Embed Size (px)
Citation preview

Invariantes de variedades determinantais
Nancy Carolina Chachapoyas Siesquén


!
Invariantes de variedades determinantais
Nancy Carolina Chachapoyas Siesquén!
Orientadora: Profa. Dra. Maria Aparecida Soares Ruas Orientador da instituição conveniada: Prof. Dr. Jean-Paul Brasselet
Tese apresentada ao Instituto de Ciências Matemáticas e de Computação - ICMC-USP, como parte dos requisitos para obtenção do título de Doutor em Ciências – Matemática. VERSÃO REVISADA.
USP – São Carlos Novembro de 2014!!
!
SERVIÇO DE PÓS-GRADUAÇÃO DO ICMC-USP Data de Depósito: Assinatura:______________________________

Ficha catalográfica elaborada pela Biblioteca Prof. Achille Bassi e Seção Técnica de Informática, ICMC/USP,
com os dados fornecidos pelo(a) autor(a)
C431iChachapoyas Siesquen, Nancy Carolina Invariantes de variedades determinantais / NancyCarolina Chachapoyas Siesquen; orientadora MariaAparecida Soares Ruas; co-orientador Jean-PaulBrasselet. -- São Carlos, 2014. 82 p.
Tese (Doutorado - Programa de Pós-Graduação emMatemática) -- Instituto de Ciências Matemáticas ede Computação, Universidade de São Paulo, 2014.
1. Variedades determinantais. 2. Transformada deNash. 3. Hiperplano genérico. 4. Seção genérica. 5.Obstrução de Euler. I. Soares Ruas, Maria Aparecida,orient. II. Brasselet, Jean-Paul, co-orient. III.Título.

v

A Matemática é o maismaravilhoso instrumen-to criado pelo gênio dohomem para a descober-ta da verdade.Laisant.
Going after a dream hasa price. But howevercostly it may be, it isnever as high as theprice paid by people whodidn’t live !Paulo Coelho.

Agradecimentos
É com muita satisfação que expresso aqui o mais profundo agradecimento a todos aquelesque tornaram a realização deste trabalho possível.
Em primeiro lugar gostaria de expressar minha gratidão a Deus por seu infinito amor, portodas as alegrias, pela saúde e pela força que me concedeu, para que conseguisse chegar atéaqui.
Gostaria antes de mais nada de agradecer aos meus Professores orientadores, Profa. Dra.Maria Aparecida Soares Ruas, pelo apoio nesses momentos em que quase desistia e me sentiaperdida, pelo incentivo de continuar, pela confiança desprendida. Ao prof. Dr. Jean-Paul Bras-selet, pela assistência durante minha estadia na França, pelo apoio e sugestões realizadas, peloincentivo de progredir. Agradeço aos dois por acreditar sempre no meu trabalho, pela disponi-bilidade demonstrada, pela amizade e pela enorme contribuição em todas as fases que levaramà concretização deste trabalho.
Quero expressar aqui meus sinceros agradecimentos a minha mãe, María Yolanda, pelo seucarinho e apoio moral incondicional durante o transcurso da minha vida, sempre acreditandoem mim, “te amo mamá". A meu pai, Santiago, pelos ensinamentos em minha infância que meforam muito úteis, só Deus sabe quanta saudade tenho de você. A meus irmãos Jimmy, Sandra,José e Alexis pela compreensão, companherismo e carinho durante estes anos, porque mais queirmãos sempre têm sido meus amigos.Talvez nem saibam a sua importância em minha vida,meus sobrinhos Jhon, Juliana e Estrella. Alegrias incomparáveis ao lado deles. Agradeço muitoa toda minha família que apesar de estar longe sempre estão comigo no meu coração.
Gostaria de agradecer aos professores Jawad Snoussi e Juan J. Nuño Ballesteros por aceitarser os pareceristas desta tese, “rapporteurs", pelos comentários e sugestões. Aos professoresNicolas Dutertre, Marcelo Escudeiro por ser parte da banca. Agradeço muito sua participação !
Agradeço aos professores Lê Dung Trang, Terence Gaffney por algumas sugestões e pelasconversas matemáticas.
Aos professores do ICMC, com os quais muito aprendi. Aos amigos que sempre estiverampresentes Luis Sanchez, Manuel Zuloeta, Thaís Dalbelo, Maria Amelia, Andrea e a todos osamigos com os quais compartilhei conversas durante todo este longo trajeto do meu doutorado,muito obrigada pela amizade e por fazerem minha estadia em São Carlos inesquecível.
A meu amor José Vidarte, pelo apoio e pela compreensão com que sempre me brinda. Por
vii

viii
dar-me forças para não desistir. Suas palavras sempre chegam na hora certa. Obrigada por estarcomigo neste longo caminho.
A FAPESP, Fundação de Amparo à Pesquisa do Estado de São Paulo, processo n0 2010/09736-1 e 2011/20082-6 pelo apoio financeiro.
Reitero aqui minhas palavras, sendo este um grande sonho, não se pode empreendê-lo sem
a ajuda dos que nos cercam e querem bem. Um muito obrigado a todos, por estarem lado a lado
nessa caminhada.

Com amor, a minha mãeYolanda, a meus irmãosJimmy, Sandra, José eAlexis.
Ao meu pai Santiago emmemória a seu décimosexto aniversário de estarjunto a nosso Criador.
Resumo
Neste trabalho estudamos variedades determinantais essencialmente isoladas (EIDS), defi-nidas por W. Èbeling e S. M. Guseın-Zade em [23]. Este tipo de singularidades é uma gene-ralização das singularidades isoladas. A variedade determinantal genérica M t
m,n é o subcon-junto das matrizes m × n, tais que o posto seja menor que t, onde t 6 minn,m. Umavariedade X ⊂ CN é determinantal se é definida como a pré-imagem de uma função holo-morfa F : CN → Mm,n, sobre a variedade determinantal genérica M t
m,n, com a condiçãocodimX = codimM t
m,n.Uma variedade determinantal tem singularidade isolada se N 6 (n − t + 2)(m − t + 2) e
admite suavização se N < (n− t+ 2)(m− t+ 2). Trabalhos recentes têm estudado variedadesdeterminantais com singularidade isolada, [35, 31]. O número de Milnor de uma superfíciedeterminantal é investigado em [35, 31, 12]. Para variedades determinantais de dimensõesmaiores a característica de Euler evanescente é definida em [31, 12].
Neste trabalho estudamos o conjunto de limites de hiperplanos tangentes às variedades de-terminantaisX2 ⊂ C4 eX3 ⊂ C5 para dar uma caracterização deste conjunto, em que o númerode Milnor de sua seção com a superfície no primeiro caso ou a 3- variedade no segundo casonão é mínimo. O primeiro caso foi estudado por Jawad Snoussi em [38].
Provamos também que se X é uma EIDS de dimensão d e H e H ′ são dois hiperplanosfortemente gerais, se P ⊂ H e P ′ ⊂ H ′ são planos lineares de codimensão d − 2 contidosrespectivamente em H e H ′, o número de Milnor das superfícies correspondentes X ∩ P eX ∩ P ′ são iguais. Este resultado foi provado para o caso em que a seção genérica é uma curvaem [26].
Estudamos a transformada de Nash de uma EIDS e discutimos condições suficientes paraque esta transformada seja suave.
Outro objetivo é estudar a obstrução de Euler de singularidades determinantais essencial-
mente isoladas. Obtemos fórmulas que relacionam a obstrução de Euler com a característica
de Euler evanescente da suavização essencial de suas seções gerais. Estudamos as variedades
determinantais com o conjunto singular de dimensão 1 para ilustrar os resultados.

xii

Résumé
Dans ce travail nous étudions les variétés determinantales essentiellement isolées (EIDS),qui ont éte définies dans l’article [23]. Ce type de singularité est une généralization de la notionde singularité isolée. La variété determinantale générique est un sous-ensemble des matrices,m × n, tels que le rang est inférieur que t, où t 6 minn,m. Une variété X ⊂ CN est deter-minantal si X est définie comme la pré-image d’une fonction holomorphe, F : CN → Mm,n,sur la variété determinantale générique, M t
m,n, avec la condition codimX = codimM tm,n.
Les variétés determinantales ont des singularités isolées si N 6 (n − t + 2)(m − t + 2) etelles admettent un “lissage” si N < (n − t + 2)(m − t + 2). Certains travaux précédents ontétudié les variétés determinantales avec singularité isolée [35, 31] et ils ont défini le nombre deMilnor d’une surface determinantale. La caractéristique évanescente d’Euler a été definie dans[31].
Nous étudions l’ensemble des hyperplans limites d’hyperplans tangents à une variété deter-minantale X2 ⊂ C4 et X3 ⊂ C5 pour donner une caractérisation de ces hyperplans, par le faitque le nombre de Milnor de leur section avec la surface dans le premier cas ou la 3- variété dansle deuxième cas n’est pas minimum. Le premier cas a été étudié par Jawad Snoussi dans [38].
Nous montrons également que, si X est une EIDS, de dimension d et H et H ′ sont deshyperplans fortement généraux, si P ⊂ H et P ′ ⊂ H ′ sont des plans de codimension d − 2
contenus respectivement dans H et H ′, les nombres de Milnor des surfaces X ∩ P et X ∩ P ′sont égaux . Ce résultat a été démontré dans le cas où la section est une courbe dans [26].
Nous étudions aussi la modification de Nash d’une EIDS et donnons des conditions suffi-santes pour que cette transformation soit lisse.
Un autre objectif de notre travail est l’étude de l’obstruction d’Euler des variétés déterminan-
tales essentiellements isolées. Nous obtenons des formules inductives qui relient l’obstruction
d’Euler de X à la caractéristique d’Euler évanescente du lissage essentiel de leurs sections gé-
nériques. Nous étudions les variétés déterminantales dont l’ensemble singulier est de dimension
1 pour illustrer ce résultat

xiv

Abstract
In this work, we study the essentially isolated determinantal singularities (EIDS), whichhave been defined by W. Èbeling and S. M. Guseın-Zade in the article [23]. This type ofsingularities is a natural generalization of isolated ones. A generic determinantal variety M t
m,n
is a subset of the space of m × n matrices, given by matrices of rank less than t, where t 6minn,m. A variety X ⊂ CN is determinantal if X is defined as the pre-image of M t
m,n by aholomorphic function F : CN →Mm,n with the condition codimX = codimM t
m,n.Determinantal varieties have isolated singularity if N 6 (n − t + 2)(m − t + 2) and they
admit smoothing if N < (n− t+ 2)(m− t+ 2). Several recent works investigate determinantalvariety with isolated singularities. The Milnor number of a surface was defined in [35, 31] andthe vanishing Euler characteristic was studied in [31].
In this work we study the set of limits of tangent hyperplanes to determinantal varietiesX2 ⊂ C4 and X3 ⊂ C5 to give a characterization of this set by the fact that the Milnor numberof its section with the surface in the first case or the 3-dimensional determinantal variety in thesecond case is not minimum. The first case is studied by Jawad Snoussi in [38].
We also prove that if X is a d- dimensional EIDS and H and H ′ are strongly general hyper-plans, if P ⊂ H and P ′ ⊂ H ′ are linear plans of codimension d− 2 contained in H and H ′, theMilnor number of the surfaces X ∩P and X ∩P ′ are equal. In the case that the generic sectionis a curve the result has been proved in [26].
We study the Nash transformation of an EIDS and give sufficient conditions for this trans-formation to be smooth.
Another aim of our study is the Euler obstruction of essentially isolated determinantal singu-
larities. We obtain inductive formulas associating the Euler obstruction with the vanishing Euler
characteristic of the essencial smoothing of their generic sections. We study the determinantal
variety with singular set of dimension 1 to illustrate the results.

xvi

Sumário
Lista de Tabelas xix
Introdução 1
Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1 Preliminares 5
1.1 Variedades Analíticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Estratificação de Whitney . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 Transformação de Nash e o Fibrado de Nash . . . . . . . . . . . . . . . . . . . 6
1.4 Variedades Polares e Multiplicidade Polar . . . . . . . . . . . . . . . . . . . . 8
1.5 Fecho Integral de Ideais e de Módulos . . . . . . . . . . . . . . . . . . . . . . 11
1.6 Número de Milnor de uma Curva em CN . . . . . . . . . . . . . . . . . . . . 12
2 Variedades Determinantais 15
2.1 Variedades Determinantais Essencialmente Isoladas . . . . . . . . . . . . . . . 15
2.2 Singularidades de Matrizes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2.1 K- Equivalência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.2 A G(n,m) - Equivalência . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.3 A KV - Equivalência . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.2.4 A KH - Equivalência . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.3 Determinação Finita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.4 Variedades Cohen-Macaulay de Codimensão 2 . . . . . . . . . . . . . . . . . 24
3 Topologia de Variedades com Singularidade Isolada 27
3.1 Teoria de Morse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
xvii

3.2 Funções Definidas em IDS . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.3 Fórmula de Tipo Lê-Greuel para Variedades Determinantais . . . . . . . . . . 30
4 A Transformada de Nash de Variedades Determinantais 334.1 Resoluções de M t
m,n . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2 Transformação de Nash de uma EIDS . . . . . . . . . . . . . . . . . . . . . . 40
4.3 Exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5 Espaço Conormal de Variedades Determinantais 495.1 Limite de Hiperplanos de Espaços Tangentes . . . . . . . . . . . . . . . . . . 49
5.2 Minimalidade do Número de Milnor . . . . . . . . . . . . . . . . . . . . . . . 54
5.2.1 Hipersuperfícies e Interseções Completas em CN . . . . . . . . . . . . 54
5.2.2 Variedades Determinantais com Singularidade Isolada na Origem . . . 55
5.3 Seções de Variedades Determinantais Essencialmente Isoladas . . . . . . . . . 59
6 Topologia de EIDS 616.1 Indices de Poincaré Hopf de 1-formas sobre EIDS . . . . . . . . . . . . . . . . 61
6.2 Obstrução de Euler Local . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.3 Número de Milnor Singular de Seções de Interseções Completas . . . . . . . . 67
6.4 A característica de Euler Evanescente de Variedades Determinantais . . . . . . 69
6.5 Obstrução de Euler de Variedades Determinantais . . . . . . . . . . . . . . . . 71
6.5.1 Obstrução de Euler de IDS, caso N < (n− t+ 2)(m− t+ 2) . . . . . 73
6.6 Obstrução de Euler para as EIDS, definidas por F : CN →M2,3 . . . . . . . . 73
6.7 Obstrução de Euler de EIDS, caso N > 7 . . . . . . . . . . . . . . . . . . . . 74
Referências Bibliográficas 82
xviii
Lista de Tabelas
6.1 Tabela das equações definindo os divisores livres, E e as variedades determi-
nantais D. Se A = (Aij) então A denota a matriz obtida eliminando a primeira
coluna da matriz A e A(k) denota a submatriz k × k superior a esquerda de A. . 69
6.2 Ostrução de Euler, X ⊂ C6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
6.3 Obstrução de Euler, X ⊂ C6. . . . . . . . . . . . . . . . . . . . . . . . . . . . 76

xx LISTA DE TABELAS
Introdução
Um tipo de variedade analítica que pode ser considerado uma geralização para interse-ções completas com singularidade isolada (ICIS) é a variedade com singularidade determi-nantal essencialmente isolada (EIDS). Estas variedades foram definidas por W. Èbeling e S. M.Guseın-Zade em [23]. As variedades determinantais X ⊂ CN são definidas por uma funçãoF : CN →Mm,n holomorfa tal que X = F−1(M t
m,n) e que satisfazem certas condições sobre acodimensão de X , em que M t
m,n é o subconjunto das matrizes m× n com posto menor do quet, chamada variedade determinantal genérica.
Uma EIDS satisfaz condições de transversalidade da F sobre os estratos de M tm,n. Nem
toda EIDS tem singularidade isolada. Temos singularidade determinantal isolada (IDS) se N 6(m− t+ 2)(n− t+ 2). Trabalhos recentes, como por exemplo [31, 35], têm estudado IDS queadmitem suavização (N < (m− t+ 2)(n− t+ 2)). A topologia da fibra genérica da suavizaçãoé um invariante da variedade e então se pode definir a característica de Euler evanescente emtermos da característica de Euler da fibra genérica, ν(X) = (−1)d(χ(Xt)− 1).
No caso de superfícies determinantais com singularidade isolada em CN , o primeiro númerode Betti b1(Xt) é nulo [40], então podemos definir o número de Milnor de X , µ(X) = b2(Xt).Miriam Pereira e Maria Ruas [35], Bruna Oréfice, João Tomazella e Juan Nuño Ballesteros [31]demonstraram uma fórmula de tipo Lê-Greuel em termos do número de Milnor da superfíciedeterminantal ou característica de Euler evanescente.
Neste trabalho desenvolvemos o estudo de seções genéricas de IDS, dadas pela interseção daIDSX com um hiperplano geral, isto é um hiperplano que não é limite de hiperplanos tangentesà variedade X . Estudamos superfícies determinantais em C4 e 3- variedades em C5 e damosuma caracterização das seções genéricas em termos da minimalidade do número de Milnor. Ocaso de superfícies determinantais segue do trabalho de Jawad Snoussi [38], pois toda variedadedeterminantal com singularidade isolada é normal.
Estudamos também seções genéricas de uma EIDS X ⊂ CN , dadas pela interseção de umaEIDS e P -planos que estão contidos num hiperplano fortemente geral, com a condição que essa

2 Introdução
interseção seja uma superfície determinantal (IDS). Sobre algumas condições sobreN podemosgarantir que X ∩ P admite suavização. Provamos uma generalização do resultado de Lê DungTrang em [26], obtendo a igualdade do número de Milnor de duas seções gerais de uma EIDS.
No Capítulo 1, relembramos algumas definições e resultados básicos tais como germes devariedades analíticais, estratificação de Whitney, transformada de Nash de uma variedade ana-lítica, variedades polares, fecho integral de módulos e número de Milnor de curvas espaciais.
No Capítulo 2, definimos as variedades essencialmente isoladas (EIDS), suavização essen-cial de uma EIDS, estudamos diferentes grupos de equivalência que agem sobre o conjunto defunções F : CN →Mm,n e relacionamos as EIDS com a teoria de singularidades de matrizes.
No capítulo 3, é estudada a topologia de variedades com singularidade isolada. A fórmulade tipo Lê-Greuel para singularidades determinantais isoladas (IDS) é apresentada.
A transformada de Nash da variedade determinantal genérica M tm,n é suave, no capítulo
4, fazemos um estudo detalhado deste resultado, usando as diferentes resoluções da variedadeM t
m,n. Calculamos o espaço tangente em um ponto regular de M tm,n. Provamos em que condi-
ções a transformada de Nash de uma EIDS é suave. Concluimos este capítulo dando exemplosde transformada de Nash.
Os resultados obtidos no capítulo 5, são geralizações dos trabalhos de Jawad Snoussi [38] eLê Dung Trang [26]. Aqui usamos as seções gerais da EIDS, dadas pela interseção de hiperpla-nos gerais e a variedade EIDS. Provamos que um hiperplano é geral a uma variedade X ⊂ CN
3-dimensional se somente se µ(X ∩H) e µ(X ∩H ∩H ′) são mínimos.No Capítulo 6, estudamos a topologia de EIDS. Definimos a obstrução de Euler e fornece-
mos uma fórmula para o cálculo da obstrução de Euler de EIDS que admitem 3 estratos, coma condição que o conjunto singular é uma ICIS. Para variedades determinantais definidas porF : CN →M2,3, N > 7 e de coposto 1, mostramos que este número é constante e igual a 2.
Resultados
Os resultados mais relevantes deste trabalho são enunciados nesta seção. As provas sãoencontradas nos Capítulos 4, 5, 6.
O seguinte resultado dá uma condição para que a transformada de Nash de uma EIDS sejasuave.
Proposição 0.1. (Proposição 4.7) Seja X = F−1(M tm,n) ⊂ CN uma EIDS, definida pela
função F : CN → Mm,n. Se F é transversal aos limites de espaços tangentes da variedade
M tm,n então a transformada de Nash de X denotado por X , é suave.
Dizemos que um hiperplano H ⊂ CN é geral a X no ponto x se H não é limite de hiperpla-nos tangentes a X em x. Se H for transversal a todos os estratos da estratificação de X numa

3
vizinhança do ponto x dizemos que H é fortemente geral.
Proposição 0.2. (Proposição 5.9) Seja X ⊂ CN uma variedade determinantal d-dimensional
com singularidade isolada na origem eH um hiperplano geral com relação aX , entãoX∩H ⊂CN−1 é uma variedade determinantal d− 1 dimensional com singularidade isolada na origem.
Teorema 0.3. (Teorema 5.12) Seja (X, 0) ⊂ (CN , 0) uma EIDS, de tipo (n,m, t). Se H ⊂ CN
é um hiperplano fortemente geral a X na origem, então X ∩ H é uma EIDS em CN−1 de
dimensão d− 1 e do mesmo tipo.
Teorema 0.4. (Teorema 5.21) Seja X ⊂ CN uma variedade determinantal de dimensão 3 com
singularidade isolada, e seja H um hiperplano em CN dado pelo núcleo da projeção linear
p : CN → C. Suponha que X ∩ H tem singularidade isolada na origem, então as seguintes
condições são equivalentes:
a) p é geral a X na origem
b) µ(X ∩H) é mínimo e µ(X ∩H ∩H ′) é mínimo para todo H ′ geral a X e a X ∩H .
Teorema 0.5. (Teorema 5.24) Seja Xd ⊂ CN uma EIDS de tipo (m,n, t) tal que codimX <
(m− t+ 2)(n− t+ 2)− 2. Sejam H e H ′ hiperplanos de CN fortemente gerais para (X, 0) na
origem. Então H e H ′ contêm respetivamente P e P ′ tais que codimP = codimP ′ = d − 2,
para os quais as superfícies determinantais X ∩ P e X ∩ P ′ satisfazem as seguintes condições
a) têm singularidade isolada
b) admitem suavizações
c) µ(X ∩ P ) = µ(X ∩ P ′).
Proposição 0.6. (Proposição 6.36) Seja X = F−1(M tm,n) uma EIDS, definida pela função
F : CN →Mm,n, se N < (n− t+ 3)(m− t+ 3) e o conjunto singular, ΣX , é uma ICIS, então
a obstrução de Euler de X na origem é dado por:
Eu0(X) = ((−1)dim(ΣX∩l−1(0))µ(ΣX ∩ l−1(0)) + 1)(χ(LV1)− 1) + χ(X ∩ l−1(0) ∩Bε) + 1,
onde l : CN → C é uma projeção linear genérica, LV1 é o link complexo do estrato V1 em X e
Bε é a bola de raio ε em CN .
Teorema 0.7. (Teorema 6.41) Seja X ⊂ CN uma EIDS, definida pela função F : CN →M2,3,
com N > 7. Então
Eu0(X) = (−1)N−7µ(Σ(X ∩H)) + χ(X ∩H) + 2
onde χ(X) = χ(F−1s (M2
2,3))− 1, Fs é uma estabilização de F .
4 Introdução
Corolário 0.8. (Corolário 6.42) Com as hipóteses do Teorema 0.7, se F é de coposto igual a
1, então
Eu0(X) = 2

Capítulo Um
Preliminares
Neste capítulo apresentamos as definições e principais resultados que serão usados para odesenvolvimento deste trabalho. Começamos definindo variedades analíticas, estratificação deWhitney, transformação de Nash de variedades analíticas. O nosso objeto de estudo são asvariedades determinantais que serão definidas no próximo capítulo. As principais referênciaspara este capítulo são [8, 24, 27, 21].
1.1 Variedades Analíticas
Seja K o corpo dos números reais ou complexos. Indicamos por ON o conjunto de germesde funções analíticas (KN , 0) → K. Este conjunto é um anel local (possui um único idealmaximal), cujo ideal maximal é dado por m = f ∈ ON/f(0) = 0.
Usaremos a notação C [x1, x2, . . . , xN ] para representar o anel dos polinômios com variáveisx1, . . . , xN sobre C.
Definição 1.1. Seja Y ⊂ CN . Se existe um subconjunto T ⊂ C [x1, x2, . . . , xN ] tal que Y é o
conjunto de zeros comuns a todos os polinômios de T , dizemos que Y é um conjunto algébrico.
Definição 1.2. Um subconjunto Y ⊂ CN é chamado subconjunto analítico complexo de CN se
para cada ponto y ∈ CN existe uma vizinhança U de y e funções holomorfas f1, . . . , fm em U
tal que
Y ∩ U = x ∈ U |f1 = · · · = fm = 0.
Ou seja Y localmente é o conjunto de zeros de funções holomorfas.
Definição 1.3. Um conjunto Y é chamado conjunto analítico ou variedade analítica (complexa)
se em uma vizinhaça U ′ de cada um do seus pontos, U ′ é um subconjunto analítico.

6 Preliminares
Definição 1.4. Sejam Y1, Y2 ⊂ CN conjuntos analíticos, Y1 e Y2 são equivalentes em y se existe
uma vizinhança U de y tal que Y1 ∩ U = Y2 ∩ U . As correspondentes classes de equivalências
são chamadas germes de conjuntos analíticos em y.
1.2 Estratificação de Whitney
Definição 1.5. Seja X uma variedade analítica complexa de dimensão (complexa ) d. Uma
estratificação de X é dada por uma filtração
(χ) ∅ = X−1 ⊂ X0 ⊂ · · · ⊂ Xd−1 ⊂ Xd = X,
tal que cada Vi = Xi\Xi−1 é uma variedade complexa suave de dimensão complexa i. Chama-
mos as variedades Vi de estratos (não necessariamente conexos) da estratificação.
Definição 1.6. Dizemos que a estratificação Vi deX satisfaz à condição de fronteira, se para
cada par de estratos (V1, V2) tais que V1 ∩ V 2 6= ∅ então V1 ⊂ V 2.
Definição 1.7. A estratificação Vi satisfaz as condições de Whitney se para todo par de
estratos (V,W ) tais que W ⊂ V e para todo y ∈ W temos:
a) Para toda seqüência xi ∈ V , xi → y, e tal que o limite
limi→∞
Txi(V ) = T
existe na grassmaniana correspondente, então Ty(W ) ⊂ T .
b) Se além disso temos uma seqüência yi ∈ W , yi → y e tal que o limite de direções
limi→∞
xiyi = λ
existe no espaço projetivo, então λ ⊂ T.
Exemplo 1.8. Consideremos o coneC cujo vértice é a origem, e seja Y, V uma estratificação
onde Y é uma geratriz do cone e V = C − Y . Esta estratificação não é de Whitney pois as
condições da Definição 1.7 não são satisfeitas, como se mostra na figura 1.1.
1.3 Transformação de Nash e o Fibrado de Nash
Definição 1.9. Seja X uma variedade analítica complexa de dimensão d, mergulhada em uma
variedade suave M de dimensão m, X ⊂ Ω ⊂ M , Ω um aberto em M . Sobre M definimos o
fibrado M , cuja fibra Mx sobre x ∈ M é Gr(d,m), conjunto dos d-subespaços em Tx(M) ∼=

1.3 Transformação de Nash e o Fibrado de Nash 7
0Y xi
T
Yxi
Tyi
8
Condition a) Condition b)
Figura 1.1: Estratificação de Whitney, condições a) e b) não satisfeitas.
Cm. Denotamos por π : M → M a projeção do fibrado. Sobre a parte regular de X temos
uma seção dada por:
s : Xreg → M
x 7→ (x, TxXreg).
A transformação de Nash X de X é o fecho em M da imagem de s. Quer dizer que:
X = (x,W )/x ∈ Xreg,W = TxXreg ⊂ X ×Gr(d,m).
Segundo a definição temos o seguinte diagrama:
X //
ν
M
π
X //M.
A aplicação ν : X → X é a restrição de π à X.
Se x ∈ X é um ponto singular então:
ν−1(x) = (x, T )/∃xn → x, xn ∈ Xreg, T = limxn→x
(TxnX).
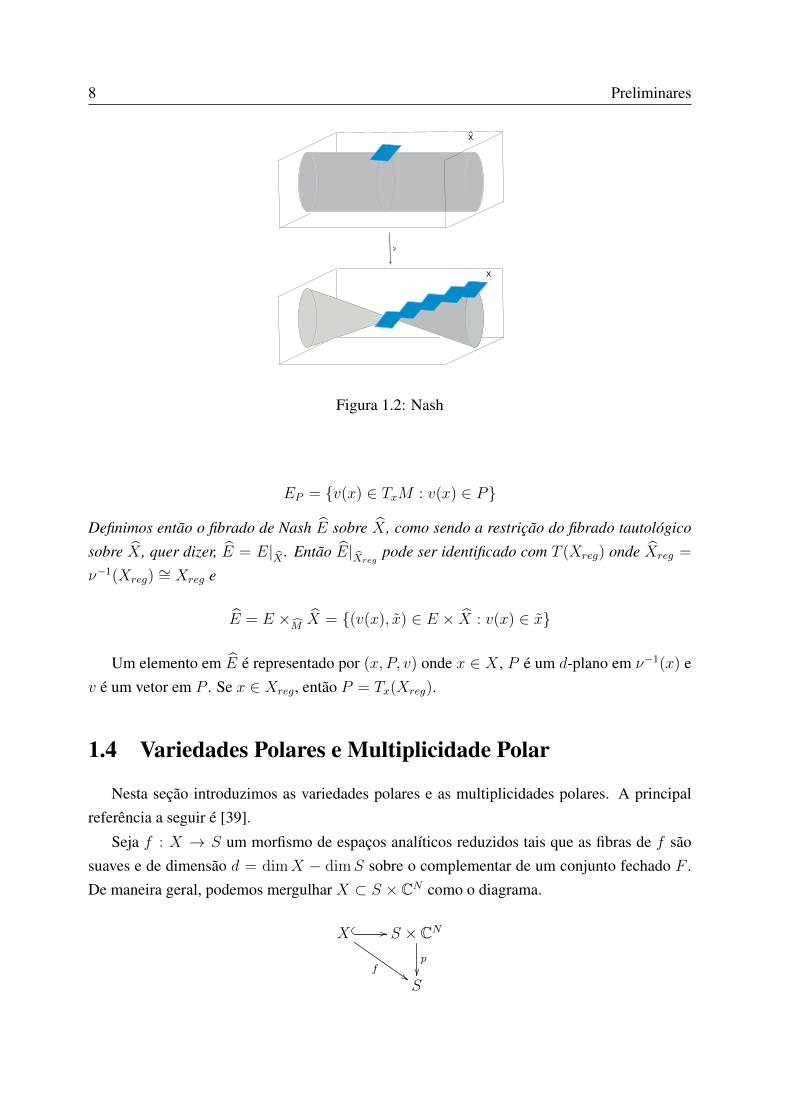
Definição 1.10. Denotemos porE o fibrado tautológico sobre M . A fibraEP no ponto (x, P ) ∈M é o conjunto de vetores v no d- plano P ∈ Mx.
8 Preliminares
X
ν
X
Figura 1.2: Nash
EP = v(x) ∈ TxM : v(x) ∈ P
Definimos então o fibrado de Nash E sobre X , como sendo a restrição do fibrado tautológico
sobre X , quer dizer, E = E|X . Então E|Xregpode ser identificado com T (Xreg) onde Xreg =
ν−1(Xreg) ∼= Xreg e
E = E ×M X = (v(x), x) ∈ E × X : v(x) ∈ x
Um elemento em E é representado por (x, P, v) onde x ∈ X , P é um d-plano em ν−1(x) ev é um vetor em P . Se x ∈ Xreg, então P = Tx(Xreg).
1.4 Variedades Polares e Multiplicidade Polar
Nesta seção introduzimos as variedades polares e as multiplicidades polares. A principalreferência a seguir é [39].
Seja f : X → S um morfismo de espaços analíticos reduzidos tais que as fibras de f sãosuaves e de dimensão d = dimX − dimS sobre o complementar de um conjunto fechado F .De maneira geral, podemos mergulhar X ⊂ S × CN como o diagrama.
X
f$$
// S × CN
p
S

1.4 Variedades Polares e Multiplicidade Polar 9
Proposição 1.11. Seja N um inteiro e seja:
(D :) (0) ⊂ DN−1 ⊂ DN−2 ⊂ · · · ⊂ D1 ⊂ D0 = CN
uma sequência de subespaços vetoriais em CN , tal que codimDi = i. Para cada inteiro
0 6 k 6 d, chamamos k-ésima variedade de Schubert projetiva associada à D, denotada por
ck(D), ao subespaço da Grassmanniana G de d- planos de CN , definido por:
ck(D) = T ∈ G/ dim(T ∩Dd−k+1) > k.
Para todo D, o conjunto ck(D) é munido naturalmente de uma estrutura de subvariedadealgébrica reduzida de G, de codimensão k em G.
Denotemos por Wk o conjunto dos sub-espaços genéricos, Dd−k+1 em CN , ver [39, Pag.419] para as propriedades de generalidade. O conjuntoWk é aberto e denso nas Grassmanianasde sub-espaços de codimensão d− k + 1 em CN .
Uma projeção p : CN → Cd−k+1 é uma projeção linear genérica se ker p = Dd−k+1 ∈ Wk.
Teorema 1.12. [39, V 1.3.2] Suponha que f : X → S seja um morfismo liso, isto é, f é
plano e as fibras são suaves de codimensão d = dimX − dimS, fora de um conjunto fechado
F . Seja p : CN → Cd−k+1 uma projeção linear genérica. Para cada x ∈ X − F , a fibra
X(f(x)) = f−1(f(x)) de f em X é não singular em x, contida em f(x)×CN . Notemos por
πx : X(f(x))→ Cd−k+1 a restrição à X(f(x)) da projeção p.
Seja P 0k (X, f, p) = x ∈ X − F |x ∈ Σπx, onde Σπx é o conjunto de pontos críticos de
πx.
O fecho Pk(X, f, p) de P 0k (X, f, p) em X , é um subespaço analítico fechado de X , de
codimensão k em X ou vazio.
Então temos a seguinte definição:
Definição 1.13. Seja f : (X, 0) → (S, 0) um morfismo como acima, tal que (X, 0) ⊂ (S, 0)×(CN , 0), e seja Dd−k+1 ⊂ CN de codimensão d− k + 1 contido emWk. Chamamos variedade
polar local relativa de codimensão k associada a f e a p ao subespaço analítico
Pk(X, f, p) = P 0k (X, f, p),
onde p : CN → Cd−k+1 é uma aplicação linear tal que Dd−k+1 = ker p.
Observação 1.14. Podemos ver que
1. Se S é um ponto e f é a aplicação constante, então denotamos a variedade polar por
Pk(X, p) e a chamaremos variedade polar absoluta.

10 Preliminares
P (X,p)1
Figura 1.3: P1(X, p)
Exemplo 1.15. Calculemos as variedades polares da seguinte variedade singular:
X = (x, y, t) ∈ C3 : y2 − x3 − tx2 = 0
1. P0(X, p) = X , p : C3 → C3, p(x, y, t) = (x, y, t).
2. P1(X, p) = (x, y, t) ∈ C3 : x+ t = 0, y = 0, p : C3 → C2, p(x, y, t) = (x, t).
Denotamos pormk(X, f) = m0(Pk(X, f, p)) ( comD = ker p ∈ Wk) a k-ésima multiplici-dade polar da variedade polar relativa Pk(X, f, p). Se f é uma aplicação constante, denotamosa multiplicidade polar absoluta por mk(X).
Teorema 1.16. Seja f : (X, 0) → (S, 0) um morfismo de espaços analíticos. Para todo S-
mergulho local (X, 0) ⊂ (S, 0) × (CN , 0), toda escolha de coordenadas, e para todo inteiro
k, 0 6 k 6 d = dimX − dimS, existe um aberto de Zariski denso Vk ⊂ Wk, tal que as
multiplicidades mk(X, f) independem do Dd−k+1 ∈ Vk.
No Capítulo 3, definiremos md(X) para variedades de dimensão d que admitem perturba-ções suaves (suavização).

1.5 Fecho Integral de Ideais e de Módulos 11
1.5 Fecho Integral de Ideais e de Módulos
A principal referência para esta seção na qual daremos algumas noções de fecho integral é[21].
Definição 1.17. Seja I um ideal no anel A e h ∈ A, dizemos que h está no fecho integral de
I , denotado por I , se existe um polinômio mônico P (z) = zn +∑n−1
i=0 aizi, ai ∈ In−i tal que
P (h) = 0
Considere (X, x) uma variedade analítica complexa equidimensional, definida por F :
(CN , 0)→ (Cp, 0) e A = OX,x seu anel local. Neste caso I tem propriedades interessantes.Dada φ : (C, 0) → (X, x) uma aplicação, podemos associar uma aplicação induzida φ∗ :
OpX,x → OC,0 definida por φ∗(h) = h φ.
Proposição 1.18. [21] Seja I ⊂ OX,x um ideal, X um conjunto analítico complexo. Então as
seguintes condições são equivalentes.
1. h ∈ I .
2. Para cada escolha de geradores (gi) de I , existe uma vizinhança U de x e uma constante
C > 0 tal que:
‖h(z)‖ 6 C supi‖gi(z)‖, para todo z ∈ U.
3. Para cada φ : (C, 0)→ (X, x), h φ ∈ (φ∗(I))O1.
4. Existe L, OX,x módulo faithful de tipo finito tal que h.I ⊂ I.L. L é um OX,x módulo
faithful se AnnOX,x(L) = r ∈ OX,x|∀l ∈ L, rl = 0 = 0,
A seguir daremos a definição de fecho integral de módulos, e algumas das suas propriedades.
Definição 1.19. Seja (X, x) um germe analítico complexo, M ⊂ OpX,x um submódulo. Então
h ∈M se para todo φ : (C, 0)→ (X, x), h φ ∈ (φ∗(M))O1.
Exemplo 1.20. Seja X = C2, M = 〈(x, 0), (0, y), (y, x)〉 ⊂ O22. Então M = m2O2
2. Seja
φ(t) = (φ1(t), φ2(t)), então (φ∗M)O1 = 〈(tn, 0), (0, tn)〉, onde n = mini=1,2o(φi) e o(φi)
denota a ordem de φi.
Denotemos por Jk(M) o k-ésimo ideal de Fitting de M , i.e. o ideal gerado pelos zeros dosmenores k × k, da matriz A, dado pelos geradores de M . O módulo gerado por M e h ∈ OpX,xserá denotado por (h,M) .
Proposição 1.21. Se M ⊂ OpX,x é um submódulo, h ∈ OpX,x e rank(h,M) = k sobre cada
componente de (X, x). Então h ∈M se somente se, Jk(h,M) ⊂ Jk(M).

12 Preliminares
Seja F : CN → Cp, uma função analítica complexa, denotemos por JM(F ) ⊂ OpX,x osubmódulo jacobiano de F gerado por 〈 ∂F
∂x1, . . . , ∂F
∂xN〉. Os módulos de nosso interesse são os
módulos jacobianos, JM(F ), e as reduções destes (P ⊂M é redução de M se M = P .)
Corolário 1.22. [21] Seja (X, 0) uma d-variedade analítica complexa equidimensional defi-
nida por F : CN → Cp. Então P é redução de JM(F ) se, somente ∀ φ : (C, 0) → (X, 0) tal
que φ(C− 0) ⊂ X − ΣX , temos que (φ∗P )O1 = (φ∗M)O1.
Proposição 1.23. Seja (X, x) uma variedade analítica complexa equidimensional, definida por
F : (CN , 0) → (Cp, 0) e seja P um submódulo de JM(F ) tal que (h, P ) = JM(F ). Temos
que h ∈ P se, somente se, para toda curva φ : (C,C − 0, 0) → (X,X − ΣX, 0) e ψ : C →Hom(Cp, 0), temos ψ(φ∗(h)) ∈ Iψ(φ∗(P )), onde Iψ(φ∗(P )) é o ideal de O1 gerado aplicando
ψ aos geradores de φ∗(N).
1.6 Número de Milnor de uma Curva em CN
Nesta parte definimos o número de Milnor para curvas espaciais seguindo os artigos [7, 32,6].
Seja (X, 0) ⊂ (CN , 0) uma curva singular reduzida. Seja Ω1(X,0) o módulo de 1-formas ho-
lomorfas sobreX (módulo das diferenciais de Kähler) e ω(X,0) o módulo dualizante de Grothen-dieck
ω(X,0) = ExtN−1O
(CN,0)(OX,0,ΩN
(CN ,0))
onde ΩN(CN ,0) é o módulo de N -formas holomorfas sobre CN e ExtN−1
O(CN,0)
é o funtor derivado
Ext. Seja η : (X, x0) → (X, 0) a normalização, onde (X, x0) é o multigerme (X, η−1(0)).Como Ω1 é um funtor contravariante e ω é um funtor covariante, podemos usar a funtorialidadepara obter a aplicação cX .
cX : Ω1(X,0) → Ω1
(X,x0)∼= ω(X,x0) → ω(X,0).
Também temos a aplicação derivada “d”, compondo com cX obtemos uma nova aplicação aoqual chamamos de “d”
d : O(X,0)d // Ω1
(X,0)
cX // ω(X,0) .
Definição 1.24. [7] Seja (X, 0) uma curva singular reduzida. Defininimos o número de Milnor,
µ, como a dimensão da seguinte álgebra:
µ = µ(X, 0) = dimCω(X,0)
d(OX,0).

1.6 Número de Milnor de uma Curva em CN 13
Daremos uma definição equivalente para ω(X,0), usando as formas diferenciais de Rosenli-cht. Seja x0 = η−1(0) e denotemos por Ω1
(X,x0)(x0) o multigerme de formas meromorfas sobre
(X, x0) com no máximo um polo (de qualquer ordem) em x0. Definimos o conjunto das formasdiferenciais regulares de Rosenlicht como sendo:
ωR(X,0) = η∗α ∈ Ω1(X,x0)
(x0)/∑p∈x0
resp(fα) = 0,∀f ∈ O(X,0).
Outra vez obtemos a aplicação d,
d : O(X,0)d // Ω1
(X,0)
cX // ω(X,0) .
Assim
µ(X) = dimCωR(X,0)
dO(X,0)
.
A definição de Grothendieck tem a vantagem de ser funtorial e pode ser estendida a váriasdimensões. Mas pelo contrário a definição de Rosenlicht é mais usada para os cálculos.
Em [7] é dada otra definição de número de Milnor que coincide com o número de Milnorpara interseções completas.
Seja η : (X, x0) → (X, 0) a normalização, denotemos por δ = dimCη∗O(X,x0)
OX,0e por r o
número de ramos da curva (X, 0
Observação 1.25. [7] O número de Milnor da curva (X, 0) satisfaz a fórmula de Milnor
µ(X) = 2δ − r + 1.
No seguinte exemplo calculamos o número de Milnor de C usando a definição equivalenteà definição 1.24.
Exemplo 1.26. Seja C = V (z(z + x2), y(z + x2), y2 − xz), curva singular. Vamos calcular o
número de Milnor da curva C. A curva tem dois ramos, o primeiro ramo é dado pela seguinte
normalizaçãoη1 : C → C
t 7→ (t2,−t3,−t4)
O segundo ramo é parametrizado por:
η2 : C → C
s 7→ (s, 0, 0)

14 Preliminares
Assim, temos a aplicação induzida por η,
η∗ : C(t2
s
),
(−t3
0
),
(−t4
0
)→ Ct ⊕ Cs
Vamos calcular uma base para as 1-formas diferenciais de Rosenlicht. Um elemento α ∈Ω1
(X,x0)(x0) pode ser expresso em séries da seguinte forma:(
(∑r
m=1 amt−m +
∑∞m=0 bmt
m)dt
(∑l
k=1 cks−k +
∑∞k=0 dks
k)ds
).
Temos que
(1
1
)∈ O(X,0), então a1 + c1 = 0(
t2
s
)∈ O(X,0), então a3 + c2 = 0(
−t3
0
)∈ O(X,0), então a4 = 0, assim am = 0, ∀m > 4 e ck = 0, ∀m > 2.
Logo temos que ((a3t
−3 + a2t−2 + a1t
−1 +∑∞
m=0 bmtm)dt
(−a3s−2 +−a1s
−1 +∑∞
k=0 dksk)ds
)∈ ωRX
ωRX =
(t−3dt
−s−2ds
)C⊕
(t−2dt
0
)C⊕
(t−1dt
−s−1ds
)C⊕
(1dt
0
)Ct ⊕
(0
1ds
)Cs
Para calcular µ, precisamos descrever dOX:
dOX,0 =
(2t
1
)C⊕
(t2
0
)Ct ⊕
(0
s
)Cs
Assim, temos que o quociente é gerado por
ωR(X,0)
dO(X,0)
=
(t−3dt
−s−2ds
)C⊕
(t−2
0
)C⊕
(t−1
−s−1
)C⊕
(1dt
0
)C⊕
(tdt
0
)C
Portanto µ = 5.

Capítulo Dois
Variedades Determinantais
Neste capítulo apresentaremos as definições básicas sobre variedades determinantais, combase no artigo de W. Èbeling e S. M. Guseın-Zade [23]. O objetivo é definir as variedadesessencialmente isoladas e estudar suas propriedades. Estas singularidades generalizam as sin-gularidades isoladas . Mostramos também que elas podem ser estudadas através da teoria desingularidades de matrizes. As referências para este estudo são as teses de Frühbis-Krüger [17]e Silva Pereira [34]
2.1 Variedades Determinantais Essencialmente Isoladas
Denotemos por Mm,n o conjunto das matrizes m× n com entradas complexas.
Definição 2.1. Para cada t, 1 6 t 6 minm,n, seja M tm,n o subconjunto de Mm,n cujos
elementos são matrizes de posto menor do que t:
M tm,n = A ∈Mm,n/ rank(A) < t.
Este conjunto é uma variedade singular de codimensão (m − t + 1)(n − t + 1) em Mm,n,
chamada variedade determinantal genérica.
O conjunto singular de M tm,n é M t−1
m,n. Temos que M tm,n = ∪i = 1, ..., t(M
im,n\M i−1
m,n) eM i
m,n\M i−1m,ni=1,··· ,t é uma estratificação de Whitney de M t
m,n, ver [1].
Seja F : CN → Mm,n uma aplicação dada pela matriz m × n, F (x) = (fij(x)), cujasentradas são funções analíticas complexas definidas sobre um domínio aberto U ⊂ CN .
Definição 2.2. A variedade determinantal de tipo (m,n, t) é a pré-imagem F−1(M tm,n) da
variedade M tm,n com a condição que a codimensão seja (n− t+ 1)(m− t+ 1).

16 Variedades Determinantais
A imagem de uma aplicação genérica F pode interceptar a variedade M im,n com i < t (além
disso a correspondente variedade determinantal X = F−1(M tm,n) tem singularidades). Uma
aplicação genérica F intercepta o estrato M im,n\M i−1
m,n da variedade M tm,n transversalmente.
Quer dizer, nos pontos correspondentes, a variedade determinantal tem um tipo de singularida-des que depende apenas de i = rankF (x) + 1.
Definição 2.3. Um ponto x ∈ X = F−1(M tm,n) é chamado essencialmente não singular se,
neste ponto, a aplicação F é transversal ao estrato correspondente da variedade M tm,n (isto é,
ao estrato M im,n\M i−1
m,n, com i = rankF (x) + 1).
Sejam I ⊂ 1, · · · ,m e J ⊂ 1, · · · , n tais que |I| = |J | = i. Denotemos por mIJ(x)
o menor i × i correspondente da matriz F (x) e por dmiIJ(x) o conjunto de diferenciais de
todos os menores mIJ(x).Em um ponto essencialmente não singular x0 ∈ X com rankF (x0) = i − 1, temos que o
posto da matriz dmiIJ é (m− i+ 1)(n− i+ 1).
Para 1 6 i 6 t, denotemos por Xi = F−1(M im,n). Em uma vizinhança do ponto essencial
não singular x0, temos que a subvariedade Xi\Xi−1 = x ∈ X/ rankF (x) = i − 1 é nãosingular de dimensão N − (m− i+ 1)(n− i+ 1).
Em um ponto essencialmente singular x ∈ X temos,
rank(dmiIJ)IJ < (m− i+ 1)(n− i+ 1).
Definição 2.4. Um germe (X, 0) ⊂ (CN , 0) de variedade determinantal de tipo (m,n, t) tem
um ponto essencialmente singular isolado na origem (EIDS), se existe uma vizinhança U da
origem em CN tal que todos os pontos singulares de X em U − 0 são pontos essencialmente
não singulares.
Quando t = 1 ou N 6 (m− t + 2)(n− t + 2) a singularidade da variedade determinantalé isolada e satisfaz a seguinte definição.
Definição 2.5. Seja X uma variedade determinantal de tipo (m,n, t), definida por F e satisfa-
zendo: t = 1 ou N 6 (m−t+2)(n−t+2). Dizemos que (X, 0) é uma variedade determinantal
com singularidade isolada em 0 ou IDS se X é suave em x e rankF (x) = t − 1, para todo
x 6= 0 em uma vizinhança da origem.
De agora em diante vamos supor que a variedade determinantal X é definida por uma apli-cação F : (CN , 0) → Mm,n com F (0) = 0. Isto não é uma restrição porque se F (0) 6= 0
e rankF (0) = s > 0, então X é uma variedade determinantal de tipo (m − s, n − s, t − s)
definida pela aplicação F ′ : (CN , 0)→ Mm−s,n−s com F ′(0) = 0. Vamos supor também que adimensão de X é maior do que 0, ou seja N > (m− t+ 1)(n− t+ 1).

2.1 Variedades Determinantais Essencialmente Isoladas 17
Exemplo 2.6. Considere X = F−1(M22,3), onde F é definida por
F : C4 → M2,3
(x, y, z, w) 7→
(z y x
w z y
)
A variedade X é definida pelos zeros de z2−wy, y2− zx, zy−wx e tem singularidade isolada
na origem.
Definição 2.7. Consideramos uma perturbação de F no seguinte sentido,
F : CN × C → Mm,n
(x, t) 7→ F (x, s)
onde F (x, 0) = F (x) e Fs : CN → Mm,n é transversal a todos os estratos M im,n\M i−1
m,n, com
i 6 t, para todo s 6= 0 suficiente próximo de zero. Então Xs = F−1s (M t
m,n), s 6= 0 é chamada
uma suavização essencial de X .
Quando X é suave, dizemos que X é uma suavização de X .Uma perturbação genérica F da aplicação F define uma suavização essencial da EIDS
(X, 0). Uma suavização essencial em geral não é suave (para N ≥ (m− t+ 2)(n− t+ 2)). Oconjunto singular de Xs é F−1
s (M t−1m,n). Como F é transversal aos estratos de M t
m,n, segue queXs = ∪1≤i≤tF
−1s (M i
m,n\M i−1m,n) é uma estratificação de Whitney de Xs.
Uma suavização essencial de uma EIDS (X, 0) de tipo (m,n, t) é uma suavização, isto é,X é suave, se N < (m− t+ 2)(n− t+ 2).
Teorema 2.8. [40] Seja (X, 0) uma variedade determinantal com singularidade isolada na
origem, definida pelos menores t× t de uma matriz Fij m× n, com entradas em ON , 2 6 t 6
m 6 n. Se dim(X) < m+ n− 2t+ 3, então X admite uma suavização.
Exemplo 2.9. Seja X = F−1(M22,3) a superfície determinantal definida pela função,
F : C4 → M2,3
(x, y, z, w) 7→
(z y + w x
w x y
)
Uma suavização essencial, Xs, de X é representada pela seguinte matriz:
Fs : U ⊂ C4 → M2,3
(x, y, z, w) 7→
(z y + w x+ s
w x y
), s 6= 0,

18 Variedades Determinantais
então Xs = F−1s (M2
2,3) é uma suavização de X .
Exemplo 2.10. Seja X = F−1(M22,3) a 4- variedade determinantal definida pela seguinte ma-
trizF : C6 → M2,3
(x, y, z, w, v, u) 7→
(x y v
z w x+ u2
)
Uma suavização essencial, Xs, de X é representada pela seguinte matriz:
Fs : U ⊂ C6 → M2,3
(x, y, z, w, v, u) 7→
(x+ s y v
z w x+ u2
), s 6= 0,
então Xs = F−1s (M2
2,3) é uma suavização essencial de X , que tem singularidade em y = z =
w = v = 0, x = −s, u = ±√s.
Exemplo 2.11. Seja X = F−1(M22,4) ⊂ C5 a superfície determinantal definida por
F : C5 → M2,4
(x, y, z, w, v) 7→
(x y z w
y z w v
)
Uma suavização essencial, Xs, de X é representada pela matriz:
Fs : U ⊂ C5 → M2,4
(x, y, z, w, v) 7→
(x y + s z w
y z w v
), s 6= 0,
então Xs = F−1s (M2
2,4) é uma suavização essencial de X , que é singular.
2.2 Singularidades de Matrizes
Vamos definir os grupos G(n,m), KV e KH que são subgrupos geométricos do grupo decontato K, que agem no espaço das matrizes m × n com entradas em ON . O grupo G(n,m)
age sobre o espaço das matrizes através de operações de linhas e colunas de matrizes e demudanças de coordenadas na fonte. A teoria de singularidades pode ser então utilizada, e as

2.2 Singularidades de Matrizes 19
caracterizações de estabilidade e determinação finita se verificam para estas ações. Poderemosentão dar novas caracterizações para as EIDS, tendo como base a teoria de singularidades dematrizes. As principais referências a seguir são [18, 35, 12].
2.2.1 K- Equivalência
Vamos descrever o grupo de contato K que age sobre o espaço de de germes analíticosF : (CN , 0)→ (Cp, 0).
K = Φ : (CN+p, 0)→ (CN+p, 0)|Φ é um difeomorfismo,Φ(x, y) = (φ(x), θ(x, y)), θ(x, 0) =
0, onde φ : (CN , 0)→ (CN , 0)→ (CN , 0)é um difeomorfismo.Ou seja, K consiste de difeomorfismos analíticos Φ : CN × Cp → CN × Cp tais que existe
um difeomorfismo φ : (CN , 0)→ (CN , 0), na qual temos o seguinte diagrama comutativo:
CN i //
φ
CN+p π //
Φ
CN
φ
CN i // CN+p π // CN .
i : CN → CN+p é a inclusão i(x) = (x, 0) e π : CN+p → CN é a projeção sobre o primeirofator.
Um elemento Φ ∈ K age sobre F : (CN , 0) → (Cp, 0) se graf(Φ.F ) = Φ(grafF ), ondegrafF é o gráfico da função F .
2.2.2 A G(n,m) - Equivalência
Seja como antes F : (CN , 0)→Mm,n, tal que para cada x em uma vizinhança U da origem,F (x) ∈Mm,n.
Indicaremos por Mm,n(ON) = F : (CN , 0)→Mm,n|F é um germe analítico complexo.Seja R o grupo de mudanças de coordenadas em (CN , 0), ou seja R = φ : (CN , 0) →
(CN , 0)/φ é um germe de difeomorfismo analítico .
Definição 2.12. (O Grupo G(n,m)) Seja GLi(ON) o grupo das matrizes i× i invertíveis com
entradas em ON . Denotemos porH = Gln(ON)×Glm(ON)
Então definimos G(n,m) = R×H, o qual é um grupo com as seguintes operações.
(φ,R, L) (ψ, S,N) = (φ ψ, (ψ∗R).S, (ψ∗L).N),
onde ψ∗(M) é a matriz gerada aplicando ψ em cada uma das entradas de M .

20 Variedades Determinantais
Definimos a ação de G(n,m) sobre Mm,n(ON)
Ψ : G(n,m)×Mm,n(ON) −→ Mm,n(ON)
((φ,R, L), F ) 7−→ L−1(φ∗F ).R.
Dizemos queF1, F2 são G(n,m)-equivalentes se ∃(φ,R, L) ∈ G(n,m) tal queF2 = L−1(φ∗F1)R.
A ação do grupo G(n,m) é dada por mudanças de coordenadas na fonte e transformaçõesde linhas e colunas da matriz.
Como já definimos uma ação sobre o espaço das matrizes m× n, a primeira tarefa é deter-minar o espaço tangente sob a ação do grupo G(n,m).
Definição 2.13. Seja F : (CN , 0)→ (Cp, 0) um germe analítico, definimos o ON - módulo
θ(F ) = ON∂
∂yipi=1,
módulo de campos vetoriais ao longo de F .
Consideremos o espaço das matrizes com entradas emON como umON módulo. O espaçotangente será considerado como um ON submódulo de θ(F ).
Teorema 2.14. [35, 16] Seja F ∈Mm,n(ON).
1. O espaço tangente com relação ao grupoR é dado por:
TR · F = m∂F∂xi
, ∀ 1 ≤ i ≤ N
onde m é o ideal maximal de ON .
Usamos também a notação J(F ) para o ON - módulo gerado pelas matrizes da forma
∂F
∂xj=
∂F11
∂xj· · · ∂F1n
∂xj... . . . ...
∂Fm1
∂xj· · · ∂Fmn
∂xj
m×n
∀1 ≤ j ≤ N.
2. O espaço tangente com relação ao grupoH é dado por:
TH · F = ON(AF + FB)/A ∈Mm(ON), B ∈Mn(ON).

2.2 Singularidades de Matrizes 21
3. O espaço tangente com relação ao grupo G(n,m) = R × H é dado pela soma dos
espaços tangentes:
TG(n,m)·F = m∂F∂xi
, ∀ 1 ≤ i ≤ N+ON(AF+FB)/A ∈Mm(ON), B ∈Mn(ON).
Definição 2.15. O espaço tangente estendido para F ∈Mm,n(ON) é dado por:
TeG(n,m) · F = ON〈JM(F ), AF + FB〉/A ∈Mm(ON), B ∈Mn(ON).
Lema 2.16. [35] Seja F ∈ Mm,n(ON) com entradas no ideal maximal m. Então o módulo
normal é dado por:
NF =θ(F )
TH · F
Definição 2.17. A codimensão do espaço tangente estendido de G(n,m) em F é denominada
número de Tjurina de X = F−1(M tm,n). Isto é,
τ(F ) = dimCθ(F )
TeG(n,m) · F.
2.2.3 A KV - Equivalência
Nesta seção apresentamos o grupo KV que é um subconjunto do grupo de contato K, quedepende do conjunto analítico (V, 0) ⊂ (Cp, 0) e age sobre o espaço de funções F : CN → Cp.Para nosso contexto Cp é o espaço das matrizes Mm,n. As referências para esta subseção são[12, 36].
Denotemos por θp o Op módulo de germes de campos vetoriais holomorfos sobre Cp, 0 epor K o grupo de contato que age sobre o espaço das funções F : CN → Cp.
Definição 2.18. Seja (V, 0) ⊂ (Cp, 0) um germe de conjunto analítico. Seja I(V ) ⊂ Op o ideal
de germes que se anulam sobre V . Definimos o módulo de germes de campos vetoriais que são
tangentes a V .
Derlog(V ) = η ∈ θp | η(I(V )) ⊂ I(V ).
Definição 2.19. Seja (V, 0) ⊂ (Cp, 0) um germe de espaço analítico complexo, definido pelos
zeros de uma função H : Cp → Cr. Definimos o submódulo do Derlog(V ) por
Derlog(H) = η ∈ θp | η(H) = 0.

22 Variedades Determinantais
Nesse contexto, se H é uma boa equação que define V ⊂ Cp, então:
Derlog(V ) = Derlog(H)⊕Opζ,
o vetor ζ é chamado campo vetorial de Euler.
Definição 2.20. Seja (V, 0) ⊂ (Cp, 0) um germe de variedade analítica. Definimos o subgrupo
deK denotado porKV , que consiste de germes de difeomorfismos deK que preservam CN×V ,
isto é,
KV = Φ ∈ K | Φ(CN × V ) ⊂ CN × V .
Seja ηjmj=1 o conjunto de geradores para o Derlog(V ). Então o espaço tangente estendidodo KV em F : CN → Cp é
TKV,e · F = OCN ,0∂F
∂xiNi=1 +OCN ,0ηi Fmj=1
Então a codimensão de KV em F é a dimensão do espaço normal de KV em F .
KV,e − codim(F ) = dimCθ(F )
TKV,e · F.
2.2.4 A KH - Equivalência
Seja (V, 0) ⊂ (Cp, 0) tal que V = H−1(0), com H : (Cp, 0)→ (Cr, 0) um germe analítico.Neste caso definimos o grupo KH que consiste de difeomorfismos que preservam todos osconjuntos de nível de H , ver [36].
Definição 2.21. Com as hipóteses acima, seja π2 : CN ×Cp → Cp a projeção sobre o segundo
fator. Então o grupo KH é definido por:
KH = Φ ∈ K|H π2 Φ = H π2.
O espaço tangente estendido do grupo KH em F : (CN , 0) → (Cp, 0) é um submódulo deθ(F ), dado por
TKH,e · F = OCN ,0∂F
∂xiNi=1 +OCN ,0ηj Fmj=1
onde ηjmj=1 é o conjunto de geradores para o Derlog(H).A codimensão estendida de KH em F é definida por
TKH,e − codim(F ) = dimCθ(F )
TKH,e · F

2.3 Determinação Finita 23
2.3 Determinação Finita
Seja G qualquer um dos grupos definidos acima, G = G(n,m),KV ou KH . Nesta seçãoapresentaremos critérios de determinação finita do grupo G.
Definição 2.22. Seja F ∈Mm,n(ON). Dizemos que F é k−G determinado se para toda matriz
P ∈Mm,n(ON) tal que jk(F ) = jk(P ) se tem que F ∼G P .
Dizemos que F é finitamente determinado se ∃k ∈ N tal que F é k-G determinado.
Nos resultados seguintes, apresentamos condições necessárias e suficientes para aG-determi-nação finita.
Proposição 2.23. [34, 9] Seja F ∈ Mm,n(ON). Se F é k-G determinado então mk+1θ(F ) ⊆TG · F
Teorema 2.24. [34, 9] (Critério Infinitesimal da determinação Finita.) Seja F ∈ Mm,n(ON)
um germe de matriz. Seja k > 0 um inteiro tal que se G satisfaz as relações para os grupos
G = G(n,m),KV e KH respetivamente
mk+1θ(F ) ⊂ m2(∂F
∂x1
, . . .∂F
∂xN) + m(AF + FB)/A ∈Mm(ON), B ∈Mn(ON). (2.1)
mk+1θ(F ) ⊂ m2(∂F
∂x1
, . . .∂F
∂xN) + mDerlog(V ). (2.2)
mk+1θ(F ) ⊂ m2(∂F
∂x1
, . . .∂F
∂xN) + mDerlog(H). (2.3)
Então F é G k- finitamente determinado.
O seguinte resultado é uma caracterização geométrica dos germes finitamente determinados.
Definição 2.25. Um germe F : (CN , 0)→Mm,n é G- estável se TGe · F = θ(F ).
Teorema 2.26. [34] (Critério Geométrico da G- determinação Finita.) F : (CN , 0) → Mm,n
é G-finitamente determinado se e somente se existe um representante F : U → Mm,n tal que
para todo x ∈ U − 0, o germe de F no ponto x é G estável.
Podemos usar o critério geométrico da G- determinação finita para relacionar esta aborda-gem com as EIDS definidas na seção anterior no caso de variedades determinantais definidaspelo anulamento dos menores maximais da matriz F (x).
Seja F : (CN , 0)→Mm,n e X = F−1(Mmm,n) a variedade determinantal definida por F .
Teorema 2.27. F : CN → Mm,n é G(n,m) finitamente determinada se e somente se X é uma
EIDS.

24 Variedades Determinantais
Demonstração: Se F é G(n,m) finitamente determinado, existe um representante F : U →Mm,n, U uma vizinhança da origem tal que, ∀ x ∈ U\0, F é transversal aos estratosM i
m,n\M i−1m,n de Mm
m,n. Ou seja, X = F−1(Mmm,n) é uma EIDS. Evidentemente a recíproca
também se verifica.
Um germe F : (CN , 0) → Mm,n G(n,m) finitamente determinado admite um desdobra-mento versal a s-parâmetros (onde s = τ(F )), ver [34]
F : (CN × Cs, 0) → Mm,n
(x, u) 7→ F(x, u) = (Fij(x, u)).
Para um representante F : W ×D → Mm,n de F , onde W é uma vizinhança de 0 em CN
e D é vizinhança de 0 em Cs, definimos o conjunto de bifurcação B(F) por
B(F) = u ∈ D|Fu : W →Mm,n não é G(n,m) estável
onde Fu : W → Mm,n, Fu(x) = F(x, u). Este é um subconjunto analítico próprio de W eportanto seu complemento é conexo.
Assim, para cada u ∈ D\B(F), Fu é G(n,m)- estável. Além disso, ∀u, u′ ∈ D\B(F),Fu ∼G(n,m) F ′u.
Em outras palavras, ∀u ∈ D\B(F), Fu é uma suavização essencial de F. Além disso,quaisquer duas suavizações essenciais são equivalentes.
2.4 Variedades Cohen-Macaulay de Codimensão 2
O Teorema de Hilbert-Burch nos permite enunciar a seguinte proposição, que diz que todogerme Cohen-Macaulay de codimensão 2 pode ser expresso como os menores maximais de umamatriz M de tamanho n× (n+ 1) e viceversa. No mesmo contexto, deformações de um germeCohen-Macaulay de codimensão 2 podem ser representadas por perturbações da matriz M , equalquer perturbação da matriz surge como uma deformação do germe X .
Dada uma matriz F ∈ Mn(n+1)(ON), denotemos por ∆i o menor n × n cujo índice i,indica que a i-ésima linha da matriz F (x) foi eliminada para calcular o menor, denotemos por〈∆〉 = 〈∆1,∆2, · · · ,∆n+1〉 o ideal gerado pelos menores ∆i, i = 1, . . . , n + 1 e por V (∆) avariedade em CN definida pelos zeros das funções ∆i.
Proposição 2.28. [15, página 496]
1. Se a codimV (〈∆〉) > 2, a seguinte seqüência

2.4 Variedades Cohen-Macaulay de Codimensão 2 25
0 // OnNF // ONn+1 ∆ // ON // ON
〈∆〉// 0
é exata . Além disso,ON〈∆〉
é Cohen - Macaulay e codimV (〈∆〉) = 2.
2. Se X ⊂ CN é Cohen- Macaulay, tal que codim(X) = 2 e X = V (I) então ON/I tem
uma resolução livre minimal do tipo.
0 // OnNF // ONn+1 I // ON // ON
I// 0
Além disso existe uma unidade u ∈ ON tal que I = u.∆, onde ∆ = 〈∆1, . . . ,∆n+1〉 .
3. Qualquer perturbação da matriz F (x) dá origem a uma deformação do X .
4. Qualquer deformação da variedade X pode ser gerada por uma perturbação da matriz
F (x).
Observação 2.29. X ⊆ CN é chamado Cohen-Macaulay se o anel local ON/I , é Cohen-Macaulay.

26 Variedades Determinantais

Capítulo Três
Topologia de Variedades comSingularidade Isolada
Vamos estudar neste capítulo a topologia de variedades determinantais isoladas. Estas varie-dades podem admitir suavização. A topologia da fibra genérica é um invariante da variedadedeterminantal. Definimos o número de Milnor com base nos trabalhos [12, 35, 31] e a caracte-rística de Euler evanescente com base nos trabalhos [12, 31] e estudamos uma fórmula de tipoLê-Greuel que se verifica para essas variedades.
3.1 Teoria de Morse
Seja (X, 0) ⊂ (CN , 0) uma variedade d-dimensional com singularidade isolada na origem.Uma suavização deX é uma deformação plana com a propriedade que suas fibras genéricas sãosuaves.
Definição 3.1. Dizemos que uma variedade (X, 0) ⊂ (CN , 0) d- dimensional com singulari-
dade isolada admite uma suavização, se existem uma bola aberta Bε(0) ⊂ CN centrada na
origem, um subespaço fechado X ⊂ Bε(0) × D, onde D ⊂ C é um disco aberto centrado
no zero e uma aplicação analítica própria π : X → D ⊂ C, que é a restrição da aplicação
projeção π : Bε(0)×D → D tal que:
1. π é plana
2. (π−1(0), 0) é isomorfo a (X, 0)
3. π−1(s) é não singular para s 6= 0
Segue da definição que X tem singularidade isolada na origem e é uma variedade normal seX é normal em zero. Além disso,
π|π−1(D−0) : π−1(D − 0)→ D − 0

28 Topologia de Variedades com Singularidade Isolada
é um fibrado cujas fibras Xt = π−1(s) são suaves.
Seja (X, 0) ⊂ (CN , 0) uma variedade d-dimensional com singularidade isolada na origem.Suponhamos que exista uma suavização para X , isto é, uma família plana π : X → C, restriçãode π : CN × C, tal que Xs = π−1(s) é suave para s 6= 0 e X = X0. Notemos também queX tem singularidade isolada na origem. Seja p uma função analítica complexa definida em X ,com singularidade isolada na origem. Seja
p : X ⊂ CN × C → C(x, s) 7→ p(x, s)
tal que p(x, 0) = p(x) e tal que para todo s 6= 0, p(., s) = ps seja uma função de Morse em Xs.O número de pontos críticos de ps é finito.
Proposição 3.2. [35] Sejam X uma variedade d-dimensional com singularidade isolada na
origem que admite uma suavização π e ps = p(., s) como acima. Então:
1. Se s 6= 0
Xs∼= p−1
s (0) ∪ Células de dimensão d ,
onde ∪ indica a colagem dos dois espaços e ∼= indica que os espaços têm o mesmo tipo
de homotopia.
2. Temos a igualdade
χ(Xs) = χ(p−1s (0)) + (−1)dnσ (3.1)
onde nσ é o número de pontos críticos de ps e χ(Xs) é a característica de Euler de Xs.
Na fórmula (3.1) podemos substituir nσ pela multiplicidade polar md(X), que definimos aseguir.
Definição 3.3. [20] Sejam X ⊂ CN ×Cs uma variedade analítica complexa de dimensão d+s
e π : X → Cs uma função analítica tal que π−1(0) = X . Seja p : X ⊂ (CN×Cs, 0)→ (Cs, 0)
tal que p|X tem singularidade isolada na origem. Denotamos md(X, π, p) = m0(Pd(X, π, p)),
onde Pd(X, π, p) é a d- ésima variedade polar de X com relação a π. Em geral md(X, π, p)
depende das escolhas de X e p, mas quando X ⊂ CN × C é uma suavização única de X ,
md(X, π, p) depende apenas de p. Quando p é uma projeção genérica, então md(X, π, p)
depende apenas de X , e é portanto um invariante de X que será denotado por md(X) =
md(X, π, p).
A prova da proposição abaixo pode ser encontrada em [34].
Proposição 3.4. Sob as condições da Proposição 3.2, nσ = md(X).

3.2 Funções Definidas em IDS 29
No estudo da topologia de variedades determinantais com singularidade isolada, os seguin-tes resultados são úteis.
Teorema 3.5. [22] Seja (X, 0) um espaço analítico complexo d- dimensional, com singulari-
dade isolada e Xs a suavização de (X, 0). Então πi(Xs) = 0 para i 6 dimX − codimX .
Denotemos por bi(Xs) o i-ésimo número de Betti da fibra genérica.
Teorema 3.6. [22] Seja Xs a suavização de uma singularidade normal, então b1(Xs) = 0.
Exemplo 3.7. (Interseções completas com singularidade isolada) Seja (X, 0) ⊂ (CN , 0) uma
ICIS d-dimesional. A fibra de Milnor Xs, tem o tipo de homotopia de um bouquet de esferas. O
número de esferas é o número de Milnor, denotado por µ(X) e temos a seguinte relação
χ(Xs) = 1 + (−1)dµ(X).
3.2 Funções Definidas em IDS
Nem toda IDS tem suavização, como vimos no Teorema 2.8. A condição é que N <
(n− t + 2)(m− t + 2). Em [31, 33], J. Nuño Ballesteros, B. Oréfice-Okamoto e J. Tomazellaconstruiram suavizações de (X, 0), no seguinte sentido:
Dado um germe de variedade determinantal (X, 0) = (F−1(M tm,n), 0) ⊂ (CN , 0), onde
F : CN →Mm,n vamos construir uma suavização de (X, 0) através de uma deformação de F .Seja A = (aij)mn com aij ∈ C números genéricos. Denotamos
FA : CN → Mm,n
x 7→ F (x) + A
e XA = F−1A (M t
m,n).
Lema 3.8. [31, Lema 3.1] Seja (X, 0) = (F−1(M tm,n), 0) ⊂ (CN , 0) uma IDS, com N < (n−
t+ 2)(m− t+ 2). Escolhemos um representante suficientemente pequeno de X = F−1(M tm,n).
Existe um aberto de Zariski não vazio W ⊂ Mm,n tal que se A ∈ W então XA é suave e
rankFA(x) = t− 1 para todo x ∈ XA.
Teorema 3.9. [33, Teorema 4.14] Sejam (X, 0) = (F−1(M tm,n), 0) ⊂ (CN , 0) uma IDS e
A = (aij)m×n uma matriz genérica. Definimos
Fs : CN → Mm,n
x 7→ F (x) + sA.
Então Xs = F−1s (M t
m,n) é uma suavização de X.

30 Topologia de Variedades com Singularidade Isolada
Lema 3.10. [33, Lema 5.2] Existe uma função linear p : CN → C e um conjunto Zariski aberto
W ⊂Mm,n tal que para todo A ∈ W , XA é suave e p|XAé uma função de Morse.
Estes resultados foram mostrados usando o fato que para A genérica, Fs é transversal aosestratos da variedade determinantal genérica M t
m,n.
3.3 Fórmula de Tipo Lê-Greuel para Variedades Determi-nantais
No estudo da topologia de interseções completas com singularidades isoladas (ICIS), umresultado importante é a fórmula de Lê-Greuel. Esta fórmula estabelece um método indutivoque permite calcular o número de Milnor da variedade, no seguinte sentido:
Sejam f = (f1, . . . , fk−1, fk) : (CN , 0) → (Ck, 0) e g = (f1, . . . , fk−1) : (CN , 0) →(Ck−1, 0). Seja X = g−1(0) e Y = f−1(0) = X ∩ f−1
k (0), então
µ(X, 0) + µ(Y, 0) = dimCON
〈f1, . . . , fk−1, J(f1, . . . , fk)〉
onde J(f1, . . . , fk) é o ideal de todos os menores k × k da matriz jacobiana de f . A dimensãodescrita na parte direita é igual ao número de pontos críticos de uma perturbação de fk restritaà fibra genérica g.
Fórmulas de tipo Lê- Greuel para variedades determinantais foram estudadas recentementeem [31, 35, 12]. Para superfícies determinantais em CN , segue do Teorema 3.6 que b1(Xs) = 0.Então a seguinte definição se justifica.
Definição 3.11. [35] SejamX uma superfície determinantal em CN , com singularidade isolada
na origem. O número de Milnor de X , denotado por µ(X), é o segundo número de Betti de Xs,
µ(X, 0) = b2(Xs).
Para obter a fórmula de tipo Lê-Greuel, é considerada a curva determinantal obtida pelainterseção de X com um hiperplano H , definido pelo núcleo de uma aplicação linear p, tal queX ∩H tem singularidade isolada na origem.
O seguinte resultado é encontrado no artigo [35], para o caso de superfícies X ⊂ C4, masvale também para superfícies com singularidade isolada em CN , que admitem suavização.
Proposição 3.12. [35] Seja (X, 0) ⊂ (CN , 0) o germe de uma superfície determinantal com
singularidade isolada na origem. Seja p : (CN , 0) → (C, 0) uma aplicação linear cuja restri-
ção à X tem singularidade isolada na origem. Então:

3.3 Fórmula de Tipo Lê-Greuel para Variedades Determinantais 31
µ(X) + µ(X ∩H) = m2(X). (3.2)
Para dimensões d = dimX > 2, os números de Betti bi(X), 2 6 i < d não são necessaria-mente nulos, neste caso em [31, 12] os autores definem a característica de Euler evanescentede variedadades que admitem suavizações. No trabalho [12] a noção de característica de Eulerevanescente é também definida para EIDS que não são necessariamente IDS, ver Capítulo 6.
Definição 3.13. [31] Seja (X, 0) ⊂ (CN , 0) uma IDS tal que N < (n − t + 2)(m − t + 2). A
característica de Euler evanescente é definida por
ν(X, 0) = (−1)d(χ(Xs)− 1),
onde Xs é uma suavização de X e χ(Xs) é a característica de Euler de Xt .
Observação 3.14. Se χ(X) = χ(Xs)− 1 então χ(X) = (−1)dν(X).
Teorema 3.15. [31] Seja (X, 0) ⊂ (CN , 0) uma IDS tal que N < (n− t+ 2)(m− t+ 2) e seja
p : (CN , 0)→ (C, 0) uma função linear genérica cuja restrição à X tem singularidade isolada
na origem. Então,
ν(X) + ν(X ∩ p−1(0)) = md(X) (3.3)
Observação 3.16. Quando d = 2, então ν(X) = µ(X).
Exemplo 3.17. [34] Seja X = F−1(M22,3) ⊂ C4 definida pela função:
F : C4 → M2,3
(x, y, z, w) 7→
(w y x
z w y
)
Considere Xs a suavização de X , definida pela matriz(z y + w x+ s
w x y
).
Considere p : C4 → C dada por p(x,y,z,w)=w, como m2(X) = 3 e µ(X ∩ p−1(0)) = 2, então
µ(X) = 1.

32 Topologia de Variedades com Singularidade Isolada
Capítulo Quatro
A Transformada de Nash de VariedadesDeterminantais
Estudamos a transformada de Nash da variedade determinantal genérica M tm,n, de forma
detalhada, seguindo W. Èbeling e S. M. Guseın-Zade em [23]. Se verifica que a transformadade Nash de M t
m,n é suave e portanto uma resolução para M tm,n. Com isso podemos estudar a
transformada de Nash X , da EIDSX , definida por F e obter condições sobre a transversalidadede F aos estratos da estratificação de M t
m,n para obter X suave.
4.1 Resoluções de M tm,n
Nesta seção apresentaremos três tipos de resoluções para as variedades determinantais ge-néricas, sendo uma delas a transformação de Nash da variedade determinantal genérica. Nossoobjetivo aqui é apresentar com mais detalhes os resultados de W. Èbeling e S. M. Guseın-Zadeem [23].
Denotemos por ΣX o conjunto dos pontos singulares de X e por Xreg = X\ΣX a parteregular de X . Consideremos Gr(k, n) a variedade grassmanniana de subespaços vetoriais com-plexos de dimensão k em Cn.
No seguinte lema vamos mostrar que o espaço tangente de Gr(k, n) em um ponto W pode
ser identificado com Hom(W,Cn
W), o que será usado para calcular o espaço tangente de M t
m,n.
Lema 4.1. Dado W ∈ Gr(k, n), temos que TW (Gr(k, n)) e Hom(W,Cn
W) são isomorfos.
Demonstração: Definimos a seguinte aplicação linear de espaços vetoriais:
L : Hom(W,Cn) → TW (Gr(k, n))
φ 7→ Wφ,ε

34 A Transformada de Nash de Variedades Determinantais
como segue: se w1, ..., wk ∈ W ⊂ Cn geram uma base de W , então definimos Wφ,ε = 〈w1 +
εφ(w1), ..., wk+εφ(wk)〉. Notemos que os vetoreswi+εφ(wi), i = 1, ..., k são ainda linearmenteindependentes pois são pequenas perturbações de um conjunto lineramente independente.
Vamos mostrar que L é sobrejetora: suponha que w1, · · · , wk, ek+1, · · · , en formem umabase de Cn, completando a base W . Cada elemento W ′ ∈ Gr(k, n) perto de W pode ser dadocomo o gráfico de uma aplicação linear λ : W → W⊥ definida por uma matriz (n − k) × k,α = (bij) com relação as bases 〈w1, . . . , wk〉 de W e 〈ek+1, . . . , en〉 de W⊥. Logo W ′ =
(w, λ(w))|w ∈ W, assim uma base para W ′ é dada por 〈wi + bi,k+1ek+1 + · · · + bi,nen〉.Então definimos φ como
φ(wi) = bi,k+1ei,k+1 + · · ·+ bi,nen.
Agora, temos queHom(W,W ) ⊂ Hom(W,Cn)
está contido noKer(L), pois dado φ : W → W , L(φ) = W que corresponde ao espaço vetorial0 em CN/W . Como L é sobrejetora, usando o teorema do posto, obtemos
dim ker(L) = dimHom(W,Cn)− dimGr(k, n) = nk − k(n− k) = k2.
Como dimHom(W,W ) = k2 e Hom(W,W ) ⊂ Ker(L), então
Hom(W,W ) = Ker(L).
Pelo Teorema do isomorfismo temos:
Hom(W,Cn
W) ∼=
Hom(W,Cn)
Hom(W,W )∼= TW (Gr(k, n)).
Definição 4.2. Dada uma variedade singular X , uma resolução de X é uma aplicação π :
Y → X , onde Y é uma variedade suave e que satisfaz as seguintes condições:
– π|π−1(Xreg) : π−1(Xreg)→ X − ΣX é um isomorfismo.
– π é própria.
Existem ao menos 4 resoluções para a variedadeM tm,n. Vamos defini-las e estudar com mais
detalhes a resolução de Nash.
1. A primeira resolução é construída da seguinte maneira. Consideremos as matrizes detamanho m × n como aplicações Cn → Cm. Para t 6 minm,n definimos Y1, uma

4.1 Resoluções de M tm,n 35
subvariedade de Mm,n ×Gr(n− t+ 1, n) :
Y1 = (A,W ) ∈Mm,n ×Gr(n− t+ 1, n)/A(W ) = 0.
Consideramos a aplicação π1 : Y1 →M tm,n que é a projeção no primeiro fator. A projeção
no segundo fator π2 : Y1 → Gr(n − t + 1, n) define um fibrado vetorial, cuja fibra temposto m(t− 1). Assim Y1 é suave e portanto uma resolução de M t
m,n.
O seguinte lema será util para calcular a transformada de Nash de M tm,n. Sua prova usa a
resolução Y1.
Lema 4.3. [1] Seja A ∈ (M tm,n)reg. O espaço tangente de (M t
m,n)reg no ponto A é igual
a:
TA(M tm,n) = B ∈Mm,n/B. kerA ⊂ imA.
Demonstração: Consideremos a aplicação π1 : Y1 → M tm,n e determinemos o espaço
tangente de (A,W ) ∈ Y1.
Dado (A,W ) ∈ Y1, temos que AW = 0. O espaço tangente é dado por um par (B, φ)
onde B é uma matriz e φ ∈ Hom(W,Cn
W) tais que (A + εB)(wi + εφ(wi)) = 0, onde
wi é uma base de W . Assim A.W = 0 e Aφ(wi) + B.wi = 0, (Aφ + B)W = 0,B.W = A(−φW ), i.e. B.W ⊂ im(A). Assim
d(A,W )π1(T(A,W )Y1) = B ∈Mm,n/B.W ⊂ im(A).
Quando A ∈ (M tm,n)reg = M t
m,n\M t−1m,n, rankA = t − 1 então W = kerA e temos que
(A, kerA) ∈ Y1 e a aplicação d(A,kerA)π : T(A,kerA)Y1 → TAMtm,n é injetiva. Assim
TA(M tm,n) = B ∈Mm,n/B kerA ⊂ imA.
2. A segunda resolução é dada considerando as matrizes de tamanhom×n, como aplicaçõesde Cm → Cn. Definimos Y2 da mesma forma que a primeira resolução dada como umsubconjunto de Mm,n ×Gr(m− t+ 1,m) e definimos π2 : Y2 →M t
m,n.
3. Uma terceira resolução é definida considerando Y definido por:
Y = (A,W ) ∈Mm,n ×Gr(t− 1,m)/ imA ⊂ W
e definindo π : Y →M tm,n como a projeção no primeiro fator.
4. A transformada de Nash da variedade M tm,n, denotada por M t
m,n é uma resolução da

36 A Transformada de Nash de Variedades Determinantais
variedade M tm,n.
Vamos usar esta definição para o caso da variedade analítica das matrizes de posto menordo que t, M t
m,n. Denotamos por dtm,n = mn− (m− t+1)(n− t+1) a dimensão da varie-dade M t
m,n . A transformação de Nash M tm,n é um subespaço de M t
m,n×Gr(dtm,n,Mm,n)
dado por:
M tm,n = (A, T )/A ∈M t
m,n\M t−1m,n = (M t
m,n)reg, T = TAM tm,n.
Na seqüência daremos uma caracterização da transformada de NashM tm,n. Consideremos
a seguinte aplicação:
α : Gr(n− t+ 1, n)×Gr(t− 1,m) → Gr(dtm,n,mn)
(W1,W2) 7→ B ∈Mm,n/BW1 ⊂ W2.
Proposição 4.4. [23] A transformação de Nash de M tm,n é dada por:
M tm,n = (A, T )/A ∈Mm,n, T = α(W1,W2),W1 ⊂ kerA, imA ⊂ W2.
Demonstração:
Dados W1 e W2 , Q = B ∈ Mm,n/BW1 ⊂ W2 é um subespaço vetorial de Mm,n. Defato, temos:
(a) Seja B1 ∈ Q, B2 ∈ Q, então B1W1 ⊂ W2 e B2W1 ⊂ W2, logo (B1 + B2)W1 =
B1W1 +B2W1 ⊂ W2.
(b) Seja k ∈ C e B ∈ Q então (kB)W1 ⊂ kW2 ⊂ W2.
Os elementos W1 ∈ Gr(n − t + 1, n) podem ser descritos por coordenadas, dadas poruma matriz complexa n × (n − t + 1), Y = (yij) de posto n − t + 1, cujas colunasv1 = (y11, · · · , y1n), · · · , vn−t+1 = (y(n−t+1)1, · · · , y(n−t+1)n) formam uma base de W1.Todas as outras bases de W são combinações lineares da base dada, determinadas poruma matriz A = (aij), r × r, invertível. Então as coordenadas de W estão definidas porY A, onde A é uma matriz invertível.
Considerando W1 gerado pelos primeiros n − t + 1 elementos da base canônica de Cn,e1, · · · , en−t+1, e W2 gerado pelos últimos t − 1 geradores da base canônica de Cm,podemos representar W1,W2 pelas seguintes matrizes:

4.1 Resoluções de M tm,n 37
W1 =
Id(n−t+1)×(n−t+1)
−−−−−−−0(t−1)×(n−t+1)
n×(n−t+1)
W2 =
0(m−t+1)×(t−1)
−−−−−−−Id(t−1)×(t−1)
m×(t−1)
.
Dado um elemento B ∈ W , temos que BW1 ⊂ W2, então podemos dividir a matriz Bem blocos, e fazer o produto:
Considere B =
(P Q
R S
)m×n
, onde [P ](m−t+1)(n−t+1), [Q](m−t+1)(t−1), [R](t−1)(n−t+1),
[S](t−1)×(t−1).
(P Q
R S
).
Id
−−−0
=
P(m−t+1)×(n−t+1)
−−−−−−−−R(t−1)×(n−t+1)
.
Como BW1 ⊂ W2, então P = 0. Assim B =
(0 Q
R S
).
Vamos mostrar que
α : Gr(n− t+ 1, n)×Gr(t− 1,m) → Gr(dtm,n,mn)
(W1,W2) 7→ B ∈Mm,n/BW1 ⊂ W2
é um mergulho.
Sejam W1,W′1 ∈ Gr(n − t + 1, n), e W2,W
′2 ∈ Gr(t − 1,m), com α(W1,W2) =
α(W ′1,W
′2). Sem perda de generalidade podemos considerar W1 e W2, como no caso
anterior e W ′1,W
′2 representados pelas matrizes:
W ′1 =
M
−−−N
, W ′2 =
T
−−−U
.
A injetividade de α vai ser demonstrada em 3 casos:
1) Caso: W2 = W ′2 =
0(m−t+1)×(t−1)
−−−−−−−Id(t−1)×(t−1)
.
Como B ∈ α(W1,W2) então B é da forma B =
(0 Q
R S
), e como α(W1,W2) =
α(W ′1,W
′2), temos
(0 Q
R S
).
M
−−−N
=
QN
−−−RM + SN
, os vetores colunas

38 A Transformada de Nash de Variedades Determinantais
pertencem a W2. Em termos de matrizes, por abuso de notação, podemos dizer que QN
−−−RM + SN
⊂ 0(m−t+1)×(t−1)
−−−−−−−Id(t−1)×(t−1)
. Assim QN = 0 para toda matriz Q, en-
tão N = 0, logo W ′1 =
M
−−−0
. Como W ′1 é um subespaço vetorial temos que
detM 6= 0, assim concluímos que W1 = W ′1.
2) Caso W2 6= W ′2 e detU 6= 0.
Neste caso, a matriz U em W ′2 é invertível. Então W ′
2 pode ser representada por W ′2 = T
−−−U
.U−1 =
TU−1
−−−Id
.
Então BW ′1 =
QN
−−−RM + SN
⊂ TU−1
−−−Id
. Como esta condição está satisfeita
para toda matriz Q, podemos considerar Q = 0, logo TU−1 = 0, assim W2 = W ′2, pelo
caso anterior.
3) Caso W2 6= W ′2 e detU = 0.
Usando os mesmos argumentos BW ′1 =
QN
−−−RM + SN
⊂ T
−−−U
. Como esta
condição é verificada para qualquer matriz Q, podemos considerar Q = 0, assim T = 0.Temos uma contradição, pois o posto de W ′
2 é t− 1.
Continuando com o cálculo da transformação de Nash para a variedade M tm,n e conside-
rando o espaço tangente calculado temos:
M tm,n = (A, T )/A ∈M t
m,n\M t−1m,n = (M t
m,n)reg, T = TAM tm,n
M tm,n = (A, T )/A ∈M t
m,n\M t−1m,n = (M t
m,n)reg, T = α(kerA, imA)
Seja (A, T ) ∈ (A, T )/A ∈M tm,n\M t−1
m,n = (M tm,n)reg, T = TAM t
m,n, então (A, T ) =
limr→∞(Ar, Tr), com (Ar, Tr) ∈ (A, T )/A ∈M tm,n\M t−1
m,n = (M tm,n)reg, T = TAM
tm,n
então Tr = α(kerAr, ImAr). Como α é um mergulho então

4.1 Resoluções de M tm,n 39
limTr = α(lim kerAr, lim imAr). Assim,A/ kerA = W1, imA = W2 = A ∈Mm,n/W1 ⊂ kerA, imA ⊂ W2.
Mostramos acima que a restrição de π ao segundo fator de M tm,n ⊂M t
m,n×Gr(dtm,n,mn) éa projeção de um fibrado vetorial de posto (t−1)2 e de base α(Gr(n−t+1, n)×Gr(t−1,m)).A fibra F deste fibrado vetorial é dada por
π−1(α(W1,W2)) = A/W1 ⊂ kerA, imA ⊂ W2.
Temos dimB + dimF = dim M tm,n, dimB = (t − 1)(n − t + 1) + (t − 1)(m − t + 1) e
dim M tm,m = dimM t
m,n = mn− (m− t+ 1)(n− t+ 1), assim dimF = (t− 1)2. Logo M tm,n
é suave.Assim obtemos uma resolução de M t
m,n, Y3 = M tm,ndada pela transformação de Nash e
denotamos
π3 : M tm,n →M t
m,n
a projeção no primeiro fator.
Exemplo 4.5. Vamos calcular a transformada de Nash de M22,3.
M22,3 = A =
(x y z
w u v
)|xu− wy = xv − wz = yv − uz = 0.
Para isso primeiro vamos calcular ν−1(A) = (A, T ) ∈ M2,3 × Gr(2, 4)|T = TA(M22,3)reg,
onde A é um ponto regular.
Para ilustrar, se consideramos A =
(1 0 0
1 0 0
), então
TAM22,3 = B ∈M2,3|B kerA ⊂ imA =
(a b b
d e e
)|a, b, d, e ∈ C
Temos então ν−1(A) =((1 0 0
1 0 0
),
(a b b
d e e
))|a, b, d, e ∈ C
.
Seja A =
(0 0 0
0 0 0
), ponto singular de M2
2,3, agora vamos calcular
ν−1(A) = (A, T ) ∈M2,3 ×Gr(2, 4)/T = α(W1,W2),W1 ⊂ kerA, imA ⊂ W2.
Temos que (A, T ) ∈ M22,3, se T = α(W1,W2) com W1 ⊂ kerA = C3, 0 = ImA ⊂ W2,

40 A Transformada de Nash de Variedades Determinantais
com dimW1 = 2, dimW2 = 1.
Dado W1 ⊂ kerA = C3 e (0) = imA ⊂ W2, se consideramos W1 = 〈(1, 0, r), (0, 1, s)〉e W2 = 〈(1, u)〉, com r, s, u ∈ C, podemos construir uma matriz C tal que kerC = W1 e
imC = W2.
Assim obtemos C da seguinte forma:
C =
(r s −1
ur us −u
)Com isso podemos concluir que C ∈ ν−1(0),
Para as outras bases acontece o mesmo, existe uma matriz com uma entrada distinta de
zero.
Logo ν−1(0) é o conjunto de matrizes de posto 1 módulo o subconjunto cA| rank(A) =
1, c ∈ C, c 6= 0, tais que ν(M) = 0 e dim ν−1(0) = 3.
4.2 Transformação de Nash de uma EIDS
Seja X uma variedade determinantal essencialmente isolada (Def. 2.4), ou seja X =
F−1(M tm,n), onde F é transversal a todos os estratos da estratificação canônica de M t
m,n fora daorigem.
Usando a transformação de Nash para matrizes M tm,n, podemos calcular a transformação de
Nash para X = F−1(M tm,n), que denotamos por X ⊂ CN ×Gr(d,N), onde d = N − (n− t+
1)(m− t+ 1).
Por definição temos que X é dada por:
X = (x, T )/x ∈ Xreg, T = Tx(Xreg)
Usando a transversalidade de F temos que:
X = (x, T )/F (x) ∈ (M tm,n\M t−1
m,n), T = (dxF )−1(TF (x)(M tm,n\M t−1
m,n))
Agora vamos considerar os seguintes casos:
1. Se x ∈ Xreg = F−1(M tm,n\M t−1
m,n). Temos que (x, T ) ∈ X , se F (x) ∈ M tm,n\M t−1
m,n,então T = Tx(Xreg) = (dxF )−1(TF (x)(M
tm,n\M t−1
m,n)).
2. Se x ∈ ΣX = F−1(M t−1m,n).
Temos que (x, T ) ∈ X , se existe uma seqüência (xr, Tr) tal que xr → x ∈ F−1(M t−1m,n),

4.2 Transformação de Nash de uma EIDS 41
F (xr) ∈ (M tm,n)reg, com Tr = dxrF
−1(TF (xr)(Mtm,n\M t−1
m,n)) e Tr → T , onde T =
limxr→x Tr.
No próximo teorema obtemos condições para que a transformada de Nash de uma EIDSseja suave.
Teorema 4.6. Seja X = F−1(M tm,n) ⊂ CN uma EIDS, definida por F : CN → Mm,n. Se F é
transversal aos limites dos espaços tangentes aos estratos da variedade M tm,n então X é suave.
Inicialmente, mostraremos os seguintes resultados
Proposição 4.7. Seja X = F−1(M tm,n) ⊂ CN uma EIDS, definida pela função F : CN →
Mm,n. Se F é transversal aos estratos da variedade M tm,n então X é suave.
Demonstração: Como M1m,n = 0 é estrato de dimensão 0 e F é transversal aos estratos de
M tm,n, então F é transversal a M1
m,n, ∀ x ∈ CN tal que F (x) = 0, quer dizer dxF é sobrejetoraem x. Portanto, existe uma vizinhança U de 0 tal que
dxF (CN) = TF (x)Mm,n,∀x ∈ U. (4.1)
Ou seja, temos que N > m× n e F localmente é equivalente a uma projeção.
Considere a seguinte aplicação:
F : CN ×Gr(dtm,n,mn) → Mm,n ×Gr(dtm,n,mn)
(x, T ) 7→ (F (x), T )
onde dtm,n = dimM tm,n = mn− (m− t+ 1)(n− t+ 1).
Queremos mostrar que F é transversal a M tm,n. De fato, seja x tal que F (x) ∈M i
m,n\M i−1m,n,
x ∈ U , como F tM im,n\M i−1
m,n em F (x) temos
dxF (CN) + TF (x)(Mim,n\M i−1
m,n) = TF (x)Mm,n. (4.2)
Assim
dxF (CN)⊕ TWGr(dtm,n,mn) + T(F (x),W )Mtn,m = Mm,n ⊕ TWGr(dtm,n,mn).(4.3)
d(x,W )F (CN ⊕ TWGr(dtm,n,mn)) + T(F (x),W )Mtm,n = Mm,n ⊕ TWGr(dtm,n,mn),(4.4)
e portanto F é transversal a M tm,n em (x,W ). Então X = F−1(M t
m,n) é suave.
Vamos mostrar que X ∼= X . De fato, considere a seguinte aplicação

42 A Transformada de Nash de Variedades Determinantais
Ψ : X → X
(x,W ) 7→ (x, (dxF )−1(W )).
A aplicação Ψ está bem definida pois para um ponto singular x ∈ X , (x,W ) ∈ X ,(F (x),W ) ∈ M t
m,n, existe uma seqüência xr → x, F (xr)→ F (x), xr ∈ Xreg = F−1(M tm,n\M t
m,n)
tal que limTF (xr)Mtm,n = W. Como F é transversal aos estratos de M t
m,n, então
(dxrF )−1(TF (xr)(Mtm,n\M t−1
m,n) = TxrXreg e T = (dxF )−1(W ).
A restrição da projeção π : Mm,n × Gr(dtm,n,mn) → Mm,n a M tm,n é a aplicação νt :
M tm,n →M t
m,n.
Lema 4.8. Se (F (x),W ) ∈ ν−1t (M i
m,n\M i−1m,n) então
d(F (x),W )νt(T(F (x),W )Mtm,n) ⊃ TF (x)(M
im,n\M i−1
m,n).
Demonstração: Como (F (x),W ) ∈ M tm,n, então existe uma seqüência xk → x, com xk ∈
Xreg, assim F (xk) ∈M tm,n\M t−1
m,n, F (xk)→ F (x) e TF (xk)(Mtm,n\M t−1
m,n)→ W .
Temos que a aplicação νt : M tm,n\ν−1
t (M t−1m,n) → M t
m,n\M t−1m,n é um difeomorfismo, se
denotamos Wk = TF (xk)(Mtm,n\M t−1
m,n) então
d(F (xk),Wk)νt(T(F (xk),Wk)Mtm,n) = TF (xk)(M
tm,n\M t−1
m,n)
Aplicando limite temos que
d(F (x),W )νt(T(F (x),W )Mtm,n) = W
Como a estratificação de M tm,n é Whitney, então pela condição a) temos que
W ⊃ TF (x)(Mim,n\M i−1
m,n).
Prova do Teorema 4.6 Vamos provar que se F é transversal aos limites dos espaços tan-gentes aos estratos, então X é suave.
Se x 6∈ F−1(0), F (x) ∈M im,n\M i−1
m,n, então F t M im,n\M i−1
m,n em x. Isto é
dxF (CN) + TF (x)(Mim,n\M i−1
m,n) = Mm,n. (4.5)

4.2 Transformação de Nash de uma EIDS 43
Então afirmamos que
d(x,W )F (CN ⊕ TWGr(dtm,n,mn)) + T(F (x),W )Mtm,n = Mm,n ⊕ TWGr(dtm,n,mn). (4.6)
De fato, pelo Lema 4.8, como (F (x),W ) ∈ ν−1t (M i
m,n\M i−1m,n) então
d(F (x),W )νt(T(F (x),W ))Mtm,n) ⊃ TF (x)(M
im,n\M i−1
m,n).
O resultado segue da Equacão (4.5).
Se x ∈ F−1(0), por hipótese F é transversal aos limites dos espaços tangentes aos estratosde M t
m,n. Isto é, ∀ xk → x, F (xk) → 0, F (xk) ∈ M im,n\M i−1
m,n, TF (xk)(Mim,n\M i−1
m,n) → T i,então
dxF (CN) + T i = Mm,n. (4.7)
Seja (0,W ) ∈ ν−1t (0). Queremos mostrar que
dxF (CN)⊕ TWGr(dtm,n,mn)) + T(0,W )Mtm,n = Mm,n ⊕ TWGr(dtm,n,mn). (4.8)
É suficiente mostrar que ∀ T i como acima
d(0,W )νt(T(0,W )(Mtm,n)) ⊃ T i.
Seja T i como na Equação 4.7. Para cada k seja xkl uma seqüência em Xreg tal que xkl → xk,então temos que F (xkl) ∈M t
m,n\M t−1m,n, F (xkl)→ F (xk) ∈M i
m,n\M i−1m,n e
Wk = limF (xkl)→F (xk)
TF (xkl)(Mtm,n\M t−1
m,n).
Tomando a seqüência diagonal xkk → x, temosF (xkk)→ F (x) = 0, TF (xkk)(Mtm,n\M t−1
m,n)→W . Então (0,W ) ∈ ν−1
t (0) e Wk → W . Temos que (F (xk),Wk) ∈ ν−1(M im,n\M i−1
m,n), peloLema 4.8 segue que
d(F (xk),Wk)νt(T(F (xk),Wk)Mtm,n) ⊃ TF (xk)(M
im,n\M i−1
m,n) (4.9)
Aplicando limite, obtemos
d(0,W )νt(T(0,W )Mtm,n) ⊃ W ⊃ T i (4.10)
Assim X é suave.

44 A Transformada de Nash de Variedades Determinantais
4.3 Exemplos
Na seqüência apresentamos alguns exemplos de transformada de Nash de EIDS. Para ocálculo usamos a definição da transformada de Nash. As matrizes nos exemplos são obtidas databela de A. Frühbis-Krüger e A. Neumer em [18].
Exemplo 4.9. Considere
F : C4 → M2,3
(x, y, z, w) 7→
(w y x
z w y
).
Então X = V (w2 − zy, wy − zx, y2 − wx), tem uma singularidade isolada na origem.
A fibra ν−1(0) é igual a,
ν−1(0) = (0, T )/T = limxr→0
(dxrF )−1(TF (xr)M22,3\M1
2,3).
ν−1(0) = (0, T )/T = (dxF )−1( limxr→0
TF (xr)M22,3\M1
2,3).
ν−1(0) = (0, T )/T = (dxF )−1(W ),W = α(W1,W2),W1 ⊂ C3, 0 ⊂ W2
Temos que a dimensão de W1 é 2 e a dimensão de W2 é 1, F (0) é a matriz nula, kerF (0) =
C3 e ImF (0) = 0. Calculamos o limite da diferencial de F :
d(x,y,z,w)F (a, b, c, d) =
(d b a
c d b
).
Logo, como W1 ⊂ C3 é de dimensão dois, podemos considerar sem perda de generalidade
W1 gerada pelos vetores (1, 0, 0) e (0, 1, 0) e W2 = 〈(1, 0)〉 assim:
W = α(W1,W2) = B ∈M2,3|B.W1 ⊂ W2
(a b c
d e f
) 1 0
0 1
0 0
=
(a b
d e
).
Como W2 = 〈(1, 0)〉, então d = e = 0.
Assim W = B =
(a b c
d e f
)|d = e = 0
T = (dxF )−1(W ) = 〈(a, b, c, d)|c = d = 0〉. Portanto (0, T ) ∈ ν−1(0).
Se consideramos outras bases W1, W2 que satisfazem as condições acima mencionadas
temos outros elementos na fibra.

4.3 Exemplos 45
Para os próximos exemplos calculamos os limites de planos tangentes em x = 0.
Exemplo 4.10. Seja F dada por:
F : C4 → M2,3
(x, y, z, w) 7→
(z y x
w z y
)
Então a variedade determinantal X é uma superfície dada pelos zeros das funções:1) z2 − wy = 0
2) zy − xw = 0
3) y2 − xz = 0
Podemos ver X como o cone de uma curva projetiva X∗ em P3 parametrizada por
ν : P1 → P3
(S : T ) 7→ (S3 : S2T : ST 2 : T 3)
Ou seja, X = C(X∗) ⊂ C4 onde X∗ é uma curva suave isomorfa a P1.
Vamos calcular os planos limites, ou seja, os limites da sequência TxnXreg quando xn con-verge para x, que é equivalente pelo Lema de seleção da curva a calcular o limite de Tδ(t)Xreg
com δ(t), uma curva em X convergendo para 0, quando t converge para 0.
Considerando uma carta, quando x 6= 0, temos que a variedade pode se representar com asseguintes coordenadas:
(x, y,y2
x,y3
x2).
Agora considerando as derivadas com relação a x e y, temos o espaço tangente gerado por:
〈(1, 0,−y2
x2,−2
y3
x3), (0, 1, 2
y
x, 3y2
x2)〉.
Seja δ(t) = (x(t), y(t), z(t), w(t)) em X uma curva em X , tal que limt→0
δ(t) = 0. Se
x(t) = a0tα0 + · · · e y(t) = b0t
β0 + · · · , então 2α0 < 3β0, assim:
1. Se α0 < β0, então o plano limite é gerado por
〈(1, 0, 0, 0), (0, 1, 0, 0)〉.
2. Se α0 = β0, então o plano limite é gerado por
〈(1, 0,− b20
a20
,−2b3
0
a30
), (0, 1, 2b0
a0
, 3b2
0
a20
)〉.

46 A Transformada de Nash de Variedades Determinantais
Quando x→ 0, temos o seguinte limite de planos tangentes:
〈(0, 0, 1, 0), (0, 0, 0, 1)〉.
Com estes resultados obtemos ν−1(0, 0, 0, 0) = X∗ e X = C(X∗).
Exemplo 4.11. Seja F dada pela seguinte matriz, para k > 2
F : C4 → M2,3
(x, y, z, w) 7→
(z y x
w z yk
)
A superfície X = F−1(M22,3) é definida pelos zeros das seguintes funções
1. z2 − wy = 0
2. zyk − wx = 0
3. yk+1 − zx = 0
Considerando uma carta, quando x 6= 0, temos que a variedade pode se representar com asseguintes coordenadas:
(x, y,yk+1
x,y2k+1
x2).
Agora considerando as derivadas com relação a x e y, temos o espaço tangente gerado por:
〈(1, 0,−yk+1
x2,−2
y2k+1
x3), (0, 1, (k + 1)
yk
x, (2k + 1)
y2k
x2)〉.
Tirando os denominadores temos que o espaço tangente é gerado por:
〈(x3, 0,−xyk+1,−2y2k+1), (0, x2, (k + 1)xyk, (2k + 1)y2k)〉.
Dada uma curva δ(t) = (x(t), y(t), z(t), w(t)) em X , tal que limt→0
δ(t) = 0, se:
x(t) = a0tα0 + · · · e y(t) = b0t
β0 + · · · , então 2α0 < (2k + 1)β0, assim:
〈(a30t
3α0 + · · · , 0,−a0bk+1tα0+(k+1)β0 + · · · ,−2b2k+1
0 t(2k+1)β0 + · · · ), (0, a20t
2α0 + · · · , (k +
1)a0bk0tα0+kβ0 + · · · , (2k + 1)b2k
0 t2kβ0 + · · · )〉.
Fazendo por casos:
1. Se α0 6 β0, então o plano limite é gerado por
〈(1, 0, 0, 0), (0, 1, 0, 0)〉.

4.3 Exemplos 47
2. Se β0 < α0 <(k + 1)β0
2, então 3α0 < α0 + (k+ 1)β0 < (2k+ 1)β0 e 2α0 < α0 +kβ0 <
2kβ0, logo, o plano limite é gerado por
〈(1, 0, 0, 0), (0, 1, 0, 0)〉.
3. Se 2α0 = (k + 1)β0, então o plano tangente é gerado por:
〈(a20, 0,−bk+1
0 , 0), (0, 1, 0, 0)〉.
4. Se(k + 1)β0
2< α0 < kβ0, então α0 +(k+1)β0 < (2k+1)β0 < 3α0 e 2α0 < α0 +kβ0 <
2kβ0, logo o plano é gerado por
〈(0, 0, 1, 0), (0, 1, 0, 0)〉.
5. α0 = kβ0, então o plano limite é gerado por
〈(0, 0, a0, 2bk0), (0, a2
0, (k + 1)a0bk0, (2k + 1)b2k
0 )〉.
6. kβ0 < α0 <(2k+1)β0
2, então os limites de vetores tangentes são paralelos
〈(0, 0, 0, 1)〉.
7. Se x = 0, temos o seguinte limite de planos tangentes
〈(0, 0, 1, 0), (0, 0, 0, 1)〉.
Podemos ver que o conjunto de limites de espaços tangentes na origem se dá através do conetangente unido com um feixe de planos que são gerados por (0, 1, 0, 0) e (a2
0, 0,−bk+10 , 0), con-
cluindo que a transformada de Nash não é suave.

48 A Transformada de Nash de Variedades Determinantais

Capítulo Cinco
Espaço Conormal de VariedadesDeterminantais
O objetivo deste capítulo é estudar os limites de hiperplanos tangentes de uma variedadedeterminantal. Definiremos hiperplano geral e fortemente geral sobre uma IDS ou EIDS respe-tivamente. Estas duas definições são equivalentes no caso de singularidade isolada. As seçõesgerais definidas pela interseção de um hiperplano geral (fortemente geral) com a variedade de-terminantal determina uma variedade determinantal com singularidade isolada ou uma EIDSrespectivamente. Jawad Snoussi estudou o limite de hiperplanos tangentes de superfícies nor-mais em [38], dando algumas caracterizações das seções gerais em termos da minimalidade donúmero de Milnor da curva. Como toda superfície determinantal com singularidade isolada énormal o resultado se aplica para superfícies determinantais em C4. Neste capítulo estudamosas seções gerais de uma 3 variedade determinantal em C5. Tais seções são superfícies determi-nantais, e portanto seu número de Milnor está bem definido. No Teorema 5.21 provamos que onúmero de Milnor de uma seção geral é mínimo.
Para o caso de EIDS, podemos considerar as seções gerais, dadas pela interseção da vari-edade X com um plano linear P , de codimensão d − 2 tal que dimX ∩ P = 2. Neste caso,obtemos um resultado análogo ao de Lê Dung Trang en [26]. No Teorema 5.24 provamos quese H e H ′ são dois hiperplanos fortemente gerais então eles contêm P eP ′ espaços linearesde codimensão d − 2, tais que os respectivos números de Milnor das seções gerais, que sãosuperfícies determinantais, são iguais.
5.1 Limite de Hiperplanos de Espaços Tangentes
Seja (X, 0) ⊂ (CN , 0) um germe de variedade analítica d-dimensional reduzida. Denotamospor X um representante suficientemente pequeno do germe (X, 0) e por X0 = Xreg a parteregular de X (para não fazer confusão com a notação, note que se X tem uma estratificação de

50 Espaço Conormal de Variedades Determinantais
Whitney V0 = 0 é o estrato de X).
Consideremos o subconjunto C0(X0,CN) de X0 × CN , definido assim:
C0(X0,CN) = (x, ξ)/x ∈ X0 e ξ : CN → C, é uma forma linear com ξ(TxX0) = 0.
Definição 5.1. O fecho da projetivização com relação ao segundo fator de C0(X0,CN) em
X × PN−1, é chamado espaço conormal associado X em CN , denotado por C(X,CN) ou sim-
plesmente C(X). Denotaremos por η : C(X,CN) → X o morfismo induzido pela primeira
projeção, chamado morfismo conormal.
Observação 5.2. Para um germe (X, 0) de variedade analítica as seguintes propriedades se
verificam, ver [39]:
1. O conjunto C(X) é um subespaço analítico de X × PN−1 de dimensão N − 1.
2. Se x é um ponto não singular do espaço X , então η−1(x) corresponde ao conjunto de
hiperplanos de CN tangentes ao espaço X em x e dim η−1(x) = N − d− 1.
3. Um hiperplano H ∈ η−1(0) ⊂ CN é um limite de hiperplanos tangentes ao espaço X em
0, se existe uma sequência de pontos não singulares (xn) de X que converge a 0 e uma
sequência de hiperplanos Hn ⊃ TxnXreg de CN , tais que Hn converge à H em PN−1.
4. A fibra η−1(0) em um ponto singular tem dimensão N − d+ k− 1, onde k = dim ν−1(0)
(ν : X → X é a aplicação definida pela transformação de Nash, ver Definição 1.9).
Como k 6 d− 1, temos que dim η−1(0) 6 N − 2.
Denotemos por C0(X) = η−1(0) o conjunto de todos os limites de hiperplanos tangentes aX em 0.
Denotemos por φ : (C,C− 0, 0)→ (X,X0, 0) o germe de curva analítica tal que φ(0) = 0
e φ(C− 0) ⊂ X0
Lema 5.3. [21] Seja F : (CN , 0) → (Cp, 0), com X = F−1(0). Um hiperplano H pertence a
C0(X) se somente se existe um germe de curva analítica φ : (C,C− 0, 0)→ (X,X0, 0) e uma
aplicação ψ : (C, 0)→ Hom(Cp,C) tais que para algum k,
(a1, a2, · · · , aN) = limt→0
1
tkψ(t)(DF (φ(t)))
ondeN∑i
aixi = 0 é a equação de H.

5.1 Limite de Hiperplanos de Espaços Tangentes 51
Se H é um hiperplano em CN , denotemos JM(F )H o submódulos de JM(F ) gerado por∂F/∂v, ∀ v ∈ H .
O seguinte resultado é uma caracterização do conjunto de limites de hiperplanos tangentes.Apresentamos a prova com mais detalhes.
Teorema 5.4. [21, 13] Seja H um hiperplano em CN , temos que H ∈ C0(X) se somente se,
JM(F )H não é redução de JM(F ).
Demonstração: Pelo lema 5.3, temos que H = (x1, · · · , xN)/∑N
i=1 aixi = 0 ∈ C(X) seexistem φ : (C,C− 0, 0)→ (X,X0, 0), ψ : (C, 0)→ Hom(Cp,C) e k > 0, tais que
(a1, · · · , aN) = limt→0
1
tkψ(t)(DF (φ(t))). (5.1)
Por outro lado temos que Iψφ∗(JM(F )H) = O1ψ(t)(DF (φ(t).v))/v ∈ H (φ∗ é definido noCapítulo 1, Seção 1.5), como Iψ(φ∗(N)) ⊂ O1, então Iψφ∗(JM(F )H) = O1tq, para algumq ∈ N. Pela equação (5.1), temos que: Iψφ∗(JM(F )H) = O1tq, para q > k.
Da equação (5.1), temos que limt→0
1
tkψ(t)(DF (φ(t))).u 6= 0 para qualquer u ∈ CN−H . Logo
ψ(t)(DF (φ(t))).u /∈ Iψφ∗(JM(F )H), segue da proposição 1.23, que DF (x)u /∈ JM(F )H .
Reciprocamente, se JM(F )H & JM(F ), existe u ∈ CN−H tal queD(F ).u /∈ JM(F )H , logopela proposição 1.23, existem φ : (C,C−0, 0)→ (X,X0, 0), ψ : (C, 0)→ Hom(Cp,C) tal queψ(t)(DF (φ(t))).u /∈ Iψφ∗(JM(F )H). Como Iψφ∗(JM(F )H) ⊆ Iψφ
∗(JM(F )) ⊆ O1, exis-tem k, q ∈ N tais que Iψφ∗(JM(F )H) = O1tq, Iψφ∗(JM(F )) = O1tk, com 0 6 k 6 q.Como ψ(t)(DF (φ(t))).u /∈ Iψφ
∗(JM(F )H), então 0 6 k < q. Como Iψφ∗(JM(F )) =
O1tk, segue que
limt→0
1
tkψ(t)(DF (φ(t))) = (a1, a2, · · · , aN) 6= 0
e pelo fato que Iψφ∗(JM(F )H) = O1tq e 0 6 k < q, segue que
limt→0
1
tkψ(t)(DF (φ(t))) = 0,
portanto∑N
i=1 aixi = 0, ∀x ∈ H . Assim H = (x1, · · · , xN)/∑N
i=1 aixi = 0 e pelo lema 5.3segue que H ∈ C0(X).
No artigo [38], o autor define hiperplano geral se ele não é limite de espaços tangentes. Aquidaremos uma definição equivalente.
Definição 5.5. Dizemos que um hiperplano H em CN , dado pelo núcleo de uma aplicação
linear p : CN → C é geral com relação a X em 0 se H é transversal a T , ∀ T ∈ ν−1(0) (limite
de espaços tangentes).

52 Espaço Conormal de Variedades Determinantais
Proposição 5.6. Seja X uma variedade analítica em CN . Existe um conjunto Zariski aberto
não vazio Ω ⊂ PN−1 tal que ∀ H ∈ Ω, H é geral a X em 0.
Demonstração: A proposição segue da observação 5.2, com Ω = PN−1\η−1(0), pois η−1(0) éum conjunto analítico próprio.
Na seguinte proposição mostraremos que a Definição 2.2 (pag. 64) dada no artigo [38] e adefinição 5.5 são equivalentes.
Proposição 5.7. Um hiperplano H é limite de hiperplanos tangentes a X em 0 se, somente se
H não é geral.
Demonstração: Suponha que H é um limite de hiperplanos tangentes, então existe umasequência (xn) de pontos na parte regular de X , tal que T = limTxnXreg ⊂ H = p−1(0).Logo ker(p) não é transversal à T.
Reciprocamente, suponha que H não é geral, então, existe uma sequência (xn) ∈ Xreg comT = limTxn→0Xreg, tal que H não é transversal à T . Isto quer dizer que T + H 6= CN . ComodimH = N − 1 e dimT = 2, então T ⊆ H , ou seja, p(T ) = 0, assim H = p−1(0) é limite dehiperplanos tangentes.
Na seguinte proposição vamos mostrar que a condição "H é geral” vale para todos os pontosregulares em uma vizinhança de 0.
Proposição 5.8. SeH é geral em 0 então existe um abertoU contendo 0, tal queH é transversal
a X em y, ∀y ∈ U ∩Xreg
Demonstração: Suponha que a condição não seja verdadeira. Pelo lema da seleção da curva,existe uma curva α em X , tal que α(t) 6= 0 quando t 6= 0 e α(0) = 0, tal que Tα(t)X não étransversal à H , ∀t 6= 0. Isto implica que Tα(t)X ⊂ H , ∀ t 6= 0. Logo T = limt→0 Tα(t) ⊂ H , oque contradiz a hipótese.
Proposição 5.9. SejaX ⊂ CN uma variedade determinantal d-dimensional com singularidade
isolada na origem e H um hiperplano geral com relação a X , então X ∩ H ⊂ CN−1 é uma
variedade determinantal d− 1 dimensional com singularidade isolada na origem.
Demonstração: Como H é transversal à T , então dim(X ∩ H) = d − 1. Assim , suponhasem perda de generalidade que x1 = 0 é a equação de H e X é definida pela função F : CN →Mm,n, entãoX∩H é definida pela função F ′(x2, · · · , xN) = F (0, x2, · · · , xN). PortantoX∩Hé uma variedade determinantal d− 1 dimensional em CN−1.
Segue da proposição 5.8 que X ∩H tem singularidade isolada na origem.

5.1 Limite de Hiperplanos de Espaços Tangentes 53
y
x
Figura 5.1:
Na sequência daremos um exemplo no qual um hiperplano H não é limite de hiperplanostangentes, mas ele não é transversal aos limites de espaços tangentes aos estratos do conjuntosingular da variedade com singularidade não isolada.
Exemplo 5.10. Considere X a superfície rabo de andorinha, dada na figura 5.1. X é a super-
ficie em C3 definida pelos zeros de
256Z3 − 27X4 − 128Z2Y 2 + 144ZX2Y + 16ZY 4 − 4X2Y 3 = 0.
Ela pode também ser definida pela parametrização.
C2 → C3
(x, y) 7→ (−4x3 − 2xy, y,−3x4 − x2y)
O conjunto dos hiperplanos tangentes a X em zero é o hiperplano Z = 0 (ver por exemplo
[30]).
Temos que todo hiperplano diferente do hiperplano Z = 0 é geral, em particular o plano
H = (X, Y, Z) : X = 0 é geral, mas H não é transversal aos limites de retas tangentes aos
estratos de dimensão 1.
Este exemplo motiva a seguinte definição.
Definição 5.11. Seja X uma variedade analítica complexa d-dimensional, e seja Vi uma
estratificação de X . Dizemos que um hiperplano H é fortemente geral a X em 0, se existe uma

54 Espaço Conormal de Variedades Determinantais
vizinhança U de 0 tal que para todo estrato Vλ de X , com 0 ∈ V λ, temos que H t Vλ em x, ∀x ∈ U\0.
Se a variedade tem singularidade isolada, então as duas condições das definições (geral efortemente geral) coincidem.
Teorema 5.12. Seja (X, 0) ⊂ (CN , 0) uma EIDS, de tipo (n,m, t). Se H ⊂ CN é um hiper-
plano fortemente geral a X na origem, então X ∩H é uma EIDS em CN−1 de dimensão d− 1
e do mesmo tipo.
Demonstração: Seja F : CN → Mm,n a função que define X = F−1(M tm,n). Como X é
uma EIDS, então F é transversal aos estratos de M tm,n em U\0, onde U é uma vizinhança
da origem. Pela hipótese temos que H é transversal aos estratos de X fora da origem, ouseja a aplicação inclusão i : CN−1 → CN é transversal aos estratos de X fora da origem.Então F i : CN−1 → Mm,n é transversal a todos os estratos de M t
m,n fora da origem, assimX ∩H = F−1(M t
m,n) ⊂ CN−1 é uma EIDS do mesmo tipo do que X e dim(X ∩H) = d− 1
em CN−1.
5.2 Minimalidade do Número de Milnor
O objetivo desta seção é provar um resultado de minimalidade análogo ao obtido por JawadSnoussi [38], para variedades determinantais com singularidade isolada.
Os primeiros resultados sobre minimalidade do número de Milnor de uma seção genéricaforam obtidos por J.-P. G. Henry e D. T. Lê para hipersuperficies em CN em 1975, [25]. Essesresultados foram estendidos ao caso de interseções completas por Terence Gaffney, em [21]. Osdois trabalhos usam fecho integral de ideais e módulos para provar os resultados.
5.2.1 Hipersuperfícies e Interseções Completas em CN
Seja X ⊂ U ⊂ CN uma hipersuperfície analítica definida em um aberto U em CN pelafunção f = 0. Suponha que X tem singularidade isolada na origem.
Lema 5.13. [25] Existe um conjunto Zariski aberto Ω, do espaço projetivo de hiperplanos afins
de CN passando pela origem tal que H ∈ Ω se e somente se (X ∩H) tem uma singularidade
isolada na origem e o número de Milnor µ(X ∩H, 0) de X ∩H na origem é mínimo entre os
números de Milnor na origem de seções hiperplanas X ∩ L, tendo singularidade isolada na
origem.
Se H ∈ Ω, então H é chamado plano geral de X na origem.

5.2 Minimalidade do Número de Milnor 55
Teorema 5.14. [25] Um hiperplano H ⊂ CN não é limite de hiperplanos tangentes em X se e
somente se µ(X ∩H) é mínimo.
Demonstração: Suponha sem perda de generalidade que H é definido por x0 = 0
Temos a fórmula de tipo Lê-Greuel:
dimCOCN ,0
〈f, ∂f∂x1, . . . , ∂f
∂xN〉
= µ(X) + µ(X ∩H).
EntãodimC
OCN ,0
〈f, ∂f∂x1, . . . , ∂f
∂xN〉
= e(〈 ∂f∂x1
, . . . ,∂f
∂xN〉,OX,x),
onde e(I,OX,x) é a multiplicidade do ideal I sobre OX,x.
Indicamos por I = 〈 ∂f∂x1, . . . , ∂f
∂xN〉 e J = 〈 ∂f
∂x0, . . . , ∂f
∂xN〉 os ideais do anel OX,x, podemos
usar o seguinte resultado, ver [37].
Lema 5.15. Se I ⊆ J então e(I,OX,x) = e(J,OX,x) se e somente se I = J.
Continuando com a prova, como 〈 ∂f∂x1, . . . , ∂f
∂xN〉 ⊆ 〈 ∂f
∂x0, . . . , ∂f
∂xN〉 então temos a desigual-
dadee(〈 ∂f
∂x0
, . . . ,∂f
∂xN〉,OX,x) 6 e(〈 ∂f
∂x1
, . . . ,∂f
∂xN〉,OX,x).
Logo e(〈 ∂f∂x0, . . . , ∂f
∂xN〉,OX,x) = e(〈 ∂f
∂x1, . . . , ∂f
∂xN〉,OX,x) se e somente se
〈 ∂f∂x0
, . . . ,∂f
∂xN〉 = 〈 ∂f
∂x1
, . . . ,∂f
∂xN〉
O resultado segue de [25, Lema 2.5].
5.2.2 Variedades Determinantais com Singularidade Isolada na Origem
O seguinte resultado foi provado por Jawad Snoussi [38] para o caso de superfícies normais.Este lema é um dos resultados chaves para obter os resultados nesse artigo.
Seja X ⊂ CN uma superfície, considere π : CN → C2 uma aplicação linear genérica,denotemos por ∆L = π(P1(X), π) o discriminante da aplicação π, onde P1(X) é o conjuntopolar P1(X) = Σπ|Xreg
Lema 5.16. [38] Um hiperplano H em CN é geral se e somente se existe um (N − 2) plano
L ⊂ H tal que L ∩ |CX,0| = 0 e πL(H ∩ X) não é tangente ao cone tangente C∆L,0, onde
π : CN → C2 com L = ker(π).
56 Espaço Conormal de Variedades Determinantais
Para dimensões maiores, a seguinte proposição é demonstrada em [26].
Proposição 5.17. [26] Sejam X ⊂ CN uma variedade analítica complexa e L um subespaço
afim em CN de codimensão igual a dimensão de CX,x em CN , x ∈ L e L ∩ CX,x = x.Considere a projeção π : CN → CdimX tal que kerπ = L. Considere ∆L o discriminante de
π restrito a X . Seja H0 um hiperplano de CdimX que não é limite de hiperplanos tangentes
do discriminante ∆L. Então, o hiperplano H dado pela imagem inversa H = π−1(H0) não é
limite de hiperplanos tangentes a X .
O seguinte resultado é uma conseqüência simples da fórmula de Lê- Greuel mas é um re-sultado útil.
Proposição 5.18. Seja (X, 0) ⊂ CN uma IDS de dimensão d,N < (m−t+2)(n−t+2). Sejam
H eH ′ hiperplanos em CN tais queX∩H eX∩H ′ são EIDS então ν(X∩H, 0) 6 ν(X∩H ′, 0)
se, e somente se md(X, p) 6 md(X, p′).
Demonstração: Segue diretamente do Teorema 3.15.
Na sequência temos o seguinte resultado para o caso de superfícies determinantais, esteresultado é um caso particular do resultado no trabalho [38], já que toda variedade determi-nantal é normal. A nossa prova da condição necessária usa argumentos da teoria de variedadesdeterminantais, mas a prova recíproca é a mesma prova apresentada por Jawad Snoussi em [38].
Teorema 5.19. Sejam X ⊂ CN uma superfície determinantal e H ⊂ CN um hiperplano em
CN . Temos que H = p−1(0) é geral a X em 0, se e somente se, md(X, p) é mínimo.
Demonstração: Suponha que p não é geral e seja pt uma família a 1-parâmetro de projeçõestal que para t 6= 0, pt é geral. Podemos assumir que X ∩Ht = X ∩ p−1
t (0) é família plana decurvas reduzidas. Pela semicontinuidade do número de Milnor µ de curvas reduzidas, então
µ(X ∩Ht) < µ(X ∩H), t 6= 0.
Da proposição 5.18, segue que md(X, pt) < md(X, p), assim md(X, p) não é mínimo.Reciprocamente como em [38], suponha que p é geral e md(X, p) não é mínimo. pela
Proposição 5.18, µ(X ∩H) não é mínimo. Por [7, Teorema 6.1.7], existe um aberto Zariski Ω
do conjunto de hiperplanos em CN tal que para todo H ′ ∈ Ω temos que H ′ ∩ X é uma curvareduzida e µ(H ′∩X) < µ(H ∩X). O conjunto W = H ∩H ′/H ∈ Ω é um conjunto Zariskiaberto de hiperplanos de H . Como H não contém nenhuma componente irredutível de |CX |, oconjunto
W ′ = L/L não contém nenhuma geratriz em comum com o cone |CX |

5.2 Minimalidade do Número de Milnor 57
de hiperplanos de H é também aberto e denso. Então existe um hiperplano H ′ ⊂ CN tal queH ′ ∩X é uma curva reduzida e µ(H ′ ∩X) < µ(H ∩X). Seja L = H ∩H ′, L é um (N − 2)-plano de CN , então L ∩ |CX | = ∅, então temos:
(∆L.πL(H ∩X))0 = µ(X ∩H) + deg0(πL)− 1
(∆L.πL(H ′ ∩X))0 = µ(X ∩H ′) + deg0(πL)− 1,
Denotamos por (∆L.πL(H ′ ∩ X))0 a multiplicidade de interseção de curvas planas. Comoµ(H ′ ∩X) < µ(H ∩X), então temos que (∆L.πL(H ∩X))0 > (∆L.πL(H ′ ∩X))0, logo por[19, pag. 40] πL(X ∩ H) é tangente ao cone tangente de ∆L. Pelo Lema 5.16 temos que H éum limite de hiperplanos tangentes.
Proposição 5.20. [28, Corolário 2.3.2.1] Sejam c um inteiro e E um subespaço vetorial de
CN de codimensão c que é a interseção de c hiperplanos H1, H2, . . . , Hc tais que Hi não é
tangente à |X ∩ H1 ∩ H2 ∩ · · · ∩ Hi−1|, para 1 6 i 6 c. Então a multiplicidade em x das
variedades polares Pk(|X ∩ E|) é igual à multiplicidade em x das variedades polares Pk(X)
para 0 6 k 6 d− c− 1.
O próximo resultado é uma generalização do Teorema 5.19, para o caso de 3-variedadesdeterminantais em C5.
Teorema 5.21. Seja X ⊂ CN uma variedade determinantal de dimensão 3 com singularidade
isolada, e seja H um hiperplano em CN dado pelo núcleo da projeção linear p : CN → C.
Suponha que X ∩ H tem singularidade isolada na origem, então as seguintes condições são
equivalentes:
a) p é geral a X na origem
b) µ(X ∩H) é mínimo e µ(X ∩H ∩H ′) é mínimo para todo H ′ geral a X e a X ∩H .
Demonstração: Suponha que p : CN → C é geral a X na origem, H = p−1(0) então X ∩Hé uma superfície determinantal com singularidade isolada na origem. Então existe um conjuntoZariski aberto Ω ⊂ PN−1 tal que ∀ H ′ ∈ Ω, com H ′ = ker p′, p′ : CN → C uma aplicaçãolinear tem-se que:
1. p é geral a X na origem e p é geral a X ∩H ′ na origem.
2. µ(X ∩H ′) é mínimo.
Usando a fórmula de tipo Lê- Greuel (3.2) da Proposição 3.12 para a superfícieX∩H eX∩H ′,temos:
µ(X ∩H) + µ(X ∩H ∩H ′) = m2(X ∩H) (5.2)
58 Espaço Conormal de Variedades Determinantais
µ(X ∩H ′) + µ(X ∩H ∩H ′) = m2(X ∩H ′) (5.3)
ComoH eH ′ são gerais aX em 0, segue da Proposição 5.20 quem2(X∩H) = m2(X∩H ′) =
m2(X). Então segue das equações (5.2) e (5.3) que µ(X ∩H) = µ(X ∩H ′), logo µ(X ∩H) émínimo.
Sejam H ′ e H ′′ hiperplanos gerais a X na origem, dados pelo kernel de p′ e p′′, tais queµ(X ∩H ′ ∩H ′′) é mínimo. Então temos as seguintes fórmulas de tipo Lê- Greuel para X ∩He X ∩H ′.
µ(X ∩H) + µ(X ∩H ∩H ′) = m2(X ∩H) = m2(X) (5.4)
µ(X ∩H ′) + µ(X ∩H ′ ∩H ′′) = m2(X ∩H ′) = m2(X) (5.5)
Como µ(X ∩H) = µ(X ∩H ′) então segue que µ(X ∩H ∩H ′) = µ(X ∩H ′ ∩H ′′).
Reciprocamente, seja π = (p, p′, p′′) a aplicação CN → C3, com H = ker p, H ′ = ker p′ eH ′′ = ker p′′, tal que kerπ ∩ CX,0 = 0 e m0(X) = degπ|X . Consideremos π′ : C3 → C2 talque π′ π|X∩H = (p′, p′′), ker(π′ π)∩CX∩H = 0 em0(X) = m0(X∩H) = degπ′ π|X∩H .Logo
µ(X ∩H ∩H ′) + degπ − 1 = m1(X ∩H ∩H ′) (5.6)
µ(X ∩H ′ ∩H ′′) + degπ − 1 = m1(X ∩H ′ ∩H ′′). (5.7)
Temos que m1(X) = m1(X ∩H ∩H ′). Por outro lado, segue de [38, Lema 4.3] que
µ(X ∩H ∩H ′) + degπ − 1 = (∆π′π · (π′ π)(X ∩H ∩H ′))0.
Logo m1(X ∩H ∩H ′) = (∆π′π · (π′ π)(X ∩H ∩H ′))0 então (π′ π)(X ∩H ∩H ′) não élimite de hiperplanos tangentes a ∆π′π. Logo pela Proposição 5.17, temos que π(X ∩H) nãoé limite de hiperplanos tangentes a ∆π. Segue então pela Proposição 5.17 que H não é limitede hiperplanos tangentes a X .
Exemplo 5.22. Seja X a 3-variedade determinantal com singularidade isolada definida pela
funçãoF : C5 → M2,3
(x, y, z, w, v) 7→
(x y z
w v x2 + y2
)Sejam p e p′ as projeções lineares definidas por
p(x, y, z, w, v) = w − z

5.3 Seções de Variedades Determinantais Essencialmente Isoladas 59
e
p′(x, y, z, w, v) = x− v
que definem os hiperplanos H e H ′ respectivamente.
Então a superfície X ∩H é determinada pela seguinte matriz(x y z
z v x2 + y2
)
O número de Milnor de X ∩H é µ(X ∩H) = 4, ver [34].
A superfície X ∩H ′ é determinada pela seguinte matriz(x y z
w x x2 + y2
)∼G(n,m)
(x y z
w x y2
)
Então segue de [35] que o número de Milnor desta superfície é µ(X ∩H ′) = 2.
Então temos que p′ é geral a X na origem.
5.3 Seções de Variedades Determinantais Essencialmente Iso-ladas
Quando X é uma EIDS, de dimensão d > 2 também é possível associar a X uma superfíciedeterminantal Y cujo número de Milnor é um invariante de X .
Proposição 5.23. [26] Sejam H e H ′ hiperplanos em CN que não são limites de hiperplanos
tangentes a (X, 0). Então H e H ′ contêm planos Q e Q′ respectivamente tais que as curvas
reduzidas |X ∩Q| e |X ∩Q′| têm o mesmo número de Milnor.
O seguinte resultado é uma generalização da Proposição 5.23 e resulta como conseqüênciada Proposição 5.20 e da fórmula de tipo Lê- Greuel, Teorema 3.3.
Teorema 5.24. Seja X ⊂ CN uma EIDS de tipo (m,n, t) de dimensão d. Sejam H e H ′ hiper-
planos de CN fortemente gerais para (X, 0) na origem. Então H e H ′ contêm respetivamente
P e P ′ tais que codimP = codimP ′ = d − 2, para os quais as superfícies determinantais
X ∩ P e X ∩ P ′ satisfazem as seguintes condições
a) têm singularidade isolada
b) admitem suavizações
c) µ(X ∩ P ) = µ(X ∩ P ′).
Demonstração:

60 Espaço Conormal de Variedades Determinantais
a) Podemos considerar P = H∩· · ·∩Hd−3 ⊂ H e P ′ = H ′∩· · ·∩H ′d−3 ⊂ H ′ tais que paratudo i,Hi eH ′i são fortemente gerais paraX∩H∩H1∩· · ·∩Hi−1 eX∩H ′∩H ′1∩· · ·∩H ′i−1
respectivamente. Pela Proposição 5.12, segue que X ∩P ⊂ CN−d+2 e X ∩P ′ ⊂ CN−d+2
são EIDS e como a codimX < (m − t + 2)(n − t + 2) − 2 então X ∩ P e X ∩ P ′ sãosuperfícies determinantais com singularidade isolada.
b) SejaX um smoothing essencial deX , tal queHi×C eH ′i×C são fortemente gerais paraX ∩ (H×C)∩ (H1×C)∩· · ·∩ (Hi−1×C) e X ∩ (H ′×C)∩ (H ′1×C)∩ . . . (∩H ′i−1×C)
respetivamente. De fato, X ∩ P e X ∩ P ′, com P = P × C e P ′ = P ′ × C são assuavizações de X ∩ P e X ∩ P ′, pelo Teorema 2.8.
c) Os hiperplanos H e H ′ contêm planos Q = P ∩H ′ e Q′ = P ′ ∩H dados na Proposição5.23, então X ∩Q e X ∩Q′ são curvas determinantais e pela Proposição 5.23, temos que:
µ(X ∩Q) = µ(X ∩Q′). (5.8)
Usando a fórmula de tipo Lê- Greuel, Teorema 3.3, temos
µ(X ∩ P ) + µ(X ∩Q) = m2(X ∩ P, p′) (5.9)
µ(X ∩ P ′) + µ(X ∩Q′) = m2(X ∩ P ′, p). (5.10)
Podemos aplicar a Proposição 5.20 na variedade X ⊂ CN ×C, e nos hiperplanos produtoHi × C. Logo, temos que m2(X ∩ P, p′) = m2(X ∩ P ′, p) pois m2(X ∩ P, p′) =
m0(P2(X ∩ P ), p′) = m0(P2(X )), e da mesma forma m2(X ∩ P ′, p) = m0(P2(X )).
Logo m2(X ∩ P, p′) = m2(X ∩ P ′, p) = m0(P2(X )) e usando (5.8) temos o resultado.
Exemplo 5.25. Seja F : CN →M2,3, N > 7 definida por
F (x, y) =
(x1 x2 x3
x4 x5 x6 + f(y)
), f(0) = 0
onde x = (x1, x2, . . . , x6) e y = (y1, . . . , yN−6). Então X = F−1(M tm,n) é uma EIDS em CN
de codimensão 2. Considere P = (x, y)|x1 = x5, x2 = x6, y = 0, obtemos a superfície
determinantal em C4 definida por (x1 x2 x3
x4 x1 x2
)Segue de [34] que µ(X ∩ P ) = 1.

Capítulo Seis
Topologia de EIDS
Neste capítulo estudamos o conceito de índice de Poincaré- Hopf de 1-formas sobre EIDSe estudamos a noção de obstrução de Euler local de variedades analíticas. O principal objetivoé calcular a obstrução de Euler de variedades determinantais essencialmente isoladas definidaspela função F : CN → Mm,n e que admitem 3 estratos. Daremos algumas condições sobre Npara garantir a existência de tais variedades e forneceremos uma fórmula explícita da obstruçãode Euler em termos da característica de Euler evanescente, definida em [12]. Além disso estu-daremos o caso particular das EIDS, definidas por uma função F : CN → M2,3 de coposto 1.Neste caso, verificaremos que a obstrução de Euler é constante.
6.1 Indices de Poincaré Hopf de 1-formas sobre EIDS
Nesta seção, com base no artigo [23], definimos índices de 1-formas sobre variedades deter-minantais. Estes índices são índices de Poincaré Hopf, e são definidos usando as três resoluçõesestudadas no Capítulo 4.
Seja (X, 0) = F−1(M tm,n) ⊂ (CN , 0) de tipo (m,n, t) e w uma 1-forma sobre (CN , 0) tal
que w|X tem um ponto singular isolado na origem.
Uma suavização essencial X = F−1(M tm,n) ⊂ U de EIDS (X, 0) em geral não é suave.
Para definir um análogo ao índice de Poincaré-Hopf, temos que construir um substituto para ofibrado tangente a X .
Uma possibilidade é usar uma resolução X deX , usando uma das resoluções Yk, k = 1, 2, 3
de M tm,n, apresentadas no Capítulo 4. Nestes casos, Xk é o pull-back de (πk, F ), no diagrama
Xk//
Πk
Yk
πk
X
F |X //M t
m,n

62 Topologia de EIDS
Vimos no Capítulo 4 que Xk = X ×Mtm,n
Yk é suave. Como w é uma forma sobre CN entãopodemos definir uma 1-forma sobre Xk como: (j Πk)
∗(w) = wk (onde j é uma aplicaçãoinclusão X → U ⊂ CN ).
Temos que wk é uma 1-forma sobre a variedade analítica complexa não singular Xk semzeros fora da preimagem de uma vizinhança na origem. Em geralwk pode ter zeros não isolados.Podemos ver wk como uma seção do fibrado cotangente de Xk.
Definição 6.1. [23] O índice de Poincaré-Hopf (PH-índice) indkPH(w) = indkPH(w,X, 0),
k = 1, 2, 3, da 1-forma w sobre a EIDS (X, 0) ⊂ (CN , 0) é a soma dos índices dos zeros de
uma perturbação genérica wk da 1-forma wk sobre a variedade Xk. Em outras palavras, o
PH-índice indkPH(w) é a obstrução à extensão da 1- forma não nula wk da preimagem (sob
j Πk) da vizinhança da esfera Sε = ∂Bε à variedade Xk.
indkPH(w) = Obs(wk, (j Πk)−1(Bε), (j Πk)
−1(Sε))
Este índice independe da escolha da deformação.
Outra possibilidade é levar em conta que o espaço X3 da terceira resolução é a transfor-mação de Nash de X . Vamos usar o fibrado de Nash T de X no lugar do fibrado tangente deXk. A 1-forma w define uma seção não nula w do fibrado dual de T ∗ sobre a preimagem daintersecção de X ∩ Sε.
Definição 6.2. [23] O índice de Poincaré-Hopf-Nash (PHN-índice) da 1- forma w sobre (X, 0)
indPHNw = indPHN(w,X, 0) é a obstrução a extensão da seção não nula w do fibrado dual
T∗ da preimagem da esfera Sε = ∂Bε à preimagem do seu interior, ie, à variedade X3 sobre a
classe fundamental do par [(Π−13 (X ∩Bε),Π
−13 (X ∩ Sε))].
indPHNw = Obs(w,Π−13 (X ∩Bε),Π
−13 (X ∩ Sε))([(Π−1
3 (X ∩Bε),Π−13 (X ∩ Sε))])
Proposição 6.3. [23] O índice de PHN, indPHN(w) = indPHN(w;X, 0) da 1- forma w sobre
uma EIDS X , é igual ao número de pontos singulares não degenerados de uma deformação
genérica w da 1- forma w sobre a parte não singular Xreg = F−1(M tm,n\M t−1
m,n) de uma suavi-
zação essencial X da variedade (X, 0).
Quando X é uma variedade determinantal com singularidade isolada que admite uma sua-vização e w é uma 1-forma definida em X , o número de pontos singulares não degenerados deuma perturbação w de w sobre a suavização X de X é o índice GSV de w sobre X em x = 0,ver [5] para mais detalhes.
Então temos o seguinte corolário da proposição anterior.

6.1 Indices de Poincaré Hopf de 1-formas sobre EIDS 63
Corolário 6.4. SeX é IDS que admite suavização e w é uma 1- forma emX com singularidade
isolada em x = 0. Então
indPHN(w,X, 0) = indGSV (w,X, 0)
Queremos mostrar que para o caso de uma variedade com suavização e com singularidadeisolada todos os índices de Poincaré Hopf ( e o índice de Poincaré- Hopf- Nash) coincidem.Temos o seguinte resultado enunciado por Èbeling e Guseın-Zade [23, pag. 120].
Teorema 6.5. Seja X uma variedade determinantal com singularidade isolada, que admite
uma suavização X . Então
Ind3PH(w,X, 0) = IndPHN(w,X, 0)
Demonstração: Seja w uma 1-forma definida sobre CN tal que w|X tem singularidades isoladana origem, como X é uma variedade singular com suavização, temos que a suavização é umasuavização essencial X ( é suave ), assim X3
∼= X , então temos T é o fibrado tangente de X .
Seja χ(X, 0) = χ(X ∩ Bε), onde X é uma suavização essencial de (X, 0). Denotemos porXi ⊂ X a suavização essencial da EIDS Xi = F−1(M i
m,n) de tipo (m,n, i).Vamos denotar por Gk
i a imagem inversa de um ponto de Vi = M im,n\M i−1
m,n das resoluçõesπk da variedade M t
m,n.
G1i = Gr(n− t+ 1, n− i+ 1)
G2i = Gr(m− t+ 1,m− i+ 1)
G3i = Gr(n− t+ 1, n− i+ 1)×Gr(m− t+ 1,m− i+ 1)
Definiremos o índice radial de 1- formas complexas com base em [5, 14].Seja (X, 0) ⊂ (RN , 0) um germe de variedade analítica e seja w uma 1- forma sobre uma
vizinhaça na origem em RN .
Definição 6.6. [14] A 1- forma w é radial sobre (X, 0) se para qualquer curva analítica ϕ :
(R, 0)→ (X, 0), o valor da 1- forma sobre o espaço tangente ϕ é positivo para t > 0.
Seja X = ∪qi=0Vi uma estratificação de Whitney do germe (X, 0), V0 = 0. Seja w uma1-forma sobre uma vizinhança na origem em RN , com uma singularidade isolada sobre (X, 0)
na origem. Seja ε > 0 suficientemente pequeno tal que na bola fechada Bε de raio ε e centradana origem em RN a 1-forma w não tem pontos singulares sobre X\0. Então existe uma 1-forma w sobre RN tal que

64 Topologia de EIDS
1. A 1- forma w coincide com a 1- forma sobre uma vizinhança da esfera Sε = ∂Bε.
2. A 1- forma w é radial sobre (X, 0) na origem.
3. Em cada vizinhaça de um ponto singular x0 ∈ (X ∩ Bε)\0, x0 ∈ Vi, dimVi = k,a 1- forma w pode ser vista como segue. Existe um difeomorfismo analítico local h :
(RN ,Rk, 0) → (RN , Vi, x0) tal que h∗w = π∗1w1 + π∗2w2, onde π1 : RN → Rk e π2 :
RN → RN−k são projeções, w1 é o germe de 1-forma sobre (Rk, 0) com um pontosingular isolado na origem e w2 é uma forma radial sobre (RN−k, 0).
Definição 6.7. O índice radial da 1- forma w sobre a variedade X na origem é
indrad(w;X, 0) = 1 +
q∑i=1
∑Q∈Σw∩Vi
indQw|Vi ,
onde a segunda soma é considerada sobre todos os pontos singulares da 1- forma w sobre
Vi ∩Bε.
Agora seja (X, 0) ⊂ (CN , 0) um germe de variedade analítica complexa de dimensão d eseja w uma 1- forma complexa sobre uma vizinhança da origem em CN . Existe uma corres-pondência entre as 1-formas complexas sobre CN e 1-formas reais sobre CN (considerando CN
como uma variedades real de dimensão 2N ). Ou seja, a uma 1- forma complexa w associamosuma 1- forma real η = Rew; a 1 forma w pode ser obtida pela fórmula w(v) = η(v) − iη(iv)
para v ∈ TxCN . Isto quer dizer que o índice radial à 1- forma real ReW é um invarianteda 1- forma complexa sobre si mesma. Porém, sobre uma variedade suave M d-dimensional,indrad(Rew;M,x) não coincide com o índice usual de um ponto singular x da 1- forma w. Elesdiferem pelo coeficiente (−1)d.
Definição 6.8. [5, 14] O índice radial da 1- forma complexaw sobreX na origem, indrad(w;X, 0),
é indrad(w;X, 0) = (−1)dindrad(Rew;X, 0).
Proposição 6.9. [23] Temos a seguinte igualdade:
indkPH(w;X, 0) = (−1)dimX
t∑i=1
((−1)dimXiindrad(w;Xi, 0)− (−1)dimXi−1indrad(w;Xi−1, 0)
+(χ(Xi, 0)− χ(Xi−1, 0)))χ(Gki ),
onde X0 = 0 e indrad(w,X0, 0) = 1 e χ(X0, 0) = 0.
Calculamos a diferença entre o índices de Poincaré Hopf e o índice de Poincré Hopf Nash.Queremos usar esta diferença para exibir um exemplo em que os fibrados correspondentes,fibrado de Nash e fibrado tangente da transformação de Nash são isomorfos se a transformadade Nash é suave.

6.2 Obstrução de Euler Local 65
Usando as fórmulas dadas na proposição 6. no artigo [23], temos a seguinte diferença:
indkPH(w)− indPHN(w) = [(−1)dimXχ(Gkt−1) + (−1)m+n+2(m− t+ 1)]χ(Xt−1, 0),
onde χ(X) = χ(X)− 1.
6.2 Obstrução de Euler Local
Sejam (X, 0) ⊂ (CN , 0) germe de variedade analítica complexa, X um representante sufici-entemente pequeno do germe (X, 0) e Vi uma estratificação de Whitney de X . Suponhamosque 0 seja um estrato. Seja ∪TVi a união dos fibrados tangentes a todos os estratos. Estaunião pode ser vista como um subconjunto do fibrado tangente TCN |X . A referência para estaseção são os artigos [3, 2, 4].
Definição 6.10. Seja v uma seção de TCN sobre um subconjunto A ⊂ CN . Dizemos que o
campo v é estratificado se para z ∈ Vi ∩ A, temos que v(z) ∈ TzVi, onde Vi é o estrato que
contém z.
Definição 6.11. Dizemos que o campo de vetores v é radial em a se v é um campo estratificado
e se existe ε0 > 0 tal que o campo v está saindo de Bε(a), para 0 < ε 6 ε0.
Lema 6.12. [4] Um campo de vetores estratificado v não nulo definido sobre um subconjunto
A ⊂ X admite um levantamento canônico v como seção não nula do fibrado de Nash, T , sobre
ν−1(A).
Tν∗ //
TM |X
X
ν //M
Demonstração:Dado x ∈ X , denotemos por x = ν(x)
1. Se x ∈ Xreg, então v(x) ∈ Tx(Xreg) = x com x = ν−1(x). Então v(x) = (x, Tx(Xreg), v(x)).
2. Se x ∈ Vi, então v(x) ∈ Tx(Vi). Temos que cada x ∈ ν−1(x) está no fecho da imagemdo s, ver Definição 1.9. Então existe uma sequência (xn) de pontos de Xreg tal quex = lim xn, ν(xn) = xn ∈ Xreg e xn = Txn(Xreg). Então temos que limxn = x elimTxn(Xreg) = x. Como Vi é uma estratificação de Whitney, temos pela condição a)
da Definição 1.7 que Tx(Vi) ⊂ x. E então v(x) = (x, x, v(x)) está bem definido.

66 Topologia de EIDS
A definição de obstrução de Euler foi dada por R. MacPherson [29]. Aqui damos umadefinição equivalente dada por J.-P. Brasselet e M.-H. Schwartz.
Definição 6.13. [4] Seja v um campo de vetores radial sobre X ∩ ∂Bε e v o levantamento de v
sobre o conjunto ν−1(X ∩ ∂Bε). O campo v define um cociclo de obstrução Obs(v), que mede
a obstrução para estender v como seção não-nula de T sobre ν−1(X ∩Bε) :
Obs(v) ∈ Z2N(ν−1(X ∩Bε), ν−1(V ∩ ∂Bε))
A obstrução de Euler local, denotada por EuX(0) é a avaliação do cociclo Obs(v) sobre a
classe fundamental [ν−1(X ∩Bε), ν−1(V ∩ ∂Bε)], quer dizer:
Eu0(X) = 〈Obs(v), [ν−1(X ∩Bε), ν−1(V ∩ ∂Bε)]〉
Observação 6.14. As seguintes propriedades da obstrução de Euler se verificam:
– Eux(X) é constante sobre os estratos de uma estratificação de Whitney de X.
– Eux(X) = 1, se x ∈ Xreg.
– Assuma que X é localmente mergulhado em CN e W uma variedade suave em CN que
intercepta a estratificação de Whitney de X transversalmente. Então Eux(X ∩W ) =
Eux(X) para todo ponto x ∈ X ∩W .
– Eu(x,y)(X × Y ) = Eux(X)× Euy(Y ) para x ∈ X e y ∈ Y.
O teorema seguinte é a fórmula de tipo Lefschetz para a obstrução de Euler, dada em [3,Teorema 3.1]. Este resultado é muito importante para o cálculo da obstrução de Euler.
Teorema 6.15. [3] Seja (X, 0) um germe de espaço analítico complexo equidimensional em
CN . Seja Vi, i = 1, . . . , l estratos de uma estratificação de Whitney de um representante pe-
quenoX de (X, 0). Então existe um subconjunto aberto Zariski Ω no espaço de formas lineares
complexas sobre CN , tal que para cada l ∈ Ω, existe ε0, tal que para cada ε, ε0 > ε > 0 e t0 6= 0
suficientemente pequeno tal que a seguinte fórmula para a obstrução de Euler de (X, 0) se ve-
rifica.
Eu0(X) =l∑1
χ(Vi ∩Bε ∩ l−1(t0))EuVi(X),
onde χ denota a característica de Euler-Poincaré e EuVi(X) é a obstrução de Euler de X em
qualquer ponto de Vi, i = 1, . . . , l.
Para o cálculo da obstrução de Euler de variedades determinantais, a seguinte fórmuladada em [23] é bastante útil. Para variedades determinantais X = F−1(M t
m,n) fora da ori-

6.3 Número de Milnor Singular de Seções de Interseções Completas 67
gem, uma seção normal ao estrato Vi = Xi\Xi−1 (onde Xi = F−1(M im,n)) é isomorfo a
(M t−i+1m−i+1,n−i+1, 0).
Teorema 6.16. [23] Seja l : Mm,n → C uma forma linear genérica, e seja Ltm,n = M tm,n ∩
l−1(1). Então, para t 6 m 6 n, se tem:
χ(Ltm,n) = (−1)t
(m− 1
t− 1
),
onde χ(Ltm,n) = χ(Ltm,n)− 1.
6.3 Número de Milnor Singular de Seções de Interseções Com-pletas
Definição 6.17. [12] Sejam F : (CN , 0) → (Cp, 0) uma função analítica e (V, 0) ⊂ (Cp, 0)
um germe de conjunto analítico. Dizemos que F é geometricamente transversal a (V, 0) fora
da origem se existe, U = Bε(0)\0 ⊂ CN tal que F é transversal a todos os estratos de V , ∀x ∈ U .
Definição 6.18. [12] Seja (V, 0) ⊂ (Cp, 0) um germe de uma conjunto analítico. Sejam
η1, . . . , ηk o conjunto de geradores para o Derlog(V ). Uma função F : CN → Cp é alge-
bricamente transversal a (V, 0) em x0 ∈ CN se
dx0F (Tx0CN) + 〈Derlog(V )〉F (x0) = TF (x0)CP ,
onde para y ∈ Cp, 〈Derlog(V )〉y = Cη1(y), . . . , ηk(y) ⊂ TyCp. Se existe uma vizinhança
U = Bε(0)\0 ⊂ CN tal que F é algebricamente transversal a (V, 0) em x ∈ U , então
dizemos que F é algebricamente transversal a (V, 0) fora da origem.
Seja F : (CN , 0) → (Cp, 0) um germe holomorfo e seja (V, 0) ⊂ (Cp, 0) uma interseçãocompleta de dimensão k. Seja F ′ : (CN × C, 0) → (Cp, 0) um desdobramento versal de Fdefinido sobre uma vizinhança U × T ⊂ CN × C. Denotemos por Ft(x) = F ′(x, t).
Definição 6.19. [12] Sejam F e V como acima, assuma que F é geometricamente transversal
a V fora da origem. Então chamamos F ′ uma estabilização geométrica com relação a V se
para todo t ∈ T\0, Ft é geometricamente transversal a V sobre U .
Definição 6.20. Sejam F e V como acima, assuma que F é algebricamente transversal a V
fora da origem. Então F ′ é uma estabilização algébrica de F com relação a V se para todo
t ∈ T\0, Ft é algebricamente transversal a V sobre U.

68 Topologia de EIDS
Proposição 6.21. [12] Sejam F : (CN , 0)→ (Cp, 0) um germe analítico e (V, 0) ⊂ (Cp, 0) um
conjunto analítico
1. F tem KV,e- codimensão finita se e somente se F é algebricamente transversal a V fora
da origem.
2. Seja H : Cp → C um germe analítico tal que V = H−1(0). Então F tem KH,e- co-
dimensão finita se e somente se F é algebricamente transversal a V = H−1(0) fora da
origem.
Teorema 6.22. [10, 11, 12] Seja F : (CN , 0) → (Cp, 0) um germe holomorfo e seja (V, 0) ⊂(Cp, 0) uma interseção completa de dimensão k. Suponha que F é geometricamente transversal
a V fora da origem. Seja F ′ : (CN × C, 0)→ (Cp, 0) uma estabilização geométrica de F com
relação a V e seja Ft = F ′(·, t). Então existem ε > 0 e 0 < δ ε tais que se 0 < |t| < δ,
a fibra F−1t (V ) ∩ Bε(0) tem o tipo de homotopia de um bouquet de esferas de dimensão real
N − p+ k, e o número de esferas é independente da escolha da estabilização de t e ε.
Definição 6.23. [12] O conjunto F−1t (V ) ∩ Bε é chamado fibra de Milnor singular de F com
relação a V (ou a X = F−1(V )). 0 número de esferas é chamado número de Milnor singular
de X e é denotado por µV (F ) ou µ(X).
Definição 6.24. Seja (V, 0) ⊂ (Cp, 0) uma hipersuperfície. Dizemos que V é um divisor livre
se Derlog(V ) é um OCp,0-módulo livre de posto p.
Um divisor livre V é chamado holonômico se para cada z ∈ V os geradores do Derlog(V )
avaliados em z geram o espaço tangente do estrato correspondente da estratificação de Whitney
de V que contém z. Se H é a equação que define V e Derlog(H) satisfaz a condição acima,
dizemos que V é H- holonômico.
Teorema 6.25. [12, Teorema 3.1] Se V ⊂ Cp é um divisor livre,H holonômico eF : (CN , 0)→Cp, 0 é transversal a V fora da origem, então
µ(X) = KH,e − codim(F ),
onde KH,e é a KH,e codimensão de F .
Definição 6.26. [12] Uma hipersuperfície singular (W, 0) ⊂ (Cp, 0) admite um completamento
livre se existe um divisor livre (V, 0) ⊂ (Cp, 0) talque V ∪W é outra vez um divisor livre.

6.4 A característica de Euler Evanescente de Variedades Determinantais 69
6.4 A característica de Euler Evanescente de Variedades De-terminantais
No caso em que V não é uma interseção completa, os autores em [12] definiram a caracte-rística de Euler evanescente singular como segue.
Definição 6.27. [12] Seja V ⊂ Cp uma variedade analítica complexa não necessariamente
uma interseção completa e seja X = F−1(V ). Suponha que F : CN → Cp é transversal aos
estratos de V fora da origem, e considere F ′ uma estabilização de F . Então a característica
de Euler evanescente singular de X é dada por:
χ(X) = χ(F−1t (V )) = χ(F−1
t (V ))− 1, em que Ft = F ′(·, t), t 6= 0 pequeno.
Observação 6.28. [12] Se V é uma interseção completa de codimensão igual a k e X =
F−1(V ) então:
χ(X) = (−1)N−kµ(X).
Lema 6.29. [12] Suponha que F : CN → Cp é transversal a V , W e V ∩W fora da origem
0 ∈ CN , então:
χW∪V (F ) = χW (F ) + χV (F )− χW∩V (F ) (6.1)
E Equação para E D Equação para D
En∏n
k=1 det(A(k)) ·∏n−1
k=1 det(A(k)) Dn det(An−1) · det(A)
En−1,n
∏n−1k=1 det(A(k)) ·
∏n−1k=1 det(A(k)) Dn−1,n det(An−1) · det(An−1)
Tabela 6.1: Tabela das equações definindo os divisores livres, E e as variedades determinantaisD. Se A = (Aij) então A denota a matriz obtida eliminando a primeira coluna da matriz A eA(k) denota a submatriz k × k superior a esquerda de A.
Sejam E e D definidos na Tabela 6.1, no trabalho [12] se mostra que E é um divisor livre Hholonômico e que D tem completamento livre dado por:
En = π∗En−1,n ∪ Dn e
En−1,n = π′∗En−1 ∪ Dn−1,n (6.2)
onde π e π′ são as projeções dadas por π : Mn →Mn−1,n e π′ : Mn−1,n →Mn−1.

70 Topologia de EIDS
As matrizes 2 × 2, M2,2 podem ser representadas pelas coordenadas
(a b
c d
), o divisor E2
é definido por ab(ad− bd) = 0 e V (D2) = V (ac− bd) = V (ab) ∪ V (ad− bc). Então
Teorema 6.30. [12, Teorema 7.1] Sobre o espaço de germes transversais fora da origem as
variedades associadas a E2, então
µV (D2) = µV (E2) − ((µV (a) + µV (a,cb)) + (µV (b) + µV (b,ad))), (6.3)
onde µV (E2) = KG2−codim onde G2 é o grupo deB2×C2 preservando a equação ab(ad−bc) =
0.
Corolário 6.31. Com as hipótesis do teorema acima, a fórmula (6.3) pode ser reformulada por
µV (D2) = µV (E2) + µV (bc) − µV (abc) + µV (ad) − µV (abd). (6.4)
Todos os termos na parte dereita são números de Milnor singular de divisores livres holonômi-
cos, que podem ser calculados usando o Teorema 6.25.
Teorema 6.32. [12, Teorema 7.4] Para o espaço de germes transversais às variedades associ-
adas a E2,3 fora da origem,
µV1,3 = µV (E2,3)− (µV (a,bde(df−ce)) +µV (a)) + (µV (a,e,bdf) +µV (a,e))− (µV (b,ace) +µV (b)). (6.5)
Exemplo 6.33. Considere F : C5 →M2,2 definido por(u v
w x3 + y3 + u2 + v2 + w2
).
Então X = F−1(M22,2) = V (u(x3 + y3 + u2 + v2 +w2)− vw) define uma hipersuperfície que
não tem singularidade isolada em 0.
Usaremos a fórmula (6.4) para calcular µV (D2)(F ). Pela tabela 6.4, temos queD2 = ad−bce E2 = ab(ad− bc).
Como (u, v, w) e (v, w) são submersões, então µV (u,v,w)(F ) = µV (v,w)(F ) = 0.
µV (ab(ad−bc)) = Kab(ad−bc),e−codim(F ) = 16, oDerlog(ab(ad−bc)) é gerado pelos vetores:(u 0
−w −2(x3 + y3 + u2 + v2 + w2)
),
(0 v
−2w −(x3 + y3 + u2 + v2 + w2)
),
(0 0
u v
).
Uma base para o espaço tangente estendido do grupo KH , TKH,e · F , é dada pelos vetores

6.5 Obstrução de Euler de Variedades Determinantais 71
(0 0
0 u2
),
(0 0
0 v
),
(0 0
0 w2
),
(0 0
0 x2
),
(0 0
0 y2
),
(1 0
0 0
),
(0 1
0 0
),
(0 0
1 0
).
Derlog(ad) eDerlog(abd) são gerados por a ∂∂a−d ∂
∂d, ∂∂b, ∂∂c e a ∂
∂a−d ∂
∂d, b ∂
∂b−d ∂
∂d, ∂∂c,
assim Kad,e − codim(F ) = 8 e Kabd,e − codim(F ) = 16.
Por Corolário 6.31, temos que µV (ad−bc)(F ) = 16 + 8− 16 = 8.
Teorema 6.34. [12, Teorema 8.1] Para um germe F transversal aos estratos de M22,3, fora
da origem, seja X = F−1(M22,3) a EIDS correspondente. Então a característica de Euler
evanescente singular de X é calculada por
χ(X) = (−1)N−1(µV123(F )−
∑µVij(F ) +
3∑i=1
µVi(F )),
em que a primeira soma é sobre i, j = 1, 2, 1, 3, 2, 3 e V123 = V1 ∪ V2 ∪ V3 é holonô-
mico e pode ser calculado usando o Teorema 6.25.
Se F : CN →M2,3 é um germe genérico de coposto igual a 1, Então
F (x, y) =5∑i=1
xiwi + g(y)w0,
onde w1, w2, w3, w4, w5 é uma base para W = dF (0)(CN), w0 /∈ W e g(y) define umasingularidade isolada sobre CN−5.
Corolário 6.35. [12] Se F é um germe genérico de coposto 1, N > 6,
χ(X) = (−1)N−1µV123(F ) = (−1)N−1µ(g)
Se g é quase-homogêneo, µ(g) é igual a τ(X).
6.5 Obstrução de Euler de Variedades Determinantais
Seja X = F−1(M tm,n) uma EIDS, definida pela função F : CN → Mm,n. Se N 6 (m −
t+ 3)(n− t+ 3) então ΣX = F−1(M t−1m,n) é uma variedade com singularidade isolada. Logo a
variedade admite 3 estratos V0, V1, V2, V0 = 0, V1 = ΣX\0, V2 = Xreg. Esta é a classede EIDS que consideramos nesta seção.
Para o cálculo da obstrução de Euler usamos a fórmula do Teorema 6.15, então temos
Eu0(X) = χ(V0∩l−1(r)∩Bε)EuV0(X)+χ(V1∩l−1(r)∩Bε)EuV1(X)+χ(V2∩l−1(r)∩Bε)EuV2(X).

72 Topologia de EIDS
Como V0 ∩ l−1(r) ∩ Bε = ∅ então χ(V0 ∩ l−1(r) ∩ Bε) = 0. Temos também EuV2(X) = 1,então
Eu0(X) = χ(V1 ∩ l−1(r) ∩Bε)(EuV1(X)− 1) + χ(X ∩ l−1(r) ∩Bε) (6.6)
Note que χ(V1∩l−1(r)∩Bε) = χ(ΣX∩l−1(r)∩Bε) e por outro lado dado a ∈ V1 existe umaberto Ua contendo a tal que Ua ∼= Bδ × c(LV1), onde a dimensão de Bδ é dimV1 = N − (m−t+ 2)(n− t+ 2) e c(LV1) é o cone do link complexo de V1 em X , LV1 = X ∩N ∩ p−1(s), comN transversal a V1 em a, codimN = dimV1, então EuV1(X) = Eua(Bδ) × Eua(c(LV1)) =
Eua(c(LV1)) = χ(LV1) = χ(X ∩N ∩ p−1(s)).X ∩ N é a suavização essencial de uma variedade determinantal de tipo (m,n, t) em Cr,
onde r = codimV1 = (m− t+ 2)(n− t+ 2), por tanto com singularidade isolada.Substituindo na equação (6.6), temos
Eu0(X) = χ(ΣX ∩ l−1(r) ∩Bε)(χ(LV1)− 1) + χ(X ∩ l−1(r) ∩Bε). (6.7)
Esta fórmula pode ser expressa em termos da característica de Euler evanescente singular daDefinição 6.27.
Eu0(X) = (χ(ΣX ∩ l−1(0) ∩Bε) + 1)(χ(LV1)− 1) + χ(X ∩ l−1(0) ∩Bε) + 1. (6.8)
Proposição 6.36. Seja X = F−1(M tm,n) uma EIDS, definida pela função F : CN → Mm,n, se
N 6 (n− t+ 3)(m− t+ 3) e ΣX é uma ICIS, então:
Eu0(X) = ((−1)dim(ΣX∩l−1(0))µ(ΣX∩l−1(0))+1)(χ(LV1)−1)+χ(X∩l−1(0)∩Bε)+1, (6.9)
onde l : CN → C é uma projeção linear genérica, LV1 é o link complexo do estrato V1 em X e
Bε é a bola de raio ε em CN .
Demonstração:Se ΣX é uma interseção completa, então χ(ΣX ∩ l−1(r)) = 1+(−1)dim(ΣX∩l−1(0))µ(ΣX ∩
l−1(0)) Substituindo esta fórmula em (6.8) obtemos o resultado.
O seguinte resultado mostra a existência de variedades determinantais cujo conjunto singu-lar é uma ICIS.
Proposição 6.37. Seja X = F−1(M22,n) ⊂ CN uma EIDS definida pela função F : CN →
M2,n, n > 2 então o conjunto singular de X , ΣX ⊂ CN é uma ICIS.
Demonstração: ComoX = F−1(M22,n) é uma EIDS então ΣX = F−1(ΣM2
2,n) = F−1(M12,n),
como M12,n = 0, então ΣX = F−1(0) e codim ΣX = (2−2+2)(n−2+2) = 2 ·n, portanto
ΣX é uma interseção completa.

6.6 Obstrução de Euler para as EIDS, definidas por F : CN →M2,3 73
Seja x ∈ ΣX , x 6= 0 então rankF (x) = 0, pela definição de EIDS, temos que F étransversal ao estrato corresponde, neste caso F é transversal à 0 fora da origem. EntãodF é uma submersão em x 6= 0, assim ΣX é uma ICIS.
6.5.1 Obstrução de Euler de IDS, caso N < (n− t+ 2)(m− t+ 2)
Nesta seção trataremos as variedades IDS, definidas pela função F : CN → Mm,n, tal queN < (n− t + 2)(m− t + 2). Estas variedades admitem suavização e a obstrução de Euler foiestudada no trabalho [31], usando a característica de Euler evanescente e a multiplicidade davariedade.
Teorema 6.38. [31] Seja X = F−1(M tm,n) definida pela função F : CN → Mm,n com N <
(n− t+ 2)(m− t+ 2), então
Eu0(X) = 1 + (−1)dν(X, 0) + (−1)d+1md(X, 0)
Demonstração: Pelo teorema 6.15 e pela definição da característica de Euler evanescentetemos que Eu0(X) = χ(X ∩ p−1(t)) = (−1)dν(X ∩ p−1(0)) + 1. Usando a fórmula de tipoLê-Greuel (3.3), temos que ν(X) + ν(X ∩ p−1(0)) = md(X). Então
Eu0(X) + (−1)dmd(X) = 1 + (−1)dν(X).
Então obtemos o resultado.
Exemplo 6.39. Seja X = F−1(M22,3) ⊂ C4 uma variedade determinantal com singularidade
isolada, definida por F .
F : C4 → M2,3
(x, y, z, w) 7→
(x y z
y z w
)
Por [31] temos que m2(X) = 3, ν(X) = 1, logo Eu0(X) = −1.
6.6 Obstrução de Euler para as EIDS, definidas porF : CN →M2,3
O próximo resultado é para o caso N = 6, neste caso a variedade determinantal não admitesuavização, a fórmula do Teorema 6.38, dada acima não vale.

74 Topologia de EIDS
Teorema 6.40. Seja X = F−1(M22,3) definida pela função F : CN →M2,3 com N = 6, então
Eu0(X) = b2(X ∩ l−1(r))− b3(X ∩ l−1(r)) + 1.
Demonstração: Segue directamente pois χ(X ∩ l−1(r)) − 1 = χ(X ∩ l−1(0)) = b2(X ∩l−1(r))− b3(X ∩ l−1(r)).
Nas tabelas 6.2, 6.3, calculamos a obstrução de Euler de variedades determinantais 4-dimensionais em C6, classificadas em [18]. Usamos a Tabela 5 do trabalho [12] para obteros resultados.
6.7 Obstrução de Euler de EIDS, caso N > 7
Teorema 6.41. Seja X ⊂ CN uma EIDS, definida pela função F : CN → M2,3, com N > 7.
Então
Eu0(X) = (−1)N−7µ(ΣX ∩ l−1(0)) + χ(X ∩ l−1(0)) + 2. (6.10)
Demonstração: Como X tem três estratos, V0, V1, V2, V0 = 0, V1 = Σ\0, V2 = Xreg eV1 = F−1(M1
2,3)\F−1(M02,3). Temos que LV1 = X ∩N ∩ p−1(s), a variedade X ∩N ∼= M2
2,3.Assim χ(LV1)− 1 = 1 pelo Teorema 6.16. Substituindo este valor na Proposição 6.36 temos oresultado.
Corolário 6.42. Com as hipóteses do Teorema 6.41, se F é de coposto igual a 1, então
Eu0(X) = 2.
Demonstração: Como F tem coposto 1, então
F (x, y) =5∑i=1
xiwi + g(y)w0,
onde w1, w2, w3, w4, w5 é uma base para W = d0F (CN), w0 /∈ W e g(y1, y2, . . . , yN−5)
define uma singularidade isolada sobre CN−5. Suponha sem perda de generalidade que l(x, y) =
y1 e considere g(y2, . . . , yN−5) = g(0, y2, . . . , yN−5)
Usando a fórmula do Corolário 6.35 para X ∩ l−1(0) ⊂ CN−1, temos que χ(X ∩ l−1(0)) =
(−1)N−2µ(g).
Também temos que ΣX ∩ l−1(0) = (0, . . . , 0, y2, . . . , yN−5)|g(y2, . . . , yN−5) = 0 e por-tanto µ(ΣX ∩ l−1(0)) = µ(g). Substituindo na fórmula (6.10), temos que Eu0(X) = 2.
Veremos dois exemplos de cálculo da obstrução de Euler usando Corolário 6.42.

6.7 Obstrução de Euler de EIDS, caso N > 7 75
TipoApresentação
da MatrizCondições τ Eu0(X)
Ω1
(x y vz w u
)0 2
Ωk
(x y vz w x+ uk
)k > 2 k − 1 2
A†k
(x y zw v u2 + xk+1 + y2
)k > 1 k − 2 1
D†k
(x y zw v u2 + xy2 + xk−1
)k > 4 k + 2 -1
E†6
(x y zw v u2 + y4
)8 0
E†7
(x y zw v u2 + x3 + xy3
)9 0
E†8
(x y zw v u2 + x3 + y5
)10 0
(x y zw v ux+ yk + ul
)k > 2, l > 3 k + l − 1 3− k
(x y zw v x2 + y2 + u3
)6 1
F †q,r
(w y xz w + vu y + vq + ur
)q, r > 2 q + r 2
G†5
(w y xz w + v2 y + u3
)7 2
G†7
(w y xz w + v2 y + u4
)10 2
H†q+3
(w y xz w + v2 + uq y + vu2
)q > 3 q + 5 2
Tabela 6.2: Ostrução de Euler, X ⊂ C6

76 Topologia de EIDS
TipoApresentação
da MatrizCondições τ Eu0(X)
I†2q−1
(w y vz w + v2 + u3 y + uq
)q > 4 2q + 1 2
I†2r+2
(w y xz w + v2 + u3 y + vur
)r > 3 2r + 4 2
(w y xz w + v2 u2 + yv
)6 1
(w y xz w + uv u2 + yv + vk
)k > 3 k + 4 1
(w y xz w + vk u2 + yv + v3
)k > 3 2k + 2 1
(w y xz w + uvk u2 + yv + v3
)k > 2 2k + 5 1
(w y xz w + v3 u2 + yv
)9 1
(w y xz w + vk u2 + y2 = v3
)k > 3 2k + 3 1
H†q+3
(w y xz w + uvk u2 + y2 + v3
)k > 2 2k + 6 1
Tabela 6.3: Obstrução de Euler, X ⊂ C6.

6.7 Obstrução de Euler de EIDS, caso N > 7 77
Exemplo 6.43. Seja X definido pela função F .
F : C8 → M2,3
(x, y) 7→
(x1 x2 x3
x4 x5 x1 + y21 − y2
2 + y23
)
onde x = (x1, x2, x3, x4, x5) e y = (y1, y2, y3). A variedade X é uma EIDS de dimensão 6 em
C8. O conjunto singular é de dimensão 2 e é dado pelo conjunto
ΣX = (0, 0, 0, 0, 0, y1, y2, y3)|y21 − y2
2 + y23 = 0.
Esta variedade tem três estratos V0 = 0, V1 = ΣX − 0 e V2 = Xreg.
Como o coposto de F é 1. Então pelo Corolário 6.42, temos:
Eu0(X) = 2.
Exemplo 6.44. Seja X definido pela função F .
F : C7 → M2,3
(x, y) 7→
(x1 x2 x3
x4 x5 x1 + y21 − y2
2
)
onde x = (x1, x2, x3, x4, x5) e y = (y1, y2). A variedade X é uma EIDS de dimensão 5 em C7.
O conjunto singular é de dimensão 2 e é dado pelo conjunto
ΣX = (0, 0, 0, 0, 0, y1, y2)|y21 − y2
2 = 0
Esta variedade tem três estratos V0 = 0, V1 = ΣX − 0 e V2 = Xreg.
Como o coposto de F é 1. Então usando o Corolário 6.42, temos:
Eu0(X) = 2.

78 Topologia de EIDS

Referências Bibliográficas
[1] E. Arbarello, M. Cornalba, P. A. Griffiths, and J. Harris. Geometry of algebraic curves. Vol.
I, volume 267 of Grundlehren der Mathematischen Wissenschaften [Fundamental Princi-
ples of Mathematical Sciences]. Springer-Verlag, New York, 1985.
[2] J.-P. Brasselet. Milnor classes via polar varieties. In Singularities in algebraic and analytic
geometry (San Antonio, TX, 1999), volume 266 of Contemp. Math., pages 181–187. Amer.Math. Soc., Providence, RI, 2000.
[3] J.-P. Brasselet, D. T. Lê, and J. Seade. Euler obstruction and indices of vector fields. Topo-
logy, 39(6):1193–1208, 2000.
[4] J.-P. Brasselet et M.-H. Schwartz. Sur les classes de Chern d’un ensemble analytique com-plexe. In The Euler-Poincaré characteristic (French), volume 82 of Astérisque, pages 93–147. Soc. Math. France, Paris, 1981.
[5] J.-P. Brasselet, J. Seade, and T. Suwa. Vector fields on singular varieties, volume 1987 ofLecture Notes in Mathematics. Springer-Verlag, Berlin, 2009.
[6] J. Briançon, A. Galligo, et M. Granger. Déformations équisingulières des germes de cour-bes gauches réduites. Mém. Soc. Math. France (N.S.), (1):69, 1980/81.
[7] R.-O. Buchweitz and G.-M. Greuel. The Milnor number and deformations of complexcurve singularities. Invent. Math., 58(3):241–281, 1980.
[8] E. M. Chirka. Complex analytic sets, volume 46 of Mathematics and its Applications (Soviet
Series). Kluwer Academic Publishers Group, Dordrecht, 1989. Translated from the Russianby R. A. M. Hoksbergen.
[9] J. Damon. The unfolding and determinacy theorems for subgroups of A and K. Mem.
Amer. Math. Soc., 50(306):x+88, 1984.

80 REFERÊNCIAS BIBLIOGRÁFICAS
[10] J. Damon. Higher multiplicities and almost free divisors and complete intersections. Mem.
Amer. Math. Soc., 123(589):x+113, 1996.
[11] J. Damon and D. Mond. A-codimension and the vanishing topology of discriminants.Invent. Math., 106(2):217–242, 1991.
[12] J. Damon and B. Pike. Solvable groups, free divisors and nonisolated matrix singularitiesII: Vanishing topology. Geom. Topol., 18(2):911–962, 2014.
[13] L. R. Dias. Regularity at infinity and global fibrations of real algebraic maps. PhD thesis,ICMC-USP, 2013.
[14] W. Ebeling and S. M. Gusein-Zade. Radial index and Euler obstruction of a 1-form on asingular variety. Geom. Dedicata, 113:231–241, 2005.
[15] D. Einsenbud. Commutative Algebra with a view towards Algebraic Geometry. Springer-Verlag, 1995.
[16] A. Frühbis-Krüger. Classification of simple space curve singularities. Comm. Algebra,27(8):3993–4013, 1999.
[17] A. Frühbis-Krüger. Moduli spaces for space curve singularities. PhD thesis, UniversitätKaiserslautern, 2000.
[18] A. Frühbis-Krüger and A. Neumer. Simple Cohen-Macaulay codimension 2 singularities.Comm. Algebra, 38(2):454–495, 2010.
[19] W. Fulton. Algebraic curves. An introduction to algebraic geometry. W. A. Benjamin,Inc., New York-Amsterdam, 1969. Notes written with the collaboration of Richard Weiss,Mathematics Lecture Notes Series.
[20] T. Gaffney. Polar multiplicities and equisingularity of map germs. Topology, 32(1):185–223, 1993.
[21] T. Gaffney. Aureoles and integral closure of modules. In Stratifications, singularities and
differential equations, II (Marseille, 1990; Honolulu, HI, 1990), volume 55 of Travaux en
Cours, pages 55–62. Hermann, Paris, 1997.
[22] G.-M. Greuel and J. Steenbrink. On the topology of smoothable singularities. In Sin-
gularities, Part 1 (Arcata, Calif., 1981), volume 40 of Proc. Sympos. Pure Math., pages535–545. Amer. Math. Soc., Providence, R.I., 1983.

REFERÊNCIAS BIBLIOGRÁFICAS 81
[23] S. M. Guseın-Zade and W. Èbeling. On the indices of 1-forms on determinantal singulari-ties. Tr. Mat. Inst. Steklova, 267(Osobennosti i Prilozheniya):119–131, 2009.
[24] R. Hartshorne. Book Review: Algebraic geometry I: Complex projective varieties. Bull.
Amer. Math. Soc. (N.S.), 1(3):513–515, 1979.
[25] J.-P. G. Henry et D. T. Lê. Limites d’espaces tangents. In Fonctions de plusieurs variables
complexes, II (Sém. François Norguet, 1974-1975), pages 251–265. Lecture Notes in Math.,Vol. 482. Springer, Berlin, 1975.
[26] D. T. Lê. Generic sections of singularities. In Singularity theory, pages 677–682. WorldSci. Publ., Hackensack, NJ, 2007.
[27] D. T. Lê et B. Teissier. Variétés polaires locales et classes de Chern des variétés singulières.Ann. of Math. (2), 114(3):457–491, 1981.
[28] D. T. Lê et B. Teissier. Limites d’espaces tangents en géométrie analytique. Comment.
Math. Helv., 63(4):540–578, 1988.
[29] R. D. MacPherson. Chern classes for singular algebraic varieties. Ann. of Math. (2),100:423–432, 1974.
[30] W. L. Marar, J. A. Montaldi, and M. A. S. Ruas. Multiplicities of zero-schemes in qua-sihomogeneous corank-1 singularities Cn → Cn. In Singularity theory (Liverpool, 1996),volume 263 of London Math. Soc. Lecture Note Ser., pages 353–367. Cambridge Univ.Press, Cambridge, 1999.
[31] J. Nuño Ballesteros, B. Oréfice-Okamoto, and J. Tomazella. The vanishing Euler charac-teristic of an isolated determinantal singularity. Israel Journal of Mathematics, 197(1):475–495, 2013.
[32] J. J. Nuño-Ballesteros and J. N. Tomazella. The Milnor number of a function on a spacecurve germ. Bull. Lond. Math. Soc., 40(1):129–138, 2008.
[33] B. Oréfice. O número de Milnor de uma singularidade isolada. PhD thesis, UFSCAR,2011.
[34] M. S. Pereira. Variedades determinantais e singularidades de matrizes. PhD thesis, ICMC,2010.
[35] M. S. Pereira and M. A. S. Ruas. Codimension two determinantal varieties with isolatedsingularities. Math. Scandinavica, to appear.

82 REFERÊNCIAS BIBLIOGRÁFICAS
[36] B. Pike. Singular Milnor numbers of non-isolated singularities. PhD thesis, University ofNorth Carolina, 2010.
[37] D. Rees. A-transforms of local rings and a theorem on multiplicities of ideals. Proc.
Cambridge Philos. Soc., 57:8–17, 1961.
[38] J. Snoussi. Limites d’espaces tangents à une surface normale. Comment. Math. Helv.,76(1):61–88, 2001.
[39] B. Teissier. Variétés polaires. II. Multiplicités polaires, sections planes, et conditions deWhitney. In Algebraic geometry (La Rábida, 1981), volume 961 of Lecture Notes in Math.,pages 314–491. Springer, Berlin, 1982.
[40] J. Wahl. Smoothings of normal surface singularities. Topology, 20(3):219–246, 1981.





























