Embed Size (px)
Citation preview
Edvaldo Raniere Ferreira Silva SantosEryck Lucas Figueira
Marcello Marques de OliveiraMatheus Bernardes Santos de Matos
Matheus Lima de FreitasWallisson Dantas da Silva
Alimentador Automático para Peixes
Brasil
2014, Agosto
Edvaldo Raniere Ferreira Silva SantosEryck Lucas Figueira
Marcello Marques de OliveiraMatheus Bernardes Santos de Matos
Matheus Lima de FreitasWallisson Dantas da Silva
Alimentador Automático para Peixes
Projeto de Introdução a Engenharia daComputação refente a construção de umAlimentador Automático para peixes utili-zando o microcontrolador Arduino.
Professor Doutor Ruy Altafim.
Universidade Federal da Paraíba - UFPB
Engenharia da Computação
Graduação
Brasil2014, Agosto

Sumário
1 COMPONENTES UTILIZADOS . . . . . . . . . . . . . . . . . . . . 4
2 INTERAÇÃO HOMEM-MÁQUINA . . . . . . . . . . . . . . . . . . 5
3 PROBLEMAS DURANTE O PROJETO . . . . . . . . . . . . . . . 6
4 SISTEMA DE REDUDÂNCIA . . . . . . . . . . . . . . . . . . . . . 7
5 O APLICATIVO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
6 ELETRÔNICA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Introdução
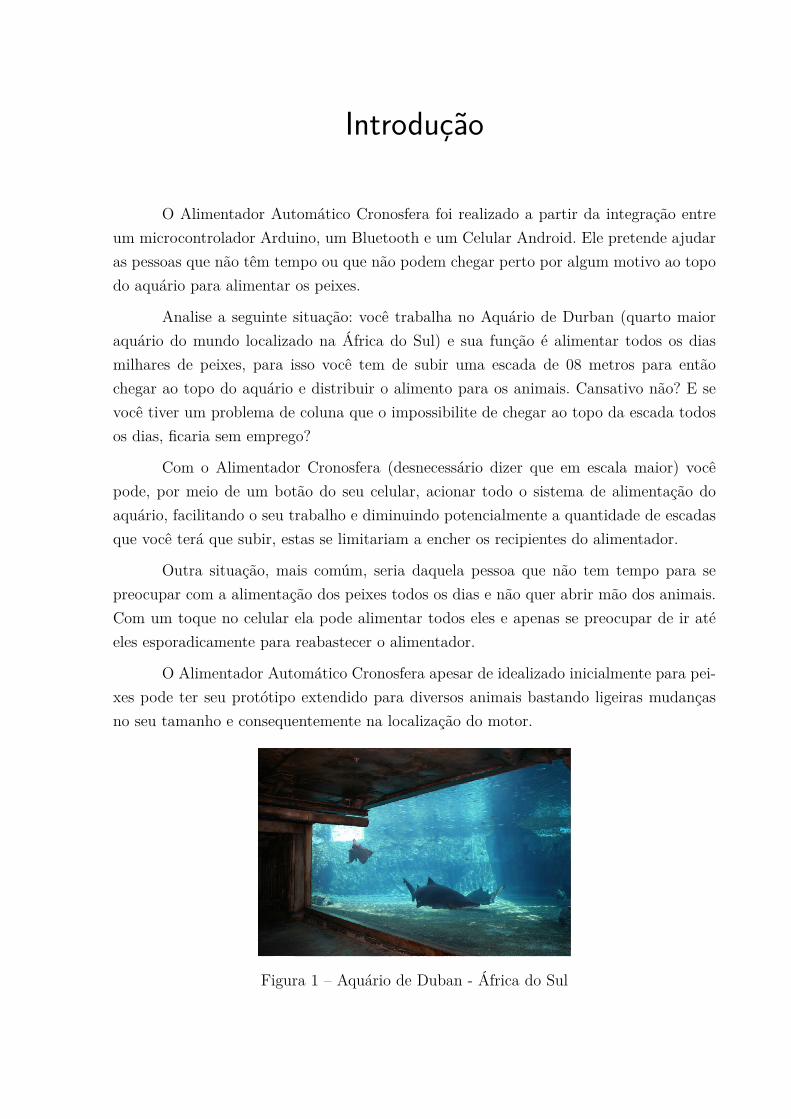
O Alimentador Automático Cronosfera foi realizado a partir da integração entreum microcontrolador Arduino, um Bluetooth e um Celular Android. Ele pretende ajudaras pessoas que não têm tempo ou que não podem chegar perto por algum motivo ao topodo aquário para alimentar os peixes.
Analise a seguinte situação: você trabalha no Aquário de Durban (quarto maioraquário do mundo localizado na África do Sul) e sua função é alimentar todos os diasmilhares de peixes, para isso você tem de subir uma escada de 08 metros para entãochegar ao topo do aquário e distribuir o alimento para os animais. Cansativo não? E sevocê tiver um problema de coluna que o impossibilite de chegar ao topo da escada todosos dias, ficaria sem emprego?
Com o Alimentador Cronosfera (desnecessário dizer que em escala maior) vocêpode, por meio de um botão do seu celular, acionar todo o sistema de alimentação doaquário, facilitando o seu trabalho e diminuindo potencialmente a quantidade de escadasque você terá que subir, estas se limitariam a encher os recipientes do alimentador.
Outra situação, mais comúm, seria daquela pessoa que não tem tempo para sepreocupar com a alimentação dos peixes todos os dias e não quer abrir mão dos animais.Com um toque no celular ela pode alimentar todos eles e apenas se preocupar de ir atéeles esporadicamente para reabastecer o alimentador.
O Alimentador Automático Cronosfera apesar de idealizado inicialmente para pei-xes pode ter seu protótipo extendido para diversos animais bastando ligeiras mudançasno seu tamanho e consequentemente na localização do motor.
Figura 1 – Aquário de Duban - África do Sul

1 Componentes Utilizados
1 x Arduino1 x Modulo Bluetooth8 x Conectores1 x Servomotor1 x Led1 x Resistor1 x Celular Android1 x Recipiente(10cm de altura; 1,5cm de raio menor; 5,75cm de raio maior; 345,8g
e área liberada para o alimento descer de 1,76cm2 = (𝜋*1,52)4 )
2 Interação Homem-Máquina
A interação homem-máquina é o estudo da interação entre pessoas e máquinas.É um assunto interdisciplinar que envolve ciência da computação, artes, design, psicolo-gia, linguística entre várias outras áreas. Ela acontece através da interface do utilizador,formada por software e hardware. Sua aplicação pode ocorrer através da manipulação deperiféricos e computadores.
Através das interfaces, o principal objetivo dessa relação é tornar tarefas o maissimples e agradável possível. O nosso trabalho através do mini controlador arduino buscauma alternativa simples e barata para o processo de alimentação de peixes em aquários.
Todo o material investido no projeto custou menos de 200 reais, sendo uma exce-lente opção para quem busca custo. O alimentador de peixes possui modulo automático,permitindo o usuário controlar o fluxo de alimento e quantidade de vezes que o alimentoé oferecido ao peixe.
Ele também possui módulo bluetooth, sendo possível controla-lo a distância. Atra-vés de um aplicativo da plataforma android pode-se alimentar o peixe de qualquer parte domundo basta ter um computador com internet ou um simples celular que possua android,isso mostra a comodidade e eficiência do projeto.
Assim, o nosso projeto tem como foco, um aparelho com baixo custo de produ-ção, fácil implementação e uso. O publico alvo destina-se a pessoas com pouco tempodisponível, buscando uma alternativa simples barata e eficaz na alimentação de peixes.
3 Problemas durante o projeto
A princípio quando passado a proposta do projeto, surgiu a pergunta: como fa-zer? Quem sabe programar? Quem tem conhecimento de eletrônica? Quem sabe fazeraplicativo para celular? Essas foram as primeiras dúvidas.
Logo depois surgiu a pergunta de como apresentar, como simular um aquário? Aprincipio iríamos mostrar só as partes eletrônicas, sem nada para descrever um aquário,foi quando tivemos a ideia de criar uma caixa de madeira que simulasse um aquário.
Para conseguir a parte eletrônica, mais precisamente o motor, abrimos uma impres-sora, pegamos dois motores (um de 5V e outro de 12V) rotacionais, para tentar substituiro motor de passo e o servo motor. Durante todo o trabalho tivemos bastante problemae tivemos que mudar várias vezes o código, para que o motor rotacional pudesse fazer oque a gente queria, chegamos pertos mas não obtivemos sucesso. Foi quando conseguimosum Servo motor e então o projeto andou.
O aplicativo do celular, Foi mais tranquilo só encontramos o problema na comu-nicação dele com o modulo bluetooth, pois o módulo recebe só variáveis do tipo Char ouint com string ele não consegue se comunicar o que causou um constragimento, porém foirapidamente resolvido.
Por fim, usamos o modulo bluetooth por que estávamos tendo trabalho na partede comunicação via wifi, pois precisávamos de um modulo wireless, um roteador na casaconectado a rede (internet) e um servidor de internet para conseguir o contato e a cone-xão com êxito. Então optamos por um modulo bluetooth, deixando um smartphone emcasa, ligado no bluetooth, que por um SMS conseguimos se comunicar com o Arduino econseguindo alimentar os peixes.
4 Sistema de Redundância
Por estarmos trabalhando com vida faz-se necessário o uso de um sistema deredundância, afinal se a comunicação falhar devido a erro do programa ou qualquer outroeventual erro, não iremos querer perder a vida do animal, o Alimentador Automático épara facilitar a vida do animal e do ser humano e não para por em jogo sua vida.
Pensando nisso criamos um sistema a mais para realizar a mesma coisa (um sistemade redundância) podemos nos comunicar com o Alimentador Automático Cronosfera porbluetooth ou por SMS, assim se um der errado ou estiver impossibilitado teremos nasnossas mãos outra forma de comunicação, dobrando a impossibilidade de erro.
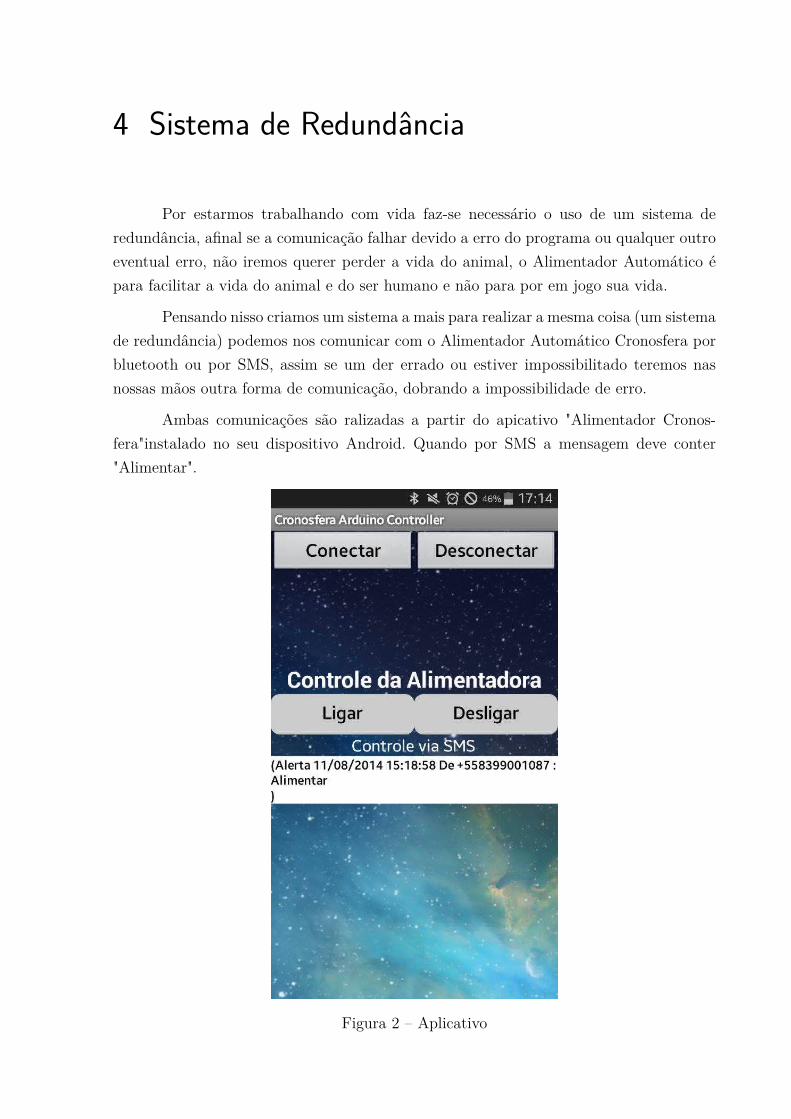
Ambas comunicações são ralizadas a partir do apicativo "Alimentador Cronos-fera"instalado no seu dispositivo Android. Quando por SMS a mensagem deve conter"Alimentar".
Figura 2 – Aplicativo
5 O Aplicativo
A proposta do projeto gerou muitos debates, porém, uma opinião era unânime:deveríamos utilizar um aplicativo de celular para realizar a interação entre o usuário, eo alimentador. Por outro lado, uma das principais funcionalidades que queríamos imple-mentar era a possibilidade de alimentar seus peixes à distância, estando você na sua sala,ou do outro lado do mundo.
Deste modo, a primeira proposta apresentada foi a utilização da internet para fazeresta comunicação. A intenção era desenvolver uma API Restful que intermediaria a trocade comandos e funções, através de requisições HTTP codificadas em linguagens de mar-cação como JSON ou XML. Assim, seria possível se comunicar com o alimentador atravésde qualquer plataforma: Windows, Mac, Linux, Android, iOs, FirefoxOs, uma televisão ouaté mesmo um relógio inteligente; bastando apenas que o mesmo tivesse acesso à internetatravés de um browser ou possibilitasse o desenvolvimento de uma aplicação integrada aosistema. No entanto, esta solução não foi implementada por um motivo simples: era ne-cessário um módulo Wireless para que o Alimentador permanecesse conectado à internete pudesse receber as informações. Infelizmente este recurso não estava disponível para aequipe.
No entanto, a possibilidade de alimentar seus peixes a distância não deixou de serimplementada. A solução proposta agora, foi a comunicação através de SMS. Neste caso, ousuário precisa deixar um smartphone conectado através de Bluetooth com o Alimentador.Logo após, basta enviar uma mensagem de texto para o smartphone conectado com opedido: "Alimentar". Se o alimentador funcionar corretamente, será retornado outro SMSavisando que a operação foi realizada com sucesso. Caso não seja possível, o aplicativoavisa da mesma forma, exibindo o motivo pelo qual não funcionou e sugerindo que ousuário tente novamente em um outro momento.
Figura 3 – Aplicativo, tamanho reduzido
6 Eletrônica
“Um Arduino e um micro controlador de placa única e um conjunto de softwarepara programa-lo. O hardware consiste em um projeto simples de hardware livre para ocontrolador, com um processador Atmel AVR e suporte embutido de entrada/saída. Osoftware consiste de uma linguagem de programação padrão e do bootloader que roda naplaca.”
Em termos práticos, um arduino e um pequeno computador que você pode pro-gramar para processar entradas e sadas entre o dispositivo e os componentes externosconectados a ele. O arduino e o que chamamos de plataforma de computação física ouembarcada, ou seja, um sistema que pode interagir com seu ambiente por meio de hard-ware e software.
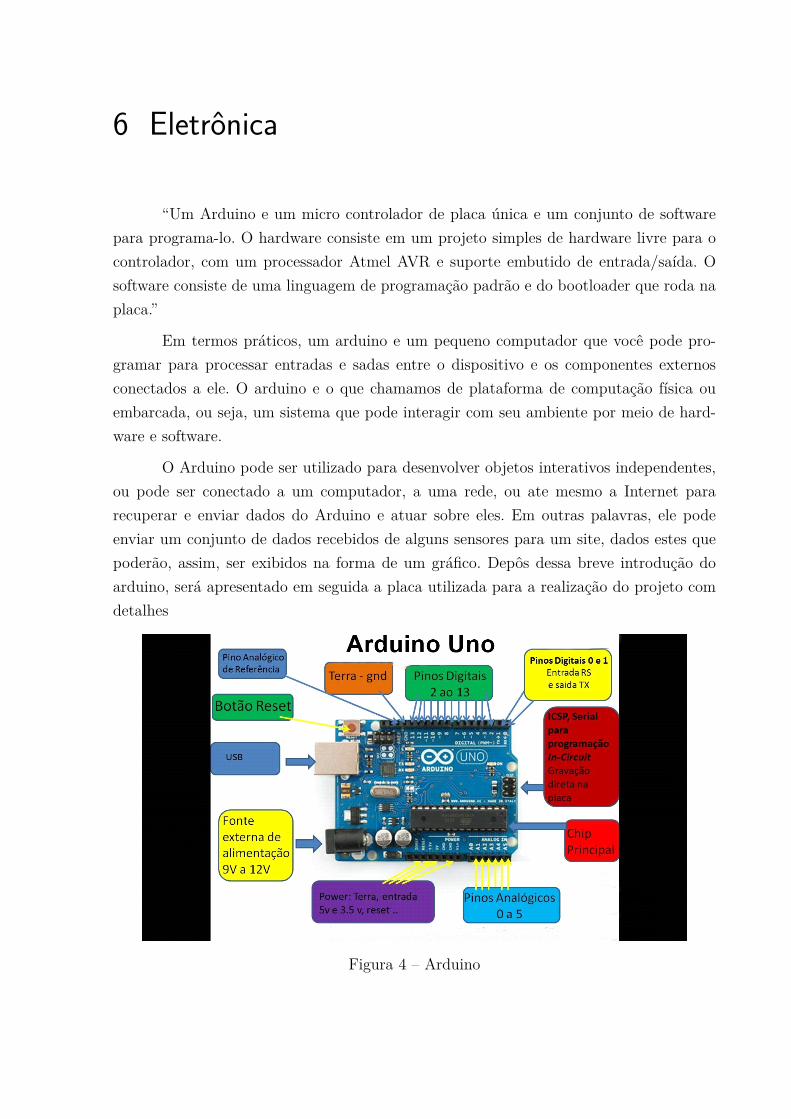
O Arduino pode ser utilizado para desenvolver objetos interativos independentes,ou pode ser conectado a um computador, a uma rede, ou ate mesmo a Internet pararecuperar e enviar dados do Arduino e atuar sobre eles. Em outras palavras, ele podeenviar um conjunto de dados recebidos de alguns sensores para um site, dados estes quepoderão, assim, ser exibidos na forma de um gráfico. Depôs dessa breve introdução doarduino, será apresentado em seguida a placa utilizada para a realização do projeto comdetalhes
Figura 4 – Arduino
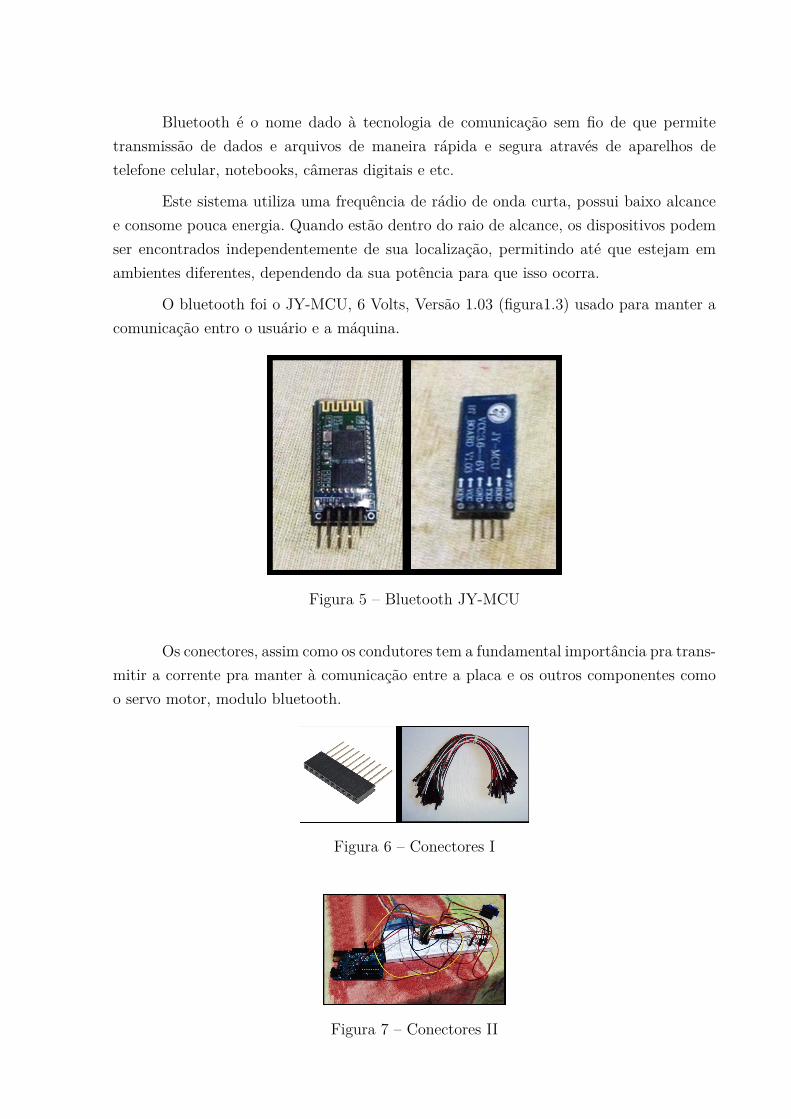
Bluetooth é o nome dado à tecnologia de comunicação sem fio de que permitetransmissão de dados e arquivos de maneira rápida e segura através de aparelhos detelefone celular, notebooks, câmeras digitais e etc.
Este sistema utiliza uma frequência de rádio de onda curta, possui baixo alcancee consome pouca energia. Quando estão dentro do raio de alcance, os dispositivos podemser encontrados independentemente de sua localização, permitindo até que estejam emambientes diferentes, dependendo da sua potência para que isso ocorra.
O bluetooth foi o JY-MCU, 6 Volts, Versão 1.03 (figura1.3) usado para manter acomunicação entro o usuário e a máquina.
Figura 5 – Bluetooth JY-MCU
Os conectores, assim como os condutores tem a fundamental importância pra trans-mitir a corrente pra manter à comunicação entre a placa e os outros componentes comoo servo motor, modulo bluetooth.
Figura 6 – Conectores I
Figura 7 – Conectores II
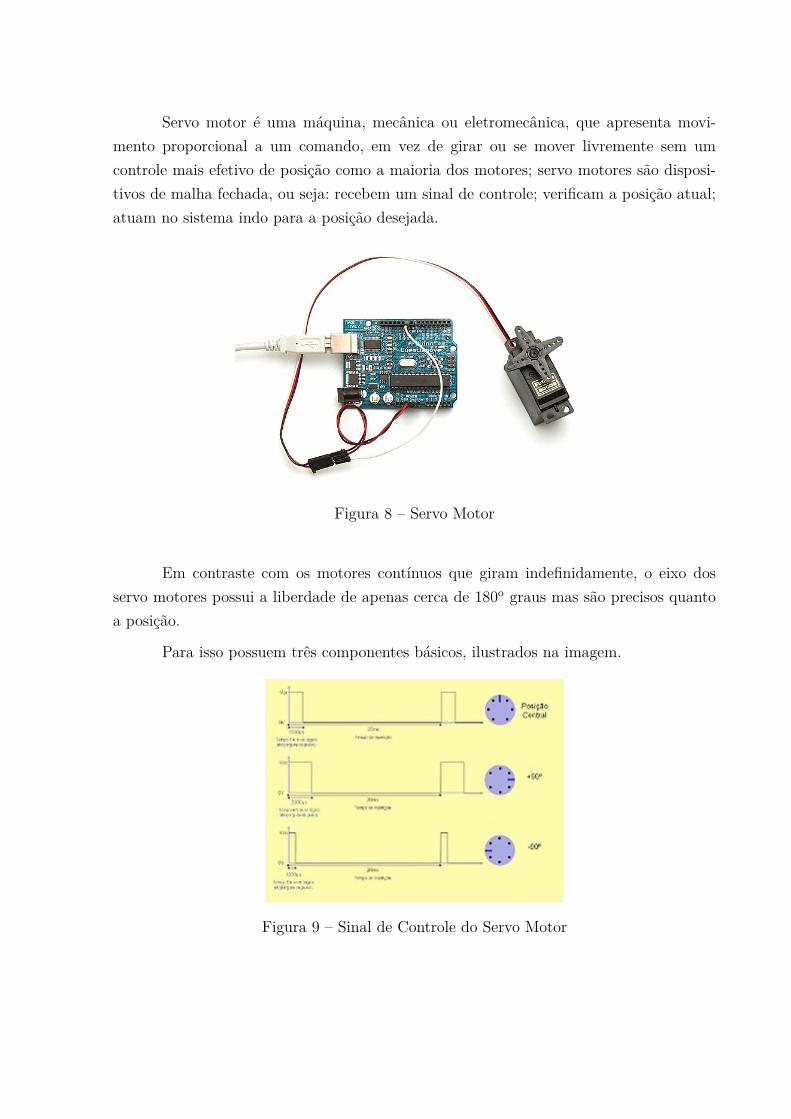
Servo motor é uma máquina, mecânica ou eletromecânica, que apresenta movi-mento proporcional a um comando, em vez de girar ou se mover livremente sem umcontrole mais efetivo de posição como a maioria dos motores; servo motores são disposi-tivos de malha fechada, ou seja: recebem um sinal de controle; verificam a posição atual;atuam no sistema indo para a posição desejada.
Figura 8 – Servo Motor
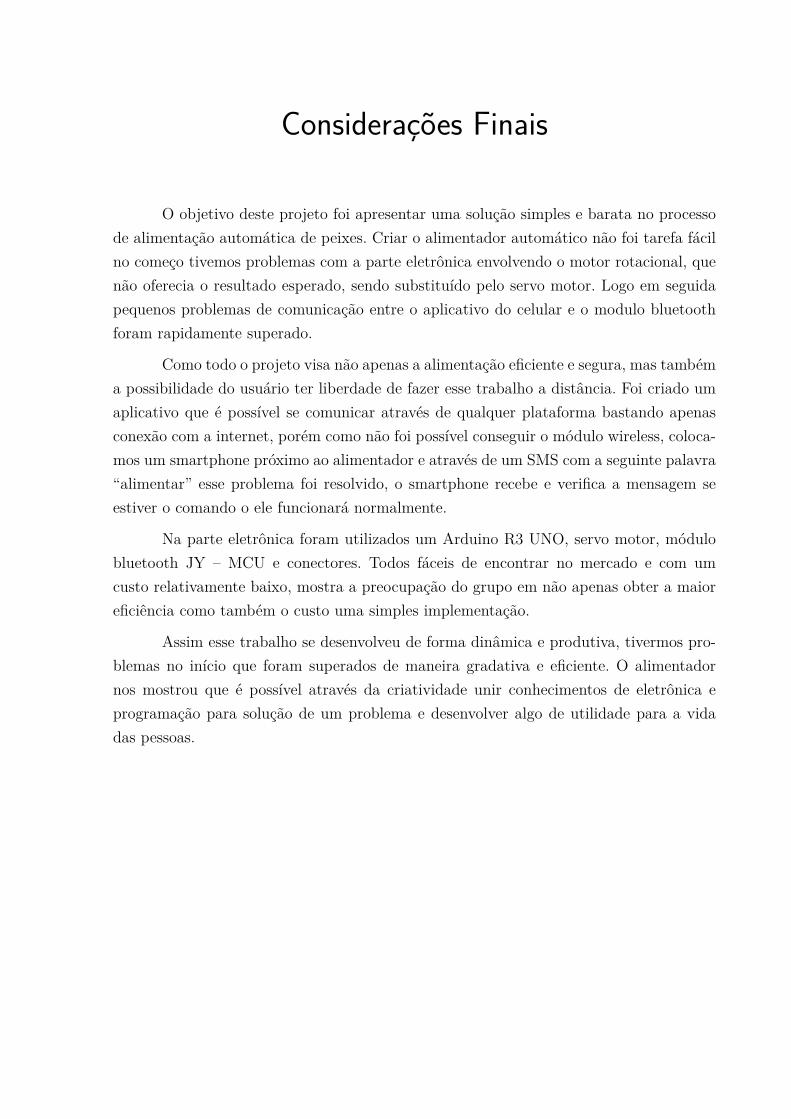
Em contraste com os motores contínuos que giram indefinidamente, o eixo dosservo motores possui a liberdade de apenas cerca de 180o graus mas são precisos quantoa posição.
Para isso possuem três componentes básicos, ilustrados na imagem.
Figura 9 – Sinal de Controle do Servo Motor

Sistema atuador - o sistema atuador é constituído por um motor elétrico, emboratambém possa encontrar servos com motores de corrente alternada, a maioria utilizamotores de corrente contínua. Também está presente um conjunto de engrenagens queforma uma caixa de redução com uma relação bem longa o que ajuda a amplificar otorque. O tamanho, torque e velocidade do motor, material das engrenagens, liberdadede giro do eixo e consumo são características-chave para especificação de servo motores.
Sensor - o sensor normalmente é um potenciômetro solidário ao eixo do servo. Ovalor de sua resistência elétrica indica a posição angular em que se encontra o eixo. Aqualidade desse vai interferir na precisão, estabilidade e vida útil do servo motor.
Circuito de controle - o circuito de controle é formado por componentes eletrô-nicos discretos ou circuitos integrados e geralmente é composto por um oscilador e umcontrolador PID (controle proporcional integrativo e derivativo) que recebe um sinal dosensor (posição do eixo) e o sinal de controle e aciona o motor no sentido necessário paraposicionar o eixo na posição desejada.
Servos possuem três fios de interface, dois para alimentação e um para o sinal decontrole. O sinal de controle utiliza o protocolo PPM (modulação por posição do pulso)que possui três características básicas: largura mínima, largura máxima e taxa de repetição(frequência).
A largura do pulso de controle determinará a posição do eixo:
- largura máxima equivale ao deslocamento do eixo em + 90o da posição central;
- largura mínima equivale ao deslocamento do eixo em -90o;
- demais larguras determinam a posição proporcionalmente. O pulso de controlepode ser visto na ilustração sobre sinais de controle de servo motores.
Em geral, a taxa de repetição é 50Hz e a largura do pulso do sinal de controlevaria de 1 a 2ms. Porém um servo motor pode funcionar a 60Hz também.
Cálculos foram realizado e o servo motor ficou com o dever de rotação para aliberação dos alimentos.
Figura 10 – Servo Motor
Considerações Finais
O objetivo deste projeto foi apresentar uma solução simples e barata no processode alimentação automática de peixes. Criar o alimentador automático não foi tarefa fácilno começo tivemos problemas com a parte eletrônica envolvendo o motor rotacional, quenão oferecia o resultado esperado, sendo substituído pelo servo motor. Logo em seguidapequenos problemas de comunicação entre o aplicativo do celular e o modulo bluetoothforam rapidamente superado.
Como todo o projeto visa não apenas a alimentação eficiente e segura, mas tambéma possibilidade do usuário ter liberdade de fazer esse trabalho a distância. Foi criado umaplicativo que é possível se comunicar através de qualquer plataforma bastando apenasconexão com a internet, porém como não foi possível conseguir o módulo wireless, coloca-mos um smartphone próximo ao alimentador e através de um SMS com a seguinte palavra“alimentar” esse problema foi resolvido, o smartphone recebe e verifica a mensagem seestiver o comando o ele funcionará normalmente.
Na parte eletrônica foram utilizados um Arduino R3 UNO, servo motor, módulobluetooth JY – MCU e conectores. Todos fáceis de encontrar no mercado e com umcusto relativamente baixo, mostra a preocupação do grupo em não apenas obter a maioreficiência como também o custo uma simples implementação.
Assim esse trabalho se desenvolveu de forma dinâmica e produtiva, tivermos pro-blemas no início que foram superados de maneira gradativa e eficiente. O alimentadornos mostrou que é possível através da criatividade unir conhecimentos de eletrônica eprogramação para solução de um problema e desenvolver algo de utilidade para a vidadas pessoas.





























