Embed Size (px)
Citation preview

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 1/416
3
Equações diferenciais parciais,métodos de Fouriere variáveis complexas

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 2/416
Z69m Zill, Dennis G.
Matemática avançada para engenharia 3 [recurso eletrônico] /
Dennis G. Zill, Michael R. Cullen ; tradução Fernando Henrique Silveira. – 3. ed. – Dados eletrônicos. – Porto Alegre : Bookman,
2009.
Editado também como livro impresso em 2009.
Contém: gráficos, desenhos e tabelas.
ISBN 978-85-7780-599-0
1. Matemática. 2. Equações diferenciais. 3. Variáveis
complexas. I. Cullen, Michael R. II. Título.
CDU 517.9
Catalogação na publicação: Renata de Souza Borges CRB-10/1922

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 3/416
2009
Loyola Marymount University Ex-Professor da Loyola Marymount University
Tradução:
Fernando Henrique SilveiraDoutor em Engenharia Elétrica pela UFMG
Consultoria, supervisão e revisão técnica desta edição:
Antonio Pertence JúniorProfessor Titular de Matemática da Faculdade de Sabará/MG
Membro efetivo da SBM
Versão impressa
desta obra: 2009
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 4/416
Reservados todos os direitos de publicação, em língua portuguesa, àARTMED® EDITORA S.A.(BOOKMAN® COMPANHIA EDITORA é uma divisão da ARTMED® EDITORA S.A.)Av. Jerônimo de Ornelas, 670 - Santana90040-340 Porto Alegre RSFone (51) 3027-7000 Fax (51) 3027-7070
É proibida a duplicação ou reprodução deste volume, no todo ou em parte,sob quaisquer formas ou por quaisquer meios (eletrônico, mecânico, gravação,fotocópia, distribuição na Web e outros), sem permissão expressa da Editora.
SÃO PAULOAv. Angélica, 1091 - Higienópolis01227-100 São Paulo SPFone (11) 3665-1100 Fax (11) 3667-1333
SAC 0800 703-3444
IMPRESSO NO BRASILPRINTED IN BRAZIL
Obra originalmente publicada sob o título Advanced Engineering Mathematics
ISBN 9780763745912
Jones and Bartlett Publishers, Inc.40 Tall Pine Drive
Sudbury, MA 01776, U.S.A.
Copyright © 2006 by Jones and Bartlett PublishersAll Rights Reserved.
Capa: Rogério Grilho, arte sobre capa original
Leitura final: Théo Amon
Supervisão editorial: Denise Weber Nowaczyk
Editoração eletrônica: Techbooks
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 5/416
Prefácio daTerceira Edição
Ao contrário de um curso de cálculo ou equações diferenciais, para os quais o con-teúdo do curso é bastante padronizado, o conteúdo de um curso intitulado “mate-mática para engenharia” pode variar consideravelmente entre instituições acadêmi-cas diferentes. Um livro de Matemática Avançada para Engenharia é, portanto, umcompêndio de muitos tópicos matemáticos, todos relacionados pelo fato de seremnecessários ou úteis em cursos e carreiras subsequentes em ciência e engenharia. Li-teralmente não existem limites para a quantidade de tópicos a serem incluídos em umtexto como esse. Consequentemente, este livro representa a opinião do autor, neste
momento, com relação ao conteúdo da matemática para engenharia.
Conteúdo do livro
Para a flexibilidade na seleção dos tópicos, a obra está dividida em três volumes.Será possível observar que acreditamos que a espinha dorsal da matemática relacio-nada à ciência/engenharia se refere a teoria e aplicações de equações diferenciaisparciais e ordinárias.
Volume 1Equações Diferenciais ElementaresOs seis capítulos desse volume constituem um breve curso completo de equaçõesdiferenciais elementares.
Volume 2Vetores, Matrizes e Cálculo Vetorial O Capítulo 1, Vetores, e o Capítulo 3, Cálculo Vetorial, incluem muitos dos tópicosusualmente abordados no terceiro semestre de um curso de cálculo: vetores geométri-cos, funções vetoriais, derivadas direcionais, integrais de linha, integrais dupla e tripla,integrais de superfície, teorema de Green, teorema de Stokes e o teorema da divergên-cia. O Capítulo 2, Matrizes, é uma introdução aos sistemas de equações algébricas, de-terminantes e álgebra matricial com ênfase especial naqueles tipos de matrizes que sãoúteis para a solução de sistemas de equações diferenciais lineares. Seções a respeito decriptografia, códigos de correção de erro, o método dos mínimos quadrados e modeloscomportamentais discretos são apresentados como aplicações de álgebra matricial.
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 6/416
vi Prefácio
Volume 3Parte 1: Sistemas de Equações DiferenciaisOs dois capítulos dessa parte são Sistema de Equações Diferenciais Lineares e Sis-
temas de Equações Diferenciais Não Lineares. No Capítulo 1, sistemas de equações
de primeira ordem lineares são resolvidos utilizando os conceitos de autovalores eautovetores, diagonalização e por meio de uma função matricial exponencial. NoCapítulo 2, conceitos de estabilidade são apresentados utilizando duas aplicações:fluxo de fluido em um plano e o movimento de um glóbulo em um fio.
Parte 2: Séries de Fourier e Equações Diferenciais ParciaisNo Capítulo 3, Funções Ortogonais e Séries de Fourier , são destacados os tópicosfundamentais sobre conjuntos de funções ortogonais e expansões de funções em ter-mos de uma série infinita de funções ortogonais. Esses tópicos são então utilizadosnos Capítulos 4 e 5, nos quais problemas de valor de contorno em coordenadas re-tangular, polar, cilíndrica e esférica são resolvidos usando o método da separação devariáveis. No Capítulo 6, Método da Transformada Integral, problemas de valor decontorno são resolvidos por meio das transformadas integrais de Laplace e Fourier.
Parte 3: Análise ComplexaOs capítulos dessa parte abrangem os conceitos básicos de números complexos pormeio de aplicações de mapeamentos conformes na solução do problema de Dirichlet.Esse material por si só poderia facilmente servir como um curso introdutório de trêsmeses em variáveis complexas.
Principais características do livro
O texto foi totalmente modernizado de modo a dotar engenheiros e cientistas com•
as habilidades matemáticas necessárias para os desafios tecnológicos atuais.Novos projetos de engenharia e ciência, contribuições dos melhores matemáti-•
cos, foram adicionados. Esses projetos estão amarrados a tópicos matemáticosno texto.Diversos novos problemas foram adicionados. Além disso, muitos conjuntos•
de exercícios foram reorganizados e, em alguns casos, completamente rees-critos de modo a seguir o fluxo de desenvolvimento na seção e para melhorfacilitar a atribuição da tarefa a ser feita em casa. Os conjuntos de exercíciostambém refletem uma maior ênfase em conceitos.Como na segunda edição, existe uma ênfase extensiva em equações diferen-•
ciais como modelos matemáticos. A idéia de um modelo matemático está in-dicada ao longo do texto, e as construções e armadilhas de diversos modelossão discutidas.
Projeto do texto
Como pode ser facilmente observado, o livro tem um formato grande e é colorido,tornando-o mais prazeroso de ler e aprender. Todas as figuras possuem textos expli-cativos. Mais Observações e anotações nas margens foram adicionadas ao longo dotexto. Cada capítulo tem uma página de abertura que inclui uma lista de conteúdoe uma introdução ao material abordado naquele capítulo. Exercícios de revisão sãoapresentados ao final de cada capítulo. As respostas dos problemas ímpares selecio-nados estão na parte final do livro.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 7/416
Prefácio vii
SuplementosOs professores que adotarem a obra terão acesso ao material suplementar. Essesprofessores devem acessar o site www.bookman.com.br e entrar na Área do Pro-fessor. Lá encontrarão o Manual de Soluções (em inglês) e lâminas de Power Point(em português).
AgradecimentosEu gostaria de agradecer às seguintes pessoas que generosamente cederam o tempodas suas agendas ocupadas para fornecer os projetos que aparecem antes do textoprincipal:
Anton M. Jopko, Departamento de Física e Astronomia, McMaster University
Warren S. Wright, Departamento de Matemática, Loyola MarymountUniversity
Eu gostaria de agradecer às seguintes pessoas por suas informações e sugestões parao aprimoramento em relação às edições anteriores e das versões preliminares da nova
edição:Sonia Henckel, Texas Tech University
Donald Hartig, California Polytechnic State University, San Luis Obispo
Jeff Dodd, Jacksonville State University
Victor Elias, University of Western Ontario
Cecilia Knoll, Florida Institute of Technology
William Criminale, University of Washington
Stan Freidlander, Bronx Community College
Herman Gollwitzer, Drexel University
Robert Hunt, Humboldt State University
Ronald Guenther, Oregon State University
Noel Harbertson, California State University
Gary Stoudt, Indiana University of Pennsylvania
A tarefa de compilar um texto desse tamanho foi, para dizer o mínimo, demo-rada e difícil. Durante o processo no qual centenas de páginas manuscritas forampassadas por muitas mãos, indubitavelmente alguns erros ocorreram. Peço descul-pas antecipadas por isso e certamente gostaria de saber de algum erro que possa sercorrigido. Enviem todas as correções via e-mail para o meu editor Tim Andersonem [email protected].
Dennis G. Zill
Los Angeles

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 8/416
Sobre a Capa
Quando o viaduto de Millau foi aberto para o tráfego em 16 de dezembro de 2004,ele foi saudado como o mais alto do mundo. Ele se localiza no Vale Rhone na Fran-ça e atravessa o largo vale do rio Tarn, próximo da conhecida vila de Millau.
A ponte de aço e concreto, estaiada por múltiplos cabos, é constituída por oitovãos. Mais de 43 mil toneladas de aço foram utilizadas na construção dos deques decontenção, das torres e dos pilares temporários utilizados durante a construção. Opilar mais alto mede 342 m, o que a torna 21,34 m mais alta do que a torre Eiffel coma sua antena.
O viaduto de Millau é celebrado como um trabalho de arte assim como uma rea-
lização de engenharia fora de série. Seu aspecto aberto e arejado 271,6 m acima dorio Tarn oferece vistas espetaculares para os passageiros que cruzam os seus 2.574,4m de comprimento. Durante os meses do verão, mais de 28 mil veículos cruzam pordia essa ligação norte-sul entre Paris e o Mediterrâneo.
Quando o arquiteto britânico Norman Foster projetou a ponte, ele queria dar aela um aspecto arejado e flexível. “A delicadeza de uma borboleta”, dizia Foster. Elatem que “se fundir com a natureza. Os pilares teriam que se parecer quase orgânicos,como se tivessem crescido a partir da terra”.
O presidente da França, Jacques Chirac, proclamou: “Essa inauguração excep-cional entrará para a história industrial e tecnológica”. Ele elogiou os projetistas econstrutores da ponte por criar “uma maravilha de arte e arquitetura” – um novoemblema da engenharia civil da França.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 9/416
Sumário
Projeto para a Seção 5.3 O átomo de hidrogênio 13
Projeto para a Seção 6.4 A desigualdade da incerteza em processamento de
sinais 16
Projeto para a Seção 6.4 Difração de Fraunhofer por uma abertura circular 18
Projeto para a Seção 7.2 Instabilidades de métodos numéricos 20
Capítulo 1 Sistemas de Equações Diferenciais Lineares 23
1.1 Teoria preliminar 24
1.2 Sistemas lineares homogêneos 31
1.2.1 Autovalores reais distintos 32
1.2.2 Autovalores repetidos 35
1.2.3 Autovalores complexos 39
1.3 Solução por diagonalização 44
1.4 Sistemas lineares não homogêneos 47
1.4.1 Coeficientes indeterminados 47
1.4.2 Variação de parâmetros 50
1.4.3 Diagonalização 52
1.5 Exponencial de matriz 55
Capítulo 2 Sistemas de Equações Diferenciais Não Lineares 61
2.1 Sistemas autônomos 62
2.2 Estabilidade de sistemas lineares 68
2.3 Linearização e estabilidade local 77
2.4 Sistemas autônomos como modelos matemáticos 86
2.5 Soluções periódicas, ciclos limites e estabilidade global 94

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 10/416
10 Sumário
Capítulo 3 Funções Ortogonais e Séries de Fourier 105
3.1 Funções ortogonais 106
3.2 Séries de Fourier 111
3.3 Séries de Fourier do co-seno e do seno 116 3.4 Série complexa de Fourier 123
3.5 Problema de Sturm-Liouville 127
3.6 Séries de Bessel e Legendre 134
3.6.1 Série de Fourier-Bessel 135
3.6.2 Série de Fourier-Legendre 138
Capítulo 4 Problemas de Valor de Contorno em Coordenadas
Retangulares 142
4.1 Equações diferenciais parciais separáveis 143
4.2 Equações clássicas e problemas de valor de contorno 147
4.3 Equação do calor 152
4.4 Equação de onda 155
4.5 Equação de Laplace 160
4.6 PVCs não homogêneos 165
4.7 Expansões em séries ortogonais 172
4.8 Série de Fourier em duas variáveis 176
Capítulo 5 Problemas de Valor de Contorno em Outros Sistemas de Coordenadas 181
5.1 Problemas em coordenadas polares 182
5.2 Problemas em coordenadas polares e coordenadas cilíndricas: Funções de
Bessel 187
5.3 Problemas em coordenadas esféricas: Polinômios de Legendre 193
Capítulo 6 Método da Transformada Integral 198
6.1 Função erro 199
6.2 Aplicações da transformada de Laplace 200
6.3 Integral de Fourier 208
6.4 Transformadas de Fourier 213
6.5 Transformada rápida de Fourier 219
Capítulo 7 Soluções Numéricas de Equações Diferenciais Parciais 230
7.1 Equação de Laplace 231
7.2 A equação do calor 236
7.3 A equação de onda 242

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 11/416
Capítulo 8 Funções de Variáveis Complexas 247
8.1 Números complexos 248
8.2 Potências e raízes 252
8.3 Conjuntos no plano complexo 256 8.4 Funções de uma variável complexa 259
8.5 Equações de Cauchy-Riemann 265
8.6 Funções exponenciais e logarítmicas 270
8.7 Funções trigonométricas e hiperbólicas 276
8.8 Funções trigonométricas e hiperbólicas inversas 280
Capítulo 9 Integração no Plano Complexo 284
9.1 Integrais de contorno 285
9.2 Teorema de Cauchy-Goursat 290
9.3 Independência do caminho 295 9.4 Fórmulas integrais de Cauchy 301
Capítulo 10 Séries e Resíduos 308
10.1 Sequências e séries 309
10.2 Série de Taylor 314
10.3 Série de Laurent 320
10.4 Zeros e pólos 328
10.5 Resíduos e teorema do resíduo 331
10.6 Cálculo de integrais reais 337
Capítulo 11 Mapeamentos Conformes 345
11.1 Funções complexas como mapeamentos 346
11.2 Mapeamentos conformes 350
11.3 Transformações fracionais lineares 357
11.4 Transformações de Schwarz-Christoffel 363
11.5 Fórmulas integrais de Poisson 368
11.6 Aplicações 372
Apêndice 381
Respostas dos Problemas Ímpares Selecionados 387
Índice 411
Sumário 11

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 12/416
PROJETO PARA A SEÇÃO 5.3
O átomo de hidrogênioMatheus Grasselli, Ph.DDepartamento de Matemática e Estatística,
McMaster University
No início do século XX, um dos problemas não resol-vidos mais importantes da física estava relacionado aoátomo de hidrogênio. Com apenas um próton e um elé-tron, o átomo de hidrogênio era o exemplo mais simplesa ser explicado por qualquer modelo atômico. A figuraclássica era a de um elétron orbitando em torno do pró-ton em decorrência da atração elétrica. Essa hipótese, noentanto, era inconsistente, pois o elétron precisava ace-lerar para se mover ao redor do próton. Qualquer partí-cula carregada acelerada irradia ondas eletromagnéticas.Assim, com o passar do tempo, o elétron deveria perderenergia cinética e acabar se deslocando em direção aonúcleo do átomo. Outro ponto que tornava esse assuntoainda mais incompreensível se referia ao fato de se saber,a partir de dados espectroscópicos, que o gás hidrogênioemitia luz com comprimentos de onda muito específi-cos, as chamadas linhas espectrais. Além disso, as linhasespectrais que podiam ser observadas na escala visívelsatisfaziam uma fórmula empírica primeiro descrita porJ. J. Balmer em 1885. Considerando que o comprimentode onda fosse representado por , as linhas espectraispassaram a ser denominadas como série de Balmer, sen-do definidas por
(1)
onde R H é uma constante para a qual o melhor valor empí-rico é 10.967.757,6 1,2m1.
Qualquer modelo atômico razoável não apenas temque explicar a estabilidade do átomo do hidrogênio, comotambém tem que produzir uma explicação para as linhasespectrais com frequências que satisfazem a fórmula. Oprimeiro modelo desse tipo foi proposto por Niels Bohrem 1913, utilizando uma combinação engenhosa de ar-gumentos clássicos e dois “postulados quânticos”. Bohrconsiderou que o elétron estivesse restringido a se moverem órbitas com momentos angulares “quantizados” – istoé, múltiplos inteiros de uma dada constante. Veja a Figura1. Além disso, o átomo emitiria energia na forma de on-das eletromagnéticas somente quando o elétron saltassede uma órbita fixa para outra. As frequências dessas on-
das seriam então indicadas pela fórmula de Planck, E v, onde E é a diferença de energia entre as órbitas, e é a constante de Planck.
Tente reproduzir os passos de Bohr solucionando os
Problemas 1-3.
Próton
Elétron
Figura 1 Modelo planetário de Bohr para o átomo de hi-drogênio: nesse modelo, um elétron pode ocupar somentedeterminadas órbitas ao redor de um núcleo constituído porum próton.
Problemas relacionados
1. Suponha, conforme indicado na Figura 1, que o elétrontenha massa m e carga –e e se mova em uma órbita cir-cular de raio r em torno do próton, que tem carga e euma massa muito maior. Utilize as fórmulas clássicasda força elétrica de cargas pontuais para deduzir que aenergia mecânica total (cinética mais potencial) para oelétron nessa órbita é
(2)
onde 0 é a permissividade do espaço. Ademais, deduzaque o momento angular clássico para essa órbita é
(3)
2. Agora vamos aplicar o primeiro postulado de Bohr: con-sidere que o momento angular tenha a forma L n ,onde n 1, 2,.... Substitua essa expressão na equação(3) e obtenha uma expressão para os níveis quantizados
de energia do átomo de hidrogênio. 3. Estamos agora prontos para aplicar o segundo postu-
lado de Bohr. Suponha que um elétron faça uma tran-sição do nível de energia E k para o nível de energia E n, para inteiros k n. Use a fórmula E v e arelação v c (onde c é a velocidade da luz) paradeduzir que o comprimento de onda emitido por essatransição é
(4)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 13/416
Coloque n 2 na equação (4) e conclua que temos como
resultado a série de Balmer com . Faça ago-
ra uma pesquisa na literatura a respeito dos valores das
constantes físicas que aparecem nessa fórmula e calcule R H . Esse valor é comparável ao valor empírico? Final-
mente, substitua m pela massa reduzida (onde M
é a massa do próton) e se impressione com a exatidãoformidável do resultado obtido.
Além do seu sucesso óbvio, o modelo de Bohr esti-cava a teoria clássica até onde dava com postulados quân-ticos ad hoc onde necessário. Essas características foram
justamente consideradas insatisfatórias, o que inspirouos físicos a desenvolver uma teoria do fenômeno atômi-co muito mais abrangente, dando surgimento à mecânicaquântica. Em seu núcleo está uma equação diferencial
parcial proposta por Erwin Schrödinger em 1926 em umartigo sugestivamente intitulado “Quantização como umProblema de Autovalores.” A equação de Schrödinger in-dependente do tempo para um sistema físico de massa m sujeito a um potencial V (x) é
(5)
onde 2 é o operador Laplaciano e E é o valor (escalar)para a energia total do sistema no estado estacionário(x). Aqui x ( x , y, x ) representa um ponto no espaçotridimensional. A interpretação correta da função (x)
envolve argumentos probabilísticos sutis. Para o nossoproblema, é suficiente dizer que (x) contém toda a in-formação que pode ser fisicamente obtida a respeito dosistema em consideração. Nosso propósito agora, no espí-rito do trabalho original de Schrödinger, é tentar obter osníveis de energia E n para o átomo de hidrogênio como osvalores possíveis de energia para os quais a equação (5)admite uma solução.
Tente agora resolver o próximo problema.
4. Como a energia potencial depende ape-
nas do raio r , é natural para esse problema considerarcoordenadas esféricas (r , , ) definidas pelas equações
Comece por reescrever a equação (5) nessas coorde-nadas (recorde a expressão para o operador Laplacia-no em coordenadas esféricas indicado em (2) da Seção15.3). Aplique agora separação de variáveis com (x)
R(r )()() para mostrar que a componente radial R(r ) satisfaz
(6)
onde k é uma constante.Na solução do Problema 4, você deve ter notado
que a técnica de separação de variáveis dividiu a equa-ção de Schrödinger em duas partes: uma que dependesomente de r e a outra dependendo apenas de e .Cada uma dessas partes tem que ser igual a uma cons-tante, que denominamos k . Se fôssemos determinar asolução da parte angular (aquela envolvendo e ), ob-teríamos k como sendo um número quântico relaciona-do ao momento angular do átomo. Para o restante desseprojeto, consideraremos o caso k 0, que correspondea estados com momento angular nulo.
Nesse ponto, resolva os Problemas 5-7.
5. Coloque k 0 na equação (6) e considere seu limitecomo sendo r → . Mostre que e
Cr , onde
(7)
é uma solução para essa equação limite.
6. Com base no exercício anterior, considere uma soluçãogeral da forma R(r ) f (r )eCr para uma função analítica
f (r ). Por analiticidade, a função f (r ) possui uma expan-são em série
Substitua essa série na equação (6) (com k 0) e dedu-za que os coeficientes ai satisfazem a relação recursiva
(8)
onde
7. Mostre que o limite da equação (8) para valores grandes
de j é , que é a série de potência para a
função e2Cr . Conclua que a única forma da função R(r )
decair para zero com o aumento de r ocorre quando asérie de potência para f (r ) termina após um número fini-to de termos. Finalmente, observe que esse será o casose e somente se nC B para algum inteiro n.
Nosso problema final nesse projeto resultará nosníveis de energia do átomo de hidrogênio como con-sequência do trabalho realizado. Você deve observarque, até o momento, a existência de níveis de energia
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 14/416
quantizados não teve que ser postulada, mas sim de-duzida a partir da análise matemática da equação deSchrödinger.
Como os passos de obtenção são mais difíceis do
que aqueles seguidos por Bohr, deve estar claro paravocê que a eliminação dos axiomas diretos de quan-tização de Bohr foi uma realização significativa deSchrödinger, pela qual ele foi premiado com o prêmioNobel de física em 1933.
8. Utilize a condição expressada no exercício anterior e asfórmulas obtidas para C e B para concluir que as ener-gias permitidas para o átomo de hidrogênio em um esta-do com momento angular nulo são
(9)
que devem coincidir com os níveis de energia que vocêobteve para o átomo de Bohr no Problema 2.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 15/416
PROJETO PARA A SEÇÃO 6.4
A desigualdade daincerteza em processamentode sinais
Jeff Dodd, Ph.DDepartamento de Matemática, Computação
e Ciência da Informação, Jacksonville State
University
Engenheiros de comunicação interpretam a transformadade Fourier como decompondo um sinal f ( x ) que transpor-ta informação, onde x representa o tempo, em uma su-perposição de “tons” senoidais puros tendo frequênciasrepresentadas por uma variável real. De fato, engenheirosusualmente pensam a respeito da representação resultanteno “domínio da frequência” tanto quanto ou mais do quea respeito da representação no “domínio do tempo” (istoé, o próprio sinal)! Um fato fundamental do processa-mento de sinais é que quanto mais estreito for um sinal nodomínio do tempo, mais largo ele será no domínio da fre-quência. De modo oposto, quanto mais estreito um sinalno domínio da frequência, mais largo ele será no domí-nio do tempo. Esse efeito é importante porque na práticaum sinal tem que ser enviado em um intervalo de tempolimitado e usando um intervalo limitado, ou “faixa”, defrequências. Nesse projeto, descreveremos e investigare-mos esse compromisso entre duração e largura de faixade modo qualitativo e quantitativo. Os resultados da nos-sa investigação darão suporte a uma regra prática comum:o número de sinais diferentes que podem ser enviados emuma certa duração de tempo utilizando uma determinadafaixa de frequências é proporcional ao produto da dura-ção do tempo e largura da faixa de frequências.
Problemas relacionados
Aplicaremos a forma complexa da transformada de Fou-rier e da transformada inversa de Fourier indicadas em (5)e (6) da Seção 6.4. Utilizaremos a notação para re-presentar a transformada de Fourier de uma função f ( x ) deuma maneira compacta que torna explícita sua dependên-cia em relação a f – isto é, F { f ( x )}. Consideramos
f como sendo uma função de valores reais. A seguir, vocêdesenvolverá duas propriedades simples que se aplicama .
1. Mostre que se 0, então . Logo, paraqualquer , . (Aqui as notações e | z|
representam o conjugado e o módulo de um númerocomplexo z, respectivamente).
2. Se k for um número real, considere f k ( x ) f ( x – k ). Mos-tre que
Assim, deslocar um sinal no tempo não afeta os valoresde no domínio da frequência.
Mantendo esses fatos em mente, consideramosagora o efeito de estreitar ou alargar um sinal no do-mínio do tempo simplesmente escalonando a variáveltemporal.
3. Se c for um número positivo, considere f c( x ) f (cx ).Mostre que
Portanto, estreitar a função do sinal f no domínio dotempo (c 1) alarga a sua transformada no domínio dafrequência, e alargar a função do sinal f no domínio dotempo (c 1) estreita a sua transformada no domínioda frequência.
Para quantificar o efeito que observamos no Pro-blema 3, precisamos definir uma medida de “largura”do gráfico de uma função. A medida utilizada mais co-mum é a largura da raiz da média dos quadrados (ou raizquadrática média), que quando aplicada a um sinal f nosdomínios do tempo e da frequência, resulta em uma raizquadrática média da duração D( f ) e uma raiz quadráticamédia da largura de faixa B( f ) indicadas por
e
Assim, a largura de faixa e a duração são calculadas comrelação aos “centros” de 0 e x 0, pois, pelos Pro-blemas 1 e 2, o gráfico de 2 é simétrico em tornode 0 no domínio da frequência, e o sinal pode serdeslocado horizontalmente no domínio do tempo semafetar o gráfico de 2 no domínio da frequência.
4. Mostre que, para uma família de funções f c( x ) definidasno Problema 3, D( f c) · B( f c) é independente de c.
5. Mostre que para a família de funções f c( x ) ec| x |,
(Sugestão: Pelo Problema 4, po-
demos adotar f ( x ) f 1( x ). A integral de Fourier neces-

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 16/416
sária pode ser retirada do Exemplo 3 da Seção 6.3. Paracalcular as integrais em D( f ) e B( f ), pense a respeitode integração por partes e frações parciais, respectiva-mente.)
A duração e a largura de faixa de um sinal são in-versamente proporcionais uma em relação a outra sobo escalonamento da variável de tempo. E em relação àconstante de proporcionalidade?
Quão pequeno D( f ) · B( f ) pode ser? Notavelmen-te, existe um limite inferior para esse produto.
6. Obtenha a desigualdade da incerteza: Se
e
então D( f ) · B( f ) Siga esses passos.
(a) Estabeleça a fórmula de Parseval:
[Sugestão: Aplique o teorema da convolução indi-cado no Problema 20, Exercícios 6.4 com g( x )
f ( x ).
Especificamente, aplique a fórmula para a trans-formada inversa de Fourier apresentada em (6) da
Seção 6.4, mostre que e então adote x
0.](b) Estabeleça a desigualdade de Schwartz: Para fun-
ções reais h1 e h2,
com igualdade ocorrendo somente quando h2 ch1, onde c é uma constante [Sugestão: Escreva
como uma expressão quadrática A 2 B C na
variável real . Note que a expressão quadrática énão negativa para todo e considere o discriminan-te B
2 – 4 AC .]
(c) Estabeleça a desigualdade da incerteza. [Suges-
tão: Primeiro, aplique a desigualdade de Schwartzcomo segue:
Aplique integração por partes para mostrar que
Reescrevaa segunda integral que aparece no lado direito dadesigualdade utilizando a propriedade operacional(11) da Seção 6.4 e a fórmula de Parseval.]
7. (a) Mostre que se f indicar o mínimo valor possível de D( f ) · B( f ), então
onde c é alguma constante. Resolva essa equaçãodiferencial para mostrar que para c 0 e d uma constante. (Tal função é chamada
função gaussiana. Funções gaussianas desempe-nham papel importante na teoria da probabilidade.)
(b) Tome a transformada de Fourier de ambos os la-dos da equação diferencial do item (a) para obteruma equação diferencial para e mostre que
, onde c é a mesma do item (a).Você precisará da seguinte consideração:
(No Problema 35 dos Exercícios 3.11 do Volume 2,vimos que A partir desse fato,
podemos deduzir que )
Logo, o mínimo valor possível de D( f ) · B( f ) é alcan-çado para uma função gaussiana, cuja transformada deFourier é outra função gaussiana!
A palavra “incerteza” está associada com a desigualdadeapresentada no Problema 6 pois, a partir de um ponto devista mais abstrato, ela é matematicamente análoga ao fa-moso princípio da incerteza de Heisenberg da mecânicaquântica. (A interpretação desse princípio de mecânicaquântica é uma tarefa sutil, mas ele é comumente com-
preendido como “quanto mais exata for determinada aposição de uma partícula, com menos exatidão se conhe-cerá seu momento, e vice-versa”.)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 17/416
PROJETO PARA A SEÇÃO 6.4
Difração de Fraunhofer poruma abertura circular Anton M. Jopko, Ph.DDepartamento de Física e Astronomia,
MacMaster University
Como as estrelas no céu estão a uma enorme distância denós, podemos considerá-las fontes pontuais de luz. Se vocêolhar para uma estrela por meio de um telescópio, você es-
peraria ver apenas outro ponto de luz, embora muito maisbrilhante, certo? Entretanto, esse não é o caso. Como a luzé uma onda, ela se difrata ao passar pela abertura circu-lar do telescópio e se espalha sobre uma pequena regiãonebulosa que chamaremos de diagrama de difração. Esseprojeto investigará o formato do diagrama de difração paraa luz que passa por uma abertura circular de raio R.
Para simplificar, consideramos que a luz tenha umcomprimento de onda, ou cor, . Próxima à estrela, essaonda tem uma frente de onda esférica, porém, quando elanos atinge, sua frente de onda tem a forma de uma ondaplana. Todos os pontos na frente de onda têm a mesmafase. Vamos agora apontar o telescópio com a sua aber-
tura circular e suas lentes diretamente para a estrela demodo que as frentes das ondas planas incidam pela es-querda, como na Figura 1.
Lente
Raio deabertura R
Figura 1 Difração da luz.
A partir do princípio de Huygen, cada ponto na aber-tura circular emite uma onda em todas as direções. A difra-ção de Fraunhofer requer que as ondas deixem a aberturaem um agrupamento paralelo se propagando em direção aum ponto P muito distante. O único propósito das lentes éformar uma imagem pontual desse agrupamento paralelo auma distância muito mais próxima da abertura. A difraçãoaconteceria mesmo sem as lentes. A linha tracejada unindoas duas origens é também o eixo da abertura e das lentes. Osistema LM de coordenadas está no plano focal da lente, e
a sua origem está onde toda a luz a partir da estrela apare-ceria na ausência da difração. Em decorrência da difração,no entanto, alguma luz aparecerá também em P. O pontoP é um ponto genérico mas muito próximo de O, estando a
apenas poucos arco-segundos de distância.
Lente
Figura 2
Na Figura 2, ligamos a abertura e as lentes, pois naprática as extremidades da lente também definem a abertu-ra. Por causa da simetria circular das lentes e do diagramade difração, é desejável que trabalhemos em coordenadaspolares. Considere uma onda sendo emitida a partir de umponto S na lente com coordenadas ( X ,Y ) ou ( , ) e quechegue em P com coordenadas ( L, M ) ou coordenadas an-gulares (w, ). Então, X cos, Y sen, L w cos e M w sen . Aqui é a distância radial a partir do centrodas lentes para a fonte S da onda emitida, e é o seu ângulopolar; w é o raio angular de P, e é o seu ângulo polar.
As ondas emitidas na abertura estão em fase e têma mesma amplitude, porém todas elas viajam distânciasdiferentes até o ponto P, se tornando fora de fase lá. A
intensidade da luz em P será proporcional ao quadrado daamplitude resultante de todas as ondas que chegam em P.Precisamos agora calcular essa amplitude resultante con-siderando as diferenças de fase entre as ondas.
Definimos o número de onda das ondas incidente eemitida como sendo k 2 / . Então, de acordo com o livroPrinciples of Optics, sétima edição, de Born e Wolf, a am-plitude resultante em P a partir de todas as ondas emitidasna abertura é apenas a transformada de Fourier da abertura:
onde C é uma constante, proporcional em parte ao bri-lho da estrela. A intensidade em P será então dada por|U (P)|2. Esse é o diagrama de difração para a estrelaem função do raio angular w.
Problemas relacionados
1. Mostre que a amplitude resultante em P utilizando os doissistemas de coordenadas polares pode ser escrita como

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 18/416
2. Utilizando a identidade
onde J n é a função de Bessel de primeiro tipo, mostreque a amplitude resultante se reduz para
para qualquer . Escolhemos 0. (Essa expressãoé também conhecida como transformada de Hankel deuma abertura circular.)
3. Utilizando a relação de recorrência
mostre que
4. Mostre que Portanto, a inten-
sidade é dada por
5. O que é ?
6. Qual é o significado físico de I 0?
7. Qual é o valor da menor raiz não nula de J 1? Utilizando 550 nm, R 10 cm e a menor raiz anteriormenteobtida, calcule o raio angular w (em arco-segundos) dodisco de difração central.
8. Trace um gráfico de como uma função de kRw
bem como da intensidade, seu quadrado. O diagrama dedifração da estrela consiste de um disco central brilhanteenvolto por diversos anéis concêntricos finos e de poucaluminosidade. O disco é denominado disco de Airy emhomenagem a G.B. Airy, que foi o primeiro a calcular odiagrama de difração de uma abertura circular em 1826.
9. O que ocorre com a largura angular do diagrama de di-fração se o raio R da abertura for duplicado?
10. O que ocorre com a largura angular do diagrama de difra-ção se o comprimento de onda da luz for duplicado?
11. O que ocorre com a largura angular do diagrama de di-fração se o comprimento focal das lentes for duplicado?
12. Suponha que uma abertura circular tenha o formato deum anel com raio interno a e raio externo b. DetermineU (P). (Esse resultado tem importância prática, pois te-lescópios refletores quase sempre têm uma obstrução naparte central da abertura.)
13. Suponha que o anel no Problema 12 seja muito estreito,de modo que b a a, com a sendo pequeno, masnão infinitesimal. Mostre então que a amplitude resul-tante aproximada é dada por U (P) C (2 aa) J 0(kwa).[Sugestão: Interprete o resultado U ( p) do Problema 12
como uma aproximação para com
u kwa.]

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 19/416
PROJETO PARA A SEÇÃO 7.2
Instabilidades de métodosnuméricosDmitry Pelinovsky, Ph.DDepartamento de Matemática e Estatística,
MacMaster University
Métodos de diferenças finitas para soluções numéricas deequações diferenciais parciais podem ser surpreendente-mente inapropriados para aproximações numéricas. O pro-
blema principal dos métodos de diferenças finitas (espe-cialmente com esquemas de interação explícita) é que elespodem aumentar os ruídos de arredondamento numéricoem decorrência de instabilidades intrínsecas. Tais insta-bilidades ocorrem muito frequentemente em trabalhos depesquisa. Um engenheiro deve estar preparado para essasituação. Após gastar diversas horas no desenvolvimentode um novo método numérico para modelagem de um pro-blema aplicado e na programação cuidadosa do método emuma linguagem computacional, o programa pode se tornarinútil por causa das suas instabilidades dinâmicas.
A Figura 1 ilustra uma solução numérica da equaçãode onda por um método de diferenças finitas explícito,
onde o passo de tempo k excede metade do tamanho depasso quadrado k (veja o Exemplo 1 na Seção 7.2). Espe-ra-se que uma solução de uma equação do calor para umahaste de comprimento infinito com temperaturas nulasnas extremidades exiba um decaimento suave a partir deuma distribuição de calor inicial para o nível constantede temperatura zero. No entanto, a superfície na Figura 1
mostra que o decaimento suave esperado é destruído peloruído que cresce rapidamente devido às instabilidades di-nâmicas do método explícito.
As instabilidades de métodos numéricos de diferen-
ças finitas podem ser compreendidas por uma aplicaçãoelementar da transformada discreta de Fourier, que foi es-tudada na Seção 6.5. O princípio da superposição linear ea transformada discreta de Fourier nos permitem separaras variáveis em um método de diferenças finitas numéricoe estudar a evolução temporal individual (interações) decada modo de Fourier da solução numérica.
Para simplificar, consideraremos o método de dife-renças finitas explícito para a equação do calor ut u xx nointervalo 0 x a sujeita às condições de contorno nu-las em x 0 e x a e a uma condição inicial não nula noinstante de tempo t 0. A discretização numérica resultano esquema de iteração explícita:
(1)
onde ui,j é uma aproximação numérica da solução u( x ,t )no ponto da malha x x i e o instante de tempo t t j,enquanto que k / h2 é o parâmetro de discretização.Vamos congelar o instante de tempo t t j, j 0 e expan-dir o vetor numérico (u0, j, u1, j,..., ui, j) definido na malhaigualmente espaçada x i ih, i 0, 1,..., n, onde nh a,na transformada discreta de Fourier do seno:
(2)
As condições de contorno u0, j un, j 0 são satisfeitas
para qualquer j 0. Em decorrência do princípio da su-perposição linear, consideraremos cada termo da soma naequação (2) separadamente. Assim, substituímos ui, j ul,
j sen(li), l l / n no método explícito (1) e obtemos
(3)
Utilizando a identidade trigonométrica,
o fator sen(li) é cancelado na equação (3) e obtemos uma
fórmula de iteração simples para al, j:
onde
(4)
Sabendo que o fator Ql é independente de j, pode-se ob-servar que a amplitude al, j do modo de Fourier sen(li) semodifica em j 0, de acordo com a potência do fator Ql:
Figura 1 Superfície da solução numérica.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 20/416
A amplitude al, j crescerá em j se |Ql| 1, e será limi-tada ou decairá se |Ql| 1. Portanto, a instabilidadedo método de interação explícita é definida a partir dacondição
(5)
Como Ql 1 para 0, a condição de estabilidade (5)pode ser reescrita como
(6)
que resulta na estabilidade condicional do método explí-cito para 0 0,5. Quando 0,5, o primeiro modoinstável de Fourier corresponde a l n, sendo respon-sável por um padrão alternante de tempo e espaço cres-centes para a sequência de ui, j. Esse padrão é claramentevisto na Figura 1.
Assim, as instabilidades de métodos de diferençasfinitas podem ser estudadas utilizando-se a transformadadiscreta de Fourier, o princípio da superposição linear efatores explícitos de interação temporal. O mesmo mé-todo pode ser aplicado a outros métodos de diferençasfinitas para equações do calor e de onda, e em geral parauma discretização de qualquer equação diferencial par-cial linear com coeficientes constantes.
Problemas relacionados
1. Considere o método de Crank-Nicholson implícitopara a equação do calor ut u xx (veja o Exemplo 2 naSeção 7.2):
(7)
onde 2(1 1/ ), 2(1 – 1/ ) e k / h2. Deter-mine a fórmula explícita para Ql na equação (4) e proveque o método de Crank-Nicholson implícito (7) é incon-
dicionalmente estável para qualquer 0.
2. Considere o método de diferença central explícito para aequação do calor ut u xx :
(8)
Utilizando o mesmo algoritmo do Problema 1, reduzaa equação (8) para um esquema de iteração de doispassos:
(9)
Utilizando o esquema de interação explícito (4), deter-mine uma equação quadrática para Ql e resolva-a com afórmula quadrática (veja o Exemplo 1 na Seção 11.2).Prove que o método de diferença central explícito (8) éincondicionalmente instável para qualquer 0.
3. Considere o método de diferença central explícito para aequação de onda utt c2
u xx (veja o Exemplo 1 na Seção7.3):
(10)
onde ck / h é o número de Courant. Utilizando omesmo algoritmo do Problema 2, determine e resolva a
equação quadrática paraQ
l. Prove que |Q
l|
1 quandoambas as raízes da equação quadrática são complexas.Prove que a condição de estabilidade (5) é violada quan-do ambas as raízes da equação quadrática forem distintase reais. Prove que o método de diferença central explíci-to (10) é estável para 0 2
1 e instável para 2 1.
4. Considere o método para frente no tempo e para trás noespaço para a equação do transporte ut cu x 0:
(11)
onde ck / h. Considere a transformada discreta com-plexa de Fourier com o modo de Fourier
e determine o fator de valor complexo Ql no esquemade iteração de um passo (4). Prove que o método parafrente no tempo e para trás no espaço (11) é estável para0 1 e instável para 1.
5. Considere o método para trás no tempo e central no es-paço para a equação do transporte ut cu x 0:
(12)
Utilizando o mesmo algoritmo do Problema 4, proveque o método para trás no tempo e central no espaço(12) é incondicionalmente estável para qualquer 0.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 21/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 22/416
24 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
1.1 Teoria preliminar
Notação e propriedades matriciais são utilizadas extensivamente ao longo desse ca-pítulo. Você deve rever o Capítulo 2 do Volume 2 caso não esteja familiarizado comesses conceitos.
Introdução Relembre que na Seção 3.1 do Volume 1 ilustramos como resolversistemas de n equações diferenciais lineares com n incógnitas da forma
(1)
onde Pij são polinômios de vários graus no operador diferencial D. Nesse capítulo,restringiremos nosso estudo a sistemas de EDs de primeira ordem que sejam casosespeciais de sistemas que tenham a forma normal
(2)
Um sistema tal como (2) de n equações de primeira ordem é denominado sistema de
primeira ordem.
Sistemas lineares Quando cada uma das funções g1, g2,..., gn em (2) for linear
nas variáveis dependentes x 1, x 2,..., x n, obtemos a forma normal de um sistema deprimeira ordem de equações lineares:
(3)
Fazemos referência a um sistema da forma indicada em (3) simplesmente como
um sistema linear. Consideramos que os coeficientes aij(t ) bem como as funções f i(t )sejam contínuos em um intervalo comum I . Quando f i(t ) 0, i 1, 2,..., n, o sistemalinear é dito ser homogêneo; caso contrário, ele é não homogêneo.
Forma matricial de um sistema linear Se X, A(t ) e F(t ) representarem as respec-tivas matrizes
Observação parao estudante.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 23/416
1.1 Teoria Preliminar 25
então o sistema de equações diferenciais de primeira ordem lineares (3) pode serescrito como
ou simplesmente (4)
Se o sistema for homogêneo, sua forma matricial é então
(5)
Exemplo 1 Sistemas escritos em notação matricial
(a) Se então a forma matricial do sistema homogêneo
(b) Se então a forma matricial do sistema não homogêneo
❑
Vetor soluçãoUm vetor solução em um intervalo é qualquer matriz coluna
cujas entradas são funções diferenciáveis que satisfazem o sistema (4) no intervalo.
DEFINIÇÃO 1.1
Um vetor solução de (4), obviamente, equivale a n equações escalares x 1 1(t ), x 2 2(t ),..., x n n(t ), podendo ser interpretado geometricamente comoum conjunto de equações paramétricas de uma curva espacial. Nos casos n 2e n 3, as equações x 1 1(t ), x 2 2(t ), e x 1 1(t ), x 2 2(t ), x 3 3(t )representam curvas em duas e três dimensões, respectivamente. Trata-se de umaprática comum designar tal curva solução como trajetória. O plano é tambémchamado de plano de fase. Ilustraremos esses conceitos na seção a seguir, assimcomo no Capítulo 2.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 24/416
26 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
Exemplo 2 Verificação de soluções
Verifique que no intervalo (,)
são soluções de (6)
Solução A partir de e , temos que
e ❑
Grande parte da teoria de sistemas de n equações diferenciais de primeira ordemlineares é similar àquela para equações diferenciais lineares de ordem n.
Problema de valor inicial Seja t 0 um ponto em um intervalo I e
onde i, i 1, 2,..., n são constantes dadas. Assim, o problema
Resolver:
Sujeita a: (7)é um problema de valor inicial no intervalo.
Existência de uma solução únicaConsidere as entradas das matrizes A(t ) e F(t ) como sendo funções contínuas emum intervalo comum I que contenha o ponto t 0. Logo, existe uma única solução doproblema de valor inicial (7) no intervalo.
TEOREMA 1.1
Sistemas homogêneos Nas próximas definições e teoremas, estaremos interes-sados somente em sistemas homogêneos. Sem definir, consideraremos sempre que aij e f i sejam funções contínuas de t em algum intervalo comum I .
Princípio da superposição O resultado apresentado a seguir é um princípio da
superposição para a solução de sistemas lineares.
Princípio da superposiçãoConsidere X1, X2,..., Xk um conjunto de vetores solução do sistema homogêneo(5) em um intervalo I . Assim, a combinação linear
onde os ci, i 1, 2,..., k são constantes arbitrárias, é também uma solução nointervalo.
TEOREMA 1.2

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 25/416
1.1 Teoria Preliminar 27
Decorre do Teorema 1.2 que um múltiplo constante de qualquer vetor solução de umsistema homogêneo de equações diferenciais de primeira ordem lineares é tambémuma solução.
Exemplo 3 Utilizando o princípio da superposiçãoVocê deve praticar verificando que os dois vetores
são soluções do sistema
(8)
Pelo princípio da superposição, a combinação linear
é outra solução do sistema. ❑
Dependência linear e independência linear Estamos principalmente interessa-dos em soluções linearmente independentes do sistema homogêneo (5).
Dependência/independência linear
Considere X1, X2,..., Xk como sendo um conjunto de vetores solução do sistema ho-
mogêneo (5) em um intervalo I . Dizemos que o conjunto é linearmente dependen-
te no intervalo se existirem constantes c1, c2,... ck , nem todas nulas, de modo que
para todo t no intervalo. Se o conjunto de vetores não for linearmente dependenteno intervalo, ele será linearmente independente.
DEFINIÇÃO 1.2
O caso no qual k 2 deve estar claro; dois vetores solução X1 e X2 são linear-mente dependentes se um for múltiplo constante do outro, e vice-versa. Para k 2,um conjunto de vetores solução é linearmente dependente se pudermos expressar aomenos um vetor solução como uma combinação linear dos vetores restantes.
Wronskiano Como na nossa consideração inicial da teoria de uma única equaçãodiferencial ordinária, podemos introduzir o conceito do determinante Wronskiano como um teste para a independência linear. Enunciamos o seguinte teorema sem de-monstração.
Critério para soluçõeslinearmente independentes
Considere
sendo n vetores solução do sistema homogêneo (5) em um intervalo I . Logo, oconjunto de vetores solução será linearmente independente em I se e somente seo Wronskiano
TEOREMA 2.3
(continua)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 26/416
28 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
(9)
para todo t no intervalo.
(continuação)
Pode ser mostrado que se X1, X2,..., Xn forem vetores solução de (5), então, paratodo t em I , W (X1, X2,..., Xn) 0 ou W (X1, X2,..., Xn) 0. Assim, se pudermos de-monstrar que W 0 para algum t 0 em I , então W 0 para todo t , e consequentementeo conjunto de soluções é linearmente independente no intervalo.
Observe que, ao contrário da nossa definição de Wronskiano na Seção 3.1 doVolume 1, aqui a definição do determinante (9) não envolve diferenciação.
Exemplo 4 Soluções linearmente independentes
No Exemplo 2 vimos que e são soluções do sistema (6).Claramente X1 e X2 são soluções linearmente independentes no intervalo (,),pois nenhum vetor é um múltiplo constante do outro. Além disso, temos
para todos os valores reais de t . ❑
Conjunto fundamental de soluçõesQualquer conjunto X1, X2,..., Xn de n vetores solução linearmente independentesdo sistema homogêneo (5) em um intervalo I é dito ser um conjunto fundamental
de soluções no intervalo.
DEFINIÇÃO 1.3
Existência de um conjuntofundamental
Existe um conjunto fundamental de soluções para o sistema homogêneo (5) emum intervalo I .
TEOREMA 1.4
Os próximos dois teoremas são os equivalentes em sistema linear dos Teoremas3.5 e 3.6 do Volume 1.
Solução geral – Sistemas
homogêneosConsidere X1, X2,..., Xn como sendo um conjunto fundamental de soluções do sis-tema homogêneo (5) em um intervalo I . Assim, a solução geral do sistema nointervalo é
onde os ci, i 1, 2,..., n são constantes arbitrárias.
TEOREMA 1.5
Exemplo 5 Solução geral do sistema (6)
A partir do Exemplo 2, sabemos que são soluções
linearmente independentes de (6) em (,). Portanto, X1 e X2 formam um con-

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 27/416
1.1 Teoria Preliminar 29
junto fundamental de soluções no intervalo. A solução geral do sistema no intervaloé então
(10) ❑
Exemplo 6 Solução geral do sistema (8)
Os vetores
são soluções do sistema (8) no Exemplo 3 (veja o Problema 16 nos Exercícios 1.1).Agora
para todos os valores reais de t . Concluímos que X1, X2 e X3 formam um conjuntofundamental de soluções em (,). Assim, a solução geral do sistema no intervaloé a combinação linear X c1X1 c2X2 c3X3, isto é,
❑
Sistemas não homogêneos Para sistemas não homogêneos, uma solução par-
ticular X p em um intervalo I é qualquer vetor, livre de parâmetros arbitrários, cujas
entradas são funções que satisfazem o sistema (4).
Solução geral – Sistemas nãohomogêneos
Considere X p uma solução dada do sistema não homogêneo (4) em um intervalo I , e seja
a solução geral no mesmo intervalo do sistema homogêneo associado (5). Logo, asolução geral do sistema não homogêneo no intervalo é
A solução geral Xc do sistema homogêneo (5) é chamada de função comple-mentar do sistema não homogêneo (4).
TEOREMA 1.6
Exemplo 7 Solução geral – sistema não homogêneo
O vetor é uma solução particular do sistema não homogêneo
(11)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 28/416
30 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
Nos Problemas 1-6, escreva o sistema linear na forma matricial.
1. 2.
3. 4.
5.
6.
Nos Problemas 7-10, escreva o sistema indicado sem utilizar ma-trizes.
7.
8.
9.
10.
Nos Problemas 11-16, verifique que o vetor X é uma solução dosistema indicado.
11.
12.
13.
14.
15.
16.
Nos Problemas 17-20, os vetores dados são soluções de um sis-tema X¿ AX. Determine se os vetores formam um conjuntofundamental em (,).
17.
18.
19.
no intervalo (,). (Verifique isso.) A função complementar de (11) no mesmo in-
tervalo, ou a solução geral de , foi vista em (10) do Exemplo 5 como
sendo . Portanto, pelo Teorema 1.6,
é a solução geral de (11) em (,). ❑
EXERCÍCIOS 1.1 As respostas de problemas ímpares selecionados estão na página 387.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 29/416
1.2 Sistemas Lineares Homogêneos 31
20.
Nos Problemas 21-24, verifique que o vetor X p é uma solução
particular do sistema dado. 21.
22.
23.
24.
25. Prove que a solução geral de
no intervalo (,) é
26. Prove que a solução geral de
no intervalo (,) é
1.2 Sistemas lineares homogêneos
Introdução No Exemplo 5 da Seção 1.1, vimos que a solução geral do sistema
homogêneo
Como ambos os vetores solução têm a forma i 1,2, onde k 1, k 2, 1 e
2 são constantes, somos solicitados a dizer se podemos sempre obter uma soluçãoda forma
(1)
para o sistema de primeira ordem linear homogêneo
(2)
onde a matriz de coeficientes A é uma matriz de constantes n n.
Autovalores e autovetores Se (1) for um vetor solução do sistema, então X¿ K e t
de modo que (2) se escreve K e t
AK e t
. Após cancelar e t
e rearranjando, obte-
mos AK K ou AK K 0. Como K IK, a última equação é o mesmo que
(3)
Trabalharemossomente com
sistemas lineares decoeficientes constantes.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 30/416
32 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
A equação matricial (3) é equivalente às equações algébricas simultâneas
Assim, para obter uma solução não trivial X de (2), temos primeiro que obter umasolução não trivial do sistema anterior; em outras palavras, precisamos calcular umvetor não trivial K que satisfaça (3). Porém, para que (3) tenha outras soluções quenão apenas a solução óbvia k 1 k 2 ... k n 0, temos que ter
Essa equação polinomial em é chamada de equação característica da matriz A;as soluções dessa equação são os autovalores de A. Uma solução K 0 de (3) quecorresponde a um autovalor é denominada um autovetor de A. Uma solução dosistema homogêneo (2) é então X Ke
t .Na discussão que se segue, examinaremos três casos: todos os autovalores sendo
reais e distintos (isto é, não existem autovalores iguais), autovalores repetidos, e,
finalmente, autovalores complexos.
1.2.1 Autovalores reais distintos
Quando a matriz A n n tem autovalores reais e distintos 1, 2,..., n, então umconjunto de n autovetores linearmente independentes K1, K2,..., Kn pode sempre serobtido e
é um conjunto fundamental de soluções de (2) em (,).
Solução geral – Sistemashomogêneos
Considere 1, 2,..., n como sendo n autovalores reais e distintos da matriz decoeficientes A do sistema homogêneo (2), e K1, K2,..., Kn os autovetores corres-pondentes.Logo, a solução geral de (2) no intervalo (,) é definida como
TEOREMA 1.7
Exemplo 1 Autovalores distintos
Resolva
(4)
Solução Primeiro obtemos os autovalores e autovetores da matriz de coeficientes.
A partir da equação característica
vemos que os autovalores são 1 1 e 2 4.Agora para 1 1, (3) é equivalente a

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 31/416
1.2 Sistemas Lineares Homogêneos 33
Logo, k 1 k 2. Quando k 2 1, o autovetor correspondente é
Para 2 4, temos
de modo que k 1 3k 2 /2, e portanto, com k 2 2, o autovetor correspondente é
Como a matriz de coeficientes A é uma matriz 2 2, e por termos obtido duas solu-ções de (4) que são linearmente independentes,
concluímos que a solução geral do sistema é
(5) ❑
Devemos ter em mente que uma solução de um sistema de equações diferenciaisde primeira ordem lineares, quando escrito em termos de matrizes, é simplesmenteuma alternativa ao método empregado na Seção 3.11 do Volume 1 – ou seja, listar asfunções individuais e a relação entre as constantes. Se somarmos os vetores do ladodireito de (5) e a seguir as igualarmos às entradas correspondentes no vetor da esquer-da, obteremos a definição mais familiar
Conforme destacado na Seção 1.1, podemos interpretar essas equações como equaçõesparamétricas de uma curva ou trajetória no plano xy ou plano de fase. Os três gráfi-
cos ilustrados na Figura 1.1, x (t ) no plano tx , y(t ) no plano ty, e a trajetória no plano de
fase, correspondem à escolha das constantes c1 c2 1 na solução. Um conjunto de
trajetórias no plano de fase como mostrado na Figura 1.2 é dito ser um perfil de fase
do sistema linear dado. O que parece ser duas retas pretas na Figura 1.2 são na verda-
de quatro retas-metade definidas parametricamente no primeiro, segundo, terceiro e
quarto quadrantes pelas soluções X2, X1, X2, e X1, respectivamente. Por exemplo,
as equações cartesianas , x 0, e y x , x 0, das retas-metade no primeiro
e quarto quadrantes foram obtidas pela eliminação do parâmetro t nas soluções x
3e4t , y 2e
4t , e x e
t , y e
t , respectivamente. Além disso, cada autovetor pode
ser visto como um vetor de duas dimensões se estendendo ao longo de uma das retas-
metade. O autovetor se localiza ao longo de no primeiro quadrante,
e se estende ao longo de y x no quarto quadrante; cada vetor se inicia
na origem, com K2 terminando no ponto (2,3) e K1 terminando em (1,1).
A origem não é somente uma solução constante, x 0, y 0, para todo sistemalinear homogêneo 22 X¿ AX, mas é também um ponto importante no estudo qua-litativo de tais sistemas. Se pensarmos em termos físicos, as pontas das setas em umatrajetória na Figura 1.2 indicam a direção na qual uma partícula com coordenadas( x (t ), y(t )) numa trajetória no tempo T se moveria com o aumento do tempo. Observeque as pontas das setas, sendo exceção apenas aquelas das retas-metade no segundo equarto quadrantes, indicam que uma partícula se moveria para longe da origem com oaumento do tempo t . Se imaginarmos a escala de tempo de a , então a inspeção
x
y
4
2
0
–2
–5
–6
–8
–100 2,5 5 7,5 10 12,5 15
6
5
4
3
2
1
–3 –2 –1 0 1 2 3t
x
6
4
2
–2
–4
–3 –2 –1 0 1 2 3
t 0
y
(a) Gráfico de x = e–t + 3e4t
(b) Gráfico de y = –e–t + 2e4t
(c) Trajetória definida por x = e–t + 3e4t ,
y = –e–t + 2e4t no plano de fase
Figura 1.1 Uma solução particular de(5) resulta em três planos coordenadosdiferentes.
y
x
Figura 1.2 Um perfil de fase do siste-ma (4).

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 32/416
34 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
da solução x c1et 3c2e
4t , y c1et 2c2e
4t , c1 0, c2 0, mostra que umatrajetória, ou partícula em movimento, “começa” assintótica às retas-metade defini-das por X1 ou –X1 (pois e
4t é insignificante para t → ) e “termina” assintótica auma das retas-metade definidas por X2 e –X2 (pois e
t é desprezível para t→ ).Observamos que a Figura 1.2 representa um perfil de fase típico de todos os siste-
mas lineares homogêneo 22 X¿ AX com autovalores reais de sinais opostos. Veja oProblema 17 nos Exercícios 1.2. Além disso, perfis de fase nos dois casos para os quais
autovalores reais distintos têm o mesmo sinal algébrico seriam perfis típicos de todos os
sistemas lineares 22; a única diferença é que as pontas das setas indicariam que uma
partícula se afastaria da origem em qualquer trajetória com t→ quando ambos 1 e 2
fossem positivos, e se moveria em direção à origem em qualquer trajetória quando ambos
1 e 2 fossem negativos. Consequentemente, é comum denominar a origem como um
repulsor no caso 1 0, 2 0, e um atrator no caso 1 0, 2 0. Veja o Problema
18 nos Exercícios 1.2. A origem na Figura 1.2 não é um repulsor nem um atrator. A in-
vestigação do caso restante quando 0 é um autovalor de um sistema linear homogê-
neo 22 é deixado como um exercício. Veja o Problema 48 nos Exercícios 1.2.
Exemplo 2 Autovalores distintos
Resolva
(6)
Solução Utilizando os cofatores da terceira linha, obtemos
e assim os autovalores são 1 3, 2 4, 3 5.Para 1 3, a eliminação de Gauss-Jordan resulta em
Então, k 1 k 3 e k 2 0. A escolha k 3 1 resulta em um autovetor e o vetor soluçãocorrespondente
(7)
De modo similar, para 2 4,
implica k 1 10k 3 e k 2 k 3. Escolhendo k 3 1, obtemos um segundo autovetor evetor solução
(8)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 33/416
1.2 Sistemas Lineares Homogêneos 35
Finalmente, quando 3 5, as matrizes aumentadas
resultam em
(9)
A solução geral de (6) é uma combinação linear dos vetores solução em (7), (8)e (9):
❑
Uso de computadores Pacotes matemáticos como MATLAB, Mathematica, Ma-
ple e DERIVE podem poupar tempo na obtenção dos autovalores e autovetores deuma matriz. Por exemplo, para calcular os autovalores e autovetores da matriz de co-eficientes em (6) aplicando o Mathematica, utilizamos primeiro a definição da matrizpor linhas:
Os comandos Eigenvalues[m] e Eigenvectors[m] digitados em sequência resultam em
respectivamente. No Mathematica, autovalores e autovetores podem também ser ob-tidos ao mesmo tempo por meio do comando Eigensystem[m].
1.2.2 Autovalores repetidosÉ claro que nem todos os n autovalores 1, 2,..., n de uma matriz A n n precisamser distintos, isto é, alguns dos autovalores podem ser repetidos. Por exemplo, a equa-ção característica da matriz de coeficientes no sistema
(10)
é diretamente mostrada como sendo ( 3)2 0, e portanto 1 2 3 é umaraiz de multiplicidade dois. Para esse valor, obtemos o autovetor único
(11)
é uma solução de (10). Porém, como estamos obviamente interessados em determinara solução geral do sistema, precisamos obter uma segunda solução.
Em geral, se m for um inteiro positivo e ( t )m for um fator da equação ca-
racterística enquanto que ( 1)m+1 não for, então 1 é dito ser um autovalor de
multiplicidade m. Os próximos três exemplos ilustram os seguintes casos:
(i) Para algumas matrizes A nn, pode ser possível obter m autovetores line-armente independentes K1, K2,..., Km que correspondem a um autovalor 1 de multiplicidade m n. Nesse caso, a solução geral do sistema contém acombinação linear

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 34/416
36 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
(ii) Caso exista somente um autovetor correspondente ao autovalor 1 de mul-tiplicidade m, então m soluções linearmente independentes da forma
onde Kij são vetores coluna, podem sempre ser determinadas.
Autovalor de multiplicidade dois Iniciamos considerando autovalores de mul-tiplicidade dois. No primeiro exemplo, ilustramos uma matriz para a qual podemosdeterminar dois autovalores distintos que correspondem a um autovalor duplo.
Exemplo 3 Autovalores repetidos
Resolva
Solução Expandir o determinante na equação característica
resulta em –( 1)2( 5) 0. Vemos que 1 2 1 e 3 5.Para 1 1, a eliminação de Gauss-Jordan imediatamente nos dá
A primeira linha da última matriz significa k 1 – k 2 k 3 0 ou k 1 k 2 – k 3. As esco-lhas k 2 1, k 3 0 e k 2 1, k 3 1, resultam, respectivamente, em k 1 1 e k 1 0.Portanto, os dois autovetores correspondentes a 1 1 são
Como nenhum autovetor é um múltiplo constante do outro, obtivemos duas soluçõeslinearmente independentes correspondentes ao mesmo autovalor
Por último, para 3 5, a redução

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 35/416
1.2 Sistemas Lineares Homogêneos 37
implica k 1 k 3 e k 2 k 3. Adotando k 3 1, temos k 1 1, k 2 1, e portanto umterceiro autovetor é
Concluímos que a solução geral do sistema é
A matriz de coeficientes A no Exemplo 3 é um tipo especial de matriz conhecidocomo matriz simétrica. Uma matriz A n n é dita ser simétrica se sua transposta A
T (onde as linhas são trocadas pelas colunas e vice-versa) for igual a A, ou seja, se A
T A. Pode-se provar que se a matriz A no sistema X¿ AX for simétrica e tiver entra-das reais, então sempre podemos determinar n autovetores linearmente independen-tes K1, K2,... Kn, e a solução geral de tal sistema é dada no Teorema 1.7. Conforme
ilustrado no Exemplo 3, o resultado se aplica mesmo quando alguns dos autovaloresforem repetidos.
Segunda solução Suponha agora que 1 seja um autovalor de multiplicidade doise que exista somente um autovetor associado a esse valor. Uma segunda solução podeser obtida na forma
(12)
onde
Para termos isso, substituímos (12) no sistema X¿ AX e simplificamos:
Como essa equação se aplica a todos os valores de t , temos que ter
(13)
e (14)
A equação (13) simplesmente declara que K tem ser um autovetor de A associadocom 1. Pela solução de (13), determinamos uma solução . Para obter asegunda solução X2, precisamos somente resolver o sistema adicional (14) para ovetor P.
Exemplo 4 Autovalores repetidos
Determine a solução geral do sistema indicado em (10).
Solução A partir de (11), sabemos que 1 3 e que uma solução é
Identificando temos a partir de (14) que agora precisamos re-
solver

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 36/416
38 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
Como esse sistema é claramente equivalente a uma equação, temos um número infi-nito de escolhas para p1 e p2. Por exemplo, escolhendo p1 1, temos . Entre-
tanto, para simplificar, adotaremos , de modo que p2 0. Portanto, .Assim, a partir de (12), obtemos
A solução geral de (10) é então
❑
Pela adoção de diversos valores para c1 e c2 na solução do Exemplo 4, podemostraçar trajetórias do sistema em (10). A Figura 1.3 apresenta um perfil de fase de (10).As soluções X1 e –X1 determinam duas retas-metade x 0, e x 0,respectivamente, que estão indicadas em preto na Figura 1.3. Como o único autovaloré negativo e e
3t → 0 quando t→ em todas as trajetórias, temos ( x (t ), y(t ))→ (0,0)quando t → . É por isso que as pontas das setas na Figura 1.3 indicam que uma
partícula em qualquer trajetória se moveria em direção à origem com o aumento dotempo e pelo fato da origem ser um atrator nesse caso. Além disso, uma partícula emmovimento em uma trajetória y c1e
3t c2te3t , c2
0, se aproxima de (0,0) tangencialmente a uma das retas-metade quando t→ . Poroutro lado, quando o autovalor repetido for positivo, a situação se reverte e a origemse torna um repulsor. Veja o Problema 21 nos Exercícios 1.2. Análoga à Figura 1.2,a Figura 1.3 é típica de todos os sistemas lineares homogêneos 2 2 X¿ AX quetenham dois autovalores negativos repetidos. Veja o Problema 32 nos Exercícios 1.2.
Autovalor de multiplicidade três Quando a matriz de coeficientes A tem so-mente um autovetor associado com um autovalor 1 de multiplicidade três, podemosdeterminar uma solução da forma (12) e uma terceira solução da forma
(15)
onde
Substituindo (15) no sistema X¿ AX, temos que os vetores coluna K, P e Q preci-sam satisfazer
(16)
(17)
e (18)
Obviamente, as soluções de (16) e (17) podem ser utilizadas para formar as soluçõesX1 e X2.
Exemplo 5 Autovalores repetidos
Resolva
y
x
Figura 1.3 Um perfil de fase do siste-ma (10).

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 37/416
1.2 Sistemas Lineares Homogêneos 39
Solução A equação característica ( 2)3 0 mostra que 1 2 é um autovalorde multiplicidade três. Resolvendo (A – 2I)K 0, obtemos o único autovetor
A seguir, resolvemos os sistemas (A – 2I)P K e (A – 2I)Q P, obtendo
Utilizando (12) e (15), vemos que a solução geral do sistema é
❑
Observações
Quando um autovalor 1 tem multiplicidade m, podemos obter m autovetores line-armente independentes ou o número de autovetores correspondentes é menor quem. Logo, os dois casos listados na página 35 não se referem a todas as possibili-dades sob as quais um autovalor repetido pode ocorrer. Podemos ter, por exemplo,uma matriz 55 com um autovalor de multiplicidade 5 e existirem três autovetoreslinearmente independentes correspondentes. Veja os Problemas 31 e 49 nos Exer-cícios 1.2.
1.2.3 Autovalores complexosSe 1 i e 2 i, 0, i
2 1, forem autovalores complexos damatriz de coeficientes A, podemos então certamente esperar que os seus autovetorescorrespondentes tenham também entradas complexas.*
Por exemplo, a equação característica do sistema
(19)
é
A partir da fórmula quadrática, obtemos 1 5 2i, 2 5 2i.
Agora, para 1 5 2i, temos que resolver
* Quando a equação característica tem coeficientes reais, autovalores complexos sempre aparecemem pares conjugados.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 38/416
40 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
Como k 2 (1 –2i)k 1,* a escolha k 1 1 resulta no seguinte autovetor e um vetorsolução:
De modo similar, para 2 5 – 2i, obtemos
Podemos verificar por meio do Wronskiano que esses vetores solução são linearmen-te independentes, e assim a solução geral de (19) é
(20)
Observe que as entradas em K2 correspondentes a 2 são os conjugados dasentradas em K1 correspondentes a 1. O conjugado de 1 é, claramente, 2. Escre-
vemos essa informação como e . Apresentamos o resultado gerala seguir.
Soluções correspondentes a umautovalor complexo
Seja A uma matriz de coeficientes com entradas reais do sistema homogêneo (2),e K1 um autovetor que corresponde ao autovalor complexo 1 i, e reais. Assim
são soluções de (2).
TEOREMA 1.8
É desejável e relativamente fácil reescrever uma solução tal como (20) em ter-mos de funções reais. Com esse objetivo, aplicamos primeiro a fórmula de Euler paraescrever
Então, após multiplicar números complexos, organizar os termos e substituir c1 c2 por C 1 e (c1 – c2)i por C 2, (20) se escreve
(21)
onde
e
Agora é importante percebermos que os dois vetores X1 e X2 em (21) são eles pró-prios soluções reais linearmente independentes do sistema original. Consequente-mente, se justifica ignorar a relação entre C 1, C 2 e c1, c2, e podemos considerar C 1 eC 2 como completamente arbitrárias e reais. Em outras palavras, a combinação linear(21) é uma solução geral alternativa de (19).
* Note que a segunda equação é simplesmente (1 2i) vezes a primeira.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 39/416
1.2 Sistemas Lineares Homogêneos 41
O processo anterior pode ser generalizado. Seja K1 um autovetor da matriz decoeficientes A (com entradas reais) que corresponde ao autovalor complexo 1 i. Logo, os dois vetores solução no Teorema 1.8 podem ser escritos como
Pelo princípio da superposição, Teorema 1.2, os seguintes vetores também são solu-ções:
Para qualquer número complexo z a ib, ambos e
são números reais. Portanto, as entradas dos vetores coluna e
são números reais. Definindo
(22)
somos levados ao teorema a seguir.
Soluções reais correspondentes aum autovalor complexo
Seja 1 i um autovalor complexo da matriz de coeficientes A no sistemahomogêneo (2), e B1 e B2 os vetores coluna definidos em (22). Assim,
(23)
são soluções linearmente independentes de (2) em (,).
TEOREMA 1.9
As matrizes B1 e B2 em (22) são muitas vezes descritas como
(24)
pois esses vetores são, respectivamente, as partes real e imaginária do autovetor K1.Por exemplo, (21) decorre de (23) com
Exemplo 6 Autovalores complexos
Resolva o problema de valor inicial
(25)
Solução Primeiro obtemos os autovalores a partir de

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 40/416
42 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
1.2.1 Autovalores reais distintos
Nos Problemas 1-12, determine a solução geral do sistema in-dicado.
1. 2.
3. 4.
5. 6.
7. 8.
9. 10.
11.
Os autovalores são 1 2i e . Para 1, o sistema
resulta em k 1 (2 2i) k 2. Escolhendo k 2 1, obtemos
Agora, a partir de (24) formamos
Como 0, decorre de (23) que a solução geral do sistema é
(26)
O perfil de fase da Figura 1.4 apresenta alguns gráficos de curvas ou trajetórias de-
finidas pela solução (26) do sistema. Agora a condição inicial ou, de
modo equivalente, x (0) 2, e y(0) 1, resulta no sistema algébrico 2c1 2c2 2, c1 1, cuja solução é c1 1, c2 0. Portanto, a solução do problema é
A trajetória específica definida parametricamente pela so-
lução particular x 2 cos 2t – 2 sen 2t , y cos 2t se refere à curva preta na Figura1.4. Note que essa curva passa por (2,1). ❑
y
x
Figura 1.4 Um perfil de fase do siste-ma em (26).
EXERCÍCIOS 1.2 As respostas de problemas ímpares selecionados estão na página 387.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 41/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 42/416
44 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
41. 42.
43. 44.
Nos Problemas 45 e 46, resolva o problema de valor inicial dado.
45.
46.
Tarefas computacionais 47. Obtenha perfis de fase para os sistemas nos Problemas 36,
37 e 38.
48. Resolva cada um dos seguintes sistemas lineares.
(a)
(b)
Determine um perfil de fase para cada sistema. Qual é o sig-nificado geométrico da reta y x em cada perfil de fase?
Problemas para discussão 49. Considere a matriz 5 5 apresentada no Problema 31. Re-
solva o sistema X¿ AX sem o auxílio de métodos ma-triciais, porém escreva a solução geral usando a notaçãomatricial. Utilize a solução geral como base para discutircomo o sistema pode ser resolvido aplicando-se os métodosmatriciais dessa seção. Apresente as suas idéias.
50. Obtenha uma equação cartesiana da curva definida para-metricamente pela solução do sistema linear no Exemplo
6. Identifique a curva que passa por (2,1) na Figura 1.4.[Sugestão: Calcule x
2, y2 e xy].
51. Examine os perfis de fase do Problema 47. Sob quais condi-ções o perfil de fase de um sistema linear homogêneo 2 2com autovalores complexos será constituído por uma famí-
lia de curvas fechadas? E uma família de espirais? Sob quaiscondições a origem (0,0) é um repulsor? E um atrator?
52. O sistema de equações diferenciais de segunda ordem lineares
(27)
descreve o movimento de dois sistemas massa-mola acoplados
(veja a Figura 3.59 do Volume 1). Já resolvemos um caso es-
pecial desse sistema nas Seções 3.11 e 4.6 do Volume 1. Nesse
problema descrevemos outro método para resolver o sistema.
(a) Mostre que (27) pode ser escrita como a equação matri-cial X– AX onde
(b) Se uma solução tem a forma X Ket , mostre que X–
AX resulta em
(c) Mostre que se m1 1, m2 1, k 1 3 e k 2 2, umasolução do sistema é
(d) Mostre que a solução no item (c) pode ser escrita como
1.3 Solução por diagonalização
Introdução Nessa seção, consideraremos um método alternativo para resolverum sistema homogêneo de equações diferenciais de primeira ordem lineares. Essemétodo é aplicável a um sistema X¿ AX sempre que a matriz de coeficientes A for
diagonalizável.
Sistemas acoplados Um sistema linear homogêneo X¿ AX,
(1)
no qual cada x i¿ é escrito como uma combinação linear de x 1, x 2,..., x n, é dito seracoplado. Se a matriz de coeficientes A for diagonalizável, então o sistema pode serdesacoplado de modo que cada x i¿ possa ser expresso somente em termos de x i.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 43/416
1.3 Solução por Diagonalização 45
Se a matriz A tiver n autovetores linearmente independentes, então sabemos apartir do Teorema 2.27 do Volume 2 que podemos obter uma matriz P tal que P
1AP
D, onde D é uma matriz diagonal. Se fizermos a substituição X PY no sistemaX¿ AX, então
(2)
A última equação em (2) é igual a
(3)
Como D é diagonal, a inspeção de (3) revela que esse novo sistema é desacoplado;cada equação diferencial no sistema é da forma yi¿ i yi, i 1, 2,..., n. A solução decada uma dessas equações lineares é Logo, a solução geralde (3) pode ser escrita como o vetor coluna
(4)
Como agora conhecemos Y e como a matriz P pode ser construída a partir dos auto-vetores de A, a solução geral do sistema original X¿ AX é obtida a partir de X PY.
Exemplo 1 Desacoplando um sistema linear
Resolva por diagonalização.
Solução Iniciamos calculando os autovalores e os autovetores correspondentesda matriz de coeficientes.
A partir de det(A I) ( 2)( 1)( 5), obtemos 1 2, 2 1e 3 5. Como os autovalores são distintos, os autovetores são linearmente indepen-dentes. Resolvendo (A iI)K 0 para i 1, 2 e 3, temos, respectivamente,
(5)
Portanto, uma matriz que diagonaliza a matriz de coeficientes é
As entradas na diagonal principal de D são os autovalores de A que correspondem àordem na qual os autovetores aparecem em P:

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 44/416
46 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
EXERCÍCIOS 1.3 As respostas de problemas ímpares selecionados estão na página 388.
Conforme vimos anteriormente, a substituição X PY em X¿ AX resulta nosistema desacoplado Y¿ DY. A solução geral desse último sistema é imediata:
Logo, a solução do sistema dado é
(6) ❑
Note que (6) pode ser escrita da maneira usual expressando-se a última matrizcomo uma soma de matrizes colunas:
A solução por diagonalização sempre funcionará desde que possamos determi-nar n autovetores linearmente independentes de uma matriz A n n; os autovaloresde A podem ser reais e distintos, complexos ou repetidos. O método falha quando A tem autovalores repetidos e n autovetores linearmente independentes não podem serobtidos. É claro que nessa última situação A não é diagonalizável.
Como temos que calcular autovalores e autovetores de A, esse método é essen-cialmente equivalente ao procedimento apresentado na última seção.
Na próxima seção, veremos que a diagonalização pode também ser utilizada pararesolver sistemas lineares não homogêneos X¿ AX + F(t ).
Nos Problemas 1-10, utilize diagonalização para resolver o sis-
tema indicado.
1. 2.
3. 4.
5. 6.
7. 8.
9. 10.
11. Já demonstramos como resolver o sistema de equações dife-
renciais de segunda ordem lineares que descreve o movimento
do sistema massa-mola acoplado na Figura 3.59 do Volume 1,
(7)
de três modos diferentes (veja o Exemplo 4 na Seção 3.11 doVolume 1, o Problema 52 nos Exercícios 1.2 deste Volumee o Exemplo 1 na Seção 4.6 do Volume 1). Neste problema,você percorrerá os passos para os quais (7) também pode serresolvido utilizando-se diagonalização.
(a) Escreva (7) na forma MX– KX 0, onde
Identifique as matrizes M e K. Explique por que a ma-triz M tem uma inversa.
(b) Escreva o sistema do item (a) como
(8)
Identifique a matriz B.
(c) Resolva o sistema (7) para o caso especial no qualm1 1, m2 1, k 1 3 e k 2 2 solucionando (8) utilizando

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 45/416
1.4 Sistemas Lineares Não Homogêneos 47
o método da diagonalização. Em outras palavras, consi-dere X PY, onde P é uma matriz cujas colunas são osautovetores de B.
(d) Mostre que a solução X no item (c) é igual àquelaindicada no item (d) do Problema 52 nos Exercícios1.2.
1.4 Sistemas lineares não homogêneos
Introdução Os métodos dos coeficientes indeterminados e variação de pa-
râmetros utilizados no Capítulo 3 do Volume 1 para determinar soluções particu-lares de EDOs lineares não homogêneas podem ser adaptados para a solução desistemas lineares não homogêneos. Dentre os dois métodos, a variação de parâme-tros é a técnica mais poderosa. Entretanto, existem casos para os quais o métododos coeficientes indeterminados consiste em um meio mais rápido para se obteruma solução particular.
Na Seção 1.1, vimos que a solução geral de um sistema linear não homogêneo X¿ AX + F(t ) em um intervalo I é X Xc X p, onde Xc c1X1 c2X2 ... cnXn é a função complementar ou solução geral do sistema linear homogêneo associado X¿ AX, e X p é qualquer solução particular do sistema não homogêneo. Vimos como
obter Xc na Seção 1.2 quando A era uma matriz de constantes n n; consideramosagora três métodos para obter X p.
1.4.1 Coeficientes indeterminados
As considerações Como na Seção 3.4 do Volume 1, o método dos coeficientes
indeterminados consiste em adotar um palpite embasado a respeito da forma de umvetor solução particular X p; o palpite é motivado pelos tipos de funções que com-preendem as entradas da matriz coluna F(t ). Não é surpresa que a versão matricialdos coeficientes indeterminados somente é aplicável a X¿ AX + F(t ) quando asentradas de A e de F(t ) forem constantes, polinômios, funções exponenciais, senos eco-senos, ou somas e produtos finitos dessas funções.
Exemplo 1 Coeficientes indeterminados
Resolva o sistema
Solução Resolvemos primeiro o sistema homogêneo associado
A equação característica da matriz de coeficientes A,
resulta nos autovalores complexos 1 i e . Pelos procedimentos da
última seção, obtemos

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 46/416
48 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
Agora, como F(t ) é um vetor constante, consideramos um vetor solução particular
Substituindo essa última consideração no sistema original e igualando
as entradas, temos
Resolver esse sistema algébrico resulta em a1 14 e b1 11, e assim uma solução
particular é A solução geral do sistema original de EDs no intervalo (,
) é então X Xc X p ou
❑
Exemplo 2 Coeficientes indeterminados
Resolva o sistema
Solução Os autovalores e os autovetores correspondentes do sistema homogêneo
associado são 1 2, 2 7, Portan-
to, a função complementar é
Agora, como F(t ) pode ser escrita , tentaremos determinar uma
solução particular do sistema que tenha a mesma forma:
Substituir essa última consideração no sistema dado resulta em
ou
A partir da última identidade, obtemos quatro equações algébricas em quatro incógnitas
Resolvendo as primeiras duas equações simultaneamente, obtemos a2 2 e b2 6. Substituímos então esses valores nas duas últimas equações e resolvemos emrelação a a1 e b1. Os resultados são . Segue-se, portanto, que um vetorsolução particular é

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 47/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 48/416
50 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
1.4.2 Variação de parâmetros
Uma matriz fundamental Se X1, X2,..., Xn for um conjunto fundamental de solu-ções do sistema homogêneo X¿ AX em um intervalo I , então sua solução geral nointervalo será a combinação linear X c1X1 c2X2 ... cnXn, ou
(1)
A última matriz em (1) é reconhecida como o produto de uma matriz n n por uma
matriz n 1. Em outras palavras, a solução geral (1) pode ser escrita como o produto
(2)
onde C é um vetor coluna n 1 de constantes arbitrárias c1, c2,..., cn, e a matriz n n,
cujas colunas são constituídas pelas entradas dos vetores solução do sistema X¿ AX,
é denominada uma matriz fundamental do sistema no intervalo.Na discussão a seguir, precisamos aplicar duas propriedades de uma matriz fun-
damental:
Uma matriz fundamental• (t ) é não singular.Se• (t ) for uma matriz fundamental do sistema X¿ AX, então
(3)
O reexame de (9) do Teorema 1.3 mostra que det (t ) é o mesmo que o Wronskiano
W (X1, X2,..., Xn). Portanto, a independência linear das colunas de
(t ) no intervalo I garante que det (t ) 0 para todo t no intervalo. Como (t ) é não singular, a inver-sa multiplicativa
1(t ) existe para todo t no intervalo. O resultado indicado em (3)decorre imediatamente do fato de que toda coluna de (t ) é um vetor solução de X¿ AX.
Variação de parâmetros De modo análogo ao procedimento na Seção 3.5 do Vo-lume 1, questionamos se é possível substituir a matriz de constantes C em (2) poruma matriz coluna de funções
(4)
seja uma solução particular do sistema não homogêneo
(5)
Pela regra do produto, a derivada da última expressão em (4) é
(6)
Note que a ordem dos produtos em (6) é muito importante. Como U(t ) é uma matrizcoluna, os produtos U¿(t )(t ) e U(t )¿(t ) não são definidos. Substituir (4) e (6) em(5) resulta em
(7)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 49/416
1.4 Sistemas Lineares Não Homogêneos 51
Agora, se utilizarmos (3) para substituir ¿(t ), (7) se escreve
ou (8)
Multiplicando ambos os lados da equação (8) por –1(t ), obtemos
Como X p (t )U(t ), concluímos que uma solução particular de (5) é
(9)
Para calcular a integral indefinida da matriz coluna 1(t )F(t ) em (9), integramos
cada entrada. Portanto, a solução geral do sistema (5) é X Xc X p ou
(10)
Exemplo 4 Variação de parâmetros
Determine a solução geral do sistema não homogêneo
(11)
no intervalo (,).
Solução Primeiro resolvemos o sistema homogêneo
(12)
A equação característica da matriz de coeficientes é
logo os autovalores são 1 2 e 2 5. Pelo método usual, temos que os auto-vetores correspondentes a 1 e 2 são, respectivamente,
Os vetores solução do sistema (11) são então
As entradas em X1 formam a primeira coluna de (t ), e as entradas em X2 formam asegunda coluna de (t ). Logo,

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 50/416
52 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
A partir de (9), obtemos
Consequentemente, a partir de (10), a solução geral de (11) no intervalo é
❑
Problema de valor inicial A solução geral do sistema não homogêneo (5) em umintervalo pode ser escrito de um modo alternativo
(13)
onde t e t 0 são pontos no intervalo. A última forma é útil para a solução de (5) sujeitaa uma condição inicial X(t 0) X0, pois os limites de integração são escolhidos demodo que a solução particular desapareça em t t 0. Substituir t t 0 em (13) resultaem X0 (t 0)C, a partir do qual temos C 1(t 0)X0. Substituindo esse últimoresultado em (13), obtemos a seguinte solução do problema de valor inicial:
(14)
1.4.3 Diagonalização
As considerações Como na Seção 1.3, se a matriz de coeficientes A possuir n autovetores linearmente independentes, então podemos utilizar diagonalização paradesacoplar o sistema X¿ AX F(t ). Suponha P sendo uma matriz tal que P
1AP
D, onde D é uma matriz diagonal. Substituir X PY no sistema não homogêneoX¿ AX F(t ) resulta em
(15)
Na última equação em (15), G P1
F é um vetor coluna. Assim, cada equação dife-
rencial nesse novo sistema tem a forma Porém, ob-serve que, ao contrário do procedimento para resolver um sistema homogêneo X¿
AX, agora temos que calcular a inversa da matriz P.
Exemplo 2 Diagonalização
Resolva por diagonalização.
Solução Os autovalores e autovetores correspondentes da matriz de coeficientes
são Assim, obtemos e

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 51/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 52/416
54 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
28.
29.
30.
Nos Problemas 31 e 32, utilize (14) para resolver o problema devalor inicial indicado.
31.
32.
33. O sistema de equações diferenciais para as correntes i1(t ) ei2(t ) na rede elétrica ilustrada na Figura 1.6 é
Utilize variação de parâmetros para resolver o sistema con-siderando R1 8 , R2 3 , L1 1 h, L2 1 h, E (t ) 100 sen t V, i1(0) 0 e i2(0) 0.
E
L2
L1
R1
R2
i2i3
i1
Figura 1.6 Rede no Problema 33.
Tarefas computacionais 34. Resolver um sistema linear não homogêneo X¿ AX
F(t ) por variação de parâmetros quando A for uma matriz33 (ou maior) é uma tarefa praticamente impossível de serfeita à mão. Considere o sistema
(a) Utilize um SAC ou um programa de álgebra linear paraobter os autovalores e autovetores da matriz de coefi-cientes.
(b) Forme uma matriz fundamental (t ) e utilize o compu-tador para calcular 1(t ).
(c) Use o computador para realizar os cálculos de
onde C é uma
matriz coluna de constantes c1, c2, c3 e c4.
(d) Reescreva a saída do computador para a solução geraldo sistema na forma X Xc X p, onde Xc c1X1 c2X2 c3X3 c4X4.
1.4.3 Diagonalização
Nos Problemas 35-38, aplique diagonalização para resolver osistema indicado.
35.
36.
37.
38.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 53/416
1.5 Exponencial de Matriz 55
1.5 Exponencial de matriz
Introdução Matrizes podem ser utilizadas de um modo totalmente diferente pararesolver um sistema de equações diferenciais de primeira ordem lineares. Recordeque uma equação diferencial de primeira ordem linear simples x ¿ ax , onde a é uma
constante, tem a solução geral x ceat . Parece natural, então, perguntarmos se po-demos definir uma exponencial de matriz e
At , onde A é uma matriz de constantes, demodo que e
At é uma solução do sistema X¿ AX.
Sistemas homogêneos Veremos agora que é possível definir uma exponencial
de matriz eAt de modo que o sistema homogêneo X¿ AX, onde A é uma matriz deconstantes n n, tenha uma solução
(1)
Como C é uma matriz coluna n 1 de constantes arbitrárias, queremos que eAt seja
uma matriz n n. O desenvolvimento completo do significado e teoria da exponen-cial de matriz exige um conhecimento profundo de álgebra matricial. Assim, umamaneira de definir e
At é inspirada pela representação em série de potências da funçãoexponencial escalar eat .
(2)
A série em (2) converge para todo t . Utilizando essa série, com 1 substituído pelaidentidade I e a constante a substituída por uma matriz A de constantes n n, obte-mos uma definição para a matriz e
At n n.
Exponencial de matrizPara uma matriz A n n,
(3)
DEFINIÇÃO 1.4
Pode-se mostrar que a série dada em (3) converge para uma matriz n n para todo
valor de t . Além disso, em (3), A0 I, A
2 AA, A
3 A(A
2), e assim por diante.
Derivada de eAt A derivada da exponencial de matriz e
At é análoga àquela daexponencial escalar, isto é, d / dt eat ae
at . Para justificar
(4)
diferenciamos (3) termo a termo:
Em decorrência de (4), podemos agora provar que (1) é uma solução de X¿ AX para todo vetor C de constantes n 1:
(5)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 54/416
56 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
eAt é uma matriz fundamental Se representarmos a matriz e
At pelo símbolo (t ),então (4) é equivalente à equação diferencial matricial ¿(t ) A (veja (3) da Seção1.4). Além disso, decorre imediatamente da Definição 1.4 que (0) eA0 I e assimdet (0) 0. Essas duas propriedades são suficientes para concluirmos que (t ) éuma matriz fundamental do sistema X¿ AX.
Sistemas não homogêneos Vimos em (4) da Seção 2.3 do Volume 1 que a solu-ção geral da equação diferencial de primeira ordem linear única x ¿ ax f (t ), ondea é uma constante, pode ser escrita como
Para um sistema não homogêneo de equações diferenciais de primeira ordem linea-res, pode-se mostrar que a solução geral X¿ AX F(t ), onde A é uma matriz deconstantes n n, é
(6)
Como a exponencial de matriz eAt é uma matriz fundamental, ela sempre é não sin-
gular e eAs (eAs)1. Note que e
As pode ser obtida a partir de eAt pela substituição
de t por –s.
Cálculo de eAt A definição de e
At dada em (3) pode, é claro, sempre ser utilizadapara calcular e
At . Entretanto, a utilidade prática de (3) está limitada pelo fato de queas entradas em e
At são séries de potência em t . Com um desejo natural de trabalhar-mos com coisas simples e familiares, tentaremos então reconhecer se essas entradasdefinem uma função de forma fechada. Veja os Problemas 1-4 nos Exercícios 1.5.Felizmente existem muitas maneiras alternativas de se calcular e
At . Esboçamos doisdesses métodos na discussão que se segue.
Utilizando transformada de Laplace
Vimos em (5) que X
eAt
é uma soluçãode X¿ AX. De fato, como eA0 I, X eAt é uma solução do problema de valor
inicial
(7)
Se x(s) {X(t )} {eAt }, então a transformada de Laplace de (7) é
Multiplicar a última equação por (sI – A)1 implica x(s) (sI – A)1I = (sI – A)1.
Em outras palavras, {eAt } (sI – A)1 ou
(8)
Exemplo 1 Exponencial de matrizUtilize a transformada de Laplace para calcular e
At para
Solução Primeiro calculamos a matriz sI – A e então obtemos a sua inversa:

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 55/416
1.5 Exponencial de Matriz 57
Então decompomos as entradas da última matriz em frações parciais:
(9)
Tomando a transformada de Laplace inversa de (9), obtemos o resultado desejado,
❑
Utilizando potências Am Na Seção 2.8 do Volume 2, desenvolvemos um método
para calcular uma potência arbitrária Ak , k um inteiro não negativo, de uma matriz A
n n. Recorde da Seção 2.8 do Volume 2 que podemos escrever
(10)
onde os coeficientes c j
são os mesmos em cada uma das expressões anteriores, sendoque a última expressão é válida para os autovalores 1, 2,..., n de A. Consideramosaqui que os autovalores de A são distintos. Adotando 1, 2,..., n na segundaexpressão de (10), fomos capazes de determinar c j na primeira expressão pela soluçãode n equações em n incógnitas. Será conveniente no desenvolvimento que se segueenfatizar o fato de que os coeficientes c j em (10) dependem da potência k se substi-tuirmos c j por c j(k ). A partir de (3) e (2), temos
(11)
A seguir, aplicamos (10) em (11) para substituir Ak e k como somas finitas seguidas
por uma troca de ordem dos somatórios
(12)
(13)
onde . Do mesmo modo que utilizamos os autovalores de A
em (10) para determinar os c j, novamente aplicamos autovalores, porém dessa vez nosomatório finito (13) para obter um sistema de equações para determinar os b j; essescoeficientes, por sua vez, são utilizados em (12) para determinar e
At .
Exemplo 2 Exponencial de matriz
Calcule eAt para
Solução Já vimos a matriz A na Seção 2.8 do Volume 2 e lá calculamos seusautovalores como sendo 1 1 e 2 2. Agora, como A é uma matriz 22, temosa partir de (12) e (13)
(14)
Adotando 1 e 2 na segunda equação de (14), obtemos duas equações nasduas incógnitas b0 e b1. Resolver o sistema

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 56/416
58 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
resulta em . Substituindo esses valores na primei-ra equação de (14) e simplificando as entradas, temos
(15) ❑
Nos Problemas 25-28 nos Exercícios 1.5, mostramos como calcular a exponencial
de matriz eAt
quando a matriz A é diagonalizável (veja a Seção 2.11 do Volume 2).
Uso de computadores Para aqueles dispostos a momentaneamente trocar enten-dimento por velocidade de solução, e
At pode ser calculado de um modo mecânicocom o auxílio de um programa computacional; por exemplo, no Mathematica, a fun-ção MatrixExp [A t] calcula a exponencial de matriz para uma matriz quadrada At;no Maple, o comando é exponential(A,t); no MATLAB, a função é expm(At). Vejaos Problemas 27 e 28 nos Exercícios 1.5.
EXERCÍCIOS 1.5 As respostas de problemas ímpares selecionados estão na página 389.
Nos Problemas 1 e 2, use (3) para calcular eAt e e
At .
1. 2.
Nos Problemas 3 e 4, use (3) para calcular eAt.
3. 4.
Nos Problemas 5-8, utilize (1) e os resultados dos Problemas 1-4para obter a solução geral do sistema dado.
5. 6.
7. 8.
Nos Problemas 9-12, utilize (6) para calcular a solução geral dosistema indicado.
9.
10.
11.
12.
13. Resolva o sistema no Problema 7 sujeito à condição inicial
14. Resolva o sistema no Problema 9 sujeito à condição inicial
Nos Problemas 15-18, use o método do Exemplo 1 para calculare
At para a matriz de coeficientes. Utilize (1) para determinar asolução geral do sistema indicado.
15. 16.
17. 18.
Nos Problemas 19-22, use o método do Exemplo 2 para calculare
At para a matriz de coeficientes. Utilize (1) para determinar asolução geral do sistema indicado.
19. 20.
21. 22.
23. Se a matriz A puder ser diagonalizada, então P1
AP D ouA PDP
1. Utilize esse último resultado e (3) para mostrarque e
At PeDt
P1.
24. Utilize e (3) para mostrar que
Nos Problemas 25 e 26, utilize os resultados dos Problemas 23 e24 para resolver o sistema indicado.
25. 26.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 57/416
Exercícios de Revisão 59
Tarefas computacionais 27. (a) Aplique (1) para obter a solução geral de
Utilize um SAC para calcular eAt
. A seguir, use o compu-
tador para determinar autovalores e autovetores da matriz
de coeficientes e formar a solução geral do
modo indicado na Seção 1.2. Finalmente, confira as duas
formas da solução geral do sistema.
(b) Aplique (1) para obter a solução geral de
Utilize um SAC para calcular eAt . No
caso da saída ser complexa, use o programa para fazera simplificação; por exemplo, no Mathematica, se m =
MatrixExp [A t] tiver entradas complexas, então tenteo comando Simplify[ComplexExpand[m]].
28. Aplique (1) para calcular a solução geral de
Utilize um SAC para calcular eAt .
Problemas para discussão 29. Releia a discussão do resultado indicado em (8). A matriz
sI – A sempre tem uma inversa? Discuta.
30. Nos Exercícios 2.9 do Volume 2, vimos que uma matriz não
nula A n n é nilpotente sem for o menor inteiro positivo tal
que Am 0. Verifique que é nilpotente.
Discuta por que é relativamente fácil calcular e
At
quando A énilpotente. Calcule eAt para a matriz dada e então utilize (2)
para resolver o sistema X¿ AX.
CAPÍTULO 1 EXERCÍCIOS DE REVISÃO As respostas de problemas ímpares selecionados estão na página 389.
Nos Problemas 1 e 2, preencha os espaços.
1. O vetor é uma solução de X¿
para k ______.
2. O vetor é uma solução do
problema de valor inicial
para c1 ______ e c2 ______.
3. Considere o sistema linear
Sem tentar resolver o sistema, quais dos seguintes vetores,
é um autovetor da matriz de coeficientes? Qual é a soluçãodo sistema que corresponde a esse autovetor?
4. Considere o sistema linear X¿ AX de duas equações dife-
renciais onde A é uma matriz de coeficientes reais. Qual é a
solução geral do sistema considerando que se saiba que 1
1 2i é um autovalor e é um autovetor correspon-
dente?
Nos Problemas 5-14, resolva o sistema linear indicado com osmétodos desse capítulo.
5. 6.
7. 8.
9. 10.
11.
12.
13.
14.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 58/416
60 CAPÍTULO 1 Sistemas de Equações Diferenciais Lineares
15. (a) Considere o sistema linear X¿ AX de três equaçõesdiferenciais de primeira ordem onde a matriz de coefi-cientes é
e 2 é um autovalor de multiplicidade dois. Deter-mine duas soluções diferentes do sistema que corres-ponde a esse autovalor sem utilizar qualquer fórmulaespecial (tal como (12) da Seção 1.2).
(b) Utilize o procedimento do item (a) para resolver
16. Verifique que é uma solução do sistema linear
para constantes c1 e c2 arbitrárias. À mão,
trace um perfil de fase do sistema.
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 59/416
2
C A P Í T U L O
Sistemas de EquaçõesDiferenciais Não Lineares
No Capítulo 1, nos concentramos nas técnicas para solução de EDs linearesda forma X¿ AX F (t ). Quando o sistema de equações diferenciais não forlinear, usualmente não será possível obter soluções em termos de funçõeselementares. Nesse capítulo, veremos que informações valiosas a respeito danatureza geométrica das soluções podem ser obtidas analisando-se primeirosoluções constantes especiais denominadas pontos críticos e, a seguir,buscando-se por soluções periódicas chamadas ciclos limites. O importanteconceito de estabilidade será introduzido e ilustrado com exemplos dafísica e biologia.
Descrição do capítulo
2.1 Sistemas autônomos
2.2 Estabilidade de sistemas lineares
2.3 Linearização e estabilidade local
2.4 Sistemas autônomos como modelos matemáticos
2.5 Soluções periódicas, ciclos limites e estabilidade global
Exercícios de revisão

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 60/416
62 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
2.1 Sistemas autônomos
Introdução Introduzimos os conceitos de EDs de primeira ordem autônomas,pontos críticos de uma ED autônoma, e a estabilidade de um ponto crítico na Seção2.1 do Volume 1. Essas primeiras considerações a respeito de estabilidade foram pro-
positalmente mantidas em um nível bastante intuitivo; agora é o momento de darmosa definição precisa desse conceito. Para fazermos isso, precisamos examinar sistemas autônomos de EDs de primeira ordem. Nessa seção, definimos pontos críticos de sis-temas autônomos com duas EDs de primeira ordem; os sistemas autônomos podemser lineares ou não lineares.
Sistemas autônomos Um sistema de equações diferenciais de primeira ordem édenominado autônomo quando o sistema puder ser escrito na forma
(1)
Observe que a variável independente t não aparece explicitamente no lado direito decada equação diferencial. Compare (1) com o sistema geral dado em (2) da Seção1.1.
Exemplo 1 Um sistema não autônomo
O sistema de equações diferenciais de primeira ordem não lineares
não é autônomo em decorrência da presença de t no lado direito de ambas EDs. ❑
Quando n 1 em (1), uma equação diferencial de primeira ordem única adquirea forma dx / dt g( x ). Essa última equação é equivalente a (1) da Seção 2.1 do Volume1 com os símbolos x e t desempenhando os papéis de y e x , respectivamente. Soluçõesexplícitas podem ser construídas pois a equação diferencial dx / dt g( x ) é separável.Faremos uso desse fato para ilustrarmos os conceitos desse capítulo.
ED de segunda ordem como um sistema Qualquer equação diferencial de se-gunda ordem x – g( x , x ¿) pode ser escrita como um sistema autônomo. Conforme foifeito na Seção 3.7 do Volume 1, se adotarmos y x ¿, então x – g( x , x ¿) se transformaem y¿ g( x , y). Assim, a equação diferencial de segunda ordem se torna o sistemacom duas equações de primeira ordem
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 61/416
2.1 Sistemas Autônomos 63
Exemplo 2 A ED do pêndulo como um sistema autônomo
Em (6) da Seção 3.10 do Volume 1, mostramos que o ângulo de deslocamento paraum pêndulo satisfaz a equação diferencial de segunda ordem não linear
Se considerarmos x e y ¿, essa equação diferencial de segunda ordem pode serreescrita como o sistema autônomo
❑
Se X(t ) e g(X) representarem os seguintes vetores coluna
então o sistema autônomo (1) pode ser escrito na forma vetor coluna compacta X¿ g(X). O sistema linear homogêneo X¿ AX estudado na Seção 1.2 é um casoespecial importante.
Nesse capítulo, é conveniente escrevermos (1) utilizando também vetores linha.Se adotarmos
e
então o sistema autônomo (1) pode também ser escrito na forma vetor linha com-pacta X¿ g(X). Deve ser claro a partir do contexto se estamos utilizando a forma
vetor linha ou coluna. Portanto, não faremos distinção entre X e XT , a transposta
de X. Em particular, quando n 2, é conveniente utilizarmos a forma vetor linha eescrevermos uma condição inicial X(0) ( x 0, y0).
Quando a variável t for interpretada como tempo, podemos nos referir ao sistemade equações diferenciais em (1) como um sistema dinâmico, e a uma solução X(t )como o estado do sistema ou a resposta do sistema no tempo t . Com essa termino-logia, um sistema dinâmico é autônomo quando a taxa X¿(t ) na qual o sistema variadepende somente do estado atual do sistema X(t ). O sistema linear X¿ AX F(t )estudado no Capítulo 10 é então autônomo quando F(t ) for constante. No caso n 2ou 3, denominaremos uma solução como caminho ou trajetória pois podemos con-siderar x x 1(t ), y x 2(t ), z x 3(t ) como as equações paramétricas de uma curva.
Interpretação de campo vetorial Quando n 2, o sistema em (1) é chamado de
sistema autônomo plano, e escrevemos o sistema como
O vetor V( x , y) (P( x , y),Q( x , y)) define um campo vetorial em uma região do plano,sendo que uma solução para o sistema pode ser interpretada como o caminho resul-tante do movimento de uma partícula pela região. Para ser mais específico, considereV( x , y) (P( x , y),Q( x , y)) como sendo a velocidade da correnteza de um rio na posição

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 62/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 63/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 64/416
66 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
Portanto, toda solução é periódica com período p . A solução que satisfazX(0) (2,0) é
Essa solução gera a elipse ilustrada na Figura 2.4(a).
(b) Utilizando o método autovalor-autovetor, podemos mostrar que
Em decorrência da presença de et na solução geral, não existem soluções periódi-
cas (isto é, ciclos). A solução que satisfaz X(0) (2,0) é
e a curva resultante está indicada na Figura 2.4(b). ❑
Mudando para coordenadas polares Exceto para o caso de soluções constantes,usualmente não é possível obter soluções explícitas para as soluções de um siste-ma autônomo não linear . Podemos resolver alguns sistemas não lineares, no entan-to, mudando-os para coordenadas polares. A partir da fórmula r
2 x 2 y
2 e tg1( y / x ), obtemos
(2)
Podemos em alguns casos aplicar (2) para converter um sistema autônomo plano emcoordenadas retangulares para um sistema mais simples em coordenadas polares.
Exemplo 6 Mudando para coordenadas polares
Determine a solução para o sistema autônomo plano não linear
satisfazendo a condição inicial X(0) (3,3).
Solução Substituindo dx / dt e dy / dt nas expressões para dr / dt e d / dt em (2), ob-temos
Como (3,3) é ( , /4) em coordenadas polares, a condição inicial X(0) (3,3)se torna r (0) e (0) /4. Utilizando separação de variáveis, vemos que a
solução do sistema é
para r 0. (Confira!). Aplicando a condição inicial, obtemos
A espiral está esboçada na Figura 2.5. ❑
y
x
3
3–3
–3
(a)
y
x –5 5
–5
5
(b)
(2, 0)
Figura 2.4 Curvas solução no Exemplo 5.
y
x
–3 3
–3
3
Figura 2.5 Curvas solução no Exemplo 6.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 65/416
2.1 Sistemas Autônomos 67
Exemplo 7 Soluções em coordenadas polares
Quando escrito em coordenadas polares, um sistema autônomo plano adquire a forma
Determine e esboce as soluções que satisfazem X(0) (0,1) e X(0) (3,0) em co-ordenadas retangulares.
Solução Aplicar separação de variáveis em dr / dt 0,5(3 – r ) e integrar d / dt resulta na solução
Se X(0) (0,1), então r (0) 1 e (0) /2, e portanto c1 2 e c2 /2. Acurva solução é a espiral Observe que quando t→ , aumentailimitadamente e r se aproxima de 3.
Se X(0) (3,0), então r (0) 3 e (0) 0, segue que c1 c2 0, e assim r 3e t . Portanto, x r cos 3 cos t e y r sen 3 sen t , e portanto a solução éperiódica. A solução gera um círculo de raio 3 em relação a (0,0). Ambas as soluçõesestão apresentadas na Figura 2.6.
4
y
x
4
–4
–4
Figura 2.6 Curvas solução no Exemplo 7.
EXERCÍCIOS 2.1 As respostas de problemas ímpares selecionados estão na página 390.
Nos Problemas 1-6, escreva a equação diferencial de segundaordem não linear indicada como um sistema autônomo plano.Determine todos os pontos críticos do sistema resultante.
1. 2. 3. 4.
5. para
6. para
Nos Problemas 7-16, determine todos os pontos críticos do siste-ma autônomo plano indicado.
7. 8.
9. 10.
11. 12.
13. 14.
15. 16.
Nos Problemas 17-22, para o sistema dinâmico linear dado (obti-do a partir dos Exercícios 1.2)
(a) obtenha a solução geral e determine se existem soluções
periódicas.(b) determine a solução que satisfaz a condição inicial
dada, e
(c) com o auxílio de uma ferramenta gráfica, trace a solu-ção do item (b) e indique a direção na qual a curva éatravessada.
17.
(Problema 1, Exercícios1.2)
18.
(Problema 6, Exercícios 1.2)
19.
(Problema 37, Exercícios1.2)
20.
(Problema 34, Exercícios1.2)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 66/416
68 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
21.
(Problema 35, Exercícios1.2)
22.
(Problema 38, Exercícios 1.2)
Nos Problemas 23-26, resolva o sistema autônomo plano não li-near dado mudando para coordenadas polares. Descreva o com-portamento geométrico da solução que satisfaz a(s) condição(ões)inicial(ais) indicada(s).
23.
24.
25.
[Sugestão: A equação diferencial resultante em relação a r éuma equação diferencial de Bernoulli. Veja a Seção 2.5 doVolume 1]
26.
[Sugestão: Veja o Exemplo 3 na Seção 2.2 do Volume 1]
Se um sistema autônomo plano tiver uma solução periódica,então tem que existir ao menos um ponto crítico no interiorda curva gerada pela solução. Nos Problemas 27-30, utilizeesse fato junto com um programa de cálculo numérico para
investigar a possibilidade de soluções periódicas. 27. 28.
29.
30.
31. Se z f ( x , y) for uma função com derivadas parciais pri-meira contínuas em uma região R, então um fluxo V( x , y) (P( x , y), Q( x , y)) em R pode ser definido adotando-se P( x , y)
. Mostre que se X(t )
( x (t ), y(t )) for uma solução do sistema autônomo plano
então f ( x (t ), y (t )) c para alguma constante c. Assim, umacurva solução se localiza nas curvas de nível de f . [Sugestão:
Use a regra da cadeia para calcular
2.2 Estabilidade de sistemas lineares
Introdução Vimos que o sistema autônomo plano
gera um campo vetorial V( x , y) (P( x , y),Q( x ,0)), e uma solução X X(t ) dosistema pode ser interpretada como o caminho resultante de uma partícula queé inicialmente colocada na posição X(0) X0. Se X0 for um ponto crítico dosistema, então a partícula permanece estacionária. Nessa seção, examinaremos ocomportamento de soluções quando X0 for escolhida próxima a um ponto críticodo sistema.
Algumas questões fundamentais Suponha que X1 seja um ponto crítico de umsistema autônomo plano e X X(t ) seja uma solução do sistema que satisfaça X(0) X0. Se a solução for interpretada como um caminho de uma partícula em movi-mento, estaremos interessados na resposta da seguinte questão quando X0 for posi-cionada próxima de X1:
(i) A partícula retornará para o ponto crítico? Mais precisamente, se X X(t )for a solução que satisfaz X(0) X0, limt→X(t ) X1?
(ii) Se a partícula não retornar para o ponto crítico, ela permanecerá próximaao ponto crítico ou se afastará do ponto crítico? É concebível, por exem-plo, que a partícula possa simplesmente circular o ponto crítico ou mesmo
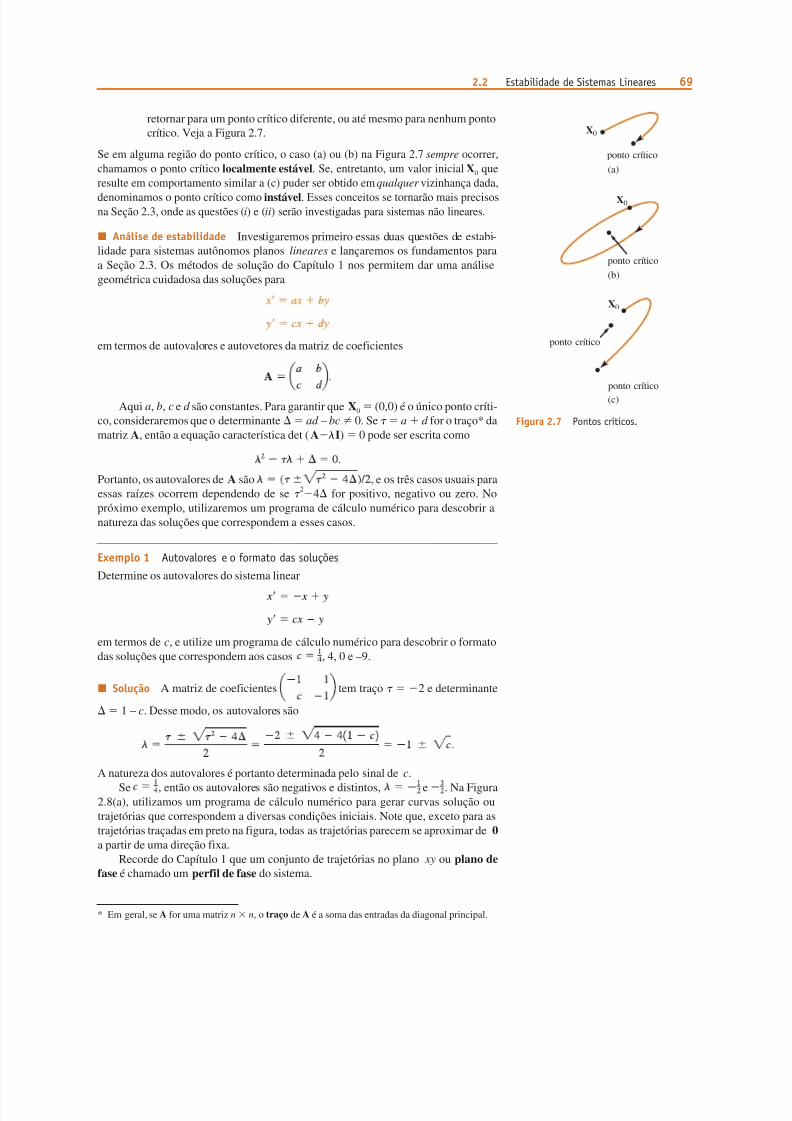
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 67/416
2.2 Estabilidade de Sistemas Lineares 69
retornar para um ponto crítico diferente, ou até mesmo para nenhum pontocrítico. Veja a Figura 2.7.
Se em alguma região do ponto crítico, o caso (a) ou (b) na Figura 2.7 sempre ocorrer,chamamos o ponto crítico localmente estável. Se, entretanto, um valor inicial X0 que
resulte em comportamento similar a (c) puder ser obtido em qualquer vizinhança dada,denominamos o ponto crítico como instável. Esses conceitos se tornarão mais precisosna Seção 2.3, onde as questões (i) e (ii) serão investigadas para sistemas não lineares.
Análise de estabilidade Investigaremos primeiro essas duas questões de estabi-lidade para sistemas autônomos planos lineares e lançaremos os fundamentos paraa Seção 2.3. Os métodos de solução do Capítulo 1 nos permitem dar uma análisegeométrica cuidadosa das soluções para
em termos de autovalores e autovetores da matriz de coeficientes
Aqui a, b, c e d são constantes. Para garantir que X0 (0,0) é o único ponto críti-co, consideraremos que o determinante ad – bc 0. Se a d for o traço* damatriz A, então a equação característica det (A I) 0 pode ser escrita como
Portanto, os autovalores de A são e os três casos usuais paraessas raízes ocorrem dependendo de se
24 for positivo, negativo ou zero. No
próximo exemplo, utilizaremos um programa de cálculo numérico para descobrir anatureza das soluções que correspondem a esses casos.
Exemplo 1 Autovalores e o formato das soluçõesDetermine os autovalores do sistema linear
em termos de c, e utilize um programa de cálculo numérico para descobrir o formatodas soluções que correspondem aos casos , 4, 0 e –9.
Solução A matriz de coeficientes tem traço 2 e determinante
1 – c. Desse modo, os autovalores são
A natureza dos autovalores é portanto determinada pelo sinal de c.Se , então os autovalores são negativos e distintos, e . Na Figura
2.8(a), utilizamos um programa de cálculo numérico para gerar curvas solução outrajetórias que correspondem a diversas condições iniciais. Note que, exceto para astrajetórias traçadas em preto na figura, todas as trajetórias parecem se aproximar de 0 a partir de uma direção fixa.
Recorde do Capítulo 1 que um conjunto de trajetórias no plano xy ou plano de
fase é chamado um perfil de fase do sistema.
* Em geral, se A for uma matriz n n, o traço de A é a soma das entradas da diagonal principal.
ponto crítico
(a)
(b)
ponto crítico
ponto crítico
ponto crítico
(c)
X0
X0
X0
Figura 2.7 Pontos críticos.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 68/416
70 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
Quando c 4, os autovalores têm sinais opostos, 1 e –3, e um fenômeno inte-ressante ocorre. Todas as trajetórias se afastam da origem em uma direção fixa excetopara as soluções que se iniciam ao longo da reta única desenhada em preto na Figura2.8(b). Já vimos comportamento como esse no perfil de fase indicado na Figura 1.2.Experimente com o seu programa de cálculo numérico e verifique essas observações.
A seleção c 0 nos leva a um autovalor real único 1. Esse caso é muitosimilar ao caso com uma exceção notável. Todas as curvas solução na Figura2.8(c) parecem se aproximar de 0 a partir de uma direção fixa com o aumento de t .
0,5
0,5
y
x
y
0,5
0,5
x
4
1
x
0,5
0,5
y
0,5
0,5
y
x
–0,5–0,5
–0,5
–0,5–0,5
–0,5–0,5
–0,5
(b) c = 4(a) c =
(d) c = –9(c) c = 0
Figura 2.8 Perfis de fase do sistema linear no Exemplo 1.
Finalmente, quando . Assim, os au-tovalores são números complexos conjugados com parte real negativa –1. A Figura2.8(d) mostra curvas solução movendo-se em forma de espiral em direção à origem 0 à medida que t aumenta. ❑
Os comportamentos das trajetórias observadas nos quatro perfis de fase da Fi-gura 2.8 no Exemplo 1 podem ser explicados utilizando-se os resultados da soluçãoautovalo-autovetor do Capítulo 1.
Caso I: Autovalores reais distintos De acordo com o Teorema 1.7 na Seção 1.2, a solução geral de (1) édada por
(2)
onde 1 e 2 são os autovalores e K1 e K2 são os autovetores corres-pondentes. Observe que X(t ) também pode ser escrita como
(3)
y
x
K1
K2
Figura 2.9 Nó estável.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 69/416
2.2 Estabilidade de Sistemas Lineares 71
(a) Ambos autovalores negativos
Nó estável ( 2 1 0): Como ambos os autovalores são negativos,segue-se de (2) que limt →
X(t ) 0. Se considerarmos que 2 1, en-tão 2 1 0 e assim é uma função com decaimento exponen-
cial. Podemos portanto concluir a partir de (3) que paravalores grandes de t . Quando c1 0, X(t ) se aproximará de 0 a partir deuma das duas direções determinadas pelo autovetor K1 correspondentea 1. Se c1 0, e X(t ) se aproxima de 0 ao longo dareta determinada pelo autovetor K2. A Figura 2.9 mostra um conjuntode curvas solução em torno da origem. Um ponto crítico é denominadonó estável quando ambos os autovalores forem negativos.
(b) Ambos autovalores positivos
Nó instável (0 2 1): A análise desse caso é similar ao caso (a).Novamente a partir de (2), X(t ) se torna ilimitada com o aumento de t .Além disso, considerando novamente 2 1 e utilizando (3), vemosque X(t ) se torna ilimitada em uma das direções determinada pelo au-tovetor K1 (quando c1 0) ou ao longo da reta definida pelo autovetor
K2 (quando c1 0). A Figura 2.10 apresenta um conjunto típico decurvas solução. Esse tipo de ponto crítico, correspondendo ao caso noqual ambos os autovalores são positivos, é designado nó instável.
(c) Autovalores com sinais opostos Ponto de sela ( 2 0 1): A análise da solução é idêntica à de (b)com uma exceção. Quando c1 0, e, como 2 0,X(t ) se aproximará de 0 ao longo da reta definida pelo autovetor K2.Se X(0) não se localizar na reta determinada por K2, a reta determi-nada por K1 servirá como uma assíntota para X(t ). Portanto, o pontocrítico é instável mesmo apesar de algumas soluções se aproximaremde 0 com o aumento de t . Esse ponto crítico instável é chamado ponto
de sela. Veja a Figura 2.11.
Exemplo 2 Autovalores reais distintos
Classifique o ponto crítico (0,0) de cada um dos seguintes sistemas lineares X¿ AX como nó estável, nó instável ou ponto de sela.
Em cada caso discuta a natureza da solução na vizinhança de (0,0).
Solução (a) Como o traço 3 e o determinante 4, os autovalores são
Os autovalores têm sinais opostos, e portanto (0,0) é um ponto de sela. Não é difícilmostrar (veja o Exemplo 1, Seção 1.2) que os autovetores correspondentes a 1 4e 2 1 são
respectivamente. Se X(0) X0 se localizar na reta y x , então X(t ) se aproxima de0. Para qualquer outra condição inicial, X(t ) se tornará ilimitada na direção determi-nada por K1. Em outras palavras, a reta serve como uma assíntota para todasas curvas solução. Veja a Figura 2.12.
(b) A partir de 29 e 100, segue-se que os autovalores de A são 1 4e 2 25. Ambos autovalores são negativos, e assim (0,0) nesse caso é um nóestável. Como os autovetores que correspondem a 1 4 e 2 25 são
y
x
K1
K2
Figura 2.11 Ponto de sela.
y
x
2
2–2
–2
y = 2 x /3
Figura 2.12 Ponto de sela.
y
x
K1
K2
Figura 2.10 Nó instável.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 70/416
72 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
respectivamente, segue-se que todas as soluções se aproximam de 0 a partir da di-reção definida por K1, exceto aquelas soluções nas quais X(0) X0 se localiza na
reta determinada por K2. Essas soluções se aproximam de 0 ao longo de . Veja a Figura 2.13. ❑
Caso II: Um autovalor real repetido ( 24 0)Nós degenerados: Relembre da Seção 1.2 que a solução geral adquireuma das duas diferentes formas dependendo se um ou dois autove-tores linearmente independentes podem ser obtidos para o autovalorrepetido 1.(a) Dois autovetores linearmente independentes
Se K1 e K2 forem dois autovetores linearmente independentes que cor-respondem a 1, então a solução geral é dada por
Se 1 0, então X(t ) se aproxima de 0 ao longo da reta determinada
pelo vetor c1K1 c2K2, sendo o ponto crítico chamado um nó estáveldegenerado (veja a Figura 2.14(a)). Quando 1 0, as setas na Figura2.14(a) são revertidas e temos um nó instável degenerado.(b) Um único autovetor linearmente independente
Quando somente um único autovetor linearmente independente K1 existir, a solução geral é dada por
onde (A 1I)P K1 (veja a Seção 1.2, (12)-(14)), e a solução podeser escrita como
Se 1 0, então , e segue-se que X(t ) se aproximade 0 em uma das direções determinadas pelo vetor K1 (veja a Figura2.14(b)). O ponto crítico é novamente denominado nó estável dege-
nerado. Quando 1 0, as soluções se assemelham àquelas da Figura2.14(b) com as setas revertidas. A reta determinada por K1 é uma as-síntota para todas as soluções. O ponto crítico é novamente chamadode nó instável degenerado.
y
x
(a)
x
(b)
y
K1 K1
K2 c1K1 + c2K2
Figura 2.14 Nós estáveis degenerados.
x
y
y = x
Figura 2.13 Nó estável.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 71/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 72/416
74 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
A partir do Exemplo 4 da Seção 1.2, a solução geral do sistema em (a) é
A condição inicial resulta em c1
0 e c2
2, e assim
são equações paramétricas para a solução.A solução geral do sistema em (b) é
A condição inicial resulta em c1 0 e c2 1, e assim
são equações paramétricas para a elipse. Note que y 0 para valores positivos peque-nos de t , e portanto a elipse é atravessada no sentido horário.
As soluções de (a) e (b) estão indicadas nas Figuras 2.17(a) e (b), respectiva-mente. ❑
A Figura 2.18 resume convenientemente os resultados dessa seção. A naturezageométrica geral das soluções pode ser determinada pelo cálculo do traço e do de-terminante de A. Na prática, os gráficos das soluções são mais facilmente obtidosnão pela construção de soluções autovalor-autovetor explícitas, mas sim pela gera-ção numérica das soluções utilizando-se um programa de cálculo numérico e ummétodo tal como o método de Runge-Kutta (Seção 6.2 do Volume 1) para sistemasde primeira ordem.
sela
nó estável
nó estável
degenerado
espiral
estável
espiral
estável
centro
nó instável
degenerado
2
2
nó instável
∆
= 4∆
– 4∆ < 0
Figura 2.18 Resumo geométrico dos Casos I, II e III.
y
–1
1
(b)
–1 1 x
y
x
–1
–1
1
1
(a)
Figura 2.17 Curvas solução no Exem-plo 3.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 73/416
2.2 Estabilidade de Sistemas Lineares 75
Exemplo 4 Classificando pontos críticos
Classifique o ponto crítico (0,0) para cada um dos sistemas lineares X¿ AX indi-cados a seguir
para constantes positivas a, b, c, d , e .
Solução (a) Para essa matriz 0,01, 2,3798, e assim 2 4 0. Uti-
lizando a Figura 2.18, vemos que (0,0) é um ponto espiral estável.(b) Essa matriz surge do modelo de competição de Lotka-Volterra, que será estudadona Seção 2.4. Como (a d ) e todas as constantes na matriz são positivas, 0. O determinante pode ser escrito como ad (1 – bc). Se bc 1, então 0 e o ponto crítico é um ponto de sela. Se bc 1, então 0 e o ponto crítico é umnó estável, um nó estável degenerado ou um ponto espiral estável. Em todos esses trêscasos, limt→
X(t ) 0. ❑
Podemos agora dar respostas para cada uma das equações postuladas no início daseção para o sistema autônomo plano linear
com ad – bc 0. As respostas estão resumidas no teorema que se segue.
Critério de estabilidade parasistemas lineares
Para um sistema autônomo plano linear X¿ AX com det A 0, considere X X(t ) a solução que satisfaz a condição inicial X(0) X0, onde X0 0.
(a) limt → X(t )
0 se e somente se os autovalores de A tiverem partes reaisnegativas. Isso ocorrerá quando 0 e 0.
(b) X(t ) é periódica se e somente se os autovalores de A forem imaginários pu-ros. Isso ocorrerá quando 0 e 0.
(c) Em todos os outros casos, definida qualquer vizinhança da origem, existiráao menos um X0 na vizinhança para a qual X(t ) se torna ilimitada com ocrescimento de t .
TEOREMA 2.1
Observações
A terminologia utilizada para descrever os tipos de pontos críticos varia de texto paratexto. A tabela a seguir lista muitos dos termos alternativos que você encontrará emseus estudos.
Termo Termos alternativos
Ponto crítico ponto de equilíbrio, ponto singular, posto estacio-nário, ponto de repouso
Ponto espiral foco, ponto focal, ponto de vértice
Nó estável ou ponto espiral atrator, receptor
Nó instável ou ponto espiral repulsor, fonte

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 74/416
76 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
Nos Problemas 1-8, a solução geral do sistema linear X¿ AX está indicada.
(a) Em cada caso, discuta a natureza das soluções na vizi-nhança de (0,0).
(b) Com o auxílio de uma ferramenta gráfica, trace a solu-ção que satisfaz X(0) (1,1).
1.
2.
3.
4.
5.
6.
7.
8.
Nos Problemas 9-16, classifique o ponto crítico (0,0) do sistemalinear indicado calculando o traço e o determinante , e utili-zando a Figura 2.18.
9. 10.
11. 12.
13. 14.
15. 16.
17. Determine condições para a constante real de modo que(0,0) seja o centro para o sistema linear
18. Determine condições para a constante real de modo que(0,0) seja um ponto espiral estável para o sistema linear
19. Mostre que (0,0) é sempre um ponto crítico instável do sis-
tema linear
onde é uma constante real e 1. Quando (0,0) é umponto de sela instável? Quando (0,0) é um ponto espiralinstável?
20. Seja X X(t ) a resposta do sistema dinâmico linear
satisfazendo a condição inicial X(0) X0. Determinecondições para as constantes reais e que garantirãolimt → X(t ) (0,0). (0,0) pode ser um nó ou ponto desela?
21. Mostre que o sistema linear não homogêneo X¿ AX +
F tem um ponto crítico único X1 quando detA 0.Conclua que se X X(t ) for uma solução para o sistemanão homogêneo, 0 e 0, então limt →
X(t ) X1.[Sugestão: X(t ) Xc(t ) X1.]
22. No Exemplo 4(b), mostre que (0,0) é um nó estável quandobc 1.
Nos Problemas 23-26, um sistema linear não homogêneo X¿ AX + F está indicado.
(a) Em cada caso, determine o ponto crítico único X1.
(b) Utilize um programa de cálculo numérico para determi-nar a natureza do ponto crítico em (a).
(c) Investigue a relação entre X1 e o ponto crítico (0,0) dosistema linear homogêneo X¿ AX.
23. 24.
25. 26.
EXERCÍCIOS 2.2 As respostas de problemas ímpares selecionados estão na página 390.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 75/416
2.3 Linearização e Estabilidade Local 77
2.3 Linearização e estabilidade local
Introdução A idéia principal dessa seção é a linearização. Uma aproximaçãolinear local ou linearização de uma função diferenciável f ( x ) em um ponto ( x 1, f ( x 1))é a equação da reta tangente ao gráfico de f no ponto: y f ( x 1) f ¿( x 1)( x – x 1). Para x
próximo de x 1, os pontos no gráfico de f ( x ) estão próximos aos pontos da reta tangentede modo que os valores y( x ) obtidos a partir dessa equação podem ser utilizados paraaproximar os valores correspondentes de f ( x ). Nessa seção, usaremos a linearizaçãocomo um meio de analizar EDs não lineares e sistemas não lineares; a idéia é substi-tuí-los por EDs lineares e sistemas lineares.
Partícula deslizante Iniciamos essa seção refinando os conceitos de estabilidadeintroduzidos na Seção 2.2 de tal modo que eles também sejam aplicados a sistemasautônomos não lineares. Apesar do sistema linear X¿ AX ter somente um pontocrítico quando det A 0, vimos na Seção 2.1 que um sistema não linear pode termuitos pontos críticos. Portanto, não podemos esperar que uma partícula posicionadainicialmente em X0 permaneça próxima a um dado ponto crítico X1, a menos que X0 tenha sido posicionada suficientemente próxima de X1. A partícula poderia se dirigir
a um segundo ponto crítico X2. Para enfatizar essa idéia, consideraremos o sistemafísico apresentado na Figura 2.19, no qual uma partícula desliza ao longo da curva z
f ( x ) sob a influência apenas da gravidade. Mostraremos na Seção 2.4 que a coordenada
x da partícula satisfaz uma equação diferencial de segunda ordem não linear x – g( x , x ¿), e assim adotar y x ¿ satisfaz o sistema autônomo não linear
Se a partícula for posicionada em P ( x , f ( x )) e considerando-se velocidadeinicial zero, a partícula permanecerá em P desde que f ¿( x ) 0. Se a partícula forposicionada próxima ao ponto crítico localizado em x x 1, ela permanecerá próximaa x x 1 somente se a sua velocidade inicial não a dirigir para a “corcova” em x x 2
em direção ao ponto crítico posicionado em x x 3. Logo, X(0) ( x (0), x ¿(0)) temque estar próxima de ( x 1,0).
Na próxima definição, representaremos a distância entre dois pontos X e Y por|X – Y|. Recorde que se X ( x 1, x 2,..., x n) e Y ( y1, y2,..., yn), então
Pontos críticos estáveisSeja X1 um ponto crítico de um sistema autônomo, e X X(t ) a solução que sa-tisfaz a condição inicial X(0) X0, onde X0 X1. Dizemos que X1 é um ponto
crítico estável quando, dado qualquer raio 0, existe um raio correspondente
r 0 tal que se a posição inicial X0 satisfizer |X0 – X1| r , então a solução cor-
respondente X(t ) satisfaz |X(t ) – X1|
para todo t
0. Se, além disso, limt→ X(t ) X1 sempre que |X0 – X1| r , denominaremos X1 como um ponto crítico
assintoticamente estável.
DEFINIÇÃO 2.1
Essa definição é ilustrada na Figura 2.20(a). Dado qualquer disco de raio ao re-dor do ponto crítico X1, uma solução permanecerá dentro do disco desde que X(0) X0 seja selecionado suficientemente próximo a X1. Não é necessário que uma soluçãose aproxime do ponto crítico para que X1 seja estável. Nós estáveis, pontos espiraisestáveis e centros são todos exemplos de pontos críticos estáveis para sistemas line-ares. Para enfatizar que X0 tem que ser selecionado próximo de X1, a terminologiaponto crítico localmente estável é também utilizada.
Pela negação da Definição 2.1, obtemos a definição de um ponto crítico instável.
z
x
z = f ( x )
x 1 x 2 x 3
Figura 2.19 Partícula deslizante nográfico de z f ( x ).
r
ρ
(a) estável
(b) instável
ρ
X0
X0
Figura 2.20 Pontos críticos.
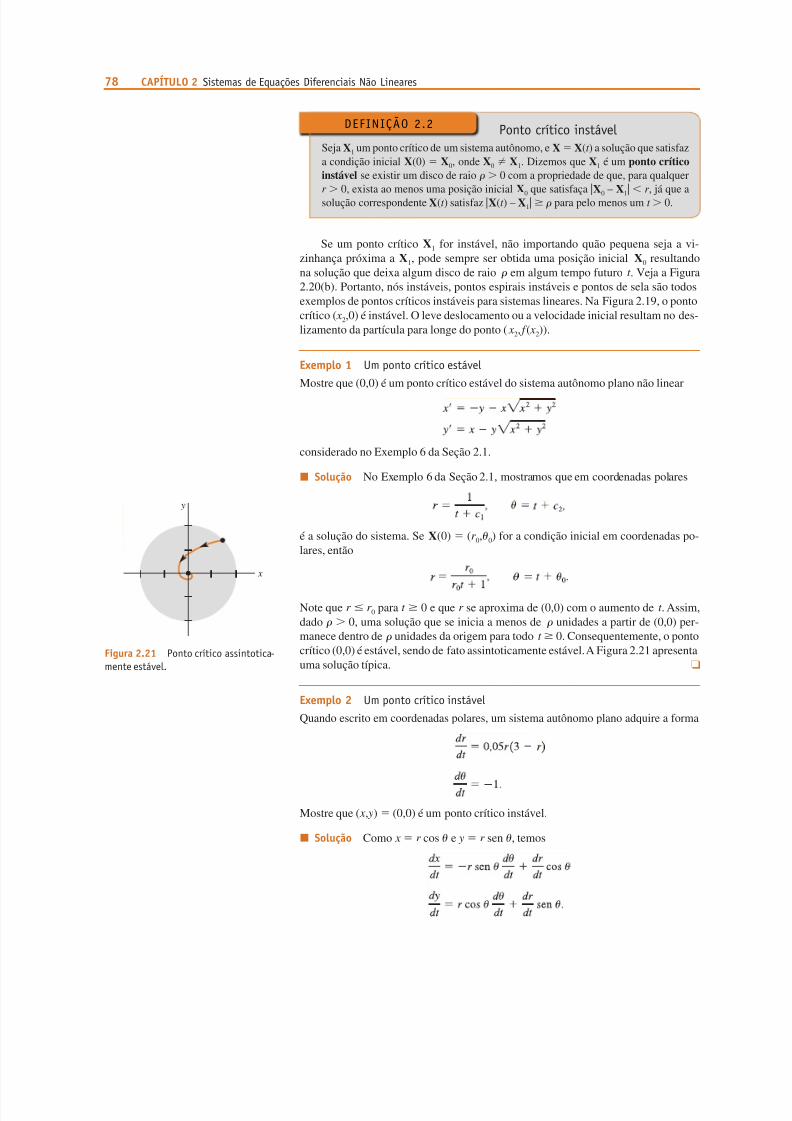
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 76/416
78 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
Ponto crítico instável Seja X1 um ponto crítico de um sistema autônomo, e X X(t ) a solução que satisfaza condição inicial X(0) X0, onde X0 X1. Dizemos que X1 é um ponto crítico
instável se existir um disco de raio 0 com a propriedade de que, para qualquer
r 0, exista ao menos uma posição inicial X0 que satisfaça |X0 – X1| r , já que asolução correspondente X(t ) satisfaz |X(t ) – X1| para pelo menos um t 0.
DEFINIÇÃO 2.2
Se um ponto crítico X1 for instável, não importando quão pequena seja a vi-zinhança próxima a X1, pode sempre ser obtida uma posição inicial X0 resultandona solução que deixa algum disco de raio em algum tempo futuro t . Veja a Figura2.20(b). Portanto, nós instáveis, pontos espirais instáveis e pontos de sela são todosexemplos de pontos críticos instáveis para sistemas lineares. Na Figura 2.19, o pontocrítico ( x 2,0) é instável. O leve deslocamento ou a velocidade inicial resultam no des-lizamento da partícula para longe do ponto ( x 2, f ( x 2)).
Exemplo 1 Um ponto crítico estável
Mostre que (0,0) é um ponto crítico estável do sistema autônomo plano não linear
considerado no Exemplo 6 da Seção 2.1.
Solução No Exemplo 6 da Seção 2.1, mostramos que em coordenadas polares
é a solução do sistema. Se X(0) (r 0,0) for a condição inicial em coordenadas po-lares, então
Note que r r 0 para t 0 e que r se aproxima de (0,0) com o aumento de t . Assim,dado 0, uma solução que se inicia a menos de unidades a partir de (0,0) per-manece dentro de unidades da origem para todo t 0. Consequentemente, o pontocrítico (0,0) é estável, sendo de fato assintoticamente estável. A Figura 2.21 apresentauma solução típica. ❑
Exemplo 2 Um ponto crítico instável
Quando escrito em coordenadas polares, um sistema autônomo plano adquire a forma
Mostre que ( x , y) (0,0) é um ponto crítico instável.
Solução Como x r cos e y r sen , temos
x
y
Figura 2.21 Ponto crítico assintotica-mente estável.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 77/416
2.3 Linearização e Estabilidade Local 79
A partir de dr / dt 0,05r (3 – r ), vemos que dr / dt 0 quando r 0. Logo, podemosconcluir que ( x , y) (0,0) é um ponto crítico substituindo r 0 no novo sistema.
A equação diferencial dr / dt 0,05r (3 – r ) é uma equação logística que pode serresolvida utilizando-se separação de variáveis. Se r (0) r 0, e r 0 0, então
onde c0 (3 – r 0)/ r 0. Como
segue que, não importa quão próximo de (0,0) uma solução comece, a solução deixa-rá um disco de raio 1 ao redor da origem. Portanto, (0,0) é um ponto crítico instável.Uma solução típica que se inicia ao redor de (0,0) está indicada na Figura 2.22.
Linearização Raramente é possível determinar a estabilidade de um ponto críticode um sistema não linear determinando-se soluções explícitas, como nos Exemplos1 e 2. Em vez disso, substituímos o termo g(X) no sistema autônomo original X¿
g(X) por um termo linear A(X – X1) que mais aproxima g(X) em uma vizinhança deX1. Esse processo de substituição, denominado linearização, será ilustrado primeiropara a equação diferencial de primeira ordem x ¿ g( x ).
Uma equação da reta tangente à curva y g( x ) em x x 1 é y g( x 1) g¿( x 1)( x – x 1). Se x 1 for um ponto crítico de x ¿ g( x ), teremos
A solução geral para a equação diferencial linear
é , onde 1 g¿( x 1). Portanto, se g¿( x 1) 0, então x (t ) aproxima x 1. OTeorema 2.2 afirma que o mesmo comportamento ocorre na equação diferencial ori-ginal desde que x (0) x 0 seja selecionado suficientemente próximo de x 1.
Critério de estabilidade para x ¿ g ( x )
Considere x 1 como sendo um ponto crítico da equação diferencial autônoma x ¿ g( x ), onde g é diferenciável em x 1.
(a) Se g¿( x 1) 0, então x 1 é um ponto crítico assintoticamente estável.
(b) Se g¿( x 1) 0, então x 1 é um ponto crítico instável.
TEOREMA 2.2
Exemplo 3 Estabilidade em uma ED de primeira ordem não linear
Tanto x /4 como x 5 /4 são pontos críticos da equação diferencial autônoma
x ¿ cos x – sen x . Essa equação diferencial é difícil de ser resolvida explicitamente,porém podemos aplicar o Teorema 2.2 para prever o comportamento das soluçõespróximas desses dois pontos críticos.
Como g¿( x ) – sen x – cos x , g¿( /4) 0 e g¿(5 /4) 0. Logo, x /4 é um ponto crítico assintoticamente estável, mas x 5 /4 é instável. NaFigura 2.23, utilizamos um programa de cálculo numérico para investigar soluçõesque se iniciam próximas de (0, /4) e (0, 5 /4). Observe que as curvas solução quecomeçam próximas de (0, 5 /4) se afastam mais rapidamente da reta x 5 /4, con-forme previsto. ❑
EDs de primeiraordem autônomas
foram discutidas naSeção 2.1 do Volume 1.
y
x
3
–3 3
–3
Figura 2.22 Ponto crítico instável.
x
t
5 /4
/4
Figura 2.23 /4 é assintoticamenteestável; 5 /4 é instável.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 78/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 79/416
2.3 Linearização e Estabilidade Local 81
Exemplo 5 Análise de estabilidade de sistemas não lineares
Classifique (se possível) os pontos críticos de cada um dos seguintes sistemas autôno-mos planos como estável ou instável.
Solução Os pontos críticos de cada sistema foram determinados no Exemplo 4da Seção 2.1.
(a) Os pontos críticos são ( ,2) e ( ,2). A matriz Jacobiana é
então
Como o determinante de A1 é negativo, A1 tem um autovalor real positivo. Por-tanto, ( ,2) é um ponto crítico instável. A matriz A2 tem um determinantepositivo e um traço negativo, e assim ambos os autovalores têm partes reais nega-tivas. Segue-se que ( ,2) é um ponto crítico estável.
(b) Os pontos críticos são (0,0), (0,60), (100,0) e (50,50). A matriz Jacobiana é
então
Como a matriz A1 tem um determinante positivo e um traço positivo, ambos autovalorestêm partes reais positivas. Logo, (0,0) é um ponto crítico instável. Os determinantes dasmatrizes A2 e A3 são negativos, e assim, em cada caso, um dos autovalores é positivo.Portanto, tanto (0,60) como (100,0) são pontos críticos instáveis. Como a matriz A4 temum determinante positivo e um traço negativo, (50,50) é um ponto crítico estável. ❑
No Exemplo 5, não calculamos 2 4 (como na Seção 2.2) nem tentamos clas-sificar os pontos críticos como nós estáveis, pontos espirais estáveis, pontos de sela eassim por diante. Por exemplo, para X1 ( ,2) no Exemplo 4(a), 2 4 0,e se o sistema fosse linear, seríamos capazes de concluir que X1 era um ponto espiralestável. A Figura 2.24 mostra diversas curvas solução próximas de X1 que foram obti-das com um programa de cálculo numérico, sendo que cada solução parece se mover
em formato espiral em direção ao ponto crítico.
Classificando pontos críticos É natural perguntarmos se podemos inferir maisinformações geométricas a respeito das soluções próximas a um ponto crítico X1 deum sistema autônomo não linear a partir da análise do ponto crítico do sistema linearcorrespondente. A resposta está resumida na Figura 2.25. Entretanto, podemos desta-car os comentários a seguir:
(i) Em cinco casos separados (nó estável, ponto espiral estável, ponto espiralinstável, nó instável e ponto de sela), o ponto crítico pode ser categorizadocomo o ponto crítico no sistema linear correspondente. As soluções têm asmesmas características geométricas gerais das soluções do sistema linear,e quanto menor a vizinhança em torno de X1, mais próxima a semelhança.
y
x –2 –1
1
2
Figura 2.24 O ponto se comporta comoum ponto espiral estável.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 80/416
82 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
(ii) Se 2 4 e 0, o ponto crítico X1 é instável, porém nesse caso-limitenão somos ainda capazes de decidir se X1 é uma espiral instável, um nó
instável ou um nó instável degenerado. Do mesmo modo, se 2 4 e 0, o ponto crítico é estável, podendo ser ou uma espiral estável, ou um nóestável ou um nó estável degenerado.
(iii) Se 0 e 0, os autovalores de A g¿(X) são imaginários puros, e nessecaso-limite X1 pode ser ou um ponto espiral estável, ou uma espiral instávelou um centro. Portanto, ainda não é possível determinar se X1 é estável ou
instável.
Exemplo 6 Classificando pontos críticos de um sistema não linear
Classifique cada ponto crítico do sistema autônomo plano no Exemplo 5(b) como nóestável, ponto espiral estável, ponto espiral instável, nó instável ou ponto de sela.
Solução Para a matriz A1 correspondente a (0,0), 3, 4, e assim 2 4
4. Portanto, (0,0) é um nó instável. Os pontos críticos (0,60) e (100,0) são pontosde sela, pois 0 em ambos os casos. Para a matriz A4, 0, 0 e 2 4 0. Decorre então que (50,50) é um nó estável. Verifique essas conclusões por meio deum programa de cálculo numérico.
Exemplo 7 Análise de estabilidade para uma mola flexível
Recorde da Seção 3.10 do Volume 1 que a equação diferencial de segunda ordemmx – kx k 1 x
3 0, para k 0, representa um modelo geral para oscilações nãoamortecidas livres de uma massa m conectada a uma mola não linear. Se k 1 e k 1 1, a mola é chamada de flexível e o sistema autônomo plano que corresponde àequação diferencial de segunda ordem não linear x – x x
3 0 é
sela
nó estável
estável
espiral
estável
espiral
instável
instável
2
2
nó instável
?
?
?? ?
? ???
? ?
? ?
∆
= 4∆
– 4∆ < 0
Figura 2.25 Resumo geométrico.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 81/416
2.3 Linearização e Estabilidade Local 83
Obtenha e classifique (se possível) os pontos críticos.
Solução Como x 3 – x x ( x
2 – 1), os pontos críticos são (0,0), (1,0) e (1,0). Asmatrizes Jacobianas correspondentes são
Como det A2 0, os pontos críticos (1,0) e (1,0) são ambos pontos de sela. Os au-tovalores da matriz A1 são i, e, de acordo com o comentário (iii), permanecemos emdúvida quanto ao status do ponto crítico em (0,0). Ele pode ser ou uma espiral estável,ou uma espiral instável ou um centro.
O método do plano de fase O método da linearização, quando bem-sucedido,pode fornecer informações úteis a respeito do comportamento local de soluções pró-ximas aos pontos críticos. Ele é de pouca ajuda se estivermos interessados em solu-ções cuja posição inicial X(0) X0 não estiver próxima a um ponto crítico, ou sedesejarmos obter uma visão global da família de curvas solução. O método do plano
de fase se baseia no fato de que
e tenta obter y como uma função de x utilizando um dos métodos disponíveis pararesolver equações diferenciais de primeira ordem (Capítulo 2 do Volume 1). Con-forme mostraremos nos Exemplos 8 e 9, o método pode algumas vezes ser utilizadopara decidirmos se um ponto crítico tal como (0,0) no Exemplo 7 é um ponto espiralestável, uma espiral instável ou um centro.
Exemplo 8 Método do plano de fase
Use o método do plano de fase para classificar o ponto crítico único (0,0) do sistemaautônomo plano
Solução O determinante da matriz Jacobiana
é 0 em (0,0), e assim a natureza do ponto crítico (0,0) permanece incerta. Utilizando ométodo do plano de fase, obtemos a equação diferencial de primeira ordem
que pode ser facilmente resolvida por separação de variáveis:
Se X(0) (0, y0), segue-se que . A Figura 2.26 apre-senta um conjunto de curvas solução que correspondem a diversas escolhas para y0,tornando clara a natureza do ponto crítico. Não importa o quão próxima de (0,0) asolução se inicia, X(t ) se afasta da origem com o aumento de t . O ponto crítico em(0,0) é portanto instável.
Exemplo 9 Análise do plano de fase de uma mola flexível
Use o método do plano de fase para determinar a natureza das soluções de x – x – x 3
0 na vizinhança de (0,0).
–2
–2 2
y
x
2
Figura 2.26 Perfil de fase do sistemanão linear no Exemplo 8.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 82/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 83/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 84/416
86 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
mas que a linearização não nos dá informação útil arespeito da natureza desse ponto crítico.
(b) Use o método do plano de fase para mostrar que x 3 y
3 3cxy. Essa curva clássica é chamada fólio de Descar-
tes. Equações paramétricas para um fólio são
[Sugestão: A equação diferencial em x e y é homo-gênea.]
(c) Utilize uma ferramenta gráfica ou um programa decálculo numérico para obter curvas solução. Com baseem seu perfil de fase, você classificaria o ponto crítico
como estável ou instável? Você classificaria o ponto crí-tico como um nó, um ponto de sela ou um ponto espi-ral? Explique.
2.4 Sistemas autônomos como modelos matemáticos
Introdução Diversas aplicações da física resultam em equações diferenciais desegunda ordem autônomas não lineares – isto é, EDs da forma x – g( x , x ¿). Porexemplo, na análise do movimento amortecido livre de um sistema massa-mola naSeção 3.8 do Volume 1, consideramos que a força de amortecimento era proporcionalà velocidade x ¿ e o modelo resultante mx – x ¿ kx era uma equação diferenciallinear. Porém, se a magnitude da força de amortecimento for proporcional ao quadra-
do da velocidade, a nova equação diferencial mx – x
¿| x
¿| kx será não linear. Osistema autônomo plano correspondente é não linear:
Nessa seção, analisaremos também o pêndulo não linear, o movimento de uma partí-cula em uma curva, modelos predador-presa de Lotka-Volterra, e o modelo de com-petição de Lotka-Volterra. Modelos adicionais são apresentados nesses exercícios.
Pêndulo não linear Em (6) da Seção 3.10 do Volume 1 mostramos que o ângulode deslocamento para um pêndulo simples satisfaz a equação diferencial de segun-da ordem não linear
Quando adotamos x e y ¿, essa equação diferencial de segunda ordem podeser escrita como um sistema dinâmico
Os pontos críticos são ( k ,0) e a matriz Jacobiana é facilmente mostrada comosendo
Se k 2n 1, 0, e então todos os pontos críticos ( (2n 1) ,0) são pontosde sela. Em particular, o ponto crítico em ( ,0) é instável conforme esperado. Vejaa Figura 2.28. Quando k 2n, os autovalores são imaginários puros e assim a natu-reza desses pontos críticos permanece incerta. Como consideramos a inexistência de
(a)
(b) = , ¿ = 0
= 0, ¿ = 0
Figura 2.28 (0,0) é estável; ( ,0) éinstável.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 85/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 86/416
88 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
Se ignorarmos a força de atrito entre o fio e a partícula e considerarmos que nenhumaoutra força externa atue no sistema, segue-se da segunda lei de Newton que
e o sistema autônomo plano correspondente é
Se X1 ( x 1, y1) é um ponto crítico do sistema, y1 0 e portanto f ¿( x 1) 0. A partículatem que estar em repouso em um ponto no fio no qual a reta tangente é horizontal.Quando f for duplamente diferenciável, a matriz Jacobiana em X1 é
e assim e Utilizando os resul-
tados da Seção 2.3, podemos concluir o seguinte: (i) f –( x 1) 0:
Um máximo relativo ocorre em x x 1, e como 0, um ponto de sela
instável ocorre em X1 ( x 1,0).
(ii) f –( x 1) 0 e 0:
Um mínimo relativo ocorre em x x 1, e como 0 e 0, X1 ( x 1,0)é um ponto crítico estável. Se 2 4gm
2 f –( x 1), o sistema é sobreamor-
tecido e o ponto crítico é um nó estável. Se 2 4gm2 f –( x 1), o sistema é
subamortecido e o ponto crítico é um ponto espiral estável. A naturezaexata do ponto crítico estável é ainda incerta se 2 4gm
2 f –( x 1).
(iii) f –( x 1) 0 e o sistema é subamortecido ( 0):
Nesse caso, os autovalores são imaginários puros, mas o método do plano de
fase pode ser usado para mostrar que o ponto crítico é um centro. Portanto,soluções com X(0) ( x (0), x ¿(0)) próximas de X1 ( x 1,0) são periódicas.
Exemplo 2 Partícula deslizante ao longo de uma onda seno
Uma partícula de 10 gramas desliza ao longo da curva z sen x . De acordo com aconclusão (ii), o mínimo relativo em x 1 /2 e 3 /2 resulta em pontos críticosestáveis (veja a Figura 2.31). Como f –( /2) f –(3 /2) 1, o sistema será sobre-amortecido desde que 2 4gm2. Se utilizarmos unidades SI, m 0,01 kg e g 9,8m/s2, a condição para um sistema sobremortecido se torna 2 3,92 103.
Se 0,01 for a constante de amortecimento, ambos pontos críticos serão pon-tos espirais estáveis. As duas soluções que correspondem às condições iniciais X(0) ( x (0), x ¿(0)) (2 ,10) e X(0) (2 ,15), respectivamente, foram obtidas a
partir de um programa de cálculo numérico e estão indicadas na Figura 2.32. Quando x ¿(0) 10, a partícula tem momento suficiente pra transpor o aclive em x 3 /2,mas não para x /2. A partícula então se aproxima do mínimo relativo baseado em
x /2. Se x ¿(0) 15, a partícula tem o momento suficiente para transpor ambosos aclives. Porém, após isso, ela passa a subir e descer no vale baseado em x 3 /2e se aproxima do ponto (3 /2, 1) no fio. Experimente com outras condições iniciaisutilizando um programa de cálculo numérico.
A Figura 2.33 mostra um conjunto de curvas solução obtidas a partir de um pro-grama de cálculo numérico para o caso subamortecido. Como 0, os pontos críti-cos correspondem a x 1 /2 e 3 /2 são agora centros. Quando X(0) (2 ,10),a partícula tem momento suficiente para se mover sobre todos os aclives. A figuratambém indica que quando a partícula for liberada a partir do repouso em uma posi-ção no fio entre x 3 /2 e x /2, o movimento resultante será periódico. ❑
x
z
z = sen x
– /2 3 /2
–
Figura 2.31 /2 e 3 /2 são estáveis.
x
x
15
10
5
–5–
(–2 , 10)
(–2 , 15)
Figura 2.32 0,01.
x
–
5
10(–2 , 10)
x
Figura 2.33 0.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 87/416
2.4 Sistemas Autônomos Como Modelos Matemáticos 89
Modelo predador-presa de Lotka-Volterra Uma interação predador-presa entreduas espécies ocorre quando uma espécie (o predador) se alimenta de uma segundaespécie (a presa). Por exemplo, a coruja-das-neve se alimenta quase exclusivamentede um roedor ártico chamado lemingo, enquanto esse roedor utiliza as plantas das sa-vanas congeladas como suprimento de comida. O interesse em se utilizar a matemá-
tica para ajudar a explicar interações predador-presa foi estimulada pela observaçãode ciclos de população em muitos mamíferos do ártico. No distrito de MacKenzieno Canadá, por exemplo, a principal presa do lince é a lebre, e ambos os ciclos daspopulações têm aproximadamente 10 anos.
Existem diversos modelos predador-presa que resultam em sistemas autônomosplanos com ao menos uma solução periódica. O primeiro desses modelos foi cons-truído de modo independente pelos biomatemáticos pioneiros A. Lotka (1925) e V.Volterra (1926). Se x representa o número de predadores e y representa o número depresas, então o modelo de Lotka-Volterra adquire a forma
onde a, b, c e d são constantes positivas.
Note que na ausência de predadores ( x 0), y¿ dy, e logo o número de presascresce exponencialmente. Na ausência da presa, x ¿ ax , e assim a população de pre-dadores se extingue. O termo –cxy representa a taxa de morte em decorrência dos preda-dores. O modelo portanto considera que a taxa de mortes é diretamente proporcional aonúmero de encontros possíveis xy entre predador e presa em um tempo particular t , e otermo bxy representa a contribuição positiva resultante para a população de predadores.
Os pontos críticos desse sistema autônomo plano são (0,0) e (d/c, a/b), e as ma-trizes Jacobianas correspondentes são
O ponto crítico em (0,0) é um ponto de sela. A Figura 2.34 apresenta um perfiltípico de soluções que estão no primeiro quadrante e próximas de (0,0).
Como a matriz A2 tem autovalores imaginários puros o ponto crí-tico (d/c, a/b) pode ser um centro. Essa possibilidade pode ser investigada utilizando-se o método do plano de fase. Como
podemos separar variáveis e obter
de modo que
O argumento seguinte estabelece que todas as curvas solução que se originam noprimeiro quadrante são periódicas.
Gráficos típicos de funções não negativas sãoindicadas na Figura 2.35. Não é difícil mostrar que F ( x ) tem um máximo absolutoem x d/c, enquanto que G( y) tem um máximo absoluto em y a/b. Note que, coma exceção de 0 e do máximo absoluto, F e G assumem todos os valores na sua faixaprecisamente duas vezes.
Esses gráficos podem ser utilizados para estabelecer as seguintes propriedadesde uma curva solução que se origina em um ponto não crítico ( x 0, y0) no primeiroquadrante.
1. Se y a / b, a equação F ( x )G( y) c0 tem exatamente duas soluções x m e x M que satisfazem x m d / c x M .
y
x
predadores
p r e s a s
Figura 2.34 Soluções próximas de(0,0).

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 88/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 89/416
2.4 Sistemas Autônomos Como Modelos Matemáticos 91
Esse sistema autônomo plano tem pontos críticos em (0,0), (K 1,0) e (0,K 2). Quan-do 1221 0, as retas K 1 – x – a12 y 0 e K 2 – y – a21 x 0 se interceptam para pro-duzir um quarto ponto crítico . A Figura 2.38 indica as duas condições sobas quais está no primeiro quadrante.
O traço e o determinante da matriz Jacobiana em são, respectivamente,
No caso (a), K 1 / 12 K 2 e K 2 / 21 K 1. Segue-se que 1221 1, 0 e 0.Como
2 4 0 e assim é um nó estável. Portanto, se X(0) X0 estiver suficien-
temente próximo de , limt→ X(t ) , e podemos concluir que a coexis-
tência é possível. A demonstração de que o caso (b) resulta em um ponto de sela ea investigação da natureza dos pontos críticos em (0,0), (K 1,0) e (0,K 2) são deixadascomo exercício.
Quando as interações competitivas entre duas espécies forem fracas, ambosos coeficientes 12 e 21 serão pequenos, e assim as condições K 1 / 12 K 2 e K 2 / 21 K 1 podem ser satisfeitas. Isso poderia ocorrer quando houvesse uma pequenasobreposição nas escalas de duas espécies de predadores que caçam uma presa emcomum.
Exemplo 4 Um modelo de competição de Lotka-VolterraUma interação competitiva é descrita pelo modelo de competição de Lotka-Volterra
Determine e classifique todos os pontos críticos do sistema.
Solução Os pontos críticos existem em (0,0), (50,0), (0,100) e na solução (20,40)do sistema
Como 12
21
2,25 1, temos o caso (b) na Figura 2.38, e assim o ponto crítico em(20,40) é um ponto de sela. A matriz Jacobiana é
e obtemos
y
x 21
12
ˆ ˆ
21 12 < 1(a)
y
12
21
x
21 12 > 1(b)
K 2
K 2
K 1 /
K 1 /
K 2 /
K 2 /
( x , y)
ˆ ˆ( x , y)
K 1
K 1
Figura 2.38 Duas condições com pon-tos críticos no primeiro quadrante.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 90/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 91/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 92/416
94 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
2.5 Soluções periódicas, ciclos limites e estabilidadeglobal
Introdução Nessa seção, investigaremos a existência de soluções periódicas para
sistemas autônomos planos e introduziremos soluções periódicas especiais denomi-
nadas ciclos limites.
Vimos nas Seções 2.3 e 2.4 que uma análise de pontos críticos utilizando linea-
rização pode fornecer informações valiosas a respeito de soluções próximas a pontos
críticos e percepções em relação a uma variedade de fenômenos biológicos e físicos.
Existem, entretanto, algumas limitações inerentes a essa abordagem. Quando os auto-
valores da matriz Jacobiana forem imaginários puros, não podemos concluir se exis-
tem soluções periódicas próximas ao ponto crítico. Em alguns casos, fomos capazes
de resolver dy / dx Q( x , y)/ P( x , y), obter uma representação implícita f ( x , y) c das
curvas solução, e investigar se alguma dessas soluções formavam curvas fechadas.
Antes de mais nada, essa equação diferencial não terá soluções na forma fechada.
Por exemplo, o modelo de competição de Lotka-Volterra não pode ser trabalhado
por esse procedimento. O primeiro objetivo dessa seção é determinar condições sob
as quais possamos excluir a possibilidade de soluções periódicas ou garantir a sua
existência.Encontramos um problema adicional ao estudar os modelos da Seção 2.3. A Figu-
ra 2.39 ilustra a situação comum na qual uma região R contém um único ponto crítico
assintoticamente estável X1. Podemos afirmar que limt → X(t ) X1 quando a posição
inicial X(0) X0 está “próxima” de X1, mas sob qual condição temos limt → X(t ) X1
para todas as posições iniciais em R? Tal ponto crítico é chamado globalmente estável
em R. Um segundo objetivo é determinar condições sob as quais um ponto crítico as-
sintoticamente estável é globalmente estável.
Para motivar e discutir os métodos nessa seção, utilizaremos o fato de que o cam-
po vetorial V( x , y) (P( x , y),Q( x , y)) pode ser interpretado como definindo um fluxo
de fluido em uma região do plano. Além disso, uma solução do sistema autônomo
pode ser interpretada como o caminho resultante de uma partícula que se move pela
região.
Critério negativo Uma quantidade de resultados pode algumas vezes ser utili-
zada para estabelecer a não existência de soluções periódicas em uma dada região
R do plano. Consideraremos que P( x , y) e Q( x , y) tenham derivadas parciais primeira
contínuas em R e que R seja simplesmente conexa. Recorde que em uma região sim-
plesmente conexa, qualquer curva simples fechada C em R engloba somente pontos
em R. Portanto, se existir uma solução periódica X X(t ) em R, então R conterá
todos os pontos no interior da curva resultante.
Ciclos e pontos críticosSe um sistema autônomo plano tiver uma solução periódica X X(t ) em uma
região simplesmente conexa R, então o sistema tem ao menos um ponto crítico
no interior da curva simples fechada correspondente C . Se existir um único pontocrítico no interior de C , então esse ponto crítico não pode ser um ponto de sela.
TEOREMA 2.4
Se uma região simplesmente conexa R não contiver nenhum ponto crítico de um
sistema autônomo plano ou contiver um único ponto de sela, então não existirão
soluções periódicas em R.
COROLÁRIO
R
?
X1
X0
Figura 2.39 Para qualquer X0 em R , X se aproxima de X1 quando t→?

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 93/416
2.5 Soluções Periódicas, Ciclos Limites e Estabilidade Global 95
Exemplo 1 Nenhuma solução periódica
Mostre que o sistema autônomo plano
não tem soluções periódicas.
Solução Se ( x , y) for um ponto crítico, então, a partir da primeira equação, x 0ou y 0. Se x 0, então –1 – y
2 0 ou y2 1. De modo semelhante, y 0 im-
plica x 2 1. Portanto, esse sistema autônomo plano não tem pontos críticos e, pelo
corolário, não possui soluções periódicas no plano.
Exemplo 2 Modelo de competição de Lotka-Volterra
Mostre que o modelo de competição de Lotka-Volterra
não tem soluções periódicas no primeiro quadrante.
Solução No Exemplo 4 da Seção 2.4, mostramos que esse sistema tem pontoscríticos em (0,0), (50,0), (0,100) e (20,40), e que (20,40) é um ponto de sela. Comosomente (20,40) se situa no primeiro quadrante, pelo corolário não existem soluçõesperiódicas no primeiro quadrante. ❑
Outro resultado algumas vezes útil pode ser formulado em termos do divergentedo campo vetorial V( x , y) (P( x , y),Q( x , y)):
Critério negativo de Bendixson
Se div V
P / x
Q / y não muda o sinal em uma região simplesmente conexa R, então o sistema autônomo plano não tem soluções periódicas em R.
TEOREMA 2.5
Demonstração Suponha, ao contrário, que existe uma solução periódica X X(t )situada em R, e considere C como sendo a curva simples fechada resultante e R1 aregião limitada por C . O teorema de Green afirma que
sempre que M ( x , y) e N ( x , y) tiverem derivadas parciais primeira contínuas em R. Seadotarmos N P e M Q, obtemos
Como X X(t ) é uma solução com período p, temos x ¿(t ) P( x (t ), y(t )) e y¿(t ) Q( x (t ), y(t )), e assim

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 94/416
96 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
Como div V P / x Q / y é contínuo e não muda o sinal em R, segue-se que divV 0 em R ou div V 0 em R. Assim
❑
Essa contradição estabelece a não existência de soluções periódicas em R.
Exemplo 3 Critério negativo de Bendixson
Investigue possíveis soluções periódicas para cada sistema
Solução
(a) Temos div V P / x Q / y 1 12 x 2 2 x
2 3 y2 3, e assim nãoexistem soluções periódicas no plano.
(b) Para esse sistema, div V (2 – 3 x 2 – y
2) (2 – x 2 – 3 y2) 4 – 4( x
2 y2). Portan-
to, se R estiver no interior do círculo x 2 y
2 1, div V 0, e logo não existemsoluções periódicas dentro do disco. Note que div V 0 no exterior do círculo.Se R for qualquer subconjunto simplesmente conexo do exterior, então não exis-tem soluções periódicas em R. Decorre que se existir uma solução periódica noexterior, ela tem que englobar o círculo x
2 y2 1. De fato, o leitor pode verifi-
car que X(t ) ( sen t , cos t) é uma solução periódica que gera o círculo x 2
y2 2. ❑
Exemplo 4 Partícula deslizante e soluções periódicas
A partícula deslizante discutida na Seção 2.4 satisfaz a equação diferencial
Mostre que não existem soluções periódicas.
Solução O sistema autônomo plano correspondente é
e assim ❑
O teorema apresentado a seguir é uma generalização do critério negativo de Ben-dixson, sendo deixado para o leitor construir uma função apropriada ( x , y).
Critério negativo de DulacSe ( x , y) tiver derivadas parciais primeira contínuas em uma região simplesmente
conexa R e não mudar de sinal em R, então o sistema autônomo
plano não tem soluções periódicas em R.
TEOREMA 2.6

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 95/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 96/416
98 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
A Figura 2.40 apresenta dois tipos padrões de regiões invariantes. Uma região R
invariante de Tipo I é limitada por uma curva fechada simples C , e o fluxo no con-torno definido pelo campo vetorial V( x , y) (P( x , y),Q( x , y)) está sempre direcionadopara dentro da região. Isso previne uma partícula de cruzar o contorno. Uma região
invariante de Tipo II é uma região anular limitada pelas curvas simples fechadas C 1
e C 2, sendo que o fluxo no contorno está novamente direcionado em direção ao inte-rior de R. O teorema a seguir fornece um método para verificar se uma determinadaregião é invariante.
Vetores normais e regiõesinvariantes
Se n( x , y) representa um vetor normal no contorno apontando para o interior daregião, então R será uma região invariante para o sistema autônomo plano desdeque V( x , y) · n( x , y) 0 para todos os pontos ( x , y) no contorno.
TEOREMA 2.7
Demonstração Se for o ângulo entre V( x , y) e n( x , y), então, a partir de V· n ||V||
||n|| cos , podemos concluir que cos 0 e logo está entre 0o
e 90o
. O fluxo estáportanto direcionado para o interior da região (ou no mínimo ao longo do contorno).Isso previne que uma solução que se inicie em R deixe R. Portanto, R é uma regiãoinvariante para o sistema autônomo plano. ❑
O problema de se obter uma região invariante para um determinado sistema nãolinear é extremamente difícil. Um excelente primeiro passo consiste em utilizar umprograma que trace o campo vetorial V( x , y) (P( x , y),Q( x , y)) em conjunto com ascurvas P( x , y) 0 (ao longo das quais os vetores são verticais) e Q( x , y) 0 (aolongo das quais os vetores são horizontais). Isso pode resultar em escolhas para R.Nos exemplos que se seguem, construiremos regiões invariantes limitadas por retase círculos. Em casos mais complicados, nos contentaremos com oferecer evidênciasempíricas a respeito da existência de uma região invariante.
Exemplo 7 Região invariante circular
Determine uma região circular com centro em (0,0) que sirva como uma região inva-riante para o sistema autônomo plano
Solução Para o círculo x 2 y
2 r 2, n (2 x , 2 y) é um vetor normal que
aponta em direção ao interior do círculo. Como
podemos concluir que V· n 0 no círculo x 2 y
2 r 2. Portanto, pelo Teorema 2.7, a
região circular definida por x 2 y2 r 2 serve como uma região invariante do sistemapara qualquer r 0. ❑
Exemplo 8 Região invariante anular
Determine uma região anular limitada pelos círculos que servem como uma regiãoinvariante para o sistema autônomo plano

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 97/416
2.5 Soluções Periódicas, Ciclos Limites e Estabilidade Global 99
Solução Como no Exemplo 7, o vetor normal n1 (2 x , 2 y) aponta para ointerior do círculo x
2 y2 r
2, enquanto o vetor normal n2 n1 está direcionadoem direção ao exterior. Calculando V· n e simplificando, obtemos
Note que r 2 – 5r 4 r 2(1 – 5r 2) admite valores positivos e negativos.Se pois o valor máximo de x
6 y6 no cír-
culo x 2 y
2 1 é 1. O fluxo está portanto direcionado em direção à região circular
x 2 y
2 1.Se e assim V· n2 V· n1 0. O fluxo está
portanto direcionado em direção ao exterior do círculo e logo a regiãoanular R definida por é uma região invariante para o sistema. ❑
Exemplo 9 A equação de Van der Pol
A equação de Van der Pol é uma equação diferencial de segunda ordem não linearutilizada em eletrônica. Como um sistema autônomo plano, admite a forma
A Figura 2.41 mostra o campo vetorial correspondente para 1, junto com ascurvas y 0 e ( x
2 – 1) y x ao longo das quais os vetores são verticais e hori-zontais, respectivamente. (Por questão de conveniência, esboçamos o campo vetorialnormalizado V /||V||.) Não é possível determinar uma região invariante simples cujoscontornos são constituídos por retas ou círculos. A figura oferece evidência empíricade que uma região invariante R, com (0,0) em seu interior, existe. A demonstraçãomatemática desse fato exige o uso de métodos avançados.* ❑
A seguir apresentamos dois casos especiais importantes do teorema de Poincaré-Bendixson que garante a existência de soluções periódicas.
Poincaré-Bendixson ISeja R uma região invariante para um sistema autônomo plano, e considere que
R não tenha pontos críticos em seu contorno.
(a) Se R for uma região do Tipo I que tenha um único nó instável ou ponto es-piral instável em seu interior, então existe ao menos uma solução periódicaem R.
(b) Se R for uma região do Tipo II que não contenha pontos críticos do siste-ma, então existe ao menos uma solução periódica em R.
Em qualquer um dos dois casos, se X X(t ) for uma solução não periódica em R, então X(t ) gira em formato espiral em direção a um ciclo que é uma soluçãopara o sistema. Essa solução periódica é denominada ciclo limite.
TEOREMA 2.8
A interpretação de fluxo destacada na Figura 2.40 pode ser aplicada para tornaro resultado plausível. Se uma partícula for liberada em um ponto X0 em uma região R invariante do Tipo II, então, sem escapar da região e sem pontos de repouso, a partí-cula começará a girar em torno do contorno C 2, definindo uma órbita periódica. Nãoé possível para a partícula retornar para uma posição anterior a menos que a própriasolução seja periódica.
* Veja M. Hirsh e S. Smale, Differential Equations, Dynamical Systems, and Linear Algebra (NewYork: Academic Press, 1974).
–2 2
x
y
–2
2
P < 0, Q < 0P < 0, Q > 0
P > 0, Q < 0P > 0, Q > 0
Figura 2.41 Campo vetorial para aequação de Van der Pol.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 98/416
100 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
Exemplo 10 Existência de uma solução periódica
Utilize o Teorema 2.8 para mostrar que o sistema
tem ao menos uma solução periódica.
Solução Primeiro construímos uma região invariante que seja limitada por cír-culos. Se n1 (2 x , 2 y), então V· n1 –2r
2(1 – r 2). Se adotarmos r 2 e depois
r podemos concluir que a região anular R definida por é in-variante. Se ( x 1, y1) for um ponto crítico do sistema, então V· n1 (0,0) · n1 0.Portanto, r 0 ou r 1. Se r 0, então ( x 1, y1) (0,0) é um ponto crítico. Se r 1,o sistema se reduz para –2 y 0, 2 x 0, e chegamos a uma contradição. Logo, (0,0)é o único ponto crítico, sendo que esse ponto crítico não está em R. Pelo item (b) doTeorema 2.8, o sistema tem ao menos uma solução periódica em R.
O leitor pode verificar que X(t ) (cos 2t , sen 2t ) é uma solução periódica. ❑
Exemplo 11 Ciclo limite na equação de Van der Pol Mostre que a equação diferencial de Van der Pol
tem uma solução periódica quando 0.
Solução Consideraremos que exista uma região R invariante do Tipo I para o sis-tema autônomo plano correspondente e que essa região contém (0,0) em seu interior(veja o Exemplo 9 e a Figura 2.41). O único ponto crítico é (0,0), e a matriz Jacobianaé dada por
Assim, . Como 0, o ponto crítico é um pontoespiral instável ou um nó instável. Pelo item (i) do Teorema 2.8, o sistema tem ao me-nos uma solução periódica em R. A Figura 2.42 apresenta soluções correspondentesa X(0) (0,5, 0,5) e X(0) (3,3) para 1. Cada uma dessas soluções gira emformato espiral em torno da origem e se aproxima de um ciclo limite. Pode-se mos-trar que a equação diferencial de Van der Pol tem um único ciclo limite para todos osvalores do parâmetro . ❑
Estabilidade global Outra versão do teorema de Poicaré-Bendixson pode ser uti-lizada para mostrar que um ponto crítico localmente estável é globalmente estável:
Poicaré-Bendixson II
Seja R uma região invariante de Tipo I para um sistema autônomo plano que não tenha soluções periódicas em R.
(a) Se R tiver um número finito de nós ou pontos espirais, então, dada qualquerposição inicial X0 em R, limt → X(t ) X1 para algum ponto crítico X1.
(b) Se R tiver um único nó estável ou ponto espiral estável X1 em seu interiore nenhum ponto crítico em seu contorno, então limt →
X(t ) X1 para todaposição inicial X0 em R.
TEOREMA 2.9
No Teorema 2.9, a partícula não pode escapar de R, não pode retornar para qual-quer das suas posições anteriores e, portanto, na ausência de ciclos, tem que ser atra-ída para algum ponto crítico estável X1.
y
x
3
–3 3
–3
(3, 3)
(0,5, 0,5)
Figura 2.42 Duas soluções da equaçãode Van der Pol se aproximam do mesmociclo limite.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 99/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 100/416
102 CAPÍTULO 2 Sistemas de Equações Diferenciais Não Lineares
11. Mostre que o sistema autônomo plano
não tem soluções periódicas em uma região elíptica em tor-no da origem.
12. Se g/ x ¿ 0 em uma região R, prove que x – g( x , x ¿) nãotem soluções periódicas em R.
13. Mostre que o modelo predador-presa
apresentado no Problema 20 dos Exercícios 2.4 não tem so-luções periódicas no primeiro quadrante.
Nos Problemas 14 e 15, determine uma região invariante circular
para o sistema autônomo plano indicado. 14. 15.
16. Verifique que a região limitada pela curva fechada x 6 3 y2
1 é uma região invariante para a equação diferencial nãolinear de segunda ordem x – x ¿ – ( x ¿)3 – x
5. Veja a Figura2.44.
y
x
0,5–0,5
x 6 + 3 y2 = 1
Figura 2.44 Região invariante no Problema 16.
17. O sistema autônomo plano no Exemplo 8 tem apenas umponto crítico. Podemos concluir que esse sistema tem aomenos uma solução periódica?
18. Use o teorema de Poicaré-Bendixson para mostrar que aequação diferencial não linear de segunda ordem
tem ao menos uma solução periódica. [Sugestão: Determineuma região anular invariante para o sistema autônomo planocorrespondente.]
19. Seja X X(t ) a solução do sistema autônomo plano
que satisfaz X(0) ( x 0
, y0
). Mostre que se x 0
2 y0
2 1, en-tão limt →
X(t ) (0,0). [Sugestão: Selecione r 1 com x 02
y02 r
2 e mostre primeiro que a região circular R definidapor x
2 y2 r
2 é uma região invariante.]
20. Investigue a estabilidade global para o sistema
21. Evidências empíricas sugerem que o sistema autônomoplano
tem uma região invariante R do Tipo I que se situa no inte-rior do retângulo 0 x 2, 0 y 1.
(a) Utilize o critério negativo de Bendixson para mostrarque não existem soluções periódicas em R.
(b) Se X0 estiver em R e X X(t ) for a solução que satisfazX(t ) X0, use o Teorema 2.9 para obter limt →
X(t ).
22. (a) Determine e classifique todos os pontos críticos do sis-tema autônomo plano
(b) A Figura 2.45 mostra o campo vetorial V /||V|| e ofereceevidência empírica de que existe uma região invariante
R no primeiro quadrante com um ponto crítico em seuinterior. Considerando que tal região exista, prove quehá ao menos uma solução periódica.
y
x
(2, 6)
2
2
4
6
y¿ = 0
x ¿ = 0
Figura 2.45 Campo vetorial para o Problema 22.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 101/416
Exercícios de Revisão 103
CAPÍTULO 2 EXERCÍCIOS DE REVISÃO As respostas de problemas ímpares selecionados estão na página 391.
Responda os Problemas 1-10 sem consultar o texto. Preencha osespaços ou responda verdadeiro/falso.
1. A equação diferencial de segunda ordem x – f ( x ¿) g( x ) 0 pode ser escrita como um sistema autônomo plano._____
2. Se X X(t ) for uma solução de um sistema autônomo pla-no e X(t 1) X(t 2) para t 1 t 2, então X(t ) é uma soluçãoperiódica. _____
3. Se o traço da matriz A for 0 e det A 0, então o ponto crí-tico (0,0) do sistema linear X¿ AX pode ser classificadocomo _____.
4. Se o ponto crítico (0,0) do sistema linear X¿ AX for umponto espiral estável, então os autovalores de A são _____.
5. Se o ponto crítico (0,0) do sistema linear X¿ AX for um
ponto de sela e X X(t ) for uma solução, então limt→ X(t )não existe. _____
6. Se a matriz Jacobiana A g¿(X1) em um ponto crítico deum sistema autônomo plano tem traço e determinante posi-tivos, então o ponto crítico X1 é instável. _____
7. É possível demonstrar que um sistema autônomo planonão linear tem soluções periódicas utilizando linearização._____
8. Todas as soluções da equação do pêndulo
são periódicas. _____
9. Se uma região simplesmente conexa R não contiver pontoscríticos de um sistema autônomo plano, então não existem
soluções periódicas em R. _____ 10. Se um sistema autônomo plano não tiver pontos críticos em
uma região invariante anular, então existe ao menos uma so-lução periódica em R. _____
11. Resolva o seguinte sistema autônomo plano não linear trans-formando-o em coordenadas polares, e descreva o compor-tamento geométrico da solução que satisfaz a condição ini-cial indicada.
12. Discuta a natureza geométrica das soluções do sistema li-
near X¿ AX dada a solução geral.
(a)
(b)
13. Classifique o ponto crítico (0,0) do sistema linear indicadocalculando o traço e o determinante .
(a) (b)
14. Determine e classifique (se possível) os pontos críticos dosistema autônomo plano
O sistema tem alguma solução periódica no primeiro qua-drante?
15. Classifique o ponto crítico (0,0) do sistema autônomo planoque corresponde à equação diferencial de segunda ordemnão linear
onde é uma constante real.
16. Sem resolver explicitamente, classifique (se possível) os
pontos críticos da equação diferencial de primeira ordemautônoma como assintoticamente está-vel ou instável.
17. Utilize o método do plano de fase para mostrar que as solu-ções da equação diferencial de segunda ordem não linear
que satisfazem x (0) x 0 e x ¿(0) 0 são periódicas.
18. Na Seção 3.8 do Volume 1, consideramos que a força derestauração F da mola satisfez a lei de Hooke F ks, onde s é o alongamento da mola e k é uma constante de proporcio-nalidade positiva. Se substituirmos essa consideração pelalei não linear F ks
3, então a nova equação diferencial parao movimento amortecido se escreve mx – x ¿ k (s
x 3) mg, onde ks
3 mg. O sistema é denominado sobre-amortecido quando (0,0) for um nó estável, e é chamadosubamortecido quando (0,0) for um ponto espiral estável.Determine novas condições para m, k e que resultarão emsobreamortecimento e subamortecimento.
19. Mostre que o sistema autônomo plano
não tem soluções periódicas.
20. Use o teorema de Poicaré-Bendixson para mostrar que o sis-
tema autônomo plano
tem ao menos uma solução periódica quando 0. O queocorre quando 0?
21. A haste de um pêndulo está conectada a uma articula-ção móvel no ponto P e gira a uma velocidade angular (radianos/s) no plano perpendicular à haste (veja a Figura2.46). Como resultado, o bulbo do pêndulo sofre uma força

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 102/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 103/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 104/416
106 CAPÍTULO 3 Funções Ortogonais e Séries de Fourier
3.1 Funções ortogonais
Introdução Em determinadas áreas da matemática avançada, uma função é con-siderada como sendo uma generalização de um vetor. Nessa seção, veremos como osdois conceitos vetoriais de produto interno, ou escalar, e ortogonalidades de vetores
podem ser estendidas para as funções. O restante do capítulo é uma aplicação práticadessa discussão.
Produto interno Recordando, se u u1i u2 j u3k e v v1i v2 j v3k fo-rem dois vetores em R
3 ou tridimensionais, então o produto interno ou produto escalarde u e v é um número real (ou escalar) definido como a soma dos produtos das suascomponentes correspondentes:
O produto interno (u,v) possui as seguintes propriedades:
(i)
(ii)(iii)
(iv)
Qualquer generalização do produto interno tem essas mesmas propriedades.Suponha que f 1 e f 2 sejam funções definidas em um intervalo [a,b].* Como uma
integral definida no intervalo do produto f 1( x ) f 2( x ) possui as propriedades (i)-(iv) do
produto interno de vetores, sempre que a integral existir a seguinte definição é válida.
Produto interno de funçõesO produto interno de duas funções f 1 e f 2 em um intervalo [a,b] é o número
DEFINIÇÃO 3.1
Funções ortogonais Motivados pelo fato de que dois vetores u e v são ortogonaissempre que o produto interno deles for nulo, definimos as funções ortogonais deuma maneira similar.
Funções ortogonaisDuas funções f 1 e f 2 são ditas ser ortogonais em um intervalo [a,b] se
(1)
DEFINIÇÃO 3.2
Por exemplo, as funções f 1( x ) x 2 e f 2( x ) x
3 são ortogonais no intervalo [1,1]pois
* O intervalo poderia também ser (, ), [0,), e assim por diante.
No Capítulo 1do Volume 2, o
produto interno foirepresentado por u. v.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 105/416
3.1 Funções Ortogonais 107
Ao contrário da análise vetorial, onde a palavra ortogonal é um sinônimo para per-
pendicular , no contexto presente o termo ortogonal e a condição (1) não têm signifi-cado geométrico.
Conjuntos ortogonais Estamos inicialmente interessados em conjuntos infinitos
de funções ortogonais.
Conjunto ortogonal Um conjunto de funções reais {0( x ), 1( x ), 2( x ),... } é dito ser ortogonal em umintervalo [a,b] se
(2)
DEFINIÇÃO 3.3
Conjuntos ortonormais A norma, ou comprimento ||u||, de um vetor u pode serescrita em termos do produto interno. A expressão (u,u) ||u||2 é denominada como
norma quadrada, sendo que a norma é De modo similar, a norma
quadrada de uma função n é e assim a norma, ou o seu compri-
mento generalizado, é Em outras palavras, a norma quadrada ea norma de uma função n em um conjunto ortogonal {n( x )} são, respectivamente,
(3)
Se {n( x )} for um conjunto ortogonal de funções no intervalo [a,b] com a proprie-dade de que ||n( x )|| 1 para n 0, 1, 2,..., então {n( x )} é dito ser um conjunto
ortonormal no intervalo.
Exemplo 1 Conjunto ortogonal de funções
Mostre que o conjunto {1, cos x , cos 2 x ,…} é ortogonal no intervalo [ , ].Solução Se identificarmos 0( x ) 1 en( x ) cos nx , precisamos então mostrar
que e Temos, no primei-ro caso,
e no segundo,
Exemplo 2 Normas
Determine as normas de cada função no conjunto ortogonal indicado no Exemplo 1.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 106/416
108 CAPÍTULO 3 Funções Ortogonais e Séries de Fourier
Solução Para 0( x ) 1, temos a partir de (3)
de modo que Para n( x )
cos nx , n
0, segue-se que
Portanto, para ❑
Qualquer conjunto ortogonal de funções não nulas {n( x )}, n 0,1,2,..., pode sernormalizado – isto é, ser transformado em um conjunto ortonormal – dividindo-secada função por sua norma. Decorre dos Exemplos 1 e 2 que o conjunto
é ortonormal no intervalo [ , ].
Analogia com vetores Faremos mais uma analogia entre vetores e funções. Supo-
nha v1, v2 e v3 como sendo três vetores não nulos mutuamente ortogonais em três di-
mensões. Tal conjunto ortogonal pode ser utilizado como uma base em três dimensões;
isto é, qualquer vetor tridimensional pode ser escrito como uma combinação linear
(4)
onde ci, i 1,2,3, são escalares chamados de componentes do vetor. Cada componen-te ci pode ser escrita em termos de u e o vetor correspondente vi. Para vermos isso,calculamos o produto interno de (4) com v1:
Logo,
De modo similar, temos que as componentes c2 e c3 são dadas por
Portanto, (4) pode ser expressa como
(5)
Expansão em séries ortogonais Considere {n( x )} como sendo um conjunto or-togonal infinito de funções em um intervalo [a,b]. Perguntamos: se y f ( x ) for uma
função definida no intervalo [a,b], é possível determinar um conjunto de coeficientescn, n 0, 1, 2,..., para o qual
(6)
Como na discussão anterior para se obter as componentes de um vetor, podemos de-terminar os coeficientes cn utilizando o produto interno. Multiplicando (6) por m( x )e integrando no intervalo [a,b], obtemos
Um conjuntoortogonal pode ser
transformado em umconjunto ortonormal.
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 107/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 108/416
110 CAPÍTULO 3 Funções Ortogonais e Séries de Fourier
Observações
Suponha que { f 0( x ), f 1( x ), f 2( x ),...} seja um conjunto infinito de funções reais contínuasem um intervalo [a,b]. Se esse conjunto for linearmente independente em [a,b] (veja
a página 57 do Volume 2 para a definição de um conjunto linearmente independenteinfinito), então ele pode ser transformado em um conjunto ortogonal e, conformedescrito anteriormente nessa seção, pode ser escrito como um conjunto ortonormal.Veja o Problema 22 nos Exercícios 3.1.
EXERCÍCIOS 3.1 As respostas de problemas ímpares selecionados estão na página 391.
Nos Problemas 1-6, mostre que as funções apresentadas são or-togonais no intervalo indicado.
1.
2.
3.
4.
5.
6.
Nos Problemas 7-12, mostre que o conjunto de funções apresen-tado é ortogonal no intervalo indicado. Determine a norma decada função no conjunto.
7.
8.
9.
10.
11.
12.
Nos Problemas 13 e 14, verifique por integração direta que asfunções são ortogonais em relação à função de peso indicada nointervalo dado.
13.
14.
15. Seja {n( x )} um conjunto ortogonal de funções em [a,b] demodo que 0( x ) 1. Mostre que para n 1,2,....
16. Seja {n( x )} um conjunto ortogonal de funções em[a,b] de modo que 0( x ) 1 e 1( x ) x . Mostre que
para n 2, 3,... e quaisquer cons-tantes e .
17. Seja {n( x )} um conjunto ortogonal de funções em [a,b].Mostre que
18. A partir do Problema 1, sabemos que f 1( x ) x e f 2( x ) x 2
são ortogonais em [2,2]. Determine as constantes c1 e c2 de modo que f 3( x ) x c1 x
2 c2 x 3 seja ortogonal tanto
para f 1 como para f 2 no mesmo intervalo.
19. O conjunto de funções {sen nx }, n 1, 2,3,..., é ortogonalno intervalo [ , ]. Mostre que o conjunto não é com-pleto.
20. Considere f 1, f 2 e f 3 como sendo funções contínuas no inter-valo [a,b]. Mostre que ( f 1 f 2, f 3) ( f 1, f 3) ( f 2, f 3).
21. Uma função f real é dita ser periódica com período T se f ( x T ) f ( x ). Por exemplo, 4 é um período de sen x poissen( x 4 ) sen x . O menor valor de T para o qual f ( x T ) f ( x ) se aplica é denominado período fundamental de
f . Por exemplo, o período fundamental de f ( x ) sen x é T 2 . Qual é o período fundamental de cada uma das seguin-tes funções?
(a)
(b)
(c)
(d)
(e)
(f)
An e Bn dependendo somente de n
22. O processo de Gram-Schmidt para a construção de umconjunto ortogonal discutido na Seção 1.7 do Volume 2se aplica a um conjunto linearmente independente { f 0( x ),
f 1( x ), f 2( x ),...} de funções reais contínuas em um intervalo
[a,b]. Com o produto interno de-fina as funções no conjunto B¿ {0( x ), 1( x ), 2( x ),...}como sendo
e assim por diante.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 109/416
3.2 Séries de Fourier 111
3.2 Séries de Fourier
Introdução Vimos na seção anterior que se {0( x ), 1( x ), 2( x ),...} for um con- junto de funções reais que seja ortogonal em um intervalo [a,b] e se f for uma funçãodefinida no mesmo intervalo, então podemos expandir formalmente f em uma sérieortogonal c00( x ) c11( x ) c22( x ) .... Nessa seção, expandiremos funções emtermos de um conjunto ortogonal especial de funções trigonométricas.
Série trigonométrica No Problema 12 nos Exercícios 3.1, tivemos que demons-trar que o conjunto de funções trigonométricas
(1)
era ortogonal no intervalo [ p, p]. Esse conjunto terá importância especial mais adian-te na solução de determinados tipos de problemas de valor de contorno envolvendoequações diferenciais parciais lineares. Em tais aplicações, precisaremos expandiruma função f definida em [ p, p] em uma série ortogonal constituída por funçõestrigonométricas em (1), isto é,
(2)
Os coeficientes a0, a1, a2,..., b1, b2,..., podem ser determinados exatamente do mesmomodo da discussão geral da expansões em séries ortogonais nas páginas 108 e 109.Antes de procedermos, note que escolhemos escrever o coeficientes de 1 no conjunto(1) como a0 /2 em vez de a0; trata-se de uma questão de conveniência pois assim afórmula de an se reduz em a0 para n 0.
Integrando agora ambos os lados de (2) de – p a p, obtemos
(3)
Como cos(n x / p) e sen(n x / p), n 1, são ortogonais em relação a 1 no intervalo, o
lado direito de (3) se reduz a um único termo:
Resolver em relação a a0 resulta em
(4)
É por isso quea0 /2 é utilizado
em vez de a0.
(a) Escreva 3( x ) no conjunto.
(b) Por construção, o conjunto B¿ {0( x ), 1( x ), 2( x ),...}é ortogonal em [a,b]. Demonstre que 0( x ), 1( x ) e2( x ) são mutuamente ortogonais.
Problemas para discussão 23. (a) Considere o conjunto de funções {1, x , x
2, x
3,...} definido
no intervalo [1,1]. Aplique o processo de Gram-Sch-
midt indicado no Problema 22 a esse conjunto e determi-
ne 0( x ), 1( x ), 2( x ) e 3( x ) do conjunto ortogonal B¿.
(b) Discuta: você reconhece o conjunto ortogonal?
24. Verifique que o produto interno ( f 1, f 2) na Definição 3.1 satis-
faz as propriedades (i)-(iv) dadas na página 106. 25. Em R
3, dê um exemplo de um conjunto de vetores ortogo-nais que não seja completo. Defina um conjunto de vetoresortogonais que seja completo.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 110/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 111/416
3.2 Séries de Fourier 113
Exemplo 1 Expansão em uma série de Fourier
Expanda
(12)
em uma série de Fourier.
Solução O gráfico de f está indicado na Figura 3.1. Com p , temos a partirde (9) e (10) que
De modo similar, temos a partir de (11) que
Portanto
(13) ❑
Note que an definido por (10) se reduz para a0 definido por (9) quando adotamosn 0. Porém, conforme mostrado no Exemplo 1, esse pode não ser o caso após ocálculo da integral em relação a an.
Convergência de uma série de Fourier O teorema a seguir indica as condiçõessuficientes para a convergência de uma série de Fourier em um ponto.
Condições para convergênciaConsidere f e f ¿ contínuas por partes no intervalo ( p, p); isto é, admita que f e f ¿ sejam contínuas exceto em um número finito de pontos no intervalo e que tenham,nesses pontos, somente descontinuidades finitas. Assim, a série de Fourier de f
no intervalo converge para f ( x ) em um ponto de continuidade. Em um ponto dedescontinuidade, a série de Fourier converge para a média
onde f ( x ) e f ( x ) representam os limites de f em x a partir da direita e a partir daesquerda, respectivamente.*
TEOREMA 3.1
y
x
−
Figura 3.1 Função f no Exemplo 1.
* Em outras palavras, para x sendo um ponto no intervalo e h 0,

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 112/416
114 CAPÍTULO 3 Funções Ortogonais e Séries de Fourier
Para verificar a prova desse teorema, recomenda-se o texto clássico de Churchill eBrown.*
Exemplo 2 Convergência de um ponto de descontinuidade
A função (12) no Exemplo 1 satisfaz as condições do Teorema 3.1. Logo, para todo xno intervalo ( , ), exceto em x 0, a série (13) convergirá para f ( x ). Em x 0, afunção é descontínua, e assim a série (13) convergirá para
❑
Extensão periódica Observe que cada uma das funções no conjunto básico (1)tem um período fundamental diferente,** ou seja, 2 p / n, n 1. Porém, como um inteiropositivo múltiplo de um período é também um período, vemos que todas as funçõestêm em comum o período 2 p (verifique). Portanto, o lado direito de (2) é periódicoem 2 p; de fato, 2 p é o período fundamental da soma. Concluímos que uma série deFourier não apenas representa a função no intervalo ( p, p), mas também informa a
extensão periódica de f fora do intervalo. Podemos agora aplicar o Teorema 3.1 paraa extensão periódica de f , ou podemos considerar a princípio que a função dada é pe-riódica com período T 2 p; isto é, f ( x T ) f ( x ). Quando f for contínua por partese as derivadas à direita e à esquerda existirem em x p e x p, respectivamente, asérie (8) convergirá para a média [ f ( p) f ( p)]/2 nesses pontos finais e para essevalor estendido periodicamente para 3 p, 5 p, 7 p, e assim por diante. A série deFourier em (13) converge para a extensão periódica de (12) em todo o eixo x . Em 0, 2 , 4 ,..., e em , 3 , 5 ,..., a série converge para os valores
respectivamente. Os pontos sólidos na Figura 3.2 representam o valor /2.
–2 –3 –4 2 3 4
x
y
–
Figura 3.2 Extensão periódica da função f indicada na Figura 3.1.
Sequência de somas parciais É interessante vermos como a sequência de somasparciais {S N ( x )}de uma série de Fourier aproxima uma função. Por exemplo, as pri-meiras três somas parciais de (13) são
Na Figura 3.3, utilizamos um SAC para traçar o gráfico das somas parciais S 5( x ),S 8( x ) e S 15( x ) de (13) no intervalo ( , ). A Figura 3.3(d) mostra a extensão periódi-ca usando S 15( x ) em (4 ,4 ).
* Ruel V. Churchill e James Ward Brown, Fourier Series and Boundary Value Problems (New York:McGraw-Hill, 2000).
** Veja o Problema 21 nos Exercícios 3.1.
Podemos considerarque a função f dada
seja periódica.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 113/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 114/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 115/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 116/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 117/416
3.3 Séries de Fourier do Co-Seno e do Seno 119
A extensão periódica de f no Exemplo 2 em todo o eixo x é uma função sinuosa(veja a página 239 do Volume 1).
Expansão em meia escala Por toda a discussão anterior, considerou-se que umafunção f estivesse definida em um intervalo com a origem como sendo o ponto cen-
tral, isto é, p x p. Entretanto, em diversas aplicações estaremos interessadosem representar uma função definida somente para 0 x L por uma série trigono-métrica. Isso pode ser feito de muitas maneiras diferentes fornecendo-se uma defini-
ção arbitrária da função no intervalo – L x 0. Para abreviar, consideraremos ostrês casos mais importantes. Se y f ( x ) for definida no intervalo 0 x L,
(i) reflita o gráfico da função em relação ao eixo y em – L x 0; a função éagora par em – L x L (veja a Figura 3.10); ou
(ii) reflita o gráfico da função em relação à origem em – L x 0; a função éagora ímpar em – L x L (veja a Figura 3.11); ou
(iii) defina f em – L x 0 por f ( x ) f ( x L) (veja a Figura 3.12).
Note que os coeficientes da série (1) e (4) utilizam apenas a definição da função
em 0 x p (isto é, metade do intervalo – p x p). Portanto, na prática não existe
necessidade de adotarmos a reflexão descrita em (i) e (ii). Se f estiver definida em 0
x L, simplesmente identificamos a metade do período como o comprimento do
intervalo p L. As fórmulas dos coeficientes (2), (3) e (5) e a série correspondente
determinam uma extensão periódica par ou ímpar de período 2 L da função original. As
séries de co-seno e seno obtidas desse modo são conhecidas como expansões em meia
escala. Por último, no caso (iii), estamos definindo valores funcionais no intervalo – L
x 0 como sendo os mesmos valores em 0 x L. Como nos dois casos anterio-
res, não há necessidade real de se fazer isso. Pode-se mostrar que o conjunto de funções
em (1) da Seção 3.2 é ortogonal em a x a 2 p para qualquer número real a. Es-
colhendo a p, obtemos os limites de integração em (9), (10) e (11) daquela seção.
Porém, para a 0 os limites de integração são de x 0 para x 2 p. Assim, se f for
definida no intervalo 0 x L, identificamos 2 p L ou p L /2. A série de Fourier
resultante dará a extensão periódica de f com período L. Dessa maneira, os valores para
os quais a série converge serão os mesmos em – L x 0 e 0 x L.
Exemplo 3 Expansão em três séries
Expanda f ( x ) x 2, 0 x L, (a) em uma série de co-senos, (b) em uma série de
senos, (c) em uma série de Fourier.
Solução O gráfico da função está ilustrado na Figura 3.13.
(a) Temos
onde foi aplicada integração por partes duas vezes no cálculo de an.
Assim
(8)
(b) Nesse caso, temos novamente que integrar por partes duas vezes:
Logo (9)
(c) Com p L /2, 1/ p 2 L e n / p 2n / L, temos
y
x L– L
Figura 3.10 Reflexão par.
y
x L
– L
Figura 3.11 Reflexão ímpar.
x L
y
f ( x ) = f ( x + L)
– L
Figura 3.12 Reflexão identidade.
y
x
L
y = x 2, 0 < x < L
Figura 3.13 Função f no Exemplo 3.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 118/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 119/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 120/416
122 CAPÍTULO 3 Funções Ortogonais e Séries de Fourier
31.
32.
33. 34.
Nos Problemas 35-38, expanda a função dada em uma série deFourier.
35. 36.
37. 38.
Nos Problemas 39 e 40, proceda como no Exemplo 4 para deter-minar uma solução particular x p(t ) da equação 11 quando m 1, k 10 e a força de excitação f (t ) seja como a indicada. Con-sidere que quando f (t ) seja estendida ao eixo t negativo de umamaneira periódica, a função resultante seja ímpar.
39.
40.
Nos Problemas 41 e 42, proceda como no Exemplo 4 para deter-minar uma solução particular x p(t ) da equação 11 quandok 12 e a força de excitação f (t ) seja como a indicada. Considereque quando f (t ) seja estendida ao eixo t negativo de uma maneiraperiódica, a função resultante seja par.
41.
42.
43. (a) Resolva a equação diferencial no Problema 39, x – 10 x
f (t ), sujeita às condições iniciais x (0) 0 e x ¿(0) 0.
(b) Utilize um SAC para traçar o gráfico da solução x (t ) noitem (a).
44. (a) Resolva a equação diferencial no Problema 41,sujeita às condições iniciais x (0)
1 e x ¿(0) 0.
(b) Utilize um SAC para traçar o gráfico da solução x (t ) noitem (a).
45. Suponha que uma viga uniforme de comprimento L estejasimplesmente apoiada em x 0 e em x L. Se a carga porunidade de comprimento for dada por w( x ) w0 x / L, 0 x
L, então a equação diferencial para a deflexão y( x ) é
onde E , I e w0 são constantes. (Veja (4) na Seção 3.9 do Vo-lume 1).
(a) Expanda w( x ) em uma série de senos em meia escala.
(b) Utilize o método do Exemplo 4 para determinar umasolução particular y( x ) da equação diferencial.
46. Proceda como no Exemplo 45 para obter uma solução par-ticular y( x ) quando a carga por unidade de comprimento forrepresentada pelo gráfico da Figura 3.16.
L /3 2 L /3 L
x
w( x )
w0
Figura 3.16 Gráfico para o Problema 46.
Tarefas computacionaisNos Problemas 47 e 48, utilize um SAC para traçar o gráfico das
somas parciais {S N ( x )} da série trigonométrica indicada. Experi-mente valores diferentes de N e use diferentes intervalos do eixo
x . Com base nesses gráficos, apresente uma expressão em formafechada para uma função f definida para 0 x L que seja re-presentada pela série.
47.
48.
Problemas para discussão 49. A resposta do Problema 47 ou do Problema 48 é única? In-
dique uma função f definida em um intervalo simétrico emtorno da origem –a x a que tenha a mesma série trigo-nométrica do Problema 47; e do Problema 48.
50. Discuta por que a expansão em série de Fourier dos co-senosde f ( x ) e x , 0 x , converge para e
x no intervalo x 0.
51. Suponha que f ( x ) e x , 0 x seja primeiro expandidaem uma série de co-senos e depois seja expandida em umasérie de senos. Se as duas séries forem somadas e a seguirdivididas por 2 (isto é, a média das duas séries), obteremos
uma série com co-senos e senos que também representa f ( x ) e x no intervalo 0 x . Trata-se de uma sériecompleta de Fourier em f ? [Sugestão: O que a média dasséries do co-seno e do seno representam no intervalo x 0?]
52. Prove as propriedades (a), (c), (d), (f) e (g) no Teorema 3.2.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 121/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 122/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 123/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 124/416
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 125/416
3.5 Problema de Sturm-Liouville 127
3.5 Problema de Sturm-Liouville
Revisão Por conveniência, apresentamos aqui uma breve revisão de algumasequações diferenciais ordinárias que serão de grande importância nas próximas se-ções e capítulos.
Em relação às duas formas da solução geral de utilizaremos no futuroa seguinte regra informal: use a forma exponencial quando o do-
mínio de x for um intervalo infinito ou semi-infinito; use a forma hiperbólica y c1 cosh x c2 senh x quando o domínio de x for um intervalo finito.
Autovalores e autofunções Funções ortogonais surgem na solução de equaçõesdiferenciais. Além disso, um conjunto de funções ortogonais pode ser gerado ao re-solver-se um problema de valor de contorno de dois pontos envolvendo uma equaçãodiferencial de segunda ordem linear que contenha um parâmetro . No Exemplo 2 daSeção 3.9 do Volume 1, vimos que o problema de valor de contorno
(1)
possuía soluções não triviais somente quando o parâmetro era tomado nos valores n n2
2 / L2, n 1, 2, 3,... chamados autovalores. As soluções não triviais corres-
pondentes y c2 sen(n x / L) ou simplesmente y sen(n x / L) são denominadas deautofunções do problema. Por exemplo, para (1) temos:
Essa regra será útilnos Capítulos 4-5.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 126/416
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 127/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 128/416
130 CAPÍTULO 3 Funções Ortogonais e Séries de Fourier
Exemplo 2 Um problema de Sturm-Liouville regular
Resolva o problema de valor de contorno
(10)
Solução Você deve verificar que para 0 e para 2 0, onde 0, o
PVC em (10) possui apenas a solução trivial y 0. Para 2 0, 0, a soluçãogeral da equação diferencial y– 2
y 0 é y c1 cos x c2 sen x . Agora a con-dição y(0) 0 implica c1 0 nessa solução, e assim temos y c2 sen x . A segundacondição de contorno y(1) y¿(1) 0 é satisfeita se
Escolhendo c2 0, vemos que a última equação é equivalente a
(11)
Se adotarmos x em (11), então a Figura 3.20 mostra a plausibilidade de que lá
exista um número infinito de raízes da equação tg x
x , ou seja, as coordenadas x dos pontos nos quais o gráfico de y x intercepta os ramos do gráfico de y tg
x . Os autovalores do problema (10) são então onde n 1, 2, 3,..., são asraízes positivas consecutivas 1, 2, 3,..., de (11). Com o auxílio de um SAC é fácilmostrar que, arredondando-se em quatro casas decimais, 1 2,0288, 2 4,9132,3 7,9787, y3 sen 7,9787 x e y4 sen 11,0855 x . Em geral, as autofunções doproblema são {sen n x }, n 1, 2, 3,....
y
x
y = tg x
y = – x
x 1 x 2 x 3 x 4
Figura 3.20 Raízes positivas de tg x x .
Com as identificações evemos que (10) é um problema de Sturm-Liouville regular. Logo, {sen n x }, n 1,2, 3,... é um conjunto ortogonal em relação à função de peso p( x ) 1 no intervalo[0,1]. ❑
Em algumas circunstâncias, podemos provar a ortogonalidade das soluçõesde (3) sem a necessidade de especificar uma condição de contorno em x a e em
x b.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 129/416
3.5 Problema de Sturm-Liouville 131
Problema de Sturm-Liouville singular Existem diversas outras condições impor-tantes sob as quais buscamos soluções não triviais da equação diferencial (3):
r • (a) 0 e uma condição de contorno do tipo indicado em (5) é especificadaem x b; (12)
r •
(b)
0 e uma condição de contorno do tipo indicado em (4) é especificadaem x a; (13)r • (a) r (b) 0 e nenhuma condição de contorno é especificada em x a ouem x b; (14)r • (a) r (b) e condições de contorno y(a) y(b), y¿(a) y¿(b). (15)
A equação diferencial (3) junto com uma das condições (12)-(13) é dita ser um pro-blema de valor de contorno singular. A equação (3) com as condições especificadasem (15) é um problema de valor de contorno periódico (as condições de contornosão também periódicas). Observe que se, por exemplo, r (a) 0, então x a pode ser um ponto singular da equação diferencial, e consequentemente uma solução de(3) pode se tornar ilimitada quando x → a. Entretanto, vemos de (8) que se r (a) 0, então nenhuma condição de contorno é necessária em x a para provar a ortogo-nalidade das autofunções desde que essas soluções sejam limitadas naquele ponto.
Essa última exigência garante a existência das integrais envolvidas. Assumindo quea solução de (3) seja limitada no intervalo fechado [a,b], podemos ver a partir dainspeção de (8) que:
se• r (a) 0, então a relação de ortogonalidade (9) se aplicasem nenhuma condição de contorno em x a; (16)se• r (b) 0, então a relação de ortogonalidade (9) se aplicasem nenhuma condição de contorno em x b;* (17)se• r (a) r (b) 0, então a relação de ortogonalidade (9) se aplicasem nenhuma condição de contorno em x a ou em x b; (18)se• r (a) r (b), então a relação de ortogonalidade (9) se aplica comas condições de contorno periódicas y(a) y(b), y¿(a) y¿(b). (19)
Forma adjunta própria
Se realizarmos a diferenciação a equaçãodiferencial em (3) é a mesma que
(20)
Por exemplo, a equação diferencial de Legendre (1 – x 2) y– 2 xy¿ n(n 1) y 0
é exatamente da forma indicada em (20) com r ( x ) 1 – x 2 e r ¿( x ) 2 x . Em outras
palavras, outra forma de escrever a ED de Legendre é
(21)
Porém, se comparássemos outras EDs de segunda ordem (por exemplo, equação deBessel, equações de Cauchy-Euler, e EDs com coeficientes constantes), você pode-ria crer que, dado que o coeficiente de y¿ é a derivada dos coeficientes de y–, poucas
outras EDs de segunda ordem têm a forma indicada em (3). Ao contrário, se os coe-ficientes forem contínuos e a( x ) 0 para todo x em algum intervalo, então qualquer equação diferencial de segunda ordem
(22)
pode ser rearranjada na chamada forma adjunta própria (3). Para ver isso, procede-mos como na Seção 2.3 do Volume 1, onde reescrevemos uma equação de primeira
* As condições (16) e (17) são equivalentes a escolher A1 0, B1 0 em (4), e A2 0, B2 0 em(5), respectivamente.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 130/416
132 CAPÍTULO 3 Funções Ortogonais e Séries de Fourier
ordem linear a1( x ) y¿ a0( x ) y 0 na forma , dividindo a equação por
a1( x ) e multiplicando a seguir pelo fator integrante , onde, considerando
a inexistência de fatores comuns, P( x ) a0( x )/ a1( x ). Assim, dividimos primeiro (22)
por a( x ). Os primeiros dois termos são então , onde, para enfati-
zar, escrevemos Y y ¿. Depois, multiplicamos essa equação pelo fator integrante
onde considera-se que a( x ) e b( x )não tenham fatores comuns
Para concluir, dividindo (22) por a( x ) e então multiplicando por , obtemos
(23)
A equação (23) é a forma desejada indicada em (20), sendo igual a (3):
Por exemplo, para escrever 3 y– 6 y¿ y 0 na forma adjunta própria, escrevemos y– 2 y¿ 1/3
y 0 e a seguir multiplicamos por A equação resultante é
Certamente não é necessário colocar uma equação diferencial de segunda ordem(22) na forma adjunta própria (3) para resolver a ED. Para os nossos propósitos,utilizamos a forma indicada em (3) para determinar a função de peso p( x ) necessáriana relação de ortogonalidade (9). Os próximos dois exemplos ilustram as relações deortogonalidade para as funções de Bessel e para os polinômios de Legendre.
Exemplo 3 Equação de Bessel paramétrica
Na Seção 5.3 do Volume 1, vimos que a solução geral da equação diferen-cial de Bessel paramétrica é
Após dividirmos a equação de Bessel paramétrica pelocoeficiente principal x
2 e multiplicarmos a equação resultante pelo fator integrante
obtemos a forma adjunta própria
onde identificamos r ( x ) x , q( x ) n2 / x , p( x ) x e 2. Agora r (0) 0, e das
duas soluções J n( x ) e Y n( x ) apenas J n( x ) é limitada em x 0. Assim, em vista de(16), o conjunto { J n(i x )}, i 1, 2, 3,..., é ortogonal em relação à função de peso p( x ) x no intervalo [0,b]. A relação de ortogonalidade é
(24)
Observe.
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 131/416
3.5 Problema de Sturm-Liouville 133
desde que i, e portanto os autovalores sejam definidos pormeio de uma condição de contorno em x b do tipo apresentado em (5):
* (25) ❑
Para qualquer escolha de A2 e B2, ambos não sendo nulos, sabe-se que (25) tem
um número infinito de raízes x i ib. Os autovalores são entãoMais informações a respeito dos autovalores serão dadas no próximo capítulo.
Exemplo 4 Equação de Legendre
A partir do resultado indicado em (21), podemos identificar q( x ) 0, p( x ) 1 e n(n 1). Recorde da Seção 5.3 do Volume 1 que quando n 0, 1, 2,... a ED deLegendre tem soluções polinomiais Pn( x ). Agora podemos adicionar a informação deque r (1) r (1) 0 ao fato de que os polinômios de Legendre Pn( x ) são as únicassoluções de (21) que são limitadas no intervalo fechado [1,1], para concluir a partirde (18) que o conjunto {Pn( x )}, n 0, 1, 2,..., é ortogonal em relação à função depeso p( x ) 1 em [1,1]. A relação de ortogonalidade é
Observações
(i) Um problema de Sturm-Liouville é também considerado como sendo singularquando o intervalo em consideração é infinito. Veja os Problemas 11 e 12 nos Exer-cícios 3.5.(ii) Mesmo quando as condições nos coeficientes p, q, r e r ¿ são como as consideradasno problema de Sturm-Liouville regular, se as condições de contorno forem periódi-cas, então a propriedade (b) do Teorema 3.3 não se aplica. Você mostrará no Proble-ma 4 dos Exercícios 3.5 que correspondendo a cada autovalor do PVC
existem duas autofunções linearmente independentes.
* O fator extra de em (25) vem da regra da cadeia:
EXERCÍCIOS 3.5 As respostas de problemas ímpares selecionados estão na página 392.
Nos Problemas 1 e 2, determine as autofunções e a equação quedefine os autovalores para o problema de valor de contorno indi-cado. Utilize um SAC para aproximar os primeiros quatro auto-valores 1, 2, 3 e 4. Defina as autofunções que correspondema essas aproximações.
1.
2.
3. Considere y–
y
0 sujeita a y¿
(0)
0, y¿
( L)
0. Mostreque as autofunções são
Esse conjunto, que é ortogonal em [0, L], é a base para a série deFourier de co-senos.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 132/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 133/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 134/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 135/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 136/416
138 CAPÍTULO 3 Funções Ortogonais e Séries de Fourier
Você calculará os primeiros quatro valores de i para a série de Bessel anterior noProblema 1 dos Exercícios 3.6.
Exemplo 2 Expansão em uma série de Fourier-Bessel
Se os i no Exemplo 1 forem definidos por então a únicacoisa que se modifica na expansão será o valor da norma quadrada. Multiplicando a
condição de contorno por 3, temos que agora corresponde
a (10) quando h 3, b 3 e n 1. Logo, (18) e (17) resultam, respectivamente, em
❑
Uso de computadores Como as funções de Bessel são “funções embutidas” em um
SAC, a determinação de valores aproximados dos i e dos coeficientes ci em uma série
de Fourier-Bessel é uma tarefa simples. Por exemplo, em (9) podemos imaginar x i
ib como uma raiz positiva da equação Assim, no Exemplo 2, uti-
lizamos um SAC para obter as primeiras cinco raízes positivas x i de
e a partir dessas raízes obtemos os primeiros cinco autovalores de i: 1 x 1 /3
0,98320, 2 x 2 /3 1,94704, 3 x 3 /3 2,95758, 4 x 4 /3 3,98538 e 5 x 5 /3
5,02078. Conhecendo as raízes x i 3i e os i, novamente utilizamos um SAC para
calcular os valores numéricos de J 2(3i), e finalmente os coeficientes ci. Dessa
maneira, obtemos a quinta soma parcial S 5( x ) para a representação de f ( x ) = x em série
de Fourier-Bessel, 0 x 3 no Exemplo 2 como sendo
O gráfico de S 5( x ) no intervalo 0 x 3 está indicado na Figura 3.21(a). Na Figura
3.21(b), traçamos S 10( x ) no intervalo 0 x 50. Observe que fora do intervalo de defi-nição 0 x 3 a série não converge para uma extensão periódica de f porque as funções
de Bessel não são funções periódicas. Veja os Problemas 11 e 12 nos Exercícios 3.6.
3.6.2 Série de Fourier-Legendre
A partir do Exemplo 4 da Seção 3.5, sabemos que o conjunto de polinômios de Le-gendre {Pn( x )}, n 0, 1, 2,..., é ortogonal em relação à função de peso p( x ) 1 nointervalo [1, 1]. Além disso, pode-se provar que a norma quadrada de um polinômioPn( x ) depende de n da seguinte maneira:
A expansão em séries ortogonais de uma função em termos dos polinômios de Legen-dre é resumida na próxima definição.
Série de Fourier-LegendreA série de Fourier-Legendre de uma função f definida no intervalo (1, 1) édada por
(21)
onde
(22)
DEFINIÇÃO 3.9
2,5
x
y
2
1,5
1
0,5
00 0,5 1 1,5 2 2,5 3
3
x
y
2
1
0
–1
0 10 50403020
(a) S 5( x ), 0 < x < 3
(b) S 10( x ), 0 < x < 50
Figura 3.21 Somas parciais de umasérie de Fourier-Bessel.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 137/416
3.6 Séries de Bessel e Legendre 139
Convergência de uma série de Fourier-Legendre Condições suficientes paraa convergência de uma série de Fourier-Legendre são apresentadas no próximoteorema.
Condições para a convergênciaSe f e f ¿ forem contínuas por partes em (1, 1), então a série de Fourier-Legendre(21) converge para f ( x ) em um ponto de continuidade e para a média [ f ( x )
f ( x )]/2 em um ponto de descontinuidade.
TEOREMA 3.5
Exemplo 3 Expansão em uma série de Fourier-Legendre
Escreva os primeiros quatro termos não nulos da expansão de Fourier-Legendre de
Solução Os primeiros polinômios de Legendre estão listados na página 282 doVolume 1. A partir deles e de (22), temos
Portanto,
❑
Como as funções de Bessel, os polinômios de Legendre são funções já progra-madas em sistemas de álgebra computacional tais como o Maple e o Mathematica,e assim cada um dos coeficientes listados anteriormente pode ser calculado com a
aplicação de integração de tais programas. De fato, utilizando um SAC, também ob-temos c6 0 e A quinta soma parcial da representação de f em série deFourier-Legendre definida no Exemplo 3 é então
O gráfico de S 5( x ) no intervalo –1 x 1 está representado na Figura 3.22.
Formas alternativas de séries Em aplicações, a série de Fourier-Legendre apa-rece de uma forma alternativa. Se considerarmos x cos , então x 1 implica 0, enquanto que x 1 implica . Como dx sen d , (21) e (22) se tornam,respectivamente,
0,8
1
0,6
0,4
0,2
0
y
x
–1 –0,5 0,50 1
Figura 3.22 Soma parcial de uma sériede Fourier-Legendre.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 138/416
140 CAPÍTULO 3 Funções Ortogonais e Séries de Fourier
(23)
(24)
onde f (cos ) foi substituída por F ().
EXERCÍCIOS 3.6 As respostas de problemas ímpares selecionados estão na página 393.
3.6.1 Série de Fourier-Bessel
Nos Problemas 1 e 2, utilize a Tabela 5.1 da Seção 5.3 do Volume1.
1. Determine os primeiros quatro i 0 definidos por J 1(3) 0.
2. Determine os primeiros quatro i
0 definidos por
Nos Problemas 3-6, expanda f ( x ) 1, 0 x 2, em uma sériede Fourier-Bessel utilizando funções de Bessel de ordem zeroque satisfazem as condições de contorno indicadas.
3. 4.
5. 6.
Nos Problemas 7-10, expanda f ( x ) 1, 0 x 2, em uma sériede Fourier-Bessel utilizando funções de Bessel da mesma ordemcomo indicado na condição de contorno.
7. 8.
9. 10.
Tarefas computacionais 11. (a) Utilize um SAC para traçar o gráfico
em um intervalo de modo que os primeiros cinco pontospositivos que interceptam o eixo x do gráfico sejam in-dicados.
(b) Utilize a ferramenta de determinação de raiz do seuSAC para aproximar as primeiras cinco raízes x i daequação
(c) Use os dados obtidos no item (b) para calcular os pri-meiros cinco valores positivos de i que satisfazem
(Veja o Problema 7.)
(d) Determine os primeiros dez valores positivos dei.
12. (a) Utilize os valores de i no item (c) do Problema 11 e um
SAC para aproximar os valores dos primeiros cinco coefi-
cientes ci da série de Fourier-Bessel obtida no Problema 7.
(b) Use um SAC para traçar o gráfico das somas parciaisS N ( x ), N 1, 2, 3, 4, 5 da série de Fourier-Bessel noProblema 7.
(c) Se requerido, trace o gráfico da soma parcial S 10( x ) em0 x 4 e em 0 x 50.
Problemas para discussão 13. Se as somas parciais no Problema 12 forem traçadas em um
intervalo simétrico como –30 x 30, os gráficos terão
alguma simetria? Explique. 14. (a) Esboce, à mão, um gráfico no qual você imagina que a
série de Fourier-Bessel no Problema 3 seja convergenteno intervalo –2 x 2.
(b) Esboce, à mão, um gráfico no qual você imagina que asérie de Fourier-Bessel no Problema 3 convergiria nointervalo –4 x 4 se os valores i no Problema 7fossem definidos por 3 J 2(4) 4 J 2¿(4) 0.
3.6.2 Série de Fourier-Legendre
Nos Problemas 15 e 16, escreva os primeiros cinco termos nãonulos na expansão de Fourier-Legendre da função indicada. Uti-lize um SAC como auxílio para o cálculo dos coeficientes. Use
um SAC para traçar o gráfico da soma parcial S 5( x ).
15.
16.
17. Os primeiros três polinômios de Legendre são P0( x ) 1, P1( x ) x e Se x cos, entãoP0(cos) 1 e P1(cos) cos. Mostre que P2(cos)
18. Use os resultados do Problema 17 para obter uma expansãoFourier-Legendre (23) de
19. Um polinômio de Legendre Pn( x ) é uma função par ou ím-par dependendo se n for par ou ímpar. Mostre que se f for
uma função par em (
1,1), então (21) e (22) se tornam, res-pectivamente,
(25)
(26)
20. Mostre que se f for uma função ímpar em (1,1), então (21)e (22) se tornam, respectivamente
(27)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 139/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 140/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 141/416
4.1 Equações Diferenciais Parciais Separáveis 143
4.1 Equações diferenciais parciais separáveis
Revisão Equações diferenciais parciais (EDPs), como as equações diferenciaisordinárias (EDOs), são classificadas como lineares ou não lineares. De forma aná-loga à EDO linear (veja (6) da Seção 1.1 do Volume 1), a variável dependente e as
suas derivadas parciais aparecem somente elevadas à primeira potência em uma EDPlinear. Nesse e nos próximos capítulos, estaremos interessados apenas em equaçõesdiferenciais parciais lineares.
Equação diferencial parcial linear Se considerarmos u representando a variáveldependente e x e y como as variáveis independentes, então a forma geral de umaequação diferencial parcial de segunda ordem linear é indicada por
(1)
onde os coeficientes A, B, C ,..., G são constantes ou funções de x e y. Quando G( x , y) 0, a equação (1) é dita ser homogênea; de outro modo, ela é não homogênea. Porexemplo, as equações lineares
são homogêneas e não homogêneas, respectivamente.
Solução de uma EDP Uma solução de uma equação diferencial parcial linear (1)é uma função u( x , y) de duas variáveis independentes que possui todas as derivadasparciais ocorrendo na equação e satisfaz a equação em alguma região do plano xy.
Não é nossa intenção examinar procedimentos para obter soluções gerais de umaequação diferencial parcial linear. A obtenção de uma solução geral de uma EDP li-near de segunda ordem não apenas é difícil como também muitas vezes uma soluçãogeral nem sempre é útil em aplicações. Portanto, nosso foco estará em obter soluções
particulares de algumas importantes EDPs lineares, isto é, equações que aparecem
em diversas aplicações.
Separação de variáveis Apesar de existirem diversos métodos que podem serutilizados para a obtenção de soluções particulares de uma EDP linear, no método da
separação de variáveis buscamos determinar uma solução particular da forma de um produto entre uma função x e uma função y,
Adotando essa consideração, em alguns casos é possível reduzir uma EDP linear emduas variáveis a duas EDOs. Com esse intuito, observamos que
onde o apóstrofo representa uma diferenciação ordinária.
Exemplo 1 Utilizando separação de variáveis
Determine soluções produto de
Solução Substituindo u( x , y) X ( x )Y ( y) na equação diferencial parcial, obtemos
Estamos interessadosapenas em soluções
particulares de EDPs.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 142/416
144 CAPÍTULO 4 Problemas de Valor de Contorno em Coordenadas Retangulares
Após dividir ambos os lados por 4 XY , separamos as variáveis:
Como o lado esquerdo da última equação é independente de y e é igual ao lado di-
reito, que é independente de x , concluímos que ambos os lados da equação são in-dependentes de x e de y. Em outras palavras, cada lado da equação tem que ser umaconstante. Por praticidade, é conveniente escrevermos essa constante de separação real como . A partir das duas igualdades
obtemos as duas equações diferenciais ordinárias lineares
(2)
Para os três casos de : zero, negativa ou positiva; isto é, 0, 2 0 e
2 0, onde 0, as EDOs, em (2) são, respectivamente,
(3)
(4)
(5)
Caso I ( 0): As EDs em (3) podem ser resolvidas por integração. As solu-ções são . Assim, uma solução produto particularda EDP indicada é
(6)
onde substituímos c1c3 e c2c3 por A1 e B1, respectivamente.
Caso II ( 2): As soluções gerais das ED em (4) são
respectivamente. Logo, outra solução produto particular daEDP é
ou (7)
onde A2 c4c6 e B2 c5c6.
Caso III ( 2): Finalmente, as soluções gerais das EDs em (5) são
respectivamente. Esses resultados geram outra solução parti-cular
(8)
onde A3 c7c9 e B3 c8c9. ❑
Deixa-se como exercício verificar que (6), (7) e (8) satisfazem a equação diferen-cial parcial dada u xx 4u y. Veja o Problema 29 nos Exercícios 4.1.
Veja o Exemplo 2,Seção 3.9 do Volume
1 e o Exemplo 1, Seção3.5 deste Volume.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 143/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 144/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 145/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 146/416
148 CAPÍTULO 4 Problemas de Valor de Contorno em Coordenadas Retangulares
Apesar de termos que adotar muitas simplificações, é importante vermos comoequações tais como (1) e (2) surgem.
Suponha que uma haste circular fina de comprimento L tendo uma área A daseção transversal coincida com o eixo x no intervalo [0, L]. Veja a Figura 4.1. Vamosconsiderar que:
O fluxo de calor no interior da haste ocorre somente na direção• x .A superfície lateral da haste é isolada; isto é, nenhum calor escapa a partir•
dessa superfície.Nenhum calor é gerado no interior da haste.•
A haste é homogênea; isto é, a sua massa por unidade de volume (• ) é umaconstante.O calor específico• e a condutividade térmica K do material da haste sãoconstantes.
Para obter a equação diferencial parcial que satisfaz a temperatura u( x ,t ), preci-samos de duas leis empíricas de condução de calor:
(i) A quantidade de calor Q em um elemento de massa m é
(4)
onde u é a temperatura do elemento.
(ii) A taxa de fluxo de calor Qt através da seção transversal indicada na Figu-
ra 4.1 é proporcional à área A da seção transversal e à derivada parcial
em relação a x da temperatura:
(5)
Como o calor flui na direção de decréscimo de temperatura, o sinal de menos em (5) éutilizado para garantir que Qt seja positivo para u x 0 (fluxo de calor para a direita) enegativo para u x 0 (fluxo de calor para a esquerda). Se a fatia circular da haste mos-trada na Figura 4.1 entre x e x x for muito fina, então u( x ,t ) pode ser tomada comoa temperatura aproximada em cada ponto no intervalo. Portanto, a massa da fatia é m
( A x ), e assim decorre de (4) que a quantidade de calor nela é (6)
Além disso, quando o calor fluir na direção x positiva, vemos a partir de (5) que ocalor surge na fatia a uma taxa líquida
(7)
Diferenciando (6) em relação a t , vemos que essa taxa líquida é também dada por
(8)
Igualando (7) e (8), obtemos
(9)Tomando o limite de (9) quando x → 0 finalmente resulta em (1) na forma*
É comum adotarmos k K / e denominarmos essa constante positiva como difu-
sividade térmica.
x L
seção transversal de área A
0 x x + ∆ x
Figura 4.1 Fluxo de calor unidimen-sional.
* Relembre do cálculo que

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 147/416
4.2 Equações Clássicas e Problemas de Valor de Contorno 149
Equação de onda Considere uma corda de comprimento L, tal como uma corda deviolão, esticada entre dois pontos no eixo x – por exemplo, x 0 e x L. Quando a cor-da começa a vibrar, considere que o movimento ocorra no plano xy de tal maneira quecada ponto na corda se mova em uma direção perpendicular ao eixo x (vibrações trans-versais). Conforme apresentado na Figura 4.2(a), seja u( x ,t ) o deslocamento vertical de
qualquer ponto na corda medido a partir do eixo x para t 0. Outras considerações:
A corda é perfeitamente flexível.•
A corda é homogênea; isto é, sua massa por unidade de comprimento• é umaconstante.Os deslocamentos• u são pequenos em comparação ao comprimento da corda.A inclinação (coeficiente angular) da corda é pequena em todos os pontos.•
A tensão• T atua tangente à corda e a sua magnitude T é a mesma em todos ospontos.A tensão é grande em comparação com a força da gravidade.•
Nenhuma outra força externa atua na corda.•
Agora na Figura 4.2(b) as tensões T1 e T2 são tangentes às extremidades da curvano intervalo [ x , x x ]. Para 1 e 2 pequenos, a força vertical líquida que atua no
elemento correspondente s da corda é então
*
onde T |T1| |T2|. Agora s x é a massa da corda em [ x , x x ], e assim asegunda lei de Newton resulta em
Se o limite for adotado como x → 0, a última equação se escreve u xx ( / T )utt . Essaequação é (2) com a
2 T / .
Equação de Laplace Apesar de não apresentarmos a sua definição, a equaçãode Laplace em duas ou três dimensões ocorre em problemas independente do tempoenvolvendo potenciais como o eletrostático, o gravitacional, e velocidade em mecâ-nica dos fluidos. Além disso, uma solução da equação de Laplace pode também serinterpretada como uma distribuição de temperatura de regime permanente. Conformeilustrado na Figura 4.3, uma solução u( x , y) de (3) poderia representar a temperaturaque varia ponto a ponto – mas não com o tempo – de uma placa retangular.
Frequentemente desejamos obter soluções das equações (1), (2) e (3) que satisfa-zem certas condições laterais.
Condições iniciais Como as soluções de (1) e (2) dependem do tempo t , podemosprever o que ocorre em t 0; isto é, podemos definir condições iniciais (CI). Se f ( x )
representar a distribuição de temperatura inicial por toda a haste na Figura 4.1, entãouma solução u( x ,t ) de (1) tem que satisfazer a condição inicial única u( x ,0) f ( x ), 0
x L. Por outro lado, para uma corda vibrando, podemos especificar seu deslocamen-to inicial (ou formato) f ( x ), bem como sua velocidade inicial g( x ). Em termos matemá-ticos, buscamos uma função u( x ,t ) que satisfaça (2) e as duas condições iniciais:
(10)
Por exemplo, a corda poderia ser puxada, como mostra a Figura 4.4, e liberada apartir do repouso (g( x ) 0).
* são expressões equivalente para a inclinação.
x 0 x
u
1
2
(a) segmento de corda
x L0 x
u
∆s
∆s
u( x , t )
x + ∆ x
T2
T1
x + ∆ x
(b) aumento do segmento
Figura 4.2 Corda ancorada em doispontos no eixo x.
termômetro
y
x
W H
O
temperatura comouma função da posiçãoem uma placa quente
( x, y)
Figura 4.3 Temperaturas de regimepermanente em uma placa retangular.
x L
u
h
0 u = 0
em x = L
u = 0
em x = 0
Figura 4.4 Corda puxada.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 148/416
150 CAPÍTULO 4 Problemas de Valor de Contorno em Coordenadas Retangulares
Condições de contorno Essa corda na Figura 4.4 está presa ao eixo x em x 0 e x L por todo o tempo. Interpretamos isso por meio de duas condições de contorno (CC):
Note que nesse contexto, a função f em (10) é contínua, e consequentemente f (0) 0 e
f ( L) 0. Em geral, existem três tipos de condições de contorno associadas com as equa-ções (1), (2) e (3). Em um contorno, podemos especificar um dos seguintes valores:
Aqui u / n representa a derivada normal de u (a derivada direcional de u na direçãoperpendicular ao contorno). Uma condição de contorno do primeiro tipo (i) é deno-minada condição de Dirichlet; uma condição de contorno do segundo tipo (ii) é de-nominada condição de Neumann; e uma condição de contorno do terceiro tipo (iii)é conhecida como condição de Robin. Por exemplo, para t 0, uma condição típicana extremidade direita da haste na Figura 4.1 pode ser
A condição (i)¿ simplesmente declara que o contorno x L é mantido de algum modoa uma temperatura constante u0 para todo tempo t 0. A condição (ii)¿ indica que ocontorno x L está isolado. A partir da lei empírica de transferência de calor, o fluxode calor através de um contorno (isto é, a quantidade de calor por unidade de área porunidade de comprimento conduzida através da superfície) é proporcional ao valorda derivada normal u / n da temperatura u. Assim, quando o contorno x L estivertermicamente isolado, não há fluxo de calor para dentro ou para fora da haste, e logo
Podemos interpretar (iii)¿ como o calor perdido a partir da extremidade direita da has-te por estar em contato com um meio, como ar ou água, que é mantido a uma tempe-ratura constante. A partir da lei de Newton do resfriamento, o fluxo de calor para foraa partir da haste é proporcional à diferença entre a temperatura u( L,t ) no contorno ea temperatura um do meio circundante. Notemos que se o calor for perdido a partir daextremidade esquerda da haste, a condição de contorno será
A mudança no sinal algébrico está consistente com a consideração de que a haste está
a uma temperatura maior que a do meio que circunda as extremidades, de modo queu(0,t ) um e u( L,t ) um. Em x 0 e x L, as derivadas u x (0,t ) e u x ( L,t ) têm que serpositiva e negativa, respectivamente.
É claro que nas extremidades da haste podemos especificar condições diferentesao mesmo tempo. Por exemplo, poderíamos ter
Observamos que a condição de contorno em (i)¿ é homogênea se u0 0; se u0 0, a condição de contorno é não homogênea. A condição de contorno (ii)¿ é homogê-nea; (iii)¿ é homogênea se um 0 e não homogênea se um 0.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 149/416
4.2 Equações Clássicas e Problemas de Valor de Contorno 151
Problemas de valor de contorno Problemas tais como
Resolva:
Sujeito a:
(11)
e
Resolva:
Sujeito a: (12)
são chamados problemas de valor de contorno. Os problemas em (11) e (12) sãoclassificados como PVCs homogêneos pois a equação diferencial parcial e as condi-ções de contorno são homogêneas.
Variações As equações diferenciais parciais (1), (2) e (3) têm que ser modificadaspara considerarem influências internas ou externas que atuam no sistema físico. For-mas mais gerais das equações do calor e de onda unimensionais são, respectivamente,
(13)
e (14)
Por exemplo, se houver transferência de calor a partir da superfície lateral de umahaste para o meio circundante que esteja mantido a uma temperatura constante um,então a equação do calor (13) será
onde h é uma constante. Em (14), a função F poderia representar as várias forças queatuam na corda. Por exemplo, quando forças externas, de amortecimento e elásticasrestauradoras são consideradas, (14) assume a forma
(15)
Observações
A análise de uma ampla variedade de fenômenos resulta nos modelos matemáticos(1), (2) e (3) ou suas generalizações envolvendo um grande número de variáveis es-paciais. Por exemplo, (1) é algumas vezes chamada de equação de difusão, pois adifusão de substâncias dissolvidas em uma solução é análoga ao fluxo de calor emum sólido. A função c( x ,t ) que satisfaz a equação diferencial parcial nesse caso repre-

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 150/416
152 CAPÍTULO 4 Problemas de Valor de Contorno em Coordenadas Retangulares
senta a concentração de substância dissolvida. De modo similar, a equação (2) e a suageneralização (15) surgem da análise do fluxo de eletricidade em um cabo longo ouuma linha de transmissão. Nesse arranjo, (2) é conhecida como equação telegráfica
(ou do telegrafista). Pode-se mostrar que sob certas considerações a corrente i( x ,t ) ea tensão v( x ,t ) na linha satisfazem duas equações diferenciais parciais idênticas a (2)
(ou (15)). A equação de onda (2) aparece também em mecânica dos fluidos, acústicae elasticidade. A equação de Laplace (3) é utilizada para determinar o deslocamentoestático de membranas.
EXERCÍCIOS 4.2 As respostas de problemas ímpares selecionados estão na página 393.
Nos Problemas 1-6, uma haste de comprimento L coincide com ointervalo [0, L] no eixo x . Monte o problema de valor de contor-no para a temperatura u( x ,t ).
1. A extremidade esquerda é mantida à temperatura zero e a
extremidade direita está isolada. A temperatura inicial é f ( x )por toda a haste.
2. A extremidade esquerda é mantida à temperatura u0 e a ex-tremidade direita é mantida à temperatura u1. A temperaturainicial é zero por toda a haste.
3. A extremidade esquerda é mantida à temperatura de 100o ehá transferência de calor a partir da extremidade direita parao meio envolvente à temperatura zero. A temperatura inicialé f ( x ) por toda a haste.
4. Existe transferência de calor a partir da extremidade esquer-da para o meio circundante à temperatura 20o, e a extremi-dade direita está isolada. A temperatura inicial é f ( x ) portoda a haste.
5. A extremidade esquerda está a uma temperatura sen( t / L),a extremidade direita é mantida em zero, e existe transferên-cia de calor a partir da superfície lateral da haste para o meiocircundante à temperatura zero. A temperatura inicial é f ( x )por toda a haste.
6. As extremidades estão isoladas e há transferência de calor apartir da superfície lateral da haste para o meio circundantemantido a uma temperatura de 50o. A temperatura inicial éde 100o por toda a haste.
7. As extremidades estão conectadas ao eixo x . A corda é libe-rada do repouso a partir do deslocamento inicial x ( L – x ).
8. As extremidades estão no eixo x . Inicialmente, a corda nãoestá deslocada, mas tem velocidade inicial sen( x / L).
9. A extremidade esquerda está conectada ao eixo x , porém aextremidade direita se move de uma maneira transversal deacordo com sen t . A corda é liberada do repouso a partir dodeslocamento inicial f ( x ). Para t 0, as vibrações transver-sais são amortecidas com uma força proporcional à veloci-dade instantânea.
10. As extremidades estão conectadas ao eixo x e a corda estáinicialmente em repouso naquele eixo. Uma força verticalexterna proporcional à distância horizontal a partir da extre-midade esquerda atua na corda para t 0.
Nos Problemas 11 e 12, monte o problema de valor de contornopara a temperatura de regime permanente u( x , y).
11. Uma placa retangular fina coincide com a região no plano xy definida por 0 x 4, 0 y 2. A extremidade esquerdae a base da placa estão isoladas. O topo da placa é mantido àtemperatura zero e a extremidade direita da placa é mantidaà temperatura f ( y).
12. Uma placa semi-infinita coincide com a região no plano xy definida por 0 x , y 0. A extremidade esquerda émantida à temperatura e
y e a extremidade direita é mantidaà temperatura 100o para 0 y 1 e à temperatura zero para
y 1. A base da placa é mantida à temperatura f ( x ).
4.3 Equação do calor
Introdução Considere uma haste fina de comprimento L com uma temperaturainicial f ( x ) por toda a haste, cujas extremidades sejam mantidas à temperatura zeropara todo o tempo t 0. Se a haste indicada na Figura 4.5 satisfizer as consideraçõesdadas na página 148, então a temperatura u( x , t ) na haste é determinada a partir doproblema de valor de contorno
(1)
(2)
(3)
x L0
u = 0 u = 0
Figura 4.5 Determinação da tempera-tura u em uma haste finita.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 151/416
4.3 Equação do Calor 153
Na discussão a seguir, mostramos como resolver esse PVC utilizando o método daseparação de variáveis introduzido na Seção 4.1.
Solução do PVC Aplicando o produto u( x , t ) X ( x )T(t ), e como a constantede separação, temos
(4)
e (5)
(6)
Agora as condições de contorno em (2) se tornam u(0,t ) X (0)T (t ) 0 e u( L,t ) X ( L)T (t ). Como a última igualdade tem que ser válida por todo o tempo t , temos queter X (0) 0 e X ( L) 0. Essas condições de contorno homogêneas junto com a EDOhomogênea (5) constitui um problema de Sturm-Liouville regular:
(7)
A solução desse PVC foi discutida em detalhes no Exemplo 2 da Seção 3.9 do Volu-me 1 e nas páginas 127-128 da Seção 3.5. Naquele exemplo, consideramos três casospossíveis para o parâmetro : zero, negativo e positivo. As soluções gerais correspon-dentes das EDs são
(8)
(9)
(10)
Relembre que quando as condições de contorno X (0) 0 e X ( L) 0 são aplicadasem (8) e (9), essas soluções resultam somente em X ( x ) 0, e assim ficamos como resultado instável u 0. Aplicando a primeira condição de contorno X (0) 0 àsolução em (10), obtemos c1 0. Portanto, X ( x ) c2 sen x . A segunda condição decontorno X ( L) 0 agora implica
(11)
Se c2 0, então X 0 de modo que u 0. Porém, (11) pode ser satisfeita para c2 0 quando sen L 0. Essa última equação implica que L n ou n / L, onden 1, 2, 3,... Logo, (7) tem soluções não triviais quando n 1,2, 3,.... Os valores n e as soluções correspondentes
(12)
são autovalores e autofunções, respectivamente, do problema em (7).
A solução geral de (6) é e assim
(13)
onde substituímos as constantes c2c3 por An. Os produtos un( x ,t ) indicados em (13)satisfazem a equação diferencial parcial (1) assim como as condições de contorno (2)para cada valor do inteiro positivo n. Entretanto, para que a função em (13) satisfaça acondição inicial (3), temos que escolher o coeficiente An de tal modo que
(14)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 152/416
154 CAPÍTULO 4 Problemas de Valor de Contorno em Coordenadas Retangulares
Em geral, não esperamos que a condição (14) seja satisfeita para uma escolha arbitrá-ria, porém razoável de f . Portanto, somos forçados a admitir que un( x ,t ) não é uma so-
lução do problema dado em (1)-(3). Agora, pelo princípio da superposição, a função
(15)precisa também satisfazer ainda que formalmente, a equação (1) e as condições em(2). Se substituirmos t 0 em (15), então
A última expressão é reconhecida como expansão em meia escala de f em uma sériede senos. Se adotarmos a identificação An bn, n 1, 2, 3,..., decorre de (5) da Seção12.3 que
(16)
Concluímos que uma solução do problema de valor de contorno descrito em (1), (2)e (3) é indicada pela série infinita
(17)
Para o caso especial no qual a temperatura inicial é u( x ,0) 100, L e k 1,verifique que os coeficientes (16) são definidos por
e que a série (17) é
(18)
Uso de computadores A solução u em (18) é uma função de duas variáveis, demodo que o seu gráfico é uma superfície em três dimensões. Poderíamos utilizar aaplicação de gráficos 3D de um sistema de álgebra computacional para aproximaressa superfície traçando somas parciais S n( x ,t ) sobre uma região retangular definidapor 0 x , 0 t T . Alternativamente, com o auxílio da aplicação de gráficos2D de um SAC, traçamos a solução u( x ,t ) no intervalo x [0, ] para valores crescentesde tempo t . Veja a Figura 4.6(a). Na Figura 4.6(b), a solução u( x ,t ) é traçada no inter-valo t [0,6] para valores crescentes de x ( x 0 é a extremidade esquerda e x /2é o ponto central da haste de comprimento L ). Ambos os conjuntos de gráficosverificam o que é aparente em (18) – ou seja, u( x ,t )→ 0 quando t →.
u
100
80
60
40
20
0 1 32 5 6t
4
u
100
80
60
40
20
0 0,5 1 1,5 2 2,5 3 x
t = 0,05
t = 0,35
t = 0,6
t = 1,5
t = 1
t = 0
(a) gráfico de u( x,t ) comouma função de x paravários tempos fixos
x = /2
x = /4
x = /6
x = /12
x = 0
(b) gráfico de u( x ,t ) comouma função de t paravárias posições fixas
Figura 4.6 Determinação da tempera-tura u em uma haste finita.
EXERCÍCIOS 4.3 As respostas de problemas ímpares selecionados estão na página 394.
Nos Problemas 1 e 2, resolva a equação do calor (1) sujeita àscondições indicadas. Considere uma haste de comprimento L.
1.
2.
3. Determine a temperatura u( x ,t ) em uma haste de compri-mento L se a temperatura inicial for f ( x ) por toda a haste e seas extremidades x 0 e x L estiverem isoladas.
4. Resolva o Problema 3 se L 2 e
5. Suponha que calor seja perdido a partir da superfície lateralde uma haste fina de comprimento L para um meio circun-

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 153/416
4.4 Equação de Onda 155
dante a uma temperatura zero. Se a lei linear de transferên-cia de calor se aplicar, então a equação do calor adquire aforma
h uma constante. Determine a temperatura u( x ,t ) se a tempe-ratura inicial for f ( x ) por toda a haste e as extremidades x 0 e x L estiverem isoladas. Veja a Figura 4.7.
x L
isolada
0
isolada
transferência de calora partir da superfície
lateral da haste
0∞
0∞
Figura 4.7 Haste no Problema 5.
6. Resolva o Problema 5 se as extremidades x 0 e x L forem mantidas a temperatura zero.
Tarefas computacionais 7. (a) Resolva a equação do calor (1) sujeita a
(b) Use a aplicação de gráfico 3D do seu SAC para traçar asoma parcial S 5( x ,t ), constituída pelos primeiros cinco ter-mos não nulos da solução no item (a) para 0 x 100, 0 t 200. Considere que k 1,6352. Experimente comvárias perspectivas de visão da superfície em três dimen-sões (chamada opção ViewPoint no Mathematica).
Problemas para discussão 8. Na Figura 4.6(b), temos os gráficos de u( x ,t ) no intervalo 0
t 6 para x 0, x /12, x /6, x /4 e x /2.
Descreva ou esboce os gráficos de u( x ,t ) no mesmo inter-valo, porém para os valores fixos x 3 /4, x 5 /6, x 11 /12 e x .
4.4 Equação de onda
Introdução Estamos agora preparados para resolver o problema de valor de con-torno (11) discutido na Seção 4.2. O deslocamento vertical u( x ,t ) de uma corda decomprimento L que está vibrando livremente no plano vertical ilustrado na Figura4.2(a) é determinado a partir de
(1)
(2)
(3)
Solução do PVC Com a consideração usual de que u( x ,t ) X ( x )T (t ), separandovariáveis em (7), temos
de modo que (4)
(5)
Como na Seção 4.3, as condições de contorno (2) se traduzem em X (0) 0 e X ( L) 0. A EDO em (4) junto com essas condições de contorno é o problema de Sturm-Liouville regular
(6)
Das três possibilidades usuais para o parâmetro : 0, 2 0 e 2
0, apenas a última escolha resulta em soluções triviais. A solução geral de (4) quecorresponde a 2, 0, é

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 154/416
156 CAPÍTULO 4 Problemas de Valor de Contorno em Coordenadas Retangulares
X (0) 0 e X ( L) 0 indicam que c1 0 e c2 sen L 0. A última equação novamenteimplica que L n ou n / L. Os autovalores e as autofunções corresponden-
tes de (6) são e A solução geral da
equação de segunda ordem (5) é então
Reescrevendo c2c3 como An e c2c4 como Bn, soluções que satisfazem tanto a equaçãode onda (1) como as condições de contorno (2) são
(7)
e
(8)
Adotando t 0 em (8) e utilizando a condição inicial u( x ,0) f ( x ), temos
Como a última série é uma expansão em meia escala para f em uma série de senos,podemos escrever An bn:
(9)
Para determinar Bn, diferenciamos (8) em relação a t e então adotamos t 0:
Para que essa última série seja uma expansão de meia escala em senos da velocidadeinicial g no intervalo, o coeficiente total Bnn a / L tem que ser dado pela forma bn em(5) da Seção 3.3 – isto é,
a partir da qual obtemos
(10)
A solução do problema de valor de contorno (1)-(3) é constituída pela série (8)com os coeficientes An e Bn definidos por (9) e (10), respectivamente.
Notamos que quando a corda é liberada a partir do repouso, então g( x ) 0 paratodo x no intervalo 0 x L, e consequentemente Bn 0.
Corda puxada Um caso especial do problema de valor de contorno em (1)-(3) éum modelo da corda puxada. Podemos ver o movimento da corda ao traçar a soluçãoou deslocamento u( x ,t ) para valores crescentes do tempo t e usando a aplicação deanimação de um SAC. A Figura 4.8 mostra alguns quadros de uma animação geradadessa maneira.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 155/416
4.4 Equação de Onda 157
Siga os passos dos resultados na figura traçando uma sequência de somas parciais de(8). Veja os Problemas 7 e 21 nos Exercícios 4.4.
u
x
1
0
–1
1 2 3
u
x
1
0
–1
1 2 3
–1
–1
u
x
1
0
1 2 3
u
x
1
0
1 2 3
x
1
0
–1
1 2 3
u
x
1
0
–1
1 2 3
u
(a) t = 0 formato inicial (b) t = 0,2
(c) t = 0,7 (d) t = 1,0
(e) t = 1,6 (f) t = 1,9
Figura 4.8 Quadros de uma animação da corda puxada.
Ondas estacionárias Relembre da obtenção da equação de onda na Seção 4.2 que
a constante a que aparece na solução do problema de valor de contorno em (1), (2) e
(3) é dada por onde é massa por unidade de comprimento e T é a magnitudeda tensão na corda. Quando T for grande o suficiente, a corda vibrante produz um sommusical. Esse som é o resultado de ondas estacionárias. A solução (5) é uma superpo-sição de soluções produto chamadas ondas estacionárias ou modos normais:
Em vista de (6) e (7) da Seção 3.8 do Volume 1, as soluções produto (4) podem serescritas como
(11)
onde e n é definida como sen n An / C n e cos n Bn / C n. Paran 1, 2, 3,..., as ondas estacionárias são essencialmente os gráficos de sen(n x / L),com a amplitude variando com o tempo sendo dada por
De modo alternativo, vemos a partir de (8) que para um valor fixo de x , cada função pro-duto un( x ,t ) representa o movimento harmônico simples com amplitude C n|sen(n x / L)|e frequência f n na /2 L. Em outras palavras, cada ponto em uma onda estacionáriavibra com uma amplitude diferente, porém com a mesma frequência. Quando n 1,

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 156/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 157/416
4.4 Equação de Onda 159
10. Mostre que uma solução do problema de valor de contorno
é
11. Considere o problema de valor de contorno indicado em (1),(2) e (3) dessa seção. Se g( x ) 0 em 0 x L, mostre quea solução do problema pode ser escrita como
[Sugestão: Utilize a identidade
12. O deslocamento vertical u( x ,t ) de uma corda infinitamentelonga é determinado a partir do problema de valor inicial
(12)
Esse problema pode ser resolvido sem o uso de separaçãode variáveis.
(a) Mostre que a equação de onda pode ser escrita naforma por meio das substituições
(b) Integre a equação diferencial parcial no item (a), pri-meiro em relação a e depois em relação a para mos-trar que u( x ,t ) F ( x at ) G( x – at ), onde F e G sãofunções arbitrárias duplamente diferenciáveis, é umasolução da equação de onda. Use essa solução e as con-dições iniciais dadas para mostrar que
onde x 0 é arbitrária e c é uma constante de integração.
(c) Utilize o resultado no item (b) para mostrar que
(13)
Note que quando a velocidade inicial g( x ) 0, obtemos
A última solução pode ser interpretada como uma su-perposição de duas ondas viajantes, uma se movendopara a direita (isto é, ) e uma se movendopara a esquerda ( ). Ambas as ondas se pro-pagam com velocidade a e têm o mesmo formato bási-
co do deslocamento inicial f ( x ). A forma u( x ,t ) destaca-da em (13) é denominada solução de d’Alembert.
Nos Problemas 13-15, use a solução de d’Alembert (13) pararesolver o problema de valor inicial no Problema 12 sujeito àscondições iniciais indicadas.
13.
14.
15.
16. Suponha f ( x ) 1/(1 x 2), g( x ) 0 e a 1 para o problema
de valor inicial dado no Problema 12. Trace o gráfico dasolução de d’Alembert nesse caso nos tempos t 0, t 1 e
t 3.
17. O deslocamento transversal u( x ,t ) de uma viga vibrante decomprimento L é determinado a partir de uma equação dife-rencial parcial de quarta ordem
Se a viga estiver simplesmente apoiada, como mostrado naFigura 4.12, as condições de contorno e inicial são
Resolva para u( x ,t ). [Sugestão: Por conveniência, use
4 ao separar as variáveis.]
u
x
L0
Figura 4.12 Viga simplesmente apoiada no Problema 17.
Tarefas computacionais 18. Se as extremidades da viga no Problema 17 estiverem fixa-
das em x 0 e x L, as condições de contorno se tornam,para t 0,
(a) Mostre que os autovalores do problema são ,onde x n, n 1, 2, 3,..., são as raízes positivas da equa-ção cosh x cos x 1.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 158/416
160 CAPÍTULO 4 Problemas de Valor de Contorno em Coordenadas Retangulares
(b) Mostre graficamente que a equação no item (a) tem umnúmero infinito de raízes.
(c) Utilize um SAC para obter aproximações dos primeirosquatro autovalores. Use quatro casas decimais.
19. Um modelo para uma corda infinitamente longa que estáinicialmente presa em três pontos (1,0), (1,0) e (0,1) e de-pois é liberada simultaneamente dos três pontos no tempo t
0 é dado por (12) com
(a) Trace o gráfico da posição inicial da corda no intervalo[6,6].
(b) Utilize um SAC para traçar a solução de d’Alembert(13) em [6,6] para t 0,2k , k 0, 1, 2,..., 25. Consi-dere a 1.
(c) Use a ferramenta de animação do seu sistema de ál-
gebra computacional para fazer uma animação da so-lução. Descreva o movimento da corda ao longo dotempo.
20. Uma corda infinitamente longa coincidindo com o eixo x éatingida na origem por um martelo cuja cabeça tem 0,2 m
de diâmetro. Um modelo para o movimento da corda é dadopor (12) com
(a) Use um SAC para traçar a solução de d’Alembert (13)em [6,6] para t 0,2k , k 0, 1, 2,..., 25. Considerea 1.
(b) Use a ferramenta de animação do seu sistema de ál-gebra computacional para fazer uma animação da so-lução. Descreva o movimento da corda ao longo dotempo.
21. O modelo da corda vibrante no Problema 7 é chamado decorda puxada. A corda é amarrada ao eixo x em x 0 e x
L e é segurada em x L /2 a h unidades acima do eixo x .Veja a Figura 4.4. Começando em t 0, a corda é liberada apartir do repouso.
(a) Utilize um SAC para traçar a soma parcial S 6( x ,t ), isto é,
os primeiros seis termos não nulos da sua solução para t 0,1k , k 0, 1, 2,..., 20. Considere a 1, h 1 e L .
(b) Use a ferramenta de animação do seu sistema de álge-bra computacional para fazer uma animação da soluçãodo Problema 7.
4.5 Equação de Laplace
Introdução Suponha que desejemos obter a temperatura de regime permanenteu( x , y) em uma placa retangular cujas extremidades verticais x 0 e x a estão iso-ladas, e cujas extremidades superior e inferior y b e y 0 são mantidas em tempe-raturas f ( x ) e 0, respectivamente. Veja a Figura 4.13. Quando nenhum calor escapa a
partir da face lateral da placa, resolvemos o seguinte problema de valor de contorno:
(1)
(2)
(3)
Solução do PVC Com u( x , y) X ( x )Y ( y), a separação de variáveis em (1) resulta em
(4)
(5)
As três condições de contorno homogêneas em (2) e (3) se traduzem em X ¿(0) 0, X ¿(a) 0 e Y (0) 0. O problema de Sturm-Liouville associado com a equação em(4) é então
(6)
x
y
isolado isolado
u = f ( x )(a, b)
u = 0
Figura 4.13 Determine a temperatura uem uma placa retangular.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 159/416
4.5 Equação de Laplace 161
A investigação dos casos que correspondem a 0, 2 0 e 2 0,
onde 0, já foi feita no Exemplo 1 da Seção 3.5. Por conveniência, uma versãosimplificada daquela análise é apresentada a seguir.
Para 0, (6) se escreve
A solução da EDO é X c1 c2 x . A condição de contorno X ¿(0) 0 implica entãoc2 0, e assim X c1. Note que para qualquer c1, essa solução constante satisfaz asegunda condição de contorno X ¿(a) 0. Impondo c1 0, X c1 é uma solução nãotrivial do PVC (6). Para
2 0, (6) não possui solução trivial. Para 2 0, (6) se escreve
Aplicando-se a condição de contorno X ¿(0) 0, a soluçãoimplica c2 0, e assim X c1cos x . A segunda condição de contorno X ¿(a) 0aplicada à última expressão então resulta em –c1 sena 0. Como 0, a últimaequação é satisfeita quando a n ou n / a, n 1, 2,.... Os autovalores de (6)são então 0 e Fazendo a correspondência de 0 com n 0, as autofunções de (6) são
Temos agora que resolver a equação (5) sujeita à condição de contorno únicaY (0) 0. Primeiro, para 0 0, a ED em (5) é simplesmente Y – 0, e portanto a suasolução é Y c3 c4 y. Mas Y (0) 0 implica c3 0, de modo que Y c4 y. A seguir,
para a ED em (5) é Como 0 y b é um intervalo
finito, escrevemos a solução geral em termos de funções hiperbólicas:
A partir dessa solução, vemos que Y (0) 0 implica novamente c3 0, de modo que
Y senh(n y / a).Logo, as soluções produto un X ( x )Y ( y) que satisfazem a equação de Laplace
(1) e as três condições de contorno homogêneas em (2) e (3) são
onde reescrevemos c1c4 como A0 para n 0 e como An para n 1, 2,... .A aplicação do principio da superposição resulta em outra solução
(7)
Finalmente, substituindo y b em (7), vemos que
é uma expansão em meia escala de f em uma série de Fourier de co-senos. Se adotar-mos as identificações A0b a0 /2 e An senh (n b / a) an, n 1, 2,..., decorre de (2)e (3) da Seção 3.3 que
(8)
Por que funçõeshiperbólicas? Veja
a página 127.
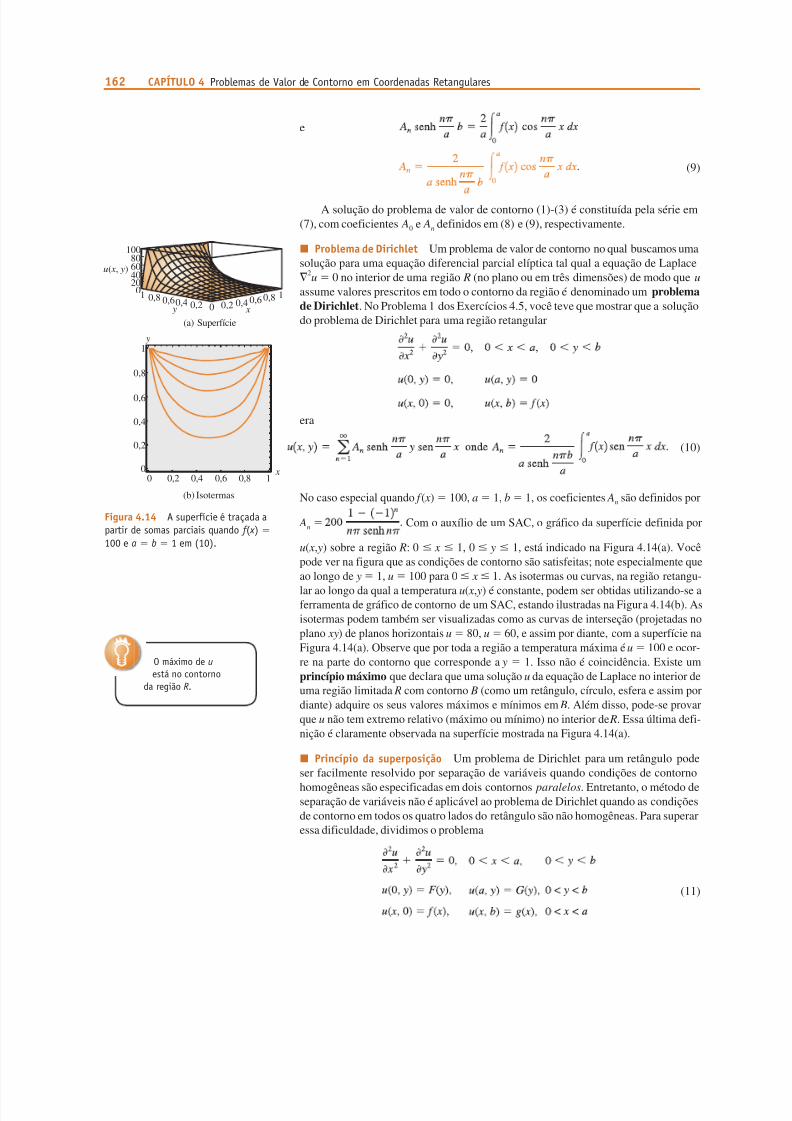
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 160/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 161/416
4.5 Equação de Laplace 163
em dois problemas, cada qual com condições de contorno homogêneas em contornosparalelos, como indicado.
Suponha que u1 e u2 sejam soluções dos Problemas 1 e 2, respectivamente. Sedefinirmos u( x , y) u1( x , y) u2( x , y), temos que u satisfaz todas as condições de con-torno do problema original (11). Por exemplo,
e assim por diante. Além disso, u é uma solução da equação de Laplace pelo Teorema4.1. Em outras palavras, resolvendo os Problemas 1 e 2 e somando as suas soluções,resolvemos o problema original. Essa propriedade aditiva de soluções é conhecidacomo princípio da superposição. Veja a Figura 4.15.
=
y
x
y
x
0
y
x 0
0 +
0
F ( y) F ( y)
g( x ) (a, b) g( x ) (a, b) (a, b)
G( y) G( y)∇2u = 0 ∇
2u1 = 0 ∇
2u2 = 0
f ( x ) f ( x )
Figura 4.15 Solução u Solução u1 do Problema 1 Solução u2 do Problema 2.
Deixamos como exercício (veja os Problemas 13 e 14 nos Exercícios 4.5) mos-trar que uma solução do Problema 1 é
e que uma solução do Problema 2 é

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 162/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 163/416
4.6 PVC Não Homogêneos 165
4.6 PVCs não homogêneos
Introdução Um problema de valor de contorno é dito ser não homogêneo quan-do a equação diferencial parcial ou as condições de contorno são não homogêneas.Por exemplo, um PVC não homogêneo típico para a equação do calor é
(1)
Podemos interpretar esse problema como um modelo para a distribuição de tempera-tura u no interior de uma haste de comprimento L quando calor é gerado internamentea uma taxa F ( x ,t ); as temperaturas nas extremidades da haste variam com o tempo t .O método de separação de variáveis pode não se aplicar a um problema de valor decontorno quando a equação diferencial parcial ou as condições de contorno foremnão homogêneas. Por exemplo, quando calor é gerado a uma taxa constante r dentroda haste, a equação do calor (1) adquire a forma
(2)
A equação (2) claramente não é separável. Por outro lado, suponha que desejemosresolver a equação do calor usual ku xx ut quando os contornos x 0 e x L foremmantidos a temperaturas não nulas u0 e u1. Apesar da substituição u( x ,t ) X ( x )T (t )separar as EDPs, chegamos a um impasse na hora de determinar os autovalores e asautofunções, pois nenhuma conclusão a respeito de X (0) e X ( L) pode ser obtida apartir de u(0,t ) X (0)T (t ) u0 e u( L,t ) X ( L)T (t ) u1.
Mudança da variável dependente Nessa seção, consideraremos certos tipos deproblemas de valor de contorno não homogêneos que podem ser resolvidos mudan-do-se a variável dependente u para uma nova variável dependente v por meio da subs-
tituição u v , onde é uma função a ser determinada.EDP e CC independentes do tempo Consideramos primeiro problemas de valor
de contorno tais como (1), onde o termo de fonte de calor F e as condições de contor-no são independentes do tempo:
(3)
Problemas de discussão 21. Resolva o problema de Neumann para um retângulo:
Explique por que uma condição necessária para que existauma solução u é que g satisfaça
Essa condição é algumas vezes chamada de condição de
compatibilidade. Faça leituras extras e explique a condiçãode compatibilidade em aterramentos elétricos.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 164/416
166 CAPÍTULO 4 Problemas de Valor de Contorno em Coordenadas Retangulares
Em (3), u0 e u1 representam constantes. Mudando a variável dependente u para umanova variável dependente y pela substituição u( x ,t ) v( x ,t ) ( x ), (3) pode ser redu-zida para dois problemas:
Observe que a EDO no Problema 1 pode ser resolvida por integração. Além disso, oProblema 2 é um PVC homogêneo que pode ser resolvido diretamente por separaçãode variáveis. Uma solução do problema original é então
Solução u Solução do Problema 1 Solução v do Problema 2
Nada apresentado nos dois problemas anteriores precisa ser memorizado, masvocê deve trabalhar a substituição u( x ,t ) v( x ,t ) ( x ) todas as vezes conforme
destacado no próximo exemplo.
Exemplo 1 EDP e CC independentes do tempo
Resolva a equação (2) sujeita a
Solução Tanto a equação diferencial parcial como a condição no contorno direito
x 1 são não homogêneas. Se adotarmos u( x ,t ) v( x ,t ) ( x ), então
(4)
pois t 0. Substituindo esses resultados de (4) em (3), temos
(5)
A equação (5) se reduz a uma EDP homogênea se exigirmos que seja uma funçãoque satisfaça a EDO
Integrando a última equação duas vezes, obtemos
(6)
Além disso,
Temos v(0,t ) 0 e v(1,t ) 0, desde que escolhamos

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 165/416
4.6 PVC Não Homogêneos 167
Aplicando as duas últimas condições a (6) obtemos, respectivamente, c2 0 e c1 r /2k u0. Consequentemente
Finalmente, a condição inicial u( x ,0) v( x ,0) ( x ) implica v( x ,0) u( x ,0) ( x ) f ( x ) ( x ). Logo, para determinar v( x ,t ), resolvemos o novo problema de valor decontorno homogêneo
por separação de variáveis. Na maneira usual, obtemos
onde a condição inicial v( x ,0) determina os coeficientes da série de Fourier dos senos:
(7)
Uma solução do problema original é obtida somando-se ( x ) e v( x ,t ):
(8)
onde os coeficientes An são definidos em (7). ❑
Observe em (8) que u( x ,t ) → ( x ) quando t → . No contexto do problema devalor de contorno dado, é denominada uma solução de regime permanente. Comov( x ,t )→ 0 quando t→ , v é chamada de solução transitória.
EDP e CC dependentes do tempo Retornamos agora ao problema indicado em(1), onde o termo de fonte de calor F e as condições de contorno são dependentesdo tempo. Intuitivamente, poderíamos esperar que a linha de ataque a esse problemafosse uma extensão natural do procedimento trabalhado no Exemplo 1, ou seja, buscaruma solução da forma u( x ,t ) v( x ,t ) ( x ,t ). Apesar da última forma de solução sercorreta, usualmente não é possível obter uma função de duas variáveis ( x ,t ) que reduzo problema em v( x ,t ) a um problema homogêneo. Para entender por que isso ocorre,vamos ver o que acontece quando u( x ,t ) v( x ,t ) ( x ,t ) é substituída em (1). Como
(9)
(1) é escrita como
(10)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 166/416
168 CAPÍTULO 4 Problemas de Valor de Contorno em Coordenadas Retangulares
As condições de contorno de v em (10) serão homogêneas se considerarmos que
(11)
Se nesse ponto fôssemos seguir os mesmos passos utilizados no Exemplo 1, tentaría-mos forçar o problema em (10) a ser homogêneo resolvendo k xx F ( x ,t ) t e a se-
guir impondo as condições de (11) na solução . Como a equação que define é porsi só uma EDP não homogênea, essa expectativa é irreal. Tentaremos uma abordagemtotalmente diferente ao construirmos simplesmente uma função que satisfaça am-bas as condições em (11). Tal função é dada por
(12)
A reinspeção de (10) mostra que ganhamos alguma simplificação adicional com essaescolha de , pois xx 0. Recomeçamos então. Dessa vez, se substituirmos
(13)
o problema em (1) se torna
(14)
onde G( x ,t ) F ( x ,t ) t. Enquanto o problema em (14) for ainda não homogêneo(as condições de contorno são homogêneas, porém a equação diferencial parcial énão homogênea), ele pode ser resolvido. O método de solução para (14) é um poucocomplexo, assim, antes de ilustrarmos com um exemplo específico, destacaremosprimeiro a estratégia básica:
Considere que os coeficientes dependentes do tempo vn(t ) e Gn(t ) podem serobtidos de modo que tanto v( x ,t ) quanto G( x ,t ) em (14) podem ser expandidosna série
(15)
onde sen(n x / L), n 1, 2, 3,... são as autofunções de X – X 0, X (0) 0, X ( L) 0 que correspondem aos autovalores Esse proble-ma de Sturm-Liouville seria obtido se separação de variáveis fosse aplicada aoPVC homogêneo associado de (14). Em (15), observe que a série consideradapara v( x ,t ) já satisfaz as condições de contorno em (14). Agora, substituímos aprimeira série de (15) na EDP não homogênea em (14), agrupamos os termos, eigualamos a série resultante com a expansão em séries obtida para G( x ,t ).
O próximo exemplo ilustra esse método.
Exemplo 2 EDP e CC dependentes do tempo
Resolva

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 167/416
4.6 PVC Não Homogêneos 169
Solução Ao comparar esse problema com (1), identificamos k 1, L 1, F ( x ,t ) 0, u0(t ) cos t , u1(t ) 0 e f ( x ) 0. Começamos pela construção de . A partir de(12), obtemos
e então, como indicado em (13), utilizamos a substituição
(16)
para obter o PVC para v( x ,t ):
(17)
Os autovalores e autofunções do problema de Sturm-Liouville
são e sen Com G( x ,t ) (1 – x ) sen t , consi-deramos a partir de (15) que para um t fixo, v e G podem ser escritos como uma sériede Fourier de senos:
(18)
e
(19)
Tratando t como um parâmetro, os coeficientes Gn em (19) podem ser calculados:
Portanto,
(20)
Podemos determinar os coeficientes vn(t ) substituindo (19) e (20) de volta na EDP em(17). Com essa finalidade, as derivadas parciais de v são
(21)
Escrevendo a EDP como vt – v xx (1 – x )sen t e usando (20) e (21), temos
Igualamos então os coeficientes de sen(n x / L) em cada lado da igualdade para obter
Para cada n, a última equação é uma EDO de primeira ordem linear cuja soluçãogeral é

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 168/416
170 CAPÍTULO 4 Problemas de Valor de Contorno em Coordenadas Retangulares
onde C n representa a constante arbitrária. Portanto, a forma considerada de v( x ,t ) em(18) pode ser escrita como
(22)
Os C n podem ser calculados aplicando-se a condição inicial v( x ,0) para (22). A partirda série de Fourier dos senos,
vemos que a quantidade entre chaves representa os coeficientes bn da série de Fourierdos senos para x – 1. Isto é,
Logo,
Substituindo o último resultado em (22), obtemos uma solução de (17),
Finalmente, decorre de (16) que a solução desejada u( x ,t ) é
❑
Observações
(i) Se o problema de valor de contorno tiver condições de contorno homogêneas eum termo dependente do tempo F ( x ,t ) na EDP, então não há necessidade de mudar a
variável dependente substituindo-se u( x ,t )
v( x ,t )
( x ,t ). Por exemplo, se u0 e u1 são 0 em um problema tal qual (1), então temos de (12) que ( x ,t ) 0. O método desolução é basicamente um ataque frontal à EDP assumindo expansões em séries orto-gonais apropriadas para u( x ,t ) e F ( x ,t ). Novamente, se u0 e u1 forem 0 em (1), a solu-ção começa com as considerações em (15), onde os símbolos v e G são naturalmentesubstituídos por u e 0, respectivamente. Veja os Problemas 13-16 dos Exercícios 4.6.Nos Problemas 17 e 18 dos Exercícios 4.6, você terá que construir ( x ,t ) conformeilustrado no Exemplo 2. Veja também o Problema 20 nos Exercícios 4.6.(ii) Não coloque nenhuma ênfase especial no fato de termos utilizado a equação do ca-lor por toda a discussão anterior. O método destacado no Exemplo 1 pode ser aplicadoà equação de onda, bem como à equação de Laplace. Veja os Problemas 1-12 nos Exer-cícios 4.6. O método apresentado no Exemplo 2 é baseado na dependência do tempo doproblema e, portanto, não se aplica a PVCs envolvendo a equação de Laplace.
EXERCÍCIOS 4.6 As respostas de problemas ímpares selecionados estão na página 395.
EDP e CC dependentes do tempo
Nos Problemas 1 e 2, resolva a equação do calor ku xx ut , 0 x
1, t 0, sujeita às condições indicadas.
1.
2.
Nos Problemas 3 e 4, resolva a equação do calor (2) sujeita àscondições indicadas.
3.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 169/416
4.6 PVC Não Homogêneos 171
4.
5. Resolva o problema de valor de contorno
onde A é uma constante. A EDP está em uma forma da equa-ção do calor que considera o calor gerado dentro da hasteem decorrência do decaimento radioativo do material.
6. Resolva o problema de valor de contorno
A EDP está em uma forma da equação do calor que conside-ra a perda de calor por radiação a partir da superfície lateralde uma haste fina para um meio a temperatura zero.
7. Determine uma solução de regime permanente ( x ) do pro-blema de valor de contorno
8. Determine uma solução de regime permanente ( x ) con-siderando que a haste no Problema 7 seja semi-infinita se
estendendo na direção x positiva, radiando a partir da suasuperfície lateral para um meio a temperatura zero e
9. Quando se sujeita uma corda vibrante a uma força verticalexterna que varia com a distância horizontal a partir da ex-tremidade esquerda, a equação de onda adquire a forma
onde A é uma constante. Resolva essa equação diferencialparcial sujeita a
10. Uma corda inicialmente em repouso no eixo x é mantidapresa ao eixo x em x 0 e x 1. Se for permitido à cordaque caia sobre o seu próprio peso para t 0, o deslocamen-to u( x ,t ) satisfaz
onde g é a aceleração da gravidade. Resolva para u( x ,t ).
11. Determine a temperatura de regime permanente u( x , y) naplaca semi-infinita mostrada na Figura 4.18. Considere quea temperatura seja limitada quando x → . [Sugestão: Useu( x , y) v( x , y) ( y).]
y
x
1
0
u = u0
u = u1
u = 0
Figura 4.18 Placa semi-infinita no Problema 11.
12. A equação diferencial parcial
ocorre em muitos problemas envolvendo potencial elétri-co, sendo conhecida como equação de Poisson. Resolva aequação anterior sujeita às condições
EDP e CC dependentes do tempo
Nos Problemas 13-18, resolva o problema de valor de contornoindicado.
13.
14.
15.
16.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 170/416
172 CAPÍTULO 4 Problemas de Valor de Contorno em Coordenadas Retangulares
17.
18.
Problemas para discussão 19. Considere o problema de valor de contorno
que é um modelo para a temperatura u em uma haste decomprimento L. Se u0 e u1 forem constantes diferente dezero, o que você intuitivamente esperaria a respeito da tem-peratura no centro da haste após um longo período de tem-po? Demonstre a sua afirmação.
20. Leia (i) das Observações ao final dessa seção. Discuta entãocomo resolver
Apresente as suas idéias para resolver o PVC acima com k 1, L 1, F ( x ,t ) tx e f ( x ) 0.
4.7 Expansões em séries ortogonais
Introdução Para certos tipos de condições de contorno, o método da separaçãode variáveis e o princípio da superposição resultam na expansão de uma função emuma série infinita que não é uma série de Fourier. Para resolver esses problemas, nes-sa seção utilizaremos o conceito de expansão em séries ortogonal ou séries de Fouriergeneralizadas desenvolvido na Seção 3.1.
Exemplo 1 Utilizando expansões em séries ortogonais
A temperatura em uma haste de comprimento unitário na qual exista transferência de
calor a partir do seu contorno direito para um meio circundante mantido à temperatu-ra constante zero é determinada a partir de
Resolva para u( x ,t ).
Solução Procedendo exatamente como fizemos na Seção 4.3, com u( x ,t ) X ( x )T (t ) e como a constante de separação, obtemos as EDOs separadas e as condiçõesde contorno como sendo, respectivamente,
(1)
(2)
(3)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 171/416
4.7 Expansões em Séries Ortogonais 173
A equação (1) junto com as condições de contorno homogêneas (3) compreendem oproblema de Sturm-Liouville regular:
(4)
Exceto pela presença do símbolo h, o PVC em (4) é essencialmente o problema resol-
vido no Exemplo 2 da Seção 3.5. Como naquele exemplo, (4) terá soluções não triviaissomente no caso 2 0, 0. A solução geral da ED em (4) é X ( x ) c1 cos x c2 sen x . A primeira condição de contorno em (4) imediatamente resulta em c1 0.Aplicando a segunda condição de contorno em (4) para X ( x ) c2 sen x , obtemos
(5)
Como os gráficos de y tg x e y x / h, h 0, têm um número infinito de pontosde interseção para x 0 (a Figura 3.20 ilustra o caso h 1), a última equação em (5)tem um número infinito de raízes. É claro que essas raízes dependem do valor de h.Se as raízes positivas consecutivas forem denotadas por n, n 1, 2, 3,..., então osautovalores do problema são e as autofunções correspondentes são X ( x ) c2 senn x , n 1, 2, 3,.... A solução da ED de primeira ordem é , e assim
Agora, em t 0, u( x ,0) 1, 0 x 1, de modo que
(6)
A série em (6) não é uma série de Fourier de senos; trata-se de uma expansão deu( x ,0) 1 em termos das funções ortogonais que surgem a partir do problema deSturm-Liouville (4). Decorre que o conjunto de autofunções {senn x }, n 1, 2, 3,...,onde os são definidos por tg / h, ortogonais, em relação à função de peso
p( x ) 1 no intervalo [0,1]. Com f ( x ) 1 en( x ) senn x , segue-se de (8) da Seção3.1 que os coeficientes An de (6) são
(7)
Para calcular a norma quadrada de cada uma das autofunções, utilizamos uma iden-tidade trigonométrica:
(8)
Com o auxílio da fórmula do ângulo duplo sen2n 2 senn cosn e a primeira equa-ção em (5) na forma ncosn h senn, podemos simplificar (8) para
Além disso,
Consequentemente, (7) se torna

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 172/416
174 CAPÍTULO 4 Problemas de Valor de Contorno em Coordenadas Retangulares
Finalmente, uma solução do problema de valor de contorno é
❑
Exemplo 2 Utilizando expansões em séries ortogonais
O ângulo de torção ( x ,t ) de um bastão de comprimento unitário que gira é determi-nado por
Veja a Figura 4.19. A condição de contorno em x 1 é denominada uma condição deextremidade livre. Resolva para ( x ,t ).
Solução Procedendo como na Seção 4.4 com ( x ,t ) X ( x )T (t ) e usando novamente como a constante de separação, as equações separadas e as condições decontorno são
(9)
(10)
(11)
A equação (9) junto com as condições de contorno homogêneas em (11),
(12)
é um problema de Sturm-Liouville regular. Sugerimos que você verifique que para 0 e para
2, 0, a única solução de (12) é X 0. Para 2 0,
0, as condições de contorno X (0) 0 e X ¿(1) 0 aplicadas à solução geral X ( x ) c1 cos x c2 sen x resultam, respectivamente, em c1 0 e c2 cos 0. Comocos é zero apenas quando for um múltiplo inteiro ímpar de /2, escrevemosn (2n – 1) /2. Os autovalores de (12) são e as autofunções
correspondentes são X ( x )
Como a haste é liberada a partir do repouso, a condição inicial t ( x ,0) 0 se tra-duz em X ( x )T ¿(0) 0 ou T ¿(0) 0. Quando aplicada à solução geral T (t ) c3 cosant c4 senant da ED de segunda ordem (10), T ¿(0) 0 implica c4 0, resultando em
T (t ) Portanto,
Para que a condição inicial restante seja satisfeita, formamos a superposição de n,
(13)
Quando t 0, temos que ter, para 0 x 1,
(14)
0 1bastão torcido
Figura 4.19 Determinação do ângulode torção.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 173/416
4.7 Expansões em Séries Ortogonais 175
EXERCÍCIOS 4.7 As respostas de problemas ímpares selecionados estão na página 395.
Como no Exemplo 1, o conjunto de autofunções
é ortogonal em relação à função de peso p( x ) 1 no intervalo [0,1]. Apesar da sérietrigonométrica em (14) se assemelhar mais à série de Fourier do que (6), ela não éuma série de Fourier de senos, pois o argumento da função seno não é um inteiro múl-tiplo de x / L (aqui L 1). A série é novamente uma expansão em séries ortogonalou série de Fourier generalizada. Assim, a partir de (8) da Seção 3.1, os coeficientes
An em (14) são dados por
Realizando as duas integrações, obtemos
O ângulo de torção é então
❑
1. No Exemplo 1, determine a temperatura u( x ,t ) quando a ex-tremidade esquerda da haste está isolada.
2. Resolva o problema de valor de contorno
3. Determine a temperatura de regime permanente para umaplaca retangular na qual as condições de contorno são
4. Resolva o problema de valor de contorno
5. Determine a temperatura u( x ,t ) em uma haste de compri-mento L considerando que a temperatura inicial seja f ( x ) portoda a haste, a extremidade x 0 seja mantida à temperatu-ra zero, e a extremidade x L esteja isolada.
6. Resolva o problema de valor de contorno
A solução u( x ,t ) representa o deslocamento longitudinal deuma barra elástica vibrante que está ancorada em sua extre-midade esquerda, estando sujeita a uma força constante F 0 em sua extremidade direita. Veja a Figura 4.11 na página158. E é denominado módulo de elasticidade.
7. Resolva o problema de valor de contorno
8. A temperatura inicial por toda uma haste de comprimentounitário é f ( x ). Existe transferência de calor a partir de ambasas extremidades, x 0 e x 1, para um meio circundantemantido a uma temperatura constante zero. Mostre que
onde

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 174/416
176 CAPÍTULO 4 Problemas de Valor de Contorno em Coordenadas Retangulares
Os autovalores são onde os n
são as raízes positivas consecutivas de tg 2h /(2 – h
2).
9. Use o método que se inicia por (15) da Seção 4.6 para resol-ver o problema de valor de contorno não homogêneo
[Sugestão: Veja (i) nas Observações da página 170.]
Tarefas computacionais 10. Uma viga em balanço vibrando está presa em sua extremi-
dade esquerda ( x 0) e livre em sua extremidade direita ( x 1). Veja a Figura 4.20. O deslocamento transversal u( x ,t )
da viga é determinado a partir de
Esse problema de valor de contorno serve como um modelopara o deslocamento de uma asa de avião vibrando.
(a) Mostre que os autovalores do problema são determina-dos a partir da equação cos cosh 1.
(b) Utilize um SAC para obter aproximações dos primeirosdois autovalores positivos do problema. [Sugestão: Vejao Problema 11 nos Exercícios 4.4].
x
u
1
Figura 4.20 Viga em balanço no Problema 10.
11. (a) Determine uma equação que defina os autovalores quan-
do as extremidades da viga no Problema 10 estão fixasem x 0 e x 1.
(b) Utilize um SAC para obter aproximações dos primeirosdois autovalores positivos do problema. [Sugestão: Vejao Problema 12 nos Exercícios 4.4].
4.8 Série de Fourier em duas variáveisIntrodução Nas seções anteriores, resolvemos formas unidimensionais das
equações do calor e de onda. Nessa seção, estenderemos o método da separaçãode variáveis para certos problemas que envolvem equações do calor e de onda bi-dimensionais.
Equações do calor e de onda em duas dimensões Suponha que a região retan-gular na Figura 4.21(a) seja uma placa fina na qual a temperatura u seja uma funçãodo tempo t e da posição ( x , y). Então, sob certas condições, u( x , y,t ) pode satisfazer aequação do calor bidimensional
(1)
Por outro lado, suponha que a Figura 4.21(b) represente um quadro retangular sobreo qual uma membrana fina flexível tenha sido esticada (um tambor retangular). Se amembrana for colocada em movimento, então o seu deslocamento u, medido a partirdo plano xy (vibrações transversais), é também uma função do tempo t e da posição( x , y). Quando o deslocamento for pequeno, livre e não amortecido, u( x , y,t ) satisfaz aequação de onda bidimensional
(2)
Como próximo exemplo mostraremos que soluções de problemas de valor decontorno envolvendo (1) e (2) levam ao conceito de uma série de Fourier em duas
y
x
c
b
(a)
c
x
y
u
b
(b)
(b, c)
Figura 4.21 (a) Determine a tempe-ratura u em uma placa retangular e (b)determine o deslocamento vertical u deuma membrana retangular.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 175/416
4.8 Série De Fourier Em Duas Variáveis 177
variáveis. Como as análises dos problemas envolvendo (1) e (2) são muito similares,ilustramos uma solução apenas da equação do calor (1).
Exemplo 1 Temperaturas em uma placa
Determine a temperatura u( x , y,t ) na placa apresentada na Figura 4.21(a) consideran-do que a temperatura inicial seja f ( x , y) por toda a placa e os contornos sejam mantidosà temperatura zero por todo o tempo t 0.
Solução Temos que resolver
sujeita a
Para separar as variáveis da EDP em três variáveis independentes x , y e t , tentamosobter uma solução produto u( x , y,t ) X ( x )Y ( y)T (t ). Substituindo, temos
(3)
Como o lado esquerdo da última equação em (3) depende somente de x e o lado di-reito depende somente de y e t , temos que ter ambos os lados iguais a uma constante
:
e assim (4)
(5)
Pela mesma razão, se introduzirmos outra constante de separação em (5), então
(6)
Agora, as condições de contorno homogêneas
Logo, temos dois problemas de Sturm-Liouville, um na variável x , (7)
e o outro na variável y,
(8)
A consideração usual dos casos ( 0, 2 0, 2
0, 0, 2
0, e assim por diante) resulta em dois conjuntos independentes de autovalores defini-dos por sen b 0 e sen c 0. Essas equações por sua vez implicam
(9)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 176/416
178 CAPÍTULO 4 Problemas de Valor de Contorno em Coordenadas Retangulares
As autofunções correspondentes são
(10)
Após substituir-se os valores de (9) na ED de primeira ordem em (6), sua solução
geral é Uma solução produto da equação do calor bidimen-sional que satisfaz as quatro condições de contorno homogêneas é então
onde Amn é uma constante arbitrária. Como temos dois conjuntos de autovalores, ten-taremos o princípio da superposição na forma de uma soma dupla
(11)
Em t 0, queremos que a temperatura f ( x , y) seja representada por
(12)
Determinar os coeficientes Amn em (12) realmente não é um problema: simplesmentemultiplicamos a soma dupla (12) pelo produto sen(m x / b) sen(n y / c) e integramossobre o retângulo definido por 0 x b, 0 y c. Temos que
(13)
Assim, a solução do problema de valor de contorno é constituída por (11) com Amn definido por (13). ❑
A série (11) com coeficientes (13) é denominada uma série de senos em duas
variáveis ou uma série dupla de senos. A série de co-senos em duas variáveis deuma função f ( x , y) é um pouco mais complicada. Se a função f for definida sobre uma
região retangular definida por 0 x b, 0 y c, então a série dupla de co-senos é dada por
onde
Veja o Problema 2 nos Exercícios 4.8 para um problema de valor de contorno queresulta em uma série dupla de co-senos.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 177/416
Exercícios de Revisão 179
EXERCÍCIOS 4.8 As respostas de problemas ímpares selecionados estão na página 395.
Nos Problemas 1 e 2, resolva a equação do calor (1) sujeita àscondições indicadas.
1.
2.
Nos Problemas 3 e 4, resolva a equação de onda (2) sujeita àscondições indicadas.
3.
4.
Nos Problemas 5-7, resolva a equação de Laplace
(14)
para a temperatura de regime permanente u( x , y, z) no paralelepí-pedo retangular indicado na Figura 4.22.
x
y
z
(a, b, c)
Figura 4.22 Paralelepípedo retangular nos Problemas 5-7.
5. O topo ( z c) do paralelepípedo é mantido a uma tempe-ratura f ( x , y) e os lados restantes são mantidos à temperaturazero.
6. A base ( z 0) do paralelepípedo é mantida a uma tempe-ratura f ( x , y) e os lados restantes são mantidos à temperaturazero.
7. O paralelepípedo é um cubo unitário (a b c 1) com otopo ( z 1) e a base ( z 0) mantidos à temperatura cons-tante u0 e –u0, respectivamente, e os lados restantes manti-
dos à temperatura zero.
CAPÍTULO 4 EXERCÍCIOS DE REVISÃO As respostas de problemas ímpares selecionados estão na página 396.
Nos Problemas 1 e 2, use separação de variáveis para obter so-luções produto u X ( x )Y ( y) da equação diferencial parcial in-dicada.
1.
2.
3. Determine uma solução de regime permanente ( x ) do pro-blema de valor de contorno
4. Dê uma interpretação física para as condições de contornono Problema 3.
5. Em t 0, uma corda de comprimento unitário é esticada aolongo do eixo positivo. As extremidades da corda x 0 e x
1 estão presas no eixo x para t 0. Determine o desloca-mento u( x ,t ) se a velocidade inicial g( x ) for como mostradona Figura 4.23.
h
1
4
1
2
3
4
1
x
g( x )
Figura 4.23 Velocidade inicial no Problema 5.
6. A equação diferencial parcial
é uma forma da equação de onda na qual uma força externavertical proporcional ao quadrado da distância horizontal a

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 178/416
180 CAPÍTULO 4 Problemas de Valor de Contorno em Coordenadas Retangulares
partir da extremidade esquerda é aplicada à corda. A cordaestá presa em x 0 uma unidade acima do eixo x e em x 1 para t 0. Determine o deslocamento u( x ,t ) se a cordaparte do repouso a partir do deslocamento inicial f ( x ).
7. Determine a temperatura de regime permanente u( x , y) na
placa quadrada mostrada na Figura 4.24.
x
y
( , )
u = 50u = 0
u = 0
u = 0
Figura 4.24 Placa quadrada no Problema 7.
8. Determine a temperatura de regime permanente u( x , y) naplaca semi-infinita mostrada na Figura 4.25.
y
x
0
isolada
isolada
u = 50
Figura 4.25 Placa semi-infinita no Problema 8.
9. Resolva o Problema 8 considerando que os contornos y 0 e y sejam mantidos à temperatura zero por todo otempo.
10. Determine a temperatura u( x ,t ) na placa infinita de espessu-ra 2 L ilustrada na Figura 4.26 se a temperatura inicial for u0
por toda a placa. [Sugestão: u( x ,0) u0, L x L é umafunção par de x.]
x
y
L –L
u = 0 u = 0
Figura 4.26 Placa infinita no Problema 10.
11. (a) Resolva o problema de valor de contorno
(b) Qual é a solução do PVC no item (a) se a temperaturainicial for
u( x ,0) 100 sen 3 x – 30 sen 5 x ?
12. Resolva o problema de valor de contorno
13. Determine uma solução em série para o problema
Não tente calcular os coeficientes da série.
14. A concentração c( x ,t ) de uma substância que tanto se difun-de em um meio como também é conduzida pelas correntes
nesse meio satisfaz a equação diferencial parcial
onde k e h são constantes. Resolva a EDP sujeita a
onde c0 é uma constante.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 179/416
5
C A P Í T U L O
Problemas de Valor de Contorno emOutros Sistemas de Coordenadas
No capítulo anterior, utilizamos séries de Fourier para resolver problemas
de valor de contorno descritos no sistema de coordenadas cartesianas ouretangular. Neste capítulo, finalmente colocaremos em prática o uso dasséries de Fourier-Bessel (Seção 5.2) e de Fourier-Legendre (Seção 5.3)na solução de problemas de valor de contorno descritos em coordenadascilíndricas ou em coordenadas esféricas.
Descrição do capítulo
5.1 Problemas em coordenadas polares
5.2 Problemas em coordenadas cilíndricas
5.3 Problemas em coordenadas esféricas
Exercícios de revisão

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 180/416
182 CAPÍTULO 5 Problemas de Valor de Contorno em Outros Sistemas de Coordenadas
5.1 Problemas em coordenadas polares
Introdução Todos os problemas de valor de contorno considerados até o mo-mento foram expressos em termos de coordenadas retangulares. Se, entretanto, dese-
jarmos obter temperaturas em um disco circular, em um cilindro circular ou em uma
esfera, naturalmente tentaremos descrever os problemas em coordenadas polares, ci-líndricas ou esféricas, respectivamente.
Como consideraremos somente problemas de temperatura de regime permanenteem coordenadas polares nessa seção, a primeira coisa que temos a fazer é converter afamiliar equação de Laplace em coordenadas retangulares para coordenadas polares.
Laplaciano em coordenadas polares A relação entre coordenadas polares no pla-no e coordenadas retangulares é indicada a seguir:
Veja a Figura 5.1. O primeiro par de equações transforma as coordenadas polares (r ,)em coordenadas retangulares ( x , y); o segundo par de equações nos permite transfor-
mar coordenadas retangulares em coordenadas polares. Com essas equações é pos-sível converter o Laplaciano bidimensional da funçãoem coordenadas polares. Recomenda-se que você trabalhe com a regra da cadeia emostre que
(1)
(2)
Somando (1) e (2) e simplificando, obtemos o Laplaciano de u em coordenadas po-lares:
Nessa seção, nos concentraremos apenas em problemas de valor de contornoenvolvendo a equação de Laplace em coordenadas polares:
(3)
Nosso primeiro exemplo se refere ao problema de Dirichlet para um disco cir-cular. Desejamos resolver a equação de Laplace (3) para a temperatura de regimepermanente u(r ,) em um disco circular ou uma placa de raio c quando a temperaturada circunferência for u(c, ) f (), 0 2 . Veja a Figura 5.2. Considera-se queas duas faces da placa estejam isoladas. Esse problema aparentemente simples é dife-rente de qualquer outro apresentado no capítulo anterior.
Exemplo 1 Temperaturas de regime permanente em uma placa circular
Resolva a equação de Laplace (3) sujeita a u(c, ) f (), 0 2 .
y
x
y
x
r
( x , y) ou(r , )
Figura 5.1 As coordenadas polares de
um ponto ( x , y ) são (r ,).
x
y
c
u = f ()
Figura 5.2 Problema de Dirichlet paraum círculo.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 181/416
5.1 Problemas em Coordenadas Polares 183
Solução Antes de tentarmos a separação de variáveis, observamos que a únicacondição de contorno é não-homogênea. Em outras palavras, não existem condiçõesexplícitas no enunciado do problema que nos permitem determinar os coeficientesnas soluções das EDOs separadas ou os autovalores exigidos. Entretanto, existemalgumas condições implícitas.
Primeiro, nossa intuição física nos leva a esperar que a temperatura u(r , ) sejacontínua e portanto limitada no interior do círculo r c. Além disso, a temperaturau(r , ) deve ter valor único, significando que o valor de u deve ser o mesmo em umponto especificado no círculo a despeito da descrição polar daquele ponto. Como (r , 2 ) é uma descrição equivalente do ponto (r , ), temos que ter u(r , ) u(r , 2 ). Isto é, u(r , ) tem que ser periódica em com período 2 . Se buscarmos umasolução produto u R(r )(), então (0) precisa ser periódica em 2 .
Com todas essas informações em mente, escolhemos escrever a constante deseparação na separação das variáveis como :
As equações separadas são então
(4)
(5)
Buscamos uma solução do problema
(6)
Apesar de (6) não ser um problema de Sturm-Liouville regular, o problema gera auto-valores e autofunções. O último forma um conjunto ortogonal no intervalo [0,2 ].
Das três possíveis soluções gerais de (5),
(7)
(8)
(9)
podemos considerar (8) como inerentemente não periódica a menos que c1 0 e c2
0. De modo similar, a solução (7) é não periódica a menos que definamos c2 0. A
solução constante remanescente () c1, c1 0, pode ser designada para qualquer
período, e assim 0 é um autovalor. Finalmente, a solução (9) será periódica em 2
se adotarmos n, onde n 1, 2,...* Os autovalores de (6) são então 0 0 e n
n2, n 1, 2,.... Se correspondermos 0 0 com n 0, as autofunções de (6) serão
Quando n n2, n 0, 1, 2,..., as soluções da ED de Cauchy-Euler (4) são
(10)
(11)
Agora observe em (11) que r –n 1/ r n. Na solução (10) ou na solução (11), temos
que definir c4 0 para garantir que a solução u seja limitada no centro da placa (queé r 0). Assim, as soluções produto un R(r )() para a equação de Laplace emcoordenadas polares são
* Por exemplo, note que

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 182/416
184 CAPÍTULO 5 Problemas de Valor de Contorno em Outros Sistemas de Coordenadas
onde substituímos c3c1 por A0 para n 0 e por An para n 1, 2,...; a combinação c3c2 foi substituída por Bn. O princípio da superposição então resulta em
(12)
Aplicando a condição de contorno em r c ao resultado em (12), reconhecemos
como uma expansão de f em uma série de Fourier completa. Consequentemente, po-demos adotar as identificações
Isto é,
(13)
(14)
(15)
A solução do problema consiste da série dada em (12), onde os coeficientes A0, An e Bn são definidos em (13), (14) e (15). ❑
Observe no Exemplo 1 que correspondendo a cada autovalor positivo, n n2, n 1, 2,..., existem duas autofunções diferentes – ou seja, cos n e sen n. Nessa situa-ção, os autovalores são algumas vezes chamados autovalores duplos.
Exemplo 2 Temperaturas de regime permanente em uma placa semicircular
Determine a temperatura de regime permanente u(r , ) na placa semicircular mostra-da na Figura 5.3.
Solução O problema de valor de contorno é
Definindo u R(r )() e separando as variáveis, temos
e (16)
(17)
A condição homogênea estipulada nos contornos 0 e se traduzem em (0) 0 e ( ) 0. Essas condições, junto com a equação (17), constituem um proble-ma de Sturn-Liouville regular:
(18)
=
= 0
y
x
c
u = u0
u = 0 em u = 0 em
=
Figura 5.3 Placa semicircular no Exem-plo 2.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 183/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 184/416
186 CAPÍTULO 5 Problemas de Valor de Contorno em Outros Sistemas de Coordenadas
9. Determine a temperatura de regime permanente u(r , ) noanel circular apresentado na Figura 5.4 considerando que ascondições de contorno sejam
10. Determine a temperatura de regime permanente u(r , ) noquarto de placa circular indicado na Figura 5.5.
11. Se os contornos 0 e /2 na Figura 5.5 estiveremisolados, temos então
Determine a temperatura de regime permanente se
.
x
y
c
u = 0
u = 0
u = f ()
Figura 5.5 Quarto de placa no Problema 10.
12. Determine a temperatura de regime permanente u(r , ) naplaca em formato de cunha infinita mostrada na Figura 5.6.
[Sugestão: Considere que a temperatura seja limitada quan-do r→ 0 e r→ .]
.
y
x
u = 0
y = x
u = 30
Figura 5.6 Placa infinita no Problema 12.
13. Determine a temperatura de regime permanente u(r , ) emum anel semicircular se
14. Determine a temperatura de regime permanente u(r , ) emuma placa semicircular de raio r 1 se
onde u0 é uma constante.
15. Determine a temperatura de regime permanente u(r , ) emuma placa semicircular de raio r 2 se
onde u0 é uma constante e as extremidades 0 e estão isoladas.
Tarefas computacionais 16. (a) Determine a solução em séries para u(r , ) no Exemplo
1 quando
(Veja o Problema 1.)
(b) Utilize um SAC ou uma ferramenta gráfica para traçara soma parcial S 5(r , ) constituída pelos primeiros cincotermos não nulos da solução do item (a) para r 0,9, r 0,7, r 0,5, r 0,3 e r 0,1. Superponha os gráfi-cos nos mesmos eixos coordenados.
(c) Aproxime as temperaturas u(0,9, 1,3), u(0,7, 2), u(0,5,3,5), u(0,3, 4), u(0,1, 5,5). A seguir, aproxime u(0,9, 2
1,3), u(0,7, 2 2), u(0,5, 2 3,5), u(0,3, 2 4), u(0,1, 2 5,5).
(d) Qual é a temperatura no centro da placa circular? Porque é apropriado chamar esse valor de temperatura mé-dia na placa? [Sugestão: Observe os gráficos no item(b) e os números no item (c).]
Problema para discussão 17. Considere o anel circular apresentado na Figura 5.4. Discuta
como a temperatura de regime permanente u(r , ) pode serdeterminada quando as condições de contorno são u(a,) f (), u(b, ) g(), 0 2 .

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 185/416
5.2 Problemas em Coordenadas Polares e Coordenadas Cilíndricas: Funções de Bessel 187
5.2 Problemas em coordenadas polares e coordenadascilíndricas: Funções de Bessel
Introdução Nessa seção consideraremos problemas de valor de contorno envol-vendo formas da equação do calor e de onda em coordenadas polares e uma forma daequação de Laplace em coordenadas cilíndricas. Existe um ponto comum em todos osexemplos e exercícios – cada problema de valor de contorno nessa seção tem simetriaradial.
Simetria radial As equações bidimensionais do calor e de onda
escritas em coordenadas polares são, respectivamente,
(1)
onde u u(r ,,t ). Para resolver um problema de valor de contorno envolvendo uma
dessas equações por separação de variáveis, temos que definir u R(r )()T (t ). Como
na Seção 4.8, essa consideração resulta em múltiplas séries infinitas. Veja o Problema
15 nos Exercícios 5.2. Na discussão que se segue, consideraremos os problemas mais
simples, porém ainda importantes, que possuem simetria radial – isto é, problemas
nos quais a função incógnita u é não dependente da coordenada angular . Nesse caso,
as equações do calor e de onda em (1) adquirem, respectivamente, as formas
(2)
onde u u(r ,t ). Vibrações descritas pela segunda equação em (2) são ditas seremvibrações radiais.
O primeiro exemplo trabalha com vibrações radiais não amortecidas livres de
uma membrana circular fina. Consideramos que os deslocamentos são pequenos eque o movimento é tal que cada ponto na membrana se move em uma direção perpen-dicular ao plano xy (vibrações transversais) – isto é, o eixo u é perpendicular ao plano xy. Uma modelo físico para se ter em mente enquanto estudamos esse exemplo é o deuma pele de tambor vibrando.
Exemplo 1 Vibrações radiais de uma membrana circular
Determine o deslocamento u(r ,t ) de uma membrana circular de raio c presa ao longode sua circunferência considerando que o seu deslocamento inicial seja f (r ) e a suavelocidade inicial seja g(r ). Veja a Figura 5.7.
Solução O problema de valor de contorno a ser resolvido é
Substituindo u R(r )T (t ) na equação diferencial parcial e separando as variáveis,temos
(3)
x
y
uu = f (r ) em t = 0
u = 0 em r = c
Figura 5.7 Deslocamento inicial da
membrana circular no Exemplo 1.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 186/416
188 CAPÍTULO 5 Problemas de Valor de Contorno em Outros Sistemas de Coordenadas
Note em (3) que retornamos à nossa constante de separação usual . As duas equa-ções obtidas a partir de (3) são
(4)
e (5)Em decorrência da natureza vibracional do problema, a equação (5) sugere que utilize-
mos apenas 2 0, 0. Agora, (4) não é uma equação de Cauchy-Euler, mas é
uma equação diferencial de Bessel paramétrica de ordem v 0, isto é, rR– R¿ 2rR
0. A partir de (13) da Seção 5.3 do Volume 1, a solução geral da última equação é
(6)
A solução geral da equação familiar (5) é
Recorde agora que a função de Bessel de segundo tipo de ordem zero tem a proprie-dade Y 0(r )→ quando r→ 0, e assim a consideração implícita de que o deslo-camento u(r ,t ) deve ser limitado em r 0 nos força a definir c2 0 em (6). Logo, R
c1 J 0(r ).Como a condição de contorno u(c,t ) 0 é equivalente a R(c) 0, temos que
ter c1 J 0(c) 0. Definimos c1 0, (isso resulta em uma solução trivial da EDP),consequentemente
(7)
Se x n nc forem raízes positivas de (7), então n x n / c e portanto os autovalores doproblema são e as autofunções são c1 J 0(nr ). Soluções produto quesatisfazem a equação diferencial parcial e a condição de contorno são
(8)
onde adotamos a renomeação de constantes usual. O princípio da superposição entãoresulta em
(9)
As condições iniciais dadas determinam os coeficientes An e Bn.Aplicando t 0 em (9) e utilizando u(r ,0) f (r ), temos
(10)
Esse último resultado é reconhecido como a expansão de Fourier-Bessel da função f no intervalo (0,c). Portanto, por comparação direta de (7) e (10) com (7) e (15) daSeção 3.6, podemos identificar os coeficientes An com aqueles indicados em (16) daSeção 3.6:
(11)
A seguir, diferenciamos (9) em relação a t , adotamos t 0 e utilizamos ut (r ,0) g(r ):
Essa é agora uma expansão de Fourier-Bessel da função g. Identificando o coeficientetotal an Bn com (16) da Seção 3.6, podemos escrever
(12)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 187/416
5.2 Problemas em Coordenadas Polares e Coordenadas Cilíndricas: Funções de Bessel 189
Finalmente, a solução do problema de valor de contorno dado é a série (9) com coefi-cientes An e Bn definidos em (11) e (12). ❑
Ondas estacionárias De forma análoga a (8) da Seção 4.4, as soluções produto(8) são chamadas ondas estacionárias. Para n 1, 2, 3,..., as ondas estacionárias são
basicamente o gráfico de J 0(nr ) com a amplitude variando no tempo
As ondas estacionárias para diferentes valores de tempo são representadas pela curvastracejadas na Figura 5.8. Os zeros de cada onda estacionária no intervalo (0,c) são asraízes de J 0(nr ) 0 e correspondem ao conjunto de pontos em uma onda estacioná-ria nos quais não há movimento. Esse conjunto de pontos é denominado linha nodal.Se (como no Exemplo 1) as raízes positivas de J 0(nc) 0 forem representadas por x n, então x n nc implica n x n / c e consequentemente os zeros das ondas estacio-nárias serão determinados a partir de
Agora, a partir da Tabela 5.2 do Volume 1, os primeiros três zeros positivos de J 0 são(aproximadamente) x 1 2,4, x 2 5,5 e x 3 8,7. Assim, para n 1, a primeira raizpositiva de
Como estamos buscando zeros de ondas estacionárias no intervalo aberto (0,c), oúltimo resultado significa que a primeira onda estacionária não tem linha nodal. Paran 2, as duas primeiras raízes positivas de
são determinadas a partir de e
Assim, a segunda onda estacionária tem uma linha nodal definida por r x 1c / x 2
2,4c /5,5. Note que r 0,44c c. Para n 3, uma análise similar mostra que existemduas linhas nodais definidas por r x 1c / x 3 2,4c /8,7 e r x 2c / x 3 5,5c /8,7. Em geral,
a enésima onda estacionária tem n – 1 linhas nodais r x 1c / x n, r x 2c / x n,..., r x n1c /
x n. Como r constante é uma equação de um círculo em coordenadas polares, vemos
na Figura 5.8 que as linhas nodais de uma onda estacionária são círculos concêntricos.
Uso de computadores É possível ver o efeito de uma batida de tambor para omodelo resolvido no Exemplo 1 por meio das capacidades de animação de um siste-ma de álgebra computacional. No Problema 14 nos Exercícios 5.2, você deve obter asolução indicada em (6) quando
A Figura 5.9 mostra alguns quadros de uma “animação” de uma pele de tambor vi-brando.
Figura 5.9 Quadros de uma “animação” feita por um SAC.
(a)
(b)
(c)
n = 1
n = 2
n = 3
Figura 5.8 Ondas estacionárias.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 188/416
190 CAPÍTULO 5 Problemas de Valor de Contorno em Outros Sistemas de Coordenadas
Laplaciano em coordenadas cilíndricas A partir da Figura 5.10, podemos ver quea relação entre as coordenadas cilíndricas de um ponto no espaço e suas coordenadasretangulares é dada por
Decorre imediatamente da derivação do Laplaciano em coordenadas polares (veja aSeção 5.1) que o Laplaciano de uma função u em coordenadas cilíndricas é
Exemplo 2 Temperaturas de regime permanente em um cilindro circular
Determine a temperatura de regime permanente no cilindro circular ilustrado na Fi-gura 5.11.
Solução As condições de contorno sugerem que a temperatura u tem simetriaradial. Consequentemente, u(r , z) é determinada por
Utilizando u R(r ) Z ( z) e separando as variáveis, temos
(13)
e (14)
(15)Para a escolha 2 0, 0, a solução de (14) é
e como a solução de (15) é definida no intervalo finito [0,2], escrevemos a sua solu-ção geral como
Como no Exemplo 1, a consideração de que a temperatura u é limitada em r 0 re-quer c2 0. A condição u(2, z) 0 implica R(2) 0. Essa equação,
(16)
define os autovalores positivos do problema. Finalmente, Z (0)
0 implicac3 0. Assim, temos
e
A condição de contorno restante em z 4 resulta na série de Fourier-Bessel
x
y
z
z
r
( x, y, z) são(r, , z)
Figura 5.10 As coordenadas cilíndricasde um ponto ( x , y , z ) são (r ,, z ).
z
y
x u
em z = 4
u = 0 em z = 0
u = 0em r = 2
u = u0
Figura 5.11 Cilindro finito no Exem-plo 2.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 189/416
5.2 Problemas em Coordenadas Polares e Coordenadas Cilíndricas: Funções de Bessel 191
De forma que, com base em (16), os coeficientes são definidos por (16) da Seção 3.6,
Para calcular a última integral, primeiro aplicamos a substituição t n
r , seguido de
A partir de
obtemos
Finalmente, a temperatura no cilindro é
❑
EXERCÍCIOS 5.2 As respostas de problemas ímpares selecionados estão na página 396.
1. Determine o deslocamento u(r ,t ) no Exemplo 1 se f (r ) 0e considerando que é dada à membrana circular uma veloci-dade unitária inicial na direção para cima.
2. Uma membrana circular de raio unitário 1 é grampeada aolongo da sua circunferência. Determine o deslocamentou(r ,t ) considerando que a membrana parta do repouso parao deslocamento inicial f (r ) 1 – r
2, 0 r 1. [Sugestão:
Veja o Problema 10 nos Exercícios 3.6.] 3. Obtenha a temperatura de regime permanente u(r , z) no cilin-
dro do Exemplo 2 se as condições de contorno forem u(2, z) 0, 0 z 4, u(r ,0) u0, u(r ,4) 0, 0 r 2.
4. Se a parte lateral do cilindro no Exemplo 2 estiver isolada,então
(a) Determine a temperatura de regime permanente u(r , z)quando u(r ,4) f (r ), 0 r 2.
(b) Mostre que a temperatura de regime permanente noitem (a) se reduz para u(r , z) u
0
z /4 quando f (r ) u0.
[Sugestão: Utilize (11) da Seção 3.6.]
5. A temperatura em uma placa circular de raio c é determina-da a partir do problema de valor de contorno
Resolva para u(r ,t ).
6. Resolva o Problema 5 se a extremidade r c da placa esti-ver isolada.
7. Quando existe transferência de calor a partir da parte lateral
de um cilindro circular infinito de raio unitário (veja a Figura
5.12) em um meio circundante à temperatura zero, a tempe-
ratura no interior do cilindro é determinada a partir de
Resolva para u(r ,t ).
z
y
x
1
Figura 5.12 Cilindro infinito no Problema 7.
8. Determine a temperatura de regime permanente u(r , z) em um
cilindro semi-infinito de raio unitário ( z 0) considerando que
exista transferência de calor a partir da sua parte lateral para o
meio circundante à temperatura zero e que a temperatura da
base z 0 seja mantida a uma temperatura constante u0.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 190/416
192 CAPÍTULO 5 Problemas de Valor de Contorno em Outros Sistemas de Coordenadas
9. Uma placa circular é composta por dois materiais diferen-tes na forma de círculos concêntricos. Veja a Figura 5.13. Atemperatura na placa é determinada a partir do problema devalor de contorno
Resolva para u(r ,t ). [Sugestão: Considere u(r ,t ) v(r ,t ) (r ).]
y
x
2
1
u = 100
Figura 5.13 Placa circular no Problema 9.
10. Resolva o problema de valor de contorno
11. O deslocamento horizontal u( x ,t ) de uma corrente pesada decomprimento L oscilando em um plano vertical satisfaz aequação diferencial parcial
Veja a Figura 5.14.
(a) Utilizando como uma constante de separação, mos-tre que a equação diferencial ordinária na variável espa-cial x é xX – X ¿ X 0. Resolva essa equação pormeio da substituição x 2 /4.
(b) Utilize o resultado do item (a) para resolver a equaçãodiferencial parcial indicada sujeita a
[Sugestão: Considere que as oscilações na extremidadelivre x 0 sejam finitas.]
x
u
L
0
Figura 5.14 Corrente oscilante no Problema 11.
12. Nesse problema, consideramos o caso geral – isto é, com de-
pendência de da membrana circular vibrante de raio c:
(a) Assuma que u R(r )()T (t ) e que as constantes deseparação sejam – e –v. Mostre que as equações dife-renciais separadas são
(b) Considere 2 e v 2 e resolva as equações sepa-radas do item (a).
(c) Mostre que os autovalores e as autofunções do proble-mas são como se segue:Autovalores: v n, n 0, 1, 2,...;
autofunções: 1, cos n, sen n.
Autovalores: ni x ni / c, i 1, 2,..., onde, para cada n, x ni são as raízes positivas de J n( c) 0;
autofunções: J n( nir ) 0.
(d) Use o princípio da superposição para determinar umasolução em séries múltiplas. Não tente calcular os coe-ficientes.
Tarefas computacionais 13. (a) Considere o Exemplo 1 com a 1, c 10, g(r ) 0 e
f (r ) 1 – r /10, 0 r 10. Utilize um SAC como au-
xílio para obter os valores numéricos dos primeiros trêsautovalores 1, 2, 3 do problema de valor de contor-no e os primeiros três coeficientes A1, A2, A3 da soluçãou(r ,t ) indicada em (6). Escreva a terceira soma parcialS 3(r ,t ) da solução em série.
(b) Utilize um SAC para traçar o gráfico de S 3(r ,t ) para t 0, 4, 10, 12, 20.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 191/416
5.3 Problemas em Coordenadas Esféricas: Polinômios de Legendre 193
14. Resolva o Problema 5 com condições de contorno u(c,t ) 200, u(r ,0) 0. Com essas condições impostas, espera-seintuitivamente que qualquer ponto interior da placa, u(r ,t )→ 200 quando t→ . Assuma que c 10 e que a placa sejade ferro fundido, de modo que k 0,1 (aproximadamente).
Utilize um SAC como um auxílio para obter os valores nu-méricos dos primeiros cinco autovalores 1, 2, 3, 4, 5 doproblema de valor de contorno e os cinco coeficientes A1, A2, A3, A4, A5 na solução u(r ,t ). Considere a solução aproxima-da correspondente sendo escrita como S 5(r ,t ). Trace S 5(5,t )e S 5(0,t ) em um intervalo de tempo suficientemente grande 0 t T . Use os gráficos de S 5(5,t ) e S 5(0,t ) para estimar ostempos (em segundos) para os quais u(5,t ) 100 e u(0,t ) 100. Repita para u(5,t ) 200 e u(0,t ) 200.
15. Considere um tambor idealizado constituído por uma mem-brana fina esticada sobre um quadro circular de raio unitá-rio. Quando esse tambor é atingido em seu centro, ouve-seum som que é frequentemente descrito como uma pancadaincômoda em vez de um tom melódico. Podemos modelaruma única batida de tambor utilizando o problema de valorde contorno resolvido no Exemplo 1.
(a) Determine a solução u(r ,t ) indicada em (6) quando c 1, f (r ) 0 e
(b) Mostre que a frequência da onda estacionária un(r ,t )é f n a n /2 , onde n é o enésimo zero positivo de J 0( x ). Ao contrário da solução da equação de ondaunidimensional na Seção 4.4, as frequências não sãomúltiplos inteiros da frequência fundamental f 1. Mos-
tre que f 2 2,295 f 1 e f 3 3,598 f 1. Dizemos que abatida de tambor produz sobretons desarmônicos.Como resultado, a função de deslocamento u(r ,t ) nãoé periódica, e assim o nosso tambor idealizado nãopode produzir um tom sustentado.
(c) Considere a 1, e v0 1 em sua solução doitem (a). Utilize um SAC para traçar a quinta somaparcial S 5(r ,t ) para os tempos t 0, 0,1, 0,2, 0,3,...,5,9, 6,0 no intervalo –1 r 1. Use a capacidade deanimação do seu SAC para produzir um filme dessasvibrações.
(d) Para um desafio maior, use a capacidade de gráficos 3Ddo seu SAC para fazer uma animação do movimento
da cabeça do tambor circular que é mostrada na seçãotransversal no item (c). [Sugestão: Existem diversasformas de se proceder. Para um tempo fixo, faça o grá-
fico de u em função de x e y usando
ou use o comando equivalente CylindricalPlot3D do Mathematica].
5.3 Problemas em coordenadas esféricas: Polinômios deLegendre
Introdução Nessa seção, continuamos nossa investigação de problemas de va-
lor de contorno em diferentes sistemas de coordenadas. Desta vez, consideraremosproblemas envolvendo equação do calor, de onda e de Laplace em coordenadasesféricas.
Laplaciano em coordenadas esféricas Conforme apresentado na Figura 5.15, umponto em três dimensões é descrito em termos de coordenadas retangulares e em co-ordenadas esféricas. As coordenadas retangulares x , y e z do ponto estão relacionadasàs suas coordenadas esféricas r , e por meio das equações
(1)
Utilizando as equações em (1), pode-se mostrar que o Laplaciano 2u no sistema de
coordenadas esféricas é
(2)
Como você pode imaginar, problemas envolvendo (1) podem ser bastante formidá-veis. Consequentemente, consideraremos somente alguns problemas mais simplesque são independentes do ângulo azimutal .
Nosso primeiro exemplo corresponde ao problema de Dirichlet para uma esfera.
z
y
x
r
( x , y, z) ou(r , , )
Figura 5.15 As coordenadas esféricasde um ponto ( x , y , z ) são (r ,,).

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 192/416
194 CAPÍTULO 5 Problemas de Valor de Contorno em Outros Sistemas de Coordenadas
Exemplo 1 Temperaturas constantes em uma esfera
Determine a temperatura de regime permanente u(r , ) na esfera ilustrada na Figura5.16.
Solução A temperatura é determinada a partir de
Se u R(r )(), a equação diferencial parcial se separa em
e assim (2)
(3)
Após substituirmos x cos , 0 , (3) se escreve como
(4)
A última equação é uma forma da equação de Legendre (veja o Problema 36 nosExercícios 5.3 do Volume 1). Agora, as únicas soluções de (4) que são contínuase têm derivadas contínuas no intervalo fechado [1,1] são os polinômios de Le-gendre Pn( x ) que correspondem a 2 n(n 1), n 0,1,2,.... Logo, tomamos assoluções de (3) como sendo
Além disso, quando n(n 1), a solução geral da equação de Cauchy-Euler (2) é
Como novamente esperamos que u(r ,) seja limitada em r 0, definimos c2 0.Portanto, un Anr
nPn(cos ) e
Em r c,
Assim, Ancn são os coeficientes da série de Legendre-Forier (23) da Seção 3.5:
Segue-se que a solução é
❑
c
z
y
x u = f ()em r = c
Figura 5.16 Problema de Dirichlet parauma esfera no Exemplo 1.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 193/416
5.3 Problemas em Coordenadas Esféricas: Polinômios de Legendre 195
EXERCÍCIOS 5.3 As respostas de problemas ímpares selecionados estão na página 396.
1. Resolva o problema no Exemplo 1 se
Escreva os primeiros quatro termos não nulos da solução emsérie. [Sugestão: Veja o Exemplo 3, Seção 3.6.]
2. A solução u(r ,) no Exemplo 1 poderia também ser inter-pretada como o potencial dentro da esfera devido a umadistribuição de carga f () em sua superfície. Determine opotancial fora da esfera.
3. Determine a solução do problema no Exemplo 1 conside-rando f () cos , 0 . [Sugestão: P1(cos ) cos. Use ortogonalidade.]
4. Determine a solução do problema no Exemplo 1 conside-
rando f () 1 cos 2, 0 . [Sugestão: Veja oProblema 16, Exercícios 3.6.]
5. Determine a temperatura de regime permanente u(r , ) den-tro de uma esfera oca a r b se a superfície interna r a for mantida à temperatura f () e a sua superfície externa r b for mantida à temperatura zero. A Figura 5.17 mostra aesfera no primeiro octante.
y
z
x
u = f ()
u = 0
em r = a
em r = b
Figura 5.17 Esfera oca no Problema 5.
6. A temperatura de regime permanente em um hemisfério deraio r c é determinada a partir de
Resolva para u(r , ). [Sugestão: Pn(0) 0 somente se n forímpar. Veja também o Problema 18, Exercícios 3.6.]
7. Resolva o Problema 6 quando a base do hemisfério estiverisolada; isto é,
8. Resolva o Problema 6 para r c.
9. A temperatura dependente do tempo dentro de uma esferade raio unitário é determinada a partir de
Resolva para u(r ,t ). [Sugestão: Verifique que o lado esquer-do da equação diferencial parcial pode ser escrito como
Considere ru(r ,t ) v(r ,t ) (r ). Use apenas fun-
ções que sejam limitadas quando r→ 0.]
10. Uma esfera sólida uniforme de raio 1 a uma temperatura inicial
constante u0 é colocada em um recipiente grande com fluido
que está mantido a uma temperatura constante u1 (u1 u0) por
todo o tempo. Veja a Figura 5.18. Como existe transferência de
calor através do contorno r 1, a temperatura u(r ,t ) na esfera
é determinada a partir do problema de valor de contorno
Resolva para u(r ,t ). [Sugestão: Proceda como no Exemplo 9.]
1
u1
Figura 5.18 Recipiente no Problema 10.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 194/416
196 CAPÍTULO 5 Problemas de Valor de Contorno em Outros Sistemas de Coordenadas
11. Resolva o problema de valor de contorno envolvendo vibra-ções esféricas:
[Sugestão: Escreva o lado esquerdo da equação diferencial
parcial como Adote v(r ,t ) ru(r ,t ).]
12. Uma esfera condutora de raio r c é aterrada e colocadaem um campo elétrico uniforme que tem intensidade E na
direção z. O potencial u(r , ) fora da esfera é determinado apartir do problema de valor de contorno
Mostre que
[Sugestão: Explique por que
para todos os inteiros não negativos exceto n 1. Veja (24)da Seção 3.6].
CAPÍTULO 5 EXERCÍCIOS DE REVISÃO As respostas de problemas ímpares selecionados estão na página 397.
Nos Problemas 1 e 2, determine a temperatura de regime perma-nente u(r ,) em uma placa circular de raio c considerando que atemperatura na circunferência seja conforme indicado.
1.
2.
Nos Problemas 3-4, determine a temperatura de regime perma-
nente u(r ,) em uma placa semicircular de raio 1 considerandoque as condições de contorno sejam seja conforme indicado.
3.
4.
5. Determine a temperatura de regime permanente u(r ,) emuma placa semicircular de raio c se os contornos 0 e estiverem isolados e u(c,) f (), 0 .
6. Determine a temperatura de regime permanente u(r ,) emuma placa semicircular de raio c se o contorno 0 for
mantido à temperatura zero, o contorno estiver isola-do e u(c,) f (), 0 .
Nos Problemas 7 e 8, determine a temperatura de regime perma-nente u(r ,) na placa indicada na figura.
7.
x
y y = x
u = 0
u = 0em = 0
u = u0
=1
2
isolado
em r = 1em r
Figura 5.19 Placa no Problema 7.
8.
x
y
u = f ()em r = b
u = u1em =
u = 0em r = a
u = u0
em = 0
β
Figura 5.20 Placa no Problema 8.
9. Se as condições de contorno para um anel circular definido
por 1 r 2 forem
mostre que a temperatura de regime permanente é u(r ,) [Sugestão: Veja a Figura 5.6.
Além disso, aplique a identidade sen2 1/2 (1 – cos2).]

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 195/416
Exercícios de Revisão 197
10. Determine a temperatura de regime permanente u(r ,) naplaca infinita ilustrada na Figura 5.21.
y
x 1
u = 0u = 0
u = f ()
Figura 5.21 Placa infinita no Problema 10.
11. Suponha que calor seja perdido a partir das superfícies planas
de um disco circular de raio unitário muito fino para um meio
circundante à temperatura zero. Se a lei linear de transferên-
cia de calor for aplicada, a equação do calor adquire a forma
Veja a Figura 5.22. Determine a temperatura u(r ,t ) se a ex-
tremidade r 1 for mantida à temperatura zero e ser inicial-mente a temperatura da placa for uniforme por toda a placa.
1
0°
0°
u = 0
Figura 5.22 Placa circular no Problema 11.
12. Suponha x k sendo um zero positivo de J 0. Mostre que umasolução do problema de valor de contorno
13. Determine a temperatura de regime permanente u(r , z) nocilindro da Figura 5.11 se a parte lateral for mantida à tem-peratura zero, o topo z 4 for mantido à temperatura 50, ea base z 0 estiver isolada.
14. Resolva o problema de valor de contorno
15. Determine a temperatura de regime permanente u(r ,) emuma esfera de raio unitário considerando que a superfícieseja mantida a
[Sugestão: Veja o Problema 20 nos Exercícios 3.5.]
16. Resolva o problema de valor de contorno
[Sugestão: Proceda como nos Problemas 9 e 10 nos Exercí-cios 5.3, porém adote v(r ,t ) ru(r ,t ). Veja a Seção 4.7.]
17. A função é umasolução da equação de Bessel paramétrica
no intervalo a x b. Se os autovalores foremdefinidos pelas raízes positivas da equação
mostre que as funções
são ortogonais em relação à função de peso p( x ) x no in-tervalo [a,b]; isto é,
[Sugestão: Siga o procedimento da página 129].
18. Utilize os resultados do Problema 17 para resolver o seguin-te problema de valor de contorno para a temperatura u(r ,t )em um anel circular:
19. Discuta como resolver
com as condições de contorno indicadas na Figura 5.23.
∇2u = 0u = h( z)
u = f (r )
u = g(r )
em z = L
em r = c
em z = 0
Figura 5.23 Cilindro no Problema 19.
20. Desenvolva as suas idéias e obtenha u(r , z) no Problema 19.[Sugestão: Revise (11) da Seção 3.5.]

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 196/416
6
C A P Í T U L O
Método da Transformada Integral
O método da separação de variáveis que utilizamos nos Capítulos 4 e 5 é ummétodo poderoso, mas não é aplicado de modo universal para a solução deproblemas de valor de contorno. Se a equação diferencial parcial em questãofor não homogênea, ou se as condições de contorno forem dependentesdo tempo, ou ainda se o domínio da variável espacial for infinito (,)ou semi-infinito (a, ), podemos ser capazes de utilizar uma transformadaintegral para resolver o problema. Na Seção 6.2, resolveremos problemasque envolvem as equações do calor e de onda por meio da familiartransformada de Laplace. Na Seção 6.4, três novas transformadas integrais e
transformadas de Fourier serão introduzidas e utilizadas.
Descrição do capítulo
6.1 Função erro
6.2 Aplicações da transformada de Laplace
6.3 Integral de Fourier
6.4 Transformadas de Fourier
6.5 Transformada rápida de Fourier
Exercícios de revisão

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 197/416
6.1 Função Erro 199
6.1 Função erro
Introdução Existem diversas funções na matemática que são definidas por meiode uma integral. Por exemplo, em muitos textos tradicionais de cálculo, o logaritmo
natural é definido da seguinte maneira: Em capítulos anterio-res vimos, apesar de brevemente, a função erro erf( x ), a função erro complementarerfc( x ), a função integral do seno Si( x ), a integral de Fresnel do seno S ( x ) e a funçãogamma (); todas essas funções são definidas em termos de uma integral. Antesde aplicar a transformada de Laplace a problemas de valor de contorno, precisamosconhecer um pouco mais a respeito da função erro e da função erro complementar.Nessa seção, examinaremos os gráficos e algumas das propriedades mais óbvias deerf( x ) e erfc( x ).
Propriedades e gráficos Relembre de (14) da Seção 2.3 do Volume 1 que as defini-
ções da função erro erf( x ) e função erro complementar erfc( x ) são, respectivamente,
(1)
Com o auxílio de coordenadas polares, pode ser demonstrado que
Assim, a partir da propriedade de adição de intervalos para integrais definidas, o últi-mo resultado é o mesmo que
Isso mostra que erf( x ) e erfc( x ) estão relacionadas pela identidade
(2)Os gráficos de erf( x ) e erfc( x ) para x 0 estão indicados na Figura 6.1. Note queerf(0) 0, erfc(0) 1 e que erf( x )→ 1 e erf( x )→ 0 quando x→ .
Outros valores numéricos de erf( x ) e erfc( x ) podem ser obtidos a partir de umSAC ou tabelas. Em tabelas, muitas vezes a função erro é referenciada como a in-
tegral de probabilidade. O domínio de erf( x ) e de erfc(c) é (,). No Problema11 dos Exercícios 6.1, você terá que obter o gráfico de cada função nesse intervalo ededuzir algumas propriedades adicionais.
A Tabela 6.1, de transformadas de Laplace, será útil para os exercícios da próxi-ma seção.
Tabela 6.1
0,2
0,4
0,6
0,8
1 y
x
0,50 1 1,5 2
erf( x )
erfc( x )
Figura 6.1 Gráficos de erf( x ) e erfc( x )para x 0.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 198/416
200 CAPÍTULO 6 Método da Transformada Integral
Observações
As demonstrações dos resultados na Tabela 6.1 não serão apresentadas pois elas sãomuito longas e um pouco complicadas. Por exemplo, as provas das entradas 2 e 3 da
tabela exigem diversas mudanças de variáveis e a aplicação do teorema da convolu-ção. Para os interessados, consultem Introduction to the Laplace Transform, de Holl,Maple e Vinograde, Appleton-Century-Crofts, 1959, páginas 142-143. Uma visãogeral desse tipo de demonstração pode ser obtida através da resolução do Problema1 nos Exercícios 6.1.
EXERCÍCIOS 6.1 As respostas de problemas ímpares selecionados estão na página 397.
1. (a) Mostre que
(b) Aplique o teorema da convolução e os resultados dosProblemas 41 e 42 nos Exercícios 4.1 do Volume 1 paramostrar que
2. Utilize o resultado do Problema 1 para mostrar que
3. Utilize o resultado do Problema 1 para mostrar que
4. Utilize o resultado do Problema 2 para mostrar que
5. Considere C , G, R e x como sendo constantes. Use a Tabela6.1 para mostrar que
6. Seja a uma constante. Mostre que
[Sugestão: Utilize a definição exponencial do seno hiperbó-
lico. Expanda em uma série geométrica.]
7. Utilize a transformada de Laplace e a Tabela 6.1 para resol-ver a equação integral
8. Use a terceira e a quinta entradas da Tabela 6.1 para obter asexta entrada.
9. Mostre que
10. Mostre que
Tarefas computacionais 11. As funções erf( x ) e erfc( x ) são definidas para x 0. Utilize
um SAC para superpor os gráficos de erf( x ) e erfc( x ) nosmesmos eixos para –10 x 10. Os gráficos possuem al-guma simetria? Quais são os resultados de e
6.2 Aplicações da transformada de LaplaceIntrodução No Capítulo 4 do Volume 1, definimos a transformada de Laplace de
uma função f (t ), t 0, como sendo
sempre que a integral imprópria converge. Essa integral transforma uma função f (t )
em outra função F do parâmetro de transformação s, isto é, { f (t )} F (s). A prin-
cipal aplicação da transformada de Laplace no Capítulo 4 do Volume 1 se referia à

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 199/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 200/416
202 CAPÍTULO 6 Método da Transformada Integral
A transformada de Laplace em relação a t da equação de onda ou da equação docalor elimina essa variável, sendo que para as equações unidimensionais as equaçõestransformadas são então equações diferenciais ordinárias na variável espacial x . Naresolução de uma equação transformada, tratamos s como um parâmetro.
Exemplo 2 Utilizando a transformada de Laplace para resolver um PVC
Resolva
sujeita a
Solução A equação diferencial parcial é reconhecida como a equação de ondacom a 1. A partir de (4) e das condições iniciais dadas, a equação transformada é
(5)
onde U ( x ,s) {u( x ,t )}. Como as condições de contorno são funções de t , obtemostambém as suas transformadas de Laplace:
(6)
Os resultados em (6) são condições de contorno para a equação diferencial ordinária(5). Como (5) é definida em um intervalo finito, sua função complementar é
O método dos coeficientes indeterminados resulta em uma solução particular
Logo
Porém, as condições U (0,s) 0 e U (1,s) 0 resultam, respectivamente, em c1 0 ec2 0. Concluímos que
Portanto
❑
Exemplo 3 Utilizando a transformada de Laplace para resolver um PVC
Uma corda muito longa está inicialmente em repouso no eixo x não negativo. A cordaestá presa em x 0 e a sua extremidade direita desliza para baixo em um suportevertical sem atrito. A corda é posta em movimento deixando-a cair sob o seu própriopeso. Determine o deslocamento u( x ,t ).
Solução Como a força da gravidade é levada em consideração, pode-se mostrarque a equação de onda tem a forma

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 201/416
6.2 Aplicações da Transformada de Laplace 203
As condições de contorno e inicial são, respectivamente,
A segunda condição de contorno lim x → u / x 0 indica que a corda é horizontal a
uma grande distância a partir da extremidade esquerda. Agora, de (2) e (3),
se torna
ou, em vista das condições iniciais,
As transformadas das condições de contorno são
Com o auxílio dos coeficientes indeterminados, a solução geral da equação transfor-mada é
A condição de contorno lim x → dU / dx 0 implica c2 0, e U (0,s) 0 resulta em c1
g / s3. Portanto,
Agora, pelo segundo teorema da translação, temos
ou
Para interpretarmos a solução, vamos considerar t 0. Para 0 x at , a corda temo formato de uma parábola passando por (0,0) e Para x at , a corda édescrita pela reta horizontal Veja a Figura 6.2. ❑
Observe que o problema no próximo exemplo poderia ser resolvido pelo proce-dimento da Seção 4.6. A transformada de Laplace fornece uma solução alternativa.
Exemplo 4 Uma solução em termos de erf( x )
Resolva a equação do calor
sujeita a
x
u
at
12
(at , – gt 2)
suportevertical“no ”
Figura 6.2 Uma corda comprida caindosob o seu próprio peso.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 202/416
204 CAPÍTULO 6 Método da Transformada Integral
Solução A partir de (1) e (3) e da condição inicial,
se torna (7)
As transformadas das condições de contorno são
(8)
Como estamos interessados em um intervalo finito no eixo x , escolhemos escrever asolução geral de (7) como
Aplicando as duas condições de contorno em (8), obtemos, respectivamente, c1 0 eLogo
A transformada inversa da última função não pode ser obtida por meio da maio-ria das tabelas existentes. Entretanto, escrevendo
e utilizando a série geométrica
temos
Se considerarmos que a transformada inversa de Laplace pode ser feita termo a ter-mo, decorre da entrada 3 da Tabela 6.1 que
(9)
A solução (9) pode ser escrita em termos da função erro aplicando erfc( x ) 1 – erf( x ):
❑
A Figura 6.3(a), obtida com o auxílio da função que traça gráficos 3D em umSAC, mostra a superfície sobre a região retangular 0 x 1, 0 t 6 definida pelasoma parcial S 10( x ,t ) da solução (10). A partir da análise da superfície e dos gráficosbidimensionais que a acompanham, fica evidente que, em um valor fixo de x (a curvade interseção de um plano partindo a superfície perpendicular ao eixo x no intervalo0 x 1), a temperatura u( x ,t ) cresce rapidamente para um valor constante com oaumento do tempo. Veja a Figura 6.3(b) e (c). Para um tempo fixo (a curva de inter-seção de um plano partindo a superfície perpendicular ao eixo t ), a temperatura u( x ,t )naturalmente cresce de 0 a 100. Veja a Figura 6.3(d) e (e).
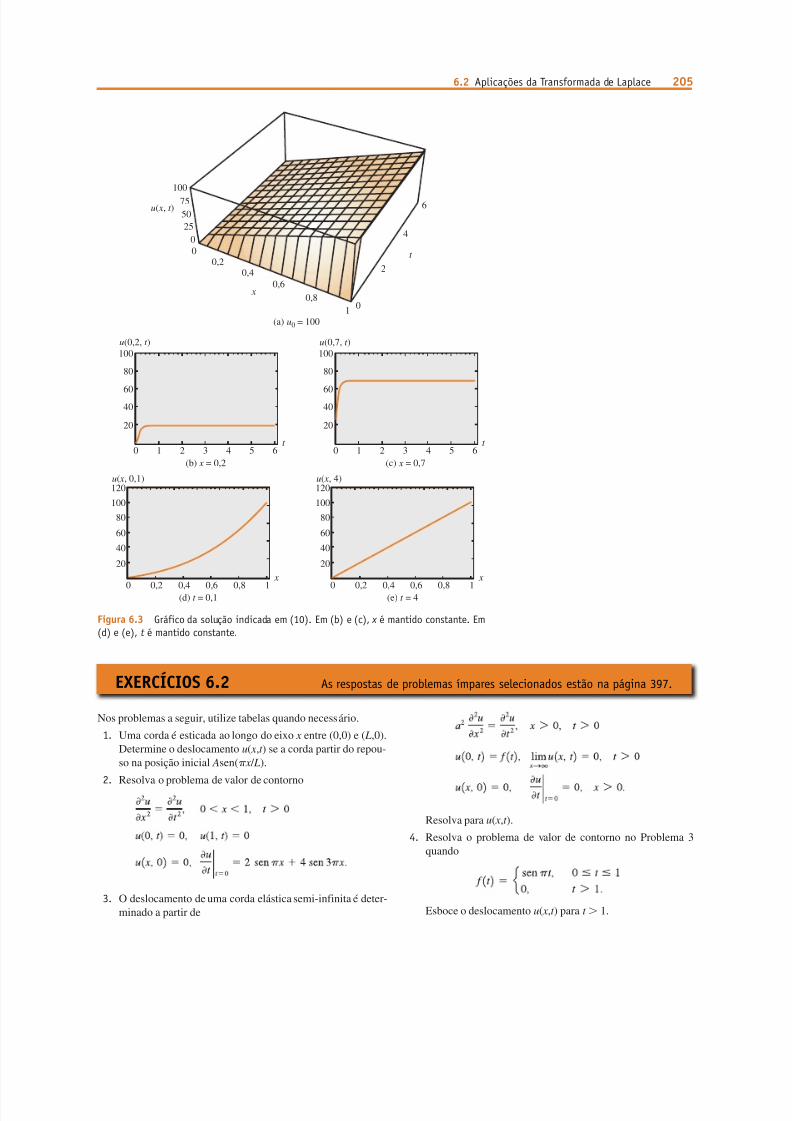
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 203/416
6.2 Aplicações da Transformada de Laplace 205
6
4
2
0
t
x
10075
50
25
00
0,20,4
0,6
0,8
1
100
8060
40
20
0 1 2 3 4 5 6t
100
8060
40
20
0 1 2 3 4 5 6t
120
100
80
60
40
0 0,2 0,4 x
20
0,6 0,8 1
120
100
80
60
40
0 0,2 0,4 x
20
0,6 0,8 1
(a) u0 = 100
u( x , t )
u(0,2, t ) u(0,7, t )
(b) x = 0,2 (c) x = 0,7
u( x , 4)
(e) t = 4(d) t = 0,1
u( x , 0,1)
Figura 6.3 Gráfico da solução indicada em (10). Em (b) e (c), x é mantido constante. Em(d) e (e), t é mantido constante.
EXERCÍCIOS 6.2 As respostas de problemas ímpares selecionados estão na página 397.
Nos problemas a seguir, utilize tabelas quando necessário.
1. Uma corda é esticada ao longo do eixo x entre (0,0) e ( L,0).
Determine o deslocamento u( x ,t ) se a corda partir do repou-so na posição inicial Asen( x / L).
2. Resolva o problema de valor de contorno
3. O deslocamento de uma corda elástica semi-infinita é deter-minado a partir de
Resolva para u( x ,t ).
4. Resolva o problema de valor de contorno no Problema 3quando
Esboce o deslocamento u( x ,t ) para t 1.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 204/416
206 CAPÍTULO 6 Método da Transformada Integral
5. No Exemplo 3, determine o deslocamento u( x ,t ) quando fordada à extremidade esquerda da corda em x 0 um movi-mento oscilatório descrito por f (t ) A sen t .
6. O deslocamento u( x ,t ) de uma corda que é excitada por umaforça externa é determinado a partir de
Resolva para u( x ,t ).
7. Uma barra uniforme presa em x 0 está inicialmente emrepouso. Se uma força constante F 0 for aplicada à extremi-dade livre em x L, o deslocamento longitudinal u( x ,t ) deuma seção transversal da barra é determinado a partir de
Resolva para u( x ,t ). [Sugestão: Expanda emuma série geométrica.]
8. Uma viga elástica semi-infinita uniforme movendo-se aolongo do eixo x com uma velocidade constante –v0 para aoatingir uma parede no tempo t 0. Veja a Figura 6.4. Odeslocamento longitudinal u( x ,t ) é determinado a partir de
Resolva para u( x ,t ).
x
vigaparedev0
x = 0
Figura 6.4 Viga elástica em movimento no Problema 8.
9. Resolva o problema de valor de contorno
10. Resolva o problema de valor de contorno
Nos Problemas 11-18, utilize a transformada de Laplace pararesolver a equação do calor u xx ut , x 0, t 0 sujeita às con-dições indicadas.
11.
12.
13.
14.
15.
[Sugestão: Utilize o teorema da convolução.]
16.
17.
18.
19. Resolva o problema de valor de contorno
20. Mostre que uma solução do problema de valor de contorno
onde r é uma constante, é dada por
21. Uma haste de comprimento L é mantida a uma temperatu-ra constante u0 em suas extremidades x 0 e x L. Se atemperatura inicial da haste for u0 u0sen( x / L), resolva aequação do calor u xx ut , 0 x L, t 0 para a tempera-tura u( x ,t ).

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 205/416
6.2 Aplicações da Transformada de Laplace 207
22. Se existir uma transferência de calor a partir da superfícielateral de um fio fino de comprimento L para um meio auma temperatura constante um, então a equação do calor ad-quire a forma
onde h é uma constante. Determine a temperatura u( x ,t ) con-
siderando que a temperatura inicial seja uma constante u0 por
todo o fio e as extremidades x 0 e x L estejam isoladas.
23. Uma haste de comprimento unitário está isolada em x 0e é mantida a uma temperatura zero em x 1. Se a tempe-ratura inicial da haste for uma constante u0, resolva ku xx ut , 0 x 1, t 0 para a temperatura u( x ,t ). [Sugestão:Expanda em uma série geométrica.]
24. Uma placa porosa infinita de espessura unitária é imersa emuma solução de concentração constante c0. Uma substânciadissolvida na solução se difunde na placa. A concentração
c( x ,t ) na placa é determinada a partir de
onde D é uma constante. Resolva para c( x ,t ).
25. Uma linha de transmissão telefônica muito longa está ini-cialmente em um potencial constante u0. Se a linha for ater-rada em x 0 e isolada na extremidade direita distante, en-tão o potencial u( x ,t ) em um ponto x ao longo da linha notempo t é determinado a partir de
onde R, C e G são constantes conhecidas como resistência,capacitância e condutância, respectivamente. Resolva parau( x ,t ). [Sugestão: Veja o Problema 5 nos Exercícios 6.1.]
26. Iniciando em t 0, um peso concentrado de magnitude F 0 se move com uma velocidade constante v0 ao longo de umacorda semi-infinita. Nesse caso, a equação de onda se torna
onde (t – x / v0) é a função delta de Dirac. Resolva a EDPanterior sujeita a
(a) quando v0 a
(b) quando v0 a
27. Mostre que uma solução do problema de valor de contorno
é
Tarefas computacionais 28. (a) A temperatura em um sólido semi-infinito é modelada
pelo problema de valor de contorno
Resolva para u( x ,t ). Use a solução para determinar ana-liticamente o valor de limt →
u( x ,t ), x 0.
(b) Utilize um SAC para traçar o gráfico u( x ,t ) sobre a re-gião retangular 0 x 10, 0 t 15. Assuma u0 100 e k 1. Indique as duas condições de contorno ea condição inicial em seu gráfico. Utilize gráficos emduas e três dimensões de u( x ,t ) para verificar a sua res-posta do item (a).
29. (a) No Problema 28, se existir um fluxo constante de calorno sólido em seu contorno esquerdo, então a condição
de contorno será Resolva
para u( x ,t ). Utilize a solução para determinar analitica-mente o valor de limt →
u( x ,t ), x 0.
(b) Utilize um SAC para traçar o gráfico u( x ,t ) sobre a re-gião retangular 0 x 10, 0 t 15. Assuma u0 100 e k 1. Indique as duas condições de contorno ea condição inicial em seu gráfico. Utilize gráficos emduas e três dimensões de u( x ,t ) para verificar a sua res-posta do item (a).
30. Os humanos recolhem a maior parte das informações domundo exterior por meio da visão e do som. Porém, muitascriaturas utilizam sinais químicos como meio primário de
comunicação: por exemplo, as abelhas, quando amedron-tadas, secretam uma substância e batem suas asas fervo-rosamente para transmitir o sinal de alerta para as abelhasque cuidam da abelha-rainha. Essas mensagens molecula-res entre membros da mesma espécie são chamadas fero-monas (ou feromônios). Os sinais podem ser transmitidospor ar ou água ou por um processo de difusão no qual omovimento aleatório de moléculas de gás transportam oelemento químico para longe da sua fonte. A Figura 6.5apresenta uma formiga emitindo um alarme químico no ardo túnel. Se c( x ,t ) representar a concentração do elemento

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 206/416
208 CAPÍTULO 6 Método da Transformada Integral
químico a x centímetros da fonte no tempo t , então c( x ,t )satisfaz
sendo k uma constante positiva. O emissão de feromônioscomo um pulso discreto está relacionada a uma condição decontorno da forma
onde (t ) é a função delta de Dirac.
(a) Resolva o problema de valor de contorno considerandoc( x ,0) 0, x 0 e lim x →
c( x ,t ), t 0.
(b) Utilize um SAC para traçar o gráfico da solução no item(a) para x 0 nos instantes de tempo fixos t 0,1, t 0,5, t 1, t 2, t 5.
(c) Para um tempo fixo t , mostre queLogo, Ak representa a quantidade total de elemento quí-
mico descarregado.
0 x
Figura 6.5 Formigas no Problema 30.
6.3 Integral de Fourier
Introdução Nos capítulos anteriores, séries de Fourier foram empregadas pararepresentar uma função f definida em um intervalo finito ( p, p) ou (0, L). Quando f e f ¿ são contínuas por partes em um tal intervalo, uma série de Fourier representa afunção no intervalo e converge para a extensão periódica de f fora do intervalo. Dessemodo, justifica-se dizer que as séries de Fourier estão associadas somente a funções
periódicas. Obteremos agora, de uma maneira não rigorosa, um meio de representarcertos tipos de funções não periódicas que sejam definidas em um intervalo infinito(,) ou em um intervalo semi-infinito (0, ).
De série de Fourier para integral de Fourier Suponha uma função f definida em( p, p). Se utilizarmos as definições de integrais dos coeficientes (9), (10), (11) daSeção 3.2 em (8) daquela seção, a série de Fourier de f no intervalo é
(1)
Se adotarmos n n / p, n1 n / p, então (1) se torna
(2)
Expandimos agora o intervalo ( p, p) definido p → . Como p → implica →
0, o limite de (2) tem a forma que sugere a definição da
integral Logo, se existir, o limite do primeiro termo em (2) ézero e o limite da soma é
(3)
O resultado indicado em (3) é denominado integral de Fourier de f em (,).Como mostra o resumo a seguir, a estrutura básica da integral de Fourier é remanes-cente daquela da série de Fourier.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 207/416
6.3 Integral de Fourier 209
Integral de FourierA integral de Fourier de uma função f definida no intervalo (,) é dada por
(4)
onde
(5)
(6)
DEFINIÇÃO 6.1
Convergência de uma integral de Fourier As condições suficientes sob as quaisuma integral de Fourier converge para f ( x ) são similares, porém um pouco mais res-tritivas, às condições para uma série de Fourier.
Condições para convergênciaConsidere f e f ¿ contínuas por partes em qualquer intervalo finito, e seja f absolu-tamente integrável em (,).* Assim, a integral de Fourier de f no intervalo con-verge para f ( x ) em um ponto de continuidade. Em um ponto de descontinuidade, aintegral de Fourier convergirá para a média
onde f ( x ) e f ( x ) representam os limites de f em x a partir da direita e da esquer-da, respectivamente.
TEOREMA 6.1
Exemplo 1 Representação por integral de Fourier
Determine a representação por integral de Fourier da função
Solução A função, cujo gráfico está ilustrado na Figura 6.6, satisfaz a hipótesedo Teorema 6.1. Logo, a partir de (5) e (6), temos
x
y
1
2
Figura 6.6 Função no Exemplo 1 defi-nida em (,).
* Isso significa que a integral converge.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 208/416
210 CAPÍTULO 6 Método da Transformada Integral
Substituindo esses coeficientes em (4), obtemos
Quando aplicamos identidades trigonométricas, a última integral se simplifica para
(7) ❑
A integral de Fourier pode ser utilizada para calcular integrais. Por exemplo, em
x 1, temos do Teorema 6.1 que (7) converge para f (1); isto é,
O último resultado é digno de observação especial, pois ele não pode ser obtido damaneira “usual”; o integrando (sen x )/ x não possui uma antiderivada que seja umafunção elementar.
Integrais do co-seno e do seno Quando f for uma função par no intervalo(,), então o produto f ( x )cos x é também uma função par, enquanto f ( x )sen x é uma função ímpar. Como consequência da propriedade (g) da Seção 3.3, B() 0e assim (4) se torna
Aqui utilizamos também a propriedade ( f ) da Seção 3.3 para escrever
De modo similar, quando f for uma função ímpar em (,), os produtos f ( x )cos x
e f ( x )sen x são funções ímpar e par, respectivamente. Portanto, A() 0 e
Resumimos essas informações nas seguinte definição.
Integrais de Fourier do co-seno edo seno
(i) A integral de Fourier de uma função par no intervalo (,) é a integral do
co-seno
(8)
onde
(9)
(ii) A integral de Fourier de uma função ímpar no intervalo (,) é a integral
do seno
(10)
onde
(11)
DEFINIÇÃO 6.2
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 209/416
6.3 Integral de Fourier 211
Exemplo 2 Representação por integral do co-seno
Determine a representação por integral de Fourier da função
Solução É evidente da Figura 6.7 que f é uma função par. Logo, representaremos f pela integral de Fourier do co-seno (8). De (9), obtemos
e assim (12) ❑
As integrais (8) e (10) podem ser utilizadas quando f não for ímpar e nem par, edefinida apenas no eixo metade (0, ). Nesse caso, (8) representa f no intervalo (0,) e
sua extensão par (porém não periódica) para (, 0), enquanto que (10) representa f em
(0, ) e sua extensão ímpar para (, 0). O próximo exemplo ilustra esse conceito.
Exemplo 3 Representações da integral do co-seno e do seno
Represente f ( x ) e x , x 0 (a) por uma integral de co-senos; (b) por uma integralde senos.
Solução O gráfico da função está indicado na Figura 6.8.
(a) Utilizando integração por partes, temos
Portanto, a integral do co-seno de f é
(13)
(b) De modo similar, temos
A integral do seno de f é então
(14)
A Figura 6.9 mostra os gráficos das funções e suas extensões representadas pelasduas integrais. ❑
Forma complexa A integral de Fourier (4) possui também uma forma complexa ou forma exponencial equivalente, que é análoga à forma complexa de uma série deFourier (veja a Seção 3.4). Se (5) e (6) forem substituídas em (4), então
y
x a
1
–a
Figura 6.7 Função no Exemplo 2 defi-nida em (,).
x
y
1
Figura 6.8 Função no Exemplo 3 defi-nida em (0,).
y
x
(a) Integral do co-seno
y
x
(b) Integral do seno
Figura 6.9 (a) é a extensão par de f ;(b) é a extensão ímpar de f .

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 210/416
212 CAPÍTULO 6 Método da Transformada Integral
(15)
(16)
(17)
Notamos que (15) existe do fato do integrando ser uma função par de . Em (16),simplesmente somamos zero ao integrando,
pois o integrando é uma função ímpar de . A integral em (17) pode ser escrita como
(18)
onde
(19)
Essa última forma da integral de Fourier será posta em uso na próxima seção,quando retornaremos à solução de problemas de valor de contorno.
Uso de computadores A convergência de uma integral de Fourier pode ser exa-
minada de uma maneira que é similar a traçar gráficos de somas parciais de uma série
de Fourier. Para ilustrar, vamos utilizar os resultados dos itens (a) e (b) do Exemplo 3.
Por definição de uma integral imprópria, a representação por integral de Fourier do co-
seno de f ( x ) e x
, x 0 em (13) pode ser escrita como f ( x ) limb→F b( x ), onde
sendo x tratado como um parâmetro. De modo similar, a representação por inte-gral de Fourier do seno de f ( x ) e x , x 0 em (14) pode ser escrita como f ( x ) limb→
Gb( x ), onde
.Como as integrais de Fourier (13) e (14) convergem, os gráficos das integrais parciaisF b( x ) e Gb( x ) para um valor específico de b 0 serão uma aproximação dos gráficosde f e suas extensões par e ímpar indicadas na Figura 6.9(a) e Figura 6.9(b), respec-tivamente. Os gráficos de F b( x ) e Gb( x ) para b 20 ilustrados na Figura 6.10 foramobtidos utilizando-se o Mathematica e sua aplicação NIntegrate. Veja o Problema 21
nos Exercícios 6.3.
1
–1
0
1,5
0,5
–0,5
y
–3 –2 –1 0 1 2 3
x
(a) G20( x )
1
–1
0
1,5
0,5
–0,5
y
–3 –2 –1 0 1 2 3
x
(b) F 20( x )
Figura 6.10 Gráficos de integrais par-ciais.
EXERCÍCIOS 6.3 As respostas de problemas ímpares selecionados estão na página 397.
Nos Problemas 1-6, determine a representação por integral deFourier da função indicada.
1.
2.
3.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 211/416
6.4 Transformadas de Fourier 213
4.
5.
6.
Nos Problemas 7-12, represente a função indicada por uma inte-gral apropriada do co-seno ou do seno.
7.
8.
9. 10.
11. 12.
Nos Problemas 13-16, determine as representações por integraldo co-seno e do seno da função indicada.
13. 14.
15. 16.
Nos Problemas 17 e 18, resolva a equação integral dada para afunção f .
17.
18.
19. (a) Use (7) para mostrar que
[Sugestão: é uma variável muda de integração.]
(b) Mostre em geral que, para
20. Utilize a forma complexa (15) para obter a representaçãopor integral de Fourier de f ( x ) e| x |. Mostre que o resulta-do é igual ao obtido a partir de (8).
Tarefas computacionais 21. Enquanto que a integral (12) pode ser traçada da mesma
maneira discutida na página 212 para obter a Figura 6.10,ela também poderá ser expressa em termos de uma funçãoespecial que é construída em um SAC.
(a) Aplique uma identidade trigonométrica para mostrar que
uma forma alternativa da representação por integral de
Fourier (12) da função f no Exemplo 2 (com a 1) é
(b) Como consequência do item (a), onde
Mostre que a última integral pode ser escrita como
onde Si( x ) é a função integral do seno. Veja o Proble-ma 49 nos Exercícios 2.3 do Volume 1.
(c) Utilize um SAC e a forma integral do seno obtida noitem (b) para traçar o gráfico de F b( x ) no intervalo –3 x 3 para b 4, 6 e 15. Trace depois F b( x ) paravalores maiores de b 0.
6.4 Transformadas de Fourier
Introdução Até o momento, estudamos e aplicamos apenas uma transformadaintegral: a transformada de Laplace. Porém, na Seção 6.3, vimos que a integral deFourier tinha três formas alternativas: a integral do co-seno, a integral do seno e aforma complexa ou exponencial. Na presente seção, trabalharemos com essas trêsformas da integral de Fourier e as desenvolveremos em três novas transformadas in-
tegrais naturalmente denominadas transformadas de Fourier. Além disso, expandi-remos o conceito de um par de transformadas, isto é, uma transformada integral e suainversa. Veremos também que a inversa de uma transformada integral é ela própriauma outra transformada integral.
Pares de transformadas A transformada de Laplace F (s) de uma função f (t ) édefinida por uma integral, mas até agora temos utilizado a representação simbólica

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 212/416
214 CAPÍTULO 6 Método da Transformada Integral
f (t ) 1{F (s)} para representar a transformada inversa de Laplace de F (s). Na ver-dade, a transformada inversa de Laplace é também uma transformada integral. Se
(1)
então a transformada inversa de Laplace é
(2)
A última integral é denominada integral de contorno; seu cálculo exige o uso devariáveis complexas, estando além do escopo dessa discussão. O ponto aqui é: trans-formadas integrais aparecem em pares de transformadas. Se f ( x ) for transformadaem F () por uma transformada integral
(3)
então a função f pode ser recuperada por outra transformada integral
(4)
chamada de transformada inversa. As funções K e H nos integrandos de (3) e (4)são designadas núcleos de suas respectivas transformadas. Identificamos K (s,t ) e
st como o núcleo da transformada de Laplace, e H (s,t ) est /2 i como o núcleo datransformada inversa de Laplace.
Pares de transformadas de Fourier A integral de Fourier é a fonte de três novastransformadas integrais. A partir de (8) e (9), (10) e (11), e (18) e (19) da seção ante-rior, definimos os seguintes pares de transformadas de Fourier.
Pares de transformadas de Fourier
(i) Transformada de Fourier: (5)
Transformada inversa de Fourier: (6)
(ii) Transformada de Fourier do seno: sen (7)
Transformada inversa de Fourier do seno: sen (8)
(iii) Transformada de Fourier do co-seno: (9)
Transformada inversa de Fourier do co-seno: (10)
DEFINIÇÃO 6.3
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 213/416
6.4 Transformadas de Fourier 215
Existência As condições sob as quais (5), (7) e (9) existem são mais severasdo que aquelas para a transformada de Laplace. Por exemplo, deve-se verificar quef{1}, fs{1} e fc{1} não existem. Condições suficientes para a existência são que f seja absolutamente integrável no intervalo apropriado e que f e f ¿ sejam contínuas porpartes em qualquer intervalo finito.
Propriedades operacionais Como nosso objetivo imediato é aplicar essas novastransformadas a problemas de valor de contorno, precisamos examinar as transforma-das de derivadas.
Transformada de Fourier
Suponha f contínua e absolutamente integrável no intervalo (,) e f ¿ contínua porpartes em qualquer intervalo finito. Se f ( x )→ 0 quando x→ , então a integraçãopor partes resulta em
isto é, (11)De modo similar, sob as condições adicionadas de que f ¿ seja contínua em (,),
f –( x ) seja contínua por partes em qualquer intervalo finito, e f ¿( x )→ 0 quando x → , temos
(12)É importante estarmos conscientes de que as transformadas do seno e do co-seno nãosão adequadas para transformar a derivada primeira (ou qualquer derivada de ordemímpar ). É fácil de ver que
A dificuldade é evidente: a transformada de f ¿( x ) não é escrita em termos da transfor-mada integral original.
Transformada de Fourier do seno
Suponha que f e f ¿ sejam contínuas, f seja absolutamente integrável no intervalo [0,),e f – seja contínua em qualquer intervalo finito. Se f → 0 e f ¿ → 0 quando x → ,então
isto é, (13)
Transformada de Fourier do co-seno
Sob as mesmas considerações que resultaram em (9), obtemos a transformada deFourier do co-seno de f –( x ) como sendo
(14)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 214/416
216 CAPÍTULO 6 Método da Transformada Integral
Uma questão natural é: “Como sabemos qual transformada aplicar em um dadoproblema de valor de contorno?”. Claramente, para utilizar a transformada de Fou-rier, o domínio da variável a ser eliminada tem que ser (,). Para utilizar umatransformada de seno ou do co-seno, o domínio de ao menos uma das variáveisno problema tem que ser [0,). Porém, o fator determinante para escolher entre a
transformada do seno e a transformada do co-seno é o tipo de condição de contornoespecificada em zero.
Nos exemplos que se seguem, consideraremos sem mencionar que tanto u comou / x (ou u / y) se aproximam de zero quando x → . Essa não é uma granderestrição, pois essas condições se aplicam na maioria das aplicações.
Exemplo 1 Utilizando a transformada de Fourier
Resolva a equação do calor sujeita a
Solução O problema pode ser interpretado como obter a temperatura u( x ,t ) emuma haste infinita. Como o domínio de x é o intervalo infinito (,), utilizamos atransformada de Fourier (5) e definimos
Transformando a equação diferencial parcial e usando (12),
resulta em
Resolvendo a última equação, obtemos Agora, a transformada dacondição inicial é
Esse resultado é o mesmo que Aplicando essa condição à solu-
ção U (,t ) resulta em U (,0) c (2u0 sen )/ , e assim
Decorre da integral inversa (6) que
A última expressão pode ser simplificada pela fórmula de Euler ei x cos x – i
sen x , observando que , pois o integrando é uma fun-
ção ímpar de . Portanto, temos finalmente
(15) ❑
Recomenda-se ao leitor mostrar que a solução (15) pode ser escrita em termos dafunção erro. Veja o Problema 23 nos Exercícios 6.4.
Como sabemos qualtransformada usar?

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 215/416
6.4 Transformadas de Fourier 217
Exemplo 2 Utilizando a transformada do co-seno
A temperatura de regime permanente em uma placa semi-infinita é determinada apartir de
Resolva para u( x , y).
Solução O domínio da variável y e a condição prescrita em y 0 indicam que atransformada de Fourier do co-seno é adequada para o problema. Definimos
Em vista de (14),
se torna
Como o domínio de x é um intervalo finito, escolhemos escrever a solução da equa-ção diferencial ordinária como
(16)
Agora são, respectivamente,equivalentes a
Quando aplicamos essas últimas condições, a solução (16) resulta em c1 0 e c2 1/[(1 2) senh ]. Portanto,
e assim de (10) obtemos
(17) ❑
Se u( x ,0) tivesse sido indicado no Exemplo 2 em vez de u y( x ,0), então a transfor-mada do seno teria sido apropriada.
EXERCÍCIOS 6.4 As respostas de problemas ímpares selecionados estão na página 398.
Nos Problemas 1-21, aplique a transformada integral de Fourierdessa seção para resolver o problema de valor de contorno dado.Faça considerações a respeito dos contornos quando necessário.
1.
2.
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 216/416
218 CAPÍTULO 6 Método da Transformada Integral
3. Determine a temperatura u( x ,t ) em uma haste semi-infinitase u(0,t ) u0, t 0 e u( x ,0) 0, x 0.
4. Utilize o resultado para mostrar
que a solução no Problema 3 pode ser escrita como
5. Determine a temperatura u( x ,t ) em uma haste semi-infinitase u(0,t ) 0, t 0 e
6. Resolva o Problema 3 se a condição no contorno esquerdo for
7. Resolva o Problema 5 considerando que o contorno x
0esteja isolado.
8. Determine a temperatura u( x ,t ) em uma haste semi-infinitase u(0,t ) 1, t 0, e u( x ,0) e x , x 0.
9. (a)
(b) Se g( x ) 0, mostre que a solução do item (a) pode serescrita como
10. Determine o deslocamento u( x ,t ) de uma corda semi-infi-nita se
11. Resolva o Problema no Exemplo 2 considerando que as con-dições de contorno em x 0 e x sejam trocadas:
12. Resolva o Problema no Exemplo 2 se a condição de contor-no em y 0 for u( x ,0) 1, 0 x .
13. Determine a temperatura de regime permanente u( x , y) emuma placa definida por x 0, y 0 se o contorno x 0estiver isolado e, em y 0,
14. Resolva o Problema 13 se a condição de contorno em x 0for u(0, y) 0, y 0.
15.
16.
Nos Problemas 17 e 18, determine a temperatura de regimepermanente u( x , y) na placa ilustrada na figura. [Sugestão: Ummodo de proceder é expressar os Problemas 17 e 18 como dois etrês problemas de valor de contorno, respectivamente. Aplique oprincípio da superposição (veja a Seção 4.5)].
17.
x
y
u = e– y
u = e– x
Figura 6.11 Placa no Problema 17.
18.
x
y
0
1
u = e– y
u = 0
u = 100
u = f ( x )
Figura 6.12 Placa no Problema 18.
19. Utilize o resultado para resolvero problema de valor de contorno
20. Se f{ f ( x )} F () e f{g( x )} G(), então o teorema da
convolução para a transformada de Fourier é dado por
Use esse resultado e a transformada indicada noProblema 19 para mostrar que uma solução do problema devalor de contorno

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 217/416
6.5 Transformada Rápida de Fourier 219
21. Use a transformada indicada no Problema 19para definir a temperatura de regime permanente u( x , y) nafita infinita mostrada na Figura 6.13.
y
1
x
isolada
u = e
– x 2
Figura 6.13 Placa no Problema 21.
22. A solução do Problema 14 pode ser integrada. Utilize as en-tradas 42 e 43 da tabela no Apêndice III do Volume 1 paramostrar que
23. Use o Problema 20, a mudança de variáveis v ( x )2 e o Problema 9 nos Exercícios 6.1, para mostrar que a
solução do Exemplo 1 pode ser expressada como
Tarefas computacionais 24. Considere u0 100 e k 1 na solução do Problema 23. Use
um SAC para traçar o gráfico u( x ,t ) sobre a região retangu-lar –4 x 4, 0 t 6. Utilize a ferramenta de gráficos2D para superpor os gráficos de u( x ,t ) para t 0,05, 0,125,0,5, 1, 2, 4, 6 e 15 no intervalo –4 x 4. Use os gráficospara determinar os valores de limt→
u( x ,t ) e lim x → u( x ,t ).Demonstre então esses resultados analiticamente aplicandoas propriedades de erf( x ).
6.5 Transformada rápida de Fourier
Introdução Considere uma função f que seja definida e contínua no intervalo[0,2 p]. Se x 0, x 1, x 2,..., x n,... são pontos igualmente espaçados no intervalo, então osvalores funcionais correspondentes f 0, f 1, f 2,..., f n,... apresentados na Figura 6.14 re-presentam uma amostragem discreta da função f . O conceito de amostras discretas deuma função é importante para a análise de sinais contínuos.
Nessa seção, a forma complexa ou exponencial de uma série de Fourier desem-penha um importante papel na discussão. Recomenda-se revisar a Seção 3.4.
Transformada discreta de Fourier Considere uma função f definida no intervalo[0,2 p]. A partir de (11) da Seção 3.4, vimos que f pode ser escrita em uma série com-
plexa de Fourier,
(1)
onde 2 /2 p / p é a frequência angular fundamental, e 2 p é o período fun-damental. No caso discreto, entretanto, a entrada é f 0, f 1, f 2,..., que são os valoresda função f em pontos igualmente espaçados x nT , n 0, 1, 2,.... O número T édenominado taxa de amostragem ou o comprimento do intervalo de amostragem.*Se f for contínua em t , então a amostra de f em T é definida como sendo o produto f ( x )( x – T ), onde ( x – T ) é a função delta de Dirac (veja a Seção 4.5 do Volume 1).Podemos então representar essa versão discreta de f , ou sinal discreto, como a somade impulsos unitários que atuam na função em x nT :
(2)
Se aplicarmos a transformada de Fourier para o sinal discreto (2), obtemos
(3)
* Note que o símbolo T utilizado aqui não tem o mesmo significado que aquele da Seção 3.4.
y y = f ( x ) f (nT )
x
T
2 p
f 1
f 2
f n f
0
. . .
Figura 6.14 Amostragem de uma fun-
ção contínua.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 218/416
220 CAPÍTULO 6 Método da Transformada Integral
Pela propriedade de separação da função delta de Dirac (veja as Observações ao finalda Seção 4.5 do Volume 1), (3) é igual a
(4)
A expressão F () em (4) é denominada transformada discreta de Fourier (TDF) dafunção f . Muitas vezes escrevemos os coeficientes f (nT ) em (4) como f (n) ou f n. É im-portante também observar que como e
i x é periódica em eprecisamos considerar apenas a função para em [0, 2 / T ]. Seja N 2 / T . Isso co-loca x no intervalo [0, 2 ]. Assim, como amostramos sobre um período, a soma em(4) é de fato finita.
Considere agora os valores funcionais f ( x ) em N pontos igualmente espaçados, x nT , n 0, 1, 2,..., N – 1, no intervalo [0, 2 ], isto é, f 0, f 1, f 2,..., f N 1. A série deFourier discreta (finita) utilizando esses N termos nos dá
Se adotarmos , e aplicarmos as leis usuais de ex-
poentes, esse sistema de equação será o mesmo que
(5)
Se utilizarmos notação matricial (veja as Seções 2.1 e 2.2 do Volume 2), (5) então será
(6)
Considere a matriz N N em (6) representada pelo símbolo F N . Definidas as entradas f 0, f 1, f 2,..., f N 1, existe um modo fácil de se obter os coeficientes de Fourier c0, c1, c2,...,c N 1? Se for a matriz constituída pelos complexos conjugados das entradas de F N ,e se I representar uma matriz identidade N N , temos então
Decorre de (6) e da última equação que

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 219/416
6.5 Transformada Rápida de Fourier 221
Par da transformada discreta Recorde da Seção 6.4 que no par da transformadade Fourier, utilizamos uma função f ( x ) como entrada e calculamos os coeficientes quedão a amplitude para cada frequência k (ck no caso de funções periódicas de período2 ) ou calculamos os coeficientes que representam a amplitude para cada frequência (F () no caso de funções não periódicas).
Além disso, definidas essas frequências e coeficientes, podemos reconstruir afunção original f ( x ). No caso discreto, utilizamos uma amostra de N valores da fun-ção f ( x ) como entrada e calculamos os coeficientes que resultam na amplitude paracada frequência amostrada. Definidas essas frequências e coeficientes, é possível re-construir os n valores amostrados de f ( x ). O par transformado, ou seja, o par da
transformada discreta de Fourier, é dado por
(7)
onde
Exemplo 1 Transformada discreta de Fourier
Considere N 4, de modo que a entrada seja f 0, f 1, f 2, f 3 nos quatro pontos x 0, /2,
, 3 /2. Como a matriz F4 é
Logo, a partir de (7), os coeficientes de Fourier são definidos por
Se adotarmos f 0, f 1, f 2, f 3 como sendo 0, 2, 4, 6, respectivamente, temos a partir damatriz produto anterior que
Note que obtemos o mesmo resultado utilizando (4), isto é,
com T /2, 0, 1, 2, 3. Os gráficos de |cn|, n 0, 1, 2, 3, ou, de modo equiva-
lente, |F ()| para 0, 1, 2, 3, estão destacados na Figura 6.15. ❑
A determinação dos coeficientes envolve a multiplicação pelas matrizesEm decorrência da natureza dessas matrizes, essas multiplicações podem ser feitasde uma maneira computacional muito eficiente, usando a Transformada Rápida de
Fourier (FFT*), que será discutida mais a frente nessa seção.
* N. de T.: FFT se refere ao termo em língua inglesa Fast Fourier Transform.
3
2,5
2
1,5
10,5 1 1,5 2 2,5 3
|F ()|
Figura 6.15 Gráfico de |F ()| no Exem-plo 1.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 220/416
222 CAPÍTULO 6 Método da Transformada Integral
Equação do calor e série de Fourier discreta Se a função f no problema de valorinicial
(8)
for periódica com período 2 , a solução pode ser escrita em termos de uma série deFourier para f ( x ). Podemos também aproximar essa solução por uma soma finita
Se examinarmos ambos os lados da equação do calor unidimensional em (8), ve-mos que
e
pois
Igualando essas duas últimas expressões, temos a ED de primeira ordem
A tarefa final consiste em determinar os valores c j(0). Entretanto, recorde que
e u( x ,0) f ( x ), logo c j(0) são os coeficientes da série discre-
ta de Fourier de f ( x ). Compara esse resultado com a Seção 4.3.
Equação do calor e transformada discreta de Fourier O problema de valor ini-cial (8) pode ser interpretado como o modelo matemático para a temperatura u( x ,t )em uma barra infinitamente longa. Na Seção 6.4, vimos que podemos resolver (8)aplicando a transformada de Fourier e que a solução u( x ,t ) depende da transformadade Fourier F () de f ( x ) (veja a página 216). Podemos aproximar F () adotando umanova visão da transformada discreta de Fourier.
Primeiro aproximamos valores da transformada discretizando a integralf{ f ( x )} Considere um intervalo [a, b]. Seja f ( x ) definida em n pontos igualmente espaçados
Agora aproxime:

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 221/416
6.5 Transformada Rápida de Fourier 223
Se escolhermos um valor conveniente para , por exemplo, sendo M um intei-ro, temos
onde relembre que n ei2 / n. Essa é uma aproximação numérica para a transformada
de Fourier de f ( x ) calculada nos pontos com M um inteiro.
Exemplo 2 Exemplo 1, Seção 6.4 – Revisto
Recorde do Exemplo 1 na Seção 6.4 (com u0 1) que a transformada de Fourier deum pulso retangular definido por
é
O espectro de frequência está indicado pelo gráfico de |F ()| versus da Figura6.16(a). Utilizando n 16 pontos igualmente espaçados entre a 2 e b 2, e
M de –6 a 6, obtemos a transformada discreta de Fourier de f ( x ), superposta sobre ográfico de |F ()|, na Figura 6.16(b). ❑
–10 –5 5 10
2
1,75
1,5
1,25
1
0,75
0,5
0,25
(a)–10 –5 5 10
2
1,75
1,5
1,25
1
0,75
0,5
0,25
(b)
|F ()||F ()|
Figura 6.16 (a) é o gráfico de |F ()|; (b) é a transformada discreta de Fourier de f .
Serrilhamento Um problema conhecido como serrilhamento (em inglês, alia-
sing) pode ocorrer quando um conjunto de dados é amostrado em intervalos igual-mente espaçados. Se você já viu uma animação na qual rodas em rotação parecem
girar lentamente (ou mesmo para trás!), você está presenciando o efeito do serrilha-mento. As rodas podem girar a uma taxa elevada, mas como os quadros da animaçãosão “amostrados” em intervalos igualmente espaçados, vemos uma taxa baixa derotação.
Calculadoras gráficas também sofrem do efeito de serrilhamento em decorrênciado modo como os pontos são amostrados para criar os gráficos. Por exemplo, trace afunção trigonométrica y sen x com frequência 10 em uma TI-92 da Texas Instru-ment e você terá o gráfico da Figura 6.17(a). Em frequências elevadas, por exemplo,
y sen x com frequência 50, você obtém a quantidade correta de ciclos, porémclaramente as amplitudes do gráfico na Figura 6.17(b) claramente são 1.
Em uma calculadora como a TI-83 da Texas Instrument, os gráficos na Figura6.18 mostram o efeito de serrilhmento de modo muito mais claro.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 222/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 223/416
6.5 Transformada Rápida de Fourier 225
Para justificar esse Teorema da Amostragem, considere a transformada de Fou-rier F () de f ( x ) como uma extensão periódica de modo que F () seja definida paratodos os valores de , não apenas aqueles em – A k A. Aplicando a transformadade Fourier, temos
(9)
(10)
Tratando F () como uma extensão periódica, a série de Fourier para F () é
(11)
onde
(12)
Utilizando (10), observe que
que por (12) é igual a cn. Substituindo em (11), obtemos
Substituindo essa expressão para F () de volta em (10), temos
Note que utilizamos, sucessivamente, um intercâmbio de somatório e integração(nem sempre permitido, mas válido nesse caso), integração de uma função exponen-
cial, sen , e o fato de que sen () sen .

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 224/416
226 CAPÍTULO 6 Método da Transformada Integral
Assim, a partir das amostras nos intervalos de , todos os valores de f podem ser
reconstruídos. Note que se permitirmos eiAx (em outras palavras, permitirmos k A),
então o Teorema da Amostragem falha. Se, por exemplo, f ( x ) sen Ax , então todasas amostras serão 0 e f não poderá ser reconstruída, pois o efeito de serrilhamento
ocorre novamente.
Sinais com faixa limitada Um sinal contendo muitas frequências pode ser filtra-
do de modo que restem somente as frequências em um intervalo, tornando-o um sinalcom faixa limitada. Considere o sinal f ( x ). Multiplique a transformada de FourierF () de f por uma função G() que seja 1 no intervalo que contém as frequências que você deseja manter, e 0 para o restante. Essas multiplicação de duas transforma-das de Fourier no domínio da frequência é uma convolução de f ( x ) e g( x ) no domíniodo tempo. Recorde que o Problema 20 nos Exercícios 6.4 enuncia
A integral do lado direito é denominada a convolução de f e g, sendo escrita como
f *g. A última definição pode ser escrita de modo mais compacto como
A idéia análoga para a transformada de Laplace está na Seção 4.4 do Volume 1. A
função g( x ) tem como sua transformada de Fourier a função pulso
Isso implica que a função ( f *g)( x ) tenha faixa limitada, com frequências entre – A e A.
Cálculo com a Transformada Rápida de Fourier Retornemos para a transformadadiscreta de Fourier de f ( x ), onde temos f amostrada em n pontos igualmente espaça-dos por uma distância T , ou seja, 0, T , 2T , 3T ,..., (n – 1)T . (Utilizamos T / n no iní-cio dessa seção.) Substituindo essa informação, a transformada discreta de Fourier
se torna
Para simplificar a notação, escrevemos a expressão anterior como
que é semelhante a (6), onde tínhamos
ou f Fnc. A chave para a FFT são as propriedades de n e a fatoração matricial. Se n 2 N , podemos escrever Fn da seguinte forma (que não será demonstrada):
(13)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 225/416
6.5 Transformada Rápida de Fourier 227
onde Ik é a matriz identidade k k e P é a matriz de permutação que rearranja a ma-triz c de modo que os subscritos pares sejam ordenados no topo e os ímpares sejamordenados na base. A matriz D é uma matriz diagonal definida por
Note que cada uma das matrizes pode ser fatorada. Ao final, a matriz Fn com n2
entradas não nulas é fatorada no produto de n matrizes mais simples, o que resulta emuma redução significativa do número de cálculos necessários no computador.
Exemplo 3 A FFT
Considere n 22 4 e seja F4 a matriz do Exemplo 1:
A partir de (13), a fatoração desejada de F4 é
(14)
Inserirmos retas tracejadas nas matrizes marcadas como A e B de modo que possamos
identificar as submatrizes I2, D2, -D2 e F2 comparando (14) diretamente com (13). Acon-
selhamos a você multiplicar o lado direito de (14) e verificar que F4 é obtida. Agora
❑
Sem entrar em detalhes, o cômputo de Fn exige n2 cálculos, enquanto utilizar a fato-
ração matricial (a FFT) significa reduzir o número de cálculos para uma quantidadeproporcional a n. Tente valores de n um pouco maiores e você terá uma economiasubstancial.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 226/416
228 CAPÍTULO 6 Método da Transformada Integral
EXERCÍCIOS 6.5 As respostas de problemas ímpares selecionados estão na página 398.
1. Mostre que
2. Prove a propriedade de separação da função delta de Dirac:
[Sugestão: Considere a função
Aplique o teorema do valor médio para integrais e faça → 0.]
3. Determine a transformada de Fourier da função delta de Di-rac ( x ).
4. Mostre que a função delta de Dirac é a identidade sob a ope-ração de convolução, isto é, mostre que f * * f f . [Su-
gestão: Utilize transformadas de Fourier e o Problema 3.]
5. Mostre que a derivada da função delta de Dirac¿( x – a) tema propriedade de separar a derivada de uma função f em a.[Sugestão: Aplique integração por partes.]
6. Utilize um SAC para mostrar que a transformada de Fourier
da função é a função pulso
7. Escreva a matriz F8 e depois escreva-a na forma fatorada(13). Verifique que o produto dos fatores é F8. Se necessário,use um SAC para verificar esse resultado.
8. Seja Como ei2 k 1, os
números têm a propriedadePor causa disso, n – 1, são
chamadas enésimas raízes da unidade, sendo soluções daequação z
n – 1 0. Determine a oitava raiz da unidade etrace-a no plano xy no qual um número complexo é escritocomo z x iy. O que você observa?
Tarefas computacionais 9. Use um SAC para verificar que a função f *g, onde f ( x )
tem faixa limitada. Se o seu SAC
for capaz, trace os gráficos def{ f *g} e F ()G() para veri-ficar o resultado.
10. Se o seu SAC tiver o comando da transformada discreta deFourier, escolha seis pontos e compare o resultado obtidoutilizando esse comando com aquele calculado a partir de
CAPÍTULO 6 EXERCÍCIOS DE REVISÃO As respostas de problemas ímpares selecionados estão na página 398.
Nos Problemas 1-15, resolva o problema de valor de contorno in-dicado utilizando uma transformada integral apropriada. Quandonecessário, faça considerações a respeito dos contornos.
1.
2.
3.
4.
5.
6.
7.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 227/416
Exercícios de Revisão 229
8.
9.
10.
11.
12.
[Sugestão: Utilize a identidade senh( x – y) senh x cosh
y – cosh x senh y, e a seguir use o Problema 6 dos Exercícios6.1.]
13.
14.
15. Mostre que a solução do PVC

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 228/416
7
C A P Í T U L O
Soluções Numéricas de EquaçõesDiferenciais Parciais
Na Seção 6.5 do Volume 1, vimos que uma maneira de aproximar uma
solução de um problema de valor de contorno de segunda ordem consistiaem substituir uma equação diferencial ordinária por uma equação dediferenças finitas. A mesma ideia se aplica às equações diferenciais parciais.Nas seções respectivas deste capítulo, construiremos uma substituiçãode equação diferença para a equação de Laplace, equação do calorunidimensional e equação de onda unidimensional substituindo as derivadasparciais u xx u yy , utt e ut por quocientes de diferença.
Descrição do capítulo
7.1 Equação de Laplace
7.2 A equação do calor
7.3 A equação de onda
Exercícios de revisão

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 229/416
7.1 Equação de Laplace 231
7.1 Equação de Laplace
Introdução Recorde da Seção 4.1 que EDPs de segunda ordem lineares comduas variáveis independentes são classificadas como elíptica, parabólica e hiperbó-
lica. Aproximadamente, EDPs elípticas envolvem derivadas parciais em relação ape-
nas a variáveis espaciais, e, como consequência, as soluções de tais equações são de-terminadas apenas pelas condições de contorno. Equações parabólicas e hiperbólicasenvolvem derivadas parciais em relação a variáveis espaciais e temporais, e assim assoluções dessas equações geralmente são determinadas a partir de condições de con-torno e iniciais. Uma solução de uma EDP elíptica (tal como a equação de Laplace)pode descrever um sistema físico cujo estado está em equilíbrio (regime permanente);uma solução de uma EDP parabólica (tal como a equação do calor) pode descreverum estado de dispersão, enquanto que uma EDP hiperbólica (tal como a equação deonda) pode descrever um estado vibracional.
Nessa seção, iniciamos a nossa discussão com métodos de aproximação apro-priados para equações elípticas. Nosso foco estará na EDP mais simples, mas prova-velmente a mais importante: a equação de Laplace.
Substituição por equação de diferença Suponha que estejamos buscando umasolução u( x ,t ) da equação de Laplace
em uma região planar R que seja limitada por uma curva qualquer C . Veja a Figura7.1. De modo análogo à Seção 6.5 do Volume 1, utilizando as diferenças centrais
aproximações para as derivadas parciais segundas u xx e u yy podem ser obtidas usando-se os coeficientes de diferença
(1)
(2)
Agora, somando (1) e (2), obtemos uma aproximação de cinco pontos para o La-placiano:
Logo, podemos substituir a equação de Laplace pela equação de diferença
(3)
Se adotarmos a notação u( x , y) uij
e
então (3) se torna
(4)
Para compreender (4) um pouco melhor, considere que uma malha retangular consti-tuída por retas horizontais espaçadas por h unidades e retas verticais espaçadas tam-bém por h unidades é posta sobre a região R. O número h é denominado de tamanho
da malha. Veja a Figura 7.2(a). Os pontos Pij P(ih, jh), i e j inteiros, da interseçãodas retas horizontais e verticais, são denominados pontos da malha ou pontos de
h
h
x
y
R
C
(a)
(b)
h
h
P22P12
P21 P31
P20
P11
P13
2h 4h 5h 6h3h
2h
4h
5h
6h
7h
3h
Pi, j + 1
Pi, j – 1
Pi – 1, j Pi + 1, jPi j
Figura 7.2 Região R sobreposta poruma malha retangular.
x
y
R
C
∇2u = 0
Figura 7.1 Região planar R com con-torno C .

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 230/416
232 CAPÍTULO 7 Soluções Numéricas de Equações Diferenciais Parciais
lattice. Um ponto da malha será um ponto interior se os quatro pontos de malhamais próximos forem pontos de R. Pontos em R ou em C que não sejam pontos inte-riores são chamados pontos de contorno. Por exemplo, na Figura 7.2(a), temos
e assim por diante. Dos pontos listados, P21 e P22 são pontos interiores, enquanto queP20 e P11 são pontos de contorno. Na Figura 7.2(a), pontos interiores são os pontosindicados em colorido e os pontos de contorno são apresentados em preto. Agora, apartir de (4) vemos que
(5)
e assim, conforme mostrado na Figura 7.2(b), o valor de uij em um ponto do interiorda malha de R é a média dos valores de u em quatro pontos de malha vizinhos. Ospontos vizinhos Pi1, j, Pi, j1, Pi1, j e Pi, j1 correspondem, respectivamente, aos quatropontos em uma bússola L, N, O e S.
Problema de Dirichlet Recorde que no problema de Dirichlet para a equaçãode Laplace 2
u 0, os valores de u( x , y) são definidos no contorno C de uma região R. A idéia básica é obter uma solução aproximada da equação de Laplace nos pon-tos de malha interiores substituindo a equação diferencial parcial nesses pontos pelaequação de diferença (4). Portanto, os valores aproximados de u nos pontos de malha– ou seja, os uij – estão relacionados um com o outro, e possivelmente, a valores co-nhecidos de u considerando que um ponto de malha se localize no contorno C . Dessamaneira, obtemos um sistema de equações algébricas lineares que resolvemos para aincógnita uij. O exemplo a seguir ilustra o método para uma região quadrada.
Exemplo 1 Um PVC revisto
No Problema 14 dos Exercícios 4.5, você resolveu o problema de valor de contorno
utilizando o princípio da superposição. Para aplicar o método numérico apresenta-do, vamos começar com um tamanho de malha Conforme vemos na Figura7.3, a escolha resulta em quatro pontos interiores e oito pontos de contorno. Os nú-meros listados próximos aos pontos de contorno são os valores exatos de u obti-dos a partir da condição especificada ao longo daquele contorno. Por exemplo, em
, temos e e assim a condição u(2, y) resulta emDe modo similar, em a condição u( x ,2) resul-
ta em Aplicamos agora (4) em cada ponto interior. Por exemplo, em P11,
temos i 1 e j 1. Portanto, (4) se torna
Como e a equação anterior é escrita como–4u11 u21 u12 0. Repetindo isso respectivamente em P21, P12 e P22, obtemos trêsequações adicionais:
(6)
P22P12
P21P11
x
y 2
3
2
3
8
9
8
9
0 0
0
0
Figura 7.3 Região quadrada R para oExemplo 1.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 231/416
7.1 Equação de Laplace 233
Utilizando um sistema de álgebra computacional para resolver o sistema, obtemos astemperaturas aproximadas nos quatro pontos interiores como sendo
❑
Como na discussão das equações diferenciais ordinárias, esperamos que um me-nor valor de h melhore a exatidão da aproximação. Entretanto, a utilização de umamalha de menor tamanho significa, é claro, que existem mais pontos interiores demalha, e, de modo correspondente, existe um sistema de equações muito maior a serresolvido. Para uma região quadrada cujo comprimento de lado seja L, um tamanhode malha h L / n resultará em um número total de (n – 1)2 pontos interiores de ma-lha. No Exemplo 1, para n 8, o tamanho da malha é razoável ( ), porémo número de pontos interiores é (8 – 1)2 49. Portanto, temos 49 equações com 49incógnitas. No próximo exemplo, utilizamos um tamanho de malha
Exemplo 2 Exemplo 1 com mais pontos de malha
Conforme pode ser observado na Figura 7.4, com n 4, um tamanho de malha
para o quadrado no Exemplo 1 resulta em 32 9 pontos interiores demalha. Aplicando (4) nesses pontos e utilizando as condições de contorno indicadas,obtemos nove equações em nove incógnitas. Assim, para que você possa verificar osresultados, apresentamos o sistema em uma forma não simplificada:
(7)Nesse caso, o uso de um SAC resulta em
❑
Após simplificarmos (7), é interessante observar que a matriz de coeficientes9 9 é
(8)
Trata-se de um exemplo de uma matriz esparsa na qual uma grande parte das entra-das é nula. A matriz (8) é também um exemplo de uma matriz limitada. Esses tipos
x
y 1
2
3
4
0 0
0
0
1
2
1
1
3
4
0
0
P13 P23 P33
P12 P22 P32
P11 P21 P31
Figura 7.4 Região R no Exemplo 1 compontos de malha adicionais.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 232/416
234 CAPÍTULO 7 Soluções Numéricas de Equações Diferenciais Parciais
de matrizes são caracterizados pela entradas da diagonal principal e nas diagonais (oufaixas) paralelas à diagonal principal serem todas não nulas. As faixas indicadas emcolorido em (8) estão separadas por diagonais que são totalmente constituídas porzero ou não.
Interação de Gauss-Seidel Problemas que exigem aproximações para as solu-ções de equações diferenciais parciais invariavelmente resultam em sistemas grandesde equações algébricas lineares. Não é incomum termos que resolver sistemas en-volvendo centenas de equações. Apesar de um método direto de solução tal como aeliminação gaussiana não modificar as entradas nulas fora das faixas em uma matrizcomo a indicada em (8), esse tipo de método preenche as posições entre as faixas comnúmeros diferentes de zero. Como a armazenagem de matrizes muito grandes ocupauma quantidade significativa de memória do computador, é comum resolvermos sis-temas dessa natureza de maneira indireta. Um método indireto popular é denominadointeração de Gauss-Seidel.
Exemplo 3 Interação de Gauss-Seidel
Passo 1: Resolva cada equação para as variáveis na diagonal principal do sistema.Isto é, em (6), resolva a primeira equação em relação a x 1, a segunda equação emrelação a x 2, e assim por diante:
(9)
Essas equações podem ser obtidas diretamente utilizando-se (5) em vez de (4) nospontos interiores.
Passo 2: Iterações. Iniciamos pela escolha de valores iniciais de x 1, x 2, x 3 e x 4. Se
tivermos simplesmente um sistema de equações lineares e não conhecermos nada arespeito da solução, podemos começar com x 1 0, x 2 0, x 3 0, x 4 0. Porém,como a solução de (9) representa aproximações para uma solução de um problemade valor de contorno, seria razoável utilizar como palpite inicial para os valores de x 1 u11, x 2 u21, x 3 u12 e x 4 u22 a média de todas as condições de contorno. Nessecaso, a média dos números nos oito pontos de contorno indicados na Figura 7.2 éaproximadamente 0,4. Portanto, nosso palpite inicial é x 1 0,4, x 2 0,4, x 3 0,4 e
x 4 0,4. Interações do método de Gauss-Seidel utilizam os valores de x tão logo elessejam calculados. Note que a primeira equação em (9) depende somente de x 2 e x 3; as-sim, substituindo x 2 0,4 e x 3 0,4, obtemos x 1 0,2. Como a segunda e a terceiraequações dependem de x 1 e x 4, utilizamos os novos valores calculados x 1 0,2 e x 4 0,4 para obter x 2 0,3722 e x 3 0,3167. A quarta equação depende de x 2 e x 3, logoutilizamos os novos valores x 2 0,3722 e x 3 0,3167 para obter x 4 0,5611. Em
resumo, a primeira interação resultou nos valores
Observe o quão próximo esses números estão dos valores reais apresentados ao finaldo Exemplo 1.
A segunda interação começa pela substituição de x 2 0,3722 e x 3 0,3167 na
primeira equação. Isso resulta em x 1 0,1722. A partir de x 1 0,1722 e do último
valor calculado de x 4 (ou seja, x 4 0,5611), a segunda e terceira equações resultam,
respectivamente, em x 2 0,4055 e x 3 0,3500. Utilizando esses dois valores, temos a
partir da quarta equação x 4 0,5678. Ao final da segunda interação, temos

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 233/416
7.1 Equação de Laplace 235
A Tabela 7.1 resume da terceira à sétima iterações.
Tabela 7.1 Iterações
3 4 5 6 7
❑
Para aplicarmos a iteração de Gauss-Seidel para um sistema geral de n equaçõeslineares em n incógnitas, a variável x i precisa de fato aparecer na i-ésima equação dosistema. Além disso, após a solução de cada equação para x i, i 1, 2,..., n, o sistemaresultante adquire a forma X AX B, onde todas as entradas na diagonal principalde A são nulas.
Observações
(i) Nos exemplos apresentados nessa seção, os valores de uij foram determinadosutilizando-se valores conhecidos de u nos pontos de contorno. Porém, o que fazemosse a região é tal que os pontos de contorno não coincidem com o contorno real C daregião R? Nesse caso, os valores exigidos podem ser obtidos por interpolação.(ii) Algumas vezes é possível reduzir o número de equações a ser solucionadas uti-lizando-se simetria. Considere a região retangular 0 x 2, 0 y 1, ilustradana Figura 7.5. As condições de contorno são u 0 ao longo dos contornos x 0, x 2, y 1, e u 100 ao longo de y 0. A região é simétrica em relação às retas x
1 e e os pontos interiores P11 e P31 são equidistantes em relação aos pontosde contorno vizinhos nos quais os valores especificados de u são os mesmos. Con-sequentemente, consideramos u11 u31, e assim o sistema de três equações em trêsincógnitas se reduz para duas equações em duas incógnitas. Veja o Problema 2 nosExercícios 7.1.
(iii) No contexto de aproximar uma solução à equação de Laplace, a técnica de intera-ção ilustrada no Exemplo 3 é muitas vezes referida como método de Liebman.
(iv) Pode não se notar em um computador, mas a convergência da interação de Gauss-Seidel (ou método de Liebman) pode não ser particularmente rápida. Além disso,em um conjunto mais geral, a interação de Gauss-Seidel pode não convergir por com-pleto. Recomenda-se a consulta de livros de análise numérica para uma idéia dascondições suficientes que garantam a convergência da interação de Gauss-Seidel.
Observação.
x
y
100 100
0
100
0
x = 1
y =
0 0
0P31P21P111
2
Figura 7.5 Região retangular R.
EXERCÍCIOS 7.1 As respostas de problemas ímpares selecionados estão na página 399.
Nos Problemas 1-8, utilize um computador para auxiliar nos cál-culos.
Nos Problemas 1-4, aplique (4) para aproximar a solução daequação de Laplace nos pontos interiores da região indicada. Usesimetria quando possível.
1.
tamanho de malha:
2.
tamanho de malha:3.
tamanho de malha:

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 234/416
236 CAPÍTULO 7 Soluções Numéricas de Equações Diferenciais Parciais
7.2 A equação do calor
Introdução A idéia básica na discussão que se segue é a mesma da Seção 7.1:aproximamos uma solução de uma EDP – dessa vez uma EDP parabólica – pela subs-tituição da equação por uma equação de diferença finita. Porém, ao contrário da seçãoanterior, consideraremos dois métodos de aproximação por diferenças finitas paraequações diferenciais parciais parabólicas: um chamado método explícito e o outro
denominado método implícito. Para facilitar a definição, consideraremos somente aequação do calor unidimensional.
Substituição por equação de diferença Para aproximar a solução u( x ,t ) da equa-ção do calor unidimensional
(1)
substituímos novamente as derivadas por quocientes de diferença. Utilizando a apro-ximação por diferença central (2) da Seção 7.1,
4.
tamanho de malha:
Nos Problemas 5 e 6, utilize (5) e interação de Gauss-Seidel paraaproximar a solução da equação de Laplace nos pontos interio-res de um quadrado unitário. Use o tamanho de malhaNo Problema 5, as condições de contorno estão indicadas; noProblema 6, os valores de u nos pontos de contorno estão apre-sentados na Figura 7.6.
5.
6.
x
y
10 20
20
20
30
40
10 20 40
50
70
60
P33P23P13
P32P22P12
P31P21P11
Figura 7.6 Região no Problema 6.
7. (a) No Problema 12 dos Exercícios 4.6, resolvemos umproblema de potencial aplicando uma forma especial da
equação de Poisson Mostre que a
substituição da equação de Poisson por uma equação dediferença é
(b) Use o resultado do item (a) para aproximar a solução
da equação de Poisson nos pontos
interiores da região da Figura 7.7. O tamanho de ma-
lha é em qualquer ponto ao longo de ABCD, e u 0 em qualquer ponto ao longo de DE-
FGA. Utilize simetria e, se necessário, interação deGauss-Seidel.
x
y
G
A B
C
D E
F
Figura 7.7 Região no Problema 7.
8. Utilize o resultado do item (a) do Problema 7 para apro-
ximar a solução da equação de Poisson
nos pontos interiores da região na Figura 7.8. A malha ée u 0 em qualquer ponto no contorno da região. Se
necessário, utilize a interação de Gauss-Seidel.
x
y
Figura 7.8 Região no Problema 8.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 235/416
7.2 A Equação do Calor 237
e a aproximação por diferença para frente (3) da Seção 6.5 do Volume 1,
a equação (1) se torna
(2)
Se adotarmos ck / h2 e
então, após simplificar, (2) é
(3)
No caso da equação da equação do calor (1), as condições de contorno típicas são
u(0,t ) u1, u(a,t ) u2, t 0, e uma condição inicial é u( x ,0) f ( x ), 0 x a. A
função f pode ser interpretada como a distribuição de temperatura inicial em uma haste
homogênea que se estende de x 0 a x a; u1 e u2 podem ser interpretadas como
temperaturas constantes nas extremidades das hastes. Apesar de não demonstrarmos, o
problema de valor de contorno constituído por (1) e essas duas condições de contorno e
uma condição inicial terá uma solução única quando f for contínua no intervalo fechado
[0,a]. Essa última condição será considerada, e assim substituímos a condição inicial
por u( x , 0) f ( x ), 0 x a. Além disso, em vez de trabalharmos com a região semi-
infinita no plano xt definida pelas igualdades 0 x a, t 0, utilizamos a região re-
tangular definida por 0 x a, 0 t T , onde T é algum valor específico de tempo.
Sobre essa região, posicionamos uma malha retangular constituída por retas verticais
espaçadas por h unidades e retas horizontais afastadas k unidades entre si. Veja a Figura
7.9. Se escolhermos dois inteiros positivos n e m e definirmos
então as retas verticais e horizontais da malha são definidas por
Conforme ilustrado na Figura 7.10, o plano é aplicar a fórmula (3) para estimaros valores da solução u( x ,t ) nos pontos na ( j 1)-ésima reta de tempo utilizando so-mente valores a partir j-ésima reta de tempo. Por exemplo, os valores na primeira retade tempo ( j 1) dependem da condição inicial ui,0 u( x i,0) f ( x i) indicada na retade tempo zero ( j 0). Esse tipo de procedimento numérico é chamado método das
diferenças finitas explícito.
Exemplo 1 Utilizando o método das diferenças finitas
Considere o problema de valor de contorno
Primeiro, identificamos c 1, a 1 e T 0,5. Se escolhermos, por exemplo, n 5e m 50, então
x
t
T
k
0 ah . . .
.
. .
3k
2k
3h2h
Figura 7.9 Região retangular no plano x t.
k
h
( j+1)-ésima reta
de tempo
j-ésima reta
de tempo
ui, j + 1
ui + 1, jui – 1, j uij
Figura 7.10 u em t j é determinadoa partir de três valores de u em t j .
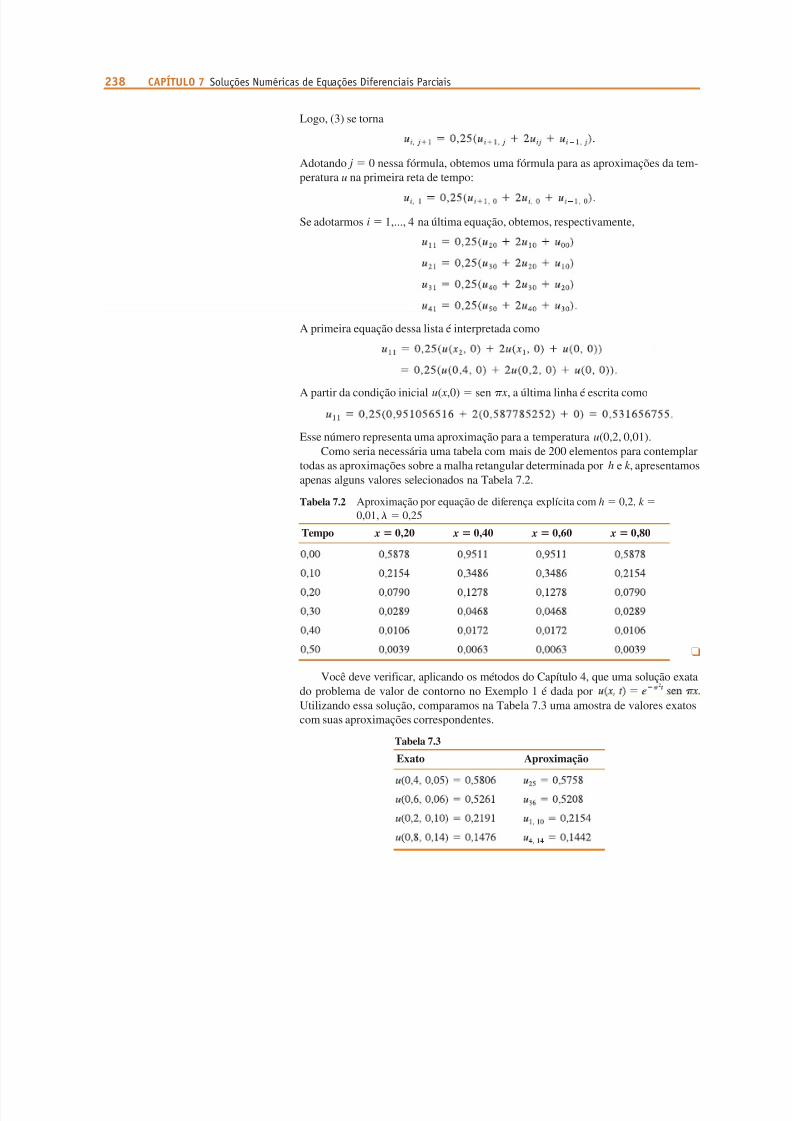
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 236/416
238 CAPÍTULO 7 Soluções Numéricas de Equações Diferenciais Parciais
Logo, (3) se torna
Adotando j 0 nessa fórmula, obtemos uma fórmula para as aproximações da tem-peratura u na primeira reta de tempo:
Se adotarmos i 1,..., 4 na última equação, obtemos, respectivamente,
A primeira equação dessa lista é interpretada como
A partir da condição inicial u( x ,0) sen x , a última linha é escrita como
Esse número representa uma aproximação para a temperatura u(0,2, 0,01).Como seria necessária uma tabela com mais de 200 elementos para contemplar
todas as aproximações sobre a malha retangular determinada por h e k , apresentamosapenas alguns valores selecionados na Tabela 7.2.
Tabela 7.2 Aproximação por equação de diferença explícita com h 0,2, k 0,01, 0,25
Tempo x 0,20 x 0,40 x 0,60 x 0,80
❑
Você deve verificar, aplicando os métodos do Capítulo 4, que uma solução exatado problema de valor de contorno no Exemplo 1 é dada porUtilizando essa solução, comparamos na Tabela 7.3 uma amostra de valores exatoscom suas aproximações correspondentes.
Tabela 7.3
Exato Aproximação

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 237/416
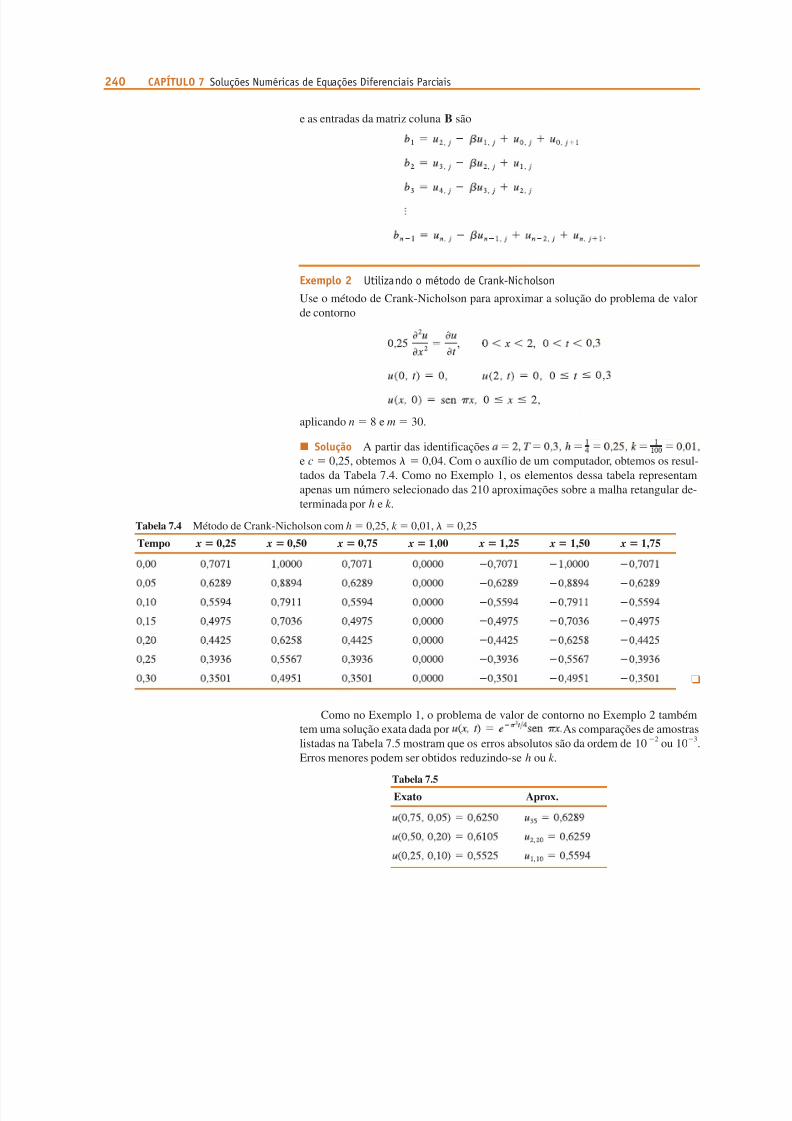
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 238/416
240 CAPÍTULO 7 Soluções Numéricas de Equações Diferenciais Parciais
e as entradas da matriz coluna B são
Exemplo 2 Utilizando o método de Crank-Nicholson
Use o método de Crank-Nicholson para aproximar a solução do problema de valorde contorno
aplicando n 8 e m 30.
Solução A partir das identificaçõese c 0,25, obtemos 0,04. Com o auxílio de um computador, obtemos os resul-tados da Tabela 7.4. Como no Exemplo 1, os elementos dessa tabela representamapenas um número selecionado das 210 aproximações sobre a malha retangular de-terminada por h e k .
Tabela 7.4 Método de Crank-Nicholson com h 0,25, k 0,01, 0,25
Tempo x 0,25 x 0,50 x 0,75 x 1,00 x 1,25 x 1,50 x 1,75
❑
Como no Exemplo 1, o problema de valor de contorno no Exemplo 2 tambémtem uma solução exata dada por As comparações de amostraslistadas na Tabela 7.5 mostram que os erros absolutos são da ordem de 102 ou 103.Erros menores podem ser obtidos reduzindo-se h ou k .
Tabela 7.5
Exato Aprox.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 239/416
7.2 A Equação do Calor 241
Nos Problemas 1-12, utilize um computador para auxiliar noscálculos.
1. Use a equação de diferença (3) para aproximar a solução doproblema de valor de contorno
Aplique n 8 e m 40.
2. Utilizando a solução em série de Fourier obtida no Problema
1 dos Exercícios 4.3 com L 2, é possível somar os primei-
ros 20 termos para estimar os valores de u(0,25, 0,1), u(1,
0,5) e u(1,5, 0,8) para a solução u( x ,t ) do Problema 1 acima.Um estudante escreveu um programa computacional com
esse objetivo e obteve os resultados u(0,25, 0,1) 0,3794,
u(1, 0,5) 0,1854, e u(1,5, 0,8) 0,0623. Considere que
esses resultados sejam precisos para todos os dígitos dados.
Compare esses valores com as aproximações obtidas no Pro-
blema 1 acima. Determine os erros absolutos em cada caso.
3. Resolva o Problema 1 pelo método de Crank-Nicholsoncom n 8 e m 40. Use os valores para u(0,25, 0,1), u(1,0,5) e u(1,5, 0,8) indicados no Problema 2 para calcular oserros absolutos.
4. Repita o Problema 1 usando n 8 e m 20. Utilize os va-lores para u(0,25, 0,1), u(1, 0,5), e u(1,5, 0,8) ) indicados no
Problema 2 para calcular os erros absolutos. Por que nessecaso as aproximações são tão imprecisas?
5. Resolva o Problema 1 pelo método de Crank-Nicholsoncom n 8 e m 40. Use os valores para u(0,25, 0,1), u(1,0,5) e u(1,5, 0,8) indicados no Problema 2 para calcular oserros absolutos. Compare os erros absolutos com aquelesobtidos no Problema 4.
6. Mostrou-se na Seção 4.2 que se uma haste de comprimento L for feita de um material com condutividade térmica K , ca-lor específico e densidade , a temperatura u( x ,t ) satisfaz aequação diferencial parcial
Considere o problema de valor de contorno constituído pelaequação anterior e as condições
Utilize a equação de diferença (3) dessa seção com n 10e m 10 para aproximar a solução do problema de valor decontorno quando
(a)
(b)
(c)
(d)
7. Resolva o Problema 6 pelo método de Crank-Nicholsoncom n 10 e m 10.
8. Repita o Problema 6 considerando que as temperaturas nasextremidades sejam u(0,t ) 0, u( L,t ) 20, 0 t 10.
9. Resolva o Problema 8 pelo método de Crank-Nicholson.
10. Considere o problema de valor de contorno no Exemplo 2.Assuma n 4.
(a) Determine o novo valor de .
(b) Utilize a equação de diferença de Crank-Nicholson (5)para determinar o sistema de equações para u11, u21 eu31, isto é, os valores aproximados de u na primeira retade tempo. [Sugestão: Adote j 0 em (5) e i com osvalores 1, 2, 3.]
(c) Resolva o sistema de três equações sem o auxílio de umprograma computacional. Compare os resultados comas entradas correspondentes na Tabela 7.4.
11. Considere uma haste cujo comprimento seja L 20 para aqual K 1,05, 10,6 e 0,056. Suponha
(a) Utilize o método apresentado na Seção 4.6 para obter asolução de regime permanente ( x ).
(b) Utilize o método de Crank-Nicholson para aproximaras temperaturas u( x ,t ) para 0 t T max. Selecione T max grande o suficiente para permitir que as temperaturas seaproximem de valores de regime permanente. Compareas aproximações para t T max com os valores de ( x )apresentados no item (a).
12. Utilize a equação de diferença (3) para aproximar a soluçãodo problema de valor de contorno
Aplique n 5 e m 25.
EXERCÍCIOS 7.2 As respostas de problemas ímpares selecionados estão na página 399.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 240/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 241/416
7.3 A Equação de Onda 243
vemos que os valores de ui, 1 na primeira reta de tempo depende dos valores de ui, 0 nazero-ésima reta de tempo e dos valores de ui, 1. Para calcular esses últimos valores,fazemos uso da condição de velocidade inicial ut ( x ,0) g( x ). Em t 0, temos de (5)da Seção 6.5 do Volume 1 que
(4)
Para que o termo u( x i, k ) ui, 1 faça sentido em (4), temos que imaginar u( x ,t )estendido para trás no tempo. Decorre de (4) que
Esse último resultado sugere que definamos
(5)
na iteração de (3). Substituindo (5) em (3) quando j 0, obtemos o caso especial
(6)
Exemplo 1 Utilizando o método das diferenças finitas
Aproxime a solução do problema de valor de contorno
aplicando (3) com n 5 e m 20.
Solução Adotamos as identificações c 2, a 1 e T 1. Com n 5 e m 20,obtemos e 0,5. Portanto, com g( x ) 0, as equações(6) e (3) são escritas, respectivamente, como
(7)
(8)
Para i 1, 2, 3, 4, a equação (7) resulta nos seguintes valores para os ui, 1 na primeirareta de tempo:
(9)
Note que os resultados indicados em (9) foram obtidos a partir da condição inicialu( x , 0) sen x . Por exemplo, u20 sen (0,2 ), e assim por diante. Agora, j 1 em(8) resulta em

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 242/416
244 CAPÍTULO 7 Soluções Numéricas de Equações Diferenciais Parciais
e assim, para i 1, 2, 3, 4, obtemos
Utilizando as condições de contorno, as condições iniciais e os dados obtidos em (9),obtemos a partir dessas equações as aproximações para u na segunda reta de tempo.Esses últimos resultados e um resumo dos cálculos restantes estão apresentados naTabela 7.6.
Tabela 7.6 Aproximação por equação de diferença explícita com h 0,2, k 0,05, 0,5
Tempo x 0,20 x 0,40 x 0,60 x 0,80
❑
Verifica-se facilmente que a solução exata do PVC no Exemplo 1 é u( x ,t ) sen x cos 2 t . Com essa função, podemos comparar os resultados exatos com as aproxi-mações. Por exemplo, algumas comparações selecionadas estão indicadas na Tabela7.7. Como é possível ver, as aproximações estão no mesmo “campo” dos valoresexatos, mas a exatidão não é particularmente impressionante. Podemos, no entanto,obter resultados melhores. A exatidão desse algoritmo varia com a escolha de . Éclaro que o valor de é determinado pela escolha dos inteiros n e m, que por sua vezdeterminam os valores dos tamanhos de passo h e k . Pode-se provar que a melhor exa-tidão é sempre obtida a partir desse método quando a razão kc / h for igual a um– em outras palavras, quando o passo na direção do tempo for k h / c. Por exemplo,a escolha n 8 e m 16 resulta em e 1. Os valores amostradoslistados na Tabela 7.8 claramente mostram uma melhor exatidão.
Tabela 7.7
Exato Aprox.
Tabela 7.8
Exato Aprox.
Estabilidade Notamos na conclusão que esse método de diferenças finitas explí-cito para a equação de onda é estável quando 1 e instável quando 1.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 243/416
Exercícios de Revisão 245
EXERCÍCIOS 7.3 As respostas de problemas ímpares selecionados estão na página 401.
Nos Problemas 1, 3, 5 e 6, utilize um computador para auxiliarnos cálculos.
1. Utilize a equação de diferença (3) para aproximar a soluçãodo problema de valor de contorno
quando
(a)
(b)
(c)
2. Considere o problema de valor de contorno
(a) Utilize os métodos do Capítulo 4 para verificar que asolução do problema é u( x ,t ) sen x cos t .
(b) Utilize o método dessa seção para aproximar a soluçãodo problema sem o auxílio de um programa computa-cional. Use n 4 e m 5.
(c) Calcule o erro absoluto em cada ponto interior de malha.
3. Aproxime a solução do problema de valor de contorno noProblema 2 utilizando um programa computacional com
(a) n 5, m 10 (b) n 5, m 20
4. Dado o problema de valor de contorno
use na equação (6) para calcular os valores deui, 1 à mão.
5. Mostrou-se na Seção 4.2 que a equação de uma corda vi-brando é
onde T é a magnitude constante da tensão na corda e éa sua massa por unidade de comprimento. Considere umacorda de 60 cm de comprimento presa ao eixo x por suasextremidades, sendo liberada a partir do repouso com des-locamento inicial
Aplique a equação de diferença (3) dessa seção para apro-ximar a solução do problema de valor de contorno quando h
10, , onde 0,0225 g/cm, T 1,4 107 dinas. Utilize m 50.
6. Repita o Problema 5 usando
e h 10, Utilize m 50.
CAPÍTULO 7 EXERCÍCIOS DE REVISÃO As respostas de problemas ímpares selecionados estão na página 402.
1. Considere o problema de valor de contorno
Aproxime a solução da equação diferencial nos pontos in-teriores da região com tamanho de malha Apliqueeliminação gaussiana ou interação de Gauss-Seidel.
2. Resolva o Problema 1 utilizando tamanho de malhaAplique interação de Gauss-Seidel.
3. Considere o problema de valor de contorno

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 244/416
246 CAPÍTULO 7 Soluções Numéricas de Equações Diferenciais Parciais
(a) Note que a temperatura inicial u( x ,0) x indica que atemperatura na extremidade direita x 1 deveria seru(1,0) 1, enquanto as condições de contorno impli-cam u(1,0) 0. Escreva um programa computacionalpara o método de diferenças finitas explícito de modo
que as condições de contorno prevaleçam para todos ostempos considerados, incluindo t 0. Utilize o progra-ma para completar a Tabela 7.9.
(b) Modifique o seu programa computacional de modo quea condição inicial prevaleça nos contornos em t 0.Utilize esse programa para completar a Tabela 7.10.
(c) As Tabelas 7.9 e 7.10 se relacionam de algum modo?Utilize um intervalo de tempo maior se necessário.
Tabela 7.9
Tempo x 0,00 x 0,20 x 0,40 x 0,60 x 0,80 x 1,00
Tabela 7.10
Tempo x 0,00 x 0,20 x 0,40 x 0,60 x 0,80 x 1,00

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 245/416
8
C A P Í T U L O
Funções de Variáveis Complexas
Em disciplinas de álgebra elementar, você aprendeu a respeito da existênciae algumas das propriedades de números complexos. Porém, em disciplinascomo Cálculo é provável que você nunca tenha visto um número complexo.Cálculo introdutório consiste basicamente no estudo de funções de umavariável real. Em disciplinas avançadas, você pode ter utilizado númeroscomplexos ocasionalmente (veja as Seções 3.3 do Volume 1, 2.8 doVolume 2 e 1.2 deste volume). Entretanto, nos próximos quatro capítulos,introduziremos a análise complexa, isto é, o estudo de funções de umavariável complexa. Apesar de existirem similaridades entre essa análise e aanálise real, existem muitas diferenças interessantes e algumas surpresas.
Descrição do capítulo
8.1 Números complexos
8.2 Potências e raízes
8.3 Conjuntos no plano complexo
8.4 Funções de uma variável complexa
8.5 Equações de Cauchy-Riemann
8.6 Funções exponenciais e logarítmicas
8.7 Funções trigonométricas e hiperbólicas
8.8 Funções trigonométricas e hiperbólicas inversas
Exercícios de revisão

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 246/416
248 CAPÍTULO 8 Funções de Variáveis Complexas
8.1 Números complexos
Introdução Com certeza você se deparou com números complexos em disci-plinas anteriores de matemática. Quando você aprendeu pela primeira vez a resol-ver uma equação quadrática ax
2 bx c 0 pela fórmula quadrática, você viu
que as raízes da equação não são reais, ou seja, são complexas, quando o discri-minante b
2 – 4ac é negativo. Assim, equações simples tais como x 2 5 0 e x
2 x 1 0 não têm soluções reais. Por exemplo, as raízes da última equação são
Se considerarmos , então as raí-
zes são escritas
Uma definição Duzentos anos atrás, quando os números complexos estavamganhando alguma respeitabilidade na comunidade matemática, o símbolo i foi origi-nalmente utilizado para substituir o símbolo embaraçoso Hoje, dizemos sim-plesmente que i é a unidade imaginária, sendo definida pela propriedade i
2 1.Utilizando a unidade imaginária, construímos um número complexo geral a partir de
dois números reais.
Número complexoUm número complexo é qualquer número da forma z a ib, onde a e b sãonúmeros reais e i é unidade imaginária.
DEFINIÇÃO 8.1
Terminologia O número i na Definição 8.1 é denominado unidade imaginária.O número real x em z x iy é chamado de parte real de z; o número real y é cha-mado de parte imaginária de z. As partes real e imaginária de um número complexo
z são abreviadas como Re( z) e Im( z), respectivamente. Por exemplo, se z 4 – 9i,então Re( z) 4 e Im( z) 9. Um múltiplo constante real da unidade imaginária é
designado número imaginário puro. Por exemplo, z 6i é um número imagináriopuro. Dois números complexos são iguais se suas partes real e imaginária foremiguais. Como esse conceito simples é algumas vezes útil, formalizamos a última de-claração na próxima definição.
IgualdadeOs números complexos z1 x 1 iy1 e z2 x 2 iy2 são iguais, z1 z2, se Re( z1) Re( z2) e Im( z1) Im( z2).
DEFINIÇÃO 8.2
Um número complexo x iy 0 se x 0 e y 0.
Operações aritméticas Números complexos podem ser somados, subtraídos,multiplicados e divididos. Essas operações são definidas a seguir, considerando z1
x 1 iy1 e z2 x 2 iy2.
Observe: A parteimaginária de z
4 – 9i é –9, e não –9i .

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 247/416
8.1 Números Complexos 249
As familiares leis comutativa, associativa e distributiva se aplicam aos númeroscomplexos.
Em vista dessas leis, não há necessidade de se memorizar as definições de adição,subtração e multiplicação. Para somar (subtrair) dois números complexos, simples-mente somamos (subtraímos) as partes reais e imaginárias correspondentes. Paramultiplicarmos dois números complexos, aplicamos a lei distributiva e o fato de quei2 1.
Exemplo 1 Adição e multiplicação
Se z1 2 4i e z2 3 8i, determine (a) z1 z2 e (b) z1 z2.
Solução (a) Somando as partes real e imaginária dos dois números, obtemos
(b) Utilizando a lei distributiva, temos
❑
Não há também a necessidade de se memorizar a definição de divisão, porém,antes de discutirmos isso, precisamos introduzir outro conceito.
Conjugado Se z for um número complexo, então o número obtido pela mudançade sinal da sua parte imaginária é chamado o complexo conjugado ou, simplesmen-te, o conjugado de z. Se z x iy, então o seu conjugado é
Por exemplo, se z 6 3i, então ; se z –5 –i, então Se z
for um número real, por exemplo, z 7, então A partir da definição da adição,pode-se mostrar facilmente que o conjugado de uma soma de dois números comple-xos é a soma dos conjugados:
Além disso, temos as três propriedades adicionais
As definições de adição e multiplicação mostram que a soma e o produto de um nú-mero complexo z e seu conjugado são também números reais:
(1)
(2)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 248/416
250 CAPÍTULO 8 Funções de Variáveis Complexas
A diferença entre um número complexo z e seu conjugado é um número imagináriopuro:
(3)
Como x Re( z) e y Im( z), (1) e (3) resultam em duas fórmulas úteis:
Entretanto, (2) é a relação importante que nos permite aproximar a divisão de umamaneira mais prática: para dividir z1 por z2, multiplicamos tanto o numerador como odenominador de z1 / z2 pelo conjugado de z2. Isso será ilustrado no próximo exemplo.
Exemplo 2 Divisão
Se z1 2 – 3i e z2 4 6i, calcule
Solução Nos dois itens desse exemplo, multiplicaremos o numerador e o deno-minador pelo conjugado do denominador e então utilizaremos (2).
❑
Interpretação geométrica Um número complexo z x iy é determinado uni-camente por um par ordenado de números reais ( x , y). A primeira e segunda entra-das dos pares ordenados correspondem, respectivamente, às partes real e imagináriado número complexo. Por exemplo, o par ordenado (2, 3) corresponde ao número
complexo z 2 – 3i. De modo recíproco, z 2 – 3i determina o par ordenado (2, 3). Dessa maneira, somos capazes de associar um número complexo z x iy com um ponto ( x , y) em um plano coordenado. Porém, conforme vimos na Seção 1.1do Volume 2, um par ordenado de números reais pode ser interpretado como sendo ascomponentes de um vetor. Portanto, um número complexo z x iy pode tambémser visto como um vetor cujo ponto inicial está na origem e cujo ponto terminal é( x , y). O plano coordenado ilustrado na Figura 8.1 é denominado plano complexo, ousimplesmente plano z. O eixo horizontal ou x é chamado de eixo real, e o eixo verti-cal ou y é chamado de eixo imaginário. O comprimento de um vetor z, ou a distânciaa partir da origem para o ponto ( x , y), é claramente A esse número real, édado um nome especial.
Módulo ou valor absolutoO módulo ou valor absoluto de z x iy, denotado por | z|, é o número real
(4)
DEFINIÇÃO 8.3
Exemplo 3 Módulo de um número complexo
Se z 2 – 3i, então ❑
y
x
z = x + iy
Figura 8.1 z como um vetor posição.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 249/416
8.1 Números Complexos 251
Como a Figura 8.2 indica, a soma dos vetores z1 e z2 é o vetor z1 z2. Para otriângulo apresentado na figura, sabemos que o comprimento do lado do triângulocorrespondente ao vetor z1 z2 não pode ser maior do que a soma dos dois ladosrestantes. Em termos de símbolos, isso significa
(5)O resultado em (5) é conhecido como desigualdade do triângulo e se aplica a qual-quer soma finita:
(6)
Aplicando (5) em z1 z2 ( z2), obtemos outra importante desigualdade:
(7)
Observações
Muitas das propriedades do sistema real se aplicam ao sistema de números com-
plexos, porém existem algumas diferenças importantes. Por exemplo, não podemoscomparar dois números complexos z1 x 1 iy1, y1 0, e z2 x 2 iy2, y2 0, pormeio de desigualdades. Em outras palavras, definições tais como z1 z2 e z2 z1 nãotêm sentido exceto no caso para o qual os dois números z1 e z2 são reais. Podemos,entretanto, comparar os valores absolutos de dois números complexos. Assim, se z1 3 4i e z2 5 – i, então | z1| 5 e e consequentemente, | z1| | z2|. Essaúltima desigualdade significa que o ponto (3,4) está mais próximo da origem do queo ponto (5,1).
y
x
z1
z2
z1
z1 + z2
Figura 8.2 Soma de vetores.
EXERCÍCIOS 8.1 As respostas de problemas ímpares selecionados estão na página 402.
Nos Problemas 1-26, escreva o número indicado na forma a ib.
1.
2.
3. 4.
5. 6.
7. 8.
9. 10.
11. 12.
13. 14.
15. 16.
17. 18.
19. 20.
21. 22.
23.
24.
25. 26.
Nos Problemas 27-32, seja z x iy. Determine a expressãoindicada.
27. 28.
29. 30.
31. 32.
Nos Problemas 33-36, use a Definição 8.2 para obter um número
complexo z que satisfaça a equação indicada. 33. 34.
35. 36.
Nos Problemas 37 e 38, determine qual número complexo estámais próximo da origem.
37. 38.
39. Prove que | z1 – z2| é a distância entre os pontos z1 e z2 noplano complexo.
40. Mostre para todos os números complexos z no círculo x 2
y2 4 que | z 6 8i| 12.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 250/416
252 CAPÍTULO 8 Funções de Variáveis Complexas
8.2 Potências e raízes
Introdução Recorde de cálculo que um ponto ( x , y) em coordenadas retangularespode também ser escrito em termos de coordenadas polares (r , ). Veremos nessaseção que a possibilidade de expressar um número complexo z em termos de r e
facilita bastante a determinação de potências e raízes de z.
Forma polar As coordenadas retangulares ( x , y) e as coordenadas polares (r , )estão relacionadas pelas equações x r cos e y r sen (veja a Seção 5.1). Assim,um número complexo não nulo z x iy pode ser escrito como z (r cos ) i(r sen ) ou
(1)
Dizemos que (1) é a forma polar do número complexo z. Vemos a partir da Figura8.3 que a coordenada polar r pode ser interpretada como a distância a partir da origempara o ponto ( x , y). Em outras palavras, adotamos a convenção de que r nunca sejanegativa de modo que possamos tomar r como sendo o módulo de z, isto é, r | z|. Oângulo de inclinação do vetor z medido em radianos a partir do eixo real positivo é
positivo quando medido no sentido anti-horário e negativo quando medido no sentidohorário. O ângulo é denominado argumento de z e escrito como arg z. A partirda Figura 8.3, vemos que um argumento de um número complexo tem que satisfazera equação tg y / x . As soluções dessa equação não são únicas, pois se 0 for umargumento de z, então necessariamente os ângulos 0 2 , 0 4 ,..., são tambémargumentos. O argumento de um número complexo no intervalo é cha-mado de argumento principal de z, sendo representado por Arg z. Por exemplo, Arg(i) /2.
Exemplo 1 Um número complexo na forma polar
Expresse em forma polar.
Solução Com x 1 e obtemos
Agora, como o ponto se localiza no quarto quadrante, podemos tomar asolução de tg como sendo arg z 5 /3. Decorre de (1)que uma forma polar do número é
Conforme vemos na Figura 8.4, o argumento de que se estende no intervalo( , ], o argumento principal de z, é Arg z /3. Logo, uma forma polar alter-nativa do número complexo é
❑
Multiplicação e divisão A forma polar de um número complexo é especialmenteconveniente para ser utilizada na multiplicação e divisão de dois números complexos.Suponha
onde 1 e 2 são quaisquer argumentos de z1 e z2, respectivamente. Logo
(2)
e para z2 0,
(3)
y
x
r θ
θ
θ
z = x + iy
r cos
r sen
Figura 8.3 Coordenadas polares.
y
x
1 – √
– /3
5 /3
3i
Figura 8.4 Dois argumentos de z 1
.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 251/416
8.2 Potências e Raízes 253
A partir das fórmulas de adição da trigonometria, (2) e (3) podem ser reescritas, res-pectivamente, como
(4)
e (5)
A inspeção de (4) e (5) mostra que
(6)
e
(7)
Exemplo 2 Argumento de um produto e de um quociente
Vimos que Arg z1 /2 para z1 i. No Exemplo 1, vimos que Arg z2 /3 para
Assim, para
decorre de (7) que
❑
No Exemplo 2, utilizamos os argumentos principais de z1 e z2 e obtivemos arg( z1 z2) Arg( z1 z2) e arg( z1 / z
2) Arg( z1 / z2). É importante observar, no entanto, que isso foi uma
coincidência. Apesar de (7) ser verdadeira para qualquer argumento de z1 e z2, não é
verdade, em geral, que Arg( z1 z2) Arg z1 Arg z2 e Arg( z1 / z2) Arg z1 Arg z2.Veja o Problema 39 nos Exercícios 8.2.
Potências de z Podemos determinar potências inteiras do número complexo z apartir dos resultados de (4) e (5). Por exemplo, se z r (cos i sen ), então, com
z1 z e z2 z, (4) resulta em
Como z3 z2
z, temos que
Além disso, como arg(1) 0, segue-se de (5) que
Continuando dessa maneira, obtemos uma fórmula para a enésima potência de z paraqualquer inteiro n:
(8)
Exemplo 3 Potência de um número complexo
Calcule z3 para
Solução No Exemplo 1, vimos que

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 252/416
254 CAPÍTULO 8 Funções de Variáveis Complexas
Logo, a partir de (8) com r 2, /3 e n 3, obtemos
❑
Fórmula de De Moivre Quando temos | z| r 1 e assim (8)resulta em
(9)
Esse último resultado é conhecido como fórmula de De Moivre e é útil para a obten-ção de determinadas identidades trigonométricas.
Raízes Um número w é dito ser uma raiz enésima de um número complexo nãonulo z se w
n z. Se adotarmos w (cos i sen ) e z r (cos i sen ) comosendo as fórmulas polares de w e z, então, com base em (8), w
n z se torna
A partir disso, concluímos que n r ou r 1/ n e
Igualando as partes real e imaginária, obtemos dessa equação
Essas igualdades implicam que n 2k , onde k é um inteiro. Assim,
Com k adquirindo valores inteiros sucessivos k 0, 1, 2,..., n – 1, obtemos n raízesdistintas com o mesmo módulo porém argumentos diferentes. Mas para k n ob-temos as mesmas raízes, pois seno e co-seno são periódicos em 2 . Para ver isso,
suponha k n m, onde m 0, 1, 2,.... Assim,
e portanto
Resumiremos esse resultado. A enésima raiz de um número complexo não nulo z
r (cos i sen ) é dada por
(10)
onde k 0, 1, 2,..., n – 1.
Exemplo 4 Raízes de um número complexo
Determine as três raízes cúbicas de z i.
Solução Com r 1, arg z /2, a forma polar do número indicado é z cos( /2) i sen( /2). A partir de (10) com n 3, obtemos

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 253/416
8.2 Potências e Raízes 255
Logo, as três raízes são
❑
A raiz w de um número complexo z obtida por meio do argumento principal de z
com k 0 é algumas vezes denominada enésima raiz principal de z. No Exemplo 4,como Arg (i) /2, é a terceira raiz principal de i.
Como as raízes indicadas por (8) têm o mesmo módulo, as n raízes de um nú-mero complexo não nulo z se situa em um círculo de raio r
1/ n centrado na origem doplano complexo. Além disso, como a diferença entre os argumentos de quaisquerduas raízes sucessivas é 2 / n, as n raízes estão igualmente espaçadas nesse círculo. AFigura 8.5 apresenta as três raízes de i igualmente espaçadas em um círculo unitário;
o ângulo entre as raízes (vetores) wk e wk 1 é 2 /3.Como será mostrado no próximo exemplo, as raízes de um número complexonão têm que ser números “agradáveis” como no Exemplo 3.
Exemplo 5 Raízes de um número complexo
Determine as quatro raízes quartas de z 1 i.
Solução Nesse caso, e arg z /4. De (10) com n 4, obtemos
Assim,
❑
y
x
w2
w1 w0
Figura 8.5 Três raízes cúbicas de i.
EXERCÍCIOS 8.2 As respostas de problemas ímpares selecionados estão na página 402.
Nos Problemas 1-10, escreva o número complexo indicado naforma polar.
1. 2.
3. 4.
5. 6.
7. 8.
9. 10.
Nos Problemas 11-14, escreva o número indicado em notaçãopolar na forma a ib.
11.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 254/416
256 CAPÍTULO 8 Funções de Variáveis Complexas
12.
13.
14.
Nos Problemas 15 e 16, determine z1 z2 e z1 / z2. Escreva o númerona forma a ib.
15.
16.
Nos Problemas 17-20, escreva cada número complexo na formapolar. A seguir, use (4) ou (5) para obter a forma polar do númeroindicado. Escreva a forma polar na forma a ib.
17. 18.
19. 20.
Nos Problemas 21-26, use (8) para calcular a potência indicada.
21. 22.
23. 24.
25.
26.
Nos Problemas 27-32, aplique (10) para calcular todas as raí-zes. Esboce essas raízes em um círculo apropriado centrado naorigem.
27. 28.
29. 30.
31. 32.
Nos Problemas 33 e 34, calcule todas as soluções da equaçãoindicada.
33. 34.
Nos Problemas 35 e 36, escreva o número complexo indicadoprimeiro na forma polar e a seguir na forma a ib.
35.
36.
37. Utilize o resultado (cos i sen )2 cos 2 i sen 2 para obter identidades trigonométricas para cos 2 e sen
2. 38. Utilize o resultado (cos i sen )3 cos 3 i sen 3 para obter identidades trigonométricas para cos 3 e sen3.
39. (a) Se z1 1 e z2 5i, verifique que Arg( z1 z2) Arg( z1) Arg( z2)
(b) Se z1 1 e z2 5i, verifique que Arg( z1 / z2) Arg( z1) Arg( z2)
40. Para os números complexos indicados no Problema 39, ve-rifique nos itens (a) e (b) que
e
8.3 Conjuntos no plano complexo
Introdução Nas seções anteriores, examinamos alguns fundamentos da álgebrae da geometria dos números complexos. Porém, apenas arranhamos a superfície doassunto conhecido como análise complexa; o impulso principal do nosso estudo estáadiante. Nosso objetivo nas seções e capítulos que se seguem é examinar funções deuma única variável complexa z x iy, além do cálculo dessas funções.
Antes de introduzir a noção de uma função de uma variável complexa, precisa-mos apresentar algumas definições e terminologias a respeito de conjuntos no planocomplexo.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 255/416
8.3 Conjuntos no Plano Complexo 257
Terminologia Antes de discutir o conceito de funções de uma variável complexa,precisamos introduzir alguma terminologia essencial a respeito de conjuntos no planocomplexo.
Considere z0 x 0 iy0. Como é a distânciaentre os pontos z x iy e z0 x 0 iy0, os pontos z x iy que satisfazem a
equação
0, estão localizados em um círculo de raio centrado no ponto z0. Veja a Figura8.6.
Exemplo 1 Círculos
(a) | z| 1 é a equação de um círculo unitário centrado na origem.
(b) | z – 1 – 2i| 5 é a equação de um círculo de raio 5 centrado em 1 2i. ❑
Os pontos z que satisfazem a desigualdade | z – z0| , 0, estão localiza-dos no interior (mas não no perímetro) de um círculo, de raio centrado no ponto
z0. Esse conjunto é denominado vizinhança de z0 ou um disco aberto. Um ponto z0 é dito ser um ponto interior de um conjunto S de um plano complexo quandoexistir alguma vizinhança de z0 que se estenda inteiramente dentro de S . Se todoponto z de um conjunto S for um ponto interior, então S é um conjunto aberto.Veja a Figura 8.7. Por exemplo, a desigualdade Re( z) 1 define um plano metade
à direita, que é um conjunto aberto. Todos os números complexos z x iy paraos quais x 1 estão nesse conjunto. Se escolhermos, por exemplo, z0 1,1 2i,então uma vizinhança de z0 se localiza inteiramente no conjunto que é definido por| z – (1,1 2i)| 0,05. Veja a Figura 8.8. Por outro lado, o conjunto S de pontosno plano complexo definido por Re( z) 1 não é aberto, pois toda vizinhança deum ponto na reta x 1 tem que conter pontos dentro de S e pontos fora de S . Vejaa Figura 8.9.
x
y
| z – (1,1 + 2i)| < 0,05
z = 1,1 + 2i
x = 1
Figura 8.8 Vista ampliada do conjuntoaberto de um ponto próximo de x 1.
x
y
em S
fora de S
x = 1
Figura 8.9 Conjunto S não é aberto.
ρ
ρ | z – z0| =
z0
Figura 8.6 Círculo de raio .
z0
Figura 8.7 Conjunto aberto.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 256/416
258 CAPÍTULO 8 Funções de Variáveis Complexas
Exemplo 2 Conjuntos abertos
A Figura 8.10 ilustra alguns conjuntos abertos adicionais.
y
x x
y
x
y
x
y
(a) (b)
(d)(c)
Im( z) < 0plano metade inferior
–1 < Re( z) < 1faixa infinita
| z| > 1exterior do círculo unitário
1 < | z| < 2anel circular
❑
Figura 8.10 Quatro exemplos de conjuntos abertos.
O conjunto de números que satisfazem a desigualdade
tal como ilustrado na Figura 8.10(d), é também chamado de anel aberto.Se toda vizinhança de um ponto z0 contiver ao menos um ponto que esteja em
um conjunto S e ao menos um ponto que não esteja em S , então z0 é um ponto de
contorno de S . O contorno de um conjunto S é o conjunto de todos os pontos decontorno de S . Para o conjunto de pontos definido por Re( z) 1, os pontos na reta x
1 são pontos de contorno. Os pontos no círculo | z – i| 2 são pontos de contornopara o disco | z – i| 2.
Se qualquer par de pontos z1 e z2 em um conjunto aberto S puder ser conectadopor uma reta poligonal que se estenda inteiramente no conjunto, então o conjuntoaberto S é dito ser conexo. Veja a Figura 8.11. Um conjunto conexo aberto é denomi-
nado domínio. Todos os conjuntos abertos na Figura 8.10 são conexos e portanto sãodomínios. O conjunto de números que satisfaz Re( z) 4 é um conjunto aberto masnão é conexo, pois não é possível juntar pontos em qualquer lado da reta vertical x 4 por uma reta poligonal sem deixar o conjunto (tenha em mente que os pontos em x
4 não estão no conjunto).Uma região é um domínio no plano complexo com todos, alguns ou nenhum dos
seus pontos de contorno. Como um conjunto conexo aberto não contém quaisquerpontos de contorno, ele é automaticamente uma região. Uma região contendo todosos seus pontos de contorno é dita ser fechada. O disco definido por | z – i| 2 é umexemplo de uma região fechada, sendo referida como um disco fechado. Uma regiãopode ser nem aberta nem fechada; a região anular definida por 1 | z – 5| 3 contémapenas alguns dos seus pontos de contorno e, assim, não é aberta nem fechada.
z1
z2
Figura 8.11 Conjunto conexo.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 257/416
8.4 Funções de Uma Variável Complexa 259
Observações
Muitas vezes na matemática a mesma palavra é utilizada em contextos inteiramentediferentes. Não confunda o conceito de “domínio” definido nessa seção com o con-
ceito de “domínio de uma função”.
EXERCÍCIOS 8.3 As respostas de problemas ímpares selecionados estão na página 403.
Nos Problemas 1-8, esboce o gráfico da equação indicada.
1. 2.
3.
4.
5. 6.
7. 8.
Nos Problemas 9-22, esboce o conjunto de pontos no plano com-plexo satisfazendo a desigualdade indicada. Determine se o con-
junto é um domínio. 9. 10.
11. 12.
13. 14.
15. 16.
17. 18.
19. 20.
21. 22.
23. Descreva o conjunto de pontos no plano complexo que satis-faz | z 1| | z – i|.
24. Descreva o conjunto de pontos no plano complexo que satis-faz |Re( z)| | z|.
25. Descreva o conjunto de pontos no plano complexo que satis-faz
26. Descreva o conjunto de pontos no plano complexo que satis-faz | z i| | z i| 1.
8.4 Funções de uma variável complexa
Introdução Um dos conceitos mais importantes na matemática é o de funções.Você deve se lembrar de disciplinas anteriores que uma função é um determinado
tipo de correspondência entre dois conjuntos; mais especificamente, uma função f de
um conjunto A para um conjunto B é uma regra de correspondência que determina
para cada elemento em A um e somente um elemento em B. Se b for o elemento noconjunto B relacionado ao elemento a no conjunto A por f , dizemos que b é a imagem de a e escrevemos b f (a). O conjunto A é denominado domínio da função f (porémnão é necessariamente um domínio no sentido definido na Seção 8.3). O conjunto detodas as imagens em B é chamado de contradomínio da função. Por exemplo, supo-nha que o conjunto A seja um conjunto de números reais definidos em 3 x eque a função seja dada por então f (3) 0, f (4) 1, eassim por diante. Em outras palavras, o contradomínio de f é o conjunto dado por 0 y . Como A é um conjunto de números reais, dizemos que f é uma função de
uma variável real x.
Funções de uma variável complexa Quando o domínio A na definição anterior defunção for um conjunto de números complexos z, dizemos naturalmente que f é umafunção de uma variável complexa z ou uma função complexa. A imagem w de umnúmero complexo z será algum número complexo u iv, isto é,
(1)
onde u e v são as partes real e imaginária de w, sendo funções de valores reais. Ine-rente à definição matemática (1) está o fato de que não podemos traçar um gráfico de
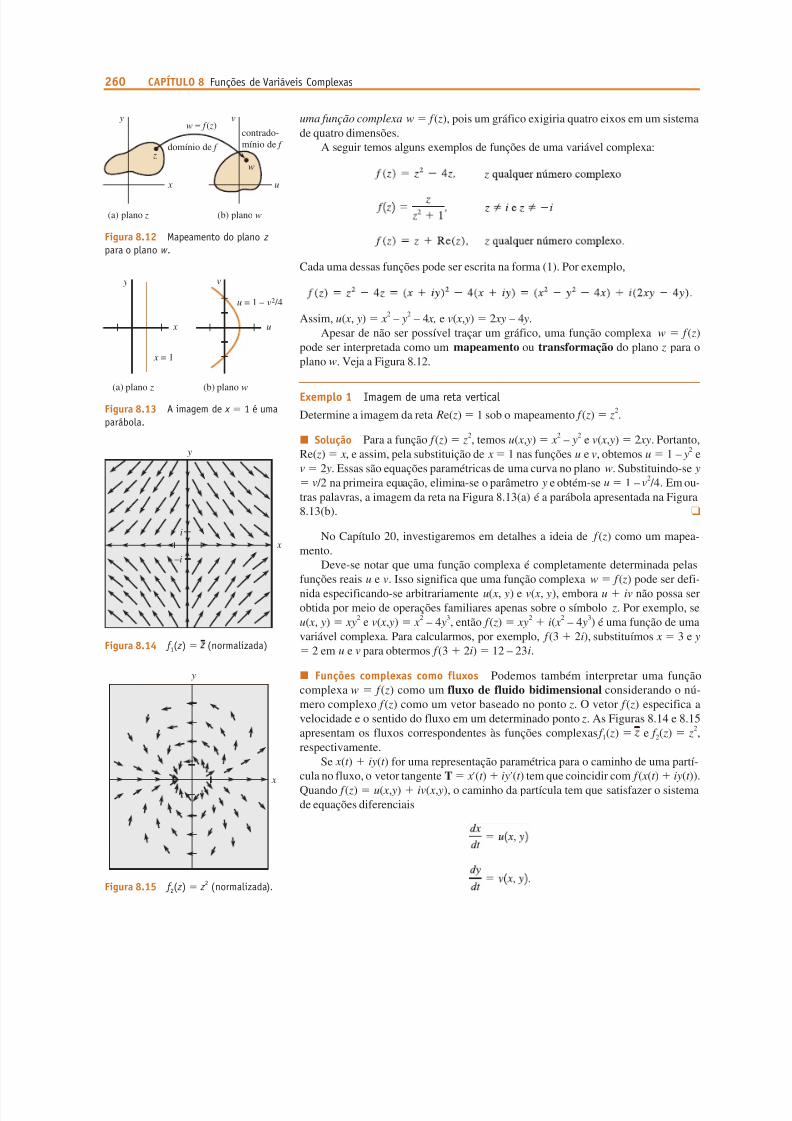
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 258/416
260 CAPÍTULO 8 Funções de Variáveis Complexas
uma função complexa w f ( z), pois um gráfico exigiria quatro eixos em um sistemade quatro dimensões.
A seguir temos alguns exemplos de funções de uma variável complexa:
Cada uma dessas funções pode ser escrita na forma (1). Por exemplo,
Assim, u( x , y) x 2 – y
2 – 4 x, e v( x , y) 2 xy – 4 y.Apesar de não ser possível traçar um gráfico, uma função complexa w f ( z)
pode ser interpretada como um mapeamento ou transformação do plano z para oplano w. Veja a Figura 8.12.
Exemplo 1 Imagem de uma reta vertical
Determine a imagem da reta Re( z) 1 sob o mapeamento f ( z) z2.
Solução Para a função f ( z) z2, temos u( x , y) x 2 – y
2 e v( x , y) 2 xy. Portanto,Re( z) x , e assim, pela substituição de x 1 nas funções u e v, obtemos u 1 – y
2 ev 2 y. Essas são equações paramétricas de uma curva no plano w. Substituindo-se y
v /2 na primeira equação, elimina-se o parâmetro y e obtém-se u 1 – v2 /4. Em ou-
tras palavras, a imagem da reta na Figura 8.13(a) é a parábola apresentada na Figura8.13(b). ❑
No Capítulo 20, investigaremos em detalhes a ideia de f ( z) como um mapea-mento.
Deve-se notar que uma função complexa é completamente determinada pelasfunções reais u e v. Isso significa que uma função complexa w f ( z) pode ser defi-nida especificando-se arbitrariamente u( x , y) e v( x , y), embora u iv não possa serobtida por meio de operações familiares apenas sobre o símbolo z. Por exemplo, seu( x , y) xy
2 e v( x , y) x 2 – 4 y3, então f ( z) xy
2 i( x 2 – 4 y3) é uma função de uma
variável complexa. Para calcularmos, por exemplo, f (3 2i), substituímos x 3 e y
2 em u e v para obtermos f (3 2i) 12 – 23i.
Funções complexas como fluxos Podemos também interpretar uma funçãocomplexa w f ( z) como um fluxo de fluido bidimensional considerando o nú-mero complexo f ( z) como um vetor baseado no ponto z. O vetor f ( z) especifica avelocidade e o sentido do fluxo em um determinado ponto z. As Figuras 8.14 e 8.15apresentam os fluxos correspondentes às funções complexas f 1( z) e f 2( z) z2,
respectivamente.Se x (t ) iy(t ) for uma representação paramétrica para o caminho de uma partí-cula no fluxo, o vetor tangente T x ¿(t ) iy¿(t ) tem que coincidir com f ( x (t ) iy(t )).Quando f ( z) u( x , y) iv( x , y), o caminho da partícula tem que satisfazer o sistemade equações diferenciais
y v
x u
z
w
(a) plano z (b) plano w
domínio de f
contrado-mínio de f
w = f ( z)
Figura 8.12 Mapeamento do plano zpara o plano w .
y
x u
v
u = 1 – v2 /4
x = 1
(a) plano z (b) plano w
Figura 8.13 A imagem de x 1 é umaparábola.
y
x
Figura 8.15 f 2( z ) z 2 (normalizada).
y
x
i
–i
Figura 8.14 f 1( z ) (normalizada)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 259/416
8.4 Funções de Uma Variável Complexa 261
Chamamos a família de soluções desse sistema como linhas de fluxo do fluxo asso-ciado a f ( z).
Exemplo 2 Linhas de fluxo
Determine as linhas de fluxo associadas às funções complexas (a) f 1( z) e (b) f 2( z) z2.
Solução (a) As linhas de fluxo que correspondem a f 1( z) x – iy satisfazem osistema
e portanto x (t ) c1et e y(t ) c2e
-t . Multiplicando essas duas equações paramétri-cas, vemos que o ponto x (t ) iy(t ) se localiza na hipérbole xy c1c2.
(b) Para obter as linhas de fluxo que correspondem a f 2( z)
( x
2
– y
2
)
i2 xy, observeque dx / dt x 2 – y
2, dy / dt 2 xy, e assim
Essa equação diferencial homogênea tem a solução x 2 y
2 c2 y, uma família decírculos que têm centros no eixo y e que passam pela origem. ❑
Limites e continuidade A definição de um limite de uma função complexa f ( z)quando z→ z0 tem a mesma aparência externa do limite para variáveis reais.
Limite de uma função
Suponha que a função f seja definida em alguma vizinhança de z0, exceto possivel-mente no próprio z0. Então f é dito possuir um limite em z0, escrito como
se, para cada 0, existir um 0 tal que | f ( z) – L| sempre que 0 | z – z0| .
DEFINIÇÃO 8.4
Em palavras, lim z→ z0 f ( z) L significa que os pontos f ( z) podem estar arbitraria-
mente próximos do ponto L se escolhermos o ponto z suficientemente próximo, masnão igual, ao ponto z0. Conforme indicado na Figura 8.16, para cada vizinhança de L (definida por | f ( z) – L| ), existe uma vizinhança de z0 (definida por | z – z0| ) de modo que as imagens de todos os pontos z z0 nessa vizinhança se localizamna vizinhança de L.
A diferença fundamental entre essa definição e o conceito de limite em variáveisreais está no significado de z→ z0. Para uma função f de uma única variável real x ,lim x → x 0
f ( x ) L significa que f ( x ) se aproxima de L quando x se aproxima de x 0 apartir da direita de x 0 ou a partir da esquerda de x 0 na reta de números reais. Porém,como z e z0 são pontos no plano complexo, quando dizemos que lim z→ z0
f ( z) existe,isso significa que f ( z) se aproxima de L quando os pontos z se aproximam de z0 apartir de qualquer direção.
O teorema a seguir resumirá algumas propriedades dos limites:
y v
x u
D L
z
(a) vizinhança (b) vizinhança
z0
f ( z)
Figura 8.16 Significado geométrico deum limite complexo.
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 260/416
262 CAPÍTULO 8 Funções de Variáveis Complexas
Limite da soma, produto equociente
Considere lim z→ z0 f ( z) L1 e lim z→ z0
g( z) L2. Então:
(i)(ii)
(iii)
TEOREMA 8.1
Continuidade em um pontoUma função f é contínua em um ponto z0 se
DEFINIÇÃO 8.5
Como consequência do Teorema 8.1, se duas funções f e g forem contínuas emum ponto z0, então a soma e o produto delas serão contínuas em z0. O quociente dasduas funções será contínuo em z0 desde que g( z0) 0.
Uma função f definida por
(2)
onde n é um inteiro não negativo e os coeficientes ai, i 0, 1,..., n, são constantescomplexas, é chamada função polinomial de grau n. Apesar de não demonstrarmosisso, o resultado do limite indica que a função polinomial simples f ( z)
z é contínua em todos os lugares – isto é, em todo o plano z. Com esse resultado em
mente e com aplicações repetidas de (ii) e (i) do Teorema 8.1, temos que uma funçãopolinomial (2) é contínua em qualquer lugar. Uma função racional
onde g e h são funções polinomiais, é contínua exceto naqueles pontos nos quais h( z)é zero.
Derivada A derivada de uma função complexa é definida em termos de um limi-te. O símbolo z usado na definição a seguir corresponde ao número complexo x i y.
DerivadaConsidere a função complexa f definida em uma vizinhança de z0. A derivada de
f em z0 é
(3)
desde que o limite exista.
DEFINIÇÃO 8.6
Se o limite em (3) existir, a função f é dita ser diferenciável em z0. A derivada deuma função w f ( z) é também escrita dw / dz.
Do mesmo modo que em variáveis reais, diferenciação implica continuidade:
Se f for diferenciável em z0 , então f é contínua em z0.
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 261/416
8.4 Funções de Uma Variável Complexa 263
Além disso, as regras de diferenciação são as mesmas do cálculo com variáveisreais. Se f e g forem diferenciáveis em um ponto z, e c for uma constante complexa,então:
(4)
(5)
(6)
(7)
(8)
A regra usual para a diferenciação de potências de z também é válida:
(9)
Exemplo 3 Utilizando as regras da diferenciação
Diferencie
Solução (a) Utilizando a regra da potência (9) junto com a regra da soma (5),obtemos
(b) A partir da regra do quociente (7),
❑
Para que uma função complexa f seja diferenciável em um ponto z0,
tem que aproximar do mesmo número complexo a partir de
qualquer direção. Assim, no estudo de variáveis complexas, garantir a diferenciação deuma função é mais importante do que para variáveis reais. Se uma função complexa forcomposta, tal como f ( z) x 4iy, existe uma boa chance dela não ser diferenciável.
Exemplo 4 Uma função que não é diferenciável em nenhum lugar
Mostre que a função f ( z) x 4iy não é diferenciável em nenhum lugar.
Solução Com z x i y, temos
e assim
(10)
Agora, se adotarmos z → 0 ao longo de uma reta paralela ao eixo x , então y 0 e o valor de (10) é 1. Por outro lado, se considerarmos z → 0 ao longo de uma retaparalela ao eixo y, então x 0 e o valor de (10) é visto como sendo (4). Portanto,
f ( z) x 4iy não é diferenciável em nenhum ponto z. ❑

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 262/416
264 CAPÍTULO 8 Funções de Variáveis Complexas
Funções analíticas As exigências para diferenciação são severas. No entanto,existe uma classe de funções de grande importância cujos membros satisfazem exi-gências ainda mais severas. Essas funções são denominadas funções analíticas.
Analiticidade em um pontoUma função complexa w f ( z) é analítica em um ponto z0 se f for diferenciávelem z0 e em todo ponto em alguma vizinhança de z0.
DEFINIÇÃO 8.7
Uma função f é analítica em um domínio D se ela for analítica em todo ponto em D.O estudante deve ler a Definição 8.7 atentamente. Analiticidade em um ponto é
uma propriedade de vizinhança. Analiticidade em um ponto não é, portanto, o mesmoque diferenciabilidade em um ponto. Deixa-se como exercício mostrar que a função
f ( z) | z|2 é diferenciável em z 0 mas não em qualquer outro ponto. Consequen-temente, f ( z) | z|2 não é analítica em nenhum ponto. Contrastando, o polinômiosimples f ( z) z2 é analítico em todos os lugares. Uma função que é analítica emqualquer ponto z é uma função completa. Funções polinomiais são diferenciáveis em
qualquer ponto z, e portanto são funções complexas.
Observações
Recorde da álgebra que um número c é um zero de uma função polinomial se e so-mente se x – c for um fator de f ( x ). O mesmo resultado se aplica para a análise com-plexa. Por exemplo, como f ( z) z4 5 z2 4 ( z2 1)( z2 4), os zeros de f são –i,i, 2i e 2i. Assim, f ( z) ( z i)( z – i)( z 2i)( z – 2i). Além disso, a fórmula quadrá-tica é também válida. Por exemplo, utilizando essa fórmula, podemos escrever
Veja os Problemas 21 e 22 nos Exercícios 8.4.
EXERCÍCIOS 8.4 As respostas de problemas ímpares selecionados estão na página 403.
Nos Problemas 1-6, determine a imagem da reta indicada sob omapeamento f ( z) z2. 1. 2.
3. 4.
5. 6.
Nos Problemas 7-14, expresse a função indicada na forma f ( z) u iv. 7.
8.
9. 10.
11. 12.
13. 14.
Nos Problemas 15-18, calcule a função dada nos pontos indicados.
15.
16.
17.
18.
Nos Problemas 19-22, o limite indicado existe. Determine o seuvalor.
19.
20.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 263/416
8.5 Funções Exponenciais e Logarítmicas 265
8.5 Equações de Cauchy-Riemann
Introdução Na seção anterior, vimos que uma função f de uma variável comple-xa z é analítica em um ponto z quando f for diferenciável em z e em qualquer pontoem alguma vizinhança de z. Essa condição é mais severa do que simplesmente dife-
renciabilidade em um ponto, pois uma função complexa pode ser diferenciável emum ponto z e em mais nenhum ponto. Uma função f é analítica em um domínio D se
f for diferenciável em todos os pontos em D. Desenvolveremos agora um teste paraanaliticidade de uma função complexa f ( z) u( x , y) iv( x , y).
Uma condição necessária para analiticidade No próximo teorema, veremos quese uma função f ( z) u( x , y) iv( x , y) for diferenciável em um ponto z, então as fun-ções u e v têm que satisfazer um par de equações que relaciona suas derivadas parciaisde primeira ordem. Isso resulta em uma condição necessária para a analiticidade.
Equações de Cauchy-RiemannSuponha f ( z) u( x , y) iv( x , y) diferenciável em um ponto z x iy. Então, em
z, as derivadas parciais de primeira ordem de u e v existem e satisfazem as equa-
ções de Cauchy-Riemann
(1)
TEOREMA 8.2
Prova Como f ¿( z) existe, sabemos que
(2)
21. 22.
Nos Problemas 23 e 24, mostre que o limite indicado não existe.
23. 24.
Nos Problemas 25 e 26, use (3) para obter a derivada indicada dafunção dada.
25.
26.
Nos Problemas 27-34, aplique (4)-(8) para determinar a derivada f ¿( z) para a função indicada.
27.
28. 29.
30.
31. 32. 33. 34.
Nos Problemas 35-38, defina os pontos nos quais a função indi-cada não será analítica.
35. 36.
37. 38.
39. Mostre que a função não é diferenciável em ne-nhum lugar.
40. A função f ( z) | z|2 é contínua em todo o plano complexo.Mostre, no entanto, que f é diferenciável somente no ponto
z 0. [Sugestão: Aplique (3) e considere dois casos, z 0e z 0. No segundo caso, considere que z se aproxime dezero ao longo da reta paralela ao eixo x e a seguir que z seaproxime de zero ao longo da reta paralela ao eixo y.]
Nos Problemas 41-44, determine as linhas de fluxo associadas àfunção complexa indicada. 41. 42.
43. 44.
Nos Problemas 45 e 46, utilize uma calculadora gráfica ou umcomputador para obter a imagem da parábola indicada sob o ma-peamento f ( z) z2.
45. 46.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 264/416
266 CAPÍTULO 8 Funções de Variáveis Complexas
Escrevendo f ( z) u( x ,0) iv( x , y) e z x i y, temos a partir de (2)
(3)
Como esse limite existe, z pode se aproximar de zero a partir de qualquer direçãoconveniente. Em particular, se z→0 horizontalmente, então z x , e assim (3)se torna
(4)
Como f ¿( z) existe, os dois limites em (4) existem. Porém, por definição, os limitesem (4) são as derivadas parciais primeiras de u e v em relação a x . Assim, mostramosque
(5)
Agora, se adotarmos z→0 verticalmente, então z i y e (3) se torna
(6)
que é o mesmo que
(7)
Igualando as partes real e imaginária de (5) e (7), obtemos o par de equaçõesem (1). ❑
Se uma função complexa f ( z) u( x , y) iv( x , y) for analítica por todo um domí-nio D, então as funções reais u e v têm que satisfazer as equações de Cauchy-Riemann(1) em todo ponto em D.
Exemplo 1 Utilizando as equações de Cauchy-Riemann
O polinômio f ( z) z2 z é analítico para todo z e f ( z) x 2 – y
2 x i(2 xy y).Assim, u( x , y) x
2 – y2 x e v( x , y) 2 xy y. Para qualquer ponto ( x , y), vemos que
as equações de Cauchy-Riemann são satisfeitas:
❑
Exemplo 2 Utilizando as equações de Cauchy-Riemann
Mostre que a função f ( z) (2 x 2 y) i( y2 – x ) não é analítica em qualquer ponto.
Solução
Identificamos u( x , y)
2 x
2
y e v( x , y)
y
2
– x . Agora a partir de
vemos que u / y v / x , mas que a igualdade u / x v / y é satisfeita somentena reta y 2 x . Entretanto, para qualquer ponto z na reta, não há nenhuma vizinhançaou disco aberto próximo de z no qual f é diferenciável. Concluímos que f não é analí-tica em nenhum lugar. ❑

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 265/416
8.5 Funções Exponenciais e Logarítmicas 267
Por si só, as equações de Cauchy-Riemann não são suficientes para garantir ana-liticidade. Entretanto, quando adicionamos a condição de continuidade para u e v e as quatro derivadas parciais, pode-se mostrar que as equações de Cauchy-Riemannimplicam analiticidade. A demonstração é longa e complicada, e portanto apresenta-remos apenas o resultado.
Critério para analiticidadeSuponha as funções reais u( x , y) e v( x , y) contínuas e tendo derivadas parciais deprimeira ordem contínuas em um domínio D. Se u e v satisfizerem as equações deCauchy-Riemann em todos os pontos de D, então a função complexa f ( z) u( x , y) iv( x , y) é analítica em D.
TEOREMA 8.3
Exemplo 3 Utilizando o Teorema 8.3
Para a função , temos
Em outras palavras, as equações de Cauchy-Riemann são satisfeitas, exceto no pontoonde x
2 y2 0, isto é, em z 0. Concluímos a partir do Teorema 8.3 que f é analí-
tica em qualquer domínio que não contenha o ponto z 0. ❑
Os resultados em (5) e (7) foram obtidos sob a consideração básica de que f eradiferenciável no ponto z. Em outras palavras, (5) e (7) nos dão uma fórmula paracalcular f ¿( z):
(8)
Por exemplo, sabemos que f ( z)
z2
é diferenciável para todo z. Com u( x , y)
x
2
– y
2
,u / x 2 x , v( x , y) 2 xy e v / x 2 y, vemos que
Recorde que analiticidade implica diferenciabilidade, mas a recíproca não é verda-deira. O Teorema 8.3 tem um análogo que apresenta condições suficientes para adiferenciabilidade:
Se as funções reais u(x,y) e v(x,y) são contínuas e têm derivadas
parciais de primeira ordem contínuas em uma vizinhança de z, e se u e v
satisfizerem as equações de Cauchy-Riemann no ponto z, então a função
complexa f(z) = u(x,y) + iv(x,y) é diferenciável em z, e f ¿(z) é dada por (8).
A função f ( z) x 2 – y
2i não é analítica em nenhum lugar. Com as identificações
u( x , y) x 2 e v( x , y) y2, vemos a partir de
que as equações de Cauchy-Riemann são satisfeitas apenas quando y x . Porém,como as funções u, u / x , u / y, v, v / x e v / y são contínuas em todos os pontos,temos que f é diferenciável na reta y x , sendo que (8) define a derivada f ¿( z) 2 x 2 y.
Funções harmônicas Vimos no Capítulo 4 que a equação de Laplace 2u / x
2
2u / y2 0 ocorre em certos problemas que envolvem temperaturas de regime per-
manente. Essa equação diferencial parcial também desempenha um importante papel
Importante.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 266/416
268 CAPÍTULO 8 Funções de Variáveis Complexas
em muitas áreas da matemática aplicada. De fato, conforme veremos, as partes reale imaginária de uma função analítica não podem ser escolhidas arbitrariamente, poistanto u quanto v têm que satisfazer a equação de Laplace. É essa ligação entre funçõesanalíticas e a equação de Laplace que torna as variáveis complexas tão essenciais noestudo da matemática aplicada.
Funções harmônicasUma função de valor real ( x , y) que tenha derivadas parciais de segunda ordemcontínuas em um domínio D e que satisfaça a equação de Laplace é dita ser har-
mônica em D.
DEFINIÇÃO 8.8
Uma fonte de funções harmônicasSuponha f ( z) u( x , y) iv( x , y) analítica em um domínio D. Assim, as funçõesu( x , y) e v( x , y) são funções harmônicas.
TEOREMA 8.4
Demonstração Nessa demonstração, consideraremos que u e v têm derivadas par-ciais de segunda ordem contínuas. Como f é analítica, as equações de Cauchy-Rie-mann são satisfeitas. Diferenciando ambos os lados de u / x v / y em relação a x ediferenciando ambos os lados de u / y v / x em relação a y, obtemos
Considerando continuidade, as derivadas parciais trocadas são iguais. Portanto, adi-cionando essas duas equações temos
Isso mostra que u( x , y) é harmônica.Agora diferenciando ambos os lados de u / x v / y em relação a y e diferen-
ciando ambos os lados de u / y v / x em relação a x , e subtraindo, obtemos
❑
Funções harmônicas conjugadas Se f ( z) u( x , y) iv( x , y) for analítica em umdomínio D, então u e v são harmônicas em D. Suponha agora que u( x , y) seja umafunção harmônica em D. É possível então obter outra função v( x , y) que seja harmôni-ca em D de modo que u( x , y) iv( x , y) seja uma função analítica em D. A função v échamada função harmônica conjugada de u.
Exemplo 4 Função harmônica/função harmônica conjugada(a) Verifique que a função u( x , y) x
3 –3 xy2 – 5 y é harmônica em todo o plano com-
plexo. (b) Obtenha a função harmônica conjugada de u.
Solução (a) A partir das derivadas parciais
vemos que u satisfaz a equação de Laplace:

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 267/416
8.5 Funções Exponenciais e Logarítmicas 269
(b) Como a função harmônica conjugada v tem que satisfazer as equações de Cau-chy-Riemann, temos que ter
(9)
A integração parcial da primeira equação de (9) em relação a y resulta em v( x , y) 3 x
2 y – y
3 h( x ). A partir disso, temos
Substituir esse resultado na segunda equação de (9) resulta em h¿( x ) 5, e portantoh( x ) 5 x C . Consequentemente, a função harmônica conjugada de u é v( x , y) 3 x
2 y – y
3 5 x C . A função analítica é
❑
Observações
Suponha que u e v sejam funções harmônicas que compreendem as partes real e ima-ginária de uma função analítica f ( z). As curvas de nível u( x , y) c1 e v( x , y) c2 definidas por essas funções formam duas famílias de curvas ortogonais. (Veja o Pro-blema 32 nos Exercícios 8.5.) Por exemplo, as curvas de nível geradas pela funçãoanalítica simples f ( z) z x iy são x c1 e y c2. A família de retas verticaisdefinidas por x c1 é claramente ortogonal à família de retas horizontais definidaspor y c2. Em eletrostática, se u( x , y) c1 define as curvas equipotenciais, então aoutra (e ortogonal) família v( x , y) c2 define as linhas de força.
EXERCÍCIOS 8.5 As respostas de problemas ímpares selecionados estão na página 404.
Nos Problemas 1 e 2, a função indicada é analítica para todo z.Mostre que as equações de Cauchy-Riemann são satisfeitas emtodos os pontos. 1. 2.
Nos Problemas 3-8, mostre que a função indicada não é analíticaem qualquer ponto.
3. 4.
5. 6.
7.
8.
Nos Problemas 9-14, utilize o Teorema 8.3 para mostrar que afunção indicada é analítica em um domínio apropriado. 9.
10.
11.
12.
13.
14.
Nos Problemas 15 e 16, determine constantes reais a, b, c e d demodo que a função indicada seja analítica.
15.
16.
Nos Problemas 17-20, mostre que a função indicada não é ana-lítica em qualquer ponto, porém é diferenciável ao longo da(s)curva(s) indicada(s).
17. ; eixo x
18. ; eixos coordenados
19. ; eixos coorde-nados
20.
21. Utilize (8) para obter a derivada da função no Problema 9.
22. Utilize (8) para obter a derivada da função no Problema 11.
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 268/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 269/416
8.6 Funções Exponenciais e Logarítmicas 271
Exemplo 1 Valor complexo da função exponencial
Calcule e1,7 4,2i.
Solução Com as identificações x 1,7 e y 4,2, e com o auxílio de uma calcu-
ladora, temos, arredondando para quatro casas decimais,
A partir de (3), temos ❑
As partes real e imaginária de e z, u( x , y) e x cos y e v( x , y) e x sen y, são contí-
nuas e têm derivadas parciais primeira contínuas em todo ponto z do plano complexo.Além disso, as equações de Cauchy-Riemann são satisfeitas em todos os pontos doplano complexo:
A partir do Teorema 8.3, temos que f ( z) e z é analítica para todo z; em outras pala-
vras, f é uma função completa.Demonstraremos que e z possui as duas propriedades desejadas indicadas em (1).
Primeiro, a derivada de f é dada por (5) da Seção 8.5:
Conforme desejado, estabelecemos que
A seguir, se z1 x 1 iy1 e z2 x 2 iy2, então, pela multiplicação dos números com-plexos e as fórmulas de adição da trigonometria, obtemos
Em outras palavras, (4)
Deixa-se como exercício demonstrar que
Periodicidade Ao contrário da função real e x , a função complexa f ( z) e
z é peri-
ódica como período complexo 2 i. Como e2 i cos 2 i sen2 1 e, em vista de
(4), e z2 i e
ze
2 i e z para todo z, temos f ( z2 i) f ( z). Em decorrência dessa perio-
dicidade complexa, todos os valores possíveis de f ( z) e z são considerados em qualquer
faixa horizontal infinita de largura 2 . Logo, se dividirmos o plano complexo em faixashorizontais definidas por (2n – 1) y (2n 1) , n 0,1,2,..., então, confor-me ilustrado na Figura 8.17, para qualquer ponto z na faixa y , os valores f ( z), f ( z 2 i), f ( z 2 i), f ( z 4 i), e assim por diante, são os mesmos. A faixa y
é denominada região fundamental para a função exponencial f ( z) e z. O fluxo
correspondente sobre a região fundamental está apresentado na Figura 8.18.
Forma polar de um número complexo Na Seção 8.2, vimos que o número comple-xo z poderia ser escrito na forma polar como z r (cos i sen). Como e
i cos i sen , podemos agora escrever a forma polar de um número complexo como
x
y
z + 4 i
z + 2 i
z – 2 i
3 i
–3 i
z
– i
Figura 8.17 Os valores de f ( z ) e z nos quatro pontos são os mesmos.
y
x
i
– i
Figura 8.18 Fluxo sobre a região fun-damental.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 270/416
272 CAPÍTULO 8 Funções de Variáveis Complexas
Por exemplo, em forma polar, z 1 i é
Comentários Em matemática aplicada, matemáticos e engenheiros frequente-mente resolvem o mesmo problema de formas completamente diferentes. Considere,por exemplo, a solução do Exemplo 10 na Seção 3.8 do Volume 1. Nesse exemplo,
utilizamos estritamente análise real para obter a corrente de regime permanente i p(t )em um circuito série RLC descrito pela equação diferencial
Engenheiros eletricistas muitas vezes resolvem problemas de circuitos tais como esseutilizando análise complexa. Para ilustrar, vamos primeiro representar a unidade ima-ginária pelo símbolo j para evitar confusão com a corrente i. Como a corrente i está relacionada à carga q por i dq / dt , a equação diferencial é igual a
Além disso, a tensão de alimentação E 0 sen t pode ser substituída por Im( E 0e j t ),
onde Im significa a “parte imaginária de”. Por causa dessa última forma, o métododos coeficientes indeterminados sugere que assumamos uma solução na forma de ummúltiplo constante da exponencial complexa – isto é, i p(t ) Im( Ae
j t ). Substituímosessa expressão na última equação diferencial, utilizamos o fato de que q é uma anti-derivada de i, e igualamos os coeficientes de e
j t :
A quantidade Z R j( L 1/ C ) é chamada de impedância complexa do cir-cuito. Note que o módulo da impedância complexa, foirepresentado no Exemplo 10 da Seção 3.8 do Volume 1 pela letra Z e denominadoimpedância.
Agora, em forma polar, a impedância complexa é
Portanto, A E 0 / Z E 0 /(| Z |e j), e assim a corrente de regime permanente pode serescrita como
O leitor é encorajado a verificar que essa última expressão é a mesma de (35) da Se-ção 3.8 do Volume 1.
Função logarítmica O logaritmo de um número complexo z x iy, z 0, édefinido como o inverso da função exponencial – isto é,
(5)
Em (5), notamos que ln z não é definido para z 0, pois não existe valor de w para oqual e
w 0. Para obter as partes real e imaginária de ln z, escrevemos w u iv eaplicamos (3) e (5):
A última igualdade implica x eu cos v e y e
u sen v. Podemos resolver essas duasequações para u e v. Primeiro, elevando ao quadrado e somando as equações, obtemos

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 271/416
8.6 Funções Exponenciais e Logarítmicas 273
onde loge| z| representa o logaritmo natural real do módulo de z. Depois, para resolverem relação a v, dividimos as duas equações para obter
Essa última equação significa que v é um argumento de z, isto é, v arg z. Po-rém, como não há argumento único para um dado número complexo z x iy, se for um argumento de z, então ele é 2n , n 0, 1, 2,....
Logaritmo de um númerocomplexo
Para z 0 e arg z,
(6)
DEFINIÇÃO 8.10
Como está claramente indicado em (6), existem infinitos valores do logaritmode um número complexo z. Isso não deve ser uma grande surpresa, pois a funçãoexponencial é periódica.
Em cálculo real, logaritmos de números negativos não são definidos. Como opróximo exemplo mostrará, esse não é o caso em cálculo complexo.
Exemplo 2 Valores complexos da função logarítmica
Determine os valores de (a) ln (2), (b) ln i e (c) ln (–1 – i)
Solução (a) Com arg (2) e loge|2| 0,6932, temos de (6)
(b) Com arg (i) /2 e loge|i| loge1 0, temos a partir de (6) que
Em outras palavras, ln i i /2, 3 i /2, 5 i /2, 7 i /2, e assim por diante.
(c) Com arg(–1 – i) 5 /4 e loge|–1 – i| loge 0,3466, temos de (6)
❑
Exemplo 3 Resolvendo uma equação exponencial
Determine todos os valores de z de modo que e z i.
Solução A partir de (5), com o símbolo w substituído por z, temos z ln(
i). Agora | i| 2 e tg 1/ implica arg( i) /6. Assim, (6) resultaem
❑
Valor principal É interessante notar que, como consequência de (6), o logaritmode um número real positivo tem muitos valores. Por exemplo, em cálculo real, log e
5 tem apenas um valor: loge 5 1,6094, enquanto que em cálculo complexo, ln 5

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 272/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 273/416
8.6 Funções Exponenciais e Logarítmicas 275
Analiticidade A função logarítmica f ( z) Ln z não é contínua em z 0, pois f (0) não é definida. Além disso, f ( z) Ln z é descontínua em todos os pontos do eixoreal negativo. Isso ocorre porque a parte imaginária da função, v Arg z, é descon-tínua somente nesses pontos. Para ver isso, suponha x 0 sendo um ponto no eixo realnegativo. Quando z→ x 0 a partir do plano metade superior, Arg z→ , enquanto que
se z→ x 0 a partir do plano metade inferior, então Arg z→ . Isso significa que f ( z) Ln z não é analítica no eixo real não positivo. Entretanto, f ( z) Ln z é analítica portodo o domínio D constituído por todos os pontos no plano complexo exceto aquelesno eixo real não positivo. É conveniente pensar D como o plano complexo a partir doqual o eixo real não positivo foi retirado. Como f ( z) Ln z é o ramo principal de ln
z, o eixo real não positivo é referido como corte de ramificação para a função. Vejaa Figura 8.19. Deixa-se como exercício mostrar que as equações de Cauchy-Riemannsão satisfeitas por todo esse plano cortado e que a derivada de Ln z é dada por
(9)
para todo z em D.A Figura 8.20 mostra w Ln z como um fluxo. Note que o campo vetorial não é
contínuo ao longo do corte de ramificação.Potências complexas Inspirados pela identidade x
a ea ln x em variáveis reais,
podemos definir potências complexas de um número complexo. Se for um númerocomplexo e z x iy, então z é definida como
(10)
Em geral, z tem múltiplos valores pois ln z tem também múltiplos valores. No en-tanto, no caso especial quando n, n 0, 1, 2,..., (10) tem valor único, poisexiste apenas um valor para z
2, z3, z1 e assim por diante. Para ver isso, suponha 2 e z re
i, onde é qualquer argumento de z. Então,
Se utilizarmos Ln z no lugar de ln z, então (10) retorna o valor principal de z.
Exemplo 6 Potência complexa
Determine o valor de i2i.
Solução Com z i, arg z /2 e 2i, a partir de (9) temos
onde n 0, 1, 2,.... A inspeção da equação mostra que i2 é real para todo valor
de n. Como /2 é o argumento principal de z i, obtemos o valor principal de i2i
para n 0. Arredondando para quatro casas decimais, esse valor principal é i2i
e 0,0043. ❑
y
x
i
–i
Figura 8.20 w Ln z como um fluxo.
EXERCÍCIOS 8.6 As respostas de problemas ímpares selecionados estão na página 404.
Nos Problemas 1-10, espresse e z na forma a ib.
1. 2.
3. 4.
5. 6.
7. 8.
9. 10.
Nos Problemas 11 e 12, expresse o número indicado na formaa ib.
11. 12.
Nos Problemas 13-16, use a Definição 8.9 para expressar a fun-ção indicada na forma f ( z) u iv.
13. 14.
y
x
corte de
ramificação
Figura 8.19 Corte de ramificação paraLn z .

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 274/416
276 CAPÍTULO 8 Funções de Variáveis Complexas
15. 16.
Nos Problemas 17-20, verifique o resultado indicado.
17. 18.
19. 20. um inteiro 21. Mostre que f ( z) e z não é analítica em nenhum lugar.
22. (a) Use o resultado do Problema 15 para mostrar queé uma função completa.
(b) Verifique que u( x , y) é uma função harmônica.
Nos Problemas 23-28, expresse ln z na forma a ib.
23. 24.
25. 26.
27. 28.
Nos Problemas 29-34, expresse Ln z na forma a ib.
29. 30. 31. 32.
33. 34.
Nos Problemas 35-38, determine todos os valores de z que satis-fazem a equação indicada.
35. 36.
37. 38.
Nos Problemas 39-42, determine todos os valores da quantidadedada.
39. 40.
41. 42.
Nos Problemas 43 e 44, determine o valor principal da quantida-de dada. Expresse as respostas na forma a ib.
43. 44.
45. Se z1 i e z2 1 i, verifique que
46. Determine dois números complexos z1 e z2 tais que
47. Determine se a definição indicada é verdadeira.
(a)
(b)
(c)
48. As leis de expoentes se aplicam aos números complexos e:
um inteiro
Entretanto, a última lei não é válida se n for um númerocomplexo. Verifique que (ii)2 i2i, mas (i2)i i2i.
49. Para números complexos z que satisfazem Re( z) 0, mos-tre que (7) pode ser escrita como
50. A função indicada no Problema 49 é analítica:
(a) Verifique que u( x , y) loge( x 2 y
2) é uma função har-mônica.
(b) Verifique que v( x , y) tg1( y / x ) é uma função harmôni-
ca.
8.7 Funções trigonométricas e hiperbólicas
Introdução Nessa seção, definiremos funções trigonométricas e hiperbólicascomplexas. De modo análogo às funções complexas e
z e Ln z definidas na seção an-terior, essas funções estarão de acordo com as suas contrapartidas reais para valoresreais de z. Além disso, mostraremos que as funções trigonométricas e hiperbólicascomplexas têm as mesmas derivadas e satisfazem muitas das mesmas identidades queas funções trigonométricas e hiperbólicas reais.
Funções trigonométricas Se x for uma variável real, então temos da fórmula deEuler que
Subtraindo e a seguir somando essas equações, vemos que as funções reais sen x e cos
x podem ser expressas como uma combinação de funções exponenciais:
(1)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 275/416
8.7 Funções Trigonométricas e Hiperbólicas 277
Utilizando (1) como modelo, definimos agora o seno e o co-seno de uma variávelcomplexa:
Seno e co-seno trigonométricosPara qualquer número complexo z x iy,
(2)
DEFINIÇÃO 8.11
Como na trigonometria, definimos quatro funções trigonométricas adicionais em ter-mos de sen z e cos z:
(3)
Quando y 0, cada função em (2) e (3) se reduz à sua contraparte real.
Analiticidade Como as funções exponenciais eiz e e
iz são funções completas,temos então que sen z e cos z são também funções complexas. Agora, conforme vere-mos brevemente, sen z 0 somente para números reais z n , n um inteiro, e cos z
0 apenas para os números reais z (2n 1) /2, n um inteiro. Portanto, tg z e sec
z são analíticas exceto nos pontos z (2n 1) /2, e cotg z e cosec z são analíticasexceto nos pontos z n .
Derivadas Como (d / dz)e z e z, a partir da regra da cadeia temos que (d / dz)eiz ie
iz e (d / dz)eiz ieiz. Assim,
De fato, mostra-se facilmente que as formas das derivadas das funções trigonométri-cas complexas são as mesmas das funções reais. A seguir, resumimos os resultados.
(4)
Identidades As identidades trigonométricas familiares são também as mesmaspara o caso complexo.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 276/416
278 CAPÍTULO 8 Funções de Variáveis Complexas
Zeros Para obter os zeros de sen z e cos z, precisamos expressar ambas as fun-ções na forma u iv. Antes de procedermos, recorde de cálculo que se y for real,então o seno e o co-seno hiperbólicos são definidos em termos das funções exponen-ciais reais e
y e e y:
(5)
Agora, a partir da Definição 8.11 e da fórmula de Euler, obtemos, após simplificar-mos,
Logo, a partir de (5), temos
(6)
Deixa-se como exercício mostrar que
(7)
De (6), (7) e cosh2 y 1 senh2 y, temos
(8)
e (9)
Agora um número complexo é zero se e somente se | z|2 0. Portanto, se sen z 0,então a partir de (8) temos que ter sen2
x senh2 y 0. Isso implica sen x 0 e senh
y 0. Logo, x n e y 0. Assim, os únicos zeros de sen z são os números reais z
n 0i n , n 0, 1, 2,.... De modo similar, temos a partir de (9) que cos z
0 apenas quando z (2n 1) /2, n 0, 1, 2,....
Exemplo 1 Valor complexo da função seno
A partir de (6), temos, com o auxílio de uma calculadora,
❑
Em trigonometria normal, estamos acostumados ao fato de que |sen x | 1 e |cos x | 1. A inspeção de (8) e (9) mostra que essas desigualdades não se aplicam para o senoe co-seno complexos, pois senh y pode variar de a. Em outras palavras, é perfeita-mente possível termos soluções para equações tais como cos z 10.
Exemplo 2 Resolvendo uma equação trigonométrica
Resolva a equação cos z 10.
Solução A partir de (2), cos z 10 é equivalente a (eiz eiz)/2 10. Multipli-cando-se a última equação por e
iz, obtém-se a equação quadrática em eiz:
A partir da fórmula quadrática, temos Assim, para n 0,1, 2,..., temos Dividindo por i e utilizando
podemos expressar as soluções da equaçãoindicada como z 2n i loge(10 ). ❑

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 277/416
8.6 Funções Exponenciais e Logarítmicas 279
Funções hiperbólicas Definimos seno e co-seno hiperbólicos complexos de umamaneira análoga às definições reais apresentadas em (5):
Seno e co-seno hiperbólicos
Para qualquer número complexo z x iy,
(10)
DEFINIÇÃO 8.12
As funções tangente, co-tangente, secante e co-secante hiperbólicas são definidas emtermos de senh z e cosh z:
(11)
O seno e o co-seno hiperbólicos são funções completas, e as funções definidasem (11) são analíticas exceto nos pontos nos quais os denominadores são zero. Étambém fácil ver de (10) que
(12)
É interessante observar que, ao contrário do cálculo real, as funções trigonomé-tricas e hiperbólicas estão relacionadas em cálculo complexo. Se substituirmos z poriz em todas as fórmulas de (10) e compararmos os resultados com (2), veremos quesenh(iz) i sen z e cosh (iz) cos z. Essas equações nos permitem expressar sen z ecos z em termos de senh(iz) e cosh(iz), respectivamente. De modo similar, substituin-do z por iz em (2), podemos expressar, respectivamente, senh z e cosh z em termos desen(iz) e cos(iz). Resumimos os resultados a seguir:
(13)
(14)
Zeros As relações ilustradas em (14) nos permitem obter identidades para as
funções hiperbólicas utilizando resultados das funções trigonométricas. Por exemplo,para espressar senh z na forma u iv, escrevemos senh z i sen(iz) na forma senh
z i sen( y ix ) e utilizamos (6):
Como sen( y) sen y e cos( y) cos y, a equação anterior se simplifica para
(15)
Similarmente, (16)
Decorre também diretamente de (14) que os zeros de senh z e cosh z são imagináriospuros, sendo, respectivamente,
Periodicidade Como sen x e cos x são periódicas em 2 , podemos demonstrarfacilmente que sen z e cos z são também periódicas com o mesmo período real 2 .Por exemplo, a partir de (6), observe que
isto é, sen( z 2 ) sen z. Exatamente da mesma maneira, segue-se de (7) que cos( z 2 ) cos z. Além disso, as funções hiperbólicas senh z e cosh z têm o períodoimaginário 2 i. Esse último resultado decorre da Definição 8.12 e do fato de que e
z éperiódica com período 2 i, ou a partir de (15) e (16) e substituindo-se z por z 2 i.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 278/416
280 CAPÍTULO 8 Funções de Variáveis Complexas
EXERCÍCIOS 8.7 As respostas de problemas ímpares selecionados estão na página 404.
Nos Problemas 1-12, expresse a quantidade indicada na formaa ib. 1. 2.
3. 4.
5. 6.
7. 8.
9. 10.
11. 12.
Nos Problemas 13 e 14, verifique o resultado indicado.
13.
14.
Nos Problemas 15-20, determine todos os valores de z que satis-fazem a equação indicada.
15. 16.
17. 18.
19. 20.
Nos Problemas 21 e 22, utilize a definição de igualdade de nú-meros complexos para obter todos os valores de z que satisfazema equação dada.
21. 22.
23. Demonstre que
24. Demonstre que
25. Demonstre que
26. Demonstre que
27. Demonstre que
28. Demonstre que
29. Demonstre que
30. Demonstre que tg z u iv, onde
31. Prove que tgh z é periódica com período i.
32. Prove que
8.8 Funções trigonométricas e hiperbólicas inversas
Introdução Como funções de uma variável complexa z, vimos que as funçõestrigonométricas e hiperbólicas são periódicas. Consequentemente, essas funções nãopossuem inversas que sejam funções na interpretação estrita da palavra. As inversasdessas funções analíticas são funções de múltiplos valores. Conforme fizemos na Se-ção 8.6 para a investigação da função logarítmica, retiraremos o adjetivo “múltiplosvalores” em toda a discussão que se segue.
Seno inversa A função seno inversa, escrita sen1 z ou arcsen z, é definida por
(1)
A função seno inversa pode ser expressa em termos da função logarítmica. Para verisso, aplicamos (1) e a definição da função seno:
A partir da última equação e da fórmula quadrática, obtemos então
(2)
Note em (2) que não utilizamos o simbolismo comum pois sabemos daSeção 8.2 que (1 – z
2)1/2 tem dois valores. Resolvendo (2) para w então resulta em
(3)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 279/416
8.8 Funções Trigonométricas e Hiperbólicas inversas 281
Procedendo de uma maneira similar, obtemos as inversas do co-seno e da tan-gente como sendo
(4)
(5)
Exemplo 1 Valores de uma função seno inversa
Determine todos os valores de
Solução A partir de (3), temos
Com a expressão anterior se torna
Esse resultado pode ser simplificado observando-se que log e( ) loge(1/
( )) loge( ). Assim, para n 0, 1, 2,...,
(6) ❑
Para obtermos valores particulares de, por exemplo, sen1 z, temos que escolher
uma raiz específica de 1 – z2 e um ramo específico do logaritmo. Se escolhermos (1
– ( )2)1/2 (4)1/2 2i e o ramo principal do logaritmo, então (6) resulta no valorúnico
Derivadas As derivadas das três funções trigonométricas inversas consideradasanteriormente podem ser obtidas por diferenciação implícita. Para obter a derivada dafunção seno inversa w sen1
z, iniciamos por diferenciar z sen w:
Utilizando a identidade trigonométrica cos2w sen2
w 1 (veja o Problema 28 nosExercícios 8.7) na forma cos w (1 – sen2
w)1/2 (1 – z2)1/2, obtemos
(7)
De modo similar, temos que
(8)
(9)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 280/416
282 CAPÍTULO 8 Funções de Variáveis Complexas
Deve-se observar que as raízes quadradas utilizadas em (7) e (8) têm que ser consis-tentes com as raízes quadradas utilizadas em (3) e (4).
Exemplo 2 Calculando uma derivada
Determine a derivada de
Solução No Exemplo 1, se usarmos então a mes-ma raiz tem que ser utilizada em (7). O valor da derivada consistente com essa esco-lha é indicado por
❑
Funções hiperbólicas inversas As funções hiperbólicas inversas podem tambémser escritas em termos de logaritmo. Resumimos esses resultados para seno, co-senoe tangente hiperbólicas inversas junto com suas derivadas:
(10)
(11)
(12)
(13)
(14)
(15)
Exemplo 3 Valores de um co-seno hiperbólico inverso
Determine todos os valores de cosh1(1),
Solução A partir de (11) com z 1, obtemos
Como loge1 0, temos para n 0, 1, 2,...,
❑
EXERCÍCIOS 8.8 As respostas de problemas ímpares selecionados estão na página 404.
Nos Problemas 1-14, determine todos os valores da quantidadeindicada. 1. 2.
3. 4.
5. 6.
7. 8.
9. 10.
11. 12.
13. 14.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 281/416
Exercícios de Revisão 283
CAPÍTULO 8 EXERCÍCIOS DE REVISÃO As respostas de problemas ímpares selecionados estão na página 404.
Responda os Problemas 1-16 sem consultar o texto. Preencha osespaços ou responda verdadeiro/falso.
1. Re((1 i)10) ____ e Im((1 i)10) ____.
2. Se z for um ponto no terceiro quadrante, então está no____ quadrante.
3. Se z 3 4i, então _____
4. i127 – 5i
9 2i1 ____
5. Se então | z| _____
6. Descreva a região definida por ____
7. _____
8. Se então Arg z _____
9. Se e z 2i, então z _____ 10. Se então z é um número imaginário puro. _____
11. O valor principal de é _____
12. Se então f (1 2i) _____
13. Se as equações de Cauchy-Riemann forem satisfeitas emum ponto, então a função é necessariamente analítica nesseponto. _____
14. f ( z) e z é periódica com período _____
15. Ln(ie3) _____
16. f ( z) sen( x – iy) não é analítica em nenhum lugar. _____
Nos Problemas 17-20, escreva o número indicado na forma a ib.
17. 18.
19. 20.
Nos Problemas 21-24, esboce o conjunto de pontos no planocomplexo que satisfaz a desigualdade indicada.
21. 22.
23. 24.
25. Veja as definições de seções cônicas em um texto de cálcu-lo. Descreva agora o conjunto de pontos no plano complexoque satisfaz a equação | z – 2i| | z 2i| 5.
26. Considere z e w números complexos de modo que | z| 1 e|w| 1. Demonstre que
Nos Problemas 27 e 28, determine todas as soluções da equaçãoindicada.
27. 28.
29. Se f ( z) z24 – 3 z20 4 z12 – 5 z6, calcule
30. Escreva na forma f ( z) u( x , y) iv( x , y).
Nos Problemas 31 e 32, determine a imagem da reta x 1 noplano w sob o mapeamento indicado.
31.
32.
Nos Problemas 33-36, determine todos os números complexospara os quais a declaração indicada é verdadeira.
33. 34.
35. 36.
37. Mostre que a função f ( z) (2 xy 5 x ) i( x 2 – 5 y – y
2) éanalítica para todo z. Determine f ¿( z).
38. Determine se a função
é diferenciável. Ela é analítica?
Nos Problemas 39 e 40, verifique a igualdade indicada.
39.
40.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 282/416
9
C A P Í T U L O
Integração no Plano Complexo
Para definir uma integral de uma função complexa f , consideramos f definidaao longo de alguma curva C ou contorno no plano complexo. Veremos nessaseção que a definição de uma integral complexa, suas propriedades e ométodo de cálculo são bastante similares àqueles referentes a uma integralde linha real no plano.
Descrição do capítulo
9.1 Integrais de contorno
9.2 Teorema de Cauchy-Goursat
9.3 Independência do caminho
9.4 Fórmulas integrais de Cauchy
Exercícios de revisão
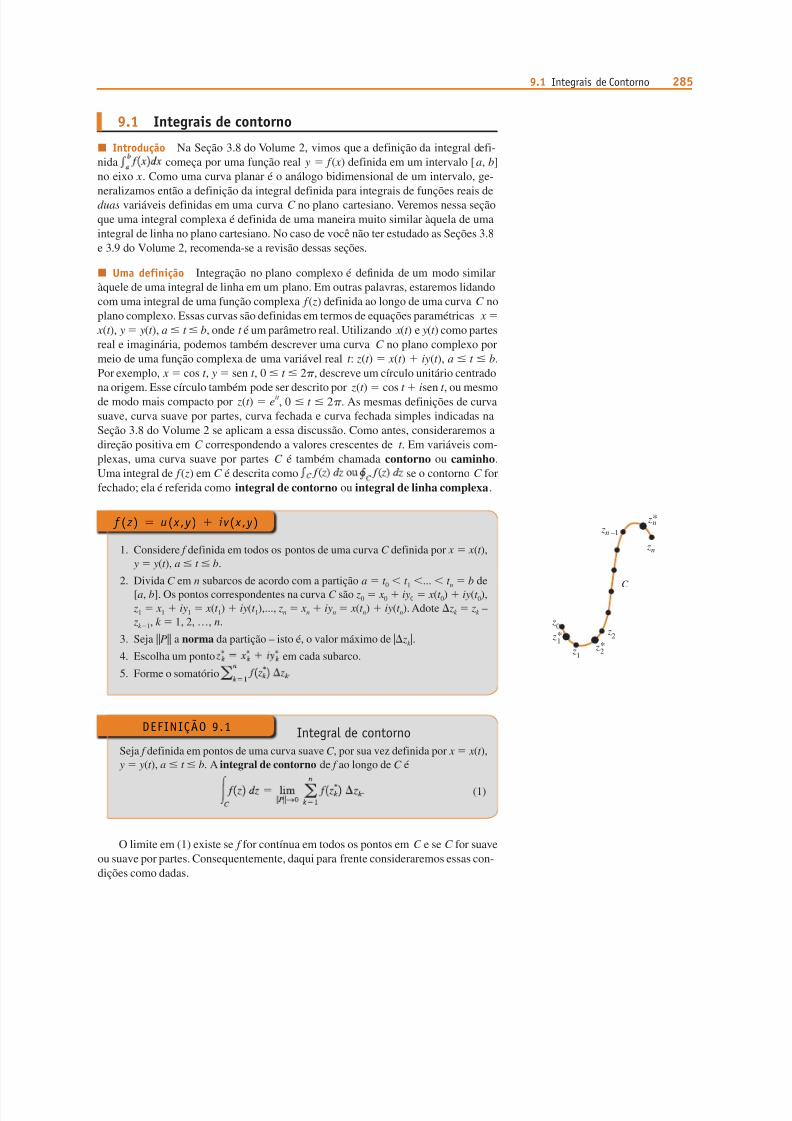
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 283/416
9.1 Integrais de Contorno 285
9.1 Integrais de contorno
Introdução Na Seção 3.8 do Volume 2, vimos que a definição da integral defi-nida começa por uma função real y f ( x ) definida em um intervalo [a, b]no eixo x . Como uma curva planar é o análogo bidimensional de um intervalo, ge-
neralizamos então a definição da integral definida para integrais de funções reais deduas variáveis definidas em uma curva C no plano cartesiano. Veremos nessa seçãoque uma integral complexa é definida de uma maneira muito similar àquela de umaintegral de linha no plano cartesiano. No caso de você não ter estudado as Seções 3.8e 3.9 do Volume 2, recomenda-se a revisão dessas seções.
Uma definição Integração no plano complexo é definida de um modo similaràquele de uma integral de linha em um plano. Em outras palavras, estaremos lidandocom uma integral de uma função complexa f ( z) definida ao longo de uma curva C noplano complexo. Essas curvas são definidas em termos de equações paramétricas x
x (t ), y y(t ), a t b, onde t é um parâmetro real. Utilizando x (t ) e y(t ) como partesreal e imaginária, podemos também descrever uma curva C no plano complexo pormeio de uma função complexa de uma variável real t : z(t ) x (t ) iy(t ), a t b.
Por exemplo, x cos t , y sen t , 0 t 2 , descreve um círculo unitário centradona origem. Esse círculo também pode ser descrito por z(t ) cos t isen t , ou mesmode modo mais compacto por z(t ) eit , 0 t 2 . As mesmas definições de curvasuave, curva suave por partes, curva fechada e curva fechada simples indicadas naSeção 3.8 do Volume 2 se aplicam a essa discussão. Como antes, consideraremos adireção positiva em C correspondendo a valores crescentes de t . Em variáveis com-plexas, uma curva suave por partes C é também chamada contorno ou caminho.Uma integral de f ( z) em C é descrita como se o contorno C forfechado; ela é referida como integral de contorno ou integral de linha complexa.
1. Considere f definida em todos os pontos de uma curva C definida por x x (t ),
y y(t ), a t b. 2. Divida C em n subarcos de acordo com a partição a t 0 t 1 ... t n b de
[a, b]. Os pontos correspondentes na curva C são z0 x 0 iy0 x (t 0) iy(t 0), z1 x 1 iy1 x (t 1) iy(t 1),..., zn x n iyn x (t n) iy(t n). Adote zk zk – zk 1, k 1, 2, …, n.
3. Seja ||P|| a norma da partição – isto é, o valor máximo de | zk |.
4. Escolha um ponto em cada subarco.
5. Forme o somatório
f ( z ) u( x , y ) i v ( x , y )
Integral de contorno
Seja f definida em pontos de uma curva suave C , por sua vez definida por x x (t ), y y(t ), a t b. A integral de contorno de f ao longo de C é
(1)
DEFINIÇÃO 9.1
O limite em (1) existe se f for contínua em todos os pontos em C e se C for suaveou suave por partes. Consequentemente, daqui para frente consideraremos essas con-dições como dadas.
C
zn –1
z1
z2
z0
zn
z*n
z*1
z*2

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 284/416
286 CAPÍTULO 9 Integração no Plano Complexo
Um método de cálculo Voltaremos agora para a questão do cálculo de uma inte-gral de contorno. Para facilitar a discussão, vamos suprimir os subscritos e escrever(1) na forma abreviada
Isso significa (2)
Em outras palavras, uma integral de contorno é uma combinação de duasintegrais de linha reais Agora, como x x (t ) e y
y(t ), a t b, o lado direito de (2) é o mesmo que
Porém, se utilizarmos z(t )
x (t )
iy(t ) para descrever C , o último resultado é omesmo que quando separada em duas integrais. Assim, obtemos ummeio prático de calcular uma integral de contorno:
Cálculo de uma integral decontorno
Se f for contínua em uma curva suave C dada por z(t ) x (t ) iy(t ), a t b,então
(3)
TEOREMA 9.1
Se f for escrita em termos do símbolo z, então para calcular f ( z(t )) simplesmentesubstitui-se o símbolo z por z(t ). Se f não estiver escrita em termos de z, então paracalcular f ( z(t )) substitui-se x e y sempre que eles forem representados por x (t ) e y(t ),respectivamente.
Exemplo 1 Calculando uma integral de contorno
Calcule onde o contorno C é definido por x 3t , y t 2, 1 t 4.
Solução Escrevemos z(t ) 3t it 2 de modo que z¿(t ) 3 2it eAssim,
❑
Exemplo 2 Calculando uma integral de contorno
Calcule onde o C é círculo x cos t , y sen t, 0 t 2 .

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 285/416
9.1 Integrais de Contorno 287
Solução Nesse caso,Portanto,
❑
Para algumas curvas, a própria variável real x pode ser utilizada como parâmetro.Por exemplo, para calcular escrevemos
e integramos da maneira usual.
Propriedades As seguintes propriedades de integrais de contorno são análogas àspropriedades de integrais de linha:
Propriedades de integrais decontorno
Suponha f e g contínuas em um domínio D, e C sendo uma curva suave localizadainteiramente em D. Assim:
(i) , k uma constante (ii)
(iii) , onde C é a união das curvas sua-ves C 1 e C 2.
(iv) , onde –C denota a curva tendo a orientaçãooposta à de C .
TEOREMA 9.2
As quatro partes do Teorema 9.2 também se aplicam quando C for uma curva suavepor partes em D.
Exemplo 3 Calculando uma integral de contorno
Calcule , onde C é o contorno apresentado na Figura 9.1.
Solução Em vista do Teorema 9.2(iii), escrevemos
Como a curva C 1 é definida por y x , faz sentido utilizar x como parâmetro. Assim, z( x ) x ix , z¿( x ) 1 i, f ( z( x )) x
2 ix 2 e
A curva C 2 é definida por x 1, 1 y 2. Usando y como um parâmetro, temos z( y) 1 iy, z¿( y) i e f ( z( y)) 1 iy2. Portanto,
Finalmente, temos ❑
y
x
1 + 2i
C 2
C 1
1 + i
Figura 9.1 Contorno suave por partesno Exemplo 3.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 286/416
288 CAPÍTULO 9 Integração no Plano Complexo
Existem casos na aplicação de integração complexa que é útil determinar um limitesuperior para o valor absoluto de uma integral de contorno. No próximo teorema, usare-
mos o fato de que o comprimento de uma curva plana é
Porém, se z¿(t ) x ¿(t ) iy¿(t ), então e consequente-
mente s
Um teorema limiteSe f for contínua em uma curva suave C e se | f ( z)| M para todo z em C , então
onde L é o comprimento de C .
TEOREMA 9.3
Demonstração A partir da desigualdade do triângulo (6) da Seção 8.1, podemosescrever
(4)
Agora, | zk | pode ser interpretado como o comprimento da corda unindo os pontos zk e zk 1. Como a soma dos comprimentos das cordas não pode ser maior do que o com-primento de C , (4) se torna Logo, como ||P|| → 0, a últimadesigualdade resulta em ❑
O Teorema 9.3 é frequentemente utilizado na teoria de integração complexa, sen-do algumas vezes referido como desigualdade ML.
Exemplo 4 Um limite para uma integral de contorno
Determine um limite superior para o valor absoluto de , onde C é o
círculo | z| 4.
Solução Primeiro, o comprimento s do círculo de raio 4 é 8 . A seguir, a partirda desigualdade (7) da Seção 8.1, temos e assim
(5)
Além disso, |e z| |e x (cos y i sen y)| e x . Para pontos no círculo | z| 4, o máximovalor de x é 4, e assim (5) se torna
Portanto, a partir do Teorema 9.3, temos
❑
Circulação e fluxo líquido Considere T e N como sendo o vetor tangente unitárioe o vetor normal unitário a um contorno fechado simples orientado positivamente C .Quando interpretamos a função complexa f ( z) u( x , y) iv( x , y) como um vetor, asintegrais de linha
(6)
e
(7)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 287/416
9.1 Integrais de Contorno 289
têm interpretações especiais. A integral de linha em (6) é chamada de circulação emtorno de C e mede a tendência do fluxo a rotacionar a curva C . Veja a Seção 3.8 doVolume 2 para derivação. O fluxo líquido através de C é a diferença entre a taxa àqual o fluxo entra e a taxa à qual o fluxo sai da região limitada por C . O fluxo líquidoatravés de C é dado pela integral de linha em (7), e um valor não nulo para
indica a presença de fontes ou escoadouros para o fluxo dentro da curva C . Note que
e assim
(8)
(9)
Logo, essas duas quantidades-chave podem ser obtidas pelo cálculo de uma única
integral complexa.
Exemplo 5 Fluxo líquido
Dado o fluxo f ( z) (1 i) z, calcule a circulação ao redor e o fluxo líquido atravésdo círculo C : | z| 1.
Solução Como temos
Logo, a circulação em torno de C é 2 , e o fluxo líquido através de C é 2 . Veja aFigura 9.2. ❑
x
y
C
Figura 9.2 Fluxo f ( z ) (1 i ) z .
EXERCÍCIOS 9.1 As respostas de problemas ímpares selecionados estão na página 404.
Nos Problemas 1-16, calcule a integral dada ao longo do contor-no indicado.
1.
2.
3.
4.
5. , onde C é a metade direita do círculo | z| 1 a
partir de z i para z i.
6. , onde C é x t 2, y 1/ t , 1 t 2.
7. , onde C é o círculo | z| 1
8. , onde C é o círculo | z i|
1, 0 t 2
9. , onde C é a reta de z 1 para z i
10. , onde C é a metade inferior do círculo | z| 1 de z 1 para z 1
11. , onde C é o caminho poligonal constituído pelossegmentos de reta de z 0 para z 2 e de z 2 para z 1 i
12. , onde C é o caminho poligonal constituído pelossegmentos de reta de z 0 para z 1 e de z 1 para z 1 i
13. , onde C é o caminho poligonal constituídopelo arco circular ao longo de | z| 1 de z 1 para z i e o
segmento de reta de z i para z 1
14. , onde C é a metade esquerda da elipse x 2 /36 y
2 /4
1 de z 2i para z 2i
15. , onde C é o quadrado com vértices z 0, z 1, z 1 i e z i
16. , onde e C é a parábola y
x 2 de z 1 i para z 1 i
Nos Problemas 17-20, calcule a integral dada ao longo do con-torno C indicado na Figura 9.3.
17. 18.
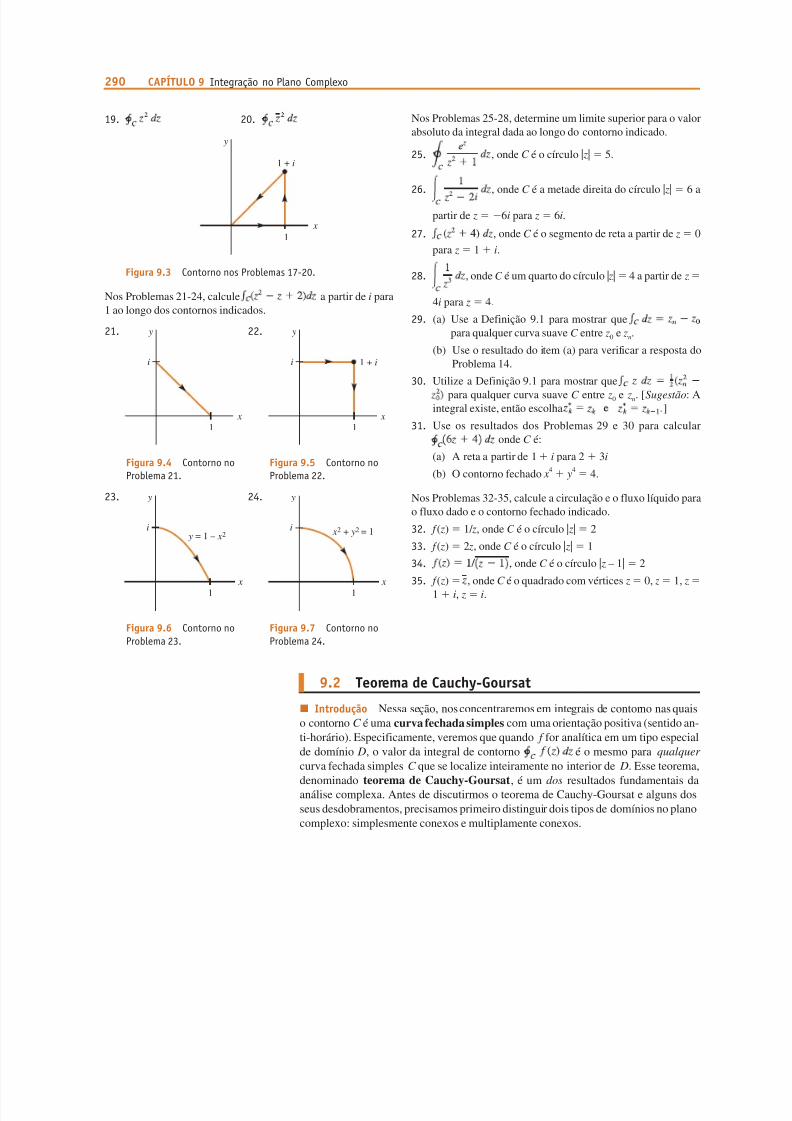
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 288/416
290 CAPÍTULO 9 Integração no Plano Complexo
19. 20.
y
x
1
1 + i
Figura 9.3 Contorno nos Problemas 17-20.
Nos Problemas 21-24, calcule a partir de i para1 ao longo dos contornos indicados.
21. y
x
1
i
Figura 9.4 Contorno noProblema 21.
22. y
x
1
i 1 + i
Figura 9.5 Contorno noProblema 22.
23. y
x
1
i y = 1 – x 2
Figura 9.6 Contorno noProblema 23.
24. y
x
1
i x 2 + y2
= 1
Figura 9.7 Contorno noProblema 24.
Nos Problemas 25-28, determine um limite superior para o valorabsoluto da integral dada ao longo do contorno indicado.
25. , onde C é o círculo | z| 5.
26. , onde C é a metade direita do círculo | z| 6 a
partir de z 6i para z 6i.
27. , onde C é o segmento de reta a partir de z 0 para z 1 i.
28. , onde C é um quarto do círculo | z| 4 a partir de z
4i para z 4.
29. (a) Use a Definição 9.1 para mostrar quepara qualquer curva suave C entre z0 e zn.
(b) Use o resultado do item (a) para verificar a resposta doProblema 14.
30. Utilize a Definição 9.1 para mostrar quepara qualquer curva suave C entre z0 e zn. [Sugestão: A
integral existe, então escolha ]
31. Use os resultados dos Problemas 29 e 30 para calcularonde C é:
(a) A reta a partir de 1 i para 2 3i
(b) O contorno fechado x 4 y
4 4.
Nos Problemas 32-35, calcule a circulação e o fluxo líquido parao fluxo dado e o contorno fechado indicado.
32. f ( z) 1/ z, onde C é o círculo | z| 2
33. f ( z) 2 z, onde C é o círculo | z| 1
34. , onde C é o círculo | z – 1| 2 35. f ( z) , onde C é o quadrado com vértices z 0, z 1, z
1 i, z i.
9.2 Teorema de Cauchy-Goursat
Introdução Nessa seção, nos concentraremos em integrais de contorno nas quaiso contorno C é uma curva fechada simples com uma orientação positiva (sentido an-ti-horário). Especificamente, veremos que quando f for analítica em um tipo especial
de domínio D, o valor da integral de contorno é o mesmo para qualquer curva fechada simples C que se localize inteiramente no interior de D. Esse teorema,denominado teorema de Cauchy-Goursat, é um dos resultados fundamentais daanálise complexa. Antes de discutirmos o teorema de Cauchy-Goursat e alguns dosseus desdobramentos, precisamos primeiro distinguir dois tipos de domínios no planocomplexo: simplesmente conexos e multiplamente conexos.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 289/416
9.2 Teorema de Cauchy-Goursat 291
Domínios simplesmente e multiplamente conexos Na discussão que se segue nosconcentraremos em integrais de contorno onde o contorno C é uma curva fechada sim-ples com uma orientação positiva (sentido anti-horário). Antes de procedermos, precisa-mos distinguir dois tipos de domínios. Um domínio D é dito ser simplesmente conexo setodo contorno fechado simples C que se estende inteiramente em D puder ser contraído
para um ponto sem deixar D. Em outras palavras, em um domínio simplesmente conexo,todo contorno fechado simples C engloba somente pontos do domínio D. Expressando-se ainda de um modo diferente, um domínio simplesmente conexo não tem “buracos”dentro dele. O plano complexo completo é um exemplo de um domínio simplesmenteconexo. Um domínio que não é simplesmente conexo tem “buracos”. Veja a Figura 9.8.Como na Seção 3.9 do Volume 2, chamamos um domínio com um “buraco” duplamenteconexo, um domínio com dois “buracos” triplamente conexo, e assim por diante.
Teorema de Cauchy Em 1825, o matemático francês Louis-Augustin Cauchyprovou um dos mais importantes teoremas em análise complexa. O teorema de Cau-
chy diz:
Suponha que uma função f seja analítica em um domínio simplesmente
conexo D e que f ¿ seja contínua em D. Então, para todo contorno fechadosimples C em D,
A demonstração desse teorema é uma consequência imediata do teorema de Green edas equações de Cauchy-Riemann. Como f ¿ é contínua em D, as partes real e imagi-nária de f ( z) u iv e suas derivadas primeira parciais são contínuas em D. De (2)da Seção 9.1, escrevemos em termos de integrais de linha reais e aplica-mos o teorema de Green em cada integral de linha:
(1)
Agora, como f é analítica, as equações de Cauchy-Riemann, u / x v / y e u / y v / x , implicam que os integrandos em (1) são identicamente nulos. Portanto,temos
Em 1883, o matemático francês Edouard Goursat demonstrou o teorema de Cau-chy sem a consideração da continuidade de f ¿. A versão modificada resultante doteorema de Cauchy é conhecida como teorema de Cauchy-Goursat:
Teorema de Cauchy-GoursatSuponha uma função f analítica em um domínio simplesmente conexo D. Então,para todo contorno C simples fechado em D,
TEOREMA 9.4
Como o interior de um contorno fechado simples é um domínio simplesmente co-nexo, o teorema de Cauchy-Goursat pode ser definido de uma maneira mais prática:
Se f for analítica em todos os pontos dentro e no contorno fechado
simples C, então (2)
Exemplo 1 Aplicando o Teorema de Cauchy-Goursat
Calcule , onde C é a curva mostrada na Figura 9.9.
Solução A função f ( z) e z é completa, e C é um contorno fechado simples.
A partir da forma do teorema de Cauchy-Goursat indicada em (2), temos que❑
(a) Domínio simplesmente conexo
(b) Domínio multiplamente conexo
D
D
Figura 9.8 Dois tipos de domínios.
y
C
x
Figura 9.9 Contorno no Exemplo 1.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 290/416
292 CAPÍTULO 9 Integração no Plano Complexo
Exemplo 2 Aplicando o Teorema de Cauchy-Goursat
Calcule , onde C é a elipse
Solução A função racional f ( z) 1/ z2
é analítica em todo lugar, exceto em z 0. Mas z 0 não é um ponto interior ao contorno C . Assim, de (2), temos
❑
Exemplo 3 Aplicando o Teorema de Cauchy-Goursat
Dado o fluxo , calcule a circulação em torno e o fluxo líquido através deC , onde C é o quadrado com vértices z 1, z i, z 1 e z i.
Solução Temos que calcular e então tomar as partesreal e imaginária da integral para obter a circulação e o fluxo líquido, respectivamen-te. A função cos z é analítica em todo lugar, e assim a partir de (2). Acirculação e o fluxo líquido são portanto ambos nulos. A Figura 9.10 mostra o fluxo
e o contorno C . ❑
Teorema de Cauchy-Goursat para domínios multiplamente conexos Se f foranalítica em um domínio multiplamente conexo D, então não podemos concluir que
para todo contorno fechado simples C em D. Para começar, suponhaque D seja um domínio duplamente conexo e que C e C 1 sejam contornos simplesfechados de modo que C 1 cerque o “buraco” no domínio e seja interior a C . Veja aFigura 9.11(a). Suponha, também que f seja analítica em cada contorno e em cadaponto interior a C , mas exterior a C 1. Quando introduzimos o corte AB apresentadona Figura 9.11(b), a região limitada pelas curvas é simplesmente conexa. Agora aintegral de A para B tem valor oposto ao da integral de B para A, e assim a partir de(2) temos ou
(3)
O último resultado é algumas vezes chamado de princípio da deformação de
contornos, pois podemos pensar o contorno C 1 como uma deformação contínuado contorno C . Sob essa deformação de contornos, o valor da integral não muda.Logo, em um nível prático, (3) nos permite calcular uma integral sobre um contor-no fechado simples complicado substituindo esse contorno por um que seja maisconveniente.
Exemplo 4 Aplicando deformação de contornos
Calcule , onde C é o contorno exterior indicado na Figura 9.12.
Solução
Em vista de (3), escolhemos o contorno circular mais conveniente C 1 nafigura. Tomando o raio do círculo como sendo r 1, garantimos que C 1 se localizeno interior de C 1. Em outras palavras, C 1 é o círculo | z – i| 1, que pode ser parame-trizado por x cos t , y 1 sen t , 0 t 2 , ou de modo equivalente por z i e
it , 0 t 2 . A partir de z – i eit e dz ieit dt , obtemos
❑
y
x
i
–i
–1 1
Figura 9.10 Fluxo f ( z) .
D
C
(a)
C D
A
B
(b)
C 1
Figura 9.11 Domínio duplamente co-nexo D.
y
x –2
i
C
2 + 3i
4i–2 + 4i
C 1
–2i 2 – 2i
Figura 9.12 Utilizamos o contornomais simples C 1 no Exemplo 4.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 291/416
9.2 Teorema de Cauchy-Goursat 293
O resultado no Exemplo 4 pode ser generalizado. Aplicando o princípio da de-formação de contornos (3) e procedendo como no exemplo, podemos mostrar quese z0 for qualquer número complexo constante interior a qualquer contorno fechadosimples C , então
(4)
O fato da integral em (4) ser zero quando n for um inteiro 1 decorre apenasparcialmente do teorema de Cauchy-Goursat. Quando n for zero ou um inteiro ne-gativo, 1/( z – z0)
n é um polinômio (por exemplo, n 3, 1/( z – z0)3 ( z – z0)
3), eportanto completo. O Teorema 9.4 implica então Deixa-se comoexercício mostrar que a integral é ainda zero quando n for um inteiro positivo diferen-te de um. Veja o Problema 22 nos Exercícios 9.2.
Exemplo 5 Aplicando a fórmula (4)
Calcule , onde C é o círculo | z – 2| 2.
Solução Como o denominador é fatorado z2 2 z – 3 ( z – 1)( z 3), o in-
tegrando não é analítico em z 1 e z 3. Desses dois pontos somente z 1 selocaliza no interior do contorno C , que é um círculo centrado em z 2 de raio r 2.Assim, por frações parciais,
e portanto
(5)
Em vista do resultado indicado em (4), a primeira integral em (5) tem o valor 2 i. Peloteorema de Cauchy-Goursat, o valor da segunda integral é zero. Logo, (5) se torna
❑
Se C , C 1 e C 2 forem os contornos fechados simples apresentados na Figura 9.13e se f for analítica em cada um dos três contornos, bem como em cada ponto interiora C mas exterior tanto a C 1 como a C 2, então, introduzindo cortes, obtemos a partir doTeorema 9.4 que Logo,
O próximo teorema resumirá o resultado geral para um domínio multiplamente cone-xo com n “buracos”:
Teorema de Cauchy-Goursat paradomínios multiplamente conexos
Considere C , C 1,..., C n curvas fechadas simples com uma orientação positiva demodo que C 1, C 2,..., C n sejam interiores a C porém as regiões interiores a cada C k ,k 1, 2,..., n, não tenham pontos em comum. Se f for analítica em cada contorno eem cada ponto interior a C porém exterior a todos C k , k 1, 2,..., n, então
(6)
TEOREMA 9.5
D
C
C 2C 1
Figura 9.13 Domínio triplamente co-nexo D.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 292/416
294 CAPÍTULO 9 Integração no Plano Complexo
Exemplo 6 Aplicando o Teorema 9.5
Calcule onde C é o círculo | z| 3.
Solução Nesse caso, o denominador do integrando é fatorado como z2 1
( z – i)( z i). Consequentemente, o integrando 1/( z2 1) não é analítico em z i e z
i. Esses pontos se localizam no interior do contorno C . Aplicando decomposiçãoem frações parciais mais uma vez, temos
e
Cercamos agora os pontos z i e z i por contornos circulares C 1 e C 2,respectivamente, que se localizam inteiramente no interior de C . Especificamente, aescolha para C 1 e para C 2 é suficiente. Veja a Figura 9.14. Apartir do Teorema 9.5, podemos então escrever
(7)
Como 1/( z i) é analítica em C 1 e em cada ponto em seu interior, e como 1/( z – i) éanalítica em C 2 e em cada ponto em seu interior, a partir de (4) temos que a segunda eterceira integrais em (7) são nulas. Além disso, decorre de (4) que, com n 1,
Assim, (7) é escrita como ❑
Observações
Por toda a discussão anterior, consideramos C como sendo um contorno fechadosimples; em outras palavras, C não interceptava a si próprio. Apesar de não apresen-tarmos a demonstração, pode-se mostrar que o teorema de Cauchy-Goursat é válidopara qualquer contorno fechado C em um domínio simplesmente conexo D. Confor-me ilustrado na Figura 9.15, o contorno C é fechado, porém não é simples. Apesardisso, se f for analítica em D, então
y
C i
x
C 1
C 2–i
Figura 9.14 Contorno no Exemplo 6.
C
D
Figura 9.15 O contorno C é fechadomas não é simples.
EXERCÍCIOS 9.2 As respostas de problemas ímpares selecionados estão na página 405.
Nos Problemas 1-8, demonstre que , onde f é a
função dada e C é o círculo unitário | z| 1.
1. 2.
3. 4.
5. 6.
7. 8.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 293/416
9.3 Independência do Caminho 295
9. Calcule , onde C é o contorno mostrado na Figura
9.16.
x
y
C
2
Figura 9.16 Contorno no Problema 9.
10. Calcule , onde C é o contorno mostrado na
Figura 9.17.
x
y
C
x 4 + y4 = 16
Figura 9.17 Contorno no Problema 10.
Nos Problemas 11-20, use qualquer um dos resultados dessaseção para calcular a integral dada ao longo do(s) contorno(s)fechado(s) indicado(s).
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21. Calcule , onde C é o contorno fechado ilustra-
do na Figura 9.18. [Sugestão: Expresse C como a união deduas curvas fechadas C 1 e C 2.]
y
x
C
1
Figura 9.18 Contorno no Problema 21.
22. Suponha que z0 seja qualquer número complexo constanteinterior a qualquer contorno fechado simples C . Mostre que
Nos Problemas 23 e 24, calcule a integral indicada por qualquermeio.
23. , C é o círculo unitário | z| 1.
24. , C é o triângulo com vértices z 0, z 1 2i, z 1.
9.3 Independência do caminho
Introdução Em cálculo real, quando uma função f possui uma antiderivada ele-mentar, isto é, uma função F para a qual F ¿( x ) f ( x ), uma integral definida pode sercalculada pelo Teorema Fundamental do Cálculo:
(1)
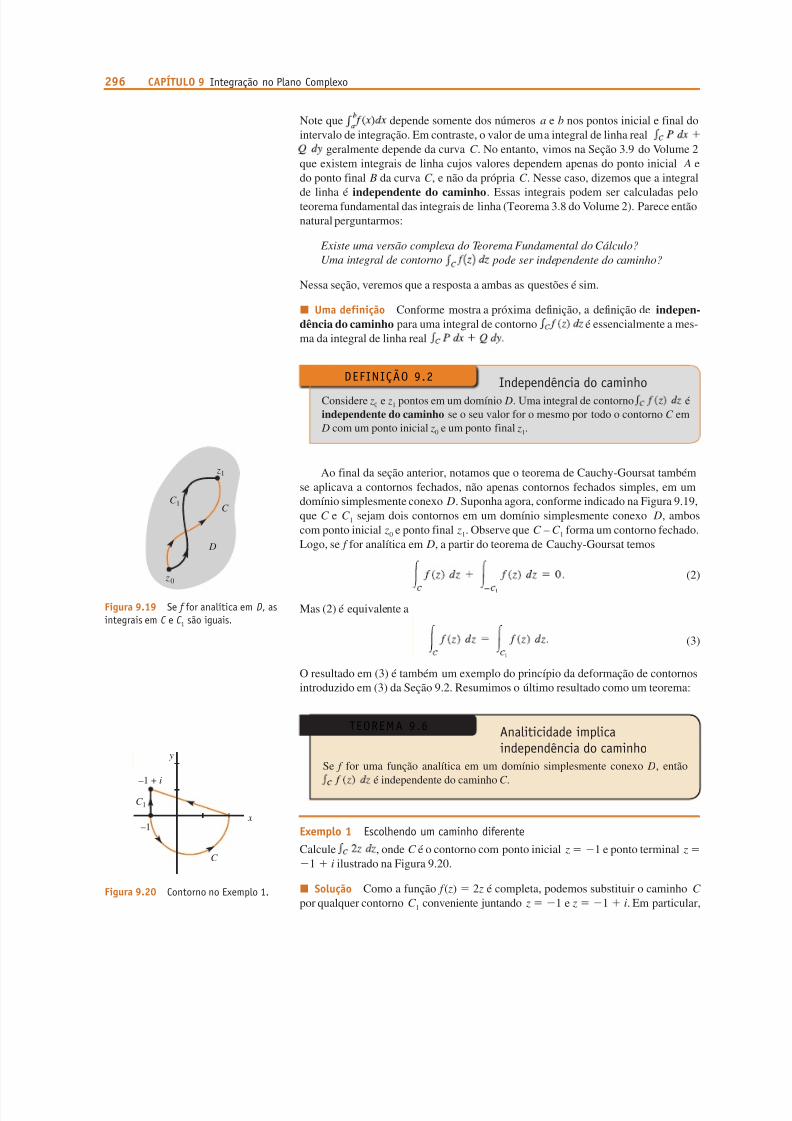
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 294/416
296 CAPÍTULO 9 Integração no Plano Complexo
Note que depende somente dos números a e b nos pontos inicial e final dointervalo de integração. Em contraste, o valor de uma integral de linha real
geralmente depende da curva C . No entanto, vimos na Seção 3.9 do Volume 2que existem integrais de linha cujos valores dependem apenas do ponto inicial A edo ponto final B da curva C , e não da própria C . Nesse caso, dizemos que a integral
de linha é independente do caminho. Essas integrais podem ser calculadas peloteorema fundamental das integrais de linha (Teorema 3.8 do Volume 2). Parece entãonatural perguntarmos:
Existe uma versão complexa do Teorema Fundamental do Cálculo?
Uma integral de contorno pode ser independente do caminho?
Nessa seção, veremos que a resposta a ambas as questões é sim.
Uma definição Conforme mostra a próxima definição, a definição de indepen-
dência do caminho para uma integral de contorno é essencialmente a mes-ma da integral de linha real
Independência do caminhoConsidere z0 e z1 pontos em um domínio D. Uma integral de contorno éindependente do caminho se o seu valor for o mesmo por todo o contorno C em
D com um ponto inicial z0 e um ponto final z1.
DEFINIÇÃO 9.2
Ao final da seção anterior, notamos que o teorema de Cauchy-Goursat tambémse aplicava a contornos fechados, não apenas contornos fechados simples, em umdomínio simplesmente conexo D. Suponha agora, conforme indicado na Figura 9.19,que C e C 1 sejam dois contornos em um domínio simplesmente conexo D, amboscom ponto inicial z0 e ponto final z1. Observe que C – C 1 forma um contorno fechado.Logo, se f for analítica em D, a partir do teorema de Cauchy-Goursat temos
(2)
Mas (2) é equivalente a
(3)
O resultado em (3) é também um exemplo do princípio da deformação de contornosintroduzido em (3) da Seção 9.2. Resumimos o último resultado como um teorema:
Analiticidade implica
independência do caminhoSe f for uma função analítica em um domínio simplesmente conexo D, então
é independente do caminho C .
TEOREMA 9.6
Exemplo 1 Escolhendo um caminho diferente
Calcule , onde C é o contorno com ponto inicial z 1 e ponto terminal z
1 i ilustrado na Figura 9.20.
Solução Como a função f ( z) 2 z é completa, podemos substituir o caminho C por qualquer contorno C 1 conveniente juntando z 1 e z 1 i. Em particular,
C C 1
D
z1
z0
Figura 9.19 Se f for analítica em D, asintegrais em C e C 1 são iguais.
y
x
C
–1
–1 + i
C 1
Figura 9.20 Contorno no Exemplo 1.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 295/416
9.3 Independência do Caminho 297
escolhendo C 1 como o segmento de reta x 1, 0 y 1, mostrado em preto naFigura 9.20, temos z 1 iy, dz i dy. Portanto,
❑
Uma integral de contorno que seja independente do caminho C é usu-almente escrita , onde z0 e z1 são os pontos inicial e final de C . Logo, no
Exemplo 1, podemos escreverExiste um modo mais fácil de calcular a integral de contorno no Exemplo 1. Mas
antes de prosseguirmos, precisamos de outra definição.
AntiderivadaSuponha que f seja contínua em um domínio D. Se existir uma função F tal queF ¿( z) f ( z) para cada z em D, então F é chamada de antiderivada de f .
DEFINIÇÃO 9.3
Por exemplo, a função F ( z) cos z é uma antiderivada de f ( z) sen z, poisF ¿( z) sen z. Como em cálculo real, a antiderivada mais geral, ou integral inde-
finida, de uma função f ( z) é escrita , onde F ¿( z) f ( z) e C éalguma constante complexa.
Como uma antiderivada F de uma função f tem uma derivada em cada ponto deum domínio D, ela é necessariamente analítica e, portanto, contínua em D (recordeque diferenciabilidade implica continuidade).
Estamos agora prontos para provar o análogo complexo de (1).
Teorema fundamental paraintegrais de contorno
Suponha que f seja contínua em um domínio D, e que F seja uma antiderivada de f em D. Então, para qualquer contorno C em D com ponto inicial z0 e ponto final z1,
(4)
TEOREMA 9.7
Demonstração Provaremos (4) para o caso quando C é uma curva suave definidapor z z(t ), a t b. Utilizando (3) da Seção 9.1 e o fato de que F ¿( z) f ( z) paracada z em D, temos
❑

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 296/416
298 CAPÍTULO 9 Integração no Plano Complexo
Exemplo 2 Utilizando uma antiderivada
No Exemplo 1, vimos que a integral , onde C é apresentada na Figura 9.20, é in-dependente do caminho. Agora como f ( z) 2 z é uma função complexa, ela é contínua.Além disso, F ( z) z2 é uma antiderivada de f , pois F ¿( z) 2 z. Logo, de (4) temos
❑
Exemplo 3 Utilizando uma antiderivada
Calcule , onde C é qualquer contorno com ponto inicial z 0 e ponto final z 2 i.
Solução F ( z) sen z é uma antiderivada de f ( z) cos z, pois F ¿( z) cos z.Portanto, a partir de (4) temos
Se desejarmos um número complexo da forma a ib como uma resposta, podemosutilizar sen (2 i) 1,4031 – 0,4891i (veja o Exemplo 1 na Seção 8.7). Assim,
❑
Podemos retirar diversas conclusões imediatas a partir do Teorema 9.7. Primeiro,observe que se o contorno C for fechado, então z0 z1 e consequentemente
(5)
A seguir, como o valor de depende apenas dos pontos z0 e z1, esse valoré o mesmo para qualquer contorno C em D conectando esses pontos. Em outraspalavras:
Se uma função contínua f tiver uma antiderivada F em D, então
é independente do caminho. (6)
Além disso, temos a seguinte condição suficiente para a existência de uma antiderivada:
Se f for contínua e for independente do caminho em um domínio
D, então f tem uma antiderivada em qualquer lugar em D. (7)
O último enunciado é importante e merece uma demonstração. Considere que f seja contínua, seja independente do caminho em um domínio D, e F sejauma função definida por onde s representa uma variável complexa,
z0 é um ponto fixo em D, e z representa qualquer ponto em D. Queremos mostrar queF ¿( z) f ( z); isto é, F é uma antiderivada de f em D. Agora,
(8)
Como D é um domínio, podemos escolher z de modo que z z esteja em D. Alémdisso, z e z z podem ser ligados por um segmento direto localizado em D, comomostra a Figura 9.21. Trata-se do contorno que utilizamos na última integral em (8).Com z fixo, podemos escrever*
(9)
* Veja o Problema 29 nos Exercícios 9.1.
D
zs
z + ∆ z
z0
Figura 9.21 Contorno utilizado na de-monstração de (7).

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 297/416
9.3 Independência do Caminho 299
A partir de (8) e (9), temos
Agora f é contínua no ponto z. Isso significa que para qualquer 0, existe um 0 tal que | f (s) – f ( z)| sempre que |s – z| . Consequentemente, se escolhermos z de modo que | z| , temos
Logo, mostramos que
Se f for uma função analítica em um domínio simplesmente conexo D, ela é ne-cessariamente contínua por todo D. Esse fato, quando posto junto com os resultadosno Teorema 9.6 e (7), resulta em um teorema que declara que uma função analíticapossui uma antiderivada analítica.
Existência de uma antiderivadaSe f for analítica em um domínio simplesmente conexo D, então f tem uma antide-rivada em D; isto é, existe uma função F tal que F ¿( z) f ( z) para todo z em D.
TEOREMA 9.8
Em (9) da Seção 8.6, vimos que 1/ z é a derivada de Ln z. Isso significa que, sobalgumas circunstâncias, Ln z é uma antiderivada de 1/ z. Deve-se ter cuidado ao uti-lizar esse resultado. Por exemplo, suponha que D seja o plano complexo completosem a origem. A função 1/ z é analítica nesse domínio multiplamente conexo. Se C for qualquer contorno fechado simples contendo a origem, não decorre de (5) que
De fato, a partir de (4) da Seção 9.2 com a identificação z0 0, vemosque
Nesse caso, Ln z não é uma antiderivada de 1/ z em D, pois Ln z não é analítica em D.
Relembre que Ln z falha em ser analítica no eixo real não positivo (o corte de ramifi-cação do ramo principal do logaritmo).
Exemplo 4 Utilizando a função logarítmica
Calcule , onde C é o contorno mostrado na Figura 9.22.
Solução Suponha D sendo o domínio simplesmente conexo definido por x Re( z) 0, y Im( z) 0. Nesse caso, Ln z é uma antiderivada de 1/ z, pois ambasessas funções são analíticas em D. Portanto, a partir de (4),
y
C
x
3
2i
Figura 9.22 Contorno no Exemplo 4.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 298/416
300 CAPÍTULO 9 Integração no Plano Complexo
De (7) da Seção 8.6, temos
e assim
❑
Observações
Suponha f e g analíticas em um domínio simplesmente conexo D que contenha o con-torno C . Se z0 e z1 forem os pontos inicial e final de C , então a fórmula de integração
por partes é válida em D:
Isso pode ser provado de uma maneira direta aplicando-se o Teorema 9.7 na função(d / dz)( fg). Veja os Problemas 21-24 nos Exercícios 9.3.
EXERCÍCIOS 9.3 As respostas de problemas ímpares selecionados estão na página 405.
Nos Problemas 1 e 2, calcule a integral dada, onde C é o con-torno indicado na figura, (a) obtendo um caminho alternativo deintegração e (b) aplicando o Teorema 9.7.
1. 2.
y
x
i
–i | z| = 1
Figura 9.23 Contorno noProblema 1.
x
y
0
3 + i
3 + 3i
Figura 9.24 Contorno noProblema 2.
Nos Problemas 3 e 4, calcule a integral dada ao longo do contor-
no C indicado.
3.
4.
Nos Problemas 5-24, aplique o Teorema 9.7 para calcular a inte-gral indicada. Escreva cada resposta na forma a ib.
5. 6.
7. 8.
9. 10.
11. 12.
13. 14.
15. 16.
17. , C é o arco do círculo z 4eit , /2 t /2
18. , C é o segmento de reta direto entre z 1 i e z
4 4i
19. , C é qualquer contorno que não passe pela origem
20. , C é qualquer contorno no plano meta-
de direito Re( z) 0
21. 22.
23. 24.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 299/416
9.4 Fórmulas Integrais de Cauchy 301
9.4 Fórmulas integrais de Cauchy
Introdução Nas últimas duas seções, vimos a importância do teorema de Cau-chy-Goursat no cálculo das integrais de contorno. Nessa seção, examinaremos di-versas outras consequências do teorema de Cauchy-Goursat. Inquestionavelmente, a
mais significativa corresponde ao seguinte resultado:
O valor de uma função analítica f em qualquer ponto z0 de um domínio
simplesmente conexo pode ser representado por uma integral de contorno.
Depois de estabelecida essa proposição, ela será utilizada para mostrar que:
Uma função analítica f em um domínio simplesmente conexo possui
derivadas de todas as ordens.
As consequências desses dois resultados nos manterão ocupados não apenas pelorestante dessa seção, mas também no próximo capítulo.
Primeira fórmula Iniciamos pela fórmula integral de Cauchy. A ideia para o pró-
ximo teorema é a seguinte: se f for analítica em um domínio simplesmente conexoe z0 é qualquer ponto D, então o quociente f ( z)/( z – z0) não é analítico em D. Comoconsequência, a integral de f ( z)/( z – z0) em torno de um contorno fechado simples C que contenha z0 não é necessariamente zero, porém tem, conforme veremos agora, ovalor 2 i f ( z0). Esse resultado notável indica que os valores de uma função analítica f em pontos dentro de um contorno fechado simples C são determinados pelos valoresde f no contorno C .
Fórmula integral de CauchySeja f analítica em um domínio simplesmente conexo D, e seja C um contornofechado simples localizado inteiramente no interior de D. Se z0 for qualquer pontodentro de C , então
(1)
TEOREMA 9.9
Demonstração Considere D sendo um domínio simplesmente conexo, C um contor-no fechado simples em D, e z0 um ponto interior de C . Além disso, seja C 1 um círculocentrado em z0 com raio pequeno o suficiente para que esteja no interior de C . Peloprincípio da deformação de contornos, podemos escrever
(2)
Queremos mostrar que o valor da integral à direita é 2 i f ( z0). Com esse objetivo,somamos e subtraímos a constante f ( z
0
) no numerador:
(3)
Agora, a partir de (4) da Seção 9.2, sabemos que

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 300/416
302 CAPÍTULO 9 Integração no Plano Complexo
Portanto, (3) é escrita como
(4)
Como f é contínua em z0 para qualquer
0 arbitrariamente pequeno, existe um 0 tal que | f ( z) – f ( z0)| sempre que | z – z0| . Em particular, se escolhermos ocírculo C 1 como sendo | z – z0| /2 , então, pela desigualdade ML (Teorema 9.3),o valor absoluto da integral do lado direito de (4) satisfaz
Em outras palavras, o valor absoluto da integral pode ser feito arbitrariamente peque-no considerando-se o raio do círculo C 1 suficientemente pequeno. Isso pode ocor-rer somente se a integral for zero. A fórmula integral de Cauchy (1) decorre de (4)dividindo-se ambos os lados por 2 i. ❑
A fórmula integral de Cauchy (1) pode ser utilizada para o cálculo de integrais decontorno. Como muitas vezes trabalhamos problemas sem um domínio simplesmente
conexo definido explicitamente, uma declaração mais prática do Teorema 9.9 é:
Se f for analítica em todos os pontos no interior e em um contorno
fechado simples C, e z0 for qualquer ponto interior a C, então
(5)
Exemplo 1 Utilizando a fórmula integral de Cauchy
Calcule , onde C é o círculo | z| 2.
Solução Primeiro, identificamos f ( z) z2 – 4 z 4 e z0 i como um ponto
dentro do círculo C . A seguir, observamos que f é analítica em todos os pontos dentroe no contorno C . Assim, pela fórmula integral de Cauchy, obtemos
❑
Exemplo 2 Utilizando a fórmula integral de Cauchy
Calcule , onde C é o círculo | z – 2i| 4.
Solução Fatorando o denominador como z2 9 ( z – 3i)( z 3i), vemos que
3i é o único ponto dentro do contorno fechado para o qual o integrando falha em seranalítico. Veja a Figura 9.25. Agora, escrevendo
podemos identificar f ( z) z /( z 3i). Essa função é analítica em todos os pontosdentro e no contorno C . A partir da fórmula integral de Cauchy, temos então
❑
x
y
C
–3i
3i
Figura 9.25 Contorno no Exemplo 2.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 301/416
9.4 Fórmulas Integrais de Cauchy 303
Exemplo 3 Fluxo e fórmula integral de Cauchy
A função complexa , onde k a ib e z1 são números complexos,resulta em um fluxo no domínio z z1. Se C for um contorno fechado simples con-tendo z z1 em seu interior, então a partir da fórmula integral de Cauchy temos
Assim, a circulação em torno de C 1 é 2 b e o fluxo líquido através de C é 2 a. Se z1 estivesse no exterior de C , tanto a circulação como o fluxo líquido seriam nulos peloteorema de Cauchy.
Note que quando k for real, a circulação em torno de C será zero, porém o fluxolíquido através de C será 2 k . O número complexo z1 é denominado fonte para o flu-xo quando k 0, e escoadouro quando k 0. Campos vetoriais que correspondem aesses dois casos são apresentados na Figura 9.26(a) e (b). ❑
Segunda fórmula Podemos agora usar o Teorema 9.9 para demonstrar que umafunção analítica possui derivadas de todas as ordens; isto é, se f for analítica em um pon-
to z0, então f ¿
, f –
, f ‡
e assim por diante são também analíticas em z0. Além disso, os va-lores das derivadas f (n) ( z0), n 1, 2, 3,..., são definidos por uma fórmula similar a (1).
Fórmula integral de Cauchy paraderivadas
Considere f analítica em um domínio simplesmente conexo D, e C um contornofechado simples localizado inteiramente dentro de D. Se z0 for qualquer pontointerior a C , então
(6)
TEOREMA 9.10
Demonstração parcial Demonstraremos (6) somente para o caso n
1. O restante dademonstração pode ser completado utilizando-se o princípio da indução matemática.Iniciamos pela definição da derivada e (1):
Antes de procedermos, vamos definir alguns pontos. Como f é contínua em C , ela élimitada; isto é, existe um número real M tal que | f ( z)| M para todos os pontos z em
C . Além disso, seja L o comprimento de C e considere como sendo a menor distân-cia entre pontos em C e o ponto z0. Logo, para todos os pontos z em C , temos
Além disso, se escolhermos | z| /2, então
Agora,
y
x
y
x
z1
z1
(a) Fonte: k > 0
(b) Escoadouro: k < 0
Figura 9.26 Campos vetoriais no Exem-plo 3.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 302/416
304 CAPÍTULO 9 Integração no Plano Complexo
Como a última expressão se aproxima de zero quando z → 0, mostramos que
❑
Se f ( z)
u( x , y)
iv( x , y) for analítica em um ponto, então suas derivadas de to-das as ordens existem naquele ponto e são contínuas. Consequentemente, a partir de
podemos concluir que as funções reais u e v têm derivadas parciais contínuas de todasas ordens em um ponto de analiticidade.
Como (1), (6) pode algumas vezes ser utilizada para calcular integrais.
Exemplo 4 Utilizando a fórmula integral de Cauchy para derivadas
Calcule , onde C é o círculo | z| 1.
Solução A inspeção do integrando mostra que ele não é analítico em z 0 e z
4, mas apenas z 0 se localiza dentro do contorno fechado. Escrevendo o inte-grando como
podemos identificar z0 0, n 2 e f ( z) ( z 1)/( z 4). Pela regra do quociente, f –( z) 6/( z 4)3, e assim de (6) temos
❑
Exemplo 5 Utilizando a fórmula integral de Cauchy para derivadas
Calcule , onde C é o contorno apresentado na Figura 9.27.
Solução Apesar de C não ser um contorno simples fechado, podemos pensá-locomo a união de dois contornos simples fechados C 1 e C 2 como indicado na Figura9.27. Escrevendo
estamos em posição de usar tanto (1) como (6).Para calcular I 1, identificamos z0 0 e f ( z) ( z3 3)/( z – i)2. De (1), temos
y
x
i
0
C 1
C 2
Figura 9.27 Contorno no Exemplo 5.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 303/416
9.4 Fórmulas Integrais de Cauchy 305
Para calcular I 2, identificamos z0 i, n 1, f ( z) ( z3 3)/ z, e f ¿( z) (2 z3 – 3)/ z2. Apartir de (6), obtemos
Finalmente, temos
❑
Teorema de Liouville Se considerarmos o contorno C como sendo o círculo| z – z0| r , decorre de (6) e da desigualdade ML que
(7)
onde M é um número real tal que | f ( z)| M para todos os pontos z em C . O resultado
em (7), denominado desigualdade de Cauchy, é usado para demonstrar o próximoresultado.
Teorema de LiouvilleAs funções completas somente limitadas são constantes.
TEOREMA 9.11
Demonstração Suponha que f seja uma função completa e limitada, isto é, | f ( z)| M para todo z. Então, para qualquer ponto z0, (7) resulta em | f ¿( z0)| M / r . Assumindo
r arbitrariamente grande, podemos fazer | f ¿( z0)| tão pequeno quanto desejarmos. Issosignifica f ¿( z0) 0 para todos os pontos z0 no plano complexo. Portanto, f tem que seruma constante. ❑
Teorema Fundamental da Álgebra O teorema de Liouville nos permite demons-trar um resultado que é aprendido em álgebra elementar: se P( z) for um polinômio nãoconstante, então a equação P( z) 0 tem ao menos uma raiz. Esse resultado é conhecidocomo Teorema Fundamental da Álgebra. Para demonstrá-lo, vamos supor que P( z) 0 para todo z. Isso implica que o recíproco de P, f ( z) 1/ P( z), é uma função completa.Agora, como | f ( z)|→ 0 quando | z|→ , a função f tem que ser limitada para todo z finito.Decorre do teorema de Liouville que f é uma constante e portanto P é constante. Porém,isso é uma contradição da nossa consideração de que P não é um polinômio constante.Concluímos que tem que existir ao menos um número z para o qual P( z) 0.
EXERCÍCIOS 9.4 As respostas de problemas ímpares selecionados estão na página 405.
Nos Problemas 1-24, aplique os Teoremas 9.9 e 9.10, quan-do apropriado, para calcular a integral dada ao longo do(s)contorno(s) fechado(s) indicado(s).
1.
2.
3.
4.
5.
6.
7.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 304/416
306 CAPÍTULO 9 Integração no Plano Complexo
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23. ; C está indicado na Figura 9.28.
y
C
x 0 2
Figura 9.28 Contorno no Problema 23.
24. ; C está indicado na Figura 9.29.
x
i
y
C
–i
Figura 9.29 Contorno no Problema 24.
CAPÍTULO 9 EXERCÍCIOS DE REVISÃO As respostas de problemas ímpares selecionados estão na página 405.
Responda os Problemas 1-12 sem consultar o texto. Preencha osespaços ou responda verdadeiro/falso.
1. O setor definido por /6 arg z /6 é um domíniosimplesmente conexo. _____
2. Se para todo contorno fechado simples C ,
então f é analítica dentro e em C . _____
3. O valor de é o mesmo para qualquer caminho C
no plano metade direito Re( z) 0 entre z 1 i e z 10 8i. _____
4. Se g for completa, então , onde C
é o círculo | z| 3 e C 1 é a elipse x 2 y
2 /9 1. _____
5. Se f for um polinômio e C for uma curva simples fechada,então _____.
6. Se , onde C é | z| 3, então f (1
i) _____.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 305/416
Exercícios de Revisão 307
7. Se f ( z) z3 e z e C for o contorno z 8eit , 0 t 2 ,
então _____.
8. Se f for completa e | f ( z)| 10 para todo z, então f ( z)
_____. 9. para todo contorno fechado
simples C que englobe os pontos z0 e z1. _____
10. Se f for analítica dentro e no contorno fechado simples C , e z0 for um ponto dentro de C , então
_____.
11.
onde n é um inteiro e C é | z| 1.
12. Se | f ( z)| 2 em | z| 3, então _____.
Nos Problemas 13-28, calcule a integral indicada utilizando astécnicas consideradas nesse capítulo.
13. C é o contorno mostrado na Figura 9.30.
C
y
x
3–4
Figura 9.30 Contorno no Problema 13.
14. C é o contorno mostrado na Figura 9.30.
15.
16. C é o segmento de reta de z i para z 1 i
17. C é a elipse x 2 /100 y
2 /64 1
18.
19.
20. C é o segmento de reta de 0 a 2i
21. C é o círculo | z| 1
22. C é o círculo | z| 2
23. C é o círculo | z 1| 3
24. C é o círculo
25. C é a elipse x 2 /4 y
2 1
26. C é o retângulo com vértices 1 i, 1 – i, 2
i, 2 – i
27. C é o contorno mostrado na Figura 9.31
–2 3
y
C
x
Figura 9.31 Contorno no Problema 27.
28.
29. Considere f ( z) zn g( z), onde n é um inteiro positivo, g( z)
é completa, e g( z) 0 para todo z. Seja C um círculo com
centro na origem. Calcule
30. Seja C o segmento de reta direto de i para 2 i. Mostreque

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 306/416
10
C A P Í T U L O
Séries e Resíduos
A fórmula integral de Cauchy para derivadas indica que se uma função f foranalítica em um ponto z 0, então essa função possui derivadas de todas asordens naquele ponto. Como consequência desse resultado, veremos que f pode sempre ser expandida em uma série de potências centrada naqueleponto. Por outro lado, se f não for analítica em um ponto z 0, podemos aindaser capazes de expandi-la em um tipo diferente de série denominada sériede Laurent. A noção de série de Laurent nos leva ao conceito de resíduo, eesse, por sua vez, leva a outra forma de se calcular integrais complexas.
Descrição do capítulo
10.1 Sequências e séries
10.2 Série de Taylor
10.3 Série de Laurent
10.4 Zeros e pólos
10.5 Resíduos e teorema do resíduo
10.6 Cálculo de integrais reais
Exercícios de revisão

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 307/416
10.1 Seqüências e Séries 309
10.1 Sequências e séries
Introdução A maior parte da teoria de sequências e séries complexas é análo-ga àquela encontrada em cálculo real. Nessa seção, exploraremos as definições deconvergência e divergência para sequências complexas e séries infinitas complexas.
Além disso, apresentaremos alguns testes para convergência de séries infinitas. Vocêdeve prestar atenção especial ao conteúdo referente às séries geométricas, pois essetipo de série será importante nas últimas seções desse capítulo.
Sequências Uma sequência { zn} é uma função cujo domínio é o conjunto deinteiros positivos; em outras palavras, para cada inteiro n 1, 2, 3,..., designamos umnúmero complexo zn. Por exemplo, a sequência {1 in} é
(1)
Se lim n→ zn L, dizemos que a sequência { zn} é convergente. Em outras palavras,{ zn} converge para o número L se, para cada número positivo , um N puder ser de-
terminado de modo que | zn – L|
sempre que n
N . Conforme indicado na Figura10.1, quando uma sequência { zn} converge para L, todos os termos da sequência (ex-ceto um número finito) estão no interior de qualquer vizinhança de L. A sequência{1 in} ilustrada em (1) é divergente, pois o termo geral zn 1 in não se aproximade um número complexo fixo quando n → . De fato, os primeiros quatro termosdessa sequência se repetem infinitamente à medida que n cresce.
Exemplo 1 Uma sequência convergente
A sequência converge, pois
Conforme vemos de
e da Figura 10.2, os termos da sequência giram em formato espiral em direção aoponto z 0. ❑
O seguinte teorema é intuitivo:
Critério para convergênciaUma sequência { zn} converge para um número complexo L se e somente se Re( zn)convergir para Re( L) e Im( zn) convergir para Im( L).
TEOREMA 10.1
Exemplo 2 Ilustrando o teorema 10.1
A sequência converge para i. Note que Re(i) 0 e Im(i) 1. Assim, a
partir de
y
x
L
ε
Figura 10.1 Se { z n} converge para L,
todos os termos da sequência (exceto umnúmero finito) estão em qualquer vizi-nhança de L.
x
y
–1
i
415
– 13
2– i
Figura 10.2 Os termos da sequênciagiram em formato espiral em direção azero.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 308/416
310 CAPÍTULO 10 Séries e Resíduos
vemos que Re( zn) 2n /(n2 4)→ 0 e Im( zn) n2 /(n2 4)→ 1 quando n → . ❑
Séries Uma série infinita de números complexos
é convergente se a sequência de somas parciais {S n}, onde
convergir. Se S n → L quando n → , dizemos que a soma da série é L.
Série geométrica Para a série geométrica
(2)
o enésimo termo da sequência de somas parciais é
(3)
Multiplicando S n por z e subtraindo esse resultado de S n, obtemos S n – zS n a – azn.Resolvendo em relação a S n, obtemos
(4)
Como zn → 0 quando n → , sempre que | z| 1, concluímos a partir de (4) que (2)
converge para
quando | z| 1; a série diverge quando | z| 1. A série geométrica especial
(5)
e
,
(6)
válida para | z| 1, terá utilidade particular nas próximas duas seções. Além disso,utilizaremos
(7)
na forma alternativa
(8)
nas provas dos dois principais teoremas desse capítulo.
Exemplo 3 Série geométrica convergente
A série

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 309/416
10.1 Seqüências e Séries 311
é uma série geométrica com a (1 2i)/5 e z (1 2i)/5. Comoa série converge e podemos escrever
❑
Condição necessária paraconvergência
Se , então limn→ zn 0.
TEOREMA 10.2
Uma forma equivalente do Teorema 10.2 se refere ao familiar teste do enésimotermo para divergência de uma série infinita.
O teste do enésimo termo paradivergência
Se limn→ zn 0, então a série diverge.
TEOREMA 10.3
Por exemplo, a série diverge, pois zn (n 5i)/ n → 1 quandon→. A série geométrica (2) diverge quando | z| 1, pois, nesse caso, limn→
| zn| nãoexiste.
Convergência absolutaUma série infinita é absolutamente convergente se convergir.
DEFINIÇÃO 10.1
Exemplo 4 Convergência absoluta
A série é absolutamente convergente, pois |ik / k
2| 1/ k 2 e a série real
converge. Recorde de cálculo que uma série real da forma édenominada série p, e converge para p 1 e diverge para p 1. ❑
Como em cálculo real,
Convergência absoluta implica convergência.
Assim, no Exemplo 4, a série
converge.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 310/416
312 CAPÍTULO 10 Séries e Resíduos
Os dois testes seguintes são as versões complexas dos testes da razão e da raizencontrados no cálculo:
Teste da razãoSuponha sendo uma série de termos complexos não nulos de modo que
(9)
(i) Se L 1, então a série converge absolutamente.
(ii) Se L 1 ou L , então a série diverge.
(iii) Se L 1, o teste não é conclusivo.
TEOREMA 10.4
Teste da raizSuponha sendo uma série de termos complexos tal que
(10)
(i) Se L 1, então a série converge absolutamente.
(ii) Se L 1 ou L , então a série diverge
(iii) Se L 1, o teste não é conclusivo.
TEOREMA 10.5
Estamos principalmente interessados em aplicar esses testes às séries de potências.
Série de potências A noção de uma série de potências é importante no estudo defunções analíticas. Uma série infinita da forma
(11)
onde os coeficientes ak são constantes complexas, é chamada série de potências em
z – z0. A série de potências (11) está centrada em z0, e o ponto complexo z0 é referidocomo o centro da série. Em (11), é conveniente também definir ( z – z0)
0 1 mesmoquando z z0.
Círculo de convergência Toda série de potências complexa tem um raio de con-
vergência R. Análogo ao conceito de um intervalo de convergência no cálculo real,quando 0 R , uma série de potências complexa (11) tem um círculo de con-
vergência definido por | z – z0| R. A série de potências converge absolutamente paratodo z que satisfaz | z – z0| R e diverge para | z – z0| R. Veja a Figura 10.3. O raio Rde convergência pode ser:
(i) zero (nesse caso (11) converge somente em z z0), (ii) um número finito (nesse caso (11) converge em todos os pontos interiores
do círculo | z – z0| R), ou
(iii) (nesse caso (11) converge para todo z).
Uma série de potências pode convergir em alguns, todos ou nenhum dos pontos no verdadeiro círculo de convergência.
y
x
R
z0
convergência
divergência
| z– z0| = R
Figura 10.3 Uma série de potênciasconverge em todos os pontos do interiordo círculo de convergência.
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 311/416
10.1 Seqüências e Séries 313
Exemplo 5 Círculo de convergência
Considere a série de potências Pelo teste da razão (9),
Assim, a série converge absolutamente para | z| 1. O círculo de convergência é | z| 1 e o raio de convergência é R 1. Note que, no círculo de convergência, a sérienão converge absolutamente, pois a série de valores absolutos é a conhecida sérieharmônica divergente Tenha em mente, porém, que isso não quer dizerque a série diverge no círculo de convergência. De fato, em z 1,é a série harmônica alternada convergente. Pode ser mostrado que a série convergeem todos os pontos no círculo | z| 1 exceto em z 1. ❑
Deve estar claro do Teorema 10.4 e do Exemplo 5 que para uma série de potên-
cias o limite (9) depende apenas dos coeficientes ak . Logo, se (i) o raio de convergência é R 1/ L;
(ii) o raio de convergência é ;
(iii) o raio de convergência é R 0.
Constatações similares podem ser feitas para o teste da raiz (10) utilizando-se
Exemplo 6 Raio de convergência
Considere a série de potências Identificando an (1)n1
/ n!, temos
Assim, o raio de convergência é ; a série de potências com centro 1 i convergeabsolutamente para todo z. ❑
Exemplo 7 Raio de convergência
Considere a série de potências Com o teste
da raiz na forma
mostra que o raio de convergência da série é O círculo de convergência éa série converge absolutamente para ❑

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 312/416
314 CAPÍTULO 10 Séries e Resíduos
EXERCÍCIOS 10.1 As respostas de problemas ímpares selecionados estão na página 405.
Nos Problemas 1-4, escreva os primeiros cinco termos da se-
quência indicada.
1. 2.
3.
4. [Sugestão: Escreva em forma polar.]
Nos Problemas 5-10, determine se a sequência indicada converge
ou diverge.
5. 6.
7. 8.
9. 10.
Nos Problemas 11 e 12, mostre que a sequência indicada { zn}
converge para um número complexo L calculando lim n→ Re( zn)
e lim n→ Im( zn).
11. 12.
Nos Problemas 13 e 14, utilize a sequência de somas parciais
para mostrar que a série indicada é convergente.
13.
14.
Nos Problemas 15-20, determine se a série geométrica indicada
é convergente ou divergente. Se for convergente, determine a sua
soma.
15. 16.
17. 18.
19. 20.
Nos Problemas 21-28, determine o círculo e o raio de convergên-
cia da série de potências indicada.
21.
22.
23.
24.
25.
26.
27.
28.
29. Mostre que a série de potências não é absoluta-
mente convergente em seu círculo de convergência. Deter-mine ao menos um ponto no círculo de convergência para o
qual a série de potências converge.
30. (a) Mostre que a série de potências converge em todo
ponto do seu círculo de convergência.
(b) Mostre que a série de potências converge em
todo ponto do seu círculo de convergência.
10.2 Série de Taylor Introdução A correspondência entre um número complexo z dentro do círculo
de convergência e o número para o qual a série converge tem valor
único. Desse modo, uma série de potências define ou representa uma função f ; para
um z especificado no interior do círculo de convergência, o número L para o qual a
série de potências converge é definido como sendo o valor de f em z, isto é, f ( z)
L. Nessa seção, apresentamos alguns fatos importantes a respeito da natureza dessa
função f .
Na seção anterior, vimos que toda série de potências tem um raio de conver-
gência R. Consideraremos nas discussões dessa seção que uma série de potências
tem um raio de convergência R positivo ou infinito. Os próximos três

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 313/416
10.2 Série de Taylor 315
teoremas apresentarão alguns fatos importantes a respeito da natureza de uma série depotências dentro do seu círculo de convergência | z – z0| R, R 0.
ContinuidadeUma série de potências representa uma função contínua f no inte-rior do seu círculo de convergência | z – z0| R, R 0.
TEOREMA 10.6
Integração termo a termoUma série de potências pode ser integrada termo a termo no in-terior do seu círculo de convergência | z – z0| R, R 0, para qualquer contorno C que se localize inteiramente dentro do círculo de convergência.
TEOREMA 10.7
Diferenciação termo a termoUma série de potências pode ser diferenciada termo a termo nointerior do seu círculo de convergência | z – z0| R, R 0.
TEOREMA 10.8
Série de Taylor Suponha que uma série de potências represente uma função f para | z – z0| R, R 0; isto é,
(1)
Decorre do Teorema 10.8 que as derivadas de f são
(2)
(3)
(4)
e assim por diante. Cada uma das séries diferenciadas tem o mesmo raio de conver-gência da série original. Além disso, como a série de potências original representauma função diferenciável f dentro do seu círculo de convergência, concluímos que,quando R 0, uma série de potências representa uma função analítica no interior do
seu círculo de convergência.Existe uma relação entre os coeficientes ak e as derivadas de f . Calculando (1),
(2), (3) e (4) em z z0, obtemos
respectivamente. Em geral, f (n)( z0) n!an ou
(5)
Quando n 0, interpretamos a zeroésima derivada como f ( z0) e 0! 1. Substituindo(5) em (1), temos
(6)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 314/416
316 CAPÍTULO 10 Séries e Resíduos
Essa série é denominada série de Taylor para f centrada em z0. Uma série de Taylorcom centro z0 0,
(7)
é referida como série de Maclaurin.Vimos que uma série de potências com raio de convergência não nulo representa
uma função analítica. Por outro lado, se nos for dada uma função f que seja analíticaem algum domínio D, podemos representá-la por uma série de potências da forma (6)e (7)? Como uma série de potências converge em um domínio circular, e um domínio
D geramente não é circular, a questão se torna: podemos expandir f em uma ou mais séries de potência que sejam válidas em domínios circulares, todos contidos em D? Aquestão será respondida afirmativamente no próximo teorema.
Teorema de TaylorConsidere f analítica no interior de um domínio D e seja z0 um ponto em D. Então
f tem a representação em série
(8)
válida para o maior círculo C com centro em z0 e raio R que se localiza inteiramen-te no interior de D.
TEOREMA 10.9
Demonstração Considere z como um ponto fixo no interior do círculo C , e s comoa variável de integração. O círculo C é então descrito por |s – z0| R. Veja a Figura 10.4.Para começar, aplicamos a fórmula integral de Cauchy para obter o valor de f em z:
(9)
Substituindo z por ( z – z0)/(s – z0) em (8) da Seção 10.1, temos
e portanto (9) é escrita como
(10)
Utilizando a fórmula integral de Cauchy para derivadas, podemos escrever (10)como
(11)
RC
D
s
z
z0
Figura 10.4 Contorno circular C utiliza-do na demonstração do Teorema 10.9.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 315/416
10.2 Série de Taylor 317
onde
A equação (11) é chamada fórmula de Taylor com resíduo Rn. Queremos agora mos-trar que Rn( z) → 0 quando n → . Como f é analítica em D, | f ( z)| tem um valor
máximo M no contorno C . Além disso, como z é interior a C , temos | z – z0| R e,consequentemente,
onde d | z – z0| é a distância de z a z0. A desigualdade ML então resulta em
Como d R, (d / R)n → 0 quando n → , concluímos que | Rn( z)|→ 0 quando n → .Assim, a série infinita
converge para f ( z). Em outras palavras, o resultado em (8) é válido para qualquerponto z interior a C . ❑
Podemos obter o raio de convergência de uma série de Taylor exatamente damesma maneira ilustrada nos Exemplos 5-7 da Seção 10.1. Entretanto, podemossimplificar ainda mais, observando que o raio de convergência é a distância a partirdo centro z0 da série para a singularidade isolada mais próxima de f . Elaboraremosmais esse conceito na próxima seção, porém uma singularidade isolada é um pontono qual f não é analítica, mas é, apesar disso, analítica em todos os outros pontos dealguma vizinhança do ponto. Por exemplo, z 5i é uma singularidade isolada de f ( z) 1/( z – 5i). Se a função f for completa, então o raio de convergência de umasérie de Taylor centrada em qualquer ponto z0 é necessariamente infinito. Utilizando
(8) e o último fato, podemos dizer que as representações em série de Maclaurin
(12)
(13)
(14)
são válidas para todo z.Se duas séries de potência com centro z0:
representam a mesma função e têm o mesmo raio de convergência não nulo, entãoak bk , k 0, 1, 2,.... Dito de outra forma, a expansão em séries de potência deuma função com centro z0 é única. Em um nível prático, isso significa que uma ex-pansão em série de potências de uma função analítica f centrada em z0, a despeitodo método utilizado para obtê-la, é a expansão em série de Taylor da função. Porexemplo, podemos obter (14) simplesmente diferenciando (13) termo a termo. Asérie de Maclaurin para pode ser obtida substituindo-se o símbolo z em (12)por z2.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 316/416
318 CAPÍTULO 10 Séries e Resíduos
Exemplo 1 Série de Maclaurin
Determine a expansão em série de Maclaurin de
Solução Poderíamos, é claro, começar calculando os coeficientes a partir de (8).
Entretanto, sabemos de (5) da Seção 10.1 que, para | z| 1,
(15)
Diferenciando ambos os lados do último resultado em relação a z, obtemos
Como estamos utilizando o Teorema 10.8, o raio de convergência dessa última série éo mesmo da série original, R 1. ❑
Exemplo 2 Série de Taylor
Expanda em uma série de Taylor com z0 2i.
Solução Resolveremos esse problema de duas formas. Inicialmente, utilizamos(8). A partir das primeiras diversas derivadas,
concluímos que f (n)( z) n!/(1 – z)n1 e assim f
(n)(2i) n!/(1 – 2i)n1. Logo, a partirde (8), obtemos a série de Taylor
(16)
Como a distância a partir do centro z0 2i até a singularidade mais próxima z 1é concluímos que o círculo de convergência para a série de potências em (16) é
Isso pode ser verificado pelo teste da razão da seção anterior.
Solução alternativa Nessa solução, novamente utilizamos a série geométrica(15). Somando e subtraindo 2i no denominador de 1/(1 – z), podemos escrever
Escrevemos agora como uma série de potências aplicando (15) com o
símbolo z substituído por ( z – 2i)/(1 – 2i):
O leitor deve verificar que essa última série é exatamente a mesma de (16). ❑

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 317/416
10.2 Série de Taylor 319
Em (15) e (16), representamos a mesma função 1/(1 – z) por duas séries de po-tência diferentes. A primeira série
tem centro zero e raio de convergência um. A segunda série
tem centro 2i e raio de convergência Os dois círculos de convergência diferen-tes estão ilustrados na Figura 10.5. O interior da interseção dos dois círculos (partesombreada) é a região na qual ambas as séries convergem; em outras palavras, em umponto especificado z* nessa região, ambas as séries convergem para o mesmo valor
f ( z*) 1/(1 – z*). Fora da região sombreada, ao menos uma das duas séries tem quedivergir.
x
y
z*
| z – 2i| = √5
| z| = 1
Figura 10.5 Ambas as séries (15) e(16) convergem no interior da regiãosombreada.
EXERCÍCIOS 10.2 As respostas de problemas ímpares selecionados estão na página 405.
Nos Problemas 1-12, expanda a função indicada em uma série deMaclaurin. Defina o raio de convergência de cada série.
1. 2.
3. 4.
5. 6.
7. 8.
9. 10.
11.
12. [Sugestão: Use uma identidade trigonométrica.]
Nos Problemas 13-22, expanda a função dada em uma série deTaylor centrada no ponto indicado. Defina o raio de convergênciade cada série.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
Nos Problemas 23 e 24, use (7) para obter os primeiros três ter-mos não nulos da série de Maclaurin da função indicada.
23. 24.
Nos Problemas 25 e 26, utilize frações parciais como um auxíliopara obter a série de Maclaurin da função indicada. Defina o raiode convergência da série.
25. 26.
Nos Problemas 27 e 28, sem de fato expandir, determine o raiode convergência da série de Taylor da função dada centrada noponto indicado.
27.
28.
Nos Problemas 29 e 30, expanda a função dada na série de Taylorcentrada nos pontos indicados. Defina o raio de convergência decada série. Esboce a região no interior da qual ambas as sériesconvergem.
29.
30.
31. (a) Suponha que o ramo principal do logaritmo f ( z) Ln z
loge| z| i Arg z seja expandido em uma série de Taylorcom centro z0 1 i. Explique por que R 1 é o raiodo maior círculo centrado em z0 1 i dentro do qual f éanalítica.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 318/416
320 CAPÍTULO 10 Séries e Resíduos
(b) Mostre que no interior do círculo | z – (–1 i)| 1, asérie de Taylor para f é
(c) Mostre que o raio de convergência para a série de po-tências no item (b) é Explique por que issonão contradiz o resultado do item (a).
32. (a) Considere a função f ( z) Ln(1 z). Qual é o raio domaior círculo centrado na origem dentro do qual f é ana-lítica?
(b) Expanda f em uma série de Maclaurin. Qual é o raio deconvergência dessa série?
(c) Use o resultado do item (b) para obter uma série de Ma-claurin para Ln(1 – z).
(d) Determine uma série de Maclaurin para
Nos Problemas 33 e 34, aproxime o valor da expressão utilizan-do o número de termos indicados de uma série de Maclaurin.
33. e(1
i)/10, três termos 34. dois termos
35. Na Seção 6.1, definimos a função erro como
Determine uma série de Maclaurin para erf( z).
36. Utilize a série de Maclaurin de eiz para provar a fórmula de
Euler para z complezo:
10.3 Série de LaurentIntrodução Se uma função complexa f não for analítica em um ponto z z0,
então esse ponto é dito ser uma singularidade ou um ponto singular da função. Porexemplo, os números complexos z 2i e z 2i são singularidades da função f ( z) z /( z2 4), pois f é descontínua em cada um desses pontos. Recorde da Seção 8.6que o valor principal do logaritmo, Ln z, é analítico em todos os pontos exceto aque-les pontos no corte da ramificação constituído pelo eixo x não positivo; isto é, o pontode ramificação z 0, bem como todos os números reais negativos, são pontos singu-lares de Ln z. Nessa seção, estaremos interessados em um novo tipo de expansão em“série de potências” de f em torno de uma singularidade isolada z0. Essa nova sérieenvolverá potências inteiras negativas e não negativas de z z0.
Singularidades isoladas Suponha que z z0 seja uma singularidade de uma fun-
ção complexa f . O ponto z z0 será uma singularidade isolada da função f se existiralguma vizinhança retirada, ou disco aberto perfurado, 0 | z – z0| R de z0 para osquais f seja analítica. Por exemplo, vimos que z 2i e z 2i são singularidades de
f ( z) z /( z2 4). Tanto 2i como –2i são singularidades isoladas, pois f é analítica emtodo ponto na vizinhança definida por | z – 2i| 1 exceto em z 2i e em todo pontona vizinhança de definida por | z – (–2i)| 1 exceto em z –2i. Em outras palavras,
f é analítica na vizinhança retirada 0 | z – 2i| 1 e 0 | z 2i| 1. Por outro lado,o ponto de ramificação z 0 não é uma singularidade isolada de Ln z, pois qualquervizinhança de z 0 tem que conter pontos no eixo x negativo. Dizemos que um pontosingular z z0 de uma função f é não isolado se qualquer vizinhança de z0 contiverao menos uma singularidade de Ln z, pois toda vizinhança de z0 contém pontos noeixo real negativo.
Um novo tipo de série Se z z0 for uma singularidade de uma função f , entãocertamente f não pode ser expandida em uma série de potências com z0 como o seucentro. Entretanto, em torno de uma singularidade isolada z z0 é possível represen-tar f por um novo tipo de série envolvendo potências inteiras negativas e não negativasde z – z0; isto é

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 319/416
10.3 Série de Laurent 321
Utilizando notação de somatório, a última expressão pode ser escrita como a somade duas séries
(1)
As duas séries no lado direito de (1) possuem nomes especiais. A parte com potênciasnegativas de z – z0, isto é,
,
é denominada parte principal da série (1) e convergirá para |1/( z – z0)| r *, ou, demodo equivalente, para | z – z0| 1/ r * = r . A parcela constituída pelas potências nãonegativas de z – z0,
é denominada parte analítica da série (1) e convergirá para | z – z0| R. Portanto, a
soma dessas partes converge quando z tanto | z – z0|
r como | z – z0|
R, isto é, quan-do z for um ponto em um domínio anular definido por r | z – z0| R.Somando sobre os inteiros negativos e não negativos, (1) pode ser escrita de
modo compacto como
O próximo exemplo ilustra uma série da forma (1) na qual a parte principal dasérie consiste em um número finito de termos não nulos, porém a parte analítica éconstituída por um número infinito de termos não nulos.
Exemplo 1 Um novo tipo de série
A função f ( z) (sen z)/ z3 não é analítica em z 0 e portanto não pode ser expandidaem uma série de Maclaurin. No entanto, sen z é uma função completa, e a partir de(13) da Seção 10.2 sabemos que sua série de Maclaurin,
converge para todo z. Dividindo essa série de potências por z3, obtemos a seguinte
série com potências inteiras negativas e não negativas de z:
(2)
Essa série converge para todo z exceto z 0, isto é, para 0 | z|. ❑
Uma representação em série de uma função f que tenha a forma indicada em (1),
e (2) é um exemplo, é chamada série de Laurent ou uma expansão Laurent de f .
Teorema de LaurentSeja f analítica no interior do domínio anular D definido por r | z – z0| R. As-sim, f tem a representação em série
(3)
TEOREMA 10.10

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 320/416
322 CAPÍTULO 10 Séries e Resíduos
válida para r | z – z0| R. Os coeficientes ak são definidos por
(4)
onde C é uma curva fechada simples que se localiza inteiramente dentro de D etem z0 em seu interior (veja a Figura 10.6).
Demonstração Considere C 1 e C 2 como sendo círculos concêntricos com centro z0 eraios r 1 e R2, onde r r 1 R2 R. Seja z um ponto fixo em D que também satisfazr 1 | z – z0| R2. Veja a Figura 10.7. Introduzindo um corte transversal entre C 2 e C 1,obtemos a partir da fórmula integral de Cauchy que
(5)
Procedendo como na prova do Teorema 10.9, podemos escrever
(6)
onde
(7)
Utilizando agora (5) e (8) da Seção 10.1, temos
(8)
onde
(9)
e
Considere agora d como a distância de z para z0, isto é, | z – z0| d , e M como o valormáximo de | f ( z)| no contorno C 1. Como |s – z0| r 1,
A desigualdade ML então resulta em
R
C
D
r z0
Figura 10.6 Contorno no Teorema10.10.
z
C 1
C 2
z0
Figura 10.7 C 1 e C 2 são círculos con-cêntricos.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 321/416
10.3 Série de Laurent 323
Como r 1 d , (r 1 / d )n → 0 quando n → , assim | Rn( z)|→ 0 quando n → . Portanto,mostramos que
(10)
onde os coeficientes ak estão indicados em (9). Combinando (6) e (10), vemos que
(5) resulta em
(11)
Finalmente, somando sobre os inteiros não negativos e negativos, podemos escrever(11) como Entretanto, (7) e (9) podem ser escritas comouma integral única:
onde, em vista de (3) da Seção 9.2, substituímos os contornos C 1 e C 2 por qualquer
contorno fechado simples C em D com z0 em seu interior. ❑
No caso para o qual ak 0 para k 1, 2, 3,..., a série de Laurent (3) é uma série
de Taylor. Por causa disso, uma expansão Laurent é uma generalização de uma sériede Taylor.
O domínio anular no Teorema 10.10 definido por r | z – z0| R não precisa tero formato em “anel” ilustrado na Figura 10.7. Outros domínios anulares possíveissão: (i) r 0, R finito; (ii) r 0, R → ; e (iii) r 0, R → . No primeiro caso, asérie converge no domínio anular definido por 0 | z – z0| R. Trata-se do interior docírculo | z – z0| R exceto o ponto z0. No segundo caso, o domínio anular é definidopor r | z – z0|; em outras palavras, o domínio consiste em todos os pontos exterioresao círculo | z – z0| r . No terceiro caso, o domínio é definido por 0 | z – z0|. Trata-seda representação do plano complexo completo exceto o ponto z0. A série obtida em
(2) é válida nesse último tipo de domínio.Na prática, a fórmula em (4) para os coeficientes de uma série de Laurent é ra-ramente utilizada. Como consequência, determinar a série de Laurent de uma funçãoem um domínio anular específico geralmente não é uma tarefa fácil. Muitas vezesutilizamos as séries geométricas (5) e (6) da Seção 10.1 ou, conforme fizemos noExemplo 1, outra série conhecida. Porém, a despeito de como uma expansão Laurentde uma função f é obtida em um domínio anular especificado, ela é a série de Laurent;isto é, a série obtida é única.
Exemplo 2 Expansões Laurent
Expanda em uma série de Laurent válida para (a) 0 | z| 1, (b) 1
| z|, (c) 0
| z – 1|
1, e (d) 1
| z – 1|.Solução Os quatro domínios anulares especificados estão apresentados na Figu-
ra 10.8. Nos itens (a) e (b), queremos representar f em uma série envolvendo somentepotências inteiras negativas e não negativas de z, enquanto que nos itens (c) e (d)queremos representar f em uma série que envolva potências inteiras negativas e nãonegativas de z – 1.
(a) Escrevendo
podemos aplicar (5) da Seção 10.1:
y y
x x
x x
y y
0 1 0 1
(a) (b)
0 1 10
(c) (d)
Figura 10.8 Domínios anulares para oExemplo 2.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 322/416
324 CAPÍTULO 10 Séries e Resíduos
A série entre colchetes converge para | z| 1. Porém, após a multiplicação dessaexpressão por 1/ z, a série resultante
converge para 0 | z| 1.(b) Para obtermos uma série convergente para 1 | z|, começamos por construir uma
série que seja convergente para |1/ z| 1. Com esse objetivo, escrevemos a função f dada como
e novamente utilizamos (5) da Seção 10.1 com z substituído por 1/ z:
A série entre colchetes converge para |1/ z| 1 ou, de modo equivalente, para 1
| z|. Logo, a série de Laurent exigida é
(c) Esse é basicamente o mesmo problema do item (a) exceto que queremos todas aspotências de z – 1. Com esse objetivo, somamos e subtraímos 1 no denominadore usamos (6) da Seção 10.1 com z substituído por z – 1:
A série entre colchetes converge para | z – 1| 1, e portanto a última série con-verge para 0 | z – 1| 1.
(d) Procedendo como no item (b), escrevemos
Como a série dentro dos colchetes converge para |1/( z – 1)| 1, a série finalconverge para 1 | z – 1|. ❑
Exemplo 3 Expansões Laurent
Expanda em uma série de Laurent válida para (a) 0 | z 1|
2 e (b) 0 | z 3| 2.
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 323/416
10.3 Série de Laurent 325
Solução (a) Como nos itens (c) e (d) do Exemplo 2, queremos apenas potênciasde z – 1, e assim precisamos expressar z – 3 em termos de z – 1. Isso pode ser feitoexpressando-se
e a seguir aplicando-se (5) da Seção 10.1 com z substituído por ( z – 1)/2:
(12)
(b) Para obter potências de z – 3, escrevemos z – 1 2 ( z – 3) e
Nesse ponto, podemos expandir em uma série de potências utili-
zando o teorema binomial geral:
A série binomial é válida para |( z – 3)/2| 1 ou | z – 3| 2. Multiplicandoessa série por 1/4( z – 3), obtemos uma série de Laurent que é válida para 0 | z – 3| 2:
❑
Exemplo 4 Uma expansão Laurent
Expanda em uma série de Laurent válida para 0 | z| 1.
Solução De (5) da Seção 10.1, podemos escrever
Multiplicamos então a série por 8 1/ z e agrupamos os termos iguais:
A série geométrica converge para | z| 1. Após multiplicá-la por 8 1/ z, a série deLaurent resultante é válida para 0 | z| 1. ❑
Nos exemplos anteriores, o ponto no centro do domínio anular de validade paracada série de Laurent era uma singularidade isolada da função f . Um novo exame doTeorema 10.10 mostra que esse não precisa ser o caso.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 324/416
326 CAPÍTULO 10 Séries e Resíduos
Exemplo 5 Uma expansão Laurent
Expanda em uma série de Laurent válida para 1 | z 2| 2.
Solução O domínio anular especificado está mostrado na Figura 10.9. O centrodesse domínio, z 2, é um ponto de analiticidade da função f . Nosso objetivo agoraé obter duas séries envolvendo potências inteiras de z – 2; uma convergindo para 1 | z – 2| e a outra convergindo para | z – 2| 2. Para conseguirmos, iniciamos com adecomposição de f em frações parciais:
(13)
Agora,
Essa série converge para |( z – 2)/2| 1 ou | z – 2| 2. Além disso,
converge para |1/( z – 2)| 1 ou 1 | z – 2|. Substituindo esses dois resultados em(13), temos então
Essa representação é válida para 1 | z – 2| 2. ❑
Exemplo 6 Uma expansão Laurent
Expanda f ( z) e3/ z em uma série de Laurent válida para 0 | z|:
Solução A partir de (12) da Seção 10.2, sabemos que, para todo z finito,
(14)
Substituindo z em (14) por 3/ z, z 0, obtemos a série de Laurent
Essa série é válida para 0 | z|. ❑
y
x 0 1 2
Figura 10.9 Domínio anular para oExemplo 5.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 325/416
10.3 Série de Laurent 327
Observações
Concluindo, destacamos um resultado que terá importância particular para nós nasSeções 10.5 e 10.6. Substituindo a variável complexa s pelo símbolo usual z, vemos
que quando k
1, (4) para os coeficientes da série de Laurent resulta em
ou, mais importante, a integral pode ser escrita como
(15)
EXERCÍCIOS 10.3 As respostas de problemas ímpares selecionados estão na página 406.
Nos Problemas 1-6, expanda a função dada em uma série de Lau-rent válida para o domínio anular indicado.
1.
2.
3.
4.
5.
6.
Nos Problemas 7-12, expanda em uma série de
Laurent válida para o domínio anular indicado.
7. 8.
9. 10.
11. 12.
Nos Problemas 13-16, expanda em uma
série de Laurent válida para o domínio anular indicado.
13. 14. 15. 16.
Nos Problemas 17-20, expanda em uma
série de Laurent válida para o domínio anular indicado.
17. 18.
19. 20.
Nos Problemas 21 e 22, expanda em uma série
de Laurent válida para o domínio anular indicado.
21. 22.
Nos Problemas 23 e 24, expanda em
uma série de Laurent válida para o domínio anular indicado.
23. 24.
Nos Problemas 25 e 26, expanda em uma série
de Laurent válida para o domínio anular indicado.
25. 26.
Nos Problemas 27 e 28, expanda em uma
série de Laurent válida para o domínio anular indicado.
27. 28.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 326/416
328 CAPÍTULO 10 Séries e Resíduos
10.4 Zeros e pólos
Introdução Suponha que z z0 seja uma singularidade isolada de uma função f e que
(1)
seja a representação em série de Laurent de f válida para o disco aberto perfurado 0 | z – z0| R. Vimos na seção anterior que uma série de Laurent (1) é constituída porduas partes. A parte da série em (1) com potências negativas de z – z0, ou seja,
(2)
é a parte principal da série. Na discussão que se segue, apresentaremos nomes di-ferentes para a singularidade isolada z z0 de acordo com o número de termos daparte principal.
Classificação de pontos singulares isolados A um ponto singular isolado z z0
de uma função complexa f é dado uma classificação que depende de se a parte prin-cipal (2) da sua expansão Laurent (1) contém zero, um número finito, ou um númeroinfinito de termos.
(i) Se a parte principal for nula, isto é, todos os coeficientes ak em (2) forem
nulos, então z z0 é denominado singularidade removível.
(ii) Se a parte principal contiver um número finito de termos não nulos então z
z0 é denominado pólo. Se, nesse caso, o último coeficiente não nulo em(2) for a
n, n 1, então dizemos que z z0 é um pólo de ordem n. Se z z0 for um pólo de ordem 1, então a parte principal (2) contém exatamenteum termo com coeficiente a
1. Um pólo de ordem 1 é comumente chama-do pólo simples.
(iii) Se a parte principal (2) contiver infinitos termos não nulos, então z z0 é
denominado singularidade essencial.A tabela a seguir resume as formas da série de Laurent para uma função f quan-
do z z0 for um dos tipos anteriores de singularidades essenciais. É claro que R natabela poderia ser .
z = z0 Série de Laurent
Singularidade removível
Pólo de ordem n
Pólo simples
Singularidade essencial
Exemplo 1 Descontinuidade removível
Procedendo como em (2) da Seção 10.3, vemos a partir de
(3)
que z 0 é uma singularidade removível da função f ( z) (sen z)/ z. ❑

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 327/416
10.4 Zeros e Pólos 329
Se uma função f tiver uma singularidade removível no ponto z z0, então pode-remos sempre fornecer uma definição apropriada para o valor de f ( z0) de modo que f se torne analítica no ponto. Por exemplo, como o lado direito de (2) é 1 em z 0, fazsentido definir f (0) 1. Com essa definição, a função f ( z) (sen z)/ z no Exemplo 1é agora analítica em z 0.
Exemplo 2 Pólos e singularidade essencial
(a) De
0 | z|, vemos que a1 0, e assim z 0 é um pólo simples da função f ( z)
(sen z)/ z2. A função f ( z) (sen z)/ z3 representada pela série em (2) da Seção 10.3tem um pólo de ordem 2 em z 0.
(b) No Exemplo 3 da Seção 10.3, mostramos que a expansão Laurent de f ( z) 1/
( z – 1)2( z – 3) válida para 0 | z – 1| 2 era
Como a2 0, concluímos que z 1 é um pólo de ordem 2.
(c) No Exemplo 6 da Seção 10.3, vimos a partir da série de Laurent que a parte prin-cipal da função f ( z) e3/ z contém um número infinito de termos. Logo, z 0 éuma singularidade essencial. ❑
No item (b) do Exemplo 2 na Seção 10.3, mostramos que a representação emsérie de Laurent de f ( z) 1/ z( z – 1) válida para 1 | z| é
O ponto z 0 é uma singularidade isolada de f , e a série de Laurent contém um númeroinfinito de termos envolvendo potências inteiras negativas de z. Isso significa que z 0 é uma singularidade essencial de f ? A resposta é não. Para essa função particular, umnovo exame de (1) mostra que a série de Laurent em que estamos interessados é aquelacujo domínio anular 0 | z| 1. A partir do item (a) desse mesmo exemplo, vimos que
era válida para 0 | z| 1. Assim, vemos que z 0 é um pólo simples.
Zeros
Recorde que z0 é um zero de uma função f se f ( z0)
0. Uma função analí-tica f tem um zero de ordem n em z z0 se
(3)
Por exemplo, para f ( z) ( z – 5)3 temos f (5) 0, f ¿(5) 0, f –(5) 0, porém f ‡(5) 6. Logo, z 5 é um zero de ordem 3. Se uma função analítica f tiver um zero deordem n em z z0, decorre de (3) que a expansão em série de Taylor de f centrada em
z0 tem que ter a forma
onde an 0.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 328/416
330 CAPÍTULO 10 Séries e Resíduos
Exemplo 3 Ordem de um zero
A função analítica f ( z) z sen z2 tem um zero em z 0. Substituindo z por z2 em (13)da Seção 10.2, obtemos
e assim
Portanto, z 0 é um zero de ordem 3. ❑
Um zero z0 de uma função analítica não trivial f é isolado no sentido de queexiste alguma vizinhança de z0 para a qual f ( z) 0 em todo ponto z nessa vizinhançaexceto em z z0. Como consequência, se z0 for um zero de uma função analíticanão trivial f , então a função 1/ f ( z) tem uma singularidade isolada no ponto z z0. Oresultado seguinte nos permite, em algumas circunstâncias, determinar os pólos deuma função por inspeção.
Pólos de ordem n
Se as funções f e g forem analíticas em z z0 e f tiver um zero de ordem n em z z0 e g( z0) 0, então a função F ( z) g( z)/ f ( z) terá um pólo de ordem n em z z0.
TEOREMA 10.11
Exemplo 4 Ordem dos pólos
(a) A inspeção da função racional
mostra que o denominador tem zeros de ordem 1 em z 1 e z 5, e um zerode ordem 4 em z 2. Como o numerador não é zero nesses pontos, decorre doTeorema 10.11 que f tem pólos simples em z 1 e z 5, e um pólo de ordem4 em z 2.
(b) No Exemplo 3, vimos que z 0 é um zero de ordem 3 de f ( z) z sen z2. A partir
do Teorema 10.11, concluímos que a função F ( z) 1/( z sen z2) tem um pólo de
ordem 3 em z 0. ❑
A partir da discussão anterior, deve ser intuitivamente claro que se uma funçãotiver um pólo em z z0, então | f ( z)|→ quando z→ z0 a partir de qualquer direção.
EXERCÍCIOS 10.4 As respostas de problemas ímpares selecionados estão na página 406.
Nos Problemas 1 e 2, mostre que z 0 é uma singularidade re-movível da função indicada. Forneça uma definição de f (0) demodo que f seja analítica em z 0.
1. 2.
Nos Problemas 3-8, determine os zeros e suas ordens para a fun-ção indicada.
3. 4.
5. 6.
7. 8.
Nos Problemas 9-12, o número indicado é um zero de uma fun-ção. Utilize uma série de Maclaurin ou de Taylor para determinara ordem do zero. 9.
10.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 329/416
10.5 Resíduos e Teorema do Resíduo 331
11.
12.
Nos Problemas 13-22, determine a ordem dos pólos para a fun-ção indicada.
13. 14.
15. 16.
17. 18.
19. 20.
21. 22.
23. Determine se z
0 é uma singularidade isolada ou não iso-lada de f ( z) tg (1/ z).
24. Mostre que z 0 é uma singularidade essencial de f ( z) z3 sen(1/ z).
10.5 Resíduos e teorema do resíduo
Introdução Vimos na última seção que se a função complexa f tiver uma singula-
ridade isolada no ponto z0, então f possui uma representação em série de Laurent
que converge para todo z em torno de z0. Mais precisamente, a representação é válidaem alguma vizinhança retirada de z0, ou disco aberto perfurado, 0 | z – z0| R.Nessa seção, nosso foco estará no coeficiente a
1 e sua importância no cálculo deintegrais de contorno.
Resíduo O coeficiente a1 de 1/( z – z0) na série de Laurent indicada anterior-
mente é chamado resíduo da função f na singularidade isolada z0. Utilizaremos anotação
para representar o resíduo de f em z0. Relembre, se a parte principal da série de Lau-rent válida para 0 | z – z0| R contiver um número finito de termos com a
n sendoo último coeficiente não nulo, então z0 é um pólo de ordem n; se a parte principal dasérie contiver um número infinito de termos com coeficientes não nulos, então z0 éuma singularidade essencial.
Exemplo 1 Resíduos
(a) No Exemplo 2 da Seção 10.4, vimos que z 1 é um pólo de ordem 2 da função f ( z) 1/( z – 1)2( z – 3). A partir da série de Laurent indicada naquele exemplo,vimos que o coeficiente de 1/( z – 1) é
(b) O Exemplo 6 da Seção 10.3 mostrou que z 0 é uma singularidade essencial de f ( z) e3/ z. A partir da série de Laurent indicada naquele exemplo, vimos que o
coeficiente de 1/ z é a1 Res( f ( z), 0) 3. ❑
Mais adiante nessa seção, veremos por que o coeficiente a1 é tão importante.
Enquanto isso, examinaremos maneiras de obter esse número complexo quando z0 forum pólo de uma função f sem a necessidade de expandir f em uma série de Laurentem z0. Iniciaremos pelo resíduo em um pólo simples.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 330/416
332 CAPÍTULO 10 Séries e Resíduos
Resíduo em um pólo simplesSe f tiver um pólo simples em z z0, então
(1)
TEOREMA 10.12
Demonstração Como z z0 é um pólo simples, a expansão Laurent de f em tornodo ponto tem a forma
Multiplicando ambos os lados por z – z0 e então tomando o limite como z→ z0, obtemos❑
Resíduo em um pólo de ordem n
Se f tiver um pólo de ordem n em z z0, então
(2)
TEOREMA 10.13
Demonstração Como f é considerada como tendo um pólo de ordem n, sua expan-são Laurent para 0 | z – z0| R tem que ter a forma
Multiplicamos a última expressão por ( z – z0)n:
e então diferenciamos n – 1 vezes:
(3)
Como todos os termos no lado direito após o primeiro envolvem potências inteiraspositivas de z – z0, o limite de (3) quando z→ z0 é
Resolvendo a última equação em relação a a1, obtemos (2). ❑
Note que (2) se reduz para (1) quando n 1.
Exemplo 2 Resíduo em um pólo
A função tem um pólo simples em z 3 e um pólo de ordem
2 em z 1. Utilize os Teoremas 10.12 e 10.13 para obter os resíduos.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 331/416
10.5 Resíduos e Teorema do Resíduo 333
Solução Como z 3 é um pólo simples, aplicamos (1):
Agora, no pólo de ordem 2, a partir de (2) temos que
❑
Quando f não for uma função racional, o cálculo de resíduos por meio de (1)pode algumas vezes ser tedioso. É possível projetar fórmulas alternativas de resíduos.Em particular, suponha que uma função f possa ser escrita como um quociente f ( z) g( z)/ h( z), onde g e h são analíticas em z z0. Se g( z0) 0 e se a função f tiver um zero
de ordem 1 em z0, então f terá um pólo simples em z z0 e
(4)
Para ver esse último resultado, utilizamos (1) e o fato de que h( z0) 0 e de quelim z→ z0
(h( z) – h( z0))/( z – z0) é uma definição da derivada h¿( z0):
Fórmulas análogas para resíduos em pólos de ordem maior que 1 são complicadas enão serão apresentadas.
Exemplo 3 Utilizando (4) para calcular um resíduo
O polinômio z4 1 pode ser fatorado como ( z – z1) ( z – z2) ( z – z3) ( z – z4), onde z1,
z2, z3 e z4 são as quatro raízes distintas da equação z4 1 0. Decorre do Teorema
10.11 que a função
tem quatro pólos simples. Agora, a partir de (10) da Seção 8.2, temos z1 e i /4, z2 e3 i /4, z3 e5 i /4, z4 e7 i /4. Para calcular os resíduos, usamos (4) e a fórmula deEuler:
❑
Um métodoalternativo para
calcular um resíduoem um pólo simples.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 332/416
334 CAPÍTULO 10 Séries e Resíduos
Teorema do resíduo Vamos apresentar agora a razão da importância do conceitode resíduo. O próximo teorema declara que, sob algumas circunstâncias, podemoscalcular integrais complexas somando os resíduos nas singularidades isola-das de f dentro do contorno fechado C .
Teorema de Cauchy do resíduoConsidere D um domínio simplesmente conexo, e C um contorno fechado simpleslocalizado inteiramente em D. Se uma função f for analítica em e no interior de C ,exceto em um número finito de pontos singulares z1, z2,..., zn dentro de C , então
(5)
TEOREMA 10.14
Demonstração Suponha que C 1, C 2,..., C n sejam círculos centrados em z1, z2,..., zn,respectivamente. Além disso, suponha que cada círculo C k tenha um raio r k pequenoo suficiente para que C 1, C 2,..., C n sejam mutuamente separadas e estejam no interiorda curva fechada simples C . Veja a Figura 10.10. Relembre que (15) da Seção 10.3implica e portanto o Teorema 18.5 resulta em
❑
Exemplo 4 Cálculo pelo teorema do resíduo
Calcule , onde
(a) o contorno C é o retângulo definido por x 0, x 4, y 1, y 1, e (b) o con-torno C é o círculo | z| 2.
Solução (a) Como ambos os pólos z 1 e z 3 se localizam dentro do quadra-
do, temos a partir de (5) que
Obtivemos esses resíduos nos Exemplos 2 e 3, e assim
(c) Como apenas o pólo z 1 se localiza dentro do círculo | z| 2, temos a partir de(5) que
❑
Exemplo 5 Cálculo pelo teorema do resíduo
Calcule , onde o contorno C é o círculo | z – i| 2.
Solução Escrevendo z2 4 ( z – 2i)( z 2i), vemos que o integrando tem pólos
simples em –2i e 2i. Agora, como somente 2i se localiza dentro do contorno C , temosa partir de (5) que
C
D
C n
zn
z1
z2C 2
C 1
Figura 10.10 n pontos singulares den-tro do contorno C .
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 333/416
10.5 Resíduos e Teorema do Resíduo 335
Porém
Portanto,
❑
Exemplo 6 Cálculo pelo teorema do resíduo
Calcule , onde o contorno C é o círculo | z| 2.
Solução Como z4 5 z3 z3( z 5), vemos que o integrando tem um pólo de
ordem 3 em z 0 e um pólo simples em z 5. Como somente z 0 se localiza nointerior do contorno dado, temos a partir de (5) e (2)
❑
Exemplo 7 Cálculo pelo teorema do resíduo
Calcule , onde o contorno C é o círculo | z| 2.
Solução O integrando tg z sen z /cos z tem pólos simples nos pontos nos quaiscos z 0. Vimos na Seção 8.7 que os únicos zeros para cos z são os números reais z
(2n 1) /2, n 0, 1, 2,.... Como apenas /2 e /2 estão dentro do círculo| z| 2, temos
Agora, a partir de (4) com g( z) sen z, h( z) cos z e h¿( z) sen z, vemos que
Portanto,
❑
Exemplo 8 Cálculo pelo teorema do resíduo
Calcule , onde o contorno C é o círculo | z| 1.
Solução Conforme vimos, z 0 é uma singularidade essencial do integrando f ( z) e3/ z, e portanto nem a fórmula (1), nem a fórmula (2) se aplicam para que um resíduode f seja determinado naquele ponto. Apesar disso, vimos no Exemplo 1 que a série deLaurent de f em z 0 resulta em Res( f ( z), 0) 3. Assim, a partir de (5), temos
❑

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 334/416
336 CAPÍTULO 10 Séries e Resíduos
Observações
Na aplicação das fórmulas de limite (1) e (2) para o cálculo de resíduos, pode-seobter a forma indeterminada 0/0. Apesar de não provarmos, deve-se destacar que
a regra de L’Hôpital é válida em análise complexa. Se f ( z)
g( z)/ h( z), onde g eh são analíticas em z z0, g( z0) 0, h( z0) 0 e h¿( z0) 0, então
EXERCÍCIOS 10.5 As respostas de problemas ímpares selecionados estão na página 406.
Nos Problemas 1-6, utilize a série de Laurent para obter o resí-duo indicado.
1.
2.
3.
4.
5.
6.
Nos Problemas 7-16, utilize (1), (2) ou (4) para obter o resíduoem cada pólo da função indicada.
7. 8.
9. 10.
11.
12.
13. 14.
15. 16.
Nos Problemas 17-20, utilize o teorema do resíduo de Cauchy,quando apropriado, para calcular a integral dada ao longo doscontornos indicados.
17.
18.
19.
20.
Nos Problemas 21-32, utilize o teorema do resíduo de Cauchy,quando apropriado, para calcular a integral dada ao longo doscontornos indicados.
21.
22.
23.
24. , C é a elipse 16 x 2 y
2 4
25.
26.
27.
28.
29. , C é o retângulo definido por , x , y
1, y 1
30. , C é o retângulo definido por x 2, x
1, , y 1
31.
32.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 335/416
10.6 Cálculo de Integrais Reais 337
10.6 Cálculo de integrais reais
Introdução Nessa seção, veremos como a teoria de resíduos pode ser utilizadapara calcular integrais reais das formas
(1)
(2)
(3)
onde F em (1) e f em (2) e (3) são funções racionais. Para a função racional f ( x ) p( x )/ q( x ) em (2) e (3), consideraremos que os polinômios p e q não têm fatorescomuns.
Integrais da forma F(cos , sen ) d A idéia básica aqui é converter umaintegral da forma (1) em uma integral complexa na qual o contorno C é o círculo uni-tário centrado na origem. Esse contorno pode ser parametrizado por z cos i sen ei, 0 2 . Utilizando
substituímos d , cos e sen , respectivamente, por
(4)
A integral em (1) então se torna
onde C é | z| 1.
Exemplo 1 Uma integral trigonométrica real
Calcule
Solução Utilizando as substituições em (4) e simplificando, obtemos a integralde contorno
Com o auxílio da fórmula quadrática, podemos escrever
onde e Como somente z1 é interior ao círculo uni-tário C , temos

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 336/416
338 CAPÍTULO 10 Séries e Resíduos
Agora z1 é um pólo de ordem 2, e assim, a partir de (2) da Seção 10.5,
Logo,
e finalmente
❑
Integrais da forma f ( x ) dx Quando f for contínua em (, ), relembrede cálculo que a integral imprópria é definida em termos de dois limitesdistintos:
(5)
Se ambos os limites de (5) existirem, a integral é convergente; se um ou ambos os li-mites não existirem, a integral é divergente. No caso de sabermos (a priori) que umaintegral converge, podemos calculá-la por meio de um único processode limite:
(6)
É importante notar que o limite simétrico em (6) pode existir apesar da inte-gral imprópria ser divergente. Por exemplo, a integral é divergente pois
Entretanto, aplicando (6), obtemos
(7)
O limite em (6) é denominado valor principal de Cauchy da integral, sendo escritocomo
Em (7), mostramos que V.P. Para resumir, quando uma integral da for-ma (2) converge, seu valor principal de Cauchy é igual ao valor da integral. Se aintegral divergir, ela pode ainda possuir um valor principal de Cauchy.
Para calcular uma integral , onde f ( x ) P( x )/ Q( x ) é contínua em(, ), pela teoria do resíduo substituímos x pela variável complexa z e integramos
a função complexa f sobre um contorno fechado C que consiste no intervalo [ R, R]no eixo real e um semicírculo C R de raio grande o suficiente para englobar todos ospólos de f ( z) P( z)/ Q( z) no plano metade superior Re( z) 0. Veja a Figura 10.11.Pelo Teorema 10.14, temos
onde zk , k 1, 2,..., n, representa os pólos no plano metade superior. Se pudermosmostrar que a integral quando , então temos
(8)
y
x R0– R
z3
z2
z1 z4
znC R
Figura 10.11 Contorno fechado C constituído por um semicírculo C R e ointervalo [R, R].

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 337/416
10.6 Cálculo de Integrais Reais 339
Exemplo 2 V.P. de Cauchy de uma integral imprópria
Calcule o valor principal de Cauchy de
Solução Seja f ( z) 1/( z2 1)( z2 9). Como
consideramos C como sendo o contorno fechado constituído pelo intervalo [ R, R]no eixo x e o semicírculo C R de raio R 3. Conforme vemos da Figura 10.12,
Nos pólos simples z i e z 3i, obtemos, respectivamente,
de modo que (9)
Queremos agora adotar R → em (9). Antes de fazermos isso, observamos que, em C R,
e assim, a partir da desigualdade ML da Seção 9.1, podemos escrever
Esse último resultado mostra que | I 2|→ 0 quando R → , e portanto concluímos quelim R→
I 2 0. A partir de (9), temos que lim R→ I 1 /12; em outras palavras,
❑
Mostrar que a integral de contorno ao longo de C R se aproxima de zero quando R → é uma tarefa muitas vezes tediosa. A seguir são indicadas as condições suficien-tes sob as quais essa condição é sempre verdadeira:
Comportamento da integralquando R → Suponha que f ( z) P( z)/ Q( z), onde o grau de P( z) é n, e que o grau de Q( z)seja m n 2. Se C R for um contorno semicircular z Re
i, 0 , entãoquando R → .
TEOREMA 10.15
Em outras palavras, a integral ao longo de C R se aproxima de zero com R → quando o denominador de f for de uma potência ao menos maior por 2 do que a do seunumerador. A demonstração desse fato decorre da mesma maneira indicada no Exem-plo 2. Observe que naquele exemplo as condições estipuladas no Teorema 10.15 sãosatisfeitas, pois o grau de P( z) 1 é 0 e o grau de Q( z) ( z2 1)( z2 9) é 4.
i
y
x R
C R
– R
3i
Figura 10.12 Contorno fechado C parao Exemplo 2.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 338/416
340 CAPÍTULO 10 Séries e Resíduos
Exemplo 3 V.P. de Cauchy de uma integral imprópria
Calcule o valor principal de Cauchy de
Solução Por inspeção do integrando, vemos que as condições dadas no Teorema
10.15 são satisfeitas. Além disso, sabemos a partir do Exemplo 3 da Seção 10.5 que f tem pólos simples no plano metade superior em z1 e i /4 e z2 e3 i /4. Vimos tambémnaquele exemplo que os resíduos nesses pólos são
Assim, de (8),
❑
Integrais das formas f ( x ) cos x dx ou f ( x ) sen x dx Encontra-mos integrais desse tipo na Seção 6.4 para o estudo de transformadas de Fourier.
Consequentemente, são refe-ridas como integrais de Fourier. Integrais de Fourier aparecem como partes reale imaginária na integral imprópria Utilizando a fórmula de Euler
, obtemos
(10)
sempre que ambas as integrais no lado direito convergirem. Quando f ( x ) P( x )/ Q( x )for contínua em (, ), podemos calcular ambas as integrais de Fourier ao mesmotempo considerando a integral onde 0 e o contorno C novamenteconsiste do intervalo [ R, R] no eixo real e um contorno semicircular C R com raiogrande o suficiente para englobar os pólos de f ( z) no plano metade superior.
Antes de prosseguirmos, indicamos, sem demonstrar, as condições suficientes sobas quais a integral de contorno ao longo de C R se aproxima de zero quando R → :
Comportamento da integralquando R →
Suponha que f ( z) P( z)/ Q( z), onde o grau de P( z) é n, e que o grau de Q( z) seja m n 1. Se C R for um contorno semicircular z Re
i, 0 e 0, entãoquando R → .
TEOREMA 10.16
Exemplo 4 Utilizando simetria
Calcule o valor principal de Cauchy deSolução Observe primeiro que os limites de integração não são de a con-
forme exige o método. Isso pode ser corrigido observando-se que, como o integrandoé uma função par de x , podemos escrever
(11)
Com 1, formamos agora a integral de contorno

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 339/416
10.6 Cálculo de Integrais Reais 341
onde C é o mesmo contorno apresentado na Figura 10.12. Pelo Teorema 10.14,
onde f ( z) z /( z2 9). A partir de (4) da Seção 10.5,
Portanto, em vista do Teorema 10.16, concluímos que quando R → , e assim
Porém, a partir de (10),
Igualando as partes real e imaginária na última linha, obtemos o resultado extra
Finalmente, com base em (11), obtemos o valor da integral prescrita:
❑
Contornos endentados As integrais impróprias da forma (2) e (3) que conside-ramos até o momento eram contínuas no intervalo [, ]. Em outras palavras, afunção complexa f ( z) P( z)/ Q( z) não tinha pólos no eixo real. No caso evento em que f tem pólos no eixo real, precisamos modificar o procedimento utilizado nos Exemplos2-4. Por exemplo, para calcular por resíduos quando f ( z) tem um pólo em z
c, onde c é um número real, utilizamos um contorno endentado conforme ilustradona Figura 10.13. O símbolo C r representa um contorno semicircular centrado em z c
e orientado na direção positiva. O próximo teorema é importante para essa discussão.
Comportamento da integralquando r→ 0
Suponha que f tenha um pólo simples z c no eixo real. Se C r for o contorno defi-nido por z c re
i, 0 , então
TEOREMA 10.17
Demonstração Como f tem um pólo simples em z
c, sua série de Laurent é
onde a1 Res( f ( z), c) e g é analítica em c. Utilizando a série de Laurent e a parame-
trização de C r , temos
(12)
Primeiro, vemos que
c
y
x
R
C R
–C r
– R
Figura 10.13 Contorno endentado.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 340/416
342 CAPÍTULO 10 Séries e Resíduos
A seguir, g é analítica em c, e assim ela é contínua nesse ponto e limitada em umavizinhança do ponto; isto é, existe um M 0 para o qual |g(c re
i)| M . Logo,
Decorre da última desigualdade que limr → 0 I 2 0. Tomando o limite de (12) para
r→ 0, demonstramos o teorema. ❑
Exemplo 5 Utilizando um contorno endentado
Calcule o valor principal de Cauchy de
Solução Como a integral é da forma (3), consideramos a integral de contornoA função f ( z) 1/ z( z2 – 2 z 2) tem pólos simples em z 0
e em z 1 i no plano metade superior. O contorno C mostrado na Figura 10.14 éendentado na origem. Adotando uma notação óbvia, temos
(13)
onde Tomando os limites de (13) para R → e r→ 0, obtemos a partirdos Teoremas 10.16 e 10.17 que
Agora,
Portanto,
Usando e1i e1(cos 1 i sen 1), simplificando e então igualando as partes real e
imaginária, obtemos a partir da última igualdade
e ❑
r
y
x R– R –r
–C r 1 + i
C R
Figura 10.14 Contorno endentado C para o Exemplo 5.
EXERCÍCIOS 10.6 As respostas de problemas ímpares selecionados estão na página 406.
Nos Problemas 1-10, calcule a integral trigonométrica indicada.
1. 2.
3. 4.
5. [Sugestão: Considere ]
6.
7. 8.
9.
10.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 341/416
Exercícios de Revisão 343
Nos Problemas 11-30, calcule o valor principal de Cauchy daintegral imprópria indicada.
11. 12.
13. 14.
15. 16.
17. 18.
19. 20.
21. 22.
23. 24.
25. 26.
27. 28.
29.
30.
Nos Problemas 31 e 32, utilize um contorno endentado e resíduospara estabelecer o contorno indicado.
31.
32.
33. Estabeleça o resultado geral
e use essa fórmula para verificar a resposta no Exemplo 1.
34. Estabeleça o resultado geral
e use essa fórmula para verificar a resposta do Problema 7.
35. Use o contorno apresentado na Figura 10.15 para mostrarque
y
x r
C
2 i
–r
i
Figura 10.15 Contorno no Problema 35.
36. A temperatura de regime permanente u( x , y) em uma placasemi-infinita é determinada a partir de
Utilize uma transformada de Fourier e o método do resíduopara mostrar que
CAPÍTULO 10 EXERCÍCIOS DE REVISÃO As respostas de problemas ímpares selecionados estão na página 406.
Responda os Problemas 1-12, sem consultar o texto. Preencha osespaços ou responda verdadeiro/falso.
1. Uma função f é analítica em um ponto z0 se f puder ser ex-pandida em uma série de potências convergente centrada em
z0. ______
2. Uma série de potências representa uma função contínua emtodos os pontos dentro e em seu círculo de convergência.______
3. Para f ( z) 1/( z – 3), a série de Laurent válida para | z| 3 é z
1 3 z2 9 z3 .... Como existe um número infinito depotências negativas de z z – 0, z 0 é uma singularidadeessencial. ______
4. As únicas singularidades possíveis de uma função racionalsão pólos. ______
5. A função f ( z) e1/( z1) tem uma singularidade essencial em
z 1. ______
6. A função f ( z) z /(e z – 1) tem uma singularidade removívelem z 0. ______
7. A função f ( z) z(e z – 1) possui um zero de ordem 2 em z 0. ______
8. A função f ( z) ( z 5)/( z3sen2 z) tem um pólo de ordem
______ em z 0.
9. Se f ( z) cotg z, então Res ( f ( z), 0) ______.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 342/416
344 CAPÍTULO 10 Séries e Resíduos
10. A série de Laurent de f válida para 0 | z – 1| é dada por
A partir dessa série, vemos que f tem um pólo de ordem
_____ em z 1 e Res( f ( z), 1) ______. 11. O círculo de convergência da série de potências
é ______.
12. A série de potências converge em z 2i. ______
13. Determine uma expansão Maclaurin de f ( z) e zcos z. [Su-
gestão: Utilize a identidade cos z (eiz eiz)/2.]
14. Mostre que a função f ( z) 1/sen ( / z) tem um número in-finito de pontos singulares. Algum desses pontos são pontossingulares isolados?
Nos Problemas 15-18, utilize resultados conhecidos como um
auxílio para expandir a função dada em uma série de Laurentválida para a região anular indicada.
15.
16.
17.
18.
19. Expanda em uma série apropriada vá-
lida para
20. Expanda em uma série apropriada válidapara
Nos Problemas 21-30, utilize o teorema do resíduo de Cauchypara calcular a integral dada ao longo do contorno indicado.
21.
22. , C é a elipse x 2 /4 y
2 1.
23.
24. , C é o retângulo definido por x 1, x 1, y
4, y 1.
25.
26. , C é o quadrado definido por x 2, x
2, y 0, y 1.
27. .[Sugestão: Utilize a série de
Maclaurin para z(e z – 1).]
28.
29.
30. ,C é o retângulo definido por
y 1, y 1
Nos Problemas 31 e 32, calcule o valor principal de Cauchy daintegral imprópria indicada.
31.
32. [Sugestão: Considere
]
Nos Problemas 33 e 34, calcule a integral trigonométrica indicada.
33.
34.
35. Utilize um contorno endentado para mostrar que
36. Mostre que consideran-do a integral complexa ao longo do contornoC mostrado na Figura 10.16. Utilize o resultado conhecido
y
x r
C
ib
–r
2a2
Figura 10.16 Contorno no Problema 36.
37. A expansão Laurent de f ( z) e(u /2)( z – 1/ z) válida para 0 | z|pode ser mostrada como sendo , onde
J k (u) é a função de Bessel de primeiro tipo de ordem k . Use(4) da Seção 10.3 e o contorno C : | z| 1 para mostrar que oscoeficientes J k (u) são definidos por
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 343/416
11
C A P Í T U L O
Mapeamentos Conformes
Neste capítulo, estudaremos as propriedades de mapeamento das funçõeselementares introduzidas no Capítulo 8 e desenvolveremos duas novasclasses de mapeamentos especiais denominadas transformações fracionais lineares e transformações de Schwarz-Christoffel.
Em capítulos anteriores, utilizamos séries de Fourier e transformadasintegrais para resolver problemas de valor de contorno envolvendo aequação de Laplace. Os métodos de mapeamento conforme discutidosnesse capítulo podem ser utilizados para transferir soluções conhecidas
para a equação de Laplace de uma região para outra. Além disso, fluxos defluidos em torno de obstáculos e através de canais podem ser determinadosutilizando-se mapeamentos conformes.
Descrição do capítulo
11.1 Funções complexas como mapeamentos
11.2 Mapeamentos conformes
11.3 Transformações fracionais lineares
11.4 Transformações de Schwarz-Christoffel
11.5 Fórmulas integrais de Poisson
11.6 Aplicações
Exercícios de revisão

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 344/416
346 CAPÍTULO 11 Mapeamentos Conformes
11.1 Funções complexas como mapeamentos
Introdução No Capítulo 8, enfatizamos definições algébricas e propriedades defunções complexas. Para darmos uma interpretação geométrica de uma função com-plexa w f ( z), posicionamos um plano z e um plano w lado a lado e imaginamos que
um ponto z x iy no domínio de definição de f é mapeado (ou transformado) noponto w f ( z) no segundo plano. Assim, a função complexa w f ( z) u( x , y) iv( x , y) pode ser considerada como a transformação planar
e w f ( z) é chamada de imagem de z sob f .A Figura 11.1 indica as imagens de um número finito de números complexos na
região R. Informação mais útil é obtida ao se determinar a imagem da região R juntocom as imagens de uma família de curvas que se localiza dentro de R. Escolhas co-muns para as curvas consistem em famílias de retas, famílias de círculos, e o sistemade curvas de nível para as partes real e imaginária de f .
(a) plano z (b) plano w
Figura 11.1 w 1, w 2, w 3 são imagens de z 1, z 2, z 3
Imagens de curvas Note que se z(t ) x (t ) iy(t ), a t b, descrever uma
curva C na região, então w f ( z(t )), a t b, é uma representação paramétrica dacurva correspondente C ¿ no plano w. Além disso, um ponto z na curva de nível u( x , y) a será mapeado em um ponto w que se localiza na reta vertical u a, e um ponto
z na curva de nível v( x , y) b será mapeado em um ponto w que se localiza na retahorizontal v b.
Exemplo 1 Mapeamento f ( z ) e z
A faixa horizontal 0 y se estende na região fundamental da função exponen-cial f ( z) e z. Um segmento de reta vertical x a nessa região pode ser descrito por z(t ) a it , 0 y , e assim w f ( z(t )) ea
eit . Logo, a imagem é um semicír-
culo com centro em w 0 e com raio r ea. De modo similar, uma reta horizontal y b pode ser parametrizada por z(t ) t ib, t , e assim w f ( z(t )) e
t e
ib. Como Arg w b e |w| et , a imagem é um raio emanando a partir da origem,e como 0 Arg w , a imagem da faixa horizontal complexa é o plano metadesuperior v 0. Note que as retas horizontais y 0 e y são mapeadas no eixou positivo e negativo, respectivamente. Veja a Figura 11.2 para o mapeamento por f ( z) e z.
A partir de w e x e
iy, podemos concluir que |w| e x e y Arg w. Portanto, z x
iy loge|w| iArg w Ln w. A função inversa f 1(w) Ln w consequentemente
mapeia o plano metade superior v 0 de volta à faixa horizontal 0 y . ❑
y
x
(a)
v
u
(b)
0Arg w = Arg w =
i
Figura 11.2 Imagens de retas verticale horizontal no Exemplo 1.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 345/416
11.1 Funções Complexas Como Mapeamentos 347
Exemplo 2 O mapeamento f ( z ) 1/ z
A função complexa f ( z) 1/ z tem domínio z 0 e partes real e imaginária u( x , y)
x /( x 2 y
2) e v( x , y) y /( x 2 y
2), respectivamente. Quando a 0, uma curva denível u( x , y) a pode ser escrita como
A curva de nível é portanto um círculo com seu centro no eixo x e passando pela ori-gem. Um ponto z nesse círculo, que não seja zero, é mapeado em um ponto w na reta u a. De modo semelhante, a curva de nível v( x , y) b, b 0, pode ser escrita como
e um ponto z nesse círculo é mapeado em um ponto w na reta v b. A Figura 11.3mostra o mapeamento por f ( z) 1/ z. A Figura 11.3(a) ilustra os dois conjuntos decurvas de nível circulares, e a Figura 11.3(b) apresenta suas imagens correspondentesno plano w.
Como w 1/ z, temos z 1/ w. Logo, f 1(w) 1/ w, e assim f f 1. Podemos por-
tanto concluir que f mapeia a reta horizontal y b no círculoe f mapeia a reta vertical x a no círculo ❑
Translação e rotação A função linear elementar f ( z) z z0 pode ser interpre-tada como uma translação no plano z. Para ver isso, adotamos z x iy e z0 h ik . Como w f ( z) ( x h) i( y k ), o ponto ( x , y) é transladado h unidades nadireção horizontal e k unidades na direção vertical para a nova posição em ( x h, y k ). Em particular, a origem O é mapeada em z0 h ik .
A função elementar pode ser interpretada como uma rotação por 0 graus. Se z re
i, então Note que se o mapeamento complexofor aplicado a uma região R que esteja centrada na origem, a região
imagem R¿ pode ser obtida primeiro rotacionando-se R por 0 graus e depois transla-
dando-se o centro para a nova posição z0. Veja a Figura 11.4 para o mapeamento por
Exemplo 3 Rotação e translação
Determine uma função complexa que mapeie a faixa horizontal –1 y 1 na faixavertical 2 x 4.
Solução Se a faixa horizontal –1 y 1 for rotacionada por 90o, obtemos afaixa vertical –1 x 1, sendo que a faixa vertical 2 x 4 pode ser obtidadeslocando-se essa faixa vertical 3 unidades para a direita. Veja a Figura 11.5. Comoe
i /2 i, obtemos h( z) iz 3 como o mapeamento complexo desejado.
(a)
y
x
4
2
2 4
–2
–2
(b)
u
4
2
2 4
–2
–2
v
–4–4
–4–4
Figura 11.5 Imagem da faixa horizontal no Exemplo 3.
(a)
v
u
2
2–2
–2
(b)
y
x
12
12
12
12
–
b =
a =
b = –
a =
Figura 11.3 Imagens de círculos noExemplo 2.
(b)
v
0u
θ
y
x
R
(a)
z0
R¿
Figura 11.4 Translação e rotação.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 346/416
348 CAPÍTULO 11 Mapeamentos Conformes
Aumento Uma função aumentada é uma função complexa da forma f ( z) z,onde é um número real positivo fixo. Note que |w| | z| | z|, e assim f modificao comprimento (mas não a direção) do número complexo z por um fator fixo . Seg( z) az b e então o vetor z é rotacionado por 0 graus, aumentado porum fator r 0 e então transladado utilizando-se b.
Exemplo 4 Contração e translação
Determine uma função complexa que mapeie o disco | z| 1 no disco
Solução Primeiro, temos que contrair o raio do disco por um fator de 1/2 e aseguir transladar o seu centro para o ponto 1 i. Portanto,mapeia | z| 1 no disco ❑
Funções de potências Uma função complexa da forma f ( z) z, onde é umnúmero real positivo fixo, é chamada função de potência real. A Figura 11.6 mostrao efeito da função complexa f ( z) z na cunha angular 0 Arg z 0. Se z re
i,então w f ( z) r
e
i. Logo, 0 Arg w 0 e a abertura da cunha é modificadapor um fator . Não é difícil mostrar que um arco circular com centro na origem é
mapeado em um arco circular similar, e que raios emanando a partir da origem sãomapeados em raios similares.
Exemplo 5 A função de potência f ( z ) z 1/4
Determine uma função complexa que mapeie o plano metade superior y 0 na cunha0 Arg z /4.
Solução O plano metade superior y 0 pode também ser descrito pela desigual-dade 0 Arg z . Temos portanto que obter um mapeamento complexo que reduzo ângulo de 0 por um fator Logo, f ( z) z
1/4. ❑
Mapeamentos sucessivos Para determinar um mapeamento entre duas regiões R e R¿, muitas vezes é conveniente primeiro mapear R em uma terceira região R–,e então obter um mapeamento complexo de R– em R¿. Mais precisamente, se f ( z) mapeia R em R–, e w g( ) mapeia R– em R¿, então a função composta w g( f ( z)) mapeia R em R¿. Veja a Figura 11.7 para um diagrama de mapeamentossucessivos.
R
f g
plano z plano w
R–
R ¿
plano
Figura 11.7 R¿ é imagem de R sob mapeamentos sucessivos.
y
x
(a)
R0
v
u
(b)
0
R
Figura 11.6 R¿ é imagem da cunhaangular R.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 347/416
11.1 Funções Complexas Como Mapeamentos 349
Exemplo 6 Mapeamentos sucessivos
Determine uma função complexa que mapeie a faixa horizontal 0 y na cunha0 Arg w /4.
Solução Vimos no Exemplo 1 que a função complexa f ( z) e z
mapeou a faixahorizontal 0 y no plano metade superior 0 Arg . A partir do Exemplo5, o plano metade superior 0 Arg é mapeado na cunha 0 Arg w /4 porg( ) 1/4. Portanto, a função composta w g( f ( z)) g(e z) e z /4 mapeia a faixahorizontal 0 y na cunha 0 Arg w /4. ❑
Exemplo 7 Mapeamentos sucessivos
Determine uma função complexa que mapeie a faixa horizontal /4 Arg z 3 /4no plano metade superior v 0.
Solução Primeiro rotacionamos a cunha /4 Arg z 3 /4 de modo que ela fi-que na posição padrão mostrada na Figura 11.6. Se f ( z) ei /4
z, então a imagemdessa cunha é a cunha R– definida por 0 Arg /2. A função de potência real w
g( ) 2 expande a abertura de R– por um fator 2 para resultar no plano metadesuperior 0 Arg w como sua imagem. Portanto, w g( f ( z)) (ei /4
z)2 iz2
é o mapeamento desejado. ❑
Nas Seções 11.2-11.4, expandiremos nosso conhecimento de mapeamentos com-plexos e mostraremos como eles podem ser utilizados para resolver a equação deLaplace no plano.
EXERCÍCIOS 11.1 As respostas de problemas ímpares selecionados estão na página 407.
Nos Problemas 1-10, indica-se uma curva no plano z e um ma-
peamento complexo w f ( z). Em cada caso, determine a curvaimagem no plano w.
1. y x sob w 1/ z
2. y 1 sob w 1/ z
3. Hipérbole xy 1 sob w z2
4. Hipérbole x 2 – y
2 4 sob w z2
5. Semicírculo | z| 1, y 0 sob w Ln z
6. Raio /4 sob w Ln z
7. Raio 0 sob w z1/2
8. Arco circular r 2, 0 /2, sob w z1/2
9. Curva e x
cos y 1 sob w e z
10. Círculo | z| 1 sob w z 1/ z
Nos Problemas 11-20, indica-se uma região no plano z e um ma-peamento complexo w f ( z). Em cada caso, determine a regiãoimagem no plano w.
11. Primeiro quadrante sob w 1/ z
12. Faixa 0 y 1 sob w 1/ z
13. Faixa /4 y /2 sob w e z
14. Retângulo 0 x 1, 0 y sob w e z
15. Círculo | z| 1 sob w z 4i
16. Círculo | z| 1 sob w 2 z – 1
17. Faixa 0 y 1 sob w iz
18. Primeiro quadrante sob w (1 i) z
19. Cunha 0 Arg z /4 sob w z3
20. Cunha 0 Arg z /4 sob w z1/2
Nos Problemas 21-30, determine um mapeamento complexo apartir da região R indicada no plano z para a região imagem R¿ no plano w.
21. Faixa 1 y 4 para a faixa 0 u 3
22. Faixa 1 y 4 para a faixa 0 v 3
23. Disco | z – 1| 1 para o disco |w| 2
24. Faixa 1 x 1 para a faixa 1 v 1
25. Cunha /4 Arg z /2 para o plano metade superior v 0
26. Faixa 0 y 4 para o plano metade superior v 0
27. Faixa 0 y para a cunha 0 Arg w 3 /2
28. Cunha 0 Arg z 3 /2 para o plano metade u 2

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 348/416
350 CAPÍTULO 11 Mapeamentos Conformes
29.
v
u
y
R
x
iv = 1
R
Figura 11.8 Regiões R e R¿ para o Problema 29.
30.
x
y
R
v
u
v =
R ¿
y =
Figura 11.9 Regiões R e R¿ para o Problema 30.
31. Projeto O mapeamento no Problema 10 é um caso especial
do mapeamento w z k 2 / z, onde k é uma constante posi-
tiva, denominado transformação de Joukowski.
(a) Mostre que a transformação de Joukowski mapeia qual-quer círculo x
2 y2 R2 na elipse
(b) Qual é a imagem do círculo quando R k ?
(c) A importância da transformação w z k 2 / z não está
no seu efeito nos círculos | z| R centrados na origem,mas sim nos círculos com centro no eixo real. Mostreque a transformação de Joukowski pode ser escritacomo
Com k 1, essa transformação particular mapeia um
círculo passando por z
1 e contendo o ponto z
1 dentro de uma curva fechada com uma extremidadeacentuadamente pontiaguda. Esse tipo de curva, que seassemelha a uma seção transversal de uma asa de avião,é conhecida como aerofólio de Joukowski.
Escreva um texto a respeito do uso da transforma-ção de Joukowski no estudo do fluxo de ar em torno deum aerofólio. Existe muita informação desse tópico naInternet; por exemplo, você pode iniciar sua pesquisapela URL:
www.ae.su.oz.au/aero/jouk/jouk.html
11.2 Mapeamentos conformesIntrodução Na Seção 11.1, vimos que um mapeamento linear não constante f ( z)
az b, a e b números complexos, atua rotacionando, aumentando e transladandopontos no plano complexo. Como resultado, é fácil mostrar que o ângulo entre quais-quer duas curvas que se interceptam no eixo z é igual ao ângulo entre as imagens dosarcos no plano w sob um mapeamento linear. Outros mapeamentos complexos quetêm essa propriedade de preservação de ângulo são o assunto do nosso estudo nessaseção.
Mapeamentos com preservação de ângulo Um mapeamento complexo w f ( z)definido em um domínio D é chamado conforme para z = z0 em D quando f preservaos ângulos entre quaisquer duas curvas em D que se interceptam em z0. Mais precisa-mente, se C 1 e C 2 interceptam em D para z0, e C 1¿ e C 2¿ são as imagens corresponden-
tes no plano w, exigimos que o ângulo entre C 1 e C 2 seja igual ao ângulo entre C 1¿ e C 2¿. Veja a Figura 11.10.
Esses ângulos podem ser calculados em termos de vetores tangentes às curvas.Se z1¿ e z2¿ representarem vetores tangentes às curvas C 1 e C 2, respectivamente, então,aplicando a lei dos co-senos ao triângulo determinado por z1¿ e z2¿, temos
ou
(1)
y
x
v
u
C 2¿ w2¿
w1¿
z1¿
z2¿
C 1¿
(b) plano w
(a) plano z
C 1
C 2
Figura 11.10 Mapeamento conformese .

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 349/416
11.2 Mapeamentos Conformes 351
De modo similar, se w1¿ e w2¿ representarem vetores tangentes às curvas C 1¿ e C 2¿,respectivamente, então
(2)
O próximo teorema apresentará uma condição simples que garante .
Mapeamento conformeSe f ( z) for analítica no domínio D e f ¿( z0) 0, então f é conforme em z z0.
TEOREMA 11.1*
Demonstração Se uma curva C em D for parametrizada por z z(t ), então w f ( z(t )) descreve a curva imagem no plano w. Aplicando a regra da cadeia em w f ( z(t )), temos w¿ f ¿( z(t )) z¿(t ). Se as curvas C 1 e C 2 se interceptam em D para z0, entãow1¿ f ¿( z0) z1¿ e w2¿ f ¿( z0) z2¿. Como f ¿( z0) 0, podemos usar (2) para obter
Podemos aplicar as leis de valor absoluto para fatorar | f ¿( z0)|2 no numerador e no
denominador e obter
Portanto, a partir de (1), . ❑
Exemplo 1 Mapeamentos conformes
(a) A função analítica f ( z) e z é conforme em todos os pontos no plano z, pois f ¿( z)
e
z
nunca é zero.(b) A função analítica g( z) z2 é conforme em todos os pontos exceto z 0, pois
g¿( z) 2 z 0 para z 0. A partir da Figura 11.6, vemos que g( z) dobra o ânguloformado pelos dois raios na origem. ❑
Se f ¿( z0), porém f –( z0) 0, é possível mostrar que f dobra o ângulo entre quais-quer duas curvas em D que se interceptam em z z0. Os próximos dois exemplosintroduzirão dois mapeamentos complexos importantes que são conformes em todosos pontos, exceto um número finito, em seus domínios.
Exemplo 2 f ( z ) sen z como um mapeamento conforme
A faixa vertical /2 x /2 é chamada de região fundamental da função trigo-nométrica w sen z. Uma reta vertical x a no interior dessa região pode ser descri-
ta por z(t ) a it , t . A partir de (6) da Seção 8.7, temos
e assim
A partir da identidade cosh2t senh2
t 1, temos
* Também é possível demonstrar que f preserva o senso de direção entre os vetores tangentes.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 350/416
352 CAPÍTULO 11 Mapeamentos Conformes
A imagem da reta vertical x a é portanto uma hipérbole com sen a quando u éinterceptada, e como /2 a /2, a hipérbole cruza o eixo u entre u 1 e u 1. Note que se a /2, então w cosh t , e assim a reta x /2 é mapeada nointervalo (, 1] do eixo u negativo. De modo semelhante, a reta x /2 é mape-ada no intervalo [1, ) do eixo u positivo.
Um argumento similar estabelece que o segmento de reta horizontal descrito por z(t ) t ib, /2 t /2, é mapeado na parte superior ou inferior da elipse
de acordo com b 0 ou b 0. Esses resultados estão resumidos na Figura 11.11, quemostra o mapeamento por f ( z) sen z. Note que utilizamos cuidadosamente letrasmaiúsculas para indicar onde as partes do contorno são mapeadas. Assim, por exem-plo, o segmento de contorno AB é transformado em A¿ B¿.
Como f ¿( z) cos z, f é conforme em todos os pontos na região, exceto em z /2. As hipérboles e elipses são portanto ortogonais, pois elas são imagens dasfamílias ortogonais de segmentos horizontais e retas verticais. Observe que o ângulode 180o em z /2 formado pelos segmentos AB e AC é dobrado para formar um
único segmento de reta em w 1. ❑
Exemplo 3 f (z) z 1/z como um mapeamento conforme
O mapeamento complexo f ( z) z 1/ z é conforme em todos os valores de z excetoem z 1 e z 0. Em particular, a função é conforme para todos os valores de z noplano metade superior que satisfazem | z| 1. Se z re
i, entãoe portanto
(3)
Note que se r 1, então v 0 e u 2cos . Consequentemente, o semicírculo z e
it , 0 t , é mapeado no segmento [2,2] do eixo u. Decorre de (3) que se r 1,
então o semicírculo z reit , 0 t , é mapeado na metade superior da elipse u2 / a2 v2 / b2 1, onde a r 1/ r e b r – 1/ r . Veja a Figura 11.12 para o mapeamentopor f ( z) z 1/ z.
Para um valor fixo de , o raio z tei, para t 1, é mapeado para a parte dahipérbole u
2 /cos2 v
2sen2 4 no plano metade superior v 0. Isso decorre de
(3), pois
Como f é conforme para | z| 1, e um raio 0 intercepta um círculo | z| r em umângulo reto, as hipérboles e elipses no plano w são ortogonais. ❑
Mapeamentos conformes utilizando tabelas O Apêndice I apresenta mapeamen-
tos conformes. Os mapeamentos foram classificados como mapeamentos elementares(E-1 a E-9), mapeamentos em planos metade (H-1 a H-6), mapeamentos em regiõescirculares (C-1 a C-5) e mapeamentos diversos (M-1 a M-10). Alguns desses mapea-mentos complexos serão obtidos nas Seções 11.3 e 11.4.
As entradas indicam não apenas as imagens da região R, mas também as imagensdas várias partes do contorno de R. Isso será especialmente útil quando tentarmosresolver problemas de valor de contorno utilizando mapas conformes. Você deve usaro apêndice do mesmo modo que você utiliza uma tabela de integrais para obter anti-derivadas. Em alguns casos, uma única entrada pode ser aplicada para determinar ummapeamento conforme entre duas regiões dadas R e R¿. Em outros casos, transforma-ções sucessivas podem ser necessárias para mapear R em R¿.
v
u
(b)
y
B E
A D
C F
x –
2 2
(a)
B¿
C ¿ A¿ D¿
E ¿
F ¿
Figura 11.11 Imagem da faixa verticalno Exemplo 2.
y
x D A C E
B
(a)
v
u
(b)
E ¿ C ¿ B¿ A¿ D¿
Figura 11.12 Imagem de raios e círcu-los no Exemplo 3.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 351/416
11.2 Mapeamentos Conformes 353
Exemplo 4 Utilizando uma tabela de mapeamentos conformes
Use os mapeamentos conformes do Apêndice I para determinar um mapeamento con-forme entre a faixa 0 y 2 e o plano metade superior v 0. Qual é a imagem doeixo x negativo?
Solução Um mapeamento apropriado pode ser obtido diretamente a partir daentrada H-2. Adotando a 2, temos f ( z) e z /2, e observando as posições E , D, E ¿ e
D¿ na figura, podemos mapear o eixo x negativo no intervalo (0,1) no eixo u.
Exemplo 5 Utilizando uma tabela de mapeamentos conformes
Use os mapeamentos conformes do Apêndice I para determinar um mapeamento con-forme entre a faixa 0 y 2 e o disco |w| 1. Qual é a imagem do eixo x negativo?
Solução O Apêndice I não tem uma entrada que mapeie a faixa 0 y 2 direta-mente no disco. No Exemplo 4, a faixa foi mapeada por f ( z) e z /2 no plano metade
superior e, a partir da entrada C-4, o mapeamento complexo mapeia o pla-
no metade superior para o disco |w| 1. Portanto, mapeia a
faixa 0 y 2 no disco |w| 1.O eixo x negativo é primeiro mapeado para o intervalo (0,1) no plano , e a partir
da posição dos pontos C e C ¿ em C-4 o intervalo (0,1) é mapeado para o arco circularw ei
, 0 /2, no plano w. ❑
Funções harmônicas e o problema de Dirichlet Uma função harmônica limitadau u( x , y) que assume valores prescritos no contorno completo de uma região R é de-nominada solução para um problema de Dirichlet em R. Nos Capítulos 4-6, introdu-zimos diversas técnicas para resolver a equação de Laplace no plano, e interpretamosa solução de um problema de Dirichlet como a distribuição de temperatura em regimepermanente no interior de R a qual é resultado das temperaturas fixas no contorno.
Existem ao menos duas desvantagens em relação às séries de Fourier e métodosde transformada integral apresentados nos Capítulos 4-6. Os métodos funcionam so-mente para regiões simples no plano, e as soluções tipicamente adquirem a forma deséries infinitas ou integrais impróprias. Como tal, elas são difíceis de serem calcula-das. Na Seção 8.5, vimos que as partes real e imaginária de uma função analítica sãoambas harmônicas. Como temos um estoque grande de funções analíticas, podemosobter soluções fechadas para muitos problemas de Dirichlet e usar essas soluçõespara esboçar as isotermas e retas de fluxo da distribuição de temperatura.
Mostraremos a seguir como os mapeamentos conformes podem ser utilizadospara resolver um problema de Dirichlet em uma região R uma vez conhecida a so-lução para o problema de Dirichlet na região imagem R¿ correspondente. O métododepende do teorema a seguir:
Teorema da transformação parafunções harmônicas
Seja f uma função analítica que mapeia um domínio D em um domínio D¿. Se U forharmônica em D¿, então a função de valor real u( x , y) U ( f ( z)) é harmônica em D.
TEOREMA 11.2
Demonstração Apresentaremos uma prova para o caso especial no qual D¿ é sim-plesmente conexa. Se U tiver um conjugado harmônico V em D¿, então H U iV é analítica em D¿, e assim a função composta F ( f ( z)) U ( f ( z)) iV ( f ( z)) é analíticaem D. Pelo Teorema 8.4, a parte real U ( f ( z)) é harmônica em D, completando a de-monstração.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 352/416
354 CAPÍTULO 11 Mapeamentos Conformes
Para estabelecer que U tem um conjugado harmônico, adotamos g( z) U / x – i U / y. A primeira equação de Cauchy-Riemann ( / x )(U / x ) ( / y)(U / y) éequivalente à equação de Laplace
2U / x 2 2
U / y2 0, que é satisfeita porque U éharmônica em D¿. A segunda equação de Cauchy-Riemann ( / y)(U / x ) ( / x )(U / y) é equivalente à igualdade das derivadas parciais trocadas de segunda ordem.
Portanto, g( z) é analítica no domínio simples conexo D¿ e assim, pelo Teorema 9.8, temuma antiderivada G( z). Se G( z) U 1 iV 1, então g( z) G¿( z) U 1 / x – i U 1 / y.Como g( z) U / x – i U / y, U e U 1 têm derivadas parciais primeira iguais. Logo, H U iV 1 é analítica em D¿ e portanto U tem um conjugado harmônico em D¿. ❑
O Teorema 11.2 pode ser utilizado para resolver um problema de Dirichlet emuma região R transformando o problema para uma região R¿ na qual a solução U é evidente ou pode ser obtida por métodos anteriores (incluindo a série de Fouriere métodos de transformada integral dos Capítulos 4-6). Os passos principais estãoresumidos a seguir.
Resolvendo problemas de Dirichlet utilizando mapeamento conforme
1. Determine um mapeamento conforme w f ( z) que transforme a região
original R na região imagem R¿. A região R¿ pode ser uma região para a qualmuitas soluções explícitas dos problemas de Dirichlet são conhecidas.
2. Transfira as condições de contorno do contorno de R para o contorno de R¿.O valor de u em um ponto de contorno de R é determinado como o valorde U no ponto de contorno correspondente f ( ). Veja a Figura 11.13 parauma ilustração de transferência de condições de contorno.
B
A
C
E D
R
f U = 1
R¿
f ( )U ( f ( )) = u( )
u = 1
u = 0
u = –1
u = 2U = 0
A¿
B¿
U = –1
E ¿
D¿
U = 2
C ¿
Figura 11.13 R¿ é a imagem de R sob um mapeamento conforme f .
3. Resolva o problema de Dirichlet correspondente em R¿. A solução U podeser aparente a partir da simplicidade do problema em R¿ ou pode ser obtidautilizando-se métodos de Fourier ou de transformada integral. (Métodosadicionais serão apresentados nas Seções 11.3 e 11.5).
4. A solução para o problema de Dirichlet original é u( x , y) U ( f ( z)).
Exemplo 6 Resolvendo um problema de Dirichlet
A função U (u,v) (1/ ) Arg w é harmônica no plano metade superior v 0, poisela é a parte imaginária da função analítica g(w) (1/ ) Ln w. Use essa função pararesolver o problema de Dirichlet na Figura 11.14(a).
Solução A função analítica f ( z) sen z mapeia a região original no plano me-tade superior v 0 e mapeia os segmentos do contorno nos segmentos indicados naFigura 11.14(b). A função harmônica U (u,v) (1/ ) Arg w satisfaz as condições decontorno transferidas U (u,0) 0 para u 0 e U (u,0) 1 para u 0. Portanto, u( x , y)(b)
u
v
U = 1
B E
A D
O
x
y
(a)22
–
u = 0
u = 0
u = 1
u = 1
U = 1 U = 0 U = 0U = 1
E ¿ B¿ A¿ D¿O¿
Figura 11.14 Imagem da faixa verticalsemi-infinita no Exemplo 6.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 353/416
11.2 Mapeamentos Conformes 355
U (sen z) (1/ ) Arg (sen z) é a solução do problema original. Se tg1(v / u) forescolhida para se estender entre 0 e , a solução pode também ser escrita como
❑
Exemplo 7 Resolvendo um problema de Dirichlet
A partir de C-1 no Apêndice I de mapeamentos conformes, a função analítica f ( z) ( z – a)/(az – 1), onde mapeia a região exterior aos dois discosabertos | z| 1 e na região circular r 0 |w| 1, onde A Fi-gura 11.15(a) apresenta o problema de Dirichlet original, e a Figura 11.15(b) mostraas condições de contorno transferidas.
y
A B
x 1 2 3
(a) (b)
u
v
u = 0u = 1
U = 0
A¿
B¿
U = 1
Figura 11.15 Imagem do problema de Dirichlet no Exemplo 7.
Nos Problema 10 dos Exercícios 5.1, descobrimos que U (r ,) (loger )(loger 0)é a solução para o novo problema de Dirichlet. A partir do Teorema 11.2, podemosconcluir que a solução do problema de valor de contorno original é
❑
Uma região imagem R¿ favorita para uma região simples conexa R é o planometade superior y 0. Para qualquer número real a, a função complexa Ln( z – a) loge| z – a| i Arg( z – a) é analítica em R¿. Assim, Arg( z – a) é harmônica em R¿,sendo uma solução para o problema de Dirichlet ilustrado na Figura 11.16.
Segue que a solução em R¿ para o problema de Dirichlet com
é a função harmônica U ( x , y) (c0 / )(Arg( z – b) – Arg( z – a)). Um grande número deproblemas de Dirichlet no plano metade superior y 0 pode ser resolvido somando-se juntamente as funções harmônicas dessa forma.
a
z
U = 0U =
Arg( z – a)
Figura 11.16 Imagem de um problemade Dirichlet.
EXERCÍCIOS 11.2 As respostas de problemas ímpares selecionados estão na página 407.
Nos Problemas 1-6, determine onde o mapeamento complexoindicado é conforme.
1. 2.
3. 4.
5.
6.
Nos Problemas 7-10, utilize os resultados dos Exemplos 3 e 4.
7. Aplique a identidade cos z sen( /2 – z) para obter a ima-gem da faixa 0 x sob o mapeamento complexo w cos z. Qual é a imagem de uma reta horizontal na faixa?
8. Aplique a identidade senh z i sen(iz) para obter a ima-gem da faixa /2 x /2, x 0, sob o mapeamentocomplexo w senh z. Qual é a imagem de um segmento dereta vertical na faixa?

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 354/416
356 CAPÍTULO 11 Mapeamentos Conformes
9. Determine a imagem da região definida por /2 x /2, y 0, sob o mapeamento complexo w sen( z)1/4.Qual é a imagem do segmento de reta [ /2, /2] no eixo
x ?
10. Determine a imagem da região definida por | z| 1 no pla-
no metade superior sob o mapeamento complexo w z 1/ z. Qual é a imagem do segmento de reta [1, 1] no eixo
x ?
Nos Problemas 11-18, utilize os mapeamentos conformes doApêndice I para obter um mapeamento conforme a partir da re-gião indicada R no plano z para a região-alvo R¿ no plano w, edetermine a imagem da curva de contorno dada.
11.
B
A
y R
x 2
v
u
R¿
Figura 11.17 Regiões R e R¿ para o Problema 11.
12.
R
A B
y
x
v
u1
R ¿
i
Figura 11.18 Regiões R e R¿ para o Problema 12.
13.
R
y
x 1
B
A
v
u
R¿
v = u
Figura 11.19 Regiões R e R¿ para o Problema 13.
14.
R
y
x 1
B
A
v
u
i R¿
Figura 11.20 Regiões R e R¿ para o Problema 14.
15.
R
A B x
i
C
y v
u
R¿
Figura 11.21 Regiões R e R¿ para o Problema 15. 16. y
B A R x
1
u
v
R¿
Figura 11.22 Regiões R e R¿ para o Problema 16. 17.
R
A B x
y
u
v
–1 1
R¿
Figura 11.23 Regiões R e R¿ para o Problema 17. 18.
u
v
R
A B
x
y
y =
R¿ i
Figura 11.24 Regiões R e R¿ para o Problema 18.
Nos Problemas 19-22, utilize um mapeamento conforme apro-priado e a função harmônica U (1/ ) Arg w para resolver oproblema de Dirichlet indicado.
19. y
x
R
u = 0
u = 1
Figura 11.25 Problema de Dirichlet no Problema 19.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 355/416
11.3 Transformações Fracionais Lineares 357
20.
R
y
x 1
u = 1u = 1
u = 0 u = 0
Figura 11.26 Problema de Dirichlet no Problema 20. 21.
R
y
x 1
u = 1 u = 1
u = 0u = 0
Figura 11.27 Problema de Dirichlet no Problema 21. 22.
x
R
y
1
u = 0
u = 0
u = 1
u = 1
Figura 11.28 Problema de Dirichlet no Problema 22.
Nos Problemas 23-26, utilize um mapeamento conforme apro-
priado e a função harmônica U
(c0 / )[Arg (w – 1) – Arg (w
1)] para resolver o problema de Dirichlet indicado.
23. y
i R
x
1
u = 0
u = 0
u = 1
u = 1
Figura 11.29 Problema de Dirichlet no Problema 23.
24.
i R
x
y
1
u = 0
u = 0
u = 5
Figura 11.30 Problema de Dirichlet no Problema 24. 25.
x
i
R
y
u = 10 u = 0
u = 0u = 10
Figura 11.31 Problema de Dirichlet no Problema 25. 26. y
2 x
u = 0
u = 4
u = 0
Figura 11.32 Problema de Dirichlet no Problema 26.
27. Uma função de valor real( x , y) é denominada bi-harmôni-ca em um domínio D quando a equação diferencial de quar-ta ordem
em todos os pontos em D. A função tensão de Airy em me-cânica de sólidos e potenciais de velocidade para a análisede fluxo de fluido viscoso são exemplos de funções bi-har-mônicas.
(a) Mostre que se for bi-harmônica em D, então u
2 / x
2 2 / y2 é harmônica em D.
(b) Se g( z) for analítica em D e mos-
tre que é bi-harmônica em D.
11.3 Transformações fracionais lineares
Introdução Em diversas aplicações que envolvem problemas de valor de contor-no associados com a equação de Laplace, é necessário obter um mapeamento confor-me que mapeie um disco no plano metade v 0. Tal mapeamento teria que mapearo contorno circular do disco para a reta de contorno do plano metade. Uma classeimportante de mapeamentos conformes elementares que mapeiam círculos em retas(e vice-versa) se refere às transformações fracionais. Nessa seção, definiremos e es-tudaremos essa classe especial de mapeamentos.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 356/416
358 CAPÍTULO 11 Mapeamentos Conformes
Transformação fracional linear Se a, b, c e d forem constantes complexas comad – bc 0, então a função complexa definida por
é denominada transformação fracional linear. Como
T é conforme em z desde que ad – bc 0 e z d / c. (Se 0, então T ¿( z) 0 e T ( z) seria uma função constante.) Transformações fracionais lineares têm comocaracterística a “preservação de círculo” em um sentido que esclareceremos nessa se-ção e, conforme vimos no Exemplo 8 da Seção 11.2, elas podem ser úteis na soluçãode problemas de Dirichlet em regiões limitadas por círculos.
Note que quando c 0, T ( z) tem um pólo simples em z0 d / c, e assim
Escreveremos de modo simplificado T ( z0) para esse limite. Além disso, se c 0, então
e escrevemos T () a / c.
Exemplo 1 Uma transformação fracional linear
Se T ( z) (2 z 1)/( z – i), calcule T (0), T () e T (i).
Solução Note que T (0) 1/(i) i e T () lim| z|→ T ( z) 2. Como z i é umpólo simples para T ( z), temos lim z→i |T ( z)| e escrevemos T (i) . ❑
Propriedade de preservação do círculo Se c 0, a transformação fracional li-near se reduz para uma função linear T ( z) Az B. Vimos na Seção 11.1 que essemapeamento complexo pode ser considerado como a composição de uma rotação,aumento e translação. Como tal, uma função linear mapeará um círculo no plano z emum círculo no plano w. Quando c 0, podemos dividir az b por cz d para obter
(1)
Se adotarmos A (bc – ad )/ c e B a / c, T ( z) pode ser escrita como a composição detransformações:
(2)
Uma transformação fracional linear geral pode portanto ser escrita como a composi-ção de duas funções lineares e a inversão w 1/ z. Note que se | z – z1| r e w 1/ z,então
(3)
Não é difícil mostrar que o conjunto de todos os pontos w que satisfazem
(4)
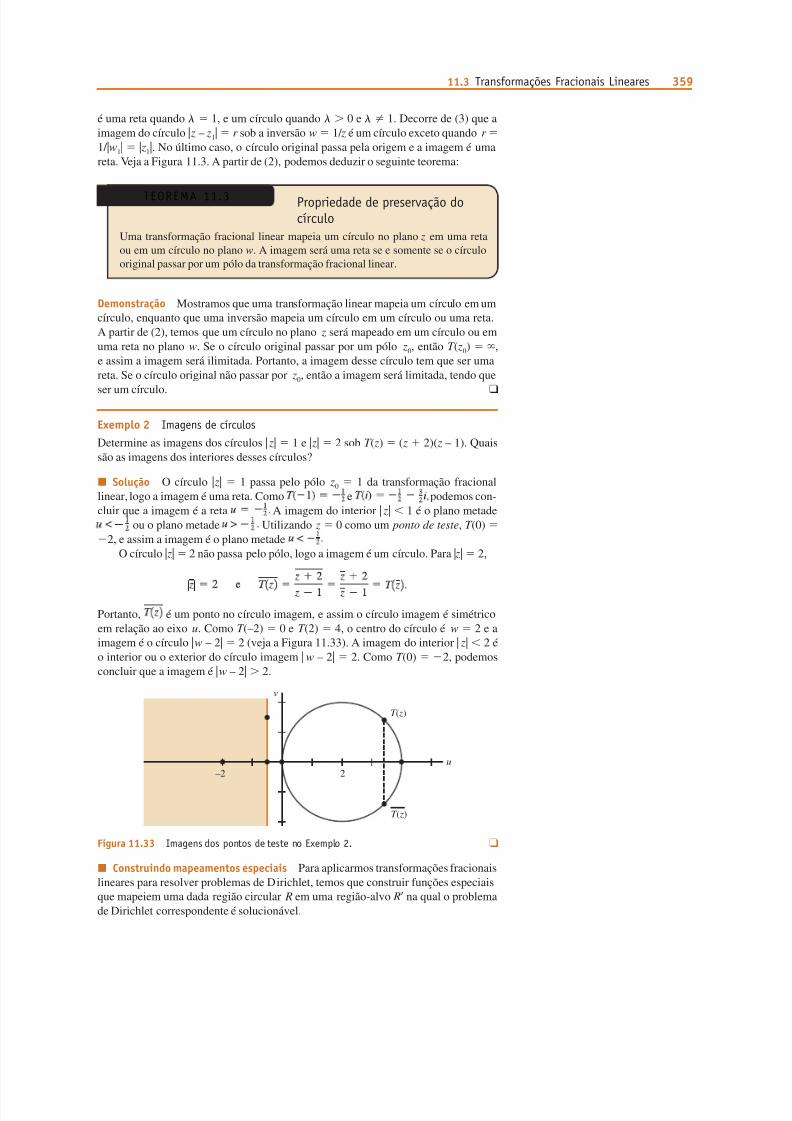
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 357/416
11.3 Transformações Fracionais Lineares 359
é uma reta quando 1, e um círculo quando 0 e 1. Decorre de (3) que aimagem do círculo | z – z1| r sob a inversão w 1/ z é um círculo exceto quando r 1/|w1| | z1|. No último caso, o círculo original passa pela origem e a imagem é umareta. Veja a Figura 11.3. A partir de (2), podemos deduzir o seguinte teorema:
Propriedade de preservação docírculo
Uma transformação fracional linear mapeia um círculo no plano z em uma retaou em um círculo no plano w. A imagem será uma reta se e somente se o círculooriginal passar por um pólo da transformação fracional linear.
TEOREMA 11.3
Demonstração Mostramos que uma transformação linear mapeia um círculo em umcírculo, enquanto que uma inversão mapeia um círculo em um círculo ou uma reta.A partir de (2), temos que um círculo no plano z será mapeado em um círculo ou emuma reta no plano w. Se o círculo original passar por um pólo z0, então T ( z0) ,e assim a imagem será ilimitada. Portanto, a imagem desse círculo tem que ser uma
reta. Se o círculo original não passar por z0, então a imagem será limitada, tendo queser um círculo. ❑
Exemplo 2 Imagens de círculos
Determine as imagens dos círculos | z| 1 e | z| 2 sob T ( z) ( z 2)( z – 1). Quaissão as imagens dos interiores desses círculos?
Solução O círculo | z| 1 passa pelo pólo z0 1 da transformação fracionallinear, logo a imagem é uma reta. Como e podemos con-cluir que a imagem é a reta A imagem do interior | z| 1 é o plano metade
ou o plano metade Utilizando z 0 como um ponto de teste, T (0)
2, e assim a imagem é o plano metadeO círculo | z| 2 não passa pelo pólo, logo a imagem é um círculo. Para | z| 2,
Portanto, é um ponto no círculo imagem, e assim o círculo imagem é simétricoem relação ao eixo u. Como T (–2) 0 e T (2) 4, o centro do círculo é w 2 e aimagem é o círculo |w – 2| 2 (veja a Figura 11.33). A imagem do interior | z| 2 éo interior ou o exterior do círculo imagem |w – 2| 2. Como T (0) 2, podemosconcluir que a imagem é |w – 2| 2.
v
u
–2 2
T ( z)
T ( z)
Figura 11.33 Imagens dos pontos de teste no Exemplo 2. ❑
Construindo mapeamentos especiais Para aplicarmos transformações fracionaislineares para resolver problemas de Dirichlet, temos que construir funções especiaisque mapeiem uma dada região circular R em uma região-alvo R¿ na qual o problemade Dirichlet correspondente é solucionável.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 358/416
360 CAPÍTULO 11 Mapeamentos Conformes
Como um contorno circular é determinado por três desses pontos, precisamos obteruma transformação fracional linear w T ( z) que mapeie três pontos dados z1, z2 e z3 no contorno de R em três pontos w1, w2 e w3 no contorno de R¿. Além disso, o interiorde R¿ tem que ser a imagem do interior de R. Veja a Figura 11.34.
R R¿
w3w2w1
z1
z2
z3
w = T ( z)
Figura 11.34 R¿ é a imagem de R sob T .
Métodos matriciais Métodos matriciais podem ser utilizados para simplificarmuitos dos cálculos. Podemos associar a matriz
com T ( z) (az b)/(cz d ).* Se T 1( z) (a1 z b1)/(c1 z d 1) e T 2( z) (a2 z b2)/ (c2 z d 2), então a função composta T ( z) T 2(T 1( z)) é dada por T ( z) (az b)/(cz d ), onde
(5)
Se w T ( z) (az b)/(cz d ), podemos resolver em relação a z para obter z (dw – b)/(cw a). Portanto, a inversa da transformação fracional linear T é T
1(w) (dw – b)/(cw a) e associamos a matriz
(6)
com T 1. A matriz adj A é a matriz adjunta de A (veja a Seção 2.6 do Volume 2), a
matriz para T .
Exemplo 3 Utilizando matrizes para obter uma transformada inversa
Se e obtenha S 1(T ( z)).
Solução A partir de (5) e (6), temos S 1(T ( z)) (az b)/(cz d ), onde
Logo,
❑
* A matriz A não é única, pois o numerador e o denominador em T ( z) podem ser multiplicados por
uma constante não nula.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 359/416
11.3 Transformações Fracionais Lineares 361
Triplo a triplo A transformação fracional linear
tem um zero em z
z1, um pólo em z
z3, e T ( z2)
1. Portanto, T ( z) mapeiatrês números complexos distintos z1, z2 e z3 em 0, 1 e , respectivamente. O termo
é denominado razão cruzada dos números complexos z, z1, z2 e z3.
De modo similar, o mapeamento complexo remete w1,
w2 e w3 a 0, 1 e , e assim S 1 mapeia 0, 1 e em w1, w2 e w3. Assim, a transformação
fracional linear w S 1(T ( z)) mapeia o triplo z1, z2 e z3 em w1, w2 e w3. A partir de w
S 1(T ( z)), temos S (w) T ( z) e podemos concluir que
(7)
Na construção de uma transformação fracional linear que mapeie o triplo z1, z2 e z3 emw1, w2 e w3, podemos aplicar métodos matriciais para calcular w S
1(T ( z)). Alterna-
tivamente, podemos substituir em (7) e resolver a equação resultante em relação a w.
Exemplo 4 Construindo uma transformação fracional linear
Construa uma transformação fracional linear que mapeie os pontos 1, i e –1 no círcu-lo | z| 1 para os pontos –1, 0 e 1 no eixo real.
Solução Substituindo em (7), temos
ou
Resolvendo em relação a w, obtemos w –i( z – i)/( z i). Alternativamente, podería-mos usar o método matricial para calcular w S
1(T ( z)). ❑
Quando zk desempenha o papel de um dos pontos em um triplo, a definiçãoda razão cruzada é modificada substituindo-se cada fator que contém zk por 1. Porexemplo, se z2 , ambos z2 – z3 e z2 – z1 são substituídos por 1, resultando em ( z –
z1)/( z – z3) como razão cruzada.
Exemplo 5 Construindo uma transformação fracional linear
Construa uma transformação fracional linear que mapeie os pontos , 0 e 1 no eixoreal para os pontos 1, i e –1 no círculo |w| 1.
Solução Como z1 , os termos z – z1 e z2 – z1 no produto cruzado são substi-tuídos por 1. Assim
ou

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 360/416
362 CAPÍTULO 11 Mapeamentos Conformes
Se utilizarmos o método matricial para obter w S 1(T ( z)), então
e assim ❑
Exemplo 6 Resolvendo um problema de Dirichlet
Resolva o problema de Dirichlet da Figura 11.35(a) utilizando mapeamento confor-me construindo uma transformação fracional linear que mapeie a região dada no pla-no metade superior.
Solução Cada um dos círculos de contorno | z| 1 e passa por z 1.Podemos portanto mapear cada círculo de contorno em uma reta, selecionando umatransformação fracional linear que tenha z 1 como um pólo. Se além disso exigir-mos que T (i) 0 e T (1) 1, então
Como T (0) 1 i e T mapeia o interior do círculo | z| 1 no plano metade superior e mapeia o círculo na reta v 1. A Figura11.35(b) mostra as condições de contorno transferidas.
A função harmônica U (u,v) v é a solução do problema de Dirichlet simplifica-do no plano w, e assim, pelo Teorema 11.2, u( x , y) U (T ( z)) é a solução do problemade Dirichlet original no plano z.
Como a parte imaginária de a solução
é dada por
As curvas de nível u( x , y) c podem ser escritas como
sendo portanto círculos que passam por z 1. Veja a Figura 11.36. Essas curvas denível podem ser interpretadas como as isotermas da distribuição de temperatura deregime permanente induzidas pelas temperaturas de contorno. ❑
(b)
v
u
C
D B
A
y
x
(a)
1
u = 0u = 0
u = 0u = 0
u = 1
U = 1
U = 0U = 0 U = 0
U = 1U = 1 C ¿ D¿
B¿
A¿
Figura 11.35 Imagem do problema deDirichlet no Exemplo 6.
0,4
y
x 1
0,2
0,6
0,8
Figura 11.36 Círculos e curvas de nívelno Exemplo 6.
EXERCÍCIOS 11.3 As respostas de problemas ímpares selecionados estão na página 407.
Nos Problemas 1-4, uma transformação fracional linear é indi-cada.
(a) Calcule T (0), T (1) e T ().
(b) Determine as imagens dos círculos | z| 1 e | z – 1| 1.
(c) Determine a imagem do disco | z| 1.
1. 2.
3. 4.
Nos Problemas 5-8, use o método matricial para calcular S 1
(w)e S
1(T ( z)) para cada par de transformações fracionais lineares.
5.
6.
7.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 361/416
11.4 Transformações de Schwarz-Christoffel 363
8.
Nos Problemas 9-16, construa uma transformação fracional li-
near que mapeie o triplo indicado z1, z2 e z3 para o triplo w1, w2
e w3.
9. 10.
11. 12.
13. 14.
15. 16.
17. Utilize os resultados no Exemplo 2 e a função harmônica U
(loge r )/(loge r 0) para resolver o problema de Dirichlet na
Figura 11.37. Explique por que as curvas de nível têm que
ser círculos.
x
2
2
y
Ru = 1
u = 0
–0,5
Figura 11.37 Problema de Dirichlet no Problema 17.
18. Use a transformação fracional linear que mapeia –1, 1, 0 em
0, 1, para resolver o problema de Dirichlet na Figura 11.38.Explique por que, com uma exceção, todas as curvas de níveltêm que ser círculos. Qual curva de nível é uma reta?
x
y
R
–1 1
u = 0 u = 1
Figura 11.38 Problema de Dirichlet no Problema 18.
19. Obtenha o mapeamento conforme H-1 com base nos mapea-
mentos conformes do Apêndice I. 20. Obtenha o mapeamento conforme H-5 com base nos mapea-
mentos conformes do Apêndice I, primeiro mapeando 1, i, 1 em , i, 0.
21. Mostre que a composição de duas transformações fracionaislineares é uma transformação fracional linear e verifique (5).
22. Se w1 w2 e 0, mostre que o conjunto de todos os pon-tos w que satisfazem |w – w1| |w – w2| é uma reta quando 1 e um círculo quando 1. [Sugestão: Escreva como|w – w1|
2 2|w – w2|2 e expanda.]
11.4 Transformações de Schwarz-Christoffel
Introdução Se D¿ for um domínio simplesmente conexo com ao menos um pontode contorno, então o famoso teorema do mapeamento de Riemann afirma a exis-tência de uma função analítica g que mapeia conformemente o disco aberto unitário| z| 1 em D¿. O teorema do mapeamento de Riemann é um teorema de existênciapura que não especifica uma fórmula para o mapeamento conforme. Como o planometade superior y 0 pode ser mapeado conformemente no disco utilizando umatransformação fracional linear, existe um mapeamento conforme f entre o plano me-tade superior e D¿. Em particular, existem funções analíticas que mapeiam o planometade superior em regiões poligonais dos tipos apresentados na Figura 11.39. Aocontrário do teorema do mapeamento de Riemann, a fórmula de Schwarz-Christoffelespecifica uma forma para a derivada f ¿( z) de um mapeamento conforme a partir do
plano metade superior em uma região poligonal limitada ou ilimitada.
Casos especiais Para motivar o uso da fórmula geral de Schwarz-Christoffel,primeiro examinamos o efeito do mapeamento f ( z) ( z – x 1)
/ , 0 2 , noplano metade superior y 0 ilustrado na Figura 11.40(a). Esse mapeamento é a com-posição da translação z – x 1 e a função de potência real w / . Como w /
4
3
21
(b) Região ilimitada
4
3
21
(a) Região limitada
z4
z4
z3
z3
z5
z2
z2
z1
z1
Figura 11.39 Regiões poligonais.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 362/416
364 CAPÍTULO 11 Mapeamentos Conformes
modifica o ângulo em uma cunha por um fator / , o ângulo interior na região ima-gem é ( / ) . Veja a Figura 11.40(b).
Note que f ¿( z) A( z – x 1)( / )1 para A / . A seguir, consideramos f ( z) como
sendo uma função analítica no plano metade superior e que tenha a derivada
(1)onde x 1 x 2. Para determinar as imagens dos segmentos de reta no eixo x , utilizare-mos o fato de que uma curva w w(t ) no plano w é um segmento de reta quando oargumento do seu vetor tangente w¿(t ) for constante. De (1), um argumento de f ¿(t ) édado por
(2)
Como Arg(t – x ) para t x , podemos obter a variação de arg f ¿(t ) ao longo doeixo x . Os resultados estão apresentados na seguinte tabela.
Intervalo arg f ¿( t) Mudança no argumento
Como arg f ¿(t ) é constante nos intervalos da tabela, as imagens são segmentos deretas. A Figura 11.41 mostra a imagem do plano metade superior. Observe que os ân-gulos interiores da região imagem poligonal são 1 e 2. Essa discussão se generalizapara produzir a fórmula de Schwarz-Christoffel.
Fórmula de Schwarz-Christoffel Seja f ( z) uma função analítica no plano metade superior y 0 e que tenha a deri-
vada
(3)
onde x 1 x 2 ... x n e todo i satisfaz 0 i 2 . Então f ( z) mapeia o planometade superior y 0 em uma região poligonal com ângulo interior 1, 2,..., n.
TEOREMA 11.4
Ao aplicar essa fórmula a uma região-alvo poligonal particular, o leitor deveobservar cuidadosamente os seguintes comentários:
(i) Pode-se selecionar a posição de três dos pontos x k no eixo x . Uma escolhainteligente pode simplificar o cálculo de f ( z). A seleção dos pontos restan-tes depende do formato do polígono-alvo.
(ii) Uma fórmula geral para f ( z) é
e portanto f ( z) pode ser considerada como a composição do mapeamento conforme
e a função linear w Az B. A função linear w Az B nos permite aumentar,rotacionar e transladar a imagem poligonal produzida por g( z). (Veja a Seção 11.1.)
0
(b )
A B
(a )
x 1
B
A
Figura 11.40 Imagem do plano metadesuperior.
2
1
1
2w = f (t ), x 1< t < x 2
w = f (t ), t > x 2 –
–
w = f (t ), t < x 1
Figura 11.41 Imagem do plano metadesuperior.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 363/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 364/416
366 CAPÍTULO 11 Mapeamentos Conformes
Solução Como a região poligonal é limitada, somente dois dos três ângulos an-teriores de 60o devem ser incluídos na fórmula de Schwarz-Christoffel. Se x 1 0e x 2 1, obtemos f ¿( z) Az
2/3( z – 1)2/3. Não é possível calcular f ( z) em termosde funções elementares; entretanto, podemos utilizar o Teorema 9.8 para construir aantiderivada
Se exigirmos que f (0) 0 e f (1) 1, temos que B 0 e
Pode-se mostrar que essa última integral é (1/3), onde representa a função gam-ma. Portanto, o mapeamento conforme necessário é
❑
A fórmula de Schwarz-Christoffel pode algumas vezes ser utilizada para suge-rir um mapeamento conforme possível a partir do plano metade superior para umaregião não poligonal R¿. Um primeiro passo importante é aproximar R¿ por regiõespoligonais. Isso será ilustrado no exemplo final.
Exemplo 4 Construindo um mapeamento conforme
Utilize a fórmula de Schwarz-Christoffel para construir um mapeamento conforme apartir do plano metade superior para o plano metade superior com a reta horizontal v , u 0, retirada.
Solução A região-alvo não poligonal pode ser aproximada por uma região poli-gonal juntando-se um segmento de reta a partir de w i para um ponto u0 no eixo u
negativo. Veja a Figura 11.45(b). Se exigirmos f (1) i e f (0) u0, a transforma-ção de Schwarz-Christoffel satisfaz
Note que quando u0 se aproxima de , os ângulos interiores 1 e 2 se aproximamde 2 e 0, respectivamente. Isso sugere que examinemos mapeamentos conformesque satisfaçam w¿ A( z 1)1
z1 A(1 1/ z) ou w A( z Ln z) B.
Primeiro determinamos a imagem do plano metade superior sob g( z) z Ln z
e então transladamos a região imagem se necessário. Para t real,
Se t 0, Arg t e u(t ) t loge|t | varia de – a –1. Decorre que w g(t ) se moveao longo da reta v de – a –1. Quando t 0, Arg t 0 e u(t ) varia de – a .
Portanto, g mapeia o eixo x positivo no eixo u. Podemos concluir que g( z) z Ln z mapeia o plano metade superior no plano metade superior com a reta horizontal v , u 1, retirada. Assim, w z Ln z 1 mapeia o plano metade superior naregião-alvo original.
Muitos dos mapeamentos conformes do Apêndice I podem ser obtidos utilizan-do-se a fórmula de Schwarz-Christoffel, e mostraremos na Seção 11.6 que esses ma-peamentos são especialmente úteis na análise de fluxos bidimensionais de fluidos.
v
u
(b)
u0
1
2
y
A B x
–1(a)
0
v = A
B
Figura 11.45 Imagem do plano metadesuperior no Exemplo 4.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 365/416
11.4 Transformações de Schwarz-Christoffel 367
EXERCÍCIOS 11.4 As respostas de problemas ímpares selecionados estão na página 408.
Nos Problemas 1-4, use (2) para descrever a imagem do planometade superior y 0 sob o mapeamento conforme w f ( z) quesatisfaz as condições dadas. Não tente determinar f ( z).
1.
2.
3.
4.
Nos Problemas 5-8, determine f ¿( z) para a região poligonal dadautilizando x 1 1, x 2 0, x 3 1, x 4 2, e assim por diante.
Não tente determinar f ( z).
5. f (1) 0, f (0) 1
u
v
i
1
Figura 11.46 Região poligonal para o Problema 5.
6. f (1) 1, f (0) 0
u
v
–1
3
Figura 11.47 Região poligonal para o Problema 6.
7. f (1) 1, f (0) 1
u
v
23
23
–1 1
Figura 11.48 Região poligonal para o Problema 7.
8. f (1) i, f (0) 0
v
u
i
4
Figura 11.49 Região poligonal para o Problema 8.
9. Utilize a fórmula de Schwarz-Christoffel para construir ummapeamento conforme a partir do plano metade superior y
0 para a região na Figura 11.50. Exija f (1) i e f (1) 0.
u
v
i
Figura 11.50 Imagem do plano metade superior no Proble-ma 9.
10. Utilize a fórmula de Schwarz-Christoffel para construir ummapeamento conforme a partir do plano metade superior y 0para a região na Figura 11.51. Exija f (1) ai e f (1) ai.
v
u
ai
–ai
Figura 11.51 Imagem do plano metade superior no Proble-ma 10.
11. Utilize a fórmula de Schwarz-Christoffel para construir ummapeamento conforme a partir do plano metade superior y
0 para a faixa horizontal 0 v primeiro aproximan-do a faixa pela região poligonal indicada na Figura 11.52.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 366/416
368 CAPÍTULO 11 Mapeamentos Conformes
Exija e f (1) 0 e ado-te w1 → na direção horizontal.
v
u
w2 w1
i
Figura 11.52 Imagem do plano metade superior no Proble-ma 11.
12. Utilize a fórmula de Schwarz-Christoffel para construir ummapeamento conforme a partir do plano metade superior y
0 para a cunha 0 Arg w /4 primeiro aproximando acunha pela região indicada na Figura 11.53. Exija f (0) 0 e
f (1) 1, e adote → 0.
v
u1
Figura 11.53 Imagem do plano metade superior no Proble-ma 12.
13. Verifique M-4 no Apêndice I primeiro aproximando a região R¿ pela região poligonal mostrada na Figura 11.54. Exija f (1) u1, f (0) ai e f (1) 1 e adote u1 → 0 ao longodo eixo u.
v
u
R¿
ai
u1–u1
Figura 11.54 Imagem do plano metade superior no Proble-ma 13.
14. Mostre que se uma curva no plano w for parametrizada porw w(t ), a t b, e arg w¿(t ) for constante, então a curvaserá um segmento de reta. [Sugestão: Se w(t ) u(t ) iv(t ),então tg(arg w¿(t )) dv / du.]
11.5 Fórmulas integrais de Poisson
Introdução O sucesso do método de mapeamento conforme depende da identifi-cação da solução do novo problema de Dirichlet na região imagem R¿. Seria portantoútil se uma solução geral pudesse ser obtida para problemas de Dirichlet no planometade superior y 0 ou no disco unitário | z| 1. A fórmula integral de Poisson para o plano metade superior fornece essa solução ao expressar o valor da funçãoharmônica u( x , y) em um ponto no interior do plano metade superior em termos deseus valores no contorno y 0.
Fórmulas para o plano metade superior Para desenvolver a fórmula, primeiroconsideramos que a função de contorno é dada por u( x ,0) f ( x ), onde f ( x ) é a função
degrau indicada na Figura 11.55. A solução do problema de Dirichlet correspondenteno plano metade superior é
(1)
Como Arg( z – b) é um ângulo exterior no triângulo formado por z, a e b, Arg( z – b) ( z) Arg( z – a), onde 0 , e podemos escrever
(2)
z
u = 0 a u = 0bu = ui
Arg( z – a)
Arg( z – b)
x
( z)
Figura 11.55 Condições de contornoem y 0.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 367/416
11.5 Fórmulas Integrais de Poisson 369
O princípio da superposição pode ser utilizado para resolver o problema de Di-richlet mais geral na Figura 11.56. Se u( x ,0) ui para x i1 x x i e u( x ,0) 0 forado intervalo [a,b], então, a partir de (1),
(3)
Note que Arg( z – t ) tg1( y /( x – t )), onde tg1 é selecionada entre 0 e , e portanto(d / dt ) Arg ( z – t ) y /(( x – t )2 y
2). A partir de (3),
Como u( x ,0) 0 fora do intervalo [a,b], temos
(4)
Uma função contínua por partes limitada pode ser aproximada por funções de-grau, e assim nossa discussão sugere que (4) seja a solução do problema de Dirichlet
no plano metade superior. Esse é o conteúdo do Teorema 11.5.
Fórmula integral de Poisson parao plano metade superior
Seja u( x ,0) uma função contínua por partes em qualquer intervalo finito e limitadaem x . Então a função definida por
é a solução do problema de Dirichlet correspondente no plano metade superior y
0.
TEOREMA 11.5
Existem poucas funções para as quais é possível calcular a integral em (4). Emgeral, são necessários métodos numéricos para o cálculo da integral.
Exemplo 1 Resolvendo um problema de Dirichlet
Determine a solução do problema de Dirichlet no plano metade superior que satisfaza condição de contorno u( x ,0) x quando | x | 1, e u( x ,0) de outra forma.
Solução Pela fórmula integral de Poisson,
Utilizando as substituições s x – t , podemos mostrar que
que pode ser simplificada por
❑
Na maioria dos exemplos e exercícios, u( x ,0) é uma função degrau, e utilizare-mos a solução integrada (3) em vez de (4). Se o primeiro intervalo for (, x 1), entãoo termo Arg( z – x 1) – Arg( z – a) na soma seve ser substituído por Arg( z – x 1). De modo
z
x
1 2
n
• • •
u = 0 u = 0u = unu = u2u = u1
x n = ba = x 0 x 1 x 2 x n–1
Figura 11.56 Condições de contornogerais em y 0.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 368/416
370 CAPÍTULO 11 Mapeamentos Conformes
similar, se o último intervalo for ( x n1, ), então Arg( z – b) – Arg( z – x n1) deve sersubstituído por Arg( z x n1).
Exemplo 2 Resolvendo um problema de Dirichlet
O mapeamento conforme f ( z) z 1/ z mapeia a região no plano metade superior efora do círculo | z| 1 para o plano metade superior v 0. Use esse mapeamento ea fórmula integral de Poisson para resolver o problema de Dirichlet apresentado naFigura 11.57(a).
Solução Utilizando os resultados do Exemplo 4 na Seção 11.2, podemos trans-ferir as condições de contorno para o plano w. Veja a Figura 11.57(b). Como U ( x ,0) éuma função degrau, utilizaremos a solução integrada (3) em vez da integral de Pois-son. A solução para o novo problema de Dirichlet é
e portanto
que pode ser simplificada para ❑
Fórmula para o disco unitário Uma fórmula integral de Poisson pode tambémser desenvolvida para resolver o problema geral de Dirichlet para o disco unitário:
Fórmula integral de Poisson parao disco unitário
Seja u(ei) limitada e contínua por partes para . Então, a solução para o
problema de Dirichlet correspondente no disco unitário aberto | z| 1 é dada por
(5)
TEOREMA 11.6
Interpretação geométrica A Figura 11.58 mostra uma membrana fina (tal comouma película de sabão) que foi esticada sobre de uma armação definida por u u(e
i).O deslocamento u na direção perpendicular ao plano z satisfaz a equação de onda
bidimensional
e assim, em equilíbrio, a função deslocamento u u( x , y) é harmônica. A fórmula (5)fornece uma solução explícita para o deslocamento u e tem a vantagem da integral sersobre o intervalo finito [ , ]. Quando a integral não puder ser calculada, os proce-dimentos de integração numérica padrão podem ser aplicados para estimar u( x , y) emum ponto fixo z x iy com | z| 1.
Exemplo 3 Deslocamento de uma membrana
Uma armação para uma membrana é definida por u(ei) || para . Esti-me o deslocamento de equilíbrio da membrana em (0,5, 0), (0,0) e (0,5, 0).
Solução Utilizando (5), temos Quando ( x , y) (0,0), obtemos
x
y
(a)
–2 2
u
v
(b)
–2 2
u = 1
U = 1 U = 0 U = 1
u = 0
u = 1
Figura 11.57 Imagem do problema deDirichlet no Exemplo 2.
armação
u = u( x , y)
| z| < 1
Figura 11.58 Membrana fina em umaarmação.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 369/416
11.5 Fórmulas Integrais de Poisson 371
Para os outros dois valores de ( x , y), a integral não é elementar e tem que ser estimadautilizando-se um procedimento de integração numérica. Usando a regra de Simpson,obtemos (para quatro casas decimais) u(0,5, 0) 2,2269 e u(0,5, 0) 0,9147.
Forma em série de Fourier A fórmula integral de Poisson para o disco unitário é
de fato uma forma compacta de se escrever a solução em série de Fourier para a equa-ção de Laplace que desenvolvemos no Capítulo 5. Para ver isso, primeiro observe queun(r , ) r
n cos n e vn(r , ) r n sen n são harmônicas, pois essas funções são as
partes real e imaginária de zn. Se a0, an e bn forem escolhidas como sendo os coefi-
cientes de Fourier de u(ei) para , então, pelo princípio da superposição,
(6)
é harmônica e Como a
solução do problema de Dirichlet é também dada por (5), temos
Exemplo 4 Resolvendo um problema de Dirichlet
Determine a solução do problema de Dirichlet no disco unitário que satisfaz a condi-ção de contorno u(ei) sen 4. Esboce a curva de nível u 0.
Solução Em vez de trabalharmos com a integral de Poisson (5), utilizaremos asolução em série de Fourier (6), que reduz para u(r , ) r
4 sen 4. Portanto, u 0 see somente se sen 4 0. Isso implica u 0 nas retas x 0, y 0 e y x .
Se mudarmos para coordenadas retangulares, u( x , y) 4 xy( x 2 – y2). A superfícieu( x , y) 4 xy( x 2 – y2), a estrutura u(ei) sen 4 e o sistema de curvas de nível foramesboçados utilizando-se programas gráficos, estando indicados na Figura 11.59. ❑
curvas de nível
plano z
estrutura u(ei) = sen 4
Figura 11.59 Curvas de nível no Exem-plo 4.
EXERCÍCIOS 11.5 As respostas de problemas ímpares selecionados estão na página 408.
Nos Problemas 1-4, utilize a solução integrada (3) da fórmulaintegral de Poisson para resolver o problema de Dirichlet dadono plano metade superior.
1. y
x –1 1
u = 0u = 0 u = 1u = –1
Figura 11.60 Problema de Dirichlet no Problema 1.
2. y
x –2 1
u = 0 u = 0u = 1u = 5
Figura 11.61 Problema de Dirichlet no Problema 2.
3. y
x –2 1–1
u = 0 u = 0 u = 5u = –1 u = 1
Figura 11.62 Problema de Dirichlet no Problema 3.
4. y
x –2 1–1
u = 1 u = 1 u = 1 u = 0u = –1
Figura 11.63 Problema de Dirichlet no Problema 4.
5. Determine a solução do problema de Dirichlet no plano me-tade superior que satisfaz a condição de contorno u( x ,0)
x 2 quando 0 x 1, e u( x ,0) 0 caso contrário.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 370/416
372 CAPÍTULO 11 Mapeamentos Conformes
6. Determine a solução do problema de Dirichlet no plano meta-de superior que satisfaz a condição de contorno u( x ,0) cos x .[Sugestão: Adote s t – x e use as fórmulas da Seção 10.6
Nos Problemas 7-10, resolva o problema de Dirichlet indicadoobtendo um mapeamento conforme a partir da região dada noplano metade superior v 0.
7.
x
R
y
i
1 u = 0
u = 5
u = 0
u = 1
Figura 11.64 Problema deDirichlet no Problema 7.
8.
x
R
y
3
u = 1 u = 1
u = 0
Figura 11.65 Problema
de Dirichlet no Problema 8.
9. y
R
x
u = 0 u = 1
u = 0 u = 1
Figura 11.66 Problema de Dirichlet no Problema 9.
10.
y
R
x 1
u = 1
u = 1
u = 0
u = 0
Figura 11.67 Problema de Dirichlet no Problema 10.
11. Uma armação para uma membrana é definida por u(ei)
2 /
2 para . Utilize a fórmula integral de Pois-
son para o disco unitário para estimar o deslocamento deequilíbrio da membrana em (0,5, 0), (0,0) e (0,5, 0).
12. Uma armação para uma membrana é definida por u(ei) e
|| para . Utilize a fórmula integral de Pois-son para o disco unitário para estimar o deslocamento deequilíbrio da membrana em (0,5, 0), (0,0) e (0,5, 0).
13. Utilize a fórmula integral de Poisson do disco unitário paramostrar que u(0,0) é o valor médio da função u u(ei) nocontorno | z| 1.
Nos Problemas 14 e 15, resolva o problema de Dirichlet indica-do para o disco unitário utilizando a forma em série de Fourierda fórmula integral de Poisson e esboce o sistema de curvas denível.
14. 15.
11.6 Aplicações
Introdução Nas Seções 11.2, 11.3 e 11.5, demonstramos como a equação dife-rencial parcial de Laplace pode ser resolvida por meio de métodos de mapeamentoconforme, e interpretamos uma solução u u( x , y) do problema de Dirichlet comoa temperatura de regime permanente no ponto ( x , y) ou o deslocamento de equilíbriode uma membrana no ponto ( x , y). A equação de Laplace é uma equação diferencialparcial fundamental que surge em uma variedade de contextos. Nessa seção, estabele-ceremos uma relação geral entre campos vetoriais e funções analíticas, e utilizaremosnossas técnicas de mapeamento conforme para resolver problemas envolvendo cam-pos de força eletrostáticos e fluxos bidimensionais de fluidos.
Campos vetoriais Um campo vetorial F( x , y) P( x , y)i Q( x , y) j em um domínio
D pode também ser escrito na forma complexa
e pensado como uma função complexa. Recorde do Capítulo 3 do Volume 2 que ·F P / x Q / y e F (Q / x P / y)k. Se exigirmos que ambos ·F 0 eF = 0, então
(1)
Esse conjunto de equações relembra o critério de Cauchy-Riemann para analiticidadeapresentado no Teorema 8.3 e sugere que examinemos a função complexa g( z) P( x ,
y) – iQ( x , y).

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 371/416
11.6 Aplicações 373
Campos vetoriais e analiticidade
(i) Suponha que F( x , y) P( x , y) iQ( x , y) seja um campo vetorial em um do-mínio D e P( x , y) e Q( x , y) sejam contínuas e tenham derivadas parciais pri-meira contínuas em D. Se ·F 0 e F 0, então a função complexa
é analítica em D.
(ii) De modo oposto, se g( z) for analítica em D, então define umcampo vetorial em D para o qual ·F 0 e F 0.
TEOREMA 11.7
Demonstração Se u( x , y) e v( x , y) representam as partes real e imaginária de g( z),então u P e v Q. Portanto, as equações em (1) são equivalentes às equações
isto é,
(2)
As equações em (2) são as equações de Cauchy-Riemann para analiticidade. ❑
Exemplo 1 Um campo vetorial resulta em uma função analítica
O campo vetorial definido por F( x , y) (kq /| z – z0|2)( z – z0) pode ser interpretado
como o campo elétrico produzido por um fio perpendicular ao plano z em z z0,e que transporta uma carga de q coulombs por unidade de comprimento. A funçãocomplexa correspondente é
Como g( z) é analítica para z z0, ·F 0 e F 0. ❑
Exemplo 2 Uma função analítica resulta em um campo vetorial
A função complexa g( z) Az, A 0, é analítica no primeiro quadrante, e assim re-sulta no campo vetorial , que satisfaz ·F 0 e F 0. Mostraremos ao final dessa seção que V( x , y) pode ser interpretado como a veloci-dade de um fluido que se move em torno da extremidade produzida pelo contorno doprimeiro quadrante. ❑
A interpretação física das condições ·F 0 e F 0 dependem do conjunto.Se F( x , y) representar a força em um campo elétrico que atua em uma carga de testeunitária posicionada em ( x , y), então, pelo Teorema 3.9 do Volume 2, F 0 se esomente se o campo for conservativo. O trabalho feito para transportar uma carga deteste entre dois pontos em D tem que ser independente do caminho.
Se C for um contorno fechado simples localizado em D, a lei de Gauss afirmaque a integral de linha Ds é proporcional à carga total encerrada pela curvaC . Se D for simplesmente conexa e toda a carga elétrica estiver distribuída no contor-no de D, então para qualquer contorno fechado simples em D. Peloteorema da divergência na forma (1) da Seção 3.16 do Volume 2,
(3)

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 372/416
374 CAPÍTULO 11 Mapeamentos Conformes
onde R é a região encerrada por C , e podemos concluir que ·F 0 em D. De modooposto, se ·F 0 em D, a integral dupla é zero e portanto o domínio D não contémcarga.
Funções potenciais Suponha que F( x , y) seja um campo vetorial em um domínio
D simplesmente conexo com ambos ·F 0 e F 0. Pelo Teorema 9.8, a funçãoanalítica g( z) P( x , y) – iQ( x , y) tem uma antiderivada
(4)
em D, que é chamada de potencial complexo para o campo vetorial F. Note que
e assim
(5)
Portanto, F e, como na Seção 3.9 do Volume 2, a função harmônica é de-nominada função potencial (real) de F.* Quando o potencial for especificado nocontorno de uma região R, podemos usar técnicas de mapeamento conforme para re-solver o problema de Dirichlet resultante. As linhas equipotenciais( x , y) c podemser esboçadas e o campo vetorial F pode ser determinado utilizando-se (5).
Exemplo 3 Potencial complexo
O potencial no plano metade x 0 satisfaz as condições de contorno(0, y) 0 e( x ,0) 1 para x 1. Veja a Figura 11.68(a). Determine um potencial complexo, aslinhas equipotenciais, e o campo de força F.
Solução Vimos no Exemplo 3 da Seção 11.2 que a função analítica z sen w mapeia a faixa 0 u /2 do plano w na região R em questão. Logo, f ( z) sen1
z
mapeia R na faixa, e a Figura 11.68(b) apresenta as condições de contorno transfe-ridas. O problema de Dirichlet simplificado tem a solução U (u,v) (2/ )u, e assim
( x , y) U (sen1
z) Re((2/ )sen1
z) é a função potencial em D, e G( z) (2/ )u sen1 z é um potencial complexo para o campo de força F.Note que as linhas equipotenciais c são as imagens das linhas equipotenciais
U c no plano w sob o mapeamento inverso z sen w. No Exemplo 3 da Seção11.2, mostramos que a reta vertical u a é mapeada em um ramo da hipérbole
Como a linha equipotencial U c, 0 c 1, é a reta vertical u /2c, decorre quea linha equipotencial c é o ramo direito da hipérbole
Como e (d / dz) sen1 z 1/(1 – z2)1/2, o campo de força é dado por
❑
Fluxo de fluido em regime permanente O vetor V( x , y) P( x , y) iQ( x , y) tam-bém pode ser interpretado como o vetor velocidade de um fluxo bidimensional defluido para um ponto ( x , y) em um domínio D. A velocidade em todos os pontos no
* Se F for um campo elétrico, a função potencial elétrico é definida como sendo e F
.
x
y
1
= 0
= 0
= 1
0,25 0,5
0,75
(a)
0,750,25 0,5
v
u
(b)
2
U = 0
U = 0 U = 1
Figura 11.68 Imagens das condiçõesde contorno no Exemplo 3.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 373/416
11.6 Aplicações 375
domínio é portanto independente do tempo, e todo movimento ocorre em planos quesão paralelos ao plano z.
A interpretação física da condição ·V 0 e V 0 foi discutida na Seção3.7 do Volume 2. Recorde que se V 0 em D, o fluxo é denominado irrotacio-
nal. Se uma pequena roda de pá circular for colocada no fluido, a velocidade angular
líquida no contorno da roda será zero, e assim a roda não girará. Se ·V 0 em D,o fluxo é denominado incompressível . Em um domínio simplesmente conexo D, umfluxo incompressível tem a propriedade especial de que a quantidade de fluido nointerior de qualquer contorno simples fechado C independe do tempo. A taxa na qualo fluido entra no interior de C é igual à taxa na qual ele sai, e consequentemente nãopode haver fonte ou escoadouro de fluido em pontos de D.
Se ·V 0 e V 0, V tem um potencial de velocidade complexo
que satisfaz . Nesse conjunto, especial importância é dada às curvas denível ( x , y) c. Se z(t ) x (t ) iy(t ) for o caminho de uma partícula (tal como umarolha pequena) que foi colocada em um fluido, então
(6)
Logo, dy / dx Q( x , y)/ P( x , y) ou –Q( x , y)dx P( x , y)dy 0. Essa equação diferencialé exata, pois ·V 0 implica (Q)/ y P / x . Pelas equações de Cauchy-Rie-mann, / x / y Q e / y / x P, e assim todas as soluções de(6) satisfazem ( x , y) c. A função ( x , y) é portanto chamada função de fluxo, e ascurvas de nível ( x , y) c são linhas de fluxo.
Exemplo 4 Fluxo uniforme
O fluxo uniforme no plano metade superior é definido por V( x , y) A(1,0), onde A é
uma constante positiva fixa. Note que |V| A, e assim uma partícula no fluído se movea uma velocidade constante. Um potencial complexo para o campo vetorial é G( z) Az Ax iAy, e portanto as linhas de fluxo são retas horizontais Ay c. Veja a Figura11.69(a). Note que o contorno y 0 da região é ele próprio uma linha de fluxo.
Exemplo 5 Fluxo em torno de uma extremidade
A função analítica G( z) z2 gera o campo vetorial V( x , y) (2 x , 2 y) noprimeiro quadrante. Como z
2 x 2 – y
2 i(2 xy), a função de fluxo é ( x , y) 2 xy eas linhas de fluxo são as hipérboles 2 xy c. Esse fluxo, chamado fluxo em torno deuma extremidade, está destacado na Figura 11.69(b). Como no Exemplo 4, as retas decontorno x 0 e y 0 no primeiro quadrante são elas próprias linhas de fluxo.
Construindo fluxos especiais O processo de construção de um fluxo irrotacionale incompressível que permanece dentro de uma dada região R é denominado demar-
cação de fluxo. Como as linhas de fluxo são descritas por ( x , y) c, duas linhas defluxo distintas não se interceptam. Portanto, se o contorno for uma linha de fluxo,uma partícula que inicie o movimento dentro de R não pode sair de R. Esse é o con-teúdo do próximo teorema:
Demarcação de fluxoSuponha que G( z) ( x , y) i ( x , y) seja analítica em uma região R, e que ( x , y)seja constante no contorno de R. Então, define um fluxo de fluidoirrotacional e incompressível em R. Além disso, se uma partícula for colocada nointerior de R, seu caminho z z(t ) permanece em R.
TEOREMA 11.8
(a)
x
y
V V
x
y
V
V
(b)
Figura 11.69 (a) Fluxo uniforme noExemplo 4; (b) fluxo em torno de umaextremidade no Exemplo 5.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 374/416
376 CAPÍTULO 11 Mapeamentos Conformes
Exemplo 6 Fluxo em torno de um cilindro
A função analítica G( z) z 1/ z mapeia a região R no plano metade superior efora do círculo | z| 1 no plano metade superior v 0. O contorno de R é mapeadono eixo u, e assim v ( x , y) y – y /( x
2 y2) é zero no contorno de R. A Figura
11.70 mostra as linhas de fluxo do fluxo resultante. O campo velocidade é dado pore assim
Decorre que V (1,0) para valores grandes de r , e portanto o fluxo é aproximada-mente uniforme a longas distâncias do círculo | z| 1. O fluxo resultante na região
R é chamado fluxo em torno de um cilindro. A imagem espelhada do fluxo pode seradicionada para resultar no fluxo em torno de um cilindro completo. ❑
Se R for uma região poligonal, podemos aplicar a fórmula de Schwarz-Christo-ffel para obter um mapeamento conforme z f (w) a partir do plano metade superior
R¿ em R. A função inversa G( z) f 1( z) mapeia o contorno de R no eixo u. Conse-
quentemente, se G( z)
( x , y)
i ( x , y), então ( x , y)
0 no contorno de R. Note queas linhas de fluxo ( x , y) c no plano z são as imagens das retas horizontais v c noplano w sob z f (w).
Exemplo 7 Linhas de fluxo definidas parametricamente
A função analítica f (w) w Ln w 1 mapeia o plano metade superior v 0 parao plano metade superior y 0 com a reta horizontal y , x 0, retirada. Veja oExemplo 4 na Seção 11.4. Se G( z) f 1( z) ( x , y) i ( x , y), então G( z) mapeia R no plano metade superior e mapeia o contorno de R no eixo u. Portanto, ( x , y) 0no contorno de R.
Não é possível obter uma fórmula explícita para a função de fluxo ( x , y). Aslinhas de fluxo, entretanto, são as imagens das retas horizontais v c sob z f (w).Se escrevermos w t ic, c 0, então as linhas de fluxo podem ser representadas
na forma paramétrica
isto é,
Utilizou-se um programa gráfico para gerar as linhas de fluxo na Figura 11.71. ❑
Uma função de fluxo ( x , y) é harmônica, porém, ao contrário de uma soluçãopara um problema de Dirichlet, não exigimos que ( x , y) seja limitada (veja os Exem-plos 4-6) ou assuma um conjunto fixo de constantes no contorno. Portanto, podemexistir muitas funções de fluxo diferentes para uma dada região que satisfazem oTeorema 11.8. Esse fato será ilustrado no exemplo final.
Exemplo 8 Linhas de fluxo definidas parametricamente
A função analítica f (w) w ew 1 mapeia a faixa horizontal 0 v na região R apresentada na Figura 11.71. Logo, G( z) f 1( z) ( x , y) i ( x , y) mapeia R devolta para a faixa e, a partir de M-1 nos mapeamentos conformes do Apêndice I, ma-peia a reta de contorno y 0 no eixo u e mapeia a reta de contorno y , x 0, nareta horizontal v . Portanto, ( x , y) é constante no contorno de R.
y
x
V
–1 1
Figura 11.70 Fluxo em torno de umcilindro no Exemplo 6.
x
y
y =
Figura 11.71 Fluxo no Exemplo 7.
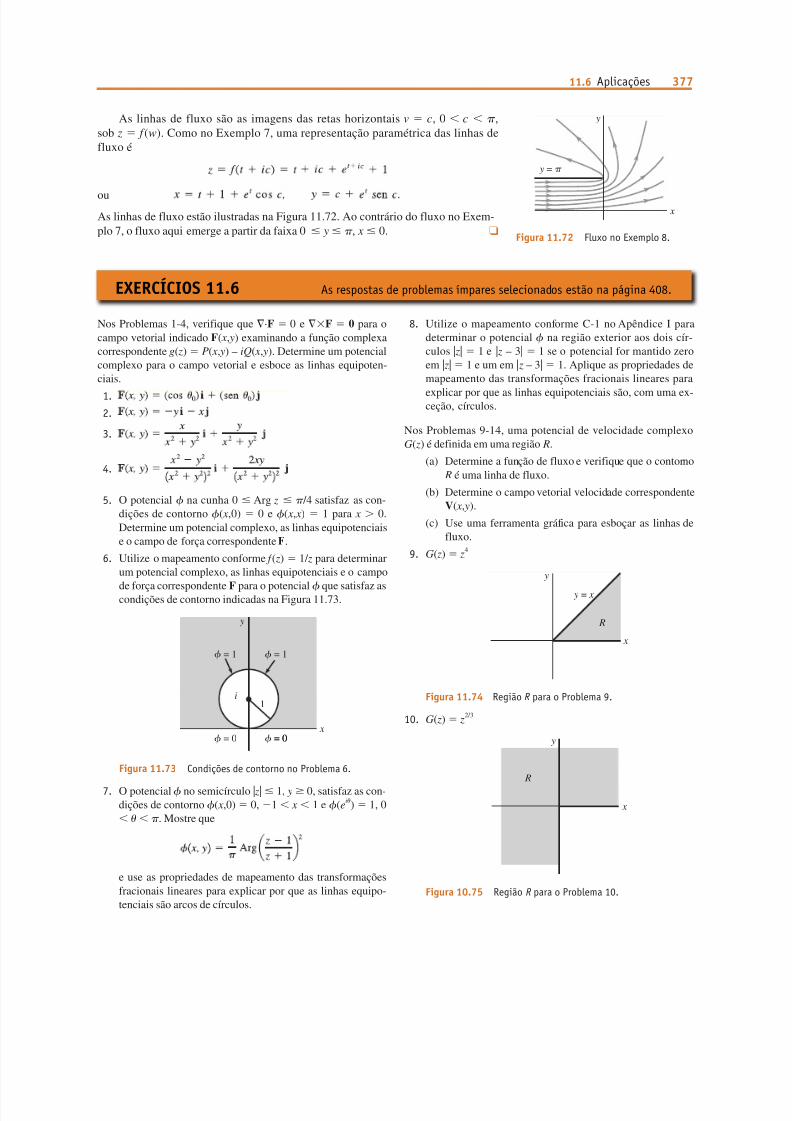
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 375/416
11.6 Aplicações 377
As linhas de fluxo são as imagens das retas horizontais v c, 0 c ,sob z f (w). Como no Exemplo 7, uma representação paramétrica das linhas defluxo é
ou
As linhas de fluxo estão ilustradas na Figura 11.72. Ao contrário do fluxo no Exem-plo 7, o fluxo aqui emerge a partir da faixa 0 y , x 0. ❑
x
y
y =
Figura 11.72 Fluxo no Exemplo 8.
EXERCÍCIOS 11.6 As respostas de problemas ímpares selecionados estão na página 408.
Nos Problemas 1-4, verifique que ·F 0 e F 0 para ocampo vetorial indicado F( x , y) examinando a função complexacorrespondente g( z) P( x , y) – iQ( x , y). Determine um potencialcomplexo para o campo vetorial e esboce as linhas equipoten-
ciais.
1.
2.
3.
4.
5. O potencial na cunha 0 Arg z /4 satisfaz as con-dições de contorno ( x ,0) 0 e ( x , x ) 1 para x 0.Determine um potencial complexo, as linhas equipotenciaise o campo de força correspondente F.
6. Utilize o mapeamento conforme f ( z)
1/ z para determinarum potencial complexo, as linhas equipotenciais e o campode força correspondente F para o potencial que satisfaz ascondições de contorno indicadas na Figura 11.73.
x
y
= 1 = 1
= 0 = 0 = 0
1i
Figura 11.73 Condições de contorno no Problema 6.
7. O potencial no semicírculo | z| 1, y 0, satisfaz as con-dições de contorno ( x ,0) 0, 1 x 1 e (ei) 1, 0 . Mostre que
e use as propriedades de mapeamento das transformaçõesfracionais lineares para explicar por que as linhas equipo-tenciais são arcos de círculos.
8. Utilize o mapeamento conforme C-1 no Apêndice I paradeterminar o potencial na região exterior aos dois cír-culos | z| 1 e | z – 3| 1 se o potencial for mantido zeroem | z| 1 e um em | z – 3| 1. Aplique as propriedades de
mapeamento das transformações fracionais lineares paraexplicar por que as linhas equipotenciais são, com uma ex-ceção, círculos.
Nos Problemas 9-14, uma potencial de velocidade complexoG( z) é definida em uma região R.
(a) Determine a função de fluxo e verifique que o contorno R é uma linha de fluxo.
(b) Determine o campo vetorial velocidade correspondenteV( x , y).
(c) Use uma ferramenta gráfica para esboçar as linhas defluxo.
9. G( z) z4
y
R
x
y = x
Figura 11.74 Região R para o Problema 9.
10. G( z) z2/3
y
R
x
Figura 10.75 Região R para o Problema 10.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 376/416
378 CAPÍTULO 11 Mapeamentos Conformes
11. G( z) sen z
y
22–
R
x
Figura 11.76 Região R para o Problema 11.
12. G( z) i sen1 z
R
x
y
1–1
Figura 11.77 Região R para o Problema 12.
13. G( z) z2 1/ z
2
y
Ri
x 1
Figura 11.78 Região R para o Problema 13.
14. G( z) e z
x
y
R
i
Figura 11.79 Região R para o Problema 14.
Nos Problemas 15-18, um mapeamento conforme z f (w) a par-tir do plano metade superior v 0 para uma região R no plano z
é indicado e o fluxo em R com potencial complexo G( z) f 1( z)é construído.
(a) Verifique que o contorno de R é uma linha de fluxo parao fluxo.
(b) Determine uma representação paramétrica para as li-nhas de fluxo do fluxo.
(c) Utilize uma ferramenta gráfica para esboçar as linhas defluxo do fluxo.
15. M-9 no Apêndice I
16. M-4 no Apêndice I; use a 1
17. M-2 no Apêndice I; use a 1
18. M-5 no Apêndice I
19. Um ponto de estagnação em um fluxo é um ponto no qualV 0. Determine todos os pontos de estagnação para osfluxos nos Exemplos 5 e 6.
20. Para quaisquer dois números reais k e x 1, a função G( z) k Ln( z – x 1) é analítica no plano metade superior e, portanto,é um potencial complexo para um fluxo. O número real x 1 é chamado escoadouro quando k 0 e fonte para o fluxo
quando k 0.
(a) Mostre que as linhas de fluxo são raios emanando a par-tir de x 1.
(b) Mostre que V (k /| z – x 1|2)( z – x 1) e conclua que o flu-
xo é direcionado a x 1 precisamente quando k 0.
21. Se f ( z) for um mapeamento conforme a partir de um domí-nio D no plano metade superior, um fluxo com uma fonteem um ponto 0 no contorno de D é definido pelo potencialcomplexo G( z) k Ln ( f ( z) – f ( 0)), onde k 0. Determineas linhas de fluxo para um fluxo no primeiro quadrante comuma fonte em 0 1 e k 1.
22. (a) Construa um fluxo na faixa horizontal 0 y com
um escoadouro no ponto de contorno 0
0. [Sugestão:Veja o Problema 21.]
(b) Utilize uma ferramenta gráfica para esboçar as linhas defluxo do fluxo.
23. O potencial complexo G( z) k Ln ( z – 1) – k Ln( z 1) comk 0 gera um fluxo no plano metade superior com umaúnica fonte em z 1 e um único escoadouro em z 1.Mostre que as linhas de fluxo correspondem à família decírculos x
2 ( y – c)2 1 c2. Veja a Figura 11.80.
–1 1
x
Figura 11.80 Linhas de fluxo no Problema 23.
24. O fluxo com vetor velocidade é denomina-do vórtice em z 0, e a natureza geométrica das linhas defluxo dependem da escolha de a e b.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 377/416
Exercícios de Revisão 379
(a) Mostre que se z x (t ) iy(t ) for o caminho de umapartícula, então
(b) Mude para coordenadas polares para estabelecer quedr / dt a / r e d / dt b / r
2, e conclua que r ce
a / b para
b 0. [Sugestão: Veja (2) da Seção 2.1].
(c) Conclua que as espirais logarítmicas do item (b) girampara dentro se e somente se a 0 e as curvas são atra-
vessadas no sentido horário se e somente se b 0. Vejaa Figura 11.81.
y
x
Figura 11.81 Espiral logarítmica no Problema 24.
Responda os Problemas 1-10, sem consultar o texto. Preencha osespaços ou responda verdadeiro/falso.
1. Sob o mapeamento complexo f ( z) z2, a curva xy 2 émapeada na reta _____.
2. O mapeamento complexo f ( z) iz é uma rotação de_____ graus.
3. A imagem do plano metade superior y 0 sob o mapea-mento complexo f ( z) z2/3 é _____.
4. A função analítica f ( z) cosh z é conforme exceto em z _____.
5. Se w f ( z) é uma função analítica que mapeia um domí-nio D no plano metade superior v 0, então a função u Arg( f ( z)) é harmônica em D. _____
6. A imagem do círculo | z – 1| 1 sob o mapeamento comple-xo T ( z) ( z – 1)/( z – 2) é um círculo ou uma reta? _____
7. A transformação fracional linear ma-
peia o triplo z1, z2 e z3 para _____.
8. Se f ¿( z) z1/2( z 1)1/2( z – 1)1/2, então f ( z) mapeia oplano metade superior y 0 no interior de um retângulo._____
9. Se F( x , y) P( x , y)i Q( x , y) j for um campo vetorial em umdomínio D com ·F 0 e F 0, então a função com-plexa g( z) P( x , y) iQ( x , y) é analítica em D. _____
10. Se G( z) ( x , y) i ( x ,0) for analítica em uma região R e
então as linhas de fluxo do fluxo corres-pondente são descritas por ( x , y) c. _____
11. Determine a imagem do primeiro quadrante sob o mapea-mento complexo w Ln z loge| z| i Arg z. Quais sãoas imagens dos raios 0 que se localizam no primeiroquadrante?
Nos Problemas 12 e 13, utilize os mapeamentos conformes doApêndice I para obter um mapeamento conforme a partir da re-gião dada R no plano z para a região-alvo R¿ no plano w, e deter-mine a imagem da curva de contorno indicada.
12. y
A
B
R
x
v
u
i R¿
Figura 11.82 Regiões R e R¿ para o Problema 12.
13.
B
R
A
y
x 1
v
u1
R¿
Figura 11.83 Regiões R e R¿ para o Problema 13.
Nos Problemas 14 e 15, use um mapeamento conforme apropria-do para resolver o problema de Dirichlet indicado.
14. y
x
R
1
ei /4
u = 0
u = 0
u = 1
u = 1
Figura 11.84 Problema de Dirichlet no Problema 14.
CAPÍTULO 11 EXERCÍCIOS DE REVISÃO As respostas de problemas ímpares selecionados estão na página 409.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 378/416
380 CAPÍTULO 11 Mapeamentos Conformes
15.
x
y
i
u = 1 u = 12i
u = 0 u = 0
R
Figura 11.85 Problema de Dirichlet no Problema 15.
16. Determine o mapeamento conforme C-4 do Apêndice Iconstruindo a transformação fracional linear que mapeia 1, 1, em i, i, 1.
17. (a) Aproxime a região R¿ em M-9 do Apêndice I pela re-
gião poligonal mostrada na Figura 11.86. Exija que f (1) u1, f (0) i /2 e f (1) u1 i.
(b) Mostre que quando u1 → ,
(c) Se exigirmos que Im( f (t )) 0 para t 1, Im( f (t )) para t 1 e f (0) i /2, conclua que
v
u
22
u1 + i
–u1 +
u1
i i
i
Figura 11.86 Imagem do plano metade superior no Proble-ma 17.
18. (a) Determine a solução u( x , y) do problema de Dirichlet noplano metade superior y 0 que satisfaz a condição decontorno u( x ,0) sen x . [Sugestão: Veja o Problema 6nos Exercícios 11.5.]
(b) Determine a solução u( x , y) do problema de Dirichlet nodisco unitário | z| 1 que satisfaz a condição de contor-
no u(ei) sen .
19. Explique por que as linhas de fluxo na Figura 11.72 podemtambém ser interpretadas como as linhas equipotenciais dopotencial que satisfaz ( x ,0) 0 para x e( x , ) 1 para x 0.
20. Verifique que o contorno da região R definida por y2 4(1
– x ) é uma linha de fluxo para o fluxo do fluido com po-tencial complexo G( z) i( z1/2 – 1). Esboce as linhas defluxo do fluido.

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 379/416
I
A P Ê N D I C E
Mapeamentos Conformes
Mapeamentos elementares
y
x u
v
w = z + z0
z0
E-1
z
v
u x
y
w = ei
E-2
y
x u
vE-3
w = z, > 0
y
B A x
C
0
v
u
C ¿0
w = z , > 0
B¿ A¿
E-4

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 380/416
382 APÊNDICE I Mapeamentos Conformes
A B
C
y
x D
v
u
w = e z z = Ln w
A¿ B¿ C ¿ D¿
E-5
i
u
v y
x
E B
A D
F C
–2 2 –1 1
w = sen z z = sen–1 w
A¿ B¿
C ¿
D¿ E ¿
F ¿
E-6
y
x A
C
B
w = 1 z
v
u
B¿
A¿
C ¿
E-7
x
y
C
D E a b
F
v
u
i
w = loge|z| + i Arg za > 1
ln a ln b
C ¿F ¿
D¿ E ¿
E-8
y
x
C D
A B
i
v
u–1 1w = cosh z
B¿ A¿C ¿ D¿
E-9
Mapeamentos em planos metade
x AC
B
D
y
1
i
v
u–1 1
w =1+ z1– z
B¿ D¿ A¿
H-1

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 381/416
APÊNDICE I Mapeamentos Conformes 383
x
AC B
D
y v
u–1 1
E F
ai
largura = a w = e z/a
A¿ B¿C ¿ D¿ E ¿ F ¿
H-2
y
A C x
B
–1 1
(a2 ( z + 1
z
au
v
w =
A¿ B¿ C ¿–a
H-3
z( a (u
v
1
A D
y
BC
a x
largura = a
w = cos
A¿
B¿C ¿
D¿ –1
H-4
( (1 + z1 – z
2
x
y
C
B
A
D 1
–1u
v
1
A¿ B¿ C ¿ D¿
w =
H-5
y
u
v
1
A E x
C
B D1 e + ee – e
w=–1
A¿ B¿ C ¿ D¿ E ¿
H-6
/z
/z
– /z
– /z
Mapeamentos em regiões circulares
y
A B
1 b c x
√ √
u
v
1
a=b + c
bc + 1 + (b2 –1)(c2 –1)
az – 1
z – aw =
r 0= bc – 1 –
c – b
(b2 –1)(c2 –1)
r 0
A¿
B¿
C-1
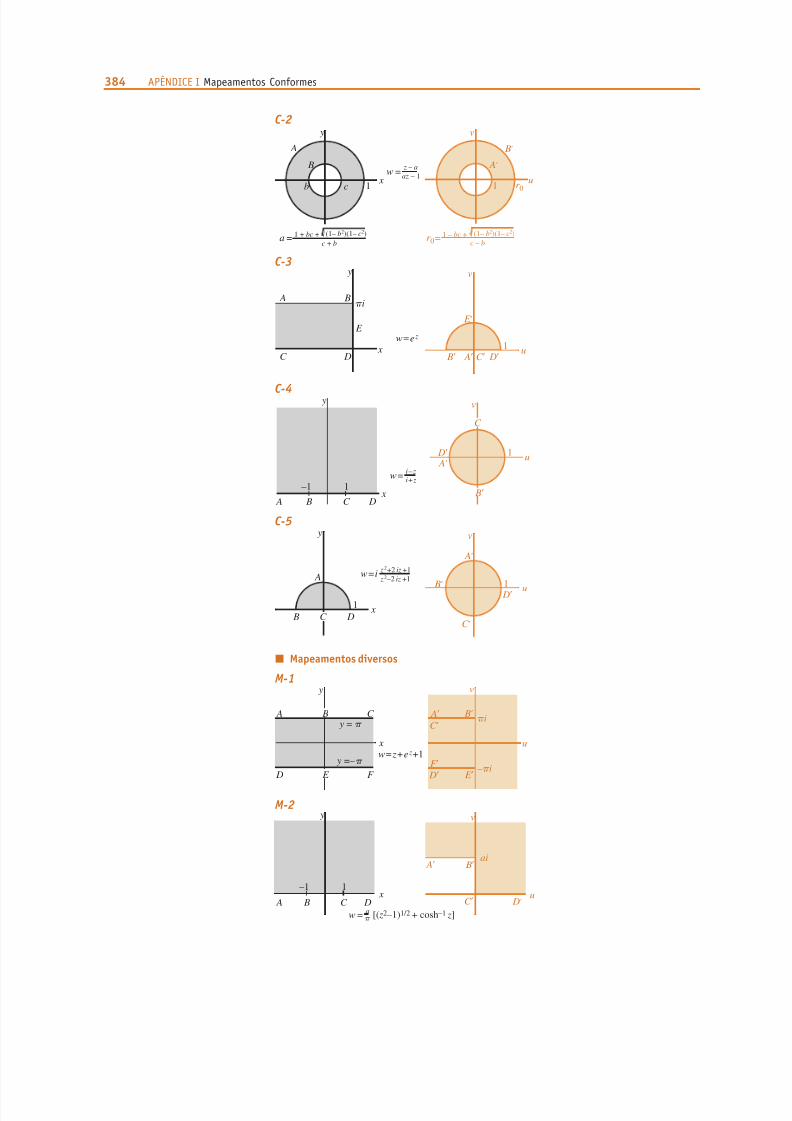
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 382/416
384 APÊNDICE I Mapeamentos Conformes
A
y
B
b c 1 x
√
v
u1
√
w = az – 1
z – a
c + ba = 1 + bc + (1– b2)(1– c2) r 0=
c – b1 – bc + (1– b2)(1– c2)
A¿
B¿
r 0
C-2
A B
y
C D
E
x
i
v
u1w=e z
A¿ C ¿ D¿
E ¿
B¿
C-3
x B A C D
1–1
y
u
v
1
i+ zi– z
w=
A¿
B¿
D¿
C
C-4
u
v
1
y
x 1
B
A
C D
z2–2 iz +1
z2+2 iz +1w= i
C ¿
B¿
D¿
A¿
C-5
Mapeamentos diversos
A B C
D E F
x
y v
u
i
– i
y =
y =– w= z+e z+1
D¿ E ¿
A¿
C ¿ B¿
F ¿
M-1
y
B A C D
–1 1 x
v
u
a
ai
[( z2–1)1/2 + cosh–1 z]w =
D¿C ¿
A¿ B¿
M-2

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 383/416
APÊNDICE I Mapeamentos Conformes 385
y
B A C D
–1 1 x
2a
v
ua D¿C ¿ A¿ B¿
[( z2–1)1/2 + sen–1(1/ z)]w=
–a
M-3
y
A C x
B
–1 1
D E
ai
u
v
D¿ E ¿
C ¿
A¿ B¿
w = a( z2–1)1/2
M-4
(w = 2 (+ Ln –1
+1
= ( z + 1)1/2
y
A C x
B
–1
D E
i
u
v
D¿ E ¿
C ¿
A¿
B¿
M-5
1+ i1– i (( + Ln
y
A C x
B
–1 1
D F E
u
v
1+1– ((
z – 1 z + 1
1/2= ( (
D¿
E ¿
C ¿
A¿
F ¿
B¿
w = i Ln
M-6
i
–
y
A C x
B
–1 1
D F E u
v
w = z + Ln z +1 D¿ E ¿C ¿
A¿
F ¿
B¿
M-7
i
y B A
x
C
D E
F G H
v
u1
y =
y = –
w =e z – 1
e z + 1
D¿
E ¿
G¿
A¿
F ¿ B¿C ¿
H ¿
M-8

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 384/416
386 APÊNDICE I Mapeamentos Conformes
u
v
i
i
–12
/2
D
y
A C x
B
–1 1
F E G[Ln( z +1) + Ln( z–1)]w=
D¿
E ¿
G¿
A¿
F ¿
B¿
C ¿
M-9
i
B E a
D
A
C
F
1 x
y
z –1
v
u
D¿ E ¿
A¿
F ¿
B¿ C ¿
v= a /(1 – a)
w = (1– i) z – i
0<a<1
M-10

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 385/416
Respostas dos ProblemasÍmpares Selecionados
Exercícios 1.1, página 30
1.
3.
5.
7.
9.
17. Sim; W (X1, X2) 2e8t 0 implica que X1 e X2 são line-
armente independentes em (, ).
19. Não; W (X1, X2, X3) 0 para qualquer t . Os vetores solução
são linearmente dependentes em (, ). Note que X3 2X1 X2.
Exercícios 1.2, página 42
1.
3.
5.
7.
9.
11.
13.
19.
21.
23.
25.
27.
R E S P O S T A S D O S P R O B L E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
1

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 386/416
388 Respostas dos Problemas Ímpares Selecionados
29.
31. Os autovetores que correspondem ao autovalor λ 1 2 demultiplicidade cinco são
33.
35.
37.
39.
41.
43.
45.
Exercícios 1.3, página 46
1.
3.
5.
7.
9.
11.
Como M é uma matriz diagonal com m1 e m2 não nulos,ela tem uma inversa.
(b)
(c)
Exercícios 1.4, página 53
1.
3.
5.
7.
9.
11.
13.
15.
17.
19.
21.
23.
R E S P O S T A S D O S P R O B L E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
1

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 387/416
Respostas dos Problemas Ímpares Selecionados 389
25.
27.
29.
31.
33.
35.
37.
Exercícios 1.5, página 58
1.
3.
5.
7.
9.
11.
13.
15.
17.
19.
21.
25.
Capítulo 1 – Exercícios de revisão, página 59
1.
7.
9.
11.
13.
15.
R E S P O S T A S D O S P R O B L E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
1

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 388/416
390 Respostas dos Problemas Ímpares Selecionados
Exercícios 2.1, página 67
1.
sen x , pontos críticos em
3.
5.
7.
9.
11.
13. arbitrário
15. (0,0), (0,1), (0,1), (1,0), (1,0)
17.
19.
21.
23.
a solução gira em formato espiral em direção à origem como aumento de t.
25.
(ou x cos t e y sen t ) é a solução que satisfaz
é a solução que
satisfaz X(0) (2,0). Essa solução gira em formato espiralem direção ao círculo r 1 com o aumento de t.
27. Não existem pontos críticos e portanto não existem soluçõesperiódicas.
29. Parece haver uma solução periódica englobando o ponto crí-tico (0,0).
Exercícios 2.2, página 76
1. (a) Se X(0) X0 se localiza na reta y 2 x , então X(t ) apro-xima-se de (0,0) ao longo dessa reta. Para todas as outrascondições, X(t ) aproxima-se de (0,0) a partir da direção de-terminada pela reta y x /2
3. (a) Todas as soluções são espirais instáveis que se tornamilimitadas com o aumento de t .
5. (a) Todas as soluções se aproximam de (0,0) a partir da di-reção especificada pela reta y x
7. (a) Se X(0) X0 se localiza na reta y 3x, então X(t ) seaproxima de (0,0) ao longo dessa reta. Para todas as ou-tras condições iniciais, X(t ) se torna ilimitada e y x serve como uma assíntota.
9. ponto de sela 11. ponto de sela
13. nó estável degenerado 15. espiral estável
17.
19. < 1 para um ponto de sela; 1 < < 3 para um pontoespiral instável
23. (a) (3,4)
(b) nó instável ou ponto de sela
(c) (0,0) é um ponto de sela
25. (a)
(b) ponto espiral instável
(c) (0,0) é um ponto espiral instável
Exercícios 2.3, página 84
1. 3. x 0 é instável; x n1 é assintóticamente estável
5. T T 0 é instável
7. x é instável; x é assintóticamente estável
9. P a / b é assintóticamente estável; P c é instável
11. é um ponto espiral estável
13. e são pontos de sela; é um pontoespiral estável.
15. (1,1) é um nó estável; (1,1) é um ponto de sela; (2,2) é umponto de sela; (2,2) é um ponto espiral instável
17. (0,1) é um ponto de sela; (0,0) não é classificado; (0,1) é
estável porém não somos capazes de classificá-lo. 19. (0,0) é um nó instável; (10,0) é um ponto de sela; (0,16) é
um ponto de sela; (4,12) é um nó estável.
21. 0 é um ponto de sela. Não é possível classificar /3e /3
23. Não é possível classificar x 0.
25. Não é possível classificar x 0, porém esão pontos de sela.
29. (a) (0,0) é um ponto espiral estável.
R E S P O S T A S D O S P R O B L E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
2

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 389/416
Respostas dos Problemas Ímpares Selecionados 391
33.
35.
37. Se > 0, (0,0) é o único ponto crítico, sendo estável. Se <
0, (0,0), ( ,0), e ( ,0), onde / , são pontos críticos.
(0,0) é estável, enquanto ( ,0) e (
,0) são pontos de sela. 39. (b) (5 /6, 0) é um ponto de sela.
(c) ( /6, 0) é um centro.
Exercícios 2.4, página 92
1.
5. (a) Primeiro mostre que
9. (a) O novo ponto crítico é (d / c – 2 / c, a / b 1 / b)
(b) sim
11. (0,0) é um nó instável, (0,100) é um nó estável, (50,0) é um
nó estável e (20,40) é um ponto de sela 17. (a) (0,0) é o único ponto crítico
Exercícios 2.5, página 101
1. O sistema não tem pontos críticos
3.
5.
7. O único ponto crítico (0,0) é um ponto de sela
9.
11.
13. Use ( x , y) 1/( xy) e mostre que
15. Se n (2 x ,2 y), mostre que V· n 2( x – y)2 2 y4.
17. Sim; o único ponto crítico (0,0) se localiza fora da regiãoinvariante e assim o Teorema 2.8(ii) seaplica.
19. V· n 2 y2(1 – x 2) 2 y2(1 – r
2) e ∂P / ∂ x ∂Q / ∂ y x 2 – 1
< 0. O único ponto crítico é (0,0), sendo um ponto espiralestável. Portanto, o Teorema 2.9(ii) se aplica
21. (a)
(b) um ponto espiral estável
Capítulo 2 – Exercícios de revisão, página 103
1. verdadeiro 3. um centro ou um ponto de sela
5. falso 7. falso 9. verdadeiro
11. a curva solução gira em formato es-
piral em direção à origem
13. centro; nó estável degenerado
15. nó estável para <2; ponto espiral estável para –2< < 0;
ponto espiral instável para 0 < < 2; nó instável para > 2
17. Mostre que
19.
21. (a) Sugestão: Use o critério negativo de Bendixson
(d) Em (b), (0,0) será um ponto espiral estável quandoEm (c), ( ,0), ( ,0) serão pontos
espirais estáveis quando
Exercícios 3.1, página 110
1.
9.
11.
21.
Exercícios 3.2, página 115
1.
3.
5.
7.
9.
11.
R E S P O S T A S D O S P R O B L E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
3

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 390/416
392 Respostas dos Problemas Ímpares Selecionados
13.
15.
19. Adote x /2
Exercícios 3.3, página 121
1. ímpar 3. nem par nem ímpar 5. par
7. ímpar 9. nem par nem ímpar
11.
13.
15.
17.
19.
21.
23.
25.
27.
29.
31.
33.
35.
37.
39.
41.
43.
45.
Exercícios 3.4, página 126
1.
3.
5.
Exercícios 3.5, página 133
1. y cos n x ; definida por cot ;
5.
7.
9.
11.
R E S P O S T A S D O S P R O B L E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
3

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 391/416
Respostas dos Problemas Ímpares Selecionados 393
Exercícios 3.6, página 140
1.
3.
5.
7.
9.
15.
21.
Capítulo 3 – Exercícios de revisão, página 141
1. verdadeiro 3. co-seno
5. falso 7. 5,5, 1, 0
13.
15.
17.
19.
21.
Exercícios 4.1, página 146 1. Os casos possíveis podem ser resumidos em uma forma
onde c1 e c2 são constantes.
3. 5.
7. não é separável
9.
11.
13.
15. Para λ 2 > 0, existem três possibilidades:
(i) Para 0 < 2 < 1,
(ii) Para 2 > 1,
(iii) Para 2 1,
Os resultados para o caso λ 2 são similares. Paraλ 0,
u (c1 x c2)(c3 cosh y c4 senh y)
17. elíptica 19. parabólica
21. hiperbólica 23. parabólica
25. hiperbólica
Exercícios 4.2, página 152
1.
3.
5.
7.
R E S P O S T A S D O S P R O B L E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
4

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 392/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 393/416
Respostas dos Problemas Ímpares Selecionados 395
15.
17. A temperatura máxima é u 1
Exercícios 4.6, página 170
1.
3.
5.
7.
9.
11.
13.
15.
17.
Exercícios 4.7, página 175
1. onde n são
as raízes positivas consecutivas de cotg / h
3.
e n são
as raízes positivas consecutivas de tg a / h
5.
7.
9.
Exercícios 4.8, página 179
1.
3.
5.
7. Utilize a b c 1 com f ( x , y) u0 no Problema 5 e f ( x , y) u0 no Problema 6. Some as duas soluções.
R E S P O S T A S D O S P R O B L E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
4

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 394/416
396 Respostas dos Problemas Ímpares Selecionados
Capítulo 4 – Exercícios de revisão, página 179
1. 3.
5.
7.
9.
11.
13.
Exercícios 5.1, página 185
1.
3.
5.
7.
9.
11.
13.
15.
Exercícios 5.2, página 191
1.
3.
5.
7.
9.
11.
Exercícios 5.3, página 195
1.
3.
5.
R E S P O S T A S D O S P R O B L E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
5

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 395/416
Respostas dos Problemas Ímpares Selecionados 397
7.
9.
11.
Capítulo 5 – Exercícios de revisão, página 196
1.
3.
5.
7.
11.
13.
15.
Exercícios 6.1, página 200 1. (a) Adote u2 na integral erf
7.
9. Use a propriedade
Exercícios 6.2, página 205
1.
3.
5.
7.
9.
11.
13.
15.
17.
19.
21.
23.
25.
Exercícios 6.3, página 212
1.
3.
R E S P O S T A S D O S P R O B L E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
6

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 396/416
398 Respostas dos Problemas Ímpares Selecionados
5.
7.
9.
11.
13.
15.
17.
19. Adote x 2 em (7). Utilize uma identidade trigonométricae substitua por x . No item b, faça a mudança de variável 2 x kt .
Exercícios 6.4, página 217
1.
3.
5.
7.
9.
11.
13.
15.
17.
19.
21.
Exercícios 6.5, página 228
3. 1 7.
Capítulo 6 – Exercícios de revisão, página 228
1.
3.
5.
7.
9.
11.
13.
R E S P O S T A S D O S P R O B L E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
7

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 397/416
Respostas dos Problemas Ímpares Selecionados 399
Exercícios 7.1, página 235
1.
3.
5. 7.
Exercícios 7.2, página 241 As tabelas dessa seção apresentam uma seleção do número total
de aproximações
1.
3.
Os erros absolutos são aproximadamente 2,2 102, 3,7 102, 1,3 102.
5.
Os erros absolutos são aproximadamente 1,8 102, 3,7 102, 1,3 102.
7. (a)
(b)
R E S P O S T A S D O S P R O B L E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
7

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 398/416
400 Respostas dos Problemas Ímpares Selecionados
(c)
(d)
9. (a)
(b)
(c)
R E S P O S T A S D O S P R O B L E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
7

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 399/416
Respostas dos Problemas Ímpares Selecionados 401
(d)
11. (a)
(b)
Exercícios 7.3, página 245
1. (a) (b)
(c)
R E S P O S T A S D O S P R O B L E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
7

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 400/416
402 Respostas dos Problemas Ímpares Selecionados
3. (a)
(b)
5.
Nota: Tempo expressado em milissegundos.
Capítulo 7 – Exercícios de revisão, página 245
1. u11 0,8929, u21 3,5714, u31 13,3929
3. (a)
(b)
(c) Sim; a tabela do item (b) é igual à tabela do item (a)
deslocada para baixo
Exercícios 8.1, página 251
1. 3. 1 5.
7. 9. 11.
13. 15. 17.
19. 21. 23. 25. 27.
29. 31.
33. 35.
37.
Exercícios 8.2, página 255
1.
3. 5.
7.
9.
11. 13.
15.
R E S P O S T A S D O S P R O B L
E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P Í T U L O
8

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 401/416
Respostas dos Problemas Ímpares Selecionados 403
17.
19.
21. 23. 25. 27.
29.
31.
33.
35.
37.
Exercícios 8.3, página 259 1. y
x
x = 5
3.
y
x
y = –3
5. y
x
7.
y
x
(4, –3)
9. É um domínio 11. É um domínio
y
x
y
x
13. É um domínio 15. Não é um domínio
y
x
y
x
17. Não é um domínio 19. É um domínio
y
x
y
x
21. É um domínio
y
x
23. A reta y – x 25. A hipérbole x 2 – y
2 1
Exercícios 8.4, página 264
1. v
u
16 – 4u =v2
3.
v
u
u ≤ 0
v = 0
5. v
u
v ≥ 0
u = 0
7.
9.
11.
13.
15.
17. 19.
21. 27.
29. 31.
33. 35. 37.
R E S P O S T A S D O S P R O B L E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
8

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 402/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 403/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 404/416

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 405/416
Respostas dos Problemas Ímpares Selecionados 407
15.
17.
19.
21. 23.
25. 27.
29. 31.
33.
Exercícios 11.1, página 349
1. a reta v u 3. a reta v 2
5. segmento de reta aberto de 0 a i
7. o raio 0 9. a reta u 1
11. o quarto quadrante
13. a cunha /4 Arg w /2
15. o círculo com centro w 4i e raio r 1 17. a faixa –1 u 0
19. a cunha 0 Arg w 3 /4
21.
23. 25.
27. 29.
Exercícios 11.2, página 355
1. conforme em todos os pontos exceto z 1
3. conforme em todos os pontos exceto z i 2n i
5. conforme em todos os pontos exteriores ao intervalo [1,1]no eixo x
7. A imagem é a região apresentada na Figura 20.11(b). Umsegmento horizontal z(t ) t ib, 0 < t < , é mapeado naparte inferior ou superior da elipse
de acordo se b > 0 ou b < 0.
9. A imagem da região é a cunha 0 Arg w /4. A imagemdo segmento de reta [ /2, /2] é a união dos segmentos
juntando ei /4 para 0 e 0 para 1.
11. utilizando H-4
u
1
v
A¿
B¿
R¿
13. utilizando H-5 e
v
ui /4
A¿
B¿ R¿
v = u
B¿ = e
15. utilizando H-6 e
v
u
i R¿
A¿
B¿
C ¿
17.
é o intervalo real
19.
21.
23.
25.
Exercícios 11.3, página 362
1. e a reta v
3. a reta e o círculo
o plano metade
5.
7.
9. 11.
R E S P O S T A S D O S P R O B L
E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
1 1

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 406/416
408 Respostas dos Problemas Ímpares Selecionados
13.
15.
17. As curvas de nível são as imagens
dos círculos |w| r , 1 < r < 2, sob a transformação fracionallinear T (w) (w 2)/(w – 1). Como os círculos não pas-sam pelo pólo em w 1, as imagens são círculos.
19. Construa a transformação fracional linear que transforma 1,i,i em 0, 1, 1
21. Simplifique
Exercícios 11.4, página 367
1. Primeiro quadrante 3. v
ai
u0
5. para alguma constante
A
7. para alguma constante A
9. Mostre que e conclua que f ( z) cosh1
z.
11. Mostre que f ¿( z) → A / z quando w1 → e conclua que f ( z) Ln z.
13. Mostre que f ¿( z) → A( z 1)1/2 z( z – 1)1/2 Az /( z2 – 1)1/2 quando u1 → 0.
Exercícios 11.5, página 371
1.
3.
5.
7.
9.
11.
13. Mostre que
15.
y
x
1,20,8
0,4
–1,2
–1 10
–0,4
–0,8
Exercícios 11.6, página 377
1. é analítica em toda parte e é umpotencial complexo. As linhas equipotenciais são as retas x cos0 ysen0 c.
y
–6 –20
24
6
x
0 =6
–4
3. g( z) 1/ z é analítica para z ≠ 0 e G( z) Ln z é analítica ex-ceto para z x 0. As linhas equipotenciais são os círculos
x 2 y2 e2c.
0,750,5 1
0
y
x
5. é um
potencial complexo. As linhas equipotenciais são os raios
7. As linhas equipotenciais são as imagens dos raios 0 sob as transformações sucessivas ζ w1/2 e z (ζ 1) (ζ
R E S P O S T A S D O S P R O B L
E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
1 1

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 407/416
Respostas dos Problemas Ímpares Selecionados 409
1). A transformação ζ w1/2 mapeia o raio 0 parao raio 0 /2 no plano ζ, e z (ζ 1) (ζ 1) mapeiaesse raio em um arco de um círculo que passa por z 1 e
z 1.
9. (a) ( x , y) 4 xy( x 2 – y
2) ou, em coordenadas polares, (r ,) r 4sen4. Note que 0 no contorno de R.
(b)
(c)
x
y
11. (a) ( x , y) cos x senh y e 0 no contorno de R.
(b)(c) y
x
2–
2
13. (a) ou, em coordenadas pola-
res, (r ,) (r 2 – 1/ r 2)sen 2. Note que 0 no con-torno de R.
(b)(c)
x
y
1
15. (a)
e assim
Portanto, Im(G( z)) ( x , y) 0 no contorno de R.
(b)
(c) y
x
y =
y = /2
17. (a)
Portanto, no contorno de R.
(b)
(c) y
x 0
19. z 0 no Exemplo 5; z 1, z 1 no Exemplo 6
21. As linhas de fluxo são os ramos da família de hipérboles x 2
Bxy – y2 –1 0 que se localiza no primeiro quadrante.
Cada membro da família passa por (1,0).
23. Sugestão: Para z no plano metade superior,
Capítulo 11 – Exercícios de revisão, página 379
1. v 4 3. a cunha 0 Arg w 2 /3
5. verdadeiro 7. 0, 1, 9. falso
11. A imagem do primeiro quadrante é a faixa 0 < v < /2. Raios 0 são mapeados em retas horizontais v 0 no planow.
R E S P O S T A S D O S P R O B L
E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
1 1

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 408/416
410 Respostas dos Problemas Ímpares Selecionados
13.
v
u1
A¿
B′
R¿
15.
17. (a) Note que 1 → 0, 2 → 2 e 3 → 0 quando u1 → .
(b) Sugestão: Escreva
19. G( z) f 1( z) mapeia R na faixa 0 v , e U (u,v) v / é a solução para o problema de contorno transferido.Portanto, ( x , y) (1/ ) Im(G( z)) (1/ ) ( x , y), e assimas linhas equipotenciais ( x , y) c são as linhas de fluxo ( x , y) c .
R E S P O S T A S D O S P R O B L
E M A S Í M P A R E S S E L E C I O N A D O S ,
C A P
Í T U L O
1 1

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 409/416
Índice

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 410/416
412 Índice
A
Aerofólio de Joukowski, 350Amostragem de uma função, 219Amplitude, variante no tempo, 189Análise qualitativa de sistemas de equações diferenciais, 69-84Analiticidade de um ponto, 264 critério para, 265Anel no plano complexo, 258Animação, 156-157, 189Antiderivada de uma função complexa, 297-299 existência de, 299Aplicações de equações diferenciais corrente vibratória, 160 distribuições de temperatura, 149 populações, 90 presa-predador, 89-92 relógio de água, 160
Aproximação de cinco pontos para a equação de Laplace, 231Aproximação linear local, 76Arco, 64Argumento de um número complexo, 252Argumento principal de um número complexo, 252Átomo de hidrogênio, 13-15Atrator, 34Aumento no plano z, 348Autofunções do problema, 127-128Autovalores complexos, 39-42 de multiplicidade dois, 36-38 de multiplicidadem, 35-36 de multiplicidade três, 38-39 duplos, 184 e o formato das soluções, 69-71 reais distintos, 32-35 repetida, 35-39
B
Bastão torcido, 174
C
Cálculo de integrais reais por meio de resíduos, 337-342Campos vetoriais
e analiticidade, 373-374 sistema autônomo plano de, 63-64 velocidade, 376, 377Centro, 73Ciclo, 94Ciclo limite, 99Circulação, 288-289Círculo de convergência, 312-313 em um plano complexo, 257Coeficientes de Fourier, 112
Condição de compatibilidade, 165Condição de Dirichlet, 150Condição de Neumann, 150Condição de Robin, 150Condições de contorno
dependente do tempo, 167-170 homogêneas, 150 independente do tempo, 165-167 não homogêneas, 150Condições iniciais, 149Condições para a extremidade livre, 158, 174Conjugado de um número complexo, 249-250Conjunto aberto, 257-258Conjunto completo de funções, 109Conjunto conexo, 258Conjunto de funções normalizadas, 108Conjunto de funções ortonormais, 107-108, 134Conjunto fundamental de soluções de um sistema de equações diferenciais lineares, 28
existência de, 28Conjunto ortogonal de funções, 107-108 de vetores, 108 em relação a uma função de peso, 109Constante amortecida, 88Constante de separação, 144Continuidade de uma função complexa, 262Contorno, 214, 284, 285 endentado, 340-342Contorno de um conjunto, 258Contornos isolados, 150Convergência
critério para, 309 de uma integral de Fourier, 209 de uma integral imprópria, 339-340 de uma série de Fourier, 113-114 de uma série de Fourier-Bessel, 137-138 de uma série de Fourier-Legendre, 139Convergência absoluta de uma série complexa, 311Coordenadas cilíndricas, 187-193 Laplaciano em, 190-191Coordenadas esféricas, Laplaciano em, 193-194Coordenadas polares, 66-67, 182-186, 187-193 Laplaciano em, 182-184Coordenadas retangulares, 142-182
Corrente puxada, 156-157, 160Corte de ramificação, 275Critério de estabilidade para equações autônomas de primeira ordem, 79-80 para sistemas autônomos planos, 75, 80 para sistemas lineares, 68-76Critério negativo, 94-102Critério negativo de Bendixson, 95-96Critério negativo de Dulac, 96-98Critério positivo, 97-100Curvas ortogonais, 269

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 411/416
Índice 413
D
Deformação de contornos, 292Demarcação do fluxo, 375-377Derivadas de funções complexas de função exponencial complexa, 55 de funções hiperbólicas complexas, 279 de funções hiperbólicas inversas complexas, 281-282 de funções trigonométricas complexas, 276-278 de funções trigonométricas inversas complexas, 277 de logaritmo complexo, 272-274 definição de, 262 regras para, 263Derivadas de funções reais, 277Desigualdade da incerteza, 16-17Desigualdade de Cauchy, 305Desigualdade do triângulo, 251Desigualdade ML, 288-289Determinante do Wronskiano, 27-28
Diferenciação, regras de, 263Diferencial, relações de recorrência, 135Difração de Fraunhofer, 18-19Difusão térmica, 148Disco aberto, 257Domínio de uma função, 259 no plano complexo, 258Domínio duplamente conexo, 291, 292Domínio simplesmente conexo, 291, 294, 296, 299-303, 334, 354,363, 374-375
Domínio triplamente conexo, 293
EEixo imaginário, 250Eixo real, 250Enésima raiz da unidade, 228Enésima raiz de um número complexo não zero, 254Enésima raiz de z, de um número complexo não zero, 255Enésima raiz principal de um número complexo, 255Enésimo termo para divergência, teste, 311Equação característica de uma matriz, 32Equação da difusão, 151Equação de Bessel paramétrica, 132-133Equação de diferença substituição para equação de Laplace, 231-232
substituição para equação de onda, 242-244 substituição para equação do calor, 236-238Equação de Laplace, 231-236Equação de Laplace em duas dimensões, 147Equação de onda, 147, 155 duas dimensões, 176 obtenção da equação unidimensional, 202 solução de, 155-160 substituição por equação de diferença, 242 uma dimensão, 147, 149Equação de onda bidimensional, 370-371
Equação de onda unidimensional, 147, 149 obtenção da, 157Equação diferencial autônoma, 62-67Equação diferencial de Bessel paramétrica, 132-133Equação diferencial de Chebyschev, 141
Equação diferencial de Hermite, 134Equação diferencial de Laguerre, 134Equação diferencial de Legendre, 133Equação diferencial de Raleigh, 85Equação diferencial de Van der Pol, 99-100Equação diferencial linear não homogênea parcial, 143Equação diferencial ordinária autônoma, 62-67 homogênea, 261Equação diferencial parcial (EDP) classificação de segunda ordem linear, 145 dependente do tempo, 167-170 de segunda ordem linear, 62
de segunda ordem linear homogênea, 143 de segunda ordem linear não homogênea, 143 elíptica, 231 hiperbólica, 231, 232 homogênea, 166-168 independente do tempo, 165-167 não homogênea, 165, 168 parabólica, 231, 239 princípio da superposição para linear homogênea, 145 separável, 143-147 solução de, 143Equação diferencial parcial de Laplace, 147, 148, 231-236 princípio máximo para, 162 solução de, 160-165
Equação diferencial parcial de Poisson, 171Equação do calor bidimensional, 176-178 e série discreta de Fourier, 222 e transformada discreta de Fourier, 222-223 em coordenadas polares, 187 obtenção da equação unidimensional, 148 solução da, 152-154 substituição por equação diferencial, 236-238 unidimensional, 147-148Equação telegráfica, 152Equações de Cauchy-Riemann, 265-270Equações diferenciais ordinárias lineares, 144, 169
primeira ordem, 24-25 solução particular de, 120-121Equações diferenciais parciais de segunda ordem lineares, 143-147 homogêneas, 143 não homogêneas, 143 princípio da superposição para, 145 solução de, 143Erro(s), propagação, 239Espectro de frequência, 125-126Estado de um sistema, 63Existência de transformadas de Fourier, 215

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 412/416
414 Índice
Expansão de uma função de meia escala, 119 em termos de funções ortogonais, 118-121 em três séries, 119 em uma série complexa de Fourier, 124-125
em uma série de co-senos, 117 em uma série de Fourier, 113 em uma série de Fourier-Bessel, 137-138 em uma série de Fourier-Legendre, 138 em uma série de Laurent, 323-326 em uma série de senos, 117-118Expansão em séries ortogonais, 172-176Extensão periódica, 114
F
Fenômeno de Gibbs, 118-119Fluido incompressível, 375Fluxo
de calor, 148 em torno de um cilindro, 376 em torno de uma extremidade, 375 fluido em estado estacionário, 374-375Fluxo de fluido em regime permanente, 374-375Fluxo do fluido em duas dimensões, 260Fluxo e a forma integral de Cauchy, 303Fluxo irrotacional, 375Fluxo líquido, 289Fluxo uniforme, 375Fonte, 303Força externa, 120, 151Força motriz periódica, 120-121
Forma adjunta própria, 131-133Forma complexa de séries de Fourier, 123-126Forma exponencial, 123, 211Forma matricial de um sistema de equações algébricas lineares,24-25
Forma matricial de um sistema de equações diferenciais lineares,24-26
Forma normal de um sistema de equações de primeira ordemlineares, 24
Forma polar de um número complexo, 252, 271-272Fórmula de De Moivre, 254Fórmula integral de Cauchy, 301-305 para derivadas, 303-305Fórmula integral de Poisson
para o disco unitário, 370-371 para o plano metade superior, 368-370Frequência angular fundamental, 110, 125Frequência fundamental, 125, 158Função complementar, 29 complexa, ver Função complexa de potência real, 348 domínio da, 259 escala da, 259 harmônica, ver Função harmônica
ímpar, 116 ortogonal, 106-111 par, 116 periódica, 110 potencial, 374
produto interno da, 106 tendência, 375Função analítica,
critério para, 265 definição de, 264 derivadas de, 303Função bi-harmônica, 357Função complexa analítica, 264 como mapeamento, 260, 346-350 como um fluxo de fluido, 260-261 como uma transformação, 260 completa, 264 contínua, 197, 262
definição de, 260, 262, 264, 358 derivada de, 262 diferenciável, 262 domínio de, 259 escala de, 259 exponencial, 270 hiperbólica, 279 hiperbólica inversa, 280-283 limite de, 261-262 logarítmica, 272-274 polinomial, 262 racional, 262 trigonométrica, 276-278
trigonométrica inversa, 281Função de fluxo, 375Função erro, 199-200Função erro complementar, 199Função exponencial definição de, 270 derivada de, 55 período de, 271 propriedades de, 270 região fundamental para, 271Função harmônica, 267-269 conjugada, 268-270 teorema da transformação para, 353-354Função inteira, 264
Função logarítmica principal, 274Função par, 116Função peso, ortogonalidade em relação a, 109Função racional, 262Função seno inversa, 280-281Funções de Bessel, 187-193 ortogonalidade de, 132 relações de recorrência diferencial para, 135Funções hiperbólicas, 279Funções hiperbólicas inversas, 280-283 derivadas de, 281-282

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 413/416
Índice 415
Funções trigonométricas inversas, 245, 280 derivadas de, 281-282
G
Glóbulo deslizante, 77-79, 87-88, 96Glóbulo incrustado, 159
I
Identidades trigonométricas, 277-278Imagem, 346-347Impedância, 272Independência do caminho, 295-300 definição de, 296Integração por partes, 300Integrais de linha complexa, 285
no plano complexo, 285Integrais reais, cálculo por meio de resíduos, 337-342Integral complexa, 285, 289, 337, 344Integral de contorno, 285-290
definição da, 285 método de cálculo, 286-287 propriedades de, 287 teorema fundamental para, 297-298 teorema limite para, 288-289Integral de Fourier, 208-213 condições para convergência, 209 forma complexa, 211-212 forma do co-seno, 210-211 forma do seno, 210-211
Integral de probabilidade, 199Integral indefinida, 51, 297Interação competitiva, 90Interação de Gauss-Siedel, 234-235
L
Laplaciano em coordenadas cilíndricas, 190-191 em coordenadas esféricas, 193-194 em coordenadas polares, 182-184Laplaciano em duas dimensões, 147Limite de uma função de uma variável complexa, 261-262
Linearização de um sistema não-linear de equações diferenciais,77-86Linha nodal, 189Linhas de fluxo, 261, 375-377Logaritmo de um número complexo corte de ramificação para, 275 definição de, 273-274 derivada de, 272-274 propriedades de, 274 ramificação de, 274, 275 valor principal de, 273-275
M
Malha, 232Mapeamento conforme, 350-357 e o problema de Dirichlet, 353-355Mapeamentos com ângulo preservado, 350-352Mapeamentos sucessivos, 348-349Matriz (matrizes) derivada de, 55 diagonalizável, 44, 52-53 equação característica de, 32 esparsa, 233 exponencial, 55-58 fundamental, 50, 56 integral de, 51 inversa multiplicativa, 50 Jacobiana, 80 limitada, 233 nilpotente, 59
tridiagonal, 239 utilizada para obter uma transformada inversa, 360 Wronski, 50Matriz simétrica, autovalores para, 37Método da diferença finita, 243-244 implícito, 239Método da variação de parâmetros, 50-52Método das diferenças finitas explícito, 237-238Método das diferenças finitas implícito, 239Método de Crank-Nicholson, 239-240Método de Liebman, 235Método do plano de fase, 83-84Método numérico instável, 239Métodos dos coeficientes indeterminados, 47-49
Métodos numéricos estabilidade de, 239 instabilidades de, 20-21 método de Crank-Nicholson, 239-240 métodos da diferença finita, 243-244Modelo predador-presa de Lotka-Volterra, 89-92 modelo de competição, 90-92, 95Modo fundamental de oscilação, 158Modos normais, 157-158Módulo de um número complexo, 250Mola flexível, 82-84Multiplicação conexa, domínio, 292-294Multiplicativa inversa, 50
Multiplicidade de autovalores, 35-39
N
Norma de uma função, 107, 108 de uma partição, 285 quadrada, 107, 135-137Norma quadrada, 107, 135-136Nós de um sistema autônomo plano, 71, 72Nós de uma onda estacionária, 158
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 414/416
416 Índice
Nós degenerativos, 72Núcleo de uma transformação integral, 214Número(s) complexo(s) adição de, 249 argumento de, 252
argumento principal de, 252 conjugado de, 249-250 definição de, 248 desigualdade do triângulo para, 251 divisão de, 249, 252-253 enésima raiz principal de, 255 forma polar de, 252, 271-272 igualdade de, 248 imaginário puro, 248 interpretação geométrica de, 250 interpretação vetorial, 250 lei comutativa para, 249 leis associativas para, 249 leis distributivas para, 249
logaritmo de, 272-274 módulo de, 250 multiplicação de, 249, 252-253 parte imaginária de, 248 parte real de, 248 potências complexas de, 275, 312 potências inteiras de, 253-254 raízes de, 254-255 subtração de, 249 unidade imaginária, 248
O
Onda seno retificada, 88Ondas estacionárias, 157-158, 189Ondas viajantes, 159Orientação de uma curva, 287Oscilações não lineares, 87-88
P
Par da transformada discreta de Fourier, 221Par transformado, 214, 221Parte analítica de uma série de Laurent, 321Parte principal da série de Laurent, 321, 328Pêndulo não linear, 86-87Perfil de fase, 33
para sistemas de duas equações diferenciais de primeira ordemlineares, 69-70
para sistemas de duas equações diferenciais de primeira ordemnão lineares, 83, 84
Período fundamental, 110, 125Plano complexo, 250 conjuntos em, 256-259 eixo imaginário de, 250 eixo real de, 250Plano de fase, 25, 33, 69-70Plano z, 250, 347
Plano(s), fase, 83-84Polinômios de Hermite, 134Polinômios de Legendre, 193Pólo de ordem n, 328, 330
definição de, 328 resíduo no, 332 simples, 328Ponto crítico globalmente estável, 94, 100-101Ponto crítico instável, 69Ponto crítico localmente estável, 69Ponto de cela, 71Ponto de contorno, 232Ponto de estagnação, 75Ponto de ramificação, 320Ponto de vórtice, 75Ponto espiral instável, 73Ponto interior de um conjunto no plano complexo, 257Ponto singular de uma função complexa
definição de, 320 essencial, 328 pólo, 328-329 removível, 328Ponto singular isolado, 320 classificação de, 328Ponto singular não isolado, 320Pontos críticos para sistemas autônomos planos, 64-66 assintoticamente estável, 77 definição de, 77 estável, 77, 78 globalmente estável, 94, 100-101 instável, 78-80
localmente estável, 69, 77Pontos críticos para sistemas lineares autônomos atrator, 34 centro, 83 classificação, 75, 81-83 definição de, 77 instável, 69 localmente estável, 69 nó estável, 71 nó instável, 71 nós degenerativos, 72 ponto de sela, 71 ponto espiral estável, 73 ponto espiral instável, 73
repulsor, 34Pontos de Lattice, 232Pontos do interior da malha, 232Pontos espirais, 73Pontos estáveis, 73População, modelos matemáticos para, 90Potência de uma matriz, 57Potencial complexo, 374 função, 374 velocidade complexa, 375

8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 415/416
Índice 417
Potências complexas, 275Predador-presa, 89-92Primeira onda estacionária, 158Primeiro harmônico, 125, 158Primeiro modo normal, 158
Princípio da superposição, 26-27 para o problema de Dirichlet para um prato retangular, 162-163 para sistemas de equações diferenciais lineares, 145Princípio de Volterra, 92Princípio máximo, 162Problema de Dirichlet, 162, 232-234 funções harmônicas e, 353-354 para um disco circular, 182-184 princípio da superposição para, 162-163 solução utilizando mapeamento conforme, 354-355Problema de Neumann para um disco circular, 185 para um retângulo, 165Problema de Sturm-Liouville, 127-134
ortogonalidade de soluções, 128-130 propriedades de, 128-130 regular, 128-130 singular, 131, 133Problema de valor de contorno (PVC) homogêneo, 167 métodos numéricos para EDP, 232-234, 237, 238, 240 não homogêneo, 165-172 para uma equação diferencial parcial, 142-182Problema de valor de contorno em dois pontos, 127, 128Problema de valor de contorno periódico, 131Problema de valor de contorno singular, 131Processamento de sinal, 224-226
Processo de ortogonalização de Gram-Schmidt, 110-111Propriedade de preservação do círculo, 358-359Pulso retangular, 223
R
Raio angular, 18Raio de convergência, 312, 313Raiz quadrada principal, 116Raízes de um número complexo, 254-255Ramo do logaritmo complexo, 274Ramo principal do logaritmo, 274Razão cruzada, 361Região
fechada, 258 invariante, 97-99 no plano complexo, 258Região fundamental, 271Regra da cadeia de derivadas parciais, 263Regra da soma, 263Regra de L’Hôpital, 336Regra do produto, 263Regra do quociente, 263Regras constantes, 263Relação de recorrência diferencial, 135
Repulsor, 34Resíduo (s) cálculo de integrais por, 334-335, 337-342 definição, 331 em um pólo de ordem n, 332
em um pólo simples, 332Resposta de um sistema, 63Rotação e translação, 347Rotação no plano z, 347
S
Sequência convergente, 309-310 definição de, 309Sequência complexa, 309Sequência de somas parciais, 114-115Série (infinita) absolutamente convergente, 311
convergente, 310 de Fourier, ver Série de Fourier de Fourier-Bessel, 135-138 de Fourier-Legendre, 138-140 de Laurent, 320-327, 328 de Maclaurin, 316, 318 de potências, ver Série de potências de Taylor, 314-319 geométrica, 310-311 testes para convergência, 309Série complexa, 123Série de co-senos, 117-118 em duas variáveis, 178
Série de Fourier, 111-126 complexa, 123-126 condições para convergência, 113-114 co-seno, 117-118 definição, 112 em duas variáveis, 176-179 expansão em, 113 generalizada, 109 seno, 117-118Série de potências centro, 312 círculo de convergência, 312-313 de Maclaurin, 316, 318 de Taylor, 314-319
diferenciação de, 315 integração de, 315 raio convergência, 312, 313 representando uma função contínua, 315Série de senos em duas variáveis, 178Série dupla de co-senos, 178Série dupla de senos, 178Série geométrica, 309-311, 318, 323, 325Série trigonométrica, 111-112Serrilhamento, 223-224Simetria radial, 187Sinais com faixa limitada, 224-226
8/15/2019 Matemática Avançada Para Engenharia - Vol 3 - 3ª Ed 2009
http://slidepdf.com/reader/full/matematica-avancada-para-engenharia-vol-3-3a-ed-2009 416/416
418 Índice
Sinais filtrados, 226Singularidade essencial, 328Singularidade removível, 328Sistema autônomo plano de campos vetoriais, 63-64Sistema de primeira ordem, 24
Sistema degenerativo de equações diferenciais, 72, 73Sistema dinâmico, 63Sistema homogêneo associado, 47Sistema linear desacoplado, 44-46Sistema sobreamortecido, 88Sistema sobredeterminado para sistemas lineares, 47-49Sistemas acoplados, 44-46Sistemas autônomos, 62-67Sistemas homogêneos de equações diferenciais lineares, 24, 26-29,31-44
autovalores complexos, 39-42 autovalores reais distintos, 32-35 autovalores repetidos, 35-39Sistemas lineares de equações diferenciais, 23-60Sistemas não homogêneos de equações diferenciais lineares, 24,47-54, 56
Sobreamortecimento, 88Sobretom desarmônico, 193Sobretons, 158Solução constante, 64Solução de D’Alembert, 159Solução de equilíbrio, 64Solução de uma equação diferencial parcial linear definição de, 143 particular, 143-145Solução geral da equação de Bessel paramétrica, 127 da equação de Cauchy-Euler, 127 de equações lineares, 127
de um sistema de equações diferenciais lineares homogêneas, 28-29, 32
de um sistema de equações diferenciais lineares não homogêneas,29-30
utilizando variação de parâmetros, 51-52Solução particular, 29 da equação de Legendre, 127 por variação de parâmetros, 50-51Solução periódica de um sistema autônomo plano, 65-66Solução transitória, 167
Teorema de Cauchy, 291Teorema de Cauchy do resíduo, 334-335Teorema de Cauchy-Goursat, 290-295 para domínios multiplamente conexos, 292-294Teorema de Laurent, 321-322
Teorema de Liouville, 305Teorema de Taylor, 316Teorema do contorno para integrais complexas, 288-289Teorema do contorno para integrais de contorno, 288-289Teorema do mapeamento de Riemann, 363Teorema do resíduo, 334-335Teorema fundamental da álgebra, 305 para integrais de contorno, 297-298Teoremas de Poincare-Bendixson, 97-100Teste da raiz, 312Teste da razão, 312Traço de uma matriz, 69Trajetórias, 25, 33, 63Transformação de Joukowski, 350
Transformação de Schwartz-Christoffel, 363-368Transformação fracional linear, 357-363Transformação planar, 346Transformada de Fourier, 213-219Transformada de Fourier do co-seno, 215-217Transformada de Fourier do seno, 215-216Transformada de Laplace de uma derivada parcial, 201-208 exponencial de uma matriz, 56-58 tabelas de, 199Transformada discreta de Fourier, 219-220Transformada integral Fourier, 213-219 Fourier co-seno, 215 Fourier seno, 215-216
par, 214Transformada integral inversa Fourier, 216 Fourier co-seno, 215 Fourier seno, 215-216Transformada rápida de Fourier, 221 cálculo com, 226-227Translação e contração, 348Translação e rotação, 347Translação no plano z, 347Triplo a triplo, 361