Embed Size (px)
Citation preview

PROGRAMA FRANCISCO EDUARDO MOURÃO SABOYA DE
PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA
ESCOLA DE ENGENHARIA
UNIVERSIDADE FEDERAL FLUMINENSE
Tese de Doutorado
UMA CONTRIBUIÇÃO AO ESTUDO E
CONTROLE DE UM MOTOR DE
RELUTÂNCIA CHAVEADO DE FLUXO
AXIAL COM UM SÓ ESTATOR
ERIC SERGE SANCHES
DEZEMBRO DE 2015

ERIC SERGE SANCHES
UMA CONTRIBUIÇÃO AO ESTUDO E CONTROLE DE UM MOTOR DE RELUTÂNCIA CHAVEADO DE FLUXO AXIAL
COM UM SÓ ESTATOR
Tese de Doutorado apresentada ao Programa
Francisco Eduardo Mourão Saboya de Pós -
Graduação em Engenharia Mecânica da UFF
como parte dos requisitos para a obtenção do
título de Doutor em Ciências em Engenharia
Mecânica
Orientador: Prof. Dr. José Andrés Santisteban Larrea (PGMEC/UFF )
UNIVERSIDADE FEDERAL FLUMINENSE NITERÓI, 16 DE DEZEMBRO DE 2015



À minha família e aos amigos que
direta ou indiretamente contribuíram
para a concretização deste sonho.

AGRADECIMENTOS
Ao Professor José Andrés Santisteban Larrea um
agradecimento do fundo do meu coração pelo auxílio
inestimável na realização deste sonho, pois quando perdia
o rumo ele me indicava o norte.
À Professora Stella Maris pelo apoio prestado nos
primeiros passos desta empreitada.
Aos Professores do Programa de Pós-Graduação em
Engenharia Mecânica (PGMEC) da Universidade Federal
Fluminense pelos ensinamentos ministrados.
Ao Professores do Departamento de Engenharia Elétrica
da Universidade Federal Fluminense, em especial Márcio
Sens, Guilherme Sotelo e Vitor Hugo, pelo apoio e
incentivo prestados durante a realização desta pesquisa.
Aos amigos engenheiros e técnicos Itamar e equipe
(AMRJ), Almir, Fabrício, Silvio, Amaro, Branquinho, Pedro,
Medeiros, Christopher Grey, Roberto Brandão, Gustavo e
José Carlos, pela ajuda na parte experimental desta
pesquisa e constante incentivo.
Ao amigo Ribas pela sabedoria e paciência na revisão do
texto da tese.

EPÍGRAFE
“The path that leads to scientific discovery very often
begins when one of us takes an adventurous step into the
world of endless possibilities. Scientists intrigued by a
mere glimpse of a subtle variation may uncover a clue or
link, and from that fragment emerges an idea to be
developed and worked into shape”.
“O caminho que leva à descoberta científica, muitas vezes
começa quando um de nós dá um passo aventureiro no
mundo de infinitas possibilidades. Os cientistas intrigados
com um mero vislumbre de uma variação sutil podem
descobrir uma pista ou elo, e a partir desse fragmento
surge uma idéia para ser desenvolvida e trabalhada em
forma.”
Dr. Madan M. Gupta - 1999

RESUMO
O Motor de Relutância Chaveado (MRC) é uma máquina elétrica cujo
conjugado é produzido pela tendência de sua parte móvel se mover para uma
posição onde a indutância do enrolamento excitado da parte fixa é maximizada,
diferentemente dos motores elétricos mais comuns que utilizam o princípio da
criação da força eletromecânica por meio da interação entre fluxos magnéticos.
Nesta tese foi pesquisado o MRC de fluxo axial com somente um estator, estudado
por poucos pesquisadores. Neste tipo de MRC as indutâncias mútuas não podem
ser desprezadas, sendo avaliados três diferentes métodos para determiná-las:
experimental, elementos finitos bidimensionais e elementos finitos tridimensionais. A
pesquisa explorou a estratégia de controle do perfil de corrente para redução das
oscilações do conjugado, sendo feitas simulações dinâmicas de controle de
velocidade em malha fechada no ambiente MatLab/Simulink® para diferentes tipos
de controle: PID convencional, PID nebuloso e PID neural. Um protótipo do MRC de
fluxo axial e diversos circuitos (conversor de potência, sensor de corrente, sensor de
posição e controlador) foram construídos para a realização de experimentos a fim de
comparar os diferentes tipos de controle simulados em computador.
Palavras-chave: Motor de relutância chaveado de fluxo axial. Minimização das
oscilações no conjugado. Controlador PID de velocidade. Controlador nebuloso de
velocidade. Controlador neural de velocidade. Microcontrolador. Modelagem via
elementos finitos.

ABSTRACT
The Switched Reluctance Motor (SRM) is an electric motor whose torque is
produced by the tendency of its movable part to move to a position where the
inductance of the excited winding of the fixed part is maximized, unlike the more
common electric motors that use the principle of electromechanical force created by
the interaction of magnetic flux. This thesis has researched the SRM with axial
magnetic flux with only one stator, studied by few researchers. In this type of SRM
the mutual inductances can not be ignored and three different methods were
evaluated to determine them: experimental, two-dimensional finite element and
three-dimensional finite element. The research explored the strategy of current profile
control for reducing torque ripple, and dynamic simulations of speed control closed
loop environment in MatLab / Simulink® for different types of controllers: conventional
PID, fuzzy PID and neural PID. A prototype of the SRM and various circuits (power
converter, current sensor, position sensor and controller) were built to conduct
experiments to compare the different control methods simulated by computer.
Keywords: Axial flux switched reluctance motor. Torque ripple minimization. PID
speed controller. Fuzzy speed controller. Neural speed controller. Miccrocontroller.
Finite element modeling.

SUMÁRIO
LISTA DE FIGURAS
LISTA DE TABELAS
LISTA DE ABREVIATURAS, SIGLAS E SÍMBOLOS
1 INTRODUÇÃO ............................................................................................. 27
1.1 MOTIVAÇÃO ......................................................................................... 27
1.2 HISTÓRICO .......................................................................................... 29
1.3 OBJETIVOS .......................................................................................... 30
1.4 CONTRIBUIÇÕES ORIGINAIS DESTA TESE ...................................... 31
1.5 ESTRUTURA DA TESE ........................................................................ 31
2 MOTOR DE RELUTÂNCIA CHAVEADO (MRC) .......................................... 33
2.1 OUTROS NOMES UTILIZADOS PARA O MRC (MILLER, 1993) ......... 34
2.2 CLASSIFICAÇÕES DO MRC ................................................................ 35
2.2.1 QUANTO À SIMETRIA DOS PÓLOS .......................................... 35
2.2.2 QUANTO À NATUREZA DO MOVIMENTO ................................. 36
2.2.2.1 MRC ROTATIVO .............................................................. 36
2.2.2.1.1 MRC Rotativo de Fluxo Radial .......................... 38
2.2.2.1.2 MRC Rotativo de Fluxo Axial ............................ 41
2.2.2.2 MRC LINEAR ................................................................... 43
2.3 CONVERSORES DE POTÊNCIA ......................................................... 45
2.4 SENSOR DE POSIÇÃO ........................................................................ 49
2.4.1 DESCRIÇÃO DE ALGUNS SENSORES DE POSIÇÃO .............. 49
2.4.2 ELIMINAÇÃO DO SENSOR DE POSIÇÃO ................................. 51
3 MODELAGEM DO MOTOR DE RELUTÂNCIA CHAVEADO (MRC) ........... 52
3.1 PARÂMETROS FÍSICOS DO PROTÓTIPO DO MRC DE FLUXO AXIAL .
.............................................................................................................. 53
3.2 PERFIL IDEAL DA INDUTÂNCIA PRÓPRIA ........................................ 57
3.3 EXPERIMENTO PARA ESTIMAR AS INDUTÂNCIAS ......................... 61
3.4 MODELOS PARA CÁLCULO DAS INDUTÂNCIAS .............................. 64
3.4.1 MÉTODO DE ELEMENTOS FINITOS BIDIMENSIONAL (MEF-2D) .
..................................................................................................... 65

3.4.2 MÉTODO DE ELEMENTOS FINITOS TRIDIMENSIONAL (MEF-
3D) ............................................................................................... 68
3.5 MODELO PARA CÁLCULO DO CONJUGADO ELETROMAGNÉTICO 70
4 ANÁLISE DOS RESULTADOS OBTIDOS ................................................... 75
4.1 INDUTÂNCIAS ESTIMADAS EXPERIMENTALMENTE ....................... 76
4.2 INDUTÂNCIAS OBTIDAS COM O MEF BIDIMENSIONAL ................... 83
4.3 INDUTÂNCIAS OBTIDAS COM O MEF TRIDIMENSIONAL ................ 88
4.4 COMPARAÇÕES ENTRE AS INDUTÂNCIAS CALCULADAS PELOS
TRÊS MÉTODOS ................................................................................. 89
4.6 AJUSTES DAS CURVAS DE INDUTÂNCIAS ....................................... 93
4.7 CONJUGADO RESULTANTE ............................................................... 97
5 CONTROLE DO MRC DE FLUXO AXIAL .................................................. 104
5.1 HISTÓRICO ........................................................................................ 105
5.2 CONTROLE CONVENCIONAL ........................................................... 107
5.2.1 CONTROLADORES PID ........................................................... 108
5.2.2 SIMULAÇÃO EM MATLAB® .................................................................................. 111
5.2.3 PID CONVENCIONAL COM PULSOS DE CORRENTE............. 117
5.2.4 PID CONVENCIONAL COM CORRENTE DE REFERÊNCIA
MODIFICADA ............................................................................. 120
5.3 CONTROLE INTELIGENTE ................................................................ 124
5.3.1 CONTROLADOR PID NEBULOSO ........................................... 124
5.3.2 CONTROLADOR PID NEURAL................................................. 133
5.4 COMPARAÇÃO DOS RESULTADOS DAS SIMULAÇÕES ................ 138
6 RESULTADOS EXPERIMENTAIS ............................................................. 139
6.1 BANCADA EXPERIMENTAL DO SISTEMA DE CONTROLE DO MRC ....
............................................................................................................ 139
6.2 CONTROLADOR PID CONVENCIONAL COM PULSO RETANGULAR
DE CORRENTE .................................................................................. 148
6.3 CONTROLADOR PID CONVENCIONAL COM CORRENTES
MODIFICADAS PARA REDUÇÃO DAS OSCILAÇÕES DO
CONJUGADO ..................................................................................... 150

6.4 CONTROLADOR PID NEBULOSO .................................................... 154
6.5 CONTROLADOR PID NEURAL .......................................................... 157
6.6 COMPARAÇÃO ENTRE AS SIMULAÇÕES E OS EXPERIMENTOS 161
7 CONCLUSÕES .......................................................................................... 162
8 OBRAS CITADAS ...................................................................................... 165
9 OBRAS CONSULTADAS ........................................................................... 173
10 APÊNDICES ............................................................................................. 192
10.1 PROGRAMA PARA CÁLCULO DAS INDUTÂNCIAS PELO
MÉTODO DE ELEMENTOS FINITOS 3D UTILIZANDO O
SOFTWARE ANSYS .................................................................. 193
10.2 EQUAÇÕES DAS INDUTÂNCIAS E DE SUAS DERIVADAS .... 198
10.2.1 INDUTÂNCIAS......................................................................... 198
10.2.2 DERIVADAS DAS INDUTÂNCIAS ........................................... 200
10.3 LÓGICA NEBULOSA .................................................................. 204
10.3.1 HISTÓRICO ............................................................................. 204
10.3.2 LÓGICA NEBULOSA ............................................................... 206
10.3.3 FUNÇÃO DE PERTINÊNCIA ................................................... 208
10.3.4 MODELAGEM NEBULOSA DE SISTEMAS ............................ 210
10.3.4.1 FUZZIFICAÇÃO .................................................................... 210
10.3.4.2 INFERÊNCIA ......................................................................... 211
10.3.4.3 DEFUZZIFICAÇÃO ............................................................... 213
10.3.4.4 VANTAGENS E DESVANTAGENS DOS SISTEMAS
NEBULOSOS ............................................................................. 217
10.4 REDES NEURAIS....................................................................... 219
10.4.1 HISTÓRICO ............................................................................. 219
10.4.2 NEURÔNIO BIOLÓGICO ........................................................ 221
10.4.3 NEURÔNIO ARTIFICIAL.......................................................... 222
10.4.4 REDES NEURAIS ARTIFICIAIS .............................................. 223
10.4.5 TOPOLOGIA DAS REDES NEURAIS ARTIFICIAIS ................ 225
10.4.6 APRENDIZADO DAS RNAs .................................................... 227
10.4.7 TIPOS DE REDES NEURAIS ARTIFICIAIS ............................. 230

10.4.8 VANTAGENS E DESVANTAGENS DAS REDES NEURAIS
ARTIFICIAIS ............................................................................... 233
10.5 FUNÇÕES UTILIZADAS NA SIMULAÇÃO COM O SIMULINK .. 235
10.5.1 CÁLCULO DAS CORRENTES DE REFERÊNCIA DO PID
CONVENCIONAL COM PULSOS RETANGULARES DE
CORRENTES ............................................................................. 235
10.5.2 CÁLCULO DAS CORRENTES DE REFERÊNCIA DO PID
CONVENCIONAL COM CORRENTE CONFORMADA PARA
REDUÇÃO DAS OSCILAÇÕES NO CONJUGADO ................... 235
10.5.3 CÁLCULO DAS CORRENTES DE FASE DO MRC ................. 236
10.5.4 CÁLCULO DO CONJUGADO ELETROMAGNÉTICO ............. 238
10.5.5 REGRAS NEBULOSAS ........................................................... 239
10.5.6 SEPARAÇÃO DOS DADOS PARA TREINO, TESTE E
VALIDAÇÃO DA REDE NEURAL ............................................... 243
10.5.7 CÁLCULO DAS CORRENTES DE REFERÊNCIA DO PID
NEURAL ..................................................................................... 243
10.6 PROGRAMAÇÕES DO PIC 18F4680 DO CIRCUITO
CONTROLADOR ....................................................................... 246
10.6.1 CÁLCULO DA VELOCIDADE .................................................. 246
10.6.2 PID CONVENCIONAL COM CORRENTE MODIFICADA ........ 247
10.6.3 PID NEBULOSO ...................................................................... 251
10.6.4 PID NEURAL ........................................................................... 256

LISTA DE FIGURAS
Figura 2.1 - Seção transversal de um MRC regular (MILLER, 1993). .............. 35
Figura 2.2 - Seção transversal de um MRC irregular (MILLER, 1993). ............ 36
Figura 2.3 - Seção transversal de um MRC de fluxo radial de 6/4 pólos
(KRISHNAN, 2001). ......................................................................................... 37
Figura 2.4 - Vista espacial de um MRC de fluxo axial com dois estatores
(adaptado de PULLE e PETERSOEN, 1998). .................................................. 37
Figura 2.5 - Vista espacial de um MRC de fluxo axial com um estator
(adaptado de ARIHARA; AKATSU, 2013). ....................................................... 38
Figura 2.6 - Seção transversal de um MRC de fluxo radial com caminhos
curtos (KRISHNAN, 2001). ............................................................................... 38
Figura 2.7 - Seção transversal de um MRC de fluxo radial com caminhos
longos (VIJAYRAGHAVAN, 2001). .................................................................. 38
Figura 2.8 - Seção transversal de um MRC de fluxo radial com os pólos
do estator “c” e “c´” alinhados com os pólos do rotor “r1” e “r1´”
(KRISHNAN, 2001). ......................................................................................... 39
Figura 2.9 - Seção transversal de um MRC de fluxo radial com os pólos
do estator “a” e “a´” alinhados com os pólos do rotor “r2” e “r2´”
(KRISHNAN, 2001). ......................................................................................... 39
Figura 2.10 - Seção transversal de um MRC de 2/2 pólos com imã
permanente para auxiliar na partida (adaptado de KRISHNAN, 2001). ........... 40
Figura 2.11 - Seção longitudinal de um MRC de fluxo axial com dois
estatores (adaptado de KRISHNAN; ABOUZEID; MANG, 1990). .................... 41
Figura 2.12 - Seção transversal de um dos discos do estator de um MRC
de fluxo axial com dois estatores cada um com três pólos
(KRISHNAN; ABOUZEID; MANG, 1990). ........................................................ 42
Figura 2.13 - Seção transversal do disco do rotor com dois pólos
de um MRC de fluxo axial (KRISHNAN; ABOUZEID; MANG, 1990). ............... 42
Figura 2.14 - Caminho do fluxo na seção longitudinal do MRC de fluxo axial
com dois estatores (adaptado de KRISHNAN; ABOUZEID; MANG, 1990). ..... 43
Figura 2.15 - Vista espacial do MRC linear de fluxo magnético longitudinal
(adaptado de SALO, 1999)............................................................................... 44
Figura 2.16 - Vista espacial do MRC linear de fluxo magnético transversal
(adaptado de SALO, 1999)............................................................................... 44
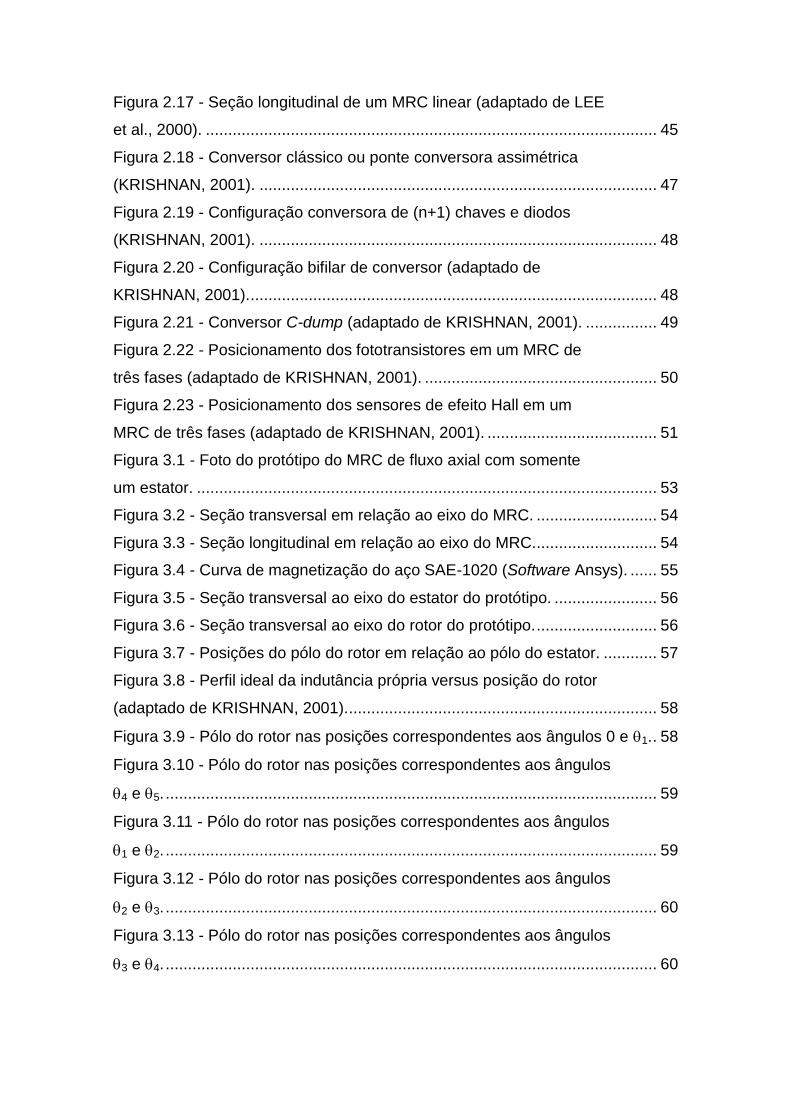
Figura 2.17 - Seção longitudinal de um MRC linear (adaptado de LEE
et al., 2000). ..................................................................................................... 45
Figura 2.18 - Conversor clássico ou ponte conversora assimétrica
(KRISHNAN, 2001). ......................................................................................... 47
Figura 2.19 - Configuração conversora de (n+1) chaves e diodos
(KRISHNAN, 2001). ......................................................................................... 48
Figura 2.20 - Configuração bifilar de conversor (adaptado de
KRISHNAN, 2001). ........................................................................................... 48
Figura 2.21 - Conversor C-dump (adaptado de KRISHNAN, 2001). ................ 49
Figura 2.22 - Posicionamento dos fototransistores em um MRC de
três fases (adaptado de KRISHNAN, 2001). .................................................... 50
Figura 2.23 - Posicionamento dos sensores de efeito Hall em um
MRC de três fases (adaptado de KRISHNAN, 2001). ...................................... 51
Figura 3.1 - Foto do protótipo do MRC de fluxo axial com somente
um estator. ....................................................................................................... 53
Figura 3.2 - Seção transversal em relação ao eixo do MRC. ........................... 54
Figura 3.3 - Seção longitudinal em relação ao eixo do MRC............................ 54
Figura 3.4 - Curva de magnetização do aço SAE-1020 (Software Ansys). ...... 55
Figura 3.5 - Seção transversal ao eixo do estator do protótipo. ....................... 56
Figura 3.6 - Seção transversal ao eixo do rotor do protótipo. ........................... 56
Figura 3.7 - Posições do pólo do rotor em relação ao pólo do estator. ............ 57
Figura 3.8 - Perfil ideal da indutância própria versus posição do rotor
(adaptado de KRISHNAN, 2001). ..................................................................... 58
Figura 3.9 - Pólo do rotor nas posições correspondentes aos ângulos 0 e 1. . 58
Figura 3.10 - Pólo do rotor nas posições correspondentes aos ângulos
4 e 5. .............................................................................................................. 59
Figura 3.11 - Pólo do rotor nas posições correspondentes aos ângulos
1 e 2. .............................................................................................................. 59
Figura 3.12 - Pólo do rotor nas posições correspondentes aos ângulos
2 e 3. .............................................................................................................. 60
Figura 3.13 - Pólo do rotor nas posições correspondentes aos ângulos
3 e 4. .............................................................................................................. 60

Figura 3.14 - Montagem utilizada para medida das indutâncias própria e
mútuas. ............................................................................................................ 61
Figura 3.15 – Visualização das áreas onde foram executadas as
medidas de densidade de fluxo magnético no protótipo do MRC. ................... 63
Figura 3.16 - Estrutura em 2D resultante da linearização do
protótipo do MRC. ............................................................................................ 65
Figura 3.17 - Exemplo de estrutura criada pelo módulo EFD do programa
EFCAD. ............................................................................................................ 66
Figura 3.18 - Exemplo de malha gerada pelo módulo EFM do programa
EFCAD. ............................................................................................................ 66
Figura 3.19 - Exemplo de linhas de fluxo geradas pelo módulo EFGN do
EFCAD. ............................................................................................................ 67
Figura 3.20 - Estrutura do protótipo do MRC construída para o
estudo do MEF-3D. .......................................................................................... 68
Figura 3.21 - Malha de elementos finitos gerada pelo programa
Multiphysics da Ansys. ..................................................................................... 69
Figura 3.22 - Exemplo de densidade de fluxo magnético na face
do pólo A1 gerada pelo programa Multiphysics da Ansys. ............................... 69
Figura 3.23 - Circulação de correntes nas bobinas dos pólos do
estator do protótipo do MRC. ........................................................................... 72
Figura 4.1 - Fluxo magnético resultante no MRC na posição de 0. ................ 84
Figura 4.2 - Fluxo magnético resultante no MRC na posição de 5. ................ 84
Figura 4.3 - Fluxo magnético resultante no MRC na posição de 15. .............. 84
Figura 4.4 - Fluxo magnético resultante no MRC na posição de 25. .............. 84
Figura 4.5 - Fluxo magnético resultante no MRC na posição de 35. .............. 85
Figura 4.6 - Fluxo magnético resultante no MRC na posição de 45. .............. 85
Figura 4.7 - Fluxo magnético resultante no MRC na posição de 55. .............. 85
Figura 4.8 - Fluxo magnético resultante no MRC na posição de 65. .............. 85
Figura 4.9 - Fluxo magnético resultante no MRC na posição de 75. .............. 86
Figura 4.10 - Fluxo magnético resultante no MRC na posição de 85. ............ 86
Figura 4.11 - Fluxo magnético resultante no MRC na posição de 90. ............. 86
Figura 4.12 - Indutâncias LA1A1. ........................................................................ 89
Figura 4.13 - Indutâncias MA1A2. ....................................................................... 90

Figura 4.14 - Indutâncias MA1B1. ....................................................................... 90
Figura 4.15 - Indutâncias MA1B2. ....................................................................... 91
Figura 4.16 - Indutâncias MA1C1. ....................................................................... 91
Figura 4.17 - Indutâncias MA1C2. ....................................................................... 92
Figura 4.18 - Ajuste nas curvas da indutância LA1A1. ........................................ 94
Figura 4.19 - Ajuste nas curvas das indutâncias MA1A2. ................................... 94
Figura 4.20 - Ajuste nas curvas das indutâncias MA1B1. ................................... 95
Figura 4.21 - Ajuste nas curvas das indutâncias MA1B2. ................................... 95
Figura 4.22 - Ajuste nas curvas das indutâncias MA1C1. ................................... 96
Figura 4.23 - Ajuste nas curvas das indutâncias MA1C2. ................................... 97
Figura 4.24 - Curva do conjugado eletromagnético com a fase
“A” alimentada. ................................................................................................. 98
Figura 4.25 - Curva do conjugado eletromagnético com a fase
“B” alimentada. ................................................................................................. 99
Figura 4.26 - Curva do conjugado eletromagnético com a fase
“C” alimentada. ............................................................................................... 100
Figura 4.27 - Curva do conjugado eletromagnético com as fases
“A” e “B” alimentadas. .................................................................................... 101
Figura 4.28 - Curva do conjugado eletromagnético para o método
MEF-3D com as fases “A”, “B” e “C” alimentadas. ......................................... 103
Figura 5.1 - Modelo computacional utilizado para simular o controle de
velocidade, com um PID convencional, do MRC. .......................................... 113
Figura 5.2 - Modelo eletromecânico do MRC. ................................................ 114
Figura 5.3 - Modelo da parte mecânica do MRC. ........................................... 115
Figura 5.4 - Modelo de controlador PID utilizado na simulação. .................... 115
Figura 5.5 - Estrutura de cálculo da posição do rotor a cada 90. .................. 116
Figura 5.6 - Estrutura geral do conversor de potência utilizado. .................... 116
Figura 5.7 - Ponte conversora de potência da fase “a”. ................................. 116
Figura 5.8 - Bloco funcional que calcula as correntes de referência. ............. 117
Figura 5.9 - Formas de onda das correntes com o MRC sem carga. ............. 118
Figura 5.10 - Formas de onda das correntes com o MRC com carga. ........... 118
Figura 5.11 - Formas de onda das correntes reais, conjugado
eletromagnético e rotação do eixo do rotor do MRC para um
controlador PID convencional com estratégia de pulso de corrente. .............. 119

Figura 5.12 - Formas de onda da Figura 5.11 ampliada nas proximidades
do primeiro segundo de simulação. ................................................................ 120
Figura 5.13 - Formas de onda das correntes de referência. .......................... 121
Figura 5.14 - Formas de onda das correntes reais e de referência. ............... 122
Figura 5.15 - Formas de onda das correntes reais, conjugado
eletromagnético e rotação do eixo do rotor do MRC para um controlador
PID convencional. .......................................................................................... 123
Figura 5.16 - Formas de onda da Figura 5.15 ampliada nas proximidades
do primeiro segundo de simulação. ................................................................ 123
Figura 5.17 - Arquitetura de um controlador nebuloso. .................................. 125
Figura 5.18 - Modelo computacional utilizado para simular o controle
PID nebuloso do MRC. ................................................................................... 127
Figura 5.19 - Controlador nebuloso implementado na simulação. ................. 128
Figura 5.20 - Funções de pertinência da entrada “Erro de Velocidade”. ........ 129
Figura 5.21 - Funções de pertinência da entrada “Derivada do Erro de
Velocidade”. ................................................................................................... 129
Figura 5.22 - Funções de pertinência da entrada “Integral do Erro de
Velocidade”. ................................................................................................... 130
Figura 5.23 - Funções de pertinência da entrada “Posição Angular”. ............ 130
Figura 5.24 - Funções de pertinência da saída “Ia”. ....................................... 131
Figura 5.25 - Formas de onda das correntes reais, conjugado
eletromagnético e rotação do eixo do rotor do MRC para um
controlador PID nebuloso. .............................................................................. 132
Figura 5.26 - Formas de onda da Figura 5.25 ampliada nas
proximidades do primeiro segundo de simulação. ......................................... 132
Figura 5.27 - Arquitetura de um controlador neural. ....................................... 133
Figura 5.28 - Modelo computacional utilizado para simular o controle
PID neural do MRC. ....................................................................................... 134
Figura 5.29 - Arquitetura neural gerada pela ferramenta “nntool”. ................. 135
Figura 5.30 - Parâmetros de treinamento da rede neural. .............................. 135
Figura 5.31 - Treinamento da rede neural. ..................................................... 136
Figura 5.32 - Formas de onda das correntes reais, conjugado
eletromagnético e rotação do eixo do rotor do MRC para um
controlador PID neural. .................................................................................. 137

Figura 5.33 - Formas de onda da Figura 5.32 ampliada nas
proximidades do primeiro segundo de simulação. ......................................... 137
Figura 6.1 - Diagrama em blocos das interligações dos circuitos
utilizados nos experimentos. .......................................................................... 140
Figura 6.2 - Foto com a cabeação entre os circuitos utilizados nos
experimentos. ................................................................................................. 141
Figura 6.3 - Circuito do sensor de corrente. ................................................... 141
Figura 6.4 – Exemplo de forma de onda da tensão de saída
de um dos circuitos dos sensores de corrente. .............................................. 142
Figura 6.5 - Foto dos três sensores de corrente. ............................................ 142
Figura 6.6 - Circuito do sensor de posição. .................................................... 143
Figura 6.7 - Foto do circuito do sensor de posição e do sensor de posição. .. 143
Figura 6.8 - Exemplo de forma de onda de saída do circuito do sensor
de posição. ..................................................................................................... 144
Figura 6.9 - Diagrama em blocos do circuito controlador. .............................. 145
Figura 6.10 - Exemplo de forma de onda de corrente de referência
gerada pelo circuito controlador para uma fase. ............................................ 146
Figura 6.11 - Foto do circuito controlador. ...................................................... 146
Figura 6.12 - Circuito do conversor de potência de uma das fases do motor. 147
Figura 6.13 - Circuito dos conversores de potência das três fases do MRC. . 148
Figura 6.14 – Exemplo de formas de onda das correntes de referência
nas fases “A” e “B” no controlador convencional com pulso retangular de
corrente. ......................................................................................................... 148
Figura 6.15 - Formas de onda das correntes de referência e real na
fase “A” em um dado instante no controlador convencional com pulso
retangular de corrente. ................................................................................... 149
Figura 6.16 - Forma de onda da resposta em velocidade do controlador
convencional com pulso retangular de corrente para o MRC com carga
mecânica. ....................................................................................................... 149
Figura 6.17 - Forma de onda do conjugado eletromagnético para um
controlador convencional com pulso retangular de corrente. ......................... 150
Figura 6.18 – Exemplo de formas de onda das correntes de referência
nas fases “A” e “B” no controlador convencional com correntes modificadas. 151

Figura 6.19 – Exemplo de formas de onda das correntes reais nas
fases “A” e “B” no controlador convencional com correntes modificadas. ...... 151
Figura 6.20 - Formas de onda das correntes de referência e real na
fase “A” em um dado instante. ....................................................................... 152
Figura 6.21 - Forma de onda da resposta do controlador convencional a uma
variação na velocidade de referência com o MRC sem carga mecânica. ...... 153
Figura 6.22 - Forma de onda da resposta em velocidade do controlador
convencional com correntes modificadas para o MRC com carga mecânica. 153
Figura 6.23 - Forma de onda do conjugado eletromagnético para um
controlador convencional................................................................................ 154
Figura 6.24 – Exemplo de formas de onda das correntes de referência
nas fases “A” e “B” no controlador nebuloso. ................................................. 155
Figura 6.25 – Exemplo de formas de onda das correntes reais nas
fases “A” e “B” no controlador nebuloso. ........................................................ 155
Figura 6.26 - Forma de onda da resposta do controlador nebuloso a
uma variação na velocidade de referência com o MRC
sem carga mecânica. ..................................................................................... 156
Figura 6.27 - Forma de onda da resposta em velocidade do controlador
nebuloso com o MRC com carga mecânica. .................................................. 156
Figura 6.28 - Forma de onda do conjugado eletromagnético para um
controlador nebuloso. ..................................................................................... 157
Figura 6.29 – Exemplo de formas de onda das correntes de referência
nas fases “A” e “B” no controlador neural. ...................................................... 158
Figura 6.30 – Exemplo de formas de onda das correntes reais nas fases
“A” e “B” no controlador neural. ...................................................................... 158
Figura 6.31 - Forma de onda da resposta do controlador neural a uma
variação de velocidade na referência com o MRC sem carga mecânica. ...... 159
Figura 6.32 - Forma de onda da resposta em velocidade do controlador
nebuloso com o MRC com carga mecânica. .................................................. 160
Figura 6.33 - Forma de onda do conjugado eletromagnético para um
controlador neural. ......................................................................................... 160
Figura 10.1 - Classificação binária entre ser rotação não alta e alta. ............. 206
Figura 10.2 - Classificação nebulosa para a variável linguística rotação. ...... 207
Figura 10.3 - Funções de Pertinência mais utilizadas. ................................... 209

Figura 10.4 - Sistema de inferência nebuloso. ............................................... 210
Figura 10.5 - Graus de pertinência da rotação de 1850 rpm. ......................... 211
Figura 10.6 - Exemplo de cálculo de defuzzificação pelo método
do Centro da Área aplicado ao modelo de inferência nebulosa Mamdani. .... 215
Figura 10.7 - Exemplo de neurônio biológico (adaptado de
DAVIS IV, 2006). ............................................................................................ 221
Figura 10.8 - Modelo de um neurônio artificial (FILHO; LOTUFO;
LOPES, 2008). ............................................................................................... 222
Figura 10.9 - Funções de ativação mais utilizadas. ........................................ 223
Figura 10.10 - Exemplo de rede neural alimentada adiante - feedforward. .... 225
Figura 10.11 - Exemplo de rede neural recorrente - feedback. ...................... 226
Figura 10.12 - Exemplo de rede neural auto-organizável (NEVES, 2010). .... 226

LISTA DE TABELAS
Tabela 4.1 - Valores das densidades de fluxo obtidas experimentalmente no
pólo da bobina “A1”. ......................................................................................... 77
Tabela 4.2 - Valores das densidades de fluxo obtidas experimentalmente no
pólo da bobina “A2”. ......................................................................................... 78
Tabela 4.3 - Valores das densidades de fluxo obtidas experimentalmente no
pólo da bobina “B1”. ......................................................................................... 79
Tabela 4.4 - Valores das densidades de fluxo obtidas experimentalmente no
pólo da bobina “B2”. ......................................................................................... 80
Tabela 4.5 - Valores das densidades de fluxo obtidas experimentalmente no
pólo da bobina “C1”. ......................................................................................... 81
Tabela 4.6 - Valores das densidades de fluxo obtidas experimentalmente no
pólo da bobina “C2”. ......................................................................................... 82
Tabela 4.7 - Valores das indutâncias estimadas experimentalmente. .............. 83
Tabela 4.8 - Valores dos fluxos/m obtidos com o MEF bidimensional. ............. 87
Tabela 4.9 - Valores das indutâncias resultantes do MEF bidimensional. ........ 88
Tabela 4.10 - Valores das densidades de fluxo obtidas com o MEF
tridimensional. .................................................................................................. 88
Tabela 4.11 - Valores das indutâncias resultantes do MEF tridimensional. ...... 89
Tabela 5.1 – Tempos de processamento dispendido pelos controladores. ..... 138

LISTA DE ABREVIATURAS, SIGLAS E SÍMBOLOS
2D duas dimensões
3D três dimensões
A Ampere
CA corrente alternada
CC corrente contínua
DerErVel derivada do erro de velocidade
div divisão
ErVel erro de velocidade
FT fototransistor
G Gauss
GB Giga Byte
GHz Giga Hertz
HP Horse Power
IntErVel integral do erro de velocidade
kg quilograma
Nm Newton metro
PosAng posição angular
rad radiano
rpm rotação por minuto
V Volt
ADALINE ADAptative LINear Element
ART Adaptive Resonance Theory
ECR Electronically Commutated Reluctance
EFCAD Electromagnetic Fields Computer Aided Design
FAPERJ Fundação Carlos Chagas Filho de Amparo à Pesquisa do Estado
do Rio de Janeiro
GRUCAD Grupo de Concepção e Análise de Dispositivos Eletromagnéticos
ICCG Incomplete Choleski Conjugate Gradient
MatLab Matrix Laboratory
MEF Método de Elemento Finito
MLP Multi Layer Perceptron
MRC Motor de Relutância Chaveado
NASA National Aeronautics and Space Administration

PID Proporcional, Integral e Derivativo
RAM Random Access Memory
RBF Radial Basis Function
RNA Rede Neural Artificial
ROM Ready Only Memory
SAE Society of Automotive Engineers
SRM Switched Reluctance Motor
UFSC Universidade Federal de Santa Catarina
VR Variable Reluctance
AFC área da face frontal do pólo do estator coincidente com a face do
pólo do rotor
AFL área da face frontal do pólo do estator não coincidente (livre) com
a face do pólo do rotor
ALD área da face lateral direita do pólo do estator sem espira
superposta
ALE área da face lateral esquerda do pólo do estator sem espira
superposta (observador olhando para a face frontal do pólo)
ALI área da face lateral inferior do pólo do estator, sem espira
superposta
ALIC área da face lateral inferior (interna) do pólo do estator coincidente
com a face do pólo do rotor, sem espira superposta
ALIL área da face lateral inferior (interna) do pólo do estator não
coincidente com a face do pólo do rotor, sem espira superposta
ALS área da face lateral superior do pólo do estator, sem espira
superposta
ALSC área da face lateral superior (externa) do pólo do estator
coincidente com a face do pólo do rotor, sem espira superposta
ALSL área da face lateral superior (externa) do pólo do estator não
coincidente (lvre) com a face do pólo do rotor, sem espira
superposta
ATFC área total da face frontal do pólo do estator
pe ângulo do arco do pólo do estator
pr ângulo do arco do pólo do rotor
B coeficiente de atrito viscoso

Bz densidade média do fluxo magnético na direção “z”
B_FC densidade máxima de fluxo na área AFC
B_FL densidade máxima de fluxo na área AFL
B_LD densidade máxima de fluxo na área ALD
B_LE densidade máxima de fluxo na área ALE
B_LIC densidade máxima de fluxo na área ALIC
B_LIL densidade máxima de fluxo na área ALIL
B_LSC densidade máxima de fluxo na área ALSC
B_LSL densidade máxima de fluxo na área ALSL
Ene espessura do núcleo do estator
Enr espessura do núcleo do rotor
Epe espessura do pólo do estator
Epr espessura do pólo do rotor
fluxo magnético
FC percentagem da área AFC
Fe número de fases do estator
FL percentagem da área AFL
g comprimento do entreferro
KD ganho derivativo
KI ganho integral
KP ganho proporcional
J momento de inércia
L indutância própria
LIC percentagem da área ALIC
LIL percentagem da área ALIL
LSC percentagem da área ALSC
LSL percentagem da área ALSL
M indutância mútua
Ni número de espiras da bobina i
Pe número de pólos do estator
Pr número de pólos do rotor
R raio dos núcleos ou raio externo dos pólos
Rm raio do eixo da máquina
Rpe raio interno do pólo do estator

Rpr raio interno do pólo do rotor
S área
posição angular do rotor
T conjugado
TD constante de tempo derivativo
TI constante de tempo integral
Ts tempo de amostragem
velocidade angular

1 INTRODUÇÃO
1.1 MOTIVAÇÃO
Atualmente, os motores elétricos mais comuns utilizam o princípio da criação
da força eletromecânica por meio da interação entre fluxos magnéticos: por exemplo,
uma espira com uma corrente circulando nela, submetida a um fluxo magnético, está
sujeita a uma força de natureza eletromagnética.
Nas últimas décadas, os sistemas de acionamento das máquinas elétricas
evoluíram muito rapidamente, apresentando significativos avanços em termos de
eficiência, precisão e potência convertida. No âmbito destes avanços, novas
máquinas passam a fazer parte do conjunto de alternativas aplicáveis a sistemas de
acionamento com velocidade variável. Dentro deste novo conjunto destaca-se o
Motor de Relutância Chaveado (MRC) (BERNARDELLI et al., 2008).
O desenvolvimento do acionamento do MRC necessita que o projeto da
máquina e o seu sistema de controle caminhem juntos, diferentemente das outras
máquinas elétricas (VIJAYRAGHAVAN, 2001).
Diferente da maioria das máquinas rotativas, o MRC usa outro princípio de
funcionamento: um pedaço de ferro sujeito à ação de um fluxo magnético se alinha
na posição de relutância mínima, ou seja, o MRC é um motor elétrico no qual o
conjugado é produzido pela tendência de sua parte móvel (rotor) girar para uma
posição onde o fluxo magnético atinge a menor relutância (ANDRADE et al., 2004).
As bobinas que geram os fluxos magnéticos no MRC são colocadas no
estator, como em um motor de corrente contínua, não possuindo bobinas ou pólos
magnéticos em seu rotor. Neste tipo de motor o estator e o rotor têm núcleos de
ferro com pólos salientes. As bobinas ao longo dos pólos do estator são
diametralmente conectadas duas a duas, formando as fases. Devido aos pólos

28
salientes no rotor e no estator, cada circuito de fase do estator tem uma relutância
que varia com a posição do rotor.
Quando uma das bobinas de fase é alimentada, o rotor se movimenta para a
posição de mínima relutância para esta fase. Quando o rotor se aproxima do
equilíbrio deve ocorrer o chaveamento de corrente para a próxima fase a fim de
manter a sua rotação. Para a manutenção da rotação de um MRC deve-se controlar
a sequência de excitação das bobinas do estator de acordo com a posição do rotor.
A denominação relutância chaveada não significa que a relutância é
chaveada, mas refere-se ao chaveamento das correntes de fase, essencial para a
operação do motor (MILLER, 1993).
O MRC se caracteriza pela facilidade de construção, baixo custo de
fabricação e manutenção, alta confiabilidade e simplicidade dos conversores de
potência unipolares associados. Outra vantagem do MRC é possuir uma melhor
relação potência/peso quando comparado a outros sistemas motrizes (OLIVEIRA et
al., 2006). O MRC pode, também, produzir um alto conjugado em baixas
velocidades. Estas características, combinadas com dispositivos avançados de
eletrônica de potência e a disponibilidade de processadores velozes, fazem este
motor atrativo para muitas aplicações não somente de baixo desempenho, tais como
ventiladores e ferramentas manuais, mas, também, de alto desempenho dinâmico,
tais como: veículos elétricos e motores usados em aplicações aeronáuticas (ALRIFAI
et al., 2008).
O MRC possui, entretanto, algumas desvantagens: a necessidade de um
sensor de posição para determinados tipos de estratégia de controle; a oscilação no
conjugado eletromagnético gerado pela máquina, quando se aplicam pulsos de
tensão ou de corrente; e o alto nível de ruído sonoro em relação a outras máquinas
de sua classe de potência. Além disto, a modelagem matemática do MRC é
complexa devido à sua significativa não linearidade magnética. Durante a operação,
o perfil de magnetização das fases determina a amplitude das oscilações do
conjugado (HENRIQUES, 2004).
A introdução da lógica nebulosa (fuzzy) em sistemas de controle, incorporada
a um sistema com capacidade de aprendizado, como o das redes neurais,
potencializa um controle com adequada adaptação à característica de conjugado, ou
seja, a uma minimização dos harmônicos do conjugado (HENRIQUES, 2004).

29
A maior parte da literatura existente trata do MRC de fluxo radial. Alguns
trabalhos sobre o MRC de fluxo axial, normalmente com dois estatores, foram
publicados (ABOUZEID, 1995; KRISHNAN, 2001; KRISHNAN; ABOUZEID; MANG,
1990; MADHAVAN; FERNANDES, 2012; MAO; TSAI, 2005; PULLE; PETERSOEN,
1998; ZAID; EL-ATTAR; MOUSA, 1999).
Por ter um menor comprimento de eixo, o MRC de fluxo axial é vantajoso em
aplicações onde a dimensão é importante, como por exemplo, na tração de carros
elétricos.
Nesta tese é estudado o MRC de fluxo axial com somente um estator (SASS;
SANTISTEBAN; SANCHES, 2009; SANCHES; SANTISTEBAN, 2012; SANCHES;
SANTISTEBAN, 2014), pesquisado por poucos especialistas (ARIHARA; AKATSU,
2013), e propostas técnicas convencional e não convencionais (nebulosa e neural)
para o seu controle visando à minimização dos harmônicos do conjugado
eletromagnético.
1.2 HISTÓRICO
O conceito de motores de relutância chaveados surgiu em 1838 quando uma
locomotiva foi propulsada por este tipo de motor construído por Davidson para a
Estrada de Ferro Glasgow – Edinburgh, localizada na Escócia (MILLER, 1993).
O motor de passos, que inclui algumas das características do moderno motor
de relutância chaveado, foi inventado e patenteado nos idos de 1920 em Aberdeen
(Estados Unidos) por Walker (MILLER, 1993).
Em 1969, Nasar introduziu o conceito básico do atual MRC, propondo um
motor para aplicações em velocidades variáveis (VIJAYAKUMAR et al., 2008).
A década de 70 do século passado foi um período fértil no desenvolvimento
de conceitos do motor de relutância chaveado, auxiliado pelo desenvolvimento de
dispositivos mais rápidos de chaveamento de alta potência, de ferramentas
matemáticas computacionais e uma melhor compreensão do ganho obtido na
eficiência da conversão de energia utilizando a saturação magnética. Entre outras
publicações, podem ser mencionadas as duas patentes americanas de Bedford
(1971) e Hoft (1972) que descreveram muitas das características essenciais do
moderno MRC, com verdadeira comutação eletrônica, sincronizada positivamente
com a posição do rotor; o motor de entreferro axial controlado por tiristores

30
construído por Unnewehr e Koch para a Ford Motor Company; os trabalhos de
Bausch e a patente de Byrne (MILLER, 1993).
Uma das primeiras aplicações comerciais do MRC foi o servo motor utilizado
na impressora Draftmaster da Hewlett-Packard que usava a técnica de saturação
controlada no entreferro para diminuir as oscilações no conjugado (KONECNY,
1981).
Desde então tem havido um crescente desenvolvimento nos campos de
projeto e de controle do MRC, fazendo com que ele já possua uma pequena parcela
do mercado de acionamentos de velocidade variável de baixa e média potência,
devido também à sua simplicidade construtiva e robustez (HENRIQUES, 2004).
A utilização desses motores abrange desde eletrodomésticos (processadores
de alimentos, máquinas de lavar e aspirador de pó) até equipamentos industriais
(compressores, ventiladores, bombas, centrífugas, tração de veículos elétricos e
sistemas de aeronaves). O MRC pode ser encontrado em minas de carvão, bauxita
e ferro, em acionamento de ônibus elétrico na Inglaterra, assim como em aplicações
aeronáuticas, como o motor para bombeamento de combustível de 120 HP e 25000
rpm (HENRIQUES, 2004).
1.3 OBJETIVOS
Os principais objetivos da tese são:
Estabelecer o estado da arte em motor de relutância chaveado;
Aprofundar o conhecimento do motor de relutância chaveado de fluxo
axial, analisando as interações eletromagnéticas e mecânicas na
geração do conjugado;
Desenvolver modelos para o MRC rotativo de fluxo axial com somente
um estator que possibilitem definir as estratégias de acionamento e
controle desse tipo de motor;
Validar os modelos elaborados que caracterizem o projeto do motor de
relutância chaveado, através de simulações por elementos finitos e
testes experimentais;
Aprofundar o conhecimento em controle não convencional (redes
neural e lógica nebulosa);
Implementar, no protótipo do MRC rotativo de fluxo axial, sistemas de
controle convencional e não convencionais (nebuloso e neural);

31
Reduzir os harmônicos do conjugado eletromagnético gerado utilizando
a estratégia de imposição de um perfil pré-calculado de corrente nas
fases do motor;
Comparar os sistemas de controle convencional e não convencionais
implementados.
1.4 CONTRIBUIÇÕES ORIGINAIS DESTA TESE
Uma vez que o conjugado gerado pelos motores de relutância chaveados é
proporcional ao quadrado da corrente nas fases do estator e à derivada da
indutância em relação à posição angular do rotor, são desenvolvidos e comparados
métodos de cálculo das indutâncias, considerando: os fluxos magnéticos em um
modelo de duas dimensões (2D) do MRC “linearizado”, utilizando a técnica de
elementos finitos; e um modelo de três dimensões (3D) dos fluxos magnéticos no
MRC, utilizando a técnica de elementos finitos.
Os resultados obtidos com esses métodos de cálculo das indutâncias são
comparados com os valores estimados experimentalmente em um protótipo do MRC
de fluxo axial com somente um estator.
Técnicas de acionamento e controle convencional e não convencionais são
definidas para o protótipo do MRC, utilizando lógica nebulosa e redes neurais,
visando à minimização das oscilações do conjugado eletromagnético gerado. As
técnicas são simuladas em computador e implementadas no controle do protótipo
fabricado, e os seus resultados comparados.
1.5 ESTRUTURA DA TESE
A tese está dividida em dez capítulos.
O Capítulo 1 apresenta a motivação desta pesquisa, o histórico dos motores
de relutância chaveados, os objetivos atingidos e as contribuições originais.
O Capítulo 2 apresenta os principais tipos de MRC, com uma breve descrição
das principais características desses motores e do hardware necessário para seu
acionamento.
O Capítulo 3 apresenta a modelagem do MRC de fluxo axial com somente um
estator, com os modelos para cálculo das indutâncias próprias e mútuas e o modelo
para cálculo do conjugado eletromagnético.

32
O Capítulo 4 apresenta os valores obtidos pelos diversos modelos para o
cálculo das indutâncias próprias e mútuas e uma análise do conjugado resultante
com esses valores de indutâncias.
O Capítulo 5 apresenta a modelagem dos controladores convencionais e não
convencionais (nebuloso e neural), bem como a obtenção do perfil de corrente
imposta ao motor para minimização das oscilações no conjugado eletromagnético.
Neste capítulo são apresentados resultados de simulação em computador, utilizando
a ferramenta Simulink do programa MatLab®, mostrando o desempenho das
estratégias de controle.
O Capítulo 6 apresenta o projeto dos circuitos elétricos e eletrônicos
desenvolvidos para o controle do protótipo do MRC fabricado. Os resultados dos
experimentos com os controladores convencional e não convencionais são
apresentados neste capítulo, bem como são feitas comparações entre os resultados
das simulações em computador e os resultados obtidos nos experimentos.
O Capítulo 7 apresenta as principais conclusões desta tese e algumas
propostas de trabalhos futuros com o MRC de fluxo axial com somente um estator.
Os Capítulos 8 e 9 apresentam, respectivamente, as relações das referências
bibliográficas utilizadas e das obras consultadas na elaboração da tese.
O Capítulo 10 apresenta os apêndices da tese, contendo basicamente
programas para cálculo de indutâncias utilizando o Ansys® (método de elementos
finitos em três dimensões), uma visão geral da lógica nebulosa e das redes neurais,
a descrição de funções utilizadas na simulação com o Simulink e os programas
elaborados para o microcontrolador PIC 18F4680 utilizado no controle do protótipo
do MRC.

2 MOTOR DE RELUTÂNCIA CHAVEADO (MRC)
O MRC é um motor de pólos salientes duplos sem escovas, com bobinas de
cobre concentradas nos pólos do estator e sem bobinas ou magnetos nos pólos do
rotor. Em geral, os núcleos do rotor e do estator são construídos de lâminas de ferro.
Cada fase tem as suas bobinas colocadas em pólos diametralmente opostos do
estator. A excitação de uma fase, ou seja, a energização de um par de pólos
diametralmente opostos no estator leva o par de pólos mais próximo do rotor a
alinhar com os pólos excitados do estator. Isto produz um conjugado
eletromagnético independentemente da direção da corrente nas bobinas de fase.
Portanto, correntes unipolares são suficientes nas fases do estator e a excitação
sequencial, levando em conta a posição do rotor, faz com que este gire e alinhe
seus pólos com os pólos excitados do estator. Um sensor de posição angular do
rotor é frequentemente usado para fornecer a informação ao sistema de controle
(ALRIFAI et al., 2008).
Como o movimento do rotor e, portanto, a produção de conjugado
eletromagnético e de potência mecânica, envolve um chaveamento das correntes
nas bobinas das fases do estator quando há uma variação de relutância, este motor
de velocidade variável é conhecido como motor de relutância chaveado (MRC).
O conjugado eletromagnético gerado pelo MRC é determinado pelo binômio
corrente x indutância, sendo proporcional à derivada da matriz de indutâncias em
relação à posição angular do rotor e ao quadrado das correntes nas fases. O perfil
do conjugado é influenciado pela estrutura de dupla saliência da máquina (pólos
tanto no estator quanto no rotor) e, também, pelo fato das fases de um MRC serem
tipicamente alimentadas individualmente de forma sequencial. As oscilações de
conjugado são produzidas principalmente na região de superposição das fases que

34
conduzem correntes, quando a geração do conjugado eletromagnético é transferida
de uma fase para outra (BERNARDELI et al., 2008).
As não linearidades magnéticas são características inerentes ao MRC,
consequentemente, as equações dinâmicas deste motor são também não lineares e
variantes no tempo. Um alto desempenho pode ser obtido usando controladores
lineares convencionais, providenciando a linearização de sistemas dinâmicos nas
proximidades de um ponto de operação, entretanto, isto nem sempre é suficiente
para obter o desempenho dinâmico requerido pelos servos de alto desempenho.
Portanto, é necessário levar em conta as não linearidades do sistema no projeto das
leis de controle e as incertezas dos parâmetros da planta (ALRIFAI et al., 2008).
A fim de garantir que o MRC possa partir com qualquer posição inicial do rotor
e para obter um conjugado suave, o MRC é projetado com múltiplas fases no estator
e múltiplos pares de pólos no rotor, sendo que, em geral, o número de pólos no
estator (Pe) é diferente do número de pólos no rotor (Pr), ou seja, Pe Pr. Algumas
possíveis combinações são: 6/4 pólos (Pe = 6 e Pr = 4), 8/6 pólos (Pe = 8 e Pr = 6) e
12/10 pólos (Pe = 12 e Pr = 10). Estas combinações asseguram que o rotor nunca
esteja em uma posição onde o somatório dos conjugados eletromagnéticos gerados
por cada fase seja zero. Quanto maior for o número de pólos do estator e do rotor,
menor é a oscilação no conjugado. Escolhendo-se uma combinação onde existam 2
pólos no estator a mais do que no rotor, maior é o conjugado e menor a frequência
de chaveamento do conversor de potência (YUAN, 2000).
As oscilações no conjugado eletromagnético não são aceitáveis em
aplicações de alto desempenho (robótica, controle de posição, controle de
velocidade, veículos elétricos, etc.), de forma que o acionamento tradicional coloca o
MRC em desvantagem nessas aplicações. Existem três estratégias para a redução
das oscilações no conjugado eletromagnético: melhorar o projeto magnético da
máquina, controlar os ângulos de abertura e fechamento das chaves
semicondutoras, e impor um perfil apropriado de corrente às fases do motor
(MILLER, 1993). Estratégias que utilizam uma combinação dessas três também
podem ser encontradas.
2.1 OUTROS NOMES UTILIZADOS PARA O MRC (MILLER, 1993)
O nome Motor de Relutância Chaveado (Switched Reluctance Motor - SRM)
foi originado nos Estados Unidos, onde é utilizado, também, o nome Motor de

35
Relutância Variável (Variable Reluctance Motor - VR Motor). Entretanto, o VR Motor
engloba também o Motor de Passos (Stepper Motor), causando certa confusão. O
MRC é similar em termos eletromagnéticos ao Motor de Passos, tendo como
principais diferenças: o projeto; o método de controle (Motor de Passos não precisa
da realimentação da posição do rotor, necessária em algumas técnicas de controle
do MRC); as características de desempenho (MRC busca a conversão eficiente de
potência ao contrário do Motor de Passos que objetiva a integridade dos passos); e
o emprego.
O nome Motor de Relutância sem Escovas (Brushless Reluctance Motor) é
também utilizado para ressaltar o fato do motor não possuir escovas.
Outro nome utilizado é Motor de Relutância Comutado Eletronicamente
(Electronically Commutated Reluctance Motor – ECR Motor). Esta denominação
parece mais adequada do que chaveamento.
2.2 CLASSIFICAÇÕES DO MRC
Os MRC podem ser classificados de várias formas, sendo as principais:
2.2.1 QUANTO À SIMETRIA DOS PÓLOS
O MRC quanto à simetria dos pólos do estator e do rotor se divide em
(MILLER, 1993):
MRC regular;
MRC irregular.
Um MRC regular tem os pólos do rotor e do estator simétricos em relação as
suas linhas de centro e os pólos são igualmente espaçados ao longo do rotor e do
estator, conforme pode ser visto na ilustração do MRC regular de 4/2 pólos da Figura
2.1.
Figura 2.1 - Seção transversal de um MRC regular (MILLER, 1993).

36
Um MRC irregular possui características que não atendem às anteriormente
citadas, por exemplo, na Figura 2.2 se ilustra o MRC de 4/2 pólos cujo rotor dispõe
de pólos não simétricos em relação às suas linhas de centro, implicando em dois
espaçamentos diferentes de entreferro quando os pólos do rotor e do estator se
alinham.
Figura 2.2 - Seção transversal de um MRC irregular (MILLER, 1993).
Tipicamente, um MRC irregular é projetado para obter maior capacidade de
partida em qualquer posição do rotor (SAKURAI, 2001).
2.2.2 QUANTO À NATUREZA DO MOVIMENTO
O MRC quanto à natureza do movimento se divide em (KRISHNAN, 2001):
a) MRC rotativo;
b) MRC linear.
Por sua vez, o MRC rotativo pode ser subdividido de acordo com a orientação
relativa ao seu eixo do fluxo magnético responsável pela produção do conjugado,
em:
a) MRC rotativo de fluxo radial;
b) MRC rotativo de fluxo axial.
2.2.2.1 MRC ROTATIVO
No caso do MRC rotativo de fluxo radial, o caminho do fluxo magnético
gerado é perpendicular ao seu eixo de rotação, ou em outras palavras, o fluxo
magnético segue o percurso do raio dos cilindros do estator e rotor. Um exemplo
pode ser visto na Figura 2.3. Este tipo de MRC é atualmente o mais utilizado.

37
Figura 2.3 - Seção transversal de um MRC de fluxo radial de 6/4 pólos (KRISHNAN,
2001).
Para o caso do MRC rotativo de fluxo axial o caminho do fluxo magnético
gerado possui uma parcela de trajetória paralela ao seu eixo, ou seja, o fluxo
magnético segue o percurso ao longo da direção axial dos cilindros do estator e
rotor. A Figura 2.4 apresenta um exemplo de MRC de fluxo axial com dois estatores.
ESTATORROTORESTATOR
Figura 2.4 - Vista espacial de um MRC de fluxo axial com dois estatores (adaptado
de PULLE e PETERSOEN, 1998).
O MRC estudado nesta tese é o de fluxo axial com apenas um estator,
conforme ilustrado na Figura 2.5, que possui um menor volume comparado com o de
dois estatores.

38
Figura 2.5 - Vista espacial de um MRC de fluxo axial com um estator (adaptado de
ARIHARA; AKATSU, 2013).
2.2.2.1.1 MRC Rotativo de Fluxo Radial
Eles podem ser classificados de acordo com os caminhos curtos ou longos do
fluxo magnético.
A Figura 2.6 ilustra um MRC de fluxo radial com caminhos curtos do fluxo
magnético, composto de 10/8 pólos com cinco fases.
Figura 2.6 - Seção transversal de um MRC de fluxo radial com caminhos curtos
(KRISHNAN, 2001).
A Figura 2.7 apresenta um MRC de fluxo radial com caminhos longos do fluxo
magnético, composto de 8/6 pólos com quatro fases.
Figura 2.7 - Seção transversal de um MRC de fluxo radial com caminhos longos
(VIJAYRAGHAVAN, 2001).
O princípio de funcionamento do MRC de fluxo radial baseia-se no
alinhamento dos pólos do rotor e do estator sempre que as bobinas do estator
diametralmente opostas (fase) são excitadas. Considerando o circuito magnético da
máquina, o rotor se movimenta para a posição de relutância mínima no instante da
excitação. Enquanto dois pólos do rotor estão alinhados com os do estator, outro
conjunto de pólos do rotor está desalinhado com respeito a outro conjunto do
estator. Então, este conjunto de pólos do estator é excitado para trazer os pólos do

39
rotor para a posição de alinhamento. Esta operação pode ser explicada com o
auxílio da Figura 2.8.
Figura 2.8 - Seção transversal de um MRC de fluxo radial com os pólos do estator
“c” e “c´” alinhados com os pólos do rotor “r1” e “r1´” (KRISHNAN, 2001).
Na Figura 2.8 considere que os pólos do rotor “r1” e “r1´” e os pólos do estator
“c” e “c´” estão alinhados. Aplicando uma corrente à fase “a” com a direção mostrada
na figura, um fluxo magnético é estabelecido através dos pólos do estator “a” e “a´” e
do rotor “r2”e “r2´”, tendendo a girá-los na direção dos pólos do estator “a” e “a´”,
respectivamente. Quando eles se alinham, a corrente do estator na fase “a” é
desligada provocando a situação mostrada na Figura 2.9.
Figura 2.9 - Seção transversal de um MRC de fluxo radial com os pólos do estator
“a” e “a´” alinhados com os pólos do rotor “r2” e “r2´” (KRISHNAN, 2001).
Neste instante as bobinas da fase “b” do estator são alimentadas, fazendo os
pólos do rotor “r1” e “r1´” girarem na direção dos pólos do estator “b” e “b´”,
respectivamente, no sentido horário. De forma semelhante, desalimentando as
bobinas da fase “b” e alimentando as bobinas da fase “c”, resultam no alinhamento
dos pólos do rotor “r2” e “r2´” com os pólos do estator “c” e “c´”, respectivamente.
Consequentemente, por meio do chaveamento das correntes de fases do estator

40
nesta sequência, o rotor gira. Similarmente, o chaveamento das correntes na
sequência “acb” resulta na rotação do rotor no sentido contrário (anti-horário).
Um caso de interesse particular é o MRC de fluxo radial de uma fase devido à
forte semelhança com os motores universal e de indução de uma fase, pois são
motores de baixo custo de fabricação. Este motor é particularmente atrativo em
aplicações de alta velocidade. Quando os pólos do estator e do rotor estão
alinhados, a corrente na fase do estator é desligada e o rotor mantém o seu
movimento devido à energia cinética armazenada. Quando ocorre o desalinhamento
dos pólos, a bobina do estator é novamente alimentada, produzindo um conjugado
eletromagnético. Um problema para operação desse tipo de motor aparece na
partida, caso os pólos do estator e do rotor estejam alinhados ou caso o rotor esteja
em uma posição onde o conjugado produzido seja menor do que o conjugado da
carga. Esse problema pode ser contornado com a utilização de um imã permanente
no estator, conforme ilustra a Figura 2.10, que desloca o rotor da posição de
alinhamento ou para uma posição apropriada, possibilitando a geração do máximo
conjugado eletromagnético.
Bobina do
Estator
Imã
Permanente
Figura 2.10 - Seção transversal de um MRC de 2/2 pólos com imã permanente para
auxiliar na partida (adaptado de KRISHNAN, 2001).
O MRC de uma fase é normalmente do tipo 2/2, 4/4, 6/6 ou 8/8 pólos,
operando com um ciclo de funcionamento máximo de 50%, quando somente a
região da rampa de subida da indutância é utilizada para gerar conjugado. Isto
provoca uma descontinuidade no conjugado com consequente produção de altas
oscilações mecânicas e aumento do ruído acústico (KRISHNAN, 2001). Ele é usado
em aplicações onde essas desvantagens não são relevantes, tais como: máquinas
manuais e aparelhos domésticos.

41
As principais vantagens do MRC de fluxo radial são (MILLER, 1993):
a) baixo custo de fabricação;
b) efeitos térmicos mínimos;
c) operação em altas velocidades;
d) baixa inércia;
e) facilidade de reparo;
f) baixas perdas no rotor;
g) tolerância à faltas (curto-circuito ou circuito aberto).
As principais desvantagens do MRC de fluxo radial são (MILLER, 1993):
a) diâmetro de eixo pequeno;
b) entreferro pequeno;
c) necessidade do uso de um sensor de posição;
d) impossibilidade de operação direta na rede elétrica;
e) oscilações no conjugado eletromagnético e alto ruído audível;
f) altas perdas por ventilação em altas velocidades.
2.2.2.1.2 MRC Rotativo de Fluxo Axial
A seção longitudinal de um dos MRC de fluxo axial mais estudado na
literatura é mostrada na Figura 2.11. Ela consiste de dois discos separados
formando o estator e um disco compondo o rotor. Cada disco do estator contém
pólos no formato de um “U” com relação à seção longitudinal ao eixo, sendo que os
pólos de um disco faceiam os pólos do outro disco e estão alinhados
mecanicamente. Os pólos do estator e do rotor são fixados por material não
magnético, sendo normalmente utilizados discos de alumínio pela facilidade de
construção.
Pólos do EstatorPólos do Rotor
Bobina
Figura 2.11 - Seção longitudinal de um MRC de fluxo axial com dois estatores
(adaptado de KRISHNAN; ABOUZEID; MANG, 1990).

42
A seção transversal ao eixo de um disco do estator de uma máquina de três
pólos é apresentada na Figura 2.12. As partes superiores e inferiores dos pólos do
estator são seções de coroas de círculos tendo áreas iguais, implicando em que a
parte inferior tenha maior espessura do que a parte superior, ou seja, (D2 – D1) > (D4
– D3), para manter a mesma densidade de fluxo.
Figura 2.12 - Seção transversal de um dos discos do estator de um MRC de fluxo
axial com dois estatores cada um com três pólos (KRISHNAN; ABOUZEID; MANG,
1990).
Na máquina de três pólos da Figura 2.12, o rotor tem somente dois pólos,
cada um composto por duas partes com formato de casca de cilindro cujo corte
transversal ao eixo é uma seção de coroa de círculo, conforme ilustrado na Figura
2.13.
Figura 2.13 - Seção transversal do disco do rotor com dois pólos de um MRC de
fluxo axial (KRISHNAN; ABOUZEID; MANG, 1990).
A operação deste MRC com três pólos nos discos dos estatores e dois pólos
no disco do rotor é descrita a seguir com o auxílio da Figura 2.14 que apresenta o
caminho do fluxo magnético em uma seção longitudinal ao eixo da máquina.

43
Rotor
Entreferro 1 Entreferro 2
Pólo do
Estator
(Disco 1)
Pólo do
Estator
(Disco 2)
Figura 2.14 - Caminho do fluxo na seção longitudinal do MRC de fluxo axial com dois
estatores (adaptado de KRISHNAN; ABOUZEID; MANG, 1990).
Quando os pólos do rotor estão a 60 ou menos de um particular conjunto de
pólos do estator, as bobinas correspondentes a esses pólos do estator são
alimentadas movendo o rotor. O fluxo magnético segue o caminho mostrado na
figura, englobando as duas partes dos dois entreferros, as duas partes em “U” dos
estatores e as duas partes do pólo do rotor. As bobinas são desalimentadas quando
os pólos do estator e do rotor estão alinhados a fim de evitar a produção de um
conjugado negativo. Devido à energia cinética armazenada o rotor continua seu
movimento. Nesse instante, as bobinas do conjunto de pólos do estator mais
próximo dos pólos do rotor são alimentadas, repetindo a operação (KRISHNAN;
ABOUZEID; MANG, 1990).
Este tipo de motor é ideal para aplicações onde o comprimento total do eixo é
uma restrição, por exemplo: ventilador de teto ou propulsão. A desvantagem reside
no fato das laminações do estator serem dobradas uma sobre a outra, ao contrário
do empilhamento simples de lâminas do MRC de fluxo radial (KRISHNAN, 2001).
2.2.2.2 MRC LINEAR
O MRC linear pode ter bobinas no estator ou na parte móvel, enquanto que
no MRC rotativo as bobinas estão sempre no estator e o rotor não possui bobinas
(KRISHNAN, 2001).
A configuração com o estator ativo e a parte móvel passiva tem a vantagem
da alimentação elétrica e do conversor de potência serem estacionários, resultando
em reduzido peso da parte móvel. Este projeto, entretanto, necessita de um grande
número de seções do conversor de potência, resultando em alto custo. Por outro
lado, uma estrutura com a parte móvel ativa e o estator passivo necessita somente
de uma seção do conversor de potência, mas a potência precisa ser transferida por

44
meio de contatos do tipo escovas, que não é desejável para aplicações em alta
velocidade, ou por transferência indutiva com circuitos de conversão de potência
adicionais, com consequente complexidade e custo mais alto (KRISHNAN, 2001).
Existem duas configurações distintas do caminho do fluxo magnético no MRC
linear: longitudinal e transversal, ilustradas nas Figuras 2.15 e 2.16, respectivamente
(LEE et al., 2000).
Direção do
Movimento
Bobinas
Pólos do
Estator
Parte Móvel
Caminho
do Fluxo
Figura 2.15 - Vista espacial do MRC linear de fluxo magnético longitudinal (adaptado
de SALO, 1999).
Direção do
Movimento
Caminho
do fluxo
Bobinas
Pólos do
Estator
Pólos da
Parte Móvel
Figura 2.16 - Vista espacial do MRC linear de fluxo magnético transversal (adaptado
de SALO, 1999).
A configuração com o caminho do fluxo magnético longitudinal é uma
contrapartida linear do MRC rotativo de fluxo radial, sendo de fácil fabricação e
mecanicamente robusta. O caminho do fluxo magnético está na direção do
movimento da parte móvel, possuindo menores perdas por correntes parasitas
(Foucault). Um projeto com o fluxo magnético transversal, permite a utilização de
uma simples estrutura, consistindo de barras transversais individualmente montadas.

45
O caminho do fluxo magnético perpendicular à direção do movimento da parte
móvel, induz uma força eletromotriz no núcleo, resultando em altas perdas por
correntes parasitas (KRISHNAN, 2001).
O funcionamento do MRC linear é baseado na tendência de alinhamento dos
pólos do estator e do rotor. Na Figura 2.17 é apresentada uma configuração com
fluxo longitudinal, cujo estator é composto de várias seções, cada uma com seis
pólos, e a parte móvel é constituída de seis pólos.
Estator
Parte Móvel
Figura 2.17 - Seção longitudinal de um MRC linear (adaptado de LEE et al., 2000).
A sequência de energização das bobinas para o movimento da parte móvel
para a direita é “a1a1´” - “b1b1´” - “c2c2´” - etc.. Similarmente, uma sequência para a
direção contrária pode ser produzida (LEE et al., 2000).
O MRC linear pode também ter dois estatores ou duas partes móveis, neste
caso não possuem a mesma liberdade na tolerância do entreferro daqueles de uma
parte. Para aplicações em levitação magnética, o MRC linear com um estator e uma
parte móvel, mostra-se mais adequado. Por outro lado, o MRC de duas partes fixas
ou móveis possui maior densidade de força magnética e menor indutância, devido
aos quatro entreferros no caminho do fluxo magnético. Ao contrário, o MRC de uma
parte, tendo somente dois entreferros, possui uma menor densidade de força
magnética e uma maior indutância (KRISHNAN, 2001).
2.3 CONVERSORES DE POTÊNCIA
Atualmente existem inúmeras configurações de conversores desenvolvidos
para o MRC. Cada uma é projetada para aplicações específicas. Não existe um
conversor único que possa ser utilizado em todas as aplicações possíveis. A escolha
da configuração deve considerar a potência, as características físicas do motor e as
necessidades da carga (HENRIQUES, 2004).

46
Qualquer conversor para MRC deve apresentar as seguintes características
(HENRIQUES, 2004):
a) ser capaz de aplicar pulsos de tensão, com polaridade invertida, na fase que
tenha acabado de ser desligada, com o intuito de levar o mais rápido possível a
corrente nesta fase ao valor zero, desmagnetizando tal fase no menor tempo
possível, e assim não gerando conjugado negativo após passar pela sua posição
de alinhamento;
b) permitir a sobreposição de corrente de fase, ou seja, permitir que mais de uma
fase conduza ao mesmo tempo. Isto é normalmente desejado quando a máquina
opera em altas velocidades, quando o tempo de comutação entre fases é muito
pequeno. Esta superposição permite diminuir as oscilações no conjugado
eletromagnético na operação do motor;
c) ser capaz de controlar a amplitude e forma de onda das correntes de fase;
d) ser capaz de suprir pulsos de corrente unipolar em cada fase, sincronizada com
a posição angular instantânea do rotor.
Os conversores são classificados segundo sua operação e seu projeto. Eles
são inicialmente divididos em comutação brusca (hard-switching) e comutação suave
(soft-switching). Na comutação suave as chaves semicondutoras são comutadas
com tensão ou corrente zero, evitando perdas no chaveamento e aumentando a
eficiência do conversor. Para que se tenha o cruzamento das tensões ou correntes
por zero são utilizados capacitores e indutores formando circuitos ressonantes, o
que aumenta o custo do conversor. A comutação brusca, por outro lado, tem um
custo inferior ao da comutação suave, mas tem como desvantagens o aumento das
perdas e a diminuição da eficiência do conversor (HENRIQUES, 2004).
Desde que o conjugado nos acionamentos do MRC é independente da
polaridade da corrente de excitação, estes dispositivos necessitariam somente de
uma chave por bobina da fase. Além disso, diferentemente dos acionamentos dos
motores CA, os dedicados ao MRC sempre têm uma bobina da fase em série com
uma chave. Portanto, no caso de uma falta, a indutância das bobinas limita a taxa de
crescimento da corrente e fornece tempo suficiente para a atuação da proteção.
Além disso, as fases do MRC são independentes e, no caso de uma falta em uma
bobina é possível continuar operando (KRISHNAN, 2001).

47
A seguir são apresentadas algumas configurações de conversores, com
comutação brusca, mais usadas em acionamentos de MRC (HENRIQUES, 2004;
MILLER, 1993; KRISHNAN, 2001).
a) Conversor clássico ou ponte conversora assimétrica
A Figura 2.18 mostra um exemplo deste tipo de conversor. Ligando as duas
chaves de potência (MOSFET´s) conectadas na fase circulará uma corrente nesta
fase do MRC. Se a corrente cresce acima do valor comandado, as chaves são
desligadas. A energia armazenada nas bobinas da fase do motor manterá a corrente
na mesma direção até o seu descarregamento através dos diodos.
Figura 2.18 - Conversor clássico ou ponte conversora assimétrica (KRISHNAN,
2001).
Este conversor possui grande flexibilidade no controle de corrente, onde cada
fase é controlada independentemente das outras, permitindo uma operação com
qualquer nível de superposição de corrente, além de ser uma configuração bastante
confiável, por não permitir curto-circuito no barramento CC do conversor. Entretanto,
esta configuração não é a mais barata, por necessitar de duas chaves
semicondutoras por fase.
b) Configuração (n+1) chaves e diodos (Conversor de Miller)
Uma topologia mais eficiente que a anterior é mostrada na Figura 2.19, que
utiliza apenas n+1 chaves e diodos para um motor de n fases. Quando as chaves T1
e T2 são ligadas, a fase A é alimentada pela aplicação da fonte de tensão nas
bobinas desta fase. A corrente pode ser limitada para o nível pré-estabelecido no
controle de T1 ou T2 ou de ambas. Similarmente, a fase B pode ser alimentada
utilizando as chaves T2 e T3. Este conversor possibilita a maior utilização dos
dispositivos de potência devido à operação compartilhada da chave. Todavia, o
circuito fornece controle restrito de corrente durante a sobreposição das correntes de
fase.

48
Figura 2.19 - Configuração conversora de (n+1) chaves e diodos (KRISHNAN,
2001).
Neste conversor uma única chave é responsável por controlar a corrente nas
fases, enquanto que as outras chaves têm o objetivo de escolher qual fase deve ser
alimentada levando em conta a posição angular do rotor. A desvantagem é não
permitir um controle totalmente independente de fases, não sendo possível aplicar
tensão positiva numa fase e negativa em outra, simultaneamente. Assim sendo, em
altas velocidades, onde a superposição de fases é importante para maximizar o
conjugado, o desempenho do motor é bastante limitado. Por este motivo, esta
configuração é habitualmente usada em aplicações que necessitam de velocidades
baixas.
c) Configuração bifilar
A Figura 2.20 apresenta uma fase de uma configuração de conversor com
uma chave de potência e um diodo por fase, mas com retorno da energia magnética
armazenada para a fonte. Isto é obtido tendo uma bobina bifilar com a polaridade
mostrada na figura. Nesta configuração a tensão através da chave de potência
chega a ser muito maior que a tensão da fonte. A desvantagem deste acionamento é
que o MRC necessita de uma bobina bifásica, que aumenta a complexidade do
motor.
FASE A
Vdc
T1
i a1 i a2
D1
+
-
VT1
+
-
Figura 2.20 - Configuração bifilar de conversor (adaptado de KRISHNAN, 2001).

49
d) Conversor C-dump
Esta configuração é apresentada na Figura 2.21, com um circuito de
recuperação de energia. A energia magnética armazenada é parcialmente desviada
para o capacitor Cd e recuperada deste pelo chopper compreendendo transistor Tr,
indutância Lr e diodo Dr, sendo posteriormente enviada para a fonte de corrente
contínua Vdc. Esta configuração tem a vantagem de minimizar o uso de chaves de
potência permitindo controle de fase independente. A principal desvantagem é que a
comutação de corrente é limitada pela diferença entre a tensão vo, através do
capacitor Cd, e a tensão da fonte Vdc. Além disso, a energia circulando entre Cd e a
fonte resulta em perdas adicionais na máquina.
Figura 2.21 - Conversor C-dump (adaptado de KRISHNAN, 2001).
2.4 SENSOR DE POSIÇÃO
No acionamento do MRC, a posição do rotor é essencial para a comutação da
energização das fases do estator e o controle do ângulo de avanço.
A informação da posição do rotor é usualmente obtida por sensores e
transdutores de posição, absolutos ou incrementais, tais como: fototransistor,
fotodiodo, elemento de efeito Hall, sensor magnético, encoder e transformador
diferencial variável (KRISHNAN, 2001).
Atualmente, diversas soluções sem a utilização de sensores de posição estão
sendo estudadas e implementadas (CAI; DENG, 2013; CAI; DENG, 2014; HA; KIM;
CHOI, 2014; PALAKEERTHI; SUBBAIAH, 2014).
2.4.1 DESCRIÇÃO DE ALGUNS SENSORES DE POSIÇÃO
A seguir serão descritas algumas estruturas mostrando a utilização de
sensores de posição (KRISHNAN, 2001).

50
a) Sensor fototransistor
O princípio de funcionamento do sensor fototransistor é baseado no efeito
fotoelétrico. A Figura 2.22 mostra uma estrutura básica utilizando esse sensor.
Um obturador giratório é acoplado mecanicamente ao eixo do rotor, com uma
abertura cujo ângulo correspondente, em radianos, a 2/(número de fases). O
número de fototransistores utilizados é igual ao número de fases da máquina,
dispostos igualmente espaçados sobre a superfície do estator. Quando a abertura
estiver alinhada com o fototransistor 1 (FT1), este gera uma corrente devido à
incidência de luz, enquanto os demais fototransistores tem somente pequenas
correntes de fuga, pois a luz é bloqueada pelo obturador. Neste caso, a fase do
estator associada com o fototransistor deverá ser alimentada. Situação semelhante
deve ocorrer quando a abertura do obturador estiver alinhada com os outros
fototransistores.
Fototransistor
Fonte de Luz
Fototransistor FT 1
FT 3
FT 2
Obturador Giratório
Eixo do Motor
Figura 2.22 - Posicionamento dos fototransistores em um MRC de três fases
(adaptado de KRISHNAN, 2001).
b) Sensor de efeito Hall
O funcionamento deste sensor é baseado no princípio físico do efeito Hall.
Acoplado a circuitos eletrônicos forma um transdutor que varia sua tensão de saída
em resposta a um campo magnético.
Uma estrutura típica de posicionamento dos sensores de efeito Hall para um
motor de três fases é ilustrada na Figura 2.23. Ela é feita com três elementos de
efeito Hall e um disco rotativo com imã permanente fixado sobre o eixo do rotor. O
imã permanente é instalado de modo que as saídas dos elementos de efeito Hall
possam indicar a posição do rotor utilizada no controle das correntes das fases.

51
Elemento Hall
Figura 2.23 - Posicionamento dos sensores de efeito Hall em um MRC de três fases
(adaptado de KRISHNAN, 2001).
2.4.2 ELIMINAÇÃO DO SENSOR DE POSIÇÃO
Em algumas aplicações os sensores de posição não são desejáveis por
diversas razões: custo, tamanho, peso, inércia e confiabilidade; fatores
desfavoráveis às potenciais áreas de aplicação do MRC. Também há determinadas
aplicações, por exemplo, em compressores, onde as condições ambientais não
permitem o uso de sensores de posição externos. Existem várias técnicas de
estimação sem sensor de posição, largamente encontradas na literatura
(HENRIQUES, 2004).
Atualmente, as soluções propostas para se determinar de forma indireta a
posição do eixo do rotor do MRC, podem ser agrupadas em (OLIVEIRA, 2002):
a) Técnicas que utilizam fases alimentadas
Análise da forma de onda da corrente;
Fluxo concatenado x corrente.
b) Técnicas que utilizam fases desalimentadas
Pulsos de teste;
Injeção de sinais de alta frequência;
Medição da força contra eletromotriz.
Essas técnicas consideram o conhecimento do perfil de indutância (L()) do
MRC, como função da posição () do rotor.
Há outras técnicas que não se enquadram nas duas categorias acima, tais
como: medição da tensão induzida devido à indutância mútua e observadores de
estado (VAS, 1999).

3 MODELAGEM DO MOTOR DE RELUTÂNCIA CHAVEADO (MRC)
O princípio eletromagnético da operação do MRC, apesar de sua simplicidade
por não ser linear, não permite o desenvolvimento fácil de fórmulas que considerem
unicamente os conceitos bem conhecidos de eletromagnetismo.
O problema de projeto de um MRC é que este não segue as técnicas
clássicas usadas para os motores elétricos convencionais de corrente contínua e de
corrente alternada.
O MRC é uma máquina que apresenta saturação localizada e necessita de
um conversor eletrônico de potência para seu funcionamento, não usual em outras
máquinas. Muito embora a sua fabricação seja simples, o seu controle para atingir
um bom desempenho é difícil com os métodos tradicionais (MILLER, 1993).
A maior dificuldade para entender a operação e o projeto do MRC reside nos
pólos salientes duplos: nem o rotor nem o estator têm uma superfície cilíndrica lisa
no entreferro, mas ambos têm pólos salientes ou dentes. Devido a esta
característica, a sua operação em regime permanente se caracteriza por uma série
de transientes nos quais os parâmetros do circuito indutivo dos enrolamentos das
bobinas de fase são funções variáveis da posição e da corrente. A variação com a
corrente é associada com a intensa saturação de pólos parcialmente sobrepostos,
que é difícil de calcular em detalhes sem programas de simulação, como por
exemplo, de elementos finitos (KRISHNAN, 2001).
Considerando ainda que a variação da indutância depende diretamente do
material magnético e das dimensões construtivas escolhidas para o MRC, os
resultados gerados pela simulação também são bastante úteis no projeto do
conversor de potência e na estratégia de controle para acionamento do MRC, já que
os tempos de fechamento e abertura do circuito de cada fase devem coincidir com
os intervalos de máxima e mínima indutância do motor.
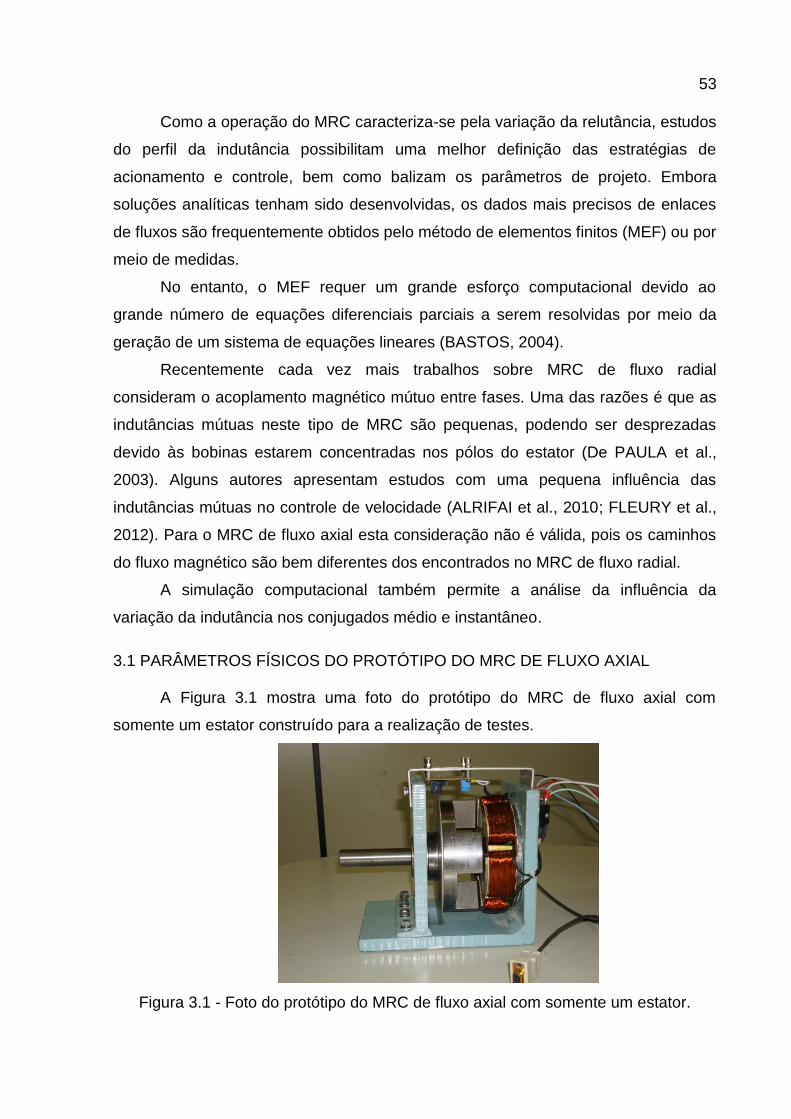
53
Como a operação do MRC caracteriza-se pela variação da relutância, estudos
do perfil da indutância possibilitam uma melhor definição das estratégias de
acionamento e controle, bem como balizam os parâmetros de projeto. Embora
soluções analíticas tenham sido desenvolvidas, os dados mais precisos de enlaces
de fluxos são frequentemente obtidos pelo método de elementos finitos (MEF) ou por
meio de medidas.
No entanto, o MEF requer um grande esforço computacional devido ao
grande número de equações diferenciais parciais a serem resolvidas por meio da
geração de um sistema de equações lineares (BASTOS, 2004).
Recentemente cada vez mais trabalhos sobre MRC de fluxo radial
consideram o acoplamento magnético mútuo entre fases. Uma das razões é que as
indutâncias mútuas neste tipo de MRC são pequenas, podendo ser desprezadas
devido às bobinas estarem concentradas nos pólos do estator (De PAULA et al.,
2003). Alguns autores apresentam estudos com uma pequena influência das
indutâncias mútuas no controle de velocidade (ALRIFAI et al., 2010; FLEURY et al.,
2012). Para o MRC de fluxo axial esta consideração não é válida, pois os caminhos
do fluxo magnético são bem diferentes dos encontrados no MRC de fluxo radial.
A simulação computacional também permite a análise da influência da
variação da indutância nos conjugados médio e instantâneo.
3.1 PARÂMETROS FÍSICOS DO PROTÓTIPO DO MRC DE FLUXO AXIAL
A Figura 3.1 mostra uma foto do protótipo do MRC de fluxo axial com
somente um estator construído para a realização de testes.
Figura 3.1 - Foto do protótipo do MRC de fluxo axial com somente um estator.

54
As Figuras 3.2 e 3.3 mostram, respectivamente, partes das seções
transversal e longitudinal em relação ao eixo do MRC de fluxo axial, com somente
um estator, com a visualização dos principais parâmetros geométricos a serem
utilizados na modelagem.
Pólo do
Rotor
Pólo do
Estator
Eixo da
Máquina
pr
pe
Rm
R
Rpr
Rpe
Figura 3.2 - Seção transversal em relação ao eixo do MRC.
Pólo do
Rotor
Núcleo do
EstatorNúcleo do
Rotor
Pólo do
Estator
Epe
Eixo da
Máquina
Pólo do
Rotor
Pólo do
Estator
Epr EnrEne
g
Figura 3.3 - Seção longitudinal em relação ao eixo do MRC.
Com base nessas duas figuras são definidos os seguintes parâmetros físicos:
pe – ângulo do arco do pólo do estator;
pr – ângulo do arco do pólo do rotor;
Rpe – raio interno do pólo do estator;
Rpr – raio interno do pólo do rotor;
Rm – raio do eixo da máquina;
R – raio dos núcleos ou raio externo dos pólos (estator e rotor);

55
g – comprimento do entreferro;
Epe – espessura do pólo do estator;
Epr – espessura do pólo do rotor;
Ene – espessura do núcleo do estator;
Enr – espessura do núcleo do rotor.
Outros parâmetros físicos a serem utilizados:
Pr – número de pólos do rotor;
Pe – número de pólos do estator;
Fe – número de fases do estator (usualmente igual a Pe/2);
Ni – número de espiras da bobina i dos pólos do estator.
O protótipo do MRC de fluxo axial é do tipo 6/4, ou seja, tem seis pólos no
estator e quatro pólos no rotor. Os núcleos do estator e do rotor são feitos de aço
SAE-1020 e o eixo do MRC é feito de aço inoxidável.
O aço inoxidável tem permeabilidade magnética relativa igual ao ar, ou seja,
1. No caso do aço SAE-1020, o número 10 significa que não é uma liga (associação
com outros elementos como o níquel e o cromo) e o número 20 quer dizer que este
material contém 0,2% (20/100) de carbono em sua estrutura. Sua curva de
magnetização é mostrada na Figura 3.4.
Figura 3.4 - Curva de magnetização do aço SAE-1020 (Software Ansys).
As Figuras 3.5 e 3.6 apresentam as seções transversais ao eixo da máquina
do estator e do rotor, respectivamente. Na Figura 3.5 visualizam-se as bobinas nos
seis pólos do estator, já a Figura 3.6 apresenta os quatro pólos do rotor.

56
Eixo da
Máquina
Núcleo do
Estator
BOBINA A1
BOBINA C2
BOBINA C1BOBINA B2
BOBINA B1
BOBINA A2
Figura 3.5 - Seção transversal ao eixo do estator do protótipo.
Eixo da
Máquina
Núcleo do
Rotor
Pólo I
Pólo III
Pólo II
Pólo IV
Figura 3.6 - Seção transversal ao eixo do rotor do protótipo.
Os valores dos parâmetros físicos para o protótipo do MRC são:
pe = pr = 40;
Rpe = Rpr = 31,5 mm;
Rm = 20 mm;
R = 63 mm;
g = 1,9 mm;
Epe = 34 mm;
Epr = 26 mm;
Ene = 5 mm;
Enr = 17 mm.
Pr = 4;
Pe = 6;
Fe = 3;
Ni = 175.

57
3.2 PERFIL IDEAL DA INDUTÂNCIA PRÓPRIA
A Figura 3.7 apresenta as posições relativas entre um pólo do rotor e um pólo
do estator relevantes para o entendimento da variação da indutância.
Posição 0
do Rotor
Posição 5
do Rotor
Pólo do
Rotor
Pólo do
Estator
1
Posição 1
do RotorPosição 2
do Rotor
Posição 3
do RotorPosição 4
do Rotor
5 =2/Pr
/Pr
Figura 3.7 - Posições do pólo do rotor em relação ao pólo do estator.
Os ângulos assinalados na Figura 3.7 são determinados com o auxílio das
seguintes equações (KRISHNAN, 2001):
2
pr
2
pe
rP1
= (3.1)
pe12= (3.2)
pepr23= (3.3)
pe34= (3.4)
rP
2145
== (3.5)
Desta forma, para o protótipo, 1 = 5, 2 = 45, 3 = 45, 4 = 85 e 5 = 90.
A Figura 3.8 apresenta um perfil ideal da indutância própria de uma das
bobinas de fase do estator versus a posição angular do rotor para um valor fixo da
corrente de excitação na bobina, desprezando-se o efeito do espraiamento e a
saturação. Esse perfil de indutância de uma fase se repete a cada 2 / Pr radianos.

58
Figura 3.8 - Perfil ideal da indutância própria versus posição do rotor (adaptado de
KRISHNAN, 2001).
Na Figura 3.8 são vistas quatro regiões distintas de indutância:
a) Região A (0 a 1 e 4 a 5): conforme ilustrado nas Figuras 3.9 e 3.10, nestas
regiões os pólos do estator e do rotor não estão sobrepostos e a indutância é
mínima e quase constante, valendo aproximadamente Ld. A posição totalmente
desalinhada corresponde a 0 rad, quando a extremidade do pólo do rotor está
situada a um arco correspondente a 1 radianos da extremidade do pólo do estator.
Essas regiões não contribuem para a produção de conjugado.
Posição 0
do Rotor
Pólo do
Rotor
Pólo do
Estator
1
Posição 1
do Rotor
/Pr
Eixo da
Máquina
pr
pe
Figura 3.9 - Pólo do rotor nas posições correspondentes aos ângulos 0 e 1.
La
Ld
2 3 1 4 0 5 1
L
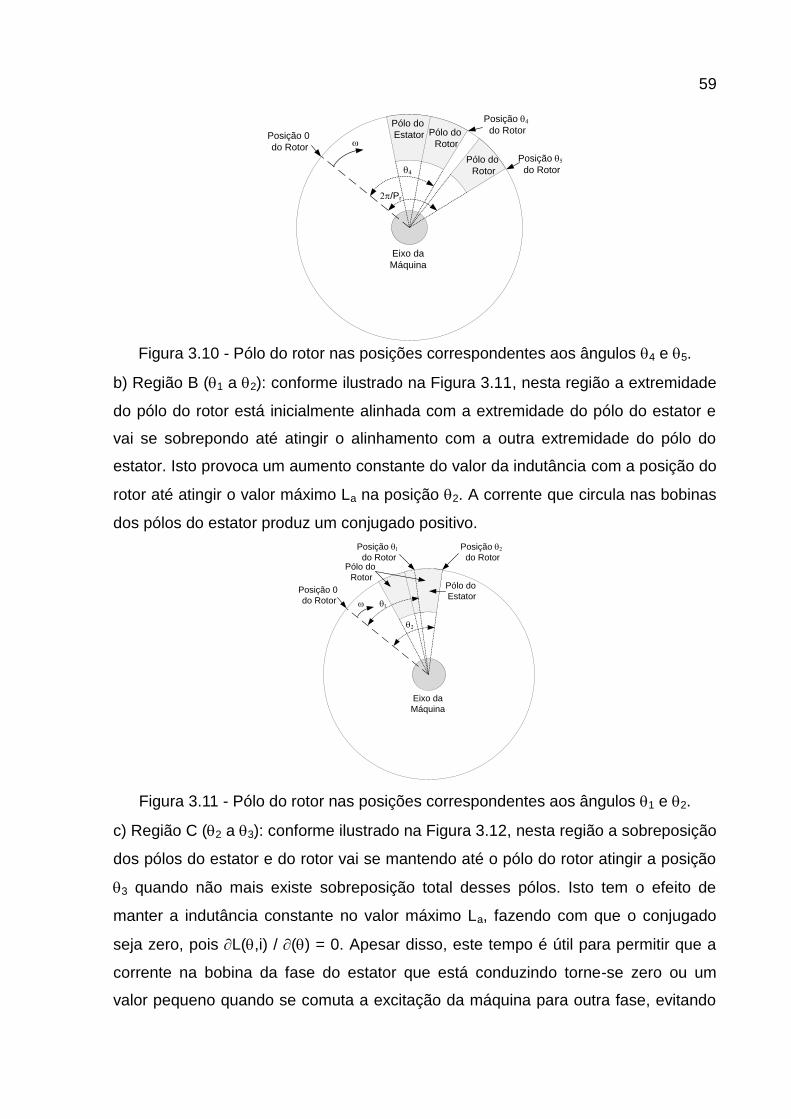
59
Posição 0
do RotorPosição 5
do RotorPólo do
Rotor
Pólo do
Estator
4
2/Pr
Eixo da
Máquina
Pólo do
Rotor
Posição 4
do Rotor
Figura 3.10 - Pólo do rotor nas posições correspondentes aos ângulos 4 e 5.
b) Região B (1 a 2): conforme ilustrado na Figura 3.11, nesta região a extremidade
do pólo do rotor está inicialmente alinhada com a extremidade do pólo do estator e
vai se sobrepondo até atingir o alinhamento com a outra extremidade do pólo do
estator. Isto provoca um aumento constante do valor da indutância com a posição do
rotor até atingir o valor máximo La na posição 2. A corrente que circula nas bobinas
dos pólos do estator produz um conjugado positivo.
Posição 0
do Rotor
Posição 2
do Rotor
Pólo do
Estator1
Eixo da
Máquina
Pólo do
Rotor
Posição 1
do Rotor
2
Figura 3.11 - Pólo do rotor nas posições correspondentes aos ângulos 1 e 2.
c) Região C (2 a 3): conforme ilustrado na Figura 3.12, nesta região a sobreposição
dos pólos do estator e do rotor vai se mantendo até o pólo do rotor atingir a posição
3 quando não mais existe sobreposição total desses pólos. Isto tem o efeito de
manter a indutância constante no valor máximo La, fazendo com que o conjugado
seja zero, pois L(,i) / () = 0. Apesar disso, este tempo é útil para permitir que a
corrente na bobina da fase do estator que está conduzindo torne-se zero ou um
valor pequeno quando se comuta a excitação da máquina para outra fase, evitando

60
a produção de conjugado negativo na Região D, seguinte, onde ocorre o decréscimo
constante do valor da indutância.
Posição 0
do Rotor
Posição 2
do Rotor
Pólo do
Estator
3
Eixo da
Máquina
Pólo do
Rotor
Posição 3
do Rotor
2
Figura 3.12 - Pólo do rotor nas posições correspondentes aos ângulos 2 e 3.
d) Região D (3 a 4): conforme ilustrado na Figura 3.13, nesta região o pólo do rotor
está se afastando da região de sobreposição com o pólo do estator, provocando um
decréscimo constante do valor da indutância com a posição do rotor até atingir o
valor mínimo de desalinhamento Ld. A operação do MRC nesta região resulta em um
conjugado negativo.
Posição 0
do Rotor
Posição 4
do Rotor
Pólo do
Estator
3
Eixo da
Máquina
Pólo do
Rotor
Posição 3
do Rotor
4
Figura 3.13 - Pólo do rotor nas posições correspondentes aos ângulos 3 e 4.
Em um motor real, não é possível obter o perfil ideal de indutância mostrado
na Figura 3.8 devido à saturação. A saturação leva o perfil de indutância a se curvar
próximo do valor máximo e, portanto, reduzir o valor do conjugado constante
(KRISHNAN, 2001).
Para correntes retangulares pode ser visto que o conjugado é produzido
durante um curto período na forma pulsada, resultando em uma alta oscilação do

61
conjugado. Isto pode criar problemas de aumento do ruído audível, fadiga no eixo da
máquina e possíveis oscilações na velocidade. Entretanto, as oscilações no
conjugado podem ser minimizadas construindo-se a máquina de forma que os perfis
de indutância de duas fases consecutivas se sobreponham durante o fim de uma e o
começo da outra. Por sua vez, isto requer a correta escolha do número de pólos do
estator e do rotor e de seus ângulos de arcos de pólos. Por outro lado, uma técnica
alternativa para reduzir as oscilações do conjugado é modelar a corrente para não
ser retangular (KRISHNAN, 2001), técnica utilizada nesta tese.
O protótipo do MRC construído tem 4 pólos no rotor, portanto, o seu perfil de
indutância se repete a cada /2 rad (2 /Pr). Outra característica deste MRC é que
os ângulos dos arcos dos pólos do estator e do rotor são iguais, fazendo com que a
Região C (2 a 3) anteriormente descrita não exista.
Para o protótipo construído do MRC a indutância é máxima quando os pólos I
do rotor e A1 do estator estão alinhados, correspondendo a posição angular do
rotor de / 4 rad (( / Pr) + (pe / 2) - (pr / 2)). Logo, a posição inicial do rotor = 0 é
aquela onde a extremidade final do seu pólo I está a 5 da extremidade inicial do
pólo A1 do estator, estando neste caso os pólos totalmente desalinhados.
3.3 EXPERIMENTO PARA ESTIMAR AS INDUTÂNCIAS
Para estimar os valores das indutâncias própria e mútuas foi feito um
experimento, conforme apresentado esquematicamente na Figura 3.14, utilizando
uma fonte de Corrente Contínua (CC) regulável.
Bobina B1
Bobina A1
Bobina C2
Bobina C1
Bobina B2
Bobina A2
I = 1A
FONTE CC
REGULÁVEL
Figura 3.14 - Montagem utilizada para medida das indutâncias própria e mútuas.
Para a realização do experimento, o rotor foi posicionado manualmente em
um ângulo pré-definido e o eixo da máquina travado. A fonte de alimentação CC foi
ajustada para fornecer uma corrente de 1A para o enrolamento da bobina “A1”.

62
Cada pólo do estator foi dividido em oito áreas:
AFC – área da face frontal do pólo do estator coincidente com a face do
pólo do rotor;
AFL – área da face frontal do pólo do estator não coincidente (livre) com a
face do pólo do rotor;
ALSC – área da face lateral superior (externa) do pólo do estator
coincidente com a face do pólo do rotor, sem espira superposta;
ALSL – área da face lateral superior (externa) do pólo do estator não
coincidente (livre) com a face do pólo do rotor, sem espira superposta;
ALIC – área da face lateral inferior (interna) do pólo do estator coincidente
com a face do pólo do rotor, sem espira superposta;
ALIL – área da face lateral inferior (interna) do pólo do estator não
coincidente com a face do pólo do rotor, sem espira superposta;
ALD – área da face lateral direita do pólo do estator sem espira
superposta (observador olhando para a face frontal do pólo);
ALE – área da face lateral esquerda do pólo do estator sem espira
superposta (observador olhando para a face frontal do pólo).
Os valores no protótipo do MRC das áreas consideradas são:
Área total da face frontal do pólo do estator (ATFC) = 0,001039 m2;
Área da face lateral superior do pólo do estator, sem espira superposta
(ALS) = 0,000175924 m2;
Área da face lateral inferior do pólo do estator, sem espira superposta
(ALI) = 0,000087962 m2;
Área da face lateral direita do pólo do estator, sem espira superposta
(ALD) = 0,000126 m2;
Área da face lateral esquerda do pólo do estator, sem espira superposta
(ALE) = 0,000126 m2.
As áreas AFC e AFL correspondem a uma parcela de 0 a 100% de ATFC.
As áreas ALSC e ALSL correspondem a uma parcela de 0 a 100% de ALS.
As áreas ALIC e ALIL correspondem a uma parcela de 0 a 100% de ALI.
A Figura 3.15 mostra estas áreas no protótipo do MRC.

63
AFC
ESTATOR
ROTOR
BOBINA
BOBINA
BOBINA
AFL
ALE
ALD
ALSL
ALSC
ALIC
ALIL
POLOS DO ESTATOR
POLOS DO ROTOR
Figura 3.15 – Visualização das áreas onde foram executadas as medidas de
densidade de fluxo magnético no protótipo do MRC.
Portanto, foram executadas oito medidas de densidade de fluxo,
perpendiculares às superfícies, em cada um dos seis pólos do estator para cada
posição do rotor considerada. Essas medidas são identificadas por:
B_FC – densidade máxima de fluxo na face frontal do pólo do estator na
área coincidente (AFC) com a face do pólo do rotor;
B_FL – densidade máxima de fluxo na face frontal do pólo do estator na
área não coincidente (AFL) com a face do pólo do rotor;
B_LSC – densidade máxima de fluxo na face lateral superior (externa) do
pólo do estator na área coincidente (ALSC) com a face do pólo do rotor;
B_LSL – densidade máxima de fluxo na face lateral superior (externa) do
pólo do estator na área não coincidente (ALSL) com a face do pólo do
rotor;

64
B_LIC – densidade máxima de fluxo na face lateral inferior (interna)do
pólo do estator na área coincidente (ALIC) com a face do pólo do rotor;
B_LIL – densidade máxima de fluxo na face lateral inferior (interna) do
pólo do estator na área não coincidente (ALIL) com a face do pólo do
rotor;
B_LD – densidade máxima de fluxo na área da face lateral direita (ALD)
do pólo do estator sem espira superposta;
B_LE – densidade máxima de fluxo na área da face lateral esquerda
(ALE) do pólo do estator sem espira superposta.
A indutância própria Lii pode ser estimada através da equação:
i
k
kikii
iiI
)S.B(.N
L
= (3.6)
onde: Ni – número de espiras da bobina i;
Bki – densidade máxima do fluxo magnético na área k do pólo i;
Ski – área k do pólo i;
Ii – corrente na bobina i.
A indutância mútua Mij pode ser calculada através da equação:
i
k
kjkjj
ijI
)S.B(.N
M
= (3.7)
onde: Nj - número de espiras da bobina j;
Bkj - densidade máxima do fluxo magnético na área k do pólo j;
Skj - área k do pólo j.
O índice “i” e o índice “j” podem ser qualquer um dos seis pólos do estator
(A1, A2, B1, B2, C1 e C2), enquanto que o índice “k” pode representar qualquer uma
das oito áreas da Figura 3.15 (AFC, AFL, ALSC, ALSL, ALIC, ALIL, ALD e ALE).
Os resultados obtidos no experimento são apresentados no Capítulo 4.
3.4 MODELOS PARA CÁLCULO DAS INDUTÂNCIAS
Uma maneira de se estimar as indutâncias de máquinas elétricas é através de
experimentos. Outra forma é a utilização de modelos que abrangem simulações
utilizando elementos finitos.

65
Para a determinação das indutâncias próprias e mútuas do protótipo do MRC
foram desenvolvidos dois modelos:
simulação bidimensional – método de elementos finitos em estruturas de
duas dimensões (2D) do motor, utilizando o programa comercial
Electromagnetic Fields Computer Aided Design (EFCAD) da Universidade
Federal de Santa Catarina (UFSC);
simulação tridimensional – método de elementos finitos em estruturas de
três dimensões (3D) do motor, utilizando o programa comercial Ansys
Multiphysics.
3.4.1 MÉTODO DE ELEMENTOS FINITOS BIDIMENSIONAL (MEF-2D)
Para o estudo das indutâncias pelo método de elementos finitos em duas
dimensões (2D MEF) a estrutura do protótipo do MRC foi aproximada como linear,
ou seja, como se a seção correspondente à área lateral de um cilindro que
envolvesse o motor fosse aberta num plano, considerando como referência o raio
médio ((R + Rpe) / 2 = 47,25 mm) dos pólos do estator, conforme mostrado na Figura
3.16 para a posição = 0 do rotor.
0
ESTATOR
ROTOR
5
50
6545
90
105 125
140
165
III I
180
185
B1A1C2 C1A2 B2
IV IIIII
A2
-180
-15-75
-40
-115 -55
-90
-175 -130
-135
MOVIMENTO
BOBINA
Figura 3.16 - Estrutura em 2D resultante da linearização do protótipo do MRC.
Neste caso foi empregado o programa Electromagnetic Fields Computer
Aided Design (EFCAD) da Universidade Federal de Santa Catarina (GRUCAD,
2002). Trata-se de um pacote computacional para a solução de equações
diferenciais parciais de duas dimensões (Laplace e Poisson) relacionadas a
fenômenos eletromagnéticos usando o método de elementos finitos.

66
Foram utilizados quatro módulos do programa EFCAD descritos resumidamente
a seguir:
A) EFD – responsável pela criação do desenho 2D da estrutura do MRC e que
contém a descrição da geometria do domínio da solução, como exemplificado na
Figura 3.17. Este módulo cria um arquivo com extensão “.pre” no formato ASCII.
ROTOR
ESTATOR ARBOBINAS
AR
AR
Figura 3.17 - Exemplo de estrutura criada pelo módulo EFD do programa EFCAD.
B) EFM – permite modificações e ajustes no desenho criado pelo módulo EFD;
criação das regiões no domínio da solução; definição de materiais e fontes nas
regiões e as condições de contorno; e geração das malhas de elementos finitos,
como exemplificado na Figura 3.18. Este módulo cria um arquivo com extensão
“.elf” no formato ASCII.
Figura 3.18 - Exemplo de malha gerada pelo módulo EFM do programa EFCAD.
Todos os segmentos da fronteira (contorno) foram fixados com um potencial
igual a zero, utilizando a opção “totDirch” (total Dirichlet on the boundary). Na
discretização da malha foram utilizados elementos do tipo triângulo (opção
“Triangle”) que empregam o método de Delaunay. A densidade de elementos de
malha utilizada foi a normal (opção “Normal”).
C) EFCS – define os parâmetros do processamento e executa os cálculos
eletromagnéticos estáticos. Como a estrutura do MRC possui fonte de energia o
programa usa o potencial vetor magnético. As condições de contorno utilizadas
no processamento foram:

67
opção tipo de elemento – elementos de primeira ordem (“First order”),
que corresponde ao campo constante dentro de um elemento;
opção “Coordinate System” – cartesiana (“Cartesian coordinates”);
opção “Linearity” – linear (“Linear”);
opção “Equations solver” – método Incomplete Choleski Conjugate
Gradient (ICCG).
D) EFGN – apresenta os resultados dos cálculos executados pelo módulo EFCS,
gerando as linhas de fluxo magnético na estrutura do MRC linearizado como
ilustrado na Figura 3.16, para o caso de alimentar com corrente contínua uma
das bobinas do estator.
Figura 3.19 - Exemplo de linhas de fluxo geradas pelo módulo EFGN do EFCAD.
Os dois primeiros módulos fazem parte do pré-processador, o terceiro
corresponde ao processador e o último é parte integrante do pós-processador do
método de elementos finitos.
A versão do programa utilizada é a educacional, que difere da versão
completa apenas na parte do processador, cujos módulos estão limitados a 600 nós,
devendo-se neste caso usar elementos de primeira ordem.
O programa EFCAD calcula os fluxos magnéticos por unidade de
profundidade (Wb/m). Com base na Figura 3.2, observa-se que a profundidade da
estrutura do modelo 2D da Figura 3.19 corresponde a profundidade do pólo do
estator, ou seja, igual a 0,0315 m (R - Rpe). Logo, o valor do fluxo magnético no pólo
do estator (Wb) é obtido multiplicando o valor do fluxo magnético por unidade de
profundidade (Wb/m), calculado com o programa EFCAD, pela profundidade do pólo
do estator (m).
A indutância própria Lii da bobina i é calculada através da fórmula:
i
iiii
I
.NL
= (3.8)

68
A indutância mútua Mij entre as bobinas i e j é calculada a partir do enlace de
fluxo na bobina j gerado pela corrente na bobina i dada por:
i
jj
ijI
.NM
= (3.9)
No Capítulo 4 são apresentados os resultados dos fluxos magnéticos obtidos
com as estruturas bidimensionais aproximadas do MRC de fluxo axial, bem como as
indutâncias calculadas a partir destes valores.
3.4.2 MÉTODO DE ELEMENTOS FINITOS TRIDIMENSIONAL (MEF-3D)
Para o estudo das indutâncias pelo método de elementos finitos em três
dimensões foi construído um modelo computacional da estrutura real do protótipo do
MRC de fluxo axial utilizando o programa Multiphysics da ANSYS, Inc. (ANSYS,
2005), conforme mostrado na Figura 3.20 para a posição = 0 do rotor.
Figura 3.20 - Estrutura do protótipo do MRC construída para o estudo do MEF-3D.
O programa foi utilizado para uma análise magnética estática com uma
formulação de potencial magnético escalar.
A Figura 3.21 mostra um exemplo da malha de elementos finitos no estator da
estrutura do MRC gerada pelo programa.
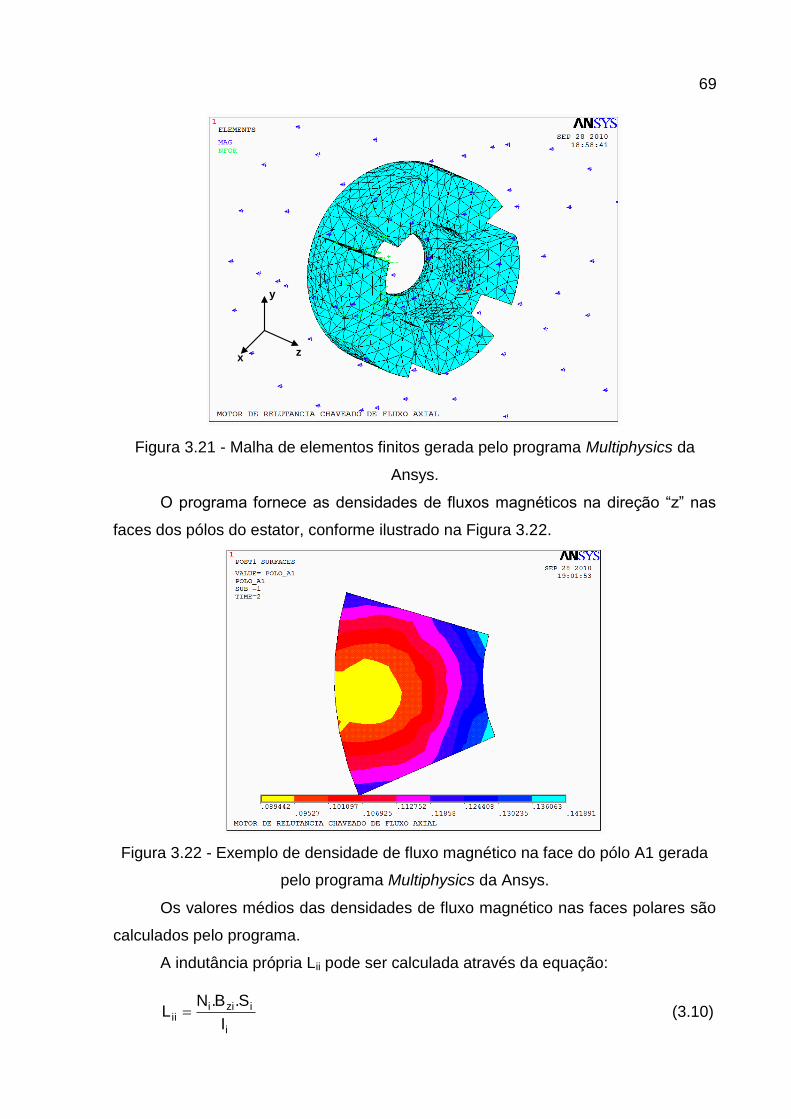
69
x
y
z
Figura 3.21 - Malha de elementos finitos gerada pelo programa Multiphysics da
Ansys.
O programa fornece as densidades de fluxos magnéticos na direção “z” nas
faces dos pólos do estator, conforme ilustrado na Figura 3.22.
Figura 3.22 - Exemplo de densidade de fluxo magnético na face do pólo A1 gerada
pelo programa Multiphysics da Ansys.
Os valores médios das densidades de fluxo magnético nas faces polares são
calculados pelo programa.
A indutância própria Lii pode ser calculada através da equação:
i
iziiii
I
S.B.NL = (3.10)

70
onde: Ni – número de espiras da bobina i;
Bzi – densidade média do fluxo magnético na direção “z” na face do pólo i;
Si – área da face do pólo i (1039 mm2);
Ii – corrente na bobina i.
A indutância mútua Mij pode ser calculada através da equação:
i
jzjj
ijI
S.B.NM = (3.11)
onde: Nj - número de espiras da bobina j;
Bzj - densidade média do fluxo magnético na direção “z” na face do pólo j;
Sj - área da face do pólo j (1039 mm2).
O Apêndice 10.1 apresenta a codificação da modelagem da máquina e dos
comandos do programa Multiphysics da Ansys, utilizada no cálculo da densidade do
fluxo magnético. No Capítulo 4 são apresentados os resultados obtidos com esse
tipo de método de cálculo das indutâncias do MRC de fluxo axial.
3.5 MODELO PARA CÁLCULO DO CONJUGADO ELETROMAGNÉTICO
O protótipo do MRC tem três fases, cada uma com duas bobinas em série,
cujas tensões são:
2A1AA VVV = (3.12)
2B1BB VVV = (3.13)
2C1CC VVV = (3.14)
onde: Vf - tensão na fase f (f = A, B ou C);
Vi - tensão na bobina i (i = A1, A2, B1, B2, C1 ou C2).
As tensões nas bobinas podem ser escritas como:
t
)I.LI.LI.LI.LI.LI.L(I.RV 2C1A2C2B1A2B2A1A2A1C1A1C1B1A1B1A1A1A
1A1A1A
= (3.15)
t
)I.LI.LI.LI.LI.LI.L(I.RV 2C2A2C2B2A2B2A2A2A1C2A1C1B2A1B1A2A1A
2A2A2A
= (3.16)
t
)I.LI.LI.LI.LI.LI.L(I.RV 2C1B2C2B1B2B2A1B2A1C1B1C1B1B1B1A1B1A
1B1B1B
= (3.17)
t
)I.LI.LI.LI.LI.LI.L(I.RV 2C2B2C2B2B2B2A2B2A1C2B1C1B2B1B1A2B1A
2B2B2B
= (3.18)
t
)I.LI.LI.LI.LI.LI.L(I.RV 2C1C2C2B1C2B2A1C2A1C1C1C1B1C1B1A1C1A
1C1C1C
= (3.19)

71
t
)I.LI.LI.LI.LI.LI.L(I.RV 2C2C2C2B2C2B2A2C2A1C2C1C1B2C1B1A2C1A
2C2C12C
= (3.20)
onde: Ri - resistência da bobina “i”;
Ii - corrente na bobina “i”;
Lii - indutância própria da bobina “i”, dependente do ângulo ;
Lij - indutância mútua entre as bobinas “i” e “j” (j = A1, A2, B1, B2, C1 ou C2),
dependente do ângulo .
As correntes nas fases (If) são:
2A1AA III == (3.21)
2B1BB III == (3.22)
2C1CC III == (3.23)
As resistências das bobinas são iguais, ou seja:
2C1C2B1B2A1A RRRRRRR ====== (3.24)
Substituindo as equações 3.15, 3.16 e 3.21 a 3.24 na equação 3.12, resulta:
C
2A2C2A1C1A2C1A1C
B2A2B2A1B1A2B1A1B
A2A2A2A1A1A2A1A1A
AA
It
LLLL
It
LLLLI
t
LLLLRI2V
=
(3.25)
Analogamente para as outras fases têm-se:
C
2B2C2B1C1B2C1B1C
B2B2B2B1B1B2B1B1B
A2B2A2B1A1B2A1B1A
BB
It
LLLL
It
LLLLI
t
LLLLRI2V
=
(3.26)
C
2C2C2C1C1C2C1C1C
B2C2B2C1B1C2B1C1B
A2C2A2C1A1C2A1C1A
CC
It
LLLL
It
LLLLI
t
LLLLRI2V
=
(3.27)
Na forma matricial:
=
C
B
A
333231
232221
131211
C
B
A
C
B
A
I
I
I
LLL
LLL
LLL
tI
I
I
R00
0R0
00R
2
V
V
V
(3.28)
A equação matricial das tensões nas fases do MRC é:
ILt
IR2V
= (3.29)

72
It
LIt
LIR2V
= (3.30)
It
LILIR2V
= (3.31)
A Figura 3.23 ilustra a circulação de corrente nas bobinas das fases do
protótipo do MRC para definição do sinal das indutâncias mútuas.
A1
C1
A2
C2
B2
B1
IA
IA
IB IC
IBIC
Figura 3.23 - Circulação de correntes nas bobinas dos pólos do estator do protótipo.
As indutâncias da matriz L() da equação 3.28, levando em conta o sinal das
indutâncias mútuas obtidas com o auxílio da Figura 3.23, são:
)(L)(L)(L)(L)(L 2A2A2A1A1A2A1A1A11 = (3.32)
)(L)(L)(L)(L)(L 2A2B2A1B1A2B1A1B12 = (3.33)
)(L)(L)(L)(L)(L 2A2C2A1C1A2C1A1C13 = (3.34)
)(L)(L)(L)(L)(L 2B2A2B1A1B2A1B1A21 = (3.35)
)(L)(L)(L)(L)(L 12B2B12B1B11B2B11B1B22 = (3.36)
)(L)(L)(L)(L)(L 12B2C12B1C11B2C11B1C23 = (3.37)
)(L)(L)(L)(L)(L 2C2A2C1A1C2A1C1A31 = (3.38)
)(L)(L)(L)(L)(L 12C2B12C1B11C2B11C1B32 = (3.39)
)(L)(L)(L)(L)(L 22C2C22C1C21C2C21C1C33 = (3.40)
Os ângulos 1 e 2 correspondem às posições angulares do rotor para as
fases “B” e “C”, respectivamente, e estão relacionados com o ângulo pelas
seguintes relações:
para ≤ 30
= 301 (3.41)
= 602 (3.42)

73
para 30 ≤ 60
= 301 (3.43)
= 302 (3.44)
para 60 ≤ 90
= 601 (3.45)
= 302 (3.46)
As relações entre as diversas indutâncias próprias e mútuas das três fases do
protótipo do MRC são:
)(L)(L 2A1A1A2A =
)(L)(L 1A1A2A2A =
)(L)(L 2B1A1B2A =
)(L)(L 1B1A2B2A =
)(L)(L 2C1A1C2A =
)(L)(L 1C1A2C2A =
)(L)(L 1B1A1A1B =
)(L)(L 1B2A2A1B =
)(L)(L 11A1A11B1B =
)(L)(L 12A1A12B1B =
)(L)(L 11B1A11C1B =
)(L)(L 12B1A12C1B =
)(L)(L 2B1A1A2B =
)(L)(L 2B2A2A2B =
)(L)(L 12B1B11B2B =
)(L)(L 11B1B12B2B =
)(L)(L 12C1B11C2B =
)(L)(L 11C1B12C2B =
)(L)(L 1C1A1A1C =
)(L)(L 1C2A2A1C =
)(L)(L 11C1B11B1C =

74
)(L)(L 11C2B12B1C =
)(L)(L 21A1A22C1C =
)(L)(L 22A1A22C1C =
)(L)(L 2C1A1A2C =
)(L)(L 2C2A2A2C =
)(L)(L 12C1B11B2C =
)(L)(L 12C2B2B2C =
)(L)(L 22C1C21C2C =
)(L)(L 21C1C22C2C =
A equação mecânica do motor é dada por:
Le TBt
JT
= (3.47)
onde: Te – conjugado eletromagnético resultante do motor;
TL – conjugado de carga;
J – momento de inércia;
– velocidade angular;
B – coeficiente de atrito viscoso.
O conjugado eletromagnético resultante nas três fases do MRC pode ser
escrito pela equação matricial:
=
C
B
A
CBACBAe
I
I
IL
III2
1I,I,I,T (3.48)

4 ANÁLISE DOS RESULTADOS OBTIDOS
Neste capítulo são apresentados os valores das indutâncias estimadas a
partir dos experimentos com o protótipo do MRC de fluxo axial, descritos no item 3.3,
e os valores calculados com os dois métodos apresentados no Capítulo 3: o método
de elementos finitos bidimensional (item 3.4.1) e o método de elementos finitos
tridimensional (item 3.4.2). São também feitas comparações entre essas
metodologias de cálculo dos valores das indutâncias.
As medidas e os cálculos foram feitos para onze posições estáticas do rotor:
Posição 1: = 0;
Posição 2: = 5;
Posição 3: = 15;
Posição 4: = 25;
Posição 5: = 35;
Posição 6: = 45;
Posição 7: = 55;
Posição 8: = 65;
Posição 9: = 75;
Posição 10: = 85;
Posição 11: = 90.
No final deste capítulo são apresentados alguns cálculos dos conjugados
associados com esses valores de indutâncias.
Os resultados do estudo das indutâncias são utilizados na definição da
estratégia de controle do MRC de fluxo axial com somente um estator.

76
4.1 INDUTÂNCIAS ESTIMADAS EXPERIMENTALMENTE
As medidas foram realizadas alimentando apenas a bobina “A1” do estator
com uma corrente contínua de 1 A, considerando o eixo travado em onze posições
diferentes do rotor.
Foi utilizado o Gaussmeter modelo MG-5DP da Walker Scientific Inc.
As Tabelas 4.1 a 4.6 apresentam os valores das máximas densidades de
fluxo nos pólos das seis bobinas do estator. Nestas tabelas, os símbolos utilizados
são os mesmos definidos no item 3.3, com exceção de:
FC – percentagem da área AFC;
FL – percentagem da área AFL;
LSC – percentagem da área ALSC;
LSL – percentagem da área ALSL;
LIC – percentagem da área ALIC;
LIL – percentagem da área ALIL.

77
Tabela 4.1 - Valores das densidades de fluxo obtidas experimentalmente no pólo da bobina “A1”.
PÓLO DA BOBINA "A1"
Posição B_FC FC B_FL FL B_LSC LSC B_LSL LSL B_LIC LIC B_LIL LIL B_LD B_LE
do Rotor (°) (G) (%) (G) (%) (G) (%) (G) (%) (G) (%) (G) (%) (G) (G)
0 0 0 415 100 0 0 297 100 0 0 195 100 445 447
5 0 0 470 100 0 0 320 100 0 0 165 100 425 470
15 882 25 446 75 399 25 280 75 215 25 120 75 407 497
25 825 50 395 50 373 50 253 50 250 50 90 50 391 515
35 757 75 419 25 310 75 270 25 295 75 40 25 325 480
45 729 100 0 0 295 100 0 0 350 100 0 0 302 305
55 752 75 420 25 307 75 271 25 300 75 43 25 484 330
65 818 50 400 50 370 50 250 50 255 50 95 50 510 388
75 880 25 450 75 395 25 278 75 210 25 120 75 500 410
85 0 0 474 100 0 0 317 100 0 0 161 100 467 420
90 0 0 420 100 0 0 300 100 0 0 192 100 444 442

78
Tabela 4.2 - Valores das densidades de fluxo obtidas experimentalmente no pólo da bobina “A2”.
PÓLO DA BOBINA "A2"
Posição B_FC FC B_FL FL B_LSC LSC B_LSL LSL B_LIC LIC B_LIL LIL B_LD B_LE
do Rotor (°) (G) (%) (G) (%) (G) (%) (G) (%) (G) (%) (G) (%) (G) (G)
0 0 0 36 100 0 0 47 100 0 0 29 100 46 45
5 0 0 47 100 0 0 44 100 0 0 22 100 38 54
15 97 25 39 75 55 25 35 75 29 25 14 75 32 58
25 110 50 45 50 58 50 29 50 38 50 11 50 27 50
35 132 75 51 25 62 75 23 25 58 75 5 25 29 45
45 153 100 0 0 69 100 0 0 81 100 0 0 37 38
55 131 75 53 25 61 75 22 25 60 75 6 25 46 30
65 113 50 47 50 57 50 27 50 39 50 10 50 49 26
75 94 25 37 75 56 25 32 75 32 25 15 75 59 31
85 0 0 46 100 0 0 36 100 0 0 19 100 55 36
90 0 0 35 100 0 0 48 100 0 0 30 100 46 46

79
Tabela 4.3 - Valores das densidades de fluxo obtidas experimentalmente no pólo da bobina “B1”.
PÓLO DA BOBINA "B1"
Posição B_FC FC B_FL FL B_LSC LSC B_LSL LSL B_LIC LIC B_LIL LIL B_LD B_LE
do Rotor (°) (G) (%) (G) (%) (G) (%) (G) (%) (G) (%) (G) (%) (G) (G)
0 137 62,5 78 37,5 55 62,5 32 37,5 58 62,5 30 37,5 95 49
5 140 75 90 25 62 75 27 25 67 75 33 25 14 57
15 150 100 0 0 49 100 0 0 48 100 0 0 132 37
25 177 75 110 25 67 75 28 25 69 75 34 25 163 44
35 200 50 102 50 64 50 35 50 79 50 41 50 147 56
45 228 25 117 75 72 25 46 75 74 25 39 75 126 71
55 0 0 134 100 0 0 77 100 0 0 36 100 98 78
65 0 0 131 100 0 0 71 100 0 0 41 100 107 42
75 182 25 95 75 69 25 41 75 71 25 36 75 119 66
85 171 50 89 50 61 50 32 50 64 50 31 50 75 72
90 134 62,5 83 37,5 53 62,5 30 37,5 57 62,5 28 37,5 84 66

80
Tabela 4.4 - Valores das densidades de fluxo obtidas experimentalmente no pólo da bobina “B2”.
PÓLO DA BOBINA "B2"
Posição B_FC FC B_FL FL B_LSC LSC B_LSL LSL B_LIC LIC B_LIL LIL B_LD B_LE
do Rotor (°) (G) (%) (G) (%) (G) (%) (G) (%) (G) (%) (G) (%) (G) (G)
0 90 62,5 33 37,5 30 62,5 22 37,5 36 62,5 30 37,5 60 80
5 94 75 35 25 37 75 32 25 40 75 38 25 55 87
15 108 100 0 0 46 100 0 0 48 100 0 0 35 30
25 136 75 66 25 49 75 36 25 53 75 41 25 85 28
35 157 50 67 50 63 50 43 50 60 50 44 50 100 25
45 172 25 73 75 53 25 32 75 54 25 37 75 115 21
55 0 0 80 100 0 0 30 100 0 0 33 100 103 50
65 0 0 61 100 0 0 37 100 0 0 40 100 55 98
75 128 25 47 75 35 25 24 75 39 25 31 75 30 111
85 105 50 43 50 32 50 22 50 35 50 29 50 20 97
90 100 62,5 39 37,5 27 62,5 16 37,5 30 62,5 21 37,5 58 78

81
Tabela 4.5 - Valores das densidades de fluxo obtidas experimentalmente no pólo da bobina “C1”.
PÓLO DA BOBINA "C1"
Posição B_FC FC B_FL FL B_LSC LSC B_LSL LSL B_LIC LIC B_LIL LIL B_LD B_LE
do Rotor (°) (G) (%) (G) (%) (G) (%) (G) (%) (G) (%) (G) (%) (G) (G)
0 97 62,5 41 37,5 25 62,5 17 37,5 31 62,5 22 37,5 59 79
5 102 50 44 50 30 50 23 50 33 50 27 50 22 99
15 126 25 49 75 33 25 25 75 37 25 30 75 32 108
25 0 0 62 100 0 0 36 100 0 0 38 100 53 96
35 0 0 82 100 0 0 31 100 0 0 32 100 101 52
45 174 25 75 75 51 25 34 75 53 25 36 75 117 22
55 155 50 66 50 62 50 42 50 58 50 42 50 102 24
65 138 75 64 25 50 75 37 25 52 75 40 25 83 29
75 105 100 0 0 47 100 0 0 47 100 0 0 34 32
85 93 75 33 25 36 75 33 25 42 75 39 25 53 88
90 91 62,5 31 37,5 31 62,5 24 37,5 38 62,5 29 37,5 59 78

82
Tabela 4.6 - Valores das densidades de fluxo obtidas experimentalmente no pólo da bobina “C2”.
PÓLO DA BOBINA "C2"
Posição B_FC FC B_FL FL B_LSC LSC B_LSL LSL B_LIC LIC B_LIL LIL B_LD B_LE
do Rotor (°) (G) (%) (G) (%) (G) (%) (G) (%) (G) (%) (G) (%) (G) (G)
0 136 62,5 85 37,5 52 62,5 30 37,5 55 62,5 27 37,5 85 67
5 170 50 87 50 62 50 33 50 65 50 32 50 76 73
15 180 25 95 75 70 25 42 75 70 25 36 75 120 67
25 0 0 130 100 0 0 70 100 0 0 42 100 105 41
35 0 0 135 100 0 0 75 100 0 0 37 100 98 77
45 230 25 115 75 72 25 45 75 75 25 40 75 124 70
55 202 50 100 50 65 50 36 50 80 50 43 50 145 54
65 175 75 109 25 66 75 27 25 69 75 33 25 163 45
75 149 100 0 0 47 100 0 0 49 100 0 0 130 35
85 134 75 88 25 64 75 27 25 68 75 34 25 110 55
90 138 62,5 76 37,5 53 62,5 31 37,5 57 62,5 29 37,5 95 48

83
A Tabela 4.7 apresenta os valores estimados das indutâncias própria e
mútuas das seis bobinas calculados utilizando as equações 3.6 e 3.7 e as tabelas
4.1 a 4.6.
Tabela 4.7 - Valores das indutâncias estimadas experimentalmente.
POSIÇÃO DO
ROTOR ()
INDUTÂNCIA (H)
LA1A1 MA1A2 MA1B1 MA1B2 MA1C1 MA1C2
0 0,010727 0,001045 0,002622 0,001692 0,001796 0,002663
5 0,011758 0,001227 0,002729 0,001925 0,001722 0,002886
15 0,013260 0,001322 0,003325 0,002323 0,001682 0,002745
25 0,014314 0,001751 0,003639 0,002622 0,001625 0,002966
35 0,015282 0,002425 0,003438 0,002555 0,001973 0,003128
45 0,016040 0,003284 0,003301 0,002255 0,002300 0,003276
55 0,015239 0,002424 0,003117 0,001935 0,002524 0,003434
65 0,014277 0,001787 0,002992 0,001622 0,002639 0,003606
75 0,013309 0,001277 0,002747 0,001667 0,002272 0,003293
85 0,011798 0,001177 0,002904 0,001736 0,001901 0,002851
90 0,010809 0,001033 0,002627 0,001814 0,001688 0,002611
Na Tabela 4.7 os símbolos representam:
LA1A1 – indutância própria da bobina “A1”;
MA1A2 – indutância mútua entre as bobinas “A1” e “A2”;
MA1B1 – indutância mútua entre as bobinas “A1” e “B1”;
MA1B2 – indutância mútua entre as bobinas “A1” e “B2”;
MA1C1 – indutância mútua entre as bobinas “A1” e “C1”;
MA1C2 – indutância mútua entre as bobinas “A1” e “C2”.
4.2 INDUTÂNCIAS OBTIDAS COM O MEF BIDIMENSIONAL
Com o auxílio do programa EFCAD foram gerados os caminhos dos fluxos
nas onze posições estáticas do rotor, conforme mostrados nas Figuras 4.1 a 4.11.

84
Figura 4.1 - Fluxo magnético resultante no MRC na posição de 0.
Figura 4.2 - Fluxo magnético resultante no MRC na posição de 5.
Figura 4.3 - Fluxo magnético resultante no MRC na posição de 15.
Figura 4.4 - Fluxo magnético resultante no MRC na posição de 25.

85
Figura 4.5 - Fluxo magnético resultante no MRC na posição de 35.
Figura 4.6 - Fluxo magnético resultante no MRC na posição de 45.
Figura 4.7 - Fluxo magnético resultante no MRC na posição de 55.
Figura 4.8 - Fluxo magnético resultante no MRC na posição de 65.

86
Figura 4.9 - Fluxo magnético resultante no MRC na posição de 75.
Figura 4.10 - Fluxo magnético resultante no MRC na posição de 85.
Figura 4.11 - Fluxo magnético resultante no MRC na posição de 90.
As simulações realizadas com o programa EFCAD forneceram os fluxos por
unidade de comprimento mostrados na Tabela 4.8.

87
Tabela 4.8 - Valores dos fluxos/m obtidos com o MEF bidimensional.
POSIÇÃO DO
ROTOR ()
FLUXO/UNIDADE DE COMPRIMENTO (Wb/m)
A1/m A2/m B1/m B2/m C1/m C2/m
0 0,001902 0,000158 0,000505 0,000343 0,000331 0,000496
5 0,002250 0,000180 0,000632 0,000446 0,000334 0,000529
15 0,002744 0,000276 0,000841 0,000628 0,000327 0,000559
25 0,003761 0,000603 0,001004 0,000785 0,000332 0,000499
35 0,004340 0,000910 0,001084 0,000802 0,000435 0,000562
45 0,004752 0,001272 0,000828 0,000673 0,000538 0,000832
55 0,004334 0,000907 0,000627 0,000385 0,000754 0,001077
65 0,003680 0,000559 0,000523 0,000333 0,000815 0,001038
75 0,002757 0,000260 0,000587 0,000308 0,000671 0,000832
85 0,002087 0,000150 0,000539 0,000332 0,000458 0,000560
90 0,001795 0,000112 0,000495 0,000314 0,000344 0,000488
Na Tabela 4.8 os símbolos representam:
A1/m – fluxo por unidade de comprimento na bobina “A1”;
A2/m – fluxo por unidade de comprimento na bobina “A2”;
B1/m – fluxo por unidade de comprimento na bobina “B1”;
B2/m – fluxo por unidade de comprimento na bobina “B2”;
C1/m – fluxo por unidade de comprimento na bobina “C1”;
C2/m – fluxo por unidade de comprimento na bobina “C2”.
Todas as bobinas nas fases do estator têm 175 espiras e, nestas simulações,
a corrente contínua que circula na bobina “A1” vale 1 A, com as demais bobinas sem
alimentação.
Como o fio condutor de cobre utilizado nas bobinas foi o 24 AWG, que
corresponde a uma seção transversal de 0,21 mm2, o valor da densidade de
corrente (J) utilizado no programa EFCAD vale J = 1 / 0,21 = 4,762 A/mm2.
Estes valores de fluxos magnéticos são referidos às profundidades das
estruturas criadas; para se obter o fluxo real basta multiplicar esses valores pelo
comprimento de um pólo do estator, ou seja, R – Rpe = 0,0315 m.
Logo, os valores das indutâncias podem ser calculados utilizando as
equações 3.8 e 3.9, obtendo os resultados mostrados na Tabela 4.9.

88
Tabela 4.9 - Valores das indutâncias resultantes do MEF bidimensional.
POSIÇÃO DO
ROTOR ()
INDUTÂNCIA (H)
LA1A1 MA1A2 MA1B1 MA1B2 MA1C1 MA1C2
0 0,010485 0,000872 0,002783 0,001891 0,001824 0,002735
5 0,012403 0,000993 0,003482 0,002459 0,001842 0,002914
15 0,015126 0,001523 0,004636 0,003462 0,001803 0,003081
25 0,020733 0,003326 0,005535 0,004327 0,001832 0,002751
35 0,023924 0,005015 0,005975 0,004421 0,002399 0,003100
45 0,026195 0,007012 0,004564 0,003711 0,002965 0,004586
55 0,023891 0,004997 0,003458 0,002121 0,004157 0,005935
65 0,020286 0,003080 0,002883 0,001837 0,004493 0,005722
75 0,015198 0,001434 0,003236 0,001696 0,003699 0,004587
85 0,011505 0,000828 0,002969 0,001830 0,002525 0,003088
90 0,009895 0,000616 0,002730 0,001731 0,001894 0,002690
4.3 INDUTÂNCIAS OBTIDAS COM O MEF TRIDIMENSIONAL
De forma semelhante aos cálculos executados com o programa MEF-2D,
considerou-se que todas as bobinas nas fases do estator têm 175 espiras e que a
corrente na bobina “A1” foi de 1 A, com as demais bobinas sem alimentação.
As medidas realizadas com o programa Ansys Multiphysics® resultaram nas
densidades de fluxo mostradas na Tabela 4.10.
Tabela 4.10 - Valores das densidades de fluxo obtidas com o MEF tridimensional.
POSIÇÃO DO
ROTOR ()
DENSIDADES DE FLUXO (T)
BA1 BA2 BB1 BB2 BC1 BC2
0 0,072685 0,005034 0,016657 0,011637 0,011836 0,016548
5 0,082310 0,006899 0,020406 0,014517 0,011773 0,016956
15 0,102434 0,010923 0,029517 0,020893 0,011497 0,018148
25 0,125687 0,019926 0,034056 0,025558 0,011464 0,017516
35 0,139123 0,030567 0,033781 0,024723 0,014204 0,019940
45 0,167403 0,040460 0,029063 0,021721 0,020962 0,028846
55 0,146020 0,030601 0,020057 0,014968 0,024840 0,033787
65 0,128145 0,020262 0,017240 0,012577 0,025672 0,034476
75 0,104881 0,011190 0,018390 0,011539 0,021970 0,029683
85 0,083668 0,006994 0,017340 0,012096 0,014775 0,020561
90 0,072020 0,005066 0,016417 0,011604 0,011612 0,016659

89
Logo, os valores das indutâncias podem ser calculados utilizando as
equações 3.10 e 3.11, obtendo-se os resultados mostrados na Tabela 4.11.
Tabela 4.11 - Valores das indutâncias resultantes do MEF tridimensional.
POSIÇÃO DO
ROTOR ()
INDUTÂNCIA (H)
LA1A1 MA1A2 MA1B1 MA1B2 MA1C1 MA1C2
0 0,013216 0,000915 0,003029 0,002116 0,002152 0,003009
5 0,014966 0,001254 0,003710 0,002640 0,002141 0,003083
15 0,018625 0,001986 0,005367 0,003799 0,002090 0,003300
25 0,022853 0,003623 0,006192 0,004647 0,002084 0,003185
35 0,025296 0,005558 0,006142 0,004495 0,002583 0,003626
45 0,030438 0,007357 0,005284 0,003949 0,003811 0,005245
55 0,026550 0,005564 0,003647 0,002722 0,004517 0,006143
65 0,023300 0,003684 0,003135 0,002287 0,004668 0,006269
75 0,019070 0,002035 0,003344 0,002098 0,003995 0,005397
85 0,015213 0,001272 0,003153 0,002199 0,002686 0,003739
90 0,013095 0,000921 0,002985 0,002110 0,002111 0,003029
4.4 COMPARAÇÕES ENTRE AS INDUTÂNCIAS CALCULADAS PELOS TRÊS
MÉTODOS
As Figuras 4.12 a 4.17 apresentam em um mesmo gráfico as indutâncias
LA1A1, MA1A2, MA1B1, MA1B2, MA1C1 e MA1C2, respectivamente, resultantes das medidas
efetuadas no protótipo do MRC de fluxo axial e dos valores obtidos utilizando os dois
métodos de cálculo de indutâncias. No eixo horizontal está a posição do rotor.
Figura 4.12 - Indutâncias LA1A1.

90
Figura 4.13 - Indutâncias MA1A2.
Figura 4.14 - Indutâncias MA1B1.

91
Figura 4.15 - Indutâncias MA1B2.
Figura 4.16 - Indutâncias MA1C1.

92
Figura 4.17 - Indutâncias MA1C2.
Pelos gráficos pode-se verificar que as curvas apresentam um formato similar,
mas com valores diferentes.
Os resultados para as indutâncias próprias, na Figura 4.12, estão de acordo
com o perfil ideal mostrado na Figura 3.8.
Os métodos de elementos finitos apresentam pequenas diferenças entre si
com valores superiores aos obtidos experimentalmente, devido às imprecisões nas
medições.
As curvas das indutâncias mútuas MA1A2 têm um formato semelhante às
curvas das indutâncias próprias LA1A1, pois os pólos do rotor em ambas as condições
têm um movimento similar relativo ao correspondente pólo do estator.
As curvas das indutâncias mútuas MA1B1 e MA1C2 têm formato similar, mas
refletidas em relação ao eixo vertical. O mesmo ocorre com as curvas das
indutâncias MA1B2 e MA1C1.
Os efeitos das indutâncias mútuas nos MRC de fluxo radial não estão
consolidados na comunidade científica. O fato é que as indutâncias mútuas existem
e afetam o desempenho da máquina. A questão é se o seu efeito deve ser
considerado (FLEURY et al., 2012).
No caso do MRC de fluxo axial essas indutâncias não podem ser
desprezadas em todas as posições do rotor, pois afetam o seu desempenho
(SANCHES; SANTISTEBAN, 2015).

93
A faixa das razões entre as indutâncias própria e mútua no MRC de fluxo axial
são:
valores experimentais
faixa da razão LA1A1/MA1A2: 5 a 10
faixa da razão LA1A1/MA1B1: 4 a 5
faixa da razão LA1A1/MA1B2: 6 a 9
faixa da razão LA1A1/MA1C1: 5 a 9
faixa da razão LA1A1/MA1C2: 4 a 5
valores do MEF-2D
faixa da razão LA1A1/MA1A2: 4 a 14
faixa da razão LA1A1/MA1B1: 3 a 7
faixa da razão LA1A1/MA1B2: 4 a 11
faixa da razão LA1A1/MA1C1: 4 a 11
faixa da razão LA1A1/MA1C2: 3 a 8
valores do MEF-3D
faixa da razão LA1A1/MA1A2: 4 a 14
faixa da razão LA1A1/MA1B1: 3 a 7
faixa da razão LA1A1/MA1B2: 5 a 10
faixa da razão LA1A1/MA1C1: 5 a 11
faixa da razão LA1A1/MA1C2: 4 a 7
4.6 AJUSTES DAS CURVAS DE INDUTÂNCIAS
Com o auxílio do programa MatLab®, utilizando a ferramenta Curve Fitting
Tool, foram geradas curvas resultantes de ajustes nos valores de indutâncias
próprias e mútuas obtidos experimentalmente e por meio dos dois métodos de
simulação apresentados no capítulo anterior.
As equações obtidas para as indutâncias própria e mútuas são apresentadas
no Apêndice 10.2, bem como as suas derivadas.
Para o caso da indutância própria LA1A1 as curvas geradas são apresentadas
na Figura 4.18.

94
Figura 4.18 - Ajuste nas curvas da indutância LA1A1.
Para o caso da indutância mútua MA1A2 as curvas geradas são apresentadas
na Figura 4.19.
Figura 4.19 - Ajuste nas curvas das indutâncias MA1A2.

95
Para o caso da indutância mútua MA1B1 as curvas geradas são apresentadas
na Figura 4.20.
Figura 4.20 - Ajuste nas curvas das indutâncias MA1B1.
Para o caso da indutância mútua MA1B2 as curvas geradas são apresentadas
na Figura 4.21.
Figura 4.21 - Ajuste nas curvas das indutâncias MA1B2.

96
Para o caso da indutância mútua MA1C1 as curvas geradas são apresentadas
na Figura 4.22.
Figura 4.22 - Ajuste nas curvas das indutâncias MA1C1.
Para o caso da indutância mútua MA1C2 as curvas geradas são apresentadas
na Figura 4.23.

97
Figura 4.23 - Ajuste nas curvas das indutâncias MA1C2.
4.7 CONJUGADO RESULTANTE
Como a estratégia de controle a ser adotada vai considerar que em nenhum
trecho as três fases estarão conduzindo corrente ao mesmo tempo, serão estudadas
as variações do conjugado nas situações em que apenas uma das fases esteja
conduzindo corrente e em que duas fases estejam com corrente circulando ao
mesmo tempo.
Os estudos do conjugado eletromagnético foram feitos utilizando apenas as
indutâncias e suas derivadas obtidas pelo método MEF-3D.
Considerando apenas a fase “A” alimentada com uma corrente de 1 A, a
matriz de correntes do protótipo do MRC pode ser escrita como:
001I = (4.1)
A equação do conjugado eletromagnético resultante nesta situação é dada
pela equação:
=
0
0
1
LLL
LLL
LLL
0012
10,0,1,T
333231
232221
131211
e (4.2)
Resolvendo a equação 4.2 obtém-se a equação do conjugado
eletromagnético:
= 11
e
L
2
10,0,1,T (4.3)
Substituindo a equação 3.32 na equação 4.3 resulta em:
= 2A2A2A1A1A2A1A1A
e
LLLL
2
10,0,1,T (4.4)
= 2A1A1A1A
e
LL0,0,1,T (4.5)
Utilizando as derivadas das indutâncias deduzidas a partir do método MEF-3D
(Apêndice 10.2.2) obtém-se a expressão para o conjugado eletromagnético:
F)..1007,0
.10658,710.245,2510 . (18,48752 0,0,1,T
05-
-052073-09
e =
(4.6)
onde: F = 57,29578.

98
A curva do conjugado eletromagnético com somente a fase “A” alimentada
para o método MEF-3D é mostrada na Figura 4.24.
Figura 4.24 - Curva do conjugado eletromagnético com a fase “A” alimentada.
Como esperado, a curva se anula nas proximidades da posição 45,
apresentando uma região decrescente na faixa de 30 a 60, com conjugados
positivos e negativos, que é adequada para efeitos de controle.
Considerando agora apenas a fase “B” alimentada com uma corrente de 1 A,
a matriz de correntes do protótipo do MRC pode ser escrita como:
010I = (4.7)
A equação do conjugado eletromagnético resultante nesta situação é dada
pela equação:
=
0
1
0
LLL
LLL
LLL
0102
10,1,0,T
333231
232221
131211
e (4.8)
Resolvendo a equação 4.8 e utilizando a equação 3.36 resulta em:
= 12B1B11B1B
e
LL0,1,0,T (4.9)
Utilizando as derivadas das indutâncias deduzidas a partir do método MEF-3D
(Apêndice 10.2.2) obtém-se a expressão para o conjugado eletromagnético:

99
F)..1007,0
.10658,710.245,2510 . 18,48752 (0,1,0,T
05-
1
-052
1
073
1
-09
e =
(4.10)
As relações entre os ângulos 1 e são definidas no item 3.5 do Capítulo 3.
A curva do conjugado eletromagnético com somente a fase “B” alimentada
para o método MEF-3D é mostrada na Figura 4.25.
Figura 4.25 - Curva do conjugado eletromagnético com a fase “B” alimentada.
A curva obtida com a bobina “B” alimentada mostra um formato similar
daquela com a bobina “A” alimentada, apresentada na Figura 4.24, mas deslocada
de menos 30.
Considerando apenas a fase “C” alimentada com uma corrente de 1 A, a
matriz de correntes do protótipo do MRC pode ser escrita como:
100I = (4.11)
A equação do conjugado eletromagnético resultante nesta situação é dada
pela equação:
=
1
0
0
LLL
LLL
LLL
1002
11,0,0,T
333231
232221
131211
e (4.12)
Resolvendo a equação 4.12 e utilizando a equação 3.40 resulta em:
= 22C1C21C1C
e
LL1,0,0,T (4.13)

100
Utilizando as derivadas das indutâncias deduzidas a partir do método MEF-3D
(Apêndice 10.2.2) obtém-se a expressão para o conjugado eletromagnético:
F)..1007,0
.10658,710.245,2510 . (18,48752 1,0,0,T
05-
2
-052
2
073
2
-09
e =
(4.14)
As relações entre os ângulos 2 e são definidas no item 3.5 do Capítulo 3.
A curva do conjugado eletromagnético com somente a fase “C” alimentada
para o método MEF-3D é mostrada na Figura 4.26.
Figura 4.26 - Curva do conjugado eletromagnético com a fase “C” alimentada.
A curva obtida com a bobina “C” alimentada mostra um formato similar
daquela com a bobina “A” alimentada, apresentada na Figura 4.24, mas deslocada
de mais 30.
Caso as fases “A” e “B” sejam alimentadas com uma corrente de 1 A, a matriz
de correntes do protótipo do MRC pode ser escrita como:
011I = (4.15)
A equação do conjugado eletromagnético resultante nesta situação é dada
pela equação:
=
0
1
1
LLL
LLL
LLL
0112
10,1,1,T
333231
232221
131211
e (4.16)

101
Resolvendo a equação 4.16 e utilizando as equações 3.32, 3.33, 3.35 e 3.36
resulta em:
=
1B1A2B1A
12B1B11B1B2A1A1A1Ae
L2
L2
LLLL0,1,1,T
(4.17)
Utilizando as derivadas das indutâncias deduzidas a partir do método MEF-3D
(Apêndice 10.2.2) obtém-se a expressão para o conjugado eletromagnético:
F).10.6118,4.10658,710.245,25
10.4875,1810.022,7.10367,17
10.1525,1510.23,5210 . (-26,5102 0,1,1,T
05
1
05-2
1
07-
3
1
09-05207-
3-094115-13
e
=
(4.18)
A curva do conjugado eletromagnético com as fases “A” e “B” alimentadas
para o método MEF-3D é mostrada na Figura 4.27.
Figura 4.27 - Curva do conjugado eletromagnético com as fases “A” e “B”
alimentadas.
A curva obtida mostra uma região decrescente na faixa de 15 a 45, com
conjugados positivos e negativos, que é adequada para efeitos de controle.
Caso as três fases sejam alimentadas com uma corrente de 1 A, a matriz de
correntes do protótipo do MRC pode ser escrita como:
111I = (4.19)

102
A equação do conjugado eletromagnético resultante nesta situação é dada
pela equação:
=
1
1
1
LLL
LLL
LLL
1112
11,1,1,T
333231
232221
131211
e (4.20)
Resolvendo a equação 4.20 e utilizando as equações 3.32 a 3.40 resulta em:
=
22C1C21C1C12B1A11B1A
12B1B11B1B2C1A1C1A
2B1A1B1A2A1A1A1Ae
LLL2
L2
LLL2
L2
L2
L2
LL1,1,1,T
(4.21)
Utilizando as derivadas das indutâncias deduzidas a partir do método MEF-3D
(Apêndice 10.2.2) obtém-se a expressão para o conjugado eletromagnético:
F).10 .7654,13
10 .022,710 17,367.10 .1525,15
10 .23,5210 .5102,2610 .022,7
10 .367,1710 .1525,1510 .23,52
10 .5102,2610 .022,710 17,367.
10 .1525,1510 .23,5210 26,5102. ( 1,1,1,T
05-
2
05-2
2
07-3
2
09-
4
2
11-5
2
13-
1
05-
2
1
07-3
1
09-4
1
11-
5
1
13-05-207-
3-094-115-13
e
=
(4.22)
A curva do conjugado eletromagnético com as três fases alimentadas para o
método MEF-3D é mostrada na Figura 4.28.
A curva obtida mostra que o máximo conjugado eletromagnético é cerca de
dez vezes menor que o obtido quando considerando apenas duas correntes
conduzindo ao mesmo tempo, conforme mostrado na Figura 4.27.
Além disso, não existe simetria entre o início e fim da curva do conjugado
devido aos ajustes feitos nas funções das indutâncias mostradas no Apêndice 10.2.

103
Figura 4.28 - Curva do conjugado eletromagnético para o método MEF-3D com as
fases “A”, “B” e “C” alimentadas.

5 CONTROLE DO MRC DE FLUXO AXIAL
A palavra controle pode ter dois significados principais: atividade de testar ou
verificar se um dispositivo físico ou recurso matemático tem um comportamento
satisfatório, e atuar na implementação de decisões que garantam que um dispositivo
se comporte como desejado (NECULAI, 2005).
A função de um mecanismo de controle é manter determinadas propriedades
essenciais de um sistema em um valor desejado sob perturbações, onde um sistema
é definido como um conjunto de componentes físicos reunidos para executar uma
função específica (CIRSTEA et al, 2002).
A maior parte da teoria de controle se fundamenta no princípio da
realimentação (ou retroação) com o objetivo de manter determinadas variáveis de
um sistema em uma faixa de valores pré definida. A teoria de controle teve seus
principais avanços caminhando passo a passo com o progresso da matemática e o
desenvolvimento tecnológico.
Além das técnicas clássicas, as principais técnicas atuais de controle são
(SENGUPTA, 2010):
- controle adaptativo: utiliza a identificação em tempo real dos parâmetros do
processo, ou modificação dos ganhos do controlador, obtendo assim fortes
propriedades de robustez;
- controle hierárquico: utiliza um conjunto de dispositivos e programas de
controle combinados em uma árvore hierárquica;
- controle inteligente: utiliza várias abordagens da inteligência artificial como
redes neurais, lógica nebulosa, algoritmos genéticos e probabilidade bayesiana;
- controle ótimo: utiliza o sinal de controle para otimizar um determinado
“índice de custo”;

105
- controle robusto: utiliza controladores capazes de tratar pequenas diferenças
entre o sistema real e o modelo nominal usado no projeto;
- controle estocástico: trata o projeto de controle com incertezas no modelo.
Nesta tese é dada ênfase à abordagem de controle inteligente devido ao seu
menor esforço computacional.
Neste capítulo são apresentadas as técnicas de controle utilizadas e as
respectivas simulações, com o modelo de MRC de fluxo axial com somente um
estator, usando a ferramenta Simulink do programa MatLab®. Foram simulados os
controladores proporcional, integral e derivativo (PID) convencionais e inteligentes
do tipo nebuloso e neural.
5.1 HISTÓRICO
Na Grécia e em Alexandria foram encontrados relatos históricos do uso de
algumas técnicas rudimentares de controle.
Nos séculos XVII e XVIII foram desenvolvidos vários dispositivos de controle,
mas foi a Revolução Industrial, com o surgimento dos processos industriais, que
impulsionou o desenvolvimento das técnicas de controle, principalmente com relação
à velocidade dos teares.
Uma das primeiras análises matemáticas de sistemas de controle foi a
abordagem no domínio da frequência baseada nos trabalhos do matemático, físico e
astrônomo francês Pierre-Simon Laplace, do matemático e físico francês Jean-
Baptiste Joseph Fourier e do matemático francês Augustin-Louis Cauchy, dentre
outros. O conceito central dessa abordagem é a função de transferência.
O primeiro trabalho importante de controle automático ocorreu no século XVIII
com o trabalho do matemático e engenheiro escocês James Watt que utilizou um
pêndulo como sensor de velocidade, permitindo o controle em malha fechada de
uma máquina a vapor (OGATA, 2011).
Em 1868 o físico e matemático inglês James Clerk Maxwell publicou um artigo
analisando o comportamento dinâmico dos sistemas de controle, com uma
abordagem na modelagem do sistema por equações diferenciais, demonstrando
que, para determinadas faixas de valores dos parâmetros, as soluções das
equações eram instáveis. Em 1877, o matemático inglês Edward John Routh e o
matemático alemão Adolf Hurwitz desenvolveram técnicas que permitiam determinar

106
diretamente a estabilidade do sistema sem a necessidade da solução das equações
diferenciais (WAN, 1998).
Um marco no desenvolvimento da teoria de controle foi o trabalho publicado
pelo matemático, mecânico e físico russo Aleksandr Mikhailovich Lyapunov em
1897, somente traduzido para o inglês em 1947. O trabalho de Lyapunov, que
marcou o início da teoria de estabilidade, continuou a ser desenvolvido na então
União Soviética, permitindo aos pesquisadores soviéticos grandes avanços
especialmente na teoria de sistemas não lineares e uma liderança na área que se
manteve até os anos 1950.
Nas décadas de 1920 e 1930, engenheiros do Bell Telephone Laboratory dos
Estados Unidos desenvolveram várias técnicas no domínio da frequência, como, em
1932, o critério de estabilidade do americano Harry Nyquist e em 1938 o diagrama
do também americano Hendrik Wade Bode (WAN, 1998).
O início da Segunda Guerra Mundial impulsionou a pesquisa militar em
sistemas de controle. Nos Estados Unidos o Massachusetts Institute of Technology
foi um centro de desenvolvimento de técnicas de controle, como a carta do
engenheiro americano Nathaniel B. Nichols (1947) que estabeleceu a teoria do
servomecanismo. Outros desenvolvimentos se seguiram, inclusive com o
aparecimento da técnica do lugar das raízes desenvolvida em 1948 pelo engenheiro
americano Walter Richard Evans (WAN, 1998).
Ao final dos anos 1950 a teoria de controle clássica já se encontrava bastante
consolidada em muitas aplicações industriais, baseada nos métodos de resposta em
frequência e lugar das raízes, tratando sistemas com apenas uma entrada e uma
saída. No entanto, a necessidade por novas técnicas para tratar com sistemas de
muitas entradas e saídas, especialmente no crescente setor aeroespacial,
impulsionou o desenvolvimento do chamado controle moderno.
Em contraste com a análise no domínio da frequência da teoria de controle
clássica, a teoria do controle moderno utiliza a representação no domínio do tempo.
O controle moderno utilizou muito das ideias de Lyapunov, usando técnicas
no domínio do tempo para sistemas multivariáveis (várias entradas e saídas). Um
dos principais nomes do controle moderno é o engenheiro húngaro-americano
Rudolf Emil Kalman, conhecido por ser o co-inventor do filtro de Kalman, técnica
matemática intensamente utilizada no campo da engenharia de controle.

107
Atualmente a teoria de controle é bastante extensa, mas a relação entre
vários aspectos foi mais bem estabelecida. Assim, as técnicas no domínio da
frequência para sistemas multivariáveis foram desenvolvidas e as relações entre o
domínio do tempo e da frequência melhor compreendidas. Mas os termos controle
clássico e controle moderno ainda são usados.
O desenvolvimento de técnicas de Inteligência Artificial (IA), nos últimos anos,
ocupa cada vez mais posição de destaque em pesquisas na área de controle de
processos industriais e, aos poucos, começam a ser implantadas em plantas
industriais com enorme sucesso. Dentre as técnicas mais utilizadas, além do
Controle Nebuloso, destacam-se as Redes Neurais Artificiais (RNAs) aplicadas a
sistemas de controle, que estão atualmente em tamanha evidência que os
japoneses as consideram como duas das mais promissoras técnicas para o século
XXI.
Enquanto as redes neurais são apropriadas para a criação de modelos a
partir de um conhecimento implícito embutido em um conjunto de dados, os sistemas
nebulosos são adequados para a criação de modelos a partir de um conhecimento
explícito, originário de especialistas humanos. Muitos pesquisadores têm tentado
integrar essas duas técnicas de inteligência artificial para gerar sistemas híbridos
que possam associar as vantagens de cada abordagem e minimizar suas
deficiências (PAGLIOSA, 2003).
Uma descrição mais detalhada, incluindo um breve histórico, da lógica
nebulosa e das redes neurais artificiais é apresentada nos Apêndices 10.3 e 10.4,
respectivamente.
5.2 CONTROLE CONVENCIONAL
O controlador PID é considerado como a estrutura padrão da teoria de
controle clássico, sendo utilizado na solução da maioria dos problemas de controle
de processos industriais (ERENOGLU et al, 2006).
A popularidade do controle PID pode ser atribuída a sua simplicidade (em
termos de projeto e do ponto de vista da sintonia de parâmetros), boa aceitação
pelos operadores da indústria, e por apresentar bom desempenho em um amplo
espectro de condições operacionais. Entretanto, o PID pode não ser a melhor
escolha do projetista quando distúrbios, não linearidades, comportamento variante
no tempo e atrasos estão presentes no sistema de controle (MANNALA, 2004).

108
Especialistas e cientistas da área de controle de processos têm realizado
grandes esforços para explorar a direção futura da teoria de controle e suas
aplicações. Os avanços recentes na tecnologia de computadores, controle
adaptativo e técnicas de otimização abrem um caminho para a nova geração de
controle avançado de processos. Neste contexto vários desenvolvimentos
significativos têm sido estabelecidos na área de controle adaptativo para o ajuste
automático dos parâmetros de controladores PID de forma a garantir um
comportamento servo e regulatório adequado para um processo em malha fechada
(MANNALA, 2004).
5.2.1 CONTROLADORES PID
O controlador proporcional, integral e derivativo (PID) é o tipo mais utilizado,
pois é visto como simples, confiável e fácil de entendimento (PASSINO;
YURKOVICH, 1998). A função de transferência desse controlador é geralmente
escrita na forma ideal como:
= sT
sT
11K)s(G D
I
P (5.1)
onde: KP é o ganho proporcional;
TI é a constante de tempo integral;
TD é a constante de tempo derivativa.
Define-se ganho integral (KI) como o produto de KP por (1/TI), e ganho
derivativo (KD) como o produto de KP por TD.
Os resultados dos três termos são somados para calcular a saída do
controlador PID.
As funcionalidades dos três termos do controlador PID são:
A. Proporcional
Este termo determina a reação ao erro atual, não considerando o tempo. Ele
fornece uma ação de controle proporcional ao valor atual do erro (produto do erro
pelo ganho proporcional KP).
Se o ganho proporcional for elevado, o sistema terá uma resposta mais
rápida, mas pode se tornar instável ou gerar um sobre sinal elevado; em contraste,
um ganho pequeno resultará em uma resposta pequena na saída para um erro
grande na entrada, implicando em um controlador pouco sensível. Se o ganho

109
proporcional for muito baixo, a ação de controle pode ser muito pequena para
responder aos distúrbios do sistema.
Para uma planta que não possui um integrador na sua função de
transferência, na ausência de distúrbios, o controle proporcional puro não atingirá o
valor de referência, mas permanecerá em um erro constante, função do ganho
proporcional e do ganho do processo. Portanto, nesse caso, a melhor maneira de
eliminar esse erro em regime permanente é introduzir no controle algum componente
que considere a variação com respeito ao tempo, ou seja, incluir ações integral e/ou
derivativa.
B. Integral
Este termo determina a reação baseada na soma de erros recentes,
reduzindo ou eliminando o erro em regime permanente por meio de uma
compensação de baixa frequência oferecida por um integrador. A ausência de um
valor integral pode impedir que o sistema alcance seu valor de referência.
A contribuição desse termo é proporcional ao valor do erro e à duração do
erro. Ele soma o erro instantâneo ao longo do tempo, integrando-o, e fornecendo o
erro acumulado que deve ser corrigido. O erro acumulado é multiplicado pelo ganho
integral KI e adicionado à saída de controlador.
Se o termo integral é adicionado ao termo proporcional, o deslocamento da
saída do processo para o valor de referência é acelerado, eliminando-se o erro
residual em regime permanente que ocorre quando se utiliza somente o controlador
proporcional. Entretanto, como o termo integral está respondendo aos erros
acumulados do passado, se o ganho integral for alto pode ocorrer um sobre sinal
inaceitável do erro. De outro modo, caso o ganho integral seja baixo a ação de
controle pode levar muito tempo para eliminar o erro em regime permanente.
C. Derivativo
Este termo determina a reação à taxa em que o erro varia no tempo
(derivada), aumentando a resposta transitória por meio de uma compensação de alta
frequência oferecida por um diferenciador. O termo derivativo é obtido multiplicando-
se a taxa de variação do erro pelo ganho derivativo KD.
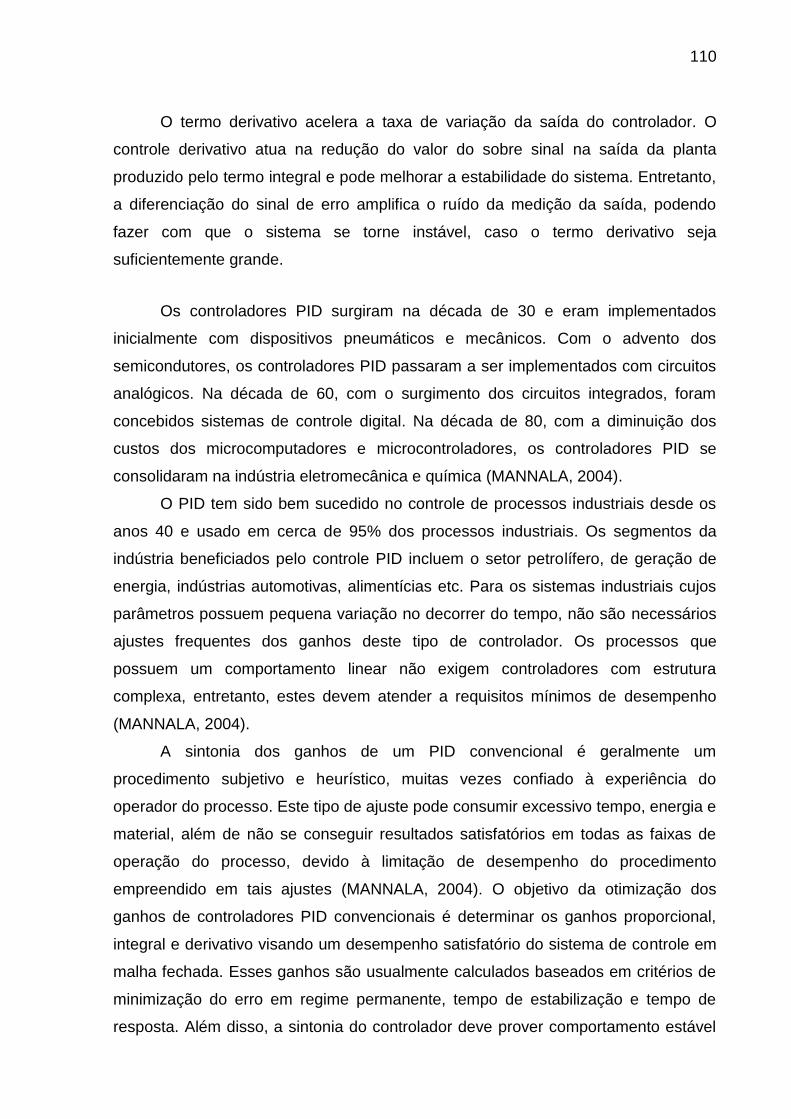
110
O termo derivativo acelera a taxa de variação da saída do controlador. O
controle derivativo atua na redução do valor do sobre sinal na saída da planta
produzido pelo termo integral e pode melhorar a estabilidade do sistema. Entretanto,
a diferenciação do sinal de erro amplifica o ruído da medição da saída, podendo
fazer com que o sistema se torne instável, caso o termo derivativo seja
suficientemente grande.
Os controladores PID surgiram na década de 30 e eram implementados
inicialmente com dispositivos pneumáticos e mecânicos. Com o advento dos
semicondutores, os controladores PID passaram a ser implementados com circuitos
analógicos. Na década de 60, com o surgimento dos circuitos integrados, foram
concebidos sistemas de controle digital. Na década de 80, com a diminuição dos
custos dos microcomputadores e microcontroladores, os controladores PID se
consolidaram na indústria eletromecânica e química (MANNALA, 2004).
O PID tem sido bem sucedido no controle de processos industriais desde os
anos 40 e usado em cerca de 95% dos processos industriais. Os segmentos da
indústria beneficiados pelo controle PID incluem o setor petrolífero, de geração de
energia, indústrias automotivas, alimentícias etc. Para os sistemas industriais cujos
parâmetros possuem pequena variação no decorrer do tempo, não são necessários
ajustes frequentes dos ganhos deste tipo de controlador. Os processos que
possuem um comportamento linear não exigem controladores com estrutura
complexa, entretanto, estes devem atender a requisitos mínimos de desempenho
(MANNALA, 2004).
A sintonia dos ganhos de um PID convencional é geralmente um
procedimento subjetivo e heurístico, muitas vezes confiado à experiência do
operador do processo. Este tipo de ajuste pode consumir excessivo tempo, energia e
material, além de não se conseguir resultados satisfatórios em todas as faixas de
operação do processo, devido à limitação de desempenho do procedimento
empreendido em tais ajustes (MANNALA, 2004). O objetivo da otimização dos
ganhos de controladores PID convencionais é determinar os ganhos proporcional,
integral e derivativo visando um desempenho satisfatório do sistema de controle em
malha fechada. Esses ganhos são usualmente calculados baseados em critérios de
minimização do erro em regime permanente, tempo de estabilização e tempo de
resposta. Além disso, a sintonia do controlador deve prover comportamento estável

111
no decorrer do tempo. Na prática, é difícil atingir todos os critérios mencionados de
forma simultânea. Neste contexto, muitos métodos de sintonia utilizando malha-
simples e ou multi-malhas para sintonia dos ganhos do controlador do tipo PID estão
disponíveis na literatura (MANNALA, 2004).
5.2.2 SIMULAÇÃO EM MATLAB®
A operação correta e eficiente de um MRC exige um controle eficaz de suas
correntes além da utilização de uma técnica adequada de controle da sua
velocidade e uma precisa informação da posição angular do seu rotor. As correntes
de fase de um MRC geralmente são obtidas a partir de uma fonte de tensão
(inversor), associada a um controlador de corrente operando em malha fechada.
Dentre as estratégias de controle de corrente utilizadas pode-se citar o controle por
histerese que é de simples implementação, no entanto dependendo da banda de
histerese definida para o mesmo podem ser geradas elevadas frequências de
chaveamento no inversor ou um elevado nível de ondulação na corrente. Nesta tese,
este tipo de controlador foi utilizado nas simulações em computador e nos
experimentos práticos. Independente do tipo de controle utilizado, os sinais de
comando gerados são referências de tensão a ser sintetizada pelo inversor que, por
sua vez, apresenta não linearidades decorrentes das quedas resistivas, da tensão
limite das chaves de potência e dos tempos mortos associados aos sinais de
comando, fazendo com que haja uma discrepância entre o valor de referência e o
valor real, que mesmo sendo compensada pelos controladores de corrente, dificulta
o uso da tensão de referência para propósito de estimação acurada, por exemplo, do
fluxo magnético (OLIVEIRA, 2002).
A Figura 5.1 apresenta o modelo computacional utilizado para simular o
sistema de controle de velocidade, com um PID convencional, do MRC de fluxo axial
com somente um estator, utilizando a ferramenta Simulink do programa MatLab®.
A Figura 5.2 apresenta o detalhamento do bloco “MRC” da Figura 5.1,
correspondendo ao modelo eletromecânico do motor.
A simulação foi executada em três etapas, tendo um tempo total de um
segundo e dois décimos de segundo, a saber:
- nos primeiros quatro décimos de segundo, assume-se o MRC sem carga e
com a velocidade de referência ajustada para 330 rpm;

112
- do quarto décimo ao oitavo décimo de segundo, o MRC permanece sem
carga, mas a velocidade de referência foi ajustada para 350 rpm;
- a partir do oitavo décimo de segundo foi colocada uma carga mecânica de
0,25 Nm, mantendo a mesma referência de velocidade da etapa anterior.

113
Figura 5.1 - Modelo computacional utilizado para simular o controle de velocidade, com um PID convencional, do MRC.

114
MRC
Figura 5.2 - Modelo eletromecânico do MRC.

115
Na Figura 5.2, as funções “C_Cor” e “C_Conj” que calculam respectivamente,
as correntes reais e o conjugado instantâneo do MRC, são apresentadas nos
Apêndices 10.5.3 e 10.5.4.
O detalhamento da modelagem do bloco “Mecânica” da Figura 5.2 é
apresentado na Figura 5.3. Para tornar a simulação mais rápida, a velocidade inicial
foi considerada como 33 rad/s (315,13 rpm). O momento de inércia foi calculado
como 0,0054 kg m2, e o atrito viscoso torcional foi estimado em 0,00001 Nms.
Figura 5.3 - Modelo da parte mecânica do MRC.
Foi utilizado o controlador PID disponível na ferramenta Simulink,
apresentado na Figura 5.4. Os ganhos proporcional, integral e derivativo foram
ajustados por tentativas e erros para 16, 3 e 1, respectivamente. O tempo de
amostragem (Ts) é de 0,00001 s. A saída do controlador foi limitada no intervalo [0,
1].
Figura 5.4 - Modelo de controlador PID utilizado na simulação.
A Figura 5.5 representa a estrutura que simula o sensor de posição da Figura
5.2 e calcula a posição do rotor a cada 90, repetindo o ciclo de correntes nas três
fases.

116
Figura 5.5 - Estrutura de cálculo da posição do rotor a cada 90.
A Figura 5.6 apresenta a estrutura geral utilizada na simulação do conversor
de potência das três fases do MRC.
Figura 5.6 - Estrutura geral do conversor de potência utilizado.
Cada fase do MRC é alimentada por meio de uma ponte conversora com
duas chaves do tipo Mosfet, conforme ilustrada na Figura 5.7 para a fase “a”
(BR_CONV_A). A tensão de alimentação é contínua (“V+” e “V-“) no valor de 80V.
Figura 5.7 - Ponte conversora de potência da fase “a”.

117
A Figura 5.8 representa a expansão do bloco “Fase Conduzindo Corrente” da
Figura 5.1, que calcula as correntes de referência em função da posição angular do
rotor, de acordo com o tipo de corrente de referência imposta (pulsos retangulares
de corrente ou corrente conformada para redução das oscilações no conjugado). As
funções “fcn” da figura que calculam essas correntes são apresentadas nos
Apêndices 10.5.1 (pulsos retangulares) e 10.5.2 (corrente conformada).
Figura 5.8 - Bloco funcional que calcula as correntes de referência.
Para o cálculo do conjugado de referência foi arbitrada uma corrente de 3 A
na fase “a” na posição do eixo do rotor próxima de 30, onde somente a corrente da
fase “a” está energizada. O conjugado eletromagnético obtido, utilizando a equação
4.6 para corrente de 3 A, foi de 0,2708 Nm, e para fins de simulação é utilizado um
valor menor de conjugado de carga de 0,250 Nm, para levar em conta as perdas
mecânicas.
As simulações utilizando a ferramenta Simulink do programa MatLab® são
executadas em um desktop com processador AMD Athlon X4 620 de 2,6 GHz e com
6 GB de memória RAM.
5.2.3 PID CONVENCIONAL COM PULSOS DE CORRENTE
A fim de demonstrar que a estratégia de imposição de correntes de
referência, apresentada no item 5.2.4, reduz as oscilações (ripple) no conjugado,
foram inicialmente realizadas simulações utilizando a ferramenta Simulink do
programa MatLab®, e com a função “fcn”, apresentada no Apêndice 10.5.1,
utilizando correntes de referências com formato de pulsos retangulares de amplitude
de 3.1 A, sendo:
- posição do rotor entre 0 e 30: fase “a” energizada;
- posição do rotor entre 30 e 60: fase “c” energizada;
- posição do rotor entre 60 e 90: fase “b” energizada.
Conforme já escrito anteriormente, o ciclo de correntes se repete a cada giro
de 90 do eixo do rotor.

118
A Figura 5.9 apresenta as formas de onda das correntes reais e de referência
das três fases do MRC obtidas na simulação com o controlador PID convencional
sem carga mecânica no eixo. Note que as correntes de referências e reais no início
e no final do pulso, devido às indutâncias presentes, não se sobrepõem.
Figura 5.9 - Formas de onda das correntes com o MRC sem carga.
A Figura 5.10 apresenta as formas de onda das correntes reais e de
referência das três fases do MRC obtidas na simulação com o controlador PID
convencional com carga mecânica no eixo.
Figura 5.10 - Formas de onda das correntes com o MRC com carga.

119
O tempo de processamento gasto para este tipo de controlador é de 65,6 s,
sem considerar o tempo adicional gasto no armazenamento de dados nos
osciloscópios da Figura 5.1.
A Figura 5.11 apresenta as correntes reais nas três fases, o conjugado
eletromagnético desenvolvido pelo motor e a velocidade do eixo do rotor, quando
aplicado um controle PID convencional com estratégia de pulsos de corrente.
Figura 5.11 - Formas de onda das correntes reais, conjugado eletromagnético e
rotação do eixo do rotor do MRC para um controlador PID convencional com
estratégia de pulso de corrente.
A Figura 5.12 corresponde a uma imagem ampliada da Figura 5.11 nas
proximidades do primeiro segundo de simulação.
Na Figura 5.12 observa-se que o ripple do conjugado é muito grande,
variando de 0,10 a 0,37 Nm.

120
Figura 5.12 - Formas de onda da Figura 5.11 ampliada nas proximidades do primeiro
segundo de simulação.
5.2.4 PID CONVENCIONAL COM CORRENTE DE REFERÊNCIA MODIFICADA
Para a configuração do MRC protótipo com seis pólos no estator e quatro
pólos no rotor, cada um cobrindo 40, a melhor estratégia de alimentação das
bobinas do estator para um melhor rendimento em termos de conjugado
eletromagnético é (SASS; SANTISTEBAN; SANCHES, 2009):
- posição do rotor entre 0 e 15: fases “a” e “b” energizadas;
- posição do rotor entre 15 e 30: somente a fase “a” energizada;
- posição do rotor entre 30 e 45: fases “a” e “c” energizadas;
- posição do rotor entre 45 e 60: somente a fase “c” energizada;
- posição do rotor entre 60 e 75: fases “b” e “c” energizadas;
- posição do rotor entre 75 e 90: somente a fase “b” energizada.
Conforme já escrito anteriormente, o ciclo de correntes se repete a cada giro
de 90 do eixo do rotor.
No cálculo das correntes de referência impostas ao MRC, o objetivo era
fornecer um conjugado eletromagnético constante, definido anteriormente em 0,2708
Nm, para as diversas posições do rotor do MRC. Inicialmente foram calculados os
valores para a corrente na fase “a” de 1 em 1 da seguinte forma:

121
- para a posição do rotor () entre 15 e 30:
=
θ
θL
θ
θL2
2.0,2708θI
A1A2A1A1
a (5.2)
- para a posição do rotor () entre 0 e 15 foi arbitrada uma função que
começasse em zero e se aproximasse do valor da equação 5.2 em 15, dada pela
equação abaixo:
4/a e7967,27967,2I = (5.3)
- para a posição do rotor () entre 30 e 45: calcula-se a solução da equação
5.4 (segundo grau), com o auxílio do programa Excel, considerando o valor da
corrente Ic como o valor da corrente Ia para a posição do rotor de 0 a 15 (equação
5.3).
00,2708θI
θ
θL
θ
θL
θIθIθ
θL2
θ
θL2θI
θ
θL
θ
θL
2
cC1C2C1C1
acA1C2A1C12
aA1A2A1A1
=
(5.4)
Para os valores (pontos) das correntes de 1 em 1, obtidos pelas equações
5.2 e 5.4 foram obtidas equações utilizando-se a ferramenta “cftool” do MatLab®,
utilizadas na função “fcn” (Figura 5.8).
As correntes de referência das fases “c” e “b” estão defasadas em relação à
corrente da fase “a” de 30 e 60, respectivamente. Foram feitos ajustes de curvas
para os diversos valores de correntes, obtendo-se as equações apresentadas no
Apêndice 10.5.2, cujas formas de onda são apresentadas na Figura 5.13.
Figura 5.13 - Formas de onda das correntes de referência.

122
O tempo de processamento gasto para este tipo de controlador é de 78,4 s,
sem considerar o tempo adicional gasto no armazenamento de dados nos
osciloscópios da Figura 5.1.
A Figura 5.14 apresenta as formas de onda das correntes reais e de
referência das três fases do MRC obtidas na simulação com o controlador PID
convencional. Note que as correntes reais e de referência de cada fase estão
praticamente sobrepostas.
Figura 5.14 - Formas de onda das correntes reais e de referência.
A Figura 5.15 apresenta as correntes reais nas três fases, o conjugado
eletromagnético desenvolvido pelo motor e a velocidade do eixo do rotor, quando
aplicado um controle PID convencional.
A Figura 5.16 corresponde a uma imagem ampliada da Figura 5.15 nas
proximidades do primeiro segundo de simulação.

123
Figura 5.15 - Formas de onda das correntes reais, conjugado eletromagnético e
rotação do eixo do rotor do MRC para um controlador PID convencional.
Figura 5.16 - Formas de onda da Figura 5.15 ampliada nas proximidades do primeiro
segundo de simulação.
Comparando as Figuras 5.11 (pulso retangular de corrente) e 5.16 (corrente
modificada) verifica-se que a estratégia de imposição de uma corrente conformada
para redução das oscilações do conjugado atingiu plenamente seu objetivo.

124
5.3 CONTROLE INTELIGENTE
Para contornar os problemas encontrados pelos métodos convencionais de
controle, propostas alternativas surgiram nas últimas décadas, tais como o controle
por Lógica Nebulosa (fuzzy) e Redes Neurais Artificiais. Essas duas técnicas têm
sido empregadas com sucesso em várias áreas, onde a abordagem convencional
tem falhado em fornecer soluções satisfatórias (PAGLIOSA, 2003).
Cada técnica inteligente tem propriedades computacionais particulares (por
exemplo: habilidade de aprender, justificativa de decisões) que as tornam
adequadas para problemas particulares e não para outros. Por exemplo, enquanto
as redes neurais são boas para reconhecimento de padrões, elas não são boas para
explicar como elas alcançam suas decisões. Sistemas de lógica nebulosa, que
podem trabalhar com informação imprecisa.
Estas limitações têm sido a força diretora central para criação de sistemas
híbridos inteligentes, onde duas ou mais técnicas são combinadas de maneira que
superem as limitações das técnicas individuais.
5.3.1 CONTROLADOR PID NEBULOSO
Uma visão geral da lógica nebulosa é apresentada no Apêndice 10.3, com
histórico, diferenças para a lógica clássica, funções de pertinência e modelagem
nebulosa de sistemas (fuzzificação, inferência, defuzzificação, vantagens e
desvantagens).
Os controladores nebulosos têm sido uma contrapartida aos controladores
clássicos na mesma tarefa dominante para o espectro abundante de conhecimento
(ERENOGLU et al, 2006).
Para o caso particular do MRC, o controlador nebuloso atua de acordo com o
desvio em relação à referência de velocidade. Para tanto, é natural que o
mecanismo de controle tenha condições de raciocinar e decidir. O raciocínio é
implementado pela base de regras e pelo método de inferência, e a decisão é
atingida pela defuzzificação. A Figura 5.17 apresenta uma arquitetura de um
controlador nebuloso atuando em um MRC.

125
REFERÊNCIA MRC
F
U
Z
Z
I
F
I
C
A
Ç
Ã
O
INFERÊNCIA
D
E
F
U
Z
Z
I
F
I
C
A
Ç
Ã
O
CONTROLADOR
NEBULOSO
SINAL DE
CONTROLE SAÍDA
CONHECIMENTO
DO MRC
Figura 5.17 - Arquitetura de um controlador nebuloso.
Controladores nebulosos, em geral, consistem de um módulo de entrada, um
módulo de processamento e um módulo de saída. O módulo de entrada
(fuzzificação) classifica os sinais de sensores ou outros tipos de entrada (chaves,
interruptores, etc.) por variáveis linguísticas, com valores no intervalo [0,1]. O
processamento (inferência) verifica as regras, geradas com base no conhecimento
do sistema a ser controlado, disparando um peso para cada uma. O módulo de
saída gera um resultado a partir das regras, combinando os resultados de cada uma
por uma operação matemática (união, intersecção, etc.).
Essa estrutura de controlador representa a transformação que ocorre do
domínio do mundo real, que usa números reais, para o domínio nebuloso, que usa
números nebulosos. Nessa transformação um conjunto de inferências nebulosas é
usado para as tomadas de decisões, e por fim há uma transformação inversa do
domínio nebuloso para o domínio do mundo real, para que ocorra o acoplamento
entre a saída do algoritmo nebuloso e as variáveis de atuação.
A literatura classifica os controladores PID nebulosos em três grandes
categorias: ação direta, programação de ganho nebuloso e híbrido (YESIL et al.,
2003).
Nos controladores de ação direta, as ações de controle são determinadas
diretamente por meio de um sistema de inferência nebulosa. Este tipo é em essência
igual ao controlador PID convencional. Nesta tese, o PID nebuloso implementado se
encontra na categoria de ação direta.

126
Nos controladores com programação de ganho nebuloso, os ganhos do PID
são ajustados com base em um sistema de inferência nebuloso ao invés da
abordagem convencional de Ziegler e Nichols.
O objetivo dos controladores híbridos (clássico e nebuloso) é melhorar o
desempenho da resposta do sistema nas condições transitórias e de regime
permanente após comparar os desempenhos do PID clássico com o PID nebuloso.
A hibridização das duas estruturas de controladores busca imediatamente explorar
os benefícios de cada categoria. Naturalmente várias estruturas híbridas de
controladores podem ser encontradas na literatura (LI, 1998; REZNIK; GHANAYEM;
BOURMISTROV, 2000). Em algumas aplicações, essas estruturas de controle são
escolhidas em função do ponto de operação (OTSUBO et al, 1998; PARNICHKUN;
NGAECHAROENKUL, 2001). Um método nebuloso de chaveamento entre esses
tipos de controladores PID é proposto por Er e Sun, visando um controle suave
durante o chaveamento (ER; SUN, 2001). Um controlador PID híbrido, com um
mecanismo inteligente de chaveamento dos dois controladores, projetado em função
do erro de atuação, é proposto por Erenoglu e outros (ERENOGLU et al, 2006).
A Figura 5.18 apresenta o modelo computacional utilizado para simular o
controle PID nebuloso do MRC, utilizando a ferramenta Simulink do programa
MatLab® (THE MATHWORKS, INC, 2007). Os demais blocos da simulação são os
mesmos descritos anteriormente para o controle convencional.

127
Figura 5.18 - Modelo computacional utilizado para simular o controle PID nebuloso do MRC.
128
Ressalta-se que o bloco PID na Figura 5.18 somente tem o papel de gerar as
entradas do controlador nebuloso: erro, integral do erro e derivada do erro. Desta
forma, os ganhos proporcional, integral e derivativo foram ajustados para 1, 1 e 1,
respectivamente. O tempo de amostragem (Ts) foi mantido como 0,00001 s.
O controlador nebuloso implementado tem as entradas e saídas apresentadas
na Figura 5.19.
Figura 5.19 - Controlador nebuloso implementado na simulação.
Os parâmetros definidos para o controlador nebuloso foram: método “And”
(min), método “Or” (max), implicação (min), agregação (max) e defuzzificação
(centroide).
As entradas do controlador nebuloso são o “Erro de Velocidade”, a “Derivada
do Erro de Velocidade”, a “Integral do Erro de Velocidade” e a “Posição Angular”
(eixo do rotor), cujas funções de pertinências são apresentadas nas Figuras de 5.20
a 5.23, respectivamente.
As saídas do controlador nebuloso são as correntes nas fases (“Ia”, “Ib” e
“Ic”), cujas funções de pertinências são iguais e apresentadas na Figura 5.24 para a
corrente “Ia”.

129
Figura 5.20 - Funções de pertinência da entrada “Erro de Velocidade”.
Figura 5.21 - Funções de pertinência da entrada “Derivada do Erro de Velocidade”.

130
Figura 5.22 - Funções de pertinência da entrada “Integral do Erro de Velocidade”.
Figura 5.23 - Funções de pertinência da entrada “Posição Angular”.

131
Figura 5.24 - Funções de pertinência da saída “Ia”.
Considerando as quatro entradas do controlador nebuloso foram necessárias
270 (3 x 3 x 3 x 10) regras nebulosas. Estas regras estão no Apêndice 10.5.5. A
seguir são apresentadas algumas dessas regras, que completam um ciclo de 90 de
posição angular do eixo do rotor.
O tempo de processamento gasto para este tipo de controlador foi de 1 h, 48
min e 4,9 s, sem considerar o tempo adicional gasto no armazenamento de dados
nos osciloscópios da Figura 5.18.
A Figura 5.25 apresenta as correntes reais nas três fases, o conjugado
eletromagnético desenvolvido pelo motor e a velocidade do eixo do rotor, quando
aplicado um controle PID nebuloso.

132
A Figura 5.26 corresponde a uma imagem ampliada da Figura 5.25 nas
proximidades do primeiro segundo de simulação.
Figura 5.25 - Formas de onda das correntes reais, conjugado eletromagnético e
rotação do eixo do rotor do MRC para um controlador PID nebuloso.
Figura 5.26 - Formas de onda da Figura 5.25 ampliada nas proximidades do primeiro
segundo de simulação.

133
5.3.2 CONTROLADOR PID NEURAL
Uma visão geral das redes neurais é apresentada no Apêndice 10.4, com
histórico, neurônio biológico, neurônio artificial, topologia, aprendizado, tipos,
vantagens e desvantagens.
A Figura 5.27 apresenta uma arquitetura de um controlador nebuloso atuando
em um MRC.
REFERÊNCIAMRC
CONTROLADOR
NEURAL
SINAL DE
CONTROLE SAÍDA
Camada
de Entrada
Camada
Escondida
Camada
de Saída
Figura 5.27 - Arquitetura de um controlador neural.
A Figura 5.28 apresenta o modelo computacional utilizado para simular o
controle PID neural do MRC, utilizando a ferramenta Simulink do programa MatLab®.
Os demais blocos da simulação são os mesmos descritos anteriormente para o
controle convencional.
Os ganhos proporcional, integral e derivativo do bloco PID foram todos
ajustados em 1. O tempo de amostragem (Ts) foi mantido em 0,00001 s.
Foram utilizados 12.000 dados das entradas erros de velocidade, derivadas
dos erros de velocidade, integrais dos erros de velocidade e posições angulares,
assim distribuídos: 6.000 para treino, 3.000 para teste e 3.000 para validação. Para
as saídas (correntes nas três fases) foram também utilizados 12.000 dados. Esses
dados foram obtidos do controlador PID convencional. O Apêndice 10.5.6 apresenta
o programa utilizado na separação dos dados para treino, teste e validação.
Para o treinamento da rede neural foi utilizada a ferramenta “nntool” do
MatLab®.
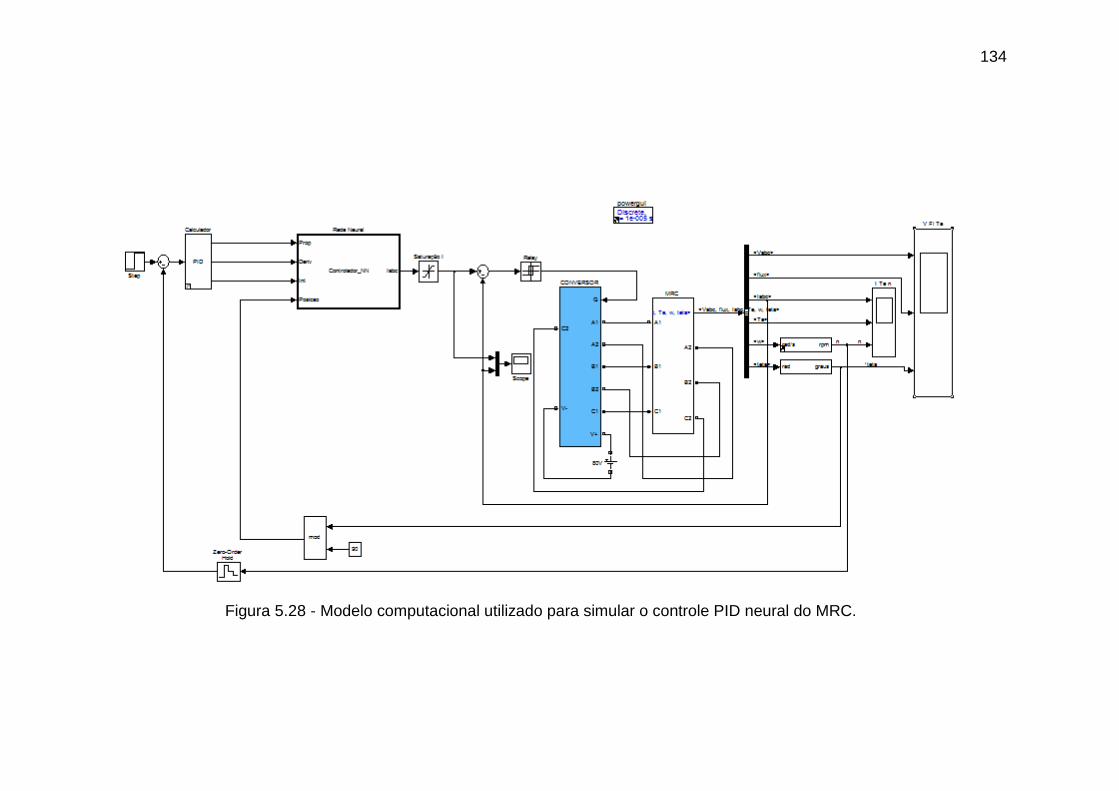
134
Figura 5.28 - Modelo computacional utilizado para simular o controle PID neural do MRC.

135
A Figura 5.29 apresenta a arquitetura neural gerada pelo programa.
Figura 5.29 - Arquitetura neural gerada pela ferramenta “nntool”.
Após vários experimentos, as propriedades da rede neural com melhor
desempenho foram:
- tipo de rede: feed-forward backprop;
- função de treinamento: TRAINLM;
- função de aprendizado adaptativo: LEARNGDM;
- função de desempenho: MSE;
- camada oculta: 1 com 36 neurônios (função de ativação TANSIG);
- camada de saída: 3 neurônios com função de ativação PURELIN.
A função de treinamento de rede “TRAINLM” atualiza os valores dos pesos e
dos bias de acordo com o algoritmo de otimização de Levenberg – Marquardt.
A função de aprendizado adaptativo “LEARNGDM” se utiliza do gradiente
descendente.
A função “MSE” mede o desempenho da rede de acordo com a média dos
quadrados dos erros.
Os parâmetros de treinamento utilizados são apresentados na Figura 5.30.
Figura 5.30 - Parâmetros de treinamento da rede neural.

136
O treinamento pára quando qualquer uma das condições da Figura 5.30
ocorrer (o número máximo de épocas (repetições) é atingido, o desempenho é
minimizado para o objetivo, o gradiente de desempenho cai abaixo do valor mínimo
(min_grad), o valor adaptativo “mu” excede o valor máximo (mu_max), etc.).
O treinamento da rede neural é apresentado na Figura 5.31.
Figura 5.31 - Treinamento da rede neural.
O treinamento forneceu os dados dos pesos e bias das duas camadas,
utilizados no módulo “Controlador_NN” da Figura 5.28 para cálculo das correntes de
referências, cujo programa está apresentado no Apêndice 10.5.7.
O tempo de processamento gasto para este tipo de controlador foi de 73,9 s,
sem considerar o tempo adicional gasto no armazenamento de dados nos
osciloscópios da Figura 5.28.
A Figura 5.32 apresenta as correntes elétricas nas três fases, o conjugado
eletromagnético desenvolvido pelo motor e a velocidade do eixo do rotor, quando
aplicado um controlador PID neural.

137
Figura 5.32 - Formas de onda das correntes reais, conjugado eletromagnético e
rotação do eixo do rotor do MRC para um controlador PID neural.
A Figura 5.33 corresponde a uma imagem ampliada da Figura 5.32 nas
proximidades do primeiro segundo de simulação.
Figura 5.33 - Formas de onda da Figura 5.32 ampliada nas proximidades do primeiro
segundo de simulação.
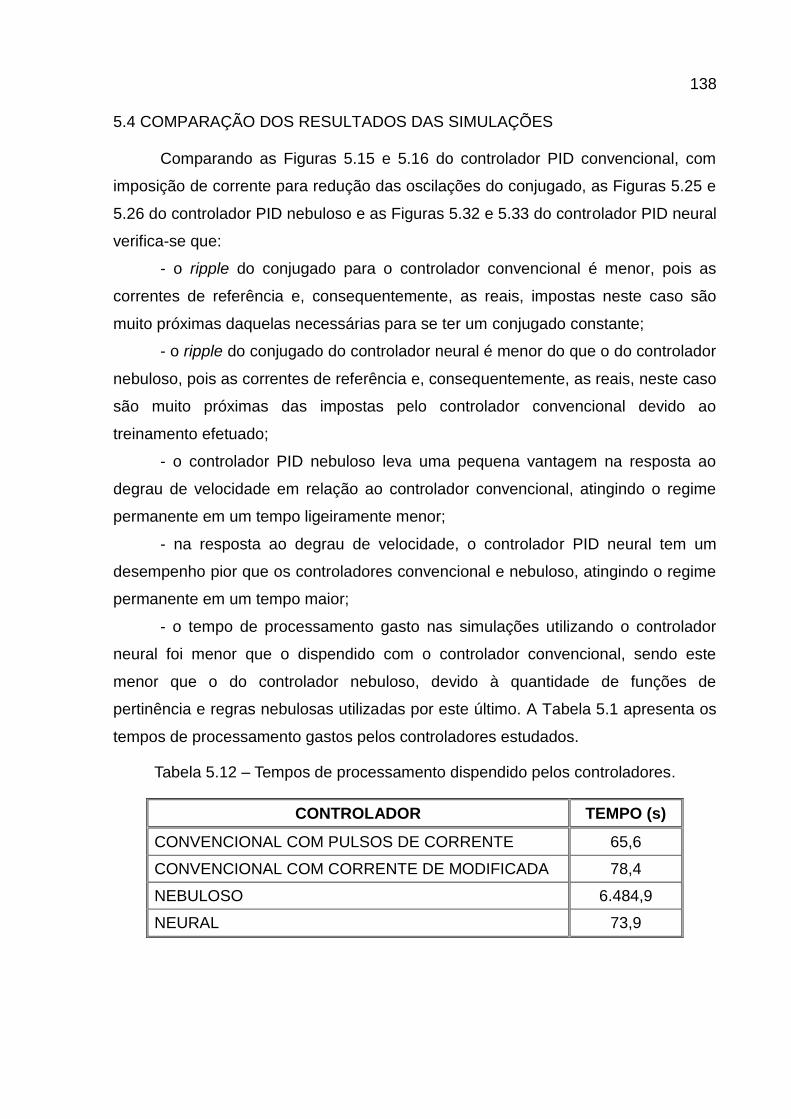
138
5.4 COMPARAÇÃO DOS RESULTADOS DAS SIMULAÇÕES
Comparando as Figuras 5.15 e 5.16 do controlador PID convencional, com
imposição de corrente para redução das oscilações do conjugado, as Figuras 5.25 e
5.26 do controlador PID nebuloso e as Figuras 5.32 e 5.33 do controlador PID neural
verifica-se que:
- o ripple do conjugado para o controlador convencional é menor, pois as
correntes de referência e, consequentemente, as reais, impostas neste caso são
muito próximas daquelas necessárias para se ter um conjugado constante;
- o ripple do conjugado do controlador neural é menor do que o do controlador
nebuloso, pois as correntes de referência e, consequentemente, as reais, neste caso
são muito próximas das impostas pelo controlador convencional devido ao
treinamento efetuado;
- o controlador PID nebuloso leva uma pequena vantagem na resposta ao
degrau de velocidade em relação ao controlador convencional, atingindo o regime
permanente em um tempo ligeiramente menor;
- na resposta ao degrau de velocidade, o controlador PID neural tem um
desempenho pior que os controladores convencional e nebuloso, atingindo o regime
permanente em um tempo maior;
- o tempo de processamento gasto nas simulações utilizando o controlador
neural foi menor que o dispendido com o controlador convencional, sendo este
menor que o do controlador nebuloso, devido à quantidade de funções de
pertinência e regras nebulosas utilizadas por este último. A Tabela 5.1 apresenta os
tempos de processamento gastos pelos controladores estudados.
Tabela 5.12 – Tempos de processamento dispendido pelos controladores.
CONTROLADOR TEMPO (s)
CONVENCIONAL COM PULSOS DE CORRENTE 65,6
CONVENCIONAL COM CORRENTE DE MODIFICADA 78,4
NEBULOSO 6.484,9
NEURAL 73,9

6 RESULTADOS EXPERIMENTAIS
6.1 BANCADA EXPERIMENTAL DO SISTEMA DE CONTROLE DO MRC
Os projetos dos circuitos para controle do MRC foram baseados no trabalho
de iniciação científica desenvolvido por Felipe Sass, patrocinado pela FAPERJ
(SASS, 2008). Algumas mudanças se fizeram necessárias, principalmente a troca do
microcontrolador PIC 16F877 pelo PIC 18F4680 de maior capacidade de memória
(368 para 3328 bytes).
Um protótipo do MRC de fluxo axial com somente um estator foi construído,
conforme pode ser visto na Figura 3.1. O protótipo é constituído de quatro pólos no
rotor e seis pólos com bobinas no estator. Cada bobina tem 175 espiras, formando
duas a duas, as três fases do motor.
Foram confeccionadas diversas placas de circuito impresso para alojar os
diferentes componentes dos circuitos utilizados, colocadas dentro de caixas para
melhor proteção.
A Figura 6.1 apresenta um diagrama em blocos das interligações dos circuitos
utilizados nos experimentos com o MRC de fluxo axial. Basicamente o sistema
utilizado constou de:
a) Fontes de alimentação de corrente contínua fornecendo tensões de 80 V,
15 V (quatro no total), 12 V, 5 V, - 6 V e - 12 V;
b) Circuito de potência composto de três conversores, um para cada fase do
MRC;
c) Circuito do sensor de posição;
d) Circuitos dos três sensores de corrente (Efeito Hall), um para cada fase do
MRC;
e) Circuito controlador.

140
110 VTrafo
Fonte CC
80 VFonte
CC
I real A
I real B
I real C
Sensores
de
Corrente
I real A
I real B
I real C
110 V
22
0 V
11
0 V
I ref A
I ref B
I ref C
Circuito de Potência
80
V
15
V
0 V
5 V
-6 V
12
V
0 V
-12
V
15
V (
A)
0 V
12 V
0 V
-12 V
Bo
bin
a A
+
Bo
bin
a A
-
Bo
bin
a B
+
Bo
bin
a B
-
Bo
bin
a C
+
Bo
bin
a C
-
80
V
Bobina A +
Bobina A -
Bobina B +
Bobina B -
Bobina C +
Bobina C -
5 V
12 V
-6 V
-12 V
0 V
0 VFonte CC
15 V
15 V
0 V
110 V
Fonte CC
15 V
15 V
0 V
110 V
55 V
0 V
0 V5 V
Sensor de
Posição
12 V 5 V -12 V 0V
Controlador
POS
ANG
MRC
Bobina
A
Bobina
B
Bobina
C
I re
f A
I re
f B
I re
f C
POS
ANG
Fontes CC
15 V
15 V
0 V
110 V
15 V
0 V
15
V (
B)
0 V
15
V (
C)
0 V
Figura 6.1 - Diagrama em blocos das interligações dos circuitos utilizados nos experimentos.

141
A Figura 6.2 mostra uma foto com os fios de interligações entre os diversos
circuitos, alojados em caixas plásticas, utilizados nos experimentos. Nela também se
observa o motor acoplado a um sensor de conjugado e um motor de corrente
contínua simulando uma carga mecânica.
Figura 6.2 - Foto com a cabeação entre os circuitos utilizados nos experimentos.
A Figura 6.3 mostra o circuito do sensor de corrente utilizado para a
determinação das correntes reais em cada fase do MRC, que foram adquiridos no
comércio: modelo SC-50 da MSA Control Comércio e Serviços Ltda. O sensor
propriamente dito é um circuito integrado de efeito Hall.
Figura 6.3 - Circuito do sensor de corrente.

142
O circuito de aplicação do sensor é para medição de 0 a 50 Acc e o sinal de
saída é de 0 a 5 Vcc. Os ajustes de ganho e zero foram feitos de forma que uma
corrente de 1 A circulando na fase do MRC correspondesse a uma tensão na saída
de 1 V. A Figura 6.4 apresenta um exemplo de forma de onda da tensão de saída de
um dos circuitos.
Figura 6.4 – Exemplo de forma de onda da tensão de saída de um dos circuitos dos
sensores de corrente.
A Figura 6.5 mostra uma foto dos sensores de corrente utilizados nos
experimentos montados em uma caixa plástica.
Figura 6.5 - Foto dos três sensores de corrente.

143
Os valores das correntes de referência impostas às três fases do MRC são
função da posição angular e da saída do tipo de controlador utilizado. A Figura 6.6
apresenta o circuito do sensor de posição angular utilizado nos experimentos.
-+
33 kW
330 W
LM339
3 2
5
12
4
2,37k W
10 kW
2,7 kW
SAÍDA
(pulsos)SENSOR
DE
POSIÇÃO
4,7 kW
10 kW
Figura 6.6 - Circuito do sensor de posição.
Esse circuito utiliza um transmissor e um receptor infravermelho em um único
encapsulamento, modelo OPB 865L55 da OPTEK Technology Inc., encaixado em
um disco de alumínio colado na estrutura do rotor, com 180 furos de diâmetro 1 mm
igualmente espaçados, constituindo-se em um encoder incremental. A Figura 6.7
mostra uma foto do circuito do sensor de posição, montado dentro de uma caixa
plástica, do disco de alumínio e do sensor de posição.
Figura 6.7 - Foto do circuito do sensor de posição e do sensor de posição.

144
O emissor infravermelho do sensor envia continuamente energia radiante que
ao passar por um furo do disco sensibiliza o receptor infravermelho do sensor. O
sinal é tratado pelo circuito do sensor e transformado em um pulso retangular de
tensão com amplitude de 4 V que é enviado ao circuito controlador, cujo
microcontrolador interpreta-o como nível lógico alto. A Figura 6.8 apresenta um
exemplo de forma de onda do sinal de saída do circuito do sensor de posição.
Figura 6.8 - Exemplo de forma de onda de saída do circuito do sensor de posição.
A Figura 6.9 apresenta um diagrama em blocos do circuito controlador. O
circuito recebe pulsos retangulares provenientes do circuito do sensor de posição
angular do eixo do rotor a cada dois graus e calcula as correntes de referências das
três fases de acordo com o tipo de controle utilizado, enviando essas correntes para
o circuito do conversor de potência, conforme exemplo apresentado na Figura 6.10
para a forma de onda de uma das correntes de referência.
Na Figura 6.9 o primeiro microcontrolador PIC, denominado U1, calcula a
velocidade do rotor do MRC, enquanto que o segundo PIC, denominado U2, calcula
as correntes de referências das três fases dos controladores estudados. As
programações desses microcontroladores PIC são apresentadas no Apêndice 10.6.
A Figura 6.11 mostra uma foto do circuito controlador montado dentro de uma
caixa plástica.
A Figura 6.12 apresenta o circuito do conversor de potência utilizado para
cada fase do MRC. O tipo utilizado é o conversor clássico ou ponte conversora
assimétrica apresentada na Figura 2.18. O circuito recebe as correntes reais
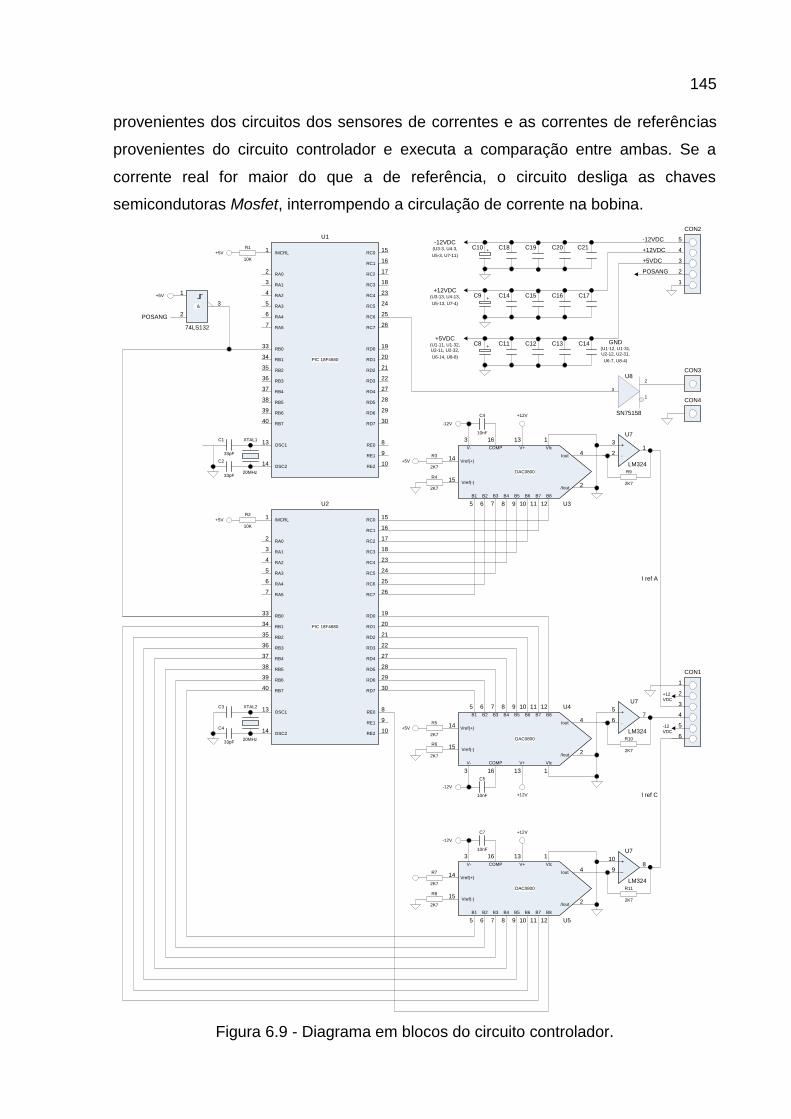
145
provenientes dos circuitos dos sensores de correntes e as correntes de referências
provenientes do circuito controlador e executa a comparação entre ambas. Se a
corrente real for maior do que a de referência, o circuito desliga as chaves
semicondutoras Mosfet, interrompendo a circulação de corrente na bobina.
PIC 18F4680
1
2
3
I ref A
I ref C
3
2
4
5
7
6
8
9
RA0
RA1
RA2
RA3
RA4
RA5
RE0
RE1
10RE2
/MCRL
+
-
3
21
OSC1
OSC2
20MHz33pF
33pF
34
33
35
36
38
37
RB0
RB1
RB2
RB3
RB4
RB5
40
39RB6
RB7
RC0
RC1
RC2
RC3
RC4
RC5
RC6
RC7
24
25
26
17
18
23
15
16
RD0
RD1
RD2
RD3
RD4
RD5
RD6
RD7
28
29
30
21
22
27
19
20
13
14
+5V
2K7
PIC 18F4680
3
2
4
5
7
6
8
9
RA0
RA1
RA2
RA3
RA4
RA5
RE0
RE1
10RE2
1/MCRL
OSC1
OSC2
20MHz33pF
34
33
35
36
38
37
RB0
RB1
RB2
RB3
RB4
RB5
40
39RB6
RB7
RC0
RC1
RC2
RC3
RC4
RC5
RC6
RC7
24
25
26
17
18
23
15
16
RD0
RD1
RD2
RD3
RD4
RD5
RD6
RD7
28
29
30
21
22
27
19
20
13
14
10K
&
1
2
3
+5V
DAC0800
B1 B2 B3 B4 B5 B6 B7 B8
Vref(+)
Vref(-)
Iout
/Iout
5 6 7 8 9 10 11 12
4
2
14
15
V- COMP V+ Vlc
113163
DAC0800
B1 B2 B3 B4 B5 B6 B7 B8
Vref(+)
Vref(-)
Iout
/Iout
5 6 7 8 9 10 11 12
4
2
14
15
V- COMP V+ Vlc
113163
+
-
5
67
2K7
1
+5V
2K7
2K7
+5V
2K7
2K7
+5V
+12V
-12V
10nF
+12V
-12V
10nF
LM324
74LS132
5
4
3
-12VDC
+12VDC
+5VDC
2
1
POSANG
U1
U2
U4
U3
U7
LM324
U7
CON1
CON2
C3
C4
C1
C2
10K
R1
R2
R5
R6
R10
R9
C4
C5
POSANG
XTAL2
XTAL1
R3
R4
C8 C11
C9 C14
C10 C18
+5VDC(U1-11, U1-32,
U2-11, U2-32,
U6-14, U8-8)
C12 C13
C15 C16
C19 C20
+
-
10
98
2K7
DAC0800
B1 B2 B3 B4 B5 B6 B7 B8
Vref(+)
Vref(-)
Iout
/Iout
5 6 7 8 9 10 11 12
4
2
14
15
V- COMP V+ Vlc
113163
2K7
2K7
+12V
-12V
10nF
LM324
U5
U7
R11
C7
R7
R8
C17
C21
+12VDC(U3-13, U4-13,
U5-13, U7-4)
GND(U1-12, U1-31,
U2-12, U2-31,
U6-7, U8-4)
-12VDC(U3-3, U4-3,
U5-3, U7-11)
3
2
1
SN75158
C14
U8CON3
CON4
+
+
+
5
4
6
+12
VDC
-12
VDC
Figura 6.9 - Diagrama em blocos do circuito controlador.

146
Figura 6.10 - Exemplo de forma de onda de corrente de referência gerada pelo
circuito controlador para uma fase.
Figura 6.11 - Foto do circuito controlador.

147
12
1N4007
100 mF80 V
1N4007
1N4007
IRF840
IRF840
I real
I ref
-
+
-+
-+
-
+
4,7 kW 4,7 kW
4,7 kW
4,7 kW
2,7 kW
2,7 kW2,7 kW
LM324
2,7 kW150 kW
4,7 kW
-+
2,7 kW
56 W
2,2 kW
100 W14
- 6 V
LM710
15 V
74LS74
+ 12 V + 5 V
555
+ 5 V
7,605 nFCtl
Thr
Dis
Vcc Rst
Out
Gnd
Trg
Q
R
Cp
D
BOBINA
DO MRC
Sensor de
Corrente
SC50
2,7 kW
56 W
15 V
100 W
4N35
4N35
S
1
5
51
2
D
4
1
2
7
4
D
2
G
8
5
S
3
4
9
6
S
G
3
6
1
2
5
7
610
13
- 12 V
9
2
11
13
12
9 8
10 14
4
3
11
+ 12 V
4 11
12 V
1Vº1A
- 12 VVcc
8Q
7
Figura 6.12 - Circuito do conversor de potência de uma das fases do motor.

148
A Figura 6.13 mostra a foto dos circuitos dos conversores de potência das
três fases (“A”, “B” e “C”), montados dentro de uma caixa plástica.
Figura 6.13 - Circuito dos conversores de potência das três fases do MRC.
6.2 CONTROLADOR PID CONVENCIONAL COM PULSO RETANGULAR DE
CORRENTE
A Figura 6.14 apresenta as formas de onda das correntes de referências nas
fases “A” e “B” em um dado instante (escala horizontal de 20 ms/div e escala vertical
de 1V/div).
Figura 6.14 – Exemplo de formas de onda das correntes de referência nas fases “A”
e “B” no controlador convencional com pulso retangular de corrente.

149
A Figura 6.15 apresenta as formas de onda das correntes de referência e real
na fase “A” em um dado instante.
Figura 6.15 - Formas de onda das correntes de referência e real na fase “A” em um
dado instante no controlador convencional com pulso retangular de corrente.
A Figura 6.16 apresenta a resposta em velocidade do controlador PID
convencional com pulso retangular de corrente para o MRC operando com carga
mecânica no eixo, partindo do repouso até atingir uma velocidade de referência de
350 rpm.
Figura 6.16 - Forma de onda da resposta em velocidade do controlador convencional
com pulso retangular de corrente para o MRC com carga mecânica.

150
A Figura 6.17 apresenta a forma de onda do conjugado eletromagnético
resultante quando utilizando um controlador PID convencional com pulso retangular
de corrente para o MRC operando com carga mecânica no eixo para uma velocidade
de referência de 350 rpm.
Figura 6.17 - Forma de onda do conjugado eletromagnético para um controlador
convencional com pulso retangular de corrente.
6.3 CONTROLADOR PID CONVENCIONAL COM CORRENTES MODIFICADAS
PARA REDUÇÃO DAS OSCILAÇÕES DO CONJUGADO
A programação do microcontrolador 18F4680 foi feita utilizando a linguagem
“C”. O programa implementado no controlador do tipo PID convencional encontra-se
no Apêndice 10.5.2. Na implementação deste microcontrolador foram usados 5284
bytes (8%) de memória ROM e 359 bytes (11%) de RAM, permanecendo livres
60251 bytes (92%) de ROM e 2781 bytes (89%) de RAM.
A Figura 6.18 apresenta as formas de onda das correntes de referências nas
fases “A” e “B” em um dado instante.

151
Figura 6.18 – Exemplo de formas de onda das correntes de referência nas fases “A”
e “B” no controlador convencional com correntes modificadas.
A Figura 6.19 apresenta as formas de onda das correntes reais nas fases “A”
e “B” em um dado instante.
Figura 6.19 – Exemplo de formas de onda das correntes reais nas fases “A” e “B” no
controlador convencional com correntes modificadas.
A Figura 6.20 apresenta as formas de onda das correntes de referência e real
na fase “A” em um dado instante.

152
Figura 6.20 - Formas de onda das correntes de referência e real na fase “A” em um
dado instante.
Comparando as formas de onda das correntes de referência e real na Figura
6.20 verifica-se que elas são bem similares. Nesta figura a corrente real é
ligeiramente inferior em amplitude comparada com a corrente de referência, pois
neste caso a fase foi energizada com tensão de 30V ao invés de 80V (tensão
utilizada nas simulações).
A Figura 6.21 apresenta a resposta do controlador PID convencional a uma
variação na velocidade de referência de 330 rpm para 350 rpm, com o MRC
operando sem carga mecânica no eixo.
A Figura 6.22 apresenta a resposta em velocidade do controlador PID
convencional com correntes modificadas para o MRC operando com carga mecânica
no eixo, partindo do repouso até atingir uma velocidade de referência de 350 rpm.

153
CONTROLADOR CONVENCIONAL - DEGRAU DE VELOCIDADE
310
315
320
325
330
335
340
345
350
355
0 1 2 3 4 5 6 7 8 9 10
Tempo (s)
Ve
loc
ida
de
(rp
m)
Figura 6.21 - Forma de onda da resposta do controlador convencional a uma
variação na velocidade de referência com o MRC sem carga mecânica.
CONTROLADOR CONVENCIONAL - VELOCIDADE
0
50
100
150
200
250
300
350
400
0 3 6 9 12 15 18 21
Tempo (s)
Ve
loc
ida
de
(rp
m)
Figura 6.22 - Forma de onda da resposta em velocidade do controlador convencional
com correntes modificadas para o MRC com carga mecânica.
A Figura 6.23 apresenta a forma de onda do conjugado eletromagnético
resultante quando utilizando um controlador PID convencional com o MRC operando

154
com carga mecânica no eixo, partindo do repouso até atingir uma velocidade de
referência de 350 rpm.
CONTROLADOR CONVENCIONAL - CONJUGADO
0
10
20
30
40
50
60
70
0 3 6 9 12 15 18 21
Tempo (s)
Co
nju
ga
do
(m
Nm
)
Figura 6.23 - Forma de onda do conjugado eletromagnético para um controlador
convencional.
6.4 CONTROLADOR PID NEBULOSO
O programa na linguagem “C” implementado no controlador do tipo PID
nebuloso encontra-se no Apêndice 10.5.3. Na implementação do microcontrolador
18F4680 foram usados 12674 bytes (19%) de memória ROM e 2542 bytes (80%) de
RAM, permanecendo livres 52861 bytes (81%) de ROM e 598 bytes (20%) de RAM.
A Figura 6.24 apresenta as formas de onda das correntes de referências nas
fases “A” e “B” em um dado instante.
A Figura 6.25 apresenta as formas de onda das correntes reais nas fases “A”
e “B” em um dado instante.

155
Figura 6.24 – Exemplo de formas de onda das correntes de referência nas fases “A”
e “B” no controlador nebuloso.
Figura 6.25 – Exemplo de formas de onda das correntes reais nas fases “A” e “B” no
controlador nebuloso.
A Figura 6.26 apresenta a resposta do controlador PID nebuloso a uma
variação na velocidade de referência de 330 rpm para 350 rpm, com o MRC
operando sem carga mecânica no eixo.

156
CONTROLADOR NEBULOSO - DEGRAU DE VELOCIDADE
310
315
320
325
330
335
340
345
350
355
0 1 2 3 4 5 6 7 8 9 10
Tempo (s)
Ve
loc
ida
de
(rp
m)
Figura 6.26 - Forma de onda da resposta do controlador nebuloso a uma variação na
velocidade de referência com o MRC sem carga mecânica.
A Figura 6.27 apresenta a resposta em velocidade do controlador PID
nebuloso com o MRC operando com carga mecânica no eixo, partindo do repouso
até atingir uma velocidade de referência de 350 rpm.
CONTROLADOR NEBULOSO - VELOCIDADE
0
50
100
150
200
250
300
350
400
0 3 6 9 12 15 18 21
Tempo (s)
Ve
loc
ida
de
(rp
m)
Figura 6.27 - Forma de onda da resposta em velocidade do controlador nebuloso
com o MRC com carga mecânica.
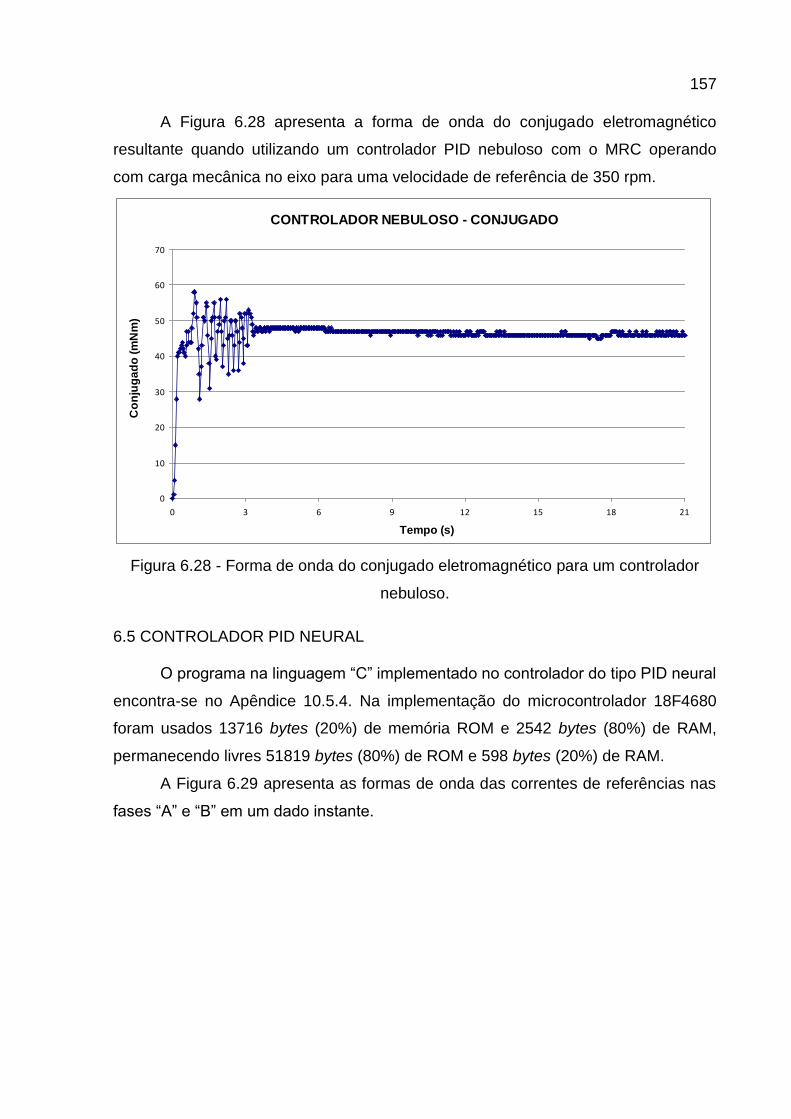
157
A Figura 6.28 apresenta a forma de onda do conjugado eletromagnético
resultante quando utilizando um controlador PID nebuloso com o MRC operando
com carga mecânica no eixo para uma velocidade de referência de 350 rpm.
CONTROLADOR NEBULOSO - CONJUGADO
0
10
20
30
40
50
60
70
0 3 6 9 12 15 18 21
Tempo (s)
Co
nju
ga
do
(m
Nm
)
Figura 6.28 - Forma de onda do conjugado eletromagnético para um controlador
nebuloso.
6.5 CONTROLADOR PID NEURAL
O programa na linguagem “C” implementado no controlador do tipo PID neural
encontra-se no Apêndice 10.5.4. Na implementação do microcontrolador 18F4680
foram usados 13716 bytes (20%) de memória ROM e 2542 bytes (80%) de RAM,
permanecendo livres 51819 bytes (80%) de ROM e 598 bytes (20%) de RAM.
A Figura 6.29 apresenta as formas de onda das correntes de referências nas
fases “A” e “B” em um dado instante.

158
Figura 6.29 – Exemplo de formas de onda das correntes de referência nas fases “A”
e “B” no controlador neural.
A Figura 6.30 apresenta as formas de onda das correntes reais nas fases “A”
e “B” em um dado instante.
Figura 6.30 – Exemplo de formas de onda das correntes reais nas fases “A” e “B” no
controlador neural.

159
A Figura 6.31 apresenta a resposta do controlador PID neural a uma variação
na velocidade de referência de 330 rpm para 350 rpm, com o MRC operando sem
carga mecânica no eixo.
CONTROLADOR NEURAL - DEGRAU DE VELOCIDADE
310
315
320
325
330
335
340
345
350
355
0 1 2 3 4 5 6 7 8 9 10
Tempo (s)
Ve
loc
ida
de
(rp
m)
Figura 6.31 - Forma de onda da resposta do controlador neural a uma variação de
velocidade na referência com o MRC sem carga mecânica.
A Figura 6.32 apresenta a resposta em velocidade do controlador PID neural
com o MRC operando com carga mecânica no eixo, partindo do repouso até atingir
uma velocidade de referência de 350 rpm.

160
CONTROLADOR NEURAL - VELOCIDADE
0
50
100
150
200
250
300
350
400
0 3 6 9 12 15 18 21
Tempo (s)
Ve
loc
ida
de
(rp
m)
Figura 6.32 - Forma de onda da resposta em velocidade do controlador nebuloso
com o MRC com carga mecânica.
A Figura 6.33 apresenta a forma de onda do conjugado eletromagnético
resultante quando utilizando um controlador PID neural com o MRC operando com
carga mecânica no eixo para uma velocidade de referência de 350 rpm.
CONTROLADOR NEURAL - CONJUGADO
0
10
20
30
40
50
60
70
0 3 6 9 12 15 18 21
Tempo (s)
Co
nju
ga
do
(m
Nm
)
Figura 6.33 - Forma de onda do conjugado eletromagnético para um controlador
neural.

161
6.6 COMPARAÇÕES ENTRE AS SIMULAÇÕES E OS EXPERIMENTOS
As variações dos conjugados, em relação ao conjugado médio, obtidos nos
diversos controladores utilizados nos experimentos reais são:
a) Convencional com Pulso Retangular de Corrente: 17,1%;
b) Convencional com Correntes Modificadas: 2,1%;
c) Nebuloso: 6,5%;
d) Neural: 2%.
Comparando o desempenho de um controlador de velocidade PID
convencional, utilizando as formas de onda modificadas, com um controlador de
velocidade PID com lógica nebulosa, notou-se que a ondulação de conjugado para o
primeiro é menor, o que pode ser explicado porque as correntes obtidas com o
controlador de lógica nebulosa não são exatamente semelhantes aos que produzem
um torque constante.
No entanto, no que diz respeito à resposta em velocidade, o controlador PID
de lógica nebulosa atinge o estado estacionário em menos tempo do que o
controlador PID convencional. Além disto, no que diz respeito à implementação, o
tempo de execução da lógica nebulosa é menor do que o utilizado com o controlador
PID convencional, mas similar ao tempo gasto pelo controlador PID neural.
Finalmente, com relação ao controlador PID neural, observa-se que as
oscilações do conjugado semelhante para o controlador PID convencional, mas
menor do que o obtido utilizando a abordagem com lógica nebulosa, o que é
esperado visto este ser obtido a partir de formação com base nos resultados do
controlador PID convencional. No entanto, isso tem um custo, que é o tempo de
treinamento off-line.

7 CONCLUSÕES
O Motor de Relutância Chaveado (MRC) de fluxo magnético radial tem sido
amplamente utilizado em muitas aplicações industriais de velocidade variável e
algumas vantagens têm sido relatadas: elevado conjugado de saída, larga faixa de
velocidade de operação, simplicidade geométrica, confiabilidade e robustez.
Acionado com pulsos de tensão ou corrente nas suas fases, o nível do ripple no
conjugado é alto, se comparado com outros tipos de motores, o que é a principal
desvantagem do MRC, pois contribui para a vibração e o ruído acústico. O MRC de
fluxo magnético axial pode ter um comprimento do eixo menor do que o motor de
fluxo magnético radial, parecendo ser uma solução promissora para utilização em
aplicações em que o tamanho é importante, como em carros elétricos, por exemplo.
As análises do MRC são complexas devido à sua estrutura de pólos
duplamente saliente e às características magnéticas não lineares. O conjugado
desenvolvido é uma função não linear das correntes aplicadas aos enrolamentos do
estator e de suas indutâncias, que dependem da posição do rotor. No entanto, com
um sistema de controle adequado, um conjugado com pequenas oscilações pode
ser obtido.
Nos últimos anos os pesquisadores de MRC de fluxo magnético radial estão
considerando as indutâncias mútuas das bobinas do estator (FLEURY et al., 2012),
da mesma forma que este estudo para o MRC de fluxo axial, embora os caminhos
do fluxo magnético sejam bem diferentes nas duas concepções de MRC. Nesta tese,
as indutâncias próprias e mútuas do MRC de fluxo axial foram estimadas utilizando
diversos métodos (experimental, simulação bidimensional e simulação
tridimensional). Neste trabalho, os resultados da simulação tridimensional com
elementos finitos foram utilizados para a modelagem da parte eletromecânica do
motor.

163
Três controladores de velocidade para o MRC de fluxo magnético axial com
apenas um estator foram desenvolvidos e testados experimentalmente. Como é
sabido, quando pulsos de corrente são impostos nos enrolamentos do estator deste
motor, uma elevada oscilação no conjugado é obtida. A fim de reduzir esta
oscilação, uma estratégia de controle com as formas de correntes modificadas foi
proposta. Estas consideram não somente as indutâncias próprias dos enrolamentos
por fase, mas também as indutâncias mútuas. Estes controladores PID foram: o
convencional, o baseado na lógica nebulosa e o construído como rede neural. Os
resultados experimentais confirmam a redução das oscilações no conjugado,
embora em níveis diferentes, mas também há diferenças no que diz respeito ao
tempo de execução e à velocidade de resposta.
Pode-se concluir que, embora as oscilações no conjugado não sejam
menores que as obtidas com um controlador PID convencional, os controladores não
convencionais, nebuloso e neural, se apresentam promissores quando se
consideram os tempos de execução dos mesmos.
Alguns trabalhos futuros que podem ser desenvolvidos para o MRC de fluxo
axial com somente um estator são:
a) Estudar e implementar uma técnica de controle de velocidade sem o
sensor de posição;
b) Aperfeiçoar o modelo do MRC de fluxo axial considerando perdas no
núcleo;
c) Construir um protótipo de MRC com núcleo laminado, visando aumentar a
potência útil;
d) Empregar microcontroladores e acionamentos com maiores velocidades
de resposta.
As contribuições desta tese estão reportadas nas seguintes publicações:
a) Design and implementation of a digital control system for an axial flux
switched reluctance motor (SASS; SANTISTEBAN; SANCHES, 2009);
b) Design and implementation of simple speed controllers with torque ripple
minimization for an axial magnetic flux switched reluctance motor
(SANCHES; SANTISTEBAN, 2012);
c) Implementing a neural PID speed controller for a single stator flux aiming
torque ripple minimization (SANCHES; SANTISTEBAN, 2013);

164
d) Comparative study of conventional, fuzzy logic and neural PID speed
controllers with torque ripple minimization for an axial magnetic flux
switched reluctance motor (SANCHES; SANTISTEBAN, 2014);
e) Mutual inductances effect on the torque of an axial magnetic flux switched
reluctance motor (SANCHES; SANTISTEBAN, 2015).

8 OBRAS CITADAS
[ 1 ] ABOUZEID, Mohamed. The use of an axial field-switched reluctance
generator driven by wind energy. Renewable Energy, v. 6, n. 5-6, p. 619-622,
july-september 1995.
[ 2 ] ABOU-ZAID, M.; EL-ATTAR, Magdy; MOUSA, M. Analysis and performance
of axial field switched reluctance generator. In: International Electric
Machines and Drives Conference, may 1999, Seattle. p. 141-143.
[ 3 ] ALRIFAI, Muthana et al. Speed control of switched reluctance motors taking
into account mutual inductances and magnetic saturation effects. Energy
Conversion and Management, v. 51, p. 1287-1297, 2010.
[ 4 ] ALRIFAI, Muthana et al. Nonlinear speed control of switched reluctance
motor drives taking into account mutual inductance. Journal of Control
Science and Engineering, v. 2008, 11 p.
[ 5 ] ANDRADE, Darizon Alves de. et al. Motores a relutância chaveados: uma
opção potencial para Acionamentos Elétricos. Revista Eletricidade Moderna,
v. XXXII, n. 361, p. 136-149, 2004.
[ 6 ] ANSYS. Low-Frequency Electromagnetics Analysis Guide: ANSYS Release
10.0. ANSYS Inc, Canonsburg, 2005. 412p.
[ 7 ] ARIHARA, Hiromu; AKATSU, Kan. Basic properties of an axial-type switched
reluctance motor. IEEE Transactions on Industry Applications, v. 49, n. 1, p.
59-65, january/february 2013.
[ 8 ] BASTOS, João Pedro Assumpção. Eletromagnetismo para Engenharia:
Estática e Quase-Estática. Florianópolis: Editora da UFSC, 2004. 396 p.
[ 9 ] BERNARDELI, Victor Regis et al. Proposta de Estratégia para Melhoria do
Perfil de Conjugado de Motores a Relutância Variável. In: Anais do
Congresso Brasileiro de Automática, XVII, 2008, Juiz de Fora.
166
[ 10 ] BOSE, Bimal K. Fuzzy logic and neural network applications in power
electronics. IEEE Industrial Electronics Society Newsletter, v. 50, n. 2-3, p. 6-
13, 2003.
[ 11 ] CAI, Jun; DENG, Zhiquan. A sensorless starting control strategy for switched
reluctance motor drives with current threshold. Electric Power Components
and Systems, v. 41, n. 1, p. 1-15, january 2013.
[ 12 ] __________. A switching flux-linkage reference-based sensorless method for
switched reluctance motor drives. In: Electric Power Components and
Systems, v. 42, n. 2, p. 227-237, january 2014.
[ 13 ] CALDEIRA, André Machado et al. Inteligência computacional aplicada à
administração, economia e engenharia em Matlab®. Hime Aguiar e Oliveira
Junior, coordenador. São Paulo: Thomson Learning, 2007. 370 p.
[ 14 ] CIRSTEA, Marcian N. et al. Neural and fuzzy logic control of drives and
power systems. Oxford: Elsevier Science, 2002. 399 p.
[ 15 ] De PAULA, Pedro Pereira et al. Assessment of the influences of the mutual
inductances on switched reluctance machines performance. In: IEEE
International Electric Machines and Drives Conference, 2003, Madison. v. 3,
p. 1732-1738.
[ 16 ] DAVIS IV, Warren L. Enhancing pattern classification with relational fuzzy
neural networks and square bk-products. Florida, 2006. 116 p. Thesis (Doctor
of Philosophy) – Department of Computer Science, The Florida State
University, Florida, 2006.
[ 17 ] ER, Meng Joo; SUN, Ya Lei. Hybrid fuzzy proportional-integral plus
conventional derivative control of linear and nonlinear systems. IEEE
Transactions on Industrial Electronics, v. 48, n. 6, p. 1109-1117, december
2001.
[ 18 ] ERENOGLU, Isin et al. An intelligent hybrid fuzzy PID controller. In: European
Conference on Modelling and Simulation (ECMS 2006), 20., 2006, Bonn, p.
62-66.
[ 19 ] FERREIRA, Vitor Hugo. Desenvolvimento de modelos neurais autônomos
para previsão de carga elétrica. Rio de Janeiro, 2008. 302 f. Tese (Doutorado
em Engenharia Elétrica) – Coordenação dos Programas de Pós-Graduação
de Engenharia, Universidade Federal do Rio de Janeiro, Rio de Janeiro.
2008.

167
[ 20 ] FILHO, Kenji Nose; LOTUFO, Anna Diva Plasencia; LOPES, Mara Lúcia
Martins. Utilização de redes neurais artificiais e redes neuro fuzzy para
previsão de cargas elétricas. In: Brazilian Conference on Dynamics, Control
and Applications, 7th., 2008, Presidente Prudente.
[ 21 ] FLEURY, Augusto et al. Effects of the mutual inductances on switched
reluctance machines. In: International Conference on Renewable Energies
and Power Quality, 2012, Santiago de Compostela. 6 p.
[ 22 ] FULLÉR, Robert. Neural fuzzy systems. Abo: Abo Akademi University, 1995.
346 p.
[ 23 ] GRUCAD. Electromagnetic Fields Computer Aided Design (EFCAD):
Operations Manual. Universidade Federal de Santa Catarina, Florianópolis,
2002. version 6, 61p.
[ 24 ] HA, Keunsoo; KIM, Jaehyuck; CHOI, Jang Young. FFT-Based Position
Estimation in Switched Reluctance Motor Drives. Journal of Magnetics, v. 19,
n. 1, p. 90-100, 2014.
[ 25 ] HENRIQUES, Luís Oscar de Araújo Porto. Implementação de estratégia de
minimização de oscilações de torque e remoção de sensor de posição para
um acionamento de relutância variável usando técnica neuro-fuzzy. Rio de
Janeiro, 2004. 156 f. Tese (Doutorado em Engenharia Elétrica) –
Coordenação dos Programas de Pós-Graduação de Engenharia,
Universidade Federal do Rio de Janeiro, Rio de Janeiro. 2004.
[ 26 ] KONECNY, Karl F. Analysis of variable reluctance motor parameters through
magnetic field simulations. In: Proceedings of the First Annual International
Motorcon Conference, june 1981, Chigaco. v. 1, p. 2A.
[ 27 ] KOVÁCS, Zsolt László. Redes neurais artificiais: fundamentos e aplicações.
São Paulo: Editora Livraria da Física, 2006. 174 p. 4a edição.
[ 28 ] KRISHNAN, Ramu. Switched reluctance motor drives: modeling, simulation,
analysis, design and applications. Boca Raton: CRC Press, 2001. 432 p.
[ 29 ] KRISHNAN, Ramu; ABOUZEID, M.; MANG, X. A design procedure for axial
field switched reluctance motors. In: IEEE IAS Annual Meeting, 1990, Seattle.
v. 1, p. 241-246.
[ 30 ] LEE, Byeong-Seok et al. Design of a linear switched reluctance machine.
IEEE Transaction on Industrial Applications, v. 36, n. 6, p. 1571-1580,
november/december 2000.

168
[ 31 ] LI, Wei. Design of hybrid fuzzy logic proportional plus conventional integral-
derivative controller. IEEE Transaction on Fuzzy Systems, v. 6, n. 4, p. 449-
463, november 1998.
[ 32 ] MADHAVAN, Ramanujam; FERNANDES, Baylon G. Comparative analysis of
axial flux SRM topologies for electric vehicle application. In: IEEE
International Conference on Power Electronics, Drives and Energy Systems,
december 2012, Bengaluru. p. 1-6.
[ 33 ] MANNALA, Marcos José. Projetos de controle convencional e adaptativo
aplicados ao sistema térmico de uma bancada de ensaios de cabos
condutores. Curitiba, 2004. 63 f. Tese (Mestrado em Engenharia de
Produção e Sistemas) – Programa de Pós-Graduação em Engenharia de
Produção e Sistemas, Pontifícia Universidade Católica do Paraná, Curitiba.
2004.
[ 34 ] MAO, Shang-Hsun; TSAI, Mi-Ching. A novel switched reluctance motor with
c-core stators. IEEE Transactions on Magnetics, v. 41, n. 12, p. 4413-4420,
december 2005.
[ 35 ] MEJIA SANCHEZ, Eleazar Cristian. Controle por aprendizado acelerado e
neuro-fuzzy de sistemas servo-hidráulicos de alta frequência. Rio de Janeiro,
2009. 130 f. Dissertação (Mestrado em Engenharia Mecânica) – Programa
de Pós-Graduação em Engenharia Mecânica, Pontifícia Universidade
Católica do Rio de Janeiro, Rio de Janeiro, 2009.
[ 36 ] MILLER, Timothy John Eastham. Switched reluctance motors and their
control. Ohio: Magna Physics Publishing and Clarendon Press, 1993. 205p.
[ 37 ] NECULAI, Andrei. Modern control theory – a historical perspective. Scrieri
Matematice 1. 10 february 2005. 12 p. Disponível em: <http://sharif.ir/
~namvar/index_files/history.pdf>. Acesso em: 20 agosto 2010.
[ 38 ] NEVES, Marcelo Veiga. Uma (breve) introdução às redes neurais artificiais.
Disponível em: <http://www.scribd.com/doc/36859377/Redes-Neurais-breve-
Introducao>. Acesso em: 30 dezembro 2010.
[ 39 ] OGATA, Katsuhiko. Engenharia de controle moderno. São Paulo: Pearson
Education do Brasil, 2011. 5a edição.

169
[ 40 ] OLIVEIRA, Alexandre Cunha. Acionamento de máquinas de relutância
variável. Campina Grande, 2002. 264 f. Tese (Doutorado em Engenharia
Elétrica) – Coordenação dos Cursos de Pós-Graduação de Engenharia
Elétrica, Universidade Federal de Campina Grande, Campina Grande. 2002.
[ 41 ] OLIVEIRA, Danilo Nobre et al. Método iterativo para cálculo da variação da
indutância do motor rotativo de relutância chaveada. In: Encontro de
Modelagem Computacional, IX, 2006, Belo Horizonte. 11 p.
[ 42 ] OLIVEIRA JÚNIOR, Hime Aguiar e. Lógica difusa: aspectos práticos e
aplicações. Rio de Janeiro: Interciência, 1999. 192 p.
[ 43 ] OTSUBO, Akifumi et al. Fuzzy hibrid control using simplified indirect
inference method. Fuzzy Sets and Systems, v. 99, p. 265-272, 1998.
[ 44 ] PAGLIOSA, Angelo Luís. Obtenção das funções de pertinência de um
sistema neurofuzzy modificado pela rede de Kohonen. Joinvile, 2003. 189 p.
Dissertação (Mestrado em Automação Industrial) – Departamento de
Engenharia Elétrica, Universidade do Estado de Santa Catarina, Joinvile,
2003.
[ 45 ] PALAKEERTHI, Ramesh; SUBBAIAH, P. Rotor position of switched
reluctance motor using sensorless method. Journal of Theoretical and
Applied Information Technology, v. 70, n. 2, p. 234-240, 2014.
[ 46 ] PARAMASIVAM, Saravanan; ARUMUGAM, Rengasamy. Hybrid fuzzy
controller for speed control of switched reluctance motor drives. Energy
Conversion and Management, v. 46, n. 9, p. 1365-1378, may 2005.
[ 47 ] PARNICHKUN, Manukid; NGAECHAROENKUL, Charoen. Kinematics control
of pneumatic systems by hybrid fuzzy PID. Mechatronics, v. 11, n. 8, p. 1001-
1023, december 2001.
[ 48 ] PASSINO, Kevin M.; YURKOVICH, Stephen. Fuzzy Control. Menlo Park:
Addison Wesley Longman, Inc., 1998. 502 p.
[ 49 ] PULLE, Duco W. J.; PETERSOEN, Ian R. A unified approach to switched
reluctance drive modeling: application to an axial flux (SRAF) motor. In:
Annual IEEE Power Electronics Specialists Conference (PESC 98), 29.,
1998, Fukuoka. v. 2, p. 1681-1686, 1998.
[ 50 ] REZNIK, Leonid; GHANAYEM, Omar; BOURMISTROV, Anna. PID plus fuzzy
controller structures as a design base for industrial applications. Engineering
Applications of Artificial Intelligence, v. 13, n. 4, p. 419-430, july 2000.

170
[ 51 ] SAKURAI, Atsuhiko. Sliding mode control of switched reluctance motors.
Toronto, 2001. 110 p. Thesis (Master of Applied Science) - Graduate
Department of Electrical and Computer Engineering, University of Toronto,
Toronto. 2001.
[ 52 ] SALO, Jussi. Design and analysis of a transversal-flux switched-reluctance-
linear-machine pole pair. Lappeenranta, 1999. 161 p. Thesis (Doctor of
Science in Technology), Lappeenranta University of Technology,
Lappeenranta. 1999.
[ 53 ] SANCHES, Eric Serge; SANTISTEBAN, José Andrés. Comparative study of
conventional, fuzzy logic and neural PID speed controllers with torque ripple
minimization for an axial magnetic flux switched reluctance motor.
Engineering, v. 6, p. 655-669, 2014.
[ 54 ] SANCHES, Eric; SANTISTEBAN, José Andrés. Design and implementation
of simple speed controllers with torque ripple minimization for an axial
magnetic flux switched reluctance motor. In: Congresso Brasileiro de
Automática, XIX, 2012, Campina Grande. v. 1. p. 564-570.
[ 55 ] SANCHES, Eric Serge; SANTISTEBAN, José Andrés. Implementing a neural
pid speed controller for a single stator flux aiming torque ripple minimization.
In: Brazilian Power Electronics Conference, 12th, 2013, Gramado. v. 1. p.
929-934.
[ 56 ] SANCHES, Eric Serge; SANTISTEBAN, José Andrés. Mutual inductances
effect on the torque of an axial magnetic flux switched reluctance motor. IEEE
Latin America Transactions, v. 13, n. 7, p. 2239- 2244, july 2015.
[ 57 ] SANDRI, Sandra; CORREA, Cláudio. Lógica Nebulosa. In: Escola de Redes
Neurais, V, 1999, São José dos Campos. p. c073-c090.
[ 58 ] SASS, Felipe. Projeto e Implementação de um Controlador Digital para um
Motor de Relutância de Fluxo Axial. In: Relatório Final de Projeto de Iniciação
Científica, FAPERJ, 2008.
[ 59 ] SASS, Felipe; SANTISTEBAN, José Andrés; SANCHES, Eric. Design and
implementation of a digital control system for an axial flux switched reluctance
motor. In: Brazilian Power Electronics Conference, 2009, Bonito. p. 138-144.
[ 60 ] SENGUPTA, A. et al. Control theory. Disponível em: <http://en.wikipedia.org/
wiki/Control_theory>. Acesso em: 20 setembro 2010.
171
[ 61 ] SHAW, Ian S.; SIMÕES, Marcelo Godoy. Controle e modelagem fuzzy. São
Paulo: Editora Edgard Blucher Ltda, 1999. 165 p.
[ 62 ] SILVA, Ivan Nunes da; SPATTI, Danilo Hernane; FLAUZINO, Rogério
Andrade. Redes neurais artificiais: para engenharia e ciências aplicadas. São
Paulo: Artliber, 2010. 399 p.
[ 63 ] SILVA, Juliana Mendes N. Redes neurais artificiais: rede Hopfield e redes
estocásticas. Niterói: Universidade Federal Fluminense, 2003. 40 p.
[ 64 ] TATIBANA, Cassia Yuri; KAETSU, Deisi Yuki. Uma introdução às redes
neurais. 2010. 29 p. Disponível em: < http://www.din.uem.br/ia/neurais>.
Acesso em: 05 janeiro 2011.
[ 65 ] THE MATHWORKS, INC. Control System Toolbox User’s Guide. Natick: The
MathWorks, Inc, 2007.
[ 66 ] VAS, Peter. Artificial-Intelligence-Based Electrical Machines and Drives:
Application of Fuzzy, Neural, Fuzzy-Neural, and Genetic-Algorithm-Based
Techniques. New York: Oxford University Press, 1999. 625p.
[ 67 ] VIEIRA, Renato Corrêa; ROISENBERG, Mauro. Redes neurais artificiais: um
breve tutorial. 2008. 17p. Disponível em: <http://educaonline.eng.br/
UNISANTA/HTML/DOWNLOAD/AULAS/TutorialRNA.pdf>. Acesso em: 20
dezembro 2010.
[ 68 ] VIJAYAKUMAR, K. et al. Switched reluctance motor modeling, design,
simulation, and analysis: a comprehensive review. IEEE Transactions on
Magnetics, v. 44, n. 12, p. 4605-4617, december 2008.
[ 69 ] VIJAYRAGHAVAN, Praven. Design of switched reluctance motors and
development of a universal controller for switched reluctance and permanent
magnet brushless DC motors drives. Blacksburg, 2001. 215 p. Thesis (Doctor
of Philosophy in Electrical Engineering) – Department of Electrical
Engineering, Virginia Polytechnic Institute and State University, Blacksburg.
2001.
[ 70 ] WAN, Eric A. Control systems: classical, neural, and fuzzy. Hillsboro: Oregon
Graduate Institute, 1998. 296 p.
[ 71 ] WIKIPÉDIA. Rede Neural. Disponível em: <http://pt.wikipedia.org/wiki/Rede_
neural>. Acesso em: 10 janeiro 2011.

172
[ 72 ] WINANDY, Charles-Edouard; BORGES FILHO, Estillac; BENTO, Lisânia
Vieira. Algoritmos para aprendizagem supervisionada. São José dos
Campos: Instituto Tecnológico da Aeronáutica, 2007. 7 p.
[ 73 ] YESIL, Engin; GUZELKAYA, Mudje; EKSIN, Ibrahim. Fuzzy PID controllers:
an overview. In: Triennial ETAI International Conference on Applied
Automatic Systems, 3., 2003, Skopje, p. 105-112.
[ 74 ] YUAN, Gao. Speed control of switched reluctance motors. Hong Kong, 2000.
94 p. Thesis (Master of Philosophy in Electrical and Electronic Engineering) –
Department of Electrical and Electronic Engineering, The Hong Kong
University of Science and Technology, Hong Kong. 2000.
[ 75 ] ZADEH, Lotfi A. Fuzzy sets. Information and Control, v. 8, p. 338-353, 1965.

9 OBRAS CONSULTADAS
[ 1 ] ADLY, Amr Amin; ABD-EL-HAFIZ, Salwa K. Utilizing Hopfield neural
networks in the analysis of switched reluctance motors. IEEE Transactions on
Magnetics, v. 36, n. 5, p. 3147-3149, september 2000.
[ 2 ] AKCAYOL, M. Ali; ELMAS, Cetin. NEFCLASS-based neuro fuzzy controller
for SRM drive. Engineering Applications of Artificial Intelligence, v. 18, p. 595-
602, 2005.
[ 3 ] AKHTER, Hamid Ehsan et al. Performance simulation of switched reluctance
motor drive system operating with fixed angle control scheme. In:
International Conference on Modeling and Simulation of Electric Machines,
Converters and Systems (Electrimacs), 7., 2002, Montreal.
[ 4 ] AMOR, L. Ben; DESSAINT, Louis A.; AKHRIF, Ouassima. Adaptive nonlinear
torque control of a switched reluctance motor via flux observation.
Mathematics and Computers in Simulation, v. 38, p. 345-358, 1995.
[ 5 ] ANWAR, M.N. et al. Evaluation of acoustic noise and mode frequencies with
design variations of switched reluctance machines. IEEE Transactions on
Industry Applications, v. 39, n. 3, p. 695-703, may/june 2003.
[ 6 ] ARKADAN, Abdul-Rahman A.; KIELGAS, B.W. Switched reluctance motor
drive systems dynamic performance prediction and experimental verification.
IEEE Transactions on Energy Conversion, v. 9, n. 1, p. 36-44, march 1994.
[ 7 ] BAE, Han-Kyung. Control of switched reluctance motors considering mutual
inductance. Blacksburg, 2000. 152 p. Thesis (Doctor of Philosophy in
Electrical and Computer Engineering) – The Bradley Department of Electrical
and Computer Engineering, Virginia Polytechnic Institute and State
University, Blacksburg, 2000.

174
[ 8 ] BASTOS, João Pedro A.; SADOWSKI, Nelson. Electromagnetic modeling by
finite element methods. New York: Marcel Dekker, Inc., 2003. 490 p.
[ 9 ] BELMANS, Ronnie; DRIESEN, Johan. Four-quadrant control of an 8/6
switched reluctance motor. Disponível em: <http://www.esat.kuleuven.be/
electa/research/descriptions/SRM-web_page.pdf>. Acesso em: 31 dezembro
2010.
[ 10 ] BIENKOWSKI, Krzysztof et al. Five phase switched reluctance motor with
short flux path for low speed applications and mechatronics. Disponível em:
<http://www.docin.com/p-83084268.html>. Acesso em: 10 julho 2010.
[ 11 ] BLAABJERG, Frede et al. Improved digital current control methods in
switched reluctance motor drives. IEEE Transactions on Power Electronics, v.
14, n. 3, p. 563-572, may 1999.
[ 12 ] BOLOGNANI, Silverio; ZIGLIOTTO, Mauro. Fuzzy logic control of a switched
reluctance motor drive. IEEE Transactions on Industry Applications, v. 32, n.
5, p. 1063-1068, september/october 1996.
[ 13 ] BONISSONE, Piero P. et al. Industrial application of fuzzy logic at General
Electric. Proceedings of the IEEE, v. 83, n. 3, p. 450-465, march 1995.
[ 14 ] BORKA, Jozsef; LUPAN, Karoly; SZAMEL, Laszlo. Control aspects of
switched reluctance motor drives. In: IEEE International Symposium on
Industrial Electronics, 1993, Budapest. p. 296-300.
[ 15 ] CAD, Marcelo Machado. Estratégias de modelagem dinâmica e simulação
computacional do motor de indução trifásico. São Carlos, 2000. 171 f.
Dissertação (Mestrado em Engenharia Elétrica) - Escola de Engenharia de
São Carlos, Universidade de São Paulo, São Carlos, 2001.
[ 16 ] CAI, Jun; DENG, Zhiquan. Sensorless control of switched reluctance motor
based on phase inductance vectors. IEEE Transactions on Power
Electronics, v. 27, n. 7, p. 3410-3423, july 2012.
[ 17 ] CAI, Wei et al. Low-vibration design of switched reluctance motors for
automotive applications using modal analysis. IEEE Transactions on Industry
Applications, v. 39, n. 4, p. 971-977, july/august 2003.
[ 18 ] CAO, J.Y. et al. Robust control of switched reluctance motors for direct-drive
robotic applications. The International Journal of Advanced Manufacturing
Technology, v. 22, n. 3, p. 184-190, september 2003.

175
[ 19 ] CHAN, S.; BOLTON, Hugh R. Performance enhancement of single-phase
switched-reluctance motor by DC link voltage boosting. IEE Proceedings - B,
v. 140, n. 5, p. 316-322, september 1993.
[ 20 ] CHANCHAROENSOOK, Phop; RAHMAN, M. Faz. Machine’s characteristics
identification: a preliminary study on direct torque control for switched
reluctance motor drives. In: Proceedings of the Australasian Universities
Power Engineering Conference, september 2000, Brisbane. p. 132-137.
[ 21 ] CHAPPELL, Paul H. Current pulses in switched reluctance motor. IEE
Proceedings - B, v. 135, n. 5, p. 224-230, september 1988.
[ 22 ] CHEN, Hai-Jin et al. A new analytical model for switched reluctance motors.
IEEE Transactions on Magnetics, v. 45, n. 8, p. 3107-3113, december 2009.
[ 23 ] CHEN, Hao; MENG, Xianjun; ZHANG, Dong. Systematic design of switched
reluctance motor drive based on the intelligent computational software
package. In: Proceedings of IEEE International Symposium on Computational
Intelligence in Robotics and Automation, 2001, Alberta. p. 473-478.
[ 24 ] CHEN, Hao; SHAO, Zuo; ZHU, Yifeng. Rotor speed testing and closed-loop
control for switched reluctance motor drive based on fuzzy logic. In: World
Congress on Intelligent Control and Automation (WCICA 2004), 5th, 2004,
Hangzhou. v. 5, p. 4458-4462.
[ 25 ] CHEN, Hao et al. Fuzzy logic control for switched reluctance motor drive. In:
International Conference on Machine Learning and Cybernetics, 2002,
Beijing. v. 1, p. 145-149.
[ 26 ] CHEN, Hao. et al. Models and simulation of the switched reluctance motor
drive with the microcomputer control based on MatLab software package. In:
The 2000 Asia-Pacific Conference on Circuits and Systems (IEEE APCCAS
2000), 2000, Tianjin. p. 493-496.
[ 27 ] CHEN, Hao et al. Variable angle control for switched reluctance motor drive
based on fuzzy logic. In: International Conference on Power Electronics and
Drive Systems (PEDS 2003), 5th, november 2003, Singapore. v. 2, p. 964-
968.
[ 28 ] CHEOK, Adrian David; ERTUGRUL, Nesimi. Use of fuzzy logic for modeling,
estimation and prediction in switched reluctance motor drives. IEEE
Transactions on Industry Electronics, v. 46, n. 6, p. 1207-1224, december
1999.

176
[ 29 ] CHEOK, Adrian David; FUKUDA, Yusuke. A new torque and flux control
method for switched reluctance motor drives. IEEE Transactions on Power
Electronics, v. 17, n. 4, p. 543-557, july 2002.
[ 30 ] CHI, Hsiao-Ping; LIN, Ray-Lee; CHEN, Jiann-Fuh. Simplified flux-linkage
model for switched-reluctance motors. IEE Proceedings on Electric Power
Applications, v. 152, n. 3, p. 577-583, may 2005.
[ 31 ] CHOI, Changhwan; LEE, Daeok; PARK, Kyihwan. Fuzzy design of a
switched reluctance motor based on the torque profile optimization. IEEE
Transactions on Magnetics, v. 36, n. 5, p. 3548-3550, september 2000.
[ 32 ] CORDA, Jasmin. Search for optimum numbers of turns of switched
reluctance motor. In: International Power Electronics Congress (CIEP 96), V,
1996, Cuernavaca. p. 241-245.
[ 33 ] CORDA, Jasmin; MASIC, Semsudin; STEPHENSON, J.M. Computation and
experimental determination of running torque waveforms in switched-
reluctance motor. IEE Proceedings – B, v. 140, n. 6, p. 387-392, november
1993.
[ 34 ] CORDA, Jasmin; SKOPLJAK; E. Linear switched reluctance actuator. In:
International Conference on Electrical Machines and Drives, 6., 1993, Oxford.
p. 535-539.
[ 35 ] CORDA, Jasmin et al. Analytical estimation of torque enhancement of the SR
machine with saw-shaped (shark) pole surface. IEE Proceedings on Electric
Power Applications, v. 151, n. 2, p. 223-229, march 2004.
[ 36 ] COSTA, Alessandra et al. Hardware solutions for fuzzy control. Proceedings
of the IEEE, v. 83, n. 3, p. 422-434, march 1995.
[ 37 ] COSTA, Eduardo Montgomery Meira. Eletromagnetismo – campos
dinâmicos. Rio de Janeiro: Editora Ciência Moderna Ltda., 2006. 144p.
[ 38 ] COSTA BRANCO, Paulo José da; DENTE, Joaquim A. A fuzzy relational
identification algorithm and its application to predict the behaviour of a motor
drive system. Fuzzy Sets and Systems, v. 109, n. 3, p. 343-354, february
2000.
[ 39 ] __________. Fuzzy systems modeling in practice. Fuzzy Sets and Systems,
v. 121, p. 73-93, 2001.

177
[ 40 ] __________. The application of fuzzy logic in automatic modeling of
electromechanical systems. Fuzzy Sets and Systems, v. 95, p. 273-293,
1998.
[ 41 ] CRIVII, Mircea. Two phase switched reluctance motors. In: Workshop on
Variable Reluctance Electrical Machines, 2002, Cluj-Napoca. p. 6-9.
[ 42 ] CRIVII, Mircea et al. 3D to 2D equivalence for a transverse flux reluctance
motor. In: International Conference on Electrical Machines (ICEM 2002), 15.,
2002, Brugge.
[ 43 ] CUI, Yu-Long et al. The simlation study for switched reluctance motor drives
based on MatLab 6.5. In: Proceedings of International Conference on
Machine Learning and Cybernetics, 4., 2005, Guangzhou. p. 1076-1081.
[ 44 ] CUNKAS, Mehmet; AKKAYA, Ramazan. A view of genetic algorithms
approaches to electrical machines optimization. In: Proceedings of
International Symposium on Intelligent Manufacturing Systems, 5., 2006. p.
258-268.
[ 45 ] D´AZZO, John J.; HOUPIS, Constantine H. Análise e projeto de sistemas de
controle lineares. Rio de Janeiro: Guanabara Dois, 1984. 2a edição.
[ 46 ] Da LUZ, Maurício Valencia Ferreira. Desenvolvimento de um software para
cálculo de campos eletromagnéticos 3D utilizando elementos de aresta,
levando em conta o movimento e o circuito de alimentação. Florianópolis,
2003. Tese (Doutorado em Engenharia Elétrica), Universidade Federal de
Santa Catarina, Florianópolis, Março 2003.
[ 47 ] Da PALMA, João Carlos Pires. Accionamentos electromecânicos de
velocidade variável. Lisboa: Fundação Calouste Gulbenkian, 1999. 446p.
[ 48 ] DADONE, Paolo. Design optimization of fuzzy logic systems. Blacksburg,
2001. 197 p. Thesis (Doctor of Philosophy in Electrical Engineering) -
Department of Electrical Engineering, Virginia Polytechnic Institute and State
University, Blacksburg. 2001.
[ 49 ] DALDABAN, Ferhat; USTKOYUNCU, Nurettin. Multi-layer switched
reluctance motor to reduce torque ripple. Energy Conversion and
Management, v. 49, p. 974-979, 2008.
[ 50 ] ________. New disc type switched reluctance motor for high torque density.
Energy Conversion and Management, v.48, p. 2424-2431, 2007.

178
[ 51 ] DALDABAN, Ferhat; USTKOYUNCU, Nurettin; GUNEY, Kerim. Phase
inductance estimation for switched reluctance motor using adaptive neuro-
fuzzy inference system. Energy Conversion and Management, v.47, p. 485-
493, 2006.
[ 52 ] DIDEKOVÁ, Zuzana, KAJAN, Slavomír. Applications of Intelligent Hybrid
Systems in Matlab. In: Annual Conference in Technical Computing, 17., 2009,
Prague.
[ 53 ] DiRENZO, Michael T. Switched reluctance motor control - basic operation
and example using the TMS320F240. Texas Instruments, Application Report
SPRA420A, February 2000. 62p.
[ 54 ] DiRENZO, Michael T.; MASTEN, Michael K.; COLE, Charles P. Switched
reluctance motor control techniques. In: Proceedings of the American Control
Conference. Albuquerque, 1997, New Mexico. p. 272-277.
[ 55 ] DORF, Richard C.; BISHOP, Robert H. Modern control systems. New York:
Addison-Wesley Publishing Company, 1995. 1104 p. 12th edition.
[ 56 ] DRAGU, Catalin Serban; BELMANS, Ronnie. Measurement of magnetic
characteristics of switched reluctance motor. Disponível em: <http://www.
esat.kuleuven.be/electa/publications/fulltexts/pub_1099.pdf>. Acesso em: 25
setembro 2010.
[ 57 ] ECO, Umberto. Como se faz uma tese. São Paulo: Perspectiva, 2002. 170p.
17a edição.
[ 58 ] EDRINGTON, Chris S. et al. Investigation of electromagnetic force
components in SRM under single and multiphase excitation. IEEE
Transactions on Industry Applications, v. 41, n. 4, p. 978-988, july/august
2005.
[ 59 ] EHSANI, Mehrdad. Switched reluctance motor drives – recent advances.
Proceedings in Engineering and Sciences of Indian Academy of Sciences, v.
22, part 6, p. 821-836, december 1997.
[ 60 ] EHSANI, Mehrdad; HUSAIN, Iqbal; KULKARNI, Ashok B. Elimination of
discrete position sensor and current sensor in switched reluctance motor
drives. IEEE Transactions on Industry Applications, v. 28, n. 1, p. 128-135,
january/february 1992.

179
[ 61 ] ESPINOSA-PEREZ, Gerardo et al. On the control of switched reluctance
motors. In: IEEE International Symposium on Industrial Electronics (ISIE
2000), 2000, Cholula. v. 2, p. 413-418.
[ 62 ] ESSAH, D.N.; SUDHOFF, Scott D. An improved analytical model for the
switched reluctance motor. IEEE Transactions on Energy Conversion, v. 18,
n. 3, p. 349-356, september 2003.
[ 63 ] FAIZ, Jawad; FINCH, John W. Aspects of design optimisation for switched
reluctance motors. IEEE Transactions on Energy Conversion, v. 8, n. 4, p.
704-713, december 1993.
[ 64 ] FINCH, John W.; FAIZ, Jawad; METWALLY, Hamid M.B. Design study of
switched reluctance motor performance. In: Industry Applications Society
Annual Meeting, 1992, Houston. v. 1, p. 242-248.
[ 65 ] GAN, Wai-Chuen; CHEUNG, Norbert C.; QIU, Li. Position control of linear
switched reluctance motors for high-precision applications. IEEE
Transactions on Industry Applications, v. 39, n. 5, p. 1350-1362,
september/october 2003.
[ 66 ] GHABOUSSI, Jamshid; JOGHATAIE, Abdolreza. Active control of structures
using neural networks. Journal of Engineering Mechanics, v. 121, n. 4, p.
555-567, 1995.
[ 67 ] GOPALAKRISHNAN, Suresh; OMEKANDA, Avoki M.; LEQUESNE, Bruno.
Classification and remediation of electrical faults in switched reluctance drive.
IEEE Transactions on Industry Applications, v. 42, n. 2, p. 479-486,
march/april 2006.
[ 68 ] GUNDOGDU, Omer; ERENTURK, Koksal. Fuzzy control of a dc motor driven
four-bar mechanism. Mechatronics, v. 15, n. 4, p. 423-438, may 2005.
[ 69 ] GUPTA, Madan M.; RAO, D.H. Dynamic neural units with applications to the
control of unknown nonlinear systems. Journal of Intelligent and Fuzzy
Systems, v. 1, n. 1, p. 73-92, 1993.
[ 70 ] HAYKIN, Simon. Neural networks: a comprehensive foundation. New York:
MacMillan Publishing Company, 1994.

180
[ 71 ] HENRIQUES, Luís Oscar de Araújo Porto. Compensação das oscilações de
torque de um acionamento de relutância chaveado utilizando técnicas de
controle neuro-fuzzy. Rio de Janeiro, 1999. 110 f. Dissertação (Mestrado em
Engenharia Elétrica) – Coordenação dos Programas de Pós-Graduação de
Engenharia, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999.
[ 72 ] HENRIQUES, Luís Oscar de Araújo Porto et al. Proposition of an offline
learning current modulation for torque-ripple reduction in switched reluctance
motors: design and experimental evaluation. IEEE Transaction on Industrial
Electronics, v. 49, n. 3, p. 665-676, june 2002.
[ 73 ] HENRIQUES, Luís Oscar de Araújo Porto et al. Automatic learning of pulse
current shape for torque ripple minimization in switched reluctance machines.
In: European Control Conference, 2001, Porto. p. 232-237.
[ 74 ] ________. Position sensor elimination using a neuro-fuzzy technique in a
SRM: project and implementation. Congresso Brasileiro de Automática, XV,
2004, Gramado.
[ 75 ] ________. Review of the ripple reduction strategies in SRM. In: Congresso
Brasileiro de Automática, XIV, 2002, Natal. p. 1164-1169.
[ 76 ] ________. Two automatic on-line new schemes to compensate the torque
ripple of switched reluctance machines: with and without torque signal
measurement. In: Online World Conference on Soft Computing in Industrial
Applications (WSC6), 6th, 2001, on the internet. 11p.
[ 77 ] ________. Uma revisão das estratégias de redução de oscilações de
conjugado no motor de relutância chaveado. Revista da Sociedade Brasileira
de Eletrônica de Potência, v. 8, n. 1, p. 16-24, 2003.
[ 78 ] HENRIQUES, Luís Oscar de Araújo Porto et al. Neuro-fuzzy compensation of
torque ripple in a switched reluctance drive. In: International Conference on
Modelling and Simulation of Electric Machines, Converters and Systems
(ELECTRIMACS 99), 6th, 1999, Lisboa. 5p.
[ 79 ] ________. Torque ripple minimization in a switched reluctance drive by
neuro-fuzzy compensation. IEEE Transactions on Magnetics, v. 36, n. 5, p.
3592-3594, september 2000.

181
[ 80 ] HUAMANÍ, Ivette R. Luna. Redes neurais fuzzy aplicada em identificação e
controle de sistemas. Campinas, 2003. 165 f. Tese (Mestrado em Engenharia
Elétrica) – Departamento de Engenharia de Computação e Automação
Industrial, Universidade Estadual de Campinas, Campinas. 2003.
[ 81 ] HUANG, Surong et al. A comparison of power density for axial flux machines
based on general purpose sizing equations. IEEE Transactions on Energy
Conversion, v. 14, n. 2, p. 185-192, june 1999.
[ 82 ] HUNT, Kenneth J.; SBARBARO, Daniel Neural networks for nonlinear
internal model control. IEE Proceedings - D, v. 138, n. 5, p. 431-438,
September 1991.
[ 83 ] HUSAIN, Iqbal. Minimization of torque ripple in SRM drives. IEEE Transaction
on Industrial Electronics, v. 49, n. 1, p. 28-39, february 2002.
[ 84 ] HUSAIN, Iqbal; HOSSAIN, Syed A. Modeling, simulation, and control of
switched reluctance motor drives. IEEE Transaction on Industrial Electronics,
v. 52, n. 6, p. 1625-1634, december 2005.
[ 85 ] INANC, Nihat. Phase current modulation of switched reluctance motor to
minimize torque ripple. Electric Power Systems Research, v. 61, p. 51-55,
2002.
[ 86 ] INDERKA, Robert B.; De DONCKER, Rik W. A. A. DITC – Direct
instantaneous torque control of switched reluctance drives. IEEE Transaction
on Industrial Applications, v. 39, n. 4, p. 1046-1051, july/august 2003.
[ 87 ] __________. High-dynamic direct average torque control for switched
reluctance drives. IEEE Transaction on Industrial Applications, v. 39, n. 4, p.
1040-1045, july/august 2003.
[ 88 ] JACK, Alan G.; FINCH, John W.; WRIGHT, Julian P. Adaptative mesh
generation applied to switched-reluctance motor design. IEEE Transaction on
Industrial Applications, v. 28, n. 2, p. 370-375, march/april 1992.
[ 89 ] JANG, Jyh-Shing Roger. ANFIS: adaptive-network-based fuzzy inference
system. IEEE Transaction on Systems, Man and Cybernetics, v. 23, n. 3, p.
665-685, may/june 1993.
[ 90 ] JANG, Jyh-Shing Roger; SUN, Chuen-Tsai. Neuro-fuzzy modeling and
control. Proceedings of the IEEE, v. 83, n. 3, p. 378-406, march 1995.

182
[ 91 ] JEONG, B.H. et al. Direct torque control for 4-phase switched reluctance
motor drives. In: International Conference on Electrical Machines and
Systems (ICEMS 2005), 8., 2005, Nanjing, v. 1, p. 524-528.
[ 92 ] KANERVA, Sami. Simulation of electrical machines, circuits and control
systems using finite element method and system simulator. Espoo, 2005. 92
p. Thesis (Doctor of Science in Technology), Helsinki University of
Technology, Espoo, 2005.
[ 93 ] KHALIL; Hossain et al. A hybrid sensorless SRM drive with eight- and six-
switched converter topologies. IEEE Transaction on Industrial Applications, v.
41, n. 6, p. 1647-1655, november/december 2005.
[ 94 ] KLINE, Joseph A. Opportunities for switched reluctance motor-drives. In:
Annual Pulp and Paper Industry Technical Conference, 1999, Seattle. p. 42-
47.
[ 95 ] KOIBUCHI, Koichi; OHNO, Tomoyoshi; SAWA, Koichiro. A basic study for
optimal design of switched reluctance motor by finite element method. IEEE
Transactions on Magnetics, v. 33, n. 2, p. 2077-2080, march 1997.
[ 96 ] KRISHNAN, Ramu. A novel converter topology for switched reluctance motor
drives. In: Annual IEEE Power Electronics Specialists Conference (PESC 96),
27., 1996, Baveno. v. 2, p. 1811-1816.
[ 97 ] KRISHNAN, Ramu; PARK, Sung-Yeul; HA, Keunsoo. Theory and operation
of a four-quadrant switched reluctance motor drive with a single controllable
switch - the lowest cost four-quadrant brushless motor drive. IEEE
Transaction on Industrial Applications, v. 41, n. 4, p. 1047-1055, july/august
2005.
[ 98 ] LEE, Chuen Chien. Fuzzy logic in control systems: fuzzy logic controller –
Part I. IEEE Transaction on Systems, Man and Cybernetics, v. 20, n. 2, p.
404-418, march/april 1990.
[ 99 ] _________. Fuzzy logic in control systems: fuzzy logic controller – Part II.
IEEE Transaction on Systems, Man and Cybernetics, v. 20, n. 2, p. 419-435,
march/april 1990.
[ 100 ] LEMARQUAND, Valérie. Synthesis study of magnetic torque sensors. IEEE
Transactions on Magnetics, v. 35, n. 6, p. 4503-4510, november 1999.
[ 101 ] LEONHARD, Werner. Control of Electrical Drives. Berlin: Springer-Verlag,
2001. 470p. 3rd edition.

183
[ 102 ] LEQUESNE, Bruno; GOPALAKRISHNAN, Suresh; OMEKANDA, Avoki M.
Winding short circuits in the switched reluctance drive. IEEE Transaction on
Industrial Applications, v. 41, n. 5, p. 1178-1184, september/october 2005.
[ 103 ] LIAN, Ruey-Jing; LIN, Bai-Fu. Design of a mixed fuzzy controller for multiple-
input multiple-output systems. Mechatronics, v. 15, p. 1225-1252, 2005.
[ 104 ] LIM, Jun-Young et al. A performance of single phase switched reluctance
motor having both radial and axial air gap. In: Annual Conference of the IEEE
Industrial Electronics Society (IECON 98), 24., 1998, Aachen. v. 2, p. 905-
910.
[ 105 ] LIM, Jun-Young et al. Single phase switched reluctance motor for vacuum
cleaner. In: International Symposium on Industrial Electronics (ISIE 2001),
2001, Pusan. v. 2, p 1393-1400.
[ 106 ] LIN, Dingsheng et al. An analytical circuit model of switched reluctance
motors, IEEE Transactions on Magnetics, v. 45, n. 12, p. 5368-5375,
december 2009.
[ 107 ] LIN, Zhengyu et al. Online modeling for switched reluctance motor using B-
spline neural networks. IEEE Transactions on Industry Applications, v. 54, n.
6, p. 3317-3322, december 2007.
[ 108 ] ____________. Torque ripple reduction in switched reluctance motor drives
using B-spline neural networks. IEEE Transactions on Industry Applications,
v. 42, n. 6, p. 1445-1453, november/december 2006.
[ 109 ] LIU, Cheng-Tsung; CHEN, Yan-Nan. On the feasible polygon classifications
of linear switched reluctance machines. In: IEEE International Electric
Machines and Drives Conference, 1997, Milwaukee. p. TB1/11.1 - TB1/11.3.
[ 110 ] LIU, Cheng-Tsung; CHEN, Yen-Ming; PANG, Da-Chen. Performance index
evaluations of a micro axial-flux switched-reluctance motor. In: International
Power Electronics and Motion Control Conference (IPEMC 2006), 5., 2006,
Shanghai. p. 1-5.
[ 111 ] LIU, Cheng-Tsung; SU, Kun-Shian; CHEN, Jyh-Wei. Operational stability
enhancement analysis of a transverse flux linear switched-reluctance motor.
IEEE Transactions on Magnetics, v. 36, n. 5, p. 3699-3702, september 2000.
[ 112 ] LIU, Puyin; LI, Hongxing. Fuzzy neural network theory and application.
Singapore: World Scientific Publishing Co. Pte. Ltd., 2004. 393 p.

184
[ 113 ] LOCMENT, Fabrice; SEMAIL, Eric; PIRIOU, Francis. Design and study of a
multiphase axial-flux machine. IEEE Transactions on Magnetics, v. 42, n. 4,
p. 1427-1430, april 2006.
[ 114 ] LOOP, Benjamin P.; SUDHOFF, Scott D. Switched reluctance machine
model using inverse inductance characterization. IEEE Transactions on
Industry Applications, v. 39, n. 3, p. 743-751, may/june 2003.
[ 115 ] LOVATT, Howard C. Analytical model of a classical switched-reluctance
motor. IEE Proceedings on Electrical Power Applications, v. 152, n. 2, p. 352-
358, march 2005.
[ 116 ] LOVATT, Howard C.; McCLELLAND, Mike L.; STEPHENSON, J.M.
Comparative performance of singly salient reluctance, switched reluctance,
and induction motors. In: International Conference on Electrical Machines and
Drives, 8., 1997, Cambridge. p. 361-365.
[ 117 ] LOVATT, Howard C.; STEPHENSON, J.M. Computer-optimized current
waveforms for switched reluctance motor. IEE Proceedings - B, v. 141, n. 2,
p. 45-51, march 1994.
[ 118 ] __________. Influence of number of poles per phase in switched reluctance
motors. IEE Proceedings – B, v. 139, n. 4, p. 307-314, july 1992.
[ 119 ] LÖWENSTEIN, Lars; HENNEBERGER, Gerhard. Modeling of reluctance
machines with Simplorer. Disponível em: <http://www.ansoft.com/news/
articles/Modeling_of_reluctance_machines_with_SIMPLORER.pdf>. Acesso
em: 10 maio 2010.
[ 120 ] LU, W.Y. et al. Design and simulation of an asymmetric variable reluctance
stepping millimotor. Microsystem Technologies, v. 11, p. 335-342, 2005.
[ 121 ] MA, Bin-Yen et al. Design and implementation of a sensorless switched
reluctance drive system. IEEE Transactions on Aerospace and Electronics
Systems, v. 34, n. 4, p. 1193-1207, october 1998.
[ 122 ] MacMINN, Stephen R. et al. Application of sensor integration techniques to
switched reluctance motor drives. IEEE Transactions on Industry
Applications, v. 28, n. 6, p. 1339-1344, november/december 1992.
[ 123 ] MANOLAS, Iakovos St.; KLADAS, Antonios G.; MANIAS, Stefanos N. Finite-
element-based estimator for high-performance switched reluctance machines
drives. IEEE Transactions on Magnetics, v. 45, n. 3, p. 1266-1269, march
2009.

185
[ 124 ] MAO, Shang-Hsun; DORRELL, David; TSAI, Mi-Ching. Fast analytical
determination of aligned and unaligned flux linkage in switched reluctance
motors based on a magnetic circuit model. IEEE Transactions on Magnetics,
v. 45, n. 7, p. 2935-2942, july 2009.
[ 125 ] MARTINS, João F. et al. New trends in recognizing experimental drives:
fuzzy logic and formal language theories. IEEE Transactions on Fuzzy
Systems, v. 9, n. 1, p. 68-87, february 2001.
[ 126 ] MATERU, Peter N.; KRISHNAN, Ramu. Estimation switched reluctance
motor losses. IEEE Transactions on Industry Applications, v. 28, n. 3, p. 668-
679, may/june 1992.
[ 127 ] MATVEEV, Alexei; UNDELAND, Tore; NILSSEN, Robert. Design optimization
of switched reluctance drives using artificial neural networks. In: International
Power Electronics and Motion Control (EPE-PEMC 2002), 10., 2002,
Dubrovnik. T11-037.
[ 128 ] MAYHAN, Paul; WASHINGTON, Gregory N. Fuzzy model reference learning
control: a new control paradigm for smart structures. Smart Materials and
Structures, v. 7, p. 874-884, 1998.
[ 129 ] MECROW, Barrie C. Fully pitched-winding switched reluctance and stepping-
motor arrangements. IEE Proceedings – B, v. 140, n. 1, p. 61-70, january
1993.
[ 130 ] MENDEL, Jerry M. Fuzzy logic systems for engineering: a tutorial.
Proceedings of the IEEE, v. 83, n. 3, p. 345-377, march 1995.
[ 131 ] MICHAELIDES, Alexandros M.; POLLOCK, Charles; JOLLIFFE, C. Analytical
computation of minimum and maximum inductance in single and two phase
switched reluctance motor. IEEE Transactions on Magnetics, v. 33, n. 2, p.
2037-2040, march 1997.
[ 132 ] MILES, Arturo R. Design of a 5MW, 9000V switched reluctance motor. IEEE
Transactions on Energy Conversion, v. 6, n. 3, p. 484-491, september 1991.
[ 133 ] MILLER, Timothy John Eastham. Optimal design of switched reluctance
motors. IEEE Transactions on Industry Electronics, v. 49, n. 1, p. 15-27,
february 2002.
[ 134 ] MILLER, Timothy John Eastham; McGLIP, M. Nonlinear theory of the
switched reluctance motor for rapid computer-aided design. IEE Proceedings
– B, v. 137, n. 6, p. 337-347, November 1990.

186
[ 135 ] MIR, Sayeed; ELBULUK, Malik E.; HUSAIN, Iqbal. Torque-ripple minimization
in switched reluctance motors using adaptive fuzzy control. IEEE
Transactions on Industry Applications, v. 35, n. 2, p. 461-468, march/april
1999.
[ 136 ] MISIR, Dave; MALKI, Heidar A.; CHEN, Guanrong. Design and analysis of a
fuzzy proportional-integral-derivative controller. Fuzzy Sets and Systems, v.
79, p. 297-314, 1996.
[ 137 ] MOALLEM, Mehdi; ONG, Chee-Mun. Predicting the steady-state
performance of a switched reluctance machine. IEEE Transactions on
Industry Applications, v. 27, n. 6, p. 1087-1097, november/december 1991.
[ 138 ] MOGHBELLI, Hassan H.; MOALLEM, Mehdi; ONG, Chee-Mun. Operational
characteristics of switched reluctance motor drives. In: IEEE International
Symposium on Industrial Electronics, 1992, Xian. v. 2, p. 643-647.
[ 139 ] MOMEN, M. Faiizul; HUSAIN, Iqbal. Design and performance analysis of a
switched reluctance motor for low duty cycle operation. . IEEE Transactions
on Industry Applications, v. 41, n. 6, p. 1612-1618, november/december
2005.
[ 140 ] MURAI, Yoshihiro; CHENG, Ji; YOSHIDA, Masaharu. New soft-switched
reluctance motor drive circuit. In: IEEE Industry Applications Society – Annual
Meeting, 1997, New Orleans. p. 676-681.
[ 141 ] NAGAMINE, Renato Kazuki. Lógica difusa para controle não convencional de
uma viga inteligente. São Carlos, 2001. 117 f. Dissertação (Mestrado em
Engenharia Mecânica), Escola de Engenharia de São Carlos, Universidade
de São Paulo, São Carlos, 2001.
[ 142 ] NAGEL, Nicholas J.; LORENZ, Robert D. Rotating vector methods for smooth
torque control of a switched reluctance motor drive. IEEE Transactions on
Industry Applications, v. 36, n. 2, p. 540-548, march/april 2000.
[ 143 ] NELSON, Andrew L.; CHOW, Mo-Yuen. Characterization of coil faults in an
axial flux variable reluctance PM motor. IEEE Transactions on Energy
Conversion, v. 17, n. 3, p. 340-348, september 2002.
[ 144 ] OLIVEIRA, Ana Margarida de. Modelagem de máquinas elétricas e seus
circuitos elétricos associados utilizando o método de elementos finitos 2D.
Florianópolis, 2004. 196 f. Tese (Doutorado em Engenharia Elétrica),
Universidade Federal de Santa Catarina, Florianópolis, Março 2004.

187
[ 145 ] OMEKANDA, Avoki M. Robust torque and torque-per-inertia optimization of a
switched reluctance motor using the Taguchi methods. IEEE Transactions on
Industry Applications, v. 42, n. 2, p. 473-478, march/april 2006.
[ 146 ] PANDA, Sanjib Kuamr; AMARATUNGA, Gehan A. J. Waveform detection
technique for indirect rotor-position sensing of switched-reluctance motor
drives. Part 1: Analysis. IEE Proceedings – B, v. 140, n. 1, p. 80-88, january
1993.
[ 147 ] ________. Waveform detection technique for indirect rotor-position sensing of
switched-reluctance motor drives. Part 2: Experimental results. IEE
Proceedings – B, v. 140, n. 1, p. 89-96, january 1993.
[ 148 ] PARREIRA, Baltazar et al. Obtaining the magnetic characteristics of an 8/6
switched reluctance machine: from FEM analysis to the experimental tests.
IEEE Transactions on Industry Electronics, v. 52, n. 6, p. 1635-1643,
december 2005.
[ 149 ] PARVIAINEN, Asko; NIEMELÄ, Markku; PYRHÖNEN, Juha. Modeling of
axial axial flux permanent-magnet machines. IEEE Transaction on Industry
Applications, v. 40, n. 5, p. 1333-1340, september-october 2004.
[ 150 ] PHILIPS, Dirk Alexander. Switched reluctance drives: new aspects. IEEE
Transactions on Power Electronics, v. 5, n. 4, p. 454-458, october 1990.
[ 151 ] PILLAY, Pragasen; LIU, Yaguang; DURHAM, Ormonde G. A novel switched
reluctance motor drive with optical graphical programming technology. IEEE
Transactions on Industry Electronics, v. 47, n. 4, p. 915-919, august 2000.
[ 152 ] POLLOCK, Charles; BRACKLEY, Mark. Comparison of the acoustic noise of
a flux-switching and a switched reluctance drive. IEEE Transactions on
Industry Applications, v. 39, n. 3, p. 826-834, may/june 2003.
[ 153 ] PULLE, Duco W.J. New data base for switched reluctance drive simulation.
IEE Proceedings – B, v. 138, n. 6, p. 331-337, november 1991.
[ 154 ] RABINOVICI, Raul. Scaling of switched reluctance motors. IEE Proceedings
on Electrical Power Applications, v. 142, n. 1, p. 1-4, january 1995.
[ 155 ] RADUN, Arthur V. Analytical calculation of the switched reluctance motor’s
unaligned inductance. IEEE Transactions on Magnetics, v. 35, n. 6, p 4473-
4481, november 1999.

188
[ 156 ] RADUN, Arthur V. Design considerations for the switched reluctance motor.
IEEE Transactions on Industry Applications, v. 31, n. 5, p. 1079-1087,
september/ october 1995.
[ 157 ] RAFAJDUS, Pavol et al. Torque optimization of switched reluctance motor.
In: Workshop on Variable Reluctance Electrical Machines, 2002, Cluj-
Napoca. p. 2-5.
[ 158 ] RAFAJDUS, Pavol, ZRAK, Ivan; HRABOVCOVÁ, Valéria. Analysis of the
switched reluctance motor (SRM) parameters. Journal of Electrical
Engineering, v. 55, n. 7-8, p. 195-200, 2004.
[ 159 ] RAHMAN, Khwaja M. et al. Optimized torque control of switched reluctance
motor at all operational regimes using neural network. IEEE Transactions on
Industry Applications, v. 37, n. 3, p. 904-913, may/june 2001.
[ 160 ] RASMUSSEN, Peter Omand; ANDREASEN, Jens H.; PIJANOWSKI, Joseph
Michael. Structural stator spacers - a solution for noise reduction of switched
reluctance motors. IEEE Transactions on Industry Applications, v. 40, n. 2, p.
574-581, march/april 2004.
[ 161 ] RAULIN, Virginie; RADUN, Art; HUSAIN, Iqbal. Modeling of losses in
switched reluctance machines. IEEE Transactions on Industry Applications, v.
40, n. 6, p. 1560-1569, november/december 2004.
[ 162 ] REAY, Donald S. et al. Switched reluctance motor control via fuzzy adaptive
systems. IEEE Control Systems Magazine, v. 15, n. 3, p. 8-15, june 1995.
[ 163 ] RODRIGUES, Marcelo Guimarães; COSTA BRANCO, Paulo José da;
SUEMITSU, Walter Issamu. Fuzzy logic torque ripple reduction by turn-off
angle compensation for switched reluctance motors. IEEE Transaction on
Industrial Electronics, v. 48, n. 3, p. 711-715, june 2001.
[ 164 ] RODRIGUES, Marcelo Guimarães et al. Fuzzy logic control of a switched
reluctance motor. In: IEEE International Symposium on Industrial Electronics,
1997, Guimarães. v.2, p. 527-531.
[ 165 ] ROOS, Fredrik, JOHANSSON, Hans; WIKANDER, Jan. Optimal selection of
motor and gearhead in mechatronic applications. Mechatronics, v. 16, n. 1, p.
63-72, 2006.
[ 166 ] RYCKAERT, Paul et al. A comparison of classical, state-space and neural
network control to avoid slip. Mechatronics, v. 15, n. 10, p. 1273-1288, 2005.

189
[ 167 ] SANTOS, Antonio Raimundo dos. Metodologia científica: a construção do
conhecimento. Rio de Janeiro: DP&A, 2002. 168 p., 5a edição.
[ 168 ] SCHULZ, Steven E.; RAHMAN, Khwaja M. High-performance digital PI
current regulator for EV switched reluctance motor drives. IEEE Transaction
on Industrial Applications, v. 39, n. 4, p. 1118-1126, july/august 2003.
[ 169 ] SERAFIM, Emerson Silveira. Influência dos parâmetros geométricos no
comportamento vibracional e acústico de um motor de relutância chaveado.
Florianópolis, 2002. 128 f. Tese (Doutorado em Engenharia Elétrica),
Universidade Federal de Santa Catarina, Florianópolis, 2002.
[ 170 ] SHETH, Nimit K.; RAJAGOPAL, K.R. Calculation of the flux-linkage
characteristics of a switched reluctance motor by flux tube method. IEEE
Transactions on Magnetics, v. 41, n. 10, p. 4069-4071, october 2005.
[ 171 ] SILAGHI, Helga; SPOIALÃ, Viorica. Dual voltage switched reluctance motors
drives with converters. In: Workshop on Variable Reluctance Electrical
Machines, 2002, Cluj-Napoca. p. 42-47.
[ 172 ] SILVA NETO, José L. da et al. Application of learning methodologies in
control of power electronics drives. In: International Symposium on Industrial
Electronics, 2003, Rio de Janeiro. p. 358-363.
[ 173 ] SOZER, Yilmaz; TORREY, David A.; MESE, Erkan. Automatic control of
excitation parameters for switched-reluctance motor drives. IEEE
Transactions on Power Electronics, v. 18, n. 2, p. 594-603, march 2003.
[ 174 ] STANKOVIC, Aleksandar M. et al. On torque ripple reduction in current-fed
switched reluctance motors. IEEE Transactions on Industrial Electronics, v.
46, n. 1, p. 177-183, february 1999.
[ 175 ] STEPHENSON, J.M.; JENKINSON, Graeme C. Single-phase switched
reluctance motor design. IEE Proceedings on Electrical Power Applications,
v. 147, n. 2, p. 131-139, march 2000.
[ 176 ] STET, Cristian et al. Hybrid electric vehicles based on switched reluctance
motor drives. Disponível em: <http://users.utcluj.ro/~szabol/Papers/Oradea
2004Stet.pdf>. Acesso em: 20 agosto 2010.
[ 177 ] TAHOUR, Ahmed; ABID, Hamza; AISSAOUI, Abdel Ghani. Adaptive neuro-
fuzzy controller of switched reluctance motor. Serbian Journal of Electrical
Engineering, v. 4, n. 1, p. 23-34, june 2007.
190
[ 178 ] TAKEMOTO, Masatsugu et al. Radial force and torque of a bearingless
switched reluctance motor operating in a region of magnetic saturation. IEEE
Transactions on Industry Applications, v. 40, n. 1, p. 103-112, january/
february 2004.
[ 179 ] TANG, Yifan. Characterization, numerical analysis, and design of switched
reluctance motors. IEEE Transactions on Industry Applications, v. 33, n. 6, p.
1544-1552, november/december 1997.
[ 180 ] TANG, Zhangjun et al. Prediction of electromagnetic forces and vibrations in
SRMs operating at steady-state and transient speeds. IEEE Transactions on
Industry Applications, v. 41, n. 4, p. 927-934, july/august 2005.
[ 181 ] TANG, Zhangjun et al. Young´s modulus for laminated machine structures
with particular reference to switched reluctance motors vibrations. IEEE
Transactions on Industry Applications, v. 40, n. 3, p. 748-754, may/june 2004.
[ 182 ] TANG, Zhangjun; PILLAY, Pragasen; OMEKANDA, Avoki M. Vibration
prediction in switched reluctance motors with transfer function identification
from shaker and force Hammer testes. IEEE Transactions on Industry
Applications, v. 39, n. 4, p. 978-985, july/august 2003.
[ 183 ] THOMAS, David E.; ARMSTRONG-HÉLOUVRY, Brian. Fuzzy logic control –
a taxonomy of demonstrated benefits. Proceedings of the IEEE, v. 83, n. 3, p.
407-421, march 1995.
[ 184 ] TOMCZEWSKI, Krzysztof; WACH, P. Control characteristics for quasi-optimal
operation of switched reluctance motors. Electrical Engineering, v. 85, p. 275-
281, 2003.
[ 185 ] TORREY, David A.; LANG, Jeffrey H. Optimal-efficiency excitation of
variable-reluctance motor drives. IEE Proceedings – B, v. 138, n. 1, p. 1-14,
january 1991.
[ 186 ] TRIFA, Viorel; RABULEA, Ovidiu. Switched reluctance motor phase
inductivity approximation using artificial neural networks. In: Workshop on
Variable Reluctance Electrical Machines, 2002, Cluj-Napoca. p. 52-55.
[ 187 ] UDDIN, M. Nasir; ABIDO, Mohammed Ali; RAHMAN, M. Azizur. Real-time
performance evaluation of a genetic-algorithm-based fuzzy logic controller for
IPM motor drives. IEEE Transactions on Industry Applications, v. 41, n. 1, p.
246-252, january/february 2005.

191
[ 188 ] UNIVERSIDADE FEDERAL FLUMINENSE. Apresentação de trabalhos
monográficos de conclusão de curso. Niterói: EdUFF, 2007. 9 ed., 90 p.
[ 189 ] UNNEWEHR, Lewis E.; KOCH, W.H. An axial air-gap reluctance motor for
variable speed applications. In: IEEE PES Summer Meeting & EHV/UHV
Conference, 1973, Vancouver. p. 367-376.
[ 190 ] USTUN, Oguz. Measurement and real-time modeling of inductance and flux
linkage in switched reluctance motors. IEEE Transactions on Magnetic, v. 45,
n. 12, p. 5376-5382, december 2009.
[ 191 ] VADIEE, Nader; JAMSHIDI, Mohammad; ROSS, Timothy J. Fuzzy logic and
control: software and hardware applications. Englewood Cliffs: Prentice Hall,
1993. 397 p.
[ 192 ] VAS, Peter. Electrical machines and drives: a space-vector theory approach.
New York: Oxford University Press, 1992. 832 p.
[ 193 ] VIOREL, Ioan-Adrian; LORÁND, Szabó; ZOLTÁN, Kovács. On the switched
reluctance linear motor positioning system control. In: International
Conference on Power Electronics, Drives and Motion (PCIM), 1998,
Nurnberg. v. Intelligent Motion, p. 21-30.
[ 194 ] VISINKA, Radim. 3-Phase switched reluctance (SR) sensorless motor control
using a 56F80x, 56F8100 or 56F8300 device: design of a motor control
application. Freescale Semiconductor, Inc. Application Note AN 1932, rev. 2.
2/2005. 64p.
[ 195 ] WEI, Wang et al. A sensorless drive method for switched reluctance motor
based on fuzzy logic. In: International Conference on Communications,
Circuits and Systems, 2007, Kokura. p. 887-890.
[ 196 ] YAGER, Ronald R.; FILEV, Dimitar P. Essentials of fuzzy modeling and
control. New York: John Wiley & Sons, 1994. 388 p.
[ 197 ] ZHANG, Jinhui; RADUN, Arthur V. A new method to measure the switched
reluctance motor’s flux. IEEE Transactions on Industry Applications, v. 42, n.
5, p. 1171-1176, september/october 2006.
[ 198 ] ZHILICHEV, Yuriy N. Three-dimensional analytic model of permanent magnet
axial flux machine. IEEE Transactions on Magnetics, v. 34, n. 6, p. 3897-
3901, november 1998.

10 APÊNDICES
193
10.1 PROGRAMA PARA CÁLCULO DAS INDUTÂNCIAS PELO MÉTODO DE
ELEMENTOS FINITOS 3D UTILIZANDO O SOFTWARE ANSYS
/FILNAME,MRC /PREP7 /TITLE, MOTOR DE RELUTANCIA CHAVEADO DE FLUXO AXIAL ! !******************************************************************************************************************* !* TIPO DE ANÁLISE * !******************************************************************************************************************* ! ANTYPE,STATIC ! ANÁLISE ELETROSTÁTICA ! !******************************************************************************************************************* !* SISTEMAS DE COORDENADAS * !******************************************************************************************************************* ! CSYS,1 ! COORDENADAS CILÍNDRICAS ! !******************************************************************************************************************* !* SISTEMA DE UNIDADES * !******************************************************************************************************************* ! EMUNIT,MKS ! MKS ! !******************************************************************************************************************* !* TIPO DE ELEMENTO * !******************************************************************************************************************* ! ET,1,SOLID96 ! TIPO DE ELEMENTO ! !******************************************************************************************************************* !* DEFINIÇÕES * !******************************************************************************************************************* ! AB=3/1000 ! ALTURA DA BOBINA APE=20 ! ÂNGULO ENTRE OS PÓLOS DO ESTATOR APR=50 ! ÂNGULO ENTRE OS PÓLOS DO ROTOR ENE=5/1000 ! ESPESSURA DO NÚCLEO DO ESTATOR ENR=17/1000 ! ESPESSURA DO NÚCLEO DO ROTOR EPE=34/1000 ! ESPESSURA DO PÓLO DO ESTATOR EPR=26/1000 ! ESPESSURA DO PÓLO DO ROTOR GAP=1.9/1000 ! COMPRIMENTO DO ENTREFERRO LB=21/1000 ! LARGURA DA BOBINA NB=6 ! NÚMERO DE BOBINAS NEB=175 ! NÚMERO DE ESPIRAS MAPE=20 ! METADE DO ÂNGULO DO PÓLO DO ESTATOR MAPR=20 ! METADE DO ÂNGULO DO PÓLO DO ROTOR PARAP=-45 ! POS ANG REL ALINHAMENTO DOS PÓLOS REPE=63/1000 ! RAIO EXTERNO DO PÓLO DO ESTATOR REPR=63/1000 ! RAIO EXTERNO DO PÓLO DO ROTOR RINE=20/1000 ! RAIO INTERNO DO NÚCLEO DO ESTATOR RINR=20/1000 ! RAIO INTERNO DO NÚCLEO DO ROTOR RIPE=31.5/1000 ! RAIO INTERNO DO PÓLO DO ESTATOR RIPR=31.5/1000 ! RAIO INTERNO DO PÓLO DO ROTOR RMEIB=RIPE-AB!-0.5/1000 ! RAIO MENOR INFERIOR DA BOBINA RMAIB=RIPE!-0.5/1000 ! RAIO MAIOR INFERIOR DA BOBINA RMESB=REPE!+0.5/1000 ! RAIO MENOR SUPERIOR DA BOBINA

194
RMASB=REPE+AB!+0.5/1000 ! RAIO MAIOR SUPERIOR DA BOBINA DZFNE=ENR+EPR+GAP+EPE ! DIST Z DA FACE DO NÚCLEO DO ESTATOR DZFPE=ENR+EPR+GAP ! DIST Z DA FACE DO PÓLO DO ESTATOR DZFPR=ENR+EPR ! DIST Z DA FACE DO PÓLO DO ROTOR DZF1B=ENR+EPR+GAP+EPE-LB!-1/1000 ! DIST Z DA FACE 1 DA BOBINA DZF2B=ENR+EPR+GAP+EPE!-1/1000 ! DIST Z DA FACE 2 DA BOBINA LEIXO=ENR+EPR+GAP+EPE+ENE ! COMPRIMENTO DO EIXO ! !******************************************************************************************************************* !* MATERIAIS * !******************************************************************************************************************* ! MP,MURX,1,1 ! MATERIAL 1 (AR) MP,MURY,1,1 ! MATERIAL 1 (AR) MP,MURZ,1,1 ! MATERIAL 1 (AR) TB,BH,2,,26 ! MATERIAL 2 - AÇO 1020 (FERROMAGNÉTICO) TBPT,,90.00,0.5000 ! PONTOS DA CURVA B VERSUS H TBPT,,270.00,1.0000 ! USADA A CURVA DO AÇO 1010 TBPT,,318.25,1.1000 ! SIMILAR MAGNETICAMENTE À DO AÇO 1020 TBPT,,384.50,1.2000 ! C:\Program Files\Ansys Inc\v100\ANSYS\ TBPT,,479.50,1.3000 ! matlib\emagSa1010.SI_MPL TBPT,,608.56,1.3875 ! TBPT,,755.44,1.4500 ! TBPT,,939.19,1.5000 ! TBPT,,1188.90,1.5450 ! TBPT,,1407.90,1.5750 ! TBPT,,2077.30,1.6275 ! TBPT,,3117.90,1.6738 ! TBPT,,3969.40,1.7023 ! TBPT,,4843.70,1.7275 ! TBPT,,6081.30,1.7583 ! TBPT,,8581.10,1.8088 ! TBPT,,11066.00,1.8500 ! TBPT,,14986.00,1.9025 ! TBPT,,33003.00,2.0500 ! TBPT,,59203.00,2.1500 ! TBPT,,93215.00,2.2262 ! TBPT,,0.11888E+06,2.2700 ! TBPT,,0.16356E+06,2.3337 ! TBPT,,0.22079E+06,2.4075 ! TBPT,,0.37397E+06,2.6000 ! TBPT,,0.69228E+06,3.0000 ! ! !******************************************************************************************************************* !* PONTOS DO ROTOR * !******************************************************************************************************************* ! K,1,RIPR,-MAPR+PARAP,ENR ! PONTO 1 K,2,RIPR,MAPR+PARAP,ENR ! PONTO 2 K,3,REPR,-MAPR+PARAP,ENR ! PONTO 3 K,4,REPR,MAPR+PARAP,ENR ! PONTO 4 K,5,RIPR,-MAPR+PARAP,DZFPR ! PONTO 5 K,6,RIPR,MAPR+PARAP,DZFPR ! PONTO 6 K,7,REPR,-MAPR+PARAP,DZFPR ! PONTO 7 K,8,REPR,MAPR+PARAP,DZFPR ! PONTO 8

195
! !******************************************************************************************************************* !* PONTOS DO ESTATOR * !******************************************************************************************************************* ! K,9,RIPE,-MAPE,DZFPE ! PONTO 9 K,10,RIPE,MAPE,DZFPE ! PONTO 10 K,11,REPE,-MAPE,DZFPE ! PONTO 11 K,12,REPE,MAPE,DZFPE ! PONTO 12 K,13,RIPE,-MAPE,DZFNE ! PONTO 13 K,14,RIPE,MAPE,DZFNE ! PONTO 14 K,15,REPE,-MAPE,DZFNE ! PONTO 15 K,16,REPE,MAPE,DZFNE ! PONTO 16 ! !******************************************************************************************************************* !* LINHAS DO ROTOR * !******************************************************************************************************************* ! L,1,2 ! LINHA 1 L,3,4 ! LINHA 2 L,1,3 ! LINHA 3 L,2,4 ! LINHA 4 L,5,6 ! LINHA 5 L,7,8 ! LINHA 6 L,5,7 ! LINHA 7 L,6,8 ! LINHA 8 L,1,5 ! LINHA 9 L,2,6 ! LINHA 10 L,3,7 ! LINHA 11 L,4,8 ! LINHA 12 ! !******************************************************************************************************************* !* LINHAS DO ESTATOR * !******************************************************************************************************************* ! L,9,10 ! LINHA 13 L,11,12 ! LINHA 14 L,9,11 ! LINHA 15 L,10,12 ! LINHA 16 L,13,14 ! LINHA 17 L,15,16 ! LINHA 18 L,13,15 ! LINHA 19 L,14,16 ! LINHA 20 L,9,13 ! LINHA 21 L,10,14 ! LINHA 22 L,11,15 ! LINHA 23 L,12,16 ! LINHA 24 ! !******************************************************************************************************************* !* ÁREAS DO ROTOR * !******************************************************************************************************************* ! AL,1,2,3,4 ! ÁREA 1 AL,5,6,7,8 ! ÁREA 2 AL,1,5,9,10 ! ÁREA 3

196
AL,2,6,11,12 ! ÁREA 4 AL,3,7,9,11 ! ÁREA 5 AL,4,8,10,12 ! ÁREA 6 ! !******************************************************************************************************************* !* ÁREAS DO ESTATOR * !******************************************************************************************************************* ! AL,13,14,15,16 ! ÁREA 7 AL,17,18,19,20 ! ÁREA 8 AL,13,17,21,22 ! ÁREA 9 AL,14,18,23,24 ! ÁREA 10 AL,15,19,21,23 ! ÁREA 11 AL,16,20,22,24 ! ÁREA 12 ! !******************************************************************************************************************* !* VOLUME DO EIXO * !******************************************************************************************************************* ! CYLIND,0,RINR,0,LEIXO,0,360 ! VOLUME 1 (EIXO) ! !******************************************************************************************************************* !* VOLUME DO ROTOR * !******************************************************************************************************************* ! VA,1,2,3,4,5,6 ! VOLUME 2 VGEN,4,2,2,1,0,90,0 ! CRIA VOL 3/4/5 A PARTIR VOL 2 CYLIND,RINR,REPR,0,ENR,0,360 ! VOLUME 6 VADD,2,3,4,5,6 ! VOLUME FINAL 2 (ROTOR) NUMMRG,ALL NUMCMP,VOLU ! !******************************************************************************************************************* !* VOLUME DO ESTATOR * !******************************************************************************************************************* ! CYLIND,RINE,REPE,DZFNE,LEIXO,0,360 ! VOLUME 7 (NOVO VOLUME 3) VA,7,8,9,10,11,12 ! VOLUME 8 (NOVO VOLUME 4) VGEN,6,4,4,1,0,60,0 ! CRIA VOL 9/10/11/12/13 A PARTIR ! VOL 8 (NOVOS VOLUMES 5/6/7/8/9) VADD,3,4,5,6,7,8,9 ! VOLUME FINAL 3 (ESTATOR) NUMMRG,ALL NUMCMP,VOLU ! !******************************************************************************************************************* !* VOLUME DO AR * !******************************************************************************************************************* ! CYLIND,0.100,0,-0.030,0.115,0,360, ! VOLUME 4 (AR) VOVLAP,ALL NUMCMP,VOLU ! !******************************************************************************************************************* !* MATERIAL DOS VOLUMES * !******************************************************************************************************************* ! VSEL,S,VOLU,,1 ! SELEÇÃO DO VOLUME 1 CM,EIXO,VOLU ! NOME DO VOLUME 1 (EIXO) VATT,1,1,1 ! MATERIAL DO VOLUME 1

197
VSEL,S,VOLU,,2 ! SELEÇÃO DO VOLUME 2 CM,ROTOR,VOLU ! NOME DO VOLUME 2 (ROTOR) VATT,2,1,1 ! MATERIAL DO VOLUME 2 VSEL,S,VOLU,,3 ! SELEÇÃO DO VOLUME 3 CM,ESTATOR,VOLU ! NOME DO VOLUME 3 (ESTATOR) VATT,2,1,1 ! MATERIAL DO VOLUME 3 VSEL,S,VOLU,,4 ! SELEÇÃO DO VOLUME 4 CM,AR,VOLU ! NOME DO VOLUME 4 (AR) VATT,1,1,1 ! MATERIAL DO VOLUME 4 ALLSEL,ALL ! !******************************************************************************************************************* !* GERANDO NÓS / ELEMENTOS DE VOLUME / MALHAS * !******************************************************************************************************************* ! SMRT,1 ! MSHAPE,1,3D ! CMSEL,S,EIXO ! VMESH,ALL ! CMSEL,S,ROTOR ! VMESH,ALL ! CMSEL,S,ESTATOR ! VMESH,ALL ! SMRT,5 ! MSHAPE,1,3D ! MSHKEY,0 ! CMSEL,S,AR ! VMESH,ALL ! ALLSEL,ALL ! !******************************************************************************************************************* !* CRIANDO A BOBINA * !******************************************************************************************************************* ! LOCAL,12,0,(REPE+RIPE)*0.5-0.0015,0,(DZFNE+DZFPE)*0.5 WPCSYS,-1 RACE,(REPE-RIPE)*0.5+0.0025,0.0015+0.5*40*3.14*REPE/180,,250,AB,LB,,,'COIL1' /ESHAPE,1 EPLOT FINISH ! !******************************************************************************************************************* !* DEFININDO AS CONDIÇÕES DE CONTORNO EXTERNO * !* (ATRIBUI POTENCIAL ESCALAR ZERO NA FRONTEIRA EXTERNA) * !******************************************************************************************************************* ! /SOLU NSEL,S,LOC,X,100/1000 ! SELEÇÃO DA LATERAL DO CILINDRO EXTERNO NSEL,A,LOC,Z,-30/1000 ! SELEÇÃO DA BASE 1 DO CILINDRO EXTERNO NSEL,A,LOC,Z,115/1000 ! SELEÇÃO DA BASE 2 DO CILINDRO EXTERNO D,ALL,MAG,0 ALLSEL,ALL ! !SOLVE ! MAGSOLV,3,,,,,0 FINISH

198
10.2 EQUAÇÕES DAS INDUTÂNCIAS E DE SUAS DERIVADAS
10.2.1 INDUTÂNCIAS
As equações da indutância própria LA1A1 são:
a) Com o método experimental
.1082,10θ10.623,1
θ10.716,5θ10.327,5θ10 . 999,2 θL
03-04-
207-308410-
1A1A
=
(10.1)
b) Com o método MEF-2D
.1083,10θ10.277,5
θ10.626,2θ10.964,5θ10 . 301,3 θL
03-05-
205-307409-
1A1A
=
(10.2)
c) Com o método MEF-3D
.1056,137,989.10
2,352.1010.309,510 . 8856,2L
03-05-
2-053074-09
A1A1
=
(10.3)
As equações da indutância mútua MA1A2 são:
a) Com o método experimental
.10182,16,857.10
.10981,610.381,110 . 665,7M
03-06-
2-063074-10
A1A2
=
(10.4)
b) Com o método MEF-2D
.105,95,2.10
10.295,110.812,210 . 593,1M
04-05-
2-053074-09
A1A2
=
(10.5)
c) Com o método MEF-3D
.1015,17,919.10
10.477,110.106,310 . 73628,1M
03-05-
2-053074-09
A1A2
=
(10.6)
As equações da indutância mútua MA1B1 são:
a) Com o método experimental
0305206-
3-084095-12
A1B1
10.577,210.182,41,569.10
.10998,910.481,110 . 6,889- M
= (10.7)
b) Com o método MEF-2D
.10771,22,3.10
10.405,210.929,17,1.10
.10236,110.014,110 . 3,181 M
03-04-
205306408-
5-096117-14
A1B1
=
(10.8)

199
Com o método MEF-3D
0305205-
3-074095-11A1B1
10.309,310.085,31,275.10
.10282,510.885,610 . 2,925- M
= (10.9)
As equações da indutância mútua MA1B2 são:
a) Com o método experimental
03
05206-308-
4-095126-14
A1B2
10.698,1
10.317,31,882.1010.765,9
10.149,110.083,210 . 887,1M
=
(10.10)
b) Com o método MEF-2D
0304
205306-408-
5-106127-14A1B2
10.882,110.7,1
10.507,11,24.1010.635,4
10.02,810.485,610 . 996,1M
=
(10.11)
c) Com o método MEF-3D
03
06205307-
4-085116-13
A1B2
10.21,2
10.141,810.434,16,595.10
.10109,110.148,810 . 20919,2M
=
(10.12)
As equações da indutância mútua MA1C1 são:
a) Com o método experimental
03-
06206307-
4-095126-15
A1C1
1,789.10
10.419,110.82,11,042.10
.10644,110.322,810 . 4,617- M
=
(10.13)
b) Com o método MEF-2D
03-
06207308-
4-095116-13A1C1
1,821.10
10.27,810.532,46,113.10
.10242,410.887,610 . 3,311 M
=
(10.14)
c) Com o método MEF-3D
03-06
207307408-
5-106127-15A1C1
.10141,210.711,8
10.092,110.144,21,313.10
10.723,210.366,210 . 7,462- M
=
(10.15)
As simulações com o protótipo do MRC são executadas somente com os
valores obtidos pelo método MEF-3D. Como as formas de onda das indutâncias
MA1B2() e MA1C1() são espelhadas em relação ao eixo “y”, para facilitar a

200
implementação, é utilizada a equação 10.12 ao invés da equação 10.15 para a
indutância MA1C1(), alterando na equação 10.12 a posição angular de para 2,
sendo as relações entre esses ângulos apresentadas no item 3.5 do Capítulo 3.
Logo, a equação 10.15 pode ser modificada para:
03
2
062
2
053
2
07-
4
2
-085
2
116
2
-13
2A1C1
2,21.10
θ8,141.10θ1,434.10θ6,595.10
θ1,109.10θ8,148.10θ10 . 2,20919 θM
=
(10.16)
As equações da indutância mútua MA1C2 são:
a) Com o método experimental
03-05-
205307408-
5-106127-15
A1C2
10.674,27,738.10
10.133,110.993,62,092.10
.10306,310.651,210 . 8,452 M
=
(10.17)
b) Com o método MEF-2D
03-07
205306408-
5-096127-14A1C2
.1073,210.38,5
10.41,110.543,16,122.10
10.091,110.973,810 . 2,789- M
=
(10.18)
c) Com o método MEF-3D
0304205-
3-074095-11A1C2
10.924,210.29,11,422.10
10.382,510.256,710 . 3,174 M
= (10.19)
De forma análoga ao explicado anteriormente para a equação 10.15, a
equação 10.19 pode também ser modificada, utilizando o ângulo 2 na equação
10.9, devido ao espelhamento em relação ao eixo “y” das formas de onda das
indutâncias MA1B1() e MA1C2(). Logo, a equação 10.19 pode ser modificada para:
03
2
052
2
05-
3
2
-074
2
095
2
-11
2A1C2
3,309.10θ3,085.10θ1,275.10
θ5,282.10θ6,885.10θ10 . 2,925- θM
= (10.20)
10.2.2 DERIVADAS DAS INDUTÂNCIAS
A seguir são calculadas as derivadas das indutâncias que serão utilizadas nos
cálculos dos conjugados eletromagnéticos.
No cálculo das derivadas das indutâncias, as equações obtidas no item
anterior que estavam em função do ângulo em graus, devem ser utilizadas com o
ângulo em radianos.

201
A transformação de radianos para graus é dada pela equação:
)rad(.29578,57)rad(.180
)( =
= (10.21)
As equações que se seguem serão escritas em função do fator F = 57,29578
para melhor visualização, e para o ângulo , em graus.
As derivadas das equações 10.1 a 10.3, representativas das indutâncias
próprias LA1A1, em relação ao ângulo , são:
a) Com o método experimental
).F1,623.10
θ11,432.10θ15,981.10θ10 . (11.996 θ
θL
04-
07-208310-A1A1 =
(10.22)
b) Com o método MEF-2D
F)..10277,5
.10252,510.892,1710 . (13,204 L
05-
05-207309-A1A1 =
(10.23)
c) Com o método MEF-3D
F)..10989,7
.10704,410.927,1510 . (11,5424 L
05-
05-207309-A1A1 =
(10.24)
As derivadas das equações 10.4 a 10.6, representativas das indutâncias
mútuas MA1A2, em relação ao ângulo , são:
a) Com o método experimental
F)..10857,6
962,1310.143,410 . 66,30(M
05-
06-207-310-A1A2 =
(10.25)
b) Com o método MEF-2D
F)..102,5
.1059,210.436,810 . 372,6(M
05-
05-207309-A1A2 =
(10.26)
c) Com o método MEF-3D
F)..10919,7
.10954,210.318,910 .9451,6(M
05-
05-207309-A1A2 =
(10.27)
202
As derivadas das equações 10.7 a 10.9, representativas das indutâncias
mútuas MA1B1, em relação ao ângulo , são:
a) Com o método experimental
F).10.182,410.138,3
.10994,2910.924,510 .445,34(M
0506-
208-309412-A1B1
=
(10.28)
b) Com o método MEF-2D
F)..103,2
.1081,410.787,510.4,28
.1018,610.084,610 .267,22(M
04-
05-206308-
409-511614-A1B1
=
(10.29)
c) Com o método MEF-3D
F).10.085,310.55,2
.10846,1510.54,2710 .625,14(M
0505-
207-309411-A1B1
=
(10.30)
As derivadas das equações 10.10 a 10.12, representativas das indutâncias
mútuas MA1B2, em relação ao ângulo , são:
a) Com o método experimental
F)..10317,310.764,310.295,29
.10596,410.415,1010 .322,11(M
05-06208-
309-412514-A1B2
=
(10.31)
b) Com o método MEF-2D
F)..107,1.10014,310.72,310.54,18
.101,4010.91,3810 .972,13(M
04-05-206308-
410-512614-A1B2
=
(10.32)
c) Com o método MEF-3D
F)..10141,810.868,210.785,19
.10436,410.74,4010 .2551,13(M
06-05207-
308-411513-A1B2
=
(10.33)
As derivadas das equações 10.13, 10.14 e 10.16, representativas das
indutâncias mútuas MA1C1, em relação ao ângulo , são:
a) Com o método experimental

203
F).10.419,110.64,310.126,3
.10576,610.61,4110 .702,27(M
06-06207-
309-412515-A1C1
=
(10.34)
b) Com o método MEF-2D
F)..1027,810.064,910.339,18
.10968,1610.435,3410 .866,19(M
06-07208-
309-411513-A1C1
=
(10.35)
c) Com o método MEF-3D
).F8,141.10θ2,868.10θ19,785.10
θ4,436.10θ40,74.10θ10 (13,2551.θ
θM
06-
2
052
2
07-
3
2
08-4
2
115
2
13-2A1C1
=
(10.36)
As derivadas das equações 10.17, 10.18 e 10.20, representativas das
indutâncias mútuas MA1C2, em relação ao ângulo , são:
a) Com o método experimental
F).10.738,7
.10266,210.979,2001.368,8
.1053,1610.906,1510 .164,59(M
05-
05-207308-
410-512615-A1C2
=
(10.37)
b) Com o método MEF-2D
F).10.338,5
.1082,210.629,401.488,24
.10455,510.838,5310 .523,19(M
07-
05-206308-
409-512614-A1C2
=
(10.38)
c) Com o método MEF-3D
).F3,085.10θ2,55.10
θ15,846.10θ27,54.10θ10 14,625.(θ
θM
05-
2
05-
2
2
07-3
2
094
2
11-2A1C2
=
(10.39)

204
10.3 LÓGICA NEBULOSA
10.3.1 HISTÓRICO
O filósofo grego Aristóteles criou a ciência da lógica estabelecendo um
conjunto de regras rígidas para obter conclusões a serem aceitas como logicamente
válidas. A teoria diz: “todo raciocínio lógico é baseado em premissas e conclusões, e
atribui valores às afirmações, classificando-as como verdadeiras ou falsas”.
No século XIV, o filósofo inglês William of Ockam simplificou um modelo
criado a partir da natureza, utilizando uma lógica baseada em informações que não
eram nem totalmente verdadeiras nem totalmente falsas.
Em 1847, o matemático e filósofo inglês George Boole publicou o livro “The
Mathematical Analysis of Logic” onde atribuiu valores numéricos para as afirmações:
“1” para premissas verdadeiras e “0” para premissas falsas. Nascia a álgebra
booleana estabelecendo operações baseadas nesses valores. Grande parte da
lógica tradicional de controle e/ou computação usa as operações executadas nessa
álgebra.
Em 1903, o matemático e filósofo galês Bertrand Arthur William Russell, autor
de importantes trabalhos sobre lógica matemática, publicou um problema que ficou
famoso como o “paradoxo de Russell”, que não podia ser resolvido pela lógica
aristotélica tradicional. Posteriormente, este problema foi resolvido utilizando a lógica
nebulosa.
Na década de 1930, o matemático e filósofo polonês Jan Lukasiewicz
desenvolveu uma lógica multinível, argumentando sobre a lei da contradição: uma
afirmação contrária à natureza psicológica do homem pode ser válida
matematicamente se os graus de verdade não forem bivalentes (“verdadeiro” ou
“falso”).
Em 1965, o matemático e engenheiro iraniano-americano Lotfi Asker Zadeh,
nascido na cidade de Baku no Azerbaijão, considerado um grande colaborador do
controle moderno, publicou o artigo “Fuzzy Sets” (ZADEH, 1965) criando uma nova
teoria de conjuntos onde não há descontinuidades ou variação abrupta entre
elementos pertencentes e não pertencentes a um conjunto denominado Nebuloso.
Tal teoria tratava de variáveis "imprecisas" ou definidas de maneira forma "vaga".
Zadeh contribuiu com outros trabalhos consolidando a teoria da Lógica Nebulosa.

205
A primeira aplicação prática ocorreu em 1974 quando o engenheiro tanzanês
Ebrahim H. Mamdani implementou um controle nebuloso em uma máquina a vapor,
feito bastante relevante em face de não ter se conseguido automatizar essas
máquinas com outras técnicas de controle. Mamdani criou um dos principais
modelos de inferência nebulosa que leva o seu nome (FULLÉR, 1995).
Outra importante metodologia de derivação de regras de controle nebuloso foi
desenvolvida em 1983 pelo físico japonês Michio Sugeno e pelo engenheiro japonês
Tomohiro Takagi.
Em 1980, os engenheiros dinamarqueses J. J. Ostergaard e L. P. Holmblad
da empresa dinamarquesa F. L. Smidth Company aplicaram pela primeira vez a
teoria nebulosa numa situação de processo de controle real de um forno de tijolos de
cimento (FULLÉR, 1995).
A partir de 1980 os controladores nebulosos passaram a ser utilizados em
diversas aplicações industriais. Apesar dos estudos teóricos terem se desenvolvido
na Europa e nos Estados Unidos, as aplicações nunca tiveram a mesma ênfase que
tiveram no Oriente, principalmente no Japão, que investiu muito no desenvolvimento
de tecnologias baseadas na Teoria Nebulosa. Inúmeras aplicações surgiram
principalmente no Japão, tais como:
- em 1983, os engenheiros japoneses Seiji Yasunobu e Shoji Miyamoto, da
empresa japonesa Hitachi, usam modelagem nebulosa para controle preditivo;
- em 1984, Michio Sugeno e K. Murakami implementam o controle nebuloso
no estacionamento de um carro miniatura;
- em 1985, Yasunobu e Miyamoto apresentaram simulações que
demonstraram o sucesso do controle nebuloso na aceleração, frenagem e parada do
trem da estrada de ferro de Sendai, inaugurada em 1987 com esses recursos;
- em 1986, o engenheiro japonês Takeshi Yamakawa criou o primeiro
hardware de um controlador nebuloso e, no ano seguinte, demonstra o uso de
Lógica Nebulosa no problema clássico de controle da estabilidade de um pêndulo
invertido;
- em 1988, aspiradores de pó (Matsushita), máquinas de lavar roupas
(Hitashi), câmeras fotográficas e filmadoras com auto ajuste de foco (Canon) e
aparelhos ar condicionado (Mitsubishi) foram dotados de controladores nebulosos
para melhorar seu desempenho, seja tornando-os mais eficientes ou mais
econômicos;

206
- em 1995, os engenheiros da empresa japonesa Maytag desenvolveram uma
máquina de lavar pratos dotada de um controlador nebuloso, otimizando a lavagem
com gastos mínimos de energia, detergente e água.
Hoje, empresas como Boeing, General Motors, Allen-Bradley, Chrysler, Eaton
e Whirlpool, e a Agência Espacial Americana (NASA) têm procurado soluções
diversas na Teoria Nebulosa. Controle de refrigeradores de baixa potência,
transmissão automotiva, motores elétricos de alta eficácia e ancoragem automática
de naves espaciais fazem parte de suas linhas de pesquisa.
10.3.2 LÓGICA NEBULOSA
A Lógica Nebulosa (fuzzy), também conhecida como Lógica Difusa, é uma
abordagem da inteligência artificial incorporando um mecanismo de raciocínio similar
ao do ser humano. Ela trata do manuseio de informações imprecisas, transformando
expressões verbais vagas, imprecisas ou qualitativas, em números, permitindo o uso
da experiência de um operador humano.
Nos sistemas lógicos binários, o valor “verdade” só pode assumir dois valores:
“verdadeiro” ou “falso”, ou em termos numéricos “1” ou “0”, respectivamente.
Suponha a seguinte situação: a rotação de uma máquina pode ser
considerada “alta” ou “não alta” em relação a uma determinada rotação padrão.
Caso não se estabeleça uma referência, torna-se impossível determinar se a rotação
de uma máquina é “alta”. Por exemplo, se a referência fosse 1800 rpm, uma
máquina com 1801 rpm seria considerada com rotação “alta”, enquanto outra com
1799 rpm teria rotação “não alta”. A Figura 10.1 mostra uma curva dividindo as duas
classes, possuindo uma mudança brusca para os valores binários “0” ou “1”,
correspondendo à classificação da rotação da máquina.
0
1
Rotação (rpm)
1800
Alta
Não Alta
Figura 10.1 - Classificação binária entre ser rotação não alta e alta.

207
A mudança brusca em 1800 rpm de “não alta” para “alta” normalmente não
corresponde ao pensamento humano. A Lógica Nebulosa contorna tal problema
adotando o conceito de pertencer parcialmente a um conjunto, como em
proposições do tipo “não muito alta” ou “muito alta”.
A Lógica Nebulosa difere da Lógica Clássica em seu mapeamento do valor
“verdade” que pode ser um conjunto nebuloso com rótulo linguístico (por exemplo:
baixa, média e alta) de qualquer variável linguística, conforme ilustrado na Figura
10.2.
Rotação (rpm)
1800
1
0
Gra
u d
e
Pe
rtin
ên
cia
Baixa Média Alta
2000
Figura 10.2 - Classificação nebulosa para a variável linguística rotação.
Cada uma dessas afirmações linguísticas representa uma verdade parcial,
certo grau de verdade, ou certo grau de pertinência a um conjunto. Na Lógica
Nebulosa, um elemento pode pertencer de forma parcial a um conjunto, com certo
grau de pertinência, por exemplo, 0,25 ou 0,75.
Na Lógica Clássica, o grau de pertinência é sempre 0% ou 100% (“0” ou “1”),
enquanto na Lógica Nebulosa ele pode ser um valor entre 0 e 1. A ideia básica da
Lógica Nebulosa é admitir uma graduação para todos os valores.
A utilização da Lógica Nebulosa no campo da engenharia se justifica tanto
nos sistemas cujo comportamento dinâmico é pouco conhecido quanto naqueles
cujas características não lineares de suas plantas dificultam a utilização de técnicas
de controle convencionais.
Não é preciso conhecer muita matemática ou em profundidade a teoria de
controle para se desenvolver uma aplicação em controle. Controladores Nebulosos
tratam igualmente sistemas lineares e não lineares, além de não requererem a
modelagem matemática do processo a ser controlado. Isto tem sido sem dúvida, o
grande atrativo desses sistemas.

208
Ao contrário dos controladores convencionais utilizadores de modelos
matemáticos com o algoritmo de controle descrito analiticamente por equações
algébricas ou diferenciais, no controle nebuloso são utilizadas regras lógicas no
algoritmo de controle, tentando descrever numa rotina a experiência humana,
intuição e heurística para controlar um processo (ZADEH, 1965).
10.3.3 FUNÇÃO DE PERTINÊNCIA
Um conjunto nebuloso é totalmente caracterizado por sua Função de
Pertinência. A Função de Pertinência equivale a uma função numérica gráfica ou
tabulada que atribuem valores de pertinência nebulosa para valores discretos de
uma variável, em seu Universo de Discurso que representa o intervalo numérico de
todos os valores reais possíveis que uma variável específica pode assumir.
Seja “E” um conjunto de objetos denominados por “x”, um conjunto nebuloso
“A” em “E” é definido pelo conjunto de pares ordenados abaixo:
Ex|x,xA A m= (10.40)
O termo mA(x) é chamado Função de Pertinência de “x” em “A”, mapeando
cada elemento “x” de “E” a um grau de pertinência contínuo entre 0 e 1.
As funções de pertinência mais utilizadas na prática são (OLIVEIRA JUNIOR,
1999):
a) Triangular - caracterizada pela equação 10.41.
=m 0,
bc
xc,
ab
axminmaxc,b,a;xA (10.41)
b) Trapezoidal - caracterizada pela equação 10.42.
=m 0,
cd
xd,1,
ab
axminmaxd,c,b,a;xA (10.42)
c) Gaussiana - caracterizada pela equação 10.43.
2cx
2
1
A ec,;x
=m (10.43)
onde: c - média;
- desvio padrão.
d) Sigmoide (curva “S”) - caracterizada pela equação 10.44.
cxaA
e1
1c,a;x
=m (10.44)

209
Essas funções são apresentadas na Figura 10.3.
cba
1
0
Gra
u d
e
Pe
rtin
ên
cia
TRIANGULAR
dba
1
0
Gra
u d
e
Pe
rtin
ên
cia
TRAPEZOIDAL
c
1
0
Gra
u d
e
Pe
rtin
ên
cia
c c
1
0
Gra
u d
e
Pe
rtin
ên
cia
a
GAUSSIANA SIGMÓIDE
Figura 10.3 - Funções de Pertinência mais utilizadas.
A quantidade e o formato das funções de pertinência de um Universo de
Discurso são escolhidos com base na experiência humana e na natureza do
processo a ser controlado. Não é uma tarefa fácil, mas algumas informações
práticas são (SHAW; SIMÕES, 1999):
a) o número de funções de pertinência deve ser de dois a sete. Muitas
funções podem provocar confusão na classificação de valores abruptos, e
poucas funções podem reduzir a precisão no momento da fuzzificação.
Com o aumento do número de funções maior será a precisão, mas o
esforço computacional também aumentará;
b) os formatos de funções de pertinência mais usuais são triangulares e
trapezoidais, devido à facilidade de geração. As funções de pertinências
não precisam ser simétricas ou igualmente espaçadas, e uma variável
pode ter um conjunto de funções de pertinência diferente, com diversos
formatos e distribuições;
c) para os casos onde o Universo de Discurso cobre valores negativos e
positivos, tendo o zero como ponto central de equilíbrio, deve-se colocar
mais Funções de Pertinência nesse ponto, garantindo uma maior
sensibilidade para um ajuste de posição preciso, enquanto um ajuste mais
grosseiro é aceitável em regiões mais distantes do ponto de equilíbrio;
d) o grau de superposição entre funções de pertinência nebulosas deve estar
entre um mínimo de 25% e um máximo de 75%. Um valor de 50% deve

210
ser usado nos primeiros testes num sistema em malha fechada. Um alto
grau de interseção pode causar superposição de significados e a ausência
de interseção provocará “lacunas” no momento da fuzzificação.
10.3.4 MODELAGEM NEBULOSA DE SISTEMAS
O sistema de inferência nebuloso consiste de três blocos funcionais:
- fuzzificação das variáveis de entrada;
- inferência ou avaliação das regras de controle;
- defuzzificação das variáveis de saída.
A Figura 10.4 apresenta um diagrama relacionando esses elementos.
VARIÁVEIS
DE ENTRADA
F
U
Z
Z
I
F
I
C
A
Ç
Ã
O
INFERÊNCIA
D
E
F
U
Z
Z
I
F
I
C
A
Ç
Ã
O
SISTEMA DE INFERÊNCIA
NEBULOSO
VARIÁVEIS
DE SAÍDA
BASE DE
CONHECIMENTO
CONJUNTOS
NEBULOSOS
DE ENTRADA
CONJUNTOS
NEBULOSOS
DE SAÍDA
Figura 10.4 - Sistema de inferência nebuloso.
A base de conhecimento representa o modelo do sistema a ser controlado,
consistindo de uma base de dados (Funções de Pertinência) e uma base de regras
nebulosas linguísticas.
10.3.4.1 FUZZIFICAÇÃO
Nesta etapa os valores discretos (não nebulosos) das variáveis de entrada,
geralmente provenientes de sensores das grandezas físicas, são classificados com
rótulos linguísticos e atribuídos graus de pertinência no intervalo [0 1] por meio de
Funções de Pertinências contidas na Base de Conhecimento, determinando quanto
o valor numérico de entrada pertence a uma determinada classificação nebulosa da
variável linguística. Um fator de escala é utilizado para converter valores numéricos
das variáveis de entrada, caso estas não sejam cobertas pelos respectivos
Universos de Discurso.

211
Por exemplo, para a variável linguística rotação representada pela
classificação nebulosa mostrada na Figura 10.5, um valor de entrada de 1850 rpm
pode ser considerado baixo com grau de pertinência de 0, médio com grau de
pertinência de 0,75 ou alto com um grau de pertinência de 0,25.
Rotação (rpm)
1800
1
0
Gra
u d
e
Pe
rtin
ên
cia
Baixa Média Alta
200016001850
0,75
0,25
Figura 10.5 - Graus de pertinência da rotação de 1850 rpm.
10.3.4.2 INFERÊNCIA
A base de dados fornece as definições numéricas necessárias às Funções de
Pertinência usadas no conjunto de regras nebulosas. A base de regras caracteriza
os conjuntos de controle e a estratégia de controle utilizada por especialistas na
área, por meio de um conjunto de regras de controle em geral linguísticas.
Nesta etapa o conhecimento é representado por um conjunto de regras nas
quais as condições são dadas a partir de um conjunto de rótulos linguísticos
associados às variáveis de entrada/saída do processo. Regras do tipo “SE - ENTÃO”
são chamadas de regras nebulosas.
A lógica de tomada de decisões, incorporada na estrutura de inferência da
base de regras, usa implicações nebulosas para simular tomadas de decisão
humanas. Ela gera ações de controle, denominadas consequentes, inferidas a partir
de um conjunto de condições de entrada, denominadas antecedentes.
Os tipos de controladores nebulosos encontrados na literatura são os
modelos clássicos de Mamdani e de Larsen, e os modelos de interpolação de
Takagi-Sugeno e de Tsukamoto. Os modelos diferem quanto à forma de
representação dos termos na premissa, quanto à representação das ações de
controle e quanto aos operadores utilizados para implementação do controlador
(SANDRI; CORREA, 1999). Os tipos mais usuais são o Mamdani e o Takagi-

212
Sugeno. O controlador Mamdani utiliza um método para o processo de decisão
baseado em regras do tipo “SE A ENTÃO B”, nas quais tanto o antecedente “A”
quanto o consequente “B” são expressos por meio de conjuntos nebulosos; já o
controlador de Takagi-Sugeno utiliza um método de tomada de decisão simplificado,
baseado na lógica nebulosa, onde somente o antecedente das regras é formado por
variáveis nebulosas, enquanto o consequente de cada regra é expresso, em geral,
por uma função linear dos valores observados das variáveis que descrevem o
estado do sistema (variáveis de entrada).
As vantagens do modelo de Takagi-Sugeno são: computacionalmente
eficiente, trabalha bem com técnicas clássicas (por exemplo: controle PID) e com
técnicas adaptativas e de otimização, continuidade garantida da superfície de saída
e boa adequação para análise matemática. As vantagens do Modelo de Mamdani
são: fácil intuição, grande aceitação e boa adequação o pensamento humano (THE
MATHWORKS, INC, 2007).
As variáveis de entrada estão relacionadas entre si por meio de conectivos
lógicos, dados pelo operador de conjunção “e” ou pelo operador de disjunção “ou”.
Normalmente, o conectivo “e” executa operações de mínimo ou de produto das
entradas, sendo que a operação “produto” fornece melhor continuidade e uma
função entrada/saída mais suave, visto que a operação “mínimo” cria
descontinuidades não lineares na saída nebulosa (SHAW; SIMÕES, 1999). Já o
conectivo “ou” executa operações de máximo ou de soma algébrica (conhecida
como “ou probabilístico”) das entradas.
Uma variável de entrada pode ser excluída de uma regra utilizando-se o
operador “not”.
É importante que exista ao menos uma regra a ser disparada para qualquer
entrada a fim de cobrir totalmente as combinações de rótulos linguísticos das
variáveis.
O sistema de inferência nebuloso do tipo Mamdani utiliza operadores de
implicação e de agregação.
A implicação consiste no processo de moldar o conjunto nebuloso do
consequente baseado nos resultados do antecedente. As operações de implicação
nebulosa recebem os valores de entrada provenientes da fuzzificação e os valores
de saída contidos na inferência, gerando um valor de saída. A implicação possui as
operações mais usuais de mínimo ou de produto.

213
A agregação é a combinação dos consequentes de cada regra em
preparação para a defuzzificação. A agregação possui as operações mais usuais de
máximo, de soma limitada ou de soma algébrica.
Para definir o resultado de uma regra, um dos métodos mais comuns é o
chamado método de inferência "max-min", cuja saída é dada pelo máximo entre as
saídas das regras, que são obtidas pelos mínimos dos valores de suas variáveis
linguísticas.
10.3.4.3 DEFUZZIFICAÇÃO
A defuzzificação consiste em se obter um único valor discreto para a ação de
controle, a partir dos valores nebulosos de saída obtidos da inferência. Este único
valor discreto representa um compromisso entre os diferentes valores nebulosos
contidos na saída do controlador.
Esta função é necessária apenas quando a saída do controlador tiver de ser
interpretada como uma ação de controle discreta, como por exemplo, movimentar
um motor para uma determinada posição angular. Existem sistemas que não exigem
defuzzificação porque a saída nebulosa é interpretada de modo qualitativo.
Os métodos mais utilizados são (SHAW; SIMÕES, 1999):
a) Centro da Área: calcula o centro de gravidade (centroide) da área
composta representativa do termo de saída nebuloso composto pela união
de todas as contribuições de regras. É o ponto de divisão da área da saída
nebulosa em duas partes iguais. Esse método favorece a regra com a
saída de maior área. O cálculo do centroide da área é executado utilizando
a equação:
=
=
m
m
=N
1iis
N
1iisi
*
u
uu
u (10.45)
onde: N - número de regras disparadas;
ui - posição do centroide da função de pertinência individual;
ms(ui) - área da função de pertinência modificada pelo resultado da
inferência nebulosa.

214
Apresenta alguns problemas:
quando as funções de pertinências não possuem sobreposição, o
centro geométrico da figura não tem significado físico;
se mais de uma regra tiver a mesma saída nebulosa há uma
sobreposição de áreas que não é devidamente contabilizada;
a necessidade de integração numérica toma esforço computacional
para o cálculo.
b) Centro do Máximo: a saída discreta é calculada como uma média
ponderada dos máximos, cujos pesos são os resultados da inferência.
Também conhecido como método de defuzzificação pelas alturas. Caso a
função de pertinência tenha mais de um máximo, este método não pode
ser utilizado. O cálculo é feito da seguinte forma:
= =
= =
m
m
=N
1i
n
1kik,s
N
1i
n
1kik,si
*
u
uu
u (10.46)
onde: mi - posição do centro do máximo;
ms,k(ui) - pontos onde ocorrem os máximos (alturas) das funções de
pertinência de saída.
c) Média do Máximo: calcula a média aritmética dos elementos de
pertinência máxima. Neste caso, não se considera o formato das funções
de pertinência de saída. Nos casos em que a função de pertinência tenha
mais de um máximo, este método também não pode ser utilizado.
=
=M
1m
m*
M
uu (10.47)
onde: um - m-ésimo elemento do Universo de Discurso, onde a função
ms(ui) tenha um máximo;
M - número total de elementos um.
A seguir, a título de ilustração, é apresentado um cálculo de defuzzificação
pelo método do Centro da Área aplicado ao modelo de inferência nebulosa do tipo
Mamdani (adaptado de BOSE, 2003; PARAMASIVAM; ARUMUGAM, 2005).
Considerando:
- dois rótulos linguísticos (ZE e PS) da variável de entrada Erro (E);
- um rótulo linguístico (NS) da variável de entrada Variação do Erro (VE);

215
- dois rótulos linguísticos (NS e ZE) da variável de saída Incremento do Sinal
de Controle (DU);
- regra 1: Se “E = ZE” e “VE = NS” Então DU = NS;
- regra 2: Se “E = PS” e “VE = NS” Então DU = ZE;
- as variáveis de entrada Erro e Variação do Erro valem 0,75 e – 1,5,
respectivamente.
A Figura 10.6 ilustra os passos para obtenção do valor da variável de saída.
0 0
0
0
0 0
0
1
1 1
1
1
1
1Centro de
Gravidade
E
E
Erro
Regra 1
Regra 2
m(VE)m(E)
ZENS NS
VE
VE
PS NS
Variação
do Erro
ZE
m(E) m(VE)
DU
DU
m(DU)
m(DU)
m(DU)
m1
m2m1
m1'm2'm2'
m2'm1
Sinal de
Saída
NS ZE
0,250,5
0,750,5
-1
-0,3684
1
-2
1
-2
2
1
-2
-2-1 1
-1
-1
-1 1
Figura 10.6 - Exemplo de cálculo de defuzzificação pelo método do Centro da
Área aplicado ao modelo de inferência nebulosa Mamdani.
Os valores das funções de pertinência para a variável de entrada “Erro”,
correspondentes aos rótulos linguísticos ZE e PS, são obtidos a partir da equação
10.41, valendo:
25,00,
01
75,01,
10
175,0minmax1,0,1;75,0ZE =
=m
75,00,12
75,02,
01
075,0minmax2,1,0;75,0PS =
=m

216
De maneira análoga, o valor da função de pertinência para a variável de
entrada “Variação do Erro” com rótulo linguístico NS vale:
5,00,10
5,10,
21
25,1minmax0,1,2;5,1NS =
=m
Assim, os valores das funções de pertinência da variável de saída DU obtidos
pela regra de implicação mínima (“and”) de Mamdani são calculados da seguinte
forma:
25,05,0;25,0minVE;)E(minDU NSZENS ==mm=m
5,05,0;75,0minVE;)E(minDU NSPSZE ==mm=m
Da Figura 10.6 são obtidas as posições uNS = -1 e uZE = 0 dos centroides das
funções de pertinências para a variável de saída “Incremento do Sinal de Controle”
com rótulos linguísticos NS e ZE, respectivamente.
As áreas ms(ui) dos trapézios isósceles resultantes da inferência nebulosa nas
funções de pertinência triangulares da variável de saída DU, podem ser calculadas
pela equação (PASSINO; YURKOVICH, 1998):
mm=m
2u
2
is (10.48)
onde: - variação dos valores do rótulo linguístico da variável de saída (base maior
do trapézio);
m - valor da função de pertinência do rótulo linguístico da variável de saída
(altura do trapézio).
Aplicando a equação 10.48 no exemplo, resulta em:
4375,02
25,025,02u
2
NSS =
=m
75,02
5,05,02u
2
ZES =
=m
Logo, o valor da variável de saída u*, calculado utilizando-se a equação 10.45
vale:
3684,0
75,04375,0
0.75,01.4375,0* =
=m
Um exemplo de cálculo utilizando o modelo de inferência nebulosa do tipo
Sugeno (adaptado de VAS, 1999) será apresentado a seguir, utilizando as

217
premissas do exemplo anterior para o modelo Mamdani, exceto pelas regras,
definidas como:
- regra 1: Se “E = ZE” e “VE = NS” Então DU1 = f(E, VE) = 4 x E + VE;
- regra 2: Se “E = PS” e “VE = NS” Então DU2 = f(E, VE) = - 0,45 - E;
Usando o operador mínino (“and”), os pesos das regras são calculados da
seguinte forma:
25,075,0;25,0min)E();E(min PSZE1 ==mm=
5,05,0;5,0min)VE();VE(min NSNS2 ==mm=
As saídas individuais das regras são calculadas da seguinte forma:
5,15,175,0.4DU1 ==
2,175,045,0DU2 ==
A saída geral é a média ponderada das duas saídas individuais. Logo:
3,0
5,025,0
2,1.5,05,1.25,0DU =
=
Com este exemplo de modelo Sugeno, o resultado corresponde a uma
composição ponderada de dois controladores lineares tradicionais, cujas saídas
seriam 1,5 e menos 1,2, respectivamente. Neste caso, não é necessária a
defuzzificação, pois a saída de cada regra não é nebulosa e a saída geral é a média
ponderada das duas saídas individuais.
Em aplicações em malha fechada onde a propriedade de continuidade é
importante, pois se a saída de um controlador nebuloso controla uma variável do
processo, saltos na saída do controlador podem causar instabilidades e oscilações,
logo é prudente optar pela defuzzificação pelo método “Centro da Área”. Contudo,
em certos controladores PI nebulosos, um integrador colocado entre o controlador e
o processo pode garantir que a variável de controle mantenha-se contínua, mesmo
quando se usa o método “Média do Máximo” (SHAW; SIMÕES, 1999).
10.3.4.4 VANTAGENS E DESVANTAGENS DOS SISTEMAS NEBULOSOS
As principais vantagens apresentadas pelos sistemas nebulosos em
aplicações práticas são (MEJIA SANCHEZ, 2009):
a) a capacidade de controlar sistemas com muitas variáveis de saída
utilizando um só controlador nebuloso, com um bom desempenho;

218
b) a facilidade de utilizar expressões utilizadas na linguagem natural na
elaboração das regras (proposições linguísticas);
c) a habilidade de controlar processos com característica não linear e de alta
ordem, na qual a determinação do modelo matemático e o controle
clássico do sistema são muito complexos;
d) a facilidade de implementar técnicas de controle baseadas na experiência
de um especialista e em aspectos intuitivos, utilizando regras e entradas
imprecisas.
As principais desvantagens apresentadas pelos sistemas nebulosos em
aplicações práticas são (MEJIA SANCHEZ, 2009):
a) a dificuldade de análise de aspectos de otimização, estabilidade e
robustez;
b) a influência da grande quantidade de parâmetros na configuração
geralmente feita pelo usuário, algumas das quais são: número de funções
de pertinência de cada variável, número de regras, seleção dos métodos
de implicação e agregação, método de defuzzificação, assim como os
parâmetros de cada função de pertinência;
c) geralmente a precisão do sistema nebuloso é limitada pela experiência do
especialista na configuração dos parâmetros, a qual é determinada pelo
conhecimento do processo pelo especialista.

219
10.4 REDES NEURAIS
10.4.1 HISTÓRICO
A história das Redes Neurais Artificiais (RNAs) começou em 1943, quando o
psiquiatra americano Warren Sturgis McCulloch e o matemático americano Walter
Pitts publicaram o artigo “A logical calculus of the ideas immanent in nervous activity”
descrevendo um modelo matemático para o neurônio biológico, limitado ao
entendimento do funcionamento do cérebro humano para aplicações em medicina e
psicologia. Em 1947, McCulloch e Pitts publicaram um segundo estudo intitulado
“How we know universal” (PAGLIOSA, 2003).
Em 1949, o psicólogo canadense Donald Olding Hebb observando o que
ocorria nas ligações entre neurônios, desenvolveu a Teoria do Aprendizado Neural a
qual determinava que quanto mais correlacionadas estivessem as saídas de dois
neurônios em cascata, maior deveria ser o nível ou a intensidade das ligações entre
eles. Hebb publicou o livro “Organization of Behavior” propondo um modo de
proporcionar capacidade de aprendizado às Redes Neurais Artificiais. Nessa época
as pesquisas eram limitadas pela baixa tecnologia computacional existente
(TATIBANA; KAETSU, 2010).
Em 1959, o engenheiro americano Bernard Widrow desenvolveu o elemento
linear adaptativo chamado ADALINE (ADAptative LINear Element), capaz de auto
ajustar-se para minimizar o erro entre a resposta desejada e a resposta gerada pelo
sistema. A primeira aplicação prática de um sistema de computação neural foi a
utilização do ADALINE para o desenvolvimento de filtros digitais adaptativos com a
função de eliminar ecos em linhas telefônicas.
Ainda em 1959, o cientista americano Frank Rosenblatt concluía o projeto
“Perceptron”, consistindo de uma rede neural de duas camadas de neurônios, capaz
de aprender de acordo com a regra de Hebb. Este projeto, iniciado em 1958,
resultou na publicação de um livro em 1962.
A publicação em 1969 do livro “Perceptrons” escrito pelo cientista americano
Marvin Lee Minsky - conhecido e renomado pesquisador da área - e pelo cientista
sul africano Seymour Papert, criticando o trabalho de Rosemblat, provocou uma
parada e um grande atraso no desenvolvimento das Redes Neurais Artificiais
(RNAs). Neste livro os autores provaram que o perceptron apresentava sérias

220
restrições conceituais, sendo capaz apenas de solucionar problemas dentro do
universo dos linearmente separáveis, não distinguindo padrões não linearmente
separáveis como o problema “Ou - Exclusivo”.
Em 1982, o físico e biólogo americano John Joseph Hopfield concebeu um
modelo de rede adaptativa para memórias associativas e introduziu o conceito de
função de energia às redes, associando a convergência da rede à estabilidade
dessa função em seu mínimo global. Os estudos de Hopfield salientavam as
propriedades associativas de uma classe de redes neurais que apresentava fluxo de
dados multidirecional e comportamento dinâmico (WIKIPÉDIA, 2011).
Em 1986, os psicólogos americanos James Lloyd McClelland e David Everett
Rumelhart criaram as redes Multi Layer Perceptron (MLP). Ainda em 1986,
Rumelhart e McClelland publicaram um trabalho desenvolvido por Rumelhart,
Geoffrey E. Hinton e Ronald J. Williams do grupo Parallel Distributed Processing do
Massachusetts Institute of Technology, popularizando o algoritmo de treinamento
conhecido por Retro propagação (Backpropagation) para o aprendizado em redes
neurais. Este algoritmo foi proposto inicialmente em 1974 pelo matemático
americano Paul J. Werbos na sua tese de doutorado em estatística com o nome de
"Algoritmo de Realimentação Dinâmica". Em 1982, David Blair Parker redescobriu
esse algoritmo e o chamou de "Algoritmo de Aprendizado Lógico".
Posteriormente, destacam-se: algoritmos de aprendizado baseados no
método de Levenberg - Marquardt, redes neurais artificiais baseadas em máquinas
de vetores suporte, utilizadas em classificações de padrões e regressão, e
implementação de circuitos integrados neurais com diversas configurações de
topologias (SILVA; SPATTI; FLAUZINO; 2010).
Muito ainda precisa ser feito para criar o computador com reais condições de
emular o cérebro e o raciocínio humano. As redes neurais, apesar das limitações, se
apresentam como a estratégia computacional com maior possibilidade de abrir
novos horizontes e possibilitar novas aplicações nas áreas da engenharia e ciências,
tais como: aproximador universal de funções, controle de processos,
reconhecimento/classificação de padrões, agrupamento de dados (clustering),
sistemas de previsão, otimização de sistemas e memórias associativas.

221
10.4.2 NEURÔNIO BIOLÓGICO
O ser humano é dotado de complexos circuitos neurais cerebrais constituídos
de variadas conexões entre seus neurônios, denominadas sinapses, que interagem
entre si resultando em um comportamento inteligente.
A Figura 10.7 apresenta um exemplo de neurônio biológico composto
basicamente de um corpo da célula ou soma, um axônio tubular e vários dendritos
(ramificações arbóreas). Os dendritos formam uma malha de filamentos finíssima ao
redor do neurônio. O axônio é constituído de um tubo longo e fino que ao final se
divide em ramos terminados em pequenos bulbos que quase tocam os dendritos dos
outros neurônios. O pequeno espaço entre o fim do bulbo e o dendrito é conhecido
como sinapse, através da qual as informações se propagam.
Dentritos
Sinapse
Sinapses
Núcleo
Axônio
Axônio de outra célula
Corpo da célula ou Soma
Arborização axonal
Figura 10.7 - Exemplo de neurônio biológico (adaptado de DAVIS IV, 2006).
A célula nervosa tem um potencial de repouso devido a concentrações
diferentes dentro e fora da célula, respectivamente, de íons negativos de potássio
(K-) e positivos de sódio (Na+), de modo que qualquer perturbação na membrana do
neurônio provoca uma série de alterações durante um curto período de tempo.
A alteração na concentração dos íons Na+ e K- gera um trem de pulso que se
expande localmente nas proximidades dos dendritos. Dependendo da intensidade
do estímulo, este trem de pulso pode exceder certo limiar no corpo celular e gerar
um sinal com amplitude constante ao longo do axônio. Na fronteira do momento do
disparo do neurônio, é gerado um potencial de ação que impulsiona o fluxo do sinal
gerado pelo corpo celular para outras células. O pulso elétrico gerado pelo potencial
de ação libera neurotransmissores que são substâncias químicas contidas nos
bulbos do axônio, estes neurotransmissores são repassados para os dendritos do

222
neurônio seguinte. Assim, quando o conjunto de neurotransmissores que chegam
aos dendritos de um determinado neurônio atinge certo limiar, eles disparam de
novo um potencial de ação que vai repetir todo o processo novamente.
O número de sinapses recebidas por cada neurônio varia de 100 a 100.000,
sendo que elas podem ser tanto excitatórias, facilitando o fluxo dos sinais elétricos
gerados pelo potencial de ação, como inibitórias, dificultando a passagem desta
corrente (VIEIRA; ROISENBERG, 2008).
10.4.3 NEURÔNIO ARTIFICIAL
Apesar dos esforços em se modelar o neurônio biológico até o momento só
se conseguiu uma aproximação elementar. A Figura 10.8 apresenta um diagrama
esquemático de um neurônio artificial, cuja saída y é dada pela equação:
=
=oo
n
1iii xxfy (10.49)
onde: i - peso da conexão sináptica da entrada “i”;
xi - entrada “i” do neurônio, proveniente da saída de outro neurônio ou de uma
entrada externa;
o - bias;
xo - entrada constante (= 1).
.
.
.
ENTRADAS SAÍDA
x1
xn
x2
w1
w2
wn
x0
w0
yS
PESOS
SINÁPTICOS
f(s)
FUNÇÃO DE
ATIVAÇÃO
BIAS
0x0ωn
1i
xi
ωs =
Figura 10.8 - Modelo de um neurônio artificial (FILHO; LOTUFO; LOPES, 2008).
Conseguido o valor da soma ponderada, a função de ativação f(s) do
neurônio artificial utiliza um limiar de disparo para determinar a sua ativação ou não.
A saída y do neurônio normalmente tem forma contínua e crescente, de tal sorte que
seu domínio geralmente se encontra no âmbito dos números reais.

223
As funções de ativação mais utilizadas são (CALDEIRA et al., 2007):
a) Degrau
0sse1y =
0sse1y =
b) Rampa
0sse0y =
1s0sesy =
1sse1y =
c) Sigmoide ou logística
0sses1
11y
=
0sses1
11y
=
A Figura 10.9 apresenta os gráficos dessas funções.
s
y
1
-1
DEGRAU
s
y
-1
1
SIGMÓIDEy
1
RAMPA
s1
Figura 10.9 - Funções de ativação mais utilizadas.
10.4.4 REDES NEURAIS ARTIFICIAIS
As redes neurais artificiais (RNAs) são inspiradas na própria natureza das
redes de neurônios e sinapses biológicas, buscando modelar computacionalmente
essas conexões neurais, a fim de tentar fazer emergir comportamentos também
inteligentes em máquinas (KOVÁCS, 2006).
Uma rede neural pode ser caracterizada por três aspectos principais:
a) o padrão de conexões entre as unidades (topologia);
b) o método de determinação dos pesos das conexões (algoritmo de
treinamento ou aprendizado);
c) sua função de ativação.

224
As redes neurais artificiais têm sido desenvolvidas como generalizações de
modelos matemáticos da cognição humana ou biologia neural, assumindo que:
a) o processamento da informação ocorre em vários neurônios;
b) os sinais são propagados de um elemento a outro através de conexões
(sinapses);
c) cada conexão possui um peso associado, que em uma rede neural típica
pondera o sinal transmitido;
d) cada neurônio aplica uma função de ativação (geralmente não linear) à
sua entrada de rede (soma ponderada dos sinais de entrada) para
determinar sua saída.
Uma rede neural artificial é uma combinação de neurônios artificiais, suas
conexões e algoritmo de aprendizado usado para treinamento. Para caracterizar
esses agrupamentos de neurônios, devem ser considerados:
a) o número de camadas da rede;
b) o número de neurônios por camada;
c) o tipo de conexões: alimentado adiante (feedforward), recorrente
(feedback);
d) o grau de conexidade entre os neurônios: um a um, total, randômico, etc..
Essas redes podem ser vistas como um processador de sinais paralelamente
distribuído, constituído de unidades de processamento simples, os neurônios, que
adquirem conhecimento acerca de uma determinada tarefa através da integração
com o ambiente via um algoritmo de aprendizagem. Tal conhecimento é
armazenado nos pesos sinápticos que interligam os diversos neurônios.
O objetivo do desenvolvimento de uma máquina de aprendizagem não reside
na representação exata do conjunto de dados disponíveis, mas sim na obtenção de
um modelo estatístico do processo gerador de tais dados. Logo, é desejado que o
modelo apresente resultados satisfatórios tanto para os dados disponíveis quanto
para novos dados a serem apresentados. Em outras palavras, a estrutura
desenvolvida deve apresentar boa capacidade de generalização (FERREIRA, 2008).
O nível de não linearidade disponibilizado pela rede neural está diretamente
relacionado com as suas entradas. Além disso, a utilização direta de variáveis
irrelevantes que não possuem nenhum grau de interdependência com a saída pode
comprometer a precisão da saída. Assim, em conjunto com o controle de

225
complexidade, é necessária a seleção adequada do espaço de entrada no intuito de
obter estruturas com elevada capacidade de generalização (FERREIRA, 2008).
As redes neurais artificiais oferecem um paradigma atrativo, pois “aprendem”
a resolver problemas através de exemplos.
10.4.5 TOPOLOGIA DAS REDES NEURAIS ARTIFICIAIS
Mantendo a analogia biológica, os neurônios constituintes das RNAs são
dispostos em camadas, e a forma com que estas camadas são interligadas define a
topologia do modelo.
A forma como os neurônios são organizados em uma rede neural está
intrinsecamente ligada ao tipo de problema que será solucionado e é fator
importante para a definição dos algoritmos de aprendizado utilizados. As redes
neurais artificiais existentes podem ser classificadas em três categorias básicas:
alimentadas adiante (feedforward), recorrentes (feedback), auto-organizáveis
(NEVES, 2010).
Nas redes alimentadas adiante as camadas são conectadas de forma
consecutiva e adjacente, com o sinal fluindo da entrada para a saída em sentido
único, conforme ilustrado na Figura 10.10. Os neurônios não recebem realimentação
em suas entradas. Atualmente as redes neurais alimentadas adiante são as mais
utilizadas principalmente pela utilização do algoritmo de treinamento de Retro
propagação (Backpropagation). Este tipo de rede pode ser considerado um
aproximador de funções, sendo que seu nível de precisão dependerá principalmente
do número de neurônios, bem como da escolha eficiente do conjunto de exemplos.
Camada
de Entrada
Camada
Escondida
Camada
de Saída
Figura 10.10 - Exemplo de rede neural alimentada adiante - feedforward.
As redes recorrentes apresentam um ou mais laços de realimentação,
conforme apresentado na estrutura da Figura 10.11. Nas redes neurais recorrentes

226
existe pelo menos um ciclo de retroalimentação, onde algum neurônio fornece o seu
sinal de saída para a entrada de outro neurônio.
Camada
de Entrada
Camada
Escondida
Camada
de Saída
Figura 10.11 - Exemplo de rede neural recorrente - feedback.
O ser humano tem a capacidade única de usar suas experiências passadas
para adaptar-se às mudanças imprevisíveis de seu ambiente. No contexto das redes
neurais artificiais, tal adaptação é chamada de auto-organização, como ilustrado na
Figura 10.12 (NEVES, 2010).
Mapa de Kohonen
Figura 10.12 - Exemplo de rede neural auto-organizável (NEVES, 2010).
Para a maioria dos problemas práticos um único neurônio não é suficiente,
sendo assim utilizam-se neurônios interconectados, sendo que a decisão de como
interconectar os neurônios é uma das mais importantes decisões a se tomar em um
projeto de uma rede neural artificial. No tocante de como os neurônios se interligam,
é conveniente ressaltar a utilização de camadas intermediarias ou camadas
escondidas (hidden layer) que permitem as RNAs utilizar superfícies de decisão
mais complexas. Estas camadas permitem que seus elementos se organizem de tal
forma que cada elemento aprenda a reconhecer características diferentes do espaço
de entrada, assim, o algoritmo de treinamento deve decidir que características

227
devem ser extraídas do conjunto de treinamento. A desvantagem em utilizar camada
escondida é que o aprendizado se torna mais difícil.
É importante salientar que as conexões entre neurônios podem ser feitas de
outras diversas maneiras, por exemplo, fazer ligações entre neurônios da mesma
camada, fazer ligações entre todos os neurônios de uma camada com apenas
alguns de outra camada, e assim por diante. A disposição das ligações dependerá
de que tipo de rede neural se deseja utilizar.
10.4.6 APRENDIZADO DAS RNAs
A rede neural possui tipicamente duas fases de processamento: a de
aprendizado e a de utilização. Esses dois momentos de operação são bem distintos
e aplicados em períodos diferentes.
O aprendizado é um processo de ajuste dos pesos das conexões em resposta
ao estímulo apresentado à rede neural, ou seja, a rede possui a propriedade de
modificar-se em função da necessidade de aprender a informação que lhe foi
apresentada. Já o processo de utilização é a maneira pela qual a rede responde a
um estímulo de entrada sem que ocorram modificações na sua estrutura.
Os algoritmos de aprendizado são utilizados para determinar os valores
adequados para os pesos de uma RNA, utilizando-se de valores iniciais arbitrários
para os pesos e iterativamente alterando-os até que a rede possa se comportar
como desejado (WINANDY; BORGES FILHO; BENTO, 2007).
Os algoritmos de aprendizado podem ser agrupados em quatro categorias
(SILVA, 2003):
a) correção de erro;
b) hebbiano;
c) competitivo;
d) Boltzmann.
A solução de um problema utilizando RNA depende da topologia da rede e do
ajuste dos pesos das conexões entre os neurônios de diferentes camadas. O
aprendizado das RNAs pode ser classificado em três tipos de treinamento:
a) supervisionado: necessita de um “instrutor” (agente externo) durante a
fase de aprendizagem, que avalia e informa à rede sobre o seu
desempenho;

228
b) não supervisionado: não possui um “instrutor”, sendo a rede autônoma,
trabalhando com os dados que lhes são apresentados e aprendendo a
refletir sobre as suas propriedades na sua saída. Esse tipo de aprendizado
utiliza um algoritmo competitivo ou hebbiano;
c) por reforço: possui um “instrutor” que avalia em tempo real (on line) as
respostas fornecidas pela rede e direciona o ajuste dos pesos. O
aprendizado é feito por um processo de tentativas e erros, que visa
maximizar um dado índice de desempenho, denominado de sinal de
reforço.
Os tipos mais utilizados são o não supervisionado e o supervisionado, que
são mais bem descritos a seguir.
O aprendizado não supervisionado não possui conhecimento a priori das
saídas da rede, e funciona de modo a distinguir classes de padrões diferentes dos
dados apresentados à rede, através de algoritmos de aprendizado baseados
geralmente em conceitos de vizinhança e agrupamento. Neste caso, a rede é
ajustada de acordo com regularidades estatísticas dos dados de entrada, de tal
forma que ela cria categorias, otimizando em relação aos parâmetros livres da rede
uma medida da qualidade que é independente da tarefa a ser executada. Algumas
topologias que se utilizam desse tipo de aprendizado são: para redes recorrentes
(Grossberg aditivo, Adaptive Resonance Theory, Hopfield simétrico e assimétrico,
memória associativa bidirecional, memória associativa temporal, mapa auto-
organizável de Kohonen e aprendizado competitivo) e para redes alimentadas
adiante (learning matrix, driver-reinforcement learning, memória associativa linear e
counterprogation).
O aprendizado supervisionado insere em sua estrutura uma espécie de
instrutor que confere o quanto a rede está próxima de uma solução aceitável,
adaptando na concepção do treinamento os pesos entre os neurônios, de modo a
prover uma menor diferença entre as saídas desejadas e as obtidas. Para este tipo
de aprendizado, a alternativa mais utilizada para treinamento de redes neurais
alimentadas adiante multicamadas é o algoritmo de Retro propagação do Erro
(Backpropagation) que procura achar iterativamente a mínima diferença (erro) entre
as saídas desejadas e as saídas obtidas pela rede neural, ajustando os pesos entre
as camadas através da retro propagação do erro encontrado em cada iteração.

229
Basicamente, a rede aprende um conjunto pré-definido de pares de exemplos
de entrada/saída em ciclos de propagação/adaptação. Depois que um padrão de
entrada foi aplicado como um estímulo aos elementos da primeira camada da rede,
ele é propagado por cada uma das outras camadas até que a saída seja gerada.
Este padrão de saída é então comparado com a saída desejada e um sinal de erro é
calculado para cada elemento de saída. O sinal de erro é então retro propagado da
camada de saída para cada elemento da camada intermediária anterior que contribui
diretamente para a formação da saída. Entretanto, cada elemento da camada
intermediária recebe apenas uma porção do sinal de erro total, proporcional apenas
à contribuição relativa de cada elemento na formação da saída original. Este
processo se repete, camada por camada, até que cada elemento da rede receba um
sinal de erro que descreva sua contribuição relativa para o erro total. Dependendo
do sinal de erro recebido, os pesos das conexões são então atualizados para cada
elemento de modo a fazer a rede convergir para um estado que permita a
codificação de todos os padrões do conjunto de treinamento.
Da descrição acima, o algoritmo de Retro propagação usa o mesmo princípio
da Regra Delta, ou seja, a minimização de uma função custo, no caso, a soma dos
erros médios quadráticos sobre um conjunto de treinamento, utilizando a técnica de
busca do gradiente-descendente. Por esta razão, esse algoritmo também é chamado
muitas vezes de Regra Delta Generalizada (Generalized Delta-Rule). As funções de
ativação foram substituídas por funções contínuas sigmoides (PAGLIOSA, 2003).
Como as funções de saída passaram a ser deriváveis, isto permitiu a utilização da
busca do gradiente descendente também para os elementos das camadas
intermediárias.
Algumas topologias que se utilizam desse tipo de aprendizado são: para
redes recorrentes (máquina de Boltzmann, mean field annealing, cascade correlation
recorrente, aprendizado recorrente em tempo real e filtro de Kalman recorrente) e
para redes alimentadas adiante (perceptron, Adaline, Madaline, retro propagação -
backpropagation,·máquina de Cauchy, Artmap, rede lógica adaptativa, cascade
correlation, filtro de Kalman, learning vector quantization e rede neural
probabilística).

230
10.4.7 TIPOS DE REDES NEURAIS ARTIFICIAIS
Existem diversos tipos de redes neurais utilizados para as mais diversas
aplicações. Alguns tipos mais utilizados atualmente são (SILVA; SPATTI;
FLAUZINO; 2010; CALDEIRA et al, 2007):
A) Rede Neural Perceptron
Trata-se da forma mais simples de configuração de uma rede neural artificial,
idealizada por Franck Rosenblatt visando implementar um modelo computacional
inspirado na retina (percepção eletrônica de sinais). É uma rede alimentada adiante
com uma única camada cujos pesos e erros (diferenças entre a resposta da rede e o
vetor de saída desejado) podem ser treinados repetidamente mudando os pesos até
a obtenção de um erro aceitável. Os pesos são inicializados aleatoriamente.
Cada entrada é ponderada com peso, e a soma das entradas ponderadas é a
entrada da função de ativação cuja saída é “0” ou “1”. Como a função de ativação só
admite valores “0” ou “1”, dividindo o espaço de saída em duas regiões, este tipo de
rede pode ser usado em problemas de classificação de vetores linearmente
separáveis (padrões) e resolução de problemas lógicos (“and” e “or”).
B) Rede Neural Linear
Essa rede possui neurônios com função de ativação linear, possibilitando que
a saída seja um número real. A rede é também inicializada com pesos aleatórios,
sendo os mesmos recalculados em função dos vetores de entrada e saída, e
existindo uma solução, ela é obtida pelo somatório dos erros ao quadrado,
repetindo-se o processo até que essa soma decresça atingindo um valor aceitável
ou um número máximo de iterações. A direção em que decresce o erro da rede é
obtida tomando-se derivadas parciais da soma dos quadrados dos erros em relação
aos parâmetros.
C) Rede Neural Probabilística
Essa rede surgiu com os trabalhos pioneiros de Donald F. Specht, sendo
utilizada em classificação.
A primeira camada calcula as distâncias entre os vetores de entrada e os
esperados, obtendo um vetor cujos elementos indicam a distância entre a camada e
o exemplar usado para treinamento. A segunda camada soma essas contribuições
para cada classe de entradas e obtém um vetor de probabilidades. Uma função de

231
ativação na saída da segunda camada considera o máximo dessas probabilidades,
assumindo 1 para essa classe e 0 para as outras classes.
D) Rede Auto Organizável de Kohonen
Normalmente as redes neurais artificiais necessitam de um conjunto de
padrões de entradas e saídas para que possam ser devidamente treinadas,
entretanto, em certas aplicações, somente o conjunto de padrões de entrada está
disponível, possuindo informações relevantes sobre o comportamento do sistema
em que foram extraídas. A maioria das redes utilizadas nesses problemas possui a
capacidade de se auto-organizar por meio de aprendizagem competitiva, detectando
similaridades, regularidades e correlações entre padrões do conjunto de entrada,
agrupando-os em classes (clusters).
Os mapas auto-organizáveis propostos pelo finlandês Teuvo Kohonen, na
década de 80 do século passado, são algumas das estruturas de redes neurais mais
difundidas, tendo sido inspiradas biologicamente no córtex cerebral, onde a ativação
de uma região específica corresponde à resposta frente a determinado estímulo
sensorial. As redes de Kohonen são utilizadas principalmente em problemas
envolvendo classificação de padrões e agrupamento de dados (clustering).
E) Rede Perceptron de Múltiplas Camadas (MLP – Multi Layer Perceptrons)
A rede perceptron de múltiplas camadas (MLP), constitui o modelo neural
artificial mais utilizado e conhecido, representando uma generalização da rede
perceptron apresentada anteriormente. Essas redes têm sido utilizadas com sucesso
para a solução de vários problemas envolvendo alto grau de não linearidade,
realizando operações lógicas complexas, reconhecimento, classificação de padrões,
controle de robôs e processamento da fala.
Tipicamente, sua topologia consiste de um conjunto de unidades sensoriais
que formam uma camada de entrada, uma ou mais camadas intermediárias
(escondidas) de neurônios sigmoides seguidos por uma camada de saída de
neurônios lineares ou sigmoides. Os sinais são propagados camada a camada pela
rede da entrada para a saída.
Seu treinamento é do tipo supervisionado e utiliza o algoritmo de retro
propagação do erro. Os valores de entrada e saída são usados para treinar a rede,
até que ela se aproxime de uma dada função numérica, associe os valores de
entrada e saída ou classifique os valores de entrada do modo desejado. Em cada
caso, trata-se de um problema de aproximação de funções.

232
A regra utilizada para ajustar os pesos e bias da rede, visando à minimização
da soma dos erros médios quadráticos da rede, altera continuamente os valores dos
pesos na direção decrescente do erro. As derivadas dos erros são calculadas para a
camada de saída da rede e, então, retro propagadas até que os valores dos erros
estejam disponíveis para cada camada intermediária. Os valores dos erros para as
camadas intermediárias são calculados a partir dos erros da camada seguinte e dos
respectivos pesos.
O treinamento continua até que o erro aceitável seja obtido ou um número
máximo de iterações alcançado. A taxa de aprendizado especifica a intensidade das
mudanças nos pesos. Pequenas taxas de aprendizado resultam, tipicamente, em
maior tempo de treinamento.
F) Rede de Função de Base Radial (RBF - Radial Basis Function)
A rede alimentada adiante RBF possui apenas uma camada intermediária de
neurônios com ativação caracterizada por funções de base radial como as
gaussianas. Os neurônios da camada de saída têm função de ativação linear.
Essas redes combinam vários conceitos da teoria de aproximação de funções
e de agrupamento de dados (clustering), sendo tipicamente utilizadas na
aproximação de funções multivariáveis, assim como em reconhecimento de padrões,
em que as saídas da rede são encaradas como estimadores estatísticos.
A arquitetura final de uma dada rede pode ser aproveitada para construção de
sistemas nebulosos com funcionalidade similar à da rede recém-treinada.
A estratégia de treinamento da rede RBF é dividida em duas fases. A primeira
fase consiste no ajuste dos pesos dos neurônios da camada intermediária por meio
de um método de aprendizagem auto-organizado (não supervisionado). Já na
segunda fase são ajustados os pesos dos neurônios da camada de saída utilizando
um aprendizado supervisionado com a regra delta generalizada. No caso particular
de treinamento somente da parte linear da rede (parâmetros do estágio de saída), o
problema de mínimos locais é eliminado.
G) Rede de Teoria da Ressonância Adaptativa (ART - Adaptive Resonance Theory)
Vários modelos de redes neurais artificiais utilizam a teoria da ressonância
adaptativa, proposta por Grossberg na década de 70 do século passado, que se
fundamenta em três princípios biológicos caracterizados por: normalização de sinais,
intensificação de contraste e memória de curto prazo. Essas redes são utilizadas
para reconhecimento de sinais de radar e processamento de imagens.

233
As redes ART utilizam treinamento não supervisionado (com característica
recorrente), possuindo habilidade de aprender novos padrões sem destruir
conhecimentos anteriormente adquiridos, característica associada à flexibilidade do
sistema (adaptativo) em incorporar mudanças ocorridas no ambiente, conservando a
estabilidade adquirida pelo conhecimento ao longo do tempo.
10.4.8 VANTAGENS E DESVANTAGENS DAS REDES NEURAIS ARTIFICIAIS
Algumas das principais vantagens apresentadas em aplicações práticas das
redes neurais artificiais são (FERREIRA, 2008; MEJIA SANCHEZ, 2009):
a) não é necessária informação sobre o ambiente a priori, pois o aprendizado
é feito através da apresentação de padrões à rede, sem a necessidade do
desenvolvimento de modelos matemáticos abordando a dinâmica do
processo;
b) processamento paralelo;
c) no caso mais utilizado, em que a função de ativação dos neurônios da
camada escondida é não linear, a rede neural resultante da interconexão
apresenta considerável grau de não linearidade. Entretanto, esta
característica pode ser prejudicial na presença de dados ruidosos;
d) habilidade de aprender por meio de exemplos e elevada capacidade de
adaptação às mudanças nas condições do ambiente para o qual a rede foi
treinada, bastando treiná-la novamente com padrões referentes às novas
condições operacionais;
e) implementação dos modelos alimentados adiante (feedforward) é simples
quando comparada com a complexidade dos modelos que podem ser
gerados.
Algumas das principais desvantagens apresentadas em aplicações práticas
das redes neurais artificiais são (MEJIA SANCHEZ, 2009):
a) difícil justificativa do comportamento das RNAs em determinadas
situações, em face de serem consideradas como “caixas pretas”, não se
sabendo como a rede chegou a um determinado resultado;
b) nas RNAs com arquiteturas muito grande ou grande quantidade de dados
de treinamento, caso utilizem o algoritmo de retro propagação, se gasta
muito tempo com o treinamento da rede;

234
c) dificuldade na determinação da arquitetura ideal da RNA, pois a mesma
deve ser suficientemente grande para resolver o problema e, ao mesmo
tempo, pequena para ter boa generalização;
d) necessidade de uma base de dados para o processo de treinamento,
dependendo do tipo de aprendizado.

235
10.5 FUNÇÕES UTILIZADAS NA SIMULAÇÃO COM O SIMULINK
10.5.1 CÁLCULO DAS CORRENTES DE REFERÊNCIA DO PID CONVENCIONAL
COM PULSOS RETANGULARES DE CORRENTES
function fase_cond = fcn(ang,teta) Imax = 3.1; if (ang<=45); Ia = Imax; Ib = 0; Ic = 0; else if (teta<=30); Ia = 3.1; Ib = 0; Ic = 0; elseif (teta<=60); Ia = 0; Ib = 0; Ic = 3.1; else Ia = 0; Ib = 3.1; Ic = 0; end end fase_cond = [Ia Ib Ic];
10.5.2 CÁLCULO DAS CORRENTES DE REFERÊNCIA DO PID CONVENCIONAL
COM CORRENTE CONFORMADA PARA REDUÇÃO DAS OSCILAÇÕES NO
CONJUGADO
function fase_cond = fcn(ang,teta) Imax = 3; if (ang<=45); Ia = Imax; Ib = 0; Ic = 0; else teta1 = teta-30; teta2 = teta-60; if (teta<=5); Ia = 2.7967 - 2.7967*exp(-teta/4); Ib = 0.00038287*teta^4 - 0.0042122*teta^3 - 0.00066773*teta^2 + 0.046895*teta + 3.0169; Ic = 0; elseif (teta<=15); Ia = 2.7967 - 2.7967*exp(-teta/4); Ib = -0.0002055*teta^5 + 0.00911*teta^4 - 0.1581*teta^3 + 1.329*teta^2 - 5.509*teta + 11.99; Ic = 0; elseif (teta<=30); Ia = 4.625*10^-6*teta^4 - 0.0003966*teta^3 + 0.01553*teta^2 - 0.2888*teta + 4.673;
236
Ib = 0; Ic = 0; elseif (teta<=35); Ia = 0.00038287*teta1^4 - 0.0042122*teta1^3 - 0.00066773*teta1^2 + 0.046895*teta1 + 3.0169; Ib = 0; Ic = 2.7967 - 2.7967*exp(-teta1/4); elseif (teta<=45); Ia = -0.0002055*teta1^5 + 0.00911*teta1^4 - 0.1581*teta1^3 + 1.329*teta1^2 - 5.509*teta1 + 11.99; Ib = 0; Ic = 2.7967 - 2.7967*exp(-teta1/4); elseif (teta<=60); Ia = 0; Ib = 0; Ic = 4.625*10^-6*teta1^4 - 0.0003966*teta1^3 + 0.01553*teta1^2 - 0.2888*teta1 + 4.673; elseif (teta<=65); Ia = 0; Ib = 2.7967 - 2.7967*exp(-teta2/4); Ic = 0.00038287*teta2^4 - 0.0042122*teta2^3 - 0.00066773*teta2^2 + 0.046895*teta2 + 3.0169; elseif (teta<=75); Ia = 0; Ib = 2.7967 - 2.7967*exp(-teta2/4); Ic = -0.0002055*teta2^5 + 0.00911*teta2^4 - 0.1581*teta2^3 + 1.329*teta2^2 - 5.509*teta2 + 11.99; else Ia = 0; Ib = 4.625*10^-6*teta2^4 - 0.0003966*teta2^3 + 0.01553*teta2^2 - 0.2888*teta2 + 4.673; Ic = 0; end
10.5.3 CÁLCULO DAS CORRENTES DE FASE DO MRC
function Iabc = C_Cor(pos,flux) % pos em grau % pos1 em grau % pos2 em grau % flux em V.s (enlace de fluxo) % Iabc em A if (pos <= 30) pos1 = pos + 30; pos2 = pos + 60; else if (pos <= 60) pos1 = pos + 30; pos2 = pos - 30; else pos1 = pos - 60; pos2 = pos - 30; end; end La1a1= 2.8856*10^-09*pos^4 - 5.309*10^-07*pos^3 + 2.352*10^-05*pos^2 + 7.989*10^-05*pos + 13.56*10^-03; Ma1a2 = 1.73628*10^-09*pos^4 - 3.106*10^-07*pos^3 + 1.477*10^-05*pos^2 - 7.919*10^-05*pos + 1.15*10^-03; Ma1b1 = -2.925*10^-11*pos^5 + 6.885*10^-09*pos^4 - 5.282*10^-07*pos^3 + 1.275*10^-05*pos^2 + 3.085*10^-05*pos + 0.003309; Ma1b2 = 2.20919*10^-13*pos^6 - 8.148*10^-11*pos^5 + 1.109*10^-08*pos^4 - 6.595*10^-07*pos^3 + 1.434*10^-05*pos^2 + 8.141*10^-06*pos + 0.00221;

237
Ma1c1 = 2.20919*10^-13*pos2^6 - 8.148*10^-11*pos2^5 + 1.109*10^-08*pos2^4 - 6.595*10^-07*pos2^3 + 1.434*10^-05*pos2^2 + 8.141*10^-06*pos2 + 0.00221; Ma1c2 = -2.925*10^-11*pos2^5 + 6.885*10^-09*pos2^4 - 5.282*10^-07*pos2^3 + 1.275*10^-05*pos2^2 + 3.085*10^-05*pos2 + 0.003309; Ma2a1 = Ma1a2; La2a2 = La1a1; Ma2b1 = Ma1b2; Ma2b2 = Ma1b1; Ma2c1 = Ma1c2; Ma2c2 = Ma1c1; Mb1a1 = Ma1b1; Mb1a2 = Ma2b1; Lb1b1 = 2.8856*10^-09*pos1^4 - 5.309*10^-07*pos1^3 + 2.352*10^-05*pos1^2 + 7.989*10^-05*pos1 + 13.56*10^-03; Mb1b2 = 1.73628*10^-09*pos1^4 - 3.106*10^-07*pos1^3 + 1.477*10^-05*pos1^2 - 7.919*10^-05*pos1 + 1.15*10^-03; Mb1c1 = -2.925*10^-11*pos1^5 + 6.885*10^-09*pos1^4 - 5.282*10^-07*pos1^3 + 1.275*10^-05*pos1^2 + 3.085*10^-05*pos1 + 0.003309; Mb1c2 = 2.20919*10^-13*pos1^6 - 8.148*10^-11*pos1^5 + 1.109*10^-08*pos1^4 - 6.595*10^-07*pos1^3 + 1.434*10^-05*pos1^2 + 8.141*10^-06*pos1 + 0.00221; Mb2a1 = Ma1b2; Mb2a2 = Ma2b2; Mb2b1 = Mb1b2; Lb2b2 = Lb1b1; Mb2c1 = Mb1c2; Mb2c2 = Mb1c1; Mc1a1 = Ma1c1; Mc1a2 = Ma2c1; Mc1b1 = Mb1c1; Mc1b2 = Mb2c1; Lc1c1 = 2.8856*10^-09*pos2^4 - 5.309*10^-07*pos2^3 + 2.352*10^-05*pos2^2 + 7.989*10^-05*pos2 + 13.56*10^-03; Mc1c2 = 1.73628*10^-09*pos2^4 - 3.106*10^-07*pos2^3 + 1.477*10^-05*pos2^2 - 7.919*10^-05*pos2 + 1.15*10^-03; Mc2a1 = Ma1c2; Mc2a2 = Ma2c2; Mc2b1 = Mb1c2; Mc2b2 = Mb2c2; Mc2c1 = Mc1c2; Lc2c2 = Lc1c1; L11 = La1a1 + Ma2a1 + Ma1a2 + La2a2; L12 = Mb1a1 - Mb2a1 - Mb1a2 + Mb2a2; L13 = - Mc1a1 + Mc2a1 + Mc1a2 - Mc2a2; L21 = Ma1b1 - Ma2b1 - Ma1b2 + Ma2b2; L22 = Lb1b1 + Mb2b1 + Mb1b2 + Lb2b2; L23 = Mc1b1 - Mc2b1 - Mc1b2 + Mc2b2; L31 = - Ma1c1 + Ma2c1 + Ma1c2 - Ma2c2; L32 = Mb1c1 - Mb2c1 - Mb1c2 + Mb2c2; L33 = Lc1c1 + Mc2c1 + Mc1c2 + Lc2c2; L = [L11 L12 L13; L21 L22 L23; L31 L32 L33]; Linv = inv(L); Iabc = Linv * flux;

238
10.5.4 CÁLCULO DO CONJUGADO ELETROMAGNÉTICO
function Te = C_Conj(pos,Iabc) % pos em grau % pos1 em grau % pos2 em grau % Iabc em A % Te em Nm if (pos <= 30) pos1 = pos + 30; pos2 = pos + 60; else if (pos <= 60.) pos1 = pos + 30; pos2 = pos - 30; else pos1 = pos - 60; pos2 = pos - 30; end; end DLa1a1= 4*2.8856*10^-09*pos^3 - 3*5.309*10^-07*pos^2 + 2*2.352*10^-05*pos + 7.989*10^-05; DMa1a2 = 4*1.73628*10^-09*pos^3 - 3*3.106*10^-07*pos^2 + 2*1.477*10^-05*pos - 7.919*10^-05; DMa1b1 = 5*-2.925*10^-11*pos^4 + 4*6.885*10^-09*pos^3 - 3*5.282*10^-07*pos^2 + 2*1.275*10^-05*pos + 3.085*10^-05; DMa1b2 = 6*2.20919*10^-13*pos^5 - 5*8.148*10^-11*pos^4 + 4*1.109*10^-08*pos^3 - 3*6.595*10^-07*pos^2 + 2*1.434*10^-05*pos + 8.141*10^-06; DMa1c1 = 6*2.20919*10^-13*pos2^5 - 5*8.148*10^-11*pos2^4 + 4*1.109*10^-08*pos2^3 - 3*6.595*10^-07*pos2^2 + 2*1.434*10^-05*pos2 + 8.141*10^-06; DMa1c2 = 5*-2.925*10^-11*pos2^4 + 4*6.885*10^-09*pos2^3 - 3*5.282*10^-07*pos2^2 + 2*1.275*10^-05*pos2 + 3.085*10^-05; DMa2a1 = DMa1a2; DLa2a2 = DLa1a1; DMa2b1 = DMa1b2; DMa2b2 = DMa1b1; DMa2c1 = DMa1c2; DMa2c2 = DMa1c1; DMb1a1 = DMa1b1; DMb1a2 = DMa2b1; DLb1b1 = 4*2.8856*10^-09*pos1^3 - 3*5.309*10^-07*pos1^2 + 2*2.352*10^-05*pos1 + 7.989*10^-05; DMb1b2 = 4*1.73628*10^-09*pos1^3 - 3*3.106*10^-07*pos1^2 + 2*1.477*10^-05*pos1 - 7.919*10^-05; DMb1c1 = 5*-2.925*10^-11*pos1^4 + 4*6.885*10^-09*pos1^3 - 3*5.282*10^-07*pos1^2 + 2*1.275*10^-05*pos1 + 3.085*10^-05; DMb1c2 = 6*2.20919*10^-13*pos1^5 - 5*8.148*10^-11*pos1^4 + 4*1.109*10^-08*pos1^3 - 3*6.595*10^-07*pos1^2 + 2*1.434*10^-05*pos1 + 8.141*10^-06; DMb2a1 = DMa1b2; DMb2a2 = DMa2b2; DMb2b1 = DMb1b2; DLb2b2 = DLb1b1; DMb2c1 = DMb1c2; DMb2c2 = DMb1c1; DMc1a1 = DMa1c1; DMc1a2 = DMa2c1; DMc1b1 = DMb1c1; DMc1b2 = DMb2c1; DLc1c1 = 4*2.8856*10^-09*pos2^3 - 3*5.309*10^-07*pos2^2 + 2*2.352*10^-05*pos2 + 7.989*10^-05; DMc1c2 = 4*1.73628*10^-09*pos2^3 - 3*3.106*10^-07*pos2^2 + 2*1.477*10^-05*pos2 - 7.919*10^-05; DMc2a1 = DMa1c2;
239
DMc2a2 = DMa2c2; DMc2b1 = DMb1c2; DMc2b2 = DMb2c2; DMc2c1 = DMc1c2; DLc2c2 = DLc1c1; DL11 = DLa1a1 + DMa2a1 + DMa1a2 + DLa2a2; DL12 = DMb1a1 - DMb2a1 - DMb1a2 + DMb2a2; DL13 = - DMc1a1 + DMc2a1 + DMc1a2 - DMc2a2; DL21 = DMa1b1 - DMa2b1 - DMa1b2 + DMa2b2; DL22 = DLb1b1 + DMb2b1 + DMb1b2 + DLb2b2; DL23 = DMc1b1 - DMc2b1 - DMc1b2 + DMc2b2; DL31 = - DMa1c1 + DMa2c1 + DMa1c2 - DMa2c2; DL32 = DMb1c1 - DMb2c1 - DMb1c2 + DMb2c2; DL33 = DLc1c1 + DMc2c1 + DMc1c2 + DLc2c2; DL = [DL11 DL12 DL13; DL21 DL22 DL23; DL31 DL32 DL33]; Te = 0.5 * 57,29578 * Iabc' * DL * Iabc;
10.5.5 REGRAS NEBULOSAS
1. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 2. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
3. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
4. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 5. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
6. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
7. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 8. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
9. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
10. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 11. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
12. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
13. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 14. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
15. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
16. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 17. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
18. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
19. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 20. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
21. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
22. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
23. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
24. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
25. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 26. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
27. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
28. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 29. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
30. If (ErVel is Neg) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
31. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 32. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
33. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
34. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 35. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
36. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
37. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 38. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
39. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
40. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
41. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
42. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 43. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
44. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
45. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 46. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
47. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero)

240
48. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 49. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
50. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
51. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 52. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
53. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
54. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 55. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
56. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
57. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 58. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
59. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
60. If (ErVel is Neg) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 61. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
62. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
63. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
64. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
65. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
66. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 67. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
68. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
69. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 70. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
71. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
72. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 73. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
74. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
75. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 76. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
77. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
78. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 79. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
80. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
81. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 82. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
83. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
84. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 85. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
86. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 87. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
88. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
89. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 90. If (ErVel is Neg) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
91. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
92. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 93. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
94. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
95. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 96. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
97. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
98. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 99. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
100. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
101. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 102. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
103. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
104. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 105. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
106. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
107. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 108. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
109. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
110. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 111. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
112. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
113. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 114. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
115. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
116. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 117. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
118. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
119. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 120. If (ErVel is Zer) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
121. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
122. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 123. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
241
124. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 125. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
126. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
127. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 128. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
129. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
130. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 131. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
132. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
133. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 134. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
135. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
136. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 137. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
138. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
139. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
140. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
141. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
142. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 143. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
144. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
145. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 146. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
147. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
148. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 149. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
150. If (ErVel is Zer) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
151. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 152. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
153. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
154. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 155. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
156. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
157. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 158. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
159. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
160. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 161. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
162. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 163. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
164. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
165. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 166. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
167. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
168. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 169. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
170. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
171. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P1) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 172. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P2) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
173. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P3) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
174. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P4) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 175. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P5) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
176. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
177. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 178. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P8) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
179. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P9) then (Ia is Zero)(Ib is Zero)(Ic is Zero)
180. If (ErVel is Zer) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P10) then (Ia is Zero)(Ib is Zero)(Ic is Zero) 181. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P1) then (Ia is Bai)(Ib is Alt)(Ic is Zero)
182. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P2) then (Ia is Alt)(Ib is Med)(Ic is Zero)
183. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P3) then (Ia is Alt)(Ib is Zero)(Ic is Zero) 184. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P4) then (Ia is Alt)(Ib is Zero)(Ic is Zero)
185. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P5) then (Ia is Alt)(Ib is Zero)(Ic is Alt)
186. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Alt) 187. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Alt)
188. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P8) then (Ia is Zero)(Ib is Alt)(Ic is Med)
189. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P9) then (Ia is Zero)(Ib is Alt)(Ic is Zero) 190. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Neg) and (PosAng is P10) then (Ia is Zero)(Ib is Alt)(Ic is Zero)
191. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P1) then (Ia is Bai)(Ib is Alt)(Ic is Zero)
192. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P2) then (Ia is Alt)(Ib is Zero)(Ic is Zero) 193. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P3) then (Ia is Alt)(Ib is Zero)(Ic is Zero)
194. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P4) then (Ia is Alt)(Ib is Zero)(Ic is Zero)
195. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P5) then (Ia is Alt)(Ib is Zero)(Ic is Alt) 196. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Alt)
197. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Alt)
198. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P8) then (Ia is Zero)(Ib is Alt)(Ic is Med) 199. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P9) then (Ia is Zero)(Ib is Alt)(Ic is Zero)

242
200. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Zero) and (PosAng is P10) then (Ia is Zero)(Ib is Alt)(Ic is Zero) 201. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P1) then (Ia is Bai)(Ib is Alt)(Ic is Zero)
202. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P2) then (Ia is Alt)(Ib is Med)(Ic is Zero)
203. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P3) then (Ia is Alt)(Ib is Zero)(Ic is Zero) 204. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P4) then (Ia is Alt)(Ib is Zero)(Ic is Zero)
205. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P5) then (Ia is Alt)(Ib is Zero)(Ic is Alt)
206. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Alt) 207. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Alt)
208. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P8) then (Ia is Zero)(Ib is Alt)(Ic is Med)
209. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P9) then (Ia is Zero)(Ib is Alt)(Ic is Zero) 210. If (ErVel is Pos) and (DerErVel is Neg) and (IntErVel is Pos) and (PosAng is P10) then (Ia is Zero)(Ib is Alt)(Ic is Zero)
211. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P1) then (Ia is Bai)(Ib is Alt)(Ic is Zero)
212. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P2) then (Ia is Alt)(Ib is Med)(Ic is Zero) 213. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P3) then (Ia is Alt)(Ib is Zero)(Ic is Zero)
214. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P4) then (Ia is Alt)(Ib is Zero)(Ic is Zero)
215. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P5) then (Ia is Alt)(Ib is Zero)(Ic is Alt)
216. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Alt)
217. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Alt)
218. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P8) then (Ia is Zero)(Ib is Alt)(Ic is Med) 219. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P9) then (Ia is Zero)(Ib is Alt)(Ic is Zero)
220. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Neg) and (PosAng is P10) then (Ia is Zero)(Ib is Alt)(Ic is Zero)
221. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P1) then (Ia is Bai)(Ib is Alt)(Ic is Zero) 222. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P2) then (Ia is Alt)(Ib is Med)(Ic is Zero)
223. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P3) then (Ia is Alt)(Ib is Zero)(Ic is Zero)
224. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P4) then (Ia is Alt)(Ib is Zero)(Ic is Zero) 225. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P5) then (Ia is Alt)(Ib is Zero)(Ic is Alt)
226. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Alt)
227. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Alt) 228. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P8) then (Ia is Zero)(Ib is Alt)(Ic is Med)
229. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P9) then (Ia is Zero)(Ib is Alt)(Ic is Zero)
230. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Zero) and (PosAng is P10) then (Ia is Zero)(Ib is Alt)(Ic is Zero) 231. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P1) then (Ia is Bai)(Ib is Alt)(Ic is Zero)
232. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P2) then (Ia is Alt)(Ib is Med)(Ic is Zero)
233. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P3) then (Ia is Alt)(Ib is Zero)(Ic is Zero) 234. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P4) then (Ia is Alt)(Ib is Zero)(Ic is Zero)
235. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P5) then (Ia is Alt)(Ib is Zero)(Ic is Alt)
236. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Alt) 237. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Alt)
238. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P8) then (Ia is Zero)(Ib is Alt)(Ic is Med) 239. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P9) then (Ia is Zero)(Ib is Alt)(Ic is Zero)
240. If (ErVel is Pos) and (DerErVel is Zer) and (IntErVel is Pos) and (PosAng is P10) then (Ia is Zero)(Ib is Alt)(Ic is Zero)
241. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P1) then (Ia is Bai)(Ib is Alt)(Ic is Zero) 242. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P2) then (Ia is Alt)(Ib is Med)(Ic is Zero)
243. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P3) then (Ia is Alt)(Ib is Zero)(Ic is Zero)
244. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P4) then (Ia is Alt)(Ib is Zero)(Ic is Zero) 245. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P5) then (Ia is Alt)(Ib is Zero)(Ic is Alt)
246. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Alt)
247. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Alt) 248. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P8) then (Ia is Zero)(Ib is Alt)(Ic is Med)
249. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P9) then (Ia is Zero)(Ib is Alt)(Ic is Zero)
250. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Neg) and (PosAng is P10) then (Ia is Zero)(Ib is Alt)(Ic is Zero) 251. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P1) then (Ia is Bai)(Ib is Alt)(Ic is Zero)
252. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P2) then (Ia is Alt)(Ib is Med)(Ic is Zero)
253. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P3) then (Ia is Alt)(Ib is Zero)(Ic is Zero) 254. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P4) then (Ia is Alt)(Ib is Zero)(Ic is Zero)
255. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P5) then (Ia is Alt)(Ib is Zero)(Ic is Alt)
256. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Alt) 257. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Alt)
258. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P8) then (Ia is Zero)(Ib is Alt)(Ic is Med)
259. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P9) then (Ia is Zero)(Ib is Alt)(Ic is Zero) 260. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Zero) and (PosAng is P10) then (Ia is Zero)(Ib is Alt)(Ic is Zero)
261. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P1) then (Ia is Bai)(Ib is Alt)(Ic is Zero)
262. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P2) then (Ia is Alt)(Ib is Med)(Ic is Zero) 263. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P3) then (Ia is Alt)(Ib is Zero)(Ic is Zero)
264. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P4) then (Ia is Alt)(Ib is Zero)(Ic is Zero)
265. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P5) then (Ia is Alt)(Ib is Zero)(Ic is Alt) 266. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P6) then (Ia is Zero)(Ib is Zero)(Ic is Alt)
267. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P7) then (Ia is Zero)(Ib is Zero)(Ic is Alt)
268. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P8) then (Ia is Zero)(Ib is Alt)(Ic is Med) 269. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P9) then (Ia is Zero)(Ib is Alt)(Ic is Zero)
270. If (ErVel is Pos) and (DerErVel is Pos) and (IntErVel is Pos) and (PosAng is P10) then (Ia is Zero)(Ib is Alt)(Ic is Med)

243
10.5.6 SEPARAÇÃO DOS DADOS PARA TREINO, TESTE E VALIDAÇÃO DA
REDE NEURAL
entrada = [12000 dados das entradas: erros de velocidade, derivadas do erros de velocidade, integrais dos erros de velocidade e posição angular do rotor]; saída = [12000 dados das correntes Ia, Ib e Ic]; numero_de_dados = length(entrada); validacao = 3; Entrada_Treino = []; Entrada_Teste = []; Entrada_Validacao = []; Saida_Treino = []; Saida_Teste = []; Saida_Validacao = []; i = 1; cont_valid = 1; while i <= numero_de_dados if cont_valid == 3 Entrada_Validacao = cat(1,Entrada_Validacao,entrada(i,:)); Saida_Validacao = cat(1,Saida_Validacao,saida(i,:)); i = i + 1; if i < numero_de_dados Entrada_Teste = cat(1,Entrada_Teste,entrada(i,:)); Saida_Teste = cat(1,Saida_Teste,saida(i,:)); end cont_valid = 1; else Entrada_Treino = cat(1,Entrada_Treino,entrada(i,:)); Saida_Treino = cat(1,Saida_Treino,saida(i,:)); cont_valid = cont_valid + 1; end i = i + 1; end Entrada_Treino = Entrada_Treino'; Saida_Treino = Saida_Treino'; Entrada_Validacao = Entrada_Validacao'; Saida_Validacao = Saida_Validacao'; Entrada_Teste = Entrada_Teste'; Saida_Teste = Saida_Teste';
10.5.7 CÁLCULO DAS CORRENTES DE REFERÊNCIA DO PID NEURAL
function Iabc = Controlador_NN(Prop,Deriv,Int,Posicao) Entrada = [Prop;Deriv;Int;Posicao]; % 1 - bias da camada oculta

244
x = [1;Entrada]; %W = NN_Control.IW{1,1}'; W = [0.47776 1.3872 0.31223 0.059867; 1.2546 -0.18072 2.1266 0.65907; 0.17396 0.30698 0.78788 -0.4515; -1.4056 0.089871 -1.7843 -0.13301; 0.63238 0.90348 0.83117 0.15237; -0.085193 1.5881 -0.58117 -0.096129; 1.3422 0.85018 2.7531 -0.089119; 0.00851 0.91679 -2.8954 0.028588; -0.033239 0.080356 -2.556 0.20926; 1.1355 0.38141 0.7681 -0.23903; -0.44134 0.91061 -0.7236 -0.12528; 0.40028 -0.42405 0.77596 -0.076656; 0.58396 0.40182 0.37236 -0.15127; 0.49084 0.53508 2.593 -0.017221; 1.695 0.75061 4.7901 -0.24109; -1.5221 -1.0604 -2.2545 -0.10976; 1.2167 0.83766 1.0266 0.083876; 0.027438 0.3579 -2.4962 0.018756; 0.04122 0.21275 -1.8844 0.014913; -0.067348 0.51379 0.18001 0.23984; 0.28836 -0.29568 2.3632 -0.017019; 0.34129 -0.16864 -0.57241 0.067477; 0.0001451 -0.12538 -0.005418 0.096872; -0.38656 -0.088888 -1.2439 0.046776; 0.069617 -0.066245 2.0254 -0.17953; 2.239 -1.1984 1.1758 -0.216; 0.75246 0.60727 -0.50427 0.015594; -0.034856 -0.22951 1.1895 0.091661; -0.002775 -0.19408 0.66184 0.10442; -3.677 -2.1397 -3.1335 0.10665; -0.82512 -0.020007 -3.261 -0.0097316; 1.5997 0.66261 3.3561 -0.0059099; 1.3446 1.5215 0.54839 -0.089644; 0.35632 1.0699 -1.8875 -0.0099358; 2.2638 0.85386 2.1368 -0.062573; -2.16 -3.1577 0.84204 -0.23086]'; %BIAS = NN_Control.b{1}'; BIAS_CAMADA_OCULTA = [-4.4208; -3.703; 5.5386; 10.1368; -5.7909; 7.3648; -8.2784; -3.0766; -0.79168; 6.5756; 9.4216; 5.5998; 5.7708; -1.0858; -0.90941; 5.0569; -5.5112;

245
2.8462; 1.0617; -6.4682; -2.2705; -4.1905; -6.3479; -2.6083; 0.79305; -0.58567; 0.47957; 0.41597; -4.6743; 0.31229; 5.9872; -1.6689; 4.168; 6.1225; 4.4976; -0.78294]'; W_oculta = [BIAS_CAMADA_OCULTA;W]; z = x'*W_oculta; %a = tansig(z); a = 2./(1+exp(-2*z))-1; % 1 - bias da camada de saida a_saida = [1 a]; %W_saida = NN_Control.LW{2}'; W_saida = [-0.26136 0.1303 -0.030398 0.048014 1.1944 -0.068661 -0.043071 -0.27708 -0.052457 0.099054 -0.0046292 -0.20696 1.0076 0.3433 0.041913 -1.211 0.20415 -0.17746 0.055749 0.094804 -0.077921 -0.15547 -0.10919 0.080913 -0.061268 -1.0616 0.43865 0.41114 -2.1778 -1.1272 0.519 -0.053339 -0.71244 -0.83727 0.044223 -0.030427; 0.9914 -0.067119 0.11792 -2.0138 -0.69739 0.49513 -0.29128 -0.10456 -0.33291 -0.28452 1.7504 -0.30799 -0.78964 -0.071406 1.5256 -0.41443 -1.3997 -0.46388 0.50181 -0.27909 -0.99541 -0.48471 1.7286 0.59417 -0.41738 0.45086 -0.53323 0.45186 -0.51681 0.31421 -1.0375 0.65458 0.053827 0.58413 1.32 -1.5225; -1.3523 0.01541 0.021959 -2.4854 1.4075 0.019912 -0.080053 -0.69522 -0.5637 -0.52748 3.2018 -1.752 1.7055 0.50541 0.024547 0.49348 1.2826 0.65142 1.0064 -0.50799 0.74609 -0.50139 -0.15308 -0.19499 -0.69987 -0.0096656 -0.35939 -0.78112 2.1416 0.14202 0.80931 0.1807 1.311 -1.7831 0.22387 0.041701]'; %BIAS_CAMADA_DE_SAIDA = NN_Control.b{2}'; BIAS_CAMADA_DE_SAIDA = [-0.46504; -0.1294; 0.79868]'; W_final = [BIAS_CAMADA_DE_SAIDA;W_saida]; Iabc = a_saida*W_final;

246
10.6 PROGRAMAÇÕES DO PIC 18F4680 DO CIRCUITO CONTROLADOR
10.6.1 CÁLCULO DA VELOCIDADE
/* * Projeto: Motor Relutância Chaveado de Fluxo Axial * Módulo: Cálculo da Velocidade * Autor - Eric Sanches */ // Indica a ocorrência de um novo furo no disco unsigned short FLAG_PROX_FURO; // Indica que o intervalo de tempo atingiu 92 ms unsigned short FLAG_DT; // Variáveis do cálculo da velocidade float VelReal=0; // Velocidade real (rpm) float dt=0.092; // Intervalo de tempo para cálculo da velocidade // Contador de furos unsigned char ContadorFuros = 0; // Número de furos contados a cada 92 ms unsigned char FurosContados = 0; // Mensagem enviada pela interface serial char msgSerial[50]; // Calcula a velocidade em rpm do rotor a cada 92 ms void CalculaVel(); // Escreve na interface serial a velocidade do rotor void WriteSerial(); // // Rotina de interrupção a cada furo no disco ou a cada 92 ms // void interrupt() { if(INTCON & 0b00000010) { // Trata a interrupção do contador de furos FLAG_PROX_FURO=1; ContadorFuros=ContadorFuros+1; INTCON = INTCON & 0b11111101; // Clear INT0IF } else { // Trata a interrupção de tempo de 92 ms FLAG_DT = 1; TMR0H=0x20; TMR0L=0x00; FurosContados = ContadorFuros; ContadorFuros = 0; INTCON = INTCON & 0b11111011; // Clear INT0IF } } // // Programa principal // void main() { // Habilita a interface serial Usart_Init(38400); ADCON1 = 0x0F; // Desliga todas as entradas A/D da porta A TRISA = 0b00100000; // Configura a porta A

247
// Configura Interrupção INTCON = 0b11110000; INTCON2 = 0b01000100; INTCON3 = 0x00; // Inicializa FLAG_PROX_FURO FLAG_PROX_FURO = 0; // Parâmetros de tempo TMR0H=0x20; TMR0L=0x00; T0CON = 0b00000010; //Habilita Timer 0 como contador e prescaler de 1:256 T0CON = 0b10000010; //Habilita contagem Timer/Counter 0 // Inicializa FLAG_DT FLAG_DT=0; // do { if(FLAG_PROX_FURO) { FLAG_PROX_FURO=0; } // Se intervalo de tempo atingiu 92 ms // Calcula nova velocidade e a escreve na interface serial if(FLAG_DT) { CalculaVel(); sprintf(msgSerial,"%6.2f\r\n",VelReal); WriteSerial(); FLAG_DT=0; } } while(1); } // // Rotina de cálculo da velocidade do rotor em rpm // void CalculaVel() { VelReal = FurosContados/(3*dt); } // // Rotina de escrita na serial // void WriteSerial() { int idx=0; while(msgSerial[idx]!=0) { USART_Write(msgSerial[idx]); msgSerial[idx]=0; idx++; } }
10.6.2 PID CONVENCIONAL COM CORRENTE MODIFICADA
/* * Project name: Motor Relutância Chaveado de Fluxo Axial * Módulo: Correntes de Referência Convencionais * Autor - Eric Sanches */

248
// Indica a ocorrência de um novo furo no disco unsigned short FLAG_PROX_FURO; // Indica que o intervalo de tempo atingiu 6.55 ms (dt) unsigned short FLAG_DT; // Indica o cálculo da velocidade real para uso no controlador PID unsigned short FLAG_CALC_VELOC; // Indica a mudança da velocidade de referência (330 para 350 rpm) unsigned short FLAG_MUD_VELREF; // Parâmtros do PID float Kp = 16; // Ganho proporcional float Ki = 3; // Ganho integral float Kd = 1; // Ganho derivativo float Integral = 0; // Inicialização da parte Integral float VelRef = 330; // Velocidade de referência inicial (rpm) float VelReal = 0; // Velocidade real (rpm) float ErVel; // Erro de velocidade atual float Ant_ErVel; // Erro de velocidade anterior float SaiContr; // Inicialização da saída do controlador float Derivativa; // Parte derivativa float dt = 0.00655; // Intervalo de tempo para cálculo do PID // Guarda o ângulo do motor unsigned char CurrAngle; // Atualiza o número de furos contados unsigned char ContadorFuros = 0; // Guarda o número de furos contados a cada 32.75 ms (5 x dt) unsigned char FurosContados = 0; // Tabelas com os valores das correntes de referência a cada 2 graus char Ia[] = {0,32,57,76,91,102,111,118,124,128,131,134,136,138,139,140,139,138,137,137,137,137,138,139,140,142,143,146,148,151,154,157,158,157,155,151,146,140,133,125,117,107,95,79,54,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0}; char Ib[] = {154,157,158,157,155,151,146,140,133,125,117,107,95,79,54,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,32,57,76,91,102,111,118,124,128,131,134,136,138,139,140,139,138,137,137,137,137,138,139,140,142,143,146,148,151}; char Ic[] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,32,57,76,91,102,111,118,124,128,131,134,136,138,139,140,139,138,137,137,137,137,138,139,140,142,143,146,148,151,154,157,158,157,155,151,146,140,133,125,117,107,95,79,54,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0}; // Calcula o fator de correção na saída do PID a cada 6.55 ms void CalculaPID(); // // Rotina de interrupção a cada furo no disco ou a cada 6.55 ms // void interrupt() { if(INTCON & 0b00000010) { // Trata interrupção do contador de furos e atualiza o ângulo do rotor FLAG_PROX_FURO=1; ContadorFuros=ContadorFuros+1; CurrAngle=CurrAngle+2; if(CurrAngle>89) { CurrAngle=1; } INTCON = INTCON & 0b11111101; // Clear INT0IF } else {

249
// Trata interrupção de tempo de 6.55 ms FLAG_DT = 1; TMR0H=0x00; TMR0L=0x01; INTCON = INTCON & 0b11111011; // Clear INT0IF } } // // Programa principal // void main() { // Configuração das portas ADCON1 = 0x0F; // Desliga as entradas A/D da porta A TRISA = 0b00100000; // Configura a porta A TRISB = 0x1; // Porta B é saída TRISC = 0; // Porta C é saída TRISD = 0; // Porta D é saída // Como o bit 0 da porta B está sendo usado como entrada do sensor de posição // este bit é replicado na porta E TRISE = 0; // Porta E é saída PORTE=0x0; // Aplica as correntes para a posição de referência do rotor (45 graus) e espera 3 s LATA = 0; LATB = 0; LATE = 0; LATD = 0; LATC = 100; delay_ms(3000); // Desliga as correntes na posição de referência e espera 1 s LATA = 0; LATB = 0; LATE = 0; LATD = 0; LATC = 0; delay_ms(1000); // Configura a interrupção INTCON = 0b11110000; INTCON2 = 0b01000100; INTCON3 = 0x00; // Inicializa o ângulo para a posição de referência do rotor (45 graus) CurrAngle =45; // Inicializa FLAG_PROX_FURO FLAG_PROX_FURO = 0; // Inicializa FLAG_CALC_VELOC FLAG_CALC_VELOC = 0; // Parâmetros de tempo TMR0H=0x00; TMR0L=0x01; T0CON = 0b01000110; //Habilita Timer 0 como contador e prescaler de 1:256 T0CON = 0b11000110; //Habilita contagem Timer/Counter 0 // Aplica as correntes de referência relativas à posição de referência do rotor (45 graus) LATB = Ic[CurrAngle] | 0x01;//0xFE; LATE = Ic[CurrAngle] & 0x01;//0xFE; LATD = Ib[CurrAngle]; LATC = Ia[CurrAngle]; // Inicializa FLAG_DT FLAG_DT=0; // Inicializa FLAG_MUD_VELREF FLAG_MUD_VELREF=0; // Inicializa a saída do controlador

250
SaiContr=1; // do { if(FLAG_PROX_FURO) { FLAG_PROX_FURO = 0; // Atualiza as saídas de corrente LATB = (short)(Ic[CurrAngle]*SaiContr) | 0x01;//0xFE; LATE = (short) (Ic[CurrAngle]*SaiContr) & 0x01;//0xFE; LATD = (short) (Ib[CurrAngle]*SaiContr); LATC = (short) (Ia[CurrAngle]*SaiContr); } // Se chegou em 6.55 ms calcula novo valor das saídas do PID if(FLAG_DT) { FLAG_DT=0; // atualiza FLAG_CALC_VELOC FLAG_CALC_VELOC=FLAG_CALC_VELOC+1; // Chama a rotina de cálculo do PID CalculaPID(); // Muda o valor da velocidade de referência de 330 para 350 rpm if(FLAG_MUD_VELREF == 50) { VelRef = 350; } } } while(1); } // // Rotina de cálculo da saída do controlador PID // void CalculaPID() { // A cada 32.75 ms (5 x dt) calcula-se a velocidade real em rpm if(FLAG_CALC_VELOC == 5) { FLAG_CALC_VELOC = 0; FurosContados = ContadorFuros; ContadorFuros = 0; VelReal = FurosContados/(15*dt); // Atualiza FLAG_MUD_VERREF if(VelReal > 330) { FLAG_MUD_VELREF=FLAG_MUD_VELREF+1; } } // Cálculo da saída do PID ErVel = (VelRef - VelReal); Integral = Integral + (Ki * ErVel * dt); Derivativa = (ErVel - Ant_ErVel) / dt; SaiContr = Kp * ErVel + Integral + Kd * Derivativa; // Limita a saída do controlador entre 0 e 1 if(SaiContr > 1) { SaiContr = 1; } if(SaiContr < 0) {

251
SaiContr=0; } // Atualiza erro de velocidade anterior Ant_ErVel = ErVel; }
10.6.3 PID NEBULOSO
/* * Project name: Motor Relutância Chaveado de Fluxo Axial * Módulo: Correntes de Referência Nebulosas (Fuzzy) * Autor - Eric Sanches */ // Definição das tabelas das correntes de referências nebulosas struct Correntes { char Ia; char Ib; char Ic; }; struct Correntes V_Cor_Pos1[7][3][3]; struct Correntes V_Cor_Pos2[7][3][3]; struct Correntes V_Cor_Pos3[7][3][3]; struct Correntes V_Cor_Pos4[7][3][3]; struct Correntes V_Cor_Pos5[7][3][3]; struct Correntes V_Cor_Pos6[7][3][3]; struct Correntes V_Cor_Pos7[7][3][3]; struct Correntes V_Cor_Pos8[7][3][3]; struct Correntes V_Cor_Pos9[7][3][3]; struct Correntes V_Cor_Pos10[7][3][3]; struct Correntes V_Cor_Pos11[7][3][3]; struct Correntes V_Cor_Pos12[7][3][3]; struct Correntes V_Cor_Pos13[7][3][3]; // Indica a ocorrência de um novo furo no disco unsigned short FLAG_PROX_FURO; // Indica que o intervalo de tempo atingiu 6.55 ms (dt) unsigned short FLAG_DT; // Indica o cálculo da velocidade real para uso no controlador PID unsigned short FLAG_CALC_VELOC; // Indica a mudança da velocidade de referência (330 para 350 rpm) unsigned short FLAG_MUD_VELREF; // Indica os índices nebulosos unsigned char IdxProp; // Proporcional unsigned char IdxInt; // Integral unsigned char IdxDer; // Derivativo // Parâmetros do PID float Kp = 16; // Ganho proporcional float Ki = 3; // Ganho integral float Kd = 1; // Ganho derivativo float Integral = 0; // Inicialização da parte integral do PID float VelRef = 330; // Velocidade de referência inicial (rpm) float VelReal = 0; // Velocidade real (rpm) float ErVel; // Erro de velocidade atual float Ant_ErVel; // Erro de velocidade anterior float Derivativo; // Parte Derivativa do PID float Propocional; // Parte proporcional do PID float dt=0.00655; // Intervalo de tempo para cálculo dos parâmetros do PID // Guarda o ângulo do motor unsigned char CurrAngle; // Atualiza o número de furos contados unsigned char ContadorFuros = 0;

252
// Guarda o número de furos contados a cada 32.75 ms (5 x dt) unsigned char FurosContados = 0; // Correntes de referências nebulosas char FuzIa; // Corrente de referência nebulosa da fase A char FuzIb; // Corrente de referência nebulosa da fase B char FuzIc; // Corrente de referência nebulosa da fase C // Calcula os parâmetros do PID void CalculaPID(); // Calcula os índices nebulosos void CalculaFuzzy(); // Carrega a tabela Fuzzy das correntes void inicializa(); // // Rotina de interrupção a cada furo no disco ou a cada 6.55 ms // void interrupt() { if(INTCON & 0b00000010) { // Trata interrupção do contador de furos e atualiza o ângulo do rotor FLAG_PROX_FURO=1; ContadorFuros=ContadorFuros+1; CurrAngle=CurrAngle+2; if(CurrAngle>89) { CurrAngle=1; } INTCON = INTCON & 0b11111101; // Clear INT0IF } else { // Trata interrupção de tempo de 6.55 ms FLAG_DT = 1; TMR0H=0x00; TMR0L=0x01; INTCON = INTCON & 0b11111011; // Clear INT0IF } } // // Programa principal // void main() { // Chama a rotina com a tabela Fuzzy das correntes inicializa(); // Configuração das portas ADCON1 = 0x0F; // Desliga todas as entradas A/D da porta A TRISA = 0b00100000; // Configura a porta A TRISB = 0x1; // Porta B é saída TRISC = 0; // Porta C é saída TRISD = 0; // Porta D é saída // Como o bit 0 da porta B está sendo usado como entrada do sensor de posição // este bit é replicado na porta E TRISE = 0; // Porta E é saída PORTE=0x0; // Aplica as correntes para a posição de referência do rotor (45 graus) e espera 3 s LATA = 0; LATB = 0; LATE = 0; LATD = 0;

253
LATC = 100; delay_ms(3000); // Desliga as correntes na posição de referência e espera 1 s LATA = 0; LATB = 0; LATE = 0; LATD = 0; LATC = 0; delay_ms(1000); // Configura a interrupção INTCON = 0b11110000; INTCON2 = 0b01000100; INTCON3 = 0x00; // Inicializa o ângulo para a posição de referência do rotor (45 graus) CurrAngle=45; // Aplica as correntes de referência nebulosas relativas à posição de referência do rotor (45 graus) LATB = (char)V_Cor_Pos7[3][0][0].Ic | 0x01; LATE = (char)V_Cor_Pos7[3][0][0].Ic & 0x01;//0xFE; LATD = (char)V_Cor_Pos7[3][0][0].Ib; LATC = (char)V_Cor_Pos7[3][0][0].Ia; // Inicializa FLAG_PROX_FURO FLAG_PROX_FURO = 0; // Initialize FLAG_PROX_FURO // Inicializa FLAG_CALC_VELOC FLAG_CALC_VELOC = 0; // Parâmetros de tempo TMR0H=0x00; TMR0L=0x01; T0CON = 0b01000110; //Habilita Timer 0 como contador e prescaler de 1:256 T0CON = 0b11000110; //Habilita contagem Timer/Counter 0 // Inicializa FLAG_DT FLAG_DT=0; // Inicializa FLAG_MUD_VELREF FLAG_MUD_VELREF=0; do { if(FLAG_PROX_FURO) { FLAG_PROX_FURO=0; // Atualiza as saídas de corrente CalculaFuzzy(); LATB = FuzIc | 0x01; LATE = FuzIc & 0x01;//0xFE; LATD = FuzIb; LATC = FuzIa; } // Se chegou em 6.55 ms calcula novo valor dos parâmetros do PID if(FLAG_DT) { FLAG_DT=0; // Atualiza FLAG_CALC_VELOC FLAG_CALC_VELOC=FLAG_CALC_VELOC+1; // Chama a rotina de cálculo dos parâmetros do PID CalculaPID(); // Muda o valor da velocidade de referência de 330 para 350 rpm if(FLAG_MUD_VELREF == 120) { VelRef = 350; } } }

254
while(1); } // // Rotina de cálculo dos índices nebulosos // void CalculaFuzzy() { // if(Propocional<-5.0){ IdxProp=0; }else{ if(Propocional<-0.5){ IdxProp=1; }else{ if(Propocional<0.5){ IdxProp=2; }else{ if(Propocional<5.0){ IdxProp=3; }else{ if(Propocional<80){ IdxProp=4; }else{ if(Propocional<250.0){ IdxProp=5; }else{ IdxProp=6; }}}}}} // if(Integral<-5.0){ IdxInt=0; }else{ if(Integral<5.0){ IdxInt=1; }else{ IdxInt=2; }} // if(Derivativo<-10.0){ IdxDer=0 ; }else{ if(Integral<10.0){ IdxDer=1; }else{ IdxDer=2; }} // if(CurrAngle<5){ FuzIa = V_Cor_Pos1[IdxProp][IdxDer][IdxInt].Ia; FuzIb = V_Cor_Pos1[IdxProp][IdxDer][IdxInt].Ib; FuzIc = V_Cor_Pos1[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<12){ FuzIa = V_Cor_Pos2[IdxProp][IdxDer][IdxInt].Ia; FuzIb = V_Cor_Pos2[IdxProp][IdxDer][IdxInt].Ib; FuzIc = V_Cor_Pos2[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<19){ FuzIa = V_Cor_Pos3[IdxProp][IdxDer][IdxInt].Ia; FuzIb = V_Cor_Pos3[IdxProp][IdxDer][IdxInt].Ib;

255
FuzIc = V_Cor_Pos3[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<26){ FuzIa = V_Cor_Pos4[IdxProp][IdxDer][IdxInt].Ia; FuzIb = V_Cor_Pos4[IdxProp][IdxDer][IdxInt].Ib; FuzIc = V_Cor_Pos4[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<33){ FuzIa = V_Cor_Pos5[IdxProp][IdxDer][IdxInt].Ia; FuzIb = V_Cor_Pos5[IdxProp][IdxDer][IdxInt].Ib; FuzIc = V_Cor_Pos5[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<40){ FuzIa = V_Cor_Pos6[IdxProp][IdxDer][IdxInt].Ia; FuzIb = V_Cor_Pos6[IdxProp][IdxDer][IdxInt].Ib; FuzIc = V_Cor_Pos6[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<47){ FuzIa = V_Cor_Pos7[IdxProp][IdxDer][IdxInt].Ia; FuzIb = V_Cor_Pos7[IdxProp][IdxDer][IdxInt].Ib; FuzIc = V_Cor_Pos7[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<54){ FuzIa = V_Cor_Pos8[IdxProp][IdxDer][IdxInt].Ia; FuzIb = V_Cor_Pos8[IdxProp][IdxDer][IdxInt].Ib; FuzIc = V_Cor_Pos8[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<61){ FuzIa = V_Cor_Pos9[IdxProp][IdxDer][IdxInt].Ia; FuzIb = V_Cor_Pos9[IdxProp][IdxDer][IdxInt].Ib; FuzIc = V_Cor_Pos9[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<68){ FuzIa = V_Cor_Pos10[IdxProp][IdxDer][IdxInt].Ia; FuzIb = V_Cor_Pos10[IdxProp][IdxDer][IdxInt].Ib; FuzIc = V_Cor_Pos10[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<75){ FuzIa = V_Cor_Pos11[IdxProp][IdxDer][IdxInt].Ia; FuzIb = V_Cor_Pos11[IdxProp][IdxDer][IdxInt].Ib; FuzIc = V_Cor_Pos11[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<82){ FuzIa = V_Cor_Pos12[IdxProp][IdxDer][IdxInt].Ia; FuzIb = V_Cor_Pos12[IdxProp][IdxDer][IdxInt].Ib; FuzIc = V_Cor_Pos12[IdxProp][IdxDer][IdxInt].Ic; }else{ FuzIa = V_Cor_Pos13[IdxProp][IdxDer][IdxInt].Ia; FuzIb = V_Cor_Pos13[IdxProp][IdxDer][IdxInt].Ib; FuzIc = V_Cor_Pos13[IdxProp][IdxDer][IdxInt].Ic; }}}}}}}}}}}} } // // Rotina de cálculo dos parâmtros do PID // void CalculaPID() { // A cada 32.75 ms (5 x dt) calcula-se a velocidade real em rpm if(FLAG_CALC_VELOC==5) {

256
FLAG_CALC_VELOC=0; FurosContados = ContadorFuros; ContadorFuros = 0; VelReal = FurosContados/(15*dt); // Atualiza FLAG_MUD_VERREF if(VelReal > 330) { FLAG_MUD_VELREF=FLAG_MUD_VELREF+1; } } // Cálculo dos parâmetros do PID ErVel = VelRef - VelReal; Integral = Integral + (Ki * ErVel * dt); Derivativo = (ErVel - Ant_ErVel) / dt; Propocional = Kp * ErVel; // Atualiza erro de velocidade anterior Ant_ErVel = ErVel; } // // Rotina com a tabela Fuzzy das correntes // void inicializa() { V_Cor_Pos1[0][0][0].Ia=0;V_Cor_Pos1[0][0][0].Ib=0;V_Cor_Pos1[0][0][0].Ic=0; . . . 819 valores nebulosos para as três correntes de referências . . . V_Cor_Pos13[6][2][2].Ia=0;V_Cor_Pos13[6][2][2].Ib=240;V_Cor_Pos13[6][2][2].Ic=0; }
10.6.4 PID NEURAL
/* * Project name: Motor Relutância Chaveado de Fluxo Axial * Módulo: Correntes de Referência Neurais * Autor - Eric Sanches */ // Definição das tabelas das correntes de referências neurais struct Correntes { char Ia; char Ib; char Ic; }; struct Correntes V_Cor_Pos1[7][3][3]; struct Correntes V_Cor_Pos2[7][3][3]; struct Correntes V_Cor_Pos3[7][3][3]; struct Correntes V_Cor_Pos4[7][3][3]; struct Correntes V_Cor_Pos5[7][3][3]; struct Correntes V_Cor_Pos6[7][3][3]; struct Correntes V_Cor_Pos7[7][3][3]; struct Correntes V_Cor_Pos8[7][3][3]; struct Correntes V_Cor_Pos9[7][3][3]; struct Correntes V_Cor_Pos10[7][3][3]; struct Correntes V_Cor_Pos11[7][3][3]; struct Correntes V_Cor_Pos12[7][3][3]; struct Correntes V_Cor_Pos13[7][3][3];
257
// Indica a ocorrência de um novo furo no disco unsigned short FLAG_PROX_FURO; // Indica que o intervalo de tempo atingiu 6.55 ms (dt) unsigned short FLAG_DT; // Indica o cálculo da velocidade real para uso no controlador PID unsigned short FLAG_CALC_VELOC; // Indica a mudança da velocidade de referência (330 para 350 rpm) unsigned short FLAG_MUD_VELREF; // Indica os índices neurais unsigned char IdxProp; // Proporcional unsigned char IdxInt; // Integral unsigned char IdxDer; // Derivativo // Parâmetros do PID float Kp = 16; // Ganho proporcional float Ki = 3; // Ganho integral float Kd = 1; // Ganho derivativo float Integral = 0; // Inicialização da parte integral do PID float VelRef = 330; // Velocidade de referência inicial (rpm) float VelReal = 0; // Velocidade real (rpm) float ErVel; // Erro de velocidade atual float Ant_ErVel; // Erro de velocidade anterior float Derivativo; // Parte Derivativa do PID float Propocional; // Parte proporcional do PID float dt=0.00655; // Intervalo de tempo para cálculo dos parâmetros do PID // Guarda o ângulo do motor unsigned char CurrAngle; // Atualiza o número de furos contados unsigned char ContadorFuros = 0; // Guarda o número de furos contados a cada 32.75 ms (5 x dt) unsigned char FurosContados = 0; // Correntes de referências neurais char NeuIa; // Corrente de referência neurais da fase A char NeuIb; // Corrente de referência neurais da fase B char NeuIc; // Corrente de referência neurais da fase C // Calcula os parâmetros do PID void CalculaPID(); // Calcula os índices neurais void CalculaNeural(); // Carrega a tabela neural das correntes void inicializa(); // // Rotina de interrupção a cada furo no disco ou a cada 6.55 ms // void interrupt() { if(INTCON & 0b00000010) { // Trata interrupção do contador de furos FLAG_PROX_FURO=1; ContadorFuros=ContadorFuros+1; CurrAngle=CurrAngle+2; if(CurrAngle>89) { CurrAngle=1; } INTCON = INTCON & 0b11111101; // Clear INT0IF } else { // Trata interrupção de tempo de 6.55 ms

258
FLAG_DT = 1; TMR0H=0x00; TMR0L=0x01; INTCON = INTCON & 0b11111011; // Clear INT0IF } } // // Programa principal // void main() { // Chama a rotina com a tabela neural das correntes inicializa(); // Configuração das portas ADCON1 = 0x0F // Desliga todas as entradas A/D da porta A TRISA = 0b00100000; // Configura a porta A TRISB = 0x1; // Porta B é saída TRISC = 0; // Porta C é saída TRISD = 0; // Porta D é saída // Como o bit 0 da porta B está sendo usado como entrada do sensor de posição // este bit é replicado na porta E TRISE = 0; // Porta E é saída PORTE=0x0; // Aplica as correntes para a posição de referência do rotor (45 graus) e espera 3 s LATA = 0; LATB = 0; LATE = 0; LATD = 0; LATC = 100; delay_ms(3000); // Desliga as correntes na posição de referência e espera 1 s LATA = 0; LATB = 0; LATE = 0; LATD = 0; LATC = 0; delay_ms(1000); // Configura a interrupção INTCON = 0b11110000; INTCON2 = 0b01000100; INTCON3 = 0x00; // Inicializa o ângulo para a posição de referência do rotor (45 graus) CurrAngle=45; // Aplica as correntes de referência neurais relativas à posição de referência do rotor (45 graus) LATB = (char)V_Cor_Pos7[3][0][0].Ic | 0x01; LATE = (char)V_Cor_Pos7[3][0][0].Ic & 0x01;//0xFE; LATD = (char)V_Cor_Pos7[3][0][0].Ib; LATC = (char)V_Cor_Pos7[3][0][0].Ia; // Inicializa FLAG_PROX_FURO FLAG_PROX_FURO = 0; // Initialize FLAG_PROX_FURO // Inicializa FLAG_CALC_VELOC FLAG_CALC_VELOC = 0; // Parâmetros de tempo TMR0H=0x00; TMR0L=0x01; T0CON = 0b01000110; //Habilita Timer 0 como contador e prescaler de 1:256 T0CON = 0b11000110; //Habilita contagem Timer/Counter 0 // Inicializa FLAG_DT FLAG_DT=0; // Inicializa FLAG_MUD_VELREF FLAG_MUD_VELREF=0;

259
do { if(FLAG_PROX_FURO) { FLAG_PROX_FURO=0; // Atualiza as saídas de corrente CalculaNeural(); LATB = NeuIc | 0x01; LATE = NeuIc & 0x01;//0xFE; LATD = NeuIb; LATC = NeuIa; } // Se chegou em 6.55 ms calcula novo valor dos parâmetros do PID if(FLAG_DT) { FLAG_DT=0; // Atualiza FLAG_CALC_VELOC FLAG_CALC_VELOC=FLAG_CALC_VELOC+1; // Chama a rotina de cálculo dos parâmetros do PID CalculaPID(); // Muda o valor da velocidade de referência de 330 para 350 rpm if(FLAG_MUD_VELREF == 120) { VelRef = 350; } } } while(1); } // // Rotina de cálculo dos índices neurais // void CalculaNeural() { // if(Propocional<-5.0){ IdxProp=0; }else{ if(Propocional<-0.5){ IdxProp=1; }else{ if(Propocional<0.5){ IdxProp=2; }else{ if(Propocional<5.0){ IdxProp=3; }else{ if(Propocional<80){ IdxProp=4; }else{ if(Propocional<250.0){ IdxProp=5; }else{ IdxProp=6; }}}}}} // if(Integral<-5.0){ IdxInt=0; }else{ if(Integral<5.0){

260
IdxInt=1; }else{ IdxInt=2; }} // if(Derivativo<-10.0){ IdxDer=0 ; }else{ if(Integral<10.0){ IdxDer=1; }else{ IdxDer=2; }} // if(CurrAngle<5){ NeuIa = V_Cor_Pos1[IdxProp][IdxDer][IdxInt].Ia; NeuIb = V_Cor_Pos1[IdxProp][IdxDer][IdxInt].Ib; NeuIc = V_Cor_Pos1[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<12){ NeuIa = V_Cor_Pos2[IdxProp][IdxDer][IdxInt].Ia; NeuIb = V_Cor_Pos2[IdxProp][IdxDer][IdxInt].Ib; NeuIc = V_Cor_Pos2[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<19){ NeuIa = V_Cor_Pos3[IdxProp][IdxDer][IdxInt].Ia; NeuIb = V_Cor_Pos3[IdxProp][IdxDer][IdxInt].Ib; NeuIc = V_Cor_Pos3[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<26){ NeuIa = V_Cor_Pos4[IdxProp][IdxDer][IdxInt].Ia; NeuIb = V_Cor_Pos4[IdxProp][IdxDer][IdxInt].Ib; NeuIc = V_Cor_Pos4[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<33){ NeuIa = V_Cor_Pos5[IdxProp][IdxDer][IdxInt].Ia; NeuIb = V_Cor_Pos5[IdxProp][IdxDer][IdxInt].Ib; NeuIc = V_Cor_Pos5[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<40){ NeuIa = V_Cor_Pos6[IdxProp][IdxDer][IdxInt].Ia; NeuIb = V_Cor_Pos6[IdxProp][IdxDer][IdxInt].Ib; NeuIc = V_Cor_Pos6[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<47){ NeuIa = V_Cor_Pos7[IdxProp][IdxDer][IdxInt].Ia; NeuIb = V_Cor_Pos7[IdxProp][IdxDer][IdxInt].Ib; NeuIc = V_Cor_Pos7[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<54){ NeuIa = V_Cor_Pos8[IdxProp][IdxDer][IdxInt].Ia; NeuIb = V_Cor_Pos8[IdxProp][IdxDer][IdxInt].Ib; NeuIc = V_Cor_Pos8[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<61){ NeuIa = V_Cor_Pos9[IdxProp][IdxDer][IdxInt].Ia; NeuIb = V_Cor_Pos9[IdxProp][IdxDer][IdxInt].Ib; NeuIc = V_Cor_Pos9[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<68){

261
NeuIa = V_Cor_Pos10[IdxProp][IdxDer][IdxInt].Ia; NeuIb = V_Cor_Pos10[IdxProp][IdxDer][IdxInt].Ib; NeuIc = V_Cor_Pos10[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<75){ NeuIa = V_Cor_Pos11[IdxProp][IdxDer][IdxInt].Ia; NeuIb = V_Cor_Pos11[IdxProp][IdxDer][IdxInt].Ib; NeuIc = V_Cor_Pos11[IdxProp][IdxDer][IdxInt].Ic; }else{ if(CurrAngle<82){ NeuIa = V_Cor_Pos12[IdxProp][IdxDer][IdxInt].Ia; NeuIb = V_Cor_Pos12[IdxProp][IdxDer][IdxInt].Ib; NeuIc = V_Cor_Pos12[IdxProp][IdxDer][IdxInt].Ic; }else{ NeuIa = V_Cor_Pos13[IdxProp][IdxDer][IdxInt].Ia; NeuIb = V_Cor_Pos13[IdxProp][IdxDer][IdxInt].Ib; NeuIc = V_Cor_Pos13[IdxProp][IdxDer][IdxInt].Ic; }}}}}}}}}}}} } // // Rotina de cálculo dos parâmtros do PID // void CalculaPID() { // A cada 32.75 ms (5 x dt) calcula-se a velocidade real em rpm if(FLAG_CALC_VELOC==5) { FLAG_CALC_VELOC=0; FurosContados = ContadorFuros; ContadorFuros = 0; VelReal = FurosContados/(15*dt); // Atualiza FLAG_MUD_VERREF if(VelReal > 330) { FLAG_MUD_VELREF=FLAG_MUD_VELREF+1; } } // Cálculo dos parâmetros do PID ErVel = VelRef - VelReal; Integral = Integral + (Ki * ErVel * dt); Derivativo = (ErVel - Ant_ErVel) / dt; Propocional = Kp * ErVel; // Atualiza erro de velocidade anterior Ant_ErVel = ErVel; } // // Rotina com a tabela neural das correntes // void inicializa() { V_Cor_Pos1[0][0][0].Ia=12;V_Cor_Pos1[0][0][0].Ib=92;V_Cor_Pos1[0][0][0].Ic=0; . . . 819 valores neurais para as três correntes de referências . . . V_Cor_Pos13[6][2][2].Ia=0;V_Cor_Pos13[6][2][2].Ib=232;V_Cor_Pos13[6][2][2].Ic=0; }




![PGMEC · mostra, nos dois modelos, ... 4.11 Comparação entre erros obtidos para malhas de 501 pontos, ... resultado comparado com o obtido por Aktas [7]](https://img.document.onl/doc/110x75/5c12b5f309d3f2f42a8b954f/-mostra-nos-dois-modelos-411-comparacao-entre-erros-obtidos-para-malhas.jpg)
























