Embed Size (px)
Citation preview

AMSD - AULA 03 - 2015/2
Modelagem de circuitos Elétricos (RLC,
amplificadores operacionais) e sistemas
mecânicos translacionais. Função de
transferência e Diagrama de blocos. Cálculo da
função de transferência resultante. Simulação e
análise Dinâmica.
Circuitos com amplificadores operacionais
Estes circuitos podem sintetizar importantes funções
de transferência de filtros e de controladores.
Basicamente, a modelagem baseia-se nas seguintes
propriedades:
1. A tensão entre os terminais + e – é zero; ou seja,
ee . Essa propriedade é comumente chamada
de terra virtual ou curto-circuito virtual.
2. As correntes que entram nos terminais + e – são
nulas. Assim, a impedância de entrada é infinita.
3. A impedância vista olhando no terminal de saída
é nula. Assim, a saída é uma fonte de tensão
ideal.
4. A relação entrada-saída é eeAeo , onde o
ganho A tende ao infinito.

Para a operação linear, requer-se à adição da
realimentação do sinal de saída ao terminal de
entrada.
Exemplo 1.3 - Exemplos de circuitos de soma e
diferença

A modelagem destes circuitos é basicamente realizada
fazendo-se a soma das correntes em cada um dos nós
de entrada do Amp-Op igual a zero. Também, como a
impedância de entrada do amp-op é infinita,
consideram-se as correntes de entrada do Amp-Op
nulas. Então, tem-se que:
Circuito a
0
R
ee
R
ee
R
ee oba
Logo
bao eee
Circuito b
00
R
ee
R
e o
e
0
R
ee
R
ee ba

Logo
bao eee
Circuito c
0
R
ee
R
ee oa
e
00
R
e
R
ee b
Logo
bao eee
Exemplo 1.4 – Circuito de amplificador
operacional em geral
)(
)(
)(
)()(
1
2
sZ
sZ
sE
sEsG
i
o

Tabela 1.1 Funções de transferência de amp-op
inversor


B) Modelagem de sistemas mecânicos
translacional
Nestes, basicamente, a modelagem é realizada por
meio da 2ª lei de Newton:
dt
tdM
dt
tydMtMatf
)()()()(
2
2
Ou seja, a somatória das forças aplicadas a um corpo
é igual ao produto da massa pela aceleração.
Normalmente, nestes problemas de modelagem
de sistemas mecânicos, deve-se calcular as forças de
elementos como mola, amortecedores e engrenagens,
bem como modelar o atrito.
No caso da mola, análoga ao capacitor em
sistemas elétricos, se a deformação da mola é
pequena, seu comportamento pode ser aproximado
para uma relação linear dada por:

)()( tKytf
onde K é a constante da mola, ou simplesmente
rigidez, com unidade pelo SI de medidas dado N/m.
Diagrama esquemático de forças em uma mola
Certamente, em molas reais, este equacionamento é
não-linear em alguma extensão.
No caso de amortecedor, existe uma relação linear
entre a força aplicada e a velocidade do mesmo.
Assim tem-se que

dt
tdyBtf
)()(
onde B é o coeficiente de amortecimento, com
unidade pelo SI de medidas dado por N/m/seg.
Cálculo de forças de atrito no movimento de
translação
- quando existe movimento ou tendência de
movimento entre dois elementos físicos, existe força
de atrito.
- As forças de atrito encontradas em sistemas físicos
são geralmente de natureza não-linear.
- Forças de atrito entre duas superfícies de contato
frequentemente dependem da composição das
superfícies, a pressão entre as duas superfícies, suas
velocidades relativas, e outras, assim uma descrição
matemática da força de atrito é difícil.

Três diferentes tipos de atrito são geralmente usados
em sistemas práticos: atrito viscoso, atrito estático, e
atrito de Coulomb.
O atrito viscoso representa uma força de retardo que
é proporcional à velocidade entre as superfícies
(equacionamento semelhante ao do amortecedor).
Assim, a expressão matemática do atrito viscoso é
dada por
dt
tdytfat
)()(
onde é o coeficiente de atrito viscoso, com
unidade pelo SI de medidas dado por N/m/seg.
O atrito estático representa uma força de retardo
que tende a impedir o movimento de iniciar. A força

de atrito estático pode ser representada pela
expressão
0)()(
ysat Ftf
Que é definida como uma força de atrito que existe
somente quando o corpo está estacionário, mas tem
tendência ao movimento. O sinal do atrito depende
do sentido do movimento ou a direção inicial da
velocidade. Note que uma vez iniciado o movimento, a
força de atrito estático desaparece e outros atritos o
substituem.
O atrito de Coulomb é uma força de retardo que tem
amplitude constante com relação às mudanças de
velocidade, mas o sinal da força de atrito muda com a
mudança do sentido da velocidade. A relação
matemática para o atrito de Coulomb é dada por

dttdy
dttdyFtf cat
/)(
/)()(
em que cF é o coeficiente de atrito de Coulomb.
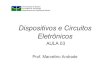
Gráficos das diferentes forças de atrito:
Atritos viscoso, estático e de Coulomb
Exemplos 1.5 – Determinar as funções de
transferência que regem o comportamento
dinâmico dos sistemas mecânicos abaixo:

m1 m2
Ku
y1 y2
b
NISE, N. Engenharia de Sistemas de Controle. 3ª edição. Editora LTC.
2000.
OGATA, K. Engenharia de Controle Moderno, 4ª edição. Prentice Hall,
São Paulo, 2003.
KUO, B. C., Automatic Control Systems, 7th ed (capítulos: 1-7), John
Wiley & Sons, Inc. New York, 1995, Prentice Hall, 1995.