Embed Size (px)
Citation preview
Transmissão de impulsos em banda-base
2
Transmissão de impulsos através de um canal com ruído aditivo
2.1
Probabilidades de erro com detecção no ponto central
Probabilidades de erro com detecção no ponto central 2
Detecção de sinais binários em ruído gaussiano
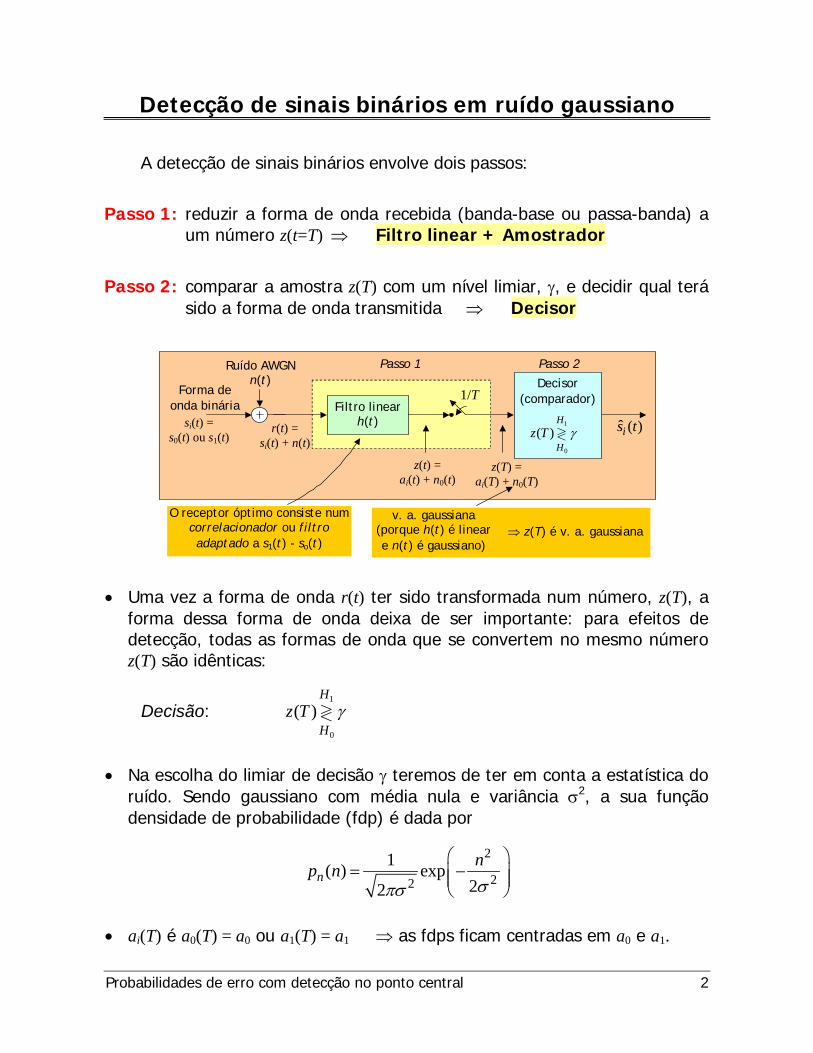
A detecção de sinais binários envolve dois passos:
Passo 1: reduzir a forma de onda recebida (banda-base ou passa-banda) a um número z(t=T) ⇒ Filtro linear + Amostrador
Passo 2: comparar a amostra z(T) com um nível limiar, γ, e decidir qual terá sido a forma de onda transmitida ⇒ Decisor
Passo 1 Passo 2
Filtro linearh(t) si(t) =
s0(t) ou s1(t)
1/T
Ruído AWGN n(t)
r(t) = si(t) + n(t)
Forma de onda binária
z(t) = ai(t) + n0(t)
z(T) = ai(T) + n0(T)
ˆ ( )is t
Decisor (comparador)
1
0
( )H
Hz T γ≷
O receptor óptimo consiste num correlacionador ou filtro adaptado a s1(t) - so(t)
v. a. gaussiana (porque h(t) é linear e n(t) é gaussiano)
⇒ z(T) é v. a. gaussiana
• Uma vez a forma de onda r(t) ter sido transformada num número, z(T), a forma dessa forma de onda deixa de ser importante: para efeitos de detecção, todas as formas de onda que se convertem no mesmo número z(T) são idênticas:
Decisão: 1
0
( )H
Hz T γ≷
• Na escolha do limiar de decisão γ teremos de ter em conta a estatística do ruído. Sendo gaussiano com média nula e variância σ2, a sua função densidade de probabilidade (fdp) é dada por
2
22
1( ) exp22
nnp nσπσ
⎛ ⎞= −⎜ ⎟⎜ ⎟
⎝ ⎠
• ai(T) é a0(T) = a0 ou a1(T) = a1 ⇒ as fdps ficam centradas em a0 e a1.
Probabilidades de erro com detecção no ponto central 3
Detecção de sinais binários em ruído gaussiano
Decisões rígidas e decisões brandas
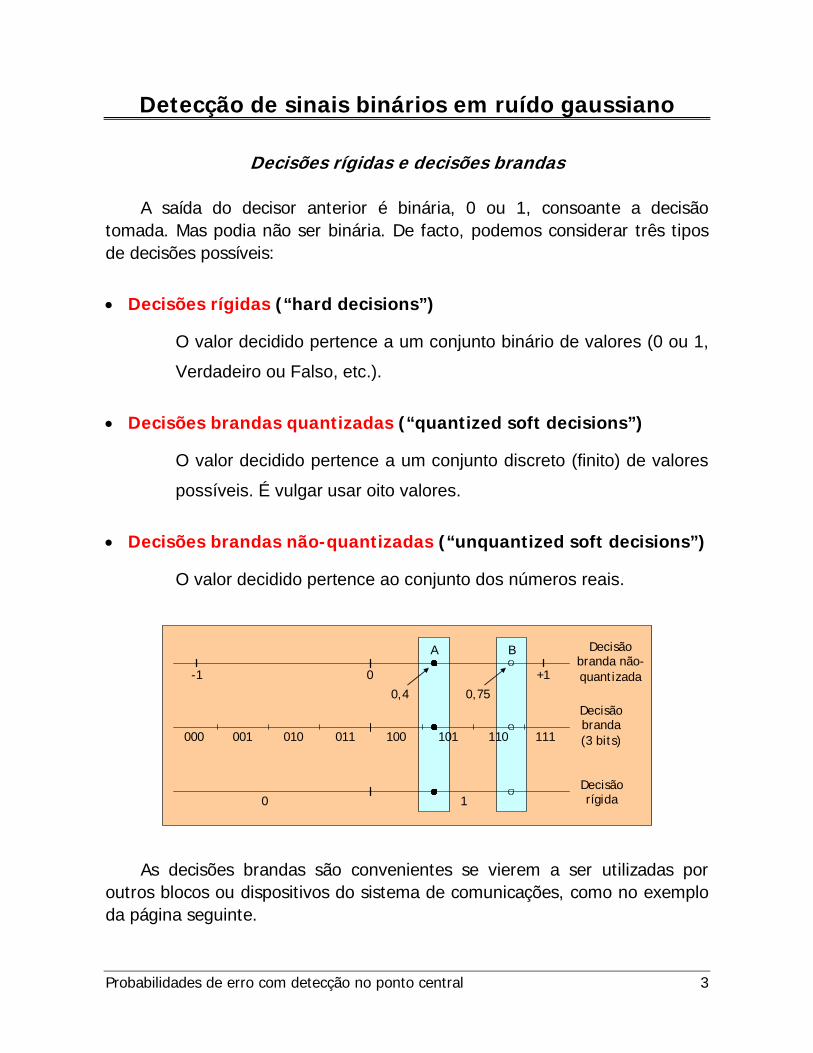
A saída do decisor anterior é binária, 0 ou 1, consoante a decisão tomada. Mas podia não ser binária. De facto, podemos considerar três tipos de decisões possíveis:
• Decisões rígidas (“hard decisions”)
O valor decidido pertence a um conjunto binário de valores (0 ou 1,
Verdadeiro ou Falso, etc.).
• Decisões brandas quantizadas (“quantized soft decisions”)
O valor decidido pertence a um conjunto discreto (finito) de valores
possíveis. É vulgar usar oito valores.
• Decisões brandas não-quantizadas (“unquantized soft decisions”)
O valor decidido pertence ao conjunto dos números reais.
B A
-1 0 +1
1 0
000 001 010 011 100 101 110 111
Decisão rígida
Decisão branda (3 bits)
Decisão branda não-quantizada
0,4 0,75
As decisões brandas são convenientes se vierem a ser utilizadas por outros blocos ou dispositivos do sistema de comunicações, como no exemplo da página seguinte.
Probabilidades de erro com detecção no ponto central 4
Detecção de sinais binários em ruído gaussiano
Decisões rígidas e decisões brandas
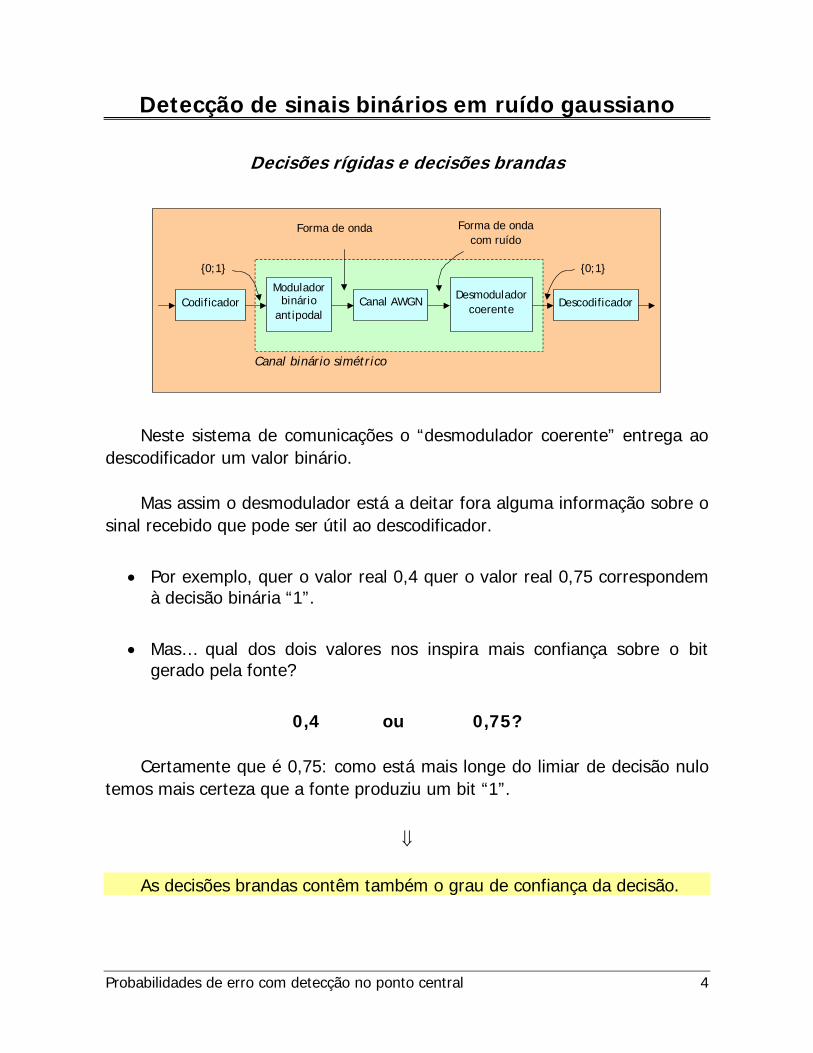
Moduladorbinário
antipodal
Desmoduladorcoerente
Canal AWGN DescodificadorCodificador
Forma de ondacom ruído
Forma de onda
0;1 0;1
Canal binário simétrico
Neste sistema de comunicações o “desmodulador coerente” entrega ao descodificador um valor binário.
Mas assim o desmodulador está a deitar fora alguma informação sobre o sinal recebido que pode ser útil ao descodificador.
• Por exemplo, quer o valor real 0,4 quer o valor real 0,75 correspondem à decisão binária “1”.
• Mas… qual dos dois valores nos inspira mais confiança sobre o bit gerado pela fonte?
0,4 ou 0,75?
Certamente que é 0,75: como está mais longe do limiar de decisão nulo temos mais certeza que a fonte produziu um bit “1”.
⇓
As decisões brandas contêm também o grau de confiança da decisão.
Probabilidades de erro com detecção no ponto central 5
Estimações MAP e de máxima verosimilhança com decisões rígidas
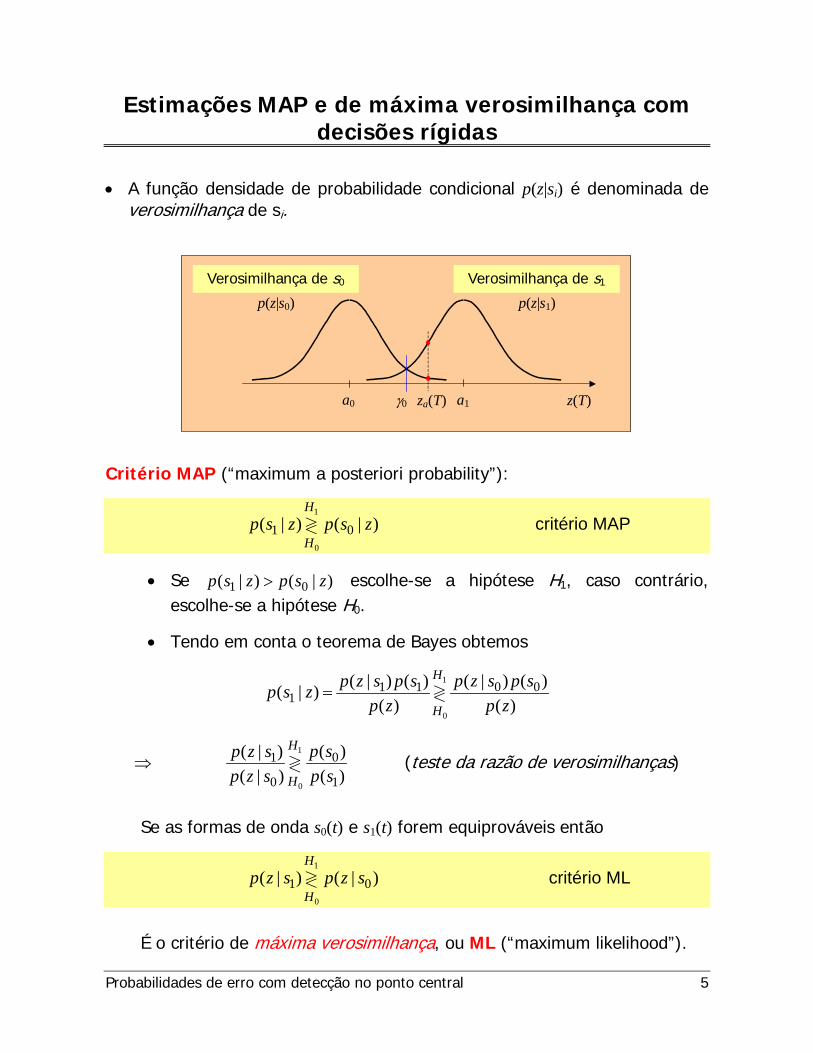
• A função densidade de probabilidade condicional p(z|si) é denominada de verosimilhança de si.
Verosimilhança de s0
p(z|s0) Verosimilhança de s1
p(z|s1)
a1a0 γ0 za(T) z(T)
Critério MAP (“maximum a posteriori probability”):
1
0
1 0( | ) ( | )H
Hp s z p s z≷ critério MAP
• Se 1 0( | ) ( | )p s z p s z> escolhe-se a hipótese H1, caso contrário, escolhe-se a hipótese H0.
• Tendo em conta o teorema de Bayes obtemos
1
0
0 01 11
( | ) ( )( | ) ( )( | )( ) ( )
H
H
p z s p sp z s p sp s zp z p z
= ≷
⇒ 1
0
01
0 1
( )( | )( | ) ( )
H
H
p sp z sp z s p s
≷ (teste da razão de verosimilhanças)
Se as formas de onda s0(t) e s1(t) forem equiprováveis então
1
0
1 0( | ) ( | )H
Hp z s p z s≷ critério ML
É o critério de máxima verosimilhança, ou ML (“maximum likelihood”).
Probabilidades de erro com detecção no ponto central 6
Estimação de máxima verosimilhança
• Na estimação MAP consideramos probabilidades a posteriori, isto é, probabilidades obtidas após observação da saída do canal.
• Na estimação ML consideramos probabilidades a priori (verosimilhanças), isto é, probabilidades já conhecidas antecipadamente.
• Se as formas de onda s0(t) e s1(t) forem equiprováveis os dois critérios de estimação são equivalentes, como se viu.
• Na estimação ML o limiar de decisão óptimo escolhido minimiza a probabilidade de erro.
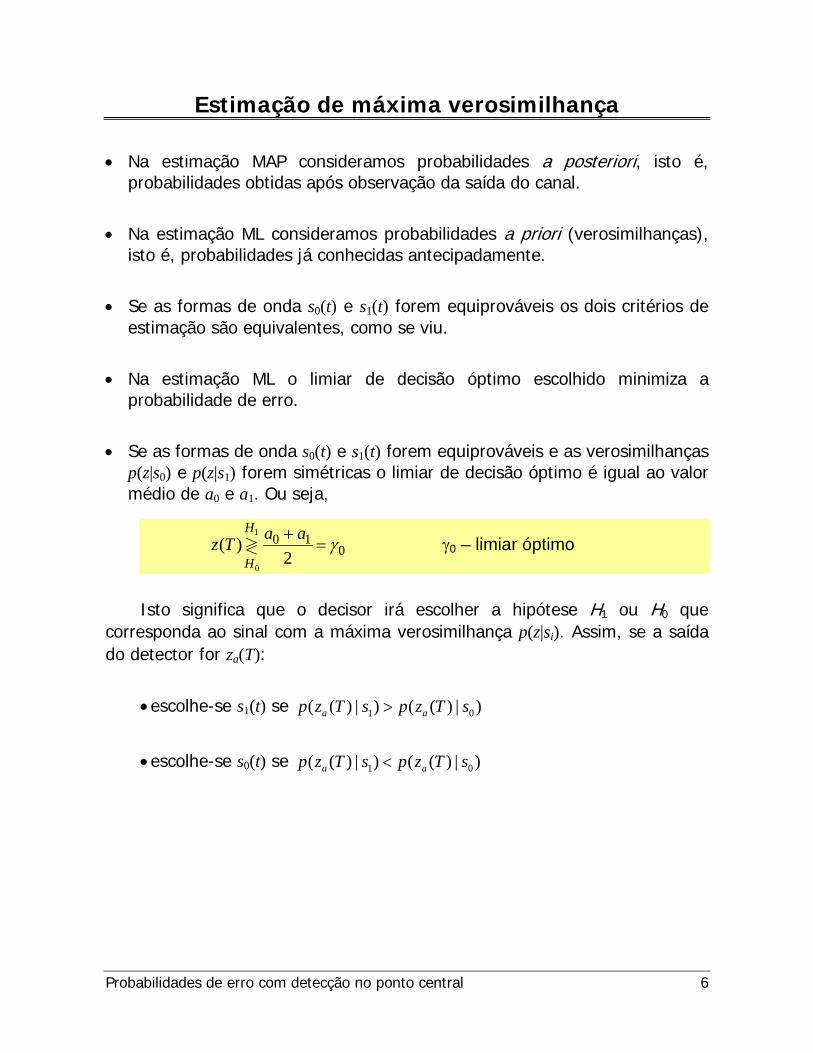
• Se as formas de onda s0(t) e s1(t) forem equiprováveis e as verosimilhanças p(z|s0) e p(z|s1) forem simétricas o limiar de decisão óptimo é igual ao valor médio de a0 e a1. Ou seja,
1
0
0 10( )
2
H
H
a az T γ+=≷ γ0 – limiar óptimo
Isto significa que o decisor irá escolher a hipótese H1 ou H0 que corresponda ao sinal com a máxima verosimilhança p(z|si). Assim, se a saída do detector for za(T):
• escolhe-se s1(t) se 1 0( ( ) | ) ( ( ) | )a ap z T s p z T s>
• escolhe-se s0(t) se 1 0( ( ) | ) ( ( ) | )a ap z T s p z T s<
Probabilidades de erro com detecção no ponto central 7
Transmissão de impulsos em banda-base
Detecção de impulsos com amostragem no ponto central
Vamos, para já, “esquecer” o filtro linear no receptor.
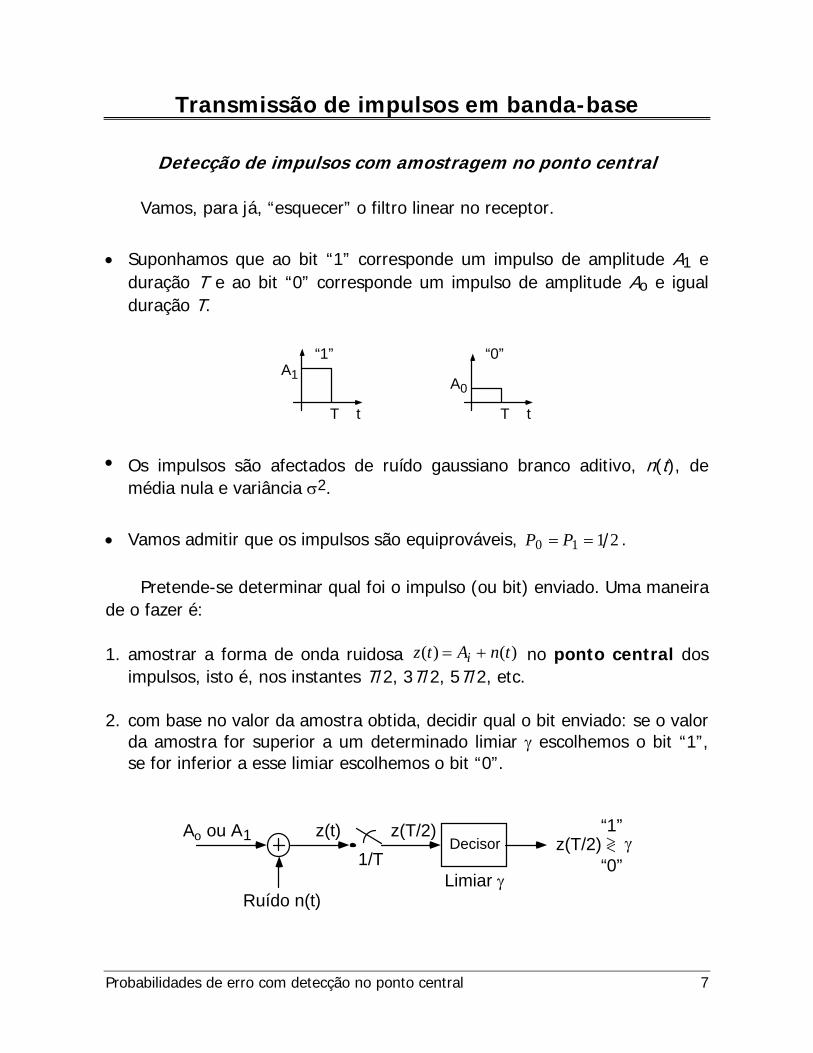
• Suponhamos que ao bit “1” corresponde um impulso de amplitude A1 e duração T e ao bit “0” corresponde um impulso de amplitude Ao e igual duração T.
T
A1
t
“1”
T
A0
t
“0”
• Os impulsos são afectados de ruído gaussiano branco aditivo, n(t), de média nula e variância σ2.
• Vamos admitir que os impulsos são equiprováveis, P0 = P1 = 1 2 .
Pretende-se determinar qual foi o impulso (ou bit) enviado. Uma maneira de o fazer é:
1. amostrar a forma de onda ruidosa )()( tnAtz i += no ponto central dos impulsos, isto é, nos instantes T/2, 3T/2, 5T/2, etc.
2. com base no valor da amostra obtida, decidir qual o bit enviado: se o valor da amostra for superior a um determinado limiar γ escolhemos o bit “1”, se for inferior a esse limiar escolhemos o bit “0”.
Ao ou A1 z(t) z(T/2)1/T
Decisor z(T/2) >< γ“1”
“0”
Ruído n(t)Limiar γ
Probabilidades de erro com detecção no ponto central 8
Transmissão de impulsos em banda-base
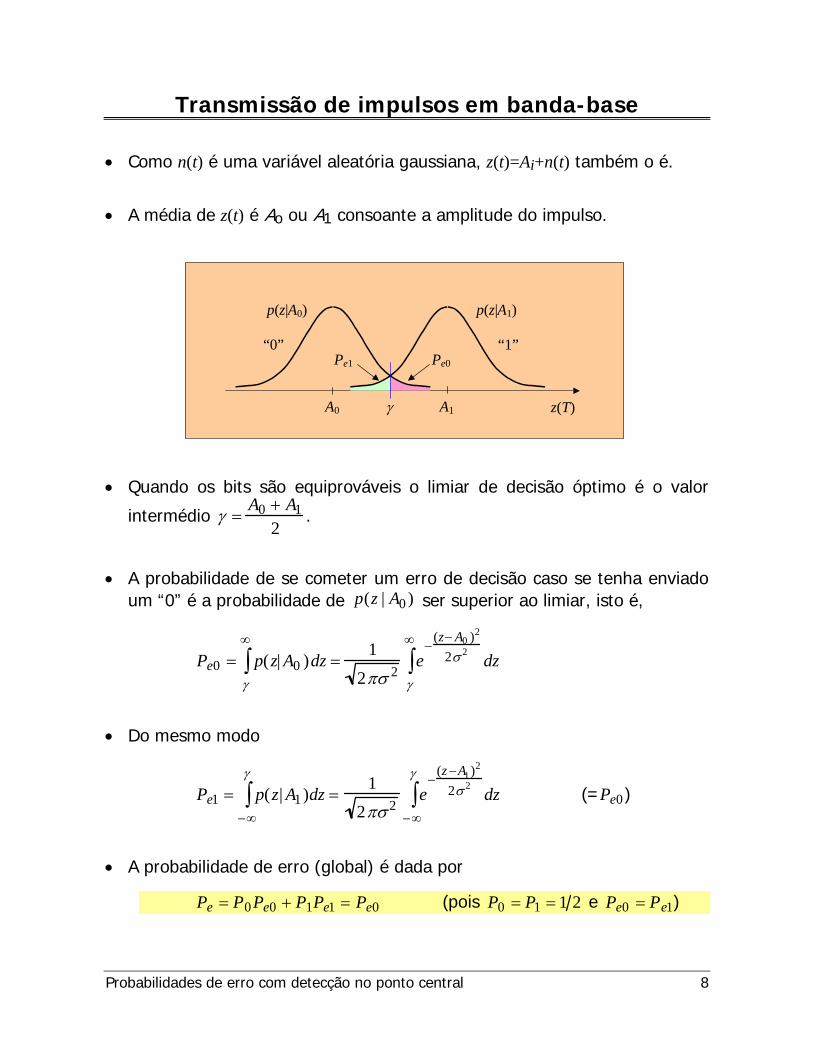
• Como n(t) é uma variável aleatória gaussiana, z(t)=Ai+n(t) também o é.
• A média de z(t) é Ao ou A1 consoante a amplitude do impulso.
p(z|A0) p(z|A1)
A1A0 γ z(T)
Pe0
“1”Pe1
“0”
• Quando os bits são equiprováveis o limiar de decisão óptimo é o valor
intermédio γ =A0 + A1
2.
• A probabilidade de se cometer um erro de decisão caso se tenha enviado um “0” é a probabilidade de )|( 0Azp ser superior ao limiar, isto é,
Pe0 = p(z| A0 )dzγ
∞
∫ =1
2πσ 2e
−(z− A0 )2
2σ 2 dzγ
∞
∫
• Do mesmo modo
Pe1 = p(z| A1 )dz−∞
γ
∫ =1
2πσ 2e
−(z −A1)2
2σ 2 dz−∞
γ
∫ (= Pe0 )
• A probabilidade de erro (global) é dada por
Pe = P0 Pe0 + P1Pe1 = Pe0 (pois P0 = P1 = 1 2 e Pe0 = Pe1)
Probabilidades de erro com detecção no ponto central 9
Transmissão de impulsos em banda-base
Probabilidade de erro na presença de ruído gaussiano
Desenvolvendo e fazendo a mudança de variável x =z − A0
σ:
Pe = Pe0 =1
2πσ2e
−(z− A0)2
2σ 2 dzγ
∞
∫ =12π
e −x2 2dxγ −A0
σ
∞
∫
Como γ =A0 + A1
2:
Pe =12π
e−x2 2dx( A1−A0 ) 2σ
∞
∫ = Q( A1 − A02σ
)
• Como se vê, a probabilidade de erro apenas depende da diferença das amplitudes dos impulsos, ∆V = A1 − A0 , e do valor eficaz (ou desvio padrão) do ruído gaussiano, σ:
Pe = Q( A1 − A02σ
) =
= Q ∆V2σ
⎛ ⎝ ⎜ ⎞
⎠ ⎟
• A função Q (ver à frente) é uma função decrescente; logo, quanto maior for a diferença de amplitudes dos impulsos binários ou quanto menor for a potência do ruído, menor será a probabilidade de erro na detecção dos impulsos.
• A função densidade de probabilidade gaussiana de média X e variância σ2 é designada por N( X , σ2).
Probabilidades de erro com detecção no ponto central 10
Transmissão de impulsos em banda-base
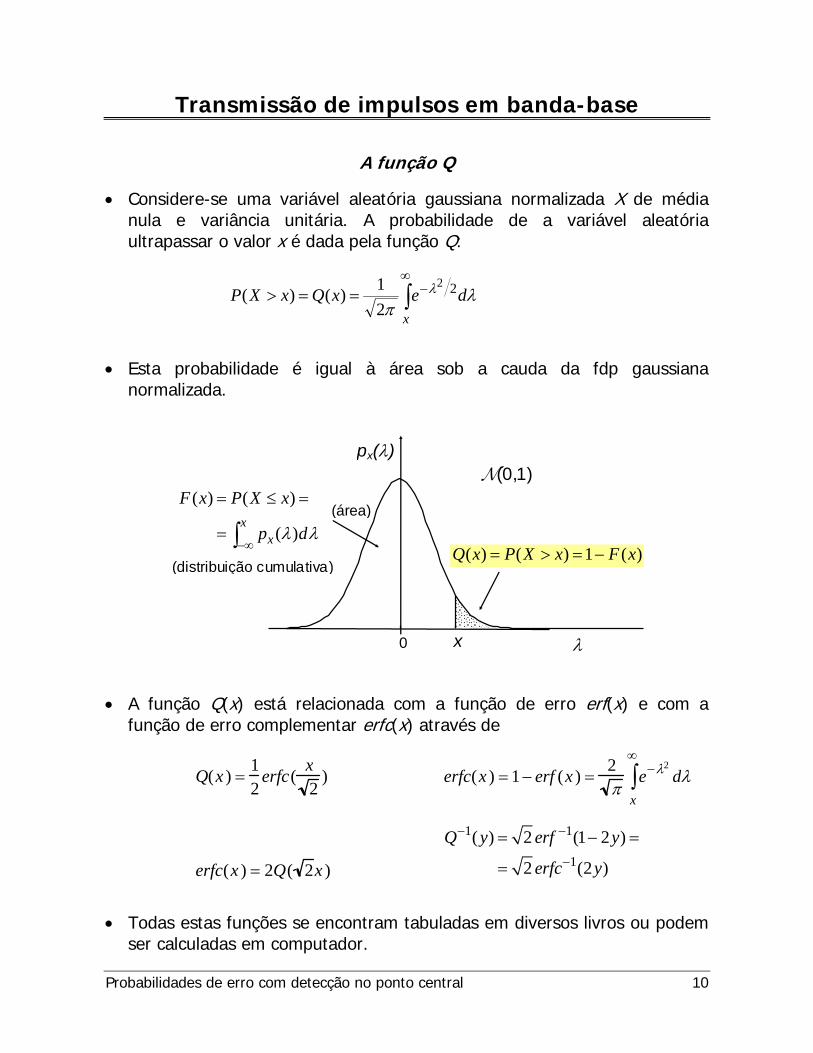
A função Q
• Considere-se uma variável aleatória gaussiana normalizada X de média nula e variância unitária. A probabilidade de a variável aleatória ultrapassar o valor x é dada pela função Q:
∫∞
−==>x
dexQxXP λπ
λ 22
21)()(
• Esta probabilidade é igual à área sob a cauda da fdp gaussiana normalizada.
0 λ x
N(0,1)px(λ)
( ) ( )
( )x
x
F x P X x
p dλ λ−∞
= ≤ =
= ∫ (área)
( ) ( ) 1 ( )Q x P X x F x= > = −(distribuição cumulativa)
• A função Q(x) está relacionada com a função de erro erf(x) e com a função de erro complementar erfc(x) através de
Q(x ) =12
erfc( x2
) erfc(x ) = 1 − erf (x ) =2π
e−λ2dλ
x
∞
∫
erfc(x ) = 2Q( 2x )
1 1
1
( ) 2 (1 2 )
2 (2 )
Q y erf y
erfc y
− −
−
= − =
=
• Todas estas funções se encontram tabuladas em diversos livros ou podem ser calculadas em computador.
Probabilidades de erro com detecção no ponto central 11
Transmissão de impulsos em banda-base
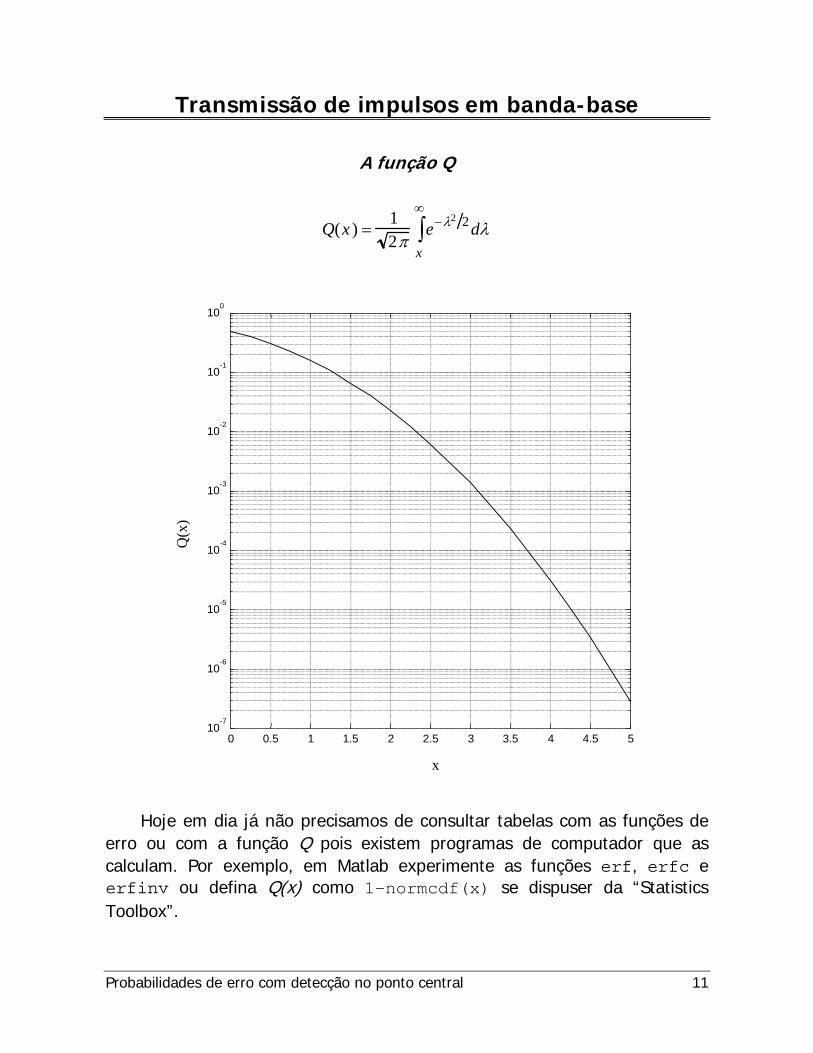
A função Q
Q(x ) =12π
e−λ2 2dλx
∞
∫
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 10 -7
10 -6
10 -5
10 -4
10 -3
10 -2
10 -1
10 0
x
Q(x
)
Hoje em dia já não precisamos de consultar tabelas com as funções de erro ou com a função Q pois existem programas de computador que as calculam. Por exemplo, em Matlab experimente as funções erf, erfc e erfinv ou defina Q(x) como 1–normcdf(x) se dispuser da “Statistics Toolbox”.
Probabilidades de erro com detecção no ponto central 12
Transmissão de impulsos em banda-base
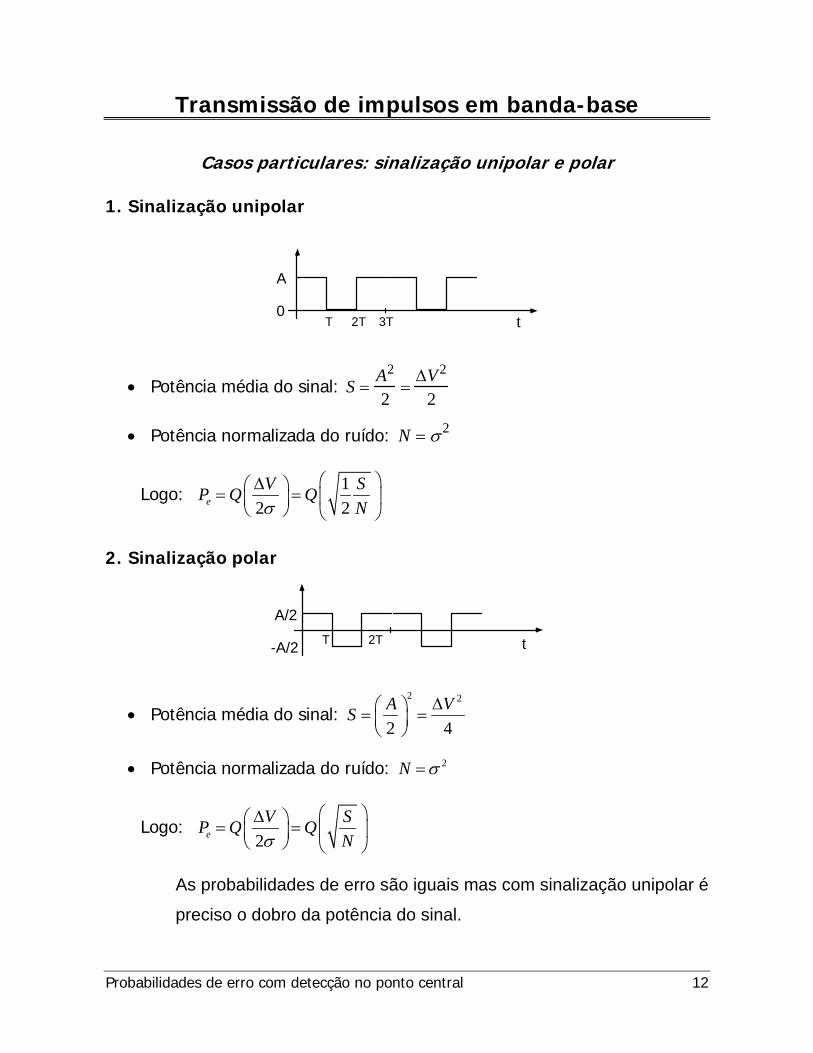
Casos particulares: sinalização unipolar e polar
1. Sinalização unipolar
T
A
t2T 3T0
• Potência média do sinal: S =A2
2=
∆V2
2
• Potência normalizada do ruído: N = σ2
Logo: 1
2 2eV SP Q Q
Nσ⎛ ⎞∆⎛ ⎞= = ⎜ ⎟⎜ ⎟
⎝ ⎠ ⎝ ⎠
2. Sinalização polar
T
A/2
t2T-A/2
• Potência média do sinal: 2 2
2 4A VS ∆⎛ ⎞= =⎜ ⎟
⎝ ⎠
• Potência normalizada do ruído: 2N σ=
Logo: 2e
V SP Q QNσ
⎛ ⎞∆⎛ ⎞= = ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠
As probabilidades de erro são iguais mas com sinalização unipolar é
preciso o dobro da potência do sinal.
Probabilidades de erro com detecção no ponto central 13
Transmissão de impulsos em banda-base
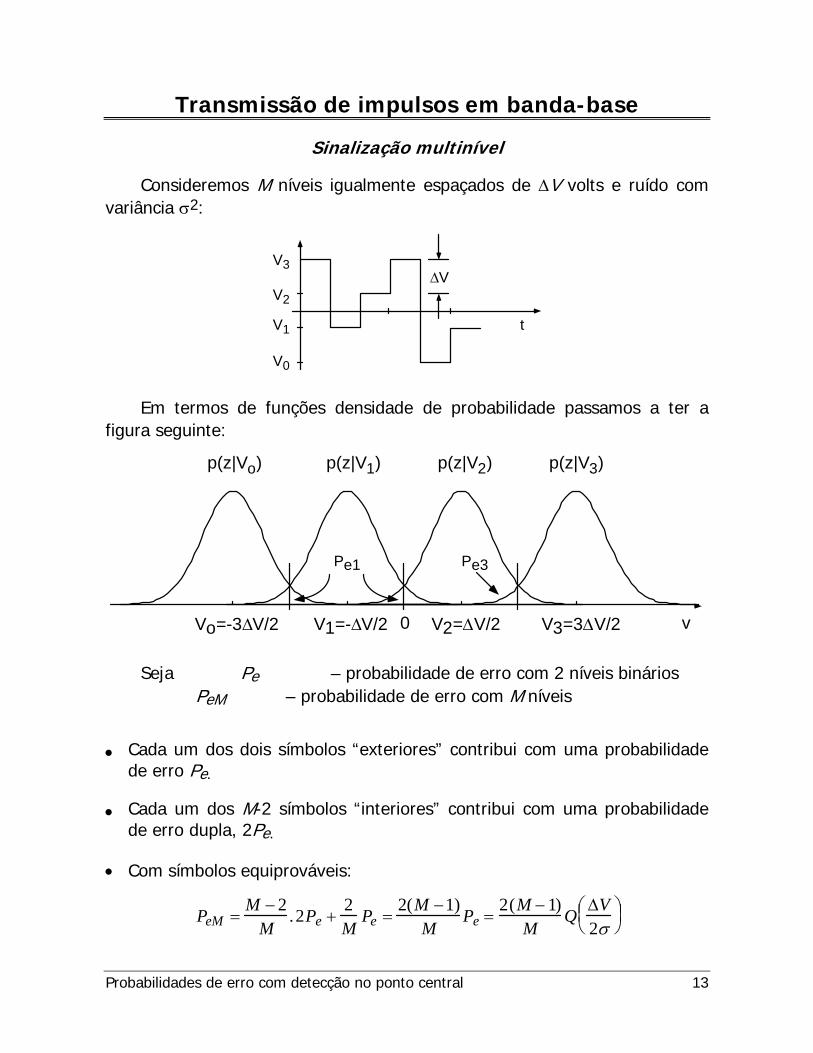
Sinalização multinível
Consideremos M níveis igualmente espaçados de ∆V volts e ruído com variância σ2:
t
V3
V2
V1
V0
∆V
Em termos de funções densidade de probabilidade passamos a ter a figura seguinte:
p(z|Vo)
vVo=-3∆V/2 V1=-∆V/2 V2=∆V/2 V3=3∆V/2
p(z|V1) p(z|V2) p(z|V3)
0
Pe1 Pe3
Seja Pe – probabilidade de erro com 2 níveis binários PeM – probabilidade de erro com M níveis
• Cada um dos dois símbolos “exteriores” contribui com uma probabilidade de erro Pe.
• Cada um dos M-2 símbolos “interiores” contribui com uma probabilidade de erro dupla, 2Pe.
• Com símbolos equiprováveis:
PeM =M − 2
M.2Pe +
2M
Pe =2(M −1)
MPe =
2(M − 1)M
Q ∆V2σ
⎛ ⎝ ⎜ ⎞
⎠ ⎟

Probabilidades de erro com detecção no ponto central 14
Transmissão de impulsos em banda-base
Sinalização multinível: um exemplo
P.: Um sistema de sinalização em banda-base, de quatro níveis equiprováveis, utiliza impulsos rectangulares NRZ. A atenuação entre emissor e receptor é 15dB e a potência do ruído na entrada a 50Ω de um detector ideal com decisão no ponto central é 10µW. Qual é a potência média do sinal transmitido para que a probabilidade de símbolo errado seja 10-4?
R.: O desvio padrão da tensão de ruído no receptor é igual ao valor eficaz (rms) da tensão de ruído (pois este tem média nula):
σ = PR = 1 ×10−5 × 50 = 2,236 ×10−2 (V )
Resolvendo a equação 2( 1)2eM
M VP QM σ
− ∆⎛ ⎞= ⎜ ⎟⎝ ⎠
em ordem a ∆V :
∆V = 2σQ−1 M2(M −1)
PeM⎡ ⎣ ⎢
⎤ ⎦ ⎥ = 2 × 2,236 × 10−2Q−1 4
6×10−4⎛
⎝ ⎜ ⎞
⎠ ⎟ = 0,171(V )
⇒ no receptor os níveis dos impulsos são ±85,5mV e ±256mV.
• Potência dos impulsos no receptor:
0,08552 50 = 1,46 × 10−4W (dois dos impulsos)
0,2562 50 = 1,31 ×10−3W (dois dos impulsos)
• Potência recebida média (com símbolos equiprováveis):
SR =12
0,146 + 1,31( ).10−3 = 0,728mW
• ⇒ Potência transmitida:
15 1010 0,728 31,62 23T RP S mW= × = × = (13,6dBm)

Probabilidades de erro com detecção no ponto central 15
Transmissão de impulsos em banda-base
Sinalização multinível: o caso dos códigos AMI
• No código AMI temos três níveis, 0 e ±∆V , não equiprováveis:
P(“−∆V ”) = P(“∆V”) =14
e P(“0”) =12
• Suponhamos que o ruído AWGN tem variância σ2 e que f0 (z) e f1(z) são as fdps gaussianas associadas aos níveis 0 e ∆V .
• Dada a simetria das fdps os limiares são simétricos: ±γ .
• Probabilidade de erro:
Pe =14
.2 f1(z)dz−∞
γ∫ +
12
.2 f0(z)dzγ
∞∫ =
12
f1(z)dz−∞
γ∫ + 1 − f 0(z)dz
−∞
γ∫
Fazendo as necessárias mudanças de variável chega-se a
Pe =12
1 − Q γ − ∆Vσ
⎛ ⎝ ⎜ ⎞
⎠ ⎟ ⎡
⎣ ⎢ ⎤ ⎦ ⎥ + Q γ
σ⎛ ⎝ ⎜ ⎞
⎠ ⎟ =
12
Q ∆V − γσ
⎛ ⎝ ⎜ ⎞
⎠ ⎟ + Q γ
σ⎛ ⎝ ⎜ ⎞
⎠ ⎟
• Os limiares óptimos obtêm-se igualando a derivada de Pe a zero:
0edPdγ
= ⇒ γopt ⇒ f1(γopt )f0 (γopt )
= 2
γ opt =∆V2 + 2σ 2 ln2
2∆V=
∆V2
+σ2
∆Vln 2
• A probabilidade de erro mínima é obtida com estes limiares:
Pemin
=12
Q ∆V2σ
−σ
∆Vln2⎛
⎝ ⎜ ⎞
⎠ ⎟ + Q ∆V
2σ+
σ∆V
ln 2⎛ ⎝ ⎜ ⎞
⎠ ⎟





























