Embed Size (px)
Citation preview

ANALISE NÃO-LINEAR GEOMETRICA DE PORTICOS TRIDIMENSIONAIS PELO
METODO DOS ELEMENTOS FINITOS
Adilson Carvalho Benjamin
TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS PROGRAMAS DE
POS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE FEDERAL DO RIO DE JA
NEIRO, COMO PARTE DOS REQUISITOS NECESSÃRIOS PARA A OBTENÇÃO DO
GRAU DE MESTRE EM CitNCIAS (M.Sc.).
aprovada por:
Nelson Francisco Favilla Ebecken Presidente
/ Ronaldo' Carvalho Batista ~ .
/
RIO DE JANEIRO, RJ - BRASIL JUNHO DE 1982
ou a

BENJAMIN, ADILSON CARVALHO Anilise Nio-Linear Geomitrica de P6rticos
Tridimensionais pelo Mitodo dos Elementos Fi nitos [Rio de Janeiro] 1982. -
VIII, 220p. 29,7cm (COPPE-UFRJ, M.Sc. Engenharia Civil, 1982)
Tese - Universidade Federal do Rio de Janeiro - Escola de Engenharia
l.Nio-Linearidade Geomitrica I.COPPE/UFRJ II.Titulo(sirie)

i. i
~ meus pais, Amarilio e Linda

i i i
AGRADECIMENTOS
Ao Prof. Nelson Francisco Favilla Ebecken pela
orientação deste trabalho e pelo incentivo e compreensão nas ho
ras de desânimo.
Ao amigo e companheiro de estudos João de Deus Fon
seca Neto pela solidariedade prestada em todos os momentos.
Aos Professores da COPPE/UFRJ, em especial ao Pro
fessor Abimael Fernando Dourado Loula, pelos ensinamentos recebi
dos.
Aos meus parentes e familiares do Rio, de Brasí
lia e de Salvador, em especial a tio Waldemar, por tudo que fez
por mim nestes tr~s anos de Rio.
Ao CNPq pelo apoio financeiro.
A ~elena Santos de Oliveira pela excelente datilo
grafia deste trabalho.

i V
SUMIIRIO
Neste trabalho, são apresentadas duas formulações
consistentes de elementos finitos, para anãlise não-linear geom~
trica de põrticos tridimensionais.
Na primeira, a discretizaçâo ê feita atravês de
um elemento de eixo reto e seção transversal constante, que in
terpola os deslocamentos utilizando as funções convencion~is de
põrtico.
Na segunda, o e 1 emento, de eixo curvo e seção tran~
versal variãvel, ê resultante da degeneração do elemento isopari
metrice tridimensional.

V
ABSTRACT
ln this work, the finite element method is applied
to problems in~olving the geometrically nonlinear behaViour of
framed structures. Two consistent formulations of three-dimen
sional beam element are presented.
ln the first one, the element is straight with
constant cross section and the displacements are interpolated by
the usual beam functions.
ln the other one, the element is arbitrarily cur
ved in space with variable cross section and results from the de
generation of the three-dimensional isoparametric element.

vi
INDICE
INTRODUÇ/\0 ............................................ .
I - N/\0-LINEARIDADE GEOMtTRICA ...................... . 3
1.1 - Grandes Deslocamentos ...... .... ...... ...... 4
l.2 - Instabilidade.............................. 6 l .3 - Interaçio Axial-Transversal ..... ..... ...... 12
I I - FUNDAMENTOS TEÕRICOS l 7
2.1 - Descriçio do Movimento . . . . . . . . . . . . . . . . . . . . . 18
2.2 - Deformaçio do Corpo . ... ........ ............ 19
2.3 - Distribuiçio de Tensões ........ ·............ 25
2.4 - Equilibrio do Corpo .. . . . . . . . . . . . . . . . . . . . . . . 28
2.5 - Comportamento do Material ...... ...... ...... 30
2.6 - Formulaçio do Problema Geral da Elasticidade 31
2. 7 - Hipótese de Pequenas Deformações . . . . . . . . . . . 33
III - MtTODOS DE ANIILISE . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 39
3.1 - Resumo Histórico . . . . . . . . . . . . . .. . . . . . ... . . . . 39
3.2 - Algoritmos ................................. 44
3.3 - Mêtodo dos Elementos Finitos .. ... ....... .. . 45
3.4 - Mêtodo da Viga-Coluna . . . . . . . . . . . . . . .. . .. . . . 54
IV - MODELO l - ELEMENTO DE EIXO RETO E SEÇ/\0 TRANSVER-SAL CONSTANTE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4. l - Campo de Deslocamentos 63
4.2 - Equações Constitutivas e Campo de Tensões .. 69
4.3 - Matriz de Rigidez e Vetor de Forças Internas 72
4.4 - Matriz de Rigidez Nio-Linear 76

V
Vi i
4.5 - Transformação do Sistema de Referência Local Fixo para o Sistema Local Mõvel............. 86
- MODELO 2 - ELEMENTO DE EIXO CURVO E SEÇliO TRANSVE~ SAL E NUMERO DE NÕS VARiliVEIS ................... . 93
5.1 - Campo de Deslocamentos . . . .. . . ... . . . . . . . .... 95
5.2 - Campo de Tensões e Equações Constitutivas . . 107
5.3 - Matriz de Rigidez Linear e Vetor de Forças Intérnas ................................... 120
5.4 - Matriz de Rigidez Não-Linear 1 21
5.5 - Cossenos Diretores dos Eixos dos Sistemas de Referência Locais .. .. .. .. .. .. . .. .. .. .. .. .. . 126
5.6 - Matriz de Rigidez do Elemento e Vetor de For ças Internas com todos os Coeficientes Corres pondendo a Graus de Liberdade Referidos ao Sistema Global............................. 129
5.7 - Esquema de Integração para o Cãlculo das Ma-trizes de Rigidez e do Vetor de Forças..... 132
5.8 - Indicações para a Formulação do Elemento de 132 Seção Transversal Circular ................ .
VI - RESULTADOS NUMtRICOS E COMPARAÇÕES . .. . . . . . . .. .. .. 136
6 .1 - Viga Engastada 1 3 6
6.2 - Coluna de Euler............................ 145
6.3 - Arco Circular Abatido . .. . . ... . . ... .. .. ..... 156
6.4 - Viga Balcão................................ 165
6.5 - Põrtico Tridimensional
6.6 - PÕrtico Tridimensional 2
6.7 - Tempos de Geração das Matrizes de Rigidez e
l 7 2
179
do Vetor de Forças . . . . . . . . . . . . . . . . . . . . . . . . . 195
VII - CONCLUSliO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
BIBLIOGRAFIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199

Vi i i
APtNDTCE A - PROGRAMA PAPT-NLG {PROGRAMA PARA ANALISE DE PÕRTI
COS TRIDIMENSIONAIS CONSIDERANDO NIIO - LINEARIDADE
GEOMETRICA) • • • • • • • • • • . . • • • • • • • • • • • . • • • • • • • • • • • • • 206

1
INTRODUÇJ\O
O estudo do comportamento não-linear das estruturas
engloba uma bibliografia bastante diversificada.
Em gera 1, as formulações apresentadas uti 1 i zam uma
teoria linear, a qual foram acoplados termos não-lineares, mais
ou menos complexos de acordo com a precisão desejada.
Em publ i caçoes mais recentes foram desenvolvi das
formulações de elementos finitos que utilizam como ponto de par
tida uma teoria geral. Esta teoria, que pode ser simplificada
de acordo com o tipo de comportamento e de estrutura em estudo,
inclui comportamentos linear, não-linear geométrico e não-linear
fisico, para carregamentos estãticos ou dinãmicos. A condição de
equilibrio é representada por uma equação incremental não-linear,
determinada a partir dos principios da mecãnica dos solidos.Equ!
ção esta que, apos ser linearizada, é discretizada e resolvida
utilizando-se elementos finitos.
Seguindo este Ültimo enfoque desenvolveram-se neste
trabalho, duas formulações consistentes de elementos finitos pa
ra analise não-linear geométrica de porticos tridimensionais. A
primeira resulta em um elemento de eixo reto e seção transversal
constante em que os deslocamentos são interpolados por funções
convencionais de portico. Na segunda, um el~mento de eixo curvo
e seção transversal variãvel é obtido através da degeneração do
elemento isoparamétrico tridimensional.
No Capitulo I são mostradas as principais caracte
risticas do comportamento não-linear geométrico utilizando-se es
truturas simples.

2
Os conceitos da mecânica dos sÕlidos relacionados
com a não-linearidade geomêtrica são apresentados no Capitulo II.
O Capitulo III ê constituído por quatro itens que
tratam de assuntos distintos. No item 3.1 faz-se um resumo da
evolução dos mêtodos matriciais de anãlise estrutural, desde o
seu surgimento. No item 3.2 são apresentados, de forma esquemI
tica, os principais tipos de algoritmos utilizados na resolução
de equações não-lineares. No item 3.3 uma equação incremental não
-linear ê deduzida a partir dos princípios da mecânica dos sõli
dos, linearizada e discretizada atravês de elementos finitos. No
item 3.4 apresenta-se resumidamente a formulação do mêtodo da
viga-coluna.
Derivam-se as matrizes de rigidez e o vetor de for
ças internas do elemento de eixo reto e seção transversal cons
tante (modelo 1) no Capitulo IV e do elemento de eixo curvo e se
çao transversal variãvel (modelo 2) no Capitulo V.
Os resultados das anãlises de vãrias estruturas en
contram-se no Capitulo VI.
O Capitulo VII consta de comentãrios sobre os dois
modelos e sugestões para pesquisas futuras.
Um programa em linguagem FORTRAN IV, constituido P!
los procedimentos computacionais necessãrios para a implementa
çao dos modelos l e 2, ê descrito e comentado no Apêndice A.

3
I - NAO-LINEARIDADE GEOMtTRICA
Quando numa anãlise estrutural os efeitos da mu
dança· de geometria sao considerados, a relação carga-des
locamento e não-linear. Esta não-linearidade ê chamada de geom~
trica e, em geral, pode ser desconsiderada nas situações em que
a hipótese de pequenos deslocamentos for vãlida.
A não-linearidade geomêtrica ê relevante nos ca
sos de deslocamentos relativamente grandes, de estabilidade es
trutural e de interação axial-transversal. Ou seja, nos casos
em que devido a grandeza dos deslocamentos surge a necessidade
de se escreverem as equaçoes de equilibrio em relação a configu
raçao deformada da estrutura, ou ainda, mesmo com deslocamentos
relativamente pequenos, quando a disposição das cargas na estru
tura seja tal que,combinada com os deslocamentos, leve a uma si
tuação de instabilidade ou ao surgimento de esforços adicionais.
Os sistemas estruturais constituídos por membros
esbeltos, em geral, exigem uma anãlise não-linear geomêtrica.
Quando os efeitos não-lineares implicam em enrij~
cimento da estrutura a utilização de uma anãlise linear conduz a
uma estrutura segura, porem pouco eficiente do ponto de vista
de aproveitamento do material. No entanto, se o comportamento
não-linear se caracteriza por perda de rigidez ou instabilidade
a utilização de uma anãlise linear pode reduzir bastante a mar
gem de segurança, chegando atê mesmo a causar o colapso da estru
tura.
Neste capitulo, estudam-se o enrijecimento, a in~
tabilidade e a perda de rigidez em estruturas simples: a viga, a
coluna e o arco.

4
l. l - GRANDES DESLOCAMENTOS
A viga em balanço com uma carga concentrada na e~
tremidade (Figura l.la)ilustra muito bem o comportamento de uma
estrutura sujeita a deslocamentos relativamente grandes. Nas Fig~
ras l. lb e l. lc encontram-se representadas as configurações defor
madas da viga para os casos de pequenos e grandes deslocamentos
relativos, respectivamente.
No caso de deslocamentos relativamente pequenos
adota-se a solução linear do problema. Como o equilibrio ê fei
to em relação a configuração indeformada, o deslocamento horizo~
tal do ponto B tu 8 ) e desprezado, calculando-se apenas o deslo
camento vertical (v 8 ) Esta solução ê vilida desde que v8 se
ja pequeno quando comparado com o vão da viga
A medida em que a relação VB T
{L) .
vai crescendo a hi
põtese de pequenos deslocamentos vai se tornando menos represen
tativa da realidade. Adota-se então a solução não-linear,que tor
na possivel o cilculo de u8 e fornece valores menores que os
lineares para e (momento no apoio).
A redução no valor de MA ocorre porque, como o
equilibrio ê feito em relação a configuração deformada, a distã~
ci a i entre os pontos A e B {Figura l. l c) diminui a medi da em
que aumenta.
A redução no valor de v8 e uma consequência do
enrijecimento que a viga sofre durante o carregamento. Isto pode
ser constatado através do grifico da Figura l. ld. A partir de de
terminado valor da carga a relação P x v8 torna-se não-linear com
a carga crescendo mais rapidamente que o deslocamento.

PL2
E I
Ai
1
5
L
( a l
( b)
l, L->1.ii
( e )
-----------
p
t p
j +vb ~
....... '
--0.2 0.4 0.6 0.8 1.0 1.2 1. 4 Vb /L
( d)
Figuro 1.1

6
1.2 - INSTABILIDADE
Como exemplo de estrutura sujeita a instabilidade
tem-se a coluna esbelta carregada axialmente (Figura 1.2a), conh!
cida tambêm como coluna de Euler 1 • Neste tipo de estrutura ocor
re o fenômeno da bifurcação simêtrica estãvel 2•
Este fenômeno encontra-se representado graficame~
te na Figura 2c. A coluna se mantem reta atê que a carga p atin
ja valor da de Euler (PE 112 L E I ) Neste ponto existe o carga =
uma bifurcação de equilíbrio, ou seja, a coluna pode permanecer
na configuração reta, que se tornou instãvel, ou passar para a
configuração curva (Figura 1.2b), que ê a nova configuração estã
ve l .
Para valores de P superiores a PE a coluna en
contra-se fletida e a relação entre carga e deslocamento trans
versal ê nao-linear, com a carga crescendo mais rapidamente que
o deslocamento (enrijecimento). Este trecho da curva P x vc e
chamado de caminho pôs-critico.
A determinação do caminho pôs-critico ê feita ut1
li zando-se uma teoria não-1 i near 1;3
, que pode ser dispensada qua~
do se quer calcular apenas a carga de Euler.
Os deslocamentos axiais da coluna tambêm sao afe
tados pela mudança de configuração. A curva P x u8 , apresent!
da na Figura 2d, mostra que a partir de um certo ponto "a", que
corresponde a mudança de configuração, inicia-se um trecho em que
o deslocamento passa a crescer mais rapidamente 4•
Dentre as suposições feitas para a idealização da
coluna de Euler duas são particularmente difíceis de ocorrer: a
perfeita linearidade do eixo da coluna e a aplicaçio concêntrica

7
A e e.,. p
,A. X , L/2 L/2 f , ( a )
d_vc ~-----y p
=z:--( b ) -f':!!t
2.0
I.Of----=----- -
0.1 0.2 0.3 0.4 0.5 0.6 Vc /L
( e )
p
a
~-------------- µb
( d )
Figura 1. 2

8
A ~o A p
.IS: --2.L
~ L/2
l L/2
'1
( o )
Vc
p -- --·_::.-~---
( b )
p , PE I
ao= o
o 1
º2
1.0
( e l
Figuro l.3

9
e
L/2 L/2
( . )
( b )
p
PE '1o' O
2.0
QI
€2
1.0
( e )
Figura 1.4

l o
da carga. As situações em que estas hipõteses nao sao cumpridas
são analisadas através das colunas esbeltas com curvatura inicial
do eixo (coluna imperfeitaj e das colunas com carregamento excen
trico.
Estes dois tipos de colunas têm comportamentos bas
tante semelhantes, como pode ser constatado comparando-se as cur
vas P x vc das Figuras 1.3c e l.4·c. Em ambos os casos não existe.
bifurcação de equilibrio, a flexão tem inicio desde o instante
de aplicação da carga. A relação carga-desl ocamente e não-1 i near.
No trecho inicial da curva a carga cresce mais rapidamente que o
deslocamento, porém a medida em que P se aproxima de PE esta
relação vai se modificando e no trecho final o deslocamento pas
sa a crescer mais rapidamente que a carga (perda de rigidez).
Colunas com imperfeições iniciais, ou excentrici
dades, grandes apresentam deslocamentos transversais considerã
veis com cargas muito abaixo da carga de Euler (Figuras .l.3c e 1.4c),
enquanto as colunas com imperfeições iniciais, ou excentricida
des, pequenas experimentam deslocamentos transversais apreciiveis
apenas quando P se encontra bastante prõxima de PE .
Em outro tipo de estrutura, o arco abatido, a ins
tabilidade e precedida por uma redução crescente da rigidez de
flexão e a mudança de configuração ocorre de uma man~ira brusca
e violenta, com liberação de energia 2•
O comportamento de um arco abatido quando solici
tado por uma carga concentrada· (__~ig_ura _l .Sa) encontra-se represe.!:_
tado no grifice da Figura 1.5d.
A relação entre a carga p e o deslocamento v
se mantem linear até P atingir um determinado valor prõximo de

li
p
P.crll.
l l
p
e
-+----- Y~Z----.1,---L=/~2~----~ ( a l
,,./
--- ---( b)
_____ p __ _
( e )
b
1 I 1 I 1 I 1 I
I I I
I I
I /
I .. ./ I d
Figura l.5
e
1 1 1 1 1 1
v.

l 2
P ·t (ponto ''a'' da curva P x v) . Dai em diante torna-se nao cri linear com o deslocamento crescendo mais rapidamente que a carga
P (redução de rigidez).
Quando P alcança valor igual ao de p "t cri (po~
to b) ocorre uma variação dinâmica no deslocamento e o arco Pª!
sa de uma configuração concava (Figura 5b}, que se tornou instã
vel, para uma convexa, que e a nova configuração estãvel.
Logo em seguida (ponto c) ê estabelecida outra r!
lação não-linear entre P e v , com o deslocamento crescendo mais
lentamente que a carga (enrijecimento).
O trecho tracejado da curva corresponde a um pro
cesso de variação da carga em que os incrementas de carga são n!
gativos (descarregamento e carregamento no sentido contrãrio).Ao
ser atingida uma carga igual a - Pcrit (ponto d) volta a ocor
rer uma variação dinâmica no deslocamento, desta vez no sentido
oposto.
1.3 - INTERAÇAO AXIAL-TRANSVERSAL
Como exemplo de estrutura em que ocorre interação
entre as forças axial e transversal tem-se a viga-coluna.
A viga-coluna e uma peça de eixo reto submetida
simultaneamente a compressao e flexão. Flexão esta que pode ser
causada tanto por momentos aplicados nos apoios quanto por carre
gamento transversal'.
Assim, a coluna esbelta carregada excentricamente
pode ser vista como um caso particular de viga-coluna, em que a
flexão surge como um efeito secundãrio. Secundãrio no sentido
de que os momentos nos apoios são acidentais, pois exi~tem ape-

1 3
Q
A;.-------;;--------i.B,_ __ _ e
t L/2
Q
LO ---_.,,.
Q
( b )
/
.,/
/ /
L/2
e)
- O 7 I'• P- .
I
~ªº'º I
/ /
p
--------(d)
Figura l. 6
Vc
Vc/L

l 4
Q
A ! B
A e A L
( a l
Q
;JS; JéVc
:z. HA ( b ) He
Q
( e l
Fiouro 1.7

l 5
nas quando uma carga que deveria ser concêntrica e aplicada in
voluntariamente com uma certá excentricidade.
Em geral, no entanto, flexão e compressao apare
cem como efeitos primãrios resultantes de carregamentos aplica
dos intencionalmente.
Na viga-coluna da Figura C6a- as car'gasaxTa-1 e
transversal são independentes, podendo variar simultaneamente ou
uma de cada vez.
A carga axial, como pode-se verificar no grãfico
da Figura.f-;-6c provoca uriiá, redução na rigidez de flexão. As cur
vas P x vc , determinadas para valores constantes de P , apre
sentam inclinações que diminuem a medida em que a carga axial
constante P e aumentada. Para um mesmo valor de Q o maior
deslocamento transversal vc corresponderã a curva em que P for
maior 3•
A carga transversal Q , quando constante, exerce
sobre o comportamento da viga-coluna efeito semelhante ao da cur
vatura inici_al na coluna esbelta (Figura l_'.3c). Quando P e Q
variam simultaneamente a rigidez se red.uz rapidamente -(Figurá l.6d-).,
A interação entre as forças axial e transversal
pode ocorrer mesmo em situações em que existe apenas o carrega
mento transversal.
Este ê o caso da viga bi-apoiada com restrição ho
rizontal nos dois apoios, submetida a uma carga aplicada no meio
do vão tFigura L7a). Esta restrição, ao impedir o deslocamento
horizontal nos apoios, faz com que surjam forças de reação hori
zontais'(Figural:?b)_.. a partir do instante em que ocorre desloca
mento transversal no vão.

l 6
Aqui tambem, como no caso da viga engastada, oco~
re enrijecimento. A relação carga-deslocamento, inicialmente li
near, logo se transforma em não-linear, com a carga crescendo
mais rapidamente que o deslocamento (Figura 1,7c).

l 7
II - FUNDAMENTOS TEÕRICOS
A anãlise não-linear geométrica de estruturas re
tira os seus fundamentos teõricos da teoria da elasticidade não
linear, que faz parte da mecânica dos sõlidos.
A mecânica dos sõlidos, ramo da mecânica que tra
ta das tensões e deformações nos "solidos" 5, e desenvolvida a
partir do conceito de meio continuo.
O meio continuo é um material hipotético em que
nao existem falhas ou espaços vazios e que tem as suas propried!
des descritas por funções matemãticas continuas 6•
Os conceitos e equações da mecânica dos sõlidos
sao gerais o sufuciente para abrangerem, além da teoria da elas
ticidade, teorias como a viscoelasticidade e a plasticidade 5•
A teoria da elasticidade na sua formulação mais
ampla nao impõe restrições a magnitude dos alongamentos, distor
çoes, deslocamentos e ângulos de rotação. E também chamada de
teoria da elasticidade não-linear 7' 8 , em contraposição a teoria
clãssica que é linear 9
A não-linearidade geométrica aparece,na teoria da
elasticidade, nas equações de equilibrio, que sao escritas utili
zando-se a configuração deformada do corpo, e nas relaçôes defor
mação-deslocamento, que incluem termos não-lineares.
Neste Capitulo apresentam-se resumidamente os pri~
cipios da mecânic~ dos sõlidos, que servem de base para a formu
lação variacional do método dos elementos finitos.

1 8
2.1 - DESCRIÇÃO DO MOVIMENTO
Ao sofrer a ação de um agente externo qualquer, um
corpo sõl ido muda de configuração, sofrendo a 1 te rações na forma
e no volume.
A configuração de um corpo ê descrita por um sis
tema de coordenadas que tem os seus pontos geomêtricos identific~
dos com a posição que as partículas do corpo ocupam no espaço.
Como em cada configuração a posição das parti cu-
1 as ê diferente, ê necessario que se esta6eleça uma forma ünica
de determina-las. Isto ê feito escolhendo-se uma configuração
de referência, a qual todas as outras são relacionadas.
O vetor ! , que determina a posição da partícula
na configuração de referência, e o tempo t sao tomados comova
riaveis independentes. Conhecendo-se t e ! , determina-se o
vetor y, que fornece a posição da partícula na nova configura
ção6.
A descrição do movimento de um corpo feita desta
maneira e chamada de descrição referencial. t comum escolher-se
como referência a configuração inicial, correspondente a t = O
{_descrição lagrangeana), porêm outras configurações podem seres
colhidas tambêm. Nas deduções feitas a seguir sempre que nao
houver ressalva estara sendo utilizada a descrição lagrangeana.
A sequência de mudanças de configuração ê represe~
tada pelas equações de deformação:
(i = 1 , 2 , 3) (2. 1 )
ou

sendo:
l 9
y.=x.+u. l l l
yi - componentes cartesianas de r
fi - funções continuas de x e ,
xi - componentes cartesianas de x
( 2 . 2 )
ui - funções continuas de x e , e componentes carte-sianas de u , vetor de deslocamentos'-da ri"arTícula
Os vetores r e x , nas equaçoes (2.1) e (2.2),
estão referidos ao mesmo sistema de eixos cartesianos.
2.2 - DEFORMAÇAO DO CORPO
O estudo da deformação na vizinhança de uma part_I
cula i feito verificando-se o que ocorre com um elemento infini
tesimal do corpo. Este elemento i constituido pelo segmento de
reta que une as posições de duas partículas geniricas P e Q, si
tuadas infinitamente prõximas uma da outra. Inicialmente P e Q
ocupam as posições x e x + d~ , deslocando-se para as pos!
çoes r e r + dr durante a deformação.
O gradiente de deformação F i definido como o
tensor que atua no vetor infinitesimal dx , relacionando-o com
o vetor dt da seguinte forma 6:
dt = F dx (2. 3a}
ou
dy i = F i k dxk (2.3b}
onde:

20
ou
sendo:
ºik - delta de Kronecker
ºik = para i = k
a u. l
~
ºik = O para i I k
(2.4a)
(2.4b}
Os tensores de deformação ~ , ~ e e sao tenso
res simétricos definidos a partir do gradiente de deformação:
ou
sendo:
C = F T F
E .. l J
r3 - matriz identidade 3 x 3
ºij - delta de Kronecker
e - tensor de deformação de Green-Lagrange
(2. 5)
( 2. 6)
(2.7a)
(2.7b}
As componentes do tensor s sao usualmente expre~
sas em termos de deslocamentos. Isto é obtido facilmente substi
tuindo-se as componentes yk nas equações (.2.7b} pelas equações
( 2 . 2) .

sendo:
E .. lJ
21
e .. 1 J
1 a u . = (--1 + z a x.
J
n .. 1 J
eij - parcela linear de Eij
nij - parcela nâo-linear de
a u. d.)
E .• 1 J
1
(2. 8)
(2.9a)
(2.9b)
Nos mêtodos incrementais o tensor E e utilizado
na sua forma incremental 4•
A e .. 1 J
A El·J· = A e .. + A n .. 1 J 1 J
A n .. 1 J
a uk aA uk ~ _a_x_.)
J 1
(2.10)
(2.lla)
(2.llb)
As equaçoes (2.11) sao obtidas substituiffdo-se as
equações (2.9) em (2.8) e utilizando-se uma decomposiçâo incre
mental para os deslocamentos ui .
(2.12)
sendo:
N+l ui - componentes do vetor de deslocamentos para a con-figuraçâo N +

N u. 1
22.
- componentes do vetor de deslocamentos para a con
figuração N
6 u. - componentes do vetor de deslocamentos incrementais. 1
A deformação do corpo causa uma variação no com
primento de um elemento infinitesimal. Esta variação e medida
atravês do alongamento unitãrio 7
onde:
1:,i - mudança ocorrida na distância entre P e Q comprimento final menos o inicial
di - distância inicial entre P e Q .
(2.13)
igual ao
Se a posição inicial do elemento e paralela a um
dos eixos de referência xi , tem-se
ou
l E.= (1 + 2 E--) 2 - l . 1 1 1
(2.14a)
(2.14b)
Os elementos que se situam, antes da deformação,
paralelamente aos eixos de referência xi formam entre si ângu
los retos. Apõs a deformação, estes ângulos são alterados, pas
sando a valer 7 - @ij . O ângulo @ij e a distorção sofrida
pelo retângulo infinitesimal de lados dxi e dxj (Figura 2.1}.
As distorções se relacionam com as outras medidas
de deformação atravês das seguintes equações 10 :

ou
lados
onde:
sin
d X j
dxi
cp. . = 1 J
23
2 E .• 1 J
(l+E;)(l
Figura 2.1
r--1
1
1
1
1
1
1
--------,
Tf .:l .. - - '!IJ
2
1 1
1
1 1
(2.15a)
(2.15b)
dx. 1
A variação da ãrea do retângulo infinitesimal de
e dx. e dada por 7:
J
dA aJÇ = [( l + 2 E i i ) ( l + 2 E j j ) - ( 2
dA - area apos a deformação
dA - area antes da deformação o
E .. ) 2] ! 1 J
(2.16)
As alterações no volume e na densidade de um par~

24
lelepTpedo infinitesimal, de lados inicialmente paralelos aos
eixos xi , são determinadas através das seguintes equações 7:
onde:
P o = dV = J p~
dV ~
=
p - densidade ap5s a deformação
p0
- densidade antes da deformação
dV - volume ap5s a deformação
dV0
- volume antes da deformação
J - determinante do gradiente de deformação F
(2.17al
(2.17b)
ti - alongamentos nas direções principais de deformação
O movimento e deformação de um elemento de volume
infinitesimal, que ocupa inicialmente a posição x , pode ser
considerado como resultante de três transformações: uma deforma
ção, uma rotação de corpo rigido e uma translaçãi atê i Esta
interpretação do movimento é chamada de teorema da decomposição
polar e ê representada pela seguinte equação 6 •
onde:
R -
F = R U
tensor ortogonal, isto é, rotação de corpo rigido
(_2. l 8)
, que produz uma
U tensor simétrico positivo definido (ver equaçao (2.6)), que produz alongamento··e·distorção. E chamado de tensor de deformação direito (right stretch tensor).

25
l>P "'
A
Figura 2. 2
2.3 - DISTRIBUIÇAO DE TENSÕES
A definição da tensão em um ponto e feita atraves
de um limite matemãtico anãlogo ao utilizado no cãlculo diferen
cial para definir derivada.
Em um corpo que estã se deformando, uma pequena
area bA, situada numa superficie fechada arbitrãria A ,estã su
jeita a açao de uma força bP (Figura 2.2). Esta força resulta
da interação entre o material interno e externo ã superf1cie e e

26
uma função da área e da orientação da superficie. Um vetor uni
tário v normal a AA , dirigido de dentro para fora de A , fi
xa o lado externo de AA como sendo o
AA tender para zero, o quociente AP
lado positivo. Fazendo-se dP
tende rã para o limite dA
e os momentos agindo na superficie se anularão no limite 5• Ove
tor limite
dP t = âA (_2.19)
ê chamado de vetor de tensâo. Representa a força por unidade de
área exercida pelo material situado no lado positivo da superfi
cie sobre o material situado no lado negativo.
O estado de tensão em um ponto e completamente d~
terminado por um tensor de 22 ordem simêtrico chamado de tensor
tensão de Cauchy t~l-
Conhecendo-se ~, o vetor de tensão t que atua
num plano arbitrário ê calculado atravês das seguintes equaçoes:
(2.20a)
ou
t. = O .• V· 1 J 1 J (2.20b)
sendo:
v - vetor unitário normal ao plano
O tensor o está definido em relação a configur~
çao presente do corpo. Isto resulta do conceito fisico natural
e da necessidade de satisfazer as equações do movimento na confi
guração presente ou deformada. Porêm, para montar as equaçoes

27
constitutivas e necessãrio que os tensores de tensão e de defor
mação estejam definidos em relação a mesma configuração. Por is
so, quando a configuração de referência não ê a presente, em vez
do tensor de Cauchy o utiliza-se o 29 tensor de tensão de Pio
la-Kirchhoff, que e definido em relação a configuração de refe
rência.
Este tensor ê obtido a partir de uma força ficti
cia, dP' = C!') dA' , que se relaciona com a força real,
dP = C!) dA , da mesma f6rma que dx se relaciona com dt (ver
equação (2.3a))
dP' = F-l dP (.2.2la)
(!') dA' = F-l (!) dA (2.21b)
O vetor de tensão ficticio t' e calculado atra
ves de uma equação anâloga a equação (2.20a).
onde:
se:
(.2.22)
S - 29 tensor de tensão de Piola-Kirchholff
v'- vetor unitârio normal a superficie dA' , situada na configuração de referência
Substituindo-se (2.20a) e (.2.22) em (2.21b) tem-
(~T ~') dA' = F-l (c:i:T ~) dA (2.23)

28
Apõs algumas-operações algébricas' e obtida a se
guinte expressao para S
ou
p -o
(2.24a)
(2.24b)
A equaçao (2.24a) mostra que, assim como o, o ten
sor S também e simétrico.
2.4 - EQUJLTBRIO DO CORPO
O movimento de um corpo sõlido deformãvel é regi
do pelas duas leis do movimento de Cauchy. Estas leis são dedu
zidas através da aplicação dos princípios de conservação das qua~
tidades de movimento linear e angular'. Segundo elas em cada po~
to do corpo deve-se ter:
ou
e
sendo:
Vo + b = dv
p ãf (2.25a)
ªº ji dv. b. l
d + - . p aT Y· l J
(2.25b)
a= a1 (2.26)
Vo divergente do tensor çi: , com derivadas parciais em re lação as coordenadas yi
b • vetor das forças de massa (força por unidade de volu me)

dv dt
29
vetor de aceleração
p - densidade do material na configuração deformada
a aceleração
Quando o corpo se encontra em equilíbrio estãtico dy êlt ê nula e as equaçoes do movimento (equações
2.25)), passam a ser chamadas de equações de equilíbrio.
ou
Vo + b = O
a o .. J 1
d y. J
+ b. 1
= o
(2.27a)
(2.27b}
Nos casos em que a configuração de referência nao
e a presente utiliza-se as equações de equilíbrio na seguinte
forma 6:
ou
onde:
v e~ E r i + b º = o (2.28a)
d y.
afl k
= o (2.28b)
divergente de (~ ET) , com derivadas parciais em relação ãs coordenadas X,
1
b0 - vetor das forças de massa, referido a configur~
ção de referência.
O princípio dos trabalhos virtuais ê uma forma al
ternativa de se expressarem as condições de equilíbrio de um co~
po 6• Este principio ê representado na mecãnica dos sõlidos pela
equaçao:

onde:
30
( 2 . 2 9 )
8 uk - variação (virtual) das componentes cartesianas do vetor de deslocamentos
s.. - componentes cartesianas do 29 tensor de tensão Pio l J
la-Kirchhoff
8 E-. - variação (virtual) das componentes cartesianas do 1 J
tensor de deformação de Green-Lagrange
t~ - componentes cartesianas das forças de superficie (força por unidade de ãrea), referidas a configur~ ção de referência
b~ - componentes cartesianas das forças de massa, refe-ridas a configuração de referência.
2.5 - COMPORTAMENTO DO MATERIAL
O comportamento de um material quando submetido a
solicitações externas ê caracterizado pelas equações constituti
vas.
As equaçoes constitutivas elãsticas resultam da
generalização da· lei de Hooke. São nove equaçoes qu.e expressam
as componentes de tensão como funções lineares das componentes
de deformação:
s .. = e .. E (2.30) lJ , J rs rs
sendo:
5i j -componentes do tensor s dispostas num vetor de
nove elementos

31
C.. - componentes do tensor constituivo de quarta ordem 1 J rs
f (diferente do tensor C definido na equaçao (2.5))
Ers - componentes do tensor E dispostas num vetor de nove elementos.
Corno S e E são simétricos, as equaçoes (2.30)
para um material elãstico, hornog~neo e isotr6pico são sirnplific!
das, reduzindo-se de nove para seis 6•
S. ·=À Ekk 8 .. + 2 µE .. lJ lJ lJ (2.31)
sendo:
À , µ - constantes de cada material (constantes de Lamê)
2.6 - FORMULAÇAO DO PROBLEMA GERAL DA ELASTICIDADE
As equações de equi l ibri o, equações (2.27} e (_2. 28),
não contêm variãveis cinemãticas, mas em geral não são suficien
tes para determinar-se a distribuição de tensões, pois enquanto
as componentes de tensão independentes sãos seis as equações de
equilibrio são apenas três.
As equações que estão faltando ~ão as equaçoes
constitutivas e cinernãticas. Portanto, o problema da determina
ção de tensões não pode em geral ser resolvido sem que sejam co~
siderados deslocamentos e deformações; ê um problema estaticarnen
te indeterminado exceto em alguns casos especiais.
O problema geral da elasticidade consiste em:

32
- Dado um corpo B de densidade p , sujeito ao sistema de forças (! , ~) , determinar os campos de deslocamentos (_~). e de tensões (~) , que satisfaçam ãs equações do problema.
Estas equaçoes podem ser apresentadas de duas ma
neiras, na forma diferencial ou na forma variacional.
As equaçoes na forma diferencial, para o caso de
equilibrio estãtico, são:
- equações de equilíbrio
- equaçoes constitutivas
- equaçoes cinemãticas
d y. :) X:) + b.
1
E . . 1 J
1 a u . = ( 1 + -z ·:aT.
a u. __ J + d Xi
J
- condições de contorno
-u . = u. em , 1
t. = t. em , ,
sendo:
= o (2.321
(2.33)
(_2.34)
d lB t {2.35)
d JB 2
t
a lllt , a IB~ - superf'ícies que fazem parte do contorno do corpo em que os deslocamentos ou as tensões estão prescritos

33
As equações na forma variacional, para o caso de
equilíbrio estãtico, são:
- equação de equilíbrio (principio dos trabalhos virtuais)
r s . . º ~ 1 J
o
= I 2
alB o
- condições subsidiãrias
e
o E: •• 1 J
1 ó = 7
a u. J +
~
em a IB ' o
(2.36)
(2.37)
(2.38)
Na forma variacional, como o equilíbrio não ê fei
to em cada ponto do corpo, o conjunto de soluções admissíveis ê
ampliado. Podem ser aceitas soluções que violem o equilíbrio em
alguns pontos, desde que o equilíbrio global do corpo seja manti
do.
2.7 - HIPOTESE DE PEQUENAS DEFORMAÇDES
Na maioria das estruturas encontradas na prãtica,
mesmo em presença de deslocamentos e rotações relativamente gra~
des, os alongamentos Ei e distorções tij sao pequenos -em re
lação a unidade 7•
Nestas situações, o comportamento estrutural pode
ser representado pela teoria das pequenas deformações. Esta teo

34
ri a resulta da aplicação da hi põtese • de pequenas deformações a
teoria geral, apresentada anteriormente.
Na literatura, a utilização das hipõteses de pequ!
nos deslocamentos e de pequenas deformações as vezes deixa mar
gem a duvidas. No Capitulo l, é importante notar, o problema es
trutural linear foi definido em relação a deslocamentos e não em
relação a deformações.
A hipõtese de pequenos deslocamentos exige que as
translações e as rotações dos pontos da estrutura sejam pe
quenas quando comparadas, respectivamente, com as dimensões da
estrutura e com a unidade 7•
alongamentos
A hipõtese de pequenas deformaç5es sup5e que os
E. l
e distorç5es cj,i j sao pequenos em relação a
unidade. Portanto, refere-se exclusivamente a deformação de um
volume infinitesimal do corpo.
A primeira hipõtese é a mais restritiva pois envolve
a deformação da estrutura como um todo. A primeira implica na
segunda, porém a reciproca não é verdadeira.
Adotando-se a hi põtese de pequenas deforrnaç5es, as
equaçoes (:2.l4b)_, (2.15b), (2.16), (.2.17a) e (.2.17b) são simpli
ficadas para:
e: . . - E . l 1 l
(2.39)
2 E: • • - cj, .. (2.40) 1 J lJ
dA - l (2. 4 l ) -a:nç =

35
dV cl'v--:-
0
Assim, as componentes do tensor s
(2.42a)
(2.42b)
adquirem um
significado geometrico que não possuíam anteriormente. Agora os
sii sao alongamentos e os sij são proporcionais as distorções.
As equações (2.41) e (2.42b) mostram que um para
lelepipedo infinitesimal, de lados inicialmente paralelos aos e~
xos
ces.
x. , não sofre variação nem no volume nem nas ãreas das fa-1 .
Como consequência da deformação o paralelepipedo retangu-
lar transforma-se em obliquo com ângulos 1T
2 - "'12 ' 1T
7 - "'23 e
f - q, 13 . Porem, como o corpo estã submetido a grandes rotações
( em relação a os ~ i j ) , as equações d e e q ui 1 i b ri o e as tensões p o -
dem ser determinadas considerando-se que o paralelepipedo perma
neceu retangular, sofrendo apenas uma rotação de corpo rigido 7 •
De acordo com esta suposição, a màtriz identidade
I substitui a matriz do tensor U na equaçao (2.18) e o .gra
diente de deformação passa a produzir apenas rotação de corpo ri
gido.
F = R (2.43)
Substituindo-se (2.43) em (2.24a) e (2.28a) obte~
se a nova forma da relação entre os tensores S e cr e das equ~
ções de equilibrio:
(2.44)

36
(2.45)
A equaçao (2.44) ê anãloga as equaçoes utilizadas
para mudanças de referencial de tensores de segunda ordem. De-
vem existir portanto dois sistemas de eixos x! 1
e para os
quais a matriz do tensor o , referida a
triz do tensor S , referida a xi .
x! , seja igual 1
a ma-
As matrizes dos tensores S e o na equaçao (2.44)
estão referidas ao sistema de eixos x. 1
A transformação de um
sistema para outro ê feita atravês da equação:
onde:
!5 1 -K -
º -
tal que
K'=Ç~QT (2.46}
matriz referida a x! 1
matriz referi da a xi
matriz ortogonal (gT g = ~) que transforma x. 1
em
x! (!:'. 1 = º !:'. ) 1
A matriz de o referida ao sistema de eixos x! 1
' e:
o'=RToR (2.47}
Resolvendo-se a equação (2.47} para o tem-se:
o=Ro'RT (2.48}
Substituindo-se (2.48) em (2.44) obtem-se o resul

37
tado esperado:
S = o' (2.49)
A matriz de rotação Ç = RT , obtida anteriormen
te, define um sistema de eixos móvel, que acompanha a rotação do
corpo. Isto pode ser comprovado através do estudo do movimento
de um quadrado que sofre uma rotação no plano (Figura 2.3).
X2 1 Y2
x2
a -+ ' + A B x,
1
a
~ o' e
e D x, Y1
Figura 2.3

forma:
38
Neste caso, as equaçoes (2.1) assumem a seguinte
y 1 = cos e x1 - sen e x2
y 2 = sen e x1 + cos e x2 ( 2. 50)
Uti 1 i zando-se as equaçoes (2. 3b), obtem-se o gra
diente de deformação:
sistema xi l
CDS 8 - sen e o
F = R = sen e CDS 8 o
o o 1
A transformação do sistema de eixos
(Figura 2.3) idada por:
X' = Ç X
cose sen e o
º = - sen e cose o
o o
x . . l
(2.51)
para o
(2.52a)
(2.52b}
Comparando-se as matrizes das equaçoes (2.51} e
(2.52b} comprova-se a afirmação anterior de que:
(2.53)

39
III - METODOS DE ANALISE
A aplicação direta da mecânica dos sõlidos na ana
lise dos sistemas estruturais de uso corrente na engenharia nao
e usual.
Nos problemas lineares e unidimensionais, a solu
çao exata da equação diferencial existe para quase todos os ca
sos. Porem, em estruturas reticuladas formadas por vârias bar
ras, a complexidade da geometria dificulta a montagem e resolu
ção do sistema de equações diferenciais.
Nos problemas bi 'e tridimensionais, a- solu-ção
exata do sistema de equações diferenciais e obtida apenas em al
gumas situações. Consequentemente, em estruturas formadas por
vârios elementos bi ou tridimensionais, somam-se a complexidade
geometri ca e a di fi cul dade de resolução das equações diferenciais.
Os metodos de anãlise estrutural resultaram dos
esforços no sentido de superar estes obstãculos. O relato resu
mido do seu surgimento e evolução encontra-se no item 1 deste ca
pitulo. O item 2 trata dos tipos de algoritmo mais utilizados
na resolução de equações não-lineares. Nos itens 3 e 4,são apr!
sentados, respectivamente, a formulação variacional do .metodo
dos elementos finitos (metodo dos deslocamentos) e um resumo do
metodo da viga-coluna.
3.1 - RESUMO HISTORICO
O estudo das estruturas reticuladas teve inicio
ainda no seculo passado (1850-1875) com Maxwell, Castigliano e
Mohr. A partir dos conceitos por eles enunciados foram desenvol

40
vi dos os mêtodos para anãl i se de põrti cos e treliças nas suas for
mas cl ãssi cas 11•
Estes mêtodos tornaram possível a solução dos pr~
blemas estruturais ao transformarem as equações diferenciais em
equações algêbricas lineares. No entanto, as dificuldades exis
tentes para a resolução de grandes sistemas de equaçoes algêbri
cas fizeram com que apenas os problemas em que o numero de incõg
nitas fosse reduzido pudessem ser analisados.
Esta limitação foi ultrapassada somente na dêcada
de 50 quando surgiram simultaneamente os computadores eletrôni
cos e os mêtodos matriciais de anãlise estrutural 12
•13
•
Os mêtodos matriciais e clãssicos, apesar de se
basearem nos mesmos princípios da mecânica das estruturas, dife
rem bastante quanto a sua formulação.
Os mêtodos clãssicos sao aplicados a estrutura c~
mo um todo e foram desenvolvidos de maneira a facilitar os cãlcu
los manuais.
Os mêtodos matriciais substituem a estrutura.um
corpo continuo, por um conjunto de elementos estruturais, unidos
entre si atravês de um numero finito de pontos, os nôs. Esta dis
creti zação da estrutura permite a uti 1 i zação de uma rotina de .cãl
cul o que contêm um numero grande de operações repetidas, favore
cendo assim o uso de computadores 14•
A anãlise matricial de estruturas e o mêtodo dos
elementos finitos podem, de uma maneira geral, ser tomados como
sinônimos. No entanto, alguns autores reservam a primeira deno
minação para a anâlise de estruturas reticuladas e a segunda pa
ra a anãlise de estruturas formadas por elementos bi e tridimen-

41
sionais.
O trabalho de Turner, Clough, Martin e Topp 15 pu
blicado em 1956 é considerado como o ponto de partida para a for
mulação do método dos elementos finitos (MEF).
Inicialmente o seu desenvolvimento se fez baseado
no conceito fisico de elementos estruturais .discretos, sujeitos
a cargas concentradas aplicadas nos nõs. Porém, a falta de um mo
dela matemãtico rigoroso, além de dificultar a aplicação do MEF
a problemas mais complexos, tornava o avanço da sua teoria lento
e desordenado.
O estabelecimento de um enfoque racional e unifi
cado para a representação das caracteristicas dos elementos sõ
foi conseguido quando os principias variacionais da mecânica dos
sõl idos foram reconhecidos como base para o MEF 16 i 17• Isto resul
tou no desenvolvimento de formulações chamadas de consistentes.
Apôs o êxito obtido com os problemas lineares as
atenções se voltaram para os não-lineares. A não-linearidade geo
métrica tem sido bastante investigada. Consequentemente, muitas
são as formulações propostas. A utilização de principias varia
cionais permite comparar estas formulações e estabelecer as sem~
lhanças e diferenças entre elas. Este tipo de estudo foi feito
por Ebner e Ucciferro 18 e por Carey 19•
Em elementos unidimensionais lineares nao hã dife
rença entre a matriz de rigidez obtida pela formulação consiste~
te, que utiliza um principio variacional, e as outras formulações,
que utilizam outros principias como o teorema de Castigliano ou
a solução da equação diferencial em termos de deslocamentos 14 •
Quando se quer desenvolver elementos unidimensio-

42
nais não-lineares esta situação muda. Apenas a utilização de uma
formulação consistente garante a inclusão de todos os termos nao
lineares na expressão de energia do problema.
O elemento de pÕrti co plano foi um dos primeiros
elementos para anãlise não-linear geometrica a ser formulado. Em
1965, Martin jã publicava um trabalho 20 que inclui a, entre outras,
uma formulação para este elemento. Desde então vãrias formula
ções tem sido apresentadas 2~
2•. A diferença entre elas se encon
tra basicamente na transformação de coordenadas (do sistema de
referencia local para o global) e na consideração, ou não,de ter
mos não-lineares de grau elevado.
O elemento de põrtico tridimensional nao e, como
parece a primeira vista, uma mera extensão do elemento plano. Em
tres dimensões as rotações finitas jã não sao grandezas veto
riais6. Isto cria dificuldades para a determinação da configur~
ção deformada.
Na referencia l 25 I, que serve de base para a for
mulação do modelo l, a configuração deformada e determinada atra
ves de ãngulos de Euler; enquanto na referencia 1261 utilizam-se
vetores unitãrios ortogonais para determinar a orientação de ca
da nõ. Em outra publicação 27 estudam-se os efeitos das rotações
finitas sobre o cãlculo dos momentos nodais atravês do conceito
de momentos quasttangenci a l e semi tangencial 28
•29
•
Os elementos degenerados surgiram como consequen
cia das tentativas de se incorporarem ãs anãlises de pÕrticos e
estruturas laminares a versatilidade e a efici~ncia dos elemen
tos isoparamêtricos.
Em 1968 foi publicndo o primeiro trabalho sobre o

43
assunto 30 . A partir desta idéia inicial desenvolveu-se o elemen
to para anãlise linear de cascas 31• Alguns anos depois aparece
ram os elementos para anãlise não-linear de cascas 32 •33 e para ana
lise linear de põrticos tridimensionais 34 .
O elemento degenerado para anãlise não-linear ge~
métrica de põrticos tem sido pouco estudado. A referência 1331
apresenta um elemento de põrtico plano e em outras publica
ções35•36 sao feitas apenas algumas indicações a respeito do ele
mento de põrtico tridimencional.
Uma formulação do elemento de pÕrtico tridimensi~
nal foi publicada em 1979 37 . Neste modelo, a modificação da ene..!:_
gia de deformação, uma das hipõteses bãsicas para a degeneração
do elemento isoparamétrico, ê levada a efeito através das compo
nentes do tensor de deformação. No modelo:2, que foi desenvolvi
do a partir das referências 1341 e 1351, esta mesma modificação
é feita através da matriz constitutiva.
A anãlise não~linear geométrica de põrticos com
porta, além das duas opções discutidas anteriormente, mais duas
que merecem ser mencionadas.
Em uma delas, os põrticos planos sao analisados
por elementos isoparamétricos cujas funções de interpolação na
direção da espessura sao lineares 38 .
Na outra, utiliza-se o método da viga-coluna (ver
item 3.3}. Este método desenvolveu-se paralelamente a formula
ção do MEF para anãlise não-linear geométrica e pode ser conside
rado como uma formulação não consistente do MEF, apesar de nao
ser tratado assim na bibliografia.

44
3.2 - ALGORITMOS
Quando aplicados a problemas não-lineares os mêto
dos de anãlise estrutural dão origem a sistemas de equações algI
bricas não-lineares. Os algoritmos mais utilizados na resolução
destes sistemas de equações são incrementais, iterativos ou in
crementais-iterativos39"""2.
O processo incremental supõe que o carregamento
do corpo ê feito por partes, correspondendo ãs vãri as etapas de
carga uma sucessão de configurações de equilibrio,
onde íl(o) e íl(f) sao os estados inicial e final de deforma
çao, respectivamente, e íl(N) ê uma configuração intermediãria
qualquer' . O problema consiste em determinar a solução para a
etapa N + 1 conhecidas as soluções anteriores atê a etapa N,
atravês da repetição do mesmo processo de solução. Isto ê viã
vel desde que a configuração N + 1 seja suficientemente prõxi
ma da configuração N e que as equações do problema possam ser
linearizadas em relação as incõgnitas incrementais. Dessa manei
ra, um problema não-linear ê transformado numa serie de proble
mas lineares.
No processo iterativo 13 aplica-se a carga total
de uma so vez, obtem-se uma solução inicial e calculam-se as for
ças nodais para a geometria dada por esta solução. Como o com
portamento da estrutura ê não-linear as forças nodais não se igu~
1am as forças externas aplicadas. Isto corresponde a presença
de um carregamento residual não equilibrado, igual as forças ex
ternas menos as forças nodais. Aplica-se então este carregamen-

45
to, com os parâmetros da estrutura atualiza~os segundo a geome
tria dada pela ultima solução, obtém-se uma nova solução e cale~
lam-se as forças nodais para a nova geometria. Com estas forças
nodais e o carregamento externo calcula-se um novo carregamento
residual e inicia-se todo o processo de novo. Repete-se o proc~
dimento até que os carregamentos não equilibrados sejam menores
que um determinado valor, estabelecido de acordo com a precisão
desejada.
No processo incremental-iterativo o carregamento
é feito por partes, sendo efetuadas iterações dentro de cada in
cremento.
3.3 - METODO DOS ELEMENTOS FINITOS
A formulação variacional do método dos deslocamen
tos, ou modelo compativel do MEF, pode ser feita a partir do pri~
cipio dos trabalhos virtuais ou do principio da energia potencial
estacionãria' 3 • A primeira opção é mais geral porque permite a
utilização de qualquer tipo de equação constitutiva, enquanto a
segunda é vãlida apenas para comportamento elãstico do material'º
As condições de equilíbrio de um corpo na etapa
N + l , utilizando-se o principio dos trabalhos virtuais e um re
ferencial lagrangeano, estão definidas pelas equações (ver item
2. 4) :
J N+ls .. li N+lE: .. dV = o N+lw
, J , J ( 3 • l )
ºv
{3. 2)

sendo:
N+ 1 S .. 1 J
o N+ l E •. 1 J
46
- componentes cartesianas do 29 tensor d.e tensao de Pi ol a-Ki rchhoff, na configuração da eta
pa N + 1
- variação virtual das componentes cartesianas do tensor de deformação de Green -Lagrange na configuração da etapa N + 1
- trabalho virtual das forças externas na etapa
N + 1
- componentes cartesianas das forças de superf! cie na etapa N + 1
- componentes cartesianas das forças de massa na etapa N + 1
o uk - variação virtual das componentes cartesianas do vetor de deslocamentos totais
Relacionando tensões e deformações tem-se a equa
ção constitutiva (ver item 2.5):
N+ 1 S .. 1 J
(3. 3)
O tensor de deformação pode ser decomposto em duas
parcelas, uma linear e outra não-linear (ver item 2.2):
N+l N+l + N+l Eij = e .. n ..
1 J 1 J (3.4a)
o N+l o N+l + o N+l E .. = e .. nij 1 J 1 J (3.4b)
Substitui.ndo (_3.3)_, (.3.4a) e (3.4b) em (3.1) tem-
se:

47
[ 1 N+l N+l N+l N+l l:i jk,Q, eki o eij + cijki n .. o e .. +
l J l J
+ Ci jk.Q. N+l
eki o N+l + cijki
N+l n .. l J n ki o N+ ln. J
l J dv = o N+lw
( 3. 5)
A equaçao acima e a expressao completa do traba
lho virtual interno. As vãrias teorias não -lineares existentes
diferem basicamente em dois aspectos 19, na consideração ou nao
de todos os termos da equação (3.5) e na maneira de agrupã-los.
As pesquisas iniciais 20 deram origem a uma teoria
incremental, em que a matriz de rigidez, referida ao sistema de
coordenadas local, resulta da soma de duas outras, a matriz de
rigidez linear convencional e a matriz de rigidez geomêtrica,que
representa a contribuição das tensões existentes no inicio do in
cremento. Como as tensões são mantidas constantes durante o in-
cremento não ê possfvel a realização de iterações.
ê chamada tambêm de teoria da tensão i ni ci al 19•
Esta teoria
Mais recentemente foi proposta uma teoria incre
mental-iterativa25•35•44, que supera alguns dos inconvenientes da
teoria anterior, mantendo a mesma simplicidade.
Estas duas teorias serio apresentadas a seguir.
Inicialmente faz-se uma decomposição incremental:
(3.6)
(3. 7)
(3. 8)

48
N+l N + Íl nki ( 3. 9) nki = nki
6 N+l nki = 6 Íl nki (3.10)
N+ l t k = Nt
k + Íl tk (3.11)
N+lb k = Nb
k + Íl bk (3.12)
Substituindo (3.7),(3.8),(3,9) e (3.10) em (3.5),
tem-se:
. f ~ijki Neki 6 ll eij + cijki ll eki 6 ll eij +
ºv
+ ci j k i N eki 6 Íl n ..
1 J + cijki fl eki 6 Íl n .. +
1 J
cijki N 6 Íl n .. + Ci jki ll 6 Íl niJ dV = 6 N+lw (3.13) + nki nki 1 J
Para linearizar a equaçao (3.13) desprezam-se as
parcelas não-lineares em termos de deslocamentos incrementais.
Reagrupando os termos de (3.13) tem-se:
f ~ijki (Neki + Nnki) 6 ll eij + cijki ll eki ll eij +
ºv
(3.14)
Utilizando-se (3.4a) e (3.3) tem-se para a eta-
pa N

49
(3.15)
Substituindo (3.15) em (3.14) tem-se:
J rsij o 6 eij + Cijkt 6 ekt o 6 eij + NSij 06 niJ dV =o N+lw
ºv (3.16)
Substituindo (3.6), (3.11) e (3.12) em (3.2),tem-
se:
o N+lw = I Nt k o 6 u k dA + J Nbk o 6 uk dV +
ºA ºv
+ J 6 tk o 6 uk dA + J
6 bk o 6 uk dV (3.17)
ºA ºv
Para o equilíbrio do corpo na etapa N , utilizan
do o princípio dos trabalhos virtuais', tem-se:
Igualando (3.16) e (3.17), e rearranjando os ter-
mos, tem-se:

50_
J Lcijkt t, ekt º t, eij + Nsij <lt,niJ dV =
ºv
+ J Ntk o t, uk dA + J Nbk o t, uk dV - J
ºA ºv ºv
N s .. at,e .. dv l J l J
(3.19)
As simplificações feitas para linearizar a equa
çao (3.13) e os erros computacionais fazem com que a eq. (3. 18)
raramente se verifique'
seguinte forma:
( o [:, ~k)T [:, 11' = J
Nt k
ºA
+ J Nb k o t, uk dV - J
ºv ºv
Por isso é mais correto escreve-la da
o t, uk dA +
N o [:, s .. l J
e .. l J
dV ( 3. 20)
O vetor t, 11' e o residuo que fica apos cada in
cremento. Sua eliminação soe possivel através de um processo
iterativo.
A teoria da tensão inicial ao supor que o compor
tamento da estrutura durante cada incremento de carga e linear,
estã implicitamente aceitando a validade da equação (3.18). Des
sa maneira a equação (3.19) fica simplificada.

51
J @ijk9, t:. ekt c5 t:. N
c5 6 nij] dV e .. + sij = 1 J
ºv
= J
6 tk c5 6 uk dA + J 6 bk c5 6 uk dV (3.21)
ºA ºv
Discretizando a equaçao (3.21) tem-se
(3.22)
onde:
( ' , !:!k)T ~L, uk = J e 'e ' 'e dV u Ll Ll ijk9, Ll kt u Ll ij
ºv
( c5 Í', k T uk
J N c5nn .. dv !! ) ~NL Í', = s ..
1 J 1 J
ºv
( c5 6 !:! k) T Í', R = I 6 tk c5 6 uk dA + f nbkc5nukdV
ºA ºv
~L - matriz de rigidez linear
~NL - matriz de rigidez geométrica ou não-1 inear
Í', R - vetor dos i ncrementos das cargas aplicadas
Í', uk - vetor dos i ncrementos dos deslocamentos nodais
c5 Í', uk - vetor . àa -variação dos i ncremeritos dos deslocamentos - -
nodais
Simplificando a equaçao (3.22), tem-se:
(3.23)
A equaçao (3.23) representa um processo estrita
mente incremental. Para que a solução obtida seja prõxima da

5.2.
exata os incrementos de carga devem ser suficientemente pequenos.
Como não existe um critério geral que forneça o numero de incre
mentos adequado para cada problema, quando o comportamento da es
trutura ê desconhecido, esta escolha torna-se bastante dificil.
E comum realizar-se, inicialmente, uma anãlise li
near para verificar a grandeza dos deslocamentos e das rotações.
Com base nestes resultados, escolhe-se então um numero de incre
mentos adequado. No entanto, seguindo este procedimento nunca se
sabe a distância entre a solução exata e a obtida.
Uma maneira mais segura seria realizarem-se va
rias anãlises não-lineares, com numero crescente de incrementos,
atê que a variação entre as duas ultimas soluções fosse pequena.
Porém, a aplicação deste procedimento, em geral, torna-se proibi
tiva pelo alto custo computacional resultante.
A teoria incremental-iterativa mantêm todos os
termos da equação (3.19}, que discretizada assume a forma segui!
te:
(3.24}
O processo incremental-iterativo representado pe
la equaçao (3.24}, como jã foi dito anteriormente, ê mais preci
so e mais versãtil do que o estritamente incremental da equação
(3.23}. Apesar do grau de aproximação em relação aos termos da
equaçao (3.13) ser o mesmo nos dois processos, a realização de
iterações em cada incremento evita a acumulação de erros, tornan
do menos rigidas as restrições quanto a grandeza dos incrementos
adotados.
Para facilitar a implementação da equaçao (3.24)

53
faz-se um reagrupamento de termos.
sendo,
(8 6 ~k)T R = J (Ntk + 6 tk) 8 6 uk dA +
ºA
ºv
(8 6 ~k)T F = J V
(3.25)
A equaçao (3.25) ê vãlida tanto para a estrutura
como um todo quanto para cada um dos elementos. Quando aplicada
a estrutura as matrizes ~L , ~NL e F são montadas .,a partir
das matrizes correspondentes dos elementos 43• As matrizes de ca
da elemento são calculadas atravês das seguintes equações:
~L = f BT e ~L dV -L (3.26a)
ºv
K.i [ I T ~M ~NL dV = ~NL -J ·.
(3.26b)
ºv
F = f BT ~V dV -L (3.26c)
ºv
sao montadas a partir das
derivadas das funções de interpolação (ver itens 4.2, 4.4, 5.2 e
5.4). As matrizes ~M e ~V contêm as componentes do tensor
As matrizes ~L e ~NL

54
de tensão, rearranjadas de uma maneira adequada (ver itens 4.4 e
5.4). Finalmente.a matriz C ê a matriz constitutiva (ver itens
2.5, 4.2 e 5.2).
3.4 - METODO DA VIGA-COLUNA
No método da viga-coluna as relações força-deloc~
menta em cada elemento são obtidas aplicando-se a teoria de vig~
coluna. Isto implica em supor que os efeitos não-lineares rela
cionados a deformação de flexão do elemento podem ser despreza
dos. Ou seja, a força axial ê considerada finita enquanto os m~
mentas de flexão e os cortantes são considerados infinitesimais's-52•
As funções de estabilidade, deduzidas pela teoria
de viga-coluna, são coeficientes que traduzem a influência de uma
força axial sobre a rigidez a flexão do elemento 1 • Elas são de
terminadadas a partir da equação diferencial da viga da Fig. 3.1.
por:
interno - E!
onde:
O momento em uma seção qualquer da viga e dado
Igualando a d2y cJx2 tem-se:
d2y + k2y cfx2
(3.26)
equaçao (3.26) ao momento resistente
Ml X M2 X ;rr(r- 1l+rrr
k2 ; p rr
(3. 2 7)

5.5
y
_..,_P~- ( (D1"' _-_----l.&_..!._-_-_'_,:,,..._,-,-;-2--~---~~-2~-p-X
Figura 3. 1

56
A equaçao (3.27) admite duas soluções gerais con
forme a carga P seja de compressão ou de tração.
Para compressão tem-se:
Ml X M2 X Y = A sen kx + B cos kx + p (T - l) + p [
(3.28)
Para tração tem-se
(3.29)
Ap6s virias operaçoes algibricas 1 os momentos M1 e M2 sao obtidos em função das rotações e1 e e2
(3.30)
Os coeficientes c1 e c2 sao as funções de es-
tabilidade. Eles possuem valores diferentes conforme
uma força de compressão, de tração ou nula 49•
Para compressão tem-se:
c1 <P (sen <P - <P cos <P ) = 2 (1 ~ CDS <j, ) - <P sen <P
C2 . <P ( <P - sen <P )
2 (1 - cos q, ) - q, sen q,
p seja
{3.31)

57
Para tração tem-se:
c1 cj, ( cj, cosh cj, - sinh cj,) = 2 ( 1 - cosh cj, ) + cj, s1nh cj,
( 3. 32)
c2 cj, (senh cj, - cj, ) = 2 ( 1 - cosh cj,J + cj, sinh cj,
Para P = O tem-se
Uma formulação bastante simples do método da vig~
coluna e encontrada na referência l 51 I. A matriz de rigidez do
elemento no sistema de referência local ê deduzida diretamente das
equaçoes (3.30) e das condições de equilfbrio.
l 2 3
o
o
o
K =
o o
o
o
4
E Ax - -L-
o
o
o
o
5
o
o
6
o
2
3
o 4
5
6

58
- para compressao
c3 = cp' (cos cj>)
2 ( 1 - CDS cj> ) - cj> sen cj>
C4 <P 3 sen cj>
= ( 1 cj> ) 2 - CDS - cj> sen cj>
- para tração
C3 cj> 2 (cosh cj> - l )
= 2 ( 1 - cosh cj> ) + cj> senh cj>
C4 cj> 3 senh cj>
= 2 ( 1 cosh cj> ) senh - + cj> cj>
Esta matriz inclui os efeitos da interação entre
as cargas transversais e axiais. A mudança de geometria da es
trutura ê considerada no início de cada ciclo iterativo, através
da atualização das matrizes de rotação que fazem a transformação
do referencial local para o global.
Outras formulações'ª~º utilizam a matriz de rigi
dez tangente, que por ser mais precisa acelera a convergência do
processo iterativo. A dedução desta matriz ê feita a partir do
conceito matemãtico do desenvolvimento de Taylor, que calcula o
valor de uma função P {u 1 , u2 , u3 , ... , un) na vizinhança de
um ponto (ulO , uzo , u30 , ... , uno)
a P P (u10 'uzo' ... , uzo) +~ dul +
a P a P ~ du 2 + ... + ~ dun
(3.33)

59
As equaçoes de equilfbrio, que relacionam as for
ças nodais P com os deslocamentos nodais u , são determinadas,
no sistema de referencia local, utilizando-se as equações (3.30)
as condições de equilfbrio e algumas considerações geometricas 13.
Apôs a transformação das equaçoes de equilfbrio
do sistema local para o global, aplica-se a cada uma das forças
Pi o desenvolvimento de Taylor.
sendo:
/:, p. 1
a P. 1 ... ' au;;-
gente para
= r~ a u ' l
3 P. 1
auz 3 P.
1 , au 3
a P. J ' · · ·' a u~
(3.34)
aP. aP. aP. Na equaçao (3.34) os termos 1 1 1
au", ' au;- , au;;-sao os elementos da linha i d a matriz de rigidez tan-
a geometria especificada por (u 10 , u20 , u30 , ... , un0
)
= a P.
1
~ ( 3 . 3 5 )

60.
IV - MODELO 1 - ELEMENTO DE EIXO RETO E SEÇllO TRANSVERSAL CONS
TANTE
Este elemento possui dois nos com seis incõgnitas
nodais, três translações e três rotações (Figura 4.1).
Adota-se a hi põtese ,' de pequenas deformações ( ver
item 2.7), porem admitem-se translações e rotações grandes quan
do comparadas com as dimensões da estrutura e com a unidade, res
pectivamente.
A hipõtese de pequenas deformações permite duas
outras simplificações. A primeira e a hipõtese das seçoes pla
nas, que supõe que as seções inicialmente planas permanecem pla
nas na configuração deformada. A outra simplificação se aplica
a representação do movimento do elemento. Supõe-se que o elemen
to estã sujeito apenas a rotações de corpo rigido, mantendo o ei
xo reto e a seção transversal e o comprimento constantes. Com is·
to torna-se posslvel relacionar as configurações deformada e in
deformada atraves de uma transformação linear.
Alem do sistema de referência global, utilizam-se
mais dois sistemas de referência: o local fixo e o local mõvel 2~
No sistema fixo a direção 1 coincide com o eixo
do elemento e as direções 2 e 3 correspondem a cada uma das dire
ções principais de inercia. Os eixos são mantidos na configura
çao indeformada do elemento (Figura 4.2), correspondente a etapa
o.
O sistema mõvel se desloca a medida em que o ele
mento sofre deformação. Os eixos se mantêm sempre retos e mutua
mente perpendiculare.s 26'53
• Na etapa O os dois sistemas de re-

61
AM.11
t AM.5 A.u.9 t __ ----A.u.10
0~ A AJ.7
A .u.2 A "-9
' A.u.1 A .u.12
A .u_,i----0 ~ A .U.3
' A.Ms
Figura 4. l
--------X 1 'y 1
©
'
x1 tx 2 ,x3 - Coordenados do sistema fixo
Y1 , Y 2 , Y 3 - Coordenadas do 11stema móvel
Figura 4.2

62.
ferência sao coincidentes (Figura 4.2).
O referencial mõvel estã sempre situado na confi
guraçao correspondente a etapa N , pois a configuração da etapa
N + l para ser determinada, depende ___ do-s deslocamentos incre
mentais que são as incõgnitas do problema. A utilização deste
referencial ê equivalente a escolha da configuração da etapa N
para referência.
O campo de deslocamentos incrementais .e esérito
tomando-se como referência o sistema mõvel. Como es.te referen
cial acompanha o deslocamento do elemento podem-se utilizar as
mesmas funções de interpolação usadas na anãlise linear de põrt~
cos 25 •
Desta forma, escolhem-se funções lineares para in
terpolar os deslocamentos axial e de torção e funções cúbicas p~
ra interpolar os deslocamentos transversais, resultantes da fle
xão.
As integrais que determinam as matrizes de ri gi
dez e o vetor de forças internas (equações (3.26)), sao resolvi
das, explicitamente, na configuração da etapa N • Isto e feito
porque as funções de interpolação estão definidas em relação ao
referencial mõvel. As matrizes assim obtidas são transformadas
sucessivamente para os referenciais fixo e global 54•
A matriz de rigidez linear, calculada em relação
ao sistema. de referência mõvel, e igual a matriz de rigidez uti
lizada na anãlise linear de põrticos e se mantem constante duran
te todo o processo incremental. O efeito da mudança de geometria
e inclu{do ao se fazer a passagem do referencial mõvel para o fi
xo.

-63
4.1 - CAMPO DE DESLOCAMENTOS
As translações do eixo do elemento e as rotações
do elemento são aproximados por polinõmios em r 11•
sendo:
u
V
w
er -
es -
et -
u = ª1 + ª2 r.
V = ª3 + ª4 r + ªs r2 + ª5
r3
w = ª7 + ªs r + ªg r2 + ª10 r 3
e I". = ª l l + ª l 2 r
es dw
{as + 2 ªg r + 3 ª10 r 2) = - ar = -
et dv
= ar = ª4 + 2 ªs r + 3 ª5 r2
deslocamento do eixo do elemento na direção r (Figu-
ra 4. 2)
deslocamento do eixo do elemento na direção s {Figu-
ra 4. 2)
deslocamento do eixo do elemento na direçao t (Figu-ra 4. 2)
rotação do elemento em torno do eixo r
rotação do elemento em torno do eixo s
rotação do elemento em torno do eixo t
As coordenadas generalizadas a. 55 são calculadas l
em função dos deslocamentos nodais LILI; através das condições
que u , v , w , er , es e et devem satisfazer em r = O (nõ
ll e em r = L (nõ 2).

64
em r = O em r = L
u = 6 u 1 u = 6 U7
V = 6 u2 V = 6 Ug
w = 6 U3 w = 6 Ug ( 4. 2)
er = 6 U4 er = 6 ulO
es = 6 U5 es = 6 u 11
et = 6 U5 et = 6 u l 2
As translações do eixo do elemento e as suas rota
çoes sao obtidas em função dos deslocamentos nodais substitutin-
do-se na equaçao (4.1) as expressões que relacionam os
6 u. 1
U = (l - [) Ô Ul + [ Ô u7
r 2 r 3 r r 2 r 3
v = (l - 3 rz + 2 r,l 6 u2 + L (T - 2 L2 + ul ô U5 +
r 2 r 3 r r 2 + (3 L2 - 2 ul ô Ug + r (- "[ + u) 6 u, 2
(1 3 r2
2 r' L (. - r 2
r2 r' w = - [z + r,l 6 U3 + I + L2 r,) 6 U3
(3 r2
2 r, r r2
+ L - r,) Ô Ug + r (T - rzl 6 u 11
+
a. aos 1
( 4. 3)
( 4. 4)

6.5
cf r2 6 (1 4 r 3 r2
es = - [zl [ il U3 + - I" + [zl il U5 +
( - r r2 6 (- 2 r 3 r2
(4.4) + [ + [zl I" 6. Ug + I" + [2) il u 11
r r 2 6 r r 2 8t = (- [ + [2) [ D. u2 + (1 - 4 [ + 3 p) il u6 +
r r 2 6 r r 2 + (T - I2) I" 11 u 8 + ( - 2 I" + 3 L2) 6. u 1 2
As translações de um ponto qualquer do elemento
sao determinadas pelas equações a seguir.
u (r , s , t) = u + u' + u"
V (_r , s , t) = V + v' ( 4. 5)
w (r , s , t) = w + w'
Os deslocamentos u' , u" , v' e w' são calcu
lados em função das rotações do elemento, utilizando-se a hip6t!
se das seções planas {Figura 4.3).
u' = - s tg et
u" = t tg es (4 .,6)
v' = - t tg er
w' = s tg er
Como a hip6tese dos pequenos deslocamentos i vili
da em cada incremento de carga e as rotações er , es e et são
deslocamentos incrementais, pode-se considerar tg e; e nas equi
ções (4.6).

66
s . \}" • - ,.,._
( a )
1 ·"'
Jt ,,.,_
( b)
ó s.~
• w
6- /1-
(h
',w _,.,... ( e )
Figuro 4.3

6.7
u 1. = - s et
u li = t es ( 4. 7)
v' = t er
w' = s er
Substituindo-se sucessivamente (4.3), (4.7) e (4.4)
em (4.5) obtem-se as equaçoes que expressam o campo de desloca
mentos em funçâo dos deslocamentos nodais.
ou
sendo:
' u = hi uk u i 9, 9,
(i=l,2,3) (Q,=1,2, ... ' l 2 ) (4.8a}
( 4. 8b)
!':, u - vetor dos deslocamentos incrementais, referido ao
sistema mõvel
H - matriz das funções de interpolaçâo definidas em re laçâo ao referencial mõvel
/':, uk - vetor dos deslocamentos nodais incrementais, referido ao sistema mõvel
hl - componentes da matriz H , correspondentes a linha 11 i II e a coluna 11 2 11
Os elementos da matriz ~ , que sao polinômios em
r , s e t , estâo determina dos a seguir em funçâo das variãvei s
s e t e dos polinômios fi(r) e gi(r) .

68
h 1 = fl h 1 = 92 s h 1 = 92 t 1 2 3 h 1
5 = 93 t h 1 6 = 93 s h 1
7 .- f 4
h 1 = - 95 s h 1 = 95 t h 11 = 95 t 8 9
h{2 = 95 s h 2 = f2 h2 = ~ fl t 2 4 ( 4. 9) h2 = f3 h2 = f5 hio = f4 t 6 8
hi2 = f6 h 3 3 = f2 h 3 = fl s 4
h2 = - f3 h 3 = f5 hfo = f4 s 5 9
hi1 = f6
sendo:
fl 1 r f2 1 3
r2 + 2
r3 = - r = - [2 p
cf r2 3 r f3 = - 2 L
+ .!:_) L f4 = [ (4.10a) L
r2 r3 r 2 f5 = 3L - 2 L f6 = (- r + f-l r
91 = - 1 (- r + [ )
6 -L- 92 = r [
93 = 1 - 4 r + [ 3 r2 u 94 = - 91 (4.10b)
95 = - 92 95 = - 2 r + 3 r2
r [2

69_
4.2 - EQUAÇÕES CONSTITUTIVAS E CAMPO DE TENSÕES
As equações constitutivas do elemento foram esco
lhidas de acordo com a teoria técnica das vigas, pois as barras
de um pÕrtico se comportam como vigas submetidas a flexão, tor
çao e compressao ou tração.
Segundo essa teoria 10, a flexão e a compressao ou
tração produzem tensões normais ã seção transversal, enquanto a
torção produz tensões tangenciais e empenamento da seção. O em
penamento, que sõ deixa de ocorrer em seçoes circulares 56 57 58,não
foi considerado na determinação do campo de deslocamentos, para
nao contrariar a hipõtese das seções planas.
O tensor de tensão para uma viga cdntém apenas
cinco componentes não nulas: s11 , s12 = s21 e s13 = s31 . Du
rante o processo incremental estas componentes são determinadas
de forma incremental, também:
N+l~v = N~v + 6 ~V (4.11)
As componentes do tensor incremental de tensão de
Cauchy 25 se relacionam com as componentes da parcela linear do
tensor incremental de deformação através das equaçoes constituti
vas.
(4.12}
onde:
(4.13a)

onde:
70
E o
e o E = 2 {l +
o o
E - mõdulo de elasticidade
v - coeficiente de Poisson
v)
As componentes 6 e .. l J
6 e .. l J
i
j
=
=
1
1 • 2 • 3
(4.13a)
o
o (4.13b)
E 2 (1 + v)
sao dadas por:
36 u. 3 y ~)
l
(4.14)
Y1 = r
Yz = s
Y3 = t
A relação entre 6 e e os .deslocamentos nodais -V
incrementais e estabelecida utilizando-se as equações (4.8a) e
e (4. 1 4) .
(4.15a)
sendo:

ou
91
~L = o
o
\
94
o
o
- 97
o
o
- 99
o
o
a h ! _._J a Yi
t
s·
91 - definido em (4. lOb)
94 - definido em (4.lOb)
71
a h ~ + __ J
a Yl
- 97 t
o
o
- 99 t
o
o
97 = (- l + 2 f) 6 I2
99 = - 97 910 =
p/ i = 1
p/ 1 < i < 3
o 9s t - 98
- 91 t o o
91 s o o
o 910 t - 910
- 94 t o o
94 s o o
9s = (- 4 + 6 f) l [
(- 2 + 6 r) l T [
Substituindo (4.15a) em (4.12), tem-se:
(4.15b)
s 1
' '
s 1
(4.16)
(4.17)
A equação (4.14) difere da equação (2.lla) porque,
como o referencial mõvel corresponde a confi 9uração da etapa N,
a decomposição incremental dos deslocamentos, para este referen-

cial, se reduz a u. = 1
72
N+l u.=L\u. 1 1
4.3 - MATRIZ DE RIGIDEZ LINEAR E VETOR DE FORÇAS INTERNAS
A matriz de rigidez linear ~L e o vetor de for
ças internas F resultam da discretização das parcelas
e Jv
Ns .. cS LI e .. dV 1 J l J
da equaçao (3.19).
(4.18)
. ~L = J ~[ C ~L dV (4.19a)
2 3 4 5 6 7 8 9 1 O 1 l 1 2 - -Kll Kl 7
K22 K26 K28 K2,l2 2
K33 K35 K39 K3~ 11 3
K44 K 4, l O 4
K55 K5 9 K ... , 5, 11 5
~L = K66 K68 K5 ; l 2
s I M K77
6
7
K88 Kg, l 2 8
Kgg Kg , 11
Kl0,10 10
Kl l , 11 11
•· Kl2,12 .
12

73
Kll E Ax
K l 7 = Kll = -r
l 2 EI2
6 E! K22 K26
z = = L 3 L
= - K22 K2, l 2 = K26
12 E I - 6 E! = y
K35 = y L L2
K39 = - K33 K3, 11 = K35
G I K44
X K4,10 = K44 = -r -
4 Ely 6 Ely K55 = K5 9 = [2 (4.19b) ,
2 E! 4 E I K5, 11
y K55
z = = L L
6 E! 2 EI2
K68 z
K6 12 = = L , L
Kg , 11
Kl l , 11
sendo:

74
Ax - a rea da seçao transversal
IX - constante de torção igual a soma de IX e Iy
I - momento de inercia y da seçao transversal em relação
ao eixo s
Iz - momento de inercia da seçao transversal em relação
ao eixo t
E - mõdulo de elasticidade
G mõdulo de elasticidade transversal (G E =2c1+v)l
v - coeficiente de Poisson
(4. 2 o a)
F = I (4.20b}
Adotando-se uma decomposição incremental para Ns -V
e substituindo em (4.20b}
ou
(4.21)
Substituindo (4.17) e (4.19a) em (4.21)
As forças internas
respondentes ao campo de tensões
F
s -v
(4.22)
sao os esforços nodais co~
A distribuição de esfor-
ços ao longo do elemento e determinada de acordo com o processo

75
usual da estãtica.
O esforço normal e o momento torsor sao constan
tes em todo o elemento, enquanto os momentos fletores variam li
nearmente
(4.23)
My = F3 r + F5
Sendo:
N - esforço normal
T - momento torsor
My momento fletor em torno do eixo s
Mz momento f1 e to r em torno do eixo t
As componentes do tensor de tensão e as forças i~
ternas podem ser relacionadas entre si através das equações (4.23)
e d a teor i a de f 1 ex ão u sua 1 16 .
N Mz M sll =
lÇ + r; s -!~
t
S 1 2 - T
t (4.24a) = r;
5 13 T s = -r;

76
Substituindo (4.23) em (4.24a)
Fl ( - F2 r + F 6) (F3 r + F5) Sll = 1Ç +
Iz s - t
y
S12 F4
t = i-; (4.24b)
5 13 F4
s = i-;
A matriz de rigidez linear e o vetor de forças i~
ternas referidos ao sistema global são determinados através das
seguintes equações:
onde:
(4.25a)
GE = TT RT F (4.25b)
R - matriz que realiza a transformação do sistema de referência local mõvel para o local fixo
T - matriz que realiza a transformação do sistema de referência local fixo para o global 54
4.4 - MATRIZ DE RIGIDEZ NAO-LINEAR
A matriz de rigidez não-linear resulta da discre
tização da parcela
S .. 6 /'i n .. dV J N
V 1 J 1 J
da equaçao (3.19).

77
( I V (4.26)
~NL = I T ~NL ?M ~NL dV (4.27)
Explicitando-se o somatório do lado esquerdo da equ~
çao (4.26) e considerando s22 = s33 = s23 = O , tem-se:
•
(4.28)
As componentes 6 nij sao dadas por:
l 36 uk 36 uk 6 nij = z 3 y. 3 y.
1 J (4.29a)
i = Y1 = r
j = l ' 2' 3 Yz = s
Y3 = t
ou
6 n .. l 6 UT 6 l 6
T 6 ~' l (4.29b} = z u = z u .
1 J - 'l -,j -,J
onde:
T [36 u l 36 Uz 36 u3 J 6 u ; l = (4.30a) 3 y 1 3 y 1 3 Yl

ou
sendo:
I - matriz
o - matriz
T ti u . = ,J
(j=l,2,3)
!:,. u ' l
=
!:,. T
!:,. u 1 = ,
u . = -,J
!:,. T u .
-,J = !:,.
M' = [! M2 = [Q
M' = [Q
T [/:,. T !:,. !,! ,y = ~ l ,
78
M' !:,. u -,Y
UT ,y
( M 1 ) T
Mj !:,. u -,y
UT -,y
(~j) T
o Q] I D] o I]
T !:,. !,! 2 ,
identidade 3 X 3
nula 3 X 3
(4.30b)
(4.31a)
(4.31b)
(4.32a)
(4.32b)
(4.33)
t,. u T J -,3 (4.34)
Fazendo a primeira variação das equaçoes (4.29b),
(4.31b) e (4.32b), tem-se:
(4.35)

79
ol'i UT - 'l
= ol'i u -,y (!11) T (4.36a)
ol'i T u .
-,J = ol'i u -,y ( ~j) T (4.36b)
Substituindo (4.31a), (4.32a), (4.36a) e (4.36b)
em (4.35), tem-se
(4.37)
Variando o indice j em (4.37) tem-se:
o /'i n 11 = ol'i UT -,Y
(~1)T MI /'i u -. ,y
oi'i n 12 l
ol'i UT [c~1)T M2 + (~2)T ~IJ /'i (4.38) = 7 u -,y ,y
o/'i n13 l
ol'i T
= 2 u -,y [e~ 1) T M' + ( ~,) T ~IJ /'i ~.y
Através das equaçoes (4.34), (4.30b) e (4.8a) ob-
tem-se a relação entre o vetor
incrementais
/'i u e os deslocamentos nodais ,y
/'i u = HD /'i uk (4.39a) -,y
ou
(4.39b)
sendo

80
a h~ J p/ i < 3 aYí-
a i-3 h. ( H D) .. = J p/ 3 < i < 6 (4.40) , J a Y2
a i-6 h. J p/ 6 < i < 9 a Y3
Fazendo a primeira variaçio da equaçao (4.39b),
tem-se:
(4.41)
Substituindo as equaçoes (4.38), (4.39a) e (4.41)
em (4.28), tem-se:
J sij 06 n .. , J dV = (06 ~k)T [
J V H p T [s 11 ( ~ 1 ) T M' + 512 [( ~ 1) T Mz + (~z)T ~ 1 J + -
+ 513 [l~ 1) T Ma + (~')T~']] HD dv] 6 uk (4.42) -
Comparando as equaçoes (4.26) e (4.42) conclui-se
que:

e
ou
~M 9x9
(BNL)ij
=
a =
a
81
o
o
~NL = HD
ah~ _J p/ ºY1
h~-3 J p/ a Y2 I
h i_ -6 J p/ a Y3
o (4.43)
o
(4.44a)
i < 3
3 < l < 6 (4.44b)
6 < i < 9 -

~
91 - 97 s - 97 t o 9g t - 9g s 94
o 92 o - 9 l t o 93 o
o o 9z 91 s - 93 o o
o - 9z o o O, - 93 o -
~NL = o o o o o o o
o o o fl o o o
o o - 9z o 93 o o
o o o - f l o o o
o o o o o o o ~
9g s - 9g t o
95 o - 94
o 95 94
95 o o
o o o
o o f4
o - 95 o
o o - f4
o o o
910 t -
t o
s - 96
o -
o
o
96
o
o
910 s
96
o
96
o
o
o
o
o
1
co N

83
Os elementos da matriz de riigdez não-linear, re-
feri da ao sistema mõvel, são determinadas através das equaçoes
(4.43), (4.44), (4.24b) e (4.27).
2 3 4 5 6 7 8 9 l o l l l 2
- N N N N N N N N N N Kll Kl2 Kl3 Kl5 Kl6 Kl7 Kl 8 K1g K l 11 Kl , l 2
l
, N
K22 N
K24 N
K26 N
K27 N
K2a N
K2 , l O N
K2,12 2
N K33
N K34
N K35
N K37
N K3g
N. K3 ; l O
N K 3 , 11
3
N K44
N K45
N K46
N K48
N K4g
N K4, l O
N K 4, 11
N K4, 12
4
N K55
N K57
N K5g
N K5 , l O
N K5, 11
5
N N N N N 6 K66 K6 7 K68 K6, l O K6 12
~NL= s I M , N N N N N
K77 K78 K7g K 7 11 K7,12 7
, N
K88 N
KB, l O N
K 8, l 2 8
N N N 9
Kgg Kg, l O Kg, 11 N
Kl O, l O N
Kl O, 11 KlO, 12 10
N Kl 1 , 11
11
N Kl2,12
12
N Fl N F2 Kll = T N l 2 = T
N F3 KN F5 Kl3 = T = T l 5
N F6 N N Kl6 = --r- Kl7 = K 11
( 4. 45 a)
N N N N Kl8 = Kl2 K1g = K13
N F3 +
F5 N F6 K l , 11 = T Kl , 1 2 = - Fz + T
N l 2 I z 6 Kzz = Fl - Fl
L' Ax 5[

84
N F3 F5 Kz4 = 2 + T
N 6 I z Fl Kz5 = Fl L2 Ax
- TIT
N Fz Kz7 =T
N l 2 I 6 z
Kzs = F1 + Fl L' A "5T
X
N F3 F5 Kz, l O = z- T
=- 12 Iy
L' Ax
N F 2 F 6 K34 = - 2 + T
l 2 I y
L' Ax
(4.45a)
(4.45b)

85
N I N L X Fl K44 = IA K45 = TI F2
N L F3
N F3 F5 K45 = TI K43 = 2 T
(4.45b) N F2 F5 N N
K49 = 2 T K 4 , l O = K44
N N N N K4, 11 = K45 Kll, 12 = K45
(4.45c)
6 I F = __ z Fl + ,;,.
A L 2 , u
N K5, l O =

86
KN Fl N = T K73 = 77
N N = -K79 KN
l 3 K 7, 11 =
N K7 12 = ,
N Kg, l O =
KN N K33 99
N Kl 12 ,
N K24
N Kg , 11 =
N Kl0,11
N Kss
N KS,12 =
N Kg, l O
KN 35
N Kl2
N K l , l l
=
-
=
N K22
N K26
N . K34
N Kl0,12
(4.45d)
A matriz de rigidez não-linear referida ao siste
ma global e determinada através da seguinte equação:
(4.46)
4.5 - TRANSFORMAÇAO DO SISTEMA DE REFERÊNCIA LOCAL FIXO PARA O SISTEMA LOCAL MDVEL
. A determinação da posição do sistema de referencia
mõvel e feita através de ângulos de Euler'.
O sistema de eixos X. , correspondente a config~ 1 .
raçao indeformada, transforma-se no sistema de eixos yi , cor
respondente a configuração deformada, através de tres rotações
sucessivas (Fig. 4.4).

87
( a )
~ X2
\ (; X2
1 1 1 1 \ 1
( b)
,. X2
Y2 \ \ \ 1
\ \ \ \
\
/ v, /
.. 'õ /
/
x3 / /
Y3 / /
( e J
Figura 4.4

origem aos
88
Primeiro, uma rotação
eixos xª l e xª 3
xª l -X2 = Rª
a X3
cos (l
o
- sena
Em seguida, os eixos
o
l
o
a em torno do eixo
x,
x2
X3
sena
o
cos (l
a x 1 e sofrem
de B em torno do eixo x~ , transformando-se em y 1 e
Y1 xª l xs
2 = RS x2
xª a 3 X3
r cos B se n B o RB = l -sen B cos B o
o o l
Finalmente, apos uma rotação y em torno
xB 2 e X a
3 transformam-se em Y2 e Y3
Y1 Y1
Y2 = Ry xs 2
Y3 a
X3
x2 dã
(4.47a)
(4.47b}
um g i ro
(4.48a)
(4.48b}
de y l '
(4.49a}

l
o
o
89
o
CDS y
- sen y
o
sen y
CDS y
(4.49b)
As matrizes Rª e RS determinadas a seguir,r!
presentam a rotação causada pelas translações relativas dos nõs
(Fig. 4.5) 25•
onde:
N-r N- N-ui = ui+6 - ui
(i = 1, 2 , 3)
1
IJ 1 = [(ºL + Nuf) 2 + tu~) 2]2
ºL + N-r ul
cos a =
IJl
N-r
sen a U3
=
IJl
s IJl
cos = NL
N-r
s u2
sen = NL
(4.50)
(4.51a)
(4.51b)

90
N ,,;
.U.1
I J K1
N .. .JJ.. 3
_j,_ J1 ...
X1
( a l
Y1
J2
~ \.. 1 N_.o. JJ-2
o<-
I J1 x,
( b )
Rgura 4. 5

91
N-r ui - componentes do vetor de deslocamentos relativos refe
.rido ao sistema local fixo
Nüi - componentes do vetor de deslocamentos nodais totais
referido ao sistema local fixo
ºL - comprimento inicial do elemento
NL - comprimento do elemento na configuração da etapa N
A matriz RY representa a rotação causada pela
torção. O ãngul o de rotação y ê calculado de forma i ncremen
ta l .
N N-1 y = y = y + õy (_4.52)
O incremento õy ê considerado como sendo igual
a metade da soma das rotações nodais incrementais em torno doei
xo y 1 , referidas ao sistema mõvel 25•
l k k õY = 7 (u 4 + UlO) (4.53a)
sendo:
k d -k d -k d -k u l l = R 11 U4 + Rl2 U5 + Rl3 u6
(4.53b) k d -k d k d -k
ulO = Rll UlO+ Rl2 u 11 + Rl3 ul2
onde:

92
-k u. - componentes do v_etor de deslocamentos nodais incrementais 1
referido ao sistema local fixo.
R~. componentes da matriz Rd = RB Rª 1 J
· Substituindo-se sucessivamente as equaçoes (4.48a)
e (4.47a) em (4.49a) tem-se:
(4.54a)
onde:
(4.54b)
(3 X 3)
A matriz R que transforma os vetores de desloci
mentos nodais, o vetor de forças internas e as matrizes de rigi
dez ê montada a partir da matriz Rx
Rx o o o - - - -o Rx o o
R - - - -= 112x121 o o Rx o -
o o o Rx - - -
onde:
O - matriz nula de dimensão 3 x 3

93
V - MODELO 2 - ELEMENTO DE EIXO CURVO E SEÇAO TRANSVERSAL E NOME RODE NÕS VARIAVEIS
A formulação apresentada a seguir foi desenvolvi
da para um elemento de seção transversal retangular. O elemento
de seçao circular pode ser desenvolvido sem dificuldades, segui~
do-se as indicações feitas no ultimo item deste capitulo.
Este elemento possui seis graus de liberdade em
cada no, três translações e três rotações. Conforme o numero de
nõs seja dois, três ou quatro, os graus de liberdade do elemento
serão doze, dezoito ou vinte e quatro. Sua formulação e feita a
partir do elemento isoparametrico tridimensional, que e degener~
do em duas dimensões. Esta degeneração se baseia nas seguintes
hi põteses 59:
- As seções normais as duas superfícies medias do elemento (na largura e na altura) permanecem planas durante a deformação.
- A energia de deformação correspondente as tensões perpendicul~ resas duas superfícies medias e desprezada.
São utilizados vãrios sistemas de referência. O
global e cartesiano e fixo. Os locais são: um curvo,.definido p~
ra o elemento todo,e um cartesiano mõvel em cada nõ.
No sistema local curvo a direção 1 coincide com o
eixo do elemento. As direções 2 e 3 são perpendiculares a dire
ção 1 e correspondem as direções pri nci pais de inercia ,da seçao
transversal (_Fig. 5.la).
Em cada ponto nodal a posição dos eixos do siste
ma local cartesiano e determinada atraves dos seus cossenos dire
tores. Os cossenos diretores, que na etapa O sao forneci dos

º"' _3
Yz
PC
d/2
( a l
Yz
e b 1
. .,. _2
Fi9ura li. 1
94
b/z

9.5
pelos dados do problema, sao atualizados ao longo do processo in
cremental e servem para determinar a configuração d~formada do
elemento. As direções dos sistemas locais, na etapa O, são coin
cidentes nos pontos nodais (Fig. 5.lb).
As translações e as rotações são interpoladas in
dependentemente por funções de mesmo grau, que interpolam também
a geometria. Estas funções estão definidas em relação a coorde
nada "r" do sistema de referência local curvo, que varia ao lon
godo eixo do elemento.
A interpolação das rotações de maneira independe~
te, faz com que as seções inicialmente normais as superfícies m~
dias, não mantenham necessariamente esta perpendi cul a ri da d.e du
rante a deformação, apesar de continuarem planas. Isto permite
que a deformação causada pelo esforço cortante seja considerada.
5. 1 - CAMPO DE DESLOCAMENTOS
A posição e os des 1 ocamentos dos pontos si tua dos
no eixo do elemento são determinados por equaçoes ànãlogas as
utilizadas pelo elemento isoparamêtrico uriidimensional (Figura
5. 2) .
N n Nx~ X· = E hk l k=l l
( 5. l )
n t, u ~ 6U i = E hk
k=l l (5.2)
sendo:

CD ,. '-1
CD
"' -1
CD ,., - 1
@
.11,,-.L 3
3
@
"'º
Flaura 5. 2
96
1\., !... 3
2
@ ,., 1
® ;1,, 1
® ,.., 1

97
Nx. coordenadas cartesianas dos pontos situados no eixo do 1
elemento, na etapa N , referidas ao sistema global
nui - componentes do vetor de deslocamentos incrementai:s dos po~ tos situados no eixo do elemento, referidas ao sistema glQ bal
hk - função de interpolação correspondente ao no k
Nx~ - coordenadas cartesianas do ponto nodal k , na etapa N , 1
referidas ao sistema global
nu~ - componentes (trans 1 ações) do vetor de des 1 ocamentos nodais 1
incrementais, referidas ao sistema global
n - numero de nõs do elemento (n = 2, 3 ou 4)
As funções de interpolação do elemento são polin~
mias do primeiro, segundo ou terceiro grau em r 55 , conforme o
numero de nõs seja igual a dois, três ou quatro.
Se n = 2
h1 = } ( 1 - r)
(5.3a)
h2 = -} (1 + r)
Se n = 3
h1 =} (- r + r 2)
(r + r 2) (5.3b)

98
Se n = 4
hl l (- l + r + 9 r2 9 r') = Tõ -
h2 l (- l r + 9 r2 + 9 r') = Tõ -
(5.3c)
h3 l (9 27 = Tõ - r - 9 r2 + 27 r,)
h4 l = To (9 + 27 r - 9 r2 - 27 r,)
A posição e as translações de um ponto qualquer
do elemento sao determinadas pelas seguintes equações 34•35
:
N n N k n N k t n N k X· = l: hk 1
X· ·1 + s
2 l: bk hk V2i + "Z l: dk hk v3i
.6.U. = 1
sendo:
n l:
k=l
k=l
( i
n l:
k=l
k=l
= l '
k=l (5.4)
2 ' 3)
V 11 + w'] ( 5. 5)
bk - altura da seçao transversal correspondente ao no k {Fig. 5.la)
dk - largura da seção transversal correspondente ao no k (Fig. 5.la)
Nv - componentes cartesianas do vetor N k l i Y1
N k componentes cartesianas do vetor N k V2i- ~2
N k componentes cartesianas do vetor N k v3i- Y3

99
N~~ vetor dos cossenos diretores do eixo 1, do sistema de referência cartesiano do nõ k , na etapa N
Nv~ vetor dos cossenos diretores do eixo 2, do sistema de referência cartesiano do nõ k na etapa N
Nv~ - vetor dos cossenos diretores do eixo 3, do sistema de referência cartesiano do nõ k na etapa N
Os deslocamentos u' , u 11 , v 11 e w' sao calcu-
lados em função das rotações em cada seção nodal do elemento (F__!_
gura 5.lb), utilizando-se a hipõtese das seções plana;s (Figuras
5.3 e 5.4).
u' l tg k = - -z b k s y
(5.6a)
u li l tg il = -z dk t
V li 1 t tg k = -z dk a
(5.6b)
w' 1 bk tg k
-z s a
As rotações incrementais sao pequenas o suficien
te para que se possa fazer tg e; e nas equações (5.6).
u' 1 bk
k = -z s y
u li 1 dk t sk = 7
e 5. 7 i V li 1
dk t k = 7 a
w 1 =

100
fJ
"
-"'"
•
Fl;ura !1.3

1
•
' _...,
1 O 1
•
' IA)
...
...
Figura 5.4

sendo:
102
Substituindo (5.7) em (5.5) tem-se:
n k n Nf~ k LILI • = z hk li ui + z hk li ªm l k=l k=l ,m e 5. a l
( i = l ' 2, 3)
llui - componentes do vetor de deslocamentos incrementais no elemento, referidas ao sistema global
llu~ - componentes (translações) do vetor de des l ocamen-1
tos incrementais, referidas ao sistema global
li k componentes (rotações) do vetor ªm -dais incrementais, referidas (li k k k k
Cl l = Cl ; li ª2 = s ; li
Nf~ - componentes da matriz NFk ,m
k ª3 =
de des l acame n tos no ao distema local . k y )
A matriz NFk transforma as rotações no sistema
de referência local em translações no sistema de referência glo-
ba l. Além disso seleciona os coeficientes que ·vâo exercer in-
fluência sobre cada direçâo, como se fosse uma matriz de pos i çâo.
N k N k V 11 V21
NFk = Vl2 [o l t dk . - l
bk] + [- l tdk;O;o] ;7 ' 7 s v22 7 +
vl3 V 2 :!
N k V3l
+ V32 [l 7 s bk o o] {5.9a)
V33

1 03
Nfk 1 t dk
N k + 1 s bk
N k = 2 v21 7 V31 11
Nfk 1 t dk
N k = 7 V 11 1 2
Nfk 1 s bk N k = 7 V 11 1 3
Nfk 1 t dk
N k 1 s bk
N k (5.9b) = - 2 V22 + -z V32 21
Nfk 1 t dk
N k = 7 v,2 22
Nfk 1 s bk
N k = 2 vl2 23
Nfk 1 t dk
N k + .l s bk N k = 2 V23 V33 31 2
Nfk 1 t dk
N k = -z V 1 3 32
Nfk 1 s bk
N k = 7 V 1 3 33
Explicitando-se os somat6rios da equaçao (5.8),
tem-se:
IIU = H li Uk (5. l O)
onde:

104
H = [~' ..• ~nJ (5.11)
3x6n
As matrizes Hk (.k = 1, ... , n) possuem todas a
mesma forma.
hk o o hk k
f 11 Hk o hk o hk
k = f21
o o hk hk k
f31
ou (5.12)
h l a+l o o h l
a+4 h~+S h l a+6
Hk = o h~+2 o h!+4 h!+s h 2 a+6
o o h~+3 h~+4 h 3
a+S h!+6
sendo:
o p/ k = 1
6 p/ k = 2 a =
1 2 p/ k = 3
[ 1 8 p/ k = 4
As derivadas dos deslocamentos em relação as coo~
denadas do sistema local estão relacionadas com os deslocamentos
incrementais através da seguinte equação:
6 u = H.D 6 Uk -,y (5.13)
onde:

105
ÍIUT [81'1 u l 81'1 u l 81'1 u l 81'1 u2 81'1 u 2 31'1 u 2 81'1 u3 86 u3 81'1 u3] = 8y 3 8Y1 8y 3 ,y 8Y1 8Y2 8Y3 8Y1 ;iy 2 8y2
(5. 14a)
HD = [H D 1 ... H Dn J (5.14b) 9x6 n
As matrizes HDk sao obtidas derivando-se as ma-
trizes Hk -
h k, l o o h k , l f 11 h k , l f12 h k, l fl3
o o o hk fll ,2 hk f12,2 hk fl3,2
o o o hk/11,3 hk/12,3 hk fl3,3
o h k, l o h k , l f21 h k , l f22 h k 'l f23
HDk = o o o hk f21 ,2 hk f 22, 2 hk f23,2
o o o hk f 21 , 3 hk f22,3 hk f23,3
o o h k, l h k , l f 31 h k, l f32 h k, l f33
o o o hk f 31 , 2 hk f32,2 hk f33,2
o o o hk f 31 3 hk f32 3 hk f33,3 , ,
HD 1
a+l = h k, l
HD 4
a+2 = h k , l
HD~+ 3 = h k , l
HD 1 l t dk
N k l s bk
N k = (- 2 v21 + 2 V 31 ) h k 'l a+u
HD!+ 4 l N k h = °Z bk V31 k
HD~+ 4 l N k
hk (5.15a) = - "Z dk V21
HD;+ 4 l t N N k + l s bk
N k (- 2 dk dk V22 2 V32) h k, l
HD!+ 4 l N k = 2 bk V32 hk
HD:+ 4 l N k = - 2 dk v22 hk
HD~+ 4 l
dk N k l N k
h k 'l = (- 7 t V23 + 7 S bk v33 )
HD!+ 4 l N k
hk = 2 bk V33

106
H0 9 l dk
N k hk = "Z V23 a+4
H0 1 l t dk N k
h k 'l = 2 V 11 a+5
H0 2 a+5 = o
H0 3 l dk
N k hk = "Z vll a+5
H0 4 l t dk N k
h k 'l = 7 vl2 a+5
H0 5 a+5 = o (5.15b}
HO:+s l
dk N k
hk = 2 vl2
H0 7 l t dk N k
h k 'l = "Z vl3 a+5 H0 8
a+5 = o
H 09 l dk
N k hk = 2 vl3 a+5
H0 1 l bk
N k hk,l = 7 s V 11 a+6
1:10~+6 l
bk N k
= 2 V 11 h k
1:10:+6 = o
1:10:+6 l N k
h k 'l = 7 s bk .vl2
H0 5 l bk
N k hk (5.15c) = 2 V l 2 ·· a+6
1:10:+6 = o
1:10;+6 = l
"Z s bk N k
vl3 h k 'l
1:10:+6 l
bk N k
hk = 2 vl3
H0 9 · a+6 = o

l O 7
5.2 - CAMPO DE TENSÕES E EQUAÇÕES CONSTITUTIVAS
A degeneração do elemento isoparamitrico tridime~
sional transforma-o num elemento de viga. E razoãvel, portanto,
supor que ao nível do sistema de referencia local existam apenas
as tensões que agem sobre a seção transversal, uma normal e duas
cisalh.antes 34• Esta hipõtese satisfaz, simultaneamente, a teo
ria ticnica das vigas e a necessidade de se desprezar a energia
de deformação correspondente as tensões perpendiculares ãs duas
superfícies midias.
A determinação das componentes do segundo tensor
de tensão de Piola-Kirchhoff i feita de maneira incremental.
sendo
e• = 9x9
L\S' = C' L\e'
f 11 o
o -
E
o
o
o
f22 ~22
o
o
o
o -
f22 ~22
o
o
o
(5.16)
(5.17)

onde:
E -G -
\) -
módulo
módulo
(G = 2
Czz =
3x3
G
o
o
108
o
o
o
de elasticidade
de elasticidade
E \) ) ) (1 +
coeficiente de Poisson
o
o
G
transversal
Como as equaçôes (_5.16) e (_5.17) estaô definidas
em relação ao sistema de referencia local curvo e necessãrio trans
formã-las para o sistema global. Os tensores líS e lie são ten
sores de segunda ordem e se comportam como tal em relação a mu
danças de referencial.
líS'.. = R.k 1iSk 0 R., l J l . .X, J X,
(5.18a)·
ou
liS' = RT liS {5.18b)
(5.19a)
ou
lie' = RT lie M
(5.19b)

RT = 9x9
~11
~21
~21
109
~12 ~12
~22 ~23

onde:
~22 =
3x3
~23 =
3x3
11 O
R .. - componentes da matriz que transforma as coordenadas l J
do sistema de referência global em coordenadas do sistema de referência local curvo (:)'. = ~ ::<)
Substituindo-se as equaçoes (5.18b) e (5.19b) em
(5.17) tem-se:
t.S = e fie cs.2oa)
e = RT T e' RT (_5.20.bl
f 11 f12
_ç -9x9 f22

l l l
f 11 = RT - 11 f i l 811 + (_ 2 T C' (2 821 ) 821 t -22
f12 T
f i l (2 T ) ç22 (_1~-2 2 13.23) = 811 B12 + B21 +
f22 T
f i l 812 T T
f22 (833 822l = 812 + (822 + 823) +
Utilizando-se a simetria de 4S , 4! e C rees
crevem-se as equaç6es (5.17) e (_5.20a).
4S' = C" 4e' -V - V
(5.21)
E o o o o o
o o o o o o ·ç11 = o o o o o o
6x6 o o o G o o
o o o o o o
o o o o o G
6S = e 4e v -v (5.22)

R31 R31
TR = 6x6 2 R21 Rll
2 R21 R31
2 Rll R31
11 2
_ç = TRT C" TR 6x6
R32 R32 R33 R33 R31 R32
Rl l R22 2 Rl 2 R22 2 R13 R23 +
R21 R12
2 R22 R32 2 R23 R33 R21 R32
+ R22 R31
2 Rl 2 R32 2 R13 R33 Rl l R32
+ R3l Rl2
(5.23)
R32 R33 R31 R33
Rl 2 R23 +
Rll R23 +
R22 Rl 3 R21 R13
R22 R33 +
R21 R33 +
R32 R23 R31 R23
Rl2 R33 +
Rl 1 R33 +
R32 Rl 3 R3l Rl 3
A matriz R ê constituída pelos cossenos direto
res dos eixos yi . Como o elemento ê curvo R varia de ponto
para ponto do elemento.
Os cossenos diretores de cada um dos eixos Y· l em um ponto qualquer do elemento, são determinados atravês do
produto vetorial de dois vetores tangentes a superfície cuja di
reção normal coincide-com este,eixo 59 . Esta superfície ê obtida to
mando-se as coordenadas xi que descrevem um volume e fazendo
se s ou t constantes.

para s = cte
~2 =
~2 =
li
para t = cte
~3 =
~3 =
11 3
a xl at
a x2 at
a x3 at
~2
~2
a xl ar
a x2 ar
a X3 ar
~3
~3
=
a xl ar
a x2 X ar (5.24a)
a X3 ar
,Q,2
m2 (5.24b)
n2
a xl as
a x2 X as (5.25a)
a X3 as
(5.25b)

onde:
11 4
v. - cossenos diretores do eixo y1 .•
-1
a xl n Cºx~ + s
bk k l: h k , l
o = 2 yl2 + r k=l
a n
dk t2
x2 o k bk k dk o ar = l: hk,l(x2+s 2 y22 + t 2 k = l
o x3 n (ºxt + s
bk o k dk ar = l: h k, l 2 y32 + t 2 k=l
a xl n bk k l: hk
o = 2 Vl2 as k = l
a x2 n bk o k as = l: hk 2 vl2
k = l
a X3 n bk o k as = l: hk 2 y22
k = l
(5.26)
o k yl3)
o k y23) ( 5 . 2 7 )
o k Y33)
(5.28)

a X]
ar =
a x2 ar =
11 5
n l:
k = l
n l:
k=l
n l:
k=l
dk hk 2
dk hk 2
Os cossenos diretores
o k vl3
o k V23
V • _,
(5.29)
sâo calculados para a
configuração indeformada do elemento, correspondente a etapa O.
Nos pontos nodais os v. são iguais aos 0 v~ . -1 -1
(2. lla)):
seguinte:
onde:
As componentes
1 ati ui = "2" ( ax. +
J
tie .. l J
sao dadas por (ver equaçao
(5.30)
A equaçao (5.30) em forma matricial tem o aspecto
= M ti U -,X
(5.31)
T [tie 11 tie 22 tie 33 2 tie 12 2 tie 23 2 tie13] ti~v =
tiU T [ªti u l ati u1 ati u 1 ati u2 ati u2 ati u2 ati u 3 ati u 3 3ti u3 J = ,X ax 1 ax 2 ax 3 ax 1 ax 2 ax 3 ax 1 ax 2 ax 3

~D =
onde:
11 6
M =~o+ ~D (5.32)
o o o o o o o o
o o o o 1 o o o o
o o o o o o o o l M = -o o o o o o o o
o o o o o ó 1 o
o o o o o l o o
d 11 o o d21 o o d31 o o
o d12 o o d22 o o d32 o
o o d13 o o d23 o o d33
d12 d 11 o d22 d21 o d32 d31 o
o d13 dl2 o d23 d22 o d33 d32
d13 o d 11 d2 3 o d21 d33 o d31
dij - derivadas dos deslocamentos totais em relação ascoordenadas do sistema global
d N u.
d .. l =
l J d o x.
J
As derivadas em relação as coordenadas do sistema
de referência global são transformadas em derivadas em relação
as coordenadas do sistema de referência local atravês da matriz
jacobiana J

11 7
= J (5.33)
onde:
J =
Os coeficientes da matriz jacobiana sao determina
dos atrav~s das equações (5.27), (5.28) e (5.29).
Invertendo-se a equação (5.33) obtem-se:
= J* ( 5. 34)
onde:
(5.35)

11 8
As translações do elemento na etapa N sao deter
minadas utilizando-se as suas coordenadas nas etapas O e N .
,N X. l
o xi
s u 1 ta :
n = ,:
k=l
n = ,:
k=l
n = ,:
h = 1
Nu. = l
N k n hk x. + ,: hk l k=l
o k n hk ,: hk x. +
l k=l
Substituindo-se
n ,:
k= 1
N x. l
s
s
as
o - Xi
bk N k n
2 Vi2 + ,: hk k=l
bk o k n ,: hk 2 vi2 +
k=l
equaçoes (5.37)
n ,:
k = 1
(5.36)
dk t2
N k Vi3
(5.37)
dk o k t 2 vi3
em (5.36), re-
(5.38)
Derivando a equaçao (5.38) em relação as coordena
das do sistema de referência global ,tem-se:
a N n Nk u. l ,: JJ, h k , 1 = u . +
a o k=l l x. J
n N k o k bk + ,: ( s J j 1 h k , 1 + h k JJ2l ( vi2 - Vi 2) 2 +
k= 1
n N k o k ) dk + ,: ( t JJ 1 h k, 1 + hk JJ3) ( Vi 3 - V;3 2 (5.39a)
k=l
a N u . l = dij a o x. J
(5.39b)

11 9
Utilizando-se a equaçio (5.34) obtem-se a relaçio
entre os vetores Í', u -,x (equaçio (5. 31)) e Í', u -,y (eq. (5.13)).
onde:
/', U = AJ /', u -,X -,y
J* o o
AJ = o J* o
o o J*
A relaçio entre /',e -V
e os
(5.40)
deslocamentos nodais
incrementais i estabelecida s~bstituindo-se sucessivamente as
equaçoes(5.40) e (5.13) em (5.31).
(5.41)
sendo:
~L = M AJ HD (5.42)
Substituindo (5.41) em (5.22) tem-se:
(5.43)

l 20
5.3 - MATRIZ DE RIGIDEZ LINEAR E VETOR DE FORÇAS INTERNAS
A matriz de rigidez e o vetor. d.e forças internas
sao determinados seguindo-se o procedimento comumente utilizado
em elementos isoparamitricos 55'59
•
Como as funções de interpolação estio definidas
em relação as coordenadas do sistema de referência local curvo,
o domfnio de integração das equações (3.26) deve ser modificado.
Esta modificação i feita utilizando-se a equaçao (2.17a).
sendo:
1 l l
= f f I G(r, s, t) J dr ds dt -1 - l - l (5.44)
J - determinante da matriz jacobiana J definida na equ! çao (5.33)
O determinante J i mantido constante durante to
do o processo incremental, pois nesta formulação estã sendo uti
lizada uma descrição lagrangeana (ver item 2. l).
Aplicando-se a equaçao {5.44) as equações (3.26a)
e (_3.26c),obtem-se:
l 1
~L = I I I BT e ~L J dr ds dt -L -1 -1 -1
(5.45)
E: = J1 J1 r BT NS J dr ds dt -L -V (5.46) -1 -1 -1

l 21
5.4 - MATRIZ DE RIGIDEZ NAO-LINEAR
A matriz de rigidez não-linear resulta da discre
tização da parcela
r N ó!:, dV s .. n .. ) l J l J V
da equaçao (3.19).
I N ó!:, dV (ót, ~k)T cf T
~M ~NL dV) t, uk s .. n .. = ~NL l J l J
V V ( 5 • 4 7 )
(5.48)
Aplicando-se a equaçao (5.44) a equaçao (5.48) ob
tem-se:
l l
~NL = I I I T ~NL ~M ~NL J dr ds dt ( 5. 49)
-1 -1 -1
Explicitando-se o somatõrio do lado esquerdo da
equaçao (5.48) chega-se a:
I N s .. ot,n .. dV l J l J
V
As componentes
(2.llb}).
t, n .. l J
(5.50)
sao dadas por (ver equaçao

ou
onde:
ou
sendo:
l 2 2
l ati uk ati uk ti nij = 2 d d x. xj l
( i = l , 2 , 3)
( j = l , 2 , 3)
1 T 1 T =.,,.tiu.tiu .=.,,.tiu .tiu. e.. ,1 ,J {_ ,J ,,
T ti u . , l
ti u T. -,J
ti
ti
ti
ti
= [ªti u l d X.
l
u . - , l
= Mi
u . - , l
= ti
u . = Mj -,J
uT. -,J ti
ati u2 d X.
l
ati u2 d X.
J
ti ~,X
UT -,X
( ~ i ) T
ti ~,X
T L~j) T ~,X
(5.51a)
(5.51b)
(5.52a)
(5.52b)
(5.53a)
(5.53b)
(5.54a)
(5.54b)

onde:
l 23
M2 = [ O
M3 = [ Q
UT - , l
o
o
T t, ~, 2
!3
- matriz identidade 3 x 3
O - matriz nula 3 x 3
o J
o J
!3 J
t, u T J - , 3
t, ~.x = MP t, ~.x
l o o o o o o o
o o o l o o o o
o o o o o o l o
o l o o o o o o
MP = o o o o l o o o
o o o o o o o l
o o o o o o o
o o o o o l o o
o o o o o o o o
( 5 . 5 5 )
(5.56)
(5.57)
o
o
o
o
o
o
o
o
l
Tomando-se a primeira variaçâo das equações (5.51b),
(5.53b) e (5.54b),obtem-se
(5.58)

124
ól!. T u .
- , l = ól!. UT
-,X (~ i ) T (5.59a)
ól!. T
ól!. UT (~j)T u . = -,J -,X (5.59b)
Substituindo (5.53a), (5.54a), (5.59a) e (5.59b)
em (5.58), resulta em:
(5.60)
Através das equaçoes (5.13), (5.40) e (5.57} ob-
tem-se a relação entre o vetor
incrementais
l!. u -,X
e os deslocamentos nodais
l!. u = MP AJ HD !!. uk -,X
(5.61a)
ou
(5.61b}
A primeira variação da equaçao (5.61b} é dada por:
(5.62)
Substituindo-se as equaçoes (5.61a) e (5.62) em
(5.60).
(5.63)

125
Variando-se os índices i e j na eq. (5.63) e
substituindo-se em (5.50) fica:
I N s .. ótin .. dV= lJ lJ
V
se que:
~M = S 11 (~ 1) T
+ 533 (~,) T
+ 523 [tt1 2) T
+ 513 [tr1 i) T
+ S22 (~')T ~• + S33 (~')T ~' +
+ S12 [t~')T M' + (~')T ~'] +
+ S23 [t~')T M' + (~')T ~•J +
+ S13 [t~') T M' + (~') T ~']]
MP AJ HD dVJ 6. ~k (5.64)
Comparando-se as equaçoes (5.48) e (5.64) conclui
~NL = MP AJ HD ( 5 . 6 5 )
M' + 522 (~')T ~• +
M' + 512 [ (~ 1) T M' + ( ~2 ) T ~JJ + - -
11 ' + (!1') t1•] +
!1' + (!1') T t1'] (5.66a)

126
s = -M (5.66b) 9x9
5.5 - COSSENOS DIRETORES DOS EIXOS DOS SISTEMAS DE REFERÊNCIA LO
CAIS
Os cossenos diretores dos eixos do sistema de re
fer~ncia cartesiano de cada no sao calculados utili.zando•se as
coordenadas dos pontos PC, PS e PT (Figura 5.la).
N
Nyk -2 =
N k ~2 =
N k Y3 =
N k Y1 =
k xl
x2
PS
(5.67)
Nyk
li Nyk -3 -3
Nvk N k (5.68) X Y3 -2
N k xl
x2 = bk N k 2 Y2 (5.69a)
PC

l 27
N k N k xl xl
Nvk dk N k (5.69b) = X2 Xz = 2 V -3 3
X3 PT
X3 PC
Como as coordenadas dos pontos PC, PS e PT ,
que na etapa O fazem parte dos dados
te o processo incremental, os vetores
atualizados constantemente.
do problema,
Nvk e Nvk -2 -3
variam duran
devem ser
Utilizando a hipótese das seçoes planas e supondo
que as tangentes dos ângulos incrementais de rotação são iguais
aos próprios ângulos, tem-se:
N+lvk Nvk + bk N k k bk N k (e/) = 2 ~l (- y ) +7 ~3 -2 -2 (5.70a)
N+lvk NVk + dk N k ( Bk ) dk N k (e/) = 2 '.:'.1 +7 '.:'.z -3 -3
(5.70b)
Substituindo-se as equaçoes (5.69a) e (5.69b) em
(5. 70}, respectivamente, e arranjando os fermos obtem-se
N+lk bk[Nk V2 = v 2 -1
N k N k] ~2 ~3
- yk
k a
(5.71a)

se:
128
N+lvk dk [ N k N k N k] = 2 .':' l '!.2 '!.3 3
Calculando as normas de
N+lvk 2
sk
k (5.71b) - a
l
e tem-
(5. 72a)
(5.72b)
As equaçoes que determinam os valores atualizados
dos vetores y~ e y~ sao obtidas substituindo-se as equaçoes
(5.71a), (5.72a), (5.71b) e (5.72b) nas equações (5.67).
N+ l k ~2 =
N+ l k .':13
l
íN k +1J2L~1
N k N kl '!.2 '!.3
k - y
l
k a
l
(5.73a)
(5.73b)
J

l 29
O produto vetorial da equaçao (5.68) continuava
lido para o vetor vk atualizado -1
N+ l k _I' l =
Na etapa o
N+l k N+l k _1'2 X V 3
a direção do vetor N k _I' l
e 5. 74,
coincide exa
tamente com a direção do eixo do elemento. Nas outras etapas e~
ta coincidência nem sempre ocorre. Isto acontece, porque as se
ções normais ao eixo permanecem planas durante a deformação, mas
não necessariamente perpendiculares ao eixo.
5.6 - MATRIZ DE RIGIDEZ DO ELEMENTO E VETOR DE FORÇAS INTERNAS COM TODOS OS COEFICIENTES CORRESPONDENDO A GRAUS DE LIBERDADE REFERIDOS AO SISTEMA GLOBAL
Nas matrizes de rigidez e no vetor de forças i~
ternas (equações (5.45), (5.49) e (_5.46)), os coeficientes cor
respondentes as rotações nodais estão calculados para rotações
referidas aos sistemas de referência locais.
Quando em um n6 comum a dois ou mais elementos,
existe descontinuidade na curvatura (Figura 5.5), torna-se nece~
sãrio passar o referencial desses coeficientes para o siltema
global.
Esta transformação e .feita at,ravês da seguinte
equaçao:
~G = TT K T (5.75)
~G = TT F (5.76)

onde:
130
~G - matriz de rigidez do elemento com todos os coeficientes correspondendo a graus de 1 i berdade referi dos ao sistema global.
K - matriz de rigidez do elemento resultante da soma de
~L (equação (5.45)) e ~NL (equação (5.49)).
~G - vetor de forças internas do elemento com todos os coe ficientes correspondendo a graus de liberdade referidos ao sistema global.
F - vetor de forças internas dado pela equaçao (5.46).
Figura ll.5

1 31
A matriz T quando considerada subdividida em
matrizes 6 x 6 e uma matriz diagonal'º com n linhas e n co
lunas (n = numero de nõs do elemento).
o ... o
o o T = (5.77)
o o
A matriz !k (k = 1, ... , n) , correspondente ao
no k , pode, por sua vez, ser subdividida em matrizes 3 x 3
sendo:
i3 Tk =
º3
f3
- matriz identidade 3 x 3
Q3 - matriz nula 3 x 3
º3
(5.78)
gk
gk - matriz de rotação formada pelos cossenos diretores do sistema de referência mõvel do nõ k (eqs. (5.67) e (5.68))
(Ny~)T
gk = (Ny~)T ( 5. 79)
(Ny;) T

132
5. 7 - ESQUEMA DE INTEGRAÇAO PARA O CIILCULO DAS MATRIZES DE RIGIDEZ E DO VETOR DE FORÇAS
As integrais das equaçoes 5.45, 5.46 e 5.49 sao
calculadas numericamente 55 • Utilizam-se pontos de integração de
Gauss nas direções r, s e t de acordo com o esquema da Tabe
la 5. l, sendo o numero maior de pontos colocado ao longo da dire
çao r .
NQ DE NOS TIPO DE NQ DE PONTOS NQ MIIXIMO DO ELEMENTO PROBLEMA DE INTEGRAÇJIO DE PONTOS DE
USUAL INTEGRAÇAO
4 Tridimensional 3 X 2 X 2 · 4 X 2 X 2
4 Plano j X l. X 1 ou '1- X t. X 1 ou 3 X l X 2 4 X l X 2
3 Tridimensional 3 X 2 X 2 4 X 2 X 2
3 Plano ,j X l. X 1 ou '1- X 2 X l ou 3 X l X 2 4 X l X 2
2 Tridimensional 2 X 2 X 2 3 X 2 X 2
2 Plano l. X 2 X l ou ,j X 2 X l ou 2 X l X 2 3 X l X 2
TABELA 5. l
5.8 - INDICAÇÕES PARA A FORMULAÇAO DO ELEMENTO DE SEÇAO TRANSVER SAL CIRCULAR
A formulação do elemento de seçao circular e fei
ta a partir das expressões jã desenvolvidas para o elemento de
seção retangular, devendo-se apenas realizar uma mudança de coor
denadas. Em vez das coordenadas retangulares s e t , utili
zam-se coordenadas polares R e e (Figura 5.6).
s = R cose
t = R sen e (5.80)

l 3 3
s
b
d
Figura 5.6

134
-11<8<11
A coordenada r permanece a mesma.
Esta transformação afeta principalmente as expre~
soes em que aparecem derivadas (eqs. 5.13, 5.27, s~2s, 5.29 e ou
tras). A eq. 5.33, por exemplo, deve ser desdobrada em duas par
celas, como a seguir:
a a ar ar a
~c a (5.81) aR = as
a a ae TI
a a ar ax 1 a
~r a ( 5. 82) as = ax 2
a a TI _ ax3
onde:
ar as at ar ar ar
~c ar as at aR 31< 31<
ar as at ae ae ae

135
ax 1 ax 2 ox 3 ar ar ar
~r
ax 1 ax 2 ox 3 = as as 35
d X l ax 2 ox 3 aí aT aT
Substitutindo-se (5.82) em (5.81) tem-se a expre!
sao equivalente a eq. 5.33.
d d ar ax 1
d ~e ~r
d (5.83) ãR = ax 2
a a ãe ax 3
As matrizes de rigidez e o vetor de forças sao de
terminados, como anteriormente; pelas equações (3.26). Porim, a
mudança de dominio de integração, que antes era realizada pela
eq. (5.44), agora i feita pela seguinte equação: b
rr 2 l r G{x 1 , x2 , x3 ) dV = J f f G{r, R, B) Jr Jc dr dR de (5.84) J V -rr d - l
2 Sendo:
Jr - determinante da matriz jacobiana ( 5. 82)
J -r definida na eq.
Jc - determinante da matriz jacobiana ~e definida na eq. (5.81)

136
VI - RESULTADOS NUMERICOS E COMPARAÇÕES
Para testar os dois modelos foram escolhidos três
problemas planos (itens 6.1, 6.2 e 6.3) e tfês tridimensionais
(itens 6.4, 6.5 e 6.6). Nos quatro primeiros, estruturas sim
ples são submetidas a situações extremas de carregamento e defor
maçao. Nos dois ultimes, estruturas com geometria mais complexa
representam casos encontrados mais frequentemente na prãtica.
Sempre que possível as respostas dos dois modelos
foram compar~das com aquelas obtidas anteriormente por
pesquisadores.
outros
A anãlise da eficiência computacional foi feita
ao longo de todo o capitulo. No ultimo item, foram forn~idos os
tempos necessãrios para a geração da matriz de rigidez e do ve
tor de forças de cada modelo. Nos outros itens, foram registra
dos os tempos de processamento, e de entrada e saida, al.êm dos
gastos com memõria, para cada problema.
6.1 - VIGA ENGASTADA
A viga engastada com uma carga concentrada na ex
tremidade (Figura 6.1} foi calculada, entre outros, por Bathe e
Bolourch.i 25 utilizando elementos finitos, por Oran e Kassimali~
atravês do mêtodo da viga-coluna, e por Bisshopp e Drucker 61 em
termos de integrais elipticas ...
Para a resolução deste problema utilizaram-se qu!
tro elementos do modelo l e um elemento do modelo 2. A carga to
tal foi aplicada em sessenta incrementes iguais.
No grãfico da Figura 6.1 traçou-se a curva da car

1 3 7
Y,~ p
j seção transversal
y 1
IA B x, .... l 2.5mm
L 50mm
L, 1000 mm I , 65. 1042 mm 4
E , 2 1 • 1 O 6 9.t / mm 2 P, -5468 .75 , ..
4.0
3.0
2.0
1.0
0.1 0.2 0.3 0.4 0.5 0.6 &11/L
Figura 6. l

ga
138
( P = k 5....!.) em função do deslocamento vertical da extremidaL2
de livre da viga (v 8 ) . Os pontos utilizados para a construção
do gráfico encontram-se na Tabela 6. l, que reune as soluções ob
tidas pelo metodo analitico 61 e pelos modelos 1 e 2.
A tabela 6.2 contem os deslocamentos horizontais
da extremidade livre da viga (u 8 ) e os seus incrementos (li u8),
em estágios de carga regularmente espaçados.
O gráfico da Figura 6.2 e a Tabela 6.3 comparam
os valores do momento fletor na extremidade engastada da viga
(MA) , obtidos pelos modelos 1 e 2 e pela teoria linear.
Ma L E 1
2
- -~-~----------
2 4
F l I u r a 6.2

139
PL 2 - v8/L
INCREMENTO k = ti BISSHOPP E MODELO 2 DRUCKER MODELO l COM 4 NOS
5 0.333 - O. 11 O O. 109
lo 0.667 - 0.212 O. 211
1 5 1 . DOO 0.300 0.301 0.300
20 1 . 3 33 - 0.377 0.376
25 1 . 6 6 7 - 0.441 0.439
30 2.000 0.497 0.493 O. 491
35 2.333 - 0.536 0.535
40 2.667 - 0.572 0.571
45 3.000 0.600 0.603 0.602
50 3:333 - 0.628 0.628
55 3.667 - 0.650 0.651
60 4.000 0.670 0.669 0.671
TABELA 6.1

140
MODELO 1 E MODELO 2 COM 4 NOS PL 2
INCREMENTO k = Tr UB liu 8 - T - ""T
5 0.333 0.00869 -lo 0.667 0.03000 0.0213
l 5 1 . DOO 0.00598 0.0298
20 l . 33 3 0.0942 0.0344
25 l . 66 7 O. 130 0.0358
30 2.000 0.165 0.0350
35 2.333 O. 199 0.0340
40 2.667 0.231 0.0320
45 3.000 0.261 0.0300
50 3.333 0.288 0.0270
55 3.667 O. 31 4 0.0260
60 4.000 0.337 0.0230
TABELA 6.2

141
Na Figura 6.3 e na Tabela 6.4 encontram-se respe~
tivamente, o desenho do eixo da viga deformada e os deslocamen
tos finais dos nõs 2, 3, 4 e 5.
As respostas fornecidas pelos dois modelos conco~
daram totalmente com a solução analítica e entre si. No entanto,
ocorreram diferenças significativas no que diz respeito ao desem
penha computacional. O modelo 1, mesmo utili.zando um nümero de
elementos quatro vêzes màior, foi mais eficiente que o modelo
2. Todos os índices contidos nas Tabelas 6.5 e 6.6 sao favorã
veis ao modelo 1 e apresentam variações que vão de trinta a cin
quenta por cento.

5 r 1
1
1
1
1
1 1 1
1 4. 1 1
1
1
1 1
1
1
1
1
3 l 1 1
1
1
1
1
1
1
1
1 2 1 2
1 1
1 1 1
1
1
1
142
5
4
3
Fí11uro 6.3

143
MAL
PL 2 ti INCREMENTO k = TI
MODELO l e MODELO 2 SOLUÇAO LINEAR COM 4 NOS
lo 0.667 0.649 O. 66 7
20 1 . 3 3 3 1. 213 1 . 333
30 2.000 l . 6 79 2.000
40 2.667 2.066 2.667
50 3.333 2.395 3.333
60 4.000 2.682 4.000
TABELA 6.3
INCREMENTO 60
MODELO l E MODELO 2 COM 4 NÕS
NO X u V
(mm) (mm) (mm)
2 250 - 11. 032 - 72.747
3 500 - 77.047 - 240.082
4 750 - 192.486 - 447.825
5 1000 - 333.438 - 669.295
TABELA 6.4

TOLERANCIA = 0.0001
MODELO NQ TOTAL DE NQ TOTAL DE INTEGRAL DE TEMPO TOTAL DE ENTRADA TEMPO TOTAL DE INCREMENTOS ITERAÇOES MEMORIA E SAIDA PROCESSAMENTO
(seg) (se g)
l 60 277 7 827 87 597
2 com 4 nos 60 400 18 735 l 2 5 l .323
TABELA 6.5
MO DE LO NQ MEDIO DE ITERAÇÕES POR TEMPO MEDIO DE TEMPO MEDIO DE
INCREMENTO PROCESSAMENTO POR PROCESSAMENTO POR INCREMENTO (seg) ITERAÇão (seg)
l 4.6 9.95 2. l 5
2 com 4 nos 6.7 22.05 3.31
TABELA 6.6

145
6.2 - COLUNA DE EULER
No método analítico, a determinação do caminho
pós-critico de colunas esbeltas é feita a partir da equação dif~
rencial não-linear da coluna, utilizando-se integrais elípti
cas'"º .
O método dos elementos finitos tambê.m fornece bons
resultados contanto que a coluna seja discretizada por um numero
adequado de elementos. Neste exemplo (Figura 6.4), utilizaram
se vinte e quatro elementos do modelo l e quatro elementos do mo
delo 2.
Para evitar a passagem pelo ponto crítico
(P = PE = n 2 EI/L 2}, onde a matriz de rigidez torna-se singular,
a carga foi aplicada com uma pequena excentricidade (Figura 6.4).
Outra maneira de se contornar este problema seria nas proximida
des da carga crítica, passar a incrementar deslocamentos em vez
de cargas 62•
Com o objetivo de se obter um melhor rendimento do
algoritmo incremental-iterativo, a grandeza dos incrementas de
carga foi fixada de acordo com a intensidade do comportamento nã~
linear da coluna, em cada fase do carregamento. Assim, a carga
foi aplicada em cinquenta incrementas, sendo nove iniciais de
1277.776 gr, trinta e seis interdiãrios de 152.776 gr e cinco fi
nais de 600.016 (Tabela 6.7).
No grâfico da Figura 6.5 traçou-se a curva da car
ga em função do deslocamento vertical do ponto central da coluna
(vc) . Os pontos utilizados para a construção do grãfico encon
tram-se na Tabela 6.8, que reune as soluções obtidas pelo método
analítico e pelos modelos l e 2.

y
l 46
seção traMvarml
y
irA:.._ ______ c;-_____ ~B __ _,_P ___ ____,X l. 2,5mm
L 2 L/2
L, 1000 mm
E , 2 1 • J 06 9" /mm2
\: = 'l!i E l j!
p
Fltura 6.4
p
50 fflffl
4 I ii! • 6 5. 1042mm
P • - 20 000 , ..
E---TLQ = 1.25 mm

l 4 7
INCREMENTO FUNÇ/10-CARGA CARGA (gr) INCREMENTO DE CARGA ( g r)
X q (X) P=q . Ptotal t.P
o 0.000 o -9 0.5749992 11499.984 1277.776
45 0.8499981 16999.936 152.776
50 l. 0000000 20000.000 600.013
TABELA 6.7
Os deslocamentos horizontais da extremidade da co
luna (u 8 ) encontram-se representados numericamente na Tabela
6.9 e graficamente na Figura 6.6.
O grãfico da Figura 6.7 e a Tabela 6.10 apresen
tam os valores do momento fletor no ponto central da coluna.
Na Figura 6.8 e nas tabelas 6.11 e 6.12 encontram
se, respectivamente, os desenhos do eixo da coluna deformada e os
seus deslocamentos, correspondentes aos estãgios de carga 44 e
5 O.

.L.. 1\:
1.8
1.6
1. 4
1.2
1.0 • • • o
0.6
_P_
Ft
1.3
1.8
0.6
0.4
0.2
148
•
0.1 0.2 0.3
FiQuro 6. 5
0.1 0.2 0.3
Figura 6.6
0.4
solução analitico
X modoloa I o 2
Q.5 0.6 "'•I L
---- MODELO ---- MODELO - 2
0.4

l 49
Vc -p T
INCREMENTO ~ DYM E MODELO 2
SHAMES MODELO l COM 4 NOS
6 0.57 - 0.00206 0.00200
10 0.86 - 0.00993 0.01000
14 O. 91 - 0.0156 0.0158
18 0.95 - 0.0314 0.0321
20 0.98 - 0.0552 0.0563
22 l. 00 0.080 O. l O 6 O. l 03
24 l. 02 - O. l 5 9 O. l 51
26 l. 04 - O. 199 O. 189
28 l. 07 - 0.229 0.220
30 l. 09 - 0.254 0.245
32 l. 11 - 0.274 0.266
36 l. 16 - 0.304 0.298
40 l. 20 0.320 0.327 0.323
44 l. 25 - 0.344 0.341
46 l. 30 - 0.358 0.358
48 l. 39 - 0.373 0.376
- l. 40 0.375 - -50 l. 48 - 0.377 0.387
- l . 60 0.402 - -- · l. 80 0.415 - -
TABELA 6.8

1 50
UB -p T
INCREMENTO ~ MODELO 1 MODELO 1 COM 4 NOS
6 0.57 0.00002 0.00002
1 O 0.86 0.00028 0.00029
14 0.91 0.00065 0.00067
18 0.95 0.00262 0.00274
20 0.48 0.00825 0.00851
22 l. 00 0.0315 0.0286
24 1. 02 0.0723 0.0618
26 l. 04 O. 11 5 0.0987
28 1 . O 7 O. 156 O. 136
30 l. 09 O. 194 O. 1 71
32 1. 11 0.231 0.206
36 1. 16 0.298 0.272
40 .
l. 20 0.360 0.333
. 44 l. 25 0.416 0.389
46 l. 30 0.479 0.451
48 l. 39 o .. 5 7 6 0.540
50 l. 48 O. 663 0.616
TABELA 6.9

Me L
1'1 2 E I
INCREMENTO
lo
20
30
40
50
0.20 t
0.10 t '
p
~
0.86
0.98
l. 09
l. 20
l. 48
l 51
MC L
TT 2 E] MODELO 2 MODELO l COM 4 Ni'.lS
0.00965 0.00973
0.05523 0.05625
0.28224 0.26818
0.40255 0.38984
0.57779 0.57575
TABELA 6. 10
IÍ /,
Í ---- MODELO - 1
-- MODELO -2
_P_
í
Fi;ura 6.7

l 5 2
INCREMENTO 44
MODELO l MODELO 2 COM 4 N!'.iS
No X u V u V
(mm) (mm) (mm) (mm) (mm)
2 83.5 - 64.56 - 78. 6 7 - 60.44 - 79. l 3
3 166.8 - 122.02. - 155.44 - 114.16 - 155.91
4 250.l - 166.53 - 227.12 - 155.76 - 227.00
5 333.4 - 194.37 - 287.65 - 181.55 - 286.36
6 416.7 - 206. 14 - 328.97 - 192.53 - 326.68
7 500.0 - 207.85 - 343.74 - 194.35 - 341.35
8 583.3 - 209.57 - 328.97 - 196.16 - 326.68
9 666.3 - 221. 34 - 287.65 - 207.08 - 286.36
lo 749.9 - 2 49. 18 - 227.12 - 232.95 - 227.00
l l 833.2 - 293.69 - 155.44 - 274.55 - 155.91
l 2 916.5 - 351.14 - 78. 6 7 - 328.27 - 7 9. l 3
l 3 1000.0 - 415.71 - - 388.73 -
TABELA 6. 11

l 5 3
INCREMENTO 50
MODELO l MODELO 2 COM 4 NÕS
No X u V u V
(mm) (mm) (mm) (mm) (mm)
2 83.5 - 108.41 - 75.43 - 92.21 - 81 . 5 3
3 166.8 - 196.14 - 155.02 - 175.71 - 163.38
4 2 50. l - 264.48 - 234.17 - 242.58 - 243.74
5 333.4 - 309.14 - 305.82 - 285.70 - 315.59
6 416. 7 - 328.78 - 357.79 - 304.82 - 367.41
7 soo.o - 331. 72 - 377.04 - 308.14 - 387.20
8 583.3 - 334.65 - 357.79 - 311.44 - 367.41
9 666.3 - 354.29 - 305.82 - 330.46 - 315.59
10 749.9 - 398.95 - 234.17 - 373.73 - 243.74
l l 833.2 - 467.29 - 155.02 - 440.62 - 163.38
l 2 916.5 - 555.02 - 75.43 - 524.14 - 81 . 53
l 3 1000.0 - 663.42 - - 616.38 -
TABELA 6. 12

13 T 1 1 1 1
12'
1 1 1
li~ 1
1
101 1 1 1 1
9 ' 1 1 1
12 8t--_____ · li
l 54
modelo 1
modelo 2
1 -----~ 1 10
1 -~
'1 -~ 1 . si 1 1
li 10 12~- ·---...
---...._ 2 3
Figuro 6-8
7

TOLERÂNCIA = 0.0001
NQ TOTAL DE NQ TOTAL DE INTEGRAL DE TEMPO TOTAL DE MODELO INCREMENTOS ITERAÇÕES MEMORIA ENTRADA E SATDA
(seg)
l 50 331 44 999 309
2 COM 4 NÕS 50 682 105 384 454
TABELA 6.13
MODELO NQ Ml:DIO DE ITERAÇÕES TEMPO MtDIO DE PROCESSAMENTO POR INCREMENTO POR INCREMENTO (seg)
l 6.62 6 2 . l 8
2 COM 4 NOS 13.64 150.90
TABELA 6. 14
TEMPO TOTAL DE PROCESSAMENTO
(se g)
3109
7545
TEMPO MtDIO DE .PROCESSAMENTO
POR ITERAÇ}l;Q (seg)
9.39
11 . O 6
<.n <.n

l 56
As respostas fornecidas pelos dois modelos se apr~
ximaram bastante da solução analitica (Tabela 6.8). Houve ape
nas uma discrepãncia no valor do deslocamento v , corresponden e -te ao estãgio de carga 50, fornecido pelo modelo l. Nos valo-
res dos deslocamentos (Tabela 6.9) e dos momentos Me (Ta-
bela 6.10) ocorreram também pequenas diferenças. Estas diferen
ças tornam-se mais evidentes nas configurações deformadas finais
fornecidas pelos dois modelos (Figura 6.8 e Tabela 6.11 e 6.12).
No entanto, um aumento do numero de elementos do
modelo l ou uma redução na grandeza dos incrementos de carga se
riam suficientes para eliminar estes desvios.
O desempenho computacional do modelo foi supe-
rior ao do modelo 2. Todos os indices contidos nas Tabelas 6.13
e 6. 14 são favorãveis ao modelo l e apresentam variações que vão
de quinze a cinquenta e nove por cento.
6.3.- ARCO CIRCULAR ABATIDO
Neste item, foi feito o cãlculo de um arco circu
lar abatido (Figura 6.9) analisado anteriormente por Walker [63],
através do método de Rayleigh-Ritz. Utilizaram-se doze elemen
tos do modelo l e dois elementos do modelo 2 para discretizar ·uma
metade do arco.
A carga foi aplicada em incrementos variãveis, de
acôrdo com o esquema da Tabela 6.15.
No grãfico da Figura 6.10 traçou-se a curva da
carga em função do deslocamento vertical do ponto central do ar
Os pontos utilizados para a construção do grãfico e~
contram-se na Tabela 6.16, que reune as soluções obtidas pelos

y
...!!.... : 500
E= 211106 911, /mm2
R= 1250 mm
t•2.5tnm
157
p
F",gura 6. 9
t
Seç;ão transversal
z
50mm

158
modelos 1 e 2.
Os valores mãximos de À , correspondentes ao po~
to em que a matriz de rigidez torna-se singular, foram colocados
na Tabela 6.17.
Os grãficos das Figuras 6.11 e 6.12 e as Tabelas
6.18 e 6. 19 apresentam, respectivamente, os valores do momento
fletor no ponto central do arco (Mel e da reação horizontal no
apoio (HA) .
Nas Tabelas 6.20 e 6.21 encontram-se os desloca
mentos do eixo do arco, correspondentes ao estãgio de carga 58.
As respostas fornecidas pelos dois modelos concoi
daram totalmente entre si e se aproximaram bastante da solução
obtida por Walker. No entanto, ocorreram diferenças significat~
vas no que diz respeito ao desempenho computacional.
O modelo 1, mesmo utilizando um numero de elemen
tos seis vezes maior, foi mais eficiente que o modelo 2 que, ne!
te exemplo, utilizou um algoritmo que mantem a matriz de rigidez
constante em cada incremento, sã atualizando o vetor de cargas.
Todos os indices registrados nas·Tabelas 6.22 e 6.23 sao favorã
veis ao modelo 1, com exceção do tempo médio de processamento por
iteração, apresentando variações que vão de vinte a tinquenta e
um por cento.

1 59
INCREMENTO FUNÇAO-CARGA CARGA INCREMENTO DE ( g r) CARGA ( g r)
q(x) p Ptotal 6P
X "Z = q i:'. 2
o 0.07143 2734.375 -20 0.64286
' 24609.375 1093.75
30 0.78571 30078.125 546.875
90 l. 0000 38281.25 136.72
TABELA 6. 15
• •
60
50 __ "'ª 111. or
)( Mod1lo1 1 1 2 40
30
20
10
0.10 0.20 025 0.30 U'c / 2 h
Fi9ura 6.10

160
v/2h
INCREMENTO PR 2
MODELO 1 MODELO 2 À= tT COM 4 NIJS
2 11 . 2 5 0.00960 0.00950
6 21 . 25 0.01970 0.01945
1 O 31 . 2 5 0.03195 0.03160
1 2 36.25 0.03915 0.03875
1 6 46.25 0.05650 0.05595
20 56.25 .0.07985 0.07915
22 58.75 0.08705 0.08630
26 63.75 0.10405 0.10320
30 68. 75 0.12635 o. 12545
40 71 . 8 7 o. 14490 0.14385
50 75.00 0.17130 ·o.11oos
58 77.50 0.21310 0.21060
TABELA6.16·
Àmax
WALKER MODELO 1 E MODELO 2
76.21 7 7. 81
TABELA 6. 17

Me R
Et
2.5
2.0
1.5
1.0
0.5
HAR 2
EI
400
300
200
100
20
20
l 61
40 60 80 100 /)
Figuro 6. li
40 60 80 100
Figuro 6.12

162
Me R
EI
INCREMENTO À MODELO 1 MODELO 2 COM 4 NOS
10 31 . 2 5 0.6768 0.6834
20 56. 2 5 1.4557 1.4654
30 68.75 2.0518 2.0612
40 71 . 87 2.2595 2.2682
50 75. 00 2.5306 2.5375
TABELA 6. 18
H RL A ti
INCREMENTO À MODELO 1 MODELO 2 COM 4 NOS
10 31 . 2 5 145.695 145.091
20 56.25 272.552 271. 291
30 68.75 349.319 347.544
40 71 . 87 373.097 371. 124
50 75.00 402.335 400.041
TABELA 6. 19

l 63
INCREMENTO 58
MODELO l
No X Y· u V (mm) (mm) (mm) (mm).
.2 24.68 3.99 - 0.14575 0.79449
3 37.05 5.80 - 0.18825 1.05281
4 49. 44 7.48 - 0.20456 1.15619
5 . 74.25 1O.48 - 0.16741 0.79574
6 86. 69 11 . 7 8 - 0.12824 0.31032
7 99.13 12.96 - 0.08416 - 0.36945
8 124.05 14.96 - 0.00962 - 2.19370
9 136.53 15.78 0.01720 - 3.24903
10 161 . 49 1 7. 03 0.02283 - 5.35776
1 1 173. 98 17.46 0.01871 - 6.27766
12 198.98 17.78 - 0.00041 - 7.50591
13 211.48 18.03 - - 7.68035
TABELA 6.20
INCREMENTO 58
MODELO 2 COM 4 NCiS
No X y u V (mm) (mm) (mm) (mm)
2 37.05 5.80 - 0.18684 1.00778
3 74.25 10.48 - 0.16703 0.76309
4 99. 13 12.96 - 0.09174 - 0.33422
5 136.53 15.78 - 0.00242 - 3.21188
6 173.98 17.46 0.01050 - 6.19595
7 211. 48 18.03 . - - 7.59152
TABELA 6.21

o TOLERIINCIA = 0.0001
MODELO NQ TOTAL DE NQ TOTAL DE INTEGRAL DE TEMPO TOTAL DE TEMPO TOTAL DE INCREMENTOS ITERAÇÕES MEMORIA ENTRADA E SATDA PROCESSAMENTO
(seg) (seg)
l 59 224 14972 l 2 7 1192
2 COM 4 NOS 59 382 21882 162 l 491
TABELA 6.22
MODELO NQ MtDIO DE ITERAÇÕES TEMPO MtDIO DE TEMPO MtDIO DE POR INCREMENTO PROCESSAMENTO POR PROCESSAMENTO POR
INCREMENTO (seg) ITERAÇ/10 (seg)
1 3.80 20.20 5.32
2 COM 4 NOS 6.47 25.27 3.90
TABELA 6.23

165
6.4 - VIGA BALCAO
A viga balcão com uma carga concentrada na extre
midade (Figura 6.13) foi calculada por Bathe e Bolourchi 25 util!
zando elementos finitos. Para a resolução deste problema utili
zaram-se oito elementos do modelo l e um elemento do modelo 2. A
carga total foi aplicada em sessenta incrementes iguais.
Nos grãficos das Figuras 6.14, 6.15 e 6.16 traça
ram-se, respectivamente, as curvas da carga em função dos deslo
camentos da extremidade livre, nas direções vertical (w8 ) e ho
rizontais tu 8 e v8) . Os pontos utilizados para a construção
dos grãficos encontram-se nas Tabelas 6.24, 6.25 e 6.26.
As respostas fornecidas pelos dois modelos concor
daram entre si e aproximaram-se bastante da solução bbtida por
Bathe e Bolourchi.
O desempenho computacional do modelo l foi o me
lhor, porem o modelo 2 superou-o em alguns indices (Tabela 6.27
e 6.28).

z
X
E, 702151 Kgf /cm2
\) ' o
y
166
p
e
e
Secão transversal
z
y
2 .54 cm
2.54cm
P , 2 6 4. 2 8 K gf
45º
A --.•.....-------------------~--~~-X
F'~ura 6. 13

167
w8/R
PR 2 BATHE E MODELO l E INCREMENTO k = tT BOLOURCHI MODELO 2
COM 4 NOS
- l. 00 O. 14 7 -lo 1. l 7 - O. l 72
- 2.00 0.270 -20 2.33 - 0.304
30 3.50 0.398 0.394
- 4.00 0.427 -40 4.67 - 0.455
- 5.00 0.473 -50 5.83 - 0.498
- 6.00 0.500 -60 7.00 0.533 0.530
TABELA 6.24
7
6
5
4
3
2
0.1 0.2 0.3 0.4 0.5 0.6
Figuro 6. 14

168
8
7
6
4
3
--- Modelos l e 2 2
---- Bathe
0.025 0.050 0.075 0.100 0.125
Figura 6.15
7
6
' 3
--- Modelas 1 • 2
---- Bathe 2
1
0.04 0.0B 0.12 0.16 0.20
Fig,ra 6. 16

1 69
u8
/R
BATHE E MODELO l E INCREMENTO k MODELO 2 BOLOURCHI COM 4 NOS
- 1. 00 0.0067
1 O 1. 1 7 - 0.0130
- 2.00 0.0267 -.
20 2.33 - 0.0402
30 3.50 0.0700 0.0690
- 4.00 0.0807 -
40 4. 6 7 - 0.0946
- 5.00 O. l 033 -50 5.83 - 0.1161
- 6.00 0.1200 -
60 7.00 O. 133 3 o. 1340
TABELA 6.25

1 70
v8
/R
BATHE E MODELO 1 E INCREMENTO k MODELO 2 BOLOURCHr COM 4 NOS
- 1. DO 0.0133 -1 O 1. 1 7 - 0.0223
- 2.00 0.0480 -20 2.33 - 0.0687
30 3.50 º· 1200 O. 1187
- 4.00 0.1400 -40 4.67 - 0.1641
- 5.00 o. 1747 -50 5.83 - 0.2033
- 6.00 0.2067 -60 7.00 0.2333 0.2368
TABELA 6.26

TOLERÃNCIA = 0.001
NQ TOTAL DE NQ TOTAL DE INTEGRAL DE TEMPO TOTAL DE TEMPO TOTAL DE MODELO INCREMENTOS ITERAÇÕES MEMÕRIA ENTRADA E SAIDA PROCESSAMENTO
(seg) (seg)
l 60 354 17340 163 1380
2 COM 4 NÕS 60 321 27741 147 206 4
TABELA 6.27
TEMPO ME'.DIO DE TEMPO ME'.DIO DE MODELO NQ ME'.DIO DE ITERAÇÕES POR PROCESSAMENTO POR PROCESSAMENTO POR
INCREMENTO INCREMENTO ITERAÇ/10 (seg) (seg)
l 5.90 23.00 3.90
2 COM 4 NÕS 5.35 34.40 6.43
TABELA 6.28

l 72
6.5 - PORTICO TRIDIMENSIONAL l
Neste item, foi feito o cilculo do p6rtico tridime~
sional da Figura 6.17, utilizando-se o modelo l ~e a formulação
de viga-coluna estudada por Mantilla 51•
Os pontos A, B, C, D, E, F e G, transformados em
nos 1, 2, 3, 4, 5, 6 e 7, definem a discretização da estrutura
em doze elementos.
A carga foi aplicada em incrementas vartiveis, de
acordo com o esquema da Tabela 6.29.
CARGA INCREMENTO DE INCREMENTO FUNÇIIO-CARGA CARGA (9, b )
( tb j
X q(x) p ti p
o 0.0625 4.6875 -20 0.5625 42.1875 l . 8 75
30 0.6875 51. 5625 0.9375
90 0.8750 65.6250 0.234375
100 1. 000 75.0000 0.9375
TABELA 6.29

E: 460 000 psi
'\l = O, 25
4 Iy= Iz•0,02 pol
A : 0,4 9 pol. 2
l 7 3
E
> BJi-------A
l
p
24" I · 24"
Fivuro 6.17
X
1. 75"
se~âo Transversal
D 0.1 •
CORTE A-A

l 7 4
No grãfico da Figura 6.18 traçou-se a. curva da
carga em funçio do deslocamento vertical do ponto G (v 6) . Os
pontos utilizados para a construçio do grãfico encontram-se na
Tabela 6.30.
Os valores mãximos da carga, correspondentes ao
ponto em que a matriz de rigidez torna-se singular, foram coloca
dos na Tabela 6.31.
O grãfico da Figura 6.lg e a Tabela 6.32 apresen
tam os valores da força axial nas barras que convergem no ponto
G .
As respostas fornecidas pelo modelo l e pelo meto
do da viga-coluna concordaram totalmente no trecho inicial do car ~
regamento, porem ao se aproximarem do ponto de carga mãxima apr~
sentaram um certo distanciamento. A formulaçio de viga-coluna
interrompeu o processamento antes q~e a matriz de rigidez se to!
nasse singular, devido a ultrapassagem de valores limites para
suas funções trigonometricas. Portanto, o valor da Tabela 6.31
correspondente a viga-coluna deveria ser maior.
O desempenho computacional da formulaçio de viga
coluna foi melhor que o do modelo l. Porem, deve-se dar um des
conto nos tndices da Tabela 6.33 pois o modelo l realizou dezes
seis incrementas a mais que o outro modelo. Neste caso, a Tabe
la 6.34 reflete com maior fidelidade a performance de cada mode
lo. A formulaçio de viga-coluna foi superior ao modelo l porque,
apesar de gastar maior tempo para completar uma iteraçio,realiza
menos iterações por incremento.

- p tlb)
60
50
40
30
20
10
N (Lb 1
200
160
120
80
40
o., 0,2
10 20
l 75
__ modeto.l
____ 'f' 1Qa -coluna
0.3 0.4 0.5 0.6 0.7 V: (po.C 1 G
Figuro 6.18
/ /;
// #
modelo 1
---- v190 - coluna
30 40 50 60 70 p (1', 1
Figuro 6, I 9

l 7 6
- VG
INCREMENTO p MODELO l VIGA-COLUNA
( b ) e po l ) ( po l )
5 14.063 0.0901 0.0897
lo 23.438 O. 15 84 O. l 5 83
15 32.813 0.2365 0.2372
20 42. 188 0.3290 0.3324
25 46.875 0.3834 0.3896
30 51 . 563 0.4463 0.4433
40 53.906 0.4822 0.5003
50 56.250 0.5224 0.5495
60 58.594 0.5688 0.6131
70 60.938 0.6250 0.7267
75 62.109 0.6594 -80 63.281 0.7012 -85 64.453 0.7585 -
TABELA 6.30

1 7 7
Pmax
MODELO 1 VIGA-COLUNA (t b) (tb)
65.156 61. 172
TABELA 6.31
N - (tb)
INCREMENTO p
MODELO 1 VIGA-COLUNA (tb)
10 23.438 51. 458 51.965
20 42. 188 101.367 102.867
30 51. 56 3 132.429 136.159
40 53.906 141.420 146.570
50 56.250 151.197 158.424
60 58.594 162.080 172.822
70 60.938 174.705 196.764
80 63.281 190.779 -
TABELA 6.32

TOLERANCIA = 0.001
NQ TOTAL DE NQ TOTAL DE INTEGRAL DE TEMPO TOTAL DE TEMPO TOTAL DE MODELO INCREMENTOS ITERAÇÕES MEMÕRIA ENTRADA E SAIDA PROCESSAMENTO
(seg) (seg)
l 88 668 47991 372 3861
VIGA-COLUNA 72 175 4750 8 l 36 5 .
TABELA 6.33
TEMPO ME'.DIO DE TEMPO ME'.DIO DE MODELO NQ ME'.DIO DE ITERAÇÕES POR PROCESSAMENTO POR PROCESSAMENTO POR
INCREMENTO INCREMENTO ITERAÇIIO e se g ) (seg)
l 7.59 43.89 5.78
VIGA-COLUNA 2.43 18.96 7.80
TABELA 6.34

179
6.6 - PORTICO TRIDIMENSIONAL 2
O põrtico tridimensional da Figura 6.20 foi cale~
lado utilizando-se o modelo l. Trata-se de uma estrutura campo~
ta por barras de seção circular vazada, cujas dimensõés encon
tram-se na Tabela 6.35.
As barras estão divididas em cinco grupos de aco~
do com as caracteristicas geométricas da seção transversal (Tab!
la 6.36). O grupo l reune as barras formadas por dois tubos, um
externo e outro interno, de seções tipo l e 2. Por questões de
projeto somaram-se os momentos de inercia, porem. considerou-se
apenas a ãrea do tubo externo. Os grupos 2, 3 e 4 reunem as bar
ras formadas por tubos de seções tipo l, 3 e 4, respectivamente.
O grupo 5 e constituido por dois elementos ficticios, que pos
suem rigidez apenas na direção axial, criados para ·simularem o
comportamento das duas molas tk = AE/L = 19 052 499 N/m) situa
das nos apoios superiores.
Os nõs que definem a discretização 'da estrutura
em trinta e oito elementos tem suas posições registradas nas Ta-
belas 6.37 e 6.38.
A conetividade dos elementos e os grupos de cara~
teristicas geométricas a que pertencem encontram-se na:s Tabelas
6.3g e 6.40.
A estrutura estã submetida ao carregamento indic~
do nas Tabelas 6.41, 6.42 e 6.43, constituido por forças concen
tradas nos nos. As cargas foram aplicadas .em ,dez .incrementas
iguais.
No grãfico da Figura 6.21 traçou-se a curva do p~
rãmetro de carga A (A= 10 NP 1; 1ºPi ; N = l, 2, ... , 101 em fun

180
30
28 31
26 29
24 27
22 25
10 E= 20 X 10 N/m 2
20 23 \) = o
18 21
16 19
14
15 17
li S ,cão tran1v1r1ol 12 13
8 9 10
5 6 7
zlv 2 4
X
Fi;ura 6. 20

1 81
TIPO DE SEÇI\O d t (mm) (mm)
1 762 25.4
2 508 15.9
3 219 8.2
4 508 25.4
TABELA 6.35
IIREA MOMENTO DE GRUPO (m2) INE'.RCIA
( m 4)
1 5.878 X 10-2 47.3 X 1 o-'
2 5.878 X 10-2 39. 9 X 10-•
3 0.542 X 10-2 0.3 X 10-'
4 3.851 X 10-2 11. 2 X 1 o-'
5 O. 1 91 X 10-2 o.o
TABELA 6.36

l 82
No X y z (m) ( m) ( m)
l 2.29 0.00 0.00
2 0.00 2.29 0.00
3 - 2.29 0.00 0.00
4 2.29 0.00 10.00
5 0.00 2. 2 9 10.00
6 - 2.29 0.00 10.00
7 2.29 º·ºº 15.00
8 0.00 2.29 15.00
9 - 2.29 º·ºº 15.00
10 2.29 O.DO 20.00
11 º·ºº 2.29 20.00
1 2 - 2.29 0.00 20.00
13 . 2.29 º·ºº 30.00
1 4 0.00 2,29 30.00
1 5 - 2,29 0.00 30.00
16 - 2.29 º·ºº 40.00
1 7 2,29 0.00 40.00
18 2.29 º·ºº 50.00
TABELA 6,37

183
No X y z (m) (m) (m)
l 9 2.29 0.00 50.00
20 - 2.29 0.00 60.00
21 2.29 0.00 60.00
22 - 2.29 O.DO 70.00
23 2.29 º·ºº 70.00
24 - 2.29 º·ºº 80.00
25 2.29 º·ºº 80.00
26 - 2.29 0.00 90.60
27 2.29 º·ºº 90.60
28 - 2.29 O.DO 96.90
29 2.29 0.00 96.90
30 - 2.29 º·ºº 100.00
31 2. 2 9 o.ao 100.00
32 - 2.29 º·ºº 102.00
33 2.29 º·ºº 102.00
34 - 2.29 º·ºº 122.00
35 2.29 º·ºº 122.00
TABELA 6.38

l 84
ELEMENTO NO INICIAL NO FINAL NQ DO GRUPO
l l 4 l
2 2 5 2
3 3 6 l
.4 4 7 l
5 5 8 2
6 6 9 l
7 7 9 3
8 7 8 3
9 8 9 3
10 7 l o l
l l 8 l l 2
l 2 9 l 2 l
13 10 l 3 l
14 l l l 4 2
l 5 l 2 1 5 l
16 l 3 l 5 3
l 7 1 3 l 4 3
18 14 1 5 3
1 9 13 1 7 4·
TABELA 6.39

185
ELEMENTO NO INICIAL NO FINAL NQ DO GRUPO
20 1 5 1 6 4
21 1 7 1 9 4
22 16 18 4
23 19 21 4
24 18 20 4
25 21 23 4
26 20 22 4
27 23 25 4
28 22 24 4
29 25 27 4
30 24 26 4
31 27 29 4
32 26 28 4
33 29 31 4
34 28 30 4
35 31 33 4
36 30 32 4
37 32 34 5
38 33 35 5
TABELA 6.40

186
No DIREÇ/.10 CARGA (N)
4 y l 252.5
4 z - 11 8 230.0
5 y l 252.5
5 z - 11 8 230.0
6 y l 252.5
6 z - 118 230.0
10 y l 973.3
10 z - 11 8 230.0
11 y l 973.3
l l z - 11 8 230.0
l 2 y l 973.3
l 2 z - 11 8 230.0
13 y 3 l O 8. l
l 3 z - 118 230.0
14 y l 554. l
l 4 z - 59 11 4. O
l 5 y 3 l O 8. l
l 5 z - 118 230.0
TABELA 6.41

187
No DIREÇÃO CARGA ( N)
l 6 y - 4 896.8
16 z - 95 652.0
l 7 y 4 896.8
l 7 z - 95 652.0
l 8 y 7 748.2
l 8 z - 37 l 4 l . O
l 9 y 7 748.2
l 9 z - 37 l 41 . O
20 y l 2 375.0
20 z - 37 l 41 . O
21 y l 2 375.0
21 z - 37 l 4 l . O
22 y 20 039.0
22 z - 37 l 41 . O
23 y 20 039.0
23 z - 37 l 4 l . O
TABELA 6.42

188
No DIREÇIIO CARGA (N)
24 y 34 686.0
24 z - 38 256.0
25 y 34 686.0
25 z - 38 256.0
26 y 42 353.0
26 z - 31 388.0
27 y 42 353.0
27 z - 31 388.0
28 y 20 083.0
28 z - l 7 456.0
29 y 20 083.0
29 z - l 7 456.0
30 z - 9 4 71 . O
31 z - 9 4 71 . O
32 z 584 890.0
33 z 584 890.0
TABELA 6.43

10
9
8
7
M1 6
( 10 N.m)
6
5
4
3
2
1.4
1. 2
1.0
0.8
0.6
04
0.2
0.4
/'.'.
0.8
/ /
/ //
1 89
1.2 1.6
F'19ura 6.21
/ /
///
//
2.0
/ /
/
2.4
/ /
/
/ modelo 1
/
/?' --- solução linear
2 3 4 5 6 7 8 9 10
Figura 6. 22
li

190
v22
À MODELO 1 S0LUÇ1\0 LINEAR
(ml (m)
1 0.2030 0.2246
2 0.3645 0.4492
3 0.4945 0.6737
4 0.6022 0.8983
5 0.6938 1. 1229
6 0.7734 1.3475
7 0.8439 1.5721
8 0.9071 l. 7966
9 0.9644 2.0212
1 O l.0168 2.2458
TABELA 6.44

l 91
M25 /
<, CP N.m) / /
0.9 / /
08 / 0.7 /
/ 06 / 05 /
/ 0.4 /
/ 0.3 /
/ modelo 1 0.2 / ---solucào linear
0.1 ,(,
2 3 4 5 6 7 8 9 10 li 12
F·, gu r a 6 . 2 3
5
4
3
2 ---modelo 1
----solução linear
------------2 4 6 8 10 12 14
Figura 6 .24

192
Ml
À MODELO l SOLUÇJIO LINEAR
( N , m) ( N , m)
2 - 2 75 895. - 314 732.
4 - 490 764. - 629 .464.
6 - 671 705. - 944 196.
8 - 832 270. - l , 2 58 928.
10 - 979. 196. - 1 573 660.
TABELA 6.45
M25
À MODELO l SOLUÇJIO LINEAR
( N , m) (N , m)
2 1 76 973. 220 400.
4 289 838. 440 800.
6 369 372. 661 200.
8 430 l 1 7 . 881 600.
1 O 479 027. 1 102 000.
TABELA 6.46

1 93
vl
À MODELO 1 SOLUÇ/10 LINEAR
(N) ( N)
2 105 813. 1 5 907.
4 222 046. 31 81 5.
6 326 646. 47 722.
8 419 656. 63 629.
1 O 502.977. 79 537.
TABELA 6,47

TOLERANCIA = 0.001
MODELO l NQ TOTAL DE NQ TOTAL DE INTEGRAL DE TEMPO TOTAL DE TEMPO TOTAL DE INCREMENTO$ ITERAÇOES MEMORIA ENTRADA E SAIDA PROCESSAMENTO
(seg) (se g)
LINEAR l 1 2282 9 47
NAO-LINEAR lo 37 16384 57 764
TABELA 6.48
MODELO l NQ ME'.DIO DE ITERAÇOES POR TEMPO ME'.DIO DE TEMPO ME'.DIO DE INCREMENTO PROCESSAMENTO POR PROCESSAMENTO POR
INCREMENTO (s eg} ITERAÇAO (seg) .
LINEAR 1 47 47
NAO-LINEAR 3.7 76.4 20.6
TABELA 6.49

195
çao do deslocamento na direção y tv 22 ) do nõ 22. Os pontos
utilizados para a construção do grãfico encontram-se na Tabela
6.44.
Os grãficos das Figuras 6.22, 6.23 e 6.24 e as Ta
belas 6.45, 6.46 e 6.47 apresentam respectivamente, os valores
dos momentos fletores (em relação ao eixo x do sistema global)
nos nõs 1 (M) e 25 (M ) e a reaçao na direção z no nõ 1. - 1 - - 25 -
Os valores dos deslocamentos na direção y e dos
momentos fletores em torno de x , nas barras entre os nos 1 e
33 e 3 e 32, foram bastante inferiores aos obtidos pela teoria
linear. No entanto ocorreu o oposto com as forças axiais de tra
ção nestas mesmas barras. Ficou assim caracterizado um comport~
mento não-linear com enrijecimento progressivo.
Nas Tabelas 6.48 e 6.49 encontram-se os indicado
res do desempenho computacional do modelo 1 não-linear e linear.
6.7 - TEMPOS DE GERAÇAO DAS MATRIZES DE RIGIDEZ E DO VETOR DE FORÇAS
Na Tabela 6.50 encontram-se os tempos de process~
menta necessãrios para o cãlculo das matrizes de rigidez e do v~
tor de forças, dos modelos 1 e 2. Assim como os tempos registr~
dos nos outros itens deste capftulo, estes foram obtidos no com
putador BURROUGHS B-6700 do Nucleo de Computação.da UFRJ.
O modelo 1, como jã acontecera anteriormente,apr~
sentou os tempos mais baixos. As versões mais simples do modelo
2 (com 3 nõs e 2. nõs) se mostraram mais rãpidas que a versão com
4 nos, porem exigem um numero elevado de elementos para alcança
rem respostas satisfatõrias. Nos exemplos testados a versão com

196
4 nos foi sempre mais eficiente computacionalmente que as outras
duas.
TEMPO DE PROCESSAMENTO (seg) .
MATRIZ DE MATRIZES DE RIGIDEZ LINEAR VETOR DE TIPO DE ELEMENTO RIGIDEZ N/10-LINEAR E FORÇAS LINEAR VETOR DE FORÇAS ,
MODELO 1 0.36 0.42 O. 1 8
MODELO 2 COM 4 NOS 2.40 2.87 1. 38 NO PLANO
MODELO 2 COM 4 NOS 4.90 6. 7 5 3. l 3 NO ESPAÇO
MODELO 2 COM 3 NOS 1. 69 2. 1 4 1. 28 NO PLANO
MODELO 2 COM 3 NOS 3.22 4. 1 7 2.32 NO ESPAÇO
MODELO 2 COM 2 NÕS 1. 4 1. 85 l. 13 NO ESPAÇO
TABELA 6.50

197
VII - CONCLUS/10
No estãgio em que se encontra atualmente a pesqu!
sa de formulações não-lineares de elementos finitos, apenas a
busca de novos modelos jã não é suficiente.
Para que haja um melhor aproveitamento dos numero
sos estudos, concluidos, por concluir, ou futuros,
a utilização de formulações consistentes. Isto e,
e importante
formulações
que adotem os principios variacionais da mecânica dos sõlidos co
mo base teõrica.
As formulações consistentes ao utilizarem como
ponto de partida uma teoria unica e de carater geral, facilitam
as comparaçoes e permitem estabelecer com mais segurança as im
plicaçôes de cada simplificação adotada.
As formulações não consistentes, desenvolvidas a
partir de modelos lineares com o objetivo de resolver problemas
especificos, foram muito utilizadas nos primeiros estudos sobre
comportamento não-linear de estruturas. No entanto, formulações
deste tipo ainda podem ser encontradas em trabalhos mais recen
tes.
No caso especifico de modelos para anãlise não-1!
near geometrica de põrticos, a maioria das formulações existentes
na literatura e não-consistente.
As duas formulações consistentes desenvolvidas nes
te trabalho, ambas para anãlise não-linear geométrica de pÕrti
cos tridimensionais ,'di:!~o-nstrarãin,condiçôes de desempenhar funções
diferentes.
O modelo 1 representa uma solução simples, de bai

198
xo custo computacional, que apresenta bons resultados para a maio
ria dos põrticos encontrados na prãtica.
O modelo 2 possui todas as vantagens dos elemen
tos isoparamétricos, porém a integração numérica necessãria para
o cãlculo das suas matrizes, torna-o computacionalmente menos efi
ciente que o modelo l. Sua utilização pode ser vantajosa em ele
mentas estruturais com geometria curva e/ou seção transversal V!
riãvel, ou ainda, em elementos estruturais sujeitos a sofrerem
um processo de deformação complexo. Pode ser aproveitado também
em estruturas laminares com enrijecedores, em utilização conjun
ta com o elemento degenerado para cascas.
Por motivos acadêmicos, neste estudo, investigou
se o comportamento não-linear geométrico em pÕrticos sujeitos a
carregamento estãtico. Pesquisas futuras poderiam, a partir do
que foi apresentado aqui, buscar maior generalidade incluindo a
não-linearidade física e/ou carregamentos dinâmicos.

199
BIBLIOGRAFIA
l CHAJES, A. - Principles of Structural Stability Theory - Pre.!!_ tice Hall, Inc., Englewood Cliffs, New Jersey (1974).
2 CROLL, J.G.A. and WALKER, A.C. - Elements of Structural Sta bility - Macmilan Press Ltd., London (1972).
3 TIMOSHENKO, S.P. and GERE, J.M. - Theory of Slastic Stabili ty - McGraw-Hill Kogakusha, Ltd., '2ríd ed. (1961}:-·- ,
4 WASHIZU, K. - Variational Methods in Elasticity and Plasti-city - Pergamon Press, 2nd. ed. (1975).
5 FUNG, Y.C. - Foundations of Solid Mechanics - Prentice-Hall Inc, Englewood Cliffs, New Jersey (1975).
6 MALVERN, L.E. - lntroduction to the Mechanics of a Conti-nous Medium - Prentice-Hall, Englewood Cliffs, New Jer sey (1969).
7 NOVOZHILOV, V.V. - Foundations of the Nonlinear Theory of
Elasticity - Graylock Press, Rochester, N.Y. (1953).
8 GREEN, A.E. and ZERNA, W. - Theoretical Elasticity - Oxford University Press, London, 2nd ed. (1968).
9 TIMOSHENKO, S.P. - Theory of Elasticity - McGraw-Hill Koga-kusha, Ltd., '3rd ed. (1961).
10 DYM, C.L. and SHAMES, 1.H. - Solid Mechanics, a Variational Approach - McGraw-Hill Kogakusha, Ltd., (1973).
11 GALAGHER, R.H. - Finite Element Analysis, Fundamentals - Pren tice-Hall, Inc., Englewood Cliffs, New Jersey (1975).
12 MARTIN, H.C. - Introduction to Matrix Methods of Structural Analysis - McGraw-Hill, New York (1966).
13 VENANCIO FILHO, F. - Anilise Matricial de Eitruturas - Al-meida Neves Editores, Ltda., (1975).

200
14 PRZEMIENIECKI, J.S. - Theory of Matrix Structural Analysis
- McGraw-Hill Book Company (1968).
15 TURNER, M.J.';. CLOUGH, R.W. ;,MARTIN, H.C. and TOPP, L.J.
1 6
1 7
- Stiffness and Deflection Analysis of Complex Structu
res - J. Aeron. Sei., Vol. 23, no. 9, pp. 805-824, Se_e.
tember (1956).
MARTIN, H.C. and CAREY, G.F. - Introduction
ment Analysis, Theory and Application
Book Company (1973).
NORRIE, D.H. and DE VRIES, G. - The Finite
to Firiite Ele
McGraw - Hi 11
Element Method,
Fundamentais and Applications - Academic Press, N.Y.
and London (1973).
18 EBNER, A.M. and UCCIFERRO, J.J. - A Theoreti.cal and Numeri-
cal Comparison of Elastic Nonlinear Finite Element Me
thods - Computer & Structures, Vol. 2, pp. 1043 - 1061
(1972).
19 CAREY, G.F. - A Unified Approach. to Three' Finite Element
Theories for Geometric Nonlinearity - Computer Meth.in
Appl. Mechs, and Engng., Vol. 4, pp. 69-79, (1974).
20 MARTIN, H.C. - On the Derivation of Stiffness Matrices for
21
the Analysis of Large Deflection and Stability Problems
- Proceedings 1st Conference of Matrix Meth. in Struc.
Mech., Wright-Patterson Air Force Base, Ohio (1965).
JENNINGS, A. - Frame Analysis Including Change
- J. Struct. Div., ASCE, Vol. 94, No. ST3,
(1968).
of Geometry
pp. 627-644
22 MALLET, R.H. and MARCAL, P.V. - Finite Element Analysis of
Nonlinear Structures - J. Stru.ct. Div., ASCE, Vol. 94,
No. ST9, pp. 2081-2105 Cl968).
23 POWELL, G.H. - Theory of Nonlinear Elastic Structures - J.
Struct. Div., ASCE, Vol. 95, No. ST12, pp. 2687 - 2701
(1969).

2.0J
24 YANG, T.Y. - Matrix Displacement Solution to Elastic Problems
of Beams and Frames - Int. J. Solids, Structures, Vol.
9, pp. 829-842 (1973).
25 BATHE, K.J. e BOLOUReHI, S. - Large Displacement Analysis
of Three-Dimensional Beam Structures - Int. J. Num.
Meth. Engng., Vol. 14, pp. 961-986 (1979).
26 BELYTSeHKO, T. and seHWER, L. - Large Displacement, Transient
Analysis of Space Frames - Int. J. Num. Meth. Engn<J.,
Vol. 11, pp. 65-84 (1977).
27 ARGYRIS, J.H.; HILPERT, O., MALEJANNAKIS, G.A. and seHARPF,
O.W. - On the Geometrical Stiffness of a Beam in Space,
a eonsistent V.W. Approach - eomputer Meths.fin -Appl.
' Me eh s . a n d Eng n g , v o 1 ; ·2 O , p p . 1 O 5- 1 31 ( T9 7 9 ) .
28 ARGYRIS, J.H.; DUNNE, P.e.; MALEJANNAKIS, G.A. and SeHARPF,
D.W. - On Large Displacement-Small Strtin Analysis of
Structures with Rotational Degrees of Freedom - eompu
ter Meth. in Appl. Mech. and Engng., Vol. 14, pp. 401-
451 (1978) and Vol. 15, pp. 99-135 (l 978).
29 ZIEGLER, H. - Prjnciples of, Structural Stability - Birkhau
ser Verlag, Basel and Stuttgart (1977).
30 AHMAD, S.; IRONS, B.M. and ZIENKIEWiez, O.e. - eurved Thick
Shell and Membrane El ement wi th Particular Reference to
Axi-Symmetric Problems - Proceedings 2nd eonference of
Matrix Meth. in Struct. Mech., Wright-Patterson. Air For
ce Base, Ohio (1968).
31 AHMAD, S.; IRONS, B.M. and ZIENKIEWieZ, o.e. - Analysis of
Thick and Thin Shell Structures by eurved Elements
Int. J. Num. Meth. Engng., Vol. 2, pp. 419-451 (1970).
32 RAMM, E. - A Plate/Shell Element for Large Deflections and
Rotations - ln Formulations and eornputational Algorithms
in Finite Element Analysis - Bathe, K.J.; Oden, J.T.,
and Wunderlich, W., (eds.), M.I.T. Press (1977).

202.
33 EBECKEN, N.F.F. - LORANE NL: Uma Linguagem Orientada ã Anã-
34
35
lise Estrutural Não-Linear - Tese de Doutorado, COPPE/
UFRJ (1977).
BURAGOHAIN, D.N.; AGRAWAL, S.B.; AYYAR, R.S. A Matching
Superparametric Beam Element for Shell Beam Systems Computers & Structures, Vol. 9, pp. 175-182 (1978).
BATHE, K.J. and BOLOURCHI, S. A Geometric and Material Nonlinear Plate and Shell Element - Computers & Struc
t u re s , Vo l . l l , p p . 2 3 - 4 8 , Cl 9 80 ) .
36 BATHE, K.J. - Finite Element Formulation, Modeling and Sol~ tlon of Nonlinear Dynamic Problems ~ in Numerical Me
thods for Partial Differentlal Equations (Ed. S.V. Par ter), Academi e Press (1979).
37 FERGUSON, G.H. and CLARK, R.D. - A Variable Thickness, Cur-ved Beam and Shell Stiffening Element wlth Shear Defo~ mations - Int. J. Num, Meth. Engng., Vol. 14, pp. 581-
592 (1979).
38 WOOD, R.D. and ZIENKIEWICZ, o.e. - Geometrically Nonlinear Finite Element Analysis of Beams, Frames, Arches and Axisymmetric Shells - Computers & Structures, Vol. 7,
pp. 725-735 (1977).
39 HAISLER, W.E.; STRICKLIN, J.A. and STEBBINS, F.J. - DevelOf ment and Evaluation of Solution Procedures for Geometrical ly Nonl inear Structural Analysi s - AIAA Journal, Vol. 10, No. 3, pp. 264-272 (March 1972).
40 STRICKLIN, J.A. and HAISLER, W.E. - Formulations and Solu-tion Procedures for Nonlinear Structural Analysis -Com puters & Structures, Vol. 7, pp. 125-136 (1977).
41 BATHE, K.J. and CIMENTO, A.P. - Some Practical Procedures for the Solution of Nonlinear Finite Element equations - Computer Meth. in Appl. Mech. and Engng. Vol. 22, pp. 59-85 (1980).

203
42 MATTHIES, H. and STRANG, G. - The Solution of Nonlinear Fi-nite Element Equations - Int. J. Num. Meth. Engng.vol.
14, pp. 1613-1626 (_1979).
43 BREBBIA, C.A. and FERRANTE, A.J. (_editors) - The Finite Ele ment Technique - Editora da URGS, Porto Alegre, Brasil (_1975).
44 BATHE, K.J.; RAMM, E. and WILSON, E.L. - Finite Element Fo_!: mulations for large Deformation Dynamic Analysis -Int. J. Num. Meth. Engng., Vol. 9, pp. 353-386 (1975).
45 SAAFAN, S.A. - Nonlinear Behavior of Structural Plane Fra-mes - J. Struct. Div., ASCE, Vol. 89, No. ST4, pp.557-579 (1963).
46 TEZCAN, S.S. and OVUNC, B. - An )Iteration/Method for the Nonlinear Buckling of Framed Structures - Space Structures, R.M. Davis ed., John-Wiley & Sons Inc., N.Y. (_1967).
47 TEZCAN, S.S. and KRISHNA, P. - Discussion of ''Numerical So-lution of Nonlinear Structures'' by T.J. Poskitt J. Struct. Div., ASCE, Vol. 94, No. ST6, pp. 1613 -1523 (1968).
48 TEZCAN, S.S. and MAHAPATRA, B.C. - Tangent Stiffness Matrix for Space Frame Members - J. Struct. Div., ASCE, Vol. 95, No. ST6, PP. 1257-1270 (1969).
49 ORAN, C. - Tangent Stiffness in Plane Frames J. Struct. Div., ASCE, Vol. 99, No. ST6, pp. 973-985 (1973).
50 ORAN, C. - Tangent Stiffness in Space Frames J. Struct. Div., ASCE, Vol. 99, No. ST6, pp. 987-1001 (_1973).
51 MANTILLA, E.P. - Um método Iterativo para Anilise de Nio-Linearidade Geométrica em Estruturas Reticulares - Tese de Mestrado, COPPE/UFRJ (_1974).
52 ORAN, C. and KASSIMALI, A. - Large Deformations of Framed Structures Under Static and Dynamic Loads - Computers & Structures, Vol. 6, pp. 539-547 (1976).

204
53 BELYTSCHKO, T. and HSIEH, B.J. - Nonlinear Transient Finite Element Analysis with Convected Coordinates - Int. J. Num. Me t h . Eng n g . , Vo 1. 7 , p p . 2 5 5 - 2 71 ( 1 9 7 3 ) .
54 GERE, J.M. and WEAVER, W., Jr. - Analysis of Framed Structu res - D. Van Nostrand Company, N.Y. (1965).
55 BATHE, K.J. and WILSON, E.L. - Numerical Methods in Finite
56
Element Analysis - Prentice-Hall, Inc.,Englewood Cliffs, New Jersey tl976).
LOVE, A.E.H. - A Treatise on the Mathematical Elasticity - Dover Publications, New York, (1927).
Theory of 4th ed.,
57 SOKOLNIKOFF, I.S. - Mathematical Theory of Elasticity - Mc-Graw-Hi 11 Book Company, 2nd ed. ( 1956).
58 ODEN, J.T. and RIPPERGER, E.A. - Mechanics of Elastic Struc tures - McGraw-Hi-11, 2nd ed. (1981).
59 ZIENKIEWICZ, O.C. - The Finite Element Method - McGraw-Hill 3rd ed. (1977).
60 WROBEL, L.C. - Anãlise Não-Linear de Estruturas Laminares p~ lo Método dos Elementos Finitos - Tese de Mestrado, COPPE/UFRJ (1977).
61 BISSHOP, K.E. and DRUCKER, D.C. - Large Deflection of Canti lever Beams - Quart. J. Appl. Math., No. III, pp. 272-2 75 ( 1 945) .
62 HAISLER, W.E.; STRICKLIN, J.A. and KEY, J.E. - Displacement Incrementation in Nonlinear Structural Analysis by the Self-Correcting Method - Int. J. Num. Meth. Engng. ,vol. 11, pp. 3-10 (1977).
63 WALKER, A.C. - A Nonlinear Finite Element Analysis of Shal-low Circular Arches - Int. J. Solids Structures, Vol. 5, pp. 97-107 (1969).

64
205
BATHE, K.J.; WILSON, E.L. and PETERSON, F.E. SAP IV : A Structural Analysis Program for Static and Dynamic Re~ ponse of Linear Systems - Report EERC 73 - 11, College of Engineering, University of California, Berkeley, Ju ne 1973, revised April 1974.
65 BATHE, K.J. - ADINA: A Finite Element Program for Automatic Dynamic Incremental Nonlinear Analysis - Report 82448-1, Acoustics and Vibration Laboratory, Departament of Mechanical Engineering, Massachusetts Institute Techno logy, Cambridge, Mass., 1975.

206
APtNDICE A
PROGRAMA PAPT-NLG (PROGRAMA PARA ANALISE DE PDRTICOS TRIDIMENSIONAIS CONSIDERANDO NAO-LINEARIDADE GEOMtTRICA)
O programa PAPT-NLG, escrito em linguagem FORTRAN
IV, ê subdividido em vãrias sub-rotinas. Na entrada de dados e
na solução do sistema de equações foram aproveitadas sub-rotinas
do programa STAP 55, que são basicamente as mesmas dos programas
SAP IV 64 e ADINA 65•
As têcnicas computacionais utilizadas sao aquelas
jã consagradas pelo mêtodo dos elementos finitos. As variãveis
principais (matriz de rigidez da estrutura, vetor de forças da
estrutura, vetores de deslocamentos nodais da estrutura e outras)
são dispostas num vetor de trabalho. Da matriz de rigidez são
gerados apenas os coeficientes situados abaixo do perfil da ban
da superior. Diversas variãveis ocupam o mesmo endereço na memo
ria em diferentes fases do processamento. A mem.Õria auxiliar ê
utilizada para armazenar variãveis que devem ser preservadas pa
ra utilização em determinadas etapas do processo incremental-ite
ra ti vo.
Este programa deve ser utilizado com precisão sim
ples em computadores CDC e com precisão dupla em computadores
IBM, UNIVAC e BURROUGHS. A versao aqui apresentada foi desenvol
vida utilizando-se precisão dupla, no BURROUGHS 6700 do NCE/UFRJ.

207
A. l - CARACTERfSTICAS GERAIS
A
NUMNP
ID
No programa, utilizam-se as seguintes variiveis:
vetor de trabalho que armazena as variâveis principais do programa
- numero de nõs da estrutura
- matriz 6 x NUMNP que define os graus de liberdade existentes em cada nõ da estrutura
X , Y, Z - vetores que definem as coordenadas dos nos da estrutura
NEQ - numero de equaçoes do problema; igual aos graus de
FE
V
R
NLOAD
liberdade da estrutura
- vetor de forças da estrutura
- vetor auxiliar utilizado para armazenar o segundo car regamento, quando existem dois carregamentos
- vetor de cargas (primeiro carregamento) e vetor de cargas efetivas da estrutura
- numero de cargas concentradas que compoem um carreg~ mento
NOD - vetor que armazena o numero do no em que atua cada
IDIRN
FLOAD
MHT
.carga concentrada
- vetor que armazena a direção em que atua cada carga concentrada
- vetor que armazena o valor de cada carga concentrada
- vetor que armazena o numero de coeficientes nã.o nu-1 os acima da diagonal de cada coluna da matriz de ri gidez da estrutura.
MAXA - vetor que armazena os endereços relativos dos elemen tos da diagonal da matriz de rigidez no vetor de tra balho.

OES
NWK
K
DOE
208
- vetor de deslocamentos nodais totais da estrutura
numero de coeficientes não nulos da banda superior da matriz de rigidez da estrutura
- matriz de rigidez da estrutura
- vetor dos deslocamentos nodais incrementais da estru
tura
Identificam-se três fases no programa. Na prime!
ra e na segunda e feita, respectivamente, a preparaçao dos dados
da estrutura e dos dados dos elementos. Na terceira calculam-se
os deslocamentos e os esforços nodais da estrutura através de um
processo incremental-iterativo.
Nestas três fases realizam-se as seguintes opera-
çoes:
i Leitura das caracteristicas dos nos e definição dos graus de liberdade da estrutura
ii Leitura e armazenamento em disco dos vetores de carga
i i i - Leitura, cãl cul o e armazenamento e.m disco das caracteristi cas dos elementos
iv Leitura no disco das caracteristicas dos elementos e cãlcu lo das matrizes de rigidez e do vetor de forças dos elemen tos
v - Montagem da matriz de rigidez e do vetor de forças da es-trutura
vi 'rriangularização d-a-·niatrizdé rigidez da estru_1u_ra.
vii - Leitura no disco dos vetores de carga e cãlculo do vetor de cargas efetivas
viii- Cãlculo dos deslocamentos nodais, increniiint-ais e totais, da ·eiit r1itu ra

209
ix repetição do processo a partir da operaçao iv
As posições e os·endereços das variãveis no vetor
A, nas três fases do programa, são mostrados nas Figuras A.l,
A.2 e A.3.
O parâmetro ITWO, que aparece nas especi fi.cações
dos endereços, estã relacionado a precisâo arii tmêtica requeri da
no processamento. Na vers'ão do programa .:aqui · apresentada
ITWO = 1, pois a precisão dupla foi especificada apena.s atravês
dos comandos IMPLICIT REAL.a e REAL.a.
Utilizam-se os seguintes arquivos em disco (memõ-
ria auxiliar):
IELMNT
ILOAD
ILROT
ILMATl
ILMAT2
- armazena as caracterTsticas geomêtricas e materiais dos elementos
- armazena os vetores de carga da estrutura
- armazena as matrizes de rotação dos elementos
- armazena variãveis utilizadas no cãlculo das matri-zes de rigidez e vetor de forças dos elementos
- exerce a mesma função de ILMATl
As cargas sao aplicadas, simultaneamente, em .in
crementas iguais ou variãveis, agrupadas em um ou do.is carrega
mentos. A variação dos incrementas de carga ê feita através de
funções-carga, constituídas por quatro polinõmios .lineares para
o primeiro carregamento, e por dois polinômios lineares para o
segundo carregamento (sub-rotina INCREMl,
O processo incremental-iterativo ê controlado por
três parâmetros: o numero total de incrementas (:_NINC), o numero
mãximo de iterações (NITE) e a tolerância (TOL). A tolerância

210
estabelece a precisão desejada para o processo iterativo. Quanto
menor for o seu valor (sempre menor que a unidade) maior s.era a
precisão dos resultados.
Soluções estritamente incrementais podem ser obti
das faze.ndo-se NITE = 1. Porém, esta opção, que do ponto de vis
ta académico pode ser interessante, não é recomendivel na priti
ca, pelas razões ji expostas anteriormente (item 3 do Capitulo
III).
Nl !D Nl =
N2 X N2 = Nl + 6* NUMNP
N3 y N3 = N2 + NUMNP* ITWO
N4 z N4 = N3 + NUMNP* !TWO
N5 R N5 = N4 + NUMNP* ITWO
N6 NOD N6 = N5 + NEQ* ITWO
N7 IDIRN N7 = N6 + NLOAD
N8 FLOAD N8 = N7 + NLOAD
FIGURA A.1 - SITUAÇAO DO VETOR DE TRABALHO NA 1~ FASE

211
Nl 1 D Nl = l
N2 X N2 = Nl + 6* NUMNP
N3 y N3 = N2 + NUMNP* ITWO
N4 z N4 = N3 + NUMNP* I TWO
N5 MHT N5 = N4 + NUMNP* ITWO
Caracte N6 ris ti cas
dos elemen N6 = N5. + NEQ -tos
FIGURA A.2 - SITUAÇAO DO VETOR DE TRABALHO NA 2ª FASE
Nl ID Nl =
N2 MAXA N2 = Nl + 6* NUMNP
N3 DES N3 = N2 + NEQ + l
N4 K N4 = N3 + NEQ* ITWO
N5 R ou DOE N5 = N4 + NWK* ITWO
N6 Caracte rist.icas
dos el emen N6 = N5 + NEQ* ITWO -tos
N7 FE N7 = N6 + MAXEST
N8 V N8 = N7 + NEQ* ITWO
FIGURA A.3 - SITUAÇAO DO VETOR DE TRABALHO NA 3ª FASE

21 2
O parâmetro NEWR controla a montagem da matriz de
rigidez da estrutura, que pode ser atualizada antes de cada nova
iteração (NEWR = O) ou apenas quando passar para o incremento se
guinte (NEWR = 1).
O sistema de equaçoes que fornece os valores dos
deslocamentos incrementais ê resolvido pelo mêtodo de eliminação
de Gauss (sub-rotina COLSOL).
Como resultados da anãlise sao impressos, ao fi
nal de cada incremento ou em intervalos estipulados pelos param~
tros NDES e NESF, os deslocamentos nodais totais e os esforços
nodais em cada elemento.
A.2 - SUB-ROTINAS ESPECTFICAS DO ELEMENTO CONVENCIONAL DE PÕRTI
CO (MODELO l)
As sub-rotinas do elemento convencional sao: CHA
MAl, LERIGl, ESFORl e MATRil. Nestas subcrótinas utilizam-se ,
alem daquelas jã mencionadas no item Al, as seguintes variãveis:
NUME - numero de elementos
NUMMAT - numero de sub-grupos de elementos com caracteristicas materiais e geomêtricas diferentes
NPA - numero de nõs auxiliares que definem o plano XY(=rs)
E
de cada elemento; usados para o cãlculo das matrizes de rotação (RO) dos elementos
- vetor que armazena os valores dos mõdulos de elasticidade dos sub-grupos de elementos
POI - vetor que armazena os valores dos coeficientes de
AREA
Poisson dos sub-grupos de elementos
vetor que armazena os valores das ãreas das seçoes
transversais dos sub-grupos de elementos

YINE
ZINE
LM
XYZ
MATP
RO
CPA
NAE
FOT
RA
GAMA
RT
SKL
SKT
213
- vetor que armazena os valores dos momentos de inercia em relação ao eixo y t = s} dos sub-grupos de elementos
- vetor que armazena os valores dos momentos de inercia em relação ao eixo z (= t) dos sub-grupos de elementos
- matriz 12 x NUME que relaciona os graus de liberdade do elemento aos graus de liberdade da estrutura
- matriz 6 x NUME que armazena as coordenadas dos nos de cada elemento
- vetor que armazena o numero do sub-grupo a que per
tence cada um dos elementos
matriz de rotação 3 x 3 que relaciona a posição inicial do elemento ao sistema de referência global
- matriz 3 x NPA que armazena as coordenadas dos nos auxiliares
- vetor que armazena o numero do nõ auxiliar que define o plano xy ( = rs) de cada elemento
vetor das forças nodais do elemento referidas ao sis tema de referência local mõvel
matriz de rotação 3 x 3 qu~ relaciona a posição do elemento na iteração anterior a posição inicial
ângulo de rotação total do elemento em torno do prõprio eixo, que descreve a rotação de corpo rígido do elemento causada pela torção
- matriz de rotação 3 x 3 que relaciona os sistemas de referência locais, o mõvel e o fixo
- matriz de rigidez do elemento referida ao sistema lo cal fixo
- matriz de rigidez do elemento referida ao sistema lo cal mõvel

214
FOL - vetor de forças do elemento referido ao sistema lo-
s
cal fixo
- vetor que armazena (_por linha) os coeficientes da banda superior da matriz SKL
DDL - vetor de deslocamentos nodais incrementais do elemen
to referido ao sistema local fixo
DESL - vetor de deslocamentos nodais totais do elemento re-ferido ao sistema local fixo ou vetor de deslocamentos nodais incrementais referido ao sistema local mo
ve l .
As posições ocupadas pelas variãveis das sub-roti
nas CHAMAl, LERIGl, ESFORl e MATRI1 no vetor de trabalho,nas
duas ultimas fases do programa encontram-se nas Figuras A.4 e
A.5

21 5
N l O l E N l O l = N6
Nl02 POI Nl02 = NlOl + NUMMAT* ITWO
Nl03 AREA Nl03 = Nl02 + NUMMAT* ITWO
Nl04 YINE Nl04 = N l O 3. + MUMMAT* I TWO
Nl05 ZINE Nl05 = Nl04 + NUMMAT* I TWO
Nl06 LM Nl06 = Nl05 + NUMMAT* I TWO
Nl O 7 XYZ Nl07 = Nl06 + 12* NUME
Nl08 MATP Nl 08 = Nl07 + 6* NUME* ITWO
Nl09 FE Nl09 = Nl08 + NUME
N 11 5 RO Nl09 = NLAST = N7
N 11 O CPA N 11 5 = NLAST + NEQ* ITWO
N 111 NAE N 11 O = NLAST + NEQ* I TWO + 9 * I TWO
Nl 11 = NllO + 3* NPA* ITWO
FIGURA A.4 - POSIÇÕES OCUPADAS PELAS VARIAVEIS DAS SUB-ROTINAS CHAMAl, LER!Gl, ESFORl E MATR!l NO VETOR DE TRABA LHO NA 2~ FASE

21 6
N6 E
POI
AREA
YINE
ZINE
LM
XYZ
MATP
N 11 4 FE Nll4 = NLAST = N7
N 11 5 RO Nll5 = Mll4 + NEQ* ITWO
Nll 7 FOT Nll7 = Nll5 + 9* ITWO
Nll 8 RA N 1 l 8 = N 11 7 + 1 2 * I TW O
N 1 1 9 GAMA Nll9 = N11s + g* In~o
FIGURA A.5 - POSIÇÕES OCUPADAS PELAS VARIAVEIS DAS SUB-ROTINAS CHAMAl, LERIGl, ESFORl E MATRil NO VETOR DE TRABALHO NA 3~ FASE

21 7
A.3 - SUB-ROTINAS ESPECfFICAS DO ELEMENTO DEGENERADO DE PÕRTICO
(MODELO 2)
As sub-rotinas especificas do elemento degenerado
sao: CHAMA2, LERIG2, ESFOR2, MATRI2, DERIVA e INTERP. Nestas sub
rotinas utilizam-se, alem daquelas jã mencionadas no item A.l,as
seguintes variãveis:
NUME
NUMMAT
E
POI
BK
DK
LM
XYZ
- numero de elementos
- numero de sub-grupos de elementos com características materiais e geométricas diferentes
- vetor que armazena os valores dos mõdulos de elasti cidade dos sub-grupos de elementos
- vetor que armazena os valores dos coefitientes de Poisson dos sub-grupos de elementos
- matriz 4 x NUMMAT que armazena as alturas das seções transversais dos sub-grupos de elementos
- matriz 4 x NUMMAT que armazena as larguras das seções transversais dos sub-grupos de elementos
- matriz 24 x NUME que relaciona os graus de liberdade do elemento aos graus de liberdade da estrutura
- matriz 12 x NUME que armazena as coordenadas dos nõs de cada elemento
MATP - vetor que armazena o numero do sub-grupo a que per-
ITR
NN
KNl
tence cada um dos elementos
- vetor que armazena os indices que definem a transformação das rotações nodais do sistema de referência local para o global
- numero de nõs do elemento
- numero de pontos de integração na direção r

KN2
KN3
KN4
RO
RM
TENG
SKL
FOL
s
RN
DDL
DESL
FK
FL
RJ
RT
CD
218
- numero de pontos de integração na direção s
- numero de pontos de integração na direção t
- graus de liberdade totais do elemento, igual a 6* NN
- matriz 3 x (_3* NN) que armazena os cossenos diret~ res dos sistemas de referência nodais na .configura
çao inicial
- matriz 3 x 12 que armazena os cossenos diretores
dos sistemas de referência nodais, correspondentes a configuração da iteração anterior
- vetor que armazena os valores das tensões nos pontos
de integração
- matriz de rigidez do elemento
- vetor de forças do elemento
- vetor que armazena (por linha) os coeficientes da ban
da superior da matriz SKL
- matriz 3 x 12 que armazena os cossenos diretores dos sistemas de referência nodais correspndentes a confi guração da iteração presente
- vetor de deslocamentos nodais incrementais do elemen to
- vetor de deslocamentos (_translações) nodais totais do elemento
- vetor das funções de interpolação
- vetor das derivadas das funções de interpolação
- inversa da matriz jacobiana
- matriz que transforma a matriz constitutiva do siste ma local de referência para o global
- matriz constitutiva, referida ao sistema global

219
TEN - vetor das tensões em um determinado ponto de integr~
çao
RST - matriz que armazena as coordenadas dos pontos de in-tegração de Gauss
PG - matriz que armazena os valores dos pesos.utilizados
na integração
As posições ocupadas pelas variãveis das sub-roti
nas CHAMA2, LERIG2, ESFOR2 e MATRI2 no vetor de trabalho nas
duas ultimas fases do programa encontram-se nas Figuras A.6 e
A.7.
NlOl E N l O l = N6
Nl02 POI Nl02 = N l O l + NUMMAT* ITWO
Nl03 BK Nl03 = Nl02 + NUMMAT* ITWO
Nl 04 DK Nl04 = Nl O 3 + 4* NUMMAT* I TWO
Nl05 LM Nl05 = Nl04 + 4* NUMMAT* ITWO
Nl06 XYZ Nl06 = Nl05 + 24* NUME
Nl07 MATP Nl07 = Nl06 + 12* NUME* I Tl40
Nl 08 ITR Nl 08 = Nl07 + NUME
Nl09 FE Nl09 = Nl08 + NUME = NLAST
Nl l 5 RO 1
N 11 5 = NLAST + NEQ* ITWO
FIGURA A.6 - POSIÇÕES OCUPADAS PELAS VARIAVEIS DAS SUB-ROTINAS CHAMA2, LERIG2, ESFOR2 E MATRI2 NO VETOR DE TRABA LHO NA zS FASE

220
N6 E
POI
BK
DK
LM
XYZ
MATP
ITR
N 114 FE Nll4 = NLAST = N7
Nll 5 RO Nll5 = Nll4 + NEQ* ITWO
N 11 9 RM N 1 1 9 = N 11 5 + 9 * N N * I TW O
Nl20 TENG Nl20 = Nll9 + 9* NN* ITWO
FIGURA A.7 - POSIÇÕES OCUPADAS PELAS VARI~VEIS DAS SUB-ROTINAS CHAMA2, LERIG2, ESFOR2 e MATRI2 NO VETOR DE TRABA LHO NA 3!! FASE





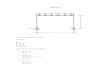

















![Optica geometrica[1]](https://img.document.onl/doc/110x75/553a067e550346bf308b4a81/optica-geometrica1.jpg)




