Embed Size (px)
Citation preview

Instituto Superior Tecnico
Controlo em Espaco de EstadosProfessor Catedratico: Joao Miranda Lemos
Resumo da Teoria
Joao Paulo Silva, 73411, MEAerLisboa, Marco de 2015


Conteudo
1 Modelo de Estado de Sistemas Lineares Contınuos 11.1 Equacoes do Modelo de Estado de Sistemas Lineares Contınuos . . . . . . . . . . . . . . . 11.2 Conversao entre Modelo de Estado e Funcao de Transferencia . . . . . . . . . . . . . . . . 21.3 Polos e Zeros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.4 Mudanca de Coordenadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.5 A Equacao Homogenea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.6 Matriz de Transicao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.7 Sistemas Nao Homogeneos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.8 Modelo de estado de Sistemas Discretos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Retroaccao Linear de Variaveis de Estado 132.1 Motivacao para retroaccao linear de variaveis de estado . . . . . . . . . . . . . . . . . . . 132.2 Controlabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.3 Observabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.4 Influencia de uma transformacao linear do estado na Observabilidade . . . . . . . . . . . . 212.5 Controlabilidade e Observabilidade Conjunta . . . . . . . . . . . . . . . . . . . . . . . . . 242.6 Realimentacao Linear de Variaveis de Estado . . . . . . . . . . . . . . . . . . . . . . . . . 252.7 Observadores Assimptoticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.8 Teorema de Separacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.9 Seguimento de referencias e efeito integral . . . . . . . . . . . . . . . . . . . . . . . . . . . 37

1 Modelo de Estado de Sistemas Lineares Contınuos
1.1 Equacoes do Modelo de Estado de Sistemas Lineares Contınuos
Objectivo: Mostrar que ha um conjunto diversificado de sistemas que podem ser modelados atravesdas equacoes de estado.
No caso geral temos:
x(t) = Ax(t) +Bu(t) x(0) = x0
y(t) = Cx(t) +Du(t) (1.1)
Em que as Matrizes sao:
• A - Matriz da Dinamica (Quadrada) - Define o comportamento dinamico do Sistema, i.e. se einstavel ou estavel e se e rapido ou lento. Essas caracterısticas dependem dos Valores Proprios.
• B - Matriz da Entrada (normalmente Matriz Coluna) - Define o modo como a entrada (actuacao)afecta o estado.
• C - Matriz de Saıda (normalmente Matriz Linha) - E a relacao entre o estado do sistema e a saıdaque se deseja escolher.
• D - Matriz de Saıda directa (normalmente Nula) - Define o modo como a entrada (actuacao) afectadirectamente a saıda, e para sistemas causais ela e nula.
E que os domınios sao:
• Estados: x(t) ∈ Rn em que n = #estados (tambem chamada Ordem do Sistema)
• Entradas: u(t) ∈ Rm em que m = #entradas (normalmente 1)
• Saıda: y(t) ∈ Rp em que p = #saıdas (normalmente 1)
Como tal as matrizes tem a seguinte dimensao:
A [n x n] B [n x m] C [p x n] D [p x m]
[A B
C D
]Nesta forma o Modelo em Espaco de Estados tem a seguinte representacao de Diagrama de Blocos:
1

1.1.1 Espaco de Estados
O vector de estados e o vector que contem todas as variaveis que representam o sistema, e ele:
x(t) =
x1(t)x2(t)
...xn(t)
(1.2)
Podemos entao definir um referencial ortogonal em Rn e cujos eixos representam os n estados. Assim,a forma como o sistema evolui, i.e. os varios valores de x(t) no tempo podem ser representados e a suaevolucao e chamada de trajectoria.
Para sistemas de ordem 2, o Espaco de Estados passa a ser o Plano de Estados:
1.2 Conversao entre Modelo de Estado e Funcao de Transferencia
Objectivo: Apos estudar este modulo, o aluno devera ser capaz de obter as matrizes que definem omodelo de estado dada uma funcao de transferencia e vice-versa.
1.2.1 Funcao de Transferencia
Partindo do Modelo em Espaco de Estados (1.1) da seccao anterior (a partir daqui usa-se D = 0):
x(t) = Ax(t) + bu(t) x(0) = x0
y(t) = Cx(t)
E aplicando a Transformada de Laplace com condicoes iniciais nulas entao:{sX(s) = AX(s) + bU(s)Y (s) = CX(s)
(1.3)
O que resulta na seguinte equacao:
Y (s) = C(sI −A)−1bU(s) (1.4)
2

E como tal podemos converter de novo para o tempo continuo usando a Transformada de LaplaceInversa, isto e:
y(t) = L−1{C(sI −A)−1bU(s)} (1.5)
Esta analise tambem permite definir a Funcao de Transferencia (relacao da entrada para a saıda), quee definida como:
Y (s)
U(s)= G(s) = C(sI −A)−1b (1.6)
Em que:
(sI −A)−1 =adj(sI −A)
det(sI −A)
Sendo a Matriz Adjunta a Matriz dos Co-factores Transposta, isto e:
adj(sI −A) = [Mij ]T
Atencao: a solucao obtida em (1.5) e (1.6) resulta do facto da condicao inicial ser nula. Caso issonao se verificasse entao nao se poderia obter uma funcao de transferencia, e ter-se-ia ainda que:
y(t) = L−1{C(sI −A)−1 [x0 + bU(s)]} (1.7)
1.3 Polos e Zeros
Analisando a Funcao de transferencias podemos ver os polos e zeros.
• Os polos sao por definicao as raızes do Denominador de G(s), o chamado polinomio caracterıstico:
det(sI −A) = 0 (1.8)
Como tal os polos dum Sistema em Cadeia Aberta apenas dependem da Matriz da Dinamica.
• Os zeros sao por definicao as raızes do Numerador de G(s).
Cadj(sI −A)b = 0 (1.9)
Como tal os zeros dependem nao so da Matriz da Dinamica mas tambem das matrizes de Entradae Saıda.
1.3.1 Obtencao do Modelo de Estado
Tendo a Funcao de Transferencia e possıvel obter o Modelo de Estado. Este modelo nao e unico,existem infinitas realizacoes de Modelos, as quais podem ser obtidas umas das outras atraves de Trans-formacoes.
3

Sistema sem Zeros:
Neste caso a Funcao de Transferencia e do tipo:
G(s) =b0
sn + a1sn−1 + · · ·+ an−1s+ an(1.10)
Assim uma realizacao possıvel e usar as Variaveis de Fase, i.e. comecar por definir os estados (fases)como sendo:
x1(t) = y(t)
x2(t) = x1(t) = y(t)
...
xn(t) = xn−1(t) = y(n−1)(t) (1.11)
E como tal, a derivada da ultima variavel de fase e dada por:
xn(t) = y(n)(t) = −a1xn(t) · · · − an−1x2(t)− anx1(t) + b0u(t) (1.12)
Ou seja, temos a Matriz da Dinamica na Forma Companheira e podemos definir o Modelo deEstados da seguinte forma:
x(t) =
0 1 · · · 0 00 0 1 · · · 0...
. . ....
0 0 · · · 0 1−an −an−1 · · · −a2 −a1
x(t) +
00...0b0
u(t) (1.13)
E a Equacao de Saıda como sendo:
y(t) = [ 1 0 · · · 0 ]x(t) (1.14)
Sistema com Zeros
Neste caso a Funcao de transferencia e do tipo:
G(s) =b1s
n−1 + b2sn−2 + · · ·+ bn
sn + a1sn−1 + · · ·+ an−1s+ an(1.15)
A equacao anterior e assim definida para sistemas causais.
Podemos definir o sistema como uma parte sem zeros e outra com zeros:
• Parte sem zeros:
X(s) =1
sn + a1sn−1 + · · ·+ an−1s+ an
4

Que resulta:
x(t) =
0 1 · · · 0 00 0 1 · · · 0...
. . ....
0 0 · · · 0 1−an · · · −a2 −a1
x(t) +
00...01
u(t) (1.16)
• Parte com zeros:Y (s) = X(s) ·
(b1s
n−1 + b2sn−2 + · · ·+ bn
)E como tal:
y(t) = [ bn bn−1 · · · b2 b1 ]x(t) (1.17)
Note-se que no sistema com zeros a Matriz da Dinamica manteve-se constante.
1.4 Mudanca de Coordenadas
Objectivo: Dado um modelo de estado e uma transformacao linear das variaveis de estado, calcularas equacoes do modelo de estado nas novas coordenadas.
Comecando de novo pelo Modelo em Espaco de estados:
x(t) = Ax(t) + bu(t) x(0) = x0
y(t) = Cx(t)
Pode-se fazer uma Transformacao de Coordenadas:
z(t) = Tx(T ) ⇒ z(t) = T x(t) (1.18)
Aplicando no sistema podemos chegar a:
z(t) =TAT−1︸ ︷︷ ︸Az
z(t) + Tb︸︷︷︸bz
u(t) z(0) = Tx(0) = Tx0 = z0
y(t) =CT−1︸ ︷︷ ︸Cz
z(t) (1.19)
Podemos entao definir um Modelo em Espaco de Estados na forma convencional:
z(t) = Azz(t) + bzu(t) z(0) = z0 (1.20)
y(t) = Czz(t) (1.21)
Com:
Az = TAT−1 bz = Tb Cz = CT−1 z0 = Tx0
5

1.4.1 Frequencias Naturais da Transformacao de Coordenadas
Ao se fazer uma transformacao de coordenadas seria expectavel que os polos do sistema fossemafectados. Na verdade tal nao acontece, isto e, os polos (valores proprios ou frequencias naturais) dosistema mantem-se constantes, como se pode demonstrar:
det(sI − TAT−1) = det(TsIT−1 − TAT−1)
= det(T (sI −A)T−1)
= det(T ) det(sI −A) det(T−1)
=det(T ) det(sI −A)
det(T )
= det(sI −A)
E portanto:
det(sI − TAT−1) = det(sI −A) (1.22)
Ou seja, as Frequencias Naturais do Sistema nao se alteraram pelo facto de existir uma Mudanca deCoordenadas.
1.5 A Equacao Homogenea
Objectivo: Apresentar a estrutura da solucao da equacao homogenea.
Relaxando o Modelo do Sistema contendo apenas a Matriz da dinamica entao ficamos com um Sistemamais simples. A solucao desta equacao desempenha um papel fundamental na solucao da equacao deestado. A estrutura da solucao depende dos valores proprios e dos vectores proprios de A. Assim:
x(t) = Ax(t) x(0) = x0 (1.23)
1.5.1 Campo de Vectores e Retrato de Fase
Assumindo o vector de estados como sendo a posicao no Espaco de Estados e analisando a EquacaoHomogenea verifica-se que se trata de um Sistema Dinamico em que o estado no instante imediatamenteseguir esta na direccao definida pelo estado actual e a Matriz A. Assim, a direccao tangente a trajectoriano instante arbitrario t e:
−→x =
−−−→Ax(t)
Podemos assim definir:
• Campo de Vectores - Representam a direccao tangente a
trajectoria, isto e,−→x =
−−−→Ax(t). Sao as setas a verde.
• Retrato de Fase - Infinitas linhas que vem desde todas as ar-bitrarias condicoes iniciais ate ao estado final. As linhas nuncase tocam (Principio da invariancia no tempo). Da solucao daequacao homogenea resulta que o estado final so pode ser 0 ou∞. Sao as linhas a azul.
6

1.5.2 Valores e Vectores Proprios
Sendo A quadrada [n x n] entao podemos chegar a seguinte igualdade:
Avi = λivi (1.24)
Em que vi tambem se podem chamar vectores de modo. Geralmente existem (podem nao existir) nvectores proprios linearmente independentes. Caso existam podemos usar a Diagonalizacao de Matrizespara resolver a Equacao Homogenea (ja veremos a seguir).
• Valores Proprios: λi sao as solucoes de det(λiI −A) = 0
• Vectores Proprios: vi sao as solucoes de (λiI −A)vi = 0 (sao definidos a menos de uma razao denormalizacao)
1.5.3 Diagonalizacao de Matrizes
Tendo n vectores proprios linearmente independentes entao e possıvel definir a Matriz Modal [n xn] que tem inversa:
M = [ v1 · · · vn ] (1.25)
E tendo tambem n valores proprios podemos definir uma Matriz Diagonal [n x n] que tem os valoresproprios na sua diagonal:
Λ = diag(λ1, · · · , λn) (1.26)
Assim sendo podemos escrever:
AM = MΛ⇒
{ A = MΛM−1
Λ = M−1AM(1.27)
1.5.4 Solucao da Equacao Homogenea por Diagonalizacao
Ao Modelo da Equacao Homogenea podemos fazer uma transformacao particular, isto e, fazer umatransformacao em que se roda as Coordenadas para as Coordenadas Ortogonais definidas pelos vectoresproprios, isto e:
x(t) = Mz(t) ⇔ z(t) = M−1x(t) (1.28)
Como
z(t) = M−1x(t) = M−1Ax(t) = M−1AMz(t)
Vem:
z(t) = Λz(t) (1.29)
Em que Λ e a Matriz Diagonal que contem os Valores Proprios.
7

Ficamos entao com um sistema mais simples, que facilmente pode ser resoluvel:
{ z1(t) = λ1z1(t)...
zn(t) = λnzn(t)
(1.30)
Cuja solucao (que depende das condicoes iniciais) e dada por:
{ z1(t) = k1eλ1t
...zn(t) = kne
λnt
(1.31)
Logo nas coordenadas x vem:
x(t) = Mz(t) = [ v1 · · · vn ]
k1eλ1t
· · ·kne
λnt
(1.32)
Ou seja:
x(t) = k1v1eλ1t + · · ·+ knvne
λnt =
n∑i=1
kivieλit (1.33)
Em que temos os n Modos do Sistema:
vieλit
1.6 Matriz de Transicao
Objectivo: A solucao da equacao homogenea como uma transformacao do estado associada a matrizde transicao. Principais propriedades da matriz de transicao.
Continuando a analise da Equacao Homogenea:
x(t) = Ax(t) x(0) = x0
Podemos definir uma Matriz de Transicao, que leva o estado desde o estado inicial, t0, ate aoestado arbitrario t:
x(t) = Φ(t, t0)x0 (1.34)
Pode-se provar que a Matriz de Transicao obedece a:
• Serie de Peano-Baker
Φ(t, t0) = I +A(t− to) +1
2!A2(t− t0)2 + · · · =
+∞∑k=0
Ak(t− t0)k
k!(1.35)
8

• Exponencial de Matriz
Φ(t, t0) = eA(t−t0) (1.36)
Pois:
Φ(t, t0) = Φ(t− t0) (1.37)
Atencao: Estas propriedades aplicam-se apenas a sistemas invariantes no tempo, em que a matrizA e constante.
1.6.1 Mudanca de Coordenadas - Efeito na Matriz de Transicao
Usando a transformacao habitual de x(t) para z(t):
z(t) = Tx(t) z(t) = TAT−1 z(0) = z0 = Tx(0) = Tx0
Usando a Matriz de Transformacao entao:
z(t) = Tx(t) = TΦ(t, t0)x0 = TΦ(t, t0)T−1︸ ︷︷ ︸Φz(t,t0)
z0 (1.38)
Logo podemos escrever:
Φz(t, t0) = TΦx(t, t0)T−1 (1.39)
O que era semelhante ao encontrado nas Mudancas de Coordenadas em relacao a Matriz da Dinamica:
z(t) = TAT−1︸ ︷︷ ︸Az
z(t) ⇒ Az = TAT−1
1.6.2 Calculo da Matriz de Transformacao usando a Transformada de Laplace
Aplicando a Transformada de Laplace a Equacao homogenea vem:
sX(s)− x0 = AX(s)⇔ X(s) = (sI −A)−1x0 (1.40)
E aplicando a Transformada Inversa:
x(t) = L−1{(sI −A)−1}|t−t0x0 (1.41)
Pois x0 = cte. Logo pode-se concluir que:
Φ(t, t0) = L−1{(sI −A)−1}|t−t0 (1.42)
9

1.6.3 Propriedades da Matriz de Transicao
A matriz de transicao definida de estado em (1.34) tal que:
x(t) = Φ(t, t0)x0
Obedece, alem das propriedades ja referidas anteriormente, as seguintes propriedades:
• Diferenciacao
d
dtΦ(t, t0) = AΦ(t, t0) (1.43)
• Identidade
Φ(t, t) = I ∀t (1.44)
• Invertibilidade da Matriz de Transicao
Pelo Teorema de Abel-Jacobi-Liouville (caso particular) temos:
det(eA(t−t0)) = e(t−t0)tr(A) (1.45)
E como a exponencial nunca e 0 entao o determinante nunca se anula e a Matriz de Transicao esempre invertıvel.
• Inversa
Φ−1(t, t0) = Φ(t0, t) (1.46)
Demonstracao:
Φ(t, t0)Φ(t0, t) = Φ(t, t) = I ⇒ Φ(t0, t) = Φ−1(t, t0)
Assim sendo, podemos sempre recuperar a condicao inicial para sistemas contınuos. Para sistemasdiscretos tal pode nao ser possıvel.
• Semigrupo
Φ(t2, t0) = Φ(t2, t1)Φ(t1, t0) (1.47)
Demonstracao:
x(t2) = Φ(t2, t1)x(t1) = Φ(t2, t1)Φ(t1, t0)x(t0) = Φ(t2, t0)x(t0)
• Continuidade
A Matriz de Transicao e uma funcao contınua entre t e t0
10

1.6.4 Calculo de eAt por diagonalizacao
Usando de novo a Equacao Homogenea e partindo de t0 = 0 entao temos:
x(t) = eAtx(0) (1.48)
Admitindo que a Matriz da Dinamica possui n vectores proprios linearmente independentes entao jasabemos que podemos aplicar a Transformacao com a Matriz Modal (e invertıvel) de modo a:
x(t) = Mz(t) ⇒ z(t) = Λz(t)
Como Λ e diagonal entao existe uma propriedade da soma de series exponenciais que diz:
eΛt = I + Λt+1
2!Λ2t2 + · · · =
eλ1t 0. . .
0 eλnt
(1.49)
E como:
x(t) = Mz(t) = MeΛtz(0) = MeΛtM−1x(0) (1.50)
Vem que:
eAt = MeΛtM−1 (1.51)
1.7 Sistemas Nao Homogeneos
Objectivo: Calculo da resposta no tempo de um SLIT nao homogeneo descrito pelo modelo deestado.
Os Sistemas Nao Homogeneos sao sistemas nos quais o estado nao evolui livremente, isto e, nao eapenas afectado pela dinamica do sistema mas tambem por uma entrada.
No caso de sistemas nao homogeneos a solucao obtem-se da solucao da equacao homogenea tendo emconta a entrada e recorrendo ao Princıpio de Sobreposicao.
Sendo o sistema descrito pela equacao de estado (1.1):
x(t) = Ax(t) + bu(t) x(t0) = x0
A evolucao temporal do estado vem dado por:
x(t) = eA(t−t0)x0︸ ︷︷ ︸Regime Livre
+
∫ t
t0
eA(t−τ)bu(τ)d τ︸ ︷︷ ︸Regime Forcado
(1.52)
Em que se usou a formula da Analise Diferencial chamada Formula das Variacao das Constantes.
11
1.8 Modelo de estado de Sistemas Discretos
Objectivo: Estudo muito abreviado da resposta no tempo de sistemas discretos representados pelomodelo de estado.
Para Sistemas Discretos, a Equacao Homogenea vem dada por:
x(k + 1) = Ax(k) x(k0) = x0 (1.53)
Uma vez mais o estado no instante k esta relacionado com o estado no instante k0 ≤ k por umoperador matricial linear (matriz de transicao de estado). Entao temos:
x(k) = Ak−k0x0 (1.54)
1.8.1 Nao invertibilidade da matriz de transicao no caso discreto
Uma diferenca com consequencias do caso discreto em relacao ao contınuo e que, no caso discreto,a matriz de transicao pode nao ser invertıvel (ao contrario dos sistemas contınuos em que a matriz detransicao e sempre invertıvel). Se a matriz A for singular as suas potencias tambem o serao.
Isto significa que ha sistemas discretos para os quais, sabendo o estado no instante k , nao podemosinferir qual a condicao inicial de onde ele partiu, ao contrario dos sistemas contınuos em que isso e semprepossıvel.
1.8.2 Solucao da equacao nao homogenea (caso discreto)
x(k) = Ak−k0x0︸ ︷︷ ︸Regime Livre
+k−1∑j=k0
Ak−j−1bu(j)
︸ ︷︷ ︸Regime Forcado
(1.55)
Se as condicoes iniciais forem nulas entao:
x(k) = Ak−1bu(0) +Ak−2bu(1) + · · ·+ bu(k − 1) (1.56)
Este resultado pode ser facilmente demonstrado atraves do Princıpio de Sobreposicao.
Conhecida a sequencia de entrada e a condicao inicial do estado, as expressoes anteriores permitemcalcular o estado no final do intervalo de tempo (quer em tempo contınuo, quer discreto).
Pode naturalmente pensar-se no problema inverso. Este sera estudado posteriormente.
12

2 Retroaccao Linear de Variaveis de Estado
2.1 Motivacao para retroaccao linear de variaveis de estado
Objectivo: Motivar o projecto de controladores com base no modelo de estado e apresentar osprincipais problemas que esta abordagem coloca, relacionando-os com os conceitos de controlabilidade eobservabilidade.
A retroaccao linear de todas as variaveis de estado permite aumentar a flexibilidade no projectodo controlador, dado que temos um procedimento sistematico para colocar os polos da cadeia fechada.Tendo o acesso ao estado podemos fazer a sua retroaccao para a entrada, de modo a termos assim ocomportamento desejado para a dinamica do sistema.
Podemos tornar sistemas naturalmente instaveis em sistemas estaveis. Podemos tornar sistemaslentos em sistemas mais rapidos, puxando os polos para a esquerda do Plano Complexo, alterando asua constante de tempo. Tambem podemos alterar o factor de amortecimento de sistemas amortecidos,puxando os polos complexos mais ou menos na direccao do eixo imaginario.
No entanto, algumas questoes importantes podem ser levantadas:
• Acessibilidade do estado
Sera que o estado esta sempre acessıvel? Na realidade o estado nem sempre esta acessıvel paramedida directa, por exemplo devido a limitacoes tecnologicas ou de custo dos sensores. Podeprender-se ainda com o facto de nem sempre o estado ter uma realidade fısica, e como tal naoconsegue sequer ser medido. Esta questao vai estar relacionada com a observabilidade.
• Existencia de solucao das equacoes
Sera que a colocacao dos polos e sempre possıvel? Na maior parte dos sistemas realimentandotodos os estados sim, mas isso depende tambem da entrada. Uma entrada que so actue sobrealguns estados (portanto fraca) e que estes nao tenham uma relacao significativa com outros entaonem sempre consegue controlar o sistema do modo que se quer, e a solucao da colocacao de polosnem sempre existe. Esta questao vai estar relacionada com a controlabilidade.
• A necessidade de uma descricao interna dos sistemas
Ha sistemas complexos que possuem modos da dinamica que nem sempre sao observaveis a olho nu,e portanto uma descricao interna dos mesmos e necessario, de modo a clarificar questoes relativasao cancelamento de polos e zeros.Isto vai conduzir-nos uma vez mais aos conceitos anteriores
Os metodos para o projecto de sistemas de controlo baseados no modelo de estado nasceram nosanos 60 nos USA, associados aos problemas postos pela Engenharia Aeroespacial (a celebre “aposta” deKennedy sobre a ida a Lua data desse perıodo). Tem no entanto raızes mais antigas (e importantes) nostrabalhos de Poincare e Lyapunov (que ja consideravam problemas nao-lineares). Uma boa parte dosfundamentos da teoria do controlo em espaco de estado e devida a R. Kalman (que viu muitos dos seustrabalhos rejeitados em revistas de Electricidade, o que o levou a publicar em revistas de Mecanica).
Na Europa o problema era diferente: Apos a destruicao causada pela II Guerra Mundial a prioridadeia para o desenvolvimento das industrias de bens de consumo. Aqui, ao contrario da industria Aero-espacial, e muito difıcil construir modelos de estado a partir de princıpios basicos, o que levou a ummaior desenvolvimento dos modelos entrada/saıda. Nomes como V. Peterka (na Checoslovaquia, onde aindustria do aco adquiriu grande importancia) ou K. Astrom (na Suecia, com trabalhos ligados a industriado papel) ilustram esta afirmacao.
A partir dos anos 80 compreendeu-se progressivamente melhor (nao sem que antes tivesse havidodebates acesos) que as duas abordagens sao, de facto, as duas faces da mesma moeda, dando pontos devista complementares sobre virtualmente todas as questoes.
13

2.2 Controlabilidade
2.2.1 Definicao de Contrabilidade - Sistemas Contınuos
Dado o Sistema habitual (1.1):
x(t) = Ax(t) + bu(t) x(0) = x0
Sera possıvel, partindo da origem (x(0) = 0), levar o estado a um valor especificado arbitrario porescolha conveniente das entradas? A resposta a esta questao depende do par de matrizes A e b.
Para sistemas contınuos a realizacao de estado contınua diz-se completamente controlavel se:
• Dado um estado inicial na origem (x(0) = 0) e qualquer xf , existir um instante finito tf e umafuncao de entrada u(t), 0 ≤ t ≤ tf tal que x(tf ) = xf .
Para sistemas contınuos a definicao de controlabilidade e equivalente a impor que de qualquerestado se atinja a origem num intervalo de tempo finito por escolha conveniente da entrada. E esta adefinicao dada em [Rugh]. A definicao dada anteriormente e normalmente referida como atingibilidade.Para sistemas contınuos as duas definicoes sao equivalentes mas para sistemas discretos nao.
2.2.2 Criterio de Contrabilidade - Sistemas Contınuos
O sistema contınuo (1.1):
x(t) = Ax(t) + bu(t) x(0) = x0
E completamente controlavel se a Matriz de Controlabilidade tiver caracterıstica (Rank) a ordem oudimensao n = dim(x). A Matriz de Contrabilidade e a seguinte:
C [A, b] =[b | Ab | A2b | · · · | An−1b
](2.1)
Logo para o sistema ser controlavel entao:
car (C [A, b]) = n (2.2)
Em que car(X) e o numero de vectores linearmente independentes de X.
Caso car (C [A, b]) = m < n entao a partir da condicao inicial o sistema so conseguira atingir umsusbespaco Rm, de dimensao m, e contido em Rn.
Imagine-se que n = 3 e m = 2 entao o conjunto de pontos que o sistema consegue atingir no Espacode Estados e um plano. Caso m = 1 entao seria uma recta e m = 0 seria um ponto, i.e., o sistema naosairia da condicao inicial por ser totalmente nao controlavel.
14
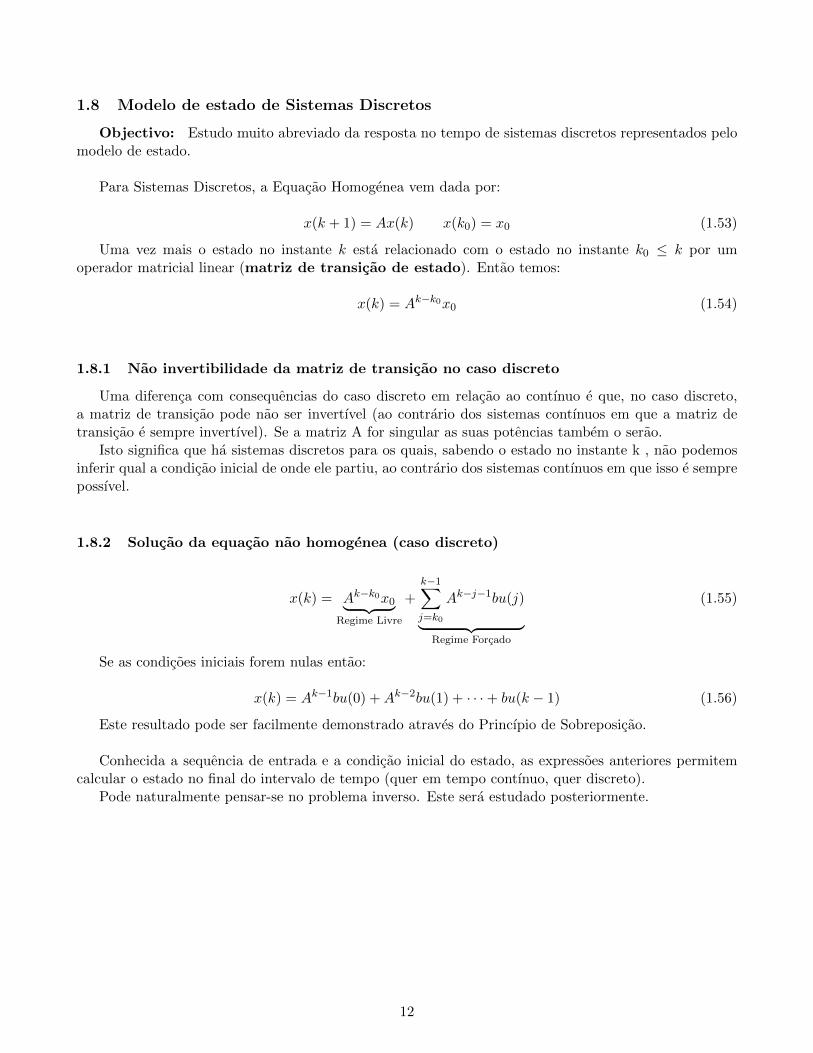
Exemplo: Caso em que n = 2 mas se obtem dois valores proprios iguais (ou seja apenas um vectorproprio linearmente independente) e logo m = 1:
2.2.3 Interpretacao em Termos de Sistemas diagonais (Contınuo)
Considerando agora um sistema diagonal (note-se que se houverem n vectores proprios linearmenteindependentes entao podemos sempre diagonalizar o sistema atraves de uma transformacao) tal que:
z(t) = Λz(t) + bu(t) Λ = diag(λ1, λ2, · · · , λn) (2.3)
Entao usando a expressao (2.1) chegamos a Matriz de Controlabilidade:
C[Λ, b] =
b1 λ1b1 λ2
1b1 · · · λn−11 b1
b2 λ2b2 λ22b2 · · · λn−1
2 b2...
......
......
bn λnbn λ2nbn · · · λn−1
n bn
(2.4)
Para que esta realizacao de estado seja controlavel, tem de ser bi 6= 0∀i para que nenhuma linha seanule e λi 6= λj∀i 6=j ainda para que nao haja linhas proporcionais.
O sistema diagonal tem um diagrama de blocos do tipo:
Logo:• Se houver bi nulo, a entrada nao afecta o respectivo estado, que nao saira da origem.• Se houver valores proprios iguais, os correspondentes estados serao sempre proporcionais.
15

2.2.4 Definicao de Contrabilidade - Sistemas Discretos
Dado o Sistema habitual para o modelos discreto:
x(k + 1) = Ax(k) + bu(k) x(0) = x0
• A realizacao de estado de ordem n diz-se completamente controlavel se e so se para uma condicaoinicial x(0) = 0 e xf qualquer, existe N finito e uma sequencia de entradas:
u(0), u(1), · · · , u(N − 1)
Tal quex(N) = xf
2.2.5 Criterio de Contrabilidade - Sistemas Discretos
A semelhanca dos Sistemas Contınuos, o Sistema Discreto:
x(k + 1) = Ax(k) + bu(k) x(0) = x0
E completamente controlavel se a Matriz de Controlabilidade tiver caracterıstica (Rank) a ordem oudimensao n = dim(x). A Matriz de Contrabilidade e a seguinte:
C [A, b] =[b | Ab | A2b | · · · | An−1b
](2.5)
Logo para o sistema ser controlavel entao:
car (C [A, b]) = n
Em que car(X) e o numero de vectores linearmente independentes de X.
2.2.6 Demonstracao do Criterio de Contrabilidade (Discreto)
Pela formula de variacao das constantes e tendo em conta que a condicao inicial e nula, o estado aofim de N ≥ n passos vem dado por:
x(N) = AN−1bu(0) +AN−2bu(1) + · · ·+ bu(N − 1) (2.6)
Entao os pontos do espaco de estados que podem ser atingidos a partir da origem sao aqueles que sepodem ser obtidos como combinacao linear dos vectores:
b, Ab, · · · , AN−2b, aN−1b (2.7)
E se seguirmos o Lema (2.9), entao o subespaco gerado por estes vectores e igual ao subespaco geradopelos vectores:
b, Ab, · · · , An−2b, an−1b (2.8)
Que sao os vectores coluna da matriz de controlabilidade.
Sendo assim, para provar o Criterio precisamos primeiro de provar o Lema. O que o Lema diz e queos vectores (2.7) e (2.8) geram o mesmo subespaco.
16

• Lema
∀N≥n ⇒ car[b | Ab | · · · | An−1b | · · · |AN−1b
]= car
[b | Ab | · · · | An−1b
](2.9)
Como tal qualquer ponto x(N) sera atingido no instante N apenas se os vectores (2.8) foremlinearmente independentes.
O Lema pode ser provado tendo em conta o Teorema de Cailey-Hamilton que nos diz:
Teorema de Cailey-Hamilton: Seja a(s) = det(sI −A) = sm + as−11 + · · ·+ an o polinomio
caracterıstico da matriz da dinamica A, entao:
An + a1An−1 + · · ·+ anI = 0 (2.10)
Ou seja, podemos multiplicar a direita e esquerda por b e obter:
Anb+ a1An−1b+ · · ·+ anb = 0 (2.11)
O que significa que Anb e combinacao linear de a1An−1b + · · · + anb. Assim sendo, por inducao
podemos provar para para i ≥ n que o mesmo se verifica, e portanto para N ≥ n podemos afirmarque os vectores (2.8) sao combinacoes lineares de (2.7) e geram o mesmo subespaco.
2.2.7 Controlabilidade para a origem e Controlabilidade
Nos sistemas discretos os conceitos de controlabilidade para a origem (ser capaz de atingir a origem apartir de qualquer estado) e controlabilidade (ser capaz de atingir a origem a partir de qualquer estado)nao sao equivalentes. Isto leva a que a controlabilidade como a definimos seja tambem designada poratingibilidade.
Nos sistemas contınuos os dois conceitos sao equivalentes. Repare-se que o criterio relativo a carac-terıstica da matriz de controlabilidade se refere a atingibilidade (=controlabilidade) e nao a controlabili-dade para a origem.
2.2.8 Influencia de uma transformacao linear do estado na Controlabilidade
Dado o sistema habitual (1.1):
x(t) = Ax(t) + bu(t) x(0) = x0
y(t) = Cx(t)
Pode-se fazer uma Transformacao de Coordenadas:
x(t) = Tz(T ) ⇒ x(t) = T z(t)
E chegar a:
z(t) =T−1ATz(t) + Tbu(t) z(0) = T−1x(0) = T−1x0 = z0
y(t) =CTz(t)
17

Assim sendo, nas coordenadas z, a Matriz de Controlabilidade vem dada por:
C[Az, bz] =[T−1b | T−1ATT−1b | · · · | (T−1AT )n−1T−1b
](2.12)
Simplificando e tendo em conta que:
(T−1AT )n−1T−1 = T−1ATT−1AT · · ·T−1AT︸ ︷︷ ︸n−1 vezes
T−1 = T−1An−1
Entao:
C[Az, bz] =[T−1b | T−1Ab | · · · |T−1An−1b
](2.13)
E como T tem caracterıstica n pode sair e obtemos:
C[Az, bz] = T−1[b | Ab | · · · |An−1b
](2.14)
Ou seja:
C[Az, bz] = T−1C[Ax, bx] (2.15)
Logo podemos escrever:
T = C[Ax, bx]C−1[Az, bz] (2.16)
2.2.9 Forma Canonica do Controlador
Analisando o obtido no ponto anterior entao tendo:
• Uma qualquer representacao em espaco de estados, que permite obter C[Ax, bx] e a Funcao deTransferencia G(s)
Podemos obter a Matriz de Mudanca de Coordenadas T que permite passar qualquer representacao emespaco de estados para a representacao na forma canonica do controlador, que torna a RLVE trivialmentemais facil.
A funcao de transferenciaG(s) permite obter C[Axk , bxk ] (em que xk retrata o estado na forma canonicado controlador) e e do tipo:
G(s) =b1s
n−1 + b2sn−2 + · · ·+ bn
sn + a1sn−1 + · · ·+ an(2.17)
O seu modelo em espaco de estados usando as variaveis de fase do controlador vem:
xk(t) =
−a1 −a2 · · · −an
1 0 · · · 0. . . 0 0
0 1 0
xk(t) +
10...0
u(t) (2.18)
y(t) = [ b1 b2 · · · bn ]xk(t) (2.19)
18

Assim sendo a Matriz de Contrabilidade no estado do controlador (sem demonstracao) vem dada por:
C[Axk , bxk ] =
1 a1 · · · an−1
0 1. . .
...
0 0. . . a1
0 0 0 1
−1
(2.20)
E assim sendo a Matriz de Mudanca de Coordenadas entre qualquer modelo de estado que tem umafuncao de transferencia G(s) (unica e independente do modelo escolhido) na forma (2.17) e o modelo deestados na forma do controlador vem dada por:
T = C[Ax, bx]
1 a1 · · · an−1
0 1. . .
...
0 0. . . a1
0 0 0 1
(2.21)
Exemplo: Para n = 3, resulta uma funcao de transferencia G(s) do tipo:
G(s) =b1s
2 + b2s+ b3s3 + a1s2 + a2s+ a3
O Diagrama de Blocos e do tipo:
E a Matriz de mudanca de coordenadas para a forma do controlador e:
T = C[Ax, bx]
1 a1 a2
0 1 a1
0 0 1
x(t) = Txc(t)
19

2.3 Observabilidade
2.3.1 Definicao de Observabilidade - Sistemas Contınuos
Dado a realizacao de estado habitual (1.1):
x(t) = Ax(t) + bu(t) x(0) = x0
Sera possıvel determinar a condicao inicial x0 (e portanto x(t)forallt) por observacao da saıda? Aresposta a esta questao depende do par A, C.
Uma outra questao relacionada e: Como estimar o estado a partir das observacoes da saıda?
Para sistemas contınuos a realizacao de estado contınua diz-se completamente observavel se:
• Existir um tempo finito t1 : 0 < t1 < ∞ tal que a saıda y(t) para 0 ≤ t ≤ t1 e suficiente paradeterminar a condicao inicial do estado, x(0).
2.3.2 Criterio de Observabilidade - Sistemas Contınuos
O sistema contınuo (1.1):
x(t) = Ax(t) + bu(t) x(0) = x0
E completamente observavel se a Matriz de Observabilidade tiver caracterıstica (Rank) a ordem oudimensao n = dim(x). A Matriz de Observabilidade e a seguinte:
O [A,C] =
CCA
...CAn−1
(2.22)
Logo para o sistema ser controlavel entao:
car (O [A,C]) = n (2.23)
Em que car(X) e o numero de vectores linearmente independentes de X.
2.3.3 Interpretacao em termos de sistemas diagonais
Considerando agora um sistema diagonal , equacao (2.3) (note-se que se houverem n vectores proprioslinearmente independentes entao podemos sempre diagonalizar o sistema atraves de uma transformacao),tal que:
z(t) = Λz(t) + bu(t) Λ = diag(λ1, λ2, · · · , λn)
Entao usando a expressao (2.22) chegamos a Matriz de Observabilidade:
O[A,C] =
c1 c2 · · · cnc1λ1 c2λ2 · · · cnλnc1λ
21 c2λ
22 · · · cnλ
2n
......
......
c1λn−11 c2λ
n−12 · · · cnλ
n−1n
(2.24)
Para que esta realizacao de estado seja observavel, tem de ser ci 6= 0∀i para que nenhuma coluna seanule e λi 6= λj∀i 6=j ainda para que nao haja colunas proporcionais.
20

2.4 Influencia de uma transformacao linear do estado na Observabilidade
Dado o sistema habitual (1.1):
x(t) = Ax(t) + bu(t) x(0) = x0
y(t) = Cx(t)
Pode-se fazer uma Transformacao de Coordenadas:
x(t) = Tz(T ) ⇒ x(t) = T z(t)
E chegar a:
z(t) =T−1ATz(t) + Tbu(t) z(0) = T−1x(0) = T−1x0 = z0
y(t) =CTz(t)
Assim sendo, nas coordenadas z, a Matriz de Observabilidade vem dada por:
O[Az, Cz] =
CT
CTT−1AT...
CT (T−1AT )n−1
(2.25)
Simplificando e tendo em conta que:
T (T−1AT )n−1 = T T−1ATT−1AT · sT−1AT︸ ︷︷ ︸n−1 vezes
= TAn−1
Entao:
O[Az, Cz] =
CTCAT
...CAn−1T
(2.26)
E como T tem caracterıstica n pode sair e obtemos:
O[Az, Cz] =
CCA
...CAn−1
T (2.27)
Ou seja:
O[Az, Cz] = O[Ax, Cx]T (2.28)
Logo podemos escrever:
T = O−1[Ax, Cx]O[Az, Cz] (2.29)
21

2.4.1 Forma Canonica do Observador
Analisando o obtido no ponto anterior entao tendo:
• Uma qualquer representacao em espaco de estados, que permite obter O[Ax, Cx] e a Funcao deTransferencia G(s)
Podemos obter a Matriz de Mudanca de Coordenadas T que permite passar qualquer representacaoem espaco de estados para a representacao na forma canonica do observador, que torna o calculo doganho L do observador assimptotico trivialmente mais facil.
A funcao de transferencia G(s) permite obter O[AxO , CxO ] (em que xO retrata o estado na formacanonica do observador) e e do tipo:
G(s) =bs1n− 1 + b2s
n−2 + · · ·+ bm
sn + an−11 + · · ·+ an
(2.30)
O seu modelo em espaco de estados usando as variaveis de fase do observador bem:
xO(t) =
−a1 1 0
−a2 0. . .
...... 0 1
−an 0 0 0
xO(t) +
b1b2...bn
u(t) (2.31)
y(t) =[ 1 0 · · · 0]xO(t) (2.32)
Assim sendo a Matriz de Observabilidade no estado do observador (sem demonstracao) vem dada por:
O[AxO , CxO ] =
1 0 0 0a1 1 0 0...
. . .. . . 0
an−1 · · · a1 1
−1
(2.33)
E assim sendo a Matriz de Mudanca de Coordenadas entre qualquer modelo de estado que tem umafuncao de transferencia G(s) (unica e independente do modelo escolhido) na forma (2.17) e o modelo deestados na forma do observador vem dada por:
T =
1 0 0 0a1 1 0 0...
. . .. . . 0
an−1 · · · a1 1
−1
O−1[Ax, Cx] =
O[Ax, Cx]
1 0 0 0a1 1 0 0...
. . .. . . 0
an−1 · · · a1 1
−1
(2.34)
22

Exemplo: Para n = 3, resulta uma funcao de transferencia G(s) do tipo:
G(s) =b1s
2 + b2s+ b3s3 + a1s2 + a2s+ a3
O Diagrama de Blocos e do tipo:
E a Matriz de mudanca de coordenadas para a forma do observador e:
T =
O[Ax, bx]
1 0 0a1 1 0a2 a1 1
−1
x(t) = TxO(t)
23

2.5 Controlabilidade e Observabilidade Conjunta
Continuando com a nossa intuicao acerca de sistemas diagonais (equacao (2.3)):
z(t) = Λz(t) + bu(t) Λ = diag(λ1, λ2, · · · , λn)
Podemos chegar a funcao de transferencia do mesmo:
H(s) = C(sI −A)−1b = [ c1 · · · cn ]
1
s− λ10
. . .
01
s− λn
b1
...bn
(2.35)
Ou seja:
H(s) =n∑i=1
cibis− λi
(2.36)
O somatorio tera menos de n termos se houver um i tal que:
• bi = 0 ⇒ Perda de Controlabilidade
• ci = 0 ⇒ Perda de Observabilidade
• λi repetido ⇒ Perda de Controlabilidade e Observabilidade
Conclusao: Havera cancelamento de polos e zeros se o sistema nao for controlavel ou observavel.Este facto, que demonstramos para sistemas diagonais, e valido em geral.
2.5.1 Decomposicao de Kalman
Como vimos o sistema pode ser controlavel e/ou observavel ou nenhuma das duas. Como tal existemquatro tipos tipos de sistemas. O que a decomposicao de Kalman diz e que, em geral, e possıvel levarum sistema a representacao de estado:
x(t) =
A11 A12 0 00 A22 0 0A31 A32 A33 A34
0 A42 0 A44
x(t) +
b10b30
u(t) (2.37)
y(t) = [ c1 c2 0 0 ]x(t) (2.38)
Em que o vector de estados e a composicao dos 4 possıveis tipos de estados:
x(t) = [ xTOC xTOC
xTOC
xTOC
]T (2.39)
E portanto, se fizermos a funcao de transferencia, vem que:
G(s) = c1(sI −A11)−1b1 (2.40)
2.5.2 Rescontructibilidade e Detectibilidade
Dois conceitos importantes relacionados com a observabilidade sao:
• Se a partir das observacoes da saıda for possıvel obter o “ultimo” valor do estado (mas nao neces-sariamente a condicao inicial), a realizacao diz-se reconstruıvel.
• Se a parte nao observavel do estado for assimptoticamente estavel, a realizacao diz-se detectavel.
24

2.6 Realimentacao Linear de Variaveis de Estado
Objectivo: Projectar um regulador de colocacao de polos por realimentacao linear de todas asvariaveis de estado. Demonstracao da formula de Bass-Gura.
2.6.1 Projecto de um regulador por RLVE
Admite-se modelo em espaco de estados habitual:
x(t) = Ax(t) + bu(t) x(0) = x0
y(t) = Cx(t)
Em que se considera que o sistema e controlavel, observavel e com o polinomio caracterısticoem Malha Aberta:
a(s) = det(sI −A) = sn + a1sn−1 + · · ·+ an (2.41)
• Problema de Seguimento de Referencia
Uma Lei de Controlo que permite resolver o problema do seguimento de referencia e:
u(t) = r(t)−Kx(t) (2.42)
Assim sendo o sistema em Malha Fechada fica:
x(t) = (A− bK)x(t) + br(t) x(0) = x0
y(t) = Cx(t) (2.43)
E como tal o Diagrama de Blocos e:
Este problema e um pouco mais complexo que o da regulacao pelo que sera visto mais a frente.
• Problema de Regulacao
Um problema mais simples que o do seguimento de referencia e o da regulacao. Para Lei de Controlovamos admitir uma simples retroaccao linear (multiplicada por um ganho K) de todos os estados, de modoa que a entrada fique definida em funcao do estado:
u(t) = −Kx(t) (2.44)
Em que o sinal negativo e puramente convencional.
25

Assim sendo, em Malha Fechada temos:
x(t) = (A− bK)x(t) x(0) = x0
y(t) = Cx(t) (2.45)
O objectivo desejado para o controlador e que seja capaz de respeitar a dinamica pedida, i.e., desejamosque o polinomio caracterıstico do sistema em malha fechada seja:
α(s) = sn + α1sn−1 + · · ·+ αn (2.46)
E como tal o Diagrama de Blocos e:
Dada a realimentacao de estado entao o polinomio caracterıstico do sistema passa a ser:
ak(s) = det(sI −A+ bK) = sn + a1ksn−1 + · · ·+ ank (2.47)
Em que se usa o subscrito k para controlador.
Resumo:
Temos assim 3 polinomios caracterısticos diferentes:
• Sistema em Malha Aberta (Traduz a dinamica do sistema sem Controlo)
a(s) = det(sI −A) = sn + a1sn−1 + · · ·+ an
• Especificado (Traduz a dinamica pretendida para a cadeia fechada)
α(s) = sn + α1sn−1 + · · ·+ αn
• Sistema em Malha Fechada (Traduz a influencia do Controlador)
ak(s) = det(sI −A+ bK) = sn + a1ksn−1 + · · ·+ ank
Assim sendo para resolver o problema e necessario igualar as equacoes (2.46) e (2.47), ou seja:
α(s) = ak(s) (2.48)
26

2.6.2 Metodo dos Coeficientes Indeterminados
Uma forma de resolver esta equacao corresponde a igualar os coeficientes dos monomios do mesmograu em ambos os polinomios. Assim obtem-se o sistema de equacoes lineares verificado pelo ganho:
a1k = α1
...ank = αn
(2.49)
Este sistema tem solucao quando o par (A, b) for controlavel.
2.6.3 Formula de Bass-Gura para o calculo dos ganhos do Controlador
Uma outra forma de obter os ganhos automaticamente e a chamada formula de Bass-Gura.Esta formula permite o posicionamento arbitrario dos polos da cadeia fechada caso o par (A, b) seja
controlavel. Nestas condicoes o vector de ganhos e calculado por:
K = (α− a)M−TC−1(A, b) (2.50)
Em que C−1(A, b) e a Matriz de Controlabilidade (2.4) e:
α = [ α1 α2 · · · αn ]
a = [ a1 a2 · · · an ]M =
1 0 · · ·
a1 1. . .
......
. . .. . . 0
an−1 · · · a1 1
(2.51)
Uma das consequencias iniciais da formula de Bass-Gura e:
• O ganho do controlador e proporcional a diferenca entre α e a.
Isto significa que quanto mais afastados estejam os polos da cadeia fechada e os polos da dinamicapretendida, maior vai ser o ganho do controlador. Portanto se pedirmos uma dinamica bastante rapidaa um sistema que era relativamente lento poderemos correr o risco de usar um K demasiado elevado quesature a entrada.
Esta e a racao pela qual sistemas fracos nao conseguem ficar imediatamente bons pela RLVE sem quehaja melhoramento das caracterısticas de entrada do sistema.
2.6.4 Forma Canonica do Controlador
Uma outra forma (trivial) de calcular o ganho do controlador, K, e colocar o sistema na sua formacanonica. Nesta forma, uma funcao de transferencia do tipo:
G(S) =b1s
2 + b2s+ b3s3 + a1s2 + a2s+ a3
(2.52)
(Em que se considerou n = 3 mas pode ser generalizado)
27

Este sistema na forma canonica tem o diagrama de blocos a esquerda, sendo que o desejado seria odiagrama a direita:
Para tal podemos fazer uma realimentacao para a entrada de todos os estados corresponde a umsistema em malha fechada com o diagrama de blocos da figura:
O permite fazer uma facil comparacao e obter o ganho na forma canonica do controlador:
Kc = α− a (2.53)
Assim sendo para resolver o problema basta simplesmente modelar o sistema em espaco de estadosna forma canonica do controlador. Para tal e necessario recorrer a uma transformacao do tipo:
x(t) = Txc(t) T = C(A, b)MT (2.54)
Podemos retirar o ganho na forma canonica como vimos em (2.53) e voltar de novo para a formaoriginal invertendo ou seja:
K = KcT−1 (2.55)
28

Este raciocınio corresponde a fazer:
2.6.5 Formula de Ackermann
Alternativamente, o vector de ganhos do controlador pode ser calculado pela formula de Ackermann,que nao necessita do conhecimento explıcito do polinomio caracterıstico do sistema em cadeia aberta:
A formula de Ackermann e:
K = [ 0 · · · 0 1 ]C−1(A, b)α(A) (2.56)
Em que:
• [ 0 · · · 0 1 ]C−1(A, b) e a ultima linha da Matriz de Controlabilidade
• α(A) e o polinomio caracterıstico desejado em que s = A, ou seja α(A) = An +α1An−1 + · · ·+αnI
29
2.7 Observadores Assimptoticos
Objectivo: Projecto de observadores assimptoticos de ordem completa.
Ja vimos, na subseccao anterior, como definir os ganhos do controlador. O problema prende-se agoracom o facto de nem sempre o estado do sistema estar acessıvel, e como tal e necessario usar uma estimativadesse mesmo estado para o poder controlar.
Problema: Estimacao de Estado
Dada a realizacao de estado {A, b, C} (1.1) de um sistema:
x(t) = Ax(t) +Bu(t) x(0) = x0
y(t) = Cx(t)
Determinar uma estimativa x(t) de x(t) por observacao da entrada e da saıda. Esta estimativa deveser recursiva, i.e. definida por uma equacao diferencial cuja integracao “produza” x(t) para todo o t.Podemos assim definir o erro de estimacao:
x(t) = x(t)− x(t) (2.57)
E o nosso objectivo e que o erro tenda para 0.
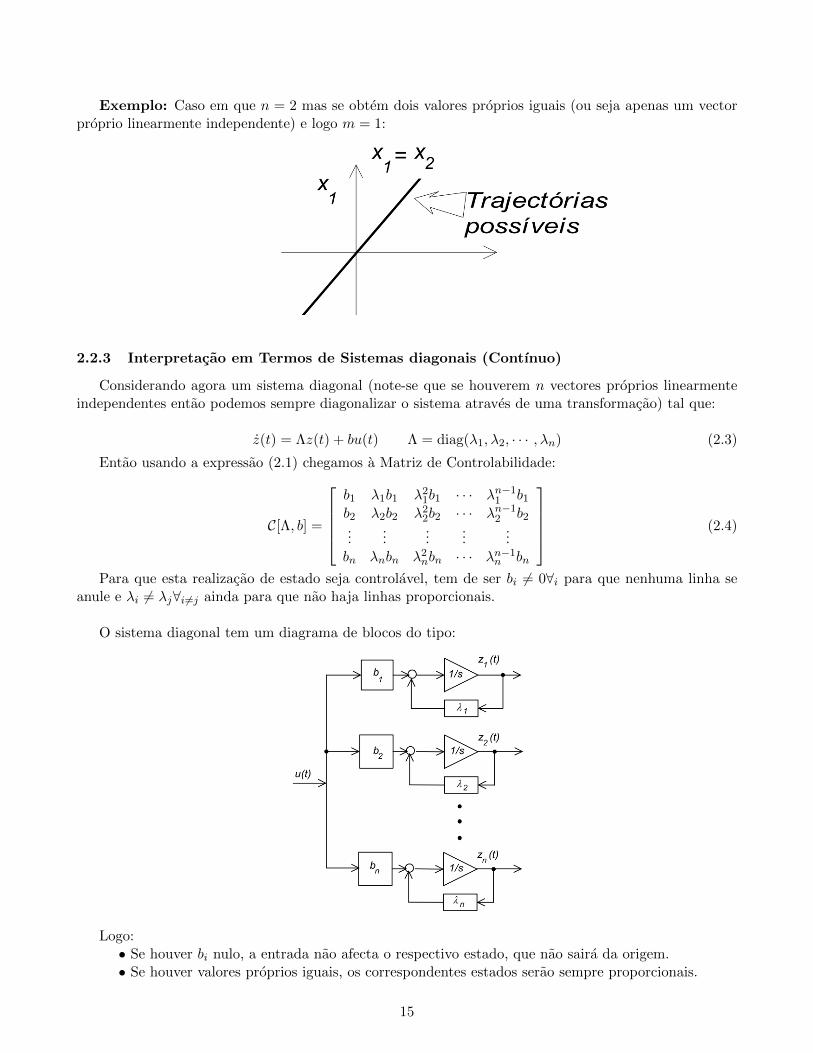
2.7.1 1a Solucao - Observador em Cadeia Aberta
Usando uma replica exacta do sistema em cadeia aberta (apenas parte da dinamica e entrada, semusar a saıda) podemos obter uma estimativa do estado, pois temos u(t).
Erro de Estimacao no observador em cadeia aberta
As equacoes da dinamica serao entao:
x(t) =Ax(t) + bu(t)
ˆx(t) =Ax(t) + bu(t) (2.58)
Assim sendo, para este tipo de observador, o erro de estimacao seguira a equacao da dinamica:
˙x(t) =x(t)− ˆx(t) = Ax(t) + bu(t)−Ax− bu(t) ⇔˙x(t) =Ax(t) (2.59)
30

Conclusao: Com o observador em cadeia aberta, o erro de estimacao do estado apenas tende parazero para sistemas estaveis em cadeia aberta e com uma taxa que depende dos valores proprios de A .
Ou seja, podemos ter sistemas dinamicos instaveis que como tal sejam impossıveis de observar pois oerro de observacao nunca tende para 0. E podemos ter tambem sistemas dinamicos estaveis mas lentose como tal o erro de estimacao tende tambem lentamente para 0, o que nao e exequıvel pois sistemasque se prezem tem que ter a dinamica da observacao mais rapida que a dinamica do proprio sistema, demodo a ser possıvel um controlo eficaz.
2.7.2 2a Solucao: Observador em Cadeia Fechada (Assimptotico)
Usando nao so a entrada mas tambem a saıda podemos entao obter a diferenca entre a saıda estimadae observada (real), o chamado erro de estimacao, e usa-la para melhorar a dinamica do erro de estimacao.
Erro de Estimacao no observador em cadeia fechada (assimptotico)
As equacoes da dinamica serao entao:
x(t) =Ax(t) + bu(t)
ˆx(t) =Ax(t) + bu(t) + L [y(t)− Cx(t)]︸ ︷︷ ︸Termo de correccao
(2.60)
Em que dim(L) =dim(x).
Como tal, quando a estimativa for correcta vem que y(t) = Cx(t) pelo que a dinamica da real e daestimacao serao exactamente iguais (seguiram um observador do tipo em cadeia aberta (2.58). O errosera:
˙x(t) = x(t)− ˆx(t) = Ax(t) + bu(t)−Ax− bu(t)− L[
Cx(t)︷︸︸︷y(t) −Cx(t)]
˙x(t) = [A− LC]x(t) (2.61)
31

Dinamica do erro do observador assimptotico
A equacao de dinamica do erro de observacao (2.61) e:
˙x(t) = [A− LC]x(t)
Conclusao: Com o observador em cadeia fechada, o erro de estimacao do estado ja nao depende dosvalores proprops de A, mas sim de A− LC. E portanto, se o par (A,C) for observavel podemos colocararbitrariamente os polos (valores proprios) da matriz A−LC de modo a termos uma dinamica pretendidapara o erro de observacao.
Pelo facto de (para realizacoes observaveis) o ganho L poder ser dimensionado por forma a que o errotenda assimptotiocamente para zero, este tipo de observadores diz-se “assimptotico”.
Nota: Este tipo de observador e uma versao simplificada daquele que e um dos observadores maisimportantes de toda a teoria de controlo, o chamado Filtro de Kalman, desenvolvido na a meio doseculo XX e que permitiu a viagem do homem a Lua.
2.7.3 Escolha dos valores proprios da dinamica do erro
A escolha dos valores proprios de (A− LC) resulta do seguinte compromisso:
• Nao podem ser muito pequenos, para que o erro nao tenda lentamente para zero;
• Nao podem ser muito grandes pois, se o estimador for muito rapido, pode ser “enganado” pelos errosde modelacao. Em particular, o ganho de malha resultante quando se fecha a cadeia realimentandoas estimativas do estado deve respeitar a condicao de estabilidade robusta.
2.7.4 Metodo do Coeficientes Indeterminados
Temos assim uma equacao que permite verificar como se comporta a dinamica do erro:
˙x(t) = (A− LC)x(t)
Podemos assim de definir um polinomio caracterıstico desejado, que traduz a dinamica do erro deestimacao, sendo ele:
α(s) = sn + αn−11 + · · ·+ αn (2.62)
E compara-lo com o polinomio caracterıstico da dinamica do erro de observacao:
aO(s) = det(sI −A− CL) = sn + a1Os
n−1 + · · ·+ anO (2.63)
E portanto podemos usar o metodo dos coeficientes indeterminados para resolver o sistema que cor-responde a igualar os dois polinomios, ou seja:
aO(s) = α(s) ⇔
a1O = α1
...anO = αn
(2.64)
Este sistema tem solucao quando o par (A,C) for observavel.
32

2.7.5 Formula de Bass-Gura para o calculo dos ganhos do Observador
Uma outra forma de obter os ganhos automaticamente e a chamada formula de Bass-Gura. Ja a vimospara o posicionamento arbitrario de polos da cadeia fechada acerca da RLVE mas tambem funciona parao caso de ganho do observador. Funciona caso o par (A,C) seja controlavel. Nestas condicoes o vectorde ganhos e calculado por:
LT = (α− a)MO[A,C] (2.65)
Em que O[A,C] e a Matriz de Observabilidade (2.22) e:
α = [ α1 α2 · · · αn ]
a = [ a1 a2 · · · an ]M =
1 0 · · ·
a1 1. . .
......
. . .. . . 0
an−1 · · · a1 1
(2.66)
Uma das consequencias iniciais da formula de Bass-Gura e:
• O ganho do observador e proporcional a diferenca entre α e a.
No entanto, aqui o erro pode ter a dinamica tao rapida como se pretenda.
2.7.6 Forma Canonica do Observador
Uma outra forma (trivial) de calcular o ganho do observador L e colocar o sistema na sua formacanonica do observador. Nesta formula, tendo em conta o Modelo em espaco de estados do observador,a dinamica do erro vem:
˙x(t) =
−a1 1 0
−a2 0. . .
...... 0 1
−an 0 0 0
−L1
L2...Ln
[ 1 0 · · · 0 ]
x(t) =
−a1 − L1 1 0
−a2 − L2 0. . .
...... 0 1
−an − Ln 0 0 0
x(t) (2.67)
E cujo polinomio caracterıstico e :
det(sI −A+ LC) = s.+ (a1 + L1)sn−1 + · · ·+ (an − Ln) (2.68)
O que permite obter o ganho na forma do observador facilmente usando:
LTO = (α− a) (2.69)
Assim sendo para resolver o problema basta simplesmente modelar o sistema em espaco de estadosna forma canonica do controlador. Para tal e necessario recorrer a uma transformacao do tipo:
x(t) = Txc(t) T = (MO[A,C])−1 (2.70)
Podemos retirar o ganho na forma canonica e voltar de novo para a forma original invertendo ou seja:
L = LOT−1 (2.71)
33

2.8 Teorema de Separacao
Objectivo: Mostrar que o observador e o controlador por realimentacao da estimativa do estadopodem ser projectados independentemente.
Na subseccao de Realimentacao Linear de Variaveis de Estado (2.6) vimos que tendo acesso a todosos n estados de um sistema entao podemos projectar um controlador usando a realimentacao dos mesmoscom um ganho linear para a entrada, de modo a obtermos a dinamica pretendida para o sistema emmalha fechada. Quando o estado nao esta acessıvel para medida directa, uma ideia natural consiste emrealimentar a estimativa produzida por um Observador Assimptotico do tipo do discutido na subseccaoanterior (2.7). Juntando as duas ideias tem-se entao a estrutura do compensador (controlador) (a maneiracorrecta de introduzir a referencia sera discutida posteriormente):
Sistema:
x(t) = Ax(t) + bu(t) x(0) = x0
y(t) = Cx(t) (2.72)
Controlador (Lei de Controlo):
u(t) = −Kx(t) (2.73)
Observador:
˙x(t) = Ax(t) + bu(t) + L[y(t)− Cx(t)] (2.74)
Assim sendo, o sistema (compensado) e de ordem 2n.
2.8.1 Teorema de Separacao
Segundo o Teorema da Separacao, o polinomio caracterıstico do sistema global em cadeia fechada(sistema em cadeia aberta e observador, com realimentacao da estimativa do estado) e o produto dospolinomios caracterısticos de (A− bK) e de (A− LC).
Este teorema diz-nos que podemos projectar o vector de ganhos K como se realimentassemos o estadoe nao a sua estimativa, e o vector de ganhos do observador L como se estimassemos o estado em cadeiaaberta. O observador e o controlador podem pois ser projectados separadamente.
Nota sobre o Teorema de Separacao: Em geral, para sistemas nao lineares, o controlador e oobservador nao podem ser projectados separadamente. Isto acontece porque a variavel de controlo temum efeito chamado dual: Por um lado, permite efectuar a accao de regulacao da saıda; por outro ladoproporciona a excitacao suficiente para se estimar o estado. Estes dois efeitos conflituam e a escolha docontrolo deve ser feito como um compromisso entre ambos. O efeito de dualidade e conhecido (no ambitodo Controlo Adaptativo) desde os anos 50, pelos trabalhos de Feld’baum. No caso linear, o conflito naoexiste, tendo lugar o teorema de separacao. Ha classes de sistemas nao lineares para os quais e possıveldemonstrar “teoremas de separacao”. Isto constitui um tema de investigacao actual.
34

2.8.2 Demonstracao do Teorema da Separacao
Juntando as equacoes (2.72), (2.73) e (2.74) obtem-se:
x(t) =Ax(t)− bKx(t) (2.75)
˙x(t) =LCx(t) + (A− LC − bK)x(t) (2.76)
Ou seja o sistema completo e de ordem 2n sendo n para o semi estado x(t) e n para o x(t).
Designando o estado global X entao a matriz da dinamica do mesmo tem todas as entradas preen-chidas, pelo que o calculo do seu determinante (polinomio caracterıstico) nao e assim tao trivial.
Trabalhando antes com o erro de estimacao, i.e., x(t) = x(t)− x(t) e nao com a estimativa do estadopodemos facilitar o calculo do seu determinante. Isto corresponde a fazer uma transformacao invertıvelde coordenadas no estado, pelo que os valores proprios do sistema global nao sao alterados. Subtraindoas duas equacoes anteriores, obtem-se:
˙x(t) = (A− LC)x(t) (2.77)
E portanto o sistema global e descrito por:
x(t) =(A− bK)x(t) + bKx(t) (2.78)
˙x(t) =(A− LC)x(t) (2.79)
Podemos entao escrever o estado total com dimensao 2n e como tal:
X(t) =
[x(t)˙x(t)
]=
[(A− bK) bK
0 (A− LC)
]︸ ︷︷ ︸
AX
[x(t)x(t)
](2.80)
Em que AX e a matriz da dinamica do sistema total.
A matriz AX e uma matriz triangular por blocos, como tal a matriz (sI −AX) tambem o sera. Vemda algebra que o determinante de matrizes triangulares por blocos e o produto dos determinantes dasmatrizes na diagonal principal.
Assim sendo:
det(sI −AX) = det(sI −A+ bK)︸ ︷︷ ︸controlador
det(sI −A+ LC)︸ ︷︷ ︸observador
(2.81)
Conclusao: As frequencias naturais agrupam-se em dois tipos de termos:
• Uma parte dependem apenas do ganho K do controlador, como se fosse feita uma retroaccao doestado e nao da sua estimativa.
• A outra parte depende apenas do ganho L do observador, como se o controlador estivesse ausente.
35
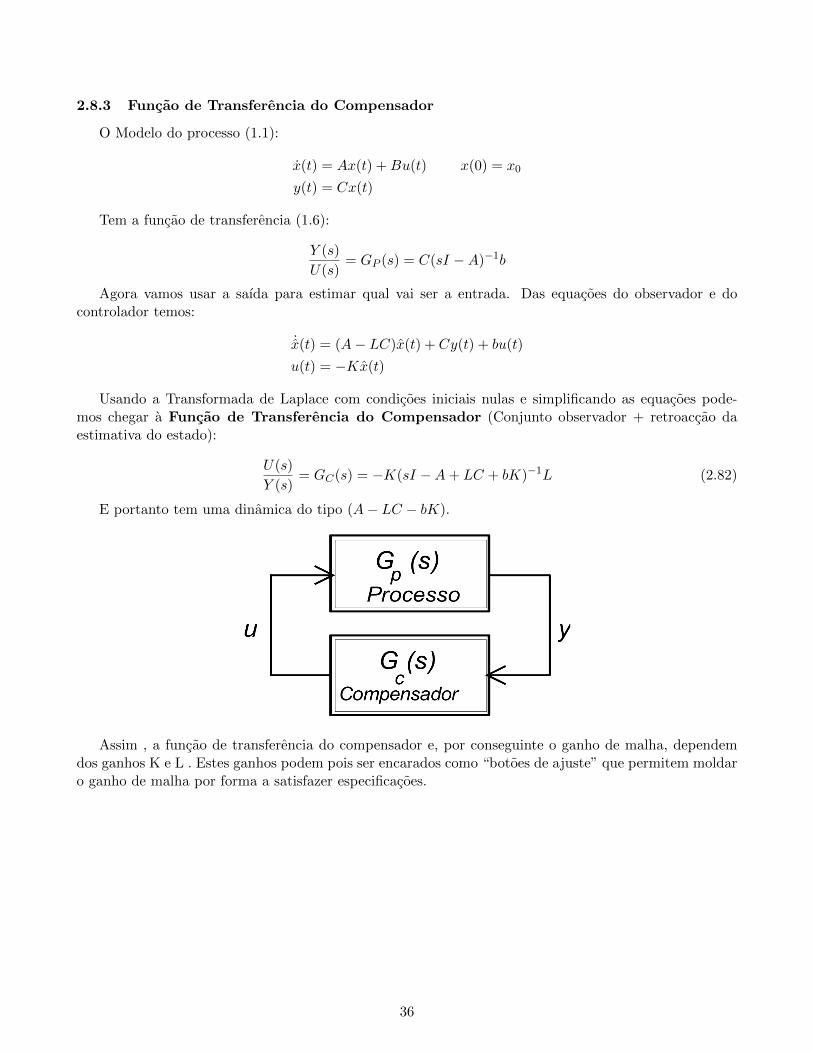
2.8.3 Funcao de Transferencia do Compensador
O Modelo do processo (1.1):
x(t) = Ax(t) +Bu(t) x(0) = x0
y(t) = Cx(t)
Tem a funcao de transferencia (1.6):
Y (s)
U(s)= GP (s) = C(sI −A)−1b
Agora vamos usar a saıda para estimar qual vai ser a entrada. Das equacoes do observador e docontrolador temos:
˙x(t) = (A− LC)x(t) + Cy(t) + bu(t)
u(t) = −Kx(t)
Usando a Transformada de Laplace com condicoes iniciais nulas e simplificando as equacoes pode-mos chegar a Funcao de Transferencia do Compensador (Conjunto observador + retroaccao daestimativa do estado):
U(s)
Y (s)= GC(s) = −K(sI −A+ LC + bK)−1L (2.82)
E portanto tem uma dinamica do tipo (A− LC − bK).
Assim , a funcao de transferencia do compensador e, por conseguinte o ganho de malha, dependemdos ganhos K e L . Estes ganhos podem pois ser encarados como “botoes de ajuste” que permitem moldaro ganho de malha por forma a satisfazer especificacoes.
36

2.9 Seguimento de referencias e efeito integral
Objectivo: Mostrar como e possıvel modificar o regulador de retroaccao de variaveis de estado porforma a seguir referencias nao nulas, incluindo ou nao efeito integral.
Seguimento de referencias nao nulas
Temos considerado ate agora o problema de projectar controladores que levem o estado do processopara zero, rejeitando assim perturbacoes que tenham causado condicoes iniciais nao nulas. Este problemae conhecido como problema de regulacao.
Em geral pretende-se seguir referencias nao nulas, eventualmente variaveis. Neste ultimo caso oproblema diz-se problema do servomecanismo (isto e uma “heranca” dos tempos em que os controladoresvisavam movimentar sistemas mecanicos, por exemplo lemes de navios (anos 20) ou canhoes (anos 40).
2.9.1 Possibilidade de inclusao de Referencia
Para seguirmos a referencia iremos usar um controlador semelhante ao visto do para na subseccao deRLVE (2.6). Da equacao (2.42) do seguimento de referencia tınhamos u(t) = r(t) −Kx(t). Nao tendoacesso ao estado mas sim a uma estimativa do mesmo, entao podemos fazer uma retroaccao do tipo:
u(t) = −Kx(t) +Nr(t) (2.83)
Em que se acrescentou o escalar N para multiplicar pela referencia e cuja funcao sera vista de seguida.
Nao tendo acesso ao estado entao podemos usar um observador para obter uma estimativa do estado,cuja equacao da dinamica devera ser semelhante a habitual (2.74) mas incluindo a referencia:
˙x(t) = (A− bK)x(t) + L[y(t)− Cx(t)] +Mr(t) (2.84)
Em que se acrescentou o vector M para multiplicar pela referencia e cuja funcao sera vista de seguida.
Tendo em conta estas equacoes (2.83) e (2.84) entao chegamos ao diagrama de blocos geral paraseguimento de referencias nao nulas:
Repare-se que se r(t) for nulo ou M e N forem nulos entao ficamos com um compensador (Reali-mentacao dos estados mais observador) exactamente igual ao visto na seccao do Teorema de Separacao,subseccao da Funcao de Transferencia do Compensador (2.8.3) e que satisfaz o problema da Regulacao.
Ha varias possibilidades para a escolha de M (vector) e N (escalar). De acordo com estas possibilidadesresultam varios tipos de resposta a referencia. Vamos considerara duas hipoteses.
37

2.9.2 Escolher M e N por forma a que a equacao de erro nao dependa da referencia r(t)
Usando as equacoes (2.83) e (2.84) podemos obter:
x(t) = Ax(t) + bu(t) =Ax(t)− bKx(t) + bNr(t) (2.85)
˙x(t) = (A− bK)x(t) + L[y(t)− Cx(t)] +Mr(t) =Ax(t)− bKx(t) +Mr(t) + LC[x(t)− x(t)] (2.86)
Subtraindo assim as duas equacoes de modo a obter o erro de estimacao chegamos a:
˙x(t) = (A− LC)x(t) + (bN −M)r(t) (2.87)
Quando a referencia era nula (r(t) = 0) o segundo termo que agora aparece era nulo e como tal naotinha influencia na dinamica do erro de observacao. Como tal, para que a referencia nao interfira com adinamica do erro podemos usar:
M = bN (2.88)
Com esta escolha entao a equacao (2.84) fica:
˙x(t) = (A− bK)x(t) + L[y(t)− Cx(t)] + bNr(t)
E reagrupando obtemos:
˙x(t) = Ax(t) + CL[y(t)− Cx(t)] + b [−Kx(t) +Nr(t)]︸ ︷︷ ︸u(t)
(2.89)
Com esta escolha de M e N temos entao um sistema tal que:
x(t) =Ax(t) + bu(t)
ˆx(t) =Ax(t) + bu(t) + L[y(t)− Cx(t)] (2.90)
u(t) =−Kx(t) +Nr(t)
Que sao as equacoes (2.60) vistas na seccao do observador assimptotico mais a retroaccao vistaem (2.83). Portanto o compensador tem exactamente a mesma dinamica do sistema em cadeia abertaacrescido do Termo de Correccao ja visto e segue as equacoes (2.72)-(2.74) vistas na seccao (2.8) doTeorema da Separacao. A unica diferenca e que agora temos um termo escalar N que multiplica por r(t)e que serve para compensar o ganho estatico em malha fechada por forma a que y(t) = r(t).
Deste modo, quando esse erro fosse nulo, o observador passa a funcionar em cadeia aberta. Mas e seo ganho N estiver ligeiramente mal calculado? Isso significa que a saıda nunca atinge a referencia. E naoe difıcil o ganho estar mal calculado, pois esse ganho tem com base as matrizes A, b e C e que por vezessao aproximadas pois nao temos conhecimento total sobre o sistema. Mais, pelo facto de o sistema ficarem cadeia aberta, as perturbacoes nao sao rejeitadas.
38

2.9.3 Escolher M e N por forma a que o erro de seguimento e(t) = r(t)− y(t) seja usado nocontrolador
Esta escolha faz mais sentido que a anterior. Na anterior o nosso objectivo era que erro de observacaotendesse para zero sem que nos importassemos com a referencia, e como vimos a saıda poderia nao tenderpara a referencia dado que o calculo de N nem sempre e trivial, para alem que nao rejeita perturbacoes.Usando antes o erro de seguimento somos capazes de desenhar o controlador de modo a que o mesmotenda para zero. Sendo assim, seremos capazes de rejeitar perturbacoes e mesmo erros de modelacao.
Usando a equacao do erro de seguimento:
e(t) = r(t)− y(t) (2.91)
Entao a equacao (2.84) vem como:
˙x(t) =(A− bK)x(t) + L[y(t)− Cx(t)] +M [e(t) + y(t)]
˙x(t) =(A− bK − LC)x(t) + (L+M)y(t) +Me(t) (2.92)
Assim, fazendo:
M = −L (2.93)
Chegamos a uma equacao para a dinamica do estado de estimacao que apenas depende do erro:
˙x(t) = (A− bK − LC)︸ ︷︷ ︸Ax
x(t)− Le(t) (2.94)
Assim sendo, basta que a matriz da dinamica do estado estimado, Ax seja estavel para que o errotenda para zero. Repara-se que se o erro tender para 0 e Ax for estavel entao o estado estimado tendepara 0 e deixa de influenciar a entrada pela equacao (2.83). Ficamos neste caso com:
u(t) = Nr(t)|e(t)=0 (2.95)
Assim sendo, para que a saıda se mantenha constante quando o erro e nulo entao a entrada tem queser nula, sempre e independentemente da referencia, pelo que:
N = 0 (2.96)
Com esta escolha de M e N temos entao um sistema tal que:
x(t) =Ax(t) + bu(t)
ˆx(t) =(A− bK − LC)x(t)− Le(t) (2.97)
u(t) =−Kx(t)
Passamos assim a ter o seguinte diagrama de blocos:
39

2.9.4 Inclusao do efeito integral
Existem varias formas de incluir o efeito integral, sendo que vamos discutir duas:
• Aumentar o estado x(t) de dimensao n com mais um estado, xI(t), que e o integrador do erro
• Inserir um integrador em serie a entrada do sistema
Integrador do Erro
Vimos o erro de seguimento na equacao (2.91) que era:
e(t) = r(t)− y(t)
Neste caso vamos usar o simetrico do erro, e como tal:
e(t) = y(t)− r(t) (2.98)
Integrando este mesmo erro ao longo do tempo vem o novo estado:
xI =
∫ t
t0
e(τ) dτ =
∫ t
t0
y(τ)− r(τ) dτ (2.99)
Assim sendo, assumindo que e(t0) = e0 = 0 vem:
xI(t) = y(t)− r(t) = Cx(t)− r(t) (2.100)
E como tal, o modelo em espacos de estados do sistema completo (sistema + integrador) fica:
[x(t)xI(t)
]=
[A 0C 0
] [x(t)xI(t)
]+
[b0
]u(t) +
[0−1
]r(t)
y(t) =[C 0
] [ x(t)xI(t)
](2.101)
Podemos ainda compactar mais e escrever:
[x(t)xI(t)
]︸ ︷︷ ︸
X(t)
=
[A 0C 0
]︸ ︷︷ ︸
AX
[x(t)xI(t)
]︸ ︷︷ ︸
X(t)
+
[b 00 −1
]︸ ︷︷ ︸
bX
[u(t)r(t)
]︸ ︷︷ ︸
U(t)
y(t) =[C 0
]︸ ︷︷ ︸CX
[x(t)xI(t)
]︸ ︷︷ ︸
X(t)
(2.102)
Em que:
AX [(n+ 1) x (n+ 1)] BX [(n+ 1) x 2] CX [1 x (n+ 1)]
Repare-se que:
• O sistema e Controlavel
• O sistema nao e Observavel
40

Controlabilidade:A exponencial da Matriz AX e:
AX =
[A 0C 0
]A2x =
[A2 0CA 0
]· · · An =
[Anx 0
CAn−1 0
](2.103)
A Matriz de Controlabilidade e entao:
C[AX , bX ] =
[b 0 Ab 0 . . . An−1b 00 −1 −Cb 0 CAn−2b 0
](2.104)
E portanto a sua dimensao nao e [(n+ 1) x (n+ 1)] mas sim [2(n+ 1) x (n+ 1)]. Isto e algo esperadopois nao ha so uma entrada mas sim duas. Ou seja a Matriz de Controlabilidade nao e quadrada. Noscasos em que uma matriz nao e quadrada, diz-se que tem caracterıstica completa se houverem m vectorescoluna ou linha linearmente independentes, sendo m o menor entre o numero de colunas e linhas (sehouverem m linhas < que l colunas entao temos que ter m colunas linearmente independentes, visto queas linhas nunca o serao).
Assim sendo, facilmente se ve que ha (n+ 1) colunas linearmente independentes, sendo elas:[b Ab . . . An−1b0 −Cb CAn−2b
](2.105)
E portanto a car(C) = n+ 1 e o sistema e controlavel.
ObservabilidadeA Matriz de Observabilidade e entao:
O[AX , CX ] =
C 0CA 0
......
CAn 0
(2.106)
E portanto a sua dimensao e [(n+ 1) x (n+ 1)].Facilmente se verifica que a sua caracterıstica nao e n+1 pelo que o sistema nao e observavel. Podemos
no entanto estimar apenas o estado x com um observador, e usar a medida directa do estado do integradorxI (dado que e gerado pelo computador de controlo). Nestas condicoes continua a ser valido o teoremade separacao.
ControloA este modelo podem ser aplicadas as tecnicas estudadas antes. Em particular, se o estado for acessıvel
podemos realimenta-lo usando:
u(t) = −[K0 kI
] [ x(t)xI(t)
](2.107)
Cuja Estrutura e:
41
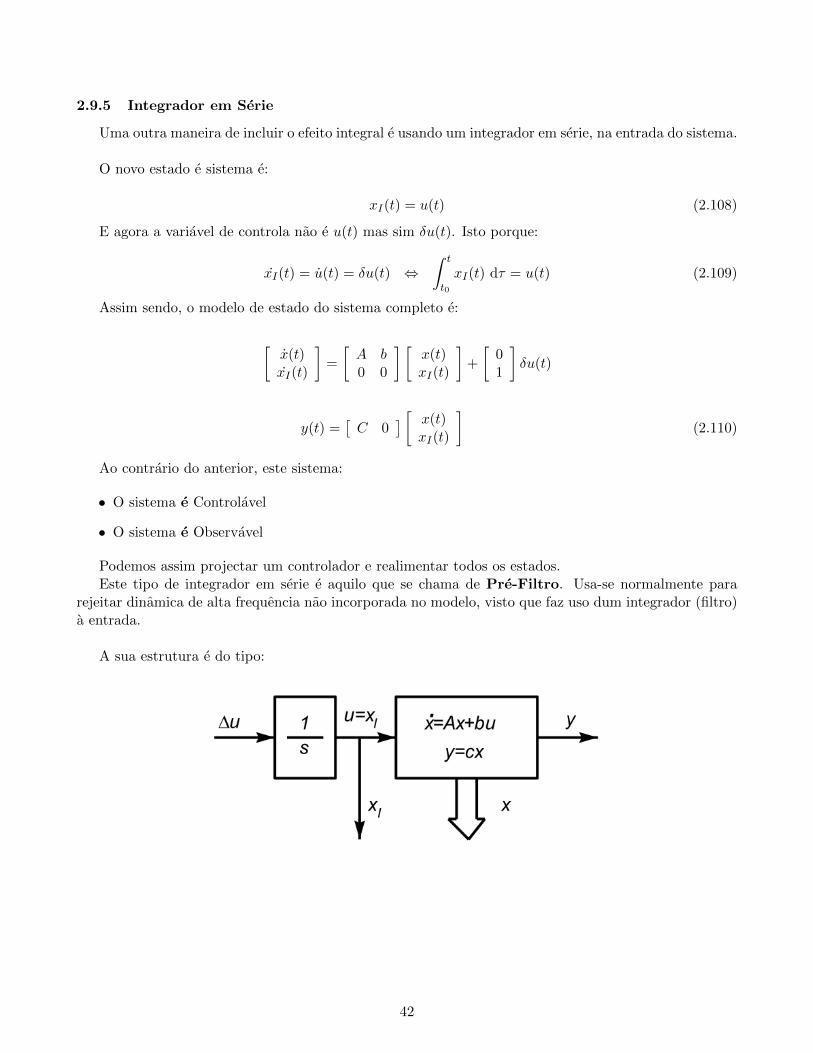
2.9.5 Integrador em Serie
Uma outra maneira de incluir o efeito integral e usando um integrador em serie, na entrada do sistema.
O novo estado e sistema e:
xI(t) = u(t) (2.108)
E agora a variavel de controla nao e u(t) mas sim δu(t). Isto porque:
xI(t) = u(t) = δu(t) ⇔∫ t
t0
xI(t) dτ = u(t) (2.109)
Assim sendo, o modelo de estado do sistema completo e:
[x(t)xI(t)
]=
[A b0 0
] [x(t)xI(t)
]+
[01
]δu(t)
y(t) =[C 0
] [ x(t)xI(t)
](2.110)
Ao contrario do anterior, este sistema:
• O sistema e Controlavel
• O sistema e Observavel
Podemos assim projectar um controlador e realimentar todos os estados.Este tipo de integrador em serie e aquilo que se chama de Pre-Filtro. Usa-se normalmente para
rejeitar dinamica de alta frequencia nao incorporada no modelo, visto que faz uso dum integrador (filtro)a entrada.
A sua estrutura e do tipo:
42