Embed Size (px)
Citation preview
Eficiente
Flexível
Confiável
alpha Value Line - NPL Dimensionamento e dados técnicos
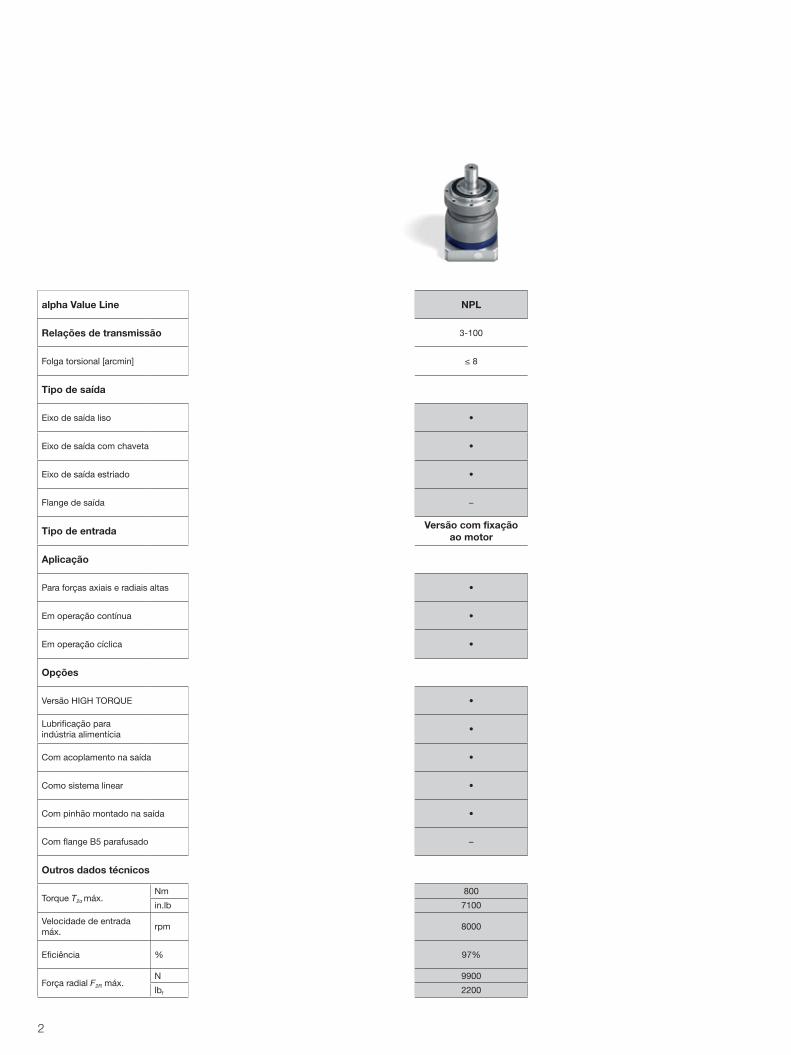
alpha Value Line NP NPS NPL NPT NPR
Relações de transmissão 3-100
Folga torsional [arcmin] ≤ 8
Tipo de saída
Eixo de saída liso • • • – •
Eixo de saída com chaveta • • • – •
Eixo de saída estriado – • • – •
Flange de saída – – – • –
Tipo de entrada Versão com fixação ao motor
Aplicação
Para forças axiais e radiais altas – • • – •
Em operação contínua • • • • –
Em operação cíclica • • • • •
Opções
Versão HIGH TORQUE • • • • •
Lubrificação para indústria alimentícia • • • • •
Com acoplamento na saída • • • • •
Como sistema linear • • • – •
Com pinhão montado na saída • • • – •
Com flange B5 parafusado • – – – –
Outros dados técnicos
Torque T2α máx.Nm 800 800 800 800 800
in.lb 7100 7100 7100 7100 7100
Velocidade de entrada máx. rpm 10000 8000 8000 10000 8000
Eficiência % 97% 97% 97% 97% 97%
Força radial F2R máx.N 8000 9900 9900 4800 9900
lbf 1800 2200 2200 1080 2200
2
Índice
Dimensionamento da alpha Value Line – NPL 4
NPL 015S 6
NPL 025S 8
NPL 035S 10
NPL 045S 12
Glossário 14
Códigos de encomenda 15
WITTENSTEIN alpha adaptada para qualquer eixo
A solução perfeita de acionamento seja qual for a exigência
A WITTENSTEIN alpha desenvolve soluções comple-tas, de um único fornecedor, para mover qualquer eixo. Podem ser usadas em praticamente qualquer aplicação – em eixos de alta precisão de máqui-na-ferramenta e sistemas de fabricação para má-quinas de embalagem, onde a máxima produtivida-de é obrigatória. O nome WITTENSTEIN alpha é sinônimo de quali-dade superior e alta confiabilidade, grande precisão e exatidão de sincronização, máxima densidade de energia, longa vida útil e montagem muito simples aos motores. A alpha Value Line é a nova família de produtos que une essas características – adaptadas especialmente para aplicações no segmento de baixo valor ou eixos secundários de tecnologia de ponta – de forma adequada à classe.
Benefícios da alpha Value Line:
· Rápida disponibilidade independentemente do tamanho do lote
· Alta flexibilidade · Capacidade de reagir rapidamente a alterações nas exigências dos clientes
· Montagem após pedido
3
Dimensionamento da alpha Value Line – NPL
Fator do modo de operação KM
Fato
r de
dim
ensi
onam
ento
f a
Esporádico (tempo de operação < 1h/dia)1 turno2/3 turnos
6
5
4
3
2
11 1,2 1,4 1,6 1,8 2 2,2 2,4 2,6 2,8 3
1,6
1,9
1,61,9
3,0
3,6
4,1
3,5
2,22,5
4,0
4,8 4,8
5,7
3,0
2,6
3,1
1,0
2
Auslegung alpha Value Line – NP
A: Vereinfachte Auslegung bei Servomotoren über maximales Motormoment: Mmax * i ≤ T2α
Schritt 1: Bestimmung des maximalen Applikationsmoments T2b: [Nm]
Schritt 2: Bestimmung des Betriebsartfaktors KM:
Anwendungs- beispiel
Zyklus Charakterististischer Drehmomenten-verlauf
Betriebs- artfaktor KM
Formatverstellung z.B. bei Verpackungsmaschinen, Antriebe für Bearbeitungsvor-richtungen, Stellantriebe, etc.
S5 Betrieb: Geringe Einschaltdauer Geringe Zyklenzahl Geringe Dynamik
1,0
Werkzeugwechsler mit gerin-ger Dynamik, Bestückungs-portalachsen, Reifenaufbau-maschine etc.
S5 Betrieb: Mittlere Einschaltdauer geringe Zyklenzahl mittlere Dynamik
1,6
Linearmodule, Linearachsen in Holzbearbeitungsmaschi-nen, Antrieb von Kugelgewin-detrieben etc.
S5 Betrieb: Mittlere ED Mittlere Zyklenzahl Mittlere Dynamik
1,9
Walzenantrieb in Druck-maschinen, Sternantrieb Abfüllmaschine etc.
S1 Betrieb: Hohe Einschaltdauer
2,2
Linearachsen in Plasma-, Laser-, Wasserstrahlschnei-der, Portale, Werkzeug-wechsler mit hoher Dynamik
S5 Betrieb: Mittlere Einschaltdauer Mittlere Zyklenzahl Hohe Dynamik;
2,5
Scara RoboterPortalroboterBearbeitungsspindeln etc.
S5 Betrieb: Hohe Einschaltdauer Hohe Zyklenzahl Hohe Dynamik
3,0
Schritt 3: Bestimmung des Auslegungsfaktors mit dem Betriebsartfaktor KM fa:
Schritt 4: Abgleich äquivalentes Applikationsmoment und max. Getriebedrehmoment T2α (aus Tabelle Schritt 5)
T2_eq = fa * T2b ≤ T2α
T2_eq = ____ * ____≤ T2α
T2_eq = ____ [Nm] ≤ ____ [Nm]
NP 005 NP 015 NP 025 NP 035 NP 045
1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig
Übersetzung i 3 - 100
Max. Drehmoment a) MF T2α Nm 18-23 51-64 128-160 320-408 640-800
Max. Drehmoment a) MA T2α Nm - 62-88 160-200 432-488 -
Max. Drehzahl n1max min-1 10000 10000 8000 10000 7000 8000 6000 7000 4000 6000
Zul. Mittlere Drehzahl n1N min-1 3800 4000 3300 3800 3100 3300 2700 3100 2000 2600
Max. Radialkraft F2RMax N 800 1700 2800 5000 8000
Mittleres Laufgeräusch LPA dB(A) 58 58 60 63 66
Lackierung Perldunkelgrau - Innovation blue
Drehrichtung An- und Abtriebsseite gleichsinnig
Schutzart IP 64
Seite xx xx xx xx xx
Schritt 5: Technische Daten Schnellauswahl
a) Maximale Drehmomente sind übersetzungsabhängig
Die passende Adapterplatte kann mit dem Onlinekonfigurator unter www.wittenstein-alpha.de ausgewählt werden. Applikationsspezifische Auslegung mit cymex® – www.cymex.de. Detaillierte Hinweise zu den einzelnen Getriebebaugrößen finden sich auf den jeweiligen Produktseiten
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
1
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
1 1,2 1,4 1,6 1,8 2 2,2 2,4 2,6 2,8 3
Ausl
egun
gsfa
ktor
f a [-
]
Betriebsartfaktor KM
Auslegungsfaktor fa
sporatisch (Betriebszeit < 1h/Tag) 1-Schicht 2-Schicht
1,0
1,6
1,611
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
1,2 1,4 1,8 2 2,2 2,4 2,6 2,8 3
1,92,2
2,5
1,6
2,6
3,0
3,5
4,0
1,9
3,1
3,6
4,1
4,8
6,2
5,2
3,2
Betriebsartfaktor KM
Au
sleg
un
gsf
akto
r f
a
B: Auslegung über die Applikation
NPL 015 NPL 025 NPL 035 NPL 045
1 estágio 2 estágios 1 estágio 2 estágios 1 estágio 2 estágios 1 estágio 2 estágios
Relação de transmissão a) 3 - 10 12 - 100 3 - 10 9 - 100 3 - 10 9 - 100 5 - 10 15 - 100
Torque máximo a) MF T2α
Nm 51-64 128-160 320-408 640-800in.lb 450-570 1130-1420 2830-3610 5660-7080
Torque máximo a) MA T2α
Nm 62-88 184-200 432-488 -in.lb 550-780 1490-1770 4250-4320 -
Velocidade de entrada máx. n1max min-1 8000 10000 7000 8000 6000 7000 4000 6000
Velocidade de entrada nominal n1N min-1 2900 3800 2700 3300 2000 2700 1800 2600
Força radial máx. F2RMax
N 2800 4200 6600 9900lbf 630 950 1490 2200
Ruído operacional médio LPA dB(A) 58 60 63 66
Pintura Pintura Cinza escuro perolado – Innovation Blue
Direção de rotação Motor e redutor mesma direção
Classe de proteção IP 65
Página 6 8 10 12
2
Auslegung alpha Value Line – NP
A: Vereinfachte Auslegung bei Servomotoren über maximales Motormoment: Mmax * i ≤ T2α
Schritt 1: Bestimmung des maximalen Applikationsmoments T2b: [Nm]
Schritt 2: Bestimmung des Betriebsartfaktors KM:
Anwendungs- beispiel
Zyklus Charakterististischer Drehmomenten-verlauf
Betriebs- artfaktor KM
Formatverstellung z.B. bei Verpackungsmaschinen, Antriebe für Bearbeitungsvor-richtungen, Stellantriebe, etc.
S5 Betrieb: Geringe Einschaltdauer Geringe Zyklenzahl Geringe Dynamik
1,0
Werkzeugwechsler mit gerin-ger Dynamik, Bestückungs-portalachsen, Reifenaufbau-maschine etc.
S5 Betrieb: Mittlere Einschaltdauer geringe Zyklenzahl mittlere Dynamik
1,6
Linearmodule, Linearachsen in Holzbearbeitungsmaschi-nen, Antrieb von Kugelgewin-detrieben etc.
S5 Betrieb: Mittlere ED Mittlere Zyklenzahl Mittlere Dynamik
1,9
Walzenantrieb in Druck-maschinen, Sternantrieb Abfüllmaschine etc.
S1 Betrieb: Hohe Einschaltdauer
2,2
Linearachsen in Plasma-, Laser-, Wasserstrahlschnei-der, Portale, Werkzeug-wechsler mit hoher Dynamik
S5 Betrieb: Mittlere Einschaltdauer Mittlere Zyklenzahl Hohe Dynamik;
2,5
Scara RoboterPortalroboterBearbeitungsspindeln etc.
S5 Betrieb: Hohe Einschaltdauer Hohe Zyklenzahl Hohe Dynamik
3,0
Schritt 3: Bestimmung des Auslegungsfaktors mit dem Betriebsartfaktor KM fa:
Schritt 4: Abgleich äquivalentes Applikationsmoment und max. Getriebedrehmoment T2α (aus Tabelle Schritt 5)
T2_eq = fa * T2b ≤ T2α
T2_eq = ____ * ____≤ T2α
T2_eq = ____ [Nm] ≤ ____ [Nm]
NP 005 NP 015 NP 025 NP 035 NP 045
1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig
Übersetzung i 3 - 100
Max. Drehmoment a) MF T2α Nm 18-23 51-64 128-160 320-408 640-800
Max. Drehmoment a) MA T2α Nm - 62-88 160-200 432-488 -
Max. Drehzahl n1max min-1 10000 10000 8000 10000 7000 8000 6000 7000 4000 6000
Zul. Mittlere Drehzahl n1N min-1 3800 4000 3300 3800 3100 3300 2700 3100 2000 2600
Max. Radialkraft F2RMax N 800 1700 2800 5000 8000
Mittleres Laufgeräusch LPA dB(A) 58 58 60 63 66
Lackierung Perldunkelgrau - Innovation blue
Drehrichtung An- und Abtriebsseite gleichsinnig
Schutzart IP 64
Seite xx xx xx xx xx
Schritt 5: Technische Daten Schnellauswahl
a) Maximale Drehmomente sind übersetzungsabhängig
Die passende Adapterplatte kann mit dem Onlinekonfigurator unter www.wittenstein-alpha.de ausgewählt werden. Applikationsspezifische Auslegung mit cymex® – www.cymex.de. Detaillierte Hinweise zu den einzelnen Getriebebaugrößen finden sich auf den jeweiligen Produktseiten
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
1
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
1 1,2 1,4 1,6 1,8 2 2,2 2,4 2,6 2,8 3
Ausl
egun
gsfa
ktor
f a [-
]
Betriebsartfaktor KM
Auslegungsfaktor fa
sporatisch (Betriebszeit < 1h/Tag) 1-Schicht 2-Schicht
1,0
1,6
1,611
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
1,2 1,4 1,8 2 2,2 2,4 2,6 2,8 3
1,92,2
2,5
1,6
2,6
3,0
3,5
4,0
1,9
3,1
3,6
4,1
4,8
6,2
5,2
3,2
Betriebsartfaktor KM
Au
sleg
un
gsf
akto
r f
a
B: Auslegung über die Applikation
2
Auslegung alpha Value Line – NP
A: Vereinfachte Auslegung bei Servomotoren über maximales Motormoment: Mmax * i ≤ T2α
Schritt 1: Bestimmung des maximalen Applikationsmoments T2b: [Nm]
Schritt 2: Bestimmung des Betriebsartfaktors KM:
Anwendungs- beispiel
Zyklus Charakterististischer Drehmomenten-verlauf
Betriebs- artfaktor KM
Formatverstellung z.B. bei Verpackungsmaschinen, Antriebe für Bearbeitungsvor-richtungen, Stellantriebe, etc.
S5 Betrieb: Geringe Einschaltdauer Geringe Zyklenzahl Geringe Dynamik
1,0
Werkzeugwechsler mit gerin-ger Dynamik, Bestückungs-portalachsen, Reifenaufbau-maschine etc.
S5 Betrieb: Mittlere Einschaltdauer geringe Zyklenzahl mittlere Dynamik
1,6
Linearmodule, Linearachsen in Holzbearbeitungsmaschi-nen, Antrieb von Kugelgewin-detrieben etc.
S5 Betrieb: Mittlere ED Mittlere Zyklenzahl Mittlere Dynamik
1,9
Walzenantrieb in Druck-maschinen, Sternantrieb Abfüllmaschine etc.
S1 Betrieb: Hohe Einschaltdauer
2,2
Linearachsen in Plasma-, Laser-, Wasserstrahlschnei-der, Portale, Werkzeug-wechsler mit hoher Dynamik
S5 Betrieb: Mittlere Einschaltdauer Mittlere Zyklenzahl Hohe Dynamik;
2,5
Scara RoboterPortalroboterBearbeitungsspindeln etc.
S5 Betrieb: Hohe Einschaltdauer Hohe Zyklenzahl Hohe Dynamik
3,0
Schritt 3: Bestimmung des Auslegungsfaktors mit dem Betriebsartfaktor KM fa:
Schritt 4: Abgleich äquivalentes Applikationsmoment und max. Getriebedrehmoment T2α (aus Tabelle Schritt 5)
T2_eq = fa * T2b ≤ T2α
T2_eq = ____ * ____≤ T2α
T2_eq = ____ [Nm] ≤ ____ [Nm]
NP 005 NP 015 NP 025 NP 035 NP 045
1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig
Übersetzung i 3 - 100
Max. Drehmoment a) MF T2α Nm 18-23 51-64 128-160 320-408 640-800
Max. Drehmoment a) MA T2α Nm - 62-88 160-200 432-488 -
Max. Drehzahl n1max min-1 10000 10000 8000 10000 7000 8000 6000 7000 4000 6000
Zul. Mittlere Drehzahl n1N min-1 3800 4000 3300 3800 3100 3300 2700 3100 2000 2600
Max. Radialkraft F2RMax N 800 1700 2800 5000 8000
Mittleres Laufgeräusch LPA dB(A) 58 58 60 63 66
Lackierung Perldunkelgrau - Innovation blue
Drehrichtung An- und Abtriebsseite gleichsinnig
Schutzart IP 64
Seite xx xx xx xx xx
Schritt 5: Technische Daten Schnellauswahl
a) Maximale Drehmomente sind übersetzungsabhängig
Die passende Adapterplatte kann mit dem Onlinekonfigurator unter www.wittenstein-alpha.de ausgewählt werden. Applikationsspezifische Auslegung mit cymex® – www.cymex.de. Detaillierte Hinweise zu den einzelnen Getriebebaugrößen finden sich auf den jeweiligen Produktseiten
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
1
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
1 1,2 1,4 1,6 1,8 2 2,2 2,4 2,6 2,8 3
Ausl
egun
gsfa
ktor
f a [-
]
Betriebsartfaktor KM
Auslegungsfaktor fa
sporatisch (Betriebszeit < 1h/Tag) 1-Schicht 2-Schicht
1,0
1,6
1,611
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
1,2 1,4 1,8 2 2,2 2,4 2,6 2,8 3
1,92,2
2,5
1,6
2,6
3,0
3,5
4,0
1,9
3,1
3,6
4,1
4,8
6,2
5,2
3,2
Betriebsartfaktor KM
Au
sleg
un
gsf
akto
r f
a
B: Auslegung über die Applikation
2
Auslegung alpha Value Line – NP
A: Vereinfachte Auslegung bei Servomotoren über maximales Motormoment: Mmax * i ≤ T2α
Schritt 1: Bestimmung des maximalen Applikationsmoments T2b: [Nm]
Schritt 2: Bestimmung des Betriebsartfaktors KM:
Anwendungs- beispiel
Zyklus Charakterististischer Drehmomenten-verlauf
Betriebs- artfaktor KM
Formatverstellung z.B. bei Verpackungsmaschinen, Antriebe für Bearbeitungsvor-richtungen, Stellantriebe, etc.
S5 Betrieb: Geringe Einschaltdauer Geringe Zyklenzahl Geringe Dynamik
1,0
Werkzeugwechsler mit gerin-ger Dynamik, Bestückungs-portalachsen, Reifenaufbau-maschine etc.
S5 Betrieb: Mittlere Einschaltdauer geringe Zyklenzahl mittlere Dynamik
1,6
Linearmodule, Linearachsen in Holzbearbeitungsmaschi-nen, Antrieb von Kugelgewin-detrieben etc.
S5 Betrieb: Mittlere ED Mittlere Zyklenzahl Mittlere Dynamik
1,9
Walzenantrieb in Druck-maschinen, Sternantrieb Abfüllmaschine etc.
S1 Betrieb: Hohe Einschaltdauer
2,2
Linearachsen in Plasma-, Laser-, Wasserstrahlschnei-der, Portale, Werkzeug-wechsler mit hoher Dynamik
S5 Betrieb: Mittlere Einschaltdauer Mittlere Zyklenzahl Hohe Dynamik;
2,5
Scara RoboterPortalroboterBearbeitungsspindeln etc.
S5 Betrieb: Hohe Einschaltdauer Hohe Zyklenzahl Hohe Dynamik
3,0
Schritt 3: Bestimmung des Auslegungsfaktors mit dem Betriebsartfaktor KM fa:
Schritt 4: Abgleich äquivalentes Applikationsmoment und max. Getriebedrehmoment T2α (aus Tabelle Schritt 5)
T2_eq = fa * T2b ≤ T2α
T2_eq = ____ * ____≤ T2α
T2_eq = ____ [Nm] ≤ ____ [Nm]
NP 005 NP 015 NP 025 NP 035 NP 045
1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig
Übersetzung i 3 - 100
Max. Drehmoment a) MF T2α Nm 18-23 51-64 128-160 320-408 640-800
Max. Drehmoment a) MA T2α Nm - 62-88 160-200 432-488 -
Max. Drehzahl n1max min-1 10000 10000 8000 10000 7000 8000 6000 7000 4000 6000
Zul. Mittlere Drehzahl n1N min-1 3800 4000 3300 3800 3100 3300 2700 3100 2000 2600
Max. Radialkraft F2RMax N 800 1700 2800 5000 8000
Mittleres Laufgeräusch LPA dB(A) 58 58 60 63 66
Lackierung Perldunkelgrau - Innovation blue
Drehrichtung An- und Abtriebsseite gleichsinnig
Schutzart IP 64
Seite xx xx xx xx xx
Schritt 5: Technische Daten Schnellauswahl
a) Maximale Drehmomente sind übersetzungsabhängig
Die passende Adapterplatte kann mit dem Onlinekonfigurator unter www.wittenstein-alpha.de ausgewählt werden. Applikationsspezifische Auslegung mit cymex® – www.cymex.de. Detaillierte Hinweise zu den einzelnen Getriebebaugrößen finden sich auf den jeweiligen Produktseiten
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
1
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
1 1,2 1,4 1,6 1,8 2 2,2 2,4 2,6 2,8 3
Ausl
egun
gsfa
ktor
f a [-
]
Betriebsartfaktor KM
Auslegungsfaktor fa
sporatisch (Betriebszeit < 1h/Tag) 1-Schicht 2-Schicht
1,0
1,6
1,611
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
1,2 1,4 1,8 2 2,2 2,4 2,6 2,8 3
1,92,2
2,5
1,6
2,6
3,0
3,5
4,0
1,9
3,1
3,6
4,1
4,8
6,2
5,2
3,2
Betriebsartfaktor KM
Au
sleg
un
gsf
akto
r f
a
B: Auslegung über die Applikation
2
Auslegung alpha Value Line – NP
A: Vereinfachte Auslegung bei Servomotoren über maximales Motormoment: Mmax * i ≤ T2α
Schritt 1: Bestimmung des maximalen Applikationsmoments T2b: [Nm]
Schritt 2: Bestimmung des Betriebsartfaktors KM:
Anwendungs- beispiel
Zyklus Charakterististischer Drehmomenten-verlauf
Betriebs- artfaktor KM
Formatverstellung z.B. bei Verpackungsmaschinen, Antriebe für Bearbeitungsvor-richtungen, Stellantriebe, etc.
S5 Betrieb: Geringe Einschaltdauer Geringe Zyklenzahl Geringe Dynamik
1,0
Werkzeugwechsler mit gerin-ger Dynamik, Bestückungs-portalachsen, Reifenaufbau-maschine etc.
S5 Betrieb: Mittlere Einschaltdauer geringe Zyklenzahl mittlere Dynamik
1,6
Linearmodule, Linearachsen in Holzbearbeitungsmaschi-nen, Antrieb von Kugelgewin-detrieben etc.
S5 Betrieb: Mittlere ED Mittlere Zyklenzahl Mittlere Dynamik
1,9
Walzenantrieb in Druck-maschinen, Sternantrieb Abfüllmaschine etc.
S1 Betrieb: Hohe Einschaltdauer
2,2
Linearachsen in Plasma-, Laser-, Wasserstrahlschnei-der, Portale, Werkzeug-wechsler mit hoher Dynamik
S5 Betrieb: Mittlere Einschaltdauer Mittlere Zyklenzahl Hohe Dynamik;
2,5
Scara RoboterPortalroboterBearbeitungsspindeln etc.
S5 Betrieb: Hohe Einschaltdauer Hohe Zyklenzahl Hohe Dynamik
3,0
Schritt 3: Bestimmung des Auslegungsfaktors mit dem Betriebsartfaktor KM fa:
Schritt 4: Abgleich äquivalentes Applikationsmoment und max. Getriebedrehmoment T2α (aus Tabelle Schritt 5)
T2_eq = fa * T2b ≤ T2α
T2_eq = ____ * ____≤ T2α
T2_eq = ____ [Nm] ≤ ____ [Nm]
NP 005 NP 015 NP 025 NP 035 NP 045
1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig
Übersetzung i 3 - 100
Max. Drehmoment a) MF T2α Nm 18-23 51-64 128-160 320-408 640-800
Max. Drehmoment a) MA T2α Nm - 62-88 160-200 432-488 -
Max. Drehzahl n1max min-1 10000 10000 8000 10000 7000 8000 6000 7000 4000 6000
Zul. Mittlere Drehzahl n1N min-1 3800 4000 3300 3800 3100 3300 2700 3100 2000 2600
Max. Radialkraft F2RMax N 800 1700 2800 5000 8000
Mittleres Laufgeräusch LPA dB(A) 58 58 60 63 66
Lackierung Perldunkelgrau - Innovation blue
Drehrichtung An- und Abtriebsseite gleichsinnig
Schutzart IP 64
Seite xx xx xx xx xx
Schritt 5: Technische Daten Schnellauswahl
a) Maximale Drehmomente sind übersetzungsabhängig
Die passende Adapterplatte kann mit dem Onlinekonfigurator unter www.wittenstein-alpha.de ausgewählt werden. Applikationsspezifische Auslegung mit cymex® – www.cymex.de. Detaillierte Hinweise zu den einzelnen Getriebebaugrößen finden sich auf den jeweiligen Produktseiten
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
1
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
1 1,2 1,4 1,6 1,8 2 2,2 2,4 2,6 2,8 3
Ausl
egun
gsfa
ktor
f a [-
]
Betriebsartfaktor KM
Auslegungsfaktor fa
sporatisch (Betriebszeit < 1h/Tag) 1-Schicht 2-Schicht
1,0
1,6
1,611
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
1,2 1,4 1,8 2 2,2 2,4 2,6 2,8 3
1,92,2
2,5
1,6
2,6
3,0
3,5
4,0
1,9
3,1
3,6
4,1
4,8
6,2
5,2
3,2
Betriebsartfaktor KM
Au
sleg
un
gsf
akto
r f
a
B: Auslegung über die Applikation
2
Auslegung alpha Value Line – NP
A: Vereinfachte Auslegung bei Servomotoren über maximales Motormoment: Mmax * i ≤ T2α
Schritt 1: Bestimmung des maximalen Applikationsmoments T2b: [Nm]
Schritt 2: Bestimmung des Betriebsartfaktors KM:
Anwendungs- beispiel
Zyklus Charakterististischer Drehmomenten-verlauf
Betriebs- artfaktor KM
Formatverstellung z.B. bei Verpackungsmaschinen, Antriebe für Bearbeitungsvor-richtungen, Stellantriebe, etc.
S5 Betrieb: Geringe Einschaltdauer Geringe Zyklenzahl Geringe Dynamik
1,0
Werkzeugwechsler mit gerin-ger Dynamik, Bestückungs-portalachsen, Reifenaufbau-maschine etc.
S5 Betrieb: Mittlere Einschaltdauer geringe Zyklenzahl mittlere Dynamik
1,6
Linearmodule, Linearachsen in Holzbearbeitungsmaschi-nen, Antrieb von Kugelgewin-detrieben etc.
S5 Betrieb: Mittlere ED Mittlere Zyklenzahl Mittlere Dynamik
1,9
Walzenantrieb in Druck-maschinen, Sternantrieb Abfüllmaschine etc.
S1 Betrieb: Hohe Einschaltdauer
2,2
Linearachsen in Plasma-, Laser-, Wasserstrahlschnei-der, Portale, Werkzeug-wechsler mit hoher Dynamik
S5 Betrieb: Mittlere Einschaltdauer Mittlere Zyklenzahl Hohe Dynamik;
2,5
Scara RoboterPortalroboterBearbeitungsspindeln etc.
S5 Betrieb: Hohe Einschaltdauer Hohe Zyklenzahl Hohe Dynamik
3,0
Schritt 3: Bestimmung des Auslegungsfaktors mit dem Betriebsartfaktor KM fa:
Schritt 4: Abgleich äquivalentes Applikationsmoment und max. Getriebedrehmoment T2α (aus Tabelle Schritt 5)
T2_eq = fa * T2b ≤ T2α
T2_eq = ____ * ____≤ T2α
T2_eq = ____ [Nm] ≤ ____ [Nm]
NP 005 NP 015 NP 025 NP 035 NP 045
1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig 1-stufig 2-stufig
Übersetzung i 3 - 100
Max. Drehmoment a) MF T2α Nm 18-23 51-64 128-160 320-408 640-800
Max. Drehmoment a) MA T2α Nm - 62-88 160-200 432-488 -
Max. Drehzahl n1max min-1 10000 10000 8000 10000 7000 8000 6000 7000 4000 6000
Zul. Mittlere Drehzahl n1N min-1 3800 4000 3300 3800 3100 3300 2700 3100 2000 2600
Max. Radialkraft F2RMax N 800 1700 2800 5000 8000
Mittleres Laufgeräusch LPA dB(A) 58 58 60 63 66
Lackierung Perldunkelgrau - Innovation blue
Drehrichtung An- und Abtriebsseite gleichsinnig
Schutzart IP 64
Seite xx xx xx xx xx
Schritt 5: Technische Daten Schnellauswahl
a) Maximale Drehmomente sind übersetzungsabhängig
Die passende Adapterplatte kann mit dem Onlinekonfigurator unter www.wittenstein-alpha.de ausgewählt werden. Applikationsspezifische Auslegung mit cymex® – www.cymex.de. Detaillierte Hinweise zu den einzelnen Getriebebaugrößen finden sich auf den jeweiligen Produktseiten
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
T2b
T2b
T2b
T2b
T2b
T2b
t
t
t
t
t
t
tz
tz
tz
tz
tz
tz
1
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
1 1,2 1,4 1,6 1,8 2 2,2 2,4 2,6 2,8 3
Ausl
egun
gsfa
ktor
f a [-
]
Betriebsartfaktor KM
Auslegungsfaktor fa
sporatisch (Betriebszeit < 1h/Tag) 1-Schicht 2-Schicht
1,0
1,6
1,611
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
1,2 1,4 1,8 2 2,2 2,4 2,6 2,8 3
1,92,2
2,5
1,6
2,6
3,0
3,5
4,0
1,9
3,1
3,6
4,1
4,8
6,2
5,2
3,2
Betriebsartfaktor KM
Au
sleg
un
gsf
akto
r f
a
B: Auslegung über die Applikation
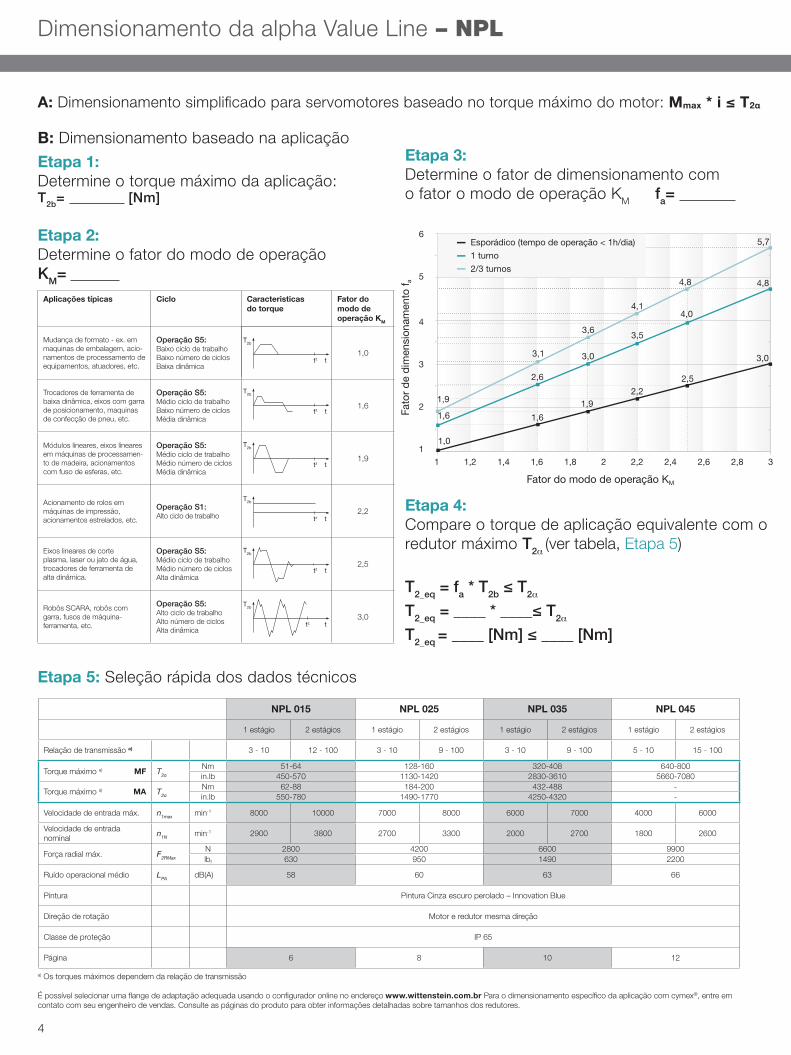
A: Dimensionamento simplificado para servomotores baseado no torque máximo do motor: Mmax * i ≤ T2α
Etapa 1: Determine o torque máximo da aplicação: T2b= [Nm]
Etapa 2: Determine o fator do modo de operação KM=
B: Dimensionamento baseado na aplicaçãoEtapa 3: Determine o fator de dimensionamento com o fator o modo de operação KM fa=
Etapa 4: Compare o torque de aplicação equivalente com o redutor máximo T2α
(ver tabela, Etapa 5)
T2_eq = fa * T2b ≤ T2α
T2_eq = ____ * ____≤ T2α
T2_eq = ____ [Nm] ≤ ____ [Nm]
Etapa 5: Seleção rápida dos dados técnicos
Aplicações típicas Ciclo Caracteristicas do torque
Fator do modo de operação KM
Mudança de formato - ex. em maquinas de embalagem, acio-namentos de processamento de equipamentos, atuadores, etc.
Operação S5:Baixo ciclo de trabalhoBaixo número de ciclosBaixa dinâmica
1,0
Trocadores de ferramenta de baixa dinâmica, eixos com garra de posicionamento, maquinas de confecção de pneu, etc.
Operação S5: Médio ciclo de trabalhoBaixo número de ciclosMédia dinâmica
1,6
Módulos lineares, eixos lineares em máquinas de processamen-to de madeira, acionamentos com fuso de esferas, etc.
Operação S5: Médio ciclo de trabalhoMédio número de ciclosMédia dinâmica
1,9
Acionamento de rolos em máquinas de impressão, acionamentos estrelados, etc.
Operação S1:Alto ciclo de trabalho 2,2
Eixos lineares de corte plasma, laser ou jato de água, trocadores de ferramenta de alta dinâmica.
Operação S5: Médio ciclo de trabalhoMédio número de ciclosAlta dinâmica
2,5
Robôs SCARA, robôs com garra, fusos de máquina- ferramenta, etc.
Operação S5: Alto ciclo de trabalhoAlto número de ciclosAlta dinâmica
3,0
a) Os torques máximos dependem da relação de transmissão
É possível selecionar uma flange de adaptação adequada usando o configurador online no endereço www.wittenstein.com.br Para o dimensionamento específico da aplicação com cymex®, entre em contato com seu engenheiro de vendas. Consulte as páginas do produto para obter informações detalhadas sobre tamanhos dos redutores.
4
alpha
3
100
1000
10000
1 10 100
Äqui
vale
nte
Abtr
iebs
kraf
t F2_
eq[N
]
Abstand vom Wellenbund / Flansch x2 [mm]
Kraft am Abtrieb - NP
NP 005
NP 015
NP 025
NP 035
NP 045
Berücksichtigung von Radial- oder Axialkräften am Abtrieb:Bei Kräften auf den Abtrieb bitte zusätzlich Schritt 6 und 7 durchführen (z.B. durch montierte Riemenscheiben, Ritzel oder Hebel).
Bedingungen bei wirkender Axialkraft F2a:
1. F2a ≤ 0,25 * F2r ⇒ ( _____ ≤ 0,25 * _____) ist erfüllt ist nicht erfüllt: Auslegung mit cymex
2. y2 ≤ x2 ⇒ ( _____ ≤ _____) ist erfüllt ist nicht erfüllt: Auslegung mit cymex
Schritt 7: Bestimmung der max. äquivalenten Kraft auf den Abtrieb F2_eq
F2_eq = F2r + 0,25 * F2a ≤ F2RMax (Bestimmung F2RMax aus Diagramm unten)
F2_eq = _____ + 0,25 * _____ ≤ _____
F2_eq = _____ [N] ≤ _____ [N] ist erfüllt
ist nicht erfüllt: Höhere Radialkräfte mit den Varianten NPS, NPL und NPR sind möglich.
Schritt 6 (falls externe Kräfte vorhanden): Bestimmung der wirkenden Kräfte und Überprüfung der Randbedingungen
Radialkraft F2r: ______ [N]Abstand Radialkraft x2: ______ [mm]Axialkraft F2a: ______ [N]Abstand Axialkraft y2: ______ [mm] (erforderlich wenn F2a anliegt)
sporadisch / 1-Schicht2-/3-Schicht
500
1000
5000
10000
5 10 100
100
1 50
Abstand Radialkraft x2 [mm]
Max
imal
e R
adia
lkra
ft F
2RM
ax [N
]
F2r
F2a
X2
Y2y 2
x2
alpha
1 5 10 50 1001000
10000
1 10 100
Max
imal
e Ra
dial
kraf
t F2R
_max
[N]
Abstand Radialkraft x2 [mm]
Kraft am Abtrieb - NPS, NPL, NPR
NPS 045
NPS 035
NPS 025
NPS 015
1000
5000
10 000
Fator do modo de operação KM
Fato
r de
dim
ensi
onam
ento
f a
Esporádico (tempo de operação < 1h/dia)1 turno2/3 turnos
6
5
4
3
2
11 1,2 1,4 1,6 1,8 2 2,2 2,4 2,6 2,8 3
1,6
1,9
1,61,9
3,0
3,6
4,1
3,5
2,22,5
4,0
4,8 4,8
5,7
3,0
2,6
3,1
1,0
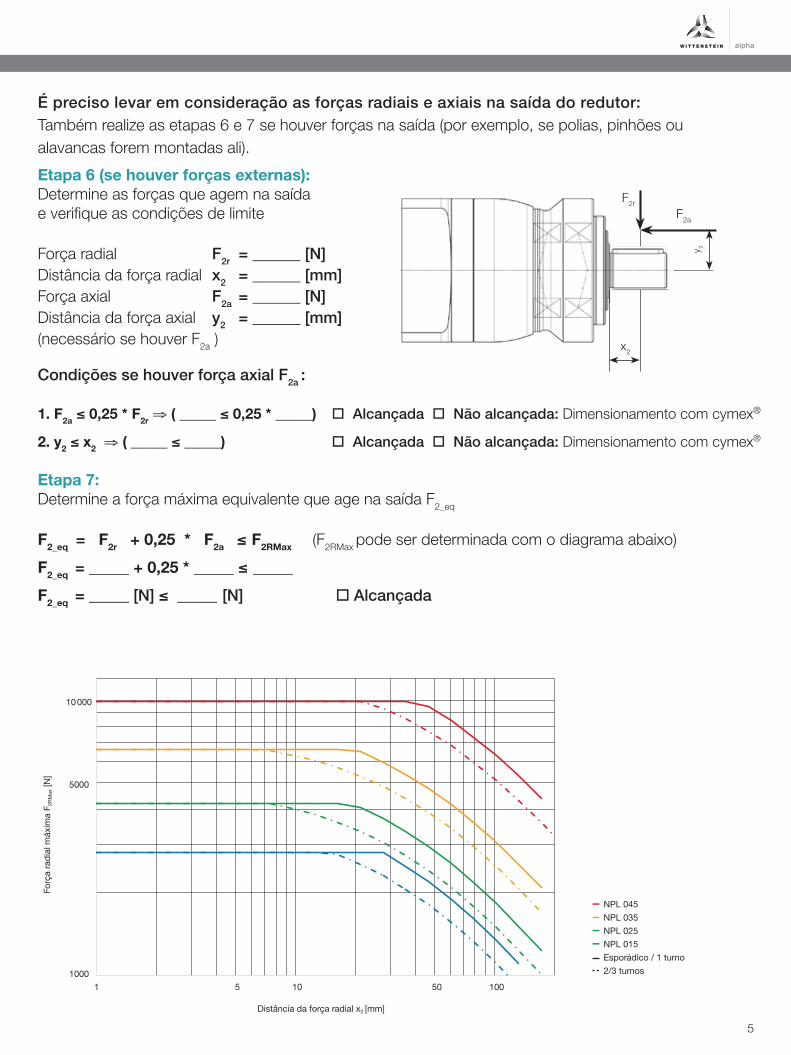
É preciso levar em consideração as forças radiais e axiais na saída do redutor:Também realize as etapas 6 e 7 se houver forças na saída (por exemplo, se polias, pinhões ou alavancas forem montadas ali).
Condições se houver força axial F2a :
1. F2a ≤ 0,25 * F2r ⇒ ( _____ ≤ 0,25 * _____) Alcançada Não alcançada: Dimensionamento com cymex®
2. y2 ≤ x2 ⇒ ( _____ ≤ _____) Alcançada Não alcançada: Dimensionamento com cymex®
Etapa 7: Determine a força máxima equivalente que age na saída F2_eq
F2_eq = F2r + 0,25 * F2a ≤ F2RMax (F2RMax pode ser determinada com o diagrama abaixo)
F2_eq = _____ + 0,25 * _____ ≤ _____
F2_eq = _____ [N] ≤ _____ [N] Alcançada
Etapa 6 (se houver forças externas): Determine as forças que agem na saída e verifique as condições de limite
Força radial F2r = ______ [N]Distância da força radial x2 = ______ [mm]Força axial F2a = ______ [N]Distância da força axial y2 = ______ [mm] (necessário se houver F2a )
Distância da força radial x2 [mm]
Forç
a ra
dial
máx
ima
F 2R
Max
[N]
NPL 045NPL 035NPL 025NPL 015Esporádico / 1 turno2/3 turnos
5
Relação de transmissão a) i
Torque máximo MF T2α Nm
in.lb
Torque máximo HIGH TORQUE – MA T2α Nm
in.lb
Torque de parada de emergência b) T2Not Nm
in.lb
Velocidade de entrada nominal c) n1N min-1
Velocidade de entrada máx. n1Max min-1
Máx. folga torsional jt arcmin
Força axial máx. d) F2AMax N
lbf
Força radial máx. d) F2RMax N
lbf
Peso incl. flange de adaptação padrão e) m kg
lbm
Ruído operacional f) LPA dB(A)
Temperatura da carcaça máx. permitida °C
F
Temperatura ambiente °C
F
Lubrificação Lubrificado permanentemente
Pintura Carcaça: cinza escuro perolado / Lado do acionamento: Innovation Blue
Direção de rotação Motor e redutor na mesma direção
Tipo de proteção
Momento de inércia (relacionado ao acionamento)
kgcm2
10-3 in.lb.s2
Diâmetro do eixo de entradaPadrão
mmgrande
Rápida seleção do redutor com base na característica do motor*:Torque máx. T2α ≥ Tmax motor * i*Consulte as páginas 4 e 5 do catálogo para obter informações detalhadas sobre a seleção manual baseada na aplicação.
Para o dimensionamento específico da aplicação com cymex®, consulte seu engenheiro de vendas.
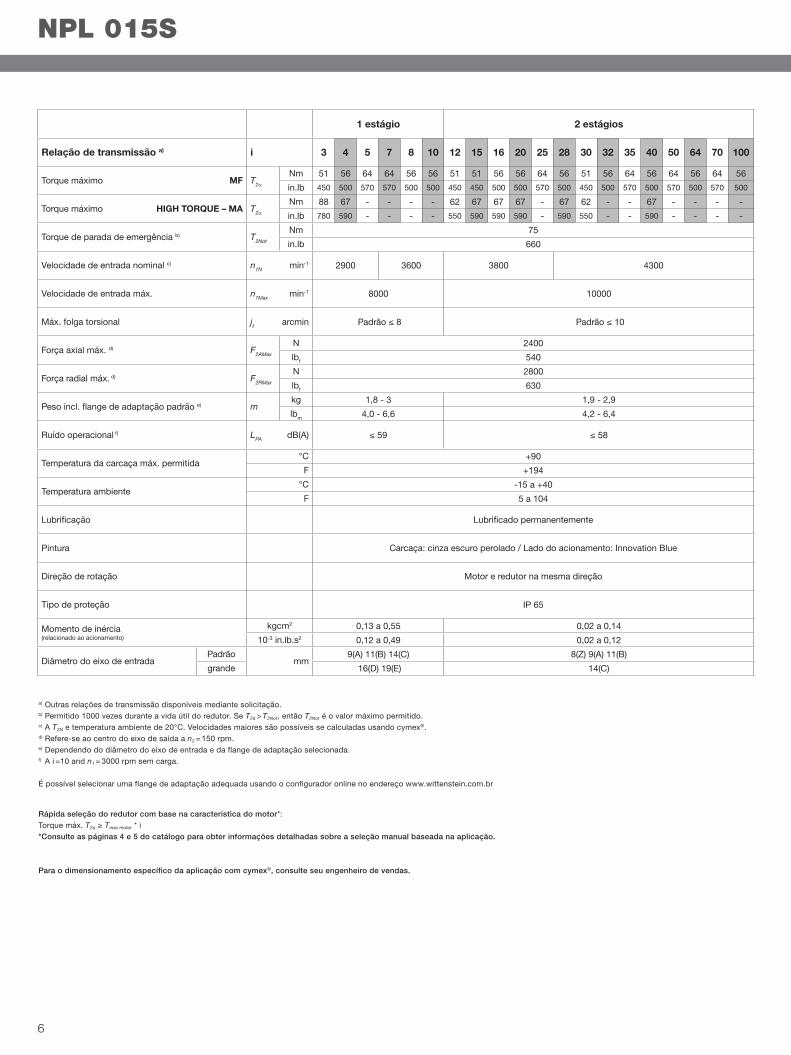
a) Outras relações de transmissão disponíveis mediante solicitação.b) Permitido 1000 vezes durante a vida útil do redutor. Se T2α > T2Not, então T2Not é o valor máximo permitido.c) A T2N e temperatura ambiente de 20°C. Velocidades maiores são possíveis se calculadas usando cymex®.d) Refere-se ao centro do eixo de saída a n2 = 150 rpm.e) Dependendo do diâmetro do eixo de entrada e da flange de adaptação selecionada.f) A i =10 and n1 = 3000 rpm sem carga.
É possível selecionar uma flange de adaptação adequada usando o configurador online no endereço www.wittenstein.com.br
NPL 015S
1 estágio 2 estágios
3 4 5 7 8 10 12 15 16 20 25 28 30 32 35 40 50 64 70 100
51 56 64 64 56 56 51 51 56 56 64 56 51 56 64 56 64 56 64 56
450 500 570 570 500 500 450 450 500 500 570 500 450 500 570 500 570 500 570 500
88 67 - - - - 62 67 67 67 - 67 62 - - 67 - - - -
780 590 - - - - 550 590 590 590 - 590 550 - - 590 - - - -
75
660
2900 3600 3800 4300
8000 10000
Padrão ≤ 8 Padrão ≤ 10
2400
540
2800
630
1,8 - 3 1,9 - 2,9
4,0 - 6,6 4,2 - 6,4
≤ 59 ≤ 58
+90
+194
-15 a +40
5 a 104
IP 65
0,13 a 0,55 0,02 a 0,14
0,12 a 0,49 0,02 a 0,12
9(A) 11(B) 14(C) 8(Z) 9(A) 11(B)
16(D) 19(E) 14(C)
6
alpha
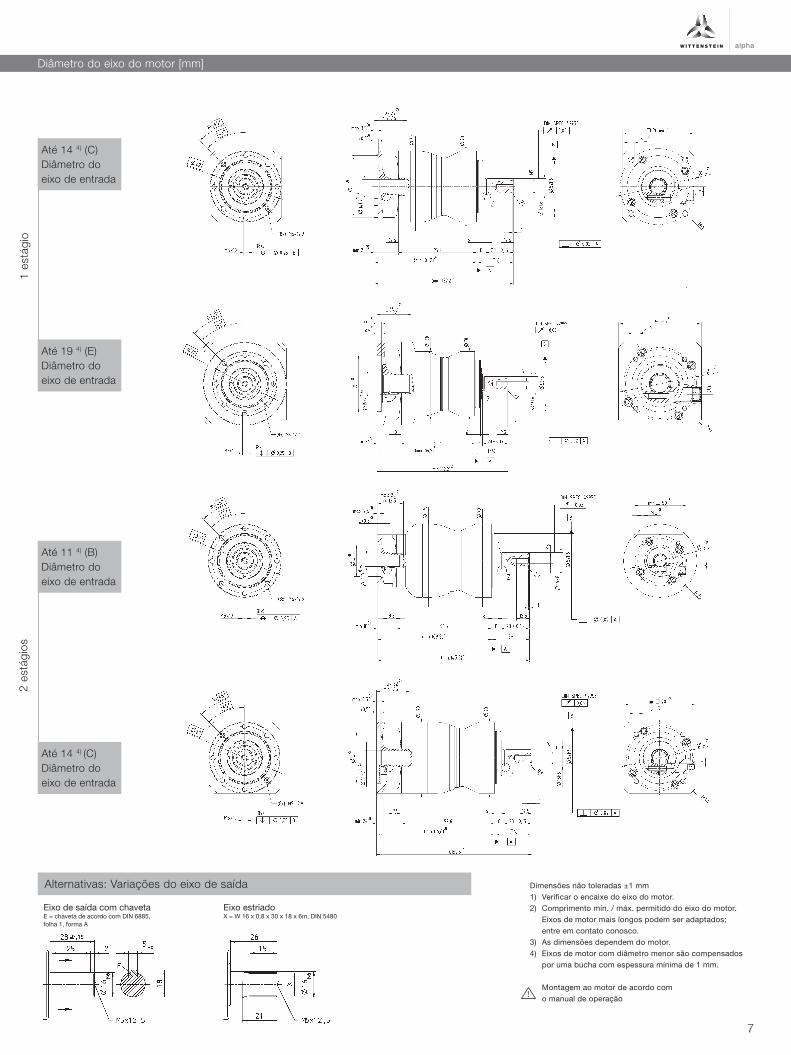
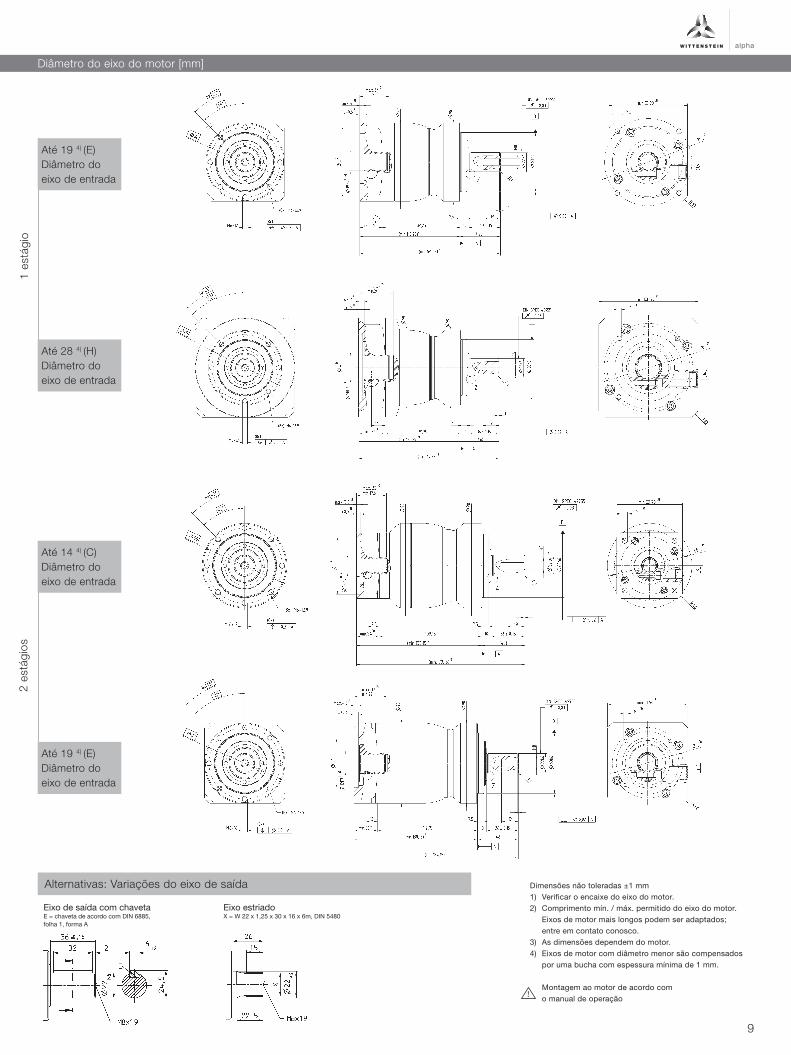
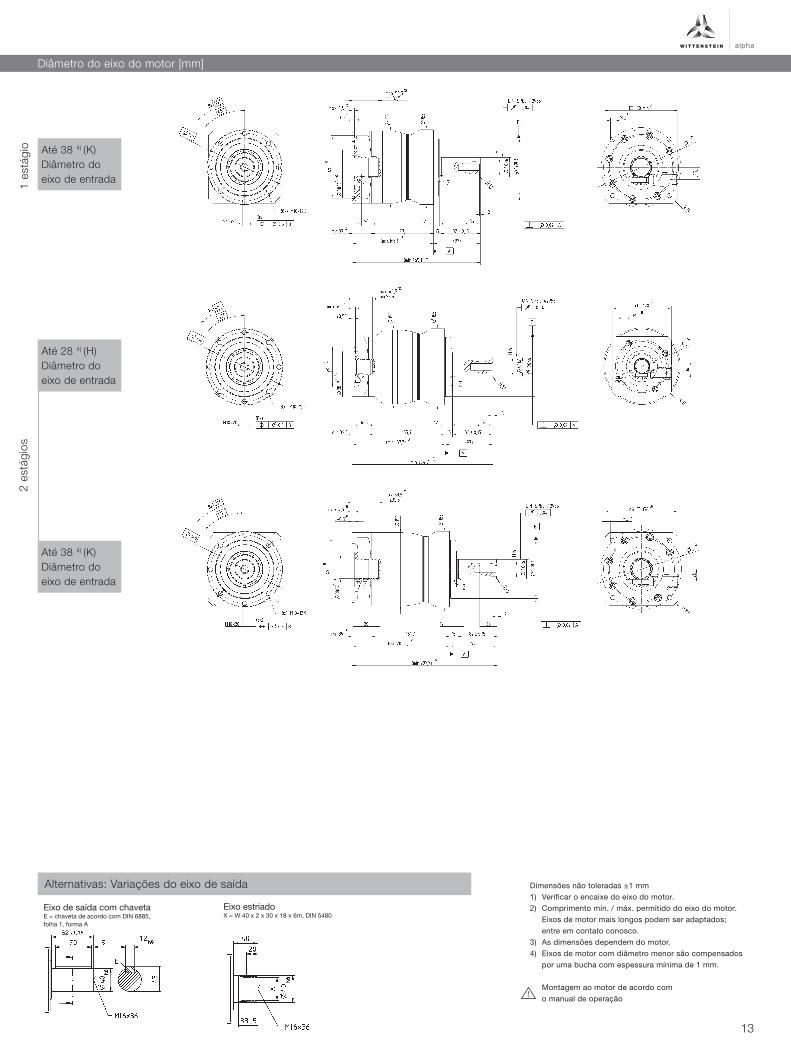
Diâmetro do eixo do motor [mm]
!
Dimensões não toleradas ±1 mm1) Verificar o encaixe do eixo do motor.2) Comprimento mín. / máx. permitido do eixo do motor. Eixos de motor mais longos podem ser adaptados; entre em contato conosco.3) As dimensões dependem do motor.4) Eixos de motor com diâmetro menor são compensados por uma bucha com espessura mínima de 1 mm.
Montagem ao motor de acordo com o manual de operação
Alternativas: Variações do eixo de saída
Eixo estriadoX = W 16 x 0,8 x 30 x 18 x 6m, DIN 5480
Eixo de saída com chavetaE = chaveta de acordo com DIN 6885, folha 1, forma A
Até 19 4) (E) Diâmetro do eixo de entrada
Até 14 4) (C) Diâmetro do eixo de entrada
Até 14 4) (C) Diâmetro do eixo de entrada
Até 11 4) (B) Diâmetro do eixo de entrada
1 es
tági
o2
está
gios
7
Relação de transmissão a) i
Torque máximo MF T2α Nm
in.lb
Torque máximo HIGH TORQUE – MA T2α Nm
in.lb
Torque de parada de emergência b) T2Not Nm
in.lb
Velocidade de entrada nominal c) n1N min-1
Velocidade de entrada máx. n1Max min-1
Máx. folga torsional jt arcmin
Força axial máx. d) F2AMax N
lbf
Força radial máx. d) F2RMax N
lbf
Peso incl. flange de adaptação padrão e) m kg
lbm
Ruído operacional f) LPA dB(A)
Temperatura da carcaça máx. permitida °C
F
Temperatura ambiente °C
F
Lubrificação Lubrificado permanentemente
Pintura Carcaça: cinza escuro perolado / Lado do acionamento: Innovation Blue
Direção de rotação Motor e redutor na mesma direção
Tipo de proteção
Momento de inércia (relacionado ao acionamento)
kgcm2
10-3 in.lb.s2
Diâmetro do eixo de entradaPadrão
mmgrande
Rápida seleção do redutor com base na característica do motor*:Torque máx. T2α ≥ Tmax motor * i*Consulte as páginas 4 e 5 do catálogo para obter informações detalhadas sobre a seleção manual baseada na aplicação.
Para o dimensionamento específico da aplicação com cymex®, consulte seu engenheiro de vendas.
a) Outras relações de transmissão disponíveis mediante solicitação.b) Permitido 1000 vezes durante a vida útil do redutor. Se T2α > T2Not, então T2Not é o valor máximo permitido.c) A T2N e temperatura ambiente de 20°C. Velocidades maiores são possíveis se calculadas usando cymex®.d) Refere-se ao centro do eixo de saída a n2 = 150 rpm.e) Dependendo do diâmetro do eixo de entrada e da flange de adaptação selecionada.f) A i =10 and n1 = 3000 rpm sem carga.
É possível selecionar uma flange de adaptação adequada usando o configurador online no endereço www.wittenstein.com.br
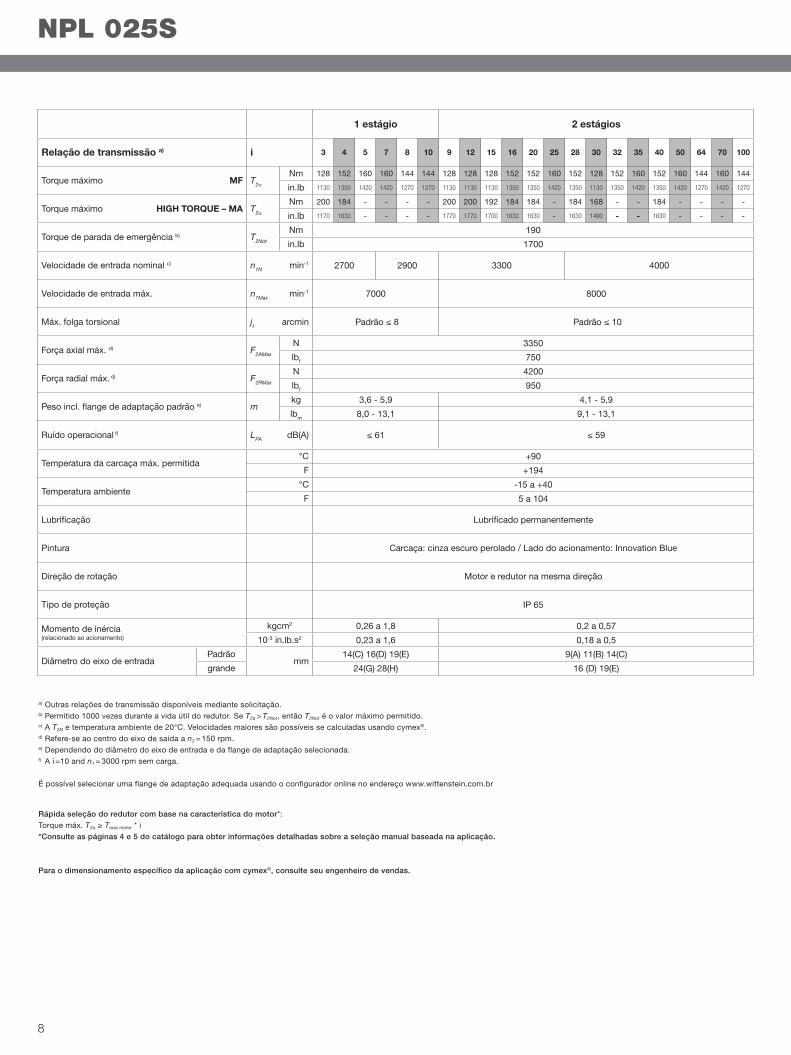
NPL 025S
1 estágio 2 estágios
3 4 5 7 8 10 9 12 15 16 20 25 28 30 32 35 40 50 64 70 100
128 152 160 160 144 144 128 128 128 152 152 160 152 128 152 160 152 160 144 160 144
1130 1350 1420 1420 1270 1270 1130 1130 1130 1350 1350 1420 1350 1130 1350 1420 1350 1420 1270 1420 1270
200 184 - - - - 200 200 192 184 184 - 184 168 - - 184 - - - -
1170 1630 - - - - 1770 1770 1700 1630 1630 - 1630 1490 - - 1630 - - - -
190
1700
2700 2900 3300 4000
7000 8000
Padrão ≤ 8 Padrão ≤ 10
3350
750
4200
950
3,6 - 5,9 4,1 - 5,9
8,0 - 13,1 9,1 - 13,1
≤ 61 ≤ 59
+90
+194
-15 a +40
5 a 104
IP 65
0,26 a 1,8 0,2 a 0,57
0,23 a 1,6 0,18 a 0,5
14(C) 16(D) 19(E) 9(A) 11(B) 14(C)
24(G) 28(H) 16 (D) 19(E)
8
alpha
Diâmetro do eixo do motor [mm]
!
Dimensões não toleradas ±1 mm1) Verificar o encaixe do eixo do motor.2) Comprimento mín. / máx. permitido do eixo do motor. Eixos de motor mais longos podem ser adaptados; entre em contato conosco.3) As dimensões dependem do motor.4) Eixos de motor com diâmetro menor são compensados por uma bucha com espessura mínima de 1 mm.
Montagem ao motor de acordo com o manual de operação
1 es
tági
o2
está
gios
Até 28 4) (H) Diâmetro do eixo de entrada
Até 19 4) (E) Diâmetro do eixo de entrada
Até 19 4) (E) Diâmetro do eixo de entrada
Até 14 4) (C) Diâmetro do eixo de entrada
Eixo estriadoX = W 22 x 1,25 x 30 x 16 x 6m, DIN 5480
Alternativas: Variações do eixo de saída
Eixo de saída com chavetaE = chaveta de acordo com DIN 6885, folha 1, forma A
9
Relação de transmissão a) i
Torque máximo MF T2α Nm
in.lb
Torque máximo HIGH TORQUE – MA T2α Nm
in.lb
Torque de parada de emergência b) T2Not Nm
in.lb
Velocidade de entrada nominal c) n1N min-1
Velocidade de entrada máx. n1Max min-1
Máx. folga torsional jt arcmin
Força axial máx. d) F2AMax N
lbf
Força radial máx. d) F2RMax N
lbf
Peso incl. flange de adaptação padrão e) m kg
lbm
Ruído operacional f) LPA dB(A)
Temperatura da carcaça máx. permitida °C
F
Temperatura ambiente °C
F
Lubrificação Lubrificado permanentemente
Pintura Carcaça: cinza escuro perolado / Lado do acionamento: Innovation Blue
Direção de rotação Motor e redutor na mesma direção
Tipo de proteção
Momento de inércia (relacionado ao acionamento)
kgcm2
10-3 in.lb.s2
Diâmetro do eixo de entradaPadrão
mmgrande
Rápida seleção do redutor com base na característica do motor*:Torque máx. T2α ≥ Tmax motor * i*Consulte as páginas 4 e 5 do catálogo para obter informações detalhadas sobre a seleção manual baseada na aplicação.
Para o dimensionamento específico da aplicação com cymex®, consulte seu engenheiro de vendas.
a) Outras relações de transmissão disponíveis mediante solicitação.b) Permitido 1000 vezes durante a vida útil do redutor. Se T2α > T2Not, então T2Not é o valor máximo permitido.c) A T2N e temperatura ambiente de 20°C. Velocidades maiores são possíveis se calculadas usando cymex®.d) Refere-se ao centro do eixo de saída a n2 = 150 rpm.e) Dependendo do diâmetro do eixo de entrada e da flange de adaptação selecionada.f) A i =10 and n1 = 3000 rpm sem carga.
É possível selecionar uma flange de adaptação adequada usando o configurador online no endereço www.wittenstein.com.br
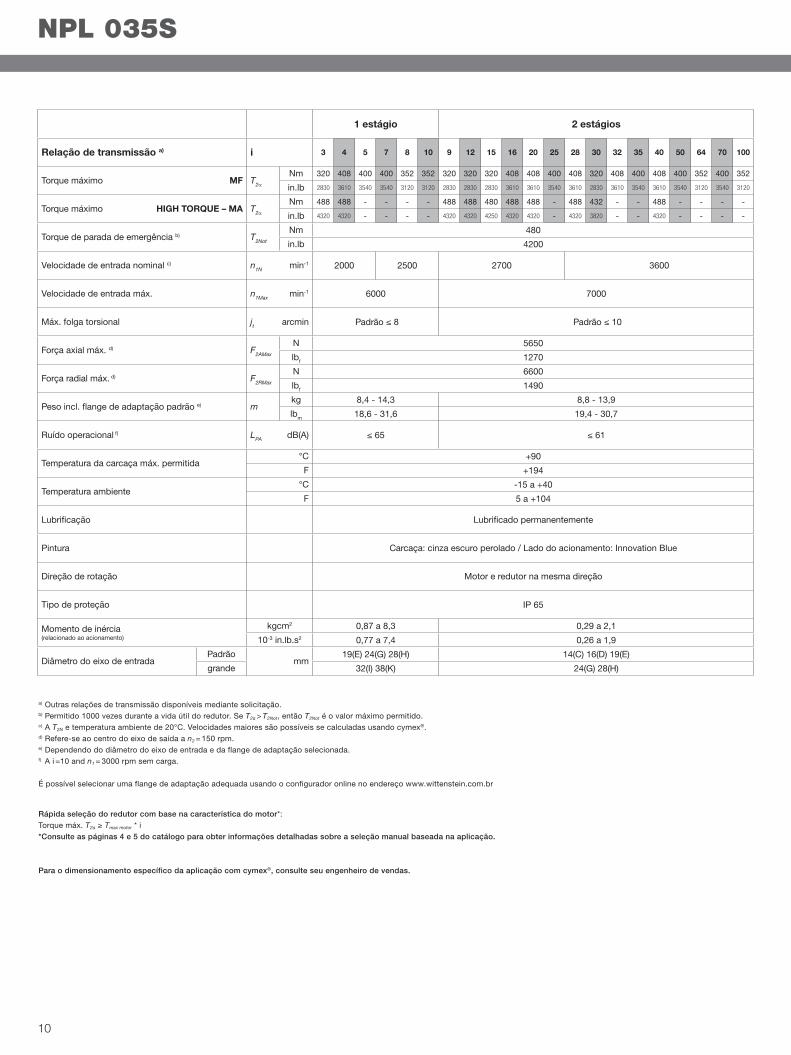
NPL 035S
1 estágio 2 estágios
3 4 5 7 8 10 9 12 15 16 20 25 28 30 32 35 40 50 64 70 100
320 408 400 400 352 352 320 320 320 408 408 400 408 320 408 400 408 400 352 400 352
2830 3610 3540 3540 3120 3120 2830 2830 2830 3610 3610 3540 3610 2830 3610 3540 3610 3540 3120 3540 3120
488 488 - - - - 488 488 480 488 488 - 488 432 - - 488 - - - -
4320 4320 - - - - 4320 4320 4250 4320 4320 - 4320 3820 - - 4320 - - - -
480
4200
2000 2500 2700 3600
6000 7000
Padrão ≤ 8 Padrão ≤ 10
5650
1270
6600
1490
8,4 - 14,3 8,8 - 13,9
18,6 - 31,6 19,4 - 30,7
≤ 65 ≤ 61
+90
+194
-15 a +40
5 a +104
IP 65
0,87 a 8,3 0,29 a 2,1
0,77 a 7,4 0,26 a 1,9
19(E) 24(G) 28(H) 14(C) 16(D) 19(E)
32(I) 38(K) 24(G) 28(H)
10
alpha
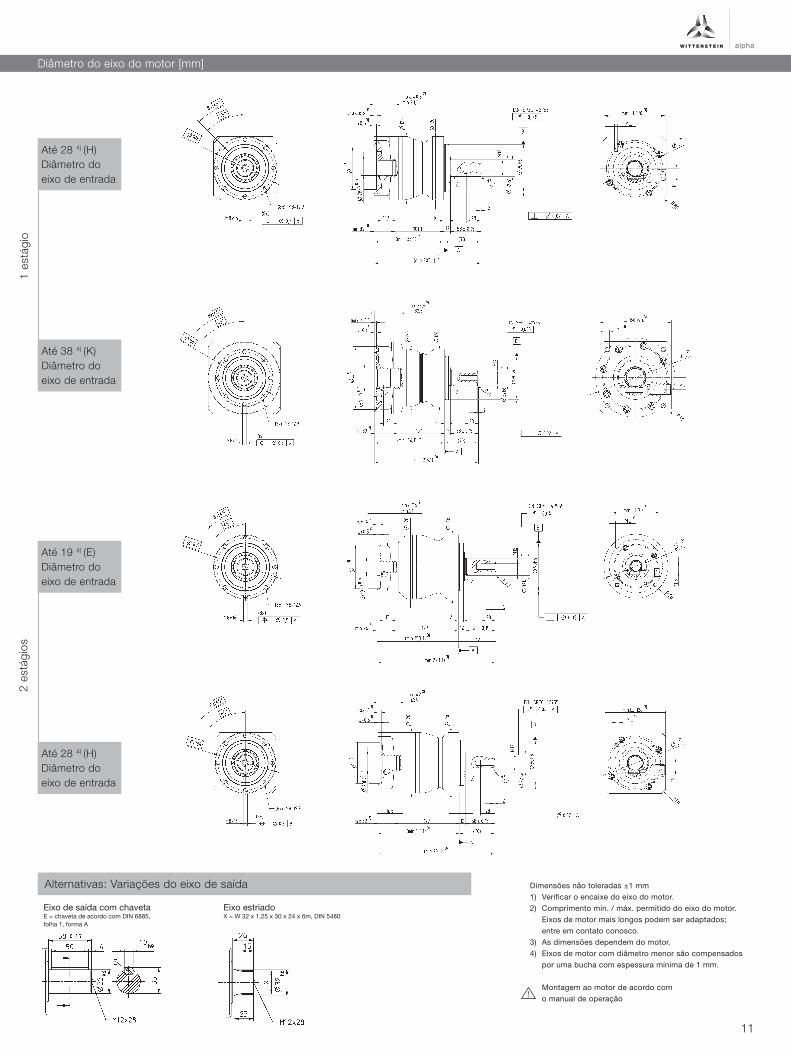
Diâmetro do eixo do motor [mm]
!
Dimensões não toleradas ±1 mm1) Verificar o encaixe do eixo do motor.2) Comprimento mín. / máx. permitido do eixo do motor. Eixos de motor mais longos podem ser adaptados; entre em contato conosco.3) As dimensões dependem do motor.4) Eixos de motor com diâmetro menor são compensados por uma bucha com espessura mínima de 1 mm.
Montagem ao motor de acordo com o manual de operação
Até 38 4) (K) Diâmetro do eixo de entrada
Até 28 4) (H) Diâmetro do eixo de entrada
Até 28 4) (H) Diâmetro do eixo de entrada
Até 19 4) (E) Diâmetro do eixo de entrada
1 es
tági
o2
está
gios
Eixo estriadoX = W 32 x 1,25 x 30 x 24 x 6m, DIN 5480
Alternativas: Variações do eixo de saída
Eixo de saída com chavetaE = chaveta de acordo com DIN 6885, folha 1, forma A
11
Relação de transmissão a) i
Torque máximo MF T2α
Nm
in.lb
Torque de parada de emergência b) T2Not Nm
in.lb
Velocidade de entrada nominal c) n1N min-1
Velocidade de entrada máx. n1Max min-1
Máx. folga torsional jt arcmin
Força axial máx. d) F2AMax N
lbf
Força radial máx. d) F2RMax N
lbf
Peso incl. flange de adaptação padrão e) mkg
lbm
Ruído operacional f) LPA dB(A)
Temperatura da carcaça máx. permitida °C
F
Temperatura ambiente °C
F
Lubrificação Lubrificado permanentemente
Pintura Carcaça: cinza escuro perolado / Lado do acionamento: Innovation Blue
Direção de rotação Motor e redutor na mesma direção
Tipo de proteção
Momento de inércia (relacionado ao acionamento)
kgcm2
10-3 in.lb.s2
Diâmetro do eixo de entradaPadrão
mmgrande
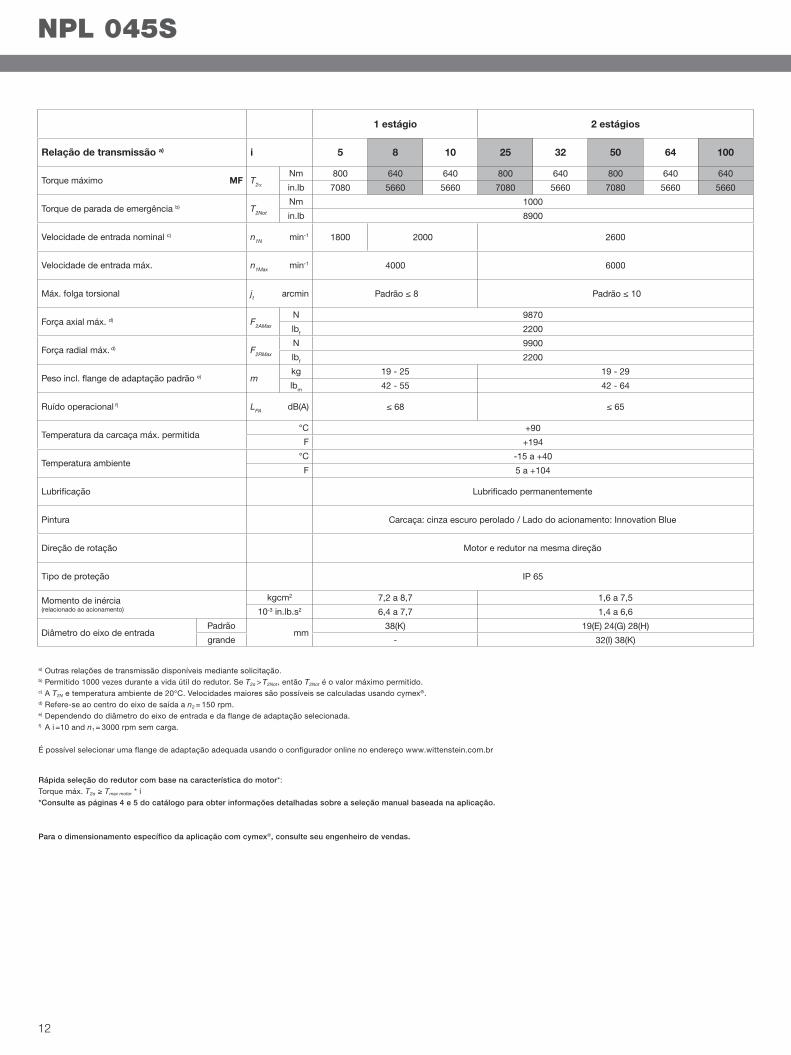
1 estágio 2 estágios
5 8 10 25 32 50 64 100
800 640 640 800 640 800 640 640
7080 5660 5660 7080 5660 7080 5660 5660
1000
8900
1800 2000 2600
4000 6000
Padrão ≤ 8 Padrão ≤ 10
9870
2200
9900
2200
19 - 25 19 - 29
42 - 55 42 - 64
≤ 68 ≤ 65
+90
+194
-15 a +40
5 a +104
IP 65
7,2 a 8,7 1,6 a 7,5
6,4 a 7,7 1,4 a 6,6
38(K) 19(E) 24(G) 28(H)
- 32(I) 38(K)
NPL 045S
Rápida seleção do redutor com base na característica do motor*:Torque máx. T2α ≥ Tmax motor * i*Consulte as páginas 4 e 5 do catálogo para obter informações detalhadas sobre a seleção manual baseada na aplicação.
Para o dimensionamento específico da aplicação com cymex®, consulte seu engenheiro de vendas.
a) Outras relações de transmissão disponíveis mediante solicitação.b) Permitido 1000 vezes durante a vida útil do redutor. Se T2α > T2Not, então T2Not é o valor máximo permitido.c) A T2N e temperatura ambiente de 20°C. Velocidades maiores são possíveis se calculadas usando cymex®.d) Refere-se ao centro do eixo de saída a n2 = 150 rpm.e) Dependendo do diâmetro do eixo de entrada e da flange de adaptação selecionada.f) A i =10 and n1 = 3000 rpm sem carga.
É possível selecionar uma flange de adaptação adequada usando o configurador online no endereço www.wittenstein.com.br
12
alpha
Diâmetro do eixo do motor [mm]
!
Dimensões não toleradas ±1 mm1) Verificar o encaixe do eixo do motor.2) Comprimento mín. / máx. permitido do eixo do motor. Eixos de motor mais longos podem ser adaptados; entre em contato conosco.3) As dimensões dependem do motor.4) Eixos de motor com diâmetro menor são compensados por uma bucha com espessura mínima de 1 mm.
Montagem ao motor de acordo com o manual de operação
Eixo estriadoX = W 40 x 2 x 30 x 18 x 6m, DIN 5480
Alternativas: Variações do eixo de saída
Eixo de saída com chavetaE = chaveta de acordo com DIN 6885, folha 1, forma A
Até 28 4) (H) Diâmetro do eixo de entrada
Até 38 4) (K) Diâmetro do eixo de entrada
Até 38 4) (K) Diâmetro do eixo de entrada
1 es
tági
o2
está
gios
13
Glossário
Força equivalentena saída (F2_eq)
A força equivalente F2_eq na saída descre-ve as forças decisivas para a seleção do redutor.
Torque de aplicaçãoequivalente (T2_eq)
O torque de aplicação equivalente T2_eq
descreve o torque decisivo para sele-cionar o redutor.
Fator de dimensionamento (fa)
O fator de dimensionamento fa descreve a influência do tempo de operação diário e o fator do modo de operação no torque da aplicação.
Fator do modo de operação (KM)
O fator do modo de operação KM des-creve a influência do ciclo de serviço, o número de ciclos e a dinâmica no torque da aplicação.
Momento de inércia (está re- lacionado ao acionamento) (J)
O momento de inércia J da massa é uma medida do esforço aplicado por um objeto para manter sua condição momentânea (em repouso ou em movimento).
Ruído operacional (LPA)
O nível baixo de ruído LPA é um fator de importância cada vez maior por moti-vos ambientais e sanitários. A relação de transmissão e a velocidade afetam o nível de ruído.Regra geral:Uma velocidade maior significa um nível de ruído maior e uma relação de trans-missão maior significa um nível de ruí-do menor. Os valores especificados em nosso catálogo referem-se a redu-tores com relação de transmissão i = 10/100 com velocidade n = 3000 rpm.
Força radial máx. (F2R)
A força radial F2R é o componente de força que age em ângulos retos ao eixo de saí-da com o NP, NPS, NPR e NPL ou paral-elamente ao flange de saída com o NPT. Ele age perpendicularmente à força axi-al e pode assumir uma distância axial de x2 em relação ao ressalto do eixo com o NP, NPS, NPR e NPL ou ao flange do eixo com o NPT, que age como braço de alavanca. A força lateral produz um mo-mento de flexão.
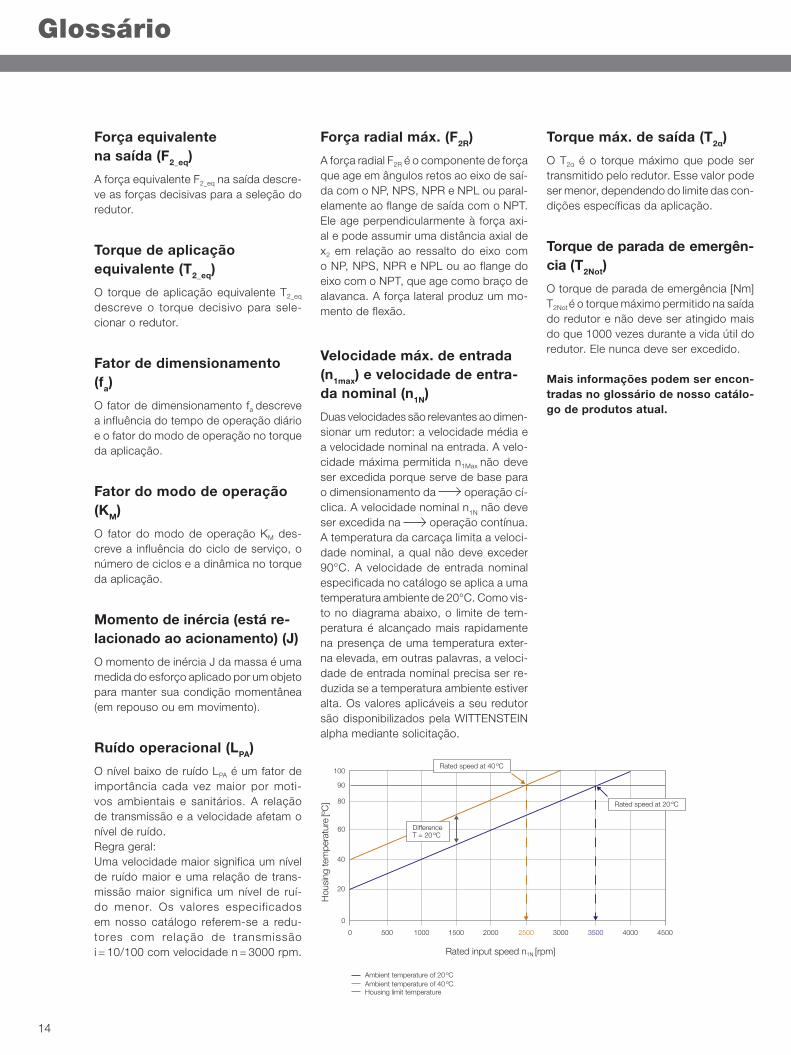
Velocidade máx. de entrada (n1max) e velocidade de entra-da nominal (n1N)
Duas velocidades são relevantes ao dimen-sionar um redutor: a velocidade média e a velocidade nominal na entrada. A velo-cidade máxima permitida n1Max não deve ser excedida porque serve de base para o dimensionamento da operação cí-clica. A velocidade nominal n1N não deve ser excedida na operação contínua. A temperatura da carcaça limita a veloci-dade nominal, a qual não deve exceder 90°C. A velocidade de entrada nominal especificada no catálogo se aplica a uma temperatura ambiente de 20°C. Como vis-to no diagrama abaixo, o limite de tem-peratura é alcançado mais rapidamente na presença de uma temperatura exter-na elevada, em outras palavras, a veloci-dade de entrada nominal precisa ser re-duzida se a temperatura ambiente estiver alta. Os valores aplicáveis a seu redutor são disponibilizados pela WITTENSTEIN alpha mediante solicitação.
Torque máx. de saída (T2α)
O T2α é o torque máximo que pode ser transmitido pelo redutor. Esse valor pode ser menor, dependendo do limite das con-dições específicas da aplicação.
Torque de parada de emergên-cia (T2Not)
O torque de parada de emergência [Nm] T2Not é o torque máximo permitido na saída do redutor e não deve ser atingido mais do que 1000 vezes durante a vida útil do redutor. Ele nunca deve ser excedido.
Mais informações podem ser encon-tradas no glossário de nosso catálo-go de produtos atual.
100
500 1000 1500 2000 2500 3000 3500 4000 4500
90
80
60
40
20
0
0
Rated input speed n1N [rpm]
Hou
sing
tem
pera
ture
[ºC
]
Ambient temperature of 20 ºCAmbient temperature of 40 ºCHousing limit temperature
Di�erenceT = 20 ºC
Rated speed at 20 ºC
Rated speed at 40 ºC
14
alpha
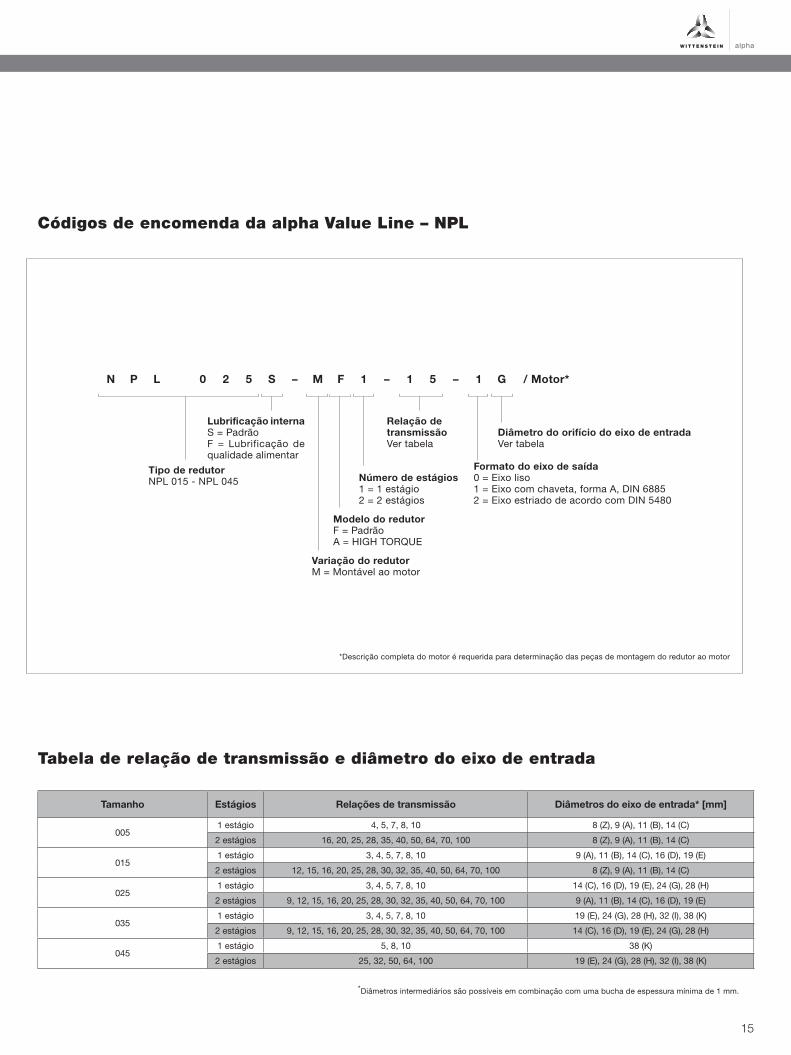
Códigos de encomenda da alpha Value Line – NPL
Tipo de redutorNPL 015 - NPL 045
Lubrificação internaS = PadrãoF = Lubrificação de qualidade alimentar
Formato do eixo de saída0 = Eixo liso1 = Eixo com chaveta, forma A, DIN 68852 = Eixo estriado de acordo com DIN 5480
Número de estágios1 = 1 estágio2 = 2 estágios
Modelo do redutorF = PadrãoA = HIGH TORQUE
Variação do redutorM = Montável ao motor
Relação de transmissãoVer tabela
Diâmetro do orifício do eixo de entradaVer tabela
N P L 0 2 5 S – M F 1 – 1 5 – 1 G / Motor*
Tamanho Estágios Relações de transmissão Diâmetros do eixo de entrada* [mm]
0051 estágio 4, 5, 7, 8, 10 8 (Z), 9 (A), 11 (B), 14 (C)
2 estágios 16, 20, 25, 28, 35, 40, 50, 64, 70, 100 8 (Z), 9 (A), 11 (B), 14 (C)
0151 estágio 3, 4, 5, 7, 8, 10 9 (A), 11 (B), 14 (C), 16 (D), 19 (E)
2 estágios 12, 15, 16, 20, 25, 28, 30, 32, 35, 40, 50, 64, 70, 100 8 (Z), 9 (A), 11 (B), 14 (C)
0251 estágio 3, 4, 5, 7, 8, 10 14 (C), 16 (D), 19 (E), 24 (G), 28 (H)
2 estágios 9, 12, 15, 16, 20, 25, 28, 30, 32, 35, 40, 50, 64, 70, 100 9 (A), 11 (B), 14 (C), 16 (D), 19 (E)
0351 estágio 3, 4, 5, 7, 8, 10 19 (E), 24 (G), 28 (H), 32 (I), 38 (K)
2 estágios 9, 12, 15, 16, 20, 25, 28, 30, 32, 35, 40, 50, 64, 70, 100 14 (C), 16 (D), 19 (E), 24 (G), 28 (H)
0451 estágio 5, 8, 10 38 (K)
2 estágios 25, 32, 50, 64, 100 19 (E), 24 (G), 28 (H), 32 (I), 38 (K)
Tabela de relação de transmissão e diâmetro do eixo de entrada
*Diâmetros intermediários são possíveis em combinação com uma bucha de espessura mínima de 1 mm.
*Descrição completa do motor é requerida para determinação das peças de montagem do redutor ao motor
15

WIT
TEN
STE
IN a
lpha
_Val
ue_L
ine_
NP
L_b
r_03
_201
6_I
Alte
raçõ
es t
écni
cas
rese
rvad
as
WITTENSTEIN alpha – sistemas de acionamento inteligentes
www.wittenstein.com.br
Wittenstein do Brasil Engenharia Mecânica Ltda · Av. Rudolf. Dafferner, 400 – Ed. Roma, Sala 205 · 18085-005 Sorocaba/SP · Brasil Tel. +55 15 3411 6454 · [email protected]





























