Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DE SANTA MARIA - UFSM CENTRO DE TECNOLOGIA - CT CURSO DE ENGENHARIA CIVIL
O USO INTEGRADO DE RECEPTORES GNSS E DA
ESTAÇÃO TOTAL NA LOCAÇÃO DE EDIFÍCIOS
TRABALHO DE CONCLUSÃO DE GRADUAÇÃO
Rafael de Oliveira Cardoso
Santa Maria,RS, Brasil
2015

O USO INTEGRADO DE RECEPTORES GNSS E DA
ESTAÇÃO TOTAL NA LOCAÇÃO DE EDIFÍCIOS
RAFAEL DE OLIVEIRA CARDOSO
Trabalho de Conclusão de Graduação apresentado ao Curso de Engenharia Civil da Universidade Federal de Santa Maria, como requisito
parcial para a obtenção do grau deEngenheiro Civil.
Orientador: Prof. Dr. Daniel Gustavo AllasiaPiccilli
Co-orientador: Prof. Dr. Gelson Lauro Dal’Forno
Santa Maria, RS, Brasil
2015

UNIVERSIDADE FEDERAL DE SANTA MARIA
CENTRO DE TECNOLOGIA
CURSO DE ENGENHARIA CIVIL
Trabalho de conclusão de curso defendido e aprovado em sua forma final pelo
professor orientador e pelos membros da bancaexaminadora.
O USO INTEGRADO DE RECEPTORES GNSS E DA
ESTAÇÃO TOTAL NA LOCAÇÃO DE EDIFÍCIOS
Elaborado por,
Rafael de Oliveira Cardoso
Prof. Daniel Gustavo Allasia Piccilli, Dr. Eng. Orientador
Prof. Gelson Lauro Dal’Forno, Dr. Eng.Co-orientador
Banca Examinadora
Prof. Daniel Carlos Cheron Pimentel, Me.
Prof.ª.Rutinéia Tassi, Dr.ª.


“Pensar é o trabalho mais difícil que existe. Talvez por isso tão poucos se dediquem a ele.”
“Se o dinheiro fora sua esperança de independência, você jamais a terá. A única segurança verdadeira consiste numa reserva de sabedoria, de experiência e de competência.”
Henry Ford

Agradecimentos
Aos meus pais Helvio e Vera, pela constante lição de vida,
exemplo de perseverança e por me ensinarem a lutar sempre pelos meus
objetivos.
A minha namorada Vera, por estar ao meu lado nos momentos
de dificuldades e pelo apoio e confiança depositados.
Agradeço a minha tia Ivonir pelo apoio, ensinamentos e orações
feitas.
Ao meu professor, sócio e amigo Engenheiro Civil Gelson Lauro
Dal’Forno pela orientação neste trabalho e pelos ensinamentos
ministrados.
Aos colegas da graduação pelo constante aprendizado durante o
nosso convívio.
Aos demais professores e funcionários do curso que, de uma
forma ou outra, contribuíram para esta conquista.

RESUMO
A presente pesquisa teve como objetivo estudar e favorecer o processo construtivo eliminando erros sistemáticos como desaprumo, locação de paredes e pilares fora do lugar, racionalizando o processo, bem como a redução do custo da obra com medidas corretivas, e com isto elevando a produtividade e os lucros da empresa construtora, no intuito de aumentar os ganhos do cliente pela opção deste tipo de processo.O presente trabalho viabiliza a integração simultânea de equipamentos geodésicos e topográficos na execução de locações de obras. Devido à indisponibilidade de edificação e tempo para a execução real do trabalho, simulou-se a locação de uma obra em um local plano e que permitisse a sua repetição pelo número de andares propostos.Optou-se por simular uma construção constante de um pavimento térreo e vinte andares. Tal escolha se deve a facilidade para se estabelecer percentagem estatística (95% corresponde a 19 andares).As coordenadas geodésicas destes pontos foram obtidas com o auxilio de equipamento GPS. Após processamento dos dados os mesmo foram convertidos ao sistema PTL, com emprego do programa TRANSGEOLOCAL, o qual realiza operações matemáticas de translação e de rotações de eixos em relação a um ponto comum aos dois sistemas (ponto origem).De posse das coordenadas no PTL, e do levantamento topográfico prévio do local, usando o programa Auto CAD Civil 3D, determinou- se as coordenadas dos pilares, georreferenciadas aos pontos de base.Estes pontos dos pilares, após a sua implantação serviram como testemunhas para a locação dos vinte pavimentos superiores.Para proceder-se a locação dos demais pavimentos, primeiramente ocupou-se, simultaneamente, dois pontos aleatórios e afastados, no interior da obra, com o equipamento GPS. Esta operação foi repetida vinte vezes, assumindo-se para cada operação dois pontos diferentes. Essa operação permitiu a verificação da posição de cada pilar, em relação ao seu eixo, nos vinte andares da presente pesquisa. As diferenças de coordenadas dos eixos dos pilares obtidas em relação ao andar térreo, adquiridas em cada repetição, foram tabuladas e posteriormente calculadas as distâncias correspondentes. De posse dessas informações calculou-se as médias e os desvios padrões para o total de trinta e seis pilares de cada pavimento e, para cada pilar dos vinte pavimentos.O método proposto mostrou-se eficaz e pode ser recomendado para a locação de edifícios convencionais. Seu emprego substitui com vantagens o método tradicional. A sua exatidão fica,em 83,93 % dos casos, menor ou igual ao recomendado (1 cm) e 98,61 % inferior a 1,5 cm,valor este aceitável em locações convencionais. Pode-se dizer que o método proposto, é adequado, acurado, rápido e não propaga erros que por ventura ocorram na locação do pilar em um pavimento. A eficácia da metodologia recomenda-se: o uso de equipamentos de alta precisão, instalação do receptor GNSS em tripé e base nivelante, emprego simultâneo de três receptores GNSS, conhecimento da teoria dos erros e sua aplicação para ocontrole dos enganos e erros sistemáticos. Para maior controle das influencias ambientais, a locação de todos os andares deve ser feita, de preferência, em um mesmo horário.

Palavras-chave: Coordenadas geodésicas, coordenadas locais, plano topográfico, locação de obra, GPS, estação total, TRANSGEOLOCAL, precisão, acurácia.

ABSTRACT
This research aimed to study and promote the construction process eliminating systematic errors as plumb, lease walls and pillars out of place, streamlining the process and reducing the cost of the work with corrective measures, and thus increasing productivity and the profits of the construction company, in order to increase the customer gains the option of this type of process. This study allows for the simultaneous integration of geodetic and topographic equipment in the execution of works of leases. Due to the unavailability of building and time for the actual execution of the work, the lease was simulated a work on a local level and to allow its repetition by the number of proposed floors. We chose to simulate a constant construction of a ground floor and twenty floors. This choice is due to the ease of establishing statistical percentage (95% corresponds to 19 floors). The geodetic coordinates of these points were obtained with GPS equipment aid. After processing the same data were converted to PTL system with employment TRANSGEOLOCAL program which performs mathematical operations and translational axis of rotation relative to a point common to the two systems (the origin point). Armed with the coordinates in the PTL, and previous survey of the site, using Auto CAD Civil 3D program, was determined the coordinates of the pillars, georeferenced to the basic points. These points of the pillars, after its implantation served as witnesses for the leasing of twenties upper floors To proceed to lease the other floors, first figured out simultaneously two random points and apart within the work with the GPS equipment. This operation was repeated twenty times for each assuming two different operating points. This operation allowed the verification of the position of each pillar, in relation to the axis of the twenty floors of this research. The differences in coordinates of the axes of the pillars obtained compared to the ground floor, acquired in each repetition, were later plotted and calculated the corresponding distances. With this information we calculated the mean and standard deviations for the total of thirty-six pillars of each deck, and for each pillar of the twenty floors. The method proved to be effective and can be recommended for the lease of conventional buildings. Its use replaces the traditional method with advantages. Their accuracy is, in 83.93% of cases, less than or equal to the recommended (1 cm) and 98.61% less than 1.5 cm, a value acceptable in conventional locations. It can be said that the proposed method is appropriate, accurate, and fast and does not propagate errors that may eventually occur in the pillar of the lease on a pavement. The effectiveness of the methodology recommended: the use of high-precision equipment, GNSS receiver installation on tripod and tribrach, simultaneous use of three GNSS receivers, errors theory of knowledge and its application for the control of systematic errors and mistakes. For more control of environmental influences, the leasing of all floors must be made, preferably in the same time.

Keywords: geodetic coordinates, local coordinates, topographic plan, work location, GPS, total station, TRANSGEOLOCAL, precision, accuracy.

LISTA DE FIGURAS
Figura 1 GEÓIDE E SUPERFÍCIE TOPOGRÁFICA – PLANTA TOPOGRÁFICA. . 23
Figura 2 - Representatividade de UTM, RTM e LTM ................................................... 29
Figura 3 - Locação de pavilhão pré-moldado................................................................. 31
Figura 4 - Gabartiro de madeira ..................................................................................... 32
Figura 5 - Marcação no terreno ...................................................................................... 32
Figura 6 - Locação de Pavilhão pré-moldado................................................................. 33
Figura 7 - Locação de Prédio Comercial ........................................................................ 34
Figura 8 – Representação de Precisão e Acurácia.......................................................... 41
Figura 9 - Total de Satélites GLONASS em 31/07/2014 ............................................... 43
Figura 10 - Constelação GPS.......................................................................................... 44
Figura 11 – Constelação GPS......................................................................................... 44
Figura 12- Constelação GLONASS em 31/07/2014 ...................................................... 46
Figura 13 - Frequências de modulação do Compass ...................................................... 48
Figura 14 – Referenciais geodesico local ....................................................................... 50
Figura 15 - Estação Total marca RUIDE modelo RTS – 820 R5 ................................... 54
Figura 16 - Receptor GNSS GPS, marca SOUTH modelo S86-S. ................................ 55
Figura 17 – Croqui da área do experimento, mostrando os pontos de base, os pilares e os
pontos de GPS. ............................................................................................................... 56
Figura 18 - Pregos fixados no chão para Controle ......................................................... 58
Figura 19 - Discrepancias de locação, por andar no pilar P01 ....................................... 66
Figura 20 - Discrepancias de locação, por andar no pilar P03 ....................................... 67
Figura 21 - Discrepancias de locação, por andar no pilar P34 ....................................... 68
Figura 22 – Discrepancias de locação, por andar no pilar P36....................................... 68

LISTA DE TABELAS
Tabela 1 - Pavimento Térreo ao 5º Pavimento ............................................................... 60
Tabela 2 - 6º Pavimento ao 11º Pavimento .................................................................... 61
Tabela 3 - 12º Pavimento ao 17º Pavimento .................................................................. 62
Tabela 4 - 18º Pavimento ao 20º Pavimento .................................................................. 63
Tabela 5 – Distribuição das discrepancias totais em número e percentagem................. 65
LISTA DE SIGLAS E SIMBOLOS
ABNT AssociaçãoBrasileiradeNormasTécnicas
DGPS Sistema de posicionamento global com correção diferencial
DOP DiluiçãodaPrecisão
EGNOS European Geostationary Navigation Overlay System
GLONASS Global Navigation Satellite System
GNSS Global Navigation Satellite System
GPS GlobalPositioningSystem
IBGE InstitutoBrasileirodeGeografiaeEstatística
LTM LocalTransversadeMercator
MSAS Multi-functional Satellite based Augmentation Service
NAVSTAR Navigation System with Time And Ranging
NBR NormaBrasileiraRegistrada
PDOP Diluiçãodaprecisãotridimensional
RRCM RededeReferênciaCadastralMunicipal
RTCM Radio Technical Committee for Maritime Service
RTM RegionalTransversadeMercator
SAD69 SouthAmericanDatum69
SCTG Sistema Cartesiano Tridimensional de CoordenadasGeodésicas
SGB SistemaGeodésicoBrasileiro
SGL Sistema Geodésico Local
SNAS Satellite Navigation Augmentation System

STL SistemaTopográficoLocal
UTM UniversalTransversadeMercator
WAAS Wide Area Argumentation System
WGS84 WorldGeodeticSystemde1984

SUMÁRIO
1 INTRODUÇÃO........................................................................................................... 19
1.1 OBJETIVOS............................................................................................................. 20
1.1.1 OBJETIVOS GERAIS .......................................................................................... 20
1.1.2 OBJETIVOS ESPECÍFICOS ................................................................................ 20
1.2 ESTRUTURA DO TCC........................................................................................... 20
2 REVISÃO BIBLIOGRÁFICA.................................................................................... 22
2.1 TOPOGRAFIA......................................................................................................... 22
2.1.1 CONCEITOS......................................................................................................... 22
2.1.2 LEVANTAMENTOS TOPOGRÁFICOS............................................................. 24
2.1.2.1 LEVANTAMENTO TOPOGRÁFICO PLANIMÉTRICO (OU
LEVANTAMENTO PLANIMÉTRICO, OU LEVANTAMENTO PERIMÉTRICO) . 24
2.1.2.2 LEVANTAMENTO TOPOGRÁFICO ALTIMÉTRICO (OU
NIVELAMENTO).......................................................................................................... 25
2.1.2.3 LEVANTAMENTO TOPOGRÁFICO PLANIALTIMÉTRICO CADASTRAL
........................................................................................................................................ 25
2.2 GEODÉSIA .............................................................................................................. 26
2.2.1 CONCEITOS......................................................................................................... 26
2.3 CARTOGRAFIA...................................................................................................... 28
2.3.1 PROJEÇÕES TM .................................................................................................. 28
2.4 LOCAÇÃO............................................................................................................... 30
2.4.1 LOCAÇÃO TRADICIONAL ............................................................................... 31
2.4.1.1 SEM AUXILIO DE EQUIPAMENTOS TOPOGRÁFICOS............................. 31
2.4.1.2 COM AUXILIO DE EQUIPAMENTOS TOPOGRÁFICOS............................ 32
2.4.2 ERROS .................................................................................................................. 34
2.4.2.1 ERROS SISTEMÁTICOS.................................................................................. 35
2.4.2.2 ERROS ACIDENTAIS OU ALEATÓRIOS ..................................................... 36
2.4.2.3. ERROS GROSSEIROS OU ENGANOS.......................................................... 37
2.5 PRECISÃO E ACURÁCIA...................................................................................... 39
2.5.1 PRECISÃO............................................................................................................ 39
2.5.2 ACURÁRIA .......................................................................................................... 40
2.6 SISTEMA GLOBAL DE NAVEGAÇÃO POR SATÉLITE (GNSS)..................... 41
2.6.1 GPS........................................................................................................................ 43
2.6.2 GLONASS............................................................................................................. 45
2.6.3 GALILEO.............................................................................................................. 47
2.6.4 COMPASS (Bússola) ............................................................................................ 47
2.7 TRANSFORMAÇÃO ENTRE OS SISTEMAS DE COORDENADAS LOCAIS E
CARTESIANAS TRIDIMENSIONAIS ........................................................................ 50
2.7.1 TRANSFORMAÇÃO DO SISTEMA GEODÉSICO CARTESIANO
TRIDIMENSIONAL PARA O SISTEMA GEODÉSICO DE COORDENADAS
TERRESTRE LOCAL ................................................................................................... 50
2.7.1.1. LIMITAÇÕES E RECOMENDAÇÕES........................................................... 51
2.7.2 TRANSFORMAÇÃO DO SISTEMA DE COORDENADAS TERRESTRE
LOCAL PARA O SISTEMA GEODÉSICO CARTESIANO TRIDIMENSIONAL.... 51
2.7.3 O SOFTWARE TRANSGEOLOCAL.................................................................. 52
3 MATERIAL E METODOS......................................................................................... 54
3.1 MATERIAL ............................................................................................................. 54
3.1.1 ESTAÇÂO TOTAL E ACESSÓRIOS:................................................................. 54
3.1.2 GPS........................................................................................................................ 55
3.1.3 PROGRAMAS COMPUTACIONAIS: ................................................................ 55
3.2 LOCAL DO EXPERIMENTO................................................................................. 56
3.3 METODOLOGIA..................................................................................................... 56
4 ANÁLISE DOS RESULTADOS ................................................................................ 59
5 CONCLUSÕES........................................................................................................... 69
6 RECOMENDAÇÕES.................................................................................................. 70

REFERÊNCIAS BIBLIOGRÁFICAS ........................................................................... 71
19
1INTRODUÇÃO
As ciências da Geodésia e da Topografia experimentaram ao fim do último
século e, nos primórdios deste, uma grande evolução. Evolução esta, que se faz notar,
tanto no que se refere à teoria, como no desenvolvimento de equipamentos e programas
computacionais.
Dentre os equipamentos e técnicas novas, merecem destaque o posicionamento
por satélites (GPS, GLONASS, Galileu, Compass/BeiDou), a medida eletrônica de
ângulos e distâncias (estação total), o laser scanner, as imagens orbitais e suborbitaisde
alta resolução. Por sua vez, os softwares e os hardwares voltados para os cálculos e
representações gráficas de trabalhos geodésicos e topográficos e, que podem ser
associados às obras de engenharia, têm facilitado e melhorado a exatidão e a
representação destas tarefas.
No entanto, no Brasil, toda essa evolução tem sido pouco adequada e utilizada
para implantação de edificações. Ainda, a maioria das pequenas, quanto médias e
grandes obras de edificações continua a ser implantada empregando a tradicional e
ultrapassada técnica da execução do esquadro, com linha e trena de fita de aço,quando
não de fibra, sobre o gabarito. E, quando da implantação de mais de um andar a locação
dos pavimentos superioresainda é predominante por prumada associada ao emprego de
estação total.
Algumas empresas e/ou profissionais preocupados com a obtenção de uma
melhor qualidade de locação e, consequentemente,com a qualidade, já vem locando
obras com o emprego de estações totais, ainda que, somente no subsolo e térreo, na
maioria das vezes.
Como é do conhecimento,os equipamentos de GNSS (siglas em inglês que
indicam os sistemas de posicionamento por satélites artificiais) fornecem coordenadas
em um sistema tridimensional (X, Y, Z) cuja origem é o centro de massa da
Terra.Posteriormente, tradicionalmente, elas podem ser transformadas em coordenadas
geodésicas (latitude, longitude e altura elipsoidal) ou ainda em Coordenadas
Transversas de Mercator (UTM), ou suas adaptações para áreas menores (RTM e LTM)
que são coordenadas cartográficas.

20
No entanto, essas coordenadas não são compatíveis com o sistema de
coordenadas no Plano Topográfico Local (PTL), pois apresentam as distorções lineares
características deste sistemacartográfico.
Para que os dados geodésicos, obtidos a partir de rastreio com equipamentos
GNSS, possam ser integrados aos dados obtidos com equipamentos topográficos é
necessário transformá-los ao PTL. BURKHOLDER (1997, 2000, 2003) Dal Forno, et.
al, 2007), .JEKELI(2006).entre outros usam da metodologia denominada por
BURKHOLDER de 3D para efetuarem esta transformação e compatibilização.Assim
procedendo, é possível integrar dados geodésicos e topográficos para operações no PTL.
Diante do acima exposto é possível integrar simultaneamente equipamentos geodésicos
e topográficos na execução de locações em diversos níveis.
1.1 OBJETIVOS
1.1.1 OBJETIVOS GERAIS
Oferecer informações técnicas que possam contribuir para a escolha de clientes e
projetistas entre a locação com equipamentos sofisticados e a locação convencional.
Apresentar informações técnicas relativas à locação de gabaritos com a
utilização integrada de equipamentos GNSS e estação total. Discutindo aspectos
executivos, facilidade, agilidade, precisão e exatidão, listando-se suas vantagens e
desvantagens.
Exporreferencia que permitam aos clientes e projetistas optarem de uma maneira
técnica e econômica, pela locação tradicional e a aqui descrita.
1.1.2 OBJETIVOS ESPECÍFICOS
Empregar os dados coletados com equipamento GNSS associados aos dados
obtidos com estação total para a locação simulada do centro de pilares de um edifício
com vinte e um pavimentos.
Verificar a viabilidade da aplicação do método, sua precisão e exatidão
(acurácia), mediante a comparação dos resultados alcançados por pavimento com o
pavimento padrão (térreo).
1.2 ESTRUTURA DO TCC
O trabalho está organizado da seguinte forma:

21
O Capítulo I-Introdução, apresenta o tema da pesquisa, sua delimitação, as
questões de estudo, os objetivos gerais e específicos, bem como, justificativas e
sistematização do trabalho.
O Capítulo II -Revisão Bibliográfica, abordaassuntos relevantes de Geodésia
Geométrica e Espacial, Topografia,Cartografia e locação de obras;
O Capítulo III - Material e Métodos, descreve os equipamentos e programas
empregados, a metodologia usada para obtenção dos resultados.
No capítulo IV – Resultados e Discussão são apresentados osresultados obtidos e
a discussão dos mesmos.
No Capítulo V – Conclusões e Recomendações são apresentadas:a análise da
viabilidade econômica, as vantagens da locação com associação de equipamentos GNSS
e estação total, suas restrições e limitações.
Ao final do trabalho sãoapresentadas as referencias bibliográficas utilizadas,
juntamente com os anexos pertinentes.

22
2 REVISÃO BIBLIOGRÁFICA
Neste capítulo apresenta-se o embasamento teórico desta pesquisa, abordando
assuntos como:
2.1TOPOGRAFIA
2.1.1CONCEITOS
Definição: a palavra “Topografia” deriva das palavras gregas “topos” (lugar) e
“graphen” (descrever), o que significa a descrição exata e minuciosa de um lugar
DOMINGUES (1979).
Segundo ESPARTEL (1965, pg. 3) “A Topografia tem por finalidade determinar
o contorno, dimensões e posição relativa de uma porção limitada da superfície terrestre,
sem levar em conta a curvatura resultante da esfericidade terrestre. Nessas condições,
pode-se, sempre, figurar em um plano a imagem da região considerada, o que equivale a
projetar sobre um plano, que se supõe horizontal, não só os limites da superfície a
representar como todas as particularidades notáveis, naturais ou artificiais, do terreno.”
Assim, a Topografia tem a importância de determinar analiticamente as
medidasde área e perímetro, localização, orientação, variações no relevo, e ainda
representá-las graficamente em plantas topográficas, ou seja, no PTL. A topografia é
também instrumento fundamental para a implantação (locações) e acompanhamentos de
obras,tais como: projeto viário, edificações, urbanizações (loteamentos), movimento de
terra (volume de terra).
Assim sendo, quando se trabalha com Topografia usa-se somente medidas
lineares e/ou angulares, situados em planos horizontal e vertical (distâncias e ângulos
horizontais e verticais).
Quando se opera com áreas maiores, onde a curvatura da Terra não pode ser
abstraída, a Topografia dá lugar à Geodésia Geométrica e a representação plana da área
é feita em cartografia. Convém salientar que ambas são projeções horizontais, mas a
cartográfica sofre deformações variáveis conforme o sistema projetivo utilizado, o que
não acontece com a projeção topográfica.

23
No Brasil, o Instituto Brasileiro de Geografia e Estatística (IBGE) é a instituição
responsável pelas atividades geodésicas e cartográficas. As ações são caracterizadas
pela implantação e manutenção do Sistema Geodésico Brasileiro (SGB).
A Figura 1 retirada de ESPARTEL (1965, pg. 10) representa o terreno em
Topografia. Traçado do geóide: onde cada ponto da superfície física A, B e C projetada
verticalmente sobre ogeóide, em Ao, Bo e Co; o conjunto de todos os pontos constitui a
representação planimétrica do terreno.
Figura 1GEÓIDE E SUPERFÍCIE TOPOGRÁFICA – PLANTA TOPOGRÁFICA.
Fonte: ESPARTEL, Lélis. Curso de topografia. 1. Ed. Porto Alegre: Globo, 1965, PG.10
Ela é abase de qualquer projetoe de qualquer obra realizada por engenheiros ou
arquitetos. Por exemplo, os trabalhos de obras viárias, núcleos habitacionais, edifícios,
aeroportos, hidrografia, usinas hidrelétricas, telecomunicações, sistemas de água e
esgoto, planejamento, urbanismo, paisagismo, irrigação, drenagem, cultura,
reflorestamento etc., se desenvolvem em função do terreno sobre o qual se assentam
DOMINGUES(1979). Portanto, é fundamental o conhecimento pormenorizado do
terreno, tanto na etapa do projeto, quanto na fase de construção ou execução.É através
do emprego de métodos e instrumentos topográficos que é assegurada uma correta
implantação da obra ou serviço.
Na engenharia civil, as obras são implantadas em um plano horizontal (PTL)
através do emprego de medidas e ângulosem verdadeira grandeza. Desta maneira o
sistema projetivo a ser usado é o PTL através de medições de ângulos horizontais e
verticais, distâncias horizontais, verticais e inclinadas, com instrumental adequado.

24
Cabe aqui um esclarecimento, no que se refere ao uso inadvertido de outras
projeções planas, principalmente as Transversas de Mercator (TM) como se fossem
idênticas as obtidas no PTL. Esse fato não corresponde à verdade pois essas projeções
cartográficas são possuidoras de deformações nas distâncias.
O sofisma, acima exemplificado, se deve a facilidade inicial da transformação
das coordenadas tridimensionais (X, Y e Z) ou coordenadas geodésicas (latitude,
longitude e altura elipsoidal) obtidas com os sistemas globais de navegação por satélites
(GNSS) em TM. No entanto, esse procedimento, nos dias atuais, não se justifica
poisexistem programas computacionais que por rotação e translação de eixos
transformam coordenadas geodésicas em topográficas BURKHOLDER (1997, 200,
2003)DAL FORNO (2007), JEKELI (2006).
Os levantamentos topográficos básicos são classificados em: levantamento
planimétrico, levantamento altimétrico e levantamento planialtimétrico cadastral.
2.1.2 LEVANTAMENTOS TOPOGRÁFICOS
“Conjunto de métodos e processos que, através de
medições de ângulos horizontais e verticais, de distâncias
horizontais, verticais e inclinadas, com instrumental adequado
à exatidão pretendida, primordialmente, implanta e materializa
pontos de apoio no terreno, determinando suas coordenadas
topográficas. A estes pontos se relacionam os pontos de
detalhes visando à sua exata representação planimétrica numa
escala predeterminada e à sua representação altimétrica por
intermédio de curvas de nível, com equidistância também
predeterminada e/ou pontos cotados.” (NBR 13133:1994, p.3).
2.1.2.1LEVANTAMENTO TOPOGRÁFICO PLANIMÉTRICO (OU
LEVANTAMENTO PLANIMÉTRICO, OU LEVANTAMENTO
PERIMÉTRICO)
“Levantamento dos limites e confrontações de uma
propriedade, pela determinação do seu perímetro, incluindo,
quando houver, o alinhamento da via ou logradouro com o qual
faça frente, bem como a sua orientação e a sua amarração a
pontos materializados no terreno de uma rede de referência
cadastral, ou, no caso de sua inexistência, a pontos notáveis e
estáveis nas suas imediações. Quando este levantamento se
destinar à identificação dominial do imóvel, são necessários

25
outros elementos complementares, tais como: perícia técnico-
judicial, memorial descritivo, etc.” (NBR 13133:1994, p.3).
Conjunto de pontos consolidados no terreno, com coordenadas cartesianas "X" e
"Y" alcançadas a partir de uma origem definida no horizonte topográfico o qual servirá
como base ao levantamento topográfico e representação gráfica de posição.
Esse levantamento não traz informações acerca do relevo do terreno a ser
levantado, apenas informações relacionadas às medições feitas na horizontal.
2.1.2.2 LEVANTAMENTO TOPOGRÁFICO ALTIMÉTRICO (OU
NIVELAMENTO)
“Levantamento que objetiva, exclusivamente, a
determinação das alturas relativas a uma superfície de
referência, dos pontos de apoio e/ou dos pontos de detalhes,
pressupondo-se o conhecimento de suas posições
planimétricas, visando à representação altimétrica da superfície
levantada.” (NBR 13133:1994, p.3).
Os dados coletados em um levantamento altimétrico, para poderem ser
representados adequadamente, necessitam do conhecimento de suas coordenadas
planimétricas. Assim é possível obter as curvas de níveis do terreno.
2.1.2.3 LEVANTAMENTO TOPOGRÁFICO PLANIALTIMÉTRICO
CADASTRAL
“Levantamento topográfico planialtimétrico acrescido
dos elementos planimétricos inerentes ao levantamento
planimétrico cadastral, que devem ser discriminados e
relacionados nos editais de licitação, propostas e instrumentos
legais entre as partes interessadas na sua execução.” (NBR
13133:1994, p.3).
O levantamento planialtimétrico é a junção do levantamento planimétrico, em
função das coordenadas planas "X" e "Y" obtidas através de medidas de ângulos e
distâncias horizontais, com a altimetria do terreno em função da coordenada "Z"
(diferença de nível ou distância vertical, comumente denominada de h).
Deve-se partir de uma origem pré-definida e um azimute e empregando
instrumentos com a precisão requerida, como por exemplo, o GNSS ou Estação Total.

26
2.2 GEODÉSIA
2.2.1 CONCEITOS
DAL’FORNO (2007)Define geodésia como sendo a ciência que trata de toda a
superfície terrestre. Segundo GRIPP JR e SILVA. (1996) geodésiaé a ciência que
estuda o conjunto de métodos e procedimentos adotados para definir a forma e
dimensão da Terra. E divide a geodésia em três Geodésia Física, Geodésia Geométrica e
Geodésia por Satélite ou Espacial. GEMAEL(1999) demaneiramaissucinta,
defineGeodésiacomo sendo aciênciaquetemporobjetivo
determinaraformaeasdimensõesdaTerraeosparâmetrosdefinidoresdocampoda gravidade.
SegundoDAL’FORNO (2007) Apud
TORGE(2001)oproblemadageodésiaédeterminara figura e o campo gravitacional
externo da Terra e de outros corpos celestiais como uma função do tempo, por
observações na superfície desses corpos ou exterior a elas.
DAL’FORNO (2007) Apud TORGE(2001) prossegue ainda afirmando que a
Geodésia é parte das geociências e das ciências da engenharia, incluindo a navegação e
a geomática. Divide-a em três grandes áreas:
i) A da geodésia global envolvida com a determinação da forma e do
tamanho da Terra, sua orientação no espaço e de seu campo
gravitacional externo;
ii) A da geodésia de levantamentos (nacional e internacional) que determina
a superfície da Terra e o campo de gravidade sobre uma região que
tipicamente abrange um país ou um grupo de países e
iii) E de levantamentos no plano (Topografia) onde os detalhes da superfície
terrestre são determinadas em um plano local e dessa maneira a
curvatura e os efeitos da gravidade são geralmente ignorados.
Segundo DAL’FORNO (2007), GRIPP JR e SILVA. (1996)“Tradicionalmente a
Geodésia é dividida em três ramos, não estanque e que interagem entre sim, como um
todo”:

27
A Geodésia Geométrica realiza operações geométricas sobre a superfície
terrestre, (medidas angulares e de distâncias) associadas a algumas determinações
astronômicas.
A Geodésia Física que estuda o campo gravitacional da Terra realizando
medições gravimétricas;
A Geodésia Celeste ou Espacial, ou ainda, Geodésia por Satélites estuda a
determinação de posições de pontos na superfície da Terra oupróximos a ela a partir
deobservações do posicionamento de satélites artificiais.
Já SILVEIRA(2000) divide a Geodésia em acadêmica ou superior e aplicada ou
elementar. A primeira, essencialmente científica, preocupa-se com a forma e as
dimensões da Terra, com o deslocamento dos continentes e, por meio da gravimetria,
investigam as anomalias da gravidade terrestre. Para SILVEIRA(2000) a geodésia
superior pode ser dividida em geodésia física, dedicada ao estudo do campo
gravitacional e suas aplicações (principalmente, na determinação da ondulação geoidal),
e na geodésia geométrica, focada em um elipsoide associado a um sistema de referência
e a seu respectivo datum1.
A geodésia aplicada ou elementar tem por objetivo principal a implantação de
vértices geodésicos, cujas coordenadas são determinadas com grande precisão, para
formar malhas triangulares (empregando operações de triangulação2 e trilateração3)
justapostas à superfície do elipsoide de revolução (redes geodésicas componentes do
sistema geodésico). Esses vértices servem de apoio à Topografia queem seus trabalhos,
desconsidera a curvatura terrestre. Segundo SILVEIRA(1994) ageodésia aplicada pode
ser dividida em geodésia terrestre e geodésia espacial. A geodésia terrestre efetua seus
trabalhos diretamente sobre a superfície terrestre, obtendo ângulos e distâncias a partir
1Datum, do latimdado, detalhe, pormenor (plural data) em cartografia refere-se ao modelo
matemático teórico da representação da superfície da Terra ao nível do mar utilizado pelos cartógrafos numa dada carta ou mapa. Dado existirem vários data em utilização simultânea, na legenda das cartas está indicado qual o datum utilizado. De uma forma muito simplificada, datum providencia o ponto de referência a partir do qual a representação gráfica dos paralelos e meridianos, e consequentemente do todo o resto que for desenhado na carta, está relacionado e é proporcionado. (Wikipédia. Datum. Site: http://pt.wikipedia.org/wiki/Datum.Acesso em: 04 agosto de 2014. 09:30AM)
2Obtenção de Figuras geométricas a partir de triângulos formados através da medição dos ângulos subtendidos por cada vértice. Os pontos de triangulação são denominados vértices de triangulação (VVTT). É o mais antigo e utilizado processo de levantamento planimétrico.
3Método semelhante à triangulação e, como aquele, baseia-se em propriedades geométricas a partir de triângulos superpostos, sendo que o levantamento será efetuado através da medição dos lados.

28
de instrumentos geodésicos; seus métodos, para o transporte de coordenadas são: a
triangulação, a trilateração e a poligonação(caminhamento). Por sua vez, a geodésia
espacial utiliza os satélites artificiais como instrumentos e, por processos de
triangulação espacial, trilateração espacial, rastreamento Doppler e rastreamento
interferométrico, implantam vértices geodésicos na superfície terrestresegundo
SILVEIRA(1994)
A Geodésia Espacial vem substituindo com vantagens a Geodésia Terrestre
graças à rápida e consistente evolução que o GNSS (Global NavigationSatellite System)
vem sofrendo. A vantagem do emprego do GNSS se prende a uma maior rapidez nas
operações, assim como, a maior precisão e exatidão obtida nos resultados. O GNSS nos
dias atuais é constituído pelos seguintes sistemas: o NAVSTAR GPS (NAVigation
System with Time AndRanging - Global Positioning System) americano; o
GLONASS, russo e o GALILEO da Agência Espacial Europeia (ESA) .
2.3 CARTOGRAFIA
“Um dos grandes desafios da cartografia é representar a Terra, que tem
superfície curva (geoide), num plano, isso é impossível de se fazer sem que ocorram
deformações4”. Vale salientar que essas distorções são significativas para as obras de
engenharia, o que invalida a aplicação para tal.
E quanto maior a área representada, mais significativa são essas deformações.
Como a topografia trata de áreas pequenas, seu limite de atuação. O campo topográfico
é aquele em que seja possível desprezar o erro causado pela curvatura da terra sem que
haja prejuízo de precisão do levantamento topográfico, esse campo depende da escala
do trabalho, pois o erro de medida é limitado ao erro de reprodução e de acuidade visual
- ou seja, o erro deve ser tão pequeno que se fosse considerado seria menor que o erro
de produção ou reprodução da planta ou ainda menor queo limite visual do olho
humano- e para um limite fixo de erro e escalas diferentes, o alcance da área a ser
levantada varia.
2.3.1 PROJEÇÕES TM
De acordo com NAZARENO (2009) projeção de Mercador é uma projeção
conforme, cilíndrica tangente à esfera modelo no equador, que nesta situação é
4 AGUIRRE, Argentino J. ; FILHO, José Américo M,.Introdução à Cartografia. UFSM. 2007,
pag. 16-17.

29
representado em verdadeira grandeza. Aprojeção Transversa de Mercator também
conhecida como projeção Conforme deLambert-Gauss é uma variante da primeira onde
a tangência se dá num meridiano qualquer.
SegundoNAZARENO apudBRUNETTI (2009), Gauss, planejando o
levantamento do território de Hannover, estabeleceu um sistema de projeção
conformeutilizando como modelo para a Terra, o elipsoide de revolução. Esta projeção
denominada Gauss HannoverscheProjeksion, possuí o cilindro tangente ao meridiano
central, sendo a sua seção, elíptica. Krüger, a partir dos estudos de Gauss, estabeleceu a
projeção em sistemas parciais, composto por fusos com 3° de amplitude.
Posteriormente, Tardi, concebeu um sistema semelhante, só que secante ao elipsoide e
com fusos de 6° em amplitude.
A partir do estudo destes geodesistas chegou-se aoUTM, que segundo
NAZARENO Apud BRUNETTI (2009), é a denominação inglesa da Projeção de
Gauss, com 60 fusos de 6° de amplitude e secante ao elipsoide de revolução.
Com a aplicação de um fator de escala e a adoção de valores para as
coordenadas do meridiano central do fuso e do equador diferentes, além da variação da
amplitude do fuso, obtêm-se projeções similares ao UTM, porém, com diferentes graus
de secância como a RTM (Regional Transverso de Mercator) e LTM (Local Transverso
de Mercator) como demostra a Figura 2 - Representatividade de UTM, RTM e LTM.
Figura 2 - Representatividade de UTM, RTM e LTM
Fonte: HOLLER, em http://mundogeo.com/blog/2009/01/06/alem-das-coordenadas-utm/

30
2.4LOCAÇÃO
De acordo com a NBR 13133 (ABNT, 1994, p. 3), Norma Brasileira para
execução de Levantamento Topográfico, o levantamento topográfico é definido por:
“Conjunto de métodos e processos que, através de medições de ângulos horizontais e verticais, de distâncias horizontais, verticais e inclinadas, com instrumental adequado à exatidão pretendida, primordialmente, implanta e materializa pontos de apoio no terreno, determinando suas coordenadas topográficas. A estes pontos se relacionam os pontos de detalhes visando à sua exata representação planimétrica numa escala predeterminada e àsua representação altimétrica por intermédio de curvas de nível, com equidistância também predeterminada e/ou pontos cotados.”
Locação de uma obra é a operação inversa ao levantamento5. O sucesso da obra
dependerá de um correto levantamento, de um projeto bem elaborado e de uma boa
locação, como exemplificado na Figura 3.
Existem diferentes métodos de locação, os quais variam em função do tipo de
edificação. É evidente que há diferenças em se locar um “Shopping Center” de
450x300m de área, de um edifício de vários pavimentos de 30x38m de área ou uma
habitação térrea de 8x12m de área. No projeto de locação a obra estará referenciada a
um ponto conhecido e previamente definido. A partir deste ponto, passa-se a locar no
solo a projeção da obra desenhada na planta. É comum ter-se como referência, para a
locação da obra, os seguintes pontos:
• o alinhamento da rua;
• um poste localizado no alinhamento do passeio;
• um ponto deixado pelo topógrafo quando da realização do controle da
terraplenagem; ou
• uma lateral do terreno quando este estiver corretamente localizado.
5 Levantamento consiste na obtenção, em campo, das medidas de ângulos e distâncias que
permitirão, em escritório, calcular e desenhar a superfície levantada. A locação consiste em tomarmos os dados calculados em escritório, de um determinado projeto de obra, e implantá-lo no terreno.

31
Figura 3 - Locação de pavilhão pré-moldado.
Fonte Do Autor
2.4.1 LOCAÇÃO TRADICIONAL
2.4.1.1 SEM AUXILIO DE EQUIPAMENTOS TOPOGRÁFICOS
A demarcação da obra é feita a partir do ponto de referência, usando-se 3
coordenadas, duas planimétricas, e uma altimétrica.
A medição das distânciasé feita com trenas que tenham medidas suficientemente
estáveis:
•Trena de aço;
•Trena de plástico armada com fibra de vidro.
A medição de alturaé feita pela transferência de nível:
•Aparelho de nível;
•Nível de mangueira, fio de prumo e régua de referência.
As medidas são retiradas da planta baixa e passadas para o gabarito (Figura 3).

32
Figura 4- Gabartiro de madeira
Fonte Apostila locação de obra – Construção Civil I – 2013 _ Prof. Nayara S KLEIN
No gabaritoFigura 4, são demarcados os eixos ortogonais, posições das estacas,
eixos das vigas baldrames, eixos e face das estacas de fundação, centro geométrico e
face dos blocos, eixo de paredes e pilares.
Após a marcação no gabarito é feita a transferência de pontos para o terreno com
o auxilio de prumo de centro, nas intersecções de duas linhas, como demonstrado
naFigura 5.
Figura 5- Marcação no terreno
Fonte Apostila locação de obra – Construção Civil I – 2013 _ Prof. Nayara S KLEIN
2.4.1.2 COM AUXILIO DE EQUIPAMENTOS TOPOGRÁFICOS
A demarcação da obra é feita através de pontos materializados (marco, piquete,
estacas, demarcação no meio fio) dentro ou fora do canteiro da mesma,usando-se

33
trêscoordenadas, duas planimétricas, e uma altimétrica.(X, Y, Z), as quais são retiradas
do projeto e inseridas na estação total.
A medição das distâncias, ângulos e alturaé feita pela estação total, tendo apenas
o operado de estação que se preocupa com os pontos materializados diminuindo com
isto possíveis erros e enganos.
Material empregado
• Estação total;
• Tripé;
• Trena de aço;
• Bastão e
• Prisma
As coordenadas são retiradas doarquivo CAD ou qualquer outro programa
similar e passadas para o terreno como mostradas nasFigura 6 e Figura 7.
Figura 6- Locação de Pavilhão pré-moldado

34
Fonte: Do Autor
Figura 7- Locação de Prédio Comercial
Fonte: Do Autor
2.4.2 ERROS
Os erros de observação sãomodernamente denominados “propriedades
estatísticas das observações” GEMAEL (1994,2004) e são devidos:
a) à falibilidade humana proveniente de nossas imperfeições;
b) à imperfeição do equipamento devida à fabricação, ajustes ou características
básicas do mesmo;
c) à influência das condições ambientais ou naturais que são incontroláveis e
influenciam os instrumentos e os processos e;
d) aos arredondamentos de cálculos. Nessas circunstâncias, o verdadeiro valor
das grandezas medidas nunca é atingido,conforme a classificação tradicionalpodem ser
definidos como sistemáticos e acidentais.
De acordo com FLORESTAL (2009, pag. 90), são feitas medidas de grandeza -
direções, distâncias e desníveis - para que se possa fazer a representação da superfície
da Terra. Estas medições invariavelmente são afetadas pelo acaso, por mais que os
equipamentos utilizados sejam os melhores do mercado e por mais cuidadoso que o
35
topógrafo seja em um levantamento, resultando que o valor medido não fica igual ao
valor real.Esta diferença entre o valor real e o obtido é chamada de erro.
Assim, os erros relacionados às medições de topografia são classificados como:
a) Erros sistemáticos;
b) Erros acidentais e;
c) Erros grosseiros ou enganos.
2.4.2.1 ERROS SISTEMÁTICOS
Os erros sistemáticos têm as suas causas conhecidas e podem ser, portanto,
evitados com o emprego de técnicas especiais de observação, ou eliminados
posteriormente mediante o emprego de fórmulas teóricas como consta na obra de
GEMAEL (1994,2004). As principais características dos erros sistemáticos são:
i) Ocorremsemprenomesmosentido;
ii) Apresentamo mesmo valor em medições sucessivas, e;
iii) São cumulativos.
Eles seguem, na maioria das vezes, alguma lei matemática ou física.
Os erros sistemáticos estão ligados à imperfeição ou calibração dos
equipamentos, às imperfeições do observador e dos métodos usados e às influências das
condições ambientais.
Para DAL’FORNO (2007) os erros quando são descobertos podem ser
quantificados e corrigidos mediante a calibração ou testes do equipamento, e
procurando-se analisar e compreender as interações do ambiente com as observações
efetuadas. A literatura é pródiga em exemplos desses erros, além de procedimentos
básicos de como evitá-los e corrigi-los. Alguns exemplos clássicos de como evitá-los
podem ser referidos:
i) A reiteração e a pontaria direta e inversa nas observações angulares (erros
instrumentais) e
36
ii) A colocação do aparelho a igual distância das miras no nivelamento geométrico
(erro devido às condições ambientais).
Um exemplo de erro sistemático são os erros cometidos por deficiência de visão.
A utilização de um método baseado em equação matemática não representativa da
realidade do fenômeno é outro exemplo dessa categoria. Todos os erros sistemáticos
devem ser conhecidos e eliminados em qualquer tipo de observação, ou de medida.
São erros que alteram a observação sistematicamente, tendendo a acumular-se se
não forem corrigidos ou evitados. Ocorre em decorrência de má calibração do
equipamento utilizado, manuseio do operador e condições do ambiente.
Para diminuir a ocorrência desse tipo de erro, é necessário adotar técnicas de
verificação de equipamento, calibrar os instrumentos utilizados, verificar a natureza do
erro para corrigir as observações.
2.4.2.2 ERROS ACIDENTAIS OU ALEATÓRIOS
De acordo com DAL’FORNO (2007) os erros acidentais ou aleatórios são
inevitáveis e ocorrem devido a causas desconhecidas e incontroláveis. Têm magnitude
desconhecida, mas que pode ser estimada. Observações repetidas sobre a mesma
grandeza, mesmo depois de eliminados os enganos e os erros sistemáticos, ainda podem
se apresentar inconsistentes. Essas inconsistências “ocorrem ora num ora noutro sentido
e que não podem ser vinculados a nenhuma causa conhecida”6. Os erros acidentais
acontecem ao acaso e são ocasionados pelas incertezas do ser humano, imperfeições dos
instrumentos e pelas dificuldades dos instrumentos determinarem as influências do
ambiente sobre as medidas tomadas. Sempre se manifestam independentes de quem
observa, de que instrumento e de que método é utilizado.
São erros acidentais os que não podem ser previstos e de natureza desconhecida.
Poderão apresentar valores positivos ou valores negativos. Não há como evitar esse tipo
de erro.
Para o controle dos erros acidentais ambientais é indispensável conhecer todas as
variáveis naturais e as suas inter-relações com o instrumental usado.
6 GEMAEL, Camil. Introdução ao ajustamento de Observações. Aplicações geodésicas. Curitiba;
Editora UFPR. 1994, pág. 60.
37
Quando o número de observações é grande, tais erros, apesar da aleatoriedade,
apresentam alguma regularidade. Nesse caso, os erros acidentais apresentam uma
distribuição de frequência com características da distribuição normal. Assim, com base
na teoria da probabilidade, os resíduos de mesmo módulo e sinais opostos são
equiprováveis; os resíduos menores ocorrem com maior frequência, a média dos
resíduos é aproximadamente nula e erros muito grandes raramente ocorrem. Para a
minimização desses erros, a teoria da probabilidade é empregada, permitindo assim,
através da análise da distribuição normal ou gaussiana de um infinito número amostras
aleatórias determinar a probabilidade de que um erro aleatório possa exceder a certa
magnitude. GEMAEL (1994) alerta que o predomínio de resíduos com um mesmo sinal
indica a possibilidade da existência de alguma influência de natureza sistemática.
Segundo GÓMEZ (2003, pág. 9) “para se lidar com dados numéricos de
qualquer tipo, é sumamente importante aprender a diferença entre uma medida e uma
contagem, entre um engano e um erro, e entre um erro sistemático e um erro aleatório”.
ANDRADE (1998) afirma que o conhecimento das técnicas de obtenção de
valores confiáveis e das “medidas de qualidade” das observações é indispensável para
se obter observações de alta precisão. Dizendo ainda que, para que o valor de uma
medida possa ser considerado bom ou não os indicadores estatísticos de sua
confiabilidade devem se fazer presentes.
Erro provocado por falhas do observador, geralmente é de fácil identificação.
Deve-se sempre repetir a experiência para identificar um possível erro desse tipo.
“Resumindo: os enganos podem ser evitados pela atenção e treinamento do
operador, os erros sistemáticos podem ser corrigidos e os erros aleatórios não são
passíveis de serem quantificados, de serem corrigidos ou eliminados, mas podem ser
minimizados e controlados mediante o uso de técnicas adequadas.”7
2.4.2.3.ERROS GROSSEIROS OU ENGANOS
“Os erros humanos se devem às circunstâncias de que não se percebe nada com
exatidão e se fazem juízos de valor que carregam consigo um erro particular mínimo
que foge ao escopo do engano. Um exemplo típico desse tipo de erro é a oscilação entre
dois números em um medidor digital, onde a escolha por um ou por outro se dá ao
7 Dal’ Forno, Gelson L. Topografia. Cap. 10. Apostila não publicada. pág. 6

38
acaso. Observe-se que, decidindo-se sempre pelo maior ou pelo menor, se estaria
introduzindo uma tendenciosidade e se incorreria em um erro sistemático. Já os erros
instrumentaisse devem principalmente às variações nos ajustes dos instrumentos e às
imperfeições inevitáveis de seus componentes.” 8
DAL’FORNO (2007) afirma que os enganos são comumente denominados de erros
grosseiros em muitos textos ou compêndios. Entretanto, eles não apresentam comportamento de
erros, pois não seguem nem uma lei ou regra e nem estão associados a processos estatísticos.
Possuem um paradigma totalmente diferente das inexatidões das medidas. Assim, conforme
DAL’FORNO (2007) Apud BUCKNER (2003) a separação em enganos e erros pode dirimir
confusões geradas por má associação do significado das palavras na abstração e interpretação de
um problema.
Enganos têm como causas principais as falhas humanas, associadas com a negligência,
a desatenção, ao treinamento inadequado e a maus hábitos. Condições adversas e emoções
também são possíveis fontes de enganos. A principal característica dos enganos são deles serem
relativamente grandes, quando comparados aos demais erros. Como exemplos de tipos de
enganos, pode-se citar:
i) A calagem displicente do teodolito, da estação total ou da antena de GPS em um
ponto;
ii) A inversão de dígitos em uma leitura;
iii) A escolha errada de um pixel em uma imagem.
De acordo com GEMAEL (1994), até em registros eletrônicos de dados, é
possível a ocorrência de enganos. Porém, nem sempre os enganos podem ser detectados
facilmente. Outra fonte, merecedora de atenção especial, é a tomada de decisões sem
uma evidência ou informação suficiente. DAL’FORNO (2007) segue afirmando que o
observador é que tem o domínio sobre os mesmos e cabe a ele o cuidado indispensável
para evitá-los, ou de detectá-los. Um bom conhecimento teórico e do equipamento
usado são fundamentais para se evitar a ocorrência de erros grosseiros. O uso de testes
estatísticos permite aceitar ou rejeitar um determinado dado suspeito de estar
impregnado por engano. Eles não podem ser eliminados completamente nas medições,
mas devem ser controlados de maneira a serem reduzidos a um mínimo. Tal controle é
conseguido pela remoção ou minimização das causas anteriormente especificadas
8 Dal’ Forno, Gelson L. Topografia. Cap. 10. Apostila não publicada. pág. 5

39
2.5 PRECISÃO E ACURÁCIA
A caracterização dos erros, conforme foi realizada sucintamente acima, traz
embutida a noção geral de precisão e acurácia (exatidão). Porém, são inevitáveis e
necessárias às definições e a distinção entre as mesmas, principalmente no que se refere
a levantamentos topográficos, geodésicos e/ou cartográficos, bem como, na tomada de
medidas sobre documentos cartográficos.
2.5.1 PRECISÃO
Precisão é um conceito qualitativo para indicar o grau de concordância entre os
diversos resultados experimentais obtidos em condições de repetitividade (estatística).
Assim, boa precisão significa erro estatístico pequeno, de forma que os
resultados apresentam boa repetitividade. Note, entretanto, que mesmo com boa
precisão a exatidão ou acurácia pode ser ruim caso exista erro sistemático grande.
A precisão pode ser entendida como o cuidado e o refinamento do processo de
medição, também, como o grau de acordo numérico entre as medidas de uma mesma
grandeza, e ainda como o número de casas decimais usadas para expressar essa medida.
Inclui a atenção do observador, a qualidade do instrumento e a estabilidade do ambiente
de operação. Como o cuidado e o refinamento usados na execução de medições estão
diretamente relacionados com o como essas medidas diferem entre si, e com o número
que as expressam, os três entendimentos de precisão se completam. As medidas
sucessivamente obtidas, por qualquer instrumento ou equipamento, certamente não
apresentarão um mesmo valor, mas a dispersão desses valores medidos é muito pequena
e eles apresentam uma distribuição gaussiana quando se tem um número expressivo de
amostras.
De acordo com GEMAEL (1994)o termo precisão está vinculado apenas aos
efeitos aleatórios (à dispersão das observações), enquanto (acurácia) vincula-se a ambos
os efeitos, aleatórios e sistemáticos.
Já DAL’FORNO (2007) Apud VUOLO (1999) define precisão como “uma
indicação parcial da qualidade da medição, que se refere apenas a flutuações aleatórias”
e acrescenta que além de boa precisão, os efeitos dos erros sistemáticos devem ser
pequenos para resultar em uma boa acurácia.

40
A precisão é expressa estatisticamente pela variância estimada, pelo desvio
padrão ou pelo erro médio quadrático quando se trabalha com uma variável aleatória
unidimensional e pelo traço da matriz variância-covariância no caso de variável n-
dimensional.
A precisão é determinada em um sentido comparativo ou relativo e é
diretamente proporcional aos erros aleatórios existentes nas medidas. Valores menores
das medidas estatísticas (espalhamento, intervalo e desvio padrão) indicam uma
precisão alta e são obtidos em função de um melhor controle de qualidade dos erros
aleatórios.
O conceito de precisão, e as variáveis que o influenciam é muito mais complexo
do que se imagina e exige uma compreensão clara dos tipos de erros, conduzindo,
necessariamente, ao controle por testes estatísticos do método de mensuração usado.
DAL’FORNO (2007) segue afirmando que precisão é o grau de refinamento da
execução de uma operação, ou o grau de perfeição nos instrumentos e métodos usados
para se obter uma medida. Uma indicação da uniformidade ou reprodutibilidade de um
resultado.
2.5.2 ACURÁRIA
É proximidade da medida relativamente ao verdadeiro valor da variável.
Sendo assim, pode-se definir acurácia como sendo a concentração de valores
precisos em torno de um verdadeiro valor (verdade). Para melhor se entender acurácia
basta olhar para a Figura 8 onde se visualiza melhor a diferença entre precisão e
acurácia.
Olhando para os alvos pode-se observar que os pontos do alvo da esquerda
estão precisos, pois apresentam uma concentração em um determinado ponto.Porém não
acurados, poisse encontram afastados do centro do alvo (verdadeiro valor ou verdade).
Mas, se observar o alvo da direita verá que os pontos encontram-se acurados, ou seja,
precisos e concentrados no centro do alvo, onde é a sua referência.

41
Figura 8 – Representação de Precisão e Acurácia
Fonte: Do Autor
O que se pode concluir é que precisão é a concentração de pontos em torno da
média, e acurácia é a concentração de pontos precisos em torno de um referencial
verdadeiro.
2.6 SISTEMAGLOBAL DE NAVEGAÇÃO POR SATÉLITE (GNSS)
Até recentemente, os processos de levantamento de dados de campo para
aquisição de bases cartográficas baseavam-se na utilização de medidas de ângulos e
distâncias terrestres para atingir seus objetivos. Uma das restrições mais severas era a
“necessidade de haver intervisibilidade entre os pontos a serem medidos”(ROCHA,
2007).
Normalmente se usa o termo GPS quando se refere à navegação por satélites,
isso é um engano corriqueiro, provavelmente por ser o GPS o mais conhecido e o mais
usado. Entretanto, o uso errôneo dessa terminologia está acabando pelo contínuo
emprego de posicionamento por satélite pela sociedade, com a revitalização do sistema
GLONASS e a ascensão do sistema GALILEO e do COMPASS. A terminologia GPS
faz referência a um sistema específico, enquanto que o GNSS faz menção a qualquer
sistema de posicionamento global de satélite, ou seja, GPS, GLONASS, GALILEO e
COMPASS são sistemas GNSS.
De acordo com SEGANTINE (2005), o objetivo do GNSS é garantir a melhoria
na geometria, disponibilidade para todas as regiões do globo, integridade e confiança
aos usuários. O desenvolvimento do sistema GNSS passa por duas considerações
distintas:

42
1. Na primeira etapa foi desenvolvida a geração GNSS-1, que se baseia no
NAVSTAR-GPS e ou no GLONASS, sendo aumentado por componentes civis.
O GNSS-1 compreende de dois sistemas diferentes
a) O sistema aumentado baseado em satélites (SBAS –
SatelliteBasedAugmentation System) e
b) O sistema aumentado baseado em estações (GBAS –
GroundBasedAugmentation System).
O SBAS consiste em sistemas regionais ampliados com respeito ao GPS ou
GLONAS, composto de satélites geoestacionários.
Atualmente, existem alguns SBAS com cobertura Global, sendo alguns deles:
WAAS, EGNOS, MSAS e SNAS Neste contexto, pode-se afirmar que todo o
sistema WideAreaAugmentation System (WASS), desenvolvido pela Federal
AviationAdministration (FAA), com o propósito de ampliar o sinal de navegação do
GPS, faz parte desta primeira etapa;
2. Na segunda etapa será desenvolvida a geração GNSS-2, que resultará num
sistema completamente novo, com uma nova tecnologia para os satélites e os
meios de comunicações. Nesta geração serão incluídos, os satélites do Bloco IIF
do sistema GPS e ou o GALILEO. O controle deste sistema será realizado por
uma comissão civil internacional.
Atualmente o sistema global de navegação via satélite funcional,é o sistema
americano, NAVSTAR-GPS ou apenas GPS, desenvolvido pelo departamento de defesa
americano,tendo sido declarado totalmente operacional em 1985,em operação completa
em fase de modernização.O sistema russo GLONASS, é similar ao sistema americano
GPS, concebido no início da década de 70 pela antiga URSS, tornou-se operacional no
fim de 1995, estando hoje com sua constelação completa, segundo a Federal Space
Agency, onde encontram se em operação 24 satélites, como mostra a Figura 9. Em
desenvolvimento encontram-se o GALILEU e o COMPASS.

43
Figura 9 - Total de Satélites GLONASS em 31/07/2014
Fonte http://glonass-iac.ru/en/
2.6.1 GPS
De acordo comROCHA (2004) o sistema de Posicionamento Global (GPS)
surgiu da necessidade de se obter, em tempo real, a posição exata de alguma entidade
(homem, veículo, aeronave, míssil, navio, etc.). No ano de 1973, o Departamento de
Defesa (DOD) dos EUA deu início ao projeto do Sistema de Posicionamento Global.
Do ponto de vista da navegação, o GPS surgiu como uma expansão do sistema de
navegação NNSS/TRANSIT da marinha Americana. O TRANSIT ficou conhecido
popularmente como SATNAV e embora, continue funcionando, está sendo
gradualmente desativado. O GPS também é conhecido pela sigla NAVSTAR
(NavigationSatellitewith Time AndRanging). Os soviéticos, por outro lado,
desenvolveram o Glonass (GlobalNavigationSatellite System), o sistema equivalente ao
GPS. Os europeus (União Europeia) desenvolveram o “Galileo”, que constitui-se no seu
próprio sistema de navegação por satélites.
O Sistema GPS é composto por uma constelação de 32 satélites9sendo deste
31operacionais e 1 em manutenção conforme mostra a Figura 10 e esta representada
Figura 11 a sua constelação, transmitindo informações para a Terra, orbitando a uma
altitude de 20.200km, é um sistema de rádio navegação baseado em satélites,
desenvolvidos e operado pelo departamento de defesa dos EUA. O sistema GPS permite
que o usuário em terra, mar e ar determinem suas posições tridimensionais (latitude,
longitude e altitude), velocidade e hora; 24 horas por dia independente de condições
atmosféricas e em qualquer lugar do mundo.
9 Informações sobre a constelação GPS, retirada do site http://glonass-iac.ru/en/GPS/index.php.
Datada de 01/08/2014

44
Figura 10 - Constelação GPS
Fonte: http://glonass-iac.ru/en/GPS/index.php. 01/08/2014
Figura 11–Constelação GPS
Adaptado de José Antônio M. R. Rocha. O ABS do GPS. Recife: Bagaço, 2004. p.12
Segundo MONICO (2000), o GPS é formado por três segmentos principais:
espacial, controle, usuários. O segmento espacial é constituído de 24 satélites
distribuídos em 6 planos orbitais, responsáveis pela transmissão de duas ondas
portadoras: L1 e L2 (com 1575,42 e 1227,60 MHz de frequência e 19 e 24 cm de
comprimento de onda, respectivamente). Cada satélite transmite um código C/A e P
modulados em fase sobre as duas portadoras, o que permite o cálculo de distâncias a
partir da medida do tempo de propagação da modulação. O código C/A
(coarse/acquisition) é modulado sobre a L1 sem criptografia e está disponível a todos os
usuários do globo, sem a cobrança de taxas, com acurácia horizontal e vertical dentro de
10 e 14 m, respectivamente. O código P (precise ouprotected) proporciona medidas
mais precisas, com acurácia ao redor de 10 a 20 cm, sendo modulado sobre a L1 e L2
com criptografia por ter sinal protegido e reservado para o uso dos militares americanos
e seus usuários autorizados, os quais disponibilizam o sinal através de receptores DGPS
(sistema de posicionamento global com correção diferencial). O segmento de controle é
composto por doze estações terrestres de monitoramento responsáveis pela transmissão
de dados entre os satélites e uma estação de controle, a qual processa os dados

45
recebidos, determina as órbitas dos satélites, corrige seus relógios, e retransmite os
dados visando a atualização periódica das mensagens de navegação. As coordenadas das
estações são determinadas em relação ao sistema de referência WGS84 (world geodetic
system of 84). O segmento de usuários é constituído pelos receptores GNSS de diversas
marcas disponíveis no mercado civil, para as mais diversas aplicações (navegação,
geodésia, etc).
O princípio básico do funcionamento da tecnologia do GPS está na trilateração,
utilizando os satélites como pontos de referência. O receptor GNSS determina a sua
posição medindo a sua distância dos satélites do sistema no espaço. Cada satélite emite,
de forma contínua, informações de sua posição e um sinal de tempo para sincronismo.
O receptor determina o tempo que o sinal leva para percorrer a distância entre o satélite
e o receptor e, conhecendo-se as coordenadas do satélite num sistema de referência
adequado, podem-se determinar as coordenadas do usuário, como sugere MOLIN
(1998).
2.6.2 GLONASS
Similar ao GPS, o GLONASS foi desenvolvido pela antiga União Soviética nos
anos de 70 e atualmente é operado pelo governo russo10. O segmento de controle e
monitoramento do GLONASS consiste em um sistema de controle central que planeja
todas as funções do sistema, um sincronizador central que dissemina o tempo
GLONASS, um sistema de controle de frequência (fase) que monitora o tempo e o
desvio da frequência MONICO (2008, p.85). O segmento de usuários se restringe aos
receptores,dosquaismuitos encontrados no mercado rastreiam os sinais GLONASS
concomitantemente com os sinais GPS.
A partir de 2003 uma nova geração de satélites (GLONASS-M) foi lançada e em
outubro de 2011 o sistema tornou-se completamente operacional e, possuindo 24
satélites, como mostra aFigura 12Figura 9, passou a possibilitar cobertura global como
demostra a Figura 12. Também em 2011 foi lançado o primeiro satélite da terceira
geração de satélites GLONASS, chamada de GLONASS-K, cuja proposta é atualizar
completamente o sistema até o ano de 2021 SEGANTINE (2005, p 366).
10 SEGANTINE, Paulo C. L. Curso de atualização Topografia e GPS. Sistema de
posicionamento global. EESC/USP. 1996. Pag.43-47.

46
Figura 12- Constelação GLONASS em 31/07/2014
Fonte: http://glonass-iac.ru/en/
Os satélites são distribuídos em três planos orbitais separados de 120º e com
inclinação de 64,8º. As órbitas têm altitude de 19.100 km e período orbital de 11 horas e
15 minutos. Uma característica dos satélites GLONASS é que devido a sua maior
inclinação, se comparado com o GPS, consegue atingir maiores latitudes MONICO
(2008, p.81).
O sistema transmite sinais em duas bandas, denominadas L1 e L2, análogo ao
GPS, utilizando divisões múltiplas de frequências, FrequencyDivisionMultiple
Access(FDMA), para diferenciar cada satélite.
Entretanto, o GLONASS conseguiu uma “aprovação preliminar” para adicionar
o código de divisão de acesso múltiplo, CodeDivisionMultiple Access (CDMA11),
utilizado no GPS e GALILEO. Com isso, os satélitesfuturos do sistema GLONASS, que
serão CDMA, terão maior interoperabilidade comos demais sistemas, ou seja, aumenta-
se a habilidade de transferir informações coerentes entre os sistemas. No sistema
CDMA, os satélites são distinguidos pelos diferentes ruídos pseudoaleatórios do código
na mesma frequência. Com relação ao referencial geodésico, atualmente as coordenadas
das estações de controle e dos satélites são dadas no referencial ParametricZemli 1990
(PZ 90). A partir do dia 20 de setembro de 2007 ossatélites GLONASS passaram a
transmitirsuas coordenadas referenciadas a uma realização refinada do PZ-90,
denominada de PZ-90.02. De forma similar ao que ocorreu com o referencial geodésico
11 CDMA é um método de acesso a canais em sistemas de comunicação. É utilizado tanto para a
telefonia celular quanto para o rastreamento via satélite (GPS)

47
WGS84, o PZ-90.02 se aproximou do ITRF2000, contendo translações em X, Y e Z de
36 cm, 8 cm e 18 cm, respectivamente
2.6.3 GALILEO
GALILEO é o sistema de posicionamento global de satélite que vem sendo
desenvolvido pela Comunidade Europeia em conjunto com a European Space Agency
(ESA). Seu pleno funcionamento está previsto para 2014. A definição do GALILEO
ocorreu em junho de 1999, baseado em trabalhos realizados pelo Fórum Europeu do
GNSS e pelo Ministério do Transporte europeu. O propósito era criar um sistema aberto
e global, com controle civil e compatível com o GPS e o GLONASS.
Os satélites experimentais GALILEO In-OrbitVerificationElement-A (GIOVE-
A) e GIOVE-B, foram lançados em 2006 e 2008 respectivamente. O GIOVE-A foi
desenvolvido para transmitir cada sinal por vez para as três frequências (E1-L1-E2), E5
A/B e E6. O GIOVE-B foi habilitado para transmitir as três frequências
simultaneamente. Desta forma o sistema GALILEO possui os sinais E1-L1-E2, E5 A/B
e E6 utilizando quatro portadoras (E1 com 1575,42 MHz, E5A com 1176,45 MHz; E5B
com 1207,14 MHz e E6 com 1278,75 MHz). As portadoras L1 e L5 do GPS encontram-
se nas mesmas frequências da E5A e E1 do GALILEO, o que poderia representar uma
fonte potencial de interferências. Entretanto, isso pode ser reduzido com técnicas
particulares de modulação. Por outro lado, essa interoperabilidade dos sinais facilita o
desenvolvimento de antenas que rastreiem simultaneamente os dois sistemas.
Em outubro de 2011 foram lançados os dois primeirossatélites operacionais,
seguidos por mais dois em outubro de 2012. Em seu pleno funcionamento o sistema
será constituído por 30 estações GALILEO Sensor Stations (GSS) distribuídas
globalmente. As GSS transmitirão os dados para os GALILEO Control Centers (GCC) e
também darão suporte a determinação de órbitas e sincronização de tempo. Dois centros
de controle do GALILEO tem sido implantados na Europa. Um desses centros é o
responsável pela geração das mensagens de navegação e sistema de tempo, enquanto o
outro é o responsável pelo controle da integridade.
2.6.4 COMPASS (Bússola)
Em 14 deabril de 2007 (horário local), a China lançou oCompassM-1
satélite.Este satéliterepresenta o primeirode um novosistema globalde navegação por
satélite(GNSS)que estáplanejado para terum total de 35satélites.Ao contrário desatélites

48
de navegaçãochinesasanteriores,BússolaM-1 transmitirá na banda L, utilizando
estruturasde sinaissemelhantes aosoutros sistemas GNSSe irá
compartilharfreqüênciaspróximas ousobrepostasas deGPS,GalileoeGLONASS.
A adição deum outroGNSS, especialmente uma queirá transmitirnas
mesmasfaixas de freqüênciacomo GPSeGalileo, tanto excitaeintrigaa
comunidadeGNSS. Tal sistematem o potencial deintroduzirbenefícios-, bem como
preocupações -para usuáriosdo GNSS.Inúmerospesquisadores ao redor domundo,
incluindo aUniversidade de Stanford(SU), tenho interesse emexaminar osinal de
navegaçãodeste sistema.
Visão geral do CompassO sistema de navegaçãopor
satéliteBeidououCompass(CNSS) é a entrada da Chinapara o reino doGNSS. O
projetoatual éter um sistemacomposto de30satélites de órbitas média (MEO) e 5satélites
geoestacionários(GEO).Ossatélites MEOvai operarem seisplanos orbitaispara fornecer
coberturaglobal de navegação.
Compassirá compartilharmuitas característicasem comum comGPSeGalileo,
fornecendo o potencial de integraçãode baixo custodesses sinaisem umreceptor
Galileo/Compass/GPS.Estestraços comunsincluemmúltiplas freqüências, estrutura do
sinal, e serviços.
De acordo com aUnião Internacional de Telecomunicações(UIT)documentos
entregues pelaChina,o Compassserá transmitidoemquatro freqüênciascentradas
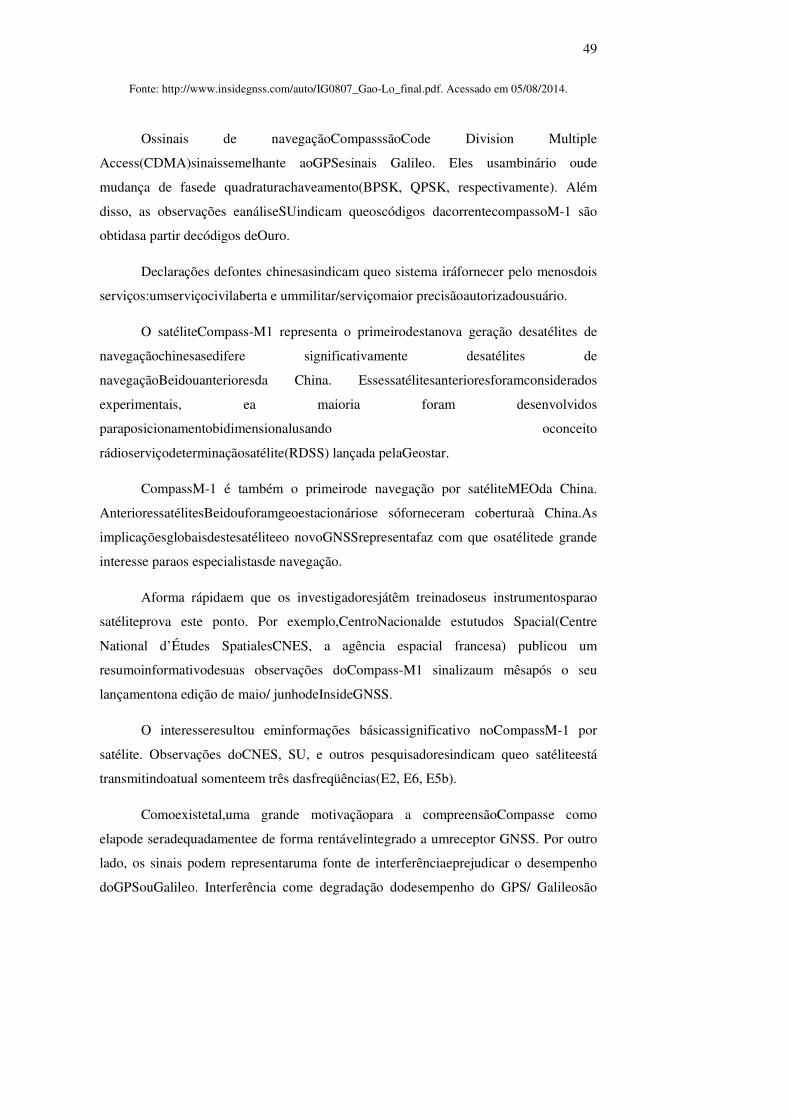
em1.590MHz, 1.561MHz,1.269MHze1.207MHz (arredondado). A Figura
13apresentainformações gerais sobreos sinaisem cada uma dessasfreqüências.Estes
sinais, em seguida, encontram-se nafaixadefreqüência GPSesinais Galileo.
Figura 13 - Frequências de modulação do Compass
49
Fonte: http://www.insidegnss.com/auto/IG0807_Gao-Lo_final.pdf. Acessado em 05/08/2014.
Ossinais de navegaçãoCompasssãoCode Division Multiple
Access(CDMA)sinaissemelhante aoGPSesinais Galileo. Eles usambinário oude
mudança de fasede quadraturachaveamento(BPSK, QPSK, respectivamente). Além
disso, as observações eanáliseSUindicam queoscódigos dacorrentecompassoM-1 são
obtidasa partir decódigos deOuro.
Declarações defontes chinesasindicam queo sistema iráfornecer pelo menosdois
serviços:umserviçocivilaberta e ummilitar/serviçomaior precisãoautorizadousuário.
O satéliteCompass-M1 representa o primeirodestanova geração desatélites de
navegaçãochinesasedifere significativamente desatélites de
navegaçãoBeidouanterioresda China. Essessatélitesanterioresforamconsiderados
experimentais, ea maioria foram desenvolvidos
paraposicionamentobidimensionalusando oconceito
rádioserviçodeterminaçãosatélite(RDSS) lançada pelaGeostar.
CompassM-1 é também o primeirode navegação por satéliteMEOda China.
AnterioressatélitesBeidouforamgeoestacionáriose sóforneceram coberturaà China.As
implicaçõesglobaisdestesatéliteeo novoGNSSrepresentafaz com que osatélitede grande
interesse paraos especialistasde navegação.
Aforma rápidaem que os investigadoresjátêm treinadoseus instrumentosparao
satéliteprova este ponto. Por exemplo,CentroNacionalde estutudos Spacial(Centre
National d’Études SpatialesCNES, a agência espacial francesa) publicou um
resumoinformativodesuas observações doCompass-M1 sinalizaum mêsapós o seu
lançamentona edição de maio/ junhodeInsideGNSS.
O interesseresultou eminformações básicassignificativo noCompassM-1 por
satélite. Observações doCNES, SU, e outros pesquisadoresindicam queo satéliteestá
transmitindoatual somenteem três dasfreqüências(E2, E6, E5b).
Comoexistetal,uma grande motivaçãopara a compreensãoCompasse como
elapode seradequadamentee de forma rentávelintegrado a umreceptor GNSS. Por outro
lado, os sinais podem representaruma fonte de interferênciaeprejudicar o desempenho
doGPSouGalileo. Interferência come degradação dodesempenho do GPS/ Galileosão

50
possibilidadesse a interoperabilidade nãoera uma preocupaçãocondução noprojetodo
sinal.
Esta última possibilidade, é claro, diz respeito a usuáriosmilitares,
bemporqueCompasssobrepõe ocódigo MGPSeGalileoserviço público
regulado(PRS)emE1/E2. Assim, compreender acriação emodulação do
sinaléimportante, a fim de determinaro potencial do sistemaCOMPASSde
interoperabilidadeeinterferência.
2.7 TRANSFORMAÇÃO ENTRE OS SISTEMAS DE COORDENADAS LOCAIS
E CARTESIANAS TRIDIMENSIONAIS
De acordo com MONICO (2008) e ANDRADE (1998,2003) é possível
transformar o sistema de coordenadas cartesianas tridimensionais no sistema de
coordenadas terrestre local (e consequentemente a sua transformação inversa) mediante
operações matemáticas de translação e de rotações de eixos em relação a um ponto
comum aos dois sistemas (ponto origem). Observe-se que, aqui está se falando do
sistema geodésico local.
2.7.1TRANSFORMAÇÃO DO SISTEMA GEODÉSICO CARTESIANO
TRIDIMENSIONAL PARA O SISTEMA GEODÉSICO DE COORDENADAS
TERRESTRE LOCAL
A Figura 14 demonstraa transformaçãoa partir das coordenadasgeodésicas, φ, λ,
h, em coordenadas topograficas locais, as quais são feitas por rotação e translação.
Figura 14 – Referenciais geodesico local Fonte: Adaptação JEKELI (2006, Cap. 2 Pág. 53)
Para a transformação de coordenadas geodésicas em coordenadas topográficas
locais emprega-se a equação a seguir ANDRADE (1998, 2003; Pág. 76):

51
−
−
−
⋅
−−
−
⋅
−
=
0
0
0
00
00
00
00
100
0cos
0cos
cos0
cos0
001
ZZ
YY
XX
sen
sen
sen
sen
v
u
t
λλ
λλ
ϕϕ
ϕϕ 1
Onde:
t, u e v são as coordenadas topográficas transformadas no PTL.
φo e λo são a latitude e a longitude geodésica do ponto escolhido como origem
do sistema;
X, Y e Z são as coordenadas geodésicas cartesianas tridimensionais do ponto a
transformar;
Xo, YoZo são as coordenadas geodésicas cartesianas tridimensionais do ponto
escolhido para origem do sistema.
2.7.1.1. LIMITAÇÕES E RECOMENDAÇÕES
SAMPAIO (2009) e DAL’FORNO et. Al. (2010) afirmam que apesar do
processo ser extremamente simples, é preciso que se tomem alguns cuidados no que se
refere ao erro relativo e ao erro absoluto dos resultados. Esse cuidado é, não ultrapassar
os limites do plano topográfico estabelecido na NBR 14166:1998.
2.7.2 TRANSFORMAÇÃO DO SISTEMA DE COORDENADAS TERRESTRE
LOCAL PARA O SISTEMA GEODÉSICO CARTESIANO TRIDIMENSIONAL
Por sua vez, a transformação inversa é feita a partir da seguinte equação,
(Andrade, 1998, pág. 76):
+
⋅
−⋅
−
−−
=
0
0
0
00
0000
00
cos0
cos0
001
100
0cos
0cos
Z
Y
X
v
u
t
sen
sensen
sen
Z
Y
X
ϕϕ
ϕϕλλ
λλ
2
Onde:
t, u e v são as coordenadas topográficas dos pontos, no PTL;
φo e λo são a latitude e a longitude geodésica do ponto escolhido como origem
do sistema;

52
X, Y e Z são as coordenadas geodésicas cartesianas tridimensionais transformadas
do ponto;
Xo, Yo e Zo são as coordenadas geodésicas cartesianas tridimensionais do ponto
escolhido para origem do sistema.
É importante salientar que, para a execução dessa transformação é
imprescindível que o levantamento topográfico esteja orientado segundo o azimute
geodésico da direção de dois pontos comuns aos dois tipos de levantamento.
2.7.3 O SOFTWARE TRANSGEOLOCAL
No Brasil a transformação de coordenadas geodésicas em topográficas é
regulamentada pela NBR 14166:1998. De acordo com SAMPAIO (2009)
TRANSGEOLOCAL é um programa computacional que executa as duas
transformações, sem a necessidade do emprego das fórmulas tradicionais de transporte
de coordenadas. Ambas as transformações têm como fundamento matemático principal
a translação e a rotação entre sistemas cartesianos, ou seja, do sistema cartesiano
tridimensional de coordenadas geodésicas (SCTG) para o Sistema Geodésico Local
(SGL), e o processo inverso. As transformações, e sua solução computacional, são
consideradas a partir de duas situações distintas e opostas:
i) São conhecidas somente as coordenadas geodésicas dos pontos
levantados, e
ii) São conhecidas as coordenadas topográficas de todos os pontos
levantados e as coordenadas geodésicas de dois pontos comuns.
O Software foi desenvolvido por DAL’FORNO et al sendo de uso livre e pode
ser obtido em http://sevenengenharia.eng.br/downloads/
Para a solução do primeiro caso, transformam-se as coordenadas obtidas no
SCTG para as coordenadas correspondentes em SGL, onde se estabelece um plano
geodésico local com origem em um dos pontos. Como essa transformação foi obtida a
partir de coordenadas geodésicas, ela está georreferenciada, pois está ligada em posição,
orientação e altura ao sistema elipsoidal.

53
A transformação é efetuada se transladando a origem do SCTG para o ponto
escolhido como origem do SGL e, ao mesmo tempo, orientando o eixo Y em relação ao
meridiano geodésico nesse ponto (rotação de Y em torno de Z) e, ainda rotacionando o
eixo Z em torno do eixo X, de maneira que o eixo Z ocupe a direção da normal ao
elipsoide nesse ponto origem ANDRADE(1998,2003) eMONICO(2008). Os demais
pontos ficam vinculados às coordenadas topográficas locais do ponto escolhido como
origem. No segundo caso a transformação é possível, desde que se disponha das
coordenadas de dois pontos em ambos os sistemas, o que permite reorientar o
levantamento topográfico em relação ao Norte Geodésico. O processo requer que se
tomem alguns cuidados no que se refere ao erro relativo e ao erro absoluto dos
resultados conforme determina a NBR 14166:1998.

54
3MATERIAL E METODOS
Este capítulo mostra como a pesquisa foi realizada, osequipamentos
empregadose suas etapasdentro do escopo metodológico a fim de apontar como as
conclusões foram feitas da forma que se propõe.
3.1 MATERIAL
Para a execução deste trabalho foram empregados os seguintes equipamentos:
3.1.1 ESTAÇÂO TOTAL E ACESSÓRIOS:
Estação Total marca RUIDE modelo RTS – 820 R5 apresentada na Figura 15,
com precisão angular de 2”, conforme as especificações da NBR 13.133/94, Tripé para
apoio da mesma, bastão e prisma para o auxilio da visada ré direta e inversa, mini
prisma para locação e coleta dos pontos.
Figura 15 - Estação Total marca RUIDE modelo RTS – 820 R5
Fonte: Do Autor
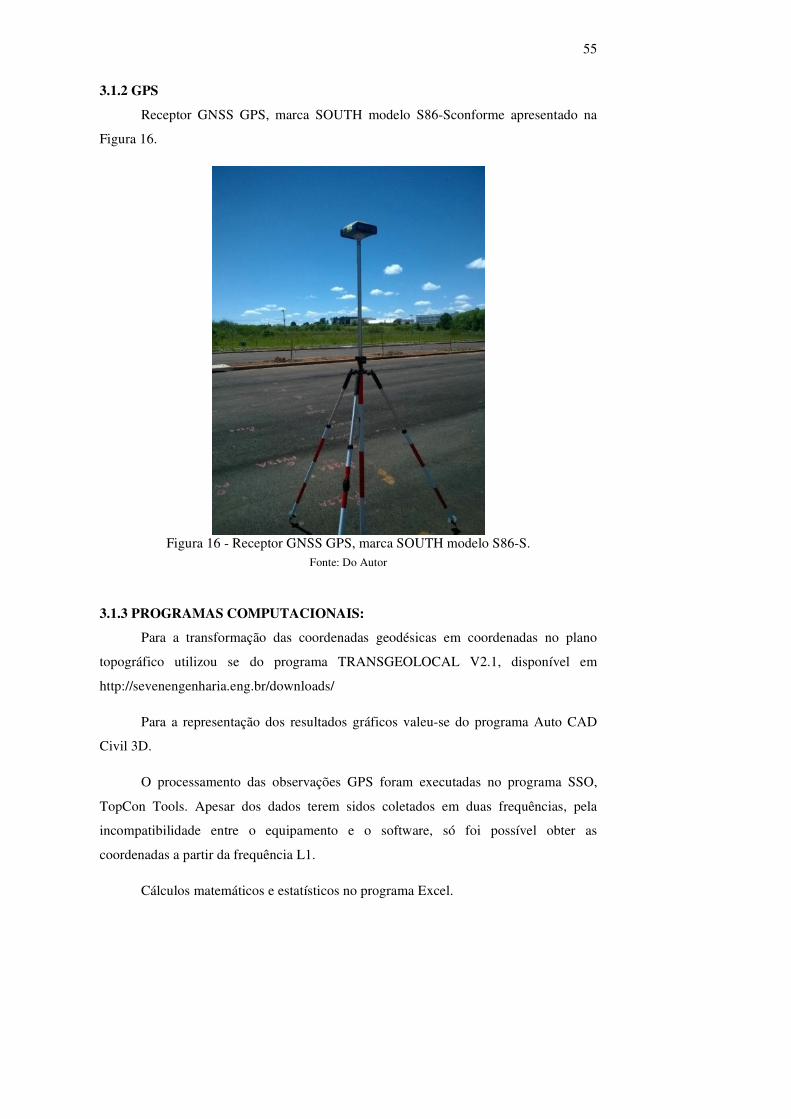
55
3.1.2 GPS
Receptor GNSS GPS, marca SOUTH modelo S86-Sconforme apresentado na
Figura 16.
Figura 16 - Receptor GNSS GPS, marca SOUTH modelo S86-S.
Fonte: Do Autor
3.1.3 PROGRAMAS COMPUTACIONAIS:
Para a transformação das coordenadas geodésicas em coordenadas no plano
topográfico utilizou se do programa TRANSGEOLOCAL V2.1, disponível em
http://sevenengenharia.eng.br/downloads/
Para a representação dos resultados gráficos valeu-se do programa Auto CAD
Civil 3D.
O processamento das observações GPS foram executadas no programa SSO,
TopCon Tools. Apesar dos dados terem sidos coletados em duas frequências, pela
incompatibilidade entre o equipamento e o software, só foi possível obter as
coordenadas a partir da frequência L1.
Cálculos matemáticos e estatísticos no programa Excel.

56
3.2 LOCAL DO EXPERIMENTO
A presente pesquisa foi efetuada em uma área de estacionamento não
ativado ao trafego, localizado aos fundos do posto Petrobras, dentro do Campus da
Universidade Federal de Santa Maria. A Figura 17ilustra o local.
Figura 17 – Croqui da área do experimento, mostrando os pontos de base, os pilares e os
pontos de GPS. Fonte: Do Autor
3.3 METODOLOGIA
Como o objetivo do presente trabalho é viabilizar a integração simultânea de
equipamentos geodésicos e topográficos na execução de locações de obra em diversos
níveis, e como não havia disponibilidade de edificação e tempo para a execução real do
trabalho, simulou-se a locação de uma obra em um local plano e que permitisse a sua
repetição pelo número de andares propostos.

57
Optou-se por simular uma construção constante de um pavimento térreo e vinte
andares. Tal escolha se deve a facilidade para se estabelecer percentagem estatística
(95% corresponde a 19 andares).
Para o desenvolvimento do trabalho, realizaram-se a implantação de três pontos
de base, externos a área do prédio, estáveis e permanentes, que permitissem, a partir
deles, a locação em uma área de 420,54 m² dos eixos dos pilares que corresponderiam
ao pavimento térreo.
As coordenadas geodésicas destes pontos foram obtidas com o auxilio de
equipamento GPS, com tempo de rastreio de trinta minutos, em cada ponto. Após
processamento dos dados os mesmo foram convertidos ao sistema PTL, com emprego
do programa TRANSGEOLOCAL.
De posse das coordenadas no PTL, e do levantamento topográfico prévio do
local, usando o programa Auto CAD Civil 3D, determinou- se as coordenadas dos
pilares, georreferenciadas aos pontos de base.
Estes pontos dos pilares, após a sua implantação serviram como testemunhas
para a locação dos vintes pavimentos superiores.
Para proceder-se a locação dos demais pavimentos, primeiramente ocupou-se,
simultaneamente, dois pontos aleatórios e afastados, no interior da obra, com o
equipamento GPS. O tempo de rastreio em cada ponto foi de 30 minutos. Esta operação
foi repetida vinte vezes, assumindo-se para cada operação dois pontos diferentes.
No levantamento geodésico foram determinadas as coordenadas geodésicas de
quarenta pontos (PV1A, PV1B, PV2A, PV2B, PV3A, PV3B, PV4A, PV4B, PV5A,
PV5B, PV6A, PV6B, ..., PV20A, PV20B), implantados na área estudada com auxilio de
pregos de aço, fixados no chão com marreta e demarcados com auxilio de tinta, como
demostra a Figura 18.
As coordenadas geodésicas, de cada par de observações, foram transformadas
para o mesmo PTL do andar térreo, (através do programa TRANSGEOLOCAL), e a
partir dai associadas às coordenadas dos pilares. Essa operação permitiu a verificação da
posição de cada pilar, em relação ao seu eixo, nos vinte andares da presente pesquisa.

58
As diferenças de coordenadas dos eixos dos pilares obtidas em relação ao andar
térreo (testemunha), adquiridas em cada repetição, foram tabuladas e posteriormente
calculadas as distâncias correspondentes. De posse dessas informações calculou-se as
médias e os desvios padrões para o total de trinta e seis pilares de cada pavimento e,
para cada pilar dos vinte pavimentos.
Figura 18 - Pregos fixados no chão para Controle
Fonte: Do Autor

59
4ANÁLISE DOS RESULTADOS
Este capítulo tem como objetivo apresentar a analise e a discussão dos resultados
obtidos. Assim sendo, foram analisadas as imprecisões das coordenadas de cada
pilar,em todos os andares,quando comparadas com as do pavimento térreo. Estas
imprecisões estão apresentadas nasTabela 1 à Tabela 4 onde os resultados foram
agrupados por grupo de andares.
Nas tabelas se apresentam os dados dos 36 pilares para cada um dos pavimentos,
com seus respectivos deslocamentos nos eixos x ey e seu deslocamento total, todos
expressos em centímetros. Nas duas ultimas linhas das tabelas são apresentadas as
médias dos deslocamentos totais e o seus desvios padrõesentre todos os pilares.
Na Tabela 4 - 18º Pavimento ao 20º Pavimento, são apresentados os mesmos
cálculos efetuados nas Tabela 1, Tabela 2e Tabela 3, com apresentação das médias dos
deslocamentos em x e y e do deslocamento total, bem como, o desvio padrão do
deslocamento total de cada pilar levando em consideração todos os pavimentos. É
apresentada também a média dos deslocamentos em x e y e o deslocamento total e os
seus respectivos desvios padrões de cada pilar quando se desprezam os resultados
obtidos até o 6º pavimento.
Tal procedimento foi adotado após a análise dos resultados, quando se verificou
discrepâncias acima das aceitáveis para o objetivo deste trabalho. Estes resultados
desprezados tem a característica de apresentarem um erro sistemático (concentração dos
desvios no primeiro quadrante e com valores acima do dobro dos obtidos nos demais
pavimentos). Na realidade, estes erros sistemáticos tem origem em um engano (erro
grosseiro), ou seja, a falta de verticalidade do bastão suporte do GPS. Chegou-se a tal
conclusão, a partir da constatação que nestes pavimentos os dados coletados por rastreio
GPS, foram efetuados por um ajudante do autor. Tal ajudante, com formação de
segundo grau, tem pouca informação sobre controle de erros.
Observou-se que nestes pavimentos as médias, na maioria dos casos, são
superiores ao dobro das médias obtidas pelo autor e, os desvios padrões também são
Excluído: .
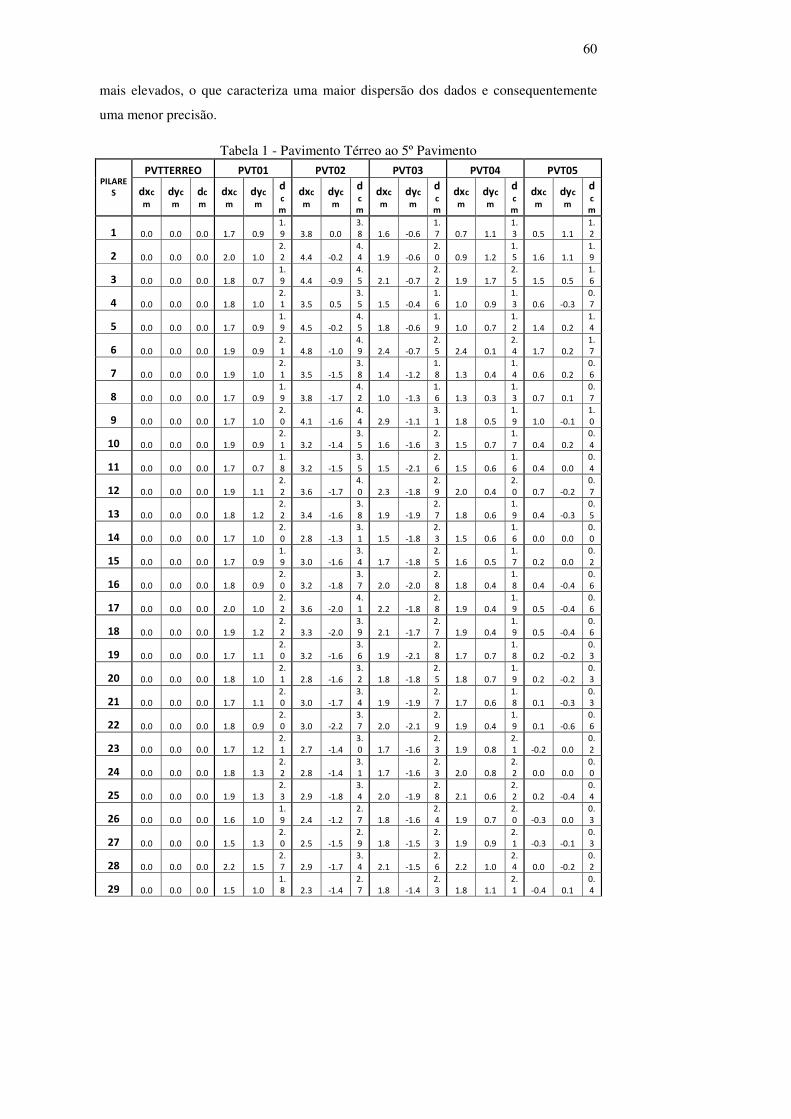
60
mais elevados, o que caracteriza uma maior dispersão dos dados e consequentemente
uma menor precisão.
Tabela 1 - Pavimento Térreo ao 5º Pavimento PVTTERREO PVT01 PVT02 PVT03 PVT04 PVT05
PILARE
S dxc
m dyc
m dc
m dxc
m dyc
m
d c
m
dxc
m dyc
m
d c
m
dxc
m dyc
m
d c
m
dxc
m dyc
m
d c
m
dxc
m dyc
m
d c
m
1 0.0 0.0 0.0 1.7 0.9
1.
9 3.8 0.0
3.
8 1.6 -0.6
1.
7 0.7 1.1
1.
3 0.5 1.1
1.
2
2 0.0 0.0 0.0 2.0 1.0
2.
2 4.4 -0.2
4.
4 1.9 -0.6
2.
0 0.9 1.2
1.
5 1.6 1.1
1.
9
3 0.0 0.0 0.0 1.8 0.7
1.
9 4.4 -0.9
4.
5 2.1 -0.7
2.
2 1.9 1.7
2.
5 1.5 0.5
1.
6
4 0.0 0.0 0.0 1.8 1.0
2.
1 3.5 0.5
3.
5 1.5 -0.4
1.
6 1.0 0.9
1.
3 0.6 -0.3
0.
7
5 0.0 0.0 0.0 1.7 0.9
1.
9 4.5 -0.2
4.
5 1.8 -0.6
1.
9 1.0 0.7
1.
2 1.4 0.2
1.
4
6 0.0 0.0 0.0 1.9 0.9
2.
1 4.8 -1.0
4.
9 2.4 -0.7
2.
5 2.4 0.1
2.
4 1.7 0.2
1.
7
7 0.0 0.0 0.0 1.9 1.0
2.
1 3.5 -1.5
3.
8 1.4 -1.2
1.
8 1.3 0.4
1.
4 0.6 0.2
0.
6
8 0.0 0.0 0.0 1.7 0.9
1.
9 3.8 -1.7
4.
2 1.0 -1.3
1.
6 1.3 0.3
1.
3 0.7 0.1
0.
7
9 0.0 0.0 0.0 1.7 1.0
2.
0 4.1 -1.6
4.
4 2.9 -1.1
3.
1 1.8 0.5
1.
9 1.0 -0.1
1.
0
10 0.0 0.0 0.0 1.9 0.9
2.
1 3.2 -1.4
3.
5 1.6 -1.6
2.
3 1.5 0.7
1.
7 0.4 0.2
0.
4
11 0.0 0.0 0.0 1.7 0.7
1.
8 3.2 -1.5
3.
5 1.5 -2.1
2.
6 1.5 0.6
1.
6 0.4 0.0
0.
4
12 0.0 0.0 0.0 1.9 1.1
2.
2 3.6 -1.7
4.
0 2.3 -1.8
2.
9 2.0 0.4
2.
0 0.7 -0.2
0.
7
13 0.0 0.0 0.0 1.8 1.2
2.
2 3.4 -1.6
3.
8 1.9 -1.9
2.
7 1.8 0.6
1.
9 0.4 -0.3
0.
5
14 0.0 0.0 0.0 1.7 1.0
2.
0 2.8 -1.3
3.
1 1.5 -1.8
2.
3 1.5 0.6
1.
6 0.0 0.0
0.
0
15 0.0 0.0 0.0 1.7 0.9
1.
9 3.0 -1.6
3.
4 1.7 -1.8
2.
5 1.6 0.5
1.
7 0.2 0.0
0.
2
16 0.0 0.0 0.0 1.8 0.9
2.
0 3.2 -1.8
3.
7 2.0 -2.0
2.
8 1.8 0.4
1.
8 0.4 -0.4
0.
6
17 0.0 0.0 0.0 2.0 1.0
2.
2 3.6 -2.0
4.
1 2.2 -1.8
2.
8 1.9 0.4
1.
9 0.5 -0.4
0.
6
18 0.0 0.0 0.0 1.9 1.2
2.
2 3.3 -2.0
3.
9 2.1 -1.7
2.
7 1.9 0.4
1.
9 0.5 -0.4
0.
6
19 0.0 0.0 0.0 1.7 1.1
2.
0 3.2 -1.6
3.
6 1.9 -2.1
2.
8 1.7 0.7
1.
8 0.2 -0.2
0.
3
20 0.0 0.0 0.0 1.8 1.0
2.
1 2.8 -1.6
3.
2 1.8 -1.8
2.
5 1.8 0.7
1.
9 0.2 -0.2
0.
3
21 0.0 0.0 0.0 1.7 1.1
2.
0 3.0 -1.7
3.
4 1.9 -1.9
2.
7 1.7 0.6
1.
8 0.1 -0.3
0.
3
22 0.0 0.0 0.0 1.8 0.9
2.
0 3.0 -2.2
3.
7 2.0 -2.1
2.
9 1.9 0.4
1.
9 0.1 -0.6
0.
6
23 0.0 0.0 0.0 1.7 1.2
2.
1 2.7 -1.4
3.
0 1.7 -1.6
2.
3 1.9 0.8
2.
1 -0.2 0.0
0.
2
24 0.0 0.0 0.0 1.8 1.3
2.
2 2.8 -1.4
3.
1 1.7 -1.6
2.
3 2.0 0.8
2.
2 0.0 0.0
0.
0
25 0.0 0.0 0.0 1.9 1.3
2.
3 2.9 -1.8
3.
4 2.0 -1.9
2.
8 2.1 0.6
2.
2 0.2 -0.4
0.
4
26 0.0 0.0 0.0 1.6 1.0
1.
9 2.4 -1.2
2.
7 1.8 -1.6
2.
4 1.9 0.7
2.
0 -0.3 0.0
0.
3
27 0.0 0.0 0.0 1.5 1.3
2.
0 2.5 -1.5
2.
9 1.8 -1.5
2.
3 1.9 0.9
2.
1 -0.3 -0.1
0.
3
28 0.0 0.0 0.0 2.2 1.5
2.
7 2.9 -1.7
3.
4 2.1 -1.5
2.
6 2.2 1.0
2.
4 0.0 -0.2
0.
2
29 0.0 0.0 0.0 1.5 1.0
1.
8 2.3 -1.4
2.
7 1.8 -1.4
2.
3 1.8 1.1
2.
1 -0.4 0.1
0.
4

61
30 0.0 0.0 0.0 1.5 1.0
1.
8 2.1 -1.4
2.
5 1.9 -1.3
2.
3 1.9 1.2
2.
2 -0.6 0.1
0.
6
31 0.0 0.0 0.0 0.8 0.9
1.
2 2.2 -1.3
2.
6 1.9 -1.3
2.
3 1.9 1.3
2.
3 -0.7 0.1
0.
7
32 0.0 0.0 0.0 1.8 0.9
2.
0 2.1 -1.1
2.
4 1.8 -1.1
2.
1 1.9 1.4
2.
4 -0.7 0.2
0.
7
33 0.0 0.0 0.0 1.6 0.4
1.
6 2.0 -1.3
2.
4 1.8 -1.2
2.
2 2.0 1.2
2.
3 -0.8 -0.1
0.
8
34 0.0 0.0 0.0 1.4 0.8
1.
6 1.5 -0.9
1.
7 1.6 -1.3
2.
1 1.9 1.3
2.
3 -1.0 0.3
1.
0
35 0.0 0.0 0.0 1.6 0.7
1.
7 1.8 -1.0
2.
1 1.8 -0.9
2.
0 1.9 1.4
2.
4 -0.8 0.5
0.
9
36 0.0 0.0 0.0 2.0 0.7
2.
1 1.6 -1.4
2.
1 1.6 -1.3
2.
1 1.6 1.2
2.
0 -1.0 -0.1
1.
0
Médi
a 0.0
2.
0
3.
4
2.
4
1.
9
0.
7
RMS* 0.0
0.
2
0.
8
0.
4
0.
4
0.
5
*RMS = Desvio Padrão
Tabela 2 - 6º Pavimento ao 11º Pavimento PVT06 PVT07 PVT08 PVT09 PVT10 PVT11
PILARE
S dxc
m dyc
m dc
m dxc
m dyc
m
d c
m
dxc
m dyc
m
d c
m
dxc
m dyc
m
d c
m
dxc
m dyc
m
d c
m
dxc
m dyc
m
d c
m
1 2.3 1.3 2.6 0.2 0.5
0.
5 -0.1 1.0
1.
0 0.4 0.5
0.
7 0.3 0.5
0.
6 0.8 0.8
1.
1
2 2.6 1.3 2.9 0.3 0.5
0.
6 0.2 0.8
0.
9 0.5 0.7
0.
9 0.4 0.5
0.
6 1.2 0.7
1.
4
3 3.1 1.0 3.3 0.6 0.5
0.
7 0.4 0.8
0.
9 0.8 0.6
1.
0 0.5 0.5
0.
7 1.4 0.8
1.
6
4 1.9 1.1 2.2 0.0 0.5
0.
5 -0.1 1.3
1.
3 0.2 0.6
0.
7 0.1 0.5
0.
5 0.7 0.8
1.
1
5 1.8 1.4 2.3 0.0 0.6
0.
6 0.3 1.1
1.
1 0.3 0.8
0.
8 0.4 0.6
0.
7 0.8 1.1
1.
4
6 3.5 0.9 3.6 0.8 0.7
1.
0 0.8 0.7
1.
1 1.2 0.8
1.
5 1.0 0.7
1.
3 1.7 0.7
1.
8
7 2.1 0.4 2.1 0.1 -0.1
0.
1 0.1 -0.2
0.
2 0.5 0.0
0.
5 0.3 -0.1
0.
3 0.7 0.0
0.
7
8 1.9 -0.1 1.9 -0.1 -0.4
0.
4 0.3 0.0
0.
4 0.3 -0.3
0.
4 0.1 -0.5
0.
5 0.8 -0.4
0.
8
9 2.8 -0.4 2.8 0.7 -0.6
0.
9 0.5 0.2
0.
5 1.3 -0.3
1.
3 1.0 -0.1
1.
0 1.3 -0.1
1.
3
10 1.6 0.2 1.6 0.0 -0.2
0.
2 0.1 0.0
0.
1 0.5 -0.2
0.
5 0.5 -0.2
0.
6 0.9 -0.2
0.
9
11 1.7 -0.5 1.8 0.0 -0.5
0.
5 0.1 -0.3
0.
3 0.6 0.0
0.
6 0.5 -0.4
0.
7 0.7 -0.4
0.
8
12 2.3 -0.5 2.4 0.5 -0.7
0.
8 0.5 -0.1
0.
5 1.0 -0.1
1.
0 0.9 -0.1
0.
9 1.2 -0.3
1.
2
13 1.7 -0.5 1.8 0.2 -0.5
0.
6 0.2 -0.2
0.
3 0.8 -0.2
0.
8 0.7 -0.4
0.
8 0.9 -0.4
1.
0
14 1.3 0.2 1.3 -0.1 -0.3
0.
3 -0.2 0.0
0.
2 0.5 -0.1
0.
5 0.5 -0.1
0.
5 0.4 -0.2
0.
5
15 1.4 -0.1 1.4 0.1 -0.4
0.
4 -0.1 -0.1
0.
1 0.5 0.1
0.
6 0.5 -0.1
0.
5 0.7 -0.2
0.
7
16 1.6 -0.4 1.6 0.3 -0.7
0.
8 0.2 0.0
0.
2 0.8 -0.5
0.
9 0.8 -0.3
0.
8 0.8 -0.2
0.
9
17 2.0 -0.6 2.1 0.5 -0.6
0.
8 0.3 0.0
0.
3 0.9 -0.2
0.
9 0.9 -0.1
0.
9 1.2 -0.5
1.
2
18 1.8 -0.4 1.8 0.5 -0.8
0.
9 0.4 -0.1
0.
4 0.8 -0.3
0.
9 0.9 -0.2
0.
9 1.1 -0.6
1.
2
19 1.5 -0.2 1.5 0.1 -0.7
0.
7 0.1 -0.2
0.
2 0.7 -0.2
0.
7 0.7 -0.3
0.
8 0.8 -0.4
0.
9
20 1.3 0.0 1.3 0.1 -0.4
0.
4 0.0 0.2
0.
2 0.8 0.0
0.
9 0.8 -0.2
0.
8 0.8 -0.1
0.
8

62
21 1.4 -0.4 1.5 0.1 -0.5
0.
5 0.0 0.1
0.
1 0.8 -0.1
0.
8 0.7 -0.2
0.
7 0.8 -0.5
1.
0
22 1.6 -0.9 1.8 0.3 -0.8
0.
8 0.1 -0.4
0.
4 0.8 -0.3
0.
9 0.7 -0.3
0.
8 0.9 -0.4
1.
0
23 1.0 0.1 1.0 0.0 -0.3
0.
3 -0.1 0.1
0.
2 0.7 0.0
0.
7 0.8 0.0
0.
8 0.8 -0.1
0.
8
24 1.1 0.2 1.1 0.0 -0.3
0.
3 0.0 0.2
0.
2 1.0 0.1
1.
0 0.9 0.0
0.
9 0.9 0.0
0.
9
25 1.3 -0.3 1.3 0.1 -0.5
0.
5 0.0 0.1
0.
1 1.0 -0.2
1.
0 1.1 0.0
1.
1 0.9 -0.3
1.
0
26 0.7 0.3 0.8 -0.1 0.6
0.
6 -0.1 0.4
0.
4 0.8 -0.1
0.
8 0.7 0.1
0.
7 0.5 0.0
0.
5
27 0.9 0.1 0.9 -0.1 -0.3
0.
3 -0.1 0.3
0.
4 0.7 0.0
0.
7 0.8 0.1
0.
8 0.6 0.0
0.
6
28 1.2 -0.4 1.3 0.3 -0.3
0.
4 0.0 0.3
0.
3 1.0 0.2
1.
0 1.2 0.4
1.
3 0.9 0.0
0.
9
29 0.7 0.4 0.8 -0.2 -0.1
0.
2 -0.1 0.3
0.
3 0.9 0.3
0.
9 1.0 0.3
1.
0 0.6 0.2
0.
6
30 0.5 0.0 0.5 -0.1 -0.3
0.
3 -0.2 0.6
0.
6 0.6 0.2
0.
7 1.1 0.2
1.
2 0.5 0.4
0.
6
31 0.5 0.0 0.5 0.0 -0.1
0.
1 -0.4 0.5
0.
6 0.6 0.5
0.
8 0.9 0.4
1.
0 0.6 0.3
0.
7
32 0.4 0.6 0.7 -0.3 0.3
0.
4 -0.2 0.5
0.
5 0.6 0.4
0.
7 1.1 0.2
1.
1 0.5 0.4
0.
6
33 0.2 -0.1 0.2 -0.1 0.0
0.
1 -0.3 0.6
0.
6 0.9 0.3
0.
9 0.9 0.5
1.
0 0.3 0.4
0.
5
34 -0.1 0.5 0.5 -0.5 0.2
0.
5 -0.4 0.6
0.
7 0.6 0.3
0.
7 0.6 0.5
0.
8 0.1 0.5
0.
5
35 0.0 0.4 0.4 -0.3 0.2
0.
3 -0.3 0.7
0.
7 0.7 0.7
1.
0 1.0 0.7
1.
2 0.5 0.4
0.
6
36 -0.1 -0.2 0.2 -0.4 -0.1
0.
4 -0.7 0.3
0.
8 0.4 0.3
0.
5 0.7 0.3
0.
8 0.2 0.1
0.
2
Médi
a 1.6
0.
5
0.
5
0.
8
0.
8
0.
9
RMS* 0.9
0.
2
0.
3
0.
2
0.
2
0.
3
*RMS = Desvio Padrão
Tabela 3 - 12º Pavimento ao 17º Pavimento PVT12 PVT13 PVT14 PVT15 PVT16 PVT17
PILARE
S dxc
m dyc
m dc
m dxc
m dyc
m
d c
m
dxc
m dyc
m
d c
m
dxc
m dyc
m
d c
m
dxc
m dyc
m
d c
m
dxc
m dyc
m
d c
m
1 0.1 0.2 0.2 0.2 0.7
0.
7 0.1 0.6
0.
6 0.1 0.5
0.
5 -0.3 0.5
0.
6 -0.4 0.5
0.
6
2 0.1 0.4 0.4 0.2 1.0
1.
0 0.4 0.6
0.
7 0.3 0.7
0.
7 0.0 0.5
0.
6 -0.3 0.7
0.
7
3 0.5 0.3 0.6 0.7 1.3
1.
5 0.5 0.5
0.
7 0.6 0.6
0.
9 0.3 0.8
0.
9 0.3 0.9
0.
9
4 -0.1 0.1 0.2 0.0 0.8
0.
8 0.1 0.4
0.
5 0.1 0.4
0.
4 -0.3 0.5
0.
6 -0.4 0.4
0.
6
5 -0.3 0.3 0.5 -0.2 0.9
0.
9 0.2 0.5
0.
6 -0.1 0.5
0.
5 -0.5 0.4
0.
7 -0.7 0.3
0.
8
6 1.2 0.6 1.3 1.5 1.1
1.
8 1.1 1.3
1.
7 1.2 0.5
1.
4 1.3 0.8
1.
5 1.2 0.3
1.
3
7 0.2 -0.4 0.4 0.2 0.2
0.
3 0.1 -0.2
0.
2 0.0 -0.4
0.
4 0.0 -0.2
0.
2 0.0 -0.1
0.
1
8 -0.1 -0.9 0.9 0.2 -0.1
0.
2 0.0 -0.3
0.
3 0.1 -0.4
0.
4 -0.1 -0.5
0.
6 0.0 -0.3
0.
3
9 0.7 -0.9 1.1 0.9 -0.1
0.
9 0.8 -0.6
1.
0 0.8 -0.6
1.
0 0.7 -0.5
0.
9 0.5 -0.5
0.
7
10 0.2 -0.6 0.6 0.4 -0.2
0.
5 0.2 -0.2
0.
3 0.2 -0.2
0.
3 0.3 -0.4
0.
5 0.2 -0.2
0.
3
11 0.1 -0.9 0.9 0.4 -0.1
0.
4 0.2 -0.6
0.
6 0.2 -0.6
0.
7 0.2 -0.4
0.
5 0.3 -0.5
0.
5
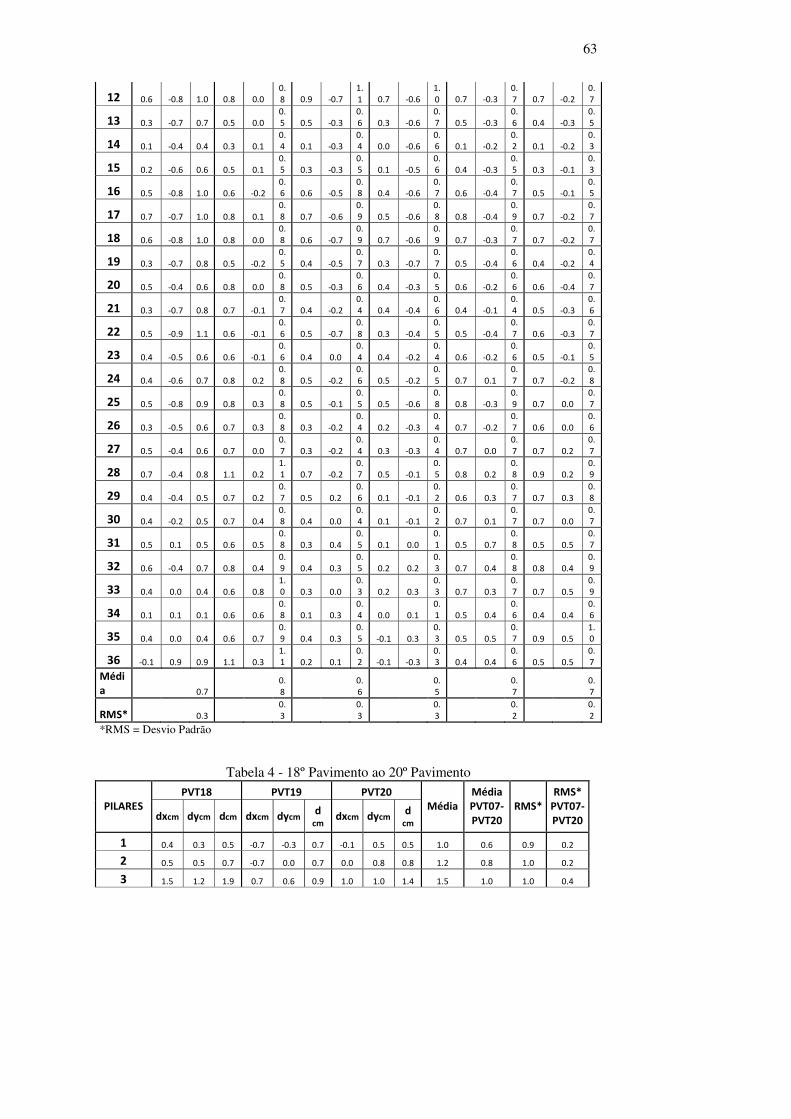
63
12 0.6 -0.8 1.0 0.8 0.0
0.
8 0.9 -0.7
1.
1 0.7 -0.6
1.
0 0.7 -0.3
0.
7 0.7 -0.2
0.
7
13 0.3 -0.7 0.7 0.5 0.0
0.
5 0.5 -0.3
0.
6 0.3 -0.6
0.
7 0.5 -0.3
0.
6 0.4 -0.3
0.
5
14 0.1 -0.4 0.4 0.3 0.1
0.
4 0.1 -0.3
0.
4 0.0 -0.6
0.
6 0.1 -0.2
0.
2 0.1 -0.2
0.
3
15 0.2 -0.6 0.6 0.5 0.1
0.
5 0.3 -0.3
0.
5 0.1 -0.5
0.
6 0.4 -0.3
0.
5 0.3 -0.1
0.
3
16 0.5 -0.8 1.0 0.6 -0.2
0.
6 0.6 -0.5
0.
8 0.4 -0.6
0.
7 0.6 -0.4
0.
7 0.5 -0.1
0.
5
17 0.7 -0.7 1.0 0.8 0.1
0.
8 0.7 -0.6
0.
9 0.5 -0.6
0.
8 0.8 -0.4
0.
9 0.7 -0.2
0.
7
18 0.6 -0.8 1.0 0.8 0.0
0.
8 0.6 -0.7
0.
9 0.7 -0.6
0.
9 0.7 -0.3
0.
7 0.7 -0.2
0.
7
19 0.3 -0.7 0.8 0.5 -0.2
0.
5 0.4 -0.5
0.
7 0.3 -0.7
0.
7 0.5 -0.4
0.
6 0.4 -0.2
0.
4
20 0.5 -0.4 0.6 0.8 0.0
0.
8 0.5 -0.3
0.
6 0.4 -0.3
0.
5 0.6 -0.2
0.
6 0.6 -0.4
0.
7
21 0.3 -0.7 0.8 0.7 -0.1
0.
7 0.4 -0.2
0.
4 0.4 -0.4
0.
6 0.4 -0.1
0.
4 0.5 -0.3
0.
6
22 0.5 -0.9 1.1 0.6 -0.1
0.
6 0.5 -0.7
0.
8 0.3 -0.4
0.
5 0.5 -0.4
0.
7 0.6 -0.3
0.
7
23 0.4 -0.5 0.6 0.6 -0.1
0.
6 0.4 0.0
0.
4 0.4 -0.2
0.
4 0.6 -0.2
0.
6 0.5 -0.1
0.
5
24 0.4 -0.6 0.7 0.8 0.2
0.
8 0.5 -0.2
0.
6 0.5 -0.2
0.
5 0.7 0.1
0.
7 0.7 -0.2
0.
8
25 0.5 -0.8 0.9 0.8 0.3
0.
8 0.5 -0.1
0.
5 0.5 -0.6
0.
8 0.8 -0.3
0.
9 0.7 0.0
0.
7
26 0.3 -0.5 0.6 0.7 0.3
0.
8 0.3 -0.2
0.
4 0.2 -0.3
0.
4 0.7 -0.2
0.
7 0.6 0.0
0.
6
27 0.5 -0.4 0.6 0.7 0.0
0.
7 0.3 -0.2
0.
4 0.3 -0.3
0.
4 0.7 0.0
0.
7 0.7 0.2
0.
7
28 0.7 -0.4 0.8 1.1 0.2
1.
1 0.7 -0.2
0.
7 0.5 -0.1
0.
5 0.8 0.2
0.
8 0.9 0.2
0.
9
29 0.4 -0.4 0.5 0.7 0.2
0.
7 0.5 0.2
0.
6 0.1 -0.1
0.
2 0.6 0.3
0.
7 0.7 0.3
0.
8
30 0.4 -0.2 0.5 0.7 0.4
0.
8 0.4 0.0
0.
4 0.1 -0.1
0.
2 0.7 0.1
0.
7 0.7 0.0
0.
7
31 0.5 0.1 0.5 0.6 0.5
0.
8 0.3 0.4
0.
5 0.1 0.0
0.
1 0.5 0.7
0.
8 0.5 0.5
0.
7
32 0.6 -0.4 0.7 0.8 0.4
0.
9 0.4 0.3
0.
5 0.2 0.2
0.
3 0.7 0.4
0.
8 0.8 0.4
0.
9
33 0.4 0.0 0.4 0.6 0.8
1.
0 0.3 0.0
0.
3 0.2 0.3
0.
3 0.7 0.3
0.
7 0.7 0.5
0.
9
34 0.1 0.1 0.1 0.6 0.6
0.
8 0.1 0.3
0.
4 0.0 0.1
0.
1 0.5 0.4
0.
6 0.4 0.4
0.
6
35 0.4 0.0 0.4 0.6 0.7
0.
9 0.4 0.3
0.
5 -0.1 0.3
0.
3 0.5 0.5
0.
7 0.9 0.5
1.
0
36 -0.1 0.9 0.9 1.1 0.3
1.
1 0.2 0.1
0.
2 -0.1 -0.3
0.
3 0.4 0.4
0.
6 0.5 0.5
0.
7
Médi
a 0.7
0.
8
0.
6
0.
5
0.
7
0.
7
RMS* 0.3
0.
3
0.
3
0.
3
0.
2
0.
2
*RMS = Desvio Padrão
Tabela 4 - 18º Pavimento ao 20º Pavimento PVT18 PVT19 PVT20
PILARES dxcm dycm dcm dxcm dycm
d cm
dxcm dycm d
cm
Média
Média
PVT07-
PVT20
RMS*
RMS*
PVT07-
PVT20
1 0.4 0.3 0.5 -0.7 -0.3 0.7 -0.1 0.5 0.5 1.0 0.6 0.9 0.2
2 0.5 0.5 0.7 -0.7 0.0 0.7 0.0 0.8 0.8 1.2 0.8 1.0 0.2
3 1.5 1.2 1.9 0.7 0.6 0.9 1.0 1.0 1.4 1.5 1.0 1.0 0.4

64
4 0.3 0.1 0.3 -0.5 -0.5 0.7 -0.2 0.2 0.3 0.9 0.6 0.8 0.3
5 0.5 0.1 0.5 -0.6 -0.7 0.9 -0.6 -0.2 0.6 1.1 0.7 1.0 0.3
6 2.3 -0.5 2.4 1.3 -0.7 1.5 1.9 -0.1 1.9 1.8 1.5 1.0 0.4
7 0.8 -0.1 0.8 0.1 -0.8 0.8 0.2 -0.2 0.3 0.8 0.4 0.9 0.2
8 0.7 -0.4 0.8 0.1 -1.1 1.1 0.3 -0.5 0.6 0.9 0.5 0.9 0.3
9 1.3 -0.5 1.4 0.5 -0.8 1.0 0.9 -0.6 1.1 1.4 1.0 1.0 0.2
10 0.9 -0.3 0.9 0.5 -0.6 0.8 0.4 -0.3 0.5 0.9 0.5 0.9 0.2
11 0.7 -0.5 0.9 0.3 -1.0 1.1 0.3 -0.6 0.7 1.0 0.6 0.8 0.2
12 1.3 -0.4 1.4 0.9 -0.7 1.2 0.8 -0.3 0.8 1.3 0.9 0.9 0.2
13 1.0 -0.4 1.1 0.6 -1.0 1.1 0.5 -0.4 0.7 1.1 0.7 0.9 0.2
14 0.7 -0.4 0.8 0.3 -0.9 1.0 0.2 -0.2 0.2 0.8 0.4 0.8 0.2
15 0.8 -0.1 0.8 0.5 -0.9 1.1 0.3 -0.5 0.6 0.9 0.6 0.8 0.2
16 1.0 -0.2 1.1 0.7 -0.9 1.2 0.5 -0.6 0.8 1.1 0.8 0.9 0.2
17 1.2 -0.3 1.3 0.8 -0.8 1.2 0.9 -0.7 1.1 1.3 0.9 0.9 0.3
18 1.3 -0.3 1.3 0.8 -0.7 1.0 0.6 -0.2 0.7 1.2 0.9 0.9 0.2
19 0.8 -0.4 0.9 0.5 -0.9 1.1 0.5 -0.4 0.6 1.0 0.7 0.9 0.2
20 1.0 -0.4 1.1 0.7 -0.9 1.1 0.5 -0.5 0.7 1.0 0.7 0.8 0.2
21 1.1 -0.2 1.1 1.0 -0.8 1.3 0.4 -0.4 0.6 1.0 0.7 0.9 0.3
22 1.0 -0.4 1.1 0.8 -0.9 1.2 0.6 -0.8 1.0 1.2 0.8 0.9 0.2
23 0.9 -0.2 0.9 0.8 -1.0 1.2 0.5 -0.3 0.6 0.9 0.6 0.8 0.3
24 1.2 -0.1 1.2 0.9 -0.8 1.2 0.6 -0.2 0.7 1.0 0.7 0.8 0.3
25 1.1 -0.5 1.2 1.1 -0.8 1.3 0.6 -0.4 0.7 1.1 0.8 0.9 0.3
26 0.9 -0.1 0.9 0.9 -0.7 1.2 0.3 -0.2 0.4 0.9 0.6 0.7 0.2
27 0.9 -0.1 1.0 1.2 -0.5 1.3 0.4 0.0 0.4 0.9 0.6 0.8 0.3
28 1.4 -0.1 1.4 1.2 -0.3 1.3 0.7 0.1 0.7 1.2 0.9 0.9 0.3
29 1.1 0.0 1.1 1.1 -0.8 1.3 0.2 0.0 0.2 0.9 0.7 0.7 0.4
30 1.1 0.1 1.1 1.2 -0.4 1.3 0.1 -0.1 0.2 0.9 0.7 0.7 0.3
31 1.0 0.2 1.0 1.3 0.1 1.3 0.3 0.3 0.5 0.9 0.7 0.7 0.3
32 1.2 0.0 1.2 1.1 -0.4 1.2 0.3 0.3 0.4 1.0 0.7 0.7 0.3
33 1.3 0.7 1.5 1.1 0.1 1.1 0.4 -0.3 0.5 0.9 0.7 0.7 0.4
34 0.6 0.2 0.7 0.9 -0.4 1.0 0.1 0.4 0.4 0.8 0.6 0.6 0.2
35 1.0 0.3 1.0 1.3 -0.2 1.3 0.2 0.5 0.5 1.0 0.8 0.6 0.3
36 0.9 0.1 1.0 1.1 -0.3 1.1 0.2 0.4 0.5 0.9 0.6 0.7 0.3
Média 1.1 1.1 0.6 1.1 0.7 0.8 0.3
RMS* 0.4 0.2 0.3 0.2 0.2 0.1 0.1
*RMS = Desvio Padrão
Para efeito de estabelecer critério de boa locação, o autor estabeleceu que seria
recomendável um deslocamento de um centímetro no centro do pilar, e aceitável até
uma vez e meia este deslocamento.
Observando-se as tabelas acima, constata-se que no pilar P06 as discrepâncias
em 95% de suas locações apresentam valores superiores ao estabelecido pelo autor

65
como recomendável, chegando a atingir o valor máximo de 4,9 cm, no 2º pavimento.
Esta elevação constante nas discrepâncias leva a crer que houve um deslocamento no
pino de aço testemunha do pilar, não superior a um centímetro.
Este fato não ocorreria em uma locação real de uma obra, uma vez que, cada
andar seria marcado independentemente da materialização do ponto do andar térreo.
Provavelmente este ponto foi deslocado pelo trafego de caminhões pesados no local do
experimento.
Observando-se a Tabela 5 é possível verificar que as discrepâncias das 720
locações (36 x 20) em 64,72 % dos casos é inferior ao valor estabelecido como
recomendável e, em 75, 69 % dos casos é inferior ao valor aceitável.
Tabela 5 – Distribuição das discrepancias totais em número e percentagem
Valores Total %
Discrepâncias ≤1.0 466 64.72
Discrepâncias ≤1.1 495 68.75
Discrepâncias ≤1.2 507 70.42
Discrepâncias ≤1.3 530 73.61
Discrepâncias ≤1.4 540 75.00
Discrepâncias ≤1.5 545 75.69
Discrepâncias>1.5 175 24.31
Total 720 100
Quando se desprezam os seis primeiros pavimentos, cujos resultados das
discrepâncias foram considerados contaminados por erros grosseiros (enganos), a
distribuição das discrepâncias apresentadas na Tabela 5 passam a ter 98,61 % de
resultados iguais ou inferiores ao valor aceitável (497 pontos de um total de 504).
Para melhor visualização dos resultados das tabelas foram feitas a representação
gráfica da distribuição das discrepâncias nos pilares de canto.
Observando a Figura 19, a qual representa o pilar 1 e tomando como base o pilar
do pavimento térreo, pode-se observar que 60% dos pontos encontram-se acurados. Em
12 andares as locações do pilar 1estão com deslocamento menor ou igual a 1 cm e 75%
está com seu deslocamento menor ou igual a 1,3 cm, valor este menor do que o
aceitável.

66
Tendo em vista que,aplicando-se este método de locação os erros não se
propagam,pois cada andar é locado independentemente do outro. No nosso caso o
deslocamentodo centro do pilar P01, no 20º pavimento, em relação ao térreo,ficou em
0,5 cm.
Figura 19 - Discrepancias de locação, por andar no pilar P01
Fonte: Do Autor
Na Figura 20, que representa o Pilar 3, pode-se observar o que segue: i) quando
se consideram todos os andares as locações apresentam erros grosseiros (andares 2, 3, 4
e 6); ii) erros sistemáticos em todos os outros andares (viés para o 1º quadrante); iii)
baixa precisão (grande dispersão) e iv) em função das constatações anteriores pode-se
concluir neste caso houve erros grosseiros na instalação do GPS para o primeiro caso e,
possivelmente, pequeno deslocamento do pino testemunha.

67
Figura 20 - Discrepancias de locação, por andar no pilar P03
Fonte: Do Autor
Na Figura 21que representa o pilar P34 os pontos encontram se acurados e 70%
deles encontram se dentro do raio de 1 cm e, dos seis pontos que se encontram externos
a este raio, cinco deles são pontos suspeitos de possuírem um erro grosseiro.
Por sua vez a Figura 22 que representa o pilar P36, apresenta as mesmas
características e percentagem da Figura 21. O que só vem a reforçar que o operador do
aparelho Receptor GPS, deve ter extremo cuidado, para que o mesmo fique no prumo,
para melhor acurácia do seu trabalho.

68
Figura 21 - Discrepancias de locação, por andar no pilar P34
Fonte: Do Autor
Figura 22–Discrepancias de locação, por andar no pilar P36
Fonte: Do Autor

69
5CONCLUSÕES
O método proposto se mostrou eficaz para os propósitos desta pesquisa e pode
ser recomendado para a locação de edifícios convencionais de vários pavimentos. Os
resultados obtidos, com a sua utilização, são superiores aqueles resultantes da aplicação
do método tradicional.
A sua exatidão, quando se desprezam os pontos afetados pelo erro grosseiro
(engano) fica, em 83,93 % dos casos menor ou igual ao recomendado (1 cm) e 98,61 %
inferior a 1,5 cm,valor este perfeitamente aceitável em locações convencionais.
Os resultados obtidos podiam ser menos discrepantes se tivessem sido
empregados equipamentos mais sofisticados, atualizados e calibrados. A ação de dois
operadores, com formação diferenciada, também influiu nos resultados.
Tomando-se os cuidados acima recomendados, pode-se dizer que o método, aqui
proposto, é adequado, acurado, rápido e não propaga erros que por ventura ocorram na
locação do pilar em um pavimento.

70
6 RECOMENDAÇÕES
Para que se melhore a eficácia da metodologia aqui sugerida, recomenda-se:
• O uso de equipamentos de alta precisão: estação total com precisão
angular superiora2” e linear a 2 mm/km +2ppm, equipamentos GNSS de
duas frequências (L1/L2);
• Instalação do receptor GNSS em tripé e base nivelante;
• Emprego simultâneo de três receptores GNSS, o que permite o emprego
de triangulação e consequentemente maior precisão nas coordenadas dos
pontos de controle;
• Conhecimento da teoria dos erros e sua aplicação para ocontrole dos
enganos e erros sistemáticos é recomendável e de extrema importância;
• Para controle das influencias ambientais recomenda-se que a locação de
todos os andares, seja feita, de preferencia, em um mesmo horário.
Sugere-se que os trabalhos, tanto de coleta de dados, quanto de locação,
sejam executados numa mesma faixa de temperatura;
• O emprego de funcionários altamente treinados.

71
REFERÊNCIAS BIBLIOGRÁFICAS
ABNT NBR 13133:1994 Versão Corrigida: 1996: Execução de levantamento topográfico. Rio de Janeiro, 1996, p3.
ABNT. NBR14166: Rede de Referência Cadastral Municipal – Procedimento. Rio de Janeiro, 1998, 23 p.
AGUIRRE, Argentino J. ; FILHO, José Américo M., :Introdução à Cartografia.UFSM. 2007.
ANDRADE, J. : Bittencourt. Fotogrametria. Ed. SBEE, Curitiba. 1998. _____ Fotogrametria. 2ª Ed. Revista, ampliada e atualizada. SBEE, Curitiba. 2003.
BURKHOLDER, E.F., 1997: “Definition and Description of a Global Spatial Data Model (GSDM)”. http://www.zianet.com/globalcogo/gsdmdefn.pdf. Acessadoem 19/08/2014
BURKHOLDER, E.F., 2000:“The Global Spatial Data Model (GSDM)”. http://www.ncgia.ucsb.edu/globalgrids/papers/burkholder.pdf. Acessadoem 19/08/2014
BURKHOLDER, E.F., 2003:“The Global Spatial Data Model (GSDM):A New Paradigm for Spatial Information.” https://www.fig.net/pub/fig_2002/Ts3-3/TS3_3_burkholder.pdf. Accessed 19/08/2014
CARVALHO, F. R. de. :CadastroGeoambiental Polivalente, Projeção TM (Conforme de Gauss). Informativo COCAR especial. Presidência da República, Secretaria dePlanejamento, Comissão de cartografia, Brasília, Dezembro de 1984.
DAL’FORNO, Gelson Lauro. : Topografia. Apostila não publicada. Universidade Federal de Santa Maria, 2007.
DAL’FORNO, Gelson. Lauro.; DAPPER F.; STRIEDER, A. J.;AGUIRRE, A. J. TRANSGEOLOCAL – Programa Computacional para Transformação de. Coordenadas Geodésicas em Coordenadas Locais e o Processo Inverso. In: Anais VI Colóquio Brasileiro de Ciências Geodésicas, UFPR, 2009.
DAL’FORNO, Gelson Lauro; AGUIRRE, Argentino José; HILLEBRAND, Fernando Luís; GREGÓRIO, Fabiano de Vargas. : Transformação de coordenadas geodésicas em coordenadas no plano topográfico local pelos métodos da norma NBR 14166:1998 e o de rotações e translações. III Simpósio Brasileiro de Ciências Geodésicas e Tecnologia da Geoinformação. Recife-PE, 27-30 de Julho de 2010.
DOMINGUES, F.A. A.: Topografia e astronomia de posição: para engenheiros e arquitetos. São Paulo: Editora Mc Graw Hill do Brasil, 1979.
FLORESTAL, E.J. M.: Apostila de topografia. Santa Maria, 2009. Apostila do Curso Técnico de Geoprocessamento, Universidade Federal de Santa Maria.

72
ESPARTEL, Lélis. : Curso de topografia. 1. Ed. Porto Alegre: Globo, 1965.
GEMAEL, Camil. : Introdução ao ajustamento de observações. Curitiba: Editora da Universidade Federal do Paraná, 1994. _____ Introdução ao ajustamento de observações. Curitiba: Editora da Universidade Federal do Paraná, 2004.
GEMAEL, Camil. : Introdução a geodésia física.Curitiba: Editora UFPR, 1999.
GOMÉZ, F. M. :El A B C de la medición en agrimensura. 2003
GRIPP J., J., SILVA, A. S. : Geodésia Geométrica. Apostila não publicada. Universidade Federal de Viçosa, 1996.
HOLLER, Wilson. : Além das coordenadas UTM.MundoGeo 06 de Janeiro de 2009. http://mundogeo.com/blog/2009/01/06/alem-das-coordenadas-utm/. Acessado em 18/08/2014
IBGE, 2004: Mudança do referencial geodésico. http://www.ibge.gov.br/home/geociencias/noticia_sirgas.shtm. Acessado em 06/08/2014.
JEKELI, Christopher. : Geometric Reference Systems in Geodesy. Division of Geodesy and Geospatial Science School of Earth Sciences, Ohio State University.July 2006.
KLEIN, Nayara S.: Locação de obra: Construção Civil I. Universidade Federal do Paraná. (2013)
MOLIN, J. P.: Utilização de GPS em Agricultura de Precisão. Eng. Agrícola, Jaboticabal, v.17.1998.
MONICO, J. F. G.: O sistema de posicionamento global (GPS): conceitos preliminares. In:__. Posicionamento pelo NAVSTAR-GPS: descrição, fundamentos e aplicações. São Paulo: UNESP, 2000.
MONICO, J. F. G.: Posicionamento pelo GNSS: descrição, fundamentos e aplicações. 2ª ed. São Paulo: UNESP, 2008.
NAZARENO, Nilton R. X. : Cartografia Geral: Notas de aula. Instituto Federal de Educação, Ciência e Tecnologia de Goiás, 2009.
PER ENGE; CHEN, A.; LORENZO, D.; XINGXIN GAO,G.; CHERMAN LO. : GNSS over China. The Compass MEO Satellite Codes.Stanford University InsideGNSS July/August 2007, p.36-43.
ROCHA, Cézar H. B.: Geoprocessamento: Tecnologia Transdisciplinar. Juiz de Fora, MG: 3ª Ed. 2007.
ROCHA, José Antônio M. R.: O ABC do GPS. Recife: Bagaço, 2004
ROCHA, R. dos S.: Algumas considerações sobre as projeções cartográficas utilizadas no Brasil para mapeamentos em grandes escalas. In: Anais – III Congresso Brasileiro de Cadastro Técnico Multifinalitário – COBRAC, Florianópolis, 18 a 22 Out 1998.

73
SAMPAIO, Marco Ivan R.: Qualidade de MDT topográfico gerado a partir de levantamento geodésico com receptor GPS L1-L2 no método relativo semiestático. Monografia de especialização. Santa Maria – RS, 2009.
SEGANTINE, Paulo C. L.: Curso de atualização Topografia e GPS. Sistema de posicionamento global. EESC/USP. 1996
SEGANTINE, P.C. L.: GPS: Sistema de Posicionamento Global. São Carlos: EESC/USP, 1ª Ed 2005.
SILVEIRA, L. C.: Fundamentos de Geodésia. Módulo 8, CEBRAPROT, Criciúma, SC. (1994)
SILVEIRA, L. C.: Fundamentos de topografia. Criciúma: Escola Brasileira de Agrimensura, Curso Técnico de Agrimensura a Distância, 2000.
TORGE, Wolfgang.:Geodesy. 3 ed. Berlin; New York: de Gruyter, 2001
WIKIPÉDIA.:Datum. Site: http://pt.wikipedia.org/wiki/Datum. Acesso em: 04 agosto de 2014. 09:30AM





























