Embed Size (px)
Citation preview
7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 1/52
Variação de velocidade earrancadores progressivos
Documento técnico nº 7
Schneider Electric PortugalEdição de Março de 2009

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 2/52
1
7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 3/52
2
Helena Santos Valente ( Engª )Centro de Formação Schneider ElectricEndereço electrónico: helena.santos@ pt.schneider-electric.com
A biblioteca técnica da Schneider Electric é muito vasta e congrega em si um elevadonúmero de publicações sobre os mais variados temas desde a Média Tensão à BaixaTensão passando pelas áreas de:
Automatismos Industriais, Supervisão e Comunicação Distribuição Eléctrica
Estas publicações encontram-se acessíveis na lingua francesa ou inglesa no sitewww.schneiderelectric.com
O Centro de Formação em Portugal optou, desde há muito, por traduzir e adaptaralgumas destas publicações de modo a enriquecer as suas acções de formação cominformação mais técnica.
Esta publicação visa complementar as acções de formação de Variação de Velocidade.
Nota:Declinamos toda a responsabilidade derivada da utilização das informações e esquemasreproduzidos na presente publicação bem por eventuais erros ou omissões, econsequências da aplicação das informações ou esquemas contidos na presente edição.
Esta edição representa uma tradução parcial e adaptada do caderno técnico 204 e 208da Schneider-Electric, bem como de documentação específica de variadores develocidade e arrancadores progressivos.
7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 4/52
3
Arrancadores e variadores de velocidade
O arranque em directo sobre a rede de distribuição dos motores assíncronos éa solução mais encontrada e também por vezes a mais conveniente para umagrande variedade de máquinas. No entanto este tipo de arranque faz-seacompanhar por alguns inconvenientes :
Correntes de arranque muito elevadas, podendo perturbar a marcha deoutros aparelhos ligados sobre a mesma rede.
Golpes mecânicos no arranque, inaceitáveis para a máquina ou para o
conforto e segurança dos utilizadores.
Impossibilidade de controlar as acelerações e desacelerações
Impossibilidade de fazer variar a velocidade
Os arrancadores e os variadores de velocidade permitem suprimir estesinconvenientes.A tecnologia electrónica deu-lhes maior flexibilidade e estendeu o seu campode aplicação. Devemos no entanto saber fazer uma boa escolha.
As grandes vantagens de utilização da variação de velocidade nas suasdiferentes aplicações resulta do vector técnico mas também e muito do vectoreconómico, comportando reduções de consumo energético e contribuindo emmuito para instalações Energéticamente Eficientes.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 5/52
4
Índice
1- Comutação de potência ............................................................pág.5
2- Variadores de velocidade ......................................................... pág.8.
3- Conversor de frequência para motores assíncronos ................ pág.12.
4- Algumas funcionalidades disponíveis nos conversores
de frequência.................................................................................. pág.19
5- Variadores de Velocidade e protecções de BT ......................... pág.29
6- Protecções de sobreintensidade ................................................pág.29
6.1- Protecções integradas nos variadores ................................... pág.29
6.2 – Protecções externas aos variadores .................................... pág.31
6.3 – Protecções de defeitos de terra integrada variador ............. pág.32
6.4 – Defeitos de isolamento e variadores de velocidade ............. pág.33
7 – Fenómenos particulares........................................................... pág.36
7.1- Defeitos de fuga em alta frequência ....................................... pág.36
7.2 – Defeitos à saída do variador em TT ou TN ........................... pág.37
7.3 – Defeitos à saída do variador em IT ....................................... pág.38
7.4 – Defeito na componente contínua .......................................... pág.39
8 - Escolha de variadores de velocidade .......................................pág. 40
9 - Arrancadores progressivos ...................................................... pág.42
10 - Escolha de arrancadores progressivos .................................. pág.49

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 6/52
5
1 – Comutação de potência
A comutação consiste em estabelecer, cortar e no caso da variação develocidade, regular o valor da corrente absorvida por um motor.
Conforme as necessidades esta função é assegurada por meio decomponentes:
Electromecânicos : contactores, contactores-disjuntores, disjuntores-motor.
Electrónicos : relés e contactores estáticos, arrancadores progressivos,variadores e reguladores de velocidade.
Os relés e os contactores estáticos
Os relés e contactores estáticos são equipamentos de comutação de potênciacom semi-condutores. Utilizam-se para controlar receptores resistivos ouindutivos alimentados em corrente alternada.Os relés e os contactores estáticos podem estabelecer ou interrompercorrentes importantes com uma corrente de control de baixo valor, funcionarem serviço internitente ou contínuo, receber ordens à distância de qualquerequipamento que emita sinais de tensão tudo ou nada (interfaces de diálogohomem/máquina, saídas de automatos programáveis, etc.).Os circuitos de control e de potência estão isolados galvânicamente através deum optoacoplador ou um relé herméticamente selado.
Vantagens em relação aos contactores electromagnéticos:- frequência de comutação elevada,- ausência de peças mecânicas em movimento,- funcionamento silencioso,- limitação de parasitas radioeléctricos, que poderíam perturbar os
componentes de automatismo electrónicos na próximidade,- Tecnologia monobloco, insensibliza os equipamentos aos choques
indirectos, às vibrações e aos ambientes poeirentos,- Circuito de control com várias possibilidades de tensões de comando,- Baixo consumo, o que permite transmitir ordens através das saídas
estáticas dos automatos programáveis.
Os circuitos RC e os limitadores de crista integrados protegem os relés e oscontactores estáticos relativamente a variações bruscas de tensão (dv/dtimportantes) e contra as sobretensões.
Podem controlar-se em corrente contínua ou alternada. Em corrente contínua,a entrada está protegida contra a inversão de polaridades. Em correntealternada, um circuito rectificador com filtro restabelece a tensão contínua nooptoacoplador.
Os relés e os contactores estáticos não constituem um isolamento galvânicoentre a rede de alimentação e o receptor.
7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 7/52
6
Os relés estáticos
São equipamentos unipolares perfeitamente adaptados para controlar cargasresistivas para regulação de fornos, aplicação que normalmente requer uma
elevada cadência de comutação. Existem duas versões:- relés sincronos: a comutação para a posição ”fechado” faz-se no
momento zero da alternância consecutivo ao sinal de comando e apassagem ao estado “aberto” faz-se no momento do zero de corrente.
- relés assíncronos: a comutação para a posição ”fechado” é consecutivaao sinal de comando e a passagem ao estado “aberto” faz-se nomomento do zero de corrente.
Em caso de utilização de relés estáticos para alimentar receptores polifásicos,é aconselhável ligar os circuitos de comando em série, por forma a garantir acomutação simultânea de todos os relés.
Contactores estáticos
Estes aparelhos tripolares são especialmente indicados para o comando demotores trifásicos funcionando com cadências elevadas.Estão equipados com dois contactos auxiliares estáticos: um contacto de auto-alimentação e um contacto de dependência compatível com as entradas dosautómatos programáveis. O mesmo sinal de comando fecha os componentesde potência e os contactos auxiliares.Uma versão com dois sentidos de marcha permite inverter o sentido de rotaçãodo motor por troca das fases 1 e 2 (a fase 3 não é comutada). O comandosimultâneo dos dois sentidos de funcionamento é impedido por umencravamento interno do inversor.
Arrancadores e Variadores de Velocidade
Adequados a motores de corrente alternada ou contínua (actualmente poucousados), garantem uma aceleração e desaceleração progressivas e permitemadaptar a velocidade a condições de exploração bem precisas. De acordo como tipo de motor podem usar-se variadores do tipo rectificador controlado,conversor de frequência ou regulador de tensão.
Os arrancadores e variadores de velocidade electrónicos são construídosapartir de dois módulos integrados numa mesma envolvente:- Um módulo de controlo, gestiona o funcionamento do equipamento- Um módulo de potência, transfere a energia eléctrica para o motor
O módulo de controlo
Todas as funções são actualmente controladas apartir de um microprocessadorque utiliza os ajustes dados pelo utilizador, ordens transmitidas por umoperador ou por uma unidade de tratamento e os resultados das medidas develocidade, corrente, etc. Com base nestes dados o microprocessador gestiona
o funcionamento dos componentes de potência, rampas de aceleração e

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 8/52
7
desaceleração, seguimento da velocidade, limitação da corrente, protecção esegurança.
De acordo com o tipo de produto, os ajustes (referências de velocidade,rampas ...) realizam-se por meio de potenciómetros, ou através de autómatos
ligados a PC por ligações em série.As ordens (marcha, paragem,...) podem ser dadas através de interfaces dediálogo homem/máquina, autómatos programáveis, os parâmetros defuncionamento e os dados de alarmes e falhas podem ser visualizados nosecrâns dos equipamentos.Em muitos casos é possível configurar os relés de saída para obter informaçãode:
- falhas (da rede, térmicos, do produto, sobrecarga, ...)- controlo (nível de velocidade atingido, pré-alarme fim de arranque,...)
O módulo de p otênc ia
Os elementos principais do módulo de potência são:- os componentes de potência- as interfaces de tensão e/ou de corrente- em equipamentos de elevado calibre, um conjunto de ventilação.
Os componentes de potência são semicondutores (ver ponto 3 – Componentesde potência) que funcionam em modo “Tudo ou Nada“ e por tanto em tudoidênticos aos interruptores estáticos de dois estados: passante ou bloqueado(aberto ou fechado).Estes componentes integrados num módulo de potência, formam um conversorque alimenta um motor eléctrico com tensão e / ou frequência variável apartirda rede de tensão e frequência fixas.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 9/52
8
2 – Variadores de Velocidade
Existem numerosos esquemas de variadores de velocidade electrónicos:cascata hiposincrona, cicloconversores, comutadores de corrente...actualmente as realizações tecnológicas mais usuais são rect i f icador
co ntro lado p ara moto r de corren te con tínua e converso res de frequênc iapara mo tores assíncr ono s de ro tor em cur to-circ uito .
Rectificador controlado para motor de corrente contínua
Ele fornece, apartir de uma rede alternada monofásica ou trifásica, umacorrente contínua com um controle do valor médio da tensão .
Os semi condutores de potência são agrupados em Ponte de Graetz,monofásica ou trifásica.
A ponte pode ser mista (díodos/tiristores) ou de rectificação completa(tiristores), esta solução é a melhor e mais frequente, dado permitir um melhorfactor de forma à corrente entregue.
O motor de corrente contínua mais usado é o de excitação separada, salvo nocaso de pequenas potências em que também é frequente encontrar motores deíman permanente.
Este tipo de variador adapta-se bem a qualquer tipo de aplicação, os limitessão impostos pelo motor de corrente contínua, em particular na obtenção deelevadas velocidades e na necessidade de manutenção (substituição deescovas). Os motores de corrente contínua e os variadores associados foramas primeiras soluções industriais. Actualmente o seu uso está em francadesaceleração em função do crescente aumento dos conversores defrequência. Com efeito o motor assíncrono é bastante mais robusto e maiseconómico do que um de corrente contínua, tendo fácilmente um IP55 sendo
por isso insensível ao meio ambiente.
Conversor de frequência para motor assíncrono de rotor em curto-circuito
Ele fornece apartir de uma rede alternada a frequência fixa, uma tensãoalternada trifásica de valor eficaz e de frequência variável. A alimentação dovariador poderá ser monofásica para pequenas potências (ordem de grandezaalguns KW) e trifásica para maiores potências.
Certos variadores de pequena potência podem ser alimentados em monofásicoou em trifásico.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 10/52
9
Os conversores de frequência alimentam motores assíncronos de rotor emcurto-circuito standard com todas as vantagens ligadas a estes motores. Estesmotores são na sua maioria auto-ventilados, o seu limite de utilização é ofuncionamento prolongado a baixa velocidade devido à deficiente refrigeração.
Se a aplicação necessitar de um funcionamento deste tipo deverá serconsiderado um motor especial, equipado de uma ventilação forçadaindependente.
Principais modos de funcionamento
Os variadores de velocidade podem, de acordo com o conversor electrónico,fazer funcionar o motor num só sentido de rotação, são dessa forma ditos«unidireccionais», ou comandar nos dois sentidos de rotação, são ditos
«bidireccionais».
Os variadores podem ser «reversíveis» logo que possam recuperar a energiado motor funcionando como gerador (modo de travagem).A reversibilidade é conseguida com o reenvio da energia para a rede (Ponte deentrada reversível), ou dissipando a energia recuperada numa resistência detravagem com um módulo de travagem.
A figura abaixo ilustra os quatro quadrantes possíveis para o funcionamento dovariador sendo que no segundo e quarto quadrante o motor funcionará comogerador e por isso beneficia de uma carga arrastante. A energia cinética
presente na árvore do motor deverá ser transferida para a rede ou dissipadanas resistências.
Os 4 quadrantes de funcionamento

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 11/52
10
Variador unidireccional
Este variador a maior parte das vezes não reversível é realizado para:
Um motor de corrente contínua, com conversor directo com uma pontemista de díodos e tiristores
Um motor corrente alternada, com conversor indirecto, tendo na entradauma ponte de díodos seguido de um conversor de frequência que fazfuncionar a máquina no 1º quadrante.
1 – ponte de díodos na entrada
2 – dispositivo de travagem
3 – conversor de frequência
Um conversor indirecto comportando um módulo de frenagem com a respectivaresistência correctamente dimensionada é conveniente para uma travagemmomentânea (desaceleração ou num engenho de elevação quando o motortiver que desenvolver um binário de frenagem na fase descendente).
Variador bidireccional
Este tipo de variador pode ser um conversor reversível ou não reversível.Se ele for reversível, a máquina funciona nos quatro quadrantes e pode permitiruma frenagem importante.Se não for reversível, a máquina funcionará apenas no 1º e 3º quadrantes.
Funcionamento a binário constante
O funcionamento é dito a binário cons tante quando as características dacarga são tais, que em regime estabelecido, o binário pedido é sensivelmente omesmo qualquer que seja a velocidade.Este tipo de funcionamento é característico dos transportadores ou dasmisturadoras. Para este tipo de aplicações o variador deverá ter a capacidadede fornecer um binário de arranque cerca de 1,5 o binário nominal para venceras fricções estáticas e para acelerar a máquina (inércia).

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 12/52
11
Curva de funcionamento a binário constante
Funcionamento a binário variável
O funcionamento é dito a b inário var iável quando as características da carga
são tais que em regime estabelecido, o binário pedido varia com a velocidade.É em particular o caso das bombas volumétricas de parafuso de Arquimedesem que o binário cresce linearmente com a velocidade (a) ou as máquinascentrifugas (bombas e ventiladores) em que o binário varia com o quadrado davelocidade (b).
Exemplo de equipamentos com funcionamento a binário constante / bináriovariável da Gama Telmecanique
ATV 31
ATV 71 ATV61
7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 13/52
12
3 – Conversor de frequência para motor assíncrono
Princípio geral
O conversor de frequência, alimentado a tensão e frequência fixas pela rede,assegura ao motor, em função das exigências de velocidade, a suaalimentação em corrente alternada a tensão e frequências variáveis.
Para alimentar convenientemente um motor assíncrono a binário constantequalquer que seja a velocidade, é necessário manter o fluxo constante. Istonecessita que a tensão e a frequência evoluam simultâneamente e nasmesmas proporções.
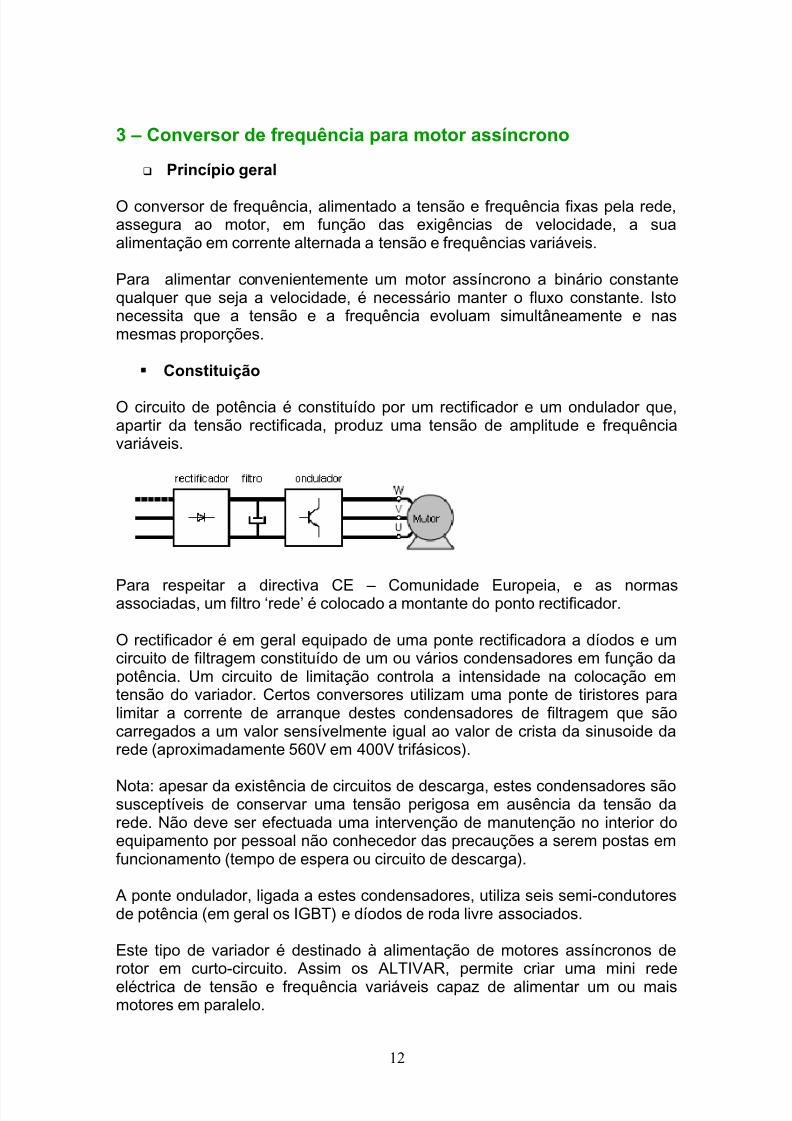
Constituição
O circuito de potência é constituído por um rectificador e um ondulador que,apartir da tensão rectificada, produz uma tensão de amplitude e frequênciavariáveis.
Para respeitar a directiva CE – Comunidade Europeia, e as normasassociadas, um filtro ‘rede’ é colocado a montante do ponto rectificador.
O rectificador é em geral equipado de uma ponte rectificadora a díodos e umcircuito de filtragem constituído de um ou vários condensadores em função dapotência. Um circuito de limitação controla a intensidade na colocação emtensão do variador. Certos conversores utilizam uma ponte de tiristores paralimitar a corrente de arranque destes condensadores de filtragem que sãocarregados a um valor sensívelmente igual ao valor de crista da sinusoide darede (aproximadamente 560V em 400V trifásicos).
Nota: apesar da existência de circuitos de descarga, estes condensadores sãosusceptíveis de conservar uma tensão perigosa em ausência da tensão darede. Não deve ser efectuada uma intervenção de manutenção no interior doequipamento por pessoal não conhecedor das precauções a serem postas emfuncionamento (tempo de espera ou circuito de descarga).
A ponte ondulador, ligada a estes condensadores, utiliza seis semi-condutoresde potência (em geral os IGBT) e díodos de roda livre associados.
Este tipo de variador é destinado à alimentação de motores assíncronos derotor em curto-circuito. Assim os ALTIVAR, permite criar uma mini rede
eléctrica de tensão e frequência variáveis capaz de alimentar um ou maismotores em paralelo.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 14/52
13
Ele comporta:
Um rectificador com condensadores de filtragem; Um ondulador com 6 IGBT e 6 Díodos; Um módulo de frenagem ligado a uma resistência de frenagem (exterior
ao produto); Os circuitos de comando dos transistores IGBT; Uma unidade de controlo organizada em torno de um microprocessador,
o qual assegura o bom funcionamento do ondulador; Captores internos para medir a corrente motor, a tensão contínua
presente aos bornes dos condensadores e em certos casos as tensõespresentes aos bornes do rectificador e do motor assim como todas asgrandezas necessárias ao controlo e à protecção moto-variador;
Uma alimentação para os circuitos electrónicos de baixo nível.
Esta alimentação é realizada por um circuito ‘ao corte’ ligado aos bornes dos
condensadores de filtragem para beneficiar desta reserva de energia. Estadisposição permite ao ALTIVAR libertar-se das flutuações da rede e dos micro-cortes, o que lhe confere características muito interessantes na presença deredes fortemente perturbadas.
Componentes de potência
Díodo
O díodo é um semi-condutor não controlado, com duas zonas P (ânodo) eN ( cátodo) e que só deixa passar a corrente num único sentido, do ânodopara o cátodo. É condutor quando a tensão do ânodo é mais positiva quea do cátodo tendo então o comportamento de um interruptor fechado. Se atensão do ânodo passar a ser menos positiva que a do cátodo, o díodobloqueia a corrente e passa a comportar-se como um interruptor aberto.
Tir istor
É um semi-condutor controlado constituído por quatro zonas alternadas
PNPN. Comporta-se como um interruptor estático em que o fecho écomandado pelo envio de um impulso eléctrico a um eléctrodo decomando designado por porta. Este fecho (ou comando) só é possivel sea tensão do ânodo for mais positiva que a tensão do cátodo.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 15/52
14
IGBT (Insulated Gate Bipolar Trans isto r)
É um transistor especial comandado em tensão com muitofraca energia, pelo que não há relação entre a energia
necessária ao comando e a corrente comutada. Todas ascomutações representam esforço para o semi-condutor, emface de um dv/dt importante devido à alta velocidade decomutação. Para minimizar estes esforços, utilizam-seindutâncias e circuitos de comutação constituídos por
resistências, díodos e condensadores.
IPM (Intell igent Power Modu le)
É uma ponte onduladora, com transistores de potência IGBTintegrados no comando de vias. O IPM reúne num só invólucro:- 7 componentes IGBT, dos quais 6 para a ponte onduladora e 1
para travagem,- os circuitos de comando dos IGBT- 7 díodos de potência em roda livre- protecções contra os curto-circuitos, sobreintensidades e
temperaturas excessivas
A variação de velocidade (no motor)
A geração da tensão de saída é obtida pelo corte da tensão rectificada atravésde impulsos em que a duração e a largura, é modulada de tal forma que acorrente de saída seja o mais próximo possível da sinusoide. Na figura abaixopoderá observar-se a forma de onda da tensão e da corrente na saída dovariador.
Esta técnica conhecida pela designação de MLI (Modulação da Largura deImpulso ou PWM em inglês) condiciona o funcionamento a baixa velocidade elimita os aquecimentos. A frequência de modulação é um compromisso: por umlado deve ser suficientemente elevada para reduzir o ‘riple’ da corrente e oruído acústico no motor sem aumentar demasiado as perdas na ponteondulador e nos semicondutores. Duas rampas regem a aceleração e adesaceleração.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 16/52
15
As protecções integradas
O variador auto protege-se e protege o motor contra os aquecimentos
excessivos encravando-se até que a temperatura volte a ter um valor aceitável.
O mesmo acontece para todas as perturbações que possam alterar o bomfuncionamento do conjunto, como as sobretensões e sub tensões, odesaparecimento de uma fase de entrada ou de saída.
Em certos calibres o rectificador, ondulador, o comando e as protecções contraos curto-circuitos são integradas num único módulo IPM – Intelligent PowerModule.
Funcionamento em U/f
Neste tipo de funcionamento, a referência de velocidade impõe uma frequênciaao ondulador e em consequência ao motor, o que determina a velocidade derotação. A tensão de alimentação está em relação directa com a frequência.Este funcionamento é normalmente designado de U/f constante oufuncionamento escalar. Se não for feita qualquer tipo de compensação avelocidade real irá variar com a carga o que limita a margem de funcionamento.Pode ser usada uma compensação para ter em conta a impedância interna domotor e limitar a perda de velocidade em carga.
Características de binário de um variador:
1 – binário util permanente de um motor auto-ventilado(a)e moto-ventilado(b), 2 – sobrebinário transitório3- binário em sobrevelocidade
7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 17/52
16
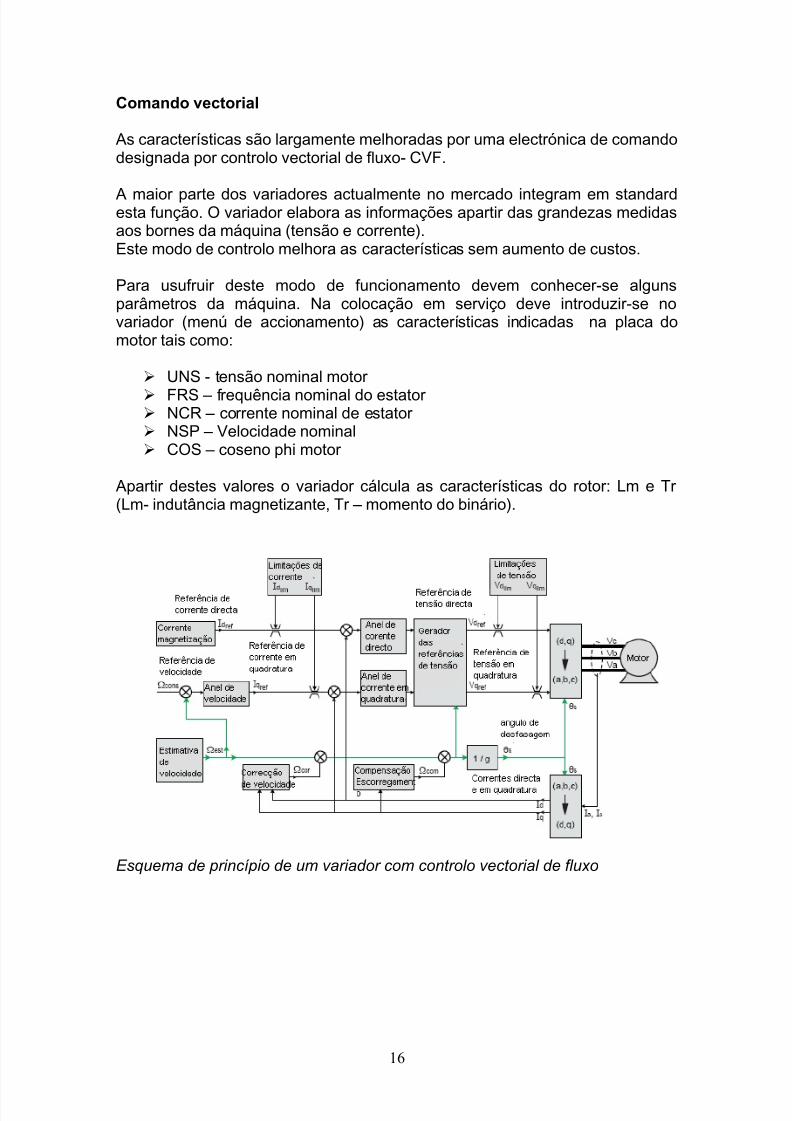
Comando vectorial
As características são largamente melhoradas por uma electrónica de comandodesignada por controlo vectorial de fluxo- CVF.
A maior parte dos variadores actualmente no mercado integram em standardesta função. O variador elabora as informações apartir das grandezas medidasaos bornes da máquina (tensão e corrente).Este modo de controlo melhora as características sem aumento de custos.
Para usufruir deste modo de funcionamento devem conhecer-se algunsparâmetros da máquina. Na colocação em serviço deve introduzir-se novariador (menú de accionamento) as características indicadas na placa domotor tais como:
UNS - tensão nominal motor
FRS – frequência nominal do estator NCR – corrente nominal de estator NSP – Velocidade nominal COS – coseno phi motor
Apartir destes valores o variador cálcula as características do rotor: Lm e Tr(Lm- indutância magnetizante, Tr – momento do binário).
Esquema de princípio de um variador com controlo vectorial de fluxo

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 18/52
17
Variador com controlo vectorial de fluxo sem captor
Na colocação em tensão um variador com controlo vectorial de fluxo semcaptor pratica uma autoregulação que lhe permite estimar os parâmetros
estatóricos Rs,Lf. Esta medida pode ser feita com o motor acoplado àmecânica. A duração varia em função da potência (1 a 10s). Estes valores sãomemorizados e permitem ao produto elaborar as leis de comando.O oscilograma da figura abaixo representa a colocação em funcionamento deum motor, com uma carga correspondente ao seu binário nominal alimentadopor um variador sem captor. De notar que o binário nominal é conseguido aofim de 200ms e também é notável a linearidade da colocação em velocidade, avelocidade nominal é atingida ao fim de 800ms.
Características de um motor na sua colocação em tensãopor um VV com controlo vectorial de fluxo sem captor .
Variador com controlo vectorial de fluxo em malha fechada com captor
O controlo vectorial de fluxo em malha fechada com captor é uma outrapossibilidade.Esta solução baseia-se nas transformadas de Parck e permite controlarindependentemente a corrente (Id) assegurando o fluxo na máquina e acorrente (Iq) assegurando o binário. O comando do motor é semelhante a ummotor de corrente contínua. Esta solução é bem vinda em resposta aaplicações exigentes: forte dinâmica nos transitórios, precisão de velocidade,binário nominal na paragem.
O binário máximo transitório pode ir até 2 a 3 vezes o binário nominal deacordo com o tipo de motor.Este tipo de controlo autoriza bandas passantes muito elevadas ecaracterísticas comparáveis ou mesmo superiores aos variadores de correntecontínua. Em contra partida o motor usado não é de construção standarddevido à pesença do captor e em alguns casos da necessidade de uma
ventilação forçada.
1 – Corrente motor2 – Variação de velocidade3 – Binário no motor
7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 19/52
18
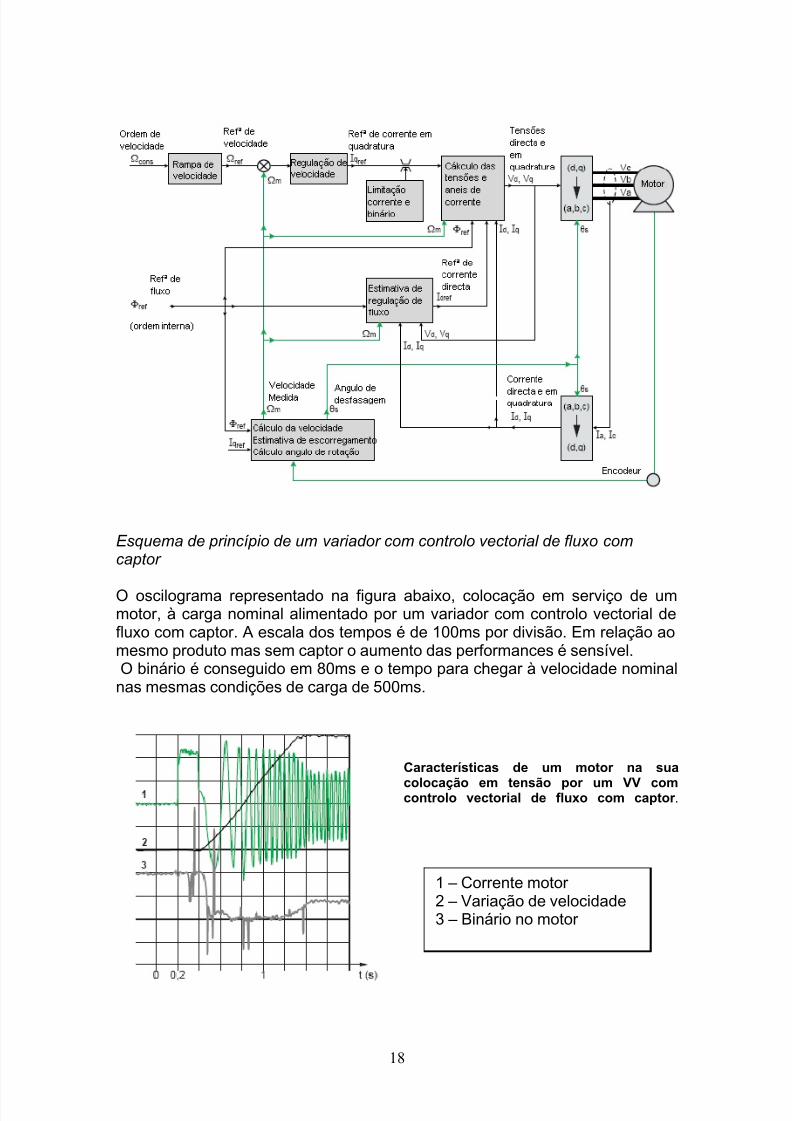
Esquema de princípio de um variador com controlo vectorial de fluxo comcaptor
O oscilograma representado na figura abaixo, colocação em serviço de ummotor, à carga nominal alimentado por um variador com controlo vectorial defluxo com captor. A escala dos tempos é de 100ms por divisão. Em relação aomesmo produto mas sem captor o aumento das performances é sensível.O binário é conseguido em 80ms e o tempo para chegar à velocidade nominal
nas mesmas condições de carga de 500ms.
Características de um motor na sua
colocação em tensão por um VV comcontrolo vectorial de fluxo com captor .
1 – Corrente motor2 – Variação de velocidade3 – Binário no motor
7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 20/52
19
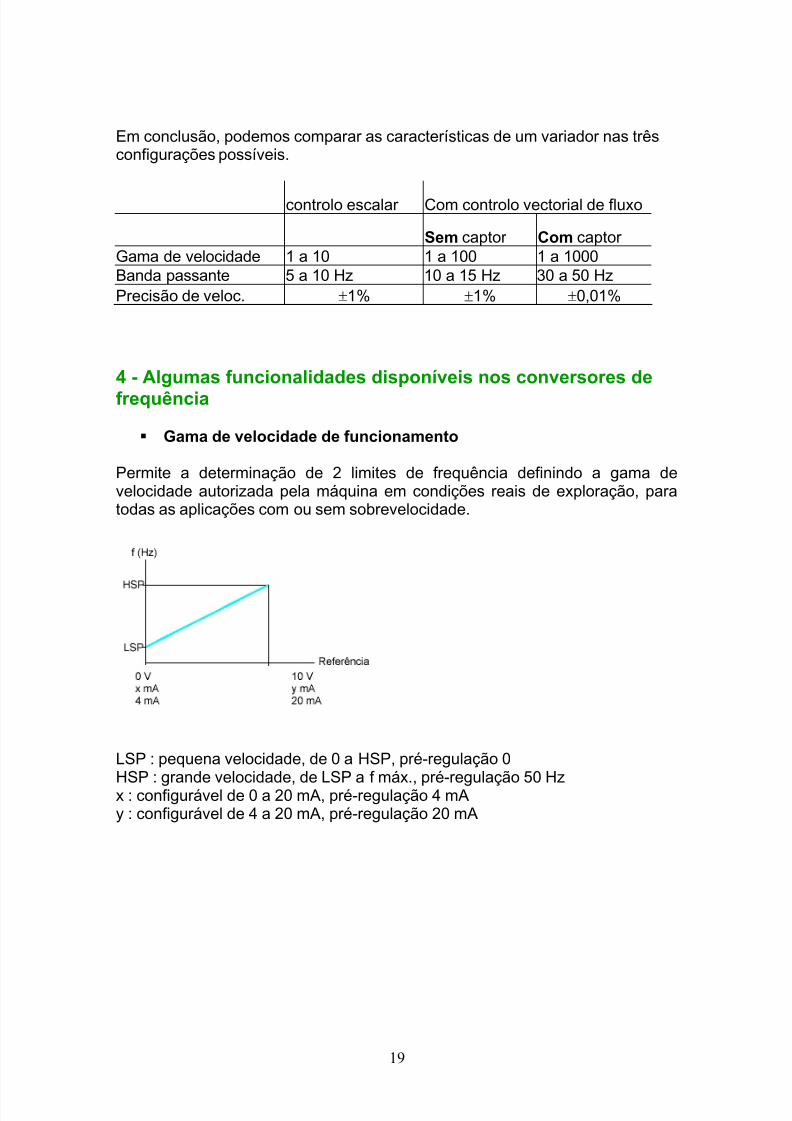
Em conclusão, podemos comparar as características de um variador nas trêsconfigurações possíveis.
controlo escalar Com controlo vectorial de fluxo
Sem captor Com captorGama de velocidade 1 a 10 1 a 100 1 a 1000Banda passante 5 a 10 Hz 10 a 15 Hz 30 a 50 HzPrecisão de veloc. ±1% ±1% ±0,01%
4 - Algumas funcionalidades disponíveis nos conversores de
frequência
Gama de velocidade de funcionamento
Permite a determinação de 2 limites de frequência definindo a gama develocidade autorizada pela máquina em condições reais de exploração, paratodas as aplicações com ou sem sobrevelocidade.
LSP : pequena velocidade, de 0 a HSP, pré-regulação 0
HSP : grande velocidade, de LSP a f máx., pré-regulação 50 Hzx : configurável de 0 a 20 mA, pré-regulação 4 mAy : configurável de 4 a 20 mA, pré-regulação 20 mA

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 21/52
20
Temporização das rampas de aceleração e de desaceleração
Permite a determinação do tempo das rampas de aceleração e dedesaceleração em função da aplicação e da cinemática da máquina.
Rampa de aceleração linear Rampa de desaceleração linear
t1 : tempo de aceleração
t2 : tempo de desaceleraçãot1 e t2 reguláveis separadamente de 0,1 a 999,9 s; pré-regulação: 3 s.
Forma das rampas de aceleração e de desaceleração
Permite a evolução progressiva da frequência de saída a partir de umareferência de velocidade, de acordo com uma lei linear ou pré-estabelecida
- Para aplicações de manipulação, condicionamento ou transporte depessoas : a utilização de rampas em S permite acompanhar o trabalhomecânico, e suprimir os esticões limitando os “não seguimentos” de
velocidade nos regimes transitórios rápidos em caso de forte inércia.- Para aplicações de bombagem (instalação com bomba centrifuga e
válvula anti-retorno), a utilização de rampas em U melhora o controlo dofecho da válvula.
- A escolha da forma de rampa “linear”, em “S “, em “U” ou personalizada,afecta a rampa de aceleração e de desaceleração.
HSP : grande velocidade HSP : grande velocidadet1 : tempo da rampa regulada t1 : tempo da rampa reguladat2 = 0,6 x t1 t2 = 0,5 x t1O coeficiente de arredondamento é fixo. O coeficiente de arredondamento é fixo.
7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 22/52
21
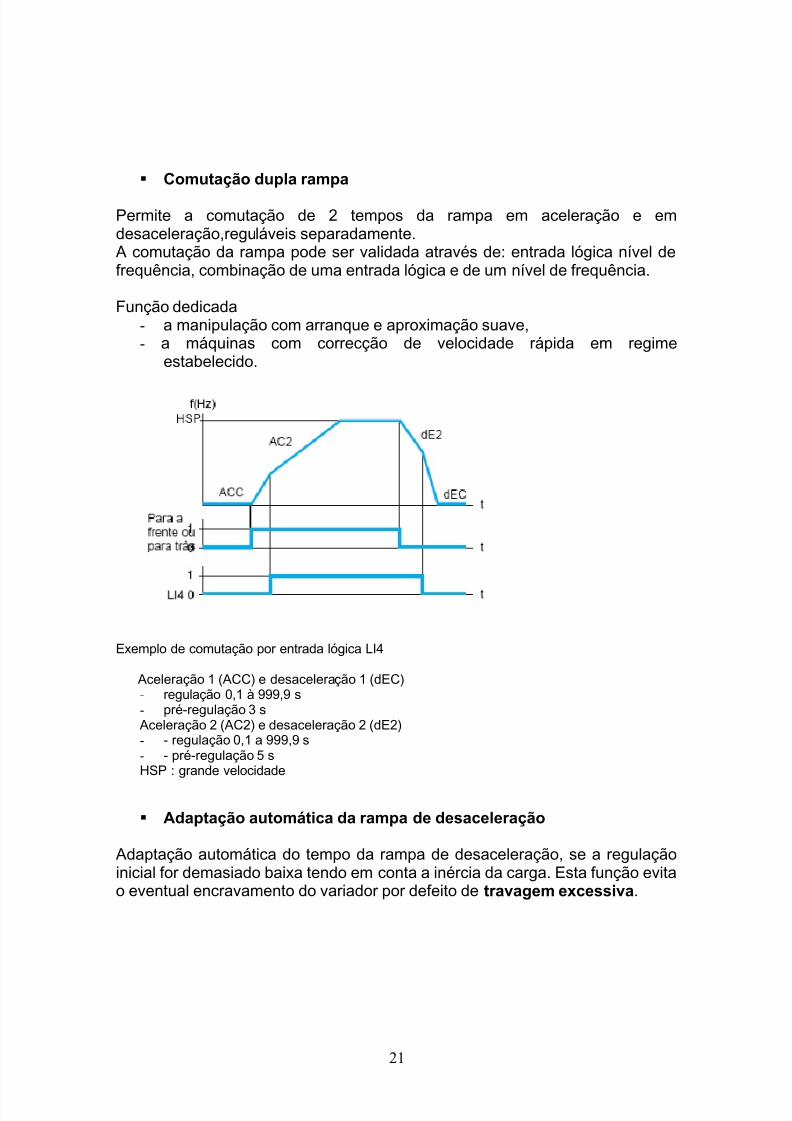
Comutação dupla rampa
Permite a comutação de 2 tempos da rampa em aceleração e emdesaceleração,reguláveis separadamente.A comutação da rampa pode ser validada através de: entrada lógica nível defrequência, combinação de uma entrada lógica e de um nível de frequência.
Função dedicada- a manipulação com arranque e aproximação suave,- a máquinas com correcção de velocidade rápida em regime
estabelecido.
Exemplo de comutação por entrada lógica LI4
Aceleração 1 (ACC) e desaceleração 1 (dEC)- regulação 0,1 à 999,9 s- pré-regulação 3 sAceleração 2 (AC2) e desaceleração 2 (dE2)- - regulação 0,1 a 999,9 s- - pré-regulação 5 sHSP : grande velocidade
Adaptação automática da rampa de desaceleração
Adaptação automática do tempo da rampa de desaceleração, se a regulaçãoinicial for demasiado baixa tendo em conta a inércia da carga. Esta função evitao eventual encravamento do variador por defeito de travagem excessiva.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 23/52
22
Aplicações:Quando não se exige uma travagem precisa e não são usadas resistências detravagem.Regulação:Esta função deve ser suprimida para máquinas com posicionamento de
paragem na rampa e com resistência de travagem. Esta função éautomáticamente inibida se se configurar a lógica de travagem.
Lei tensão / frequência
Características da alimentação e do motorDeterminação limite da lei tensão/frequência, em função das característicasda rede de alimentação, do motor e da aplicação.
Para todas as aplicações com binário constante ou variável com ou sem
sobrevelocidade à que considerar as seguintes regulações:- frequência de base correspondente à rede de alimentação- frequência nominal do motor (em hertz), lida na placa sinalética do motor,- tensão nominal do motor ( em V), lida na placa sinalética do motor- frequência máxima de saída do variador (em Hz).
Tipo lei tensão / frequência
Permite optimizar os desempenhos nas seguinte aplicações:- Máquinas com carga elevada a baixa velocidade, máquinas com ciclosrápidos com controlo vectorial de fluxo ( sem captor ): Lei n
- Aplicações com binário variável (Bombas, Ventiladores): Lei P
Frequência de comutação, redução de ruído
A regulação da frequência de comutação permite a redução do ruído geradopelo motor.A frequência de comutação é modulada de forma aleatória para evitarfenómenos de ressonância. Esta função pode ser inibida se provocarinstabilidade.
A comutação a alta frequência da tensão contínua intermédia, permitefornecer ao motor uma onda de corrente com baixa taxa de harmónicas.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 24/52
23
A frequência de comutação é regulável com o motor em funcionamento,valores permitidos (2 a 16 KHz).
Velocidade de referência
A velocidade de referência pode ter origens diferentes em função daconfiguração do variador:
- referências provenientes de 3 entradas analógicas,- referência do potenciómetro- função +/- velocidade por entrada lógica, pelas teclas ou pelas teclas
do terminal à distância- referência do terminal à distância- velocidade de referência proveniente das redes ou bus de
comunicação.Estas diferentes origens são geridas através de programação das
funções e dos canais de referência
Entradas analógicas
De acordo com o tipo de variador poderão existir 2, 3 ou mais entradasanalógicas. Estas entradas são:
- em tensão (0 -10 V) por exemplo.- em corrente X-YmA, com X configurável de 0 a 20mA e Y de 4 a 20mA
Velocidades pré-selecionadas
Permitem a comutação da velocidade de referência pré-regulada.Opção entre 2, 4, 8 ou 16 velocidades pré-selecionadas.Validação por 1, 2, 3 ou 4 entradas lógicas.As velocidades pré-selecionadas são reguláveis por intervalos de 0,1Hz de0Hz a 500Hz.Função dedicada à manipulação e ás máquinas com várias velocidades defuncionamento.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 25/52
24

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 26/52
25

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 27/52
26

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 28/52
27

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 29/52
28

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 30/52
29
5- Variadores de velocidade e protecções BTnecessidade de protecções adaptadas
As características descritas relativas ao funcionamento do variador develocidade (circuitos de electrónica de potência) bem como do motor associado
a um variador, mostram a necessidade de prever protecções adaptadas.
A realização dos variadores com uma tecnologia electrónica permite aintegração de várias destas protecções com um menor custo.
Estas protecções não substituem de forma alguma as necessárias na saída decada circuito, segundo os regulamentos de instalação em vigor, e que são pois“exteriores” aos variadores.
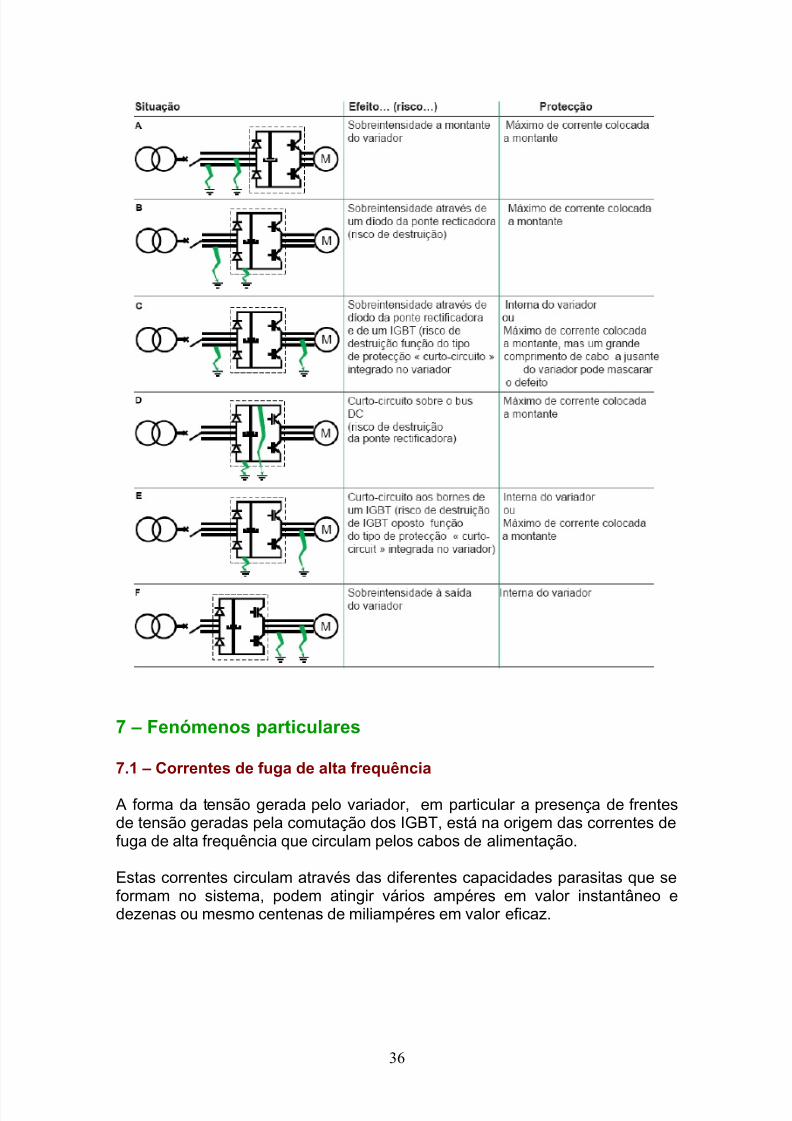
6 – Protecções contra sobreintensidades
As protecções usuais contra sobreintensidades (disjuntores ou fusíveis) sãoprincipalmente previstas para intervir em dois tipos de situação.
• Protecção da instalação em risco de curto-circuito• Evitar riscos associados aos defeitos de sobrecarga
A tecnologia dos Variadores de Velocidade permite assegurar electrónicamentealgumas destas funções.
6.1 – Protecções integradas nos variadoresProtecção de sobrecarga do motor
Actualmente os variadores asseguram esta protecção:• Limitação instantânea da corrente eficaz a 1,5x a corrente nominal• Cálculo permanente do valor I2t, tomando em consideração a velocidade
(a maior parte dos motores são auto-ventilados, o arrefecimento émenos eficaz a baixa velocidade).
Se a saída alimentar exclusivamente um motor e respectivo variador, estaprotecção de sobrecarga assegura não só a protecção do conjunto bem comoda cablagem.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 31/52
30
Protecção contra os curto-circuitos motor ou na linha a jusante dovariador
Em caso de curto-circuito entre fases à saída do variador (aos bornes do motor
ou em qualquer ponto da linha entre o motor e o variador), estasobreintensidade é detectada pelo variador e uma ordem de bloqueio é enviadamuito rápidamente aos IGBT.A corrente de curto-circuito é interrompida em poucos microsegundos, o queassegura a protecção do variador. Esta corrente tão breve é essencialmentefornecida pelo condensador de filtragem associado ao rectificador.
Outras protecções integradas nos variadores
Os variadores dispõe de outras funções de auto-protecção:
• Sobreaquecimento dos seus componentes electrónicos podendo levar àsua destruição.
Um captor colocado sobre o dissipador térmico permite a paragem do variador,logo que a temperatura ultrapasse um determinado patamar.
• Cavas de tensão da rede: esta protecção é necessária para evitarqualquer tipo de disfuncionamento dos circuitos de controlo e do motor,assim como toda a sobreintensidade periogosa logo que a tensão darede retome o seu valor normal.
• As sobretensões da rede à frequência industrial: o objectivo é evitar aeventual destruição dos componentes do variador.
• O corte de uma fase, para o caso dos variadores trifásicos, provoca umaumento da corrente absorvida dado a alimentação monofásica sesubstituir á trifásica.
Acção das protecções integradas
Todas elas, em caso de defeito, provocam o encravamento do variador e aparagem do motor “em roda livre”. O corte de alimentação é feito pelo contactorde linha, que recebe uma ordem enviada pelorelé integrado no variador.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 32/52
31
6. 2 - Protecções exteriores aos variadores
Estas protecções contra as sobreintensidades são também previstas paraintervir em caso de defeito interno do variador (destruição da ponterectificadora por exemplo): O dispositivo de protecção da linha assegura o corteda corrente de defeito.
Localização dos dispositivos:Na origem do circuito, uma protecção individual:contra sobreintensidades, por vezes associado a um contactor
Estas associações (disjuntor,contactor e variador) propostas pelos construtoressão denominadas “saídas motor”. Para assegurar a coordenação dosdispositivos a montante do variador será indispensável consultar as tabelasfornecidas pelos construtores.
Cálculo do calibre do disjuntor e do contactor
É determinado em função da corrente de linha absorvida pelo variador,calculada apartir de:
• Potência mecânica nominal do motor• Tensão nominal de alimentação• Rendimento do motor e do variador• Sobrecarga permanente admissível: - 1,1Cn para binário constante e
1,05Cn para binário variável• Harmónicas
O valor eficaz da corrente, em função da taxa de distorção, é obtido pela
seguinte fórmula , assim com THD=40%, Irms = 1,08I1

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 33/52
32
Desta forma o valor, Irms calcular-se-á da seguinte forma:
Dois casos particulares
• Alimentação de motores em paralelo,neste caso cada motor deverá ser protegido individualmente por um relétérmico, devendo ser mantida activa a protecção térmica do variador para
assegurar a correcta protecção da cablagem a montante.• Protecção de sobrecarga integrada no variador inibida,em aplicações cuja continuídade de serviço exigida é elevada.A protecção dos cabos e da aparelhagem, que deve ser assegurada amontante necessita obrigatóriamente de ser associada ao disjuntor da saídamotor.
É preconizado nesta situação um sobredimensionamento de 20% quer para ocabo quer para a aparelhagem.
6.3 – Protecção contra os defeitos de terra integrados nos variadores
No caso do sistema de ligação à terra TN, um defeito entre uma saída dovariador e a terra provoca uma sobreintensidade importante pela interligaçãodas massas. Tal como em caso de curto-circuito entre fases, estasobreintensidade é detectada e é enviada uma ordem de bloqueio aos IGBT.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 34/52
33
No entanto, neste caso, o valor da corrente de defeito circula na linha dealimentação durante um tempo muito curto (algumas centenas demicrosegundos).O dispositivo de protecção integrado irá então agir. O isolamento galvânico dovariador é obtido por abertura do contactor de linha.
No entanto este dispositivo pode não assegurar a protecção de pessoas contracontactos indirectos. Com efeito, a impedância de defeito poderá limitar acorrente a um valor inferior ao nível de protecção do variador, é geralmente oque acontece no caso do sistema TT.
Um diferencial de sensibilidade de 30mA é então necessário.No caso de uma rede em IT, o primeiro defeito não provoca a circulação decorrente e o variador contínua a funcionar normalmente.
6. 4 – Defeitos de isolamento e variadores de velocidade
Contacto directoOs circuitos que comportam variadores de velocidade, têm váriaspossibilidades de ocorrência de contacto directo.
Em sistemas TT e TN-SPode ser prevista uma protecção complementar, para o caso de falha de outrasmedidas de protecção, relativas ao contacto directo ou em caso de imprudênciados utilizadores.Um diferencial de sensibilidade de 30mA assegura este tipo de imprevistos.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 35/52
34
Tensões presentes em caso de contacto directo com os esquemas TT e TN-S
Em sistemas ITCom um primeiro defeito de isolamento presente na rede
Diferentes situações específicas numa rede em sistema IT

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 36/52
35
Nas três situações específicas ao esquema IT expostas, não é aplicávelqualquer tipo de protecção. Isto sublinha o cuidado que os instaladoresdeverão ter na cablagem de máquinas com este sistema, para garantir asprotecções de base do isolamento das partes activas.
Contacto indirecto
Em sistemas TT e TN-S
As situações de contacto indirecto são apresentadas na figura abaixo.
Em sistema IT
Em sistema IT deve ter-se em atenção a presença de dois defeitossimultâneos, o quadro abaixo precisa os diferentes tipos de defeito possíveisassim como as suas consequências.
7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 37/52
36
7 – Fenómenos particulares
7.1 – Correntes de fuga de alta frequência
A forma da tensão gerada pelo variador, em particular a presença de frentesde tensão geradas pela comutação dos IGBT, está na origem das correntes defuga de alta frequência que circulam pelos cabos de alimentação.
Estas correntes circulam através das diferentes capacidades parasitas que seformam no sistema, podem atingir vários ampéres em valor instantâneo edezenas ou mesmo centenas de miliampéres em valor eficaz.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 38/52
37
O espectro e amplitude destas correntes dependem da frequência da MLI(entre 1 e 20 KHz) e das caractrísticas da instalação:
• Alimentação• Tipo e comprimento do cabo motor ( blindado, não blindado, condutor de
protecção),
• Potência do motor
IncidênciaRisco de perturbação dos DDR
Disparos intempestivos, a medida da corrente diferencial pode serperturbada, em particular quando o cabo de ligação variador-motor é degrande comprimento e/ou as capacidades entre fase e terra são elevadas.
SoluçãoO dispositivo de medida deve incluir um dispositivo de filtragem por forma aque só as correntes de componente de baixa frequência seja tida emconsideração.
Relés Vigirex que integram filtragem de correntes de AF7.2 – Defeito à saída do variador com um esquema TT ou TN
Se o defeito for franco à saída do variador, com um sistema TN, o mesmoequivale a um curto-circuito, provocando o disparo da protecção interna dovariador ou das protecções de máximo de intensidade a montante (disjuntormagnetotérmico ou fusíveis).

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 39/52
38
Se o defeito for impedante, poderá acontecer que o valor dessa corrente nãoseja suficientemente elevado para provocar o disparo das protecções de Máx.Idevendo por esse facto ser prevista uma protecção diferencial.O bom funcionamento deste tipo de protecção depende da forma de onda queatravessa o toro, no caso do variador de velocidade e tal como já foi feita
referência as correntes não são perfeitamente sinusoidais.
SoluçãoPara este tipo de aplicação dever-se-á usar um DDR tipo A
7.3 – Defeito à saída do variador com um esquema IT
Flutuação rápida da tensão rede-terraEm sistema IT, um defeito à terra à saída do variador não deverá desplotar odisparo de qualquer protecção, provocando no entanto uma rápida flutuação datensão rede em relação à terra. Irá ser seguida a flutuação impostas pela MLI.
O conjunto de equipamentos ligados a esta rede ficam submetidos a estasflutuações, com fortes escalões de tensão (dv/dt), podendo ocorrer adeterioração de filtros capacitivos ligados entre a rede e a terra.
Soluções:É desaconselhada a utilização de filtros CEM em sistema IT, se necessárioreduzir as emissões em AF uma solução possível será a de colocar um filtroCEM na entrada do variador sem o ligar à terra.
Para eliminar o fenómeno de flutuação rápida da tensão, a instalação de umfiltro “sinus” à saída do variador pode ser uma opção, elimina todos os escalõeselevados de tensão (dv/dt) aplicados ao motor e ao cabo de alimentação.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 40/52
39
7.4 – Defeito na componente contínua
Os dispositivos usuais de protecção são adaptados à medida de correntes dedefeito alternadas.De qualquer forma, os defeitos de isolamento sobre o bus DC do variador ou
sobre o circuito de dissipação de energia de frenagem (função normalmentepreenchida pela resistência de frenagem ligada habitualmente no exterior dovariador) provocando a circulação de uma componente contínua.
Solução:Mesmo existindo esta componente contínua as protecções devem estar (ficar)operacionais.Se surgir um defeito de isolamento sobre o bus DC, ou sobre o circuito daresistência de frenagem, a utilização de um DDR tipo B se a alimentação fortrifásica será o mais adequado, se a alimentação for monofásica convirá usarum DDR tipo A.
Resumo – Escolha dos DDR

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 41/52
40
8 – Escolha de variadores de velocidade
Exemplo 1 - Selecção de variador para um ventilador
Para comando de um ventilador, de velocidade variável, débito máximo
50 000m3/h, sob uma pressão de 245 Pa à velocidade de 3000 rpm,rendimento 0,68.
Determinação do motor
Potência útil máxima absorvida pelo ventilador:
Pu = Q x M x P /η Q = débito de ar em m3/sM = massa de ar = 1,293 Kg/m3
P = pressão em Pa ou N / m2
Pu = 50 000 x 1,293 x 245 / 3600 x 0,68 = 6 470 W
Determinação do variador
O emprego de um conversor de frequência do tipo Altivar para alimentar omotor conduz a uma desclassificação de 0,9 à velocidade considerada.
Pm = Pu / 0,9 = 7 188 WOu seja um motor normalizado de 7,5KW, seleciona-se o variador de calibremais próximo por excesso, ou seja para este exemplo um ALTIVAR de 7,5 KW
Exemplo 2 - Selecção de variado r para um t rans po rtado r de co rreias
Um transportador de correias cuja carga é sensívelmente constante, devefuncionar numa gama de velocidade de 1 a 3, o que corresponde a umavelocidade motor de 480 a 1440 rpm ( velocidade nominal ).O binário resistente é de 7Nm.
Potência útil necessária ao transportador
Pu = C ω N = C 2πN / 60 = 7 x 6,28 x 1440 / 60 = 1 055
Potência útil que o motor deve fornecer
Pmotor / η redutor = 1 055 / 0,9 = 1 180 W

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 42/52
41
Determinação da frequência a baixa velocidade ( LSP )
a 480 rpm ↔16,66Hz
1- Motor autoventilado : binário útil permanente2- Motor motoventilado : binário útil permanente3- Sobrebinário transitório 1,7 a 2 C4- Binário em sobrevelocidade e potência constante
Na curva de binário da figura, a desclassificação a considerar é de 0,8
Potência do motor
Pm = 1 180 / 0,8 = 1 475 W
Determinação do motor e do variador
seleciona-se um motor standard com a potência mais próximo por excesso, ouseja para este exemplo 1,5 KW .O variador de velocidade será um ALTIVAR de 1,5 KW *
* Dependendo das funções exigidas na aplicação poder-se-á optar por
aparelhos da gama ALTIVAR 31 – Aplicações standard ou ALTIVAR 71 –Funções avançadas.
7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 43/52
42
9 – Arrancadores progressivos
Principais tipos
Podem encontrar-se no mercado três tipos de arrancadores progressivos:
1. Uma fase controlada nas pequenas potências2. Duas fases controladas ( a terceira está em ligação directa )3. Todas as fases controladas
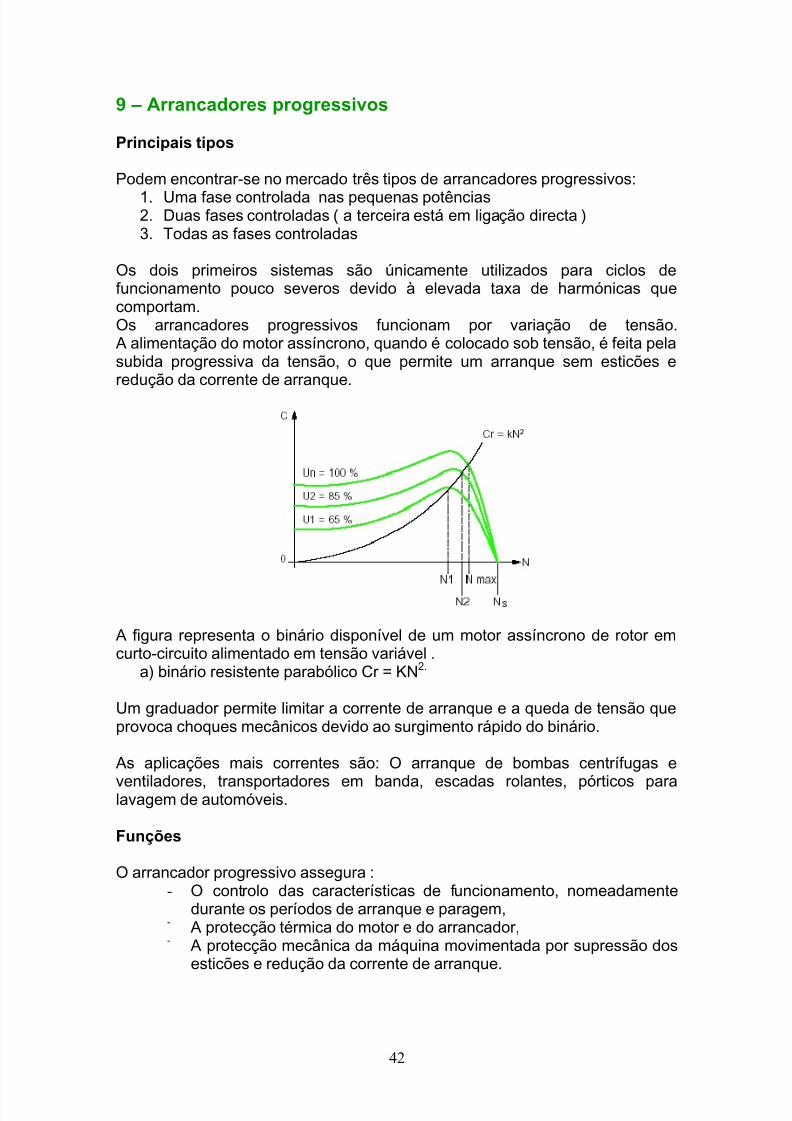
Os dois primeiros sistemas são únicamente utilizados para ciclos defuncionamento pouco severos devido à elevada taxa de harmónicas quecomportam.Os arrancadores progressivos funcionam por variação de tensão.A alimentação do motor assíncrono, quando é colocado sob tensão, é feita pelasubida progressiva da tensão, o que permite um arranque sem esticões eredução da corrente de arranque.
A figura representa o binário disponível de um motor assíncrono de rotor emcurto-circuito alimentado em tensão variável .
a) binário resistente parabólico Cr = KN2.
Um graduador permite limitar a corrente de arranque e a queda de tensão queprovoca choques mecânicos devido ao surgimento rápido do binário.
As aplicações mais correntes são: O arranque de bombas centrífugas e
ventiladores, transportadores em banda, escadas rolantes, pórticos paralavagem de automóveis.
Funções
O arrancador progressivo assegura :- O controlo das características de funcionamento, nomeadamente
durante os períodos de arranque e paragem,- A protecção térmica do motor e do arrancador, - A protecção mecânica da máquina movimentada por supressão dos
esticões e redução da corrente de arranque.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 44/52
43
Constituição
O arrancador progressivo fornece, apartir de uma rede alternada , uma correntealternada de frequência fixa igual à da rede, com controlo do valor eficaz da
tensão por modificação do ângulo de atrazo à condução, alfa (α), dossemicondutores de potência. Dois tiristores montados em anti-paralelo em cadafase do motor. Este ângulo pode variar de 0 a 180º em relação ao início dasinusoide.
Arrancador progressivo para motores assíncronos
O principio geral de funcionamento dos arrancadoresprogressivos baseia-se na variação de tensão obtida fazendo
variar o tempo de condução dos tiristores em cada meia ondada sinusoide. Quanto mais retardado for o inicio da conduçãomenor é o valor da tensão resultante.
A condução dos tiristores é gerada por um microprocessadorque assegura igualmente as funções:
De regulação
Corrente nominal do motor ( corrente máxima permanente )A corrente nominal do arrancador pode ser adaptada à corrente nominal do
motor indicada na placa sinalética.Limites de regulação: 0,4 a 1,3 vezes a corrente nominal do calibre doarrancador.
Corrente de limitaçãoA corrente máxima de arranque é regulável.Limites de regulação: 150 a 700% da corrente nominal do motor regulada elimitada a 500% da corrente máxima permanente definida para o calibre doarrancador.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 45/52
44
Tempos de rampa de aceleraçãoDurante a fase de arranque o ALTISTART aplica ao motor uma rampa debinário. O tempo ACC regulado corresponde ao tempo necessário para ir dobinário 0 ao binário nominal.Limites de regulação:1 a 60 s.
Binário inicial no arranqueO binário inicial tq0 aplicado ao motorpermite vencer instantâneamente o binárioresistente no arranque, valores de regulação:0 a 100% do binário nomonal do motor.
Escolha do tipo de paragemÉ possivel escolher entre três tipos de
paragem:
Paragem do motor em roda livre
Paragem do motor por rampa de desaceleração ( DEC ) por controlode binário
Este tipo de paragem permite desacelerarprogressivamente uma bomba centrífugasobre uma rampa para evitar umaparagem rápida. Permite assim suavizar otransitório hidráulico afim de diminuirconsiderávelmente os Golpes de Ariete. Otempo da rampa dEC é regulável.Durante a desaceleração o débito dabomba diminuí significativamente até umavelocidade em que se torna negligenciávelpodendo apartir daí definir uma passagema roda livre, valor de EdC, evitando o
aquecimento quer do motor quer da bomba.
Paragem do motor em frenagem dinâmica
Este tipo de paragem assegura adesaceleração do motor em caso de inérciaimportante.O nível de binário de frenagem (brc) éregulável. O tempo de frenagem dinâmica T1corresponde à duração de desaceleração de100% a 20% da velocidade nominal do motor.
Para melhorar o nível de frenagem no final da

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 46/52
45
desaceleração, o arrancador injecta corrente contínua, durante um temporegulável T2.
De protecção:
O Altistart possuí funções que permitem proteger quer a máquina quer o motor.
Protecção térmica do motor por cálculo
O arrancador cálcula em permanência o aquecimento do motor apartir dacorrente nominal regulada e da corrente realmente absorvida. Afim de seadaptar ao motor e à aplicação, são propostas várias classes de disparo deacordo com a norma CEI 947-4-2:Classe 30; classe 25; classe 20 (aplicação severa); classe 15; classe 10(aplicação standard); classe 10A e classe2.
As diferentes classes de protecção são dadas pelas capacidades de arranquedo motor:
- A frio sem defeito térmico- A quente sem defeito térmico
A função protecção térmica do motor pode ser inibida.Após uma paragem do motor ou uma colocação fora de tensão do arrancador,o cálculo do estado térmico prossegue, mesmo sem que o controlo estejaalimentado. O controlo térmico do ALTISTART interdita o rearranque do motorse o seu aquecimento for muito elevado.
As curvas de disparo são estabelecidas em função da relação entre a correntede arranque Id e da corrente nominal do motor In.
Tempo de disparo a frio
Tempo de disparo por aplicaçãoStandard ( classe 10 )
Tempo de disparo por aplicaçãoSevera ( classe 20 )
Id = 3 In Id = 4 In Id = 5 In46 s 23 s 15 s
Id = 3,5 In Id = 4 In Id = 5 In63 s 48 s 29 s
Tempo de disparo a quente
Tempo de disparo por aplicaçãoStandard ( classe 10 )
Tempo de disparo por aplicaçãoSevera ( classe 20 )
Id = 3 In Id = 4 In Id = 5 In23 s 12 s 7,5 s
Id = 3,5 In Id = 4 In Id = 5 In32 s 25 s 15 s

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 47/52
46
Colocação a zero do estado térmico do motor
A activação da função reinicializa a zero o estado térmico motor calculado peloarrancador.
Protecção térmica motor por sondas PTC
O arrancador integra o tratamento das sondas PTC evitando desta forma o uso deum equipamento exterior. O defeito ou alarme “ defeito térmico snda PTC “ podepode ser feita por uma saída lógica configurável ou visualizada por ligação série. Afunção pode ser inibida.Nota: As funções “ Protecção por sondas PTC“ e protecção térmica do motor porcálculo são independentes podendo ser activadas ao mesmo tempo.
Ventilação do arrancador
O ventilador de arrefecimento dos arrancadores funciona desde que a temperaturado radiador atinja 50ºC. É colocado fora de tensão para a temperatura de 40ºC.
Protecção térmica do arrancador
O arrancador é protegido por uma sonda térmica analógica contra as sobrecargastérmicas.
Protecção de Sub-CargaO arrancador detecta uma sub-carga motor
se, durante um certo tempo regulado (tUL),o binário motor for inferior a um valor pré-regulado (LUL). A detecção pode dar origema um alarme ou um defeito, no caso dealarme ele pode ser sinalizado através de
uma saída lógica parametrizada para esseefeito, no caso de defeito o arrancador ficará

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 48/52
47
encravado, em qualquer caso a detecção deste defeito pode ser inibida.
Protecção tempo de aceleração muito longo
Esta protecção permite detectar um arranque que não se faz em boas condições,
como por exemplo um rotor bloqueado, em que a velocidade de rotação não chegaa atingir o seu regime nominal.Se a duração do arranque for superior ao tempo regulado, a arrancador passa àposição de defeito. Esta função pode ser inibida.
Protecção de sobrecarga
O arrancador detecta uma sobrecarga decorrente se, durante um certo tempo regulado(tOL), a corrente motor for superior a um valorregulado (LOC). Esta função só é activada na
fase de regime estabelecido. A detecção podeactivar um alarme ou um disparo.O alarme pode ser sinalizado por uma saídalógica configurável e/ou visualizado por umaligação série.O defeito encrava o arrancador.
Protecção contra inversão das fases da rede
Esta função permite detectar o sentido de rotação das fases do motor e se forvalidada, sinalizar defeito quando o sentido de rotação se inverter.
Detecção de perda de uma fase motor
A função permite regular a sensibilidade da protecção para detectar uma ausênciade corrente ou uma corrente fraca numa das três fases durante pelo menos 0,5s ounas três fases em 0,2s.
De Regulação Avançada: Limitação de Binário
Destinado principalmente às aplicações de forte inércia e a binário constante (tipo transportador ).A função permite limitar o binário a um valor constante durante todo o tempo dearranque.

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 49/52
48
Nível do Boost em tensão
A função permite vencer um eventual binário“de descolagem “. Quando é dada a ordem demarcha, o arrancador aplica ao motor umatensão fixa ( que pode ser o valor nominal darede ) durante um tempo limitado a 100 ms.
Ensaio com motor de pequena potência
Função que permite testar o arrancador com um motor de potência inferior,importante para verificações em bancada da cablagem eléctrica doequipamento.
Função cascata
Esta função permite com um só arrancador, arrancar e desacelerar váriosmotores em cascata. É recomendado que os motores tenham potênciacompreendida entre 50% e 100% da potência do arrancador.
Retorno às regulações de fábrica
Esta função permite reinicializar cada regulação no seu valor de pré-regulaçãode fábrica.
Funções de comunicação
O ALTISTART comporta de base uma ligação série multiponto RS 485, comprotocolo Modbus. A ligação série configura-se apartir do ménu decomunicação.
7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 50/52
49
10 – Escolha dos arrancadores progressivos
É necessário verificar a compatibilidade com a aplicação.Escolher entre Rampa de Tensão ou Limitação de Corrente
Arranque em tensão1. O tempo de subida da tensão de 0 até à tensão nominal Un é regulada2. O nível de tensão Ud na colocação em tensão é fixa: Un/33. Durante o arranque, se a mecânica possuí um binário resistente
importante, o conjunto moto-arrancador é capaz de fornecer um binárionão limitado.
CdL/Cd = (IdL/Id)2
Cd – binário de arranque Id – corrente de arranqueCdL – binário limitado IdL – corrente limitada
Arranque em corrente1. O arranque é efectuado em limitação de corrente e não em binário.2. É imperativo verificar que a limitação de corrente regulada permite obter
um binário motor superior ao binário resistente.
Exemplo 1
Escolha de um arrancador para motor de arraste de um tapete rolante.Objectivo:supressão dos choques mecânicos no arranque com eventuaisruturas do tapete.
Características:
Motor:P = 5.5 KWN = 1440 rpmCd/Cn = 2,38Cm/Cn = 2,4
Rede : trifásica 400 V+N e Terra
ARRANCADOR : ATS 48 D17 Q
É um arrancador para 17 A e redes de 380/415 VO arrancador permite controlar motores de In entre 0,4 e 1 IcL – corrente doarrancador, ou seja de 6,8 A a 17 A, dado o motor de 5,5 KW 400V ter umacorrente nominal de 11A , permite ser controlado pelo arrancador proposto.
O arranque poderá ser feito em Rampa de TensãoO motor deverá ser ligado em estrela (rede 400 V)

7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 51/52
50
Exemplo 2
Escolha de um arrancador para motor de turbina centrífuga
Objectivo: Obter a potência minima instalada para redução das correntes dearranque
Características:
MotorP = 315 KwN =1490 rpmIn = 586 Acos ϕ = 0,85
Cd/Cn = 2Cn = 2020 NmId/In = 7
Turbina : Características relativas ao lado do motor
Cr = 1530 NmN =1491 rpmCrd = 756 NmJtotal= 70 Kg.m2
td = 30s.Escolha do arrancador:
ATS 48 C 66 ⇒ P=355 KW⇒ In = 630 A
Verificações:
CdL/Cd = (IdL/Id)2
1. O arrancador ficará a trabalhar em limitação de corrente
IdL = Id √ CdL/Cd
CdL = Crd + CaCa = J dω/ dt = 70 x 156 / 30 = 364 NmCdL = 756 + 364 = 1120 Nm
Cd = 2 Cn = 2 x 2020 = 4040 Nm
Id = 7 In = 7 x 586 = 4102 A
IdL = 4102 x √ 1120 / 4040 = 2160 A
7/25/2019 Variação de Velocidade
http://slidepdf.com/reader/full/variacao-de-velocidade 52/52
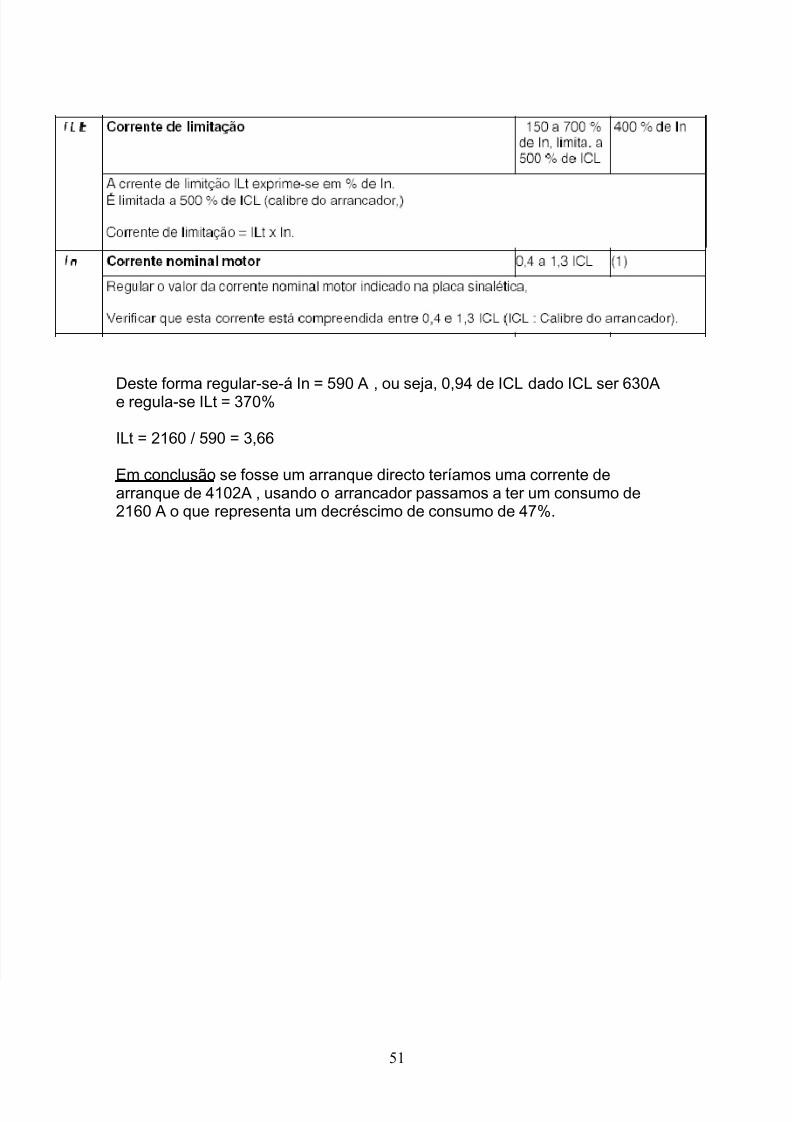
Deste forma regular-se-á In = 590 A , ou seja, 0,94 de ICL dado ICL ser 630Ae regula-se ILt = 370%
ILt = 2160 / 590 = 3,66
Em conclusão se fosse um arranque directo teríamos uma corrente dearranque de 4102A , usando o arrancador passamos a ter um consumo de2160 A o que representa um decréscimo de consumo de 47%.





























