildeo de duas Igeas
Figura 31-Resultado da interseccedilatildeo de duas Igeas
Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Resultados 64
Figura 32-Resultado da diferenccedila entre duas Igeas
Tabela 2-Nuacutemero de surfels dos modelos resultantes
Observamos que o nuacutemero de surfels dos modelos resultantes estaacute
coerente com as figuras dos seus modelos
Para avaliar o tempo de processamento das operaccedilotildees foram realizados
vaacuterios testes com o objetivo de obter uma meacutedia dos tempos de realizaccedilatildeo de
cada operaccedilatildeo Tambeacutem foram armazenados os tempos da criaccedilatildeo das duas
octrees e da classificaccedilatildeo de todos os surfels dos dois objetos (como dentro ou
fora do outro modelo) Estes testes foram feitos usando o modelo Igea A meacutedia
dos tempos de processamento foi calculada e os resultados satildeo mostrados na
Tabela 3 Verificamos que o maior tempo gasto eacute para criaccedilatildeo das octrees
Verificamos tambeacutem que este resultado apresentado eacute similar ao resultado
verificado empiricamente com o plugin de Pauly [3] Os tempos gastos para
realizar as operaccedilotildees satildeo similares e o maior tempo gasto no plugin de Pauly
tambeacutem eacute para inicializaccedilatildeo de suas estruturas de dados que incluem a kd-tree
Operaccedilatildeo Nuacutemero de surfels do modelo resultado
Uniatildeo 189715
Interseccedilatildeo 72225
Diferenccedila 134552
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001
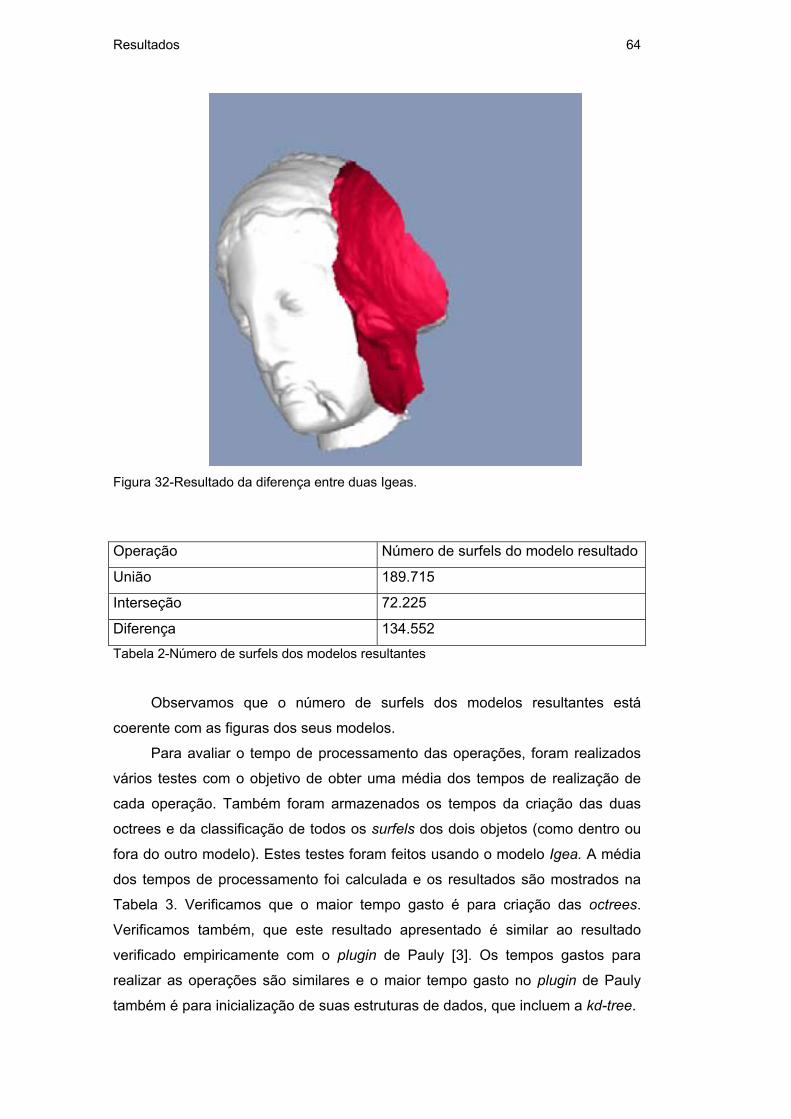
Resultados 65
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total (seg)
Uniatildeo 39375 1324 18925 7154
Interseccedilatildeo 38585 1585 09547 63982
Diferenccedila 399875 1504 1729 729475
Tabela 3- Meacutedia dos tempos de processamento para as operaccedilotildees com duas Igeas
Com o objetivo de expor melhor os resultados deste trabalho
apresentamos abaixo mais um teste das operaccedilotildees booleanas usando o nosso
plugin Os modelos usados para este segundo teste satildeo o Max Planck e o Male
ambos modelos soacutelidos disponibilizados no PointShop Estes modelos satildeo
mostrados nas figura 33 e 34
O primeiro Max Planck conteacutem 52809 surfels
Figura 33-Modelo do PointShop MaxPlanck
O segundo modelo abaixo Male conteacutem 148138 surfels
Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Resultados 66
Figura 34-Modelo do PointShop Male
As Figuras 353637 mostram o resultado da operaccedilatildeo de uniatildeo interseccedilatildeo
e diferenccedila respectivamente usando os dois modelos acima Podemos observar
pela figura 35 que o resultado da operaccedilatildeo de diferenccedila neste caso gerou um
modelo resultado com trecircs partes desconexas Os nuacutemeros de surfels de cada
modelo resultado satildeo mostrados na Tabela 5
Figura 35- Resultado da Uniatildeo do modelo Male com MaxPlanck
Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Resultados 67
Figura 36-Resultado da interseccedilatildeo do modelo Male com o MaxPlanck
Figura 37-Resultado da diferenccedila do modelo Male do modelo MaxPlanck
As meacutedias de tempos de processamento foram calculadas da mesma
forma que o primeiro teste com o modelo Igea acima apresentado Os
resultados satildeo mostrados na Tabela 4 Podemos observar que este teste
Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Resultados 68
apresenta tempos um pouco menores que o teste com o modelo Igea Isto se
deve ao fato de que o modelo MaxPlanck ser significativamente menor que o
modelo Igea MaxPlanck possui 52809 surfels e Igea conteacutem 134345 surfels
Operaccedilatildeo Criaccedilatildeo das
Octrees (seg)
Classificaccedilatildeo
(seg)
Criaccedilatildeo do
resultado (seg)
Total
(seg)
Uniatildeo 3012 1254 102 5285
Interseccedilatildeo 2985 0901 0861 4747
Diferenccedila 2965 0911 0791 4667
Tabela 4-Tempo de processamento das operaccedilotildees com os modelos MaxPlanck e Male
Operaccedilatildeo Nuacutemero de surfels do resultado
Uniatildeo 126532
Interseccedilatildeo 88414
Diferenccedila 77635
Tabela 5-Nuacutemero de surfels dos modelos resultados das operaccedilotildees com os modelos MaxPlanck e Male
Em seguida apresentaremos uma comparaccedilatildeo entre o nosso plugin e o
plugin de Pauly[3] e tambeacutem uma comparaccedilatildeo entre o meacutetodo de Adams e Dutreacute
[2] e o meacutetodo de Pauly [3]
62 Comparaccedilatildeo entre os dois meacutetodos que realizam operaccedilotildees booleanas
A comparaccedilatildeo entre os meacutetodos de Pauly[3] e de Adams e Dutreacute foi feita
em termos de tempo de processamento e em termos conceituais Em termos de
tempo de processamento comparamos o plugin de Pauly[3] com o nosso plugin
Em termos de tempo de processamento verifica-se empiricamente que os
dois meacutetodos apresentam tempos bastante similares Entretanto o tempo de
processamento do algoritmo aqui implementado ainda pode ser melhorado com
Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Resultados 69
o uso do meacutetodo TINN [19] que foi proposto em Adams[2] - para otimizar a
pesquisa do surfel mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um
noacute que conteacutem surfels - veja seccedilatildeo 42 O uso deste meacutetodo natildeo foi
implementado para este trabalho e a sua implementaccedilatildeo melhoraria o tempo de
resposta do algoritmo Aleacutem disso o trabalho de Sara F Frisken [12] citado no
capiacutetulo 2 apresenta uma otimizaccedilatildeo no uso de octrees que pode ser
incorporada no algoritmo implementado neste trabalho
Em termos conceituais vamos fazer a comparaccedilatildeo do uso do que
chamamos aqui de Regra 2 do tratamento de interseccedilatildeo e do tratamento de
ldquoarestas vivasrdquo
Como vimos na seccedilatildeo 41 tanto o algoritmo implementado nesta
dissertaccedilatildeo baseado no trabalho de Adams e Dutreacute como o meacutetodo de Pauly
[3] parte do que chamamos aqui de Regra 2 para realizar operaccedilotildees booleanas
com pontos Mas cada um destes meacutetodos daacute um tratamento diferente para o
uso desta regra
O meacutetodo de Pauly usa a Regra 2 para classificaccedilatildeo de cada ponto ou de
cada surfel Para classificar um surfel de B sb como dentro ou fora de A eacute
encontrado o surfel de A sa mais proacuteximo a sb e sb eacute classificado a partir de sa
Para encontrar sa Pauly utiliza uma kd-tree Como esta pesquisa para encontrar
sa eacute cara (mesmo usando uma kd-tree) Pauly utiliza uma esfera que conteacutem
pontos com a mesma classificaccedilatildeo (seccedilatildeo 432) e diminui em 90 este nuacutemero
de pesquisas Pauly utiliza tambeacutem a representaccedilatildeo impliacutecita MLS (Moving Least
Squares) para casos em que a Regra 2 poderia falhar e para tratamento de
interseccedilotildees Entretanto o nuacutemero destes casos em que a Regra 2 poderia falhar
eacute muito pequeno E a representaccedilatildeo MLS natildeo eacute uma estrutura simples de ser
implementada Portanto natildeo encontramos vantagens em usar MLS para estes
casos O meacutetodo de Adams e Dutreacute natildeo trata estes casos e na praacutetica
apresenta resultados bastante satisfatoacuterios como foi mostrado Portanto
consideramos que valeria a pena fazer algum tratamento especial para estes
casos se fosse um procedimento simples Para a execuccedilatildeo do algoritmo de
Pauly o uso de MLS natildeo interfere significativamente porque a construccedilatildeo desta
representaccedilatildeo natildeo eacute feita somente para realizar operaccedilotildees booleanas Os testes
empiacutericos que fizemos com o algoritmo de Pauly natildeo incluem a construccedilatildeo desta
representaccedilatildeo
Aparentemente os dois algoritmos satildeo bastante parecidos um usa octrees
e o outro usa kd-tree As duas estruturas de dados satildeo simples e otimizam a
classificaccedilatildeo dos surfels de um modelo como dentro ou fora do outro modelo
Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Resultados 70
Mas existe uma diferenccedila conceitual entre dois que merece ser destacada O
algoritmo aqui implementado usa a Regra 2 para classificaccedilatildeo dos noacutes de uma
octree e armazena esta octree classificada (ver capiacutetulo 5) Assim na maioria dos
casos natildeo seraacute necessaacuterio encontrar o surfel mais proacuteximo para classificar um
ponto (ou um surfel) como fora ou dentro de um modelo Caso o ponto esteja em
uma aacuterea da octree classificada ele teraacute a classificaccedilatildeo dada agravequela aacuterea A
pesquisa ao surfel mais proacuteximo seraacute feita apenas nos casos em que o ponto a
ser classificado estaacute localizado entre os planos que subdividem um noacute cheio
O uso desta octree classificada levanta uma questatildeo que natildeo foi citada no
trabalho de Adams e Dutreacute que eacute a proximidade desta estrutura (armazenada)
de octree classificada com uma representaccedilatildeo volumeacutetrica do objeto Sendo
assim esta estrutura pode ser aproveitada para outras funccedilotildees aleacutem da
classificaccedilatildeo dos surfels Por exemplo podemos ter uma aproximaccedilatildeo do
volume de uma cena somando os volumes aproximados dos modelos que a
compotildeem Como o enfoque deste trabalho eacute operaccedilatildeo booleana natildeo vamos nos
aprofundar nesta questatildeo
Outra importante diferenccedila entre os dois trabalhos que jaacute foi explicada na
seccedilatildeo 432 eacute que o meacutetodo de Pauly aplica-se a modelos soacutelidos ou natildeo
soacutelidos enquanto que o meacutetodo de Adams e Dutreacute aplica-se somente a modelos
soacutelidos
Quanto ao tratamento de interseccedilatildeo em termos de visualizaccedilatildeo todos os
dois resolvem bem o problema O tratamento de interseccedilatildeo nos dois trabalhos
tambeacutem resolve o problema da validade da Regra 2 (ver seccedilatildeo 44) Entretanto
o tratamento de Adams e Dutreacute natildeo depende da renderizaccedilatildeo sendo portanto
mais portaacutevel Aleacutem disso uma desvantagem do meacutetodo de Pauly eacute o uso da
representaccedilatildeo impliacutecita MLS (ldquoMoving Least Squaresrdquo) do objeto para obter os
pontos exatamente na curva de interseccedilatildeo Esta representaccedilatildeo torna o
tratamento de interseccedilatildeo mais complexo e a vantagem apresentada natildeo eacute tatildeo
significativa para este tratamento de interseccedilatildeo
Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Conclusatildeo 71
7 Conclusatildeo
Concluiacutemos entatildeo que as escolhas de Adams e Dutreacute por usar uma
octree classificada e pelo tratamento dado agrave interseccedilatildeo satildeo mais abrangentes
que a escolha de Pauly E consideramos que quanto mais abrangente for uma
escolha conceitual mais resultados poderemos tirar dela No caso de Adams e
Dutreacute eles estendem o problema de classificar um ponto para classificar todo o
modelo Como foi citado ele quase fornece uma representaccedilatildeo volumeacutetrica do
modelo Esta aproximada representaccedilatildeo volumeacutetrica pode nos fornecer outras
informaccedilotildees como por exemplo o volume aproximado do modelo
Aleacutem disso o uso da representaccedilatildeo impliacutecita MLS no meacutetodo de Pauly cria
uma complexidade a mais para o meacutetodo sem apresentar vantagens para a
realizaccedilatildeo de operaccedilotildees booleanas que eacute o nosso enfoque
Logo podemos dizer que o meacutetodo de Adams e Dutreacute apresenta as
seguintes vantagens em relaccedilatildeo ao de Pauly
- a estrutura de octree classificada aleacutem de ser usada para classificaccedilatildeo
fornece informaccedilotildees adicionais como volume aproximado do objeto
- o tempo de processamento no meacutetodo de Adams e Dutreacute tende a ser
melhor que no meacutetodo de Pauly se implementadas as melhorias acima citadas e
se colocaacutessemos em consideraccedilatildeo o uso da representaccedilatildeo impliacutecita MLS
(Moving Least Squares)
- o tratamento de interseccedilatildeo de Adams e Dutreacute apresenta a vantagem da
portabilidade ou seja iraacute funcionar independente do algoritmo de renderizaccedilatildeo
utilizado
E as vantagens do meacutetodo de Pauly em relaccedilatildeo ao de Adams e Dutreacute
- a colocaccedilatildeo de surfels exatamente na curva de interseccedilatildeo
- a possibilidade de trabalhar com modelos soacutelidos ou natildeo soacutelidos
E finalizando concluiacutemos que o estudo relatado nesta dissertaccedilatildeo foi
importante por
- fornecer um breve estudo sobre modelagem por pontos uma nova e
promissora aacuterea dentro da computaccedilatildeo graacutefica
Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Conclusatildeo 72
- por apresentar uma avaliaccedilatildeo dos dois trabalhos existentes sobre
operaccedilotildees booleanas com pontos encontrando as vantagens de cada um
e levantando questotildees que natildeo tinham sido citadas nos trabalhos originais
- por propor e implementar melhorias ao trabalho de Adams e Dutreacute
71 Trabalhos Futuros
Nossa implementaccedilatildeo pode ser ainda evoluiacuteda com as propostas
apresentadas na seccedilatildeo 62 Como observamos o tempo de processamento do
algoritmo aqui implementado ainda pode ser melhorado com o uso do meacutetodo
TINN [19] - que foi proposto em Adams[2] - para otimizar a pesquisa do surfel
mais proacuteximo a um ponto que estaacute localizado na regiatildeo de um noacute que conteacutem
surfels Aleacutem disso o trabalho Simple and Efficient Trasversal Methods for
Quadtrees and Octrees de Sara F Frisken [12] citado no capiacutetulo 2 apresenta
uma otimizaccedilatildeo no uso de octrees Outra proposta para melhorar o tempo de
processamento do algoritmo aqui implementado eacute usar a forma de trabalhar com
octrees apresentada neste trabalho
O trabalho de Adams e Dutreacute [2] eacute aplicado apenas a objetos soacutelidos O
nosso plugin portanto aplica-se somente a este tipo de objeto Jaacute o trabalho de
Pauly[3] eacute aplicado tambeacutem a modelos natildeo soacutelidos Apresentamos como
proposta a um trabalho futuro a extensatildeo do algoritmo aqui implementado para
modelos natildeo soacutelidos O surfel pode conter uma informaccedilatildeo adicional que indica
se ele estaacute delimitando um volume ou natildeo Assim pode-se ter um modelo com
ldquopartes soacutelidasrdquo e ldquopartes natildeo soacutelidasrdquo Por exemplo a uniatildeo de um plano com
uma esfera poderia resultar numa esfera com ldquoabasrdquo (seriam as partes do plano
que estariam fora da esfera) O modelo resultado teria uma parte correspondente
a um espaccedilo 3D (esfera) e outra parte que seria uma superfiacutecie 2D posicionada
no espaccedilo 3D sem delimitar algum volume (abas)
Muitos trabalhos podem ser desenvolvidos aplicando-se o modelo por
pontos em animaccedilatildeo jogos visualizaccedilatildeo de terrenos criaccedilatildeo de protoacutetipos etc
considerando-se a eficiecircncia e simplicidade do modelo E mais especificamente
as operaccedilotildees booleanas com pontos podem ser aplicadas para criaccedilatildeo de
cenaacuterios testes de colisotildees e nestes casos a representaccedilatildeo usando octrees
pode ser mais explorada considerando-se o seu potencial de representaccedilatildeo
volumeacutetrica de um objeto
Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Referecircncias Bibliograacuteficas 73
8 Referecircncias Bibliograacuteficas
[1] MAumlNTYLAuml M An Introduction to Solid Modeling Computer Science Press 1988
[2] ADAMS B DUTREacute P Interactive Boolean Operations on Surfel-
Bounded Solids Proceedings of SIGGRAPH 2003 San Diego USA 2003
[3] PAULY M KEISER R KOBBELT L GROSS M Shape Modeling
with Point-Sampled Geometry SIGGRAPH 2003 Computer Graphics
Proceedings Annual Conference Series ACM Press ACM SIGGRAPH 2003
[4] LEVOY M WHITTED T The Use of Points as Display Primitives
Technical Report TR 85-022 The University of North Carolina at Chapel Hill
Department of Computer Science 1985
[5] PFISTER H ZWICKER M VAN BAAR J GROSS M 2000 Surfels
Surface Elements as Rendering Primitives SIGGRAPH 2000 pp 335ndash342 New
Orleans LA July 23-28 2000
[6] ZWICKER M PFISTER H VAN BAAR J GROSS M Surface
Splatting SIGGRAPH 2001
[7] PAULY M KOBBELT L GROSS M Multiresolution Modeling of
Point-Sampled Geometry CS Techinical Report 378 September 16 2002
[8] CURLESS B New Methods for Surface Reconstruction from Range Images PhD thesis Stanford University 1997
[9] RUSINKIEWICZ S Real-time Acquisition and Rendering of Large 3D Models PhD thesis Stanford University 2001
Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Referecircncias Bibliograacuteficas 74
[10] AMENTA N BERN M KAMVYSSELIS M A new Voronoi-Based
Surface Reconstruction Algorithm SIGGRAPH 98 Conference proceedings pp
415-421 New York 1998
[11] ZWICKER M PAULY M KNOLL O GROSS M Pointshop 3D an
Interactive System for Point-Based Surface Editing Proceedings of SIGGRAPH 2002 San Antonio TX July 2002
[12] FRISKEN S PERRY R Simple and Efficient Traversal Methods for
Quadtrees and Octrees Journal of Graphics Tools Vol 7 Issue 3 May 2003
[13] CORREcircA W T OLIVEIRA M M Silva C T Wang J
Modeling and Rendering of Real Environments
Revista de Informaacutetica Teoacuterica e Aplicada (Brazilian Journal of Theoretic and Applied Computing) 9(2)127-156 2002
[14] DAVIS J MARSCHNER S GARR M LEVOY M Filling Holes in
Complex Surfaces Using Volumetric Diffusion First International Symposium on 3D Data Processing Visualization Transmission June 2002
[15] RAumlSAumlNEN J Surface Splatting Theory Extensions and Implementation Masterrsquos Thesis Dept of Computer Science Helsinki
University of Technology May 28 2002
[16] PAULY M Point Primitives for Interactive Modeling and Processing of 3D Geometry PhD thesis Federal Institute of Technology (ETH)
of Zurich 2003
[17] HOPPE H DEROSE T DUCHAMP T MCDONALD J
STUELZLE W Surface Reconstruction from Unorganized Points Computer Graphics 26(2)71ndash78 July 1992
[18] ALEXA M BEHR J COHEN-OR D FLEISHMAN S LEVIN D
SILVA C T Point Set Surfaces IEEE Visualization 2001 pp 21ndash28 October
2001
Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001

Referecircncias Bibliograacuteficas 75
[19] GREENSPAN M GODIN G TALBOT J Acceleration of Binning
Nearest Neighbor Methods Proceedings of Vision Interface 2000 pp 337-
344
[20] MENCL R Reconstruction of Surfaces from Unorganized Three-Dimensional Point Clouds Dissertation Dortmund Univ 2001
[21] KRIVANEK J Representing and Rendering Surfaces With Points
httpciteseernjneccomkrivanek03representinghtml Acesso em 30 jul
2003
[22] KRISTJANSSON ET AL Approximate Boolean Operations on Free-
form Solids Proceedings of SIGGRAPH 01 2001





























