Arquivo de etiquetas: TwidoSuite
ENGENHARIAPROGRAMAO DE AUTMATO DA SCHNEIDER SISTEMA DE DOIS
ELEVADORES5 JANEIRO, 2014PUBLICAR UM COMENTRIOResumo:Este artigo
apresenta uma abordagem de como programar um sistema de dois
elevadores que percorrem quatro andares, recorrendo automao atravs
de um controlador lgico programvel existente em laboratrio junto
com uma maquete para simulao. Comea por fazer uma introduo breve
dos PLCs, segue com a ilustrao do esquema simplificado do sistema a
controlar e como se chegou ao algoritmo terminando com a tabela de
entradas e sadas da maquete e com o cdigo em diagramas de contactos
do programa testado.ndice Introduo Esquema do sistema de elevadores
a controlar Tabela de entradas e sadas da maquete dos dois
elevadores Programao Listagem do programa em diagramas de contactos
(Ladder) Consideraes finaisIntroduoO objetivo deste trabalho
experimental foi ganhar conhecimentos de como programar um autmato
simples como o caso do controlador de base modular TWDLMDA20DRT da
Schneider recorrendo a programao em ladder (diagrama de contactos)
utilizando para isso um programa de simples uso (TwidoSuite) que
far a compilao para linguagem mquina servindo de interface entre o
programador e o autmato.PLCUm PLC ou controlador lgico programvel
baseia-se num microprocessador que desempenha funes de controlo de
diversos tipos. Um autmato um equipamento eltrico, programvel por
tcnicos de instrumentao industrial destinado a controlar, em tempo
real e em ambiente industrial, mquinas ou processos seqenciais. O
autmato foi concebido para ambientes industriais e por isso tem um
hardware e software otimizado para esses tipos de
aplicaes.Estrutura dos autmatos programveisOs elementos bsicos de
um autmato programvel so a unidade central de processamento (CPU),
a memria de programa e dados, as entradas e sadas, a alimentao e os
perifricos.
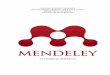
Diagrama de blocos de autmato programvelEsquema do sistema de
elevadores a controlar
Esquema do sistema de elevadores a controlarEste sistema
constitudo por dois elevadores como se pode ver acima, e percorrem
quatro andares. Sendo assim cada um vai ter quatro botes internos
de destino que vo permitir ativar o respectivo elevador a subir ou
descer conforme o boto de destino pressionado. Na parte exterior,
em cada andar, existem seis botes de chamada que podem ativar tanto
o elevador A como o elevador B, dependendo do que est mais prximo
ou de menor dispndio de energia e tempo. Ambos tm um sensor que
indica se existe alguma porta aberta.Esquema do sistema de
elevadores a controlarTabela de entradas e sadasElevador AElevador
B
EntradasEndereoEntradasEndereo
SENSOR FIM-DE-CURSO ANDAR #1%I0.0SENSOR FIM-DE-CURSO ANDAR
#1%I0.6
SENSOR FIM-DE-CURSO ANDAR #2%I0.1SENSOR FIM-DE-CURSO ANDAR
#2%I0.7
SENSOR FIM-DE CURSO ANDAR #3%I0.2SENSOR FIM-DE CURSO ANDAR
#3%I0.8
SENSOR FIM-DE-CURSO ANDAR #4%I0.3SENSOR FIM-DE-CURSO ANDAR
#4%I0.9
SENSOR FIM-DE-CURSO PORTAS%I0.4SENSOR FIM-DE-CURSO
PORTAS%I0.5
BOTAO DE DESTINO (INTERIOR) PISO #1%I1.0BOTAO DE DESTINO
(INTERIOR) PISO #1%I1.4
BOTAO DE DESTINO (INTERIOR) PISO #2%I1.1BOTAO DE DESTINO
(INTERIOR) PISO #2%I1.5
BOTAO DE DESTINO (INTERIOR) PISO #3%I1.3BOTAO DE DESTINO
(INTERIOR) PISO #3%I1.6
BOTAO DE DESTINO (INTERIOR) PISO #4%I1.2BOTAO DE DESTINO
(INTERIOR) PISO #4%I1.7
BOTAO CHAMADA PISO #1 SUBIR%I1.8BOTAO CHAMADA PISO #1
SUBIR%I1.8
BOTAO CHAMADA PISO #2 DESCER%I1.9BOTAO CHAMADA PISO #2
DESCER%I1.9
BOTAO CHAMADA PISO #3 DESCER%I1.10BOTAO CHAMADA PISO #3
DESCER%I1.10
BOTAO CHAMADA PISO #2 SUBIR%I1.11BOTAO CHAMADA PISO #2
SUBIR%I1.11
BOTAO CHAMADA PISO #3 SUBIR%I1.12BOTAO CHAMADA PISO #3
SUBIR%I1.12
BOTAO CHAMADA PISO #4 DESCER%I1.13BOTAO CHAMADA PISO #4
DESCER%I1.13
SadasEndereoSadasEndereo
MOTOR (SENTIDO ASCENDENTE)%Q0.2MOTOR (SENTIDO
ASCENDENTE)%Q0.7
MOTOR (SENTIDO DESCENDENTE)%Q0.3MOTOR (SENTIDO
DESCENDENTE)%Q0.4
LEDS (SENTIDO ASCENDENTE)%Q0.5LEDS (SENTIDO ASCENDENTE)%Q0.5
LEDS (SENTIDO DESCENDENTE)%Q0.6LEDS (SENTIDO
DESCENDENTE)%Q0.6
Tabela 1 Entradas e sadas no autmatoProgramaoEstrutura do
programaPara uma melhor compreenso e para conseguir entender o
programa como um todo foi feita uma diviso dos blocos principais
numa seqncia lgica. Para o programa funcionar corretamente o
programa precisa saber em tempo real em que andar o elevador se
situa, para isso numa fase inicial feita a inicializao de ambos os
elevadores enviando-os diretamente para o primeiro andar. Como em
cada andar existe um sensor fim de curso optou-se por localizar os
elevadores atravs de memrias de palavras (%MW), deste modo ao
elevador A atribuiu-se o endereo %MW0 e ao elevador B o endereo
%MW1 que contem o algarismo de base decimal correspondente ao andar
em que se situa.Para evitar que hajam conflitos entre pedidos que
sejam ativos enquanto o elevador ainda est a processar um outro
pedido feito um bloco no programa denominado de Manuteno dos
pedidos tanto para os botes internos ao elevador como para os
pedidos externos. Este bloco vai evitar ainda que seja feito um
pedido caso o elevador esteja no andar em que o pedido foi feito e
atua ainda como memria.Um outro bloco chamado de Ativao do motor
atravs dos botes internos ou ainda atravs dos botes externos para
ambos os elevadores, que como o nome indica vai ser responsvel por
acionar o motor quando de maneira lgica quando solicitado, sendo
responsvel por garantir que o elevador no ative caso a porta esteja
aberta e por parar no local correspondente ao que o utilizador
pediu e ficando parado nesse local por algum tempo (~4s) caso a
porta no seja aberta.
Diagrama estrutural do programaCDIGO EM LADDER
FICHEIROConsideraes finaisCom este trabalho conclumos que para
programar um autmato se torna necessrio sistematizar bem todo o
processo para ter uma imagem global do sistema j que existem muitas
variveis a controlar e pequenos erros so suficientes para causar
bugs no sistema e da se tornar necessrio saber bem os pequenos
detalhes de programao. At o programa ficar a funcionar plenamente
foram-se produzindo vrias verses medida que se ia testando na
maquete.AUTOMAOAUTOMATOAUTMATOS
PROGRAMVEISCONTROLADORELEVADORESLADDERPLCPROGRAMAOSCHNEIDERTWDLMDA20DRTTWIDOSUITEENGENHARIAPROGRAMAO
DE AUTMATO PARA CONTROLO DE SISTEMA DE SEMFOROS
Resumo:Neste relatrio est descrita uma metodologia que permite
chegar facilmente ao algoritmo de programao da maioria dos sistemas
de semforos temporizados. Comea por apresentar o esquema do sistema
de semforos a controlar, os estados de circulao do trnsito, a
tabela de estados e o seu diagrama temporal, a tabela de endereos
de entrada/sada da maquete fornecida e o programa enviado para o
autmato em linguagem Ladder com comentrios.ndice Introduo Esquema
do sistema de semforos a controlar Estados de circulao Tabela de
estados Diagrama Temporal Tabela de entradas e sadas da maquete com
os semforos Programao em diagrama de contactos (Ladder) Consideraes
finaisIntroduoO objetivo deste trabalho experimental foi ganhar
conhecimentos de como programar um autmato simples como o caso do
controlador de base modular TWDLMDA20DRT da Schneider recorrendo a
programao em ladder (diagrama de contactos) utilizando para isso um
programa de simples uso (TwidoSuite) que far a compilao para
linguagem mquina servindo de interface entre o programador e o
autmato.PLCUm PLC ou controlador lgico programvel baseia-se num
microprocessador que desempenha funes de controlo de diversos
tipos. Um autmato um equipamento eltrico, programvel por tcnicos de
instrumentao industrial destinado a controlar, em tempo real e em
ambiente industrial, mquinas ou processos seqenciais. O autmato foi
concebido para ambientes industriais e por isso tem um hardware e
software otimizado para esses tipos de aplicaes.Estrutura dos
autmatos programveisOs elementos bsicos de um autmato programvel so
a unidade central de processamento (CPU), a memria de programa e
dados, as entradas e sadas, a alimentao e os perifricos.
Diagrama de blocos de autmato programvelEsquema do sistema de
semforos a controlarO esquema abaixo traduz os dois entroncamentos
em anlise assim como os fluxos de transito com sentido e direo.
Estados de circulaoAo longo do tempo existem certos perodos em
que as luzes dos semforos no mudam, podemos chamar a esses perodos
de estados, em que as luzes dos semforos assumem uma certa
configurao estacionria.O programa vai ser composto por quatro
estados principais que vo proporcionar quatro configuraes
diferentes ao trnsito, vrios estados de transio e um estado em que
todos os semforos ficam intermitentes.Em baixo esto representados
os esquemas dos quatro estados principais que representam os fluxos
de trnsito e os pontos de paragem.
Tabela de estadosSteps01234567
EstadosTRANS1TRANS2TRANS3TRANS4
Durao0-66-2121-2727-4242-4848-6363-6969-84
Drum 1%M100%Q0.7SAR01100000
%M101%Q0.6SAO10000000
%M102%Q0.5SAG00011111
%M103%Q0.4SBR01111110
%M104%Q0.3SBO10000000
%M105%Q0.2SBG00000001
%M106%Q1.7SP1G00000100
%M107%Q1.2SCR00011000
%M108%Q1.1SCO00100000
%M109%Q1.0SCG11000111
%M110%Q1.8SP2G00000100
%M111%Q1.5SDR10011111
%M112%Q1.4SDO00100000
%M113%Q1.3SDG01000000
%M114%Q2.3SP3G00000100
Drum 2%M115%Q1.15SER11100111
%M116%Q1.14SEO00001000
%M117%Q1.13SEG00010000
%M118%Q1.10SFR11100111
%M119%Q1.11SFO00001000
%M120%Q1.12SFG00010000
%M121%Q2.5SGR10011111
%M122%Q2.6SGO00100000
%M123%Q2.7SGG01000000
%M124%Q2.11SP4G00000001
%M125%Q2.8SHR10011001
%M126%Q2.9SHO00100010
%M127%Q2.10SHG01000100
%M128%Q2.13SIR01100110
%M129%Q2.14SIO10001000
%M130%Q2.15SIG00010001
%M50%Q1.6SP1R11111011
%M51%Q1.9SP2R11111011
%M52%Q2.4SP3R11111011
%M53%Q2.12SP4R11111110
Diagrama temporal
Tabela de entradas e sadas da maquete com os
semforosNumeraoEndereos de entrada
Entradas do Autmato(TWDLMDA20DRT)1%I0.0
2%I0.1
3%I0.2
4%I0.3
NumeraoEndereos de sadaEndereos fsicos
Sadas do Autmato(TWDLMDA20DRT)1%Q0.2SBG
2%Q0.3SBO
3%Q0.4SBR
4%Q0.5SAG
5%Q0.6SAO
6%Q0.7SAR
Sadas da carta 1(TM2DRA16RT)7%Q1.0SCG
8%Q1.1SCO
9%Q1.2SCR
10%Q1.3SDG
11%Q1.4SDO
12%Q1.5SDR
13%Q1.6SP1R
14%Q1.7SP1G
15%Q1.8SP2G
16%Q1.9SP2R
17%Q1.10SFR
18%Q1.11SFO
19%Q1.12SFG
20%Q1.13SEG
21%Q1.14SEO
22%Q1.15SER
Sadas da carta 2(TM2DRA16RT)23%Q2.0-
24%Q2.1-
25%Q2.2-
26%Q2.3SP3G
27%Q2.4SP3R
28%Q2.5SGR
29%Q2.6SGO
30%Q2.7SGG
31%Q2.8SHR
32%Q2.9SHO
33%Q2.10SHG
34%Q2.11SP4G
35%Q2.12SP4R
36%Q2.13SIR
37%Q2.14SIO
38%Q2.15SIG
Programao em diagramas de contactos (Ladder)Abaixo apresenta-se
o programa utilizado para controlar o sistema de semforos da
maquete. Junto aos diagramas de contacto refere-se ainda o propsito
desse diagrama em comentrio e ainda se atribuem nomes aos bits de
memria utilizados de modo a clarificar a sua existncia.CDIGO EM
LADDER(diagrama de contactos)Consideraes finaisA programao do
autmato foi efectuada com xito, depois de vrias tentativas e
recorrendo maquete para simular os resultados foi possvel ir
corrigindo os vrios erros cometidos durante a programao. Este foi
um exemplo de um programa recorrendo a tambores mas existe uma
vasta gama de possibilidades que dariam o mesmo resultado, tais
como recorrendo a temporizadores, comparadores. Foi adquirida mais
experincia a programar em Ladder e uma maior familiaridade com o
ambiente TwidoSuite. Concluiu-se que muito fcil cometer erros neste
tipo de linguagem e que sempre importante ir simulando os
resultados medida que se vo fazendo alteraes.