Embed Size (px)
Citation preview

UFPB/CT/DEMCINEMÁTICA DAS MÁQUINAS
PROJETO DE MECANISMOS
Prof. Dr. Marcelo Cavalcanti Rodrigues
Blog: celocr.blogspot.com
http://labii.4shared.com
Password para baixar apostilas: mecanica

1. INTRODUÇÃO AO ESTUDO DE MECANISMOS

1. INTRODUÇÃO
A análise cinemática de Mecanismos consiste na determinação das características cinemáticas de mecanismos já prontos ou em fase de projeto.
As características cinemáticas são: posição, velocidade e aceleração de pontos em mecanismos que se enquadram no modelo de corpo rígido.
A análise cinemática deve ser executada na seguinte seqüência:
Análise de posição Análise de velocidade Análise de aceleração
Usando métodos:
GRÁFICOSRégua, esquadro e
compasso
ANÁLITICOS (VETORIAL)
NUMÉRICOS (COMPUTACIONAIS)

1.1 TIPOS DE MECANISMOS
Existem 2 grupos de mecanismos com elementos mecânico segundo as peculiaridades de movimento transmitido:
1.1.1 Mecanismos de movimento uniforme: Engrenagens, rodas de fricção, acoplamento flexivel.
Acoplamentos flexíveis e magnéticos1.1.2 Mecanismos de movimento periódico: Mecanismos de barras, cames, mecanismos intermitentes.
CAMES
MECANISMOS DE 4 BARRAS

1.1 TIPOS DE MECANISMOS
1.1.3 Mecanismos planos e tridimensionais:
Mecanismos 4 barras a) Plano b) esférico c) espacial
Mecanismos de Cames a) Plano b) esférico c) espacial

1.1 TIPOS DE MECANISMOS
1.1.3 Mecanismos planos e tridimensionais:
Engrenagens não-circulares
Mecanismos Intermitentesa) Roda de Genebra b) Roda estrelada c) Mecanismos de catraca
a) Biela-manivela com roda de Genebrab) Mecanismos de barras com segmentos
de engrenagens

2. GEOMETRIA DO MOVIMENTO
Mecanismos: é uma combinação de corpos rígidos de tal modo compostos e ligados que se movem entre si com movimento relativo definido. Ex: cursor-manivela do motor de combustão interna.
Máquina: mecanismos, ou conjunto de mecanismos que transmite força de uma fonte de potência para a resistência a ser superada. Ex: Motor de combustão interna.
Movimento plano (translação): um corpo tem movimento de translação quando uma reta, definida por dois pontos quaisquer desse corpo fica constantemente paralela a si mesma.
Retilínea: todos os pontos tem trajetórias retas e paralelas. Peça 4 desliza sobre B’ a B”.
Curvilínea: As trajetórias dos pontos são curvas idênticas, paralelas a um plano fixo.
4
BB”
1
B’
3A
2
1 O2

O mecanismo abaixo era usado na ligação de rodas motrizes de locomotiva a vapor. Neste mecanismo a barra 3 tem translação curvilínea e todos os seus pontos determinam trajetórias cicloidais durante o movimento de rolamento das rodas 2 e 4 sobre o trilho 1.
A peça 5 se move em translação retilínea
32
4
5
ROTAÇÃO: cada ponto de um corpo rígido em movimento plano permanece a uma distância constante de um eixo fixo, normal ao plano do movimento, o corpo está em rotação.
Se o corpo gira de um lado para outro dentro de um determinado ângulo, o movimento é de oscilação.
3A
2
1 O2
4
O4
B

Ciclo: quando as peças de um mecanismo, partindo de uma posição inicial, passar por todas as posições possíveis e retornarem a posição inicial, essas peças completaram um ciclo.
Período: o tempo necessário para completar um ciclo é chamado de período.
Fase: posições relativas de um mecanismo em determinado instante durante um ciclo.
Pares de Elementos: são formas geométricas pelas quais dois membros de um mecanismo são articulados de modo que o movimento relativo entre estes sejam coerentes.
Peça: corpo rígido que tem dois ou mais pares de elementos que podem ser articulados a outros corpos para transmitir força ou movimento.

Inversão: Em um mecanismo, se for liberada uma peça que era fixa e outra passar a ser fixa, diz-se que esse mecanismo está invertido. A inversão de um mecanismo não altera o movimento relativo entre suas peças, entretanto modifica seus movimentos absolutos.
Transmissão de Movimento:
a)Contato direto: came e seguidor.
b)Através de elemento intermediário ou biela;
c)Ligação flexível: correia ou corrente.
A figura abaixo mostra a came 2 e o seguidor 3 em contato no ponto P.
A came gira no sentido horário e a velocidade do ponto P considerado como um ponto da peça 2 é o vetor PM2. A linha NN’ é a normal as duas superfícies no ponto P e é conhecida por normal comum, linha de transmissão ou linha de ação.
A tangente comum é TT’. O vetor PM2 é decomposto em duas componentes Pn ao longo da normal comum e Pt2 ao longo da tangente comum.

A came e o seguidor são corpos rígidos e devem permanecer em contato, a componente da velocidade de P3 deve ser igual a componente normal da velocidade de P2.
Conhecendo-se a direção do vetor velocidade P3 e sabendo-se que é perpendicular ao raio O3P e conhecendo-se a sua componente normal, é possível a determinação do vetor velocidade PM3.
Assim, pode-se determinar a velocidade angular do seguidor através da relação V = R. Onde V é a velocidade linear de um ponto que se move ao longo da trajetória de raio R e é a velocidade angular do raio R.

2.1 VELOCIDADE DE DESLIZAMENTO
Analisando mecanismos com contato direto, é necessário determinar a velocidade de deslizamento.
A velocidade de deslizamento é a diferença vetorial (t2t3) entre as componentes tangenciais das velocidades do ponto de contato P dada por Pt2 e Pt3.
Se t2 e t3 estiverem do mesmo lado de P, a velocidade relativa será dada pela diferença dos segmentos Pt3 e Pt2. Se o ponto de contato estiver na linha de centros (ponto K), os vetores PM2 e PM3 serão iguais e mesma direção. Assim as componentes tangenciais serão iguais e a velocidade de deslizamento nula.
As peças estarão em ROLAMENTO PURO (ponto de contato permaneça sobre a linha de centros).

2.2 RAZÃO DE VELOCIDADES ANGULARES
Considere duas peças em contato direto, a partir dos centros O2 e O3, baixam-se perpendiculares a normal comum cruzando-a nos pontos e e f.
Logo,
Como os triângulos PM2n e O2Pe são semelhantes.
Os triângulos PM3n e O3Pf são semelhantes.
Assim,
Com a normal comum cruzando a linha de centros no ponto K, os triângulos O2Ke e O3Kf são semelhantes.
PO
PM
2
22
PO
PM
3
33
2
2
3
3
2
3
PM
PO
PO
PM
eO
Pn
PO
PM
22
2
fO
Pn
PO
PM
33
3
fO
eO
Pn
eO
fO
Pn
3
22
32
3
KO
KO
fO
eO
3
2
3
2
2
3

3. SISTEMAS ARTICULADOS
3.1 MECANISMO DE QUATRO BARRAS
Um dos Mecanismos mais simples e mais úteis. A manivela 2 é a peça acionadora que pode girar ou oscilar. A peça 4 irá oscilar.
Enquanto a peça 2 gira, não ocorre travamento do mecanismo. Se houver travamento, para evitá-lo deve-se ter cuidado com os comprimentos das peças (evitar pontos mortos).
Os pontos mortos ocorrem quando a linha de ação da força motora tiver a mesma direção da peça 4 (linha vermelha A’B’).
Se a peça 2 girar completamente mas a peça 4 for motora, ocorrerão pontos mortos e será necessário o uso de um volante (disco que contém energia de rotação) para evitar a parada.

Exemplo de volante:
VOLANTE

Ângulo de transmissão (): É o ângulo existente entre a peça de ligação 3 e a peça 4. È usado para evitar parada (travamento) do mecanismo.
Aplicando a lei dos Co-senos aos triângulos AO2O4 e ABO4.
e
Logo,
r3
r4
r2
r1
z2
22122
21
2 cos2 rrrrz cos2 4324
23
2 rrrrz
43
22124
23
22
21
4324
23221
22
21
2
cos2cos
cos2cos2
rr
rrrrrr
rrrrrrrr
O ângulo não deve ser inferior a 40° para transmitir grandes forças.Se < 40° o mecanismo tenderá a parar devido ao atrito entre as articulações, e as peças 3 e 4 tenderão a ficar alinhados bloqueando o mecanismo.

3.2 LEI DE GRASHOF
Os mecanismos de quatro barras, que possuem apenas pares rotativos, são divididos em duas classes. classe 1: inclui todos os mecanismos em que um elemento, o de menor dimensão, poderá realizar uma rotação completa em relação aos três elementos. Quando nenhum elemento pode realizar uma rotação completa em relação aos outros três elementos é chamado de mecanismo de classe 2.
A lei de Grashof é utilizada para verificar a classe destes tipos de mecanismos, esta lei diz que: “A soma dos comprimentos do elemento menor e do elemento maior, devem ser menor ou igual a soma dos elementos restantes, para que um ou mais elementos consigam realizar uma rotação completa (360 graus ou movimento circular contínuo cc).
onde: s = elemento menor, l = elemento maior, p, q = elementos restantes
qpls

DADOS:Q2Q4 = 400 mmQ2A = 120 mmQ4B = 340 mmAB = 390 mm
SOLUÇÃO:
730520
390340400120
qpls
Assim, o mecanismo é de classe 1 onde a peça 2 pode realizar rotação completa.

Exercícios para sala de aula.
1. Classifique os mecanismos abaixo seguindo a Lei de Grashof.
DADOS:Q2Q4 = 106 mmQ2A = 30 mmQ4B = 60 mmAB = 64 mm
DADOS:AD = 24 mmAB = 16 mmDC = 16 mmBC = 24 mm
124136
646010630
qpls
4040
24162416
qpls
Classe 2
Classe 1

3.3 MECANISMO CURSOR (biela) - MANIVELA
Esse mecanismo é largamente usado e sua maior aplicação é em motores de combustão interna em compressores de ar. No motor de combustão interna, os gases exercem sua pressão sobre o pistão, transmitida à manivela por intermédio da biela.
Sistema biela-manivel
Pontos mortos
Os pontos mortos PMS e PMI ocorrem em posições extremas do pistão e são superadas pela instalação de um volante no eixo da manivela.

Para um mecanismo cursor manivela, é necessário calcular o deslocamento, velocidade e aceleração do cursor para projetar equipamentos e máquinas que o utilizam para gerar potência. Assim, a equação fornece uma posição relativa e aproximada do curso (x) do mecanismo.
A
4
)cos1()cos1(
coscos
LR
LRLRx
x
R L
L sen = R sen
R cos L cos
22
2222222222222
)/(1cos
)/(1coscoscos
senLR
senLRsenRLLsenRLL
])/(11[)cos1( 22 senLRLRx
Como:
Tem-se:
Pela não linearidade acima,
Onde = t com = cte.
senL
RsenLR
222
2
11)/(1
22
2)cos1( sen
L
RRx
2coscos
22
22
2
L
RR
dt
xda
senL
RsenR
dt
dxV

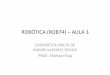
Ex: R = 50mm e L=200mm.
0 50 100 150 200 250 300 350 4000
10
20
30
40
50
60
70
80
90
100RESPOSTA DO MECANISMO CURSOR MANIVELA
Teta2 [graus]
Am
plitu
de d
o cu
rsor
[m
m]
Programa:% MARCELO CAVALCANTI RODRIGUES% DISCIPLINA: CINEMATICA %MECANISMO CURSOR-MANIVELA (TESTE) clear allclose all R=50L=200w=1convrd=pi/180; %graus para radianoconvg=1/convrd; %radianos para grausi=1;%angulo teta4for teta2 = 0:10:360; teta2=teta2*convrd; x = R*(1-cos(teta2))+((R^2)/(2*L))*(sin(teta2))^2; x1(i)=x; teta22(i)=teta2*convg; i=1+i;endfigure(1)plot(teta22,x1), title('RESPOSTA DO MECANISMO CURSOR MANIVELA')grid onxlabel('Teta2 [graus]')ylabel('Amplitude do cursor [mm]‘)

3.4 GARFO ESCOCÊS:
Esse mecanismo é largamente usado para gerar movimento harmônico.Ex: Bomba a vapor, mesa vibratória e geradores de seno e cosseno.
)cos(sin
)(sin
cos
2
lxa
lxv
lx
Como
cos)(cos)0(sin
sin)(sin
0,,
22 lla
llv
t
CD
CD

ANÁLISE VETORIAL
1. MECANISMO CURSOR - MANIVELA
3
4
i
2
k
jr2 r3
rB
2
3
O2
A
B
)sin(cos)sin(cos 33322232 jirjirirrrr BB (1)
De (1), tem-se:
0
sin
cos
0
sin
cos
0
0 33
33
22
22
r
r
r
rr
k
j
i B
(2)
De (2), tem-se:
3322
3322
sinsin0
coscos
rr
rrr
y
x B (3)(4)
Substituindo 3 de (5) na equação (3),
3
2213
sinsin
r
r De (4),
(5)
3
221322
sinsincoscos
r
rrrrB
(6)

ANÁLISE VETORIAL
2. MECANISMO CURSOR – MANIVELA INVERTIDO
Dados: 2 , O2A e O2O4 Determinar: 4 e r4
r1O4
24
4
2
O2
3
A
r1
r4r2
O2O4
A
0
sin
cos
0
0
0
sin
cos
)sin(cos)sin(cos
22
221
44
44
22214444214
r
rr
r
r
jirirjirrrrr
(1)
De (1), tem-se:
2244
22144
sinsin
coscos
rr
rrr
y
x (2)(3)
Dividindo (3) por (2) tem-se:
221
2214
221
224 cos
sintan
cos
sintan
rr
r
rr
r(4)
Substituindo (4) em (3)
4
224 sin
sin
r
r

ANÁLISE VETORIAL
3. MECANISMO QUATRO - BARRAS
Dados: 2 , O2A , AB, O4B, O2O4 Determinar: 3 e 4
42
3
r1
r2
r3
r4
ra
4132 rrrr (1)
De (1), tem-se:
0
sin
cos
0
0
0
sin
cos
0
sin
cos
44
441
33
33
22
22
r
rr
r
r
r
r(2)
De (2), tem-se:
443322
4413322
sinsinsin
coscoscos
rrr
rrrr
y
x (3)(4)
Das eqs (3) e (4), resulta 3 e 4 usando algum método numérico.

Usando o vetor auxiliar ra, tem-se:
222
2221222212221
2121
)sin()cos()sin()cos()sin(cos rrrjrirrjirirr
rrrrrr
a
aa
(5)
221
221
cos
sintan
rr
ra
Usando jrirr ayaxa
Temos também: 34 rrra
3344
3344
33
33
44
44
sinsin
coscos
0
sin
cos
0
sin
cos
0
rrr
rrrr
r
r
r
r
r
ay
ax
ay
ax
(6)
(7)
Elevando (8) e (9) ao quadrado e somando:
(8)(9)
a
a
aa
a
aa
aaa
aaaa
aa
aa
rr
rrr
rr
rrr
rrrrr
rrrrr
rrr
rrr
33
223
241
33
223
24
3
223
2433
2333
23
24
233
244
233
244
2cos)(
2)cos(
)cos(2
)sinsincos(cos2
)sinsin()sin(
)coscos()cos(
(10)

Substituindo 3 em (8) ou (9), tem-se 4.
44
314
44
34344
)cos(cos
)cos(cos)cos(cos
r
r
r
r
r
r
r
rrrr
axa
axaaxa
Ex: considere o mecanismo cursor manivela com excentricidade ao lado.
r2
2
A
r3
Be 3
y
0
sin
cos
22
22
2
r
r
rSabendo que: err 3322 sinsin
Logo:
223
3 sin1
sin rer
(*)
e
3322 coscos rrxB xB
2/13
233
23
2 )sin1(cos1cossin
(1)
A partir de (*): 2/1222
23
33 )sin(
1cos rer
r (**)
Substituindo (**) em (1) e considerando positivo.
2/1222
2322 ])sin([cos rerrxB (2) Então, dado 2 obtém-se xB.

Ex: considere o mecanismo de cursor manivela ao lado.
Cursor manivela no mesmo nível2/1222
2322
2/1222
2322
])sin([cos
])sin([cos
rrrx
rerrx
B
B

4 REPRESENTAÇÃO DE VETORES DE POSIÇÃO
Os vetores de posição entre dois pontos no plano XY serão representados nesta apostila pela letra R seguida de pelo menos dois índices (subscritos), sendo que o primeiro índice é a extremidade final e o segundo índice é o ponto de origem do vetor de posição.
Observe que ou
Note que:
senRRRR
jRiRRDC
yDC
DCxDCy
DCxDCDC
cosˆˆ
)]()[cos(
)(.)cos(_
22222
22
2
2
isenReRR
seniepoiseRR
AOi
AOAO
iiAOAO
oiei 90