Embed Size (px)
Citation preview

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
O método de Melnikov para sistemasHamiltonianos descontínuos
João Paulo Ferreira de Mello
CMCC - Departamento de MatemáticaUFABC
04/09/2015 / EPA-Dinâmica
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Conteúdo
1 MotivaçãoModelo "Rocking Block"Equações de MovimentoPropriedades
2 Funções de Melnikov - caso contínuoPropriedades e Caos HamiltonianoFunções de Melnikov
3 Funções de Melnikov - caso descontínuoHipótesesFunções de MelnikovExemplo - “Rocking Block”
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Conteúdo
1 MotivaçãoModelo "Rocking Block"Equações de MovimentoPropriedades
2 Funções de Melnikov - caso contínuoPropriedades e Caos HamiltonianoFunções de Melnikov
3 Funções de Melnikov - caso descontínuoHipótesesFunções de MelnikovExemplo - “Rocking Block”
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Motivação
Primeiro estudo analítico feito por G.W. Hausner [2].Diversos estudos experimentais, numéricos e analíticos.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Motivação
Primeiro estudo analítico feito por G.W. Hausner [2].Diversos estudos experimentais, numéricos e analíticos.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Rocking Block
CM
AB
DC
A’B’
D’C’
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
O modelo
Os parâmetros usados no modelo são
H
B
Αx
Α
R
CM
g
a(t) OO'
H Altura.B Largura.M Massa.I Momento deinércia com relaçãoà O ou O′.α = arctan
(BH
)a(t) = ε cos (ωt)
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
O modelo
Os parâmetros usados no modelo são
H
B
Αx
Α
R
CM
g
a(t) OO'
H Altura.B Largura.M Massa.I Momento deinércia com relaçãoà O ou O′.α = arctan
(BH
)a(t) = ε cos (ωt)
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
O modelo
Os parâmetros usados no modelo são
H
B
Αx
Α
R
CM
g
a(t) OO'
H Altura.B Largura.M Massa.I Momento deinércia com relaçãoà O ou O′.α = arctan
(BH
)a(t) = ε cos (ωt)
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
O modelo
Os parâmetros usados no modelo são
H
B
Αx
Α
R
CM
g
a(t) OO'
H Altura.B Largura.M Massa.I Momento deinércia com relaçãoà O ou O′.α = arctan
(BH
)a(t) = ε cos (ωt)
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
O modelo
Os parâmetros usados no modelo são
H
B
Αx
Α
R
CM
g
a(t) OO'
H Altura.B Largura.M Massa.I Momento deinércia com relaçãoà O ou O′.α = arctan
(BH
)a(t) = ε cos (ωt)
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
O modelo
Os parâmetros usados no modelo são
H
B
Αx
Α
R
CM
g
a(t) OO'
H Altura.B Largura.M Massa.I Momento deinércia com relaçãoà O ou O′.α = arctan
(BH
)a(t) = ε cos (ωt)
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Conteúdo
1 MotivaçãoModelo "Rocking Block"Equações de MovimentoPropriedades
2 Funções de Melnikov - caso contínuoPropriedades e Caos HamiltonianoFunções de Melnikov
3 Funções de Melnikov - caso descontínuoHipótesesFunções de MelnikovExemplo - “Rocking Block”
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
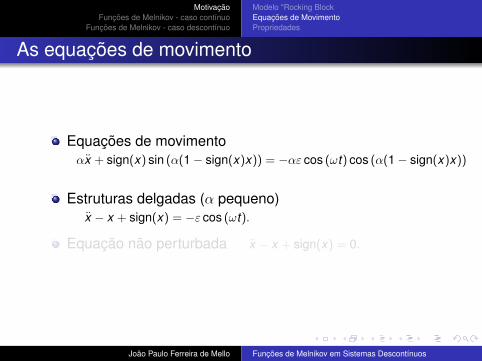
As equações de movimento
Equações de movimento{αx + sin (α(1− x)) = −αε cos (ωt) cos (α(1− x)) se x > 0αx − sin (α(1 + x)) = −αε cos (ωt) cos (α(1 + x)) se x < 0
Estruturas delgadas (α pequeno)x − x + sign(x) = −ε cos (ωt).
Equação não perturbada x − x + sign(x) = 0.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
As equações de movimento
Equações de movimentoαx + sign(x) sin (α(1− sign(x)x)) = −αε cos (ωt) cos (α(1− sign(x)x))
Estruturas delgadas (α pequeno)x − x + sign(x) = −ε cos (ωt).
Equação não perturbada x − x + sign(x) = 0.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos
MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
As equações de movimento
Equações de movimentoαx + sign(x) sin (α(1− sign(x)x)) = −αε cos (ωt) cos (α(1− sign(x)x))
Estruturas delgadas (α pequeno)x − x + sign(x) = −ε cos (ωt).
Equação não perturbada x − x + sign(x) = 0.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
As equações de movimento
Equações de movimentoαx + sign(x) sin (α(1− sign(x)x)) = −αε cos (ωt) cos (α(1− sign(x)x))
Estruturas delgadas (α pequeno)x − x + sign(x) = −ε cos (ωt).
Equação não perturbada x − x + sign(x) = 0.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Conteúdo
1 MotivaçãoModelo "Rocking Block"Equações de MovimentoPropriedades
2 Funções de Melnikov - caso contínuoPropriedades e Caos HamiltonianoFunções de Melnikov
3 Funções de Melnikov - caso descontínuoHipótesesFunções de MelnikovExemplo - “Rocking Block”
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Retrato de fase
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
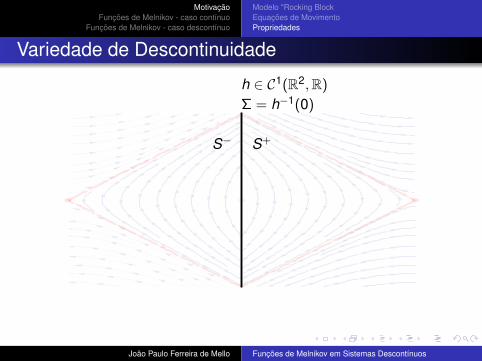
Variedade de Descontinuidade
Σ
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Variedade de Descontinuidade
Σ = h−1(0)
h ∈ C1(R2,R)
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos
MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Variedade de Descontinuidade
Σ = h−1(0)
h ∈ C1(R2,R)
S− S+
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Hamiltoniano Descontínuo
ΣΣ = h−1(0)
h ∈ C1(R2,R)
S−
H−(x , y) =y2
2− x2
2+ x
x =∂H−
∂y= y
y = −∂H−
∂x= x + 1
S+
H+(x , y) =y2
2− x2
2− x
x =∂H+
∂y= y
y = −∂H+
∂x= x − 1
H−(0, y) = H+(0, y)
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Pontos Hiperbólicos do tipo sela
z− z+
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Ponto de Dobro-Dupla Invisível
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Ponto de Dobra-Dupla Invisível
Σ
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Ponto de Dobra-Dupla Invisível
Σ
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Ponto de Dobra-Dupla Invisível
Σ
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Conexão Heteroclínica
Φ−(t , t0) Φ+(t , t0)
z− z+
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Conexão Heteroclínica
Φ−(t , t0) Φ+(t , t0)
z− z+
Φ−(t0, t0) = Φ+(t0, t0) ∈ Σ
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Conexão Heteroclínica
Φ−(t , t0) Φ+(t , t0)
z− z+
Φ−(t0, t0) = Φ+(t0, t0) ∈ Σ
Φ(t , t0) =
{Φ−(t , t0) se t < t0Φ+(t , t0) se t ≥ t0
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Órbitas Periódicas
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Órbitas Periódicas
ϕc(t , t0) órbitas periódicas
c ∈ (0,∞)
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Órbitas Periódicas
ϕc(t , t0) órbitas periódicas
c ∈ (0,∞)
Tc período de ϕc(t0)
Tc é C1
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Órbitas Periódicas
ϕc(t , t0) órbitas periódicas
c ∈ (0,∞)
Tc período de ϕc(t0)
Tc é C1
Tc é crescente
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Propriedades do sistema não perturbado
P1) O sistema não perturbado é Hamiltoniano descontínuo.P2) Presença de dois pontos hiperbólicos do tipo sela
denotados por z±.P3) A origem é um ponto de dobra dupla invisível.P4) Presença de duas conexões heteroclínicas ligando os
pontos de sela z±.P5) A região compreendida entre as duas conexões
heteroclínicas é folheada por órbitas periódicas{ϕc(t); c ∈ (0,1)}, onde ϕc(t) é uma órbita periódica.
P6) O período das órbitas ϕc(t) é uma função continuamentediferenciável e crescente com relação à c.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Modelo "Rocking BlockEquações de MovimentoPropriedades
Coeficiente de restituição
O coeficiente de restituição é um número r ∈ (0,1] que simulaa perda de energia após o impacto do bloco contra a superfície.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Conteúdo
1 MotivaçãoModelo "Rocking Block"Equações de MovimentoPropriedades
2 Funções de Melnikov - caso contínuoPropriedades e Caos HamiltonianoFunções de Melnikov
3 Funções de Melnikov - caso descontínuoHipótesesFunções de MelnikovExemplo - “Rocking Block”
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Hipóteses
q = J.∇H(q).
J =
(0 1−1 0
).
Família de órbitasperiódicas.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Perturbação do sistema dinâmico
O método de Melnikov estudará as propriedades quedevem existir no sistema perturbado, sabendo aspropriedades do não perturbado.q = J.∇H(q) + εg(t ,q) (sistema perturbado)g(t ,q) campo de vetores de classe C1.T -periódico na variável t .
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Perturbação do sistema dinâmico
O método de Melnikov estudará as propriedades quedevem existir no sistema perturbado, sabendo aspropriedades do não perturbado.q = J.∇H(q) + εg(t ,q) (sistema perturbado)g(t ,q) campo de vetores de classe C1.T -periódico na variável t .
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Perturbação do sistema dinâmico
O método de Melnikov estudará as propriedades quedevem existir no sistema perturbado, sabendo aspropriedades do não perturbado.q = J.∇H(q) + εg(t ,q) (sistema perturbado)g(t ,q) campo de vetores de classe C1.T -periódico na variável t .
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Perturbação do sistema dinâmico
O método de Melnikov estudará as propriedades quedevem existir no sistema perturbado, sabendo aspropriedades do não perturbado.q = J.∇H(q) + εg(t ,q) (sistema perturbado)g(t ,q) campo de vetores de classe C1.T -periódico na variável t .
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Caos Homoclínico/Heteroclínico
As imagens abaixo foram tiradas do sítiohttps://matheuscmss.wordpress.com/2012/08/25/homoclinicheteroclinic-bifurcations-introduction/.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Caos Homoclínico/Heteroclínico
As imagens abaixo foram tiradas do sítiohttps://matheuscmss.wordpress.com/2012/08/25/homoclinicheteroclinic-bifurcations-introduction/.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Caos Homoclínico/Heteroclínico
As imagens abaixo foram tiradas do sítiohttps://matheuscmss.wordpress.com/2012/08/25/homoclinicheteroclinic-bifurcations-introduction/.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
(m,n)-órbitas periódicas
Dados m,n ∈ N (m,n)-órbitaperiódica se:
# (γ(R+) ∩ Σ) = 2m.γ(t) = γ(t + nT ).
Observação: As (m,n)-órbitas periódicas do sistema nãoperturbado são as órbitas de período
nm
T . Denotaremos essas
órbitas por ϕ(m,n)(t , t0)
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
(m,n)-órbitas periódicas
Dados m,n ∈ N (m,n)-órbitaperiódica se:
# (γ(R+) ∩ Σ) = 2m.γ(t) = γ(t + nT ).
Observação: As (m,n)-órbitas periódicas do sistema nãoperturbado são as órbitas de período
nm
T . Denotaremos essas
órbitas por ϕ(m,n)(t , t0)
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Conteúdo
1 MotivaçãoModelo "Rocking Block"Equações de MovimentoPropriedades
2 Funções de Melnikov - caso contínuoPropriedades e Caos HamiltonianoFunções de Melnikov
3 Funções de Melnikov - caso descontínuoHipótesesFunções de MelnikovExemplo - “Rocking Block”
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Funções de Melnikov
Função de Melnikov subharmônica
Mm,n(t0) =
∫ nT
0〈∇H,g〉(ϕ(m,n)(t , t0), t + t0)dt
onde ϕ(m,n)(t , t0) é uma (m,n)- órbita periódica.Função de Melnikov
M(t0) =
∫ +∞
−∞〈∇H,g〉 (Φ(t , t0), t + t0)dt
onde Φ(t , t0) é uma órbita heteroclínica.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Funções de Melnikov
Função de Melnikov subharmônica
Mm,n(t0) =
∫ nT
0〈∇H,g〉(ϕ(m,n)(t , t0), t + t0)dt
onde ϕ(m,n)(t , t0) é uma (m,n)- órbita periódica.Função de Melnikov
M(t0) =
∫ +∞
−∞〈∇H,g〉 (Φ(t , t0), t + t0)dt
onde Φ(t , t0) é uma órbita heteroclínica.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Teoremas - Funções de Melnikov
Teorema (Caso periódico)
Se Mm,n(t0) possuir um zero simples, então existe ε0 > 0 talque para todo 0 < ε < ε0 o sistema dinâmicosq = J.∇H(q) + εg(q, t) possui uma (m,n)-órbita periódica.
Teorema (Caso heteroclínico/homoclínico)
Se M(t0) possuir um zero simples, então existe ε0 > 0 tal quepara todo 0 < ε < ε0 o sistema dinâmicosq = J.∇H(q) + εg(q, t) possui uma conexãohomoclínica/heteroclínica transversal.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
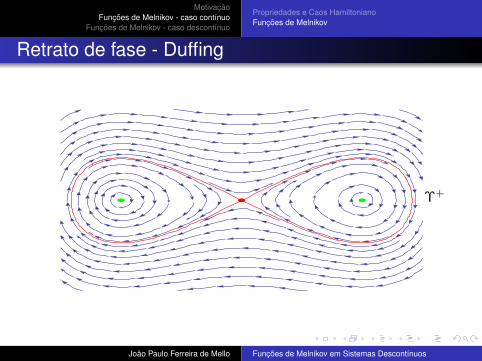
Exemplo - Oscilador de Duffing
x = y ,y = x − x3 + ε cos (t).
Tomando ε = 0
x = y ,y = x − x3,
que é um sistema Hamiltoniano com
H(x , y) =y2
2− x2
2+
x4
4.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos
MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Retrato de fase - Duffing
Υ+
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Cálculo da Função de Melnikov
Υ+(t) = (√
2sech(t),−√
2sech(t)tanh(t)).
M(t0) =√
2∫ ∞−∞
sech(t − t0)tanh(t − t0) cos (t)dt .
Após alguns cálculos utilizando resíduos obtemos,
M(t0) =√
2πsech(π
2
)sin (t0).
No intervalo (0,2π] a função M(t0) possui zeros simples, asaber, π e 2π. Portanto, o oscilador de Duffing perturbadopossui um ponto homoclínico tranversal.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Adaptação
Para um sistema dinâmico contínuo satisfazendo condiçõesanálogas ao oscilador de Duffing, o método de Melnikovfornece uma maneira analítica de responder às perguntas:
Quando as variedades instável e estável de dois pontos desela se cruzam transversalmente?Quando uma (m,n) - órbita periódica persiste sob a açãode uma perturbação?
Seria possível adaptarmos o método de Melnikov clássico parasistemas descontínuos?
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Adaptação
Para um sistema dinâmico contínuo satisfazendo condiçõesanálogas ao oscilador de Duffing, o método de Melnikovfornece uma maneira analítica de responder às perguntas:
Quando as variedades instável e estável de dois pontos desela se cruzam transversalmente?Quando uma (m,n) - órbita periódica persiste sob a açãode uma perturbação?
Seria possível adaptarmos o método de Melnikov clássico parasistemas descontínuos?
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
Propriedades e Caos HamiltonianoFunções de Melnikov
Adaptação
Para um sistema dinâmico contínuo satisfazendo condiçõesanálogas ao oscilador de Duffing, o método de Melnikovfornece uma maneira analítica de responder às perguntas:
Quando as variedades instável e estável de dois pontos desela se cruzam transversalmente?Quando uma (m,n) - órbita periódica persiste sob a açãode uma perturbação?
Seria possível adaptarmos o método de Melnikov clássico parasistemas descontínuos?
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
Conteúdo
1 MotivaçãoModelo "Rocking Block"Equações de MovimentoPropriedades
2 Funções de Melnikov - caso contínuoPropriedades e Caos HamiltonianoFunções de Melnikov
3 Funções de Melnikov - caso descontínuoHipótesesFunções de MelnikovExemplo - “Rocking Block”
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
Hipóteses
q = J.∇H(q) + εg(q, t)Σ = h−1(q) onde h é C1
g(q, t) é T - periódica navariável t .
Σ
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
Propriedades do sistema não perturbado
P1) O sistema não perturbado seja Hamiltoniano descontínuo.P2) Presença de dois pontos hiperbólicos do tipo sela
denotados por z±.P3) A origem seja um ponto de dobra dupla invisível.P4) Presença de duas conexões heteroclínicas ligando os
pontos de sela z±.P5) A região compreendida entre as duas conexões
heteroclínicas seja folheada por órbitas periódicas{ϕc(t); c ∈ (0,1)}, onde ϕc(t) é uma órbita periódica.
P6) O período das órbitas ϕc(t) seja uma funçãocontinuamente diferenciável e crescente com relação à c.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
Conteúdo
1 MotivaçãoModelo "Rocking Block"Equações de MovimentoPropriedades
2 Funções de Melnikov - caso contínuoPropriedades e Caos HamiltonianoFunções de Melnikov
3 Funções de Melnikov - caso descontínuoHipótesesFunções de MelnikovExemplo - “Rocking Block”
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
Funções de Melnikov
Função de Melnikov subharmônica
Mm,n(t0) =
∫ nT
0〈∇H,g〉(ϕ(m,n)(t , t0), t + t0)dt
onde ϕ(m,n)(t , t0) é uma (m,n)- órbita periódica.Função de Melnikov
M(t0) =
∫ +∞
−∞〈∇H,g〉 (Φ(t , t0), t + t0)dt
onde Φ(t , t0) é uma órbita heteroclínica.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos
MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
Funções de Melnikov
Função de Melnikov subharmônica
Mm,n(t0) =
∫ nT
0〈∇H,g〉(ϕ(m,n)(t , t0), t + t0)dt
onde ϕ(m,n)(t , t0) é uma (m,n)- órbita periódica.Função de Melnikov
M(t0) =
∫ +∞
−∞〈∇H,g〉 (Φ(t , t0), t + t0)dt
onde Φ(t , t0) é uma órbita heteroclínica.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
Teoremas - Funções de Melnikov
Teorema (Caso periódico)
Se Mm,n(t0) possuir um zero simples, então existe ε0 > 0 talque para todo 0 < ε < ε0 o sistema dinâmicoq = J.∇H(q) + εg(q, t) possui uma (m,n)-órbita periódica.
Teorema (Caso heteroclínico/homoclínico)
Se M(t0) possuir um zero simples, então existe ε0 > 0 tal quepara todo 0 < ε < ε0 o sistema dinâmicoq = J.∇H(q) + εg(q, t) possui uma conexãohomoclínica/heteroclínica transversal.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
Conteúdo
1 MotivaçãoModelo "Rocking Block"Equações de MovimentoPropriedades
2 Funções de Melnikov - caso contínuoPropriedades e Caos HamiltonianoFunções de Melnikov
3 Funções de Melnikov - caso descontínuoHipótesesFunções de MelnikovExemplo - “Rocking Block”
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
Voltando ao modelo "Rocking Block"
Vamos mostrar a persistência das (1,n)-órbitas periódicas.
H(x , y) =y2
2+ sign(x)x − x2
2g(x , y , t) = (0, cos (ωt)).
g(x , y , t) tem período 2π.
M1,n(t0) = − 4ω2 + 1
cos (ωt0)
No intervalo [0,T ] a função M1,n(t0) tem dois zeros simples, a
saber, t1 =T4
e t2 =3T4
.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
Voltando ao modelo "Rocking Block"
Vamos mostrar a persistência das (1,n)-órbitas periódicas.
H(x , y) =y2
2+ sign(x)x − x2
2g(x , y , t) = (0, cos (ωt)).
g(x , y , t) tem período 2π.
M1,n(t0) = − 4ω2 + 1
cos (ωt0)
No intervalo [0,T ] a função M1,n(t0) tem dois zeros simples, a
saber, t1 =T4
e t2 =3T4
.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos
MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
Voltando ao modelo "Rocking Block"
Vamos mostrar a persistência das (1,n)-órbitas periódicas.
H(x , y) =y2
2+ sign(x)x − x2
2g(x , y , t) = (0, cos (ωt)).
g(x , y , t) tem período 2π.
M1,n(t0) = − 4ω2 + 1
cos (ωt0)
No intervalo [0,T ] a função M1,n(t0) tem dois zeros simples, a
saber, t1 =T4
e t2 =3T4
.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
Voltando ao modelo "Rocking Block"
Vamos mostrar a persistência das (1,n)-órbitas periódicas.
H(x , y) =y2
2+ sign(x)x − x2
2g(x , y , t) = (0, cos (ωt)).
g(x , y , t) tem período 2π.
M1,n(t0) = − 4ω2 + 1
cos (ωt0)
No intervalo [0,T ] a função M1,n(t0) tem dois zeros simples, a
saber, t1 =T4
e t2 =3T4
.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
Voltando ao modelo "Rocking Block"
Vamos mostrar a persistência das (1,n)-órbitas periódicas.
H(x , y) =y2
2+ sign(x)x − x2
2g(x , y , t) = (0, cos (ωt)).
g(x , y , t) tem período 2π.
M1,n(t0) = − 4ω2 + 1
cos (ωt0)
No intervalo [0,T ] a função M1,n(t0) tem dois zeros simples, a
saber, t1 =T4
e t2 =3T4
.
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
Sistema Perturbado - Plot das curvas
Tomando como condições iniciais os pontos(
0, y0,π
2
)+O(ε)
e(
0, y0,3π2
)+O(ε), n = 5 e ε = 1.6565.10−2 ,podemos
resolver numericamente a equação perturbada
Figure: Essa figura foi tirada do artigo [1]
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
Bibliografia
A.Granados, S.J.Hogan, T.M.Seara. The Melnikov Methodand Subharmonic Orbits in a Piecewise-Smooth System.SIAM J. Applied Dynamical Systems. v.11, n.3, p.801-830,2012.
G.W.Housner. The behavior of inverted pendulumstructures during earthquakes. Bulletin of the Seismologicalof America. v.53, n.2,p.403-417, Fev/1963
J.Guckenheiner, P. Holmes. Nonlinear Oscillations,Dynamical Systems, and Bifurcation of Vector Field. NovaIorque, Springer-Verlag.
A. F. Filippov, Differential Equation with DiscontinuousRighthand Sides, Kluwer (1988).
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos

MotivaçãoFunções de Melnikov - caso contínuo
Funções de Melnikov - caso descontínuo
PropriedadesFunções de MelnikovExemplo - “Rocking Block”
FIM
João Paulo Ferreira de Mello Funções de Melnikov em Sistemas Descontínuos







![Um Problema Elíptico no RN Assintoticamente Linear e ... · podemos deixar de citar como inspiração o trabalho em [25], devido a Szulkin e Zou, que trata sistemas Hamiltonianos](https://img.document.onl/doc/110x75/5c3647fd09d3f23a308b9ac8/um-problema-eliptico-no-rn-assintoticamente-linear-e-podemos-deixar-de.jpg)

![Aula Propriedades Coligativas [Modo de Compatibilidade]€¦ · Propriedades Coligativas Propriedades Coligativas É o estudo da variação nas propriedades físicas do solvente quando](https://img.document.onl/doc/110x75/612f52641ecc515869435e5c/aula-propriedades-coligativas-modo-de-compatibilidade-propriedades-coligativas.jpg)


















