Embed Size (px)
Citation preview

10
263
Livro: Introdução à Álgebra LinearAutores: Abramo Hefez
Cecília de Souza Fernandez
Capítulo 10: Soluções e Respostas

264 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
Capítulo 1
2.1* Temos
2A =
[2 −4 6
8 2 0
], 3B =
[−3 6 0
3 −6 0
]e 2A− 3B =
[5 −10 6
5 8 0
].
2.2 x = 10, y = 3 e z = 1.
2.3
(a)
[−1 5 −42 1 −2
]. (b)
−2−2−6
. (c)
[−3−1
].
(d)
−1 1
−1 1
−3 3
. (e)
[−5−2
]. (f)
[3 −4 1
].
2.4* (a) Não. Porque para se determinar c63, a matriz A deveria ter, no
mínimo, 6 linhas.
(b) Por de�nição,
c36 =5∑
k=1
a3k · bk6.
Assim,
c36 =5∑
k=1
(3− k)6 =5∑
k=1
(18− 6k) = 0.
2.6* Se X é uma matriz que comuta com A, então X é uma matriz quadrada
de ordem 2. Assim, vamos determinar as matrizes
X =
[a b
c d
]tais que AX = XA. Ora,[
a b
c d
][1 0
0 3
]=
[1 0
0 3
]·
[a b
c d
],

265
se, e somente se, [a 3b
c 3d
]=
[a b
3c 3d
].
Portanto,
X =
[a b
c d
]comuta com A se, e somente se, b = c = 0 e a e d são números reais quaisquer.
2.7 (b) M =
[x y
0 x
], com x e y números reais quaisquer.
2.10* (a)
At =
1 0
2 −13 4
.(b) Seja A = (aij)n×n uma matriz triangular superior e seja At = [bij]n×n a
transposta de A. Por de�nição,
bij = aji,
para todo 1 ≤ i, j ≤ n. Mas, se j > i, segue que aji = 0, já que A é uma
matriz triangular superior. Portanto, bij = 0 sempre que i < j, ou seja, At é
uma matriz triangular inferior.
(c) Sejam A = [aij]m×n e B = [bij]m×n. Seja k ∈ R. Então,
(A+B)t = [aji + bji]n×m = [aji]n×m + [bji]n×m = At +Bt
e
(kA)t = [kaji]n×m = k[aji]n×m = kAt.
(d) Sejam A = [aij]m×n e B = [bij]n×p. Então, AB = [cij]m×p, com
cij =n∑k=1
aik · bkj,

266 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
para todo 1 ≤ i ≤ m e 1 ≤ j ≤ p, e BtAt = [dij]p×m, com
dij =n∑k=1
bki · ajk,
para todo 1 ≤ i ≤ p e 1 ≤ j ≤ m. Como (AB)t = [eij]p×m onde, para todo
1 ≤ i ≤ p e 1 ≤ j ≤ m,
eij = cji,
segue que
eij =n∑k=1
ajk · bki =n∑k=1
bki · ajk = dij,
para todo 1 ≤ i ≤ p e 1 ≤ j ≤ m. Portanto, (AB)t = BtAt.
(e) Seja A = [aij]m×n. Então At = [aji]n×m, portanto, (At)t = [aij]n×m = A.
2.11* (a) Pelo Problema 2.10, itens (c) e (e), temos (B+Bt)t = Bt+(Bt)t =
Bt + B = B + Bt, onde na última igualdade usamos o fato que a adição de
matrizes é comutativa. Agora pelo itens (d) e (e) do problema 2.10, temos
(B ·Bt)t = (Bt)t ·Bt = B ·Bt.
(b) Pelo Problema 2.10, item (c), segue que (B − Bt)t = Bt + (−Bt)t =
Bt −B = −(B −Bt).
(c) Segue imediatamente de (a) e (b).
(d) Seja B uma matriz quadrada que se escreve com B = B1 + B2, onde
B1 é simétrica e B2 é antissimétrica. Então, Bt1 = B1 e Bt
2 = −B2. Como
Bt = Bt1 +Bt
2, segue que Bt = B1 −B2. Assim,
B = B1 +B2 e Bt = B1 −B2
implicam que
B1 =B +Bt
2e B2 =
B −Bt
2.
2.16 (a) X = C−1B. (b) X = (A−1)t. (c) X = B−1A−1C.

267
Capítulo 2
1.1* (a)[2 1
−1 3
]−→
e1 : L1↔L2
[−1 3
2 1
]−→
e2 : L1→−L1
[1 −32 1
]−→
e3 : L2→L2−2L1[1 −30 7
]−→
e4 : L2→ 17L2
[1 −30 1
]−→
e5 : L1→L1+3L2
[1 0
0 1
].
(b) Sim. Porque a forma escalonada de A é a matriz identidade de ordem 2.
(c) Temos
A−1 = E5 · E4 · E3 · E2 · E1,
onde E1 = e1(I), E2 = e2(I), E3 = e3(I), E4 = e4(I) e E5 = e5(I). Assim,
A−1 =
[1 3
0 1
][1 0
0 1/7
][1 0
−2 1
][−1 0
0 1
][0 1
1 0
].
Computando o produto acima, obtemos
A−1 =
[3/7 −1/71/7 2/7
].
1.2 (a) A−1 =
[3 −7−5 12
]. (b) B−1 =
−1 −1 0
0 −1 −11 −1 −3
.
(c) C−1 =
1 −1 0 2
−1 2 2 0
0 −1 0 1
1 0 1 2
.
1.4 (a)
1 0 −7/2 5/2
0 1 3 −20 0 0 0
. (b)
1 2 0 0 4/3
0 0 1 0 0
0 0 0 1 −1/6
.

268 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
(c)
1 0 4/11 13/11
0 1 −5/11 3/11
0 0 0 0
0 0 0 0
.1.8* (a) Sejam A e B matrizes quadradas de mesma ordem n tais que AB =
I. Suponhamos que A não é invertível. Então, pelo Corolário 2.1.7, A não
tem posto n, logo A é equivalente por linhas a uma matriz com uma linha
nula, ou seja, existem matrizes elementares E1, . . . , Es tais que Es . . . E2E1A
tem uma linha nula. Portanto, temos Es · · ·E2E1AB = C, onde C também
é uma matriz com uma linha nula (cf. Problema 2.13(a), Capítulo 1). Dessa
forma, AB = (E−11 . . . E−11 )C e, portanto, também AB é uma matriz com
uma linha nula. Mas isso contradiz o fato de que AB = I. Portanto, A é
invertível. Consequentemente,
A−1 = A−1I = A−1(AB) = (A−1A)B = IB = B.
Assim AB = I se, e somente se, BA = I, pois se AB = I, pelo o que vimos
acima B = A−1 e, então, BA = A−1A = I. E reciprocamente, se BA = I,
pelo o que vimos acima A = B−1 e, então, AB = B−1B = I.
(b) SeA eB são invertíveis, temos da Proposição 1.2.4(b) queAB é invertível.
Reciprocamente, se AB é invertível, então existe C tal (AB)C = C(AB) = I.
Logo, como A(BC) = (AB)C = I, pelo item (a), temos que A é invertível.
Por outro lado, como (CA)B = C(AB) = I, pelo item (a), tem-se que B é
invertível.
2.1* Como os termos independentes do sistema são todos iguais a zero, estes
não se alteram por transformações elementares. Por isso, para resolvermos
um sistema linear homogêneo pelo método de escalonamento, basta conside-
rarmos a matriz dos coe�cientes. Ora,0 1 3 −22 1 −4 3
2 3 2 −1−4 −3 5 −4
−→L1↔L3
2 3 2 −12 1 −4 3
0 1 3 −2−4 −3 5 −4
−→
L2 → L2 − L1
L4 → L4 + 2L1

269
2 3 2 −10 −2 −6 4
0 1 3 −20 3 9 −6
−→L1 → L1 − L4
2 0 −7 5
0 −2 −6 4
0 1 3 −20 3 9 −6
−→
L1 → 1/2L2
L2 → L2 + 2L3
L4 → L4 − 3L31 0 −7/2 5/2
0 0 0 0
0 1 3 −20 0 0 0
−→L2 ↔ L3
1 0 −7/2 5/2
0 1 3 −20 0 0 0
0 0 0 0
,donde concluímos que x = 7/2z− 5/2t e que y = −3z + 2t. Fazendo z = a e
t = b, onde a e b ∈ R, obtemos que o conjunto solução do sistema dado é
S = {(72a− 5
2b, −3a+ 2b, a, b) ; a, b ∈ R}.
2.2* Note que1 2 −3 m
2 6 −11 n
1 −2 7 p
−→L2 → L2 − 2L1
L3 → L3 − L1
1 2 −3 m
0 2 −5 n− 2m
0 −4 10 p−m
−→
L3 → L3 + 2L2
1 2 −3 m
0 2 −5 n− 2m
0 0 0 p+ 2n− 5m
,o que implica que o sistema dado é possível se, e somente se, p+2n−5m = 0.
Assim, por exemplo, para m = 1, n = 2 e p = 1 o sistema tem solução. Note
que se p + 2n − 5m = 0 o sistema terá, de fato, mais de uma solução. Em
outras palavras, o sistema não pode ter solução única.
2.3
X =
[1 0 −13 2 1
].
2.4 101
.

270 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
2.5 (a) Sejam S1 e S2 os conjuntos soluções de AX = B1 e AX = B2,
respectivamente. Então
S1 = {(1/2 + 7/8t, 1/2 + 1/4t, 1/2− 11/8t) t ∈ R}
e
S2 = {(1/4 + 7/8t, 1/4t, 3/4− 11/8t) ; t ∈ R}.
(b)
{(5/4 + 7/8t, 3/2 + 1/4t, 3/4− 11/8t) ; t ∈ R}.
2.8 a = 2, b = −1, c = 1.
2.9
(a) (i) k 6= 3; {(3k + 6,−2k − 4,−1)}.
(ii) Não existe k ∈ R.
(iii) k = 3; {(5− 10z,−3 + 7z, z) z ∈ R}.
(b) (i) k 6= 1 e k 6= −2; {(1/(k + 2), 1/(k + 2), 1/(k + 2) )}.
(ii) k = −2.
(iii) k = 1; {(1− y − z, y, z) y, z ∈ R}.
(c) (i) k 6= 1 e k 6= −1; {(0, 0, 0)}.
(ii) Não existe k ∈ R.
(iii) k = ±1; {(−z, 0, z) : z ∈ R} para k = 1 e {(z, 0, z) : z ∈ R}para k = −1.
2.10 −5a+ 2b+ c = 0.
2.11 (a) a = −3. (b) a = 2. (c) a 6= −3 e a 6= 2.

271
Capítulo 3
1.1* Seja W um subconjunto não vazio de um espaço vetorial V . Queremos
mostrar que W é um subespaço vetorial se, e somente se, au+ bv ∈ W para
quaisquer a, b ∈ R e para quaisquer u, v ∈ W .
(⇒) Como W é um espaço vetorial, temos au, bv ∈ W . Logo a soma au+ bv
é um elemento de W .
(⇐) Temos que tanto a adição como a multiplicação por escalar de�nidas
em V quando restritas a W são fechadas, ou seja, se u, v ∈ W e a ∈ Rentão u + v = 1u + 1v ∈ W e au = au + 0v ∈ W . Como a adição e a
multiplicação por escalar satisfazem as condições (ii), (iii), (vii), (viii), (ix)
e (x) para quaisquer a, b ∈ R e para quaisquer u, v ∈ V , elas continuam
satisfazendo estas propriedades para quaisquer a, b ∈ R e para quaisquer
u, v ∈ W . Resta só veri�car as condições (iv) e (v). Seja w ∈ W . Então
temos o = 0w + 0w ∈ W e −w = (−1)w + 0w ∈ W .
1.2 (a) É. (b) Não é. Note que (0, 0) /∈ W .
(c) Não é. Temos (1, 1) ∈ W , mas 2(1, 1) /∈ W . (d) É.
1.3 (a) É. (b) Não é. Note que (1, 0, 0) ∈ W , mas −1(1, 0, 0) /∈ W .
(c), (d), (e) É.
1.4 (a), (b), (c) É. (d) Não é. Temos I3 ∈ W , mas 2I3 /∈ W .
(e) Não é. A matriz nula não pertence a W .
1.5 (a) Não é. Temos p(x) = 1 + x+ x2 ∈ W , mas 12p(x) /∈ W .
(b), (c) É. (d) Não é. Temos p(x) = x2 ∈ W , mas −1p(x) /∈ W .
1.6 (a) V ∩W = W e V +W = V .
(b) V ∩W = {[aij]2×2 ; a11 = a12 = a21 = a22};V +W = {[aij]2×2 ; a11 = −a12 + a21 + a22}.
(c) V ∩W = {(0, 0, 0)} e V +W = R3.
(d) V ∩W = {(0, 0, 0, 0)} e V +W = R4.
(e) V ∩W = {(0, 0, 0)} e V +W = {(x, x, y) ; x, y ∈ R}.
As somas dadas em (c) e (d) são somas diretas.

272 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
1.11* Queremos determinar a, b, c ∈ R de modo que o vetor w = (a, b, c)
seja combinação linear de u = (2,−6, 4) e v = (2,−1, 1). Para w ser uma
combinação linear de u e v devem existir dois números reais x e y tais que
(a, b, c) = xu+ yv = (2x+ 2y,−6x− y, 4x+ y).
Equivalentemente, (x, y) deve ser uma solução do sistema linear2x+ 2y = a
−6x− y = b
4x+ y = c .
Somando as três equações, obtemos 2y = a+b+c e somando as duas últimas,
temos b+ c = −2x. Assim as coordenadas a, b, c devem satisfazer a equação
a = 3b+ 5c.
1.12* (a) Dado α = {(−1, 3, 1), (1,−2, 4)}, o espaço gerado por α, G(α),
é por de�nição o conjunto de todas as combinações lineares de (−1, 3, 1) e(1,−2, 4). Assim
G(α) = {a(−1, 3, 1) + b(1,−2, 4) ; a, b ∈ R}= {(−a+ b, 3a− 2b, a+ 4b) ; a, b ∈ R}.
Geometricamente, G(α) é um plano que passa pela origem. Se (x, y, z) ∈ R3
é um elemento de G(α), então
x = −a+ b,
y = 3a− 2b,
z = a+ 4b,
(1)
onde a, b ∈ R. As equações em (1) são as equações paramétricas de G(α).
(b) O vetor (5, k, 11) ∈ G(α), se
5 = −a+ b
k = 3a− 2b
11 = a+ 4b,

273
para certos a e b em R. Resolvendo o sistema−a+ b = 5
a+ 4b = 11,
obtemos a = −a5e b = 16
5. Portanto, k = 3a− 2b = −59
5.
1.13 (a) {(2, 1, 0), (−3, 0, 1)}. (b) {(1, 1, 0,−1), (0, 0, 1, 0)}.
(c) {1 + x2, x− 12x2}. (d)
{[1 0
−1 0
],
[0 0
1 1
]}.
1.15 (a), (c) e (d).
1.16 (a) −1p1(x)− 2p2(x) + 2p3(x).
(b) 3p1(x) + 0p2(x)− 2p3(x).
(c) 2p1(x)− 1p2(x) + 0p3(x).
2.1* Sejam f(x) = x3 + 4x2 − 2x + 3, g(x) = x3 + 6x2 − x + 4 e h(x) =
2x3 + 8x2 − 8x + 7 e sejam a, b, c ∈ R tais que af(x) + bg(x) + ch(x) = 0.
Temos a+ b+ 2c = 0
4a+ 6b+ 8c = 0
2a+ b+ 8c = 0
3a+ 4b+ 7c = 0 .
Resolvendo o sitema, obtemos a = b = c = 0, Assim, os três polinômios são
linearmente independentes.
2.2 (a) e (b) independentes, (c) dependente.
2.3 (a), (b) e (c) independentes.
2.4 a = −1 ou a = 2.
3.1* Seja V um espaço vetorial de dimensão n. Queremos mostrar que qual-
quer conjunto linearmente independente com n vetores forma uma base de

274 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
V . Sejam v1, v2, . . . , vn vetores linearmente independentes. Se estes vetores
não geram V , então existe um vetor w ∈ V que não pode ser escrito como
combinação linear deles. Sejam α1, . . . , αn, β ∈ R tais que
α1v1 + · · ·+ αnvn + βw = 0.
Observemos que se β = 0, então αi = 0 para todo i = 1, . . . , n, pois os
vetores v1, v2, . . . , vn são linearmente independentes. Se β 6= 0, então
− 1
β(α1v1 + · · ·+ αnvn) = w,
o que contradiz a escolha de w. Assim, β = α1 = · · · = αn = 0. Como temos
que o conjunto com n+1 vetores formado por v1, v2, . . . , vn, w é linearmente
independente, então a dimensão de V é pelo menos n+ 1. Absurdo.
Agora vamos provar que todo conjunto formado por n geradores não
nulos é linearmente independente. Sejam v1, v2, . . . , vn vetores não nulos que
geram o espaço V . Sabemos que sempre é possível extrair dentre eles um
subconjunto linearmente independente, digamos v1, . . . , vk. A�rmamos que
estes k vetores ainda geram V . De fato, como v1, . . . , vk, vk+1 é linearmente
dependente, devemos ter que
α1v1 + · · ·+ αkvk + βvk+1 = 0,
onde os escalares não são todos nulos. Mais ainda, note que β 6= 0. Assim,
vk+1 pode ser escrito como uma combinação linear dos vetores v1, . . . , vk.
Analogamente, mostramos que cada vk+j, com 1 ≤ j ≤ n− k, também pode
ser escrito como uma combinação linear dos vetores v1, . . . , vk. Desta forma,
pela Proposição 3.1.7, concluímos a prova da a�rmação. Portanto, os vetores
v1, . . . , vk formam uma base de V . Como dimV = n, segue que k = n, ou
seja, o conjunto original já era linearmente independente.
3.2* Seja V o espaço das matrizes simétricas 2× 2, ou seja,
V =
{[a b
b c
]a, b, c ∈ R
}.
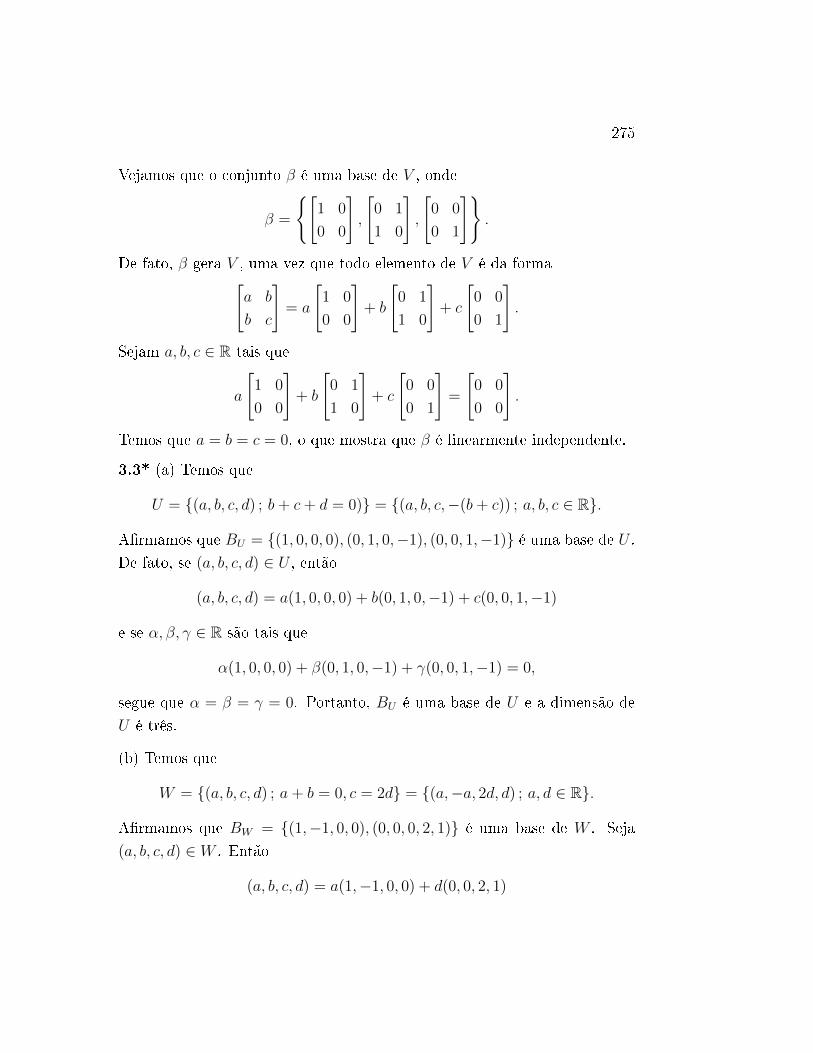
275
Vejamos que o conjunto β é uma base de V , onde
β =
{[1 0
0 0
],
[0 1
1 0
],
[0 0
0 1
]}.
De fato, β gera V , uma vez que todo elemento de V é da forma[a b
b c
]= a
[1 0
0 0
]+ b
[0 1
1 0
]+ c
[0 0
0 1
].
Sejam a, b, c ∈ R tais que
a
[1 0
0 0
]+ b
[0 1
1 0
]+ c
[0 0
0 1
]=
[0 0
0 0
].
Temos que a = b = c = 0, o que mostra que β é linearmente independente.
3.3* (a) Temos que
U = {(a, b, c, d) ; b+ c+ d = 0)} = {(a, b, c,−(b+ c)) ; a, b, c ∈ R}.
A�rmamos que BU = {(1, 0, 0, 0), (0, 1, 0,−1), (0, 0, 1,−1)} é uma base de U .
De fato, se (a, b, c, d) ∈ U , então
(a, b, c, d) = a(1, 0, 0, 0) + b(0, 1, 0,−1) + c(0, 0, 1,−1)
e se α, β, γ ∈ R são tais que
α(1, 0, 0, 0) + β(0, 1, 0,−1) + γ(0, 0, 1,−1) = 0,
segue que α = β = γ = 0. Portanto, BU é uma base de U e a dimensão de
U é três.
(b) Temos que
W = {(a, b, c, d) ; a+ b = 0, c = 2d} = {(a,−a, 2d, d) ; a, d ∈ R}.
A�rmamos que BW = {(1,−1, 0, 0), (0, 0, 0, 2, 1)} é uma base de W . Seja
(a, b, c, d) ∈ W . Então
(a, b, c, d) = a(1,−1, 0, 0) + d(0, 0, 2, 1)

276 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
e se α, β ∈ R são tais que
α(1,−1, 0, 0) + β(0, 0, 2, 1) = (α,−α, 2β, β) = 0,
segue que α = β = 0. Portanto, BW é uma base de W e a dimensão de W é
dois.
(c) Temos que
U∩W = {(a, b, c, d) ; b+c+d = 0, a+b = 0, c = 2d} = {(3d,−3d, 2d, d) ; d ∈ R}.
A�rmamos que B = {(3,−3, 2, 1)} é uma base de U ∩ W . De fato, se
(a, b, c, d) ∈ U ∩W , então
(a, b, c, d) = (3d,−3d, 2d, d) = d(3,−3, 2, 1).
Portanto, B é uma base de U ∩W e a dimensão de U ∩W é um.
(d) Observe que
dim(U +W ) = dimU + dimW − dim(U ∩W ) = 4.
Logo, U +W = R4. Assim, podemos escolher como base de U +W qual-
quer base de R4. Por exemplo, a base canônica {(1, 0, 0, 0), (0, 1, 0, 0), (0, 0, 1, 0),(0, 0, 0, 1)}.
3.4 (a) dependente, já que v3 = 2v1 − 2v2.
(b) β = {(1, 1, 0), (0, 1,−1)}.(c) dim(G(α)) = 2, porque β é uma base para G(α).
3.6 Os vetores formam uma base paraM(2, 2).
3.9 4.
3.10 (a) 2. (b) Não. Porque
[2 1
3 4
]/∈ W .
3.11 (a) {(−3, 1,−3, 5)}, 1.(b) {(−1, 1, , 0, 0), (2, 0, 1, 0), (−1, 0, 0, 1)}, 3.

277
3.13 (a) 11/28, 1/14. (b) 1,−1. (c) 2, 0,−1.
4.1* Seja U ⊆ R4 gerado pelos vetores (1,−2, 3,−3), (2, 3, 1,−4), (3, 8,−3,−5).
(a) Sejam a, b, c ∈ R tais que
a(1,−2, 3,−3) + b(2, 3, 1,−4) + c(3, 8,−3,−5) = 0.
Temos que a, b, c devem satisfazer o sistema lineara+ 2b+ 3c = 0
−2a+ 3b+ 8c = 0
3a+ b− 3c = 0
−3a− 4b− 5c = 0 .
Somando as duas últimas equações obtemos 3b = −8c e substituindo na se-
gunda equação obtemos 2a = 0. Assim, a = b = c = 0. Logo, (1,−2, 3,−3),(2, 3, 1,−4), (3, 8,−3,−5) é uma base de U e sua dimensão é três.
(b) Chamemos u1 = (1,−2, 3,−3), u2 = (2, 3, 1,−4) e u3 = (3, 8,−3,−5).Devemos achar um vetor v ∈ R4 de modo que o conjunto B = {u1, u2, u3, v}seja linearmente independente, ou seja, devemos achar um vetor v que não
seja combinação linear dos vetores u1, u2 e u3. Ora, U é o espaço gerado por
u1, u2 e u3. Equivalentemente, U é o espaço linha da matriz
A =
1 −2 3 −32 3 1 −43 8 −3 −5
.Reduzindo a matriz A a sua forma escalonada obtemos a matriz
R =
1 0 0 −30 1 0 0
0 0 1 0
.

278 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
Os vetores linha não nulos da matriz R são w1 = (1, 0, 0,−3), w2 = (0, 1, 0, 0)
e w3 = (0, 0, 1, 0). Assim,
U = G(u1, u2, u3)
= G(w1, w2, w3)
= {a(1, 0, 0,−3) + b(0, 1, 0, 0) + c(0, 0, 1, 0) ; a, b, c ∈ R}= {(a, b, c,−3a) ; a, b, c ∈ R}.
Portanto, para um vetor v ∈ R4 não ser combinação linear dos vetores u1, u2e u3, basta v não ser da forma (a, b, c,−3a), onde a, b, c ∈ R. Desse modo,
tomemos v = (1, 0, 0, 0). O conjunto B = {u1, u2, u3, v} é linearmente inde-
pendente e, portanto, é uma base de R4.
4.2* Seja U ⊆ R4 gerado pelos vetores u1 = (2, 4,−2, 6), u2 = (1, 2, 1/2,−1)e u3 = (3, 6, 3,−5) e seja W ⊆ R4 gerado pelos vetores w1 = (1, 2,−4, 11)e w2 = (2, 4,−5, 14). Para mostrarmos que U = W , basta mostrar, pela
Proposição 3.1.7, que cada vetor ui é combinação linear dos vetores w1 e w2
para i = 1, 2, 3 e que, para j = 1, 2, cada vetor wj é combinação linear dos
vetores u1, u2 e u3.
Vamos mostrar que u1 é combinação linear dos vetores w1 e w2. Para isto,
temos que achar a, b,∈ R tais que u1 = aw1 + bw2. Como u1 = −2w1 + 2w2,
mostramos o que queríamos. Analogamente podemos ver que
u2 = −2w1 + (3/2)w2,
u3 = −7w1 − (5/7)w2,
w1 = (5/4)u1 + 0u2 − (1/2)u3,
w2 = (13/8)u1 + 1u2 − (3/4)u3.
4.3 Os vetores formam uma base para R3.
4.4 {w1, w2} é uma base para W , pois {w1, w2} é independente e w3 ∈G(w1, w2) já que w3 = 2w1 + 6w2. Portanto, dimW = 2.

279
O conjunto {w1, w2, (0, 0, 1, 0), (0, 0, 0, 1)} estende {w1, w2} a uma base
de R4.
4.5 (0, 0, 0, 1, 0) e (0, 0, 0, 0, 1).
Capítulo 4
1.2* Sejam u, v e w três vetores quaisquer em R3. Podemos supor que u e v
são não nulos.
(⇒) Se u, v e w são dependentes, existem a, b, c ∈ R não simultaneamente
nulos tais que au+ bv+ cw = 0. Se a 6= 0, temos que u = −(b/a)v− (c/a)w,
o que mostra que u, v e w pertencem ao plano que passa pela origem que tem
v e w como vetores base.
(⇐) Suponhamos que u, v e w pertencem a um plano π que passa pela origem.
Sabemos que π é um subespaço de R3 de dimensão dois. Assim, qualquer
conjunto com mais de dois elementos de π será dependente, em particular,
{u, v, w} é dependente.
1.3* Consideremos v1 = B − A = (3,−3, 1) e v2 = C − A = (0,−3, 1). Sejaπ o plano que passa pelos pontos A,B e C. Um vetor normal n ao plano π é
dado pelo produto vetorial de v1 e v2. Logo, n = v1 × v2 = (0, 3, 6) é um tal
vetor. Assim, 3y + 6z + d = 0 é uma equação geral do plano π, onde d é um
número real a se determinar. Como A ∈ π, segue que 3(2) + 6(0) + d = 0, o
que nos dá que d = −6. Assim, 3y + 6y − 6 = 0 é a equação geral do plano
π.
1.4 (a) {(1, 0, 3), (0, 1,−4)}. (b) {(2,−1, 3)}. (c) {(1, 1, 0), (0, 0, 1)}.
1.5x−24
= y + 4 = z−7−8 .
1.7 x− 2 = y − 3 = −z.
1.8 x = 2z+1−3 , y = 1− z.
1.9 k = −5.

280 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
1.11 k = −21/7.
1.13 x = −4/3t−2s, y = t, z = 2+s, sendo t e s números reais quaisquer.
1.14 x = 2− 7t+ 3s, y = −1 + t+ s, z = −5t+ 2s, sendo t e s números
reais quaisquer.
1.15 (2, 1, 0), (0,−3, 2), (3/2, 0, 1/2), respectivamente.
2.1* (a)⇒ (b): Suponhamos que r1 e r2 estejam num mesmo plano, digamos
π(Q, u1, u2). Ora, como r1 ⊂ π e r2 ⊂ π, segue que A1 ∈ π e A2 ∈ π. Assim,
existem m,n, t, s ∈ R tais que
A1 = Q+mu1 + nu2 (1)
e
A2 = Q+ tu1 + su2. (2)
Consequentemente, v ∈ G(u1, u2). Como A1 + v1 ∈ r1 e A2 + v2 ∈ r2, segueque existem a, b, c, d ∈ R tais que
A1 + v1 = Q+ au1 + bu2 (3)
e
A2 + v2 = Q+ cu1 + du2, (4)
já que A1 + v1, A2 + v2 ∈ π. Substituindo (1) em (3) e substituindo (2) em
(4), concluímos que v1 ∈ G(u1, u2) e v2 ∈ G(u1, u2). Mostramos, então, que
{v, v1, v2} ⊂ G(u1, u2). Como dim(G(u1, u2)) = 2, qualquer conjunto com
mais de dois vetores é dependente. Portanto, {v, v1, v2} é dependente.
(b)⇒ (a): Os vetores v, v1 e v2 pertencem a um mesmo plano que passa pela
origem, digamos π = π(0, w1, w2). Assim, existem a, b, c, d, e, f ∈ R tais que
v = aw1 + bw2,
v1 = cw1 + dw2,
v2 = ew1 + fw2.

281
Tome P ∈ r1. Então, existe t ∈ R tal que P = A1 + tv1 = A1 + (tc)w1 +
(td)w2, mostrando que r1⊂π(A1, w1, w2). A�rmamos que r2⊂π(A1, w1, w2)
também. Ora, se P ∈ r2, então existe t ∈ R tal que P = A2 + tv2 =
A1 + aw1 + bw2 + (te)w1 + (tf)w2 = A1 + (a+ te)w1 + (b+ tf)w2, mostrando
que P ∈ π(A1, w1, w2). Portanto, ambas as retas r1 e r2 pertencem ao plano
π(A1, w1, w2).
2.2* Note que
r1 = {(0,−3, 0) + t(1, 2,−1) ; t ∈ R}
e
r2 = {(1, 4, 0) + t(−36,−6, 3) ; t ∈ R}.
Devemos veri�car se o conjunto {(1, 2,−1), (−36,−6, 3), v}, em que v =
(1, 7, 0), é linearmente independente ou não. É fácil veri�car que é line-
armente independente. Assim, as retas são reversas.
2.3 Concorrentes.
2.5 a = 1, b = −2, c = 4.
2.6 a = 4, b = 3.
3.5 x = 10.
3.6* Devemos resolver pela regra de Cramer o sistema linear AX = B, onde
A =
[cos θ − sen θ
sen θ cos θ
], X =
[x′
y′
]e B =
[x
y
].
Como detA = 1, segue pela regra de Cramer que
x′ =detA1
detA= detA1 e y′ =
detA2
detA= detA2,
em que
A1 =
[x − sen θ
y cos θ
]e A2 =
[cos θ x
sen θ y
].
Portanto,
x′ = x cos θ + y sen θ e y′ = −x sen θ + y cos θ.

282 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
Capítulo 5
1.4* Sejam A,C ∈ V e sejam a, c ∈ R. Temos
T (aA+ cC) = (aA+ cC)B +B(aA+ cC)
= aAB + cCB + aBA+ cBC
= a(AB +BA) + c(CB +BC)
= aT (A) + cT (C),
mostrando que T é uma transformação linear.
1.6 (a) T (u+ v) = 3u+ v. (b) T (3v) = 3u+ 3v.
(c) T (−3u) = −6u. (d) T (u− 5v) = −3u− 5v.
1.7 (a), (c) e (e) são transformações lineares.
(b) Não, pois T (2(1, 1)) 6= 2T (1, 1).
(d) Não, pois T (−1(1, 1)) 6= −1T (1, 1).(f) É linear somente se a = 0.
1.8 (a) n = 2, m = 3 e T (x, y) = (−x+ 2y,−3x+ 2y, y − x).(b) n = m = 3 e T (x, y, z) = (−x+ 4y − z, 5x− 5y − z, x+ 3z).
2.1* Para mostrarmos que a imagem de T é um subespaço vetorial de W ,
devemos mostrar que se w1, w2 ∈ ImT e a ∈ R, então w1 + w2, aw1 ∈ ImT .
Ora, como w1, w2 ∈ ImT , existem v1, v2 ∈ V tais que T (v1) = w1 e T (v2) =
w2. Assim w1+w2 = T (v1)+T (v2) = T (v1+v2) e, portanto, w1+w2 ∈ ImT .
Como aw1 = aT (v1) = T (av1), temos que aw1 ∈ ImT .
2.2* (a) Pela de�nição, (x, y, z) ∈ KerT quando (x, y, z) é solução do sistema
linear x+ 2y − z = 0
y + 2z = 0
x+ 3y + z = 0.
Resolvendo o sistema acima, obtemos x = 5z e y = −2z, com z ∈ R. Assim,
KerT = {(5z,−2z, z) ; z ∈ R}. Como KerT é um subespaço de R3 e sua
dimensão é 1, KerT é uma reta que passa pela origem.

283
(b) x = 5t
y = −2t, t ∈ R
z = t
.
(c) Como dimKerT = 1, segue do teorema do núcleo e da imagem que
dim ImT = 2. Portanto, Im T é um plano que passa pela origem.
(d) Ora,
ImT = G(T (1, 0, 0), T (0, 1, 0), T (0, 0, 1))
= G(((1, 0, 1), (2, 1, 3), (−1, 2, 1))= G((1, 0, 1), (2, 1, 3)),
já que (−1, 2, 1) = −5(1, 0, 1) + 2(2, 1, 3). Portanto,
ImT = π(0, v1, v2),
onde v1 = (1, 0, 1) e v2 = (2, 1, 3). Assim,x = m+ 2n
y = n, m, n ∈ R
z = m+ 3n
são as equações paramétricas procuradas.
2.4* Se {v1, . . . , vn} é uma base de V , então {T (v1), . . . , T (vn)} gera ImT .
Como dim ImT = n, segue que {T (v1), . . . , T (vn)} é uma base de ImT e,
consequentemente, uma base de W , já que ImT = W . Suponhamos agora
que {T (v1), . . . , T (vn)} é uma base de W . Para provarmos que {v1, . . . , vn}é uma base de V , basta mostrar que este conjunto é independente. Sejam
a1, . . . , an ∈ R tais que a1v1+· · ·+anvn = 0. Temos a1T (v1)+· · ·+anT (vn) =0, portanto, ai = 0 para todo 1 ≤ i ≤ n.
2.6* Vamos resolver este exercício de dois modos:

284 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
1o) Usando R[x]3: se p(x)=ax3 + bx2 + cx + d∈W , então a − b + c − d=0.
Assim,p(x) = (b− c+ d)x3 + bx2 + cx+ d
= b(x3 + x2) + c(−x3 + x) + d(x3 + 1).(1)
Chamando q1(x) = x3 + x2, q2(x) = −x3 e q3(x) = x3 + 1 temos, por (1),
que W = G(q1(x), q2(x), q3(x)). Como {q1(x), q2(x), q3(x)} é independente,
segue que este conjunto é uma base de W . Portanto, dimW = 3.
2o) Usando o fato que R[x]3 é isomorfo ao R4: a função T : R[x]3 → R4 dada
por T (ax3 + bx2 + cx + d) = (a, b, c, d) é um isomor�smo. Como T (W ) =
{(b− c+ d, b, c, d) ; b, c, d ∈ R}, para determinarmos a dimensão de W , basta
determinarmos a dimensão de T (W ). Consideremos v1 = (1, 1, 0, 0), v2 =
(−1, 0, 1, 0) v3 = (1, 0, 0, 1). Como {v1, v2, v3} é independente e gera T (W ),
já que
(b− c, d, b, c, d) = bv1 + cv2 + dv3,
segue que {v1, v2, v3} é uma base para T (W ). Portanto, dimT (W ) = 3 e,
consequentemente, dimW = 3.
2.7 (a) KerT = {(x, x, x) ; x ∈ R}, Im T = R2.
(b) KerT = {(0, 1/2w, 3/2w,w) ; w ∈ R}, Im T = R3.
(c) KerT = {0}, Im T = {p(x) = ax3 + bx2 + cx ; a, b, c ∈ R}.
(d) KerT =
{[a b
a b
]; a, b ∈ R
}, Im T =
{[a b
−4a −4b
]; a, b ∈ R
}.
(e) KerT = {0}, Im T = {(a+ b, 2b+ c, a+ 2b− c, c) ; a, b, c ∈ R}.
2.8 injetivas: (c) e (e); sobrejetivas: (a) e (b).
2.10 T (x, y, z) = (0, 0, x+y+3z3
).
2.11 T (x, y, z, t) = (−x− y + z, t− 2x− y, 0).
2.12 T (x, y, z) = (x, 2x+ y, 3x− y).
2.13 T (x, y, z) = (y + z, 3y,−y + z, 2y − z).
2.16 (a) T (x, y, z) = (x, y). (b) Não é possível.

285
(c) T (x, y, z) = (0, 0, 0). (d) T (x, y, z) = (x+ z, 0, 0, 0).
2.19 É invertível;
T−1(x, y, z) = (4x− 2y − 3z,−11x+ 6y + 9z,−12x+ 7y + 10z).
2.20 (a) ai 6= 0 para todo 1 ≤ i ≤ n.
(b) T−1(x1, x2, . . . , xn) = (a−11 x1, a−12 x2, . . . , a
−1n xn).
2.22 T : V → W dada por T ([aij]) = [bij], com bij = aij se i > j e bij = 0 se
i < j.
3.1* Como T : R3 → R4 está dada por T (x, y, z) = (x + y, z, x− y, y + z) e
S : R2 → R3 está dada por S(x, y) = (2x+ y, x− y, x− 3y), obtemos
(T ◦ S)(x, y) = T (2x+ y, x− y, x− 3y)
= ((2x+ y) + (x− y), x− 3y, (2x+ y)− (x− y),(x− y) + (x− 3y))
= (3x, x− 3y, x+ 2y, 2x− 4y).
3.3 (a) (T + S)(x, y) = (x, x).
(b) (5T − 4S)(x, y) = (5x+ 9y,−4x).(c) (S ◦ T )(x, y) = (0, x+ y).
(d) (T ◦ S)(x, y) = (x− y, 0).(e) T 3(x, y) = T (x, y).
(f) S−3(x, y) = (−y, x).
Capítulo 6
1.2* (a) Sejam α = {v1, . . . , vn} uma base de Rn e β = {w1, . . . , wm} uma
base de Rm. Sejam u, v ∈ Rn e a ∈ R. Digamos que u = x1v1 + · · ·+ xnvn e
v = y1v1 + · · ·+ ynvn. Logo, u+ av = (x1 + ay1)v1 + · · ·+ (xn+ ayn)vn. Pela
de�nição de T ,
[T (u+ av)]β = A[u+ av]α = A[u]α + aA[v]α = [T (u)]β + a[T (v)]β,

286 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
onde a segunda igualdade segue das propriedades do produto de matrizes.
Logo, T é uma transformação linear.
(b) Pela de�nição da matriz [T ]αβ , sabemos que a primeira coluna desta
matriz é [T (v1)]β e usando a de�nição de T vemos que [T (v1)]β é precisamente
a primeira coluna de A. Procedemos de maneira análoga para as outras
colunas.
1.4* Basta mostrar que dim ImT = r, pois dimKerT = dimV − dim ImT .
O posto da matriz nos diz que temos r colunas linearmente independentes e
que qualquer conjunto com mais de r colunas será linearmente dependente.
Por outro lado, sabemos que as colunas da matriz geram a imagem e que
podemos obter a partir delas uma base para ImT escolhendo um subconjunto
linearmente independente maximal. Assim pelo visto acima, este conjunto
conterá exatamente r colunas.
1.5 T (x, y, z) = (−x+ 2z,−4x− y + 6z).
1.6
[T ]αβ =
3/2 −1 −1/2−1/2 1 −1/2−1/2 0 1/2
.
1.8 β = {(0, 1, 1), (1, 0, 0), (−3, 7, 1)}.
1.9
[T ]ββ =
1 1 1
0 2 4
0 0 4
.
1.11
[T ]αα =
0 0 0 1
1 0 0 0
0 1 0 0
0 0 1 0
.

287
1.12 a) Não existe v ∈ R2 tal que T (v) = I2.
(b) T (3,−1) =
[5 −35 4
].
2.1 T (x, y, z) = (23x+ 4
3y − 1
3z, 1
3x+ 2
3y + 1
3z, 2y − z)}.
2.2 (a) KerTA = {0}. (b) Im TA = G((1, 0, 1), (2, 1,−1)).(c) KerTB = {0}. (d) Im TB = R3.
(e) Ker(TB ◦ TA) = {0}. (f) Im (TB ◦ TA) = G((2,−1, 2), (2,−2, 3)).
3.1* Vejamos qual é a imagem de cada vetor da base canônica de R2. O vetor
(1, 0) se transforma no vetor (0, 1) pela rotação e depois no vetor (0, 1) pela
re�exão. Já o vetor (0, 1) se transforma no vetor (−1, 0) pela rotação e depoisno vetor (0,−1). Assim, a matriz desta transformação na base canônica é
A =
[1 0
0 −1
].
3.2* Vamos determinar a matriz da transformação na base canônica, pois
sabemos que a inversa desta matriz é a matriz da transformação inversa.
Temos
A =
1 0 0
0 1 0
0 0 −1
.Neste caso, a matriz inversa é igual à matriz. Assim a transformação inversa
é a própria transformação.
3.7 (a)
[0 0
3 0
]. (b)
[ √24−√24
−√24−√24
].
4.1 (a)
[13
43
13−2
3
],
[1 0
1 2
],
[1 0
−12
12
]. (b) [v]β =
[−23
].
4.2 α = {(1, 3), (−5,−12)}.
4.3
−1 1 0
1 0 0
0 −1 1
.

288 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
4.8* A demonstração de (a) não apresenta di�culdade. Vamos provar (b).
Escrevamos A = (aij) e B = (blk). Temos que (AB)ii =∑n
j=1 aijbji e
(BA)jj =∑n
i=1 bjiaij . Assim,
trAB =∑n
i=1
∑nj=1 aijbji =
∑nj=1
∑ni=1 aijbji
=∑n
j=1
∑ni=1 bjiaij = trBA.
Vamos provar (c). De fato, existe uma matriz invertível P tal que [T ]αα =
P−1[T ]ββP , logo
tr[T ]αα = trP−1[T ]ββP = tr[T ]ββP−1P = tr[T ]ββ.
Capítulo 7
1.1* (a) Sejam u = (x1, x2), v = (y1, y2) e w = (z1, z2) em R2 e seja c em R.Temos:
1. 〈u, u〉 = 19x21 +
14x22 ≥ 0;
2. 〈u, u〉 = 19x21 +
14x22 = 0 se, e somente se x1 = x2 = 0, ou equivalente-
mente u = 0;
3. 〈u, v〉 = 19x1y1 +
14x2y2 =
19y1x1 +
14y2x2 = 〈v, u〉;
4. 〈u+ v, w〉 = 19(x1 + y1)z1 +
14(x2 + y2)z2 = (1
9x1z1 +
14x2z2) + (1
9y1z1 +
14y2z2) = 〈u,w〉+ 〈v, w〉;
5. 〈cu, v〉 = 19(cx1)y1 +
14(cx2)y2 = c(1
9x1y1 +
14x2y2) = c〈u, v〉.
Portanto, a expressão dada de�ne um produto interno em R2.
(b) Se V é um espaço com produto interno, então o conjunto dos vetores v
de V que satisfazem ||v|| = 1 é chamado de círculo unitário de V . Assim, o
círculo unitário de R2 usando o produto interno em (a) é dado pelo conjunto
dos vetores v = (x, y) em R2 tais que
||v|| = 〈v, v〉1/2 =√
1
9x2 +
1
4y2 = 1,

289
ou equivalentemente,x2
9+y2
4= 1.
A equação acima representa uma elipse de centro na origem e eixos maior e
menor paralelos aos eixos coordenados (Figura 24).
(c) Se v = (x, y) ∈ R2, então
||v|| = 〈v, v〉1/2 =√x2 + y2 = 1,
se, e somente se
x2 + y2 = 1.
A equação acima representa um círculo de centro na origem e raio 1 (Fi-
gura 24).
(d) Sim. O círculo unitário com a norma dada pelo produto interno em (a)
tem um formato elíptico.
Figura 24
1.4 (a) 8. (b) −11. (c) 14.
2.1 (a) 0. (b)√22. (c)
√63.

290 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
2.2* Sejam u e v dois vetores de um espaço com produto interno. Então
||u+ v||2 + ||u− v||2 = 〈u+ v, u+ v〉+ 〈u− v, u− v〉= 〈u, u〉+ 2〈u, v〉+ 〈v, v〉+ 〈u, u〉 − 2〈u, v〉+ 〈v, v〉
= 2〈u, u〉+ 2〈v, v〉= 2||u||2 + 2||v||2.
2.9* Faremos a prova por indução sobre n. Se n = 2, então
||v1 + v2||2 = 〈v1 + v2, v1 + v2〉= 〈v1, v1〉+ 2〈v1, v2〉+ 〈v2, v2〉= ||v1||2 + ||v2||2,
já que 〈v1, v2〉 = 0. Suponhamos agora o resultado válido para n = k − 1.
Vamos mostrar que ele é válido para n = k. De fato, pelo caso n = 2 e pela
hipótese de indução, segue que
||v1 + · · ·+ vk−1 + vk||2 = ||v1 + · · ·+ vk−1||2 + ||vk||2
= ||v1||2 + · · ·+ ||vk−1||2 + ||vk||2,
pois 〈v1 + · · · + vk−1, vk〉 = 〈v1, vk〉 + · · · + 〈vk−1, vk〉 = 0. Por indução, o
resultado vale para todo n ∈ N \ {0}.
2.12* O conjunto {u, v} é uma base de W . Para mostrar que um vetor v
em R5 ∈ W⊥, ou seja, que 〈v, w〉 = 0 para todo w ∈ W , basta mostrar
que 〈v, u〉 = 〈v, v〉 = 0. Tomemos v = (x, y, z, w, t) ∈ R5. Temos que
〈v, u〉 = 〈v, v〉 = 0 se, e somente se,x+ 2y + 3z − w + 2t = 0
2x+ y + 3z − 2w − t = 0.

291
Equivalentemente,
x = 5z + w +4
3t e y = −z − 5
3t,
onde z, w, t ∈ R.Portanto,
W⊥ = {(5z + w +4
3t,−z − 5
3t, z, w, t) ; z, w, t ∈ R}.
Assim,
α = {(5,−1, 1, 0, 0), (1, 0, 0, 1, 0), (4/3,−5/3, 0, 0, 1)}
é uma base para W⊥.
2.13 Basta veri�car que 〈v, v1〉 = 0 e 〈v, v2〉 = 0, pois 〈v, av1 + bv2〉 =
a〈v, v1〉+ b〈v, v2〉 = 0, para quaisquer a e b em R.
2.14 x = 1 + t, y = −2t, z = −3t, sendo t ∈ R.
3.1 (a) Suponhamos que α = {v1, v2, . . . , vn}. Então
v = a1v1 + a2v2 + · · ·+ anvn,
já que a1, a2, . . . , an são as coordenadas de v na base α. Como α é um
conjunto ortogonal, segue pelo Problema 2.9 que
||v||2 = ||a1v1 + a2v2 + · · ·+ anvn||2
= ||a1v1||2 + ||a2v2||2 + · · ·+ ||anvn||2.
Pela Proposição 7.2.2(c), temos
||a1v1||2 + ||a2v2||2 + · · ·+ ||anvn||2
= |a1|2||v1||2 + |a2|2||v2||2 + · · ·+ |a2n||vn||2
= a21 + a22 + · · ·+ a2n,
pois ||v1|| = ||v2|| = · · · = ||vn|| = 1. Portanto,
||v||2 = a21 + a22 + · · ·+ a2n.

292 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
Extraindo as raízes quadradas de ambos os lados da igualdade acima obtemos
||v|| =√a21 + a22 + · · ·+ a2n.
(b) Por de�nição, d(v, w) = ||v − w||. Como
v − w = (a1 − b1)v1 + (a2 − b2)v2 + · · ·+ (an − bn)vn,
segue do item (a) que
d(v, w) =√
(a1 − b1)2 + (a2 − b2)2 + · · ·+ (an − bn)2.
(c) Ora,
〈v, w〉 = 〈a1v1 + a2v2 + · · ·+ anvn, b1v1 + b2v2 + · · ·+ bnvn〉= a1b1〈v1, v1〉+ a1b2〈v1, v2〉+ · · ·+ a1bn〈v1, vn〉+ a2b1〈v2, v1〉+ a2b2〈v2, v2〉+ · · ·+ a2bn〈2, vn〉+ · · ·+ anb1〈vn, v1〉+ anb2〈vn, v2〉+ · · ·+ anbn〈vn, vn〉
= a1b1 + a2b2 + · · ·+ anbn,
já que 〈vi, vj〉 = 0 sempre que i 6= j e 〈vi, vi〉 = 1 para todo i.
3.4* (a) Pelo Teorema 14, v = v1+v2 onde v1 = projWv ∈ W e v2 = v−v1 ∈W⊥. Como v1 ∈ W e {w1, w2, . . . , wn} é uma base de W , v1 se escreve de
modo único como combinação linear dos vetores w1, w2, . . . , wn, digamos
v1 = a1w1 + a2w2 + · · ·+ anwn. (1)
Vamos mostrar que, para cada 1 ≤ i ≤ n, ai = 〈v, wi〉. Ora como
v − v1 ∈ W⊥, segue que 〈v − v1, w〉 = 0 para todo w ∈ W . Em particular,
〈v − v1, wi〉 = 0 para todo 1 ≤ i ≤ n. Consequentemente,
〈v, wi〉 = 〈v1, wi〉 para todo 1 ≤ i ≤ n.
Fixemos agora 1 ≤ i ≤ n. Temos
〈v, wi〉 = 〈v1, wi〉 = 〈a1w1 + a2w2 + · · ·+ anwn, wi〉 = ai, (2)

293
pois {w1, w2, . . . , wn} é um conjunto ortonormal. Substituindo (2) em (1),
obtemos
projWv = 〈v, w1〉w1 + 〈v, w2〉w2 + · · ·+ 〈v, wn〉wn.
(b) A demonstração é análoga à prova acima, sendo que, neste caso, para
cada 1 ≤ i ≤ n
〈v, wi〉 = ai〈wi, wi〉 = ai||wi||2
e, consequentemente,
ai =〈v, wi〉||wi||2
.
3.5 {w1, w2, w3, w4}, sendo w1 = (0, 2, 1, 0), w2 = (1,−1/5, 2/5, 0),w3 = (1/2, 1/2,−1,−1) e w4 = ( 4
15, 415,− 8
15, 45).
3.6 (−1/2, 5/2,−2, 4).
3.7 {(2/√5, 1/√5, 0), (−1/
√5, 2/√5, 0), (0, 0, 1)}.
4.1* Sejam S e T operadores lineares num espaço com produto interno de
dimensão �nita V e seja k ∈ R. Sejam u, v ∈ V quaisquer.
(a) 〈(S + T )(u), v〉 = 〈S(u), v〉+ 〈T (u), v〉 = 〈u, S∗(v)〉+ 〈u, T ∗(u)〉= 〈u, (S∗ + T ∗)(v)〉;
Assim, (T + S)∗ = T ∗ + S∗.
(b) 〈(kT )(u), v〉 = k〈T (u), v〉 = 〈u, T ∗(v)〉 = 〈u, kT ∗(v)〉;
Logo, (kT )∗ = kT ∗.
(c) 〈(ST )(u), v〉 = 〈T (u), S∗(v)〉 = 〈u, T ∗(S∗(v))〉;
Assim, (ST )∗ = T ∗S∗.
(d) 〈T ∗(u), v〉 = 〈v, T ∗(u)〉 = 〈T (v), u〉 = 〈u, T (v)〉.
Logo, (T ∗)∗ = T .
4.2 u = (1, 4,−5).
4.3 T ∗(x, y, z) = (2x+ 3y, 2x+ z,−4y).

294 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
4.6 (a), (c) e (d) são operadores ortogonais.
4.7* A segunda linha (a, b, c) deve satisfazer duas condições: a2+b2+c2 = 1 e
a+2b+2c = 0. Assim, 5b2+5c2+8bc = 1. Escolhendo c = 0, obtemos b =√55
e a = −2√5
5. Para a terceira linha (d, e, f), queremos que d2 + e2 + f 2 = 1,
d + 2e + 2f = 0 e que −2e + f = 0, ou seja, devemos ter que d = −2√5
15,
e = −4√5
15e f = 5
√5
15.
4.9 (a)
[2√5
1√5
− 1√5
2√5
].
(b)
13−2
323
−23−2
3−1
3
−23
13
23
.
Capítulo 8
2.2* Por indução sobre n. Para n = 2, o resultado é óbvio. Suponhamos o
resultado válido para n − 1 e seja A = [aij] uma matriz triangular superior
de ordem n. Então aij = 0 para todo j < i.
Pelo Teorema 8.2.1,
detA = a11 det(A(1|1)),
já que ai1 = 0 para todo 2 ≤ i ≤ n. Como a matriz A(1|1) é uma matriz
triangular superior de ordem n − 1, com a22, . . . , ann como elementos da
diagonal principal, temos, pela hipótese de indução, que
detA(1|1) = a22 . . . ann,
o que termina a prova o resultado.
2.3* Seja a ∈ R. Fazendo o desenvolvimento de Laplace pela primeira linha

295
obtemos
detA = det
a a2 a3
a2 a3 a4
a3 a4 a5
− det
1 a2 a3
1 a3 a4
1 a4 a5
+det
1 a a3
1 a2 a4
1 a3 a5
− det
1 a a2
1 a2 a3
1 a3 a4
= a det
a a a3
a2 a2 a4
a3 a3 a5
− a det1 a2 a2
1 a3 a3
1 a4 a4
+a2 det
1 a a
1 a2 a2
1 a3 a3
− det
1 a a
1 a2 a2
1 a3 a3
.Note que cada uma das matrizes anteriores tem duas colunas iguais e, por-
tanto, cada uma delas tem determinante nulo. Consequentemente, detA = 0.
4.1 (a) {(0, 0, 0)}. (b) {(−1, 3, 1,−1)}.
Capítulo 9
1.1* A(c) = {v ∈ V ;T (v) = cv}. Tomemos v e w em A(c) e tomemos a e b
em R. Pela linearidade de T , T (av+ bw) = aT (v)+ bT (w). Como T (v) = cv
e T (w) = cw, segue que T (av+bw) = a(cv)+b(cw) = c(av+bw), mostrando
que av + bw ∈ A(c). Portanto, A(c) é um subespaço vetorial de V .
1.2 (a) Não tem autovalores e autovetores.
(b) 1, {(x,−x,−x) ;x 6=0}; −1, {(0,−3x, x) ;x 6=0}; 2, {(0, 0, x) ;x 6=0}.
(c) 1, {ax2 + bx+ b ; a 6= 0 ou b 6= 0}; −1, {ax− a ; a 6= 0}.

296 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
(d) 1,
{[0 0
0 a
]; a 6= 0
};
−1,
{[−2a a
a 0
]; a 6= 0
};
−2,
{[a 0
−a 0
]; a 6= 0
}.
1.3 (a) c = 0, {(x,−x) ;x 6= 0}; c = 4, {(x, x) ;x 6= 0}.
(b) c = 1, {(−y − 2z, y, z) ; y 6= 0 ou z 6= 0}; c = 2, {(0, y,−y) ; y 6= 0}.
(c) c = 0, {(0, 0, 0, x) ;x 6= 0}; c = 2, {(−x,−2y, x, y) ;x 6= 0 ou y 6= 0};c = 4, {(x, 0, 0, 0) ;x 6= 0}.
1.5 T (x, y, z) = (x, 2x− y + 2z, 4x− 4y + 5z).
1.6* Seja (x, y, z) em R3. Então,
(x, y, z) = (x+ y − z)(1, 1, 1) + (−x− y + 2z)(0, 1, 1) + (y − z)(−1, 1, 0),
o que pela linearidade de T nos dá que
T (x, y, z) = (x+y−z)T (1, 1, 1)+(−x−y+2z)T (0, 1, 1)+(y−z)T (−1, 1, 0).
Como T (1, 1, 1) = (1, 1, 1), T (0, 1, 1) = (0, 2, 2) e T (−1, 1, 0) = (1,−1, 0),segue que
T (x, y, z) = (x+ y − z)(1, 1, 1) + (−x− y + 2z)(0, 2, 2) + (y − z)(1,−1, 0)= (x+ 2y − 2z),−x− 2y + 4z,−x− y + 3z).
1.8 1 0 0
−1 −12−1
2
1 −12−1
2
.

297
2.1* Calcular os autovalores e os autovetores de uma matriz A nada mais é
do que calcular os autovalores e os autovetores de TA. Assim,
det
[c− 2 3
1 c− 4
]= c2 − 6c+ 5,
nos dando que c = 1 e c = 5 são os autovalores de A. O conjunto solução do
sistema linear [−1 3
1 −3
][x
y
]=
[0
0
]é dado por {(3x, x) ;x ∈ R} e o conjunto solução do sistema linear[
3 3
1 1
][x
y
]=
[0
0
]
é dado por {(x,−x) ;x ∈ R}. Assim, os autovetores associados a c = 1 são
os vetores da forma (3x, x), x 6= 0 e os autovetores associados a c = 4 são os
vetores da forma (x,−x), x 6= 0.
2.2* Seja A ∈M(n). A matriz A é invertível se, e somente se, KerTA = {0}.Agora, KerTA = {0} se, e somente se, não existe v ∈ Rn, não nulo, tal que
TA(v) = 0 = 0 · v. Portanto, A é invertível se, e somente se, c = 0 não é um
autovalor de A.
3.1* Sabemos que o cálculo dos autovalores de T independe da base consi-
derada em R3. Assim,
det
t− 1 −2 0
−1 t+ 1 0
1 0 t− 2
= (t− 2)(t−√3)(t+
√3).
Portanto, T tem três autovalores distintos. Como dimR3 = 3, existe uma
base de R3 formada de autovetores de T e, assim, T é diagonalizável.
3.2 (a) verdadeiro (b) verdadeiro (c) falso (d) falso
3.3 (a) Não é diagonalizável.

298 CAPÍTULO 10. SOLUÇÕES E RESPOSTAS
(b) P =
[1 4
−1 3
]. (c) P =
0 1 −11 0 0
−1 0 1
.3.4 (a) c 6= 1. (b) c = 0.
3.5 (a) I3. (b) A. (c) I3.
3.6* Seja α a base canônica de R2. Então,
P[T ]αα(t) = det
[t− 2 2
1 t− 3
]= t2 − 5t+ 4,
o que nos dá que c1 = 1 e c2 = 4 são os autovalores de T . O conjunto solução
do sistema linear [−1 2
1 −2
][x
y
]=
[0
0
]e o conjunto solução do sistema linear[
2 2
1 1
][x
y
]=
[0
0
]
é o autoespaço associado a c1 = 1 e o autoespaço associado a c2 = 4, respec-
tivamente. Assim, (2, 1) é um autovetor associado a c1 = 1 e (1,−1) é um
autovetor associado a c2 = 4. Portanto, β = {(2, 1), (1,−1)} é uma base de
R2 tal que [T ]ββ é uma matriz diagonal.
5.1* (a) Temos que
x2 − 4x− 2y + 4 = 0 ⇐⇒ (x− 2)2 = 2y ⇐⇒ y =1
2(x− 2)2.
Portanto, a equação representa uma parábola.
(b) A equação 4x2 − 3y2 + 24xy − 156 = 0 equivale a equação matricial
[x y
] [ 4 12
12 −3
][x
y
]+ [−156] = [0]. (1)

299
A matriz
A =
[4 12
12 −3
]é simétrica. Logo, pelo Teorema Espectral, A é ortogonalmente diagona-
lizável. De fato, c1 = 13 e c2 = −12 são os autovalores de A. O vetor
v1 = (4/5, 3/5) é um autovetor associado a c1 = 13 e o vetor v2 = (−3/5, 4/5)é um autovetor associado a c2 = −12. Logo, a base β = {v1, v2} é uma base
ortonormal de R2 formada por autovetores. Seja P = [IR2 ]βα, onde α é a base
canônica de R2. Chame D = P−1AP . Temos
P =
[45−3
535
45
]e D =
[13 0
0 −12
]. (2)
Chamando [v]β de
[x′
y′
], onde v = (x, y) ∈ R2, de (1) e (2) obtemos a equação
matricial [x′ y′
] [13 0
0 −12
][x′
y′
]+ [−156] = [0],
que equivale a equação
13x′2 − 12y′2 − 156 = 0,
ou seja,x′2
12− y′2
13= 1.
Portanto, a equação 4x2 − 3y2 + 24xy − 156 = 0 representa uma hipérbole.
5.2
(a) ∅. (b) elipse. (c) duas retas paralelas.
(d) uma reta. (e) hipérbole. (f) elipse.
(g) parábola. (h) elipse. (i) hipérbole.