Embed Size (px)
Citation preview

Capitulo II.
POTENCIA E PRESSÃO MEDIAS DE UM MOTOR A COMBUSTAO
Potencia e rendimento
Do ponto de vista pratico, no estudo das prestações motor são consideradas dois parâmetros essenciais:
. • A potencia, que per definição e função do torque fornecido a arvore e da velocidade de rotação do motor. Desta forma um motor de tração é caracterizado pela sua curva de potencia (potencia máxima desenvolvida a cada velocidade de rotação). . • O rendimento, que caracteriza a eficácia do processo de transformação da energia introduzida pelo combustível em trabalho mecânico recolhido sobre o arvore motor; O rendimento global do motor ηg pode ser descomposto em um produto de vários rendimentos parciais que serão examinados mais adiante. II.1. Potencia efetiva. Normas de medição de potencia
A potencia efetiva desenvolvida sobre o arvore do motor e igual a:
PC.ω
=
Com em unidades S.I: �.- P: Potencia efetiva (W) �.- C: Torque motor (N.m)
-ω: Velocidade de rotação (rad/s)
Introduzindo N: Velocidade de rotação medida em rpm.
2π P = C..N
60 O que conduze a:
( (.(
kW P ) = N m C ).rpm N ) 3,9549 Por tanto:
( (.(
kW P )= daN m C ).rpm N ) 955
Nas antigas unidades:
((. (
ch P )=kgf m C ).rpm N )
716 Para cada tipo de motor esta potencia efetiva o potencia ao freio poder ser medida usando diferentes normas, variando as condições de medição:
. • Pela natureza dos auxiliares de serie que equipam o motor quando se faze o ensaio ao banco.
. • Pelas condições atmosféricas de referencia que são adotadas para a medição e, eventualmente a correção em potencia. Em efeito, os motores a combustão interna são sistemas termodinâmicos abertos e, por tanto, as prestações que podem dar dependem muito das condições ambientes (pressão, temperatura, higrometria do ar), assim como das condições do seu arrefecimento.
Distinguimos geralmente:
. • A potencia neta, determinada sobre o motor “equipado dos auxiliares de serie necessários a suo funcionamento normal para a aplicação considerada”. A medida efetuada em estas condições corresponde a utilização do motor com o seu equipamento standard; • A potencia bruta, para a qual, o motor “esta equipado solo com os auxiliares de serie estritamente necessários a seu funcionamento ao banco de ensaio”. O equipamento de serie não e então obrigatório e a utilização de algumas montagens específicos ao banco de ensaio e permitida (por exemplo, sistema de escapamento especial, alternador não embreado ou ventilador não montado no caso de um arrefecimento com um circuito de liquido particular. Especificaram-se em estas condições os auxiliares não "arrastados" durante as medições. As normas internacionais ISO (International Organization for Standardization) para estas medições de potencia são diferentes dependendo do campo de aplicação. São em particular: . • Pela potencia neta: �.- ISO 1585 (ou norma francesa conforme tecnicamente NF R 11-501) para veículos “routiers” �.- ISO 3046/I/II/III para motores terrestres, ferroviários, marinos. �.- ISO 4106 para os motociclos. �.- ISO 4164 para os ciclomotores. • Pela potencia bruta:
- ISO 2534 (ou NF R 11-503) para veículos “routiers”.
Outras definições de medida de potencia prevaleceram durante muito tempo em diferentes paises e podem ainda ser encontradas, a pesar de que uma uniformização se esta impondo cada vez mais ao nível internacional.
�.- Potencia SAE (Society of Automotive Engineers) nos USA. �.- Potencia DIN (Deutches Institut für Normung) em Alemanha. �.- Potencia CUNA (Commissione Technica di Unificazione Nell’Automobile) em Italia. �.- Potencia BS (British Standard) em Reino Unido. �.- Potencia JIS (Japan Industrial Standard) no Japao. �.- Potencia CEE (Comunidade Econômica Europea) E importante dizer que estas diferentes normas podem dar lugar a diferencias importantes de valor de potencias sobre as medições de um mesmo motor. Para algumas aplicações podemos distinguir:
. • Uma potencia continua. • Uma potencia de ponta ou intermitente esta ultima solo pode ser desenvolvida durante uma duração limitada compatível com a fiabilidade e a resistência em endurance exigidas ao motor. Para os grandes motores Diesel, podemos igualmente considerar: . • A potencia nominal o potencia máxima continua – MCR (Maximum Continuous Rating) – a uma velocidade de rotação e em condições ambientes especificadas; . • A potencia de serviço o potencia de exploração – CSR (Continuous Service Rating) – nas condições ambientes e nas condições de funcionamento para a aplicação considerada.

II.2. Definições de pressões medias
A potencia total desenvolvida nos cilindros e resultante da pressão do fluido motor atuando sobre os pistões é chamada: Potencia indicada Pi; Ela é, efetivamente, determinada com a ajuda dum indicador de pressão.
Uma parte desta potencia é perdida no motor mesmo para vencer o atrito dos elementos móbiles e fazer funcionar os auxiliares (mecanismos de distribuição, sistemas de injeção ou ignição, bombas de arrefecimento, de lubrificação, eventualmente una sobrealimentação,...). Esta potencia perdida e não recuperada sobre o arvore de saída, que em um primeiro analise podemos assimilar a uma potencia “perdida por atrito”, será chamada no sucessivo: Pf.
A potencia efetiva recolhida sobre o arvore e medida ao freio pode ser escrita:
P =Pi −Pf
e
II.2.1.Pressão Media Indicada (PMI)
Si “p” é a pressão dos gases no interior do cilindro, a força devida aos gases que atua sobre a cabeça do pistão é a cada instante:
π.D2
F = p.
4 O
trabalho desta força durante o deslocamento elementar dl do
pistão é em valor absoluto: π. D2
δW
=F.
dl
= p.. dl
= p. dV
4 Seguindo a convenção de signos adotada em
termodinâmica, o trabalho recebido pelo fluido é:

δW p dV =− .
Para uma compressão, V diminui, dV<0 δW>0 Para uma expansão, V aumenta, dV>0
δW<0
Para uma transformação definida entre dois estados V1 e V2: W p dV
=−∫. 1 2 V
O trabalho que o motor fornece ao médio exterior é então:
We W=− p dV
=∫. 1 2
positivo em uma expansão, negativo em uma compressão.
Sobre um diagrama obtido com a ajuda dum “indicador” de pressão, podemos determinar o trabalho global desenvolvido pelos gases sobre o pistão em um ciclo completo. Este trabalho, por esta ração chamado trabalho indicado, é obtido pela planimetria do diagrama pressao-volume.
Wi
=∫
p dV
. cycle
Si p mede a pressão no interior do cilindro do motor,
Wi > 0 para o ciclo recorrido no sentido das agulhas do relógio Wi < 0 para o ciclo recorrido no sentido inverso das agulhas do relógio
E também importante:
• Não e necessário conhecer o valor absoluto da pressão para calcular Wi,
(prel
+p ). dV = (p +cte ). dv = prel
. dV
atm rel
∫ ∫∫
cycle cycle cycle
O que é interessante porque a medida do pressão-cilindro dada pelo sensor é uma pressão relativa; . • Devido a dispersão cíclica – importante sobre tudo nos motores a ignição comandada – o trabalho Wi não é representativo do funcionamento motor que si o ciclo de pressão que serve de base para o calculo é um ciclo “médio”. . • Si o motor é multicilindro e o diagrama solo foi gravado em um solo cilindro, o calculo do trabalho solo pode ser feito admitindo que todos os cilindros do motor funcionam nas mesmas condições estaveis (o que é longe da realidade). Denominamos PRESSAO MEDIA INDICADA (PMI) a pressão constante teórica que, aplicada soe o

pistão durante sua corsa motora “L”, fornece o mesmo trabalho indicado Wi correspondente ao ciclo completo.
π. D2
Wi =PMI .. L
4
Wi =V PMI
· u
A PMI representa a relação entre o trabalho realizado sobre o pistão pelas forças de pressão e o volume percorrido pelo pistão, então teoricamente acerável pelo motor, o que se traduze sobre o diagrama pressão-volume pela altura de um retângulo cuja área e igual a aquela do ciclo (Fig. II.2.).
dV p
. ∫
PMI = V
u
Motor quatro tempos (Fig. II.2)
Wi e representada pelo valor algébrico da área rajada no diagrama pressão-volume, que, para um motor de aspiração natural compreende:
�.- O trabalho indicado positivo do laço alta-pressão (HP) do ciclo: corsa de compressão e expansão. �.- O trabalho indicado negativo do laço baixa-pressão (BP) do ciclo: corsa de admissão e escapamento. Para comodidade no calculo das áreas, integramos geralmente a estes dois laços a zona comum (quadriculada na figura), compreendida entre PMB (Fim admissão – Inicio compressão) e PMB (fim de expansão – Inicio escapamento).
Temos:
Wi =∫
p dV +∫p dV
.. HP BP
E podemos definir em valores absolutos: PMIHP : PMI Haute Pression
PMIBP : PMI Basse Pression
Tales que:
Wi =(PMIHP −PMIBP)·V u

Fig. II.2 Diagrama pressão – volume dum motor 4 tempos Remarca: no caso dum motor quatro tempos alguns autores alngosaxones distinguem:
�.- Um “PMI Bruto” (Gross Indicated Mean Effective Pressure), que corresponde a PMI-HP definida anteriormente �.- Um “PMI Neto” (Net Indicated Mean Effective Pressure), que toma em conta as perdas devidas ao "pompage" e por tanto corresponde ao PMI (= PMI-HP – PMI-BP) precedente. • Deve ser notado que: �.- Para um motor a aspiração natural; PMI-BP < 0, em efeito, em todos os casos a pressão escapamento e superior a pressão admissão; �.- Para motores sobrealimentados, a pressão de escapamento podendo ser menor a pressão admissão, em algumas condições de funcionamento, PMI-BP pode ser ou positiva e ser adicionada a PMI-HP. Relações entre PMI e Torque Indicado Ci (Fig II.3)
Si supusemos que a transmissão do trabalho recebido pelo pistão ao virabrequim se efetua sem atritos – pistão/cilindro, pistão/biela, biela/virabrequim- e por tanto, sem perdas energéticas, tendo em conta a definição da PMI, considerando um cilindro dum motor a quatro tempos (Fig. II.3), o trabalho sobre um ciclo completo, então sobre duas rotações do virabrequim (angulo = 4 π radians), pode ser escrito como:

pdv = 4Π. Ci = PMI V
cyl
..
Definindo Ci como um Torque Indicado (médio sobre um ciclo motor)
Fig. II.3. Transmissão de forças de pressão ao virabrequim Relação entre PMI e Torque Indicado Medio Em estas condições temos, em unidades SI, a relação :
i (.
PMI ( Pa ) = 4Π . Cm N )
Vcyl
(m3)
ou em unidades mais correntes:
i (.
PMI (bar) = 4Π
. Cm N )
100 Vcyl
(dm 3)
Nota O torque Ci mencionado anteriormente e um torque médio sobre um ciclo completo. Para um motor de quatro tempos resulta da integração do torque instantâneo transmitido ao virabrequim durante esse ciclo, o que corresponde a uma rotação do virabrequim de 270 graus. Para um motor monocilindro, o torque instantâneo em saída de virabrequim pode ser analisado como a composição:
-De um torque instantâneo resultado da pressão dos gases sobre o pistão. - De um torque instantâneo resultado de a inércia das peças móbiles (pistão, biela, …). Para um

motor multicilindrico, o torque registrado na ponta do virabrequim e a cada instante o resultado de a composição dos torques instantâneos desenvolvidos para cada cilindro.
Relação entre Potencia Indicada e PMI
Obtemos a Potencia Indicada Pi multiplicando Wi pelo numero de ciclos motores per segundo nc, então para um motor de quatro tempos (um tempo motor cada duas rotações) girando a N (rpm):
nc = ½.(N/60) = N/120 ciclos / segundo.
De onde a relação entre a Potencia Indicada Pi e a PMI em unidades SI:
1
Pi = . PMI V
cyl . N
.
120 com:
-Pi em W (watts) �.- PMI em Pa (pascals) -Vcyl em m
3
�.- N em rpm. Adotando unidades mais correntes: -Pi em kW (kilowatts) -Vcyl em dm
3
(litros) - N em rpm Deduzimos:
( i
(
MPa PMI )= .120 kW P )
(
cyl (dm3
).rpm N )
O também:
bar PMI )= .1200 kW P )
( i
(
(
cyl (dm3
).rpm N )
Motor dois tempos

Em este caso temos um ciclo motor a cada rotação, então nc = N/60 ciclos/segundo. Obtemos então, com as mesmas unidades que antes:
( i
(
bar PMI )= .600 kW P )
(
cyl (m3
).rpm N )
Para um motor de dois tempos, a compressão no carter, a PMI será obtida pela diferencia entre a PMI-cilindro (positiva) e a PMI-carter (negativa).

Fig. II.4. Diagramas de pressão-cilindro e pressão-carter Para um motor a dois tempos, a compressão no carter.
II.2.2. Pressão Media Efetiva (PME), Pressão Media de Atrito (PMF)
A Potencia Efetiva Pe dum motor pode ser associada a um parâmetro PRESSAO MEDIA EFECTIVA (PME), definida de maneira análoga a PMI:
bar PME )= .1200 P (kW )
e
( (
cyl (dm3
).rpm N )
A PME é uma pressão “fictícia”, que para um motor de características dadas, esta diretamente relacionada com o torque C desenvolvido pelo motor e recolhido sobre o arvore de saída. Temos para um motor de quatro tempos:
(.
PME ( Pa ) = 4Π . Cm N )
Vcyl
(m3)
Então com PME em bar, C em m.daN e Vcyl em dm3
(ou litros)
Cm daN ) Cm daN )
(, (.
PME bar ) = 0 4 Π . (.
= 1 257 . Vcyl
(dm 3)
,
Vcyl
(dm 3)
Do mesmo jeito que temos: Pe = Pi - Pf podemos escrever
PME = PMI − PMF
Definindo da mesma forma a PRESSAO MEDIA DE ATRITO (PMF):
.1200 Pf (kW )
bar PMF )=
( 3
(
cyl (dm ).rpm N )
II.2.3. Outras expressões das pressões medias

Nas relações entre Potencia y Pressão Media, podemos introduzir a velocidade media do pistão Vp assim como sua superfície Sp (seção do pistão). Si n é o numero de cilindros do motor podemos assim, por exemplo, mostrar que:
( 004
e (
PME bar ) = ,. PkW )
.
nSp (m
2).V
p (m / s)
O ainda a relação:
n (
Pe (kW ) = 25. . S
p (m
2).V
p (m / s). PME bar )
Para um motor, a potencia efetiva desenvolvida e assim proporcional:
Ao numero de cilindros A superfície do pistão A velocidade media do pistão A PME Da relação anterior podemos deduzir a expressão do produto (PME.Vp), que se escreve:
(
PkW )
( PME Vp ) (bar m / s) = 4.
nSp (dm 2)
.. . Este termino e considerado normalmente como representativo da carga térmica do motor.
II.3. Potencia e carga dum motor
A carga dum motor e o termino geral que define a grandeza de potencia ou torque pedida ao motor por as maquinas a ele ligadas. Normalmente é expressa em valor relativo (fração o porcentagem) respeito a potencia máxima o ao torque máximo declarado no regime considerado. Per exemplo, falamos que o motor funciona a ½ carga si a potencia desenvolvida ao regime N e igual a:
Pe = ½ Pemax Então: C = ½ Cmax Sendo Pemax e Cmax a potencia máxima e o torque máximo para este regime N.
Este termino não pode definir precisamente as condições de marcha dum motor que si este posei os regulagens definidos (alimentação em carburante, ignição, ...) e para condições ambientes de funcionamento similares a aquelas em que se mediu a potencia máxima. No caso de ensaios com parâmetros de regulagem variáveis, é melhor definir as condições de ensaios pelos valores cifrados da potencia ou do torque associados a velocidade do motor.
Como veremos mais tarde, depois examinar o processo de combustão, a carga, parâmetro regulável pelo utilizador, e geralmente modificada sobre os motores clássicos, per:
- A abertura da borboleta nos motores a gasolina. -A posição da “cremaillere” d’injeção nos motores Diesel.
A PME ligada diretamente ao torque para um motor de geometria conhecida, permite evidentemente de dar a carga do motor.

Na comparação das prestações dos motores, consideramos muitas vezes como elemento a apreciar, a relação potencia/cilindrada do motor (potencia especifica em kW/l)
PC = .ω
cyl Vcyl
Para um regime de rotação conhecido, a influencia dos parâmetros de construção e de regulagem do C
motor aparece essencialmente sobre o termino Vcyl
, que vimos que é proporcional a PME.
A Pme máxima caracteriza assim a qualidade de utilização duma geometria (cilindrada) conhecida dum motor para produzir energia mecânica. Em particular, si, o resto de cosas são iguales, dobramos a cilindrada do motor mantendo a PME igual, o torque também deve ser o dobre e potencia também para o mesmo regime.
ANNEXE II.3 : Couple instantané d’un moteur alternatif En se reportant au schéma de la figure II.3, et en négligeant tous les frottements, on peut voir que, au cours d’un cycle moteur, le couple transmis au vilebrequin (couple moteur) est, à chaque instant, égal au produit de la force Ft , perpendiculaire au maneton, par un bras de levier r constant et égal au rayon de manivelle ( r = Course L / 2 ) ou encore au produit de la force Fb , transmise par l’axe du piston à la bielle, par le bras de levier de cette force par rapport à l’axe du vilebrequin, ce bras de levier variant au cours de la rotation du vilebrequin. Ce couple instantané, intégré sur la durée totale d’un cycle soit 720 degrés d’angle vilebrequin pour un moteur à 4 temps, représente le couple moyen Ci mentionné précédemment.
En considérant un fonctionnement stabilisé et régulier du moteur, ce couple instantané est périodique de période 4π ( 720 degrés ) et représente la résultante de deux couples :
-couple instantané dû à la pression des gaz dans le cylindre qui engendre le couple moteur -couple instantané, sur cette même période, dû aux efforts d’inertie des pièces mobiles du moteur ; si on néglige les frottements, ce couple inertiel engendre un couple moyen nul.
Analyse des couples dans le cas d’un moteur monocylindre
Couple instantané dû à la pression des gaz
La pression des gaz s’exerce sur la surface du piston Sp et transmet à ce dernier une force verticale F(α) variable pendant le cycle
: F (α)= Sp . p(α)
La figure II.3.1 représente sur 720 degrés de rotation, pour une évolution de pression donnée, la variation du couple dû aux gaz : « Couple Gaz ». On notera que ce couple, de période égale à 4π, est négatif avant le PMH puis, compte tenu de la variation du bras de levier dû à l’inclinaison de la bielle, passe par un maximum avec un angle retardé par rapport à la position du maximum de pression.

Fig. II.3.1. – Couple instantané dû à la pression des gaz Couple instantané dû aux inerties
Ce couple additionnel résulte des inerties des pièces subissant des variations d’énergie cinétique au cours du cycle ; c’est le cas du piston et de la bielle dont les mouvements alternatifs conduisent à l’annulation de la vitesse à chaque passage par les Points Morts Haut et Bas. Les pièces en mouvement rotatif (Vilebrequin, volant moteur, …) n’interviennent pas car elles contribuent précisément, grâce à leur inertie, à régulariser le couple moteur.
Le déplacement des pièces en mouvement alternatif serait purement sinusoïdal dans l’hypothèse d’une bielle de longueur infinie (cas de λ = lb / r → ∞ ou lb >> r). Dans la réalité, pour des valeurs courantes de λ (3 < λ <4), l’inclinaison de la bielle deux fois par tour du vilebrequin modifie le déplacement du piston qui n’est pas purement sinusoïdal. La vitesse du piston est maximale lorsque la bielle passe en position perpendiculaire au maneton ; plus la valeur de λ est faible, plus cette position du maximum de vitesse du piston est anticipée (ou retardée) par rapport à l’angle π/2 (ou 3π/2) du cycle. Une décomposition de ce mouvement périodique en série de Fourier montre que les amplitudes maximales des harmoniques décroissent rapidement pour des ordres supérieurs à 2 et peuvent ainsi être négligés en première analyse.
On peut donc considérer que les efforts d’inertie sur le maneton dus aux masses alternatives résultent de la superposition d’efforts du premier ordre (harmonique 1, de fréquence égale à celle de la rotation du vilebrequin – de période 2π) et d’efforts du deuxième ordre (harmonique 2, de fréquence double de celle de la rotation du vilebrequin – de période π).
La figure II.3.2 représente, sur deux tours moteur (4π), les évolutions de la composante des deux types d’efforts précédents de période 2π, ainsi que le couple résultant : « Couple inertiel ».

Fig. II.3.2 – Efforts dus aux inerties et couple d’inertie instantané résultant Un exemple de la composition de ces deux couples instantanés : « Couple Gaz » et « Couple Inertiel » sur un cycle complet de moteur à 4 temps est donné par la figure II.3.3.
Fig. II.3.3. – Couple moteur résultant du « Couple Gaz » et du « Couple Inertiel » pour un moteur monocylindre
On remarquera que ces deux couples s’opposent au moment des pressions maximales des gaz résultant de la combustion ce qui , du point de vue de la sollicitation des pièces du moteur, entraîne une certaine « compensation de la charge par l’inertie ». A charge nulle – sans combustion – le couple résultant est sensiblement identique au « Couple Inertiel », et correspond naturellement à un couple moyen nul. Les efforts dus à l’inertie qui sont proportionnels à ω
2
r, augmentent rapidement avec l’accroissement du régime N du moteur , ce qui peut conduire au fait que, aux régimes de rotation élevés, les valeurs instantanées maximales du couple peuvent, à charge nulle, atteindre des niveaux du même ordre de grandeur qu’en charge, pour ces mêmes régimes. Couple instantané de moteurs multicylindres
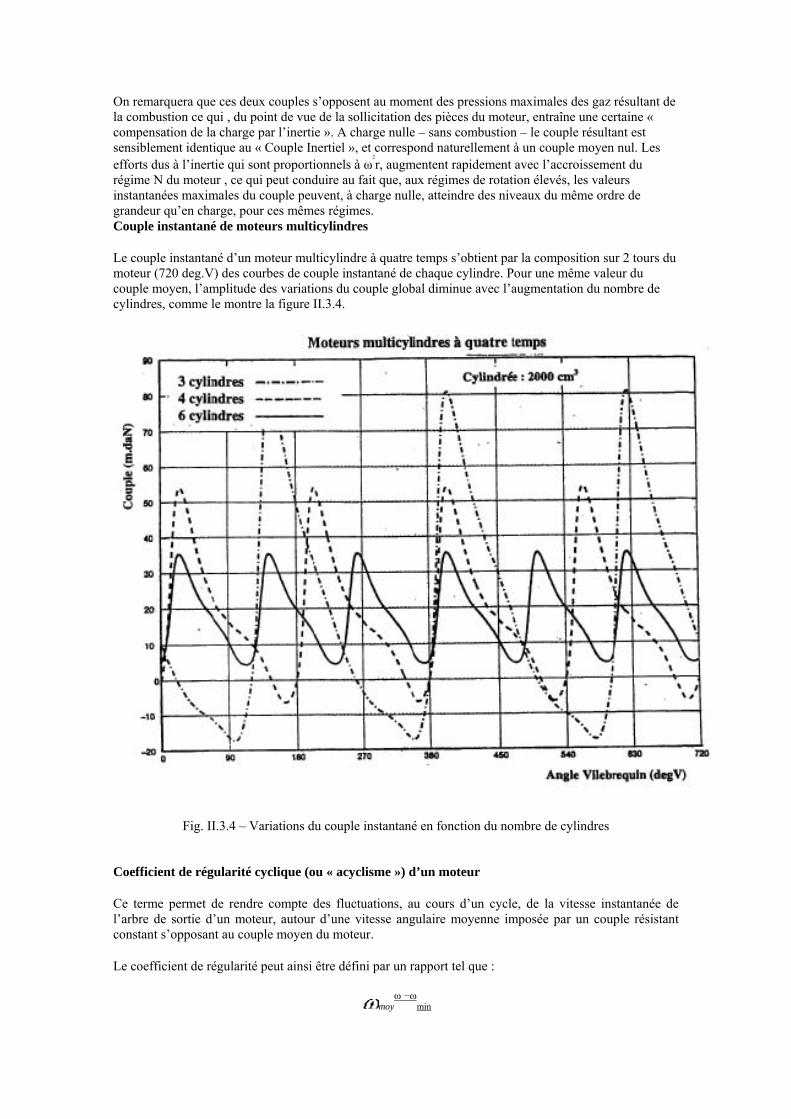
Le couple instantané d’un moteur multicylindre à quatre temps s’obtient par la composition sur 2 tours du moteur (720 deg.V) des courbes de couple instantané de chaque cylindre. Pour une même valeur du couple moyen, l’amplitude des variations du couple global diminue avec l’augmentation du nombre de cylindres, comme le montre la figure II.3.4.
Fig. II.3.4 – Variations du couple instantané en fonction du nombre de cylindres
Coefficient de régularité cyclique (ou « acyclisme ») d’un moteur
Ce terme permet de rendre compte des fluctuations, au cours d’un cycle, de la vitesse instantanée de l’arbre de sortie d’un moteur, autour d’une vitesse angulaire moyenne imposée par un couple résistant constant s’opposant au couple moyen du moteur.
Le coefficient de régularité peut ainsi être défini par un rapport tel que :
moyω −ω
min

max
ou son inverse
ω −ωmin ωmoy
max La figure II.3.5, qui donne un exemple comparatif de l’ « acyclisme » de moteurs à 3, 4 et 6 cylindres, à cylindrée et inertie de rotation constantes, montre a priori l’intérêt d’un nombre élevé de cylindres pour améliorer cette régularité cyclique
Fig. II.3.5 – Régularités cycliques pour des moteurs à 4 temps de 3, 4, 6 cylindres (Cylindrées et inerties de rotation constantes)
Cette régularité cyclique dépendra en outre du moment d’inertie total des masses tournantes entraînées, notamment volant moteur et organes accouplés au moteur, ainsi que de la vitesse moyenne de rotation moy de l’ensemble.






























