-
Cinemtica da Posio de Robs Manipuladores 1
Captulo 5
CINEMTICA DIRETA DE ROBS MANIPULADORES
A cinemtica de um rob manipulador o estudo da posio e da
velocidade do seu efetuador e dos seus ligamentos. Quando se
menciona posio, est se referindo tanto posio propriamente dita,
como orientao e quando se fala em velocidade, considera-se tanto a
velocidade linear como angular. Pode-se distinguir dois tipos de
cinemtica, a cinemtica direta e a inversa. Na cinemtica direta
deseja-se obter a posio e velocidade do efetuador, para uma dada
posio das articulaes. A cinemtica inversa o oposto da cinemtica
direta, ou seja, so fornecidas a posio e a velocidade do efetuador
e quer se obter as posies e velocidades correspondentes das
articulaes.
No captulo 4 foram vistas as ferramentas matemticas necessrias
para se determinar a posio e orientao de corpos rgidos que se
baseia na transformao de coordenadas. Neste captulo, apresentada a
cinemtica direta. A cinemtica inversa ser analisada no captulo 5.
Observa-se que neste captulo, ser visto como se calcula a posio, a
orientao, a velocidade linear e angular do efetuador de um rob
manipulador. A posio e velocidade dos outros ligamentos do rob
podem ser facilmente calculadas de forma anloga s do efetuador. 3.1
Posio e Orientao do Efetuador
Um manipulador consiste basicamente de uma srie de corpos rgidos
unidos entre si por articulaes. A Figura 5-1, mostra um esquema de
um manipulador. Ser considerado somente manipuladores com estrutura
cinemtica do tipo aberta, como foi visto no captulo 2.
Cada ligamento do manipulador pode ser numerado de 0 a n, como
mostra a Figura 5-1. O ligamento da base, que usualmente fixo em
relao ao mundo externo, numerado por convenincia como 0 e o
efetuador, que o ltimo ligamento, numerado como n. O objetivo
analisar a posio e a orientao do efetuador em funo da posio de cada
uma das articulaes.
Para representar a posio e a orientao do efetuador, posicionado
o sistema de coordenadas On-xnynzn no efetuador. A posio e orientao
deste sistema de coordenadas descrito em relao ao sistema
O0-x0y0z0, fixo na base, isto , no primeiro ligamento. Define-se,
tambm, para cada um dos demais ligamentos, um sistema de
coordenadas Oi-xiyizi. possvel determinar a posio e a orientao do
sistema i em relao ao sistema anterior, i1, pelo uso de matrizes
homogneas relacionando a transformao entre estes sistemas. Dessa
forma, a posio e a orientao do efetuador em relao base obtida por
uma composio de transformaes homogneas consecutivas, partindo-se do
sistema da base para o ltimo sistema (sistema do efetuador).
Para posicionar os sistemas de coordenadas nos ligamentos do
manipulador de forma
-
Anlise de Robs (E. L. L. Cabral) 2
sistemtica, utilizada a notao de Denavit-Hartenberg. A notao de
Denavit-Hartenberg um mtodo sistemtico de descrever a posio e a
orientao relativa entre dois ligamentos consecutivos, baseado na
transformao homognea.
Figura 5-1: Esquema da Estrutura de um Manipulador. Notao de
Denavit-Hartenberg
A Notao de Denavit-Hartenberg baseia-se no fato de que para
determinar a posio relativa de duas retas no espao, so necessrios
somente dois parmetros. O primeiro parmetro a distncia medida ao
longo da normal comum entre as duas retas e o segundo o ngulo de
rotao em torno da normal comum, que uma das retas deve girar, de
forma que fique paralela outra. Observa-se que a normal comum entre
duas retas no espao definida por uma terceira reta que intercepta
as duas primeiras retas, com ngulos de 90. Alm disso, a distncia
medida entre as duas retas, ao longo da normal comum, a menor
distncia entre as mesmas. A Figura 5-2 apresenta duas retas no
espao e os dois parmetros necessrios para descrever sua posio
relativa.
a
Normal comun
Figura 5-2: Posio relativa de duas retas no espao.
-
Cinemtica da Posio de Robs Manipuladores 3
Se para definir a posio relativa de duas retas no espao so
necessrios dois parmetros, ento, para definir a posio relativa de
dois sistemas de coordenadas sero necessrios quatro parmetros. Isto
decorre do fato de que um sistema de coordenadas definido por trs
retas (os trs eixos do sistema), sendo que conhecendo-se dois eixos
do sistema, o terceiro est automaticamente definido, pelas condies
de ortogonalidade e pela regra da mo direita. Observa-se que, a
intercesso dos eixos de um sistema de coordenadas define a origem
do mesmo. Portanto, a partir da definio da posio relativa entre
dois eixos de dois sistemas de coordenadas, pode-se descrever a
posio relativa entre os dois sistemas de coordenadas.
A Figura 5-3 representa um par de ligamentos adjacentes de um
rob manipulador (ligamentos i e i1) e suas respectivas articulaes
(articulaes i1, i e i+1). A posio e orientao relativa entre os dois
ligamentos descrita pelas transformaes de translao e de rotao entre
os dois sistemas de coordenadas fixos a estes ligamentos.
Figura 5-3: A Notao de Denavit-Hartenberg.
O primeiro passo para definir os sistemas de coordenadas de um
rob, localizar os eixos z ao longo dos eixos das articulaes, de
forma que o eixo zi1 o eixo da articulao i. Seja a reta HiOi a
normal comum aos eixos das articulaes i e i+1 (eixos zi1 e zi). A
origem do sistem Oi localizada na intercesso do eixo da articulao
i+1 (eixo zi) e a normal comum entre os eixos zi1 e zi. O eixo xi
direcionado ao longo da extenso desta normal comum, na direo de zi1
para zi. Finalmente, o eixo yi escolhido de forma que o sistema
resultante Oi-xiyizi seja um sistema de coordenadas que segue a
regra da mo direita.
-
Anlise de Robs (E. L. L. Cabral) 4
A posio relativa entre dois sistemas de coordenadas
consecutivos, sistemas Oi1-xi1yi1zi1 e Oi-xiyizi, completamente
determinada pelas posies relativas entre os eixos xi1 e xi, e entre
os eixos zi e zi1, que so definidas pelos quatro parmetros
seguintes:
ai: a distncia (em mdulo) entre zi1 e zi, medida ao longo do
eixo xi, que a normal comum entre zi1 e zi, ou seja, a distncia
HiOi;
i: o ngulo (com sinal) entre o eixo zi1 e o eixo zi, medido em
torno do eixo xi, segundo a regra da mo direita, ou seja, o ngulo
de rotao em torno do eixo xi, que o eixo zi1 deve girar para que
fique paralelo ao eixo zi;
di: a distncia (com sinal) entre os eixos xi1 e xi, medida sobre
o eixo zi1 (que a normal comum entre xi1 e xi), partindo-se de Oi1
e indo em direo Hi. O sinal de di positivo, se para ir de Oi1 at
Hi, caminha-se no sentido positivo de zi1, e negativo, se
caminha-se no sentido oposto de zi1;
i: o ngulo (com sinal) entre o eixo xi1 e o eixo xi, medido em
torno do eixo zi1, segundo a regra da mo direita, ou seja, o ngulo
de rotao em torno do eixo zi1, que o eixo xi1 deve girar para que
fique paralelo ao eixo xi.
Com estes quatro parmetros, a posio e orientao do sistema de
coordenadas i em
relao ao sistema i1 pode ser definida como uma sequncia de
quatro transformaes:
A primeira transformao, consiste em uma rotao em torno de zi1,
de um ngulo i, medido segundo a regra da mo direita, de forma a
alinhar xi1 com xi:
A segunda transformao, uma translao ao longo do eixo zi1, de uma
distncia di, medida a partir do ponto Oi1, at encontrar a
intercesso da normal comum entre zi1 e zi (ponto Hi);
A terceira transformao, consiste em uma translao ao longo do
eixo xi, de uma distncia ai, partindo-se do ponto Hi at encontrar o
eixo zi (ponto Oi); e
A quarta transformao consiste em uma rotao em torno do eixo xi,
de um ngulo i, medido segundo a regra da mo direita, de forma a
alinhar o eixo zi1 com o eixo zi.
Assim, tem-se, em resumo, as seguintes transformaes:
),(),(),(),( iiii xRotaxTransdzTranszRot =
i1iA , (5-1)
onde os smbolos Rot e Trans significam respectivamente
transformao de rotao e de translao. Em termos de transformaes
homogneas, tem-se o seguinte:
2)-(5 .
10000
cos
100000000001
100001000010
001
1000100
00100001
100001000000
=
=
iii
iiiiiii
iiiiiii
ii
ii
i
i
ii
ii
dCSSaSCCSCaSSCSC
CSSC
a
dCSSC
i1iA
Os parmetros ai e i so constantes e so determinados pela
geometria do ligamento i. Um dos outros dois parmetros, di ou i,
varia a medida que a articulao se move. Como
-
Cinemtica da Posio de Robs Manipuladores 5
visto no captulo 2, existem dois tipos de articulaes em braos
robticos: articulaes de revoluo (ou de rotao) e articulaes lineares
(ou prismticas). Se a articulao i for de revoluo, o parmetro i
varivel e representa a sua posio angular, enquanto o parmetro di
constante. Se a articulao i for prismtica, o parmetro di a varivel
que representa a sua posio linear e o parmetro i constante.
Existem algumas excees notao de Denavit-Hartenberg, sendo estas
as seguintes:
Para estabelecer o sistema de coordenadas da base, a origem do
sistema pode ser escolhida em qualquer ponto do eixo z0. Os eixos
x0 e y0, podem ser escolhidos arbitrariamente, desde que satisfaam
a regra da mo direita;
Para estabelecer o sistema de coordenadas do efetuador, a origem
do sistema pode ser escolhida em qualquer ponto conveniente do
efetuador. A orientao dos eixos deve ser tal que xn seja
perpendicular a zn1;
Se os eixos das duas articulaes de um ligamento so paralelos, a
normal comum entre eles no nica. Neste caso, a direo de xi1 deve
ser perpendicular a ambos os eixos e a origem Oi arbitrria;
Se os eixos das duas articulaes de um ligamento se interceptam,
ou seja, se zi1 intercepta zi, a origem Oi deve ser localizada na
interseo dos dois eixos e xi deve ser perpendicular a ambos os
eixos.
Posio e Orientao do Efetuador
Com a notao de Denavit-Hartenberg definida, pode-se obter a
posio e orientao do efetuador em relao ao sistema da base (sistema
O0-x0y0z0) em funo dos deslocamentos de todas as articulaes. O
deslocamento de cada articulao dada por di ou i, dependendo do tipo
de articulao. Para facilitar a nomenclatura, a posio das articulaes
ser denotada por qi, definido como:
qi = i , se a articulao i for de revoluo; e qi = di, se a
articulao i for prismtica.
Dessa forma, a posio e orientao do ligamento i relativo ao
ligamento i1 descrita em funo de qi, atravs da matriz homognea )(Ai
1i iq .
Como visto, um manipulador consiste de n + 1 ligamentos, com a
base sendo o ligamento 0 e o efetuador o ligamento n. Portanto, do
efetuador base existem n transformaes homogneas consecutivas,
assim, a posio e orientao do efetuador dada por:
)()...A()A(AA n 1n
21
10
n0 nqqq = 21 , (5-3)
onde, A 0
n a matriz homognea que representa a posio e orientao do
efetuador em relao ao sistema da base, em funo das posies de todas
as articulaes. Como A 0
n uma matriz homognea ela tem a seguinte forma:
AR x
0 10n 0
n0n
(q ,...,q )(q ,...,q ) (q ,...,q )
nn n
11 1=
. (5-4)
-
Anlise de Robs (E. L. L. Cabral) 6
R0
n(q ,...,q )n1 a matriz de rotao que representa a orientao do
efetuador em relao ao sistema da base. Desta matriz de rotao,
pode-se obter, se desejado, uma descrio da orientao do efetuador em
termos de ngulos de Euler, "roll-pitch-yaw", ou ainda, parmetros de
Euler-Rodrigues, como visto no captulo 4. O vetor x 0
n(q ,...,q )n1 fornece a posio do efetuador em relao ao sistema
da base.
Dessa forma pode-se definir o seguinte algoritmo para realizar a
cinemtica direta da posio: Passo 1: Localizar os eixos das
articulaes, ou seja, os eixos z0, z1, at zn1, de forma que o
eixo da articulao i seja o eixo zi1. Passo 2: Estabelecer o
sistema de coordenadas da base. A origem deste sistema pode ser
escolhida em qualquer lugar do eixo z0. Os eixos x0 e y0 podem
ser escolhidos arbitrariamente, desde que satisfaam a regra da mo
direita.
Repetir os passos 3 a 5 para i = 1,...,n1. Passo 3: Localizar a
origem do sistema i, ponto Oi, onde a normal comum entre os eixos
zi e
zi1 intercepta o eixo zi. Se o eixo zi intercepta o eixo zi1,
localizar o ponto Oi na interseo. Se os eixos zi e zi1 so
paralelos, localizar o ponto Oi na articulao i.
Passo 4: Estabelecer o eixo xi ao longo da normal comum entre os
eixos zi e zi1, a partir do
ponto Oi. O sentido do eixo xi na direo do eixo zi1 para o eixo
zi. Se os eixos zi e zi1 se cruzam, ento o eixo xi normal a ambos
com qualquer direo.
Passo 5: Tendo os eixos zi e xi, estabelecer o eixo yi segundo a
regra da mo direita. Passo 6: Estabelecer o sistema de coordenadas
do efetuador, sistema On-xnynzn. A origem
deste sistema escolhida de forma arbitrria, porm, de maneira
geral escolhida como sendo o centro da garra ou algum outro ponto
de interesse do efetuador. Os eixos deste sistema so definidos de
forma arbitrria, desde que o eixo xn seja perpendicular ao eixo
zn1. Normalmente tem-se, o eixo zn na direo de ataque, o eixo xn na
direo normal e o eixo yn na direo de escorregamento, como mostra a
Figura 5-4.
Passo 7: Criar uma tabela com os parmetros de Denavit-Hartenberg
referentes a cada um dos
ligamentos ou articulaes. Passo 8: Montar as matrizes de
transformao homognea, )(Ai 1i iq , a partir dos parmetros
de Denavit-Hartenberg e da eq. (5-2). Passo 9: Obter a matriz de
transformao homognea A 0
n(q ,...,q )i n , a partir de eq. (5-3), que relaciona a posio e
orientao do efetuador em relao ao sistema da base.
-
Cinemtica da Posio de Robs Manipuladores 7
xn (direo normal)
zn (direo de ataque)
yn (direo de escorregamento)
Articulao n
Efetuador
zn1
On
n
Figura 5-4: Sistema de coordenadas do efetuador.
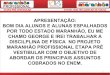
Exemplo 5.1: Rob plano de duas articulaes de revoluo (2R).
A Figura 5-5 apresenta um esquema de um rob plano de duas
articulaes de revoluo, com os sistemas de coordenadas posicionados
nas articulaes e no efetuador.
O0x0
y0
1O1
x1
y1
2
O2
x2
y2
a1 a2
Figura 5-5: Esquema de um rob plano com duas articulaes de
revoluo.
Os parmetros de Denavit-Hartenberg para este rob so definidos na
Tabela 5-1.
Tabela 5-1: Parmetros de Denavit-Hartenberg do rob plano com
dois graus de liberdade de revoluo.
Ligamento ai i di i
1 a1 0 0 1 2 a2 0 0 2
-
Anlise de Robs (E. L. L. Cabral) 8
Com estes parmetros de Denavit-Hartenberg e a eq. (5-2) pode-se
definir as matrizes de transformao homognea do sistema de
coordenadas da base para o sistema 1 e do sistema 1 para o sistema
2, fixo no efetuador, como abaixo.
A 01 =
C S a CS C a S
1 1 1 1
1 1 1 1
00
0 0 1 00 0 0 1
, e A12 =
C S a CS C a S
2 2 2 2
2 2 2 2
00
0 0 1 00 0 0 1
,
onde os smbolos S1, C1 significam respectivamente o seno e o
coseno de 1 e S2, C2 significam respectivamente o seno e o coseno
de 2. A multiplicao destas duas matrizes resulta na matriz de
transformao homognea da base para o efetuador, como se segue:
A A A02
01
12= =
++
C S a C a CS C a S a S
12 12 1 1 2 12
12 12 1 1 2 12
00
0 0 1 00 0 0 1
,
onde S12 e C12 representam respectivamente o seno e o coseno de
1 + 2. Nota-se que os dois primeiros elementos da quarta coluna so
as componentes x e y do ponto O2, ou seja, as coordenadas do
efetuador descritos em relao o sistema da base (O0-x0y0z0).
Observa-se, tambm, que a orientao do efetuador dada por uma rotao
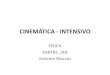
em torno do eixo z0 de um ngulo 1 + 2. Exemplo 5.2: Rob de
Stanford. A Figura 5-6 apresenta o rob de Stanford de 6 graus de
liberdade, sendo 5 articulaes de revoluo e uma prismtica.
A Figura 5-7 apresenta um esquema deste rob com as suas
articulaes e com os sistemas de coordenadas posicionados nos
ligamentos. Os parmetros de Denavit-Hartenberg correspondentes aos
sistemas de coordenadas definidos na Figura 5-7 so apresentados na
Tabela 5-2. Note que na configurao instantnea da Figura 5-7, o
manipulador apresenta os sistemas de coordenadas 3 e 5 como sendo
coincidentes e o eixo x4 tambm coincidente com x3. Contudo,
qualquer alterao nas posies das articulaes 4 e 5 (ngulos 4 e 5) far
com que a coincidncia destes eixos e destes sistemas seja
eliminada.
Tabela 5-2: Parmetros de Denavit-Hartenberg do rob de
Stanford.
Ligamento ai i di i 1 0 -90 l1 1* 2 0 90 l2 2* 3 0 0 d3* 0 4 0
-90 0 4* 5 0 90 0 5* 6 0 0 l6 6*
-
Cinemtica da Posio de Robs Manipuladores 9
Nota-se que os parmetros marcados com o asteriscos (*)
representam o parmetro varivel da articulao.
Figura 5-6: Rob de Stanford.
As matrizes homogneas podem ser calculadas a partir da eq. (5-2)
e dos parmetros de Denavit-Hartenberg da Tabela 5-2, resultando no
seguinte:
A 01 =
C SS C
l
1 1
1 1
1
0 00 0
0 1 00 0 0 1
; A12 =
C SS C
l
2 2
2 2
2
0 00 0
0 1 00 0 0 1
;
A 23 =
1 0 0 00 1 0 00 0 10 0 0 1
3d; A 3
4 =
C SS C
4 4
4 4
0 00 0
0 1 0 00 0 0 1
;
A 45 =
C SS C
5 5
5 5
0 00 0
0 1 0 00 0 0 1
; A 56 =
C SS C
l
6 6
6 6
6
0 00 0
0 0 10 0 0 1
.
-
Anlise de Robs (E. L. L. Cabral) 10
12
z0
y0
x0
l1
x1
z1
l2
x2
z2
O0
O1 O2
d3
45
z4
z6
z3z5
x6 6
O6
l6
O3x3x4x5
Figura 5-7: Esquema do rob de Stanford com os sistemas de
coordenadas das articulaes.
A posio e orientao do efetuador obtida a partir das matrizes
homogneas acima e da eq. (5-3), resultando no seguinte:
A A A A A A A06
01
12
23
34
45
56= =
r r r xr r r yr r r z
o
1 1 1 2 1 3 06
2 1 2 2 2 36
3 1 3 2 3 3 06
0 0 0 1
, , ,
, , ,
, , ,
,
onde os elementos da matriz A 0
6 acima, so dados pelas expresses seguintes:
[ ][ ]
r C C C C C S S S S C S S C C C S
r S C C C C S S S S C C S C C C S1 1 1 2 4 5 6 4 6 2 5 6 1 4 5 6
4 6
2 1 1 2 4 5 6 4 6 2 5 6 1 4 5 6 4 6
,
,
( ) ( );
( ) ( );
= +
= + +
-
Cinemtica da Posio de Robs Manipuladores 11
[ ][ ]
r S C C C S S C
r C C C C S S C S S S S S C S C C
r S C C C S S C S S S C S C S C Cr S C C S S C C
3 1 2 4 5 6 4 6 2
1 2 1 2 4 5 6 4 6 2 5 6 1 4 5 6 4 6
2 2 1 2 4 5 6 4 6 2 5 6 1 4 5 6 4 6
3 2 2 4 5 6 4 6 2
,
,
,
,
( )
( ) ( );
( ) ( );( )
=
= + + +
= + + += + +
S C ;
S S ;
5 6
5 6
r C C C S S C Sr S C C S S C Cr S C S C C
x C S d S l l C C C S C S C S S Sy S S d C l l S C C S S S C
C
1 3 1 2 4 5 2 5 1
2 3 1 2 4 5 2 5 1
3 3 2 4 5 2 5
06
1 2 3 1 2 6 1 2 4 5 1 2 5 1 4 5
06
1 2 3 1 2 6 1 2 4 5 1 2 5 1
,
,
,
( )( )
( );(
= + = + += +
= + +
= + + +
S S ;S S ;
;
4 5
4 5
S Sz l C d l C C S C So
4 56
1 2 3 6 2 5 2 4 5
);( ).= + +
Observa-se que os elementos ri,j formam a matriz de rotao da
transformao do sistema da base para o sistema do efetuador, ou
seja, a orientao do efetuador, e os elementos, x y z0
606
06, , e representam a posio do efetuador.
3.2 Velocidade do Efetuador
Pode-se definir o vetor q, como sendo um vetor coluna, que contm
as posies de todas as articulaes, da seguinte maneira, q = (q1,
q2,..., qn)t. Nota-se que o vetor q tem dimenso nx1, onde n o nmero
de articulaes. O objetivo encontrar o vetor velocidade linear, v
qn( ) , e o vetor velocidade angular do efetuador, w qn( ) ,
descritos em relao ao sistema de coordenadas da base, em funo das
velocidades das articulaes. Velocidade Linear do Efetuador
Como visto, x q0n( ) o vetor de posio do efetuador em relao ao
sistema da base,
sendo funo das posies de todas as articulaes. Portanto, para
obter a velocidade linear do efetuador, basta derivar este vetor em
relao ao tempo, ou seja:
vx
n0n
= =
ddt
dxdt
dydt
dzdt
n
n
n
0
0
0
, (5-5)
onde x y zn o
non
0 , , e so as componentes x, y e z do vetor posio do efetuador.
Como o vetor x 0
n funo da posio de todas as articulaes, as derivadas das suas
componentes em relao ao tempo so obtidas pela regra da cadeia,
sendo dadas por:
v xxq
qxq
qxq
qn xn
n n n
nn, & & & ... &= = + + +0
0
11
0
22
0
; (5-6)
-
Anlise de Robs (E. L. L. Cabral) 12
v yyq
qyq
qyq
qn yn
n n n
nn, & & & ... &= = + + +0
0
11
0
22
0
; (5-7)
v zzq
qzq
qzq
qn zn
n n n
nn, & & & ... &= = + + +0
0
11
0
22
0
; (5-8)
onde o ponto sobre a varivel denota derivada em relao ao
tempo.
Definindo a matriz jacobiano da velocidade linear, Jv(q), de
dimenso 3xn, como sendo:
J qV ( )
xq
xq
yq
yq
zq
zq
n n
nn n
nn n
n
=
0
1
0
0
1
0
0
1
0
...
...
...
, (5-9)
as eq. (5-6), (5-7) e (5-8) podem ser escritas de forma
matricial, da seguinte forma,
v J q qn V= ( )& . (5-10)
Esta expresso fornece a velocidade linear do efetuador, descrita
em relao ao sistema de coordenadas da base, em funo das velocidades
e das posies das articulaes. Note que, a matriz Jv(q), , em geral,
funo das posies de todas as articulaes.
Existe outra forma de se obter a velocidade linear do efetuador
sem a necessidade de efetuar derivadas. A eq. (5-10) pode ser
escrita da seguinte maneira:
v J J Jn V1 V2 Vn= + + +& & ... &q q qn1 2 ,
(5-11)
onde Jvi a coluna i da matriz Jv, sendo um vetor coluna de
dimenso 3x1, e o produto Jviqi representa a contribuio da articulao
i na velocidade do efetuador, com todas as outras articulaes
paradas.
Se a articulao i for prismtica, ela produz no efetuador uma
velocidade linear na mesma direo que seu eixo, eixo zi1, com
magnitude igual a &di , ou seja,
J zVi i 1& &q di i= , (5-12)
onde, zi1 o versor do eixo zi1 descrito no sistema de
coordenadas da base. Se a articulao i for de revoluo, ela produz no
efetuador uma velocidade linear igual a;
J z rVi i 1 i 1,n& ( &)qi = , (5-13)
onde & i a velocidade angular da articulao i, o smbolo
denota produto vetorial e ri1,n o vetor que une a origem do sistema
de coordenadas da articulao i, ponto Oi1, origem do
-
Cinemtica da Posio de Robs Manipuladores 13
sistema de coordenadas do efetuador, ponto On, descrito em relao
ao sistema de coordenadas da base.
Observando as eq. (5-12) e (5-13) pode-se concluir que a coluna
i da matriz Jv dada por:
=
revoluco. defor oarticulac a se ,e ,prismaticafor oarticulac a
se ,
ii
in1,i1i
1iv rz
zJ (5-14)
Velocidade Angular do Efetuador
A velocidade angular do ligamento i ou, do sistema de
coordenadas i, relativa ao sistema de coordenadas i1, expressa no
sistema de coordenadas i1, wi
(i1) , dada pela seguinte expresso:
wk
i(i ) iq i
i =
1
0&
,, se a articulacao for de revolucao;
se a articulacao for de translacao; (5-15)
onde k o eixo da articulao i visto pelo sistema de coordenadas
i1, ou seja, k = (0, 0, 1)t. Observa-se que wi
( )i1 a velocidade angular da articulao i vista pelo sistema de
coordenadas fixo na prpria articulao (sistema i1).
Para exprimir a velocidade angular wi( )i1 em relao ao sistema
de coordenadas da
base, basta descrever o versor k em relao ao sistema da base.
Para isso realiza-se a transformao de rotao que leva o sistema da
base ao sistema i1, ou seja,
R w R k z0
i 1i 0
i 1i 1
= =
( ) & &i i iq q1 . (5-16)
Note que o produto R k0
i 1 representa o versor do eixo da articulao i (eixo zi1)
descrito em relao ao sistema de coordenadas da base, que denominado
por zi1.
A velocidade angular do efetuador descrita em relao ao sistema
da base, a soma das velocidades angulares de todos os ligamentos,
expressas todas em relao ao sistema de coordenadas da base. Assim,
a velocidade angular do efetuador, descrita em relao base, dada
por:
w w R w ... R wn 1 0
12 0
n 1n= + + +
10
21 1( ) ( )
n(n ) . (5-17)
Obviamente, se a articulao i for prismtica, ela no contribui
para a velocidade angular do efetuador. Para considerar este
efeito, na equao acima, foi introduzido o parmetro i, que
representa o seguinte:
=o. translacdefor oarticulac a se ,0
revoluco; defor oarticulac a se ,1ii
i
-
Anlise de Robs (E. L. L. Cabral) 14
A velocidade do efetuador escrita em funo das velocidades das
articulaes, pode ser obtida pela substituio da eq. (5-16) na
expresso acima, obtendo-se o seguinte resultado:
w z z ... zn 0 1 n 1= + + + i n nq q q& & &1 2 2 .
(5-18)
Esta equao pode ser escrita de forma matricial, da seguinte
maneira:
w J q qn w= ( )& , (5-19)
onde Jw uma matriz de dimenso 3xn, cujas colunas so os eixos das
articulaes descritas no sistema da base multiplicados por um
indicador que fornece o tipo da articulao, ou seja,
[ ]J z z zw 0 1 n 1= 1 2, , nK, . (5-20)
Observa-se que cada coluna de Jw representa a contribuio da
respectiva articulao na velocidade angular do efetuador. 5.3 Matriz
Jacobiano de um Manipulador
Pode-se unir as relaes das velocidades linear e angular do
efetuador em funo das velocidades das articulaes em uma mesma
equao, resultando no seguinte:
vw
J qJ q q
n
n
V
W
=
( )( )
& , (5-21)
ou, definindo o vetor V v ,wn n n= ( )
t , tem-se:
V J q qn = ( )& . (5-22) A matriz J(q) definida como sendo a
Matriz Jacobiano do efetuador. Esta matriz relaciona as velocidades
linear e angular do efetuador, expressas no sistema de coordenadas
da base, com as velocidades das articulaes, para uma dada
configurao do manipulador.
Em resumo, a coluna i da Matriz Jacobiano de um manipulador dada
pela seguinte expresso:
Jz rzi
i 1 i 1,n
i 1=
, se a articulao i for de revoluo; e (5-23)
Jz
ii 1=
0, se a articulao i for de translao. (5-24)
A dimenso da Matriz Jacobiano mxn, onde m o nmero de linhas, que
igual ao
nmero de graus de liberdade do campo de trabalho do rob e n o
nmero de colunas, que igual ao nmero de articulaes do rob. Para um
rob que trabalha no espao, m ser no mximo igual a 6 e para um rob
que trabalho no plano, m ser no mximo igual a 3. Os 6 graus de
liberdade do espao correspondem aos trs graus de liberdade de
posicionamento e
-
Cinemtica da Posio de Robs Manipuladores 15
aos trs de orientao de um corpo rgido. Para o plano tem-se dois
graus de liberdade de posicionamento e somente um grau de liberdade
de orientao, pois, no plano somente define-se velocidade ou posio
angular em torno do eixo perpendicular ao plano. Assim, observa-se
que o nmero de linhas da Matriz Jacobiano no fixa, devendo ser
definida pelo interesse do problema e principalmente, em funo do
que o rob capaz de realizar. Dessa forma, por exemplo, pode ser
definida uma Matriz Jacobiano de dimenso 3x3 para um rob que
trabalha no espao, se somente interessar os trs graus de liberdade
de posicionamento.
Observa-se que na expresso (5-21), no lugar da velocidade
angular do efetuador, pode-se colocar a variao temporal dos
parmetros que descrevem a orientao do efetuador. Estes parmetros
podem ser, por exemplo, ngulos de Euler, roll-pitch-yaw, parmetros
de Euler-Rodrigues e outros. A variao temporal destes parmetros
obtida pela derivao no tempo das expresses que os relacionam com as
posies das articulaes, como ser visto na seo 5.6.
Exemplo 5.3: Velocidade linear e angular do efetuador do rob de
duas articulaes de revoluo no plano.
A Figura 5-5 apresenta um esquema do rob de duas articulaes de
revoluo no plano. A eq. (5-23) aplicada a este rob resulta no
seguinte:
Jz z
z z0 1
0 1
=
O O O O0 2 1 2 ,
onde;
O Oa Ca S0 1
1 1
1 1
0=
; O Oa C a Ca S a S0 2
1 1 2 12
1 1 2 12
0=
++
;
O O O O O Oa Ca S1 2 0 2 0 1
2 12
2 12
0= =
; z z0 1= =
001
.
Substituindo as expresses dos vetores na expresso da Matriz
Jacobiano e
efetuando as operaes resulta em:
J =
+
a S a S a Sa C a C a C
1 1 2 12 2 12
1 1 2 12 2 12
0 00 00 01 1
.
Aplicando a eq. (5-21), obtm-se as velocidades linear e angular
do efetuador, como se segue:
-
Anlise de Robs (E. L. L. Cabral) 16
v2 =
+ +
( ) & &
( ) & &a S a S a S
a C a C a C1 1 2 12 1 2 12 2
1 1 2 12 1 2 12 2
0
; w 0
2
1 2
00=+
& &
Observa-se que a velocidade linear do efetuador poderia tambm
ser obtida pela
derivao no tempo do vetor posio do efetuador ( O O0 2 ),
conforme as eq. (5-6), (5-7) e (5-8), resultando exatamente na
mesma expresso acima. Exemplo 5.4: Velocidade linear e angular do
centro do segundo ligamento de um rob de trs articulaes de revoluo
no plano.
O0x0
y0
1O1
x1
y1
2
O2
x2
y23
O3
x3
y3
Oc2
lc2a1
Figura 5-8: Esquema de um rob plano com trs articulaes de
revoluo.
A Figura 5-8 apresenta um esquema do rob de 3 articulaes no
plano. Da mesma forma que realizado no exemplo anterior, a eq.
(5-23) pode ser aplicada para se obter a velocidade angular e
linear de qualquer ponto dos ligamentos de um rob. A nica diferena
que os vetores posio utilizados relaciona a posio do ponto desejado
ao centro de cada um dos sistemas de coordenadas, como se
segue:
Jz z
z z0 1
0 1
=
O O O Oc c0 2 1 2 00
,
onde;
O Oa Ca S0 1
1 1
1 1
0=
; O Oa C l Ca S l Sc
c
c0 2
1 1 2 12
1 1 2 12
0=
++
;
-
Cinemtica da Posio de Robs Manipuladores 17
O O O O O Ol Cl Sc cc
c1 2 0 2 0 1
2 12
2 12
0= =
; z z0 1= =
001
.
Observa-se que a terceira coluna da Matriz Jacobiano neste caso
igual a zero
porque a velocidade linear e angular do segundo ligamento no
afetada pelo movimento da terceira articulao.
Substituindo as expresses dos vetores de posio e dos eixos das
articulaes na expresso da Matriz Jacobiano resulta em:
J =
+
a S l S l Sa C l C l C
c c
c c
1 1 2 12 2 12
1 1 2 12 2 12
0 00 00 01 1
000000
.
As velocidades linear e angular do centro do segundo ligamento
so obtidas pela
multiplicao da Matriz Jacobiano correspondente pelo vetor
velocidade das articulaes, resultando no seguinte:
vc2 =
+ +
( ) & &
( ) & &a S l S l S
a C l C l Cc c
c c
1 1 2 12 1 2 12 2
1 1 2 12 1 2 12 2
0
; w c2 =
+
00
1 2& &
5.4 Velocidade Angular
Um dos conceitos mais complexos na rea de cinemtica de corpos
rgidos o conceito de velocidade angular. Este fato reconhecido por
diversos atores, podendo-se destacar algumas citaes, como as
seguintes:
T.R. kane (1978): A velocidade angular parece ser um dos
conceitos mais problemticos;
H. Cheng (1989): Muitos livros no fornecem uma definio clara e
til para rotaes genricas espaciais e no as distingue de rotaes em
torno de um eixo fixo.
A definio encontrada para a velocidade angular de um corpo rgido
na maioria dos
livros, a seguinte:
wtt
=
0lim
, (5-25)
-
Anlise de Robs (E. L. L. Cabral) 18
onde, w a velocidade angular, o ngulo medido em torno do eixo
instantneo de rotao e t um intervalo de tempo.
No caso de robs manipuladores, o eixo instantneo de rotao
normalmente no conhecido. Nestes casos, a expresso acima no muito
til. Nesta seo ser obtida uma forma mais til para descrever a
velocidade angular de um corpo com uma rotao genrica no espao.
A Figura 5-9 mostra um corpo rgido com movimento de rotao em
relao ao sistema de coordenadas fixo O0-x0y0z0. O sistema de
coordenadas O1-x1y1z1 est fixo ao corpo e portanto est com
movimento de rotao em relao ao sistema O0-x0y0z0. Seja o ponto P,
fixo no corpo, cujas coordenadas em relao ao sistema O1-x1y1z1 so
dadas pelo vetor r1. Quando o corpo rgido sofre uma rotao, a relao
entre as coordenadas do vetor r1 no sistema O1-x1y1z1 e no sistema
O0-x0y0z0 dada pela seguinte expresso:
r Rr0 1= , (5-26)
onde r0 o vetor com as coordenadas do ponto P no sistema
O0-x0y0z0 e R a matriz de rotao que descreve a transformao do
sistema O0-x0y0z0 para o sistema O1-x1y1z1 fixo ao corpo.
x1
y1
z1
O1
x0
y0
z0
O0
P
r0
r1
Corpo Rgido
w
n
Figura 5-9: Esquema de um corpo rgido com movimento de
rotao.
Derivando-se a expresso (5-26) em relao ao tempo, obtm-se a
derivada do vetor r0, que igual velocidade linear do ponto P em
relao ao sistema O0-x0y0z0, como sendo,
v Rr1= & . (5-27)
onde v a velocidade linear do ponto P. Observa-se que a medida
que o vetor r1 constante, pois a posio do ponto P fixo no corpo no
muda em relao ao sistema de coordenadas fixo no corpo, a sua
derivada igual a zero.
-
Cinemtica da Posio de Robs Manipuladores 19
Por outro lado, tem-se que a velocidade linear do ponto P, cuja
posio definida pelo
vetor r0 no sistema O0-x0y0z0, fixo em um corpo rgido girando
com velocidade angular w em relao ao sistema O0-x0y0z0, dada pela
seguinte expresso:
v w r0= , (5-28)
onde o smbolo denota produto vetorial. Esta expresso pode ser
escrita de outra forma mais conveniente, ou seja,
v r0= , (5-29)
onde uma matriz de dimenso 3x3, dada por,
=
00
0
w ww ww w
z y
z x
y x
. (5-30)
Observa-se que as expresses (5-28) e (5-29) fornecem o mesmo
resultado, sendo que a matriz representa simplesmente uma forma
mais conveniente de escrever o vetor velocidade angular de um corpo
rgido. Substituindo a expresso (5-26) na eq. (5-30), resulta no
seguinte:
v Rr1= . (5-31)
Igualando-se as expresses (5-27) e (5-31) obtm-se uma relao
entre a derivada da
matriz de rotao e a velocidade angular, ou seja:
&R R= , (5-32) ou, invertendo-se,
= &RRt . (5-33)
Estas duas expresses so muito importantes, pois elas relacionam
a velocidade angular de um corpo com a matriz de rotao e com a
derivada da matriz de rotao. Observa-se que a matriz de rotao R
representa a orientao do corpo no sistema O0-x0y0z0 e a sua
derivada representa a variao da orientao do corpo. 5.5 Variao da
Orientao do Efetuador
Observa-se que na expresso (5-21), a velocidade linear do
efetuador pode ser obtida simplesmente pela derivao no tempo da
posio do efetuador. Assim, se for conhecida a posio inicial do
efetuador e a sua velocidade linear em funo do tempo, a posio do
efetuador em qualquer instante pode ser calculada pela integrao da
sua velocidade no tempo. Contudo, o mesmo raciocnio no vlido para a
orientao, pois, no caso de robs manipuladores, o eixo instantneo de
rotao normalmente no conhecido, alm de variar a todo instante.
Dessa forma, a integrao da velocidade angular do efetuador no
fornece a sua
-
Anlise de Robs (E. L. L. Cabral) 20
posio angular ou, sua orientao. Nestes casos, a parcela da eq.
(5-21) que fornece a velocidade angular do efetuador em funo das
velocidades das articulaes s vezes no muito til. Nesta seo ser
obtida uma expresso para descrever a variao da orientao do
efetuador em funo das velocidades das articulaes.
Como visto na seo 5.1, a orientao do efetuador funo das posies
das articulaes, dessa forma, pode-se definir o seguinte sistema de
equaes no lineares:
y f q0
n = ( ) , (5-34) onde o vetor y0
n , de dimenso mx1, contm a orientao do efetuador e f um vetor
de funes de dimenso mx1. A orientao do efetuador pode ser descrita
por diversos parmetros, como por exemplo, os elementos da matriz de
rotao, os ngulos de Euler, os parmetros de Euler-Rodrigues e
outros.
A partir da teoria de clculo diferencial, dado o sistema de
equaes no lineares, da forma da eq. (5-34), a derivada em relao ao
tempo da orientao do efetuador, ou seja, do vetor y0
n dada por:
& &y J q q0n
o= ( ) , (5-35) onde Jo uma matriz jacobiano de dimenso mxn.
Podem existir vrias matrizes Jo, dependendo dos parmetros
utilizados para descrever a orientao do efetuador contidos no vetor
y0
n . Assim, se for utilizada a matriz de rotao, como obtido na
eq. (5-4), repetida abaixo:
AR x
0 10n 0
n0n
(q q )(q q ) (q q )
nn n
11 1, ... ,, ... , , ... ,
=
, (5-4)
tem-se, para o vetor y 0
n , o seguinte:
y0n = ( , , , ), , ,r r r1 1 1 2 3 3K
t (5-36) e para a matriz Jo,
Jo =
rq
rq
rq
rq
rq
rq
rq
rq
rq
n
n
1 1
1
1 1
2
1 1
1 2
1
1 2
1
1 2
1
3 3
1
3 3
2
3 3
, , ,
, , ,
, , ,
K
L
M M M M
K
, (5-37)
onde ri,j o elemento da i-sima linha e j-sima coluna da matriz
R0
n . Observa-se que neste caso o vetor y0
n ter dimenso 9x1.
-
Cinemtica da Posio de Robs Manipuladores 21
Uma forma mais conveniente de descrever a orientao do efetuador
so os parmetros de Euler-Rodrigues, que consiste no conjunto de 4
elementos, p, q, r, s, como visto na seo 2.8. A expresso (2-51),
repetida abaixo, apresenta os parmetros de Euler-Rodrigues em funo
dos elementos da matriz de rotao:
p sinal r r r r r
q sinal r r r r r
r sinal r r r r r
s r r r
= +
= + +
= + +
= + + +
12
1
12
1
12
1
12
1
3 2 2 3 1 1 2 2 3 3
1 3 3 1 1 1 2 2 3 3
2 1 1 2 1 1 2 2 3 3
1 1 2 2 3 3
( )
( )
( )
,
, , , , ,
, , , , ,
, , , , ,
, , ,
;
;
; (5-38)
onde, sem perda de generalidade, o parmetro foi assumido como
sendo +1. Dessa forma, os parmetros de Euler-Rodrigues so funo das
posies das articulaes, atravs dos elementos ri,j da matriz de
rotao. Assim, neste caso, o vetor de orientao do efetuador, y0
n , ser definido como:
y 0
n = ( , , , )p q r s t , (5-39) cuja derivada em relao ao tempo
ser dada por:
&
&
&
&
&
pqrs
( )
= J q qo (5-40)
onde a matriz Jo, ser definida como;
Jo =
pq
pq
pq
qq
qq
qq
rq
rq
rq
sq
sq
sq
n
n
n
n
1 2
1 2
1 2
1 2
K
K
K
K
, (5-41)
A derivada dos parmetros de Euler-Rodrigues em relao posio da
articulao i,
qi, obtida derivando-se a eq. (5-38) em relao qi, resultando nas
seguintes expresses:
-
Anlise de Robs (E. L. L. Cabral) 22
.81
;81
;81
;81
3,32,21,1
3,32,21,1
3,32,21,1
3,32,21,1
++=
+=
+=
=
iiii
iiii
iiii
iiii
qr
qr
qr
sqs
qr
qr
qr
rqr
qr
qr
qr
qqq
qr
qr
qr
pqp
(5-42)
Observando-se estas expresses, nota-se que sempre que p, q, r,
ou s forem iguais a zero, o denominador das mesmas se anula. Dessa
forma, o clculo da variao temporal dos parmetros de Euler-Rodrigues
utilizando a eq. (5-35) e a matriz jacobiano cujos termos so
definidos pela eq. (5-42), apresentar problemas numricos.
Uma forma de se calcular a variao temporal dos parmetros de
Euler-Rodrigues sem problemas numricos utilizando a expresso
(5-32). A eq. (4-50) do item 2.8, repetida abaixo, apresenta uma
matriz de rotao genrica escrita em funo dos parmetros de
Euler-Rodrigues,
Rn,
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
=+ +
+ + + +
2 1 2 22 2 1 22 2 2 1
2 2
2 2
2 2
p s pq rs pr qspq rs q s qr pspr qs qr ps r s
. (2-50)
Derivando-se a matriz acima em relao ao tempo e igualando ao
produto matricial R da eq. (5-32), obtm-se o seguinte para os
termos da diagonal principal:
4 2 2(pp ss) w (pq rs) w (pr qs)z y& &+ = + + ;
(5-43)
4 2 2(qq ss) w (pq rs) w (qr ps)z x& &+ = + ; (5-44)
4 2 2(rr ss) w (pr qs) w (qr ps)y x& &+ = + + .
(5-45)
Sabe-se que o quatrnion formado pelos parmetros de
Euler-Rodrigues tem mdulo unitrio, ou seja,
p q r s2 2 2 2 1+ + + = , (5-46)
que derivando em relao ao tempo, resulta na seguinte relao:
pp qq rr ss& & & &+ + + = 0 . (5-47)
Somando-se as expresses (5-43), (5-44), (5-45) e substituindo o
resultado na eq. (5-
47) resulta em uma expresso para a variao temporal do parmetro
s, da seguinte forma:
&s ( w p w q w r)x y z= 12
. (5-48)
-
Cinemtica da Posio de Robs Manipuladores 23
Substituindo a eq. (5-48) na eq. (5-43), resulta em uma expresso
para a variao temporal do parmetro p, como a seguir,
&p (w s w r w q)x y z= + 12
. (5-49)
Da mesma forma, substituindo-se a eq. (5-48) na eq. (5-44),
resulta em:
&q ( w r w s w p)x y z= + +12
. (5-50)
Finalmente, substituindo a eq. (5-48) na eq. (5-45), obtm-se
para a variao temporal de r, o seguinte:
&r (w q w p w s)x y z= +12
. (5-51)
As expresses (5-49), (5-50) e (5-51) podem ser escritas de forma
matricial da
seguinte maneira:
&
&
&
&
pqrs
s r qr s p
q p sp q r
www
x
y
z
=
12
. (5-52)
Substituindo na expresso acima a eq. (5-19), que fornece a
velocidade angular do
efetuador em funo das velocidades das articulaes, tem-se:
&
&
&
&
&
pqrs
s r qr s p
q p sp q r
=
12
J qw . (5-53)
Comparando as eq. (5-40) e (5-53) chega-se concluso que a matriz
Jo pode ser
escrita como um produto entre a matriz jacobiano da velocidade
angular e uma matriz M, como se segue:
J MJo w= , (5-54)
onde a matriz M definida por:
M =
12
s r qr s p
q p sp q r
. (5-55)
-
Anlise de Robs (E. L. L. Cabral) 24
Percebe-se que neste caso, a matriz Jo no apresentam problemas
numricos, ou seja, no apresenta a possibilidade de diviso por zero,
como ocorria com as relaes da eq. (5-42).
Exemplo 5.5: Dados os parmetros de Euler-Rodrigues e a sua
variao temporal, obter a velocidade angular.
A eq. (5-52) pode ser escrita em funo da Matriz M, como se
segue:
&
&
&
&
pqrs
www
x
y
z
=
M .
Multiplicando ambos os lados da eq. acima por 2Mt, tem-se:
s r q pr s p qq p s r
pqrs
www
x
y
z
=
&
&
&
&
12
1 0 00 1 00 0 1
,
que aps efetuar a lgebra e escrevendo cada componente do vetor
velocidade angular separadamente, resulta em;
w sp rq qr psx = + 2( & & & &) ;
w rp sq pr qsy = + 2( & & & &) ;
w qp pq sr rsx = + + 2( & & & &) ; ou,
w i j k= + + + + + + 2[( & & & &) ( & &
& &) ( & & & &) ]sp rq qr ps rp sq pr qs qp
pq sr rs ; Exemplo 5.6: Obter a expresso da velocidade angular de
um corpo rgido com rotao em torno de um eixo varivel.
A expresso do vetor velocidade angular obtida no exemplo
anterior pode rearranjada para se obter:
w i j k i j k i j k= + + + + 2[( & &) ( & & ) (
& & ) & & & & & & ]qr rq pr rp pq
qp sp sq sr sp sq sr , que pode ser escrita em termos de produtos
vetoriais e escalares de vetores, como se segue:
-
Cinemtica da Posio de Robs Manipuladores 25
w =
+
2pqr
pqr
spqr
spqr
&
&
&
&
&
&
& ,
onde, significa produto vetorial. A eq. (2-49), repetida abaixo,
fornece as expresses dos parmetros de Euler-Rodrigues;
p n sinq n sinr n sins
x
y
z
====
( / );( / );( / );
cos( / ).
222
2
Lembre que estes parmetros representam uma rotao de um ngulo em
torno de um eixo arbitrrio n. Substituindo as expresses acima na
eq. da velocidade angular resulta em:
w n n n n= + + & ( )( cos ) sin 1 . Esta expresso fornece a
velocidade angular de um corpo rgido em torno do eixo instantneo de
rotao, n. Note que, quando n = 0 (eixo de rotao fixo), a velocidade
angular dada por:
w n= & . Conforme o esperado, ou seja, para um eixo de rotao
fixo, a velocidade angular igual a derivada da posio angular em
torno do eixo.