Embed Size (px)
Citation preview
TECNICAS DE OTIMIZACAO APLICADAS A PROBLEMAS DE CONTATO
ELASTICO
Gabriel Mario Guerra Bernada
DISSERTACAO SUBMETIDA AO CORPO DOCENTE DA COORDENACAO
DOS PROGRAMAS DE POS-GRADUACAO DE ENGENHARIA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSARIOS PARA A OBTENCAO DO GRAU DE MESTRE
EM CIENCIAS EM ENGENHARIA MECANICA.
Aprovada por:
Prof. Jose Herskovits Norman, Dr. Ing.
Prof. Marcelo Amorim Savi, D.Sc.
Prof. Angela Cristina Cardoso de Souza, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
OUTUBRO DE 2006

BERNADA, GABRIEL MARIO GUERRA
Tecnicas de otimizacao aplicadas a
problemas de contato elastico. [Rio de
Janeiro] 2006
IX, 79p. 29,7 cm (COPPE/UFRJ, M.Sc.,
Engenharia Mecanica, 2006)
Dissertacao - Universidade Federal do Rio
de Janeiro, COPPE
1. Otimizacao nao linear.
1. Mecanica de solidos.
I. COPPE/UFRJ II. Tıtulo (serie)
ii

A Mario Gaston Bernada
iii
Agradecimentos
Ao professor Herskovits, pela orientacao.
A Sandro, Evandro e Carmen Nilda por os valiosos aportes e observacoes.
Ao os colegas e amigos do laboratorio Optimize: Alfredo, Paulo, Henry, Moises,
Miguel, Veranisse, Vania, Denise, Rossane e Silvio.
Ao corpo docente e pessoal administrativo do Programa de Engenharia Mecanica
da COPPE.
Ao programa PEC-PG da CAPES pelo apoio financeiro.
Aos professores do Instituto de Ingenierıa Mecanica y Produccion Industrial da
Faculdade de Engenharia do Uruguai pelo incentivo.
A minha avo, mae e irma pelo grande carinho e apoio constante a distancia.
iv

Resumo da dissertacao apresentada COPPE/UFRJ como parte dos requisitos
necessarios para a obtencao do grau de Mestre em Ciencias (M.Sc.)
TECNICAS DE OTIMIZACAO APLICADAS A PROBLEMAS DE CONTATO
ELASTICO
Gabriel Mario Guerra Bernada
Outubro/2006
Orientador: Jose Herskovits Norman
Programa: Engenharia Mecanica
Este trabalho apresenta a formulacao do problema de contato entre corpos
elasticos, na hipotese de elasticidade infinitesimal sem atrito. Trata-se de
um problema nao linear devido a presenca de restricoes unilaterais de nao
interpenetracao. Por conseguinte, utilizando conceitos de otimizacao, pode-se
formular como um problema de minimizacao com restricoes de desigualdade, ou
de forma equivalente como um problema de complementaridade na variavel dual.
Devido ao carater localizado do contato, e conveniente adotar tecnicas que
trabalhem somente com a regiao de contato potencial como variaveis de otimizacao.
Com essa finalidade, foi desenvolvida uma interface entre os algoritmos e um
codigo comercial de elementos finitos, a qual permite o desacoplamento da analise
estrutural.
A presente pesquisa compara o desempenho dos algoritmos de ambas
formulacoes, e explora as vantagens da utilizacao de um codigo comercial como
ferramenta auxiliar na analise de problemas de grande porte. Em razao disso,
sao apresentados alguns exemplos de contato entre corpos bidimensionais e
tridimensionais no capıtulo final.
v

Abstract of dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
OPTIMIZATION TECHNIQUES APPLIED FOR ELASTIC CONTACT
PROBLEMS
Gabriel Mario Guerra Bernada
October/2006
Advisor: Jose Herskovits Norman
Department: Mechanical Engineering
This work presents the formulation of the contact problem between elastic bodies,
in the hypothesis of infinitesimal elasticity without friction. This is a non linear
problem due to the presence of unilateral constraints of non interpenetrability.
Consequently, using concepts of optimization, a minimization problem with
inequality constraints, or in equivalent way as a complementarity problem in the
dual variable can be formulated.
Due to the local character of the contact, it is convenient to adopt techniques
that only work with this potential contact area as optimization variables. Thus, an
interface between the algorithms and a commercial code of finite elements analysis,
which allows the uncoupling of structural analysis, was developed.
The present research compares the acting of the algorithms of both formulations,
and explores the advantages of the commercial code as an auxiliary tool of the
optimization algorithms for the analysis of large problems. Then, examples are
presented among two-dimensional and three-dimensional bodies in the final chapter.
vi

Sumario
1 Introducao 1
1.1 Conceitos preliminares . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Objetivos e organizacao deste trabalho . . . . . . . . . . . . . . . . . 5
2 Equilıbrio em elasticidade linear 7
2.1 Formulacao forte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Formulacao fraca . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3 Princıpio de mınima energia potencial total . . . . . . . . . . . . . . . 10
2.4 Solucao aproximada . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3 Apresentacao do problema de contato 14
3.1 Problema de Signorini . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2 Contato entre corpos elasticos . . . . . . . . . . . . . . . . . . . . . . 18
3.2.1 Geometria do contato . . . . . . . . . . . . . . . . . . . . . . . 18
4 Metodos de resolucao 21
4.1 Metodo 1 - Problema de otimizacao . . . . . . . . . . . . . . . . . . . 21
4.2 Descricao do algoritmo (FDIPA) . . . . . . . . . . . . . . . . . . . . . 23
4.2.1 Aplicacao ao problema de contato . . . . . . . . . . . . . . . . 25
4.2.2 Algoritmo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.3 Metodo 2 - Problema de complementaridade . . . . . . . . . . . . . . 31
4.4 Descricao do algoritmo (ALG-NCP) . . . . . . . . . . . . . . . . . . . 33
4.4.1 Aplicacao ao problema de contato . . . . . . . . . . . . . . . . 36
4.4.2 Algoritmo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
vii

5 Interface com ABAQUS 40
5.1 Descricao do programa . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.1.1 Acessibilidade e interacao . . . . . . . . . . . . . . . . . . . . 42
5.2 Descricao da interface . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.3 Funcionamento da interface . . . . . . . . . . . . . . . . . . . . . . . 43
6 Resultados numericos 45
6.1 Exemplo 1 - Semicilindro (2D) . . . . . . . . . . . . . . . . . . . . . . 46
6.2 Exemplo 2 - Mola (3D) . . . . . . . . . . . . . . . . . . . . . . . . . . 50
6.3 Exemplo 3 - Pinca (3D) . . . . . . . . . . . . . . . . . . . . . . . . . 54
6.4 Exemplo 4 - Pinhao e cremalheira (2D) . . . . . . . . . . . . . . . . . 58
7 Consideracoes finais 62
7.1 Conclusoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
7.2 Sugestoes para trabalhos futuros . . . . . . . . . . . . . . . . . . . . 63
Referencias Bibliograficas 65
A Algumas consideracoes sobre otimizacao 67
B Metodo de Newton Raphson 70
C Codigos da interface 72
viii
Lista de sımbolos
IRn Vetores reais de dimensao n
IRm×n Matrizes reais de dimensoes m× n
x Vetor de variaveis primais ou variaveis de projeto
u Vetor de deslocamentos
σ Tensor de tensoes
ε Tensor de deformacoes infinitesimais
b Campo de forcas de volume
f Campo de forcas de superfıcie
F Campo de forcas externas
F Funcao de complementaridade
Φ Funcao potencial energıa elastica, Φ : IRn → IR
f Funcao objetivo. f : IRn → IR
g Funcao das restricoes de desigualdade. g : IRn → IRm
∇f Gradiente da funcao f(x), ∇f : IRn → IRn
∇g Gradiente da funcao g(x), ∇g : IRn → IRm×n
Ω Regiao viavel, conjunto de pontos que satisfazem as restricoes
λ Multiplicadores de Lagrange das restricoes de desigualdade, λ ∈ IRm
L Funcao lagrangeana. L(u, λ) : IRn × IRm × IRp → IR
Π Funcao energıa total de deformacao Π(u) : IRn → IR
H Matriz hessiana. H : IRn × IRm × IRp → IRn×n
K Matriz de rigidez do solido k
t Passo, t ∈ IR
d, d0, d1 Direcoes de busca. d ∈ IRn, d0 ∈ IRm, d1 ∈ IRp
Λk, Gk Matriz diagonal, diag(λk), diag(gk)
• Produto de Hadamard
ix
Lista de Figuras
2.1 Solido em equilibro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1 Condicoes geometricas de contato . . . . . . . . . . . . . . . . . . . . 14
3.2 Problema de Signorini . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3 Malhas incompatıveis . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.4 Situacao de contato no - segmento . . . . . . . . . . . . . . . . . . . . 19
3.5 Situacao de contato no - no . . . . . . . . . . . . . . . . . . . . . . . 20
3.6 Campo de deslocamentos incompatıveis na configuracao no - no . . . 20
4.1 Direcao de busca do algoritmo FDIPA . . . . . . . . . . . . . . . . . 24
4.2 Direcao de busca do algoritmo ALG-NCP . . . . . . . . . . . . . . . 34
5.1 Esquema da Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.2 Diagrama da interacao Matlab - ABAQUS . . . . . . . . . . . . . . . 44
6.1 Modelo 1 condicoes de contorno . . . . . . . . . . . . . . . . . . . . . 46
6.2 Configuracao deformada com tensoes de Von-Mises . . . . . . . . . . 47
6.3 Malha deformada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
6.4 Curva pressao na regiao de contato . . . . . . . . . . . . . . . . . . . 47
6.5 Criterio de parada . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6.6 Modelo 2 condicoes de contorno . . . . . . . . . . . . . . . . . . . . . 50
6.7 Configuracao deformada com tensoes de Von-Mises . . . . . . . . . . 51
6.8 Nos da face do modelo em contato na superfıcie analıtica . . . . . . . 51
6.9 Criterio de parada . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
6.10 Modelo 3 condicoes de contorno . . . . . . . . . . . . . . . . . . . . . 54
6.11 Geometria da malha e tensoes de Von-Mises . . . . . . . . . . . . . . 55
x

6.12 Ampliacao da zona de contato . . . . . . . . . . . . . . . . . . . . . . 55
6.13 Criterio de parada . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
6.14 Modelo 4 condicoes de contorno . . . . . . . . . . . . . . . . . . . . . 58
6.15 Geometria da malha . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6.16 Tensoes de Von-Mises nos elementos . . . . . . . . . . . . . . . . . . . 59
6.17 Criterio de parada . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
B.1 Direcao de busca do algoritmo de Newton . . . . . . . . . . . . . . . 71
xi
Capıtulo 1
Introducao
O estudo do contato entre corpos deformaveis apresenta grande interesse na
engenharia devido a que os esforcos sao transmitidos nesta condicao na maioria dos
componentes mecanicos. Quando o interesse na distribuicao de tensoes encontra-se
em regioes distantes a regiao de contato, a aplicacao do principio de Saint-Venant
e suficiente. Nele, afirma-se que a distribuicao longe do ponto de aplicacao das
forcas depende somente da resultante. Deste modo, as forcas de contato podem
ser simplificadas a forcas de superfıcie, constituindo-se num dado do problema de
equilıbrio. Porem, existem casos onde devido as grandes tensoes geradas nas areas de
contato, torna-se indispensavel conhecer sua distribuicao na regiao. Como exemplos
podem-se citar o desenho de engrenagens e eixos, onde tensoes de contato cıclicas sao
responsaveis pelas falhas por fadiga ou fenomenos mais complexos como os processos
de conformacao metalica ou colisoes. A partir destes exemplos, pode ser feita uma
classificacao para a analise do contato, a saber:
- Contato intencional: previamente planejado, procura maximizar a eficiencia do
contato. Este e o caso do contato entre a matriz de conformacao mecanica e a peca
a ser conformada.
- Contato acidental: ocorre em situacoes nao previstas e procura minimizar os
efeitos, como por exemplo o impacto de veıculos.
Como pode-se observar, sao inumeras as aplicacoes onde intervem o fenomeno
de contato, assim como as dificuldades que apresentam-se no tratamento analıtico,
constituindose portanto num tema ativo de pesquisa.
1
Os primeiros estudos do problema de contato aparecem na literatura por volta
do seculo XIX, com o objetivo de desenvolver uma teoria para o impacto. Entre
os autores encontram-se nomes como POISSON, VOIGHT e SAINT-VENANT
responsaveis pelas primeiras formulacoes para esta teoria.
Em (1882) Heinrich HERTZ considerou o equilıbrio de dois corpos elasticos
em contato superficial. Seu interesse surgiu da analise da deformacao das
lentes submetidas a acao de forcas de contato e como estas poderiam gerar
interferencia otica. Assim, por analogia com a distribuicao de pressoes produzida por
deslocamentos compatıveis com uma area elıptica, ele obteve com sucesso formulas
analıticas para serem aplicadas em alguns problemas especiais, as quais ate hoje sao
utilizadas, TIMOSHENKO [17], JOHNSON [11]. Posteriormente, SIGNORINI em
(1933) apresento seu primer estudo do equilıbrio entre corpos linearmente elasticos
com contato no qual trabalho ate sua versao definitiva em (1959). Durante a primeira
metade do seculo XX a escola russa trouxe importantes contribuicoes, BELIAEV
e DINNIK verificaram experimentalmente os resultados obtidos por HERTZ, e
GALIN e SHTERMAN propuseram novos metodos para analise do contato.
A primeira analise rigorosa do problema de SIGNORINI, foi apresentada por
FICHERA em (1963), realizando valiosas contribuicoes teoricas sobre existencia e
unicidade das solucoes alcancadas a partir da formulacao variacional, este e outros
detalhes sobre a evolucao historica podem-se ver em KIKUCHI [12]. Daı em diante
muitos avancos foram efetuados, tanto na formulacao quanto na resolucao. Devido
principalmente a evolucao dos metodos numericos, e em particular, ao metodo dos
elementos finitos. Nesta tecnica, as variaveis e funcoes que definem o problema
derivam da discretizacao do corpo, obtendo desta forma solucoes aproximadas. No
entanto, com estes avancos, novas dificuldades apresentarem-se, tanto do ponto
de vista matematico quanto de sua resolucao computacional. Constituindo-se na
principal motivacao para que durante os ultimos anos um esforco consideravel tenha
sido direcionado a analise e solucao destes problemas.
Hoje em dia, como consequencia do crescente poder de processamento dos
computadores, e possıvel atingir maior sofisticacao e detalhe nos modelos de
contato. Em virtude disto, encontram-se disponıveis numerosos pacotes comerciais
2
de analise por elementos finitos (FEA), que incluem em seu codigo ferramentas
para o tratamento de alguns problemas de contato. Neste sentido, este trabalho
procura avaliar novas ferramentas aplicadas a este tipo de problemas, utilizando
como ferramenta auxiliar um software (FEA) comercial para analise estrutural.
1.1 Conceitos preliminares
Quando solidos estao em contato, existe uma restricao geometrica de nao
penetrabilidade que deve ser satisfeita na interface. Como nao se conhece a regiao
de contato a priori, nao e possıvel determinar deslocamentos nem tensoes, ou seja,
nao se podem estabelecer as condicoes de contorno. Como consequencia, mesmo
em elasticidade linear na hipotese de deformacoes infinitesimais, o problema de
valor de contorno deixa de ser linear. No caso geral, ha dois fenomenos fısicos
a serem considerados nesta interface: o comportamento na direcao normal e o
comportamento na direcao tangencial. Na direcao normal, a formulacao da condicao
de nao penetrabilidade como restricao geometrica e o procedimento adotado em
muitos trabalhos como KIKUCHI, SIMO, WRIGGERS [12] [4] [14]. Na direcao
tangencial, o comportamento e mais complexo devido a existencia de atrito. Para
modelar este fenomeno existem muitas aproximacoes, a mais frequente e baseada
na lei classica de Coulomb. Nesta, o movimento na direcao tangencial e dividido
em duas acoes. A primeira acao se denomina condicao de aderencia perfeita
- Stick - onde nao ocorre deslocamento relativo tangencial. A segunda acao e
denominada de deslizamento - Slip -, e existe um movimento tangencial relativo
na interface de contato. Outra forma de modelar o atrito e atraves de analogias com
o fenomeno de plasticidade. Nele, as equacoes constitutivas tem como ideia basica
dividir o deslocamento tangencial em uma parte elastica reversıvel e outra plastica
irreversıvel, constituindo assim um problema nao conservativo BARBOZA [7].
Neste trabalho nao sera considerado o efeito do atrito, portanto, o problema
de contato e conservativo e, como sera visto mas adiante pode-se considerar como
um problema de minimizacao de um funcional sujeito a restricoes de desigualdade.
Portanto, recai-se num problema de programacao matematica que podera ser tratado
3

atraves das tecnicas de otimizacao usuais. Entre estas tecnicas pode-se citar: o
metodo de programacao quadratica ou o metodo de penalidade, este ultimo consiste
em transformar o problema num outro de minimizacao sem restricoes atraves da
inclusao das restricoes de impenetrabilidade ao funcional. Outra alternativa e
descrita no trabalho de BJORKMAN, KLARBRIG e SJODIN [6], onde mostra como
um problema quadratico de minimizacao com restricoes de desigualdade, pode ser
reduzido a um problema de complementaridade linear (PLC) nas variaveis duais,
atraves do estabelecimento das condicoes de otimalidade (condicoes de Karush-
Kuhn-Tucker) e posterior eliminacao das variaveis primais. Para resolver problemas
de complementaridade existem uma grande variedade de tecnicas as quais serao
vistas em capıtulos posteriores.
Finalmente, outro ponto importante a ser considerado e quando apresenta-se
contato entre dois ou mais solidos deformaveis. Neste caso, o calculo das restricoes
geometricas nao e trivial, pois e necessario estabelecer uma estrategia para medir
a distancia entre corpos discretizados. Este ponto e mais importante em caso de
trabalhar com grandes deformacoes, levando em conta que um ponto da superfıcie de
um corpo pode entrar em contato com qualquer regiao da superfıcie de outro corpo.
Quando o contato e entre um corpo deformavel e um corpo rıgido, o problema e mais
simples ja que o corpo rıgido pode ser descrito por funcoes analıticas, o que facilita
o calculo das restricoes, KLARBRING [2]. Uma revisao detalhada do estado da
arte do problema de contato, assim como das vantagens e desvantagens de distintas
estrategias para o calculo das restricoes de impenetrabilidade pode-se ver no trabalho
de ARORA [3].
A seguir, sao apresentados os objetivos da presente dissertacao junto a
consideracoes adotadas para abordagem do problema de contato.
4
1.2 Objetivos e organizacao deste trabalho
Este trabalho tem como objetivo apresentar o problema de contato sem atrito
na hipotese de pequenas deformacoes. Para sua resolucao, serao adotadas duas
formulacoes alternativas. A primeira formulacao define o problema de minimizacao
na variavel primal, e a segunda define um problema de complementaridade linear
na variavel dual.
Para a resolucao do problema de minimizacao sera adotado uma variante do
metodo de Newton da famılia dos metodos de Lagrange. Esta variante proposta por
HERSKOVITS [8] chama-se ’FDIPA’ (Feasible direction interior point algorithm).
A tecnica baseia-se no calculo da direcao de descida a partir de uma iteracao
de Newton nas condicoes de Karush-Kuhn-Tucker (KKT) de primeira ordem,
seguida de uma pequena deflexao para garantir uma direcao viavel no passo.
Este procedimento iterativo gera, a partir de um ponto viavel u0, uma sequencia
de pontos viaveis convergentes para a solucao do problema, onde as restricoes
sempre sao satisfeitas, o que representa uma vantagem se comparado ao metodo de
penalidade. Para a resolucao do problema de complementaridade, sera utilizado um
novo algoritmo chamado(ALG-NCP) baseado na ideia do (FDIPA). Este algoritmo
gera uma sequencia de pontos interiores a regiao viavel, minimizando uma funcao
potencial associada ao problema.
Devido ao carater localizado do contato, as restricoes envolvem apenas os nos de
contato potencial, o que sugere trabalhar somente com o nos da regiao de contato
potencial como variaveis de otimizacao. Com esse objetivo, em geral adotam-se
tecnicas de sub-estruturacao ou condensacao estatica da matriz de rigidez. Neste
trabalho foi possıvel atingir esse objetivo atraves do desacoplamento do calculo
estrutural, permitindo resolver o problema sem a necessidade de ter acesso a matriz
de rigidez.
Em razao disto, sera desenvolvida uma interface entre os algoritmos apresentados
e um aplicativo comercial de elementos finitos ABAQUS. Isto permitira aos
algoritmos trabalhar somente com os nos da regiao de contato potencial como
variaveis de otimizacao, diminuindo assim o custo computacional. Outra vantagem
5

desta estrategia e permitir atingir problemas de maior porte com menores recursos
computacionais, assim como utilizar plataformas computacionais diferenciadas
segundo a necessidade. Por conseguinte, procura-se explorar as vantagens do uso
desta interface como ferramenta auxilar dos algoritmos, nao so no processamento,
mas tambem no pre-processamento e pos-processamento.
Com esta finalidade, sao apresentados no final deste trabalho alguns exemplos
bidimensionais e tridimensionais de contato com os quais a interface foi calibrada.
A partir destes exemplos tambem sera feita a comparacao do desempenho dos
algoritmos apresentados em termos de tempo e resultados numericos obtidos.
Este trabalho encontra-se organizado da seguinte forma:
• Capıtulo 1. Faz uma introducao do problema de contato e descreve o objetivo
do trabalho.
• Capıtulo 2. Apresenta conceitos de equilıbrio em elasticidade linear junto as
formulacoes forte e fraca.
• Capıtulo 3. Trata o problema geral de contato apresentando duas formulacoes
do mesmo.
• Capıtulo 4. Mostra esquemas numericos para a solucao das formulacoes e um
resumo dos algoritmos.
• Capıtulo 5. Apresenta a interface desenvolvida com o ABAQUS e sua
aplicacao.
• Capıtulo 6. Mostra os resultados numericos obtidos nos exemplos.
• Capıtulo 7. Finaliza a pesquisa, expondo as conclusoes e sugestoes para
trabalhos futuros.
6

Capıtulo 2
Equilıbrio em elasticidade linear
Previamente a analise do problema de contato, efetuamos algumas consideracoes a
respeito do problema de equilıbrio geral num solido elastico. Com este objetivo, sao
apresentadas as formulacoes forte (diferencial) e fraca (variacional) do problema
de valor de contorno (PVC) associado a hipotese de pequenos deslocamentos e com
condicoes de contorno bilaterais, ou seja, igualdades.
2.1 Formulacao forte
Seja um solido contınuo que na sua configuracao indeformada ocupa um subconjunto
do espaco Ω , aberto, limitado no contorno Γ, e simplesmente conexo como na
(Figura 2.1).
Figura 2.1: Solido em equilibro
7

Assume-se que o contorno Γ de Ω e dividido em regioes,
- Γu onde os deslocamentos sao prescritos,
- Γt onde atuam forcas de superfıcie f ,
que verificam,
Γt ∪ Γu = Γ, (2.1)
Γt ∩ Γu = ∅. (2.2)
Para simplificar considera-se o corpo fixo em Γu,
u(x) = 0 ∀ x ∈ Γu. (2.3)
O campo de tensoes internas σ do corpo estara em equilıbro com o carregamento
externo (b, f) se sao verificadas as seguintes equacoes,
div(σ) + b = 0 em Ω (2.4)
σ.n = f em Γt (2.5)
onde b representa o campo das forcas de volume em Ω, f o campo das forcas de
superfıcie em Γt , n e um vetor unitario normal exterior a esta superfıcie e σ o tensor
de tensoes.
Considerando-se as tensoes como uma funcao do tensor de deformacoes
infinitesimais ε, pode-se admitir a existencia de uma relacao constitutiva da forma:
σ = σ(ε(u)) (2.6)
Portanto, o problema de equilıbrio de um solido, Fig. 2.1, consiste em achar o
par (u, σ) tal que,
u satisfaca as condicoes de contorno geometricas (Eq. 2.3),
σ esteja em equilıbrio com (b, f) (Eqs. 2.4 e 2.5),
(σ, u) estejam ligados pela relacao constitutiva (Eq. 2.6).
8

2.2 Formulacao fraca
Considere agora um espaco vetorial V formado pelo campo de deslocamentos com
regularidade suficiente para que as operacoes a seguir facam sentido. Nele, considere
o subespaco K formado pelos deslocamentos cinematicamente admissıveis,
K = v ∈ V : v(x) = 0 ∀ x ∈ Γu. (2.7)
Multiplicando-se escalarmente a Eq. 2.4 pelo campo de deslocamentos v ∈ V
tem-se,
div(σ) · v + b · v = 0, (2.8)
levando em conta a seguinte propriedade,
div(σ · v) = div(σ) · v + σ · ∇v, (2.9)
e integrando no domınio Ω, obtem-se a seguinte expressao,
−
∫
Ω
σ · ∇v dΩ +
∫
Ω
div(σ · v) dΩ +
∫
Ω
b · v dΩ = 0, (2.10)
logo, aplicando o teorema da divergencia no segundo termo da equacao integral,
obtem-se,∫
Ω
σ · ∇v dΩ =
∫
Γt
f · v dΓ +
∫
Ω
b · v dΩ. (2.11)
Devido a hipotese de deformacoes infinitesimais, o tensor de deformacoes pode ser
dado pela parte simetrica do gradiente do campo de deslocamentos,
ε(v) = (∇v)s =1
2(∇v + ∇vt). (2.12)
Assim, substituindo a (Eq. 2.12) na (Eq. 2.11), obtem-se a seguinte expressao
conhecida como o princıpio dos trabalhos virtuais,
∫
Ω
σ · ε(v) dΩ =
∫
Ω
b · v dΩ +
∫
Γt
f · v dΓ, (2.13)
expressao que e satisfeita para todo campo de deslocamentos v ∈ K, desde que σ
esteja em equilıbrio com as forcas externas (b, f).
Por conseguinte, esta equacao representa o equilıbrio global e constitui a
caracterizacao fraca ou integral do equilıbrio. Levando em conta a relacao
9

constitutiva do material (Eq. 2.6) e o princıpio dos trabalhos virtuais (Eq. 2.13);
aplicando v ∈ V e a solucao do problema de valor de contorno (u = v), obtem-se a
expressao,
∫
Ω
σ(ε(u)) ·ε(v−u) dΩ =
∫
Ω
b · (v−u) dΩ+
∫
Γt
f · (v−u) dΓ ∀v ∈ K, (2.14)
que corresponde a equacao variacional do equilıbrio do solido da (Fig.2.1) com
solucao em u.
2.3 Princıpio de mınima energia potencial total
Dada uma equacao constitutiva do tipo elastica linear, pode-se introduzir uma
funcao densidade de energia de deformacao Φ quadratica nas componentes do tensor
de deformacoes infinitesimais ε,
Φ(ε) :=1
2ε
t · C · ε =1
2εij · Cijkl · εkl, (2.15)
onde C e o tensor constitutivo de elasticidade linear de quarta ordem, que satisfaz
as propriedades usuais de simetria e elipticidade,
C(u) A ·B = A · C(u)B, (2.16)
C(u) A ·B ≥ α A · A, (2.17)
sendo α positivo , u ∈ Ω e (A e B) tensores simetricos de segunda ordem.
Portanto, escrevendo a constitutiva como,
σ(u) =∂Φ(ε)
∂ε= C · ε(u) , σij = Cijkl · εkl (2.18)
a equacao variacional (Eq. 2.14) fica,
∫
Ω
C · ε(u) · ε(v − u)dΩ =
∫
Ω
b · (v − u)dΩ +
∫
Γf
f · (v − u)dΓ ∀v ∈ K. (2.19)
assim, levando em conta que Φ e convexa e ε e linear obtem-se,
Φ(ε(v)) − Φ(ε(u)) ≥ Cε(u) · ε(v − u). (2.20)
10

Finalmente, introduzindo o funcional da energia potencial total do corpo,
Π(v) :=1
2
∫
Ω
Cε(v) · ε(v) dΩ −
∫
Ω
b · v dΩ −
∫
Γt
f · v dΓ, (2.21)
e substituindo a (Eq. 2.20) na (Eq. 2.19), chega-se a formulacao equivalente do
problema de equilıbrio conhecida como ”Principio de mınima energia potencial
total”,
u ∈ K : Π(u) ≤ Π(v) ∀v ∈ K. (2.22)
que expressa a condicao de equilıbrio de um corpo elastico como aquela que minimiza
o funcional da energia potencial total do sistema Π(u).
De uma forma geral, o problema do equilıbrio de uma estrutura elastica linear
com restricoes de igualdade ou bilaterais pode ser escrito em sua formulacao fraca
como,
a(u, u− v) = l(v − u) ∀ v ∈ V (2.23)
onde, a(·, ·) a forma bilinear simetrica, positiva e contınua que representa o trabalho
das forcas internas associadas a um deslocamento virtual,
a(u, v) =
∫
Ω
C ε(u) · ε(v) dΩ, (2.24)
e l(·) e o funcional linear que representa o trabalho virtual das forcas externas,
l(v) =
∫
Γt
f · v +
∫
Ω
b · v dΩ. (2.25)
Em virtude disto, a energia potencial total do sistema pode ser expressa em sua
forma variacional como,
Π(v) =1
2a(v, v) − l(v). (2.26)
11

2.4 Solucao aproximada
Como foi visto, o problema de equilıbrio formulado a partir da equacao variacional
requer a minimizacao de um funcional em dimensao infinita. A fim de obter uma
solucao aproximada deste problema, reformula-se num espaco de dimensao finita
atraves do ”Metodo dos Elementos Finitos” (MEF). Nesta tecnica, o domınio e
discretizado com elementos finitos onde sao geradas aproximacoes da solucao a
partir de um conjunto finito de ”funcoes-base”denominadas funcoes de interpolacao.
Assim, a primeira aproximacao e obtida a partir da substituicao do domınio original
Ω por outro Ωh formado por uma geometria de elementos finitos ZIENCKIEWICS
[13].
Denotando as funcoes base como φh, o espaco de aproximacao gerado fica definido
por,
Vh = vh : vh =n
∑
i=1
βiφhi (x), βi ∈ R, x ∈ Ωh, (2.27)
onde a aproximacao Vh, se constitui num subespaco interior ao espaco original do
problema ou seja, Vh ⊂ V.
Neste espaco, tanto forma a bilinear a(·, ·) quanto o funcional linear l(·) se
aproximam por,
ah(u, v) =
∫
Ωh
C ε(u) · ε(v) dΩ, (2.28)
lh(v) =
∫
Γht
f · v dΓ +
∫
Ωh
b. · v dΩ (2.29)
Considerando estas formas em Vh resulta,
ah(uh, vh) =
n∑
i=1
n∑
j=1
αiβj
∫
Ωh
Cε(φhi ) · ε(φh
j ) dΩ, (2.30)
lh(vh) =
n∑
i=1
βi[
∫
Γht
f · φhj dΓ +
∫
Ωh
b · φhj dΩ], (2.31)
onde os termos,
Kij =
∫ h
Ω
C ε(φhi ) · ε(φh
j )dΩ, (2.32)
12

estao associados a matriz de rigidez, enquanto os elementos fj, representam o vetor
de forcas nodais equivalentes ao carregamento (b, f),
fj =
∫
Γhf
f · φhj dΓ +
∫
Ωh
b · φhj dΩ. (2.33)
Como resultado desta aproximacao, o funcional da energia potencial total Π em sua
forma discreta se representa como,
Πh(vh) =1
2
n∑
i=1
n∑
j=1
βiβjKij −n
∑
j=1
βjfj, (2.34)
ou em notacao compacta,
Π(u) =1
2utKu− f tu, (2.35)
onde K e a matriz de rigidez global do sistema, u o vetor de deslocamentos e f e
o vetor de esforcos nodais equivalentes, incluindo esforcos de superfıcie e de corpo.
Portanto, a condicao necessaria de mınimo da energia potencial e,
∂Π(u)
∂u= 0 =⇒ Ku− f = 0. (2.36)
Esta condicao conduz a um sistema linear de equacoes, onde se os movimentos rıgidos
do corpo sao eliminados a positividade da matriz K do sistema e garantida. Logo
como Π(u) e uma funcao quadratica, a funcao e estritamente convexa e a solucao
achada unica representando o mınimo global do funcional, isto pode-se ver com mais
detalhe em LUENBERGER [5].
13
Capıtulo 3
Apresentacao do problema de
contato
No capıtulo anterior, foram apresentadas as formulacoes forte e fraca do equilıbro
em solidos elasticos sob a hipotese de deformacoes infinitesimais. Agora, apresenta-
se a formulacao geral do problema de contato. Neste sentido, novas restricoes
aos deslocamentos do problema de equilıbrio sao adicionadas como desigualdades
representando as condicoes de impenetrabilidade na fronteira.
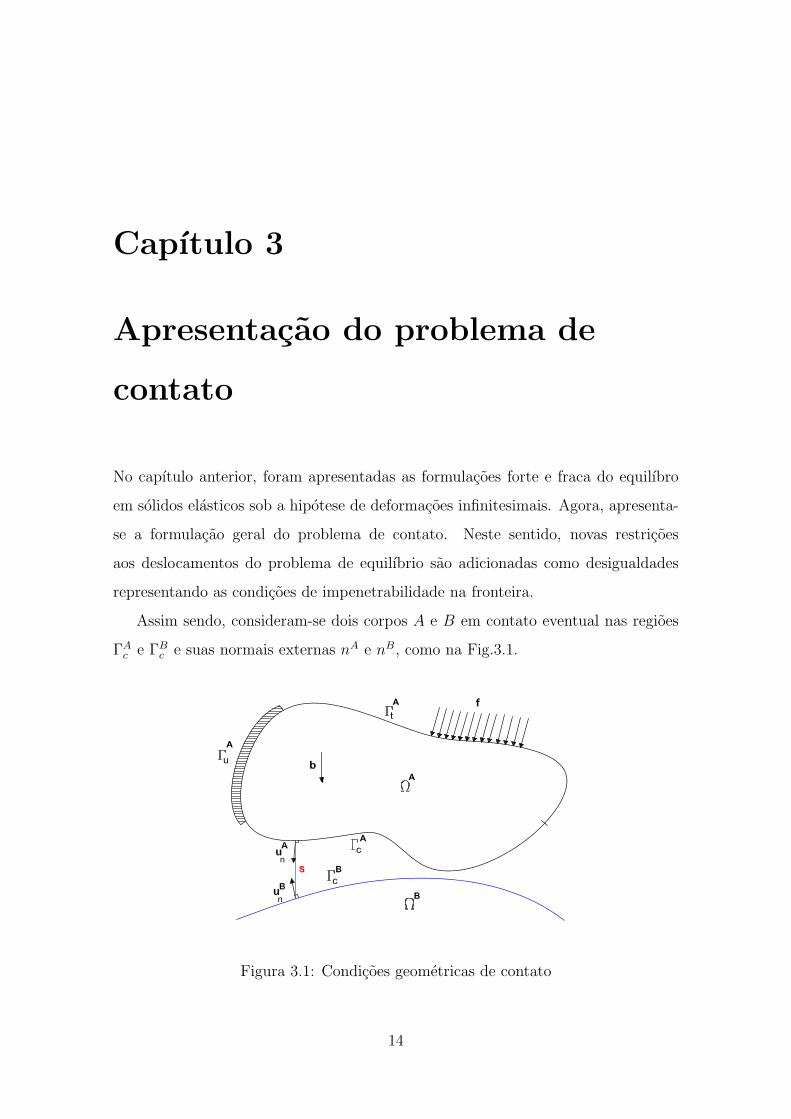
Assim sendo, consideram-se dois corpos A e B em contato eventual nas regioes
ΓAc e ΓB
c e suas normais externas nA e nB, como na Fig.3.1.
Figura 3.1: Condicoes geometricas de contato
14

Para simplificar o desenvolvimento posterior e a notacao, supoe-se nA = nB = n
portanto, se as respectivas normais se confundem, pode-se escrever a condicao
linearizada de nao interpenetrabilidade entre os corpos A e B como:
s(x) − u(x) · n(x) ≥ 0 ∀ x ∈ Γc onde Γc = ΓAc = ΓB
c (3.1)
Assim s(x) e a funcao folga na direcao normal n as superfıcies, entre os pontos
de ΓAc e ΓB
c das regioes de contato potencial. Denotando com o sub-ındice (n) a
normal do campo vetorial de deslocamentos, tem-se:
un − s ≤ 0 e un = uAn + uB
n (3.2)
sendo rn a reacao no ponto de contato da regiao Γc e, portanto, as seguintes condicoes
devem ser satisfeitas:
(un − s) < 0 =⇒ rn = 0 (3.3)
(un − s) = 0 =⇒ rn < 0 (3.4)
As (Eq. 3.3 e Eq. 3.4) podem ser reescritas como:
(un − s) ≤ 0 (3.5)
rn ≤ 0 (3.6)
(un − s) · rn = 0 (3.7)
sendo a (Eq. 3.7) conhecida como relacao de complementaridade entre (un − s) e rn
do problema de contato.
15
3.1 Problema de Signorini
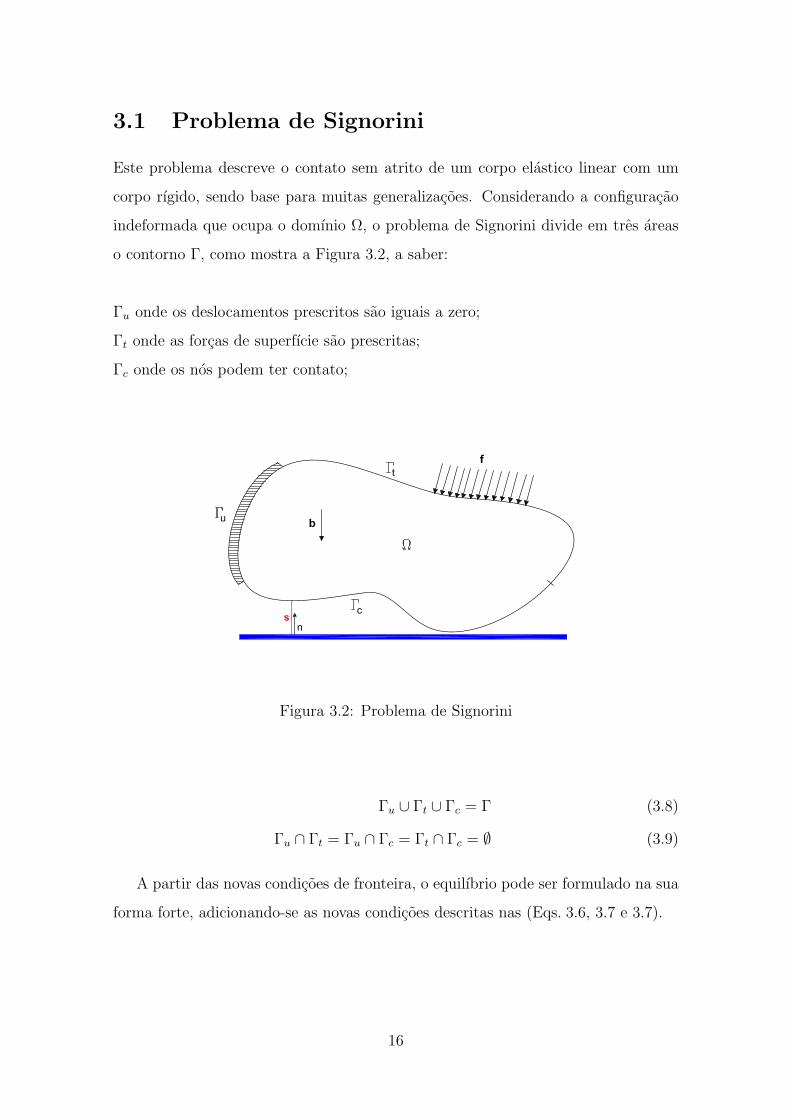
Este problema descreve o contato sem atrito de um corpo elastico linear com um
corpo rıgido, sendo base para muitas generalizacoes. Considerando a configuracao
indeformada que ocupa o domınio Ω, o problema de Signorini divide em tres areas
o contorno Γ, como mostra a Figura 3.2, a saber:
Γu onde os deslocamentos prescritos sao iguais a zero;
Γt onde as forcas de superfıcie sao prescritas;
Γc onde os nos podem ter contato;
Figura 3.2: Problema de Signorini
Γu ∪ Γt ∪ Γc = Γ (3.8)
Γu ∩ Γt = Γu ∩ Γc = Γt ∩ Γc = ∅ (3.9)
A partir das novas condicoes de fronteira, o equilıbrio pode ser formulado na sua
forma forte, adicionando-se as novas condicoes descritas nas (Eqs. 3.6, 3.7 e 3.7).
16

Assim temos:
divσ(u) + b = 0 em Ω (3.10)
σ(u) · n = f em Γt (3.11)
u = 0 em Γu (3.12)
(un − s) ≤ 0
rn = [σ(u) · n] · n ≤ 0
(un − s) · rn = 0
em Γc (3.13)
Definindo agora o conjunto de deslocamentos cinematicamente admissıveis para
este problema como,
Definicao 3.1.1 Campo de deslocamentos admissıveis
Σ = u ∈ U | un ≤ s em Γc (3.14)
onde U e um espaco de deslocamentos suficientemente regulares.
Considerando o contato como um caso particular do problema de equilıbrio,
temos que sua solucao u minimiza a energia potencial total Π(u) (Eq. 2.35) num
conjunto de deslocamentos cinematicamente admissıveis ver KIKUCHI [12].
Partindo da formulacao variacional do equilıbrio, chega-se de igualmente a
expressao da energia total de deformacao do solido, como a diferenca entre a energia
elastica de deformacao e a energia potencial das forcas externas. Portanto, o
problema de contato resume-se a minimizacao da energia de deformacao no campo
de deslocamentos admissıveis Σ.
Ou seja, se expressa como,
u ∈ Σ : Π(u) ≤ Π(v) ∀v ∈ Σ, (3.15)
onde a energia total de deformacao e representada na sua forma discreta por (Eq.
2.35). Para escrever o campo de deslocamentos admisıveis como restricoes de
desigualdade define-se a funcao gap como,
17

Definicao 3.1.2 Funcao ”gap”
g(u) = un − s (3.16)
onde s e a distancia inicial entre os pares de nos correspondentes na direcao n.
onde g(u) ≤ 0 no problema de otimizacao associado.
3.2 Contato entre corpos elasticos
Generalizando os resultados vistos anteriormente, em caso de contato entre dois
corpos A e B, minimiza-se a soma das energias potenciais totais,
ΠA(u) =1
2ut
AKAuA − f tAuA, (3.17)
ΠB(u) =1
2ut
BKBuB − f tBuB. (3.18)
Entao, pode-se escrever a energia potencial total dos corpos A e B numa
unica equacao, obtendo desta forma grandes vantagens do ponto de vista da
implementacao computacional.
ΠAB(u) = ΠA(u) + ΠB(u) =1
2
uA
uB
t[KA 0
0 KA
]
uA
uB
−
fA
fB
t uA
uB
,
(3.19)
ou de forma compacta,
ΠAB(u) =1
2ut
ABKABuAB − f tABuAB, (3.20)
onde por simplicidade na notacao, os sub-ındices AB podem ser omitidos.
3.2.1 Geometria do contato
Um aspecto importante a ser considerado em problemas de contato e a geometria da
malha. Devido ao fato de que os corpos estao discretizados, e necessario estabelecer-
se uma estrategia na geometria das malhas que permita o calculo da s(x) ∀x ∈ Γc
na funcao ”gap” (g(u) = uAn + uB
n − s ≤ 0). Como apresenta-se na (Fig.3.3) podem
18

existir diferentes graus de refinamentos nas malhas ou elementos o que dificulta esse
calculo.
Figura 3.3: Malhas incompatıveis
Uma primeira estrategia pode ser calcular a distancia entre os nos de uma malha
e os segmentos superficies opostas conforme mostrado na (Figura 3.4). Nota-se que
os campos de deslocamentos sao pontualmente compatıveis em apenas um ponto
por segmento, onde a distancia dp = 0.
Figura 3.4: Situacao de contato no - segmento
Portanto, embora as restricoes g(u) ≤ 0 estejam satisfeitas pontualmente, pode
existir interpenetracao dp. Uma forma de evitar isto e refinando a malha, o que
minimiza os valores de dp, mas acarreta um maior custo computacional. Outra
possibilidade e utilizar a estrategia ”no - no”conforme mostrado na (Figura
3.5).
Neste caso, devido ao posicionamento dos nos, a distancia de penetracao dp
tende a ser nula mas tem com a desvantagem de que e necessario conhecer os nos
associados nas superficies A e B.
Como observa-se na (Figura 3.6), se os nos nao tem um posicionamento correto
19
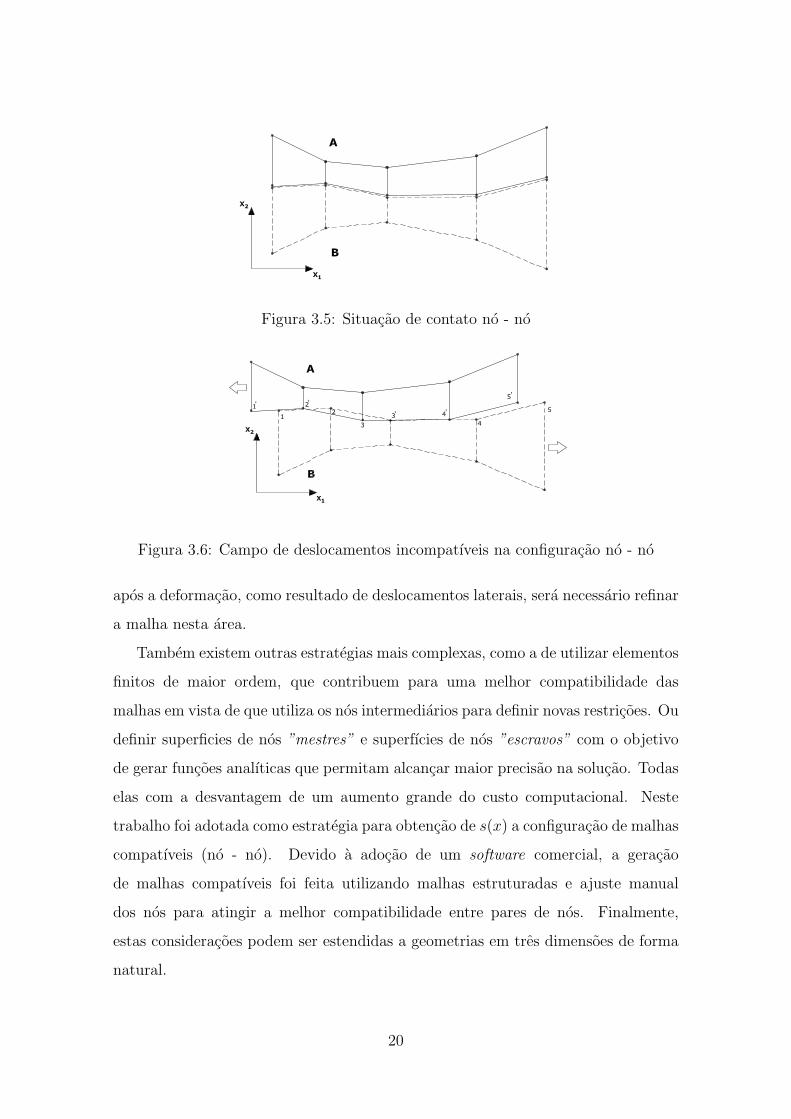
Figura 3.5: Situacao de contato no - no
Figura 3.6: Campo de deslocamentos incompatıveis na configuracao no - no
apos a deformacao, como resultado de deslocamentos laterais, sera necessario refinar
a malha nesta area.
Tambem existem outras estrategias mais complexas, como a de utilizar elementos
finitos de maior ordem, que contribuem para uma melhor compatibilidade das
malhas em vista de que utiliza os nos intermediarios para definir novas restricoes. Ou
definir superficies de nos ”mestres” e superfıcies de nos ”escravos” com o objetivo
de gerar funcoes analıticas que permitam alcancar maior precisao na solucao. Todas
elas com a desvantagem de um aumento grande do custo computacional. Neste
trabalho foi adotada como estrategia para obtencao de s(x) a configuracao de malhas
compatıveis (no - no). Devido a adocao de um software comercial, a geracao
de malhas compatıveis foi feita utilizando malhas estruturadas e ajuste manual
dos nos para atingir a melhor compatibilidade entre pares de nos. Finalmente,
estas consideracoes podem ser estendidas a geometrias em tres dimensoes de forma
natural.
20
Capıtulo 4
Metodos de resolucao
4.1 Metodo 1 - Problema de otimizacao
Como foi mostrado na (Secao 3.1), o problema de contato sem atrito se resume
a um problema de minimizacao com restricoes de desigualdade. Desta forma a
funcao objetivo a ser minimizada Π(u) representa a energia potencial total dos
corpos e as restricoes de desigualdade correspondem as condicoes cinematicas de
nao penetrabilidade da fronteira na regiao de contato g(u). Como a funcao objetivo
e quadratica, as condicoes de primeira ordem de KKT sao suficientes e pode-se
afirmar que achada a solucao, ela representa um mınimo global e e unica, ver
LUENBERGER [5].
Sendo assim, o problema pode ser represando por,
(P2)
minimizar Π(u)
sujeito a: gj(u) ≤ 0 j = 1, .....,m
(4.1)
onde,
Π(u) =1
2uKut − Fu, (4.2)
g(u) = Au− s, (4.3)
sendo A a matriz (m × n) gradiente das restricoes, onde as filas representam
21

a derivada da restricao j-esima, portanto, tem o valor ”1”na coordenada
correspondente.
Aplicando as condicoes de primeira ordem (KKT) apresentadas no (Anexo B)
obtem-se,
Ku− F + Atλ = 0, (4.4)
G(u)λ = 0, (4.5)
λ ≥ 0, (4.6)
g(u) ≤ 0. (4.7)
onde,
∇f(u) = Ku− F gradiente da funcao objetivo ∈ Rn×1
∇2f(u) = K matriz de rigidez ∈ Rn×n
∇g(u) = A gradiente das restricoes ∈ Rm×n
λ parametros de Lagrange, (forca de contato) ∈ Rm
Gii = gi matriz diagonal das restricoes ∈ Rm×m
Analisando as equacoes, nota-se que a (Eq. 4.4) representa a equacao de equilıbrio
onde os multiplicadores de Lagrange tem o significado fısico de representar as forcas
de contato nos nos. Portanto, o gradiente das restricoes atua como um ponderador,
distribuindo os esforcos de contato entre os corpos na equacao de equilıbrio.
Para resolver este problema de otimizacao, existe uma grande variedade de
tecnicas. A modo de exemplo, pode-se citar o metodo de penalidade. Este,
consiste em transformar o problema de minimizacao com restricoes num problema
sem restricoes atraves da inclusao das restricoes impenetrabilidade ao funcional do
problema. Neste caso, as forcas de contato atuam expulsando a parcela do corpo
que penetrou no outro, portanto, as restricoes nem sempre sao satisfeitas. Para
evitar isto, neste trabalho adotou-se uma tecnica de ponto interior e direcoes viaveis
FDIPA - Feasible Direction Interior Point Algorithm, proposta por HERSKOVITS
[8] [9].
22

4.2 Descricao do algoritmo (FDIPA)
Esta tecnica baseia-se no calculo da direcao de descida da funcao objetivo, a partir de
uma iteracao de Newton nas condicoes de Karush-Kuhn-Tucker (KKT) de primeira
ordem, seguida de uma pequena deflexao para garantir uma direcao viavel no passo.
Para o calculo dessa direcao, resolvem-se dois sistemas lineares nas variaveis
primais e duais x ∈ IRn e λ ∈ IRm, com a matriz chamada primal-dual. Achada a
direcao, efetua-se uma busca linear inexata na funcao objetivo para determinar o
novo ponto. Desta forma, repetindo este processo estabelece-se um procedimento
iterativo que a partir de um valor viavel u0, gera uma sequencia de pontos viaveis
convergentes a solucao do problema, onde a funcao objetivo e reduzida a cada
iteracao.
Portanto, aplicando as condicoes de otimalidade de (KKT) ao problema (Eq.
4.1), obtem-se as (Eqs. 4.4 e 4.5) que determinam o sistema de equacoes primal-
dual. Aplicando o metodo de Newton-Raphson descrito no (Anexo B), obtem-se,
H(xk, λk) ∇g(xk)
Λk∇gt(xk) G(xk)
xk+1 − xk
λk+10 − λk
= −
∇f(xk) + ∇g(xk)λk
G(xk)λk,
, (4.8)
onde (xk, λk) e o ponto de partida das iteracoes, e (xk+1, λk+10 ) o novo ponto estimado.
H(xk, λk) e a matriz Hessiana da funcao Lagrangeana do problema, e Λ a matriz
diagonal com Λii ≡ λi. Alem disto, define-se o sistema, (xk0, λ
k+10 ).
H(xk, λk)dk0 + ∇g(xk)λk+1
0 = −∇f(xk) (4.9)
Λk∇gt(xk)dk0 +G(xk)λk+1
0 = 0, (4.10)
onde dk0 e a direcao de descida no espaco primal definida por dk
0 = xk+10 − xk, e λk+1
0
e a nova estimativa do multiplicador de Lagrange λ.
Pode-se demostrar que dk0 e uma direcao de descida para a funcao f(x), porem, dk
0
nao e uma direcao de busca factıvel, devido ao fato de que se algumas restricoes sao
ativas, forcam dk0 a uma direcao tangente ao conjunto viavel. O seja, se gi(x
k) = 0,
a direcao calculada dk0 sera tangente a restricao Λk∇gt(xk)dk
0 = 0, gerando uma
23
direcao inviavel. Para evitar isto, define-se um novo sistema linear,
H(xk, λk)dk0 + ∇g(xk)λk+1
0 = −∇f(xk), (4.11)
Λk∇gt(xk)dk0 +G(xk)λk+1
0 = −ρkλk. (4.12)
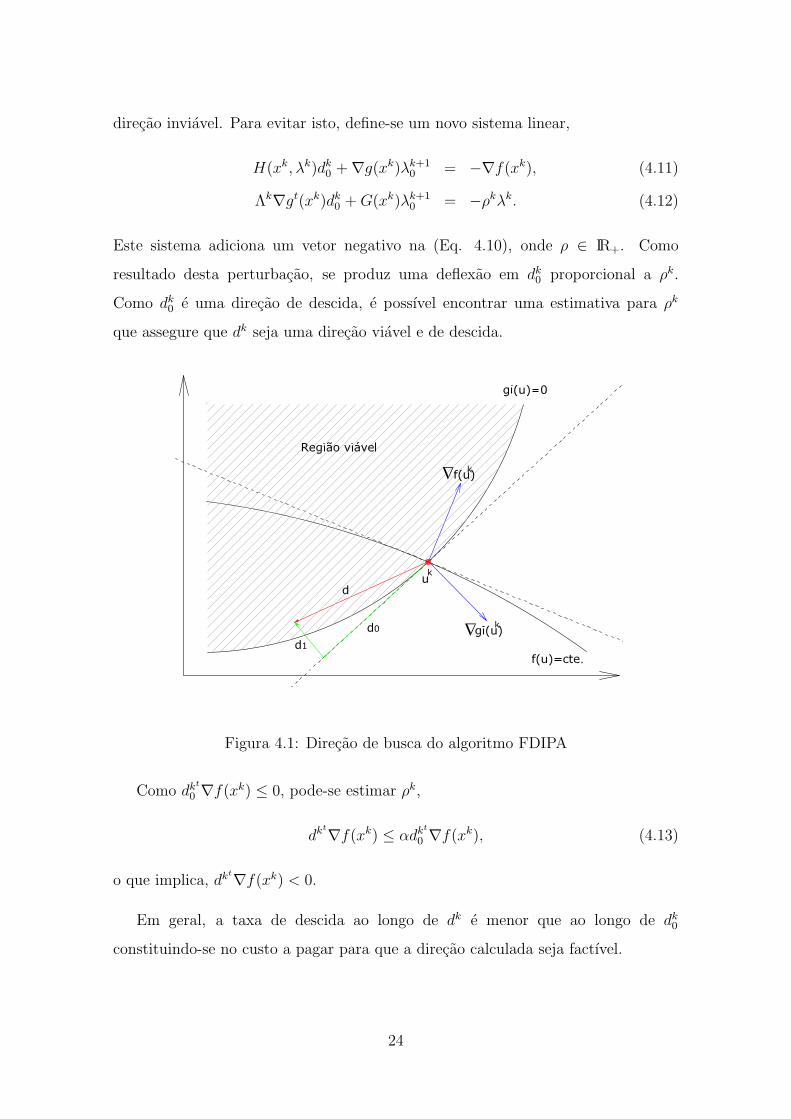
Este sistema adiciona um vetor negativo na (Eq. 4.10), onde ρ ∈ IR+. Como
resultado desta perturbacao, se produz uma deflexao em dk0 proporcional a ρk.
Como dk0 e uma direcao de descida, e possıvel encontrar uma estimativa para ρk
que assegure que dk seja uma direcao viavel e de descida.
Figura 4.1: Direcao de busca do algoritmo FDIPA
Como dkt
0 ∇f(xk) ≤ 0, pode-se estimar ρk,
dkt
∇f(xk) ≤ αdkt
0 ∇f(xk), (4.13)
o que implica, dkt
∇f(xk) < 0.
Em geral, a taxa de descida ao longo de dk e menor que ao longo de dk0
constituindo-se no custo a pagar para que a direcao calculada seja factıvel.
24

Considerando agora o sistema auxiliar,
H(xk, λk)dk0 + ∇g(xk)λk+1
0 = 0 (4.14)
Λk∇gt(xk)dk0 +G(xk)λk+1
0 = −λk (4.15)
deduz-se que, dk = dk0 + ρdk
1 assim, substituindo esta equacao na (Eq. 4.13) chega-se
a uma expressao para ρ.
ρ ≤(α− 1)dkt
0 ∇f(xk)
dkt∇f(xk)(4.16)
Com a direcao calculada, procede-se a busca linear inexata na funcao objetivo f(x)
com alguma tecnica como Armijo, Wolf ou Goldstein descritas em LUENBERGER
[5]. No caso da funcao objetivo ser quadratica, existem metodos diretos para achar
este mınimo.
Finalmente um novo ponto interior a regiao viavel e calculado, a partir do qual,
atualizando as variaveis, inicializa-se o processo iterativo na procura da solucao, ate
que a condicao de parada seja verificada. Uma aplicacao do FDIPA a problemas de
contato em elasticidade linear pode ser visto no trabalho de AUATT [18].
4.2.1 Aplicacao ao problema de contato
Com o proposito de desacoplar o calculo estrutural do FDIPA, sao efetuadas algumas
adaptacoes no algoritmo. Isto evita a analise da matriz de rigidez K, mas como
consequencia impede o calculo da funcao objetivo no problema de contato (Eq. 4.1).
Utilizando u como a variavel primal, o sistema de equacoes (Eq. 4.8) aplicado ao
problema (Eq. 4.1) e dado por,
K At
ΛA G(uk)
uk+10 − uk
λk+10 − λk
= −
Kuk − F + Atλk
G(uk)λk,
(4.17)
onde define-se dk0 = (uk+1
0 −uk). Substituindo esta expressao no sistema obtem-se
as seguintes equacoes,
Kdk0 + Atλk+1
0 = −(Kuk − F ), (4.18)
ΛAdk0 +G(uk)λk+1
0 = 0, (4.19)
25

chegando a,
λk+10 = (−Λ−1G(uk) + AK−1At)−1(−A(uk −K−1F )) (4.20)
dk0 = −K−1Atλ0 − (uk −K−1F ). (4.21)
De forma analoga, opera-se no sistema auxiliar,
Kdk1 + Atλk+1
1 = 0, (4.22)
ΛAdk1 +G(uk)λk+1
1 = −λk, (4.23)
chegando a,
λk+11 = (−ΛAK−1At +G)−1(−λ), (4.24)
dk1 = −K−1Atλ1. (4.25)
Observa-se que no calculo de d0 e d1 sao necessarias analises de sistemas S2 = K−1F
e S1 = K−1At, que podem ser executados num software comercial, obtendo
dk = dk0 + ρd1, onde ρ e estimado devido a impossibilidade de seu calculo.
Uma vez calculada a direcao dk, estima-se o passo para determinar o novo ponto
da variavel primal. Por conseguinte, o passo t e calculado de forma a garantir a
viabilidade e o mınimo da funcao objetivo na direcao dk. Como a funcao objetivo
e uma funcao quadratica, nao e necessario fazer uma busca inexata e o passo pode
ser determinado pelas as seguintes condicoes,
Primeira condicao
Como a funcao e quadratica o passo que minimiza a funcao pode ser calculado
conforme a seguir,∂
∂tf(u+ td) = 0 (4.26)
onde,
f(u+ td) =1
2(u+ td)K((u+ td)t − F (u+ td)
26

simplificando,
f(u+ td) = f(u) + uKtd+1
2t2dtKd− Ftd
na Eq. 4.26 temos que,
uKd+ tdtKd− Fd = 0 t1 =F td− utKd
dtKd. (4.27)
Como neste trabalho nao e conhecida a matriz de rigidez, esta condicao nao pode
ser aplicada.
Segunda condicao
A segunda condicao impoe que o passo seja factıvel, entao tem que cumprir,
g(u+ tid) ≤ γg(u), (4.28)
onde γ = min(γ, ‖d0‖2), alem disso,
A(u+ t2d) − s ≤ γ(Au− s)
Das restricoes, obtem-se um vetor [m× 1], de onde o passo mınimo e,
t2 = min[ti2], i− 1, ....,m, (4.29)
Em virtude de que o passo deve cumprir ambas condicoes, ele e calculado como
mınimo das duas condicoes definidas nas equacoes (Eq. 4.27) e (Eq. 4.29). Como t1
nao pode ser calculado, a escolha e feita entre 1 e t2, onde,
t = min[1, t2].
Finalmente, com t e d calculados, sao atualizados os parametros deslocamento u e
o coeficiente de Lagrange λ para a proxima iteracao.
u = u+ td,
λ = max(λ0,min[1, ‖d0‖2]).
Devido a comparacao com o problema de complementaridade, o criterio a ser
utilizado e,
‖ ut.F(u) ‖< ǫtol (4.30)
27

onde F(u) e a funcao associada ao problema de complentaridade e ε e a tolerancia
prescrita. Alem disto, monitora-se o resıduo da equacao de equilıbrio atraves das
condicoes,
Condicao 1
‖ u−K−1F −K−1Atλ ‖≤ ε (4.31)
Condicao 2
‖ G(u)λ0 ‖< ε (4.32)
A positividade de λ e garantida pela regra de atualizacao desta variavel ao final de
cada iteracao.
28

4.2.2 Algoritmo
Parametros:. α ∈ (0, 1)
Passo 0: Inicializacao de variaveis e parametros.
k = 0, xk ∈ Ω, λ, ϕ > 0
Passo 1:Direcao de busca
λ0 = (AS1 − Λ−1G)−1A(S2 − u)
d0 = −(S1λ0 + (u− S2))
λ1 = (G− ΛAS1)−1λ
d1 = −(S1λ1)
Calculo de ρ
se dt1(u− S2) > 0
entao ρ = min(ϕ‖d0‖2,
(α−1).dt0
.dt1
)
se nao ρ = min(ϕ‖d0‖2)
fim
λ = λ0 + ρλ1
d = d0 + ρd1
Passo 2: Passo
γ = min(γ, ‖d0‖2)
t = min(1,(1 − γ)λ
λ0
)
29

Passo 3: Atualizacao
u = u+ td
λi = sup(λ0,min(1, ‖d0‖2))
g = Au− s
G = diag(g)
Λ = diag(λ)
Passo 4: Criterio de parada
‖ λk+1.F(λk+1) ‖< ǫtol
Passo 5: Voltar ao passo 1
30

4.3 Metodo 2 - Problema de complementaridade
Como descrito no (Capıtulo 1), no trabalho de BJORKMAN [6] mostra-se que todo
o problema quadratico de minimizacao com restricoes de desigualdade pode ser
reduzido a um problema de complementaridade linear (PCL) nas variaveis duais.
Em virtude disto, o problema de contato pode-se escrever como um problema de
complementaridade atraves do estabelecimento das condicoes de otimalidade (KKT)
e posterior eliminacao das variaveis primais. Para isto, define-se a formulacao geral
de um problema de complementaridade.
Definicao 4.3.1 Seja F : D ⊆ IRn → IRn uma funcao vetorial nao linear, problema
de complementaridade consiste em encontrar x ∈ IRn tal que;
x ≥ 0, F (x) ≥ 0 e x.F (x) = 0, (4.33)
com,
x ≥ 0 ⇔ xi ≥ 0 ∀ 1 ≤ i ≤ n,
F (x) ≥ 0 ⇔ Fi(x) ≥ 0 ∀ 1 ≤ i ≤ n,
xF (x) = 0 ⇔ xiFi(x) = 0 ∀ 1 ≤, i ≤ n
onde, se F e uma funcao ( F (x) = Ax+b , A ∈ Rn×n e b ∈ R
n ), temos um problema
de complementaridade linear (PCL).
Definicao 4.3.2 O conjunto de pontos viaveis Ω do problema e definido como:
Ω := x ∈ IRn | x ≥ 0, F (x) ≥ 0 (4.34)
Portanto, a partir das condicoes de KKT definidas nas (Eqs.4.4 a 4.7) reescrevem-se
as (Eqs. 4.4 e Eq.4.7) em funcao de u,
u(λ) = K−1F −K−1Atλ,
g(u(λ)) = −Au(λ) + s ≥ 0,
31

substituindo, podem-se reescrever como um problema de complementaridade na
variavel dual,
G(λ) = (AK−1At)λ− AK−1F + s ≥ 0,
G(λ)λ = 0, (4.35)
λ ≥ 0,
representando as forcas de contato.
Para resolver problemas desta classe, existem varias tecnicas que basicamente
podem-se dividir em dois grandes grupos.
- No primeiro grupo encontram-se aquelas tecnicas baseadas em metodos de
minimizacao sem restricoes, para o qual sao utilizadas funcoes de merito associadas
ao problema de complementaridade.
Definicao 4.3.3 Uma funcao φ : IRn → IR e denominada de funcao de merito para
problemas de complementaridade se e so se satisfaz: a) φ(x) ≥ 0 para todo x ∈ IRn
b) φ(x) = 0 se e somente se x e uma solucao do problema de complementaridade
Desta forma consegue-se transformar o problema de complementaridade num
problema de minimizacao sem restricoes, que pode ser resolvido por metodos usuais
de programacao matematica.
- No segundo grupo encontram-se aquelas tecnicas baseadas em sistemas de
equacoes, que reformulam o problema de complementaridade como um sistema de
equacoes atraves de NCP-funcoes, ou seja,
Definicao 4.3.4 Uma funcao ψ : IR2 → IR e chamada de NCP-funcao para
problema de complementaridade se satisfaz a condicao:
ψ(a, b) = 0 ⇔ a ≥ 0, b ≥ 0 e a.b = 0. (4.36)
32

Assim, dada uma NCP-funcao ψ, define-se o operador Ψ : IRn → IRn como o sistema
de equacoes associado, da seguinte forma,
Ψ(x) :=
ψ(x1, F1(x))...
ψ(xn, Fn(x))
,Ψ(x) = 0. (4.37)
Portanto, seja ψ uma NCP-funcao e Ψ seu operador de equacoes correspondente, x
e solucao do problema de complementaridade (Eqs. 4.3), se e somente se e solucao
do sistema de equacoes (Eqs. 4.37). Em virtude disto, se F e ψ sao continuamente
diferenciaveis, o operador Ψ tambem sera, e pode-se aplicar o metodo de Newton
para achar o x que faz Ψ = 0
xk+1 = xk − [∇Ψ(xk)]−1Ψ(xk), k = 0, 1, 2 . . . (4.38)
Neste trabalho, sera adotada uma nova tecnica para resolver problemas de
complementaridade proposta em MAZORCHE [16] ou [15].
4.4 Descricao do algoritmo (ALG-NCP)
Como foi visto no capıtulo anterior, um problema de complentaridade consiste em
determinar x ∈ IRn tal que x ≥ 0, F(x) ≥ 0 e xt.F(x) = 0 onde F : IRn → IRn; ou
seja na regiao viavel do problema Ω := x ∈ IRn/x ≥ 0,F(x) ≥ 0
Para resolver este problema e utilizado um metodo baseado no metodo de
sistemas de equacoes, x e solucao do problema de complementaridade (Eq. 4.3),
se e somente se e solucao do sistema de equacoes (Eqs. 4.37).
Baseada nesta propriedade, a tecnica desenvolvida por MAZORCHE [16] se
constitui num novo metodo para problemas de complementaridade. Este metodo
utiliza ideias de FDIPA, gerando uma sequencia de pontos interiores a Ω, que
convergem a uma solucao do problema de complementaridade mediante a solucao
de dois sistemas lineares e uma busca linear na funcao potencial φ = xt.F(x)
respeitando as restricoes x ≥ 0 e F(x) ≥ 0.
33
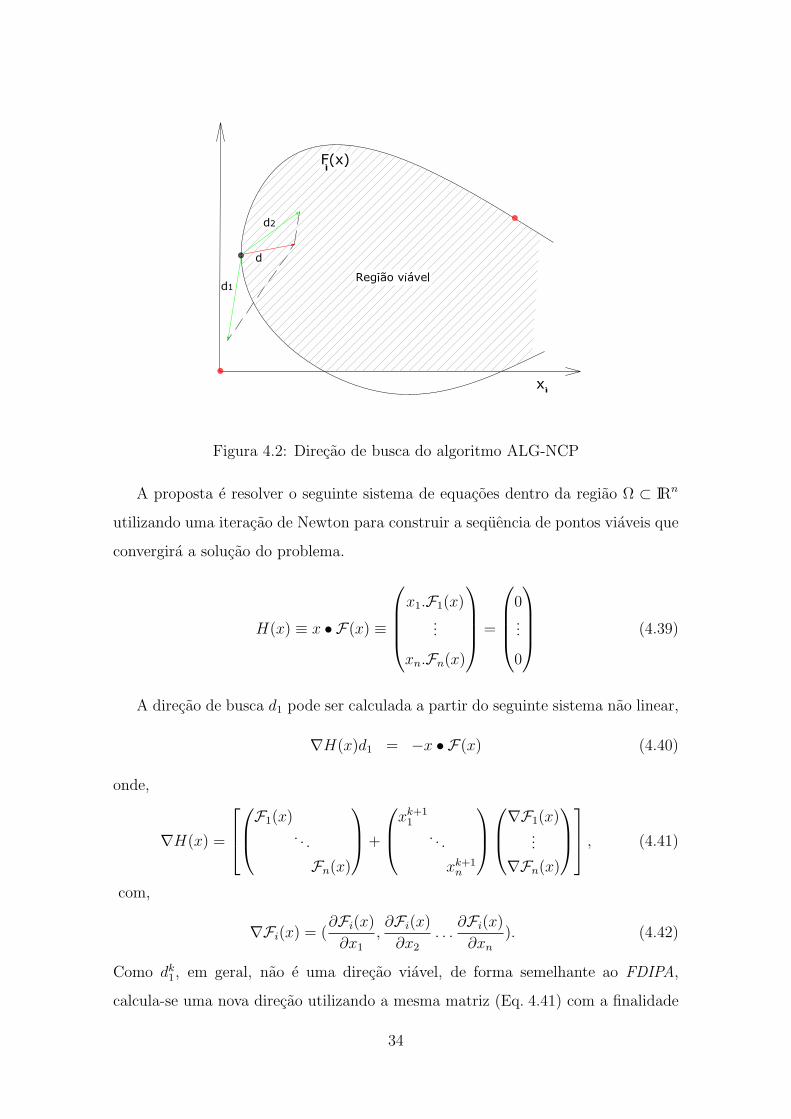
Figura 4.2: Direcao de busca do algoritmo ALG-NCP
A proposta e resolver o seguinte sistema de equacoes dentro da regiao Ω ⊂ IRn
utilizando uma iteracao de Newton para construir a sequencia de pontos viaveis que
convergira a solucao do problema.
H(x) ≡ x • F(x) ≡
x1.F1(x)...
xn.Fn(x)
=
0...
0
(4.39)
A direcao de busca d1 pode ser calculada a partir do seguinte sistema nao linear,
∇H(x)d1 = −x • F(x) (4.40)
onde,
∇H(x) =
F1(x). . .
Fn(x)
+
xk+11
. . .
xk+1n
∇F1(x)...
∇Fn(x)
, (4.41)
com,
∇Fi(x) = (∂Fi(x)
∂x1
,∂Fi(x)
∂x2
. . .∂Fi(x)
∂xn
). (4.42)
Como dk1, em geral, nao e uma direcao viavel, de forma semelhante ao FDIPA,
calcula-se uma nova direcao utilizando a mesma matriz (Eq. 4.41) com a finalidade
34

de gerar uma restauracao, que torne a direcao viavel. Para isto define-se o novo
sistema como,
∇H(x)d2 = µE (4.43)
onde,
E = [1, 1, ...., 1]t ∈ IRn e µ =xt.F(x)
n
como dk2 nao e uma direcao de descida, a nova direcao d e calculada como uma
combinacao linear entre a direcao de Newton dk1, e a direcao dk
2 viavel para todo ponto
de Ω. Esta combinacao linear possui as duas propriedades o que e demonstrado em
MAZORCHE [16].
Assim, atraves da resolucao destes dois sistemas lineares, calcula-se a direcao
de busca d como uma combinacao da direcao de Newton dk1 e de um desvio dk
2 que
restaura a viabilidade do passo, portanto e interior a Ω e de descida para a funcao
potencial.
d = d1 + ρd2 com ρ ∈ (0, 1) (4.44)
Apos o calculo da direcao, o novo ponto e calculado fazendo uma busca linear
inexata na funcao potencial e nas restricoes da funcao potencial. Para isto, adota-se
a tecnica de Armijo LUENBERGER [5]. Nesta busca inexata, calcula-se o passo t
como o primeiro termo da sequencia,
1, ν, ν2, ν3, .....,
que satisfaz a seguinte inequacao,
φ(xk) + tν1∇φ(xk)tdk ≥ φ(xk + tdk) (4.45)
xk1 + tdk ≥ 0 (4.46)
F(xk + tdk) ≥ 0 (4.47)
onde η1 ∈ (0, 1) e ν1 ∈ (0, 1).
35

Portanto, logo procedese ao calculo do novo ponto x,
xk+1 = xk + dxk.
Finalmente, efetuadas as atualizacoes, repete-se o procedimento verificando o
seguinte criterio de parada,
‖ xt.F(x) ‖< ǫtol, (4.48)
gerando assim uma sequencia de pontos em Ω que e decrescente para a funcao
potencial, e converge a solucao do problema de complementaridade.
4.4.1 Aplicacao ao problema de contato
A partir do problema de complentaridade da forma (Eqs. 4.3) tem-se que a funcao
que define o problema de contato e sua derivada e escrito por,
F(λ) = A(K−1Atλ−K−1F ) + s (4.49)
∇F(λ) = AK−1At (4.50)
Como os termos S2 = K−1At e S1 = K−1F permanecem constantes, sao
calculados antes da analise do algoritmo, permitindo assim desacoplar a analise
estrutural do problema de complementaridade.
Definindo os seguintes sistemas:
S1 = K−1At (4.51)
S2 = K−1F (4.52)
Em virtude destes sistemas compartilharem a matrizK, eles podem ser resolvidos
de forma simultanea e eficiente por um software comercial. Assim, uma vez obtida a
funcao e a sua derivada, procede-se a resolucao do problema de complementaridade
com menor custo computacional para o algoritmo (ALG-NCP) .
Em caso de haver contato entre dois corpos A e B, a partir da equacao
generalizada, (Eq. 3.2) chega-se a estrutura das matrizes S1 e S2 como,
36

S1 =
SA1
SB1
; S2 =
SA2
SB2
; A =
AA 0
0 AB
(4.53)
de onde resulta que e necessario uma analise estrutural por corpo, por exemplo uma
para calcular SA1 , SA
2 , e outra para SB1 , SB
2 .
Por conseguinte, pode-se generalizar esta estrutura matricial em caso de contato
entre mais corpos, realizando desta forma analises simultaneas e distribuıdas, se for
necessario com o objetivo de acelerar o processo da geracao das matrices S1 e S2.
37

4.4.2 Algoritmo
Parametros: α ∈ (0, 1), α1 ∈ (0, 1), e ν1 ∈ (0, 1)
Passo 0: Inicializacao de variaveis.
k = 0, λk ∈ Ω, E ∈ IRn, F (λk), H(λk), φ(λk), µk = φ(λk)n
e ∇F (λk)
Passo 1: Direcao de busca
M = ∇H(λ) (4.54)
Mdk1 = −H(λk) (4.55)
Mdk2 = µk.E (4.56)
Calculo de ρ
se ∇φ(λk)dk2 < 0
entao ρ = minα1; ‖d1‖, (α− 1)∇dt
1φ(λk)
∇dt2φ(λk)
se nao ρ = minα1; ‖d1‖
fim
dk = dk1 + ρdk
2
Passo 2 : Busca linear
Define-se o tamanho do passo t como o primeiro valor
da sequencia 1, ν, ν1, ν2, ν3, ν4, ... que satisfaz:
λk1 + tdk ≥ 0 (4.57)
F (λk + tdk) ≥ 0 (4.58)
φ(λk) + tν1∇φ(λk)tdk ≥ φ(λk + tdk) (4.59)
38

Passo 3: Atualizacao
λk+1 = λk + tdk
k = k + 1 (4.60)
H = H(λk) (4.61)
M = ∇H(λk) (4.62)
µ =f(λk)
n(4.63)
Passo 4: Criterio de Parada
‖ λk+1 · F(λk+1) ‖< ǫtol
Passo 5: Voltar passo 1
39
Capıtulo 5
Interface com ABAQUS
Como foi visto no capıtulo anterior, o desacoplamento da analise estrutural
apresenta-se como uma estrategia valida para resolver problemas de contato
utilizando os algoritmos descritos. Isto, em razao de que analises do tipo (K−1f = u)
sao varias vezes repetidas para diferentes vetores f com a mesma matriz de rigidezK.
Visando explorar as vantagens deste desacoplamento, foi desenvolvida uma interface
entre os algoritmos e um codigo comercial de elementos finitos.
A estrategia permite analisar problemas de grande porte, ja que a maior parte do
processamento e executada numa plataforma comercial atuando como ferramenta
auxiliar dos algoritmos. Alem da eficiencia na analise, esta estrategia apresenta
outras vantagens importantes, como por exemplo, facilidades no pre-processamento
e pos-processamento. Tambem possibilita realizar analises de forma remota em
plataformas computacionais diferenciadas segundo a necessidade, ou de forma
simultanea no caso de trabalhar com muitos corpos em contato. Para a construcao
da interface, optou-se por utilizar o ABAQUS, mas a presente estrategia e extensiva
a outros programas comerciais.
40
5.1 Descricao do programa
O ABAQUS e um conjunto de programas destinado a modelagem de sistemas
estruturais atraves do metodo de elementos finitos. Nele, podem-se realizar analises
numa grande variedade de problemas do tipo linear, nao linear, estatico, dinamico,
estrutural e termico. Este programa dispoe de ferramentas especıficas para resolucao
de grandes sistemas com estrutura esparsa, assim como tecnicas evoluıdas de
armazenamento que se traduzem numa eficiente e rapida resolucao destes problemas.
Os principais programas que integram ABAQUS sao:
- ABAQUS/Standard e utilizado na analise linear estatica, dinamica e termica,
com controle do passo de tempo.
- ABAQUS/Explicit e utilizado na analise nao linear, transitoria, assim como em
aplicacoes quasi-estaticas que envolvem comportamento nao linear descontınuo.
- ABAQUS/CAE e o ambiente grafico onde se integram todos os programas
ABAQUS. Apresentando uma interface simples para criar, submeter, monitorar e
avaliar os resultados das simulacoes. Sua estrutura encontra-se dividida em modulos
que correspondem a sucessao logica da criacao de um modelo. Evoluindo neles,
define-se a geometria, as propriedades dos materiais, o tipo de analise e a geometria
da malha. O resultado deste processo gera um arquivo de extensao (*.inp) onde
e armazenada esta informacao do pre-processador. O ultimo modulo e onde se
submete a analise e monitora sua evolucao. Como resultado, gera-se uma base de
dados (*.odb) com os resultados.
- ABAQUS/Viewer e ambiente de pos-processamento onde se faz a visualizacao
dos resultados do banco de dados (*.odb). Sua capacidade inclui o tracado de
graficos, animacao de resultados e geracao de informes da evolucao das variaveis.
- ABAQUS/Design e o modulo que faz analise de sensibilidade (DSA).
41
5.1.1 Acessibilidade e interacao
Neste ponto destacam-se tres caracterısticas do programa:
- Acesso aos resultados da base de dados (*.odb) mediante scripts desenvolvidos
em Python ou C++, assim como disponibilidade de outras fontes acessaveis para
pos-processamento, como se mostra na (Figura 5.1) cujas caracterısticas encontram-
se detalhadas na referencia [1].
- Capacidade de importar modelos vetoriais em diversos formatos, criados em
software CAD como Parasolid, SolidWorks, Pro-Engineer, Autocad, assim como
malhas orfas criadas em outros programas de (MEF ).
- Possibilidade de interagir facilmente com outros pacotes comerciais de analise
por elementos finitos como MSC/PATRAN, MSC/NASTRAN ou CATIA atraves
de ferramentas especıficas de traducao dos arquivos de entradas do pre-processador
e saıdas pos-processador.
5.2 Descricao da interface
A interface e composta de tres ferramentas desenvolvidas em Fortran 90 e
Python, integradas aos algoritmos em Matlab de onde sao executados de forma
automatica. A comunicacao efetua-se atraves de arquivos texto (*.txt) ASCII, onde a
compatibilidade com algoritmos desenvolvidos em outras linguagens de programacao
e garantida.
A seguir, faz-se uma descricao das funcoes da cada ferramenta da interface:
• ReadINP.exe - sua funcao e ler o arquivo do pre-processador (*.inp) e
escrever num arquivo texto (Pre.txt) acessıvel pelo algoritmo Matlab/ALG-
PC.
• WriteINP.exe - sua funcao e escrever no arquivo do pre-processador
(*.inp) as condicoes de carregamento, escritas no arquivo (F.txt). Quando
42

armazenadas varias condicoes de carregamento, elas sao analisadas si-
multaneamente.
• ReadODB.py - sua funcao e ler da base de dados (*.odb) os resultados da
analise e escrever-los num arquivo de texto (U.txt) acessıvel pelo algoritmo em
forma de vetores sequenciais, segundo o numero de analises executadas.
O codigo destas ferramentas esta disponıvel no (Anexo C).
Figura 5.1: Esquema da Interface
O codigo destas ferramentas esta disponıvel no (Anexo C).
5.3 Funcionamento da interface
Em linhas gerais, um processo de analise efetua os seguintes passos:
- Primeiro passo, se constroi a geometria do modelo em um formato vetorial, num
software CAD ou no ABAQUS/CAE. Apos disto, executam-se os passos do pre-
processo, definindo materiais, condicoes de contorno, geometria da malha e outros
detalhes. Dados que sao armazenados num arquivo (*.inp) do pre-processador.
- Segundo passo, identificam-se os nos potenciais de contato no algoritmo e
executa-se a analise. Atraves das ferramentas descritas, realiza-se a interacao
43
automatica com ABAQUS. Como resultado da pre-analise, obtem-se o arquivo de
deslocamentos U.txt a partir da qual geram-se as matrizes S1 e S2. Apos disto,
os algoritmos estao em condicoes de realizar a busca da solucao, obtendo como
resultado o vetor forcas nodais de contato.
- Terceiro passo, com as forcas nodais obtidas, e realizada uma nova analise,
chamada de pos-analise com o objetivo de pos-processar os resultados obtidos no
algoritmo. Uma vez finalizada esta etapa, os resultados tornam-se acessaveis no
modulo ABAQUS/Viewer, o que possibilita o acesso a uma grande variedade de
resultados disponıveis na base de dados (*.odb).
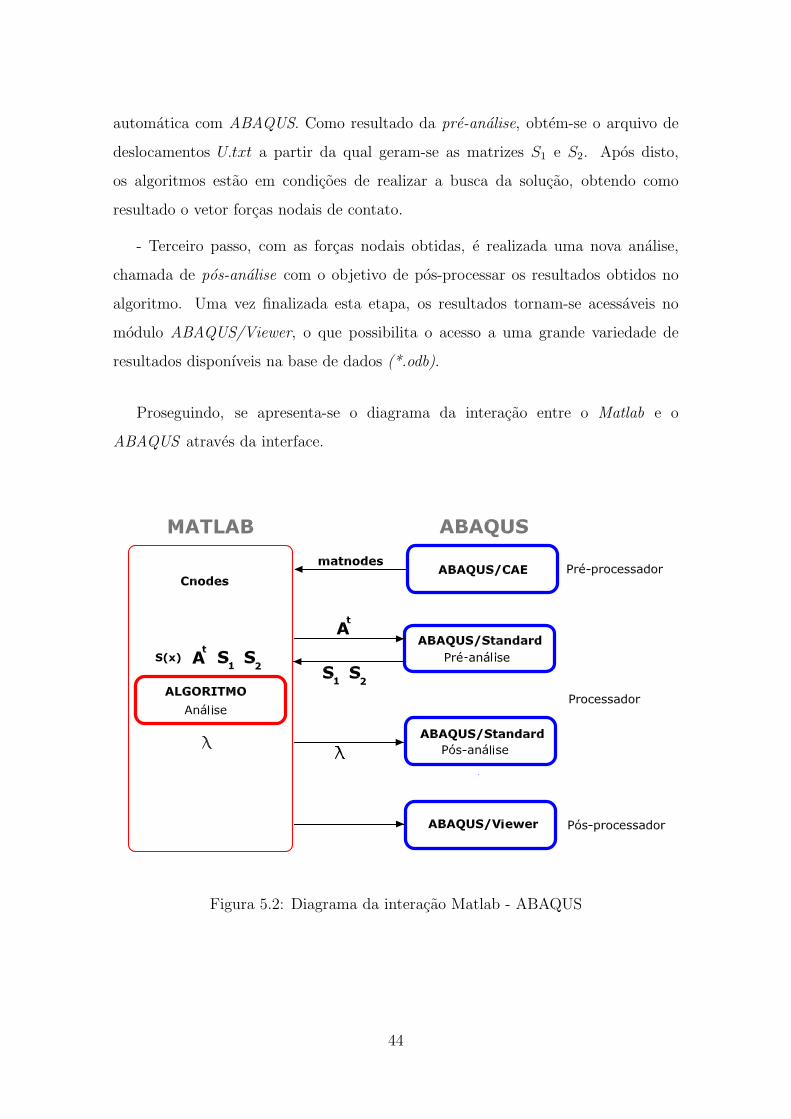
Proseguindo, se apresenta-se o diagrama da interacao entre o Matlab e o
ABAQUS atraves da interface.
Figura 5.2: Diagrama da interacao Matlab - ABAQUS
44
Capıtulo 6
Resultados numericos
Neste capıtulo, apresentam-se alguns exemplos que mostram o comportamento
numerico dos algoritmos estudados, efetuando-se a comparacao com os resultados
obtidos em ABAQUS.
Com esta finalidade, apresenta-se o tempo de parede gasto pelo ABAQUS, e
pelos algoritmos junto a interface. Sendo os tempos da interface, os que envolvem
o tempo de pre-analise, analise do algoritmo e pos-analise. Apresenta-se tambem o
numero de iteracoes feitas em cada analise, e o grafico da evolucao do criterio de
parada para cada exemplo.
A precisao dos resultados e calculada com base na norma infinito da diferenca
das pressoes de contato e dos deslocamentos obtidas do pos-processamento.
Utiliza-se a precisao simples (1 × 10−6) do ABAQUS, e tolerancia (1 × 10−8)
no criterio de parada dos algoritmos. As malhas de elementos finitos utilizadas
detalham-se em cada exemplo e correspondem a biblioteca do ABAQUS. Os testes
sao executados num computador AMD Athlon 1800Mhz com 512Mb de memoria
RAM e sistema operacional Windows XP.
45

6.1 Exemplo 1 - Semicilindro (2D)
Este exemplo e utilizado com a finalidade de verificar a interface, pois possui solucao
analıtica. Assim, tem-se um corpo semicilındrico de material homogeneo e isotropico
em contato com uma fundacao rıgida e submetido a um estado plano de tensoes.
Devido a simetria do exemplo, analisa-se a 1/4 do cilindro, impondo restricoes de
deslocamento na vertical como se ilustra na (Figura 6.1). A geometria da malha e
composta de elementos triangulares lineares (CPS3).
RP
1
2
3
Figura 6.1: Modelo 1 condicoes de contorno
Apresentam-se as curvas de pressao analıticas e numericas obtidas com as
diferentes estrategias. Como nos potenciais de contato sao considerados todos os
nos da face curva, totalizando 60 nos.
Dados do modelo.
—————————————————————————
R = 1m E = 207GPa ν = 0.3 q = 5.5GN/m
—————————————————————————
A seguir apresentam-se as equacoes da solucao analıtica das pressoes de contato:
p(x) =2F
πb
√
1 − (x
b)2 b =
√
4FR(1 − ν2)
πE
pmax =2F
πbLB =
E
2(1 − ν2)F = 2Rq
onde b e a largura da regiao de contato, q e a forca por unidade de longitude e R e
o raio do cilindro.
46

Geometria.
Elementos tipo = CPS3 No. de elementos=1062 No. de nos=587
(Ave. Crit.: 75%)S, Mises
+4.958e+00+6.641e+00+8.323e+00+1.001e+01+1.169e+01+1.337e+01+1.505e+01+1.673e+01+1.842e+01+2.010e+01+2.178e+01+2.346e+01+2.515e+01
Step: Step-1Increment 8: Step Time = 1.000Primary Var: S, MisesDeformed Var: U Deformation Scale Factor: +1.000e+00
1
2
3
Figura 6.2: Configuracao deformada com tensoes de Von-Mises
1
2
3
Figura 6.3: Malha deformada
0 0.05 0.1 0.15 0.2 0.25 0.3 0.350
0.05
0.1
0.15
0.2
0.25
0.3
0.35Solução obtida com elementos Tri
x/r
P(x
)/B
AnalíticaABAQUSAlg−PCFDIPA
Figura 6.4: Curva pressao na regiao de contato
47
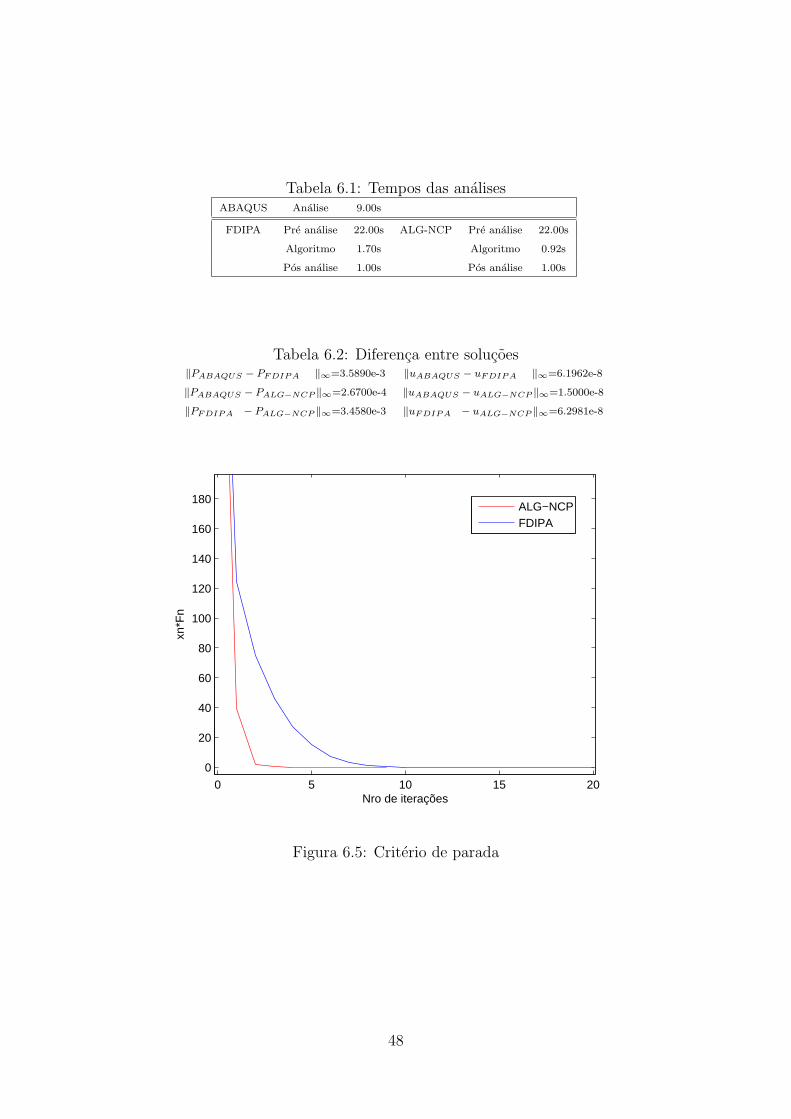
Tabela 6.1: Tempos das analisesABAQUS Analise 9.00s
FDIPA Pre analise 22.00s ALG-NCP Pre analise 22.00s
Algoritmo 1.70s Algoritmo 0.92s
Pos analise 1.00s Pos analise 1.00s
Tabela 6.2: Diferenca entre solucoes‖PABAQUS − PFDIPA ‖∞=3.5890e-3 ‖uABAQUS − uFDIPA ‖∞=6.1962e-8
‖PABAQUS − PALG−NCP ‖∞=2.6700e-4 ‖uABAQUS − uALG−NCP ‖∞=1.5000e-8
‖PFDIPA − PALG−NCP ‖∞=3.4580e-3 ‖uFDIPA − uALG−NCP ‖∞=6.2981e-8
0 5 10 15 20
0
20
40
60
80
100
120
140
160
180
Nro de iterações
xn*F
n
ALG−NCPFDIPA
Figura 6.5: Criterio de parada
48

Tabela 6.3: Numero de iteracoes com FDIPAiter t norm(d) xn*Fn cond1 cond2
0 1.000000 0.000e+000 4.432e+002 1.116e+001 0.000e+000
1 0.686853 4.208e+001 1.246e+002 3.232e+000 7.342e-001
2 0.563609 2.387e+001 7.505e+001 2.576e+000 5.885e-001
3 0.629837 1.860e+001 4.602e+001 3.320e+000 3.872e-001
4 0.750049 1.375e+001 2.738e+001 3.564e+000 1.890e-001
5 0.916895 9.382e+000 1.503e+001 2.965e+000 4.111e-002
6 1.000000 5.775e+000 7.213e+000 1.904e+000 5.551e-016
7 1.000000 3.533e+000 3.227e+000 1.054e+000 1.146e-003
8 1.000000 2.203e+000 1.412e+000 5.294e-001 1.428e-003
9 1.000000 1.293e+000 5.753e-001 2.379e-001 5.533e-004
10 0.820487 7.414e-001 1.683e-001 9.105e-002 5.612e-003
11 0.680114 3.371e-001 4.326e-002 3.332e-002 6.300e-003
12 0.772360 1.571e-001 1.497e-002 1.092e-002 3.005e-003
13 0.835462 6.825e-002 4.356e-003 3.290e-003 1.165e-003
14 0.871233 2.507e-002 1.154e-003 9.445e-004 4.455e-004
15 0.881758 8.668e-003 3.005e-004 2.675e-004 2.005e-004
16 0.874682 3.087e-003 7.643e-005 7.622e-005 1.052e-004
17 0.876931 1.135e-003 1.906e-005 2.145e-005 5.145e-005
18 0.861946 4.076e-004 4.552e-006 6.024e-006 2.752e-005
19 0.876957 1.505e-004 1.023e-006 1.521e-006 1.125e-005
20 0.940706 5.255e-005 1.613e-007 2.310e-007 2.070e-006
Tabela 6.4: Numero de iteracoes com ALG-NCPIter IterBL t xn*Fn ro norm(d)
0 0 0.000000 4.432e+002 0.000e+000 0.000e+000
1 0 1.000000 3.963e+001 6.396e-001 8.940e-002
2 0 1.000000 2.139e+000 7.639e-002 5.399e-002
3 1 0.800000 3.818e-001 4.510e-003 1.784e-001
4 0 1.000000 5.825e-002 6.413e-001 1.526e-001
5 0 1.000000 1.033e-002 4.363e+000 1.774e-001
6 0 1.000000 1.941e-003 8.963e-001 1.878e-001
7 0 1.000000 1.129e-004 6.034e-002 5.819e-002
8 0 1.000000 1.629e-007 1.453e-003 1.442e-003
9 0 1.000000 6.274e-015 3.990e-008 3.852e-008
49
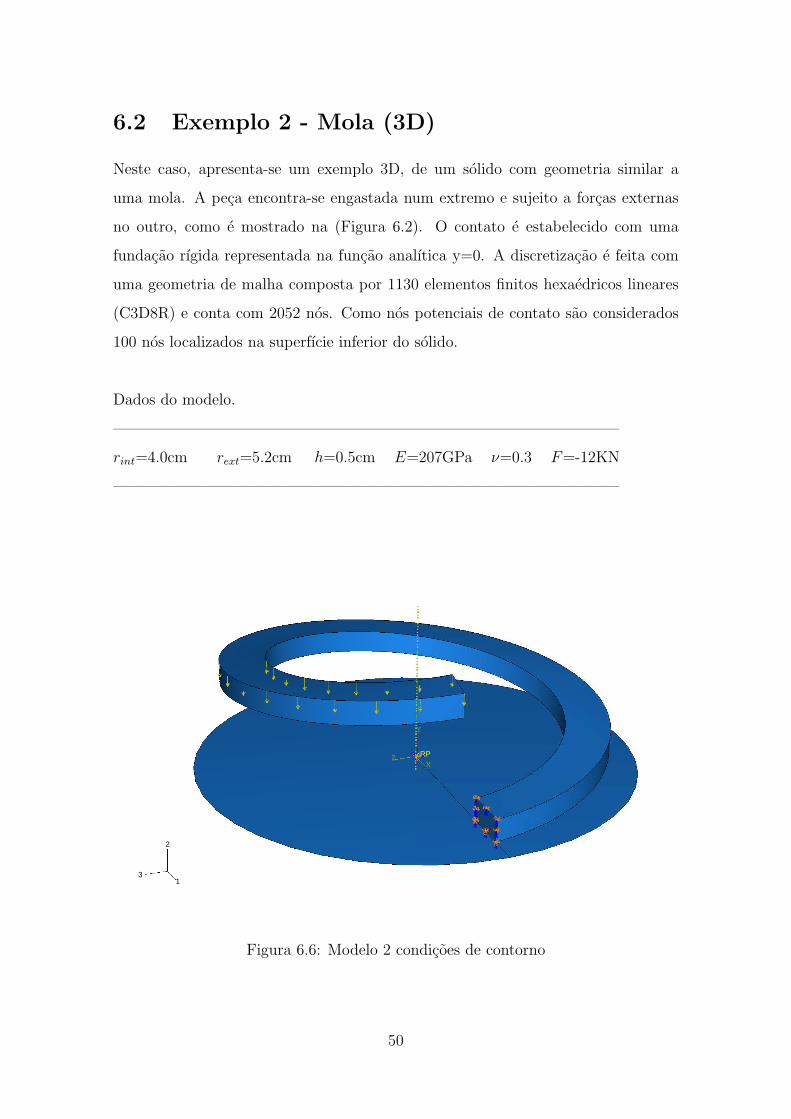
6.2 Exemplo 2 - Mola (3D)
Neste caso, apresenta-se um exemplo 3D, de um solido com geometria similar a
uma mola. A peca encontra-se engastada num extremo e sujeito a forcas externas
no outro, como e mostrado na (Figura 6.2). O contato e estabelecido com uma
fundacao rıgida representada na funcao analıtica y=0. A discretizacao e feita com
uma geometria de malha composta por 1130 elementos finitos hexaedricos lineares
(C3D8R) e conta com 2052 nos. Como nos potenciais de contato sao considerados
100 nos localizados na superfıcie inferior do solido.
Dados do modelo.
————————————————————————————————–
rint=4.0cm rext=5.2cm h=0.5cm E=207GPa ν=0.3 F=-12KN
————————————————————————————————–
RPX
Y
Z
1
2
3
Figura 6.6: Modelo 2 condicoes de contorno
50

(Ave. Crit.: 75%)S, Mises
+5.723e-02+1.655e-01+2.737e-01+3.819e-01+4.901e-01+5.983e-01+7.065e-01+8.148e-01+9.230e-01+1.031e+00+1.139e+00+1.248e+00+1.356e+00
1
2
3
Figura 6.7: Configuracao deformada com tensoes de Von-Mises
−6 −4 −2 0 2 4 6−6
−4
−2
0
2
4
6−1
−0.5
0
0.5
1
Nós sem contato
Nós com contato
Nós engastados
Figura 6.8: Nos da face do modelo em contato na superfıcie analıtica
51
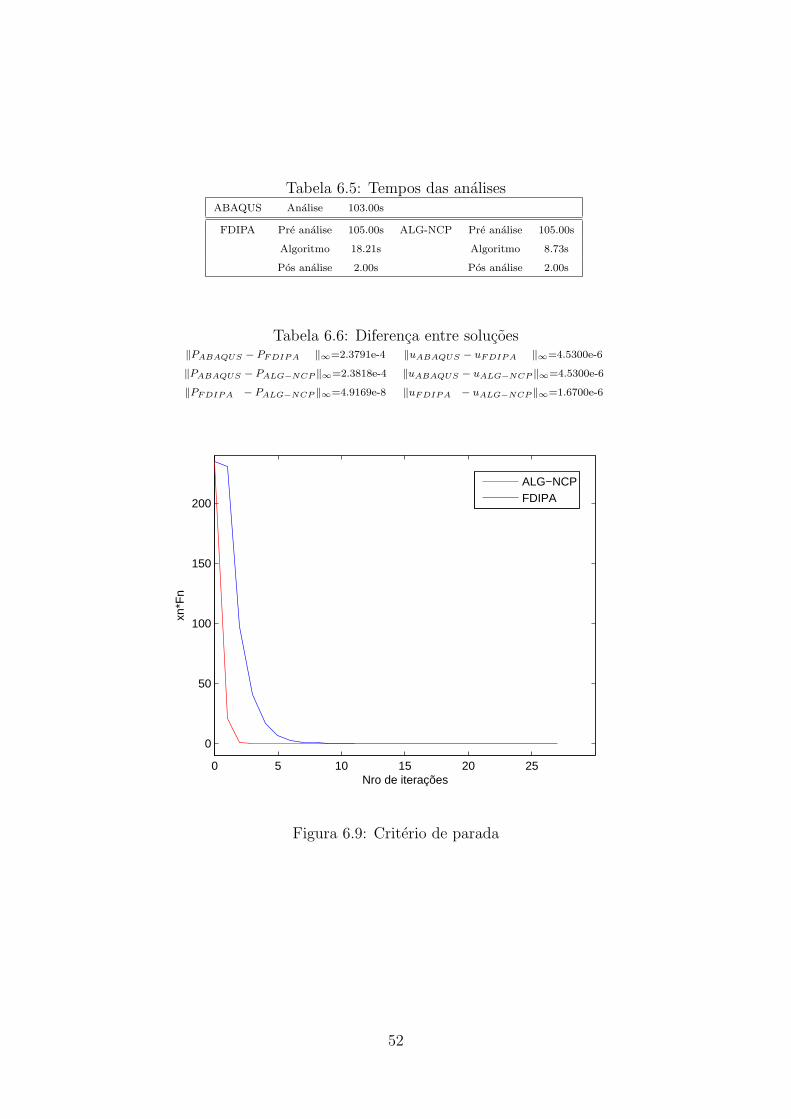
Tabela 6.5: Tempos das analisesABAQUS Analise 103.00s
FDIPA Pre analise 105.00s ALG-NCP Pre analise 105.00s
Algoritmo 18.21s Algoritmo 8.73s
Pos analise 2.00s Pos analise 2.00s
Tabela 6.6: Diferenca entre solucoes‖PABAQUS − PFDIPA ‖∞=2.3791e-4 ‖uABAQUS − uFDIPA ‖∞=4.5300e-6
‖PABAQUS − PALG−NCP ‖∞=2.3818e-4 ‖uABAQUS − uALG−NCP ‖∞=4.5300e-6
‖PFDIPA − PALG−NCP ‖∞=4.9169e-8 ‖uFDIPA − uALG−NCP ‖∞=1.6700e-6
0 5 10 15 20 25
0
50
100
150
200
Nro de iterações
xn*F
n
ALG−NCPFDIPA
Figura 6.9: Criterio de parada
52
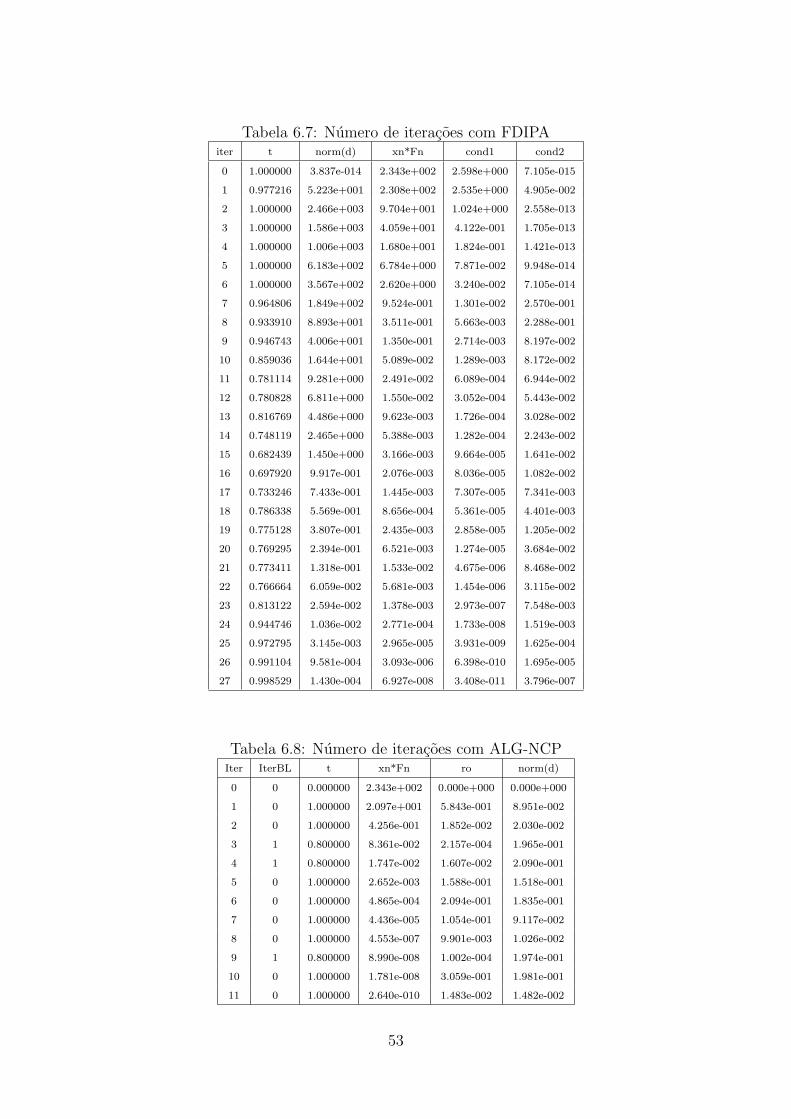
Tabela 6.7: Numero de iteracoes com FDIPAiter t norm(d) xn*Fn cond1 cond2
0 1.000000 3.837e-014 2.343e+002 2.598e+000 7.105e-015
1 0.977216 5.223e+001 2.308e+002 2.535e+000 4.905e-002
2 1.000000 2.466e+003 9.704e+001 1.024e+000 2.558e-013
3 1.000000 1.586e+003 4.059e+001 4.122e-001 1.705e-013
4 1.000000 1.006e+003 1.680e+001 1.824e-001 1.421e-013
5 1.000000 6.183e+002 6.784e+000 7.871e-002 9.948e-014
6 1.000000 3.567e+002 2.620e+000 3.240e-002 7.105e-014
7 0.964806 1.849e+002 9.524e-001 1.301e-002 2.570e-001
8 0.933910 8.893e+001 3.511e-001 5.663e-003 2.288e-001
9 0.946743 4.006e+001 1.350e-001 2.714e-003 8.197e-002
10 0.859036 1.644e+001 5.089e-002 1.289e-003 8.172e-002
11 0.781114 9.281e+000 2.491e-002 6.089e-004 6.944e-002
12 0.780828 6.811e+000 1.550e-002 3.052e-004 5.443e-002
13 0.816769 4.486e+000 9.623e-003 1.726e-004 3.028e-002
14 0.748119 2.465e+000 5.388e-003 1.282e-004 2.243e-002
15 0.682439 1.450e+000 3.166e-003 9.664e-005 1.641e-002
16 0.697920 9.917e-001 2.076e-003 8.036e-005 1.082e-002
17 0.733246 7.433e-001 1.445e-003 7.307e-005 7.341e-003
18 0.786338 5.569e-001 8.656e-004 5.361e-005 4.401e-003
19 0.775128 3.807e-001 2.435e-003 2.858e-005 1.205e-002
20 0.769295 2.394e-001 6.521e-003 1.274e-005 3.684e-002
21 0.773411 1.318e-001 1.533e-002 4.675e-006 8.468e-002
22 0.766664 6.059e-002 5.681e-003 1.454e-006 3.115e-002
23 0.813122 2.594e-002 1.378e-003 2.973e-007 7.548e-003
24 0.944746 1.036e-002 2.771e-004 1.733e-008 1.519e-003
25 0.972795 3.145e-003 2.965e-005 3.931e-009 1.625e-004
26 0.991104 9.581e-004 3.093e-006 6.398e-010 1.695e-005
27 0.998529 1.430e-004 6.927e-008 3.408e-011 3.796e-007
Tabela 6.8: Numero de iteracoes com ALG-NCPIter IterBL t xn*Fn ro norm(d)
0 0 0.000000 2.343e+002 0.000e+000 0.000e+000
1 0 1.000000 2.097e+001 5.843e-001 8.951e-002
2 0 1.000000 4.256e-001 1.852e-002 2.030e-002
3 1 0.800000 8.361e-002 2.157e-004 1.965e-001
4 1 0.800000 1.747e-002 1.607e-002 2.090e-001
5 0 1.000000 2.652e-003 1.588e-001 1.518e-001
6 0 1.000000 4.865e-004 2.094e-001 1.835e-001
7 0 1.000000 4.436e-005 1.054e-001 9.117e-002
8 0 1.000000 4.553e-007 9.901e-003 1.026e-002
9 1 0.800000 8.990e-008 1.002e-004 1.974e-001
10 0 1.000000 1.781e-008 3.059e-001 1.981e-001
11 0 1.000000 2.640e-010 1.483e-002 1.482e-002
53
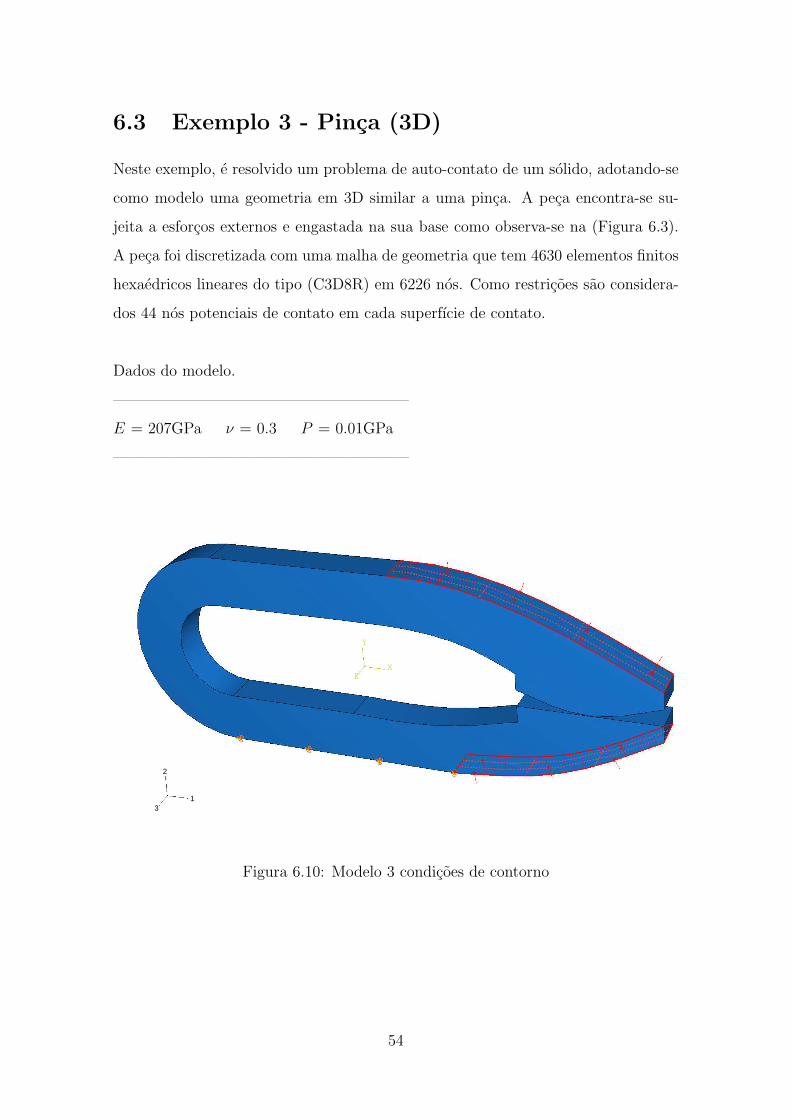
6.3 Exemplo 3 - Pinca (3D)
Neste exemplo, e resolvido um problema de auto-contato de um solido, adotando-se
como modelo uma geometria em 3D similar a uma pinca. A peca encontra-se su-
jeita a esforcos externos e engastada na sua base como observa-se na (Figura 6.3).
A peca foi discretizada com uma malha de geometria que tem 4630 elementos finitos
hexaedricos lineares do tipo (C3D8R) em 6226 nos. Como restricoes sao considera-
dos 44 nos potenciais de contato em cada superfıcie de contato.
Dados do modelo.
———————————————————
E = 207GPa ν = 0.3 P = 0.01GPa
———————————————————
X
Y
Z
1
2
3
Figura 6.10: Modelo 3 condicoes de contorno
54

(Ave. Crit.: 75%)S, Mises
+4.294e-05+3.296e-03+6.549e-03+9.803e-03+1.306e-02+1.631e-02+1.956e-02+2.282e-02+2.607e-02+2.932e-02+3.258e-02+3.583e-02+3.908e-02
1
2
3
Figura 6.11: Geometria da malha e tensoes de Von-Mises
(Ave. Crit.: 75%)S, Mises
+4.294e-05+3.296e-03+6.549e-03+9.803e-03+1.306e-02+1.631e-02+1.956e-02+2.282e-02+2.607e-02+2.932e-02+3.258e-02+3.583e-02+3.908e-02
1
2
3
Figura 6.12: Ampliacao da zona de contato
55

Tabela 6.9: Tempos das analisesABAQUS Analise 67.00s
FDIPA Pre analise 123.00s ALG-NCP Pre analise 123.00s
Algoritmo 3.26s Algoritmo 1.48s
Pos analise 7.00s Pos analise 7.00s
Tabela 6.10: Diferenca entre solucoes‖PABAQUS − PFDIPA ‖∞=2.4357e-2 ‖uABAQUS − uFDIPA ‖∞=9.1880e-3
‖PABAQUS − PALG−NCP ‖∞=1.1740e-2 ‖uABAQUS − uALG−NCP ‖∞=9.2420e-3
‖PFDIPA − PALG−NCP ‖∞=3.6074e-2 ‖uFDIPA − uALG−NCP ‖∞=7.1730e-3
0 2 4 6 8 10 12 14
0
0.1
0.2
0.3
0.4
0.5
0.6
Nro de iterações
xn*F
n
ALG−NCPFDIPA
Figura 6.13: Criterio de parada
56

Tabela 6.11: Numero de iteracoes com FDIPAiter t norm(d) xn*Fn cond1 cond2
0 1.000000 1.110e-016 6.638e-001 3.033e-002 1.110e-016
1 0.998048 1.375e+000 6.514e-001 2.978e-002 6.853e-005
2 1.000000 5.093e+001 2.750e-001 1.254e-002 1.332e-015
3 1.000000 3.303e+001 1.160e-001 5.279e-003 1.110e-015
4 1.000000 2.135e+001 4.879e-002 2.218e-003 6.661e-016
5 1.000000 1.371e+001 2.040e-002 9.289e-004 4.441e-016
6 1.000000 8.655e+000 8.419e-003 3.838e-004 4.441e-016
7 1.000000 5.267e+000 3.377e-003 1.542e-004 3.331e-016
8 1.000000 2.970e+000 1.283e-003 5.902e-005 2.776e-016
9 1.000000 1.462e+000 4.498e-004 2.131e-005 2.776e-016
10 0.914616 5.929e-001 1.438e-004 8.453e-006 1.292e-003
11 0.794872 2.717e-001 2.448e-005 3.079e-006 1.420e-003
12 0.730647 6.435e-002 2.070e-006 6.702e-007 4.363e-004
13 0.864192 8.644e-003 3.120e-007 1.219e-007 3.463e-005
14 0.965766 1.155e-003 2.225e-008 1.360e-008 2.108e-006
Tabela 6.12: Numero de iteracoes com ALG-NCPIter IterBL t xn*Fn ro norm(d)
0 0 0.000000 6.638e-001 0.000e+000 0.000e+000
1 0 1.000000 3.386e-002 5.534e-002 5.100e-002
2 0 1.000000 8.907e-004 1.133e-003 2.631e-002
3 1 0.800000 1.780e-004 1.044e-003 1.999e-001
4 0 1.000000 3.452e-005 2.432e-001 1.939e-001
5 0 1.000000 6.844e-006 2.922e-001 1.983e-001
6 0 1.000000 1.986e-007 2.932e-002 2.901e-002
7 0 1.000000 5.629e-012 2.837e-005 2.835e-005
57
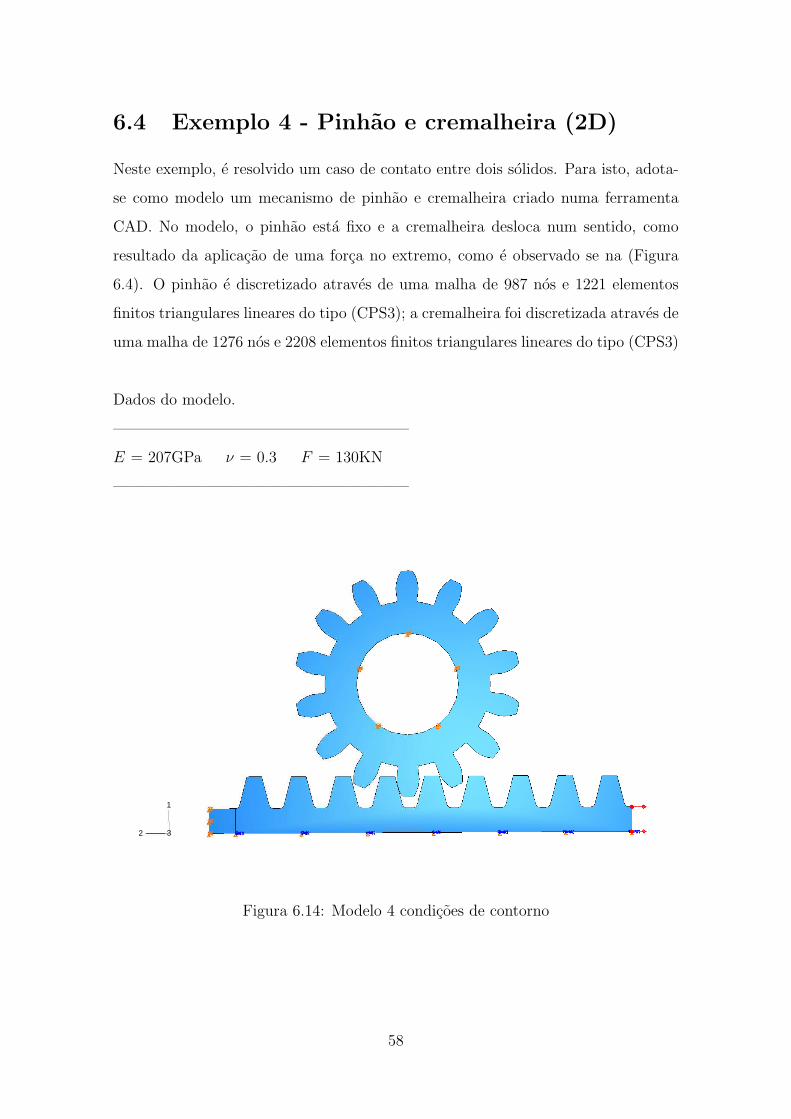
6.4 Exemplo 4 - Pinhao e cremalheira (2D)
Neste exemplo, e resolvido um caso de contato entre dois solidos. Para isto, adota-
se como modelo um mecanismo de pinhao e cremalheira criado numa ferramenta
CAD. No modelo, o pinhao esta fixo e a cremalheira desloca num sentido, como
resultado da aplicacao de uma forca no extremo, como e observado se na (Figura
6.4). O pinhao e discretizado atraves de uma malha de 987 nos e 1221 elementos
finitos triangulares lineares do tipo (CPS3); a cremalheira foi discretizada atraves de
uma malha de 1276 nos e 2208 elementos finitos triangulares lineares do tipo (CPS3)
Dados do modelo.
———————————————————
E = 207GPa ν = 0.3 F = 130KN
———————————————————
1
2 3
Figura 6.14: Modelo 4 condicoes de contorno
58
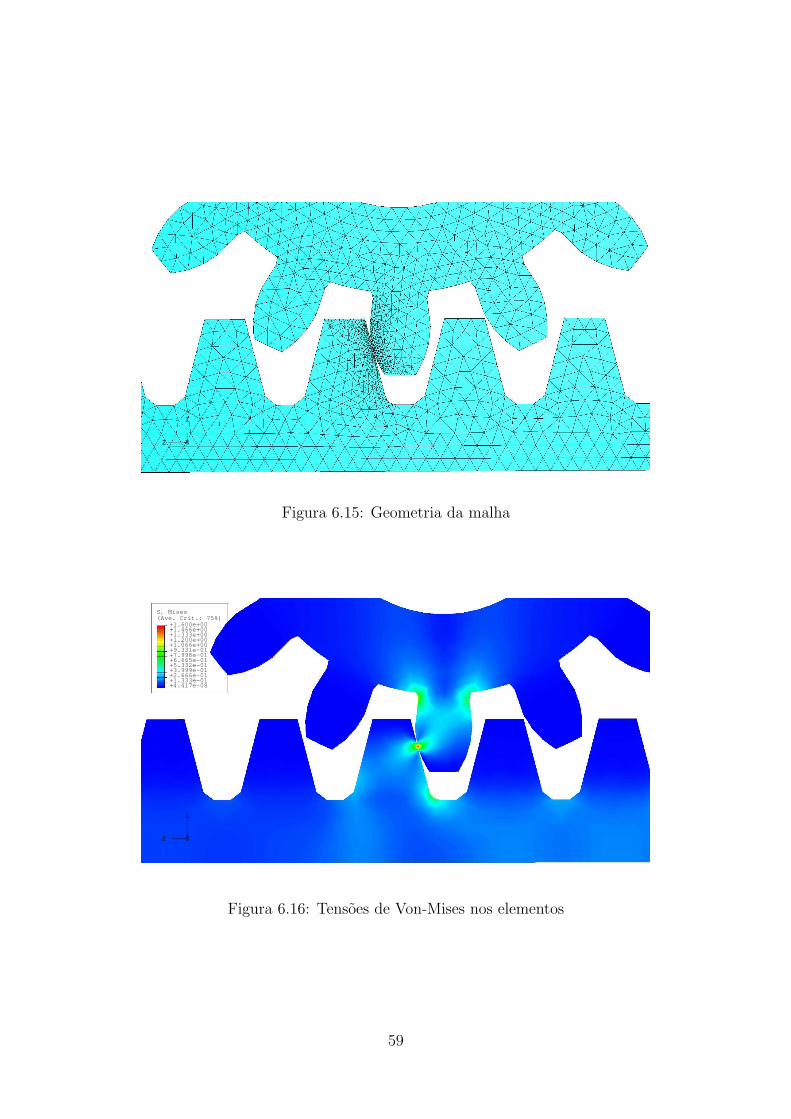
1
2 3
Figura 6.15: Geometria da malha
(Ave. Crit.: 75%)S, Mises
+4.417e-08+1.333e-01+2.666e-01+3.999e-01+5.332e-01+6.665e-01+7.998e-01+9.331e-01+1.066e+00+1.200e+00+1.333e+00+1.466e+00+1.600e+00
1
2 3
Figura 6.16: Tensoes de Von-Mises nos elementos
59

Tabela 6.13: Tempos das analisesABAQUS Analise 7.00s
FDIPA Pre analise 16.00s ALG-NCP Pre analise 16.00s
Algoritmo 1.00s Algoritmo 0.82s
Pos analise 1.00s Pos analise 1.00s
Tabela 6.14: Diferenca entre solucoes‖PABAQUS − PFDIPA ‖∞=0.3470524 ‖uABAQUS − uFDIPA ‖∞=0.0143314
‖PABAQUS − PALG−NCP ‖∞=0.3470565 ‖uABAQUS − uALG−NCP ‖∞=0.0143314
‖PFDIPA − PALG−NCP ‖∞=4.7089e-6 ‖uFDIPA − uALG−NCP ‖∞=2.2400e-8
0 2 4 6 8 10 12 140
5
10
15
20
25
30
35Evolução do criterio de parada
Nro de iterações
xn*F
n
ALG−NCPFDIPA
Figura 6.17: Criterio de parada
60
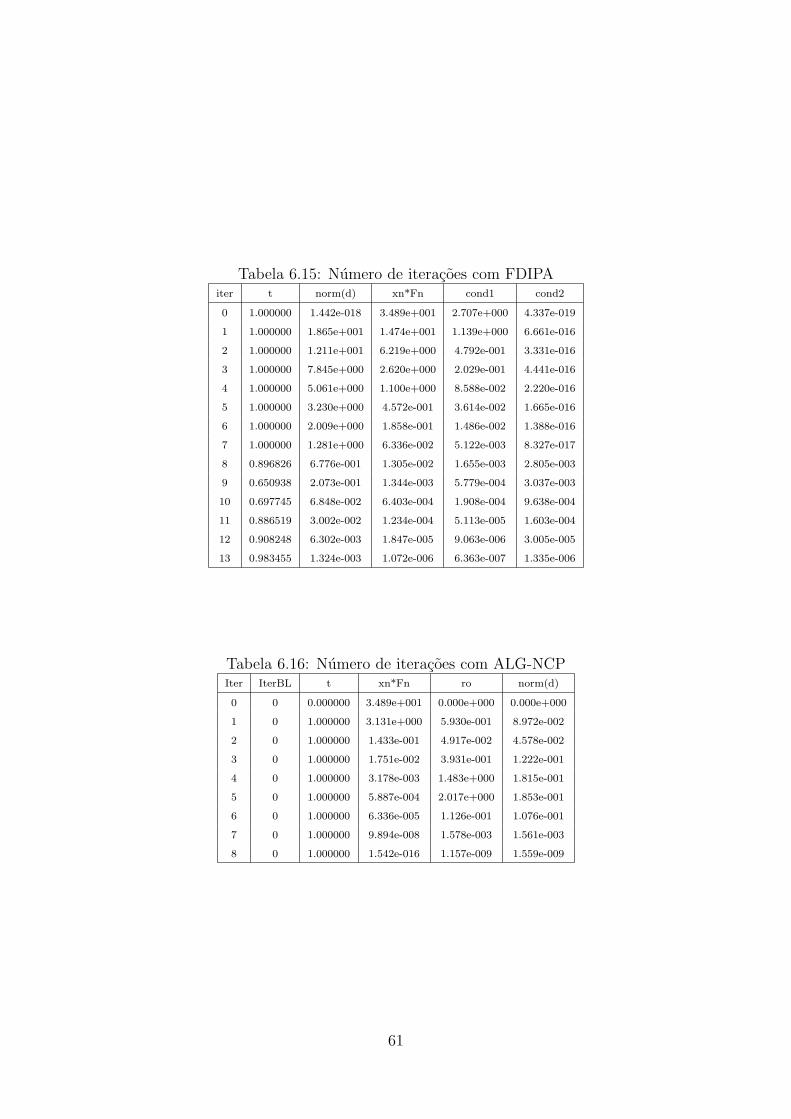
Tabela 6.15: Numero de iteracoes com FDIPAiter t norm(d) xn*Fn cond1 cond2
0 1.000000 1.442e-018 3.489e+001 2.707e+000 4.337e-019
1 1.000000 1.865e+001 1.474e+001 1.139e+000 6.661e-016
2 1.000000 1.211e+001 6.219e+000 4.792e-001 3.331e-016
3 1.000000 7.845e+000 2.620e+000 2.029e-001 4.441e-016
4 1.000000 5.061e+000 1.100e+000 8.588e-002 2.220e-016
5 1.000000 3.230e+000 4.572e-001 3.614e-002 1.665e-016
6 1.000000 2.009e+000 1.858e-001 1.486e-002 1.388e-016
7 1.000000 1.281e+000 6.336e-002 5.122e-003 8.327e-017
8 0.896826 6.776e-001 1.305e-002 1.655e-003 2.805e-003
9 0.650938 2.073e-001 1.344e-003 5.779e-004 3.037e-003
10 0.697745 6.848e-002 6.403e-004 1.908e-004 9.638e-004
11 0.886519 3.002e-002 1.234e-004 5.113e-005 1.603e-004
12 0.908248 6.302e-003 1.847e-005 9.063e-006 3.005e-005
13 0.983455 1.324e-003 1.072e-006 6.363e-007 1.335e-006
Tabela 6.16: Numero de iteracoes com ALG-NCPIter IterBL t xn*Fn ro norm(d)
0 0 0.000000 3.489e+001 0.000e+000 0.000e+000
1 0 1.000000 3.131e+000 5.930e-001 8.972e-002
2 0 1.000000 1.433e-001 4.917e-002 4.578e-002
3 0 1.000000 1.751e-002 3.931e-001 1.222e-001
4 0 1.000000 3.178e-003 1.483e+000 1.815e-001
5 0 1.000000 5.887e-004 2.017e+000 1.853e-001
6 0 1.000000 6.336e-005 1.126e-001 1.076e-001
7 0 1.000000 9.894e-008 1.578e-003 1.561e-003
8 0 1.000000 1.542e-016 1.157e-009 1.559e-009
61
Capıtulo 7
Consideracoes finais
7.1 Conclusoes
Neste trabalho, foi abordado o problema de contato entre corpos elasticos, na
hipotese de pequenos deslocamentos sem atrito. Para a resolucao, foram adotadas
duas formulacoes. A saber, como um problema de minimizacao com restricoes de
desigualdade, e como um problema de complementaridade.
Como ambas formulacoes permitiram desacoplar o calculo estrutural, foi
desenvolvida uma interface com ABAQUS para atuar como ferramenta de analise
auxiliar dos algoritmos.
A utilizacao desta estrategia de analise mostrou-se conveniente pois:
- prescinde de conhecer a matriz de rigidez do problema;
- facilita as tarefas de pre-processamento e pos-processamento;
- permite trabalhar com recursos computacionais diferenciados segundo a
necessidade.
Assim, o uso de um software comercial de analise estrutural interagindo com
algoritmos apresenta-se como uma alternativa valida de analise de problemas de
grande porte, auxiliando na reducao de um sistema fısico a um modelo numerico
que o resolve de forma eficiente.
Nos exemplos apresentados, foi avaliado o desempenho da interface, assim como
dos algoritmos interagindo com ABAQUS. Com esse objetivo, foram realizadas
comparacoes entre tempos de processamento, diferenca entre solucoes do pos-
62
processamento e velocidade de convergencia.
Com relacao aos tempos gastos no processamento dos algoritmos utilizando a
interface, estes foram razoaveis, se comparados ao gasto pelo ABAQUS. Levando
em conta que ainda pode-se melhorar muito a comunicacao, tanto otimizando o
codigo da interface, quanto implementando os algoritmos em linguagem de alto
nıvel, pode-se concluir que a estrategia aplicada e valida para a analise deste tipo
de problemas.
Dos resultados numericos obtidos com os algoritmos, estes apresentaram-se
satisfatorios quando comparados a resultados obtidos com o ABAQUS. Somente
nos exemplos onde existe contato entre superfıcies deformaveis, a diferenca entre
as solucoes dos algoritmos e do ABAQUS foi um pouco maior. O que evidencia a
necessidade de adotar uma melhor estrategia para caracterizar a distancia entre os
corpos a ser considerada no calculo da restricao g(u).
No caso do algoritmo de complementaridade (ALG-NCP) o desempenho foi
superior ao algoritmo de minimizacao (FDIPA). Isto deve-se as dificuldades para
o calculo do passo t visto no capıtulo 4, o que pode ter acarretado o atraso na
velocidade de convergencia do algoritmo. Neste ponto, a formulacao como problema
de minimizacao apresentou mais dificuldade para o desacoplamento do calculo
estrutural do que a equivalente de complentaridade, onde tanto a funcao como sua
derivada sao calculadas sem ter a necessidade de acesso a matriz de rigidez.
Da mesma forma, os resultados revelam a robustez e eficiencia dos algoritmos
aplicados, atingindo em poucas iteracoes as solucoes, e permitem vislumbrar uma
otima perspectiva quanto a resolucao de problemas de grande porte, aproveitando
as vantagens do codigo comercial atuando como ferramenta auxiliar de novos
algoritmos.
7.2 Sugestoes para trabalhos futuros
Varios aspectos podem ser considerados como possıveis linhas de estudo para a
continuidade deste trabalho.
- No que diz respeito a geometria do contato entre corpos deformaveis, e
63
necessario melhorar o modelo utilizado para caracterizar a distancia fısica entre
os corpos, visando trabalhar em grandes deformacoes.
- Ambos algoritmos apresentaram um otimo desempenho, em particular o de
complementaridade mostrou-se mais robusto. Em virtude disto, a extensao as
aplicacoes incluıdo-se outros tipos de nao linearidades presentes no fenomeno de
contato como grandes deformacoes, plasticidade e problemas dinamicos, assim como
atrito, onde introducao de um modelo satisfatorio e uma sugestao para futuros
trabalhos explorando sua formulacao como problema de complementaridade.
- Aprofundar o conhecimento do ABAQUS e outros pacotes comerciais de analise
estrutural, explorando a capacidade destas ferramentas na analise de sensibilidade
(DSA), com o objetivo de atingir analises de topologia em problemas de contato e
outros problemas de otimizacao estrutural.
Finalmente, e importante ressaltar que o emprego de novos metodos numericos
interagindo com software comercial de analise estrutural deve ser mais explorado,
pois desta forma facilita-se a rapida disseminacao nos ambientes industriais dos
avancos nesta area e constitui-se num banco de provas para as novas ferramentas
desenvolvidas no ambiente academico.
64

Referencias Bibliograficas
[1] ABAQUS 6.4. Analisys User’s Guide. c©ABAQUS, Inc.., 2003.
[2] Klarbring A. A mathematical programming approach to three-dimensional
contact problems with friction. Comp. Methods Appl. Mech. Eng., 58:175–200,
1986.
[3] Mijar A.R. and Arora J.S. Review of formulations for elastostaic frictional
contact problems. Structural Multidisciplinary Optimization, (20):167–189,
2000.
[4] Simo J. C., Wriggers P., and Taylor R.L. A perturbed lagrangian formulation
for the finite element solution of contact problems. Comp. Methods Appl. Mech.
Eng., (50):163–180, 1985.
[5] Luenberger D.G. Linear and Non Linear Programming. Addison-Wesley
Publishing Company Inc., 1984.
[6] Bjorkman G., Klarbring A., and Sjodin B. Sequential quadratic programming
for non- linear elastic contact problems. Int. J. Numer. Methods Eng., 38:137–
165, 1995.
[7] Barboza H. Algoritmos Numericos para problemas de Contato em elasticidade.
PhD thesis, Universidade Federal de Rio de Janeiro, COPPE, Programa de
Engenharia Civil, 1986.
[8] Herskovits J. A View on Nonlinear Optimization, Advances in Structural
Optimization. Kluver-Academic Publishers., 1995.
65

[9] Herskovits J., Mappa P., Goulart E., and Mota Soares C.M. Mathematical
programming models and algorithms for engineering design optimization.
Computational Methods in Applied Mechanical Engineering, 194:3244–3268,
2005.
[10] Nocedal J. and S.J. Wright. Numerical Optimization. New York, Springer-
Verlag, 1999.
[11] Johnson K.L. Contact Mechanics. Cambrigde University Press, London, 1985.
[12] Kikuchi N. and Oden J.T. Contact Problems in Elasticity: A Study of
Variational Inequalities on Finite Element Methods.
[13] Zienckiewics O.C. The Finite Element Method. McGraw-Hill, 3rd. ed edition,
1977.
[14] Wriggers P. and Fisher K. Recent new developments in contact mechanics. 4th
European LS-DYNA Users Conference, 2003.
[15] Mazorche S. Um algoritmo de ponto interior viavel para problemas de
complementaridade nao linear. Exame de Qualificacao de Doutorado -
PEM/COPPE-UFRJ., 2004.
[16] Mazorche S. and Herskovits J. A new interior point algorithm for nonlinear
complementarity problems. WCSMO6 - CD Proceedings., 38:13–14, 2005.
[17] Timoshenko S.P. and Goodier J.N. Teoria da Elasticidade. McGraw-Hill, 1980.
[18] Auatt S.S., Borges L.A., and Herskovits J. An interior poin optimization
algorithm for contact problems in linear elasticity. Numerical Methods in
Engineering, pages 855–861, 1996.
66
Apendice A
Algumas consideracoes sobre
otimizacao
Um problema de otimizacao consiste na minimizacao ou maximizacao de uma
determinada funcao objetivo sujeito a restricoes em suas variaveis. Isto significa
que matematicamente o problema geral de otimizacao nao linear pode ser formulado
como:
minimize f(x)
sujeito a: g(x) ≥ 0
h(x) = 0
(A.1)
Onde na Eq. A.1 x ∈ IRn e vetor de variaveis do problema ou variaveis de projeto,
f : IRn → IR e a funcao objetivo, g : IRn → IRm e a funcao que define as restricoes
de desigualdade e h : IRn → IRp e a funcao das restricoes de igualdade. As funcoes
f , g e h devem ser funcoes contınuas com derivadas contınuas.
Definicao A.0.1 (Regiao viavel) A regiao viavel Ω e o conjunto de pontos que
satisfazem as seguintes restricoes: Ω = x | g(x) ≥ 0, h(x) = 0
Definicao A.0.2 (Mınimo local) x∗ e um mınimo local do problema A.1 se existe
uma vizinhanca N de x∗ tal que f(x) ≥ f(x∗) para todo ponto x pertencente a Ω∩N .
67

Definicao A.0.3 (Conjunto de restricoes ativas) Dado um ponto x ∈ Ω, o conjunto
de restricoes de desigualdade ativas e: A(x) = i ∈ 1, ..,m | gi(x) = 0
Definicao A.0.4 (Independencia Linear) Dado um ponto x ∈ Ω, as restricoes
satisfazem o requisito de independencia linear em x se os gradientes das restricoes
de igualdade e de desigualdade ativas sao linearmente independentes, ou seja, o
conjunto ∇gi(x) | i ∈ A(x),∇hi(x) | i ∈ 1, .., p e linearmente independente.
Definicao A.0.5 (Condicoes de Karush - Kuhn - Tucker) Seja x ∈ IRn, se
satisfazem as condicoes de primeira ordem de Karush-Kuhn-Tucker (KKT) em x
se existem vetores λ ∈ IRm e µ ∈ IRp que verificam:
∇f(x) −m
∑
i=1
λi∇gi(x) −
p∑
i=1
µi∇hi(x) = 0 (A.2)
gi(x)λi = 0, i = 1, ..,m (A.3)
h(x) = 0 (A.4)
g(x) ≥ 0 (A.5)
λ ≥ 0 (A.6)
Teorema A.0.1 (Teorema de Karush - Kuhn - Tucker) Seja x um mınimo local
do problema A.1 onde se satisfaz o requisito de Independencia Linear, entao se
satisfazem as condicoes de primeira ordem de KKT no ponto x e vetores λ e µ sao
unicos.
Demonstracao: Ver na referencia [10].
Adicionando a funcao objetivo uma combinacao linear das restricoes, temos a
funcao Lagrangeana L(u, λ):
68

Definicao A.0.6 (Funcao Lagrangeana) A funcao lagrangeana para o problema A.1
e a funcao L : IRn × IRm × IRp → IR definida como:
L(x, λ, µ) = f(x) −m
∑
i=1
λigi(x) −
p∑
i=1
µihi(x) (A.7)
Em notacao vetorial, pode expressar como:
L(u, λ) = Π(u) + λtg(u) + µth(x) (A.8)
Sendo o vetor λ o multiplicador de Lagrange e g(u) o vetor restricoes, satisfazem-
se as seguintes equacoes:
∂L(u, λ)
∂u= 0 (A.9)
∂L(u, λ)
∂λ≤ 0 (A.10)
λtg(u) = 0 (A.11)
λ ≥ 0 (A.12)
Estas equacoes representam, de outra forma, as condicoes necessarias (KKT) de
tal forma que u seja um otimo local de (P) em termos da funcao Lagrangeana
Definicao A.0.7 (Hessiana da funcao lagrangeana) A hessiana da funcao la-
grangeana para o problema A.1 e a funcao H : IRn × IRm × IRp → IRn×n definida
como:
H(x, λ, µ) = ∇2xxL(x, λ, µ) = ∇2f(x) −
m∑
i=1
λi∇2gi(x) −
p∑
i=1
µi∇2hi(x) (A.13)
69

Apendice B
Metodo de Newton Raphson
E um metodo iterativo para a procura de zeros numa funcao diferenciavel f . O zero
da tangente e proximo ao zero da curva, portanto e utilizado como novo ponto para
uma nova tangente. Assim o metodo estima as raızes de uma funcao χ : IRm → IRn
partindo de um ponto qualquer da funcao e repete o processo, ate atingir a solucao.
Eventualmente pode divergir se a estimativa inicial nao e boa, o qual representa o
ponto fraco do metodo.
Entao, se procuras-se a solucao da seguinte equacao,
χ(x) = 0, (B.1)
a partir dos primeiros termos da serie de Taylor obtem-se:
χ(x) ≈ χ(x) + ∇χ(xk)t(x− xk), (B.2)
e uma estimativa de xk+1 pode ser obtida de,
χ(x) + ∇χ(xk)t(xk+1 − xk) = 0. (B.3)
Definido,
dk+1 := (xk+1 − xk), (B.4)
obtem-se,
[∇χ(xk)]tdk = −χ(xk). (B.5)
70

Figura B.1: Direcao de busca do algoritmo de Newton
Um resumo do algoritmo e dado por:
Passo 0: Valor inicial estimado
x = x0
Passo 1: Calculo do novo passo
[∇χ(xk)]tdk = −χ(xk)
Passo 2: Atualizacao
xk+1 = xk + dk
Passo 3: Criterio de parada
‖xk+1 − xk‖ ≤ ε
Passo 4: Volta ao passo 1
71

Apendice C
Codigos da interface
writeINP.exe
!################################################################################! Code : Fortran 90! Author : Gabriel Mario Guerra! Modify : 01/01/2006!################################################################################
!-------------------------------------------------------------------------------- program writeINP!--------------------------------------------------------------------------------
implicit none integer :: ierror,n,NN,Num character(100) :: string,str real*8,allocatable :: MatF(:,:) integer :: l,s,s1,s2 integer :: p=0
!---------------------------------------------------- Read size of matrix F.txt -
open(UNIT=1, FILE='C:\ABAQUS\F.txt' , STATUS='OLD' ,IOSTAT=ierror)
do read(1,*, IOSTAT=ierror) Num if (ierror/=0) then;do n=1,NN+2; backspace(UNIT=1);enddo;exit; end if NN=NN+1 enddo
allocate(MatF(NN,4)) close(1)
call readf(NN,MatF) !allocate matrix F to MatF
!------------------------------------------------------------ Modify inp file F -
open(UNIT=1, FILE='C:\ABAQUS\Job-1.inp' , STATUS='OLD' ,IOSTAT=ierror) open(UNIT=2, FILE='C:\ABAQUS\Job-1F.inp', STATUS='REPLACE',IOSTAT=ierror) open(UNIT=12, STATUS='SCRATCH',IOSTAT=ierror)
if (ierror/=0) then; print*,'error na lectura',ierror;stop; endif
do
read(1,'(a100)',IOSTAT=ierror) string if (ierror/=0) then; exit;endif
if (string=='** BOUNDARY CONDITIONS') then
! seek pickedset in boundary and write ! to picked.txt after erase
72
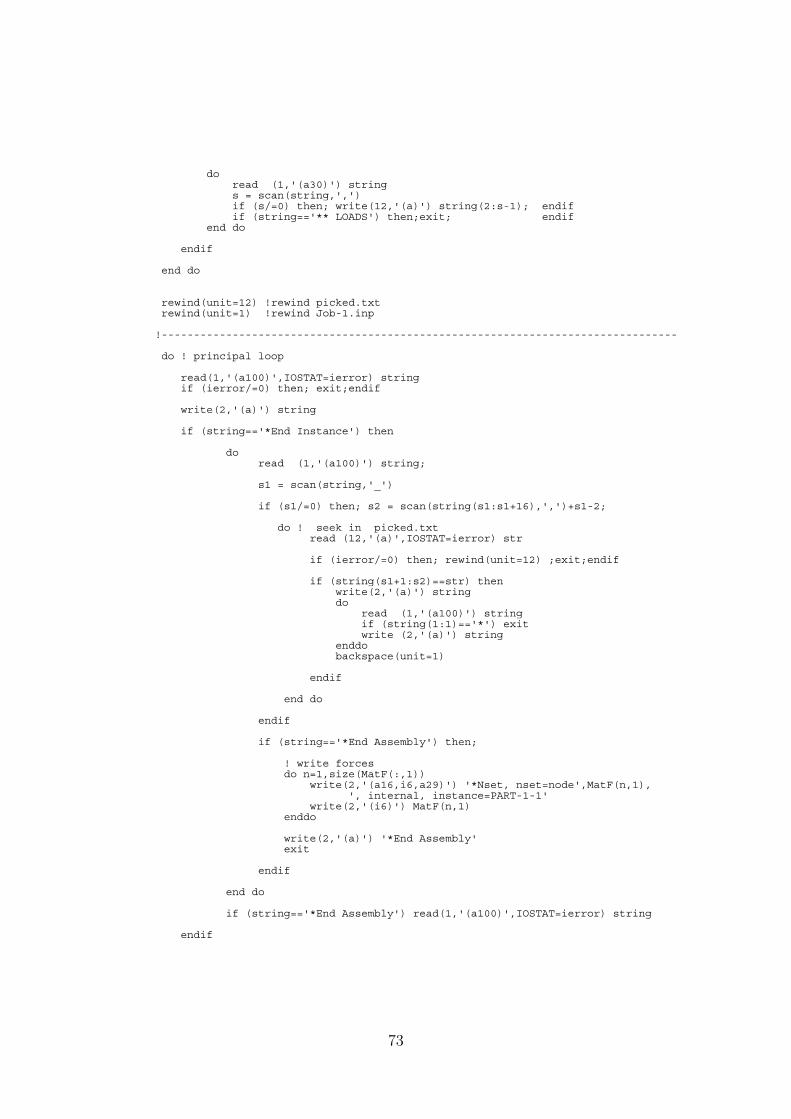
do read (1,'(a30)') string s = scan(string,',') if (s/=0) then; write(12,'(a)') string(2:s-1); endif if (string=='** LOADS') then;exit; endif end do
endif
end do
rewind(unit=12) !rewind picked.txt rewind(unit=1) !rewind Job-1.inp
!--------------------------------------------------------------------------------
do ! principal loop
read(1,'(a100)',IOSTAT=ierror) string if (ierror/=0) then; exit;endif
write(2,'(a)') string
if (string=='*End Instance') then
do read (1,'(a100)') string;
s1 = scan(string,'_')
if (s1/=0) then; s2 = scan(string(s1:s1+16),',')+s1-2;
do ! seek in picked.txt read (12,'(a)',IOSTAT=ierror) str
if (ierror/=0) then; rewind(unit=12) ;exit;endif
if (string(s1+1:s2)==str) then write(2,'(a)') string do read (1,'(a100)') string if (string(1:1)=='*') exit write (2,'(a)') string enddo backspace(unit=1)
endif
end do
endif
if (string=='*End Assembly') then;
! write forces do n=1,size(MatF(:,1)) write(2,'(a16,i6,a29)') '*Nset, nset=node',MatF(n,1), ', internal, instance=PART-1-1' write(2,'(i6)') MatF(n,1) enddo
write(2,'(a)') '*End Assembly' exit
endif
end do
if (string=='*End Assembly') read(1,'(a100)',IOSTAT=ierror) string
endif
73
!-------------------------------------------------------------- Write only forces
if (string=='** LOADS') then do n=1,size(MatF(:,1)) write(2,'(a6)') '*Cload'
if (MatF(n,2)/=0) then;write(2,'(a4,i6,a4,f12.6)') 'node',MatF(n,1),', 1,',MatF(n,2);endif if (MatF(n,3)/=0)then ;write(2,'(a4,i6,a4,f12.6)') 'node',MatF(n,1),', 2,',MatF(n,3);endif if (MatF(n,4)/=0)then ;write(2,'(a4,i6,a4,f12.6)') 'node',MatF(n,1),', 3,',MatF(n,4);endif
enddo
do read(1,'(a100)',IOSTAT=ierror) string if (string=='** OUTPUT REQUESTS') then;write(2,'(a)') string;exit;endif enddo
endif
!---------------------------------------------------- Write lines to generate .dat
if (string=='*Output, field') then; write(2,'(a)') '*Node Print';write(2,'(a)') 'U,'; endif
!---------------------------------------------------------------------------------
end do
close (1) close (2)
!-------------------------------------------------------------- Modify *.inp with N
open(UNIT=1, FILE='C:\ABAQUS\Job-1.inp' , STATUS='OLD' ,IOSTAT=ierror) open(UNIT=2, FILE='C:\ABAQUS\Job-1N.inp', STATUS='REPLACE',IOSTAT=ierror)
do read(1,'(a100)',IOSTAT=ierror) string
if (ierror/=0) then; exit;endif write(2,'(a100)') string
if (string=='*Output,field') then;write(2,'(a)')'*Node Print';write(2,'(a)')'U,' endif end do
close (1) close (2)
!----------------------------------------------------------------------------------
contains
subroutine readf(NN,Mat)
implicit none integer :: ierror,n,NN real*8 :: Mat(:,:)
open(UNIT=1, FILE='C:\ABAQUS\F.txt' , STATUS='OLD' ,IOSTAT=ierror) if (ierror/=0) then; print*,'error na lectura',ierror;stop; endif
do n=1,NN read (1,'(i6,3f18.12)') MatF(n,:) if (ierror/=0) then;exit;end if enddo
close (1)
end subroutine
!---------------------------------------------------------------------------------- end program!----------------------------------------------------------------------------------
74
readINP.exe
!################################################################################! Code : Fortran 90! Author : Gabriel Mario Guerra! Modify : 01/01/2006!################################################################################
!-------------------------------------------------------------------------------- program readINP!--------------------------------------------------------------------------------
implicit none integer :: ierror,n character(10) :: string10 integer :: NumNodes = 0 integer :: NumElements = 0 character(60) :: string60 integer :: l real*8 :: tstr,s character(60) :: stringbound character(60) :: stringforce,stf integer :: nro,nb,nf integer :: band=0 integer :: sfa,sfb,sfc = 1 real*8 :: fa,fb,fc =0 real*8 :: vf(3) integer :: bnd=0 character(100) :: string100 character(100) :: string integer :: NumBoundaries integer :: NumForces
!---------------------------------------------------------------------- Read data
open(UNIT=1, FILE='C:ABAQUS\Job-1.inp' , STATUS='OLD' ,IOSTAT=ierror) open(UNIT=2, STATUS='SCRATCH',IOSTAT=ierror) open(UNIT=12, STATUS='SCRATCH',IOSTAT=ierror)
write(2,'(A)' ) '--------------------------------------------------------------' write(2,'(A)' ) '| Preprocessor Abaqus - Matlab Translator |' write(2,'(A)' ) '| Job-1.inp to Job-2.txt |' write(2,'(A)' ) '| Gabriel Guerra 2006 |' write(2,'(A/)' )'------------------------------ -------------------------------'
if (ierror/=0) then; print*,'error na lectura',ierror;stop; endif
!-------------------------------------------------------------------------------- do
read (1,'(a10)') string10 select case (trim(string10))
case ("*Node")
do read(1,*, IOSTAT=ierror) n if (ierror/=0) then; do n=0,NumNodes; backspace(UNIT=1);enddo;exit end if; NumNodes=NumNodes+1 enddo
write(2,'(A)' ) 'NumNodes' write(2,'(1x,i6/)') NumNodes write(2,'(A)' ) 'MatNodes' write(2,'(A)' ) '%Number; Coord X; Coord Y; Coord X;'
do n=1,NumNodes read (1,'(a60)') string60 write(2,'(a60)') string60 enddo
write(2,'(A/)' )'--------------------------------------------------------- '
75

case ("*Element, ")
do read(1,*, IOSTAT=ierror) n if (ierror/=0) then; do n=0,NumElements; backspace(UNIT=1);enddo;exit end if; NumElements=NumElements+1 enddo
write(2,'(A)' ) 'NumElements' write(2,'(1x,i6/)' ) NumElements write(2,'(A)' ) 'MatElements' write(2,'(A)' ) '%Number;N1;N2;N3;N4;N5'
do n=1,NumElements read (1,'(a40)') string60 write(2,*) string60 enddo
write(2,'(A/)' )'--------------------------------------------------------- '
case ("*Elastic ")
read (1,'(a40)') string60 write(2,'(A)' ) 'NumMaterial' write(2,'(A/)') '1' write(2,'(A)' ) 'MatMaterial' write(2,'(A)' ) '% Element Materials; E; v; D;' write(2,'(a6,a10,a2)') ' 1 ',string60,',1' write(2,'(A/)' )'--------------------------------------------------------- ' write(2,'(A)' ) 'MatBoundaries' write(2,'(A)' ) '%N; Node; grfx; grfy; grfz'
case ("*Boundary ")
read (1,'(a30)') stringbound l = len_trim(stringbound) s = scan(stringbound,',')
rewind(unit=12)
do read (12,'(a)',IOSTAT=ierror) string60 if (ierror/=0) then;exit;endif if(trim(string60)==stringbound(2:s-1)) then
do read (12,'(i6)',IOSTAT=ierror) nro if (ierror/=0) then;exit;endif nb=nb+1 if ('PINNED'==stringbound(s+2:l)) then write(2,'(i6,i6,a)') nb,nro, ' 0, 0, 0';endif if ('XASYMM'==stringbound(s+2:l)) then write(2,'(i6,i6,a)') nb,nro, ' 1, 0, 0';endif if ('YASYMM'==stringbound(s+2:l)) then write(2,'(i6,i6,a)') nb,nro, ' 0, 1, 0';endif if ('ZASYMM'==stringbound(s+2:l)) then write(2,'(i6,i6,a)') nb,nro, ' 0, 0, 1';endif enddo endif
enddo
case ("*Cload ")
if (bnd==0) then write(2,'(A/)' ) write(2,'(A)' ) 'NumBoundaries' write(2,'(1x,i6)' ) nb write(2,'(A/)' )'--------------------------------------------------------- ' write(2,'(A)' ) 'MatForces' write(2,'(A)' ) '%N; Node; fx; fy; fz' bnd=1
endif
76

read (1,'(a30)') stringforce;backspace(UNIT=1) l = len_trim(stringforce); s = scan(stringforce,',')
read (1,'(13x,i4,f12.6)') sfa,fa;vf(sfa)=fa; read (1,'(a1)') string10;backspace(UNIT=1)
if (string10=='_') then read (1,'(13x,i4,f12.6)') sfb,fb;vf(sfb)=fb; endif
read (1,'(a1)') string10;backspace(UNIT=1)
if (string10=='_') then read (1,'(13x,i4,f12.6)') sfc,fc;backspace(UNIT=1);vf(sfc)=fc; endif
rewind(unit=12)
do read (12,'(a)',IOSTAT=ierror) string60
if (ierror/=0) then;exit;endif
if(trim(string60)==stringforce(2:s-1)) then do read (12,'(i4)',IOSTAT=ierror) nro if (ierror/=0) then;exit;endif nf=nf+1 write(2,'(i6,i6,3f12.6)') nf,nro,vf enddo endif
enddo
sfa=1;sfb=1;sfc=1;fa=0;fb=0;fc=0;vf=0
case ("*Nset, nse")
backspace(UNIT=1) read (1,'(a100)') string100 write(12,'(a)') string100(14:10+scan(string100(12:len_trim(string100)),','))
do read (1,'(a100)') string100 if (string100(1:1)=='*')then;backspace(UNIT=1);exit;end if l=len_trim(string100) s=scan(string100,',') tstr=nint(l/s) do n=1,tstr write(12,*) string100(s*n-(s-1):s*n-1) enddo enddo
end select
if (string10=="*End Step") exit
enddo
write(2,'(A/)' ) write(2,'(A)' )'NumForces' write(2,'(1x,i6)' ) nf write(2,'(A/)' )'---------------------------------------------------------------- '
close(1); close(12)
rewind(unit=2)
open(UNIT=3, FILE='C:ABAQUS\Job-matlab.txt', STATUS='REPLACE',IOSTAT=ierror)
if (ierror/=0) then; print*,'error na lectura',ierror;stop; endif
77
do read (2,'(a80)',IOSTAT=ierror) string100 if (ierror/=0) then;exit;endif
if (string100=='MatBoundaries') then
do read (2,'(a80)',IOSTAT=ierror) string100 if (string100=='NumBoundaries') then ; read (2,'(i10)',IOSTAT=ierror) NumBoundaries; exit endif enddo
write(3,'(a)') 'NumBoundaries' write(3,'(i6)') NumBoundaries
do n=1,NumBoundaries+6; backspace(UNIT=2);enddo
do n=1,NumBoundaries+3
read (2,'(a80)',IOSTAT=ierror) string100 write(3,'(a80)') string100;enddo
do n=1,3;read (2,*) string100;enddo
endif
if (string100=='MatForces') then
do read (2,'(a80)',IOSTAT=ierror) string100 if (string100=='NumForces') then ; read (2,'(i10)',IOSTAT=ierror) NumForces; exit endif enddo
write(3,'(a)') 'NumForces' write(3,'(i6)') NumForces
do n=1,NumForces+6; backspace(UNIT=2);enddo
do n=1,NumForces+3 read (2,'(a80)',IOSTAT=ierror) string100 write(3,'(a80)') string100; enddo
do n=1,3;read (2,*) string100;enddo
endif
write(3,'(a80)') string100
enddo
close(2); close(3)
!-------------------------------------------------------------------------------- end program!--------------------------------------------------------------------------------
78
readODB.py
################################################################################ Code : Python Author : Gabriel Mario Guerra Modify : 21/03/2006################################################################################
from sys import argv
from odbAccess import *
odb = argv[1]
u = argv[2]
precisao = '%.15e'
local = openOdb(odb)
u = open(u,'w')
for stepName in local.steps.keys():
u.write('**Step\n')
disp = local.steps[str(stepName)].frames[-1].fieldOutputs['U'].values
for v in disp:
for data in v.data:
line = str(precisao % data)
u.write(line+'\n')
u.close()
local.close()
################################################################################
79


























![Aproxima˘c~ao de Distribui˘c~oes de Probabilidade N~ao-Exp ... fileos quais a hip otese de distribui˘c~ao exponencial dos tempos e essencial [Carvalho (1991)]](https://img.document.onl/doc/110x75/5d202a6288c993a5378c2407/aproximacao-de-distribuicoes-de-probabilidade-nao-exp-quais-a-hip-otese.jpg)
