Embed Size (px)
Citation preview

0.5setgray
00.5
setgray1
Grandes deformações em meiosvisco-elásticos:
um modelo para a simulacaodos movimentos das camadas
subterraneas de sal
Instituto de Matematica
Seminario LNCCPetrópolis - 2010
– p. 1/87

Projeto IM-CENPES
Modelagem da Tectonica do Sal
Estudo Integrado da Halocinese
I-Shih Liu
Mauro Rincon
Rolci Cipolatti
Luis Anonio C. Palermo
– p. 2/87

O modelo “Sedimento-Sal”
– p. 3/87
Tópicos
• Descricao do problema;
– p. 4/87
Tópicos
• Descricao do problema;• Notacao e Equacoes do movimento;
– p. 4/87

Tópicos
• Descricao do problema;• Notacao e Equacoes do movimento;• O metodo das Aproximacoes Incrementais;
– p. 4/87
Tópicos
• Descricao do problema;• Notacao e Equacoes do movimento;• O metodo das Aproximacoes Incrementais;• Experimentos Numericos em 2D;
– p. 4/87
Tópicos
• Descricao do problema;• Notacao e Equacoes do movimento;• O metodo das Aproximacoes Incrementais;• Experimentos Numericos em 2D;• Um pouco de analise.
– p. 4/87

O modelo “Sedimento-Sal”
Γ1 Γ1
Γ2
Γ1
Ω
• Interacao com a camada sedimentar;
– p. 5/87

O modelo “Sedimento-Sal”
Γ1 Γ1
Γ2
Γ1
Ω
• Interacao com a camada sedimentar;• Modelo valido para grandes deformacoes;
– p. 5/87

O modelo “Sedimento-Sal”
Γ1 Γ1
Γ2
Γ1
Ω
• Interacao com a camada sedimentar;• Modelo valido para grandes deformacoes;• Movimentos muito lentos;
– p. 5/87

O modelo “Sedimento-Sal”
Γ1 Γ1
Γ2
Γ1
Ω
• Interacao com a camada sedimentar;• Modelo valido para grandes deformacoes;• Movimentos muito lentos;• Desconsiderar rupturas.
– p. 5/87

O modelo para o sistema “Sedimento-Sal”
Γ1 Γ1
Γ2
Γ1
Be
Bv
• B = Bv ∪ Be = SAL ∪ SEDIMENTOS
– p. 6/87

O modelo para o sistema “Sedimento-Sal”
Γ1 Γ1
Γ2
Γ1
Be
Bv
• B = Bv ∪ Be = SAL ∪ SEDIMENTOS• Be — material de visco-elastico (com
predominania elastica)
– p. 6/87

O modelo para o sistema “Sedimento-Sal”
Γ1 Γ1
Γ2
Γ1
Be
Bv
• B = Bv ∪ Be = SAL ∪ SEDIMENTOS• Be — material de visco-elastico (com
predominania elastica)• Bv — material de visco-elastico (com forte
viscosidade)– p. 6/87

Notação
• Bκ ⊂ IR3 configuracao de referencia.
– p. 7/87

Notação
• Bκ ⊂ IR3 configuracao de referencia.• O movimento deB pode ser descrito por uma
famılia de aplicacoes a um parametro
Φ : Bκ × IR → IR3.
X
Bκ
Φ(·, t, t0)−→
x
Bt
– p. 7/87

Notação
X
Bκ
Φ(·, t, t0)−→
x
Bt
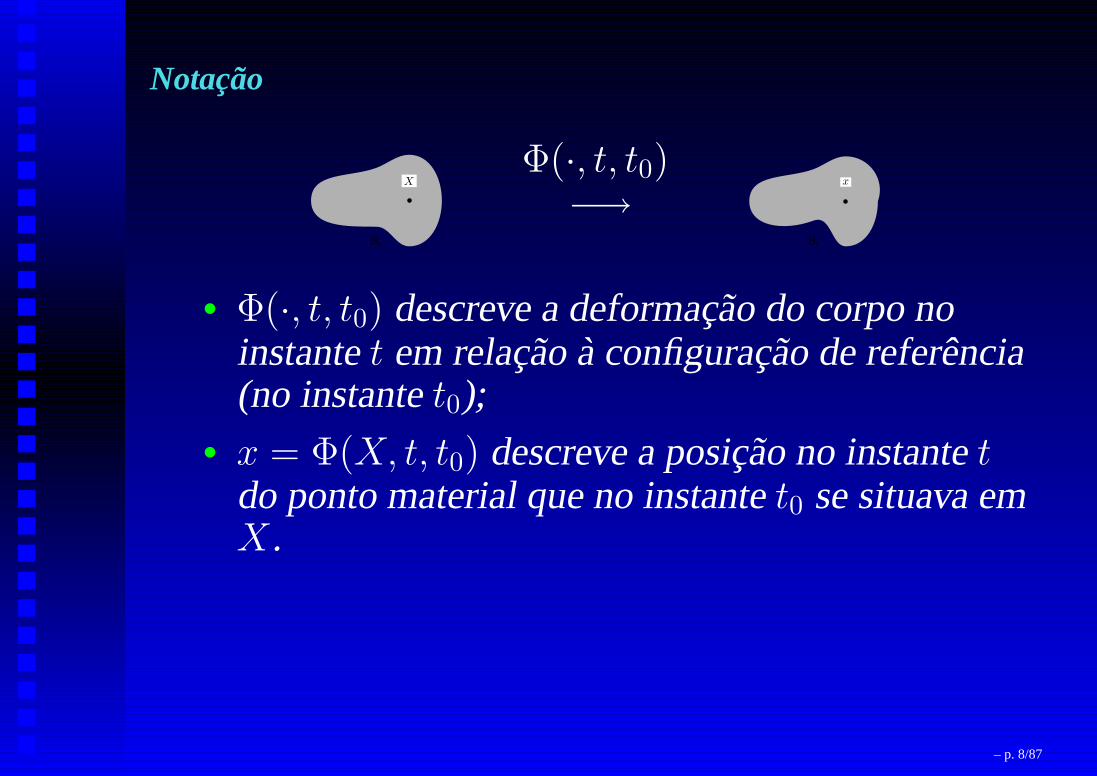
• Φ(·, t, t0) descreve a deformacao do corpo noinstantet em relacaoa configuracao de referencia(no instantet0);
– p. 8/87
Notação
X
Bκ
Φ(·, t, t0)−→
x
Bt
• Φ(·, t, t0) descreve a deformacao do corpo noinstantet em relacaoa configuracao de referencia(no instantet0);
• x = Φ(X, t, t0) descreve a posicao no instantetdo ponto material que no instantet0 se situava emX.
– p. 8/87

Notação
x = Φ(X, t, t0)
Velocidade e Aceleracao:
v(x, t) =∂
∂tΦ(X, t, t0) = Φ(X, t, t0)
a(x, t) =∂2
∂t2Φ(X, t, t0) = Φ(X, t, t0).
– p. 9/87

Notação
Deslocamento:
u(X, t) = Φ(X, t, t0) − X
Tensor de deformacoes:
F (x, t) = ∇XΦ(X, t, t0) = GradΦ(X, t, t0)
Em coordenadasxi = Φi(Xα, t) eFiα = ∂Φi
∂Xα
.
H(x, t) = ∇Xu(X, t) = F (X, t) − I
– p. 10/87

Notação
Deslocamento:
u(X, t) = Φ(X, t, t0) − X
H(x, t) = ∇Xu(X, t) = F (X, t) − I
H(x, t) =
[
∂u1
∂X1
∂u1
∂X2
∂u2
∂X1
∂u2
∂X2
]
– p. 11/87

As equações de movimento
Γ1 Γ1
Γ2
Γ1
Ω
ρa − div T = ρg emΩ × IR
Tn = p emΓ2,
u · n = 0 emΓ1,
Tn × n = 0 emΓ1,
+ condicoes iniciais
– p. 12/87

As equações de movimento — descrição Euleriana
As equacoes do movimento sao dadas por
ρa − div T = ρb,
ou, em coordenadas,
ρai −3
∑
j=1
∂
∂xj
Tij = ρbi, i = 1, 2, 3,
ondeT (x, t) e o Tensor de Tensoes (Tensor deCauchy).
– p. 13/87

As equações de movimento — descrição Lagrangeana
Na configuracao de referencia, as equacoes domovimento se escrevem
ρκ
∂2Φ
∂t2− Div Tκ = ρκb,
onde• ρκ e a densidade na configuracao de referencia
• Tκ = (det F )TF−T e o Tensor dePiola-Kirchhoff.
– p. 14/87

Equações Constitutivas
• Para materiais viscoelasticos, supoe-se queT efuncao deF e F , isto e,
T = F(F, F ) = −pI + T (F, F ), p = p(ρ).
– p. 15/87

Equações Constitutivas
• Para materiais viscoelasticos, supoe-se queT efuncao deF e F , isto e,
T = F(F, F ) = −pI + T (F, F ), p = p(ρ).
• Nas teorias constitutivas, duas condicoes saoessenciais para se estabelecer restricoes (fısicas)nesta dependencia com relacao aF e F , a saber:• a objetividade euclidiana (EO);• o princıpio da indiferenca do material ao
referencial (MFI).
– p. 15/87

Equações Constitutivas
A partir da objetividade euclidiana e do princıpio daindiferenca do material ao referencial, obtem-se asrestricoes gerais que nos permitem expressar o tensorde Piola-Kirchhoff na forma
Tκ = T 0 + Sκ(F, F ),
ondeT 0 expressa a tensao residual na configuracao dereferencia eSκ(I, 0) = 0.
– p. 16/87

Deformações Quase-estáticas
Para processos muito lentos, (regimesquase-estaticos),a = 0:
−Div Tκ = ρκb.
• Considerando a tensao residual (supostamentenao nula):
−Div Sκ(F, F ) = ρκb + Div T 0.
– p. 17/87
Deformações Quase-estáticas
Para processos muito lentos, (regimesquase-estaticos),a = 0:
−Div Tκ = ρκb.
• Considerando a tensao residual (supostamentenao nula):
−Div Sκ(F, F ) = ρκb + Div T 0.
• Sκ nao linear emF e F
– p. 17/87

Deformações Quase-estáticas
Para processos muito lentos, (regimesquase-estaticos),a = 0:
−Div Tκ = ρκb.
• Considerando a tensao residual (supostamentenao nula):
−Div Sκ(F, F ) = ρκb + Div T 0.
• Sκ nao linear emF e F
• Aproximacoes lineares podem ser consideradasno caso de pequena deformacoes.
– p. 17/87
O modelo “Sedimento-Sal”
ρκ
∂2Φ
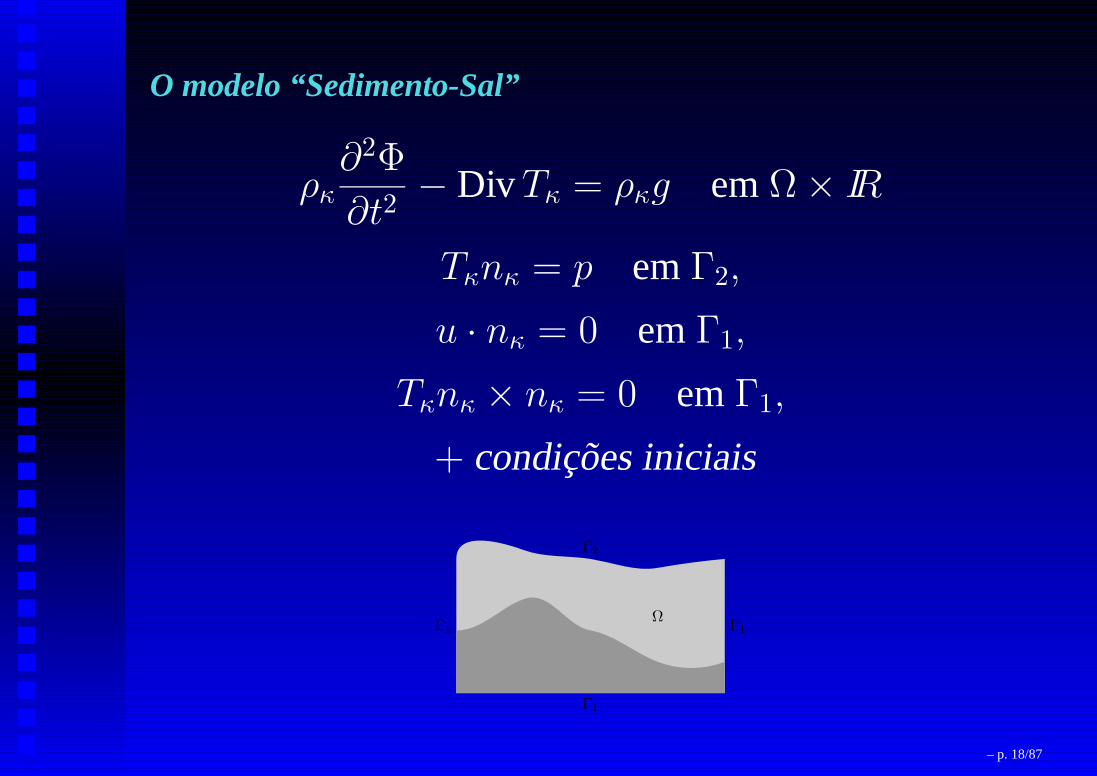
∂t2− Div Tκ = ρκg emΩ × IR
Tκnκ = p emΓ2,
u · nκ = 0 emΓ1,
Tκnκ × nκ = 0 emΓ1,
+ condicoes iniciais
Γ1 Γ1
Γ2
Γ1
Ω
– p. 18/87
O modelo “Sedimento-Sal” quase estático
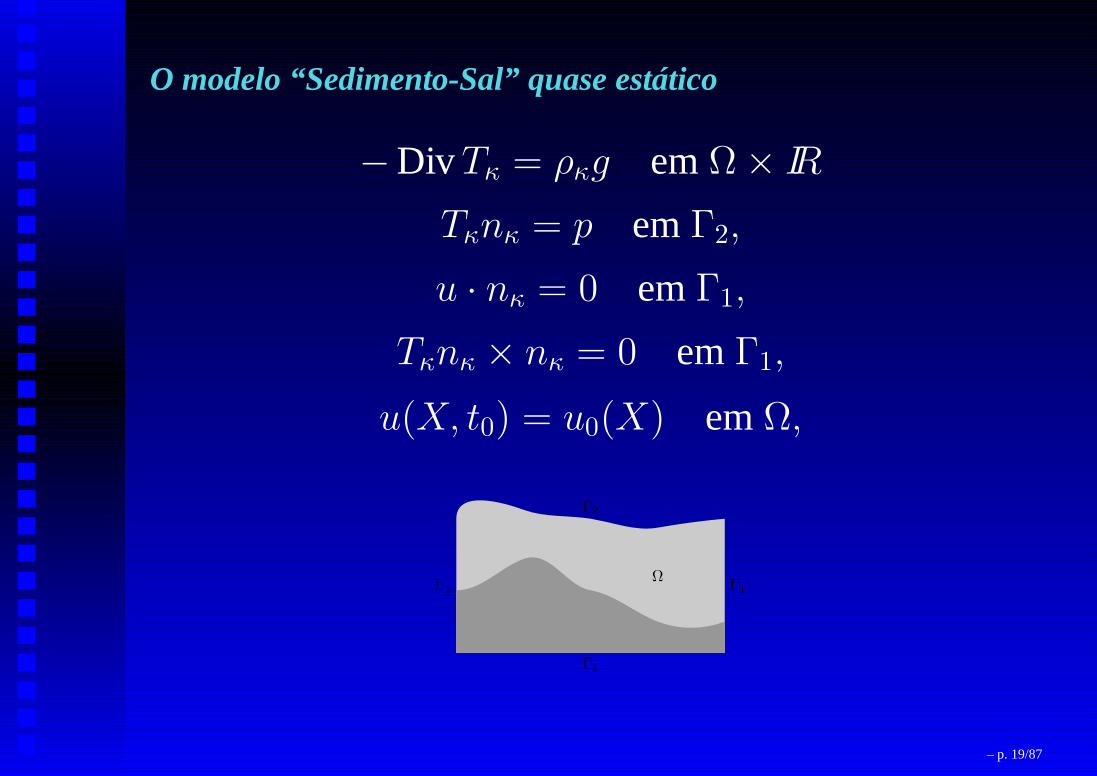
−Div Tκ = ρκg emΩ × IR
Tκnκ = p emΓ2,
u · nκ = 0 emΓ1,
Tκnκ × nκ = 0 emΓ1,
u(X, t0) = u0(X) emΩ,
Γ1 Γ1
Γ2
Γ1
Ω
– p. 19/87

O modelo “Sedimento-Sal” quase estático
−Div Sκ = Div T0 + ρκg emΩ × IR
Sκnκ = p − T0nκ emΓ2,
u · nκ = 0 emΓ1,
Sκnκ × nκ = − T0nκ × nκ emΓ1,
u(X, t0) = u0(X) emΩ,
Γ1 Γ1
Γ2
Γ1
Ω
– p. 20/87

Aproximação Linear Incremental: o método ALI
Br
F0
−→Bκt0
I+H
−→Bκt
– p. 21/87

Aproximação Linear Incremental: o método ALI
• κr, X ∈ κr(B), F (X, t), T = Fκr(F, F );
Br
F0
−→Bκt0
I+H
−→Bκt
– p. 22/87

Aproximação Linear Incremental: o método ALI
• κr, X ∈ κr(B), F (X, t), T = Fκr(F, F );
• κt0 (configuracao deformada no instantet0):
F0 = F (X, t0), T0 = T (X, t0).
Br
F0
−→Bκt0
I+H
−→Bκt
– p. 22/87
Aproximação Linear Incremental: o método ALI
• κr, X ∈ κr(B), F (X, t), T = Fκr(F, F );
• κt0 (configuracao deformada no instantet0):
F0 = F (X, t0), T0 = T (X, t0).
• u = Φ(X, t) − Φ(X, t0) ⇒ F = (I + H)F0,
Br
F0
−→Bκt0
I+H
−→Bκt
– p. 22/87

Aproximação Linear Incremental: o método ALI
• κr, X ∈ κr(B), F (X, t), T = Fκr(F, F );
• κt0 (configuracao deformada no instantet0):
F0 = F (X, t0), T0 = T (X, t0).
• u = Φ(X, t) − Φ(X, t0) ⇒ F = (I + H)F0,
• H = ∇Φ(X,t0)u (‖H‖ ≪ 1, ‖H‖ ≪ 1).
Br
F0
−→Bκt0
I+H
−→Bκt
– p. 22/87

Linearização do Tensor de Cauchy
• Linearizando o funcionalT em torno de(F0, 0):T = F(F, F ) = −pI + T (F, F )T0 = F(F0, 0) = −p0I + T (F0, 0)
– p. 23/87

Linearização do Tensor de Cauchy
• Linearizando o funcionalT em torno de(F0, 0):T = F(F, F ) = −pI + T (F, F )T0 = F(F0, 0) = −p0I + T (F0, 0)
• T − T0 = ∇FF(F0, 0)[F − F0] + ∇FF(F0, 0)[F ] + o(2),
– p. 23/87

Linearização do Tensor de Cauchy
• Linearizando o funcionalT em torno de(F0, 0):T = F(F, F ) = −pI + T (F, F )T0 = F(F0, 0) = −p0I + T (F0, 0)
• T − T0 = ∇FF(F0, 0)[F − F0] + ∇FF(F0, 0)[F ] + o(2),
• T = T0 − (p − p0)I + ∇FT (F0, 0)[HF0] +
+ ∇FT (F0, 0)[HF0] + o(2),
– p. 23/87

Linearização do Tensor de Cauchy
• Linearizando o funcionalT em torno de(F0, 0):T = F(F, F ) = −pI + T (F, F )T0 = F(F0, 0) = −p0I + T (F0, 0)
• T − T0 = ∇FF(F0, 0)[F − F0] + ∇FF(F0, 0)[F ] + o(2),
• T = T0 − (p − p0)I + ∇FT (F0, 0)[HF0] +
+ ∇FT (F0, 0)[HF0] + o(2),
• T ≈ T0 − (p − p0)I + L(F0)[H] + M(F0)[H]
– p. 23/87

Linearização do Tensor de Cauchy
• Linearizando o funcionalT em torno de(F0, 0):T = F(F, F ) = −pI + T (F, F )T0 = F(F0, 0) = −p0I + T (F0, 0)
• T − T0 = ∇FF(F0, 0)[F − F0] + ∇FF(F0, 0)[F ] + o(2),
• T = T0 − (p − p0)I + ∇FT (F0, 0)[HF0] +
+ ∇FT (F0, 0)[HF0] + o(2),
• T ≈ T0 − (p − p0)I + L(F0)[H] + M(F0)[H]
• From a Liu’s “trick”:T ≈ T0 + β tr(H)I + L(F0)[H] + M(F0)[H]
– p. 23/87

Linearização do Tensor de Cauchy
• Linearizando o funcionalT em torno de(F0, 0):T = F(F, F ) = −pI + T (F, F )T0 = F(F0, 0) = −p0I + T (F0, 0)
• T − T0 = ∇FF(F0, 0)[F − F0] + ∇FF(F0, 0)[F ] + o(2),
• T = T0 − (p − p0)I + ∇FT (F0, 0)[HF0] +
+ ∇FT (F0, 0)[HF0] + o(2),
• T ≈ T0 − (p − p0)I + L(F0)[H] + M(F0)[H]
• From a Liu’s “trick”:T ≈ T0 + β tr(H)I + L(F0)[H] + M(F0)[H]
• β ≫ 1 caracteriza a quase-incompressibilidadedo mateiral.
– p. 23/87
Linearização do Tensor de Piola-Kirchhoff
• Tκ = det(F )TF−T
– p. 24/87
Linearização do Tensor de Piola-Kirchhoff
• Tκ = det(F )TF−T
• Tκt0= det(I + H)T (I + H)−T
– p. 24/87
Linearização do Tensor de Piola-Kirchhoff
• Tκ = det(F )TF−T
• Tκt0= det(I + H)T (I + H)−T
• Tκt0= det(I + H)T0 + β tr(H)I + L(F0)[H] +
M(F0)[H] + o(2)T (I + H)−T
– p. 24/87
Linearização do Tensor de Piola-Kirchhoff
• Tκ = det(F )TF−T
• Tκt0= det(I + H)T (I + H)−T
• Tκt0= det(I + H)T0 + β tr(H)I + L(F0)[H] +
M(F0)[H] + o(2)T (I + H)−T
• Tκt0= (1 + tr H)T0 + β tr(H)I + L(F0)[H] +
M(F0)[H](I − HT ) + o(2)
– p. 24/87

Linearização do Tensor de Piola-Kirchhoff
• Tκ = det(F )TF−T
• Tκt0= det(I + H)T (I + H)−T
• Tκt0= det(I + H)T0 + β tr(H)I + L(F0)[H] +
M(F0)[H] + o(2)T (I + H)−T
• Tκt0= (1 + tr H)T0 + β tr(H)I + L(F0)[H] +
M(F0)[H](I − HT ) + o(2)
• Tκt0= T0 + (tr H)(T0 + βI) − T0H
T +
L(F0)[H] + M(F0)[H] + o(2)
– p. 24/87
Linearização do Tensor de Piola-Kirchhoff
Tκt0= T0 + Lκt0
[H] + Mκt0[H]
onde
Lκt0[H] = (tr H)(T0 + βI) − T0H
T + L(F0)[H]
Mκt0[H] = M(F0)[H]
– p. 25/87

Exemplo
Modelo “Mooney-Rivlin & Stokes”
T (F, F ) =
Te(B) = s1B + s2B−1 emBe
Tv(D) = λ tr(D)I + 2µD emBv
B = FF T eD = (L + LT )/2, L = ∇v.
– p. 26/87

Exemplo
Modelo “Mooney-Rivlin & Stokes” linearizado (emtorno deB0)
Te(B) ≈ Fe(B0) + s1(B −B0)− s2B−10 (B −B0)B
−10
B − B0 ≈ HB0 + B0HT
L ≈ H
Fv(D) ≈ λ tr(H) + µH + µHT
– p. 27/87

Formulação variacional do modelo “Sedimento-Sal”
−Div Sκ = Div T0 + ρκg emΩ × IR
Sκnκ = p − T0nκ emΓ2,
u · nκ = 0 emΓ1,
Sκnκ × nκ = − T0nκ × nκ emΓ1,
u(X, t0) = u0(X) emΩ,
Γ1 Γ1
Γ2
Γ1
Ω
– p. 28/87
Formulação variacional do modelo “Sedimento-Sal”
• O espaco funcional
V = u ∈ (H1(Ω))3 ; u · nκ = 0 emΓ1
– p. 29/87
Formulação variacional do modelo “Sedimento-Sal”
• O espaco funcional
V = u ∈ (H1(Ω))3 ; u · nκ = 0 emΓ1
• A forma linear
N (w) =
∫
Ω
ρκwigidV −
∫
Ω
∂wi
∂xj
T 0ijdV +
∫
Γ2
wipidΓ
– p. 29/87

Formulação variacional do modelo “Sedimento-Sal”
As formas bilineares
K(w, u) =
∫
Ω
∂wi
∂xj
(T 0ij+βδij)
∂uk
∂xk
dV −
∫
Ω
∂wi
∂xj
T 0ik
∂uj
∂xk
dV
L(w, u) =
∫
Ω
∂wi
∂xj
Lijkl
∂uk
∂xl
dV,
M(w, u) =
∫
Ω
∂wi
∂xj
Mijkl
∂uk
∂xl
dV
– p. 30/87
Formulação variacional do modelo “Sedimento-Sal”
• O problema variacional
– p. 31/87

Formulação variacional do modelo “Sedimento-Sal”
• O problema variacional• Dadou0 ∈ V, determinaru(X, t) satisfazendo
u(·, t0) = u0, u(·, t) ∈ V, ∀t ≥ t0
K(w, u)+L(w, u)+M(w, u) = N (w), ∀w ∈ V
– p. 31/87

Experimentos Numéricos
– p. 32/87

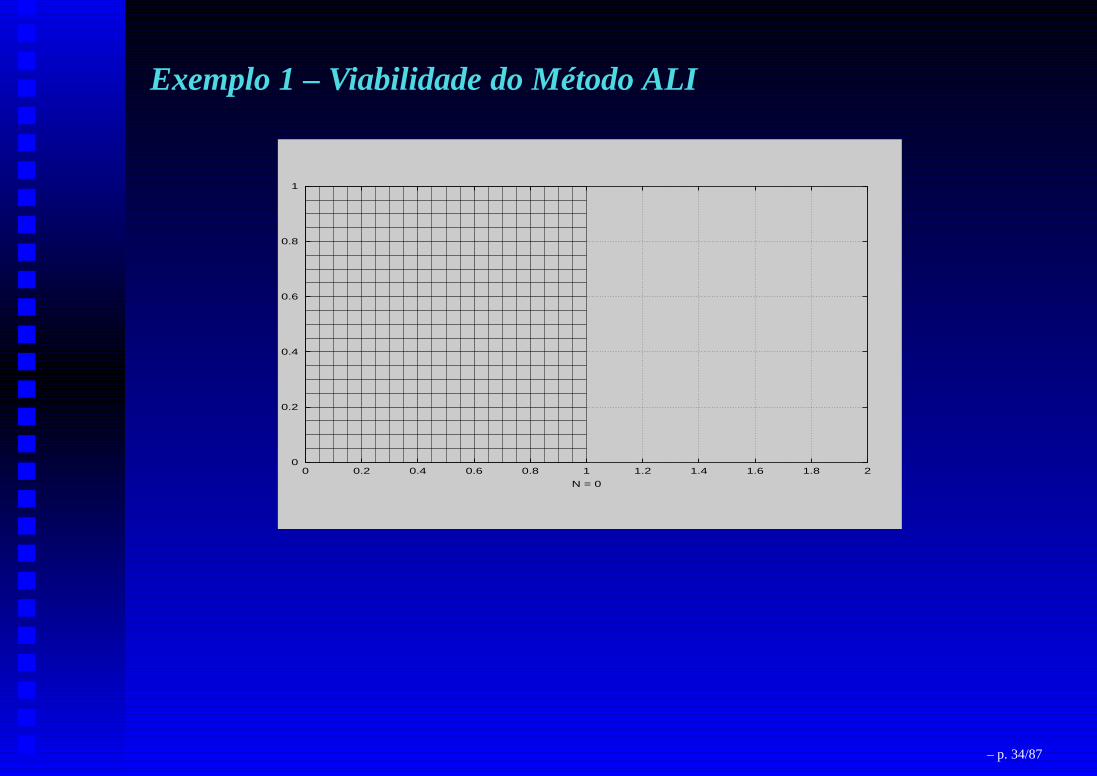
Exemplo 1 – Viabilidade do Método ALI
Modelo de Mooley-Rivlin para ocizalhamento puro emIR2
– p. 33/87
Exemplo 1 – Viabilidade do Método ALI
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
N = 0
– p. 34/87

Exemplo 1 – Viabilidade do Método ALI
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
N = 40
– p. 35/87

Exemplo 1 – Viabilidade do Método ALI
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
N = 80
– p. 36/87

Exemplo 1 – Viabilidade do Método ALI
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
N = 120
– p. 37/87
Exemplo 2 – Verificação da Flexibilidade doMétodo ALI
Modelo de Hencky (que generaliza a Lei deHooke)
T = T (B) = λ(tr e)I + 2µe
e =1
2(I − B−1) =
1
2(h + hT − hT h)
h = ∇xu
– p. 38/87

Exemplo 2 – Verificação da Flexibilidade do Método ALI
Γ1 Γ1
Γ2
Γ1
L
– p. 39/87

Exemplo 2 – Verificação da Flexibilidade do Método ALI
0
1
2
3
4
0 2 4 6 8 10
’w0’
– p. 40/87

Exemplo 2 – Verificação da Flexibilidade do Método ALI
0
1
2
3
4
0 2 4 6 8 10
’w50’
– p. 41/87

Exemplo 2 – Verificação da Flexibilidade do Método ALI
0
1
2
3
4
0 2 4 6 8 10
’w100’
– p. 42/87

Exemplo 2 – Verificação da Flexibilidade do Método ALI
0
1
2
3
4
0 2 4 6 8 10
’w200’
– p. 43/87
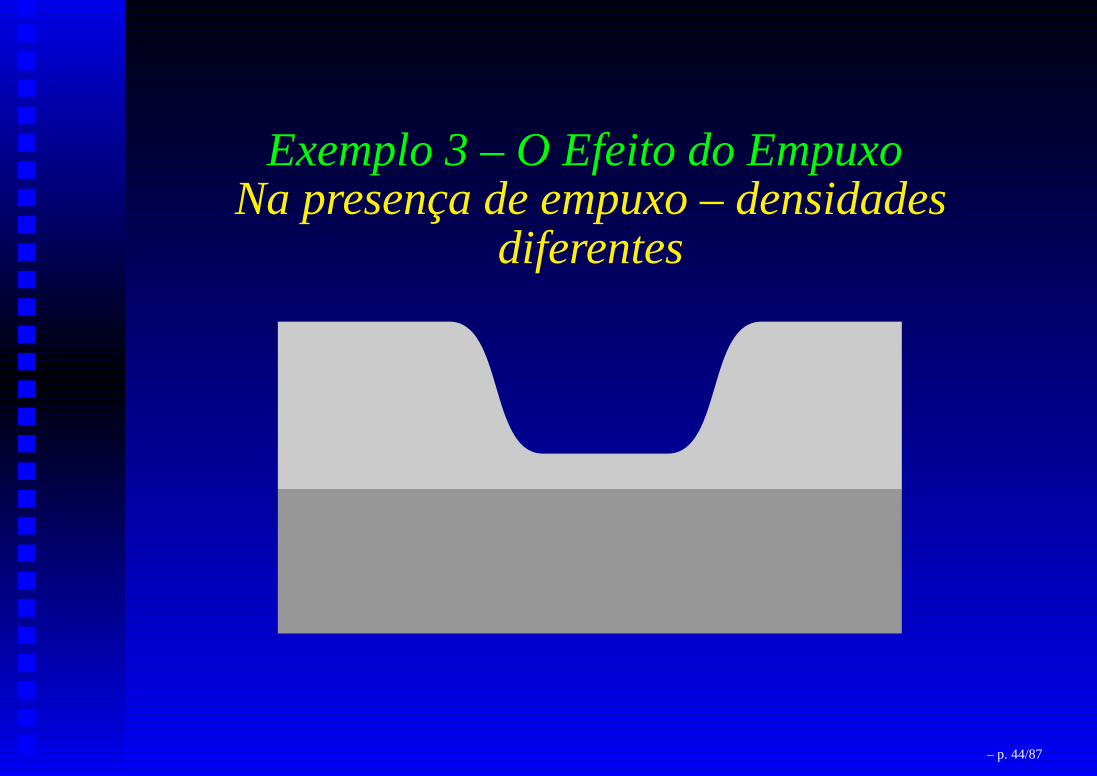
Exemplo 3 – O Efeito do EmpuxoNa presença de empuxo – densidades
diferentes
– p. 44/87

Exemplo 3 – O Efeito do Empuxo
0
0.5
1
1.5
2
0 1 2 3 4 5 6
’n=0’
– p. 45/87

Exemplo 3 – O Efeito do Empuxo
0
0.5
1
1.5
2
0 1 2 3 4 5 6
’n=100’
– p. 46/87

Exemplo 3 – O Efeito do Empuxo
0
0.5
1
1.5
2
0 1 2 3 4 5 6
’n=1000’
– p. 47/87

Exemplo 3 – O Efeito do Empuxo
0
0.5
1
1.5
2
0 1 2 3 4 5 6
’n=10000’
– p. 48/87

Exemplo 4 – O Efeito do EmpuxoNa ausência de empuxo – densidades iguas
– p. 49/87

Exemplo 4 – O Efeito do Empuxo
0
0.5
1
1.5
2
0 1 2 3 4 5 6
’x0’
– p. 50/87

Exemplo 4 – O Efeito do Empuxo
0
0.5
1
1.5
2
0 1 2 3 4 5 6
’x100’
– p. 51/87

Exemplo 4 – O Efeito do Empuxo
0
0.5
1
1.5
2
0 1 2 3 4 5 6
’x1000’
– p. 52/87

Exemplo 4 – O Efeito do Empuxo
0
0.5
1
1.5
2
0 1 2 3 4 5 6
’x10000’
– p. 53/87

Exemplo 5 – O Efeito do Empuxo
Dinamica deflagrada pela presenca de umaperturbacao na interface
Γ1 Γ1
Γ2
Γ1
– p. 54/87

Exemplo 5 – O Efeito do Empuxo
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 0
– p. 55/87
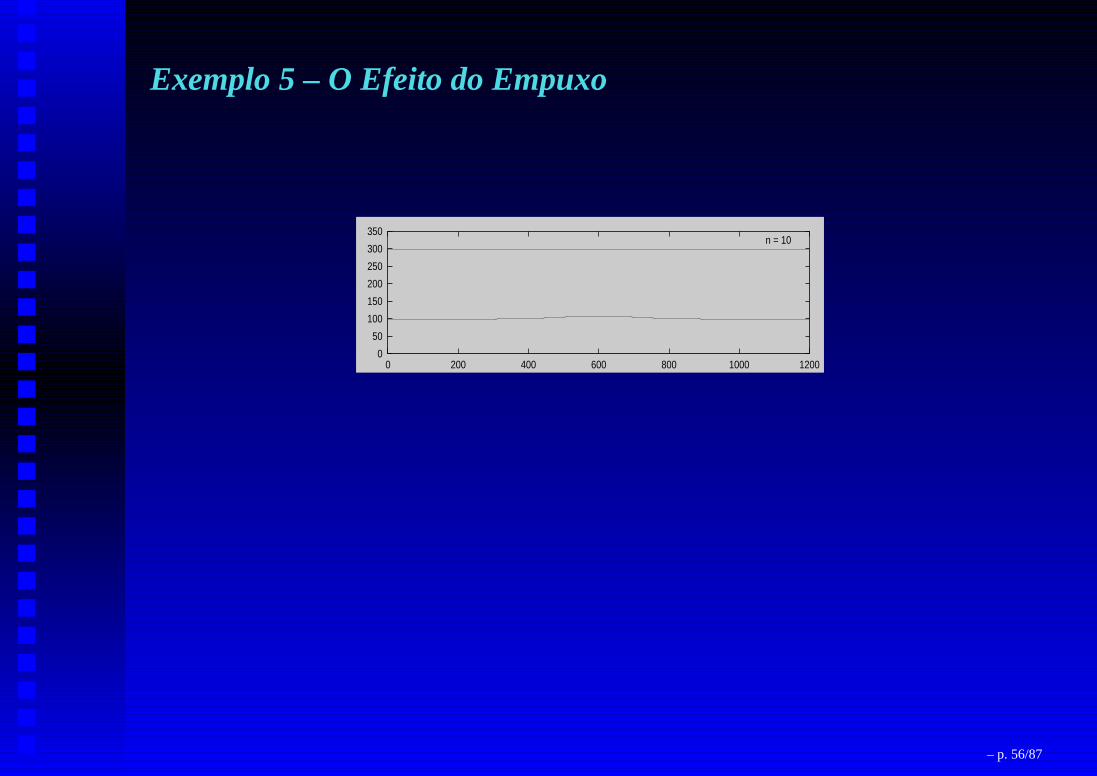
Exemplo 5 – O Efeito do Empuxo
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 10
– p. 56/87

Exemplo 5 – O Efeito do Empuxo
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 20
– p. 57/87

Exemplo 5 – O Efeito do Empuxo
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 30
– p. 58/87

Exemplo 5 – O Efeito do Empuxo
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 40
– p. 59/87

Exemplo 5 – O Efeito do Empuxo
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 60
– p. 60/87
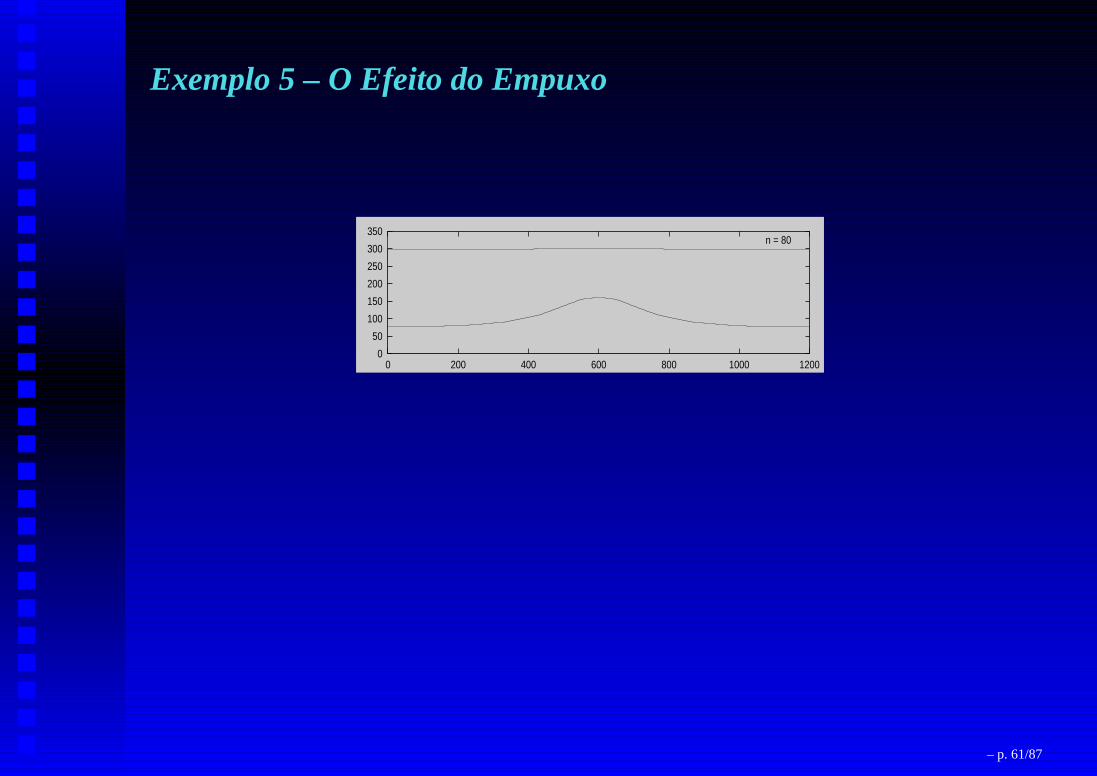
Exemplo 5 – O Efeito do Empuxo
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 80
– p. 61/87

Exemplo 5 – O Efeito do Empuxo
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 100
– p. 62/87

Exemplo 5 – O Efeito do Empuxo
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 120
– p. 63/87

Exemplo 5 – O Efeito do Empuxo
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 140
– p. 64/87

Exemplo 5 – O Efeito do Empuxo
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 150
– p. 65/87

Exemplo 5 – O Efeito do Empuxo
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 200
– p. 66/87

Exemplo 5 – O Efeito do Empuxo
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 250
– p. 67/87
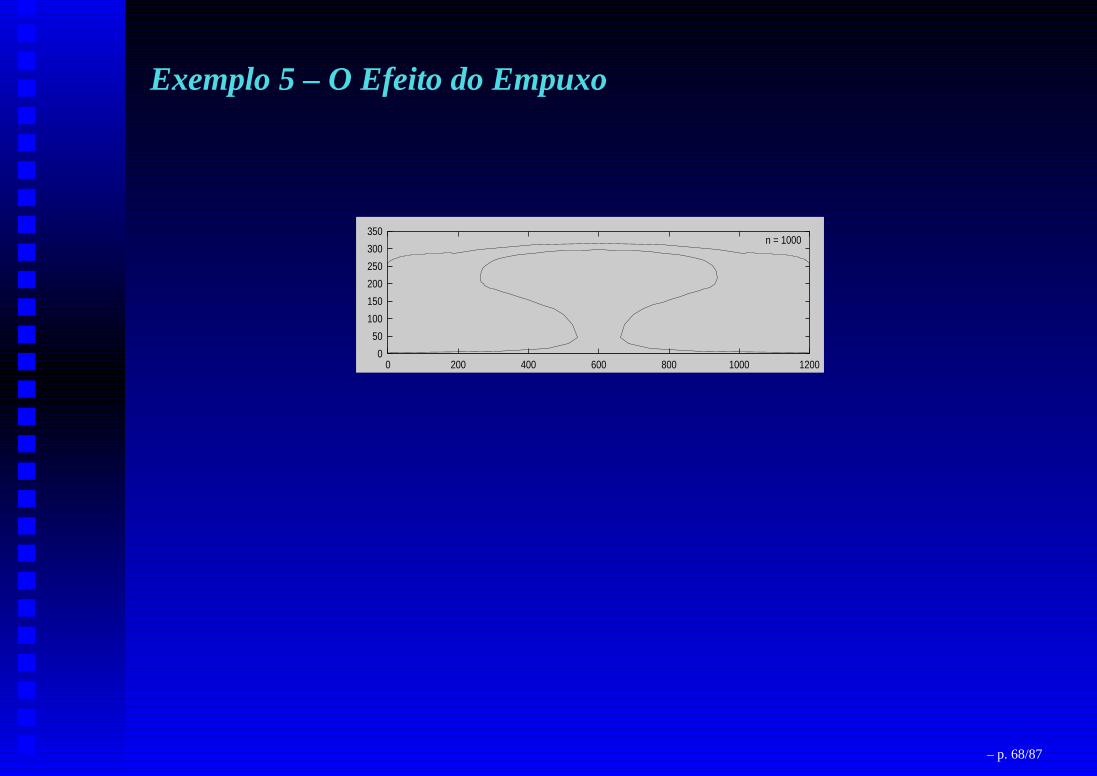
Exemplo 5 – O Efeito do Empuxo
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 1000
– p. 68/87
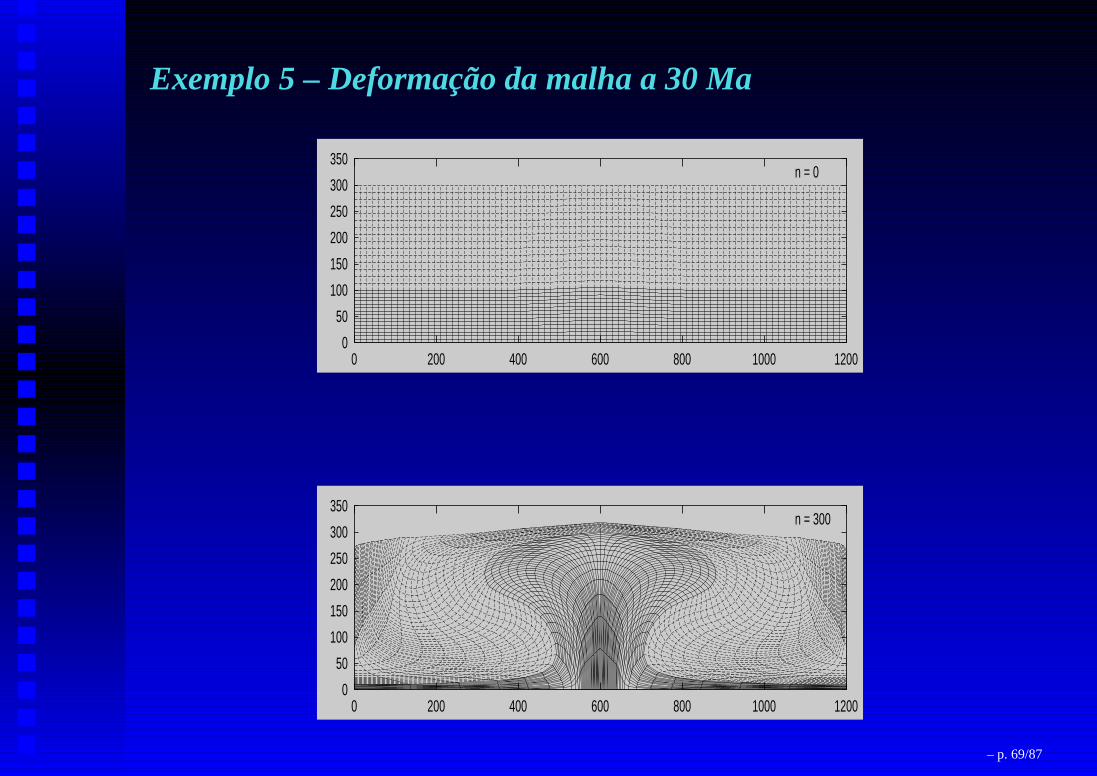
Exemplo 5 – Deformação da malha a 30 Ma
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 0
0
50
100
150
200
250
300
350
0 200 400 600 800 1000 1200
n = 300
– p. 69/87

Exemplo 6 – Grandes Extensões
0
100
200
300
0 500 1000 1500 2000 2500 3000 3500 4000
n = 0
– p. 70/87

Exemplo 6 – Grandes Extensões
0
100
200
300
0 500 1000 1500 2000 2500 3000 3500 4000
n = 100
– p. 71/87

Exemplo 6 – Grandes Extensões
0
100
200
300
0 500 1000 1500 2000 2500 3000 3500 4000
n = 250
– p. 72/87

Exemplo 6 – Grandes Extensões
0
100
200
300
0 500 1000 1500 2000 2500 3000 3500 4000
n = 500
– p. 73/87
Exemplo 6 – Grandes Extensões
0
100
200
300
0 500 1000 1500 2000 2500 3000 3500 4000
n = 750
– p. 74/87

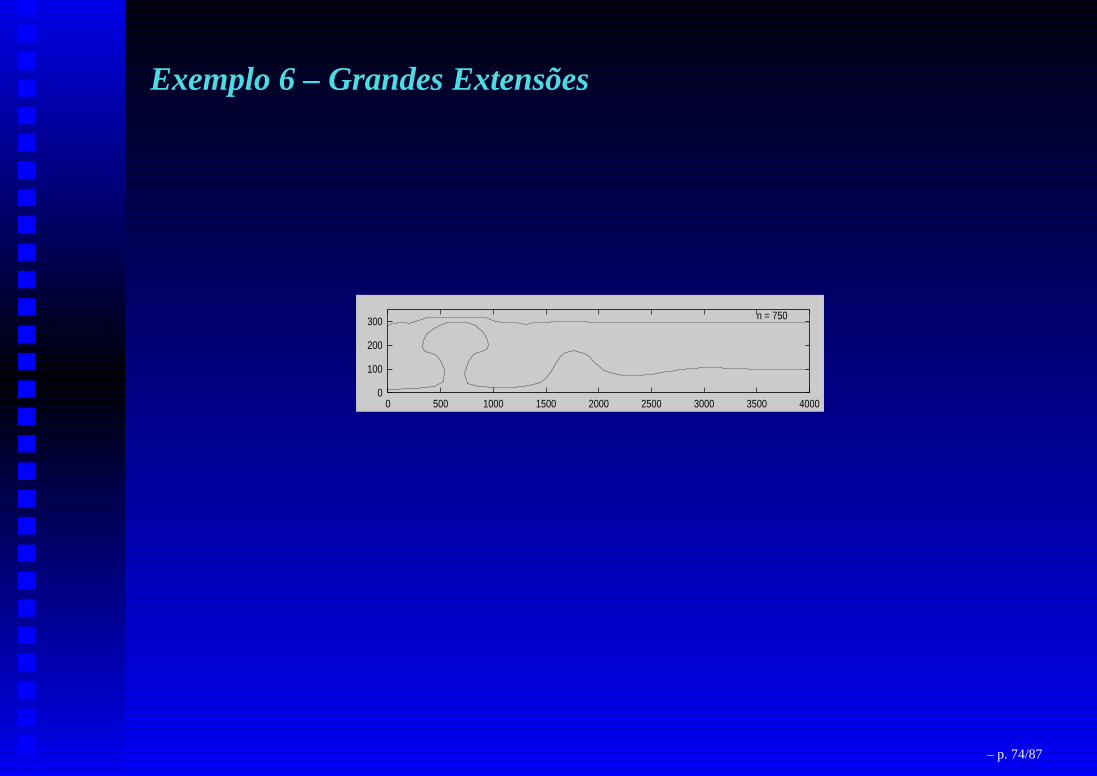
Exemplo 6 – Grandes Extensões
0
100
200
300
0 500 1000 1500 2000 2500 3000 3500 4000
n = 1000
– p. 75/87
Exemplo 6 – Grandes Extensões
0
100
200
300
0 500 1000 1500 2000 2500 3000 3500 4000
n = 1250
– p. 76/87

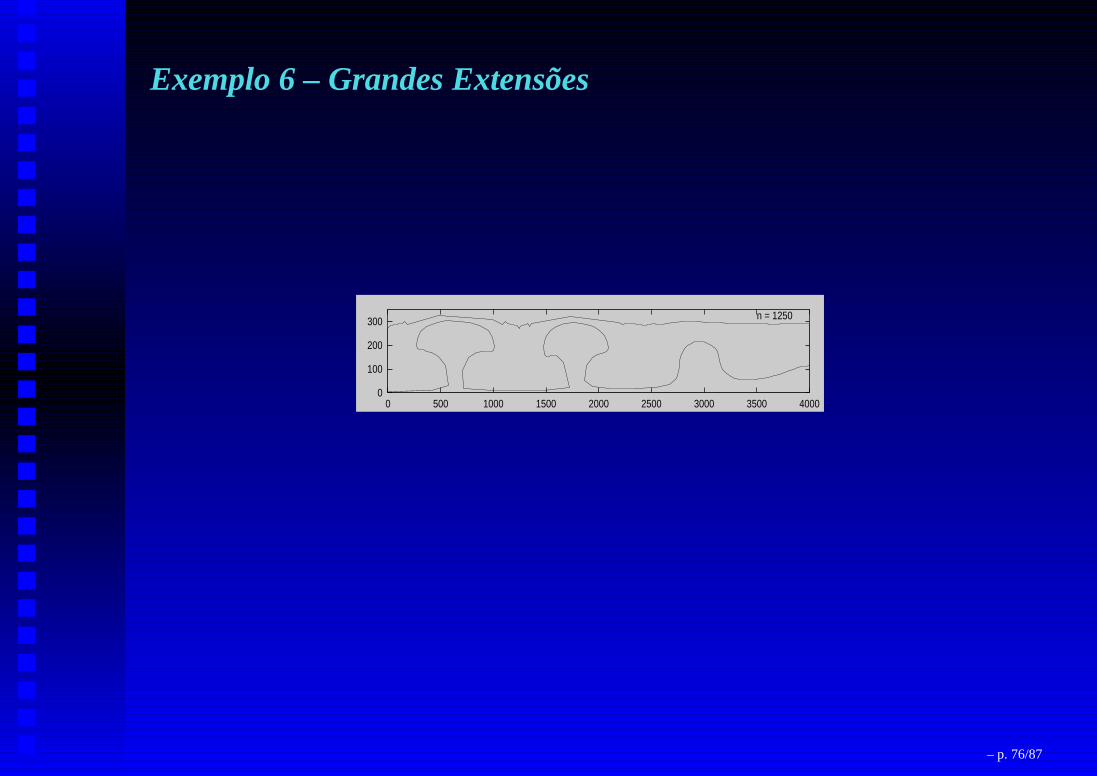
Exemplo 6 – Grandes Extensões
0
100
200
300
0 500 1000 1500 2000 2500 3000 3500 4000
n = 1500
– p. 77/87

Exemplo 6 – Deformação da malha a 150 Ma
0
100
200
300
0 500 1000 1500 2000 2500 3000 3500 4000
n = 1500
0
100
200
300
0 500 1000 1500 2000 2500 3000 3500 4000
n = 1500
– p. 78/87
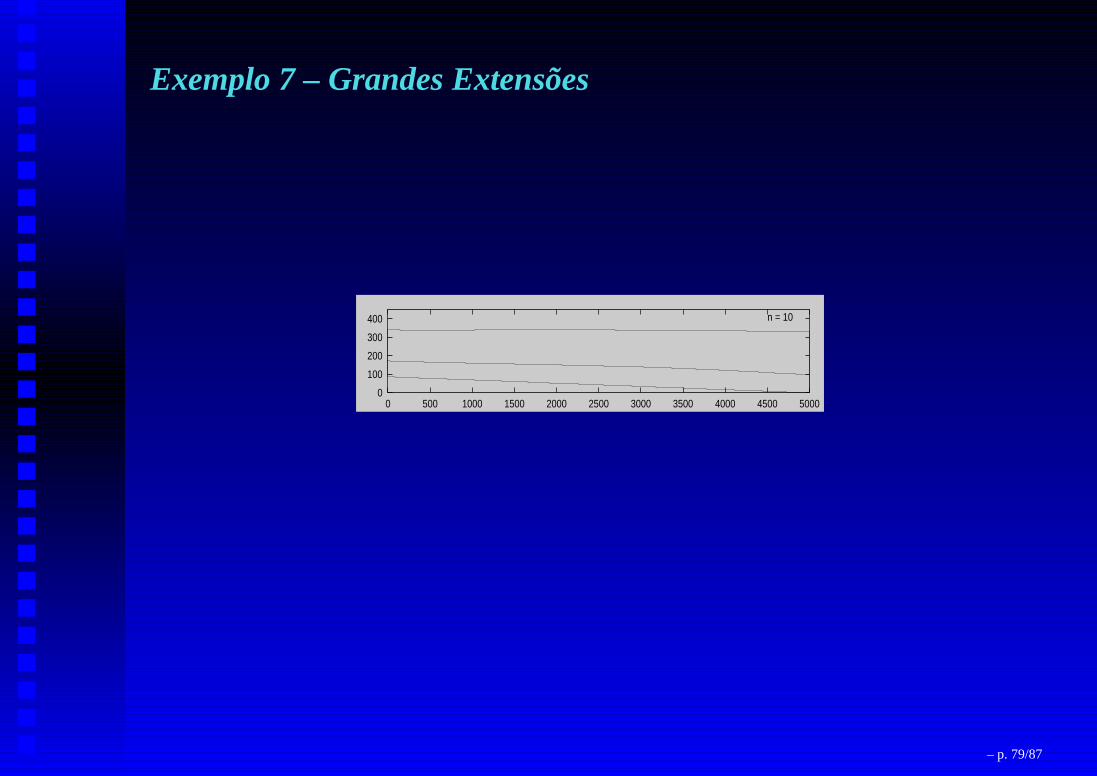
Exemplo 7 – Grandes Extensões
0
100
200
300
400
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
n = 10
– p. 79/87

Exemplo 7 – Grandes Extensões
0
100
200
300
400
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
n = 250
– p. 80/87

Exemplo 7 – Grandes Extensões
0
100
200
300
400
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
n = 500
– p. 81/87

Exemplo 7 – Grandes Extensões
0
100
200
300
400
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
n = 750
– p. 82/87
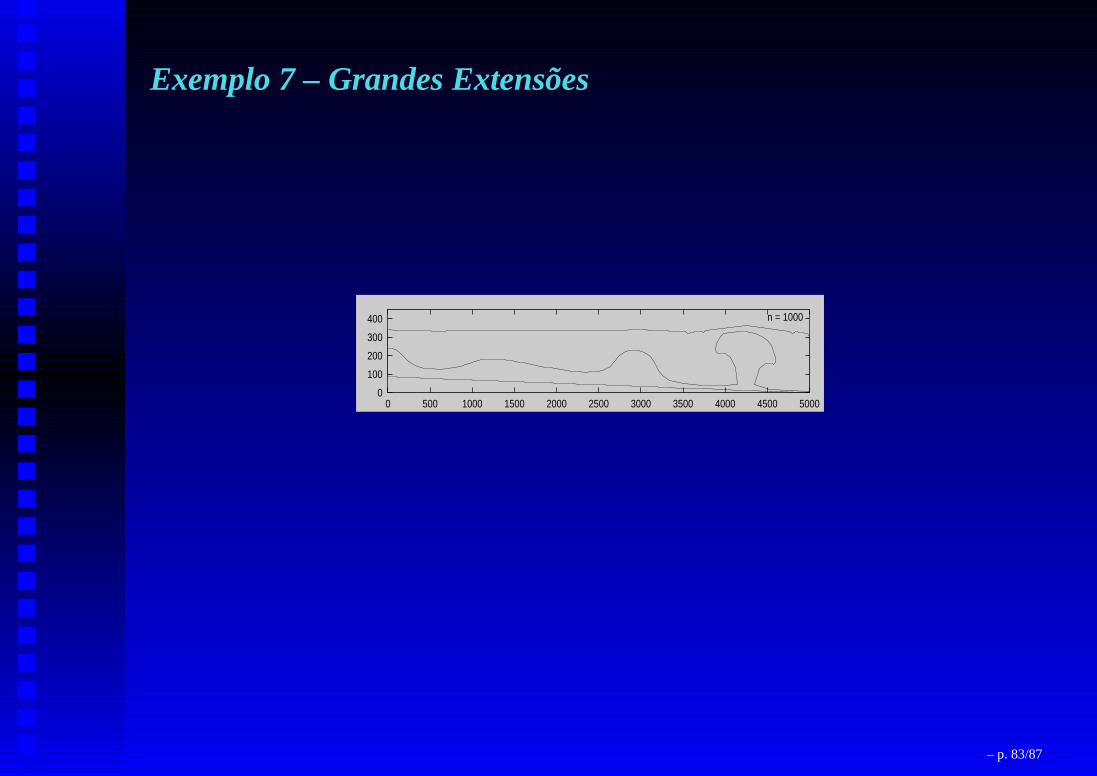
Exemplo 7 – Grandes Extensões
0
100
200
300
400
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
n = 1000
– p. 83/87

Exemplo 7 – Grandes Extensões
0
100
200
300
400
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
n = 1250
– p. 84/87
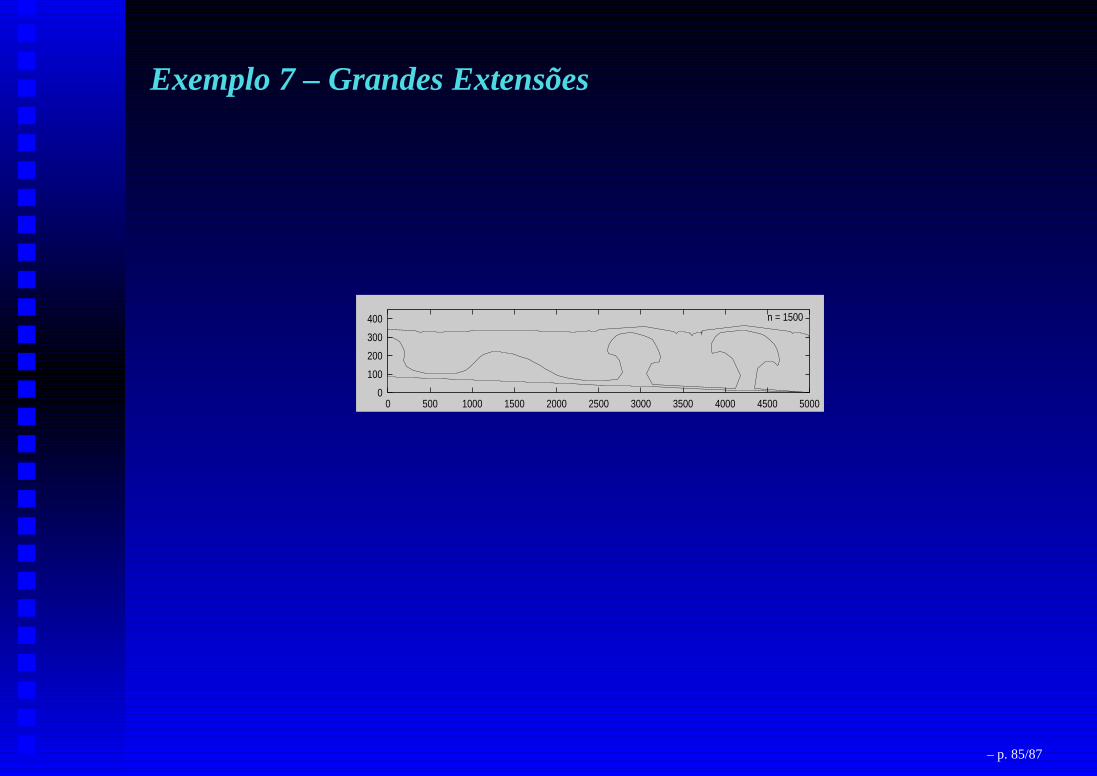
Exemplo 7 – Grandes Extensões
0
100
200
300
400
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
n = 1500
– p. 85/87
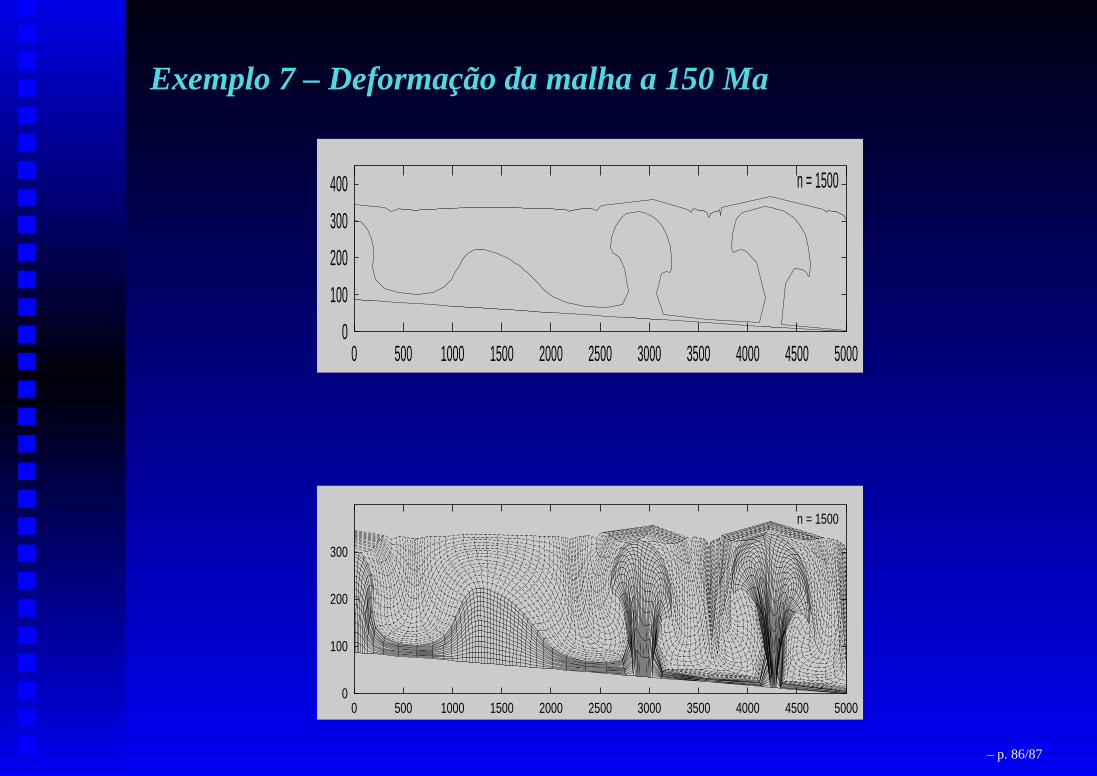
Exemplo 7 – Deformação da malha a 150 Ma
0
100
200
300
400
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
n = 1500
0
100
200
300
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
n = 1500
– p. 86/87

Bibliografia
• Liu, I Shih : Continuum Mechanicas,Spring-Verlag, 2002.
• Liu I, Shih; Rincon, M,; Cipolatti, R.:“Incremental linear approximation for finiteelasticity”, ICNAAM, 2006.
• Liu I, Shih; Rincon, M,; Cipolatti, R.:“Incremental linear approximation for finiteelasticity”, aceito em Comp. Appl. Math.
• Liu I, Shih; Rincon, M,; Cipolatti, R.: “Largedeformation in viscoelastic solid bodies -Numerical simulation of salt migration”,submetido.
– p. 87/87























![Leah Braemel [0.5 Proteção Hauberk] Primeira Noite](https://img.document.onl/doc/110x75/55cf9212550346f57b933867/leah-braemel-05-protecao-hauberk-primeira-noite.jpg)




