Embed Size (px)
Citation preview

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Modelagem e CLP – Automatos
Rafael Garlet de Oliveira
Instituto Federal Catarinense - IFCCampus Luzerna
5 de marco de 2014
Rafael Garlet de Oliveira 1 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Sumario
1 Automato Determinıstico FinitoDefinicaoExemploLinguagem de um AutomatoAutomatos x Linguagens RegularesComposicao de AutomatosAbordagens para modelagemEventos Controlaveis e ObservaveisAutomatos Acessıveis e Co-acessıveis
2 Resumo sobre Teoria de Controle SupervisorioIntroducaoControle supervisorioMetodologia para sıntese de supervisores otimos
Rafael Garlet de Oliveira 2 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Introducao
AutomatoLinguagem que permite representar o comportamento deSEDs;Uma forma de representar expressoes regulares, que porsua vez geram as linguagens;Representacao grafica: os nos representam estados e osarcos, eventos;Os nos sao os estados globais do sistema, ou seja, asituacao de todas as subpartes do SED.
Rafael Garlet de Oliveira 3 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Definicao
Um Automato Determinıstico de Estados Finitos (ADEF) edefinido por:
G = (Q, Σ, f, q0, Qm)Q: Conjunto finito e nao-vazio de estados;Σ: Alfabeto com os eventos do sistema;f: Q x Σ→ Q: Funcao de transicao de estados;q0 ∈ Q: Estado inicial;Qm ⊆ Q: Conjunto de estados finais.
Rafael Garlet de Oliveira 4 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Exemplo
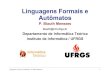
Representacao do comportamento de uma maquina:
Estado 1: Maquina parada;Estado 2: Maquina emoperacao.Evento a: inıcio de umatarefa;Evento b: termino datarefa.
Q = {1, 2};Σ = {a, b};f(1, a) = 2, f(2, b) = 1;q0: estado 1;Qm = estado 1.
Figura: Automato representando aoperacao da maquina.
Rafael Garlet de Oliveira 5 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Linguagem de um Automato
Os automatos permitem representar expressoes regulares.A Linguagem Gerada por G e:
L(G) := {s ∈ Σ∗/f (q0, s) e definida}A Linguagem Marcada de G e:
Lm(G) := {s ∈ L(G)/f (q0, s) ∈ Qm}
A linguagem L(G) representa todas as cadeias geradas noautomato a partir do estado inicial; a linguagem Lm(G)representa todas as cadeias que, a partir do estado inicial,atingem um estado marcado.
Rafael Garlet de Oliveira 6 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Exemplo
Seja Σ = {a,b};Qual a Linguagem representada pelo seguinte automato?
Rafael Garlet de Oliveira 7 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Automatos x Linguagens Regulares
Teorema de KleeneUma linguagem e regular se e somente se for reconhecida porum automato de estados finitos determinıstico.
Automato↔ Expressao Regular
Rafael Garlet de Oliveira 8 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Composicao de Automatos
Composicao Sıncrona
A Composicao de Automatos e uma operacao que sincronizaeventos compartilhados, enquanto que os nao compartilhadospodem executar de uma forma assıncrona.
Utilizada em uma abordagem modular;G1||G2 = G2||G1;(G1||G2)||G3 = G1||(G2||G3);A composicao pode ser estendida para n automatos.
Rafael Garlet de Oliveira 9 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Abordagens para modelagem
Gerador: Pode ser entendido como um automato. Podegerar duas linguagens, a linguagem gerada L(G) e alinguagem marcada Lm(G).
Abordagem global: Modelar o sistema como um todo, deuma forma generalizada;
Abordagem local: Modelar cada subsistemaseparadamente e formar o sistema global a partir dacomposicao.
Rafael Garlet de Oliveira 10 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Eventos Controlaveis e Observaveis
Eventos ControlaveisPodem ser habilitados, ou desabilitados, pelo controlesupervisorio, ex: Atuadores.
Eventos ObservaveisEventos que podem ser medidos. Os nao observaveis podemser entendidos como eventos internos de uma maquina.
Rafael Garlet de Oliveira 11 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Automatos Acessıveis e Co-acessıveis
Acessıvel: Todos os estados Q podem ser alcancados apartir de q0.Nao Acessıvel: Ha estados inacessıveis a partir de q0.
E possıvel reduzir um automato a sua componenteacessıvel, removendo os estados nao acessıveis.
Co-acessıvel ou nao bloqueante: Todas as cadeias saoprefixo de cadeias marcadas.
L(G) = Lm(G)Ou seja, a partir de qualquer estado pode-se chegar a umestado final (marcado).E possıvel obter uma componente co-acessıvel, eliminandoos estados alcancados por cadeias que nao podem sercompletadas em tarefas.
Trim: Acessıvel e co-acessıvel.
Rafael Garlet de Oliveira 12 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Exemplos
Figura: Automato acessıvel combloqueio. Figura: Automato trim: acessıvel e
co-acessıvel.
Mostrar exemplos no IDES.
Rafael Garlet de Oliveira 13 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Exemplo
Estrutura de automato com deadlock e livelock. Para encontrara componente trim basta eliminar os estados nao acessıveis enao co-acessıveis.
Figura: Exemplo de deadlock e livelock.
Rafael Garlet de Oliveira 14 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Introducao
Composicao dos subsistemas em uma planta pode gerareventos indesejaveis.E papel do supervisor fazer com que os subsistemas atuemde forma coordenada.Para isso, o supervisor desabilita estes eventos indesejaveis.
Rafael Garlet de Oliveira 15 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Obtencao da Especificacao
Deve restringir o comportamento do sistema para atingiros objetivos do projeto;Automato que leva em conta os eventos que devem sercoordenados;Pode ser modelado com a abordagem local.
Figura: Especificacao para o acionamento ordenado de duasmaquinas.
Rafael Garlet de Oliveira 16 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Obtencao do supervisor
Supervisor e obtido pela composicao sıncrona R=G||E,eliminando-se estados com eventos nao-controlaveis(maus-estados).O comportamento R pode ser nao-controlavel, devido aoseventos nao controlaveis de G.Entao deve-se obter a maxima linguagem controlavel,supC, que representa a logica otima de supervisao.supC representa o comportamento menos restritivopossıvel.
Rafael Garlet de Oliveira 17 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Algorıtmo para o calculo de supC
Dados G, E e R, calcular supervisor S:1 Identificar maus estados em R,
caso nao existam fazer S = R;2 Caso existam, atualizar R por eliminacao de maus
estados;3 Calcular a componante trim de R e voltar ao passo 1.
Mau estado: Estado em R cujo estado correspondente em Gpossui algum evento nao-controlavel que nao pertence a esteestado de R.
Rafael Garlet de Oliveira 18 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Metodologia para sıntese de supervisores otimos
Passo a passo para obtencao de um supervisor:1 Obtencao do modelo da planta G;2 Modelagem da especificacao E;3 Composicao da planta G com as especificacoes E:
R = G||E;4 Calculo de S = supC(R).
Exemplos e atividades...
Rafael Garlet de Oliveira 19 / 20

Automato Determinıstico Finito Resumo sobre Teoria de Controle Supervisorio
Rafael Garlet de [email protected] de Professores 1
Rafael Garlet de Oliveira 20 / 20