Embed Size (px)
Citation preview

UNIVERSIDADE ESTADUAL DE CAMPINAS
FACULDADE DE ENGENHARIA MECÂNICA
Relatório Final
Trabalho de Graduação II
Implementação de Simulador de
Sistemas de Levitação Inductrack
Autor: Ademir Felipe Teles
Orientador: Prof. Dr. Luiz Otávio Saraiva Ferreira
Campinas, novembro de 2014

UNIVERSIDADE ESTADUAL DE CAMPINAS
FACULDADE DE ENGENHARIA MECÂNICA
Relatório Final
Trabalho de Graduação II
Implementação de Simulador de
Sistemas de Levitação Inductrack
Autor: Ademir Felipe Teles
Orientador: Prof. Dr. Luiz Otávio Saraiva Ferreira
Curso: Engenharia de Controle e Automação
Trabalho de Conclusão de Curso apresentado à Comissão de Graduação da Faculdade de
Engenharia Mecânica, como requisito para a obtenção do título de Engenheiro de Automação e
Controle.
Campinas, 2014
S.P. – Brasil

1
Agradecimentos
Agradeço ao Prof. Dr. Luiz Otávio Saraiva Ferreira pela disponibilidade, pela inclusão no
grupo de projeto da bancada de caracterização de pistas circulares Inductrack e orientação no
desenvolvimento das atividades deste estudo.

2
Índice
Resumo 4
Lista de Figuras 5
Lista de Tabelas 5
Nomenclatura 6
Abreviações e Siglas 7
Capítulo 1 Introdução 8
Capítulo 2 Teoria 12
2.1. Arranjo de Halbach 12
2.2. Trilho Inductrack 14
2.3. Fase entre o Arranjo de Halbach e o trilho 16
2.4 Forças entre o Arranjo de Halbach e o trilho 17
2.5 Parâmetros de projeto e indicadores de performance 19
Capítulo 3 Implementação 21
3.1 Desenvolvimento realizado pelo trabalho anteriores 21
3.2 Revisão e implementações no simulador 22
3..2.1 Resistência equivalente da pista 23
3.2.2 Indutância equivalente da pista 24
3.2.3 Força de interação 24
3.3 Melhorias no modelo 25
3.3.1 Espaçamento entre imãs 26
3.3.2 Indutância equivalente do circuito 25
3.3.3 Efeito de borda 27
3.3.4 Perda por corrente de Foucault 28

3
3.3.5 Efeito pelicular 29
Capítulo 4 Considerações e orientações para projeto 30
4.1 Recomendações de montagem 30
4.1.1 Arranjo de Halbach 30
4.1.2 Trilho Inductrack 31
4.1.3 Interação entre o trilho e o arranjo de Halbach 32
Capítulo 5 Conclusão 33
Referências Bibliográficas 34
Anexo A Interface Gráfica alterada 35
Anexo B Código do simulador implementado
36

4
Resumo
TELES, Ademir Felipe, Implementação de Simulador de Sistemas de Levitação
Inductrack, Faculdade de Engenharia Mecânica, Universidade Estadual de Campinas, Trabalho de
Conclusão de Curso II, (2014), 44 p.
O objetivo deste trabalho é constituir uma base bibliográfica sobre o método de levitação
magnética Inductrack, assim como depurar e implementar melhorias no simulador desenvolvido em
trabalho de graduação anterior [1] orientado pelo Prof. Luiz Otávio S. Ferreira e co-orientado pelo
Prof. Pablo Siqueira Meirelles, ambos do DMC/FEM/UNICAMP. Este simulador desenvolvido na
plataforma MATLAB permite o cálculo parametrizado das forças e comportamento eletrodinâmico
dos modelos com pistas lineares e circulares de sistemas Inductrack, permitindo a utilização, por
exemplo, nos TGs dos alunos Leandro Fidelis e Arlindo Anselmo sobre a implementação de uma
bancada de caracterização de pistas circulares Inductrack.
Inicialmente, será elaborada uma revisão bibliográfica sobre os novos estudos e aplicações
do sistema Inductrack. Em seguida serão apresentadas a especificação do programa revisado e a
metodologia de depuração e validação a serem utilizadas durante o desenvolvimento do simulador.
Para elucidar as discussões levantadas neste trabalho e embasar as alterações e melhorias
implementadas no simulador desenvolvido no trabalho anterior, será abordado o desenvolvimento
teórico da modelagem utilizada para o projeto, assim como as considerações e simplificações
necessárias.
Todos os cálculos, gráficos e modelos foram gerados através dos softwares MATLAB e
Simulink, ambos da Mathworks; ou tirados de materiais citados na bibliografia.
Por fim será apresentada a memória de projeto com as listagens dos programas e resultados
da validação, bem como instruções para o usuário.
Palavras Chave: Magnetismo, Maglev, Inductrack, Arranjo Halbach, Simulação.

5
Lista de Figuras
Figura 1- Esquema de Funcionamento de sistemas de suspensão eletromagnética ........................ 9
Figura 2- Forma de onda dos campos magnéticos gerados pelo veículo e trilho .............................. 9
Figura 3- Principio de funcionamento do sistema Inductrack ......................................................... 10
Figura 4 - Linhas de fluxo magnético geradas pelo Arranjo de Halbach em elementos finitos ........ 12
Figura 5- Diagrama de Mallinson para o Arranjo de Halbach .......................................................... 13
Figura 6- Arranjo de Halbach .......................................................................................................... 13
Figura 7- Trilho Inductrack de circuitos verticais ‘window frame track' (à esquerda) e trilho em
escada ‘ladder track’ (à direita) ....................................................................................................... 15
Figura 8- Circuito RL equivalente .................................................................................................... 15
Figura 9 - Desenho e parâmetros do trilho 'ladder' .......................................................................... 16
Figura 10- Diagrama de Bode da função de transferência do circuito equivalente do trilho
Inductrack. ...................................................................................................................................... 17
Figura 11 - Circuito equivalente para o trilho tipo 'ladder' ................................................................ 23
Figura 12 - Código implementado anteriormente (à esquerda) e código corrigido (à direita) .......... 24
Figura 13- Código anterior (acima) e código corrigido (abaixo) ....................................................... 25
Figura 14 - Desenho do arranjo de Halbach com espaçamento entre imãs .................................... 26
Figura 15 - Estrutura e parâmetros das barras paralelas ................................................................ 27
Figura 16 - Implementação do cálculo da indutância equivalente ................................................... 28
Figura 17 - Pista linear com movimento em rotação (à esquerda) e pista circular com arranjo
circular (à direita) ............................................................................................................................ 30
Lista de Tabelas
Tabela 1 - Valores de K em H/cm*10-9 .......................................................................................... 28

6
Nomenclatura
Letras Latinas
𝐵 Campo magnético [Tesla]
𝐵0 Campo magnético máximo [Tesla]
𝐵𝑟 Campo magnético remanente dos imãs [Tesla]
𝑑ℎ Espessura do imã [Metros]
N Número de imãs por arranjo de Halbach
li Comprimento do imã [Metros]
𝑙𝑎𝑟𝑟𝑎𝑛𝑗𝑜 Comprimento total do arranjo [Metros]
𝑘 Constante de Halbach [radianos/metro]
𝐵𝑥 Campo magnético na direção paralela ao arranjo [Tesla]
𝐵𝑦 Campo magnético na direção perpendicular ao arranjo [Tesla]
y Distância entre o arranjo e o centro do trilho [Metros]
𝑣 Força contra eletromotriz [Volts]
𝑖 Corrente elétrica [Ampère]
𝐿𝑒𝑞 Indutância equivalente [Henrys]
𝑅𝑒𝑞 Resistência equivalente [Ohms]
𝑟𝑐 Resistividade do material [Ohms/metro]
𝑃𝑐 Perímetro do circuito do trilho [Metros]
𝐴𝑠𝑒𝑐 Área da secção transversal do trilho [Metro2]
w Largura do trilho [Metros]
𝑑𝑐 Distância centro à centro dos circuitos do trilho [Metros]
𝑣𝑙𝑖𝑛 Velocidade linear relativa entre o trilho e o arranjo [Metros/segundo]
𝑟 Raio de rotação [Metros]

7
𝐴 Área abaixo do arranjo de Halbach [Metro2]
Rx Resistência do segmento paralelo ao movimento [Ohms]
Rz Resistência do segmento perpendicular ao movimento [Ohms]
𝑙𝑒 Comprimento do espaçamento entre os imãs [Metros]
𝑙0 Indutância própria da barra transversal do trilho [Henrys]
𝑙𝑚 Indutância mútua entre as barras transversais do trilho [Henrys]
𝑙𝑡 Indutância própria de uma placa fina [Henrys]
𝑃𝐸𝑑𝑑𝑦 Perdas por corrente de Foucault por circuito energizado [Watts]
Letras Gregas
𝜆 Comprimento de onda gerado pelo arranjo de Halbach [Metros]
휀 Fator de espaçamento entre os imãs -
𝜔𝑒 Frequencia de excitação do trilho [Hertz]
𝜔𝒎 Velocidade de rotação relativa entre o trilho e o arranjo [Radianos/segundo]
𝜙0 Fluxo magnético induzido [Weber]
𝜇0 Permeabilidade magnética do vácuo [Henrys/metro]
𝛿 Distância imune ao efeito de pelicular [Metros]
Abreviações
Maglev Levitação magnética
f.e.m Força eletromotriz
Siglas
EDS Suspensão eletrodinâmica
EMS Suspensão eletromagnética

8
Capítulo 1
Introdução
A levitação magnética, também conhecido como Maglev, é um fenômeno estudado desde o
princípio da formulação das leis do magnetismo no século XIX, tendo sido utilizado pela primeira vez
em transporte comerciais apenas em 1984, em um trem com suspensão eletromagnética em
Birmingham, Inglaterra [2].
Apesar do fenômeno de levitação magnética ser bem conhecido e poder ser equacionado
com precisão no início do século XX, um problema persistia para sua aplicação efetiva, a
estabilidade. O Teorema de Earnshaw, derivado diretamente das leis de Gauss para a eletroestática,
afirma que um conjunto de cargas pontuais não podem ser mantidas em uma configuração de
equilíbrio estacionário estável apenas pela interação eletrostática das mesmas [11].
O teorema acima é válido para todos os casos estáticos com materiais ferromagnéticos e
paramagnéticos. Entretanto o teorema não aborda os efeitos eletrodinâmicos e os materiais
diamagnéticos. Explorando estas exceções ao teorema, diversos métodos para obter uma aplicação
com levitação magnética vêm sendo propostos e desenvolvidos nas áreas de transporte [3, 6, 8, 9],
aeroespacial [5, 10], mancais e suspensões magnéticas [4, 7].
Um corpo levita magneticamente utilizando a força de repulsão entre os campos magnéticos
gerados por 2 corpos próximos, para o caso dos trens os corpos são o trilho e o veículo. Essa
levitação implica na ausência de contato físico entre os geradores do campo, restando como única
força resistiva presente durante a operação do trem a fricção com o ar. Consequentemente, os trens
de levitação magnética conseguem atingir velocidades elevadas, com relativo baixo consumo de
energia e pouco ruído e vibração. Atualmente, existem dois métodos de levitação magnética em
operação para transporte comercial, a suspensão eletromagnética e a suspensão eletrodinâmica por
imã supercondutor [12].
A suspensão eletromagnética (EMS) é baseada na reação controlada de eletroímãs, que
constantemente alteram a força e polaridade do campo magnético produzido por eletromagnetos
utilizando um circuito fechado de realimentação (figura 1). Esses sistemas permitem alcançar
velocidades elevadas e podem também ser utilizados para a propulsão horizontal do veículo.
Entretanto sistemas de controle complexos são necessários para manter constante a distância entre
o veículo e o trilho e reduzir as vibrações provenientes da natureza instável da atração
eletromagnética [11].

9
Figura 1- Esquema de Funcionamento de sistemas de suspensão eletromagnética
Os sistemas de suspensões eletrodinâmicas (EDS) com imã supercondutor (figura 2) utilizam
uma fonte de alimentação externa para manter os campos magnéticos dos imãs. Quando o sistema
encontra-se em movimento o campo magnético gerado pelos imãs interage com circuitos condutores,
induzindo correntes de Foucault de acordo com a Lei de Faraday. O campo magnético gerado pela
corrente nestes circuitos gera outro campo magnético, que interage com os imãs e se repelem [12,
13]. A vantagem deste método é que os trilhos são sistemas passivos e o sistema é intrinsecamente
estável, entretanto a custo energético para alimentar e resfriar os supercondutores elevam o custo
do sistema e o tornam mais susceptíveis a falhas [4].
Figura 2- Forma de onda dos campos magnéticos gerados pelo veículo e trilho
Um problema comum às duas implementações é a necessidade de fonte de energia externa
para iniciar a levitação [14]. Visando solucionar este problema e criar uma levitação magnética
totalmente passiva e intrinsecamente estável, foi proposto o método Inductrack [17, 19]. Este método

10
similar ao EDS anterior, utiliza um arranjo de ímãs permanentes (Arranjo de Halbach) em temperatura
ambiente para produzir campos magnéticos em vez de eletroímãs energizados ou ímãs
supercondutores resfriados, estes imãs interagem com circuitos condutores nos trilhos para gerar a
força de levitação (figura 3). Este método foi desenvolvido pelo Prof. Dr. Richard Post em 1996 [17]
no Laboratório Nacional de Lawrence Livermore, que juntamente com sua equipe, formularam as
equações governantes da interação entre o Arranjo de Halbach e os trilhos Inductrack.
Figura 3- Principio de funcionamento do sistema Inductrack
Dentre suas vantagens observadas em estudos anteriores [18, 20, 21] podemos destacar a
eficiência energética, o menor custo de implementação, a independência de fonte externa de energia
para a levitação e sua característica à prova de falhas. Esse método é considerado à prova de falhas
por dois motivos, sua estabilidade intrínseca, característica dos sistemas EDS, e a sua frenagem
passiva.
O Inductrack apresenta dois tipos de estabilidade, estabilidade estática e dinâmica [8].
Estabilidade estática significa que qualquer pequeno deslocamento em torno do ponto de equilíbrio
estável gera uma força resultante para empurrá-lo de volta para o ponto de estabilidade, isso ocorre
pois uma pequena alteração da distância entre os imãs e o trilho gera uma grande variação da força
magnética de repulsão, forçando o sistema a retornar ao ponto de equilíbrio entre a força de
sustentação e o peso sustentado. A estabilidade dinâmica ocorre quando o sistema de levitação é
capaz de amortecer movimentos de vibração que possam ocorrer, esse amortecimento é obtido pela
corrente de Foucault (também conhecida como corrente de Eddy) [21] induzida nos circuitos
metálicos condutores. Uma consequência desta estabilidade é que a levitação magnética pode ser
assegurada sem a necessidade de um sistema de controle dedicado.

11
Os EDS utilizam a interação entre um campo magnético oscilatório e os circuitos condutores
para obter a força de repulsão, essa força tem uma direção dependente da fase entre os campos
gerados pelos dois corpos que se repelem, podendo ser decomposta em uma força horizontal (força
de arrasto) e uma vertical (força de levitação ou sustentação). Devido a estrutura do sistema
Inductrack, a fase entre os campos é dependente da velocidade relativa entre os imãs e o trilho,
ocasionando que em baixas velocidades a força de arrasto é predominante, atuando assim como
uma frenagem passiva caso o sistema de propulsão falhe e o veículo perca velocidade [16].
Um aspecto negativo do comportamento acima é que os EDS necessitam de um sistema de
propulsão independente do sistema de levitação, normalmente um motor linear de indução, para
atingir maiores velocidades. Com o aumento da velocidade, a frequência de oscilação e a fase do
campo magnético se elevam, aumentando a força de sustentação e reduzindo a força de arrasto
significativamente. A velocidade à qual a força de sustentação se iguala a força de arrasto é
denominada velocidade de transição, enquanto a velocidade onde a força de sustentação é suficiente
para provocar a levitação do corpo é denominada velocidade crítica.
Pode-se perceber portanto que o método Inductrack representa uma nova tecnologia de
levitação magnética promissora. Quando comparada aos modelos já operacionais de suspensão
magnética ela se destaca pela eficiência energética, custo de implementação, estabilidade
intrínseca, à prova de falha, possível a baixas velocidades e dispensa controle complexo. Este novo
método está em desenvolvimento [8, 10] e ainda não possui versões comerciais, fato que ressalta a
importância de estudarmos o sistema.
Como citado, as equações que governam a interação entre o arranjo de Halbach e o trilho
Inductrack foram elaboradas pelo time de pesquisa do criador do método, Prof. Dr. Richard Post,
portanto os documentos dos ensaios, simulações e bancadas de testes desenvolvidas por estes
grupos serão utilizados como referência para o desenvolvimento e validação do simulador
apresentado neste trabalho.

12
Capítulo 2
Teoria
Neste capítulo, será desenvolvida a base teórica para as equações que governam o método
Inductrack, detalhando o comportamento dos subsistemas, explicando a interação entre o Arranjo de
Halbach e o trilho Inductrack e por fim serão citadas as considerações teóricas e recomendações de
projeto.
2.1 Arranjo de Halbach
O Arranjo de Halbach foi criado por Klaus Halbach para aplicação em aceleradores de
partícula [13]. O Arranjo de Halbach é um conjunto de imãs orientados de maneira especifica de
modo a criar um forte campo magnético senoidal em apenas uma face, quase cancelando o campo
na face oposta. As linhas de fluxo para um Arranjo de Halbach podem ser visualizadas na figura 4.
Figura 4 - Linhas de fluxo magnético geradas pelo Arranjo de Halbach em elementos finitos
Vemos que o campo gerado tem um comportamento bem próximo ao senoidal. Este
comportamento pode parecer contra intuitivo, entretanto se utilizarmos o diagrama de Mallinson
(figura 5) e a orientação magnética dos imãs (figura 6) podemos analisar o comportamento do arranjo
de forma segmentada, tornando a visualização do efeito combinado dos imãs mais simples.

13
Figura 5- Diagrama de Mallinson para o Arranjo de Halbach
Existem variações do arranjo para diversas aplicações como laser de elétrons livre,
refrigeradores magnéticos, suspensão magnética e motores rotativos. Para nossa aplicação iremos
nos limitar a analisar o arranjo mostrado na figura 6, pois este permite a criação de fortes campos
magnéticos com pequenos comprimentos de onda e possui montagem mais simples.
Figura 6- Arranjo de Halbach
O comprimento de onda do campo senoidal 𝜆 pode ser obtido pela distância entre os pontos
centrais dos imãs com mesma orientação. A expressão analítica do campo magnético para o modelo
em duas dimensões do Arranjo de Halbach [13, 15], considerando que não haja espaçamento entre
os imãs é:
𝐵(𝑥, 𝑦) = 𝐵0𝑒−𝑛𝑘𝑦 ∑ (�̂�𝑥 sin 𝑛𝑘𝑥 + �̂�𝑦 cos 𝑛𝑘𝑥 )∞𝜐=0 (1)
𝐵0 =𝐵𝑟(1−𝑒𝑛𝑘𝑑ℎ) sin(
𝑛𝜋
𝑁)
𝑛𝜋
𝑁
(2)
𝑘 =2𝜋
𝜆 (3)
𝜆 = li. 𝑁 (4)
𝑛 = 1 + 𝑣𝑁 (4)

14
Onde 𝐵0 é o valor de pico do campo magnético, 𝐵𝑟 é o campo magnético gerado cada imã,
𝑑ℎ é a espessura do imã e 𝑁 o nûmero de imãs por comprimento de onda.
Segundo Halbach [13], se restringirmos a análise apenas para a primeira harmônica do
sistema, podemos obter equações mais simples que representam uma boa aproximação do campo
magnético. Com isso obtemos o campo magnético gerado pelo arranjo de Halbach nos eixos
horizontal x e vertical y.
𝐵𝑥 = 𝐵0 sin (2𝜋𝑥
𝜆) 𝑒−𝑘𝑦 (5)
𝐵𝑦 = 𝐵0 cos (2𝜋𝑥
𝜆) 𝑒−𝑘𝑦 (6)
Sendo 𝐵𝑥 o campo na direção paralela ao arranjo e 𝐵𝑦 o campo na direção perpendicular ao
arranjo.
2.2 Trilho Inductrack
Inductrack é o nome para o sistema de interação entre o arranjo de Halbach e o trilho
composto de circuitos indutivos utilizado para produzir a levitação magnética. O trilho deve permitir
a passagem de uma corrente induzida grande o suficiente para gerar um campo magnético com
magnitude capaz de provocar a levitação do corpo ligado ao arranjo de Halbach.
Existem diversos métodos de construção de trilhos Inductrack desenvolvidos pelo Laboratório
Nacional de Lawrence Livermore [19, 21] sendo os dois principais o ‘ladder track’ (trilho em escada
ou trilho laminado) e o ‘window frame track’ (trilho em janelas) (figura 7). Neste trabalho iremos
abordar apenas o ’ladder track’, escolhido devido a sua capacidade de gerar força de suspensão à
baixas velocidades e construção mais simples.

15
Figura 7- Trilho Inductrack de circuitos verticais ‘window frame track' (à esquerda) e trilho em
escada ‘ladder track’ (à direita)
O comportamento do conjunto de circuitos condutores pode ser modelado por um circuito RL
equivalente como representado na figura 8. A equação deste circuito é dada por (7):
Figura 8- Circuito RL equivalente
𝑣(𝑡) = 𝐿𝑒𝑞𝑑𝑖(𝑡)
𝑑𝑡+ 𝑅𝑒𝑞𝑖(𝑡) = 𝜔𝑒𝜙0cos (𝜔𝑒𝑡) (7)
Onde 𝑣 é a força eletromotriz induzida sobre o trilho, 𝐿𝑒𝑞 a indutância equivalente do circuito,
𝑅𝑒𝑞 a resistência equivalente, 𝜔𝑒 a frequência de excitação e 𝜙0 o pico do fluxo magnético. As
equações para a resistência e indutância equivalentes dos trilhos fornecidas pelo desenvolvedor do
Inductrack são [17, 19]:

16
Figura 9 - Desenho e parâmetros do trilho 'ladder'
𝑅𝑒𝑞 =𝑟𝑐𝑃𝑐
𝐴𝑠𝑒𝑐 (8)
𝐿𝑒𝑞 = 𝜇0w
2𝑘𝑑𝑐 (9)
Sendo 𝑟𝑐 a resistividade do cobre, 𝐴𝑠𝑒𝑐 a seção transversal do inductrack, 𝜇0 a
permeabilidade magnética do ar, 𝑃𝑐 o perímetro médio do Inductrack, 𝑑𝑐 o espaçamento entre os
indutores e 𝑤 a largura da pista.
2.3 Fase entre o arranjo de Halbach e o trilho
O comportamento indutivo do trilho provoca um atraso da corrente em relação a tensão
oscilante, permitindo que eventualmente o campo produzido pela corrente circulando no circuito se
alinhe com o campo magnético gerado pelo arranjo de Halbach. Neste momento os campos
magnéticos de ambas as partes serão máximos e consequentemente a força magnética de repulsão
também será máxima.
Este comportamento fica mais claro se analisarmos a equação de interação no domínio da
frequência. Aplicando a transformada de Laplace na equação (7) obtemos a seguinte relação.
𝐼(𝑠)
𝑉(𝑠)=
1
𝐿𝑒𝑞
𝑠+𝑅𝑒𝑞
𝐿𝑒𝑞
(10)
Traçando o diagrama de Bode da função de transferência obtida (figura 10), fica mais claro
que para baixas frequências a corrente e f.e.m. induzida estão em fase, entretanto para altas

17
frequências elas apresentam uma fase próxima a 90°, ou seja, a corrente entra em fase com o campo
magnético. Uma característica de projeto importante a ser observada neste gráfico é que quanto
menor for o polo (𝑅𝑒𝑞/𝐿𝑒𝑞 ) menor será a velocidade necessária para se obter a força de sustentação
para levitação e que o ganho da função é definido pelo componente indutivo do sistema. Portanto a
resistência e indutância do trilho devem ser projetadas para se adequar à velocidade de transição e
força de sustentação necessárias ao projeto.
Figura 10- Diagrama de Bode da função de transferência do circuito equivalente do trilho
Inductrack.
2.4 Forças entre o arranjo de Halbach e o trilho
O fluxo magnético induzido pela interação entre o campo magnético oscilando sob o
arranjo de Halbach em um trilho do tipo ‘ladder’ foi obtida pela equipe de pesquisa do Prof. Dr.
Richard Post [16] supondo a profundidade do arranjo igual ou superior à largura do trilho.
𝜙(𝑡) = 𝐵0𝑤
𝑘𝑒−𝑘𝑦sin (𝜔𝑒𝑡)(1 − 𝑒−𝑘𝑦) (11)
Sendo 𝑦 a distância vertical entre o arranjo e o trilho. Usando a lei de Faraday, podemos obter
a corrente induzida no circuito.

18
𝑖(𝑡) = 𝜙0
𝐿𝑒𝑞[
1
1+(𝑅𝑒𝑞
𝜔𝑒𝐿𝑒𝑞)
2] (𝑠𝑖𝑛 𝜔𝑒𝑡 +𝑅𝑒𝑞
𝜔𝑒𝐿𝑒𝑞cos 𝜔𝑒𝑡) (12)
𝜙0 = 𝐵0𝑤
𝑘𝑒−𝑘𝑦 (13)
𝜔𝒆 = 𝑘. 𝑣𝑙𝑖𝑛 (14)
Sendo 𝜔𝒆 a frequência de escitação do sistema e 𝑣𝑙𝑖𝑛a velocidade linear. Para uma pista
circular podemos reescrever a equação (14) utilizando 𝒓 como raio médio e 𝜔𝒎 a velocidade de
rotação
𝜔𝒆 = 𝑘. 𝑟. 𝜔𝒎 (15)
Usando a equação da força de Lorentz (16), podemos determinar a força resultante entre o
arranjo de Halbach e o conjunto de circuitos condutores do trilho imediatamente abaixo do arranjo.
�⃗�𝑥𝑦(t) = i⃗(t) × B⃗⃗⃗(𝑥, 𝑦). ∆𝑆𝑢𝑝𝑒𝑟𝑓í𝑐𝑖𝑒 (16)
𝐹𝑥𝑦 (𝜔𝑒 , 𝑦) =𝐵0
2𝑤𝐴
2𝑘𝐿𝑒𝑞𝑑𝑐 [
1+ 𝑅𝑒𝑞
𝜔𝑒𝐿𝑒𝑞
1+(𝑅𝑒𝑞
𝜔𝑒𝐿𝑒𝑞)
2] 𝑒−2𝑘𝑦 (17)
Utilizando os componentes vertical e horizontal do campo magnético (5) (6) na lei de força de
Lorentz, podemos decompor a força resultante em força de sustentação e de arrasto [19, 22].
𝐹𝑦 (𝜔𝑒 , 𝑦) =𝐵0
2𝑤𝐴
2𝑘𝐿𝑒𝑞𝑑𝑐 [
1
1+(𝑅𝑒𝑞
𝜔𝑒𝐿𝑒𝑞)
2] 𝑒−2𝑘𝑦 (18)
𝐹𝑥 (𝜔𝑒 , 𝑦) =𝐵0
2𝑤𝐴
2𝑘𝐿𝑒𝑞𝑑𝑐 [
𝑅𝑒𝑞
𝜔𝑒𝐿𝑒𝑞
1+(𝑅𝑒𝑞
𝜔𝑒𝐿𝑒𝑞)
2 ] 𝑒−2𝑘𝑦 (19)
Sendo 𝐴 a área abaixo do Arranjo de Halbach. Vale ressaltar que todas as variáveis das
equações de força são parâmetros definidos em projeto, sendo apenas a frequência de excitação e
a distância de levitação variáveis durante a operação do sistema. Conhecendo a massa do sistema,
podemos igualar a força de sustentação e a massas à levitar de forma a obter a relação entre a
frequência de excitação e a distância de levitação.
𝑦(𝜔𝑒) = 1
2𝑘𝑙𝑛
𝐵02𝑤𝐴
2𝑘𝐿𝑒𝑞𝑑𝑐𝐹𝑦 [
1
1+(𝑅𝑒𝑞
𝜔𝑒𝐿𝑒𝑞)
2] (20)

19
Com (18) concluímos que mantendo a força de sustentação constante e igual ao peso da
carga ligada ao arranjo e considerando a condição de operação em regime permanente, a distância
de levitação varia conforme a velocidade relativa entre os corpos, independente das demais
condições.
2.5 Parâmetros de projeto e indicadores de performance
Nas sessões anteriores descrevemos o comportamento dos corpos e a interação dos
mesmos, nos permitindo modelar o sistema e entender seu funcionamento, entretanto quando
desejamos construir uma aplicação algumas características do sistema e indicadores de
performance podem ajudar a identificar e especificar os parâmetros do modelo.
Em um sistema de levitação passiva EDS existem dois pontos de operação que são do
interesse para a escolha de um projeto, a velocidade em que a força de levitação se iguala à força
de arrasto (velocidade de transição) e a velocidade em que se obtém a levitação (velocidade crítica).
A velocidade de transição nos fornece a condição de operação em que a interação magnética
entre os corpos passa a ser vantajosa para o movimento, ou seja, quando a força que auxilia a
levitação se torna igual à força contrária ao deslocamento. Vemos pela equação seguinte que o
comportamento do trilho (modelado pelo circuito RL) interfere diretamente com a velocidade de
transição do sistema.
𝑣𝑡𝑟𝑎𝑛𝑠𝑖çã𝑜 =𝑅𝑒𝑞
𝑘𝐿𝑒𝑞 (21)
A velocidade crítica é o fator mais relevante para o projeto, exibindo a velocidade necessária
para que o sistema atinja a condição de levitação para um dada distância entre os corpos. Nesta
velocidade podemos observar também a ração entre a força de levitação e de arrasto, um indicador
da performance do sistema na condição de levitação [22, 23].
𝑣𝑐𝑟í𝑡𝑖𝑐𝑎(𝑦) =𝑅𝑒𝑞
𝑘𝐿𝑒𝑞 √𝑇𝑓
𝐵02𝑤𝐴
2𝑘𝐿𝑒𝑞𝑑𝑐𝑒−2𝑘𝑦
− 1 (22)
𝐹𝑎𝑡𝑜𝑟 𝐿𝑒𝑣𝑖𝑡𝑎çã𝑜/𝐴𝑟𝑎𝑠𝑡𝑜 =𝑘𝐿𝑣𝑐𝑟í𝑡𝑖𝑐𝑎
𝑅 (23)
Outros indicadores pertinentes de performance é a eficiência da levitação [2004] dada por:
𝐾 =𝑘𝐿𝑒𝑞
𝑅𝑒𝑞 (24)

20
Para o dimensionamento de mancais magnéticos é importante avaliar quais tipos de
carregamento podem ser aplicados. A força de levitação restringe a carga máxima aplicada para
uma dada altura e a frequência natural de oscilação vertical do sistema limita a faixa de frequências
que a carga alternada pode ser aplicada.
𝐹𝑦 𝑚𝑎𝑥 (𝑦) =𝐵0
2𝑤𝐴
2𝑘𝐿𝑒𝑞𝑑𝑐 𝑒−2𝑘𝑦 (25)
𝜔𝑛𝑎𝑡𝑢𝑟𝑎𝑙 𝑑𝑒 𝑜𝑠𝑐𝑖𝑙𝑎çã𝑜 = √2. 𝑘. 𝑔 (26)

21
Capítulo 3
Revisão e melhorias implementadas
O objetivo deste trabalho de graduação é dar continuidade ao estudo realizado pelo aluno
Rafael Schmidt Seminari desenvolvido em 2009 [1] sob a orientação do Prof. Luiz Otávio S. Ferreira
e co-orientado pelo Prof. Pablo Siqueira Meirelles, ambos do DMC/FEM/UNICAMP. Para permitir o
cumprimento desse proposito, será abordado brevemente o que foi desenvolvido no trabalho anterior
e quais foram suas bases teóricas e objetivos de projeto.
Posterior a isso, será possível discutir as erros identificados na base teórica construída e no
software implementado, assim como discutir as melhorias pertinentes e seu impacto sobre o
simulador.
Como citado na introdução, um dos objetivos desse trabalho é contribuir com o
desenvolvimento da bancada de Inductrack em construção pelos alunos Arlindo Anselmo e Leandro
Fidelis em trabalho de graduação paralelo à esse. Portanto, ao fim deste capitulo serão apresentadas
algumas considerações teóricas para a montagem da bancada e pontos de operação importantes
para a definição da estrutura da bancada.
3.1 Desenvolvimento realizado pelo trabalho de graduação anterior
Sendo o primeiro trabalho desenvolvida na FEM sobre o Inductrack, haviam muitos objetivos
a serem desenvolvidos e que foram alcançados ao menos parcialmente durante o projeto anterior.
Dentre os focos do trabalho é possível destacar a compilação do material bibliográfico disponível, a
compreensão e implementação da formulação relacionadas à nova tecnologia e o desenvolvimento
de uma interface gráfica de fácil utilização para o projeto de uma bancada Inductrack no laboratório
da FEM/ÚNICAMP.
A base bibliográfica utilizada para o estudo anterior foram os artigos publicados até 2005 pelo
Lawrence Livermore National Laboratory. Sabendo que a tecnologia Inductrack é recente, tendo sido
publicado pela primeira vez em 1996, e que o professor responsável pelo laboratório detém as
patentes associadas a esse dispositivo, poucos trabalhos foram desenvolvidos e publicados por
desenvolvedores não associados ao laboratório de Livermore [17-29]. Essa etapa do estudo anterior
foi plenamente desenvolvida na ocasião, entretanto alguns novos trabalhos de outros autores foram
publicados desde então [23-26, 29], expandindo a literatura relacionada à tecnologia Inductrack e
contribuindo para o seu desenvolvimento. Neste trabalho essa base foi ampliada, enriquecendo o

22
desenvolvimento teórico explicitado no capitulo 2 e embasando as correções e melhorias que serão
tratadas à seguir.
O equacionamento apresentado no relatório anterior sumariza as formulações disponíveis
nos materiais presentes na literatura, entretanto alguns equívocos na interpretação dos parâmetros
utilizados e na aplicação das mesmas para o modelo estudado provocaram um desvio significativo
dos resultados obtidos quando comparado aos presentes nos artigos sobre Inductrack. Esses
enganos podem ser novamente observados ao se analisar o código do programa implementado
(presente no anexo de [1]), assim como alguns outros erros de implementação. A seguir iremos
destacar os erros presentes no programa original, a fonte utilizada para caracterizar a interpretação
anterior como errônea e o impacto dessa alteração na modelagem do sistema.
Outro material desenvolvido anteriormente e que será utilizado neste trabalho é a interface
gráfica. A interface funciona perfeitamente para permitir a parametrização dos modelos e visualizar
a comportamento do mesmo. Contudo algumas modificações foram necessárias para permitir a
entrada de novos parâmetros (detalhados posteriormente).
3.2 Revisão das equações e implementação
Identificar as causas e corrigir os possíveis erros presentes no simulador anterior é um dos
principais objetivos deste trabalho. A discrepância dos resultados presentes na literatura e os
resultados obtidos do simulador desenvolvido no trabalho anterior incentivou a continuação deste
trabalho, reparando o simulador para que se tornasse uma ferramenta de projeto e permitisse o
desenvolvimento da bancada Inductrack do laboratório da FEM.
Para que os erros pudessem ser identificados, corrigidos e que outros enganos não fossem
inseridos, uma metodologia de revisão foi adotada seguindo a orientação do professor Luiz Otavio.
Inicialmente, foi necessário revisar a literatura presente sobre essa tecnologia, avaliando as
mudanças das formulações ao logo dos anos e as correções que os artigos seguintes abordavam
sobre os resultados dos anteriores. Em seguida as diferentes formulações foram comparadas,
analisando as peculiaridades e aplicações de cada uma, assim como a precisão das mesmas em
relação aos testes em bancada. Por fim, o código desenvolvido anteriormente foi avaliado e, em
conjunto com o professor, os erros foram identificados, reparados e validados.
A seguir serão apresentados os erros reparados.

23
3.2.1 Resistências equivalente da pista
Para representar o comportamento do trilho em relação ao campo magnético gerado pelo
arranjo de Halbach, utilizamos uma representação simplificada do modelo do trilho como uma
resistência e uma indutância equivalente, sendo estes parâmetros fundamentais para caracterizar o
comportamento do trilho e, por conseguinte, a força de interação entre os corpos.
Na literatura sobre Inductrack encontramos dois tipos principais de pistas, a ‘window frame
track’ e a ‘ladder track’, como discutido na introdução, neste trabalho iremos nos restringir a análise
do tipo ‘ladder track’. Na publicação do Dr. Post [19] ele utiliza a fórmula (18) para modelizar a
resistência equivalente para os dois tipos de trilho.
𝑅𝑒𝑞 =𝑟𝑐𝑃𝑐
𝐴 (27)
Entretanto 6 anos depois outro autor do mesmo grupo de pesquisa [27- 29] questiona essa
equação, segundo ele os circuitos vizinhos devem ser considerados e interferem na resistência
equivalente do circuito. Ele então propõe a representação da figura 11 e a equação (20).
𝑅𝑒𝑞 = 2(Rx + Rz(1 − cos(𝑘. 𝑑𝑐))) (28)
Figura 11 - Circuito equivalente para o trilho tipo 'ladder'
Onde Rx é a resistência devido ao segmento superior ou inferior do trilho e Rz a resistência
do segmento do trilho que pertence a dois circuitos, as resistências são calculadas pela fórmula (18)
substituindo 𝑃𝑐 pelo comprimento do segmento analisado. Apenas essa última equação foi
apresentada no relatório anterior, entretanto ambas foram implementadas no código, possuindo erro
nas duas devido ao cálculo incorreto do comprimento das faixas de condução.

24
Figura 12 - Código implementado anteriormente (à esquerda) e código corrigido (à direita)
Após corrigidos, os resultados das resistências equivalentes pelas duas equações foram
validados utilizando os valores apresentados nos artigos [19, 28].
3.2.2 Indutância equivalente da pista
Para modelar a indutância equivalente do circuito da figura 11, o trabalho anterior utilizou no
relatório o desenvolvimento de Paul Friend [22]. Entretanto, essa equação (29) foi desenvolvida para
os trilhos do tipo ‘window frame track’, que possui circuitos verticais e metal na parte interna do
circuito que podem auxiliar na indutância total. Esse equívoco não afetou o resultado final pois a
indutância adicional (LD) foi considerada nula, entretanto a fórmula da indutância própria deveria ter
sido alterada para se adequar ao tipo de pista ‘ladder’.
𝐿𝑒𝑞 = 𝜇0𝑃𝑐
2𝑘𝑑𝑐 (29)
Os artigos [21, 22] explicitam no texto que a o termo 𝑃𝑐 da equação (29) deve ser substituído
pela largura do trilho w quando se deseja calcular a indutância equivalente de uma pista ‘ladder’.
Esse descuido quanto às alterações necessárias para o tipo de pista do projeto acarretou em um
erro no modelo.
Após corrigida, a equação foi validada com os resultados das simulações apresentadas em
[22, 28].
3.2.3 Força de interação
Após a modelagem do arranjo de Halbach e do trilho, resta analisar a interação entre os dois
corpos, o desenvolvimento das equações apresentado anteriormente é correto, entretanto se limita
a analisar a força de repulsão resultante da interação de arranjo com um único circuito. A equação
que fornece a força de sustentação resultante a interação de um número quaisquer de circuitos do
trilho com arranjos de Halbach é dado pela equação 21, apresentada pela primeira vez em [17, 18]

25
F(𝜔𝑒 , 𝑦) =𝐵0
2𝑤𝐴
2𝑘𝐿𝑒𝑞𝑑𝑐 [
1+(𝑅𝑒𝑞
𝜔𝑒𝐿𝑒𝑞)
1+(𝑅𝑒𝑞
𝜔𝑒𝐿𝑒𝑞)
2] 𝑒−2𝑘𝑦 (30)
Neste artigo do Dr. Post, ele cita o w da equação anterior como sendo o comprimento do
arranjo de Halbach, entretanto em artigos seguintes essa informação é corrigida e o termo w passa
a representar a largura do trilho. Na implementação da fórmula da força existiam quatro erros: o
termo w foi confundido com a frequência de excitação do sistema (𝜔𝑒); a frequência de oscilação foi
calculada utilizou a velocidade de rotação ao invés da velocidade linear; utilizou a formula para
apenas um segmento e não a resultante total e as equações das forças 𝐹𝑦 e 𝐹𝑥 foram permutadas.
Figura 13- Código anterior (acima) e código corrigido (abaixo)
Esses erros foram corrigidos e os resultados atuais são compatíveis aos encontrados nos
artigos [22, 28]
3.3 Melhorias no modelo
As correções necessárias foram implementadas no simulador e os resultados foram validados
utilizando a literatura disponível, logo podemos passar ao segundo objetivo deste trabalho, aprimorar
o modelo desenvolvido para o Inductrack e melhorar a interface gráfica para que a mesma se adeque
as mudanças realizadas
A modelização desenvolvida anteriormente foi possível através de um conjunto de suposições
e simplificações da estrutura e comportamento do sistema. As melhorias propostas a seguir buscar
minimizar o efeito destas considerações e tornar o modelo mais preciso e compatível com o
comportamento do sistema.
3.3.1 Espaçamento entre imãs

26
Durante a modelagem do arranjo de Halbach nos supomos que os imãs fossem montados
sem espaçamento entre eles, compondo assim um arranjo mais estreito, com menor comprimento
de onda e consequentemente aumentando a frequência de excitação do sistema para uma dada
velocidade linear. Essa condição de operação é a ideal para obter a levitação à baixa velocidade,
entretanto devido às dificuldades de montagem esse cenário dificilmente representa um arranjo real.
Para representar esse espaçamento entre os imãs, introduzimos um fator de preenchimento
do arranjo 휀. Os únicos parâmetros afetados são o comprimento de onda, a constante de Halbach
(k) e o campo magnético máximo gerado pelo arranjo [28, 29].
Figura 14 - Desenho do arranjo de Halbach com espaçamento entre imãs
𝜆 = 𝑁. 𝑙𝑖 + 𝑙𝑒(𝑁 − 1) (31)
휀 =𝜆
𝑁.𝑙𝑖 (32)
𝐵0 =𝐵𝑟(1−𝑒𝑘𝑑ℎ) sin(
𝜋
𝑁)
𝜋
𝑁
(33)
Onde 𝑙𝑖 é o comprimento do imã e 𝑙𝑒 a distância entre dois imãs consecutivos.
3.3.2 Indutância equivalente do circuito
Na sessão 3.2.1 foi abordado duas equações de modelagem da resistência equivalente do
trilho, uma proposta pelo Dr. Post [19] que é válida para os dois tipos de trilho, e uma especifica para
o trilho ‘ladder’ elaborada por Storset [28]. Para a indutância também existem duas equações
distintas, uma de cada um destes autores.
No trabalho anterior foi utilizada a equação de Post adaptada para os trilhos ‘ladder’, essa
abordagem é presente na maior parte dos trabalhos relacionados à Inductrack, inclusive nos
trabalhos mais recentes. Entretanto Storset desenvolveu uma análise aprofundada sobre o
comportamento indutivo do trilho, tratando de maneira mais abrangente a indutância própria e mutua
gerada pelas barras condutoras [27, 29]. Em seu trabalho mais recente sobre o assunto ele

27
apresentou uma versão simplificada do modelo que permite o cálculo de uma indutância equivalente
[28].
𝐿𝑒𝑞 ≜ 𝑙0 + 2 ∑ 𝑙𝑚cos (𝑘. 𝑑𝑐 . 𝑚)∞𝑚=1 (34)
Sendo 𝑙0 a indutância própria e 𝑙𝑚 a indutância mutua entre a haste do circuito e as hastes
adjacentes. Essa equação supõe que as indutâncias 𝐿𝑥 (figura 11) são negligenciáveis devido ao
seu curto comprimento a grande distância entre as barras, sendo as indutâncias 𝐿𝑧 e a indutância
mutua gerada entre elas as componentes majoritárias da indutância apresentada pelo circuito.
Outra suposição utilizada por Storset é que o trilho é infinito, o que resulta no somatório até o
infinito na equação (34). Entretanto, analises da interação entre o arranjo e o trilho [28] demonstraram
que as correntes induzidas pelo arranjo de Halbach fora da região diretamente abaixo do arranjo são
bem reduzidas e podem ser negligenciadas, portanto podemos reescrever a fórmula como:
𝐿𝑒𝑞 ≜ 𝑙0 + 2 ∑ 𝑙𝑚cos (𝑘. 𝑑𝑐 . 𝑚)
𝐴
2.𝑑.𝑑𝑐𝑚=1 (35)
.Podemos observar que a componente cos (𝑘. 𝑑𝑐 . 𝑚) é puramente oscilatória, sendo o termo
𝑙𝑚 responsável pelo decaimento e convergência do somatório.
O cálculo da indutância própria de uma barra condutora de seção retangular e indutância
mutua entre barras idênticas podem ser obtidas pelas seguintes equações [30, 31]:
Figura 15 - Estrutura e parâmetros das barras paralelas
𝑙𝑡 = 0.002
3𝑎2 (3𝑎2𝑙. 𝑙𝑛 (𝑙+√𝑙2+𝑎2
𝑎) − ((𝑙2 + 𝑎2)
3
2 + 3𝑙2𝑎. 𝑙𝑛 (𝑎+√𝑙2+𝑎2
𝑙) + 𝑙3 + 𝑎3) (36)
𝑙0 = 𝑙𝑡 −𝐾.𝑙.𝑏
𝑎10−3 (37)
Tabela 1 - Valores de K em H/cm*10-9

28
(38)
Sendo 𝑎 a largura, 𝑏 a espessura, 𝑑 a distância entre os pontos centrais das barras e 𝑙 o
comprimento das mesmas. A equação anterior proposta pelo Prof. Dr. Post não considera a
espessura do trilho, enquanto este modelo é consideravelmente mais complexo e mede a indutância
própria do condutor retangular e indutância mutua de uma barra com as barras vizinhas.
Comparando o resultado de ambos as modelagens a partir dos parâmetros dos trilhos
simulados em [28], vemos que os valores obtidos das indutâncias são próximos. Pela equação (9)
temos 𝐿𝑒𝑞 = 0.219𝜇𝐻 enquanto a equação (35) temos 𝐿𝑒𝑞 = 0.389𝜇𝐻.
Figura 16 - Implementação do cálculo da indutância equivalente
A indutância equivalente é um dos parâmetros mais críticos do sistema, sendo o parâmetro
mais complexo de se determinar e afetando fortemente os resultados da interação do trilho e do

29
arranjo de Halbach. Essa melhoria é a mais importante implementada neste trabalho, trazendo maior
influência sobre os resultados finais.
3.3.3 Efeito de borda
As formulações desenvolvidas durante a análise teórica pressupõem que a largura do trilho é
igual ou superior a largura do arranjo de Halbach e que todo o fluxo magnético gerado pelo arranjo
é direcionado para o trilho imediatamente abaixo do arranjo, sem fuga do campo magnético.
Algumas recomendações de projeto (detalhadas no capítulo seguinte) auxiliam para
minimizar a interferência dos erros decorrente dessas considerações. Contudo o efeito de borda, ou
seja à perda de campo magnético nas extremidades do arranjo, podem ser representados de uma
forma geral por um fator de correção [22] dado por.
𝐹𝑎𝑡𝑜𝑟𝑏𝑜𝑟𝑑𝑎 = 1 −𝑑𝑐
2𝑙𝑎𝑟𝑟𝑎𝑛𝑗𝑜 (39)
Sendo 𝑙𝑎𝑟𝑟𝑎𝑛𝑗𝑜 o comprimento do arranjo de halback. Dessa forma vemos que quanto maior
o arranjo, menos efetivo serão os efeitos de borda presentes no sistema. Para introduzir esse fator
nas equações precedentes, basta multiplicar os resultados das forças obtidas pelo fator de borda.
3.3.4 Perda por corrente de Foucault
Na introdução abordamos a característica intrinsicamente estável do Inductrack, discutindo a
estabilidade estática e dinâmica presentes na levitação EDS. O fenômeno responsável pela
estabilidade dinâmica é a corrente de Foucault (ou corrente de Eddy) que ocorre quando uma
superfície condutora é exposta a um campo magnético variante normal à faixa de condução.
Esse fenômeno de perdas não se limita aos casos transientes, estando presente também em
regime permanente de operação do sistema devido exposição do trilho ao campo magnético
oscilante gerado pelo arranjo de Halback em movimento relativo. A consequência deste fenômeno é
a perda de energia do sistema sob a forma de aquecimento da placa.
As perdas energéticas não prejudicam significativamente a performance do sistema
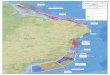
Inductrack [26] e o aquecimento pode ser negligenciado para aplicações em pistas lineares. Contudo,
em pistas circulares (figura 17), o trilho é exposto às variações do campo de forma mais frequente e
portanto o aquecimento do trilho deve ser considerado para o dimensionamento do projeto.

30
Figura 17 - Pista linear com movimento em rotação (à esquerda) e pista circular com arranjo
circular (à direita)
A corrente de Foucault ocorre quando a variação do campo magnético é perpendicular à
superfície do material condutor, portanto para o trilho ‘ladder’ temos condução na superfície superior
e na lateral das hastes do trilho.
𝑃𝐸𝑑𝑑𝑦 = 𝑃𝐸𝑑𝑑𝑦𝑆𝑢𝑝𝑒𝑟𝑖𝑜𝑟 + 2𝑃𝐸𝑑𝑑𝑦𝐿𝑎𝑡𝑒𝑟𝑎𝑙 (40)
𝑃𝐸𝑑𝑑𝑦 = 2𝑤𝜔𝑒
2.𝐵02.∆𝑐.𝑙𝑡𝑙
3
24∗𝑟𝑐+ 2𝑑𝑐
𝜔𝑒2.𝐵0
2.∆𝑐.𝑙𝑡𝑏3
24∗𝑟𝑐 + 2𝑤
𝜔𝑒2.𝐵0
2.∆𝑐3.𝑙𝑡𝑙
24∗𝑟𝑐 =
𝜔𝑒2.𝐵0
2.∆𝑐
12∗𝑟𝑐(𝑑𝑐. 𝑙𝑡𝑏
2 + 𝑤. 𝑙𝑡𝑙(𝑙𝑡𝑙2 + ∆𝑐2))
(41)
Sendo 𝑙𝑡𝑏 a largura das seções condutoras do trilho paralelas ao movimento e 𝑙𝑡𝑙 a largura
das seções condutoras do trilho perpendiculares ao movimento. Vale ressaltar que esta equação
corresponde à perda por circuito do trilho.
3.3.5 Efeito pelicular
Um condutor elétrico sujeito a uma corrente alternada gera internamente e externamente um
campo magnético alternado. Quando a intensidade da corrente conduzida varia, surge uma surge no
condutor um campo elétrico que se opõe a essa mudança, chamada força contra eletromotriz. Esse
campo é mais intenso no centro do condutor, forçando os elétrons à percorrerem a superfície e
reduzindo a secção efetiva de condução do material. Esse efeito é mais significativo em altas
frequências e acarreta um aumento da resistência aparente do condutor.

31
Os efeitos desse fenômeno foram abordados pelo artigo do Prof. Dr. Post [16] e seus efeitos
sobre a força resultante foram avaliados utilizando as equações de resistência equivalente presente
no mesmo artigo.
𝛿 = √2𝑟𝑐
𝜔𝑒𝜇0 (42)
𝐹𝑦𝐶𝑜𝑚𝐸𝑓𝑒𝑖𝑡𝑜 𝑃𝑒𝑙𝑖𝑐𝑢𝑙𝑎𝑟= 𝐹𝑦 ∗
1
𝑘𝛿+(√1+𝑘4𝛿4
4−
𝑘2𝛿2
2)
3/2 (43)
𝐹𝑥𝐶𝑜𝑚𝐸𝑓𝑒𝑖𝑡𝑜 𝑃𝑒𝑙𝑖𝑐𝑢𝑙𝑎𝑟= 𝐹𝑥 ∗
(√1+𝑘4𝛿4
4−
𝑘2𝛿2
2)
3/2
𝑘𝛿+(√1+𝑘4𝛿4
4−
𝑘2𝛿2
2)
3/2 (44)
Sendo 𝛿 a profundidade da superficie que mantem as caracteristicas condutoras.

32
Capítulo 4
Considerações e orientações para projeto
Nos capítulos anteriores discutimos sobre as características da tecnologia Inductrack, suas
formulações e implementação do simulador, cumprindo satisfatoriamente a maior parte dos objetivos
propostos para este trabalho. Neste capitulo serão discutidas as restrições e recomendações para a
concepção de um projeto usando Inductrack, tratando de maneira aplicada as restrições e
simplificações teóricas estabelecidas anteriormente e concluindo os objetivos propostos.
Os tópicos tratados abaixo têm por objetivo fornecer um guia para o dimensionamento de um
sistema Inductrack, facilitando a conformidade da aplicação com a teoria de Inductrack sem a
necessidade de um entendimento aprofundado das formulações apresentadas anteriormente.
4.1 Recomendações de montagem
Durante o desenvolvimento das equações gerais da levitação magnética entre o arranjo de
Halbach e o trilho várias considerações foram necessárias para descrever o comportamento do
sistema. Essas suposições implicam em um distanciamento do modelo teórico e do comportamento
real, entretanto, caso algumas condições de montagem e operação forem respeitadas, as
aproximações utilizadas podem se manter bem fieis ao comportamento real observado pelo sistema.
4.1.1 Arranjo de Halbach
A primeira simplificação teórica apresentada ocorreu no cálculo do campo magnético gerado
pelos imãs do arranjo de Halbach. Ao determinar o valor do campo gerado na face inferior do arranjo
optamos por utilizar apenas a primeira harmônica do campo e aproximar a distribuição do campo por
uma senoide.
Para que as demais harmônicas geradas pelo arranjo não interfiram no comportamento do
sistema, é recomendado que a quantidade de comprimentos de onda geradas por um arranjo seja
um valor inteiro, ou seja, caso seja usado o arranjo da figura 6, o número de imãs deve ser múltiplo
de 4 [13]. Dessa forma a amplitude das demais harmônicas é reduzida.
A forma do campo magnético gerado é semelhante à uma onda senoidal até para arranjos de
Halbach curtos, entretanto essa consideração é mais próxima do campo observado

33
experimentalmente para arranjos mais longos. Portanto recomendasse que seja utilizado um arranjo
com ao menos dois comprimentos de onda (duas sequencias de Halbach).
Quanto ao parâmetro de espaçamento entre os imãs descrito em 3.3.1, vemos que ele
interfere diretamente no comprimento de onda do arranjo de Halbach e consequentemente reduz a
frequência de excitação do sistema para uma dada velocidade. Ê recomendado que esse
espaçamento seja o menor possível para que possamos obter a levitação em velocidades mais
baixas.
4.1.2 Trilho Inductrack
As estruturas de trilhos estudadas para utilização com o arranjo de Halbach foram brevemente
citadas na introdução. Optamos por abordar apenas os trilhos do tipo ‘ladder’, podendo estes assumir
algumas configurações (figura 7 e 17).
Para o construção das pistas do tipo ‘ladder’ é necessária a utilização de um material capaz
de resistir as forças resultantes oriundas da interação entre o trilho e o arranjo e permitir a passagem
de corrente elétrica, formando um circuito condutor em cada segmento. Adicionalmente, as
dimensões de cada segmento do trilho devem se repetir em sua extensão, essa homogeneidade
evita vibrações e perdas repentinas da força de sustentação, que podem prejudicar a performance
do sistema e induzir correntes de Foucault excessivas que irão aquecer o trilho.
Para trilhos circulares com arranjo circular (figura 17 à direita) é necessário restringir o
caminho da corrente para que ela percorre os circuitos do trilho e gerem o campo magnético
responsável pela força de levitação magnética. Portanto é obrigatório que haja um rasgo ou furo
interno para delimitar o caminho da corrente. Além disso, para que as fórmulas mostradas neste
trabalho possam ser utilizadas adequadamente, o comprimento dos segmentos do trilho deve ser
pequeno, de modo que a aproximação do mesmo para uma pista linear possa ser feita sem perda
significativa de precisão.
Estes trilhos têm uma estrutura bem definida e existem poucas restrições quanto as suas
dimensões, entretanto várias recomendações devem ser seguidas para melhorar o desempenho do
sistema, tais como:
A largura do trilho deve ser menor ou igual a largura do arranjo de Halbach para que
todo o interior do circuito seja sujeito a um campo magnético uniforme. [28]
O comprimento dos circuitos ( 𝑑𝑐 ) devem ser pequenos para aumentar a força
resultante. Entretanto a largura das faixas de condução (𝑙𝑡) não deve ser muito curta,

34
pois isso era aumentar a resistência do circuito e consequentemente incrementar a
velocidade necessária para atingir a velocidade de transição e critica.
O número de circuitos por comprimento de onda deve ser um valor inteiro. Essa
recomendação garante a simetria entre as forças na parte frontal e traseira do arranjo,
melhorando a estabilidade da carga sustentada [29].
4.1.3 Interação entre o trilho e o arranjo
Para as análises da força magnética resultante apresentados nesse trabalho, duas condições
de operação foram assumidas: velocidade de propulsão constante; altura de levitação ou peso da
carga em levitação constante.
A simplificação para a velocidade de propulsão é essencial para que possamos negligenciar
as correntes de Foucault decorrestes das oscilações transientes e nos abster de detalhar o
comportamento transiente do sistema (aprofundado em [26, 29]). Contudo as oscilações verticais
não podem ser ignoradas, caso o sistema seja submetido a uma carga alternada (carga comum para
mancais magnéticos) é necessário garantir que a frequência de oscilação da carga esteja distante
da frequência natural de oscilação do sistema fornecida pela equação (23).
Quanto à altura de levitação, os artigos [28, 29] abordam que a aproximação do campo
magnético do arranjo de Halbach para a primeira harmônica não é valido para a levitação em alturas
inferiores à 𝑦 <𝜆
2𝑁, pois nesta condição de operação as altas frequências têm módulos significativos.
Em contrapartida, para distâncias muito elevadas entre os corpos, o campo magnético pode se
dispersar, prejudicando a eficiência do sistema e a precisão do modelo.
Para a suposição de carga constante, basta que o peso do material que se deseje levitar seja
inferior à força de levitação máxima gerada pelo sistema Inductrack para um altura constante de
operação em alta velocidade, fornecida pela equação (24).
Para o caso especifico do trilho circular com arranjo circular, o efeito de borda abordado em
3.3.3 não necessita ser considerado quando o número de comprimentos de onda do arranjo circular
é um valor inteiro. Neste caso o campo magnético gerado não apresenta variações bruscas ou
extremidades. Entretanto o aquecimento do trilho por corrente de Foucault abordado na sessão 3.3.4
deve ser considerado durante o dimensionamento do projeto.

35
Capítulo 5
Conclusão
Com este trabalho pode-se dar continuidade ao trabalho anterior sobre a tecnologia
Inductrack, compilando a literatura existente, corrigindo o simulador e implementando melhorias no
modelo capazes de torna-lo uma ferramenta apropriada para o dimensionamento e análise de
projetos. Com a modelagem e as recomendações de projeto detalhadas, será possível construir uma
bancada de testes, que servira para validar a teoria apresentada e irá ajudar no desenvolvimento
dessa tecnologia promissora.

36
Referências Bibliográficas
[1] Seminari, R.S.. Estudo de Levitação Magnética Passiva por Meio da Technologia Inductrack. Universidade Estadual de Campinas, 2009
[2] BBC News, The magnetic attraction of trains; [atualizado em 1999 novembro 9; citado em 2014 setembro 13]. Disponível em: http://news.bbc.co.uk/2/hi/science/nature/488394.stm.
[3] Ahmed, F.. Magnetic Levitation (MagLev) Trains; [atualizado em 2009 setembro 06; citado em 2014 setembro 13]. Disponível em: http://www.indiastudychannel.com/resources/84835-Magnetic-Levitation-MagLevTrains.aspx.
[4] Pope, D..Halbach Arrays Enter the Maglev Race. The Industrial Physicistmm p.12-13, 2003
[5] Nasa , Emerging Technologies May Fuel Revolutionary Launcher ; [atualizado em 2010 setembro 10; citado em 2014 setembro 13]. Disponível em: http://www.nasa.gov/topics/technology/features/horizontallaunch.html
[6] Science and Technologie Review, Maglev on the development track for urban transportation; [atualizado em 2003 novembro 7; citado em 2014 setembro 13]. Disponível em: https://str.llnl.gov/str/November03/pdfs/11_03.3.pdf.
[7] Maglev: Frontiers of physics; [citado em 2014 setembro 13]. Disponível em: http://www.hk-phy.org/articles/maglev/maglev_e.html
[8] Saiba como funciona o trem-bala que ligará SP e Rio em 90 minutos ;[atualizado em 2010 julho 14; citado em 2014 setembro 13]. Disponível em: http://estetemtudo.blogspot.com.br/2010/07/saiba-como-funciona-o-trem-bala-que.html
[9] Inductrack, levitación magnética para el transporte ; [atualizado em 201 2 fevereiro 5; citado em 2014 setembro 13]. Disponível em: http://ies.camilojosecela.climantica.org/2012/02/05/inductrack-levitacion-magnetica-para-eltransporte/
[10] Tung, L.S., Post, R.F., Martinez-Frias J.. Final Progress Report for the NASA Inductrack Model Rocket Launcher at the Lawrence Livermore National Laboratory. 2001
[11] Simon, M.D.. Diamagnetically stabilized magnet levitation. Manuscrito 12096. University of California, 2001
[12] Tsuchiya, M.. Characteristics of electromagnetic force of EMS-type maglev vehicle using bulk superconductors. Tokyo University, 2000.
[13] Halbach, K.. Application of Permanent Magnets in Accelerators and Electron Storage Rings. Journal of Applied Physics, p. 57, 1985
[14] Post, R.F., Nguyen, N..The Design of Halbach Arrays for Inductrack Maglev Systems. Lawrence Livermore National Laboratory, 2008
[15] Build a Halbach Magnet Array; [citado em 2014 setembro 13]. Disponível em: http://www.otherpower.com/danf/halbach.html
[16] Post, R.F.. Passive Magnetic Bearings for Vehicular Electromechanical Batteries. Tec. Rep. UCRL-ID-123451. Lawrence Livermore National Laboratory, 1996.
[17] Post, R.F., Ryutov, D.D.. The Inductrack Concept: a New Approach to Magnetic Levitation. Tec. Rep. UCRL-ID-12115, Lawrence Livermore National Laboratory, 1996.
[18] Post, R.F.. Inductrack Demonstration Model. Tec. Rep. UCRL-ID-129664, Lawrence Livermore National Laboratory, 1998.

37
[19] Post, R.F., Ryutov, D.D.. The Inductrack: A Simpler Approach to Magnetic Levitation, Lawrence Livermore National Laboratory, 1999. (erro na formula na definiçao de w
[20] Post, R.F., Ryutov, D.D.. The Inductrack Approach to Magnetic Levitation. IEEE Transactions of Applied Superconductivity, Volume: 10 Issue: 1, p. 901–904. 2000.
[21] Post, R.F., Hoburg, J.F.. A Laminated Track for the Inductrack System: Theory and Experiment. 18th International Conference on Magnetically Levitated Systems and Linear Drives, 2004.
[22] Friend, P.. Magnetic Levitation Train Technology 1. Final Report, Bradley University, 2004.
[23] Funk, D., Gestla, K.. Magnetic Levitation Train. Final Report, Bradley University, 2006.
[24] Zomchek, G.. Redesign of Rotary Inductrack for Magnetic Levitation Train Demonstration. Tec. Rep. Bradley University, 2007.
[25] DeDecker, D., VanIseghem, J.. Development of a Halbach Array Magnetic Levitation System. Senior Project Proposal, Bradley University, 2012.
[26] Gavelek, K., Panek, V., Smith, C.. Closed Loop Control of Halbach Array Magnetic Levitation System Height. Senior Project Final Report, Bradley University, 2013.
[27] Storset, O.F., Paden, B.E.. Infinite Dimensional Models for Perforated Track Electrodynamic Magnetic levitation. Conference of Decision and Control, 2002
[28] Storset, O.F., Paden, B.E.. Electrodynamic magnetic levitation with discrete track Part II: Periodic track model for numerical simulation and lumped parameter model. IEEE Transactions on Magnetics, 2005.
[29] Storset, O.F., Paden, B.E.. Discrete track electrodynamic maglev Part I: Modelling. IEEE Transactions on Magnetics, 2005.
[30] PIATEK, Z., BARON, B., SZCZEGIELNIAK, T., KUSIAK, D., PASIERBEK, A.. Mutual inductance of long rectangular conductors. PRZEGLĄD ELEKTROTECHNICZNY, 20012
[31] Hoer, C., Love, C.. Exact Inductance Equations for Rectangular Conductors With Applications to More Complicated Geometries. JOURNAL OF RESEARCH of the National Bureau of Standard, 1965.

38
Anexo A
Interface gráfica alterada

39
Anexo B
Código do simulador implementado
uo = 4*pi*(10^-7); %permeabilidade no espa�o g = 9.81; %[m/s] aceleracao gravitacional % Ahranjo de Halcach Nt = str2num(get(handles.Nt,'String')); % numero total de imãs dH = str2num(get(handles.dH,'String')); %[m] espessura do ima M = str2num(get(handles.M,'String')); %[] numero imas por Ahranjo Br = str2num(get(handles.Br,'String')); %[] inducao na face do ima li = str2num(get(handles.li,'String')); %[m] comrimento do ima le = str2num(get(handles.le,'String'));%[m] espaçamento entre os imas % Trilho laminado deltac = str2num(get(handles.deltac,'String')); %[m] espessura da pista dc = str2num(get(handles.dc,'String')); %[m] dist centro a centro dos
condutores lfl = str2num(get(handles.lfl,'String')); %[m] largura das faixas condutoras
laterais lfb = str2num(get(handles.lfb,'String')); %[m] largura das faixas condutoras de
base ReP = str2num(get(handles.ReP,'String')); %[ohms/m] resistividade do cobre RiP = str2num(get(handles.RiP,'String')); %[m] raio externo da pista % Corpo suspenço tm = str2num(get(handles.tm,'String')); %massa do trem [kilograms] % Entradas Vo = str2num(get(handles.Vo,'String')); % veloc inicial [rpm] Vi = str2num(get(handles.Vi,'String')); % veloc final [rpm] y1 = str2num(get(handles.y1,'String')); %[m] altura inicial Ahranjo-pista
if get(handles.material,'Value') == 1 % material utilizado rc = 1.68*10^-8; else rc = 2.82e-8; end
%% Calculos
% Geral TF = tm*g;
% Halbach Nar = Nt/M; %[] numero de arranjos lambda=M*li+le*(M-1); k = 2*pi/lambda; %valor da constante de de Halbach eh = lambda/(M*li); %percentual do comprimento de onda ocupado por imas Ah = dH*lambda*Nar; %area abaixo do arranjo % Bo = Br*(1 - exp(-*k*d))*sin(pi/M)/(pi/M) %Post Bo = Br*(1 - exp(-k*dH))*sin(eh*pi/M)/(pi/M); %Storset
% Trilho wt = ReP-RiP;
% Resistencia equivalente % % Paul Friend % Pc = 2*(wt+dc-(lfl+lfb)); % perimetro do segmento % R = rc*Pc/((lfl+lfb)*.5*deltac) % resistencia equivalente do segmento % Storset AsecL = lfl*deltac; % Area da secao tranversal das faixas de conducao

40
AsecB = lfb*deltac; % Area da secao tranversal das faixas de conducao Rz = rc*(wt-lfl)/AsecL; % Resistencia da faixa de conducao Rx = rc*(dc-lfb)/AsecB; % Resistencia da borda de conducao R = 2*(Rx + Rz*(1-cos(k*dc))); % resistencia equivalente do segmento
% Indutancia equivalente % % L = uo*wt/(2*k*dc) % Paul %Storset a = lfl*100; %comprimento da barra b = deltac*100; %espessura da barra l=wt*100; %comprimento da barra d = dc*100; %distancia das barras Lt = (0.002/3*a*a)*(3*a*a*l*log((l+sqrt(l*l+a*a))/a)-((l*l+a*a)^1.5)+
3*a*l*l*log((a+sqrt(l*l+a*a))/l)+(l*l*l+a*a*a)); K = 1.9379; % Coef para calculo da indutancia, use o valor de b/a e l/a para
obter o valor preciso Lb = (Lt-K*l*b*(10^-3)/a)*10^-3; %Indutancia propria % M = 4*(10^-11)*(uo*l/(2*pi))*(log(2*l/sqrt(sqrt((b*b+(a-
dLoop)^2)*(b*b+(a+dLoop)^2))))+13/12-(((a-dLoop)^2)/(3*a*a*b))*atan(b/(a-dLoop))-
(b*(a-dLoop)/(3*a*a))*atan((a-
dLoop)/b)+(2*dLoop*dLoop*dLoop/(3*a*a*b))*atan(b/a)+(2*b*dLoop/(3*a*a))*atan(dLoo
p/b)-(((a+dLoop)^3)/(3*a*a*b))*atan(b/(a+dLoop))-
((b*a+b*dLoop)/(3*a*a))*atan((a+dLoop)/b)-(((a-dLoop)^4)/(24*a*a*b*b))*log(((a-
dLoop)^2)/(b*b+(a-dLoop)^2))-
(((a+dLoop)^4)/(24*a*a*b*b))*log(((a+dLoop)^2)/(b*b+(a+dLoop)^2))-((b*b-
6*dLoop*dLoop)/(24*a*a))*log((b*b*+dLoop*dLoop)/(b*b+(a-dLoop)^2))-((b*b-
6*dLoop*dLoop)/(24*a*a))*log((b*b*+dLoop*dLoop)/(b*b+(a+dLoop)^2))-
((dLoop*dLoop*dLoop*dLoop)/(12*a*a*b*b))*log((b*b*+dLoop*dLoop)/(dLoop*dLoop))-
((dLoop)/(2*a))*log((b*b*+(a+dLoop)^2)/(b*b*+(a-dLoop)^2))); % indutancia mutua
L = Lb; % inicia calc da indutancia equivalente for c1=1:round(lambda/dc) %calcula a indutancia equivalente dLoop = d*c1; M = 4*(10^-11)*(uo*l/(2*pi))*(log(2*l/sqrt(sqrt((b*b+(a-
dLoop)^2)*(b*b+(a+dLoop)^2))))+13/12-(((a-dLoop)^2)/(3*a*a*b))*atan(b/(a-dLoop))-
(b*(a-dLoop)/(3*a*a))*atan((a-
dLoop)/b)+(2*dLoop*dLoop*dLoop/(3*a*a*b))*atan(b/a)+(2*b*dLoop/(3*a*a))*atan(dLoo
p/b)-(((a+dLoop)^3)/(3*a*a*b))*atan(b/(a+dLoop))-
((b*a+b*dLoop)/(3*a*a))*atan((a+dLoop)/b)-(((a-dLoop)^4)/(24*a*a*b*b))*log(((a-
dLoop)^2)/(b*b+(a-dLoop)^2))-
(((a+dLoop)^4)/(24*a*a*b*b))*log(((a+dLoop)^2)/(b*b+(a+dLoop)^2))-((b*b-
6*dLoop*dLoop)/(24*a*a))*log((b*b*+dLoop*dLoop)/(b*b+(a-dLoop)^2))-((b*b-
6*dLoop*dLoop)/(24*a*a))*log((b*b*+dLoop*dLoop)/(b*b+(a+dLoop)^2))-
((dLoop*dLoop*dLoop*dLoop)/(12*a*a*b*b))*log((b*b*+dLoop*dLoop)/(dLoop*dLoop))-
((dLoop)/(2*a))*log((b*b*+(a+dLoop)^2)/(b*b*+(a-dLoop)^2))); L = L + 2*M*cos(k*dLoop*c1); end
% Iteracao rMed = (ReP-RiP)/2; % raio médio da pista circular Vrot = Vi*2*pi/60; % velocidade de rotação em rot/s omega = k*rMed*Vrot; %frequencia de excitacao y=y1+deltac/2; % altura entre o arranjo e o centro do segmento do trilo
levs = 1-(dc/(2*lambda*Nar)); % Efeito de borda % Efeito de pele ePele = sqrt(2*rc/(omega*uo)); ConsAux = ((sqrt(1+(k^4)*(ePele^4)/4)-(k^2)*(ePele^2)/2)^(3/2)); FatorPeleX = 1/(ConsAux+k*ePele); FatorPeleY = ConsAux/(ConsAux+k*ePele);

41
%Forcas de levitação e arrasto Fx = levs*((Bo^2*wt*Ah)/(2*k*L*dc))*(1/(1+(R/(omega*L))^2))*exp(-2*k*y); % eq. da
Força de arrasto Fy = levs*((Bo^2*wt*Ah)/(2*k*L*dc))*((R/(omega*L))/(1+(R/(omega*L))^2))*exp(-
2*k*y); % eq. da Força de levitação Fxy =
levs*((Bo^2*wt*Ah)/(2*k*L*dc))*((1+(R/(omega*L)))/(1+(R/(omega*L))^2))*exp(-
2*k*y); % eq. da Força resultante
% Indicadores % Ponto critico Constan = (levs*Bo^2*wt*Ah*exp(-2*k*y))/(2*k*L*dc*TF); omegaBreak = (R/L)*2/(Constan+sqrt(Constan*Constan-4)); %velocidade critica FxBreak = levs*((Bo^2*wt*Ah)/(2*k*L*dc))*(1/(1+(R/(omegaBreak*L))^2))*exp(-
2*k*y); % força de arrasto na velocidade criticana vel de transiçao LiftDragRation = omegaBreak*L/R; % razão entre a força de levitação e arrasto vBreak = omegaBreak/k; %velocidade linear critica vRotBreak = vBreak/rMed; %velocidade de rotação critica em rad/s VRotRPMBreak = vRotBreak*60/(2*pi); %velocidade de rotação critica em RPM % Ponto de transiçao omegat = R/L; %frequencia de escitação no ponto de transição Fxt = levs*((Bo^2*wt*Ah)/(2*k*L*dc))*(0.5)*exp(-2*k*y); % força de arrasto e
levitação na vel de transição Fxyt = levs*((Bo^2*wt*Ah)/(2*k*L*dc))*(0.5)*exp(-2*k*y); % força resultante na
vel de transição vt = omegat/k; %velocidade linear de transicao vRott = vt/rMed; %velocidade de rotação de transicao em rad/s VRotRPMt = vRott*60/(2*pi); %velocidade de rotação de transicao em RPM
omegaOsc = sqrt(2*k*g); %freq natural de oscilacao vertical K = k*L/R; % Parametro de eficiencia do sistema % Perda for corrente de Foucault Peddy = ((omega^2)*(Bo^2)*deltac/(12*rc))*(dc*lfb*lfb+wt*lfl*(lfl*lfl +
deltac*deltac));
%% Saidas v1 = zeros(1000,1); Fy1 = zeros(1000,1); Fx1 = zeros(1000,1); for LOOP = 1:1000 v1(LOOP) = Vo+(Vi-Vo)*LOOP/1000; Vrot = v1(LOOP)*2*pi/60; % velocidade de rotação em rad/s omega = k*rMed*Vrot; % frequencia de excitacao Fy1(LOOP)=levs*((Bo^2*wt*Ah)/(2*k*L*dc))*(1/(1+(R/(omega*L))^2))*exp(-2*k*y);
% força de levitação
Fx1(LOOP)=levs*((Bo^2*wt*Ah)/(2*k*L*dc))*((R/(omega*L))/(1+(R/(omega*L))^2))*exp(
-2*k*y); % força de arrasto end axes(handles.axes2); plot(v1,Fy1) hold on plot(v1,Fx1,'k') hold off %saidas set(handles.R,'String',R); set(handles.L,'String',L); set(handles.omegat,'String',omegat); set(handles.VRotRPMt,'String',VRotRPMt);

42
set(handles.Fxyt,'String',Fxyt); set(handles.Fxt,'String',Fxt); set(handles.VRotRPMBreak,'String',VRotRPMBreak); set(handles.FxBreak,'String',FxBreak); set(handles.LiftDragRation,'String',LiftDragRation); set(handles.K,'String',K); set(handles.omegaOsc,'String',omegaOsc); set(handles.Peddy,'String',Peddy);