Embed Size (px)
Citation preview

56Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
4. Inversão de Matrizes e Determinantes
4.1. Matriz Inversa
Todo número real a, não nulo, possui um inverso (multiplicativo), ou seja, existe um número b, tal que a b = b a = 1. Este número é único e o denotamos por a-1. Apesar da aritmética matricial ser semelhante a aritmética dos números reais, nem todas as matrizes A não nulas possuem inversa, ou seja, nem sempre existe uma matriz B tal que AB = BA = In. De início, para que os produtos AB e BA estejam definidos e sejam iguais, é preciso que as matrizes A e B sejam quadradas. Portanto, somente as matrizes quadradas podem ter inversa, o que já diferencia do caso dos números reais, onde todo número não nulo tem inverso. Mesmo entre as matrizes quadradas, muitas não possuem inversa.
Definição Uma matriz quadrada A = (aij)n x n é chamada não singular (ou invertível), se existe uma matriz B = (bij)n x n tal que
AB = BA = In. (4.1)
onde In é a matriz identidade. A matriz B é chamada de inversa de A. Se A não tem inversa, dizemos que A é singular (ou não invertível).
Ex.: 4.1 Considere as matrizes
30
12A e
310
6121B
Como
A B = B A = I2
Concluímos que a matriz B é a inversa da matriz A e que A é não singular.
Teorema 4.1. Se uma matriz A = (aij)n x n possui inversa, então a inversa é única.
Demonstração Suponha que B e C sejam inversas de A. Então, AB = BA = In = AC = CA
e assim,
B = B In = B(AC) = (BA)C = InC = C .

57Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
De agora em diante, representaremos a inversa de A, quando ela existe, por A-1. Assim,
AA-1 = A-1A = In
Obs.: Devemos chamar atenção para o fato de que o índice superior -1 não significa uma potência, tão pouco uma divisão. Assim como no caso da transposta, em que AT
significa a transposta de A, aqui, A-1 significa a inversa de A.
Ex. 4.2 Seja
43
21A
Para acharmos A-1, fazemos
dc
baA 1
Devemos então ter
10
01
43
212
1 Idc
baAA
de maneira que
10
01
4343
22
dbca
dbca
Igualando os coeficientes correspondentes destas duas matrizes, obtemos os sistemas lineares
043
12
ca
cae
143
02
db
db
As soluções são (verifique isto):
2
11
2
32
db
ca
Além disso como a matriz
2123
12
dc
ba
também satisfaz a propriedade de que

58Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
10
01
43
21
2123
12,
concluímos que A é não singular (invertível) e que
2123
121A
Nem toda matriz tem uma inversa, como pode ser visto no exemplo seguinte
Ex. 4.3 Seja
42
21A
para acharmos A-1, fazemos
dc
baA 1
Devemos então ter
10
01
42
212
1 Idc
baAA
de maneira que
10
01
4242
22
dbca
dbca
Igualando os coeficientes correspondentes destas duas matrizes, obtemos os sistemas lineares
042
12
ca
cae
142
02
db
db
Estes sistemas lineares não têm soluções, de maneira que A não tem inversa. Assim, A é uma matriz singular.
Obs.: O método usado no Exemplo 4.2 para achar a inversa de uma matriz não é muito eficiente. Nós o modificaremos em breve, obtendo um método mais rápido. Demonstraremos antes algumas propriedades das matrizes.

59Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
4.1.1. Propriedades da Inversa
Operações com matrizes inversas aparecem sempre que se deseja obter soluções de sistemas de equações lineares ou manipulações de matrizes que facilitem a visualização de futuras soluções. O quadro abaixo fornece as duas operações mais comuns.
Quadro 4.1 – Operações mais comuns envolvendo matrizes inversasOperação Notação Simbólica Demonstração
Matriz inversa da (matriz) inversa de uma matriz
(A-1)-1 = AFazendo G-1 = (A-1)-1, donde, G = A-1 eGG-1 = A-1 (A-1)-1 = I Mas, A-1 A = I; portanto, comparando as duas últimas expressões:A-1 (A-1) -1 = A-1A, ou,A-1 [(A-1) -1 - A] = 0,donde, (A-1)-1 = A, pois A-1 0
Matriz inversa de um produto de matrizes
(AB) -1 = B-1A-1Fazendo G = (AB) -1, tem-se: G AB = I. Efetuando um
produto à direita por B-1, obtem-se: G ABB-1 = IB-1 G AI = B-1 G A= B-1. Efetuando outro produto por A-1, chega-se a:G AA-1 = B-1A-1 G I = B-1A-1 G = B-1A-1, ou: (AB)-
1 = B-1A-1.
Quadro 4.1
Teorema 4.2. a) Se A é uma matriz não singular (invertível), então A-1 também é não singular e
(A-1)-1 = A ;
b) Se A e B são matrizes não singulares (invertíveis), então AB é não singular e
(AB)-1 = B-1A-1 ;
c) Se A é uma matriz não singular (invertível), então AT também é não singular e
(AT)-1 = (A-1)T .
Demonstração Se queremos mostrar que uma matriz é a inversa de uma outra, temos que mostrar que os produtos das duas matrizes são iguais a matriz identidade.
a) Uma matriz B é a inversa de A-1 se
A-1B = BA-1 = In .
Mas, como A-1 é a inversa de A, então
AA-1 = A-1A = In .
Como a inversa é única, então B = A é a inversa de A-1, ou seja, (A-1)-1 = A.

60Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Temos que mostrar que a inversa de AB é B-1A-1, ou seja, mostrar que os produtos (AB)(B-1A-1) e (B-1A-1)AB são iguais a matriz identidade. Mas,
(AB)(B-1A-1) = A(BB-1)A-1 = AInA-1 = AA-1 = In
e
(B-1A-1)AB = B-1(A-1A)B = B-1InB = B-1B = In .
Então, AB é não singular. Visto que a inversa da matriz é única, nós concluímos que
(AB)-1 = B-1A-1
b) Nós temos
AA-1 = In e A-1A = In
Tomando a transposta, nós obtemos
(AA-1)T = InT = In e (A-1A)T = In
T = In
e
(A-1)TAT = In e AT(A-1)T = In.
Estas equações implicam que
(AT)-1 = (A-1)T .
Ex.: 4.4 Se
43
21A , então do exemplo 2
2123
121A e
211
2321 TA .
além disto, verifique
42
31TA e
211
2321TA
Corolário Se A1, A2, …, Ar são matrizes não singulares n n, então Se A1, A2, …, Ar, é não singular e
11
11
1121 )(
AAAAAA rrr .
Anteriormente, dissemos que uma matriz B é inversa de A se AB = BA = In.
O teorema seguinte, cuja demonstração será omitida, garante que basta verificarmos uma das duas igualdades em (4.1) para sabermos se uma matriz é a inversa de outra.

61Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Teorema Sejam A e B matrizes n n.
a) Se AB = In, então BA = In;
b) Se BA = In, então AB = In.
4.1.2. Método para Inversão de Matrizes
A demonstração do próximo teorema fornece uma maneira de encontrar a inversa de uma matriz, se ela existir. O exemplo seguinte faz o mesmo no caso particular em que amatriz é 2 2.
Ex.: 4.5 Seja
dc
baA . Devemos procurar uma matriz
wz
yxB tal que AB = I2.
ou seja,
1
0
0
1
dwcy
bway
dzcx
bzax
Este sistema pode ser desacoplado em dois sistemas independentes que possuem a mesma matriz, que é a matriz A. podemos resolve-los simultaneamente. Para isto, basta escalonarmos a matriz aumentada
210
01IA
dc
ba
.
Os dois sistemas têm solução única se, e somente se, a forma escalonada da matriz
[A|I2] for da forma
vu
tsSI
10
012 (verifique, observando o que acontece se a
forma escalonada reduzida da matriz A não for igual a I2). Neste caso, x = s, z = u e
y = t, w = v, ou seja, a matriz A possuirá inversa,
vu
tsSBA 1 .
O teorema seguinte oferece uma maneira de sabermos se uma matriz possui inversa e sua demonstração mostra como encontrar a inversa, se ela existir.
Teorema Uma matriz A, n n, é invertível se, e somente se, A é equivalente por linhas à matriz identidade In.

62Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Demonstração Pelo teorema, para verificarmos se uma matriz A, n n, é invertível, basta verificarmos se existe uma matriz B, tal que
A B = In .
Vamos denotar as colunas de B por X1, X2,..., Xn, ou seja, B = [ X1,..., Xn ], onde
1
21
11
1
nx
x
x
X
,
2
22
12
2
nx
x
x
X
, … ,
nn
n
n
n
x
x
x
X2
1
Vamos denotar as colunas da matriz identidade In, por E1, E2,..., En. Desta forma,
0
0
1
1
E ,
0
1
0
21
E , ... ,
1
0
0
nE
A j-ésima coluna do produto AB é igual a AXj. Assim, analisando coluna a coluna a igualdade matricial
A B = In
vemos que encontrar B é equivalente a resolver n sistemas lineares
A Xj = Ej para j =1..., n.
Cada um dos sistemas pode ser resolvido usando o método de Gauss-Jordan. Para isso, formaríamos as matrizes aumentadas [A | E1], [A | E2],...,[A | En]. Entretanto, como as matrizes dos sistemas são todas iguais a A, podemos resolver todos os sistemas simultaneamente formando a matriz n x 2n
[A | E1 E2...En] = [A | In] .
Transformando [A | In] na sua forma escalonada reduzida, que vamos denotar por [R | S], vamos chegar a duas situações possíveis: ou a matriz R é a matriz identidade, ou não é.
Se R = In, então a forma escalonada reduzida da matriz [A | In] é da forma [R | S]. Se escrevemos a matriz S em termos das suas colunas S = [S1 S2 ... Sn], então as soluções dos sistemas A Xj = Ej são Xj = Sj e assim B = S é tal que AB = In e pelo teorema 2.3 A é invertível.
Se R In, então a matriz A não é equivalente por linhas à matriz identidade In. Neste caso, R terá pelo menos uma linha nula. O que implica que cada que os sistemas A Xj = Ej não tenha solução única. Isto implica que a matriz A não tem inversa, pois as colunas da (única) inversa seriam os Xj, para j = 1, ..., n.

63Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Obs.: Da demonstração do teorema anterior obtemos não somente uma forma de descobrir se uma matriz A tem inversa mas também, como encontrar a inversa, no caso em que ela exista. Ou seja, escalonamos a matriz [A | In] e encontramos a sua forma escalonada reduzida [R | S]. Se R = In, então a matriz A é invertível e a inversa A-1 = S. Caso contrário, a matriz A não é invertível. Vejamos os exemplos seguintes.
Ex. 4.6 Vamos encontrar, se existir, a inversa de
210
211
321
A
Para isso devemos escalonar a matriz aumentada
100210
010211
001321
3IA
1ª eliminação:
O pivô da 1a linha é igual a 1. Logo, precisamos apenas “zerar” os outros elementos da coluna do pivô. Para isto, somamos à 2ª linha, –1 vezes a 1ª linha.
100210
011110
001321
2ª eliminação:
Olhamos para a submatriz obtida eliminando-se a 1a linha da matriz. Escolhemos como pivô um elemento não nulo da 1a coluna não nula da submatriz. Escolhemos o elemento de posição 2,2 . Como temos que “faze-lo” igual a 1, multiplicamos a 2a linha por –1.
100210
0111)1(0
001321
Precisamos “zerar” os outros elementos da coluna do pivô. Para isto, somamos à 1ª linha, –2 vezes a 2ª e à 3ª linha, somamos –1 vezes a 2ª.
111)1(00
011110
021101
–1 2ª linha 2ª linha
–1 1ª linha + 2ª linha 2ª linha
–2 2ª linha + 1ª linha 1ª linha–1 2ª linha + 3ª linha 3ª linha

64Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
3ª eliminação:
Olhamos para a submatriz obtida eliminando-se as duas primeiras linhas. Escolhemos para pivô um elemento não nulo da primeira coluna não nula da submatriz. Este elemento é o elemento de posição 3,3. Como ele é igual a 1, precisamos apenas “zerar” os outros elementos da coluna do pivô. Para isto, somamos à 1ª linha, –1 vezes a 3ª linha e somamos à 2ª linha, –1 vezes a 3ª.
111100
122010
110001
Assim, a matriz [A | I3] é equivalente por linhas à matriz acima, que é da forma [I3 | S], portanto a matriz A é não singular (invertível) e a sua inversa é a matriz S, ou seja,
111
122
1101A
Ex. 4.7 Vamos determinar, se existir, a inversa da matriz
110
211
321
A
Para isso devemos escalonar a matriz aumentada
100110
010211
001321
3IA
1ª eliminação:
O pivô da 1ª linha é igual a 1. Logo, precisamos apenas “zerar” os outros elementos da coluna do pivô. Para isto, somamos à 2ª linha, a –1 vezes a 1ª linha.
100110
011110
001321
–1 3ª linha + 1ª linha 1ª linha–1 3ª linha + 2ª linha 2ª linha
–1 1ª linha + 2ª linha 2ª linha

65Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
2ª eliminação:
Olhamos para a submatriz obtida eliminando-se a 1ª linha da matriz. Escolhemos como pivô um elemento não nulo da 1ª coluna não nula da submatriz. Escolhemos o elemento de posição 2,2. Como temo que “faze-lo” igual a 1, multiplicamos a 2ª linha por –1.
100110
0111)1(0
001321
Precisamos “zerar” os outros elementos da coluna do pivô. Para isto, somamos à 1ª linha, –2 vezes a 2ª e à 3ª linha, somamos –1 vezes a 2ª.
111000
011110
021101
Obs.: Assim, a matriz [A | I3] é equivalente por linhas à matriz acima, que é da forma [R | S], com R I3. Assim, a matriz A não é equivalente por linhas à matriz identidade e portanto não é invertível.
4.1.3. Sistemas Lineares e Inversas
Se um sistema linear A X = B tem o número de equações igual ao número de incógnitas, então o conhecimento da inversa da matriz do sistema A-1, reduz o problema de resolver o sistema a simplesmente fazer um produto de matrizes, como está enunciado no próximo teorema.
Teorema Uma matriz A n n é não singular se e somente se for equivalente por linhas a In.
O sistema associado AX = B tem solução única se, e somente se, A é invertível. Neste caso a solução é X = A-1B.
Demonstração Se A é uma matriz n n, então o sistema linear AX = B é um sistema de nequações e n incógnitas. Suponha que A é não singular (invertível). Então A-1 existe e podemos multiplicar AX = B por A-1 em ambos os lados, obtendo
A-1(A X) = A-1B
(A-1A)X = A-1B
InX = A-1B
X = A-1B.
–1 2ª linha 2ª linha
–2 2ª linha + 1ª linha 1ª linha–1 2ª linha + 3ª linha 3ª linha

66Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Aqui foram usadas as propriedades da álgebra matricial. Portanto, X = A-1B é a única solução do sistema A X = B. Por outro lado, se o sistema A X = B possui solução única, então a forma escalonada reduzida da matriz aumentada do sistema [A | B] é da forma [R | C], onde R = In. Pois a matriz A é quadrada e caso R fosse diferente da identidade possuiria uma linha de zeros o que levaria a que o sistema A X = B ou não tivesse solução ou tivesse infinitas soluções. Logo, a matriz A é equivalente por linhas à matriz identidade o que pelo teorema visto anteriormente implica que A é invertível.
Ex.: 4.8 Suponha que temos um processo físico em que para uma matriz de saída B, a matriz de entrada X é obtida pela solução do sistema A X = B.
Se a matriz A é a do Exemplo 4.6:
210
211
321
A e as matrizes de saída são
3
2
1
B e
3
5
2
C , então as matrizes de entrada serão
4
5
1
3
2
1
111
122
1101BAX e
4
11
8
3
5
2
111
122
1101CAY .
ou seja
4
5
1
3
2
1
x
x
x
X e
4
11
8
3
2
1
y
y
y
Y
Teorema Se A é uma matriz n n, o sistema homogêneo
AX = 0 (4.2)
tem solução não trivial ( 0) se, e somente se, A for singular (não invertível).
Ou seja, todo sistema homogêneo possui pelo menos a solução trivial. Pelo item anterior, esta será a única solução se, e somente se, A é invertível.

67Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Demonstração Suponha que A é não singular. Então A-1 existe, e multiplicando ambos os lados de (4.2) por A-1, temos
A-1(A X) = A-10
(A-1A)X = 0
InX = 0
X = 0
Portanto, a única solução de (4.2) é X = 0.
Ex.: 4.9 Considere o sistema homogêneo AX = 0, em que
155
320
111
A . Como A é não
singular,
X = A-10 = 0.
Poderíamos resolver o sistema pelo método de eliminação de Gauss-Jordan. Neste caso vemos que a matriz em forma escalonada reduzida é equivalente por linhas à matriz aumentada do sistema dado,
0155
0320
0111
,
é
0100
0010
0001
,
o que mais uma vez mostra que a solução é
X = 0.

68Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Ex.: 4.9 Considere o sistema homogêneo AX = 0, em que A é a matriz singular
325
121
321
.
Neste caso a matriz em forma escalonada reduzida que é equivalente por linhas à matriz aumentada do sistema dado,
0325
0121
0321
, e
0000
0110
0101
,
e isso acarreta que
z
y
x
onde é um número real qualquer. Assim, o sistema dado tem uma solução não trivial.
Teorema Podemos resumir nossos resultados sobre sistemas homogêneos e matrizes não singulares observando que as seguintes afirmativas são equivalentes:
Quadro 4.2Lista de equivalências não singulares
Os seguintes enunciados são equivalentes.
1. A é não singular2. Ax = 0 tem somente a solução trivial3. A é equivalente por linhas a In.
Quadro 4.2

69Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Exercícios Numéricos
1. Seja A uma matriz 3 x 3. Suponha que
3
2
1
X é solução do sistema homogêneo
A X = 0. A matriz A é singular ou não? Justifique.
R.: Teorema: Se A é uma matriz n n, o sistema homogêneo AX = 0 tem solução não trivial ( 0) se, e somente se, A for singular (não invertível).
Então, a matriz A é singular, pois o sistema homogêneo tem solução não trivial.
2. Se possível, encontre as inversas das seguintes matrizes:
(a)
210
211
321
R.:
111
122
1101A
(b)
231
131
221
R.:
110
101
4231A
(c)
421
320
321
R.:
101
5,15,05,1
0111A
(d)
110
211
321
R.: A matriz é singular.
(e)
6195
1121
2131
1111
R.: A matriz é singular.
3. Encontre todos os valores de a para os quais a matriz
a
A
21
001
011
tem inversa.
R.:
a00
010
001
, para valores de a diferentes de zero a matriz A tem inversa.

70Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
4. Se
31
231A e
23
521B
encontre (A B)-1.
Teorema: Se A e B são matrizes não singulares (invertíveis), então AB é não singular e
R.: (AB)-1 = B-1A-1 →
07
1911)( 1AB
5. Resolva o sistema A X = B, se
14
321A e
3
5B
R.: BAX 1 , se o sistema linear A X = B tem o número de equações igual ao número de incógnitas.
23
19X
Exercícios usando o MATLAB
>> M=[A,B] atribui à matriz M a matriz obtida colocando lado a lado as matrizes A e B; >> A=[A1,..., An] cria uma matriz A formada pelas matrizes, definidas anteriormente, A1,..., An colocadas uma ao lado da outra;>> M=A(:,k:1) atribui à matriz M a submatriz da matriz A obtida da
coluna 1 à coluna k da matriz A.
Comandos do pacote GAAL:>> B=opel(alpha,i,A) ou >> B=oe(alpha,i,A) faz a operação elementar alpha*linha i ==> linha i da matriz A e armazena a matriz resultante em B. >> B=opel(alpha,i,j,A) ou >> B=oe(alpha,i,j,A) faz a operação elementar alpha*linha i + linha j ==> linha j da matriz A e armazena a matriz resultante na variável B. >> B=opel(A,i,j) ou >> B=oe(A,i,j) faz a troca da linha i com a linha j da matriz Ae armazena a matriz resultante na variável B. >> B=escalona(A) calcula passo a passo a forma escalonada reduzida da matriz A e armazena a matriz resultante na variável B.
Use o MATLAB para resolver os Exercícios a partir do Exercício 2.

71Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
4.2. Determinantes
Definição Nesta seção definimos a noção de determinante e estudamos algumas de suas propriedades. Os determinantes surgiram inicialmente na solução de sistemas lineares. Embora o método dado na Unidade 3 para resolver tais sistemas seja muito mais eficiente do que os que envolvem determinantes, estes são úteis em outros aspectos da álgebra linear; algumas destas áreas serão consideradas na Unidade 7.
Definição Seja nS ,,2,1 o conjunto dos inteiros de 1 a n, dispostos em ordem crescente. Um
rearranjo njjj 21 dos elementos de S é chamado uma permutação de S. Assim, 4231
é uma permutação de 4,3,2,1S .
Podemos colocar qualquer um destes n objetos na primeira posição, qualquer um dos restantes n –1 elementos na segunda posição, qualquer um dos restantes n – 2 elementos na terceira posição, e assim sucessivamente, até que a n-ésima posição só pode ser preenchida pelo último elemento restante. Assim, há
12)2)(1( nnn (4.2)
permutações de S; representamos o conjunto de todas as permutações de S por Sn.
A expressão na equação (4.2) é representada por
Uma permutação njjj 21 de nS ,,2,1 tem uma inversão se um inteiro maior jr
precede um inteiro menor js. Uma permutação é chamada par ou ímpar se o número total de inversões for par ou ímpar.
Se 2n , pode mostrar que Sn tem 2!n permutações pares e um número igual de permutações ímpares.
880.362123456789!9
320.4012345678!8
040.51234567!7
720123456!6
12012345!5
241234!4
6123!3
212!2
1!1

72Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Definição Seja ijaA uma matriz n n. definimos o determinante de A (representado por det(A)
ou A ) por
nnjjj aaaAA
21 21)()det( , (4.3)
onde o somatório é feito sobre todas as permutações njjj 21 do conjunto
nS ,,2,1 . O sinal é escolhido positivo ou negativo conforme a permutação
njjj 21 seja par ou ímpar.
Em cada termo nnjjj aaa
21 21)( de A , os subíndices relativos às linhas estão em sua
ordem natural, enquanto que os subíndices relativos às colunas estão na ordem
njjj 21 . Como a permutação njjj 21 é simplesmente um rearranjo dos números de
1 a n, não contém repetições. Assim, cada termo de A é um produto de n elementos de
A com seu sinal apropriado, com exatamente um elemento de cada linha e exatamente um elemento de cada coluna. Como estamos somando sobre todas as permutações do conjunto nS ,,2,1 , A tem n! termos na soma de (4.3).
Ex 4.10 Se 11aA for uma matriz 1 1, então S1 tem somente uma permutação, a permutação
identidade 1, que é par. Assim, 11aA .
Definição De acordo com o exemplo (4.10) definimos o determinante de matrizes 1 1. Para cada matriz aA definimos o determinante de A – indicado por det(A) ou A – por
det(A) = a. Assim,
det( )A A a aij 11
Vamos agora, definir o determinante de matrizes 2 2 e a partir daí definir para matrizes de ordem maior. A cada matriz A, 2 2, associamos um número real, denominado determinante de A, por:
A a a
a aa a a a11 12
21 2211 22 12 21
O determinante de uma matriz 3 × 3 qualquer é:
A a a a
a a a
a a a
11 12 13
21 22 23
31 32 33
a a a a a a a a a a a a a a a a a a11 22 33 12 23 31 13 21 32 13 22 31 12 21 33 11 23 32

73Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Definição Assim, podemos obter o det(A) ou A formando o produto dos coeficientes da diagonal
da esquerda para a direita no diagrama a seguir e subtraindo disto o produto dos coeficientes da diagonal da direita para a esquerda.
2221
1211
aa
aa
Ex 4.11 Seja
54
32A
Então 22)4()3()5()2( A .
Definição Sendo A uma matriz 3 × 3, podemos obter A como se segue. Repita a primeira e a
segunda colunas de A como mostrado abaixo. Forme a soma dos produtos dos
coeficientes sobre as diagonais da esquerda para a direita e subtraia disto os produtos dos coeficientes sobre as diagonais da direita para a esquerda (verifique esta regra).
3231333231
2221232221
1211131211
aaaaa
aaaaa
aaaaa
então, para calcular A escrevemos os seis termos
312213332112322311322113312312332211 aaaaaaaaaaaaaaaaaaA . (4.4)
Ex.: 4.12 Seja
213
312
321
A
Calcule A .
Solução: Substituindo em (4.4), vemos que
6)3)(1)(3()2)(2)(2()1)(3)(1()1)(2)(3()3)(3)(2()2)(1)(1( A .
Deveria ser enfatizado que, para 4n , não há maneira “fácil”, como nos exemplos (4.11) e (4.12), de calcular A .

74Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
4.2.1. Propriedades do Determinante
Teorema Os determinantes de uma matriz e de sua transposta são iguais.
Ex.: 4.13 Seja a matriz do exemplo (4.12)
233
112
321TA .
Então, AAT 6)3)(1)(3()2)(2)(2()3)(1)(1()3)(2)(3()3)(1)(2()2)(1)(1( .
Teorema Se a matriz B resulta da matriz A pela troca da posição de duas linhas (colunas) de A, então AB .
Ex.: 4.14 Temos 723
12
e 7
12
23
Teorema Se duas linhas (colunas) de A forem iguais, então 0A .
Ex.: 4.15 Temos 0
321
701
321
e 0
373
202
111
Teorema Se uma linha (coluna) de A consiste somente em zeros, então 0A .
Ex.: 4.16 0
000
654
321
e 0
063
052
041
Teorema Se B é obtida de A multiplicando uma linha (coluna) de A por um número real c, então AcB .
Podemos usar o teorema para simplificar o cálculo de A , achando o máximo divisor
comum de cada linha e coluna de A.
Ex.: 4.17 Temos
18)14(641
11)3)(2(
121
312
121
62

75Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Ex.: 4.18 Temos
0)0)(3)(2(
141
151
121
)3)(2(
341
351
321
2
682
351
321
Neste exemplo, pusemos em primeiro lugar 2 em evidência na terceira linha, e então 3 na terceira coluna, obtendo zero, pois a primeira e terceira colunas são iguais.
Teorema Se B é obtida de A substituindo a linha (coluna) i por ela somada a um múltiplo escalar de uma linha (coluna) j, j i, então AB .
Ex.: 4.19 Temos
4
101
312
905
101
312
321
,
obtida adicionando duas vezes a segunda linha à sua primeira. Aplicando a definição de determinante ao segundo determinante, vemos que ambos têm o valor 4.
Teorema Se uma matriz ijaA é triangular inferior (superior), então
nnaaaA 2211 ;
ou seja, o determinante de uma matriz triangular é o produto dos elementos sobre a diagonal principal.
Ex.: 4.20 Temos
3)23)(2)(1(
2300
120
321
.
Teorema O determinante de um produto de duas matrizes é o produto de seus determinantes; ou seja,
BAAB .
Ex.: 4.21 Sejam
43
21A e
21
12B
Assim 2A e 5B .

76Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Além disto,
510
34AB e BAAB 10 .
Corolário Se A é não singular (invertível), então 0A e
AA
11 .
Ex.: 4.22 Seja
43
21A . Assim 2A e
2123
121A . LogoA
A1
2
11 .
4.2.2. Desenvolvimento em Cofatores e Aplicações
Até aqui, temos calculado determinantes usando a equação (4.3) da seção precedente, ajudados pelas propriedades nela demonstradas. Desenvolveremos agora um método diferente para calcular o determinante de uma matriz n n, que reduz o problema ao cálculo de determinantes de matrizes de ordem n – 1. Podemos então repetir o processo para estas matrizes )1()1( nn até chegarmos a matrizes 2 2.
Definição Seja ijaA uma matriz n n. Seja Mij a submatriz )1()1( nn de A obtida
eliminando a i-ésima linha e a i-ésima coluna de A, que tem o seguinte aspecto:
nnn
ij
n
ij
aa
a
aa
M
1
111
Ex.: 4.23 Para uma matriz A = (aij)3 x 3,
3332
2322
333231
232221
131211
11 aa
aa
aaa
aaa
aaa
M
3231
1211
333231
232221
131211
23 aa
aa
aaa
aaa
aaa
M
J
i

77Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
O determinante ijM é chamado o menor de aij. O cofator Aij de aij é definido por
ijji
ij MA )1( .
ou seja, o cofator Aij, do elemento aij é igual a mais ou menos o determinante do menor Mij, sendo o mais e o menos determinados pela seguinte disposição:
Ex.: 4.24 Seja
217
654
213
A .
Assim
3442827
6412 M , 1073
17
1323
M ,
e
1610665
2131
M
Além disso,
34)34)(1()1( 1221
12 MA ,
10)10)(1()1( 2332
23 MA ,
16)16)(1()1( 3131
31 MA .
Se imaginarmos o sinal (-1)i+j como estando colocado na posição (i, j) de uma matriz nn , então os sinais + e – formam um quadro em que se alternam, partindo de + na
posição (1, 1). Os quadros para n = 3 e n = 4 são os seguintes:
n = 3 n = 4

78Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Ex.: 4.25 Para uma matriz A = [aij]3 x 3,
233233223332
2322
333231
232221
131211
1111
11 detdet)det()1( aaaaaa
aa
aaa
aaa
aaa
MA
321112312221
1211
333231
232221
131211
2332
23 detdet)det()1( aaaaaa
aa
aaa
aaa
aaa
MA
Vamos, agora, definir o determinante de uma matriz 3 3. Escolha uma linha de A, por exemplo, a 1ª linha,
333231
232221
131211
aaa
aaa
aaa
A ,
então, o determinante de A é igual à soma dos produtos dos elementos da 1ª linha pelos seus cofatores.
)()1( 322333223332
23221111 aaaa
aa
aaA ,
)()1( 312333213331
23212112 aaaa
aa
aaA ,
)()1( 312232213231
22213113 aaaa
aa
aaA
Então
131312121111)det( AaAaAaAA
3231
222113
3331
232112
3332
232211 detdetdet)det(
aa
aaa
aa
aaa
aa
aaaAA
)()()()det( 312232211331233321123223332211 aaaaaaaaaaaaaaaA
312213332112322311322113312312332211)det( aaaaaaaaaaaaaaaaaaA .
O que nos leva novamente à equação (4.4).
De outra maneira:

79Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Escolhendo-se a 2a e a 3a linhas obtem-se respectivamente
333231
232221
131211
aaa
aaa
aaa
A det(A) = a21A21 + a22A22 + a23A23;
333231
232221
131211
aaa
aaa
aaa
A det(A) = a31A31 + a32A32 + a33A33.
Calculando-se os cofatores nas expressões acima, verifica-se que realmente qualquer uma delas dá o mesmo resultado (verifique!). Da mesma forma que a partir do determinante de matrizes 2 x 2, definimos o determinante de matrizes 3 x 3, podemos definir o determinante de matrizes quadradas de ordem maior. Supondo que sabemos como calcular o determinante de matrizes de ordem (n - 1) (n - 1) vamos definir o determinante de matrizes de ordem n n.
Vamos definir, agora, os cofatores de uma matriz quadrada nnijaA )( .O cofator do
elemento aij, denotado por Aij, é definido por
ijji
ij MA )1( .
Ou seja, o cofator Aij, do elemento aij é igual a mais ou menos o determinante do menor Mij, sendo o mais e o menos determinados pela seguinte disposição:
Definição Seja A uma matriz de ordem n x n. O determinante de A, denotado por det(A) ou A , é
definido por
n
jjjnn AaAaAaAaAA
1111112121111)det( , (4.5)
onde jj
j MA 11
1 )1( é o cofator do elemento a1j. A expressão (4.5) é chamada
desenvolvimento em cofatores do determinante de A em termo da 1ª linha.
Não vamos provar aqui que o determinante está bem definido, isto é, que o resultado é o mesmo, independente da linha escolhida para o desenvolvimento em cofatores. Podemos também estender a definição de determinantes para incluir as matrizes 1 x 1, definindo det([a]) = a. Desta forma a expansão em cofatores também é válida para matrizes 2 x 2.

80Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Ex.: 4.26 Seja
0212
5231
4321
3000
A
Desenvolvendo-se o determinante de A em cofatores, obtemos
)det()1)(3(000)det( 41131211 BAAAA , onde
212
231
321
B .
Mas o )det(B também pode ser calculado usando cofatores,
det(B) = 1B11 + 2B12 + 3B13
= 1(- 1)1 + 1det(M11) + 2(- 1)1 + 2det(M12) + 3(- 1)1 + 3det(M13)
=
12
31det3
22
21det2
21
23det
= -8 - 2 (- 2) + 3 (- 7)
= -25
Portanto, det(A) = 3det(B) = - 75.
Ex.: 4.27 Usando a definição de determinante, vamos mostrar que o determinante de uma matriz triangular inferior (isto é, os elementos situados acima da diagonal principal são iguais a zero) é o produto dos elementos da diagonal principal. Vamos mostrar inicialmente para matrizes 3 x 3. Seja
333231
2221
11
0
00
aaa
aa
a
A
Desenvolvendo-se o determinante de A em cofatores, obtemos
3322113332
2211
0det)det( aaa
aa
aaA
.
Vamos supor termos provado que para qualquer matriz (n - 1) (n - 1) triangular inferior, o determinante é o produto dos elementos da diagonal principal. Então vamos provar que isto também vale para matrizes n n. Seja
81Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
nnn aa
aa
a
A
2
2221
11
0
0
00
Desenvolvendo-se o determinante de A em cofatores, obtemos
nn
nnn
aaa
aa
aa
a
aA
2211
2
3332
22
11 0
0
00
det)det(
,
pois o determinante acima é de uma matriz (n - 1) (n - 1) triangular inferior. Em particular, o determinante da matriz identidade In é igual a 1 1)det( nI .
Obs.: Este caso vale tanto para matriz triangular inferior quanto para triangular superior.
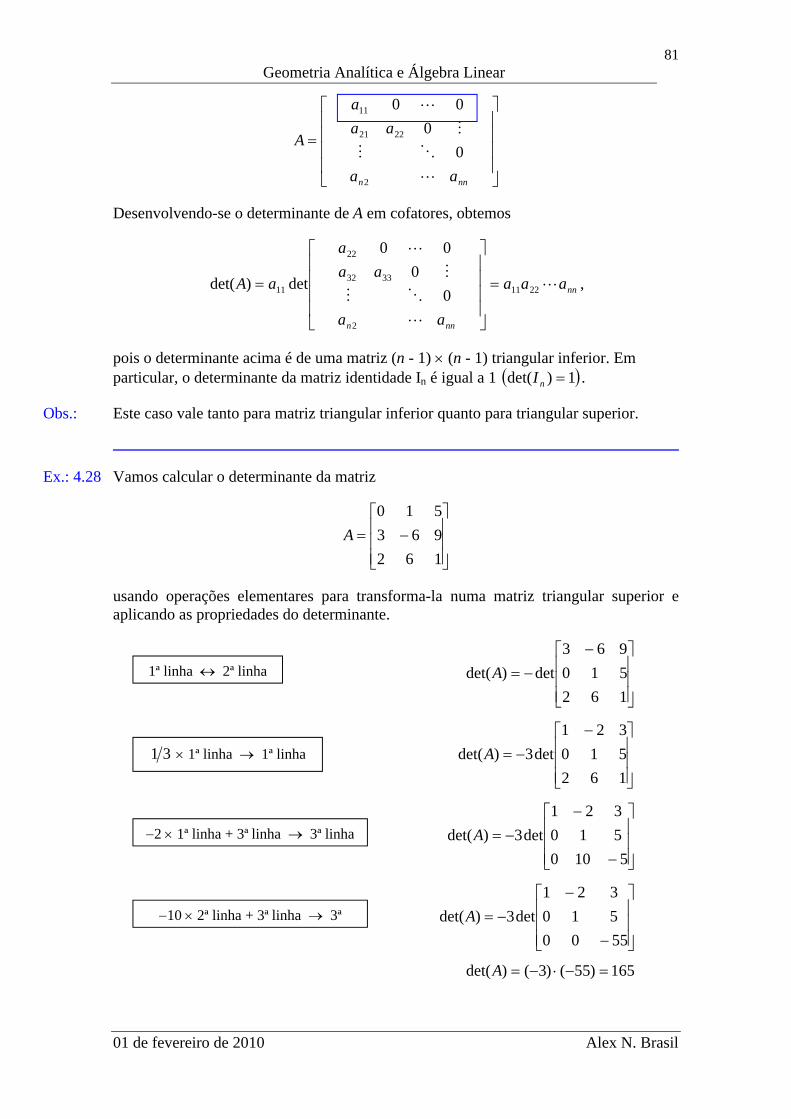
Ex.: 4.28 Vamos calcular o determinante da matriz
162
963
510
A
usando operações elementares para transforma-la numa matriz triangular superior e aplicando as propriedades do determinante.
162
510
963
det)det(A
162
510
321
det3)det(A
5100
510
321
det3)det(A
5500
510
321
det3)det(A
165)55()3()det( A
1ª linha 2ª linha
31 1ª linha 1ª linha
2 1ª linha + 3ª linha 3ª linha
10 2ª linha + 3ª linha 3ª

82Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
Para se calcular o determinante de uma matriz n n pela expansão em cofatores, precisamos fazer n produtos e calcular n determinantes de matrizes (n - 1) (n - 1), que por sua vez vai precisar de n – 1 produtos e assim por diante. Portanto, ao todo são necessários n! produtos. Para se calcular o determinante de uma matriz 20 20, é necessário se realizar 20! 108 produtos. Os computadores pessoais realizam da ordem de 108 produtos por segundo. Portanto, um computador pessoal precisaria de cerca de 1010 segundos ou 103 anos para calcular o determinante de uma matriz 20 20 usando a expansão em cofatores. Enquanto, o cálculo do determinante pelo método apresentado no exemplo anterior é necessário apenas da ordem de n3 produtos para se calcular o determinante.
O resultado seguinte caracteriza em termos do determinante as matrizes invertíveis e os sistemas lineares homogêneos que possuem solução não trivial.
Teorema Seja A uma matriz n n.
(a) A matriz A é invertível se, e somente se, 0)det( A ;
(b) O sistema homogêneo 0 XA tem solução não trivial se , e somente se, 0)det( A .
Ex.: 4.29 Seja A = (aij)n x n. Vamos mostrar que se A é invertível, então
)det(
1)det( 1
AA
Como A A-1 = In, aplicando-se o determinante a ambos os membros desta igualdade e usando as propriedades do determinante, obtemos
det(A) det(A-1) = det(In).
Mas, det(In) = 1 (Exemplo 4.27, a matriz identidade também é triangular inferior!).
Logo, )det(
1)det( 1
AA .
Ex.: 4.30 Se uma matriz quadrada é tal que A2 = A-1, então vamos mostar que det(A) = 1. Aplicando-se o determinante a ambos os membros da igualdade acima, e usando novamente as propriedades do determinante e o resultado do exemplo anterior, obtemos
)det(
1)det( 2
AA .
De onde segue que (det(A))3 = 1. Portanto, det(A) = 1.
83Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
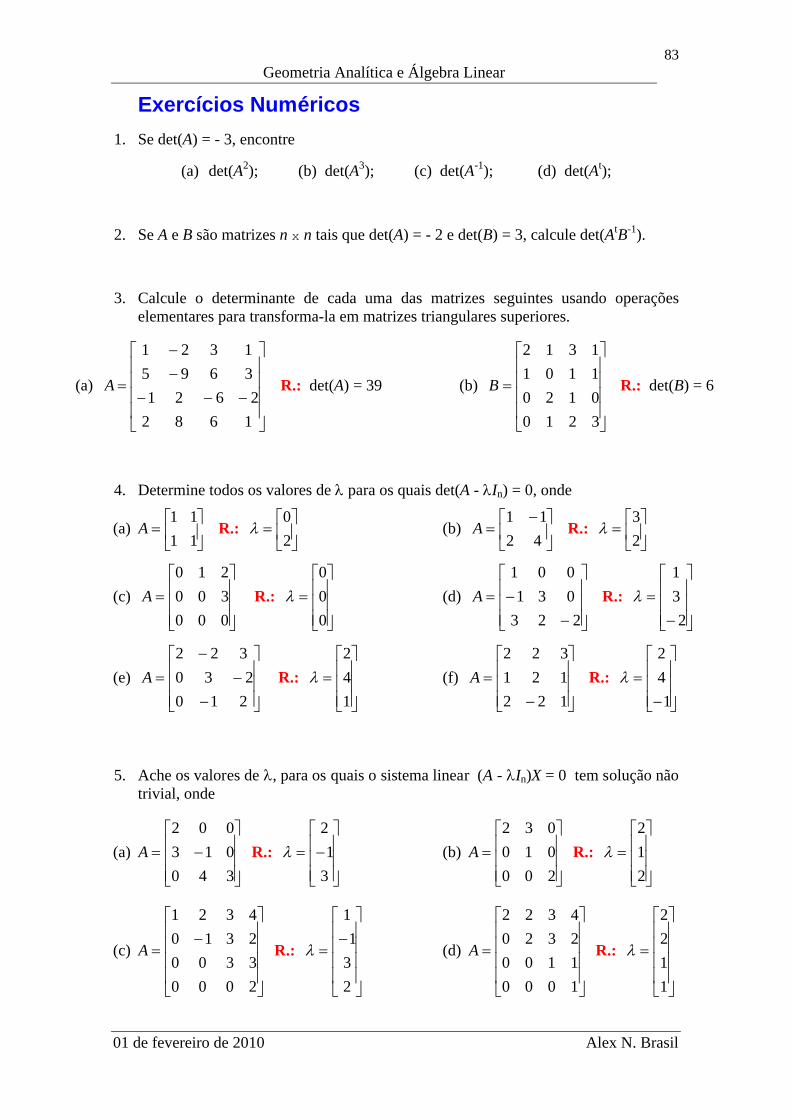
Exercícios Numéricos
1. Se det(A) = - 3, encontre
(a) det(A2); (b) det(A3); (c) det(A-1); (d) det(At);
2. Se A e B são matrizes n x n tais que det(A) = - 2 e det(B) = 3, calcule det(AtB-1).
3. Calcule o determinante de cada uma das matrizes seguintes usando operações elementares para transforma-la em matrizes triangulares superiores.
(a)
1682
2621
3695
1321
A R.: det(A) = 39 (b)
3210
0120
1101
1312
B R.: det(B) = 6
4. Determine todos os valores de para os quais det(A - In) = 0, onde
(a)
11
11A R.:
2
0 (b)
42
11A R.:
2
3
(c)
000
300
210
A R.:
0
0
0
(d)
223
031
001
A R.:
2
3
1
(e)
210
230
322
A R.:
1
4
2
(f)
122
121
322
A R.:
1
4
2
5. Ache os valores de , para os quais o sistema linear (A - In)X = 0 tem solução não trivial, onde
(a)
340
013
002
A R.:
3
1
2
(b)
200
010
032
A R.:
2
1
2
(c)
2000
3300
2310
4321
A R.:
2
3
1
1
(d)
1000
1100
2320
4322
A R.:
1
1
2
2
84Geometria Analítica e Álgebra Linear
01 de fevereiro de 2010 Alex N. Brasil
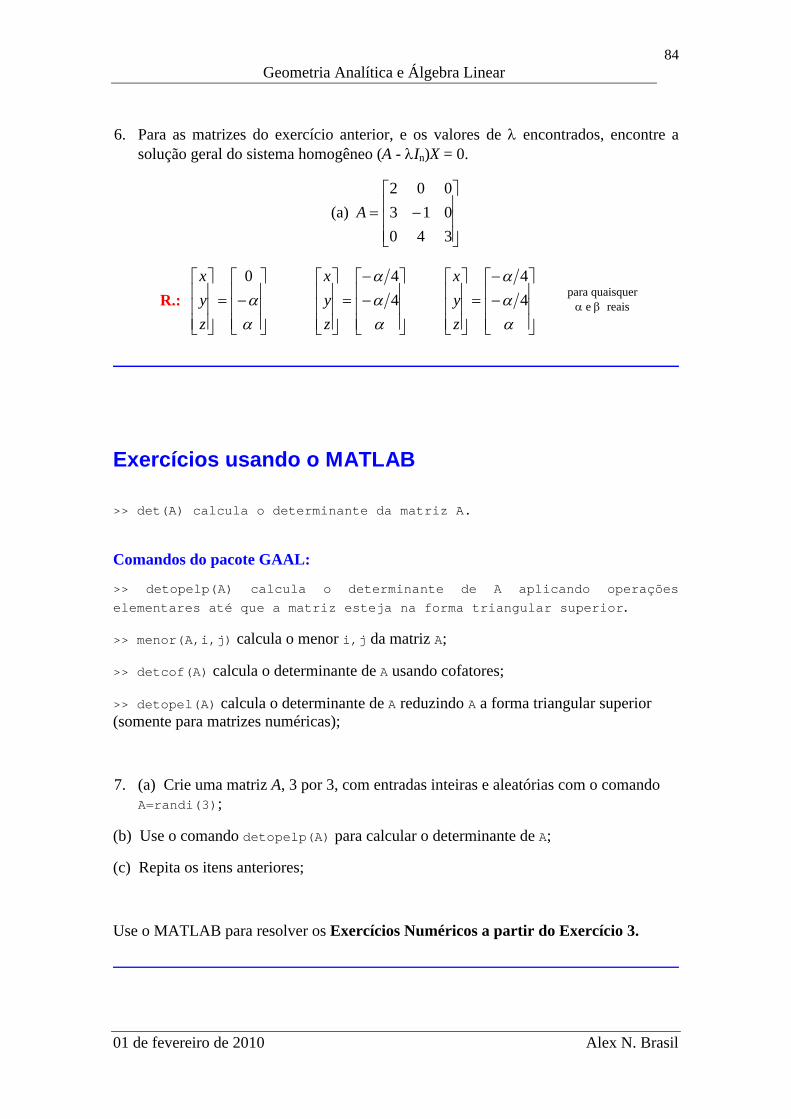
6. Para as matrizes do exercício anterior, e os valores de encontrados, encontre a solução geral do sistema homogêneo (A - In)X = 0.
(a)
340
013
002
A
R.:
0
z
y
x
4
4
z
y
x
4
4
z
y
x
Exercícios usando o MATLAB
>> det(A) calcula o determinante da matriz A.
Comandos do pacote GAAL:
>> detopelp(A) calcula o determinante de A aplicando operações
elementares até que a matriz esteja na forma triangular superior.
>> menor(A,i,j) calcula o menor i,j da matriz A;
>> detcof(A) calcula o determinante de A usando cofatores;
>> detopel(A) calcula o determinante de A reduzindo A a forma triangular superior (somente para matrizes numéricas);
7. (a) Crie uma matriz A, 3 por 3, com entradas inteiras e aleatórias com o comando A=randi(3);
(b) Use o comando detopelp(A) para calcular o determinante de A;
(c) Repita os itens anteriores;
Use o MATLAB para resolver os Exercícios Numéricos a partir do Exercício 3.
para quaisquer e reais



























![Inversão de Matrizes - matematicauva.org · ij)], pois A + ( A) = 0 ... 4 1 1 1 1 2 2 1 2 3 3 5, determine a sua inversa da seguinte forma: Escreva lado a lado as matrizes A e I,](https://img.document.onl/doc/110x75/5c0df74009d3f293028c2828/inversao-de-matrizes-ij-pois-a-a-0-4-1-1-1-1-2-2-1-2-3-3-5.jpg)