Embed Size (px)
Citation preview

SIMULAÇÃO NUMÉRICA DE UM ROTOR EM BANCADA DE TESTES
Rodrigo Martins de Oliveira
Projeto de Graduação apresentado ao Curso de
Engenharia Mecânica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro Mecânico.
Orientador: Thiago Gamboa Ritto
Rio de Janeiro
Setembro de 2016

UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
Departamento de Engenharia Mecânica
DEM/POLI/UFRJ
SIMULAÇÃO NUMÉRICA DE UM ROTOR EM BANCADA DE TESTES
Rodrigo Martins de Oliveira
PROJETO FINAL SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO DE
ENGENHARIA MECÂNICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE ENGENHEIRO MECÂNICO.
Aprovado por:
________________________________________________
Prof.º Thiago Gamboa Ritto, D.Sc.
________________________________________________
Prof.º Fernando Augusto de Noronha Castro Pinto, Dr.Ing.
________________________________________________
Prof.º Daniel Alves Castello, D.Sc.
_____________________________________________________
David Julian Gonzalez Maldonado, M.Sc.
RIO DE JANEIRO, RJ - BRASIL
SETEMBRO DE 2016

Oliveira, Rodrigo Martins de
Simulação numérica de um rotor em bancada de testes/ Rodrigo
Martins de Oliveira – Rio de Janeiro: UFRJ/ Escola Politécnica, 2016.
XII, 54 p.: il.; 29,7cm.
Orientador: Thiago Gamboa Ritto
Projeto de Graduação – UFRJ/ Escola Politécnica/ Curso de
Engenharia Mecânica, 2016.
Referências Bibliográficas: p. 55.
1.Rotor. 2.Simulação numérica. 3.Método de elementos finitos.
4.Selo. 5.LAVI. I. Thiago Gamboa Ritto. II. Universidade Federal do Rio
de Janeiro, Escola Politécnica, Curso de Engenharia Mecânica. III.
Simulação numérica de um rotor em bancada de testes

iv
Resumo do Projeto de Graduação apresentado à Escola Politécnica / UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheiro Mecânico.
SIMULAÇÃO NUMÉRICA DE UM ROTOR EM BANCADA DE TESTES
Rodrigo Martins de Oliveira
Setembro/2016
Orientador: Thiago Gamboa Ritto
Curso: Engenharia Mecânica
A aplicação de máquinas rotativas é bastante ampla no campo da engenharia. Desde
pequenos sistemas residenciais de bombeamento de água até grandes turbinas de aviões,
utilização em sistemas hidroelétricos ou na área de óleo e gás. Nesse contexto, é
necessário realizar estudo dinâmicos dessas máquinas para avaliar seu comportamento,
levando em consideração a presença de outros componentes envolvidos, tais como:
mancais, selos, discos, eixos, entre outros, para prever, evitar ou identificar falhas nos
equipamentos. Esse trabalho tem o objetivo principal de simular uma bancada de testes
desenvolvida pelo Laboratório de Acústica e Vibrações (LAVI) da COPPE em conjunto
da Petrobrás e verificar a influência dos parâmetros de rigidez e amortecimento de selos
mecânicos em um modelo de rotor. Para isso, é utilizado o programa LaviROT, baseado
em Matlab e em desenvolvimento no LAVI e o software ANSYS a fim de verificar os
resultados obtidos pelo primeiro.
Palavras-chave: rotor, simulação numérica, método de elementos finitos, selo, Lavi

v
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Engineer.
NUMERICAL SIMULATION OF A ROTOR IN TEST BENCH
Rodrigo Martins de Oliveira
September/2016
Advisor: Thiago Gamboa Ritto
Course: Mechanical Engineering
The application of rotating machines is very wide in the field of engineering. From small
residential water pumping systems to large aircraft turbines, hydroelectric systems in use
or in the oil and gas area. In this context, it is necessary to perform dynamic studies of
these machines to evaluate their behavior, taking into account the presence of other
components involved, such as bearings, seals, discs, shafts, among others, to anticipate,
prevent or identify equipment failures. This work aims, mainly, to simulate a test bench
developed by the Acoustics and Vibrations Laboratory (LAVI) COPPE together
Petrobras in order to verify the influence of the stiffness and damping parameters of
mechanical seals in a rotor model. For this, it is used the LaviROT, a program based on
Matlab under development in LAVI, and ANSYS software to verify the results of the
first.
Keywords: rotor, numerical simulation, finite-element analysis, seal, Lavi

vi
AGRADECIMENTOS
Agradeço a minha família por toda educação que me deram, carinho, apoio, e
sacrifícios que fizeram por mim. Todo meu crescimento pessoal e profissional e todas as
vitórias ao longo de meu caminho da vida devo a vocês.
À Daniela, que tem sido uma companheira maravilhosa na minha vida, me
apoiando, aconselhando e incentivando em todas as minhas escolhas. Obrigado por toda
a paciência, compreensão e carinho.
À Thaíssa, pela nossa grande amizade, e que mesmo distante, sempre me deu
apoio para seguir em frente em meu caminho.
Ao Professor Thiago Ritto por toda a passagem de conhecimento nos projetos que
realizei sob sua orientação.
À Equipe Minerva Baja UFRJ, onde passei três anos de minha formação e ganhei
uma segunda família, em especial Honda, Felipe Cristaldi, Adriano, Fred Fróes, Douglas,
Larissa, Fernando, César, Fredinho, Pedro Fusca, Casagrande e Vinicius. Devo a equipe
boa parte de meu aprendizado em engenharia.
À toda equipe do LAVI, que esteve comigo neste último ano, em especial David,
quem me ajudou bastante na realização deste projeto.
À toda equipe do Optimize, onde trabalhei por um ano e contribuiu para minha
formação, em especial Zélia e Elmer.
Ao médico oncologista Fladwmyr Barros e às fonoaudiólogas Nathalia Castellani
e Roberta Leite, que foram essenciais na minha recuperação, serei para sempre grato por
tudo.
E a todos os amigos e professores que fizeram parte da minha vida e contribuíram
para que eu alcançasse este momento. Obrigado a todos.

vii
SUMÁRIO
LISTA DE FIGURAS ..................................................................................................... ix
LISTA DE TABELAS ................................................................................................... xii
1 INTRODUÇÃO ............................................................................................................ 1
1.1 Contextualização .................................................................................................. 1
1.2 Objetivo ................................................................................................................ 1
1.3 Motivação ............................................................................................................. 1
1.4 Metodologia .......................................................................................................... 2
2 BASE TEÓRICA E ROTODINÂMICA ...................................................................... 3
2.1 Rotor de Jeffcott ................................................................................................... 3
2.2 Rotor com efeito giroscópico ............................................................................... 5
3 MODELAGEM POR ELEMENTOS FINITOS .......................................................... 9
3.1 Introdução ............................................................................................................. 9
3.2 Aplicação ao LaviROT ......................................................................................... 9
4 LaviROT ..................................................................................................................... 13
4.1 Introdução ........................................................................................................... 13
4.2 LaviROT versão 2015 ........................................................................................ 13
4.3 LaviROT versão 2016 ........................................................................................ 14
4.4 Novas opções de análises ................................................................................... 14
4.4.1 Análise de estabilidade ................................................................................. 14
4.4.2 Diagrama de Nyquist .................................................................................... 15
4.4.3 Análise do regime transiente e permanente do domínio do tempo .............. 15
5 COMPARAÇÃO ANSYS VS LaviROT ................................................................... 18
5.1 Modelo de teste inicial ........................................................................................ 18
5.2 Cálculo da rigidez do rolamento ......................................................................... 18
5.3 Simulação em ANSYS Workbench .................................................................... 22
5.3.1 Introdução ..................................................................................................... 22

viii
5.3.2 Geometria ..................................................................................................... 22
5.3.3 Geração de malha ......................................................................................... 23
5.3.4 Análise rotodinâmica .................................................................................... 24
5.3.5 Análise Modal .............................................................................................. 26
5.3.6 Análise estática ............................................................................................. 27
5.4 Simulação em Matlab – LaviROT ...................................................................... 28
5.4.1 Introdução ..................................................................................................... 28
5.4.2 Condições de contorno ................................................................................. 29
5.4.3 Resultados ..................................................................................................... 30
5.5 Comparação dos resultados ................................................................................ 32
6 SIMULAÇÃO DA BANCADA DE TESTES ........................................................... 33
6.1 Introdução ........................................................................................................... 33
6.2 Análise do rotor sem selos .................................................................................. 34
6.3 Análise do rotor com selos e sem força de pulso ............................................... 38
6.4 Análise do rotor com selos e com força de pulso ............................................... 42
6.5 Análise do rotor com selos de diferentes rigidezes diretas ................................. 44
6.6 Análise do rotor com selos de diferentes rigidezes acopladas............................ 46
6.7 Análise do rotor com selos de diferentes coeficientes de amortecimento diretos
51
7 CONCLUSÕES E TRABALHOS FUTUROS .......................................................... 54
8 REFERÊNCIAS BIBLIOGRÁFICAS ....................................................................... 55
APÊNDICE A – Desenho detalhado do eixo ................................................................. 56

ix
LISTA DE FIGURAS
Figura 1.1: Corte de um selo labirinto. ............................................................................. 1
Figura 2.1: A ilustração a direita mostra o movimento de precessão direta e a ilustração
da esquerda mostra o movimento de precessão retrógada. ............................................... 3
Figura 2.2: Modelo em 3D do rotor de Jeffcott [2]. ......................................................... 4
Figura 2.3: Vista lateral do modelo do rotor de Jeffcott [1]. ............................................ 4
Figura 2.4: Representação lateral de um rotor com o referencial inercial A e o referencial
móvel B. ........................................................................................................................... 6
Figura 2.5: Representação frontal de um rotor com os referenciais C e D. ...................... 6
Figura 3.1: Ilustração do elemento com 4 graus de liberdade. ....................................... 10
Figura 4.1: Interface do LaviROT 2015. ........................................................................ 13
Figura 4.2: Interface do LaviROT 2016. ........................................................................ 14
Figura 4.3: Detalhe do quadro de configuração da análise transiente. ........................... 17
Figura 5.1: Pontos de contato da esfera com as pistas interna e externa (adaptado de [10]).
........................................................................................................................................ 19
Figura 5.2: Representação do ângulo de contato (adaptado de [10]). ............................ 20
Figura 5.3: Geometria do eixo gerada no ANSYS. ........................................................ 23
Figura 5.4: Geometria do eixo com as seções visíveis. .................................................. 23
Figura 5.5: Detalhe das condições de contorno da análise rotodinâmica no ANSYS. ... 24
Figura 5.6: Detalhe dos dados do rolamento da direita. ................................................. 25
Figura 5.7: Detalhe dos dados do rolamento da esquerda. ............................................. 25
Figura 5.8: Diagrama de Campbell gerado pelo ANSYS. .............................................. 25
Figura 5.9: Gráfico Amplitude (mm) x Velocidade de rotação [RPM].......................... 26
Figura 5.10: Frequências naturais do sistema geradas no ANSYS. ............................... 26
Figura 5.11: Velocidades de rotação críticas e direção de precessão geradas no ANSYS.
........................................................................................................................................ 26
Figura 5.12: Frequências naturais do eixo livre geradas no ANSYS. ............................ 27
Figura 5.13: Detalhe do posicionamento das forças e dos seus respectivos módulos. ... 27
Figura 5.14: Resultado da análise estática gerada no ANSYS. ...................................... 28
Figura 5.15: Ilustração da separação das regiões do eixo. .............................................. 28
Figura 5.16: Interface do LaviROT com os dados para a simulação de teste. ............... 29
Figura 5.17: Diagrama de Campbell da simulação teste gerado no LaviROT. .............. 30

x
Figura 5.18: Gráfico da amplitude vs frequência para a simulação teste gerado no
LaviROT. ........................................................................................................................ 30
Figura 5.19: Resposta transiente da simulação teste gerado no LaviROT. .................... 31
Figura 5.20: Órbita da resposta transiente da simulação teste gerado no LaviROT. ..... 31
Figura 6.1: Diagrama de Campbell do primeiro modelo. ............................................... 34
Figura 6.2: Gráfico da amplitude vs frequência para disco 1 do primeiro modelo. ....... 35
Figura 6.3: Gráfico da amplitude vs frequência para disco 2 do primeiro modelo. ....... 35
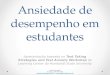
Figura 6.4: Análise transiente do disco 1 do primeiro modelo. ...................................... 36
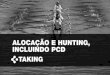
Figura 6.5: Órbita do disco 1 do primeiro modelo. ........................................................ 36
Figura 6.6: Análise transiente do disco 2 do primeiro modelo. ...................................... 37
Figura 6.7: Órbita do disco 2 do primeiro modelo. ........................................................ 37
Figura 6.8: Diagrama de Campbell do segundo modelo. ............................................... 38
Figura 6.9: Gráfico da amplitude em função da frequência para o disco 1 do segundo
modelo. ........................................................................................................................... 39
Figura 6.10: Gráfico da amplitude em função da frequência para o disco 2 do segundo
modelo. ........................................................................................................................... 39
Figura 6.11: Análise transiente para o disco 1 do segundo modelo. .............................. 40
Figura 6.12: Órbita do disco 1 do segundo modelo comparada com o do primeiro. ..... 40
Figura 6.13: Análise transiente para o disco 2 do segundo modelo. .............................. 41
Figura 6.14: Órbita do disco 2 do segundo modelo comparada com o do primeiro. ..... 41
Figura 6.15: Análise transiente para o disco 1 do terceiro modelo. ............................... 43
Figura 6.16: Análise transiente para o disco 2 do terceiro modelo. ............................... 43
Figura 6.17: Variação da amplitude máxima (em módulo) no regime transiente em função
da rigidez direta do selo. ................................................................................................. 44
Figura 6.18: Variação da amplitude máxima (em módulo) no regime permanente em
função da rigidez direta do selo. ..................................................................................... 45
Figura 6.19: Tempo de duração do regime transiente em função da rigidez direta do selo.
........................................................................................................................................ 45
Figura 6.20: Variação das frequências críticas de rotação em função da rigidez direta do
selo. ................................................................................................................................. 46
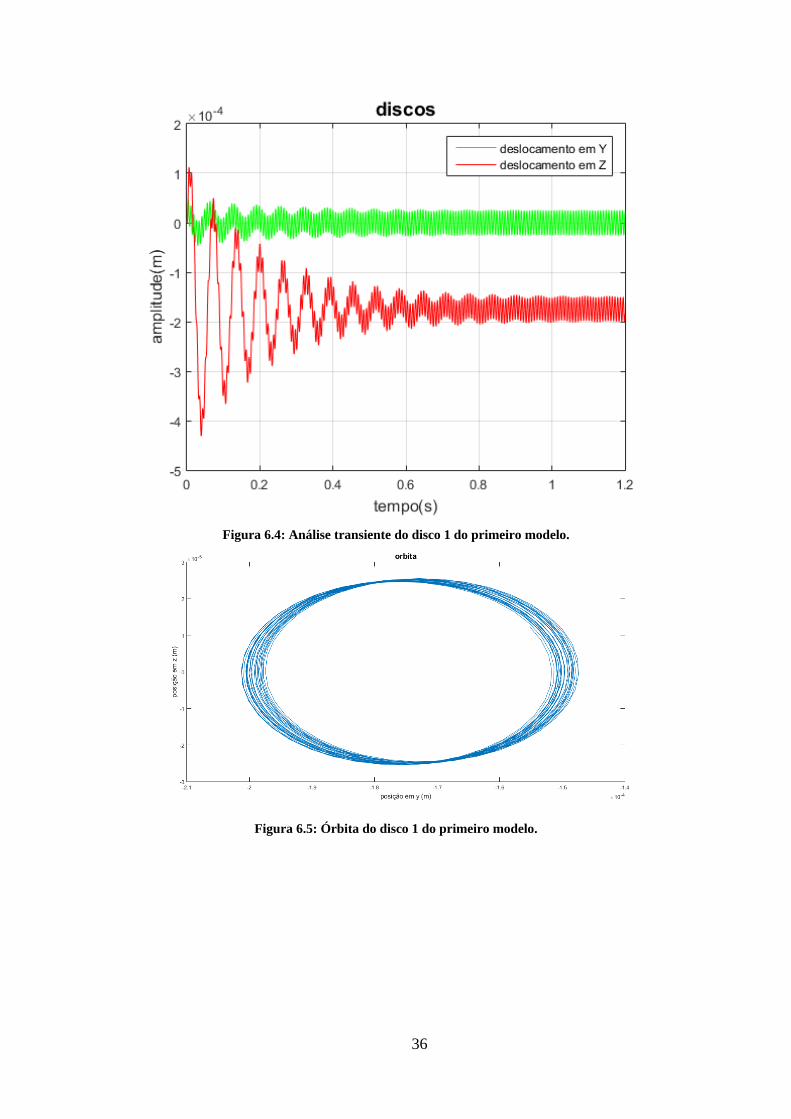
Figura 6.21: Variação da amplitude máxima no regime transiente em função da rigidez
acoplada do selo. ............................................................................................................ 47
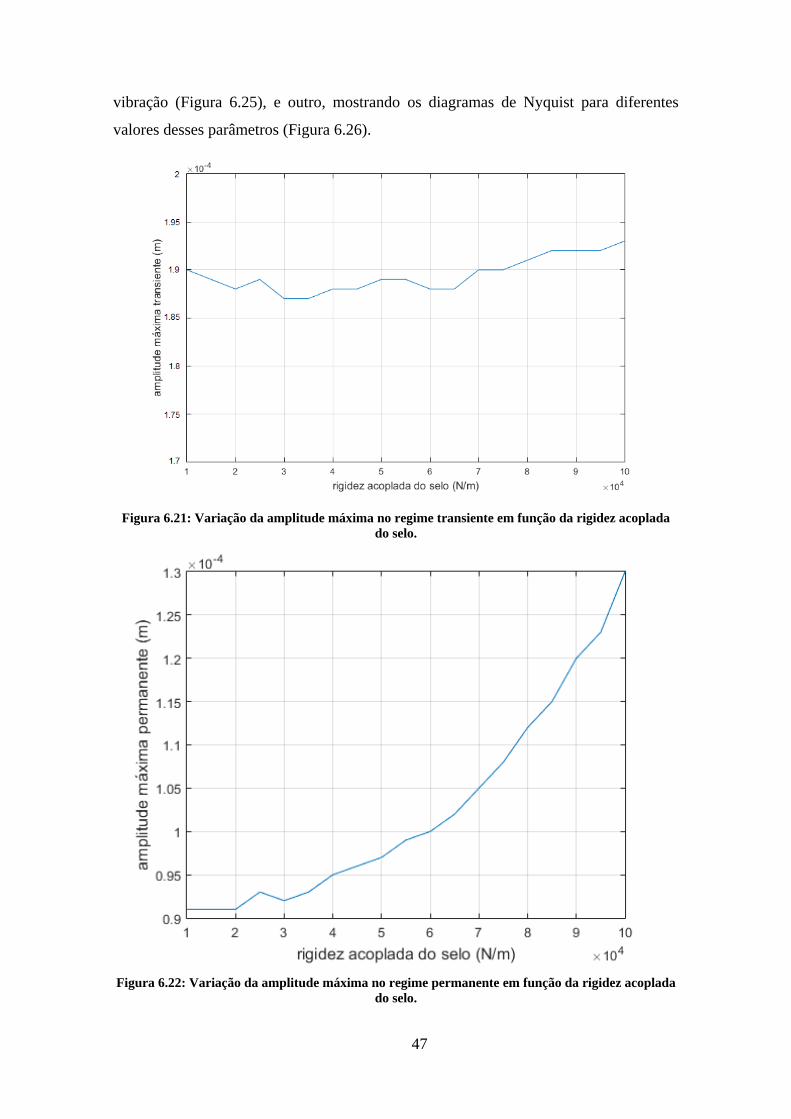
Figura 6.22: Variação da amplitude máxima no regime permanente em função da rigidez
acoplada do selo. ............................................................................................................ 47

xi
Figura 6.23: Tempo de duração do regime transiente em função da rigidez acoplada do
selo. ................................................................................................................................. 48
Figura 6.24: Variação das frequências críticas de rotação em função da rigidez acoplada
do selo. ............................................................................................................................ 48
Figura 6.25: Gráfico amplitude em função da rigidez acoplada do selo para apontar
instabilidade. ................................................................................................................... 49
Figura 6.26: Diagramas de Nyquist para diferentes valores de rigidezes acopladas do selo.
........................................................................................................................................ 50
Figura 6.27: Variação da amplitude máxima no regime transiente em função do
amortecimento direto do selo. ........................................................................................ 52
Figura 6.28: Variação da amplitude máxima no regime permanente em função do
amortecimento direto do selo. ........................................................................................ 52
Figura 6.29: Tempo de duração do regime transiente em função do amortecimento direto
do selo. ............................................................................................................................ 52

xii
LISTA DE TABELAS
Tabela 5.1: Propriedades aplicadas ao eixo na simulação no LaviROT. ....................... 28
Tabela 6.1: Dados dos discos. ........................................................................................ 33
Tabela 6.2: Dados dos selos. .......................................................................................... 33
Tabela 6.3: Velocidades críticas e direções de precessão do primeiro modelo. ............. 38
Tabela 6.4: Velocidades críticas e direções de precessão do segundo modelo. ............. 42

1
1 INTRODUÇÃO
1.1 Contextualização
Máquinas rotativas têm uma utilização bastante ampla de maneira geral, seja em
aplicação de aparelhos domésticos como ventiladores e lavadoras, seja na aplicação da
indústria como turbinas e bombas.
A criação de novas máquinas acompanha o desenvolvimento de pesquisas nessa
área para o aumento da eficiência das mesmas, uma vez que envolvem geração e consumo
de energia, e por consequência um custo financeiro significativo.
Por esse motivo, a simulação de máquinas rotativas (rotores) é essencial para
avaliar o seu comportamento e verificar como cada parâmetro atua nesse aspecto.
Um desses parâmetros é o selo interno ou anular (Figura 1.1). Os selos anulares
têm sido objeto de estudo com a finalidade de caracterizá-los a partir de coeficientes
dinâmicos de rigidez e amortecimento. E assim, analisar como estes coeficientes atuam
na dinâmica do rotor.
Figura 1.1: Corte de um selo labirinto.
1.2 Objetivo
Esse trabalho tem o objetivo principal de simular uma bancada de testes
desenvolvida pelo Laboratório de Acústica e Vibrações (LAVI) da COPPE em conjunto
da Petrobrás e verificar a influência dos parâmetros de rigidez e amortecimento de selos
anulares em um modelo de rotor, e a verificação e ampliação do LaviROT, um software
baseado em Matlab, em desenvolvimento no LAVI para a simulação de rotores.
1.3 Motivação
A principal motivação deste trabalho é um projeto de pesquisa, em andamento,
com a Petrobrás para a caracterização de selos anulares do tipo labirinto, no caráter de

2
determinar coeficientes de amortecimento e rigidez experimentalmente através de uma
bancada de testes, para futuramente prever suas influências no comportamento do
sistema.
1.4 Metodologia
Para atingir esses objetivos, o trabalho foi dividido em três partes distintas.
A primeira foi implementar novos algoritmos ao LaviROT, ou seja, aumentar a
quantidade de resultados relevantes que o programa pode gerar, e também ampliar a
variedade de dados de entrada na simulação, podendo assim, criar novas situações reais
para simular.
A segunda fase foi comparar os resultados iniciais com um software comercial
difundido. Para isso, criou-se um modelo base de um eixo com um disco no centro
apoiado em mancais de rolamento em suas extremidades. Esse modelo foi simulado no
LaviROT e os resultados foram verificados com a utilização de outro software de
simulação por elementos finitos, o ANSYS.
A terceira fase foi a preparação e simulação da geometria do rotor da bancada de
testes com os mancais e selos posicionados utilizando o programa LaviROT.

3
2 BASE TEÓRICA E ROTODINÂMICA
Rotodinâmica é um termo usado para denominar a dinâmica de rotores. Para um
modelo simples de rotor, pode-se considerar um eixo rotativo, podendo ser rígido ou
flexível, com um disco acoplado e mancais de apoio, podendo ser rígidos ou flexíveis
também. O movimento descrito pelo centro geométrico do eixo segue a trajetória de uma
órbita (circular ou elíptica). Esta órbita pode seguir o mesmo sentido de giro do eixo
(precessão direta) ou pode seguir o sentido contrário desse giro (precessão retrógrada).
Esse comportamento é ilustrado na Figura 2.1.
Figura 2.1: A ilustração a direita mostra o movimento de precessão direta e a ilustração da
esquerda mostra o movimento de precessão retrógada.
2.1 Rotor de Jeffcott
O modelo de Rotor de Jeffcott é um modelo proposto por August Föppl (1895) e
por Henry Homan Jeffcott (1919) [1] para simplificar problemas complexos de
rotodinâmica. Basicamente, ele consiste em um disco rígido desbalanceado fixado em um
eixo flexível, uniforme e de massa desprezível, apoiado em mancais.
Neste modelo, podem ser feitas as seguintes considerações: o rotor gira com
velocidade constante 𝜔 junto com o disco desbalanceado de massa 𝑚 como mostra a
Figura 2.2. O centro geométrico 𝐶 do disco, dado pelas coordenadas 𝑈𝑥𝐶 , 𝑈𝑦𝐶 não
coincide com seu centro de massa 𝐺, dado pelas coordenadas 𝑈𝑥𝐺 , 𝑈𝑦𝐺 devido ao
desbalanceamento, mas ainda assim pertencem ao mesmo plano, como mostra a Figura
2.3.

4
Figura 2.2: Modelo em 3D do rotor de Jeffcott [2].
Figura 2.3: Vista lateral do modelo do rotor de Jeffcott [1].
Assumindo que a rigidez do disco não afeta a rigidez do eixo, pode-se determinar
a rigidez de deflexão no centro de uma viga uniforme bi apoiada pela seguinte equação
[3].
𝑘𝑠 =48 ∙ 𝐸 ∙ 𝐼
𝐿3 (2.1)

5
Onde, E é o módulo de elasticidade do material eixo, L o comprimento total do
eixo e I o momento de inércia de área do eixo, que para o caso de um eixo cilíndrico é
dado por:
𝐼 =𝜋 ∙ 𝐷4
64 (2.2)
Para desenvolver analiticamente o modelo, é necessário aplicar as leis do
movimento de Newton ao disco. Uma vez que a massa do eixo é considerada desprezível,
todas as forças atuantes no disco serão devido à inércia, à rigidez e ao amortecimento de
deflexão do eixo. As equações de movimento nas direções x e y são dadas por:
𝑚𝑥𝐺 = −𝑘𝑠𝑢𝑥𝐶 − 𝑐𝑠𝑥𝐶 (2.3)
𝑚𝑦𝐺 = −𝑘𝑠𝑢𝑦𝐶 − 𝑐𝑠𝑦𝐶 (2.4)
Também é possível reescrever as coordenadas do centro de massa do disco a partir
do centro geométrico e da posição angular do eixo 𝜔𝑡 no tempo t, gerando as seguintes
equações:
𝑢𝑥𝐺 = 𝑢𝑥𝐶 + 𝑒 ∙ cos (𝜔𝑡) (2.5)
𝑢𝑦𝐺 = 𝑢𝑦𝐶 + 𝑒 ∙ sen(𝜔𝑡) (2.6)
Substituindo as coordenadas do centro de massa do disco obtidas nas equações
2.5 e 2.6 nas equações 2.3 e 2.4, obtém-se as equações de movimento do rotor de Jeffcott
em relação ao seu centro geométrico [4]:
𝑚𝑥𝐶 + 𝑘𝑠𝑢𝑥𝐶 + 𝑐𝑠𝑥𝐶 = 𝑚 ∙ 𝑒 ∙ 𝜔2 ∙ cos(𝜔𝑡) (2.7)
𝑚𝑦𝐶 + 𝑘𝑠𝑢𝑦𝐶 + 𝑐𝑠𝑦𝐶 = 𝑚 ∙ 𝑒 ∙ 𝜔2 ∙ sen(𝜔𝑡) (2.8)
2.2 Rotor com efeito giroscópico
Nas Figuras 2.4 e 2,5, pode-se observar os referencias adotados, sendo A (base
𝑎1, 𝑎2, 𝑎3 ) o referencial inercial e B (𝑏1, 𝑏2, 𝑏3), que admite um giro em torno de 𝑎2.
Além dessas bases, criou-se uma base C (𝑐1, 𝑐2, 𝑐3) e uma base D (𝑑1, 𝑑2, 𝑑3). A base
C realiza um giro 𝛽 em torno de 𝑏3 e a base D realiza um giro 𝜃 em torno de 𝑐1, que seria
a rotação do disco.
𝝎𝐷𝐴 = 𝜔𝐵𝐴 + 𝜔𝐶𝐵 + 𝜔𝐷𝐶 (2.9)

6
Figura 2.4: Representação lateral de um rotor com o referencial inercial A e o referencial móvel B.
Figura 2.5: Representação frontal de um rotor com os referenciais C e D.
Para manter o modelo simplificado, algumas hipóteses devem ser tomadas, são
elas: velocidade de rotação () do disco constante, 𝛼 e 𝛽 são considerados pequenos, logo
seus respectivos cossenos são aproximadamente 1 e seus respectivos senos são
aproximadamente 𝛼 e 𝛽. Os termos multiplicativos entre eles serão aproximadamente 0.
Considerando essas bases, pode-se escrever a velocidade angular 𝜔 da seguinte
maneira:
𝜔𝐷𝐴 = 𝒃𝟐 + 𝒄𝟑 + 𝒄𝟏 (2.11)
Escrevendo o vetor velocidade angular na base C, tem-se:

7
𝝎𝐷𝐵𝐴 = [ 𝑇𝑎𝑏 ] 𝝎𝐷
𝐴𝐴 (2.11)
𝝎𝐷𝐶𝐴 = [ 𝑇𝑏𝑐 ] 𝝎𝐷
𝐵𝐴 (2.12)
Onde:
[ 𝑇𝑎𝑏 ] = [𝑐𝑜𝑠𝛼 0 𝑠𝑒𝑛𝛼
0 1 0−𝑠𝑒𝑛𝛼 0 𝑐𝑜𝑠𝛼
] (2.13)
[ 𝑇𝑐𝑏 ] = [𝑐𝑜𝑠𝛽 −𝑠𝑒𝑛𝛽 0𝑠𝑒𝑛𝛽 𝑐𝑜𝑠𝛽 0
0 0 1
] (2.14)
Logo, a velocidade angular pode ser escrita da seguinte maneira:
𝝎 = (𝑠𝑒𝑛𝛽 + )𝒄𝟏 + 𝑐𝑜𝑠𝛽𝒄𝟐 + 𝒄𝟑 (2.15)
A derivada de 𝝎 no referencial 𝑪 é dada por:
= (𝑠𝑒𝑛𝛽 + 𝑐𝑜𝑠𝛽)𝒄𝟏 + (𝑐𝑜𝑠𝛽 − 𝑐𝑜𝑠𝛽)𝒄𝟐 + 𝒄𝟑 (2.16)
Para obter os momentos que atuam no disco, utiliza-se as equações de Euler do
movimento. A velocidade angular Ω do sistema é diferente da velocidade angular 𝜔 do
corpo axissimétrico. As equações são dadas por:
𝜔𝐷𝐴 = Ω = (𝑠𝑒𝑛𝛽)𝒄𝟏 + (𝑐𝑜𝑠𝛽)𝒄𝟐 + 𝒄𝟑 (2.17)
𝑀𝑥 = 𝐼𝑥𝑥𝑥 + 𝐼𝑧𝑧𝜔𝑧Ω𝑦 + 𝐼𝑦𝑦𝜔𝑦Ω𝑧 (2.18)
𝑀𝑦 = 𝐼𝑦𝑦𝑦 + 𝐼𝑥𝑥𝜔𝑥Ω𝑧 + 𝐼𝑧𝑧𝜔𝑧Ω𝑥 (2.19)
𝑀𝑧 = 𝐼𝑧𝑧𝑧 + 𝐼𝑦𝑦𝜔𝑦Ω𝑧 + 𝐼𝑥𝑥𝜔𝑥Ω𝑦 (2.20)
Aplicando as equações 2.15 da velocidade e 2.16 da aceleração às equações 2.18,
2.19 e 2.20, tem-se:
𝑀𝑥 =1
2𝑚𝑟²(𝑠𝑒𝑛𝛽 + 𝑐𝑜𝑠𝛽) (2.21)
𝑀𝑦 =1
4𝑚𝑟2(𝑐𝑜𝑠𝛽 − 𝑐𝑜𝑠𝛽) +
1
2𝑚𝑟2(𝑠𝑒𝑛𝛽 + ) −
1
4𝑚𝑟² (2.22)
𝑀𝑧 =1
4𝑚𝑟2 +
1
4𝑚𝑟22𝑠𝑒𝑛𝛽𝑐𝑜𝑠𝛽 −
1
2𝑚𝑟2(𝑠𝑒𝑛𝛽 + )𝑐𝑜𝑠𝛽 (2.23)
O momento resistivo é proporcional aos ângulos 𝛼 e 𝛽 pela constante de rigidez
torcional 𝐾𝑡 e proporcional às velocidades angulares e pela constante de
amortecimento C. Sendo assim, a equação do momento aplicado é:
𝑀 = −(𝐶 + 𝐾𝑡𝛼)𝒃𝟐− (𝐶 + 𝐾𝑡𝛽)𝒄
𝟑 (2.24)
Fazendo 𝑀𝑐 = [ 𝑇𝑏𝑐 ]𝑀𝑏, tem-se:
𝑀 = −(𝐶𝑠𝑒𝑛𝛽 + 𝐾𝑡𝛼𝑠𝑒𝑛𝛽)𝒄𝟏 − (𝐶𝑐𝑜𝑠𝛽 + 𝐾𝑡𝛼𝑐𝑜𝑠𝛽)𝒄𝟐 − 𝐾𝑡𝛽𝒄𝟑 (2.25)

8
Igualando a equação 2.25 às equações 2.21, 2.22 e 2.23, obtém-se as equações
diferenciais que representam o movimento do disco.
𝐼 = 𝐶 + 𝐾𝛼 + 2𝐼𝑝𝜔 (2.26)
𝐼 = 𝐶 + 𝐾𝛽 − 2𝐼𝑝𝜔 (2.27)
Onde:
𝐼 =1
2𝑚𝑟2 (2.28)
𝐼𝑝 =1
4𝑚𝑟4 (2.29)

9
3 MODELAGEM POR ELEMENTOS FINITOS
3.1 Introdução
A análise por elementos finitos é um método para aproximar soluções de equações
diferencias, amplamente utilizado em softwares de simulação numérica, que consiste em
discretizar o sistema sob análise de vários elementos. O método subdivide um problema
maior em partes menores e mais simples, chamadas de elementos finitos. As equações
simples que modelam estes elementos são então montadas em um sistema maior de
equações que descrevem todo o problema. Elementos finitos usa métodos de cálculo
variacional para aproximar uma solução, minimizando uma função de erro associada.
3.2 Aplicação ao LaviROT
O LaviROT é um programa que também faz uso desse método como estratégia
para resolver o problema rotor-mancal seguindo o modelo de viga de Euler-Bernoulli [5].
Neste modelo, a área da seção transversal do eixo permanece ortogonal à linha neutra do
eixo. A equação deste modelo para uma viga sem amortecimento, em um plano de duas
dimensões, é escrita como [4]:
ρA∂²𝑣(x, t)
∂t2+ EI
∂4v(x, t)
∂x4= f(x, t) (3.1)
onde v é o deslocamento transversal do eixo, E o módulo de elasticidade do material, 𝜌 é
a massa específica do material do eixo, A é a área da seção transversal, I é o momento de
inércia desta área, f é uma força externa por unidade de comprimento, x e t são parâmetros
de posição e tempo definidos pelos intervalos [0,L] e [0,T], onde L é o comprimento do
eixo.
De maneira análoga, é possível calcular o deslocamento 𝑤(𝑥, 𝑡) na direção
ortogonal a 𝑣(𝑥, 𝑡). Devido a rotação do eixo, um acoplamento giroscópico existe entre
os deslocamentos v e w [4]. As equações resultantes são discretizadas pelo método de
elementos finitos [4, 6]. Cada elemento tem 2 nós com 4 graus de liberdade cada um, duas
translações e duas rotações, como mostra a Figura 3.1.

10
Figura 3.1: Ilustração do elemento com 4 graus de liberdade.
O deslocamento do elemento é dado por:
𝑢(𝑒) = [𝑁] 𝑢(𝑒) (3.2)
onde:
𝑢(𝑒) = (𝑣1𝜃𝑧1 𝑤1𝜃𝑦1 𝑣2𝜃𝑧2 𝑤2𝜃𝑦2)𝑇 (3.3)
são deslocamentos generalizados dos nós e [N] é composto pelas funções de forma, que
são as funções cúbicas Hermitianas neste caso. Supõe-se que o equipamento mantém uma
velocidade constante de rotação Ω, em torno do eixo X.
A coordenada do elemento é escrita como 𝜉 = 𝑥/𝑙𝑒, onde 𝑙𝑒 é o comprimento do
elemento. Supondo pequenos deslocamentos para os graus de liberdade de translação e
rotação. As matrizes elementares de massa, giroscópica e de rigidez do eixo são dadas
por:
[𝑀𝑠](𝑒) = 𝜌𝐴∫(𝑁𝑣
𝑇𝑁𝑣
1
0
+ 𝑁𝑤𝑇𝑁𝑤) ∙ 𝑙𝑒𝑑𝜉 (3.4)
[𝐺𝑠](𝑒) =
𝜌𝑙𝑝𝑙𝑒2
Ω∫(𝑁𝑣′𝑇𝑁′𝑣 −
1
0
𝑁𝑤′𝑇𝑁′𝑤) ∙ 𝑙𝑒𝑑𝜉 (3.5)
[𝐾𝑠](𝑒) =
𝐸𝐼
𝑙𝑒4
∫(𝑁𝑣′′𝑇𝑁′′𝑣
1
0
+ 𝑁𝑤′′𝑇𝑁′′𝑤) ∙ 𝑙𝑒𝑑𝜉 (3.6)
onde I é o momento de inércia de área e 𝑙𝑝 é o momento polar de inércia. As funções de
interpolação são definidas para um elemento padrão com coordenada 𝜉 ∈ [0,1].
𝑁𝑣 = [𝑁𝑣1 𝑁𝑣2 0 0 𝑁𝑣3 𝑁𝑣4 0 0] (3.7)
𝑁𝑣′ = [𝑁𝑣1
′ 𝑁𝑣2′ 0 0 𝑁𝑣3
′ 𝑁𝑣4′ 0 0] (3.8)

11
𝑁𝑤 = [0 0 𝑁𝑤1 − 𝑁𝑤2 0 0 𝑁𝑤3 − 𝑁𝑤4] (3.9)
𝑁𝑤′ = [0 0 − 𝑁𝑤1
′ 𝑁𝑤2′ 0 0 − 𝑁𝑤3
′ 𝑁𝑤4′ ] (3.10)
e as funções individuais são dadas por:
𝑁𝑣1 = 1 − 3𝜉2 + 2𝜉³ (3.11)
𝑁𝑣2 = 𝑙𝑒(𝜉 − 2𝜉2 + 𝜉3) (3.12)
𝑁𝑣3 = 3𝜉2 − 2𝜉³ (3.13)
𝑁𝑣4 = 𝑙𝑒(−𝜉2 + 𝜉3) (3.14)
Após a integração, chega-se às matrizes elementares. A matriz de massa do
elemento do eixo é dada por:
[𝑀𝑠](𝑒) = 𝜌𝐴𝑙𝑒
[ 𝑀01 𝑀03 0 0 𝑀04 𝑀06 0 0𝑀03 𝑀02 0 0 −𝑀06 𝑀05 0 00 0 𝑀01 −𝑀03 0 0 𝑀04 −𝑀06
0 0 −𝑀03 𝑀02 0 0 𝑀06 𝑀05
𝑀04 −𝑀06 0 0 𝑀01 −𝑀03 0 0𝑀06 𝑀05 0 0 −𝑀03 𝑀02 0 00 0 𝑀04 𝑀06 0 0 𝑀01 𝑀03
0 0 𝑀06 𝑀05 0 0 𝑀03 𝑀01 ]
(3.15)
onde 𝑀01 = 78/210, 𝑀02 = (8/840)𝑙𝑒2, 𝑀03 = (44/840)𝑙𝑒, 𝑀04 = 27/210, 𝑀05 =
(−6/840)𝑙𝑒2, 𝑀06 = (−26/840)𝑙𝑒. A matriz giroscópica é dada por:
[𝐺𝑠](𝑒) = 𝜌𝑙𝑒𝑙𝑝Ω
[
0 0 −𝐺01 𝐺02 0 0 𝐺01 𝐺02
0 0 −𝐺02 𝐺03 0 0 𝐺02 −𝐺04
𝐺01 𝐺02 0 0 −𝐺01 𝐺02 0 0−𝐺02 −𝐺03 0 0 𝐺02 𝐺04 0 0
0 0 𝐺01 −𝐺02 0 0 −𝐺01 −𝐺02
0 0 −𝐺02 −𝐺04 0 0 𝐺02 𝐺03
−𝐺01 −𝐺02 0 0 𝐺01 −𝐺02 0 0−𝐺02 𝐺04 0 0 𝐺02 −𝐺03 0 0 ]
(3.16)
onde 𝐺01 = 6/(5𝑙𝑒2), 𝐺02 = 1/(10𝑙𝑒), 𝐺03 = 4/30, 𝐺04 = 1/30. E a matriz de rigidez
do eixo é dada por:
[𝐾𝑠](𝑒) =
𝐸𝐼
𝑙𝑒
[ 𝐾01 𝐾03 0 0 𝐾04 𝐾03 0 0𝐾03 𝐾02 0 0 −𝐾03 𝐾05 0 00 0 𝐾01 −𝐾03 0 0 𝐾04 −𝐾03
0 0 −𝐾03 𝐾02 0 0 𝐾03 𝐾05
𝐾04 −𝐾03 0 0 𝐾01 −𝐾03 0 0𝐾03 𝐾05 0 0 −𝐾03 𝐾02 0 00 0 𝐾04 𝐾03 0 0 𝐾01 𝐾03
0 0 𝐾03 𝐾05 0 0 𝐾03 𝐾01 ]
(3.17)
onde 𝐾01 = 12/𝑙𝑒2, 𝐾02 = 4, 𝐾03 = 6/𝑙𝑒, 𝐾04 = −12/𝑙𝑒
2, 𝐾05 = 2.
Mancais, selos e discos são representados apenas em um nó, logo a matriz de cada
um deles tem a dimensão 4 x 4. As matrizes de rigidez e amortecimento dos mancais e
selos são dadas por:

12
[𝐾𝑏](𝑛) = [
𝑘𝑦𝑦 0 𝑘𝑦𝑧 0
0 0 0 0𝑘𝑧𝑦 0 𝑘𝑧𝑧 0
0 0 0 0
] (3.18)
[𝐶𝑏](𝑛) = [
𝑐𝑦𝑦 0 𝑐𝑦𝑧 0
0 0 0 0𝑐𝑧𝑦 0 𝑐𝑧𝑧 0
0 0 0 0
] (3.19)
onde 𝑘𝑦𝑦, 𝑘𝑦𝑧, 𝑘𝑧𝑦 e 𝑘𝑧𝑧 são coeficientes de rigidez de mancais ou selos e 𝑐𝑦𝑦, 𝑐𝑦𝑧, 𝑐𝑧𝑦 e
𝑐𝑧𝑧 são coeficientes de amortecimento. As matrizes de massa e efeito giroscópico dos
discos são dadas por:
[𝑀𝑑](𝑛) = [
𝑀𝑑 0 0 00 𝐼𝑑 0 00 0 𝑀𝑑 00 0 0 𝐼𝑑
] (3.20)
[𝐺𝑑](𝑛) = [
0 0 0 00 0 0 −2𝐼𝑑Ω0 0 0 00 2𝐼𝑑Ω 0 0
] (3.21)
onde 𝑀𝑑 é a massa do disco e 𝐼𝑑 é o momento de inércia do disco relacionado aos eixos
Y e Z.
No laviROT, as matrizes de massa, amortecimento e rigidez tem suas dimensões
definidas a partir do número de graus de liberdade que o problema de elementos finitos
apresenta, e este está diretamente relacionado ao número de nós.
O número de nós do modelo é definido pela equação abaixo:
𝑛𝑛𝑜 = 𝑛𝑒𝑙 + 1 (3.22)
onde 𝑛𝑛𝑜 é o número de nós e 𝑛𝑛𝑒𝑙 é o número de elementos
Por sua vez, o número de graus de liberdade total (𝑛𝐺𝐷𝐿) é definido pelo número
de nós vezes o número de graus de liberdade por nó (𝑛𝑛𝑜𝑒𝑙):
𝑛𝐺𝐷𝐿 = 𝑛𝑛𝑜 ∙ 𝑛𝑛𝑜𝑒𝑙 (3.23)

13
4 LaviROT
4.1 Introdução
A ferramenta LaviROT é um programa em desenvolvimento, na plataforma do
Matlab, baseado em elementos finitos para a simulação de rotores. Seu objetivo é ser um
programa capaz de realizar cálculos e diagramas para avaliação de modelos de rotores,
oferecendo ao LAVI uma ferramenta para desenvolvimento de programa na área de
rotodinâmica. A ferramenta permite a simulação de eixos com mancais, discos e selos
acoplados e suas respectivas rigidezes e amortecimentos. São levados em conta a inércia,
rigidez, amortecimento viscoso, movimentos laterais e também a rotação, acoplamento
giroscópico, inércia de rotação, mancais e selos na direção radial.
Nas seções 4.2 e 4.3 serão apresentadas as funcionalidades antigas (versão 2015)
e novas (versão 2016) do programa respectivamente para mostrar a evolução do
programa.
4.2 LaviROT versão 2015
A primeira versão do programa oferecia ao usuário a possibilidade de criar uma
geometria de eixo para o rotor, selecionar dois tipos de materiais diferentes, aplicar
condições de rigidez e amortecimento para mancais e selos, posicionar discos e denotar
propriedades a eles. Além disso, o programa gerava duas respostas: diagrama de
Campbell e a resposta no domínio da frequência. A Figura 4.1 abaixo ilustra a interface
original do LaviROT.
Figura 4.1: Interface do LaviROT 2015.

14
4.3 LaviROT versão 2016
A versão 2016 do LaviROT visa não apenas ampliar a gama de análises que o
usuário pode realizar, mas também a variedade de dados de entrada e condições de
contorno para possibilitar a simulação de diferentes situações. A Figura 4.2 mostra a
interface do LaviROT versão 2016.
Figura 4.2: Interface do LaviROT 2016.
4.4 Novas opções de análises
Foram adicionadas ao programa as seguintes opções de análises: Análise de
Estabilidade, Diagrama de Nyquist e do regime transiente e permanente do domínio do
tempo.
4.4.1 Análise de estabilidade
Esta análise se baseia no problema de autovalor de um sistema de n graus de
liberdade. Ela visa verificar se o sistema é estável ou não. Isso feito a partir da verificação
da parte real dos autovalores da matriz abaixo:
[𝐴(Ω)] = |[0] [𝐼]
[𝑀]−1 ∙ [𝐾] [𝑀]−1 ∙ ([𝐶] + [𝐺])| (4.1)
onde I é a matriz identidade, M a matriz massa, K a matriz de rigidez, C a de
amortecimento e G a matriz de efeito giroscópico. Se a parte real de algum autovalor for
positiva, o sistema é instável. Se todos os autovalores tiverem parte real negativa, o
sistema será estável.

15
4.4.2 Diagrama de Nyquist
Um gráfico de Nyquist é outro nome dado a um diagrama polar de uma função. O
diagrama polar de uma função de transferência senoidal 𝐺(𝑗𝜔) é um gráfico do módulo
de 𝐺(𝑗𝜔) versus o ângulo de fase de 𝐺(𝑗𝜔) em coordenadas polares com 𝜔 variando de
0 a infinito [7].
No programa, é gerado um diagrama de Nyquist para o usuário. O programa
calcula a partir da representação de espaço de estados de um sistema linear (equação 4.2
e equação 4.3).
(𝑡) = 𝐴(𝑡)𝑥(𝑡) + 𝐵(𝑡)𝑢(𝑡) (4.2)
𝑦(𝑡) = 𝐶(𝑡)𝑥(𝑡) + 𝐷(𝑡)𝑢(𝑡) (4.3)
onde 𝑥(𝑡) é o vetor de estado, 𝑦(𝑡) é o vetor de saída (output), 𝑢(𝑡) é o vetor de entrada
(input), 𝐴(𝑡) é a matriz de estados, 𝐵(𝑡) é a matriz de entrada (input), 𝐶(𝑡) é a matriz de
saída (output), 𝐷(𝑡) é a matriz de transmissão direta e S é um vetor que localiza os nós
onde há forçamento.
𝐴 = [[0]𝑛𝑥𝑛 [𝐼]𝑛𝑥𝑛
[𝑀]𝑛𝑥𝑛−1 ∙ [𝐾]𝑛𝑥𝑛 [𝑀]𝑛𝑥𝑛
−1 ∙ ([𝐶] + [𝐺])𝑛𝑥𝑛] (4.4)
𝐵 = [
[𝑍]𝑛𝑥𝑛 ∙ [𝑆]𝑛𝑥1
[𝑀]𝑛𝑥𝑛−1 ∙ [𝑆]𝑛𝑥1
] (4.5)
𝐶 = [
00⋮
1000
]
2𝑛𝑥1
(4.6)
𝐷 = 0 (4.7)
4.4.3 Análise do regime transiente e permanente do domínio do tempo
Esta análise gera gráficos de amplitude de vibração no tempo e permite observar
os regimes transiente e permanente. O programa realiza os cálculos a partir da equação
4.8 [4], utilizando o método de iteração trapezoidal ODE23t do Matlab.
= [[0] [𝐼]
−[𝑀]−1 ∙ [𝐾] −[𝑀]−1 ∙ ([𝐶] + [𝐺])] ∙ 𝑄 + [
[0]
[𝑀]−1 ∙ [𝐹]] (4.8)
onde 𝐺 é a matriz giroscópica e tem as mesmas dimensões da matriz de massa (𝑀𝑛𝑥𝑛), e
𝐹 é o vetor de força (𝐹𝑛𝑥1), que tem o mesmo número de linhas da matriz de massa. Essa
análise exige uma configuração prévia, que será explicada a seguir
No âmbito das entradas de dados, foram adicionadas duas tabelas distintas, uma
para a inserção de forçamentos harmônicos e outra de forças de pulso. Na primeira,
entram valores dos módulos das forças harmônicas (𝑓𝑦 e 𝑓𝑧) nas direções Y e Z do sistema

16
de coordenadas e suas respectivas frequências de excitação, w, e ângulos de fase, 𝜑 (já
existe uma defasagem padrão de 90° entre as duas direções). Esse forçamento estará
presente desde o tempo inicial de análise até o tempo final. As forças harmônicas são
definidas pelas equações abaixo:
𝐹𝑦 = 𝑓𝑦 ∙ cos (𝑤 ∙ 𝑡 + 𝜑) (4.9)
𝐹𝑧 = 𝑓𝑧 ∙ 𝑠𝑒𝑛(𝑤 ∙ 𝑡 + 𝜑) (4.10)
Na segunda, entram valores de forças na forma de pulso nas direções Y e Z. Esta
função não utiliza delta de Dirac para calcular a resposta ao pulso. Essa função aplica
uma força durante um período de tempo muito curto (na ordem de 10−4s) definido pelo
passo da análise transiente, e o usuário poderá escolher em que instante de tempo o pulso
ocorre.
Vale ressaltar que é possível adicionar todos os tipos de forçamentos numa mesma
simulação. Os forçamentos serão adicionados à matriz de F de forças na equação 4.8.
Todos os vetores de força citados são criados automaticamente a partir da entrada
de dados de forças imposta pelo usuário. No código do programa, foi inserida uma rotina
que interpreta os nós com carregamento e aplica esses carregamentos nos graus de
liberdade correspondentes a cada nó.
Em conjunto a opção de análise transiente foi inserido no programa um painel de
configurações desta opção (Figura 4.3). Nela, é possível escolher a velocidade de rotação
do eixo, a qual será realizada a simulação, ativar ou não o efeito da gravidade, escolher o
nó de interesse da geometria para gerar os gráficos resposta (seja nos nós dos discos,
mancais, selos ou onde há forças atuando), opção de o programa calcular as órbitas para
cada um desses nós citados e o intervalo de tempo da análise e seu respectivo passo (esses
dois últimos itens são apenas parâmetros para geração de gráficos, o passo inserido não é
o mesmo passo utilizado pelo comando ode23t do Matlab, uma vez que esta função utiliza
um passo adaptativo).

17
Figura 4.3: Detalhe do quadro de configuração da análise transiente.
O efeito da gravidade foi inserido de tal forma que o peso de cada elemento (e não
de cada região) é dividido pelos seus respectivos nós. Esse peso é calculado através do
comprimento, diâmetro e massa específica associados a cada elemento discretizado e da
aceleração da gravidade. Cada nó da malha terá metade do peso de seus elementos
associados, por exemplo, o nó 2, que é compartilhado pelos elementos 1 e 2, terá uma
força aplicada nele que equivale à metade do peso do elemento 1 somado a metade do
peso do elemento 2.

18
5 COMPARAÇÃO ANSYS VS LaviROT
O programa LaviROT é uma ferramenta ainda em desenvolvimento. Por este
motivo, ele ainda deve passar por testes para verificar e validar seus resultados, se
provando confiável, antes que seja difundido em qualquer campo, seja no laboratório ou
para uso comercial. Este capítulo tem o propósito de criar um modelo de teste no
LaviROT e em um outro software comercial difundido, no caso o ANSYS, para comparar
os resultados obtidos em ambos os programas, e assim, validar os resultados do LaviROT.
5.1 Modelo de teste inicial
Como modelo de teste, utilizou-se a geometria do eixo do rotor que está em uma
bancada de testes no LAVI. No modelo, o eixo foi apoiado por dois mancais de rolamento
em suas extremidades. Além disso, um disco foi adicionado na parte central da geometria.
A fim de aproximar mais da realidade, tanto este teste quanto as simulações
posteriores, a rigidez direta dos mancais de rolamento foi calculada de acordo com a seção
5.2.
5.2 Cálculo da rigidez do rolamento
O deslocamento de um eixo, a partir de sua posição original concêntrica, depende
da deformação elástica das pistas e das esferas dos rolamentos que sustentam o eixo. Essa
deformação elástica depende da geometria e do material do rolamento e da folga interna
ou pré-carga (interferência). A folga é um fator importante porque determina a área de
tensão nas pistas. Quanto menor a folga (ou maior a interferência), mais elementos irão
compartilhar a carga externa aplicada.
Para uma dada força, o tamanho da área de contato determina a magnitude da
tensão nos componentes do rolamento. Pela teoria de contato de Hertz, para dois corpos
em contato, submetidos à uma força de compressão, o ponto de contato inicial entre eles
torna-se uma área (uma elipse para o caso de duas esferas). Essa força é dada pela equação
abaixo:
𝐹 = 𝐾𝑝 ∙ 𝛿𝑝3/2
(5.1)
Onde o subscrito p representa o ponto de contato da esfera com a pista (seja interna, no
ponto I ou externa, ponto O), 𝛿𝑝 é a deformação no ponto de contato e 𝐾𝑝 é a constante
força-deformação para um único ponto de contato, que depende da geometria e do

19
material da superfície [8, 9]. Nesse caso, há deformação tanto na pista externa quanto na
interna (Figura 5.1).
Figura 5.1: Pontos de contato da esfera com as pistas interna e externa (adaptado de [10]).
A deformação total é dada por:
𝛿 = 𝛿𝑝𝑖 ∙ 𝛿𝑝𝑜 (5.2)
𝛿 = (1
𝐾𝑝𝑖+
1
𝐾𝑝𝑜) ∙ 𝐹0,67 (5.3)
onde "i" representa a pista interna e "o" a pista externa. Assim, a equação 3 pode ser
rescrita como:
𝐹 = 𝐾𝑝𝑖𝑜 ∙ 𝛿1,5 (5.4)
onde 𝐾𝑝𝑖𝑜 é a constante força-deformação para o contato da esfera com as pistas dos
rolamentos em 2 pontos.
𝐾𝑝𝑖𝑜 =(𝐾𝑝𝑖 + 𝐾𝑝𝑜)
(𝐾𝑝𝑖0,67 + 𝐾𝑝𝑜
0,67)1,5 (5.5)
𝐾𝑝𝑖𝑜 depende principalmente da razão de curvatura f (Figura 5.2), do diâmetro da
esfera, do diâmetro do rolamento e do ângulo formado entre os pontos de contato da esfera
do rolamento e a vertical. A constante é definida pela equação 5.6.
𝑓 =2 ∙ 𝑟 + 𝐷𝑏
𝐷𝑏 (5.6)
onde r é o raio de curvatura e 𝐷𝑏 é o diâmetro da esfera do rolamento.

20
Figura 5.2: Representação do ângulo de contato (adaptado de [10]).
Segundo [11], ao desprezar a influência do diâmetro do rolamento e do ângulo de
contato alpha e para valores de f menores que 0,1 (maioria dos casos para rolamento de
esferas rígidas) tem-se a seguinte equação:
𝐾𝑝𝑖𝑜 =34300
𝑓0,35∙ 𝐷𝑏
0,5 (5.7)
A equação 5.4 indica a relação da deformação elástica com uma única força de
compressão aplicada ao elemento rolante. De fato, existe mais de um elemento rolante
suportando essa força de compressão, e neste caso, o efeito de cada elemento precisa ser
levado em consideração.
Quando a pista interna de um rolamento é deslocada de sua posição concêntrica
original à uma distância 𝑥𝑚 referente ao centro da pista externa, parte dessa distância
consiste na folga radial interna 𝑐𝑟. Assim, a deformação elástica na direção da carga radial
aplicada é:
𝛿0 = 𝑥𝑚 − 𝑐𝑟 (5.8)
E a deformação elástica em qualquer elemento rolante a partir de um ângulo 𝜑
com a vertical é dado por:
𝛿(𝜑) = 𝑥𝑚 ∙ cos (𝜑) ∙ 𝑐𝑟 (5.9)
Fazendo o equilíbrio de forças nas pistas do rolamento, tem-se:

21
𝐹𝑟 = ∑𝐹(𝜑𝑗)
𝑍
𝑗=1
(5.10)
Onde Z é o número de esferas do rolamento.
Para um dado rolamento, com as posições angulares das esferas conhecidas, um
deslocamento na pista interna 𝑥𝑚 pode ser assumido, resultando numa deformação
elástica 𝛿(𝜑), em cada esfera, calculada pela equação 8.
Se a fração de carga radial que é transmitida através da esfera diretamente em
linha com a carga aplicada é conhecida, então, o deslocamento resultante 𝑥𝑚 da pista
interna pode ser calculado diretamente. Da equação 5.4 tem-se:
𝑥𝑚 = 𝛿0 + 𝑐𝑟 (5.11)
Com:
𝛿0 = (𝐹𝑚
𝐹𝑝𝑖𝑜)
0,67
(5.12)
Onde 𝐹𝑚 é a força na esfera diretamente em linha com a carga radial aplicada.
Palmgren [11] faz aproximações negligenciando efeitos de folga e geometria do
rolamento:
𝑥𝑚 = 4,36 ∙ 10−8 ∙ (𝐹𝑚
2
𝐷𝑏)
0,33
(5.13)
Antes da equação 5.11 ser aplicada, a máxima força de compressão, 𝐹𝑚, em um
único elemento rolante deve ser determinada. A relação entre 𝐹𝑚 e 𝐹𝑟 é dada por:
𝐹𝑚 =4,37
𝑍∙ 𝐹𝑟 (5.14)
Substituindo a equação 5.14 na equação 5.11 tem-se:
𝑥𝑚 − 𝑐𝑟 = (4,37 ∙ 𝐹𝑟
𝑍 ∙ 𝐾𝑝𝑖𝑜)
11,08
(5.15)
Por fim, a relação entre a força radial e deformação elástica do rolamento foi
estabelecida e a rigidez pode ser calculada. Nota-se que a rigidez é não-linear com o
deslocamento da pista interna em relação à externa.
Substituindo 𝐹 = 𝐹𝑚 e 𝛿 = 𝑥𝑚 − 𝑐𝑟 na equação 5.4, tem-se:
𝐹𝑚 = 𝐾𝑝𝑖𝑜 ∙ (𝑥𝑚 − 𝑐𝑟)1,5 (5.16)
A rigidez do rolamento 𝐾(𝑥𝑚) pode ser obtida diferenciando a equação 5.16 em
relação ao deslocamento 𝑥𝑚:

22
𝐾(𝑥𝑚) =𝑑
𝑑𝑥𝑚𝐹𝑟 (5.17)
𝐾(𝑥𝑚) =𝑍
4,37∙
𝑑
𝑑𝑥𝑚𝐹𝑚 (5.18)
𝐾(𝑥𝑚) = 1,5 ∙𝑍
4,37∙ 𝐾𝑝𝑖𝑜 ∙ (𝑥𝑚 − 𝑐𝑟)
0,5 (5.19)
Para o caso da bancada de teste, o rolamento utilizado é o rolamento de esferas
SKF 6304-2Z. Pelo catálogo da SKF [12] tem-se os valores 𝐷 = 9,55mm; Z = 7 esferas;
𝐷𝑏 = 9,52mm. A folga radial da pista interna é de 0,01mm e a deformação elástica 𝑥𝑚
foi estimada em 0,008mm. Para esses valores, o resultado da equação 19. Desta forma, o
valor da rigidez do rolamento é de 1,771 ∙ 108 N/m.
5.3 Simulação em ANSYS Workbench
5.3.1 Introdução
O software de simulação por método de elementos finitos, ANSYS, apresenta uma
ferramenta para estudo de rotodinâmica. Ela é um complemento da análise modal e
permite não só a observação gráfica dos modos naturais de vibração do modelo, mas
também dos valores das frequências e a criação de um diagrama de Campbell.
Através de uma análise transiente, é possível gerar um gráfico de resposta em
frequência para a amplitude do deslocamento. E em uma análise estática, calcula-se o
deslocamento gerado pelo pulso de dois atuadores.
5.3.2 Geometria
O eixo foi desenhado na própria plataforma de desenho do ANSYS (Design
Modeler). A fim de gerar uma geometria com características semelhantes ao modelo feito
no LaviROT e que o programa gerasse elementos de viga automaticamente, a geometria
foi feita a partir de pontos, linhas de corpo (line bodies) entre estes pontos e seções
circulares. Todas as dimensões do desenho estão de acordo com o desenho técnico no
Apêndice A. A geometria final é apresentada abaixo nas Figuras 5.3 e 5.4.

23
Figura 5.3: Geometria do eixo gerada no ANSYS.
Figura 5.4: Geometria do eixo com as seções visíveis.
5.3.3 Geração de malha
Para analisar o eixo, foi escolhido o elemento de viga que se assemelhasse ao
usado no LaviROT. Sendo assim o tipo de elemento adotado foi o BEAM188. Segundo
o guia de usuário do ANSYS [13], esse elemento é adequado para análises lineares, desde
estruturas delgadas às vigas grossas. O elemento BEAM189 não foi utilizado porque é
um elemento adequado para análises não lineares. O BEAM188 é baseado na teoria de
viga de Timoshenko [14], e possui 6 graus de liberdade: rotações em 3 eixos e translações
em 3 eixos. Já o elemento EB-Ritto [5] é baseado na teoria de viga de Euler-Bernoulli.
Além do BEAM188, outros elementos estão presentes na análise, tais como MPC184,
para realizar a união entre os corpos de linha; COMBI214, que é um elemento
representando o sistema mola-amortecedor dos mancais; e MASS21, para representar a
massa do disco desbalanceado.

24
O tamanho médio de cada elemento foi selecionado de forma que o número total
de elementos BEAM188 fosse o mesmo da análise no LaviROT, 24 elementos. Por isso,
o tamanho escolhido foi de 46mm. Nota-se que não necessariamente todos os elementos
têm o mesmo comprimento, o próprio programa regula isto de forma aos elementos se
adequarem à geometria.
5.3.4 Análise rotodinâmica
Condições de contorno
Como condição de contorno, foram utilizados juntas do tipo rolamento (bearing)
no segundo e no penúltimo nó da geometria (a rigidez dos rolamentos foi calculada como
mostra a seção 5.2; velocidade de rotação numa faixa variando de 1000RPM até
10000RPM; e um ponto de massa no centro do eixo representando o disco desbalanceado.
A localização e as propriedades de rigidez dos mancais e localização e as propriedades
de inércia e desbalanceamento do disco são mostradas nas figuras 5.5, 5.6 e 5.7.
Posteriormente, a velocidade de rotação é removida para calcular as frequências naturais
do eixo parado.
Figura 5.5: Detalhe das condições de contorno da análise rotodinâmica no ANSYS.

25
Figura 5.6: Detalhe dos dados do rolamento da direita.
Figura 5.7: Detalhe dos dados do rolamento da esquerda.
Resultados
Como resultados, foram gerados o diagrama de Campbell (Figura 5.8), o diagrama
de amplitude em função da velocidade de rotação (Figura 5.9), e as frequências naturais
do eixo sem a rotação (Figura 5.10).
Figura 5.8: Diagrama de Campbell gerado pelo ANSYS.

26
Figura 5.9: Gráfico Amplitude (mm) x Velocidade de rotação [RPM].
Figura 5.10: Frequências naturais do sistema geradas no ANSYS.
A Figura 5.11, gerada pelo ANSYS, abaixo mostra os valores das velocidades
críticas de cada modo, bem como a direção de precessão e se o modo é estável ou não.
Figura 5.11: Velocidades de rotação críticas e direção de precessão geradas no ANSYS.
5.3.5 Análise Modal
Condições de contorno
Para calcular a frequência natural do corpo livre de apoios ou forçamentos
externos, foi feita uma análise modal com o eixo sem as condições de contorno aplicadas
anteriormente. O objetivo disso é comparar o resultado com o valor experimental, da
primeira frequência natural, obtido no laboratório com o auxílio de um osciloscópio e um
martelo de impacto.

27
Resultados
A Figura 5.12 abaixo mostra os valores da primeira frequência natural para as duas
direções transversais do eixo.
Figura 5.12: Frequências naturais do eixo livre geradas no ANSYS.
5.3.6 Análise estática
Condições de contorno
Nesta análise, o objetivo foi calcular o deslocamento gerado pelo pulso de uma
força em 4 passos de 5N, 10N, 15N e 20N para simular o pulso dos atuadores que estarão
na bancada de teste. Essa simulação não levou em conta a velocidade de rotação do eixo.
Para isso, usou-se as mesmas condições de fixação por rolamento descritas no sub-seção
5.3.4 e aplicou-se duas forças com aumento gradativo do seu módulo do sentido negativo
de Y, nos locais demonstrados pela Figura 5.13 abaixo.
Figura 5.13: Detalhe do posicionamento das forças e dos seus respectivos módulos.
Resultados
A Figura 5.14 abaixo mostra o resultado da simulação. Nota-se que o
deslocamento máximo gerado pelo atuador é de aproximadamente 0,09mm
aproximadamente, na região central do eixo, para uma força de 20N, bem abaixo do limite
máximo de 0,3mm permitido pelo batente da carcaça.

28
Figura 5.14: Resultado da análise estática gerada no ANSYS.
5.4 Simulação em Matlab – LaviROT
5.4.1 Introdução
No ambiente do LaviROT, a geometria foi dividida em 13 regiões, como mostra
a Figura 5.15. Cada região contendo seus dados de massa específica, coeficiente de
Poisson, módulo de elasticidade, comprimento e diâmetro. Os valores dessas
propriedades são apresentados na Tabela 5.1.
Figura 5.15: Ilustração da separação das regiões do eixo.
Tabela 5.1: Propriedades aplicadas ao eixo na simulação no LaviROT.
Região Mod. Elást.
(Pa)
Massa
esp.
(kg/m³)
Coef.
Poisson
Comprimento
(m)
Diâmetro
(m)
1 2,000e+11 7850 0,29 0,015 0,006
2 2,000e+11 7850 0,29 0,0139 0,015
3 2,000e+11 7850 0,29 0,23345 0,015
4 2,000e+11 7850 0,29 0,0485 0,018
5 2,000e+11 7850 0,29 0,05275 0,020
6 2,000e+11 7850 0,29 0,065 0,040

29
7 2,000e+11 7850 0,29 0,065 0,040
8 2,000e+11 7850 0,29 0,05275 0,020
9 2,000e+11 7850 0,29 0,0485 0,018
10 2,000e+11 7850 0,29 0,23345 0,015
11 2,000e+11 7850 0,29 0,01 0,015
12 2,000e+11 7850 0,29 0,0411 0,010
5.4.2 Condições de contorno
Como condições de contorno, nos nós 2 e 12 foram adicionadas rigidezes diretas
(𝐾𝑥𝑥 e 𝐾𝑦𝑦) na tabela de mancais e selos com os mesmos valores calculados na seção 5.2.
Na tabela de discos foi inserido um disco no nó 7 com 3kg de massa, 80mm de diâmetro
e 0,03mm de excentricidade. A Figura 5.16 mostra a interface do programa com os dados.
Figura 5.16: Interface do LaviROT com os dados para a simulação de teste.
As análises de interesse para o comparativo são: Campbell, Bode e Transiente. A
velocidade máxima de rotação (opção RPM MAX no LaviROT) configurada para realizar
o diagrama de Campbell e Bode foi 10.000 RPM. Para a análise transiente, a velocidade
de rotação escolhida foi 1458 RPM. O motivo da escolha desta velocidade será explicado
na seção de resultados a seguir. E por fim, optou-se por observar os resultados no nó onde
o disco está localizado, devido à hipótese de este nó apresentar a maior amplitude de
deslocamento.

30
5.4.3 Resultados
A partir desta simulação, obteve-se os diagramas de Campbell (Figura 5.17), o
gráfico da amplitude em função da frequência (Figura 5.18) o gráfico da amplitude, do
nó onde está o disco, ao longo do tempo (Figura 5.19) e sua respectiva órbita (Figura
5.20).
Figura 5.17: Diagrama de Campbell da simulação teste gerado no LaviROT.
Figura 5.18: Gráfico da amplitude vs frequência para a simulação teste gerado no LaviROT.

31
Figura 5.19: Resposta transiente da simulação teste gerado no LaviROT.
Figura 5.20: Órbita da resposta transiente da simulação teste gerado no LaviROT.
O gráfico da análise transiente foi gerado após o resultado das frequências críticas
pois era desejado utilizar a frequência natural para gerar a resposta transiente com ela.
Então, pelo diagrama de Campbell foi observado o valor de 1458 RPM e então colocado
no programa para calcular a resposta transiente.

32
Pelos resultados, percebe-se que os gráficos apresentam uma coerência entre
velocidade crítica e amplitude máxima, ou seja, a velocidade crítica no diagrama de
Campbell coincide com a frequência correspondente ao pico de amplitude no gráfico da
amplitude em função da frequência; e a análise transiente mostra um comportamento de
um sistema ressonância.
5.5 Comparação dos resultados
Pelos resultados gerados no ANSYS e no LaviROT, pode-se notar que ambos
apresentaram o mesmo valor para a primeira velocidade crítica de rotação no diagrama
de Campbell, mas havendo diferença no valor da segunda frequência crítica. Ambos os
programas mostraram o pico de amplitude em relação a frequência crítica para o mesmo
valor de velocidade de rotação (1458 RPM). A principal hipótese para essa diferença é o
uso de diferentes modelos de viga (Euler-Bernoulli e Timoshenko), uma vez que no
modelo de Euler-Bernoulli, a deformação devida ao esforço cortante é desprezada,
enquanto no modelo do Timoshenko não. Por este motivo, o primeiro modelo é mais
rígido e as frequências naturais são maiores.
Em relação aos valores de amplitude os programas apresentam resultados
semelhantes comparando o gráfico da Figura 5.9 e os gráfico das Figuras 5.18 e 5.19. O
primeiro apresenta o valor de 0,1183mm para a amplitude máxima, o segundo 0,110mm
e o terceiro 0,125mm aproximadamente. O erro relativo entre esses resultados é de 5,4%,
que é um erro pequeno e corresponde a erros numéricos na simulação.
Por esta validação fica claro que o LaviROT é um programa confiável para a
simulação de rotores e é de fato uma alternativa viável a outros softwares do mercado.

33
6 SIMULAÇÃO DA BANCADA DE TESTES
6.1 Introdução
Neste capítulo, será simulado o rotor em bancada de testes do LAVI. A estratégia
geral adotada para tal foi utilizar o LaviROT, a geometria do eixo da Figura 5.15 com os
dados da Tabela 5.1, mancais posicionados nos nós 2 e 12, com valor de rigidez direta
calculada na seção 5.2, taxa de amortecimento de 0,05 e rotação máxima de 15000 RPM.
As análises transientes foram realizadas para velocidades 8000 RPM, com um passo de
0,0002s e o efeito da gravidade foi considerado também.
Como primeiro caso, calcularam-se as amplitudes para o sistema sem selos,
levando em consideração, além dos mancais, apenas dois discos nos nós 6 e 8 da
geometria. O objetivo desta primeira análise é servir de referência para comparação com
as próximas simulações.
Nos casos seguintes, selos foram posicionados nos nós vizinhos aos discos (nós 5
e 9). Como ainda não há informações concretas sobre valores de coeficientes de rigidez
e amortecimento dos selos que serão utilizados na bancada, esses dados foram estimados
inicialmente por [15] e depois esses coeficientes foram alterados a fim de observar a
influência desses parâmetros dos selos no comportamento do rotor. Também aplicou-se
forças de pulso para simular os atuadores que estarão presentes na bancada e observar se
os deslocamentos respeitam os limites da bancada de testes. Os dados dos discos são
apresentados na Tabela 6.1 e os dados de referência dos selos são apresentados na Tabela
6.2.
Tabela 6.1: Dados dos discos.
Disco Localização Massa Diâmetro Excentricidade
1 Nó 6 5 Kg 100 mm 0,03 mm
2 Nó 8 5 Kg 100 mm 0,03 mm
Tabela 6.2: Dados dos selos.
Selo Localização Rigidez direta Rigidez
acoplada
Amortecimento
direto
1 Nó 5 100000 N/m 80000 N/m 250 N.s/m
2 Nó 9 100000 N/m 80000 N/m 250 N.s/m

34
A carcaça do rotor tem um batente interno (touchdown) que apenas permite um
deslocamento de 0,3mm. Logo, qualquer resultado que mostre uma amplitude de vibração
superior a este valor, significa que haverá um choque do rotor com a carcaça.
6.2 Análise do rotor sem selos
Neste primeiro caso, o modelo simulado levou em consideração o eixo, com os
dois mancais, dois discos com as propriedades da Tabela 6.1, nenhum selo posicionado e
as demais condições citadas na seção 6.1.
Como resultados iniciais, obteve-se o diagrama de Campbell (Figura 6.1), o
gráfico da amplitude em função da frequência para os nós dos discos 1 e 2 (Figuras 6.2 e
6.3 respectivamente) e os gráficos da amplitude em função do tempo para os nós dos
discos 1 e 2 (Figuras 6.4 e 6.6) e suas órbitas (Figuras 6.5 e 6.7).
Figura 6.1: Diagrama de Campbell do primeiro modelo.

35
Figura 6.2: Gráfico da amplitude vs frequência para disco 1 do primeiro modelo.
Figura 6.3: Gráfico da amplitude vs frequência para disco 2 do primeiro modelo.
36
Figura 6.4: Análise transiente do disco 1 do primeiro modelo.
Figura 6.5: Órbita do disco 1 do primeiro modelo.

37
Figura 6.6: Análise transiente do disco 2 do primeiro modelo.
Figura 6.7: Órbita do disco 2 do primeiro modelo.
Pelo gráfico da Figura 6.1, tem-se as seguintes velocidades de rotação críticas e
direções de precessão (Tabela 6.3).

38
Tabela 6.3: Velocidades críticas e direções de precessão do primeiro modelo.
Modos críticos Velocidade crítica (RPM) Direção de precessão
1 949 Retrógrada
2 950 Direta
3 4900 Retrógrada
4 5330 Direta
Os gráficos das Figuras 6.2 e 6.3 mostram um pico de 0,00025m ou 0,25mm de
amplitude para o primeiro modo crítico. Esse valor ainda respeita o limite de 0,3mm
disponível na carcaça.
Já pelos gráficos da análise transiente mostram que o primeiro pico do regime
transiente atinge um valor de 0,43mm. Vale lembrar que, neste modelo, o rotor acelera
de 0 RPM até 8000 RPM instantaneamente, por isso as amplitudes tendem a ser mais
elevadas. Outro aspecto a ser observado é o tempo que o sistema leva até atingir o regime
permanente. Neste caso, percebe-se que o sistema leva aproximadamente 1s.
6.3 Análise do rotor com selos e sem força de pulso
Neste segundo caso, o modelo simulado levou em consideração o eixo, com os
dois mancais, dois discos e dois selos nas posições mencionadas na seção 6.1 e com as
propriedades das Tabelas 6.1 e 6.2.
Para observar o comportamento desse modelo, foram gerados os gráficos das
Figuras 6.8 (Diagrama de Campbell), 6.9 e 6.10 (amplitude em função da frequência para
cada disco).
Figura 6.8: Diagrama de Campbell do segundo modelo.

39
Figura 6.9: Gráfico da amplitude em função da frequência para o disco 1 do segundo modelo.
Figura 6.10: Gráfico da amplitude em função da frequência para o disco 2 do segundo modelo.
Além desses resultados, foram gerados também gráficos que mostram as
amplitudes de vibração nas direções Y e Z no regime transiente para os nós que
apresentam discos e suas respectivas órbitas, como mostram as Figuras 6.11, 6.12, 6.13 e
6.14.

40
Figura 6.11: Análise transiente para o disco 1 do segundo modelo.
Figura 6.12: Órbita do disco 1 do segundo modelo comparada com o do primeiro.

41
Figura 6.13: Análise transiente para o disco 2 do segundo modelo.
Figura 6.14: Órbita do disco 2 do segundo modelo comparada com o do primeiro.
Pelo gráfico da Figura 6.8, tem-se as seguintes velocidades de rotação
críticas e direções de precessão (Tabela 6.4).

42
Tabela 6.4: Velocidades críticas e direções de precessão do segundo modelo.
Modos críticos Velocidade crítica (RPM) Direção de precessão
1 1086 Retrógrada
2 1872 Direta
3 5087 Retrógrada
4 5743 Direta
Pelos resultados obtidos nas Figuras 6.9 e 6.10, nota-se que este limite de batente
interno é sempre respeitado (no regime permanente) ao longo de toda a faixa de
velocidades de rotação e que o selo reduz quase pela metade a amplitude de deslocamento.
Observando os resultados da análise transiente, percebe-se que a inclusão dos
selos faz com que o sistema se comporte de maneira muito diferente do sistema da seção
6.2. Pelos gráficos das órbitas no regime permanente (Figuras 6.12 e 6.14) nota-se que,
com a adição dos selos, o centro de giro dos nós dos discos translada 0,04mm no sentido
positivo de Y, e a amplitude máxima na direção Z foi reduzida de 0,2mm para 0,114
(redução de 44%). E pelos gráficos das Figuras 6.11 e 6.13 tem-se que o maior pico de
amplitude no regime transiente é de 0,23mm, e o tempo até atingir o regime permanente
é aproximadamente 0,9s, uma redução de 47% na amplitude e 10% no tempo em relação
aos resultados da seção 6.2.
6.4 Análise do rotor com selos e com força de pulso
Nessa análise foi considerada a situação de uma força de pulso de 20N atuando
nas direções Y e Z. Como já foi dito anteriormente, o objetivo desta análise é simular o
atuador que estará presente na bancada. O pulso foi dado no nó central (nó 7) da
geometria, e em um instante de tempo em que o regime do sistema já estivesse
permanente (foi adotado o instante 1s). As Figuras 6.15 e 6.16 mostram os resultados das
amplitudes nos nós dos discos.

43
Figura 6.15: Análise transiente para o disco 1 do terceiro modelo.
Figura 6.16: Análise transiente para o disco 2 do terceiro modelo.

44
Os resultados mostram que o pulso de 20N de magnitude não representou um
aumento significativo da amplitude do deslocamento (apenas 0,04mm), somente criando
um novo regime transiente para o sistema.
6.5 Análise do rotor com selos de diferentes rigidezes diretas
Nesta seção, é avaliada, por uma análise discreta, a influência do coeficiente de
rigidez direta 𝐾𝑦 e 𝐾𝑧 dos selos no comportamento do sistema, sendo que os demais
coeficientes se mantêm constante. Para isso variou-se o coeficiente de rigidez direta dos
selos de 100.000N/m à 500.000N/m, e assim gerou-se um gráfico (Figura 6.17) que
mostra a evolução da amplitude máxima no regime transiente em função desse
coeficiente, outro para o regime permanente (Figura 6.18), um terceiro que mostra a
duração do regime transiente (Figura 6.19) e por último a influência sobre as velocidades
de rotação críticas (Figura 6.20).
Figura 6.17: Variação da amplitude máxima (em módulo) no regime transiente em função da
rigidez direta do selo.

45
Figura 6.18: Variação da amplitude máxima (em módulo) no regime permanente em função da
rigidez direta do selo.
Figura 6.19: Tempo de duração do regime transiente em função da rigidez direta do selo.

46
Figura 6.20: Variação das frequências críticas de rotação em função da rigidez direta do selo.
Os resultados mostram que o aumento da rigidez direta dos mancais contribui para
a redução das amplitudes de vibração de modo não-linear (quase exponencial).
Observando o gráfico da Figura 6.20 pode-se afirmar que as quatro primeiras
frequências críticas de rotação do rotor variam de forma diretamente proporcional em
relação à 𝐾𝑦𝑧 e 𝐾𝑧𝑦.
6.6 Análise do rotor com selos de diferentes rigidezes acopladas
Nesta seção, é avaliada, por uma análise discreta, a influência do coeficiente de
rigidez acoplado 𝐾𝑦𝑧 e 𝐾𝑧𝑦 dos selos no comportamento do sistema, sendo que os demais
coeficientes se mantêm constante. Para isso variou-se o coeficiente de rigidez acoplado
dos selos de 10.000N/m à 100.000N/m, e assim gerou-se um gráfico (Figura 6.21) que
mostra a evolução da amplitude máxima no regime transiente em função desse
coeficiente, um para o regime permanente (Figura 6.22) para a duração do regime
transiente (Figura 6.23) e para a influência sobre as velocidades de rotação críticas (Figura
6.24). Por fim, para a análise de estabilidade foram gerados dois gráficos, um apontando
a partir de qual valor de 𝐾𝑦𝑧 e 𝐾𝑧𝑦 o sistema se torna instável, através das amplitudes de
47
vibração (Figura 6.25), e outro, mostrando os diagramas de Nyquist para diferentes
valores desses parâmetros (Figura 6.26).
Figura 6.21: Variação da amplitude máxima no regime transiente em função da rigidez acoplada
do selo.
Figura 6.22: Variação da amplitude máxima no regime permanente em função da rigidez acoplada
do selo.

48
Figura 6.23: Tempo de duração do regime transiente em função da rigidez acoplada do selo.
Figura 6.24: Variação das frequências críticas de rotação em função da rigidez acoplada do selo.

49
Figura 6.25: Gráfico amplitude em função da rigidez acoplada do selo para apontar instabilidade.

50
Figura 6.26: Diagramas de Nyquist para diferentes valores de rigidezes acopladas do selo.
Os resultados mostram que a rigidez acoplada não influencia o sistema de maneira
semelhante à rigidez direta. Comparando as Figuras 6.21 e 6.22, percebe-se que o
coeficiente de rigidez acoplada dos selos exerce papéis diferentes sobre o regime
transiente e o permanente. Enquanto que a amplitude máxima no regime transiente
permanece praticamente constante, no regime permanente, a amplitude máxima de
vibração tende a aumentar conforme os valores de 𝐾𝑦𝑧 e 𝐾𝑧𝑦 aumentam. Já em relação a
duração do regime transiente, percebe-se que o tempo de duração não apresenta variação
significativa em função desses parâmetros.

51
Para as velocidades críticas é possível observar comportamentos linear em relação
aos coeficientes de rigidez acoplados. A primeira e a segunda frequências críticas são
mais sensíveis a variação de 𝐾𝑦𝑧 e 𝐾𝑧𝑦, sendo que a primeira varia negativamente e a
segunda positivamente com o aumento de 𝐾𝑦𝑧 e 𝐾𝑧𝑦. Já as demais, não apresentam
variação significativa.
Os gráficos da Figura 6.25 mostram diagramas de Nyquist para 5 situações
diferentes. O primeiro (para 𝐾𝑦𝑧 = 80000N/m) é o diagrama para o segundo modelo (rotor
com selo com as propriedades da Tabela 6.2), o último (parte inferior da figura) é o
diagrama para o caso o qual a rigidez acoplada atinge seu valor crítico e o sistema torna-
se instável e os demais gráficos mostram diagramas para valores de 𝐾𝑦𝑧 próximos ao
valor crítico, mas ainda dado com estável.
A Figura 6.26 mostra, através das amplitudes de deslocamento, para qual valor de
𝐾𝑦𝑧 o sistema se torna instável. Pode-se perceber que quando a rigidez atinge,
aproximadamente, o valor de 160500N/m, a amplitude tende a aumentar muito,
caracterizando instabilidade.
6.7 Análise do rotor com selos de diferentes coeficientes de amortecimento
diretos
Nesta seção, é avaliada, por uma análise discreta, a influência do coeficiente de
amortecimento direto 𝐶𝑦𝑧 e 𝐶𝑧𝑦 dos selos no comportamento do sistema, sendo que os
demais coeficientes se mantêm constante. Para isso variou-se o coeficiente de
amortecimento direto dos selos de 100N.s/m à 400N.s/m, e assim gerou-se um gráfico
(Figura 6.27) que mostra a evolução da amplitude máxima no regime transiente em
função desse coeficiente, outro para o regime permanente (Figura 6.28) um terceiro que
mostra a duração do regime transiente (Figura 6.29).

52
Figura 6.27: Variação da amplitude máxima no regime transiente em função do amortecimento
direto do selo.
Figura 6.28: Variação da amplitude máxima no regime permanente em função do amortecimento
direto do selo.
Figura 6.29: Tempo de duração do regime transiente em função do amortecimento direto do selo.

53
Pelos gráficos das Figuras 6.27 e 6.28, pode-se observar que a variação do
coeficiente de amortecimento do selo não exerce influência significativa nas amplitudes
de deslocamento do eixo, pois elas permanecem praticamente constantes.
Já o gráfico 6.29 mostra que o tempo de duração do regime transiente do rotor
aumenta diretamente proporcional ao aumento do coeficiente de amortecimento direto do
selo. Essa tendência mostra um comportamento superamortecido. Porém, para confirmar
essa hipótese, seriam necessárias outras análises para o sistema.

54
7 CONCLUSÕES E TRABALHOS FUTUROS
Primeiramente, a comparação entre as simulações feitas no ANSYS e no
LaviROT, mostrou que o LaviROT é um programa confiável para análises de
rotodinâmica. A diferença numérica entre os resultados é muito pequena, correspondendo
apenas aos erros numéricos. Embora o programa ainda esteja em desenvolvimento, ele é
uma alternativa aos softwares comerciais que existem no mercado.
De maneira geral, a simulação da bancada de teste mostrou que em nenhum
momento haveria choque do rotor com a carcaça para os casos com selos presentes.
Os resultados da análise de variação da rigidez direta dos selos mostraram que as
amplitudes de vibração reduzem e as frequências críticas de rotação aumentam conforme
esse fator aumenta.
Os resultados da análise da variação da rigidez acoplada mostram que esse fator
atua de maneira diversa no sistema: a amplitude máxima no regime transiente permanece
praticamente constante e no regime permanente, ela tende a aumentar conforme os valores
de 𝐾𝑦𝑧 e 𝐾𝑧𝑦 aumentam. Em relação as velocidades críticas, foi possível observar
comportamentos linear em relação aos coeficientes de rigidez acoplados. Sendo a
primeira e a segunda frequências críticas mais sensíveis; A primeira variando
negativamente e a segunda positivamente com o aumento de 𝐾𝑦𝑧 e 𝐾𝑧𝑦. Já as demais, não
apresentam variação significativa. E em relação a análise de estabilidade, conclui-se que
o valor crítico para a rigidez acoplada do selo é de 160500N/m. Valores superiores a esse
tornam o sistema instável.
Já com relação ao amortecimento direto do selo, conclui-se que este fator não
exerceu influência significativa nas amplitudes máximas. Sua influência se deu no tempo
de duração do regime transiente, onde este aumenta conforme o amortecimento aumenta.
Para melhorar o programa, seria interessante incluir o modelo de viga de
Timoshenko, aprimorar a análise de estabilidade utilizando o critério de Nyquist ou até
aplicando outros métodos (Lyapunov, por exemplo) um modo torcional de vibração, uma
ferramenta de análise estática de deflexão do eixo. Outra sugestão é migrar a plataforma
base do LaviROT para uma plataforma gratuita (Python, por exemplo), pois o Matlab é
um software pago.
Por último, seria importante a comparação dos resultados gerados pelo LaviROT
com testes experimentais para aumentar ainda mais a confiabilidade do programa.

55
8 REFERÊNCIAS BIBLIOGRÁFICAS
[1] YOON, Se Young; LIN, Zongli; ALLAIRE, Paul E., Control of Surge in
Centrifugal Compressors by Active Magnetic Bearings: Theory and
Implementation., Springer Science Business Media, 2012
[2] NPTEL Mechanical Engineering (on-line), Disponível em: http://nptel.ac.in/courses/
[3] CRANDALL, S. H.; LARDNER, T. J.; ARCHER, R. R.; COOK, N. H.; DAHL, N.
C. An introduction to the mechanics of solids. McGraw-Hill, 1978
[4] CHILDS, Dara W, Turbomachinery rotordynamics: phenomena, modeling, and
analysis., John Wiley Sons, 1993.
[5] Ritto, Thiago G., Sampaio, Rubens., Rotor Dynamics with MATLAB - Finite
Element Analysis, PUC-Rio, 2007.
[6] INMAN, Daniel J.; SINGH, Ramesh Chandra., Engineering vibration., Upper
Saddle River: Prentice Hall, 2001.
[7] OGATA, Katsuhiko, Engenharia de Controle Moderno, 5ed. São Paulo, Pearson
Prentice Hall, 2010.
[8] CHANGSEN, W., Analysis of Rolling Element Bearings, Mechanical Engineering
Publications Ltd., London, 1991.
[9] HARRIS, T.A., Rolling Bearing Analysis, Wiley, New York, 2001.
[10] TIWARI, R., Analysis and Identification in Rotor-Bearing Systems, Indian
Institute of Technology Guwahati, 2010.
[11] PALMGREN, A., Ball and Roller Bearing Engineering, 3rd ed., Burbank, 1959.
[12] Catálogo SKF (on-line), Disponível em: <http://www.skf.com/>
[13] ANSYS Mechanical APDL Element Reference, ANSYS Inc, 2012
[14] TIMOSHENKO, Stephen P.; GERE, James M.; Mecânica dos Sólidos, Vol. 1,
LTC, 1993
[15] CHILDS, D. W.; RAMSEY, Christopher., Seal-rotordynamic-coefficient test
results for a model SSME ATD-HPFTP turbine interstage seal with and without
a swirl brake., ASME, Transactions, Journal of Tribology, v. 113, 1991

56
APÊNDICE A – Desenho detalhado do eixo




![Review Article Pathogenesis and Nomenclature of ...Elzay [ ]andSlootwegandMuller [¨ ]usedtheterm ameloblastic carcinoma to convey the presence of cytologic features of malignancy](https://img.document.onl/doc/110x75/60b16c8eee3ee35e092a229d/review-article-pathogenesis-and-nomenclature-of-elzay-andslootwegandmuller.jpg)