Embed Size (px)
Citation preview

Validade de aproximação de Segunda Ordem
• Como os pólos adicionais devem estar o mais à esquerda do eixo imaginário, consideraremos que um sistema com três (ou mais) pólos pode ser aproximado por um Sistema de Segunda Ordem se os pólos adicionais estiverem a esquerda dos pólos dominantes, pelo menos cinco vezes mais distantes.

EXEMPLO•
• -2.0000 + 4.5323i• -2.0000 - 4.5323i
3542,244
626,73
10542,244
42,245
542,244
542,24
23
22
21
sssssC
sssssC
ssssC

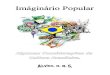
Respostas ao degrau dos
sistemas T1(s), T2(s) e T3(s)
Tempo (s)
Res
post
a no
rmal
izad
a
0,5 1,0 1,5 2,0 2,5 3,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4

Resposta de sistema com Zeros
• Influenciam no valor das constantes na expansão em frações parciais;
• Se comporta como um fator de ganho;• Quanto mais a esquerda do eixo imaginário
menor sua influência na forma da resposta;
saCssCassC

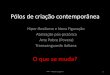
Efeito de adicionar um
zero a um sistema com
dois pólos
Tempo (s)
c (t
) no
rmal
izad
a
1,6
1,4
1,2
1,0
0,8
0,6
0,4
0,2
zero em
zero emzero em
sem zeros
2,0 4,0 6,0
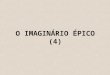
828,21: jemPólos

Resposta ao degrau de um
sistema de fase não-mínima
(Zero do lado direito do plano “s”)
Tempo (s)
1,0 2,0 3,0 4,0 5,0 6,0
0,5
1,0
1,5
–0,5

Cancelamento de Pólos e Zeros
01,4
033,0
6
4,4
5
3,587,0
5,3
1
6
5,3
5
5,31
01,465
425,26
5,365
425,26
2
1
2
1
sssssC
sssssC
ssss
ssC
ssss
ssC

Exercícios
• Capítulo 4:– Exercícios de avaliação números: 4.1, 4.3, 4.4, 4.5,
4.6– Exemplos: 4.1, 4.2, 4.3, 4.4 e 4.8– Problemas: 2, 4, 8, 18, 19, 20, 23, 24, 28, 29 e 30

ERROS DE ESTADO ESTACIONÁRIO
• Projeto de Sistemas de Controle:– Estabilidade;– Características da Resposta Transitória;– Características da Resposta de Estado
Estacionário.

ERROS DE ESTADO ESTACIONÁRIO
• É a diferença entre a entrada e a saída de um sistema para uma entrada de teste a ele aplicada quando “t” tende a infinito.
• A análise de Erros de Estado Estacionário só tem sentido para sistemas estáveis.
• Consideraremos erros devido a natureza do sistema e o tipo de sinal de teste aplicado na entrada do sistema.

Formas de onda dos
sinais de teste para o cálculo dos erros de
estado estacionário em sistemas
de controle de posição
Forma de onda NomeInterpretação
físicaFunção
do tempoTransformada
de Laplace
Degrau Posição constante
Rampa
Parábola
Velocidade constante
Aceleração constante

As entradas de teste para análise e projeto
de erro de estado estacionário variam com o tipo de alvo
Sistema de rastreamento
Fogueteacelerador
Satélite orbitando comvelocidade constante
Satélite em órbita geoestacionária

Erro de estado estacionário:a. entrada em
degrau;b. entrada em
rampa
Entrada
Saída 1
Saída 2
Tempo
Tempo
Saída 2
Saída 1
Entrada
Saída 3

Erro de sistema de controle a malha fechada:a. representação geral;
b. representação para sistemas com retroação unitária
sTssRes
1lim0
sGssR
es
1
lim0

Exemplo:
• Encontre o erro de estado estacionário para um sistema com Função de Transferência dada pela T(s) mostrada abaixo quando o mesmo é submetido a uma entrada degrau unitário
107
52
ss
sT

Exemplo:
5,010
51
107
51
1lim
1lim
20
0
e
sssse
sTssRe
s
s

Sistemas com:a. erro de estado estacionário finito para uma
entrada em degrau;b. erro de estado estacionário nulo para uma
entrada em degrau
sGssR
es
1
lim0

0
1
1lim
1
1
lim1
lim
1
1
1
1
lim1
lim
000
00
sK
sKss
sG
ssRe
KKss
sG
ssRe
sss
ss
Primeiro Caso
Segundo Caso

Sistema de controle com retroação para definição do tipo de sistema
sGssR
es
1
lim0

Erros para os vários tipos de entrada padrão
• Degrau:
• Rampa:
• Parábola:
sGes 0lim1
1
ssGe
s 0lim
1
sGses
2
0lim
1

Exemplo
• Calcule os erros de estado estacionário para um sistema com realimentação negativa unitária cuja Função de Transferência de malha aberta é dada pela G(s) abaixo para entradas
• onde é o degrau de amplitude unitária
tutttututr 25,5,5 tu
43
62100
sss
sssG

Constantes de Erro para sistemas com realimentação negativa unitária
sGsKaceleraçãodeerrodeteCons
ssGKvelocidadedeerrodeteCons
sGKposiçãodeerrodeteCons
sa
sv
sp
2
0
0
0
limtan
limtan
limtan

Relações entre entrada, tipo de sistema,constante de erro estático e erro de estado
estacionário

Exemplo: Para cada um dos
sistemas ao lado encontre as
constantes de erro de posição,
velocidade e aceleração.

Informações a partir do erro
• Que informações podem ser extraídas da especificação ?– Como a constante de erro de posição é finita o
sistema é do tipo zero;– O sinal de teste é um degrau;
– O erro vale:
1000pk
000999,010001
1

Exemplo: encontre k de modo que o erro de
estado estacionário seja de 10%