Embed Size (px)
Citation preview

Universidade Federal do ABC
Curso de Pós-Graduação em Ciência da Computação
Dissertação de Mestrado
Edilson José Rodrigues
Um Algoritmo para o Problema do
Isomorfismo de Grafos
Santo André
2014


Universidade Federal do ABC
Curso de Pós-Graduação em Ciência da Computação
Dissertação de Mestrado
Edilson José Rodrigues
Um Algoritmo para o Problema do
Isomorfismo de Grafos
Trabalho apresentado como requisito par-cial para a obtenção do título de Mestre emCiência da Computação, sob orientação doProfessor Doutor Daniel Morgato Martin.
Santo André
2014

Resumo
Neste trabalho estudamos o Problema do Isomorfismo de Grafos e a sua comple-xidade para resolvê-lo. Nossa principal contribuição é a proposta de um algoritmopara o caso geral do Problema, baseado no particionamento do conjunto de vérticese em emparelhamentos perfeitos de grafos bipartidos.Estudamos também o algoritmo de Brendan McKay, que é o mais rápido algoritmopara o Problema do Isomorfismo de Grafos conhecido. Ao final, implementamos oalgoritmo proposto nesta dissertação e o algoritmo de McKay.Após a comparação dos dois algoritmos, verificamos que os resultados obtidos peloalgoritmo proposto não foram satisfatórios, porém apresentamos possíveis melhoriasde como deixá-lo mais eficiente.
Palavras-chave: Problema do Isomorfismo de Grafos. Emparelhamentos em grafosbipartidos. Particionamento do conjunto de vértices.

Abstract
In this work we study the Graph Isomorphism Problem and their complexity tosolve it. Our main contribution is to propose an algorithm for the general case ofthe Problem, based on partitioning the set vertex and perfect matchings of bipartitegraphs.We also studied the Brendan McKay’s algorithm, who is the fastest algorithm forthe Graph Isomorphism Problem known. At the end, we implemented the algorithmproposed in this dissertation and McKay’s algorithm.After comparison of the two algorithms, we found that the results obtained by theproposed algorithm were not satisfactory, but improvements are possible as to makeit more efficient.
Key words: Graph Isomorphism Problem. Matchings in bipartite graphs. Partiti-oning of vertex set.

Agradecimentos
Agradeço primeiramente a Deus, a minha esposa Taís, aos meus pais José eMaria, ao meu orientador Prof. Dr. Daniel Martin, a UFABC, e todos aqueles que,direta ou indiretamente me ajudaram na realização deste trabalho.

Conteúdo
1 Introdução xi
1.1 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xi1.2 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii1.3 Estrutura do trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . xii
2 Preliminares 1
2.1 Definições básicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12.1.1 Grafo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12.1.2 Vizinhança e grau . . . . . . . . . . . . . . . . . . . . . . . . 22.1.3 Subgrafo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22.1.4 Representações de grafos no plano . . . . . . . . . . . . . . . 3
2.2 Isomorfismo de grafos . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3 Simetrias em grafos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.4 Problemas computacionais . . . . . . . . . . . . . . . . . . . . . . . . 7
2.4.1 Classes de problemas . . . . . . . . . . . . . . . . . . . . . . . 82.4.2 NP-Completo . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3 Isomorfismo de Grafos 11
3.1 Problema do Isomorfismo de Grafos . . . . . . . . . . . . . . . . . . 113.2 Problema do Automorfismo de Grafos . . . . . . . . . . . . . . . . . 133.3 Relação entre os problemas . . . . . . . . . . . . . . . . . . . . . . . 133.4 Problema do Isomorfismo de Subgrafos . . . . . . . . . . . . . . . . . 143.5 Aplicações práticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.5.1 Impressões digitais . . . . . . . . . . . . . . . . . . . . . . . . 153.5.2 Zero knowledge proof . . . . . . . . . . . . . . . . . . . . . . 153.5.3 Aplicações em química . . . . . . . . . . . . . . . . . . . . . . 173.5.4 Outras aplicações . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.6 Revisão bibliográfica . . . . . . . . . . . . . . . . . . . . . . . . . . . 18

4 Emparelhamentos em grafos bipartidos 19
4.1 Definições . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.2 Encontrando um emparelhamento máximo . . . . . . . . . . . . . . . 204.3 Enumerando os emparelhamentos perfeitos . . . . . . . . . . . . . . 24
4.3.1 Componentes fortemente conexas . . . . . . . . . . . . . . . . 254.3.2 Gerando novos emparelhamentos . . . . . . . . . . . . . . . . 294.3.3 Análise de complexidade . . . . . . . . . . . . . . . . . . . . . 32
5 Algoritmo para o Problema do Isomorfismo de Grafos 35
5.1 Simulação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.1.1 Efeitos de uma p-simulação . . . . . . . . . . . . . . . . . . . 375.1.2 Partições . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385.1.3 Partição associada a uma rodada . . . . . . . . . . . . . . . . 395.1.4 Algoritmo para uma p-simulação . . . . . . . . . . . . . . . . 405.1.5 Árvore de partição . . . . . . . . . . . . . . . . . . . . . . . . 42
5.2 Propriedades de uma p-simulação . . . . . . . . . . . . . . . . . . . . 445.3 Algoritmo proposto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.3.1 Emparelhamentos perfeitos e isomorfismo . . . . . . . . . . . 50
6 Algoritmo Pratical Graph Isomorphism 53
6.1 Rotulação canônica e isomorfo canônico . . . . . . . . . . . . . . . . 546.2 Refinamento de partições . . . . . . . . . . . . . . . . . . . . . . . . 556.3 Algoritmo de refinamento . . . . . . . . . . . . . . . . . . . . . . . . 566.4 Partições aninhadas . . . . . . . . . . . . . . . . . . . . . . . . . . . 596.5 Árvore de busca . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 596.6 Podando a árvore de busca . . . . . . . . . . . . . . . . . . . . . . . 63
7 Resultados 65
7.1 Gerador de grafos aleatórios - instâncias positivas . . . . . . . . . . . 667.1.1 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
7.2 Grafos com alto padrão de simetria . . . . . . . . . . . . . . . . . . . 687.2.1 Grafos fortemente regulares não isomorfos . . . . . . . . . . . 68
8 Considerações Finais 71
8.1 Trabalhos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Bibliografia 73
9 Anexo 78

Lista de Figuras
2.1 Grafo completo com 4 vértices. . . . . . . . . . . . . . . . . . . . . . 22.2 H é subgrafo de G . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.3 Um grafo planar. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.4 Dois grafos isomorfos. . . . . . . . . . . . . . . . . . . . . . . . . . . 42.5 Hipercubo de dimensão 3. . . . . . . . . . . . . . . . . . . . . . . . . 62.6 Um grafo rígido. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
4.1 Grafo dirigido por um emparelhamento perfeito. . . . . . . . . . . . 214.2 Componentes fortemente conexas em um digrafo ~D. . . . . . . . . . 26
5.1 Simulação em um grafo G . . . . . . . . . . . . . . . . . . . . . . . . 375.2 Grafo G rotulado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.3 Árvore de partição. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.4 Exemplos de partições. . . . . . . . . . . . . . . . . . . . . . . . . . . 495.5 Exemplo de árvore de recursão do Algoritmo 15. . . . . . . . . . . . 50
6.1 Grafo G. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 616.2 Árvore T (G). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
7.1 Partição π obtida após uma simulação em um grafo fortemente regular. 70

Lista de Tabelas
2.1 Um isomorfismo entre G e H. . . . . . . . . . . . . . . . . . . . . . . 5
7.1 Grafos aleatórios densos. . . . . . . . . . . . . . . . . . . . . . . . . . 667.2 Grafos aleatórios esparsos. . . . . . . . . . . . . . . . . . . . . . . . . 677.3 Grafos fortemente regulares isomorfos. . . . . . . . . . . . . . . . . . 687.4 Grafos fortemente regulares não isomorfos. . . . . . . . . . . . . . . . 70

Lista de Siglas
PAG Problema do Automorfismo de Grafos
PGI Pratical Graph Isomorphism
PIG Problema do Isomorfismo de Grafos
ZKP Zero knowledge proof


CAPÍTULO 1
Introdução
1.1 Objetivos
Este trabalho tem como finalidade estudar o Problema do Isomorfismo de Grafos.
Nesse problema, o conjunto de instâncias válidas são pares {G,H} de grafos finitos,
e o objetivo é decidir se os grafos G e H são isomorfos, isto é, se possuem a mesma
estrutura subjacente.
A principal contribuição deste trabalho é a proposta de uma nova abordagem
para o Problema do Isomorfismo de Grafos baseada num algoritmo desenvolvido
por McKay [25] em 1981 e que utiliza fortemente o conceito de emparelhamentos em
grafos bipartidos e tópicos relacionados. Nossa proposta consiste em distinguir os
vértices de um grafo através de um processo de simulação e posteriormente utilizar o
resultado dessas simulações para acelerar um algoritmo de força bruta que enumera
mapas entre G e H na busca de um possível isomorfismo entre esses grafos.
O objetivo específico deste trabalho é apresentar um algoritmo que execute, na
prática, em um tempo razoável. É sabido que os algoritmos conhecidos para o caso
geral do Problema do Isomorfismo de Grafos possuem complexidade de tempo expo-

Capítulo 1. Introdução xii
nencial, demandando muito tempo de processamento (a complexidade do Problema
e o consumo de tempo dos algoritmos serão abordados no Capítulo 3).
1.2 Motivação
O Problema do Isomorfismo de Grafos tem uma vasta gama de aplicabilidade prática
em diversas áreas de conhecimento, e por isso resolvemos estudá-lo. No Capítulo 3,
mostraremos uma série de aplicações práticas do problema.
1.3 Estrutura do trabalho
Esta monografia, que doravante será chamada de dissertação, está dividida em seis
capítulos, além deste breve capítulo introdutório: o Capítulo 2 introduz os principais
conceitos e definições da teoria dos grafos que são utilizados ao longo da dissertação.
No Capítulo 3, é apresentado o Problema do Isomorfismo de Grafos, com definições,
resultados relacionados e aplicações. O Capitulo 4 aborda o conceito de emparelha-
mentos em grafos bipartidos que servirá de base para o algoritmo apresentado no
Capítulo 5. No Capítulo 6 apresentamos o Algoritmo proposto por McKay, compa-
rando as diferenças e semelhanças com o algoritmo apresentado nesta dissertação.
O último Capítulo 7 apresenta os resultados obtidos, bem como os detalhes da sua
implementação na linguagem C++.

CAPÍTULO 2
Preliminares
2.1 Definições básicas
Neste capítulo serão introduzidas algumas definições e notações necessárias para
que o problema considerado nesta dissertação seja descrito de forma precisa. Essas
definições foram baseadas nas referências [18], [34], [22], [28], [6], [5] e [12].
2.1.1 Grafo
Um grafo é um par ordenado (V,E) onde V é um conjunto finito não vazio, e E é
um conjunto de pares não ordenados de elementos de V . O conjunto V é chamado
de conjunto de vértices1, e E de conjunto de arestas. Quando um grafo G não é
definido de maneira explícita, usa-se V (G) e E(G) para fazer referência aos conjuntos
de vértices e de arestas de G respectivamente.
1Neste trabalho, é comum supor que o conjunto V é o conjunto de números naturais {1, . . . , n}para algum n.

Capítulo 2. Preliminares 2
2.1.2 Vizinhança e grau
Se u e v são vértices de um grafo, e a = {u, v} é uma aresta desse grafo, diz-se que
u e v são vizinhos ou vértices adjacentes, ou ainda que estão ligados pela aresta a.
Dizemos ainda que u e v são as pontas ou extremidades da aresta a. O conjunto de
vizinhos de um vértice v num grafo G é denotado por NG(v), ou seja, tem-se
NG(v) ={
u ∈ V (G) : {u, v} ∈ E(G)}
.
O grau de um vértice v em um grafo G é o número de vizinhos de v em G, ou seja,
é o número de elementos de NG(v). Denota-se o grau de v por dG(v). Quando o
grafo G puder ser identificado pelo contexto, denotamos NG(v) e dG(v) simplesmente
por N(v) e d(v) respectivamente. Quando todos os vértices de um grafo possuem
grau d, diz-se que esse grafo é d-regular.
0 1
2 3
G
Figura 2.1: Grafo completo com 4 vértices.
Na Figura 2.1, o grafo G é 3-regular. O grafo completo de ordem n é um grafo
Kn = (V,E), onde V = {1, 2, . . . , n}, que possui todas as arestas, isto é, com
E ={{u, v} : {u, v} ⊆ V }
.
2.1.3 Subgrafo
Um grafo H é um subgrafo de um grafo G se VH ⊆ VG e EH ⊆ EG.

3 2.1. Definições básicas
G
1
2 3
5 4
32
5
H
4
Figura 2.2: H é subgrafo de G
Na figura 2.2, o grafo H é um subgrafo de G.
2.1.4 Representações de grafos no plano
O objeto grafo leva esse nome porque pode ser representado graficamente de modo
natural. Pode-se representar os vértices de um grafo por pontos no plano, e as
arestas desse grafo por curvas que ligam pares de pontos. Há infinitas maneiras
de se representar um mesmo grafo no plano, e cada uma delas é chamada de uma
imersão no plano.
Um grafo é planar se possui uma imersão no plano de modo que nenhum par de
arestas se cruze.
K4
1 2
34
Figura 2.3: Um grafo planar.
Na figura 2.3 temos um exemplo de um grafo planar. O objetivo deste trabalho
não é estudar representações de grafos no plano, mas esses conceitos serão utilizados

Capítulo 2. Preliminares 4
para ilustrar e exemplificar ideias.
2.2 Isomorfismo de grafos
Os grafos da Figura 2.4 compartilham algumas propriedades entre si (como o número
de vértices e de arestas), dando a impressão que são dois grafos iguais.
G
1 2 3
4 5 6
H
1 2 3
4 5 6
Figura 2.4: Dois grafos isomorfos.
Claramente, esses grafos não são iguais pois seus respectivos conjuntos de arestas
não são os mesmos: G possui a aresta {2, 4} e H não; G possui a aresta {2, 6}
e H não; H possui a aresta {4, 5} enquanto G não a possui. No entanto, pode-se
dizer que, de algum modo, esses grafos compartilham certas propriedades, como
conjunto de vértices e padrão de vizinhanças. A definição a seguir, que é central
nesta dissertação, formaliza o que acabamos de dizer.
Dois grafos G e H são isomorfos se há uma bijeção ϕ : V (G) → V (H) tal que,
para todo par de vértices i, j ∈ V (G), tem-se
{i, j} ∈ E(G) ⇐⇒ {ϕ(i), ϕ(j)} ∈ E(H).
Uma bijeção com esta propriedade é chamada de isomorfismo. Se G e H são iso-
morfos, denota-se esse fato pela expressão G ∼= H.
O conjunto de todos os isomorfismos entre G e H é denotado por Iso(G,H).

5 2.3. Simetrias em grafos
Note que Iso(G,H) é um conjunto de funções.
A Tabela 2.1 mostra um isomorfismo entre os grafos G e H da Figura 2.4.
Tabela 2.1: Um isomorfismo entre G e H .
i 1 2 3 4 5 6ϕ(i) 1 5 3 4 2 6
Seja G = (V,E) um grafo e seja K o conjunto de todos os pares não ordenados
de V . Então G = (V,K\E) é chamado de grafo complementar de G, ou simples-
mente, de complemento de G. É um fato simples que, se G ∼= H, então G ∼= H.
2.3 Simetrias em grafos
Alguns grafos, como o da Figura 2.5 são visualmente simétricos2. O grafo da Fi-
gura 2.5 é chamado de cubo. Em geral, um hipercubo de dimensão n é um grafo
Qn = (V,E) onde os conjuntos V e E são dados por
V = {0, 1}n
E = {{u, v} ⊆ V | u difere de v em apenas um bit}
2O conceito de grafo simétrico será enunciado após o conceito de automorfismo

Capítulo 2. Preliminares 6
Q3
000 001
010 011 100
101
110 111
Figura 2.5: Hipercubo de dimensão 3.
O hipercubo de dimensão n > 3 também é simétrico, embora não seja tão fácil
de se perceber isso pela observação de uma imersão do Qn no plano. Para forma-
lizar o conceito de simetrias em grafos de modo abstrato utilizamos o conceito de
automorfismo.
Um automorfismo de um grafo G = (V,E) é uma permutação3 ϕ : V → V que
preserva as adjacências em G, isto é, que satisfaz
{i, j} ∈ E ⇐⇒ {ϕ(i), ϕ(j)} ∈ E
para todo par de vértices i, j ∈ V .
O conjunto de todos os automorfismos ϕ de um grafo G é denominado Aut(G),
isto é, tem-se
Aut(G) = {ϕ : V → V | ϕ é automorfismo de G}.
Todo grafo possui um automorfismo trivial, a permutação identidade. Se um grafo
3Uma permutação é uma bijeção de um conjunto nele mesmo.

7 2.4. Problemas computacionais
não possui nenhum automorfismo, exceto o trivial, ele é chamado de grafo rígido.
1 2 3 4 5
6
Figura 2.6: Um grafo rígido.
Um grafo G é não rígido se |Aut(G)| > 1, ou seja, se G não for rígido. Os grafos
das Figuras 2.1 e 2.5 são exemplos de grafos simétricos.
Um grafo G é vértice-transitivo se, dado qualquer par de vértices u, v, há um
automorfismo ϕ : V → V tal que ϕ(u) = v.
Um grafo G é aresta-transitivo se, dados quaisquer dois pares de vértices adja-
centes i1, j1 e i2, j2, há um automorfismo ϕ : V → V tal que ϕ(i1) = i2 e ϕ(j1) = j2.
Um grafo G é simétrico se é vértice-transitivo e aresta-transitivo.
O conjunto de todas as permutações de {1, 2, . . . , n} é denotado por Sn. O grafo
completo com n vértices é um exemplo de grafo para o qual Aut(G) = Sn.
Dado um grafo G = (V,E) e uma função injetora ϕ : V → V , denotamos por
ϕ(G) o grafo definido por
ϕ(G) = (V,ϕ(E))
onde ϕ(E) ={{ϕ(u), ϕ(v)} : {u, v} ∈ E(G)
}
.
2.4 Problemas computacionais
As definições4 que se seguem foram baseadas nas referências [18] e [33].
4Estas definições são baseadas em um modelo computacional de Turing

Capítulo 2. Preliminares 8
Um alfabeto é um conjunto finito cujos elementos são chamados de símbolos. Uma
palavra sobre um alfabeto Σ é uma sequência finita de símbolos de Σ. O comprimento
de uma palavra w é o número de elementos da sequência w e é denotado por |w|. O
conjunto de todas as palavras sobre Σ é denominado Σ∗. Uma linguagem sobre um
alfabeto Σ é um subconjunto de Σ∗.
Em computação, um tipo de problema muito estudado é o problema de decisão.
Problemas desse tipo admitem apenas as respostas sim ou não. Por exemplo, des-
cobrir se uma página na web contêm o texto “index of” é um problema de decisão;
descobrir se a conectividade de uma rede de computadores é tolerante à falha de k
máquinas nessa rede é outro problema de decisão.
Todo problema de decisão em computação corresponde ao problema de se decidir
se uma dada palavra w sobre um alfabeto Σ pertence ou não a uma linguagem L.
Neste trabalho, os termos linguagem e problema se referem ao mesmo conceito. Por
isso, quando se diz que um algoritmo A decide uma linguagem L, o que se quer dizer
é que o algoritmo A, ao receber uma palavra w como entrada, devolve corretamente
sim caso w ∈ L e não caso w 6∈ L.
2.4.1 Classes de problemas
Classificamos os problemas de decisão em classes de complexidade de acordo com
a quantidade de recursos5 necessários para resolvê-los. Embora existam diversas
classes de complexidade, este trabalho apenas faz referência às classes P e NP, que
serão definidas a seguir (conforme [18]).
Uma linguagem L pertence à classe P se existe um polinômio p(n) e um algoritmo
que decide L cujo tempo total de execução com entrada w (até uma resposta sim
ou não) não ultrapassa p(|w|).
Uma linguagem L está na classe NP se e somente se há uma linguagem A ∈ P5As definições apresentadas são aplicadas ao modelo computacional de Turing.

9 2.4. Problemas computacionais
e um polinômio p(n) tal que, para toda palavra x ∈ Σ∗, tem-se x ∈ L se e somente
se existe y ∈ Σ∗ com |y| ≤ p(|x|) tal que (x, y) ∈ A. A palavra y é chamada de um
certificado para x ∈ L.
Sejam A e B duas linguagens. Dizemos que A é Turing-redutível a B em tempo
polinomial (escreve-se A ≤pT B) se existe um algoritmo que decide A, que executa
em tempo polinomial, e que pode ter instruções condicionais na forma
se y ∈ B então . . . senão . . . fim.
onde considera-se (para o cômputo do consumo de tempo do algoritmo) que uma
consulta da forma y ∈ B leva tempo constante.
2.4.2 NP-Completo
Uma linguagem L é NP-Completo se L ∈ NP e toda linguagem em NP é Turing-
redutível a L. Esta classe é de suma importância para o entendimento do problema
P versus NP, pois haverá um algoritmo em tempo polinomial para um problema NP-
Completo se e somente se todo problema em NP possuir um algoritmo em tempo
polinomial que o resolva. Em outras palavras, se houver um algoritmo polinomial
para um problema NP-Completo, então P = NP. Como há evidências que P e NP
são diferentes, a prova de que um problema é NP-Completo é considerada uma forte
evidência desta intratabilidade.


CAPÍTULO 3
Isomorfismo de Grafos
Neste capítulo, apresentamos dois problemas computacionais: o Problema do Iso-
morfismo de Grafos e o Problema do Automorfismo de Grafos. Daremos também
algumas aplicações do Problema do Isomorfismo em situações práticas.
3.1 Problema do Isomorfismo de Grafos
Definimos a versão de decisão para o Problema do Isomorfismo de Grafos (PIG)
do seguinte modo: dado um par de grafos {G,H}, decidir se esse par pertence ao
conjunto
I ={{G,H} | G é isomorfo a H
}
.
Um algoritmo para a versão de decisão do PIG retorna sim se os grafos da entrada
forem isomorfos e não caso contrário.
O melhor algoritmo conhecido para o PIG é o proposto por Babai e Luks em [4],

Capítulo 3. Isomorfismo de Grafos 12
que possui tempo de execução 2O(√
n log n), onde n é o número de vértices. Foggia [10]
comparou os algoritmos propostos por Ullmann [36], Cordella[11], McKay [25] e
Schimidt [32], e concluiu que o algoritmo implementado no programa Nauty (e
elaborado por B. McKay [25]) é o mais rápido na prática. Em [35], Torán demonstrou
que o PIG é pelo menos tão difícil quanto o problema de se computar o determinante
de uma matriz com entradas inteiras.
Existem algoritmos que decidem casos especiais do PIG em tempo polinomial.
Tais algoritmos existem para: árvores [18], grafos planares [15], grafos de intervalo
[20], grafos de permutação [7], grafos de genus limitado [26], grafos de grau limitado
[21], e grafos cujos autovalores possuem multiplicidade limitada [3]. No entanto, não
se conhece nenhum algoritmo eficiente para o caso geral e portanto não se sabe se
o PIG está na classe P ou se é NP-Completo [16], embora suspeita-se que ele esteja
estritamente entre as duas classes [2]. Por outro lado, dados dois grafos G e H e um
mapa ϕ entre seus conjuntos de vértices, há um algoritmo polinomial que decide se
ϕ é um isomorfismo entre os grafos dados.
Algoritmo 1: Um verificador para o PIGEntrada: Grafos G e H com mesmo número de vértices, e função injetora
ϕ : V (G)→ V (H)Saída: sim se ϕ(G) = H e não caso contrárioinício
para todo u ∈ V faça
para todo v ∈ V faça
se {u, v} ∈ E(G) e {ϕ(u), ϕ(v)} /∈ E(H) então
retorna não
fim se
se {u, v} /∈ E(G) e {ϕ(u), ϕ(v)} ∈ E(H) então
retorna não
fim se
fim para todo
fim para todo
retorna sim
fim

13 3.2. Problema do Automorfismo de Grafos
Conforme a definição de certificado, (vide seção 2.4.1), sabemos que o PIG per-
tence à classe NP. Para demonstrar tal afirmação, considere a linguagem
A ={
({G,H}, ϕ) : G,H são grafos e ϕ ∈ Iso(G,H)}
Note que {G,H} ∈ PIG ⇔ ({G,H}, ϕ) ∈ A. Ademais, A ∈ P pois o Algo-
ritmo 1 decide A e é claramente polinomial. Note também que qualquer mapea-
mento ϕ : V (G) → V (H) pode ser representado usando tamanho O(n). Com isso,
podemos concluir que PIG ∈ NP.
3.2 Problema do Automorfismo de Grafos
Seja G um grafo. Decidir se o grupo de automorfismos de G possui algum auto-
morfismo diferente do trivial é um problema de decisão chamado Problema do Au-
tomorfismo de Grafos (PAG), e consiste em determinar se G pertence ao conjunto
A = {G : |Aut(G)| > 1}.
Assim como o PIG, o Problema do Automorfismo de Grafos também pertence à
classe NP [18].
3.3 Relação entre os problemas
Podemos mostrar que o PAG é Turing-redutível ao PIG. Antes de mostrarmos a
redução, precisamos da seguinte definição: G[i] é o grafo obtido de G ligando ao
vértice i um caminho com |V (G)| + 1 novos vértices. O propósito desta construção
é que todo automorfismo deste grafo modificado mapeia o vértice i em si mesmo, e
além disso, não ocorre no grafo modificado nenhum automorfismo que não estivesse

Capítulo 3. Isomorfismo de Grafos 14
presente no grafo original (isto é, Aut(G[i]) ⊆ Aut(G)).
A ideia central da Turing-redução apresentada no Algoritmo 2 é a seguinte: se os
grafos G e H são isomorfos, e existe um isomorfismo ϕ de G em H tal que v = ϕ(u),
então os grafos G[u] e H[v] também são isomorfos. O Algoritmo 2 computa o PAG
em tempo polinomial fazendo consultas de decisão ao PIG como descrito a seguir.
Algoritmo 2: Algoritmo para o PAG usando consultas ao PIGEntrada: Grafo G com conjunto de vértices {1, 2, . . . , n}Saída: sim se |Aut(G)| > 1 e não se G é rígidoinício
para i← 1 até n− 1 faça
para j ← i+ 1 até n faça
se {G[i], G[j]} ∈ PIG entãoretorna sim
fim se
fim para
fim para
retorna não
fim
Retomando a demonstração da corretude da Turing-redução, o grafo G possui
um automorfismo não trivial se, e somente se, G tem um automorfismo que mapeia
i em j para algum par de vértices i 6= j. Pela observação no parágrafo que precede o
Algoritmo 2, um automorfismo que mapeia i em j existe se, e somente se, os grafos
G[i] e G[j] são isomorfos. Como o algoritmo testa todas as possíveis combinações
de diferentes vértices i e j, ele consegue determinar, em tempo O(n2) se o grafo
de entrada é rígido ou não. Portanto PAG ≤pT PIG. Atualmente não se conhece
nenhuma Turing-redução do PIG ao PAG [18].
3.4 Problema do Isomorfismo de Subgrafos
Dados dois grafos G e H, o Problema do Isomorfismo de Subgrafos consiste em
decidir se H é isomorfo a algum subgrafo de G, ou seja, se H pode ser transformado

15 3.5. Aplicações práticas
em um subgrafo de G apenas renomeando-se seus vértices. Este problema é uma
generalização do PIG e pertence à classe dos problemas NP-Completos, que são os
problemas mais difíceis da classe NP [37].
3.5 Aplicações práticas
Nesta seção, destacaremos algumas aplicações práticas onde o problema de isomor-
fismo de grafos é utilizado.
3.5.1 Impressões digitais
Nandi [27] utiliza o PIG para confrontar imagens de impressões digitais, que são
representadas por grafos gerados pelas características presentes em cada imagem.
Cada uma dessas características representa um vértice no grafo, e as arestas re-
presentam as relações que estas características possuem entre si. Para verificar se
uma impressão digital corresponde a outra, resolve-se uma instância do Problema
do Isomorfismo dos Grafos. Para essa aplicação, seria desejada a existência de um
algoritmo polinomial para o PIG ou que as instâncias geradas a partir das imagens
de impressões digitais fossem grafos de uma das classes onde o PIG é solúvel em
tempo polinomial (como aquelas listadas na Seção 3.1).
3.5.2 Zero knowledge proof
Sistemas de zero knowledge proof 1 tem aplicações em criptografia e protocolos de
segurança que requerem autenticação. Uma dessas aplicações, que se baseia na
dificuldade de se resolver o PIG, é descrita a seguir.
Um agente P conhece um circuito Hamiltoniano C em um grafo G, e um ou-
tro agente, chamado Q, conhece o grafo G mas não o circuito Hamiltoniano. O
1Adaptado de [18] e [13]

Capítulo 3. Isomorfismo de Grafos 16
agente Q está disposto a pagar uma grande quantia em dinheiro pelo circuito Ha-
miltoniano2 C, porém, antes de fazer o pagamento, ele precisa se certificar de que
P realmente conhece o circuito Hamiltoniano que diz conhecer. O agente P, por sua
vez, precisa provar a Q que conhece o circuito C sem revelá-lo, pois se o revelar a
Q, este poderá ser desonesto e não fazer o pagamento, uma vez que já adquiriu o
objeto de seu desejo.
Os dois começam, então, um jogo no qual, em cada rodada, P escolhe uma per-
mutação qualquer ϕ : V (G) → V (G) e cria um grafo H = ϕ(G) (que é claramanete
isomorfo a G) e o envia a Q. Note que, se P conhece um circuito Hamiltoniano C
em G, então ele também conhece um em H, a saber, o circuito ϕ(C). Em seguida,
Q solicita a P que revele exatamente uma dentre duas coisas: ou o isomorfismo ϕ
entre G e H, ou um circuito Hamiltoniano em H. Se Q solicitou um isomorfismo,
então P mostra o mapeamento ϕ e Q verifica que, de fato, este mapeamento é um
isomorfismo de G em H. Se Q solicitou o circuito, P mostra o circuito ϕ(C) em H.
As respostas de P não revelam o ciclo Hamiltoniano original em G (a menos
que Q seja tão poderoso computacionalmente que consiga resolver o PIG). A cada
rodada, Q saberá apenas o isomorfismo de H em G ou um circuito Hamiltoniano
em H, mas nunca ambos numa mesma rodada. Ele precisaria de ambas as respostas
na mesma rodada a fim de descobrir o circuito em G; assim, a informação permanece
protegida.
Para ser capaz de responder às duas perguntas corretamente, P deve conhecer
um isomorfismo entre G e H e também um circuito Hamiltoniano em H (e portanto
também em G). Suponhamos agora que P não conheça um circuito Hamiltoniano
e esteja tentando enganar Q para ficar com o dinheiro. A cada rodada, P não sabe
qual pergunta lhe será feita até enviar H para Q. O agente P pode tentar adivinhar
qual pergunta Q irá fazer e gerar o grafo H de acordo. Se P acha que Q irá lhe
2Um circuito é Hamiltoniano quando vértice é visitado apenas uma vez.

17 3.5. Aplicações práticas
perguntar um isomorfismo ele pode gerar um grafo H isomorfo a G. Nesse caso,
suas más intenções seriam descobertas caso Q lhe fizesse a outra pergunta pois ele
não conhece um circuito Hamiltoniano em G (e portanto também não o conhece
em H). Se P acha que Q irá lhe perguntar por um circuito Hamiltoniano ele pode
tentar gerar um grafo H que tenha um tal circuito, mas seria desmascarado caso Q
lhe pedisse por um isomorfismo.
Com isso, se Q escolhe a pergunta aleatoriamente com probabilidade 1/2, a
chance de P enganar Q é de 2−n, onde n é o número de rodadas. Portanto, após um
número razoável de rodadas, Q se convence, com um alto grau de confiabilidade, de
que P de fato conhece um circuito Hamiltoniano em G.
Observa-se que, enquanto a primeira aplicação seria beneficiada caso PIG ∈
P , a segunda perderia completamente seu sentido, pois baseia-se na dificuldade
computacional de se decidir a linguagem PIG.
3.5.3 Aplicações em química
Para se determinar se uma molécula possui uma estrutura similar a uma outra, é
necessário fazer uma comparação desta molécula com um banco de dados de molé-
culas existentes. Cada molécula é representada por um grafo, onde os vértices são os
átomos e as arestas correspondem às ligações atômicas. O processo de comparação
consiste em verificar se as estruturas moleculares são idênticas, ou seja, se os grafos
que representam duas moléculas são isomorfos [30].
3.5.4 Outras aplicações
O autor Conte [8] utiliza o PIG para o reconhecimento de padrões. Já Farouk [9]
trabalha com o reconhecimento de imagens e Pedarsani [29], em seu artigo, trata da
segurança de informação em redes sociais, todos utilizam o PIG para a resolução de
seus problemas.

Capítulo 3. Isomorfismo de Grafos 18
3.6 Revisão bibliográfica
Para a realização desta pesquisa foram consultados diversos trabalhos, entre artigos
e dissertações. O primeiro a ser destacado é o artigo escrito por McKay [25], onde o
autor apresenta um algoritmo para o PIG. Este algoritmo determina uma represen-
tação canônica dos grafos utilizando um particionamento ordenado de seus vértices.
Todos os vértices de uma partição possuem uma mesma rotulação, distinguindo-os
dos demais vértices do grafo. Este particionamento é calculado aplicando-se um con-
junto de invariantes de vértices a uma primeira partição, que, inicialmente, agrupa
todos os vértices do grafo. Ao final do processo, dois grafos são isomorfos se, e
somente se, possuem a mesma representação. No Capítulo 6 descreveremos com
maiores detalhes o algoritmo proposto por McKay.
Para obter o referencial teórico do Problema do Isomorfismo de Grafos, foi es-
tudado o livro de Köbler, Schöning e Torán [18]. Este livro traz as definições do
PIG e do PAG, apresenta quais problemas computacionais são redutíveis ao PIG,
e apresenta uma abordagem muito detalhada do PIG do ponto de vista de sua
complexidade.

CAPÍTULO 4
Emparelhamentos em grafos bipartidos
O algoritmo que será proposto no Capítulo 5 utiliza emparelhamentos em um grafo
bipartido para a verificação do isomorfismo entre dois grafos G e H. Portanto, neste
capítulo vamos apresentar o conceito de emparelhamento, e também um método
eficiente para enumerar todos os emparelhamentos perfeitos de um grafo bipartido.
4.1 Definições
Um grafo G é chamado bipartido se seu conjunto de vértices V pode ser dividido em
dois conjuntos disjuntos V1 e V2, onde toda aresta de G é da forma {u, v} com u ∈
V1, v ∈ V2.
Dado um grafo G, um emparelhamento M em G é um conjunto de arestas disjun-
tas duas a duas. Um vértice é dito saturado (ou coberto) por M quando é incidente
a uma aresta do emparelhamento. Um emparelhamento M é dito: perfeito quando
todos os vértices estão saturados; maximal quando não há nenhum emparelhamento

Capítulo 4. Emparelhamentos em grafos bipartidos 20
M ′ que contenha propriamente M ; e máximo se não existe um emparelhamento
com maior número de arestas que M . Observe que todo emparelhamento perfeito é
máximo.
Um caminho em um grafo é chamado de caminho alternante em relação a um
emparelhamento M (ou M -alternante) se, para quaisquer duas arestas consecutivas
desse caminho, uma está em M e a outra não. Um caminho alternante é dito
caminho aumentante em relação a M (ou M -aumentante) quando o primeiro e o
último vértice não estão saturados por M .
Um grafo dirigido (ou digrafo) ~G é um par ordenado (V,A) onde V é um conjunto
finito de vértices e A é um conjunto de pares ordenados de V chamados arcos. Seja
a = (u, v) um arco de ~G, dizemos que u é o vértice de partida e v o vértice de chegada
de a. Dizemos ainda que o arco a é orientado de u para v. A vizinhança de saída
de um vértice u é o conjunto N+(u) = {v ∈ V ( ~G) : (u, v) ∈ A( ~G)}.
Dados um grafo bipartido G = (V1 ∪ V2, E) e um emparelhamento M de G,
definimos o digrafo associado como sendo o digrafo ~D = ~D(G,M), onde V (~D) =
V (G) e A(~D) é o conjunto de arcos que é obtido orientando-se as arestas de M de
V1 para V2 e as arestas de E \M no sentido oposto. A Figura 4.1 nos mostra um
exemplo de um grafo bipartido G, de um emparelhamento perfeito M em G e do
digrafo associado ~D(G,M).
4.2 Encontrando um emparelhamento máximo
Nesta seção, apresentamos um algoritmo para encontrar um emparelhamento má-
ximo em um grafo bipartido. Porém, antes de apresentarmos tal algoritmo, vamos
enunciar o Teorema de Berge1, que será importante para seu entendimento.
Teorema 1. Um emparelhamento M de um grafo G é máximo se e somente se não
1Adaptado de [17] e [31]

21 4.2. Encontrando um emparelhamento máximo
0 1 2 3
4 5 6 7
0 1 2 3
0 1 2 3
4 5 6 7
4 5 6 7
G
M
~D(G,M)
Figura 4.1: Grafo dirigido por um emparelhamento perfeito.
existe um caminho M -aumentante em G.
Demonstração. Se existe um caminho M -aumentante P , podemos criar um empa-
relhamento maior eliminando as arestas de M que pertencem a P e incluindo as
arestas de P que originalmente não pertençam a M . Note que esta permuta de
arestas corresponde a tomar o emparelhamento2 M∆P . Para provar a recíproca,
suponhamos que M não é máximo. Portanto, existe um outro emparelhamento M ′
com mais arestas que M . Considere o grafo H definido por H = (V (G),M∆M ′).
Cada vértice v ∈ V (H) tem grau 0, 1 ou 2 porque v pode ser incidente em, no
máximo, uma aresta de M e uma de M ′. As componentes conexas de H podem
2O símbolo ∆ denota a operação de diferença simétrica entre dois conjuntos.

Capítulo 4. Emparelhamentos em grafos bipartidos 22
então ser: ou vértices isolados, ou circuitos de ordem par3 com arestas alternadas
de M e de M ′, ou ainda caminhos com arestas alternadas de M e de M ′. Como
|M ′| > |M |, o grafo H tem mais arestas de M ′ que de M e, portanto, pelo menos
uma das componentes de H é um caminho que começa e termina com arestas de M ′
(e que não pertencem a M); esse caminho é um caminho M -aumentante no grafo
G. Isso encerra a prova do teorema.
Com base no conceito de caminho M -aumentante e no Teorema 1, podemos de-
senvolver um algoritmo que encontra um emparelhamento máximo (Algoritmo 3).
A ideia do algoritmo é encontrar caminhos M -aumentantes e fazer a permuta das
arestas de M com as arestas dos caminhos encontrados. A busca por caminhos
aumentantes e a permuta de arestas são realizadas sucessivamente até que o em-
parelhamento corrente seja máximo4. Vamos usar S para denotar o conjunto de
vértices saturados.
O algoritmo tem como entrada um grafo G e um emparelhamento inicial M , que
pode ser vazio. Note que, caso M = ∅, todas os arcos de ~D(G,M) serão orientados
em um único sentido. Quanto maior for o emparelhamento inicial M , mais rápido o
algoritmo encontra um emparelhamento máximo.
Em seguida, para todo vértice a ∈ V1 não saturado, é realizada uma busca em
profundidade, e é obtido um caminho dirigido P entre a e um vértice não saturado
b ∈ V2. O vértice a é não saturado pela própria escolha de a (na linha 8 do Al-
goritmo 3) e b é não saturado pois é o vértice devolvido pelo algoritmo de busca
em profundidade (Algoritmo 4), que possui justamente como critério de parada en-
contrar um vértice não saturado em V2 (veja linha 2). Note que P é um caminho
M -aumentante, pois começa em a e termina em b[a], que são ambos não saturados.
3Circuitos que possuem um número par de arestas.4Este algoritmo é uma adaptação do algoritmo de Hopcroft-Karp, disponível em [14]

23 4.2. Encontrando um emparelhamento máximo
Algoritmo 3: Encontrar emparelhamento máximo de um grafo GEntrada: Grafo bipartido G = (V1 ∪ V2, E), emparelhamento M
1 início
2 S ← {v ∈ V1 ∪ V2 : v incide em alguma aresta de M}3
~D ← ~D(G,M)4 repita
5 para todo v ∈ ~D(G) faça
6 pai[v]← NULL7 fim para todo
8 para todo a ∈ V1 \ S faça
9 pai[a] = a10 b[a]← Busca(a)11 fim para todo
12 para todo a ∈ V1 \ S faça
13 se b[a] 6= NULL então
14 Inverte(b[a])15 S ← S ∪ {a, b[a]}16 fim se
17 fim para todo
18 até até que a cardinalidade de S não aumente;19 fim
Uma vez encontrado o caminho M -aumentante P de a até b, o emparelha-
mento M é substituido por M∆P . Essa atualização do emparelhamento é feita de
modo implícito, invertendo-se a orientação dos arcos no caminho P (através de uma
chamada ao Algoritmo 5). Desse modo o novo grafo ~D é, na realidade, ~D(G,M∆P ).
O laço entre as linhas 4 e 18 do Algoritmo 3 é executado até que não seja mais
possível saturar nenhum novo vértice, ou seja, até que nenhum outro caminho M -
aumentante possa ser encontrado. Quando isto ocorre, pelo Teorema 1, temos que
M é máximo.

Capítulo 4. Emparelhamentos em grafos bipartidos 24
Algoritmo 4: BuscaEntrada: vértice uSaída: vértice b ou NULL
1 início
2 se u ∈ V2 e N+(u) = ∅ então
3 retorna u4 fim se
5 para todo v ∈ N+(u) faça
6 se pai[v] = NULL então
7 pai[v]← u8 b← Busca(v)9 se b 6= NULL então
10 retorna b11 fim se
12 fim se
13 fim para todo
14 retorna NULL
15 fim
4.3 Enumerando os emparelhamentos perfeitos
Nesta seção apresentamos um algoritmo que enumera os emparelhamentos perfeitos
em um grafo bipartido G, baseado no algoritmo proposto por Uno [38]. Seja G
um grafo bipartido, M um emparelhamento perfeito de G e ~D = ~D(G,M) o grafo
dirigido associado. Podemos obter um novo emparelhamento de G permutando
arestas de M com arestas presentes em um circuito ou em caminhos M -alternantes
de ~D. Em outras palavras, o grafo gerado pela diferença simétrica de M com um
emparelhamento diferente é composta por circuitos, caminhos alternantes ou vértices
isolados.
Como em um emparelhamento perfeito todos os vértices estão saturados, o grafo
gerado pela diferença simétrica entre dois emparelhamentos perfeitos é composta
apenas por circuitos alternantes e vértices isolados. Portanto, um grafo G possuirá
emparelhamentos perfeitos diferentes de M somente se o digrafo ~D(G,M) possuir
circuitos alternantes. Portanto, a ideia central do Algoritmo 9 é encontrar um cir-

25 4.3. Enumerando os emparelhamentos perfeitos
Algoritmo 5: InverteEntrada: vértice b
1 início
2 x← b3 enquanto pai[x] 6= x faça
4 Remover arco (pai[x], x) de ~D
5 Inserir arco (x, pai[x]) em ~D6 x← pai[x]7 fim enquanto
8 fim
cuito dirigido ~C no digrafo ~D(G,M) e permutar suas arestas com as arestas empa-
relhamento perfeito M . Essa permuta irá gerar um novo emparelhamento perfeito
M ′ = M∆ ~C. Um modo de se encontrar um circuito dirigido em ~D seria fazer uma
busca em profundidade no grafo ~D, buscando uma aresta de retorno [19]. Uma outra
maneira é decompor ~D em componentes fortemente conexas (este assunto será abor-
dado na próxima seção). Este método é mais eficiente em relação ao primeiro pois
é possível encontrar todos os circuitos com apenas duas buscas em profundidade.
4.3.1 Componentes fortemente conexas
Uma componente fortemente conexa de um digrafo ~G = (V,A) é um subconjunto
maximal de vértices S ⊆ V ( ~G) tal que, para todo par de vértices u e v em S, há um
caminho de u a v e vice-versa. O grafo transposto de ~G é o grafo ~GT = (V,AT ) onde
AT ={
(u, v) : (v, u) ∈ A(G))}
. A Figura 4.2 apresenta as componentes fortemente
conexas de um digrafo ~D.
Os conceitos de circuito dirigido e componentes fortemente conexas estão associa-
dos, visto que um arco está em um circuito dirigido se e somente se suas extremidades
estão em uma mesma componente fortemente conexa. De fato, sejam u e v vértices
e F uma componente fortemente conexa de um digrafo ~G. Como u, v ∈ F , haverá
um caminho P de u até v e um caminho P ′ de v até u. Com isso, é fácil verificar

Capítulo 4. Emparelhamentos em grafos bipartidos 26
que P ∪ P ′ contém um circuito. Portanto, um modo de se encontrar um circuito
~C no grafo ~D(G,M) é executar um algoritmo que particiona os vértices de ~D em
componentes fortemente conexas e, em seguida, verificar quais arcos pertencem a
uma mesma componente fortemente conexa.
Suponha que um arco e não pertença a nenhum circuito. Podemos excluir o
arco e do digrafo ~D pois ele será irrelevante para encontrarmos um emparelhamento
perfeito M ′. Neste ponto, suponha que o arco e tenha sido removido de ~D. Vamos
analisar os dois casos possíveis para o arco e: em primeiro lugar, se e ∈ M , então
e estará presente também em M ′ = M∆C. No segundo caso, se e /∈ M , então
e /∈M ′ = M∆C. Em ambos os casos, a presença de e em ~D não teve relevância para
encontrarmos um novo emparelhamento perfeito M ′. Portanto, podemos excluir e
de ~D sem nenhum prejuízo ao emparelhamento M ′.
0 1 2 3
4 5 6 7
~D
Figura 4.2: Componentes fortemente conexas em um digrafo ~D.
Como não estamos apenas interessados em encontrar um circuito em ~D, mas
também em eliminar do grafo ~D todos os arcos que não pertencem a circuitos, é
importante encontrar todos os circuitos de ~D. Para tanto, optamos por utilizar um
algoritmo (com custo de tempo linear, ou seja, O(|V | + |E|)) que particione ~D em
componentes fortemente conexas. Na próxima seção vamos apresentar um algoritmo
que faça essa decomposição e na Seção 4.3.2 vamos explicar como remover de ~D os

27 4.3. Enumerando os emparelhamentos perfeitos
arcos que não estão em circuitos usando componentes fortemente conexas.
Algoritmo para decomposição em componentes fortemente conexas
O Algoritmo 6 decompõe um digrafo em suas componentes fortemente conexas5, e
depende dos Algoritmos 7 e 8, que executam uma busca em profundidade a partir
de um conjunto ordenado de vértices.
Algoritmo 6: ComponentesFortementeConexas
Entrada: Digrafo ~GSaída: Vetor C2
1 início
2 F0 ← ordem qualquer dos vértices de V ( ~G)3 (F1, C1)← DFS(~G,F0)4 (F2, C2)← DFS(~GT , F1)5 retorna C2
6 fim
Nos Algoritmos 7 e 8 temos um vetor chamado pai, que é utilizado para guardar
as árvores de uma floresta de busca em profundidade. Para todo nó v em uma árvore
de busca, o nó pai de v estará armazenado em pai[v]. Definimos também que os
vértices ainda não explorados pela busca em profundidade recebem o valor NULL
como pai e um vértice raiz de uma árvore de busca terá a si mesmo como pai.
Temos também nos Algoritmos 7 e 8 um estrutura do tipo fila, denominada F ,
que armazena os vértices na ordem em que eles foram explorados na busca em pro-
fundidade. Note que, na linha 10 do Algoritmo 7 e nas linhas 7 e 10 do Algoritmo 8
temos uma operação de concatenação (representada pelo símbolo ·) entre um vértice
e uma lista de vértices ou entre duas listas de vértices. Observe que ao percorrer-
mos a fila F do fim para o início, temos os vértices de ~G ordenados pelo momento5Adaptado de [19]

Capítulo 4. Emparelhamentos em grafos bipartidos 28
Algoritmo 7: DFS
Entrada: Digrafo ~G, lista de vértices LSaída: Vetor C e Fila F
1 início
2 F ← ∅3 C ← novo vetor com |V ( ~G)| elementos4 para todo u ∈ V ( ~G) faça
5 pai[u]← NULL6 fim para todo
7 k ← 08 para todo u ∈ L faça
9 se pai[u] = NULL então
10 pai[u]← u11 F ← DFSVISIT(u,C) · F12 k ← k + 113 fim se
14 fim para todo
15 retorna F,C
16 fim
em que foram explorados pelo algoritmo de busca em profundidade (vértices mais a
esquerda tiveram sua exploração finalizada por último).
Na linha 11 do Algoritmo 7, k é um contador de componentes da floresta de
busca do digrafo ~G. Ao se encerrar a exploração de uma árvore na floresta de busca
em profundidade, o contador k é incrementado (observe que cada árvore na floresta
da busca inicializada na linha 4 do Algoritmo 6 está associada a uma componente
fortemente conexa) e, ao se iniciar a exploração em uma nova árvore enraizada por
u, o Algoritmo 8 armazena no vetor C a componente fortemente conexa na qual u
e seus descendentes v pertencem (veja linha 3).
Sejam n o número de vértices e m o número de arcos do digrafo ~G. Como todo
vértice u deve ser explorado pela busca em profundidade, temos n chamadas ao
Algoritmo 8 (muitas delas recursivas). Em cada chamada, todo vértice v ∈ N+(u)
será testado. No total, o número de testes realizados será igual ao número de arcos.

29 4.3. Enumerando os emparelhamentos perfeitos
Algoritmo 8: DFSVISITEntrada: vértice u, vetor CSaída: Vértice u concatenado com a Fila F
1 início
2 F ← ∅3 C[u]← k4 para todo v ∈ N+(u) faça
5 se pai[v] = NULL então
6 pai[v]← u7 F ← DFSVISIT(v,C) · F8 fim se
9 fim para todo
10 retorna u · F11 fim
O tempo total gasto para as chamadas ao Algoritmo 8 é O(m). Devemos acrescentar
também o tempo gasto para inicialização do vetor pai (linhas 3 a 5 do Algoritmo
7) e o tempo gasto para se verificar se o vértice s já foi explorado pela busca em
profundidade (linha 8 do Algoritmo 7). Ao todo, isso leva tempo O(n). Portanto, o
tempo de execução6 do Algoritmo 7 é O(n+m).
4.3.2 Gerando novos emparelhamentos
Note que, após a decomposição, as componentes fortemente conexas de ~D serão ou
vértices isolados ou circuitos. Portanto, os arcos de ~D ou estarão em um circuito
ou terão seus vértices de partida e chegada localizados em componentes fortemente
conexas diferentes. O Algoritmo 11 se utiliza desta propriedade para eliminar todos
os arcos que não pertencem a nenhum circuito pois, como veremos mais adiante,
apenas arcos que estejam em um circuito são utilizados para se encontrar novos
emparelhamentos (linha 8 do Algoritmo 9 e linhas 10 e 13 do Algoritmo 10.
Em uma descrição informal, o Algoritmo 9 recebe inicialmente um emparelha-
mento perfeito M (obtido pelo Algoritmo 3) e o digrafo ~D = ~D(G,M) e escolhe um
6Para mais explicações e verificação da corretude do algoritmo, consulte [19]

Capítulo 4. Emparelhamentos em grafos bipartidos 30
arco arbitrário e = (u, v) de ~D, que também pertença a M . No próximo passo, é
encontrado um circuito ~C, contendo e, e é construído um emparelhamento perfeito
M ′ = M∆C. Depois, o algoritmo gera dois novos digrafos: o primeiro é obtido
excluindo-se os vértices u e v e os arcos que incidem neles; o segundo é obtido
excluindo-se o arco e. Em ambos os digrafos obtidos, os arcos que não pertencem
a um circuito são excluídos do digrafo. Por fim, o algoritmo realiza uma chamada
recursiva para cada grafo gerado. Veremos com maiores detalhes o funcionamento
do algoritmo após enunciá-lo.
Com base nas definições acima, e no algoritmo de decomposição em componentes
fortemente conexas, podemos então mostrar o Algoritmo 9, que enumera todos os
emparelhamentos perfeitos em um grafo bipartido.
Algoritmo 9: Enumerar Emparelhamentos PerfeitosEntrada: Grafo bipartido G
1 início
2 Encontrar um emparelhamento perfeito M de G pelo Algoritmo 33 se M não existe então
4 Fim
5 fim se
6 Imprimir M7
~D ← ~D(G,M)8 EliminarArestasDesnecessarias ( ~D)9 EnumEmpPerfeitosRecursivo (~D,M).
10 fim
Primeiramente o Algoritmo 9 verifica se há um emparelhamento perfeito no grafo
dado utilizando o Algoritmo 3. Caso exista, inicia-se o processo de listar todos os
emparelhamentos perfeitos, procurando um circuito C, M -alternante, e gerando um
novo emparelhamento perfeito M ′ = M∆C. O próximo passo é escolher um arco e
que esteja tanto em M quanto no circuito C. Observe que e está em M mas não

31 4.3. Enumerando os emparelhamentos perfeitos
Algoritmo 10: EnumEmpPerfeitosRecursivo
Entrada: ~D,M1 início
2 se ~D = ∅ então
3 Fim
4 fim se
5 Encontrar um circuito M -alternante C6 Escolher uma aresta arbitrária e ∈ C ∩M7 M ′ ← C∆M8 Imprimir M ′
9 Gerar grafo ~D(+e)
10 EliminarArestasDesnecessarias(D(+e))
11 EnumEmpPerfeitosRecursivo (D(+e),M)
12 Gerar grafo D(−e)
13 EliminarArestasDesnecessarias(D(−e))
14 EnumEmpPerfeitosRecursivo (D(−e),M ′)
15 fim
em M ′. No próximo passo, o algoritmo gera dois subproblemas de mesma natureza:
enumerar todos os emparelhamentos perfeitos que possuem e, e todos os empare-
lhamentos perfeitos que não possuem o arco e. Vamos analisar primeiramente o
segundo caso: para enumerar os emparelhamentos perfeitos que não contém e, con-
sideramos o digrafo ~D(−e) que é obtido removendo-se o arco e de ~D, e em seguida o
Algoritmo 10 chama-se a si mesmo, passando como parâmetro o digrafo D(−e) e o em-
parelhamento perfeito M ′. Já no primeiro caso, para enumerar os emparelhamentos
perfeitos que possuem e, consideramos o grafo D(+e) que é obtido removendo-se de ~D
as extremidades de e, e todos os arcos que partem ou chegam nelas. Note que todo
emparelhamento perfeito de D(+e) corresponde a um único emparelhamento perfeito
de ~D que contém e. Portanto, para se enumerar os emparelhamentos perfeitos que
contém e, o Algoritmo 10 executa uma chamada recursiva, tendo como parâmetros
D(+e) e M . Note que um emparelhamento perfeito de D(
+e) não conterá o arco e,

Capítulo 4. Emparelhamentos em grafos bipartidos 32
Algoritmo 11: EliminarArestasDesnecessarias
Entrada: ~D1 início
2 cfc← ComponentesFortementeConexas ( ~D) para todo (u, v) ∈ A( ~D)faça
3 se cfc(u) 6= cfc(v) então
4 A(~D)← A(~D) \ (u, v)5 fim se
6 fim para todo
7 fim
porém e estará presente em M (que foi passado como parâmetro na chamada recur-
siva). Portanto, todo emparelhamento perfeito obtido pela diferença simétrica de
M com um circuito dirigido de D(+e) é um emparelhamento perfeito do grafo G que
contém e.
4.3.3 Análise de complexidade
Nesta seção, vamos analisar a complexidade de tempo para enumerar todos os em-
parelhamentos perfeitos de um grafo bipartido.
Primeiramente, vamos analisar a complexidade do Algoritmo 3, que encontra
um emparelhamento máximo em um grafo bipartido G = (V1 ∪ V2, E). Sejam n =
|V1 ∪ V2| e m = E. Cada execução das linhas 8 a 11 corresponde a um busca em
profundidade no grafo, o que leva tempo O(n + m). Para se inicializar o vetor
pai, gasta-se tempo O(n). Já o Algoritmo 5, no pior caso, levará tempo O(n),
pois um caminho terá, no máximo, n vértices. Temos, no máximo, |V2| chamadas
ao Algoritmo 5, pois no pior caso todos os caminhos a serem invertidos possuirão
apenas uma aresta {a ∈ V1 \ S, b ∈ V2 \ S}. Cada iteração no laço das linhas 4
a 17 levará, no pior caso, tempo O(n2 + n + |V2|) (um grafo bipartido terá, no
máximo, n2 arestas). Teremos, no máximo, n/2 iterações no laço das linhas 4 a 17,
pois inicialmente S pode ser vazio, e no pior caso, apenas 2 vértices são inseridos

33 4.3. Enumerando os emparelhamentos perfeitos
em S a cada iteração (linha 15). Portanto, o Algoritmo 3 demandará um tempo
O(n/2(n2 + n+ |V2|)) = O(n3).
No Algoritmo 10, as operações de eliminar arestas desnecessárias e gerar os digra-
fos D(+e) e D(
−e) levam tempo O(n). Portanto, o tempo de execução do Algoritmo 10
é proporcional a O(n3 + nk), onde k é o número de emparelhamentos perfeitos. Há
um algoritmo mais rápido, que demanda tempo O = (√n(n + m)) [14], porém não
utilizamos devido a complexidade de implementação e também porque ele não me-
lhoraria muito a velocidade de execução na prática do algoritmo para o Problema
do Isomorfismo de Grafos proposto nesta dissertação.


CAPÍTULO 5
Algoritmo para o Problema do Isomorfismo de Grafos
Neste capítulo será apresentado o algoritmo que desenvolvemos para o Problema
do Isomorfismo de Grafos, baseado em um processo de simulação sobre os vértices
de um grafo G. O objetivo destas simulações é encontrar partições do conjunto de
vértices de G, que servirão de base para decidir se dois grafos G e H são isomorfos.
O algoritmo é dividido em três partes principais: a primeira consiste em executar
p-simulações em G e H, aplicando-se uma função f sobre seus respectivos conjuntos
de vértices. Ao final desta etapa, os vértices estarão agrupados em classes, e os
vértices de uma determinada classe compartilham as mesmas propriedades entre si
(grau, padrão de vizinhança).
Na segunda etapa, construímos um grafo bipartido R = (V (G)∪V (H), E), onde
o conjunto de arestas representa a compatibilidade entre os vértices de G e H. Esse
grafo R é construído de acordo com o particionamento de V (G) e V (H) obtidos na
etapa anterior.

Capítulo 5. Algoritmo para o Problema do Isomorfismo de Grafos 36
A terceira etapa consiste em encontrar emparelhamentos perfeitos deR e verificar
se um emparelhamento perfeito M corresponde a um isomorfismo ϕ(V (G))→ V (H).
5.1 Simulação
Como definimos na Seção 2.1.2, o conjunto NG(v) é também chamado de vizinhança
aberta de um vértice v no grafo G. Agora vamos definir NG[v] = NG(v) ∪ {v} como
a vizinhança fechada1de v em G.
Um multiconjunto é definido como um par (X,m), onde X é um conjunto qual-
quer e m : X → N∗ uma função que associa cada elemento deX a um inteiro positivo.
Denotamos por M a família de todos os multiconjuntos finitos de N.
Fixamos um grafo G = (V,E), uma função f :M→ N e um inteiro positivo k.
Para um vértice p ∈ V , que será denominado pivô, uma p-simulação é uma sequência
de vetores x(1), x(2), . . . , x(k) com entradas em N indexados por V que são definidos
indutivamente pela seguinte relação. Para i = 1, atribua x(1)v = 1 se v = p ou
x(1)v = 0 se v 6= p. Para i > 1, defina
x(i)v = f
({x(i−1)w : w ∈ NG[v]}).
Por conveniência, suponha que x(0) é um vetor nulo.
Exemplo
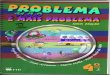
A Figura 5.1 traz o exemplo de uma p-simulação no grafo da Figura 5.2, para k = 8,
com a função f dada por
f(M) =∑
m∈M
m.
1Suprimiremos o subscrito quando o grafo estiver subentendido no texto.

37 5.1. Simulação
p
00
0
0
00
0
0
x(0)
p
10
0
0
00
0
0
x(1)
p
11
0
0
00
0
1
x(2)
79
6
2
02
6
9
x(4)
2528
26
10
210
26
28
x(5)
p
32
2
0
00
2
2
x(3)
p p
291370
350
198
60186
348
370
x(7)
1031
1359
1288
794
258732
1274
1359
x(8)
p
81105
92
48
1246
92
105
x(6)
p p
Figura 5.1: Simulação em um grafo G
5.1.1 Efeitos de uma p-simulação
Sabemos que, na i-ésima rodada de uma p-simulação, x(i)v é o valor atribuído pela
função f ao vértice v. Antes do inicio da p-simulação, todos os vértices possuem
valor 0, não sendo possível distinguir os vértices entre si. Na primeira rodada, temos
que o valor de p é 1 e o valor dos demais vértices é 0. Com isso, podemos dizer que
a primeira rodada de uma p-simulação distingue o vértice pivô dos demais vértices
do grafo. Conforme o número de rodadas vai aumentando, mais vértices podem ser

Capítulo 5. Algoritmo para o Problema do Isomorfismo de Grafos 38
distinguidos uns dos outros através dos valores atribuídos pela função f . Assim, se
na i-ésima rodada os valores de u e v forem diferentes (isto é, se x(i)u 6= x
(i)v ), dizemos
que u é distinguível de v, e estes vértices permanecem distinguíveis até o final da
simulação (mesmo que em alguma rodada posterior eles voltem a ter o mesmo valor).
Desse modo, podemos associar uma partição dos vértices do grafo a cada rodada
de uma p-simulação, onde vértices são agrupados de acordo com seus respectivos
valores naquela rodada. Antes de formalizar o conceito de uma partição associada
a uma rodada vamos definir partição e alguns conceitos relacionados.
5.1.2 Partições
Uma partição de V é uma família de subconjuntos disjuntos não vazios de V , onde
a união de todos eles é o próprio conjunto V . Uma partição ordenada de V é uma
sequência (V1, V2, . . . , Vr) tal que {V1, V2, . . . , Vr} é uma partição de V . O conjunto
de todas as partições de V e o conjunto de todas as partições ordenadas de V são
denotados por P(V ) e P ′
(V ), respectivamente.
Seja π ∈ P(V ) ∪ P ′
(V ) uma partição (ordenada ou não). Cada membro de π
é chamado de célula. Dizemos que uma célula em π é trivial se tiver apenas um
elemento. Se todas as células de π forem triviais, então π é chamada de partição
discreta, enquanto que, se π possuir apenas uma célula, então π é chamada de
partição unitária.
Duas partições ordenadas (V1, V2, . . . , Vr) e (W1,W2, . . . ,Ws) são compatíveis se
r = s e, para todo índice i entre 1 e r, vale que |Vi| = |Wi|.
Seja π = (V1, V2, . . . , Vr) uma partição ordenada de V . Para cada x ∈ V defini-
mos idx(x, π) = i, onde x ∈ Vi.
Sejam π1 e π2 duas partições. Dizemos que π1 é um refinamento de π2 se toda
célula de π1 for um subconjunto de alguma célula de π2. Dizemos que (W1, . . . ,Ws)
é um refinamento ordenado de (V1, . . . , Vr) se:

39 5.1. Simulação
(i) {W1, . . . ,Ws} for um refinamento de {V1, . . . , Vr};
(ii) se Wi ⊆ Va, Wj ⊆ Vb e a < b, então i < j.
5.1.3 Partição associada a uma rodada
Vamos definir agora, para cada i ∈ {0, 1, . . . , k}, uma partição ordenada ψ(i)G,p que
será a partição associada a x(i), ou seja, a partição associada à i-ésima rodada de
uma p-simulação. Em ψ(i)G,p, temos que u está na mesma célula que v se e somente
se
x(j)u = x(j)
v , (5.1)
para todo j, com 1 ≤ j ≤ i. Para definir a ordem das células em ψ(i)G,p, sejam u e v
vértices em células distintas, e seja j, com 1 ≤ j ≤ i, o primeiro índice que viola a
condição (5.1). Nesse caso, a célula de u precede a célula de v em ψ(i)G,p se e somente
se x(j)u < x
(j)v . Observe que, para todo i ∈ [k], ψ(i)
G,p é um refinamento ordenado de
ψ(i−1)G,p .
Proposição 1. Se a função f satisfaz f({0, . . . , 0}) = 0 e f({1, 0, 0, . . . , 0}) 6= 0
então a partição ψ(2)G,p possui exatamente três células, a saber:
ψ(2)G,p =
(
NG(p), NG(p), {p}).
Demonstração. Pela definição de simulação, temos que ψ(1)G,p terá apenas o vértice p
distinguido dos demais, porque o vetor x(1) possuirá o valor 0 em todas as posições,
exceto em x(1)p , que terá o valor 1.
Seja Miv um multiconjunto formado pelos valores do vetor x(i) nas posições
dadas pelos vértices de NG[v], para v ∈ V (G). Na segunda rodada, o vetor x(2) terá
a seguinte configuração: a posição p terá o valor 1, pois em x(1), todas as posições
relativas aos vizinhos de p possuem valor 0, e x(1)p possui valor 1. Logo,M1
p terá um

Capítulo 5. Algoritmo para o Problema do Isomorfismo de Grafos 40
único elemento 1, e os demais serão 0. Com isso, f(M1p) 6= 0 por hipótese.
Agora vamos analisar a aplicação da função nos vizinhos de p. Para todo u ∈
NG(p), o multiconjunto M1u também será formado por um único elemento 1, e
os demais 0. Isso ocorre pois o único vizinho de u que possui o valor 1 em sua
respectiva posição no vetor x(1) é p. Os demais terão o valor 0 em suas posições em
x(1). Também por hipótese, f(M1u) 6= 0.
Para todo o vértice w ∈ NG(p), o multiconjunto M1w conterá apenas elementos
0, pois todas as posições relativas aos vértices da vizinhança fechada de w possui o
valor 0 em x(1). Portanto, f(M1w) = 0 por hipótese.
Com isso, o vetor x(2) apresentará a seguinte configuração: x(2)p = 1, x(2)
u = 1,
para todo u ∈ NG(p), e x(2)w = 0, para todo w ∈ NG(p). Note que, apesar de x(2)
p
e x(2)u poderem possuir os mesmos valores, o vértice p já foi distinguido na primeira
rodada. Com isso, a partição ψ(2)G,p possuirá três células: ψ(2)
G,p[1] contendo os vértices
que não são vizinhos de p, ψ(2)G,p[2], com os vértices vizinhos de p e ψ(2)
G,p[3] contendo
apenas o vértice p, o que encerra a prova.
5.1.4 Algoritmo para uma p-simulação
Antes de apresentarmos o algoritmo para uma p-simulação, é necessário algumas
definições: dada a partição ordenada π, denotamos por π[i] a i-ésima célula de π. O
símbolo · denota a operação de concatenação de duas partições, que é definida por:
π · σ = (π[1], π[2], . . . , π[r], σ[1], σ[2], . . . , σ[s]), onde r = |π| e s = |σ|. Sejam π e σ
duas partições compatíveis. Dizemos que duas células π[i] e σ[j] são correspondentes
se i = j. Seja X uma célula de uma partição, denotamos por X〈j〉 o j-ésimo menor
elemento deX. O Algoritmo 12 formaliza os passos envolvidos em uma p-simulação2.
O Algoritmo 13 subdivide uma célula Z, da partição ψ(k)G,p de acordo com os
2O conceito de partição igualitária será abordado na Seção 5.3

41 5.1. Simulação
Algoritmo 12: SimulaçãoEntrada: G, p, f : M→ N
Saída: Célula ψ(k)G,p
1 início
2 k ← 1
3 ψ(1)G,p ←
(
V (G) \ {p}) · ({p})
4 para todo v ∈ V (G) faça
5 x(1)v ← 0
6 fim para todo
7 x(1)p ← 1
8 repita
9 ψ ← ()
10 t← |ψ(k)G,p|
11 para todo v ∈ V (G) faça
12 x(k)v ← f
({x(k−1)w : w ∈ NG[v]})
13 fim para todo
14 para i de 1 até t faça
15 ψ ← ψ· RefinaCelula(ψ(k)G,p[i], x(k))
16 fim para
17 ψ(k)G,p ← ψ
18 k ← k + 1
19 até ψ(k)G,p seja igualitária;
20 retorna ψ(k)G,p
21 fim
valores obtidos através da aplicação de uma função f em NG(z), para todo z ∈ Z.
Estes valores são armazenados no vetor x(k), na posição z. O primeiro passo é
ordenar os vértices de Z de acordo com os valores que eles possuem no vetor x(k),
de modo crescente. Este passo é realizado para otimizar o processo de verificação
de quais vértices possuem valores iguais no vetor x(k) (pela equação 5.1 dois vértices
a, b estão em uma mesma célula se e somente se x(k)a = x
(k)b ). O próximo passo
do algoritmo é realizar uma varredura no vetor x(k), inserindo os vértices em suas
respectivas células. Uma nova célula é criada sempre que o valor de x(k)s for diferente
de seu antecessor x(k)s−1.

Capítulo 5. Algoritmo para o Problema do Isomorfismo de Grafos 42
Algoritmo 13: RefinaCelula
Entrada: Célula Z, vetor x(k)
Saída: Partição π1 início
2 Ordenar Z conforme o valor de x(k)z para cada z ∈ Z, em ordem crescente
3 j ← 14 π[1]← {Z〈1〉}5 para s de 2 até |Z| faça
6 se x(k)Z<s−1> 6= x
(k)Z〈s〉 então
7 j ← j + 18 π[j]← ∅9 fim se
10 π[j]← π[j] ∪ {Z〈s〉}11 fim para
12 retorna π
13 fim
5.1.5 Árvore de partição
Uma árvore de partição TG,p é construída a partir das partições de V associadas
a cada rodada de uma p-simulação em G. O conjunto de nós dessa árvore é a
união disjunta de todas as partições ψ(i)G,p, para i ∈ {0, 1, . . . , k}. A raiz de TG,p é
o conjunto V (que é uma célula da partição ψ(0)G,p) e um nó A ∈ ψ(i)
G,p é filho de um
nó C ∈ ψ(i−1)G,p se A ⊆ C. Ademais, se dois nós A e B no nível i são filhos de um
mesmo nó C, então A encontra-se à esquerda de B se x(i)a < x
(i)b para algum a ∈ A e
algum b ∈ B; e A encontra-se à direita de B se x(i)a > x
(i)b para algum a ∈ A e algum
b ∈ B. Isto ocorre pois no refinamento de uma célula, os vértices são ordenados de
forma crescente (linha 2 do Algoritmo 13). Por fim, temos que a partição associada
à última rodada da p-simulação será denotada por ψG,p, ou seja, ψG,p = ψ(k)G,p.
Exemplo
A Figura 5.3 traz a árvore de partição para a p-simulação mostrada na Figura 5.1.
A Figura 5.2 abaixo mostra o grafo de exemplo com seus vértices rotulados.

43 5.1. Simulação
pa
b
c
def
g
Figura 5.2: Grafo G rotulado
ψ(0)G,p
ψ(1)G,p
ψ(2)G,p
ψ(3)G,p
ψ(5)G,p
ψ(6)G,p
ψ(7)G,p
ψ(8)G,p
ψ(4)G,p
Particao Unitaria
{a, b, c, d, e, f, g} {p}
{b, c, d, e, f} {a, g} {p}
{c, d, e} {b, f} {a, g} {p}
{d} {c, e} {b, f} {a, g} {p}
{d} {c, e} {b, f} {a, g} {p}
{p}{a, g}{b, f}{c}{e}{d}
{d} {e} {c} {f} {b} {a, g} {p}
{p}{a, g}{b}{f}{c}{e}{d}
Figura 5.3: Árvore de partição.

Capítulo 5. Algoritmo para o Problema do Isomorfismo de Grafos 44
5.2 Propriedades de uma p-simulação
Lema 1. Seja ϕ um isomorfismo entre grafos G e H, e seja v ∈ V (G) um vértice
qualquer. Então NH [ϕ(v)] = ϕ(NG[v]).
Demonstração. Seja v como no enunciado e w ∈ NG(v) um vértice qualquer. Se
{v,w} ∈ E(G), então {ϕ(v), ϕ(w)} ∈ E(H). Portanto ϕ(w) ∈ NH(ϕ(v)). Como w
é qualquer, fica estabelecido que NH(ϕ(v)) ⊇ ϕ(NG(v)).
Reciprocamente, seja u ∈ NH(ϕ(v)) um vértice qualquer. Como ϕ é sobrejetora,
existe w ∈ V (G) com ϕ(w) = u. Com isso temos
{ϕ(w), ϕ(v)} ∈ E(H)⇒ {v,w} ∈ E(G)⇒ w ∈ NG(v).
Conclui-se que u = ϕ(w) ∈ ϕ(NG(v)). Como u é qualquer, fica estabalecida a
inclusão NH(ϕ(v)) ⊆ ϕ(NG(v)).
Para concluir a prova do lema, observe que ϕ(v) ∈ NH [ϕ(v)] ∩ ϕ(NG[v]).
A seguir, apresentamos a propriedade fundamental de uma p-simulação.
Teorema 2. Sejam G ∼= H dois grafos, seja ϕ um isomorfismo entre G e H, e
seja ψG,p = (V1, . . . , Vr) a partição associada a uma p-simulação em G, para algum
p ∈ V (G). Nessas condições, vale que
ψH,ϕ(p) = (ϕ(V1), . . . , ϕ(Vr)), (5.2)
onde ϕ(Vi) = {ϕ(v) : v ∈ Vi}.
Demonstração. Sejam G, H, ϕ e p conforme o enunciado do teorema. Seja q = ϕ(p).
Seja x(1), . . . , x(k) uma p-simulação em G, e seja y(1), . . . , y(k) uma q-simulação em

45 5.2. Propriedades de uma p-simulação
H. Vamos primeiro mostrar, por indução em i, que
∀ v ∈ V (G) : y(i)ϕ(v) = x(i)
v . (5.3)
Quando i = 1, pela definição de p-simulação, temos x(1)v = 1 se v = p e x(1)
v = 0
se v 6= p. Pela definição de q-simulação, temos y(1)ϕ(v) = 1 se ϕ(v) = q (isto é, se
v = p) e x(1)ϕ(v) = 0 caso contrário. Assim, segue que (5.3) vale para i = 1.
Suponha então que i > 1, e suponha que (5.3) valha com i − 1 no lugar de i.
Nesse caso, temos
y(i)ϕ(v) = f
({y(i−1)u : u ∈ NH [ϕ(v)]})
= f({y(i−1)
ϕ(w) : w ∈ ϕ−1(NH [ϕ(v)]})
= f({y(i−1)
ϕ(w) : w ∈ ϕ−1(ϕ(NG[v]))})
= f({y(i−1)
ϕ(w) : w ∈ NG[v]})
= f({x(i−1)
w : w ∈ NG[v]})
= x(i)v .
A primeira igualdade segue da definição de y(i)ϕ(v), a segunda do fato de que ϕ é
um isomorfismo, a terceira segue do Lema 1, a quinta segue da hipótese de indução
e a sexta da definição de x(i)v . Portanto (5.3) é verdade.
Agora temos que mostrar (5.2). Sejam u, v ∈ V (G) vértices quaisquer. Se
u, v ∈ Vℓ para algum ℓ, então x(j)u = x
(j)v para todo j ∈ {0, 1, . . . , k}. Usando (5.3),
temos que y(j)ϕ(u) = y
(j)ϕ(v) para todo j ∈ {0, 1, . . . , k}, o que implica que ϕ(u) e ϕ(v)
pertencem à mesma célula de ψH,ϕ(p). Isso mostra que {ϕ(V1), . . . , ϕ(Vr)} é um refi-
namento de ψH,ϕ(p). Um argumento simétrico mostra que ψH,ϕ(p) é um refinamento
de {ϕ(V1), . . . , ϕ(Vr)}. Portanto, as células dessas partições são as mesmas.
Por se tratar de uma identidade de partições ordenadas, resta ainda mostrar

Capítulo 5. Algoritmo para o Problema do Isomorfismo de Grafos 46
que a ordem relativa das células de ψH,ϕ(p) e (ϕ(V1), . . . , ϕ(Vr)) é a mesma. Para
isso, suponha que u ∈ Vi e v ∈ Vj com i < j. Isso implica que x(ℓ)u < x
(ℓ)v para
algum ℓ ≤ k e x(m)u = x
(m)v para todo m entre 0 e ℓ − 1. Mas então, por (5.3),
vale que ∀m ∈ {0, . . . , ℓ − 1} temos y(m)ϕ(u) = y
(m)ϕ(v) e y(ℓ)
ϕ(u) < y(ℓ)ϕ(u). Isso implica que
idx(ϕ(u), ψH,ϕ(p)) < idx(ϕ(v), ψH,ϕ(p)) e portanto a ordem das classes também é
respeitada.
O Teorema 2 permite que p-simulações sejam usadas para resolver o Problema
do Isomorfismo de Grafos, pois a célula em que um dado vértice é colocado, ao final
de uma p-simulação, independe do nome inicialmente dado a ele. É por esse motivo
que, se dois grafos G e H são isomorfos e se q ∈ V (H) é a imagem de um vértice
p ∈ V (G) por algum isomorfismo em Iso(G,H), então uma p-simulação em G e uma
q-simulação em H fazem a mesma classificação dos vértices. Essa idéia é resumida
no enunciado a seguir.
Corolário 1. A partição ψG,p independe dos nomes dos vértices do grafo.
5.3 Algoritmo proposto
Denotamos por L(G) o conjunto
L(G) = {ψG,p : p ∈ V (G)}.
Nesta seção, propomos o Algoritmo 14, que decide se dois grafos G e H são
isomorfos. Vamos supor que V (G) ∩ V (H) = ∅.
Este algoritmo tem como entrada os grafos G e H, e como saída sim se os grafos
são isomorfos, e não caso contrário. Podemos dividir o algoritmo em duas etapas
principais: na primeira, fazemos p-simulações para todo vértice p ∈ V (G) e, ao final

47 5.3. Algoritmo proposto
Algoritmo 14: Verifica se dois grafos são isomorfosEntrada: Grafos G e HSaída: sim se G e H são isomorfos, não caso contrário
1 início
2 π ← ∅3 para todo p ∈ V (G) faça
4 ψG,p ← Simulação(G, p, f)5 se ψG,p é discreta então
6 π ← ψG,p
7 Sai do laço8 senão
9 L(G)← L(G) ∪ {ψG,p}
10 se π 6= ∅ então
11
({u1}, {u2}, . . . , {un})← π
12 para todo q ∈ V (H) faça
13 fazer q-simulação em H para obter ψH,q
14 se ψH,q é discreta então
15
({v1}, {v2}, . . . , {vn})← ψH,q
16 ϕ← mapeamento que leva ui 7→ vi
17 se ϕ é um isomorfismo de G em H então
18 retorna sim
19 retorna não
20 senão
21 para todo q ∈ V (H) faça
22 fazer q-simulação em H para obter ψH,q
23 L(H)← L(H) ∪ {ψH,q}24 Construir grafo bipartido R = (V (G) ∪ V (H), E = ∅)25 para todo {p, q} ∈ E(R) faça
26 se ψG,p for compatível com ψH,q então
27 E(R)← E(R) ∪ {p, q}
28 M ← Emparelhamento perfeito obrido pelo Algoritmo 329 ~D ← ~D(R,M)30 EnumerarCandidatoIsomorfismo(~D,M)31 retorna não
32 fim
desta etapa, temos o conjunto L(G) que contém todas as partições ψG,p. A segunda
etapa do algoritmo é a verificação do isomorfismo. Esta etapa subdivide-se em dois

Capítulo 5. Algoritmo para o Problema do Isomorfismo de Grafos 48
casos:
1. existe vértice u ∈ V (G) tal que ψG,u é a partição discreta;
2. ψG,u não é discreta para nenhum vértice u.
No primeiro caso, é necessário fazer q-simulações para todo vértice q ∈ V (H) e
verificar, para toda partição ψH,q que for discreta, se o mapeamento que leva ψG,u nos
vértices correspondentes de ψH,q (preservando a ordem das células) é um isomorfismo
entre G e H. Se algum desses mapas for um isomorfismo, o algoritmo para e devolve
sim. Caso contrário o algoritmo devolve não.
No segundo caso, considera-se um grafo bipartido R = (V (G)∪V (H), E), inicial-
mente vazio (sem nenhuma aresta entre V (G) e V (H)). Para cada par não ordenado
{p, q} de V (G)× V (G), acrescenta-se a aresta {p, q} se as partições ψG,p e ψH,q são
compatíveis3. Caso contrário, não pode haver um isomorfismo que mapeie p ∈ V (G)
a q ∈ V (H). Portanto, neste caso, a aresta {p, q} não é inserida em R.
Dados v ∈ V e W ⊂ V , definimos dG(v,W ) como o número de elementos de W
que são adjacentes a v em G. Dizemos que π ∈ P(V ) ∪ P ′
(V ) é uma partição
igualitária com relação ao grafo G (ou G-igualitária) se, para todo par de células
V1, V2 ∈ π (não necessariamente distintas) e para quaisquer elementos x, y ∈ V1,
temos que dG(x, V2) = dG(y, V2). O Teorema 3 mostra que, se uma partição G-
igualitária for encontrada, então a árvore de partições estabilizará.
A Figura 5.4 mostra um exemplo de partição G-igualitária e não igualitária:
na partição π, tomamos as célula V1 = {0, 1} e V2 = {2, 3}. A partição π não é
igualitária, pois dG(0, V2) = 0 e dG(1, V2) = 1.
3Como visto anteriormente, duas partições são compatíveis se ambas possuírem o mesmo númerode células, e se todas as células correspondentes possuírem o mesmo número de elementos

49 5.3. Algoritmo proposto
0
1
2
3
4
5
6
π nao e igualitaria.
0
1
2
3
4
5
6
σ e igualitaria.
Figura 5.4: Exemplos de partições.
Teorema 3. Uma árvore de partições Tp se estabiliza ao encontrar uma partição
G-igualitária.
Demonstração. Seja π a partição ψ(k)G,p e i = idx(v, π) para todo v ∈ V (G). Definimos
por dyj o grau que um vértice qualquer da célula π[y] possui dentro da célula π[j].
Observe que d(v, π[j]) = dij. Definimos por x(k)i o valor de x(k)
u para algum u ∈ π[i].
Pela definição de x(k+1)v temos:
x(k+1)v = f
({x(k)u : u ∈ N [v]})
= f({x(k)
idx(u,π) : u ∈ N [v]})
= f
( n⋃
j=1
dij{x(k)j }
)
Observe que a fórmula à direita do símbolo = independe de v, mas apenas de
i = idx(v, π), que é igual para todo vértice em π[i]. Portanto, x(k+1)v é igual para
todo v ∈ π[i].
Logo, se ψ(k)G,p é G-igualitária, então ψ(k)
G,p[j] = ψ(k+1)G,p [j],∀j ∈ {0, . . . , |ψ(k)
G,p|}.

Capítulo 5. Algoritmo para o Problema do Isomorfismo de Grafos 50
5.3.1 Emparelhamentos perfeitos e isomorfismo
Após a construção do grafo bipartido R, o algoritmo verifica se os emparelhamentos
perfeitos de R podem corresponder a um isomorfismo. Como vimos na Seção 4.1, o
algoritmo de Uno [38] lista todos os emparelhamentos perfeitos em um grafo bipar-
tido de forma recursiva, onde em um ramo da recursão é fixada uma aresta arbitrária
e em um emparelhamento, e no outro ramo e é retirado do emparelhamento perfeito.
Como o objetivo do nosso algoritmo é encontrar um isomorfismo entre os grafos G
e H, ao escolher uma aresta e, podemos ignorar os emparelhamentos perfeitos que
não correspondem a um isomorfismo. Para tanto, modificamos o Algoritmo 10 de
modo que arestas cujas extremidades estão em células não correspondentes não se-
jam inseridas em ~D(+e).
Veja o exemplo: dados dois grafos G e H, um isomorfismo ϕ : V (G) → V (H) e
as arestas a = {p, q}, f = {u, v} ∈ R. Suponha que ϕ(p) = q. Se ϕ(u) ∈ ψH,q[i] e
v ∈ ψH,q[j], com i 6= j, então ϕ 6= v. Portanto, a aresta f não estará presente no
digrafo ~D(+e) pois não há um isomorfismo que leva u em v.
D
D(+e1) D(
−
e1)
D(+e1
+e2) D(
+e1
−
e2) D(−
e1+e2) D(
−
e1−
e2)
D(+e1
+e2
+e3) D(
+e1
+e2
−
e3) D(+e1
−
e2+e3) D(
+e1
−
e2−
e3) D(−
e1+e2
+e3) D(
−
e1+e2
−
e3) D(−
e1−
e2+e3) D(
−
e1−
e2−
e3)
Figura 5.5: Exemplo de árvore de recursão do Algoritmo 15.
Assim, reescrevemos o Algoritmo 10 de modo que as arestas de R cujas extremi-
dades estejam em células não correspondentes em duas partições compatíveis ψG,p
e ψH,q não estejam presentes no digrafo ~D(+e).
Na primeira chamada do Algoritmo 15 é passado o digrafo D(R,M), onde M foi
obtido pelo Algoritmo 3. O grafo D(+e) é obtido eliminando-se as pontas da aresta

51 5.3. Algoritmo proposto
e e todas as arestas não correspondentes. Já o grafo D(−e) é obtido deletando-se a
aresta e.
Algoritmo 15: EnumerarCandidatoIsomorfismoEntrada: D,M
1 início
2 se M ′ corresponde a um isomorfismo então
3 para e imprime isomorfismo entre G e H4 fim se
5 se E(D) = ∅ então
6 Fim
7 fim se
8 Encontrar um circuito C M -alternante9 Escolher uma aresta arbitrária e ∈ C ∩M
10 M ′ ← C∆M
11 Gerar grafo D(+e)
12 EliminarArestasDesnecessarias (D(+e))
13 EnumerarCandidatoIsomorfismo (D(+e),M)
14 Gerar grafo D(−e)
15 EliminarArestasDesnecessarias (D(−e))
16 EnumerarCandidatoIsomorfismo (R(−e),M ′)
17 fim
Como visto na Seção 4.1, todo emparelhamento perfeito obtido em D(+e) pode
ser estendido a R adicionando-se a aresta e. Já o emparelhamento perfeito obtido
através de D(−e) é também um emparelhamento perfeito de R.


CAPÍTULO 6
Algoritmo Pratical Graph Isomorphism
Neste Capítulo descreveremos o funcionamento do algoritmo utilizado no programa
Nauty, proposto por McKay [25].
O algoritmo Pratical Graph Isomorphism (PGI) é baseado em uma rotulação
canônica e no grupo de automorfismos de um grafo. Uma rotulação canônica pode
ser entendida como um processo que recebe um grafo e devolve uma rotulação dos
vértices desse grafo, sempre produzindo a mesma saída quando as entradas são grafos
isomorfos. A ideia central do PGI é comparar as rotulações canônicas de G e H e
caso sejam iguais, os grafos G e H são isomorfos. Caso contrário, o PGI retorna
não-isomorfos.
Para encontrar uma rotulação canônica, o PGI se divide em duas partes princi-
pais: o procedimento de refinamento e o procedimento de busca. Em linhas gerais,
o procedimento de refinamento tem como entrada uma partição qualquer π e como
retorno uma partição igualitária dos vértices de G que é um refinamento de π. O pro-

Capítulo 6. Algoritmo Pratical Graph Isomorphism 54
cedimento de busca é um algoritmo recursivo que recebe uma partição G-igualitária
e introduz uma assimetria nesta partição para uma subsequente execução do proce-
dimento de refinamento. Este processo recursivo é repetido até se encontrar todas1
as partições discretas de V (G). A cada partição discreta obtida pelo procedimento
de busca é associado um grafo, e a rotulação será um destes grafos, escolhido segundo
uma ordem pré-estabelecida.
Nas próximas seções, mostraremos o funcionamento da etapa de refinamento e
do algoritmo recursivo do procedimento de busca.
6.1 Rotulação canônica e isomorfo canônico
Nesta seção, definiremos o conceito de isomorfo canônico. Para tanto, precisamos
introduzir alguns conceitos iniciais: seja G o conjunto de todos os grafos sobre o
conjunto de vértices {1, . . . , n}. Uma rotulação canônica é uma função C : G → G tal
que, para todo par de grafos isomorfos G e H pertencentes a G, vale C(G) = C(H).
Para um dado grafo G, o grafo C(G) é chamado isomorfo canônico.
Seja π uma partição discreta de V = {1, 2, . . . , n}. Definimos γπ ∈ Sn como
uma permutação tal que γπ(v) = idx(v, π). Denotamos por γπ(G) o grafo obtido
através da permutação γπ em V (G). Seja P ={{x1, y1}, . . . , {xt, yt}
}
o conjunto
de pares(V
2
)
. Podemos representar o grafo G por um vetor característico χE(G), de
comprimento t = n(n − 1)/2, que possui o valor 1 na posição j se o par {xj , yj} ∈
E(G) e 0 caso contrário. Dados grafos G e H, definimos G � H se χE(G) ≤ χE(H)
lexicograficamente.
Para encontrar um isomorfo canônico, o PGI refina uma partição dos vértices de
G, de modo a encontrar uma partição discreta de V (G). Caso isso não seja possível,
o PGI constrói uma árvore de busca na qual todas as folhas corresponderão a uma
1Este processo não lista todas as n! partições discretas, mas apenas aquelas que terão utilidadepara se encontrar a rotulação canônica.

55 6.2. Refinamento de partições
partição discreta π de V (G). O isomorfo canônico C(G) então será o maior grafo
γπ(G), de acordo com a ordem de �, onde π é uma partição discreta associada a uma
folha da árvore de partições de G. Em seguida, o PGI executa os mesmos passos
para calcular C(H) e verifica o isomorfismo entre G e H comparando os isomorfos
canônicos C(G) e C(H), pois G e H serão isomorfos se e somente se C(G) = C(H).
A comparação dos isomorfos canônicos é muito eficiente, pois basta comparar o
conjunto de arestas destes grafos, que demanda um tempo O(n2).
Na próxima seção, mostraremos como o PGI executa o procedimento de refina-
mento.
6.2 Refinamento de partições
O objetivo principal da etapa de refinamento é encontrar uma partição G-igualitária
que seja um refinamento de uma determinada partição π. A seguir, mostraremos
como este procedimento é realizado.
Para uma partição ordenada π de V (G), existe um conjunto Z(π) de partições
ordenadas de V (G) que são refinamentos de π e, ao mesmo tempo, partições G-
igualitárias.2 Note que Z(π) 6= ∅, pois a partição discreta é sempre G-igualitária e é
um refinamento de π. É possível argumentar3 que existe uma partição ζ(π) ∈ Z(π)
que satisfaz σ ≤ ζ(π) para toda σ ∈ Z(π). Em outras palavras, existe uma única
partição que é um refinamento G-igualitário de π com o número mínimo possível de
células, denominada ζ(π).
A estratégia do PGI é encontrar a partição ζ(π) a partir de uma partição or-
denada π. Mas para determinados tipos de grafos (por exemplo, os grafos vértice-
transitivos), a partição ζ(π) não será discreta. Isso torna-se uma dificuldade para
o PGI, pois como vimos, o isomorfo canônico está associado a uma partição dis-
2Neste capítulo, omitiremos as provas. Para detalhes, consulte o artigo [25]3Seção 2.3 de [25]

Capítulo 6. Algoritmo Pratical Graph Isomorphism 56
creta de V (G). Para resolver este problema, o PGI cria novas partições ordenadas
σ1, σ2, . . . , σm (onde m é o tamanho da maior célula de ζ(π)), refina cada uma destas
novas partições ordenadas obtidas e executa este processo sucessivamente até encon-
trar partições discretas de V (G) (esta etapa será explicada nas Seções 6.4 e 6.5). A
seguir, apresentamos o algoritmo que executa o procedimento de refinamento para
uma partição ordenada π.
6.3 Algoritmo de refinamento
O objetivo principal do Algoritmo 16 é encontrar uma partição G-igualitária que seja
um refinamento da partição π passada como argumento. Para tanto, o Algoritmo
16 de refinamento recebe, além do grafo G, uma partição ordenada π ∈ V (G) e uma
sequência α = (W1,W2, . . . ,WM ) de células distintas de π, que respeita a ordem de
π, e tem como saída uma partição ordenada, denominada R(G,π, α), de V (G). O
processo de refinamento consiste, a grosso modo, em verificar o número de vizinhos
que os vértices de uma célula de π possuem em relação a algum elemento de α.
Esta verificação será abordada mais adiante, ainda nesta seção. Dado que antes da
execução do Algoritmo 16, a única partição de V (G) conhecida é a partição unitária
π = V (G), então, inicialmente, o Algoritmo 16 receberá como argumentos o grafo
G, a partição unitária π e a sequência de células α = π. Pelo Teorema 4, temos que
a partição R(G,π, π) retornada pelo Algoritmo 16 é a partição ζ(π).
Teorema 4. ([25]) Para todo grafo G e toda partição ordenada π de V (G), vale que
R(G,π, π) = ζ(π).
Antes de mostrarmos o Algoritmo 16, faz-se necessário algumas definições: o
tamanho de uma partição ordenada π é a quantidade de células que ela possui,

57 6.3. Algoritmo de refinamento
denotado por |π|. Lembre-se de que π[i] denota a i-ésima célula de π. Deno-
tamos por π[i, j] a sequência de células (π[i], π[i + 1], . . . , π[j]). O símbolo · de-
nota a operação de concatenação de duas partições, que é definida por: π · σ =
(π[1], π[2], . . . , π[r], σ[1], σ[2], . . . , σ[s]), onde r = |π| e s = |σ|. Seja γ uma permu-
tação do conjunto V (G). A imagem de v ∈ V sob γ é denotada por γ(v). Para
W ⊆ V , temos γ(W ) = {γ(w)|w ∈ W}. Para π = (V1, V2, · · · , Vr), definimos
γ(π) = (γ(V1), γ(V2), · · · , γ(Vr)).
A sequência de células α pode ser entendida como uma fila de processamento
de células. Para cada m, a célula π[k] é subdividida. Esta subdivisão é feita com
base no número de vizinhos que cada vértice em π[k] possui no conjunto α[m]. Ao
término desta subdivisão, a célula π[k] foi quebrada em novas células (σ[1], . . . , σ[s]).
Dados os subconjuntos X,Y ⊂ V (G), dizemos que X é homogêneo em relação a Y
se d(x, Y ) = d(x′, Y ) para todo x, x′ ∈ X. Pelo modo como π[k] foi subdividida, os
vértices x, y ∈ σ[i] têm o mesmo número de vizinhos dentro de α[m]. Portanto, todo
σ[i] é homogêneo em relação à α[m].
Após a subdivisão, todo σ[i] é inserido na fila. Isso é necessário pois para uma
célula π[j] qualquer, π[j] poderia ser homogênea em relação a π[k]. Com o refina-
mento, π[j] pode não ser homogênea em relação a todas as células de σ criadas a
partir de π[k]. Portanto, é necessário incluir todo4 σ[i] em α. Por fim, π é atuali-
zado, concatenando-se π com σ. Em outras palavras, a célula π[k] é substituída por
σ, visto que σ é um refinamento de π[k]. O processo então se repete com a próxima
célula da lista de processamento, até que o algoritmo encontre uma partição discreta,
ou termine de processar todas as células da lista α.
Caso a partição retornada não seja discreta, é necessário então continuar o pro-
cesso para forçar a obtenção de uma partição que seja discreta. Isto é feito através
4No Algoritmo 16, a maior célula de σ (linha 23: σ[t]) não é inserida na fila devido a umaotimização do algoritmo.

Capítulo 6. Algoritmo Pratical Graph Isomorphism 58
Algoritmo 16: Procedimento de RefinamentoEntrada: Grafo G, partição ordenada π de V (G) e α subsequência de πSaída: R(G,π, α)
1 início
2 π ← π3 m← 14 enquanto π não é discreta ou m ≤ |α| faça
5 π ← ()6 para k de 1 até |π| faça
7 p← |π[k]|8 (u1, . . . , up)← elementos de π[k] ordenados de tal forma que
d(ui, α[m]) < d(uj , α[m])⇒ i < j9 σ ← ({u1})
10 s← 111 para i de 2 até p faça
12 se d(ui−1,W ) = d(ui,W ) então
13 σ[s]← σ[s] ∪ {ui}14 senão
15 s← s+ 116 σ[s]← {ui}17 fim se
18 fim para
19 se s > 1 então
20 t← arg max{|σ[t]| : 1 ≤ t ≤ s}21 se α[j] = π[k] para algum j (m ≤ j ≤ |α|) então
22 α[j] ← σ[t]23 fim se
24 α← α · σ[1, t− 1] · σ[t + 1, s]25 π ← π · σ26 fim se
27 fim para
28 π ← π29 m← m+ 130 fim enquanto
31 retorna π
32 fim
de um algoritmo recursivo, que isola um vértice na partição obtida e executa o
procedimento de refinamento novamente. Nas duas próximas seções, mostraremos
como é feita a escolha deste vértice e explicaremos o funcionamento deste algoritmo

59 6.4. Partições aninhadas
recursivo.
6.4 Partições aninhadas
Seja π = (V1, V2, . . . , Vk) uma partição ordenada de V (G) e v ∈ Vi para algum i.
Definimos π ◦ v =
1. π, se |Vi| = 1.
2. (V1, . . . , Vi−1, v, Vi \ v, Vi+1, . . . , Vk), se |V1| > 1
Definimos também π ⊥ v = R(G,π ◦ v, (v)).
Teorema 5. ([25]) Seja G um grafo, π uma partição ordenada de V (G) e suponha
que há alguma partição G-igualitária σ tal que π ≤ σ. Se escolhermos α ⊆ π tal que
para todo W ∈ σ, temos X ⊆W para, no máximo, um X ∈ π \α, então, R(G,π, α)
é G-igualitária.
Pelo Teorema 5, temos que R(G,π ◦ v, (v)) é G-igualitária.
Dado um grafo G, uma partição ordenada π de V (G) e uma sequência v =
v1, v2, . . . , vm−1 de vértices distintos de V , definimos por ν = (π1, π2, . . . , πm) a
sequência de partições aninhadas derivadas de G, π e v, onde:
1. π1 = R(G,π, π) e,
2. πi = πi−1 ⊥ vi−1, para 2 ≤ i ≤ m.
O conjunto de todas as sequências de partições aninhadas derivadas de algum
G,π e um vetor v de elementos distintos de V é denotado por N(V ).
6.5 Árvore de busca
Uma árvore de busca T (G) é o conjuntos de todas as partições aninhadas ν ∈ N(V )
tal que ν é derivado de um grafo G, uma partição ordenada π de V (G) e uma

Capítulo 6. Algoritmo Pratical Graph Isomorphism 60
sequência v1, v2, . . . , vm−1 onde, para 1 ≤ i ≤ m− 1, vi é um elemento da primeira
célula não trivial de πi que possui o menor tamanho. A definição implica que |πi| <
|πi+1| para 1 ≤ i < m. A sequência ν também é chamada de nó da árvore. Seja
ν = (π1, π2, . . . , πm) um nó da árvore T (G). Dizemos que ν é um nó terminal se
πm for discreta. Dados dois nós ν1 = (π1, π2, . . . , πm) e µ = (π1, π2, . . . , πm, πm+1),
dizemos que µ é sucessor (ou filho) de ν. De mesmo modo, dizemos que ν é antecessor
(ou pai) de µ. O nó ν = (π1) é um ancestral comum a todos os nós, já que a escolha
de π1 está fixada: π1 = R(G,π, π).
O algoritmo 17 encontra todos os nós da árvore T (G), tendo como partição inicial
a partição unitária π = ({V (G)}).
Algoritmo 17: Árvore de BuscaEntrada: Grafo G
1 início
2 π ← (
V (G))
3 ν ← (R(G,π, π))
4 Gera(ν)5 fim
Observe que o Algoritmo 18 é um algoritmo de backtracking, onde os nós ν de
T (G) são gerados de forma recursiva5. Note que, no Algoritmo 18, a partição π será
impressa se ela for discreta. As demais partições do nó ν são utilizadas apenas para
o backtracking do algoritmo, pois como já visto anteriormente, apenas as partições
discretas geradas neste processo terão utilidade para o cômputo do isomorfo canônico
C(G) e, consequentemente, para a verificação do isomorfismo.
Observe que não serão todas as n! partições discretas de V (G) que serão geradas
pelo Algoritmo 18. Isso ocorre pois os vértices que serão isolados durante o backtrac-
5O algoritmo 17 é uma versão recursiva do algoritmo iterativo apresentado por B. McKay em[25], página 55.

61 6.5. Árvore de busca
Algoritmo 18: Gera(ν)Entrada: ν
1 início
2 k ← |ν|3 π ← ν[k]4 se π é discreta então
5 Imprime π6 retorna
7 fim se
8 t← min{i : |π[i]| > 1}9 W ← π[t]
10 para cada v ∈W faça
11 σ ← π ⊥ v12 Gera(ν · (σ))13 fim para
14 fim
king estarão obrigatoriamente em uma célula não trivial (veja linha 7 do Algoritmo
18). Assim, células triviais não serão alteradas e terão suas posições fixadas no nós
descendentes na árvore de busca.
Além disso, pelo Teorema 6, temos que a quantidade de partições discretas ge-
radas pelo Algoritmo 18 para o grafo G é igual ao número de partições discretas
geradas pelo Algoritmo 18 para o grafo H.
Figuras 6.1 e 6.2 temos um exemplo de um grafo G e a árvore de busca T (G).
1
3
5
76
4
2
0
Figura 6.1: Grafo G.

Capítulo 6. Algoritmo Pratical Graph Isomorphism 62
π = ({0, . . . , 7})
π1 = ({7}, {6}, {0}, {5}, {1, 2}, {4}, {3})
ν1 =(
π1, π2 = ({7}, {6}, {0}, {5}, {1}, {2}, {4}, {3}))
ν2 =(
π1, π2 = ({7}, {6}, {0}, {5}, {2}, {1}, {4}, {3}))
Figura 6.2: Árvore T (G).
Como visto anteriormente, para cada partição discreta π impressa pelo Algo-
ritmo 18, associamos uma permutação γπ. Ao aplicarmos esta permutação no grafo
G, obtemos o grafo γπ(G), que é representado por seu vetor característico χE
(
γπ(G)).
Denotamos por P (G) o conjunto de todos grafos γπ(G). Assim, definimos o isomorfo
canônico de G como sendo o grafo
C(G) = max�{γπ(G) ∈ P (G)}
Teorema 6. ([25]) Se G e H são isomorfos, então P (G) = P (H).
Como visto, o Algoritmo 18 produz as partições discretas que serão utilizadas
para o cômputo do isomorfo canônico, através da associação de uma partição discreta
a uma permutação do grafo G. O processo então se repete para o grafo H e compara-
se os isomorfos canônicos C(G) e C(H). O Teorema 6 nos garante que se os grafos
G e H são isomorfos, então C(G) = C(H), pois como P (G) = P (H), então o grafo
máximo de P (G) é o mesmo para P (H).
A verificação do isomorfo canônico pode ser otimizada, utilizando-se o grupo de
automorfismos para descartar partições discretas impressas pelo Algoritmo 18. Na
próxima seção, veremos como o PGI utiliza o grupo de automorfismos de G para
podar a árvore de busca T (G) e otimizar ainda mais a busca pelo isomorfo canônico.

63 6.6. Podando a árvore de busca
6.6 Podando a árvore de busca
Se o grupo de automorfismos de um grafo G for grande (isso ocorre, por exemplo,
em grafos vértice-transitivos), então a árvore de busca T (G) terá muitos ramos
e, consequentemente, o número de nós terminais será, no mínimo, o tamanho de
Aut(G). Como a árvore é explorada em profundidade, então os automorfismos que
são descobertos durante a busca serão usados para podar a árvore de busca.
Sejam ν1 e ν2 dois nós terminais de uma árvore de busca T (G), e sejam π ∈
ν1 e σ ∈ ν2 partições discretas. Suponha que ν1 está a esquerda (será analisado
primeiramente pelo Algoritmo 18) de ν2 na árvore de busca. Se γπ(G) = γσ(G),
então a permutação τ : V → V definida por τ(v) = γ−1π
(
γσ(v))
é um automorfismo
de G.
Seja γ uma permutação de Sn e σ uma partição ordenada de V (G). Denotamos
por γ(σ) a partição ordenada obtida permutando-se os vértices de σ conforme γ. Seja
ν = (π1, π2, . . . , πm) um nó na árvore T (G). Denotamos por γ(ν) a permutação γ
aplicada a todas as partições de ν, ou seja, γ(ν) = (γ(π1), γ(π2), . . . , γ(πm)). Sejam
a, b, c nós de T (G) tal que a é o ancestral comum mais recente de ν1 e ν2, b é o filho
de a e ancestral de ν1 e c é o filho de a e ancestral de ν2. A permutação τ envia π a σ,
fixa a e envia b para c. Em outras palavras, temos que τ(π) = τ(σ) e τ(b) = τ(c).
Denotamos por T (G,x) uma subárvore de T (G) enraizada pelo nó x. Então T (G, c) é
isomorfa a T (G, b) (pela permutação τ), e portanto o conjunto de grafos gerados por
nós terminais de T (G, c) é o mesmo conjunto de grafos gerados por nós terminais de
T (G, b). Como a árvore de busca T (G) é explorada em profundidade, então T (G, b)
é visitada antes de T (G, c). Portanto6, não é necessário explorar T (G, c) e a busca
continua pelo nó a.
6O Algoritmo 18 não incorpora esta otimização


CAPÍTULO 7
Resultados
Neste capítulo vamos discutir os resultados obtidos nos testes do Algoritmo PGI e
também do algoritmo proposto. Para realizar os testes, implementamos o Algoritmo
proposto na linguagem C++, e o programa Nauty foi obtido no sítio nauty and
Traces [24] e testados em um computador com processador Intel Core i5 2.5GHz,
4GB de memória RAM e sistema operacional OS X Mavericks. Para efetuar os
testes, utilizamos um gerador de pares de grafos isomorfos e também bibliotecas
de grafos disponíveis em [23]. Nas próximas seções, o programa Nauty refere-se a
implementação do algoritmo PGI, e o programa Mabi (Matching based isomorphism
é a implementação do algoritmo proposto nesta dissertação, ambos na linguagem
C++, utilizando o compilador gcc, com diretiva de compilação O2. O código fonte
da implementação do algoritmo proposto está disponível no Anexo 9 e no repositório
Bitbucket1.
1https://bitbucket.org/rodrigedilson/dissertacao-isomorfismo-grafos

Capítulo 7. Resultados 66
7.1 Gerador de grafos aleatórios - instâncias positivas
Utilizamos o modelo de Erdős-Rényi, que gera um grafo G com n vértices e com m
arestas, em média. A probabilidade de uma aresta {u, v} ser inserida no grafo G é
dada por
p =m(n
2
) .
Para se gerar o grafo G, para cada par de vértices {u, v} é realizado um sorteio,
com probabilidade p de sucesso. Caso o sorteio seja bem sucedido, a aresta {u, v}
é inserida em G. O número de arestas do grafo será, com alta probabilidade, muito
próximo a m, pois a distribuição do número de arestas é binominal e possui grande
concentração em torno da média2.
Já o grafo H, isomorfo a G, é gerado permutando-se os vértices de G com uma
permutação γ ∈ Sn aleatória.
7.1.1 Resultados
A metodologia de testes foi gerar cinco pares de grafos com n vértices e m arestas e
executar tanto o programa Nauty quanto o programa Mabi para cada par de grafo.
Nas Tabelas 7.1 e 7.2, os valores se referem à média dos tempos de execução, em
segundos. Para os grafos densos, a quantidade de arestas foi dada por(n
2
)
e para os
grafos esparsos, a quantidade de arestas foi definida por 2n.
Tabela 7.1: Grafos aleatórios densos.
Vértices Nauty Mabi50 0.004 0.287100 0.017 2.490200 0.150 22.876400 0.945 191.211
2Veja desigualdade de Chernoff, em [1].

67 7.1. Gerador de grafos aleatórios - instâncias positivas
Tabela 7.2: Grafos aleatórios esparsos.
Vértices Nauty Mabi50 0.002 0.257100 0.002 0.375200 0.002 3.877400 0.005 24.014
Como observado nas tabelas, o algoritmo PGI teve um desempenho muito supe-
rior em todos os testes realizados. O motivo principal para tal superioridade é que
o PGI isola um vérice a cada chamada recursiva do algoritmo de refinamento. Em
outras palavras, a cada chamada recursiva, o algoritmo de refinamento tem como
parâmetro uma partição obtida em uma etapa anterior do backtracking. Já o algo-
ritmo proposto, por não ser um algoritmo de backtracking, não se utiliza da partição
obtida em uma simulação como informação para realizar uma próxima simulação.
Além disso o PGI possui uma otimização, que é a poda de ramos da árvore,
diminuindo a quantidade de grafos permutados que são obtidos a partir de uma
partição discreta de V (G), e consequentemente haverá uma diminuição do tempo de
cômputo do isomorfo canônico.
Ademais, na etapa de refinamento do PGI, a partição obtida sempre será iguali-
tária, o que não ocorre no algoritmo proposto, uma vez que o processo de simulação
pode se estabilizar sem encontrar uma partição igualitária. Isto ocorre pois a função
f utilizada na simulação não é bijetora, e ao implementarmos uma versão do Mabi
com uma função bijetora, o desempenho se mostrou ainda pior, pois era necessário
armazenar na memória todos os multiconjuntos encontrados durante as simulações.

Capítulo 7. Resultados 68
7.2 Grafos com alto padrão de simetria
McKay, ao testar o Algoritmo PGI, mencionou em seu artigo alguns tipos de grafos
que trariam dificuldades para o PGI resolver o Problema de Isomorfismo de Grafos.
Dentre eles, testamos os grafos fortemente regulares.
É possível demonstrar formalmente que o Mabi é ineficiente para grafos forte-
mente regulares. Um grafo regular G, com v vértices e grau k, é dito fortemente
regular se houver inteiros i e j tal que todo par de vértices adjacentes possua i
vizinhos em comum e todo par de vértices não adjacentes possua j vizinhos em
comum.3
Para efetuar os testes com grafos fortemente regulares, aplicamos uma permuta-
ção aleatória a um grafo obtido na biblioteca de grafos fortemente regulares, e assim
conseguimos um par de grafos fortemente regulares isomorfos. Como no caso dos
grafos aleatórios, executamos os programas Nauty e Mabi por cinco vezes e calcula-
mos a sua média. A seguir, a Tabela 7.3 apresenta os resultados obtidos para grafos
fortemente conexos isomorfos (tempo em segundos):
Tabela 7.3: Grafos fortemente regulares isomorfos.
Características Nauty Mabiv = 25, k = 12, i = 5, j = 6 0.002 0.041v = 36, k = 14, i = 4, j = 6 0.002 16.496
7.2.1 Grafos fortemente regulares não isomorfos
Ao testarmos um par de grafos fortemente regulares não isomorfos com as mes-
mas características (v, k, i e j comum aos dois grafos), detectamos que o processo
de simulação gerava v partições igualitárias com apenas três células, e todas elas
3Para os testes, utilizamos a biblioteca de grafos fortemente regulares, disponível em [23].

69 7.2. Grafos com alto padrão de simetria
compatíveis entre si. Com isso, o grafo bipartido R tornava-se completo, com v!
emparelhamentos perfeitos (lembre-se que uma aresta {p, q} é inserida em R se e
somente se as partições ψG,p e ψH,q são compatíveis), e consequentemente o algo-
ritmo proposto um número exponencial de testes para verificar que G e H não eram
isomorfos, o que deixou o programa Mabi ineficiente.
É possível demonstrar formalmente que o algoritmo proposto é ineficiente para
grafos fortemente regulares. Seja G um grafo fortemente regular e π = ψ(2)G,p uma
partição obtida a partir de uma p-simulação. Pela Proposição 1, π possui apenas
três células e podemos argumentar que π é G-regular. A célula π[3] contém apenas
o vértice p, a célula π[2] possui os vizinhos de p e a célula π[1] contém os vértices
não adjacentes a p. A homegeneidade de π[3] com relação às outras duas células é
óbvia. Cada vértice u ∈ π[2] possui um vizinho em π[3], e pela definição de grafo
fortemente regular, u e p possuem i vizinhos em comum. Como todos os vizinhos
de p estão em π[2], logo u terá i vizinhos em π[2]. Também pela definição, cada
vértice v ∈ π[1] possui j vizinhos em π[2], pois v e p não são adjacentes, e portanto
possuem j vizinhos em comum. Como os vizinhos de p estão em π[2], cada vértice
v terá j vizinhos em π[2]. Como G é k-regular, então todo vértice u ∈ π[2] terá
k − i− 1 vizinhos em π[1] e todo v ∈ π[1] terá k − j vizinhos em π[1]. Portanto π é
G-igualitária, para todo p ∈ V (G). Pelo Teorema 3, a p-simulação se estabiliza ao
encontrar uma partição igualitária. Ao construir o grafo R, ele será completo, pois
todo par de partições ψG,p e ψG,q será compatível, o que torna o algoritmo proposto
ineficiente para grafos fortemente regulares.
A Figura 7.1 ilustra o particionamento obtido após a realização de um p-simulação
em um grafo fortemente regular. Os valores marcados nas setas representam a quan-
tidade de vizinhos que um vértice presente em uma célula possui em relação a uma
outra célula.

Capítulo 7. Resultados 70
π[3]
π[2]π[1]
0
k
1
i
k − i− 1
j
k − j
π
Figura 7.1: Partição π obtida após uma simulação em um grafo fortemente regular.
A seguir, temos a Tabela 7.4 que mostra os resultados obtidos para pares de
grafos fortemente conexos não isomorfos, mas que possuem os mesmos valores de
v, k, i, j em ambos.
Tabela 7.4: Grafos fortemente regulares não isomorfos.
Características Nauty Mabiv = 25k = 12i = 5j = 6 0.001 28.334v = 36k = 14i = 4j = 6 0.004 4929.180

CAPÍTULO 8
Considerações Finais
Neste trabalho apresentamos conceitos básicos sobre teoria dos grafos, estudamos
o Problema do Isomorfismo de Grafos e o algoritmo proposto por McKay. Como
contribuição, apresentamos um algoritmo para o caso geral do PIG e um estudo
detalhado do algoritmo PGI.
Como visto no capítulo anterior, apesar de o algoritmo proposto não ter supe-
rado o algoritmo PGI em desempenho, houve uma contribuição válida, pois não
foi encontrado na literatura um algoritmo para o PIG baseado em emparelhamen-
tos perfeitos em grafo bipartido. Além disso, acreditamos que este algoritmo seja
de fácil paralelização, o que traria um ganho de desempenho. Na próxima seção,
apresentamos quais serão os trabalhos futuros relacionados a esta dissertação.

Capítulo 8. Considerações Finais 72
8.1 Trabalhos futuros
Em um trabalho futuro, pretendemos paralelizar este algoritmo, utilizando a seguinte
estratégia: em primeiro lugar, a simulação seria paralelizada, pois foi verificado
empiricamente que este processo demanda muito tempo de processamento. Em
segundo momento, a paralelização seria na geração de emparelhamentos perfeitos.
Outro trabalho a ser desenvolvido é paralelizar o algoritmo PGI.
Além disso, pretendemos implementar duas melhorias no algoritmo proposto,
com o objetivo de diminuir o tempo de execução: a primeira é modificar o processo de
simulação, para que uma simulação tenha como parâmetro, além do vértice pivô e a
função f , uma partição obtida em uma simulação anterior. A segunda melhoria é na
etapa de verificação do isomorfismo a partir de um emparelhamento perfeito. Se um
emparelhamento perfeitoM não corresponde a um isomorfismo ϕ, certamente haverá
um par de arestas e = {i, j} e a = {u, v} de M em que i = ϕ(j) e u 6= ϕ(v). Com
isso, podemos modificar o algoritmo que gera os emparelhamentos perfeitos, de modo
que as arestas e e a não estejam simultaneamente nos próximos emparelhamentos
perfeitos gerados.
Outras pesquisas a serem desenvolvidas é comparar o consumo de memória dos
dois algoritmos, e testá-los em sistemas com pouca memória RAM e cache inexistente
ou limitado.

Bibliografia
[1] Alon, N. e Spencer, J. (2004). The Probabilistic Method. Wiley-Interscience
series in discrete mathematics e optimization. Wiley.
[2] Arvind, V. e Torán, J. (2005). Isomorphism testing: Perspective e open problems.
Bulletin of the EATCS, 86:66–84.
[3] Babai, L., Grigoryev, D. Y., e Mount, D. M. (1982). Isomorphism of graphs
with bounded eigenvalue multiplicity. In Proceedings of the fourteenth annual
ACM symposium on Theory of computing, STOC ’82, pages 310–324, New York,
NY, USA. ACM.
[4] Babai, L. e Luks, E. M. (1983). Canonical labeling of graphs. In Proceedings
of the Fifteenth Annual ACM Symposium on Theory of Computing, STOC ’83,
pages 171–183, New York, NY, USA. ACM.
[5] Barbosa, R. M. (1975). Combinatória e Grafos. Nobel.
[6] Chen, W.-K. (1997). Graph theory e its engineering applications. Advanced
Series in Electrical e Computer Engineering. World Scientific.

Bibliografia 74
[7] Colbourn, C. J. (1981). On testing isomorphism of permutation graphs.
Networks, 11(1):13–21.
[8] Conte, D., Foggia, P., Sansone, C., e Vento, M. (2004). Thirty Years Of Graph
Matching In Pattern Recognition. International Journal of Pattern Recognition e
Artificial Intelligence.
[9] Farouk, R. M. (2011). Iris recognition based on elastic graph matching e gabor
wavelets. Computer Vision e Image Understanding, 115(8):1239–1244.
[10] Foggia, P., Sansone, C., e Vento, M. (2001). A performance comparison of five
algorithms for graph isomorphism. Proc. of the 3rd IAPR TC-15 Workshop on
Graph-based Representations in Pattern Recognition, pages 188–199.
[11] Foggia, P., Sansone, C., e Vento, M. (2004). A (sub)graph isomorphism algo-
rithm for matching large graphs. IEEETPAMI: IEEE Transactions on Pattern
Analysis e Machine Intelligence, 26.
[12] Gallian, J. (1994). Contemporary abstract algebra. D.C. Heath.
[13] Goldreich, O., Micali, S., e Wigderson, A. (1986). Proofs that yield nothing but
their validity e a methodology of cryptographic protocol design. In Proceedings
of the 27th Annual Symposium on Foundations of Computer Science, SFCS ’86,
pages 174–187, Washington, DC, USA. IEEE Computer Society.
[14] Hopcroft, J. e Karp, R. (1973). An n5/2 algorithm for maximum matchings in
bipartite graphs. SIAM Journal on Computing, 2(4):225–231.
[15] Hopcroft, J. E. e Wong, J. K. (1974). Linear time algorithm for isomorphism
of planar graphs (preliminary report). In Proceedings of the sixth annual ACM
symposium on Theory of computing, STOC ’74, pages 172–184, New York, NY,
USA. ACM.

75 Bibliografia
[16] Jenner, B., Köbler, J., McKenzie, P., e Torán, J. (2003). Completeness results
for graph isomorphism. J. Comput. Syst. Sci., 66(3):549–566.
[17] Jukna, S. (2001). Extremal Combinatorics: With Applications in Computer
Science. Springer.
[18] Köbler, J., Schöning, U., e Torán, J. (1993). The Graph Isomorphism Problem:
Its Structural Complexity. Progress in Theoretical Computer Science. Birkhäuser.
[19] Leiserson, C., Cormen, T., Rivest, R., e Stein, C. (2002). Algoritmos: teoria e
prática. Campus.
[20] Lueker, G. S. e Booth, K. S. (1979). A linear time algorithm for deciding
interval graph isomorphism. J. ACM, 26(2):183–195.
[21] Luks, E. M. (1982). Isomorphism of graphs of bounded valence can be tested
in polynomial time. Journal of Computer e System Sciences, 25(1):42 – 65.
[22] Martin, D. M. (2011). Teoria dos grafos: notas de aula. Online.
[23] McKay, B. (2013). Combinatorial data. [Online; http://cs.anu.edu.au/ bdm/-
data/graphs.html; accessado em 28-Dezembro-2013].
[24] McKay, B. e Piperno, A. (2013). nauty e traces. [Online;
http://cs.anu.edu.au/ bdm/nauty/; accessado em 28-Dezembro-2013].
[25] McKay, B. D. (1981). Practical graph isomorphism. In Congressus Nume-
rantium (10th. Manitoba Conference on Numerical Mathematics e Computing),
volume 30, pages 45–87.
[26] Miller, G. (1980). Isomorphism testing for graphs of bounded genus. In Pro-
ceedings of the twelfth annual ACM symposium on Theory of computing, STOC
’80, pages 225–235, New York, NY, USA. ACM.

Bibliografia 76
[27] Nandi, R. C. (2006). Isomorfismo de grafos aplicado à comparação de impressões
digitais. Mestrado, UFPR.
[28] Netto, P. O. B. (2006). Grafos: Teoria, modelos, algoritmos. Edgard Blucher,
4 edition.
[29] Pedarsani, P. e Grossglauser, M. (2011). On the privacy of anonymized
networks. In Proceedings of the 17th ACM SIGKDD international conference
on Knowledge discovery e data mining, KDD ’11, pages 1235–1243, New York,
NY, USA. ACM.
[30] Raymond, J. W. e Willett, P. (2002). Maximum common subgraph isomorphism
algorithms for the matching of chemical structures. Journal of Computer-Aided
Molecular Design, 16(7):521–533.
[31] Rodrigues, P. M. (2013). Emparelhamentos em grafos. [Online;
http://www.math.ist.utl.pt/ pmartins/EMF/Notas/Grafos5.pdf; accessado em
28-Dezembro-2013].
[32] Schmidt e Druffel (1976). A fast backtracking algorithm to test directed graphs
for isomorphism using distance matrices. JACM: Journal of the ACM, 23.
[33] Sipser, M. (1996). Introduction to the Theory of Computation. International
Thomson Publishing, 1st edition.
[34] Szwarcfiter, J. L. (1988). Grafos e algoritmos computacionais. Campus, Rio de
Janeiro.
[35] Torán, J. (2004). On the hardness of graph isomorphism. SIAM J. Comput.,
33(5):1093–1108.
[36] Ullmann, J. R. (1976a). An algorithm for subgraph isomorphism. JACM:
Journal of the ACM, 23.

77 Bibliografia
[37] Ullmann, J. R. (1976b). An algorithm for subgraph isomorphism. J. ACM,
23(1):31–42.
[38] Uno, T. (2001). A fast algorithm for enumerating bipartite perfect matchings.
In ISAAC, pages 367–379.

CAPÍTULO 9
Anexo
1 #pragma once
2 #i f n d e f CELULA_H_
3 #d e f i n e CELULA_H_
4
5 #inc lude <set >
6
7 us ing namespace std ;
8
9 c l a s s Ce l l {
10 pub l i c :
11 Cel l ( ) ;
12 Cel l ( i n t l a b e l ) ;
13
14 set<int > v e r t i c e s ;
15
16 i n t l a b e l ;
17

79
18 bool operator <( Ce l l c ) {
19 r e tu rn l a b e l < c . l a b e l ;
20 }
21 } ;
22
23 #e n d i f /∗ CELULA_H_ ∗/
codigo/cell.h
1
2 #i f n d e f CELULA_CPP_
3 #d e f i n e CELULA_CPP_
4
5 #inc lude " c e l l . h "
6
7 Cel l : : Ce l l ( ) {
8 l a b e l = 0 ;
9 }
10
11 Cel l : : Ce l l ( i n t l a b e l ) {
12 th i s −>l a b e l = l a b e l ;
13 }
14
15 #e n d i f
codigo/cell.cpp
1 #pragma once
2 #i f n d e f GRAPH_H_
3 #d e f i n e GRAPH_H_
4
5 #inc lude <l i s t >
6 #inc lude <iostream >
7 #inc lude <fstream>

Capítulo 9. Anexo 80
8
9 us ing namespace std ;
10
11 // Uma c l a s s e para r e p r e s e n t a r g r a f o s d i r i g i d o s
12 c l a s s Digraph {
13 protec t ed :
14 i n t n ; // numero de v e r t i c e s
15 i n t m; // numero de a r e s t a s
16
17 // Matriz de ad jacenc ia
18 i n t ∗∗ matrix ;
19
20 // Uma matriz de ad jacenc ia e s p e c i a l
21 /∗ /
22 ∗ | Adj [ u ] . end ( ) i f v i s not in u ’ s ad jacency
l i s t ,
23 ∗ M[ u ] [ v ] = <
24 ∗ | the i t e r a t o r po in t ing to v in u ’ s l i s t
o therwi se .
25 ∗ \
26 ∗/
27 l i s t <int >: : i t e r a t o r ∗∗M;
28
29 pub l i c :
30 l i s t <int > ∗ adj ;
31
32 Digraph ( i n t n) ; // Construtor
33 Digraph ( Digraph ∗G) ; // Construtor ( f a z cop ia de G)
34
35 /∗ Constro i um gra fo d i r i g i d o a p a r t i r do gra fo b i p a r t i d o balan−
36 ∗ ceado R e emparelhamento M. As a r e s t a s de M são or i en tadas de
37 ∗ ’ baixo ’ para ’ cima ’ e as a r e s t a s de R \ M são or i en tadas de
38 ∗ ’ cima ’ para ’ baixo ’ .

81
39 ∗/
40 ~Digraph ( ) ; // Destrutor
41
42 bool in se r t_arc ( i n t u , i n t v ) ; // I n s e r e o arco (u , v )
43 bool remove_arc ( i n t u , i n t v ) ; // Remove o arco (u , v )
44 bool ex i s t s_arc ( i n t u , i n t v ) ; // V e r i f i c a se (u , v ) e s ta
p re sen te
45 bool invert_arc ( i n t u , i n t v ) ; // Troca orientação do arco (
u , v )
46 bool invert_path ( i n t u , const i n t ∗ parent ) ;
47
48 l i s t <int >: : i t e r a t o r remove_arc_alternative ( i n t u , i n t v ) ; //
Remove o arco (u , v )
49
50 l i s t <int >: : i t e r a t o r arc ( i n t u , i n t v ) ;
51
52 void p r i n t ( ) ; // Imprime o gra fo na t e l a
53 void read_graph (FILE ∗) ; // Le um gra fo não d i r i g i d o de
um arqu ivo
54 void read_digraph (FILE ∗) ; // Le um gra fo d i r i g i d o de um
arqu ivo
55
56 i n t get_n ( ) ; // Retorna a quantidade de v e r t i c e s
57 i n t get_m ( ) ; // Retorna a quantidade de a r e s t a s
58
59
60 // Transpoe o gra fo ( in p lace )
61 void t ranspose ( ) ;
62
63 // Retorna uma copia do gra fo t ranspos to
64 Digraph ∗ get_transpose ( ) ;
65
66 // Retorna a matriz de a d j a c e n c i a s

Capítulo 9. Anexo 82
67 const i n t ∗∗ adjacency_matrix ( ) ;
68 } ;
69
70 #e n d i f
codigo/digraph.h
1 #i f n d e f GRAFOS_CPP_
2 #d e f i n e GRAFOS_CPP_
3
4 #inc lude " digraph . h "
5 #inc lude <iostream >
6 #inc lude <fstream>
7
8 Digraph : : Digraph ( i n t n ) {
9 th i s −>n = n ;
10 adj = new l i s t <int> [ n ] ;
11 matrix = NULL;
12
13 // I n i c i a l i z a a matriz de ad jacenc ia
14 M = new l i s t <int >: : i t e r a t o r ∗ [ n ] ;
15 f o r ( i n t i = 0 ; i < n ; i ++) {
16 M[ i ] = new l i s t <int >: : i t e r a t o r [ n ] ;
17 f o r ( i n t j = 0 ; j < n ; j ++)
18 M[ i ] [ j ] = adj [ i ] . end ( ) ;
19 }
20 }
21
22 Digraph : : Digraph ( Digraph ∗G) {
23 n = G−>n ;
24
25 adj = new l i s t <int> [ n ] ;
26 matrix = NULL;
27

83
28 // Aloca a matriz de ad jacenc ia e i n i c i a l i z a com "0"
29 M = new l i s t <int >: : i t e r a t o r ∗ [ n ] ;
30 f o r ( i n t i = 0 ; i < n ; i ++) {
31 M[ i ] = new l i s t <int >: : i t e r a t o r [ n ] ;
32 f o r ( i n t j = 0 ; j < n ; j ++)
33 M[ i ] [ j ] = adj [ i ] . end ( ) ;
34 }
35
36 // Copia os arcos
37 f o r ( i n t i = 0 ; i < n ; i ++)
38 f o r ( l i s t <int >: : i t e r a t o r j = G−>adj [ i ] . beg in ( ) ; j != G−>adj [ i ] .
end ( ) ; j ++) {
39 adj [ i ] . push_front (∗ j ) ;
40 M[ i ] [ ∗ j ] = adj [ i ] . beg in ( ) ; // Mantem a matriz atua l i zada
41 }
42 }
43
44 void Digraph : : t ran spose ( ) {
45 l i s t <int > ∗ oldAdj = adj ;
46 adj = new l i s t <int> [ n ] ;
47
48 f o r ( i n t i = 0 ; i < n ; i ++)
49 f o r ( i n t j = 0 ; j < n ; j ++)
50 M[ i ] [ j ] = adj [ i ] . end ( ) ;
51
52 f o r ( i n t i = 0 ; i < n ; i ++)
53 f o r ( l i s t <int >: : i t e r a t o r j = oldAdj [ i ] . beg in ( ) ; j != oldAdj [ i ] .
end ( ) ; j ++) {
54 adj [ ∗ j ] . push_front ( i ) ;
55 M[ i ] [ ∗ j ] = j ;
56 }
57
58 d e l e t e [ ] oldAdj ;

Capítulo 9. Anexo 84
59 }
60
61 Digraph : : ~ Digraph ( ) {
62 // Libera memoria
63 f o r ( i n t i = 0 ; i < n ; i ++)
64 d e l e t e [ ] M[ i ] ;
65 d e l e t e [ ] M;
66 d e l e t e [ ] adj ;
67 }
68
69 // I n s e r e o arco (u , v )
70 bool Digraph : : in se r t_arc ( i n t u , i n t v ) {
71 i f (M[ u ] [ v ] == adj [ u ] . end ( ) ) {
72 adj [ u ] . push_front ( v ) ;
73
74 // Atual iza a matriz
75 M[ u ] [ v ] = adj [ u ] . begin ( ) ;
76 r e tu rn t rue ;
77 }
78
79 r e tu rn f a l s e ;
80 }
81
82 // Muda a direcão de um arco em tempo constante
83 bool Digraph : : invert_arc ( i n t u , i n t v )
84 {
85 i f (M[ u ] [ v ] == adj [ u ] . end ( ) | | M[ v ] [ u ] != adj [ v ] . end ( ) )
86 r e tu rn f a l s e ;
87
88 adj [ u ] . e r a s e (M[ u ] [ v ] ) ;
89 M[ u ] [ v ] = adj [ u ] . end ( ) ;
90 adj [ v ] . push_front (u ) ;
91 M[ v ] [ u ] = adj [ v ] . begin ( ) ;

85
92
93 r e tu rn t rue ;
94 }
95
96 // Muda a direcão dos arcos em um caminho u , p [ u ] , p [ p [ u ] ] , . . .
97 bool Digraph : : invert_path ( i n t u , const i n t ∗ parent )
98 {
99 bool r e s u l t = t rue ;
100
101 whi le ( parent [ u ] != u) {
102 r e s u l t = r e s u l t && invert_arc ( parent [ u ] , u) ;
103 u = parent [ u ] ;
104 }
105
106 r e tu rn r e s u l t ;
107 }
108
109
110 // Remove o arco (u , v ) em tempo constante
111 bool Digraph : : remove_arc ( i n t u , i n t v ) {
112 i f (M[ u ] [ v ] != adj [ u ] . end ( ) ) {
113 adj [ u ] . e r a s e (M[ u ] [ v ] ) ;
114
115 // Atual iza a matriz
116 M[ u ] [ v ] = adj [ u ] . end ( ) ;
117 r e tu rn t rue ;
118 }
119
120 r e tu rn f a l s e ;
121 }
122
123 l i s t <int >: : i t e r a t o r Digraph : : remove_arc_alternative ( i n t u , i n t v )
124 {

Capítulo 9. Anexo 86
125 l i s t <int >: : i t e r a t o r next_element = adj [ u ] . e r a s e (M[ u ] [ v ] ) ;
126
127 M[ u ] [ v ] = adj [ u ] . end ( ) ;
128
129 r e tu rn next_element ;
130 }
131
132 // V e r i f i c a se o arco (u , v ) per t ence ao gra fo em tempo constante
133 bool Digraph : : ex i s t s_arc ( i n t u , i n t v ) {
134 i f (M[ u ] [ v ] == adj [ u ] . end ( ) )
135 r e tu rn f a l s e ;
136 r e tu rn t rue ;
137 }
138
139 l i s t <int >: : i t e r a t o r Digraph : : arc ( i n t u , i n t v ) {
140 r e tu rn M[ u ] [ v ] ;
141 }
142
143 // Imprime as l i s t a s de v i z inhanca na t e l a
144 void Digraph : : p r i n t ( ) {
145 f o r ( i n t i = 0 ; i < n ; i++) {
146 cout << i << " : " ;
147
148 // Imprime pr ime i ro v i z inho de i
149 l i s t <int >: : i t e r a t o r j = adj [ i ] . beg in ( ) ;
150 i f ( j != adj [ i ] . end ( ) ) {
151 cout << " " << ∗ j ;
152
153 // Percorre o r e s t a n t e dos v i z i n h o s de i , imprimindo−os
154 f o r ( j ++; j != adj [ i ] . end ( ) ; j++)
155 cout << " , " << ∗ j ;
156 }
157

87
158 cout << endl ;
159 }
160 }
161
162 // Le o gra fo da entrada e preenche a e s t r u t u r a de dados na memoria
163 void Digraph : : read_graph (FILE ∗ entrada ) {
164 whi le ( ! f e o f ( entrada ) ) {
165 i n t u , v ;
166
167 f s c a n f ( entrada , "%d" , &u) ;
168 f s c a n f ( entrada , "%d" , &v ) ;
169
170 th i s −>inse r t_arc (u , v ) ;
171 th i s −>inse r t_arc (v , u) ;
172 }
173 }
174
175 // Le o d i g r a f o da entrada e preenche a e s t r u t u r a de dados na memoria
176 void Digraph : : read_digraph (FILE ∗ entrada ) {
177 whi le ( ! f e o f ( entrada ) ) {
178 i n t u , v ;
179
180 f s c a n f ( entrada , "%d" , &u) ;
181 f s c a n f ( entrada , "%d" , &v ) ;
182
183 th i s −>inse r t_arc (u , v ) ;
184 }
185 }
186
187 // Retorna a quantidade de v e r t i c e s
188 i n t Digraph : : get_n ( ) {
189 r e tu rn n ;
190 }

Capítulo 9. Anexo 88
191
192 /∗∗ Retorna a quantidade de a r e s t a s
193 ∗/
194 i n t Digraph : : get_m ( ) {
195 i n t m = 0 ;
196
197 f o r ( i n t i = 0 ; i < n ; i ++) {
198 l i s t <int >: : i t e r a t o r j = adj [ i ] . beg in ( ) ;
199 l i s t <int >: : i t e r a t o r f = adj [ i ] . end ( ) ;
200 f o r ( ; j != f ; j ++)
201 m ++;
202 }
203
204 r e tu rn m;
205 }
206
207 // Retorna um novo gra fo que e o t ranspos to do grafo −ob je to
208 // I am not sure we need t h i s funct ion . . .
209 // s t r o n g l y Conn . comp may simply t ranspose the same graph G a l l a long
210 Digraph ∗ Digraph : : get_transpose ( ) {
211 Digraph ∗T = new Digraph (∗ t h i s ) ;
212
213 T−>transpose ( ) ;
214
215 r e tu rn T;
216 }
217
218 // Aloca e re torna a matriz de ad jacenc ia do gra fo
219 i n t const ∗∗ Digraph : : adjacency_matrix ( ) {
220 i f ( matrix != NULL)
221 r e tu rn ( const i n t ∗∗) matrix ;
222
223 matrix = new i n t ∗ [ n ] ;

89
224 f o r ( i n t i = 0 ; i < n ; i ++)
225 matrix [ i ] = new i n t [ n ] ;
226
227 f o r ( i n t i = 0 ; i < n ; i++)
228 f o r ( i n t j = 0 ; j < n ; j++)
229 matrix [ i ] [ j ] = 0 ;
230
231 f o r ( i n t i = 0 ; i < n ; i++)
232 f o r ( l i s t <int >: : i t e r a t o r j = adj [ i ] . beg in ( ) ; j != adj [ i ] . end ( ) ;
j++)
233 matrix [ i ] [ ∗ j ] = 1 ;
234
235 r e tu rn ( const i n t ∗∗) matrix ;
236 }
237
238 #e n d i f /∗ GRAFOS_CPP_ ∗/
codigo/digraph.cpp
1 #pragma once
2 #i f n d e f ARESTA_H_
3 #d e f i n e ARESTA_H_
4
5 s t r u c t Edge {
6 i n t u , v ;
7 } ;
8
9
10 #e n d i f /∗ ARESTA_H_ ∗/
codigo/edge.h
1 #pragma once
2 #i f n d e f ISOMORPHISM_H

Capítulo 9. Anexo 90
3 #d e f i n e ISOMORPHISM_H
4
5 #inc lude " digraph . h "
6 #inc lude " matching . h "
7 #inc lude " p a r t i t i o n . h "
8
9 c l a s s Isomorphism {
10 pub l i c :
11 i n t n ;
12 Digraph ∗G, ∗H;
13 P a r t i t i o n ∗∗ psiG , ∗∗ psiH ;
14
15 Isomorphism ( Digraph ∗G, Digraph ∗H) {
16 th i s −>G = G;
17 th i s −>H = H;
18 n = G−>get_n ( ) ;
19 }
20
21 ~Isomorphism ( ) {
22 f o r ( i n t p = 0 ; p < n ; p ++)
23 d e l e t e psiG [ p ] ;
24
25 f o r ( i n t q = 0 ; q < n ; q ++)
26 d e l e t e psiH [ q ] ;
27
28 d e l e t e [ ] psiG ;
29 d e l e t e [ ] psiH ;
30 }
31
32 i n t ∗ matching_based_algorithm ( ) ;
33
34 i n t ∗ get_map_from_two_discrete_partitions ( P a r t i t i o n ∗P, Pa r t i t i o n ∗Q)
;

91
35
36 /∗ Supoe |E(G) | = |E(H) | . ∗/
37 bool check_isomorphism ( const i n t ∗ permutation ) ;
38
39 /∗ Remove a r e s t a s de R que não estao cont idas em c i r c u i t o s . ∗/
40 Edge trim_edges ( Digraph ∗R) ;
41
42 void re s t r i c t_match ing ( Matching ∗M, i n t p , i n t q ) ;
43 void re s t r i c t_compat ib i l i t y _gra ph ( Digraph ∗R, i n t p , i n t q ) ;
44 Digraph ∗ new_constrained_compatibi l ity_graph ( Digraph ∗R, i n t p , i n t
q ) ;
45
46 i n t ∗ enumerate_isomorphism_candidates ( Digraph ∗D, Matching ∗M) ;
47 } ;
48
49 #e n d i f /∗ ISOMORPHISM_H ∗/
codigo/isomorphism.h
1 #inc lude <c s t d l i b >
2 #inc lude <iostream >
3 #inc lude " edge . h "
4 #inc lude " search . h "
5 #inc lude " isomorphism . h "
6 #inc lude " s imu lat ion . h "
7
8 i n t ∗ Isomorphism : : get_map_from_two_discrete_partitions ( P a r t i t i o n ∗P,
P a r t i t i o n ∗Q) {
9 i n t ∗ permutation = new i n t [ n ] ;
10
11 l i s t <Ce l l ∗ >:: i t e r a t o r i = P−>c e l l s . begin ( ) , j = Q−>c e l l s . begin ( ) ,
l a s t _ i = P−>c e l l s . end ( ) ;
12 f o r ( ; i != l a s t _ i ; i ++, j++)
13 permutation [ ∗ ( ( ∗ i )−>v e r t i c e s . begin ( ) ) ] = ∗( (∗ j )−>v e r t i c e s . begin ( ) ) ;

Capítulo 9. Anexo 92
14
15 r e tu rn permutation ;
16
17 }
18
19 /∗ Recebe do i s g r a f o s e uma n−permutaçao . Supoe que os
20 ∗ g r a f o s r e c e b i d o s tem n v e r t i c e s e supoe que os g r a f o s
21 ∗ r e c e b i d o s possuem o mesmo número de a r e s t a s . ∗/
22 bool Isomorphism : : check_isomorphism ( const i n t ∗ permutation ) {
23 i n t n = G−>get_n ( ) ;
24 const i n t ∗∗MH = H−>adjacency_matrix ( ) ;
25 l i s t <int > ∗ adj = G−>adj ;
26
27 f o r ( i n t u = 0 ; u < n ; u++)
28 f o r ( l i s t <int >: : i t e r a t o r v = adj [ u ] . begin ( ) ; v != adj [ u ] . end ( ) ; v
++)
29 i f ( !MH[ permutation [ u ] ] [ permutation [ ∗ v ] ] )
30 r e tu rn f a l s e ;
31
32 r e tu rn t rue ;
33 }
34
35 /∗ Devolve um isomorf i smo de G em H (em forma de um
36 ∗ v etor de permutaçao ) ou NULL. ∗/
37 i n t ∗ Isomorphism : : matching_based_algorithm ( ) {
38 i f (H−>get_n ( ) != G−>get_n ( ) | | H−>get_m ( ) != G−>get_m ( ) )
39 r e tu rn NULL;
40
41 psiG = new P a r t i t i o n ∗ [ n ] ;
42 psiH = new P a r t i t i o n ∗ [ n ] ;
43
44 // Calcu la a part içao da p−simulaçao para todo p em V(G)
45 f o r ( i n t p = 0 ; p < n ; p++) {

93
46 // Faz a p−simulaçao para cada p em V(G)
47 psiG [ p ] = Simulat ion (G, p) . ge t_par t i t i on ( ) ;
48
49 // Se a part içao obt ida e d i s c r e t a , s e ra rap ido . . .
50 i f ( psiG [ p]−> i s _ d i s c r e t e ( ) ) {
51
52 // Faz a q−simulaçao para cada q em V(H)
53 f o r ( i n t q = 0 ; q < n ; q++) {
54 psiH [ q ] = Simulat ion (H, q ) . ge t_par t i t i on ( ) ;
55
56 // Se uma part içao obt ida e d i s c r e t a , t e s t a por isomorf i smo
57 i f ( psiH [ q]−> i s _ d i s c r e t e ( ) ) {
58 i n t ∗ permutation = get_map_from_two_discrete_partitions ( psiG [
p ] , psiH [ q ] ) ;
59
60 i f ( check_isomorphism ( permutation ) )
61 r e tu rn permutation ;
62
63 d e l e t e [ ] permutation ;
64 }
65 }
66
67 // Nao e x i s t e i somorf i smo ent re G e H
68 r e tu rn NULL;
69 }
70 }
71
72 // Calcu la a part içao da q−simulaçao para todo q em V(H)
73 f o r ( i n t q = 0 ; q < n ; q++) {
74 psiH [ q ] = Simulat ion (H, q ) . ge t_par t i t i on ( ) ;
75
76 // Se a part içao obt ida e d i s c r e t a , nao e x i s t e i somorf i smo ent re G
e H

Capítulo 9. Anexo 94
77 i f ( psiH [ q]−> i s _ d i s c r e t e ( ) )
78 r e tu rn NULL;
79 }
80
81 // Gera gra fo R
82 Digraph ∗R = new Digraph (2 ∗ n) ;
83 f o r ( i n t p = 0 ; p < n ; p++)
84 f o r ( i n t q = 0 ; q < n ; q++)
85 i f ( psiG [ p]−>is_compat ib le ( psiH [ q ] ) )
86 R−>inse r t_arc ( q + n , p) ;
87
88 // R−>p r i n t ( ) ;
89 Matching ∗M = new Matching (n) ;
90 M−>grow_matching_in (R) ;
91 i f (M−>i s _ p e r f e c t ( ) ) {
92 i n t ∗ permutation = enumerate_isomorphism_candidates (R, M) ;
93
94 d e l e t e R;
95 d e l e t e M;
96
97 r e tu rn permutation ;
98 }
99
100 d e l e t e M;
101 d e l e t e R;
102
103 r e tu rn NULL;
104 }
105
106 void Isomorphism : : r e s t r i c t_match ing ( Matching ∗M, i n t p , i n t q ) {
107 const i n t ∗G_p_cell_of_vertex = psiG [ p]−>cel l_of_vertex_array ( ) ;
108 const i n t ∗H_q_cell_of_vertex = psiH [ q]−>cel l_of_vertex_array ( ) ;
109 const i n t ∗matched = M−>mapping ( ) ;

95
110
111 f o r ( i n t i = 0 ; i < n ; i++) {
112 i f ( matched [ i ] == NOONE)
113 cont inue ;
114
115 i n t j = matched [ i ] ;
116 const i n t ∗ G_i_cell_of_vertex = psiG [ i ]−>cel l_of_vertex_array ( ) ;
117 const i n t ∗ H_j_cell_of_vertex = psiH [ j ]−>cel l_of_vertex_array ( ) ;
118
119 i f ( G_p_cell_of_vertex [ i ] != H_q_cell_of_vertex [ j ] )
120 M−>set_matched ( i , NOONE) ;
121
122 i f ( G_i_cell_of_vertex [ p ] != H_j_cell_of_vertex [ q ] )
123 M−>set_matched ( i , NOONE) ;
124 }
125 }
126
127
128 /∗ p and q must be in the range 0 . . (n−1) . ∗/
129 Digraph ∗ Isomorphism : : new_constrained_compatibi l ity_graph ( Digraph ∗R,
i n t p , i n t q ) {
130 Digraph ∗S = new Digraph (2 ∗ n) ;
131 const i n t ∗G_p_cell_of_vertex = psiG [ p]−>cel l_of_vertex_array ( ) ;
132 const i n t ∗H_q_cell_of_vertex = psiH [ q]−>cel l_of_vertex_array ( ) ;
133
134 f o r ( i n t i = 0 ; i < n ; i++) {
135 const i n t ∗ G_i_cell_of_vertex = psiG [ i ]−>cel l_of_vertex_array ( ) ;
136 l i s t <int > &neighbors = R−>adj [ i ] ;
137
138 f o r ( l i s t <int >: : i t e r a t o r j = neighbors . begin ( ) ; j != neighbors . end
( ) ; j++) {
139 const i n t ∗ H_j_cell_of_vertex = psiH [ ∗ j − n]−>
cel l_of_vertex_array ( ) ;

Capítulo 9. Anexo 96
140
141 i f ( G_p_cell_of_vertex [ i ] == H_q_cell_of_vertex [ ∗ j − n ] )
142 i f ( G_i_cell_of_vertex [ p ] == H_j_cell_of_vertex [ q ] )
143 S−>inse r t_arc ( i , ∗ j ) ;
144 }
145 }
146
147 f o r ( i n t i = 0 ; i < n ; i++) {
148 const i n t ∗ H_i_cell_of_vertex = psiH [ i ]−>cel l_of_vertex_array ( ) ;
149 l i s t <int > &neighbors = R−>adj [ i + n ] ;
150
151 f o r ( l i s t <int >: : i t e r a t o r j = neighbors . begin ( ) ; j != neighbors . end
( ) ; j++) {
152 const i n t ∗ G_j_cell_of_vertex = psiG [ ∗ j ]−>cel l_of_vertex_array ( ) ;
153
154 i f ( G_p_cell_of_vertex [ ∗ j ] == H_q_cell_of_vertex [ i ] )
155 i f ( G_j_cell_of_vertex [ p ] == H_i_cell_of_vertex [ q ] )
156 S−>inse r t_arc ( i + n , ∗ j ) ;
157 }
158 }
159
160 r e tu rn S ;
161 }
162
163 /∗ Remove a r e s t a s que nao es tao em c i r c u i t o s e r e torna a
164 ∗ última a r e s t a que nao f o i removida . ∗/
165 Edge Isomorphism : : trim_edges ( Digraph ∗D) {
166 Edge e = {NOONE, NOONE} ;
167
168 Search S(D) ;
169 S . strongly_connected_components_algorithm ( ) ;
170 i n t const ∗ scc = S . get_scc_array ( ) ;
171

97
172 f o r ( i n t i = 0 ; i < n ; i++) {
173 l i s t <int > &neighbors = D−>adj [ i ] ;
174
175 f o r ( l i s t <int >: : i t e r a t o r j = neighbors . begin ( ) ; j != neighbors . end
( ) ; j ++)
176 i f ( s c c [ i ] != scc [ ∗ j ] ) {
177 j = D−>remove_arc_alternative ( i , ∗ j ) ;
178 i f ( j == neighbors . end ( ) )
179 break ;
180 }
181 e l s e {
182 e . u = i ;
183 e . v = ∗ j ;
184 }
185 }
186
187 r e tu rn e ;
188 }
189
190 /∗ Recebe um gra fo b i p a r t i d o balanceado R e um emp . p e r f e i t o M. ∗/
191 i n t ∗ Isomorphism : : enumerate_isomorphism_candidates ( Digraph ∗D, Matching
∗M) {
192
193 i f ( check_isomorphism (M−>mapping ( ) ) ) {
194 i n t ∗ permutation = new i n t [ n ] ;
195 const i n t ∗mapping = M−>mapping ( ) ;
196
197 f o r ( i n t i = 0 ; i < n ; i ++)
198 permutation [ i ] = mapping [ i ] ;
199
200 r e tu rn permutation ;
201 }
202

Capítulo 9. Anexo 98
203 Edge e , e_prime = trim_edges (D) ;
204
205 i f ( e_prime . u == NOONE)
206 r e tu rn NULL;
207
208 /∗ Acha c i r c u i t o C. ∗/
209 Search S(D) ;
210 S . find_path ( e_prime . v , e_prime . u ) ;
211 i n t const ∗path = S . get_parent_array ( ) ;
212
213 /∗ Escolhe a a r e s t a e . ∗/
214 i f ( e_prime . u < e_prime . v )
215 e = e_prime ;
216 e l s e {
217 e . v = e_prime . u ;
218 e . u = path [ e_prime . u ] ;
219 }
220
221 Matching ∗M_prime = new Matching (M, e_prime . u , path ) ;
222
223 Digraph ∗D_plus = new_constrained_compatibi l ity_graph (D, e . u , e . v − n
) ;
224
225 r e s t r i c t_match ing (M, e . u , e . v − n) ;
226
227 M−>grow_matching_in ( D_plus ) ;
228
229 i f (M−>i s _ p e r f e c t ( ) ) {
230
231 i n t ∗ permutation = enumerate_isomorphism_candidates ( D_plus , M) ;
232
233 i f ( permutation ) {
234 d e l e t e D_plus ;

99
235 d e l e t e M_prime ;
236
237 r e tu rn permutation ;
238 }
239
240 }
241
242 d e l e t e D_plus ;
243
244 D−>invert_path ( e_prime . u , path ) ;
245 D−>invert_arc ( e_prime . u , e_prime . v ) ;
246
247 /∗ Remove o arco r e v e r s o de e ( po i s e f o i r e v e r t i d o ) . ∗/
248 D−>remove_arc_alternat ive ( e . v , e . u ) ;
249
250 i n t ∗ permutation = enumerate_isomorphism_candidates (D, M_prime ) ;
251
252 d e l e t e M_prime ;
253
254 i f ( permutation )
255 r e tu rn permutation ;
256
257 r e tu rn NULL;
258 }
codigo/isomorphism.cpp
1 #inc lude <c s t d l i b >
2 #inc lude <fstream>
3 #inc lude <iostream >
4 #inc lude " isomorphism . h "
5
6 us ing namespace std ;
7

Capítulo 9. Anexo 100
8 i n t main ( i n t ac , char ∗∗av ) {
9 i n t n ;
10
11 // MABI −− matching based isomorphism
12 i f ( ac != 3) {
13 cout << " Usage : \ n\n\tmabi <graph f i l e #1> <graph f i l e #2>\n\n" ;
14 cout << " \ t \t−− the format o f a graph f i l e i s : \ n\ t \ t " ;
15 cout << "n a_1 b_1 a_2 b_2 . . . a_m b_m EOF, \ n\ t \ t " ;
16 cout << " where a_i b_i encodes an edge , and numbers\n\ t \ t " ;
17 cout << " are separated by whitespaces \n\n" ;
18
19 r e tu rn EXIT_FAILURE ;
20 }
21
22 // Entrada dos g r a f o s G e H
23 FILE ∗ graph1 = fopen ( av [ 1 ] , " r t " ) ;
24 i f ( graph1 == NULL) {
25 cout << " Could not open graph f i l e " << av [ 1 ] << endl ;
26 r e tu rn EXIT_FAILURE ;
27 }
28
29 f s c a n f ( graph1 , "%d" , &n) ;
30 Digraph ∗G = new Digraph (n) ;
31 G−>read_graph ( graph1 ) ;
32 f c l o s e ( graph1 ) ;
33
34 FILE ∗ graph2 = fopen ( av [ 2 ] , " r t " ) ;
35 i f ( graph2 == NULL) {
36 cout << " Could not open graph f i l e " << av [ 2 ] << endl ;
37 r e tu rn EXIT_FAILURE ;
38 }
39
40 f s c a n f ( graph2 , "%d" , &n) ;

101
41 Digraph ∗H = new Digraph (n) ;
42 H−>read_graph ( graph2 ) ;
43 f c l o s e ( graph2 ) ;
44
45 Isomorphism I (G, H) ;
46
47 i n t ∗ permutation = I . matching_based_algorithm ( ) ;
48 i f ( permutation ) {
49 f o r ( i n t i = 0 ; i < n − 1 ; i ++)
50 cout << permutation [ i ] << " " ;
51 cout << permutation [ n − 1 ] << endl ;
52 }
53
54 d e l e t e G;
55 d e l e t e H;
56
57 r e tu rn 0 ;
58 }
codigo/main.cpp
1
2 #pragma once
3 #i f n d e f MATCHING_H
4 #d e f i n e MATCHING_H
5
6 #i f n d e f NOONE
7 #d e f i n e NOONE −1
8 #e n d i f
9
10 #i f n d e f NULL
11 #d e f i n e NULL 0
12 #e n d i f
13

Capítulo 9. Anexo 102
14 #inc lude " edge . h "
15
16 c l a s s Digraph ;
17
18 /∗ Clas se r e sponsav e l por encontrar um emparelhamento
19 ∗ p e r f e i t o num gra fo b i p a r t i d o balanceado ( possu indo
20 ∗ v e r t i c e s de 0 a ( k − 1) de um lado , e de k a (2 k −
21 ∗ 1) do outro . ∗/
22 c l a s s Matching {
23 p r i v a t e :
24 /∗ n = 2k ∗/
25 i n t k , n ;
26
27 Digraph ∗D;
28
29 /∗ Vetor com k posiçoes : matched [ i ] = v e r t i c e ao qual
30 ∗ i e s ta emparelhado ou NOONE caso c o n t r a r i o . ∗/
31 i n t ∗matched ;
32
33 /∗ Vetor com 2k elementos usado para guardar
34 ∗ caminhos da busca . ∗/
35 i n t ∗ parent ;
36
37 /∗ Funçao r e c u r s i v a de busca em profundidade : a
38 ∗ busca termina quando encontrar um v e r t i c e i
39 ∗ nao saturado ( sem arco saindo ) do lado menor
40 ∗ ( i . e . com i < k ) . ∗/
41 i n t d f s _ v i s i t ( i n t i ) ;
42
43 pub l i c :
44 /∗ Supoe que o gra fo H e b ipar t ido , com v e r t i c e s
45 ∗ de 0 ate (k−1) de um dos lados . ∗/
46 Matching ( i n t k ) ;

103
47
48 Matching ( const Matching &M) ;
49
50 Matching ( Matching ∗M, i n t edge_bottom , const i n t ∗path ) ;
51
52 ~Matching ( ) ;
53
54 /∗ Encontra um emparelhamento maximo no gra fo . ∗/
55 void grow_matching_in ( Digraph ∗H) ;
56
57 /∗ V e r i f i c a se o emparelhamento e p e r f e i t o . ∗/
58 bool i s _ p e r f e c t ( ) ;
59
60 /∗ Imprime emparelhamento . ∗/
61 void p r i n t ( ) ;
62
63 /∗ Retorna mapa correspondente ao emparelhamento . ∗/
64 const i n t ∗mapping ( ) ;
65
66 /∗ Ajusta manualmente um v e r t i c e emparelhado a outro
67 ∗ ( so no v etor matched) . ∗/
68 void set_matched ( i n t i , i n t j ) ;
69 } ;
70
71
72 #e n d i f /∗ MATCHING_H ∗/
codigo/matching.h
1 #inc lude <l i s t >
2 #inc lude <vector>
3 #inc lude " search . h "
4 #inc lude " digraph . h "
5 #inc lude " matching . h "

Capítulo 9. Anexo 104
6
7 Matching : : Matching ( i n t k ) {
8 D = NULL;
9 th i s −>k = k ;
10 n = 2 ∗ k ;
11 matched = new i n t [ k ] ;
12 parent = NULL;
13
14 f o r ( i n t i = 0 ; i < k ; i++)
15 matched [ i ] = NOONE;
16 }
17
18 Matching : : Matching ( const Matching &M) {
19 D = NULL;
20 k = M. k ;
21 n = M. n ;
22 matched = new i n t [ k ] ;
23 parent = NULL;
24
25 f o r ( i n t i = 0 ; i < k ; i++)
26 matched [ i ] = M. matched [ i ] ;
27 }
28
29 /∗ Faz uma copia do emparelhamento M e f a z M = M ds C, onde
30 ∗ ds denota a ’ d i f e r e n c a s i m e t r i c a ’ e C e o c i r c u i t o codi−
31 ∗ f i c a d o pe lo v e r t i c e edge_bottom e pe lo caminho c o d i f i c a −
32 ∗ do na arvore de busca ’ path ’ . ∗/
33 Matching : : Matching ( Matching ∗M, i n t edge_bottom , const i n t ∗ path ) {
34 D = NULL;
35 k = M−>k ;
36 n = M−>n ;
37 matched = new i n t [ k ] ;
38 parent = NULL;

105
39
40 f o r ( i n t i = 0 ; i < k ; i++)
41 matched [ i ] = M−>matched [ i ] ;
42
43 /∗ ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗ CHECK CHECK CHECK CHECK ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗
∗/
44 i n t x = edge_bottom ;
45 whi le ( path [ x ] != x ) {
46 matched [ x ] = path [ x ] − k ;
47 x = path [ path [ x ] ] ;
48 }
49 }
50
51 Matching : : ~ Matching ( ) {
52 d e l e t e [ ] matched ;
53 i f ( parent != NULL)
54 d e l e t e [ ] parent ;
55 }
56
57 /∗ Funcao r e c u r s i v a de busca em profundidade .
58 ∗ Busca termina quando encontrar um v e r t i c e
59 ∗ i < k , sem arco de saà da . ∗/
60 i n t Matching : : d f s _ v i s i t ( i n t i ) {
61 i f ( i < k && matched [ i ] == NOONE)
62 r e tu rn i ;
63
64 l i s t <int >: : i t e r a t o r j = D−>adj [ i ] . beg in ( ) ;
65 l i s t <int >: : i t e r a t o r end = D−>adj [ i ] . end ( ) ;
66 f o r ( ; j != end ; j++)
67 i f ( parent [ ∗ j ] == NOONE) {
68 parent [ ∗ j ] = i ;
69 i n t r = d f s _ v i s i t (∗ j ) ;
70 i f ( r != NOONE)

Capítulo 9. Anexo 106
71 r e tu rn r ;
72 }
73
74 r e tu rn NOONE;
75 }
76
77 /∗ Encontra um emparelhamento maximo no gra fo H dado . Caso o
78 ∗ emparelhamento ja tenha s ido encontrado anter iormente sobre o mesmo
79 ∗ gra fo ou sobre um supergra fo de le , ou ainda , se o emparelhamento
80 ∗ f o i c r i ado a p a r t i r de uma cop ia de outro emparelhamento
81 ∗ ( pos s iv e lmente desatua l i za do ) , e f e i t a uma v e r i f i c a c a o para
82 ∗ encontrar p o s s à v e i s i r r e g u l a r i d a d e s . Por exemplo , se um v e r t i c e
83 ∗ es ta emparelhado com um c e r t o v e r t i c e segundo o v etor ’ matched ’ ,
84 ∗ mas com um v e r t i c e d i f e r e n t e no gra fo H, i s s o deve s e r c o r r i g i d o
85 ∗ ( atual iando−se o v etor matched) . Caso um v e r t i c e i e s t e j a
86 ∗ emparelhado com um v e r t i c e j segundo o v etor ’ matched ’ mas nao
87 ∗ e s t e j a emparelhado com ninguem no gra fo H, entao tudo bem , desde
88 ∗ que i e j nao tenham arcos i n c i d e n t e s no gra fo . Essa v e r i f i c a c a o
89 ∗ nao e f e i t a atualmente . Tambem supoe−se que o gra fo H nao possu i
90 ∗ v e r t i c e na parte de baixo ( de 0 a ( k − 1) ) com mais de um arco
91 ∗ de saà da . ∗/
92 void Matching : : grow_matching_in ( Digraph ∗H) {
93 D = H;
94
95
96 f o r ( i n t i = 0 ; i < k ; i++) {
97 l i s t <int > &neighbors = D−>adj [ i ] ;
98
99 // pensar se i s s o pode o c o r r e r :
100 i f ( ne ighbors . begin ( ) != neighbors . end ( ) )
101 matched [ i ] = ∗( ne ighbors . begin ( ) ) − k ;
102
103 /∗ Se o gra fo de entrada nao t i v e r no maximo um arco saindo

107
104 ∗ de cada v e r t i c e da parte de ’ baixo ’ , entao a l i n h a acima
105 ∗ e onde corre −se o r i s c o de t e r matched [ i ] = matched [ j ]
106 ∗ com i != j . ∗/
107 }
108
109
110
111 i f ( parent == NULL)
112 parent = new i n t [ n ] ;
113
114 bool augmented ;
115
116 /∗ Guarda se um v e r t i c e de k ate n − 1 es ta saturado ou nao . ∗/
117 i n t ∗ s = new i n t [ k ] ;
118
119 f o r ( i n t i = 0 ; i < k ; i ++)
120 s [ i ] = NOONE;
121
122 f o r ( i n t i = 0 ; i < k ; i++)
123 i f ( matched [ i ] != NOONE)
124 s [ matched [ i ] ] = i ;
125
126 do {
127 augmented = f a l s e ;
128
129 f o r ( i n t i = 0 ; i < n ; i ++)
130 parent [ i ] = NOONE;
131
132 f o r ( i n t i = 0 ; i < k ; i ++) {
133 i n t j = i + k ;
134
135 i f ( s [ i ] == NOONE) {
136 parent [ j ] = j ;

Capítulo 9. Anexo 108
137 s [ i ] = d f s _ v i s i t ( j ) ;
138 }
139 }
140
141 f o r ( i n t i = 0 ; i < k ; i ++) {
142 i f ( s [ i ] == NOONE | | matched [ s [ i ] ] == i )
143 cont inue ;
144
145 /∗ R ea l i za a inv er sao da or i en tacao dos arcos num caminho
146 ∗ aumentador de i ate s [ i ] . ∗/
147 f o r ( i n t j = s [ i ] ; parent [ j ] != j ; j = parent [ j ] ) {
148 i f ( j < k ) {
149 matched [ j ] = parent [ j ] − k ;
150 s [ matched [ j ] ] = j ;
151 }
152 D−>invert_arc ( parent [ j ] , j ) ;
153 }
154
155 augmented = true ;
156 }
157 } whi le ( augmented ) ;
158
159 d e l e t e [ ] s ;
160 }
161
162 void Matching : : p r i n t ( ) {
163 f o r ( i n t i = 0 ; i < k ; i++)
164 cout << i << " : " << matched [ i ] << endl ;
165 }
166
167 bool Matching : : i s _ p e r f e c t ( ) {
168 f o r ( i n t i = 0 ; i < k ; i++)
169 i f ( matched [ i ] == NOONE)

109
170 r e tu rn f a l s e ;
171
172 r e tu rn t rue ;
173 }
174
175 const i n t ∗Matching : : mapping ( ) {
176 r e tu rn ( const i n t ∗) matched ;
177 }
178
179 void Matching : : set_matched ( i n t i , i n t j ) {
180 matched [ i ] = j ;
181 }
codigo/matching.cpp
1 #pragma once
2 #i f n d e f PARTICAO_H_
3 #d e f i n e PARTICAO_H_
4
5 #inc lude " c e l l . h "
6 #inc lude <map>
7 #inc lude <l i s t >
8
9 us ing namespace std ;
10
11 // Clas se para armazenar dados de uma p a r t i c a o
12 c l a s s P a r t i t i o n {
13 p r i v a t e :
14 i n t n ;
15 i n t ∗ ce l l_o f_v er t ex ;
16 bool cell_of_vertex_array_up_to_date ;
17
18 pub l i c :
19 l i s t <Ce l l ∗> c e l l s ; // Guarda a l i s t a ordenada de c e l u l a s

Capítulo 9. Anexo 110
20
21 const i n t ∗ ce l l_of_vertex_array ( ) ;
22 bool i s _ d i s c r e t e ( ) ;
23 bool i s_compat ib le ( P a r t i t i o n ∗P) ;
24 bool r e f in e_ordered_par t i t i on_us ing_ labe l s ( i n t ∗) ;
25 void p r i n t ( ) ;
26 i n t s i z e ( ) ;
27
28 P a r t i t i o n ( i n t n) ;
29 ~ P a r t i t i o n ( ) ;
30 } ;
31
32
33
34 #e n d i f /∗ PARTICAO_H_ ∗/
codigo/partition.h
1 #i f n d e f PARTICAO_CPP_
2 #d e f i n e PARTICAO_CPP_
3
4 #i f n d e f NULL
5 #d e f i n e NULL 0
6 #e n d i f
7
8 #inc lude <l i s t >
9 #inc lude <set >
10 #inc lude <map>
11 #inc lude " p a r t i t i o n . h "
12
13 us ing namespace std ;
14
15 /∗ I n i c i a l i z a uma p a r t i c a o u n i t a r i a do conjunto { 0 , . . . , n − 1} ∗/
16 P a r t i t i o n : : P a r t i t i o n ( i n t n ) {

111
17 Cel l ∗C = new Ce l l ( 0 ) ;
18 th i s −>n = n ;
19
20 f o r ( i n t i = 0 ; i < n ; i ++)
21 C−>v e r t i c e s . i n s e r t ( i ) ;
22
23 c e l l s . push_back (C) ;
24 ce l l_o f_v er t ex = NULL;
25 cell_of_vertex_array_up_to_date = f a l s e ;
26 }
27
28 P a r t i t i o n : : ~ P a r t i t i o n ( ) {
29 i f ( c e l l_o f_v er t ex )
30 d e l e t e [ ] c e l l_o f_v er t ex ;
31
32 whi le ( ! c e l l s . empty ( ) ) {
33 Cel l ∗C = c e l l s . f r o n t ( ) ;
34 c e l l s . pop_front ( ) ;
35
36 d e l e t e C;
37 }
38 }
39
40 bool P a r t i t i o n : : i s_compat ib le ( P a r t i t i o n ∗P) {
41 i f ( c e l l s . s i z e ( ) != P−>c e l l s . s i z e ( ) )
42 r e tu rn f a l s e ;
43
44 l i s t <Ce l l ∗ >:: i t e r a t o r i , j ;
45 f o r ( i = c e l l s . begin ( ) , j = P−>c e l l s . begin ( ) ; i != c e l l s . end ( ) ; i
++, j ++) {
46 i f ( ( ∗ i )−>l a b e l != (∗ j )−>l a b e l )
47 r e tu rn f a l s e ;
48 i f ( ( ∗ i )−>v e r t i c e s . s i z e ( ) != (∗ j )−>v e r t i c e s . s i z e ( ) )

Capítulo 9. Anexo 112
49 r e tu rn f a l s e ;
50 }
51
52 r e tu rn t rue ;
53 }
54
55 bool P a r t i t i o n : : i s _ d i s c r e t e ( ) {
56 r e tu rn ( c e l l s . s i z e ( ) == ( unsigned ) n ) ;
57 }
58
59 const i n t ∗ P a r t i t i o n : : ce l l_of_vertex_array ( ) {
60 i f ( c e l l_o f_v er t ex == NULL)
61 ce l l_o f_v er t ex = new i n t [ n ] ;
62
63 i f ( ! cell_of_vertex_array_up_to_date ) {
64 i n t k = 0 ;
65 f o r ( l i s t <Ce l l ∗ >:: i t e r a t o r i = c e l l s . begin ( ) ; i != c e l l s . end ( )
; i ++, k++)
66 f o r ( set<int >: : i t e r a t o r j = (∗ i )−>v e r t i c e s . begin ( ) ; j != (∗
i )−>v e r t i c e s . end ( ) ; j ++)
67 ce l l_o f_v er t ex [ ∗ j ] = k ;
68
69 cell_of_vertex_array_up_to_date = true ;
70 }
71
72 r e tu rn ( const i n t ∗) ce l l_o f_v er t ex ;
73 }
74
75 /∗ Devolve ’ t rue ’ se o re f inamento induz ido pe lo v e tor ’ l a b e l ’
76 ∗ e nao t r i v i a l e ’ f a l s e ’ caso c o n t r a r i o ∗/
77 bool P a r t i t i o n : : r e f in e_ordered_par t i t i on_us ing_ labe l s ( i n t ∗ l a b e l ) {
78 bool r e f i n e d = f a l s e ;
79 l i s t <Ce l l ∗> new_cells ;

113
80
81 f o r ( l i s t <Ce l l ∗ >:: i t e r a t o r i = c e l l s . begin ( ) ; i != c e l l s . end ( ) ; i
++) {
82 map<int , Ce l l ∗> c h i l d r e n ;
83
84 f o r ( set <int >: : i t e r a t o r j = (∗ i )−>v e r t i c e s . begin ( ) ; j != (∗ i )−>
v e r t i c e s . end ( ) ; j ++)
85 c h i l d r e n [ l a b e l [ ∗ j ] ] = NULL;
86
87 f o r ( set<int >: : i t e r a t o r j = (∗ i )−>v e r t i c e s . begin ( ) ; j != (∗ i )−>
v e r t i c e s . end ( ) ; j ++) {
88 // O operador [ ] da c l a s s e ’map ’ c r i a uma ’ Ce l l ’ se a chave
nao e s t i v e r l a
89 i f ( c h i l d r e n [ l a b e l [ ∗ j ] ] == NULL) {
90 c h i l d r e n [ l a b e l [ ∗ j ] ] = new Ce l l ( l a b e l [ ∗ j ] ) ;
91 }
92
93 c h i l d r e n [ l a b e l [ ∗ j ]]−> v e r t i c e s . i n s e r t (∗ j ) ;
94 }
95
96 i f ( c h i l d r e n . s i z e ( ) > 1)
97 r e f i n e d = true ;
98
99 d e l e t e ∗ i ;
100
101 f o r (map<int , Ce l l ∗ >:: i t e r a t o r k = c h i l d r e n . begin ( ) ; k != c h i l d r e n
. end ( ) ; k ++)
102 new_cells . push_back (k−>second ) ;
103 }
104
105 c e l l s = new_cells ;
106
107 i f ( r e f i n e d )

Capítulo 9. Anexo 114
108 cell_of_vertex_array_up_to_date = f a l s e ;
109 r e tu rn r e f i n e d ;
110 }
111
112 // Retorna a quantidade de c e l u l a s da p a r t i c a o
113 i n t P a r t i t i o n : : s i z e ( ) {
114 r e tu rn c e l l s . s i z e ( ) ;
115 }
116
117 #e n d i f
codigo/partition.cpp
1 #pragma once
2 #i f n d e f DFS_H_
3 #d e f i n e DFS_H_
4
5 #inc lude <l i s t >
6 #inc lude " digraph . h "
7
8 #i f n d e f NOONE
9 #d e f i n e NOONE −1
10 #e n d i f
11
12 c l a s s Search {
13 p r i v a t e :
14 i n t n ;
15 Digraph ∗G;
16
17 i n t component_counter ;
18
19 /∗ Vetor contendo o número da componente fortemente
20 ∗ conexa contendo cada v e r t i c e . ∗/
21 i n t ∗ scc ;

115
22
23 /∗ Guarda arvore de busca . ∗/
24 i n t ∗ parent ;
25
26 /∗ Guarda l i s t a de v e r t i c e s por tempo de f i n a l i z a c a o . ∗/
27 l i s t <int > vert ices_sorted_by_fin ish_t ime ;
28
29 /∗ Funcao r e c u r s i v a da busca em profundidade . ∗/
30 void v i s i t ( i n t ) ;
31
32 /∗ Usada na busca por um caminho ( funcao find_path ) . ∗/
33 bool visit_u_look_for_v ( i n t u , i n t v ) ;
34
35 pub l i c :
36 /∗ Retorna um v etor c com n elementos , onde c [ i ] denota o número
37 ∗ da componente da arvore de busca que contem o v e r t i c e i . ∗/
38 i n t const ∗ get_scc_array ( ) ;
39
40 /∗ Retorna um v etor p com n elementos , onde p [ i ] denota o v e r t i c e
41 ∗ que e pai do v e r t i c e i na arvore de busca em profundidade . ∗/
42 i n t const ∗ get_parent_array ( ) ;
43
44 Search ( Digraph ∗G) ;
45 ~ Search ( ) ;
46
47 /∗ I n i c i a l i z a parâmetros da busca . Limpa a l i s t a de v e r t i c e s
48 ∗ ordenados por tempo de f i n a l i z a c a o . ∗/
49 void r e s e t ( ) ;
50
51 /∗ Executa busca em profundidade . Processa os v e r t i c e s no laco
52 ∗ p r i n c i p a l segundo a ordem dese jada . ∗/
53 void d f s ( l i s t <int> &order ) ;
54 void d f s ( ) ;

Capítulo 9. Anexo 116
55
56 /∗ Executa o algor i tmo que encontra as componentes fortemente
57 ∗ conexas do gra fo . Estas sao armazenadas no v etor scc
58 ∗ que pode s e r acessado pe lo metodo get_scc_array ( ) . ∗/
59 void strongly_connected_components_algorithm ( ) ;
60
61 /∗ Encontra um caminho de x a y . Retorna t rue se achou caminho . ∗/
62 bool find_path ( i n t x , i n t y ) ;
63 } ;
64
65
66 #e n d i f
codigo/search.h
1 #i f n d e f DFS_CPP_
2 #d e f i n e DFS_CPP_
3
4 #inc lude " search . h "
5
6 us ing namespace std ;
7
8 i n t const ∗ Search : : get_scc_array ( ) {
9 r e tu rn ( i n t const ∗) scc ;
10 }
11
12 i n t const ∗ Search : : get_parent_array ( ) {
13 r e tu rn ( i n t const ∗) parent ;
14 }
15
16 void Search : : strongly_connected_components_algorithm ( ) {
17 Digraph ∗H = new Digraph (G) ;
18 H−>transpose ( ) ;
19

117
20 Search S(H) ;
21 S . d f s ( ) ;
22
23 d f s (S . vert ices_sorted_by_fin ish_t ime ) ;
24
25 d e l e t e H;
26 }
27
28 Search : : Search ( Digraph ∗G) {
29 th i s −>G = G;
30 n = G−>get_n ( ) ;
31
32 s cc = new i n t [ n ] ;
33 parent = new i n t [ n ] ;
34 }
35
36 Search : : ~ Search ( ) {
37 d e l e t e [ ] parent ;
38 d e l e t e [ ] s c c ;
39 }
40
41 void Search : : d f s ( ) {
42 r e s e t ( ) ;
43
44 f o r ( i n t u = 0 ; u < n ; u ++)
45 i f ( parent [ u ] == NOONE) {
46 component_counter ++;
47 parent [ u ] = u ;
48 v i s i t (u) ;
49 }
50 }
51
52 void Search : : d f s ( l i s t <int > &order ) {

Capítulo 9. Anexo 118
53 r e s e t ( ) ;
54
55 f o r ( l i s t <int >: : i t e r a t o r u = order . begin ( ) ; u != order . end ( ) ; u ++)
56 i f ( parent [ ∗ u ] == NOONE) {
57 component_counter ++;
58 parent [ ∗ u ] = ∗u ;
59 v i s i t (∗u) ;
60 }
61 }
62
63 void Search : : v i s i t ( i n t u ) {
64 l i s t <int > &neighbors = G−>adj [ u ] ;
65
66 s cc [ u ] = component_counter ;
67 f o r ( l i s t <int >: : i t e r a t o r v = neighbors . begin ( ) ; v != neighbors . end
( ) ; v ++) {
68 i f ( parent [ ∗ v ] == NOONE) {
69 parent [ ∗ v ] = u ;
70 v i s i t (∗ v ) ;
71 }
72 }
73
74 vert ices_sorted_by_fin ish_t ime . push_front (u ) ;
75 }
76
77 void Search : : r e s e t ( ) {
78 f o r ( i n t i = 0 ; i < n ; i++) {
79 parent [ i ] = NOONE;
80 s cc [ i ] = NOONE;
81 }
82
83 component_counter = 0 ;
84 vert ices_sorted_by_fin ish_t ime . c l e a r ( ) ;

119
85 }
86
87 bool Search : : find_path ( i n t x , i n t y ) {
88 r e s e t ( ) ;
89
90 parent [ x ] = x ;
91 r e tu rn visit_u_look_for_v (x , y ) ;
92 }
93
94 bool Search : : visit_u_look_for_v ( i n t u , i n t v ) {
95 i f (u == v )
96 r e tu rn t rue ;
97
98 l i s t <int > &neighbors = G−>adj [ u ] ;
99
100 f o r ( l i s t <int >: : i t e r a t o r z = neighbors . begin ( ) ; z != neighbors . end
( ) ; z ++) {
101 i f ( parent [ ∗ z ] == NOONE) {
102 parent [ ∗ z ] = u ;
103 i f ( visit_u_look_for_v (∗ z , v ) )
104 r e tu rn t rue ;
105 }
106 }
107
108 r e tu rn f a l s e ;
109 }
110
111 #e n d i f
codigo/search.cpp
1 #pragma once
2 #i f n d e f SIMULATION_H
3 #d e f i n e SIMULATION_H

Capítulo 9. Anexo 120
4
5 #inc lude " digraph . h "
6 #inc lude " p a r t i t i o n . h "
7
8
9 c l a s s S imulat ion {
10 pub l i c :
11 Simulat ion ( Digraph ∗G, i n t seed ) ;
12 v i r t u a l ~ S imulat ion ( ) ;
13
14 P a r t i t i o n ∗ get_par t i t i on ( ) ;
15
16 p r i v a t e :
17 Digraph ∗graph ;
18 P a r t i t i o n ∗ p a r t i t i o n ;
19 i n t seed ;
20 i n t n , n_squared ;
21
22 i n t labe l_ funct ion ( mu l t i s e t<int >) ;
23 } ;
24
25 #e n d i f /∗ SIMULATION_H ∗/
codigo/simulation.h
1 #inc lude <set >
2 #inc lude " s imu lat ion . h "
3
4 i n t S imulat ion : : l abe l_ funct ion ( mu l t i s e t<int> M) {
5 i n t sum = 0 ;
6
7 f o r ( mu l t i s e t<int >: : i t e r a t o r i = M. begin ( ) ; i != M. end ( ) ; i ++)
8 sum += ∗ i ;
9

121
10 sum %= n_squared ;
11
12 r e tu rn sum ;
13 }
14
15 Simulat ion : : S imulat ion ( Digraph ∗G, i n t s ) {
16 graph = G;
17 seed = s ;
18 n = G−>get_n ( ) ;
19 n_squared = n ∗ n ;
20
21 i n t ∗ o ld_ labe l = new i n t [ n ] , ∗ l a b e l = new i n t [ n ] ;
22
23 // I n i c i a l i z a todos os r o t u l o s com 0 e o r o t u l o de ’ seed ’ com 1
24 f o r ( i n t i = 0 ; i < n ; i++)
25 o ld_ labe l [ i ] = 0 ;
26 o ld_ labe l [ seed ] = 1 ;
27
28 // Cria uma p a r t i c a o ordenada u n i t a r i a contendo números de 1 a n
29 P a r t i t i o n ∗P = new P a r t i t i o n (n ) ;
30
31 // Ref ina a p a r t i c a o ordenada P de acordo com os r o t u l o s i n i c i a i s
32 P−>re f in e_ordered_par t i t i on_us ing_ labe l s ( o ld_ labe l ) ;
33
34 f o r ( bool s t a b i l i z e d = f a l s e ; ! s t a b i l i z e d ; ) {
35 s t a b i l i z e d = true ;
36 f o r ( i n t i = 0 ; i < n ; i ++) {
37 mult i s e t<int > neighborhood ;
38 neighborhood . i n s e r t ( o ld_ labe l [ i ] ) ;
39 l i s t <int> &neighbors = G−>adj [ i ] ;
40
41 f o r ( l i s t <int >: : i t e r a t o r j = neighbors . begin ( ) ; j !=
neighbors . end ( ) ; j ++)

Capítulo 9. Anexo 122
42 neighborhood . i n s e r t ( o ld_ labe l [ ∗ j ] ) ;
43 l a b e l [ i ] = labe l_ funct ion ( neighborhood ) ;
44 }
45
46 // Ref ina a p a r t i c a o ordenada P de acordo com os novos r o t u l o s
47 s t a b i l i z e d = ! ( P−>re f in e_ordered_par t i t i on_us ing_ labe l s ( l a b e l ) )
;
48
49 i n t ∗tmp = old_ labe l ;
50 o ld_ labe l = l a b e l ;
51 l a b e l = tmp ;
52 }
53
54 d e l e t e [ ] o ld_ labe l ;
55 d e l e t e [ ] l a b e l ;
56
57 p a r t i t i o n = P;
58 }
59
60
61 Simulat ion : : ~ S imulat ion ( ) {
62 /∗ Ver porque es ta assim , e pq e ’ v i r t u a l ’ . . . ∗/
63 }
64
65 P a r t i t i o n ∗ S imulat ion : : ge t_par t i t i on ( ) {
66 r e tu rn p a r t i t i o n ;
67 }
codigo/simulation.cpp