Embed Size (px)
Citation preview

9
227
Livro: Introdução à Álgebra LinearAutores: Abramo Hefez
Cecília de Souza Fernandez
Capítulo 9: Diagonalização deOperadores
Sumário
1 Autovalores e Autovetores . . . . . . . . . . . . . . 228
2 Polinômio Característico . . . . . . . . . . . . . . . 234
3 Diagonalização de Operadores . . . . . . . . . . . . 244
4 O Teorema Espectral para Operadores Simétricos 251
5 Reconhecimento de Cônicas . . . . . . . . . . . . . 255

228 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
Vimos no Capítulo 6 que um operador linear em V , onde V tem dimensão
�nita, pode ser representado por uma matriz. Sendo as matrizes diagonais
as mais simples do ponto de vista das operações matriciais (cf. Problema
2.15, Capítulo 1), nos perguntamos se dado um operador linear T , é sempre
possível representá-lo por uma matriz diagonal? Mais precisamente, quere-
mos saber se para todo operador T existe uma base α de V tal que [T ]αα seja
uma matriz diagonal.
A resposta é que nem sempre existe uma tal base. Por exemplo, o opera-
dor T em R2, cuja matriz na base canônica é dada por
A =
[0 0
1 0
],
não adimite uma tal representação. De fato, se fosse possível achar uma base
α tal que a matriz de T nesta base é diagonal, teríamos PAP−1 = C, onde
P é uma matriz 2 × 2 invertível e C uma matriz diagonal. Como A2 = 0,
isto acarretaria que
C2 =(PAP−1
)2= PA2P−1 = 0.
Logo, C = 0, o que implicaria que A = 0; uma contradição.
Diremos que operador de�nido sobre um espaço vetorial V de dimen-
são �nita é diagonalizável, quando for possível representá-lo por uma matriz
diagonal em alguma base de V .
O resultado central deste capítulo é uma versão de um teorema chamado
Teorema Espectral que garante que todo operador simétrico é diagonalizável.
1 Autovalores e Autovetores
Seja T : V → V um operador linear. Um número real c será dito um
autovalor de T se existir um vetor não nulo v em V tal que T (v) = cv. O
vetor v é chamado de autovetor de T associado a c.

1. AUTOVALORES E AUTOVETORES 229
Observemos que se v é um autovetor de um operador T associado a um
autovalor c, então todo múltiplo por escalar de v é também um autovetor de
T associado a c. Mais ainda, se A(c) = {v ∈ V ; T (v) = cv}, então A(c) éum subespaço vetorial de V (veja Problema 1.1), chamado autoespaço de T
associado a c. Note que A(c) é formado pelo vetor nulo de V e por todos os
autovetores de T associados a c.
Vejamos a seguir alguns exemplos.
Exemplo 1. Seja T : R2 → R2 o operador linear dado por T (x, y) =
(4x − y, 2x + y). Queremos determinar c ∈ R e v = (x, y) ∈ R2, não
nulo, tais que T (x, y) = c(x, y), ou seja, tais que (4x − y, 2x + y) = c(x, y).
Equivalentemente, queremos determinar c ∈ R e v = (x, y) ∈ R2, não nulo,
tais que 4x− y = cx
2x+ y = cy.(1)
Da primeira equação do sistema (1), temos y = 4x − cx. Substituindo este
valor de y na segunda equação do sistema, obtemos
x(c2 − 5c+ 6) = 0, (2)
que é satisfeita se x = 0 ou c2 − 5c + 6 = 0. Se x = 0, então y = 0. Mas,
v = (x, y) não é o vetor nulo. Assim, segue de (2) que c2 − 5c + 6 = 0.
Portanto, c = 2 e c = 3 são os autovalores de T . Vamos agora calcular os
autovetores de T associados a c = 2. De (1) obtemos o sistema4x− y = 2x
2x+ y = 2y,
que equivale à equação 2x − y = 0, cujo conjunto solução é dado por
{(x, 2x) ; x ∈ R}. Assim, os autovetores de T associados a c = 2 são os
vetores da forma (x, 2x), em que x ∈ R, x 6= 0. Para calcularmos os autove-
tores de T associados a c = 3, devemos resolver o sistema4x− y = 3x
2x+ y = 3y,

230 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
que equivale a resolver a equação x − y = 0, cujo conjunto solução é dado
por {(x, x) ; x ∈ R}. Assim, os autovetores de T associados a c = 3 são os
vetores da forma (x, x), com x ∈ R, x 6= 0.
Exemplo 2. Seja T : R2 → R2 o operador linear dado por T (x, y) = (−y, x).Se c ∈ R e v = (x, y) ∈ R2, v 6= 0, são tais que T (x, y) = c(x, y), então
(−y, x) = c(x, y).
Equivalentemente, cx = −y
cy = x,(3)
donde obtemos a equação (c2+1)y = 0. Como c ∈ R, a equação (c2+1)y = 0
é veri�cada somente se y = 0. Mas se y = 0, segue da segunda equação do
sistema (3) que x = 0. Como v não é o vetor nulo, isso não pode ocorrer.
Concluímos, então, que T não tem autovalores nem autovetores.
Portanto, o exemplo acima nos mostra que:
Nem todo operador linear possui autovalores e autovetores.
O estudo de autovalores teve início com Cauchy no começo do século
XIX em seu trabalho sobre formas quadráticas. Contudo, os primeiros pro-
blemas envolvendo autovalores apareceram, de forma implícita, durante o
século XVIII, com o estudo de soluções de sistemas de equações diferenci-
ais lineares com coe�cientes constantes. Jean le Rond d'Alembert (França,
1717 - 1783), em seus trabalhos datando entre 1743 e 1758, e motivado pelo
estudo do movimento de uma corda com um número �nito de massas (aqui,
por simplicidade, consideramos apenas três), chegou no seguinte sistema:
d2yidt2
+3∑j=1
aijyj = 0, i = 1, 2, 3.
Para resolver este sistema, d'Alembert decidiu multiplicar a i-ésima equação
por uma constante vi, para cada i, e somar as equações, obtendo3∑i=1
vid2yidt2
+3∑
i,j=1
viaijyj = 0.

1. AUTOVALORES E AUTOVETORES 231
Denotando B = [aij]t e se os vi's são escolhidos de modo que, para alguma
constante λ,3∑i=1
viaij + λvj = 0, para j = 1, 2, 3,
isto é, se (v1, v2, v3) é um autovetor correspondente ao autovalor λ do opera-
dor TB, a substituição u = v1y1 + v2y2 + v3y3 reduz o sistema original a uma
única equação diferenciald2u
dt2− λu = 0,
que é facilmente resolvida com métodos desenvolvidos por Euler1.
A seguinte proposição mostra que autovetores associados a autovalores
distintos são linearmente independentes.
Proposição 9.1.1. Seja T : V→V um operador linear e sejam c1, c2, . . . ,
cr autovalores distintos de T . Se v1, v2, . . . , vr são autovetores associados
aos autovalores c1, c2, . . . , cr, respectivamente, então {v1, v2, . . . , vr} é linear-
mente independente.
Demonstração A prova será feita por indução sobre r. O resultado é válido
para r = 1, pois se T : V → V é um operador linear com autovalor c1 e se v1é um autovetor de T associado a c1, então {v1} é linearmente independente,
pois v1 6= 0. Suponhamos agora o resultado válido para r−1 e vamos prová-lo
para r, r ≥ 2. Para isto, consideremos a equação
a1v1 + a2v2 + · · ·+ arvr = 0, (4)
1Leonhard Paul Euler (Suíça, 1707 - 1783) é considerado o matemático mais prolífero de
toda a história. Era também astrônomo, físico, engenheiro e químico. A coleção completa
dos livros e trabalhos cientí�cos de Euler (mais de 870 artigos e livros) chega a mais
de oitenta volumes. Ele deu grandes contribuições à geometria analítica, trigonometria,
cálculo in�nitesimal e teoria dos números, continuando a trabalhar mesmo depois de ter
�cado quase cego em 1771. Sua prodigiosa memória permitia que realizasse complexos e
longos cálculos mentais e, dessa forma, ditar seus artigos para seus �lhos e outros, até a
sua morte.

232 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
onde a1, a2, . . . , ar são números reais. Aplicando T em (4), obtemos
a1(c1v1) + a2(c2v2) + · · ·+ ar(crvr) = 0, (5)
já que T (vj) = cjvj, para todo 1 ≤ j ≤ r. Por outro lado, T possui pelo
menos um autovalor não nulo. Sem perda de generalidade, suponhamos que
cr 6= 0. Multiplicando (4) por cr, obtemos
a1(crv1) + a2(crv2) + · · ·+ ar(crvr) = 0. (6)
De (5) e (6),
a1(c1 − cr)v1 + a2(c2 − cr)v2 + · · ·+ ar−1(cr−1 − cr)vr−1 = 0. (7)
Pela hipótese de indução, {v1, v2, . . . , vr−1} é linearmente independente. Por-
tanto, de (7), segue-se que
aj(cj − cr) = 0 para todo 1 ≤ j ≤ r − 1. (8)
Como os autovalores c1, c2, . . . , cr são todos distintos, de (8) obtemos que
aj = 0 para todo 1 ≤ j ≤ r−1. Substituindo estes valores em (4), concluímos
que ar = 0 também, já que vr 6= 0. Portanto, {v1, v2, . . . , vr} é independente.�
Corolário 9.1.2. Seja T : V → V um operador linear. Se dimV = n e T
possui n autovalores distintos, então V possui uma base formada por auto-
vetores de T .
Demonstração Pela Proposição 9.1.1, n autovalores distintos implicam na
existência de um conjunto de autovetores {v1, v2, . . . , vn} linearmente inde-
pendente. Como G(v1, v2, . . . , vn) ⊂ V e dimG(v1, v2, . . . , vn) = n = dimV ,
temos que G(v1, v2, . . . , vn) = V , logo {v1, v2, . . . , vn} é uma base de V . �
Na Seção 3, veremos que a existência de uma base de V formada por
autovetores de um operador linear T : V → V é equivalente à existência de
uma representação deste operador por uma matriz diagonal. Antes, porém,
na próxima seção, vamos introduzir a noção de polinômio característico que

1. AUTOVALORES E AUTOVETORES 233
nos permitirá determinar mais facilmente os autovalores e autovetores de um
operador linear.
Problemas
1.1* Seja T : V → V um operador linear e c ∈ R um autovalor de T . Prove
que o autoespaço A(c) de T associado a c é um subespaço vetorial de V .
1.2 Determine os autovalores e os autovetores das seguintes transformações
lineares:
(a) T : R2 → R2 dada por T (x, y) = (x− y, x);
(b) T : R3 → R3 dada por T (x, y, z) = (x,−2x− y, 2x+ y + 2z);
(c) T : R[x]2 → R[x]2 dada por T (ax2 + bx+ c) = ax2 + cx+ b;
(d) T :M(2)→M(2) dada por T
([a b
c d
])=
[2c a+ c
b− 2c d
].
1.3 Determine os autovalores e os autovetores dos seguintes operadores cujas
matrizes na base canônica são:
(a) A =
[2 2
2 2
]; (b) A =
1 0 0
−1 0 −21 1 3
; (c) A =
4 0 2 0
0 2 0 0
0 0 2 0
0 −1 0 0
.1.4 Suponha que c é um autovalor de um operador invertível T . Mostre que
c−1 é um autovalor de T−1.
1.5 Determine T (x, y, z) sabendo que T : R3 → R3 é um operador linear
com autoespaços, associados aos autovalores c1 = 1 e c2 = 3, dados por
{(x, x+ y, y) ; x, y ∈ R} e {(0, x, 2x) ; x ∈ R}, respectivamente.
1.6* Os autovalores de um operador linear T : R3 → R3 são c1 = 1, c2 = 2
e c3 = −1, sendo v1 = (1, 1, 1), v2 = (0, 1, 1) e v3 = (−1, 1, 0) os respectivosautovetores associados. Determine T (x, y, z).
1.7 Suponha que v é um autovetor dos operadores T e S. Mostre que v é
também um autovetor do operador aT+bS, onde a, b são escalares quaisquer.

234 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
1.8 Encontre uma matriz 3× 3 com autovalores c = 0, 1 e −1 e autovetores
associados v1 = (0, 1,−1), v2 = (1,−1, 1) e v3 = (0, 1, 1), respectivamente.
2 Polinômio Característico
Seja A uma matriz quadrada de ordem n. A matriz t In−A, onde t é uma
indeterminada, é chamada matriz característica de A. O determinante dessa
matriz é um polinômio em t, chamado polinômio característico da matriz A
e denotado por PA(t).
Exemplo 1. Seja A =
[4 −12 1
]a matriz, na base canônica, do operador do
Exemplo 1, da Seção 1. A matriz característica de A é a matriz
tI2 − A =
[t− 4 1
−2 t− 1
]e o polinômio característico de A é o polinômio
PA(t) = det
[t− 4 1
−2 t− 1
]= t2 − 5t+ 6.
Exemplo 2. Consideremos a matriz A =
[0 −11 0
], na base canônica, do
operador do Exemplo 2, da Seção 2. A matriz característica de A é a matriz[t 1
−1 t
]e o polinômio característico de A é o polinômio
PA(t) = t2 + 1.
Observemos que as raízes do polinômio do Exemplo 1, ou seja, os números
reais t0 tais que PA(t0) = 0, são os autovalores do operador dado no Exemplo
1 da Seção 1. Note que o operador do Exemplo 2, da Seção 1, não tem

2. POLINÔMIO CARACTERÍSTICO 235
autovalores e o polinômio característico de sua matriz associada não tem
raízes. Surge, então, naturalmente a seguinte pergunta:
Existe uma relação entre os autovalores de um operador e as raízes do
polinômio característico de alguma matriz associada a ele?
A resposta é a�rmativa e é dada pelo resultado a seguir.
Teorema 9.2.1. Seja T : V → V um operador linear e seja α = {v1, v2, . . . , vn}uma base de V . Então:
(i) v é um autovetor de T associado a t0 se, e somente se, [v]α é uma
solução não trivial do sistema linear AX = 0, onde A = t0In − [T ]αα;
(ii) t0 ∈ R é um autovalor de T se, e somente se, t0 é uma raiz do polinômio
característico da matriz [T ]αα, ou seja, P[T ]αα(t0) = 0.
Demonstração (i): Seja t0 um autovalor de T e v um autovetor de T
associado a t0. Como [T (v)]α = [T ]αα [v]α e T (v) = t0v, temos
[t0 v]α = [T ]αα [v]α,
ou seja, t0In[v]α = [T ]αα [v]α. Equivalentemente,
(t0In − [T ]αα)[v]α = 0. (9)
(ii): Consideremos o sistema linear AX = 0, onde A = t0In − [T ]αα. De (9),
segue que AX = 0 tem uma solução não trivial, a saber [v]α, já que v não é o
vetor nulo. Pelo Corolário 2.2.7, A não é invertível. Assim, pela Proposição
8.1.7(iii), P[T ]αα(t0) = 0, provando que t0 é uma raiz de P[T ]αα .
Reciprocamente, se t0 ∈ R é uma raiz de P[T ]αα , então P[T ]αα(t0) = 0.
Portanto, o sistema linear AX = 0, onde A = t0In − [T ]αα, tem uma solução
X1 =[x1 x2 . . . xn
]tnão nula, pois detA = 0 (cf. Corolário 2.2.7 e
Proposição 8.1.7(iii)). Vamos provar que t0 é um autovalor de T e que v =
x1v1 + x2v2 + · · ·+ xnvn é um autovetor de T associado a t0. De fato, como
X1 é uma solução do sistema AX = 0, temos AX1 = 0. Equivalentemente,
(t0In − [T ]αα)X1 = t0X1 − [T ]ααX1 = 0,

236 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
ou seja,
[t0v]α = t0[v]α = [T ]αα[v]α = [T (v)]α, (10)
pois, pela construção de v, X1 = [v]α. De (10), obtemos que [T (v)]α =
[t0v]α, isto é, as coordenadas dos vetores T (v) e t0v na base α são iguais.
Consequentemente, estes vetores são iguais, ou seja, T (v) = t0v. Como por
construção v 6= 0, segue-se que t0 é um autovalor de T e v é um autovetor de
T associado a t0. �
Exemplo 5. Vamos refazer o Exemplo 1 da Seção 1, utilizando o Teorema
9.2.1. Reconsidere o operador linear T : R2 → R2 dado por T (x, y) = (4x −y, 2x+ y) e seja α a base canônica de R2. Temos
P[T ]αα(t) = det
[t− 4 1
−2 t− 1
]= t2 − 5t+ 6.
Como t2 − 5t + 6 = 0 somente para t1 = 2 e t2 = 3, o Teorema 9.2.1 nos
mostra que t1 e t2 são os únicos autovalores de T . Para determinarmos os
autovetores de T associados a t1, devemos resolver o sistema linear[t1 − 4 1
−2 t1 − 1
][x1
x2
]=
[0
0
],
ou seja, [−2 1
−2 1
][x1
x2
]=
[0
0
],
que equivale à equação linear −2x1 + x2 = 0. Assim, o autoespaço de T
associado a t1 é {(x, 2x) ; x ∈ R}. Agora, para determinarmos os autovetores
de T associados a t2, devemos resolver o sistema linear[t2 − 4 1
−2 t2 − 1
][t1
t2
]=
[0
0
],
ou seja, [−1 1
−2 2
][t1
t2
]=
[0
0
],

2. POLINÔMIO CARACTERÍSTICO 237
que equivale à equação linear −x1 + x2 = 0. Assim, o autoespaço de T
associado a t2 é {(x, x) ; x ∈ R}.
Exemplo 4. Seja T :M(2)→M(2) o operador linear dado por T (A) = At,
onde A ∈M(2). Seja α a base canônica deM(2). Temos
P[T ]αα(t) = det
t− 2 0 0 0
0 t −1 0
0 −1 t 0
0 0 0 t− 1
= (t− 1)3(t+ 1).
Portanto, t1 = 1 e t2 = −1 são os autovalores de T . Pelo Teorema 9.2.1,
M =
[x y
z w
]é um autovetor associado a t1 = 1 se, e somente se,
0 0 0 0
0 1 −1 0
0 −1 1 0
0 0 0 0
x
y
z
w
=
0
0
0
0
.Assim, {[
x y
y w
]; x, y, w ∈ R
}é o autoespaço associado a t1 = 1. Agora, para calcularmos os autovetores
M =
[x y
z w
]associados a t2 = −1, devemos resolver o sistema linear
−2 0 0 0
0 −1 −1 0
0 −1 −1 0
0 0 0 −2
x
y
z
w
=
0
0
0
0
.Como o conjunto solução do sistema acima é dado por x = w = 0 e y = −z,segue que {[
0 y
−y 0
]; y ∈ R
}

238 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
é o autoespaço associado a t2.
Observemos que, nos exemplos acima, tomamos α sendo sempre a base
canônica. Isto não representa nenhum problema, pois o método de cálculo
dos autovalores e autovetores de um operador T , dado pelo Teorema 9.2.1,
independe da base escolhida. O que não é totalmente claro é se o polinômio
característico independe da base escolhida. De fato, o polinômio caracterís-
tico de T independe da escolha da base, pois dadas α e β bases do espaço
vetorial V , temos que P[T ]αα(t) = P[T ]ββ(t) (veja Problema 2.3).
O polinômio característico possui várias propriedades, das quais damos
abaixo a mais básica.
Lema 9.2.2. Seja B uma matriz quadrada de ordem n com entradas po-
linômiais, de graus ≤ 1, numa indeterminada t, tal que em cada linha e em
cada coluna há no máximo um polinômio não constante, então detA é um
polinômio de grau menor ou igual do que n.
Demonstração A prova pode ser feita sem di�culdade por indução sobre
n, utilizando o desenvolvimento de Laplace com relação à primeira linha, por
exemplo. �
Proposição 9.2.3. Dada uma matriz A ∈M(n), o polinômio característico
pA(t) de A é um polinômio mônico de grau n com coe�cientes em R e cujos
coe�cientes de tn−1 e de t0 são − trA e (−1)n detA.Demonstração Escrevamos A = (aij), logo
pA(t) = det
t− a11 −a12 · · · −a1n−a21 t− a22 · · · −a2n...
......
an1 −an2 · · · t− ann
.
Pelo Lema anterior, pA(t) é um polinômio de grau no máximo n. Desenvol-
vendo o determinate segundo os elementos da primeira linha e utilizando o

2. POLINÔMIO CARACTERÍSTICO 239
Lema 9.2.2 (repetidas vezes), temos que
pA(t) = (t− a11) det
t− a22 · · · −a2n...
...
−an2 · · · t− ann
+ polinômio de grau < n− 1.
Repetindo o procedimento, vemos que
pA(t) = (t− a11)(t− a22) · · · (t− ann) + polinômio de grau < n− 1.
Segue-se que pA(t) é um polinômio mônico de grau n em t e que o coe�ciente
de tn−1 é − trA.
Por outro lado, o coe�ciente de t0 em pA(t) = det(t In−A) é precisamente
PA(0) = det(−A) = (−1)n detA.
�
Sejam dados um polinômio p(t) = artr + ar−1t
r−1 + · · · + a1t + a0, com
coe�cientes reais, e uma matriz quadrada A de ordem n, de�ne-se
p(A) = arAr + ar−1A
r−1 + · · ·+ a1A+ a0 In,
que é uma matriz quadrada de ordem n.
A seguir, apresentamos um dos importantes Teoremas básicos da Álgebra
Linear, o chamado Teorema de Cayley-Hamilton2.
Teorema 9.2.4. (Cayley-Hamilton) Seja A ∈ M(n) e seja PA(t) o po-
linômio característico de A. Então, PA(A) = 0, onde 0 é a matriz nula de
M(n).
2William Rowan Hamilton (Irlanda, 1805 - 1865) deu várias contribuições à Física e à
Matemática. Com apenas 22 anos de idade, foi nomeado Royal Astronomer na Irlanda,
diretor do Observatório de Dunsek e professor de Astronomia. Deu o primeiro exemplo de
uma álgebra não comutativa com a criação dos quatérnios. Os métodos dos quatérnios,
tempos depois, motivaram a introdução da análise vetorial. Hamilton escreveu também
sobre ótica e dinâmica. De fato, Hamilton é atualmente mais conhecido por seus trabalhos
em dinâmica do que por seus trabalhos em matemática.

240 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
Demonstração Como PA(t) é um polinômio mônico de grau n em t, pode-
mos escrever
PA(t) = tn + bn−1tn−1 + · · ·+ b1t+ b0, (11)
onde b0, . . . , bn−1 são números reais. Seja C(t) a matriz adjunta da matriz
t In−A. Como C(t) é, por de�nição, a transposta da matriz cujas entradas
são os cofatores de t In−A, logo são polinômios em t de grau menor ou igual
que n− 1. Assim, podemos escrever
C(t) = Cn−1tn−1 + · · ·+ C1t+ C0, (12)
onde C0, C1, . . . , Cn−1 são matrizes quadradas de ordem n, que não dependem
de t. Pela Proposição 8.3.1, temos
(t In−A)C(t) = PA(t) In,
já que, por de�nição, PA(t) = det(t In−A). Equivalentemente, por (11) e
(12),
(t In−A)(Cn−1tn−1 + · · ·+ C1t+ C0) = (tn + bn−1tn−1 + · · ·+ b1t+ b0) In .
Da igualdade anterior, obtemos
Cn−1 = In
Cn−2 − ACn−1 = bn−1 In
Cn−3 − ACn−2 = bn−2 In...
C0 − AC1 = b1 In
−AC0 = b0 In .
Multiplicando cada uma das equações acima por An, An−1, . . . , A, In, respec-

2. POLINÔMIO CARACTERÍSTICO 241
tivamente, temos
AnCn−1 = An
An−1Cn−2 − AnCn−1 = bn−1An−1
An−2Cn−3 − An−1Cn−2 = bn−2An−2
...
AC0 − A2C1 = b1A
−AC0 = b0 In .
Somando membro a membro as equações acima, resulta
PA(A) = An + bn−1An−1 + · · ·+ b1A+ b0 In = 0.
�
Exemplo 5. Consideremos a matriz
A =
[1 3
−1 0
].
O polinômio característico de A é
PA(t) = det(t In−A) = det
[t− 1 −31 t
]= t2 − t+ 3.
Pelo Teorema de Cayley-Hamilton, PA(A) = 0.
Vamos agora veri�car esta igualdade diretamente. De fato,
PA(A) = A2 − A+ 3 I2
=
[1 3
−1 0
]2−
[1 3
−1 0
]+ 3
[1 0
0 1
]
=
[−2 3
−1 −3
]+
[−1 −31 0
]+
[3 0
0 3
]
=
[0 0
0 0
].

242 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
Uma consequência imediata do Teorema de Cayley-Hamilton é que a po-
tência An, de uma matriz A ∈M(n), pode ser escrita como uma combinação
linear das potências de A com expoentes menores do que n, pois se
PA(t) = tn + bn−1tn−1 + · · ·+ b1t+ b0,
então PA(A) = 0, o que equivale a
An = −bn−1An−1 − · · · − b1A− b0 In .
Exemplo 6. Consideremos novamente a matriz
A =
[1 3
−1 0
]
do Exemplo 5. Vimos que A2 − A+ 3 I2 = 0; ou seja, A2 = A− 3 I2.
Para obtermos A3, façamos
A3 = AA2 = A(A− 3 I2) = A2 − 3A = −2A− 3 I2 .
Para obtermos A4, façamos
A4 = AA2 = A(−2A−3 I2) = −2A2−3A = −2(A−3 I2)−3A = −5A+6 I2 .
Este procedimento mostra que, em geral, se A ∈ M(2), então para todo
m ∈ N \ {0}, a matriz Am se escreve como combinação linear de I2 e A.
Observamos �nalmente que, dada uma matriz A ∈M(n), calcular potên-
cias Ak, k ∈ N, pode ser muito trabalhoso. O Teorema de Cayley-Hamilton
nos dá uma forma de calcular estas potências. Veremos, no �nal da Seção 3
deste capítulo, que o cálculo de Ak �ca bastante simpli�cado se a matriz A
tiver a propriedade de ser diagonalizável.
A leitura do restante desta seção é facultativa, pois não utilizaremos as
informações aí contidas, exceto na Proposição 9.4.4, que também não será
empregada em nenhuma outra parte do texto.

2. POLINÔMIO CARACTERÍSTICO 243
Um outro polinômio que desempenha papel fundamental é o polinômio
mínimo de uma matriz A, ou de um operador T .
Consideremos o conjunto
I(A) = {p(t) ∈ R[t]; p(A) = 0}.
Este conjunto possui um polinômio não identicamente nulo, pois pelo Teo-
rema de Cayley-Hamilton, pA(t) ∈ I(A).De�nimos o polinômio mínimo de A como o polinômio mA(t) mônico de
menor grau em I(A).
É fácil veri�car (veja Problema 2.2) que se A é uma matriz quadrada,
p ∈ R[t] tal que p(A) = 0 e P é uma matriz invertível de mesma or-
dem que A, então p(A) = 0 se, e somente se, p(P−1AP ) = 0. Portanto,
I(A) = I(P−1AP ), mostrando que o conjunto I(T ) está bem de�nido para
um operador T . Deduzimos daí que faz sentido falar do polinômio mínimo
mT (t) de um operador T .
O próximo resultado nos dará algumas informações importantes sobre
polinômios mínimos.
Proposição 9.2.5. Seja T : V → V um operador linear sobre um espaço V
de dimensão �nita. Temos que:
(i) Se p1(t), p2(t) ∈ I(T ), então p1(t) + p2(t) ∈ I(T );
(ii) Se p(t) ∈ I(T ) e q(t) ∈ R[t], então p(t)q(t) ∈ I(T );
(iii) Se p(t) ∈ I(T ), então mT (t) divide p(t).
Demonstração As duas primeiras propriedades são de veri�cação imediata.
Vamos provar (iii). Seja p(t) ∈ I(t). Pelo algoritmo da divisão euclidiana (cf.
[4]), temos que existem polinômios h(t), r(t) ∈ R[t], com r(t) = 0, ou grau
de r(t) menor do que o grau de mT (t) tais que p(T ) = mT (t)h(t) + r(t). Da
igualdade r(t) = p(t) −mT (t)h(t) = 0, tem-se que r(A) = 0 e r(t) ∈ I(T ).Como mT (t) é um polinômio de grau mínimo que se anula em A, precisamos
ter r(t) = 0, o que mostra que mT (t) divide p(t). �

244 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
Note que o item (iii) prova a unicidade de mT (t). De fato, se mT (t) e
m′T (t) são dois polinômios mínimos, então cada um divide o outro, e como
eles são mônicos, eles são necessariamente iguais. A propriedade (iii) tam-
bém nos diz que o polinômio mínimo de um operador divide seu polinômio
característico.
Problemas
2.1* Determine os autovalores e os autovetores do operador cuja matriz na
base canônica é dada por
A =
[2 −3−1 4
].
2.2* Prove que uma matriz quadrada A é invertível se, e somente se, c = 0
não é raiz do polinômio característico de A.
2.3 Sejam A e P duas matrizes quadradas de mesma ordem, com P invertível.
Mostre que se p(t) ∈ R[t], então p(P−1AP ) = P−1p(A)P .
2.4 Prove que matrizes semelhantes têm os mesmos polinômios característi-
cos.
2.5 Seja A uma matriz quadrada de ordem n semelhante a uma matriz trian-
gular inferior B. Mostre que os autovalores de A são exatamente os elementos
da diagonal principal de B.
3 Diagonalização de Operadores
Dado um operador linear T : V → V , nosso objetivo é obter, se possível,
uma base α de V na qual a matriz [T ]αα seja uma matriz diagonal. O re-
sultado a seguir caracterizará tais bases associadas ao operador que se quer
diagonalizar.
Teorema 9.3.1. Um operador linear T : V → V admite uma base β em
relação à qual a matriz [T ]ββ é diagonal se, e somente se, essa base β for
formada por autovetores de T .

3. DIAGONALIZAÇÃO DE OPERADORES 245
Demonstração Suponhamos que β = {v1, v2, . . . , vn} é uma base de V tal
que [T ]ββ é diagonal, digamos
[T ]ββ =
a1 0 · · · 0
0 a2 · · · 0...
.... . .
...
0 0 · · · an
.Como, para cada 1 ≤ j ≤ n,
T (vj) = 0v1 + · · ·+ 0vj−1 + ajvj + 0vj+1 + · · ·+ 0vn = ajvj,
segue que aj é um autovalor de T e vj é um autovetor de T associado a aj.
Portanto, β é uma base formada de autovetores de T .
Suponhamos agora que β = {u1, u2, . . . , un} é uma base de V formada
por autovetores de T . Existem, então, números reais b1, b2, . . . , bn tais que,
para cada 1 ≤ j ≤ n, T (uj) = bjuj. Observamos que os bj's não são necessa-
riamente todos distintos. Pela de�nição de [T ]ββ, temos
[T ]ββ =
b1 0 · · · 0
0 b2 · · · 0...
......
0 0 · · · bn
,ou seja, [T ]ββ é uma matriz diagonal. �
Na demonstração do Teorema 9.3.1 �ca claro que, se um operador linear
T tem uma representação por uma mariz diagonal [T ]ββ, então as entradas da
diagonal principal de [T ]ββ são dadas pelos autovalores de T . Mais ainda, a
ordem em que os autovalores aparecem na diagonal principal da matriz é a
mesma em que seus respectivos autovetores são dados na base β.
Se T é um operador linear em um espaço V de dimensão n, o Teorema
9.3.1 nos diz que T é diagonalizável se, e somente se, T tem n autovetores
linearmente independentes. Em particular, pelo Corolário 9.1.2, se T tem n
autovalores distintos, então T é diagonalizável.

246 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
Vejamos a seguir alguns exemplos.
Exemplo 1. O operador linear T do Exemplo 1 da Seção 1 é diagonalizável.
Uma representação diagonal para T é dada por
[T ]αα =
[2 0
0 3
],
onde α = {(1, 2), (1, 1)}. Uma outra representação diagonal para T é dada
por
[T ]ββ =
[3 0
0 2
],
sendo β = {(1, 1), (1, 2)}.
Exemplo 2. O operador linear T do Exemplo 4 da Seção 2 é diagonalizável.
Uma representação diagonal para T é dada por
[T ]αα
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 −1
,com
α =
{[1 0
0 0
],
[0 1
1 0
],
[0 0
0 1
],
[0 1
−1 0
]}.
Exemplo 3. Consideremos o operador linear T : R3 → R3 dado por
T (x, y, z) = (x + y, y, z). O operador T não é diagonalizável, pois o autoes-
paço associado a seu único autovalor, k = 1, é dado por {(x, 0, z) ; x, z ∈ R}.
Vimos na Seção 1 do Capítulo 6 que toda matriz A ∈ M(m,n) de�ne
uma transformação linear TA : Rn → Rm. Em particular, se A é uma matriz
quadrada de ordem n, então A de�ne um operador linear TA em Rn. Dizemos
que a matriz A é diagonalizável quando TA é diagonalizável. No caso de TAser diagonalizável, pelo Teorema 9.3.1, existe uma base β de Rn formada de
autovetores de TA. Ou seja, existe uma representação diagonal D, a saber

3. DIAGONALIZAÇÃO DE OPERADORES 247
D = [TA]ββ, para o operador TA. Como [TA]
αα = A, onde α denota a base
canônica de Rn, segue, do Teorema 6.4.2, que
D = P−1AP,
com P = [IRn ]βα. Isto motiva a seguinte versão matricial do Teorema 9.3.1,
cuja condição necessária acabamos de demonstrar.
Teorema 9.3.2. Uma matriz A ∈ M(n) é diagonalizável se, e somente se,
existe uma matriz P invertível de ordem n tal que P−1AP é uma matriz
diagonal .
Demonstração Para provarmos a condição su�ciente, tomemos que β =
{v1, v2, . . . , vn}, onde vj é o vetor j-ésima coluna de P . Seja α a base canônica
de Rn. Pelo Teorema 6.3.2, temos
[TA]ββ = [IRn ]
αβ [TA]
αα [IRn ]
βα.
Equivalentemente,
[TA]ββ = P−1AP,
já que [IRn ]βα = P pela maneira como β foi construída. Como P−1AP é uma
matriz diagonal, segue-se que [TA]ββ é uma matriz diagonal. Portanto, TA é
diagonalizável e, então, A também o é. �
No Teorema 9.3.2, a matriz P é chamada de matriz que diagonaliza A.
Vejamos a seguir alguns exemplos.
Exemplo 4. A matriz
A =
1 0 2
0 1 3
0 0 −1
é diagonalizável. De fato, seja α a base canônica de R3. Então
P[TA]αα(t) = PA(t) = det
t− 1 0 −20 t− 1 −30 0 t+ 1
= 0 para t = 1 ou t = −1.

248 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
O autoespaço associado ao autovalor t = 1 é o conjunto solução do sistema
linear 0 0 −20 0 −30 0 2
xyz
=
000
,ou seja, é o conjunto {(x, y, 0) ; x, y ∈ R}. Já o autoespaço associado ao
autovalor t = −1 é o conjunto solução do sistema linear−2 0 −20 −2 −30 0 0
xyz
=
000
,ou seja, é o conjunto {(−z,−3/2z, z) ; z ∈ R}. Tome β = {(1, 1, 0), (1, 0, 0),(1, 3/2,−1)}. Temos que β é uma base de R3 formada de autovetores de TA.
Assim, TA é diagonalizável e, portanto, A é diagonalizável. A matriz
P =
1 1 1
1 0 3/2
0 0 −1
é uma matriz que diagonaliza A e a matriz
D =
1 0 0
0 1 0
0 0 −1
é uma representação diagonal para TA.
Exemplo 5. Consideremos a matriz
B =
1 −1 2
0 1 3
0 0 −1
.A matriz B não é diagonalizável, pois TB não é diagonalizável. Note que TBe TA têm os mesmos autovalores. Porém, o autoespaço de TB associado a

3. DIAGONALIZAÇÃO DE OPERADORES 249
t = 1 é dado por {(x, 0, 0) ; x ∈ R} e o autoespaço de TB associado a t = −1é dado por {(−7/4z,−3/2z, z) ; z ∈ R}. Assim, não é possível obter uma
base de R3 formada por autovetores de TB.
Terminamos esta seção, observando que o cálculo de potências de matrizes
é uma tarefa de custo computacional muito elevado, pois é necessário calcular
m− 1 produtos de matrizes para calcular Am. Entretanto, se soubermos que
A é uma matriz diagonalizável, o cálculo de Am �ca bastante simpli�cado.
De fato, se A ∈M(n) e se P ∈M(n) é invertível, então é fácil veri�car que
(P−1AP )m = P−1AmP.
Logo, se A é diagonalizável e se P−1AP = D é uma matriz diagonal, temos
que
Dm = P−1AmP,
ou equivalentemente,
Am = PDmP−1,
que é calculável (cf. Problema 2.15, Capítulo 1) com apenas duas multipli-
cações de matrizes.
Exemplo 6. Determinemos a matriz A50, sendo
A =
[1 2
0 −1
].
Veri�quemos que A é diagonalizável e encontremos uma matriz P que
diagonaliza A. Ora,
det(t I−A) = det
[t− 1 −20 t+ 1
]= (t− 1)(t+ 1),
que se anula para t = 1 e para t = −1. Logo, estes são os autovalores de A.
Resolvendo as equações matriciais[0 −20 2
][x
y
]=
[0
0
]

250 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
e [−2 −20 0
][x
y
]=
[0
0
],
obtemos os autoespaços associados aos autovalores 1 e −1, respectivamente.
Tomemos, então, v1 = (1, 0) um autovetor para t = 1 e v2 = (1,−1) um
autovetor para t = −1. Temos,
D = P−1AP,
com
D =
[1 0
0 −1
]e P =
[1 1
0 −1
].
Como D50 = I2, segue-se que
A50 = P−1D50 P = P−1 I2 P = I2 .
Problemas
3.1* Seja T : R3 → R3 o operador linear dado por
[T ]αα =
1 2 0
1 −1 0
−1 0 2
,onde α = {(1, 1, 1), (0, 1, 0), (0, 0, 1)} é uma base de R3. Veri�que que T é
diagonalizável.
3.2 Seja A ∈M(n). Verdadeiro ou falso? Justi�que a resposta.
(a) Se A é diagonalizável e A é invertível, então A−1 é diagonalizável.
(b) A e At têm os mesmos autovalores.
(c) A e At têm os mesmos autovetores.
(d) Se A é diagonalizável, então existe uma única matriz P tal que P−1AP
é uma matriz diagonal.

4. O TEOREMA ESPECTRAL PARA OPERADORES SIMÉTRICOS251
3.3 Determine nos itens abaixo se A é diagonalizável. Em caso a�rmativo,
encontre uma matriz P que diagonaliza A e determine P−1AP .
(a) A =
4 0 0
1 4 0
0 1 4
. (b) A =
[2 4
3 1
]. (c) A =
1 −2 −20 1 0
0 2 3
.3.4 Para quais valores de c as matrizes abaixo são diagonalizáveis?
(a) A =
[1 1
0 c
].
(b) A =
[1 c
0 1
].
3.5 Seja A =
1 −2 8
0 −1 0
0 0 −1
. Calcule:
(a) A100; (b) A1321; (c) A−100.
3.6* Seja T : R2 → R2 o operador linear dado por T (x, y) = (2x− 2y,−x+3y). Determine uma base de R2 em relação à qual a matriz do operador T é
diagonal.
3.7 Seja T : V → V um operador simétrico. Sejam c1 e c2 autovalores dis-
tintos de T . Se v1 e v2 são autovetores associados a c1 e c2 respectivamente,
prove que v1 e v2 são ortogonais.
4 O Teorema Espectral para Operadores Simé-
tricos
Vimos na seção anterior que se T : V → V é um operador diagonalizável,
então existe uma base de V formada por autovetores de T .
Nesta seção, veremos que se V é um espaço com produto interno e se
T : V → V é um operador simétrico, então existe uma base ortonormal de
V formada por autovetores de T . Em particular, todo operador simétrico é

252 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
diagonalizável. Este resultado é conhecido como Teorema Espectral e é um
dos resultados mais importantes da Álgebra Linear.
Antes de prosseguir, faremos algumas observações importantes sobre a
possibilidade de estendermos a maioria das noções e resultados estabelecidos
sobre o corpo R ao corpo C. Em particular, todos os resultados que foram
provados até o momento que envolvem sistemas lineares e determinantes são
válidos sobre um corpo arbitrário K. Utilizamos K = R, apenas para que o
leitor trabalhasse em um contexto concreto que lhe é familiar. Neste ponto
precisaremos considerar K = C também. Do mesmo modo que de�nimos
transformações lineares entre espaços vetoriais sobre o corpo R, poderíamos
tê-lo feito sobre um corpo qualquer K. Neste contexto mais geral, faz todo
o sentido de�ninir autovalores e autovetores, para os quais podemos utilizar
um análogo do Teorema 9.2.1. Continua valendo também neste contexto
o Teorema de Cayley-Hamilton. Dado um operador linear T : Rn → Rn,
podemos estendê-lo a um operador TC : Cn → Cn do seguinte modo: se
z = x + iy ∈ Cn, onde x, y ∈ Rn, de�ne-se TC(z) = T (x) + iT (y). Os
polinômios característicos de T e de TC coincidem, mas TC pode possuir mais
autovalores e autovetores do que T .
Proposição 9.4.1. Seja V um espaço vetorial de dimensão �nita sobre R.Se T : V → V é um operador simétrico e α uma base de V , então, todas as
raízes do polinômio característico P[T ]αα em C são números reais .
Demonstração Seja A = [T ]αα. O Teorema Fundamental da Álgebra (cf.
[4]) garante que o polinômio característico PA tem pelo menos uma raiz
complexa; digamos λ. Logo, o sistema (t In−A)Z = 0 possui uma solução
não trivial Z =[z1 . . . zn
]t, com coe�cientes complexos.
Sendo A uma matriz simétrica real, temos que (veja Problema 4.1)
(AZ)tZ = Z tAZ,
e como AZ = λZ, temos, da igualdade acima, que
λ ZtZ = (λZ)tZ = (AZ)tZ = ZtAZ = Z tλZ = λZ tZ.

4. O TEOREMA ESPECTRAL PARA OPERADORES SIMÉTRICOS253
Como
Z tZ = z1 z1 + · · ·+ zn zn = |z1|2 + · · ·+ |zn|2 6= 0.
segue que λ = λ, logo λ ∈ R.Falta ainda mostrar que associado a λ existe um autovetor em Rn. Escre-
vamos Z = X+iY , onde X e Y têm entradas reais, com X 6= 0 ou Y 6= 0 (re-
corde que Z 6= 0). Da equação AZ = λZ, temos que AX+ iAY = λX+ iλY ,
o que implica que AX = λX e AY = λY . Logo, temos que X ou Y é um
autovetor associado a λ com entradas reais. �
Teorema 9.4.2. (Teorema Espectral) Seja V um espaço vetorial de
dimensão �nita sobre R. Se T : V → V é um operador simétrico, então
existe uma base ortonormal β de V tal que [T ]ββ é diagonal .
Demonstração Faremos a prova por indução sobre a dimensão de V . Deno-
taremos a matriz [T ]αα por A. Se dimV = 1, o resultado é óbvio. Suponhamos
que n ≥ 1 e que o resultado é válido para espaços de dimensão n. Seja V um
espaço vetorial tal que dimV = n + 1. Seja α uma base de V e seja c uma
raiz complexa do polinômio PA. Pela Proposição 9.4.1, c ∈ R. Portanto,
c é um autovalor de T . Seja v um autovetor unitário de T associado a c.
Consideremos o subespaço
W = {w ∈ V ; 〈w, v〉 = 0}.
Note que W = G(v)⊥. A�rmamos que T (W ) ⊂ W . De fato, seja w ∈ W .
Como T é um operador simétrico, temos que
〈T (w), v〉 = 〈w, T (v)〉 = 〈w, cv〉 = c〈w, v〉 = c 0 = 0,
donde T (w) ∈ W . Assim, podemos considerar o operador restrição
S = T |W ∈ L(W,W ),
que é também um operador simétrico. Além disso, como dimG(u) = 1, se-
gue do Teorema 7.3.6 que dimW = n. Assim, podemos aplicar a hipótese

254 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
de indução ao operador S para garantir a existência de uma base ortonormal
{v1, v2, . . . , vn} de W formada por autovetores de S (logo de T ). Conse-
quentemente, β = {v, v1, . . . , vn} é uma base ortonormal de V formada por
autovetores de T . Daí, [T ]ββ é diagonal. �
O próximo resultado é a versão matricial do Teorema 9.4.2.
Teorema 9.4.3. (Teorema Espectral, versão matricial) Se A ∈MR(n)
é simétrica, então existe uma matriz ortogonal P ∈MR(n) tal que P−1AP (=
P tAP ) é diagonal.
Demonstração Seja A ∈ MR(n) uma matriz simétrica. Então o operador
TA ∈ L(Rn,Rn) também é simétrico. Pelo Teorema 9.4.2, existe uma base
ortonormal β de Rn tal que [TA]ββ = D é diagonal. Se α é a base canônica de
Rn, então
D = [TA]ββ = [IRn ]
αβ [TA]
αα [IRn ]
βα = P−1AP,
sendo P = [IRn ]βα. Como α e β são bases ortonormais, segue do Teorema
7.4.7 que P é uma matriz ortogonal, ou seja, P−1 = P t. �
Quando existe uma matriz ortogonal P ∈ MR(n) tal que P−1AP é dia-
gonal, dizemos que A é ortogonalmente diagonalizável e que P diagonaliza A
ortogonalmente.
A seguir daremos uma propriedade que relaciona as raízes do polinômio
mínimo e do polinômio característico de uma matriz (ou de um operador).
Proposição 9.4.4 Se T é um operador sobre um espaço vetorial de dimensão
�nita, então as raízes do polinômio característico pT (t) e as do polinômio
mínimo mT (t) são as mesmas (podendo ter multiplicidades distintas).
Demonstração É óbvio que as raízes do polinômio mínimo são raízes do
polinômio característico, pois o polinômio mínimo divide o polinômio carac-
terístico (cf. Proposição 9.2.5).
Reciprocamente, vamos provar que toda raiz de pT (t) em C é raiz de
qualquer polinômio p(t) tal que p(T ) = 0. De fato, seja t0 uma raiz de pT (t),
logo existe v ∈ Cn \ {0} tal que Tv = t0v. Mas,
0 = p(T )v = p(t0)v.

5. RECONHECIMENTO DE CÔNICAS 255
Como v 6= 0, segue que p(t0) = 0. �
Problemas
4.1 Seja A = [aij] ∈MC(m,n). De�ne-se A = [aij]. Mostre que
(a) λA = λ A, para todo λ ∈ C.
(b) AB = A B, para todo B ∈MC(n, p).
4.2 Prove a recíproca do Teorema Espectral. Mais precisamente, prove que
se V é um espaço sobre R com produto interno e se β é uma base ortonormal
de V formada por autovetores do operador T : V → V , então o operador T
é simétrico.
4.3 Prove a recíproca da versão matricial do Teorema Espectral. Mais pre-
cisamente, prove que se A ∈ MR(n) é uma matriz ortogonalmente diagona-
lizável, então a matriz A é simétrica.
5 Reconhecimento de Cônicas
Nesta seção mostraremos como por meio do teorema Espectral é possível
fazer o reconhecimento de cônicas. Como nosso objetivo aqui não é o de
introduzir cônicas, indicamos o livro [8] como referência para o leitor.
Consideremos a equação geral do segundo grau nas duas variáveis x e y:
ax2 + bxy + cy2 + dx+ ey + f = 0, (1)
onde a, b, c, d, e e f são números reais dados. É possível mostrar que a equa-
ção acima representa uma cônica ou uma reta ou duas retas ou um ponto ou
nenhum lugar geométrico em R2. Como exemplo, vejamos que lugar geomé-
trico em R2 cada uma das equações abaixo representa.
1. x2 + y2 + 1 = 0;
2. 2x2 + 4y2 = 0;
3. x2 − 9 = 0;

256 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
4. 4x2 + 9y2 − 8x− 36y + 4 = 0;
5. y2 + 6y2 − 8x+ 1 = 0.
1. Esta equação representa nenhum lugar geométrico em R2, pois
{(x, y) ∈ R2 ; x2 + y2 + 1 = 0} = {(x, y) ∈ R2 : x2 + y2 = −1} = ∅;
2. Esta equação representa a origem do plano cartesiano, pois
2x2 + 4y2 = 0
equivale à equação x2 = −2y2, que é veri�cada somente para x = y = 0;
3. Esta equação representa duas retas em R2. Mais precisamente, as retas
x = 3 e x = −3;
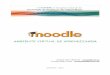
4. Esta equação representa uma elipse. De fato, seja (x, y) ∈ R2 tal que
4x2+9y2− 8x− 36y+4 = 0. Note que esta equação é equivalente à equação
4(x2 − 2x) + 9(y2 − 4y) = −4.
Completando os quadrados da equação anterior, obtemos
4(x− 1)2 + 9(y − 2)2 = 36,
ou seja,(x− 1)2
9+
(y − 2)2
4= 1,
que é a equação reduzida de uma elipse de centro (1,2) e eixos maior e menor
medindo 6 e 4, respectivamente (Figura 21).Figura 21
5. Esta equação representa uma parábola. De fato, seja (x, y) ∈ R2 tal que
y2 + 6y − 8x+ 1 = 0. Note que esta equação é equivalente à equação
(y2 + 6y) = 8x− 1.

5. RECONHECIMENTO DE CÔNICAS 257
Completando o quadrado da equação acima, obtemos
(y + 3)2 = 8(x+ 1),
que é a equação reduzida de uma parábola de vértice (−1,−3) e parâmetro
2 (Figura 22).

258 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
Figura 22
Observemos que em todos os exemplos anteriores o termo xy da equação
(2), chamado termo misto da equação, não aparece. A técnica usualmente
utilizada nesse caso é a técnica de completar quadrados. Porém, em equações
em que o termo misto aparece, precisamos de uma álgebra mais avançada
para reduzirmos a equação dada. Por exemplo, como determinar o lugar
geométrico em R2 representado pela equação
2x2 + 2xy + 2y2 + 7√2x+ 5
√2y + 10 = 0? (2)
Para respondermos esta pergunta, vamos usar o Teorema Espectral. Pri-
meiramente, note que a equação (2) equivale a equação matricial
[x y]
[2 1
1 2
][x
y
]+ [7√2 5√2]
[x
y
]+ [10] = [0]. (3)
Chame A =
[2 1
1 2
]. Como A é uma matriz simétrica, pelo Teorema
Espectral, A é ortogonalmente diagonalizável. De fato, os autovalores de
A são t1 = 3 e t2 = 1. O vetor unitário v1 =(
1√2, 1√
2
)e o vetor uni-
tário v2 =(− 1√
2, 1√
2
)são autovetores de t1 e t2, respectivamente. Assim,
β = {v1, v2} é uma base ortonormal de R2 formada por autovetores de TA.

5. RECONHECIMENTO DE CÔNICAS 259
Seja P = [IR2 ]βα, onde α é a base canônica de R2. Chame D = P−1AP .
Temos
P =
[1√2− 1√
21√2
1√2
]e D =
[3 0
0 1
].
Como A = P DP t, já que P−1 = P t, segue de (3) que
[x y]P
[3 0
0 1
]· P t
[x
y
]+ [7√2 5√2]
[x
y
]+ [10] = [0]. (4)
Observemos que o produto matricial P t
[x
y
]é a matriz das coordenadas de
um vetor v = (x, y) ∈ R2 em relação à base β, pois
P t
[x
y
]= [IR2 ]αβ [v]α.
Chamemos [v]β de
[x′
y′
]. Substituindo em (4), obtemos
[x′ y′]
[3 0
0 1
][x′
y′
]+ [7√2 5√2]
[1√2− 1√
21√2
1√2
][x′
y′
]+ [10] = [0]
ou seja,
3x′2 + y
′2 + 12x′ − 2y′ + 10 = 0. (5)
Com a mudança da base canônica α para a base β, reduzimos a equação (2)
à equação (5), que não apresenta o termo misto x′y′. Agora, vamos reduzir
(5) completando quadrados. Ora,
3x′2 + y
′2 + 12x′ − 2y′ + 10 = 0
equivale à equação
3(x′ + 2)2 + (y′ − 1)2 = 3,
ou seja,
(x′ + 2)2 +(y′ − 1)2
3= 1.

260 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
Portanto, a equação (2) representa uma elipse. Para esboçarmos o grá�co
dessa elipse, precisamos considerar as novas coordenadas x′ e y′. Assim,
nesse sistema de coordenadas, a elipse tem centro (−2, 1), semi-eixo menor
medindo 1 e semi-eixo maior medindo√3, sendo este semi-eixo paralelo ao
eixo y′ (Figura 23).
Figura 23
Generalizaremos este procedimento a seguir.
Seja dada a equação
ax2 + bxy + cy2 + dx+ ey + f = 0.
Esta é equivalente à equação matricial
[x y]
[a b/2
b/2 c
][x
y
]+ [d e]
[x
y
]+ [f ] = [0]. (6)
Seja A =
[a b/2
b/2 c
]. Como A é uma matriz simétrica, pelo Teorema Es-
pectral, existe uma base ortonormal β de R2 formada de autovetores de TA.
Assim, se t1 e t2 são autovalores de TA (pode ser que t1 = t2), existem auto-
vetores v1 e v2 associados a t1 e t2, respectivamente, tais que β = {v1, v2} é

5. RECONHECIMENTO DE CÔNICAS 261
uma base ortonormal de R2. A matriz P = [IR2 ]βα, onde α é a base canônica
de R2, diagonaliza A ortogonalmente, já que
D = P−1AP
é a matriz diagonal
[k1 0
0 k2
]com P−1 = P t. Portanto,
A = P DP t. (7)
Substituindo (7) em (6), obtemos a equação matricial
([x y]P )D
(P t
[x
y
])+ [d e]
[x
y
]+ [f ] = [0]. (8)
O produto matricial P t
[x
y
], que aparece na equação (8), é a matriz das
coordenadas de um vetor v = (x, y) ∈ R2 em relação à base β, pois
P t
[x
y
]= [IR2 ]αβ [v]α.
Chamemos [v]β de
[x′
y′
]. Substituindo em (8), obtemos
[x′ y′]D
[x′
y′
]+ [d e]P
[x′
y′
]+ [f ] = [0] (9)
uma vez que [x′
y′
]= P t
[x
y
]implica que
[x′ y′] =
(P t
[x
y
])t
=
[x
y
]t(P t)t = [x y]P
e
P
[x′
y′
]= P
(P t
[x
y
])= (P P−1)
[x
y
]=
[x
y
].

262 CAPÍTULO 9. DIAGONALIZAÇÃO DE OPERADORES
Se v1 = (x1, y1) e vv = (x2, y2), obtemos de (9) a equação
[x′ y′]
[k1 0
0 k2
][x′
y′
]+ [d e]
[x1 x2
y1 y2
][x′
y′
]+ [f ] = [0],
ou seja, obtemos a equação
k1x′2 + k2y
′2 + (dx1 + ey1)x′ + (dx2 + ey2)y
′ + f = 0. (10)
Como a equação (10) não apresenta o termo misto x′y′, podemos com-
pletar os quadrados, e assim determinar o lugar geométrico em R2 dado por
ax2 + bxy + cy2 + dx+ ey + f = 0.
Problemas
5.1* Que lugar geométrico em R2 as equações abaixo representam?
(a) x2 − 4x− 2y + 4 = 0.
(b) 4x2 − 3y2 + 24xy − 156 = 0.
5.2 Que lugar geométrico de R2 as equações abaixo representam? Esboce o
grá�co, quando possível.
(a) x2 + y2 − 2x− 2y + 4 = 0.
(b) 16x2 + 9y2 − 96x+ 72y + 144 = 0.
(c) 2x2 + 2√2xy + y2 − 12 = 0.
(d) x2 + 2xy + y2 = 0.
(e) 7x2 − 8xy + y2 − 17√5x+ 11
√5y + 41 = 0.
(f) x2 + xy + y2 + 5√2x+ 4
√2y + 1 = 0.
(g) 16x2 − 24xy + 9y2 − 15x− 20y + 50 = 0.
(h) 5x2 + 4xy + 2y2 − 12 = 0.
(i) 2x2 + 2√6xy + y2 − 16 = 0.

Bibliogra�a
[1] H. P. Bueno, Álgebra Linear, um segundo curso, Coleção Textos Univer-
sitários, SBM, 2006.
[2] P. Halmos, Teoria Ingênua dos Conjuntos , Editora Ciência Moderna,
2001.
[3] A. Hefez e M. L. T. Villela, Códigos Corretores de Erros , Coleção Mate-
mática e Aplicações, IMPA, 2008.
[4] A. Hefez e M. L. T. Villela, Números Complexos e Polinômios , Coleção
PROFMAT, SBM, 2012.
[5] V. J. Katz, A History of Mathematics - an Introduction, HarperCollins
College Publishers, 1993.
[6] S. Lang, Introduction to Linear Algebra, 2nd edition, Undergraduate Texts
in Mathematics, Springer, 1986.
[7] E.L. Lima, Álgebra Linear , 3a edição, Coleção Matemática Universitária,
IMPA, 1998.
[8] E.L. Lima, Geometria Analítica e Álgebra Linear , 2a edição, Coleção
Matemática Universitária, IMPA, 2010.
300



![[01] - profmat-sbm.org.br · sua esquerda e anda mais 1km. A figura abaixo ilustra o deslocamento. ... Como resultado, a turma deste ano tem um estudante a menos. Qual´ ... [07]](https://img.document.onl/doc/110x75/5be350f709d3f2382f8cee0f/01-profmat-sbmorgbr-sua-esquerda-e-anda-mais-1km-a-gura-abaixo-ilustra.jpg)