Embed Size (px)
Citation preview
Recorte
Instituto Superior Técnico
Edward Angel, Cap. 7
Instituto Superior Técnico Computação Gráfica
2009/2010
1
Na última aula...
� Remoção de Faces Traseiras
� Back-face Culling
©2010, CG&M/IST e Figuras Addison Wesley
� Recorte
� Cohen-Sutherland
Sumário
� Recorte 2D
� Paramétrico
©2010, CG&M/IST e Figuras Addison Wesley
� Paramétrico
� Cyrus-Beck e Liang-Barsky
� Sutherland-Hodgman
� Recorte 3D

Computação Gráfica
Recorte 2DRecorte 2D
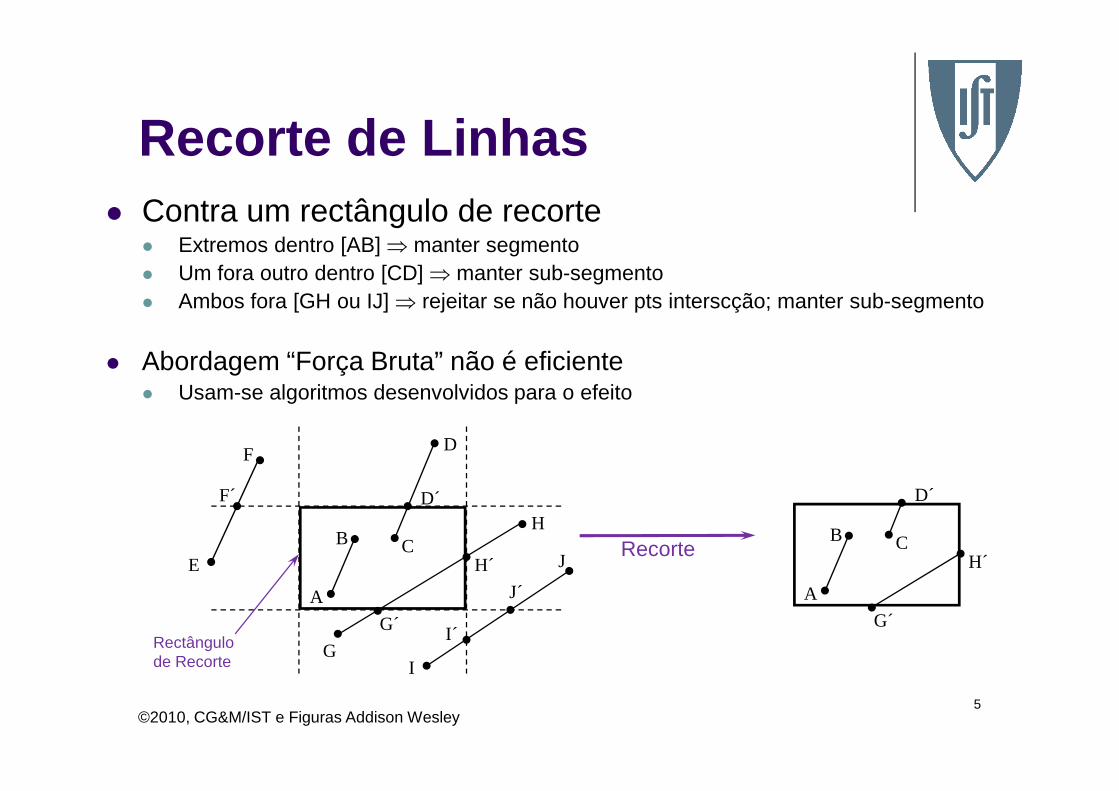
Recorte de Linhas� Contra um rectângulo de recorte
� Extremos dentro [AB] ⇒ manter segmento� Um fora outro dentro [CD] ⇒ manter sub-segmento� Ambos fora [GH ou IJ] ⇒ rejeitar se não houver pts interscção; manter sub-segmento
� Abordagem “Força Bruta” não é eficiente� Usam-se algoritmos desenvolvidos para o efeito
©2010, CG&M/IST e Figuras Addison Wesley
� Usam-se algoritmos desenvolvidos para o efeito
5
Rectângulode Recorte
A
B C
D
E
F
G
H
I
J
G´
D´F´
H´
I´
J´
Recorte
A
B C
G´
D´
H´
(na última aula)
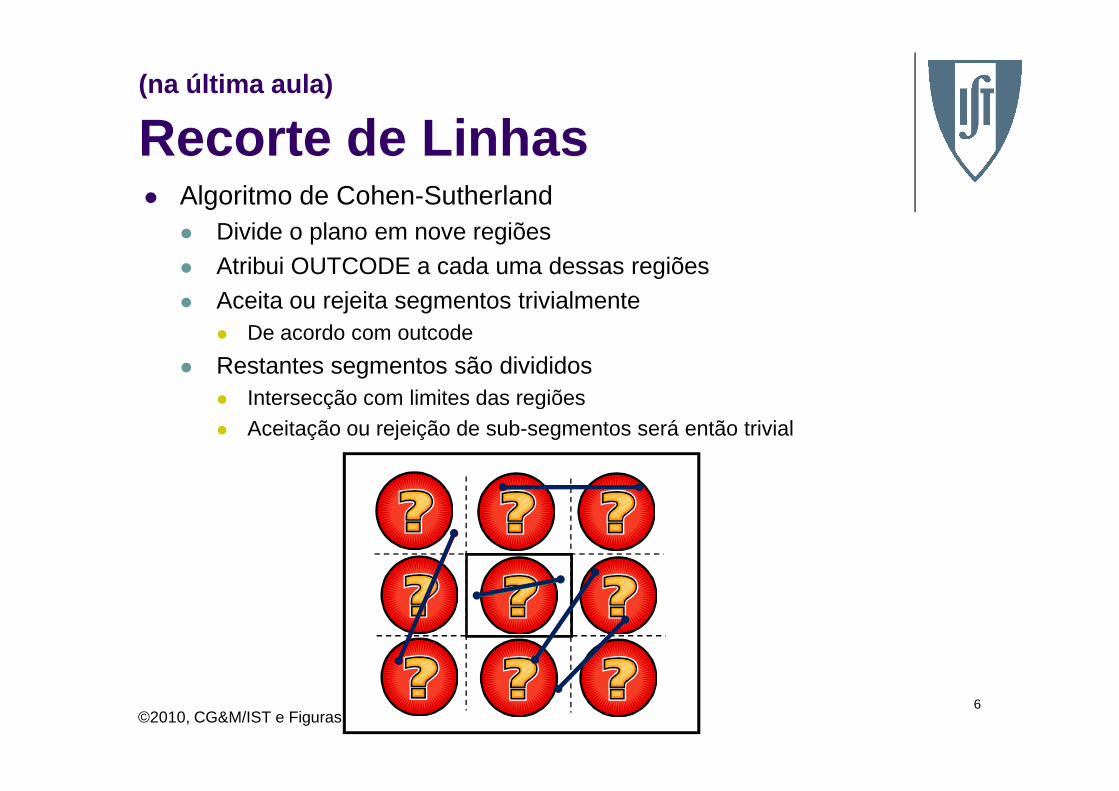
Recorte de Linhas� Algoritmo de Cohen-Sutherland
� Divide o plano em nove regiões� Atribui OUTCODE a cada uma dessas regiões� Aceita ou rejeita segmentos trivialmente
� De acordo com outcode
� Restantes segmentos são divididos� Intersecção com limites das regiões
©2010, CG&M/IST e Figuras Addison Wesley
� Intersecção com limites das regiões� Aceitação ou rejeição de sub-segmentos será então trivial
6
0000
1000 10101001
0010
0100
0001
0101 0110

Algoritmo de Cohen -Sutherland
� Especialmente eficiente em duas situações:� Janelas rectangulares “grandes”
� Rectângulo abrange quase toda as linhas� Grande parte dos segmentos trivialmente aceites
©2010, CG&M/IST e Figuras Addison Wesley
� “Pick” (selecção de objectos), � Rectângulo de recorte pequeno� Centrado na posição do cursor � Muitos segmentos trivialmente rejeitados

Computação Gráfica
Recorte 2DRecorte 2D
Algoritmo Paramétrico
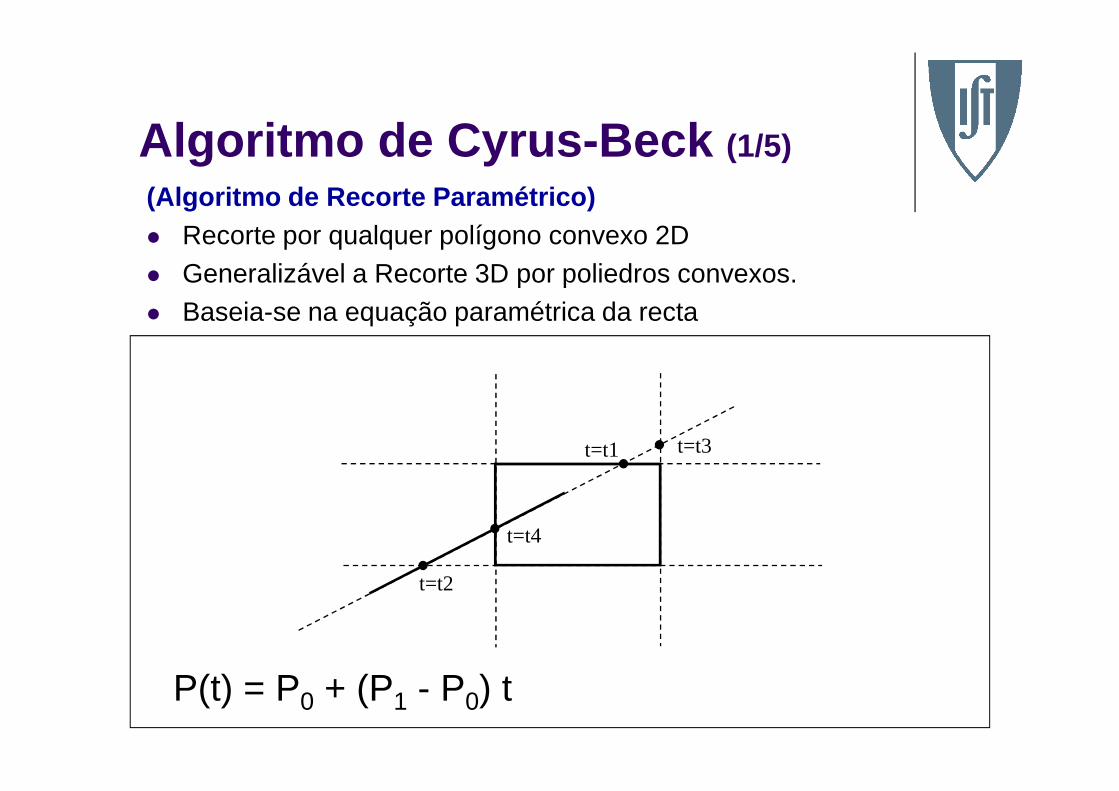
Algoritmo de Cyrus -Beck (1/5)
(Algoritmo de Recorte Paramétrico)� Recorte por qualquer polígono convexo 2D� Generalizável a Recorte 3D por poliedros convexos.� Baseia-se na equação paramétrica da recta
©2010, CG&M/IST e Figuras Addison Wesley
t=t1
t=t2
t=t3
t=t4
P(t) = P0 + (P1 - P0) t
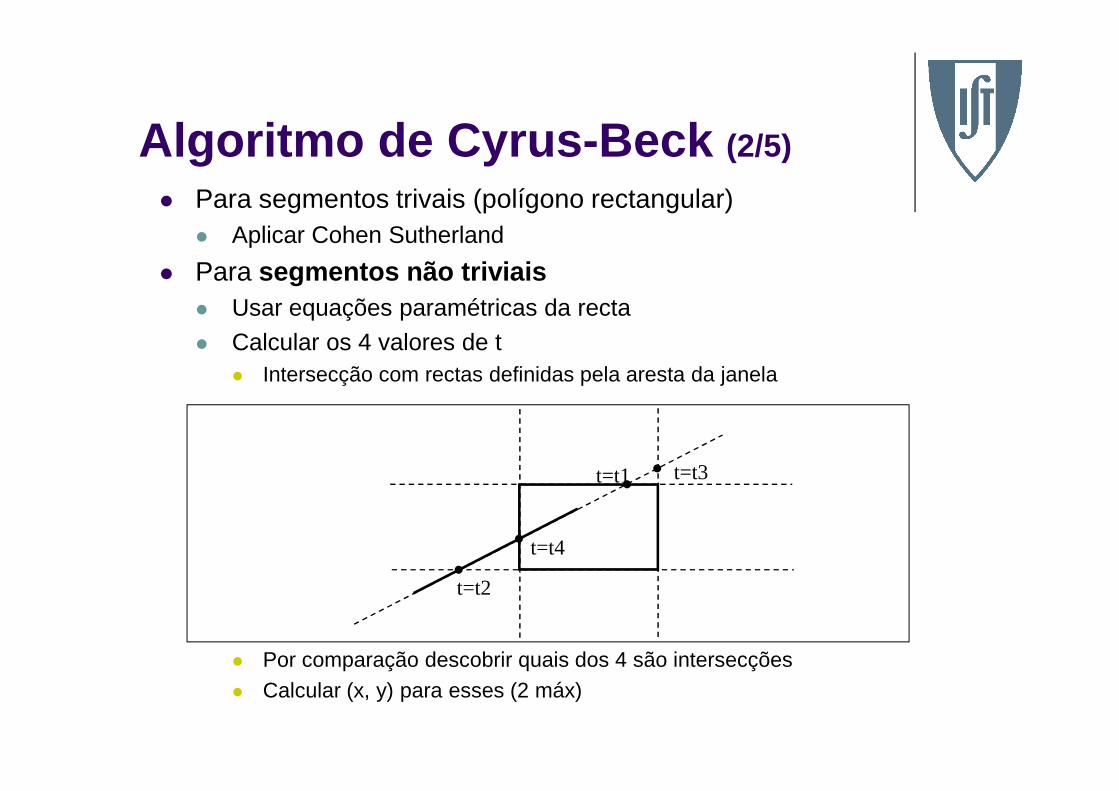
Algoritmo de Cyrus -Beck (2/5)
� Para segmentos trivais (polígono rectangular)� Aplicar Cohen Sutherland
� Para segmentos não triviais� Usar equações paramétricas da recta� Calcular os 4 valores de t
� Intersecção com rectas definidas pela aresta da janela
©2010, CG&M/IST e Figuras Addison Wesley
� Por comparação descobrir quais dos 4 são intersecções � Calcular (x, y) para esses (2 máx)
t=t1
t=t2
t=t3
t=t4
Algoritmo de Cyrus -Beck (3/5)
Lado E
PeiNi
P0
P1
Ni . [P(t) - Pei] < 0
Ni . [P(t) - Pei] = 0
Ni . [P(t) - Pei] > 0
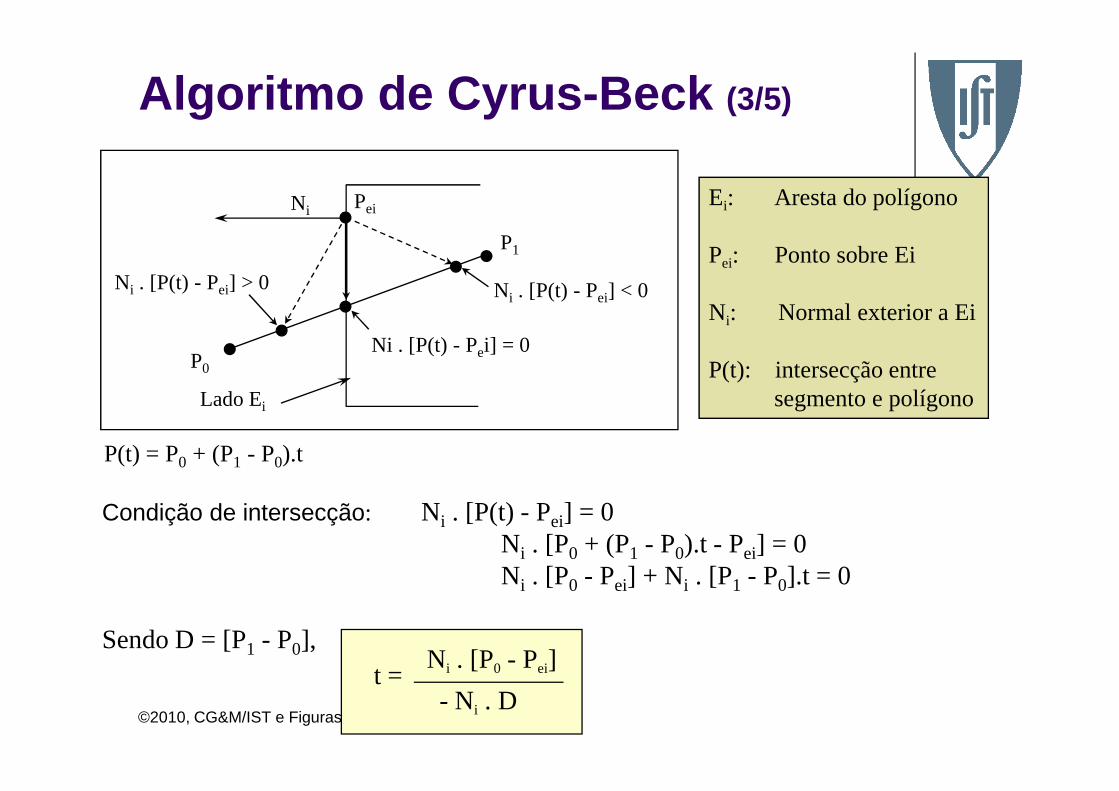
Ei: Aresta do polígono
Pei: Ponto sobre Ei
Ni: Normal exterior a Ei
P(t): intersecção entre segmento e polígono
©2010, CG&M/IST e Figuras Addison Wesley
Lado Ei segmento e polígono
P(t) = P0 + (P1 - P0).t
Condição de intersecção: Ni . [P(t) - Pei] = 0Ni . [P0 + (P1 - P0).t - Pei] = 0Ni . [P0 - Pei] + Ni . [P1 - P0].t = 0
Sendo D = [P1 - P0],t =
Ni . [P0 - Pei]
- Ni . D
Algoritmo de Cyrus -Beck (4/5)
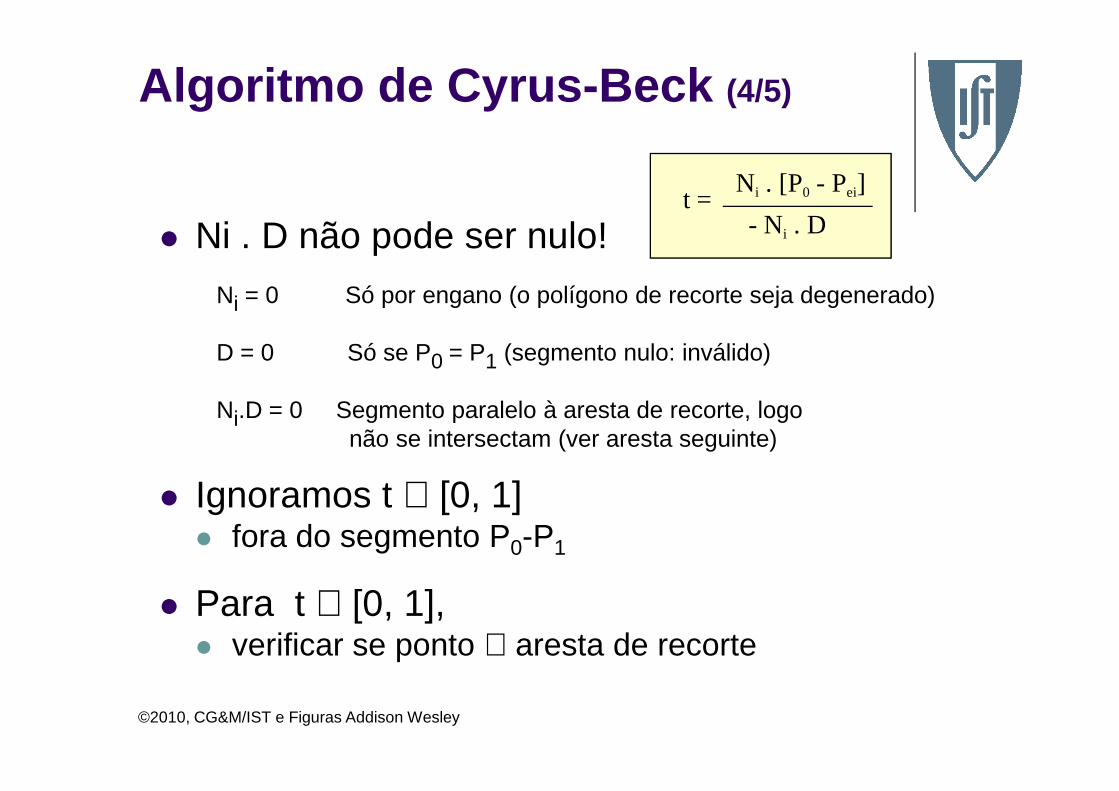
� Ni . D não pode ser nulo!t =
Ni . [P0 - Pei]
- Ni . D
Ni = 0 Só por engano (o polígono de recorte seja degenerado)
D = 0 Só se P0 = P1 (segmento nulo: inválido)
©2010, CG&M/IST e Figuras Addison Wesley
� Ignoramos t ∉ [0, 1] � fora do segmento P0-P1
� Para t ∈ [0, 1], � verificar se ponto ∈ aresta de recorte
Ni.D = 0 Segmento paralelo à aresta de recorte, logonão se intersectam (ver aresta seguinte)
Algoritmo de Cyrus -Beck (5/5)
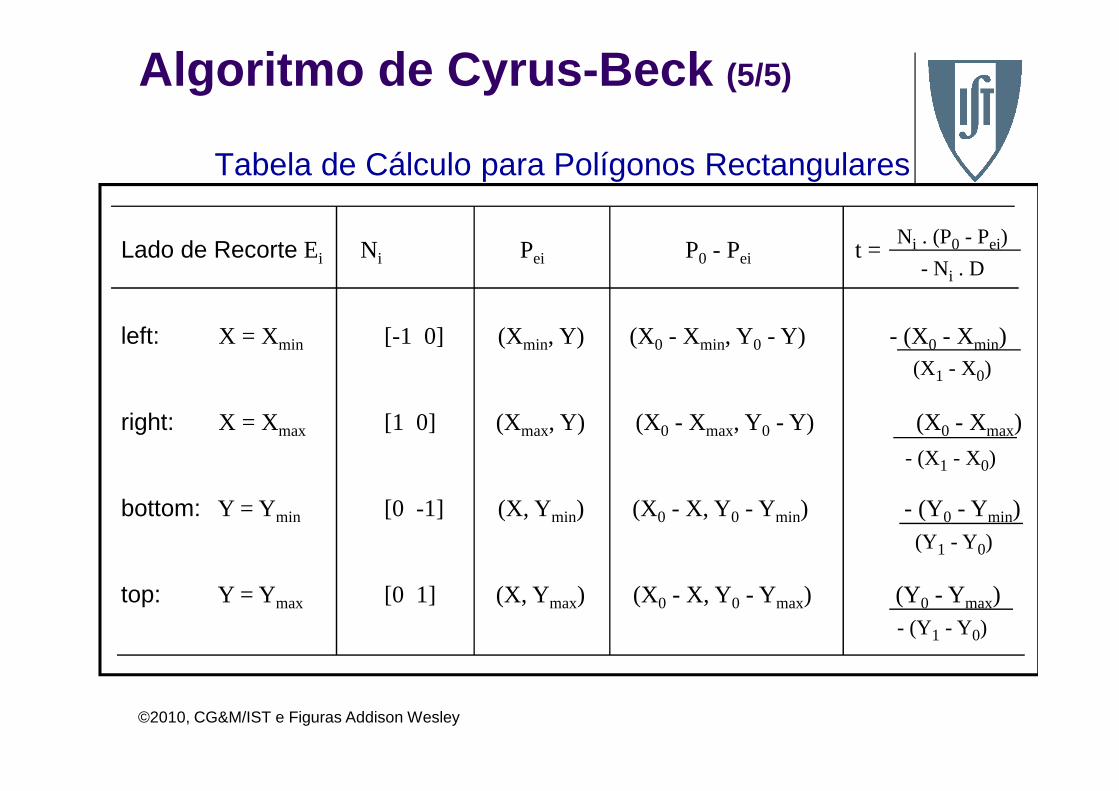
Tabela de Cálculo para Polígonos Rectangulares
Lado de Recorte Ei Ni Pei P0 - Pei t =
left: X = Xmin [-1 0] (Xmin, Y) (X0 - Xmin, Y0 - Y) - (X0 - Xmin)
Ni . (P0 - Pei)
- Ni . D
(X1 - X0)
©2010, CG&M/IST e Figuras Addison Wesley
right: X = Xmax [1 0] (Xmax, Y) (X0 - Xmax, Y0 - Y) (X0 - Xmax)
bottom: Y = Ymin [0 -1] (X, Ymin) (X0 - X, Y0 - Ymin) - (Y0 - Ymin)
top: Y = Ymax [0 1] (X, Ymax) (X0 - X, Y0 - Ymax) (Y0 - Ymax)
- (X1 - X0)
(Y1 - Y0)
- (Y1 - Y0)
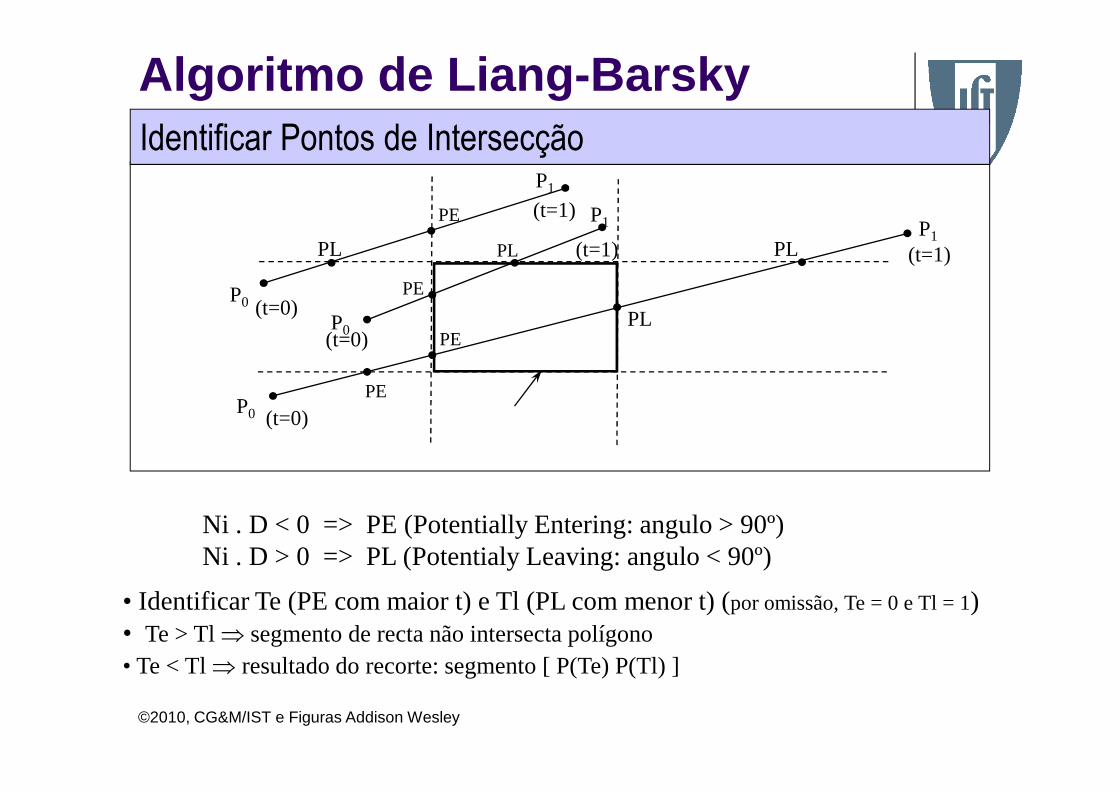
Identificar Pontos de Intersecção
Algoritmo de Liang -Barsky
PL
PEP
P1PL
PE
(t=1)
P0(t=0)
P1
(t=1)
PE
PL
P0 (t=0)
P1
(t=1)PE
PL
©2010, CG&M/IST e Figuras Addison Wesley
PEP0 (t=0)
Ni . D < 0 => PE (Potentially Entering: angulo > 90º)Ni . D > 0 => PL (Potentialy Leaving: angulo < 90º)
• Identificar Te (PE com maior t) e Tl (PL com menor t) (por omissão, Te = 0 e Tl = 1) • Te > Tl ⇒ segmento de recta não intersecta polígono• Te < Tl ⇒ resultado do recorte: segmento [ P(Te) P(Tl) ]

Recorte
Recorte de PolígonosRecorte de Polígonos
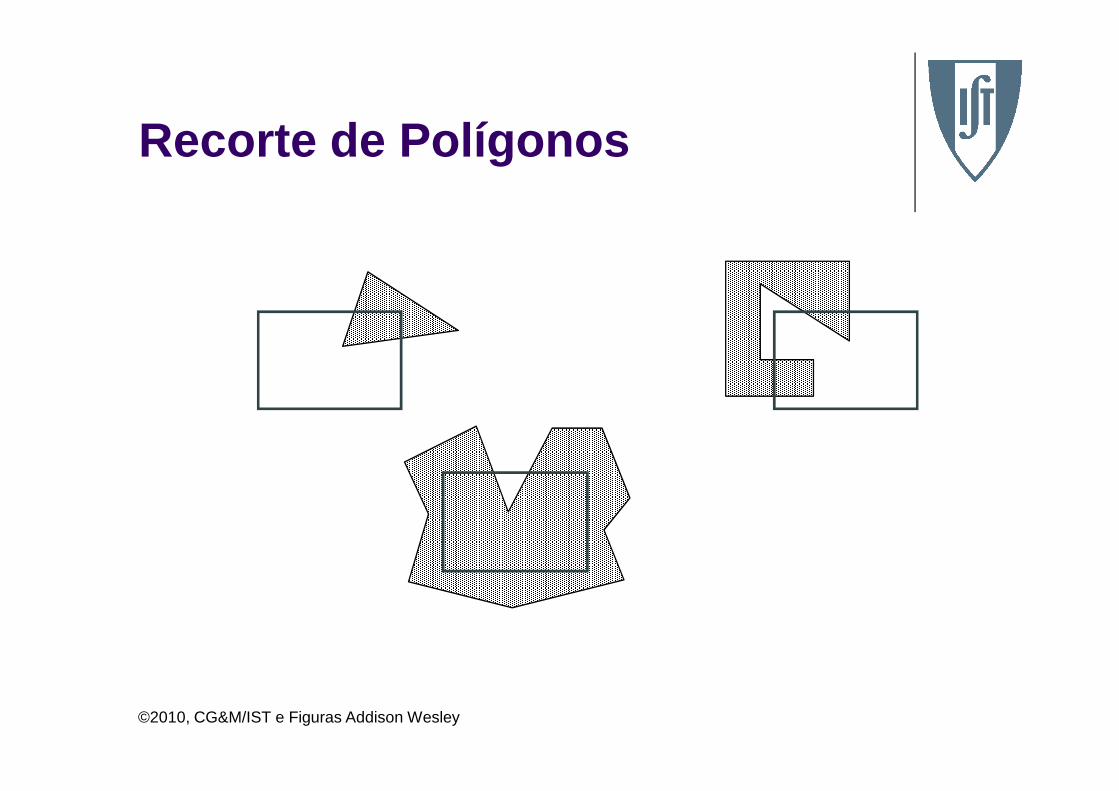
Recorte de Polígonos
©2010, CG&M/IST e Figuras Addison Wesley
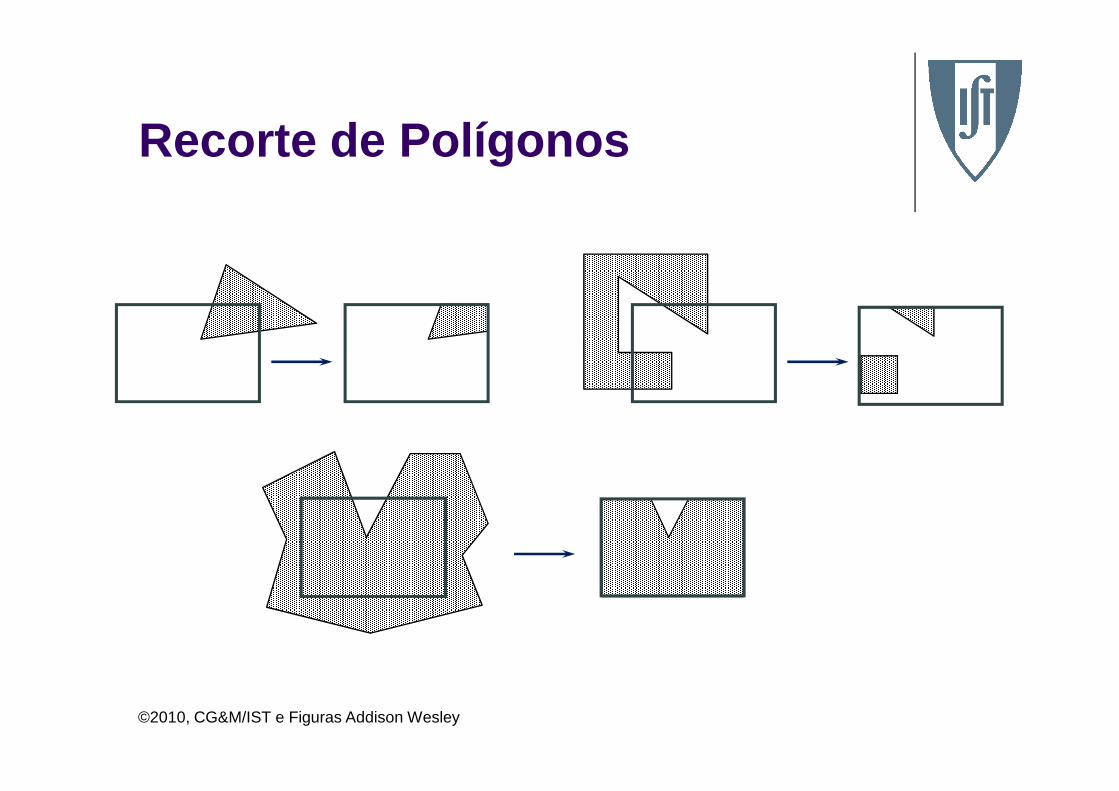
Recorte de Polígonos
©2010, CG&M/IST e Figuras Addison Wesley
17
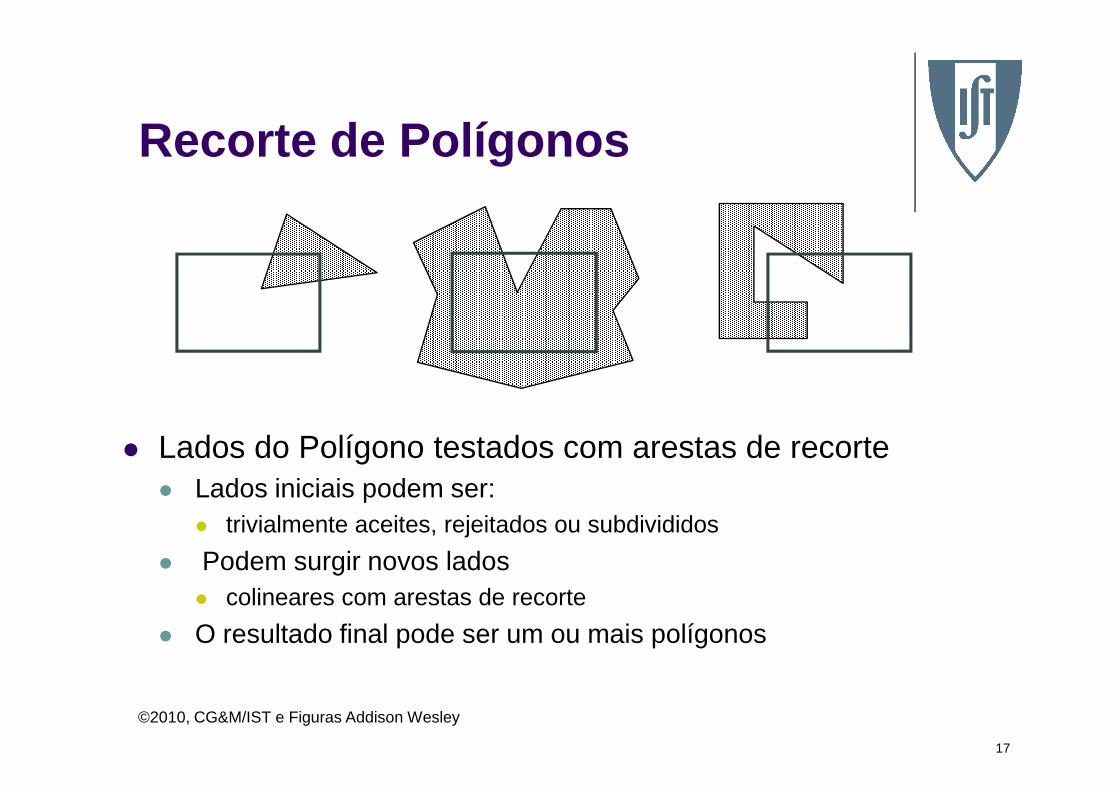
� Lados do Polígono testados com arestas de recorte� Lados iniciais podem ser:
� trivialmente aceites, rejeitados ou subdivididos
� Podem surgir novos lados � colineares com arestas de recorte
� O resultado final pode ser um ou mais polígonos
Recorte de Polígonos
©2010, CG&M/IST e Figuras Addison Wesley

Algoritmo de Sutherland -Hodgman (1/4)
� Abordagem “Dividir para Reinar”� Recortes sucessivos do polígono por aresta infinita� Quatro passos (um para cada aresta)
©2010, CG&M/IST e Figuras Addison Wesley
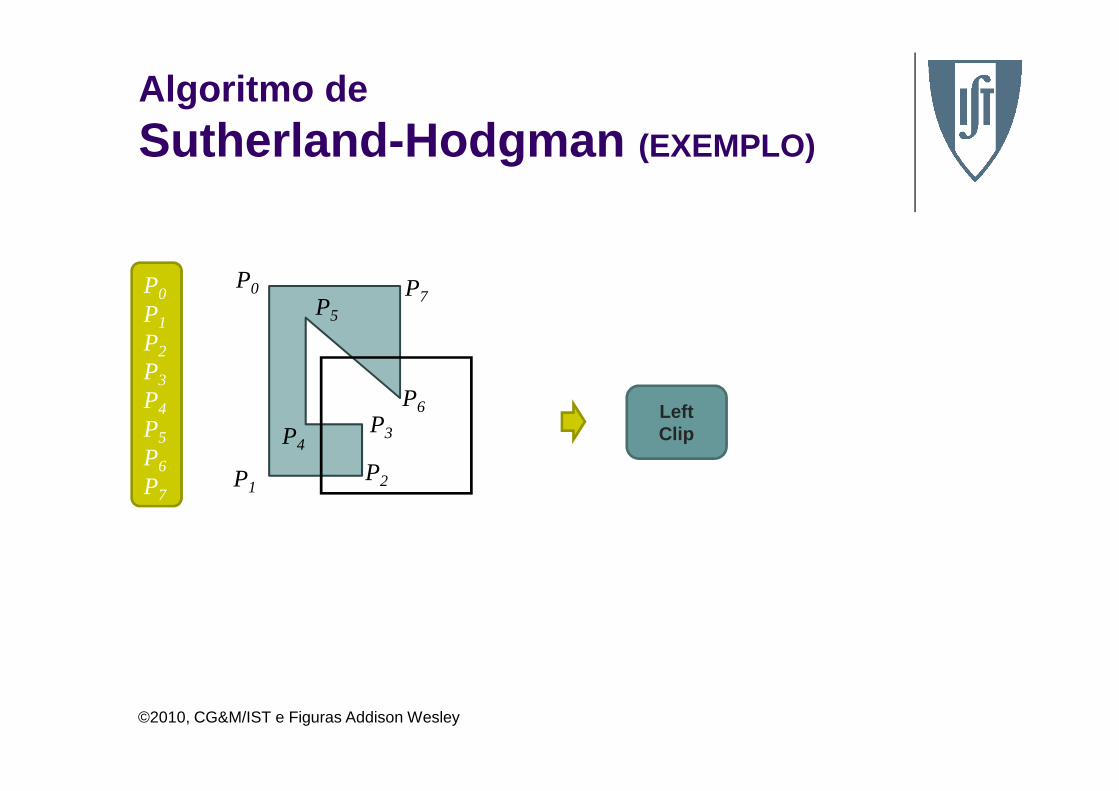
Algoritmo de Sutherland -Hodgman (2/4)
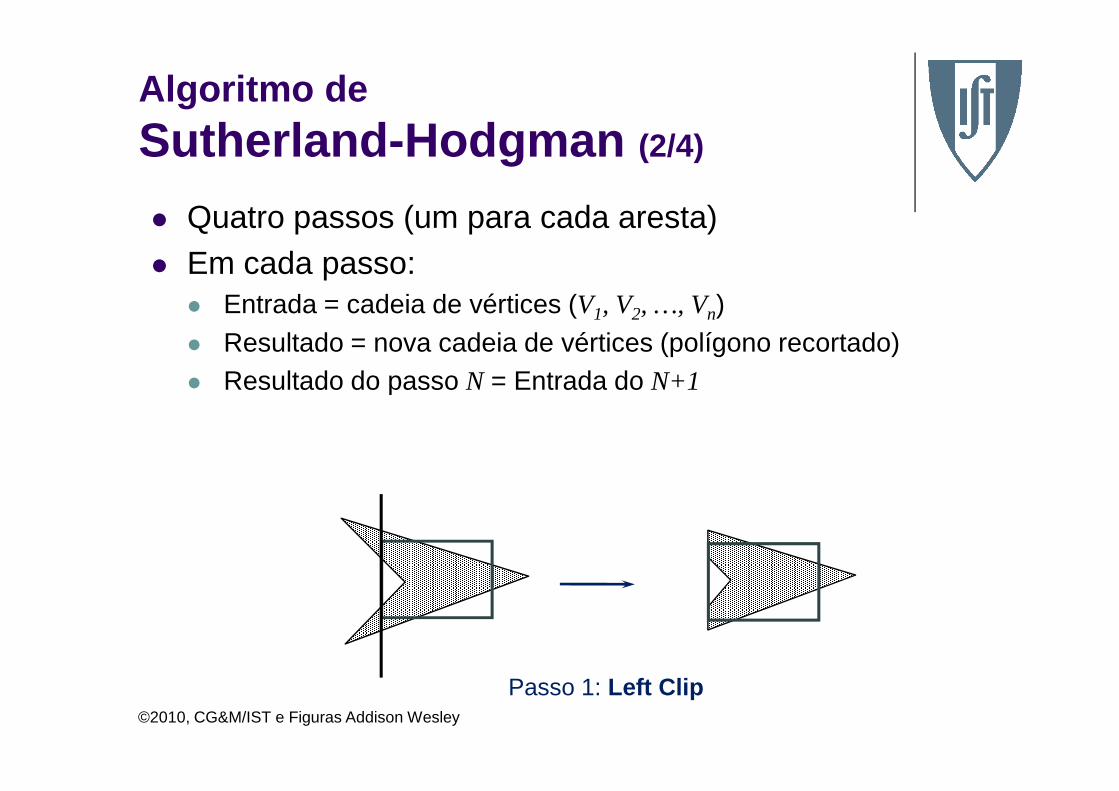
� Quatro passos (um para cada aresta)� Em cada passo:
� Entrada = cadeia de vértices (V1, V2, …, Vn) � Resultado = nova cadeia de vértices (polígono recortado)� Resultado do passo N = Entrada do N+1
©2010, CG&M/IST e Figuras Addison Wesley
Passo 1: Left Clip
N N+1
Algoritmo de Sutherland -Hodgman (2/4)
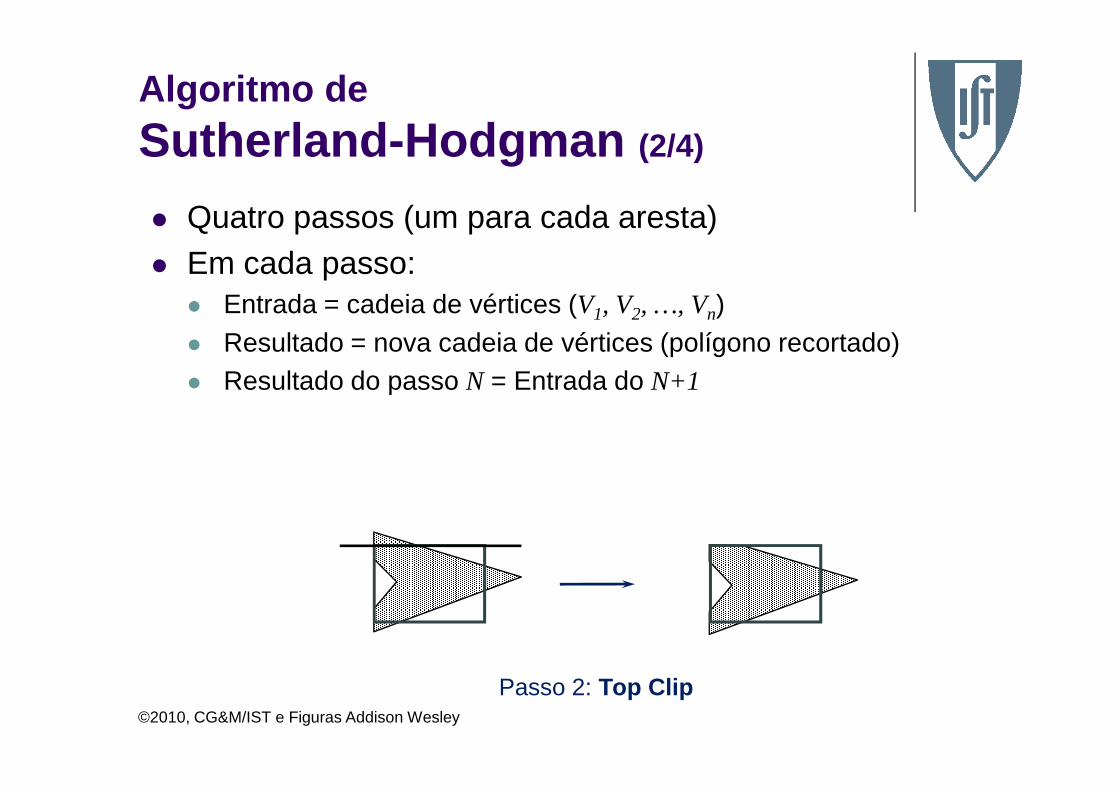
� Quatro passos (um para cada aresta)� Em cada passo:
� Entrada = cadeia de vértices (V1, V2, …, Vn) � Resultado = nova cadeia de vértices (polígono recortado)� Resultado do passo N = Entrada do N+1
©2010, CG&M/IST e Figuras Addison Wesley
N N+1
Passo 2: Top Clip
Algoritmo de Sutherland -Hodgman (2/4)
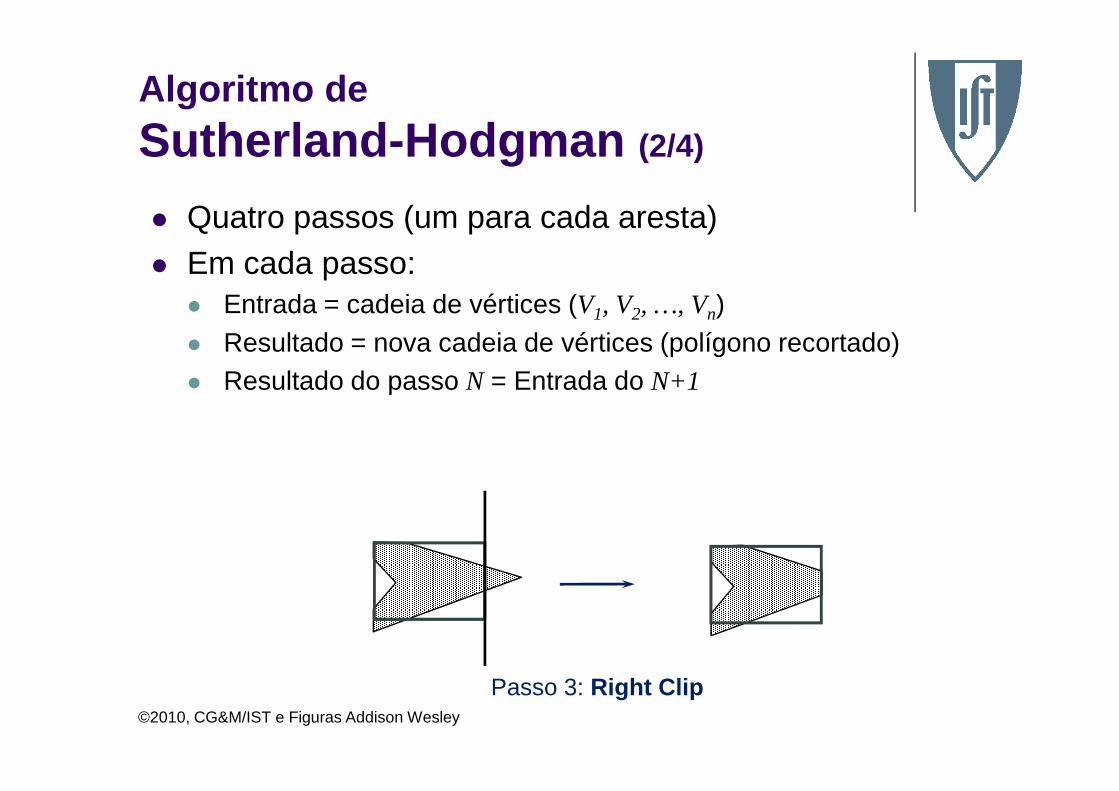
� Quatro passos (um para cada aresta)� Em cada passo:
� Entrada = cadeia de vértices (V1, V2, …, Vn) � Resultado = nova cadeia de vértices (polígono recortado)� Resultado do passo N = Entrada do N+1
©2010, CG&M/IST e Figuras Addison Wesley
N N+1
Passo 3: Right Clip
Algoritmo de Sutherland -Hodgman (2/4)
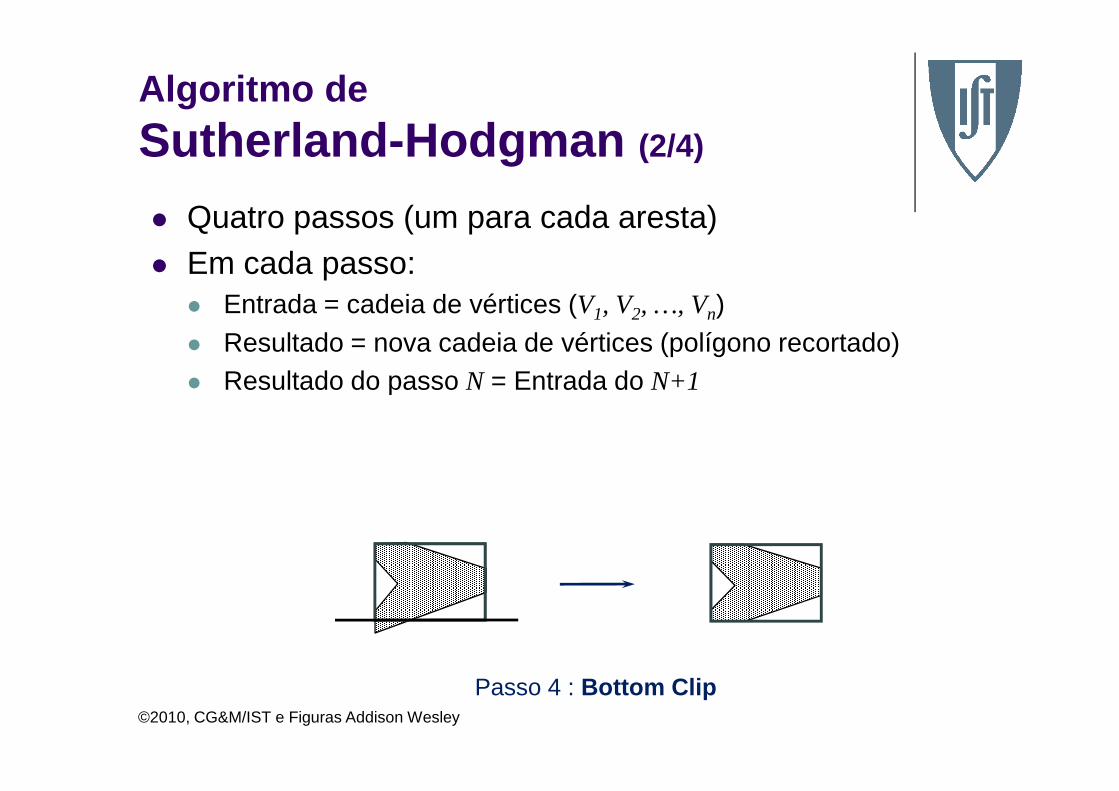
� Quatro passos (um para cada aresta)� Em cada passo:
� Entrada = cadeia de vértices (V1, V2, …, Vn) � Resultado = nova cadeia de vértices (polígono recortado)� Resultado do passo N = Entrada do N+1
©2010, CG&M/IST e Figuras Addison Wesley
N N+1
Passo 4 : Bottom Clip
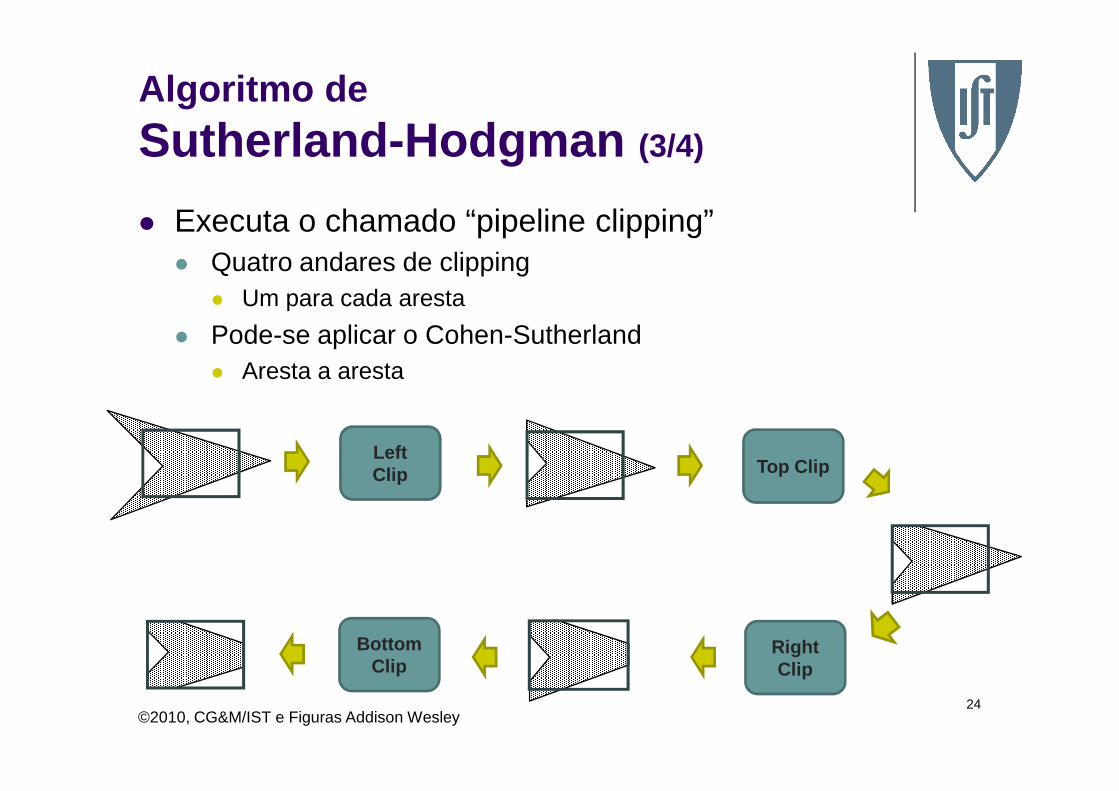
Algoritmo de Sutherland -Hodgman (3/4)
� Executa o chamado “pipeline clipping”� Quatro andares de clipping
� Um para cada aresta
� Pode-se aplicar o Cohen-Sutherland� Aresta a aresta
©2010, CG&M/IST e Figuras Addison Wesley24
LeftClip Top Clip
RightClip
BottomClip

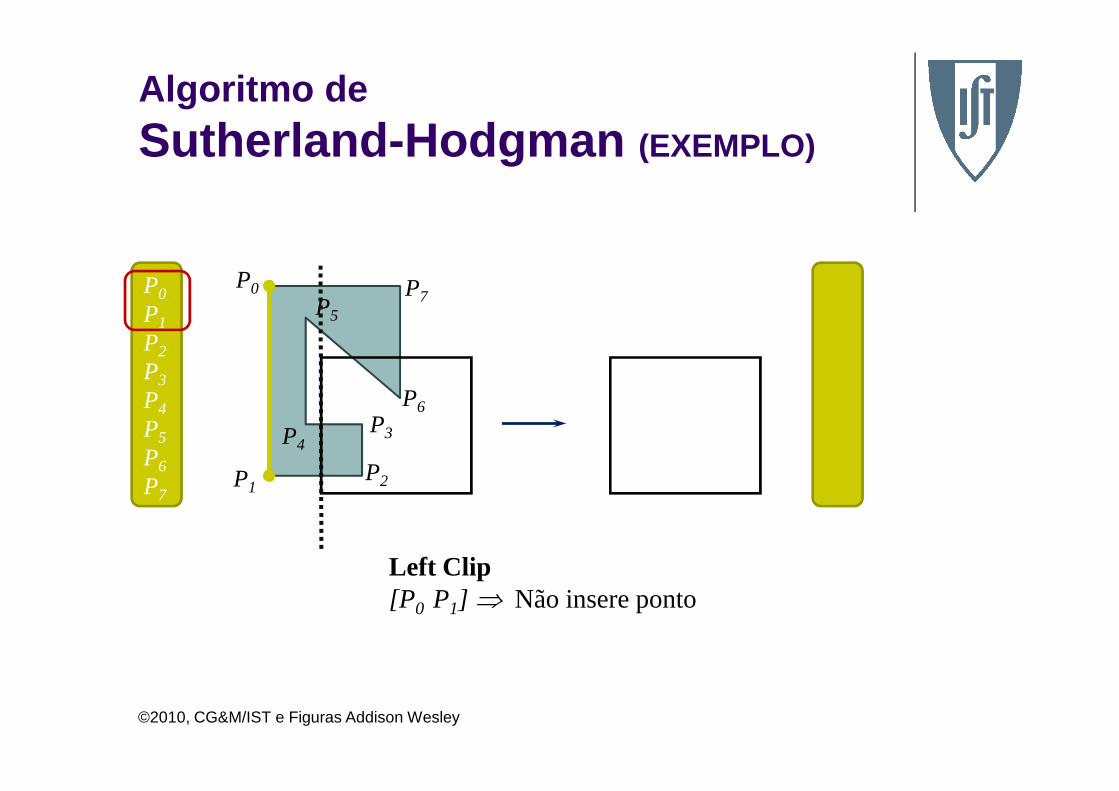
Inserção de pontos
Algoritmo deSutherland -Hodgman (4/4)
Interior Exterior
S
P
Interior Exterior
S
P
Interior Exterior
S
PI
Interior Exterior
S
P I
©2010, CG&M/IST e Figuras Addison Wesley
P S
Caso 1: Caso 2: Caso 3: Caso 4:Inserir ponto P Inserir ponto I Não insere pontos Insere primeiro I
Insere depois P
Pode gerar falsos lados(remover a posteriori)
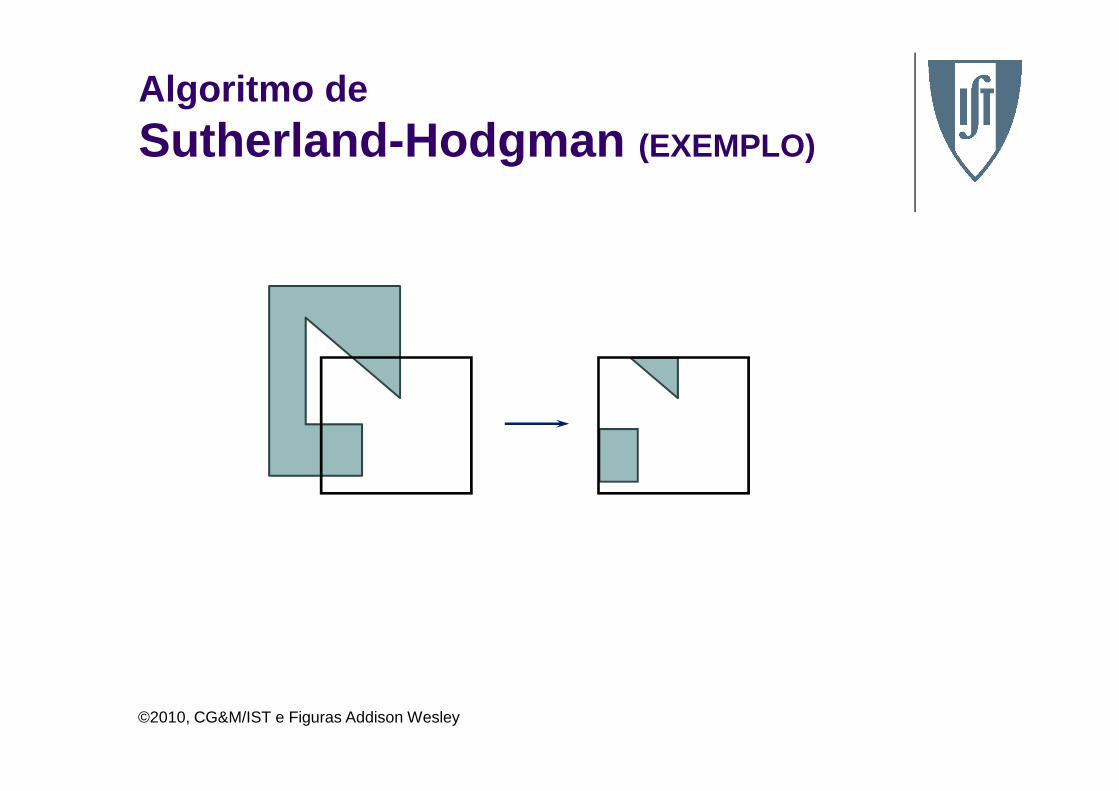
Algoritmo deSutherland -Hodgman (EXEMPLO)
©2010, CG&M/IST e Figuras Addison Wesley
P0
P1
P2
P3
P
Algoritmo deSutherland -Hodgman (EXEMPLO)
P0P5
P
P7
©2010, CG&M/IST e Figuras Addison Wesley
P4
P5
P6
P7P1
P2
P4
P6P3
LeftClip
Algoritmo deSutherland -Hodgman (EXEMPLO)
P0P5
P
P7P0
P1
P2
P3
P
©2010, CG&M/IST e Figuras Addison Wesley
P1P2
P4
P6
Left Clip[P0 P1] ⇒ Não insere ponto
P3
P4
P5
P6
P7
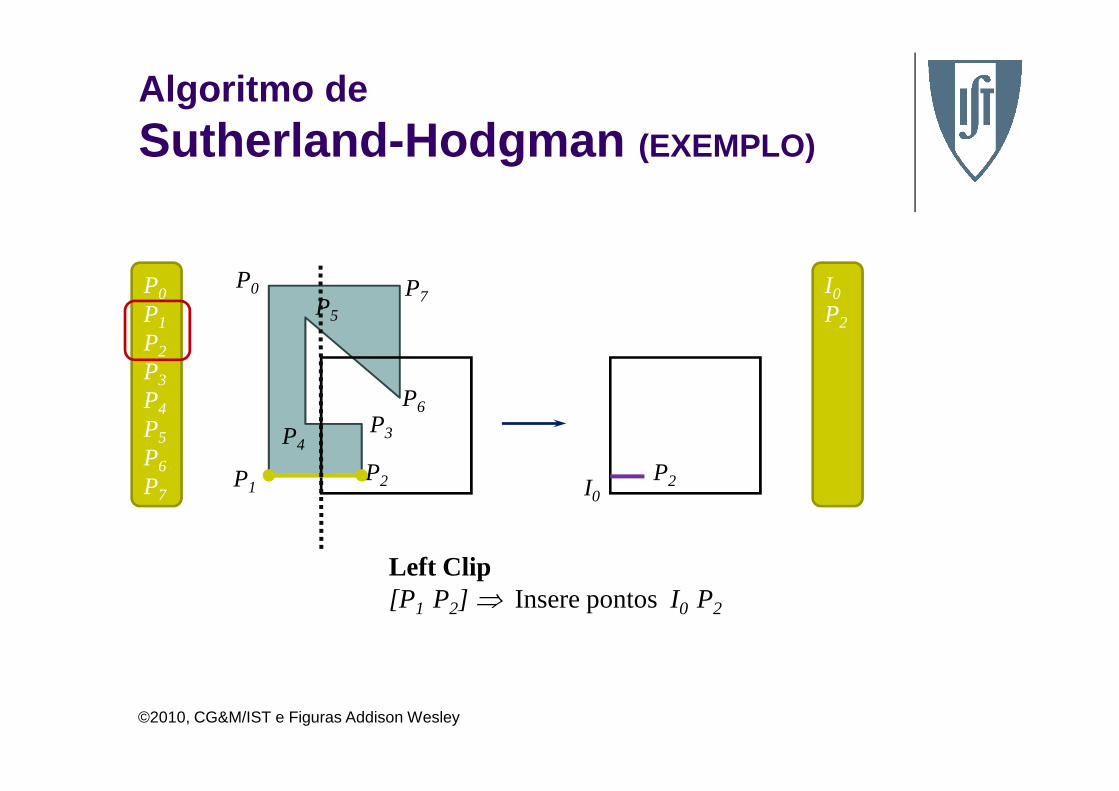
Algoritmo deSutherland -Hodgman (EXEMPLO)
P0P5
P
P7P0
P1
P2
P3
P
I0
P2
©2010, CG&M/IST e Figuras Addison Wesley
P1P2
P4
P6
Left Clip[P1 P2] ⇒ Insere pontos I0 P2
P2I0
P3
P4
P5
P6
P7
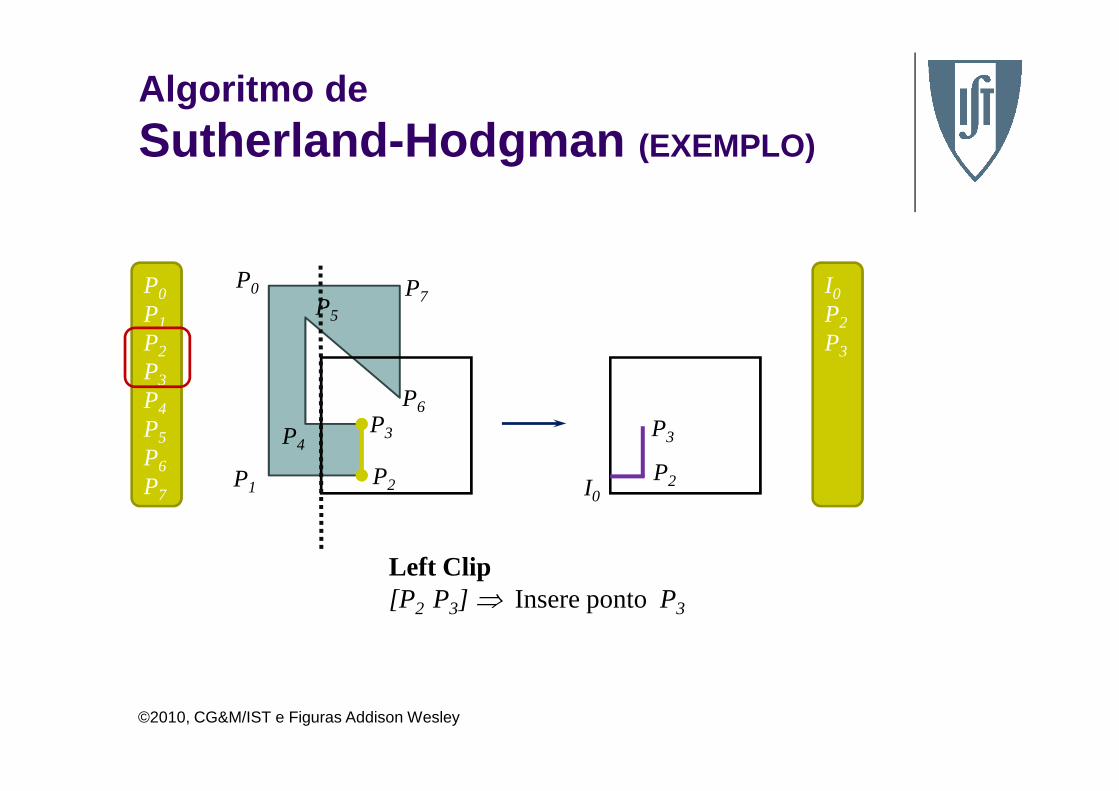
Algoritmo deSutherland -Hodgman (EXEMPLO)
P0P5
P
P7P0
P1
P2
P3
P
I0
P2
P3
©2010, CG&M/IST e Figuras Addison Wesley
P1 P2
P4
P6
Left Clip[P2 P3] ⇒ Insere ponto P3
P2I0
P3 P3
P4
P5
P6
P7

Algoritmo deSutherland -Hodgman (EXEMPLO)
P0P5
P
P7P0
P1
P2
P3
P
I0
P2
P3
I1
©2010, CG&M/IST e Figuras Addison Wesley
P1 P2
P4
P6
Left Clip[P3 P4] ⇒ Insere ponto I1
P2I0
P3 P3
I1P4
P5
P6
P7
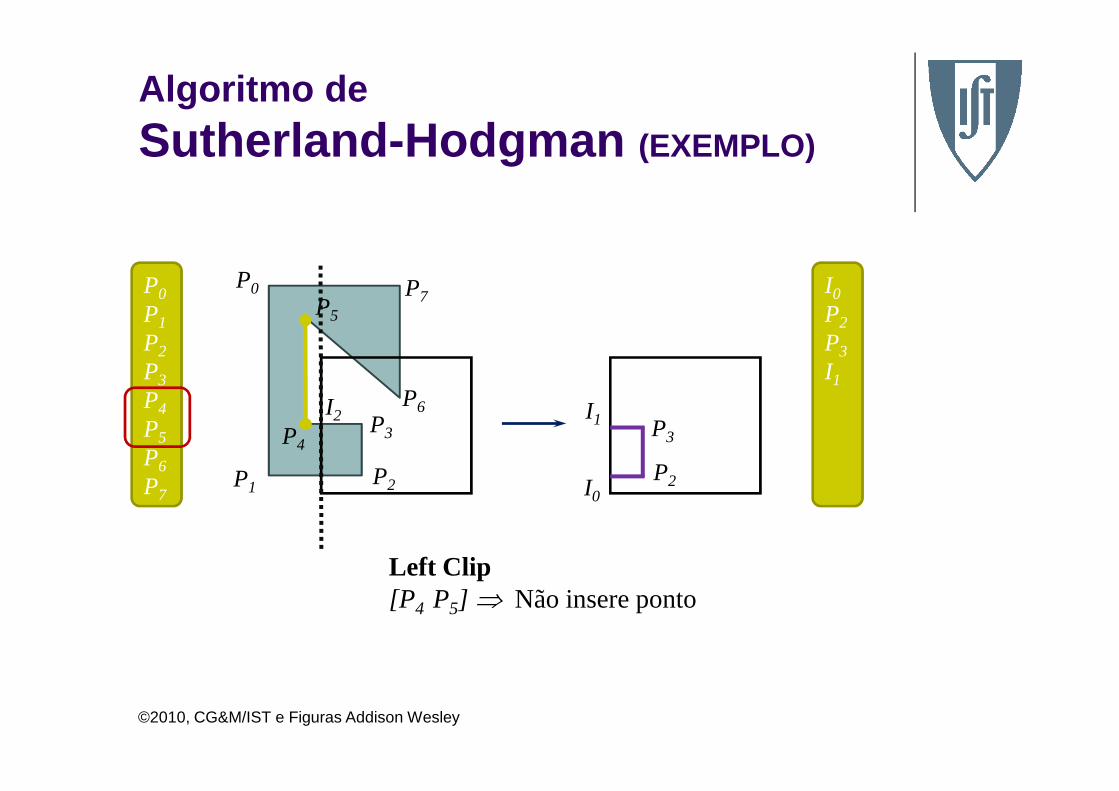
Algoritmo deSutherland -Hodgman (EXEMPLO)
P0P5
P
P7
I
P0
P1
P2
P3
P
I0
P2
P3
I1
©2010, CG&M/IST e Figuras Addison Wesley
P1 P2
P4
P6
Left Clip[P4 P5] ⇒ Não insere ponto
P2I0
I2 P3 P3
I1P4
P5
P6
P7
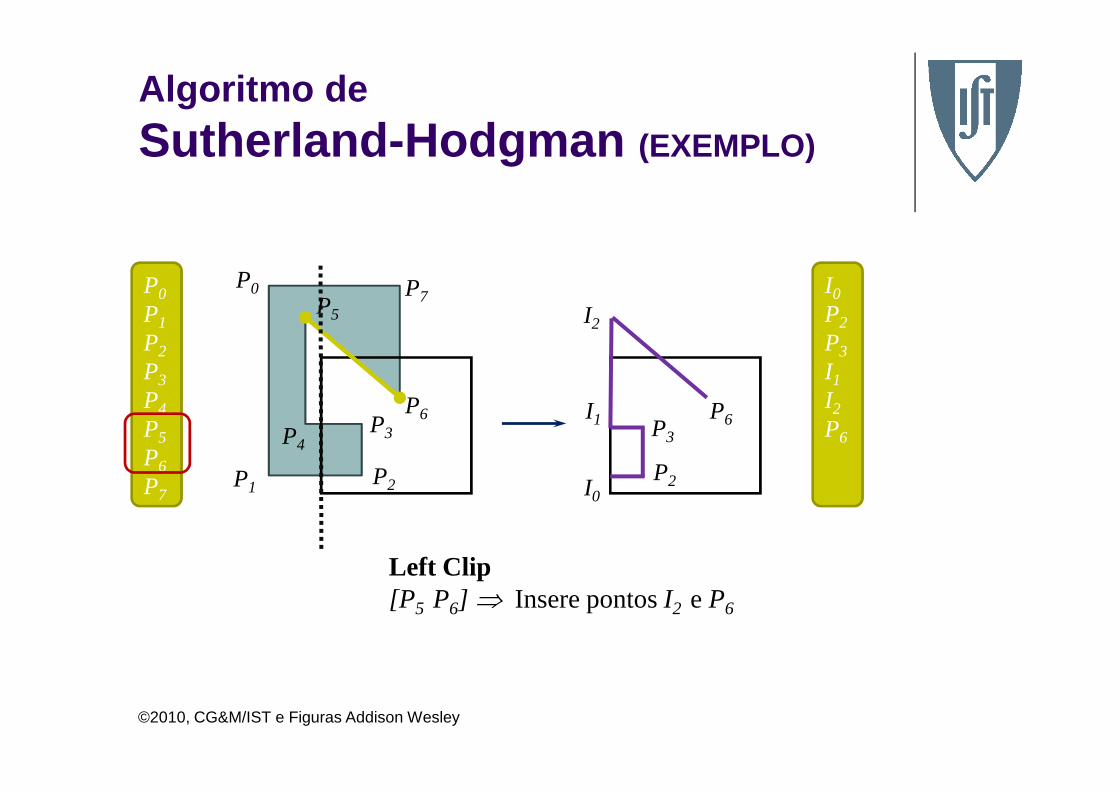
Algoritmo deSutherland -Hodgman (EXEMPLO)
P0P5
P
P7P0
P1
P2
P3
P
I0
P2
P3
I1
I
I2
©2010, CG&M/IST e Figuras Addison Wesley
P1 P2
P4
P6
Left Clip[P5 P6] ⇒ Insere pontos I2 e P6
P2I0
P3 P3
I1P4
P5
P6
P7
I2
P6
P6
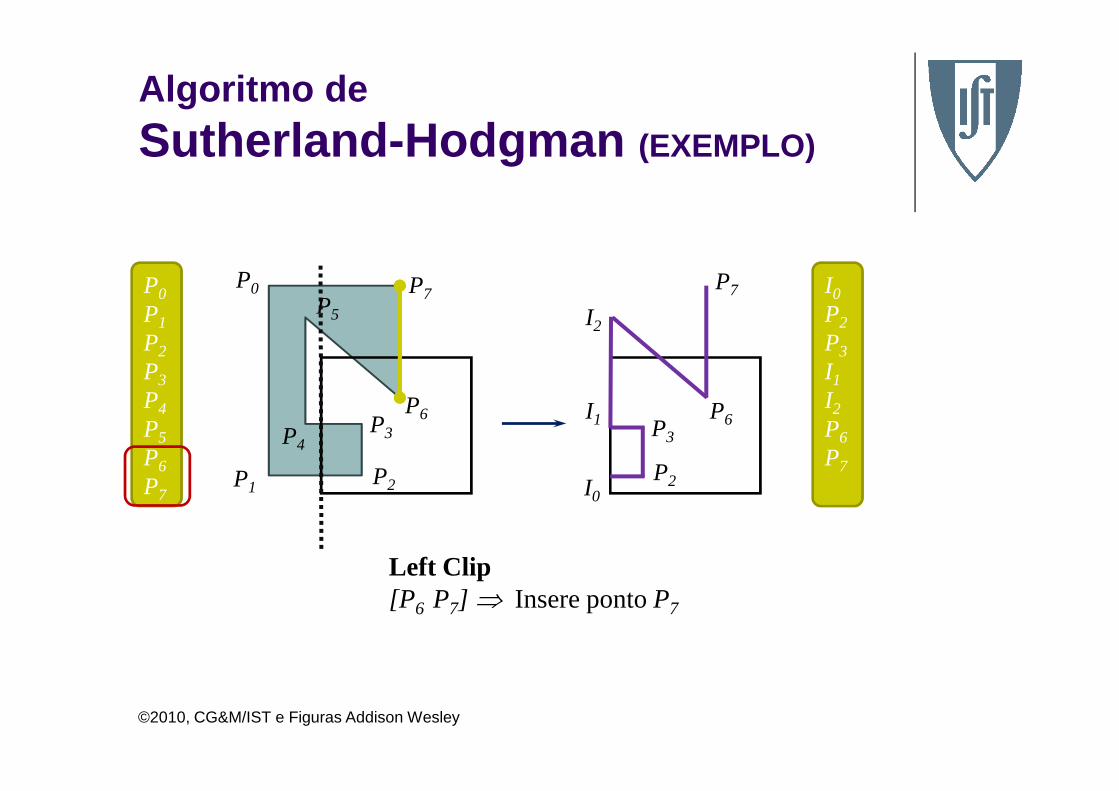
Algoritmo deSutherland -Hodgman (EXEMPLO)
P0P5
P
P7P0
P1
P2
P3
P
I0
P2
P3
I1
I
I2
P7
©2010, CG&M/IST e Figuras Addison Wesley
P1 P2
P4
P6
Left Clip[P6 P7] ⇒ Insere ponto P7
P2I0
P3 P3
I1P4
P5
P6
P7
I2
P6
P7
P6
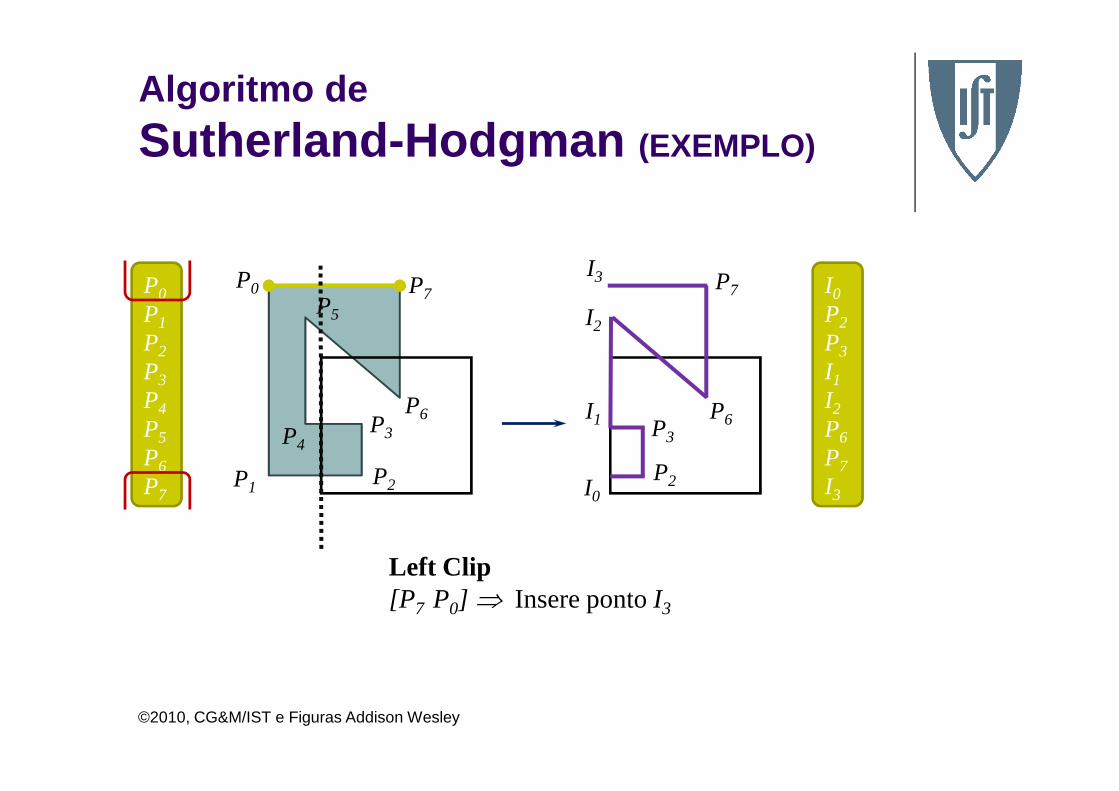
Algoritmo deSutherland -Hodgman (EXEMPLO)
P0P5
P
P7P0
P1
P2
P3
P
I0
P2
P3
I1
I
I2
P7I3
©2010, CG&M/IST e Figuras Addison Wesley
P1 P2
P4
P6
Left Clip[P7 P0] ⇒ Insere ponto I3
P2I0
P3 P3
I1P4
P5
P6
P7
I2
P6
P7
I3
P6
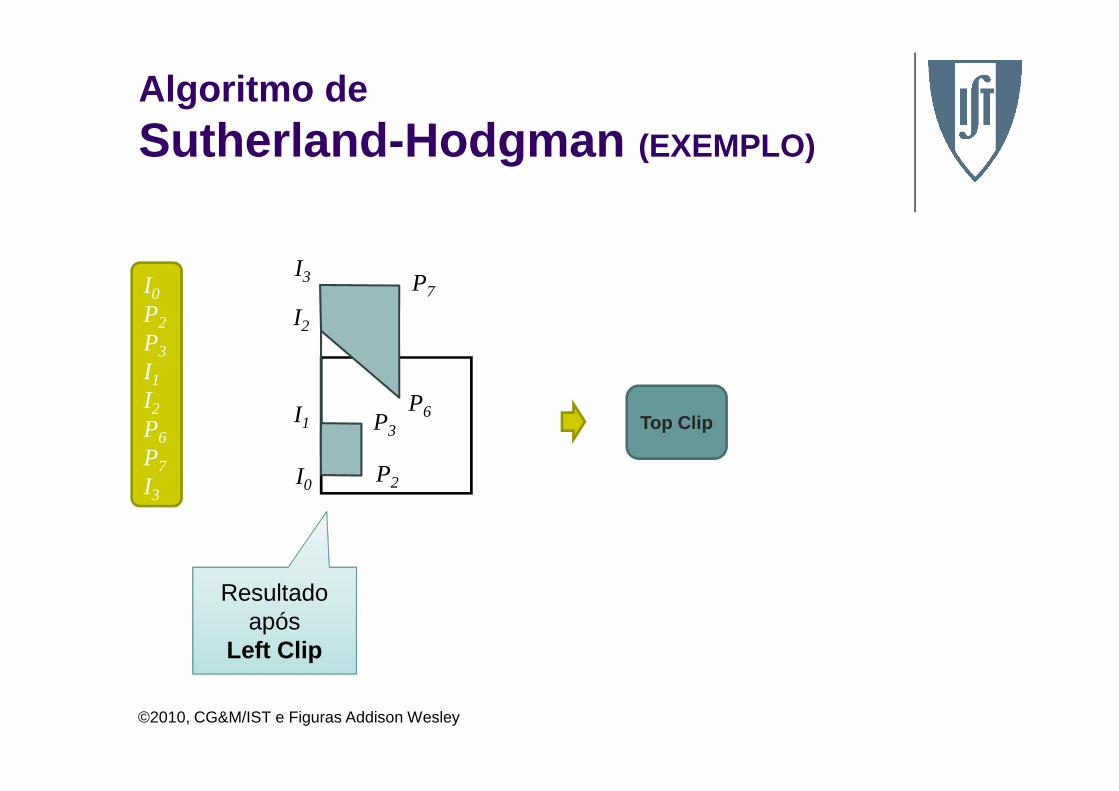
Algoritmo deSutherland -Hodgman (EXEMPLO)
P5
P
P7I0
P2
P3
I1
I
I2
I3
©2010, CG&M/IST e Figuras Addison Wesley
P2
P6I1 P3
I2
P6
P7
I3I0
Resultado após
Left Clip
Top Clip
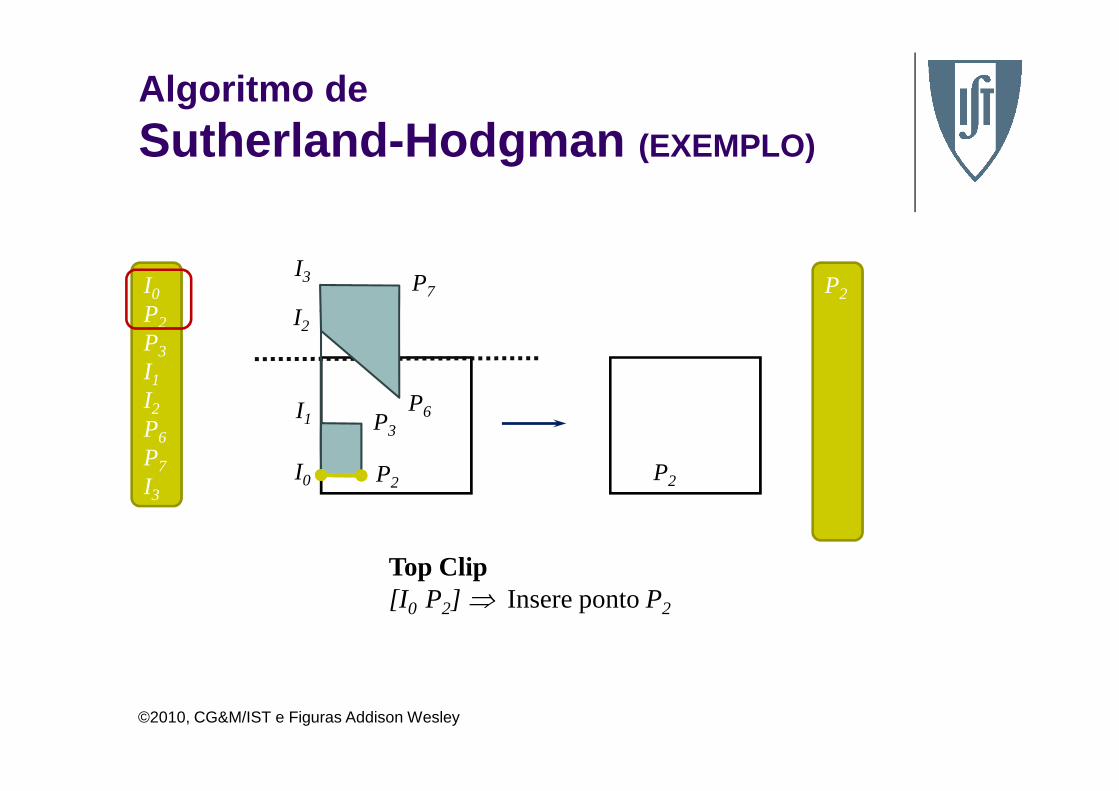
Algoritmo deSutherland -Hodgman (EXEMPLO)
P5
P
P7I0
P2
P3
I1
I
P2
I2
I3
©2010, CG&M/IST e Figuras Addison Wesley
P2
P6
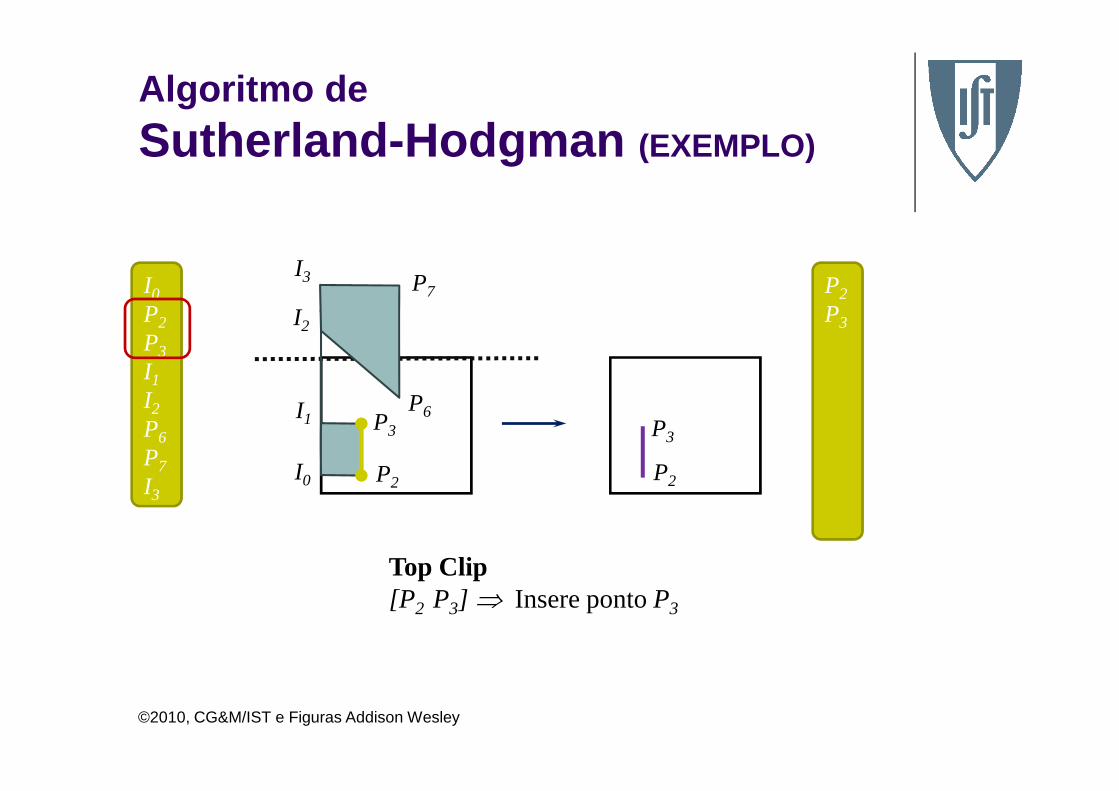
Top Clip[I 0 P2] ⇒ Insere ponto P2
P2
I1 P3
I2
P6
P7
I3I0
Algoritmo deSutherland -Hodgman (EXEMPLO)
P5
P
P7I0
P2
P3
I1
I
P2
P3I2
I3
©2010, CG&M/IST e Figuras Addison Wesley
P2
P6
Top Clip[P2 P3] ⇒ Insere ponto P3
P2
I1 P3
I2
P6
P7
I3I0
P3

Algoritmo deSutherland -Hodgman (EXEMPLO)
P5
P
P7I0
P2
P3
I1
I
P2
P3
I1
I2
I3
©2010, CG&M/IST e Figuras Addison Wesley
P2
P6
Top Clip[P3 I1] ⇒ Insere ponto I1
P2
I1 P3
I2
P6
P7
I3I0
P3
I1
Algoritmo deSutherland -Hodgman (EXEMPLO)
P5
P
P7I0
P2
P3
I1
I
P2
P3
I1
I4
I2
I3
I4
©2010, CG&M/IST e Figuras Addison Wesley
P2
P6
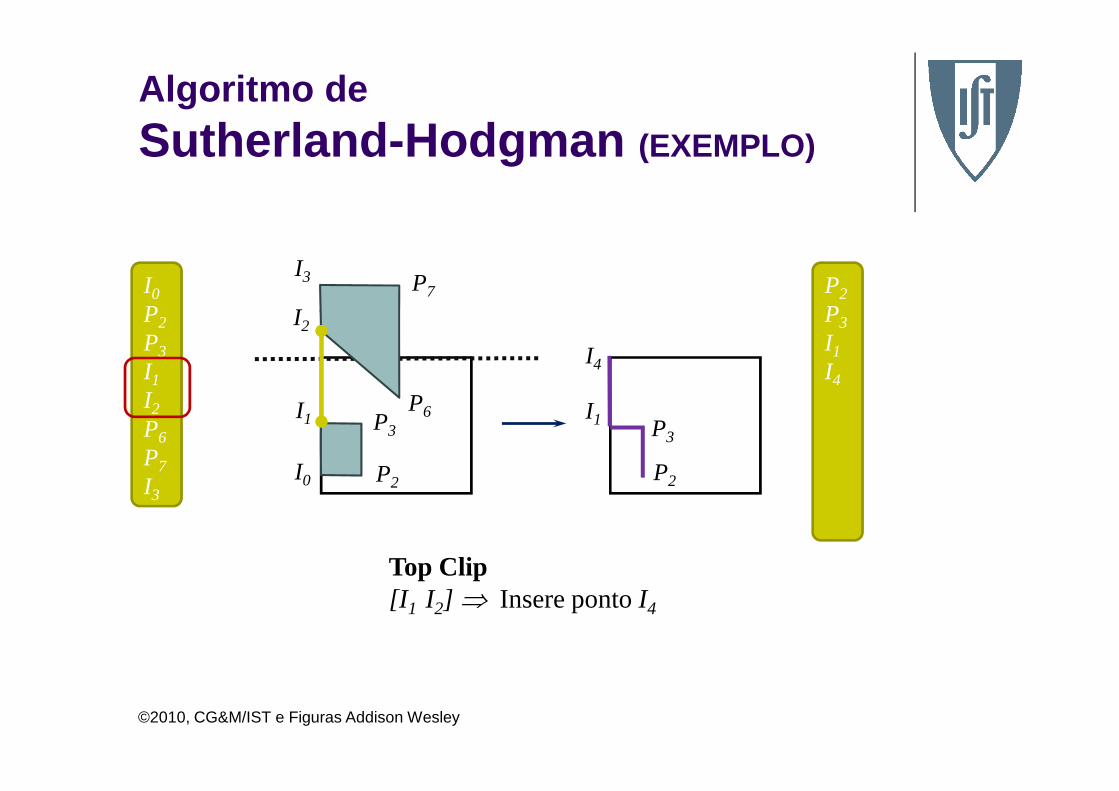
Top Clip[I 1 I2] ⇒ Insere ponto I4
P2
I1 P3
I2
P6
P7
I3I0
P3
I1
Algoritmo deSutherland -Hodgman (EXEMPLO)
P5
P
P7I0
P2
P3
I1
I
P2
P3
I1
I4
I
I2
I3
I4
I5
©2010, CG&M/IST e Figuras Addison Wesley
P2
P6
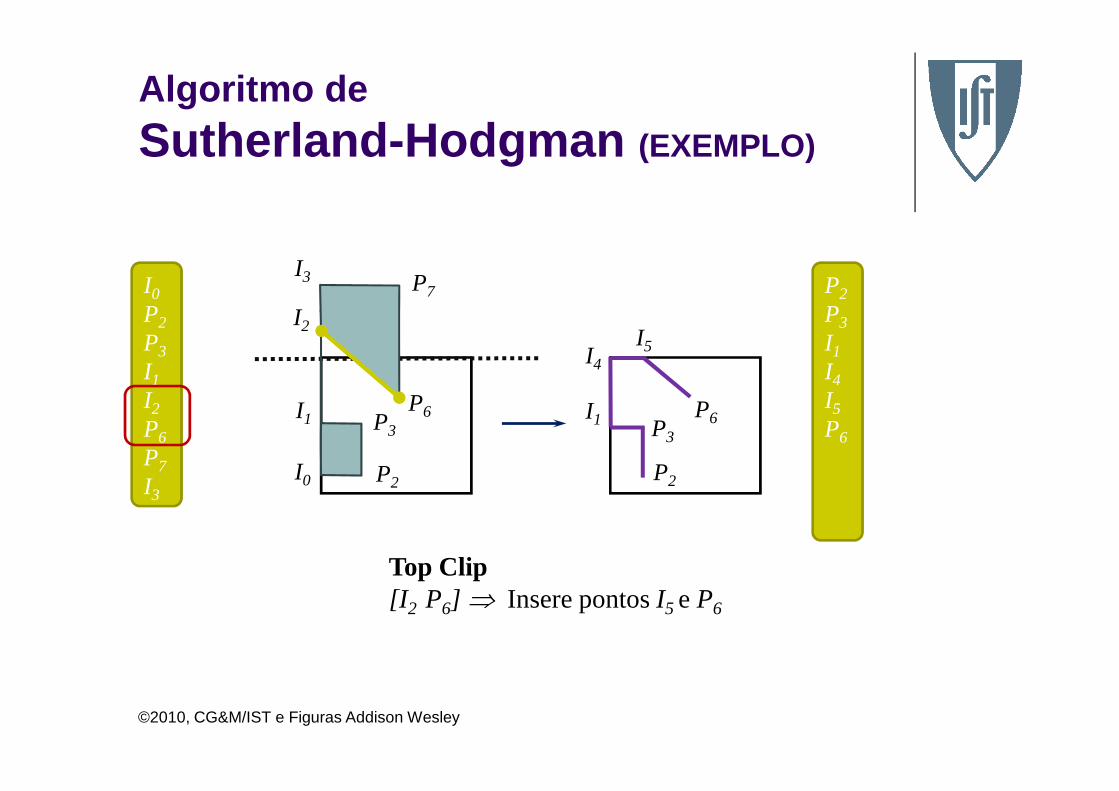
Top Clip[I 2 P6] ⇒ Insere pontos I5 e P6
P2
I1 P3
I2
P6
P7
I3
I5
P6
I0
P3
I1 P6
Algoritmo deSutherland -Hodgman (EXEMPLO)
P5
P
P7I0
P2
P3
I1
I
P2
P3
I1
I4
I
I2
I3
I4
I5 I6
©2010, CG&M/IST e Figuras Addison Wesley
P2
P6
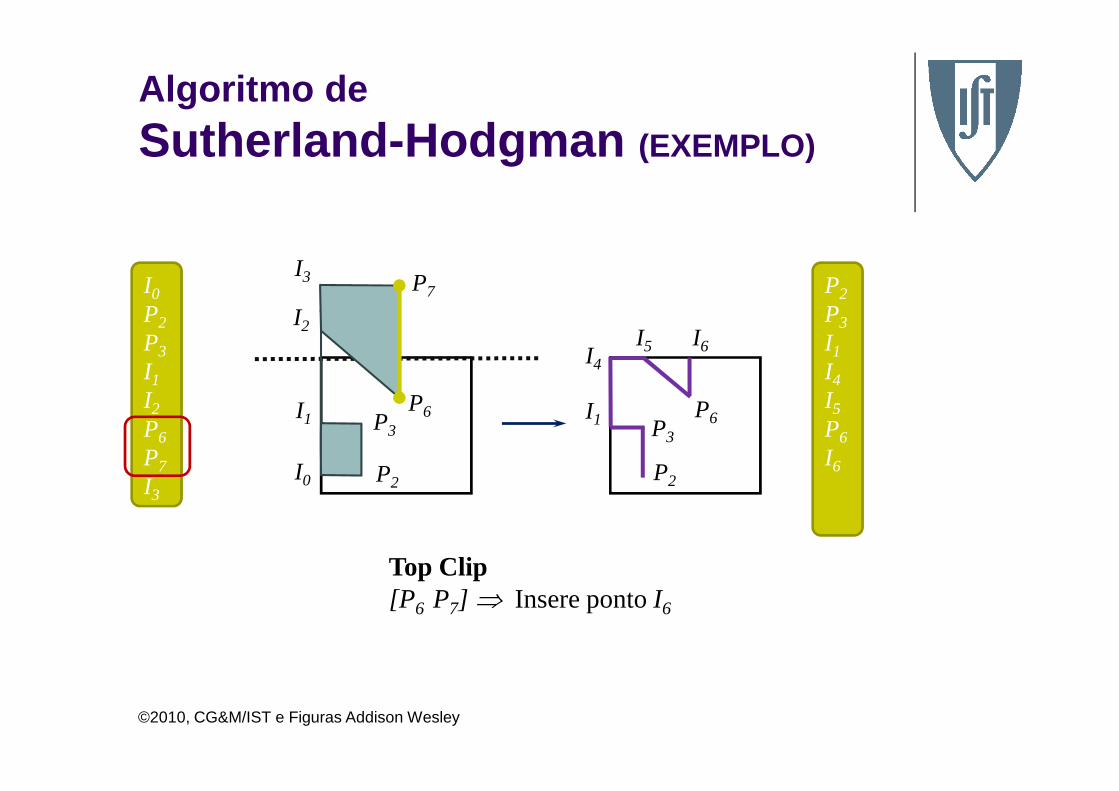
Top Clip[P6 P7] ⇒ Insere ponto I6
P2
I1 P3
I2
P6
P7
I3
I5
P6
I6I0
P3
I1 P6

Algoritmo deSutherland -Hodgman (EXEMPLO)
P5
P
P7I0
P2
P3
I1
I
P2
P3
I1
I4
I
I2
I3
I4
I5 I6
©2010, CG&M/IST e Figuras Addison Wesley
P2
P6
Top Clip[P7 I3] ⇒ Não insere pontos
P2
I1 P3
I2
P6
P7
I3
I5
P6
I6I0
P3
I1 P6
Algoritmo deSutherland -Hodgman (EXEMPLO)
P5
P
P7I0
P2
P3
I1
I
P2
P3
I1
I4
I
I2
I3
I4 = I 7I5 I6
©2010, CG&M/IST e Figuras Addison Wesley
P2
P6
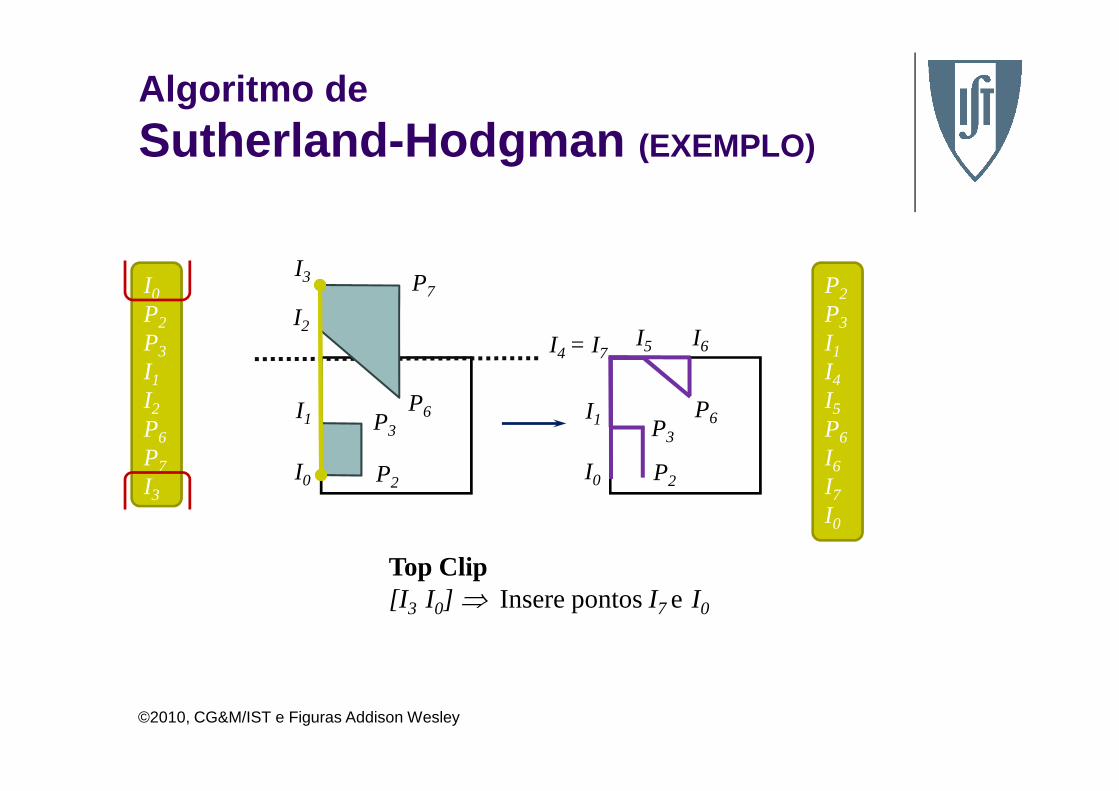
Top Clip[I 3 I0] ⇒ Insere pontos I7 e I0
P2
I1 P3
I2
P6
P7
I3
I5
P6
I6
I7
I0
I0
P3
I1 P6
I0
Algoritmo deSutherland -Hodgman (EXEMPLO)
P
I4 = I 7 I5 I6
P2
P3
I1
I4
I P
I4 = I 7 I5 I6
P3
I1
I4
I5
P
©2010, CG&M/IST e Figuras Addison Wesley
P2
P6I1 P3
I0
I5
P6
I6
I7
I0
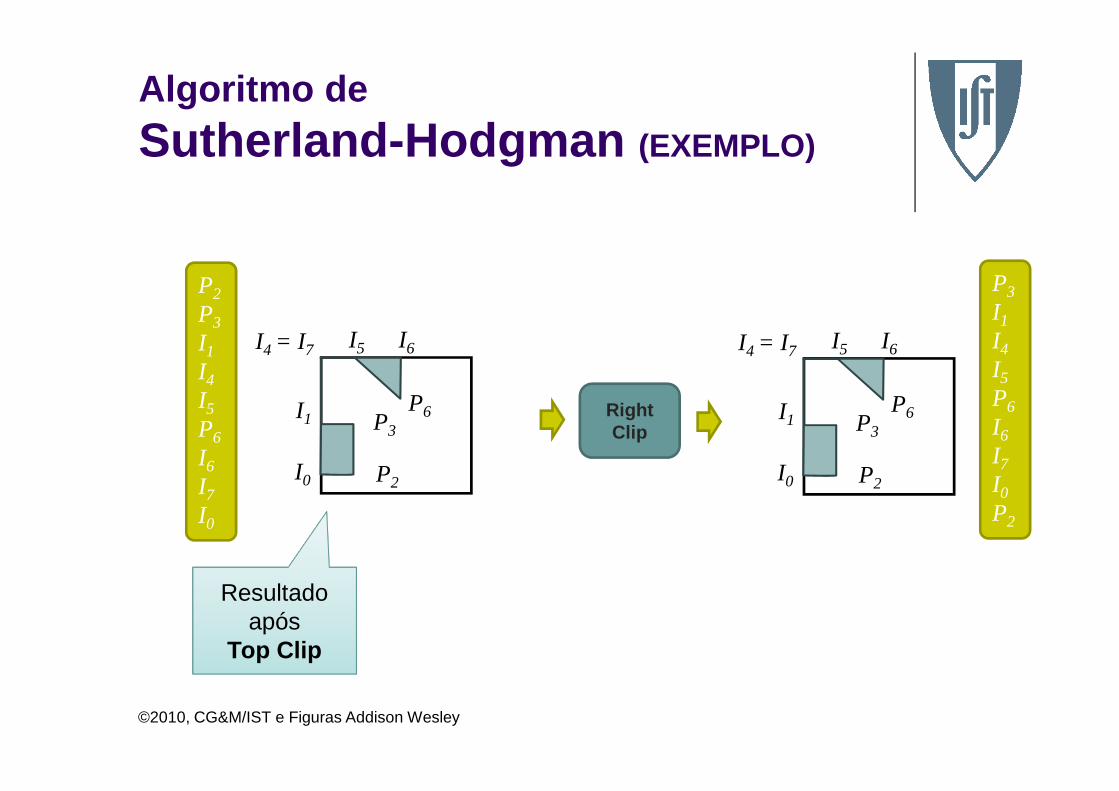
Resultado após
Top Clip
RightClip
P2
P6I1 P3
I0
P6
I6
I7
I0
P2
Algoritmo deSutherland -Hodgman (EXEMPLO)
P
I4 = I 7 I5 I6
P3
I1
I4
I5
P P
I4 = I 7 I5 I6
I1
I4
I5
P6
I
©2010, CG&M/IST e Figuras Addison Wesley
P2
P6I1 P3
I0
P6
I6
I7
I0
P2
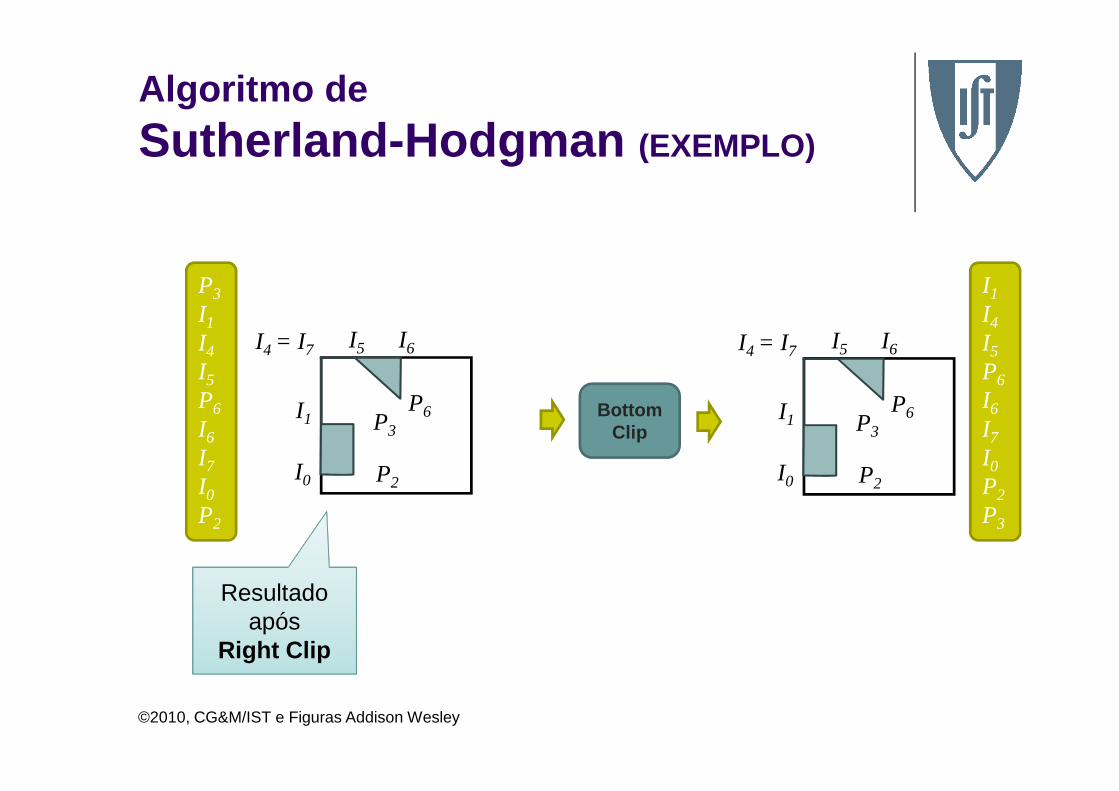
Resultado após
Right Clip
BottomClip
P2
P6I1 P3
I0
I6
I7
I0
P2
P3
Algoritmo deSutherland -Hodgman (EXEMPLO)
©2010, CG&M/IST e Figuras Addison Wesley
Recorte
Recorte 3DRecorte 3D
Recorte em 3D (1/3)
� Extensão do algoritmo de Cohen-Sutherland
� Usar Outcode de 6 bits:� bit 1: ponto em frente VV (z < 0)
©2010, CG&M/IST e Figuras Addison Wesley
bit 1: ponto em frente VV (z < 0)� bit 2: ponto atrás VV (z > 1)� bit 3: ponto acima Volume de Visualização (y > 1)� bit 4: ponto abaixo VV (y < -1)� bit 5: ponto à direita VV (x > 1)� bit 6: ponto à esquerda VV (x < -1)

Recorte em 3D (2/3)
©2010, CG&M/IST e Figuras Addison Wesley50
Volume de Visualização
Recorte em 3D (3/3)
� Extensão algortimo de Cohen-Sutherland:� Aceitação trivial: OC1 = OC2 = 0� Rejeição trivial: OC1 & OC2 ≠ 0
� Calcular 6 intersecções recta-plano VV
©2010, CG&M/IST e Figuras Addison Wesley
� Calcular 6 intersecções recta-plano VV� x = x0 + t(x1 - x0)� y = y0 + t(y1 - y0)� z = z0 + t(z1 - z0), 0 ≤ t ≤ 1
� Idêntico para recorte de polígonos� Sutherland-Hodgman

Computação Gráfica
Pipeline de Visualização 3DPipeline de Visualização 3D
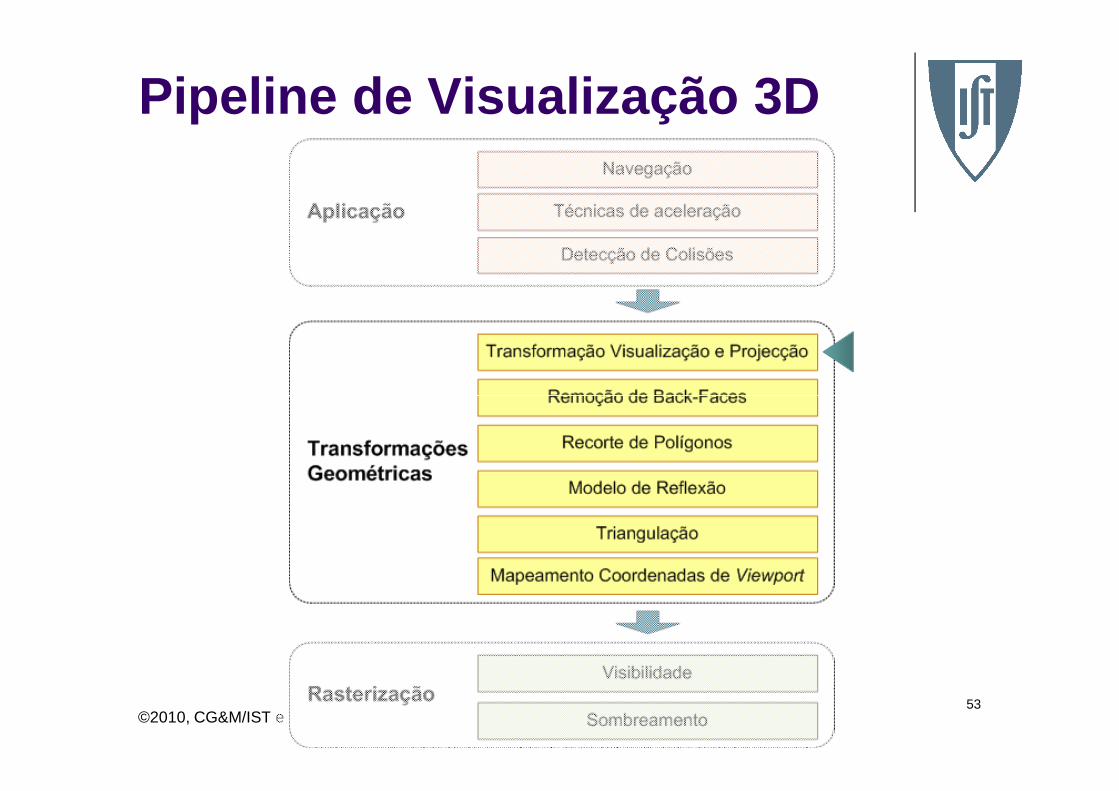
Pipeline de Visualização 3D
©2010, CG&M/IST e Figuras Addison Wesley53
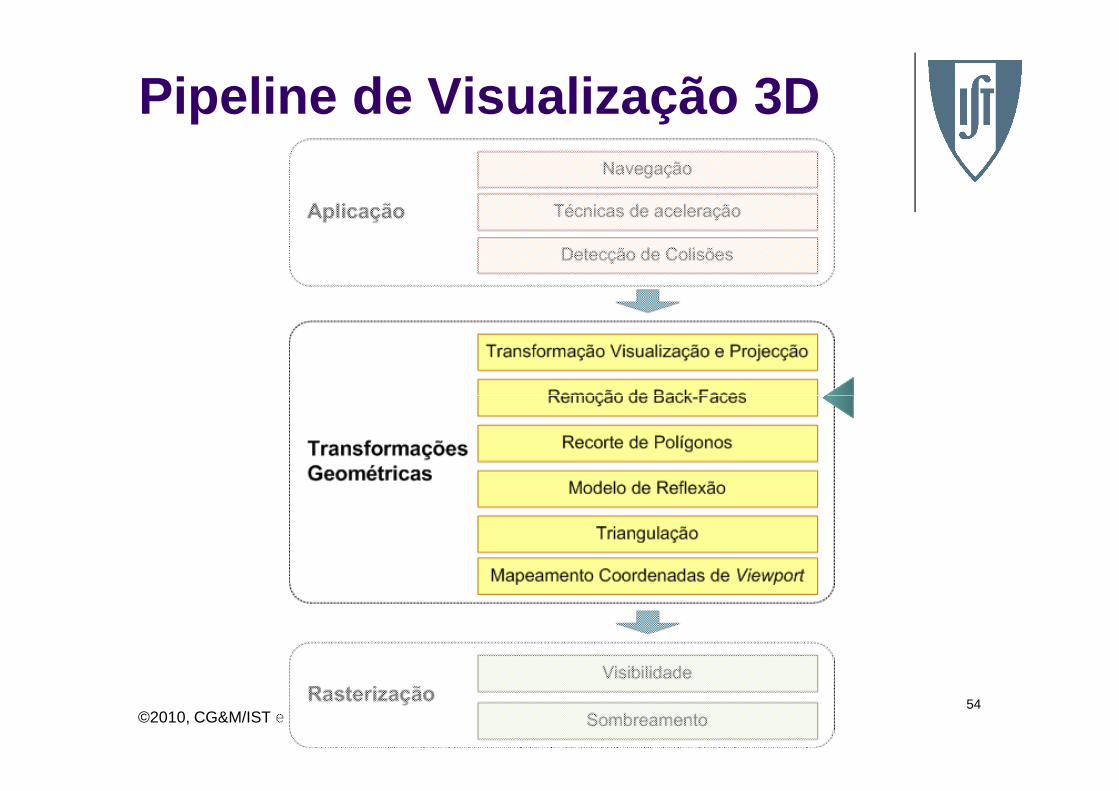
Pipeline de Visualização 3D
©2010, CG&M/IST e Figuras Addison Wesley54
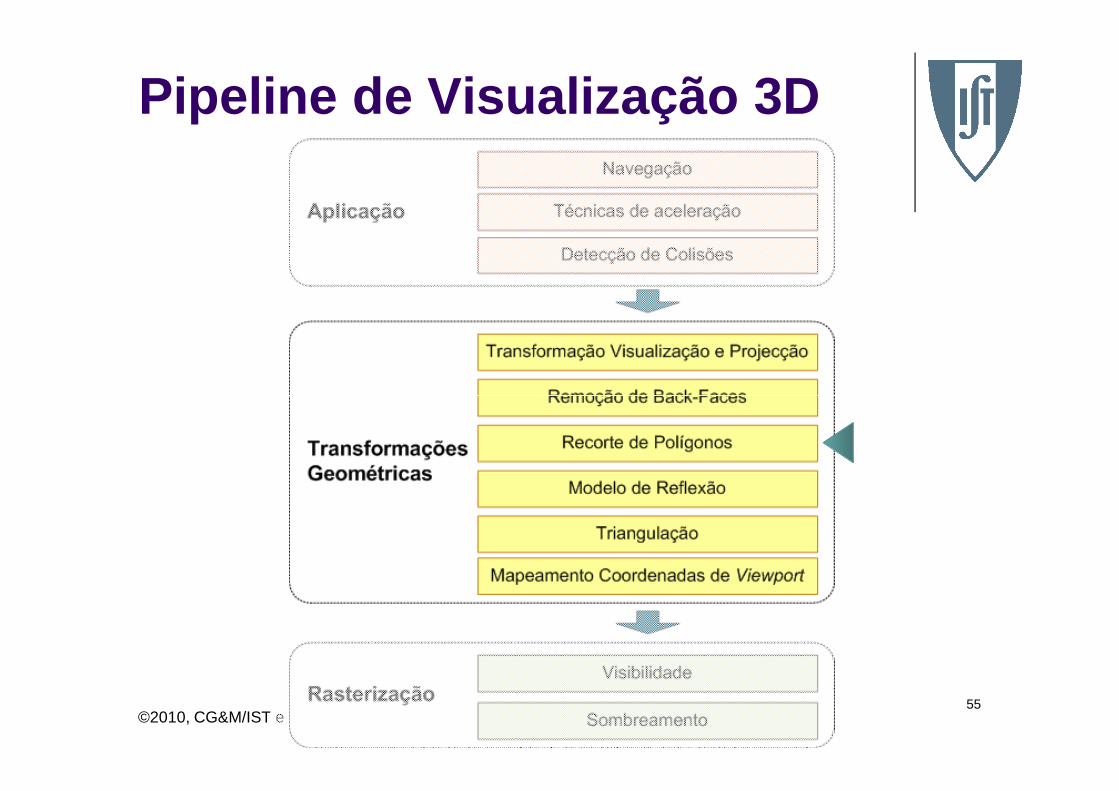
Pipeline de Visualização 3D
©2010, CG&M/IST e Figuras Addison Wesley55