-
Manufatura assistida por computador
Cinemática Direta em Manipuladores Robóticos
Professor: Mário Luiz TroncoAluno Doutorado: Luciano Cássio
Lulio
Engenharia Mecânica2013/01
-
Agenda2013/01
Cinemática Direta
� Orientação e sistemas de referência
� Cinemática direta
� Movimentos de Rotação
� Movimentos de Translação
� Matriz de Transformação Homogênea
� Representação Denavit-Hartenberg
2
-
Anatomia de manipuladores2013/01
Cinemática Direta3
Base: Fixa ou móvel, indicando o sistema
de referência;
Elos (links): Formam una cadeia cinemática
– corpos intermediários;
Juntas: Conexão entre dois ou mais elos -
movimento;
Efetuador final (end effector): Formado
pelo punho (whrist) e uma ferramenta para manipulação com o
meio;
Atuadores: Transmissão dos esforços para
com os movimentos (elétrico, pneumático,
hidráulico);
Sensores: Leitura de dados das posições de
seus elementos (odometria, tacometria).
Flange: Onde é acoplado o end effector.
-
Anatomia de manipuladores2013/01
Cinemática Direta4
Juntas (joints): Conexão entre dois ou mais corpos (elos),
que
permite a transmissão de movimentos, esforços, forças ou
torque.
Atuam como restrições geométricas.
Juntas principais:
-
Espaço/Volume/Envelope de trabalho2013/01
Cinemática Direta5
Manipulação articulada ou RRR:
-
Espaço/Volume/Envelope de trabalho2013/01
Cinemática Direta6
Manipulação esférica ou RRP:
-
Espaço/Volume/Envelope de trabalho2013/01
Cinemática Direta7
Manipulação cilíndrica ou RPP:
-
Espaço/Volume/Envelope de trabalho2013/01
Cinemática Direta8
Manipulação cartesiana ou PPP:
-
Espaço/Volume/Envelope de trabalho2013/01
Cinemática Direta9
Manipulação SCARA (Selective Compliant Articulated Robot for
Assembly):
-
Graus de Liberdade e Movimento2013/01
Cinemática Direta10
Graus de liberdade e graus de movimento
GDL ou DOF (degrees of freedom): Localização de um objeto no
espaço euclidiano. Em sistemas mecânicos representam o
número
de parâmetros independentes que são necessários para se definir
a
posição de um corpo no espaço em qualquer instante.
GDM (graus de movimento ou mobilidade): Número de eixos de
movimento – para cada junta.
-
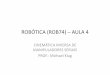
Orientação cinemática2013/01Cinemática Direta
11
Base: É chamado de XYZ0 e é um sistema fixo com a orientação de
X e Y arbitrárias, porém Z deve coincidir com o eixo Z do sistema
seguinte: XYZ1 (intermediário) – Z no eixo de rotação.
Componentes Intermediários: Sendo XYZi um componente
intermediário, então devemos orientar este sistema de forma que o
eixo Zicoincida com a junta i e Xi seja apontado para a próxima
junta i+1 (prolongamento), assim Yi édeterminado pelo produto
vetorial entre Zi e Xi. A origem do sistema de estar situada aonde
o eixo da junta i – 1 intercepta o eixo da junta i.
Órgão Terminal (end effector): Zn deve coincidir com o eixo de
rotação da junta ou apontar para fora da flange do robô ou ainda
apontar em direção ao ponto de atuação da ferramenta). A posição de
Xn é arbitrária, porém em alguns punhos escolhe-se que Xn esteja
alinhada com Xn+2 quando o valor da coordenada angular da junta Xn
for nulo, ou seja Xn = 0º.
xn
ynzn
-
Cálculo vetorial2013/01Cinemática Direta
12
Produto vetorial de versores:
+
_
(1,0,0)
(0,1,0)
(0,0,1)
i
j
k
=
=
=
r
r
r
xnyn
zn
-
Cinemática direta2013/01Cinemática Direta
13
Cinemática Direta:
São sabidas as coordenadas generalizadas de
posição das juntas (graus de liberdade) ou
ângulos de referência – solução linear.
Determina-se a posição do tool center point (posição central da
ferramenta) e a orientação
do sistema de coordenadas da ferramenta
(end effector).
Cinemática Inversa:
São sabidos os dados da posição do tool center point e a
orientação do sistema de coordenadas da ferramenta.
Determinam-se as coordenadas generalizadas
de posição das juntas – solução não-linear.
-
Cinemática direta2013/01Cinemática Direta
14
Movimento de Rotação:
-
Cinemática direta2013/01Cinemática Direta
15
Movimento de Rotação:
-
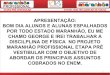
Relações trigonométricas2013/01Cinemática Direta
16
Movimento de Rotação:As matrizes de rotação fornecem a
orientação de determinado eixo em relação aos ângulos
de rotação. Assim, é possível representar as rotações de todos
os mecanismos até o tool center point. Para encontrar as rotações
realizadas, deve-se relacionar os versores dos cossenos
diretores.
-
Cinemática direta2013/01Cinemática Direta
17
Movimento de Rotação:
-
Cinemática direta2013/01Cinemática Direta
18
Ângulos de Euler:
-
Cinemática direta2013/01Cinemática Direta
19
Ângulos de Roll, Pitch e Yaw:
-
Cinemática direta2013/01Cinemática Direta
20
Movimento de Translação:
Trata-se do vetor posição (matriz coluna) representado
quanto à sua translação da origem O até o ponto P final.
Na prática, é a dimensão do referido elo transladado (Ln).
-
Cinemática direta2013/01Cinemática Direta
21
Matriz de Transformação Homogênea:
-
Cinemática direta2013/01Cinemática Direta
22
Procedimento para a cinemática direta:
-
Cinemática direta2013/01Cinemática Direta
23
Matriz de Transformação Homogênea:
-
Cinemática direta2013/01Cinemática Direta
24
Representação Denavit-Hartenberg:
-
Cinemática direta2013/01Cinemática Direta
25
Representação Denavit-Hartenberg:
Elo ai di αi Θi
e1
a1
d1 α1 Θ1
e2
a2
d2 α2 Θ2
(...) (...) (...) (...) (...)
-
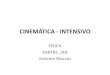
Cinemática direta2013/01Cinemática Direta
26
Robot STANFORD:
-
Bibliografia2013/01Cinemática Direta
27
Principal:
Siqueira, A. Notas de Aula (Introdução à Robótica Industrial)
–
Disciplina Pós-Graduação SEM – Engenharia Mecânica, 2009 –
EESC/USP – São Carlos, SP, Brasil.