Neste artigo são explorados os princípios básicos de criação de um sistema operacional de tempo real (RTOS). Usando um microcontrolador MSP430 como referência e um compilador GNU GCC, as tarefas mais importantes no processo de criação de um RTOS são detalhadas através de um projeto conhecido como “Basic RTOS” [1], criado especificamente para este fim e requerendo apenas 128 bytes de RAM e 1150 bytes de flash. Mesmo sistemas com grandes restrições de memória podem se beneficiar de RTOSs como o descrito aqui, evitando estratégias tradicionais de funcionamento apenas baseado em interrupções e facilitando o desenvolvimento. Os conceitos abordados são gerais e não estão restritos ao MSP430 muito menos ao compilador empregado, provendo um conhecimento indispensável para desenvolvedores interessados em aplicar técnicas similares aos seus projetos.
- 1. Fundamentos de Sistemas Operacionais de Tempo RealCriando o
seu prprio escalonador de tarefasMarcelo Barros de
[email protected]
Introduo.........................................................................................................................................12
O relgio do
escalonador..................................................................................................................13
Troca de
contexto.............................................................................................................................2
3.1 Modo
interrompido...................................................................................................................2
3.2 Bloco de controle de
tarefas......................................................................................................4
3.3 Adicionando tarefas ao
RTOS...................................................................................................5
3.4 O
escalonador...........................................................................................................................64
Controle de
tarefas............................................................................................................................95
Inicializando o
sistema...................................................................................................................116
Concluso.......................................................................................................................................117
Agradecimentos..............................................................................................................................128
Referncia.......................................................................................................................................129
Licenciamento................................................................................................................................121
IntroduoNeste artigo so explorados os princpios bsicos de criao de
um sistema operacional de temporeal (RTOS). Usando um
microcontrolador MSP430 como referncia e um compilador GNU GCC,as
tarefas mais importantes no processo de criao de um RTOS so
detalhadas atravs de umprojeto conhecido como Basic RTOS [1],
criado especificamente para este fim e requerendoapenas 128 bytes
de RAM e 1150 bytes de flash.Mesmo sistemas com grandes restries de
memria podem se beneficiar de RTOSs como odescrito aqui, evitando
estratgias tradicionais de funcionamento apenas baseado em
interrupes efacilitando o desenvolvimento. Os conceitos abordados
so gerais e no esto restritos ao MSP430muito menos ao compilador
empregado, provendo um conhecimento indispensvel
paradesenvolvedores interessados em aplicar tcnicas similares aos
seus projetos.2 O relgio do escalonadorQuando se coloca o requisito
de executar mais de uma tarefa no sistema, o problema a ser
resolvidoimediatamente o de como compartilhar o processador nesta
situao. A estratgia comumenteadotada em sistemas com um processador
s dividir o seu uso entre todas as tarefas, dando umafatia de tempo
para cada uma delas (chamado de time slicing, ou fatia de tempo) e
criando umaforma de ir alternando as tarefas, isto , um jeito de ir
escalonando tarefas no processador.Isto exige que seja criado um
mecanismo de tempo que permita, de tempos em tempos, avaliar alista
de tarefas e decidir quem ir entrar em execuo (funo conhecida como
escalonador ou
2. scheduler, em ingls). Em geral, usa-se uma interrupo de
temporizador (timer) de alta prioridadedo sistema e define-se um
tempo de avaliao peridico do sistema. Este tempo ser a resoluomnima
de execuo a ser usada por uma tarefa e comumente chamado de "tick
do sistema"(batimento). Por exemplo, comum ter sistemas com tick de
10ms ou 1ms para PCs. Isto dependedo que se pretende em termos de
responsividade das tarefas e de quanto se quer perder
deprocessamento executando o escalonador. Um nmero muito baixo pode
acabar desperdiandomuito processamento no escalonador e um muito
alto pode atrasar a resposta de uma tarefa.A estratgia adotada
dependente dos recursos disponveis na sua plataforma e, neste caso,
foiusado um watchdog timer configurado com tick de 0,5ms, para um
sistema que opera com relgiode 1MHz (o clock do sistema).
Inicialmente, coloca-se o escalonador de tarefas na interrupo
dewatchdog, com mostrado no fragmento de cdigo a seguir. A forma de
fazer isto vai depender doseu compilador, hardware e software de
suporte placa. No exemplo est sendo usado o compiladorGCC para
MSP430./* RTOS scheduler function is allocated at watchdog
interrupt */static interrupt (WDT_VECTOR)
BRTOS_Scheduler(void);Definindo a interrupo de watchdog no GCC para
MSP430Depois, na configurao inicial do RTOS, o tick pode ser
ajustado, atravs de uma chamada paraBRTOS_ConfigureClock(), dentro
da funo de inicializao do sistema (chamada deBRTOS_Initialize() e
discutida mais ao final):static void
BRTOS_ConfigureClock(void){WDTCTL = WDT_MDLY_0_5; /* configuring
interval timer */usTicksPerSecond = 1000/0.5; /* 2k ticks per
second*/} Inicializando o clock do sistema3 Troca de contextoAntes
de tratar a troca de contexto propriamente dita, preciso entender o
que acontece quando oprocessamento normal do microcontrolador
alterado por uma interrupo. Obviamente isto umaquesto dependente do
hardware mas existem algumas aes esperadas.3.1 Modo
interrompidoQuando uma interrupo est sendo tratada pelo
microcontrolador comum se referir expressomodo interrompido para
caracterizar esta situao. Em modo interrompido, o ponto
doprocessamento ir mudar para que a interrupo seja atendida
adequadamente. Neste caso, ocontexto do sistema precisa ser salvo,
isto , uma espcie de foto dos registros e modo de operaodo
processador naquele instante efetuada, para que o estado possa ser
posteriormente recuperadoquando a interrupo terminar de ser
processada. Em geral, comum realizar o salvamento dedeterminados
elementos do processador, descritos a seguir:O contador de
programa, mais conhecido como program counter (PC), que indica onde
estava aexecuo no momento da interrupo. Em geral, o PC um registro
que armazena o valor do 3. endereo de memria da prxima instruo a
ser executada.O ponteiro da pilha ou stack pointer (SP). O SP
indica a posio corrente do stack, podendoapontar para o endereo de
memria da prxima posio livre na pilha. Algumas plataformas usamo SP
de forma diferente, fazendo que ele aponte para a ltima posio
ocupada. A direo em que apilha usada tambm varia. Algumas
plataformas vo decrementando o SP medida que a pilha usada, com o
SP inicialmente apontando para o fim do stack, enquanto em outras o
SP inicializadoapontando para o incio do stack, sendo o SP
incrementado durante o seu uso.O registro de status, ou status
register (SR), no momento da interrupo. Por exemplo, tinha umflag
de overflow ligado no momento da interrupo? Se sim, ele precisa
estar ligado quando ocontexto for restaurado. Isto tambm pode
variar entre plataforma mas comum existir algumaforma de salvamento
do status em todos os microcontroladores.Registros de finalidade
geral, totalmente dependentes da arquitetura utilizada.Certas
controladores, como o ARM7TDMI, possuem registros espelhados. Por
exemplo, ao entrarno modo interrompido, voc tem um registro
especfico para o SP em modo interrompido, trocadopelo processador
no momento da interrupo, automaticamente. Enfim, o que salvar
altamentedependente do processador e ir requerer um bom
conhecimento do controlador que est sendousado.O seu compilador
tambm ir influenciar neste processo, j que ele que ir montar o
salvamentode contexto antes da entrada da interrupo. Por exemplo,
se no atendimento de uma interrupo eles usa um subconjunto dos
registros, ele pode gerar um cdigo assembly que s salve
estesubconjunto, gerando um chaveamento de contexto mais rpido do
que salvar todos os registros.No a toa que plataformas como ARM
permitem o salvamento simultneo de vrios registros,numa nica
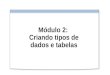
instruo, diminuindo o tempo.No caso do MSP430, existem 16
registros, como pode ser visto na Figura 1. R0 (PC)Program counter
R1 (SP)Stack pointer R2 (SR)Status register R3 (CG)Constant
generatorR4 a R15 Registros geraisFigura 1: Registros do MSP430Ao
acontecer uma interrupo, o processador coloca automaticamente na
pilha corrente os valoresdo SR e PC. Qualquer salvamento adicional
feito pelo compilador, na gerao do cdigo deentrada e sada da
interrupo. Ou, caso escrevendo cdigo em assembly, ser preciso
salvar osregistros que pretende usar dentro da funo de interrupo na
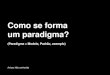
pilha e restaur-los antes do retorno.O retorno de uma interrupo
feito com a instruo reti, que devolve automaticamente os valoresdo
PC e SR, recuperando o contexto anterior. Em resumo, apenas o SR e
PC so salvosautomaticamente pelo microcontrolador (Figura 2), o
compilador (ou programador) responsvelpelos outros registros. 4.
... Stack Pointer PC Endereo de retorno SR Estado antes da
interrupo... Figura 2: Salvamento de contexto realizado
pelomicrocontrolador3.2 Bloco de controle de tarefasAgora que j
descrito como lidar com o salvamento de contexto no caso de uma
interrupo, horade tratar as tarefas. Um sistema com o objetivo de
executar vrias tarefas precisa, de alguma forma,control-las. comum
se usar uma estrutura conhecida como TCB (Task Control Block)
paramanter os dados mais importantes das tarefas do sistema.No
BRTOS, foi usada a seguinte estrutura, cujos elementos esto
descritos mais abaixo. Aquantidade de elementos na estrutura ir
variar dependendo da sua implementao de RTOS.typedef struct
{pfTaskEntry pfEntryPoint;/* task entry point */unsigned char
ucPriority;/* task priority*/unsigned char ucTaskState; /* current
task state */unsigned short usTimeSlice;/* desired time slice
*/unsigned short *pusStackBeg; /* stack beginning*/unsigned short
*pusStackPtr; /* stack pointer*/unsigned short usSleepTicks; /*
count sleep ticks*/unsigned short usTicks;/* count slice ticks*/}
BRTOS_TCB;TCB utilizado para o controle de tarefaspfEntryPoint:
ponto de entrada da tarefa, isto , o endereo da funo que representa
a tarefa.ucPriority: prioridade da tarefa, no usada nesta
implementao, mas importante em sistemas queescalonam tarefas
levando em considerao a prioridade.ucTaskState: estado atual da
tarefa (em execuo, dormindo, etc), importante para o
escalonador.usTimeSlice: time slice da tarefa, ou seja, o tempo que
a tarefa ficar em execuo antes de perdero controle do processador
para a prxima tarefa. Medido em ticks, nesta
implementao.pusStackBeg: ponteiro para o incio da pilha da tarefa.
Cada tarefa ir necessitar de uma pilhaprpria para que possa
executar de forma independente. Um pouco de memria precisar
serreservada para cada pilha sendo que a quantidade final est
relacionada com o cdigo da tarefa. Umerro neste dimensionamento em
sistemas onde a memria de processos compartilhada (semMMU, Memory
Managment Unit) pode gerar um estouro da pilha. Neste caso, pode-se
ter umproblema grave ao invadir reas de memria de outras tarefas ou
do sistema operacional. 5. pusStackPtr: ponteiro para o valor
corrente da pilha da tarefa. Este ponteiro ser usado para salvara
posio da pilha enquanto a tarefa espera por espao no processador.
Ao voltar a ser executada, ovalor desta varivel copiada novamente
no SP na operao de restaurao de contexto.usSleepTicks: este campo
usado como contador do tempo decrescente (em ticks) quando a tarefa
colocada em estado de suspenso por um determinado perodo.usTicks:
contador do nmero de ticks durante a execuo da tarefa, usado para
controlar o tempode execuo da tarefa dentro do time slice
planejado.Sistemas com restries grandes de memria podem tentar
construir TCBs com menos elementospara diminuir o uso de RAM. Alm
disso, comum usar uma lista duplamente ligada de elementosBRTOS_TCB
para manter o controle das tarefas. Mas, para simplificar, reduzir
o tamanho docdigo e uso de RAM, foi criado um vetor com
BRTOS_MAX_TASKS posies j previamentealocadas.3.3 Adicionando
tarefas ao RTOSPara adicionar uma nova tarefa no sistema, basta
definir a funo que a represente, reservarmemria para a pilha e
adicion-la no TCB atravs de uma chamada para a
funoBRTOS_CreateTask().Num microcontrolador com 1Kb de RAM e 8Kb de
Flash, chamadas como malloc() provavelmenteno esto disponveis para
uso e a reserva de espao para pilha pode ser feita atravs do
emprego deum vetor global, do tamanho desejado. No exemplo a
seguir, foram reservados 50 bytes para a pilhada tarefa. Note que
foi usado um vetor com elementos de 16 bits (short) e no de 8 bits
(char), comtamanho igual metade do espao desejado para fazer a
reserva adequadamente. Pode parecerestranho no usar diretamente um
vetor do tipo char, mas esta ao ir garantir que o vetor
estejaalinhado na memria em valores mltiplos de 16 bits, um
requisito para a pilha em plataformasonde o alinhamento importante.
Desta forma, use um tipo de dado no seu vetor que seja do
mesmotamanho da palavra da plataforma (o tipo int, em geral,
resolve isso).A tarefa, por sua vez, apenas um lao infinito que
executa a sua operao, como pode ser visto nocdigo a seguir.#define
TASK_STACK_SIZE 50unsigned short usStack[TASK_STACK_SIZE/2];void
task(unsigned long ulArgc){while(1){int i = 0;while(i < 50){ i =
i + 1;}BRTOS_Sleep(5);}}Exemplo de tarefa e alocao de stackNo Basic
RTOS, todas as tarefas devem ser criadas dentro da
chamadaBRTOS_Application_Initialize(). No foi previsto a criao de
tarefas dinamicamente, uma 6. restrio relativamente sensata quando
se pensa num sistema microprocessado pequeno.void
BRTOS_Application_Initialize(void){BRTOS_CreateTask(task,/*ponto de
entrada*/(unsigned short)&usStack[TASK_STACK_SIZE/2-1],/*pilha
(fim do vetor)*/10, /*time slice (ticks)*/BRTOS_TASK_PRIORITY_1);
/*prioridade ( usada)*/}Adicionando uma tarefa ao sistemaEm geral,
no se espera que a tarefa retorne mas, se isto acontecer, o sistema
operacional precisalidar com esta condio. Neste caso, no momento da
criao da tarefa, gerado um contextoespecial na pilha da tarefa que,
caso acontea um retorno, a coloque em um estado seguro.3.4 O
escalonadorNesta seo descrito como implementar um escalonador para
o sistema, atravs da rotinaBRTOS_Scheduler(). Esta rotina associada
com a rotina de interrupo do watchdog e o ponto deentrada do
batimento peridico do sistema (tick), como descrito anteriormente.
Por ser executadaem modo interrompido o retorno dela ser feito por
uma instruo "reti", que restauraautomaticamente os registros SR e
PC da pilha.Para esta rotina necessrio um tratamento especial por
parte do compilador. A palavra reservada"NAKED", presente na
definio da funo, ir instruir o MSPGCC a criar uma funo que nofaa
nenhuma mudana na pilha ao ser executada. Neste caso, nenhum
contexto adicional ouargumento de chamada de funo salvo na pilha,
algo bem apropriado para uma funo com papelde escalonador do
sistema. Caso o escalonador precise usar a pilha, o SP precisa ser
salvo e a pilhado escalonador definida.A rotina do escalonador est
a seguir, com comentrios sobre cada parte dela logo depois.NAKED(
BRTOS_Scheduler ){save_context_entry: SaveContext();
SaveStackPointer();
RestoreSchedStackPointer();dont_save_context_entry: /* Update
timers */ BRTOS_ProcessTimers(); /* check sleeping tasks */
BRTOS_SleepTasks(); /* Get the next task to run */ ucCurrentTask =
BRTOS_RoundRobin(ucCurrentPriLevel); if(ucCurrentTask ==
BRTOS_NO_TASK_TO_RUN) { /* nothing to do: sleep */
GoToLowPowerMode3(); goto dont_save_context_entry; 7. } /* save
scheduler context */ SaveSchedStackPointer(); /* restore stack
pointer */ RestoreStackPointer(); /* restore other registers */
RestoreContext(); /* reti will pop PC and SR from stack (naked
function) */ EnableInterrupts(); ReturnFromInterrupt();}Escalonador
de tarefas do sistemaA primeira ao salvar o contexto com
SaveContext(). Perceba que deve existir uma tarefa emexecuo e o
ponteiro da pilha atual (SP) tem relao com esta tarefa.
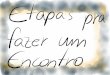
SaveContext() ir colocar napilha desta tarefa os registros
relacionados com a chamada de SaveContext(), deixando a pilha
datarefa com a seguinte estrutura:Stack pointer R15 R14... R3 PC
SR...Figura 3: Pilha com o contexto da tarefa salvoSaveContext()
escrita em assembly j que preciso controle total neste
momento:#define SaveContext() __asm__ __volatile__
("pushR3n""pushR4n""pushR5n""pushR6n""pushR7n""pushR8n""pushR9n""pushR10n"
"pushR11n" "pushR12n" "pushR13n" "pushR14n" "pushR15" ) Salvamento
dos registros da tarefa corrente na pilhaCom o contexto salvo,
falta agora salvar a posio atual do SP da tarefa no TCB dela, com
achamada SaveStackPointer(). A notao do conjunto de ferramentas do
GCC: 8. #define SaveStackPointer()asm("mov.w R1,%0" : "=m"
(asBrtosTasks[ucCurrentTask].pusStackPtr)) Salvando o stack pointer
da tarefa correnteNeste ponto est criada a condio ideal para trocar
o SP da tarefa pelo SP do escalonador,devidamente guardado na
varivel usSchStackPtr atravs da funo
RestoreSchedStackPointer().Definir o SP do escalonador vai permitir
que chamadas em C sejam feitas e variveis locais sejamcriadas,
reduzindo ao mximo a quantidade de cdigo assembly no sistema. A
inicializao do SPdo escalonador feita na partida do sistema,
descrito mais adiante.#define RestoreSchedStackPointer()asm("mov.w
%0,R1" :: "m" (usSchStackPtr))Restaurando o stack pointer do
escalonadorDepois deste incio com um bom grau de dependncia da
plataforma e do compilador, duas tarefasde faxina so feitas. Uma
delas processar os temporizadores (timers), ainda no implementada
naverso atual, e a outra verificar se as tarefas em modo "SLEEP"
ainda precisam continuar dormindoou
no.BRTOS_ProcessTimers();BRTOS_SleepTasks(); Processamento de
timers e tarefas em estado de suspensoO prximo passo decidir quem
ficar com o controle do processador, feito atravs da
chamadaBRTOS_RoundRobin() que ir retornar qual tarefa deve ter seu
contexto restaurado e ser colocadaem execuo. O funcionamento desta
rotina descrito mais adiante.ucCurrentTask =
BRTOS_RoundRobin(ucCurrentPriLevel);Determinando a prxima tarefa a
ser colocada em execuo.Se no existe nenhuma tarefa pronta para
entrar em execuo, o escalonar coloca o processador emmodo de espera
(GoToLowPowerMode3()) at que a prxima interrupo do watchdog acorde
oprocessador, voltando algumas linhas atravs de um goto e refazendo
as tarefas de rotina. Esteponto pode ser melhorado j que se o
processador sair do modo de espera por outro motivo, acontagem de
ticks para tarefas em SLEEP no estar correta. Uma sada bastante
empregada teruma tarefa para cuidar desta situao, ao invs de fazer
isto no escalonador, evitando maioresproblemas.f(ucCurrentTask ==
BRTOS_NO_TASK_TO_RUN){/* nothing to do: sleep
*/GoToLowPowerMode3();goto dont_save_context_entry;} Modo de
economia de energia caso no exista tarefa para ser executada.Uma
vez que se tenha a tarefa que ser executada definida, hora de
restaurar o contexto e devolvero processador para ela. As tarefas
so relativamente simples: salvar o SP do escalonador, restaurar oSP
da tarefa, restaurar os registros da tarefa e retornar da
interrupo. A pilha esperada para a tarefadeve ser como a descrita
anteriormente para que a tarefa assuma corretamente o
contexto.SaveSchedStackPointer(); 9.
RestoreStackPointer();RestoreContext();EnableInterrupts();ReturnFromInterrupt();
Tarefas necessrias para restaurao do contextoA rotina apresentada
pode ser melhorada e bem dependente do processador e
compiladorutilizados. A dependncia ficou oculta atravs de macros
que invocam chamadas em assembly, masso partes do cdigo que
precisam ser repensadas caso a plataforma seja diferente.4 Controle
de tarefasApesar de a maior parte do BRTOS ter sido coberta,
existem alguns detalhes importantes queprecisam ser explicados para
o adequado funcionamento do sistema. Neste seo sero exploradosos
detalhes relacionados ao gerenciamento de tarefas atravs da rotina
BRTOS_CreateTask().O controle de tarefas do sistema extremamente
simples, composto por um vetor de TCBschamado asBrtosTasks. Ao
pedir a criao de uma tarefa, uma nova posio usada neste vetor.
Osparmetros necessrios so o ponto de entrada da tarefa
(entry_point), o endereo da pilha(stack_addr), fatia de tempo mxima
(time_slice) e prioridade (pri). Estes parmetros so guardadosno
vetor de TCBs e a tarefa colocada no estado de "READY", ou seja,
pronta para executar. Valelembrar que a maioria dos RTOSs permite
iniciar uma tarefa em estado de espera, ou seja, que nosaia rodando
imediatamente. Isto no est implementado neste
sistema.asBrtosTasks[usNumTasks].pfEntryPoint =
entry_point;asBrtosTasks[usNumTasks].pusStackBeg= (unsigned short
*) stack_addr;/* ponteiro corrente da pilha
*/asBrtosTasks[usNumTasks].pusStackPtr= (unsigned short *)
stack_addr;asBrtosTasks[usNumTasks].usTimeSlice=
MSEC_TO_TICKS(time_slice);asBrtosTasks[usNumTasks].ucPriority =
pri;asBrtosTasks[usNumTasks].ucTaskState= BRTOS_TASK_STATE_READY;
Inicializando o TCBO que no bvio no processo de adio de uma nova
tarefa no sistema que a pilha inicial datarefa precisa ser
preparada. Como visto anteriormente, quando a interrupo do
escalonadoracontece, esperado que a tarefa em execuo possua um
contexto a ser salvo formado pelosregistros gerais (R3 a R15) e
tambm os registros SP e o PC, colocados na pilha por causa
dainterrupo do escalonador. Logo, necessrio imitar esta pilha
inicial no momento da criao datarefa.E tem mais um detalhe que no
pode ser ignorado. Geralmente, uma tarefa implementada comoum lao
infinito mas que alguns cuidados precisam ser tomados caso ela no
siga este padro ousimplesmente retorne. Neste caso, seria um
retorno de modo no interrompido, implementado noMSP430 pela instruo
ret, que apenas muda o PC corrente para um possvel PC que esteja
napilha (sem SR, neste caso). A recomendao aqui colocar um local
vlido e seguro para este novoPC, no caso uma funo chamada
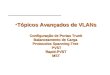
BRTOS_TaskEnd(), descrita mais abaixo.Com todos estes fatores
considerados, o diagrama da pilha inicial da tarefa ficar ento como
naFigura 4. Lembre-se que a lgica de pilha do MSP430 apontar para
um valor livre e decrescerquando valores so adicionados (isto tambm
dependente de plataforma). 10. pusStackPtr R15 R14
...R3PCSRBRTOS_TaskEndpusStackBegFigura 4: Pilha inicial da tarefaO
cdigo necessrio para criar esta pilha inicial pode ser visto
abaixo:/* if task returns some day, prepare stack
*/*(asBrtosTasks[usNumTasks].pusStackPtr) = (unsigned short)
BRTOS_TaskEnd;asBrtosTasks[usNumTasks].pusStackPtr -=1;/* status
register and program counter
*/*(asBrtosTasks[usNumTasks].pusStackPtr) = (unsigned short)
0;asBrtosTasks[usNumTasks].pusStackPtr
-=1;*(asBrtosTasks[usNumTasks].pusStackPtr) = (unsigned short)
entry_point;asBrtosTasks[usNumTasks].pusStackPtr -=1;/* prepare for
first RestoreContext(): dummy NUM_REGS_IN_CONTEXT regs */for(i = 0
; i < NUM_REGS_IN_CONTEXT ;
i++){*(asBrtosTasks[usNumTasks].pusStackPtr) = (unsigned short)
0;asBrtosTasks[usNumTasks].pusStackPtr -= 1;}Criao completa do
stack inicial da tarefa.A implementao da funo BRTOS_TaskEnd()
trival, apenas coloca a tarefa no estado de"TERMINATED" e fica num
lao infinito de forma que ela no estrague nada at que o
escalonadorrode novamente e escolha uma tarefa do grupo de tarefas
prontas para serem executadas (tarefas emREADY). Seria possvel
fazer algo melhor aqui sem grandes modificaes, como umaimplementao
que permita um reincio (RESTART) da tarefa mesmo depois de ela ter
ido paraTERMINATED, algo geralmente encontrado em sistemas de tempo
real.static void
BRTOS_TaskEnd(void){EnterCriticalSection();asBrtosTasks[ucCurrentTask].ucTaskState
=
BRTOS_TASK_STATE_TERMINATED;LeaveCriticalSection();while(1);}Terminado
uma tarefa de forma segura. 11. 5 Inicializando o sistemaA partida
do sistema merece tambm ateno, devendo ser feita de forma
organizada. Nesta seo feita uma breve discusso sobre a inicializao
do sistema, atravs da funo main(), listada aseguir:int
main(void){/* Saving the current stack pointer. It will be used by
the scheduler. */SaveSchedStackPointer();EnterCriticalSection(); /*
initialize control structures and create all user tasks */
BRTOS_Initialize(); /* call user initialization: you must create at
least one thread */ BRTOS_Application_Initialize(); /* the stack
pointer should point to the first available task stack,and the
context should be subtracted. This way, the calling ofGoToScheduler
will not fail */ asBrtosTasks[ucCurrentTask].pusStackPtr +=
NUM_REGS_IN_CONTEXT; RestoreStackPointer(); LeaveCriticalSection();
/* go to to scheduler routine*/ GoToScheduler();}Rotina de
inicializao do sistemaVrias tarefas so esperadas e no requerem
explicaes. Perceba que o escalonador vaicompartilhar a pilha desta
funo, j que o SP dele salvo partir dela. O que tem de estranho aqui
a manipulao feita no ponteiro da pilha da tarefa corrente e no SP.
No fundo, est sendo recriadaa situao de pilha que acontece no caso
de uma interrupo, por isso remove-se os registros de R3a R15,
restauramos o SP da tarefa e realizamos um salto para o
escalonador, como se esta fosserealmente a tarefa corrente. Depois
deste ponto, o processamento segue normalmente.Os pontos de entrada
dentro do escalonador (save_context_entry e
dont_save_context_entry)foram inicialmente criados para permitir
entrada no escalonador com ou sem salvamento decontexto, o que gera
uma ao mais otimizada na partida, sem perder tempo fazendo e
desfazendoesta pilha inicial.6 ConclusoAtravs deste artigo foram
evidenciados as principais questes envolvidas no processo
deconstruo de um RTOs, como escalonares, troca de contexto, etc.
Estas questes foram detalhadase explicadas, com o objetivo de
aumentando o entendimento e fomentar o uso e desenvolvimento
desistemas de tempo real. 12. 7 AgradecimentosApesar de este
trabalho ter sido totalmente escrito fora da empresa onde o autor
trabalha, no hdvida de que s foi possvel devido a experincia
adquirida nos vrios projetos que participou.Assim sendo, o autor
gostaria de agradecer Smar Equipamentos Industriais LTDA
pelasoportunidades e desafios enfrentados.8 Referncia[1] Basic RTOS
project page. http://code.google.com/p/basicrtos/9 LicenciamentoA
obra Fundamentos de Sistemas Operacionais de Tempo Real - Criando
seu prprio escalonadorde tarefas de Marcelo Barros de Almeida foi
licenciada com uma Licena Creative Commons -Atribuio - Uso
No-Comercial - Partilha nos Mesmos Termos 3.0 No Adaptada.Com base
na obra disponvel em http://code.google.com/p/basicrtos/Podem estar
disponveis permisses adicionais ao mbito desta licena atravs do
contato direto aoautor via e-mail
[email protected].