Embed Size (px)
Citation preview

Paulo Ricardo Martins Pereira de Carvalho
Desenvolvimento de um Controlador para
Acionamento de um Motor Trifásico de Fluxo
Axial
Tese de Mestrado
Ciclo de Estudos Integrados Conducentes ao
Grau de Mestre em Engenharia Eletrónica Industrial e Computadores
Trabalho realizado sob orientação do
Professor Doutor João Luiz Afonso
Dezembro de 2012


DECLARAÇÃO
Paulo Ricardo Martins Pereira de Carvalho
Endereço eletrónico: [email protected] Telemóvel: 968918344
Número do Bilhete de Identidade: 12321374
Título dissertação / tese
Desenvolvimento de um Controlador para
Acionamento de um Motor Trifásico de Fluxo
Axial
Orientador:
Professor Doutor João Luíz Afonso
Ano de Conclusão: 2012
Mestrado Integrado em Engenharia Eletrónica Industrial e Computadores
É AUTORIZADA A REPRODUÇÃO INTEGRAL DESTA TESE/TRABALHO APENAS PARA
EFEITOS DE INVESTIGAÇÃO, MEDIANTE DECLARAÇÃO ESCRITA DO INTERESSADO,
QUE A TAL SE COMPROMETE;
Universidade do Minho, ____/____/______
Assinatura: __________________________________________________________________


Aos meus Pais e namorada


Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial iii Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Agradecimentos
Desejo agradecer ao meu orientador Professor Doutor João Luiz Afonso pela
disponibilidade, cooperação e incentivo, bem como, pelo incutir de responsabilidade e
profissionalismo, durante a realização da Dissertação de Mestrado.
Aos Investigadores do Laboratório de Eletrónica de Potência da Universidade do
Minho, Gabriel Pinto, Hélder Carneiro, Henrique Gonçalves, Vítor Monteiro, Delfim
Pedrosa e Bruno Exposto, e aos colegas alunos presentes no mesmo laboratório, André
Nogueira, Romeu Ribeiro, Rui Moreira, Ângelo, Nuno e Raúl pela ajuda e
disponibilidade, pelas críticas e sugestões dadas ao longo da dissertação. A todos os
mencionados, um grande obrigado!
Ao Professor Jorge Martins e ao Investigador Francisco Brito do Departamento
de Mecânica da Universidade do Minho pela disponibilidade e apoio na compra do
material necessário à realização deste projeto de Mestrado.
Aos meus pais José Manuel e Joaquina, pelo apoio e esforço prestado, durante o
meu percurso académico.
À minha namorada Cristiana, pelo incentivo e apoio incansável, nunca
duvidando das minhas capacidades. Obrigado por tudo!
Por último, a todas as pessoas não mencionadas, que ajudaram diretamente e
indiretamente na elaboração desta dissertação.


Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial v Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Resumo
Com o aumento do aquecimento global, devido aos gases de efeito de estufa, e
com o aumento da pressão exercida pelas instituições governamentais para reduzir esse
efeito, os veículos elétricos apresentam-se como uma solução promissora e alternativa
aos veículos a combustão, visto que são uns dos maiores emissores de dióxido de
carbono para a atmosfera.
Esta Dissertação de Mestrado descreve o desenvolvimento dos sistemas de
eletrónica de potência constituintes de um veículo elétrico.
Numa fase inicial, são descritos os tipos de veículos elétricos (VE) existem no
mercado, bem como as principais tecnologias implementadas nos VE, como por
exemplo, os tipos de motores elétricos utilizados na tração, os principais acumuladores
de energia, bem como os sistemas de controlo necessários para um correto
funcionamento dos VE.
Numa segunda fase, são descritas as tecnologias escolhidas e desenvolvidas para
um VE no âmbito desta Dissertação de Mestrado. É apresentado o motor de fluxo axial
escolhido, bem como as principais topologias existentes deste tipo de motor. São ainda
descritas as simulações computacionais do sistema de controlo implementado. Além
disso são descritos os componentes escolhidos para o conversor de potência e placas
desenvolvidos para o sistema de controlo, que vão desde as placas de comando,
interface e condicionamento de sinal, até aos sensores e microcontrolador escolhidos.
Por fim, são apresentados os resultados experimentais obtidos no ensaio do
motor síncrono com um controlador comercial, no ensaio do controlador desenvolvido
em malha aberta, e no ensaio de um motor de indução com o controlador desenvolvido.
Optou-se por testar o controlador desenvolvido com um motor de indução devido à falta
de tempo e à complexidade do controlo do motor síncrono de fluxo axial.
Este projeto de mestrado foi desenvolvido em parceria com o Departamento de
Engenharia Mecânica da Universidade do Minho, no âmbito da prova Shell Eco-
Marathon.
Palavras-Chave: Veículos Elétricos, Veículos Híbridos, Veículos a Célula de
Combustível, Motores Elétricos, Motores de Fluxo Axial, Controlo de Motores de
Fluxo Axial, Supercondensadores, Baterias.


Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial vii Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Abstract
With the increase of global warming, due to the greenhouse gases, and with
increasing pressure exercised by the governmental institutions to reduce that effect, the
electric vehicles presents as a promise and alternative solution to internal combustion
vehicles, since they are one of the largest emitters of carbon dioxide to the atmosphere.
This Master Thesis describes the development of systems for electronic power
components of an electric vehicle.
Initially, are described the types of electric vehicles (EVs) available in the
market, as well as key technologies implemented in EVs, such as the types of electric
motors used in traction, the main energy accumulators and control systems required for
correct operation of EVs.
In the second phase, are describe the technologies chosen and developed for a
VE under this Master Thesis. Is displayed the chosen axial flow electric motor and the
existing main topologies of this type of motor. Are also described computer simulations
of the implemented control system. Also described are the components chosen for the
power converter and plates, developed for the monitoring system, ranging plates
command, interface and signal conditioning, to the sensors and microcontroller chosen.
Finally, are shown experimental results for testing the synchronous motor with a
commercial driver, the test of the developed driver in open loop, and the test of an
induction motor with the developed driver. We chose to test the controller powered by
an induction motor due to lack of time and complexity of the axial flow synchronous
motor control.
This master project was developed in partnership with the department of
mechanics, University of Minho, in the ambit of prove Shell Eco-Marathon.
Keyword: Electric Vehicle, Hybrid Vehicle, Fuel Cells Vehicle, Electric Motors, Axial
Flux Motors, Control of Axial Flux Motors, Supercapacitors, Batteries.


Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial ix Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Lista de Siglas e Acrónimos
AC Alternating Current
ADC Analog to Digital Converter
AFIR Axial Flux Internal Rotor
AFM Axial Flux Motor
AFPM Axial Flux Permanent Magnet
AMPOP Amplificador Operacional
CA Corrente Alternada
CAN Controller Area Network
CC Corrente Contínua
CPU Central Processing Unit
CSI Current Source Inverter
DC Direct Current
DMA Direct Memory Access
DSC Digital Signal Controller
EDLC Electrochemical Double Layer Capacitor
EFC Electrochemical Flow Capacitor
EOC End of Conversion
FP Fator de Potência
GPIO General-Purpose Input/Output
HRPWM High-Resolution Pulse With Modulator
IGBT Isolated Gate Bipolar Transistor
IPM Intelligent Power Module
JTAG Joint Test Action Group
Li-Ion Iões de Lítio
Li-Po Lítio – Polímero
LiFePO4 Fosfato de Lítio – Ferro
LiCoO2 Óxido de Lítio – Cobalto
LiMnPO4 Fosfato de Lítio – Manganês
MCI Motor de Combustão Interna
ME Motor Elétrico
Ni-Cd Níquel – Cádmio
Ni-MH Níquel – Hidreto Metálico
Pb-Ac Chumbo – Ácido

Lista de Siglas e Acrónimos
x Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
PMSM Permanent Magnet Synchronous Motors
PWM Pulse With Modulator
PLL Phase-Locked Loop
RAM Random Access Memory
RFM Radial Flux Motor
RFPM Radial Flux Permanent Magnet
RMS Root Mean Square
ROM Read Only Memory
SARAM Single-Access RAM
SCI Serial Communications Interface
SOC Start of Conversion
USB Universal Serial Bus
VE Veículos Elétricos
VECC Veículos Elétricos a Células de Combustível
VEH Veículos Elétricos Híbridos
VEP Veículos Elétricos Puros
VSI Voltage Source Inverter

Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial xi Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Índice
Agradecimentos .........................................................................................................................................iii
Resumo ........................................................................................................................................................ v
Abstract ..................................................................................................................................................... vii
Lista de Siglas e Acrónimos ...................................................................................................................... ix
Índice de Figuras .....................................................................................................................................xiii
Índice de Tabelas .................................................................................................................................... xvii
CAPÍTULO 1 Introdução ................................................................................................................ 1
1.1. Identificação do Problema ........................................................................................................... 1 1.2. Enquadramento ............................................................................................................................ 4 1.3. Motivações .................................................................................................................................. 4 1.4. Objetivos ..................................................................................................................................... 5 1.5. Organização da Dissertação ......................................................................................................... 5
CAPÍTULO 2 Tecnologias dos Veículos Elétricos ......................................................................... 7
2.1. Introdução .................................................................................................................................... 7 2.2. Tipos de Veículos Elétricos ......................................................................................................... 7
2.2.1. Veículo Elétrico Puro (VEP) ............................................................................................... 7 2.2.2. Veículo Elétrico Híbrido (VEH) ....................................................................................... 10 2.2.3. Veículo Elétrico a Células de Combustível (VECC) ........................................................ 14
2.3. Motores Elétricos de Fluxo Radial ............................................................................................ 17 2.3.1. Motor de Corrente Contínua (CC) .................................................................................... 18 2.3.2. Motor de Relutância Comutado ........................................................................................ 25 2.3.3. Motor Síncrono ................................................................................................................. 26 2.3.4. Motor Assíncrono ou de Indução ...................................................................................... 30 2.3.5. Conclusões sobre Motores Elétricos ................................................................................. 32
2.4. Elementos Armazenadores de Energia ...................................................................................... 33 2.4.1. Supercondensadores .......................................................................................................... 33 2.4.2. Baterias ............................................................................................................................. 37 2.4.3. Supercondensadores versus Baterias ................................................................................. 49 2.4.4. Conclusões sobre Elementos Armazenadores ................................................................... 50
2.5. Conversores de Potência ............................................................................................................ 50 2.5.1. Inversores Fonte de Tensão ............................................................................................... 51 2.5.2. Técnicas de Controlo PWM .............................................................................................. 53
CAPÍTULO 3 Motores Elétricos de Fluxo Axial ......................................................................... 57
3.1. Introdução .................................................................................................................................. 57 3.2. Motores Elétricos de Fluxo Axial vs. Fluxo Radial ................................................................... 58 3.3. Tipos de Motores de Fluxo Axial .............................................................................................. 58 3.4. Transformadas de Clarke e Park ................................................................................................ 64 3.5. Conclusão .................................................................................................................................. 66

Índice
xii Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
CAPÍTULO 4 Simulação do Controlador para o Motor Elétrico .............................................. 67
4.1. Introdução .................................................................................................................................. 67 4.2. Simulação do Conversor de Potência CC-CA ........................................................................... 68
4.2.1. Simulação do Conversor de Potência CC-CA em Vazio .................................................. 68 4.2.2. Simulação do Conversor de Potência CC-CA com Carga RL .......................................... 69
4.3. Simulação do Algoritmo de Controlo do Motor Síncrono ......................................................... 70 4.3.1. Simulação do Motor Síncrono em Vazio .......................................................................... 71 4.3.2. Simulação do Motor Síncrono em Carga .......................................................................... 72
4.4. Conclusão .................................................................................................................................. 73
CAPÍTULO 5 Implementação do Controlador para o Motor Elétrico ..................................... 75
5.1. Introdução .................................................................................................................................. 75 5.2. Circuito de Potência .................................................................................................................. 77
5.2.1. Motor Elétrico de Fluxo Axial .......................................................................................... 77 5.2.2. Conversor de Potência....................................................................................................... 79
5.3. Circuito de Controlo .................................................................................................................. 83 5.3.1. Placa de Comando ............................................................................................................. 84 5.3.2. Placa de Interface .............................................................................................................. 85 5.3.3. DSC/Microcontrolador ...................................................................................................... 86 5.3.4. Sensor de Posição .............................................................................................................. 92 5.3.5. Placa de Condicionamento de Sinal .................................................................................. 93
CAPÍTULO 6 Resultados Experimentais ..................................................................................... 99
6.1. Introdução .................................................................................................................................. 99 6.2. Ensaio do Motor Síncrono com o Controlador ACD4805 ......................................................... 99
6.2.1. Ensaio do Motor Síncrono em Vazio .............................................................................. 100 6.2.2. Ensaio do Motor Síncrono com Carga ............................................................................ 101
6.3. Ensaio do Controlador Desenvolvido com Cargas Lineares ................................................... 104 6.3.1. Ensaio do Controlador Desenvolvido em Vazio ............................................................. 104 6.3.2. Ensaio do Controlador Desenvolvido com Carga Resistiva ............................................ 105 6.3.3. Ensaio do Controlador Desenvolvido com Carga RL ..................................................... 105
6.4. Ensaio do Controlador Desenvolvido com um Motor de Indução ........................................... 106 6.4.1. Ensaio do Motor de Indução em Vazio ........................................................................... 106
6.5. Conclusão ................................................................................................................................ 108
CAPÍTULO 7 Conclusões e Sugestões de Trabalhos Futuros .................................................. 111
7.1. Conclusões ............................................................................................................................... 111 7.2. Sugestão de Trabalho Futuro ................................................................................................... 112
Referências .............................................................................................................................................. 113

Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial xiii Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Índice de Figuras
Figura 1.1 - Tesla Roadster [1]. .................................................................................................................... 1
Figura 1.2 – Configuração do sistema elétrico e mecânico do BMW ActiveHybrid 7 [3]............................ 2
Figura 1.3 - Carregamento por indução de um carro elétrico [6]. ................................................................ 3
Figura 2.1 - Esquema simplificado do sistema do veículo elétrico puro. ..................................................... 8
Figura 2.2 - Tipo de configurações para veículos totalmente elétricos: (a) VE com embraiagem,
caixa de velocidades e diferencial; (b) VE com caixa redutora e diferencial; (c) VE apenas
com diferencial. .................................................................................................................................... 8
Figura 2.3 - Nissan Leaf [8]. ......................................................................................................................... 9
Figura 2.4 - Tipo de configurações para veículos totalmente elétricos com o motor aplicado a cada
roda de tração: (a) ME acoplado ao eixo da roda através da caixa redutora; (b) ME acoplado
diretamente ao eixo da roda; (c) ME incorporado na roda. .................................................................. 9
Figura 2.5 - SIM-LEI [10]. ............................................................................................................................ 9
Figura 2.6 - Mitsubishi i-MIEV Sport Air [11]. .......................................................................................... 10
Figura 2.7 - Esquema simplificado do sistema de um veículo híbrido série. ............................................. 11
Figura 2.8 - Chevrolet Volt [15]. ................................................................................................................ 11
Figura 2.9 - Esquema simplificado do sistema de um veículo híbrido paralelo. ........................................ 12
Figura 2.10 - Honda Insight [16]. ............................................................................................................... 12
Figura 2.11 - Esquema simplificado do sistema de um veículo híbrido combinado. ................................. 13
Figura 2.12 - Toyota Prius [17]. ................................................................................................................. 13
Figura 2.13 - Célula de combustível utilizada pela NASA [18]. ................................................................ 14
Figura 2.14 - Mercedes-Benz Classe B movido a células de combustível [19]. ......................................... 15
Figura 2.15 - Esquema simplificado do sistema de um veículo a células de combustível. ......................... 15
Figura 2.16 - Esquema do funcionamento da célula de combustível [20]. ................................................. 15
Figura 2.17 - Diagrama dos motores de corrente contínua (CC) consoante o tipo de excitação. ............... 17
Figura 2.18 - Diagrama dos tipos de motores de excitação de corrente alternada (CA). ............................ 18
Figura 2.19 - Estator (parte fixa) e rotor (parte móvel) do motor CC [21]. ................................................ 18
Figura 2.20 - Rotor do motor CC com coletor, enrolamentos da armadura e seu núcleo [23]. .................. 19
Figura 2.21 - Princípio de funcionamento do motor CC [24]. .................................................................... 19
Figura 2.22 - Esquemas equivalentes da máquina CC de excitação independente: (a) Funcionando
como motor; (b) Funcionando como gerador; .................................................................................... 21
Figura 2.23 - Gráfico da relação binário/velocidade do motor CC de Excitação Independente’. ............... 21
Figura 2.24 - Esquemas equivalentes da máquina CC de excitação paralela: (a) Funcionando como
motor; (b) Funcionando como gerador. .............................................................................................. 22
Figura 2.25 - Esquemas equivalentes da máquina CC de excitação série: (a) - Funcionando como
motor, (b) - Funcionando como gerador. ............................................................................................ 22
Figura 2.26 - Gráfico da relação binário/velocidade do motor CC de ‘excitação série’. ............................ 23
Figura 2.27- Esquemas equivalentes da máquina CC de excitação composta: (a) Funcionando
como motor; (b) Funcionando como gerador. .................................................................................... 23
Figura 2.28 - Gráfico da relação entre o binário e a velocidade do motor CC de ‘excitação
composta’. .......................................................................................................................................... 24
Figura 2.29 – Estator e Rotor do motor síncrono de relutância de 12 polos no estator e 8 polos do
rotor [14]. ........................................................................................................................................... 25

Índice de Figuras
xiv Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 2.30 - Gráfico da relação entre o binário e a velocidade do motor síncrono [26]. .......................... 26
Figura 2.31 - Representação dos campos magnéticos do estator e do rotor do motor síncrono de
dois polos [26]. ................................................................................................................................... 27
Figura 2.32 - Curva de relação entre Binário e a Ângulo de Carga aplicada ao motor síncrono,
identificando a região de trabalho e a região instável do motor síncrono. .......................................... 27
Figura 2.33 - Representação esquemática do motor síncrono trifásico de polos salientes de 4 polos. ....... 28
Figura 2.34 - Representação esquemática do motor síncrono trifásico de polos lisos de 2 polos. ............. 29
Figura 2.35 – Representação esquemática do PMSM de: (a) Ímanes superficiais ou polos lisos; (b)
Ímanes internos ou polos salientes [28]. ............................................................................................. 30
Figura 2.36 - Rotor bobinado do motor de indução [30]. ........................................................................... 31
Figura 2.37 - (a) Esquemático do rotor gaiola de esquilo; (b) Rotor gaiola de esquilo [31]. ..................... 32
Figura 2.38 - Vários modelos de supercondensadores Boostcap [33]. ....................................................... 34
Figura 2.39 - Estrutura interna dos supercondensadores de dupla camada [35]. ........................................ 34
Figura 2.40 - Tipos de condensadores existentes [34]. ............................................................................... 35
Figura 2.41 - Supercondensador Híbrido da marca chinesa Liyuan [37]. ................................................... 36
Figura 2.42 - Bateria convencional de Chumbo-Ácido [40]....................................................................... 39
Figura 2.43 - Constituição interna da bateria de Chumbo-Ácido [41]........................................................ 39
Figura 2.44 - Bateria de iões de lítio da VARTA [44]. ................................................................................ 43
Figura 2.45 - Bateria de Lítio-Polímero [46]. ............................................................................................. 45
Figura 2.46 - Hyundai Sonata Hybrid 2011 [47]. ....................................................................................... 46
Figura 2.47 - Veículo elétrico Aptera da empresa Aptera Motors [49]. ..................................................... 47
Figura 2.48 - Densidade de energia e potência dos elementos armazenadores de energia [34]. ................ 49
Figura 2.49 - VSI meia-ponte monofásico [50]. ......................................................................................... 52
Figura 2.50 - VSI monofásico ponte-completa [50]. .................................................................................. 52
Figura 2.51 - VSI trifásico com carga em estrela [50]. ............................................................................... 53
Figura 2.52 - Estado de condução das fases e formas de onda de fase e linha da carga trifásica [50]........ 53
Figura 2.53 – Formas de onda da técnica PWM Sinusoidal trifásica [51]. ................................................. 55
Figura 2.54 – (a) Controlo de corrente por histerese do VSI; (b) Características da função histerese
do controlador de corrente da fase A [50]. .......................................................................................... 56
Figura 3.1 - Topologias do motor: (a) RFM; (b) AFM [52]. ...................................................................... 58
Figura 3.2 - Diagrama dos diferentes tipos de motores de fluxo axial. ...................................................... 59
Figura 3.3 - Formas de onda da corrente dos motores AFPM: (a) Do motor brushless DC, (b) Do
motor síncrono de ímanes permanentes [52]. ..................................................................................... 59
Figura 3.4 - Diagrama dos diferentes tipos de motores AFPM. ................................................................. 60
Figura 3.5 - Topologia e direção do fluxo magnético na configuração single-sided: (a) Estator
slotless; (b) Estator slotted. ................................................................................................................. 61
Figura 3.6 - Topologia e direção do fluxo magnético na configuração double-sided estator interno
slotted: (a) NS TORUS-S; (b) NN TORUS-S. ................................................................................... 62
Figura 3.7 - Topologia e direção do fluxo magnético da configuração double-sided estator interno
slotless: (a) NS TORUS-NS; (b) NN TORUS-NS. ............................................................................ 62
Figura 3.8 - Estrutura interna do motor elétrico TORUS-NS [52]. ............................................................ 63
Figura 3.9 - Topologia e direção do fluxo magnético na configuração double sided rotor interior:
(a) AFIR-S; (b) AFIR-NS. .................................................................................................................. 63
Figura 3.10 - Estrutura interna do motor elétrico AFIR-NS [52]. .............................................................. 63
Figura 3.11 - Topologia e direção do fluxo magnético na configuração multi-stage de quatro
rotores e três estatores slotless. ........................................................................................................... 64

Índice de Figuras
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial xv Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 3.12 - Topologia e direção do fluxo magnético na configuração multi-stage de quatro
rotores e três estatores slotted. ............................................................................................................ 64
Figura 3.13 - Eixos dos enrolamentos estacionários e rotacionais dq de um motor AFPM de dois
polos [52]. ........................................................................................................................................... 65
Figura 4.1 - Ambiente gráfico do software de simulação PSIM. ................................................................ 67
Figura 4.2 - Conversor de Potência em vazio simulado no PSIM. ............................................................. 68
Figura 4.3 - Tensões de saída do Conversor de Potência trifásico. ............................................................ 68
Figura 4.4 - Filtros passa-baixo das tensões implementados nas simulações com e sem carga. ................ 69
Figura 4.5 - Conversor de potência CC-CA com carga RL simulado no PSIM. ........................................ 69
Figura 4.6 - Tensões e correntes de fase do Conversor de Potência trifásico simulado com carga
RL em estrela...................................................................................................................................... 69
Figura 4.7 - Algoritmo de controlo do motor síncrono trifásico simulado no PSIM. ................................. 70
Figura 4.8 - Circuito de Potência implementado na simulação do Motor Síncrono no PSIM. ................... 70
Figura 4.9 - Velocidade angular do motor síncrono simulado em vazio, para duas velocidades de
referência. ........................................................................................................................................... 71
Figura 4.10 - Tensões simples aplicadas ao motor síncrono simulado em vazio, para duas
velocidades de referência. .................................................................................................................. 71
Figura 4.11 - Correntes de linha consumidas pelo motor síncrono simulado em vazio, para duas
velocidades de referência. .................................................................................................................. 72
Figura 4.12 - Velocidade angular do motor síncrono simulado em carga, para duas velocidades de
referência. ........................................................................................................................................... 72
Figura 4.13 - Tensões simples filtradas aplicadas ao motor síncrono simulado em carga, para duas
velocidades de referência. .................................................................................................................. 73
Figura 4.14 - Correntes de linha consumidas pelo motor síncrono simulado em carga, para duas
velocidades de referência. .................................................................................................................. 73
Figura 5.1 - Bancada de ensaio do controlador eletrónico desenvolvido para acionamento de
motores. .............................................................................................................................................. 75
Figura 5.2 - Esquema de ligações do sistema eletrónico implementado. ................................................... 76
Figura 5.3 - Motor Pra230 acoplado diretamente numa roda [54]. ............................................................ 77
Figura 5.4 - Forma de ondas das tensões (azul) e correntes (verde) para o cálculo das indutâncias
Ld e Lq. ................................................................................................................................................ 79
Figura 5.5 - Conversor de Potência trifásico implementado....................................................................... 80
Figura 5.6 - Módulo IGBT SKM100GB176D da Semikron e seu esquemático [56]. ................................. 80
Figura 5.7 - Driver Skyper 32Pro R da Semikron [58]. .............................................................................. 81
Figura 5.8 - Board 1 Skyper 32Pro R da Semikron. ................................................................................... 82
Figura 5.9 – Condensador com função de snubber da EPCOS de 1 µF, 1000 V [60]. ............................... 83
Figura 5.10 - Circuito de Controlo implementado. ..................................................................................... 84
Figura 5.11 - Placa de Comando. ............................................................................................................... 84
Figura 5.12 - Placa de Interface.................................................................................................................. 85
Figura 5.13 - Esquema elétrico do circuito de conversão da tensão dos erros............................................ 86
Figura 5.14 - Esquema elétrico do circuito de conversão dos sinais Enable e Reset. ................................. 86
Figura 5.15 - Esquema elétrico do circuito redutor dos sensores do motor. ............................................... 86
Figura 5.16 - ControlCard do Kit Experimentador TMS320F28335 [63]. ................................................. 87
Figura 5.17 - Kit Experimentador TMS320F28335 [63]. ........................................................................... 88
Figura 5.18 - Diagrama de blocos funcional do DSC TMS320F28335 [62]. ............................................. 88
Figura 5.19 - Ambiente gráfico do CCSv4. ................................................................................................ 89

Índice de Figuras
xvi Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 5.20 - Fluxograma de nível 1 do algoritmo de controlo do motor síncrono. ................................... 90
Figura 5.21 - Sinais de controlo configurados no módulo ePWM do microcontrolador, aplicados
nos 6 IGBTs do conversor de potência. .............................................................................................. 91
Figura 5.22 - Modulação dos pulsos resultante da comparação da onda triangular com a onda
sinusoidal. ........................................................................................................................................... 91
Figura 5.23 - Sensor de Posição RMB28MD e suas saídas [64]. ................................................................ 92
Figura 5.24 - Diagrama temporal (Seno/Coseno) [64]. .............................................................................. 92
Figura 5.25 - Placa de Condicionamento de Sinal. ..................................................................................... 94
Figura 5.26 - Princípio de funcionamento e construção dos sensores de efeito Hall [66]. ......................... 94
Figura 5.27 - Sensor de Tensão de efeito Hall LV25-P da LEM [67]. ........................................................ 95
Figura 5.28 - Esquema de ligações do Sensor de Tensão LV25-P. ............................................................. 95
Figura 5.29 - Sensor de Corrente de efeito Hall LA 100-P da LEM [68]. .................................................. 97
Figura 5.30 - Esquema de ligações do sensor de corrente LA 100-P. ......................................................... 97
Figura 6.1 - Formas de onda da tensão e corrente do motor síncrono em vazio, para uma
velocidade de 67 rpm. ...................................................................................................................... 100
Figura 6.2 - Formas de onda da tensão e corrente do motor síncrono em vazio: (a) Para 205 rpm;
(b) Para 494 rpm. .............................................................................................................................. 100
Figura 6.3 - Formas de onda das tensões e correntes do motor síncrono com uma carga de 10 N/m:
(a) Para 106 rpm; (b) Para 251 rpm. ................................................................................................. 101
Figura 6.4 - Formas de onda da tensão e corrente do motor síncrono com uma carga de 10 N/m,
para uma velocidade de 448 rpm. ..................................................................................................... 102
Figura 6.5 - Formas de onda das tensões e correntes do motor síncrono com uma carga de 20 N/m:
(a) Para 106 rpm; (b) Para 251 rpm. ................................................................................................. 102
Figura 6.6 - Formas de onda das tensões e correntes do motor síncrono com uma carga de 20 N/m,
para uma velocidade de 408 rpm. ..................................................................................................... 103
Figura 6.7 - Formas de onda das tensões e correntes do motor síncrono com uma carga de 30 N/m:
(a) Para 106 rpm; (b) Para 250 rpm. ................................................................................................. 103
Figura 6.8 - Formas de onda da tensão e corrente do motor síncrono com uma carga de 30 N/m,
para uma velocidade de 359 rpm. ..................................................................................................... 104
Figura 6.9 - Tensões de saída do controlador desenvolvido a operar em vazio. ....................................... 104
Figura 6.10 - (a) Tensões aplicadas a cada fase da carga resistiva; (b) Correntes consumidas por
cada fase da carga resistiva. .............................................................................................................. 105
Figura 6.11 - (a) Tensões aplicadas a cada fase da carga RL; (b) Correntes consumidas por cada
fase da carga RL. .............................................................................................................................. 105
Figura 6.12 - Motor de Indução ensaiado. ................................................................................................ 106
Figura 6.13 - Formas de onda à velocidade de 413 rpm: (a) Tensão; (b) Corrente. ................................. 107
Figura 6.14 - Formas de onda à velocidade de 900 rpm: (a) Tensão; (b) Corrente. ................................. 107
Figura 6.15 - Formas de onda à velocidade de 1413 rpm: (a) Tensão; (b) Corrente. ............................... 108

Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial xvii Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Índice de Tabelas
Tabela 1 - Principais características das células de combustível [12]. ....................................................... 16
Tabela 2 - Comparativo entre as diferentes baterias existentes no mercado atual [14],[50]. ...................... 48
Tabela 3 - Comparativo entre a Bateria de Ácido de Chumbo, o Supercondensador e o
condensador tradicional [50]. ............................................................................................................. 49
Tabela 4 - Características elétricas do motor síncrono Pra230 [55]........................................................... 78
Tabela 5 - Características elétricas do Sensor de Posição RMB28MD [64]. .............................................. 92
Tabela 6 - Características do controlador ACD4805 [69],[70]. .................................................................. 99
Tabela 7 - Características nominais do motor de indução trifásico. ......................................................... 106
Tabela 8 - Resultados obtidos do ensaio do motor síncrono em vazio com o controlador ACD4805. ..... 108
Tabela 9 - Resultados obtidos do ensaio do motor síncrono em carga com o controlador ACD4805. ..... 109


Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 1 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
CAPÍTULO 1
Introdução
1.1. Identificação do Problema
Com o aumento do aquecimento global, devido ao consumo abusivo de
matérias-primas por parte do homem, como o petróleo e o carvão, e com as pressões
governamentais para a redução das emissões de dióxido de carbono para a atmosfera, é
cada vez mais viável e necessário a utilização de energias não-poluentes ou renováveis.
Atualmente, sendo o sector automóvel uma das maiores fontes de poluição
ambiental e de consumo de recursos energéticos, é necessário substituir os motores de
combustão interna por motores elétricos. Advindo dessa necessidade, os construtores de
automóveis tem apostado fortemente nos veículos elétricos e híbridos, tendo já lançado
vários modelos, sendo alguns já capazes de competir com veículos de combustão
interna de alta performance. Um bom exemplo é o Tesla Roadster, um carro totalmente
elétrico que possuí um motor CA de indução trifásico de 4 polos com 248 cv (380 Nm),
e uma eficiência média de 92%. Com uma aceleração de 3,7 segundos dos 0 aos
100 km/h, e velocidade máxima limitada de 210 km/h, possui em média uma autonomia
combinada de 365 km. As baterias são de iões de lítio com 6831 células, e demoram
menos de 4 horas para se carregarem totalmente desde vazio, a partir de uma tomada
monofásico de 208-240 V e potência máxima de 16,8 kW [1].
Figura 1.1 - Tesla Roadster [1].
Nos veículos híbridos, um dos modelos mais recentes e modernos é o BMW
ActiveHybrid 7, que está equipado com um motor de combustão interna twin-turbo V8
de 4,4 litros da BMW, e com um motor elétrico síncrono trifásico de 20 cv de potência e
210 Nm de binário máximo. Os dois motores debitam uma potência total de 455 cv e

Capítulo 1 – Introdução
2 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
700 Nm de binário. ActiveHybrid 7 demora 4,8 segundos dos zero aos 100 km/h e
atinge uma velocidade máxima limitada de 240 km/h, com uma transmissão automática
de 8 velocidades. Este BMW apresenta uma redução de consumo de combustível de
15% em comparação com o BMW 750i. Em relação ao sistema de armazenamento de
energia, possuí uma bateria de baterias de iões de lítio de 35 células, que perfazem no
total uma tensão de 120 V e uma capacidade de 6,7 Ah. Esta bateria além de fornecer
energia para o motor elétrico, também alimenta o sistema de ar condicionado e o motor
de arranque do motor combustão. Todos os outros componentes elétricos são
alimentados por uma bateria convencional de 12 V. Tanto o conjunto de 120 V, como a
bateria de 12 V, são carregados através da travagem regenerativa [2],[3].
Figura 1.2 – Configuração do sistema elétrico e mecânico do BMW ActiveHybrid 7 [3].
O ActiveHybrid 7 está também equipado com um sistemas de Start/Stop, que
evita que o motor de combustão consuma combustível quando o carro se encontra
parado, não desligando com isso, os outros sistemas que são alimentados pelas baterias
[2],[3].
Embora nos últimos anos tenha havido uma forte aposta na evolução dos
veículos elétricos por parte dos grandes construtores de automóveis, a passagem dos
veículos movidos a motores térmicos para os veículos totalmente elétricos ainda está
longe, devido em muito, ao elevado tempo de carregamento das baterias e à sua baixa
autonomia. A quase inexistência de infraestruturas de abastecimento também não ajuda
a adesão aos veículos elétricos.
Embora o tempo de carregamento total das baterias dos carros elétricos
atualmente existentes, seja ainda muito longo para as necessidades do quotidiano,
demorando em média cerca de 4 a 6 horas, outros carros como por exemplo, o modelo
‘S18 EV’ da construtora chinesa Chery, ou o Nissan EV-02, têm a vantagem de
1- Motor a gasolina V8 BMW, de alta
eficiência;
2- Motor Elétrico (15 kW/210 Nm);
3- Transmissão automática de 8
velocidades;
4- Conversor de Potência (120 V);
5- Baterias de Iões de Lítio (800 Wh)

Capítulo 1 – Introdução
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 3 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
possuírem um sistema de carregamento rápido a partir de uma tomada de 480 V de
corrente contínua, que permite carregar quase totalmente as suas baterias, (até cerca de
80% da carga máxima), em aproximadamente 30 minutos [4]. Existe ainda o R1e, um
protótipo da Subaru que consegue carregar 80% das suas baterias nuns impressionantes
8 minutos, em modo de carregamento rápido. Este carro tem ainda a vantagem de as
suas baterias não possuírem “efeito memória”, isto é, não viciam, o que faz com que o
seu tempo útil de vida aumente.
Com vista a reduzir os tempos de carregamento, algumas empresas, como por
exemplo a Siemens, estão a apostar fortemente no desenvolvimento da tecnologia de
carregamento das baterias, bem como, em infraestruturas de redes elétricas que sejam
capazes de abastecer rapidamente e em segurança todos os carros elétricos, o que se
prevê que seja um desafio, devido ao fluxo de grandes quantidades de energia. Uma
outra vantagem que a Siemens pretende implementar, é a possibilidade de os carros
elétricos ou híbridos “Plug-in” devolverem energia à rede elétrica em alturas de carga
elevada, a partir das suas baterias totalmente carregadas, visto que, a grande maioria dos
automóveis dos países industrializados, encontram-se imobilizados durante longos
períodos de tempo [5].
A pensar na segurança, rapidez e comodidade nos carregamentos das baterias
dos veículos elétricos, algumas empresas estudam a possibilidade de instalar nas
infraestruturas de distribuição de energia elétrica, ou mesmo em casa de particulares,
um sistema de carregamento de baterias por indução.
Figura 1.3 - Carregamento por indução de um carro elétrico [6].
Este sistema não é novo, apenas é inovador, na medida que nunca se fez nada
parecido num veículo, já que este sistema de indução é utilizado nos transformadores, e
mais recentemente nos carregamentos de telemóveis.

Capítulo 1 – Introdução
4 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Alguns fabricantes de baterias, em parceria com as empresas de automóveis,
sabendo que, o futuro dos carros elétricos vai passar em muito por o que se conseguir
fazer em relação ao aumento da capacidade das baterias, têm-se dedicado fortemente a
melhorar esse aspeto. Como consequência dessas parcerias, foram desenvolvidas
recentemente novas baterias laminadas de iões de lítio, que fornecem o dobro da energia
das baterias de iões de lítio comuns, tendo ainda metade do seu tamanho e peso. Estas
características permitem aumentar a autonomia do veículo para o dobro, o que se traduz
num avanço significativo para a consolidação dos veículos totalmente elétricos como
solução viável e alternativa aos veículos movidos por motores de combustão interna.
Num futuro próximo, a passagem dos veículos de combustão interna para os
veículos totalmente elétricos vai passar por melhorias e avanços que se faça nos
sistemas de armazenamento de energia e nos sistemas eletrónicos dos veículos híbridos.
1.2. Enquadramento
Este projeto enquadra-se no âmbito da dissertação do 5º ano, necessária para a
conclusão do Mestrado Integrado em Engenharia Eletrónica Industrial e Computadores,
da Universidade do Minho.
Este projeto está integrado num veículo com conceção urbana, movido a
tecnologia híbrida, que está a ser desenvolvido em parceria com o Departamento de
Engenharia Mecânica da Universidade do Minho, para poder participar na prova “Shell
Eco-Marthon Season”, que se realiza na pista “Eurospeedway” em Lausitz, Alemanha.
Esta Dissertação de Mestrado, pretende estudar e desenvolver os sistemas de
Eletrónica de Potência de um veículo elétrico, dando continuidade a uma linha de
investigação na área dos veículos elétricos iniciada pelo grupo GEPE-UM (Grupo de
Eletrónica de Potência e Energia da Universidade do Minho).
1.3. Motivações
A principal motivação desta Dissertação de Mestrado é a possibilidade de
aumentar os conhecimentos na área dos veículos elétricos, e pô-los em prática, através
da construção dos seus sistemas de Eletrónica de Potência.
Este projeto permite também, por em prática a grande parte dos conhecimentos e
capacidades adquiridas ao longo do meu percurso académico.
Esta Dissertação de Mestrado trás ainda a motivação adicional de trabalhar numa
área que se preocupa com a vertente ambiental, numa altura em que tanto se fala no
aquecimento global do planeta.

Capítulo 1 – Introdução
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 5 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
1.4. Objetivos
O principal objetivo deste trabalho, é o desenvolvimento dos sistemas de
eletrónica de potência necessários à tração de um veículo elétrico, tais como, o sistema
de controlo e o conversor de potência. Para tal, os objetivos seguintes devem ser
cumpridos:
Estudar os sistemas de Eletrónica de Potência para veículos elétricos, com
recurso, primeiro a pesquisa bibliográfica, e depois através da realização de
simulações computacionais;
Projetar, dimensionar e implementar o Conversor de Potência Trifásico CC-CA,
para o sistema de tração;
Estudar e desenvolver a programação do Sistema de Controlo em
DSP/microcontrolador;
Desenhar e implementar placas de sensorização e condicionamento de sinal,
supervisão e proteção para o sistema de controlo;
Realizar testes do Controlador Eletrónico desenvolvido para o veículo elétrico.
1.5. Organização da Dissertação
Esta dissertação está organizada em sete capítulos.
No Capítulo 1, denominado “Introdução”, é feita a identificação do problema,
bem como o seu enquadramento. São ainda apresentadas as principais motivações e
objetivos para a realização desta Dissertação de Mestrado.
No Capítulo 2, denominado “Tecnologias dos Veículos Elétricos”, é descrito o
“estado da arte” dos principais componentes constituintes dos veículos elétricos. Nele
são descritas as principais configurações dos sistemas de propulsão dos Veículos
Elétricos (VE), bem como os vários tipos de motores elétricos disponíveis para tração, e
elementos armazenadores de energia, que melhor satisfazem as necessidades e
exigências deste tipo de veículo. Nele, são ainda apresentadas algumas configurações
dos conversores de potência, implementados no sistema de controlo de tração, bem
como algumas técnicas de controlo PWM.
No Capítulo 3, denominado “Motores Elétricos de Fluxo Axial”, é dado um
destaque especial aos motores de fluxo axial, sendo abordas as diferentes topologias
destes motores, bem como a comparação com os motores elétricos de fluxo radial.
No Capítulo 4, denominado “Simulação do Controlador do Motor Elétrico”, são
apresentados e comentados os resultados das simulações computacionais obtidos com

Capítulo 1 – Introdução
6 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
programa PSIM, com o Conversor de Potência e Algoritmo de Controlo implementados,
no Controlador Eletrónico desenvolvido.
No Capítulo 5, denominado “Implementação do Controlador do Motor Elétrico”,
são descritos os componentes e placas implementadas para o controlador desenvolvido
para o acionar um motor elétrico, composto pelo Circuito de Potência e pelo Circuito de
Controlo.
No Capítulo 6, denominado “Resultados Experimentais”, são apresentados os
resultados experimentais obtidos no ensaio do Motor Síncrono Double-Sided com o seu
controlador (adquirido ao fabricante do motor), no ensaio do Motor de Indução com o
controlador desenvolvido. O controlador desenvolvido também é ensaiado em malha
aberta, de forma a ser validado.
No Capítulo 7, denominado “Conclusões e Sugestões de Trabalho Futuro”, são
descritas todas as conclusões tiradas da realização desta dissertação, e são elaboradas
algumas sugestões de melhorias do projeto, que possam vir a ser aplicadas no futuro.

Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 7 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
CAPÍTULO 2
Tecnologias dos Veículos Elétricos
2.1. Introdução
Neste capítulo, são abordadas as principais tecnologias que compõem os
veículos elétricos atuais.
Em primeiro, são descritos os tipos veículos elétricos existentes no mercado,
bem como, as principais configurações dos seus sistemas de propulsão. Os tipos de
motores elétricos de fluxo radial mais utilizados, bem como, as suas vantagens e
desvantagens, são também discutidos. Em seguida, são apresentados os principais
elementos armazenadores de energia elétrica com mais capacidade de armazenamento,
utilizados nos veículos elétricos, e suas principais características.
Por fim, são abordados os diferentes tipos de conversores de potência,
implementados nos controladores eletrónicos, que compõem o sistema de propulsão dos
veículos elétricos, e suas técnicas de controlo.
2.2. Tipos de Veículos Elétricos
Atualmente, existem três tipos de veículos elétricos, os veículos totalmente
elétricos ou elétricos Puros (VEP), os veículos elétricos híbridos (VEH) e os veículos
elétricos a células de combustível (VECC). Estes veículos elétricos, distinguem-se pelo
tipo de energia armazenada que vai alimentar o sistema de propulsão elétrico. No caso
dos VEH, possuem dois ou mais tipos de sistemas de armazenamento de energia. A
seguir são discutidos estes três tipos de veículos elétricos.
2.2.1. Veículo Elétrico Puro (VEP)
O veículo elétrico puro (VEP) distingue-se dos outros tipos de veículos elétricos,
por apenas possuir um sistema de armazenamento à base de baterias eletroquímicas, que
alimentam o sistema de propulsão elétrico. Na Figura 2.1, pode-se ver a configuração
simplificada do sistema de propulsão de um veículo puramente elétrico.

Capítulo 2 – Tecnologias dos Veículos Elétricos
8 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 2.1 - Esquema simplificado do sistema do veículo elétrico puro.
Dentro dos veículos puramente elétricos, existem diversas configurações
mecânicas possíveis que variam entre o tipo de motor elétrico (ME) utilizado, o tipo do
sistema de armazenamento, bem como a localização de ambos. Na Figura 2.2, são
apresentadas algumas configurações de carros puramente elétricos, que variam apenas
em relação ao tipo de motor e sua localização no carro, bem como em relação ao tipo de
transmissão utilizada.
(a)
(b) (c)
Figura 2.2 - Tipo de configurações para veículos totalmente elétricos: (a) VE com embraiagem, caixa de
velocidades e diferencial; (b) VE com caixa redutora e diferencial; (c) VE apenas com diferencial.
A primeira configuração (Figura 2.2 (a)) é muito parecida com a de um veículo
de combustão interna (VCI), pois apenas é substituído o motor de combustão interna
(MCI) por um ME, mantendo-se a embraiagem, a caixa de velocidades e o diferencial
do eixo das rodas.
Na segunda configuração (Figura 2.2 (b)), o VE apenas possui o ME, a caixa
redutora e o diferencial, dispensando a embraiagem. Um dos carros que possui essa
configuração é o Nissan Leaf, da Figura 2.3.
Outra configuração possível, é utilizar apenas o ME acoplado ao diferencial,
evitando assim as perdas mecânicas da caixa de velocidades (Figura 2.2 (c)) [7].
Motor Elétrico
Dif
Roda
Motor Elétrico
Dif
Roda
Caixa Redutora
C. Velocidades
Motor Elétrico
Embraiagem
Dif
Roda

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 9 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 2.3 - Nissan Leaf [8].
As configurações da Figura 2.4 têm a particularidade de possuírem um motor
aplicado a cada roda de tração. Na Figura 2.4 (a) cada motor está acoplado a uma caixa
redutora, que está ligada ao eixo da roda. Na Figura 2.4 (b), a configuração é mais
simples, pois cada motor está acoplado diretamente ao eixo da roda. Por último, na
configuração da Figura 2.4 (c) os ME estão incorporados diretamente nas rodas. Estes
motores são denominados de Motor-in-Whell.
(a)
(b) (c)
Figura 2.4 - Tipo de configurações para veículos totalmente elétricos com o motor aplicado a cada roda
de tração: (a) ME acoplado ao eixo da roda através da caixa redutora; (b) ME acoplado diretamente ao
eixo da roda; (c) ME incorporado na roda.
Um bom exemplo deste tipo de configuração é o veículo SIM-LEI da corporação
chinesa SIM-Drive, que se pode visualizar na Figura 2.5 [9].
Figura 2.5 - SIM-LEI [10].
Motor Elétrico
Motor Elétrico
Ro
da
Motor Elétrico
Motor Elétrico
Ro
da
Caixa Redutora
Caixa Redutora
Ro
da
Motor Elétrico Motor Elétrico

Capítulo 2 – Tecnologias dos Veículos Elétricos
10 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
As configurações apresentadas anteriormente tanto podem ser aplicadas a
veículos com tração dianteira como em veículos de tração traseira ou tração integral.
Exemplo disso é o Mitsubishi i-MIEV Sport Air (Figura 2.6), que possui dois motores
(in-Wheel) nas rodas da frente, e um ME para as duas rodas de trás.
Figura 2.6 - Mitsubishi i-MIEV Sport Air [11].
Vantagens e Desvantagens dos Veículos Elétricos
As vantagens dos veículos elétricos movidos apenas com motor elétrico são
[7][12]:
Maior rendimento e mais económicos que um veículo a combustão interna;
Elevado binário de arranque e a baixas velocidades;
Baixa emissão de ruídos;
Zero emissão de gases poluentes para a atmosfera;
Permitem recuperação de energia através das travagens regenerativas e nas
descidas acentudas;
As desvantagens dos veículos elétricos movidos apenas com motor elétrico são:
Baterias caras, que contribuem para o alto preço do veículo;
Elevado peso e volume das baterias, que aumentam o peso do veículo e
consequentemente prejudicam a autonomia do veículo;
Tempo de carregamento total das baterias elevado;
Poucos postos de abastecimento elétrico;
Alto impacto ambiental das baterias, já que não se reciclam integralmente.
2.2.2. Veículo Elétrico Híbrido (VEH)
Num veículo elétrico híbrido (VEH), a energia de propulsão é fornecida através
de dois ou mais tipos de sistemas armazenadores de energia. Um veículo híbrido de
estrada possui geralmente dois motores, um MCI movido a gasolina ou gasóleo e um
ME alimentado a baterias eletroquímicas. A partir destes dois sistemas de propulsão

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 11 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
podem ser formados três tipos VEH: o veículo híbrido série, o veículo híbrido paralelo e
o veículo híbrido combinado. A seguir vão ser descritos os sistemas de funcionamento
que compõem os diferentes tipos de VEH, bem como as suas vantagens e desvantagens.
Veículo Híbrido Série
No veículo híbrido série, o MCI encontra-se acoplado a um gerador elétrico que
está ligado a baterias. Em série com MCI encontra-se o ME que está ligado às baterias,
através de um conversor eletrónico que converte a corrente contínua em alternada e
vice-versa, e acoplado mecanicamente ao veio de transmissão das rodas. Na Figura 2.7
podemos ver a configuração do sistema série [12],[13],[14].
Figura 2.7 - Esquema simplificado do sistema de um veículo híbrido série.
Na configuração série, o MCI move o gerador para gerar energia elétrica, e o
gerador pode tanto carregar as baterias como alimentar diretamente o ME que move as
rodas. O MCI não possui ligação mecânica com os eixos das rodas, pois apenas é
utilizado para produzir energia elétrica a bordo. O veículo é sempre movido pelo ME.
Tal como os veículos puramente elétricos, também o híbrido série permite recuperar
energia para as suas baterias através da travagem regenerativa ou mesmo em descidas
acentuadas onde o motor elétrico passa a funcionar como gerador. Alguns exemplos de
carros híbridos série são o Chevrolet Volt e o Opel Ampera.
Figura 2.8 - Chevrolet Volt [15].

Capítulo 2 – Tecnologias dos Veículos Elétricos
12 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Esta configuraçao apresenta a desvantagem de ser pouco eficiente, pois não
existe ligação mecânica entre o motor de combustão e as rodas, não aproveitando assim
o bom rendimento desse motor a altas rotações, para mover o veículo [12],[13],[14].
Veículo Híbrido Paralelo
No veículo híbrido paralelo, o MCI e o ME estão acoplados diretamente à
transmissão, sendo por isso, ambos utilizados para gerar força mecânica. Os dois
motores podem fornecer força às rodas ao mesmo tempo ou separadamente devido às
embraiagens colocadas na transmissão. Na Figura 2.9 pode-se ver a configuração do
sistema paralelo [12],[13],[14].
Figura 2.9 - Esquema simplificado do sistema de um veículo híbrido paralelo.
Esta configuração em relação à do sistema série é mais eficiente, pois aproveita
o melhor dos dois motores de tração, o alto binário de arranque do ME e o alto
rendimento do MCI para velocidades mais elevadas. O veículo híbrido paralelo tem
ainda a vantagem de não precisar de um gerador, e de o MCI e o ME serem de menores
dimensões para obter a mesma potência do veículo série, pois o MCI complementa a
potência total requerida pelo veículo, beneficiando assim o seu rendimento. Esta
configuração, tal como a série, também permite recuperação de energia para as baterias
através da travagem regenerativa e em descidas acentuadas [12],[13],[14]. Nessa
categoria estão os carros Honda Civic Hybrid e Honda Insight.
Figura 2.10 - Honda Insight [16].

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 13 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Veículo Híbrido Combinado
O veículo híbrido combinado, combina as características dos sistemas série e
paralelo. Sua composição é semelhante a um híbrido de série, porém a conexão
mecânica das rodas está ligada aos dois propulsores. Os dois motores podem fazer a
tração do veículo, seja a combinação que for. Na Figura 2.11, pode-se ver a
configuração do sistema combinado [12],[13],[14].
Figura 2.11 - Esquema simplificado do sistema de um veículo híbrido combinado.
Este sistema apresenta as vantagens do sistema série e do paralelo, sendo que o
modo de funcioamento é intercalado entre os dois de modo, a maximizar a eficiência
energética do veículo [12],[13],[14]. Os veículos híbridos produzidos pela Toyota e pela
Lexus são de configuração combinada.
Figura 2.12 - Toyota Prius [17].
Vantagens e Desvantagens dos Veículos Híbridos
As vantagens dos veículos elétricos hibridos são [12],[14]:
Maior autonomia de que um veículo elétrico e que um veículo de
combustão interna;
Baixa emissão de gases poluentes;
Baixa emissão de ruídos;
Recuperação de energia através da travagem regenerativa;

Capítulo 2 – Tecnologias dos Veículos Elétricos
14 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Arranques suaves;
Motores de combustão e elétrico mais pequenos, e consequenemente mais
leves, o que benefecia a economia.
As desvantagens dos veículos elétricos hibridos são:
Elevado preço de aquisição;
Preço alto e baixa durabilidade das baterias;
Baixa autonomia fornecida pelas baterias;
Alto impacto ambiental das baterias, já que não se reciclam integralmente.
2.2.3. Veículo Elétrico a Células de Combustível (VECC)
As células de combustível usadas como fonte de energia nos carros elétricos são
muito parecidas com as baterias convencionais, pois ambas produzem energia por via de
reacções químicas que ocorrem no interior das suas células.
A primeira célula de combustível foi inventada por volta de 1840 por William
Grove. Mais tarde, em 1950, a NASA, apercebendo-se das enormes potencialidades e
segurança da célula de combustível em relação a outras fontes de energia, começou a
utilizá-la nos seus voos espaciais, sendo ainda hoje largamente utilizada [12],[13],[14].
Figura 2.13 - Célula de combustível utilizada pela NASA [18].
Atualmente são as grandes empresas construtoras de automóveis que fazem
grandes investimentos na investigação de novas células de combustível com maior
densidade de potência, para as introduzirem nos seus carros elétricos, pois estão
conscientes das suas grandes vantagens. Um bom exemplo é o Mercedez-Benz Classe B
movido a células de combustível mostrado na Figura 2.14.
Na Figura 2.15, pode-se ver a configuração simplificada do sistema de um
veículo a células de combustível. Nessa configuração, um depósito de hidrogénio
alimenta as células de combustível que vão produzir corrente contínua

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 15 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 2.14 - Mercedes-Benz Classe B movido a células de combustível [19].
Essa corrente contínua é depois convertida em alternada, pelo conversor
eletrónico, que vai alimentar o motor trifásico. A energia mecânica produzida pelo ME
é depois enviada para as rodas através da transmissão, que pode conter embraiagem,
caixa de velocidades e diferencial [12],[13],[14] .
Figura 2.15 - Esquema simplificado do sistema de um veículo a células de combustível.
Tal como foi dito anteriormente, a célula de combustível é muito parecida com
uma bateria convencional, pois até na sua estrutura interna elas têm semelhanças, já que
ambas possuem dois eléctrodos e um eletrólito. A única diferença é que a bateria
armazena energia nas suas células, enquanto que a célula de combustível necessita de
uma fonte de Hidrogénio, que combinado com o Oxigénio, que existe na atmosfera,
provoca uma reacção quimíca dentro da célula, produzindo energia elétrica. O único
resíduo que liberta para atmosfera é vapor de água. O funcionamento de uma célula de
combustível é apresentado na figura a baixo.
Figura 2.16 - Esquema do funcionamento da célula de combustível [20].
Capítulo 2 – Tecnologias dos Veículos Elétricos
16 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Na célula de combustível, o Hidrogénio ao entrar em contacto com ânodo,
provoca uma reação química, libertando iões de Hidrogénio e electrões. Os iões de
Hidrogénio são libertados para o eletrólito da célula, enquanto os eletrões são libertados
para o circuito elétrico a que está ligada. No câtodo, dá-se depois outra reação quimíca
entre o Oxigénio, os iões de Hidrogénio e os eléctrões libertados, resultando em vapor
de água, que é depois libertado para atmosfera. As reações quimícas que ocorrem dentro
da célula de combustível são demonstradas nas equações (2.1) a (2.3) [12].
Ânodo eHH 222 (2.1)
Cátodo OHOeH 2
2
222
(2.2)
Reação total de célula OHOH 2
2
2 2
(2.3)
A célula de combustível tem uma tensão de saída normalmente inferior a 1 V e
uma potência na ordem dos 100 W. Quanto maior for a densidade de corrente da célula,
menor será a sua tensão de saída. Uma das suas vantagens, é a sua pouca perda de
eficiência com o aumento da potência.
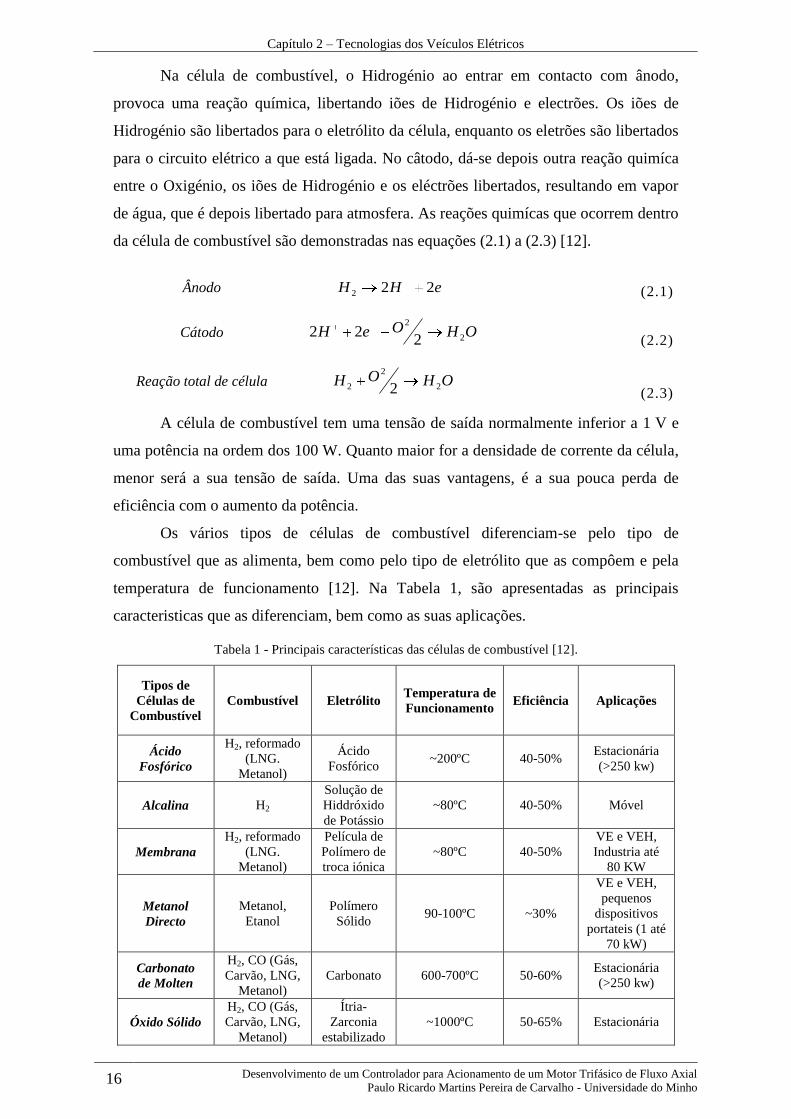
Os vários tipos de células de combustível diferenciam-se pelo tipo de
combustível que as alimenta, bem como pelo tipo de eletrólito que as compôem e pela
temperatura de funcionamento [12]. Na Tabela 1, são apresentadas as principais
caracteristicas que as diferenciam, bem como as suas aplicações.
Tabela 1 - Principais características das células de combustível [12].
Tipos de
Células de
Combustível
Combustível Eletrólito Temperatura de
Funcionamento Eficiência Aplicações
Ácido
Fosfórico
H2, reformado
(LNG.
Metanol)
Ácido
Fosfórico ~200ºC 40-50%
Estacionária
(>250 kw)
Alcalina H2
Solução de
Hiddróxido
de Potássio
~80ºC 40-50% Móvel
Membrana
H2, reformado
(LNG.
Metanol)
Película de
Polímero de
troca iónica
~80ºC 40-50%
VE e VEH,
Industria até
80 KW
Metanol
Directo
Metanol,
Etanol
Polímero
Sólido 90-100ºC ~30%
VE e VEH,
pequenos
dispositivos
portateis (1 até
70 kW)
Carbonato
de Molten
H2, CO (Gás,
Carvão, LNG,
Metanol)
Carbonato 600-700ºC 50-60% Estacionária
(>250 kw)
Óxido Sólido
H2, CO (Gás,
Carvão, LNG,
Metanol)
Ítria-
Zarconia
estabilizado
~1000ºC 50-65% Estacionária

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 17 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Vantagens e Desvantagens dos Veículos a Células de Combustível
As vantagens dos veículos elétricos a células de combustível são:
Maior autonomia que os veículos elétricos a baterias;
Emissão de CO2 nula;
Baixa emissão de ruído;
Binário elevado de arranque como nos veículos elétricos a baterias;
Menores custos de manutenção que os veículos elétricos a baterias.
As suas desvantagens são:
Mais caros que os veículos elétricos a baterias;
Postos de distribuição de hidrogénio praticamente ineixistentes;
Dificuldades no armazenamento do hidrogénio.
2.3. Motores Elétricos de Fluxo Radial
Os motores elétricos podem ser classificados em dois tipos: os motores de
corrente contínua e os motores de corrente alternada. Dentro dos motores de corrente
contínua (CC), existem cinco tipos de motores, que se distinguem pelo tipo de excitação
dos enrolamentos do rotor. Nos motores de corrente alternada (CA), existem vários
tipos de motores. Os motores CA podem funcionar com velocidade síncrona ou
assíncrona, isto é, a sua velocidade é diretamente proporcional à frequência da tensão
alimentação, ou não, dependendo do tipo de rotor. Os diagramas dos tipos de motores
CC e CA mais utilizados, são mostrados na Figura 2.17 e Figura 2.18.
Figura 2.17 - Diagrama dos motores de corrente contínua (CC) consoante o tipo de excitação.
Motores CC
Ímanes Permanentes
Excitação Composta
Excitação Independente
Excitação Série
Excitação Paralelo

Capítulo 2 – Tecnologias dos Veículos Elétricos
18 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 2.18 - Diagrama dos tipos de motores de excitação de corrente alternada (CA).
Os tipos de motores mais utilizados para tração elétrica são abordados nos
tópicos seguintes.
2.3.1. Motor de Corrente Contínua (CC)
No motor de corrente contínua (CC) a velocidade é diretamente proporcional à
tensão de alimentação do rotor, e inversamente proporcional ao fluxo do entreferro.
Apenas variando a tensão de alimentação, mantendo o fluxo constante, controla-se a
velocidade do motor, até à velocidade nominal. Para conseguir atingir velocidades
superiores à velocidade nominal, é necessário diminuir a intensidade do fluxo
magnético provocado pela corrente nos enrolamentos do estator.
O motor CC é constituído por quatro partes essenciais, sendo elas: o rotor; o
estator; o coletor (anel comutador); e as escovas.
Figura 2.19 - Estator (parte fixa) e rotor (parte móvel) do motor CC [21].
Motores CA
Monofásico
Síncrono
Hísterese
Relutância Variável
Ímanes Permanentes
Indução
Gaiola de Esquilo
Rotor Bobinado
Relutância Comutado
Série Universal
Polifásicos
Síncrono
Ímanes Permanentes
Rotor Bobinado
Relutância Variável
Indução
Gaiola de Esquilo
Rotor Bobinado

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 19 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
O rotor é a peça giratória do motor, colocado no seu eixo, e encontra-se
envolvido em um enrolamento denominado de armadura. Este enrolamento está ligado à
fonte de alimentação, sendo por isso, percorrido por correntes elevadas [22],[23],[24].
Embora a máquina CC seja alimentada com tensões e correntes contínuas,
percorrem nos enrolamentos do seu rotor correntes alternadas. Isso é devido ao coletor
que se encontra no eixo do rotor, que funciona como comutador mecânico,
transformando a tensão contínua de alimentação em tensão alternada aplicada aos
terminais dos enrolamentos do rotor. O coletor é composto por barras de cobre
eletricamente isoladas e montadas paralelamente ao eixo do motor. A tensão de
alimentação é aplicada ao coletor através das escovas [22],[23],[24].
Figura 2.20 - Rotor do motor CC com coletor, enrolamentos da armadura e seu núcleo [23].
Já o estator é a parte fixa do motor, situada na sua carcaça, que tal como o rotor
também está envolto em um enrolamento, mas de baixa potência. Esse enrolamento, que
é denominado de enrolamento de campo, é responsável pela criação de um campo
magnético que vai atravessar o enrolamento de armadura, comportando-se assim como
um íman. Existem motores CC que substituem o enrolamento de campo por ímanes
permanentes, eliminando assim a necessidade de alimentar o estator. Na Figura 2.21
pode-se ver o princípio de funcionamento do motor CC [22],[24].
Figura 2.21 - Princípio de funcionamento do motor CC [24].

Capítulo 2 – Tecnologias dos Veículos Elétricos
20 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
O princípio de funcionamento do motor CC é o mesmo de todos os motores
elétricos, que funcionam através da interação de campos eletromagnéticos. No caso
particular do motor CC, quando o enrolamento do rotor é alimentado, a corrente que
nele circula vai provocar o surgimento de um campo magnético, que será tão mais forte
quanto maior for a tensão de alimentação, comportando-se como um íman permanente,
como demonstra a Figura 2.21. Como no estator, os seus polos também se comportam
como ímanes, vão-se criar entre os enrolamentos forças de atração e repulsão, que
fazem com que o rotor gire uma vez que é a parte móvel do motor. Só por si este
princípio não funcionaria, pois os polos contrários do estator e do rotor tenderiam a
atrair-se parando o rotor. É neste momento que entra o coletor como comutador
mecânico, invertendo a tensão aplicada ao enrolamento do rotor e consequentemente o
seu campo magnético, fazendo novamente com que o rotor gire [22],[24].
Embora tenham o mesmo princípio de funcionamento, os cinco tipos de
máquinas CC já mencionados anteriormente, diferenciam-se entre si pelo tipo de
excitação que é aplicada aos enrolamentos do seu rotor. Esses tipos de excitações são
conseguidos pela forma de ligação dos enrolamentos de campo do estator e os
enrolamentos induzidos do rotor. Os diferentes tipos de motores de corrente contínua
vão ser analisados nos próximos tópicos.
Motor CC de Excitação Independente
A máquina de excitação independente ao contrário das outras máquinas CC
possui duas fontes de alimentação, uma fonte CC independente (Vf) que só alimenta os
enrolamentos do estator (Lf), e uma fonte CC (Vt) que alimenta os enrolamentos do
rotor. A função da fonte independente (Vf) que alimenta os enrolamentos do estator, é
criar um campo magnético independente da tensão de alimentação do rotor, que excite
os enrolamentos do rotor, daí ser chamada máquina de excitação independente. Devido
a capacidade de controlar o fluxo do campo magnético, esta máquina é adequada para
operar com enfraquecimento de campo, isto é, pode variar a sua velocidade mantendo a
tensão Vt constante. Utiliza-se a técnica de enfraquecimento de campo quando se
pretende velocidades acima da nominal, uma vez que a intensidade do fluxo magnético
é inversamente proporcional a velocidade do motor [14],[22],[23].
Na Figura 2.22, pode-se ver os esquemas equivalentes da máquina de excitação
independente, trabalhando como motor e como gerador.

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 21 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Vf RcEa
Ra+
-
IaIf
Vf Ea
Ra
IaIf
(a) (b)
VtLfVtLf
Figura 2.22 - Esquemas equivalentes da máquina CC de excitação independente: (a) Funcionando como
motor; (b) Funcionando como gerador;
Este tipo de motor tem características de funcionamento muito semelhantes aos
motores síncronos, uma vez que sua velocidade nominal mantém-se praticamente
constante com o aumento do binário produzido pelo motor.
Na Figura 2.23, é apresentado o gráfico da relação binário/velocidade produzido
pelo motor, onde é visível a ligeira inclinação da reta, com o aumento da carga aplicada
ao seu eixo.
Figura 2.23 - Gráfico da relação binário/velocidade do motor CC de Excitação Independente’.
Motor CC Paralelo
A máquina CC de excitação paralela possui os enrolamentos do estator ligados
em paralelo com os enrolamentos do rotor. Os mesmos enrolamentos do estator, que na
máquina de excitação independente estavam alimentados por uma fonte independente,
são agora alimentados por a fonte que alimenta os enrolamentos do rotor, daí ser
chamada máquina paralela. Devido às semelhanças físicas desta máquina com a
máquina de excitação independente, as curvas da relação binário-velocidade são iguais
[14],[22],[23]. Na Figura 2.24, pode-se ver os esquemas equivalentes da máquina
paralela trabalhando como motor e como gerador.

Capítulo 2 – Tecnologias dos Veículos Elétricos
22 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Ea
RaIa
(a)
Lf
Ea
RaIa
(b)
LfVt +
-
Rc Vt
If If
Figura 2.24 - Esquemas equivalentes da máquina CC de excitação paralela: (a) Funcionando como motor;
(b) Funcionando como gerador.
Motor CC Série
A máquina CC de excitação série possui os enrolamentos do estator ligados em
série com os enrolamentos do rotor. Como os enrolamentos de excitação são ligados em
série, cada enrolamento possui agora fio grosso e poucas espiras, pois necessita de ter
pouca resistência para provocar a menor queda de tensão e perdas possível
[14],[22],[23].
Na Figura 2.25, são mostrados os esquemas equivalentes da máquina série
funcionando como motor e como gerador.
Ea
RaIa
(a)
Ls
(b)
VtRc Vt
Ea
RaIa
+
-
Ls
Figura 2.25 - Esquemas equivalentes da máquina CC de excitação série: (a) - Funcionando como motor,
(b) - Funcionando como gerador.
O motor CC série vai ter uma corrente de arranque Ia elevada, devido a baixa
resistência interna (Ra + Rs) e ao facto de estar parado, o que provoca uma queda de
tensão Ea nula. Como consequência disso, mais o facto de o fluxo magnético Øf ser
agora produzido pela corrente do rotor (Ia), o binário de arranque deste motor vai ser
muito alto. Pela equação (2.4), que dá o binário do motor, pode-se comprovar que o
binário de arranque é muito elevado devido a corrente Ia estar elevada ao quadrado
[14],[22],[23].
2
aIk (2.4)

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 23 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Outro aspeto a ter em conta é a velocidade elevada que o motor pode atingir em
vazio, podendo mesmo sofrer danos mecânicos. Este facto pode acontecer pois com o
aumento da velocidade do motor sem carga, o fluxo magnético que já é baixo, vai
diminuir e tornar-se muito baixo. Consequentemente Ia vai assumir também valores
muito baixos, o que o pode levar a atingir velocidades elevadas. Na Figura 2.26, pode-
se comprovar o elevado binário de arranque, e o baixo binário para velocidades elevadas
do motor de excitação série.
Figura 2.26 - Gráfico da relação binário/velocidade do motor CC de ‘excitação série’.
Motor CC Composto
A máquina CC de excitação composta possui as características físicas da
máquina de excitação paralela e da máquina de excitação série, isto é, tem dois
enrolamentos de excitação que se encontram colocados, separadamente, em paralelo e
em série com os enrolamentos do rotor, daí ser chamada máquina composta
[14],[22],[23].
Na Figura 2.27, pode ver-se os esquemas equivalentes da máquina série
funcionando como motor e como gerador.
Ea
Ra
Ia
(a)
Lf
Ea
RaIa
(b)
LfVt
+
-
Rc Vt
If If
LsLs
Figura 2.27- Esquemas equivalentes da máquina CC de excitação composta: (a) Funcionando como
motor; (b) Funcionando como gerador.

Capítulo 2 – Tecnologias dos Veículos Elétricos
24 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
O motor CC composto ao contrário dos outros motores referidos atrás, com o
aumento do binário solicitado pelo aumento da carga aplicada ao motor a sua
velocidade vai aumentar, o que o torna num motor de características únicas. Este
aumento deve-se a diminuição do fluxo resultante (Øf – Øs), pois com o aumento da
corrente Ia, devido ao aumento da carga, o fluxo magnético do enrolamento série (Øs)
vai aumentar, enquanto o fluxo magnético do enrolamento paralelo (Øf) mantêm-se
constante. Na Figura 2.28, vê-se claramente o aumento da velocidade com o aumento do
binário produzido pelo motor de excitação composta [14],[22],[23].
Figura 2.28 - Gráfico da relação entre o binário e a velocidade do motor CC de ‘excitação composta’.
Vantagens e Desvantagens dos Motores CC
Os motores CC graças à sua grande flexibilidade de construção, que pode ser
obtida pelos diferentes tipos de excitações, quando associada à simplicidade de controlo
e aos conversores de corrente contínua disponíveis, tornam estes motores bastante
atrativos. Estes motores são especialmente vantajosos, em casos onde binários elevados
ou ampla variação de velocidade são desejáveis.
Como desvantagens estes motores apresentam construção volumosa, baixa
eficiência, baixa fiabilidade e necessitam de maior manutenção, devido ao facto, de
possuírem enrolamentos no rotor, comutadores e escovas. Os enrolamentos do rotor
também limitam a velocidade máxima dos motores CC [14],[22],[23].
Aplicações
Os Motores CC têm uma grande aplicação em sistemas de servo controlo, assim
como robôs e máquinas de ferramenta.
Em relação aos veículos elétricos as máquinas CC são uma boa solução para os
sistemas de tração, uma vez que é muito fácil controlar a sua velocidade, e têm
características de binário/velocidade que ajustam-se facilmente às necessidades de
tração [14],[22],[23].

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 25 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
2.3.2. Motor de Relutância Comutado
Apesar de, o primeiro motor de relutância comutado ter sido registado em 1838,
apenas na década de setenta passou a ser desenvolvido, devido à inexistência de
componentes eletrónicos adequados [25].
O motor de relutância comutado (Switched Relutance Motor - SRM), tem um
princípio de funcionamento semelhante ao motor de passo, uma vez as fases do estator
são controladas independentemente uma das outras. O estator e o rotor são constituídos
por polos salientes, sendo que apenas o estator possui enrolamentos [14],[25].
No SRM, o binário é gerado unicamente através do fenómeno da relutância
magnética. Devido ao fenómeno da relutância, o rotor que é feito de material
ferromagnético tende a alinhar-se com as linhas do campo magnético produzidas pelos
enrolamentos do estator, produzindo assim movimento no rotor. O número de polos do
estator e do rotor nunca é igual, sendo o do estator normalmente superior [14],[25].
Figura 2.29 – Estator e Rotor do motor síncrono de relutância de 12 polos no estator e 8 polos do
rotor [14].
O SRM possui algumas características de funcionamento propícias para
aplicações de tração elétrica, como razão binário/velocidade elevada e binário de
arranque alto, sem originar picos de corrente. É um motor de construção fácil, robusto e
barato, pois não possui enrolamentos no rotor ou ímanes permanentes. Devido à
independência entre fases, em caso de falha de uma das fases, o motor mantêm-se em
funcionamento. Devido a esse facto, e ao sentido da corrente ser unidirecional, este
motor necessita de menos dispositivos comutadores de potência para o seu circuito de
controlo, que os motores síncrono ou de indução trifásicos [14],[25].
Como características menos atrativas, apresenta ondulações de binário
consideráveis a baixas velocidades, tornando-o ruidoso. Necessita de um controlo
complexo, de forma a poder eliminar alguma da ondulação do binário e efetuar um
controlo adequado. Densidade de potência e eficiência mais baixa, comparativamente ao
motor síncrono [14],[25].

Capítulo 2 – Tecnologias dos Veículos Elétricos
26 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
2.3.3. Motor Síncrono
O motor síncrono é uma máquina de corrente alternada, que funciona sempre à
velocidade de sincronismo, até atingir a carga máxima que consegue suportar. Este
motor denomina-se de motor síncrono, devido a velocidade do campo magnético do
estator, girar à mesma velocidade do campo magnético do rotor, ou seja, estão em
sincronismo. A velocidade do motor síncrono ou velocidade síncrona, é diretamente
proporcional à frequência da tensão de alimentação, como se pode verificar pela
equação (2.5), onde ns é a velocidade síncrona em rotações por minuto (rpm), f é a
frequência da tensão de alimentação em Hertz (Hz), e p é o número de polos do rotor
[14],[26],[27].
p
fnS
120 (2.5)
Na Figura 2.30, é possível ver a relação entre binário e a velocidade do motor
síncrono para uma frequência fixa de alimentação, onde se verifica que funciona sempre
à velocidade de sincronismo até atingir a máxima carga, ou seja, até atingir o binário
máximo que o motor pode fornecer, sendo este limitado pela potência do mesmo [28].
O motor síncrono mantém a sua velocidade de sincronismo, enquanto o campo
magnético criado pelo enrolamento do rotor conseguir acompanhar o campo magnético
criado pelos enrolamentos do estator. Quanto maior for a carga aplicada ao eixo do rotor
maior será o desfasamento entre estes dois campos magnéticos. Quando o
desfasamento, também denominado ângulo de carga, ultrapassa os 90º, ou seja, quando
o motor atinge o binário máximo, o campo magnético do rotor começa a ter dificuldade
em acompanhar o campo magnético do estator e começam a perder o sincronismo.
Figura 2.30 - Gráfico da relação entre o binário e a velocidade do motor síncrono [26].

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 27 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Na Figura 2.31, são representados os campos magnéticos do rotor (Br) e do
estator (Bs) aplicados no eixo do motor e desfasados entre si pelo ângulo de carga (δ)
[14],[26],[27].
N
S
BrBs
ωs
δ
Figura 2.31 - Representação dos campos magnéticos do estator e do rotor do motor síncrono de dois
polos [26].
Na Figura 2.32, pode visualizar-se a região de trabalho e a região instável do
motor síncrono, provocada pela carga aplicada ao eixo do motor. O motor encontra-se
na região de trabalho até atingir a carga máxima suportada pelo motor. Quando
ultrapassa a carga máxima, o motor passa então a operar na região instável, onde
começa a perder o sincronismo. Deve-se então desligar o motor e ligá-lo novamente,
pois perdido o sincronismo não é mais possível recuperá-lo [14],[26],[27].
O motor síncrono não possui binário de arranque, devido ao campo magnético
do rotor estar inicialmente parado, não conseguindo assim, acompanhar o campo
magnético do estator que passa por ele cinquenta vezes por segundo, caso seja
alimentado por a tensão da rede elétrica. Como consequência das tentativas de
acompanhar o campo magnético do estator, o motor começa a vibrar, pois tenta rodar
para um lado e depois para o outro bruscamente o que faz com que o motor
sobreaqueça.
Binário (Nm)
Ângulo de Carga (δ)90º
τmax
Região de
Trabalho
Região
Instável
Figura 2.32 - Curva de relação entre Binário e a Ângulo de Carga aplicada ao motor síncrono,
identificando a região de trabalho e a região instável do motor síncrono.

Capítulo 2 – Tecnologias dos Veículos Elétricos
28 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
O motor síncrono possui pelo menos três métodos de arranque, o do motor
auxiliar, o de redução de frequência e o dos enrolamentos amortecedores.
O método mais utilizado é o da redução da frequência, devido à fácil
implementação, graças aos conversores de frequência, compostos por dispositivos
semicondutores de potência (IGBTs ou MOSFETs), que podem ser controlados
facilmente a altas frequências, com gamas de correntes que vão desde as dezenas até as
centenas de amperes, tudo isto, com baixas perdas em regime de condução. Neste
método, com o auxílio de técnicas de comutação PWM, consegue-se variar a frequência
de alimentação do motor, variando assim a velocidade de rotação do campo magnético
do estator, permitindo assim, que o campo magnético do rotor consiga acompanhar o do
estator. Sendo assim, para arrancar o motor síncrono basta variar gradualmente a
frequência de alimentação desde zero até a frequência nominal, levando-o assim a
atingir a velocidade de sincronismo. Este método também permite, por o motor síncrono
a funcionar como máquina de velocidade variável, pois além da frequência, também
consegue controlar a amplitude da tensão de alimentação. O funcionamento dos
principais conversores de frequência e técnicas de comutação PWM, são abordados no
último tópico deste capítulo [14],[26],[27].
Motor Síncrono Trifásico de Rotor Bobinado
Existe dois tipos de motor síncrono trifásico de rotor bobinado, que se
distinguem pela constituição do seu rotor, são eles o motor de rotor de polos salientes e
o motor de rotor cilíndrico ou polos lisos. Na Figura 2.33 e Figura 2.34, são
apresentados os esquemas do motor de polos salientes e do motor polos lisos,
respetivamente [14],[26],[27].
Figura 2.33 - Representação esquemática do motor síncrono trifásico de polos salientes de 4 polos.
O número de pares de polos por fase do estator tem que ser igual ao número de
pares de polos do rotor, como se pode ver pela Figura 2.33, caso contrário a máquina
síncrona não funciona, seja como motor ou gerador.

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 29 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 2.34 - Representação esquemática do motor síncrono trifásico de polos lisos de 2 polos.
O motor síncrono de rotor de polos salientes é usado principalmente em
situações onde sejam requeridas baixas velocidades de rotação, como por exemplo, nos
geradores das centrais hidroelétricas, enquanto o motor de rotor de polos lisos é usado
essencialmente para velocidades de rotação elevadas, como é o caso dos turbogeradores
usados nas centrais térmicas. O motor de rotor de polos salientes é particularmente
usado para velocidades baixas pois a estrutura do seu rotor é mecanicamente fraca para
altas velocidades devido a força centrífuga, e porque permite obter um número maior de
polos, o que não acontece com o rotor de polos lisos [14],[26],[27].
Motor Síncrono de Ímanes Permanentes
Na máquina Síncrona de Ímanes Permanentes (PMSM – Permanent Magnet
Synchronous Motor), o enrolamento de campo contínuo do rotor é substituído por um
íman permanente.
O motor síncrono de ímanes permanentes, quando alimentado por inversores de
frequência, consegue variar a velocidade mantendo o binário constante, e com alto
desempenho, com a vantagem de não possuir escovas no rotor, o que faz dele um motor
quase isento de manutenção, de maior rendimento e de dimensões mais reduzidas. Um
dos poucos inconvenientes que este motor tem é a perda de flexibilidade de controlo do
fluxo do campo e possíveis desmagnetizações.
O motor de ímanes permanentes é particularmente útil, em aplicações onde a
fiabilidade, binários elevados, baixos níveis de vibração e ruído são fundamentais, como
por exemplo em elevadores.
Existem dois tipos de motores de ímanes permanentes, o de rotor de polos
salientes ou ímanes internos e o de rotor de polos lisos ou ímanes superficiais. Em baixo
são ilustrados esses dois tipos de motores [28].

Capítulo 2 – Tecnologias dos Veículos Elétricos
30 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 2.35 – Representação esquemática do PMSM de: (a) Ímanes superficiais ou polos lisos; (b) Ímanes
internos ou polos salientes [28].
O motor síncrono de ímanes internos apresenta algumas vantagens em relação ao
motor síncrono de ímanes superficiais, tais como, maior binário, maior capacidade de
operar em velocidades acima da nominal com binário constante, e menor desgaste. O de
ímanes internos apresenta maior binário, devido a saliência do rotor que produz um
binário de relutância, que somado ao binário eletromagnético produzido pelos ímanes
do rotor, faz com que o binário produzido seja mais elevado. Em relação a capacidade
de operar em velocidades acima da nominal com binário constante, o motor de polos
lisos não tem essa capacidade devido a baixa indutância criada pelo grande entreferro.
Por fim, o PMSM de ímanes internos apresenta menor desgaste, devido ao ímanes
estarem colocados internamente no rotor, ao invés do motor de ímanes superficiais que
estão colocados á superfície do rotor, logo sujeitos a ação da força centrífuga,
[14],[26],[27],[28].
2.3.4. Motor Assíncrono ou de Indução
O motor assíncrono, ou de indução, é uma máquina de corrente alternada, que
funciona sempre com velocidade inferior à de sincronismo. Essa velocidade é tanto
mais inferior, quanto maior for a carga aplicada ao seu eixo.
Tal como o motor síncrono, a velocidade síncrona do motor de indução também
varia proporcionalmente com a frequência, podendo ser calculada pela equação (2.5).
Ao contrário do motor síncrono, em que os polos do rotor acompanham o campo
magnético girante produzido pelos enrolamentos do estator, no motor de indução, o
rotor nunca consegue acompanhar a velocidade síncrona do campo girante do estator
devido às perdas, mesmo operando em vazio. A essa diferença de velocidade de rotação
entre o campo do estator e o rotor, chama-se de deslizamento e vem expressa por
unidade da velocidade síncrona. Em baixo, na equação (2.6), é enunciada a lei do
deslizamento do motor de indução, onde s é o deslizamento, ns é a velocidade de
(a)
)
(b)
)
Ímanes Permanentes

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 31 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
rotação síncrona ou do campo girante, em rotações por minuto (rpm), e nr é a
velocidade de rotação do rotor, em rotações por minuto (rpm) [14],[29].
s
rs
n
nns (2.6)
O motor de indução possui dois métodos para poder variar a velocidade, um por
a variação da tensão de alimentação, outro por o uso de conversores de frequência
(Inversores). O método por variação de tensão é pouco interessante pois a gama de
variação de velocidade é baixa, e há perda de binário com redução da tensão.
Atualmente, o método de variação de velocidade do motor de indução, à semelhança do
motor síncrono, é através do método do uso de conversores de frequência, pois
permitem variar a frequência e amplitude da tensão de alimentação, que são diretamente
responsáveis pela velocidade e binário do motor. Controlando a relação entre a
amplitude da tensão de alimentação e a frequência da mesma (V/f), consegue-se
controlar o fluxo do campo magnético do estator (campo girante), e consequentemente o
binário do motor. Para obter um binário constante basta manter a relação V/f constante
[14],[29].
Existem basicamente dois tipos de motor de indução, que se distinguem pela
constituição do seu rotor, sejam monofásicos ou polifásicos, são eles o motor de
indução de rotor bobinado e o motor de indução de rotor em gaiola de esquilo. Na
Figura 2.36 e Figura 2.37, são apresentados dois tipos de rotores do motor de indução.
Nos motores monofásicos, o motor com rotor tipo gaiola de esquilo sobressaí pela
simplicidade de fabrico, robustez e pouca manutenção.
Figura 2.36 - Rotor bobinado do motor de indução [30].
Já o motor de rotor bobinado destaca-se pelo binário de partida elevado e
arranque suave, sendo utilizado em cargas com grande inércia. Apresenta algumas
desvantagens em relação ao motor de rotor em gaiola de esquilo, pois necessita de um

Capítulo 2 – Tecnologias dos Veículos Elétricos
32 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
sistema auxiliar de arranque para os enrolamentos do rotor, é mais frágil e de custo mais
elevado, para uma mesma potência [14],[29].
Figura 2.37 - (a) Esquemático do rotor gaiola de esquilo; (b) Rotor gaiola de esquilo [31].
2.3.5. Conclusões sobre Motores Elétricos
Neste item foram abordadas os principais tipos de motores elétricos de fluxo
radial, estando eles incluídos na classe dos motores de corrente contínua, na classe dos
motores síncronos e na classe dos motores de indução. Todos estes motores apresentam
características únicas que os tornam vantajosos para determinadas situações.
Existe cinco tipos de motores CC, que se distinguem pela forma da ligação entre
os enrolamentos do estator e do rotor. Os motores CC são particularmente úteis para
aplicações de baixa potência, baixa eficiência energética e velocidades moderadas.
Embora os motores CC, apresentem características interessantes para os veículos
elétricos, tais como, tecnologia madura e controlo simples, a sua construção volumosa,
aliada as suas caraterísticas, tornam a sua utilização em veículos elétricos pouco
atrativa.
No caso do motor de relutância variável comutado, ele possui características de
binário/velocidade adequadas para aplicações de tração elétrica, com a vantagem de ser
robusto e compacto. Apenas perde em eficiência e densidade de potência, para o motor
síncrono e motor de indução.
Já o motor síncrono é particularmente útil para aplicações que requerem
velocidades elevadas constantes, muito alto rendimento e potências elevadas (binários
elevados). Graças aos conversores de potência e a um controlo complexo e preciso, este
motor passou também a ser utilizado para aplicações de velocidade variável, tendo um
único se não, de aumentar ainda mais o custo da instalação. A sua alta densidade de
potência e eficiência energética torna o motor síncrono de custo mais elevado.
O motor de indução, é particularmente útil para situações onde são requeridas
potência e eficiência moderadas a um custo baixo. Todas estas características, mais a
particularidade de ser bastante compacto e robusto, torna o motor de indução ideal para

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 33 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
a indústria. Tal como o motor síncrono, o motor de indução graças aos conversores de
potência, e a algoritmos de controlo complexos mas de fácil implementação em
microprocessadores, tornou este motor interessante para aplicações de velocidade
variável, como os veículos elétricos.
Dentro da classe dos motores síncronos, é de realçar o motor síncrono de ímanes
permanentes que possui todas as características do motor síncrono tradicional, mais a
particularidade de ser mais eficiente, conseguir atingir velocidades mais elevadas e
isenção de manutenção. Todas estas razões tornam o motor síncrono de ímanes
permanentes ideal para o sistema de propulsão dos veículos elétricos
[14],[22],[23],[26],[27],[29].
2.4. Elementos Armazenadores de Energia
Os elementos armazenadores de energia, têm um papel fundamental no
desenvolvimento dos carros elétricos e híbridos do presente, pois das muitas vantagens
que os carros elétricos podem apresentar, estão dependentes das potências e capacidade
de armazenamento que os elementos armazenadores de energia podem fornecer. Por
isso, nos últimos anos, tem-se assistido a um grande empenho por parte dos fabricantes
de baterias e construtores de automóveis, em desenvolver armazenadores de energia,
capazes de fornecer mais autonomia e melhores performances aos veículos elétricos.
Atualmente, os tipos de elementos armazenadores mais utilizados nos VE e
VEH são os supercondensadores e as baterias. A utilização preferencial destes dois
elementos para o fornecimento e armazenamento de energia nos veículos elétricos, em
relação a outros como as células de combustível (fuel cell), são discutidos nos
subcapítulos apresentados a seguir.
Neste capítulo, vão ser discutidos ainda as principais características dos
supercondensadores e das baterias, bem como as suas principais vantagens e
desvantagens, da sua utilização nos veículos elétricos e híbridos.
2.4.1. Supercondensadores
O supercondensador, também conhecido como condensador electroquímico de
dupla camada (Electrochemical Double Layer Capacitor - EDLC), são condensadores
com uma densidade de energia excepcionalmente elevada quando comparados com os
condensadores normais, como os condensadores eletrolíticos ou de cerámica.
Os supercondensadores têm como principais características físicas, alta
capacidade de armazenamento podendo chegar aos milhares de farads, baixa tensão de
funcionamento, apenas alguns volts e uma resistência interna que diminui com o

Capítulo 2 – Tecnologias dos Veículos Elétricos
34 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
aumento da capacidade, tudo isto concentrado num invólucro leve e de pouco volume
[34].
Figura 2.38 - Vários modelos de supercondensadores Boostcap [33].
Os ELDCs têm uma maior densidade de energia devido ao aumento da área de
contacto entre o elétrodo e o eletrólito, isto sem aumentar o volume do componente.
Este aumento da área de contacto é conseguido pela utilização de materiais porosos na
construção dos elétrodos, sendo que a tecnologia mais usada é a de carbono ativo que
permite aumentar a superfície de contacto em mais de mil vezes.
Ao contrário dos condensadores normais que possuem um dielétrico entre os
dois elétrodos de polaridades opostos, os supercondensadores de dupla camada usam
um mecanismo físico que gera uma dupla camada elétrica que executa a mesma função
do dielétrico. A dupla camada é composta por cargas iónicas positivas e negativas que
se acumulam na superfície do elétrodo, quando sujeitas a um campo elétrico como está
exemplificado na Figura 2.39.
Figura 2.39 - Estrutura interna dos supercondensadores de dupla camada [35].
A dupla camada elétrica é gerada no limite da ligação entre o elétrodo e o
eletrólito, sendo a distância entre essas duas camadas muito pequena, na ordem dos
nanómetros [34].
Os elétrodos de carbono ativo, que estão impregnados no eletrólito, são de forma
sólida enquanto o eletrólito orgânico é líquido. Entre os dois elétrodos opostos está

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 35 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
colocado um separador com propriedades de alta isolação contra penetrações de iões,
que previne contra curto-circuitos [34].
Na Figura 2.40, são apresentados os principais tipos de condensadores existentes
no mercado, identificando as suas diferenças.
Figura 2.40 - Tipos de condensadores existentes [34].
A seguir é definida a equação que deduz a capacidade dos condensadores, onde
C é a capacidade em Farads (F), Q é quantidade de carga em Coulombs (C) e V é a
diferença de potencial entre as placas em Volts (V).
V
QC (2.7)
Ao contrário das baterias, os supercondensadores têm a vantagem de se poder
saber a quantidade de energia que armazenam num determinado momento. Isso só é
possível pois a tensão dos supercondensadores é directamente proporcional a energía
acumulada. A equação que traduz a energía armazenada nos supercondensadores é
apresentada a seguir, onde E é a quantidade de energía em Joules (J), C é a capacidade
em Farads (F) e V a tensão aos seus terminais em Volts (V).
2
2
1VCE (2.8)
Os supercondensadores têm como principais características de funcionamento
um excelente desempenho em mais 500 mil ciclos de carregamentos, capacidade de
operação em temperaturas que se situam entre os -40ºC e os +65ºC, elevadas potências
de saída, não requerendo qualquer tipo de manutenção durante 10 anos [34].
Atualmente, uma nova estrutura de supercondensadores está sendo
desenvolvida, denominados de supercondensadores híbridos. Eles possuem o melhor

Capítulo 2 – Tecnologias dos Veículos Elétricos
36 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
das baterias e dos supercondensadores, ou seja, a grande capacidade de armazenamento
de energia das baterias e a potência e durabilidade dos supercondensadores.
Os supercondensadores híbridos ou condensador eletroquímico de fluxo
(Electrochemical Flow Capacitor - EFC) advêm da necessidade de corresponder às
necessidades energética das energias renováveis em ascensão, como a eólica e a solar.
Sendo as baterias excelentes armazenadores de energia, tem a desvantagem de não
conseguir carregar ou disponibilizar rapidamente grandes quantidades de energia, tendo
ainda poucos ciclos de vida. Por seu lado os supercondensadores conseguem absorver
ou devolver grandes quantidades de energia em segundos e têm uma vida útil na ordem
dos milhares de ciclos de carga/descargas.
Estes supercondensadores serão uma mais-valia para os veículos elétricos pois
permitiria aproveitar ao máximo a energia das travagens regenerativas, em situações de
travagens a fundo onde são gerados picos de corrente, e ainda aumentar a vida útil dos
sistemas de armazenamento, viabilizando mais a compra de veículos com tração elétrica
[36].
Na Figura 2.41, pode-se ver um supercondensador híbrido da marca chinesa
Liyuan. Este supercondensador de tensão nominal 3,2 V é do tipo de Iões de Lítio, e é
ideal para VE ou VEH devido a sua grande capacidade de armazenamento na ordem dos
10 Ah até 100 Ah ou dos 11200 F até 112000 F. A conversão de Ampere-Hora (Ah)
para Farads (F) ou vice-versa é efetuada através da equação (2.7), visto que, 1 Ampere-
segundo é equivalente a 1 Coulomb (1 As = 1 C) [37].
Figura 2.41 - Supercondensador Híbrido da marca chinesa Liyuan [37].
A seguir, são apresentadas algumas das vantagens e desvantagens dos
supercondensadores.
As principais vantagens dos supercondensadores são:
Não necessita de circuito de controlo para a sua proteção;
Sobrecargas ou descargas profundas não afetam a sua vida útil;
Maior número de ciclos de vida que as baterias;

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 37 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Não utilizam materiais nocivos ao ambiente na sua constituição;
Como as partes eletrónicas podem ser soldadas, não tem problemas com
contactos instáveis como à nas baterias;
Os supercondensadores são mais adequados onde as condições de
temperaturas de funcionamento são necessárias a ter em conta., isto é,
funcionam melhor em temperaturas extremas do que as baterias.
As principais desvantagens dos supercondensadores são:
Densidade de energia muito mais baixa que a das baterias;
A sua vida útil é limitada por causa do uso de eletrólitos;
Taxa de auto descarga mais elevada do que a das baterias;
Quando usado incorretamente, o eletrólito pode vazar;
Os supercondensadores quando comparados com condensadores
eletrolíticos, apresentam resistência interna alta, e por isso, não pode ser
usado em circuitos AC.
Devido às suas inúmeras vantagens, os supercondensadores são aplicados em
variadas situações, que passam a ser descritas a seguir:
Fontes de potência de Backup para mudanças de baterias dos
equipamentos eletrónica portáteis;
Backup de memórias de relógios e programas, de equipamento de vídeo e
áudio;
Fontes de potência para equipamentos que usem células solares, tais como
relógios e luzes de displays;
Arrancadores para motores elétricos de baixa potência;
Armazenadores de energia proveniente da travagem regenerativa dos
veículos elétricos.
2.4.2. Baterias
A bateria é um dispositivo eletroquímico que armazena energia química e a
disponibiliza sobre a forma de energia elétrica, sendo formada normalmente, por várias
células (elétrodos) para aumentar o sua tensão.
Uma bateria é constituída basicamente por cinco elementos, são eles os
elétrodos, os separadores, os terminais, o eletrólito e caixa de proteção. As principais
funções são desempenhadas pelos elétrodos, que quando percorridos por uma corrente

Capítulo 2 – Tecnologias dos Veículos Elétricos
38 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
elétrica se tornam reagentes químicos, e pelo eletrólito que é um condutor iónico entre
elétrodos.
Cada bateria possui dois terminais (Positivo e Negativo), que estão ligados a
vários elétrodos com a mesma polaridade. Os elétrodos positivos (Ânodos), tal como os
elétrodos negativos (Cátodos), são ligados internamente em série e dispostos
intercaladamente, e estão mergulhados num eletrólito que pode ser de material líquido,
sólido ou de gel.
As baterias tradicionalmente mais utilizadas, como as baterias de chumbo-ácido
(Pb-Ac) ou mesmo as de níquel-cadmio (NiCd), têm um eletrólito líquido. Já as baterias
mais recentes e avançadas, desenvolvidas para os veículos elétricos usam eletrólitos em
gel, em pasta ou mesmo em resina, sendo as mais conhecidas as chumbo-ácido seladas
(Pb-Ac), as de Níquel-Hidreto Metálico (Ni-MH) e as de Iões de Lítio (Li-Ion). Como
bateria de eletrólito sólido à de Lítio-Polímero. Os eletrólitos líquidos podem ser de
solução ácida, alcalina ou de sal, dependendo do tipo de baterias [12],[38],[50].
Em relação aos veículos elétricos que necessitam de sistemas de armazenamento
com características específicas, como longa vida de funcionamento, alta densidade
energética e de potência e baixo custo, as baterias mais utilizadas atualmente nos
sistemas de propulsão elétrico são:
Chumbo-Ácido;
Níquel-Cádmio;
Níquel-Hidreto Metálico;
Lítio-Iões;
Lítio-Polímero;
Lítio-Fosfato de Ferro.
Os itens seguintes explicam a tecnologia de cada tipo destas baterias.
Chumbo - Ácido
A bateria de chumbo-ácido (Pb-Ac) já existe há muito mais de um século, tendo
sido inventada em 1859 por o físico francês Gaston Planté. Mesmo já tendo sido
inventada há algum tempo, devido a alguns melhoramentos, as baterias de chumbo
ainda hoje são largamente utilizadas [39].

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 39 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 2.42 - Bateria convencional de Chumbo-Ácido [40].
A bateria de chumbo é constituída no seu interior por vários conjuntos de placas
(células) de chumbo, compostas individualmente por placas de polarização positiva e
negativa (elétrodos), dispostas alternadamente, que estão mergulhadas numa solução
aquosa de ácido sulfúrico (eletrólito), composta geralmente por 30% de ácido sulfúrico
e 70% de água. Geralmente, na sua fabricação, as placas de polarização positiva
(ânodos) estão revestidas de dióxido de chumbo (PbO2), e as negativas (cátodos) são
formadas por chumbo esponjoso. Para evitar o contacto direto entre as placas de
polarização opostas, existem separadores isolantes que são resistentes ao ácido sulfúrico
mas que permitem a livre circulação do mesmo. Os vários conjuntos de placas
encontram-se ligados entre si, placas de polarização negativa do conjunto 1, conectadas
as placas de polarização negativa do conjunto 2, de modo a aumentarem a voltagem
total da bateria, sendo que estes conjuntos de placas estão isolados entre si. Por fim, da
constituição física da bateria de chumbo também é de realçar o espaço existente no
fundo do invólucro para o depósito de eventuais detritos que se soltam dos materiais
que formam a bateria. Para melhor entender a composição física da bateria de chumbo é
apresentada a Figura 2.43, onde se pode visualizar a sua constituição interna
[12],[39],[41].
Figura 2.43 - Constituição interna da bateria de Chumbo-Ácido [41].

Capítulo 2 – Tecnologias dos Veículos Elétricos
40 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
A seguir, são apresentados algumas das vantagens e desvantagens da bateria de
Chumbo-Ácido. As principais vantagens são:
As mais baratas do mercado;
Tecnologia madura;
Alta potência energética (150-400 W/kg).
As principais desvantagens da bateria de Chumbo-Ácido são:
Baixa densidade energética, comparada com a de Iões de Lítio (35-50
Wh/kg);
Poluente para o meio ambiente, pois o chumbo é um metal pesado.
Devido ao seu baixo preço e a sua tecnologia madura, torna estas baterias ideais
para aplicações onde não seja preciso grande rendimento, sendo utilizados:
No arranque e iluminação dos veículos convencionais;
No sistema de tração e de travagens regenerativas dos carros elétricos
e/ou híbridos.
Níquel - Cádmio
A bateria de Níquel-Cádmio (NiCd) foi inventada pelo cientista sueco Waldemar
Jungner em 1899, mas só introduzida em volume no início de 1960. Esta bateria veio
fazer frente a bateria de Chumbo-Ácido, pois apresentava uma estrutura física e química
mais resistente [42].
A bateria de níquel-cádmio, tal como as outras baterias possui dois elétrodos de
polaridades opostas que se encontram mergulhados numa solução eletrolítica. O pólo
positivo é composto por hidróxido de níquel (NiOH), enquanto pólo negativo é
composto por cádmio (Ca). O eletrólito é uma solução alcalina de hidróxido de potássio
(KOH). Ambos os polos são isolados por um separador que os impede de entrar em
contacto físico. A tensão de uma célula das baterias normais de níquel-cádmio é
normalmente de 1,2 V, sendo que pode baixar ligeiramente na sua descarga até aos
0,9 V [12],[42].
As principais vantagens da bateria Níquel-Cádmio são:
Alta taxa de cargas e descargas (ciclo de vida típico é mais de 500
ciclos);
Possibilidade de carregamento muito rápido;
Tolera várias descargas profundas;
Baixa resistência interna;
Maior rendimento e mais leves que as baterias de chumbo.

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 41 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
As principais desvantagens são:
Possuí “efeito memória”;
Deve ser totalmente descarregada antes de cada recarga;
Suscetíveis a danos por sobrecargas;
Baixa gama de temperaturas de funcionamento, pois descarrega-se
rapidamente a temperaturas muito baixas e tem dificuldades em carregar-se
totalmente a temperaturas muito elevadas;
Dificuldade em reciclar pois é um metal pesado;
Menor densidade energética que as baterias de Lítio e de Níquel-Hidreto
Metálico;
Comercialmente caras, 3 a 4 vezes mais que as baterias de Chumbo para
a mesma capacidade.
Estas baterias têm as suas principais aplicações em:
Em portáteis e telemóveis mais antigos;
Equipamento motorizado;
Iluminação de emergência;
Instrumentação médica.
Níquel - Hidreto Metálico
A bateria de Níquel-Hidreto (Ni-MH) Metálico surgiu como uma alternativa a
bateria de Níquel-Cádmio, por causa da sua menor nocividade para com o meio
ambiente e devido a sua maior capacidade de armazenamento de energia. Esta bateria
tem maior rendimento devido a substituição do cádmio por hidreto metálico que possui
uma maior densidade energética. Essa característica possibilita tornar as baterias de
Níquel-Hidreto Metálico mais leves que as de Níquel-Cádmio, e mesmo com mais
capacidade, pois permite utilizar uma maior quantidade de massa ativa no elétrodo
positivo, que é quem limita a capacidade útil desta bateria [12],[43].
Ao nível da sua composição, a bateria de Níquel-Hidreto Metálico é muito
parecida com a de Níquel-Cádmio, pois a única diferença está no elétrodo negativo que
é composto por hidreto metálico, que consiste no uso de hidrogénio absorvido numa
liga metálica, enquanto o elétrodo positivo é composto por Níquel e o eletrólito é uma
solução aquosa de hidróxido de potássio, misturada com pequenas quantidades de
aditivos cuja função é melhorar o desempenho dos elétrodos. Para isolar os dois
elétrodos e ao mesmo tempo oferecer uma maior área de contacto entre os elétrodos e o

Capítulo 2 – Tecnologias dos Veículos Elétricos
42 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
eletrólito é usado um separador, que é normalmente constituído por um tecido de fibras
fundidas de poliamida ou polipropileno, que são plásticos leves e recicláveis [12],[43].
As principais vantagens da bateria Níquel-Hidreto Metálico são:
Rápida capacidade de recarga;
Elevado número de ciclo de vida;
Maior energia específica e vida útil que as baterias de Níquel-Cádmio;
Alta potência específica, mas menor que as de Chumbo-Ácido;
Menos poluentes que as baterias de Níquel Cádmio e Chumbo;
Não tem o chamado “efeito memória”;
Larga faixa de temperaturas de funcionamento (-20 a 60 ºC);
Não necessita de manutenção.
As principais desvantagens são:
Desempenho de descarga menor que a bateria de Níquel-Cádmio;
Sofre do processo de auto descarga (cerca de 2 % por dia).
A bateria de níquel-hidreto metálico é uma boa solução para situações onde um
bom rendimento e ciclo de vida longo são requisitados, e em aplicações onde o descarte
de baterias é elevado, pois têm a vantagem de não serem poluentes para o meio
ambiente, podendo ainda ser recicláveis [12],[43]. Este tipo de bateria é aplicado em:
Equipamentos portáteis como computadores, telemóveis e rádios;
Carros elétricos e híbridos.
Esta bateria é utilizada na segunda geração do Honda Insight, que teve início de
produção em 2009.
Iões de Lítio
As primeiras experiências em baterias de lítio foram feitas por Gilbert N. Lewis,
um brilhante físico-químico americano, em 1912. Mas só em 1970 as primeiras baterias
de lítio, não-recarregáveis, começaram a ser comercializadas. Devido a vários
problemas de segurança, os esforços para desenvolver baterias recarregáveis de lítio
foram infrutíferos, pois o metal de lítio é um material muito instável em certas
circunstâncias, especialmente durante o carregamento. Foi então que em 1979, na
Universidade de Oxford no Reino Unido, que um avanço significativo no processo de
recarregamento das baterias de lítio teve lugar. Os compostos de óxido de níquel lítio
(LiNiO2) e óxido de cobalto lítio (LiCoO2) possuem uma estrutura de camadas que
permite retirar electroquimicamente os iões de lítio e repô-los reversivelmente, que veio

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 43 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
a permitir o uso de qualquer um destes compostos como material ativo do elétrodo
positivo. Devido a estes avanços, e embora a densidade de energia seja inferior a do
metal de lítio, depois de comprovada sua segurança durante as cargas e descargas, a
Sony Corporation do Japão anuncia a primeira bateria de iões de lítio (Li-Ion)
recarregável [12],[44].
Atualmente, alguns fabricantes de baterias têm apostado numa nova variante das
baterias de Li-Ion com base nas nanotecnologias, onde garantem que estás novas
baterias apresentam uma eficiência de carga/descarga 100 vezes superior as baterias
recarregáveis de hoje, uma densidade de potência 4 vezes superior às baterias de Li-Ion
convencionais, densidade de energia duas vezes superiores às baterias de NiHM usadas
nos VEH atuais, são resistentes ao fogo, e nem explodem mesmo em caso de curto-
circuitos pois não atingem temperaturas superiores a 100ºC. Estas variantes das baterias
de lítio são ainda amigas do ambiente, apresentam velocidades de carga de apenas
alguns minutos, podem durar mais de 10 anos e fazer mais de 7000 ciclos de carga.
Estas características são conseguidas graças ao uso nanomaterias, como o titanato de
lítio nanocristalino (Li4Ti5O12) que é usado como ânodo, e o fosfato de lítio (Li3PO4) e o
espinélio de magnésio (MgAl2O4), que são usados no cátodo [12],[44].
Figura 2.44 - Bateria de iões de lítio da VARTA [44].
Como descrito anteriormente, a bateria de iões de lítio, tal como as baterias
convencionais, são constituídas essencialmente por várias células de polaridades
opostas e um eletrólito. Na bateria de iões de lítio o ânodo de uma célula é constituído
por um material ativo de carbono, normalmente grafite, enquanto o cátodo é constituído
por um metal óxido, normalmente óxido de cobalto lítio (LiCoO2), já o eletrólito é
composto por um líquido orgânico, normalmente uma solução de sal em um solvente
orgânico. A solução do eletrólito é rica em iões de lítio (Li+) complexos, como as
misturas de carbonatos orgânicas tais como o carbonato de etileno ou o carbonato de
dietil. Estes eletrólitos que não contêm água, visto que o metal de lítio reage fortemente
com a água, normalmente usam aniões de sais não-coordenados tais como o
Capítulo 2 – Tecnologias dos Veículos Elétricos
44 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
hexafluorofosfato de lítio (LiPF6) ou hexafluoroarseniato de lítio (LiAsF6), perclorato
de lítio (LiClO4), tetrafluorocarbonato de lítio (LiBF4) e triflato de lítio (LiCF3SO3)
[12],[44].
As principais vantagens da bateria Iões de Lítio são:
Alta densidade energética;
Muito alta potência energética;
Mais leves e menores que as baterias de NiCd;
Alta eficiência de carga/descarga;
Ampla faixa de temperatura de funcionamento.
As principais desvantagens são:
Frágeis a picos de tensões e a temperaturas fora dos parâmetros normais
de funcionamento;
Facilmente inflamáveis, podendo mesmo explodir a altas temperaturas;
Necessita de um circuito de controlo para sua proteção, pois não tolera
descargas profundas;
São as mais caras do mercado.
Estas baterias têm as suas principais aplicações em:
Equipamentos eletrónicos portáteis;
Veículos elétricos e híbridos mais recentes.
Lítio - Polímero
A bateria de lítio-polímero (LiPo) surgiu como resultado de pesquisas realizadas
na década de 70 sobre a condução iónica dos eletrólitos em estado sólido.
Estas baterias secundárias evoluíram a partir das tradicionais de iões de lítio de
eletrólito líquido, sendo lançadas no mercado da eletrónica de consumo em 1996.
A bateria de LiPo, no princípio do seu desenvolvimento, apresentava problemas
de resistência interna, bem como tempos de carga/descarga longos. Mais recentemente,
após alguns melhoramentos no desenho da sua estrutura, permitiram aumentar a taxa de
descarga máxima, para valores de 15 a 30 vezes maiores [12],[45].
Sendo a bateria de lítio-polímero, uma versão evoluída da típica bateria de iões
de lítio, que surgiu da necessidade de melhorar a sua segurança, apresenta a sua
principal diferença no eletrólito, que deixou de ser uma solução líquida de sais de lítio
em um solvente orgânico, para um material compósito de polímero sólido como o óxido
de polietileno.

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 45 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 2.45 - Bateria de Lítio-Polímero [46].
Este eletrólito de polímero, além de substituir o eletrólito líquido também
substitui o tradicional separador, uma vez que isola eletricamente os elétrodos
conduzindo apenas iões de lítio entre eles. As células do eletrólito de polímero, que
atualmente compõem as novas baterias de lítio-polímero são chamadas de células de
bolsa, e são formadas por um invólucro flexível em forma de folha. Estas novas células
diferem das antigas células cilíndricas, pelo facto de não precisarem de uma pressão
externa para comprimir os elétrodos e os separadores, uns contra os outros, uma vez que
as folhas dos vários componentes estão laminadas entre si.
Já os elétrodos são compostos pelos mesmos materiais das primeiras baterias de
iões de lítio comercializadas, sendo que o ânodo é constituído por uma mistura de metal
de lítio com materiais de carbono enquanto o cátodo é constituído por metais óxidos de
lítio, como o óxido cobalto de lítio (LiCoO2) [12],[45].
As principais vantagens da bateria Iões de Lítio são:
Elevada flexibilidade de fabrico;
Boas características de segurança;
Maior Robustez que as baterias de iões de lítio convencionais;
Boa densidade de energia;
Elevada vida útil;
Baixo peso;
Não tem “efeito memória”;
Baixa percentagem de auto descarga.
As principais desvantagens são:
Menor densidade energética que a bateria de iões de lítio;
Condutividade pobre;
Resistência elevada;
Necessita de um circuito de controlo para sua proteção, pois contêm lítio;
Altas temperaturas de funcionamento (60 - 120ºC).

Capítulo 2 – Tecnologias dos Veículos Elétricos
46 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Estas baterias têm as suas principais aplicações em:
Equipamentos portáteis pequenos e leves;
Indústria com ambientes agressivos;
Veículos elétricos e híbridos.
Um exemplo da aplicação de baterias de lítio-polímero em veículos híbridos é o
novo Hyundai Sonata Hybrid 2011, apresentado na Figura 2.46.
Figura 2.46 - Hyundai Sonata Hybrid 2011 [47].
Lítio - Fosfato de Ferro
A bateria de lítio fosfato de ferro (LiFePO4) foi desenvolvida por um grupo de
investigação da Universidade do Texas em 1996.
A principal desvantagem para a sua comercialização inicial foi a baixa
condutividade elétrica dos seus elétrodos. Esse problema foi posteriormente
solucionado graças a utilização de nanomateriais, como o carbono, na composição dos
seus elétrodos, visto que aumentam em muito a sua área de contacto com o eletrólito,
melhorando assim a sua condutividade elétrica [12],[48].
A bateria de lítio fosfato de ferro tem como principal diferença, em relação as
outras baterias de iões de lítio, os compostos utilizados no seu cátodo. O seu elétrodo
positivo é constituído essencialmente por um composto de lítio fosfato de ferro
(LiFePO4) e por uma pequena percentagem de carbono. Já o seu elétrodo negativo é
constituído normalmente por um composto de metal de lítio e carbono, normalmente
grafite. Em relação ao eletrólito ele pode ser constituído por várias soluções, sendo que
tipicamente é um a solução líquida orgânica, rica em iões de lítio (Li+) complexos
[12],[48].
As principais vantagens da bateria Iões de Lítio são:
Boas características de segurança, devido a utilização do LiFePO4 no seu
cátodo;
Elevado número de ciclos de vida útil;
Leve;

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 47 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Baixa taxa de auto descarga;
Não tem “efeito de memória”;
Possui alto rendimento;
Boa densidade de energia.
As principais desvantagens são:
São relativamente caras em relação as baterias de chumbo;
Tensão nominal da célula LiFePo4 menor que do que as células de
LiCoO2 ou de LiMnO2;
Necessita de um circuito de controlo para sua proteção.
Devido as suas excelentes características de segurança, muito boa densidade e
potência energética e boa relação qualidade/preço, torna estas baterias bastante atrativas
para veículos elétricos, como é o caso do Aptera [12],[48]. Estas baterias são aplicadas
principalmente em:
Veículos elétricos e híbridos;
Motociclos elétricos.
Figura 2.47 - Veículo elétrico Aptera da empresa Aptera Motors [49].
Comparação Entre os Diferentes Tipos de Baterias
Nos últimos tempos, alguns construtores de baterias e automóveis, em parceria
com algumas empresas de nanotecnologias, tem apostado fortemente no
desenvolvimento de baterias capazes de fornecer as necessidades e segurança impostas
pelos VEH.
Na Tabela 2, são apresentadas as características mais importantes das principais
baterias utilizadas nos veículos elétricos.

Capítulo 2 – Tecnologias dos Veículos Elétricos
48 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Tabela 2 - Comparativo entre as diferentes baterias existentes no mercado atual [14],[50].
Parâmetros Lítio -
Iões
Lítio -
Fosfato de
Ferro
Lítio -
Polímero
Chumbo
- Ácido
Níquel -
Cádmio
Níquel -
Hidreto
Metálico
Densidade de
Energia / Massa
[Wh/Kg]
90 - 130 90 - 110 140 - 200 35 - 50 40 - 60 60 - 80
Densidade de
Energia / Volume
[Wh/L]
250 -
360 220 300 54 - 95 70 - 90 120-210
Densidade de
Potência / Massa
[W/Kg]
250 -
~340 3000 7100
150 -
400 80 - 150 200 - 300
Eficiência Carga
/ Descarga [%] 80 - 90 98 99.8 70 - 85 75 70
Auto-Descarga
por Dia [%]
~10
(mês) 1 (mês) 5 (mês) ~2 0,5 ~2
Ciclos de Vida >1000 2000 >1000 >600 500 - 1000 >2000
Tensão Nominal
de Célula [V] 3,6 / 3,7 3,3 V 3,7 2,1 1,2 1,2
Pelas características apresentadas na tabela em cima, pode-se verificar, que as
baterias que melhor se enquadram nas necessidades dos VE são sa baterias de iões de
lítio, pois possuem maior densidade energia e de potência, que traduz-se num aumento
da autonomia e potência aos veículos elétricos. Como precisam apenas de alguns
minutos para se carregarem, têm eficiência de carga/descarga perto dos 100% e
milhares de ciclos de carga, estas baterias tornam cada vez mais os VE como uma
solução alternativa e viável aos VCI. Devido a alta densidade de potência e energia, as
baterias de iões de lítio são mais pequenas e mais leves do que outras baterias para uma
mesma capacidade, o que liberta mais espaço para o habitáculo. O único senão, é que
estas baterias são caras comparativamente a outras ofertas, mas que a longo termo,
pode-se recuperar o investimento, visto que, duram mais e têm maior rendimento.
Espera-se ainda que devido ao aumento do seu fabrico os preços possam baixar dentro
em breve.

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 49 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
2.4.3. Supercondensadores versus Baterias
As baterias possuem uma densidade energética maior que os
supercondensadores, são mais baratas e tensão quase estável. Como principais
desvantagens, as baterias têm uma potência de saída mais baixa, longevidade 10 vezes
inferior aos supercondensadores, e cargas/descargas mais lentas.
Para melhor visualizar as diferenças entre as baterias e os supercondensadores, é
apresentado, na Tabela 3, um comparativo entre a bateria de chumbo, os
supercondensadores e os condensadores tradicionais, dos seus principais parâmetros.
Tabela 3 - Comparativo entre a Bateria de Ácido de Chumbo, o Supercondensador e o condensador
tradicional [50].
Parâmetros Bateria de
Chumbo-Ácido Supercondensador
Condensador
Tradicional
Tempo de Carga 1 – 5 h 0.3 – 30 s 10-6
– 10-3
s
Tempo de Descarga 0.3 – 3 h 0.3 – 30 s 10-6
– 10-3
s
Densidade de Energia
[W.h.kg-1
] 10 – 100 1 – 10 < 0,1
Densidade de Potência
[W.kg-1
] < 1000 < 10000 < 10000
Ciclos de vida 1000 > 500 000 > 500 000
Eficiência de
Carga/Descarga [%] 0,7 – 0,85 0,85 – 0,98 > 0,95
Para melhor visualizar a diferença de capacidade de armazenamento e potência,
entre os principais elementos armazenadores de energia, é mostrado o gráfico em baixo,
Figura 2.48 - Densidade de energia e potência dos elementos armazenadores de energia [34].
Baterias Convencionais
Células de Combustível
Supercondensadoreses
Condensadores Convencionais
Densidade de Potência (W/kg)
10 Horas
1 Hora
0.03 Segundos Horas
1 Segundo
Den
sid
ade
de
Ener
gia
(Wh
/kg)

Capítulo 2 – Tecnologias dos Veículos Elétricos
50 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
2.4.4. Conclusões sobre Elementos Armazenadores
Neste capítulo foram abordados os principais elementos armazenadores de
energia dos VE, as bateria, os supercondensadores e as células de combustível.
Embora os supercondensadores apresentem mais vantagens que as baterias, é na
sua utilização conjunta, que se consegue obter uma maior eficiência energética e
autonomia nos VE. Atualmente, os construtores de automóveis utilizam os
supercondensadores para se carregarem nas travagens regenerativas e devolver essa
energia nos picos de tensão elevados, como em caso do arranque do automóvel ou em
acelerações bruscas.
No caso das células de combustível, embora possuam uma maior capacidade de
armazenamento que as baterias, a sua baixa potência de saída, aliada ao seu alto preço e
dificuldade de armazenamento do hidrogénio, tornam a sua utilização pouco apetecível.
2.5. Conversores de Potência
Devido às exigências dos veículos modernos, como motores mais eficientes,
conforto dos passageiros e segurança, é necessário uma maior quantidade de energia
disponível. De modo a gerir eficientemente essa crescente necessidade de energia, são
utilizados dispositivos semicondutores de potência.
Como nos automóveis, a bateria é quem fornece energia para os acessórios
elétricos e eletrónicos, sob a forma de corrente contínua (CC), são necessários
conversores de potência para modular essa energia, para acessórios que consumam
corrente alternada (CA). Os conversores de potência que transformam um sinal contínuo
num sinal alternado (CC-CA) são chamados de inversores.
Existem dois tipos de inversores, o Inversor Fonte de Tensão (VSI – Voltage
Source Inverter) e o Inversor Fonte de Corrente (CSI – Current Source Inverter). O
VSI, tal como o nome indica, possui na entrada uma fonte de tensão CC, enquanto CSI,
possui na entrada uma fonte de corrente CC. Os inversores são constituídos basicamente
por comutadores semicondutores de potência. Atualmente, semicondutores de potência
totalmente controlados são utilizados quase exclusivamente, sendo que, para inversores
de baixa-média potência são usados MOSFETs (Metal-Oxide-Semiconductor Field-
Effect Transistor) e IGBTs (Insulated-Gate Bipolar Transistor), enquanto, para
inversores de alta potência são usados tiristores GTO (Gate Turn Off). Sendo que, os
inversores podem ser construídos com qualquer número de fases de saída, a maioria dos
inversores utilizados são monofásicos ou trifásicos.

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 51 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Os inversores têm a capacidade de ajustar a amplitude e a frequência dos sinais
de saída. Para veículos elétricos, que possuam motores CA, a frequência é ajustada para
obter a velocidade pretendida, e a amplitude da tensão de saída é ajustada para manter o
fluxo magnético de entreferro, na região de binário constante.
Para conseguir controlar a amplitude e frequências, da tensão de saída do
inversor, são utilizadas algumas técnicas de controlo, implementadas normalmente em
microprocessadores, que fornecem os sinais de controlo dos comutadores do inversor
[12],[50].
Os Inversores Fonte de Tensão, que utilizam princípios básicos dos conversores
de potência DC-AC, bem como as principais técnicas de controlo PWM, são explicados
a seguir.
2.5.1. Inversores Fonte de Tensão
Devido à crescente potência necessária para os veículos modernos, que faz com
as tensões do barramento CC sejam maiores, os VSI são preferencialmente constituídos
por IGBTs ou MOSFETs.
A saída do inversor, que tanto pode ser monofásica como polifásica, pode ter
formas de onda quadrada, sinusoidal e PWM [12],[50]. Algumas das aplicações dos VSI
são:
Drives para motores CA;
Fontes de alimentação ininterrupta CA (UPS);
Aquecimento por indução;
Fontes de alimentação CA a partir de baterias, células de combustível ou
painéis fotovoltaicos;
Filtros Ativos de Potência.
A seguir, são mostradas algumas topologias dos inversores tipo VSI.
VSI Monofásicos
Um dos inversores de configuração mais simples, é o inversor monofásico de
meia-ponte. Este inversor possui num par de dispositivos comutadores, S1 e S2, ligados
em série com a fonte CC, e a carga é ligada entre o ponto a e o ponto médio dos
condensadores de alimentação, como se pode ver na Figura 2.49 (a). Os dispositivos S1
e S2, são comutados alternadamente durante 180º, para gerar uma tensão de forma de
onda quadrada. Quando a carga é indutiva, a corrente de saída (i0) fica em atraso em
relação à tensão de saída (v0) [12],[50].

Capítulo 2 – Tecnologias dos Veículos Elétricos
52 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 2.49 - VSI meia-ponte monofásico [50].
Outra configuração possível do inversor monofásico, é o inversor em ponte
completa. Nesta configuração é acrescentado mais um braço ao inversor, formando uma
ponte-completa em H, como é mostrado na Figura 2.50. Em cada braço do inversor,
apenas pode estar ligado um dispositivo comutador de cada vez. O VSI em ponte
completa só tem 2 estados de condução. Para haver condução de corrente, os
dispositivos comutadores, S1 e S3, têm de estar ligados, enquanto os comutadores, S2 e
S4, têm de estar desligados, durante meio-ciclo (Estado 1). Para haver condução de
corrente em sentido contrário (Estado 2), é necessário trocar a estado dos comutadores,
S1 e S3, para desligados, e os comutadores, S2 e S4, para ligados, durante o outro meio-
ciclo [12],[50].
Figura 2.50 - VSI monofásico ponte-completa [50].
VSI Trifásicos
Os inversores trifásicos são geralmente utilizados para cargas trifásicas. O VSI
trifásico é constituído por 3 braços comutadores, mais um que o VSI monofásico ponte-
completa, como se pode visualizar na Figura 2.51.
Para conseguir fornecer 3 formas de onda sinusoidais à carga trifásica, é
necessário que 3 braços do inversor, comutem com desfasamentos entre si de 120º. Na
Figura 2.52, é mostrado o estado de condução das fases, dado pelas variáveis, a, b e c,
as tensões de fase (VAN, VBN, VCN) e de linha (VAB, VBC, VCA), da carga [12],[50],[51].

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 53 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 2.51 - VSI trifásico com carga em estrela [50].
Figura 2.52 - Estado de condução das fases e formas de onda de fase e linha da carga trifásica [50].
Tal como, os VSI monofásicos, em cada braço do inversor trifásico, apenas pode
estar ligado um dispositivo comutador de cada vez, conduzindo cada um metade do
ciclo. O desfasamento de comutação de 120º, provoca o aparecimento de seis estados
possíveis, entre as 3 fases de saída do inversor.
2.5.2. Técnicas de Controlo PWM
Os inversores monofásicos ou trifásicos, são utilizados para produzir na sua
saída uma tensão sinusoidal. Os VSIs permitem controlar a frequência e amplitude da
tensão de saída fundamental. As técnicas de Modulação por Largura de Pulso (PWM –
Pulse Width Modulation) para VSIs, são usadas para o controlo de tensão de saída, quer
para, o controlo de corrente de saída. Alguma das técnicas PWM, utilizadas para o
controlo da tensão, são mencionadas a baixo [12],[50]:
PWM Sinusoidal (SPWM – Sinusoidal Pulse Width Modulation);
PWM de Função Modulante (Modulating Function PWM);
PWM Espaço Vetorial da Tensão (Voltage Space-Vector PWM);
PWM Programado (Programmed PWM).

Capítulo 2 – Tecnologias dos Veículos Elétricos
54 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Nas máquinas elétricas, o controlo por corrente é muito importante, pois permite
influenciar o fluxo magnético e desenvolver binário diretamente. Os inversores de alta
performance requerem controlo de corrente. Para o controlo de corrente, as principais
técnicas PWM utilizadas são [12],[50],[51]:
Controlo de Corrente por Histerese (Hysteresis Current Control);
Controlo de Corrente com Rampa de Comparação (Ramp-Comparison
Current Control);
Controlo de Corrente Preditivo (Predictive Current Control).
A técnica de controlo de tensão PWM Sinusoidal, e a técnica de controlo de
corrente por Histerese utilizadas nos conversores de potência, são descritas a seguir.
PWM Sinusoidal
O princípio básico da técnica PWM envolve a comparação da frequência de uma
onda triangular com a onda sinusoidal modulada de frequência fundamental. Em
sistemas trifásicos é necessário a comparação com 3 ondas sinusoidais moduladas de
frequência fundamental, e desfasadas entre si de 120º.
As formas de onda obtidas na técnica PWM Sinusoidal, podem ser visualizadas
na Figura 2.53. Na Figura 2.53 (a) são apresentadas as 3 ondas sinusoidais, e a onda
triangular, moduladas pelas funções implementadas no microprocessador. Na Figura
2.53 (b) e Figura 2.53 (c), são mostradas as tensões PWM simples, nas fases A e B do
inversor, obtidas da comparação da onda sinusoidal da fase com a onda triangular. Na
Figura 2.53 (d), é mostrada a tensão PWM composta, VAB, medida entre as fases A e B
do inversor, bem como, a tensão sinusoidal de frequência fundamental, obtida por um
filtro Passa-Baixo, aplicado na tensão VAB PWM. Vd é a tensão da fonte de alimentação
CC [12],[50],[51].

Capítulo 2 – Tecnologias dos Veículos Elétricos
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 55 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 2.53 – Formas de onda da técnica PWM Sinusoidal trifásica [51].
Controlo de Corrente por Histerese
Na técnica PWM, de controlo de corrente com banda de histerese, a corrente
medida segue a corrente de comando dentro de uma banda de histerese. Na Figura
2.54 (a), é mostrado o diagrama de blocos do VSI, com uma versão básica do controlo
da corrente de saída por histerese. No controlo por histerese, as correntes de saída iA, iB
e iC, obtidas por sensores nas linhas, são comparadas com as respetivas formas de onda
da corrente de referência i*A, i*B e i*C. Dessa comparação, são obtidas as correntes de
erro ΔiA, ΔiB e ΔiC, que são aplicadas aos controladores de corrente, para produzirem os
pulsos de disparo do inversor. Na Figura 2.54 (b), pode ser vista as caraterísticas da
função histerese implementada no controlador de corrente da fase A, onde h define a
largura da banda de histerese [12],[50],[51].
(a)
(b)
(c)
(d)

Capítulo 2 – Tecnologias dos Veículos Elétricos
56 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 2.54 – (a) Controlo de corrente por histerese do VSI; (b) Características da função histerese do
controlador de corrente da fase A [50].
Se a corrente erro, ΔiA, estiver entre a margem superior e inferior da banda de
histerese )22( hih A , nenhuma ação será tomada. A largura de banda h, é a
banda de tolerância da corrente controlada iA. O sinal de disparo do controlador de
corrente não se altera, desde que iA se mantenha dentro da banda. Caso ΔiA seja alta
)2( hiA , quer dizer que, iA atingiu a margem inferior da banda de tolerância, por
isso a saída do controlador de corrente toma valor 1. Caso ΔiA seja baixa )2( hiA ,
quer dizer, que iA atingiu a margem superior da banda de tolerância, por isso, a saída do
controlador de corrente toma valor 0. Caso ΔiA se mantenha dentro da banda de
tolerância ( 22 hih A ), a saída do controlador de corrente não se altera, ficando
com o valor anterior (x). As caraterísticas da função histerese, implementada no
controlador de corrente da fase A, são apresentadas a seguir [12],[50],[51].
21
22
20
hise
hihsex
hise
a
A
A
A
(2.9)

Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 57 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
CAPÍTULO 3
Motores Elétricos de Fluxo Axial
3.1. Introdução
As primeiras máquinas elétricas a serem construídas foram máquinas de fluxo axial.
A primeira máquina elétrica de fluxo axial, foi inventada em 1831, pelo Físico-Químico
inglês Michael Faraday [52].
As máquinas de fluxo axial não tiveram grande aceitação devido a alguns
problemas, nomeadamente, forte atração magnética axial entre o estator e o rotor,
dificuldade de fabrico, custos elevados no fabrico do núcleo laminado do estator e
dificuldades na montagem e mantimento do entreferro uniforme. Devido a estas
desvantagens, os motores de fluxo radial, que apareceram uns anos mais tarde com uma
configuração mais simples, passaram a ser largamente utilizados, dominando o mercado
até à atualidade. O primeiro motor de fluxo radial, foi patenteado por Thomas
Davenport em 1837 [52].
Também os motores de fluxo axial de ímanes permanentes não tiveram grande
impacto no mercado, devido à baixa qualidade magnética dos materiais duros utilizados
na sua constituição. Só mais tarde, com a descoberta do Alnico e da Ferrite de Bário, e
mais recentemente (1983) o Neodímio-Ferro-Boro (NdFeB), que são ímanes poderosos
feitos a partir da combinação de materiais raros, tornaram viáveis a utilização de
sistemas de excitação de ímanes permanentes. Mas só agora, mais concretamente nesta
última década, com a descida brusca dos preços dos ímanes permanentes, é que
começam a ser largamente implementados nos motores para sistemas de tração [52].
Nos itens seguintes, são apresentados os principais tipos de motores elétricos de
fluxo axial, bem como, a sua comparação com os motores de fluxo radial. São ainda
descritas, as principais topologias dos motores de fluxo axial de ímanes permanentes, e
as transformadas de Park e Clarke utilizadas nos controlos de velocidade e corrente dos
motores elétricos.

Capítulo 3 – Motores Elétricos de Fluxo Axial
58 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
3.2. Motores Elétricos de Fluxo Axial vs. Fluxo Radial
Devido às várias soluções técnicas existentes, não é possível fazer uma
comparação geral entre os motores de fluxo axial e os motores de fluxo radial.
A principal diferença física entre estes dois tipos de motores, tal como o nome
indica, está na forma de excitação do rotor. No motor de fluxo axial, o caminho do fluxo
magnético ocorre paralelamente ao eixo de rotação, enquanto os motores de fluxo
radial, a direção do fluxo magnético é perpendicular ao eixo de rotação.
Outra diferença que estes dois motores apresentam é ao nível do formato, onde
os AFM (Axial Flux Motor) têm um diâmetro muito maior que os RFM (Radial Flux
Motor). Os motores de fluxo axial apresentam ainda menos perdas no núcleo, devido ao
curto caminho do fluxo no entreferro[52].
Figura 3.1 - Topologias do motor: (a) RFM; (b) AFM [52].
Graças à sua configuração física, os AFM são indicados para aplicações onde
sejam requeridas baixas velocidades e binários elevados, devido ao elevado número de
polos possíveis na sua construção. Aliada a estas características de funcionamento, estes
motores ainda apresentam tamanho reduzido e construção compacta, o que os torna
ideais para situações onde são aplicados diretamente aos eixos de rotação, sem aplicar
engrenagens, como por exemplo, nos geradores eólicos ou nos veículos elétricos.
Ao contrário dos AFM, os RFM são mais indicados para funcionar a altas
velocidades, devido ao mais baixo número de polos possíveis no seu rotor. Os RFM
apresentam topologias e construção simples, e tecnologia madura, o que leva a que
sejam largamente utilizados na indústria atual [52].
3.3. Tipos de Motores de Fluxo Axial
Existem cinco tipos de motores elétricos de fluxo axial, são eles os motores de
corrente contínua (CC) de ímanes permanentes, os Brushless DC, os motores síncronos
de ímanes permanentes, os motores de indução e os motores de relutância variável.
(a) (b)

Capítulo 3 – Motores Elétricos de Fluxo Axial
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 59 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 3.2 - Diagrama dos diferentes tipos de motores de fluxo axial.
Os motores de corrente contínua com ímanes permanentes são uma opção
versátil e económica para pequenos sistemas de propulsão elétrica, como ventiladores,
carros elétricos e ferramentas elétricas.
Os motores brushless DC e os motores síncronos de ímanes permanentes
apresentam praticamente a mesma estrutura de construção. Ambos possuem ímanes
permanentes no seu rotor, estando isentos, por isso, de escovas. São conhecidos como
motores de fluxo axial de ímanes permanentes (AFPM – Axial Flux Permanent
Magnet). A principal diferença está na forma de onda da corrente e tensão de
funcionamento. O brushless DC produz uma força contraelectromotriz trapezoidal e
absorve corrente com forma de onda retangular. Enquanto o motor síncrono de ímanes
permanentes apresenta uma força contraelectromotriz sinusoidal e absorve corrente
sinusoidal [52].
Figura 3.3 - Formas de onda da corrente dos motores AFPM: (a) Do motor brushless DC, (b) Do motor
síncrono de ímanes permanentes [52].
Os motores de indução apresentam algumas dificuldades no fabrico do rotor
laminado em gaiola.
Motores de Fluxo Axial
CC Ímanes Permanentes
Brushless DC
Síncrono de Ímanes
Permanentes
Indução
Relutância Variável
Fase A
Fase B
Fase C

Capítulo 3 – Motores Elétricos de Fluxo Axial
60 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Já os motores de relutância variável podem ser fabricados com elevado
isolamento elétrico e magnético e apresentam variedade de escolha do sistema de
controlo.
Os AFPM, também chamados de disc-type machine, tal como os outros AFM,
possuem excelentes características, assim como, construção compacta e alta densidade
de potência. Este tipo de motor, apresenta algumas vantagens em relação aos outros
AFM, como velocidades de funcionamento mais altas, devido a inexistência de
enrolamentos no rotor, não possui perdas por fricção, e não necessita de lubrificação.
Estas são ótimas características para serem incorporados no interior das rodas dos
veículos, como sistema de tração elétrica (Motor-in-Wheel).
Os motores AFPM têm um desenho eletromagnético muito idêntico aos motores
de fluxo radial com ímanes permanentes (RFPM – Radial Flux Permanent Magnet). Os
motores AFPM apresentam algumas vantagens em relação aos RFPM, como formato
cilíndrico, construção mais compacta e maior densidade de potência. O formato em
forma de disco do rotor e do estator dos AFPM, torna possível desenhá-los com ou sem
ranhuras, ou mesmo com a total isenção de ferro na armadura [52].
Na Figura 3.4, é apresentado um diagrama com as configurações existentes para
os AFPM.
Figura 3.4 - Diagrama dos diferentes tipos de motores AFPM.
AFPM
Single-Sided
Slotted Stator
Slotless Stator
Double-Sided
Internal Stator (TORUS)
Slotted Stator (TORUS-S)
Slotless Stator (TORUS-NS)
Coreless Stator (Yokeless)
Internal Rotor (AFIR)
Slotted Stator (AFIR-S)
Slotless Stator (AFIR-NS)
Multi-Stage
Slotted Stator
Sloteless Stator
Coreless Stator

Capítulo 3 – Motores Elétricos de Fluxo Axial
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 61 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Nos AFPM estão incorporados os motores single-sided, double-sided e multi-
stage. Os motores single-sided possuem apenas um estator e um rotor, podendo o
estator ser com ranhuras ou sem ranhuras (slotted ou slotless). Os double-sided podem
possuir dois estatores e um rotor interno, ou dois rotores e um estator interno, podendo
também ser de estator slotted ou slotless. Na configuração double-sided com estator
interno, o estator pode ainda ser sem núcleo (coreless). Por último, os motores multi-
stage são compostos por vários estatores e vários rotores, podendo os estatores serem
slotted, slotless ou coreless [52].
Os motores de fluxo axial single-sided apresentam a estrutura mais básica e
construção mais simples dos motores de fluxo axial de ímanes permanentes, pois apenas
possuem um estator e um rotor. Este motor possui uma capacidade de produção de
binário menor que as configurações double-sided e multi-stage, devido ao facto, de
apenas produzir fluxo magnético de um lado do motor. Esse fluxo magnético, produz
uma força atrativa entre o estator e o rotor, que provoca perdas por aquecimento nos
rolamentos e flexão do eixo do rotor [52].
(a) (b)
Figura 3.5 - Topologia e direção do fluxo magnético na configuração single-sided: (a) Estator slotless;
(b) Estator slotted.
Na configuração double-sided, que tanto pode ser composta por dois estatores
externos e um rotor interno, como por dois rotores externos e um estator interno,
apresenta maior binário e menos perdas por aquecimento, devido a possuir uma força
atrativa mais equilibrada, que a configuração single-sided. Esta configuração apresenta
como principal desvantagem, uma estrutura e construção mais complicada, e
consequentemente preço mais elevado.
A configuração double-sided com rotor interno, é normalmente denominada
AFIR (Axial Flux Internal Rotor), enquanto a configuração double-sided com estator
interno, é normalmente denominada de TORUS. O motor AFIR com estator slotted, é
denominado de NS AFIR-S ou NN AFIR-S, enquanto o motor AFIR com estator
slotless, é denominado de NS AFIR-NS ou NN AFIR-NS. Em relação ao motor TORUS

Capítulo 3 – Motores Elétricos de Fluxo Axial
62 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
de estator slotted, é denominado de NS TORUS-S ou NN TORUS-S, enquanto o motor
TORUS de estator slotless é normalmente denominado NS TORUS-NS ou NN
TORUS-NS. Por fim, o motor TORUS coreless, também é chamada de yokeless
TORUS.
A designação NN e NS antes do nome do motor, identifica a oposição de polos
do rotor. No caso de NN, indica que os polos opostos são iguais (North-North), no caso
de NS, indica que os polos opostos entre rotores são diferentes (North-South). Já depois
do nome, a designação NS indica que o estator não tem ranhuras (Not-Slotted ou
Slotless), enquanto a designação S indica que o estator tem ranhuras (Slotted) [52].
Na Figura 3.6 e Figura 3.7, são apresentadas as diversas topologias do motor
double-sided de estator interno.
(a) (b)
Figura 3.6 - Topologia e direção do fluxo magnético na configuração double-sided estator interno slotted:
(a) NS TORUS-S; (b) NN TORUS-S.
As máquinas de fluxo axial de baixa potência são normalmente desenhadas com
estatores slotless e com rotores de ímanes permanentes.
(a) (b)
Figura 3.7 - Topologia e direção do fluxo magnético da configuração double-sided estator interno slotless:
(a) NS TORUS-NS; (b) NN TORUS-NS.
Na Figura 3.8, é mostrada a estrutura interna do motor AFPM double-sided, de
estator interior sem ranhuras.

Capítulo 3 – Motores Elétricos de Fluxo Axial
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 63 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 3.8 - Estrutura interna do motor elétrico TORUS-NS [52].
O motor double-sided com estator coreless (TORUS yokeless), tem a
particularidade de possuir a estrutura interna do estator não magnetizada e não
condutora, não apresentando por isso, perdas por histerese e por correntes de eddy no
núcleo.
Na Figura 3.9, são apresentadas as topologias do motor double-sided com rotor
interno. Este motor tem a particularidade de, caso os enrolamentos dos dois estatores
estejam ligados em paralelo, e um deles se partir, o motor consegue manter-se em
funcionamento. Mas neste tipo de motor, é preferível que os enrolamentos dos estatores
estejam ligados em série, para assim criarem forças axiais iguais mas opostas entre si
[52].
(a) (b)
Figura 3.9 - Topologia e direção do fluxo magnético na configuração double sided rotor interior:
(a) AFIR-S; (b) AFIR-NS.
Na Figura 3.10 é mostrado a estrutura interna do motor AFPM double-sided sem
ranhuras, de rotor interior.
Figura 3.10 - Estrutura interna do motor elétrico AFIR-NS [52].

Capítulo 3 – Motores Elétricos de Fluxo Axial
64 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Os motores de fluxo axial multi-stage, também habitualmente chamado de
multidisc, são constituídos por vários rotores e por vários estatores intercalados entre si.
O número de rotores é sempre superior em uma unidade ao número de estatores. Este
motor devido a sua grande constituição apresenta elevada densidade de potência, e
consequentemente alto binário. Estes motores apresentam como principais desvantagens
construção e montagem mais complicadas, perdas e consumos mais elevados, e
comercialmente mais caros. Na Figura 3.11 e na Figura 3.12, são apresentadas as
topologias do motor multi-stage de quatro rotores e três estatores slotted e slotless,
respetivamente [52].
Figura 3.11 - Topologia e direção do fluxo magnético na configuração multi-stage de quatro rotores e três
estatores slotless.
Figura 3.12 - Topologia e direção do fluxo magnético na configuração multi-stage de quatro rotores e três
estatores slotted.
3.4. Transformadas de Clarke e Park
As transformadas de Clarke e Park são usadas para transformar um sistema
referencial estacionário real de três variáveis do estator num sistema referencial
rotacional imaginário de duas variáveis do rotor. Os eixos do referencial estacionário e
rotacional de um motor AFPM de dois polos são apresentados a seguir [52].

Capítulo 3 – Motores Elétricos de Fluxo Axial
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 65 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 3.13 - Eixos dos enrolamentos estacionários e rotacionais dq de um motor AFPM de dois
polos [52].
Em primeiro, a transformada de Clarke transforma o sistema de três variáveis
reais e estacionárias (A-B-C) num sistema de duas variáveis imaginárias e estacionárias
(α-β). As equações que descrevem a transformada de Clarke são as seguintes [52]:
CBA iiii2
1
2
1
3
2 (3.1)
CB iii2
3
2
3
3
2 (3.2)
CBA iiii2
1
2
1
2
1
3
2 (3.3)
Como o motor possui um sistema de enrolamentos trifásico e equilibrado,
0CBA iii , pode-se reduzir o número de entradas de três para duas, ficando [52]:
Aii (3.4)
CB iii
3
3
3
3 (3.5)
A transformada de Park transforma um sistema de duas variáveis imaginárias e
estacionárias (α-β) num sistema de duas variáveis imaginárias e rotacionais (d-q). As
equações que descrevem a transformada de Park são as seguintes [52]:
sincos iiid
(3.6)
cossin iiiq (3.7)
Íman (Norte)
Íman (Sul)
d - Eixo
A - Eixo
q - Eixo

Capítulo 3 – Motores Elétricos de Fluxo Axial
66 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
As transformadas inversas de Park e Clarke, tal como o nome indica, têm a
função inversa das transformadas descritas anteriormente, isto é, transformam um
sistema de duas variáveis imaginárias e rotacionais num sistema de três variáveis reais e
estacionárias. A transformada inversa de Park transforma um sistema de duas variáveis
imaginárias e rotacionais (d-q) num sistema de duas variáveis imaginárias e
estacionárias (α-β). As equações da transformada inversa de Park são as seguintes [52]:
sincos qd iii (3.8)
cossin qd iii (3.9)
A transformada inversa de Clarke transforma um sistema de duas variáveis
imaginárias e estacionárias (α-β) num sistema de três variáveis reais e estacionárias
(A-B-C). As equações da transformada inversa de Clarke são as seguintes [52]:
iiA (3.10)
iiiB 2
3
2
1 (3.11)
iiiC 2
3
2
1
(3.12)
3.5. Conclusão
Embora exista, para quase todos os motores de fluxo radial (RFM) um motor de
fluxo axial (AFM) equivalente, é nas suas constituições físicas que se pode ver as
principais diferenças entre estes dois tipos de motor. Também nas suas aplicações
existem diferenças, pois os motores de fluxo axial são mais indicados para trabalhar a
mais baixas velocidades e com cargas mais elevadas que os motores de fluxo radial,
devido ao elevado número de polos na sua construção.
Existem cinco tipos de motores de fluxo axial: o motor CC de ímanes
permanentes, o brushless DC, o síncrono de ímanes permanentes, o de indução e o de
relutância. Um dos mais utilizados é o síncrono de ímanes permanentes devido as suas
inúmeras vantagens, como boa relação peso/potência e baixa manutenção. Dentro dos
motores de ímanes permanentes existem três tipos de motores: os single-sided, os
double-sided e os multi-stage, que se caracterizam pela possibilidade de terem um ou
mais rotores ou estatores.

Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 67 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
CAPÍTULO 4
Simulação do Controlador para o Motor Elétrico
4.1. Introdução
Neste capítulo, é simulado o conversor de potência trifásico CC-CA para
acionamento de um motor elétrico e o algoritmo de controlo do motor síncrono de fluxo
axial.
O software de simulação do controlador desenvolvido para acionamento de um
motor elétrico foi o PSIM, pois esta é uma ferramenta projetada especificamente para a
eletrónica de potência, para o controlo de motores e para a simulação de sistemas
dinâmicos. O PSIM, com uma interface gráfica bastante simples, oferece uma
variadíssima gama de componentes para circuitos de potência e controlo nas suas
bibliotecas. Os elementos de potência vão desde componentes elétricos passivos,
passando por semicondutores de potência e transformadores, até motores elétricos e
cargas mecânicas. Já os elementos de controlo vão desde filtros, portas lógicas, até
inúmeros blocos de funções matemáticas.
Figura 4.1 - Ambiente gráfico do software de simulação PSIM.

Capítulo 4 – Simulação do Controlador para o Motor Elétrico
68 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
4.2. Simulação do Conversor de Potência CC-CA
Nesta simulação, o Conversor de Potência é simulado em vazio e com uma carga
RL com valores aproximados das caraterísticas do motor elétrico de fluxo axial.
O conversor de potência CC-AC trifásico simulado é alimentado com uma
tensão no barramento CC de 60 V. Nos elementos de controlo, a fonte de tensão
triangular tem uma frequência de 8 kHz e uma amplitude máxima de 4 V, enquanto, a
fonte de tensão sinusoidal têm uma frequência de 50 Hz e uma amplitude máxima de
4 V. A forma de onda da tensão da saída, dada por cada ramo do conversor, é filtrada
por um filtro passa-baixo de 2ª ordem de 500 Hz.
4.2.1. Simulação do Conversor de Potência CC-CA em Vazio
Na Figura 4.2 pode-se ver o conversor de potência trifásico simulado, bem como
os elementos de controlo que fornecem os sinais de disparo dos IGBTs.
Figura 4.2 - Conversor de Potência em vazio simulado no PSIM.
Na Figura 4.3, pode-se ver as formas de onda filtradas da tensão simples da
saída do conversor trifásico simulado em vazio. As formas de onda das três fases são
sinusoidais e desfasadas entre si de 120º.
Figura 4.3 - Tensões de saída do Conversor de Potência trifásico.
Ten
são
(V
)
Tempo (s)

Capítulo 4 – Simulação do Controlador para o Motor Elétrico
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 69 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
As tensões simples obtidas, não atingem a tensão do barramento CC, devido aos
filtros passa-baixo aplicados.
Figura 4.4 - Filtros passa-baixo das tensões implementados nas simulações com e sem carga.
4.2.2. Simulação do Conversor de Potência CC-CA com Carga RL
Na simulação do Conversor de Potência com carga RL em estrela o valor de
cada resistência é de 20 mΩ, e o valor de cada indutância é de 5 mH.
Figura 4.5 - Conversor de potência CC-CA com carga RL simulado no PSIM.
Na Figura 4.6 são apresentadas as formas de onda da tensão simples filtrada e
da corrente de fase, do conversor trifásico simulado com carga RL, onde se verifica o
desfasamento entre a tensão e a corrente de cada fase, provocada pela indutância da
carga RL.
Figura 4.6 - Tensões e correntes de fase do Conversor de Potência trifásico simulado com carga RL em
estrela.
Ten
são
(V
) C
orr
en
te (
A)
Tempo (s)

Capítulo 4 – Simulação do Controlador para o Motor Elétrico
70 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
4.3. Simulação do Algoritmo de Controlo do Motor Síncrono
A técnica de Modulação implementada no algoritmo de controlo é a SPWM
(Sinusoidal Pulse Width Modulation). O algoritmo de controlo do motor síncrono é de
velocidade, sendo utilizado um sensor de velocidade para medir a velocidade angular
instantaneamente (wm), como se pode ver na Figura 4.8. Posteriormente a posição
angular do motor (CTr) é calculada através do integral de wm, pois é necessária para o
cálculo das transformadas diretas e inversas de Park e Clarke do algoritmo de controlo.
Figura 4.7 - Algoritmo de controlo do motor síncrono trifásico simulado no PSIM.
Nesta simulação, o motor síncrono é testado em vazio e em carga, para duas
velocidades de referência de 25 rad/s e 50 rad/s. A tensão do barramento CC é de 48 V.
A frequência nominal do motor síncrono trifásico é 139 Hz, que equivale a uma
velocidade angular máxima de 54 rad/s. O circuito de potência implementado no PSIM
é demonstrado na Figura 4.8.
Figura 4.8 - Circuito de Potência implementado na simulação do Motor Síncrono no PSIM.

Capítulo 4 – Simulação do Controlador para o Motor Elétrico
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 71 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
4.3.1. Simulação do Motor Síncrono em Vazio
Na Figura 4.9 podem-se ver a velocidade angular (wm) do motor síncrono
simulado em vazio para as duas velocidades de referência (wm_ref). A transição de
velocidades dá-se no instante de tempo t=1.
Figura 4.9 - Velocidade angular do motor síncrono simulado em vazio, para duas velocidades de
referência.
Na Figura 4.10 podem-se ver as formas de onda filtradas da tensão simples
aplicadas ao motor síncrono simulado em vazio, para as duas velocidades de referência.
Figura 4.10 - Tensões simples aplicadas ao motor síncrono simulado em vazio, para duas velocidades de
referência.
Na Figura 4.11 pode ver-se as correntes de linha consumidas pelo motor
síncrono simulado em vazio, para as duas velocidades de referência simuladas.
Tempo (s)
Ve
loci
dad
e (
rad
/s)
Tempo (ms)
Ten
são
(V
)

Capítulo 4 – Simulação do Controlador para o Motor Elétrico
72 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 4.11 - Correntes de linha consumidas pelo motor síncrono simulado em vazio, para duas
velocidades de referência.
4.3.2. Simulação do Motor Síncrono em Carga
Nesta simulação é aplicada uma carga ao motor síncrono de 10 Nm. Na Figura
4.12, pode-se ver a velocidade angular (wm) do motor síncrono simulada para as duas
velocidades de referência (wm_ref). A transição de velocidades dá-se no instante de
tempo t=1.
Figura 4.12 - Velocidade angular do motor síncrono simulado em carga, para duas velocidades de
referência.
Na Figura 4.13 podem ver-se as tensões simples aplicadas ao motor síncrono,
simuladas para as duas velocidades de referência.
Ve
loci
dad
e (
rad
/s)
Co
rre
nte
(A
)
Tempo (ms)
Tempo (s)

Capítulo 4 – Simulação do Controlador para o Motor Elétrico
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 73 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 4.13 - Tensões simples filtradas aplicadas ao motor síncrono simulado em carga, para duas
velocidades de referência.
Na Figura 4.14 podem ver-se as correntes de linha consumidas pelo motor
síncrono, para as duas velocidades de referência simuladas.
Figura 4.14 - Correntes de linha consumidas pelo motor síncrono simulado em carga, para duas
velocidades de referência.
4.4. Conclusão
Na simulação do conversor de potência, tanto em vazio como em carga,
verificou-se que o conversor consegue fornecer tensões e correntes perfeitamente
sinusoidais. Também verificou-se que consegue fornecer tensões e correntes, que
variam em frequência e amplitude.
Na simulação do algoritmo de controlo do motor síncrono, para duas
velocidades de referência, verificou-se que, o motor atinge de forma suave, e
rapidamente, a velocidade angular de referência. Também se verificou que as formas de
Tempo (ms)
Ten
são
(V
) C
orr
en
te (
A)
Tempo (ms)

Capítulo 4 – Simulação do Controlador para o Motor Elétrico
74 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
onda das tensões e correntes adotam uma forma mais sinusoidal com o aumento da
carga.

Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 75 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
CAPÍTULO 5
Implementação do Controlador para o Motor Elétrico
5.1. Introdução
Neste capítulo, é descrita a implementação do controlador desenvolvido para o
acionamento de um motor elétrico trifásico, onde são abordadas todas as tecnologias
utilizadas na implementação do controlador desenvolvido, que é composto pelo circuito
de potência e circuito de controlo.
Na Figura 5.1 pode ser visto o controlador desenvolvido no âmbito deste
trabalho de Mestrado realizado no GEPE (Grupo de Eletrónica de Potência e Energia)
do Departamento de Eletrónica Industrial da Universidade do Minho, para um motor
elétrico.
Figura 5.1 - Bancada de ensaio do controlador eletrónico desenvolvido para acionamento de motores.
Para melhor entender a constituição e ligações do circuito de potência e do
circuito de controlo, é apresentado na Figura 5.2 um esquema de ligações dos vários
componentes que constituem o controlador eletrónico desenvolvido para o acionamento
de um motor elétrico trifásico.

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
76 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Este capítulo começa por descrever o circuito de potência desenvolvido, que
torna possível a conversão da tensão contínua do barramento CC para tensões
Placa de Interface
Conversor de Potência
Fonte de Tensão CC
Microprocessador (DSP)
Sensores de Corrente
Sensor de Posição
Placa de Comando
Motor Elétrico
P. Condicionamento de Sinal
Sensores de Tensão
Circuito de Potência
Circuito de Controlo
1 2
3
8
4
7
5
11
10
9
Legenda:
1 – A fonte de tensão alimenta o conversor de potência com tensão contínua (48 V), quando a
máquina síncrona funciona como motor;
2 – O Conversor de Potência funciona como inversor, alimentando o motor elétrico com tensões
sinusoidais trifásicas;
3 – O Circuito de Comando envia 6 sinais de comando dos IGBT´s e recebe 4 sinais de controlo de
erros dos Drivers do Conversor de Potência.
4 – O Circuito de Interface recebe 1 sinal de controlo de erros da placa interface, envia dois sinais
de controlo (Enable e Reset); 5 – recebe 2 sinais (sen/cos) do sensor de posição e; 6 – recebe 3
sinais, um do potenciómetro (velocidade) e dois dos switchs Start/Stop e Vel.1/Vel.2.
7 – O Microprocessador recebe 1 sinal do potenciómetro e 2 sinais de posição (sen/cos), e envia
dois sinais de controlo (Enable e Reset); 8 – envia 6 sinais PWM de comando dos IGBT´s e; 9 –
recebe 4 sinais dos sensores da placa de condicionamento de sinal;
10 – A Placa de Condicionamento de Sinal recebe 2 sinais dos sensores de corrente e; 11 – 2 sinais
dos sensores de tensão.
Potenciómetro
6
Sensores de
Corrente
Drivers
Figura 5.2 - Esquema de ligações do sistema eletrónico implementado.

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 77 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
sinusoidais trifásicas (após filtragem) para o motor elétrico. Nele estão incorporados
uma fonte de tensão CC, o motor elétrico e o conversor de potência.
É descrito também o circuito de controlo utilizado, onde são abordados o tipo
microcontrolador utilizado e o código implementado, as placas de comando e de
interface, bem como a placa de condicionamento de sinal desenvolvido e os sensores
utilizados.
5.2. Circuito de Potência
O circuito de potência, tal como o nome sugere, é um circuito percorrido por
correntes elevadas. Este circuito é responsável pela alimentação do motor elétrico
trifásico, transformando a tensão contínua fornecida pelos pela fonte de alimentação em
tensões sinusoidais trifásicas, desfasadas entre si de 120º.
A seguir, são descritas as características do motor síncrono de fluxo axial
inicialmente escolhido, bem como componentes que constituem o conversor de potência
trifásico implementado.
5.2.1. Motor Elétrico de Fluxo Axial
O motor elétrico escolhido foi o Pra230 da Perm-Motor. O Pra230 foi escolhido
por ser um motor síncrono trifásico de ímanes permanentes de fluxo axial, o que o torna
mais leve e compacto, comparativamente a outros motores com a mesma potência, com
a vantagem de não ter engrenagens e de poder ser acoplado diretamente na roda.
Figura 5.3 - Motor Pra230 acoplado diretamente numa roda [54].
Para a elaboração da Tabela 4, com as características do motor elétrico, foi
necessário fazer algumas medições. A resistência do estator (RS) foi obtida a partir da
medição da resistência entre fases dividida por dois, uma vez que os enrolamentos do
estator estão ligados em estrela. A medição da resistência foi efetuada com a ajuda de
uma ponte RLC de precisão (PM630A da PHILIPS).
Na Tabela 4, são apresentadas as características elétricas do motor síncrono.

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
78 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Tabela 4 - Características elétricas do motor síncrono Pra230 [55].
Potência: 1,8 kW
Ligação do Estator: Estrela
Tensão Nominal: 33,2 V
Corrente Nominal: 40,8 A
cos φ: 0,77
Velocidade Nominal: 520 rpm
Binário: 33 Nm
Constante de Binário: 0,81 Nm/A
Nº de Polos: 32
Frequência Nominal: 139 Hz
Resistência (u-v): 62 mΩ
Resistência (RS): 31 mΩ
Indutância (u-v): 358 µH
Indutância (Lq): 483 µH
Indutância (Ld): 413 µH
Massa: 13,8 kg
Para o controlo do motor são necessários os valores das indutâncias, Lq e Ld,
correspondentes às indutâncias em relação aos eixos de referência q e d. Não sendo
esses valores fornecidos pelos fabricantes, foi necessário proceder-se ao cálculo das
respetivas indutâncias. Para conseguir calcular as indutâncias, Lq e Ld, ligou-se o
terminal da fase b ao terminal da fase c do motor, de modo a eliminar a componente d
do eixo do rotor, e a alinhar a componente q do eixo do rotor com a fase a. Desta forma,
pode-se escrever a equação (5.1), que descreve o modelo equivalente do motor no eixo
q.
a s a q au R i L i (5.1)
Por fim, é preciso aplicar na fase a uma pequena tensão alternada, de amplitude
e frequência fixa, de modo a poder medir a corrente que a percorre. O valor de Lq deve
ser calculado para um valor mínimo da corrente de pico que percorre os enrolamentos
da fase a, enquanto o valor de Ld deve ser calculada para um valor máximo da mesma
corrente. Obtêm-se essa variação da corrente de pico variando a posição angular do
rotor do motor. Desta forma, para poder calcular o valor de Lq e Ld, a equação (5.1) dá
lugar às equações (5.2) e (5.3), onde Vpp é a tensão de pico aplicada na fase a, Ipp é a

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 79 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
corrente de pico medida, RS é a resistência por fase, w é a frequência angular, e Lq e Ld a
indutância no eixo q e d, respetivamente:
222
2
wLRI
VqS
PP
PP (5.2)
222
2
wLRI
VdS
PP
PP (5.3)
Nos testes realizados para o cálculo das indutâncias Lq e Ld, foram obtidas as
seguintes formas de onda das tensões e correntes mostradas na Figura 5.4. A escala dos
sensores de corrente é de 10 mV/A.
Figura 5.4 - Forma de ondas das tensões (azul) e correntes (verde) para o cálculo das indutâncias Ld e Lq.
A seguir, são apresentados os cálculos das indutâncias Lq e Ld, através das
equações (5.2) e (5.3), respetivamente.
HLLW
RI
V
L qq
S
pp
pp
q 483100
)1031(45,1
10225 23
23
2
2
(5.4)
HLLW
RI
V
L qq
S
pp
pp
d 413100
)1031(65,1
10220 23
23
2
2
(5.5)
5.2.2. Conversor de Potência
O conversor de potência implementado neste projeto foi desenvolvido para o
motor síncrono trifásico Pra230. Nele, são utilizados 3 módulos de IGBTs, 3 Drivers e
suas placas, e 3 condensadores com função de snubber.
Lq Ld

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
80 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 5.5 - Conversor de Potência trifásico implementado.
A seguir, são descritos os componentes utilizados na construção do conversor de
potência.
Módulo de IGBTs
O módulo de IGBTs utilizado é o SKM100GB176D da Semikron. Cada módulo
possui 2 IGBTs que formam um braço do conversor de potência. Os IGBTs suportam
correntes máximas de coletor (Ic) de 125 A, tensões máximas de coletor-emissor (Uce)
de 1200 V e correntes de curto-circuito até 720 A. Na Figura 5.6, é apresentado o
Módulo de IGBTs utilizado, e seu respetivo esquemático [56].
Figura 5.6 - Módulo IGBT SKM100GB176D da Semikron e seu esquemático [56].
Driver
O Driver utilizado é o Skyper 32Pro R da Semikron, e tem como principal
função, isolar eletricamente o circuito de controlo do circuito de potência. Este Driver,
além de isolar os dois circuitos através de uma fonte de alimentação interna isolada,

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 81 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
também suporta algumas funções a fim de proteger o módulo de IGBTs do lado do
circuito de potência [57]. As funções são as seguintes:
Controlo de falhas (Failure Management);
Proteção contra subtensões (Under Voltage Protection);
Proteção dinâmica contra curto-circuitos (Dynamic Short Circuit
Protection);
Geração do tempo morto (Dead Time Generation);
Sinais de Paragem/Erro (Halt Logic Signal);
Desligar suave dos IGBTs (Soft Turn-Off);
Entrada de erros externos (External Error Input).
O Failure Management gere algumas das funções do Driver, tais como Under
Voltage Protection, Dynamic Short Circuit Protection, Halt Logic Signal. Em caso de
algumas destas funções detete uma falha, o Failure Management desliga os IGBTs e
envia um erro de saída (Halt_Out). A função Under Voltage Protection protege o
circuito contra subtensões, tanto do lado do conversor (Primário <13,5 V) como do lado
do controlo (Secundário <12 V). Já a função Dynamic Short Circuit Protection protege
contra curto-circuitos, podendo a sensibilidade da proteção ser dinamicamente adaptada
aos disparos dos IGBTs durante o seu ligar (Turn-On), através de inserção de um
condensador (CCE) e uma resistência (RCE) entre o coletor e o emissor da cada IGBT. O
Driver também permite que os IGBTs possam ser desligados suavemente através da
função Soft Turn-Off (STO), que é habilitada através da colocação de uma resistência
em série (RGoff_SC) com a resistência da gate dos IGBTs (RGoff), evitando assim picos de
corrente que ocorrem quando se desliga rapidamente circuitos que possuem indutâncias.
Este Driver permite ainda a geração do Dead Time dos sinais de comando do módulo de
IGBTs, e suprime pulsos curtos indesejados, menores que 650 ns, nesses mesmos sinais.
A função Halt Logic Signal possui dois sinais de erro, um de entrada (Prim_Halt_In) e
outro de saída (Prim_Halt_Out), que habilitam ou desabilitam o estado do driver
[57],[59].
Figura 5.7 - Driver Skyper 32Pro R da Semikron [58].

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
82 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Por último a função External Error Input disponibiliza 2 entradas de erros
externos do lado conversor de potência, que podem ser usadas nos circuitos externos de
proteção contra sobre correntes ou sobre temperaturas para desligar os IGBTs [57].
O Driver possui uma placa chamada de Board 1 Skyper 32Pro R da Semikron
que serve de placa de adaptação ao próprio Driver, e de circuito de ligação entre a Placa
de Comando e o Módulo IGBT. A placa do Driver é ilustrada na Figura 5.8.
Figura 5.8 - Board 1 Skyper 32Pro R da Semikron.
A Board 1 Skyper 32Pro R além de servir de suporte ao Driver, também permite
configurar algumas das suas funções descritas anteriormente. Permite configurar a
sensibilidade ao curto-circuito da função Dynamic Short Circuit Protection, através da
escolha do condensador (CCE) e da resistência (RCE) de cada IGBT. Permite configurar o
Dead Time através da combinação de 4 pinos, conectados ou não, à terra do circuito
(GND). O Dead Time utilizado foi de 3 µs, que já vem configurado por defeito na placa.
Permite desabilitar o sinal de erro de entrada do primário (Prim_Halt_In), da função
Halt Logic Signal, ligando-o diretamente ao sinal de erro de saída do primário
(Prim_Halt_Out). A Board 1 Skyper 32 Pro também permite dimensionar a resistência
(RGoff_SC) da função Soft Turn-Off, ou mesmo desabilitá-la fazendo um shunt no lugar da
resistência. Por fim, permite configurar as duas entradas externas da função External
Error Input através da colocação de resistências para ajuste das tensões de entrada, ou
mesmo desabilita-las também através de um shunt [57],[59].
Condensador com função de Snubber
Um Condensador com função de snubber é um componente simples de absorção
de energia, que é utilizado para eliminar picos de tensão causados pela energia
armazenada nas bobinas do circuito, quando os semicondutores de potência, ou mesmo
comutadores mecânicos, abrem. O princípio de funcionamento assemelha-se a um filtro
“passa-baixo”.

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 83 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
O Condensador com função de snubber utlizado é da EPCOS, tem uma
capacidade de 1 µF e suporta picos de tensões até 1000 V.
Figura 5.9 – Condensador com função de snubber da EPCOS de 1 µF, 1000 V [60].
Para conseguirem absorver os picos de tensão que podem danificar o conversor
de potência, o Snubberes são colocados em paralelo com o módulo dos semicondutores,
de forma a poder disponibilizar um caminho alternativo para a corrente, provocada pela
energia armazenada nos enrolamentos do motor elétrico [61].
5.3. Circuito de Controlo
O Circuito de Controlo é responsável pelo controlo da velocidade do motor,
através da sincronização dos disparos dos IGBTs do conversor de potência. Para o
motor síncrono, esse controlo só é conseguido através da recolha de informação dos
sensores de corrente e do sensor de posição do motor, que é necessária para o algoritmo
de controlo implementado no microcontrolador. Devido à necessidade de ajustar as
tensões dos sinais que entram e saem do microcontrolador, várias placas são utilizadas,
tais como, a Placa de Condicionamento de Sinal e a Placa de Interface, para os sinais de
entrada, e a Placa de Comando para os sinais de saída. A Placa de Comando também
protege o Circuito de Controlo e sinaliza eventuais erros que possam ocorrer no Circuito
de Potência.
Na Figura 5.10, é mostrado o Circuito de Controlo, constituído pelas várias
placas desenvolvidas e microcontrolador utilizado.

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
84 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 5.10 - Circuito de Controlo implementado.
A seguir, são apresentadas as várias placas e componentes constituintes do
Circuito de Controlo.
5.3.1. Placa de Comando
A Placa de Comando é responsável pela conversão da tensão dos sinais de
comando dos IGBTs e pela deteção dos erros enviados pelos drivers, que em caso
afirmativo, bloqueia estes mesmos sinais.
Esta placa converte a tensão dos sinais de comando do microcontrolador (3,3 V)
para a tensão do driver (15 V). Quando algum erro é detetado, é sinalizado através de
LEDs que assinalam os respetivos erros.
A Placa de Comando utilizada, foi desenvolvido no GEPE (Grupo de Eletrónica
de Potência e Energia) do Departamento de Eletrónica Industrial da Universidade do
Minho.
Figura 5.11 - Placa de Comando.

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 85 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Esta placa também permite bloquear os sinais de comando e desativar os erros
através de dois sinais externos, chamados de Enable e Reset, respetivamente. Estes
sinais podem ser ativados mecanicamente ou por software. A placa ainda possui um
sinal de saída (Erro_Inv_Comando), que sinaliza a existência de erros nos drivers.
5.3.2. Placa de Interface
A Placa de Interface é composta por dois circuitos independentes, que têm como
principal função fazer a ligação dos sinais da Placa de Comando e da Placa de
Condicionamento de Sinal com o Microcontrolador, ou seja, ajusta os níveis de tensão
entre ambos. Os circuitos que convertem as tensões dos sinais da Placa de Comando e
dos sensores do motor vão ser designados de circuito Interface_1 e Interface_2,
respetivamente.
O circuito de Interface_1 converte a tensão do sinal de saída Erro_Inv_Comando
e dos sinais de entrada Enable e Reset do circuito de comando (15 V) para a tensão dos
pinos do micro (3,3 V). O circuito de Interface_2 tem como função, ajustar linearmente
o valor da tensão dos dois sinais de saída do sensor de posição do motor (sen e cos), do
sensor de temperatura do motor e do potenciómetro que regula a velocidade do motor (0
a 5 V), para a tensão do ADC do DSC/Microcontrolador (0 e 3 V). Este circuito fornece
também dois sinais de controlo do motor elétrico por software, um para ligar ou desligar
o motor (Start/Stop) e o outro para mudar o sentido de deslocamento do motor
(Forward/Backward).
Figura 5.12 - Placa de Interface.
No circuito Interface_1, para a conversão da tensão dos sinais
Erro_Inv_Comando, Enable e Reset são utilizados octocopladores, que além de permitir
ajustar as tensões também isolam galvanicamente a placa do Kit do microcontrolador.
Circuito Interface_1 Circuito Interface_2

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
86 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Os esquemas elétricos que permitem converter a tensão de cada um destes sinais, são
apresentados a seguir.
3.3V1
2
3 4
5
6
NC
ViVo
R1
R2
Figura 5.13 - Esquema elétrico do circuito de conversão da tensão dos erros.
15V1
2
3 4
5
6
NC
ViVo
R1
R2
Figura 5.14 - Esquema elétrico do circuito de conversão dos sinais Enable e Reset.
O circuito Interface_2 ajusta a tensão de saída dos sensores através de um
circuito redutor composto por amplificadores operacionais (AMPOPs) que garantem
uma gama de tensões de saída entre 0 e 3 V para assim poderem ser lidas pelo ADC do
microcontrolador. Tanto os sinais de saída do sensor de posição como o sinal de saída
sensor de temperatura necessitam de dois AMPOPs para obterem a gama de tensões
pretendidas. Já para ajustar o valor da tensão de saída do potenciómetro apenas foi
necessário dimensionar o valor da resistência que é colocada em série com o
potenciómetro, de forma a obter tensões entre 0 e 3 V. Na Figura 5.15, é demonstrado o
esquema elétrico do circuito redutor desenvolvido para os sensores do motor.
Figura 5.15 - Esquema elétrico do circuito redutor dos sensores do motor.
5.3.3. DSC/Microcontrolador
O Controlador de Sinal Digital (Digital Signal Controller - DSC) escolhido para
controlar o motor elétrico foi o TMS320F28335 da Texas Instruments. Este DSC foi
Tensão
de Saída
dos Erros
Tensão de
Entrada do
Microcon-
trolador
Tensão de
Saída do
Microcon-
trolador
Tensão de
Entrada da
Placa
Interface_1
Tensão
de saída
dos
Sensores
Tensão de
entrada
do
ADC
Vi
VO

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 87 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
escolhido devido a sua grande capacidade e velocidade de processamento de dados, e
também devido às soluções de alta performance para as exigências das aplicações de
controlo, como por exemplo, geradores de saídas PWM avançados e conversores
Analógico-Digital (Analog-Digital Converter - ADC) de alta velocidade.
A série C2000TM Delfino Floating Point, da família de microcontroladores
TMS320, que suportar tarefas numéricas intensivas, é desenvolvida especialmente para
o controlo de motores elétricos. As principais características deste microcontrolador são
[62]:
Frequência de clock até 150 MHz;
Unidade de Processamento Central (CPU) de 32 bits;
Controlador de acesso diretamente á memória (DMA) de 6 canais;
Memória interna flash de 256 K x 16 K e SARAM de 34 K x 16 K;
Boot ROM (8 K X 166 K), com 7 modos arranque por software;
PLL dinâmica, oscilador interno e Watchdog;
18 saídas PWM, 6 saídas HRPWM e 6 capturas de eventos de entrada;
3 timers de 32 bits;
Periféricos Porta Série: 2 módulos CAN e 3 módulos SCI;
ADC de 12 bits, com 16 canais de entrada (A0-A7; B0-B7);
88 Entradas/Saídas de propósito geral (GPIO0 até GPIO87).
Para a implementação do DSC/Microcontrolador neste projeto utilizou-se o kit
Experimentador TMS320F28335 que permite explorar e testar todas as funcionalidades
do DSC. O kit TMS320F28335 possuiu um cartão de controlo (controlCARD), onde está
inserido o microcontrolador, e uma placa de testes (docking station) que possibilita o
acesso a 100 pinos do microcontrolador e ainda a áreas de testes, bem como conectores
JTAG, comunicação RS-232 e emuladores JTAG USB.
Figura 5.16 - ControlCard do Kit Experimentador TMS320F28335 [63].
Na Figura 5.18, é apresentado o diagrama de blocos funcional do
microcontrolador utilizado.

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
88 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 5.17 - Kit Experimentador TMS320F28335 [63].
Figura 5.18 - Diagrama de blocos funcional do DSC TMS320F28335 [62].

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 89 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Para a programação do DSC TMS320F28335 foi utilizado o software Code
Composer Studio™ IDE, versão 4.1 C28x™ 32k byte. Este software além de compilar o
código, também faz o debug direto ao DSC/Microcontrolador podendo ser em tempo
real, isto é, pode ver-se o valor instantâneo das variáveis que se pretende analisar. Na
Figura 5.19, pode ver-se o ambiente gráfico do Code Composer Studio versão 4.
Figura 5.19 - Ambiente gráfico do CCSv4.
Para melhor compreender o funcionamento do microcontrolador, é apresentado
na Figura 5.20, o fluxograma do código implementado para o controlo do motor
síncrono.
O algoritmo implementado no microcontrolador começa por declarar as
variáveis, como por exemplo, as variáveis para o cálculo das transformadas diretas e
inversas de Park e Clarke, em seguida configuram-se as interrupções utilizados, como o
relógio do sistema e dos periféricos, 8 pinos de saída, sendo que 6 pinos foram
configurados como ePWM para o disparo dos IGBTs do inversor e os restantes 2 pinos
para o Enable e o Reset da placa de Interface_1.
Foram ainda configurados 6 pinos como entradas, para os quatro erros do
conversor de potência e para os botões de Start e Reverse/Forward do motor, e por
último foi habilitada a interrupção interna do ADC. Também o módulo do ADC, que
transforma os sinais analógicos vindos dos sensores de corrente, tensão e posição em
sinais digitais, foi configurado para trabalhar no modo de conversão sequencial, à

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
90 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
velocidade do clock dos periféricos e para um máximo de 8 conversões no porto A (A0-
A7).
A última configuração foi feita no módulo ePWM, que foi utilizado para
controlar os 6 IGBTs do inversor trifásico (Conversor de Potência) através de 3
módulos PWM (EPWM1, EPWM2, EPWM3), Figura 5.21, e também para controlar o
tempo entre interrupções do ADC através do módulo EPWM4, que faz disparar a o bit
de controlo de início da conversão (SOC – Start of Conversion) do ADC.
Inicio
Declaração de
Variáveis
Configuração:
Pinos do DSC/Microcontrolador (Entrada/Saída)
ADC (8 conversões)
ePWM1,2,3 para o Inversor Trifásico
ePWM4 para o SOC do ADC
Espera interrupção do
ADC (SOC). Flag
EOC=1?
Lê os 8 registos do ADC
Cálculos das transformadas diretas e
inversas, de Clarke e Park
Comparação das três ondas sinusoidais
calculadas, com a onda triangular gerada
do ePWM
Sim
Não
Figura 5.20 - Fluxograma de nível 1 do algoritmo de controlo do motor síncrono.

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 91 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 5.21 - Sinais de controlo configurados no módulo ePWM do microcontrolador, aplicados nos 6
IGBTs do conversor de potência.
Depois de todos as variáveis declaradas, interrupções e módulos do
DSC/Microcontrolador configurados, o código de controlo do motor entra num ciclo no
qual espera que aja um SOC e consequentemente um fim da conversão (EOC – End of
Conversion) para assim poder ler os 8 registos do ADC que armazenam os valores da
conversão. Depois de ler os valores dos registos para variáveis declaradas
anteriormente, o código entra na fase de cálculo das transformadas de Clarke e Park
pertencentes ao controlo implementado para o motor. Do cálculo dessas transformadas
são geradas na sua saída três ondas sinusoidais que vão ser comparadas com as ondas
triangulares geradas pelo módulo ePWM, resultando daí pulsos modulados (PWM) nos
pinos de saída configurados anteriormente, sempre que a amplitude das três ondas
sinusoidais seja superior a amplitude da onda triangular.
Na Figura 5.22, pode-se comprovar a modulação dos pulsos de disparo dos
IGBTs (Azul), devida à comparação da onda triangular (verde) que é gerada a uma
frequência muito superior à da onda sinusoidal (vermelha).
Figura 5.22 - Modulação dos pulsos resultante da comparação da onda triangular com a onda sinusoidal.
Tempo (ms)
Ten
são
(V
)

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
92 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
5.3.4. Sensor de Posição
O Sensor de Posição incorporado no motor síncrono de fluxo axial é o sensor
RMB28MD de saídas sen/cos e incrementais.
Figura 5.23 - Sensor de Posição RMB28MD e suas saídas [64].
As saídas do sensor RMB28MD utilizadas para medir a posição angular do
motor trifásico foram as saídas sen/cos. Na Figura 5.24, é ilustrada as formas de onda de
saída do seno e cosseno bem como a sua amplitude.
Figura 5.24 - Diagrama temporal (Seno/Coseno) [64].
Na Tabela 5 são apresentados s características elétricas do sensor de posição
Tabela 5 - Características elétricas do Sensor de Posição RMB28MD [64].
Alimentação: 5 V
Resolução: 8 bits + 64 ppr (256 cpr)
Consumo de Corrente: 13 mA
Saída de Dados: Dados Série Síncrona
Entrada de Dados: Relógio (Clock)
Saídas Incrementais: A, B e C
Saídas Sen/Cos: Amplitude de Sinal: 1.1 ± 0.2
Temperatura Funcionamento: -40ºC até 125ºC
Velocidade Máxima: 60000 rpm
Precisão: ±0,7º
Histerese: 0,45º

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 93 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Para a obtenção da posição e velocidade angular do motor síncrono de ímanes
permanentes, indispensáveis para o seu controlo, através das formas de onda de saída
sen/cos do sensor de posição é necessário efetuar alguns cálculos matemáticos que são
posteriormente implementados no código do DSC/Microcontrolador. A seguir, são
numerados os passos necessários para a obtenção da posição e velocidade angular do
motor elétrico.
1. Centrar a onda em zero
ADC: 3 V → 4096
Amplitude do Sinal (Seno ou Cosseno):
Ex. Entre 1,39 V e 3 V → 1898 a 4096
Valor Médio: 2,19 V → 2997
Então para centrar o sinal:
Ex. De (1898 - 2997) a (4096 - 2997) → -1100 a 1100
2. Por a onda com amplitude de 2 Vpp (1 Vp) para depois conseguir medir o ângulo
da respetiva amplitude.
11001100,
11002,1 x
xAmpl (5.6)
3. Calcular a posição do motor através da equação trigonométrica.
11),
2
1(tan 2,1
1 AmplAmpl
Amplx (5.7)
4. Cálculo da velocidade angular do motor através da derivada da posição angular.
aa
aa
tt
xx
t
xdt
dt
dxv
1
1 (5.8)
5.3.5. Placa de Condicionamento de Sinal
A Placa de Condicionamento de Sinal é responsável por receber os sinais de
saída vindos dos sensores de corrente e tensão de efeito Hall e ajusta-los para a gama de
valores de tensão do ADC. Esta placa foi concebida para receber dois sinais de tensão e
dois sinais de corrente, sendo que os sensores de tensão estão incorporados na placa e
medem a tensão dos supercondensadores, enquanto os sensores de corrente encontram-
-se colocados em duas fases do motor trifásico e medem as respetivas correntes que lá
passam.
A Placa de condicionamento de sinal além de possuir um circuito de ajuste de
ganho, do sinal de saída dos sensores, ainda possui um filtro passa-baixo Sallen-Key de

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
94 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
2ª ordem, para eliminar o ruído que possa existir, permitindo assim, ter medições de
tensões corretas aquando do ajuste do ganho, e consequentemente leituras por parte do
ADC.
Neste circuito estão colocados ainda, as resistências calculadas para o circuito
primário e secundário dos sensores de tensão e corrente. Tanto as resistências de
potência do primário, como as resistências de precisão do secundário dos sensores, são
calculadas nas secções apresentadas a seguir.
Figura 5.25 - Placa de Condicionamento de Sinal.
Sensor de Tensão
O tipo de Sensor de Tensão utilizado para medir a tensão a que se encontra o
banco de condensadores e o Motor Elétrico é o de efeito Hall.
Figura 5.26 - Princípio de funcionamento e construção dos sensores de efeito Hall [66].
Tal como o nome indica, o princípio de funcionamento destes sensores baseia-se
no efeito de Hall, que se verifica, sempre que um condutor elétrico seja percorrido por
uma corrente elétrica, e estando sobre a influência de um campo magnético, dê origem a
Íman
VH (Saída)
Resistências
de Potência
do Primário
Circuito
Condicionador
dos Sinais dos
Sensores
Entrada dos
Sinais de Saída dos
Sensores de Corrente
Sensores
de
Tensão

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 95 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
uma diferença de potencial (Tensão de Hall), perpendicular ao campo magnético e
transversal à corrente que o atravessa [65].
A escolha recaiu sobre este tipo de sensor, devido ao excelente isolamento
elétrico, entre o circuito primário (Tensões altas) do circuito secundário (Circuito
Eletrónico), e às caraterísticas vantajosas dos sensores de efeito Hall, que são [67],[68]:
Medição de campos contínuos ou alternadas;
Sinal de saída em corrente ou em tensão;
Excelente precisão de medida;
Muito boa linearidade;
Alta imunidade a interferências externas.
Relativamente ao sensor de tensão de efeito Hall escolhido, optou-se por o
LV 25 -P da LEM, devido a tensão máxima de 48 V dos supercondensadores. Na Figura
5.27, é apresentado o sensor escolhido.
Figura 5.27 - Sensor de Tensão de efeito Hall LV25-P da LEM [67].
Este sensor mede tensões nominais que vão desde 10 até 500 V (RMS) e suporta
correntes nominais até 10 mA (RMS) no primário, e fornece pelo secundário uma
corrente nominal até 25 mA (RMS) visto que a sua saída é em corrente como se pode
verificar pelo esquema de ligações apresentado em baixo [67].
LV 25-P
RmIs
+15 V
-15 V
0 V
0 V
+
-
M
+HT
+ HT
- HT
- HT
R1
Figura 5.28 - Esquema de ligações do Sensor de Tensão LV25-P.
Para introduzir o sensor de tensão entre o banco de supercondensadores e o
microcontrolador, é necessário ajustar os níveis de tensão e limitar os valores da
corrente que se encontram no circuito primário e secundário do sensor.

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
96 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Para a ligação em paralelo entre o sensor de tensão e o banco de condensadores
é necessária a introdução de uma resistência (R1) em série com o circuito primário que
limite a corrente até 10 mA (RMS), visto que o sensor obtém máxima precisão aquando
da corrente nominal do primário. A resistência R1 deve ser calculada de forma que a
tensão nominal que vai ser medida corresponda a uma corrente no primário de 10 mA.
1
( )
( )
Vmedido RMS
RI
primário RMS
(5.9)
Para a ligação entre o sensor de tensão e o DSC/Microcontrolador é também
necessária a introdução de uma resistência (RM) em série com o circuito secundário do
sensor para que ajuste a tensão na sua saída para a gama de medida do ADC
incorporado no microprocessador (0 até 3 V), visto que o sensor tem uma razão de
conversão de 2500:1000. A resistência RM deve ser calculada de forma que a tensão de
saída máxima do secundário corresponda a uma corrente no secundário de 25 mA. A
seguir são apresentadas as equações (5.10) e (5.11) que determinam o valor da
resistência RM [67].
( )1000
( ) 2500
Iprimário RMS
Isecundário RMS
(5.10)
( )
( )M
Vsecundário RMS
RI
secundário RMS
(5.11)
Os cálculos das resistências R1 e RM efetuados a seguir, são para a tensão
máxima dos supercondensadores (48 V).
1
484,8
310 10
R k
3120
325 10
MR
Sensor de Corrente
O sensor de corrente escolhido para medir a corrente consumida pelo motor
elétrico é o sensor de corrente de efeito Hall LA100-P. Este tipo de sensor foi escolhido
pelas mesmas razões enunciadas anteriormente que levaram a escolher o sensor de
tensão. O sensor LA 100-P foi selecionado devido às correntes obtidas pelo sistema de
controlo do motor elétrico, na ordem dos 90 A.

Capítulo 5 – Implementação do Controlador para o Motor Elétrico
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 97 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 5.29 - Sensor de Corrente de efeito Hall LA 100-P da LEM [68].
Este sensor de corrente mede correntes até 100 A (RMS) sendo a sua corrente
nominal no primário de 100 A (RMS). A razão de conversão de sensor é de 1:1000,
logo a sua corrente nominal do secundário é de 100 mA (RMS). Tal como o sensor de
tensão também este sensor apresenta uma saída em corrente, necessitando por isso, de
uma resistência (RM) em série com o circuito secundário para ajustar o valor da tensão
de saída [68].
LA 100-P
RmIs
+15 V
-15 V
0 V
0 V
+
-
M
Figura 5.30 - Esquema de ligações do sensor de corrente LA 100-P.
A resistência RM deve ser calculada de forma que a tensão de saída máxima do
secundário corresponda a uma corrente no secundário de 100 mA. A seguir são
apresentadas as equações (5.12) e (5.13) que determinam o valor da resistência RM [68].
( )
( ) 1000
Iprimário RMS
Isecundário RMS
(5.12)
( )
( )M
Vsecundário RMS
RI
secundário RMS
(5.13)


Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 99 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
CAPÍTULO 6
Resultados Experimentais
6.1. Introdução
Neste capítulo, em primeiro lugar, são apresentados os resultados experimentais
obtidos no ensaio do motor síncrono trifásico de ímanes permanentes de fluxo axial, de
topologia Double-Sided, de 1,8 kW de potência, com o controlador ACD4805 do
fabricante.
Depois, são mostrados os ensaios do controlador desenvolvido em malha aberta,
com e sem carga, que o validam.
Devido a falta de tempo, e ao facto do controlo dos motores síncronos de fluxo
axial ser bastante complexo, optou-se por ensaiar o controlador desenvolvido com um
motor de indução trifásico de fluxo radial.
6.2. Ensaio do Motor Síncrono com o Controlador ACD4805
Neste ensaio, o motor síncrono Double-Sided é testado em vazio e em carga,
com o controlador ACD4805 que foi comprado juntamente com o motor. O controlador
é alimentado por uma fonte de alimentação contínua de 42 V. Os sensores de corrente
usados têm uma escala de 10 mV/A. As formas de onda das tensões mostradas neste
capítulo, são resultado de um filtro passa-baixo aplicado por o osciloscópio.
As características do controlador ACD4805 são apresentadas na Tabela 6.
Tabela 6 - Características do controlador ACD4805 [69],[70].
Tipos de Motor: Motor Síncrono Trifásico de Ímanes
Permanentes
Tipo de Modulação: PWM (Pulse Width Modulation)
Frequência de Comutação: 8 kHz
Modo de Controlo: Velocidade e Binário
Tensão Nominal: 48 V
Corrente de Funcionamento (1 Hora): 75 A

Capítulo 6 – Resultados Experimentais
100 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
6.2.1. Ensaio do Motor Síncrono em Vazio
No ensaio em vazio, o motor síncrono é testado para velocidades de 67 rpm,
205 rpm e 494 rpm. Nas formas de onda da Figura 6.1, obtidas para a velocidade de
67 rpm, verifica-se que as tensões simples aplicadas no motor têm um valor de pico de
aproximadamente 7 V, e as correntes simples consumidas têm valor de pico de 8 A. As
formas de onda das tensões produzidas pelo conversor são aproximadamente
sinusoidais, enquanto as formas de onda das correntes consumidas pelo motor são muito
irregulares. Essa forma de onda irregular da corrente é típica nos motores síncronos de
fluxo axial principalmente quando funcionam em vazio, pois a medida que se aplica
carga ao seu eixo, a forma de onda vai-se tornando aproximadamente sinusoidal.
Figura 6.1 - Formas de onda da tensão e corrente do motor síncrono em vazio, para uma velocidade de
67 rpm.
Nas formas de onda visualizadas na Figura 6.2 (a), obtidas para a velocidade
205 rpm, verifica-se que as tensões simples aplicadas no motor têm um valor de pico de
aproximadamente 17 V e correntes consumidas com valor de pico de 12 A.
(a)
(b) Figura 6.2 - Formas de onda da tensão e corrente do motor síncrono em vazio: (a) Para 205 rpm; (b) Para
494 rpm.
ic ia
ib
ic ia ib ic ia ib
vc va vb
vc va vb vc va vb

Capítulo 6 – Resultados Experimentais
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 101 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
À velocidade máxima de 494 rpm em vazio, as tensões simples aplicadas no
motor têm um valor de pico de aproximadamente 40 V, e as correntes consumidas têm
valor de pico de 15 A, como se pode verificar na Figura 6.2 (b).
6.2.2. Ensaio do Motor Síncrono com Carga
No ensaio com carga, o motor síncrono é sujeito a cargas de 10, 20 e 33 Nm.
Para cada carga, são apresentadas as respetivas formas de onda das tensões filtradas e
das corrente para diferentes velocidades, sendo feita posteriormente a sua análise.
Para 10 Nm:
À velocidade de 106 rpm, as tensões simples aplicadas no motor têm um valor
de pico de aproximadamente 10 V e correntes consumidas com valor de pico de 20 A, já
para uma velocidade de 251 rpm, as tensões simples aplicadas no motor têm um valor
de pico de aproximadamente 26 V e correntes consumidas com valor de pico de 24 A.
As formas de onda, para as velocidades 106 rpm e 251 rpm, são apresentadas na Figura
6.3 (a) e Figura 6.3 (b), respetivamente.
(a)
(b) Figura 6.3 - Formas de onda das tensões e correntes do motor síncrono com uma carga de 10 N/m:
(a) Para 106 rpm; (b) Para 251 rpm.
À velocidade máxima de 448 rpm, para a carga de 10 Nm, as tensões simples
aplicadas no motor têm um valor de pico de aproximadamente 40 V e correntes
consumidas com valor de pico de 26 A.
ic ia ib ic ia ib
vc va vb vc va
vb

Capítulo 6 – Resultados Experimentais
102 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 6.4 - Formas de onda da tensão e corrente do motor síncrono com uma carga de 10 N/m, para uma
velocidade de 448 rpm.
Para 20 Nm:
À velocidade de 106 rpm, as tensões simples aplicadas no motor têm um valor
de pico de aproximadamente 12 V e correntes consumidas com valor de pico de 33 A, já
para uma velocidade de 251 rpm, as tensões simples aplicadas no motor têm um valor
de pico de aproximadamente 26 V e correntes consumidas com valor de pico de 35 A.
As formas de onda, para as velocidades 106 rpm e 251 rpm, são apresentadas na Figura
6.5 (a) e Figura 6.5 (b), respetivamente.
(a)
(b) Figura 6.5 - Formas de onda das tensões e correntes do motor síncrono com uma carga de 20 N/m:
(a) Para 106 rpm; (b) Para 251 rpm.
À velocidade máxima de 408 rpm para a carga de 20 Nm, as tensões simples
aplicadas no motor têm um valor de pico de aproximadamente 38 V e correntes
consumidas com valor de pico de 38 A.
ic ia ib
ic ia ib ic ia ib
vc va vb vc va vb
vc va vb

Capítulo 6 – Resultados Experimentais
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 103 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 6.6 - Formas de onda das tensões e correntes do motor síncrono com uma carga de 20 N/m, para
uma velocidade de 408 rpm.
Para 33 Nm:
À velocidade de 106 rpm, as tensões simples aplicadas no motor têm um valor
de pico de aproximadamente 14 V e correntes consumidas com valor de pico de 44 A, já
para uma velocidade de 250 rpm, as tensões simples aplicadas no motor têm um valor
de pico de aproximadamente 34 V e correntes consumidas com valor de pico de 60 A.
As formas de onda, para as velocidades 106 rpm e 250 rpm, são apresentadas na Figura
6.7 (a) e Figura 6.7 (b), respetivamente.
(a)
(b) Figura 6.7 - Formas de onda das tensões e correntes do motor síncrono com uma carga de 30 N/m:
(a) Para 106 rpm; (b) Para 250 rpm.
À velocidade máxima de 359 rpm para a carga de 33 Nm, as tensões simples
aplicadas no motor têm um valor de pico de aproximadamente 36 V e correntes
consumidas com valor de pico de 56 A.
vc va vb vc va vb
vc va vb
ic ia ib
ic ia ib ic ia ib

Capítulo 6 – Resultados Experimentais
104 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Figura 6.8 - Formas de onda da tensão e corrente do motor síncrono com uma carga de 30 N/m, para uma
velocidade de 359 rpm.
6.3. Ensaio do Controlador Desenvolvido com Cargas Lineares
Para validar o controlador para acionamento de motores trifásicos a operar em
malha aberta, foram criados no DSC/Microcontrolador os sinais de disparo dos módulos
IGBT. Esses sinais foram conseguidos através da comparação de 3 ondas sinusoidais de
100 Hz, desfasadas entre si de 120º, criados pela função seno, com as 3 ondas
triangulares sincronizadas criadas pelos módulos ePWM1,2,3 do microprocessador. As
ondas comparadas têm a mesma amplitude de modo a obter na saída a tensão máxima
do barramento CC. O conversor de potência foi testado inicialmente em vazio (sem
carga), e depois com uma carga trifásica resistiva e outra RL, ligadas em estrela. A
tensão do barramento CC é de 60 V. A escala dos sensores de corrente é de 40 mV/A.
Nos ensaios apresentados a seguir, são medidas as tensões simples e correntes em cada
fase.
6.3.1. Ensaio do Controlador Desenvolvido em Vazio
Na Figura 6.9 pode-se visualizar as formas de onda das tensões de saída do
controlador desenvolvido, sem cargas aplicadas na sua saída.
Figura 6.9 - Tensões de saída do controlador desenvolvido a operar em vazio.
vc va vb
vc va vb
ic ia ib

Capítulo 6 – Resultados Experimentais
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 105 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
6.3.2. Ensaio do Controlador Desenvolvido com Carga Resistiva
Neste ensaio, a carga equilibrada ligada em estrela possui 3 resistências de 26 Ω.
Na Figura 6.10 pode-se visualizar as formas de onda das tensões aplicadas e das
correntes consumidas em cada fase da carga trifásica.
(a) (b)
Figura 6.10 - (a) Tensões aplicadas a cada fase da carga resistiva; (b) Correntes consumidas por cada fase
da carga resistiva.
6.3.3. Ensaio do Controlador Desenvolvido com Carga RL
Neste ensaio, a carga Resistiva-Indutiva (RL) também é equilibrada e ligada em
estrela. Cada carga RL possui uma resistência de 26 Ω e uma indutância de 8 mH
ligadas em série. Na Figura 6.11 pode-se visualizar as formas de onda da tensão
aplicadas e correntes consumidas, por cada fase da carga RL.
(a) (b)
Figura 6.11 - (a) Tensões aplicadas a cada fase da carga RL; (b) Correntes consumidas por cada fase da
carga RL.
ic ia ib
vc va vb
ic ia ib vc va vb
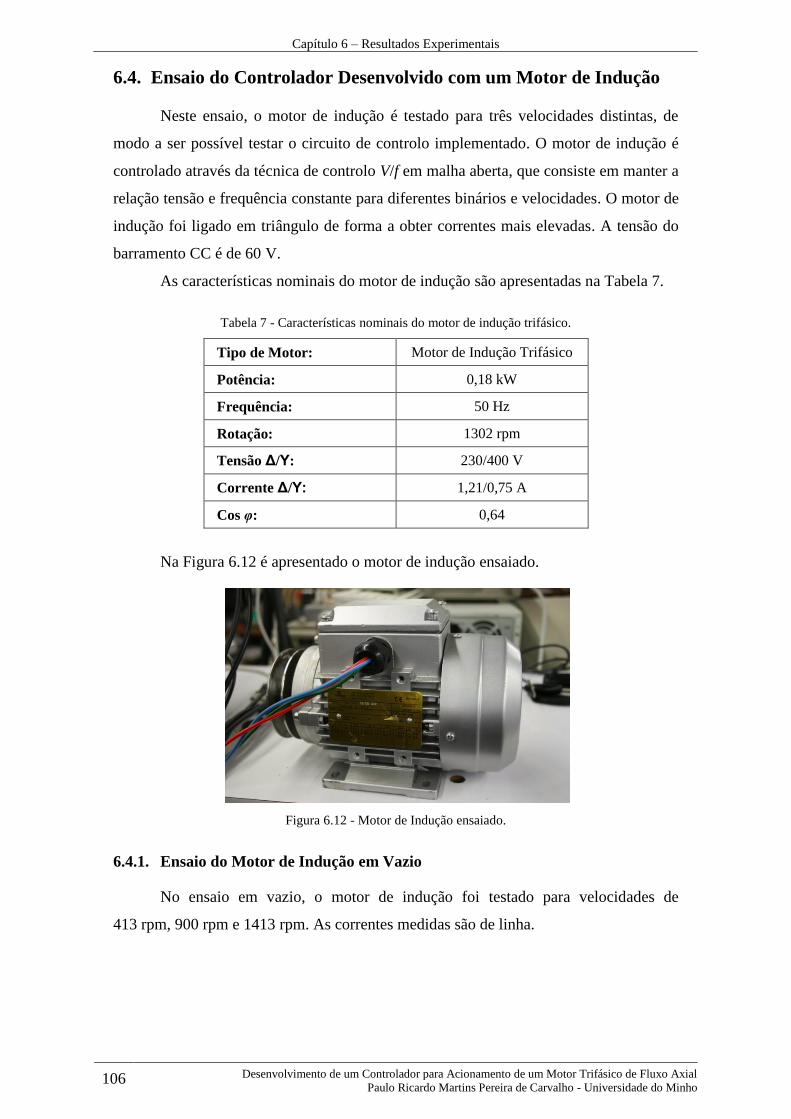
Capítulo 6 – Resultados Experimentais
106 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
6.4. Ensaio do Controlador Desenvolvido com um Motor de Indução
Neste ensaio, o motor de indução é testado para três velocidades distintas, de
modo a ser possível testar o circuito de controlo implementado. O motor de indução é
controlado através da técnica de controlo V/f em malha aberta, que consiste em manter a
relação tensão e frequência constante para diferentes binários e velocidades. O motor de
indução foi ligado em triângulo de forma a obter correntes mais elevadas. A tensão do
barramento CC é de 60 V.
As características nominais do motor de indução são apresentadas na Tabela 7.
Tabela 7 - Características nominais do motor de indução trifásico.
Tipo de Motor: Motor de Indução Trifásico
Potência: 0,18 kW
Frequência: 50 Hz
Rotação: 1302 rpm
Tensão Δ/Υ: 230/400 V
Corrente Δ/Υ: 1,21/0,75 A
Cos φ: 0,64
Na Figura 6.12 é apresentado o motor de indução ensaiado.
Figura 6.12 - Motor de Indução ensaiado.
6.4.1. Ensaio do Motor de Indução em Vazio
No ensaio em vazio, o motor de indução foi testado para velocidades de
413 rpm, 900 rpm e 1413 rpm. As correntes medidas são de linha.

Capítulo 6 – Resultados Experimentais
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 107 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Para 413 rpm:
À velocidade de 413 rpm, a tensão composta aplicada ao motor de indução, tem
amplitude de pico de 18 V e frequência de 17 Hz. Já a amplitude de pico da corrente
consumida é de 225 mA.
(a) (b)
Figura 6.13 - Formas de onda à velocidade de 413 rpm: (a) Tensão; (b) Corrente.
Para 900 rpm:
À velocidade de 900 rpm, a tensão composta aplicada ao motor de indução tem
amplitude de pico de 32,5 V e frequência de 31 Hz. Já a amplitude de pico da corrente
consumida é de 262 mA.
(a) (b)
Figura 6.14 - Formas de onda à velocidade de 900 rpm: (a) Tensão; (b) Corrente.
Para 1413 rpm:
À velocidade máxima atingida de 1413 rpm, a tensão composta aplicada ao
motor de indução tem amplitude de pico de 51,8 V e frequência de 50 Hz. Já a
amplitude de pico da corrente consumida é de 270 mA.
ic ia ib vca vab vbc
ic ia ib vca vab vbc

Capítulo 6 – Resultados Experimentais
108 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
(a) (b)
Figura 6.15 - Formas de onda à velocidade de 1413 rpm: (a) Tensão; (b) Corrente.
6.5. Conclusão
Neste capítulo, foram apresentados os resultados experimentais do ensaio do
motor síncrono com o controlador ACD4805 do fabricante, do ensaio do controlador
desenvolvido em malha aberta, com e sem carga, e do ensaio do controlador
desenvolvido com o motor de indução.
No ensaio do motor síncrono em vazio com o controlador ACD4805, verifica-se
que à medida que a velocidade aumenta, a tensão aumenta na sua igual proporção,
enquanto a corrente aumenta ligeiramente, até a um máximo de 15 A.
Em relação à forma de onda das tensões produzidas pelo conversor ACD4805,
verifica-se que são aproximadamente sinusoidais, ficando apenas ligeiramente
achatadas para a velocidade máxima, visto que o conversor está alimentado apenas com
42 V, e não com os 48 V nominais. Já a forma de onda das correntes é bastante
irregular, não se verificando melhorias com o amento da velocidade. Na Tabela 8, são
mostrados os valores de pico da tensão e corrente para diferentes velocidades, obtidos
no ensaio do motor síncrono em vazio.
Tabela 8 - Resultados obtidos do ensaio do motor síncrono em vazio com o controlador ACD4805.
Ensaio em Vazio com o Controlador ACD4805
Velocidade (rpm) 67 205 494
Tensão (V) 7 17 40
Corrente (A) 8 12 15
No ensaio do motor síncrono em carga com o controlador ACD4805, verifica-se
que com o aumento da velocidade, há um ligeiro aumento da tensão e um aumento mais
significativo da corrente em relação ao ensaio em vazio. Na comparação entre as três
ic ia ib vca vab
b
vbc

Capítulo 6 – Resultados Experimentais
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 109 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
cargas constata-se que a tensão, para as mesmas velocidades, mantêm-se praticamente
igual, enquanto a corrente aumenta significativamente, sendo esse aumento maior
quanto maior for a carga.
Verifica-se ainda, que a velocidade máxima do motor diminui
significativamente, com o aumento da carga aplicada ao motor.
Na Tabela 9, pode-se visualizar os valores de pico da tensão e corrente para
diferentes velocidades, obtidos no ensaio do motor em carga.
Tabela 9 - Resultados obtidos do ensaio do motor síncrono em carga com o controlador ACD4805.
Ensaio em Carga com Controlador ACD4805
Carga = 10 Nm Carga = 20 Nm Carga = 33 Nm
Velocidade
(rpm) 67 251 448 106 251 408 106 250 359
Tensão (V) 10 26 40 12 26 38 14 34 36
Corrente
(A) 20 24 26 33 35 38 44 60 56
Em relação às formas de onda, no ensaio em carga com o controlador ACD4805,
as formas de onda da tensão vão-se distorcendo ligeiramente com o aumento da carga,
sendo essa distorção maior quanto maior for a carga. Já as formas de onda da corrente
têm uma evolução inversa às formas de onda da tensão, pois com o aumento da carga
aplicada ao eixo do motor, ganham uma forma aproximadamente sinusoidal.
No ensaio do motor de indução em vazio com o controlador desenvolvido,
verifica-se que o algoritmo de controlo implementado consegue fornecer tensões
sinusoidais que variam linearmente em amplitude e frequência, conseguindo assim
controlar o seu binário e sua velocidade.
Para baixas velocidades (frequências baixas), as correntes consumidas
apresentam alguma distorção, tornando-se sinusoidais com o aumento da velocidade.
Como a tensão do barramento CC é de 60 V e a tensão nominal do motor é de
230 V, foi implementada uma curva de binário/velocidade mais fraca, que não deixa o
motor atingir a velocidade máxima em vazio, que ronda as 1500 rpm.


Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 111 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
CAPÍTULO 7
Conclusões e Sugestões de Trabalhos Futuros
7.1. Conclusões
Nesta Dissertação de Mestrado foi apresentado e descrito o controlador
eletrónico desenvolvido para acionamento de um motor síncrono trifásico de fluxo
axial, que pode ser empregado em veículos elétricos.
No Capítulo 2 foram descritos os principais elementos constituintes dos veículos
elétricos. Foram também descritas, as principais configurações dos três tipos de
Veículos Elétricos (VE), bem como os vários tipos de motores elétricos disponíveis para
tração, e elementos armazenadores de energia, que melhor satisfazem as necessidades e
exigências deste tipo de veículos. Por fim, foram abordadas as principais configurações
dos conversores CC/CA e técnicas de modulação PWM.
No Capítulo 3 foram abordadas as diferentes topologias dos motores de fluxo
axial, bem como a comparação com os motores elétricos de fluxo radial.
No Capítulo 4 foram apresentados e comentados os resultados das simulações
computacionais obtidos com o programa PSIM para o controlador desenvolvido.
No Capítulo 5 foram descritos os componentes e placas implementadas para o
controlador desenvolvido para o acionamento de um motor síncrono trifásico de fluxo
axial, composto pelo Circuito de Potência e pelo Circuito de Controlo.
No Capítulo 6 foram apresentados os resultados experimentais obtidos no ensaio
motor elétrico Double-Sided com o controlador ACD4805, e no ensaio do controlador
desenvolvido com cargas resistivas e RL, e com um motor de indução.
Pode-se concluir que, para a realização deste tipo de trabalho de Dissertação é
necessário ter um bom conhecimento em várias áreas da Eletrónica, tais como,
Eletrónica de Potência, Instrumentação e Medidas, Eletrónica Analógica, Programação
de DSP/Microcontroladores, bem como o conhecimento de ferramentas de simulação e
desenvolvimento de PCBs.
No final desta Dissertação, chega-se à conclusão que os objetivos de
desenvolver um controlador eletrónico para acionamento de um motor trifásico, foram
alcançados, uma vez que, conseguiu-se controlar a velocidade de um motor de indução,

Capítulo 7 – Conclusões e Sugestões de Trabalhos Futuros
112 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
com bastante precisão. Contudo não se chegou a conseguir controlar o motor síncrono
de fluxo axial.
Também se chega a conclusão que, para o melhor motor para aplicações de
tração elétrica é o motor síncrono de ímanes permanentes pois é o motor com maior
densidade de potência e energia, requisitos essenciais para veículos elétricos uma vez
que permite aumentar a sua autonomia e performance. Para aplicações do motor elétrico
nas rodas dos veículos (Motor-in-Wheel), uma boa solução é utilizar o motor síncrono
AFPM double-side, pois as suas características enquadram-se quase na perfeição.
Possui maior diâmetro e menor largura, o que ideal para ser acoplado à roda, possui
maior binário a baixas velocidades que o motor síncrono de ímanes permanentes de
fluxo radial, perdendo apenas no rendimento a altas velocidades.
Em relação aos elementos armazenadores de energia conclui-se que, os que
apresentam melhores características para aplicar em veículos elétricos são as baterias e
os supercondensadores. A bateria pela sua densidade de energia, o supercondensador
pela sua densidade de potência, possuindo ambos excelentes características de
segurança. Nas baterias, as variantes das baterias de Iões de Lítio apresentam-se como a
melhor solução mas também as mais caras. Mas é na utilização conjunta das baterias e
supercondensadores que se obtêm excelentes resultados nos veículos elétricos, pois os
supercondensadores conseguem recuperam grande parte da energia das travagens
regenerativas, devolvendo-a nos picos de correntes elevados, como em caso de arranque
ou acelerações bruscas dos veículos.
7.2. Sugestão de Trabalho Futuro
Como trabalho futuro, pode-se testar o algoritmo de controlo simulado para o
motor síncrono, inicialmente escolhido, numa bancada de ensaios.
Pode-se ainda diminuir o volume e peso do controlador desenvolvido, através do
agrupamento das várias placas construídas.
Pode-se continuar o desenvolvimento do controlador para o motor síncrono de
fluxo axial, prevendo-se a sua utilização em aplicações de travagem regenerativa, nos
veículos elétricos.

Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 113 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
Referências
[1] TESLA, “Tesla Roadster”, disponível online no dia 10 de Agosto de 2012, em
<http://www.teslamotors.com/roadster>.
[2] BMW,“BMW ActiveHybrid 7”, disponível online no dia 11 de Agosto de 2012, em
<http://www.bmw.pt/pt/pt/newvehicles/7series/sedan_active_hybrid/2009/introduction.html>.
[3] CNET, “BMW ActiveHybrid 7”, disponível online no dia 12 de Agosto de 2012, em
<http://news.cnet.com/8301-13512_3-10351624-23.html>.
[4] Autobloggreen, “Nissan EV-02”, disponível online no dia 12 de Agosto de 2012, em
<http://green.autoblog.com/2009/05/04/quick-drive-nissan-ev-02-prototype/>.
[5] Siemens, “Siemens desenvolve tecnologia para ligar veículos elétricos à rede publica”, disponível
online no dia 12 de Agosto de 2012, em
<http://www.swe.siemens.com/portugal/web/pt/power/imprensa/press/Pages/Siemens_desenvolve
_tecnologia_para_ligar_veiculos_electricos_rede_publica.aspx>.
[6] E-Move, “Carregamento por Indução de Veículos Elétricos”, disponível online no dia 10 de
Agosto de 2012, em <http://e-move.tv/lancamentos/cabos-isso-e-passado>.
[7] André Luís Lenz, “Veículos Elétricos”, disponível online no dia 22 de Agosto de 2012, em
<http://automoveiseletricos.blogspot.pt/2012/07/sistema-de-transmissao-de-um-ev-nissan.html>.
[8] Nissan Leaf, “Nissan Leaf”, disponível online no dia 22 de Agosto de 2012, em
<http://ocarroelectrico.com/destaques/nissan-leaf-apresentacao-e-fotos/>.
[9] Sim-Drive, “Sim-Drive”, disponível online no dia 23 de Agosto de 2012, em <http://www.sim-
drive.com/english/technology/index.html>.
[10] Marva Kendrick, “Sim-Lei”, disponível online no dia 23 de Agosto de 2012 em <http://marva-
kendrick.blogspot.pt/2011/05/sim-lei-elektric-cars-with-mileage-up.html>.
[11] ZerCustoms, “Mitsubishi i-MiEV Sport”, disponível online no dia 23 de Agosto de 2012, em
<http://www.zercustoms.com/news/Mitsubishi-i-MiEV-SPORT.html>.
[12] Iqbal Husain, “Electric and Hybrid Vehicles”, 2003.
[13] Ron Hodkinson and John Fenton, “Lightweight Electric/Hybrid Vehicle Design”, 2001.
[14] James Laminie; John Lowry, “Electric Vehicle Technology Explained”, 2003.
[15] Web Soft, “Chevrolet Volt”, disponível online no dia 23 de Agosto de 2012, em <http://cars-
wonder.blogspot.pt/2010_01_01_archive.html>.
[16] “Honda Insight”, disponível online no dia 23 de Agosto de 2012, em <http://world-
viewer.com/photos/honda-insight-hybrid/08/>
[17] Toyota , “Toyota Prius”, disponível online no dia 24 de Agosto de 2012, em
<http://www.toyota.pt/cars/new_cars/prius/index.tmex>.
[18] Wikipedia, “Célula de Combustível”, disponível online no dia 24 de Agosto de 2012, em
<http://pt.wikipedia.org/wiki/Célula_combustível>.
[19] The Telegraph, “Mercedes Benz Classe B”, disponível online no dia 24 de Agosto de 2012, em
<http://www.telegraph.co.uk/motoring/car-manufacturers/mercedes-benz/8214992/Mercedes-
Benz-B-Class-fuel-cell-review.html>.
[20] Faculdade de Filosofia Porto, “Funcionamento Célula de Combustível”, disponível online no dia
24 de Agosto de 2012, em <http://celulasdecombustivel.planetaclix.pt/comofuncionam.html>.
[21] Ebah, “Acionamentos de Motores”, disponível online no dia 2 de Janeiro de 2012, em
<http://www.ebah.com.br/content/ABAAAA49gAL/acionamentos-motores>.
[22] Siemens, “Motores de Corrente Contínua”, disponível online no dia 2 de Janeiro de 2012, em
<http://www.deg.ufla.br/site/_adm/upload/arquivos/motorcc-siemens.pdf>.
[23] Copeçal, “Induzido do Motor CC”, disponível online no dia 2 de Janeiro de 2012, em
<http://www.ingainformatica.com.br/copecal2010/www/site/index.php?sessao=3d0730d0cddy3d
&id=30>.

Referências
114 Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial
Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
[24] Mecaweb, “Funcionamento do Motor CC”, disponível online no dia 10 de Janeiro de 2012, em
<http://www.mecaweb.com.br/eletronica/motores/motorcc_2.php>.
[25] Nátalia Gameiro e Marques Cardoso, Universidade de Coimbra, Departamento de Eletrónica e
Computadores, “Modelação e Simulação do Motor de Relutância Variável Comutado”,
disponível online no dia 20 de Setembro de 2012, em
<http://www.deetc.isel.ipl.pt/jetc05/CCTE02/papers/finais/fortes/22.pdf>.
[26] FTP, “Motores Síncronos”, disponível online no dia 20 de Setembro de 2012, em
<ftp.unilins.edu.br/etl/T_cnico%20em%20Eletroeletr_nica%20-
%20ETL%20de%20Lins/1_%20Turma%202006/M_quinas%20El_tricas%203/Motores%20S_nc
ronos.pdf>
[27] ESTG-IPL, “Motores Síncronos”, disponível online no dia 23 de Setembro de 2012, em
<http://www.cpdee.ufmg.br/~gbarbosa/Disciplina%20de%20M%E1quinas%20El%E9tricas/Disci
plina%20de%20M%C3%A1quinas%20El%C3%A9tricas/maquinas-sincronas.pdf>
[28] WEG, “Motor de Ímâs Permanentes e Inversor de Frequência”, disponível online no dia 25 de
Setembro de 2012, em <http://ecatalog.weg.net/files/wegnet/WEG-motor-de-imas-permanentes-
e-inversor-de-frequencia-artigo-tecnico-portugues-br.pdf>.
[29] FAATESP, “Máquinas Assíncronas”, disponível online no dia 12 de Janeiro de 2012, em
<http://www.faatesp.edu.br/publicacoes/maquinas_assincronas.pdf>
[30] Blog de Engenharia Elétrica“Rotor Bobinado do Motor de Indução”, disponível online no dia 12
de Janeiro de 2012, em <http://electricalengineeringbasics.blogspot.pt/>.
[31] Profelectro , “Rotor Gaiola de Esquilo do Motor de Indução”, disponível online no dia 13 de
Janeiro de 2012, em <http://www.profelectro.info/?p=3040>
[32] EHSANI, M., GAO, Y., GAY, S. e EMADI, A., “Modern Electric, Hybrid Electric, and Fuel Cell
Vehicles”, Muhammad H. Rashid, Series Editor, 2005.
[33] Wikipedia, “Supercondensadores Boostcap”, disponível online no dia 10 de Março de 2012, em
<http://www.wikienergia.pt/~edp/index.php?title=Supercondensadores_desafiam_poder_das_bate
rias>.
[34] Wikipedia, “Condensadores de Dupla Camada Elétrica - ELDC”, disponível online no dia 10 de
Março de 2012, em <http://en.wikipedia.org/wiki/Electric_double-layer_capacitor>.
[35] EPCOS, “Estrutura Interna dos Supercondensadores”, disponível online no dia 10 de Março de
2012, em
<http://www.bairrospd.kit.net/componentes/capacitor/capCamadaDupla/CapCamadaDupla.html>.
[36] Wikipedia, “Supercondensadores Híbridos ”, disponível online no dia 15 de Março de 2012, em
<http://wikienergia.com/~edp/index.php?title=Cientistas_desenvolvem_
h%C3%ADbrido_entre_bateria_e_supercondensador_para_aplica%C3%A7%C3%B5es_de_rede
s>.
[37] Alibaba, “Supercondensador Híbrido da Liyuan ”, disponível online no dia 15 de Março de 2012,
em <http://portuguese.alibaba.com/product-gs/48v-200ah-li-ion-battery-packs-for-ev-hev-hybrid-
supercapacitor-battery--504578859.html>.
[38] Wikipedia, “Bateria de Iões de Lítio com eletrólito gel de polímero”, disponível online no dia
17 de Março de 2012, em <http://www.wikienergia.pt/~edp/index.php?title=
Inovador_gel_de_pol%C3%ADmero_abre_caminho_a_baterias_de_i%C3%A3ol%C3%ADtio_m
ais_flex%C3%ADveis_e_baratas>
[39] Wikipedia, “Bateria de Chumbo-Ácido”, disponível online no dia 14 de Abril de 2012, em
<http://pt.wikipedia.org/wiki/Acumulador_de_chumbo>.
[40] “Bateria de Chumbo-Ácido”, disponível online no dia 14 de Abril de 2012, em
<http://mundoautomobilisticogyn.blogspot.pt/2011_06_26_archive.html>.
[41] “Estrutura da Bateria de Chumbo-Ácido”, disponível online no dia 14 de Abril de 2011, em
<http://www.fazerfacil.com.br/carros/bateria.htm>.
[42] “Bateria de Níquel-Cádmio”, disponível online no dia 15 de Abril de 2012, em
<http://www.wikienergia.pt/~edp/index.php?title=Bateria_de_n%C3%ADquel-c%C3%A1dmio>
[43] “Bateria de Níquel-Hidreto Metálico”, disponível online no dia 20 de Abril de 2012, em
<http://pt.scribd.com/doc/59492835/22/BATERIAS-DE-NIMH-%E2%80%93-NIQUEL-
HIDRETO-METALICO>.

Referências
Desenvolvimento de um Controlador para Acionamento de um Motor Trifásico de Fluxo Axial 115 Paulo Ricardo Martins Pereira de Carvalho - Universidade do Minho
[44] “Bateria de Iões de Lítio”, disponível online no dia 28 de Abril de 2012, em
<http://pt.wikipedia.org/wiki/Bateria_de_i%C3%A3o_l%C3%ADtio>.
[45] “Bateria de Lítio-Polímero”, disponível online no dia 29 de Abril de 2012, em
<http://www.wikienergia.pt/~edp/index.php?title=Bateria_de_l%C3%ADtio-
pol%C3%ADmero>.
[46] “Bateria Lítio-Polímero”, disponível online no dia 29 de Maio de 2012, em <http://www.clean-
auto.com/La-filiere-industrielle-premiere?4278.html>.
[47] HybridCars, “Hyundai Sonata Hybrid”, disponível online no dia 29 de Abril de 2012, em
<http://www.hybridcars.com/vehicle/hyundai-sonata-hybrid.html>.
[48] Wikienergia, “Bateria Lítio-Fosfato de Ferro”, disponível online no dia 29 de Abril de 2012, em
<http://www.wikienergia.pt/~edp/index.php?title=Novo_c%C3%A1todo_
%C3%A0_base_de_ferro_amplia_dura%C3%A7%C3%A3o_de_vida_de_baterias_de_i%C3%A
3o-l%C3%ADtio>.
[49] “Aptera”, disponível online no dia 24 de Agosto de 2012, em
<http://www.triplepundit.com/2008/01/aptera-the-new-electric-car-on-the-block/>.
[50] Eli Amedy, “Handbook of Automotive Power Electronics and Motor Drives”, 2005.
[51] Timothy L. SKVarenina, “The Power Handbook”, Industrial Electronics Series, 2007, CRC Press.
[52] Jacek F. Gieras; R. Wang; M.J. Kamper, “Axial Flux Permanent Magnet Brushless Machines”,
2008.
[53] E. Belicová; Valéria Hrabovcová, “Analysis of an axial flux permanent magnet machine (AFPM)
based on coupling of two separated simulation models (electrical and thermal ones)”, 2007.
[54] “DS_PRA-230_Gearless-Wheel-Drive”, datasheet.
[55] “PRA-230”, datasheet.
[56] “IGBT Modules SKM 100GB176D”, datasheet.
[57] “IGBT Driver Core Skyper 32ProR””, datasheet.
[58] “Skyper 32ProR” disponível online no dia 1 de Setembro de 2012,
<http://elcodis.com/parts/5701022/SKYPER_32_PRO.html>
[59] “Adaptor Board Skyper 32ProR”, datasheet.
[60] “Condensador Snubber EPCOS” disponível online no dia 2 de Setembro de 2012,
em <http://il.farnell.com/epcos/b32656s7105k561/capacitor-1uf-1250v/dp/120082 1>.
[61] “IGBT peak voltage measurement and Snubber Capacitor Specificaion” disponível online no dia 3
de Setembro de 2012, em <http://www.semikron.com/skcompub/en/AN-
7006_IGBT_PeakVoltage_Snubber _juli_2011.pdf >.
[62] “TMS320F28335”, datasheet.
[63] “TMS320C2000™ Experimenter Kit Overview”, Quick Start Guide.
[64] “RMB28 Angular Magnetic Encoder Module”, datasheet.
[65] Wikipedia, “Efeito Hall”, disponível online no dia 20 de Setembro de 2012, em
<http://pt.wikipedia.org/wiki/Efeito_Hall>
[66] Universidade Estadual Paulista, “Sensores”, disponível online no dia 20 de Setembro de 2012, em
<http://www2.feg.unesp.br/Home/PaginasPessoais/ProfMarceloWendling/sensores.pdf>.
[67] LEM, “Voltage Transducer LV 25-P”, datasheet.
[68] LEM, “Current Transducer LA 100-P”, datasheet.
[69] Perm Motor GmbH, “AC Drive”, datasheet.
[70] Perm Motor GmbH, “ACD 4805 Drive”, User Manual v.12.





























