Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DE JUIZ DE FORA
FACULDADE DE ENGENHARIA
CURSO DE GRADUAÇÃO EM ENGENHARIA CIVIL
AVALIAÇÃO DO COMPORTAMENTO DINÂMICO DE UMA LAJE DE GRANDE
PORTE ATRAVÉS DE MODELAGEM COMPUTACIONAL E ANÁLISE
EXPERIMENTAL
NICHOLAS APPES MOTA
JUIZ DE FORA
FACULDADE DE ENGENHARIA DA UFJF
2013

UNIVERSIDADE FEDERAL DE JUIA DE FORA
CURSO DE GRADUAÇÃO EM ENGENHARAIA CIVIL
AVALIAÇÃO DO COMPORTAMENTO DINÂMICO DE UMA LAJE DE GRANDE
PORTE ATRAVÉS DE MODELAGEM COMPUTACIONAL E ANÁLISE
EXPERIMENTAL
NICHOLAS APPES MOTA
JUIZ DE FORA
2013

NICHOLAS APPES MOTA
AVALIAÇÃO DO COMPORTAMENTO DINÂMICO DE UMA LAJE DE GRANDE
PORTE ATRAVÉS DE MODELAGEM COMPUTACIONAL E ANÁLISE
EXPERIMENTAL
Trabalho Final de Curso apresentado ao Colegiado
do Curso de Engenharia Civil da Universidade
Federal de Juiz de Fora, como requisito parcial à
obtenção do título de Engenheiro Civil.
Área de Conhecimento: Dinâmica das Estruturas
Orientador: Profº. Flavio de Souza Barbosa, D.Sc.
Co-orientador: Engº. Armando de Oliveira Motta
Juiz de Fora
Faculdade de Engenharia da UFJF
2013
I

AGRADECIMENTOS
Dedico os meus sinceros agradecimentos:
Ao professor Flavio, pelos ensinamentos transmitidos, pela dedicação como
orientador e pela amizade.
Ao tio Armando, pelo conhecimento compartilhado e pela dedicação como co-
orientador.
À Construtora Vereda por facilitar o acesso à obra.
Aos meus pais Hélio e Jadetty e a minha irmã Yasmine, por todo o apoio e amor.
À Carol, pelo amor e por estar sempre ao meu lado.
A toda a minha família, pelo carinho e suporte incondicional.
Aos meus queridos amigos, por tornarem tudo mais divertido e prazeroso.
Ao PET Civil, por me proporcionar uma formação mais completa.
Aos professores da Faculdade de Engenharia de Juiz de Fora que contribuíram
para minha formação.
A todos que contribuíram para que eu chegasse até aqui.
III
RESUMO
No projeto de construções sujeitas a ações dinâmicas, faz-se necessária uma análise
refinada do comportamento da estrutura, considerando os efeitos inerciais, bem como as
variações dependentes do tempo e das forças externas. Neste contexto, a Modelagem
Computacional e a análise experimental de estruturas constituem ferramentas de
fundamental importância para dar suporte técnico ao Engenheiro na tomada de decisões.
Assim sendo, faz-se neste trabalho, uma avaliação do comportamento dinâmico de uma
laje de grande porte através de Modelagem Computacional e análise experimental.
Palavras-chave: Modelagem Computacional; Dinâmica das Estruturas; Análise
Experimental de Estruturas
IV

Sumario
1 INTRODUCAO 1
1.1 Motivacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Dinamica de Estruturas 6
2.1 Conceitos Basicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Sistemas com Um Grau de Liberdade . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2.1 Determinacao da Taxa de Amortecimento e da Frequencia Natural de um
Sistema de Um Grau de Liberdade . . . . . . . . . . . . . . . . . . . . . . 8
2.3 Sistemas com Multiplos Graus de Liberdade . . . . . . . . . . . . . . . . . . . . . 9
2.3.1 Determinacao das Taxas de Amortecimento e das Frequencias Naturais para
Sistemas com Multiplos Graus de Liberdade . . . . . . . . . . . . . . . . . 9
2.4 Analise Dinamica de Estruturas via MEF . . . . . . . . . . . . . . . . . . . . . . . 10
2.4.1 O Metodo dos Elementos Finitos . . . . . . . . . . . . . . . . . . . . . . . 10
2.4.2 Elemento de Portico Espacial . . . . . . . . . . . . . . . . . . . . . . . . . 11
3 Testes Dinamicos 14
3.1 Aquisicao e Analise de Dados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4 Aplicacao a Estrutura 17
4.1 Ensaio Experimental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.1.1 Resultados Experimentais . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2 Modelos Computacionais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2.1 Modelo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.2.2 Modelo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.2.3 Modelo 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.3 Discussao dos Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.4 Conclusoes e Comentarios Finais . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
A Projeto Arquitetonico e Estrutural da Quadra 32
V
Lista de Figuras
1.1 Tripe do conhecimento moderno, adaptado de Shodor (2004). . . . . . . . . . . . . 1
1.2 Edifıcio Burj Khalifa, em Dubai. (a) Edifıcio concluıdo em 2009 e (b) respectivo
modelo numerico em elementos finitos. . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Interacao entre modelo, experimentacao, simulacoes computacionais e teoria. . . . 3
1.4 Vista externa da quadra poliesportiva (em reforma) da Escola Estadual Juscelino
Kubitschek. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.5 Vista interna da quadra poliesportiva (em reforma) da Escola Estadual Juscelino
Kubitschek. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.6 Construcao da estrutura de suporte da area ampliada da quadra. . . . . . . . . . . 5
2.1 Componentes basicos de um sistema dinamico com um grau de liberdade. . . . . . 7
2.2 Vibracoes livres em um sistema com amortecimento subcrıtico (Clough, 1993). . . 8
2.3 Exemplos de elementos utilizados no MEF: (a) elemento cubico com 8 pontos nodais
e (b) elemento tetraedrico com 10 pontos nodais. . . . . . . . . . . . . . . . . . . 10
2.4 Exemplo de malha de elementos finitos aplicada em uma peca atraves do programa
gerador de malhas Gmsh (e J. Remacle, 2013). . . . . . . . . . . . . . . . . . . . . 11
2.5 Elemento de portico espacial. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.1 Exemplo de ensaio com vibracao forcada: excitador de rotacao sendo utilizado para
simular uma torcida de futebol durante testes realizados na construcao do estadio
Itaquerao, em Sao Paulo (IEME, 2013). . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2 Exemplo de ensaio com vibracao livre: viga de concreto armado sendo ensaiada em
laboratorio para determinacao de suas propriedades (Penner, 2002). . . . . . . . . 15
3.3 Exemplos de equipamentos para aquisicao de dados. . . . . . . . . . . . . . . . . . 16
3.4 Exemplo de resposta no domınio do tempo e da frequencia (Vale, 1996). . . . . . . 16
4.1 Planta baixa simplificada da quadra. A area hachurada demarca a regiao de interesse. 17
4.2 Corte transversal generico da quadra. . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.3 Regiao da quadra apoiada sobre estrutura. . . . . . . . . . . . . . . . . . . . . . . 18
4.4 Mapa do ensaio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.5 Aplicacao da carga de excitacao. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.6 Acelerometro fixado a laje com fita adesiva. . . . . . . . . . . . . . . . . . . . . . 20
4.7 Sistema de aquisicao de dados. Condicionador Lynx ADS 2000 a direita. . . . . . 21
4.8 Palco e banheiros enrijecem a estrutura nas proximidades do ponto 1. . . . . . . . 21
VI
4.9 Resposta de aceleracoes no tempo para o ponto 1. . . . . . . . . . . . . . . . . . . 22
4.10 Resposta de aceleracoes no tempo para o ponto 2. . . . . . . . . . . . . . . . . . . 22
4.11 Resposta de aceleracoes no domınio da frequencia para os pontos 1 e 2. . . . . . . 22
4.12 Exemplos de estruturas modeladas no SAP2000 (CSI, 2013). . . . . . . . . . . . . 24
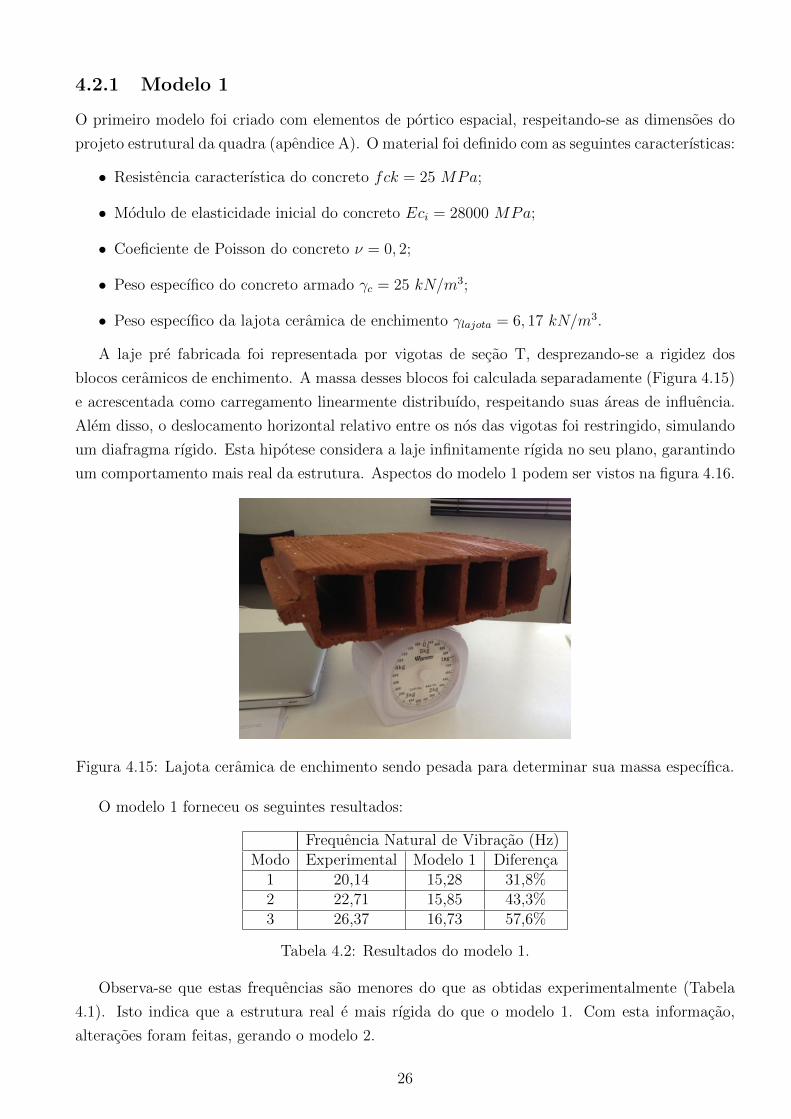
4.13 Visao geral da interface do SAP2000: modelo, analise dinamica e analise estatica. 24
4.14 Visao geral da interface do SAP2000: (a) definicao de materiais; (b) parametros
das secoes; (c) restricoes nodais. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.15 Lajota ceramica de enchimento sendo pesada para determinar sua massa especıfica. 26
4.16 Modelo 1: (a) modelo; (b) corte transversal; (c) secao da laje; e (d) primeiro modo
de vibracao. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.17 Corte longitudinal do modelo 2: translacao impedida na regiao a direita. . . . . . 28
4.18 Modelo 3: Corte longitudinal dos principais modos de vibracao, dando destaque as
amplitudes dos pontos 1 e 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.19 Modelo 3: Principais modos de vibracao. . . . . . . . . . . . . . . . . . . . . . . . 30
VII

Lista de Tabelas
4.1 Resultados experimentais. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2 Resultados do modelo 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3 Resultados do modelo 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.4 Resultados do modelo 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.5 Comparacao dos resultados experimentais e numericos. . . . . . . . . . . . . . . . 31
VIII
Capıtulo 1
INTRODUCAO
1.1 Motivacao
A busca pelo crescimento economico exige que tecnologias sejam constantemente desenvolvidas.
Novos materiais e equipamentos eletronicos, bem como novas tecnicas e culturas surgem a todo
momento. Na construcao civil, esse desenvolvimento conduz a uma tendencia de se projetar
estruturas cada vez mais seguras, leves e esbeltas, com custos e prazos cada vez mais competitivos.
Projetar e construir atendendo a tal demanda as vezes exige que se faca uma abordagem mais
completa da estrutura, avaliando o seu comportamento dinamico por exemplo.
Neste cenario, a modelagem computacional vem tornando possıvel analisar problemas cada vez
mais complexos, nao so na construcao civil, mas em diversos outros campos da ciencia. Segundo
Shodor (2004), a Modelagem Computacional e considerada uma das mais novas metodologias da
pesquisa cientıfica que, aliada a Teoria e a Experimentacao, constituem o tripe do conhecimento
moderno.
Figura 1.1: Tripe do conhecimento moderno, adaptado de Shodor (2004).
Antes da Modelagem Computacional, a analise de meios contınuos era feita essencialmente
por resolucoes diretas de sistemas de equacoes que, na maioria das vezes, se tornavam extensas e
1

exigiam o uso de artifıcios matematicos como series de Fourier e derivadas parciais, e tornavam-se
inviaveis a medida que se aumentava o numero de Graus de Liberdade (GL) do sistema. Essa
crescente necessidade de se resolver grandes quantidades de calculos tem sido solucionada pelo
desenvolvimento concomitante da computacao. Transformar um problema cientıfico em termos
matematicos, criando um modelo cujo algoritmo e expresso em codigo computacional e submetido
ao processamento computacional, e o que chamamos de Modelagem Computacional.
Na analise estrutural, o Metodo dos Elementos Finitos (MEF), que sera tratado adiante, se
destaca como um dos metodos numericos computacionais mais utilizado, permitindo determinar
os estados de tensoes e deformacoes de um elemento de geometria qualquer submetido a cargas
externas. Modelos computacionais permitem que uma estrutura passe por diferentes testes e
situacoes antes mesmo de serem construıdas. Isso viabiliza que, ao se projetar um edifıcio – por
exemplo – seja feita uma sucessao de modificacoes e analises a fim de se obter a solucao mais
eficaz, segura e economica – caracterısticas sempre almejadas na engenharia. Um exemplo e o
edifıco Burj Khalifa, em Dubai (Figura 1.2). Considerado, em 2013, a construcao mais alta do
mundo, o arranha-ceu so foi erguido apos inumeros testes computacionais.
Figura 1.2: Edifıcio Burj Khalifa, em Dubai. (a) Edifıcio concluıdo em 2009 e (b) respectivomodelo numerico em elementos finitos.
E verdade que, com o rapido avanco da informatica e o desenvolvimento de microprocessadores
cada vez mais velozes e acessıveis, estudar o comportamento de estruturas com modelos computa-
cionais gradualmente ganhou o espaco antes dominado exclusivamente por ensaios experimentais.
No entanto, para se produzir modelos confiaveis, e preciso submete-los a etapas de calibracao,
verificacao e validacao. Para isto, a teoria e a experimentacao sao de fundamental importancia.
Na calibracao, um modelo computacional recebe os parametros necessarios para representar
uma situacao desejada. Por exemplo, modelos estruturais devem receber parametros como: o tipo
2
de vinculacao entre as partes, materiais utilizados, fatores ambientais, propriedades do solo (no
caso de fundacoes), entre outros. Verifica-se, entao, se o modelo calibrado se comporta com base
nas expectativas, ou seja, se ha coerencia entre os resultados numericos e aqueles extraıdos de
ensaio. Finalmente, o modelo e validado atraves da comparacao estatıstica dos seus resultados
com dados provenientes de outros estudos, tanto teoricos quanto experimentais.
Recorre-se aos ensaios experimentais sempre que um problema gera situacoes novas ou, ainda,
pouco estudadas. Os comportamentos observados na experimentacao ainda sao a fonte de ins-
piracao para o desenvolvimento de novas teorias e modelos, como acontece na analise dinamica
de estruturas, por exemplo. Nela, torna-se cada vez mais importante dispor de meios experimen-
tais que permitam identificar os parametros caracterizadores do sistema dinamico estrutural e, ao
mesmo tempo, sirvam para calibrar os modelos de calculo utilizados na analise do comportamento
dos sistemas sob acoes estaticas ou dinamicas.
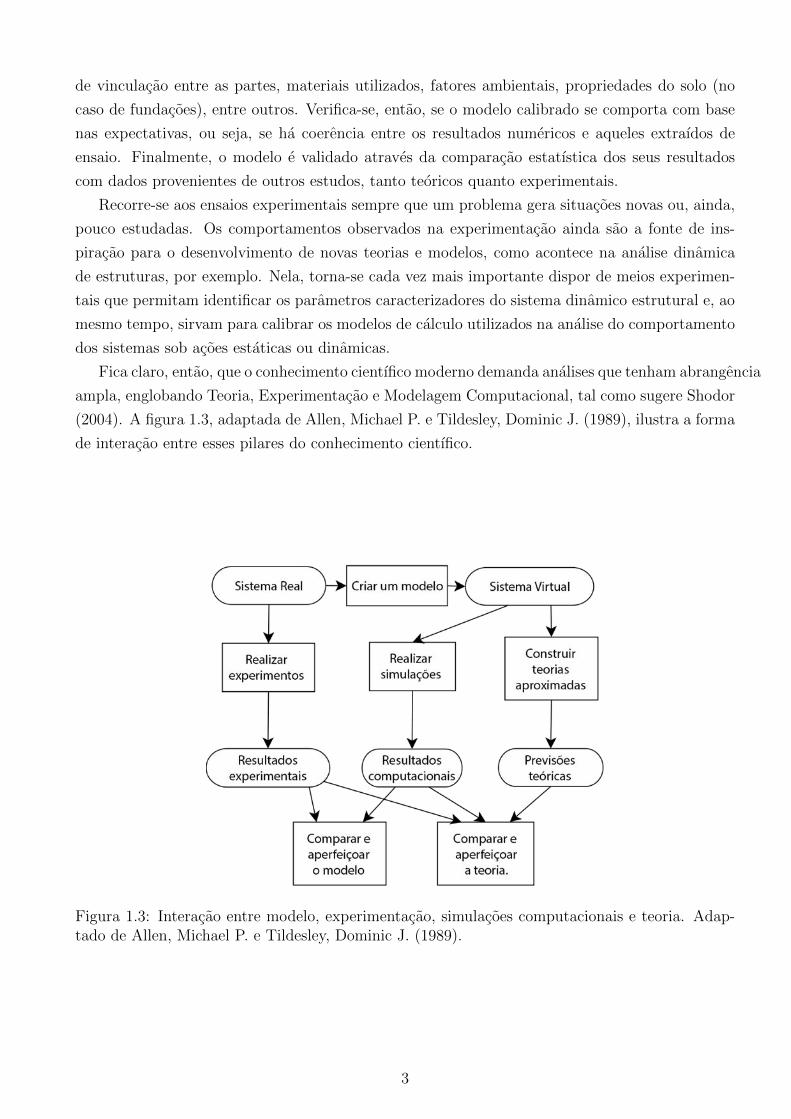
Fica claro, entao, que o conhecimento cientıfico moderno demanda analises que tenham abrangencia
ampla, englobando Teoria, Experimentacao e Modelagem Computacional, tal como sugere Shodor
(2004). A figura 1.3, adaptada de Allen, Michael P. e Tildesley, Dominic J. (1989), ilustra a forma
de interacao entre esses pilares do conhecimento cientıfico.
Figura 1.3: Interacao entre modelo, experimentacao, simulacoes computacionais e teoria. Adap-tado de Allen, Michael P. e Tildesley, Dominic J. (1989).
3
1.2 Objetivos
No contexto das informacoes apresentadas, este trabalho visa estudar o comportamento dinamico
de uma estrutura de concreto armado atraves de analises teoricas, experimentacao e modelagem
computacional.
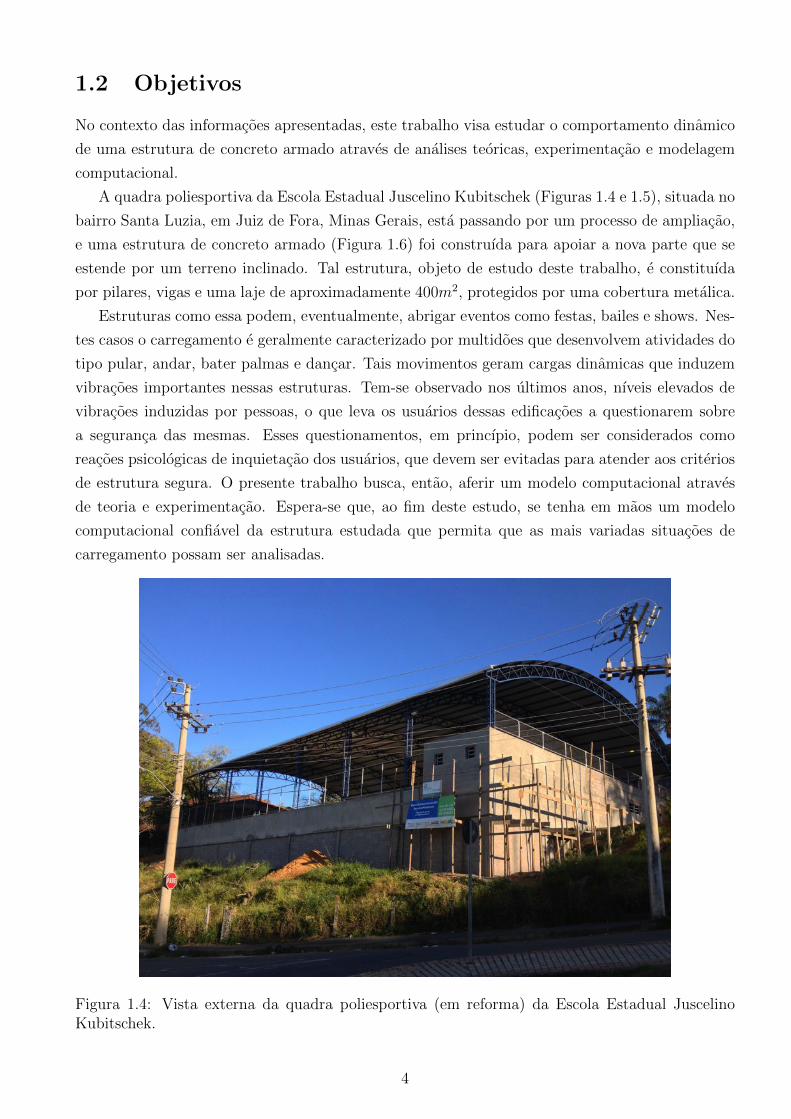
A quadra poliesportiva da Escola Estadual Juscelino Kubitschek (Figuras 1.4 e 1.5), situada no
bairro Santa Luzia, em Juiz de Fora, Minas Gerais, esta passando por um processo de ampliacao,
e uma estrutura de concreto armado (Figura 1.6) foi construıda para apoiar a nova parte que se
estende por um terreno inclinado. Tal estrutura, objeto de estudo deste trabalho, e constituıda
por pilares, vigas e uma laje de aproximadamente 400m2, protegidos por uma cobertura metalica.
Estruturas como essa podem, eventualmente, abrigar eventos como festas, bailes e shows. Nes-
tes casos o carregamento e geralmente caracterizado por multidoes que desenvolvem atividades do
tipo pular, andar, bater palmas e dancar. Tais movimentos geram cargas dinamicas que induzem
vibracoes importantes nessas estruturas. Tem-se observado nos ultimos anos, nıveis elevados de
vibracoes induzidas por pessoas, o que leva os usuarios dessas edificacoes a questionarem sobre
a seguranca das mesmas. Esses questionamentos, em princıpio, podem ser considerados como
reacoes psicologicas de inquietacao dos usuarios, que devem ser evitadas para atender aos criterios
de estrutura segura. O presente trabalho busca, entao, aferir um modelo computacional atraves
de teoria e experimentacao. Espera-se que, ao fim deste estudo, se tenha em maos um modelo
computacional confiavel da estrutura estudada que permita que as mais variadas situacoes de
carregamento possam ser analisadas.
Figura 1.4: Vista externa da quadra poliesportiva (em reforma) da Escola Estadual JuscelinoKubitschek.
4

Figura 1.5: Vista interna da quadra poliesportiva (em reforma) da Escola Estadual JuscelinoKubitschek.
Figura 1.6: Construcao da estrutura de suporte da area ampliada da quadra.
5
Capıtulo 2
Dinamica de Estruturas
Neste capıtulo, um resumo dos topicos fundamentais relativos a dinamica das estruturas aplicados
neste trabalho e abordado.
2.1 Conceitos Basicos
A analise dinamica pode ser vista como uma abordagem mais abrangente da analise estrutural,
uma vez que considera a variacao do carregamento ao longo do tempo. Neste tipo de analise,
e conveniente distinguirmos as componentes estaticas (constantes no tempo) das componentes
dinamicas (variantes no tempo) de um carregamento aplicado. O efeito total destas componentes
atuando sobre uma estrutura e obtido pela superposicao das mesmas quando se tratar de uma
analise linear. A palavra dinamica pode ser definida simplesmente como variacao do tempo. Logo,
considera-se um carregamento dinamico como aquele para o qual existe variacao de pelo menos uma
das componentes desta grandeza vetorial, ou seja, modulo, direcao, sentido ou ponto de aplicacao.
Alem do fato de o carregamento variar com o tempo, um problema dinamico diferencia-se de um
problema estatico, principalmente, devido ao aparecimento de forcas inerciais que sao contrarias
a aceleracao (Barbosa, 2006).
2.2 Sistemas com Um Grau de Liberdade
Em um sistema dinamico modelado com um grau de liberdade, como mostrado na figura 2.1, o
equilıbrio de forcas atuantes no sistema e dado pela equacao 2.1:
p(t) = f
I
(t) + f
D
(t) + f
S
(t), (2.1)
onde:
f
I
(t) e a forca inercial;
f
D
(t) e a forca de amortecimento; e
f
S
(t) e a forca elastica.
6

Figura 2.1: Componentes basicos de um sistema dinamico com um grau de liberdade (a) e seudiagrama de corpo livre (b) (Clough, 1993). Na figura, k e a rigidez da mola; c, a constante deamortecimento viscoso (proporcional a velocidade); m, a massa do sistema; x(t), o deslocamentodo bloco e p(t), a forca aplicada.
Desta forma, assumindo que a forca inercial e o produto da massa pela aceleracao, que a forca
de amortecimento e o produto da velocidade pela constante de amortecimento e que a forca elastica
e o produto da rigidez da mola pelo deslocamento, determinar a resposta dinamica de um sistema
com um grau de liberdade consiste, em ultima analise, em integrar uma equacao diferencial do
tipo:
mx(t) + cx(t) + kx = p(t). (2.2)
No caso de vibracoes livres, quando a estrutura sofre uma perturbacao inicial e depois vibra
sem a atuacao de um carregamento dinamico externo, a equacao fica:
mx(t) + cx(t) + kx = 0. (2.3)
Clough (1993) mostram que, para um sistema com vibracao livre e amortecimento subcrıtico
(0 < ⇠ < 1), situacao comum em estruturas civis, a solucao da equacao 2.3 e:
x(t) = ⇢ cos (!D
t+ ✓)e�⇠!t
, (2.4)
onde:
⇢ =
x(0)2 +
⇣x(0)+x(0)⇠!
!
D
⌘2� 1
2
;
✓ = � tan�1⇣
x(0)+x(0)⇠!!
D
x(0)
⌘;
!
D
= !
p1� ⇠
2;
⇠ = c
2!m e chamado de taxa de amortecimento;
! =q
k
m
e chamado de frequencia natural da estrutura.
Para sistemas pouco amortecidos (⇠ ! 0) os valores de ! e !
D
tendem a ser iguais.
A figura 2.2 esboca o grafico da equacao 2.4:
7

Figura 2.2: Vibracoes livres em um sistema com amortecimento subcrıtico (Clough, 1993).
2.2.1 Determinacao da Taxa de Amortecimento e da Frequencia Na-
tural de um Sistema de Um Grau de Liberdade
Da figura 2.2 percebe-se que a envoltoria dos picos da resposta e aproximadamente exponencial.
Desta forma, tem-se:
x1⇠= ⇢e
�⇠!t1, (2.5)
x2⇠= ⇢e
�⇠!t2. (2.6)
Dividindo a equacao 2.5 pela 2.6 e tomando-se o logaritmo neperiano de ambos os lados chega-
se a:
ln
✓x1
x2
◆⇠= e
⇠!(t2�t1). (2.7)
Lembrando que (t2 � t1) = T (perıodo de oscilacao) e que ! = 2⇡T
, pode-se chegar facilmente a:
⇠
⇠=1
2⇡ln
✓x1
x2
◆. (2.8)
De maneira geral fica:
⇠
⇠=1
2⇡nln
✓x
p
x
q
◆, (2.9)
onde:
p, q, n 2 N⇤ e n = p� q.
A equacao 2.9 permite, entao, a identificacao da taxa de amortecimento de um sistema com
1GL, partindo da resposta em vibracoes livres.
Observando a figura 2.2, tem-se aproximadamente o tempo transcorrido entre dois picos con-
secutivos da oscilacao, denominados perıodo natural T . De posse de T , o valor da frequencia
natural pode ser obtida diretamente:
! = 2⇡f ⇠=2⇡
T
. (2.10)
8
2.3 Sistemas com Multiplos Graus de Liberdade
Para pequenas amplitudes de vibracao em torno de uma configuracao de equilıbrio e com a hipotese
de pequenos deslocamentos, pode-se tratar um sistema com multiplos graus de liberdade de ma-
neira analoga ao sistema apresentado no item 2.2. Assim, determinar a resposta dinamica de um
sistema com n graus de liberdade consiste, em ultima analise, em integrar n equacoes diferenciais
acopladas do tipo da equacao 2.2. Desta forma, pode-se representar as forcas matricialmente:
Mx(t) +Cx(t) +Kx(t) = P (t), (2.11)
onde:
M,C,K sao respectivamente a matriz de massa, a matriz de amortecimento e a matriz de rigidez;
x(t), x(t) e x(t) sao, respectivamente o vetor de deslocamentos, o vetor de velocidades e o vetor
de aceleracoes dos GLs;
P (t) e o vetor de forcas externas.
2.3.1 Determinacao das Taxas de Amortecimento e das Frequencias
Naturais para Sistemas com Multiplos Graus de Liberdade
Atraves do Metodo da Superposicao Modal e possıvel escrever as n equacoes diferenciais acopladas
mostradas na equacao 2.11 na forma:
Mmq(t) +Cmq(t) +Kmq(t) = Pm(t), (2.12)
onde:
Mm = �
TM� chamada de matriz de massa modal;
Km = �
TK� chamada de matriz de rigidez modal;
Cm = �
TC� chamada de matriz de amortecimento modal;
Pm = �
TP chamada de vetor de forcas modal;
q = �
Tx e o vetor de deslocamentos modais;
q = �
Tx e o vetor de velocidades modais;
q = �
Tx e o vetor de aceleracoes modais;
sendo:
� a matriz cujas colunas sao auto-vetores do problema (K � !
2M )� = 0.
A grande vantagem de se resolver as equacoes 2.12 ao inves das equacoes 2.11 e que o sistema
de equacoes diferenciais presentes na equacao 2.12 e desacoplado, permitindo que se resolva n
equacoes diferenciais semelhantes a apresentada para um sistema com 1GL, simplificando signifi-
cativamente a solucao do problema.
Desta forma, para a solucao do problema de identificacao de frequencias naturais e taxas
de amortecimento para um sistema com multiplos graus de liberdade, faz-se um procedimento
semelhante ao apresentado no item 2.2.1, para cada equacao desacoplada.
9

2.4 Analise Dinamica de Estruturas via MEF
A medida em que os graus de liberdade de um problema crescem, o sistema gerado aumenta
de maneira proporcional. Isto torna inviavel tratar problemas reais de engenharia de maneira
puramente analıtica. Ate mesmo o tratamento matricial efetuado manualmente com rigoroso
criterio podem gerar resultados ineficientes, com erros consideravelmente altos (Jones, 2011).
O Metodo dos Elementos Finitos e um dos metodos numericos mais utilizados para tratar este
tipo de problema, pois permite automatizar e processar computacionalmente os dados.
2.4.1 O Metodo dos Elementos Finitos
O Metodo dos Elementos Finitos (MEF) e um metodo numerico aproximado para analise de
diversos fenomenos fısicos que ocorrem em meios contınuos, e que sao descritos atraves de equacoes
diferenciais parciais, com determinadas condicoes de contorno (Problemas de Valor de Contorno),
e possivelmente com condicoes iniciais (para problemas variaveis no tempo). O MEF e bastante
generico e pode ser aplicado na solucao de inumeros problemas da engenharia (Souza, 2003).
A principal ideia desse metodo e dividir o domınio do problema em sub-regioes de geometria
simples (formato triangular, quadrilateral, cubico, etc.). Essas sub-regioes recebem o nome de
elementos finitos (Figura 2.3). Os nos, ou pontos nodais, conectam os elementos finitos utilizados
na subdivisao do domınio do problema. O conjunto de elementos finitos e pontos nodais recebe
o nome de malha de elementos finitos (Figura 2.4). Diversos tipos de elementos finitos ja foram
desenvolvidos. Estes apresentam formas geometricas diversas, por exemplo – triangular, quadri-
lateral, cubico, etc. – em funcao do tipo e da dimensao do problema (uni, bi, ou tridimensional).
A precisao do metodo depende de alguns fatores como: a quantidade de nos (refinamento da
malha); o tipo de elemento; e as funcoes de interpolacao. Um dos aspectos mais importantes do
MEF diz respeito a sua convergencia. Quanto menor for o tamanho e maior for o numero de
elementos em uma determinada malha, mais precisos serao os resultados da analise. O item 2.4.2
apresenta o elemento de portico espacial, que e utilizado neste trabalho.
Figura 2.3: Exemplos de elementos utilizados no MEF: (a) elemento cubico com 8 pontos nodaise (b) elemento tetraedrico com 10 pontos nodais.
10
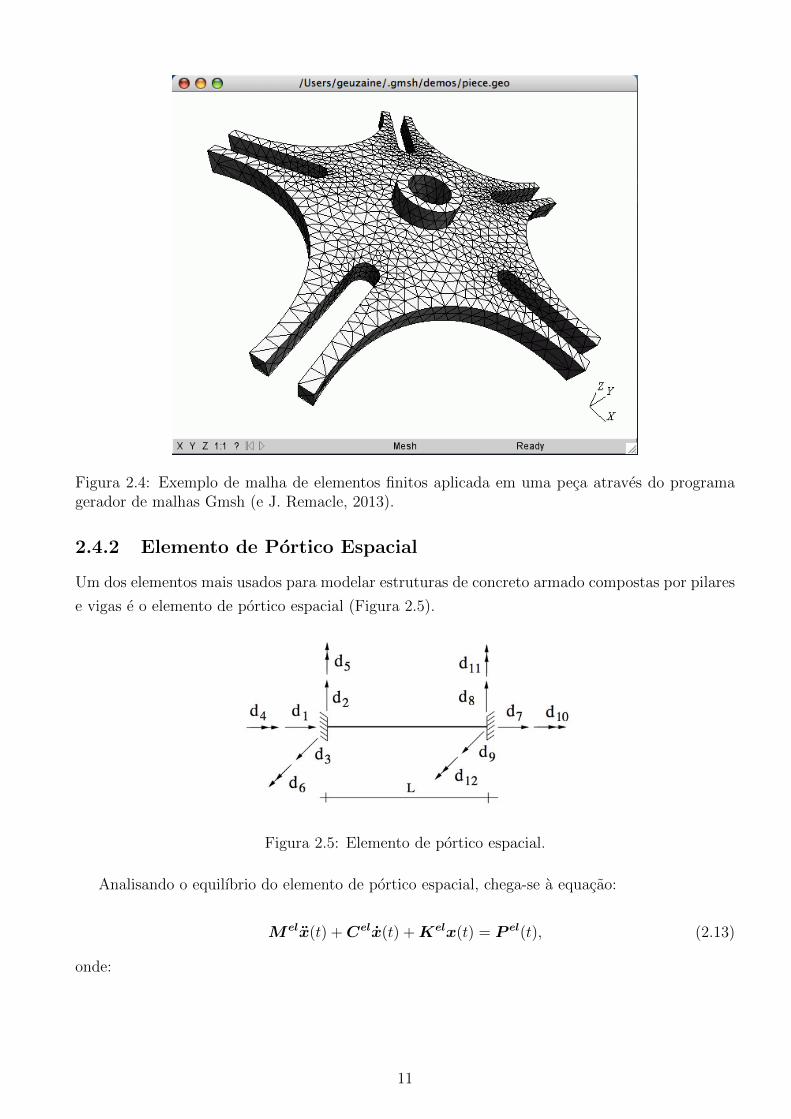
Figura 2.4: Exemplo de malha de elementos finitos aplicada em uma peca atraves do programagerador de malhas Gmsh (e J. Remacle, 2013).
2.4.2 Elemento de Portico Espacial
Um dos elementos mais usados para modelar estruturas de concreto armado compostas por pilares
e vigas e o elemento de portico espacial (Figura 2.5).
Figura 2.5: Elemento de portico espacial.
Analisando o equilıbrio do elemento de portico espacial, chega-se a equacao:
M
elx(t) +C
elx(t) +K
elx(t) = P
el(t), (2.13)
onde:
11

• M
el e a matriz de massa do elemento;
Mel =⇢Aa
105
2
66666666666666666666664
70 0 0 0 0 0 35 0 0 0 0 0
0 78 0 0 0 22a 0 27 0 0 0 �13a
0 0 78 0 �22a 0 0 0 27 0 13a 0
0 0 0 70r2x
0 0 0 0 0 �35r2x
0 0
0 0 �22a 0 �8a2 0 0 0 �13a 0 �6a2 0
0 22a 0 0 0 8a2 0 13a 0 0 0 �6a2
35 0 0 0 0 0 70 0 0 0 0 0
0 27 0 0 0 13a 0 78 0 0 0 �22a
0 0 27 0 �13a 0 0 0 78 0 22a 0
0 0 0 �35r2x
0 0 0 0 0 70r2x
0 0
0 0 13a 0 �6a2 0 0 0 22a 0 8a2 0
0 �13a 0 0 0 �6a2 0 �22a 0 0 0 8a2
3
77777777777777777777775
, (2.14)
sendo:
A a area da secao transversal;
⇢ e a densidade;
a e a metade do comprimento do elemento;
r
2x
= I
x
A
, sendo I
x
o momento de inercia da secao em relacao ao eixo x.
• K
el e a matriz de rigidez do elemento de portico espacial no referencial local;
Kel =
2
66666666666666666666666666664
EA
X
L
0 0 0 0 0 �EA
X
L
0 0 0 0 0
012EI
Z
L
3 0 0 06EI
Z
L
2 0 � 12EI
Z
L
0 0 06EI
Z
L
2
0 0EI
Y
L
3 0 � 6EI
Y
L
2 0 0 0 � 12EI
Y
L
3 0 � 12EI
Y
L
3 0
0 0 0GI
X
L
0 0 0 0 0 �GI
X
L
0 0
0 0 � 6EI
Y
L
2 04EI
Y
L
0 0 06EI
Y
L
2 02EI
Y
L
0
06EI
Z
L
2 0 0 04EI
Z
L
0 � 6EI
Z
L
2 0 0 02EI
Z
L
�EA
X
L
0 0 0 0 0EA
X
L
0 0 0 0 0
0 � 12EI
Z
L
3 0 0 0 � 6EI
Z
L
2 012EI
Z
L
0 0 0 � 6EI
Z
L
2
0 0 �EI
Y
L
3 06EI
Y
L
2 0 0 012EI
Y
L
3 012EI
Y
L
3 0
0 0 0 �GI
X
L
0 0 0 0 0GI
X
L
0 0
0 06EI
Y
L
2 0 � 4EI
Y
L
0 0 0 � 6EI
Y
L
2 0 � 2EI
Y
L
0
0 � 6EI
Z
L
2 0 0 0 � 4EI
Z
L
06EI
Z
L
2 0 0 0 � 2EI
Z
L
3
77777777777777777777777777775
,
(2.15)
sendo:
E o modulo de elasticidade longitudinal;
G o modulo de elasticidade transversal;
A
X
a area da secao transversal da barra normal ao eixo X;
I
Z
o momento de inercia da barra em relacao ao eixo Z;
I
Y
o momento de inercia da barra em relacao ao eixo Y.
• C
el e a matriz de amortecimento do elemento de viga no referencial local, geralmente tomado
como: Cel = ↵M
el + �K
el (↵ e � sao numeros reais);
• P
el sao as forcas externas atuantes no elemento, em um referencial local, associadas aos
elementos dinamicos d(t) = [d1(t), d2(t), d3(t), ..., d12(t)]T .
As matrizes de Massa, Rigidez e Amortecimento de uma estrutura, discretizada em elementos
finitos, sao obtidas pelo somatorio das contribuicoes de cada elemento, tomadas em um referencial
global. De forma simbolica fica:
12

M =NX
i=1
M
eli ; (2.16)
K =NX
i=1
K
eli ; (2.17)
C =NX
i=1
C
eli ; (2.18)
P =NX
i=1
P
eli . (2.19)
13

Capıtulo 3
Testes Dinamicos
Os ensaios dinamicos experimentais em estruturas sao constituıdos basicamente por dois tipos:
monitoramento e prova de carga. Os ensaios de monitoramento sao caracterizados pela medida
da resposta da estrutura quando submetida a carregamentos sobre os quais nao se tem controle
de sua natureza no espaco e no tempo. Ja as provas de carga sao caracterizadas pela medida da
resposta da estrutura submetida a carregamentos sobre os quais sao conhecidos tanto sua natureza
quanto a sua ocorrencia no espaco e no tempo.
As principais provas de cargas dinamicas sao os ensaios de vibracao livre e os ensaios de
vibracao forcada. Em ensaios de vibracoes forcadas, a estrutura e excitada por carregamentos
dinamicos controlados, geralmente senoidais (Figura 3.1). Em ensaios de vibracoes livres (Figura
3.2), a estrutura deve ser perturbada a partir de sua configuracao estatica de equilıbrio e liberada
de forma que possa vibrar livremente, ou seja, sem acao de nenhuma forca externa.
Figura 3.1: Exemplo de ensaio com vibracao forcada: excitador de rotacao sendo utilizado parasimular uma torcida de futebol durante testes realizados na construcao do estadio Itaquerao, emSao Paulo (IEME, 2013).
14
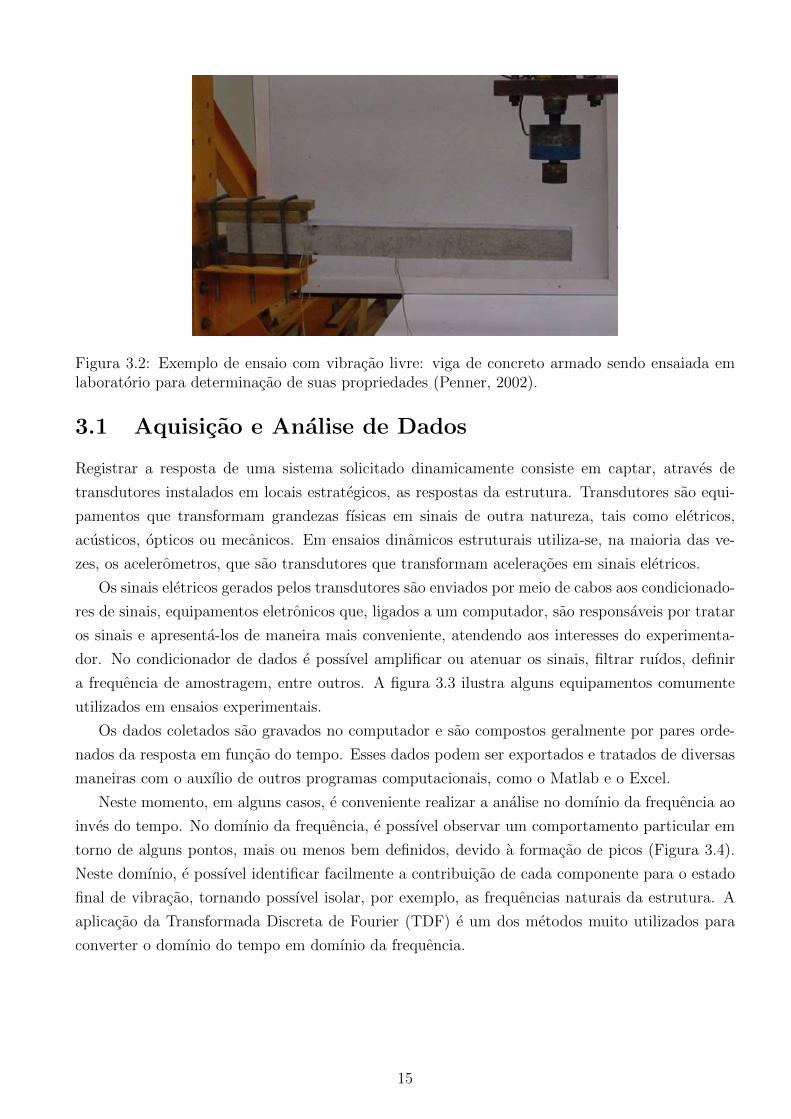
Figura 3.2: Exemplo de ensaio com vibracao livre: viga de concreto armado sendo ensaiada emlaboratorio para determinacao de suas propriedades (Penner, 2002).
3.1 Aquisicao e Analise de Dados
Registrar a resposta de uma sistema solicitado dinamicamente consiste em captar, atraves de
transdutores instalados em locais estrategicos, as respostas da estrutura. Transdutores sao equi-
pamentos que transformam grandezas fısicas em sinais de outra natureza, tais como eletricos,
acusticos, opticos ou mecanicos. Em ensaios dinamicos estruturais utiliza-se, na maioria das ve-
zes, os acelerometros, que sao transdutores que transformam aceleracoes em sinais eletricos.
Os sinais eletricos gerados pelos transdutores sao enviados por meio de cabos aos condicionado-
res de sinais, equipamentos eletronicos que, ligados a um computador, sao responsaveis por tratar
os sinais e apresenta-los de maneira mais conveniente, atendendo aos interesses do experimenta-
dor. No condicionador de dados e possıvel amplificar ou atenuar os sinais, filtrar ruıdos, definir
a frequencia de amostragem, entre outros. A figura 3.3 ilustra alguns equipamentos comumente
utilizados em ensaios experimentais.
Os dados coletados sao gravados no computador e sao compostos geralmente por pares orde-
nados da resposta em funcao do tempo. Esses dados podem ser exportados e tratados de diversas
maneiras com o auxılio de outros programas computacionais, como o Matlab e o Excel.
Neste momento, em alguns casos, e conveniente realizar a analise no domınio da frequencia ao
inves do tempo. No domınio da frequencia, e possıvel observar um comportamento particular em
torno de alguns pontos, mais ou menos bem definidos, devido a formacao de picos (Figura 3.4).
Neste domınio, e possıvel identificar facilmente a contribuicao de cada componente para o estado
final de vibracao, tornando possıvel isolar, por exemplo, as frequencias naturais da estrutura. A
aplicacao da Transformada Discreta de Fourier (TDF) e um dos metodos muito utilizados para
converter o domınio do tempo em domınio da frequencia.
15
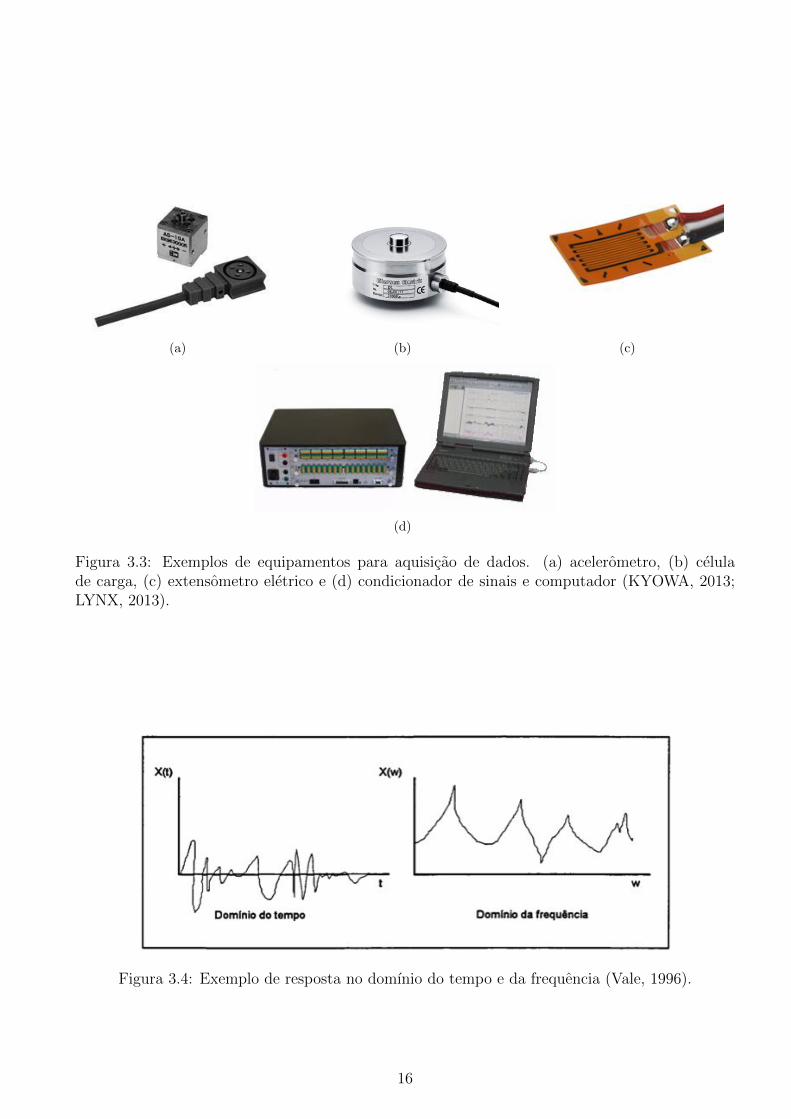
(a) (b) (c)
(d)
Figura 3.3: Exemplos de equipamentos para aquisicao de dados. (a) acelerometro, (b) celulade carga, (c) extensometro eletrico e (d) condicionador de sinais e computador (KYOWA, 2013;LYNX, 2013).
Figura 3.4: Exemplo de resposta no domınio do tempo e da frequencia (Vale, 1996).
16

Capıtulo 4
Aplicacao a Estrutura
Tendo como base as informacoes apresentadas, foi feita a avaliacao do comportamento dinamico
da quadra da Escola Estadual Juscelino Kubitschek via testes experimentais e modelagem com-
putacional. Foi possıvel obter as frequencias dos seus principais modos de vibracao natural, alem
de uma ideia qualitativa das suas formas modais. A quadra possui 1000m2 de area total, sendo
que uma parte se apoia diretamente sobre o solo e a outra sobre uma estrutura de concreto ar-
mado, recem construıda em uma reforma de ampliacao. E sabido, com base no projeto estrutural
(apendice A), que estas duas regioes trabalham de forma desacoplada. Isso possibilitou limitar o
estudo a parte estruturada, correspondente a 400m2 de area, onde o comportamento dinamico e
mais evidente. As figuras 4.1 e 4.2 ilustram a situacao descrita.
Figura 4.1: Planta baixa simplificada da quadra. A area hachurada demarca a regiao de interesse.
17
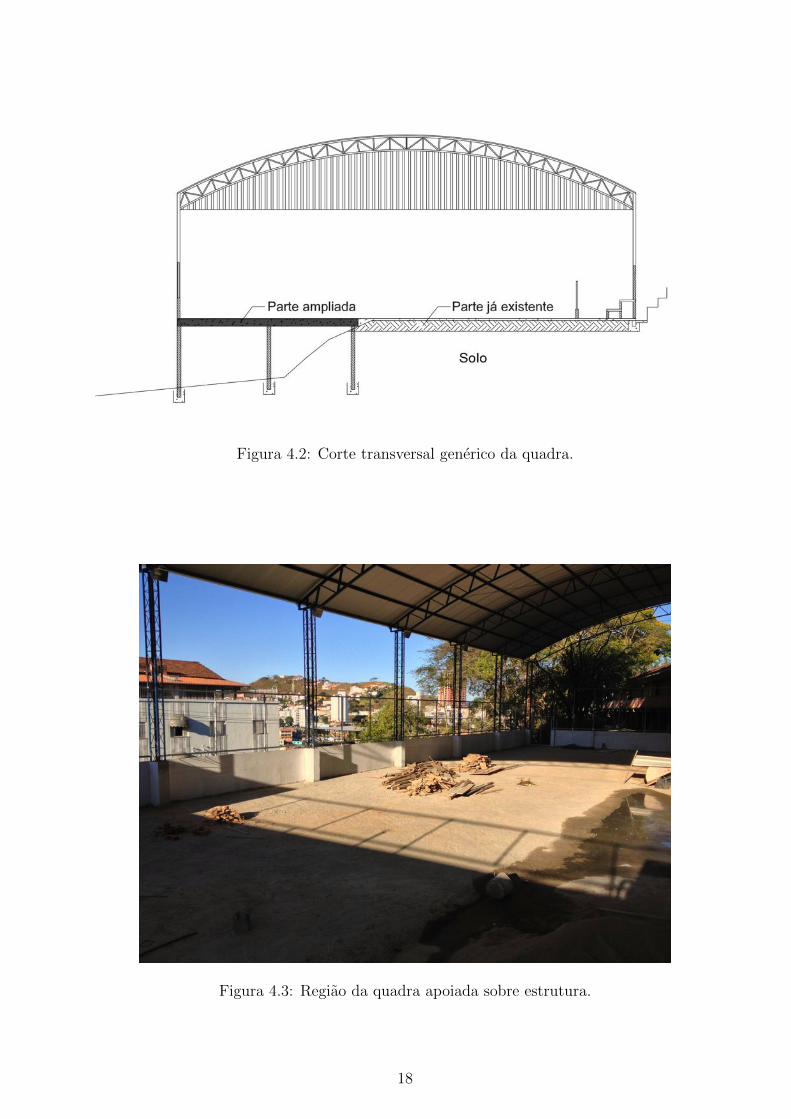
Figura 4.2: Corte transversal generico da quadra.
Figura 4.3: Regiao da quadra apoiada sobre estrutura.
18
4.1 Ensaio Experimental
O ensaio consistiu em perturbar a estrutura fazendo-a vibrar livremente. Para isso, uma haste de
madeira de aproximadamente 25kg caia livremente de uma altura fixa de aproximadamente 30cm
(Figura 4.5).
As vibracoes verticais foram captadas por um acelerometro AS-2GA da marca Kyowa (Figura
4.6) conectado ao condicionador de sinais ADS 2000 da marca Lynx (Figura 4.7), operando com
uma taxa de amostragem de 3000Hz.
Este mesmo procedimento foi realizado em dois pontos distintos de maneira nao simultanea,
mas com o carregamento sempre na mesma posicao. Isto permitiu relacionar, qualitativamente,
as amplitudes atingidas em cada ponto e identificar os modos de vibracao.
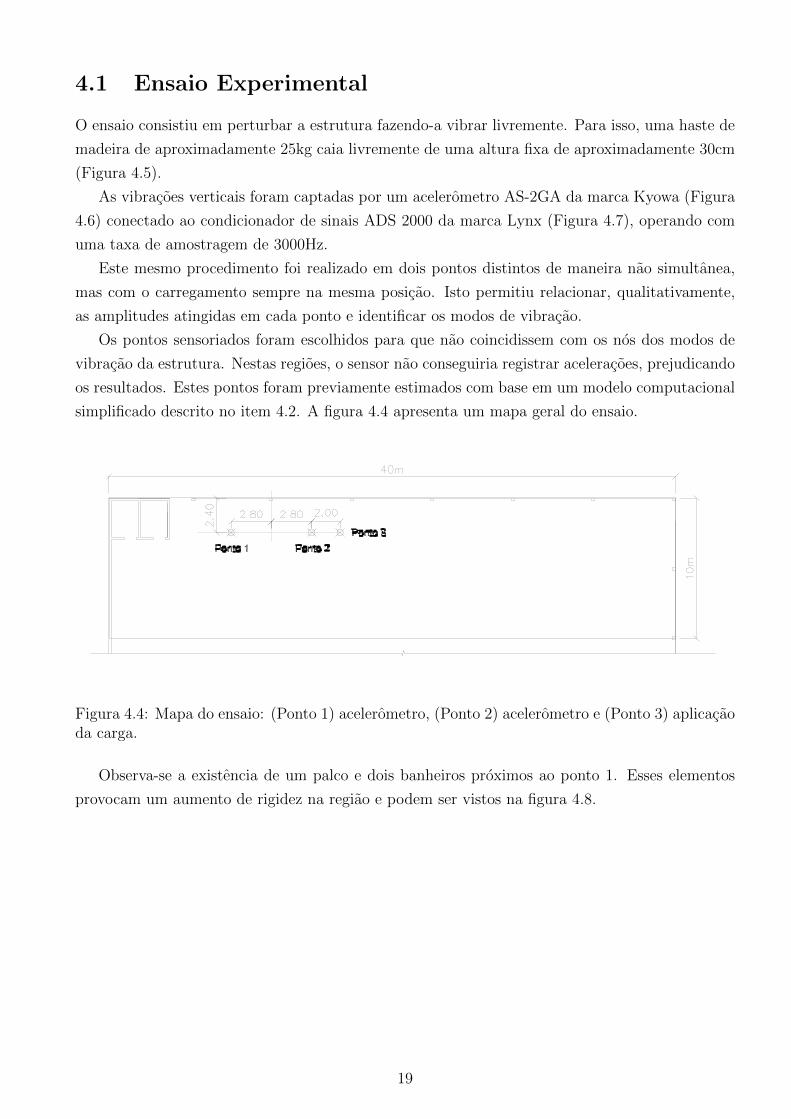
Os pontos sensoriados foram escolhidos para que nao coincidissem com os nos dos modos de
vibracao da estrutura. Nestas regioes, o sensor nao conseguiria registrar aceleracoes, prejudicando
os resultados. Estes pontos foram previamente estimados com base em um modelo computacional
simplificado descrito no item 4.2. A figura 4.4 apresenta um mapa geral do ensaio.
Figura 4.4: Mapa do ensaio: (Ponto 1) acelerometro, (Ponto 2) acelerometro e (Ponto 3) aplicacaoda carga.
Observa-se a existencia de um palco e dois banheiros proximos ao ponto 1. Esses elementos
provocam um aumento de rigidez na regiao e podem ser vistos na figura 4.8.
19
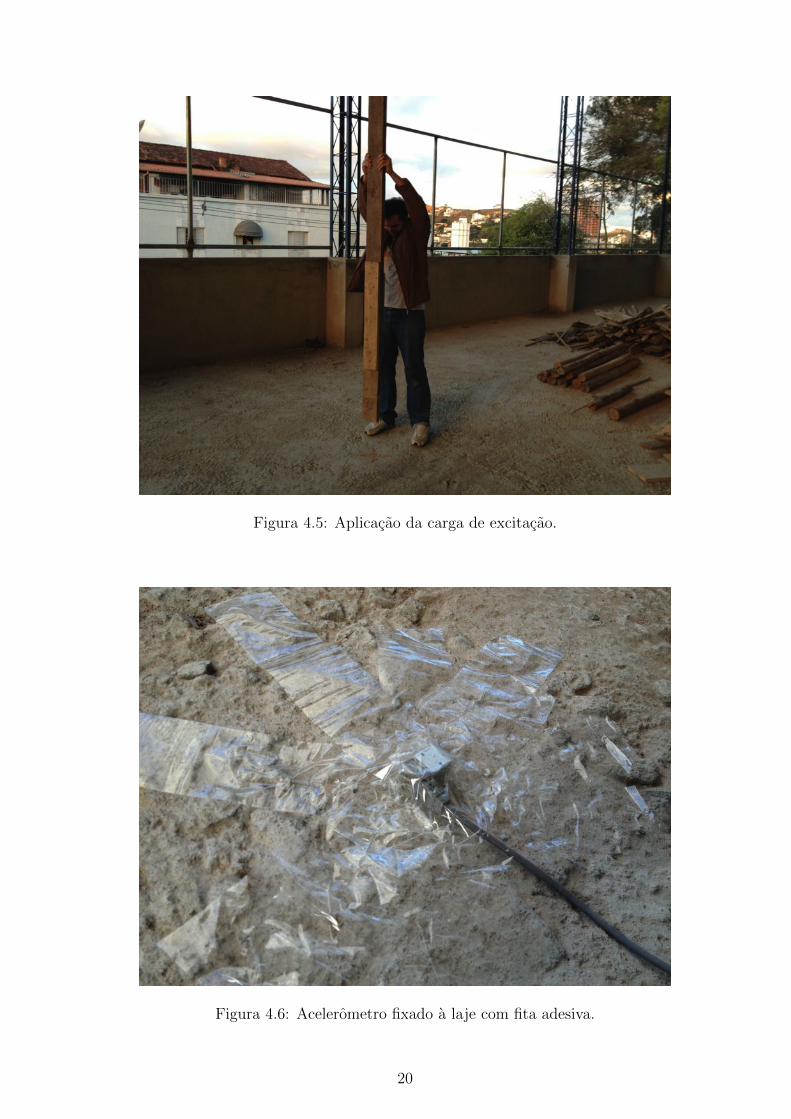
Figura 4.5: Aplicacao da carga de excitacao.
Figura 4.6: Acelerometro fixado a laje com fita adesiva.
20
Figura 4.7: Sistema de aquisicao de dados. Condicionador Lynx ADS 2000 a direita.
Figura 4.8: Palco e banheiros enrijecem a estrutura nas proximidades do ponto 1.
21
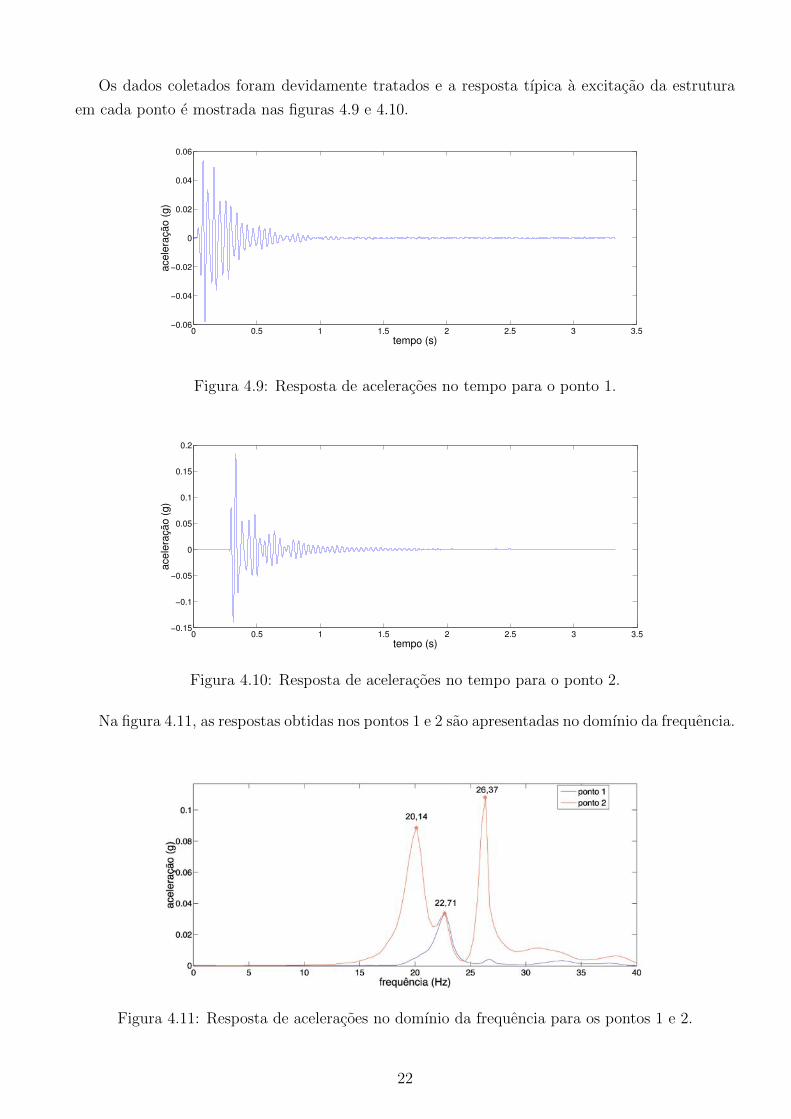
Os dados coletados foram devidamente tratados e a resposta tıpica a excitacao da estrutura
em cada ponto e mostrada nas figuras 4.9 e 4.10.
0 0.5 1 1.5 2 2.5 3 3.5!0.06
!0.04
!0.02
0
0.02
0.04
0.06
tempo (s)
ace
lera
ção (
g)
Figura 4.9: Resposta de aceleracoes no tempo para o ponto 1.
0 0.5 1 1.5 2 2.5 3 3.5!0.15
!0.1
!0.05
0
0.05
0.1
0.15
0.2
tempo (s)
ace
lera
ção (
g)
Figura 4.10: Resposta de aceleracoes no tempo para o ponto 2.
Na figura 4.11, as respostas obtidas nos pontos 1 e 2 sao apresentadas no domınio da frequencia.
Figura 4.11: Resposta de aceleracoes no domınio da frequencia para os pontos 1 e 2.
22

4.1.1 Resultados Experimentais
A partir do grafico de aceleracoes no domınio da frequencia (Figura 4.11), em que os picos iden-
tificam as principais frequencias de vibracao da estrutura, obteve-se os resultados mostrados na
Tabela 4.1.
Frequencia Natural de Vibracao (Hz)Modo 1 20,14Modo 2 22,71Modo 3 26,37
Tabela 4.1: Resultados experimentais.
Com base na relacao qualitativa de amplitudes modais entre os pontos 1 e 2, admitindo que o
carregamento foi identico nas duas medicoes efetuadas, podem ser feitas as seguintes consideracoes:
• No primeiro modo, o ponto 2 apresenta grande valor de amplitude modal, enquanto o ponto
1 parece ser um no do primeiro modo de vibracao.
• No segundo modo, os pontos 1 e 2 possuem as mesmas amplitudes, aproximadamente, porem
nao e possıvel afirmar se elas ocorrem no mesmo sentido, pois os dois pontos nao foram
ensaiados simultaneamente.
• No terceiro modo, o comportamento assemelha-se ao primeiro modo, porem o ponto 1
tambem identificou a frequencia principal.
4.2 Modelos Computacionais
Os modelos computacionais da estrutura foram desenvolvidos com a utilizacao do software co-
mercial SAP20001. O SAP, abreviacao de Structural Analysis Program, e um poderoso programa
de analise estrutural fundamentado em elementos finitos, capaz de efetuar analises estaticas e
dinamicas dos mais diversos tipos de estruturas, como mostra a figura 4.12. Programas como
este oferecem uma interface grafica e intuitiva que facilita a entrada de dados e a visualizacao dos
resultados pelo usuario.
O SAP2000 possui uma biblioteca de elementos pre definidos que devem ser escolhidos ade-
quadamente de acordo com a estrutura a ser modelada. O elemento utilizado no modelo deste
trabalho foi o de portico espacial, como mostrado no item 2.4.2. Fica a cargo do usuario definir
parametros como as resistencias dos materiais, dimensoes das barras, carregamentos e restricoes.
Matrizes locais e globais, vetores de conectividade e combinacoes de carregamento sao gerados
automaticamente e tratados de maneira semelhante a apresentada no item 2.3. Os resultados sao
apresentados de forma conveniente, com diagramas, cortes e animacoes, facilitando a compreensao
do comportamento da estrutura. A figura 4.13 mostra uma estrutura sendo modelada no SAP e
1SAP2000 e desenvolvido pela Computers and Structures, Inc. CSI (2013) e comercializado no Brasil pelaMultiplus Softwares Tecnicos.
23
suas respectivas analises. Na figura 4.14 e possıvel observar janelas de entrada de parametros do
programa.
Assim como sugere o capıtulo 1, o modelo final nao foi definido em uma unica etapa. Primei-
ramente, um modelo simplificado foi gerado e os resultados foram utilizados para planejar o teste
experimental. A partir dos resultados experimentais, esse modelo foi refinado ate que se obtivesse
um resultado mais proximo do esperado.
Figura 4.12: Exemplos de estruturas modeladas no SAP2000 (CSI, 2013).
Figura 4.13: Visao geral da interface do SAP2000: modelo, analise dinamica e analise estatica.
24

(a) (b)
(c)
Figura 4.14: Visao geral da interface do SAP2000: (a) definicao de materiais; (b) parametros dassecoes; (c) restricoes nodais.
25
4.2.1 Modelo 1
O primeiro modelo foi criado com elementos de portico espacial, respeitando-se as dimensoes do
projeto estrutural da quadra (apendice A). O material foi definido com as seguintes caracterısticas:
• Resistencia caracterıstica do concreto fck = 25 MPa;
• Modulo de elasticidade inicial do concreto Ec
i
= 28000 MPa;
• Coeficiente de Poisson do concreto ⌫ = 0, 2;
• Peso especıfico do concreto armado �
c
= 25 kN/m
3;
• Peso especıfico da lajota ceramica de enchimento �
lajota
= 6, 17 kN/m
3.
A laje pre fabricada foi representada por vigotas de secao T, desprezando-se a rigidez dos
blocos ceramicos de enchimento. A massa desses blocos foi calculada separadamente (Figura 4.15)
e acrescentada como carregamento linearmente distribuıdo, respeitando suas areas de influencia.
Alem disso, o deslocamento horizontal relativo entre os nos das vigotas foi restringido, simulando
um diafragma rıgido. Esta hipotese considera a laje infinitamente rıgida no seu plano, garantindo
um comportamento mais real da estrutura. Aspectos do modelo 1 podem ser vistos na figura 4.16.
Figura 4.15: Lajota ceramica de enchimento sendo pesada para determinar sua massa especıfica.
O modelo 1 forneceu os seguintes resultados:
Frequencia Natural de Vibracao (Hz)Modo Experimental Modelo 1 Diferenca1 20,14 15,28 31,8%2 22,71 15,85 43,3%3 26,37 16,73 57,6%
Tabela 4.2: Resultados do modelo 1.
Observa-se que estas frequencias sao menores do que as obtidas experimentalmente (Tabela
4.1). Isto indica que a estrutura real e mais rıgida do que o modelo 1. Com esta informacao,
alteracoes foram feitas, gerando o modelo 2.
26

(a)
(b)
(c)
(d)
Figura 4.16: Modelo 1: (a) modelo; (b) corte transversal; (c) secao da laje; e (d) primeiro modode vibracao.
27
4.2.2 Modelo 2
A estrutura foi, inicialmente, modelada sem a consideracao automatica da acao conjunta de lajes
e vigas. Segundo o item 14.6.2.2 da NBR 6118, esse efeito pode ser considerado mediante a
adocao de uma largura colaborante da laje associada a viga, compondo uma secao transversal T.
A consideracao da secao T pode ser feita para estabelecer as distribuicoes de esforcos internos,
tensoes, deformacoes e deslocamentos na estrutura, de uma forma mais realista.
Para duas vigas retangulares de mesma altura, o aumento da inercia em relacao ao eixo hori-
zontal da secao e maior para a mais estreita. Assim, foram adotados os multiplicadores de inercia
iguais a 1,5 e 2 para as vigas de 20x60 e 15x60, respectivamente.
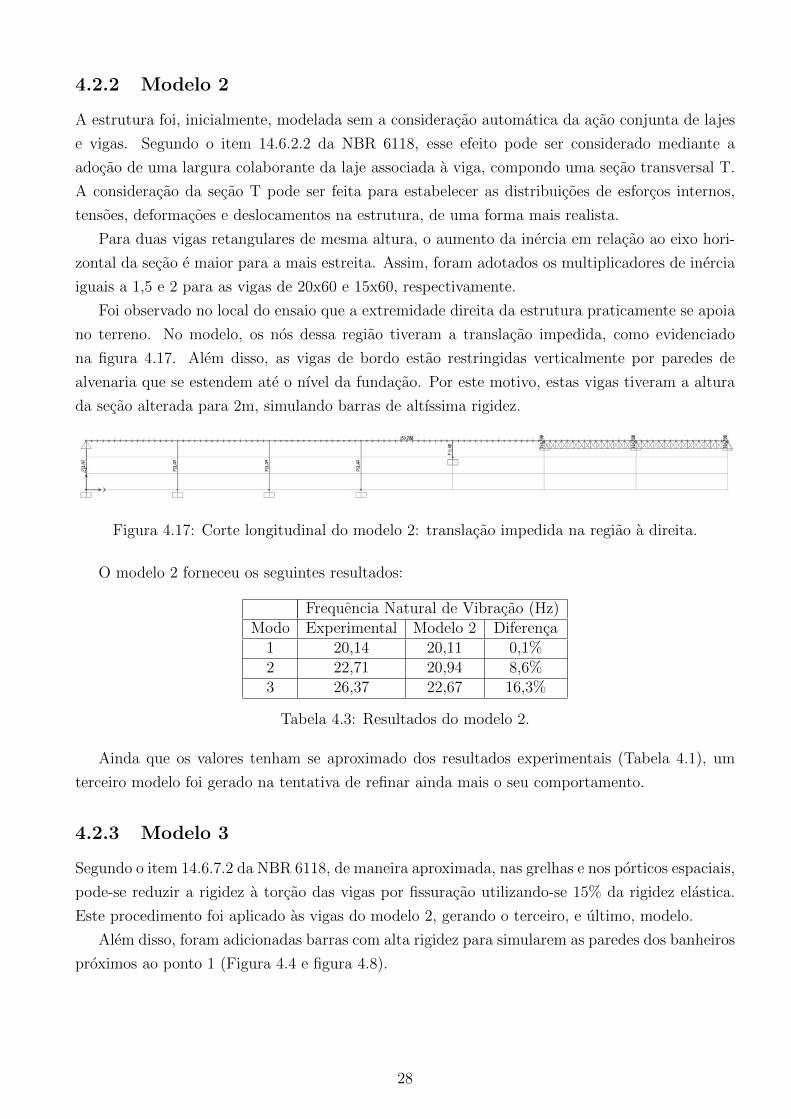
Foi observado no local do ensaio que a extremidade direita da estrutura praticamente se apoia
no terreno. No modelo, os nos dessa regiao tiveram a translacao impedida, como evidenciado
na figura 4.17. Alem disso, as vigas de bordo estao restringidas verticalmente por paredes de
alvenaria que se estendem ate o nıvel da fundacao. Por este motivo, estas vigas tiveram a altura
da secao alterada para 2m, simulando barras de altıssima rigidez.
Figura 4.17: Corte longitudinal do modelo 2: translacao impedida na regiao a direita.
O modelo 2 forneceu os seguintes resultados:
Frequencia Natural de Vibracao (Hz)Modo Experimental Modelo 2 Diferenca1 20,14 20,11 0,1%2 22,71 20,94 8,6%3 26,37 22,67 16,3%
Tabela 4.3: Resultados do modelo 2.
Ainda que os valores tenham se aproximado dos resultados experimentais (Tabela 4.1), um
terceiro modelo foi gerado na tentativa de refinar ainda mais o seu comportamento.
4.2.3 Modelo 3
Segundo o item 14.6.7.2 da NBR 6118, de maneira aproximada, nas grelhas e nos porticos espaciais,
pode-se reduzir a rigidez a torcao das vigas por fissuracao utilizando-se 15% da rigidez elastica.
Este procedimento foi aplicado as vigas do modelo 2, gerando o terceiro, e ultimo, modelo.
Alem disso, foram adicionadas barras com alta rigidez para simularem as paredes dos banheiros
proximos ao ponto 1 (Figura 4.4 e figura 4.8).
28
O terceiro, e ultimo, modelo forneceu os seguintes resultados:
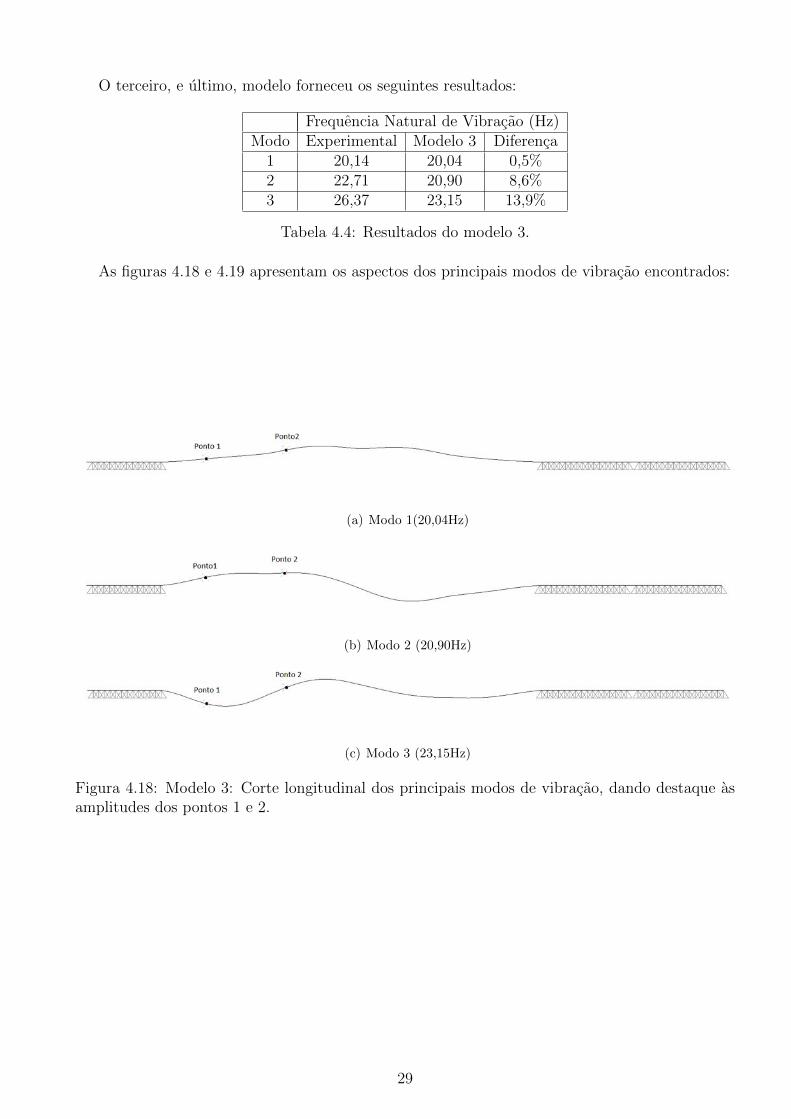
Frequencia Natural de Vibracao (Hz)Modo Experimental Modelo 3 Diferenca1 20,14 20,04 0,5%2 22,71 20,90 8,6%3 26,37 23,15 13,9%
Tabela 4.4: Resultados do modelo 3.
As figuras 4.18 e 4.19 apresentam os aspectos dos principais modos de vibracao encontrados:
(a) Modo 1(20,04Hz)
(b) Modo 2 (20,90Hz)
(c) Modo 3 (23,15Hz)
Figura 4.18: Modelo 3: Corte longitudinal dos principais modos de vibracao, dando destaque asamplitudes dos pontos 1 e 2.
29
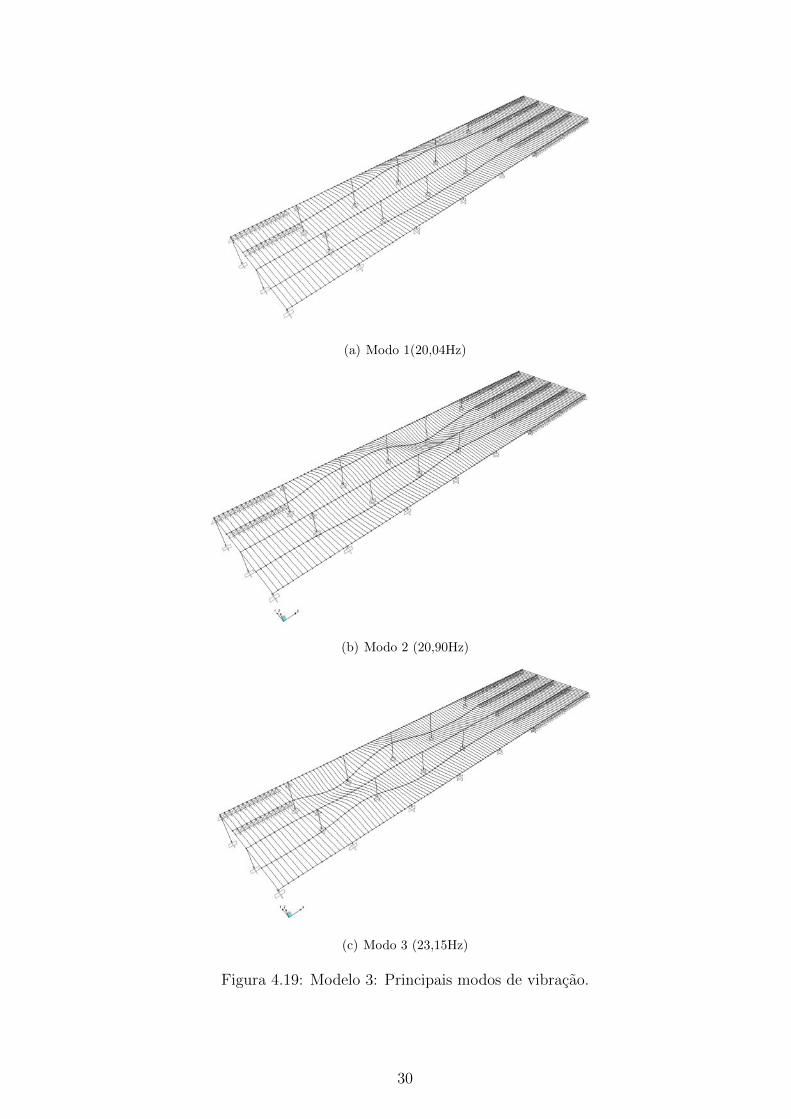
(a) Modo 1(20,04Hz)
(b) Modo 2 (20,90Hz)
(c) Modo 3 (23,15Hz)
Figura 4.19: Modelo 3: Principais modos de vibracao.
30

4.3 Discussao dos Resultados
Observa-se que as frequencias naturais obtidas atraves de modelagem computacional sao coerentes
com as frequencias obtidas atraves da experimentacao. A relacao destes resultados encontra-se na
Tabela 4.5:
Frequencia Natural de Vibracao (Hz)Modo Experimental Modelo 3 Diferenca1 20,14 20,04 0,5%2 22,71 20,90 8,6%3 26,37 23,15 13,9%
Tabela 4.5: Comparacao dos resultados experimentais e numericos.
Alem disso, as amplitudes modais dos pontos 1 e 2, mostradas nas figura 4.18, podem ser
relacionadas, ainda que qualitativamente, ao comportamento descrito nos resultados experimentais
(4.1.1):
• Modo 1: No ponto 2, o ensaio registrou grande amplitude, enquanto que no ponto 1, nenhuma
amplitude foi registrada. No modelo, o ponto 2 tambem apresenta amplitude significativa-
mente maior do que o ponto 1.
• Modo 2: Tanto no teste experimental, quanto no modelo, os pontos 1 e 2 apresentam
amplitudes com valores proximos em modulo.
• Modo 3: Para esse modo, a relacao de amplitudes nao foi considerada satisfatoria, apesar
de ter sido detectada a frequencia de 26,37Hz em ambos os pontos medidos.
4.4 Conclusoes e Comentarios Finais
Atraves dos resultados obtidos experimental e computacionalmente, conclui-se que ha uma sa-
tisfatoria coerencia – no que diz respeito ao comportamento dinamico – entre a estrutura real e
o modelo computacional. Foi obtida, portanto, uma ferramenta confiavel a qual o Engenheiro
podera recorrer sempre que necessitar analisar situacoes variadas de carregamentos atuantes na
quadra poliesportiva.
Ao longo do desenvolvimento do modelo, de todos os parametros considerados – tais como
caracterısticas dos materiais e condicoes de engastamento das vigotas, vigas, pilares e fundacao –
observou-se que o principal determinante no ajuste do comportamento dinamico deste modelo foi
o momento de inercia das vigas, sempre respeitando as caracterısticas do projeto.
Alem disso, segundo o item 23.3 da NBR 6118, o comportamento dinamico de ginasios esporti-
vos sujeitos a vibracoes pode ser considerado satisfatorio quando a frequencia natural da estrutura
for maior que 9,6Hz. Isto coloca a quadra analisada em situacao confortavel, uma vez que a sua
primeira frequencia natural e de 20,14Hz.
Para trabalhos futuros, sao sugeridos estudos do comportamento dinamico da estrutura considerando-
se a influencia da cobertura metalica e a aplicacao de carregamentos harmonicos.
31
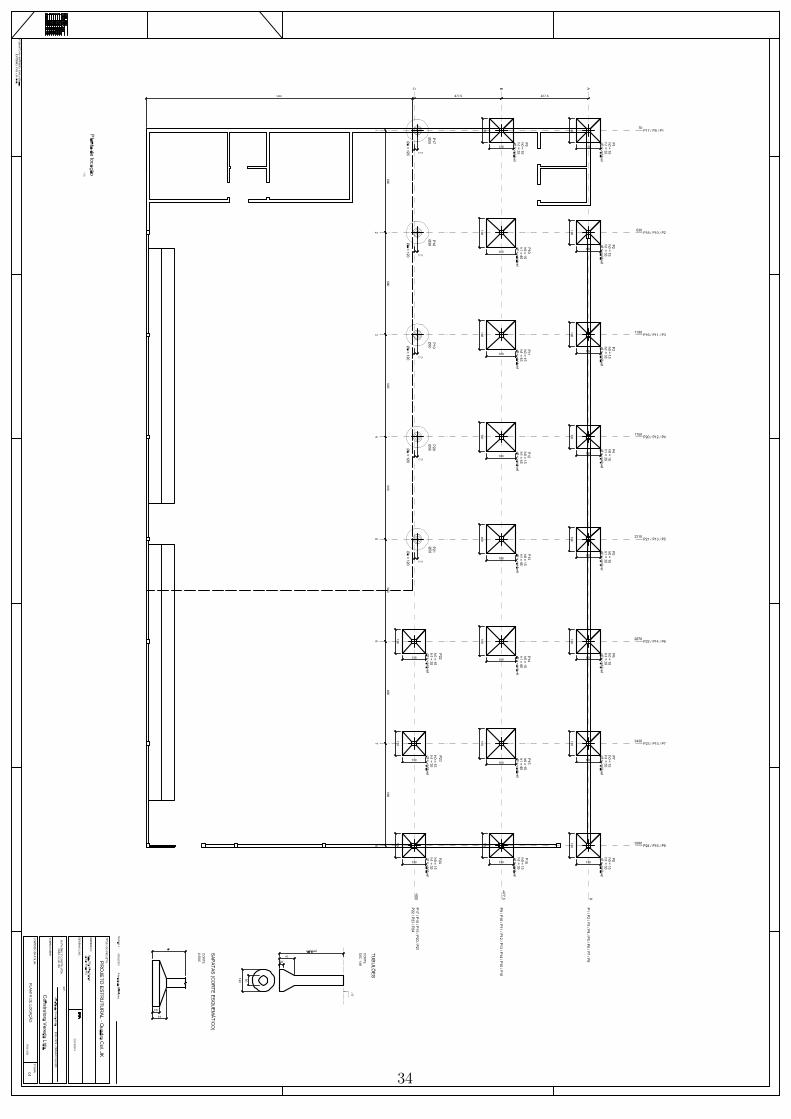
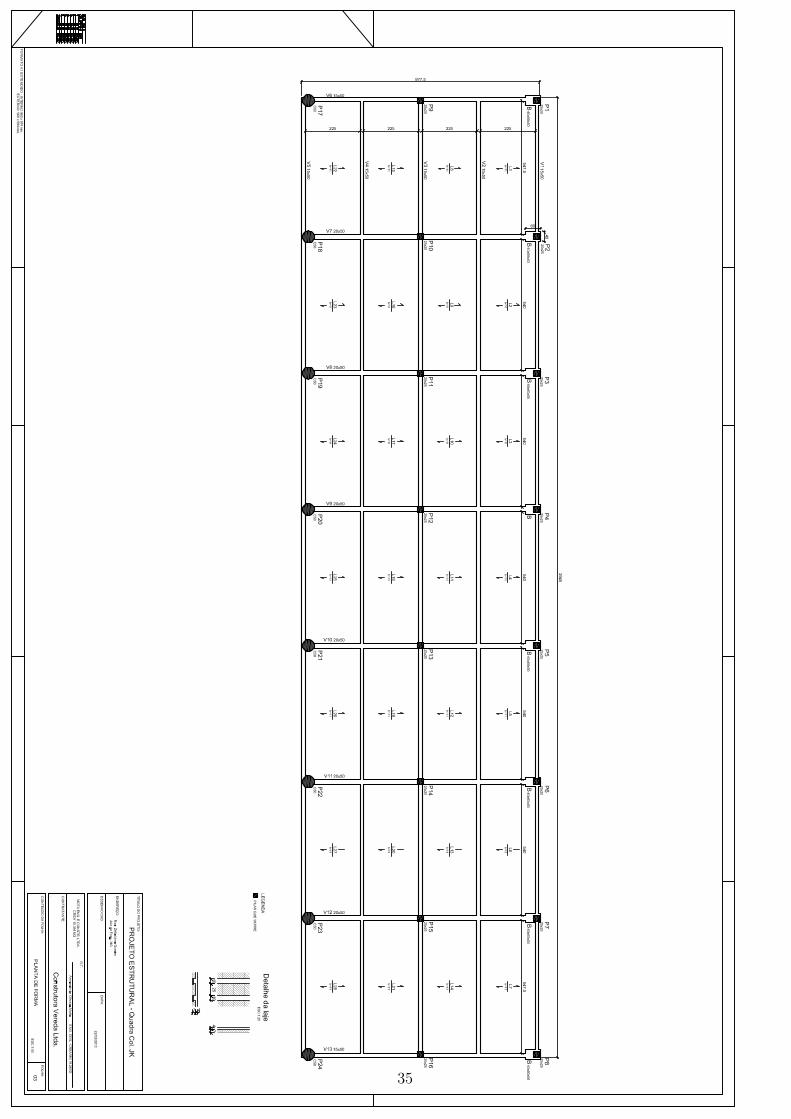
Apendice A
Projeto Arquitetonico e Estrutural da
Quadra
As plantas utilizadas como referencia neste trabalho encontram-se a seguir:
32

33
34
35
Referencias Bibliograficas
Allen, Michael P. e Tildesley, Dominic J. (1989). Computer simulation of liquids. Oxford university
press.
Barbosa, F. S. (2006). Apostilia de Analise Experimental em Dinamica das Estuturas. Universidade
Federal de Juiz de Fora.
Clough, R. W. e Penzien, J. (1993). Dynamics of Structures. McGraw-Hill.
CSI (2013). SAP2000: Structural Analysis Program. Webpage acessada em julho de 2013.
e J. Remacle, C. G. (2013). Gmsh: A three-dimensional finite element mesh generator with built-in
pre- and post-processing facilities. Webpage acessada em julho de 2013.
IEME (2013). Foto: Vibrodina no Itaquerao. http://gizmodo.uol.com.br/vibrodina-vibracao-
estadios/, acessado em maio de 2013.
Jones, C.A.; Reynolds, P. e. P. A. (2011). Vibration serviceability of stadia structures subjected
to dynamic crowd loads: A literature review. Journal of Sound and Vibration, 330(8):1531 –
1566.
KYOWA (2013). Stress measurement equipments - http://search.kyowa-ei.co.jp. Webpage aces-
sada em junho de 2013.
LYNX (2013). Testing and Measurements Systems - http://www.lynxtec.com.br. Webpage acessada
em junho de 2013.
Penner, E. e Belo, I. (2002). Avaliacao das Propriedades Estaticas e Dinamicas de Vigas de
Concreto Armado. Centro Federal de Educacao Tecnologica do Parana – CEFET/PR.
Shodor, editor (2004). Shodor Educational Foundation. Webpage acessada em maio de 2013.
Souza, R. M. (2003). O Metodo dos Elementos Finitos Aplicado ao Problema de Conducao de
Calor. Universidade Federal do Para.
Vale, C. A. (1996). Comparacao entre modelos numericos e experimentais em analise dinamica
de placas. Universidade do Porto.
36





























