Embed Size (px)
Citation preview

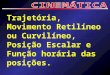
MEDIDA DE POSIÇÃO E MOVIMENTO
Logotipo da Empresa

FundamentoMOVIMENTO
POSIÇÃO ou DESLOCAMENTO
VELOCIDADE
ACELERAÇÃO
ABSOLUTO
ou
RELATIVO
SENSORES ABSOLUTOS ou INERCIAIS
SENSORES RELATIVOS ou DIFERENCIAIS
TRANSLAÇÃO
ou
ROTAÇÃO
2
2
( , , ) ( , , ) ( , , )
[ ] [ / ] [ / ]
( , , ) ( , , ) ( , , )
[ ] [ / ] [ / ]
x y z x y z x y z
x y z x y z x y z
m m s m s
rd rd s rd s

ReferenciaisREFERENCIAIS:
- INERCIAL (i)
- MÓVEL (s)
Vetor r:
Translação: Descreve a posição mas não a orientação.
Cossenos diretores de s:
Rotações: Descreve a orientação do corpo rígido mas não a posição.xi
yi
zi
xs
yszs
r
OUTROS TIPOS DE REFERENCIAIS:
CILÍNDRICO: (r, θ, z)
ESFÉRICO: (r, θ, Φ)

Sistemas de Medição de Movimento
- Medem-se Deslocamentos Relativos. EXEMPLO: Strain gage (já estudado)
DEFORMAÇÕES DE UM CORPO ELÁSTICO
-Escalas, Trenas (lineares – grandes dimensões, [± 1 mm])
-Paquímetros (lineares – pequenas dimensões, [± 20 μm])
-Micrômetros e Microscópios ferramenteiros (lineares [± 1 μm])
-Transferidores (angulares – [± 1 grau = π/180 rd])
-Sextantes e Mesas divisoras (angulares - [± 0.01 grau = π/18000 rd])
-Projetores de perfil (formas geométricas - [± 5 μm])
-Medidores Acústicos (espessuras - [± 1 μm])
-Interferômetros ópticos (SEM CONTATO - rugosidade - [±10 nm])
MEDIÇÕES DIMENSIONAIS: (estáticas)

MEDIDORES DE DESLOCAMENTO – POTENCIOMÉTRICOS
Configuração LINEAR ou ANGULAR
Fio metálico ou Semicondutor
Fio metálico enrolado em material isolante
A GRANULOMETRIA da superfície define a
resolução da ordem de Δ ≈ 2.0 x 10-5 mm
Resolução depende do PASSO do enrolamento:
Para 500 espiras por polegada Δ ≈ 2.0 x 10-3 mm
CIRCUITO de MEDIÇÃO
material isolante
cursor
Rp
I
Ei
Eo Rm
Im
xR
m
2
/
/ / /
i p p
m o o m
m po i
pm p p p
xE R I R R
LI R E e E R I I
R R RE E
RR R R R R R
cursor
L (Rp)
x (R)

MEDIDORES DE DESLOCAMENTO – POTENCIOMÉTRICOS
2
1 1:
2 1 0
/ / /
.25 /
/m pNL
m p
o
p i
NLx
p m
ER x x x
R L E L L
xO MAIO
R RF
R DESVIO ocorre para FL
R R x L x L
R R

MEDIDORES DE DESLOCAMENTO – POTENCIOMÉTRICOS
CIRCUITO PARA LINEARIZAR A SAÍDA:
RD - potenciômetro
cursor

MEDIDORES DE DESLOCAMENTO – POTENCIOMÉTRICOS DIGITAIS
MEDIÇÃO DE PROPAGAÇÃO DE TRINCA
Ei
Eo
Ro
R1 R2 R3 R4 RN
e e 1 2
e
1 1 1 1:
1 1:
o o
i o N
i
E Rcom
E R R R R R R
Se R R TEM DECREMENTOSR R
x
x
Eo/Ei
x1 x2 x3 xN
x1 x2 x3 x4 xN
Este sensor tem construção semelhante a um straingage. Sua aplicação exige o conhecimento prévio da origem e direção da propagação da trinca.

MEDIDORES DE DESLOCAMENTO – OPTICOS DIGITAIS
CONFIGURAÇÃO: - Escala Linear ou Angular
- Transmissão ou Reflexão ÓPTICA
- Relutância MAGNÉTICA
OPERAÇÃO: - Incremental ou Absoluta
A
B
P/4
A
B
FOTO DIODO
FOTO TRANSISTOR
Com apenas uma trilha de furos resulta uma medidor ABSOLUTO, incapaz de detectar o sentido do deslocamento (usado em tacômetros)

MEDIDORES DE DESLOCAMENTO – OPTICOS DIGITAIS
T
TT/4
A
B t
t
As Saídas A e B estão em QUADRATURA:
-Contando os pulsos de A ou de B POSIÇÃO
-Medindo a transição de B em relação a A SENTIDO
CONTADOR
COMPARADOR
A
B
ENTRADAS SERIAIS
POSIÇÃO
e
SENTIDO

MEDIDORES DE DESLOCAMENTO – OPTICOS DIGITAIS
CONTADOR
CONVERSOR
ENTRADAS PARALELAS
(palavra binária)
20
21
22
22
Δxx
ALTERNATIVA: saída tipo BCD
SAÍDA DECIMAL
RESOLUÇÃO: Δx

MEDIDORES DE DESLOCAMENTO – OPTICOS DIGITAIS
COMPONENTESENCODER ROTATIVO

MEDIDORES DE DESLOCAMENTO – OPTICOS DIGITAIS
SENSORES FOTO – ELÉTRICOS
Medem variações de intensidade luminosa.
a) Célula Foto Emissiva: Camadas de materiais foto emissivos (metais álcalis, exemplo – Césio) depositados em uma superfície metálica (prata) com uma camada intermediária de óxido. Forma-se um composto: Ce (Anodo) – O2 – Ag (Catodo). A luz incidente produz uma CORRENTE ELÉTRICA do Anodo para o Catodo:
Intensidade luminosa (Φ)
Elétrons Livres
I = S ΦR Eo
S depende do MATERIAL foto emissivo e do comprimento de onda da Luz incidente (10-5 a 10 A / lúmen). São não lineares
Constante de tempo: ≈ 1 μs
I

MEDIDORES DE DESLOCAMENTO – OPTICOS DIGITAIS
SENSORES FOTO – ELÉTRICOS
Medem variações de intensidade luminosa.
b) Célula Foto Condutiva: Camadas de materiais semicondutores (CdS, CdSe). Os fótons da luz incidente excitam os elétrons livres para uma banda condutora, produzindo uma variação de RESISTÊNCIA ELÉTRICA que decresce com a iluminação
R = S Φ
S depende do material semicondutor e do comprimento de onda da Luz incidente. (R ≈ 104 a 102 Ω ). São não lineares
Constante de tempo: ≈ 1 μs
Io
Ei
REo

MEDIDORES DE DESLOCAMENTO – OPTICOS DIGITAIS
SENSORES FOTO – ELÉTRICOS
Medem variações de intensidade luminosa.
c) Célula Foto Voltaica: Foto-diodo tipo P-N. Os fótons da luz incidente em N produz um fluxo de corrente entre N e P.
S depende do material semicondutor e do comprimento de onda da Luz incidente.
Constante de tempo: ≈ 5 ns
N
PRegião Difusa
óxido
LUZ
Rf
Eo = Rf I λ
I λ
I λ = S Φ

MEDIDORES DE DESLOCAMENTO – OPTICOS DIGITAIS
SENSORES FOTO – ELÉTRICOS
APLICAÇÃO: Medição de deslocamento por Interrupção do feixe luminoso
Fonte Luminosa
Lent
e Co
limad
ora
Plac
a co
m
fres
ta
Lent
e de
Foc
o
x
Sensor
Foto - Elétrico

MEDIDORES DE MOVIMENTO – INTERFEROMETRO
Medição de distâncias e espessuras.
- Fontes de LUZ COERENTE têm comprimento de onda ( λ ) fixo
- Dois feixes da mesma fonte têm inicialmente a mesma FASE.
- Quando o feixe é refletido ou refratado ocorre mudança da FASE.
- Quando dois feixes são superpostos ocorre INTERFERÊNCIA caracterizada por franjas de intensidade NULA (escuras)
n21 = índice de refração
m = 0, 1, 2, 3, ...
B e C são defasadas de λ/2, logo, quando são sobrepostos a franja ocorre em mλ.
1
21 21 21 21
21
2 22 cos
cos cos
:2 cos
m
h hmas n n sen hn
mLogo h ESPES
nSURA
A
B
C
D
α γ
λ
λ λ
λ
δ1δ2
h d
1 2 1

MEDIDORES DE MOVIMENTO - INTERFEROMETRO
n21 = índice de refração
m = 0, 1, 2, 3, ...
C e D são defasadas de 3λ/2, logo, quando são sobrepostos a franja ocorre em (2m+1)λ/2.
2
2
(2 1)
22
cos(2 1)
:4cos
m
dmas
mLogo DISTÂd NCIA
A
B
C
D
α γ
λ
λ λ
λ
δ1δ2
h d
1 2 1
Para medir h de placas transparentes: deve-se usar grande número de comprimentos de onda (m ∞ - alta ordem) com elevada coerência.
Para medir d: pode-se usar pequenos valores de (m) e menores requisitos são exigidos da fonte de luz.

MEDIDORES DE MOVIMENTO - INTERFEROMETRO
INTERFEROMETRIA: VIBRÔMETRO LASER: Mach-Zehnder
A célula de Bragg gera uma freqüência ( fB ) para determinar o sinal da velocidade
-Os caminhos ópticos internos são iguais e o caminho do feixe de medição é igual ao dobro da distância entre BS2 e o objeto (ΔL).
-A interferência entre os sinais da REFERÊNCIA e do objeto é medida pelo detector que converte-o em sinal elétrico proporcional a fmod que depende de v(t)
laser
He-Neon
detector
BS1 BS2
BS3prisma
placa λ/4
lente de foco
objeto
v(t)
Braggreferência
max
mod
( )( ) 1 cos 2
2
2
:
D
B D
B
I L tI e
vf efeito doppler
f f f
Bragg f

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE INDUTÂNCIA ou RELUTÂNCIA
LVDT – Linear Variable Differential Transformer
CIRCUITO PRIMÁRIO:
CIRCUITO SECUNDÁRIO:
1
1 1
p p
p p
j t j tp p pp p p i p p p
p p
j t j tp pp
p p p p p p
di L di EiL i R E e i e
dt R dt R
di jEi Eii e e
R j dt R j
1 2 1 21 2
1 21 2
1
: 1 2 ( ) ( )
: ( )1
p
p
p po
j tp poo
i p p p
e
j tp j tj t o i e
p p p
di diE M E M E E E
dt dtdi jM ME
E M M edt E R j
mas M M S x t x t pode ser Estáticoou Dinâmico
jE E SCaso x t X e e e
X R j

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE INDUTÂNCIA ou RELUTÂNCIA
LVDT – Saída para entrada ESTÁTICA: LB – comprimento das BOBINAS

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE INDUTÂNCIA ou RELUTÂNCIA
LVDT – Saída para entrada ESTÁTICA: LB – comprimento das BOBINAS
Para 2LB > X > LB e -2LB < X < - LB só existe M1 ou M2
Para -2LB >X >2LB M1 = M2 (sem o núcleo) Eo = 0
Para X = 0 M1 = M2 (com o núcleo) Eo = 0
Para –LB < X < LB M1 ≠ M2 Eo = ( Eo(X) )
|Eo|
x+LB-LB +2LB-2LB

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE INDUTÂNCIA ou RELUTÂNCIA
LVDT – Ei é HARMÔNICO – SAÍDA MODULADA
Ei
+
-Eab + Ecd
ab
cd
Filtro PBEo
x(t)Demodulador
Eab Ecd Eab + Eab Eo
t t tt
Para x(t) constante:

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE INDUTÂNCIA ou RELUTÂNCIA
1) Mesmo com o núcleo CENTRADO: Eo(X=0) ≠ 0 devido a presença de harmônicos em Ei (t), ou devido a acoplamento capacitivo entre o primário e o secundário offset da saída.
SOLUÇÃO: usar Ei a partir de uma FONTE SIMÉTRICA com terminal de terra, conectando-o ao terra da saída Eo. Caso a Fonte não tenha o terminal de terra construir um divisor resistivo (R – R) para produzir o TERRA VIRTUAL e ajustar Rp e C para minimizar Eo para X = 0.
Ei+
-T
EoEi
Eo
C
R
RRp
LVDT – Saída para entrada ESTÁTICA: ERROS do SM

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE INDUTÂNCIA ou RELUTÂNCIA
2) Instalando um VOLTÍMETRO de impedância de entrada Rm para medir Eo, se Rm ≠ ∞ aparece uma corrente Is no secundário. As equações do SM passam a ser:
2
2
( 1 2)
( 1 2) ( ) 0
( 1 2) ( )
: ( )
( 1 2)
1 1 2 1
p
p
j tp sp p
p p
p ss m s
m s e
j t
j tj tp
p ps sp p s p p p
m m m m
di diM M Eii e
dt R dt R
di diM M L R Rs i
dt dtEo R i e M M S x t
Caso x t X e
M M j e eEo
Ei RR RR M M L L j L L
R R R R
Portanto: O SM resulta NÃO LINEAR !!! Se Rm ∞ LINEAR (caso anterior)
SOLUÇÃO: instalar um SEGUIDOR de TENSÃO na saída do SECUNDÁRIO
LVDT – Saída para entrada DINÂMICA: ERROS do SM

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE INDUTÂNCIA ou RELUTÂNCIA
LVDT COMERCIAIS

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE INDUTÂNCIA ou RELUTÂNCIA
RVDT – Rotary Variable Differential Transformer
Características de RVDT comercial:
Faixa de operação: ± 40º Linearidade (%FS): 0.5
Se = 2.9 (mV/V)/grau Impedância (Ω): 370 (p) e 1300 (s)
Freqüência de excitação: 10kHz fmax = 1kHz
Cardióide
Bobina Secundária 1
Bobina Secundária 2
Bobinas Primárias
- θ
+ θ

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE INDUTÂNCIA ou RELUTÂNCIA Correntes Parasita – Eddy Currents

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE INDUTÂNCIA ou RELUTÂNCIA
Correntes Parasita – Eddy Currents
O campo primário induz correntes no corpo metálico (condutor).
A corrente parasita produz campo secundário que age na bobina primária alterando sua corrente. Esta variação pode ser medida.
A intensidade da Corrente Parasita depende:
- Da freqüência do campo magnético;
- Da distância da bobina à superfície;
- Da condutividade do material.
A profundidade alcançada pela corrente parasita dada por:
δ = 50.3[ρ/(f . μr)]1/2 mm, sendo a resistividade ρ [μΩ . cm] , a permeabilidade relativa μr e a freqüência f [Hz].

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE INDUTÂNCIA ou RELUTÂNCIA Correntes Parasita – Configuração do sensor de deslocamento:
1) Uma única bobina – medição por ponte de Maxwell-Wien
Bobina
Material condutor
Encapsulamentoplástico
Lx – indutância da bobina [H]
R1, R2 e R3 – resistências [Ω]
C – capacitância [F]
1 31 3
2
0x x
R RR R C L e o
RER
Eo
Com a BOBINA longe da superfície do material condutor, a PONTE é balanceada fazendo:

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE INDUTÂNCIA ou RELUTÂNCIA Correntes Parasita – Configuração do sensor de deslocamento:
2) Duas bobinas – medição por ponte de Maxwell-Wien
Com as BOBINAS longe da superfície do material condutor, a PONTE é balanceada fazendo:
Material condutor
inativa
Encapsulamentoplástico
Bobinas
ativa
Eo
LiLa
R R
C C
a iC L CL R
Eo é demodulada e filtrada para posterior amplificação.

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE INDUTÂNCIA ou RELUTÂNCIA
Correntes Parasita – Exemplo de Sistemas Comerciais: SKF

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE CAPACITÂNCIA
Princípio de Funcionamento:
área A
dielétrico K
h [ ]A
C K Faradh
A = constante e h varia:
2
:
:
A KA hC C K C
h h h h h
C KASensibilidade S
h h h
Não
h
KA C hpara
Linea
h h S
r
eh C h
:
LI
K
N
A K blC
h
EAR
hK b C l
C C l lh C l
C K bSensibilidade S
l h
h = constante e Δl varia
área A
Δl
h
b
l

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE CAPACITÂNCIA
Circuitos de Medição: Impedância Capacitiva
b) Medição com ponte: (DC até 0.1 da freqüência de excitação)
- Para h=ho e Cb = C(ho) ponte balanceada. Eo(h) é medido a partir desta condição.
- Pode-se usar Cb também como SENSOR. Neste caso Eo = Eo(h – hb). Esta configuração é usada em sensores de pressão onde a membrana elástica central é ligada ao ponto B do circuito ao lado. A linearidade é garantida se Cb = C para ΔP = 0.
- Eo pode ser amplificada com um AO diferencial.
BA D
Isolante com metalização interna
membrana
Eo
C(h)Cb
B
A D

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE CAPACITÂNCIA
Circuitos de Medição: Impedância Capacitiva
c) Medição direta com AO: (DC até 0.1 da freqüência de excitação)
ifia
ih
HIPÓTESES:
Zi ≈ ∞ ia ≈ 0 G ≈ ∞1
0
1
( )
1 1
( ) ( )
: ( )
f i a i f h af
h o a o
fo h f i
f
f io
i dt E E E i i iC
i dt E E EC h
CE i dt i d E
C h C C h
C EK Amas C h E
LINEAR
hh K A
Eo deve ser demodulado e filtrado para medidas de h(t)

MEDIDORES DE MOVIMENTO - SENSORES DE VARIAÇÃO DE CAPACITÂNCIA
Circuitos de Medição: Impedância Capacitiva
Exemplo: Sistema de medição comercial
RANGE * MODEL # L
±.025 (±.635)
D +0/-.002 (+0/-.050)
E +.001/-0 (+.025/-0)
G Min. x10 -3
Guard** Thickness
.0005 (.0127) ASP-0.5-CTA
2.50 (63.5)
.250 (6.35)
.029 ±.0008 (.737 ±.020 )
.025 (.635)
.013 (.33)
.200 (5.08)
ASP-200-CTA4.00
(101.6)1.50
(38.10).626
(15.90)10.00 (254)
.402 (10.21)
** For best linearity, guard thickness should be 2 times or greater the measurement range.
- Saída: 0 a 10 V- DC to 5 kHz- Resolução: .005% FS

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
Acoplamento entre Tensão – Deformação e Campo Elétrico - Corrente
CONSTANTES DO MATERIAL PIEZELÉTRICO:
gij - CAMPO ELÉTRICO produzido na direção i devido a
TENSÃO MECÂNICA aplicada na direção j.
dij – CARGA ELÉTRICA produzida na direção i devido a FORÇA aplicada na direção j.
MATERIAL PIEZELÉTRICO
ε q
Eε
sensores
atuadores
PRINCÍPIO DE FUNCIONAMENTO:

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
EXEMPLO: material com polarização e força na mesma direção3
2
1t
a
b
F3
F3
Eo
eletrodo
g33 = [Eo/t] / [F3/(a.b)] d33 = q / F3 A = a b C = K A / t
A constante dielétrica do material é K [Farad/m] d33 = g33 K
Quartzo - corte X: (módulo de elasticidade 8.6 1010 Pa)
K = 4.06 10-11 F/m e g = 50 10-3 (V/m)/(N/m2) d = 2.03 pC/N
Titanato de Bário: (módulo de elasticidade 12 1010 Pa)
K = 1250 10-11 F/m e g = 12 10-3 (V/m)/(N/m2) d = 150 pC/N

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
A impedância deste dispositivo é ELEVADA:
- Aplicando uma deformação ESTÁTICA a carga elétrica produzida demora a descarregar porque a resistência do material é ELEVADA (105 M ).
- Porém ao introduzir um medidor com impedância de entrada da ordem de 1 M, a carga armazenada é rapidamente dissipada.
A constante (d) pode ser usada para obter a relação entre a Carga Elétrica (q) e a variação de espessura do cristal (t):
[ / ]t
d E AS C m
t
CONCLUSÃO: sensores piezelétricos NÃO conseguem medir entradas ESTÁTICAS.

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
CIRCUITO BÁSICO:
Cristal Cabo Amplificador
1 1
: [ / ]
[ ]
1
( )1
q q q
q c r o c c q r
o or o q r q
qv
aoo v
o v
dqq S h i S h
dt
i i i E E i dt i i dtC C
E Ei C E i i S h
R RS
definindo S V mC
RC s
EE S h ordem
S DE Dh D
iq ic ir
Para h ESTÁTICO Eo = 0

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
CIRCUITO BÁSICO: Resposta ao IMPULSO
1 ( )
: ( , )
0 (0 ) (0 )
[0, ]
1
o v
qo
tq
o
T t Tq
o
D E S D h
Entrada Pulso X T
S Xt h X E
CS X
t T E eC
S Xt T E e e
C
t
h
Eo
t
T
X
τ
τ
Se τ = ∞ Eo segue a entrada. Como τ = RC, pode-se ajustar R na entrada do AO para obter
a desejada constante de tempo, desde que C é fixo (cristal+cabo).

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
CIRCUITO REAL: AMPLIFICADOR DE CARGA
2 1 1 2 2 2
2
1 1
2
2
1
: 1
1
:
1
go
b
qo o
f eq eq
eq f f ff
qo o
f f f
j t j to o
o q
f
RE G E E G E E
R
G SE E h
R C C
C Csendo C C C C
G C G
G SE E h
R C C
Para h H e E E e
A FRF resulta
G SE jH C j
Neste caso: τ = Rf Cf pode ser ajustado externamente.
A saída Eo tem GANHO ajustado por G2
=Rg / Rb

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
CIRCUITO REAL: AMPLIFICADOR DE CARGA
LIMITE INFERIOR DA BANDA DE FREQUÊNCIAS
τ = Rf Cf é a constante de tempo do sensor piezelétrico + o amplificador de carga.
Para ERRO de GANHO < 1%:
ω τ < 0.01 ERRO DE FASE < 0.6o
Para ω = 0.01 Hz τ = Rf Cf = 1.
Logo é possível operação QUASI-ESTÁTICA !!!

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
ACELERÔMETROS: CONFIGURAÇÕES e MODELO FÍSICO
x(t) – movimento absoluto de (m)
y(t) – movimento absoluto de (b)
h(t) – deformação do cristal
massa sísmica
m
c k
cristal
y(t)
x(t)
base b

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
ACELERÔMETROS: MODELO MATEMÁTICO - SM de 2a ORDEM
massa sísmica
m
c k
cristal
y(t)
x(t)
base b
2
22
amortecimento viscoso equivalente do cristal
massa sísmica fixa ao cristal
, [ / ] :
:2
: ( ) ( ) ( )
1 11
nn n
j t j t j tc
c n
E Ah y x k N m sendo A ab
tc
m
k cdefinindo
m m
Para y t Y e y t Y e y t A e
mh ch k h m y
HA
2j
Erros de GANHO e FASE

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
ACELERÔMETROS: RESPOSTA em FREQÜÊNCIA (MECÂNICA)
Para erro de FASE nulo ξ = 0.
Neste caso: para erro de GANHO < 1% η < 0.1 a freqüência natural deve ser ELEVADA para operar numa banda aceitável de freqüências.

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
ACELERÔMETROS: RESPOSTA em FREQÜÊNCIA (MECÂNICA +ELÉTRICA)
Para erro de FASE nulo ξ = 0.
Neste caso: para erro de GANHO < 1% η < 0.1 a freqüência natural deve ser ELEVADA para operar numa banda aceitável de freqüências.

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
ACELERÔMETROS COMERCIAIS:
AMPLIFICADOR DE CARGA EXTERNO
- SENSIBILIDADE à carga pode ser ajustada de 0.1 a 30 pC/m/s2
- O GANHO do amplificador de carga pode ser ajustado (x 0.1 a x1000 mV/m/s2)
- A VELOCIDADE e o DESLOCAMENTO podem ser obtidos por INTEGRAÇÃO ANALÓGICA
- FILTROS PASSA-FAIXA permitem selecionar a banda de freqüências de medição.

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
ACELERÔMETROS COMERCIAIS: PCBICP: Integrated Circuit - Piezoelectric
AMPLIFICADOR DE CARGA INTERNO-SENSIBILIDADE e GANHO FIXOS: 10 mV / g na faixa de 1 Hz a 6kHz
-ALIMENTAÇÃO EXTERNA : de 18 a 30 VDC
-MÁXIMA TEMPERATURA: 250 OC
-IMPEDÂNCIA DE SAÍDA: < 100 Ω

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
ACELERÔMETROS COMERCIAIS: B&K

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
ACELERÔMETROS COMERCIAIS: MONOLÍTICOS – Analog devices
- Sensor capacitivo diferencial
- Range: ± 120 g
- Frequência natural: 24kHz
- Sensibilidade: 18 mV/g
- Alimentação: 5 V DC
- Preço: US$ 8.00

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
DIMENSÕES, SENSIBILIDADE e BANDA DE FREQUÊNCIAS

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
TIPOS DE FIXAÇÃO: INFLUÊNCIA NA FREQUÊNCIA NATURAL

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
TIPOS DE FIXAÇÃO: SENSIBILIDADE DUAL E FIXAÇÃO DO CABO

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
INFLUÊNCIA DA MASSA DO ACELERÔMETRO

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZELÉTRICOS
VERIFICAÇÃO e CALIBRAÇÃO do ACELERÔMETRO
Calibração do ACELERÔMETRO de REFERÊNCIA: Interferometria LASER

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES PIEZORESISTIVOS
CONFIGURAÇÕES GEOMÉTRICAS DO ACELERÔMETRO:
σrσr
σt
σt
- Membranas elásticas paralelas com massa concentrada no centro sistema de 1 GDL, MÁXIMA SENSIBILIDADE na direção (z).
-As dimensões e a massa são maiores que as dos acelerômetros piezelétricos.
- Os strain gages medem a deformação que é convertida em voltagem numa PONTE de WHEATSTONE.
- A banda de freqüências é de DC até 200 Hz. (para strain gage colado com resina epóxi)
- Podem ser utilizados como SISMÓGRAFOS cuja freqüência natural é da ordem de 1 Hz.
Massa sísmica
membranascarcaça
z

MEDIDORES DE MOVIMENTOMEDIDORES INERCIAIS: SENSORES DIVERSOS
CONFIGURAÇÕES GEOMÉTRICAS DO ACELERÔMETRO COM SENSOR DE DESLOCAMENTO
- Membranas elásticas paralelas com massa concentrada no centro sistema de 1 GDL, MÁXIMA SENSIBILIDADE na direção (z).
-As dimensões e a massa são maiores que as dos acelerômetros piezelétricos.
- Pode-se usar um sensor de variação de INDUTÂNCIA (LVDT ou EDDY CURRENT) ou um sensor ÓPTICO para medir o deslocamento (z)
- Nestes casos a faixa de operação é limitada pela freqüência natural da estrutura.
Massa sísmica
membranascarcaça
z
Sensor de deslocamento

MEDIÇÃO DE FORÇA, MOMENTO E POTÊNCIA
Logotipo da Empresa

Métodos Básicos de Medida de Força
1. Equilíbrio desta força por meio de uma massa conhecida sob um campo gravitacional conhecido.
2. Medida da aceleração produzida pela força sobre uma massa conhecida.3. Equilíbrio desta força por meio de uma força magnética produzida por uma
bobina conhecida em que circula uma corrente conhecida.4. Transformando esta força em pressão e medindo esta pressão.5. Aplicando-se esta força sobre uma suspensão elástica e medindo-se a
deformação desta suspensão.6. Medindo-se a mudança no movimento de precessão de um giroscópio causado
pelo torque resultante da aplicação desta força.7. Medindo-se a mudança da frequência natural em fios e cordas provadas por esta
força.

Métodos Básicos de Medida de Força1.Equilíbrio desta força por meio de uma massa conhecida sob um campo gravitacional conhecido.

Métodos Básicos de Medida de Força2.Medida da aceleração produzida pela força sobre uma massa conhecida.

Métodos Básicos de Medida de Força3.Equilíbrio desta força por meio de uma força magnética produzida por uma bobina conhecida em que circula uma corrente conhecida.

Métodos Básicos de Medida de Força4.Transformando esta força em pressão e medindo esta pressão.

Métodos Básicos de Medida de Força5.Aplicando-se esta força sobre uma suspensão elástica e medindo-se a deformação desta suspensão.

Métodos Básicos de Medida de Força
Força Suspensão Elástica Deformação Sensor de
deformação
Sinal ElétricoLeitura
Princípio de Deflexão

Métodos Básicos de Medida de Força
Força Suspensão Deslocamento Atuador
Compensação do
Deslocamento
Força de CompensaçãoLeitura
Princípio da Compensação

Classificação de BalançasDescrição Faixa de Operação Resolução
Balança Analítica Macro 200-1000 gramas gramas
Balança Analítica Semi-micro 50-100 gramas gramas
Balança Analítica Micro 10-20 gramas gramas
Micro Balança <1 grama gramas
Ultramicro Balança <0.01 gramas gramas

CÉLULAS DE CARGA POR DEFORMAÇÃO ELÁSTICA.
Logotipo da Empresa

Modelo Fundamental
A equação do movimento
é dada por:
Isolando-se a força do
lado esquerdo da equação
temos:
m
K C
F
x

Modelo Fundamental
A força é por consequência uma soma de
componentes a saber:

Modelo Fundamental
• Verifica-se que a célula de carga é também um acelerômetro e poderá medir acelerações da base.
• Em células de cargas os elementos não podem ser completamente separados. Ex: Não existe uma mola sem massa.
• As células de carga utilizam uma rigidez elevada de maneira a minimizar e portanto os demais componentes de força que não a elástica.
• Em célula de carga geralmente o deslocamento é substituindo pela deformação elástica que é medida com o uso de extensômetros.

Células de Carga Piezoresistivas
• Baseiam-se no uso de extensômetros para medir a deformação de uma suspensão elástica provocada pela força a ser medida.
• Utilizam o circuito eletrônico denominado ponte de Wheatstone.

Células de Carga PiezoresistivasExtensometro

Células de Carga PiezoresistivasExtensometro
L
A
L+ΔL
A-ΔAε
ε
Na direção LONGITUDINAL: εl produz ΔL e ΔA, induzindo uma variação na RESISTÊNCIA ELÉTRICA de cada filamento da grade do strain gage. A resistência do strain gage é a soma das resistências dos filamentos.
Na direção TRANSVERSAL: εt abre a grade e não induz variações significativas em L e A o strain gage é INSENSÍVEL a deformações transversais.
/L L R RR GF
L A
STRAIN GAGE

Célula de Cargas PiezoresistivasPonte de Wheatstone
Considerando-se que a ponte é
excitada pela pilha com tensão
e que é nula devido ao
resistência interna elevada do
voltímetro temos:
Que conduz há:
R2R1
R3R4
11
m2
2m
imA
B
C
D

Célula de Cargas PiezoresistivasPonte de Wheatstone
Considerando-se os valores de
e obtêm se o valor da tensão :
Considerando-se que todos os resistores possuem a mesma resistência a ponte é dita balanceada e .
R2R1
R3R4
11
m2
2m
imA
B
C
D

Célula de Cargas PiezoresistivasPonte de Wheatstone
Considerando-se que e que temos:
As variações de com cada uma das resistências são dadas por:
R2R1
R3R4
11
m2
2m
imA
B
C
D

Célula de Cargas PiezoresistivasPonte de Wheatstone
Considerando-se todas as resistência com valor temos que a resistência equivalente entre A e B temos:
Da mesma maneira a resistência equivalente entre B e D é dada por:
R2R1
R3R4
11
m2
2m
imA
B
C
D

Células de Carga Piezoresistivas
R
R
Eo Ei
𝐸𝑜
𝐸𝑖
= 1+2𝜖𝐺𝐹4+2𝜖𝐺𝐹 (1−𝜈 )

Células de Carga Piezoresistivas
𝐸𝑜
𝐸𝑖
=𝜖𝐺𝐹2
R
R
Eo Ei

Células de Carga Piezoresistivas
𝐸𝑜
𝐸𝑖
= 𝜖𝐺𝐹2+𝜖𝐺𝐹
R
R
Eo Ei

Células de Carga Piezoresistivas
𝐸𝑜
𝐸𝑖
=𝜖𝐺𝐹 (1+𝜈𝐺𝐹 )2+𝜖𝐺𝐹 (1−𝜈)
Eo Ei

Células de Carga Piezoresistivas
𝐸𝑜
𝐸𝑖
=𝜖𝐺𝐹 (1+𝜈𝐺𝐹 )2+𝜖𝐺𝐹 (1−𝜈)
Eo Ei

Células de Carga Piezoresistivas
𝐸𝑜
𝐸𝑖
=𝜖𝐺𝐹
Eo Ei

Célula de Carga Piezoresistiva

Célula de Carga Piezoresistiva

Célula de Carga Piezoresistiva

(1) (3) (2) (4)
12 2
2
l
ll t l
F
A
e eE
V R GFF
Ei R A E
V GF Ei mVSe
F A E N
ESTRUTURAS ELÁSTICAS MAIS COMUNS
BARRA (uniaxial) VIGA (flexão)
3
2 12
: (1) (3) (2) (4)
2
2
l
ll l l
F L h b hI
I
e eE
V R GF L hF
Ei R E I
V GF L h Ei mVSe
F E I N
Célula de Carga Piezoresistiva

ESTRUTURAS ELÁSTICAS MAIS COMUNS
MEMBRANA CIRCULAR
Condição: R >> h
Tipos de Cargas Verticais:
-Pressão uniforme
-Força concentrada no centro
-Força distribuída numa circunferência
Tensões Mecânicas:
- Radial: σr (strain gages 1 e 3)
- Tangencial: σt (strain gages 2 e 4)
Deformações: εr e εt
Célula de Carga Piezoresistiva

2 22
2 22
2
2 22
2
2 22
222 2
3
31 3
83
1 1 38
3 13
8
3 1
8
3 1
16
r
t
r
t
pR r
hp
R rh
pR r
Eh
pR r
Eh
pw R r
Eh
MEMBRANA CIRCULAR COM BORDA ENGASTADA
p F
2
2
2
2
2
2
2
3
31 ln 1
2
31 ln
2
3 1ln 1
2
3 1ln
2
3 1ln
2
r
t
r
t
F R
h r
F R
h r
F R
Eh r
F R
Eh r
F Rw
Eh r
Célula de Carga Piezoresistiva

MEMBRANA CIRCULAR COM BORDA ENGASTADAp
F
Célula de Carga Piezoresistiva

GEOMETRIAS COMPLEXAS: USAR MODELOS COMPUTACIONAIS
EXEMPLO: Deslocamento (ux) Deformação (εy)
Célula de carga
Tipo S
Célula de Carga Piezoresistiva

EXEMPLO:
Célula de carga
Tubular
F
εx - RADIALGEOMETRIAS COMPLEXAS: USAR MODELOS COMPUTACIONAIS
Célula de Carga Piezoresistiva

EXEMPLO:
Célula de carga
Tubular
εz - TANGENCIAL
F
GEOMETRIAS COMPLEXAS: USAR MODELOS COMPUTACIONAIS
Célula de Carga Piezoresistiva

SENSIBILIDADE DUAL: Forças e Momentos NÃO DESEJADOS
EXEMPLO: Célula de carga projetada para medir Fz
Cargas adicionais: Fx e Fy (no sentido +)
(1) e (3) medem εz (2) e (4) medem εy
1,2,3,4 SIMÉTRICOS em relação a linha s
(1): εz = εFz – εFx + εFy (3): εz = εFz – εFx – εFy
(2): εy = -ν(εFz - εFx + εFy) (4): εy = -ν(εFz – εFx - εFy)
Na PONTE: (1)+(3) – (2)–(4):
εz = 2 εFz - 2 εFx εy = -2ν(εFz – εFx)
A SAÍDA resulta: (1 )
2 Fz Fxi
V GF
E
x
z
y
Fx
Fy
Existe SENSIBILIDADE DUAL devida a εFx
Célula de Carga Piezoresistiva

CORREÇÃO DA SENSIBILIDADE DUAL DO EXEMPLO ANTERIOR
ADICIONAR 4 strain gages na face oposta, //s aos primeiros:
(1 ) Fz
VGF
Ei
(1’) e (3’) medem εz (2’) e (4’) medem εy
1,2,3,4 SIMÉTRICOS em relação a linha s’ // s
(1’): εz = εFz + εFx + εFy (3’): εz = εFz + εFx – εFy
(2’): εy = -ν(εFz + εFx + εFy) (4’): εy = -ν(εFz + εFx - εFy)
Associar ( K ) e ( K’ ) em SÉRIE em cada um dos braços da ponte
Na PONTE: (1+1’) + (3+3’) – (2+2’) - (4+4’) εz = 2 εFz e εy = -2ν εFz
3’
1
1’ 2
2’
3
44’
A SAÍDA DA PONTE:
A sensibilidade é o DOBRADA e NÃO existe efeito cruzado devido a Fx e Fy
Célula de Carga Piezoresistiva

CONFIGURAÇÃO
- Plataforma rígida
- 6 células de carga uniaxiais rotuladas nas extremidades
- 3 instaladas verticalmente nos vértices de um triângulo eqüilátero de lado d1 medem (F1, F2 e F3)
- 3 instaladas no plano da plataforma formando outro triângulo eqüilátero de lado d2 medem (F4, F4 e F6)
- os triângulos têm centro comum
- os esforços devem ser aplicados no centro dos triângulos
- operações algébricas com os sinais das células resultam os valores dos esforços
EXEMPLO : MEDIR Fx, Fy, Fz, Mx, My e Mz
Z
Y
11 2 3 5 3 4 2 6
21
5 4 32
24 5 6
31 1
2 1 2 3 3 222 3
Fx F F F Fy F F F
Fz F F
dMx F F F
d dMy F F F Mz F F
Célula de Carga Piezoresistiva

CONFIGURAÇÃO
- Único corpo elástico engastado numa extremidade e livre na outra
- 3 pontes completas de strain gages com saídas independentes
- X e Y têm os 4 strain gages na direção z colados próximo do engaste: (1 e 3) numa face e (2 e 4) na face oposta.
- Z tem 2 strain gages na direção axial (1 e 3) e 2 na transversal (2 e 4), todos em faces opostas
EXEMPLO: MEDIR Fx, Fy, Fz
Cada PONTE fornece separadamente as FORÇAS.
Fz é obtida diretamente, enquanto Fy e Fx são calculadas a partir da distância L
1 2
3
4
1 3
2 4
1
3
2
4
Fy
Fz
Fx
L
Célula de Carga Piezoresistiva

EXEMPLO: MEDIR Fx, Fy, Fz
12
2
2
2
z zz Fz z
x x Fxx Fx z
y
x x FxaFxa za
y
y y Fyy Fy y
x
y y FyaFya ya
x
F FF em qualquer valor de z
A EAF L h
F para z LI E
F a hpara z a
I E
F L hF para z L
I E
F a hpara z L
I E
2
3
4
1 3
2 4
1
3
2
4
Fy
Fz
Fx
L
a
Ponte (1),(2),(3),(4): só mede Fx pois: ε1 = ε3 = -(ε2 = ε4 )Fz,Fy SE ANULAM
Ponte (1),(2),(3),(4): só mede Fy pois: ε1 = ε3 = -(ε2 = ε3 )Fz,Fx SE ANULAM
Ponte (1),(2),(3),(4): só mede Fz pois: (ε1 = -ε3 )Fx SE ANULAM e
(ε1 = ε3)Fz e –ν((ε2 = ε4 )Fz SE SOMAM
Célula de Carga Piezoresistiva

Célula de Carga Piezoresistiva
Modelo TriaxialZ
F
YF
XF
F

Célula de Carga PiezoresistivaMM - Princípio construtivo: tipo “S”. Para medição de forças no sentido tração / compressão, como em máquinas universais de ensaios, balanças industriais e dosadoras híbridas (acionamento mecânico atuando na célula de carga). Em alumínio anodizado. Grau de proteção IP-53, para células de carga nas capacidade de 5 ,10, 20 kgf e IP-65 para células de 50 , 100 , 200 kg (NBR 6146) classificação C3 (CB-204).

Célula de Carga PiezoresistivaCDA - Princípio construtivo: viga bi-engastada trabalhando à flexão. Para balanças comerciais e industriais. Permite aplicação de carga direta, eliminando qualquer sistema de redução mecânica. Insensível à cargas excêntricas. Admite plataformas com tamanho máximo de 480 x 480 mm. Em aço liga, com acabamento de níquel químico. Grau de proteção IP-23 (NBR6146). Classificação C3 (CB-204).

Célula de Carga PiezoresistivaCLC/CLS - Princípio construtivo: viga engastada trabalhando à flexão, com sensores ao cisalhamento. Para plataformas de pesagem de baixo perfil, tanques silos e pesagens industriais. Em aço liga, com acabamento em níquel químico. Gau de proteção IP-65 para a CLC e IP-67 para a CLS (NBR 6146). Classificação C3 (CB-204).

Célula de Carga PiezoresistivaKLC - Princípio construtivo tipo S, destinada a medição de forças de tração e compressão normalmente utilizada em máquinas de ensaios, balanças eletrônicas, sistemas de automação em geral. Construída em liga de aço carbono com grau de proteção IP-65 (NBR 6146). Disponível nas capacidades 500 , 1000 , 2000 , 5000 , e 10000 kgf.

Célula de Carga PiezoresistivaCCI - Princípio construtivo: 4 colunas trabalhando à tração / compressão. Altíssima rigidez e resistência à cargas laterais e excêntricas, pela construção monobloco das colunas e cabeças de fixação. Para medição de forças de tração e compressão, como em balanças rodoviárias, tanques, silos, aplicações industriais e máquinas universais de ensaio. Em aço liga, com acabamento em níquel químico. Grau de proteção IP-65 (NBR 6146). Classificação C3 (CB-204).Disponível nas capacidades de 10 , 20 , 30 , 50 , 100 , 200 , 300 e 500 tf.

Célula de Carga por Pressão

Célula de Carga Capacitiva

Balança Túnel de Vento– FEMEC
Não interferir no escoamento do fluído
Capaz de medir forças de arrasto e sustentação com baixas amplitudes
Permitir a aplicação em corpos de prova com pequenas dimensões Capaz de medir simultaneamente as forças e os momentos nos três eixos
de um referencial cartesiano

Balança Túnel de Vento– FEMEC
2
8Y
X
FF
K L L
1 2 3 4 5 6
1 2
2 3 5 6
1 2
7
1 12 2X
Fx Fx
Y
Fy Fy
Z
F F F F F F F
F F F F F
F F
1 2 3 1 2 3
1 2
1 2
2 2
2
2
Z
Y X X
Z Y Y
d dM F F F F F F
LeM F F
LeM F F
Composição das forças e dos momentos
Efeito Cruzado

Balança Túnel de Vento– FEMEC• Capaz de medir grandezas dinâmicas e estáticas• Possuir uma alta sensibilidade e uma alta resolução
Células de cargas piezoresistivas
Sensibilidade
Comportamento linear
Resolução
Construção
Compactas

Balança Túnel de Vento– FEMEC
_ 100eixo célula
célula
S SP DEF
S
Projeto e otimização da balança
Freqüências naturais elevadas

Balança Túnel de Vento– FEMEC
_ 100eixo célula
célula
S SP DEF
S
Projeto e otimização da balança
Freqüências naturais
Modelo de elementos finitos
Otimização – Minimizar P_DEF
Diâmetro do eixoDiâmetro do discoEspessura do disco
Constante elástica das células K
Variáveis de Projeto
Dimensões mínimas e máximasValor da primeira freqüência natural
maior que 60 Hz
Restrições

Balança Túnel de Vento– FEMECModelo de Elementos Finitos

Balança Túnel de Vento– FEMECModelo de Elementos Finitos

Balança Túnel de Vento– FEMEC
P_DEF=35.16%
Resultado Otimização
Diâmetro do eixo - 4.4 mm Diâmetro do disco - 45 mm
Espessura do disco - 30 mm Constante elástica das células K - 34357 N/m

Balança Túnel de Vento– FEMECProjeto da Célula de Carga
Geometria da célula – Tipo Z Rigidez definida pelo algoritmo de otimização

Balança Túnel de Vento– FEMECProjeto da Célula de Carga
Furos Concentradores de Tensão
10 MPa 13.5 MPa

Balança Túnel de Vento– FEMECProjeto da Célula de Carga
Furos Concentradores de Tensão

Balança Túnel de Vento– FEMECProjeto da Célula de Carga
Furos Concentradores de Tensão

Balança Túnel de Vento– FEMECProjeto da Célula de Carga

Balança Túnel de Vento– FEMEC

Balança Túnel de Vento– FEMECProjeto da Célula de Carga

TORQUIMETRO
Logotipo da Empresa

Metodologias e Geometrias Comuns

GEOMETRIAS COMPLEXAS: USAR MODELOS COMPUTACIONAIS
EXEMPLO: TORQUÍMETRO DE LÂMINAS PARALELAS
T CADA FLANGE É MONTADA EM UM
SEMI-EIXO E CADA UM É SUPORTADO POR ROLAMENTOS
O TORQUE FLETE AS LÂMINAS
FORÇAS AXIAIS SÃO CANCELADAS PELA
PONTE.
Torquimetro Piezoresistivo

GEOMETRIAS COMPLEXAS: USAR MODELOS COMPUTACIONAIS
EXEMPLO: TORQUÍMETRO TUBULAR
TO torque T produz TENSÕES PRINCIPAIS (DE COMPRESSÃO E DE TRAÇÃO) em direções que fazem ÂNGULOS DE 45 o EM RELAÇÃO AO EIXO
Os strain gages são diametralmente opostos
(1 e 3) SÃO COLADOS A + 45o
(2 e 4) SÃO COLADOS A - 45o
T PRODUZ DEFORMAÇÕES PRINCIPAIS:
ε1 = ε3 = - (ε2 = ε4)
As FORÇAS AXIAIS são CANCELADAS pela PONTE.
1 2
Torquimetro Piezoresistivo

TRANSMISSÃO DOS SINAIS DE EXCITAÇÃO E DE SAÍDA DA PONTE
SLIP RINGS
ALIMENTAÇÃO DA PONTE: DC
RESISTÊNCIA DE CONTATO: 40 mΩ ± 2 mΩ
ROTAÇÃO MÁXIMA: 6000 RPM
Torquimetro Piezoresistivo

TRANSMISSÃO DOS SINAIS DE EXCITAÇÃO E DE SAÍDA DA PONTE
TRANSFORMADOR ROTATIVO
ALIMENTAÇÃO DA PONTE: AC
ROTAÇÃO MÁXIMA: depende das tensões mecânicas devidas às forças centrífugas.
Torquimetro Piezoresistivo

TRANSMISSÃO DOS SINAIS DE EXCITAÇÃO E DE SAÍDA DA PONTE
TRANSFORMADOR ROTATIVO
~ EoEi
Ei = EI sen(ωpt) Voltagem de alimentação (excitação AC)
A ponte de Wheatstone modula o sinal da excitação com o sinal gerado pelas deformações dos strain gages => Es = ES sen(ωt)
Eo = Ei . Es = EI ES sen(ωpt) sen(ωt)
Eo = (EI ES)/2 [cos (ωp - ω)t + cos (ωp + ω)t ]
Torquimetro Piezoresistivo

TRANSMISSÃO DOS SINAIS DE EXCITAÇÃO E DE SAÍDA DA PONTE
TRANSFORMADOR ROTATIVO: modulação AM com fp = 1000 Hz
SINAL DEMODULADO
E FILTRADO
DEMODULADOR
FILTRO P- BAIXO
Torquimetro Piezoresistivo

TRANSMISSÃO DOS SINAIS
TRANSMISSÃO ÓPTICA: defasagem entre pulsos de 2 ENCODERS
2 a
p
tG J G JT
L L t
ref tp
ta
t
t
T T
θref θref +Δθ
L
Elemento elástico
Torquimetro Piezoresistivo

TRANSMISSÃO DOS SINAIS DE EXCITAÇÃO E DE SAÍDA DA PONTE
Requer que ELETRÔNICA de CONDICIONAMENTO do sinal dos sensores seja incluída na PARTE MÓVEL. (EMBARCADA no sistema ROTATIVO)
O sinal de saída do SM é modulado (AM ou FM) com o sinal de um transmissor de onda de rádio.
Uma ANTENA EXTERNA capta o sinal transmitido pelo rádio, e o receptor DEMODULA este sinal, recuperando a saída do SM.
Dependendo da freqüência da ONDA PORTADORA (para FM: fp = 217.55MHz ou 219.45 MHz) é possível transmitir vários canais com faixa de DC até 2 KHz.
APLICAÇÕES: sondas espaciais, mísseis, meteorologia remota, aplicações automobilísticas.
TELEMETRIA: Transmissão por onda de rádio
Torquimetro Piezoresistivo