Embed Size (px)
DESCRIPTION
uh9u
Citation preview
EST-10 Mecânica dos Sólidos ITA-2015 7.1
7
FLEXÃO DE VIGAS
TEORIA CLÁSSICA (EULER-BERNOULLI)
Neste capítulo apresentaremos o desenvolvimento de uma teoria, denominada de
Teoria Clássica de Flexão de Vigas ou Teoria de Flexão de Vigas Euler-Bernoulli. Uma
viga é um elemento estrutural em forma de barra, com o seu comprimento no mínimo
três ou quatro vezes maior que as outras duas dimensões e sujeita a um carregamento
transversal, o qual produz sobre essa barra uma deformação denominada de flexão.
A teoria de Euler-Bernoulli para a flexão de vigas se aplica, com resultados
excelentes, aos problemas de vigas delgadas ou longas, ou seja, vigas cujo
comprimento longitudinal é no mínimo dez vezes maior que a sua maior dimensão
transversal. Essa restrição geométrica é importante, porque nos casos mais gerais de
carregamento, onde estão presentes as forças de cisalhamento transversal, observa-se
que os deslocamentos de uma viga longa, decorrentes da flexão são muito maiores do
que os deslocamentos devido ao cisalhamento, sendo que esses últimos podem ser,
portanto, desprezados.
Por questões didáticas, inicialmente os problemas de flexão de vigas tratados
neste capítulo se restringirão às vigas prismáticas cujas propriedades de material e
geométricas são simétricas em relação a um plano longitudinal. Também, para que o
EST-10 Mecânica dos Sólidos ITA-2015 7.2
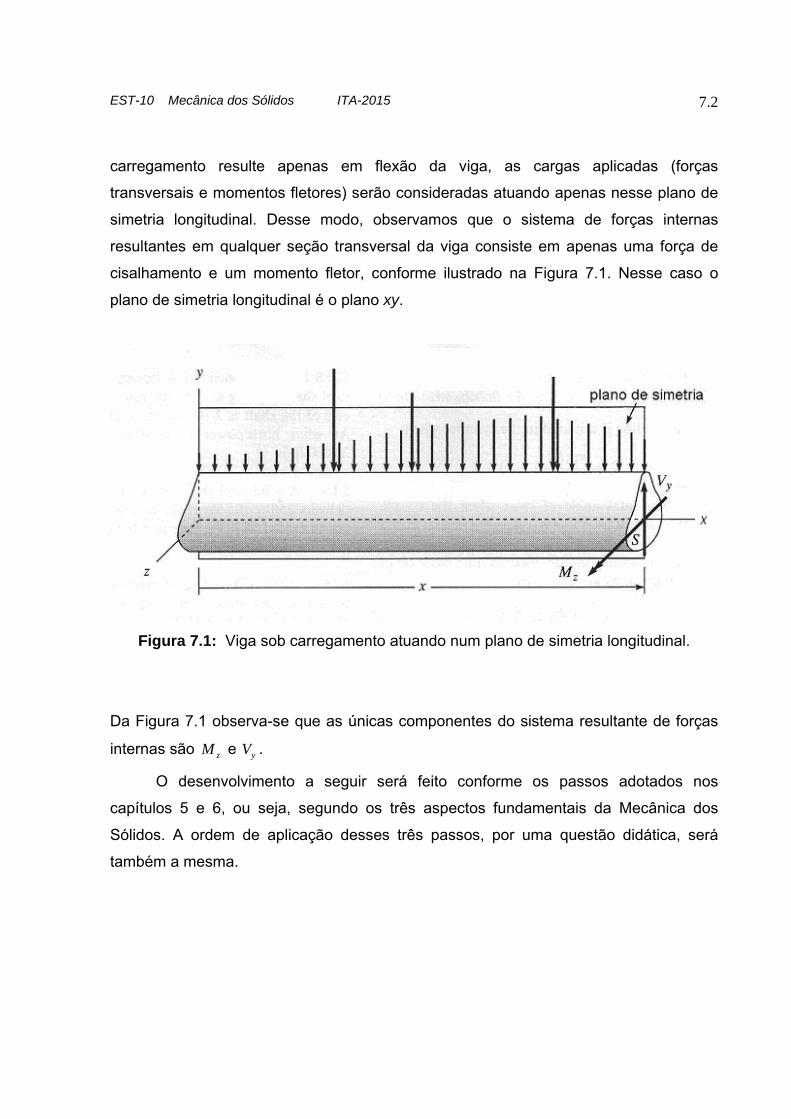
carregamento resulte apenas em flexão da viga, as cargas aplicadas (forças
transversais e momentos fletores) serão consideradas atuando apenas nesse plano de
simetria longitudinal. Desse modo, observamos que o sistema de forças internas
resultantes em qualquer seção transversal da viga consiste em apenas uma força de
cisalhamento e um momento fletor, conforme ilustrado na Figura 7.1. Nesse caso o
plano de simetria longitudinal é o plano xy.
Figura 7.1: Viga sob carregamento atuando num plano de simetria longitudinal.
Da Figura 7.1 observa-se que as únicas componentes do sistema resultante de forças
internas são zM e yV .
O desenvolvimento a seguir será feito conforme os passos adotados nos
capítulos 5 e 6, ou seja, segundo os três aspectos fundamentais da Mecânica dos
Sólidos. A ordem de aplicação desses três passos, por uma questão didática, será
também a mesma.
EST-10 Mecânica dos Sólidos ITA-2015 7.3
7.1 FLEXÃO PURA Vamos iniciar os nossos estudos considerando uma situação especial de carregamento.
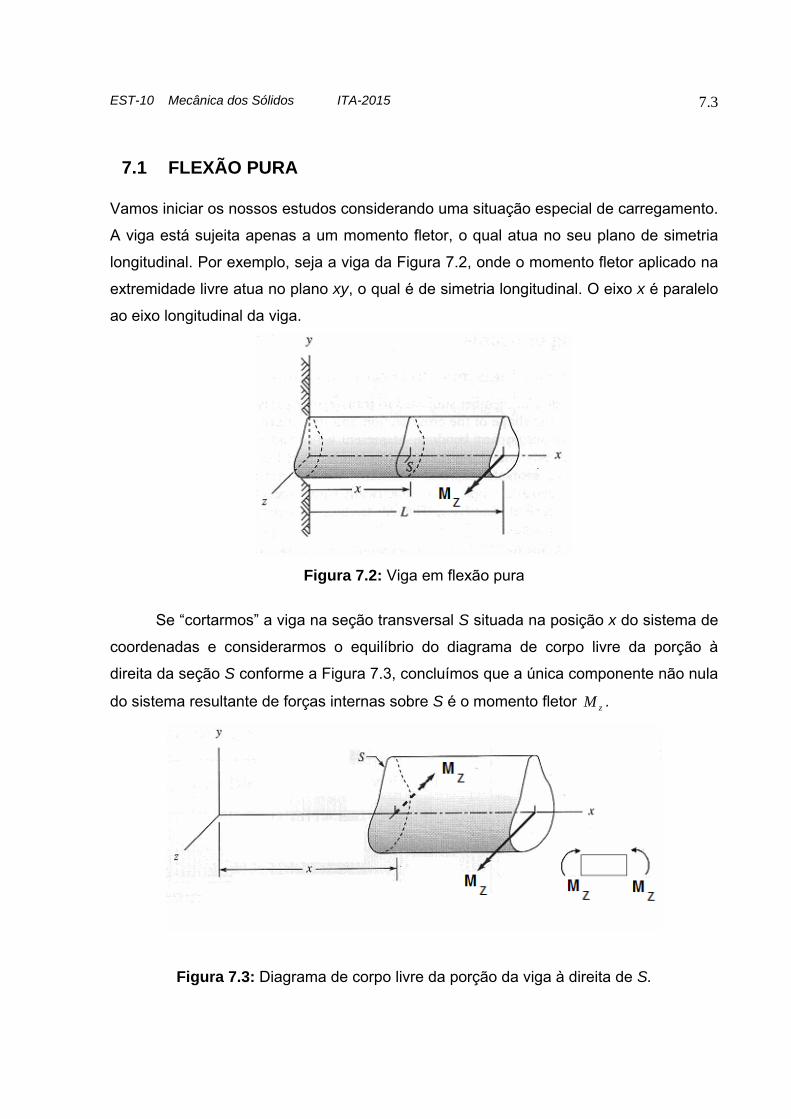
A viga está sujeita apenas a um momento fletor, o qual atua no seu plano de simetria
longitudinal. Por exemplo, seja a viga da Figura 7.2, onde o momento fletor aplicado na
extremidade livre atua no plano xy, o qual é de simetria longitudinal. O eixo x é paralelo
ao eixo longitudinal da viga.
Figura 7.2: Viga em flexão pura
Se “cortarmos” a viga na seção transversal S situada na posição x do sistema de
coordenadas e considerarmos o equilíbrio do diagrama de corpo livre da porção à
direita da seção S conforme a Figura 7.3, concluímos que a única componente não nula
do sistema resultante de forças internas sobre S é o momento fletor zM .
Figura 7.3: Diagrama de corpo livre da porção da viga à direita de S.
EST-10 Mecânica dos Sólidos ITA-2015 7.4
Cinemática da deformação
A restrição de que o carregamento aplicado atue segundo um plano de simetria
longitudinal da viga, nos permite estudar apenas os efeitos da flexão sem a combinação
com efeitos de torção.
As restrições geométricas discutidas para as barras sob cargas axiais são
também válidas para as vigas. Além disso, as seguintes hipóteses devem também ser
consideradas:
a) A seção transversal da viga tem um plano longitudinal de simetria geométrica e
de propriedades do material.
b) A resultante das cargas aplicadas transversalmente se situa no plano longitudinal
de simetria.
c) As seções planas originalmente perpendiculares ao eixo longitudinal da viga
permanecem planas e perpendiculares ao eixo longitudinal após a flexão. Essa
hipótese é denominada hipótese de Bernoulli.
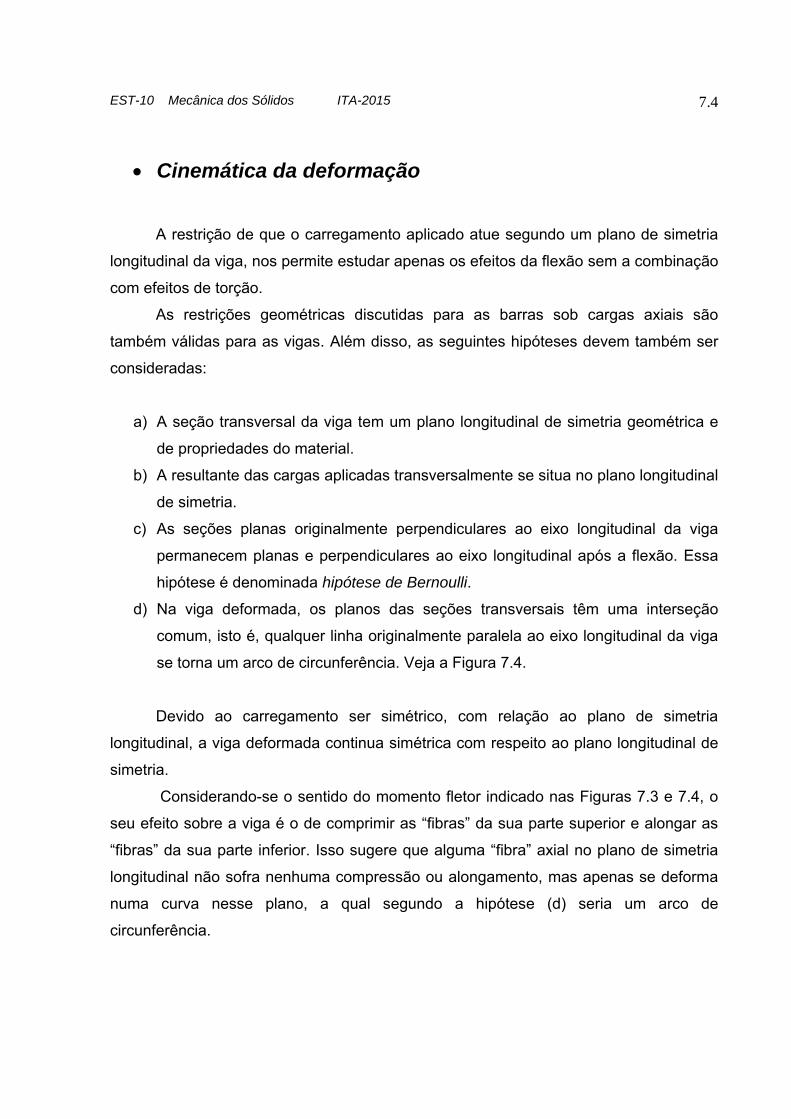
d) Na viga deformada, os planos das seções transversais têm uma interseção
comum, isto é, qualquer linha originalmente paralela ao eixo longitudinal da viga
se torna um arco de circunferência. Veja a Figura 7.4.
Devido ao carregamento ser simétrico, com relação ao plano de simetria
longitudinal, a viga deformada continua simétrica com respeito ao plano longitudinal de
simetria.
Considerando-se o sentido do momento fletor indicado nas Figuras 7.3 e 7.4, o
seu efeito sobre a viga é o de comprimir as “fibras” da sua parte superior e alongar as
“fibras” da sua parte inferior. Isso sugere que alguma “fibra” axial no plano de simetria
longitudinal não sofra nenhuma compressão ou alongamento, mas apenas se deforma
numa curva nesse plano, a qual segundo a hipótese (d) seria um arco de
circunferência.
EST-10 Mecânica dos Sólidos ITA-2015 7.5
Figura 7.4: (a) Viga indeformada; (b) Viga em flexão pura.
Assim, devido à simetria geométrica e de propriedades do material das seções
transversais em relação ao plano longitudinal de simetria, as “fibras”, originalmente
paralelas ao eixo longitudinal e simétricas em relação a esse plano, devem deformar-se
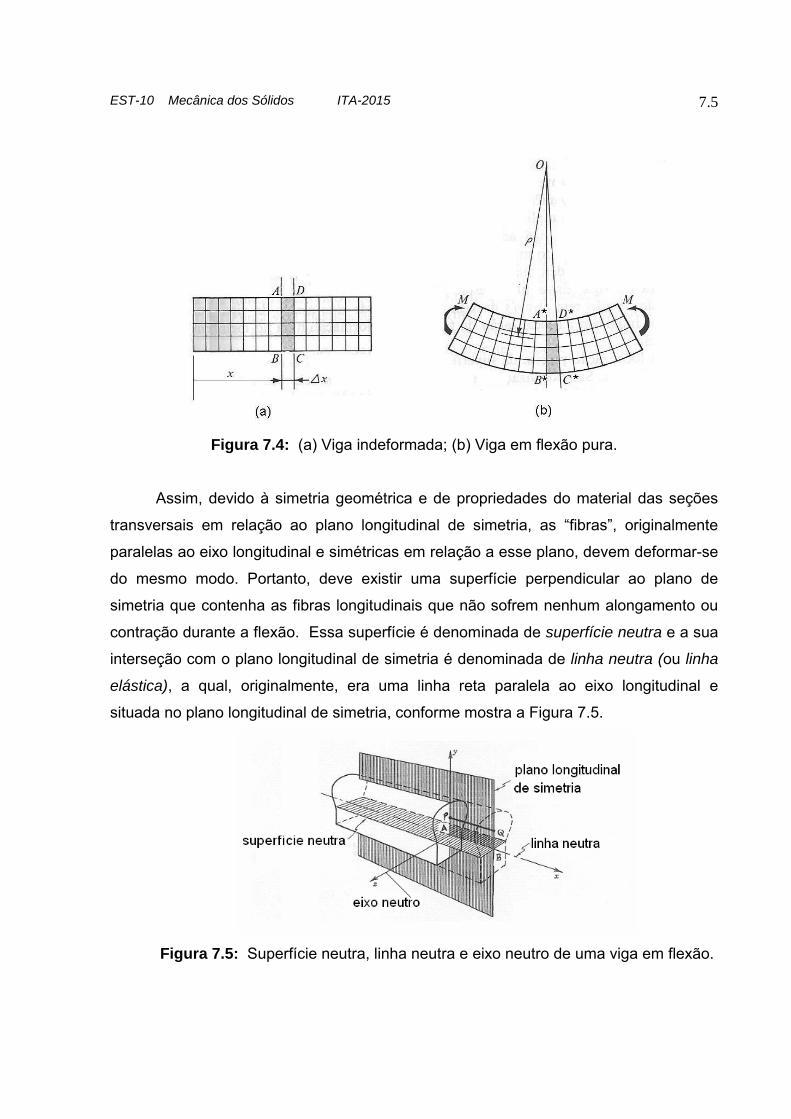
do mesmo modo. Portanto, deve existir uma superfície perpendicular ao plano de
simetria que contenha as fibras longitudinais que não sofrem nenhum alongamento ou
contração durante a flexão. Essa superfície é denominada de superfície neutra e a sua
interseção com o plano longitudinal de simetria é denominada de linha neutra (ou linha
elástica), a qual, originalmente, era uma linha reta paralela ao eixo longitudinal e
situada no plano longitudinal de simetria, conforme mostra a Figura 7.5.
Figura 7.5: Superfície neutra, linha neutra e eixo neutro de uma viga em flexão.

EST-10 Mecânica dos Sólidos ITA-2015 7.6
O eixo neutro é o lugar geométrico dos pontos da seção transversal com
deformação longitudinal x nula. Na Figura 7.5 o eixo x do sistema de coordenadas foi
colocado ao longo da linha neutra da viga. Nós ainda não conhecemos ainda a posição
desse eixo na seção transversal da viga.
Consideremos a viga da Figura 7.6 para estudarmos a deformação normal de um
segmento de reta PQ, situado no plano longitudinal de simetria.
Figura 7.6: Elemento linear PQ no plano longitudinal de simetria.
O ponto P está situado na seção transversal S localizada numa distância x da
extremidade esquerda e o ponto Q na seção vizinha 1S localizada na posição x x . A
fatia da viga entre essas seções transversais é mostrada antes e após a flexão, na
Figura 7.7.
Figura 7.7: (a) Fatia entre as seções 1,S S antes da flexão; (b) Fatia entre as seções
1,S S após a flexão.
EST-10 Mecânica dos Sólidos ITA-2015 7.7
Na Figura 7.7(a) a coordenada y é a distância inicial dos pontos P e Q em
relação à linha neutra x. Após a deformação, Figura 7.7(b), essa distância se torna y*.
Da definição de deformação normal podemos escrever
* (1 )yy y , (7.1)
onde y é a deformação normal média de y entre as seções transversais separadas
pela distância x .
O ponto O na Figura 7.7(b) é o centro de curvatura da linha neutra x no ponto A*
e é o raio de curvatura em A*.
Como AB se situa na linha neutra, o seu comprimento não se altera após a
flexão da viga. Assim, escrevemos
* *PQ AB A B x . (7.2)
Mas, o comprimento deformado da “fibra” P*Q* é dado por
* * ( *)P Q y . (7.3)
Da definição de deformação específica, podemos escrever
* *( ) limx
Q P
P Q PQP
PQ
. (7.4)
Porém, quando Q P , 0 e considerando-se (7.3), a equação (7.4) pode ser
reescrita como
0
( *) *( ) lim ( )x x
y yP P
. (7.5)
Substituindo (7.1) em (7.5) obtemos

EST-10 Mecânica dos Sólidos ITA-2015 7.8
(1 )( ) y
x
yP
. (7.6)
Mas, considerando-se pequenas deformações, y << 1, o que ocorre na maioria dos
problemas de engenharia de estruturas, a equação (7.6) reescreve-se
1 1 ( )y x
yP
, (7.7)
onde y é medido a partir do eixo neutro.
A equação (7.7) é o resultado básico da análise cinemática da deformação da
viga em flexão pura considerando-se pequenas deformações. Ela é totalmente baseada
nas hipóteses (c) e (d) e, apesar de ter sido deduzida para uma “fibra” situada no plano
longitudinal de simetria, é válida para todas as “fibras” longitudinais da viga, devido à
simetria da geometria e das propriedades do material em cada seção transversal da
viga em relação ao plano longitudinal de simetria e ao carregamento (momento fletor)
atuante nesse plano. Ela se aplica a qualquer material.
Além disso, devido à hipótese de que as seções transversais permanecem
planas e perpendiculares ao eixo longitudinal da viga e devido ao carregamento
aplicado, podemos escrever
0xy xz , (7.8)
para todos os pontos numa seção transversal da viga.
Estática
Devido ao carregamento e à deformação descrita acima, podemos prever que o
momento fletor em cada seção transversal é o resultado de forças normais internas
atuando sobre a seção como na Figura 7.8.
EST-10 Mecânica dos Sólidos ITA-2015 7.9
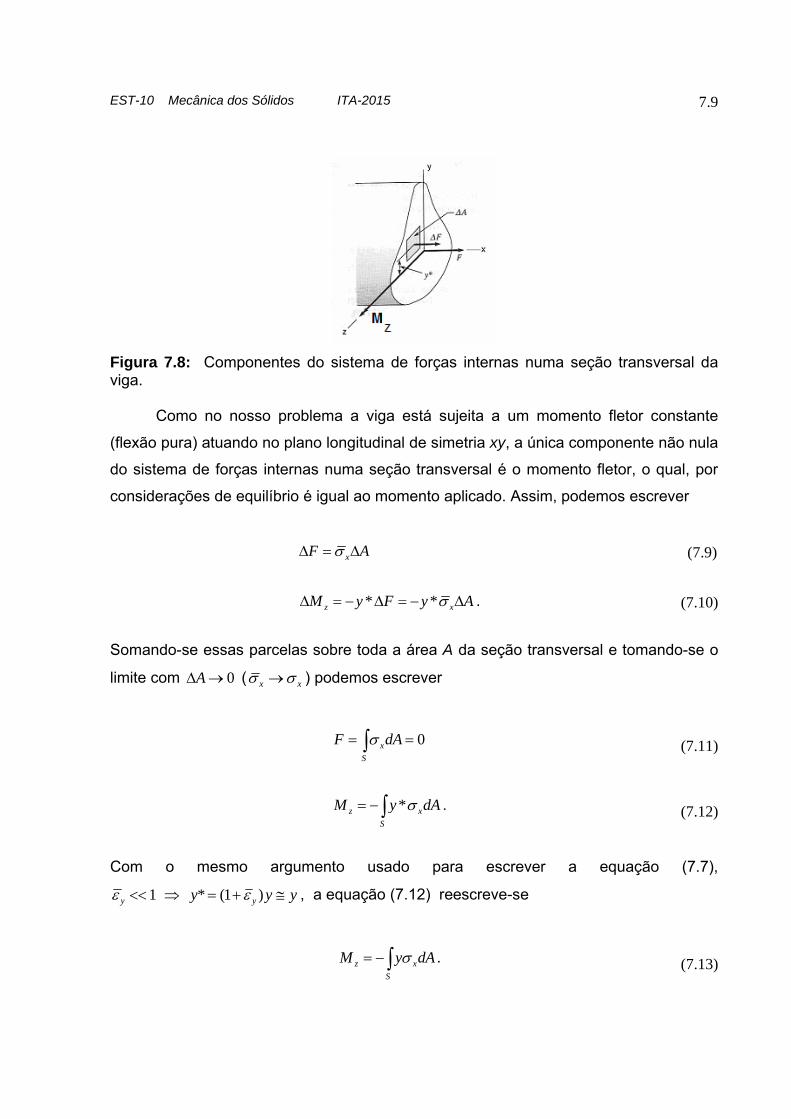
Figura 7.8: Componentes do sistema de forças internas numa seção transversal da viga. Como no nosso problema a viga está sujeita a um momento fletor constante
(flexão pura) atuando no plano longitudinal de simetria xy, a única componente não nula
do sistema de forças internas numa seção transversal é o momento fletor, o qual, por
considerações de equilíbrio é igual ao momento aplicado. Assim, podemos escrever
xF A (7.9)
* *z xM y F y A . (7.10)
Somando-se essas parcelas sobre toda a área A da seção transversal e tomando-se o
limite com 0A ( x x ) podemos escrever
0x
S
F dA (7.11)
*z x
S
M y dA . (7.12)
Com o mesmo argumento usado para escrever a equação (7.7),
1 * (1 )y yy y y , a equação (7.12) reescreve-se
z x
S
M y dA . (7.13)
EST-10 Mecânica dos Sólidos ITA-2015 7.10
Aqui, novamente consideramos a hipótese fundamental que a deformação da
seção transversal é tão pequena que podemos considerar as coordenadas
indeformadas para localizar os pontos na seção transversal da viga deformada, isto é,
embora a tensão deva ser acompanhada da deformação, assumimos que para o
propósito de se escrever as equações de equilíbrio nós podemos associar a tensão
num ponto com a posição daquele ponto na viga indeformada.
As equações (7.11) e (7.13) são resultados básicos que independem do material
da viga.
Relações constitutivas
Suponha que a viga seja feita de material elástico linear e isotrópico e cujas
propriedades sejam simétricas em relação ao plano longitudinal de simetria, como já
havíamos estabelecido pela hipótese (a). Então, a partir da equação (4.30) escrevemos
1( )x x y zE
(7.14)
1( )y y x zE
(7.15)
1( )z z x yE
(7.16)
Da cinemática das deformações apenas as deformações , ,x xy xz foram
descritas explicitamente pelas equações (7.7) e (7.8). Quanto às tensões, apenas a
componente normal x foi antecipada. Portanto precisamos de algumas hipóteses
adicionais.
A ausência de qualquer tensão sobre as superfícies laterais da viga sugere que
as tensões y , z e yz permaneçam nulas ou podem ser consideradas desprezíveis
através do interior da viga, principalmente para uma viga delgada, conforme ilustrado
na Figura 7.9.

EST-10 Mecânica dos Sólidos ITA-2015 7.11
Então, das equações acima podemos escrever
10y z x xE
(7.17)
0 xy z y z x E
. (7.18)
Na realidade, na teoria clássica de flexão de viga as deformações y e z são
consideradas nulas, ou seja, a seção transversal é considerada rígida.
Das equações (4.31) e (7.8), escrevemos
00
0xy xy
xy xzxz xz
G
G
, (7.19)
O que está coerente com o fato de que as forças cortantes nas seções transversais da
viga são nulas no caso de flexão pura.
Figura 7.9: Componentes de tensões y , z e yz .
Substituindo-se a equação (7.7) em (7.17)
1x x x
y yE
E
. (7.20)
Com o resultado (7.20) nas equações (7.11) e (7.13), obtemos

EST-10 Mecânica dos Sólidos ITA-2015 7.12
10 0
S S
yF EdA F EydA
(7.21)
21z z
S S
yM y E dA M Ey dA
. (7.22)
A partir da equação (7.22) escrevemos
2
1 z
S
M
Ey dA
. (7.23)
Substituindo (7.23) em (7.20) obtemos
2 2
1 z zx x
S S
M EME y E y y
Ey dA Ey dA
. (7.24)
As equações (7.23) e (7.24) nos dão a curvatura e as tensões normais de flexão,
respectivamente, para uma viga de material elástico linear isotrópico.
Se o material, além de ser linear elástico e isotrópico for homogêneo, então o
módulo de elasticidade E é constante em todos os pontos da área S da seção
transversal da viga e, da equação (7.21) podemos escrever
0 0S S
EF ydA ydA
,
ou seja, a coordenada y deve ser medida a partir do centróide da seção transversal.
Portanto, o eixo neutro de cada seção transversal, representado pelo eixo z, passa pelo
seu centróide e a linha neutra, representada pelo eixo x, passa pelos centróides de
cada seção transversal da viga, conforme ilustrado na Figura 7.10.

EST-10 Mecânica dos Sólidos ITA-2015 7.13
Figura 7.10: Posição do eixo neutro na seção transversal de uma viga de material elástico linear isotrópico e homogêneo. Se o material não for homogêneo mas se a função ( , )E E y z for par e a viga for
simétrica em relação ao plano xz, a integral de (7.21) também será nula para y medido
a partir do centróide da seção transversal. Portanto, também nesses casos o eixo
neutro passa pelo centróide da seção transversal da viga. Na verdade, a função E
constante é um caso particular de função par das coordenadas y e z.
Deve ser observado que, para vigas compostas de mais de um material elástico
linear ou de materiais elásticos lineares não homogêneos, o eixo neutro pode ainda ser
localizado considerando-se as equações (7.21) e (7.22) e fazendo-se
0( , ) ( ,0) 0x xzy z y
, mas em geral em tais casos ele não passará através do
centróide da seção transversal da viga. Ainda, considerando-se o material da viga linear
elástico e isotrópico e homogêneo, da equação (7.23) podemos escrever
2 2
1 z z
S S
M M
Ey dA E y dA
. (7.25)
Definindo-se a integral como
2z
S
I y dA , (7.26)

EST-10 Mecânica dos Sólidos ITA-2015 7.14
a qual é denominada de momento de inércia de área da seção transversal em relação
ao eixo z, o qual no caso passa pelo centróide da seção. Veja o Apêndice B.
Com a definição (7.26), a equação (7.25) escreve-se
1 z
z
Mk
EI , (7.27)
onde k é a curvatura da linha neutra e EI é o coeficiente de rigidez à flexão da viga. Da
equação (7.27) observa-se que quanto maior for esse coeficiente, menor será a
curvatura da viga para um mesmo momento fletor zM .
Assim, as equações (7.7) e (7.24) escrevem-se, para o material elástico linear
isotrópico e homogêneo
1 z
x xz
My y
EI
z zx x
z z
EM My y
EI I , (7.28)
Onde a segunda equação é um caso particular da equação (2.88). A distribuição da
tensão x é ilustrada na Figura 7.11
Figura 7.11: Distribuição da tensão x sobre as duas seções transversais 1,S S da
Figura 7.6.

EST-10 Mecânica dos Sólidos ITA-2015 7.15
As distribuições de deformações e de tensões das equações (7.28) se aplicam à
todas seções transversais da viga em flexão pura de material elástico linear isotrópico e
homogêneo. A Figura 7.12 ilustra essas distribuições.
Figura 7.12: (a) Distribuição da deformação x ; (b) Distribuição da tensão de flexão x .
Em particular, essas distribuições de tensões e deformações incluem as faces
onde o momento é aplicado e onde a viga é suportada. Felizmente, o Princípio de
Saint-Venant nos permite usar esses resultados em regiões suficientemente afastadas
(observa-se na prática que essa distância pode ser igual à altura da viga) daquelas
onde as reações ou o momento são aplicados, o que para as vigas longas não é um
problema. Porém, se os momentos fletores nas extremidades são aplicados de acordo
com a equação (7.28), os resultados obtidos aqui são os mesmos obtidos a partir de
teorias mais elaboradas.
Exemplo 7.1
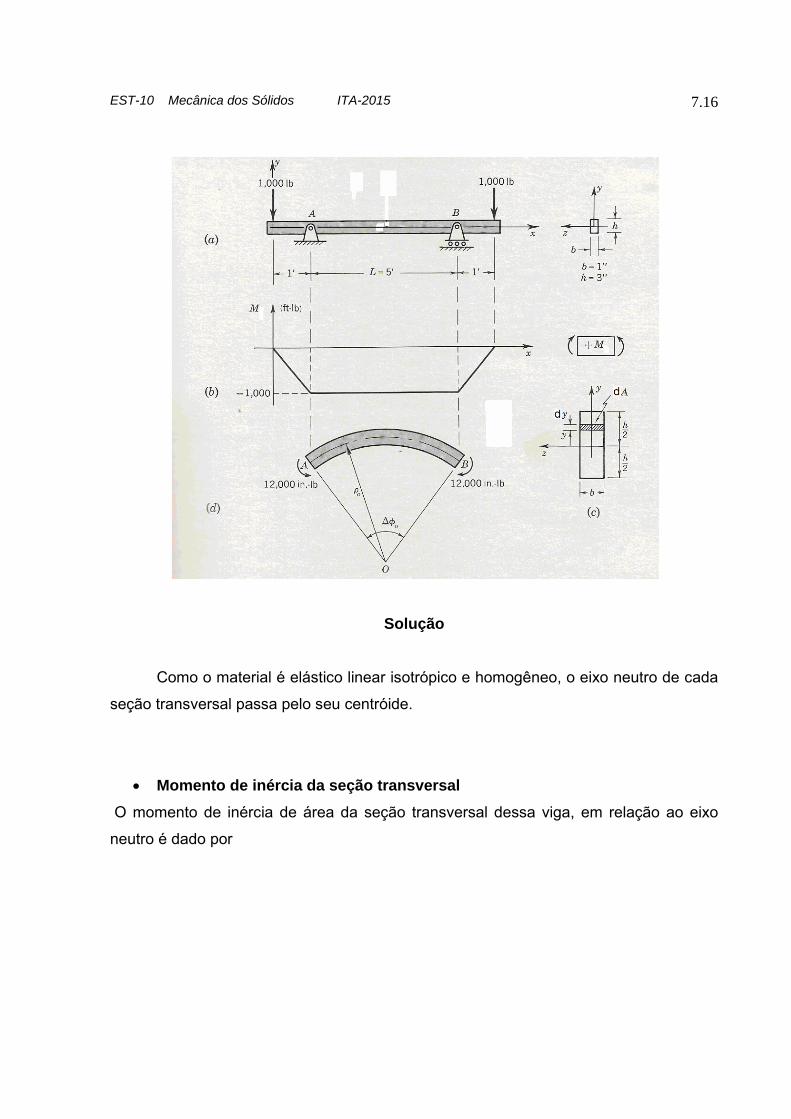
Uma viga de aço com 1 pol de largura e 3 pol de altura é apoiada nos suportes A
e B, conforme a Figura. Obter a máxima tensão de flexão no meio do vão da viga
quando ela é carregada com as forças de 1000 lb aplicadas nas suas extremidades.
EST-10 Mecânica dos Sólidos ITA-2015 7.16
Solução
Como o material é elástico linear isotrópico e homogêneo, o eixo neutro de cada
seção transversal passa pelo seu centróide.
Momento de inércia da seção transversal
O momento de inércia de área da seção transversal dessa viga, em relação ao eixo
neutro é dado por

EST-10 Mecânica dos Sólidos ITA-2015 7.17
3/ 2 32 2 4
3/ 2
11 1 3 2, 25
12z z z
S
I y dA y dy I I pol
Momento fletor
0 0x AF H (a)
0 2000y A BF R R (b)
0 1000 12 60 1000 72 0 1000A B BM R R lb
Substituindo na equação (b) obtemos
1000 2000 1000A AR R lb
Os esforços internos são obtidos conforme a seguir.
EST-10 Mecânica dos Sólidos ITA-2015 7.18
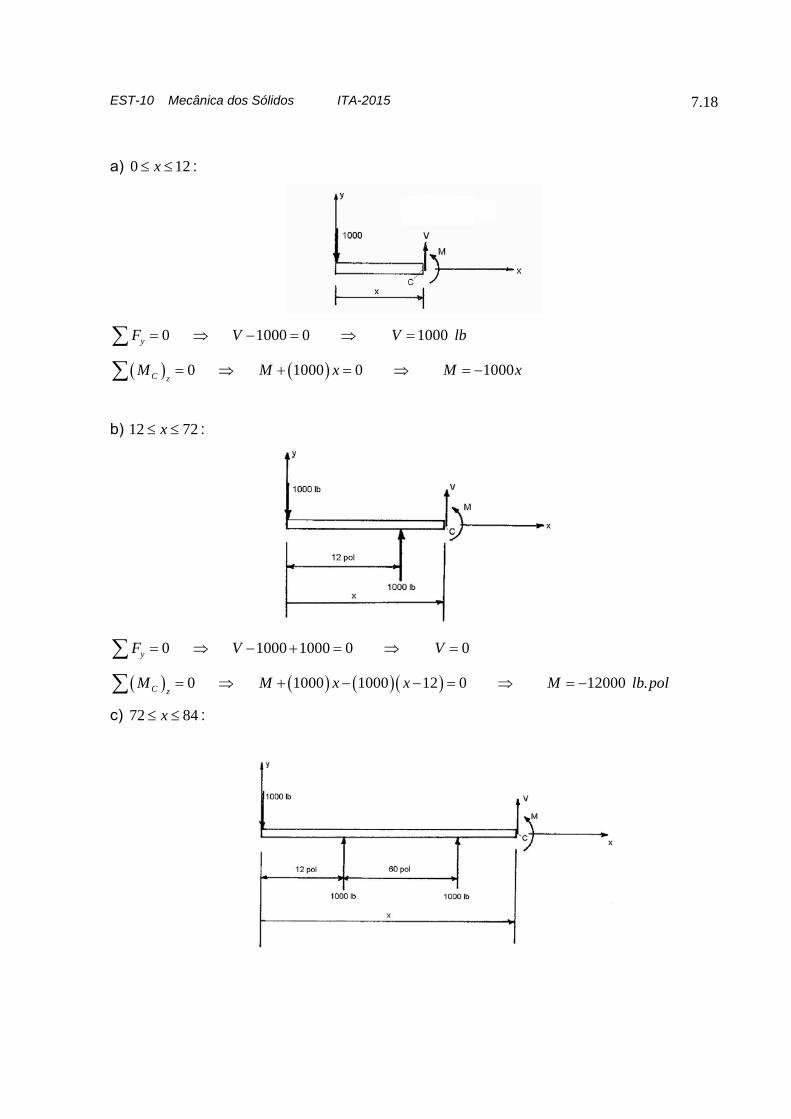
a) 0 12x :
0 1000 0 1000yF V V lb
0 1000 0 1000C zM M x M x
b) 12 72x :
0 1000 1000 0 0yF V V
0 1000 1000 12 0 12000 .C zM M x x M lb pol
c) 72 84x :
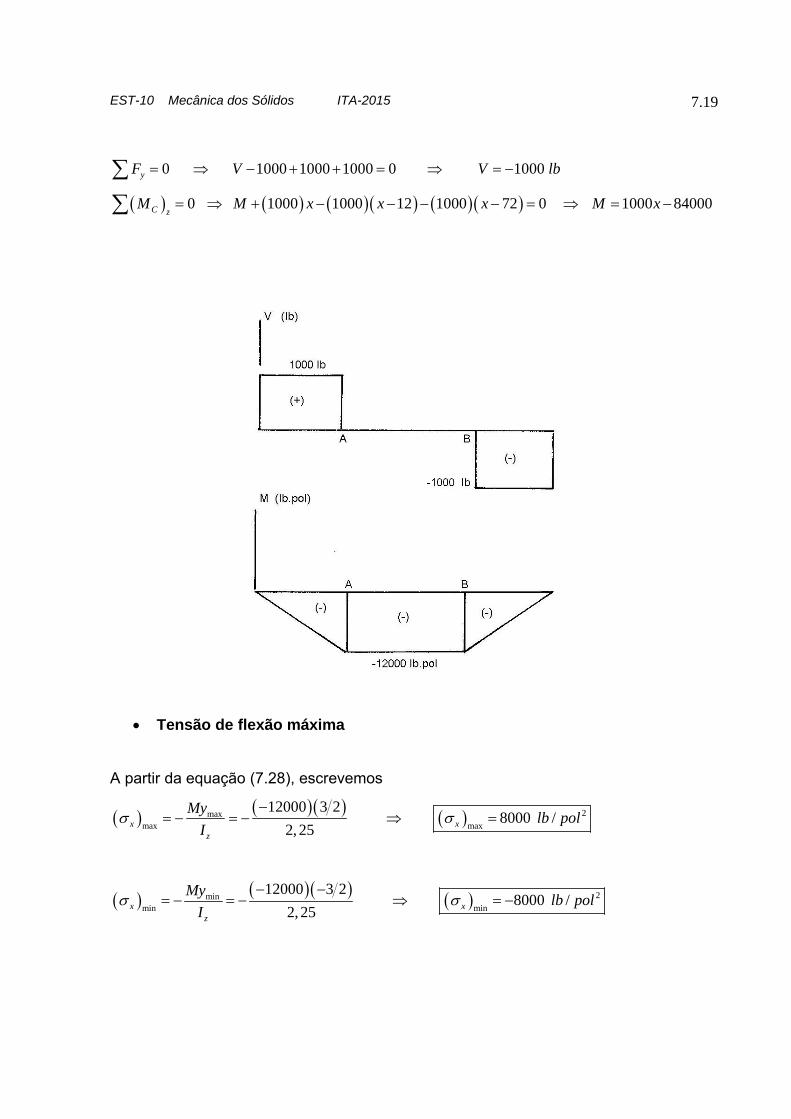
EST-10 Mecânica dos Sólidos ITA-2015 7.19
0 1000 1000 1000 0 1000yF V V lb
0 1000 1000 12 1000 72 0 1000 84000C zM M x x x M x
Tensão de flexão máxima
A partir da equação (7.28), escrevemos
2maxmax max
12000 3 28000 /
2, 25x xz
Mylb pol
I
2minmin min
12000 3 28000 /
2, 25x xz
Mylb pol
I
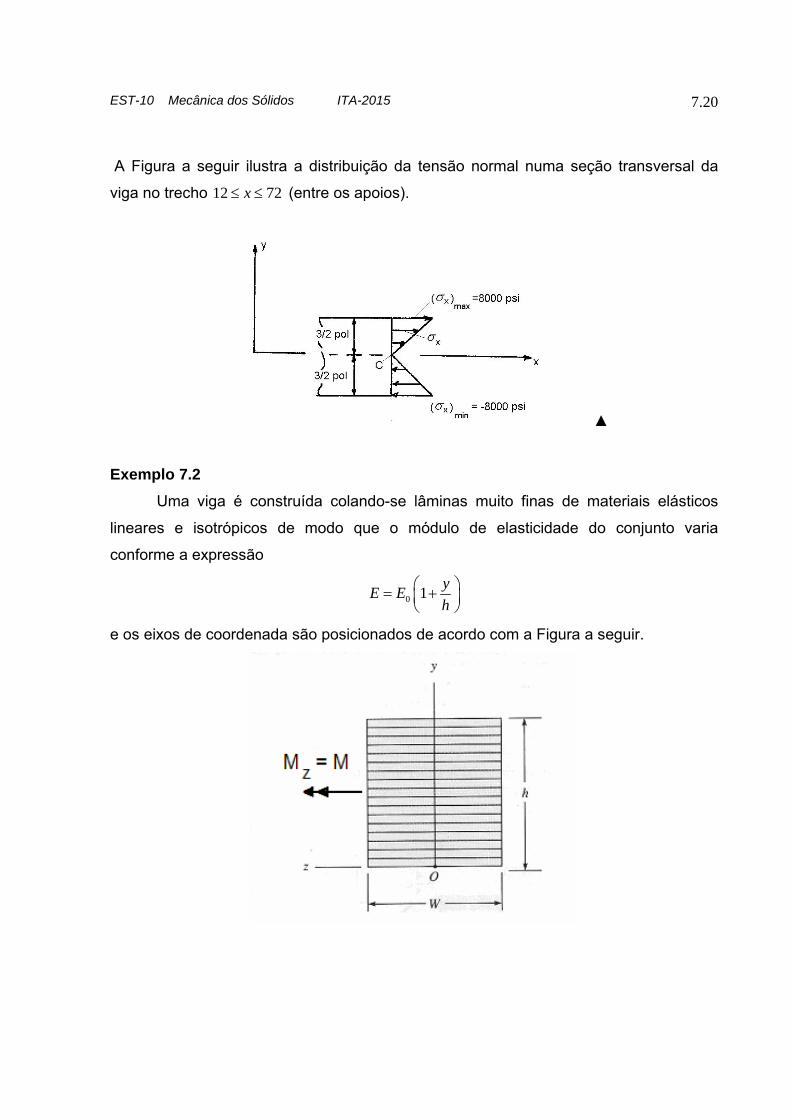
EST-10 Mecânica dos Sólidos ITA-2015 7.20
A Figura a seguir ilustra a distribuição da tensão normal numa seção transversal da
viga no trecho 12 72x (entre os apoios).
▲
Exemplo 7.2
Uma viga é construída colando-se lâminas muito finas de materiais elásticos
lineares e isotrópicos de modo que o módulo de elasticidade do conjunto varia
conforme a expressão
0 1y
E Eh
e os eixos de coordenada são posicionados de acordo com a Figura a seguir.
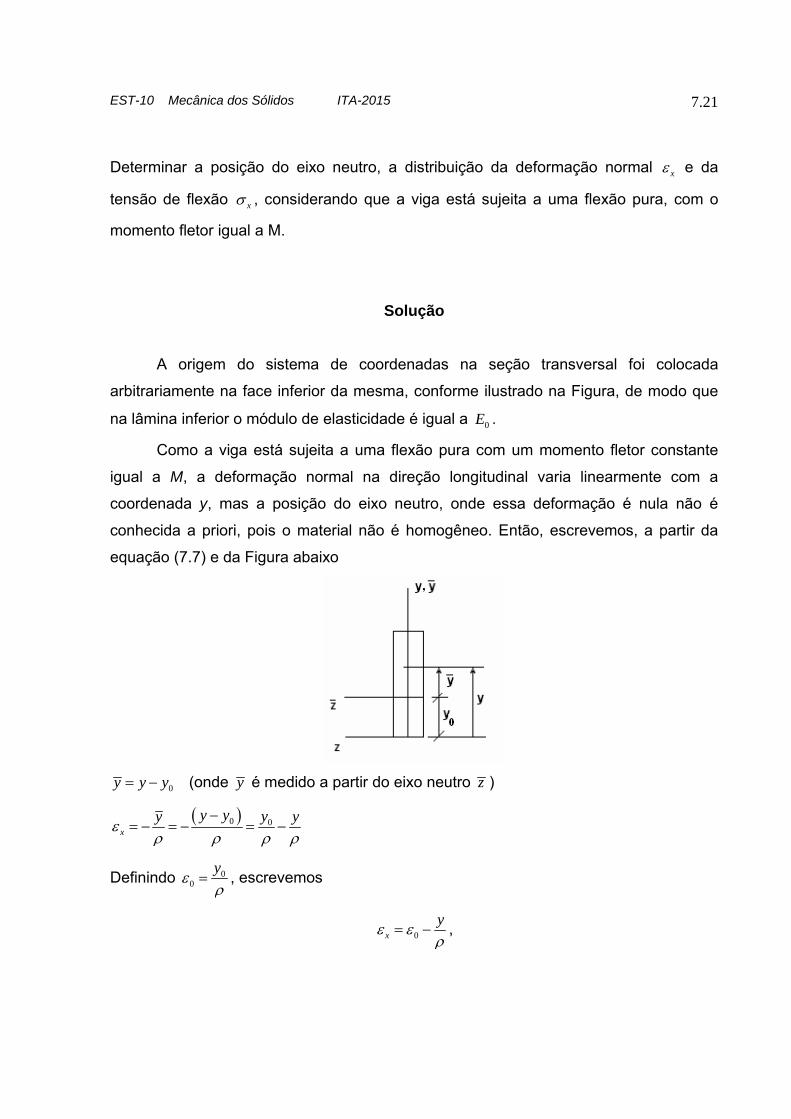
EST-10 Mecânica dos Sólidos ITA-2015 7.21
Determinar a posição do eixo neutro, a distribuição da deformação normal x e da
tensão de flexão x , considerando que a viga está sujeita a uma flexão pura, com o
momento fletor igual a M.
Solução
A origem do sistema de coordenadas na seção transversal foi colocada
arbitrariamente na face inferior da mesma, conforme ilustrado na Figura, de modo que
na lâmina inferior o módulo de elasticidade é igual a 0E .
Como a viga está sujeita a uma flexão pura com um momento fletor constante
igual a M, a deformação normal na direção longitudinal varia linearmente com a
coordenada y, mas a posição do eixo neutro, onde essa deformação é nula não é
conhecida a priori, pois o material não é homogêneo. Então, escrevemos, a partir da
equação (7.7) e da Figura abaixo
0y y y (onde y é medido a partir do eixo neutro z )
0 0x
y y yy y
Definindo 00
y
, escrevemos
0x
y
,

EST-10 Mecânica dos Sólidos ITA-2015 7.22
de modo que nos pontos com 0y , ou seja, na lâmina inferior da viga, a deformação
longitudinal seja 0 . Observe que para 0y y a deformação 0x .
A partir das equações de equilíbrio, escrevemos para a viga em flexão pura
0x
S
F dA (a)
x
S
M y dA . (b)
O momento fletor dado pela equação (b) é o mesmo que obteríamos escrevendo
em relação ao eixo neutro, como a seguir:
0 0x x x x
S S S S
M y dA y y dA y dA y dA
0 0 0x x x
S S S
y dA y dA y dA y
x x
S S
M y dA y dA ,
pois ele é um binário (a resultante F é nula).
A partir da equação (7.17), escrevemos
0 01x x x
y yE E
h
.
Substituindo nas equações (a) e (b) acima e levando em conta que
dA wdy ,
escrevemos
0 0 0 001 1 0
h
S
y y y yF E dA E wdy
h h
0 0 0 001 1
h
S
y y y yM yE dA yE wdy
h h
.

EST-10 Mecânica dos Sólidos ITA-2015 7.23
Resolvendo as integrais acima, obtemos o seguinte sistema de equações com as
incógnitas 0 e h :
0
3 50
2 6
hh h
(c)
2 20
0
5 7
6 12
h Mh h
E w
(d)
Posição do eixo neutro:
A partir da equação (c) escrevemos
0
0
0
5( )
93 50
1 92 6( )
5
he
hh h
fh
Para obtermos a posição do eixo neutro fazemos 0( ) 0x y , onde 0y é a coordenada y
do ponto onde passa esse eixo. Como esse ponto está no plano xy, longitudinal de
simetria, a sua coordenada z é nula. Então, escrevemos
00 0 0 0( ) 0x
yy y
Substituindo (e) na equação acima, escrevemos
0 0
5 5
9 9
hy y h
(posição do eixo neutro)
Se o material fosse homogêneo,teríamos: 0
5
2 10
hy h que é a posição do
centróide da seção transversal.

EST-10 Mecânica dos Sólidos ITA-2015 7.24
Deformação e tensão normais:
Multiplicando-se (c) por 7 2 h e somando-se com (d) multiplicada por 5 obtemos
2 20
2 20
0
20 0 2
0 0
21 350
4 12
25 35 5
6 12
126 100 5 60
24 13
hh h
h Mh h
E w
M Mh
E w E wh
Com (f) escrevemos
0 0 0 0
9 91
5 5x x
yy y y y
h h
Ou, substituindo o resultado anterior na equação acima
0 20
9 60 91 1
5 13 5x x
My y y y
h E wh h
Com a equação
0 01x
y yE
h
escrevemos
2 2
0 0 02 2
4 9 4 91 1
5 5 5 5x x
y yE y y
h h h h
ou,
2
2 2
60 4 91
13 5 5x
M yy
wh h h
com 0 0 0 0 02 2
0
60 60
13 13
M ME E
E wh wh

EST-10 Mecânica dos Sólidos ITA-2015 7.25
A Figura a seguir ilustra a distribuição da deformação e da tensão na seção transversal.
Para isso, com o resultado de (c) nas expressões acima, escrevemos
2 2002 2
0 0
4 9 4 91 1
5 5 5 5x y y y y
E E h h h h
2 00 02
0 0
4 90 1 0 0
5 5xy
E h h E
2 00 02
0 0
4 9 8 81
5 5 5 5xy h h h
E h h E
▲
EST-10 Mecânica dos Sólidos ITA-2015 7.26
7.2 VIGA SIMÉTRICA SOB FORÇA CORTANTE E MOMENTO FLETOR
Nessa seção estudaremos o problema de vigas com um plano longitudinal de simetria,
sujeitas a forças cortantes transversais e momentos fletores aplicados segundo esse
plano.
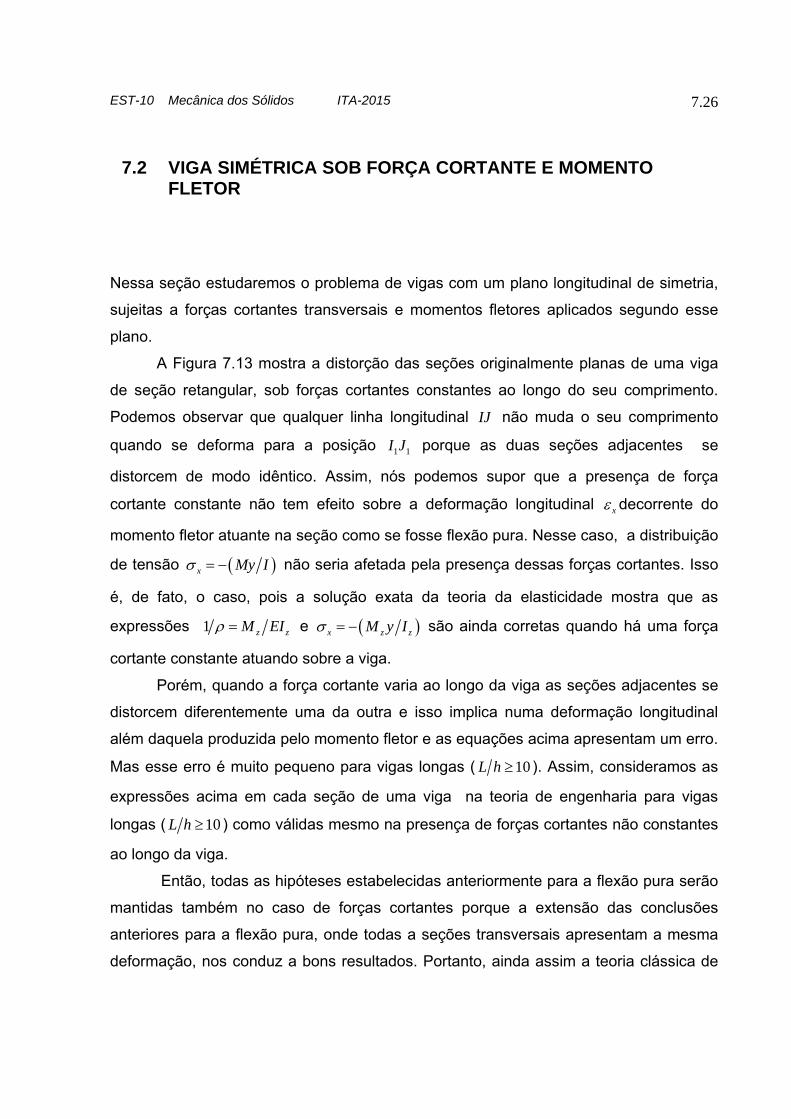
A Figura 7.13 mostra a distorção das seções originalmente planas de uma viga
de seção retangular, sob forças cortantes constantes ao longo do seu comprimento.
Podemos observar que qualquer linha longitudinal IJ não muda o seu comprimento
quando se deforma para a posição 1 1I J porque as duas seções adjacentes se
distorcem de modo idêntico. Assim, nós podemos supor que a presença de força
cortante constante não tem efeito sobre a deformação longitudinal x decorrente do
momento fletor atuante na seção como se fosse flexão pura. Nesse caso, a distribuição
de tensão x My I não seria afetada pela presença dessas forças cortantes. Isso
é, de fato, o caso, pois a solução exata da teoria da elasticidade mostra que as
expressões 1 z zM EI e x z zM y I são ainda corretas quando há uma força
cortante constante atuando sobre a viga.
Porém, quando a força cortante varia ao longo da viga as seções adjacentes se
distorcem diferentemente uma da outra e isso implica numa deformação longitudinal
além daquela produzida pelo momento fletor e as equações acima apresentam um erro.
Mas esse erro é muito pequeno para vigas longas ( 10L h ). Assim, consideramos as
expressões acima em cada seção de uma viga na teoria de engenharia para vigas
longas ( 10L h ) como válidas mesmo na presença de forças cortantes não constantes
ao longo da viga.
Então, todas as hipóteses estabelecidas anteriormente para a flexão pura serão
mantidas também no caso de forças cortantes porque a extensão das conclusões
anteriores para a flexão pura, onde todas a seções transversais apresentam a mesma
deformação, nos conduz a bons resultados. Portanto, ainda assim a teoria clássica de
EST-10 Mecânica dos Sólidos ITA-2015 7.27
flexão de vigas constitui uma ferramenta importante e útil na prática da engenharia de
estruturas.
Figura 7.13: Distorção das seções transversais retangulares planas de uma viga sujeita a força cortante constante ao longo do seu comprimento.
Cargas aplicadas e reações de apoio
Como já foi visto no início do capítulo 2, a reação de um apoio sobre qualquer
sólido sob carregamento, pode ser representada por um resultante consistindo de uma
força atuando num ponto e um binário (conjugado) e cada um deles pode ser
decomposto em três componentes segundo um sistema de coordenadas cartesianas
ortogonais, por exemplo. Como não conhecemos a distribuição dessas forças na seção
transversal no ponto de apoio, não podemos fazer uma análise do comportamento
local, isto é, tensões e deformações na vizinhança imediata. Mas em virtude do
Princípio de Saint –Venant, a resposta geral, bem como tensões e deformações em
regiões distantes desses pontos de atuação da reação de apoio, é muito pouco afetada
pela distribuição real. Observa-se experimentalmente, que essa distância mínima do

EST-10 Mecânica dos Sólidos ITA-2015 7.28
ponto de aplicação da reação é aproximadamente igual à maior dimensão transversal
da viga.
As reações de apoio serão especificadas por uma força atuando num ponto da
seção transversal e um momento em relação a esse ponto, conforme a seguir:
ˆˆ ˆx y zR F i R j R k
(7.29)
ˆˆ ˆx y zM T i M j M k
. (7.30)
Pelo fato do carregamento ser aplicado segundo um plano longitudinal de
simetria, as componentes não nulas das reações de apoio são conforme mostra a
Figura 7.14.
Figura 7.14: (a) Componentes nulas das reações de apoio; (b) Componentes não nulas da reação de apoio.
As reações de apoio podem, portanto, ser escritas simplesmente, como
ˆ ˆR Fi R j
(7.31)
ˆM M k
. (7.32)
EST-10 Mecânica dos Sólidos ITA-2015 7.29
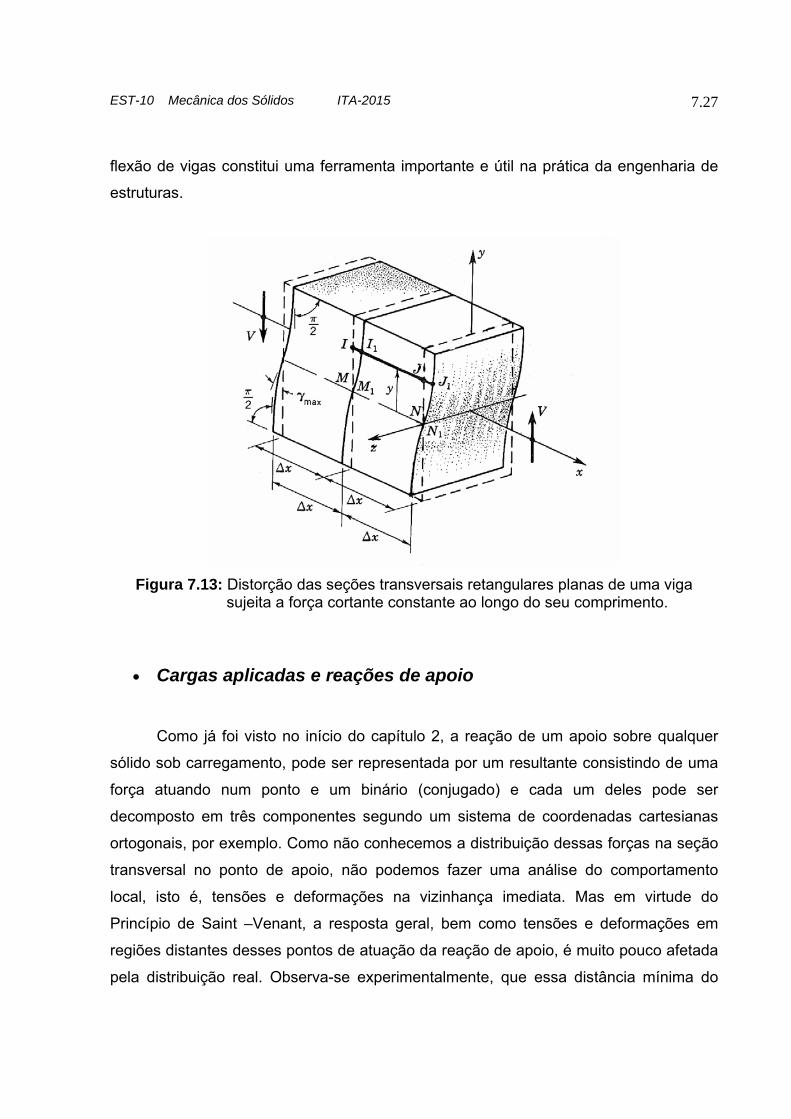
A Figura 7.15 apresenta dois tipos de apoio e suas respectivas reações, mais comuns
nos problema envolvendo a flexão de vigas. No caso, o carregamento não é
apresentado, mas ele é aplicado transversalmente à viga e segundo o plano
longitudinal de simetria.
Figura 7.15: (a) Viga simplesmente apoiada; (b) Reações de apoio da viga simplesmente apoiada; (c) Viga em balanço; (d) Reações de uma viga em balanço.
Sistema resultante de forças internas
Pelo fato do carregamento segundo o plano longitudinal de simetria ser perpendicular
ao eixo da viga, o componente de força normal sobre qualquer seção transversal é
nulo. Consequentemente, o sistema resultante de forças internas sobre qualquer seção
transversal consiste, no máximo de uma componente de força cortante e um momento
fletor. A Figura 7.16 mostra as componentes do sistema resultante de forças internas

EST-10 Mecânica dos Sólidos ITA-2015 7.30
sobre uma seção S. O diagrama de corpo livre está considerando a porção da viga à
esquerda da seção transversal S.
Figura 7.16: Componentes do sistema resultante de forças internas sobre a seção S.
Como é usual na literatura, vamos adotar uma convenção de sinais para o
momento fletor e para a força cortante. Para um sistema de coordenadas xyz conforme
a Figura 7.15, um momento fletor que tende a comprimir as “fibras” longitudinais
superiores (acima da linha neutra) é considerado positivo e se ele tende a alongá-las, é
considerado negativo. Isso está de acordo com o sinal da curvatura, como veremos
mais adiante. Quanto à força cortante, ela é positiva se tender a girar o diagrama de
corpo livre, sobre o qual ela atua, no sentido anti-horário. Caso contrário ela é
considerada negativa. A Figura 7.17 ilustra essas convenções de sinais.
Figura 7.17: (a) Sinal do momento fletor; (b) Sinal da força cortante.
EST-10 Mecânica dos Sólidos ITA-2015 7.31
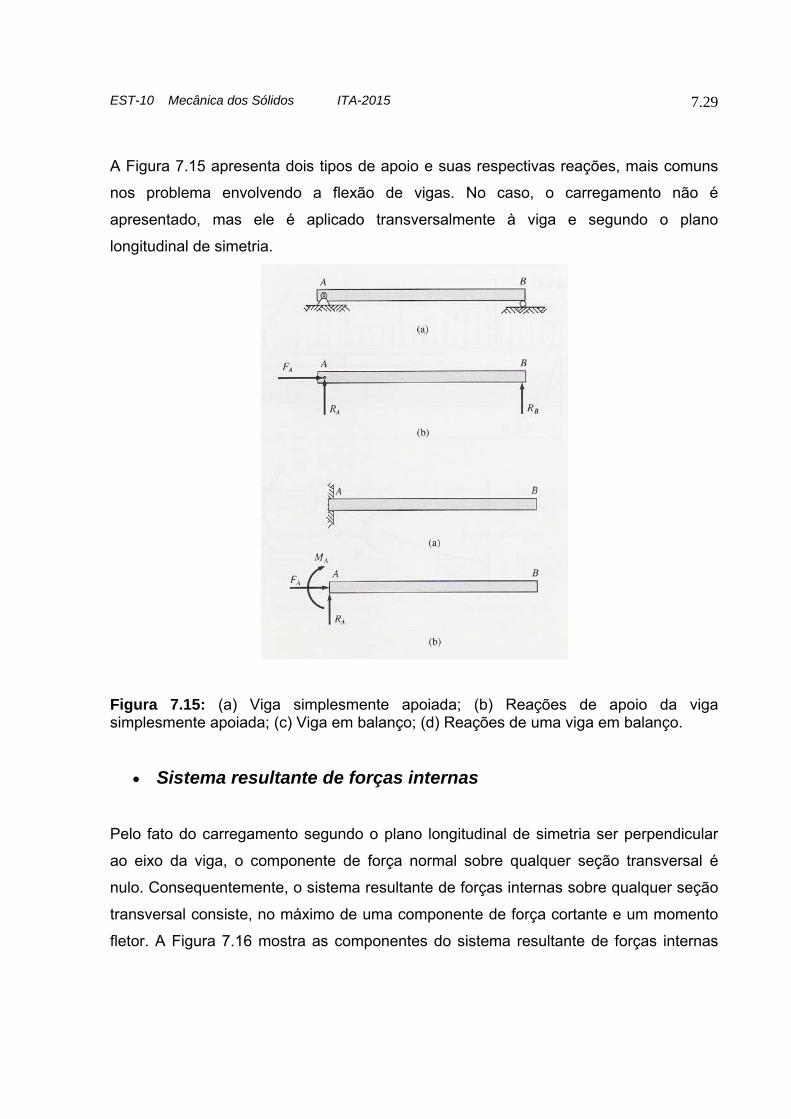
Como um exemplo geral, considere a viga da Figura 7.18(a), onde os apoios
foram substituídos pelas suas reações. A Figura 7.18(b) é um diagrama de corpo livre
da porção da viga à esquerda da seção de “corte” S, situada à distância x da
extremidade esquerda da viga. Para que as equações possam ser escritas de uma
maneira mais geral, uma variável auxiliar foi considerada.
Figura 7.18: (a) Viga sob carregamento genérico; (b) Diagrama de corpo livre da viga.
Das condições de equilíbrio podemos escrever para o diagrama de corpo livre
da Figura 7.18(b)
0
0 ( ) ( )x
y y A iF V x R F p d (7.33)
0
0 ( ) ( ) ( ) ( )x
z z A A i iCM M x M R x F x L x p d , (7.34)
EST-10 Mecânica dos Sólidos ITA-2015 7.32
onde ( )yV x e , ( )zM x as quais são funções da coordenada longitudinal x, são as
componentes do sistema resultante de forças internas sobre a seção transversal S
situada à distância x da extremidade esquerda da viga, segundo o sistema de
coordenadas xyz adotado. As relações (7.33) e (7.34) são equações de equilíbrio da
viga na forma global.
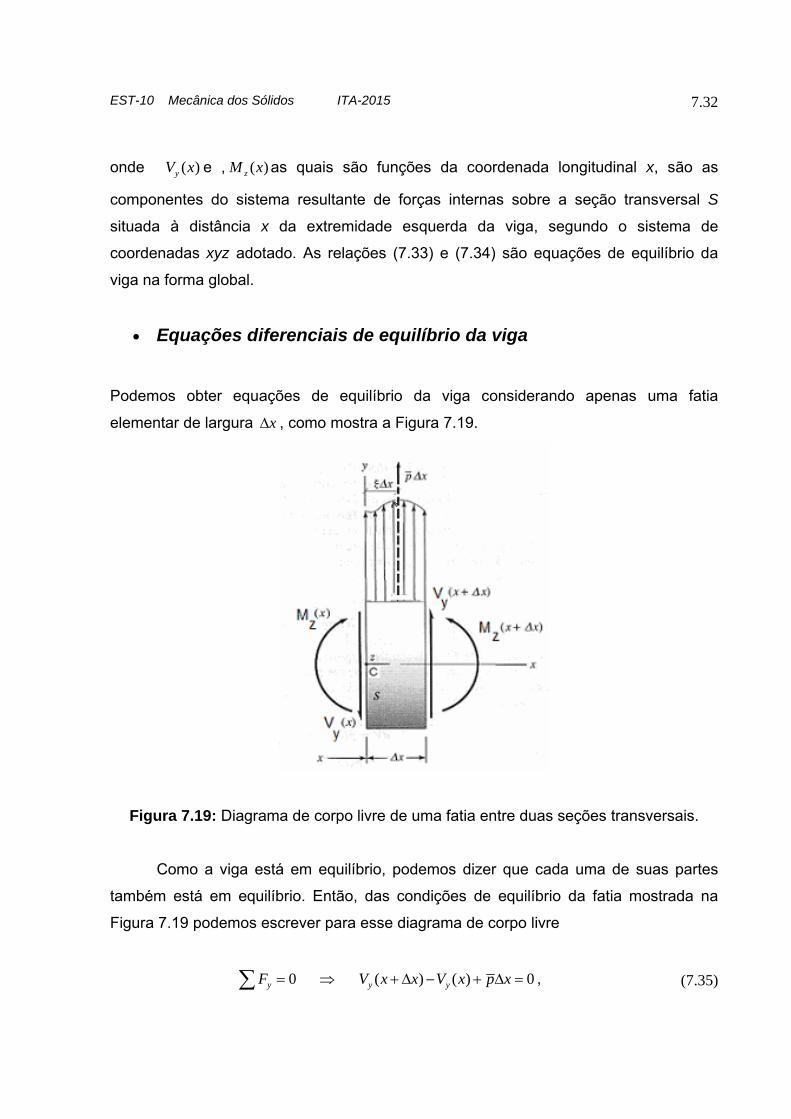
Equações diferenciais de equilíbrio da viga
Podemos obter equações de equilíbrio da viga considerando apenas uma fatia
elementar de largura x , como mostra a Figura 7.19.
Figura 7.19: Diagrama de corpo livre de uma fatia entre duas seções transversais.
Como a viga está em equilíbrio, podemos dizer que cada uma de suas partes
também está em equilíbrio. Então, das condições de equilíbrio da fatia mostrada na
Figura 7.19 podemos escrever para esse diagrama de corpo livre
0 ( ) ( ) 0y y yF V x x V x p x , (7.35)
EST-10 Mecânica dos Sólidos ITA-2015 7.33
onde p é o valor médio da carga distribuída sobre o comprimento x tal que
( )x x
xp x p x dx
. (7.36)
Assim, dividindo-se ambos os lados da equação (7.35) por x , escrevemos
( ) ( )y yV x x V xp
x
. (7.37)
Conforme 0x , p se aproxima do valor ( )p x em x , assim, no limite podemos
escrever
0 0
( ) ( )lim lim ( )y y y
x x
V x x V x dVp p x
x dx
. (7.38)
Agora, considerando o equilíbrio de momentos, escrevemos para o diagrama de corpo
livre da Figura 7.19
0 ( ) ( ) ( ) 0c z z yzM M x x M x V x x x p x x , (7.39)
onde x representa a posição do ponto de aplicação da resultante p x . Dividindo-se
(7.39) por x , escrevemos
( ) ( )( )z z
y
M x x M xV x x p x
x
. (7.40)
Tomando-se o limite com 0x e com as mesmas considerações anteriores, obtemos
0 0 0
( ) ( )lim lim ( ) limz z
yx x x
M x x M xV x x p x
x
ou
( )zy
dMV x
dx . (7.41)
EST-10 Mecânica dos Sólidos ITA-2015 7.34
As e equações diferenciais (7.38) e (7.41) são as equações diferenciais de
equilíbrio da viga. A partir dessas equações obtemos
2
2
( )( ) ( )yz z
y
dV xdM d MV x p x
dx dx dx . (7.42)
Essas equações valem para todas as seções da viga. Nas derivações dessas
equações e suas aplicações pressupõe-se que os limites existem e que as forças e os
momentos são contínuos e integráveis. Na presença de forças e/ou momentos
concentrados deve-se tomar os devidos cuidados, por exemplo, considerando o
problema por partes ao longo do comprimento da viga e levando–se em conta a
descontinuidade das funções ( )yV x e ( )yM x nesses pontos.
Tensões normais em vigas de material linearmente elástico,
isotrópico e homogêneo
A equação (7.28), x z zM y I nos dá uma relação entre a componente de
tensão normal sobre a seção transversal de uma viga em flexão pura e o momento
fletor aplicado, para o caso de um material linearmente elástico, isotrópico e
homogêneo.
Essa relação é baseada na hipótese que as seções transversais planas
permanecem planas e perpendiculares ao eixo neutro da viga após a flexão. No caso
de flexão pura o único componente do sistema resultante de forças internas é o
momento fletor ( )yM x . Porém, com forças transversais, a componente de força cortante
deve também atuar para manter o equilíbrio. A presença dessa força de cisalhamento
contraria a hipótese que a seção plana permaneça plana e normal ao eixo neutro, pois
para que isso ocorresse, a deformação de cisalhamento deveria ser nula. Portanto,
pela lei de Hooke a tensão de cisalhamento também seria nula, o que não é verdade
por causa da existência de uma força cortante na seção transversal. Esse é um ponto
frágil na teoria de flexão Euler-Bernoulli. Ela é correta para o caso de flexão pura, onde

EST-10 Mecânica dos Sólidos ITA-2015 7.35
não temos forças cortantes. É como se, nessa teoria, o material tivesse rigidez infinita à
deformação por cisalhamento transversal. A teoria de flexão de viga de Euler-Bernoulli
trabalha com um material hipotético com rigidez infinita em cisalhamento transversal de
modo que a deformação por cisalhamento transversal seja independente do valor da
força cortante necessária para o equilíbrio.
Mas, a partir de observações experimentais, sabe-se que para vigas delgadas
( 10L h ) a influência da deformação de cisalhamento é muito pequena, podendo na
maioria dos casos, ser desprezada. Portanto, nesses casos, a equação (7.28) nos dá
resultados excelentes, do ponto de vista da engenharia, mesmo a componente de
cisalhamento sendo não nula.
Portanto, em resumo temos: a teoria clássica de flexão de vigas considera
desprezível a influência da deformação de cisalhamento no plano da seção transversal
na descrição da deformação longitudinal (no caso de forças cortantes constantes ao
longo da viga essa influência é nula, como vimos no início da seção 7.2) e
conseqüentemente na dedução das equações da deformação longitudinal x e das
tensões normais x . Mas, para efeito do equilíbrio da viga, as tensões de cisalhamento
devem ser consideradas pois a componente de força cortante sobre a seção transversal
é dada por
( ) 0y xy
S
V x dA . (7.43)
Tensões de cisalhamento em vigas de material linearmente
elástico, isotrópico e homogêneo
Como nesse caso a componente do sistema resultante de forças internas ( )yV x é
não nula e é dada por ( )y xy
S
V x dA , então as componentes de tensão de cisalhamento
xy existem na seção transversal em consideração e para a sua dedução, vamos

EST-10 Mecânica dos Sólidos ITA-2015 7.36
considerar o equilíbrio do diagrama de corpo livre extraído de um segmento elementar
de comprimento x da viga, conforme mostrado na Figura 7.20.
Pela equação (7.28), o momento fletor numa seção é responsável pela tensão
normal atuando sobre ela. Então, a variação do momento fletor, indicada na Figura
7.20 (a) por zM será responsável pela variação da tensão normal numa seção e na
seção vizinha separada pela distância x .
Figura 7.20: (a) Diagrama de corpo livre de um segmento elementar da viga; (b) Distribuição das tensões normais x ; (c) Diagrama de corpo livre para determinação
das tensões de cisalhamento xy ; (d) Força resultante da tensão normal x numa seção
genérica da viga; (e) Distribuição das tensões de cisalhamento xy .
EST-10 Mecânica dos Sólidos ITA-2015 7.37
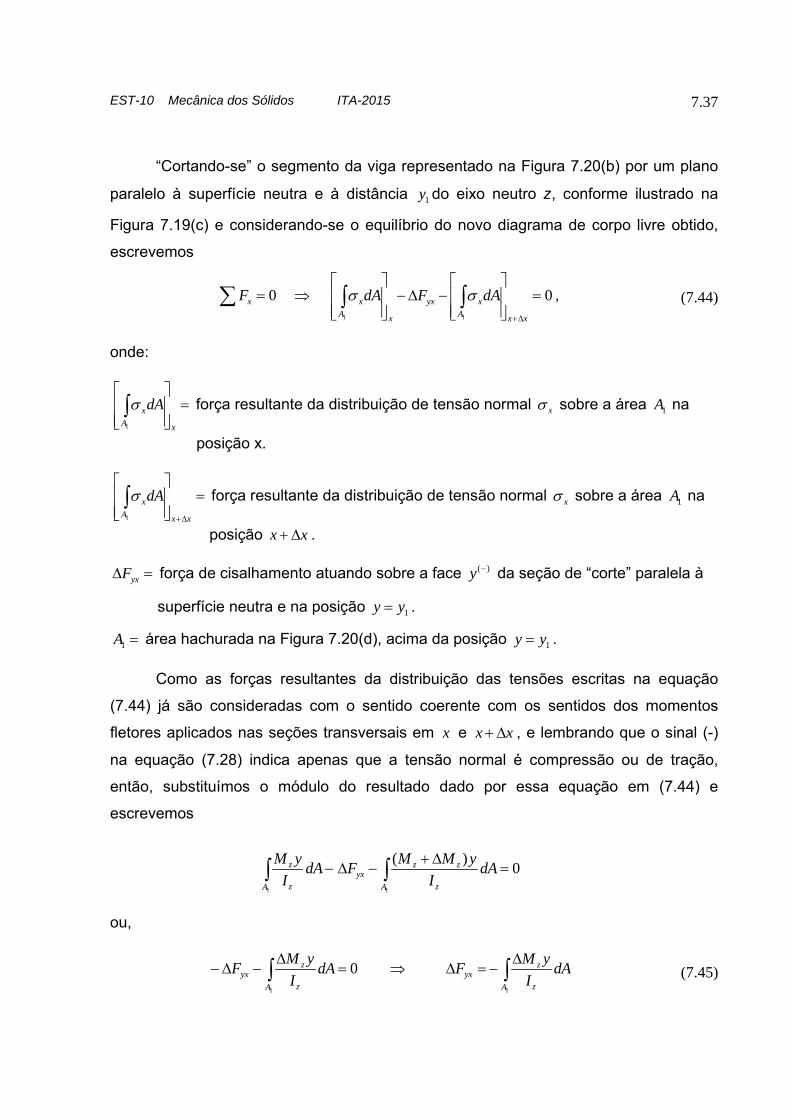
“Cortando-se” o segmento da viga representado na Figura 7.20(b) por um plano
paralelo à superfície neutra e à distância 1y do eixo neutro z, conforme ilustrado na
Figura 7.19(c) e considerando-se o equilíbrio do novo diagrama de corpo livre obtido,
escrevemos
1 1
0 0x x yx x
A Ax x x
F dA F dA
, (7.44)
onde:
1
x
A x
dA
força resultante da distribuição de tensão normal x sobre a área 1A na
posição x.
1
x
A x x
dA
força resultante da distribuição de tensão normal x sobre a área 1A na
posição x x .
yxF força de cisalhamento atuando sobre a face ( )y da seção de “corte” paralela à
superfície neutra e na posição 1y y .
1A área hachurada na Figura 7.20(d), acima da posição 1y y .
Como as forças resultantes da distribuição das tensões escritas na equação
(7.44) já são consideradas com o sentido coerente com os sentidos dos momentos
fletores aplicados nas seções transversais em x e x x , e lembrando que o sinal (-)
na equação (7.28) indica apenas que a tensão normal é compressão ou de tração,
então, substituímos o módulo do resultado dado por essa equação em (7.44) e
escrevemos
1 1
( )0z z z
yxz zA A
M y M M ydA F dA
I I
ou,
1 1
0z zyx yx
z zA A
M y M yF dA F dA
I I
(7.45)

EST-10 Mecânica dos Sólidos ITA-2015 7.38
Dividindo ambos os lados da equação (7.45) por x e levando em conta que
zM é constante em toda a área da seção transversal onde ele atua, tomamos o limite
com 0x e escrevemos
1 1
0 0
( ) 1lim limyx yxz z
x xz zA A
F dFM dM xydA ydA
x xI dx dx I
. (7.46)
Substituindo a equação diferencial de equilíbrio (7.41) em (7.46) escrevemos
1
( )( )( ) yx yz
yz A
dF V xdM xV x ydA
dx dx I . (7.47)
É comum na literatura definir-se a integral da equação acima como
1A
Q ydA (7.48)
e escrever a equação (7.47) da seguinte maneira
( )yx y
z
dF V x Q
dx I , (7.49)
onde Q é o primeiro momento da área 1A em relação ao eixo neutro z, o qual no nosso
caso passa pelo centróide da seção, porque o material é elástico linear isotrópico e
homogêneo.
O termo yxdF
dx é definido como o fluxo de cisalhamento yxq . Assim a equação
(7.49) reescreve-se
( )yyx
z
V x Qq
I . (7.50a)
EST-10 Mecânica dos Sólidos ITA-2015 7.39
Devemos ter sempre em mente que os índices yx de yxF ou de yxq significam:
y= eixo normal à superfície onde atuam yxF ou de yxq .
x = direção de yxF ou de yxq .
Como o fluxo de cisalhamento é uma força por unidade de comprimento, se o
dividirmos pela largura da seção onde ele atua, que no caso da Figura 7.19(e) é b,
podemos escrever
( ) ( )yx y yyx
z z
q V x Q V x Q
b I b I b , (7.51)
onde yx é o valor médio da tensão de cisalhamento através da largura b (a tensão de
cisalhamento é considerada constante ao longo da largura b). Como já vimos
anteriormente durante o estudo das tensões, podemos escrever yx xy . Portanto,
( )yxy yx
z
V x Q
I b . (7.52)
Como Q é calculado para a área situada acima da posição y na qual queremos
determinar a tensão de cisalhamento yx xy , vemos que Q é uma função de y. Então,
da equação (7.52) observamos que a tensão de cisalhamento xy numa seção
transversal onde atua a força cortante yV x , é uma função da coordenada y. Assim,
como o valor de Q será máximo para y=0, no eixo neutro, e será nulo para y no ponto
superior ou inferior da seção transversal, então, a tensão de cisalhamento xy também
variará de zero nos pontos superior ou inferior até um valor máximo no eixo neutro.
Como os pontos superior e inferior pertencem a superfícies livres de tensão de
cisalhamento, o resultado obtido para xy é coerente com a realidade física do
problema.

EST-10 Mecânica dos Sólidos ITA-2015 7.40
Exemplo 7.3
Seja a viga de seção retangular, sujeita a uma força cortante conforme a Figura a
seguir. A viga é de material elástico linear isotrópico e homogêneo.
Obter a distribuição da tensão de cisalhamento na seção transversal onde atua a força
de cisalhamento V.
Solução
A distribuição da tensão de cisalhamento ao longo de toda a seção transversal é
obtida calculando-se a tensão de cisalhamento numa posição y genérica, medida a
partir do eixo neutro. No nosso problema o eixo neutro passa pelo centróide da seção
transversal e é normal ao plano de carregamento da viga.
EST-10 Mecânica dos Sólidos ITA-2015 7.41
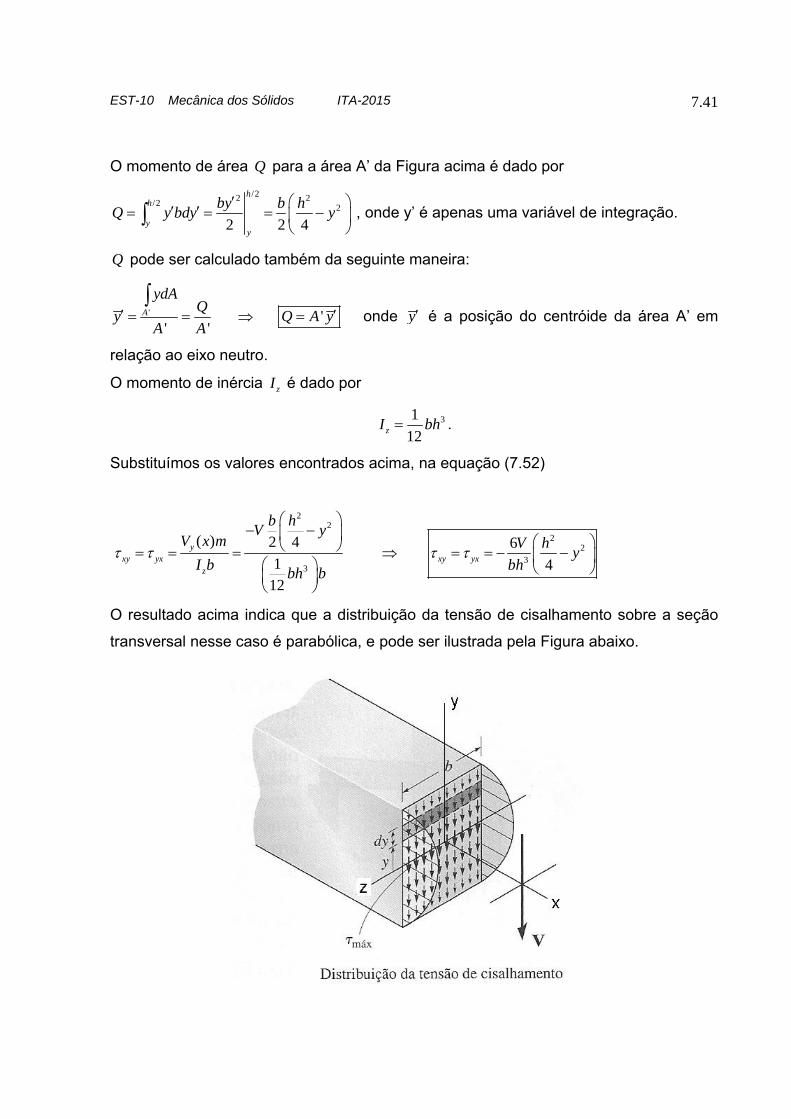
O momento de área Q para a área A’ da Figura acima é dado por
/22 2/2 2
2 2 4
hh
yy
by b hQ y bdy y
, onde y’ é apenas uma variável de integração.
Q pode ser calculado também da seguinte maneira:
' '' '
A
ydAQ
y Q A yA A
onde y é a posição do centróide da área A’ em
relação ao eixo neutro.
O momento de inércia zI é dado por
31
12zI bh .
Substituímos os valores encontrados acima, na equação (7.52)
22
22
33
( ) 2 4 61 4
12
yxy yx xy yx
z
b hV y
V x m V hy
I b bhbh b
O resultado acima indica que a distribuição da tensão de cisalhamento sobre a seção
transversal nesse caso é parabólica, e pode ser ilustrada pela Figura abaixo.

EST-10 Mecânica dos Sólidos ITA-2015 7.42
Comentários:
Para 2y h a tensão de cisalhamento é nula (superfícies livres de tensão de
cisalhamento)
22
32 2 2 2
60
4 4xy yx xy yxy h y h y h y h
V h h
bh
Se denominarmos xy media
V
A , então temos
2 2
3 3max max
6 6 60 1,5
4 4 4xy xy
A
V h V h V V
bh bh bh A
,
nesse caso, a tensão de cisalhamento máxima é 50% maior que a tensão de
cisalhamento média sobre a seção.
Como as componentes da tensão de cisalhamento ocorrem aos pares, para cada
xy existe uma componente yx xy atuando na superfície cuja normal é y,
conforme ilustrado na Figura a seguir.
▲

EST-10 Mecânica dos Sólidos ITA-2015 7.43
Exemplo 7.4
Uma viga de abas largas tem as dimensões mostradas na Figura a seguir.
Supondo que ela seja submetida a uma força cortante V=80kN, (a) traçar o gráfico da
distribuição de cisalhamento que atua sobre a sua seção transversal e (b) determinar a
força cortante suportada pela sua alma.
Solução
a) Distribuição da tensão de cisalhamento
Como as seções transversais das abas e da alma da viga são retangulares a tensão de
cisalhamento variará parabolicamente, como já vimos exemplo 7.3.
A tensão de cisalhamento é dada por
( )yxy
z
V x Q
I b
Precisamos determinar xy nos pontos B, B’ e C. O momento de inércia em torno
do eixo neutro é dado por

EST-10 Mecânica dos Sólidos ITA-2015 7.44
3 3 21 10,015 0,200 2 0,300 0,020 0,300 0,020 (0,110)
12 12zI
6 4155,6 10zI m
Para o ponto B’, a largura b da expressão que nos dá a tensão de cisalhamento
tem o seguinte valor:
0,300b m .
3 30,300 0,020 0,110 0,660 10B BQ A y Q m
3 3
6
80 10 0,660 10( )1,13
155,6 10 0,300y B
xy xyB Bz
V x QMPa
I b
No ponto B, a largura b da expressão que nos dá a tensão de cisalhamento é
0,015b m
O momento de área no ponto B é igual ao do ponto B’
3 30,660 10B BQ Q m
3 3
6
80 10 0,660 10( )22,6
155,6 10 0,015y B
xy xyB Bz
V x QMPa
I b
Para o ponto, sobre o eixo neutro, temos
EST-10 Mecânica dos Sólidos ITA-2015 7.45
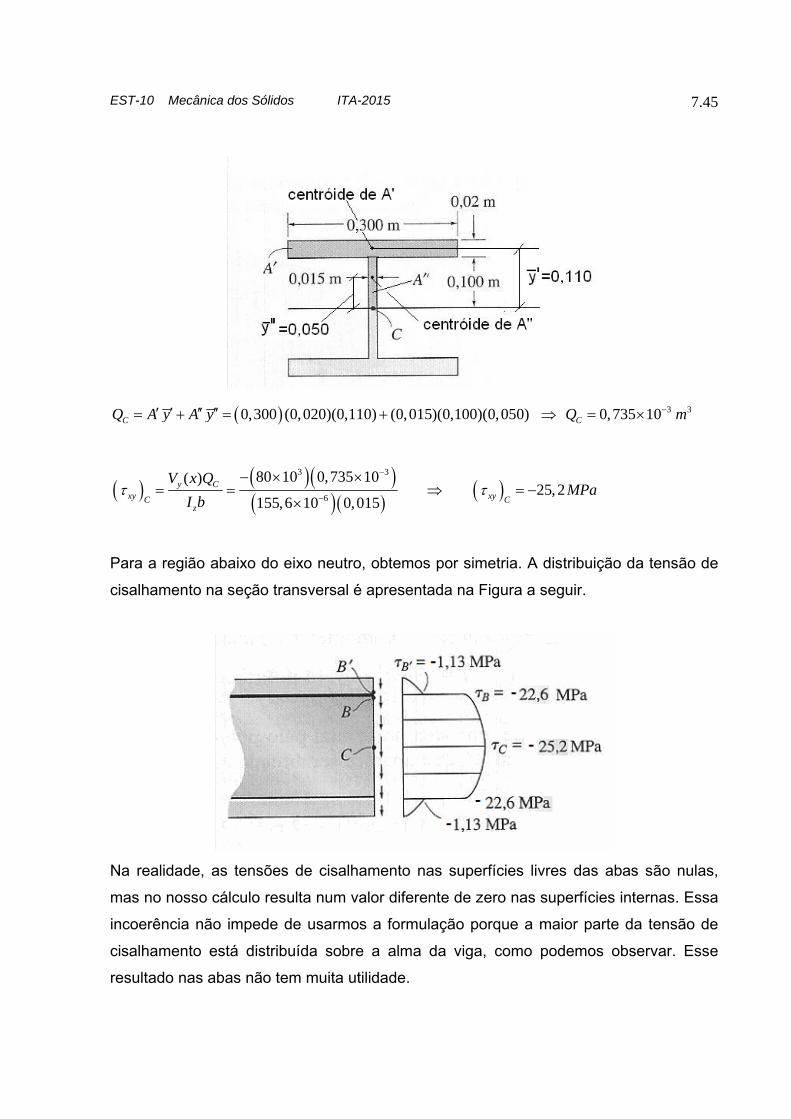
3 30,300 (0,020)(0,110) (0,015)(0,100)(0,050) 0,735 10C CQ A y A y Q m
3 3
6
80 10 0,735 10( )25,2
155,6 10 0,015y C
xy xyC Cz
V x QMPa
I b
Para a região abaixo do eixo neutro, obtemos por simetria. A distribuição da tensão de
cisalhamento na seção transversal é apresentada na Figura a seguir.
Na realidade, as tensões de cisalhamento nas superfícies livres das abas são nulas,
mas no nosso cálculo resulta num valor diferente de zero nas superfícies internas. Essa
incoerência não impede de usarmos a formulação porque a maior parte da tensão de
cisalhamento está distribuída sobre a alma da viga, como podemos observar. Esse
resultado nas abas não tem muita utilidade.

EST-10 Mecânica dos Sólidos ITA-2015 7.46
b) Força cortante suportada pela alma:
A expressão da tensão de cisalhamento para uma posição genérica é dada por
0,1000,300 (0,020)(0,110) (0,015)(0,100 )
2y
yQ A y A y y y
2 3 30,735 7,50 10yQ y m
3 2 3
2 6
6
80 10 0,735 7,50 10( )25,192 257,07 10
155,6 10 0,015y y
xy xyz
yV x Qy MPa
I b
A força de cisalhamento (cortante) atuado na alma é dada por
alma
alma xy
A
V dA .
onde: 0,015dA bdy dy
2 625,192 257,07 10xy y MPa
Assim, escrevemos
0,100 2 6
0,10025,192 257,07 10 (0,015) 73alma almaV y dy V kN
Então, a parcela de força cortante que é suportada pela alma corresponde a 91%
da força cortante total aplicada na seção transversal, ou seja,
730,91
80alma
alma totaltotal
VV V
V
A força cortante suportada pelas abas corresponde a
2 80 73 3,5aba total alma abaV V V V kN ▲

EST-10 Mecânica dos Sólidos ITA-2015 7.47
Exemplo 7.5
Para a viga cuja seção transversal é representada na Figura abaixo, sendo
conhecida a força cortante atuando nessa seção, determinar o maior valor da tensão de
cisalhamento xy nessa seção.
3600yV lb 4800zI pol
Solução
O momento de área na posição desejada é dado por
9 0.57 9 3
0 9 0.57(0,358) (7,50) 50O OQ y dy y dy Q pol
ou
39 0,57 0,579 0,57 0,358 7,50 0,57 9 49,98 50
2 2OQ pol
A tensão de cisalhamento máxima ocorre no ponto O onde oQ é máximo, e é dada por
23600 50
628 /800 0,358
y Oxy xyO O
z
V mlb pol
I b
A tensão de cisalhamento no ponto A (na alma) é dada por
y Axy A
z
V m
I b , onde
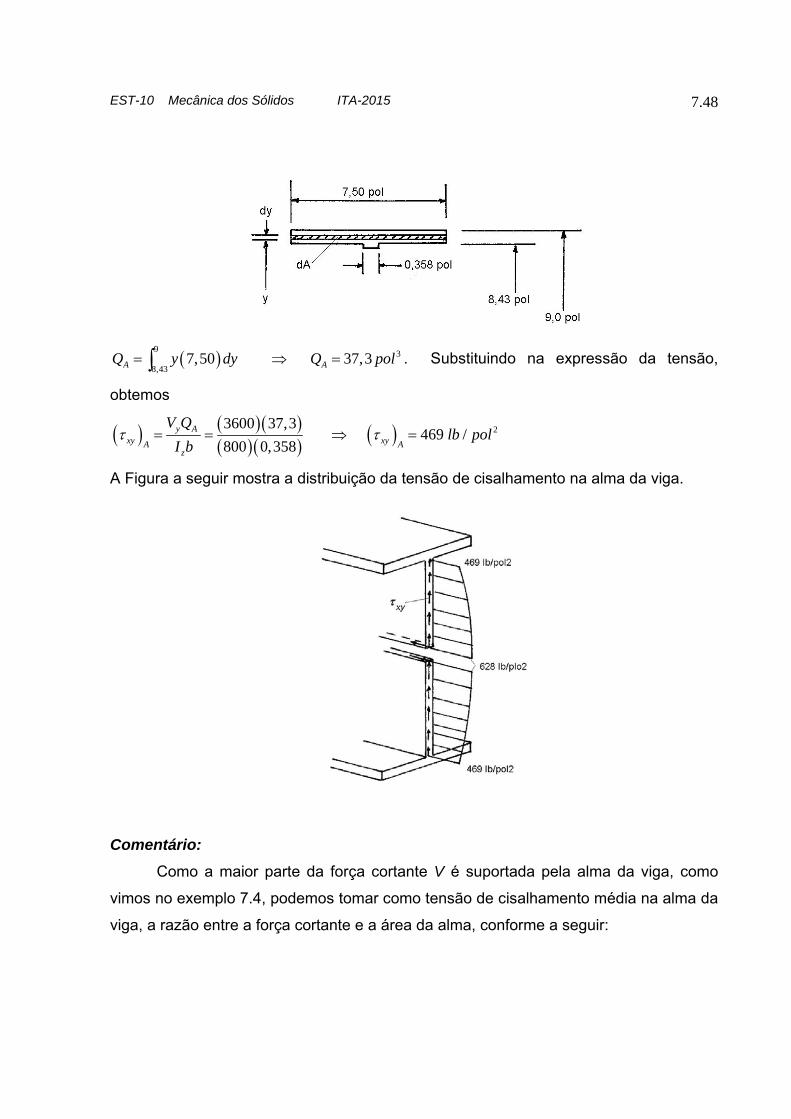
EST-10 Mecânica dos Sólidos ITA-2015 7.48
9 3
8,437,50 37,3A AQ y dy Q pol . Substituindo na expressão da tensão,
obtemos
23600 37,3
469 /800 0,358
y Axy xyA A
z
V Qlb pol
I b
A Figura a seguir mostra a distribuição da tensão de cisalhamento na alma da viga.
Comentário:
Como a maior parte da força cortante V é suportada pela alma da viga, como
vimos no exemplo 7.4, podemos tomar como tensão de cisalhamento média na alma da
viga, a razão entre a força cortante e a área da alma, conforme a seguir:
EST-10 Mecânica dos Sólidos ITA-2015 7.49
23600596 /
9 9 0,570 0,570 0,358y
media mediaxy xyalma almaalma
Vlb pol
A
Comparando-se essa tensão média na alma com a tensão de cisalhamento
máxima 2628 /xy Olb pol , escrevemos
max
max
5960,95 95%
628
mediaxyalma
mediaxy xyalmaxy
▲
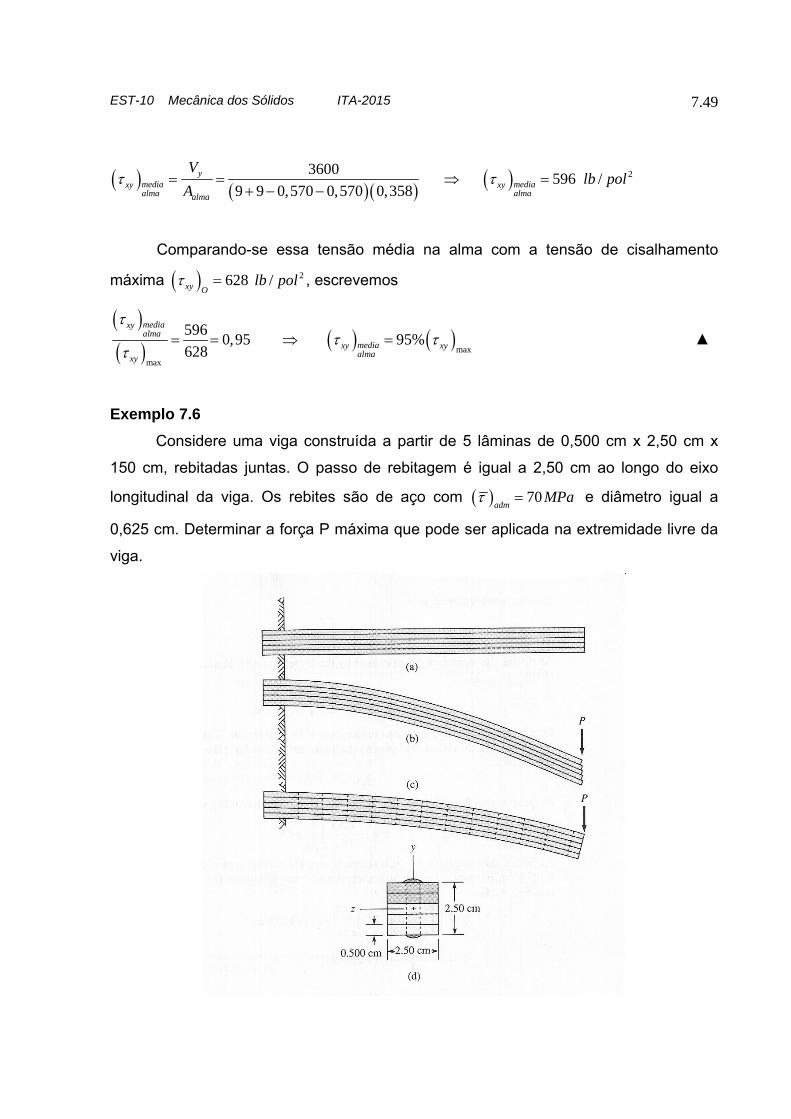
Exemplo 7.6
Considere uma viga construída a partir de 5 lâminas de 0,500 cm x 2,50 cm x
150 cm, rebitadas juntas. O passo de rebitagem é igual a 2,50 cm ao longo do eixo
longitudinal da viga. Os rebites são de aço com 70adm
MPa e diâmetro igual a
0,625 cm. Determinar a força P máxima que pode ser aplicada na extremidade livre da
viga.

EST-10 Mecânica dos Sólidos ITA-2015 7.50
Solução
Considerando a viga de material elástico linear, isotrópico e homogêneo, o eixo
neutro z passa pelo centróide da seção transversal.
O fluxo de cisalhamento yxq desenvolvido numa superfície paralela à superfície
neutra e na posição y=0,25 cm (veja a Figura a seguir) é dado pela equação (7.50)
( )yyx
z
V x Qq
I , e é resistido pela área da seção transversal de cada rebite,
conforme ilustrado nas Figuras a seguir.
Esse fluxo de cisalhamento, numa distância igual ao passo de rebitagem (2,50
cm) resulta numa força cortante sobre a área da seção transversal de um rebite,
conforme mostra a Figura a seguir.

EST-10 Mecânica dos Sólidos ITA-2015 7.51
As hachuras na Figura acima são para indicar que numa distância igual a um
passo de rebitagem está contido no máximo um rebite.
O momento de área da área A’, situada acima da seção de “corte” em
0, 25y cm (veja Figura ) é dado por
32,50 1, 25 0, 25 (0,75) 1,875Q A y Q cm .
O momento de inércia da área da seção transversal em relação ao eixo neutro z é dado
por
33 41 12,50 2,50 3,255
12 12z zI bh I cm
Então, substituindo na equação do fluxo, o seu valor absoluto é dado por
( ) 1,875 3, 255
3, 255 1,875y
yx yxz
V x Q Vq V q
I
A força cortante resistida pelo rebite é dada por
(2,50)yxF q ,
onde 2,50 cm é o passo de rebitagem. O valor máximo dessa força é dado por
222 2 2 2
max max
0,62570 10 / 70 10 / 2147,6
4 4adm rebite
dF A N cm N cm F N
Assim, o valor máximo admissível para o fluxo de cisalhamento será
maxmax max max max
2147,6(2,50) 859,04 /
2,50 2,50yx yx yx
FF q q q N cm
Substituindo na expressão obtida para o esforço cortante, escrevemos
max maxmax
3, 255 3,255859,04 1491
1,875 1,875yxV q V N
O esforço cortante ao longo da viga é constante e igual à carga P aplicada na sua
extremidade livre, conforme ilustrado na Figura a seguir.

EST-10 Mecânica dos Sólidos ITA-2015 7.52
Então, escrevemos
max max max 1491P V P N ▲
FLUXO DE CISALHAMENTO EM VIGAS DE PAREDES FINAS
No exemplo 7.4 nós vimos que as tensões de cisalhamento que se desenvolvem na
direção vertical nas abas não correspondem com a realidade física, pois nas superfícies
livres internas das abas elas deveriam ser nulas, mas o cálculo resulta em tensões
diferentes de zero. Mas, no caso de abas com espessuras finas elas podem ser
desprezadas. A Figura 21 ilustra isso que foi dito acima.
Figura 7.21: Tensão de cisalhamento na direção vertical na aba da viga.

EST-10 Mecânica dos Sólidos ITA-2015 7.53
Consideremos o diagrama de corpo livre obtido a partir do “corte” da aba por um
plano normal ao eixo z e passando pelos pontos B e C indicados na Figura 7.22.
Figura 7.22: (a) Distribuição das tensões de flexão em duas seções adjacentes da viga; (b) Diagrama de corpo livre de uma porção da aba; (c) área para cálculo do primeiro momento de área Q.
Considerando-se o equilíbrio do diagrama de corpo livre obtido acima,
escrevemos

EST-10 Mecânica dos Sólidos ITA-2015 7.54
0 0x x zx x
A Ax x x
F dA F dA
,
onde:
x
A x
dA
força resultante da distribuição de tensão normal x sobre a área A na
posição x.
x
A x x
dA
força resultante da distribuição de tensão normal x sobre a área A na
posição x x .
zxF força de cisalhamento atuando sobre a face ( )z da seção de “corte
A área onde integramos a distribuição de tensão x para o equilíbrio do diagrama
de corpo livre considerado. Como as forças resultantes da distribuição das tensões escritas na equação de
equilíbrio já são consideradas com o sentido coerente com os sentidos dos momentos
fletores aplicados nas seções transversais em x e x x , e lembrando que o sinal (-)
na equação (7.28) indica apenas que a tensão normal é compressão ou de tração,
então, substituímos o módulo do resultado dado por essa equação e escrevemos
( )
0z z zzx
z zA A
M y M M ydA F dA
I I
ou,
0z zzx zx
z zA A
M y M yF dA F dA
I I
Dividindo ambos os lados da equação acima por x e levando em conta que
zM é constante em toda a área da seção transversal onde ele atua, tomamos o limite
com 0x e escrevemos
EST-10 Mecânica dos Sólidos ITA-2015 7.55
0 0
( ) 1lim limzx zxz z
x xz zA A
F dFM dM xydA ydA
x xI dx dx I
.
Substituindo a equação diferencial de equilíbrio (7.41) na expressão acima, escrevemos
( )( )( ) yzxz
yz A
V xdFdM xV x ydA
dx dx I
.
A integral acima é o primeiro momento de área de A’, e pode ser calculado da seguinte
maneira:
Q A y , onde y é a posição do centróide da área A’ em relação ao eixo neutro e A’ pode ser
escrita como
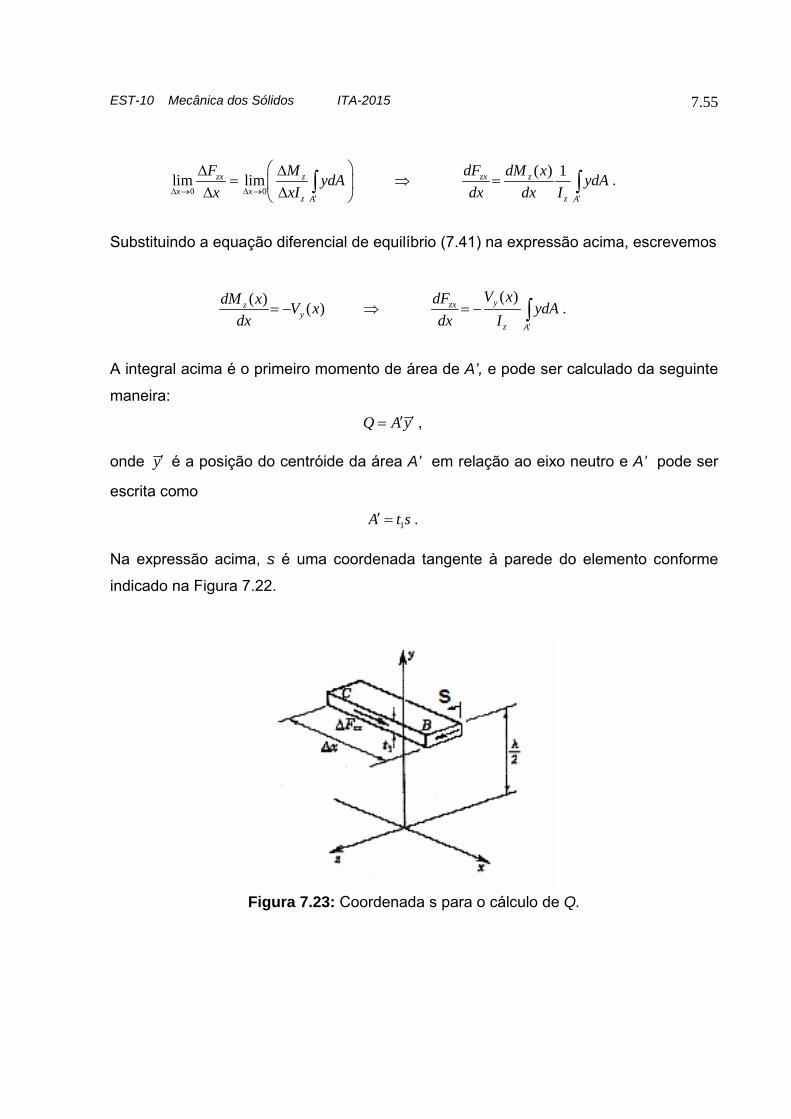
1A t s . Na expressão acima, s é uma coordenada tangente à parede do elemento conforme
indicado na Figura 7.22.
Figura 7.23: Coordenada s para o cálculo de Q.
EST-10 Mecânica dos Sólidos ITA-2015 7.56
Assim, escrevemos
( )yzx
z
V x QdF
dx I ,
O termo zxdF
dx é definido como o fluxo de cisalhamento
( )yzx
z
V x Qq
I . (7.50b)
Dividindo-se esse fluxo pela espessura da aba, obtemos a tensão de cisalhamento
1
( )yzx xz
z
V x Q
I t . (7.52)
Essa tensão de cisalhamento é assumida como uniforme ao longo da espessura.
O fluxo de cisalhamento zx xzq q q e a tensão de cisalhamento zx xz são
tangentes à direção s da parede.
Análise do sentido do fluxo de cisalhamento calculado acima:
Se a força cortante for positiva significa que o fluxo dado expressão acima é negativo,
ou seja, o seu sentido é oposto àquele arbitrado para a força zxF no diagrama de
corpo livre. Isso é coerente com as forças resultantes das distribuições de tensão de
flexão sobre a área A’, porque a taxa de variação do momento fletor com a coordenada
x será negativa ( z ydM dx V ) e assim, o momento fletor na seção com coordenada
x x será menor que o momento fletor na seção com coordenada x . Então, a força
resultante na área A’ na coordenada x x é menor que aquela na coordenada x e a
força zxF deverá ter o sentido oposto àquele do diagrama de corpo livre considerado
para equilibrar a força desbalanceada.

EST-10 Mecânica dos Sólidos ITA-2015 7.57
Exemplo 7.7
Obter a distribuição de fluxo de cisalhamento na seção da viga abaixo.
Considerar a espessura t muito pequena em relação às dimensões da seção
transversal.
Solução
Como yV V é negativo, a taxa de variação do momento fletor com a
coordenada x , z ydM dx V , será positiva. Isso implica que a força zxF deverá ter o
sentido conforme ilustrado nas Figuras a seguir, para o lado direito e lado esquerdo da
aba superior.
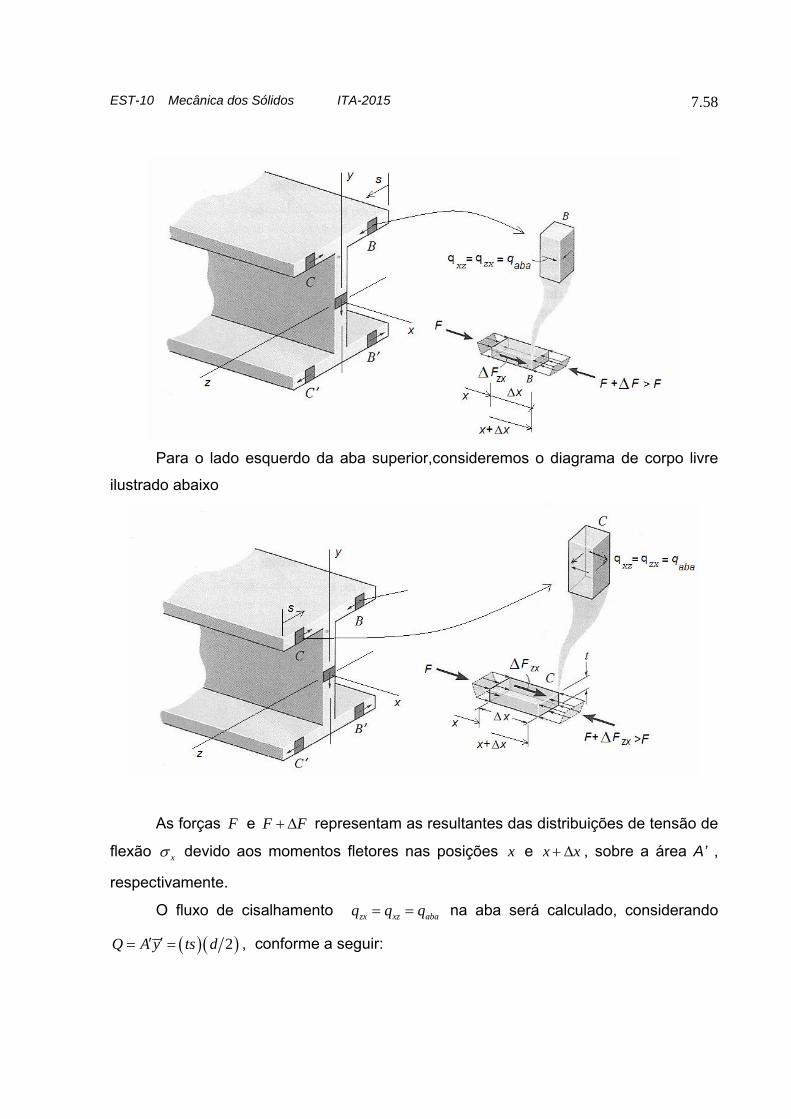
EST-10 Mecânica dos Sólidos ITA-2015 7.58
Para o lado esquerdo da aba superior,consideremos o diagrama de corpo livre
ilustrado abaixo
As forças F e F F representam as resultantes das distribuições de tensão de
flexão x devido aos momentos fletores nas posições x e x x , sobre a área A’ ,
respectivamente.
O fluxo de cisalhamento zx xz abaq q q na aba será calculado, considerando
2Q A y ts d , conforme a seguir:
EST-10 Mecânica dos Sólidos ITA-2015 7.59
02 2 2aba zx xz aba
V V d Vtd bq q q Q ts q s s
I I I
(a)
A coordenada s deverá ser considerada como indicada nas figuras acima, para
cada caso. O limite 2s b é possível aqui porque estamos supondo que a espessura
da alma é fina, podendo portanto, ser desprezada.
Da equação (a) para o fluxo de cisalhamento, observamos que ele varia
linearmente com a coordenada s e o seu valor máximo é dado para 2s b
max max2 2 4aba aba
Vtd b Vtdbq q
I I
(b)
O fluxo de cisalhamento na alma é obtido como a seguir, de modo semelhante
aos exemplos anteriores:
yalma yx xy
V Vq q q Q Q
I I (c)
O sentido do fluxo é o mesmo da força yxF indicada no diagrama de corpo livre
da figura abaixo. O sentido dessa força é o indicado para que ela equilibre a força
desbalanceada resultante dos momentos fletores nas posições x e x x . Quando
deduzimos a expressão do fluxo yxq (que tem o mesmo sentido da força yxF ) a força
yxF foi considerada com seu sentido positivo contrário ao sentido do eixo x (força
atuando na face ( )y do plano de corte e na direção de x ). Devido ao fato de
0yV V o fluxo resultou negativo, portanto, ele atua com sentido oposto àquele
arbitrado no diagrama de corpo livre para a sua dedução. Na figura a seguir a força
yxF é indicada com o seu sentido de atuação nesse caso.

EST-10 Mecânica dos Sólidos ITA-2015 7.60
Assim, o fluxo de cisalhamento na alma é calculado como a seguir, levando em
conta que já conhecemos o seu sentido (podemos dispensar o sinal negativo):
yalma yx xy
V Vq q q Q Q
I I (d)
onde o primeiro momento de área Q é dado por
2
21
2 2 2 2 2 2 4
d d d btd t dQ A y bt y t y y y
(e)
Então, escrevemos
22
2 2 4alma yx xy
V btd t dq q q y
I
(f)
Para 2y d temos
max2 22 4alma aba
Vbtd Vbtdq q
I I (g)
Para 0y temos
2
max 2 8alma
V btd tdq
I
(h)
Devido à simetria, uma análise similar nos dá a mesma distribuição do fluxo nas
abas inferiores,mas com sentidos opostos aos da aba superior, como mostra a figura a
seguir.
EST-10 Mecânica dos Sólidos ITA-2015 7.61
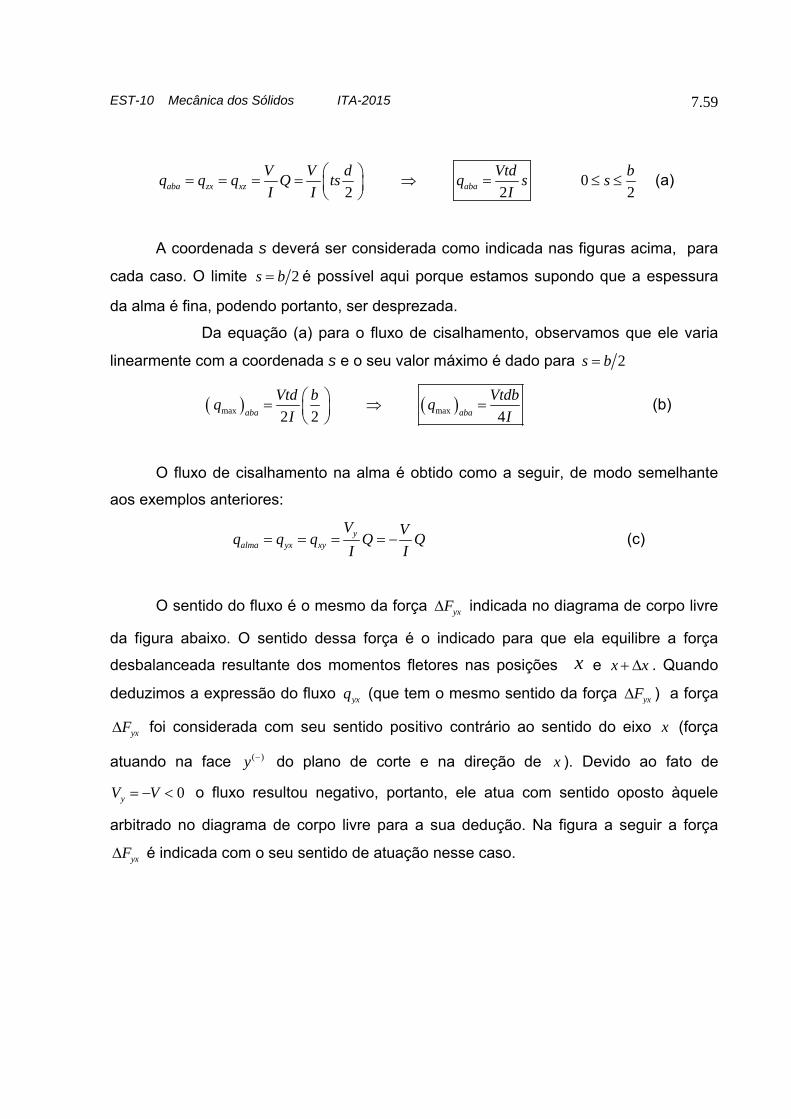
A força total desenvolvida nas partes à esquerda e direita de cada aba e a força
total desenvolvida na alma, são obtidas por integração do fluxo de cisalhamento ao
longo dos comprimentos de atuação:
22 22 2
0 00
2 2 2 16
bb b
aba aba aba
Vtd Vtd s Vtb dF q ds sds F
I I I (i)
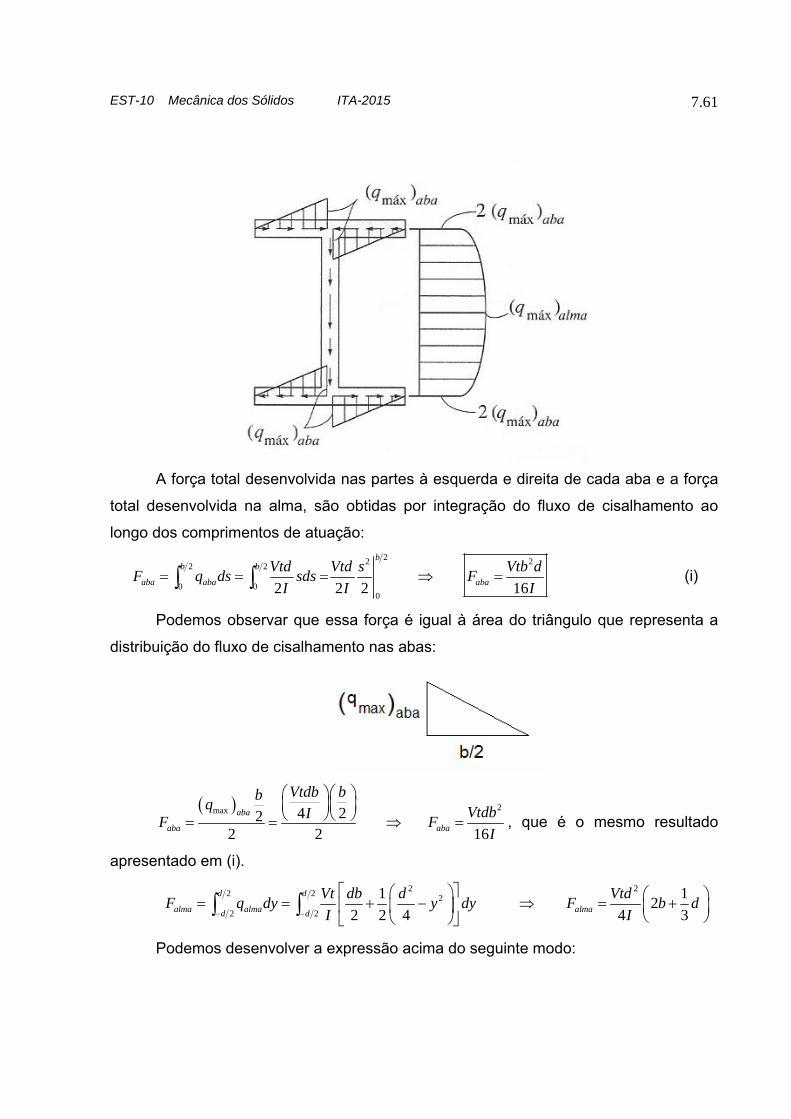
Podemos observar que essa força é igual à área do triângulo que representa a
distribuição do fluxo de cisalhamento nas abas:
2max 4 222 2 16
aba
aba aba
Vtdb bbq VtdbI
F FI
, que é o mesmo resultado
apresentado em (i).
2 22 2 2
2 2
1 12
2 2 4 4 3
d d
alma alma almad d
Vt db d VtdF q dy y dy F b d
I I
Podemos desenvolver a expressão acima do seguinte modo:
EST-10 Mecânica dos Sólidos ITA-2015 7.62
23 31 1
212 2 12
dI bt bt td
Como a espessura é fina, podemos desprezar os termos em 3t comparado com os
demais, e assim, escrever
2 231
2 24 12 4 3
d td dI bt td b
Substituindo na expressão da almaF , obtemos
2 2
2
1 12 2
4 3 34 2
4 3
alma alma
Vtd VtdF b d b d F V
td dIb
, (j)
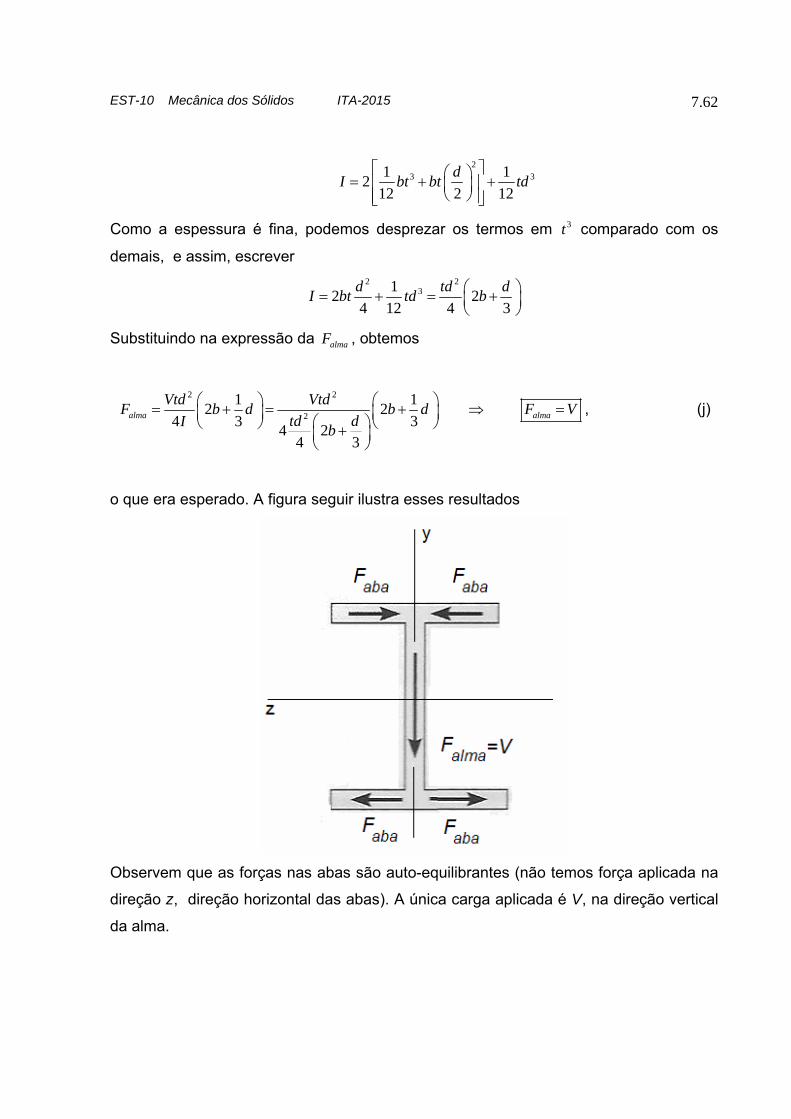
o que era esperado. A figura seguir ilustra esses resultados
Observem que as forças nas abas são auto-equilibrantes (não temos força aplicada na
direção z, direção horizontal das abas). A única carga aplicada é V, na direção vertical
da alma.
EST-10 Mecânica dos Sólidos ITA-2015 7.63
COMENTÁRIOS:
Para se determinar o sentido do fluxo de cisalhamento nas abas ou na alma da
viga é importante observar qual deve ser o sentido da força, que atua na face do
plano de "corte" do diagrama de corpo livre, necessário para equilibrar a força
desbalanceada devido à diferença dos momentos fletores atuando nas seções
transversais da viga nas posições x e x x . O sinal da taxa de variação do
momento fletor, z ydM dx V , nos dá qual deve ser o sentido dessa força para
equilibrar a força desbalanceada. Assim, nós temos o sentido dos fluxos zxq e
yxq que atuam nos planos normais a z ou y, respectivamente. Os fluxos
correspondentes atuando no plano normal a x, são xzq e xyq , respectivamente.
Esses fluxos se aproximam ou se afastam das arestas formadas pelos planos
normais entre si onde eles atuam (plano normal a z e plano normal a x; plano
normal a y e plano normal a x), conforme os fluxos zxq e yxq se aproximam ou se
afastam dessas arestas, de modo semelhante ao que se observa para as
tensões de cisalhamento.
O cálculo das propriedades da seção de elementos de paredes finas é
normalmente feito considerando-se uma idealização da seção transversal por
meio de linhas de centro com espessuras iguais às do elemento real, mas
desprezando-se os termos em 3t . Quanto menor for a espessura, menor será o
erro cometido. Em geral, esse erro é desprezível do ponto de vista de
engenharia. Esse é um procedimento muito usado, principalmente na
aeronáutica, onde é muito comum a presença de elementos estruturais com
espessuras muito finas. Por exemplo, considere a seguinte seção transversal de
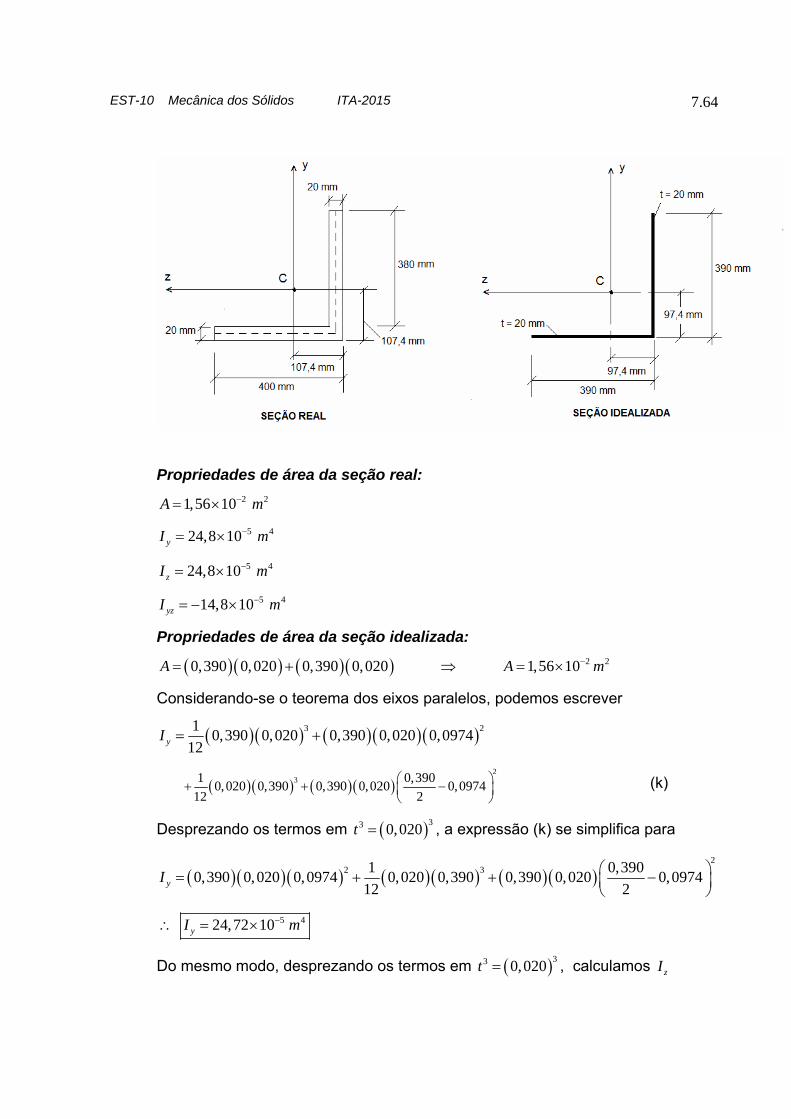
uma viga:
EST-10 Mecânica dos Sólidos ITA-2015 7.64
Propriedades de área da seção real:
2 21,56 10A m
5 424,8 10yI m
5 424,8 10zI m
5 414,8 10yzI m
Propriedades de área da seção idealizada:
2 20,390 0,020 0,390 0,020 1,56 10A A m
Considerando-se o teorema dos eixos paralelos, podemos escrever
3 210,390 0,020 0,390 0,020 0,0974
12yI
2
31 0,3900,020 0,390 0,390 0,020 0,0974
12 2
(k)
Desprezando os termos em 33 0,020t , a expressão (k) se simplifica para
2
2 31 0,3900,390 0,020 0,0974 0,020 0,390 0,390 0,020 0,0974
12 2yI
5 424,72 10yI m
Do mesmo modo, desprezando os termos em 33 0,020t , calculamos zI

EST-10 Mecânica dos Sólidos ITA-2015 7.65
2
2 31 0,3900,390 0,020 0,0974 0,020 0,390 0,390 0,020 0,0974
12 2zI
5 424,72 10zI m
O produto de inércia da área é calculado como
0,3900,390 0,020 0,0974 0,0974
2yzI
5 40,3900,390 0,020 0,0974 0,0974 14,8 10
2 yzI m
Comparando-se os valores obtidos para a seção idealizada onde desprezamos
os termos em 33 0,020t , com aqueles obtidos para a seção real, observamos
que o erro cometido é de 0,32%, o que desprezível do ponto de vista de
engenharia, além do que o cálculo se torna muito mais simples.
▲
7.3 DEFLEXÃO DE VIGAS SIMÉTRICAS Consideremos uma viga com plano longitudinal de simetria e feita de um material
linearmente elástico, isotrópico e homogêneo. Nesse caso, a equação da curvatura
Euler -Bernoulli é dada por (7.26), para o caso de flexão pura, e reescrita a seguir
1 z
z
Mk
EI . (7.53)
Como vimos na seção 7.2, podemos estender também essa equação para o
caso de vigas sob forças cortantes transversais, ou seja, para os casos onde a tensão
de cisalhamento não é nula nas seções transversais. Isso conduz a resultados muito
úteis e precisos para vigas delgadas, desde que os efeitos da deformação de
cisalhamento geralmente são insignificantes. No caso onde o momento fletor varia com
a coordenada longitudinal x, ou seja, quando existe a presença de força cortante,

EST-10 Mecânica dos Sólidos ITA-2015 7.66
segundo a equação (7.53), consideramos a curvatura k também como uma função da
coordenada x
1 z
z
M xk x
EI . (7.54)
A deformação da viga devida à flexão é determinada pela forma da linha neutra
(linha elástica) após a flexão. Inicialmente, a linha neutra é ao longo do eixo x, conforme
ilustrado na Figura 7.24. Após a flexão da viga, a linha neutra (linha elástica) se torna
uma curva no plano xy, o qual é o plano longitudinal de simetria. A equação dessa
curva determina o deslocamento transversal de cada partícula da viga sobre a linha
neutra. Essa equação é também conhecida como equação da linha elástica da viga.
Na Figura 7.24 s é um comprimento de arco ao longo da linha neutra após a
flexão. A coordenada v mede o deslocamento transversal do centróide da seção
transversal da viga (ponto na linha elástica) na coordenada x e a coordenada y é usada
para identificar a posição de um ponto, em relação ao eixo neutro z, na seção
transversal. O raio de curvatura da linha neutra (linha elástica) no ponto A*, na
coordenada x medida na configuração deformada é igual a . O centro de curvatura é
o ponto O, indicado na Figura 7.24.
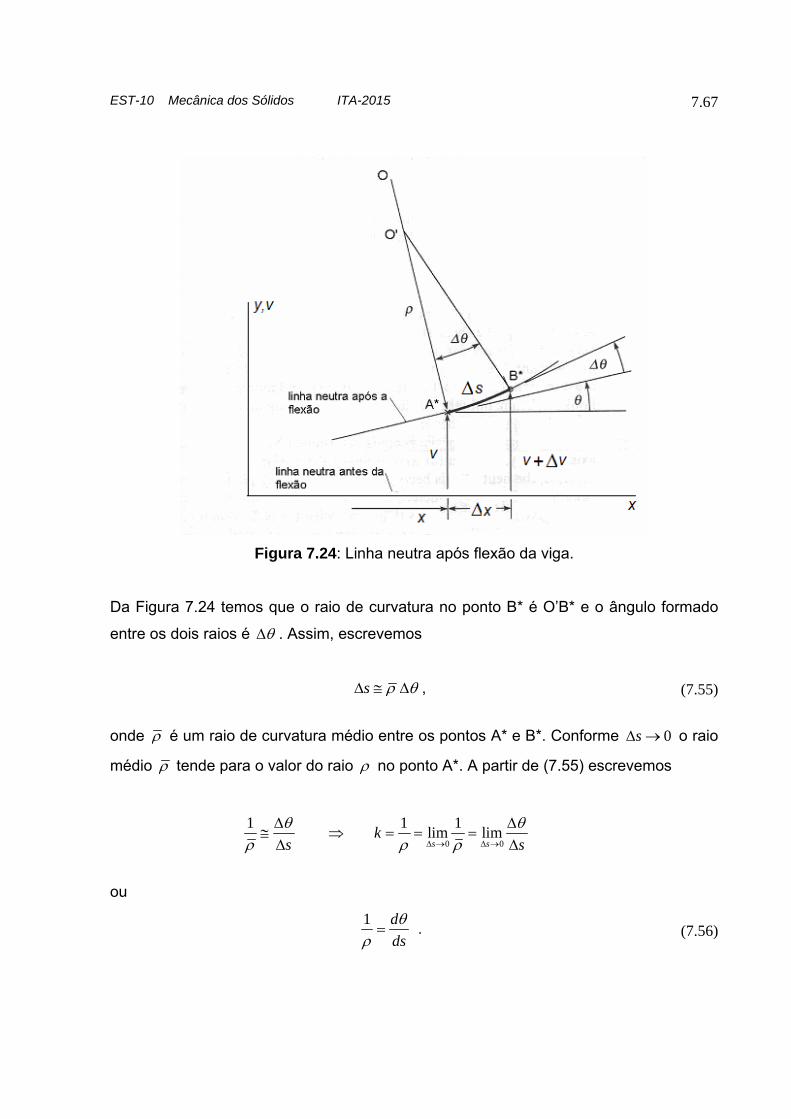
EST-10 Mecânica dos Sólidos ITA-2015 7.67
Figura 7.24: Linha neutra após flexão da viga.
Da Figura 7.24 temos que o raio de curvatura no ponto B* é O’B* e o ângulo formado
entre os dois raios é . Assim, escrevemos
s , (7.55)
onde é um raio de curvatura médio entre os pontos A* e B*. Conforme 0s o raio
médio tende para o valor do raio no ponto A*. A partir de (7.55) escrevemos
0 0
1 1 1lim lims s
ks s
ou
1 d
ds
. (7.56)
EST-10 Mecânica dos Sólidos ITA-2015 7.68
Como o comprimento s, medido ao longo da curva ( )v v x que representa a
linha neutra após a flexão, pode ser expresso como uma função da coordenada x, a
partir da Figura 7.24 podemos escrever
2* * 2 2
* * * * * *1
s s A B s x v s v
x x x xA B A B A B
. (7.57)
Tomando-se o limite de (7.57) com 0x , escrevemos
2
* *0 0 0lim lim lim 1x x x
ds s s v
dx x xA B
. (7.58)
Como * *
1s
A B
quando 0x , a equação (7.58) escreve-se
2
1ds dv
dx dx
. (7.59)
O ângulo de inclinação da reta tangente em cada ponto da linha neutra é uma
função da coordenada x do ponto. Então, pela regra da cadeia para as derivadas,
podemos escrever
d d ds
dx ds dx
. (7.60)
Substituindo (7.59) em (7.60), obtemos
2
1d d dv
dx ds dx
. (7.61)
Da Figura 7.24 vemos que v representa o deslocamento transversal dos pontos
da linha neutra, após a flexão, e para pequenos gradientes de deslocamentos em
módulo (pequenas inclinações da linha elástica), podemos escrever

EST-10 Mecânica dos Sólidos ITA-2015 7.69
2
1 1 1dv dv
dx dx
. (7.62)
Substituindo (7.62) em (7.61), escrevemos
d d
ds dx
. (7.63)
A partir deste ponto as derivadas serão desenvolvidas com respeito às
coordenadas da configuração indeformada, porque estamos considerando pequenas
deformações e pequenos gradientes de deslocamentos, ou seja, a hipótese de
pequenas modificações na configuração.
Substituindo (7.63) em (7.56), escrevemos
1 d
dx
. (7.64)
Com (7.64) na equação (7.54), escrevemos
1 ( )zM x dk
EI dx
(7.65)
Da Figura 7.24 temos
0lim tanx
v dv
x dx
(7.66)
Como estamos considerando 1dv dx (pequenas inclinações da linha elástica),
podemos fazer a seguinte aproximação
tandv dv
dx dx . (7.67)
Substituindo (7.67) em (7.65), escrevemos

EST-10 Mecânica dos Sólidos ITA-2015 7.70
2
2
2
2
1
( )1
( )
z
z
z z
d v
dxM x d dvk
EI dx dx d vEI M x
dx
(7.68)
Assim, obtivemos uma equação diferencial de segunda ordem que relaciona o
deslocamento transversal de um ponto da linha neutra da viga após a flexão, com o
momento fletor atuante na seção transversal e o coeficiente de rigidez à flexão da viga.
Essa equação se aplica para pequenas deformações e pequenos gradientes de
deslocamentos (pequenas inclinações da linha elástica).
A partir das equações diferenciais de equilíbrio da viga, dadas em (7.38) e (7.41)
e da equação (7.68), escrevemos
2 2 3
2 2 3
( ) ( )1z zz y
z z
M x dM xd v d d v d vEI V x
dx EI dx dx EI dx dx
(7.69)
3 4
3 4
( )1 1( ) ( ) 0y
zz z
dV xd d v d vp x EI p x
dx dx EI dx EI dx
. (7.70)
A equação (7.70) é também conhecida como a equação da linha elástica (linha
neutra) para uma viga de material elástico linear isotrópico e homogêneo, fletida no
plano xy.
A expressão exata para a curvatura da linha elástica de uma viga com grandes
inclinações é dada por
2 2
3 22
1
1
d d v dxk
ds dv dx
(7.71)
e substituindo em (7.54), escrevemos
2 2
3 22
1
1
z
z
M xd v dx
EIdv dx
(7.72)

EST-10 Mecânica dos Sólidos ITA-2015 7.71
Da equação (7.71) observamos que com a hipótese de 1dv dx (pequenas
inclinações da linha elástica), 2dv dx pode ser desprezado em relação à unidade e a
curvatura se torna igual àquela dada pela primeira equação de (7.68).
O livro "History of Strength of Materials" de S.P. Timoshenko (1878-1972)
apresenta os seguintes comentários sobre o problema da linha elástica: a equação
básica, relacionando a curvatura com o momento fletor, foi imaginada e desenvolvida
por Jacob Bernoulli (1654-1705). O seu trabalho deve ser considerado como a primeira
contribuição para resolver problemas de grandes deflexões de viga; tempos depois,
Euler (1707-1783), empregando o cálculo variacional, rederivou a equação diferencial
da curva de deflexão e resolveu vários problemas de linha elástica exata. Esses
resultados ele apresentou no Apêndice I ("De curvis elastics") do livro "Methodus
inveniendi lineas curvas..." que ele publicou em 1744. Esse foi o primeiro livro publicado
sobre Cálculo Variacional; Lagrange (1736-1813) foi o próximo matemático a investigar
a linha elástica exata. Os resultados de seus estudos sobre esse assunto foram
publicados no artigo "Sur la force des ressorts pliés", em 1771.
Exemplo 7.7
Considerando o exemplo 7.1, determinar o ângulo entre as seções
transversais A e B após a deformação da viga e o raio de curvatura . O módulo de
elasticidade do material é 6 230 10 /E lb pol e o momento de inércia de área da seção
transversal em relação ao eixo neutro é 42, 25zI pol .

EST-10 Mecânica dos Sólidos ITA-2015 7.72
Solução
Da equação (7.65) escrevemos
( )z
z
d M x
dx EI
.
A diferencial do ângulo escreve-se
z
z
Md dx d dx
EI .
Integrando-se a expressão acima entre as extremidades A e B da viga, tomando a
coordenada x da configuração indeformada, obtemos
72
12
Bz
B AAz
Md dx
EI .
Substituindo os dados do problema na equação acima, escrevemos
72
612
120000,01068 0,61
30 10 2,25odx rad
.
O sinal (-) indica apenas que a curvatura é negativa. O que nos interessa é o
módulo desse valor, ou seja,
0,01068 0,61orad .
O raio de curvatura é obtido a partir da equação (7.65)
6
1 ( ) 120005618
30 10 2,25z
z
M xpol
EI
.
O sinal (-) indica que a curvatura é negativa e o centro de curvatura está oposto
ao eixo de coordenada v. Assim, tomamos o módulo do valor acima para o raio de
curvatura, ou seja,
5618 pol .
Comentário:
Os resultados obtidos mostram que a viga depois de deformada apresenta uma
curvatura muito pequena, pois o seu raio é muito grande. O ângulo entre os planos das
seções transversais em A e B, depois da flexão também é muito pequeno. ▲

EST-10 Mecânica dos Sólidos ITA-2015 7.73
Exemplo 7.8
A viga em balanço mostrada na figura a seguir está submetida a uma carga vertical P
na extremidade. Determinar a equação da linha elástica e obter a inclinação e a
deflexão no ponto A. Considerar EI constante.
Solução
A equação (7.68) nos dá uma relação entre o momento fletor e a curvatura da
viga
2 2
2 2
( )1( )z
z zz
M xd v d vEI M x
dx EI dx (a)
Para obtenção do momento fletor, considere o diagrama de corpo livre a seguir:
O momento fletor é obtido escrevendo-se a equação de equilíbrio
0 0zM M Px
M Px
Substituindo na equação (a), escrevemos
2
2z
d vEI Px
dx (b)

EST-10 Mecânica dos Sólidos ITA-2015 7.74
Integrando duas vezes a equação (b), obtemos
2
12z
dv PxEI C
dx (c)
3
1 26z
PxEI v C x C (d)
As constantes de integração 1C e 2C são obtidas aplicando-se as condições de
contorno
2 2
1 10 02 2B
x L
dv PL PLC C
dx
3 2 3
2 2( ) 0 06 2 3
PL PL PLv L L C C
Substituindo as constantes obtidas acima, nas equações (c) e (d), escrevemos
Equação da linha elástica:
3 2 3
3 2 33 26 2 3 6z
Px PL PL PEI v x v x L x L
EI
Equação da inclinação:
2 2
2 2
2 2 2z
dv Px PL dv PEI L x
dx dx EI
Deslocamento no ponto A:
O deslocamento no ponto A é obtido a partir da equação da linha elástica com 0x :
3
3 2 30 0 3 0 26 3A A
P PLv v L L v
EI EI
O sinal negativo indica que o deslocamento é para baixo do eixo x.

EST-10 Mecânica dos Sólidos ITA-2015 7.75
Rotação (inclinação) no ponto A:
A rotação (inclinação) da extremidade livre da viga (ponto A) é dada por
2
2 2
0
02 2A A
x
dv P PLL
dx EI EI
Comentários:
Considerando-se uma viga em balanço com comprimento 2L m , de aço com
210E GPa , com seção transversal de 75b mm e 150h mm , sujeita a uma carga
20P kN , temos
33
39
20000 20,012 12
13 3 210 10 0,075 0,15012
A A
PLv v m mm
EI
22
39
20000 20,009 0,52
12 2 210 10 0,075 0,15012
oA A
PLrad
EI
2
2 5
0 0
0,009 1 0,009 8,1 10 1x x
dv dv
dx dx
Dos resultados acima, observamos que o deslocamento máximo e a inclinação
máxima da linha elástica da viga, os quais ocorrem na sua extremidade livre, são muito
pequenos e verificamos que
tan tan 0,009 0,009 tanA A A .
▲
EST-10 Mecânica dos Sólidos ITA-2015 7.76
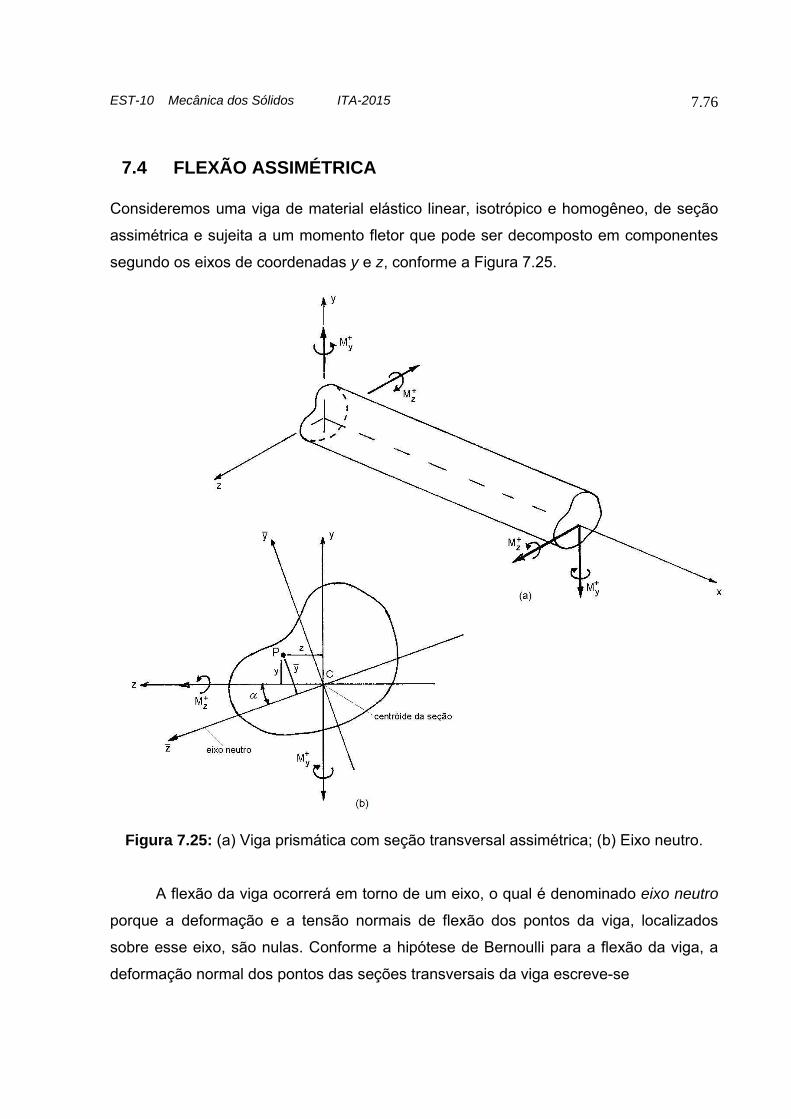
7.4 FLEXÃO ASSIMÉTRICA Consideremos uma viga de material elástico linear, isotrópico e homogêneo, de seção
assimétrica e sujeita a um momento fletor que pode ser decomposto em componentes
segundo os eixos de coordenadas y e z, conforme a Figura 7.25.
Figura 7.25: (a) Viga prismática com seção transversal assimétrica; (b) Eixo neutro.
A flexão da viga ocorrerá em torno de um eixo, o qual é denominado eixo neutro
porque a deformação e a tensão normais de flexão dos pontos da viga, localizados
sobre esse eixo, são nulas. Conforme a hipótese de Bernoulli para a flexão da viga, a
deformação normal dos pontos das seções transversais da viga escreve-se

EST-10 Mecânica dos Sólidos ITA-2015 7.77
x
y
, (7.73)
onde é o raio de curvatura da linha neutra e y é a coordenada medida a partir do
eixo neutro z , conforme mostra a Figura 7.25 (b). No caso de material elástico linear,
isotrópico e homogêneo, nós já vimos que esse eixo passa pelo centróide da seção
transversal.
Da Figura 7.25(b) podemos escrever
cos siny y z , (7.74)
onde é o ângulo que o eixo neutro z faz com o eixo z. Substituindo na equação
(7.73), escrevemos
cos sinx y z
. (7.75)
A tensão normal x , para essa viga de materiais elásticos lineares, isotrópicos e
homogêneos é dada pela equação (7.17) e levando em conta (7.75) escreve-se
cos sinx x xE E y E z
. (7.76)
Então, podemos dizer que a tensão normal de flexão x pode ser escrita como
uma função linear das coordenadas y e z, conforme a seguir.
1 2x C y C z , (7.77)
onde 1C e 2C independem de y e z.
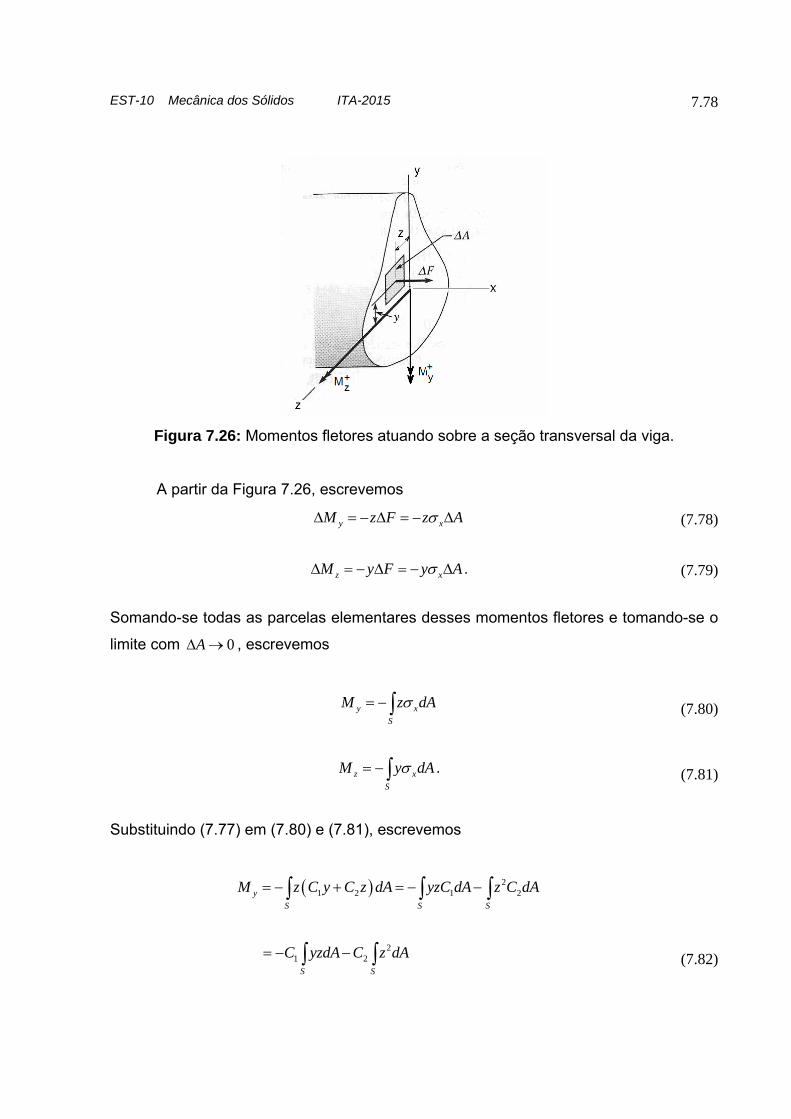
EST-10 Mecânica dos Sólidos ITA-2015 7.78
Figura 7.26: Momentos fletores atuando sobre a seção transversal da viga.
A partir da Figura 7.26, escrevemos
y xM z F z A (7.78)
z xM y F y A . (7.79)
Somando-se todas as parcelas elementares desses momentos fletores e tomando-se o
limite com 0A , escrevemos
y x
S
M z dA (7.80)
z x
S
M y dA . (7.81)
Substituindo (7.77) em (7.80) e (7.81), escrevemos
21 2 1 2y
S S S
M z C y C z dA yzC dA z C dA
21 2
S S
C yzdA C z dA (7.82)

EST-10 Mecânica dos Sólidos ITA-2015 7.79
21 2 1 2z
S S S
M y C y C z dA y C dA yzC dA
21 2
S S
C y dA C yzdA . (7.83)
As integrais acima podem ser definidas como
2 2y z yz
S S S
I z dA I y dA I yzdA , (7.84)
as quais são, respectivamente, o momento de inércia de área da seção transversal em
relação aos eixos y e z e o produto de inércia de área em relação a esses eixos. Com
essas definições, as equações (7.82) e (7.83) escrevem-se
1 2y yz yM C I C I (7.85)
1 2z z yzM C I C I . (7.86)
Resolvendo-se o sistema formado pelas equações (7.85) e (7.86), obtemos
1 2
z y y yz
y z yz
M I M IC
I I I
(7.87)
2 2
y z z yz
y z yz
M I M IC
I I I
. (7.88)
Substituindo (7.87) e (7.88) em (7.77), escrevemos
2 2
z y y yz y z z yzx
y z yz y z yz
M I M I M I M Iy z
I I I I I I
. (7.89)

EST-10 Mecânica dos Sólidos ITA-2015 7.80
Se os eixos y e z forem eixos principais de inércia, então 0yzI e podemos
escrever
1 1 yz
xy z xz y
MM
EI EI , (7.90)
onde 1 xy e 1 xz são as curvaturas da linha neutra nos planos xy e xz,
respectivamente. A Figura 7.27 ilustra essas curvas nos planos mencionados.
1 10 0yz
xy z xz y
MM
EI EI
Figura 7.27: Convenção dos momentos fletores positivos e as curvaturas da linha neutra nos planos xy e xz. Então, conforme a convenção adotada, temos, atuando na face x :
yM momento fletor positivo oposto ao sentido positivo do eixo y.
zM momento fletor positivo com o sentido positivo do eixo z.
Um caso especial que ocorre freqüentemente em problemas de engenharia de
estruturas é o de vigas com seções transversais simétricas. Considerando-se o sistema
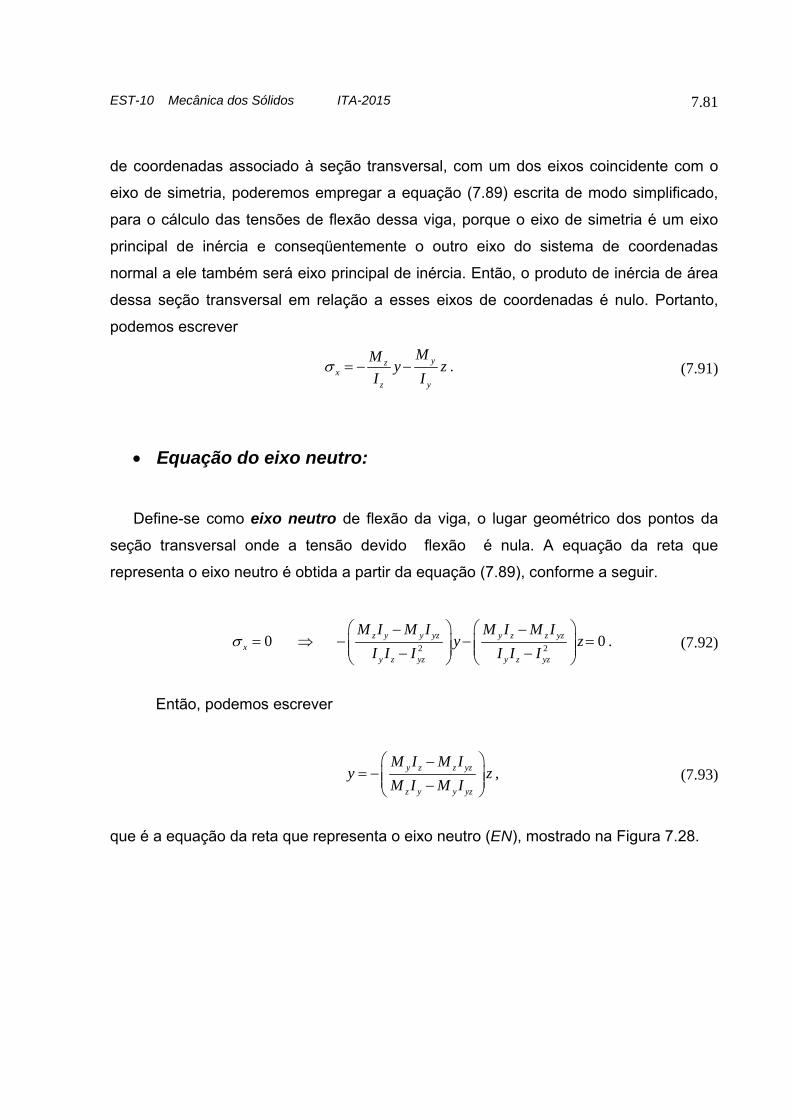
EST-10 Mecânica dos Sólidos ITA-2015 7.81
de coordenadas associado à seção transversal, com um dos eixos coincidente com o
eixo de simetria, poderemos empregar a equação (7.89) escrita de modo simplificado,
para o cálculo das tensões de flexão dessa viga, porque o eixo de simetria é um eixo
principal de inércia e conseqüentemente o outro eixo do sistema de coordenadas
normal a ele também será eixo principal de inércia. Então, o produto de inércia de área
dessa seção transversal em relação a esses eixos de coordenadas é nulo. Portanto,
podemos escrever
yzx
z y
MMy z
I I . (7.91)
Equação do eixo neutro:
Define-se como eixo neutro de flexão da viga, o lugar geométrico dos pontos da
seção transversal onde a tensão devido flexão é nula. A equação da reta que
representa o eixo neutro é obtida a partir da equação (7.89), conforme a seguir.
2 2
0 0z y y yz y z z yzx
y z yz y z yz
M I M I M I M Iy z
I I I I I I
. (7.92)
Então, podemos escrever
y z z yz
z y y yz
M I M Iy z
M I M I
, (7.93)
que é a equação da reta que representa o eixo neutro (EN), mostrado na Figura 7.28.
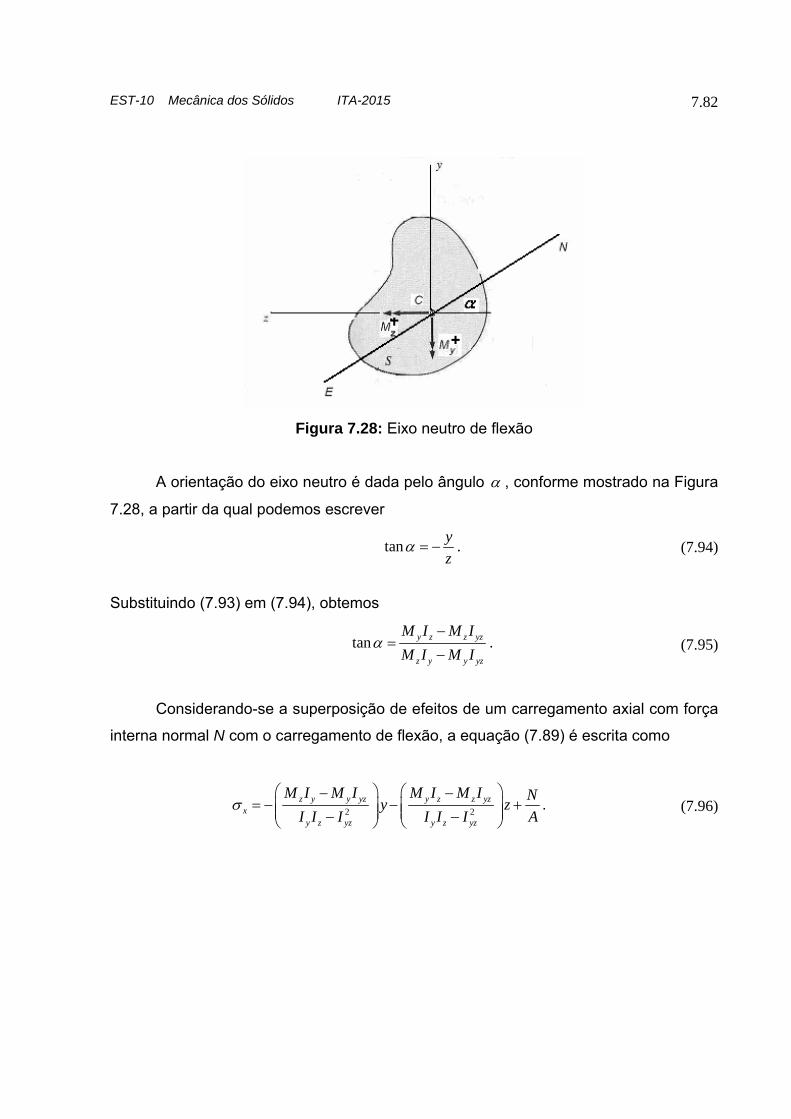
EST-10 Mecânica dos Sólidos ITA-2015 7.82
Figura 7.28: Eixo neutro de flexão
A orientação do eixo neutro é dada pelo ângulo , conforme mostrado na Figura
7.28, a partir da qual podemos escrever
tany
z . (7.94)
Substituindo (7.93) em (7.94), obtemos
tan y z z yz
z y y yz
M I M I
M I M I
. (7.95)
Considerando-se a superposição de efeitos de um carregamento axial com força
interna normal N com o carregamento de flexão, a equação (7.89) é escrita como
2 2
z y y yz y z z yzx
y z yz y z yz
M I M I M I M I Ny z
I I I I I I A
. (7.96)

EST-10 Mecânica dos Sólidos ITA-2015 7.83
Exemplo 7.9
Considere a viga de seção retangular sujeita a um momento fletor conforme
mostra a Figura a seguir. Determine as tensões normais de flexão nos pontos A, B, D e
E, e a orientação do eixo neutro. O momento fletor é 12 .M kN m e sin 4 5 e
cos 3 5
Solução
A equação (7.89) nos dá
2 2
z y y yz y z z yzx
y z yz y z yz
M I M I M I M Iy z
I I I I I I
A partir do Apêndice B calculamos os momentos de inércia de área da seção
transversal:
33 7 41 10, 4 0, 2 2667 10
12 12yI bh m
33 6 41 10, 2 0, 4 1067 10
12 12zI bh m
0yzI
O momento fletor pode ser decomposto em:

EST-10 Mecânica dos Sólidos ITA-2015 7.84
sin cosy zM M M M ,
onde
sin 4 5 cos 3 5 .
Então,
412 . 9,6 .
5yM kN m kN m
e 3
12 . 7,2 .5yM kN m kN m
.
Substituindo os momentos de inércia e o produto de inércia de área na equação da
tensão normal de flexão:
0 0
0 0z y y y z z yz
x xy z y z z y
M I M M I M MMy z y z
I I I I I I
3 36 6
6 7
7, 2 10 9,6 106,75 10 36,0 10
1067 10 2667 10x xy z y z
Substituindo as coordenadas dos pontos onde queremos calcular a tensão normal de
flexão, obtemos:
Ponto y (m) z (m) x (Mpa)
A 0,2 0,1 -4,95
B 0,2 -0,1 2,25
D -0,2 -0,1 4,95
E -0,2 0,1 -2,25
Orientação do eixo neutro:
3 6
3 7
9,6 10 1067 10 0tan 5,334 79,38
7, 2 10 2667 10 0
zy z z yz o
z y y yz y
MM I M I
M I M I M
EST-10 Mecânica dos Sólidos ITA-2015 7.85
3
3
9,6 10tan 1,333 53,13
7,2 10y o
z
M
M
▲
REFERÊNCIAS
1. Crandall, S. H.; Dahl, N. C.; Lardner, T. J.; An Introduction to the Mechanics of
Solids, McGraw-Hill, NY, 2a. edição, 1972
2. Donaldson, B. K., Analysis of Aircraft Structures – An Introduction, McGraw-Hill
Inc., NY, 1993
3. Lucena Neto, E., Análise Estrutural I, Notas de Aulas do curso EDI-31, ITA, 2007
4. Hibbeler, R. C., Resistência dos Materiais, Pearson Education do Brasil, SP, 5ª
edição, 2006
5. Timoshenko, S.P., History of Strength of Materials, Dover Publications, New
York, 1983.
6. Timoshenko, S.P.; Gere, J.E.; Mecânica dos Sólidos,Livros Técnicos e
Científicos Editora, RJ, 1994
7. Wempner, G., Mechanics of Solids, PWS Publishing Company, Boston, MA, 1995