Embed Size (px)
Citation preview

INVERSAO TOMOGRAFICA SEQUENCIAL PARA O CAMPO DE VELOCIDADES
SISMICAS BASEADA EM DIFRACOES E CRITERIOS GEOLOGICOS
Luiz Alberto Santos
Tese de Doutorado apresentada ao Programa de
Pos-graduacao em Engenharia Civil, COPPE,
da Universidade Federal do Rio de Janeiro,
como parte dos requisitos necessarios a
obtencao do tıtulo de Doutor em Engenharia
Civil.
Orientadores: Webe Joao Mansur
George Albert McMechan
Rio de Janeiro
Junho de 2012
INVERSAO TOMOGRAFICA SEQUENCIAL PARA O CAMPO DE VELOCIDADES
SISMICAS BASEADA EM DIFRACOES E CRITERIOS GEOLOGICOS
Luiz Alberto Santos
TESE SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO LUIZ
COIMBRA DE POS-GRADUACAO E PESQUISA DE ENGENHARIA (COPPE)
DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSARIOS PARA A OBTENCAO DO GRAU DE DOUTOR EM
CIENCIAS EM ENGENHARIA CIVIL.
Examinada por:
Prof. Webe Joao Mansur, Ph.D.
Prof. George Albert McMechan, Ph.D.
Prof. Otto Correa Rotunno Filho, Ph.D.
Profa. Valeria Cristina Ferreira Barbosa, D.Sc.
Prof. Jesse Carvalho Costa, D.Sc.
Dr. Djalma Manoel Soares Filho, D.Sc.
Dr. Gerson Luis da Silva Ritter, D.Sc.
Dr. Andre Bulcao, D.Sc.
RIO DE JANEIRO, RJ – BRASIL
JUNHO DE 2012

Santos, Luiz Alberto
Inversao tomografica sequencial para o campo de
velocidades sısmicas baseada em difracoes e criterios
geologicos/Luiz Alberto Santos. – Rio de Janeiro:
UFRJ/COPPE, 2012.
XX, 150 p.: il.; 29, 7cm.
Orientadores: Webe Joao Mansur
George Albert McMechan
Tese (doutorado) – UFRJ/COPPE/Programa de Engenharia
Civil, 2012.
Referencias Bibliograficas: p. 119 – 128.
1. Problema Inverso. 2. Operadores focais (CFP). 3.
Tomografia. 4. Difracoes. I. Mansur, Webe Joao et al.. II.
Universidade Federal do Rio de Janeiro, COPPE, Programa de
Engenharia Civil. III. Tıtulo.
iii

Aos meus queridos Luizes: Carlos,
onde tudo comecou; Henrique e
Eduardo, mola mestra e energia
viva do gerundio e do futuro. A
minha amada Claudia, parceira na
edificacao de nossas vidas. A irma
Patrıcia pela visao rebelde e
vanguardista, inspiracao do porvir.
A minha mae Ercine Terezinha,
somente por tudo.
iv

Agradecimentos
Os sabios dizem que, na vida, ha tres fases do aprendizado: aprendiz, praticante e
mestre. Na primeira o indivıduo e um aluno e somente le e estuda. Na segunda, ele aplica
o que aprendeu e expande seus conhecimentos com a pratica. Na terceira, o indivıduo
passa aos outros aquilo que sabe. Em mim, prevalece o aprendiz que nao avancaria sem a
valiosa ajuda dos diversos colegas, mestres e familiares. Por isso gostaria de agradecer as
pessoas a seguir.
Primeiramente a minha mae, Ercine Terezinha Santos, minha primeira, e eterna mes-
tra. Nao consigo pensar nela sem me emocionar. Obrigado, minha mae.
A minha esposa, Claudia e aos nossos filhos, os Luizes - Henrique e Eduardo - pela
alegria e motivacao e, acima de tudo, pelos seus sacrifıcios, criados pelas ausencias deste
marido e pai em funcao do trabalho e dos estudos. Meu muito obrigado a voces, e tambem
minhas desculpas.
Ao sempre amigo, irmao de caminhada, geologo, poeta e empresario Jason Carneiro,
pela amizade, pelas correcoes gramaticais e dicas no texto da tese. Valeu, Bro !!
Ao professor e orientador Webe Joao Mansur pela orientacao, pelos conselhos, por
proporcionar um ambiente prolıfico para criacao e por transmitir tranquilidade nos mo-
mentos mais duros da pesquisa.
Ao professor e orientador George A. McMechan pela orientacao e bons exemplos.
Constatei com ele a maxima aristotelica que o exemplo, de fato, e a principal ferramenta
de educacao e ensino.
A Carlos Eduardo Theodoro, colega no Centro de Pesquisas da Petrobras (CENPES),
pelas discussoes, orientacoes, bons exemplos e transmissao de suas ricas experiencias no
universo da geofısica.
Ao colega de pesquisa na Petrobras, Djalma Manoel Soares Filho, grande mestre e
guru que me iniciou no mundo da modelagem sısmica e na tomografia. O gerundio e
v

nosso tempo preferido. Valeu, Mestre.
Ao tambem colega de pesquisa no CENPES, Andre Bulcao, pelas instrucoes sobre
migracao RTM, ondulatoria, programacao e amizade. Saiba que meu primeiro codigo de
RTM acustico saiu depois de um bate papo regado a acaraje la em Salvador. Obrigado,
brother.
Nao poderia deixar de citar o colega Paulo Eduardo Miranda Cunha pelo auxılio nas
deducoes mais complicadas, pelos bate-papos abordando filosofia, religiao e cultura e
ainda pelas primeiras aulas sobre Seismic Unix. O primeiro comando desta util ferra-
menta, a2b (conversao de arquivos ascii para binarios), me foi ensinada por ti. Valeu,
meu irmao.
Ao colega Ricardo Braganca pelas aulas de scripts e dicas do ambiente UNIX e Linux.
Ainda no universo Linux, agradeco ao colega Ricardo F. Chartuni Cabral da Cruz pelas
instalacoes que muito me ajudaram na conclusao da tese.
Ao colega e professor Eduardo Filpo responsavel pelos meus primeiros passos na se-
ara de migracao Kirchhoff ainda em 2003. Ainda tenho as anotacoes do curso introdutorio
de geofısica da Petrobras.
Aos colegas e professores Andre Romanelli e Carlos Cunha Filho pelas sugestoes e
discussoes.
Ao geofısico e gerente do CENPES/PDEXP/GEOF ate dezembro de 2010, Dr. Edu-
ardo Lopes de Faria por proporcionar as condicoes para pesquisa, pelo apoio na liberacao
para o doutorado e, por que nao, pelos questionamentos. Eles me fizeram amadurecer
muitas das ideias.
Ao atual gerente do CENPES/PDGEO/GEOF, Rui Pinheiro Silva, pelas otimas
condicoes proporcionadas na conclusao deste trabalho.
Ao colega de doutorado Rodrigo Dias, pelas discussoes, trocas bibliograficas e auxılio
nas deducoes mais complicadas.
Ao prestativo Raul Flores e a Franciane Peters, pelas dicas de programacao no
domınio da frequencia e pela ajuda nos preparativos da apresentacao da defesa.
Ao professor Eduardo Gomes Dutra do Carmo, pelas fundamentais aulas de problema
inverso e pelos bate-papos sobre religiao e filantropia. Saiba que meu interesse por esses
temas menos materiais renasceram com nossas conversas. Receba meu muito obrigado,
Dudu.
vi

Ao Dr. Cleberson Dors, pesquisador da COPPE, pelas aulas de corredor, muitıssimo
uteis ao longo do desenvolvimento do trabalho.
A Ivone, nossa administradora do LAMEC (Laboratorio de Mecanica Computacio-
nal), sem a qual nada andaria. Muito obrigado, Ivone.
Aos colegas do Departamento de Geociencias da Universidade do Texas em Dallas,
em especial a Hu Jin, Ernesto Oropeza, Roberto Falcon, Sylvia Pacheco, Xinfa Zhu,
pelas discussoes tecnicas e a Sharon Edwards, sempre facilitando a vida nos assuntos
administrativos.
Enfim, estendo os meus agradecimentos a instituicao Petrobras, representada pelos
seus diretores, alta gerencia e demais colegas de trabalho. Um corpo tecnico de altıssimo
nıvel que constitui uma fonte de inspiracao para mim.
Aos colegas da pos-graduacao na Engenharia Civil da COPPE-UFRJ e aos professores
pelo ambiente agradavel e de cortesia que impera em todas as salas e corredores.
A todos voces, citados explıcita ou implicitamente, meus sinceros agradecimentos. E,
por favor, sintam-se isentos de qualquer incorrecao presente neste trabalho. Sao arestas
ainda nao desbastadas neste humilde aprendiz.
vii

Resumo da Tese apresentada a COPPE/UFRJ como parte dos requisitos necessarios para
a obtencao do grau de Doutor em Ciencias (D.Sc.)
INVERSAO TOMOGRAFICA SEQUENCIAL PARA O CAMPO DE VELOCIDADES
SISMICAS BASEADA EM DIFRACOES E CRITERIOS GEOLOGICOS
Luiz Alberto Santos
Junho/2012
Orientadores: Webe Joao Mansur
George Albert McMechan
Programa: Engenharia Civil
Esta tese avanca no emprego dos operadores focais (Common Focus Point Opera-
tor (CFPO)) para inversao tomografica de velocidades e estruturas de subsuperfıcie. Os
CFPOs constituem um neologismo para a funcao de Green de uma fonte deflagrada em
profundidade e registrada na superfıcie. O processo de inversao divide-se em duas partes:
a obtencao dos CFPOs e a tomografia sobre estes. A estimativa dos CFPOs de forma
convencional e revisitada e dois outros esquemas sao propostos nesta tese: por varredura
e atraves de difracoes. Utilizando-se somente operadores focais de difracao (Diffraction
Common Focus Operator (DCFPO)) demonstra-se que e possıvel estimar o campo de ve-
locidades a partir de dados sısmicos monocanal. Devido as caracterısticas geometricas do
dispositivo de inversao dos CFPOs ou DCFPOs, verifica-se que as formas mais estaveis
matematicamente para parametrizacao do modelo fornecem bons resultados estruturais,
mas o campo de velocidades e pouco realıstico. A consistencia do modelo invertido e
quantificada atraves do Indice de Incoerencia Geologica (IIG), proposto nesta tese, e que
relaciona campo de velocidades e estruturas. Estudos realizados com as inversoes glo-
bal, onde todo o modelo e invertido simultaneamente, e camada a camada, demonstram
que a inversao sequencial em pelo menos 2 passos proporciona modelos geologicamente
mais realısticos, com baixo IIG. Nomeou-se este processo como tomografia sequencial.
Aplicacoes em exemplos sinteticos e reais comprovam a viabilidade das teses propostas.
viii

Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the requirements
for the degree of Doctor of Science (D.Sc.)
SEQUENTIAL TOMOGRAPHIC INVERSION FOR SEISMIC VELOCITY FIELD
BASED ON DIFFRACTIONS AND GEOLOGIC CRITERIA
Luiz Alberto Santos
June/2012
Advisors: Webe Joao Mansur
George Albert McMechan
Department: Civil Engineering
This thesis has advances in the use of focusing operators (Common Focus Point Oper-
ator (CFPO)) for tomographic inversion for velocity and subsurface structures estimation.
The CFPO is a neologism for a Green function of a point source at depth and recorded
at the surface. The inversion process is divided in two steps: the CFPO estimation and
the tomography over CFPO. The conventional CFPO estimation is revisited and two other
schemes for CFPO estimation are proposed: by scanning and using diffractions. By us-
ing only diffractions CFPO (DCFPO), it is shown that the velocity field can be obtained
with single channel seismic data. Because of the geometric characteristics of the CFPO
or DCFPO device, the most mathematically stable model parameterization delivers good
structural results, but the velocity field is not geologically realistic. The consistency of the
inverted model is quantified through the Geological Incoherence Index (GII), that relates
velocity field and structures. By studying global inversion, in which the model is entirely
inverted simultaneously, and layer-stripping one, it is shown that the sequencial inversion
in at least 2 steps delivers more geologically realistic models, with low GII. This inver-
sion process is called sequential tomogaphy. Synthetic and field examples comprove the
proposed theses.
ix

Sumario
Lista de Figuras xiv
1 Introducao Geral 1
1.1 Estrutura da tese e suas contribuicoes cientıficas . . . . . . . . . . . . . . 2
1.2 Fomulacao do problema e objetivos . . . . . . . . . . . . . . . . . . . . 3
1.3 Historico de pesquisas voltados para inversao de dados sısmicos . . . . . 5
1.3.1 Inversao cinematica de dados sısmicos . . . . . . . . . . . . . . . 5
2 O modelo (m) 11
2.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Comportamento das rochas . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3 Coerencia geologica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4 Discretizacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4.1 Discretizacao por blocos ou celulas em malha regular . . . . . . . 19
2.4.2 Discretizacao por blocos ou celulas em malha nao regular . . . . 19
2.4.3 Discretizacao por polinomios . . . . . . . . . . . . . . . . . . . 20
2.4.4 Discretizacao por funcao exponencial ou logarıtmica . . . . . . . 20
2.4.5 Discretizacao por funcao de base radial gaussiana . . . . . . . . . 21
2.4.6 Discretizacao por funcoes harmonicas . . . . . . . . . . . . . . . 21
2.4.7 Discretizacao por splines cubicas (1D e 2D) . . . . . . . . . . . . 22
2.4.8 Discretizacao camada a camada . . . . . . . . . . . . . . . . . . 23
2.5 Formas de calculo do erro . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.6 Comparacao entre as formas de discretizacao . . . . . . . . . . . . . . . 24
2.7 Discussao e propostas para discretizacao geologicamente coerente . . . . 25
2.8 Conclusoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
x

3 Modelagem (D = Lm) 34
3.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.2 Resolucao da equacao da onda por metodos integrais . . . . . . . . . . . 34
3.3 Resolucao da equacao da onda por metodos diferenciais . . . . . . . . . . 37
3.4 Aproximacao da equacao da onda por tracado de raios . . . . . . . . . . 38
3.5 Modelos cinematicamente equivalentes . . . . . . . . . . . . . . . . . . 39
3.6 Comentarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4 Inversao (m=L−1 D) 42
4.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.2 Metodos de resolucao do problema inverso . . . . . . . . . . . . . . . . . 44
4.3 Resolucao do problema inverso pelos metodos de gradientes . . . . . . . 45
4.3.1 Metodo da maxima declividade . . . . . . . . . . . . . . . . . . 45
4.3.2 Metodo de Newton . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.3.3 Metodo de Gauss-Newton . . . . . . . . . . . . . . . . . . . . . 47
4.3.4 Metodo de Levenberg-Marquardt . . . . . . . . . . . . . . . . . 49
4.3.5 Pseudo-Inversa de Moore-Penrose . . . . . . . . . . . . . . . . . 49
4.3.6 Metodo dos gradientes conjugados . . . . . . . . . . . . . . . . . 51
4.4 Influencia do dispositivo de aquisicao . . . . . . . . . . . . . . . . . . . 52
4.5 Transformando um problema mal posto em bem posto . . . . . . . . . . 56
4.5.1 Parametrizacao do modelo . . . . . . . . . . . . . . . . . . . . . 56
4.5.2 Regularizacao atuando na concepcao da funcao objetivo . . . . . 57
4.5.3 Regularizacao atuando sobre a matriz de sensibilidade - Tikhonov
de ordem zero . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.5.3.1 Aplicacao de restricoes na matriz de sensibilidade e
controle da norma da perturbacao no modelo . . . . . . 61
5 Obtendo operadores focais 65
5.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.2 Estimativa de operadores focais pela abordagem convencional . . . . . . 65
5.3 Estimativa de operadores focais por varredura . . . . . . . . . . . . . . . 69
5.4 Estimativa de operadores focais a partir de difracoes . . . . . . . . . . . . 75
5.5 Fatores a serem considerados na tomografia sobre DCFPO . . . . . . . . 76
xi

5.5.1 O efeito do afastamento na estimativa da velocidade . . . . . . . 76
5.5.2 Eventos que devem ser empregados na tomografia DCFPO . . . . 79
6 Tomografia sobre operadores focais 86
6.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
6.2 Derivada em relacao a posicao do ponto focal . . . . . . . . . . . . . . . 87
6.3 Derivada em relacao ao campo de velocidades . . . . . . . . . . . . . . . 87
6.3.1 Derivada em relacao a v sob discretizacao por blocos . . . . . . . 88
6.3.2 Derivada em relacao a v sob discretizacao por polinomios . . . . 88
6.3.3 Derivada em relacao a v sob discretizacao por funcoes exponen-
cial e logarıtmica . . . . . . . . . . . . . . . . . . . . . . . . . . 89
6.3.4 Derivada em relacao a v sob discretizacao por funcao de base radial 89
6.3.5 Derivada em relacao a v sob discretizacao por funcoes harmonicas 90
6.3.6 Derivada em relacao a v sob discretizacao por splines cubicas (1D
e 2D) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
6.3.7 Derivada em relacao a v sob discretizacao camada a camada . . . 91
6.4 Consideracoes sobre a abertura dos operadores focais . . . . . . . . . . . 92
6.5 Consideracoes sobre a abordagem do problema inverso - inversao global
ou camada a camada . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
6.6 Procedimento para estimativa do melhor MCE com baixo IIG: tomografia
sequencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
6.7 Aplicacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
6.7.1 Inversao tomografica baseada em operadores CFP e DCFP - da-
dos sinteticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
6.7.2 Inversao tomografica baseada em operadores DCFP - dados
sısmicos monocanal . . . . . . . . . . . . . . . . . . . . . . . . 108
6.8 Discussao sobre as aplicacoes . . . . . . . . . . . . . . . . . . . . . . . 110
7 Discussao e conclusoes 116
7.1 Discussao final . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
7.2 Conclusoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Referencias Bibliograficas 119
xii

A Experimento sismo 1 129
B Experimento discretizacao 134
B.1 Funcao polinomial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
B.2 Funcao gaussiana 2D . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
B.3 Funcoes harmonicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
B.4 Funcao spline cubica 2D . . . . . . . . . . . . . . . . . . . . . . . . . . 138
B.5 Resumo dos resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
C Obtendo operadores CFP pela abordagem convencional 142
D Posicao x do tempo mınimo e velocidade aparente a partir de difracoes regis-
tradas em secoes de afastamento nao nulo 148
xiii

Lista de Figuras
1.1 Descricao do processo de analise de velocidade para migracao (MVA),
extraıdo de Stork (1992). . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1 Curva de variacao da velocidade P em funcao da pressao de um arenito
extraıda de Carmichael (1982). . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Relacao de estruturas basicas e propriedades (cores) observadas em ro-
chas sedimentares. (A) Acamamento sedimentar plano-paralelo; (B)
Acamamento sedimentar plano-paralelo com variacao lateral de facies;
(C) Dobras; (D) Falhamento normal; (E) Falhamento reverso; (F) In-
trusao discordante. As estruturas mais complexas sao obtidas atraves da
combinacao de uma ou mais situacoes observadas acima. . . . . . . . . . 14
2.3 (a) Registro de velocidade de uma pilha de rochas em uma bacia sedimen-
tar brasileira. (b) Versao em baixa frequencia espacial da curva (a). . . . . 16
2.4 (a) Camada com velocidade variando verticalmente limitada no topo e na
base por superfıcies horizontais (linhas tracejadas negra e branca respec-
tivamente no topo e na base). (b) θv calculado com a equacao 2.2 para (a)
gerando o angulo de 90o para todo o modelo, indicando o gradiente verti-
cal de velocidade. (c) θs (veja o texto para maiores detalhes) para o mo-
delo em (a). A normal aponta para a vertical (90o). (d) Camada com ve-
locidade variando lateralmente limitada no topo e na base por superfıcies
horizontais (linhas tracejadas brancas).(e) θv calculado com equacao 2.2
para (d) gerando o angulo de 0o para todo o modelo, o que indica gradi-
ente lateral de velocidade. (f) θs (veja texto para maiores detalhes) para o
modelo em (d). A normal aponta para direcao vertical (90o). . . . . . . . 18
xiv

2.5 Campo de velocidade obtido com a equacao 2.18 de Kabir, para v0=2000
e B=-1.0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.6 Campo de velocidade obtido com a equacao 2.22 para v0=2000 e B=-1.0. 29
2.7 Campo de velocidade obtido com a equacao 2.23 para v0=2000 e B=-1.0. 30
2.8 Campo de velocidade obtido com a equacao 2.24 para v0=2000 e B=-1.0. 31
3.1 Representacao de um campo de ondas propagando-se para cima e re-
gistrado na superfıcie S 0. Deseja-se estimar o campo de ondas em A
conhecendo-se o campo registrado na superfıcie S 0. . . . . . . . . . . . 36
3.2 Representacao de um modelo de duas celulas com velocidades v1 e v2.
A estrela representa a fonte de um raio, que viaja desta ate o receptor, o
triangulo. A dimensao da malha quadrada e DX. . . . . . . . . . . . . . . 40
4.1 Funcao objetivo com duas variaveis m1 e m2 ilustrando as iteracoes pelo
metodo de maxima declividade ate a convergencia para solucao em m
(modificado de Shewchuck, 1994). . . . . . . . . . . . . . . . . . . . . . 46
4.2 (a) Modelo de velocidade discretizado por celulas quadradas; (b)
Aquisicao sısmica hipotetica avaliando cada celula com um par fonte-
receptor, representados respectivamente pela estrela estrela vermelha e
o triangulo preto. As flechas pontilhadas indicam o caminho percorrido
pelo raio da fonte para o receptor. . . . . . . . . . . . . . . . . . . . . . 53
4.3 Diagrama kx vs kz para um dispositivo de aquisicao do tipo modelo explo-
sivo. Todos os numeros de onda sao amostrados igualmente. . . . . . . . 54
4.4 Diagrama kx vs kz para um dispositivo de aquisicao do tipo split-
spread. Observam-se heterogeneidades e vazios de amostragem de alguns
numeros de onda. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.5 Funcao objetivo com duas variaveis m1 e m2 dada pela equacao 4.42.
Ilustra-se a convergencia para o mınimo a partir de dois modelos inici-
ais (m1o ,m2o) = (2.0,2.0) e (m1o ,m2o) = (-2.0,-2.0) gerando as respectivas
solucoes (0.0,2.0) e (0.0,-2.0). Neste caso ha solucoes ambıguas. . . . . . 59
xv
4.6 Funcao objetivo com duas variaveis m1 e m2 dada pela equacao 4.42.
Ilustra-se a convergencia para o mınimo a partir de dois modelos iniciais
(m1o ,m2o) = (2.0,2.0) e (m1o ,m2o) = (-2.0,-2.0) gerando a mesma solucao
(0.0,0.0). Neste caso nao ha ambiguidade. . . . . . . . . . . . . . . . . . 60
4.7 (a) Funcao objetivo com duas variaveis m1 e m2. A linha negra trace-
jada representa o caminho da solucao ieterativa. A convergencia nao e
observada. (b) Resıduo em cada iteracao observado em (a). (c) Funcao
objetivo com duas variaveis m1 e m2. A linha negra tracejada representa
o caminho da solucao iterativa. A convergencia para o mınimo e suave e
direta. (d) Resıduo em cada iteracao observado em (c). . . . . . . . . . . 63
5.1 Representacao fısica de uma famılia CFP. Ela simula uma fonte na
posicao A com receptores espalhados na superfıcie. A famılia CFP regis-
tra a onda direta (linha pontilhada) e a onda refletida na interface abaixo
de A. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.2 Fluxograma para estimativa do operador focal para um ponto imagem. O
processo tem inıcio com a definicao de um numero inicial m de modelos
mi sobre os quais sao calculados os respectivos operadores gi. As funcoes,
ui e Φi sao calculadas de forma a compor a matriz Ψ. O modelo final e
aquele apontado pelo maximo do modulo da funcao Ψ no lag 0. . . . . . 71
5.3 Secao de afastamento nulo exibindo dois pontos imagens em x = 12500
m. Ponto 1 no fundo do mar e ponto 2 abaixo do fundo do mar. . . . . . . 72
5.4 Painel Ψ(mi, t) para o ponto 1. O eixo horizontal corresponde a veloci-
dade variando entre 1300 e 1800 m/s. O eixo vertical representa o lag
da correlacao cruzada. A amplitude maxima no lag zero ocorre com a
velocidade de 1500 m/s. . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.5 Painel Ψ(mi, t) para o ponto 2. O eixo horizontal corresponde a veloci-
dade limitada entre 1400 e 1800 m/s. O eixo vertical representa o lag
da correlacao cruzada. A amplitude maxima no lag zero ocorre com a
velocidade de 1520 m/s. . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.6 Par fonte (S ) Receptor (R) amostrando um difrator (A) na profundidade
h em um meio nao homogeneo. . . . . . . . . . . . . . . . . . . . . . . . 76
xvi
5.7 (a) Modelo de um refletor explosivo senoidal com amplitude de 25 m e
comprimento de onda igual 250 m em um meio com velocidade constante
de 2000 m/s. (b) Sismograma correspondente ao modelo em (a). A linha
branca tracejada mapeia uma difracao real no pico correspondente. Picos
e cavados da curva senoidal comportam-se como difractores; (c) Modelo
com uma serie de difratores, representados por cırculos brancos, localiza-
dos nos picos e cavados da mesma curva senoidal em (a); (d) Sismograma
correspondente ao modelo em (c). A linha branca tracejada mapeia uma
difracao real. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.8 (a) Modelo de um refletor explosivo senoidal com amplitude de 25 m e
comprimento de onda igual 500 m em um meio com velocidade constante
de 2000 m/s. (b) Sismograma correspondente ao modelo em (a). A linha
branca tracejada mapeia uma difracao real no pico correspondente. Pi-
cos e cavados da curva senoidal nao se comportam como difractores; (c)
Modelo com uma serie de difratores, representados por cırculos negros,
localizados nos picos e cavados da mesma curva senoidal em (a); (d) Sis-
mograma correspondente ao modelo em (c). A linha branca tracejada
mapeia uma difracao real. . . . . . . . . . . . . . . . . . . . . . . . . . 82
5.9 Cubo de dados sısmicos; os eixos SG e RG representam famılias de tiro
comum e receptores comuns respectivamente. O eixo vertical e o tempo,
crescente do topo para base. O plano COG representa a famılia de afasta-
mento comum para afastamento nulo. As curvas GS G, GRG e GCOG repre-
sentam o registro cinematico de uma difracao nas famılias de tiro comum,
receptor comum e afastamento (nulo) comum, respectivamente. . . . . . . 84
6.1 Experimento empregando o Projection Slice Theorem para estimar o
efeito do uso de diferentes aberturas: (a) 20000m; (b) 2000 m; (c) 1000
m; e (d) 200 m. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
6.2 Modelo original (modelo diapiro)). Os losangos em cada interface repre-
sentam os pontos focais. . . . . . . . . . . . . . . . . . . . . . . . . . . 96
6.3 Modelo inicial para inversao global. Os losangos em cada interface repre-
sentam os pontos focais no modelo a priori. . . . . . . . . . . . . . . . . 97
xvii

6.4 Modelo final para inversao global apos 24 iteracoes. Os losangos em cada
interface representam os pontos focais estimados com a inversao. . . . . . 97
6.5 Modelo final para inversao camada a camada. . . . . . . . . . . . . . . . 98
6.6 Modelo final estimado com a abordagem camada a camada utilizando-
se a equacao 2.22, topo-concordante, para representar cada camada. O
modelo a priori empregado foi o resultado da inversao camada a camada
presente na Figura 6.5. Os losangos em cada interface representam os
pontos focais estimados com a inversao. . . . . . . . . . . . . . . . . . . 100
6.7 Modelo final estimado com a inversao global empregando-se como mo-
delo a priori o resultado da inversao camada a camada presente na Figura
6.5. Os losangos em cada interface representam os pontos focais estima-
dos com a inversao. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
6.8 Overlay da secao de afastamento nulo com operadores CFP convencio-
nais (linhas brancas tracejadas) e operadores CFP obtidos por difracoes
(linhas brancas contınuas). O sismograma esta com tempo simples para
comportar os CFPOs. Os artefatos de modelagem nas bordas (as quatro
curvas hiperbolicas cujos apices estao nos tempos de 0.65 s, 1.05 s, 1.45
s and 1.80 s) a esquerda e a direita nao sao consideradas na analise. . . . . 104
6.9 (a) Resıduo a cada iteracao do experimento 1 para os dados sinteticos. (b)
Resıduo a cada iteracao do experimento 2 para os dados sinteticos. . . . 106
6.10 (a) Overlay do modelo real e dos CFPS calculados para o experimento
1. (b) Modelo de velocidade estimado a partir da inversao dos operado-
res CFP convencionais. (c) Overlay do modelo de velocidade real e dos
CFPs calculados no experimento 2, exibindo melhor resolucao estrutural
que o experimento 1. (d) Modelo de velocidade calculado pela inversao
dos CFPOs convencionais e DCFPOs conjuntamente. Todas as figuras
apresentam a mesma escala de cinza para velocidade. . . . . . . . . . . . 107
6.11 Linha sısmica 09 e pocos em Blake Ridge. . . . . . . . . . . . . . . . . 108
6.12 Linha sısmica 09 em tempo simples e as curvas de difracao mapeadas
(linhas brancas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
xviii

6.13 Evolucao da inversao desde o modelo a priori ate o modelo final referente
aos dados sısmicos de Blake Ridge. A escala de velocidade em m/s, a
direita, e a mesma para todos modelos. (a) Modelo a priori; (b) quarta
iteracao; (c) oitava iteracao; (d) decima segunda iteracao; (e) decima sexta
iteracao; (f) vigesima iteracao; (g) vigesima quarta iteracao; (h) vigesima
oitava iteracao. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
6.14 Resıduos da inversao tomografica dos dados monocanal de Blake Ridge. . 112
6.15 (a) Secao sısmica (linha 09) convertida para profundidade com as velo-
cidades calculadas durante a inversao. Abaixo do fundo do mar ha tres
horizontes interpretados, com linhas pretas, HZA, HZB e BSR (o bot-
tom simulating reflector (BSR) sobre a zona de gas). Os cırculos brancos
constituem as posicoes dos difratores determinadas durante a inversao dos
DCFPOs. (b) Secao composta contendo o resultado da inversao sobre os
DCFPOs da linha 09 e as velocidades projetadas dos pocos 994, 995 e
997 da esquerda (SW) para a direita (NE). Todas as interpretacoes estao
repetidas em ambas as Figuras (a) e (b). A legenda do campo de velo-
cidade e valida somente para (b). A zona hachurada na base representa
a regiao nao invertida por ausencia de dados. No texto encontram-se as
observacoes sobre os algarismos I, II, III, IV e V. . . . . . . . . . . . . . 113
A.1 Campo de velocidade sobre o qual foi realizado o experimento sismo 1.
Um campo de velocidade que obedece a equacao A.1. As linhas pretas
representam os raios emanados da fonte na posicao (x=250, z=500). . . . 130
A.2 Tempos de transito registrado ao longo da superfıcie para uma fonte de-
tonada em (x=250, z=500) no campo de velocidade da Figura A.1. . . . . 131
A.3 Espaco de resıduos com parametros a e b respectivamente na horizontal e
vertical. As curvas de nıvel indicam o valor do resıduo. . . . . . . . . . . 132
B.1 Campo de de velocidade real. . . . . . . . . . . . . . . . . . . . . . . . . 135
B.2 Campo de de velocidade do modelo 1 representado por polinomio de or-
dem 7 nas dimensoes x e z. . . . . . . . . . . . . . . . . . . . . . . . . . 136
B.3 Campo de de velocidade do modelo 1 representado por polinomio de or-
dem 8 nas dimensoes x e z. . . . . . . . . . . . . . . . . . . . . . . . . . 136
xix

B.4 Campo de de velocidade do modelo 1 representado por funcao gaussiana
em 2D (vide texto para detalhes de parametrizacao). . . . . . . . . . . . . 137
B.5 Campo de de velocidade do modelo 1 representado por serie de Fourier
restrita aos 20 primeiros harmonicos por direcao. . . . . . . . . . . . . . 139
B.6 Campo de de velocidade do modelo 1 representado por soma de senos e
cossenos restrita a 200 coeficientes por direcao. . . . . . . . . . . . . . . 139
B.7 Campo de de velocidade do modelo 1 representado por spline cubica 2D
restrita a 200 coeficientes em cada direcao. . . . . . . . . . . . . . . . . . 140
C.1 Secao de afastamento nulo destacando o ponto I (cırculo vermelho) sobre
o qual se deseja estimar o operador focal (CFP). . . . . . . . . . . . . . . 143
C.2 Painel de tiro comum (shot gather) em tempo simples onde se estima o
operador a inicial g0 destacado pela linha tracejada verde. . . . . . . . . . 144
C.3 Famılia CFP para o ponto imagem I. A linha vermelha representa o ope-
rador g0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
C.4 Painel DTS na primeira iteracao. A linha tracejada amarela representa
o evento relacionado ao ponto I. Observa-se que ele nao se encontra
alinhado ao longo do lag zero. . . . . . . . . . . . . . . . . . . . . . . . 146
C.5 Painel DTS na terceira iteracao. Observa-se que o evento em estudo esta
alinhado ao longo do lag zero. . . . . . . . . . . . . . . . . . . . . . . . 147
xx

Capıtulo 1
Introducao Geral
“Obter propriedades fısicas em regioes inacessıveis” e o objetivo dos estudos
geofısicos de acordo com muitos livros textos (Sheriff, 2002). Se a lei fısica L e as pro-
priedades fısicas m sao definidas, e possıvel calcular um campo d (o problema direto). As
ferramentas geofısicas medem campos d e a tarefa do geofısico e estimar as propriedades
m uma vez que a lei fısica L seja conhecida (o problema inverso).
Durante a historia da geofısica, uma serie de metodos foram propostos para estima-
tiva da velocidade e a sua distribuicao nas rochas. Esses metodos estao bem documenta-
dos em revistas especializadas, principalmente a Geophysics, desde 1936, e Geophysical
Prospecting, a partir de 1953. Em cada um dos metodos propostos, a lei L que relaci-
ona os parametros de rocha m e o campo d deve ser conhecida, e essa relacao e definida
genericamente por
d = Lm (1.1)
ou
m = L−1d. (1.2)
Enquanto d e calculado, uma vez que os parametros m sao conhecidos, pela equacao
1.1, usa-se a equacao 1.2, para o calculo dos parametros m a partir das medidas d.
O campo de estudos voltado para solucao da equacao 1.1 e denominado Modelagem,
tambem referido neste trabalho como Problema Direto ou ainda Modelagem Direta. O
campo de estudo voltado para solucao da equacao 1.2 e denominado Problema Inverso,
tambem referido neste trabalho como Inversao.
A resolucao da equacao 1.2 e mais complexa do que a da equacao 1.1. Se os
parametros m e a lei L sao conhecidos, o vetor d e calculado a partir de solucoes
1

analıticas ou numericas. Contudo, se o campo d e a lei L sao conhecidos e nenhuma
informacao a priori sobre m e dada, e possıvel provar que existe uma infinidade de veto-
res m aproximam-se da resposta d. Este fenomeno representa a nao unicidade observada
nos problemas inversos.
1.1 Estrutura da tese e suas contribuicoes cientıficas
A estrutura desta tese e inspirada nas equacoes 1.1 e 1.2. Assim, ha um segmento
dedicado ao modelo m, concentrado no Capıtulo 2. Nele, o comportamento das rochas em
um ambiente sedimentar e apresentado; o conceito de incoerencia geologica e proposto
assim como a equacao para sua quantificacao; diferentes formas para representacao do
campo de velocidade sao apresentadas e analisadas. Ao termino deste capıtulo ha secoes
devotadas a discussao e conclusoes.
O Capıtulo 3 e dedicado ao problema direto, ou modelagem (equacao 1.1). Tres
metodos para solucao da equacao da onda, e que sao diretamente empregados nesta tese,
sao revisitados: o metodo integral, metodo das diferencas finitas e o tracado de raios. O
capıtulo e concluıdo com uma secao de comentarios.
Os Capıtulos 4, 5 e 6 sao dedicados a equacao 1.2. No Capıtulo 4, os conceitos
basicos acerca da teoria de inversao e os metodos de inversao com enfase nos metodos de
gradiente sao revisitados. Na sequencia sao apresentadas formas para transformar proble-
mas mal postos em bem postos englobando a parametrizacao do modelo e os metodos de
regularizacao. No final do capıtulo, apresenta-se a equacao utilizada em todas as rotinas
de inversao tomografica nao linear desenvolvidas nesta tese.
No Capıtulo 5 ha tres metodos para calculo de operadores focais (Berkhout, 1997a):
o classico, por varredura, e por difracoes. Os dois ultimos sao propostas originais desta
tese.
O capıtulo 6 apresenta em detalhe a construcao da matriz de sensibilidade para a to-
mografia baseada em operadores focais envolvendo as derivadas parciais do modelo. Adi-
cionalmente, sao estudadas as limitacoes enfrentadas pela inversao tomografica devida a
abertura dos dados de entrada. Na sequencia, apresenta-se uma proposta de inversao de-
nominada tomografia sequencial, capaz de fornecer modelos verazes do ponto de vista
geologico. O capıtulo e concluıdo com aplicacoes sobre dados sinteticos e reais empre-
2
gando difracoes para estimativa do campo de velocidades.
O capıtulo 7 apresenta as discussoes finais e conclusoes. Em seguida listam-se
as referencias bibliograficas consultadas durante a pesquisa desta tese. Finalmente,
concentrou-se nos Apendices os experimentos e as deducoes.
As constribuicoes ineditas e originais angariadas com o desenvolvimento deste traba-
lho estam distribuıdas ao longo de todo o texto. Nas linhas a seguir estas contribuicoes
sao destacadas. No Capıtulo 3 sao propostas as parametrizacoes topo-concordante, base-
concordante e concordante com o centro da camada. Neste capıtulo tambem se propoe o
Indice de Incoerencia Geologica (IIG), como se ve em capıtulos posteriores, uma ferra-
menta analıtica passıvel de ser empregada na inversao.
O conceito de Modelo Cinematicamente Equivalente (MCE), uma especificacao da
ambiguidade em problemas inversos que lidam somente com o tempo de transito como
dado de entrada, e apresentada no Capıtulo 3.
No Capıtulo 4 exibe-se a equacao empregada para inversao tomografica (equacao
4.46) que, de acordo com a bibliografia consultada, e aqui aplicada de forma inedita em
problemas inversos nao lineares.
No Capıtulo 5 apresentam-se duas formas inovadoras para o calculo de operadores fo-
cais, sao elas: por varredura e atraves das difracoes. A consequencia natural da estimativa
de operadores focais a partir de difracoes e a possibilidade de se obter o campo de veloci-
dades em dados sısmicos monocanal, ate agora nada explorado seja academicamente, seja
pela industria do petroleo. Aplicacoes em dados sintetico e real monocanal no capıtulo
6 atestam a viabilidade da tecnica proposta. Ainda no Capıtulo 6, propoe-se a inversao
tomografica sequencial, uma tecnica original desenvolvida no ambito desta tese.
1.2 Fomulacao do problema e objetivos
A aquisicao de dados sısmicos voltada para investigacao do subsolo remonta o fi-
nal do seculo XIX e tinha como objetivo principal o delineamento estrutural das rochas
em subsuperfıcie. Nos anos 1920 a sısmica de refracao foi largamente aplicada para o
mapeamento de domos salinos nos EUA com finalidades prospectivas para hidrocarbone-
tos. Na decada seguinte, gradativamente, a sısmica de reflexao superou a refracao no que
tange a exploracao petrolıfera (Sheriff e Geldart, 1999).
3

Basicamente, a sısmica de reflexao com finalidades prospectivas para petroleo e do-
tada de um dispositivo composto por uma fonte mecanica com conteudo proprio de
frequencia (variando de unidades a uma centena de Hz), e uma serie de receptores dis-
tribuıdos na superfıcie. A onda emitida pela fonte viajara atraves do subsolo e a cada
contraste de propriedades elasticas ocorrera particao do sinal. A parte refletida do sinal
ascendera e sera captada pelos receptores. A outra parcela, transmitida, continuara no
caminho descendente. Novamente, a cada contraste de propriedades ocorra particao e os
receptores resgatarao na superfıcie o sinal ascendente.
Ha tres informacoes independentes contidas nos registros sısmicos (sismograma):
1) posicao: sao conhecidas as posicoes da fonte e dos receptores a cada registro;
2) tempo: cada evento, reflexao, difracao, onda direta etc. registrado nos receptores
ocorrera em um tempo. Ao longo deste texto diz-se que o tempo de um evento carrega
sua informacao cinematica; e
3) amplitude: os eventos registrados a cada tempo ocorrerao com uma determi-
nada amplitude ou magnitude do sinal. A magnitude e polaridade do sinal encerram
informacoes dos contrastes de propriedades entre as rochas. Ao longo deste texto as
informacoes de amplitude sao ditas dinamicas.
A modelagem (Lm) adequada para simular a propagacao de ondas sısmicas e repre-
sentada pela equacao 1.3 ou equacao vetorial da onda (Aki e Richards, 1980).
ρ∂2P∂t2= f + (λ + 2μ)∇(∇.P) − μ∇ × (∇ × P), (1.3)
onde P = (ux, uy, uz); ux, uy e uz sao os deslocamentos respectivamente nas direcoes x, y e
z; f sao as forcas de corpo; ∇ = ( ∂∂x ,
∂∂y ,
∂∂z ); ρ a massa especıfica e; λ e μ os parametros de
Lame.
Esta tese se concentra na resolucao do problema cinematico a partir dos tempos
de transito das funcoes de Green extraıdas dos proprios dados sısmicos ao modo do
que foi desenvolvido em Kabir (1997), Hegge (2000) e Cox (2004). Nesse contexto,
posicao e tempo sao suficientes para a inversao do campo de velocidades compressio-
nais. Nesta tese, contudo, ha uma preocupacao maior com a obtencao de um campo de
velocidades mais veraz no sentido geologico. Essa preocupacao nasce da necessidade
de se obter um modelo de velocidade que, alem de ser util para o processo de migracao
sısmica, constitua um insumo util para estimativa de litologias, esteja de acordo com as
informacoes geologicas disponıveis, e, finalmente, seja um bom modelo a priori para
4

inversoes dinamicas (eg. inversao total do campo de ondas).
1.3 Historico de pesquisas voltados para inversao de da-
dos sısmicos
A busca pela base teorica que fundamentou o estudo do Problema Inverso remete o
leitor aos grandes matematicos do seculo XIX. No tocante ao ajuste de curvas (funcoes)
citam-se indistintamente os criterios de mınimo valor absoluto de Laplace em (1799) e
mınimos quadrados de Legendre (1801) e Gauss (1809) (Tarantola, 2005). O objetivo
consiste essencialmente em se reduzir a diferenca entre dado observado e dado calculado.
A busca por mınimos (ou maximos) de funcoes e objeto de estudo da Otimizacao. Muitas
das ferramentas desenvolvidas nesse ramo da matematica se prestam para resolucao de
Problemas Inversos.
Desde ja se empregam os termos resıduo e erro respectivamente como a diferenca
entre dados observado (ou real) e calculado, e a diferenca entre modelos real e estimado,
(Aster et al. 2005). Em problemas geofısicos reais o erro nao e passıvel de calculo. Ele
so pode ser obtido em problemas sinteticos teoricos.
1.3.1 Inversao cinematica de dados sısmicos
Esta revisao nao deve comecar sem antes se definir os diferentes tipos de veloci-
dades relacionadas aos dados sısmicos e citadas ao longo deste trabalho. Citam-se aqui
seis velocidades cujas definicoes sao encontradas em livros texto de geofısica, entre eles
Sheriff e Geldart (1999): velocidade de fase; velocidade de grupo; velocidade media;
velocidade RMS; velocidade de empilhamento ou NMO; velocidade intervalar.
Ao se admitir que um meio e dispersivo, remete-se ao fato de que a velocidade de-
pende da frequencia. Entao, cada um dos harmonicos, ou fases, que compoe um pulso
sısmico viaja com uma velocidade distinta, denominada velocidade de fase. A envoltoria
dos diversos harmonicos viaja com uma velocidade que e chamada de velocidade de grupo
vg. Neste trabalho assume-se que o meio geologico nao e dispersivo, logo, todas as fases
e a envoltoria (ou grupo) possuem a mesma velocidade.
A velocidade media (vm) e um conceito emprestado da mecanica e e definida como a
5

razao entre o distancia (modulo da posicao final menos posicao inicial) e o tempo decor-
rido para um pulso viajar do ponto inicial ao final. Nao importa a trajetoria.
A velocidade RMS (vrms) e alcancada pela media quadratica (Sheriff and Geldart,
1999), definida pela expressao:
vrms,n =
√∑ni=1 v2
i ti∑ni=1 ti
, (1.4)
onde vi e a velocidade intervalar ao longo do intervalo ti.
A velocidade de empilhamento ou NMO (Normal Move Out) (vnmo) e obtida durante o
processamento sısmico e e aquela capaz de horizontalizar eventos hiperbolicos nas secoes
de afastamento medio comum (Common Mid Point Gather - CMP). Em geral a velocidade
NMO se aproxima da velocidade RMS, sendo esta ultima pouco menor que a primeira.
Para um modelo de camadas plano-paralelas, vnmo > vrms > vm.
Considerando-se camadas sedimentares com velocidades constantes, a velocidade de
cada camada e chamada de intervalar (vi). Segundo essa mesma premissa de camadas
com velocidades constantes, e supondo ser a velocidade vnmo muito proxima da vrms, Dix
(1955) demonstrou que as velocidades intervalares podem ser obtidas da vvnmo, bastando
para isso, substituir vrms por vnmo na equacao 1.4.
A complexidade do meio geologico nao encerra uma unica velocidade em uma ca-
mada. Sabe-se que esta propriedade pode variar bastante ao longo de um estrato. Assim,
ao longo deste texto o termo velocidade destituıdo de qualquer outro adjetivo diz respeito
a propriedade intrınseca da rocha.
Embora a investigacao das velocidades no subsolo remonte ao ano de 1927 com a
primeira perfilagem em um poco no Kansas (EUA) (Sheriff e Geldart, 1999), a extracao
do campo de velocidades das rochas a partir dos dados sısmicos evoluiu em desarmonia
com os estudos petrofısicos. Observa-se que depois da contribuicao de Dix (1955) houve
poucos avancos para determinacao do campo de velocidades ate meados da decada de
1980. Ha tres relevantes fatores que explicam este fato: na decada de 1960 comecou a
entrar em uso o registro digital de dados sısmicos (Sheriff e Geldart, 1999); nessa mesma
decada, viabilizou-se o emprego da migracao em tempo (Bednar, 2005) e; o fato de as
areas prospectadas nao apresentarem grandes complexidades estruturais.
A migracao em tempo envolveu esforcos na otimizacao dos recursos computacionais
e algoritmos para obtencao de boas imagens. Os principais insumos para a migracao
6

em tempo eram (sao) os dados sısmicos empilhados e o campo de velocidades NMO,
vnmo. Simultaneamente, as areas prospectadas ao redor do mundo, em geral, exibiam
poucas complexidades estruturais, e respondiam muito bem para o citado tipo de fluxo
de processamento. Grande parte dos destacados trabalhos versando sobre migracao em
tempo foram publicados nas decadas de 1950, 1960 e principalmente 1970. Citam-se
Hagedoorn (1954), Musgrave (1961), Schneider (1971), Schneider (1978) e Stolt (1978).
Na decada de 1970 tambem sao publicadas as bases teoricas voltadas para migracao
em profundidade (Claerbout 1970 e 1971) que tem como insumo os dados pre-empilhados
e o campo de velocidades em profundidade. Em 1976 e realizada a primeira migracao
em profundidade baseada no tracado de raios (Sheriff e Geldart, 1999). O campo de
velocidades obtido por meio da aplicacao da formula de Dix sobre a vnmo e a conversao
da velocidade intervalar em tempo (vi em tempo) para vi em profundidade era suficiente
para areas com baixa complexidade estrutural.
Em Pollet et al. (1983) e Bishop et al. (1985) sao reportadas as chamadas anomalias de
velocidade de empilhamento. Fazendo referencia aos levantamentos marıtimos, Bishop
et al.(1985) menciona que as citadas anomalias se fazem presentes quando ha variacoes
de velocidade com comprimento de onda inferior a dimensao dos cabos de aquisicao
marıtima (streamers). Em funcao de maiores complexidades no campo de velocidade,
nasceu a busca por tecnicas tomograficas voltadas para determinacao desse campo.
Destaca-se a publicacao pioneira de Bishop et al. (1985) versando sobre tomografia de
reflexao. Neste trabalho o dado observado compreende os tempos de transito das reflexoes
mapeadas em domınios nao empilhados. A modelagem e efetuada por tracado de raios e a
diferenca entre os tempos calculados e os tempos observados constitui a funcao objetivo,
alvo da minimizacao. O algoritmo empregado para inversao e o de Gauss-Newton, um
metodo de gradiente, no qual a cada iteracao o resıduo e reduzido a medida em que o
campo de velocidade e atualizado juntamente com a superfıcie dos refletores.
Sword (1987), que baseou seu trabalho em Rieber (1936) e Riabinkin (1957), emprega
a informacao contida no parametro p (razao entre o seno do angulo de incidencia e a
velocidade intervalar) da fonte e dos receptores, alem do tempo de transito, como dados
para inversao tomografica. Esse trabalho contem as formulacoes que alicercam a tecnica
chamada estereotomografia, citada adiante nesta secao.
Woodward et al. (2008) fazem uma retrospectiva dos metodos tomograficos a partir da
7

decada de 1990. Os autores citam que neste perıodo ha avancos na resolucao dos modelos,
tais como a incorporacao dos efeitos anisotropicos devido a utilizacao de maiores lancos
e abertura azimutal e ainda, ao maior emprego de inversoes mais guiadas pelo dado que
inversoes governadas por interpretacoes e modelos. Os autores informam tambem que
todos esses avancos somente foram possıveis com o aumento do poder computacional,
tanto em processamento como em capacidade de armazenamento (memoria) de dados.
De fato, os anos 1990 experimentam grandes avancos nas tecnicas de inversao
tomografica, motivados pelo crescente emprego da migracao em profundidade pre-
empilhamento (PSDM) e pelo aumento dos recursos computacionais. Observa-se nesse
perıodo a segmentacao da abordagem tomografica em duas vertentes principais: tomo-
grafia guiada predominantemente pelos dados, com poucas informacoes advindas de
interpretacoes e; tomografia guiada por modelos, com fortes vınculos provenientes de
interpretacoes e focada na determinacao de gradientes de velocidade entre camadas. Esta
ultima abordagem e aplicada nas inversoes camada a camada (layer-stripping), na qual os
parametros de velocidade sao determinados separadamente, da camada mais rasa para a
mais profunda. Observou-se que os resıduos acumulados nas camadas mais rasas preju-
dicam a determinacao de parametros nas camadas mais profundas (Soares Filho, 1994).
Billete e Lambare (1998) alem de publicar pioneiramente a estereotomografia co-
lige um rico historico sobre os metodos tomograficos, utilizado para confeccao deste
capıtulo. A tecnica estereotomografica adicionou mais parametros ao universo de da-
dos. Assim, constituem dados passıveis de minimizacao: o tempo de transito, posicao da
fonte, posicao dos receptores, parametro p (razao entre o seno do angulo de incidencia e
a velocidade) da fonte, parametro p do receptor. A modelagem a cada passo e realizada
por meio do tracado de raios paraxiais e os parametros a serem invertidos sao a posicao
dos refletores e o campo de velocidades.
Em funcao dos avancos nos recursos computacionais a partir da decada de 1990, pa-
ralelamente aos avancos da tomografia registram-se numerosos trabalhos voltados para
analise de velocidade para migracao (migration velocity analysis - MVA). Na sısmica de
reflexao, um mesmo evento (ponto) pode ser amostrado por diferentes famılias de tiro.
Depois da migracao, caso o campo de velocidades esteja correto, deve se situar na mesma
posicao. A diferenca na posicao dos eventos pode ser mensurada comparando-se secoes
de afastamento comum migradas (common offset gathers - COG), Trier (1990) e Dere-
8

gowski (1990), ou implicitamente avaliando-se o alinhamento de CRPs (common reflec-
tion point), Al-Yahya (1989), Symes e Carazzone (1991) e Jin e Madariaga (1994) e cons-
titui a funcao objetivo a ser minimizada. Seja qual for o domınio, almeja-se, implıcita ou
explicitamente, alinhar eventos nos paineis CRP. A Figura 1.1, extraıda de Stork (1992),
resume o processo de estimativa do campo de velocidades em domınios pos-migrados,
similares a MVA.
Figura 1.1: Descricao do processo de analise de velocidade para migracao (MVA), ex-
traıdo de Stork (1992).
9

Adicionam-se os trabalhos relacionados a tomografia em dispositivos de aquisicao
poco a poco e Vertical Seismic Profiling (VSP), entre eles McMechan (1983), Soares
Filho et al. (1997a, 1997b) empregados para determinacao do campo de velocidades e
geracao de imagens com maior resolucao que a sısmica convencional.
Como citado anteriormente, entre os anos 1990 e 2008, os avancos experimentados
na determinacao do campo de velocidade concentraram-se no aumento da resolucao dos
modelos, incorporacao multi-parametrica (anisotropia, absorcao etc.) e maior emprego de
inversoes guiadas pelo dado em detrimento de inversoes guiadas pelo modelo (Woodward
et al., 2008). Contudo, e digna de destaque uma mudanca substancial nos dados de en-
trada voltados para inversao tomografica. Berkhout (1997a, 1997b) lancou o conceito de
operadores de focalizacao (Common Focus Point Operator), CFPO, que representam a
funcao de Green de uma fonte virtual impulsiva deflagrada em profundidade e registrada
na superfıcie de aquisicao. Thorbecke (1997) e Bolte (2003) demonstram que os opera-
dores focais sao passıveis de obtencao a partir de dados sısmicos de reflexao. Assim, por
volta da segunda metade da decada de 1990 seria possıvel empregar, nao os tradicionais
tempos de transito das reflexoes, mas os tempos simples de funcoes de Green ascendentes
- dos pontos sobre uma superfıcie refletora ate a superfıcie.
Nos anos 1990 destacam-se os trabalhos de Hegge e Fokkema (1996), Hegge (1997),
Hegge et al. (1998), Hegge e Bolte (1999) e Kabir (1997) versando sobre inversao to-
mografica a partir de operadores focais. As teses de doutorado de Kabir (1997), Hegge
(2000) e Cox (2004) empregam a inversao tomografica sobre CFPO. Embora os princıpios
envolvidos ja fossem utilizados na sismologia para estimativa dos focos de terremotos e o
campo de velocidades crustal, os trabalhos de Kabir (1997), Hegge (2000) e Cox (2004)
empregam a inversao tomografica sobre CFPO (funcoes de Green) no ambito da sısmica
para petroleo. Neste processo os dados de entrada D sao os tempos de transito dos ope-
radores focais e na inversao almeja-se determinar a posicao dos difratores e o campo de
velocidades, que compoem o espaco de modelos m. O presente trabalho desenvolve-se
tendo como ponto de partida as teses citadas.
10
Capıtulo 2
O modelo (m)
2.1 Introducao
Neste capıtulo o comportamento das rochas em ambientes sedimentares e revisi-
tado. Ele embasa as formas de discretizacao mais adequadas para ambientes sedimenta-
res.
2.2 Comportamento das rochas
Diz-se que um problema apresenta de solucao unica quando ha alteracao de um
modelo m1 para outro modelo m2, os dados tambem mudam de d1 para d2 de tal forma
que d1 � d2 (Sen, 2006). A nao unicidade de solucao, contudo, e uma indesejavel ca-
racterıstica encontrada na resolucao de problemas inversos. O experimento apresentado
no Apendice A descreve claramente a nao unicidade de solucao em exemplo bastante
simples ja envolvendo o conceito de operador focal (CFPO) e ponto focal. Nesse experi-
mento uma parcela do espaco de resıduos foi construıda (Figura A.3) e nela se observam,
ao longo da diagonal, uma serie de mınimos que satisfazem os tempos de transito. Ou
seja, todos os modelos, coordenadas no espaco de resıduos, que se situam nos pontos de
mınimo sao solucoes possıveis pois satisfazem os dados observados.
Assim, e desejavel que sejam conhecidas a natureza e as caracterısticas gerais do
modelo a fim de se reduzir a multiplicidade de solucoes no Problema Inverso. O conheci-
mento a priori do modelo m norteia a melhor forma de representa-lo, seja na insercao de
vınculos (formas de restricao do espaco de modelos inseridas nas equacoes de inversao)
11
nas equacoes de inversao, seja na regularizacao (processo voltado para estabilizacao da
inversao por meio da imposicao de vınculos e restricoes que induzem a solucao).
Rocha e qualquer massa agregada firme e coerente de minerais que constitui parte
de um planeta (Skinner e Porter, 1987). Mineral constitui qualquer substancia com
composicao quımica e estrutura cristalina definida, formada por processos naturais.
Alem dos minerais constituintes, as rochas contem poros, que nada mais sao que o
espaco vazio entre os graos minerais (ou polimineralicos). Dada uma amostra de rocha,
sua porosidade e definida como a razao entre o volume de vazios e o seu volume total
(Mavko et al, 2009). No meio geologico as rochas sedimentares possuem seus poros
preenchidos por fluidos (e.g. ar, agua (doce ou salgada), gas, condensado e/ou oleo).
Os fatores intrınsecos que ditam as propriedades fısicas das rochas sao a composicao
mineral, o contato entre os graos, a forma dos graos, a porosidade e os fluidos intersticiais
(composicao e pressao de poros). Externamente, temperatura e pressao confinante ou
litostatica influenciam fortemente a velocidade sısmica nos litotipos (Mavko et al., 2009 e
Thomas, 2000). A primeira tende a reduzir a velocidade e os modulos de rigidez a medida
que a temperatura aumenta. A pressao confinante crescente age no sentido de aumentar
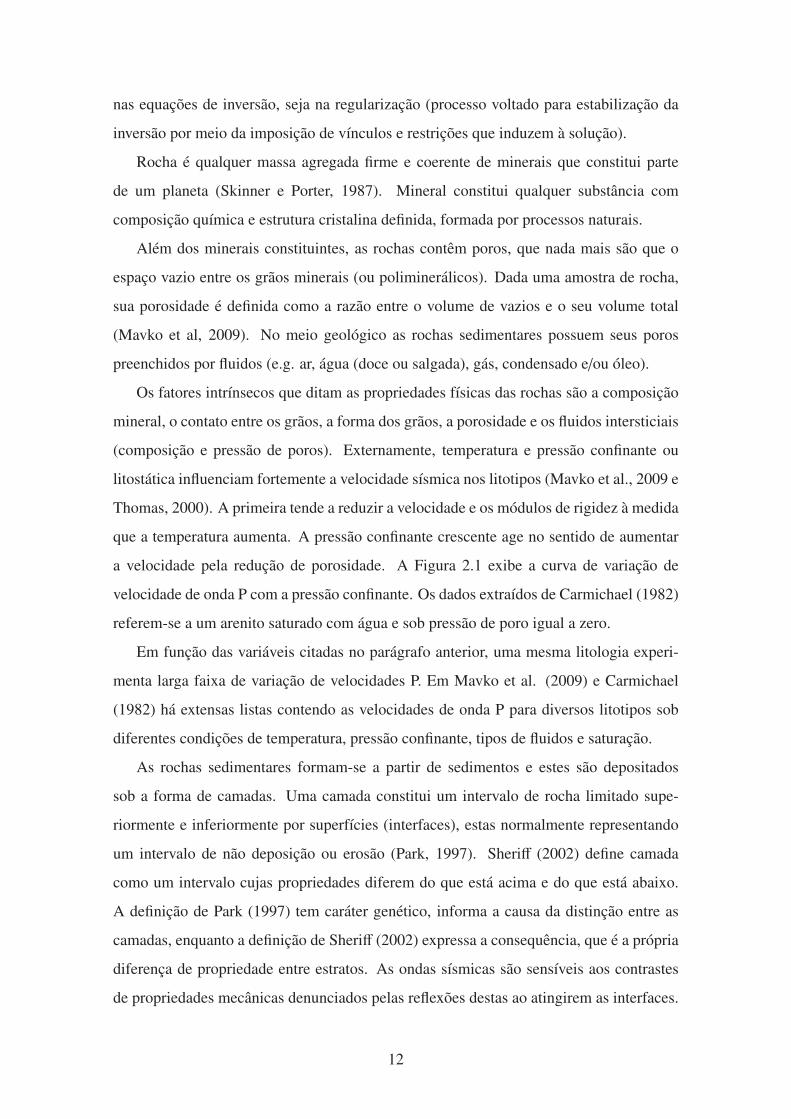
a velocidade pela reducao de porosidade. A Figura 2.1 exibe a curva de variacao de
velocidade de onda P com a pressao confinante. Os dados extraıdos de Carmichael (1982)
referem-se a um arenito saturado com agua e sob pressao de poro igual a zero.
Em funcao das variaveis citadas no paragrafo anterior, uma mesma litologia experi-
menta larga faixa de variacao de velocidades P. Em Mavko et al. (2009) e Carmichael
(1982) ha extensas listas contendo as velocidades de onda P para diversos litotipos sob
diferentes condicoes de temperatura, pressao confinante, tipos de fluidos e saturacao.
As rochas sedimentares formam-se a partir de sedimentos e estes sao depositados
sob a forma de camadas. Uma camada constitui um intervalo de rocha limitado supe-
riormente e inferiormente por superfıcies (interfaces), estas normalmente representando
um intervalo de nao deposicao ou erosao (Park, 1997). Sheriff (2002) define camada
como um intervalo cujas propriedades diferem do que esta acima e do que esta abaixo.
A definicao de Park (1997) tem carater genetico, informa a causa da distincao entre as
camadas, enquanto a definicao de Sheriff (2002) expressa a consequencia, que e a propria
diferenca de propriedade entre estratos. As ondas sısmicas sao sensıveis aos contrastes
de propriedades mecanicas denunciados pelas reflexoes destas ao atingirem as interfaces.
12
����������� �����������������
��
��
�
��
��
��
��
� ��� ��� �� ��� ��� ���
�����������
������
Figura 2.1: Curva de variacao da velocidade P em funcao da pressao de um arenito
extraıda de Carmichael (1982).
A atitude (relacao espacial de uma feicao com a horizontal, como o mergulho de uma
camada, Sheriff (2002)) original das rochas sedimentares, ou acamamento sedimentar, e
predominantemente horizontal a subhorizontal.
Em funcao das condicoes de fluxo do meio no qual os sedimentos estavam imersos e
das demais condicoes ambientais, uma mesma camada pode apresentar variacoes laterais
de propriedades ou facies (caracterısticas que distinguem uma rocha de outra adjacente,
seja na litologia, estruturas sedimentares, granulometria, etc. (Sheriff, 2002)).
Ao longo da evolucao geologica, as rochas sedimentares podem experimentar
episodios de deformacao de diversas origens (tectonica ou nao) e intrusoes ıgneas, ha-
linas ou mesmo de argila, que alteram a geometria e atitude dos estratos gerando dobras
e falhas. A Figura 2.2 resume as estruturas basicas encontradas em bacias sedimentares.
Qualquer estrutura mais complexa pode ser obtida com a combinacao de um ou mais tipos
encontrados na Figura 2.2.
13

(A)
Acamamento plano-paralelo
(B)
Acamamento plano-paralelo com
variação lateral de fácies
(C)
Dobras
(D)
Falha normal
(E)
Falha reversa
(F)
Intrusão discordante
Figura 2.2: Relacao de estruturas basicas e propriedades (cores) observadas em rochas
sedimentares. (A) Acamamento sedimentar plano-paralelo; (B) Acamamento sedimen-
tar plano-paralelo com variacao lateral de faceis; (C) Dobras; (D) Falhamento normal;
(E) Falhamento reverso; (F) Intrusao discordante.
14

2.3 Coerencia geologica
Rochas, em ambientes sedimentares, sao principalmente distribuıdas em camadas,
deformadas ou nao e, devido a compactacao, espera-se que a massa especıfica de uma de-
terminada litologia aumente com a profundidade. Admitindo que, para um meio poroso,
a velocidade e proporcional a massa especıfica (Gardner, 1974), a velocidade tambem
aumenta com a profundidade para uma rocha de composicao homogenea.
Na Figura 2.3a, expoe-se o registro bruto de velocidade extraıdo de um poco que
atravessou espessa coluna de rochas em uma bacia sedimentar brasileira. A Figura 2.3b
exibe a versao em baixa frequencia da curva mostrada na Figura 2.3a, e representa a
tendencia de compactacao desta localidade. Para uma pilha sedimentar indeformada ou
levemente deformada, a curva de velocidade em baixa frequencia espacial aumenta do
topo para a base em uma mesma camada constituıda por litotipo homogeneo (Figura
2.3b).
Devido as condicoes de sedimentacao e diagenese, o gradiente de velocidade tende a
ser paralelo ao vetor aceleracao da gravidade, ortogonal a uma superfıcie equipotencial.
Para condicoes de leito plano, o vetor de maxima variacao (aumento) de velocidade e
ortogonal a base da camada. Para uma sequencia sedimentar sobre a qual nao ha qualquer
episodio de erosao ou deformacao, o vetor gradiente de velocidade tende a ser paralelo a
normal do topo ou da base da camada.
Uma vez estabelecidas as premissas que relacionam camadas com o campo de velo-
cidade, e possvel quantificar o ındice de incoerencia geologica (IIG), um ındice original
desta tese, que deve ser computado da seguinte forma.
Primeiramente o gradiente do campo de velocidade (v) deve ser calculado.
∇v =(∂v∂x,∂v∂z
). (2.1)
Entao, o angulo θv que o vetor gradiente faz com a horizontal e obtido por
θv = arctan
⎛⎜⎜⎜⎜⎜⎝ ∂v∂z∂v∂x
⎞⎟⎟⎟⎟⎟⎠ . (2.2)
Em um terceiro passo, o vetor normal de cada ponto da interface de topo ou base de
uma camada e calculado. Em seguida, o angulo que este vetor faz com a horizontal
e extrapolado para a camada correspondente. A escolha do topo ou base da camada
deve obedecer a um criterio geologico que privilegie a interface que encerre as condicoes
15

0
1000
2000
3000
4000
5000
6000
900 1400 1900 2400 2900 3400
Profundidade (m)
Ve
loc
ida
dd
e (
m/s
)
0
1000
2000
3000
4000
5000
6000
900 1400 1900 2400 2900 3400
Profundidade (m)
Ve
loc
ida
dd
e (
m/s
)
(a)
(b)
Figura 2.3: (a) Registro de velocidade de uma pilha de rochas em uma bacia sedimentar
brasileira. (b) Versao em baixa frequencia espacial da curva (a).
16

reinantes durante a deposicao. Depois que a extrapolacao e feita para todo o modelo, ha
um campo θs que possui o mesmo significado de θv.
De acordo com as premissas previamente citadas, θs deveria ser igual a θv. O ındice
IG e computado por
IIG =∑n
i=1 abs(θvi − θsi)
n, (2.3)
onde n e o numero de celulas do modelo.
Computando θvi e θsi variando entre 0 e 180o, a situacao mais incoerente ocorre quando
θvi e θsi sao ortogonais entre si em cada celula. Neste caso, o IIG atinge o valor maximo
de 90o. Se, diferentemente, θvi e θsi sao paralelos em todo o modelo, IIG tem seu valor
mınimo em zero. Assim, o IIG varia entre 0 e 90 o para menor e maior incoerencia res-
pectivamente. A analise comparando grupos de modelos deve ser realizada sob o mesmo
numero de celulas.
Na Figura 2.4a ha um modelo representado por uma camada limitada no topo e na
base por superfıcies horizontais e o campo de velocidade exibe um gradiente vertical. θv
e θs sao comparados e sao apresentados nas Figuras 2.4b e 2.4c. O IIG, calculado com
a equacao 2.3, e 0o. Para o modelo na Figura 2.4d, os limites da camada sao os mesmos
observados em 2.4a, mas o gradiente de velocidade e lateral. Assim, para a situacao
ilustrada na Figura 2.4d, os campos θv e θs sao aqueles presentes respectivamente nas
Figuras 2.4e e 2.4f, o que causa um IIG de 90o. O modelo da Figura 2.4a e geologicamente
mais coerente que aquele observado em 2.4d.
17

Figura 2.4: (a) Camada com velocidade variando verticalmente limitada no topo e na base
por superfıcies horizontais (linhas tracejadas negra e branca respectivamente no topo e na
base). (b) θv calculado com a equacao 2.2 para (a) gerando o angulo de 90o para todo o
modelo, indicando o gradiente vertical de velocidade. (c) θs (vide o texto para maiores
detalhes) para o modelo em (a). A normal aponta para a vertical (90o). (d) Camada com
velocidade variando lateralmente, limitada no topo e na base por superfıcies horizontais
(linhas tracejadas brancas). (e) θv calculado com equacao 2.2 para (d) gerando o angulo
de 0o para todo o modelo, o que indica gradiente lateral de velocidade. (f) θs (veja texto
para maiores detalhes) para o modelo em (d). A normal aponta para direcao vertical (90o).
18

2.4 Discretizacao
Este topico dedica-se as formas de representacao do campo de propriedades m.
Este tema, por si, constitui ampla area de pesquisa e nesta secao apenas as principais
formas basicas de representacao 2D sao revisitadas.
2.4.1 Discretizacao por blocos ou celulas em malha regular
A discretizacao por blocos e o mais intuitivo e simples dos metodos de
discretizacao. Basicamente ela consiste em dividir o espaco de modelos em uma malha,
preferencialmente regular, composta por diminutos polıgonos encerrando propriedades
homogeneas, ou variaveis, contınuas. A Tabela 2.1 exibe a representacao pictorica de um
modelo por uma malha regular de retangulos.
Este tipo de discretizacao e o mais adequado para modelos extremamente complexos,
sempre que a dimensao das celulas for menor que os menores detalhes do modelo. Sob
estas condicoes, qualquer combinacao de estruturas presentes na Figura 2.2 pode ser re-
presentada por celuas. Bishop et al. (1985) e Fei e McMechan (2006), entre outros, usam
a discretizacao por celulas para estimativa da velocidade.
C1 C2 C3 C4 C5
C6 C7 C8 C9 C10
C11 C12 C13 C14 C15
C16 C17 C18 C19 C20
C21 C22 C23 C24 C25
Tabela 2.1: Representacao pictorica de um modelo discretizado por 25 retangulos.
2.4.2 Discretizacao por blocos ou celulas em malha nao regular
Malhas nao regulares constituem uma forma de discretizacao bastante atraente. Os
polıgonos nao possuem dimensoes constantes, assim, e possıvel empregar um numero
reduzido de elementos nas regioes com pouca complexidade estrutural, e elevar o seu
numero concomitantemente a reducao de suas dimensoes nas areas mais complexas e/ou
de elevados gradientes de velocidade. Rotinas de modelagem ou inversao implementadas
19

segundo o metodo dos elementos finitos permitem o emprego de malhas nao regulares
(Cook, 1995). Cox (2004) empregou triangulos de Delaunay para discretizar o campo de
velocidades no processo de inversao tomografica sobre operadores focais.
2.4.3 Discretizacao por polinomios
Nesta forma de discretizacao, sem termos cruzados, o campo de velocidades e
representado pela funcao polinomial
v(x, z) = v0 +
n∑i=1
Aixi +
m∑j=1
Bjz j, (2.4)
onde v(x, z) e o campo de velocidade e, Ai e Bj os respectivos coeficientes aplicados as
coordenadas x e z e v0 o termo independente.
Equacoes de primeiro grau, v(z) = c0+B1z , aliam a funcao compactacao (progressiva
perda de porosidade com o aumento da pressao litostatica ou profundidade) com a funcao
velocidade. Em outras palavras, para um mesmo litotipo, quanto menor a porosidade,
maior sera a velocidade de ondas compressionais. Uma serie de leis empıricas relaciona
velocidade de ondas compressionais com a porosidade. Para maiores detalhes sugere-se a
leitura de Mavko et al. (2009). Um exemplo de aplicacao do emprego de polinomio para
descricao do campo de velocidades encontra-se em Siddiqui et al. (2004). Os autores
constroem um modelo de velocidades consistente empregando equacoes de primeiro grau
para a pilha sedimentar clastica do Golfo do Mexico.
2.4.4 Discretizacao por funcao exponencial ou logarıtmica
Embora pouco comum, unidades sedimentares nao deformadas podem ser repre-
sentadas localmente por funcoes exponenciais ou logarıtmicas para grandes pacotes sedi-
mentares homogeneos. Assim uma grande sequencia arenıtica pode ser representada por
uma funcao exponencial
v(x, z) = v0 + B1e(qz), (2.5)
se ajustando ao inverso da funcao compactacao, onde q, v0 e B1 sao coeficientes que
dependem da rocha em estudo.
Algumas litologias, compostas predominantemente por graos nas fracoes silte e/ou
argila, perdem a porosidade muito rapidamente (com elevado gradiente) nas primeiras
20

centenas de metros e apresentam gradientes mais suaves em maiores profundidades (Allen
e Allen, 2005). Uma vez que a velocidade compressional relaciona-se com o inverso
da funcao compactacao, e possıvel e factıvel representar espessos pacotes de folhelhos,
argilitos ou siltitos argilosos com funcoes logarıtmicas do tipo.
v(x, z) = v0 + B1ln(z), (2.6)
onde v0 e B1 sao coeficientes que dependerao da litologia em estudo. Nao se constatou
o emprego destas funcoes (exponencial e logarıtmica) para representacao do modelo de
velocidade em tomografia nas referencias consultadas. Todavia, a Figura 2.1 que ilus-
tra a variacao de velocidade de um arenito sob diferentes pressoes confinantes se ajusta
perfeitamente a uma funcao logarıtmica.
2.4.5 Discretizacao por funcao de base radial gaussiana
As funcoes de base radial gaussiana (Buhmann, 2003) i.e.
v(x, z) =
n∑i=1
Aie− 1
2
[(x−xi)
2
σ2xi+
(z−zi)2
σ2zi
], (2.7)
onde Ai sao parametros relacionados ao peso ou apice da gaussiana, σxi e σzi relacionam-
se a abertura da superfıcie nas direcoes x e z e, finalmente xi e zi constituem as coorde-
nadas do centro da gaussiana. Se os parametros σxi e σzi forem constantes para ambas as
direcoes e para qualquer i, os unicos coeficientes necessarios para descrever um modelo
resumem-se a Ai.
2.4.6 Discretizacao por funcoes harmonicas
De forma semelhante ao topico anterior, o modelo m pode ser representado por
funcoes harmonicas como a serie de Fourier:
v(x, z) =
m∑jz=0
n∑jx=0
Ajx, jzei2π(k jx x+k jzz), (2.8)
onde Ajx, jz sao coeficientes, i =√−1, k jx e k jz sao as frequencias espaciais respectivamente
nas direcoes x e z.
A soma de cossenos e senos (equacao 2.9) sem a parcela imaginaria da equacao 2.8,
tambem pode exibir bons resultados para representacao de modelos contınuos, a depender
21

do numero de parametros empregados (anexo B).
v(x, z) =
n∑i=0
Ai[cos(kx,ix) + sen(kx,ix)
]+
m∑j=0
Aj
[cos(kz, jz) + sen(kz, jz)
], (2.9)
onde i e j sao ındices variando de 0 a n e 0 a m respectivamente, Ai o coeficiente relativo
a direcao x, A j o coeficiente na direcao z, kx,i e o numero de onda na direcao x, kz, j o
numero de onda na direcao z.
Santos e Figueiro (2006) descrevem modelos de velocidade atraves de polinomios
trigonometricos, um somatorio de funcoes harmonicas com coeficientes calculados de
forma propria e sem envolvimento de parcelas imaginarias. Os autores conseguem repre-
sentar feicoes complexas reduzindo em mais de 6 vezes (de 494 para 80) o numero de
parametros necessarios para discretizar o mesmo modelo atraves de celulas.
2.4.7 Discretizacao por splines cubicas (1D e 2D)
Observe-se primeiramente o caso 1D. Seja uma funcao C unidimensional, discreta,
definida no domınio x = [xa, xb] e representada por v=[v1, v2, v3, v4, v5, .... vn] = [v j], a
qual se deseja aproximar por funcoes de interpolacao cubica f j(x) (spline cubica) em cada
subdomınio [x j, x j+1] e com afastamento hx entre os nos do domınio. Sendo v o campo de
velocidade amostrado pontualmente, a funcao velocidade em cada subdomınio [x j, x j+1]
sera dada por:
f j(x) = Aj0 + Aj1(x − x j) + Aj2(x − x j)2 + Aj3(x − x j)
3. (2.10)
De acordo com as caracterısticas de spline em continuidade da funcao e suas derivadas
primeira e segunda (Kreyszig, 1999), advem:
Aj0 = f j(x j) = v j, (2.11)
Aj1 = f′j (x j) = bj, (2.12)
Aj2 = f′′j (x j) =
3
h2x(v j+1 − v j) − 1
hx(bj+1 + 2bj), (2.13)
Aj3 = f′′′j (x j) =
2
h3x(v j − v j+1) − 1
h2x(bj+1 + bj), (2.14)
22

onde f′j , f
′′j e f
′′′j correspondem respectivamente as derivadas primeira, segunda e terceira
de f j em relacao a x. Os parametros bj sao calculados a partir da resolucao do sistema
resumido a seguir:
bj−1 + 4bj + bj+1 =3
hx(v j+1 − v j−1), (2.15)
ou, de forma expandida: ⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
b0+ 4b1+ b2 =3hx
(v2 − v0)
b1+ 4b2+ b3 =3hx
(v3 − v1)
b2+ 4b3+ b4 =3hx
(v4 − v2)
... ... ... ...
bn−2+ 4bn−1+ bn =3hx
(vn − vn−2)
(2.16)
A extensao para o caso 2D e alcancada por meio de uma nova funcao obtida com o
produto de duas funcoes 1D, uma na direcao x e outra na direcao z concorrendo em um
mesmo no (x, z). Assim, para um domınio definido por x = [xa, xb] e z = [za, zb] com nos
em x e z definidos em v = [vi, j], o calculo do valor da funcao em cada domınio e realizado
por:
fi, j(x, z) = Ai0, j0+Ai1, j1(x− x j)(z−zi)+Ai2, j2(x− x j)2(z−zi)
2+Ai3, j3(x− x j)3(z−zi)
3, (2.17)
onde i e j variam de zero a n-1 e m-1 respectivamente, os coeficientes bj e Ai, j sao obtidos
analogamente ao caso 1D.
2.4.8 Discretizacao camada a camada
Este tipo de representacao demanda a existencia de camadas individualizaveis e
o conhecimento dos limites destas. Hegge e Fokkema (1996) empregam a inversao to-
mografica global sobre operadores focais em um modelo com 5 camadas homogeneas.
Qualquer uma das funcoes apresentadas anteriormente pode ser empregada isolada-
mente ou em conjunto para compor o modelo de velocidade de uma camada. Kabir (1997)
aplicou a inversao tomografica sobre operadores focais e representou cada camada utili-
zando funcoes lineares capazes de comportar variacoes laterais de velocidade em cada
estrato. A funcao utilizada por Kabir (1997) e definida como
vi(x, z) = v0,i + [zc,i(x) − z0]Bi. (2.18)
23

Esta funcao emprega dois parametros por camada: v0,i, uma velocidade media e o gra-
diente Bi. Na equacao 2.18 zc,i(x) constitui, para cada x, a profundidade do centro da
camada i; z0 a profundidade de referencia, podendo ser o nıvel do mar.
2.5 Formas de calculo do erro
Nesta tese emprega-se o termo erro para se referir a um desajuste entre o modelo
real e o modelo calculado. Listam-se a seguir os tipos de erros empregados ao longo do
texto.
O erro quadratico medio, empregado no topico a seguir, e calculado pela soma dos
quadrados da diferenca entre modelo real vobs e modelo calculado vcalc. Para um modelo
de velocidade com nx e nz celulas respectivamente nas direcoes x e z o erro quadratico
medio (quadrado da norma L2) e calculado por
ε =
(1
nxnz
) nz∑i=1
nx∑j=1
(vobsi, j − vcalci, j
)2. (2.19)
O erro total, empregado nas aplicacoes apresentadas no capıtulo 4, e calculado por
εT =
nz∑i=1
nx∑j=1
∣∣∣vobsi, j − vcalci, j
∣∣∣, (2.20)
e o erro medio por ponto ou celula constitui o proprio erro total dividido pelo numero de
celulas (norma L1)
εm =
(1
nxnz
) nz∑i=1
nx∑j=1
∣∣∣vobsi, j − vcalci, j
∣∣∣. (2.21)
2.6 Comparacao entre as formas de discretizacao
No Apendice B, um campo de velocidades NMO, vnmo, de uma bacia sedimentar
marıtima brasileira (Modelo 1) contem 150 celulas na horizontal e 150 celulas na vertical
(Figura B.1). Este modelo foi representado por funcoes polinomiais, de base radial gaus-
siana, harmonicas e por splines cubicas em duas dimensoes, todas descritas nos topicos
anteriores, e comparadas com os dados originais qualitativamente e quantitativamente
atraves da funcao erro na equacao 2.19, onde vobsi, j e a velocidade real do modelo 1 e
vcalci, j o campo de velocidade calculado.
Nao ha duvidas de que as funcoes por domınio, as splines, apresentam melhores re-
sultados com os menores erros quadraticos (Tabela B.1 no Apendice B). Essa assertiva
24

pode ser generalizada para demais tipos de modelos que apresentem continuidade dos
gradientes e das derivadas segunda.
A segunda melhor opcao de discretizacao, em termos de erro quadratico, embora tenha
disponibilizado um modelo bastante suavizado, foi a funcao gaussiana. A terceira melhor
forma de representacao foi a obtida pela soma de senos e cossenos.
Em relacao ao erro quadratico, a quarta melhor forma de representacao foi a baseada
em polinomios de ordem 7 (7 termos em cada direcao x e z, mais o termo indepen-
dente, totalizando 15 parametros). Contudo, o reduzido numero permitido e necessario
de parametros os tornam atrativos para calculo de modelos em baixa frequencia espacial.
A elevacao do numero de parametros associada a ordem dos polinomios nao significa me-
lhor representacao do modelo, pois os coeficientes se tornam muito pequenos e instaveis,
proporcionando o fenomeno de Runge (Berrut e Trefethen, 2003). Os ensaios apontaram
que ha um numero otimo de ordem polinomial que deve ser pesquisado previamente -
neste caso, a ordem 7. A adicao de um grau na representacao polinomial elevou o erro
relativo em uma ordem de grandeza (Tabela B.1). Essa observacao se deve ao fenomeno
de Runge, responsavel por oscilacoes nos limites de um intervalo quando se emprega uma
interpolacao polinomial (Berrut e Trefethen, 2004).
A representacao do Modelo 1 por serie de Fourier truncada, de forma equivalente, a 20
termos em cada direcao x e z, apresentou as oscilacoes inerentes as funcoes harmonicas.
Esse fato elevou o erro quadratico deste tipo de funcao, tornando-o inadequado para ca-
racterizar convenientemente o Modelo 1.
2.7 Discussao e propostas para discretizacao geologica-
mente coerente
Nesta secao almeja-se unir as caracterısticas do Modelo m, listadas na secao 2.2,
de acordo com os aspectos estruturais e a distribuicao de velocidades, com as formas de
representacao apresentadas na secao 2.4. A natureza pode gerar infinitas possibilidades de
estruturas e distribuicao de velocidades. Assim, quando nao ha restricoes quanto aos graus
de liberdade (numero de parametros) para a caracterizacao do modelo de velocidade,
a melhor forma de descreve-lo e atraves de celulas com funcoes contınuas por partes.
Contudo, para inversao numerica e desejavel reduzir ao maximo o numero de parametros
25

sem prejudicar a representacao do modelo.
O emprego de funcoes contınuas de base e util para representacao de modelos uma
vez que e possıvel extrair facilmente derivadas e integrais analıticas (Apendice B).
Os resultados discutidos em detalhe no Apendice B, apontam que, dentre as funcoes
testadas, splines cubicas 2D apresentam melhores resultados para modelos de velocidade
contınuos e suaves, caracterısticas observadas em um campo de velocidades NMO. Con-
tudo, como mencionado na secao 2.2, em uma bacia sedimentar, a distribuicao das rochas
ocorre principalmente sob a forma de camadas. Camadas sao entidades cujas proprie-
dades diferem do que esta acima e abaixo (Sheriff, 2002). Para o metodo sısmico, uma
camada e uma entidade com propriedades mecanicas - velocidades de ondas P e S alem da
massa especıfica em meios isotropicos elasticos. Se o contraste entre meios adjacentes e
abrupto, a interface que separa estas camadas constitui uma descontinuidade matematica.
Em outras palavras, a derivada ao longo da direcao normal desta interface e indeterminada
ou infinita. Nenhuma das funcoes apresentadas pode representar uma descontinuidade.
Entao, a combinacao de funcoes matematicas com a representacao por camadas e a
melhor maneira de reduzir o numero de parametros honrando a principal caracterstica do
meio geologico sedimentar (a distribuicao por estratos). Kabir (1997) e Hegge (2000)
obtem otimos resultados quando combinam funcoes matematicas simples por camadas
aplicando a inversao tomografica baseada em operadores focais (CFPO). Kabir (1997)
utiliza apenas dois parametros por camada para representar extensos domınios levando
em conta variacoes laterais de velocidade. Contudo, seus resultados nao sao consistentes
sob o ponto de vista geologico. Os testes a seguir ilustram a afirmacao citada no perıodo
anterior utilizando um modelo hipotetico. O campo de velocidade de uma camada e calcu-
lado segundo a equacao de Kabir (1997) (2.18), empregando a profundidade de referencia
z0=0, o gradiente B = -1.0 e a velocidade v0=2000.0 m/s. Com estes dados obtem-se o
modelo da Figura 2.5.
26
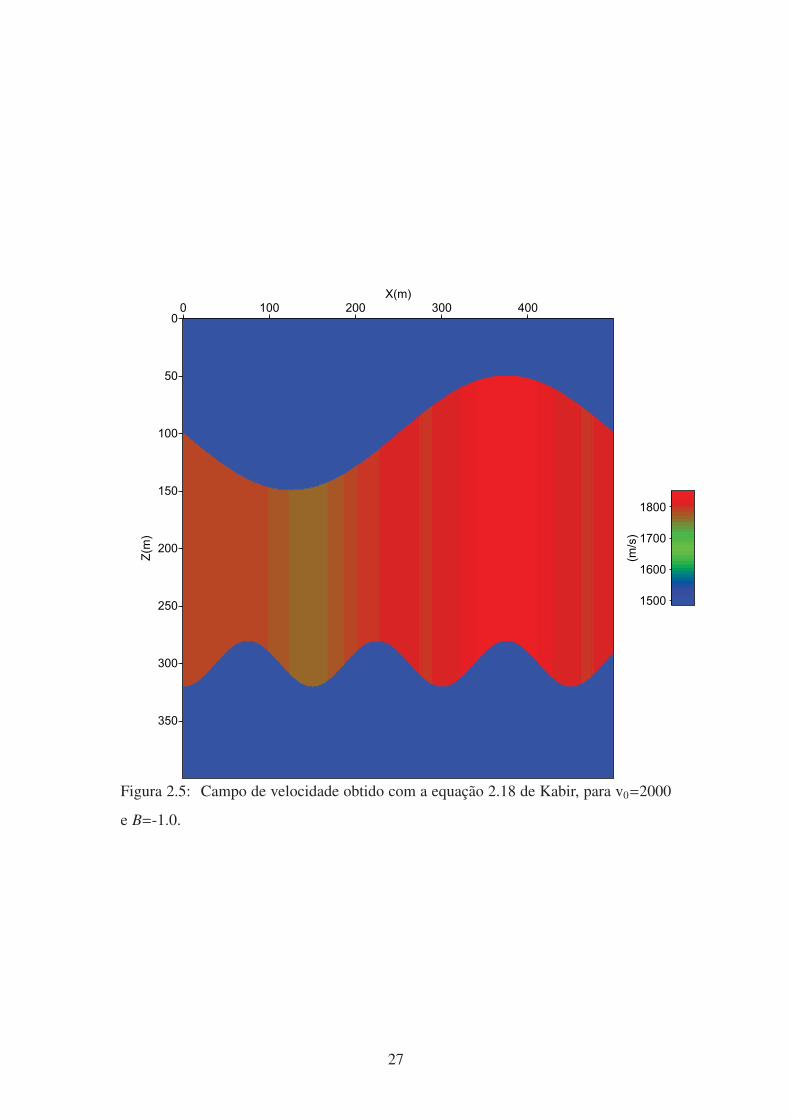
0
50
100
150
200
250
300
350
Z(m
)
0 100 200 300 400
X(m)
1500
1600
1700
1800
(m/s
)
Figura 2.5: Campo de velocidade obtido com a equacao 2.18 de Kabir, para v0=2000
e B=-1.0.
27

De fato ha variacao de velocidade na camada, mas esta se da somente com contraste
lateral, proporcionando baixa consistencia geologica.
Nos proximos paragrafos desta secao, sao apresentadas tres formas de representacao
do modelo, que constituem variacoes da equacao 2.18 de Kabir. Nessas representacoes,
a profundidade de referencia e substituıda por uma interface que nao e necessariamente
horizontal. Esta pode ser o topo da camada, o centro da camada ou a base da camada.
Adicionalmente, em cada uma das representacoes ha uma velocidade de referencia que
coincide com o topo, com o centro ou a base do estrato.
Na primeira proposta, denominada modelo topo-concordante, empregam-se as mes-
mas condicoes de gradiente, B=-1.0, e v0=2000.0 m/s, mas considerando o topo da ca-
mada como interface de referencia, via a equacao
vi(x, z) = v0,i +[ztopo,i(x) − z
]Bi, (2.22)
onde vi(x,z) e a velocidade em qualquer ponto no interior da camada, v0,i e a velocidade
de referencia , z e a profundidade de um ponto no interior da camada e ztopo,i(x) e a
profundidade do topo da camada. Com a equacao 2.22 calcula-se o modelo presente na
Figura 2.6.
28

0
50
100
150
200
250
300
350
Z(m
)
0 100 200 300 400
X(m)
1600
1800
2000
2200
(m/s
)
Figura 2.6: Campo de velocidade obtido com a equacao 2.22 para v0=2000 e B=-1.0.
29
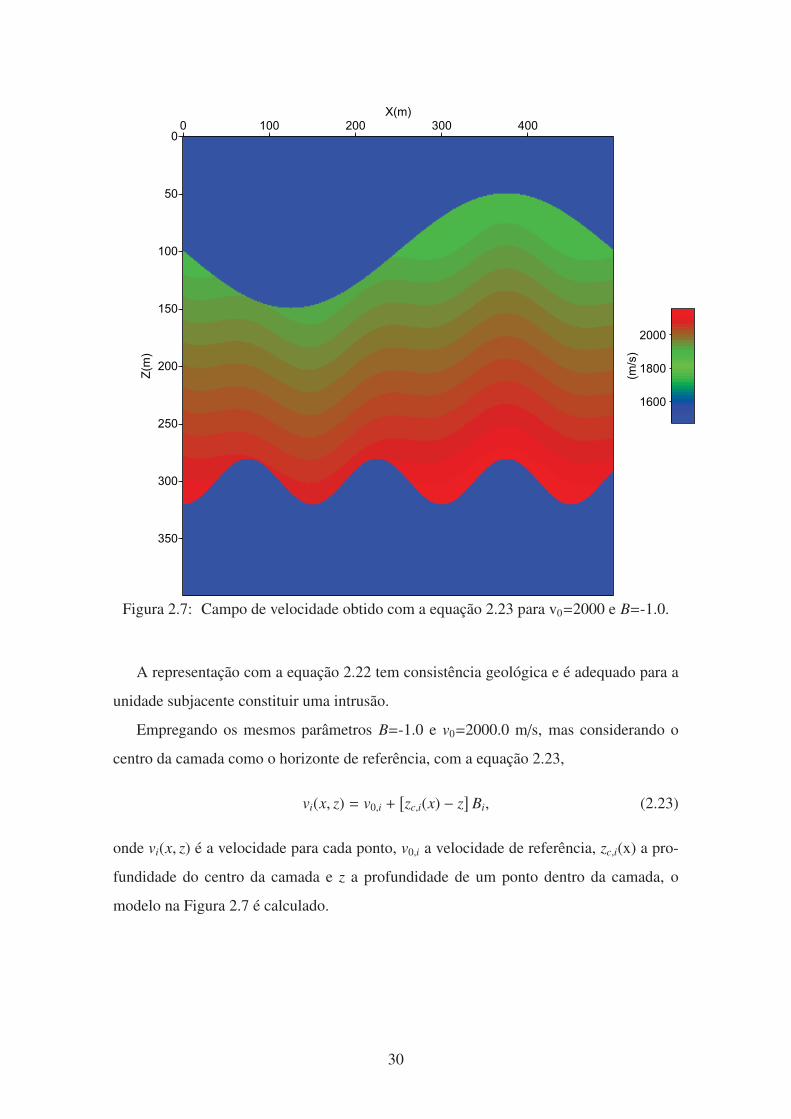
0
50
100
150
200
250
300
350
Z(m
)
0 100 200 300 400
X(m)
1600
1800
2000
(m/s
)
Figura 2.7: Campo de velocidade obtido com a equacao 2.23 para v0=2000 e B=-1.0.
A representacao com a equacao 2.22 tem consistencia geologica e e adequado para a
unidade subjacente constituir uma intrusao.
Empregando os mesmos parametros B=-1.0 e v0=2000.0 m/s, mas considerando o
centro da camada como o horizonte de referencia, com a equacao 2.23,
vi(x, z) = v0,i +[zc,i(x) − z
]Bi, (2.23)
onde vi(x, z) e a velocidade para cada ponto, v0,i a velocidade de referencia, zc,i(x) a pro-
fundidade do centro da camada e z a profundidade de um ponto dentro da camada, o
modelo na Figura 2.7 e calculado.
30
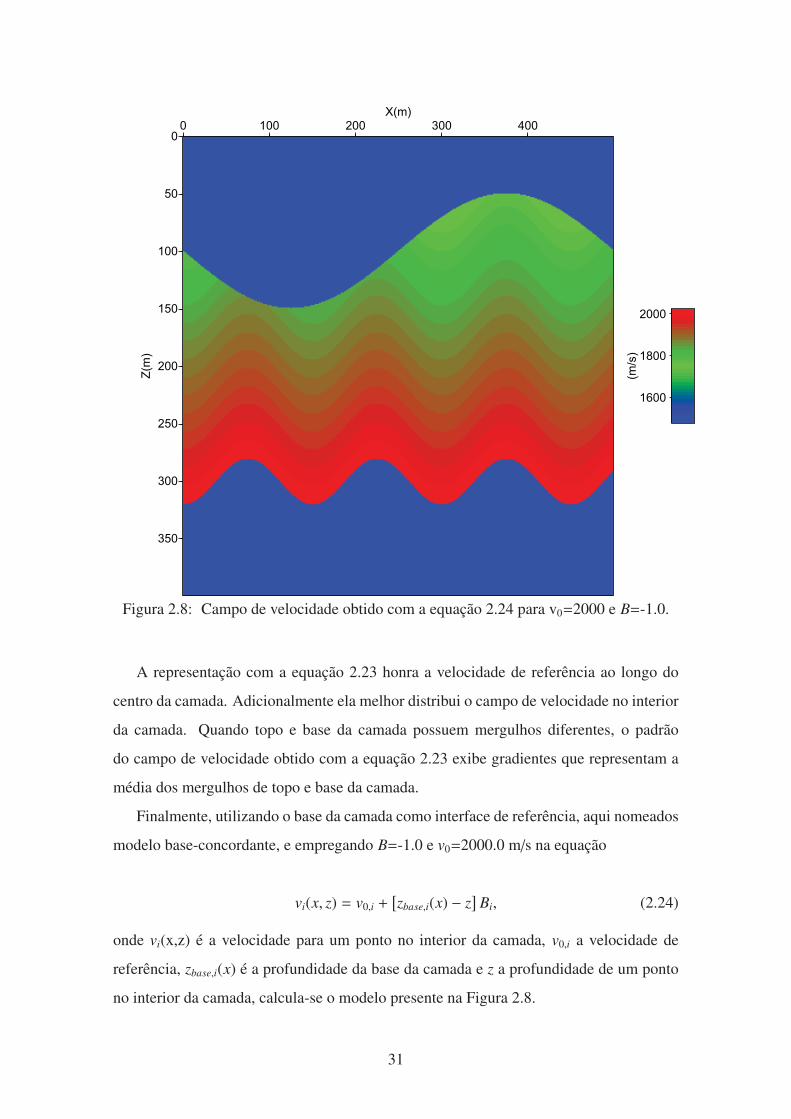
0
50
100
150
200
250
300
350
Z(m
)
0 100 200 300 400
X(m)
1600
1800
2000
(m/s
)
Figura 2.8: Campo de velocidade obtido com a equacao 2.24 para v0=2000 e B=-1.0.
A representacao com a equacao 2.23 honra a velocidade de referencia ao longo do
centro da camada. Adicionalmente ela melhor distribui o campo de velocidade no interior
da camada. Quando topo e base da camada possuem mergulhos diferentes, o padrao
do campo de velocidade obtido com a equacao 2.23 exibe gradientes que representam a
media dos mergulhos de topo e base da camada.
Finalmente, utilizando o base da camada como interface de referencia, aqui nomeados
modelo base-concordante, e empregando B=-1.0 e v0=2000.0 m/s na equacao
vi(x, z) = v0,i +[zbase,i(x) − z
]Bi, (2.24)
onde vi(x,z) e a velocidade para um ponto no interior da camada, v0,i a velocidade de
referencia, zbase,i(x) e a profundidade da base da camada e z a profundidade de um ponto
no interior da camada, calcula-se o modelo presente na Figura 2.8.
31

Dentre as quatro formas de representacao de modelos, a ultima e aquela que melhor
representa camadas sedimentares deformadas originalmente depositadas em leito plano.
O campo de velocidade e paralelo a atitude da base da camada e pode nao ser paralelo ao
topo. Idealmente espera-se que, durante a deposicao dos sedimentos, o acamamento seja
paralelo ao leito ou embasamento. Mesmo que haja episodios de deformacao com dobra-
mentos, situacao sugerida pela Figura 2.8, as propriedades tendem a seguir a geometria
da base.
A representacao pelas equacoes 2.18, 2.22, 2.23 e 2.24 indicam que e possıvel inse-
rir informacoes geologicas e reduzir o numero de parametros. Todas as representacoes
listadas neste topico sao capazes de descrever o campo de velocidades P de qualquer das
estruturas A, B, C e D presentes na Figura 2.2.
Falhas reversas e intrusoes, respectivamente estruturas E e F da Figura 2.2, encerram
complexidades difıceis de representar por camadas. Nesses casos, e necessario tratar essas
feicoes separadamente; empregando-se polıgonos com formas complexas.
2.8 Conclusoes
O experimento de discretizacao por funcoes contınuas apontou que a representacao
por spline cubica 2D e a melhor uma vez que apresentou o menor resıduo quadratico
comparadas as funcoes polinomial, base radial gaussiana, soma de funcoes harmonicas e
serie de Fourier truncada. Contudo, o reduzido numero de coeficientes necessarios para
representacao polinomial indica que essa famılia de funcoes torna-se interessante para
reduzir o numero de parametros (espaco de modelos) no processo de inversao.
A combinacao de funcoes lineares ajustando adequadamente a profundidade de re-
ferencia nas equacoes 2.22, 2.23 and 2.24 ilustram que e possıvel construir modelos con-
sistentes sob o ponto de vista geologico. Assim, a equacao 2.24 e util para descrever
camadas com gradiente de compactacao e variacao lateral deformadas devido a uma in-
trusao; a equacao 2.23 distribui o campo de velocidades crescrente do topo para a base
de uma camada tambem encerrando variacoes laterais; a equac ao 2.24 e adequada para
representar o gradiente de compactacao e mudancas laterais de velocidade em camadas
cujo topo e uma discordancia.
32

A combinacao de funcoes polinomiais de baixa ordem em cada camada constitui
poderosa ferramenta para representacao de modelos geologicamente complexos unindo
informacoes estruturais e distribuicao de velocidades.
33

Capıtulo 3
Modelagem (D = Lm)
3.1 Introducao
Esta parte da tese dedica-se a solucao do Problema Direto, equacao 1.1 voltado para
propagacao de ondas sısmicas em meios acusticos com densidade constante. Apresenta-
se, portanto, formas de resolver a equacao 3.1, um caso particular da equacao 1.1.
∇2u − 1
v2
∂2u∂t2= F, (3.1)
onde v e a velocidade de propagacao do meio, F a fonte, t o tempo, e u o campo de pressao
no domınio tempo-espaco.
Os metodos de modelagem apresentados abaixo constituem o nucleo (kernel) do pro-
cesso de inversao descrito nas proximas secoes. Assim, o principal objetivo deste capıtulo
e prover informacoes basicas que sao citadas nas secoes posteriores. Todos os metodos
para solucao da equacao 3.1 (integral, diferencas finitas e tracado de raios) sao descritos
de forma resumida com referencias classicas e recentes para que o leitor possa se apro-
fundar nesses temas. Adicionalmente, neste capıtulo se propoe o conceito de Modelo
Cinematicamente Equivalente (MCE).
3.2 Resolucao da equacao da onda por metodos integrais
Esta secao e dedicada a descricao da equacao integral voltada para simulacao do
campo de ondas acustico. Esse metodo tem maior aplicacao no ambito da sısmica para
extrapolacao reversa do campo de ondas. Ou seja, conhecido o campo de ondas na su-
34

perfıcie, calcula-se o campo de ondas no interior da Terra; ou ainda, calcula-se sua res-
posta, alterando-se virtualmente a posicao da fonte. As deducoes referentes aos metodos
integrais, resolucao do campo de ondas a partir de equacoes de integracao, baseiam-se
no Teorema de Gauss ou Princıpio da Divergencia (Mansur, 1983). O Teorema de Gauss
relaciona um campo vetorial P dentro de um volume V, limitado por uma superfıcie S,
cuja normal e n, com o fluxo P · n que atravessa S,∫V∇.PdV =
∫S
P · n dS . (3.2)
Considerando o campo vetorial P como
P = U∇G −G∇U, (3.3)
onde U e G sao dois campos escalares. Substituindo a equacao 3.3 na equacao 3.2 obtem-
se a Segunda Identidade de Green:∫V
(U∇2G −G∇2U
)dV =
∫S
(U∇G −G∇U) · n dS . (3.4)
A equacao 3.4 tem aplicacao generalizada. Em problemas acusticos U e G sao governados
pela equacao de Helmholtz,
∇2U +ω2
v2(x)U = 0, (3.5)
onde ω e a frequencia angular, x o vetor posicao e v(x) o campo de velocidade.
As deducoes a seguir estao desenvolvidas para meios com massa especıfica cons-
tante, o que constitui uma simplicacao nao considerada em Berkhout e Wapenaar (1989)
e Wapenaar et al. (1989). Apesar do rigor matematico empregado nos citados trabalhos, a
aproximacao acustica em meios geologicos nao honra as amplitudes observadas em dados
reais. Assim, as deducoes a seguir buscam honrar somente as informacoes cinematicas
trazidas pelos operadores CFP. Entao, a aproximacao para um meio com massa especıfica
constante e suficiente.
Considere um campo de ondas propagando-se para cima e sendo registrado em uma
superfıcie nao reflexiva S 0 (Figura 3.1). O meio abaixo de S 0 e caracterizado por um
campo de velocidade [v(x)] suave e sua massa especıfica e constante. O contorno S 1
encontra-se no infinito, de tal forma que qualquer campo que o atinja nao tem influencia
sobre A (Figura 3.1), em acordo com a condicao de radiacao de Sommerfeld (Mansur,
1983; Wapenaar et al., 1989). Com estas premissas, tem-se a seguinte funcao de Green
35

∇2G +ω2
v(x)2G = �[δ(x − xA)], (3.6)
onde o operador � corresponde a transformada direta de Fourier, xA significa o vetor
posicao do ponto A, local da fonte virtual abaixo de S 0.
Figura 3.1: Representacao de um campo de ondas propagando-se para cima e regis-
trado na superfıcie S 0. Deseja-se estimar o campo de ondas em A conhecendo-se o
campo registrado na superfıcie S 0.
Substituindo as equacoes 3.5 e 3.6 na equacao 3.4 tem-se:∫V
U�[δ(x − xA)] − U[ω2
v(x)2G] −G[− ω
2
v(x)2U] dV =
∫S 0
(U∇G −G∇U) · n dS (3.7)
e simplificando o lado esquerdo,∫V
U�[δ(x − xA)] dV =∫
S 0
(U∇G −G∇U) · n dS . (3.8)
Empregando as propriedades da funcao delta de Dirac na posicao xA, o lado esquerdo se
torna:
U(xA) =
∫S 0
(U∇G −G∇U) · n dS , (3.9)
onde U(xA) e o campo escalar de ondas em A.
Para propagacao inversa (Wapenaar et al., 1989) faz-se necessario utilizar o conjugado
G∗, de G. Assim, a equacao 3.9 torna-se
U(xA) =
∫S 0
(U∇G∗ −G∗∇U) · n dS . (3.10)
36

Como a superfıcie S 0 e plana, sua normal e paralela ao eixo z
U(xA) =
∫ ∞
−∞
∫ ∞
−∞U∂G∗
∂z−G∗
∂U∂z
dxdy. (3.11)
Seguindo Wapenaar et al. (1989), a equacao 3.10 torna-se
U(xA) = −2
∫ ∞
−∞
∫ ∞
−∞U∂G∗
∂zdxdy. (3.12)
Considerando G=�(g) e U=�(u), como u e g sao respectivamente o campo escalar de
ondas e a funcao de Green no domınio do tempo, e tomando a equacao 3.12 no domınio
do tempo,
u(xA) = −2
∫ ∞
−∞
∫ ∞
−∞u ⊗t∂g∂z
dxdy. (3.13)
3.3 Resolucao da equacao da onda por metodos diferen-
ciais
Na secao anterior observou-se que, conhecendo-se a funcao de Green de um meio
e o campo de ondas ao longo de uma superfıcie infinita S0, e possıvel calcular o campo
de ondas subjacente a ela utilizando de um metodo integral. Pelo Metodo das Diferencas
Finitas (MDF), e possıvel calcular o campo de ondas u, equacao 3.1, conhecendo-se as
condicoes inciais e de contorno.
A modelagem pelo MDF demanda a discretizacao do campo de velocidades por meio
de celulas, regulares ou nao, descritas na secao 2.4.1. Na formulacao mais simples
possıvel empregando-se operadores de segunda ordem no tempo e no espaco (trunca-
mento no termo de ordem 1 na serie de Taylor) em meios tridimensionais, a equacao 3.1
e resolvida iterativamente da seguinte forma:
ux,y,z,t+1 = v2x,y,zΔt2[(ux+1,y,z,t − 2ux,y,z,t + ux−1,y,z,t
Δx2
)
+
(ux,y+1,z,t − 2ux,y,z,t + ux,y−1,z,t
Δy2
)
+
(ux,y,z+1,t − 2ux,y,z,t + ux,y,z−1,t
Δz2
)
] + 2ux,y,z,t − ux,y,z,t−1.
(3.14)
37

Foge ao escopo desta tese avancar na seara de modelagem. A equacao apresentada
acima e empregada nas rotinas de simulacao que geraram alguns dos dados sinteticos
utilizados neste trabalho.
O aprofundamento do tema modelagem sısmica por MDF demanda a consulta de
bibliografias basicas como Kelly et al. (1976) que, embora seja voltada para ondas
elasticas, ilustra didaticamente o processo de implementacao para meios homogeneos e
heterogeneos. Virieux (1986) e Levander (1988), ambos tambem dedicados a simulacao
em meios elasticos, descrevem a implementacao da modelagem com o emprego de malha
intercalada.
Estudos de estabilidade, emprego das condicoes de contorno assim como formas de
aplicacao e tipos de fontes sao abordados em Cunha (1997) que, lidando com o tema da
migracao reversa no tempo, estudou os citados temas detalhadamente. Bulcao (2004), nas
secoes e apendices dedicados a modelagem, apresenta estudos de estabilidade, emprego
de operadores de ordem superior, alem de detalhes de implementacao para modelagem
acustica e elastica em meios heterogeneos em duas e tres dimensoes. Carcione (2007)
aborda a teoria e formas de implementacao de meios complexos envolvendo, alem de
meio acustico, o elastico, o poroelastico, o visco-elastico e anisotropias. Destaca-se,
adicionalmente Kelly e Marfurt (1987) e, mais recentemente, o suplemento dedicado a
modelagem introduzido por Robertsson et al. (2007).
3.4 Aproximacao da equacao da onda por tracado de
raios
O metodo de tracado de raios permite calcular o campo de ondas a partir da solucao
assintotica de alta frequencia da equacao 3.1. No ambito da tomografia estudada neste
trabalho, interessam somente as informacoes cinematicas trazidas pelos raios: tempo de
transito, posicao e direcao do raio. As deducoes referentes ao tracado cinematico de
raios sao encontradas em Botelho (1986), Soares Filho (1994), Cerveny (2001) e Cunha
(2005). As equacoes diferenciais para modelagem direta do tracado de raios a partir de
um campo de velocidade conhecido, e estabelecidas as condicoes iniciais de posicao e
38

cossenos diretores sao:
dxdl= vp, (3.15)
dpdl= ∇
(1
v
), (3.16)
dτdl=
(1
v
), (3.17)
onde x e o vetor posicao (x = (x, y, z) ), dl e o comprimento de raio infinitesimal, v e
a velocidade na posicao (x, y, z) (v = v(x, y, z)), p e o parametro de raio contendo os
cossenos diretores (p = (px, py, pz)) e τ e o tempo de transito.
Durante o desenvolvimento desta tese, uma rotina de modelagem baseada em tracado
de raios foi implementada. Ela emprega a formulacao de Runge-Kutta (Cunha, 2005)
e constitui a ferramenta de modelagem, ou kernel, das rotinas de inversao descritas nas
proximas secoes.
3.5 Modelos cinematicamente equivalentes
Na secao anterior foram apresentadas formas de resolver a equacao da onda.
Mesmo que os metodos integrais e diferenciais apresentem estimativas corretas do tempo
de transito (informacao cinematica) e amplitudes (informacao dinamica), o objetivo deste
trabalho e estimar o campo de velocidades P a partir dos tempos extraıdos de operadores
focais. Assim, o kernel da rotina de inversao tomografica adotada e uma sub-rotina de
tracado de raios.
O tempo de transito para um raio viajar de um ponto A para um ponto B e governado
pela equacao 3.17 ao longo da trajetoria deste raio. Ha diferentes campos de velocidade
que fornecem o mesmo tempo de transito causando, portanto, ambiguidades. Modelo
Cinematicamente Equivalente (MCE) e qualquer modelo contınuo de velocidade e estru-
turas cujos dados calculados se ajustam aos dados registrados em um experimento.
Mesmo um simples ensaio representado por duas celulas (Figura 3.2) ha infinitos
MCEs. O tempo de transito t de um raio horizontal viajando entre a fonte no lado es-
39

v1 v2
DX DX
Figura 3.2: Representacao de um modelo de duas celulas com velocidades v1 e v2. A es-
trela representa a fonte de um raio, que viaja desta ate o receptor, o triangulo. A dimensao
da malha quadrada e DX.
querdo (estrela) ate o receptor no lado direito (triangulo) e dado por:
t =DXv1
+DXv2
, (3.18)
onde DX e a dimensao da celula, v1 a velocidade da celula a esquerda e v2 a velocidade
da celula a direita. Qualquer outro par de velocidades vA e vB cuja soma dos inversos
satisfaca a condicao tDX e um MCE desse modelo hipotetico.
O experimento descrito no Apendice A apresenta um exemplo de MCE encerrando o
conceito de operador focal.
3.6 Comentarios
Todas as rotinas de modelagem sısmica lidando com metodos integrais (secao 3.2),
MDF (secao 3.3) e tracado de raios (secao 3.4) foram desenvolvidas e implementadas
durante o desenvolvimento desta tese. Contudo, nao ha contribuicoes alem do que ja fora
desenvolvido nos trabalhos citados nas secoes deste capıtulo.
Este capıtulo encerra a proposta e definicao de conceito de Modelo Cinematicamente
Equivalente. Ele especifica a ambiguidade, ou multiplicidade de modelos que satisfazem
40

um conjunto de dados, que ocorre durante a inversao de operadores focais.
41

Capıtulo 4
Inversao (m=L−1 D)
4.1 Introducao
Esta secao dedica-se a solucao da equacao 1.2 voltada para problemas cinematicos
acusticos da sısmica de reflexao. Antes de se visitar os metodos de resolucao, apresentam-
se a seguir informacoes e conceitos gerais relacionados ao Problema Inverso.
Hadamart (1902) elenca tres propriedades que um modelo matematico deve possuir
para representacao de um fenomeno fısico:
1) Existencia de solucao: deve-se averiguar se o sistema m = L−1d, equacao 1.2, tem
solucao. Em, outras palavras, se ha um m tal que d = Lm.
2) Unicidade: a nao unicidade implica em dizer que diferentes modelos mi sao capazes
de gerar um mesmo dado d.
3) Estabilidade: a estabilidade indica como pequenos erros nos dados se propagam no
modelo calculado. Quanto mais estavel e o problema menos sensıvel ele e a pequenos
erros nas condicoes iniciais.
Modelos matematicos que possuem as propriedades acima sao ditos bem postos.
Como citado anteriormente, a solucao da equacao 1.2 e mais complexa, pois Problemas
Inversos, normalmente, sao mal postos. Em geral os Problemas geofısicos apresentam
grande instabilidade, principalmente devido ao mal condicionamento (operadores L com
elevado numero de condicao). A estabilizacao pode ser alcancada pela regularizacao do
problema, processo no qual sao impostos vınculos que induzem a solucao.
O erro foi previamente definido na secao 1.3 como a diferenca entre modelos real e
42

calculado. Assim, calcula-se o vetor erro por
ε = mreal −mcalc, (4.1)
onde mreal e mcalc sao respectivamente os modelos real e calculado.
Para um universo de m amostras o erro total e calculado por
εt =
m∑i=1
∣∣∣mreali − mcalci
∣∣∣ , (4.2)
e o erro relativo por
εt =1
m
m∑i=1
∣∣∣mreali − mcalci
∣∣∣ . (4.3)
O vetor resıduo r constitui a diferenca entre o dado observado e o dado calculado.
r = dobs − dcalc. (4.4)
Substituindo a equacao 1.1 na equacao 4.4 obtem-se:
r = dobs − Lm. (4.5)
A resolucao do problema inverso reside na busca pelos extremos de um funcional que
meca a norma entre dados observados e dados calculados, a funcao objetivo (Wolfram,
1999). Uma funcao objetivo Θ simples e desprovida de qualquer informacao a priori
sobre o modelo pode ser obtida a partir da norma 2 do vetor resıduo (r):
Θ =[dobs − Lm
]T [dobs − Lm
].. (4.6)
Em funcao da relacao que existe entre o dado d e o modelo m classificam-se os pro-
blemas inversos em: lineares e nao lineares. Em problemas inversos lineares o dado d e
o modelo m relacionam-se linearmente por meio do operador L, tal como representado
pela equacao 1.1 (Aster et al., 2005; Menke, 1984). Em problemas nao lineares a relacao
expressa pela equacao 1.1 e valida, contudo, o operador L e funcao dos parametros m
(Aster et al., 2005).
Problemas fracamente nao lineares sao aqueles cuja perturbacao nos dados Δd
relaciona-se com a perturbacao no modelo por L pela equacao 4.7 (Sen, 2006).
Δd = LΔm. (4.7)
43

Nesta classe de problemas inversos (fracamente nao lineares), a funcao objetivo pode ser
aproximada por uma funcao quadratica na vizinhanca de um modelo mk (Menke, 1984),
levando a uma solucao mk+1 dentro da regiao de convergencia quadratica. Uma serie de
passos localmente lineares constitui uma aproximacao para a solucao fracamente nao-
linear (equacao 4.7. Devido ao carater nao linear desta classe de problemas inversos, o
operador L muda a cada iteracao.
Nesta tese, todos os problemas abordados sao considerados lineares ou fracamente
nao lineares.
4.2 Metodos de resolucao do problema inverso
Ha uma mirıade de metodos (Menke, 1984; Tarantola, 1984; Tarantola, 2002;
Aster, 2005; Tarantola, 2005; Sen, 2006) voltados para solucao do Problema Inverso
(equacao 1.2), que pode ser resumida a otimizacao, obtencao de mınimo ou maximo da
funcao objetivo. Por ora classificam-se as solucoes nos seguintes grupos basicos, aqui
modificada a partir de Tarantola (2002):
- Metodos baseados na busca sistematica, ou varredura, no espaco de modelos;
- Metodos de tentativa e erro;
- Metodos de busca aleatoria no espaco de solucoes (ex. Monte Carlo, Simulating
Annealing, algoritmo genetico);
- Metodos baseados em gradientes.
Os metodos baseados na busca sistematica, ou varredura, no espaco de modelos con-
sistem em se construir uma malha regular nesse espaco e computar o valor da funcao
objetivo em todos os pontos desta malha (Tarantola, 2002). Espera-se que aquele modelo
que possuir menor resıduo seja a solucao do problema inverso. O experimento presente
no Apendice A descreve a construcao da funcao objetivo pela varredura do espaco de
modelos. Esse metodo e indicado quando o numero de parametros e pequeno.
O metodo de tentativa e erro consiste em se alterar as variaveis do modelo em uma
base intuitiva e calcular os dados ate que a diferenca entre dados reais e calculados, o
resıduo, situe-se dentro de uma tolerancia aceitavel (Tarantola, 2002). Este metodo, de-
finitivamente, nao e passıvel de realizacao quando o espaco de modelos e muito grande.
44

Adicionalmente, ele depende da experiencia e conhecimento do profissional que esta rea-
lizando a inversao.
A busca aleatoria no espaco de modelos, ou metodos tipo Monte Carlo, sao aqueles
que empregam em algum estagio do processo inverso a escolha aleatoria de m para con-
secutivo calculo dos dados (Tarantola, 2002). Essa classe de metodos e particularmente
util para solucao de problemas altamente nao lineares. Uma segunda virtude dos metodos
tipo Monte Carlo e o fato de eles constituirem algoritmos de busca global, fato aumentam
as chances de convergencia para um mınimo global.
Agrupou-se nos metodos baseados em gradiente, aqueles que fazem uso do gradiente
da funcao objetivo (resıduo, funcao probabilidade ou outra medida que reflita o desajuste
entre dado observado e dado calculado) na busca do seu mınimo ou maximo global. Essa
classe de metodos baseia-se no metodo de gradiente de Cauchy, datado de 1847 (Kreyszig,
1999). Dentre os metodos de gradiente citam-se: Newton, Gauss-Newton e gradiente
conjugado.
Nesta tese, foram explorados os metodos baseados na busca sistematica no espaco
de modelos e os metodos baseados em gradientes. A proxima secao detalha os metodos
baseados em gradientes.
4.3 Resolucao do problema inverso pelos metodos de gra-
dientes
Abordam-se neste topico os principais metodos de resolucao de Problemas Inversos
fracamente nao lineares por meio de informacoes advindas ou relacionadas ao gradiente
da funcao objetivo.
4.3.1 Metodo da maxima declividade
Sendo o gradiente da funcao objetivo, ∇Θ = ∂Θ∂m , busca-se o mınimo iterativamente
pela equacao
mk+1 = mk − a∇Θ, (4.8)
onde a e um escalar positivo. Ou seja, o modelo no passo k + 1 e obtido a partir do
modelo no ponto k, mk na direcao contraria ao gradiente da funcao objetivo ∇Θ. A
45

Figura 4.1: Funcao objetivo com duas variaveis m1 e m2 ilustrando as iteracoes pelo
metodo de maxima declividade ate a convergencia para solucao em m (modificado de
Shewchuck, 1994).
figura 4.1 ilustra a funcao objetivo e o caminho das iteracoes, entre o modelo inicial m0
e a solucao m, segundo o metodo da maxima declividade. Este constitui o metodo de
gradiente mais simples, exibe baixa taxa de convergencia (Flechter, 1980), contudo ela
e assegurada (Aster, 2005), desde que o modulo do gradiente seja ajustado segundo uma
constante ad hoc.
4.3.2 Metodo de Newton
A expansao em serie de Taylor (truncada no termo de ordem 2) da funcao objetivo
nas vizinhancas de mk fornece:
Θ(mk+1) = Θ(mk) + ∇Θ(mk)[mk+1 − mk] +1
2∇2Θ(mk)[mk+1 − mk]
2. (4.9)
Considere Δm = mk+1 − mk. Almeja-se o ponto de mınimo de 4.9 em relacao a
Δm. Suprimindo-se os passos intermediarios obtem-se a resolucao do modelo mk+1 pelo
46

metodo de Newton (Tarantola, 2002) por:
mk+1 = mk − [∇2Θ(mk)]−1∇Θ(mk) (4.10)
A aplicacao do metodo de Newton para a resolucao de Problema Inverso demanda o
calculo do Hessiano ∇2Θ ou ∂2Θ∂m2 , a derivada segunda da funcao objetivo em relacao ao mo-
delo m. Em alguns problemas da geofısica este calculo e complexo. Adicionalmente nao
ha garantia de convergencia (Aster et al., 2005). Para problemas passıveis de linearizacao
o metodo de Gauss-Newton e mais factıvel.
4.3.3 Metodo de Gauss-Newton
A deducao do metodo em escopo pode ser encontrada em diversos livros textos,
entre eles, Flechter (1980), Menke (1984), Nocedal e Wright (2000) e Aster et al. (2005),
contudo ela e apresentada a seguir completa e comentada para compreensao do leitor e
futuras consultas do autor.
Avancando na equacao 4.4 obtem-se:
Θ =1
N
N∑i=1
[dobs
i − dcalci
]2(4.11)
Expandindo o termo dcalci da equacao acima em serie de Taylor nas proximidades de um
modelo m0,
Dcalci = Dcalc
i (m0) +
M∑j=1
∂di(m0)
∂mjΔmj, (4.12)
onde Δm j e uma perturbacao no modelo nas proximidades de m0. Derivando a equacao
4.11 em relacao ao modelo,
∂Θ
∂mk=
2
N
N∑i=1
(dobs
i − dcalci
) ∂∂mk
(dobs
i − dicalc
)(4.13)
No ponto de mınimo ∂Θ∂mk= 0. Adicionalmente, os dados observados, dobs
i , nao dependem
do modelo m. Assim a equacao 4.13 torna-se
0 =N∑
i=1
(dobs
i − dcalci
) ∂dcalci
∂mk(4.14)
Substituindo a equacao 4.12 em 4.14 obtem-se:
N∑i=1
⎛⎜⎜⎜⎜⎜⎜⎝dobsi − dcalc
i (m0) −M∑j=1
∂di(m0)
∂mjΔmj
⎞⎟⎟⎟⎟⎟⎟⎠ ∂dcalci
∂mk= 0 (4.15)
47

Considerando dobsi - dcalc
i (m0) = Δdi:
N∑i=1
⎛⎜⎜⎜⎜⎜⎜⎝Δdi,k −M∑j=1
∂dcalci
∂mjΔmj
⎞⎟⎟⎟⎟⎟⎟⎠ ∂dcalci
∂mk= 0. (4.16)
Rearranjando os termos,
N∑i=1
Δdi,k∂dcalc
i
∂mk−
N∑i=1
M∑j=1
∂dcalci
∂mjΔmj∂dcalc
i
∂mk= 0. (4.17)
A equacao 4.17 pode ser escrita na forma matricial se for considerado
L =
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
∂dcalc1
∂m1
∂dcalc1
∂m2...
∂dcalc1
∂mM
∂dcalc2
∂m1
∂dcalc2
∂m2...
∂dcalc2
∂mM
... ... ... ...
∂dcalcN∂m1
∂dcalcN∂m2
...∂dcalc
N∂mM
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠, (4.18)
e
LT =
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
∂dcalc1
∂m1
∂dcalc2
∂m1...
∂dcalcN∂m1
∂dcalc1
∂m2
∂dcalc2
∂m2...
∂dcalcN∂m2
... ... ... ...
∂dcalc1
∂mM
∂dcalc2
∂mM...
∂dcalcN∂mM
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠. (4.19)
Logo,
LTΔd − LT LΔm = 0, (4.20)
ou,
LT LΔm = LTΔd. (4.21)
Aplicando (LT L)−1 em ambos os lados:
Δm = (LT L)−1LTΔd. (4.22)
A equacao 4.22 e a forma basica mais empregada nos Problemas Inversos
considerando-se a funcao objetivo com norma 2. Ela assemelha-se a solucao da equacao
4.10 aproximando o Hessiano pelo termo LTL (Nocedal e Wright, 2000). Contudo, ha
que se relembrar duas premissas embutidas em sua solucao: (1) A modelagem e o opera-
dor L que regem o fenomeno fısico devem ser passıveis de linearizacao nas vizinhancas
de um modelo m0; e (2) O modelo m0 deve estar proximo da solucao.
A implicacao direta da primeira premissa e que, nas aproximacoes extremamente nao
lineares o metodo falha. Embora a direcao apontada pelos cossenos diretores de Δm nas
48
vizinhancas de m0 sejam corretas, seu modulo pode superar as condicoes de linearizacao
embutidas na expansao em Taylor. Neste caso, se a magnitude de Δm e maior que este
limite, deve-se reduzir o seu modulo utilizando de um parametro ad-hoc, seja ε. Este
parametro e positivo, menor que 1 (Tarantola, 2002) e pode variar em cada iteracao. As-
sim, a equacao 4.22 torna-se
Δm = ε(LT L)−1LTΔd, (4.23)
aumentando as chances de convergencia. Um valor desnecessariamente baixo de ε pode
tornar a convergencia extremamente lenta.
4.3.4 Metodo de Levenberg-Marquardt
A aproximacao do Hessiano por LT L contribui para as incertezas na magnitude
de Δm no metodo de Gauss-Newton. No metodo de Levenberg-Marquardt evita-se o
emprego da constante ε, uma especie de busca linear (line search), empregando-se uma
estrategia de regiao de confianca (Nocedal e Wright, 2000). Esta regiao de confianca e
obtida pela da adicao de uma matriz diagonal, fruto do produto de uma constante ψ com
a matriz identidade I, a matriz LT L.
Δm = (LT L + ψI)−1LTΔd, (4.24)
Uma vantagem adicional dessa estrategia e o fato de ela contornar possıveis de-
ficiencias no rank (numero de linhas ou colunas linearmente independentes) da matriz
L, uma das fraquezas do metodo de Gauss-Newton (Nocedal e Wright, 2000). Em outras
palavras, o metodo em escopo forca que a matriz LT L seja positiva definida garantindo
sua nao singularidade.
4.3.5 Pseudo-Inversa de Moore-Penrose
Para resolver a equacao 1.2 ou 4.7, e necessario inverter a matriz L. Contudo, caso
esta matriz nao seja inversıvel, em lugar de se calcular m ou Δm pela equacao 1.2, L
e decomposta em valores singulares (Singular value decomposition (SVD)) (Aster et al.
2005).
A matriz com valores singulares, Σ, e uma matriz diagonal com valores positivos e
decrescentes de acordo com o aumento de i (Σi=1 > Σi=2 > Σi=3 > ..). Ela pode possuir
49
alguns elementos muito baixos ou nulos. Se somente os p primeiros elementos nao nulos
de Σ forem considerados, esta matriz pode ser particionada da seguinte forma (Aster et
al., 2005): ⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣Σp 0
0 0
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦ , (4.25)
onde Σp corresponde a uma matriz quadrada diagonal composta por apenas valores sin-
gulares positivos nao nulos. A matriz L pode ser representada por (Aster et al. 2005),
L =W
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣Σp 0
0 0
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦ VT . (4.26)
Se as matrizes U e V na equacao 4.26 forem expandidas, obtem-se:
L =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
W1,1 W1,2 ... W1,p ... W1,m
W2,1 W2,2 ... W2,p ... W2,m
... ... ... ... ... ...
Wp,1 Wp,2 ... Wp,p ... Wp,m
... ... ... ... ... ...
Wm,1 Wm,2 ... Wm,p ... Wm,m
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣Σp 0
0 0
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
V1,1 V1,2 ... V1,p ... V1,n
V2,1 V2,2 ... V2,p ... V2,n
... ... ... ... ... ...
Vp,1 Vp,2 ... Vp,p ... Vp,n
... ... ... ... ... ...
Vn,1 Vn,2 ... Vn,p ... Vn,n
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
T
.
(4.27)
Observa-se que na multiplicacao matricial de W por Σ, todos os elementos de Wi, j tais
que j > p estarao multiplicados pelos valores nulos de Σ. Da mesma forma se sucedera
com a matriz V. Assim, empregando a notacao de Aster et al. (2005), reescreve-se o
produto matricial levando-se em conta somente os elementos de W, Σ e V que darao re-
sultados nao nulos. Neste caso, somente as p primeiras colunas de W, Wp, as p primeiras
colunas de V, Vp e somente os elementos nao nulos de Σ, Σp. Logo L pode ser calculada
por:
L =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
W1,1 W1,2 ... W1,p
W2,1 W2,2 ... W2,p
... ... ... ...
Wp,1 Wp,2 ... Wp,p
... ... ... ...
Wm,1 Wm,2 ... Wm,p
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
[Σp
]
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
V1,1 V1,2 ... V1,p
V2,1 V2,2 ... V2,p
... ... ... ...
Vp,1 Vp,2 ... Vp,p
... ... ... ...
Vn,1 Vn,2 ... Vn,p
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
T
. (4.28)
50

A equacao acima escrita de forma compacta torna-se
L =WpΣpVTp . (4.29)
O produto WpΣpVTp e passıvel de inversao de acordo com Moore (1920) e Penrose
(1950). Assim a inversa generalizada de L ou pseudo-inversa de Moore e Penrose (Aster
et al., 2005) e calculada por
L† = VpΣ−1p WT
p . (4.30)
No lugar da equacao 1.2 emprega-se
m = L†d, (4.31)
desde que o posto de L seja igual ao numero de parametros do modelo m e inferior ao
numero de registros ou dados n.
Em problemas fracamente nao lineares a mesma relacao e valida para perturbacoes no
modelo e no dado,
Δm = L†Δd, (4.32)
, e a solucao para o modelo m e alcancada iterativamente,
mk+1 = mk + Δm, (4.33)
ate que dado modelado e dado observado se ajustem.
4.3.6 Metodo dos gradientes conjugados
O metodo em escopo faz parte da famılia de metodos denominada direcoes conju-
gadas (dois vetores di e dj sao conjugados ou L-ortogonais, se diLdj = 0, onde L e uma
matriz compatıvel com o produto (Shewchuck, 1994)). Tratam-se de metodos aplicaveis
a matrizes positiva definidas (para qualquer vetor x diferente de zero tem-se xT Lx > 0) e
que sao mais efetivos no tratamento de matrizes esparsas (Shewchuck, 1994).
O ponto de partida dos metodos de direcoes conjugadas nao difere do metodo de gra-
dientes. Contudo, enquanto neste ultimo observam-se varios passos alternados seguindo
uma mesma direcao ate que se atinja a solucao (Figura 4.1), os metodos das direcoes
conjugadas empregam buscas lineares (line search) em direcoes especıficas, e, ao longo
destas, busca-se o mınimo. Este processo reduz o numero de iteracoes.
51
No metodo dos gradientes conjugados, descrito no pseudo-algoritmo a seguir, algo-
ritmo 4.34, a direcao de busca e construıda atraves da ortogonalizacao dos resıduos se-
gundo a matriz L (L-ortogonalizacao) (Shewchuck, 1994).
Δm0 = r0 = Dobs − Lm0
loop while (r > tol)
αk =rT
k rk
ΔmTk LΔmk
mk+1 = mk + αkΔmk
rk+1 = rk − αkLΔmk
βk+1 =rT
k+1rk+1
rTk rk
Δmk+1 = rk+1 + βk+1Δmk (4.34)
end loop
Na primeira iteracao assume-se que a atualizacao do modelo (Δm0) e igual ao resıduo
(r0). A constante α calculada a cada iteracao k pondera o modulo da atualizacao por
(αkΔmk). O calculo βk culmina o processo de ortogonalizacao apos o qual calcula-se o
valor efetivo da atualizacao do modelo Δmk+1. O processo iterativo continua ate que o
resıduo rk esteja abaixo de uma tolerancia tol.
4.4 Influencia do dispositivo de aquisicao
Todos os metodos de gradiente apresentados na secao anterior demandam o calculo
do operador L, aqui referido como matriz de sensibilidade, que avalia a influencia de cada
parametro sobre os dados. No experimento hipotetico representado pela Figura 4.2, um
modelo e discretizado segundo quatro celulas quadradas cujos lados posssuem dimensao
l.
52

Figura 4.2: (a) Modelo de velocidade discretizado por celulas quadradas;
(b) Aquisicao sısmica hipotetica avaliando cada celula com um par fonte-
receptor, representados respectivamente pela estrela estrela vermelha e o
triangulo preto. As flechas pontilhadas indicam o caminho percorrido pelo
raio da fonte para o receptor.
Segundo experimento da Figura 4.2, o sistema a ser resolvido para calculo do modelo
de velocidade e dado por ⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
m1
m2
m3
m4
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦=
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
l l 0 0
0 l 0 l
0 0 l l
l 0 0 l
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
−1 ⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
D1
D2
D3
D4
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦(4.35)
onde os tempos de transito estao descritos no vetor de dados com termos Di, o modelo
e representado pelo vetor mi, que contem as vagarosidades (inverso da velocidade), e a
matriz de sensibilidade (lei que rege a fısica do problema) e quadrada e contem a distancia
l entre as faces de cada celula. Neste problema o campo de velocidade e completamente
determinado pois o dispositivo de aquisicao amostra todos os numeros de onda (1l e 1
2l )
necessarios para descrever o modelo nas direcoes vertical e horizontal.
Expandindo o numero de celulas do modelo da Figura 4.2, seja nx na direcao horizon-
tal e nz na direcao vertical, se todos os pontos deste modelo se comportam como fonte e
receptor em um experimento aqui denominado modelo explosivo e; se a cada detonacao
todos os demais pontos se comportam como receptores; entao seria possıvel recuperar
53

completamente o modelo de velocidade. Todos os comprimentos de onda seriam amos-
trados e a matriz de sensilidade seria inversıvel. Essa afirmacao pode ser avaliada pela
aplicacao do Teorema da Projecao de Fatias (Projection Slice Theorem), TPF, que postula
o seguinte: a transformada de Fourier do dado em uma superfıcie de observacao e igual
a uma fatia do modelo descrito no domınio do numero de onda (Lo and Inderwiessen,
1994), desde que os raios sejam retilıneos, ou seja, o modelo de fundo deve ser constante.
Atraves do TPF, representa-se em um diagrama o numero de onda na direccao x versus
numero de onda na direcao z (kx vs. kz), as frequencias espaciais de um modelo que
sao passıveis de recuperacao em um problema inverso 2D. O diagrama kx vs. kz para o
experimento do modelo explosivo esta representado na Figura 4.3. Observa-se que todos
os comprimentos de onda sao igualmente amostrados em todas as direcoes.
Figura 4.3: Diagrama kx vs kz para um dispositivo de aquisicao do tipo
modelo explosivo. Todos os numeros de onda sao amostrados igualmente.
A Figura 4.3 representa a situacao ideal para amostragem de um modelo. Contudo, o
dispositivo de aquisicao sısmica convencional, fontes e receptores na superfıcie, com ar-
ranjo split-spread (receptores a esquerda e a direita da fonte em um arranjo 2D) apresenta
54

deficiencia de amostragem (Figura 4.4). Observa-se que os numeros de onda kz baixos,
entre 0 e 0,25 para este exemplo, nao sao amostrados. Acamamentos sedimentares hori-
zontais espessos nao sao passıveis de inversao. As duas areas em branco delimitadas na
Figura 4.4 pelos semi-cırculos, portanto nao amostradas, demonstram o quao severo e o
corte de frequencias espaciais com este dispositivo de aquisicao split-spread.
-2.0
-1.5
-1.0
-0.5
z_
k
-2 -1 0 1k_x
0
50
100
150
200
ed
utilp
ma
Figura 4.4: Diagrama kx vs kz para um dispositivo de aquisicao do tipo split-
spread. Observam-se heterogeneidades e vazios de amostragem de alguns
numeros de onda.
Os vazios de informacao em alguns comprimentos de onda aumentam o espaco nulo
da matriz de sensibilidade, fonte de instabilidades e aumento da ambiguidade na solucao
do Problema Inverso. No proximo topico apresentam-se formas de contornar este pro-
blema. Pontua-se que existem outras causas de mal condicionamento da matriz de sen-
sibilidade, entre elas a baixa iluminacao provocada pelas estruturas em subsuperfıcie.
Contudo, afirma-se que a principal causa dos espacos nulos no operador L se deve ao
dispositivo de aquisicao e a limitacoes instrumentais (receptores e fontes) que nao sao
55

capazes de registrar todas as frequencias e os numeros de onda associados.
4.5 Transformando um problema mal posto em bem
posto
Grande parte dos problemas inversos sao mal postos. Neste topico sao apresenta-
dos metodos que tendem a melhorar as condicoes de resolucao, sobretudo para reduzir
sua instabilidade, entre eles a regularizacao (processo no qual sao impostos vınculos e
restricoes que induzem a solucao (Aster et al., 2005)). De acordo com a bibliografia
consultada (Flechter, 1980; Nocedal e Wright, 2000; Aster et al., 2005) os processos
voltados para reducao da instabilidade e inducao a solucao podem atuar:
- na parametrizacao do modelo;
- na concepcao da funcao objetivo;
- na manipulacao da matriz de sensibilidade (tecnicas SVD);
Descrevem-se a seguir as diferentes formas voltadas para geracao de problemas inver-
sos bem postos.
4.5.1 Parametrizacao do modelo
Aster et al. (2005) citam que pela selecao cuidadosa da dimensao da malha (grid)
e possıvel produzir um sistema de equacoes bem condicionado. Os autores nomeiam esse
procedimento de regularizacao por discretizacao. Como citado na secao 2.7, a melhor
forma de parametrizar um modelo e por meio de celulas pequenas o suficiente para des-
crever os seus menores detalhes. Contudo, pelas razoes apresentadas nas secoes 2.7 e 4.4,
almeja-se a reducao do numero de parametros (Backus e Gilbert, 1968).
Afirma-se que as parametrizacoes, por camadas, representadas pelas equacoes 2.22,
2.23 e 2.24 constituem formas de regularizacao uteis para descricao de modelos de ve-
locidade em meios sedimentares. Essas funcoes preenchem o vazio de informacoes ge-
rado pela discretizacao por celulas. Adicionalmente, elas empregam um menor numero
de parametros pois simulam o comportamento esperado das rochas em ambientes sedi-
mentares. As parametrizacoes pelas equacoes 2.22, 2.23 e 2.24 constituem contribuicoes
56

tecnico-cientıficas desta tese.
4.5.2 Regularizacao atuando na concepcao da funcao objetivo
A funcao objetivo mais simples possıvel e alcancada atraves da equacao 4.11.
A insercao de termos adicionais na funcao objetivo e o instrumento para aplicacao de
vınculos e restricoes. Se a funcao objetivo Θ for adicionada uma funcao de restricao ou
vınculos ψ1c1(m), onde ψ1 e um escalar, obtem-se uma nova funcao
L (m, ψ1) = Θ(m) + ψ1c1(m)
Adicionando mais funcoes ci ponderadas por ψi obtem-se:
L (m, ψi) = Θ(m) +
n∑i=1
ψici(m). (4.36)
Demonstra-se que nos pontos de solucao m∗ existem escalares ψ∗i tais que
∇mL (m∗, ψ∗i ) = 0 (Nocedal e Wright, 2000). Assim, nos pontos estacionarios de
L (m∗, ψ∗i ) observa-se:
∇mΘ(m∗) = −n∑
i=1
ψ∗i∇mci(m∗). (4.37)
Os escalares ψ∗i sao os parametros de regularizacao.
Sobre as funcoes ψici citadas de forma generica no paragrafo anterior e que devem ser
construıdas as restricoes e vınculos que relacionam o processo matematico de inversao
com a realidade geologica. Uma das aplicacoes e a imposicao de uma relacao entre o
modelo mk em uma iteracao k com um modelo de referencia mre f :
c1(m) =∥∥∥Wm(m −mre f )
∥∥∥2
(4.38)
onde Wm e uma matriz MxM (onde M e o numero de parametros do modelo) que pon-
dera o vetor diferenca mk −mre f . Na tomografia cinematica para obtencao do campo de
velocidade, o modelo de referencia mre f pode ser obtido com o conhecimento do com-
portamento mais frequente das rochas:
- o meio geologico sedimentar apresenta maior conteudo de altas frequencias espaciais na
direcao vertical que nas direcoes horizontais;
- devido a compactacao, um mesmo litotipo em uma profundidade Z tera menor poro-
sidade em uma profundidade Z + dZ - desde que dZ > 0. Observadas as condicoes de
57

compactacao em meio drenado, a velocidade do meio equivalente em Z + dZ sera maior
que em Z.
Assim, o modelo de referencia toma a forma de uma funcao do tipo mre f = mre f (Z)
em situacoes onde o conhecimento de subsuperfıcie e limitado. Supondo que o modelo
de referencia e o modelo inicial, a solucao iterativa sera dada por
Δm = (WdLT L + ψWm)−1[LT WdΔD + ψWm(m − mre f )] (4.39)
onde Wd e um operador para ponderar os dados. Quando ha mais de uma funcao de
restricao a equacao 4.39 generaliza-se para:
Δm = (WdLT L +p∑
i=1
ψiWmi)−1[LT WdΔD +
p∑i=1
ψiWmi(m − mre f )] (4.40)
Na pratica a regularizacao em epıgrafe adiciona valores aos termos da matriz LT L
(equacao 4.39).
E oportuno destacar o efeito que a regularizacao causa no processo de inversao. Se o
valor de ψ for muito maior que os termos da matriz LT L, a soma (LT L+ψI) tende a ψI e
a equacao 4.11 se transforma em
Δm = (ψWm)−1LTΔD. (4.41)
O termo LTΔD e o gradiente do resıduo (ΔD). Depreende-se que o sistema tende ao
metodo de maior declividade (Aster et al., 2005) ponderado por ψ−1.
De forma contraria, se o valor ψ for muito menor que os termos da matriz LT L, nao
se observa efeito de regularizacao e o sistema tende para o metodo de Gauss-Newton,
equacao 4.22.
E desejavel que a adicao de valores a funcao objetivo, a torne cada vez mais concava.
Um funcional que possua calhas e pontos de cela desestabiliza o processo de inversao
alem de proporcionar multiplas solucoes. Assim a adicao de uma funcao que, literal-
mente, deforme o funcional, melhora a estabilidade e reduz a ambiguidade. Este fato e
observado no exemplo a seguir com um modelo representado por dois parametros, m1 e
m2, e um funcional calculado por
Θ = m21. (4.42)
Este funcional assemelha-se aquele apresentado no apendice A onde se ilustra o efeito
dos modelos cinematicamente equivalentes. A Figura 4.5 exibe o funcinal Θ da equacao
58

4.42. Observa-se que, neste exemplo, Θ dispoe-se segundo uma calha vertical com uma
serie de mınimos ao longo do eixo m2. Com este funcional a solucao sempre depende
do modelo inicial (m1o ,m2o). Para um modelo inicial (m1o ,m2o) =(2.0,2.0) a solucao e
(0.0,2.0) e; para um modelo inicial (m1o ,m2o) =(-2.0,-2.0) a solucao e (0.0,-2.0) (Figura
4.5). Neste caso ha solucoes ambıguas.
Figura 4.5: Funcao objetivo com duas variaveis m1 e m2 dada pela equacao
4.42. Ilustra-se a convergencia para o mınimo a partir de dois modelos
iniciais (m1o ,m2o) = (2.0,2.0) e (m1o ,m2o) = (-2.0,-2.0) gerando as respectivas
solucoes (0.0,2.0) e (0.0,-2.0). Neste caso ha solucoes ambıguas.
59

Se na equacao 4.42 adicionar-se um termo quadratico m22, o novo funcional Θ′ sera
Θ′ = m21 + m2
2. (4.43)
Sua forma esta representada na Figura 4.6. A solucao e unica, qualquer que seja o modelo
inicial (m1o ,m2o). Partindo dos modelos iniciais (m1o ,m2o) =(2.0,2.0) ou (m1o ,m2o) =(-2.0,-
2.0) a solucao econtra-se sempre em (m1o ,m2o) =(0.0,0.0). Nao se verifica ambiguidade
da solucao.
Figura 4.6: Funcao objetivo com duas variaveis m1 e m2 dada pela equacao
4.42. Ilustra-se a convergencia para o mınimo a partir de dois modelos
iniciais (m1o ,m2o) = (2.0,2.0) e (m1o ,m2o) = (-2.0,-2.0) gerando a mesma
solucao (0.0,0.0). Neste caso nao ha ambiguidade.
60

Neste topico foram apresentadas as formas genericas de regularizacao atraves da
concepcao da funcao objetivo.
4.5.3 Regularizacao atuando sobre a matriz de sensibilidade - Tikho-
nov de ordem zero
A pseudo-inversa calculada com a equacao 4.32 nao possui projecao sobre o espaco
nulo de L (N(L)). Contudo alguns valores singulares podem ser tao pequenos que, com
a inversao de Σ (equacao 4.30), estes podem gerar solucoes anomalamente altas. Na pior
situacao eles podem ser amplificadores de ruıdos (Aster el al. (2005)).
Segundo a condicao de Picard (Aster et al., 2005), quando o produto entre a matriz UT
(obtido pela decomposicao SV de L, secao 4.3.5) e o vetor de dados D ((UT D)i) decai mais
rapidamente que Σi ha estabilidade da solucao. A plotagem do produto (UT D)i contra
Σi constitui uma poderosa ferramenta de analise para estabilidade com a decomposicao
de valores singulares. Caso a condicao de Picard nao seja atendida, a solucao consiste
em eliminar os valores singulares extremamente baixos ao preco de um menor ajuste do
modelo. Esse procedimento e denominado regularizacao por truncamento dos valores
singulares (TSVD).
Com a regularizacao de Tikhonov (Tikhonov e Arsenin, 1977) busca-se uma solucao
que, alem de fornecer o menor resıduo, tambem apresente a menor norma. Na sua
deducao, que pode ser conduzida a partir dos multiplicadores de Lagrange (Aster et al.,
2005), elevam-se os valores singulares na busca por maior estabilidade. Na regularizacao
de ordem zero, cada valor singular Σi deve ser multiplicado por um fator de filtro (Aster
et al., 2005) fi tal que
fi =Σ2
i
Σ2i + ψ
2i
, (4.44)
onde ψ e o parametro de regularizacao.
4.5.3.1 Aplicacao de restricoes na matriz de sensibilidade e controle da norma da
perturbacao no modelo
Em problemas inversos fracamente nao lineares, (secao 4.1) as perturbacoes no
modelo relacionam-se linearmente com as perturbacoes nos dados 4.32 (Sen, 2006). A
atualizacao no modelo e calculada pela equacao 4.33 e a solucao final e obtida quando o
61

resıduo se torna menor que um valor pre-determinado de tolerancia.
Ainda para problemas fracamente nao lineares, a matriz de sensibilidade L deve ser
calculada em cada iteracao assim como sua pseudo-inversa L†. Quando o espaco nulo
de dados [N(LT )] e nao trivial e o espaco nulo de modelos [N(L)] e trivial, a solucao
por equacoes normais [(LT L)−1] e obtida pela pseudo-inversa de Moore-Penrose sao exa-
tamente iguais. Apesar da solucao ser unica, os dados nao se ajustam perfeitamente.
Quando [N(LT )] e [N(L)] sao nao-triviais, a solucao utilizando a pseudo-inversa e um
mınimo quadratico e tambem possui menor norma. Nesse caso a solucao nao e unica e os
dados nao se ajustam perfeitamente (Aster et al., 2005).
O Problema Inverso estudado nesta tese pertence a uma das situacoes citadas no ultimo
paragrafo. O processo iterativo descrito pelas equacoes 4.32 e 4.33 possui as carac-
terısticas do metodo de Gauss-Newton. A ausencia de calculo explıcito do Hessiano pode
causar inacuracia na estimativa da perturbacao do vetor modelo Δm. Consequentemente,
uma norma incorreta de Δm pode causar nao convergencia (Figura 4.7a). Neste exemplo,
em um modelo bidimensional m, com norma inadequada, nao se observa convergencia
(Figuras 4.7a e 4.7b).
62

0.0
0.2
0.4
0.6
0.8
0.01
0.21
9876543210
rebmun noitaretI
Re
sid
ua
l
Re
sid
ua
l
(a) (b)
0.0
0.2
0.4
0.6
0.8
0.01
0.21
9876543210
rebmun noitaretI
Re
sid
ua
l
Re
sid
ua
l
(c) (d)
Figura 4.7: (a) Funcao objetivo com duas variaveis m1 e m2. A linha negra tracejada
representa o caminho da solucao ieterativa. A convergencia nao e observada. (b) Resıduo
em cada iteracao observado em (a). (c) Funcao objetivo com duas variaveis m1 e m2. A
linha negra tracejada representa o caminho da solucao iterativa. A convergencia para o
mınimo e suave e direta. (d) Resıduo em cada iteracao observado em (c).
63

Portanto, um fator de estabilizacao Ω e necessario para reduzir a norma do vetor Δm.
Assim, a equacao 4.32 se torna
Δm =1
ΩL†ΔD. (4.45)
Com o mesmo problema da Figura 4.7a, a norma do vetor Δm e reduzida por um fator Ω
e a convergencia e assegurada (Figuras 4.7c e 4.7d).
O fator Ω demanda calibracao na primeira iteracao ao modo de uma busca linear
(linear search), mas na iteracoes seguintes Ω e ajustado. Se o resıduo em um passo
subsequente k + 1 e maior que no passo k, um fator de reducao f e aplicado sobre Ω−1.
Diferentemente, se em uma iteracao posterior o resıduo e menor que na iteracao anterior,
Ω−1 e aumentado segunto este fator f . O melhor valor de f empregado nos Problemas
Inversos encontrados neste trabalho e igual a 5%.
Adicionalmente, restricoes devem ser impostas na matriz de sensibilidade para incor-
porar informacoes sobre o modelo. Santos et al. (2010) apresentam a ponderacao de cada
coluna da matriz L multiplicando-a por uma constante b variando entre 0 e 1 e encerrada
na matriz diagonal B. Parametros conhecidos e, portanto restritos, tem as correspon-
dentes colunas da matriz L multiplicados por b proximas ou iguais a zero. Parametros
desconhecidos e nao restritos tem os correspondentes termos da matriz de sensibilidade
multiplicados por b igual a 1. Assim, em cada iteracao, a perturbacao do modelo e calcu-
lada por
Δm =1
Ω(LB)†ΔD. (4.46)
64

Capıtulo 5
Obtendo operadores focais
5.1 Introducao
Nesta capıtulo apresentam-se metodos dedicados a estimativa dos operadores focais
(CFP). Na secao 5.2, o metodo de Berkhout e revisitado. Nas duas ultimas secoes, 5.3
e 5.4, sao apresentadas duas formas originais e inovadoras para calculo dos operadores
CFP. Na secao 5.5 sao elencados os fatores que devem ser considerados para emprego das
difracoes no ambito da inversao tomografica.
5.2 Estimativa de operadores focais pela abordagem con-
vencional
Berkhout (1997a,b) define operador de focalizacao (Common Focus Point Operator
(CFPO)) como a funcao de Green devida a uma fonte impulsiva deflagrada em profundi-
dade e registrada na superfıcie. Thorbecke (1997) e Bolte (2003) mostram que os CFPOs
podem ser diretamente extraıdos dos dados sısmicos de reflexao. Nesta secao descreve-se
como os operadores de focalizacao sao extraıdos dos dados sısmicos, a teoria envolvida
alem das aproximacoes e premissas adotadas.
O ponto de partida para estimativa dos CFPOs e a equacao 3.13 deduzida no topico
65

3.2 e reproduzida a seguir
u(xA) = −2
∫ ∞
−∞
∫ ∞
−∞u ⊗t∂g∂z
dxdy.
Esta equacao permite calcular o campo de ondas u(xA) no ponto A (Figura 3.1)
conhecendo-se o campo de ondas a qualquer tempo ao longo da superfıcie S 0.
Na equacao 3.13, o sımbolo ⊗t siginifica correlacao cruzada traco a traco no tempo;
u sao as famılias de tiro comum, e u(xscr, xrec, t) e um campo de ondas registrado nas
coordenadas xrec ao longo da superfıcie S 0 para uma fonte na coordenada xsrc, em um
tempo t. De acordo com Berkhout (1997a), a focalizacao das famılias de tiro u(xsrc, xrec, t)
gera famılias CFP. Tomando o ponto A como um difrator, ou um ponto sobre um refletor,
a famılia CFP deste ponto e dada pela equacao 3.13, onde u(xA) e a famılia CFP do ponto
A. Ela corresponde a uma fonte virtual deflagrada no ponto A e registrada na superfıcie
S 0 (Figura 5.1). Expandindo a equacao 3.13, obtem-se a famılia CFP:
u(xA, xsrc, t) = −2
∫ ∞
−∞
∫ ∞
−∞u(xsrc, xrec, t) ⊗t
∂g(xA, xrec, t)∂z
dxrecdy. (5.1)
Aplicando a focalizacao sobre as famılias CFP obtem-se paineis migrados pre-
empilhamento
u(xA, t)mig = −2
∫ ∞
−∞
∫ ∞
−∞u(xA, xsrc, t) ⊗t
∂g(xA, xsrc, t)∂z
dxsrcdy, (5.2)
onde g(xA, xsrc, t) e a funcao de Green ou CFPO obtido quando se assumem receptores
nas mesmas estacoes das fontes.
A estimativa de um operador CFP faz uso da equacao 3.13, como o kernel de um
Problema Inverso no qual o objetivo consiste em calcular g(xA, xsrc, t) uma vez que
u(xsrc, xrec, t) e conhecido. Na pratica, devido ao Teorema de Gauss, a partir das reflexoes
observadas nos dados sısmicos, apenas uma aproximacao da funcao de Green e calculada
(pois os receptores nao estao distribuıdos em uma superfıcie horizontal infinita).
A inversao iterativa tem inıcio com a selecao de um ponto imagem A sobre uma re-
flexao. Um CFPO a priori, gk=0, deve ser estimado para propagacao entre A e a superfıcie
S 0. Atraves deste operador inicial, a equacao 5.1 e empregada para a primeira estimativa
da famılia CFP uk=0 como
uk(xA, xsrc, t) = −2
∫ ∞
−∞
∫ ∞
−∞u(xsrc, xrec, t) ⊗t
∂gk(xA, xrec, t)∂z
dxrecdy, (5.3)
66

onde uk(xA, xsrc, t) e a famılia CFP calculada na iteracao k-esima com a funcao de Green
gk. A equacao 5.3 e igual a equacao 5.1, mas com o objetivo neste instante de estimar g
(a funcao de Green). Em um passo subsequente, realiza-se a correlacao cruzada traco a
traco do j-esimo operador focal com a famılia CFP na k-esima iteracao. De acordo com
o Princıpio do tempo de transito equivalente, “o tempo envolvido na propagacao reversa
do campo da fonte e a reposta do ponto focal na propagacao direta sao iguais” (Berkhout,
1997a). Se o operador inicial esta correto, a correlacao Φk(xA, xsrc, t) entre o operador
gk(xA, xsrc, t) e a famılia CFP uk(xA, xsrc, t), obtido por
Φk(xA, xsrc, t) = uk(xA, xsrc, t) ⊗t gk(xA, xsrc, t). (5.4)
ira exibir um evento horizontal no lag-zero. Berkhout (1997b) nomeia Φk(xA, xsrc, t)
(equation 5.4) como painel de deslocamento diferencial no tempo (Differential Time Shift
- DTS). Rastreando o evento correspondente ao ponto imagem A no painel DTS gerara
um vetor σk, na k-esima iteracao. Se for adotado
rk = L0 − σk, (5.5)
como medida de resıduo, representando a diferenca entre o vetor lag-zero (o evento L0) e
o evento σk no painel DTS (equacao 5.5) e o minimizando iterativamente, o operador real
g(xA, xsrc, t) sera achado.
O objetivo com este procedimento e determinar a resposta cinematica do operador
CFP. Considerando
rk(xsrc, t) = δ(x − xsrc, t − tr), (5.6)
e extraindo a metade de rk(xsrc, t) (metade do resıduo estimado no passo k),
rk, 12(xsrc, t) = δ(x − xsrc, t − tr
2). (5.7)
A minimizacao do resıduo e alcancada via a atualizacao de gk(xA, xsrc, t) pela
convolucao de gk(xA, xsrc, t) e rk, 12(xsrc, t)
gk+1(xA, xsrc,t) = gk(xA, xsrc,t) ∗ rk, 12(xsrc, t). (5.8)
O processo iterativo continua ate que rk(xsrc, t) se torne uma funcao
rk(xsrc, t) = δ(x − xsrc, t). (5.9)
Sob esta condicao, o princıpio do tempo equivalente e satisfeito.
67

Figura 5.1: Representacao fısica de uma famılia CFP. Ela simula uma fonte na posicao
A com receptores espalhados na superfıcie. A famılia CFP registra a onda direta (linha
pontilhada) e a onda refletida na interface abaixo de A.
68
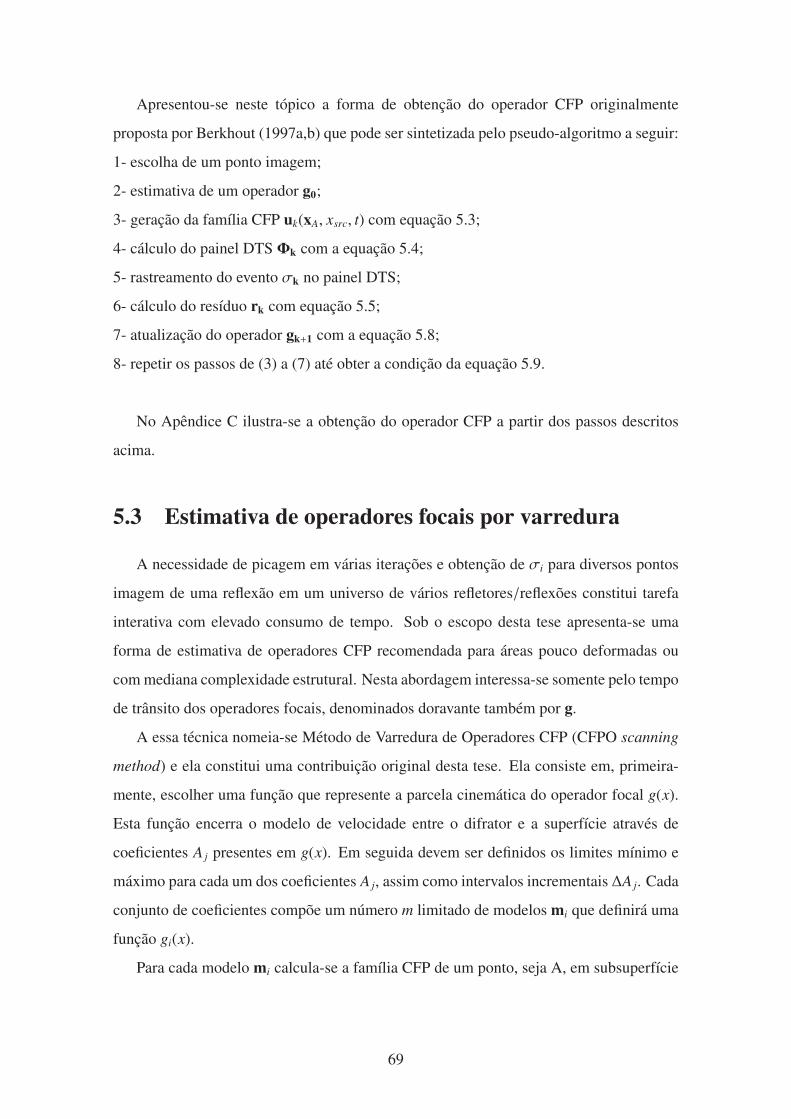
Apresentou-se neste topico a forma de obtencao do operador CFP originalmente
proposta por Berkhout (1997a,b) que pode ser sintetizada pelo pseudo-algoritmo a seguir:
1- escolha de um ponto imagem;
2- estimativa de um operador g0;
3- geracao da famılia CFP uk(xA, xsrc, t) com equacao 5.3;
4- calculo do painel DTS Φk com a equacao 5.4;
5- rastreamento do evento σk no painel DTS;
6- calculo do resıduo rk com equacao 5.5;
7- atualizacao do operador gk+1 com a equacao 5.8;
8- repetir os passos de (3) a (7) ate obter a condicao da equacao 5.9.
No Apendice C ilustra-se a obtencao do operador CFP a partir dos passos descritos
acima.
5.3 Estimativa de operadores focais por varredura
A necessidade de picagem em varias iteracoes e obtencao de σi para diversos pontos
imagem de uma reflexao em um universo de varios refletores/reflexoes constitui tarefa
interativa com elevado consumo de tempo. Sob o escopo desta tese apresenta-se uma
forma de estimativa de operadores CFP recomendada para areas pouco deformadas ou
com mediana complexidade estrutural. Nesta abordagem interessa-se somente pelo tempo
de transito dos operadores focais, denominados doravante tambem por g.
A essa tecnica nomeia-se Metodo de Varredura de Operadores CFP (CFPO scanning
method) e ela constitui uma contribuicao original desta tese. Ela consiste em, primeira-
mente, escolher uma funcao que represente a parcela cinematica do operador focal g(x).
Esta funcao encerra o modelo de velocidade entre o difrator e a superfıcie atraves de
coeficientes Aj presentes em g(x). Em seguida devem ser definidos os limites mınimo e
maximo para cada um dos coeficientes Aj, assim como intervalos incrementais ΔAj. Cada
conjunto de coeficientes compoe um numero m limitado de modelos mi que definira uma
funcao gi(x).
Para cada modelo mi calcula-se a famılia CFP de um ponto, seja A, em subsuperfıcie
69

u(xA, xsrc, t) de acordo com a equacao 5.3 adequadamente reproduzida a seguir
ui(xA, xsrc, t) = −2
∫ ∞
−∞
∫ ∞
−∞u(xsrc, xrec, t) ⊗t
∂gi(xA, xrec, t)∂z
dxrecdy.
A correlacao entre as funcoes de Green, calculadas por gi(x), e a famılia CFP correspon-
dente gera o painel Φi
Φi(xsrc, t) = gi(xA, xsrc,t) ⊗t ui(xA, xsrc, t), (5.10)
que tambem pode ser representado por:
Φi(mi, xsrc, t) = gi(xA, xsrc,t) ⊗t ui(xA, xsrc, t). (5.11)
Em um passo adicional a funcao Φi(mi, xsrc, t) e integrada ao longo de xsrc e desta
nova funcao extraem-se os valores absolutos (operador abs).
Ψ(mi, t) = abs[
∫xsrc
Φ(mi, xsrc, t)dxsrc]. (5.12)
A busca pelo maximo (max) da funcao Ψ(mi, t) no tempo t = 0 (lag 0) definira o
melhor modelo mfinal. Isso ocorre porque, caso a varredura compreenda o modelo real, o
maximo da funcao sera igual ao modelo real ou estara muito proximo a este. Somente sob
essa condicao ocorrera o alinhamento em fase (do evento referente ao difrator no ponto
A) ao longo do lag 0 gerando, portanto, o maior valor no empilhamento (equacao 5.13).
mfinal = m{max[Ψ(mi, t = 0)]}, (5.13)
onde: max e o operador para extracao do maximo de funcoes.
O fluxograma da Figura 5.2 resume o processo para obtencao de CFPO por varredura.
Nas proximas linhas apresenta-se uma aplicacao da varredura de CFPOs.
A Figura 5.3 representa uma secao de afastamento nulo (zero-offset) de um modelo
sintetico realıstico em ambiente marinho. Ha dois pontos imagens nas posicoes x 12500
m, um esta no fundo do mar (ponto 1) e o outro encontra-se na mesma coordenada x, mas
em maior profundidade abaixo do fundo do mar (ponto 2). A funcao g(x) representa o
operador
gi = (t20 +
x2
v2i
)12 + αix, (5.14)
70
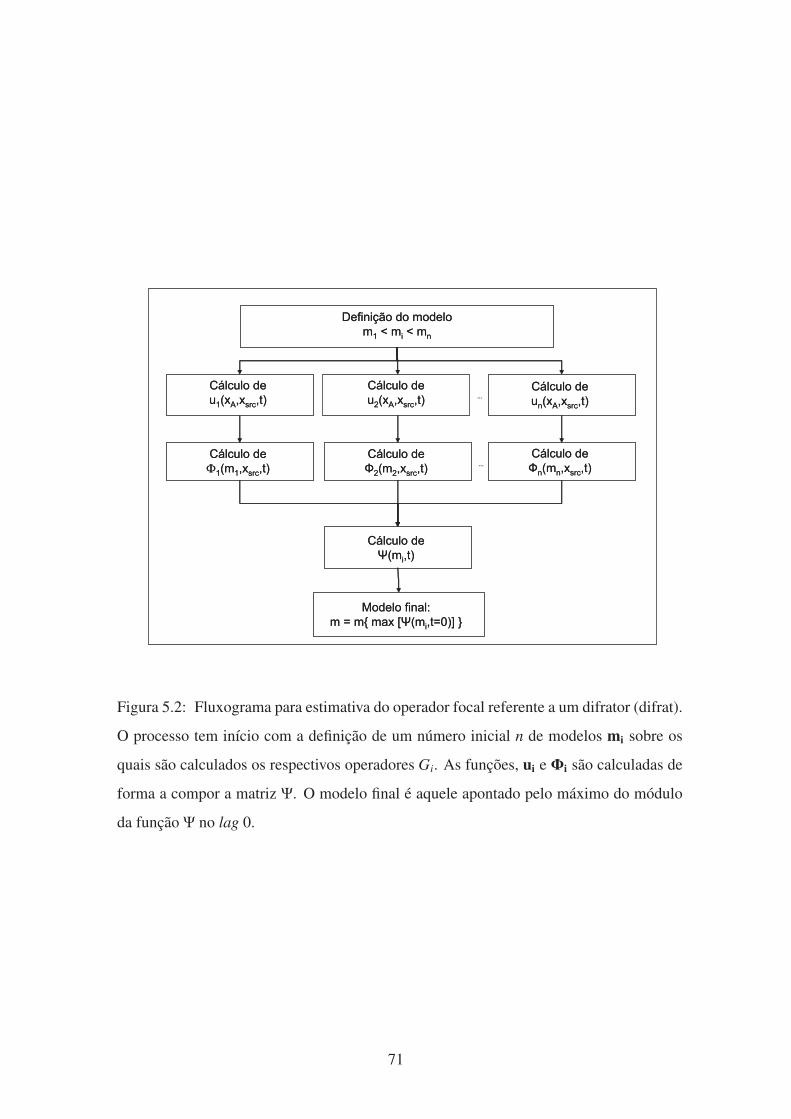
Definição do modelo
m1
< mi< m
n
Cálculo de
u1(x
A,x
src,t)
Cálculo de
u2(x
A,x
src,t)
Cálculo de
un(x
A,x
src,t)
Cálculo de
Ф1(m
1,x
src,t)
Cálculo de
Ф2(m
2,x
src,t)
Cálculo de
Фn(m
n,x
src,t)
Cálculo de
Ψ(mi,t)
Modelo final:
m = m{ max [Ψ(mi,t=0)] }
Definição do modelo
m1
< mi< m
n
Cálculo de
u1(x
A,x
src,t)
Cálculo de
u2(x
A,x
src,t)
Cálculo de
un(x
A,x
src,t)
Cálculo de
Ф1(m
1,x
src,t)
Cálculo de
Ф2(m
2,x
src,t)
Cálculo de
Фn(m
n,x
src,t)
Cálculo de
Ψ(mi,t)
Modelo final:
m = m{ max [Ψ(mi,t=0)] }
Figura 5.2: Fluxograma para estimativa do operador focal referente a um difrator (difrat).
O processo tem inıcio com a definicao de um numero inicial n de modelos mi sobre os
quais sao calculados os respectivos operadores Gi. As funcoes, ui e Φi sao calculadas de
forma a compor a matriz Ψ. O modelo final e aquele apontado pelo maximo do modulo
da funcao Ψ no lag 0.
71

3.0
4.0
5.0
8000 10000 12000 14000 16000 18000 20000
Zero-offset section
3.0
4.0
5.0
8000 10000 12000 14000 16000 18000 20000
Figura 5.3: Secao de afastamento nulo exibindo dois pontos imagens em x = 12500
m. Ponto 1 no fundo do mar e ponto 2 abaixo do fundo do mar.
72

onde gi e o tempo de transito do operador, t0 e o tempo correspondente ao ponto imagem,
x e a posicao na direcao horizontal, vi e uma constante com dimensao de velocidade, e
αi e o coeficiente angular. O termo αix executa uma inclinacao da hiperbole de forma a
representar variacoes laterais suaves do campo de velocidade.
Para o ponto 1, no modelo mi, vi foi limitado a 1300 < vi < 1800, com Δvi = 100 m/s;
α = 0 simulando a nao existencia de mudanca lateral de velocidade. Assim, neste caso, vi
representa a velocidade RMS. O fluxograma da Figura 5.2 e seguido e a matriz Ψ(mi, t)
(Figura 5.4) e calculada. A amplitude maxima no painel Ψ(mi, t) para o ponto ocorre sob
a velocidade de 1500 m/s, correspondendo a coluna d’agua.
Ψ
Figura 5.4: Painel Ψ(mi, t) para o ponto 1. O eixo horizontal corresponde a velocidade
variando entre 1300 e 1800 m/s. O eixo vertical representa o lag da correlacao cruzada.
A amplitude maxima no lag zero ocorre com a velocidade de 1500 m/s.
Para o ponto 2, o modelo mi tem a velocidade vi limitada a 1400 < vi < 1800, com
Δvi = 20m/s; e α = 0, tambem nao considerando variacao lateral de velocidade na pilha
73

ΨFigura 5.5: Painel Ψ(mi, t) para o ponto 2. O eixo horizontal corresponde a velocidade
limitada entre 1400 e 1800 m/s. O eixo vertical representa o lag da correlacao cruzada.
A amplitude maxima no lag zero ocorre com a velocidade de 1520 m/s.
sedimentar rasa. A matriz ψ(mi, t) e calculada e esta ilustrada na Figura 5.5. A maxima
amplitude no painel ψ(mi, t) ocorre sob a velocidade de 1520 m/s, que e compatıvel com
a velocidade RMS para aquele nıvel.
74

5.4 Estimativa de operadores focais a partir de difracoes
Levantamentos sısmicos em areas complexas estruturalmente geram volumes de
dados sısmicos ricos em difracoes cuja origem se deve a grande curvatura dos refletores e
descontinuidades das interfaces. Nestes ambientes geologicos, a estimativa tradicional de
operadores CFP, reproduzida a partir de Thorbecke (1997) e Bolte (2003) no topico 5.2, e
difıcil de aplicar. O rastreamento de um evento σi no painel DTS e comprometido se este
nao possuir continuidade lateral devido a interferencia de difracoes. Contudo as difracoes
podem ajudar na estimativa dos CFPOs.
Considere um par fonte-receptor com afastamento Δx em um meio homogeneo (Fi-
gura 5.6). O tempo de transito duplo, na trajetoria fonte (S), difrator (A) ate o receptor (R)
e obtido pela integral de linha ao longo da curva SA (lS A), com segmentos infinitesimais
dlsi,di f ract, mais a integral de linha ao longo da curva AR (lAR), com segmentos de linha
infinitesimais dldi f ract,rq;
t(xsi , xrq) =
∫lS A
dlsi,di f f ract
v(x, y, z)+
∫lAR
dldi f f ract,rq
v(x, y, z). (5.15)
Fazendo Δx tender a zero, o angulo agudo θ (Figura 5.6) tambem tende a zero, e pode
ser facilmente deduzido que∫lS A
dlsi,di f f ract
v(x, y, z)=
∫lAR
dldi f f ract,rq
v(x, y, z). (5.16)
A equacao 5.16 representa o princıpio da reciprocidade aplicado a dados de afastamento
nulo. Entao , para um difrator, o tempo duplo em uma secao de afastamento nulo e dado
por
t(xsi = xrq) = 2
∫lS A
dlsi,di f f ract
v(x, y, z), (5.17)
e a parte cinematica da funcao de Green e a metade do tempo duplo t
g(xdi f f ract, xsi) =t(xsi = xrq)
2. (5.18)
Atraves da extracao dos tempos das difracoes nas secoes de mınimo afastamento, os CF-
POs podem ser calculados pela equacao 5.18. Isto e possıvel porque o mınimo afasta-
mento e muito menor que a profundidade do difrator. Assim, a aproximacao de que o
caminho do difrator ate a fonte e igual ao do difrator ate o receptor e valida. Para levan-
tamentos marinhos em areas com complexas estruturas em profundidade, esta tecnica e
especialmente aplicavel.
75

Figura 5.6: Par fonte (S ) Receptor (R) amostrando um difrator (A) na profundidade h
em um meio nao homogeneo.
5.5 Fatores a serem considerados na tomografia sobre
DCFPO
5.5.1 O efeito do afastamento na estimativa da velocidade
A principal premissa para estimativa dos operadores focais a partir das difracoes
(DCFPO) e que o afastamento seja muito menor que a profundidade do difrator.
Considere-se um ponto difrator localizado em (x, h), onde x=x0, e h=profundidade, em
um meio isotropico com apenas variacao de velocidade na direcao vertical v(z). O tempo
de transito duplo t para um levantamento de afastamento nulo, onde o par fonte-receptor
localiza-se em (x,0), e dado por
t(x) =
√t20+
4(x − x0)2
v2, (5.19)
onde t0 e o tempo de transito para o receptor (e a fonte) localizados em x0, acima do
difrator, e v e a velocidade RMS em (x, h).
Se erradamente considerar-se um levantamento monocanal com afastamento offset
Δx como sendo de afastamento nulo, qual sera o erro na estimativa da velocidade? A
partir das deducoes constantes no Apendice D, o mınimo tempo de transito para esse
levantamento e dado por
tmin(x) =
√4h2 + Δx2
v2, (5.20)
76

e esse tempo ocorre no receptor em
xrecmin = x0 +Δx2. (5.21)
Uma velocidade aparente, vap e calculada a partir da equacao D.12 obtida sobre uma
secao de afastamento comum (Common Offset Gather (COG)) com afastamento nao nulo.
Esta claro que a velocidade aparente nao e constante, mas varia de acordo com a relacao
entre xrec e as coordenadas do difrator (x0, h). Assim, a curva de tempo de transito quando
o afastamento nao e nulo, nao e uma hiperbole, mesmo em meios homogeneos. Contudo,
essa curva pode ser aproximada por uma funcao hiperbolica e, a partir desta, estimar-se
uma velocidade, vest, atraves de regressao.
Considere-se um levantamento hipotetico onde x0=2500 m, h=1000 m e velocidade
v=1500 m/s, no qual 501 receptores sao alinhados ao longo da superfıcie, desde a estacao
em 0 m ate 5000 m, equiespacados a 10 m. A velocidade e estimada para diferentes afas-
tamentos assumindo-se que possuem afastamento nulo. A Tabela 5.1 exibe os resıduos,
os erros na estimativa da velocidade, e o erro nas coordenadas para cada afastamento que
variou de zero a 100 m a intervalos de 10 m.
Para cada afastamento, vest e estimado por regressao da equacao 5.19, mas
empregando-se xrecmin no lugar de x0, e tmin no lugar de t0. O resıduo do tempo de transito
r em cada afastamento e calculado por
r =n∑
i=1
1
n
∣∣∣ti − tmini
∣∣∣, (5.22)
onde n e o numero de receptores.
A posicao do difrator na direcao x e estimada pela equacao 5.21 e a profundidade pelo
mınimo tempo de transito duplo tmin em cada afastamento, multiplicado pela respectiva
velocidade,vest, divida por 2.
Os resıduos aumentam com o afastamento, mas todos sao inferiores a 1 ms (menos que
o intervalo de amostragem em levantamentos sısmicos). A velocidade estimada tambem
aumenta com o afastamento, mas mesmo com o maximo afastamento de 100 m, o erro e
de apenas 0.027%. O erro na profundidade com o afastamento maximo (100 m) e igual
a 0.15%. Finalmente, o erro na coordenada x aumenta com o afastamento atingindo o
maximo de 50 m. Assim os erros na profundidade e velocidade sao negligenciaveis no
experimento apresentado. O erro na coordenada x do difrator deve, contudo, ser corrigido
ou reduzido pelo emprego da equacao 5.21.
77

Afastamento (m) Resıduo (s) εv (m/s) εh (m) εx (m)
0 0.00 0.000 0.000 0.000
10 1.58 × 10−5 0.000 0.025 5.000
20 1.92 × 10−5 0.000 0.050 10.000
30 2.47 × 10−5 0.050 0.158 15.000
40 3.79 × 10−5 0.100 0.233 20.000
50 5.43 × 10−5 0.100 0.392 25.000
60 7.55 × 10−5 0.200 0.550 30.000
70 9.38 × 10−5 0.200 0.758 35.000
80 1.28 × 10−4 0.300 0.966 40.000
90 1.62 × 10−4 0.300 1.258 45.000
100 1.85 × 10−4 0.400 1.516 50.000
Tabela 5.1: Efeito do afastamento em um meio de velocidade constante para estimativa
da velocidade e coordenadas do difrator. A velocidade real e a coordenada do difrator
sao respectivamente 1500 m/s e (2500, 1000) m. A tabela exibe os resıduos, o erro na
velocidade (εv vide texto para maiores detalhes sobre a regressao), erros na profundidade
(εh, e erros na coordenada horizontal x (εx).
78

5.5.2 Eventos que devem ser empregados na tomografia DCFPO
A tomografia sobre DCFPO falhara quando os eventos mapeados na COG nao
forem difracoes reais (geradas por pontos). As difracoes devem ser realcadas uma vez
que sua energia e mais baixa que as reflexoes (Berkovitch et al., 2009). Neste caso, as re-
flexoes especulares devem ser filtradas nas secoes COG (Fomel, 2002). Esses metodos po-
dem produzir eventos que se assemelham a difracoes, mas nao mostram as caracterısticas
de difratores pontuais. Superfıcies curvas ou mesmo segmentos de planos geram curvas
hiperbolicas nas secoes sısmicas. No entanto, seus formatos nao sao compatıveis com o
campo de velocidade real e, portanto, nao encerram informacoes cinematicas passıveis
de emprego na tomografia. Adicionamente, uma feicao geologica, como um canal ou
dobra, pode produzir uma frente de onda cilındrica que, se amostrada obliquamente a
direcao de mergulho, tera todas as caracterısticas de curva de difracao, mas seu formato
sera incompatıvel com a velocidade reinante.
Considere-se, um levantamento hipotetico com dispositivo de aquisicao paralelo a
direcao de mergulho das feicoes geologicas. Se o raio de curvatura de uma interface
dobrada e muito menor que o comprimento de onda, ou se esta interface e abruptamente
terminada por falhas, pinchout ou discordancia etc., esta comportar-se-a como difratores
(Sheriff and Geldart, 1999).
A curvatura K(x) de uma funcao 2D f (x) (Wolfram, 1999) e dada por
K(x) =
⎧⎪⎪⎨⎪⎪⎩d2 fdx2
[1 + (d fdx )2]3/2
⎫⎪⎪⎬⎪⎪⎭ . (5.23)
O raio de curvatura rc(x) e calculado pelo modulo do inverso de K(x),
rc(x) =
∣∣∣∣∣ 1
K(x)
∣∣∣∣∣ . (5.24)
Para uma interface descrita por uma funcao senoidal
f (x) = A0 sin
(2πxλ0
), (5.25)
seu raio de curvatura em cada posicao x e
rc(x) =
∣∣∣∣∣∣∣∣∣∣∣
[1 + A2
0
(2πλ0
)2 (cos 2πx
λ0
)2] 3
2
−A0
(2πλ0
)2sin
(2πxλ0
)∣∣∣∣∣∣∣∣∣∣∣. (5.26)
Pelo Princıpio de Huygens, cada ponto de uma interface, depois que ela e estimulada,
age como uma fonte pontual individual. Se em uma superfıcie suave e contınua, com
79

pontos adjacentes suficientemente proximos, e houver a coalescencia das frentes de onda,
o efeito observado e o de uma reflexao contınua. Se a interface e uma senoide (equacao
5.25), e se os picos e cavados estao afastados o suficiente na direcao vertical, ambos se
comportarao como difratores isolados, nao ocasionando interferencia construtiva entre si.
E possıvel simular esses dados relacionando a amplitude A0 e o comprimento de onda λ0
da estrutura senoidal [funcao f (x)] com a equacao 5.26, por
λ0 = α A0. (5.27)
Uma interface senoidal com amplitude (A0) de 25 m e α=10 (ou λ0=250 m) tem um
raio de curvatura muito pequeno nos picos e cavados. Um experimemto de refletor ex-
plosivo e simulado sobre esta estrutura (Figura 5.7a) empregando-se uma wavelet Ricker
de 20 Hz, em um meio com velocidade de 2000 m/s. Ao longo da superfıcie, foram
distribuıdos receptores equiespacados a cada 1 m resultando no sismograma presente na
Figura 5.7b. Em uma segunda simulacao sısmica, empregando-se a mesma geometria do
experimento anterior, mas com pontos difratores agindo como fontes somente localizadas
nos picos e cavados (Figura 5.7c). O sismograma resultante (Figura 5.7d) exibe, portanto
difracoes reais.
Uma das difracoes (a linha tracejada na Figura 5.7d) foi destacada e foi superimposta
na Figura 5.7b; a parcela cinematica da difracao real se ajusta perfeitamente as difracoes
produzidas pelos picos e cavados da superfıcie senoidal (Figura 5.7b). Esta claro que
quando α=10, picos e cavados se comportam cinematicamente como difratores.
Em um outro teste, o experimento descrito no paragrafo anterior foi repetido,
mantendo-se a amplitude da interface em 25 m mas utilizando um comprimento de onda
de 500 m (Figuras 5.8a para o refletor senoidal e 5.8c para difratores), portanto com α=20.
A Figura 5.8b ilustra o efeito do refletor explosivo senoidal com comprimento de onda de
500 m, e a Figura 5.8d exibe o sismograma para o experimento com fontes pontuais nos
picos e cavados para o mesmo comprimento de onda. As difracoes (curva branca trace-
jada na Figura 5.8b e 5.8d) nao se ajustam a curva hiperbolica correspondente ao pico da
funcao seno na Figura 5.8b. Na verdade, a curva obtida e o resultado da soma das resposta
sısmica do apice e flancos. Devido a esse somatorio, o formato da curva e mais largo que
o daquela obtida a partir de difracoes pontuais (a curva branca tracejada na Figura 5.8d)
e, portanto, nao e consistente com a velocidade de 2000 m/s.
Uma serie de experimentos foram realizados com α variando entre 10 e 20 mantendo-
80

360
380
400
420
440
460
Dep
th (m
)
0 500 1000 1500Horizontal position (m)
360
380
400
420
440
460D
epth
(m)
0 500 1000 1500Horizontal position (m)
0.12
0.14
0.16
0.18
0.20
0.22
0.24
0.26
0.28
Tim
e (s
)
0 500 1000 1500Horizontal position (m)
0.12
0.14
0.16
0.18
0.20
0.22
0.24
0.26
0.28
Tim
e (s
)
0 500 1000 1500Horizontal position (m)
a) c)
d)b)
Figura 5.7: (a) Modelo de um refletor explosivo senoidal com amplitude de 25 m e
comprimento de onda igual 250 m em um meio com velocidade constante de 2000
m/s. (b) Sismograma correspondente ao modelo em (a). A linha branca tracejada ma-
peia uma difracao real no pico correspondente. Picos e cavados da curva senoidal
comportam-se como difractores; (c) Modelo com uma serie de difratores, representa-
dos por cırculos brancos, localizados nos picos e cavados da mesma curva senoidal em
(a); (d) Sismograma correspondente ao modelo em (c). A linha branca tracejada mapeia
uma difracao real.
81

0.12
0.14
0.16
0.18
0.20
0.22
0.24
0.26
0.28
Tim
e (s
)
0 500 1000 1500Horizontal position (m)
360
380
400
420
440
460
Dep
th (m
)
0 500 1000 1500Horizontal position (m)
360
380
400
420
440
460
Dep
th (m
)
0 500 1000 1500Horizontal position (m)
0.12
0.14
0.16
0.18
0.20
0.22
0.24
0.26
0.28
Tim
e (s
)
0 500 1000 1500Horizontal position (m)
a) c)
d)b)
Figura 5.8: (a) Modelo de um refletor explosivo senoidal com amplitude de 25 m e
comprimento de onda igual 500 m em um meio com velocidade constante de 2000 m/s.
(b) Sismograma correspondente ao modelo em (a). A linha branca tracejada mapeia
uma difracao real no pico correspondente. Picos e cavados da curva senoidal nao se
comportam como difractores; (c) Modelo com uma serie de difratores, representados
por cırculos negros, localizados nos picos e cavados da mesma curva senoidal em (a);
(d) Sismograma correspondente ao modelo em (c). A linha branca tracejada mapeia
uma difracao real.
82

se a frequencia dominante da fonte sob o mesmo modelo de velocidade (Tabela 5.2).
Conclui-se que, para estruturas senoidais com α maior ou igual a 16 (α crıtico, αc =16),
o comportamento de difracao pontual nao e observado. O comportamento de difracoes
pontuais ocorre se o raio de curvatura e menor que 1/16 do comprimento de onda domi-
nante da fonte. Analogamente ao criterio de resolucao de Rayleigh (Sheriff and Geldart,
1999), comprimentos de onda dominantes mais altos proporcionam αc mais baixos. As-
sim, espera-se que varias estruturas, tais como pinchouts, falhas, dobras kink, e canais
(vales incisos) possam gerar sinais como difracoes pontuais que sao uteis na tomografia
sobre CFPO.
Modelo α Comp. de onda da fonte(m) Comportamento de difrator
1 10 100 Sim
2 12 100 Sim
3 14 100 Sim
4 16 100 Nao
5 18 100 Nao
6 20 100 Nao
Tabela 5.2: Experimentos com refletores explosivos em interfaces senoidais para di-
ferentes α, empregando-se as mesmas fontes e com comprimento de onda de 100 m.
Comportam-se como difratores pontuais os picos e cavados nos modelos que apresentam
α menor que 16.
A analise descrita acima e importante para propositos de modelagem e e util na analise
de dados reais quando ha alguma sorte de conhecimento acerca das estruturas em subsu-
perfıcie. Caso nao haja nenhuma informacao de subsuperfıcie, uma das formas de se
averiguar se uma curva provem ou nao de difratores pontuais e por meio de sua per-
sistencia em forma e posicao do apice em diferentes famılias de tiro (Figura 5.9). A
parcela cinematica de uma difracao real exibira a mesma forma em diferentes famılias de
tiro (SGs) e receptores (RGs).
Matematicamente, qualquer registro da parcela cinematica de uma difracao localizada
em xA num painel de tiro comum (gS G) e obtido pela convolucao de uma funcao delta
δ(t − tsrc,A), que corresponde ao tempo de transito entre a fonte e o difrator, e o tempo de
83
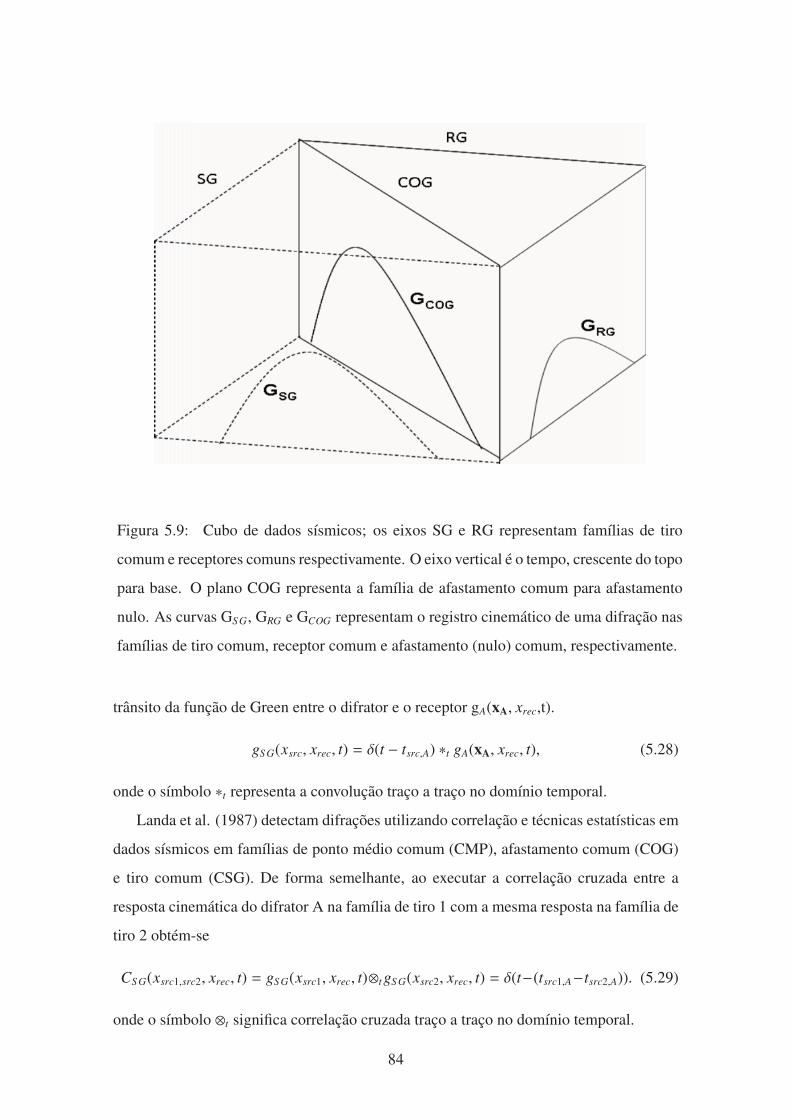
Figura 5.9: Cubo de dados sısmicos; os eixos SG e RG representam famılias de tiro
comum e receptores comuns respectivamente. O eixo vertical e o tempo, crescente do topo
para base. O plano COG representa a famılia de afastamento comum para afastamento
nulo. As curvas GS G, GRG e GCOG representam o registro cinematico de uma difracao nas
famılias de tiro comum, receptor comum e afastamento (nulo) comum, respectivamente.
transito da funcao de Green entre o difrator e o receptor gA(xA, xrec,t).
gS G(xsrc, xrec, t) = δ(t − tsrc,A) ∗t gA(xA, xrec, t), (5.28)
onde o sımbolo ∗t representa a convolucao traco a traco no domınio temporal.
Landa et al. (1987) detectam difracoes utilizando correlacao e tecnicas estatısticas em
dados sısmicos em famılias de ponto medio comum (CMP), afastamento comum (COG)
e tiro comum (CSG). De forma semelhante, ao executar a correlacao cruzada entre a
resposta cinematica do difrator A na famılia de tiro 1 com a mesma resposta na famılia de
tiro 2 obtem-se
CS G(xsrc1,src2, xrec, t) = gS G(xsrc1, xrec, t)⊗t gS G(xsrc2, xrec, t) = δ(t−(tsrc1,A−tsrc2,A)). (5.29)
onde o sımbolo ⊗t significa correlacao cruzada traco a traco no domınio temporal.
84

O painel CS G(xsrc1,src2, xrec, t) exibira um evento (uma linha) horizontal no tempo
tsrc1,A-tsrc2,A quando o evento em analise for uma difracao real. Esse tempo (tsrc1,A-tsrc2,A)
constitui a diferenca de tempo entre fonte 1 e difrator A e, fonte 2 e este difrator A (equa-
tion 5.29).
Finalmente, as difracoes mapeadas devem ser comparadas com os operadores CFPs
adjacentes obtidos de forma convencional (Berkhout, 1997a,b) na mesma famılia de afas-
tamento comum. A forma de um operador DCFP deve ser semelhante a de um CFPO vi-
zinho. Mudancas abruptas observadas em operadores adjacentes representam acentuado
contraste de velocidade. Se as informacoes a priori nao corroborarem essa caracterıstica,
operadores anomalos, com raio de curvatura muito maiores que CFPOs adjacentes, devem
ser descartados.
85

Capıtulo 6
Tomografia sobre operadores focais
6.1 Introducao
Nesta secao descreve-se o metodo de estimativa do campo de velocidades e estruturas
de subsuperfıcie a partir dos operadores focais (CFPO). A parcela cinematica dos opera-
dores focais (CFPO) constitui os dados de entrada, dobsi na equacao 4.11, e esta representa
a funcao objetivo do problema contendo n registros. dcalci na mesma equacao 4.11 repre-
senta os dados calculados. Na tomografia sobre operadores focais eles representam os
tempos de transito simples entre cada ponto focal e os receptores na superfıcie. Nas roti-
nas desenvolvidas nesta tese, os tempos de transito sao calculados por rotinas de tracado
de raios cinematicos com resolucao pelo metodo de Runge-Kutta.
Empregando os mesmos passos e premissas descritos no topico 4.3.3 para solucao do
Problema Inverso pelo metodo de Gauss-Newton, a cada iteracao resolve-se a atualizacao
no modelo Δm atraves da equacao 4.22. A menos das restricoes e regularizacoes, a
resolucao pelo metodo dos mınimos quadrados empregando Gauss-Newton e a forma
basica de resolucao encontrada em Kabir (1997), Hegge (2000), e Cox (2004).
Nesta tese, o calculo das atualizacoes no modelo Δm empregou a pseudo-inversa de
Moore-Penrose utilizando a equacao 4.46, e na qual a matriz de sensibilidade e decom-
posta em valores singulares. Embora envolva um produto matricial adicional, esse metodo
permite calcular as atualizacoes no modelo reduzindo-se o numero de condicao da ma-
triz a ser invertida. Enquanto se inverte (LT L) nas abordagens tradicionais (Kabir, 1997;
86

Hegge, 2000; Cox, 2004), com a pseudo-inversa inverte-se a matriz L truncada no seu
p-esimo valor singular.
Em ambas as abordagens faz-se necessario calcular a matriz de sensibilidade L, des-
crita no topico a seguir.
6.2 Derivada em relacao a posicao do ponto focal
A matriz de sensibilidade contem as derivadas dos dados modelados em relacao
aos parametros do modelo. Entao, cada termo do vetor de dados dcalci depende do campo
de velocidade e da posicao dos pontos focais.
De acordo com Cox (2004), para um raio partindo de um ponto focal fazendo um
angulo θ com a vertical, a derivada do tempo de transito (parte cinematica da funcao de
Green), g, em relacao a coordenada x, e
dgdx=
senθv, (6.1)
e a derivada em relacao a vertical, eixo z, sob as mesmas condicoes e igual a:
dgdz=
cosθv. (6.2)
Em ambas as equacoes, v corresponde a velocidade na posicao do ponto focal.
A derivada do tempo do CFPO em relacao a velocidade v depende da forma como o
meio geologico e discretizado. A seguir, descrevem-se cada uma das formas de derivacao
em funcao das formas de discretizacao visitadas na secao 2.4.
6.3 Derivada em relacao ao campo de velocidades
O tempo de transito modelado por tracado de raios e calculado pela integral da
equacao 3.17 em relacao ao comprimento de raio infinitesimal dl. Assim, o tempo de
transito g e dado por:
g =∫
l
dlv
(6.3)
onde v e a velocidade.
87

Derivando-se a equacao 6.3 em relacao a velocidade obtem-se:
∂g∂v= −
∫l
dlv2
(6.4)
Se a velocidade for uma funcao dependente de um parametro, diga-se f , a derivada
do tempo em relacao a esse parametro sera dada por
∂g∂ f= −
∫l
dvd f
dlv2
(6.5)
que constitui a aplicaccao da regra da cadeia (Kreyszig, 1999). O que se apresenta a
seguir e a aplicacao dessa regra para as funcoes de velocidade visitadas na secao 2.4.
6.3.1 Derivada em relacao a v sob discretizacao por blocos
Supondo que o modelo tenha sido discretizado por nx blocos na horizontal e nz
blocos na vertical, o espaco de modelos de velocidade e composto por nx x nz dimensoes.
Cada bloco possui uma velocidade constante, seja v j, e dimensoes regulares dx e dz,
respectivamente na horizontal e vertical. Cada raio tracado entre o difrator e a superfıcie
atravessara diversos blocos, e a intersecao do raio com estes possui comprimento variavel
Δlk. O tempo total de cada raio e calculado de forma discreta pela soma das razoes Δlkvk
ao
longo de todo o raio com comprimento l:
g =n∑
k=1
Δlk
vk. (6.6)
Empregando-se um reduzido numero de parametros, e factıvel calcular as derivadas
perturbando-se a velocidade em cada uma das celulas. Assim computa-se a modelagem
e calcula-se a diferenca de tempos dos dados antes e depois da perturbacao e divide-se
o resultado pela perturbacao. Este procedimento e proibitivo em modelos grandes com
elevado numero de incognitas.
6.3.2 Derivada em relacao a v sob discretizacao por polinomios
Nesta forma de discretizacao, sem termos cruzados, o campo de velocidades e
representado pela equacao 2.4. Subsituindo a equacao 2.4 na equacao 6.3 e derivando o
resultado obtem-se as derivadas em relacao aos coeficientes do polinomio:
∂g∂v0
= −∫
l
[dl
(∑n
i=1 Aixi +∑m
j=1 Bjz j)2
], (6.7)
88

∂g∂Ai= −
∫l
[xi dl
(∑n
i=1 Aixi +∑m
j=1 Bjz j)2
], (6.8)
∂g∂Bj= −
∫l
[z j dl
(∑n
i=1 Aixi +∑m
j=1 Bjz j)2
]. (6.9)
6.3.3 Derivada em relacao a v sob discretizacao por funcoes exponen-
cial e logarıtmica
Substituindo a equacao 2.5 na equacao 6.3 e tomando a derivada em relacao a v0 e
B1 obtem-se:
∂g∂v0
= −∫
l
[dl
(v0 + B1e(qz))2
], (6.10)
∂g∂B1
= −∫
l
[e(qz) dl
(v0 + B1e(qz))2
], (6.11)
∂g∂q= −B1
∫l
[ze(qz) dl
(v0 + B1e(qz))2
]. (6.12)
Analogamente, a funcao logarıtmica 2.6 substituıda na equacao 6.3 e derivada em
relacao aos parametros torna-se:
∂g∂v0
= −∫
l
[dl
(v0 + B1ln(z))2
], (6.13)
∂g∂B1
= −∫
l
[ln(z)
dl(v0 + B1ln(z))2
], (6.14)
6.3.4 Derivada em relacao a v sob discretizacao por funcao de base
radial
Substituindo a equacao 2.7 na equacao 6.3, assumindo-se que os parametros σxi e
σzi sao constantes, as derivadas em relacao aos coeficientes Ai serao dadas por:
∂g∂Ai= −
∫l
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣(
(x−xi)2
σ2xi+
(z−zi)2
σ2zi
)∑n
i=1 Aie−0.5
((x−xi)2
σ2xi+
(z−zi)2
σ2zi
)⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦ dl. (6.15)
89

6.3.5 Derivada em relacao a v sob discretizacao por funcoes
harmonicas
Se o campo de velocidade e representado pela equacao 2.8, a derivada em relacao
ao campo de aos parametros sera dada por
∂g∂Aj= −
∫l
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣ ei2π(k jx x+k jzz)(∑nj=1 Ajei2π(k jx x+k jzz)
)2
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦ dl. (6.16)
Analogamente, a derivada em relacao aos parametros de velocidade representados
pela equacao 2.9 e dada por:
∂g∂Ai= −
∫l
⎧⎪⎪⎪⎨⎪⎪⎪⎩ cos(kixx) + sen(kixx)[∑ni=1 Ai(cos(kixx) + sen(kixx)) +
∑mj=1 Aj(cos(k jzz) + sen(k jzz))
]2
⎫⎪⎪⎪⎬⎪⎪⎪⎭ dl,
(6.17)
e
∂g∂Aj= −
∫l
⎧⎪⎪⎪⎨⎪⎪⎪⎩cos(k jzz) + sen(k jzz)[∑n
i=1 Ai(cos(kixx) + sen(kixx)) +∑m
j=1 Aj(cos(k jzz) + sen(k jzz))]2
⎫⎪⎪⎪⎬⎪⎪⎪⎭ dl.
(6.18)
6.3.6 Derivada em relacao a v sob discretizacao por splines cubicas
(1D e 2D)
Veja-se primeiramente o caso 1D. No topico 2.4.7 foi descrita a representacao
do campo de velocidade por splines cubicas. Observou-se entao que a equacao 2.10
representa a funcao velocidade em um determinado subdomınio (x j, x j+1). De acordo com
as deducoes apresentadas, para a interpolacao por splines devem ser calculados quatro
coeficientes por subdomınio, Aj0, Aj1, Aj2 e Aj3, atraves das equacoes 2.11, 2.12, 2.13 e
2.14, respectivamente.
Analisando as quatro equacoes, 2.11, 2.12, 2.13 e 2.14, observa-se que o coeficiente
Aj0 e a propria velocidade v j em um determinado no do subdomınio. Adicionalmente,
nota-se que os coeficientes Aj1 e Aj2 sao dependentes das velocidades nos nos c j e c j+1,
e o coeficiente Aj1 e calculado de forma independente, pois e funcao somente de k j. Em
funcao dessas observacoes advoga-se que o coeficiente Aj0 e suficiente para descrever
90

as splines por subdomınio. Em outras palavras, a construcao da matriz de sensibilidade
em um modelo descrito por spline cubica 1D, e feito por meio da derivada do tempo de
transito em relacao a velocidade Aj0 no no da spline.
Assim, deduz-se que a derivada do tempo de transito em relacao a velocidade no
subdomınio j e calculada por:
∂g∂v j= −
∫l
{1
v2
[1 − (x − x j)
2 3
h2x+ (x − x j)
3 2
h3x
]}dl. (6.19)
Analogmanente, com as devidas substituicoes em funcao do acrescimo de outra di-
mensao, deduz-se a derivada do tempo em relacao a velocidade do no para o caso 2D por:
∂g∂vi, j
= −∫
l
{1
v2
[1 − (x − x j)
2(z − zi)2 3
h2xh2
z+ (x − x j)
3(z − zi)3 2
h3xh3
z
]}dl, (6.20)
onde hx corresponde ao espacamento entre os nos na direcao x e hz corresponde ao
espacamento entre os nos na direcao z.
6.3.7 Derivada em relacao a v sob discretizacao camada a camada
Este tipo de representacao demanda a existencia de camadas individualizaveis e
o conhecimento dos seus limites. Qualquer uma das funcoes apresentadas pode ser em-
pregada para caracterizar as derivadas em relacao aos parametros de velocidade em uma
camada.
Considerando que uma camada i e discretizada pelas equacoes 2.22, 2.23 ou 2.24,
somente dois parametros sao necessarios para descreve-las: uma velocidade de referencia
v0,i e um gradiente Bi. Como citado na secao 2.7, as equacoes 2.22, 2.23 e 2.24 cons-
tituem variacoes da equacao 2.18 (Kabir, 1997), onde a profundidade de referencia e
substituıda por uma interface de referencia nao necessariamente horizontal. As interfaces
de referencia das equacoes 2.22, 2.23 e 2.24 sao respectivamente o topo, o centro e base
da camada.
Considerando-se que a interface de referencia e igual ao topo do estrato, as derivadas
em relacao a v0,i e Bi sao dados pelas equacoes a seguir:
∂v∂v0,i
= 1, (6.21)
∂v∂Bi= [ztopo,i(x) − z], (6.22)
91

onde ztopo,i(x) e a profundidade do topo da camada para cada posicao x.
De forma semelhante, considerando a profundidade de referencia como o centro da
camada - discretizacao utilizando a equacao 2.23 - as derivadas parciais em relacao a v0,i
e Bi sao dadas por:
∂v∂v0,i
= 1, (6.23)
∂v∂Bi= [zc,i(x) − z], (6.24)
onde zc,i(x) e a profundidade do centro da camada para cada posicao x.
Finalmente, as derivadas em relacao a v0,i e Bi para camadas descritas pela equacao
2.24, onde a interface de referencia e a base do estrato, sao:
∂v∂v0,i
= 1, (6.25)
∂v∂Bi= [zbase,i(x) − z]. (6.26)
onde zbase,i(x) e a profundidade da base da camada para cada posicao x.
Assim, a derivada do tempo de transito em relacao aos parametros v0,i e Bi e alcancada
pelas equacoes∂g∂v0,i
= −∫
l
{1
v2
}dl, (6.27)
∂g∂v0,i
= −∫
l
{1
v2
[zre f ,i(x) − z
]}dl, (6.28)
onde zre f ,i(x) e a profundidade de referencia podendo ser ztopo,i(x), zc,i(x) ou zbase,i(x).
6.4 Consideracoes sobre a abertura dos operadores fo-
cais
A influencia da abertura dos operadores no resultado da inversao pode ser avaliada
qualitativamente a luz do Teorema da Projecao de Fatias (Projection slice theorem) resu-
mido na secao 4.4. Por este teorema descreve-se o experimento a seguir: varios pontos
difratores foram posicionados na profundidade de 1000 m e, ao longo da superfıcie, re-
ceptores foram distribuıdos com aberturas de 20000, 2000, 1000 e 200 m. O ponto sujeito
92
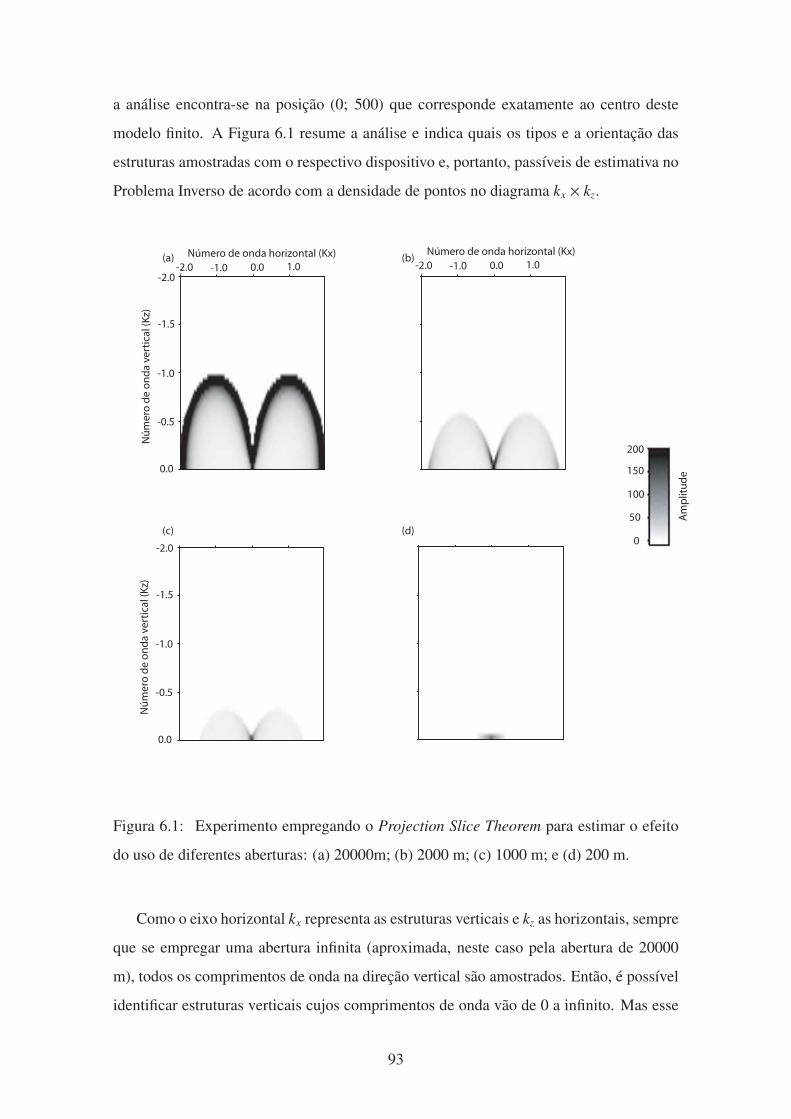
a analise encontra-se na posicao (0; 500) que corresponde exatamente ao centro deste
modelo finito. A Figura 6.1 resume a analise e indica quais os tipos e a orientacao das
estruturas amostradas com o respectivo dispositivo e, portanto, passıveis de estimativa no
Problema Inverso de acordo com a densidade de pontos no diagrama kx × kz.
Figura 6.1: Experimento empregando o Projection Slice Theorem para estimar o efeito
do uso de diferentes aberturas: (a) 20000m; (b) 2000 m; (c) 1000 m; e (d) 200 m.
Como o eixo horizontal kx representa as estruturas verticais e kz as horizontais, sempre
que se empregar uma abertura infinita (aproximada, neste caso pela abertura de 20000
m), todos os comprimentos de onda na direcao vertical sao amostrados. Entao, e possıvel
identificar estruturas verticais cujos comprimentos de onda vao de 0 a infinito. Mas esse
93
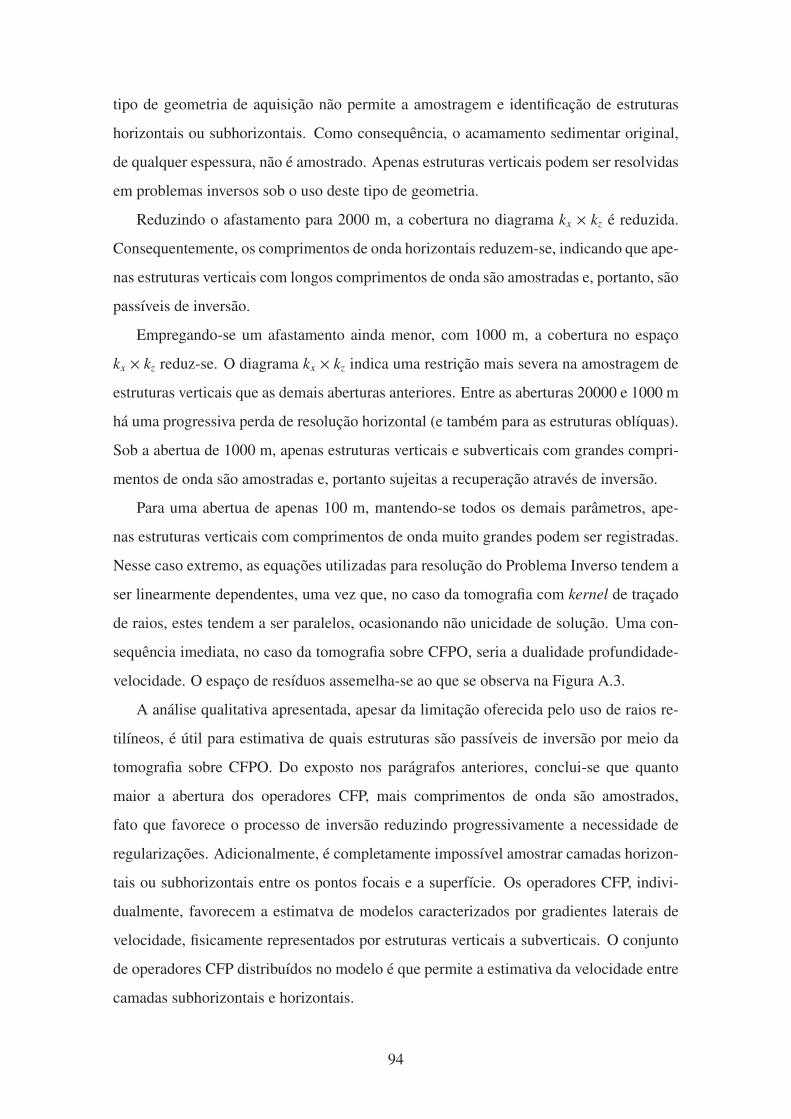
tipo de geometria de aquisicao nao permite a amostragem e identificacao de estruturas
horizontais ou subhorizontais. Como consequencia, o acamamento sedimentar original,
de qualquer espessura, nao e amostrado. Apenas estruturas verticais podem ser resolvidas
em problemas inversos sob o uso deste tipo de geometria.
Reduzindo o afastamento para 2000 m, a cobertura no diagrama kx × kz e reduzida.
Consequentemente, os comprimentos de onda horizontais reduzem-se, indicando que ape-
nas estruturas verticais com longos comprimentos de onda sao amostradas e, portanto, sao
passıveis de inversao.
Empregando-se um afastamento ainda menor, com 1000 m, a cobertura no espaco
kx × kz reduz-se. O diagrama kx × kz indica uma restricao mais severa na amostragem de
estruturas verticais que as demais aberturas anteriores. Entre as aberturas 20000 e 1000 m
ha uma progressiva perda de resolucao horizontal (e tambem para as estruturas oblıquas).
Sob a abertua de 1000 m, apenas estruturas verticais e subverticais com grandes compri-
mentos de onda sao amostradas e, portanto sujeitas a recuperacao atraves de inversao.
Para uma abertua de apenas 100 m, mantendo-se todos os demais parametros, ape-
nas estruturas verticais com comprimentos de onda muito grandes podem ser registradas.
Nesse caso extremo, as equacoes utilizadas para resolucao do Problema Inverso tendem a
ser linearmente dependentes, uma vez que, no caso da tomografia com kernel de tracado
de raios, estes tendem a ser paralelos, ocasionando nao unicidade de solucao. Uma con-
sequencia imediata, no caso da tomografia sobre CFPO, seria a dualidade profundidade-
velocidade. O espaco de resıduos assemelha-se ao que se observa na Figura A.3.
A analise qualitativa apresentada, apesar da limitacao oferecida pelo uso de raios re-
tilıneos, e util para estimativa de quais estruturas sao passıveis de inversao por meio da
tomografia sobre CFPO. Do exposto nos paragrafos anteriores, conclui-se que quanto
maior a abertura dos operadores CFP, mais comprimentos de onda sao amostrados,
fato que favorece o processo de inversao reduzindo progressivamente a necessidade de
regularizacoes. Adicionalmente, e completamente impossıvel amostrar camadas horizon-
tais ou subhorizontais entre os pontos focais e a superfıcie. Os operadores CFP, indivi-
dualmente, favorecem a estimatva de modelos caracterizados por gradientes laterais de
velocidade, fisicamente representados por estruturas verticais a subverticais. O conjunto
de operadores CFP distribuıdos no modelo e que permite a estimativa da velocidade entre
camadas subhorizontais e horizontais.
94

6.5 Consideracoes sobre a abordagem do problema in-
verso - inversao global ou camada a camada
A partir dos dados de tempo de transito dos operadores CFP ha duas abordagens
para resolucao da equacao 1.2 iterativamente. Uma delas, referida como inversao global
em Soares Filho (1994), considera todo o conjunto de dados D e computa a inversao para
estimativa das propriedades de todo o modelo m. Essa abordagem e seguida em Cox
(2004).
Uma segunda abordagem consiste em dividir o modelo em subdomınios e perfazer
a inversao somente com o conjunto de dados relativos aquele subdomınio. No meio se-
dimentar, o subdomınio e caracterizado por camadas e assim essa inversao e nomeada
camada a camada (layer-stripping). Neste sentido, os operadores CFPs que definem a
base da primeira camada sao empregados para estimar o campo de velocidades desta e a
geometria de sua base. Em seguida, os operadores CFPs que definem a base da segunda
camada sofrem processo identico aos da primeira. Este procedimento e repetido ate que
se atinja a base da camada mais profunda. A tecnica de inversao camada a camada e
ilustrada em Kabir (1997). Em Hegge (2000), o modelo e discretizado por camadas mas
a inversao e realizada globalmente.
Nesta secao, as inversoes global e camada a camada sao comparadas. Os dados de
entrada foram gerados sobre o modelo diapiro ilustrado na Figura 6.2. Esse modelo exibe
complexidades estruturais, mormente nos flancos do diapiro cujos mergulhos sao de 60 o.
Os operadores CFPs foram obtidos a partir da modelagem por tracado de raios de pontos
focais distribuıdos ao longo das cinco superfıcies que limitam as camadas do modelo
diapiro.
Para a inversao global, empregou-se a discretizacao por splines cubicas 2D, aquela
apontada como sendo a melhor dentre funcoes testadas na secao 2.4. Cinco nos sao uti-
lizados na direcao horizontal e cinco na vertical, totalizando 25 nos na malha regular de
spline. Para a inversao camada a camada, o modelo foi dividido em cinco camadas, e,
em cada estrato empregou-se uma discretizacao intracamada por spline 1D com cinco nos
igualmente espacados. Pela discretizacao com o campo de velocidade variando lateral-
mente, cada camada apresenta a melhor forma de discretizacao de acordo com os estudos
PST constante nas secoes 4.4 e 6.4.
95

Figura 6.2: Modelo original (modelo diapiro). Os losangos em cada interface repre-
sentam os pontos focais.
Para a inversao global, o modelo inicial e homogeneo com todas as interfaces horizon-
tais, tal como ilustrado na Figura 6.3. Nao foram empregadas restricoes na equacao de in-
versao 4.46, assim foram aplicados b = 1. O fator de escala adequado foi Ω = 0.01. Com
os parametros citados, depois de 24 iteracoes o sistema convergiu para um resıduo igual
a 0.00601 s e o modelo resultante encontra-se na Figura 6.4. O erro total (equacao 2.20)
observado com este modelo foi de 9.0808e+08 km/s e o Indice de Incoerencia Geologica
(IIG) e igual a 22.00, enquanto o modelo original apresenta IIG igual a 6.45.
Para inversao camada a camada foi empregado um campo de velocidade homogeneo
de 1500 m/s para a primeira camada e a sua base foi estimada, a priori, como estando
a 400 m de profundidade. Depois da obtencao da velocidade em cada camada, a media
destas e utilizada para estimar a velocidade a priori da camada imediatamente abaixo. A
equacao 4.46 foi empregada utilizando-se Ω variando de 0.08 a 0.1 para cada camada.
Nao foram empregadas restricoes. Foram necessarias 5, 6, 10, 6 e 17 iteracoes para as ca-
madas 1, 2, 3, 4 e 5 respectivamente para convergencia que resultou no modelo na Figura
96

Figura 6.3: Modelo inicial para inversao global. Os losangos em cada interface repre-
sentam os pontos focais no modelo a priori.
Figura 6.4: Modelo final para inversao global apos 24 iteracoes. Os losangos em cada
interface representam os pontos focais estimados com a inversao.
97

6.5. Os resıduos relativos para cada camada 1, 2, 3, 4 e 5 sao 0.00119491, 0.0010786,
0.00258387, 0.00216280 e 0.00398514 s respectivamente. O erro total (equacao 2.20) e
igual a 4.4853e+10 m/s e o IIG e 66.70.
Figura 6.5: Modelo final para inversao camada a camada. Os losangos em cada inter-
face representam os pontos focais estimados com a inversao.
A abordagem de inversao global proporcionou erros e resıduos altos. O IIG indica alta
coerencia, mas este fato se deve a um modelo caracterizado por interfaces subhorizontais e
gradientes de velocidade verticais. Essa relacao entre estruturas e gradiente de velocidade
se aproxima do acamamento original que denota alta coerencia geologica. Contudo, a alta
coerencia ocorrendo com altos erros e resıduos tornam o resultado da inversao inaceitavel.
Uma das premissas citadas na secao 4.3.3 como necessaria para solucao do Problema
Inverso pelo metodo dos gradientes nao e honrada, uma vez que o modelo a priori esta
muito longe da solucao. Esta solucao esta longe da regiao da funcao objetivo que pode
ser aproximada por uma funcao quadratica.
A inversao camada a camada forneceu erro e resıduo menores que aqueles obtidos
com a inversao global. O resıduo tendeu a crescer da camada mais rasa para a camada
mais profunda, caracterıstica esperada para a inversao camada a camada. O alto ındice de
incoerencia geologica indica que, a despeito do baixo resıduo, o modelo resultante nao e
realıstico. Trata-se de um bom modelo cinematicamente equivalente (MCE) e, portanto,
98

pode ser empregado para migracao de dados sısmicos, mas nenhuma outra informacao
dinamica pode ser extraıda dele. O seu emprego como modelo inicial em um processo de
inversao total do campo de ondas pode causar convergencia para mınimos locais.
6.6 Procedimento para estimativa do melhor MCE com
baixo IIG: tomografia sequencial
Sob condicoes iniciais similares, a abordagem camada a camada discutida no topico
anterior forneceu melhores resultados estruturais que a inversao global. A primeira e mais
estavel, uma vez que o espaco de dados e dedicado para cada camada e essa discretizacao
mostra-se mais adequada ao tipo de dispositivo de aquisicao. Para melhorar os resul-
tados da inversao, reduzindo-se o IIG e o resıduo, propoe-se um fluxo de trabalho que
envolve a inversao tomografica sequencial (ITS). Pela ITS, a abordagem de inversao ca-
mada a camada com parametrizacao das camadas por splines 1D e realizada no primeiro
estagio deste fluxo. Em seguida, os resultados estruturais e de velocidade obtidos no
primeiro estagio sao empregados em um segundo estagio de inversao utilizando-se nova
parametrizacao.
Nos dois exemplos a seguir, as inversoes tomograficas global e camada da camada sao
empregadas nesse segundo estagio, e os modelos de entrada para ambas e o resultado da
inversao camada a camada descrito na secao anterior (Figura 6.5). Para o exemplo A, a
equacao 2.22 e utilizada para representar o campo de velocidade na abordagem camada
a camada. No exemplo B, utiliza-se a mesma parametrizacao por spline 2D descrita na
secao anterior.
No exemplo A, a inversao convergiu para o modelo da Figura 6.6 depois de 22
iteracoes apresentando resıduos de 0.00110168, 0.000997521, 0.00287459, 0.00216722 e
0.00187692 s para as camadas 1, 2, 3, 4 e 5 respectivamente. O erro total (equacao 2.20) e
igual a 3.05589e+10 m/s e o IIG e 24.22. Durante as iteracoes as principais modificacoes
no modelo ocorreram no campo de velocidade.
No exemplo B, depois de 14 iteracoes, a inversao convergiu para um resıduo de
0.001712 s, um erro total (equacao 2.20) de 2.45407e+10 m/s e um IIG de 21.55. Du-
rante as iteracoes, o modelo estrutural sofreu poucas alteracoes, em oposicao ao campo
de velocidade, que foi alterado severamente (Figura 6.7).
99

Figura 6.6: Modelo final estimado com a abordagem camada a camada utilizando-se
a equacao 2.22, topo-concordante, para representar cada camada. O modelo a priori
empregado foi o resultado da inversao camada a camada presente na Figura 6.5. Os
losangos em cada interface representam os pontos focais estimados com a inversao.
Figura 6.7: Modelo final estimado com a inversao global empregando-se como modelo
a priori o resultado da inversao camada a camada presente na Figura 6.5. Os losangos
em cada interface representam os pontos focais estimados com a inversao.
100

Esse procedimento de inversao sequencial utiliza as melhores propriedades de cada
tecnica de inversao e parametrizacao no estagio mais adequado de conhecimento do mo-
delo. No primeiro estagio desse fluxo, quando nao ha qualquer conhecimento acerca
do modelo, o espaco de dados e reduzido (em concordancia com as camadas) e assim ,
estima-se um modelo cinematicamente equivalente. Neste estagio a parametrizacao das
camadas por splines 1D deve ser utilizada. Esta parametrizacao e o melhor meio de repre-
sentar o modelo de acordo com a geometria dos dados de entrada, operadores CFP (vide
secao 6.4). Assim o processo de inversao e mais estavel, nao necessita de regularizacoes,
e disponibiliza resultados acurados do ponto de vista estrutural (Figura 6.5).
Em seguida, adotando parametrizacao compatıvel com o comportamento geologico
dominante, efetua-se novo estagio de inversao. Na abordagem por camadas, foi empre-
gada a equacao 2.22 para descrever cada uma das camadas, que consiste em uma forma
de estabilizacao via parametrizacao do modelo (topico 4.5.1).
Na abordagem global tambem se observam os benefıcios da inversao sequencial. Em
funcao da estimativa do aracabouco estrutural e do comportamento cinematico, o modelo
de entrada tende a estar proximo da solucao e, por isso, as chances de convergencia para
um mınimo local sao reduzidas.
Ambos os metodos, camada a camada e global, disponibilizaram resultados com-
patıveis quando usados no segundo estagio da inversao uma vez que resıduos, erros e
Indice de Incoerencia Geologica foram reduzidos em comparacao com o primeiro estagio
da inversao. Contudo, como o IIG do modelo real e 6.45, observa-se pequena vantagem
da abordagem global para os experimentos realizados, como mostra a Tabela 6.1.
101

Modelo Erro (m/s) Resıduo (s) Convergencia IIG Ω
modelo diapiro (original) 0.00 1.00 × 10−7 1 6.45 1.00
inversao global 9.08081 × 10+11 0.00601815 22 22.00 0.10
inversao camada a camada 4.48534 × 10+10 ly 1: 0.00119491 5 66.70 0.10
discretizado por spline 1D ly 2: 0.00107860 6 0.10
ly 3: 0.00258387 10 0.10
ly 4: 0.00216280 6 0.10
ly 5: 0.00398514 17 0.08
inversao camada a camada 3.05589 × 10+10 ly 1: 0.00110168 2 24.22 0.10
sequencial discretizado no ly 2: 0.00099752 3 0.05
segundo passo por modelo ly 3: 0.00287459 5 0.01
topo-concordante ly 4: 0.00216722 10 0.10
ly 5: 0.00187692 2 0.01
inversao sequencial 2.45471 × 10+10 0.00171291 14 21.55 0.10
discretizado no segundo
passo por spline 2D global
Tabela 6.1: Comparacao do erro total, resıduo, convergencia, IIG e Omega para cada
procedimento de inversao. Na coluna dedicada a resıduo, ly significa camada. O IIG foi
calculado entre as amostras verticais 200 e 1700 dos modelos. Vide texto para detalhes
adicionais.
102

6.7 Aplicacoes
Neste topico sao apresentadas aplicacoes da tomografia baseada em operadores
CFP obrtidos com difracoes.
6.7.1 Inversao tomografica baseada em operadores CFP e DCFP -
dados sinteticos
O modelo empregado para os dois experimentos a seguir representa uma regiao
governada por tectonica compressiva. Feicoes tectonicas rasas e detachment basal sao
observados ao longo de 12 km de secao. A secao de afastamento nulo desta regiao (Figura
6.8) exibe feicoes suavemente deformadas nas extremidades esquerda e direita, e uma area
de deformacao mais intensa na regiao central.
Em ambos os experimentos foi empregada a inversao camada a camada pois os ope-
radores estao presentes ao longo das interfaces, o que permite este procedimento. Do
topo para a base do modelo, o campo de velocidade e a base da camada sao calculados
para cada camada ate que a interface mais profunda com dados de operadores CFPs dis-
ponıveis (neste exemplo, a base da camada 4) e alcancada. Nenhuma restricao ou vınculo
e aplicado, entao os termos da diagonal da matriz B sao todos iguais a 1,0 (equacao 4.46).
Os passos das iteracoes foram ajustados adequadamente com Ω igual a 2,0 na equacao
4.46.
Devido aos altos contrastes de velocidade, e porque o kernel da inversao e baseado em
tracado de raios, uma suavizacao de 31 x 31 amostras e aplicada em ambos os experimen-
tos. Um benefıcio secundario dessa suavizacao e o fato de ela evitar o emprego direto da
lei de Snell nas interfaces (Hegge, 2000).
Para o experimento 1, os espaco de dados contem os tempos de transito (as linhas
brancas tracejadas na Figura 6.8); no experimento 2, os tempos de transito dos operado-
res DCFP sao adicionados ao espaco de dados (linhas brancas contınuas na Figura 6.8).
O espaco de modelos de ambos os experimentos consiste de camadas com velocidades
constantes e coordenadas dos pontos focais (x,z). O modelo a priori contem CFPs posi-
cionados horizontalmente ao longo da base das camadas nas profundidades de 1000 m,
1600 m, 2450 m e 3300 m. Os modelos a priori de velocidades da primeira (topo) para a
quarta (mais profunda) camada foram 1500 m/s, 1500 m/s, 1800 m/s e 2400 m/s.
103

Figura 6.8: Overlay da secao de afastamento nulo com operadores CFP convencio-
nais (linhas brancas tracejadas) e operadores CFP obtidos por difracoes (linhas brancas
contınuas). O sismograma esta com tempo simples para comportar os CFPOs. Os ar-
tefatos de modelagem nas bordas (as quatro curvas hiperbolicas cujos apices estao nos
tempos de 0.65 s, 1.05 s, 1.45 s and 1.80 s) a esquerda e a direita nao sao consideradas na
analise.
104

O resıduo medio aceitavel para o tempo de transito em cada camada foi ajustado para
0.6 ms; os resıduos medios sao calculados a partir dos CFPOs observados e calculados,
equacao 4.6, e divididos pelo numero de registros. No experimento 1, nao mais que 4
iteracoes sao necessarias para encontrar a convergencia em 0.6 ms (Figura 6.9a), esti-
mando, portanto, a velocidade e a posicao dos CFPs. A Figura 6.10a exibe um overlay do
modelo de velocidade real e as interfaces (estruturas) estimadas. As velocidades e estru-
turas sao apresentadas conjuntamente na Figura 6.10b. O erro medio da velocidade por
ponto, calculado por
e =1
M
∣∣∣vobs − vcalc∣∣∣ , (6.29)
e 0.038 m/s. M e a dimensao do modelo, vobs e o modelo real e vcalc o modelo de veloci-
dade estimado.
No experimento 2, os processos de inversao, parametrizacao e tolerancia para
o resıduo empregadas sao os mesmos empregados no experimento 1, contudo as
informacoes carreadas pelas difracoes (Figura 6.8) sao tambem empregadas, correspon-
dendo, portanto a um espaco de dados mais completo. Um importante passo consiste em
mesclar os operadores convencionais CFP e os oriundos de difracoes, ordenando-os se-
gundo sua distribuicao, neste caso da esquerda para a direita. Para tanto, a posicao inicial
do difrator no eixo x e estimada a partir da coordenada x do apice do operador. Esse
procedimento permite uma melhor estimativa e interpolacao do horizonte falhado durante
a inversao.
O comportamento da convergencia do experimento 2 esta registrado na Figura 6.9b.
O emprego dos DCFPOs aumenta a resolucao estrutural (Figura 6.10c) e disponibiliza um
modelo final mais proximo do real (Figura 6.10d). O erro calculado com a equacao 6.29
e 0.035 m/s.
105

0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
11019876543210
rebmun noitaretI
Re
sid
ua
l (m
s)
4 reyal3 reyal2 reyal
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0.01
019876543210
rebmun noitaretI
Resid
ual
(ms)
4 reyal3 reyal2 reyal
Figura 6.9: (a) Resıduo a cada iteracao do experimento 1 para os dados sinteticos. (b)
Resıduo a cada iteracao do experimento 2 para os dados sinteticos.
106
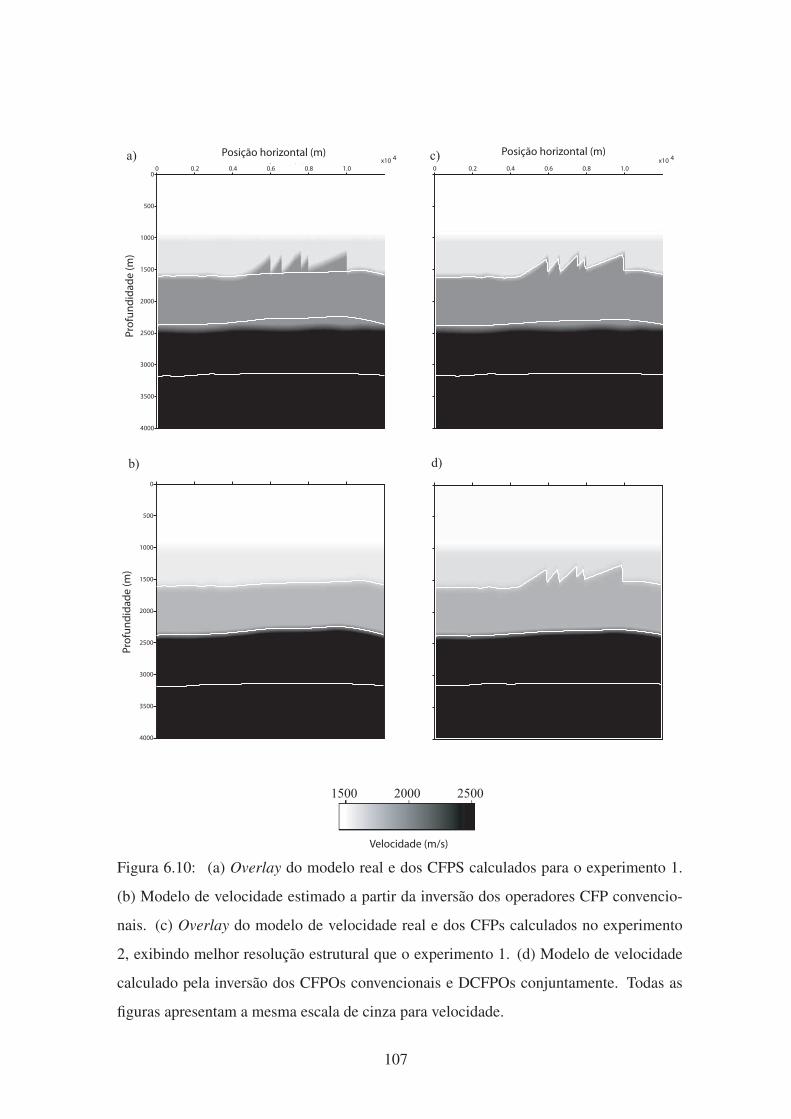
a) c)
b) d)
1500 2000 2500
Velocity (m/s)
Figura 6.10: (a) Overlay do modelo real e dos CFPS calculados para o experimento 1.
(b) Modelo de velocidade estimado a partir da inversao dos operadores CFP convencio-
nais. (c) Overlay do modelo de velocidade real e dos CFPs calculados no experimento
2, exibindo melhor resolucao estrutural que o experimento 1. (d) Modelo de velocidade
calculado pela inversao dos CFPOs convencionais e DCFPOs conjuntamente. Todas as
figuras apresentam a mesma escala de cinza para velocidade.
107

Figura 6.11: Linha sısmica 09 e pocos em Blake Ridge.
6.7.2 Inversao tomografica baseada em operadores DCFP - dados
sısmicos monocanal
O segundo exemplo de aplicacao da tomografia sobre Operadores Focais de Difracao
(DCFPO) e realizado em um segmento de 60 km de um perfil sısmico monocanal com
direcao SW-NE e levantado em Blake Ridge (costa leste dos Estados Unidos da America)
pelo United States Geological Survey (USGS) (Taylor et al., 1999) (Figura 6.11). Esse
perfil foi escolhido por ser rico em difracoes comparado aos demais perfis presentes na
regiao.
O perfil foi adquirido com afastamento fonte-receptor (offset) constante de 10 m, e
amostragem temporal de 2 ms (Taylor et al., 1999). Para o estudo de velocidades, foi
empregado o perfil nao migrado. A linha teve seus 4136 tracos equiespacados. Com base
no espacamento fonte-receptor e nos ensaios constantes na Tabela 5.1, considerou-se o
afastamento igual a zero.
O processamento dos dados incluiu filtragem preditiva para determinacao da wavelet,
108

Figura 6.12: Linha sısmica 09 em tempo simples e as curvas de difracao mapeadas (linhas
brancas).
filtragem passa-banda (8-110 Hz) e correcao para o espalhamento geometrico.
Para realcar os eventos nao especulares, as reflexoes rasas coerentes foram atenuadas
do perfil processado empregando-se a tecnica apresentada por Cao e McMechan (2010)
para eliminacao de multiplas, aplicada, contudo, para remocao de reflexoes especulares.
Utilizando as secoes processadas com e sem reflexoes, todas as difracoes pontuais foram
identificadas. Durante o mapeamento alguns eventos foram omitidos devido aos seus
elevados raios de curvatura. A abertura horizontal dos DCFPOs na superfıcie variou
entre 1800 e 2300 m. Essas aberturas sao largas o suficiente para permitir que muitos
dos operadores DCFP apresentem redundancia com seus pares adjacentes e, portanto,
reduzam as ambiguidades velocidade-profundidade (Figura 6.12).
O modelo e discretizado por splines cubica 2D, e a inversao global foi empregada.
Esta abordagem global se mostra mais adequada, pois as difracoes encontram-se espalha-
das e nao definem interfaces ou superfıcies como na aplicacao sintetica 1. No modelo a
109

priori, a velocidade da agua de 1500 m/s (Klitgord e Schneider, 1994) e empregada para
a parcela do modelo acima do fundo do mar. Um polinomino de ordem 5
v(x,Δz) =
5∑i=0
Ci(Δz)i, (6.30)
referenciado ao fundo do mar v(x,Δz), variando de 1550 a 1750 m/s (Carmichael, 1982),
e aplicado para a pilha sedimentar simulando os efeitos combinados da compactacao e da
zona de hidratos. Os coeficientes Ci foram calculados por regressao aplicada a media das
velocidades extraıdas dos pocos 994, 995 and 997 (Paull et al., 2000; Lu and McMechan,
2002) que distam de 9 a 11 km da linha 09. Os coeficientes C0, C1, C2, C3, C4 e C5
sao respectivamente 1516.19, 1.64838e-01, -1.24340e-02, 2.15813e-03, -5.59170e-05 e
3.92534e-07; Δz e a profundidade em metros a partir do fundo do mar para a posicao x.
Trata-se de um modelo topo-concordante (vide secao 2.7) empregando um polinomio de
ordem superior.
Durante a inversao, a coluna d’agua foi restrita pela aplicacao de zeros nos elementos
correspondentes na matriz B na equacao 4.46. O passo foi ajustado com Ω−1 igual a 0.2.
A Figura 6.13 apresenta a evolucao dos modelos desde a primeira iteracao ate o modelo
final. Apos 28 iteracoes, a inversao convergiu para um resıduo medio de 0.298 ms (Figura
6.14) e disponibilizando o modelo de velocidade das Figuras 6.13h e 6.15b.
6.8 Discussao sobre as aplicacoes
Para ambos os experimentos com dados sinteticos, nao mais que quatro iteracoes fo-
ram necessarias para se atingir a convergencia em cada camada. O erro observado no
campo de velocidades no experimento 1 e superior ao observado no experimento 2 de-
vido a ausencia de informacao em 1, exatamente onde ha mudancas abruptas no modelo
(Figuras 6.8 e 6.10a).
No experimento 1, as estruturas estimadas por inversao localizadas na base da camada
2 sao muito suaves (Figure 6.10a). O experimento 2 estima melhor a posicao dos pon-
tos focais (CFPs) de forma que a posicao do refletor esta bastante proxima ao modelo
real (Figure 6.10c). Isto ocorre porque os operadores CFPs obtidos convencionalmente e
pelas difracoes adicionam informacao independente ao sistema de inversao. Em ambos
110

Fig
ura
6.1
3:
Evolu
cao
da
inver
sao
des
de
om
odel
oa
prio
riat
eo
model
ofi
nal
refe
rente
aos
dad
os
de
Bla
ke
Rid
ge.
Aes
cala
de
vel
oci
dad
eem
m/s
ea
mes
ma
par
ato
dos
os
model
os.
(a)
Model
oa
prio
ri;
(b)
quar
tait
erac
ao;
(c)
oit
ava
iter
acao
;(d
)d
ecim
ase
gunda
iter
acao
;(e
)dec
ima
sexta
iter
acao
;(f
)vig
esim
ait
erac
ao;
(g)
vig
esim
aquar
tait
erac
ao;
(h)
vig
esim
aoit
ava
iter
acao
.
111

0.25
0.30
0.35
0.40
0.45
0.50
0 5 10 15 20 25
Iteration number
Resid
ual
(ms)
Figura 6.14: Resıduos da inversao tomografica dos dados monocanal de Blake Ridge.
os experimentos observa-se que a velocidade calculada e inferior ao modelo real. Este
fato e explicado pela abordagem de inversao camada a camada. Este tipo de inversao
tende a propagar o erro encontrado nas camadas rasas para estimativa das camadas mais
profundas.
Devido a inacuracia inerente ao mapeamento das reflexoes e difracoes e a baixa
frequencia dominante dos registros sısmicos (25 Hz), todos os COGs com afastamentos
entre 0 e 60 m geraram curvas de difracao similares. A equacao 5.21 deve ser empre-
gada para minimizar os erros na estimativa das coordenadas horizontais quando forem
empregados afastamentos superiores a 60 m.
Os resultados da inversao tomografica sobre DCFPO com os dados de campo de Blake
Ridge foram comparados com os resultados da inversao tomografica de Tinivella e Lodolo
(2000). Neste trabalho os autores empregam duas linhas sısmicas multicanal localizadas
a leste da linha 09. A secao sısmica na Figura 6.12 foi convertida para profundidade e tres
reflexoes foram interpretadas dentro da pilha sedimentar: HZA, HZB e BSR (o bottom
simulating reflector) (Figuras 6.15a e 6.15b). HZA e BSR correspondem aos horizontes
2 e 3 de Tinivella e Lodolo (2000).
Ao longo do flanco da estrutura, o campo de velocidades e paralelo a geometria dos
112

Velo
city
(m/s
)
b)a)
IVIV
V
994 995 997⊗ ⊗ ⊗
I
IIII
IIIIII
IVIVI
IIII
IIIIII
V
IVIV
V
Figura 6.15: (a) Secao sısmica (linha 09) convertida para profundidade com as velocidades
calculadas durante a inversao. Abaixo do fundo do mar ha tres horizontes interpretados,
com linhas pretas, HZA, HZB e BSR (o bottom simulating reflector (BSR) sobre a zona
de gas). Os cırculos brancos constituem as posicoes dos difratores determinadas durante
a inversao dos DCFPOs. (b) Secao composta contendo o resultado da inversao sobre os
DCFPOs da linha 09 e as velocidades projetadas dos pocos 994, 995 e 997 da esquerda
(SW) para a direita (NE). Todas as interpretacoes estao repetidas em ambas as Figuras (a)
e (b). A legenda do campo de velocidade e valida somente para (b). A zona hachurada
na base representa a regiao nao invertida por ausencia de dados. No texto encontram-se as
observacoes sobre os algarismos I, II, III, IV e V.
113

refletores entre o fundo do mar e o horizonte HZA, contudo observam-se gradientes la-
terais (em I na Figura 6.15b). Abaixo da posicao apical do fundo do mar, HZA cruza
velocidades mais baixas que as dominantes naquela posicao (em II na Figura 6.15b) que
se correlacionam com uma visıvel perturbacao das reflexoes (Figura 6.15a) e com algum
deslocamento no fundo do mar (vide um pequeno monte no apice da topografia subma-
rina na Figura 6.15a). As velocidades estimadas entre o fundo do mar e o horizonte HZA
foram um pouco mais baixas do que aquelas encontradas em Tinivella e Lodolo (2000).
Abaixo do horizonte HZB, as velocidades variam entre 1650 to 1750 m/s (Figura
6.15b). Guerrin et al. (1999) interpreta essas velocidades como causadas pela presenca de
hidratos de metano cimentando os espacos intergranulares, e assim elevando os modulos
elasticos dos sedimentos hospedeiros. Abaixo do HZB, entre as posicoes 0 e 20 km
existe uma zona com altas velocidades (III na Figura 6.15b) que aparece na secao sısmica
convertida em profundidade (Figura 6.15a) como uma sismofacie homogenea delimitada
por nıveis concordantes, com reflexoes nao especulares no topo e na base. Uma zona
de alta velocidade (em IV na Figura 6.15b) e observada abaixo do apice da topografia
do fundo do mar em profundidades situadas entre HZB e BSR. A proximidade do apice
promove uma maior disponibilidade de metano e, portanto, favorece uma concentracao
maior de hidratos na zona de estabilidade da hidratos de gas (Gas hydrate Stability Zone
- GHSZ), aumentando a velocidade.
Nao foi possıvel identificar a zona de baixa velocidade associada ao apice do BSR,
indicado pela alta amplitude negativa (em V nas Figuras 6.15a e b), e associada a um inter-
valo de gas livre no poco 997. Tinivella e Lodolo (2000), empregando uma discretizacao
camada a camada, subestimam a espessura da camada com gas livre em um terco me-
nos que aquela estimada por meio de dados de perfis sısmicos verticais (Vertical Seis-
mic Profile (VSP)). Os DCFPO disponıveis e a discretizacao por splines nao apresentam
resolucao suficiente para identificar esse intervalo. De acordo com Guerrin et al. (1999)
o BSR marca o topo da ocorrencia de gas livre, nao a base da GHSZ. Entao, abaixo do
BSR gas livre deve coexistir com hidratos. Assim, a velocidade estimada e uma media
das altas velocidades dos sedimentos portadores de hidratos com as baixas velocidades
dos sedimentos contendo gas livre.
A inversao realizada por Tinivella e Lodolo (2000) esta limitada ao horizonte 4, o mais
profundo mapeado pelos autores, e situado logo abaixo do BSR. Empregando as difracoes
114

disponıveis foi possıvel investigar uma regiao mais profunda que aquela estudada em Ti-
nivella e Lodolo (2000). Nesse sentido, a tomografia DCFPO e a tomografia por reflexao
em dados multicanal sao complementares.
115

Capıtulo 7
Discussao e conclusoes
7.1 Discussao final
Nesta tese e proposto o Indice de Coerencia Geologica (IIG) que mede a con-
sistencia entre as interfaces das camadas e o gradiente de velocidade. O IIG e util para am-
bientes sedimentares e pode ser incorporado como uma ferramenta de restricao e analise
dos resultados de inversao.
Dentre as funcoes polinomial, gaussiana, harmonica, exponencial, logarıtimca e spline
2D, esta ultima e a mais indicada para representacao de modelos contınuos 2D, de acordo
com os modelos analisados.
O conceito de Modelos Cinematicamente Equivalentes (MCE) e proposto para referir-
se a ambiguidades de modelos obtidos em inversoes tomograficas cujos dados sao tempos
de transito.
Os principais metodos de inversao baseados em gradientes da funcao objetivo foram
descritos.
A influencia da abertura do dispositivo de aquisicao sob o contexto PST (Projection
slice theorem) e estudado para avaliar a necessidade de regularizacoes.
Na parte dedicada a regularizacao, mostrou-se que esta se aplica na parametrizacao
do modelo, na concepcao da funcao objetivo, ou diretamente na matriz de sensibilidade.
O esquema de inversao empregado nesta tese e baseado na formulacao de Moore-Penrose
e as restricoes sao aplicadas diretamente na matriz de sensiblidade.
O metodo convencional de estimativa de CFPO foi revisitado, e duas outras formas
de calculo sao apresentadas. Uma baseia-se na varredura de CFPOs que se aplica para
116

regioes pouco deformadas. Avaliou-se sua aplicacao em um modelo sintetico realıstico.
O outro metodo para estimativa de CFPOs baseia-se na analise de difracoes, que e util
para areas complexas.
Metodos e equacoes para construcao da matriz de sensibilidade envolvendo estruturas
e diferentes representacoes de campos de velocidade sao apresentados: por celulas ou
grid, por funcoes (polinomial, exponencial, logarıtimica, gaussiana, harmonicas, splines
cubicas 1D e 2D), e por camadas.
O efeito da abertura dos operadores CFP e estudado. Empregando o PST, ilustra-se
que a ambiguidade e reduzida a medida que a abertura dos CFPOs aumenta.
A inversao tomografica sequencial e uma proposta original deste trabalho. Ela con-
siste em usar uma parametrizacao estavel (spline 1D por camada) na primeira etapa de
inversao e empregar os resultados desta como modelo a priori para uma segunda etapa de
inversao na qual se usa uma representacao geologicamente mais realista. Um experimento
(secao 6.5) aplicou essa tecnica e duas parametrizacoes foram testadas na segunda etapa
de inversao; camada a camada com parametrizacao concordante com o topo, e global
com discretizacao por spline cubica 2D. Ambas reduziram o resıduo e o IIG em relacao a
primeira etapa, mas a sequencia envolvendo parametrizacao por spline na segunda etapa
exibiu resultados melhores.
Duas aplicacoes de inversao tomografica abordando DCFPO sao apresentadas. A
primeira envolve dados sinteticos e exibe as vantagens adquiridas quando DCFPOs sao
incorporados aos demais dados convencionais em um problema inverso. Os resultados
apontaram que a incorporacao de DCFPO aos dados de CFPO melhoram a resolucao
estrutural. Em uma segunda aplicacao, somente empregando DCFPOs sobre dados re-
ais monocanal na regiao de Blake Ridge (offshore dos Estados Unidos da America), foi
possıvel extrair o campo de velocidade da pilha sedimentar. Os resultados concordaram
com estudos previamente realizados.
7.2 Conclusoes
As conclusoes alcancadas neste trabalho sao agrupadas a seguir de acordo com a
organizacao do texto: modelo, os dados para inversao (CFPO), equacoes de inversao e
procedimento de inversao.
117

Do modelo:
1) IIG e um ındice passıvel de incorporacao na restricao (e vınculos), analise e
avaliacao dos resultados de inversao.
2) Dentre as funcoes analisadas para representacao de modelos, splines 2D e a melhor
para representacao global de modelos.
Da inversao:
3) CFPOs com grande aberturas reduzem as ambiguidades no processo de inversao.
4) CFPO pode ser obtido automaticamente, sempre que as estruturas forem suaves,
pela tecnica de varredura de CFPs.
5) CFPOs de difracoes (DCFPO) sao uteis apenas onde ha complexidades estruturais
capazes de produzir difracoes nos registros sısmicos. Metodos convencionais de obtencao
de CFPOs sao preferenciais quando nao ha complexidades.
6) Duas propostas sao apresentadas para mapear corretamente difracoes reais, a saber:
por meio da consistencia da forma das difracoes em diferentes registros de tiro ou receptor
comum (equacao 5.29), e pela comparacao das curvas de difracoes com tempo simples e
CFPOs convencionais adjacentes.
7) Para levantamentos sısmicos monocanal, a estrategia de se utilizar curvas de
difracao com menores raios de curvatura e indicada para se evitar curvas com altos α
(Tabela 5.2).
Das equacoes de inversao:
8) A equacao 4.46 de fato tem aplicacao. Ela e indicada para se evitar altos numeros
de condicao no sistema a ser resolvido.
9) O emprego de umΩ−1 adaptativo, equacao 4.46, com ajuste automatico por f regula
os passos durante o processo iterativo. O uso de um f igual a 5% e indicado uma vez que
ele exibe ampla aplicacao sob diferentes volumes de dados e complexiedade de modelos.
Do procedimento de inversao:
10) A inversao tomografica sequencial constitui uma robusta forma de se estimar mo-
delos geologicamente crıveis. A inversao camada a camada com parametrizacao estavel
(campo de velocidade variando apenas lateralmente por camada) seguida por outra etapa
parametrizada de forma mais realıstica. As parametrizacoes camada a camada concor-
dante com o topo, e global com splines 2D foram testadas na segunda etapa de inversao.
As duas se mostraram equivalentes, mas a segunda apresenta pequenas vantagens.
118

Referencias Bibliograficas
[AKI and RICHARDS, 1980] AKI, K., and P. RICHARDS, 1980, Quantitative seismo-
logy theory and methods: W.H. Freeman and Company, 1.
[AL-YAHYA, 1989] AL-YAHYA, K., 1989, Velocity analysis by iterative profile migra-
tion: Geophysics, 54, 718–729.
[ALLEN and ALLEN, 2005] ALLEN, P. A., and J. R. ALLEN, 2005, Basin analysis:
principles and applications: Blackwell, 1.
[ASTER et al., 2005] ASTER, R. C., B. BORCHERS, and C. H. THURBER, 2005, Pa-
rameter estimation and inverse problems: Elsevier Academic Press.
[BACKUS and GILBERT, 1967] BACKUS, G., and F. GILBERT, 1967, Numerical ap-
plication of a formalism for geophysical inverse problems: Geophys. J. Roy.
Astr. Soc., 13, 247–276.
[BEDNAR, 2005] BEDNAR, B., 2005, A brief history of migration: Geophysics, 70,
3MJ–20MJ.
[BERKHOUT, 1997a] BERKHOUT, A. J., 1997a, Pushing the limits of seismic imaging,
part i: Prestack migration in terms of double dynamic focusing: Geophysics,
62, 937–954.
[BERKHOUT, 1997b] ——–, 1997b, Pushing the limits of seismic imaging, part ii: Inte-
gration of prestack migration, velocity estimation, and avo analysis: Geophy-
sics, 62, 954–969.
[BERKHOUT, 1997c] ——–, 1997c, Pushing the limits of seismic imaging, part ii: Inte-
gration of prestack migration, velocity estimation, and avo analysis: Geophy-
sics, 62, 954–969.
119

[BERKHOUT and WAPENAAR, 1989] BERKHOUT, A. J., and C. P. A. WAPENAAR,
1989, One-way versions of kirchhoff integrals: Geophysics, 54, 460–467.
[BERKOVITCH et al., 2009] BERKOVITCH, A., I. BELFER, Y. HASSIN, and L. E.,
2009, Diffraction imaging by multifocusing: Geophysics, 74, 75–81.
[BERRUT and TREFETHEN, 2004] BERRUT, J., and L. TREFETHEN, 2004, Barycen-
tric lagrange interpolation: Society for Industrial and Applied Mathematics,
46, 501–517.
[BILLETTE and LAMBARE, 1998] BILLETTE, F., and G. LAMBARE, 1998, Velocity
macro-model estimation from seismic reflection data by stereotomography:
Geophysical Journal International, 135, 671–690.
[BISHOP et al., 1985] BISHOP, T., R. T. BUBE, R. CUTLER, R. T. LANGAN, P.
LOVE, J. RESNICK, R. SHUEY, D. SPINDLER, and H. WYLD, 1985, To-
mographic determination of velocity and depth in laterally varying media: Ge-
ophysics, 50, 903–923.
[BOLTE, 2003] BOLTE, J., 2003, Estimation of focusing operators using the common
focal point method: PhD thesis, Delft University of Technology.
[BOTELHO, 1986] BOTELHO, M., 1986, Modelamento sısmico na bacia do reconcavo
usando a tecnica de tracamento dos raios: PhD thesis, Universidade Federal
da Bahia.
[BUHMANN, 2003] BUHMANN, M. D., 2003, Radial basis functions: Theory and im-
plementations: Cambridge University Press.
[BULCAO, 2004] BULCAO, A., 2004, Modelagem e migracao reversa no tempo empre-
gando operadores acusticos e elasticos: PhD thesis, Universidade Federal do
Rio de Janeiro.
[CAO and MCMECHAN, 2010] CAO, J., and G. A. MCMECHAN, 2010, Multiple pre-
diction and subtraction from apparent slowness relations in 2d synthetic and
field ocean-bottom cable data: Geophysics, 75, 89–99.
[CARCIONE et al., 2008] CARCIONE, J., G. HERMAN, and A. Ten KROODE, 2008,
Seismic modeling: Geophysics, 67, 1304–1325.
120

[CARCIONE, 2007] CARCIONE, J. M., 2007, Wavefields in real media. wave propa-
gation in anisotropic, anelastic, porous and eletromagnetic media: Elsevier,
38.
[CARMICHAEL, 1982] CARMICHAEL, R. S., 1982, Handbook of physical properties
of rocks v.2: CRC Press, 2.
[CERVENY, 2001] CERVENY, V., 2001, Seismic ray theory: Cambridge University
Press.
[CLAERBOUT, 1970] CLAERBOUT, J. F., 1970, Coarse grid calculations of waves in
inhomogeneous media with application to delineation of complicated seismic
structure: Geophysics, 35, 407–418.
[CLAERBOUT, 1971] ——–, 1971, Toward a unified theory of reflector mapping: Ge-
ophysics, 36, 467–481.
[COOK, 1995] COOK, R. D., 1995, Finite element modeling for stress analysis: Wiley,
1.
[COX, 2004] COX, B., 2004, Tomographic inversion of focusing operators: PhD thesis,
Delft University of Technology.
[CUNHA, 1997] CUNHA, P. E. M., 1997, Estrategias eficientes para migracao reversa
no tempo pre-empilhamento 3d em profundidade pelo metodo das diferencas
finitas: PhD thesis, Universidade Federal da Bahia.
[CUNHA, 2005] ——–, 2005, Imageamento sısmico por propagacao de ondas no limite
de altas e baixas frequencias: PhD thesis, Universidade Federal do Rio de
Janeiro.
[DEREGOWSKI, 1990] DEREGOWSKI, S. M., 1990, Common-offset migrations and
velocity analysis: First Break, 8, 225–234.
[DIX, 1955] DIX, C., 1955, Seismic velocities from surface measurements: Geophysics,
20, 68–86.
[FEI and MCMECHAN, 2006] FEI, W., and G. A. MCMECHAN, 2006, Crp-based seis-
mic migration velocity analysis: Geophysics, 71, U21–U28.
[FLECHTER, 1980] FLECHTER, R., 1980, Practical methdods of optimization: Wiley.
121

[FOMEL, 2002] FOMEL, S., 2002, Applications of plane-wave destruction filters: Ge-
ophysics, 67, 1946–1960.
[GARDNER et al., 1974] GARDNER, G. H. F., L. W. GARDNER, and A. GREGORY,
1974, Formation velocity and density - the diagnostic basis for stratigraphic
traps: Geophysics, 39, 770–780.
[GUERRIN et al., 1999] GUERRIN, G., D. GOLDBERG, and A. MELTSER, 1999,
Characterization of in situ elastic properties of gas hydrate-bearing sediments
on the blake ridge: Journal of Geophysical Research, 104, 17781–17795.
[HADAMARD, 1902] HADAMARD, J., 1902, Sur les problemes aux derives partielles
et leur signification physique: Princeton University Bulletin, 13, 49–52.
[HAGEDOORN, 1954] HAGEDOORN, J., 1954, A process of seismic reflection inter-
pretation: Geophysical Prospecting, 2, 86–127.
[HEGGE, 1997] HEGGE, J. F., 1997, Velocity model estimation by inversion of focusing
operators: Presented at the 67th Annual International Meeting, Soc. Expl. Ge-
ophys.
[HEGGE, 2000] ——–, 2000, Seismic macromodel estimation by inversion of focusing
operators: PhD thesis, Delft University of Technology.
[HEGGE and BOLTE, 1999] HEGGE, J. F., and V. D. F. J. T. D. A. BOLTE, J.F.B., 1999,
Cfp operator estimation and inversion demonstrated on a field data set - part ii:
velocity estimation: Presented at the 69th Annual International Meeting, Soc.
Expl. Geophys.
[HEGGE et al., 1998] HEGGE, J. F., J. FOKKEMA, and A. DUIJNDAM, 1998, Using
focusing operators to estimate velocity model: Presented at the 68th Annual
International Meeting, Soc. Expl. Geophys.
[HEGGE and FOKKEMA, 1996] HEGGE, J. F., and J. T. FOKKEMA, 1996, Macro mo-
del updating by global inversion of cfp operators: Presented at the 66th Annual
International Meeting, Soc. Expl. Geophys.
[JIN and MADARIAGA, 1994] JIN, S., and R. MADARIAGA, 1994, Nonlinear velocity
inversion by a two-step monte carlo method: Geophysics, 59, 577–590.
122

[KABIR, 1997] KABIR, M., 1997, Velocity estimation of the complex subsurface using
the common focus point technology: PhD thesis, Delft University of Techno-
logy.
[KABIR and VERSCHURR, 2000] KABIR, M., and D. VERSCHURR, 2000, A cons-
trained parametric inversion for velocity analysis based on cfp technology:
Geophysics, 65, 1210–1222.
[KELLY and MARFURT, 1987] KELLY, K., and K. MARFURT, 1987, Numerical mo-
deling of seismic wave propagation: SEG, Geophysics Reprint Series.
[KELLY et al., 1976] KELLY, K., R. W. WARD, S. TREITEL, and R. M. ALFORD,
1976, Synthetic seismograms: a finite-difference approach: Geophysics, 41,
2–27.
[KHAIDUKOV et al., 2004] KHAIDUKOV, V., E. LANDA, and T. J. MOSER, 2004,
Diffraction imaging by focusing-defocusing: An outlook on seismic superre-
solution: Geophysics, 69, 1478–1490.
[KLITGORD and SCHNEIDER, 1994] KLITGORD, K., and C. SCHNEIDER, 1994,
Geophysical database of the east coast of the united states northern atlantic
margin: velocity analysis, in U.S. Geological Survey Open-File Report: 94–
192.
[KREYSZIG, 1999] KREYSZIG, E., 1999, Advanced engineering mathematics: Wiley.
[LANDA et al., 1987] LANDA, E., V. SHTIVELMAN, and B. GELCHINSKY, 1987, A
method for detection of diffracted waves on common-offset sections: Geophy-
sical Prospecting, 35, 359–373.
[LEVANDER, 1988] LEVANDER, A. R., 1988, Fourth-order finite-difference p-w seis-
mograms: Geophysics, 53, 1425–1436.
[LIU et al., 2006] LIU, J., Y. LUO, and Y. YAO, 2006, Tomographic inversion based
on cfp technology: Presented at the 76th Annual International Meeting, Soc.
Expl. Geophys.
[LO and INDERWIESEN, 1994] LO, T., and P. INDERWIESEN, 1994, Fundamentals
of seismic tomography: Society of Exploration Geophysicist.
123

[LU and MCMECHAN, 2002] LU, S., and G. MCMECHAN, 2002, Estimation of gas
hydrate and free gas saturation, concentration and distribution from seismic
data: Geophysics, 67, 582–593.
[MANSUR, 1983] MANSUR, W., 1983, A time-stepping technique to solve wave propa-
gation problems using the boundary element method: PhD thesis, University
of Southhampton.
[MARQUARDT, 1963] MARQUARDT, D., 1963, An algorithm for least-squares esti-
mation of nonlinear parameters: J. Soc. Ind. Appl. Math., 2, 601–612.
[MAVKO et al., 2009] MAVKO, G., T. MUKERJI, and J. DVORKIN, 2009, The rock
physics handbook. tools for seismic analysis of porous media: Cambridge
University Press.
[MCKAY and ABMA, 1992] MCKAY, S., and R. ABMA, 1992, Imaging and velocity
estimation with depth-focusing analysis: Geophysics, 57, 1608–1622.
[MCMECHAN, 1983] MCMECHAN, G. A., 1983, Seismic tomography in boreholes:
Geophysical Journal of the Royal Astronomical Society, 74, 601–612.
[MENKE, 1984] MENKE, W., 1984, Geophysical data analysis: discrete inverse theory:
Academic Press.
[MOORE, 1920] MOORE, E., 1920, On the reciprocal of the general algebraic matrix:
Bulletin of the American Mathematical Society, 26, 394–395.
[MOSER and HOWARD, 2008] MOSER, T., and C. HOWARD, 2008, Diffraction ima-
ging in depth: Geophysical Prospecting, 56, 627–641.
[MUSGRAVE, 1961] MUSGRAVE, A. W., 1961, Wave-front charts and three dimensi-
onal migrations: Geophysics, 26, 738–753.
[NOCEDAL and WRIGHT, 2000] NOCEDAL, J., and S. J. WRIGHT, 2000, Numerical
optimization: Springer.
[PARK, 1997] PARK, R. G., 1997, Foundations of structural geology: Chapman and
Hall.
[PAULL et al., 2000] PAULL, C., R. MATSUMOTO, P. J. WALLACE, and W. P. Dillon,
2000, Proceedings of the ocean drilling program, scientific results, 167, 1–
318.
124

[PENROSE, 1955] PENROSE, R., 1955, A generalized inverse for matrices: Procee-
dings of the Cambridge Philosophical Society, 51, 406–413.
[POLLET, 1974] POLLET, A., 1974, Simple velocity modelling and the continuous ve-
locity section: Presented at the 44th Annual International Meeting, Soc. Expl.
Geophys.
[RIEBER, 1936] RIEBER, F., 1936, A new reflection system with controlled directional
sensitivity: Geophysics, 1, 97–106.
[ROBERTSSON et al., 2007] ROBERTSSON, J. O. A., B. BEDNAR, J. BLANCH, and
D. J. KOSTOV, c. MANEN, 2007, Introduction to the supplement on seis-
mic modeling with applications to acquisition, processing, and interpretation:
Geophysics, 72, 1–4.
[SANTOS et al., 2010] SANTOS, L. A., D. SOARES FILHO, A. BULCAO, C. THEO-
DORO, W. MANSUR, and G. MCMECHAN, 2010, Tomographic inversion
over diffraction cfp operators in structurally complex areas: Presented at the
80th Annual International Meeting, Soc. Expl. Geophys.
[SANTOS and FIGUEIRO, 2006] SANTOS, R. H. M., and W. M. FIGUEIRO, 2006,
Modelagem acustica bidimensional usando diferentes parametrizacoes de
campos de velocidades: Revista Brasileira de Geofısica, 24, 103–115.
[SCHNEIDER, 1971] SCHNEIDER, W. A., 1971, Developments in seismic data proces-
sing and analysis (1968-1970): Geophysics, 36, 1043–1073.
[SCHNEIDER, 1978] ——–, 1978, Integral formulation for migration in two and three
dimensions: Geophysics, 43, 49–76.
[SEN, 2006] SEN, M. K., 2006, Seismic inversion: Society of Petroleum Engineers.
[SHERIFF, 2002] SHERIFF, R. E., 2002, Encyclopedic dictionary of exploration ge-
ophysics: Society of Exploration Geophysicist, 1.
[SHERIFF and GELDART, 1999] SHERIFF, R. E., and L. P. GELDART, 1999, Explo-
ration seismology: Cambridge University Press.
[SHEWCHUK, 1994] SHEWCHUK, J. R., 1994, An introduction to the
conjugate gradient method without the agonizing pain: http :
//www.cs.cmu.edu/ jrs/ jrspapers.html.
125

[SIDDIQUI, 2004] SIDDIQUI, K., 2004, Velocity model building methodology and
psdm in deep water gulf of mexico: A case history: Presented at the 74th
Annual International Meeting, Soc. Expl. Geophys.
[SKINNER and PORTER, 1987] SKINNER, B. J., and S. C. PORTER, 1987, Physical
geology: Wiley.
[SOARES FILHO, 1994] SOARES FILHO, D. M., 1994, Inversao dos tempos das ondas
refletidas: combinacoes de tomografia, migracao e tecnicas tipo dix: PhD
thesis, Universidade Federal da Bahia.
[SOARES FILHO and ECKHARDT, 1997a] SOARES FILHO, D. M., and B. R. S.
ECKHARDT, W., 1997a, Seismic crosswell tomography: A gauss-newton
type method based on b-splines for velocity field parametrization. 1st part:
Fundamentals: Presented at the 5o Congresso Internacional da SBGf, Socie-
dade Brasileira de Geofısica.
[SOARES FILHO and ECKHARDT, 1997b] ——–, 1997b, Seismic crosswell tomo-
graphy: A gauss-newton type method based on b-splines for velocity field
parametrization. 2st part: Application: Presented at the 5o Congresso Interna-
cional da SBGf, Sociedade Brasileira de Geofısica.
[STOLT, 1978] STOLT, R. H., 1978, Migration by fourier transform: Geophysics, 43,
23–48.
[STORK, 1992] STORK, C., 1992, Reflection tomography in the postmigrated domain:
Geophysics, 57, 680–692.
[SWORD, 1987] SWORD, C. H., 1987, Tomographic determination of interval veloci-
ties from reflection seismic data: the method of controlled directional recep-
tion: PhD thesis, Stanford University.
[SYMES and CARAZZONE, 1991] SYMES, W. W., and J. J. CARAZZONE, 1991, Ve-
locity inversion by differential semblance optimization: Geophysics, 56, 654–
663.
[TARANTOLA, 1984] TARANTOLA, A., 1984, Inversion of seismic reflection data in
the acoustic approximation: Geophysics, 49, 1259–1266.
126
[TARANTOLA, 2002] ——–, 2002, Inverse problem theory: methods for data fitting
and model parameter estimation: Elsevier.
[TARANTOLA, 2005] ——–, 2005, Inverse problem theory and methods for model pa-
rameter estimation: SIAM.
[TAYLOR et al., 1999] TAYLOR, M., W. DILLON, C. ANTON, and W. DANFORTH,
1999, Seismic-reflection surveys of the blake ridge, r/v cape hatteras 1992 and
1995; data acquisition, navigation and processing, in U.S. Geological Survey
Open-File Report 99-372.
[THOMAS, 2000] THOMAS, J. E., 2000, Velocidades sısmicas: Petrobras.
[THORBECKE, 1997] THORBECKE, J. W., 1997, Common focus point technology:
PhD thesis, Delft University of Technology.
[TIKHONOV and ARSENIN, 1977] TIKHONOV, A., and V. ARSENIN, 1977, Soluti-
ons of ill-posed problems: V.H. Winstons and Sons.
[TINIVELLA and LODELO, 2000] TINIVELLA, U., and E. LODELO, 2000, The blake
ridge bottom-simulating reflector transect: tomographic velocity field and the-
oretical model to estimate methane hydrate quantities, in Proceedings of the
ocean drilling program, scientific results,, 273–318.
[TRIER, 1990] TRIER, J. A., 1990, Tomographic determination of structural velocities
from depth-migrated seismic data: PhD thesis, Stanford University.
[VIRIEUX, 1986] VIRIEUX, J., 1986, P-sv wave propagation in heterogenous media:
Velocity-stress finite-difference method: Geophysics, 51, 889–901.
[WAPENAAR et al., 1989] WAPENAAR, C. P. A., G. L. Peels, V. Budejicky, and A. J.
Berkhout, 1989, Inverse extrapolation of primary seismic waves: Geophysics,
54, 853–863.
[WOLFRAM, 1999] WOLFRAM, S., 1999, Mathematica book: Cambridge Academic
Press.
[WOODWARD et al., 2008] WOODWARD, M. J., D. NICHOLS, O. ZDRAVEVA, P.
WHITFIELD, and T. Johns, 2008, A decade of tomography: Geophysics, 73,
VE5–VE11.
127

[ZHANG and MCMECHAN, 2011] ZHANG, Q., and G. A. MCMECHAN, 2011, Di-
rect vector-field method to obtain angle-domain common-image gathers
from isotropic acoustic and elastic reverse-time migration: Geophysics, 76,
WB136–WB149.
128

Apendice A
Experimento sismo 1
O objetivo deste estudo e obter o modelo de velocidades a partir de dados de tempos de
transito por meio da varredura do espaco de resıduos (diferenca entre os dados observados
e os dados reais). Aquele modelo que apresentar o menor resıduo constituira a solucao
almejada.
Para este experimento foi criado um modelo simples cujo campo de velocidade obe-
dece a equacao A.1.
v(x, z) = 1500.0 + 5x, (A.1)
ou seja, trata-se de um modelo de velocidade variante lateralmente, que obedece a equacao
de uma reta (v = a + bx) cujos coeficientes linear e angular sao respectivamente iguais a
a = 1500 e b = 5 (Figura A.1). Portanto, somente dois parametros definem o espaco de
modelos m.
129
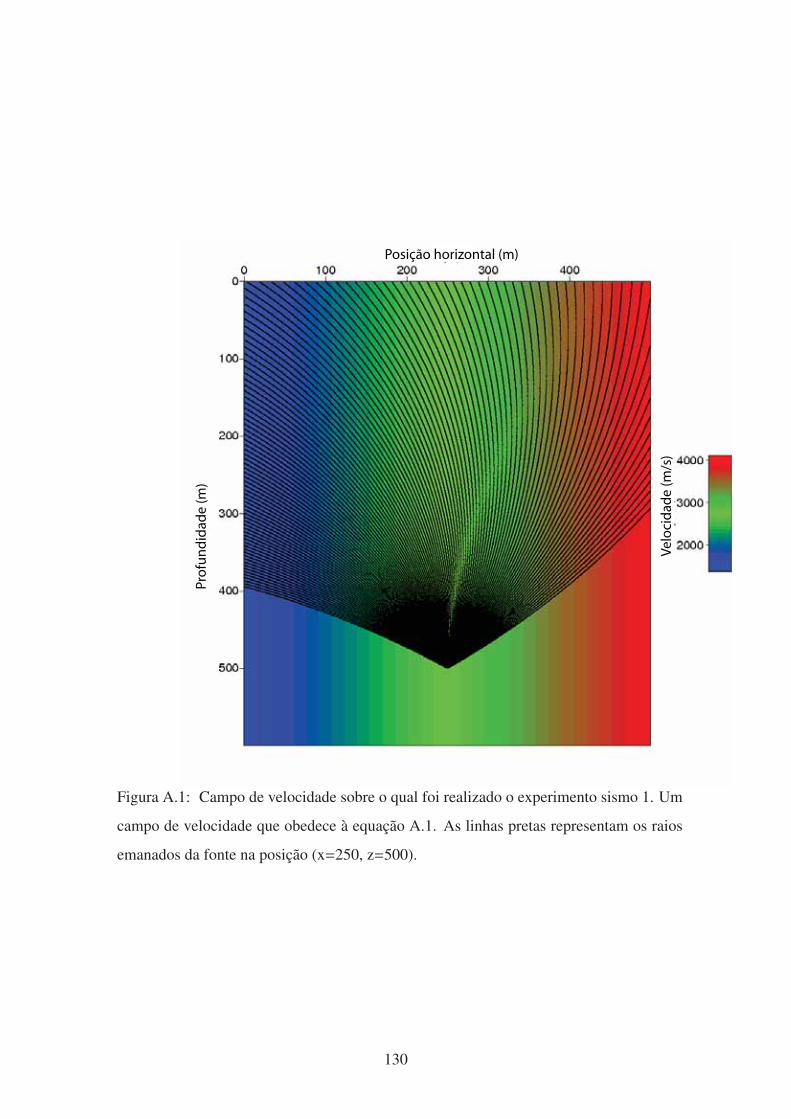
Figura A.1: Campo de velocidade sobre o qual foi realizado o experimento sismo 1. Um
campo de velocidade que obedece a equacao A.1. As linhas pretas representam os raios
emanados da fonte na posicao (x=250, z=500).
130

Figura A.2: Tempos de transito registrado ao longo da superfıcie para uma fonte detonada
em (x=250, z=500) no campo de velocidade da Figura A.1.
Uma fonte pontual na posicao (x=250, z=500) e detonada e ao longo da superfıcie
sao distribuıdos receptores em diferentes posicoes X. Nestes receptores sao registrados os
tempos de chegada da onda direta como mostra a Figura A.2.
131

0.0003
0.0003
0.0003
0.0006
0.0006
0.0009
0.0009
0.0012
0.0015
0.0018
0.0018
0.0021
0.0021
0.0027
0.0027
0.0033
0.0039
0.00450.006
0
2
4
6
8
10
b (
m/s
/m)
1000 1200 1400 1600 1800
a (m/s)
Figura A.3: Espaco de resıduos com parametros a e b respectivamente na horizontal e
vertical. As curvas de nıvel indicam o valor do resıduo.
O experimento pelo metodo de varredura consistiu em construir diversos modelos
com parametros a e b variando respectivamente de 1000 a 1700, e de 0 a 10, calculando
os resıduos sobre os tempos de transito de cada um. O produto deste ensaio esta na figura
A.3.
132

Observa-se que a coordenada (a,b)=(1500,5) na figura A.3 constitui um mınimo do
espaco de resıduos, como esperado, uma vez que estes dois parametros correspondem ao
modelo real. Todavia, e possıvel observar uma serie de mınimos que satisfazem os tempos
de transito registrados na superfıcie. Na verdade, neste simples ensaio, ha uma infinidade
de solucoes, ou modelos, que satisfazem os dados da Figura A.2. Todos os modelos que
seguem a diagonal com resıduo proximo a zero da Figura A.3 sao cinematicamente equi-
valentes. Essa infinidade de solucoes e propria da ambiguidade inerente aos problemas
inversos. Somente a insercao de restricoes e vınculos permite a reducao da ambiguidade.
133

Apendice B
Experimento discretizacao
Neste ensaio o campo de velocidades NMO de uma bacia sedimentar marıtima bra-
sileira composto por 150 celulas na horizontal e 150 celulas na vertical (Figura B.1) foi
representado por algumas das funcoes apresentadas no capıtulo 2.4. As funcoes expo-
nencial e logarıtmica nao se mostraram adequadas para representacao do modelo de ve-
locidade escolhido devido a sua complexidade. Uma combinacao dessas funcoes com as
demais pode disponibilizar melhores resultados, mas estes nao foram testados no ambito
desse trabalho. A representacao por malha nao regular nao foi desenvolvida nesta tese.
Assim, o experimento de discretizacao apresentado a seguir restringiu-se as funcoes
polinomial, de base radial gaussiana, harmonicas e por splines cubicas em duas dimensoes
para descrever o modelo 1 mostrado na Figura B.1. Para as funcoes polinomial, gaussiana
e harmonicas foi empregada uma rotina que utiliza o metodo dos mınimos quadrados para
o calculo dos coeficientes adequados de cada funcao. Para essas funcoes, o experimento
constitui um pequeno ensaio de inversao linear de ajuste de superfıcies, o campo de ve-
locidades NMO. Para a funcao spline foi utilizada uma rotina propria desenvolvida nesta
tese construıda com as equacoes 2.10 a 2.17. Em todos os experimentos foi calculado o
erro quadratico, e, utilizando a equacao 2.19.
A representacao por celulas expoe todos os detalhes do campo de velocidades (Fi-
gura B.1). Contudo, encerra elevado numero de parametros - um total de 22500 celulas
(nx=150 e nz=150).
134
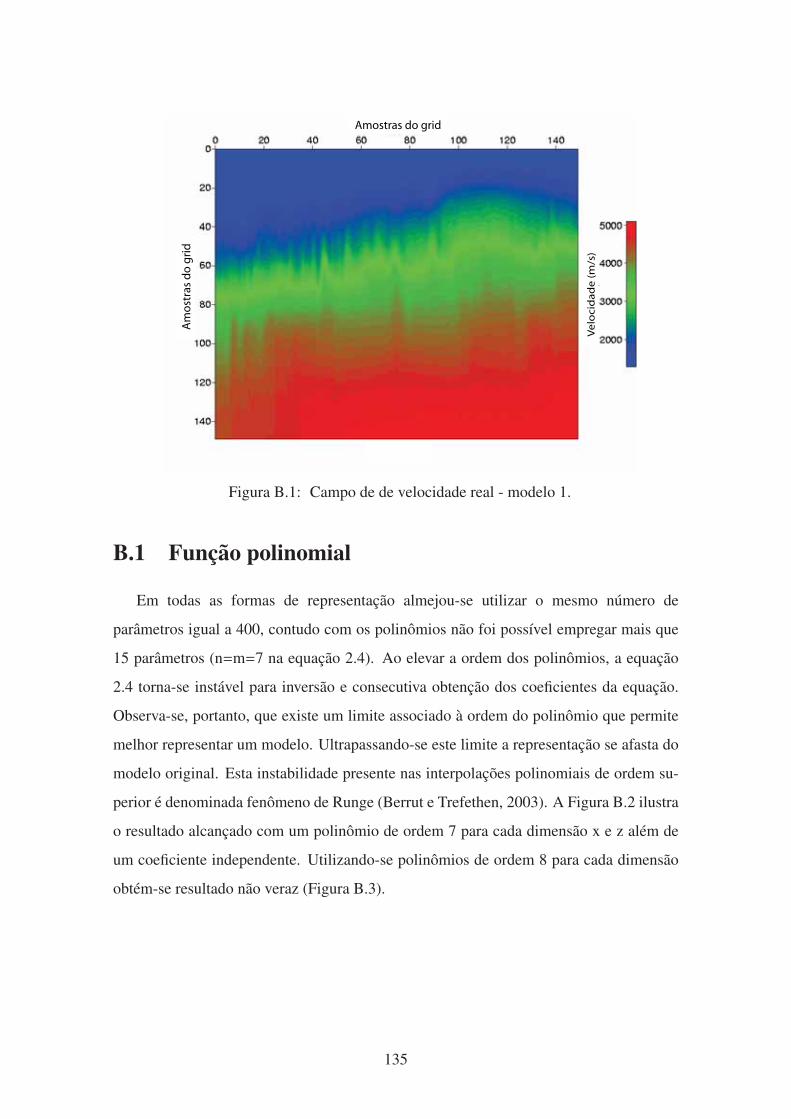
Figura B.1: Campo de de velocidade real - modelo 1.
B.1 Funcao polinomial
Em todas as formas de representacao almejou-se utilizar o mesmo numero de
parametros igual a 400, contudo com os polinomios nao foi possıvel empregar mais que
15 parametros (n=m=7 na equacao 2.4). Ao elevar a ordem dos polinomios, a equacao
2.4 torna-se instavel para inversao e consecutiva obtencao dos coeficientes da equacao.
Observa-se, portanto, que existe um limite associado a ordem do polinomio que permite
melhor representar um modelo. Ultrapassando-se este limite a representacao se afasta do
modelo original. Esta instabilidade presente nas interpolacoes polinomiais de ordem su-
perior e denominada fenomeno de Runge (Berrut e Trefethen, 2003). A Figura B.2 ilustra
o resultado alcancado com um polinomio de ordem 7 para cada dimensao x e z alem de
um coeficiente independente. Utilizando-se polinomios de ordem 8 para cada dimensao
obtem-se resultado nao veraz (Figura B.3).
135

Figura B.2: Campo de de velocidade do modelo 1 representado por polinomio de ordem
7 nas dimensoes x e z.
Figura B.3: Campo de de velocidade do modelo 1 representado por polinomio de ordem
8 nas dimensoes x e z.
136

O erro quadratico obtido com polinomio de ordem 7, como esperado, foi inferior ao
calculado com o polinomio de ordem 8. O primeiro apresentou erro igual a 2,701E+04 e
o segundo 1,574E+05.
B.2 Funcao gaussiana 2D
A representacao do modelo 1 por de uma funcao gaussiana em duas dimensoes,
equacao 2.7, empregando σ igual a 4,87 (2σ2xi= 2σ2
xi= 95), e utilizando 400 parametros
distribuıdos regularmente ao longo da malha, originalmente contendo 22500 celulas, le-
vou ao modelo da figura B.4. Observa-se que o resultado alcancado constitui uma versao
bastante suavizada do modelo original, exibindo, contudo, as grandes tendencias estrutu-
rais de distribuicao do campo de velocidades.
Figura B.4: Campo de de velocidade do modelo 1 representado por funcao gaussiana em
2D (vide texto para detalhes de parametrizacao).
Durante os ensaios com este tipo de representacao observou-se que o parametro σ
deve ser testado, caso contrario os resultados alcancados com funcao gaussiana serao
pouco realısticos. Uma vez que σ esta relacionado a abertura da gaussiana, valores muito
baixos favorecem a descricao de estruturas pequenas enquanto valores mais altos favore-
137

cem a representacao de estruturas maiores. Para este modelo1, empregando 400 amostras
regularmente espacadas, os valores de 2σ2xi
proximos a 2/3 da dimensao do modelo, fo-
ram os que melhor responderam, de forma a apontar tendencia geral, portanto em baixa
freqencia espacial, do campo de velocidade.
O erro quadratico obtido com a funcao gaussiana foi igual a 2,150E+04, inferior aos
observados com as funcoes polinomiais.
B.3 Funcoes harmonicas
A filragem de altas frequencias nas direcoes x e z limitando-as aos 20 primeiros
harmonicos (suavizacao de 25 amostras 0-0-10-35) forneceu o resultado constante na
Figura B.5. Claramente a filtragem, compatıvel com o emprego de 20 harmonicos em
cada direcao (perfazendo um total de 400 coeficientes, n=m=20 na equacao 2.8), des-
tacou o indesejavel carater oscilatorio. Embora, visualmente, o resultado obtido com a
serie de Fourier restrita aos 20 primeiros harmonicos - ainda que se tenha tido cautela
para se evitar efeito de Gibbs - guarde os principais aspectos estruturais do modelo 1, o
erro quadratico obtido com este tipo de representacao foi igual a 6,351E+04, superior aos
anteriores.
Utilizando o simples somatorio de funcoes seno e cosseno de acordo com a equacao
2.9, limitado a 200 coeficientes por direcao, obtemos o resultado contido na Figura B.6
O erro quadratico calculado para este tipo de representacao foi igual a 2,587E+04,
inferior ao de todas as equacoes anteriores.
B.4 Funcao spline cubica 2D
A representacao do modelo 1 por splines empregou 400 parametros. Os pontos
de amostragem, regularmente distribuıdos, representam os domınios das funcoes spline
(Kreyszig, 1999). O resultado da representacao por splines esta ilustrado na figura B.7.
Dentre todas as funcoes testadas, o uso de splines cubicas 2D apresentou o menor erro
quadratico: 5,465E+03.
138
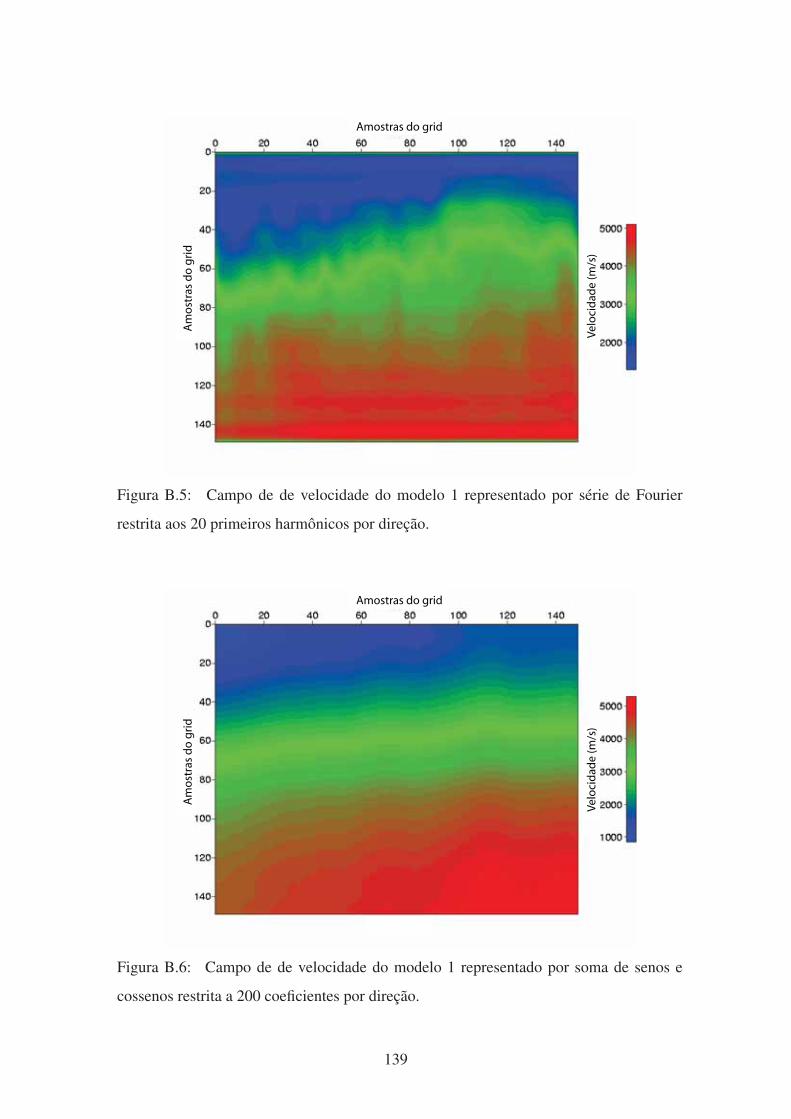
Figura B.5: Campo de de velocidade do modelo 1 representado por serie de Fourier
restrita aos 20 primeiros harmonicos por direcao.
Figura B.6: Campo de de velocidade do modelo 1 representado por soma de senos e
cossenos restrita a 200 coeficientes por direcao.
139

Figura B.7: Campo de de velocidade do modelo 1 representado por spline cubica 2D
restrita a 200 coeficientes em cada direcao.
B.5 Resumo dos resultados
A tabela B.1 resume os erros quadraticos de cada uma das funcoes testadas sob as
mesmas condicoes possıveis. Nao ha duvidas que as funcoes por domınio, tal como as
splines no experimento em escopo, apresentam melhores resultados, em funcao do menor
erro quadratico. Essa assertiva pode ser generalizada para demais tipos de modelos que
apresentem continuidade dos gradientes e das derivadas segunda.
A segunda melhor opcao de discretizacao, em termos de erro quadratico, embora te-
nha disponibilizado um modelo bastante suavizado, foi a funcao gaussiana. Destaca-se,
contudo, que houve uma pesquisa previa para determinacao do melhor parametro σ (igual
a 4,87).
A terceira melhor forma de representacao foi atraves da soma de senos e cossenos.
Em relacao ao erro quadratico, a quarta melhor forma de representacao foi atraves de po-
linomios de ordem 7. Contudo, o reduzido numero de parametros permitido e necessario
para os polinomios os torna atrativos para calculo de modelos em baixa freqencia espacial.
Os ensaios apontaram que ha um numero otimo de ordem polinomial (neste caso igual a
140

Funcao Erro quadratico Numero de parametros
polinomial de ordem 8 1,574E+05 17
polinomial de ordem 7 2,702E+04 15
gaussiana 2,150E+04 400
serie de Fourier 6,352E+04 equivalente a 400
spline cubica 2D 5,465E+03 400
Tabela B.1: Tabela comparativa dos erros quadraticos de cada funcao na representacao de
modelo 1.
ordem 7) que deve ser pesquisada previamente. A adicao de um grau na representacao
polinomial elevou o erro relativo em uma ordem de grandeza (tabela B.1).
Finalmente a representacao do modelo 1 por serie de Fourier truncada de forma equi-
valente a 20 termos apresentou as oscilacoes inerentes as funcoes harmonicas. Este fato
elevou o erro quadratico deste tipo de funcao tornando-o inadequado para caracterizar o
modelo 1.
141

Apendice C
Obtendo operadores CFP pela
abordagem convencional
Neste Apendice os passos listados no final da secao 5.2, listados abaixo, sao seguidos
para estimativa do operador CFP em um dado sintetico de acordo com a metodologia
apresentada por Berkhout (1997a, 1997b).
1- escolha de um ponto imagem;
2- estimativa de um operador g0;
3- geracao da famılia CFP uk(xA, xsrc, t) com equacao 5.3;
4- calculo do painel DTS Φk com a equacao 5.4;
5- rastreamento do evento σk no painel DTS;
6- calculo do resıduo rk com equacao 5.5;
7- atualizacao do operador gk+1 com a equacao 5.8;
8- repetir os passos de (3) a (7) ate obter a condicao da equacao 5.9.
142

1) Escolha do ponto imagem. A Figura C.1 apresenta uma secao de afastamento nulo
onde se mostra o ponto I em que se deseja estimar o operador CFP, destacado pelo cırculo
vermelho.
3.0
4.0
5.0
8000 10000 12000 14000 16000 18000 20000
Figura C.1: Secao de afastamento nulo destacando o ponto I (cırculo vermelho) sobre o
qual se deseja estimar o operador focal (CFP).
143

2) Estimativa de um operador g0. Diversas sao as formas de obtencao de operadores focais
a priori. A mais direta e, naturalmente obtida durante o processamento de dados sısmicos,
e atraves da velocidade de empilhamento ou NMO. Aqui apresenta-se um metodo alter-
nativo que consiste em mapear o evento em analise no painel de tiro comum (shot gather)
em tempo simples (Figura C.2). Na Figura C.2, o evento mapeado, e representado pela
linha tracejada verde, e a primeira estimativa do operador focal g0. Essa abordagem de
mapeamento no shot gather com tempo simples tem a vantagem de fornecer um oper-
dor CFP a priori que engloba complexidades difıceis de serem reproduzidas por funcoes
matematicas hiperbolicas. Uma desvantagem, e a necessidade de mapeamento, fato que
diminui a automacao.
Figura C.2: Painel de tiro comum (shot gather) em tempo simples onde se estima o
operador a inicial g0 destacado pela linha tracejada verde.
144

3) Geracao da famılia CFP uk(xA, xsrc, t) com a equacao 5.3. Empregando a equacao 5.3
obtem-se a famılia CFP, ou cfp gather que esta ilustrado na Figura C.3.
Figura C.3: Famılia CFP para o ponto imagem I. A linha vermelha representa o operador
g0.
145

4) Calculo do painel DTS (Φk) com a equacao 5.4. A equacao 5.4 realiza a correlacao
traco a traco entre o operador g0 e o cfp gather na Figura C.3. Esta operacao gera o painel
DTS constante na Figura C.4.
5) Rastreamento do evento σk no painel DTS. O evento relacionado ao ponto I e mapeado
e constitui a variavel σk destacada pela linha tracejada amarela.
6) Calculo do resıduo rk com a equacao 5.5. O resıduo e obtido com a diferenca entre σk
(curva amarela tracejada na Figura C.4) e o lag zero para cada traco do painel na Figura
C.4.
Figura C.4: Painel DTS na primeira iteracao. A linha tracejada amarela representa o
evento relacionado ao ponto I. Observa-se que ele nao se encontra alinhado ao longo do
lag zero.
146

7) Atualizacao do operador gk+1 com a equacao 5.8. Com o novo operador, os passos de
(3) a (6) foram seguidos para obtencao do DTS.
Em duas outras iteracoes o evento relacionado ao ponto I horizontalizou-se ao longo do
lagzero, como pode ser observado na Figura C.5. Nesta situacao obteve-se o operador
correto.
Figura C.5: Painel DTS na terceira iteracao. Observa-se que o evento em estudo esta
alinhado ao longo do lag zero.
147

Apendice D
Posicao x do tempo mınimo e velocidade
aparente a partir de difracoes
registradas em secoes de afastamento
nao nulo
Nesta secao, as equacoes de Normal Move Out (NMO) (Sheriff e Geldart, 1999)
adaptadas para difracoes, e Landa (1987), para calculo da posicao x do tempo mınimo
duplo de uma difracao em uma secao de afastamento comum (Common Offset Gather
- COG), com afastamento maior que zero. Os resultados constituem a base para as
deducoes da velocidade aparente vap que ilustra o comportamento nao hiperbolico das
curvas de transito de difracoes para secoes de afastamento nao nulo, mesmo para meios
homgeneos (Landa, 1987).
Considere-se um levantamento sısmico hipotetico com varios pares de fontes e recep-
tores com afastamento ΔxS R ao longo de uma superfıcie horizontal. Tiros e receptores sao
posicionados em xs e xr respectivamente. O modelo e composto por um unico difrator
localizado na coordenada (x0, h) e imerso em um meio homogeneo com velocidade cons-
tante v. O tempo de transito t para um raio que parte da fonte em (S) passa pelo difrator
(A) e chega ao receptor (R) (Figura 5.6) e
t =1
v
(√Δx2
s + h2 +
√Δx2
r + h2
), (D.1)
onde Δxs = x0 − xs e Δxr = xr − x0. xs, xr e x0 sao as coordenadas x da fonte, receptor e
148

difrator respectivamente.
Como ΔxS R = Δxs + Δxr, a equacao D.1 pode ser escrita por
t =1
v
( √(x0 − xs)2 + h2 +
√(xs + ΔxS R − x0)2 + h2
). (D.2)
A derivada da equacao D.2 relativa a posicao da fonte, xs, e
∂t∂xs=
1
vxs + ΔxS R − x0√
(xs + ΔxS R − x0)2 + h2− 1
vx0 − xs√
(x0 − xs})2 + h2. (D.3)
O tempo de transito mınimo ocorre quando a equacao D.3 iguala-se a zero. Entao, a
relacao entre x0, ΔxS R, xs, xr, Δxs e Δxr e
Δxs√Δx2
s + h2=
Δxr√Δx2
r + h2. (D.4)
Para satisfazer a igualdade na equacao D.4, Δxs deve ser igual a Δxr, o que significa
Δxs = Δxr =ΔxS R
2. O tempo duplo mınimo de uma difracao em um meio homogeneo
ocorre quando x0 e o ponto medio entre a a posicao da fonte e a posicao do receptor. Por
conseguinte, o tempo mınimo e
τ =
√4h2 + Δx2
S R
v(D.5)
que ocorre em
xm = x0 +ΔxS R
2. (D.6)
Se erroneamente o afastamento nao nulo ΔxS R for considerado como afastamento
zero, a velocidade aparente (vap) sera calculada por uma suposta distancia dupla entre
fonte (ou receptor) e difrator dividida por um tempo observado t.
vap = 2
√h2
w + (x − xm)2
t, (D.7)
onde hw e a suposta profundidade do difrator. Com alguma manipulacao algebrica,
t2 = 4h2
w
v2ap+ 4
(x − xm)2
v2ap
. (D.8)
O primeiro termo a direita da equacao D.8 e o tempo de transito mınimo observado τ,
descrito na equacao D.5. Entao, a velocidade aparente e:
v2ap = 4
(x − xm)2
t2 − τ2. (D.9)
149
Substituindo as equacoes D.6 e D.5 na equacao D.9,
v2ap = 4
(x0 +ΔxS R
2− x)2
t2 − 4h2+Δx2S R
v2
. (D.10)
O tempo de transito observado para este modelo e dado pela equacao D.1. Substi-
tuindo a equacao D.1 na equacao D.10:
v2ap = 4v2
(x0 +ΔxS R
2− x)2( √
Δx2s + h2 +
√Δx2
r + h2)2 − 4h2 + Δx2
S R
. (D.11)
Empregando as definicoes na equacao D.1 e considerando Δxs, Δxr, x0, xr e xs, a
equacao D.11 se torna
v2ap = 4v2
(x0 +ΔxS R
2− x)2( √
(x0 − xr + ΔxS R)2 + h2 +√
(x0 − xr)2 + h2)2 − 4h2 + Δx2
S R
. (D.12)
A partir da equacao D.12 ilustra-se que a a velocidade aparente vap nao e constante,
mas varia de acordo com a posicao do receptor e do afastamento ΔxS R. Se a diferenca
x0 − xr e muito maior que o afastamento ΔxS R (se os receptores estao muito afastados
dos difratores), vap tende a v. Igualmente, se ΔxS R tende a zero, vap tende a velocidade
real v. Todas as deducoes apresentadas para vap sao validas para meios isotropicos com
variacoes verticais da velocidade. Contudo, v deve ser substituıdo pela velocidade RMS.
150