Embed Size (px)
DESCRIPTION
Teoria de placas
Citation preview

Teoria de Mindlin 6.1
Capítulo 6
Teoria de Mindlin
6.1 Introdução
A Teoria de Mindlin1 surge em consequência da existência de placas que não podem
ser consideradas finas para as quais os efeitos das tensões de corte transverso podem ser
significativos. Para este tipo de placas as hipóteses de Kirchhoff consideradas válidas para
as placas finas deixam de ser admissíveis.
No caso dos deslocamentos transversais serem pequenos quando comparados com a
espessura da placa é possível modificar a Teoria das placas por forma a incluir a
possibilidade de a espessura ter dimensões mais elevadas modificando as hipóteses
simplificativas. O sistema de eixos coordenados a ser considerado é o sistema Ox1x2x3
representado na figura 6.1, o qual é definido de tal modo que o plano Ox1x2 seja
coincidente com o plano médio da placa antes da deformação e o eixo Ox3 seja normal ao
plano médio da placa. A origem O do sistema de eixos existe sobre o plano médio da placa.
1 R.D. Mindlin, "Influence of Rotatory Inertia and Shear on Flexural Motions of Isotropic, Elastic Plates",
Journal of Applied Mechanics,18, 31-38(1951).

Teoria de Mindlin 6.2
O
X3
X2X1
Figura 6.1: Sistema de Eixos de Referência.
As hipóteses de Reissner-Mindlin que são consideradas válidas para placas espessas
e moderadamente espessas, utilizadas para efeitos de representação do campo de
descolamentos e das tensões em placas com isotropia total submetidas a acções normais ao
plano médio, são:
(i) A superfície média é plana e indeformável ou seja as deformações no plano Ox1x2 são
nulas:
0xpara0 3122211 ==== εεε 6.1
(ii) Os pontos pertencentes à normal ao plano médio da placa antes da deformação
permanecem numa direcção linear mas não necessariamente na normal à superfície
média flectida, como se representa na figura 6.2.
(iii) A tensão na direcção normal ao plano médio, σ33 é irrelevante quando comparada
com as tensões σ11 e σ22 pelo que se considera:
033 ≅ε 6.2
O tensor das tensões toma neste caso uma forma análoga à considerada na Teoria
Clássica de Placas que é a forma seguinte:

Teoria de Mindlin 6.3
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
02313
232212
131211
ij
σσσσσσσσ
σ 6.3
Tendo em conta a hipótese (ii) os deslocamentos u1 e u2 de um ponto P da placa
situado a uma distância 3x do plano médio podem ser calculados a partir dos valores das
rotações θ1 e θ2 da normal que após deformação se admitiu ser linear mas não
necessariamente normal à superfície média flectida como se representa na figura 6.2. O
vector de deslocamentos {u1, u2, u3}T no ponto P é tal que:
( )⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
21
23
13
3
2
1
x,xxx
uuu
ωθθ
6.4
eP
P' e
ω∂ω∂x1
θ1
Figura 6.2: Deslocamentos no Ponto P e no Plano Ox1x3.
As deformações no plano Ox1 x2 a uma distância x3 do plano médio da placa
atendendo às expressões (6.4) e (1.8) são para as deformações devidas à flexão:

Teoria de Mindlin 6.4
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
∂∂
−∂∂
−
∂∂
−
∂∂
−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
1
23
2
13
2
23
1
13
12
22
11
xx
xx
xx
xx
θθ
θ
θ
εεε
e as deformações de corte ε13 e ε23 são:
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
∂∂
+−
∂∂
+−=
⎭⎬⎫
⎩⎨⎧
22
11
23
13
x
xω
θ
ωθ
γγ
6.5
Na superfície média a coordenada x3 = 0 e portanto é:
0212211 === εεε
As deformações de corte transversais, nesta teoria, são consideradas constantes ao
longo da espessura e são diferentes de zero, contrariamente ao que acontecia na Teoria
Clássica das Placas. As deformações ε11, ε22 e ε12 variam linearmente ao longo da espessura
da placa o que está de acordo com as hipóteses de Reissner-Mindlin atrás referidas.
A lei de Hooke generalizada para materiais isotrópicos, estabelece uma relação entre
as tensões e deformações no plano Ox1 x2 com a forma seguinte:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−
−−
+=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
12
22
11
12
22
11
2100
011
1
0111
1E
εεε
ννν
νν
ν
νσσσ
6.6
e uma relação entre as tensões de corte e as deformações de corte com a forma seguinte:
( ) ⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡+
=⎭⎬⎫
⎩⎨⎧
23
13
23
13
1001
10.2E
γγ
νσσ
6.7

Teoria de Mindlin 6.5
sendo E o modulo de Young e ν o coeficiente de Poisson.
Tendo em conta as equações 6.5, 6.6 e 6.7 é possível relacionar as tensões com os
deslocamentos transversais do seguinte modo:
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−−=
2
2
1
13211 xx
x1
E θυ
θν
σ
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−−=
1
1
2
23222 xx
x1
E θν
θν
σ 6.8
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+−=
1
2
2
1312 xx
x12E θθ
νσ
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−+
=1
113 x12E ω
θν
σ
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−+
=2
223 x12E ω
θν
σ
As tensões σ11, σ22 e σ12 variam linearmente ao longo do eixo dos x3 x3 como se
representa na figura 6.3, sendo nulas para x3= 0, como seria de esperar tendo em conta as
hipóteses de Reissner-Mindlin (i). As tensões de corte são constantes ao longo da
espessura. Este aproximação das tensões de corte contraria o facto das tensões de corte se
anularem na realidade para x3 = e/2 e x3 =-e/2, o que sugere a possibilidade de se
considerarem teorias que sejam de ordem superior.
6.2 Esforços Generalizados e Curvaturas
Os esforços unitários, os momentos flectores unitários M11 e M22, o momento torsor
unitário M12 e os esforços transversos unitários T1 e T2 são calculados de modo análogo ao
considerado no caso das placas finas. O momento flector unitário M11, é o momento

Teoria de Mindlin 6.6
resultante por unidade de comprimento da direcção Ox1 das tensões σ11 ao longo da
espessura da placa, ou seja:
33112/e
2/e11 dxxM σ∫= − 6.9
De modo semelhante se definem momentos unitários, M22 e M12 que resultam das
tensões σ22 e σ12, ou seja:
33222/e
2/e22 dxxM σ∫= − e 33122/e
2/e12 dxxM σ∫= − 6.10
Os esforços transversos unitários definem-se a partir das tensões σ13 e σ23 do seguinte
modo:
3232/e
2/e23132/e
2/e1 dxTedxT σσ ∫=∫= −− 6.11
O x2
x3x1
σ11σ22 σ21
Figura 6.3: Distribuição de tensões ao longo da espessura da placa.
Integrando as expressões 6.8 a 6.10 para os momentos, tendo em conta as equações
6.7 para as tensões, obtém-se:
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−=2
2
1
111 xx
DMθ
νθ

Teoria de Mindlin 6.7
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−=1
1
2
222 xx
DMθ
νθ 6.12
112
2 1
1 22
M Dx xθν θ⎛ ⎞∂− ∂
= +⎜ ⎟∂ ∂⎝ ⎠
sendo D = E e3/12 (1 - ν2), o modulo de rigidez à flexão da placa.
As derivadas das rotações 12212211 x/x/ex/,x/ ∂∂+∂∂∂∂∂∂ θθθθ são as
curvaturas da superfície média flectida as quais poderão ser designadas por χ11, χ22 e χ12
respectivamente. Portanto as equações 6.12 podem ser escritas do seguinte modo:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
12
22
11
12
22
11
2/1000101
DMMM
χχχ
νν
ν 6.13
em função das curvaturas da superfície média flectida.
As contribuições das rotações para as deformações de corte podem ser designadas por
φ1 e φ2 e definidas do seguinte modo:
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
∂∂
+−
∂∂
+−=
⎭⎬⎫
⎩⎨⎧
22
11
2
1
x
xω
θ
ωθ
φφ
6.14
Os esforços de corte tomam o seguinte valor em função das rotações:
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡=
⎭⎬⎫
⎩⎨⎧
2
1'
2
1
1001
GTT
φφ
6.15
onde ( )ν+= 10.2/EeG '

Teoria de Mindlin 6.8
No cálculo dos esforços transversos é por vezes usual incluir um factor de correcção
a fim de melhor representar os esforços de corte. Este factor é considerado a multiplicar
pelos esforços acabados de calcular e pode tomar o valor de 5/6.
x1
x2
x3
T1
T2
M12
M21
M11
M22
M11
1
M221
M121
M211 T2
1
T11
A
B C
C
Figura 6.4: Representação dos Esforços.
Os esforços no plano médio são M11, M22, M12, T1 e T2, como se indicou e estão
representados no plano médio na figura 6.4. Estes esforços são unitários e são análogos aos
considerados para efeitos de equilíbrio na teoria das placas finas. A diferença essencial
neste caso resulta do facto da deformação de corte não ser nula o que é genericamente
positivo para as placas espessas e moderadamente espessas e de os esforços de corte
poderem ser calculados a partir das deformações de corte transverso conduzindo a valores
constantes da tensão de corte, pelo que se consideram factores de correcção para efeitos de
cálculo das tensões de corte uma vez que uma distribuição de tensões de corte constante ao
longo da espessura não parece a mais adequada, embora corresponda a uma melhoria
significativa em relação à situação verificada no caso da Teoria Clássica das Placas.

Teoria de Mindlin 6.9
6.3 Trabalho Virtual e Energia de Deformação Interna
O trabalho virtual das tensões σij para uma deformação virtual ijε é definido do
seguinte modo:
dVT ijijV εσδ ∫= 6.16
sendo a integração estendida ao volume da placa.
Tendo em conta as equações 6.5 e 6.8 que definem as tensões e as deformações em
termos das rotações e deslocamentos, a expressão do trabalho virtual 6.16 toma a forma:
( ) ( )⎪⎩
⎪⎨⎧
+⎥⎦
⎤⎢⎣
⎡
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−+⎥
⎦
⎤⎢⎣
⎡
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−∫∫ −
23
2
2
1
1
1
22
23
1
1
2
2
1
12
2/e2/eS x
xxx1Ex
xxx1E θθ
νθ
νθθ
νθ
ν
( ) ( ) −⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−+
−⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+ 11
11
23
1
2
2
1
1
2
2
1
xx12Ex
xxxx12E ϖ
θω
θν
θθθθν
( ) 32
22
2 dxdSxx12
E⎪⎭
⎪⎬⎫
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−+
−ϖ
θω
θν
6.17
onde 21 e, θθϖ são deslocamentos e rotações virtuais.
Procedendo à integração ao longo da espessura e tendo em conta as expressões 6.12 a
6.14 , obtém-se:
dSxx
Mx
Mx
MT1
2
2
112
2
222
1
111S ⎥
⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∫=θθθθ
δ +
dSx
Tx
T2
221
11S ⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−∫ϖ
θϖ
θ 6.18

Teoria de Mindlin 6.10
Aplicando o Teorema de Green1 aos integrais estendidos à superfície que envolvem
primeiras derivadas dos deslocamentos e rotações virtuaisutilizando a notação da figura
6.5, obtém-se:
⎢⎣
⎡+
∂∂
−∂
∂−
∂∂
−∂
∂−∫= 2
1
121
2
122
2
221
1
11S x
Mx
Mx
Mx
MT θθθθδ
+⎥⎦
⎤∂∂
+∂∂
+++ dSxT
xT
TT2
2
1
12211 ϖϖθθ
[ ] −+++∫+ dLcosMsenMsenMcosM 212112222111L θθθθθθθθ
[ ] dLsenTcosT 21L θϖθϖ +∫− 6.19
onde a letra L está utilizada para indicar integrais estendidos ao contorno da placa e θ é
usado para designar o ângulo da normal ao contorno com a direcção do contorno, como se
representa na figura 6.5.
Tendo em conta que as rotações segundo x1 e segundo x2 se relacionam com as
rotações segundo a normal ao contorno θn e com as rotações segundo a tangente θs ao
contorno, do seguinte modo:
θθθθθ sencos sn1 +=
θθθθθ cossen sn2 −= 6.20
e que o momento normal, Mn, o momento tangente, Ms, e o esforço transverso, T, no
contorno, se relacionam com os esforços M11, M22, M12, T1 e T2 do seguinte modo:
1 O teorema de Green pode ser representado analiticamente através da seguinte expressão :
( ) dVxuwdSauwdV
xwu vvxsv ∂
∂∫−∫=
∂∂
∫

Teoria de Mindlin 6.11
( ) θθθθθ cossenM2senMcosMM 122
222
11n −+=
( ) ( ) ( )θθθθθ 22122211t sencosMcossenMMM −−−=
( ) θθθ senTcosTT 21 += 6.21
a equação 6.19 toma a forma:
⎢⎣
⎡+
∂∂
−∂
∂−
∂∂
−∂
∂−∫= 2
1
121
2
122
2
221
1
11S x
Mx
Mx
Mx
MT θθθθδ
+⎥⎦
⎤∂∂
+∂∂
+++ dSxT
xT
TT2
2
1
12211 ϖϖθθ
[ ] dLTdLMM LssnnL ϖθθ ∫−+∫+ 6.22
θ
x1
x2
θ1
θ2
θsθn
Contorno
O
θ
x1
x2
Contorno
ns
i
j
Figura 6.5: Rotações no contorno.
O trabalho realizado pelas forças exteriores, no caso da placa estar sujeita a uma
distribuição de carga p (x1, x2) normal ao plano médio da placa é, δW, calculado do
seguinte modo a partir da carga e da deformada virtual:
dspW s ϖδ ∫−= 6.23
Note-se que o Teorema dos trabalhos virtuais obriga a que seja:
0WT =δ+δ 6.24

Teoria de Mindlin 6.12
Tendo em conta as expressões 6.22 e 6.23 que definem o trabalho virtual dos esforços
internos δT e dos esforços externos δW é possível obter três equações de equilíbrio que são
coeficientes das rotações virtuais e dos deslocamentos virtuais nos integrais estendidos à
superfície da placa e as condições de contorno representadas nos integrais estendidos ao
contorno da placa.
A energia potencial é definida a partir das energias de deformação interna e potencial
externa, ou seja:
Π = E + W
sendo portanto definida de acordo com a expressão:
( ) 2121sijijv dxdxx,xpdV21
∫−∫=Π εσ
ou seja em termos dos esforços e deformações generalizadas:
−⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∫=Π dSxx
Mx
Mx
M21
1
2
2
112
2
222
1
111s
θθθθ
( ) ( ) dSx,xx,xpdSx
Tx
T21
2121s2
221
11s ωω
θω
θ ∫−⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−∫−
6.25
ou seja:
[ ] −++∫=Π dSMMM21
121222221111s χχχ
[ ] ( ) ( ) dSx,xx,xpdSTT21
2121s22211s ωφφ ∫−+∫− 6.26

Teoria de Mindlin 6.13
As equações de equilíbrio também podem ser determinadas a partir da energia
potencial e por minimização desta.
6.4 Equações de Equilíbrio
As equações de equilíbrio são estabelecidas em termos dos esforços unitários que
resultam das tensões actuantes num elemento paralelepipédico da placa de dimensões dx1,
segundo Ox1, dx2 segundo Ox2 e e segundo Ox3 sendo e uma dimensão igual à espessura
da placa, estas equações são análogas às equações obtidas no caso da Teoria Clássica de
Placas e são as equações resultantes do equilíbrio dos esforços que tomam a forma:
12
12
1
11 Tx
Mx
M=
∂∂
+∂
∂
21
12
2
22 Tx
Mx
M=
∂∂
+∂
∂
( )212
2
1
1 x,xpxT
xT
−=∂∂
+∂∂
6.27
onde p(x1,x2) representa a resultante de acções externas normais ao plano médio no
elemento dx1, dx2, dx3 sendo dx3 = e e representam duas equações de equilíbrio de
momentos e uma equação de equilíbrio de forças segundo o eixo Ox3x3. Note-se que estas
equações também podiam ser obtidas a partir do Teorema dos Trabalhos Virtuais como foi
referido. As condições no contorno que resultam da aplicação do Teorema dos Trabalhos
Virtuais são:
ω ou T em L
nn Mouθ em L 6.27
ss Mouθ em L

Teoria de Mindlin 6.14
As condições de contorno conjuntamente com as equações de equilíbrio têm de ser
verificadas.
Substituindo as equações (6.13) e (6.14) na equação (6.27), obtém-se:
0x
Gxx2
1x2
1x
D 1121
22
22
12
21
12
=⎟⎟⎠
⎞⎜⎜⎝
⎛−
∂∂
−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂++
∂∂−
+∂∂
− θωθνθνθ
0x
Gxx2
1xx2
1D 22
22
22
21
22
21
12
=⎟⎟⎠
⎞⎜⎜⎝
⎛−
∂∂
−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂−
+∂∂
∂+− θ
ωθθνθν
( ) 0x,xpxxxx
G 212
2
1
122
2
21
2
=−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂
−∂∂
+∂∂ θθωω
6.29
Estas são as equações de equilíbrio em termos dos deslocamentos transversais e das
rotações. Neste caso a solução de um problema de placas implica a determinação de três
grandezas que devem verificar as equações de equilíbrio e as condições de fronteira. Uma
vez conhecidos o deslocamento transversal e as rotações o cálculo dos esforços, tensões e
deformações é feito fazendo uso das expressões 6.12-6.14 , 6.8 e 6.5.
6.5 Condições de Contorno
Para as condições de bordo simplesmente apoiado o movimento segundo o eixo dos
x3 x3 está impedido, podendo no entanto rodar livremente. As condições de contorno
simplesmente apoiado são:
aplicadons MMe00 === θω 6.30
sendo ω o deslocamento transversal, θs a rotação tangente e Mn o momento que provoca
uma rotação normal no bordo simplesmente apoiado.
No caso de se tratar de uma placa rectangular de bordos simplesmente apoiados
paralelos aos eixos coordenados Ox1 e Ox2, de dimensões a segundo x1 e b segundo x2

Teoria de Mindlin 6.15
como se representa na figura 6.6, as condições de contorno ao longo dos lados AB e CD
que correspondem a x2 = 0 e x2 = b são:
u3 = ω = 0 θ2 = 0 e M2 = 0
e ao longo dos lados AC e BD que correspondem a x1 = 0 e x1 = a, são:
u3 = ω = 0 θ1 = 0 e M1 = 0
D
BA
x1
x2
O = C
Figura 6.6: Placa simplesmente apoiada.
No bordo perfeitamente encastrado os deslocamentos e as inclinações têm valor nulo,
ou seja:
ω = 0 θs = 0 e θn = 0 6.31
No caso da placa encastrada representada na figura 6.7, as condições de contorno são:
AB
D
x1
x2
C
Figura 6.7: Placa com bordos encastrados.

Teoria de Mindlin 6.16
ao longo dos lados AB e CD que correspondem a x2 = 0 e x2 = b, representadas através das
seguintes igualdades:
ω = 0 θ1 = 0 e θ2 = 0
e ao longo dos lados AC e BD que correspondem a x1 = 0 e x1 = a, traduzem-se do seguinte
modo:
ω = 0 θ1 = 0 e θ2 = 0
Se a placa tiver um ou mais lados livres, em todos os pontos do bordo livre devem
de ser nulos os momentos flectores Mn e os esforços transversos T. Estes esforços serão não
nulos, caso exista algum esforço ou momentos aplicados no bordo, nesse caso serão iguais
a uma função de x1 ou x2 conhecida. No caso de bordo livre sem cargas aplicadas, ser
coincidente ou paralelo ao eixo Ox2 as condições de bordo livre exprimem-se do seguinte
modo:
T1 = 0 e M11 = 0 para x1 = 0 e /ou x1 = a 6.32
se for coincidente ou paralelo a Ox1 as condições de bordo livre exprimem-se do seguinte
modo:
T2 = 0 e M22 = 0 para x2 = 0 e /ou x2 = b 6.33
As funções consideradas para a deformada e rotações de uma placa devem verificar
as equações de equilíbrio e as condições de contorno.
6.6 Flexão de Placas Rectangulares Simplesmente Apoiadas
Uma solução tipo Navier é possível para Placas simplesmente apoiadas sujeitas a um
carregamento arbitrário, esta solução toma a forma de séries duplas de Fourier para a
deformada e para as rotações, isto é:
21mn,1n,m
xsenxsenW βαω ∑=∞
=

Teoria de Mindlin 6.17
21mn,1n,m
1 xsenxcosX βαθ ∑=∞
=
21mn,1n,m
2 xcosxsenY βαθ ∑=∞
= 6.34
sendo α = 2mπ/a e β = 2nπ/b.
No caso de se admitir que a função de carga pode ser representada por um
desenvolvimento em série dupla de Fourier do seguinte modo:
( ) 21mn,1n,m
xsenxsenPy,xp βα∑=∞
= 6.35
Os coeficientes Pmn tomam a forma:
( ) 2121
21b
0
a
0mn dxdx
bxnsen
axmsenx,xp
ab4P ππ
= ∫∫ 6.36
No caso de se tratar de uma carga uniformemente distribuída a função p (x1, x2) é
igual a uma constante p, intensidade da carga uniformemente distribuída, sendo os
coeficientes Pmn definidos do seguinte modo:
mnp16P 2mn π
= com m e n números ímpares 6.37
A necessidade de se considerarem m e n números ímpares resulta dos integrais
existentes em 6.36 serem nulos no caso de m e n serem pares, consequentemente a série
6.35 no caso da carga ser uniformemente distribuída, é uma série com m e n números
ímpares.
Substituindo as expressões contidas em 6.34 nas equações de equilíbrio obtém-se:
( ) 0XWGX2
1Y2
1XD mnmn2
mnmnmn2 =−−⎟
⎠⎞
⎜⎝⎛ −
++
+ αβν
βαν
α
( ) 0XWGYY2
1X2
1D mnmnmn22
mnmn =−−⎟⎠⎞
⎜⎝⎛ +
−+
+ββα
νβα
ν
( ) 0PYXWWG mnmnmn2
mn2
mn =−−−+ βαβα 6.38

Teoria de Mindlin 6.18
Por resolução do sistema de equações anterior obtém-se os coeficientes Xmn, Ymn e
Wmn desde que sejam conhecidos os coeficientes Pmn. A este sistema de equações pode dar-
se a forma matricial seguinte:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
mnmn
mn
mn
333231
232221
131211
P00
WYX
CCCCCCCCC
6.39
onde:
( )2 2 2 2 2 211 22 33
1 1; ;2 2
C D D G C D D G C Gν να β β α α β− −= + − = + − = +
12 21 13 31 23 321 ; ; ; ;
2C C D C G C G C G C Gν α β α α β β+
= = = = − = = = − 6.40
A solução do sistema de equações toma então a forma seguinte:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
mn
1
mn
mn
mn
P00
CWYX
onde C representa a matriz dos coeficientes 6.41
Uma vez conhecidos os coeficientes é possível calcular os esforços que são
calculados a partir da definição fazendo uso das expressões 6.12, 6.15 e 6.34, obtendo-se
para estes esforços as expressões seguintes:
( )[ ]21mnmn1n1m
11 xsenxsenYXDM βαβνα +∑∑=∞
=
∞
=
( )[ ]21mnmn1n1m
22 xsenxsenXYDM βαανβ +∑∑=∞
=
∞
=
( )[ ]21mnmn1n1m
2112 xcosxcosYX2
1DMM βααβν
+∑∑−
−==∞
=
∞
=
( )[ ]21mnmn1n1m
1 xsenxcosXWGT βαα −∑∑=∞
=
∞
=
( )[ ]21mnmn1n1m
2 xcosxsenYWGT βαβ −∑∑=∞
=
∞
= 6.42

Teoria de Mindlin 6.19
Nos somatórios anteriores m e n são números ímpares como resulta do cálculo de Pmn
a partir do integral duplo 6.36.
Uma vez conhecidos os esforços, a obtenção das tensões pode ser feita tendo em
conta as equações de equivalência estática entre os esforços e as tensões. As tensões
também podem ser obtidas a partir dos deslocamentos generalizados fazendo uso das
equações 6.8, note-se que no caso da placa simplesmente apoiada sujeita a uma carga
uniformemente distribuída as tensões máximas ocorrem no centro da placa.
6.7 Flexão de Placas Ortotrópicas
6.7.1 Equações Fundamentais
O tensor das tensões tem as componentes referidas anteriormente e que são as
componentes expressas no tensor 6.5. As componentes dos deslocamentos são as definidas
por 6.4 e as deformações de flexão e corte são as definidas por 6.5.
A lei de Hooke toma a forma que resulta da consideração de ortotropia do material
1. e que pode ser reescrita, tendo em conta que σ33 = 0, com a seguinte forma:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
12
22
11
33
2212
1211
12
22
11
E000EE0EE
εεε
σσσ
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡=
⎭⎬⎫
⎩⎨⎧
23
13
55
44
23
13
E00E
γγ
σσ
6.43
onde Eij são as constantes do material segundo os eixos materiais da placa e que são
definidas em termos dos módulos de Young e dos coeficientes de Poisson do seguinte
modo:

Teoria de Mindlin 6.20
2112
222
2112
21212
2112
111 1
EE;
1E
E;1
EE
ννννν
νν −=
−=
−=
135523441233 GE;GE;GE === 3.44
Tendo em conta as equações 6.44 e as equações 6.5 e admitindo que há coincidência
entre os eixos materiais e os eixos da placa, as relações entre as tensões e os deslocamentos
e rotações são as seguintes:
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−−=
2
2212
1
11
2112
311 x
Ex
E1
x θν
θνν
σ
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−−=
1
1112
2
22
2112
322 x
Ex
E1
x θν
θνν
σ
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−=1
2
2
112312 xx
Gx θθσ
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−=1
11313 xG ω
θσ
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−=2
22323 xG ω
θσ 6.45
Os esforços generalizados definidos de acordo com as expressões 6.8, 6.11, tendo em
conta que as tensões são definidas de acordo com as equações 6.45, são:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
12
22
11
33
222212
221211
12
22
11
D000DD0DD
MMM
χχχ
νν
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡=
⎭⎬⎫
⎩⎨⎧
2
1
55
44
2
1
D00D
TT
φφ
6.46
onde:

Teoria de Mindlin 6.21
( ) ( ) 12eGD;
112eE
D;112
eED
3
12332112
32
222112
31
11 =−
=−
=νννν
eGDeGD 23551344 ==
Tendo em conta as equações de equilíbrio 6.25 e as equações que definem os esforços
6.46, obtém-se:
( ) 0x
Dxx
DDx
Dx
D1
14421
22
33221222
22
3321
12
11 =⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−+⎥⎦
⎤⎢⎣
⎡∂∂
∂++
∂∂
+∂∂ ω
θθ
νθθ
( ) 0x
Dx
Dx
Dxx
DD2
25522
22
2221
22
3321
12
332212 =⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−+⎥⎦
⎤⎢⎣
⎡∂∂
+∂∂
+∂∂
∂+
ωθ
θθθν
( ) 0x,xpxx
Dxx
D 212
222
2
551
121
2
44 =+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂ θωθω 6.47
Estas são as equações de equilíbrio para placas ortotrópicas, considerando que existe
coincidência entre os eixos de ortotropia e os eixos de referência da placa, caso contrário
tem de proceder-se a uma mudança de referencial das propriedades materiais da placa.
6.7.2 Flexão de Placas Ortotrópicas Simplesmente Apoiadas
O tipo de solução a considerar é ainda uma solução tipo Navier à qual correspondem
desenvolvimentos em série dupla de Fourier como os que se representam nas expressões
6.34 e admitindo que a função de carga se pode desenvolver fazendo uso de uma série
dupla de Fourier do tipo da considerada na análise de placas isotrópicas 6.35, as equações
de equilíbrio (6.47) tomam a forma:
( ) ( ) 0XWDXDYDDXD mnmn44mn2
33mn332212mn2
11 =−−+++ αββανα
( ) ( ) 0YWDYDYDXDD mnmn44mn2
33mn2
22mn332212 =−−+++ βαββαν

Teoria de Mindlin 6.22
( ) ( ) mnmnmn2
55mnmn2
44 PYWDXWD −=−+− ββαα
A este sistema de equações pode dar-se a forma seguinte:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
mnmn
mn
mn
333231
232221
131211
P00
WYX
CCCCCCCCC
6.49
onde:
( ) αβανβα 4431133322122112442
332
1111 DCC;DDCC;DDDC −==+==++=
255
2443355322355
233
22222 DDC;DCC;DDDC βαβαβ +=−==++=
O sistema de equações (6.49) é facilmente resolúvel e uma vez conhecidos os
coeficientes Xmn, Ymn e Wmn determinam-se os deslocamentos e esforços generalizados
fazendo uso das formulas seguintes:
21mn,1n,m
xsenxsenWw βα= ∑∞
=
21mn,1n,m
1 xsenxcosX βα=θ ∑∞
=
21mn,1n,m
2 xcosxsenY βα=θ ∑∞
=
( )[ ]2122mn1211mn1n1m
11 xsenxsenDYDXM βαβνα +∑∑−=∞
=
∞
=
( )[ ]2122mn1222mn1n1m
22 xsenxsenDXDYM βαανβ +∑∑−=∞
=
∞
=
( )[ ]21mnmn1n1m
332112 xcosxcosYXDMM βααβ +∑∑−==∞
=
∞
=

Teoria de Mindlin 6.23
( )[ ]21mnmn1n1m
441 xsenxcosXWDT βαα −∑∑=∞
=
∞
=
( )[ ]21mnmn1n1m
552 xcosxsenYWDT βαβ −∑∑=∞
=
∞
= 6.50
As tensões podem ser calculadas a partir das expressões (6.45) e das expressões dos
deslocamentos generalizados. O cálculo das reacções de apoio também pode ser feito tendo
em conta as expressões dos esforços e o modo como se relacionam com as reacções de
apoio.
Note-se que no caso de não haver coincidência entre os eixos de referência e os eixos
materiais se torna necessário proceder a uma mudança de sistema de eixos de referência no
que respeita às propriedades dos materiais, fazendo uso de uma matriz de transformação T
a matriz das constantes elásticas pode ser convertida numa matriz de constantes no sistema
de referência.
6.8 Métodos de Solução Analíticos
6.8.1 Método de Levy. Placas Apoiadas em Dois Lados Opostos
As equações de equilíbrio são:
0x
Gxx2
1x2
1x
D 1121
22
22
12
21
12
=⎟⎟⎠
⎞⎜⎜⎝
⎛−
∂∂
−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂++
∂∂−
+∂∂
− θωθνθνθ
0x
Gxx2
1xx2
1D 22
22
22
21
22
21
12
=⎟⎟⎠
⎞⎜⎜⎝
⎛−
∂∂
−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂−
+∂∂
∂+− θ
ωθθνθν
( ) 0x,xpxxxx
G 212
2
1
122
2
21
2
=−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂
−∂∂
+∂∂ θθωω 6.51
tem de acordo com Levy soluções que são representadas por uma série trigonométrica
simples do tipo:

Teoria de Mindlin 6.24
( ) ( ) 21m1m
21 xsenxWx,x βω ∑=∞
=
( ) ( ) 21m1m
211 xsenxXx,x βθ ∑=∞
=
( ) ( ) 21m1m
212 xcosxYx,x βθ ∑=∞
= 6.52
cujos coeficientes são Wm, Xm e Ym funções de x1 e b
mπβ = .A função p(x1,x2) é
desenvolvida em série simples da forma:
( ) ( ) xsenxpx,xp 21m1m
21 β∑=∞
=
sendo o coeficiente pm (x2) determinado do seguinte modo:
( ) 2221b01m dxxsen)x,x(p
b2xp β∫= 6.53
Estas soluções, (6.52), verificam as seguintes condições ao limite:
bxe0xpara0Me0,0w 22221 ===== θ
ou seja as condições de uma placa rectangular simplesmente apoiada ao longo de dois lados
opostos. As funções ( ) ( ) ( )1m1m1m xY,xX,xW podem ser calculadas de modo a verificar
as condições de contorno ao longo dos outros dois lados da placa e as equações de
equilíbrio.
Substituindo as equações (6.52) nas equações de equilíbrio
0G/P)Y'X''WW( 'mmmmm
2 =−+−+− ββ
0X'WG'Y21
X21
''XD mmmm2
m =⎟⎠⎞
⎜⎝⎛ −−⎥⎦
⎤⎢⎣⎡ +
−−
−− βν
βν
0YWGY''Y21
'X21D mmm
2mm =⎟
⎠⎞
⎜⎝⎛ −−⎥⎦
⎤⎢⎣⎡ −
−+
+− ββ
νβ
ν 6.55
A solução deste sistema de equações pode ser feita tendo em conta que o referido
sistema de equações pode tomar a forma:

Teoria de Mindlin 6.25
rTZ´Z += 6.56
onde [ ]´Y,Y,´X,X,´W,WZ mmmmmmT=
[ ]0,0,0,0,'GP,0r mT−=
[ ]
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
0CC00C100000C00CC00010000C100C000010
T
876
543
21
Onde
)1(DG2
12
C,11C
,)1(D
G2C,
21
C,2
1DG
C,DG
C,C,C
2
87
652
4322
1
ννββ
νν
νβ
νβ
νββ
−+
−=
−+−=
−−
=+
=−
+=−=−==
A Solução do sistema de equações (6.56) toma a forma
⎭⎬⎫
⎩⎨⎧
∫+=x
T- rdeK ςςeZ Tx 6.57
onde eTx representa o produto matricial seguinte:
[ ] [ ]E
e0.
e0e
Ee 1
x
x
x
Tx
6
2
1
−
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
λ
λ
λ
sendo [E] a matriz dos vectores próprios distintos da matriz [T], [ ]E 1− a inversa dessa
matriz e λi representam os valores próprios da matriz [T], K representa um vector que é
determinado a partir das condições de fronteira para os lados x1 =±a/2. Para as diferentes
condições de apoio as condições de fronteira são:
Bordo Simplesmente apoiado: ω=0, 02 =θ e 0M1 =
Bordo encastrado:ω=0 e 01 =θ
Bordo Livre: 0M1 = , 0T1 = e 0M12 =
Substituindo as equações (6.57) nas condições de fronteira adequadas obtém-se um sistema
de equações não homogéneo

Teoria de Mindlin 6.26
[M]{K}={R}
que pode ser resolvido em ordem a {K}.
6.8.2 Método de Ritz
O método de Ritz (1911)1 considera a energia potencial Π, que tem a forma seguinte:
[ ] −++∫=Π dSMMM21
121222221111s χχχ
[ ] ( ) ( ) dSx,xx,xpdSTT21
2121s2211s ωφφ ∫−+∫− 3.56
ou seja em termos dos deslocamentos generalizados:
⎢⎣
⎡+
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−∫=Π2
2
1
1
2
2
1
1
2
2
1
1s xxxxxx
D21 θθ
νθθθ
νθ
−⎥⎦
⎤⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂−
+ dSxxxx2
1
1
2
2
1
1
2
1
1 θθθθν
−⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−∫− dSxxxx
´G21
22
22
11
11s
ωθ
ωθ
ωθ
ωθ
( ) ( ) dSx,xx,xp 2121s ω∫− 6.57
Os deslocamentos generalizados podem considerar-se definidos fazendo uso de
funções de Ni (x1, x2, x3)e de parâmetros ai, bi, e ci do seguinte modo:
( )321ii
n
1ix,x,xNaw ∑=
=
1 W. Ritz,Gesammelte Werke.; Soc. Suisse de Physique . 192-264 (Gauthier-Villars, Paris, 1911).

Teoria de Mindlin 6.27
( )321ii
n
1i1 x,x,xNb∑=
=θ
( )321ii
n
1i2 x,x,xNc∑=
=θ 6.58
As funções Ni (x1, x2, x3) a considerar para o cálculo dos deslocamentos e rotações
podem ser distintas para os deslocamentos e rotações sendo em geral escolhidas por forma
a satisfazerem as condições de fronteira e podem ser do tipo trigonométrico ou polinomial.
Uma vez escolhidas as funções de aproximação Ni (x1, x2, x3), substituem-se os
valores de W, θ1 e θ2 definidos pelas expressões 6.58 na expressão da energia potencial
6.57 e minimiza-se a energia potencial em relação aos parâmetros ai, bi, e ci, obtendo-se
por este processo um sistema de equações lineares cujas incógnitas são os parâmetros ai, bi,
e ci.
0c
e0b
;0a iii
=∂
Π∂=
∂Π∂
=∂
Π∂ 6.59
Para efeitos de ilustração do Método de Ritz, considere-se uma placa rectangular
encastrada a qual está submetida a uma carga uniformemente distribuída de intensidade p.
As condições de fronteira no caso das placas encastradas ao longo do contorno são:
ω = θ 2 = θ 1 = 0 para x 1 = ±a ω = θ 2 = θ 1 = 0 para x 2 = ±b 6.60
Os deslocamentos e rotações podem considerar-se aproximados através das seguintes
funções:
( ) ( )2222
22211 bxaxa −−=ω
( ) ( )2222
2221111 bxaxxb −−=θ

Teoria de Mindlin 6.28
( ) ( )2222
2221212 bxaxxc −−=θ 6.61
Outras funções podiam ser utilizadas para efeitos de obtenção da solução por ventura
mais eficientes que as funções polinomiais referidas, nomeadamente podiam usar-se mais
funções interpoladoras para efeitos de representação dos deslocamentos e rotações. O uso
de funções trigonométricas também é possível com foi referido, sendo estas funções
escolhidas de modo a verificarem as condições de fronteira.
6.9 Métodos Numéricos de Solução
6.9.1 Método das Diferenças Finitas
O método das diferenças finitas considerado na análise de placas finas também pode
ser utilizado para efeitos da análise de placas de Mindlin, neste caso o numero de variáveis
a aproximar por diferenças finitas é três, um deslocamento e duas rotações e as equações de
equilíbrio a verificar também são três obrigando à consideração de um maior número de
equações para efeitos de solução do problema. As fórmulas de diferenças centrais podem
ser utilizadas ou outras fórmulas, eventualmente a imposição das condições de fronteira
poderá causar alguns problemas na resolução de placas por diferenças finitas.
6.9.2 Método dos Elementos Finitos
6.9.2.1 Considerações Gerais
A solução das equações que regem o comportamento de placas de Mindlin é
facilitada pelo uso de métodos numéricos, dentre os métodos numéricos disponíveis para a
solução de equações diferenciais definidas em domínios arbitrários, o Método dos
Elementos Finitos tem mostrado ser o mais eficiente.
Há vários tipos de modelos de elementos finitos desenvolvidos para serem utilizados
no contexto das teorias de placas. Estes modelos podem agrupar-se em três modelos que

Teoria de Mindlin 6.29
são: modelos baseadas numa formulação em termos de deslocamentos, modelos mistos e
híbridos e modelos de equilíbrio. Os modelos formulados em termos dos deslocamentos são
baseados no teorema dos trabalhos virtuais sendo as equações correspondentes formuladas
em termos dos deslocamentos. Os modelos mistos e híbridos são baseados em princípios
variacionais mistos da teoria das placas sendo as tensões e deslocamentos aproximadas de
forma independente. Os modelos de equilíbrio são baseados no princípio das forças
virtuais. Dentre os modelos referidos o que é mais frequentemente utilizado é o modelo
baseado numa formulação em termos de deslocamentos. O modelo aqui referido é um
modelo deste tipo.
Na formulação do Método dos Elementos Finitos considera-se que:
1. O domínio do problema é formado por um conjunto de subdomínios simples que não se
interceptam e que são chamados Elementos Finitos. O sistema físico ou região material
sobre a qual tem de verificar-se o sistema de equações que regem o processo é o
domínio. A subdivisão do domínio em elementos finitos é designada por discretização
por elementos finitos sendo o conjunto de elementos finitos designado por malha de
elementos finitos do domínio, sendo possível para cada domínio a consideração de
várias malhas de elementos finitos, cada malha representa uma possível aproximação
do domínio.
2. Para cada elemento finito do domínio a solução do sistema de equações que rege o
fenómeno é aproximada por uma combinação linear de parâmetros desconhecidos e
funções de aproximação em geral designadas por funções de forma e que são na maior
parte dos casos polinómios.
3. O processo de colocação dos elementos de forma a representarem o todo é designado
por 'Assemblagem' ou Agrupamento dos elementos. Neste processo torna-se necessário
compatibilizar entre si os subdomínios por forma a obter uma aproximação contínua no
domínio o que muitas vezes é feito impondo a continuidade da solução por elementos
finitos e algumas vezes a continuidade das derivadas nas interfaces dos elementos ou
nalguns pontos da interface.

Teoria de Mindlin 6.30
No caso da função a interpolar ser um deslocamento, por exemplo, o deslocamento
u(x), este pode ser interpolado a partir de valores do deslocamento em determinados pontos
do elemento os chamados nós ou pontos nodais, no elemento pode considerar-se que é:
( ) ( ) ( )xNuxuxu ej
ej
1je ∑==
∞
= 6.62
onde eju representa o vector dos deslocamentos nodais e e
jN representa o conjunto das
funções de forma ou interpolação do elemento que está a ser considerado.
Um dos modos de encarar o método dos elementos finitos é como uma técnica de
produção de funções de aproximação para serem utilizadas em métodos variacionais de
aproximação, como por exemplo o método de Rayleigh-Ritz, mínimos quadrados,
subdomínio, etc. A escolha das funções de aproximação é em geral condicionada sendo no
entanto possível ter vários modelos de elementos finitos para uma dada equação.
No processo de definição de funções de aproximação há uma metodologia de
formulação muito utilizada que faz uso do conceito de elemento isoparamétrico. Este
conceito veio permitir a consideração de fronteiras do elemento com formas mais
complexas do que as usualmente permitidas por outro tipo de elementos.
Um aspecto fundamental da formulação por elementos finitos consiste na escolha das
funções a interpolar que representam as variáveis a determinar no problema. No caso de se
tratar de um elemento finito a ser considerado no âmbito da Teoria de Mindlin de Placas as
variáveis a interpolar no contexto de uma formulação em termos dos deslocamentos são o
deslocamento transversal ω e as rotações 21 e θθ que podem ser inseridas num princípio
variacional nomeadamente podem ser inseridas no chamado Teorema dos Trabalhos
Virtuais. Esta formulação conduz em geral a um sistema de equações cujas incógnitas são
os valores das funções interpoladas nos chamados pontos nodais dos elementos finitos que
constituem o domínio.

Teoria de Mindlin 6.31
6.9.2.2 Discretização. Elemento de Placa de Mindlin
O campo de deslocamentos do elemento de placa de Mindlin [ ]T21,, θθω para o
elemento pode ser definido a partir dos valores dos deslocamentos generalizados
21 e, θθω num conjunto discreto de pontos, os nós, de dimensão n, fazendo uso das
funções de forma Ni, ou seja:
n
i ii 1
u N d=
= ∑ 6.63
onde [ ] [ ] iT
i2i1iiT
21 Ne,,Wd,,,u θθθθω == representa a matriz das funções nodais. A
matriz das funções de forma Ni é Ni I3 onde I3 é a matriz identidade de ordem 3 e Ni são as
funções de forma para o elemento. As funções de forma utilizadas para efeitos de
interpolação dos deslocamentos e rotações, para o modelo considerado, são as mesmas.
Considerando o conceito de elemento isoparamétrico, então as funções de forma Ni
são definidas em coordenadas locais ξ e η, como se representa na figura 6.7 para elementos
de quatro e oito nós e as coordenadas de um ponto do elemento (x, y) podem ser calculadas
a partir das coordenadas nodais (xi, yi) do seguinte modo:
n n
i i i ii 1 i 1
x N x e y N y= =
= =∑ ∑ 6.64
Note-se que as dimensões do elemento isoparamétrico no sistema de eixos local são
dois por dois sendo as coordenadas do canto do elemento (-1, -1), (1, -1), (1, 1) e (-1, 1).
No caso do elemento de 8 - nós os pontos nodais são colocados nos cantos do elemento e a
meio dos lados como se representa na figura 6.7.

Teoria de Mindlin 6.32
ξ
η
ξ
η
Graus de liberdade por nó: Wi , θ1i , θ2i
Figura 6.7: Elementos Isoparamétricos de Serendipity.
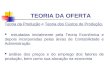
As funções de forma para os elementos isoparamétricos mais usuais estão
representadas no quadro 6.1. Estão representados os elementos lineares e parabólicos das
famílias de Lagrange e Serindipity e é feita referência ao elemento de Heterósis. As
deformações generalizadas [ ]21122211ij ,,,, φφχχχε = são definidas em função dos
deslocamentos generalizados, sendo:
ii1i
ij dB∑=∞
=ε 6.65
onde Bi representa a matriz das deformações, ou seja:
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−∂∂
−∂∂
∂∂
−∂∂
−
∂∂
−
∂∂
−
=⎥⎦
⎤⎢⎣
⎡=
i1
i
i
1
i
1
i
2
i
2
i
1
i
si
fii
N0xN
0NxN
xN
xN
0
xN00
0xN
0
BBB 6.66

Teoria de Mindlin 6.33
Ni ( ξ , η ) = 14 ( 1 + ξ ξi ) ( 1 + η ηi )
com i = 1, 4
Elemento de quatro nós
ξ
η
ξ
η
1 2 3
4
567
8
ξ
η
1 2 3
4
567
8
1 2
34
Cantos
Ni ( ξ , η ) = 14 ( 1 + ξ ξi ) ( 1 + η ηi ) ( ξ ξi+ η ηi − 1 )
com i = 1,3,5,7
Elemento de 8-nós de Serendipity
Nós do Meio dos Lados
Ni = ξi
2
2( 1 + ξ ξi ) ( 1 − η
2) + ηi
2
2( 1 + η ηi ) ( 1 − ξ
2)
com i = 2,4,6,8
ξ
η
1 2 3
4
567
8
Elemento de 9-nós de Lagrange
Ni = 14 ( ξ
2+ ξ ξi ) ( η
2+ η η i)
com i = 1,3,5,7
Nós canto
Nós do Meio dos Lados
Ni = 12 ηi
2( η
2+ η ηi ) ( 1 − ξ
2) + 1
2 ξi2( ξ
2+ ξ ξi) ( 1 − η
2)
com i = 2,4,6,8
Nó Central
Ni = ( 1 − ξ2) ( 1 − η
2)
Heterosis Element
Nós do canto e nós do meio dos lados as funções de formasão definidas de acordo com o o elemento de 8-nós dafamília Serendipity e o nó central tem uma função de formado tipo bolha:
Ni = ( 1 − ξ2) ( 1 − η
2)
Quadro 6.1: Funções de Forma.

Teoria de Mindlin 6.34
Os esforços generalizados σ relacionam-se com as deformações generalizados ε
através da matriz de elasticidade D de acordo com as expressões 6.13 e 6.15, ou seja:
( )
( )
( ) ⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
−
−=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡==
2
1
12
22
11
2
2
1
12
22
11
s
f
210000
02
1000
002
10000010001
1E
TT
MMM
D0
0DD
φφχχχ
ν
ν
νν
ν
νφχ
εσ 6.67
Tendo em conta a expressão da energia potencial (6.26) e as expressões (6.66) e (6.67),
obtém-se:
WdSD21dSD
21
sT
sfT
s −∫+∫=Π φφχχ 6.68
Tendo em conta a equação 6.65 que define a deformação em termos dos
deslocamentos nodais e designando o vector deslocamentos nodais para o elemento por eδ ,
obtém-se a energia potencial para o elemento com a seguinte forma:
[ ] eTeesese
Tfesefefe
Tfes
Te WdsBDBdsBDB
21
−∫+∫=Π δδ 6.69
A energia potencial total é:
e
N
eΠ∑=Π 6.70
Por minimização da energia potencial total obtém-se o sistema de equações seguinte:
ijij FK =Δ 6.71

Teoria de Mindlin 6.35
onde Kij é a matriz de rigidez da placa obtida por 'assemblagem' das matrizes de rigidez
elementares, Δj é o vector dos deslocamentos da placa obtido a partir dos vectores de
deslocamentos elementares e Fi é o vector das acções externas da placa obtido a partir dos
vectores das acções elementares. Estes vectores e matrizes são determinados a partir dos
valores para o elemento procedendo a um somatório adequado dos elementos, a chamada
'assemblagem' dos elementos, ou seja:
[ ]eseseTseSefefe
TfeS
N
eeee
TeS
N
e
eij
N
eij dSBDBdSBDBdSBDBKK
eee∫+∫∑=∫∑=∑=
e
Nδ
ε∑=Δ
[ ] eT
iS
N
ee
N
edS0,0,NpfF
e∫∑=∑= 6.72
Note-se que no processo de cálculo das matrizes de rigidez elementares intervêm a
matriz das deformações a qual faz uso das derivadas das funções de forma em ordem às
coordenadas globais x, y sendo portanto necessário proceder ao cálculo destas derivadas a
partir das derivadas em coordenadas locais, para isso é preciso definir o jacobiano da
transformação, ou seja:
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
=
ηξ
ηξyy
xx
J 6.73
sendo x e y determinados de acordo com a transformação isoparamétrica de coordenadas ξ,
η em x, y definida pela equação 6.64. As derivadas em ordem a x e y são calculadas a
partir da matriz inversa da Jacobiana de acordo com a fórmula seguinte:

Teoria de Mindlin 6.36
[ ]⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
∂∂∂
∂
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
∂∂∂
∂−
η
ξi
i
1
i
i
N
N
J
yNx
N
6.74
Por outro lado os integrais envolvidos nas expressões (6.72) devem ser calculados
numericamente, sendo necessário proceder também à transformação de coordenadas x1 e x2
em ξ e η.
Problemas
1. No caso de considerar uma placa constituída por duas camadas ortotrópicas de
espessuras e1 e e2 que tem um comportamento que pode ser modelado pela teoria de
Mindlin e sendo as dimensões da placa a segundo x e b segundo y, determine as
expressões que representam:
a) As Tensões no plano e as Tensões de Corte Transverso.
b) Os Momentos flectores e Torsores e os Esforços Transversos .
c) As Equações de Equilíbrio da Placa .
2. Considere uma Placa simplesmente apoiada ao longo do contorno e sujeita a uma carga
uniformemente distribuída e determine a Solução de Navier para uma Placa de
dimensões a segundo x e b segundo y no caso de ser composta por duas camadas
ortotrópicas de espessuras e1 e e2. Considere que a placa tem um comportamento
modelável pela Teoria de Mindlin.
3. Considere uma placa quadrada encastrada ao longo do contorno de lado a e sujeita a
uma carga uniformemente distribuída. Admitindo que a placa tem um comportamento
de Placa de Mindlin determine uma expressão para a deformada e para o deslocamento
no ponto médio fazendo uso do Método de Ritz e das funções seguintes:

Teoria de Mindlin 6.37
( ) ( ) ( ) ( ) ( ) ( )2222
2221
223
2222
2221
212
2222
22211 bxaxxabxaxxabxaxa −−+−−+−−=ω
( ) ( ) ( ) ( ) ( ) ( )2222
2221
513
2222
2221
312
2222
2221111 bxaxxbbxaxxbbxaxxb −−+−−+−−=θ
( ) ( ) ( ) ( ) ( ) ( )2222
2221
523
2222
2221
322
2222
2221212 bxaxxcbxaxxcbxaxxc −−+−−+−−=θ