Embed Size (px)
Citation preview

Universidade Federal do Rio de Janeiro
Instituto de Matemática
Departamento de Métodos Estatísticos
Processo de Bastões de alcance finito.Aspectos dos modelos microscópico e
macroscópico.
Aniel Ojeda Alvarez
Orientador: Leandro Pinto Rodrigues Pimentel
Tese de Doutorado apresentada como parte dos requisitos
para obtenção do título de Doutor em Estatística
Rio de Janeiro,
outubro de 2015

Ojeda Alvarez, AnielO39p Processo de Bastões de alcance finito. Aspectos dos
modelos microscópico e macroscópico./ Aniel OjedaAlvarez. – 2015
92f. ; 30 cm
Orientador: Leandro Pinto Rodrigues Pimentel
Tese (doutorado) – UFRJ/IM. Programa dePós-graduação em Estatística, 2015.Referências: f.87-88.
1. Processo de bastões 2. Limite hidrodinâmicoI. Pimentel, Leandro Pinto Rodrigues II. UniversidadeFederal do Rio de Janeiro. Instituto de MatemáticaIII. Título.

Processo de Bastões de alcance finito. Aspectos dosmodelos microscópico e macroscópico.
Aniel Ojeda Alvarez
Orientador: Leandro Pinto Rodrigues Pimentel
Tese de Doutorado apresentada ao Programa de Pós-graduação do Instituto de Mate-
mática da Universodade Federal do Rio de Janeiro como parte dos requisitos necessários
para obtenção do título de Doutor em Estatística.
Aprovada por:
Leandro Pinto Rodrigues Pimentel – IM/UFRJ (Presidente)
Maria Eulália Vares – IM/UFRJ
Glauco Valle da Silva Coelho – IM/UFRJ
Wladimir Augusto das Neves – IM/UFRJ
Roberto Imbuzeiro Moraes Felinto de Oliveira – IMPA
Rio de Janeiro, 23 de outubro de 2015


Resumo
O Processo de Bastões pode ser definido de modo geral como uma família de variáveis
não negativas indexadas geralmente por Z ou Zd. Ao evoluir o tempo, pedaços dos bastões
podem ser quebrados e adicionado a um outro deles. Neste trabalho foi introduzida uma
versão do Processo de Bastões unidimensional. Isto é, dada uma família de variáveis não
negativas em (ηi)i∈Z, em cada sitio i, depois de um tempo exponencial com taxa ηi o bastão
é quebrado uniformemente no intervalo [0, ηi] e dito pedaço é adicionado para algum dos
vizinhos no intervalo [i − R, i + R] que é escolhido aleatoriamente com probabilidade
p( q). Para mostrar que o dito processo é bem definido foi feita uma aproximação de
Z por compactos [−M,M ] fazendo M → ∞. O nosso processo possui a propriedade
de atratividade e, além disso, sob a lei produto exponenciais i.i.d. nosso processo é
invariante. Como resultado principal foi obtido o limite hidrodinâmico para dois casos,
primeiro quando p( q) tem média zero e segundo, quando tem média não nula. Em ambos
casos foi usado um enfoque martingal para o estudo da forma do limite. No caso com
média zero o perfil empírico converge para a solução fraca da equação do meio poroso. A
diferencia dos modelos simétricos estudados na literatura, o nosso foi estudado no domínio
não limitado R. Para o caso com média não nula vamos chegar na solução fraca entrópica
da equação de Burgers não viscosa. Este caso foi estudado por separado utilizando a
metodologia de soluções em valor de medidas de Young.
Palavras chaves: Processo de Bastões, limite hidrodinâmico, equação do meio poroso,
leis de conservação não linear, soluções em valor da medidas de Young.


Abstract
The stick process in general is defined as a non-negative random variable family on Z or
Zd lattice. In time evolution, pieces of sticks can be broken and added on to other site. In
this work we introduced a version of one-dimensional stick process. Given a non-negative
random variable family (ηi)i∈Z, in each site i, in exponential time with rate ηi is broken a
piece uniformly in [0, ηi] and added on to some randomly choice neighbor in [i−R, i+R]
whit probability p( q). To verify if this process is well defined was made an approximation
of Z by compact sets [−M,M ] as M →∞. The process have attractiveness property and
product exponential measure is invariant under the process dynamic. The main result
was the hydrodynamical scaling limit, in both, with p( q) zero mean and non-zero mean
case; using a martingale approach. In zero mean case the empirical profile converge to a
weak solution of porous medium equation. In contrast with literature symmetric models,
us model is development in non-bounded domain R. In non-zero mean case the limit was
a weak entropic solution of inviscid Burgers equation. This case was studied separately
using the measures valued solution approach.
Keywords: Stick process, hydrodynamic scaling limit, porous medium equation, non-
linear conservation law, measured valued solutions.


Lista de Figuras
1.1 Processo de Bastões. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2 Interpretação dos pontos em P i associados ao bastão ηi. . . . . . . . . . . 71.3 Evolução do Processo de Hammersley Generalizado. . . . . . . . . . . . . . 131.4 Deslocamento das partículas sob acoplamento básico. . . . . . . . . . . . . 161.5 Trajetórias dos processos sob acoplamento básico. . . . . . . . . . . . . . . 161.6 Caminho crescente de 6 pontos até o tempo t. . . . . . . . . . . . . . . . . 19
ix


Sumário
List of Figures viii
Contents xi
Introdução 1
1 O processo de Bastões 51.1 O processo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.1 Construção gráfica do processo truncado . . . . . . . . . . . . . . . 61.1.2 O espaço de estados . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2 O processo de Hammersley . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.2.1 Limitação uniforme dos momentos . . . . . . . . . . . . . . . . . . 14
1.3 Compacidade relativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.4 Algumas propriedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.4.1 Distribuição invariante . . . . . . . . . . . . . . . . . . . . . . . . . 25
2 Limite Hidrodinâmico 292.1 Preliminares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.1.1 Solução fraca . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.2 Limite hidrodinâmico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.3 Prova do Teorema 2.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.3.1 Estimação do martingal . . . . . . . . . . . . . . . . . . . . . . . . 372.3.2 Compacidade relativa de (αN· )n∈N . . . . . . . . . . . . . . . . . . . 382.3.3 Equilíbrio local . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.3.4 Prova do Lema de Substituição (Lema 2.4) . . . . . . . . . . . . . . 43
2.3.4.1 Estimativas de um e dois blocos . . . . . . . . . . . . . . . 452.3.5 Distribuição dos Pontos limites . . . . . . . . . . . . . . . . . . . . 542.3.6 Unicidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 582.3.7 Extensão ao caso u0 ≥ 0 . . . . . . . . . . . . . . . . . . . . . . . . 59
2.3.7.1 Gerador para o acoplamento básico . . . . . . . . . . . . . 59
3 Caso de média não nula 653.1 Leis de conservação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
xi

xii Sumário
3.2 Soluções em valores de medidas de Young para Leis de Conservação . . . . 673.2.1 Medidas de Young . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.2.1.1 Compacidade relativa de αN,Lt . . . . . . . . . . . . . . . . 693.3 Distribuição dos pontos limites . . . . . . . . . . . . . . . . . . . . . . . . 70
3.3.1 Desigualdades de entropia no nível microscópico . . . . . . . . . . . 713.3.2 Unicidade dos pontos limites . . . . . . . . . . . . . . . . . . . . . . 78
3.4 Extensão ao caso geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Referências Bibliográficas 87
Topologia do espaço de estados 89

Introdução
O Processo de Bastões pode ser definido de modo geral como uma família de variáveis
não negativas (interpretadas como bastões) indexadas geralmente por Z ou Zd. Ao evoluir
o tempo, é quebrado um pedaço de algum bastão e o dito pedaço é adicionado a um outro
deles. Este processo tem sido estudado em diversas variantes. Por exemplo: Suzuki
and Uchiyama (1993) e Ekhaus and Seppäläinen (1996) usam versões simétricas para o
estudo do modelo microscópico para a equação do meio poroso. Outra versão totalmente
assimétrica foi introduzida por Seppäläinen (1996) na grade unidimensional inteira como
uma forma à solução do problema de Ulam (comprimento da maior subsequência crescente
de uma permutação aleatória) estudado anteriormente por Hammersley (1972) e Aldous
and Diaconis (1995) onde é introduzido o Processo de Hammersley com dito nome.
Seppäläinen (1996) mostra que o Processo de Bastões totalmente assimétrico é bem
definido em um espaço de estado infinito, por meio da sua equivalência com o Processo
de Hammersley. Ele aproveita a relação variacional entre o Processo de Hammersley e o
modelo de Percolação de Última Passagem para obter estimativas que permitem provar
a boa evolução deste sistema em volume infinito. Também usa a mesma relação para
mostrar a convergência, de uma forma muito geral, para a solução fraca da equação de
Burgers não viscosa. O processo de Seppäläinen (1996) só tem alcance para seu vizinho
mais próximo na direita enquanto os processos de Ekhaus and Seppäläinen (1996), Suzuki
and Uchiyama (1993) tem alcance para qualquer sitio, mas estão definidos em espaços
compactos (por exemplo, o toro).
1

2 Introdução
Neste trabalho é introduzida uma versão mais geral do Processo de Bastões unidimen-
sional que inclui os casos simétrico e assimétrico, além de ter um alcance para vizinhos
a distancia não maior que um R > 0 dado. Para isso são exploradas as estimativas de
Seppäläinen (1996) para poder mostrar que nosso Processo de Bastões também é bem
definido em volume infinito. Usando a mesma relação entre o Processo de Hammersley e
o Processo de Bastões totalmente assimétrico, usada por Seppäläinen (1996), nos permitiu
definir uma generalização para o Processo de Hammerley.
Além da construção do processo de bastões estudamos os limites hidrodinâmicos, que
vão ser obtidos para os dois casos dependendo da simetria do processo. Nos trabalhos
de Ekhaus and Seppäläinen (1996), Suzuki and Uchiyama (1993) é estudado o modelo
simétrico do processo de bastões no toro multidimensional. Ditos resultados são baseados
no método de estimados da entropia desenvolvido por Guo et al. (1988). Como parte
do modelo simétrico, fazemos uma generalização para o espaço unidimensional de volume
infinito, como foi definido nosso processo. Para o caso assímetro, seguimos a ideia de
Rezakhanlou (1991) que utiliza os resultados de soluções definidas no espaço das medidas
de DiPerna (1985). Para desenvolver ambos enfoques são aproveitadas as propriedades
mostradas na primeira parte (atratividade e medida invariante produto). Devido a que
bastões inicialmente nulos não podem ser absolutamente contínuos com respeito a nossa
medida invariante produto, primeiramente foi preciso supor, que a condição inicial seja
estritamente positiva. Esta hipóteses é retirada no final de cada modelo usando aproxi-
mação.
Este trabalho está dividido em três capítulos. No primeiro é definido o processo medi-
ante aproximação por una sequencia de processos com evolução bem definida. Um acopla-
mento com o caso totalmente assimétrico de Seppäläinen (1996) permite ter estimativas
que ajudam na prova da rigidez da dita sequência. Uma vez que nosso processo é definido
como o único limite desta sequencia, são provadas a atratividade e que a invariância da
medida induzida por produto de exponenciais i.i.d.
No segundo capítulo é desenvolvida a teoria para encontrar e provar a convergência

Introdução 3
ao limite hidrodinâmico para nosso modelo. Primeiro é deduzida a forma do possível
limite hidrodinâmico e estabelecidas as hipóteses e condições para a prova. Utilizando
continuidade absoluta da distribuição inicial com respeito a medida invariante produto, é
mostrada a estimativa de um bloco e dois blocos utilizando ideias similares às usadas por
Ekhaus and Seppäläinen (1996) mas sem usar direitamente os estimadores da entropia
relativa. Neste passo é utilizada a suposição de condição inicial estritamente positiva que
vai ser retirada no final por aproximação. Seguidamente é feita a prova para o espaço de
volume infinito, que generaliza a prova feita por Ekhaus and Seppäläinen (1996) para o
toro, da continuidade absoluta com respeito a Lebesgue dos pontos limites. Neste capítulo
é concluída a prova do caso simétrico utilizando os resultados de unicidade para a equação
do meio poroso. Por outro lado, o casso assimétrico resulta na equação de Burgers que é
conhecida a não unicidade, de forma geral, da solução.
No terceiro capítulo é desenvolvida a teoria para o caso assimétrico. Utilizando os
resultados já obtidos no capítulo segundo, só falta estudar a unicidade dos pontos limites.
Com tal fim, é mostrado que os pontos limites são soluções entrópicas no sentido (3.2). A
teoria de DiPerna (1985) de soluções no espaço das medidas para as leis de conservação,
nos permite a partir da condição de entropia (para medidas (3.4)), deduzir direitamente
que a medida solução obtida está concentrada na solução fraca entrópica no sentido (3.2).
Por este motivo o terceiro capítulo é desenvolvido baseado na teoria de DiPerna (1985).
Os resultados fundamentais deste capítulo são a prova da condição de entropia e as demais
condições do resultado de DiPerna (1985), que garantem o fato de que a solução no espaço
das medidas converge em L1 à medida de Dirac concentrada no dado inicial, quando t→ 0.


Capítulo 1
O processo de Bastões
O Processo de Bastões totalmente assimétrico foi introduzido por Seppäläinen (1996)
relacionando-o ao Problema de Ulam de encontrar a maior sequência crescente de uma
permutação aleatória. Também foi apresentado o Processo de Bastões totalmente assi-
métrico como uma alternativa ao Processo de Hammersley. Neste trabalho é construída
uma generalização do Processo de Bastões onde acontecem saltos dentro uma vizinhança
de comprimento 2R+1 onde o sítio é escolhido por uma medida de probabilidade discreta
de alcance finito p(·). Por meio desta construção, também é obtida uma generalização do
Processo de Hammersley.
1.1 O processo
Para definir nosso processo consideramos uma grade inteira unidimensional, ou seja,
tomamos i ∈ Z e para cada sítio i definimos uma variável não negativa ηi ∈ [0,∞)
as quais são chamadas bastões. Dada p( q) uma distribuição de probabilidade sobre
{−R,−R + 1, . . . , R}, a evolução no tempo para esta configuração vai estar definida pela
seguinte lei:
5

6 1. O processo de Bastões
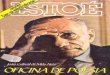
(E1) em cada sítio i, com tempo exponencial de taxa ηi, tomamos um valor Ui uniforme-
mente distribuído no intervalo [0, ηi];
(E2) o bastão ηi vai ser reduzido para ηi − Ui e é adicionado o pedaço de tamanho Ui
restante ao bastão ηi+j, com probabilidade p(j).
Em outras palavras, o alcance de cada salto vai ser dentro de um raio finito R. Com
esta informação precisamos mostrar, que de fato, existe um Processo de Markov que segue
a lei de evolução (E1)-(E2).
ηi−1 ηi+1 ηi+2 ηi+3 ηi+4ηi
Ui
Ui
j = 3
Figura 1.1: Processo de Bastões.
1.1.1 Construção gráfica do processo truncado
Para a construção de nosso processo, vamos fixar um inteiro M > 0 e consideramos o
processo com a mesma evolução mas definido nos sítios −M , −M + 1,. . . , M . Para cada
i ∈ {−M, . . . ,M} sejam P i Processos Pontuais de Poisson independentes com intensidade
`eb× `eb sobre (0,∞)× [0,∞) e J uma sequência de variáveis aleatórias independente e
identicamente distribuída com distribuição de probabilidade p( q). Assumimos também que
J é independentes da família de Processos de Poisson (P i). Dado um ponto (t, b) ∈ P i,
para algum i, a primeira coordenada t é interpretada como o tempo de ocorrência de uma
ruptura do bastão ηi e b o valor onde ele vai ser quebrado caso ηi(t−) seja maior do que
b (ver Figura 1.2). Onde ηi(t−) é o valor de ηi(t) se não tivesse o ponto (t, b), Ou seja,
coincide com o limite pela esquerda (s < t), quando s→ t, de ηi(s).
Observação. Veja na Figura 1.2 que o ponto (t, b) vai aparecer de forma que b é uniforme-
mente distribuído no intervalo [0, ηi(t−)], num tempo exponencial de parâmetro ηi(t−).
O que é equivalente à evolução (E1).

§1.1. O processo 7
ηi(t−)
t
b
P i
Figura 1.2: Interpretação dos pontos em P i associados ao bastão ηi.
Desta forma, se adicionamos uma configuração inicial η = (ηi) a uma realização da
família de processos, P = (P i)Mi=−M e uma realização do sequência J , a evolução do
processo truncado pode ser escrita como função desta tripla. Denotamos dita relação pela
função Θ(η,P ,J ), onde a evolução é definida como explicamos a seguir.
Seja τ1 o mínimo das t tais que (t, b) ∈ P i1 para algum i1 ∈ {−M, . . . ,M} e b ≤ ηi.
(Podemos assumir que não existe coincidência entre os valores de t ou b nas trajetórias de
P , pois coincidências acontecem com probabilidade nula.) Deste modo, ηi1(s) = ηi1(0),
para cada s < τ1. No instante τ1, ηi1(τ1) = ηi1(τ1−) ∧ b1, onde b1 é tal que (τ1, b1) ∈ P i1 .
Tomamos j1 o primeiro elemento da sequência J , se |i1 + j1| ≤ M , temos ηi1+j1(τ1) =
ηi1+j1(τ1−) + (ηi1(τ1−)− b1)+, onde ( q)+ = max {0, q}. Os demais sítios, ηk(τ1) = ηk(τ1−)
para k 6= i1, i1 + j1.
Analogamente, podemos encontrar sequências (τn)n≥1 e (in)n≥1 aleatórias, definida
recursivamente como, τ1 e i1 dado acima, e para n ≥ 2,
τn = min{t > τn−1 : (t, b) ∈ P in , para algum in ∈ {−M, . . . ,M} e b ≤ ηin
},
deste modo, o processo vai permanecer invariante para t ∈ [τn−1, τn) e em cada valor τn
vai tomar o valor,
ηk(τn) =
ηin(τn−) ∧ bn, se k = in,
ηin+jn(τn−) + (ηin(τn−)− bn)+, se k = in + jn e |k| ≤M,
ηk(τn−), caso contrário;
(1.1)
onde in e bn são tais que (τn, bn) ∈ P in e jn o n-ésimo elemento da sequência J .

8 1. O processo de Bastões
Deste modo é definida uma sequência de processos ηM(t) a valores no espaço de estados
Y M = [0,∞){−M,...,M} que vai ser munido pela métrica produto,
d(η, ξ) =M∑
i=−M
|ηi − ξi|.
Denotemos por P ηM a distribuição de ηM( q) em D([0,∞), Y M), o espaço das trajetórias
contínuas à direita e com limite à esquerda definidas sobre [0,∞) a valores em Y M (ver
detalhes Billingsley (1999)). Pelas propriedades de invariância sob translações da distri-
buição dos (P i), para cada M , a família de medidas de probabilidades{P ηM , ηM ∈ Y M
}define um Processo de Feller em D([0,∞), Y M) na notação de Liggett (2005). Isto é, seja
o semigrupo definido por
S(t)f(η) = Eηf(η(t)), (1.2)
para cada f contínua e limitada sobre Y M . O processo de Markov{P ηM , ηM ∈ Y M
}é
dito de Feller se S(t)f é contínua e limitada para cada t ≥ 0 e f contínua e limitada.
Em geral, dado X um espaço métrico (assumimos também que X é completo e sepa-
rável) e Cb(X) o conjunto das funções contínuas e limitadas sobre X. Dado um Processo
de Feller em D([0,∞), X), lhe podemos associar o Semigrupo de Markov {S(t), t ≥ 0}
definido em (1.2).
Dado o semigrupo de Markov {S(t), t ≥ 0}, seja
D =
{f ∈ Cb(X) : lim
t→0+
S(t)f − ft
existe}.
O Gerador Infinitesimal do semigrupo {S(t), t ≥ 0} é o operador linear L tal que para
cada f ∈ D,
L f = limt→0+
S(t)f − ft
.

§1.1. O processo 9
Proposição 1.1. Para cada M , o gerador infinitesimal associado ao processo{P ηM ,
ηM ∈ Y M}
é definido por,
LM f(η) =M∑
i=−M
R∑j=−R
p(j)
∫ ηi
0
[f(ηu,i,i+j)− f(η)
]du, (1.3)
para cada f contínua e limitada. Onde, se u ≤ ηi
ηu,i,i+jk =
ηi − u, k = i
ηi+j + u, k = i+ j e |k| ≤M
ηk, outro caso.
(1.4)
Demonstração. Seja f contínua e limitada
SM(t)f(η)− f(η)
t=Ef(η(t))− Ef(η)
t=E[f(η(t))− f(η)]
t
=∑k≥1
E[f(η(t))− f(η)∣∣Ak]P (Ak)
t
= E[f(η(t))− f(η)∣∣A1] · e−tλ1λ1 +
o(t)
t,
onde Ak é o evento da ocorrência de k pontos em (Pj)Mj=−M até o tempo t e λ1 =M∑
i=−Mηi.
Ou seja, a ocorrência de um ponto em (Pj)Mj=−M até o tempo t tem distribuição poisson
com intensidade `eb[
M⋃i=−M
[0, t]× [0, ηi]
]= t
M∑i=−M
ηi. Além disso, a ocorrência de k pontos
em (Pj)Mj=−M tem distribuição poisson com intensidade limitada por t(2M + 1)M∑
i=−Mηi.
Por outra parte,
E[f(η(t))− f(η)∣∣A1] =
M∑i=−M
E[f(η(t))− f(η)∣∣Bi, A1]P (Bi
∣∣A1)
=M∑
i=−M
E[f(η(t))− f(η)∣∣Bi, A1]
ηiλ1
,
onde Bi é o evento que o ponto de Poisson ocorrido pertence ao processo P i correspondente
ao sítio i. Mas, nesse caso, só temos a ocorrência de um salto no sítio i e a configuração

10 1. O processo de Bastões
η(t) só difere de η nos sítios i e j, este último aleatório com distribuição p(j). Além disso,
dada a ocorrência de um ponto de Poisson no sítio i ele vai quebrar o i-ésimo bastão num
ponto uniforme em [0, ηi], portanto, seja U uniforme em [0, ηi],
E[f(η(t))− f(η)∣∣Bi, A1] =
R∑j=−R
p(j)E[f(ηU,i,i+j)− f(η)]
onde a configuração ηu,i,i+j é definida como em (1.4).
Tomando limite quando t ↓ 0, obtemos
limt↓0
Ef(η(t))− Ef(η)
t= lim
t↓0
M∑i=−M
R∑j=−R
p(j)ηiE[f(ηU,i,i+j)− f(η)] · e−λ1t
=M∑
i=−M
R∑j=−R
p(j)
∫ ηi
0
[f(ηu,i,i+j)− f(η)
]du.
Note que este limite existe para toda função contínua e limitada o que define o gerador
infinitesimal para o dito processo.
1.1.2 O espaço de estados
Nosso interesse neste trabalho é definir o processo para todos os sítios em Z, para isso,
precisamos definir um espaço de estados apropriado. Em geral, se é permitido ter muita
massa no sistema, por exemplo, os bastões crescem muito rápido quando nos afastamos
da origem, pode acontecer uma acumulação infinita de massa em algum sítio durante a
evolução. Esta situação não é desejável para a boa definição do processo, por isso, devemos
definir o processo sobre um espaço de estados que controle o crescimento dos bastões em
sítios afastados da origem.
Analogamente ao modelo desenvolvido por Seppäläinen (1996), definimos nosso espaço
como
Y =
{η ∈ [0,∞)Z : lim
n→∞
1
n2
n∑i=−n
ηi = 0
}. (1.5)

§1.2. O processo de Hammersley 11
Outro elemento fundamental para o estudo da convergência é a definição de uma topologia
apropriada para o espaço Y . Definiremos uma nova métrica mais forte que a métrica
produto usual de forma a obter um controle uniforme sobre os bastões para sítios muito
longe da origem. Além disso, teremos que Y sera um subconjunto fechado de [0,∞)Z
(Lema .6 no apêndice).
Para x, y ∈ [0,∞), seja
δ(x, y) =|x− y|
1 + |x− y|,
que define uma métrica equivalente à euclidiana em R. Deste modo, para η, ξ ∈ [0,∞)Z
seja
d(η, ξ) =∞∑
n=−∞
δ(ηn, ξn)
2|n|+ sup
1≤nδ
(1
n2
n∑i=−n
ηi,1
n2
n∑i=−n
ξi
). (1.6)
Nosso espaço de estados, sob da métrica (1.6) vai ser um espaço métrico completo
separável, (Proposição .7) que são propriedades fundamentais para aplicação da teoria de
convergência em Ethier and Kurtz (1986). Outras propriedades deste espaço são explora-
das no apêndice 3.
Observação. Se vemos Y M como um subconjunto de [0,∞)Z onde ηi = 0 para |i| > M ,
temos Y M ⊂ Y . Além disso, toda sequência convergente em Y M com a métrica produto
também vai ser convergente em Y com a métrica (1.6).
1.2 O processo de Hammersley
Para dar uma breve explicação da evolução do Processo de Hammersley, fixamos uma
configuração inicial de pontos reais não decrescentes (zk)k∈Z ⊂ R e um Processo Pontual
de Poisson Q sobre R× [0,∞) de intensidade `eb× `eb. Em cada instante t, tal que existe
um ponto (x, t) ∈ Q, a partícula mais próxima à direita de x, digamos zk(t−) vai ocupar
a posição x, ou seja zk(t) = x, e as partículas restantes permanecem iguais. Para uma
densidade apropriada de partículas, como na condição (1.7), foi mostrado por Seppäläinen

12 1. O processo de Bastões
(1996) que tal evolução está bem definida.
Z ′ =
{z ∈ RZ : lim
n→−∞
znn2
= 0; zi ≤ zi+1,∀i ∈ Z}, (1.7)
e analogamente
Y ′ =
{η ∈ [0,∞)Z : lim
n→∞
1
n2
−1∑i=−n
ηi = 0
}, (1.8)
para o processo de bastões.
É explicada a seguir uma correspondência entre o Processo de Hammersley e o Processo
de Bastões. Dado β ∈ R e uma configuração η ∈ Y ′, é possível escrever z = zβ(η) como
zi =
β +
i−1∑j=0
ηj, i > 0
β, i = 0
β −−1∑j=i
ηj, i < 0.
(1.9)
Reciprocamente, é possível definir o Processo de Bastões dada uma configuração z ∈ Z ′,
sendo η = η(z), como
ηi = zi+1 − zi. (1.10)
O processo de bastões, estudado por Seppäläinen (1996) por meio da sua equivalência
com o processo de Hammersley (1.9)–(1.10), é um caso particular do nosso com p(1) = 1,
e portanto, p(j) = 0 para todo j 6= 1. Alguns resultados de Seppäläinen (1996) para o
Processo de Hammersley, serão usados a seguir para obter algumas estimativas necessárias
para nosso processo.
Se aplicamos a transformação (1.9) ao Processo de Bastões geral vamos a obter uma
generalização do Processo de Hammersley. Neste caso, quando é encontrado um ponto
(x, t) ∈ Q, temos um intervalo da forma (zk−1(t−), zk(t−)] que contém x. Neste instante,
é sorteado um valor j, com probabilidade p(−j), acontecendo três opções: se −R ≤ j < 0
a partícula zk−1 vai pular para o sítio x e as restantes zk+m, para m = j, . . . ,−2, vão a
pular uma distancia x− zk−1(t−) a direita. Caso que 0 < j ≤ R analogamente zk(t) = x

§1.2. O processo de Hammersley 13
e zk+m, para m = 2, . . . , j, vão a pular uma distancia zk(t−) − x a esquerda. Quando
j = 0 não acontece nenhuma variação. Também é importante observar que dada a nossa
aproximação, z±k = z±M para k ≥M , os pontos (x, t) ∈ Q tais que x < z−M e x > zM não
vão a influir na evolução do processo zM . Pois o processo ηM não recebe massa dos sítios
i tais que, |i| > M . Em analogia à construção gráfica em 1.1.1, escrevemos a evolução
explicada acima como uma função da tripla (z,Q,J ), denotada por Θ(z,Q,J ).
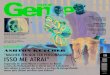
Na Figura 1.3 é apresentado um exemplo de uma trajetória para esta generalização do
Processo de Hammersley. Os pontos escuros representam os elementos de Q e abaixo deles
os correspondentes valores de J . Por exemplo o ponto mais próximo à direita dos valores
z4, z5 e z6, tem o valor 3, portanto, estas três partículas vão a ser puxadas à esquerda.
Casso que tal valor seja negativo vão ser puxadas à direita as correspondentes partículas
que estão à esquerda. Quando é zero nenhuma partícula é deslocada.
z5 z7z3 z4 z8z2z1 z6
t
1
3
−3
3
3 22
−1
−2
0
2
−2
−4
1
0
Figura 1.3: Evolução do Processo de Hammersley Generalizado.
Em geral, para o espaço de estados
Z =
{z ∈ RZ : lim
n→±∞
znn2
= 0; zi ≤ zi+1,∀i ∈ Z}, (1.11)
as equações (1.9)-(1.10) definem uma transformação contínua entre D([0,∞), Y ) e
D([0,∞), Z) de forma que as distribuições destes processos seguem as evoluções des-
critas acima e a seleção de β é irrelevante pela invariância sob translações do Processo de
Poisson.

14 1. O processo de Bastões
1.2.1 Limitação uniforme dos momentos
Agora fixamosM e consideramos nosso Processo de Bastões (ηi)i∈Z em Y M ⊂ Y . Para
cada n ∈ Z, definamos um novo processo (φn)n, como
φn(t) =R−1∑i=0
ηnR+i(t),
onde R é o alcance máximo dos saltos do processo. Note que este processo vive no espaço
de estados Y MR ⊂ Y , onde MR = bM/Rc + 1. Em geral esta transformação pode ser
feita independente deM . Além disso, note que cada salto tem alcance máximo do vizinho
mais próximo. Para descrever a evolução deste novo processo, olhando para o processo
original, o bastão φn vai ter uma rutura no tempo
τn = min {ti : ti ∼ exp(ηnR+i), 0 ≤ i < R} ,
ou seja, τn ∼ exp (φn). Assim o pedaço quebrado vai passar para um dos vizinhos n −
1, n+1 ou ficar no próprio sítio n, com probabilidade p−, p+ ou p0 respectivamente. Estas
probabilidades (cujo cálculo não é de nosso interesse) dependem de p(·) e da posição do
bastão dentro do intervalo de tamanho R.
Analogamente como foi feito anteriormente, podemos definir zi que vive no espaço de
estados Z, seguindo a transformação (1.9)-(1.10). Ou seja, de forma que φn = zn+1 − zn.
Assim, zn = zRn, onde os zn são a coleção de valores reais correspondentes aos bastões ηn
pela transformação (1.9).
O processo (φ(t); t ≥ 0), tem sua evolução definida por uma função ΘR(η,P ,J ),
dada uma configuração inicial de bastões η, a família de processos de Poisson P e a
sequência J , definidos na subseção 1.1.1. Analogamente (z(t); t ≥ 0), tem sua evolução
definida como uma função ΘR(z,Q,J ). Note que, pela construção de φ a partir de η,
estas funções dependem direitamente das funções Θ e Θ anteriormente definidas. Em
particular, ΘR(z,Q,J ) pode ser vista como tomando as componentes múltiplos de R em
Θ(z,Q,J ).

§1.2. O processo de Hammersley 15
Lema 1.2. Seja z ∈ Z. Para cada t > 0 e 1 ≤ p <∞,
supM
EηM[supk∈Z
∣∣∣∣ zk(t)k2
∣∣∣∣p] <∞. (1.12)
Demonstração. Fixemos Q Processo de Poisson em R × R+, mencionado acima e uma
configuração inicial (z0k)k∈Z para o processo (zk) de forma que z0
k = zRk, sendo (zk) é uma
configuração em Z onde inicia o correspondente processo (z(t); t ≥ 0). Defina os Processos
de Hammerleys clássicos, z+ = Θ(z0,Q,−1) e z− = Θ(z0,Q,1), onde 1 é a sequência
constante 1. Note que o primeiro salta sempre à direita e o segundo à esquerda. Assim,
construímos o acoplamento básico com estes três processos,
(z, z−, z+) =[ΘR(z,Q,J ), Θ(z0,Q,1), Θ(z0,Q,−1)
].
Lembrando que se z(t) = ΘR(z,Q,J ) e z(t) = Θ(z,Q,J ), então, zk(t) = zRk(t).
Fixando M , ηk = 0 para todo |k| > M , deste modo φk = 0 para |k| > MR, zk = zMR
para todo k > MR e zk = z−MRpara todo k < −MR e z−MR
≤ zk(t) ≤ zMRpara
todo k ∈ Z. Assim, a evolução de z só depende dos pontos de Poisson dentro da faixa
[z0−MR
, z0MR
]. Os processos z−k (t) e z+k (t) não dependem deMR pois estão definidos a partir
de Processos de Hammersley clássicos.
Dada esta construção, mostraremos que, para cada MR, −MR ≤ k ≤MR e t ≥ 0
z−k (t) ≤ zk(t) ≤ z+k (t). (1.13)
Verificamos a desigualdade da esquerda, a outra é análoga pela simetria de nossa
construção. Note que no tempo t = 0, como os processos começam do mesmo dado inicial
vamos a ter a igualdade em (1.13), permanecendo iguais até o primeiro tempo tk1 de forma
que (xk1, tk1) ∈ Q e xk1 ∈ [zk−1(tk1−), zk(t
k1−)]. Neste instante z−(tk1−) = xk1, por outra
parte, é sorteado j, para −R ≤ j ≤ R, com probabilidade p(j) e se j ≤ 0 a partícula
zk(tk1−) vai permanecer na mesma posição.

16 1. O processo de Bastões
z−k (tk1) = xk1
zk−1(tk1−)
z−k (tk1−)
zk(tk1−)zj−3 zj−2 zj−1 zj zj+1
. . . . . .
Figura 1.4: Deslocamento das partículas sob acoplamento básico.
Quando j > 0 as partículas zi(tk1−), zi+1(tk1−), . . . , zi+j(tk1−) vão se deslocar para a
esquerda uma distancia de zi(tk1−)− xk1 como abaixo (ver Figura 1.4),
zi(tk1) = xk1,
zi+1(tk1) = zi+1(tk1−)− [zi(tk1−)− xk1], (1.14)
...
zi+j(tk1) = zi+j(t
k1−)− [zi(t
k1−)− xk1].
Note que se i+ j, não atinge a posição correspondente ao sítio ocupado por zk(tk1−), não
vai ter deslocamento desta partícula no tempo tk1, assim z−k (tk1) ≤ zk(tki ). Caso contrário,
o deslocamento vai ser de tamanho zi(tk1−) − xk1, mas, o deslocamento da partícula z−k é
de tamanho z−k (tk1−)− xk1. Como zi(tk1−) ≤ z−k (tk1−), temos que z−k (tk1) ≤ zk(tk1).
Analogamente como foi descrito acima, para um tkl tal que (xkl , tkl ) ∈ Q, com xkl ∈
[zk−1(tkl−), zk(tkl−)], e vai existir algum subintervalo [zi′−1, zi′ ] que contem xkl , repetindo o
raçocinio acima, zk(tkl−) no tempo tkl , vai se deslocar ao máximo zi(tkl−)− xkl . Por outra
parte a partícula z−k (tkl−) pode estar na esquerda de xkl , ou caso contrário, ser deslocada
para xkl , se mantendo a desigualdade.
0
t
z0k
z−k z+kzk
Figura 1.5: Trajetórias dos processos sob acoplamento básico.

§1.2. O processo de Hammersley 17
Portanto, dividindo (1.13) por k2, tomando supremo e integrando,
EηM[supk∈Z
∣∣∣∣ zk(t)k2
∣∣∣∣p] ≤ Eη
[supk∈Z
∣∣∣∣z−k (t)
k2
∣∣∣∣p] ∨ Eη
[supk∈Z
∣∣∣∣z+k (t)
k2
∣∣∣∣p] ,como a evolução dos processos z−(·) e z+(·) não dependem de MR e temos a desigualdade
para todos os valores de MR,
supM
EηM[supk∈Z
∣∣∣∣ zk(t)k2
∣∣∣∣p] ≤ Eη
[supk∈Z
∣∣∣∣z−k (t)
k2
∣∣∣∣p] ∨ Eη
[supk∈Z
∣∣∣∣z+k (t)
k2
∣∣∣∣p] .Pelo Lema 5.8 em Seppäläinen (1996), os termos à direita da desigualdade estão limitados,
assim obtemos (1.12).
Corolário 1.3. Seja η ∈ Y . Para cada t > 0 e 1 ≤ p <∞
supM
EηM
[supn≥1
∣∣∣∣∣ 1
n2
n∑i=−n
ηi(t)
∣∣∣∣∣p]<∞. (1.15)
Em particular, para cada k ∈ Z, E[|ηk(t)|p] <∞.
Demonstração. Notemos que∣∣∣∣∣ 1
n2
n∑i=−n
ηi(t)
∣∣∣∣∣p
≤
∣∣∣∣∣ 1
n2
n∑i=−n
φi(t)
∣∣∣∣∣p
=
∣∣∣∣ zn+1
n2− z−n
n2
∣∣∣∣p ≤ 2p−1
(∣∣∣∣ zn+1
n2
∣∣∣∣p +
∣∣∣∣ z−nn2
∣∣∣∣p) .tomando supremo e integrando, pelo lema anterior, temos (1.15).
Corolário 1.4. Para cada ε > 0 e T , existe N tal que para cada n ≥ N ,
supt∈[0,T ]
1
n2
n∑i=−n
ηi(t) < ε
para quase toda trajetória.

18 1. O processo de Bastões
Demonstração. Seja z como acima, pela desigualdade (1.13) e a monotonia do Processo
de Hammersley clássico, temos que z−k (T ) ≤ z−k (t) ≤ zk(t) ≤ z+k (t) ≤ z+
k (T ), desta forma
supt∈[0,T ]
1
n2
n∑i=−n
ηi(t) ≤ supt∈[0,T ]
1
n2
n∑i=−n
φi(t) = supt∈[0,T ]
[zn+1(t)
n2− z−n(t)
n2
]≤z+n+1(T )
n2− z−−n(T )
n2−−−→n→∞
0
quase certamente, pois z−(T ) e z+(T ) pertencem a Z para quase toda trajetória.
Corolário 1.5. Seja K ⊂ Z finito, η ∈ Y uma configuração inicial de bastões. Então,
existem i−, i+ ∈ Z, tal que,
P
maxt∈[0,T ]
∑i∈K
ηi(t) ≤i+K∑i=i−K
ηi
= 1.
Para a prova deste corolário vamos usar a representação dada por Seppäläinen (1996)
do processo de Hammersley que será definida na seguinte proposição.
Proposição 1.6 (Proposição 4.4 em Seppäläinen (1996)). Seja z ∈ Z ′, denotemos por
Γ((zi, 0), t, k) a distancia necessária para construir um caminho crescente∗ de k pontos
em Q começando em (zi, 0) até o tempo t (ver Figura 1.6). Para quase toda realização
do processo de Poisson Q: Para todo t > 0, z(t) ∈ Z ′ e para cada k ∈ Z, existem
−∞ < i−(k, t) ≤ i+(k, t) tal que,
zk(t) = zi + Γ((zi, 0), t, k − i)
se tem para i = i±(k, t) e falha para todo i < i−(k, t) e i > i+(k, t).
∗Dizemos que um caminho de pontos em Q é crescente se quaisquer dos pontos (ai, ti) e (aj , tj), comi ≤ j, temos que ai ≤ aj e ti ≤ tj .

§1.2. O processo de Hammersley 19
zi0
zi + Γ((zi, 0), t, 6)
t
Figura 1.6: Caminho crescente de 6 pontos até o tempo t.
Demonstração do Corolário 1.5. Sejam im = min {i : i ∈ K} e iM = max {i : i ∈ K}, as-
sim,
maxt∈[0,T ]
∑i∈K
ηi(t) ≤ maxt∈[0,T ]
[ziM+1(t)− zim(t)]
≤ z+iM+1(T )− z−im(T ).
Usando a Proposição 1.6, como Γ((z0i , 0), t, k − i) ≥ 0,
z−im(T )dist.= z0
i + Γ((z0i , 0), T, im − i) ≥ z0
i ,
para algum i = i±(k, t). Por outro lado
−z+iM+1(T )
dist.= −z0
i′ − Γ((z0i′ , 0), T, iM + 1− i′) ≤ −z0
i′ ,
para algum outro i′ = i′±(k, t).
Tomando i−K = i′ e i+K = i− 1, teremos
P
maxt∈[0,T ]
∑i∈K
ηi(t) ≤i+K∑i=i−K
ηi
≥ P
{z0i + Γ((z0
i , 0), T, iM + 1− i)
− z0i′ − Γ((z0
i′ , 0), T, im − i′) ≤i−1∑i=i′
ηi
}≥ P
{z0i − z0
i′ ≤i−1∑i=i′
ηi
}= 1.
Como queríamos mostrar.

20 1. O processo de Bastões
1.3 Compacidade relativa
Depois destas estimativas estamos prontos para estudar a compacidade relativa da
sequência de medidas de provabilidades P ηM em D([0,∞), Y ). Com este objetivo vamos
seguir o enfoque utilizado em Ethier and Kurtz (1986) pela topologia de nosso espaço de
estados.
Um conceito importante relacionado com a compacidade relativa é a rigidez. Dizemos
que uma família de medidas de probabilidades {P ι}ι∈I , com I algum conjunto de índices,
é rígida, se e somente se, para cada ε > 0 existe um conjunto compacto K, tal que
P ι(x ∈ K) > 1− ε.
Também queremos ressaltar o fato que pelo Teorema de Prohorov (ver Billingsley (1999))
a rigidez é equivalente a compacidade relativa quando estamos trabalhando sobre um
espaço de estados polonês.
Proposição 1.7 (Teorema 7.2 em Ethier and Kurtz (1986)). A sequência de probabilida-
des PM , é relativamente compacta em D([0,∞), Y ) se, e somente se:
(i) Para cada t e ε > 0 existe um compacto K ⊂ Y tal que
supM
PM [ηM(t) 6∈ K] ≤ ε;
(ii) para cada ε > 0 e T <∞,
limδ→0
supM
PM [w′(η, δ, T ) > ε] = 0,
com w′(η, δ, T ) = inf{ti}ni=0
max0≤i≤n
sups,t∈[ti,ti+1)
d(η(s), η(t)), onde {ti} representa as partições
tais que min0≤i<n
(ti+1 − ti) > δ.
Com este resultado estamos prontos para provar a compacidade relativa de nossa
sequência.

§1.3. Compacidade relativa 21
Proposição 1.8. A sequência P ηM é relativamente compacta em D([0,∞), Y ).
Demonstração. Para começar a prova é importante destacar que um conjunto K, é com-
pacto em (Y, d), se, e somente se, ele é compacto na métrica produto e satisfaz (ver
Lema .10)
limn
supη∈K
1
n2
n∑i=−n
ηi = 0. (1.16)
Para provar (i) primeiro consideramos o subconjunto
K ′ = K ′ε =
{η ∈ Y : sup
n≥1
1
n2
n∑i=−n
ηi ≤ Aε
}
que é relativamente compacto na topologia produto, por estar contido no produto da
família de compactos, {ηi ∈ [0,∞) : ηi ≤ i2Aε}i∈Z.
Assim, pelo Corolário 1.3
P ηM
[supn≥1
1
n2
n∑i=−n
ηMi (t) > A
]≤ 1
AEηM
[supn≥1
1
n2
n∑i=−n
ηMi (t)
]
≤ 1
AsupM ′
EηM′[
supn≥1
1
n2
n∑i=−n
ηi(t)
]≤ C
A
Portanto, para cada ε, existe Aε suficientemente grande, de modo que,
supM
P ηM[ηM(t) 6∈ K ′ε
]= sup
MP ηM
[supn≥1
1
n2
n∑i=−n
ηMi (t) > Aε
]< ε/2.
Agora resta verificar a condição (1.16). Para isso vemos que K ′ ⊂ Y , portanto para
cada η ∈ K ′,
limn
1
n2
n∑i=−n
ηi = 0.

22 1. O processo de Bastões
Pelo Teorema de Egorov, (ver Folland (1999)) para cada ε existeK ⊂ K ′ com P (K ′\K) <
ε/2 onde
fn(η) =1
n2
n∑i=−n
ηi,
que é contínua (Lema .9), converge uniformemente para 0 sobre K, ou equivalentemente,
limn
supη∈K
1
n2
n∑i=−n
ηi = 0.
Como as fn e seu limite são contínuas em Y , podemos assumir K fechado sem perda
de generalidade. O que nos permite concluir que K é compacto em nossa métrica e,
P ηM [ηM(t) 6∈ K] = P ηM [ηM(t) 6∈ K ′] + P [ηM(t) ∈ K ′ \K] < ε/2 + ε/2 = ε
uniformemente em M .
Para provar a parte (ii), vamos usar uma versão do Critério de Aldous (Aldous (1978))
a qual fornece uma condição suficiente para segunda parte da Proposição 1.7.
Proposição 1.9. A sequência de probabilidades PM em D([0,∞), Y ) satisfaz a condição
(ii) da Proposição 1.7, se para cada ε > 0 e T <∞,
limθ→0
supM
supτ≤Tδ≤θ
PM [d(ηM(τ + δ), ηM(τ)) ≥ ε] = 0 (1.17)
com τ tempo de parada limitado por T .
Seja Ak = A(τ, τ + δ, i − R, i + R) o evento que indica a ocorrência de k pontos de
poisson no intervalo de tempo [τ, τ + δ], nos processos (Pj)j para j nos sítios entre i−R

§1.3. Compacidade relativa 23
e i+R. Assim,
P ηM (|ηMi (τ + δ)− ηMi (τ)| > ε) ≤∑k>0
P ηM (|ηMi (τ + δ)− ηMi (τ)| > ε∣∣Ak)P (Ak)
≤ P ηM (|ηMi (τ + δ)− ηMi (τ)| > ε∣∣A1)2Rδηe−2Rδη + o(δ) (1.18)
≤ 2Rδηe−2Rδη + o(δ)δ≤θ−−→θ↓0
0
pois Ak = A(τ, τ + δ, i−R, i+R) indica a ocorrência de k pontos de poisson no intervalo
de tempo [τ, τ + δ], nos sítios entre i− R e i + R e η =i+R∑j=i−R
ηj ≥ max0≤t≤T
i+R∑j=i−R
ηj(t), quase
certamente pelo Corolário 1.5 considerando K = KR = [i − R, i + R]. Note que o limite
não depende de M .
Seja agora γ > 0 arbitrário e MT de forma que para cada n ≥MT (pelo Corolário 1.4)
supM
P ηM
(sup
t∈[0,T+1]
2
n2
n∑i=−n
ηMi (t) >ε
3
)<γ
2.
Pois MT não depende de M .
Portanto,
P ηM
(max
1≤n≤M
∣∣∣∣∣ 1
n2
n∑i=−n
ηMi (τ + δ)− 1
n2
n∑i=−n
ηMi (τ)
∣∣∣∣∣ > ε
)
≤ P ηM
(max
1≤n≤MT
1
n2
n∑i=−n
∣∣ηMi (τ + δ)− ηMi (τ)∣∣ > ε
2
)(1.19)
+ P ηM
(sup
t∈[0,T+1]
2
n2
n∑i=−n
ηMi (t) >ε
2; n ≥MT
).
Como suposto acima o segundo termo a direita em (1.19) é menor do que γ/2. O primeiro
termo, para cada i o valor absoluto dentro da soma vai para suficientemente pequeno com
probabilidade grande por (1.18). Portanto, a probabilidade na esquerda de (1.19) está
limitada por γ como se queria mostrar.

24 1. O processo de Bastões
Corolário 1.10. A sequência de processos {P ηM} converge em distribuição para um Pro-
cesso de Markov {P η} com gerador
L(f) =∑i∈Z
R∑j=−R
p(j)
∫ ηi
0
[f(ηu,i,i+j)− f(η)] du. (1.20)
Demonstração. Seja P η um ponto limite da sequência {P ηM}M∈N, isto é, existe uma sub-
sequência {P ηM′} ⊂ {P ηM} tal que P ηM
′→ P η. Desta forma o correspondente semigrupo
SM ′(t)f converge para o semigrupo S(t)f do processo (P η)η∈Y , para cada t ≥ 0 e f limi-
tada e contínua. Portanto, para cada f cilíndrica, limitada e contínua, que formam um
núcleo† para os domínios dos operadores LM ′ e L′, onde L′ é o gerador infinitesimal do
semigrupo S(t), LM ′ f → L′ f , quando M ′ →∞ (ver Teorema 1.6.1 em Ethier and Kurtz
(1986)).
Por outra parte, quandoM →∞, LM f converge para L f em (1.20), para f cilíndrica,
limitada e contínua. De fato, para cada f , existeK tal que L f = LM f para todoM ≥ K.
Assim, L′ = L, qualquer seja L′ gerador do ponto limite, como acima. Isto é, L coincide
com o gerador infinitesimal de todo ponto limite da sequência {P ηM}.
1.4 Algumas propriedades
Com o processo construído, podemos agora estudar algumas propriedades importantes
dele. A primeira delas, que vai ser útil para futuras estimativas, vai ser a atratividade.
Proposição 1.11. Dadas duas configurações iniciais η, ξ ∈ Y , com η ≤ ξ, existe uma
distribuição conjunta P (η,ξ), tal que P (η,ξ)(η(t) ≤ ξ(t)) = 1 para todo t ≥ 0, de forma que
as correspondentes marginais são os Processos P η e P ξ.
Demonstração. Dadas duas configurações iniciais η, ξ ∈ Y , com η ≤ ξ, construímos o
acoplamento básico (η, ξ). Seja M > 0, {Pk} uma realização da família de Processos de†Seguindo a notação em Ethier and Kurtz (1986). Dado um operador fechado L, um subconjunto C
do domínio de L é dito um núcleo se o fecho de L restringido a C coincide com L.

§1.4. Algumas propriedades 25
Poisson e uma sequência J como definidos na Seção 1.1. Seguindo a evolução, também
descrita na Seção 1.1, usando as mesmas trajetória de {Pk} e J para ambas configurações,
é claro que a desigualdade é mantida. De fato, seja (bl, tl) ∈ P i, se bl ≤ ηi ambos bastões
na i-ésima posição são quebrados no mesmo tamanho e um pedaço maior ou igual vai
passar para ξi+jl mantendo-se a desigualdade nesse sítio. No caso que ηi ≤ bl ≤ ξi só
vai ser quebrado o bastão ξi em bl deste modo não muda a desigualdade. Por último, se
ξi ≤ bl não acontece nenhuma mudança.
Fazemos tender M para infinito e chamamos P (η,ξ) o limite. Por construção as corres-
pondentes marginais são P η e P ξ, como queríamos demonstrar.
1.4.1 Distribuição invariante
Outro fato muito importante para o estudo do processo é o conhecimento da medida
invariante. Seja ν uma medida de probabilidade sobre Y e denotamos por ν{f} =∫fdν
a esperança de f com respeito a medida ν. Esta notação vai ser usada no restante do
trabalho. Dizemos que ν é invariante para o processo η(·), se ν{S(t)f} = ν{f} para
todo t ≥ 0 e cada f limitada e contínua sobre Y , onde S(·) é o semigrupo associado ao
processo η(·).
Como no caso totalmente assimétrico de Seppäläinen (1996), temos que a medida
produto com marginais exponenciais, vai ser invariante para nosso processo. As boas e
conhecidas propriedades desta distribuição vão fornecer estimativas muito úteis.
Na prova deste resultado utilizamos um procedimento similar com a prova de Seppäläi-
nen (1996). Mas as estimativas a partir da expansão de (1.21) devem ser tratadas com
mais cuidados pela complexidade adicional do nosso processo.
Proposição 1.12. A distribuição onde os ηi, i ∈ Z são exponencial i.i.d. é invariante
para o processo de bastões.

26 1. O processo de Bastões
Demonstração. Tomemos f uma função contínua e limitada sobre Y . Considere SM(t)
semigrupo para o processo truncado (ηMk (·))−M≤k≤M .
Então,
SM(t)f(η)− f(η) =
∫ t
0
LM [SM(s)f ](η)ds.
Seja ν medida produto de exponenciais com media β−1, assim
ν{SM(t)f} − ν{f} =
∫ t
0
ν{LM [SM(s)f ]
}ds.
Sabemos que SM(t)f → S(t)f quandoM →∞ de forma pontual e limitada. Portanto,
devemos provar que, ν{LM [SM(s)f ]
}→ 0, para cada s, quando M →∞.
Chamemos como g(η) = gM(η) = SM(s)f(η), logo gM(η) = g(η−M , . . . , ηM) e
ν{LM g(η)} =R∑
j=−R
p(j)M∑
i=−M
ν
{∫ ηi
0
[g(ηu,i,i+j)− g(η)]du
}
=R∑
j=−R
p(j)
[M∑
i=−M
ν
{∫ ηi
0
g(ηu,i,i+j)du
}−
M∑i=−M
ν{ηig(η)}
].
Chamemos ν a distribuição marginal para (ηk)k 6=i,i+j, e consideremos o i-ésimo termo
da primeira soma acima,
ν
{∫ ηi
0
g(ηu,i,i+j)du
}= ν
{β2
∫ ∞0
dηi
∫ ∞0
dηi+j e−β(ηi+ηi+j)
∫ ηi
0
du g(ηu,i,i+j)
}= ν
{β2
∫ ∞0
du
∫ ∞0
dηi+j
∫ ∞u
dηi e−β(ηi+ηi+j)g(ηu,i,i+j)
}.
Fazendo a mudança ωi = ηi − u temos que a expressão acima coincide com
ν
{β2
∫ ∞0
du
∫ ∞0
dηi+j
∫ ∞0
dωi e−β(ωi+u+ηi+j)g((ηj)j 6=i,i+j, ωi, ηi+j + u)
},

§1.4. Algumas propriedades 27
e agora fazendo a mudança ωi+j = ηi+j + u, obtemos
ν
{β2
∫ ∞0
du
∫ ∞u
dωi+j
∫ ∞0
dωi e−β(ωi+ωi+j)g((ηj)j 6=i,i+j, ωi, ωi+j)
}= ν
{β2
∫ ∞0
dωi
∫ ∞0
dωi+j
∫ ωi+j
0
du e−β(ωi+ωi+j)g((ηj)j 6=i,i+j, ωi, ωi+j)
}= ν{ηi+jg(η)}.
Substituindo, vemos que
ν {LM [SM(s)f ]} =R∑
j=−R
p(j)M∑
i=−M
ν {ηi+jg(η)} − ν {ηig(η)}
=−1∑
j=−R
p(j)M∑
i=−M
ν {ηi+jg(η)} − ν {ηig(η)}
+R∑j=1
p(j)M∑
i=−M
ν {ηi+jg(η)} − ν {ηig(η)} .
Cancelando os termos na soma telescópica, vamos ter
−1∑j=−R
p(j)−1∑i=j
ν {η−M+ig(η)} − ν {ηM−i+jg(η)}
+R∑j=1
p(j)
j∑i=1
ν {ηM+ig(η)} − ν {η−M−i+jg(η)} . (1.21)
Adicionando e subtraindo ηM−i+jgM−i+j−1(η) nos termos na primeira soma em (1.21),
pode ser escrita como
−1∑i=j
ν {η−M+igM(η)} − ν {ηM−i+jgM(η)}
=−1∑i=j
[ν {η−M+igM(η)} − ν {ηM−i+jgM−i+j−1(η)}
]−−1∑i=j
ν {ηM−i+j [gM(η)− gM−i+j−1(η)]}

28 1. O processo de Bastões
=−1∑i=j
ν(η0)ν {gM(η)− gM−i+j−1(η)}
−−1∑i=j
ν {ηM−i+j [gM(η)− gM−i+j−1(η)]} .
Note que na primeira soma o termo, sendo |f | ≤ B,
|gM(η)− gM−i+j−1(η)| = |SM(s)f(η)− SM−i+j−1(s)f(η)| ≤ 2B,
portanto, podemos tomar limite quando M → ∞ e esta soma vai para zero. Por outra
parte, os termos na segunda soma,
ν {ηM−i+j [gM(η)− gM−i+j−1(η)]} ≤ ν(η20)
12ν{
[gM(η)− gM−i+j−1(η)]2} 1
2 ,
onde o argumento na segunda integral é limitado por 4B2. Portanto, podemos tomar
limite e a segunda soma vai para zero.
Analogamente somamos e subtraímos η−M−i+jgM+i−j−1(η) na segunda soma de (1.21)
e obtemos,
j∑i=1
ν {ηM+igM(η)} − ν {η−M−i+jgM(η)} =
j∑i=1
ν(η0)ν {gM(η)− gM+i−j−1(η)}
−j∑i=1
ν {η−M−i+j [gM(η)− gM+i−j−1(η)]} .
Usando o mesmo procedimento, podemos ver que ambas somas vão para zero quando
M →∞, desta forma, ν{LM [SM(s)f ]} → 0.

Capítulo 2
Limite Hidrodinâmico
Nos trabalhos de Suzuki and Uchiyama (1993) e Ekhaus and Seppäläinen (1996) foi
estudado o limite hidrodinâmico para modelos simétricos do Processo de Bastões no toro.
Eles usaram essencialmente a metodologia de estimadores da entropia introduzida por
Guo et al. (1988). O caso totalmente assimétrico em Z foi estudado por Seppäläinen
(1996) usando a formula de Lax-Oleinik e aplicando o Teorema Ergódico de Liggett no
Processo de Hammersley.
Neste trabalho estudaremos o limite hidrodinâmico do Processo de Bastões, introdu-
zido no capítulo anterior, em dois casos (quando p( q) tem média zero ou não zero). O
resultado fundamental deste capítulo (Teorema 2.1) vai incluir dois casos. Primeiramente
o caso com média zero, que em contraste com os trabalhos mencionados acima, fazemos
uma extensão para o espaço não compacto Z(ou R no nível macroscópico). A segunda
parte, o caso com média não zero, vai ser desenvolvido no capítulo seguinte por seguir
uma metodologia diferente devido a dificuldade com a unicidade da equação diferencial
obtida.
29

30 2. Limite Hidrodinâmico
2.1 Preliminares
Consideremos a medida empírica αNt definida como
αNt =1
N
∑i∈Z
ηi(t)δ iN, (2.1)
onde o espaço é redimensionado na escala 1N.
Deste modo dada uma função teste φ ∈ C∞c (R), podemos integrá-la com respeito a
dita medida como
αNt {φ} =1
N
∑i∈Z
ηi(t)φ( iN
). (2.2)
Dado um processo de Markov e seu gerador infinitesimal, denotado por L, para qual-
quer função definida no domínio de L, sabemos que
Mt = f(η(t))− f(η(0))−∫ t
0
L f(η(s))ds
é um martingal com respeito à filtração Ft = σ{η(s) : 0 ≤ s ≤ t}.
Se tomamos f(η(t)) = αNt {φ} = N−1∑i∈Z
ηi(t)φ( iN
), substituindo acima obtemos
Mt = αNt {φ} − αN0 {φ} −∫ t
0
LαNs {φ}ds. (2.3)
Se consideramos o processo de bastões, ou seja, tomamos L como em (1.20), note que
f(ηu,i,i+j)− f(η) = (ηi − u)φ( iN
)− ηiφ( iN
) + (ηi+j + u)φ( i+jN
)− ηi+jφ( i+jN
)
=u
N
[φ(i+jN
)− φ
(iN
)](2.4)
por conseguinte,
LαNs {φ} =1
N
∑i∈Z
R∑j=−R
p(j)η2i (s)
2
[φ( i+j
N)− φ( i
N)]

§2.1. Preliminares 31
Fazendo a expansão de Taylor para φ no ponto iN,
φ( i+jN
) = φ( iN
) +j
Nφ′( i
N) + · · ·+ jk
k!Nkφ(k)( i
N) +
jk+1
(k + 1)!Nk+1φ(k+1)(γi),
onde γi está entre iN
e i+jN.
Vamos supor primeiro que m =R∑
j=−Rp(j)j = 0. Neste casso, precisamos usar a
expansão de segunda ordem, pois o termo de primeira ordem vai se anular ao substituir
no gerador. Logo,
LαNs {φ} =1
N
∑i∈Z
R∑j=−R
p(j)η2i (s)
2
[φ′( i
N)j
N+
j2
2N2φ′′( i
N) +
j3
6N3φ′′′(γi)
]
=1
N3
∑i∈Z
η2i (s)
4
R∑j=−R
p(j)j2φ′′( iN
) +m3
6N4
∑i∈Z
φ′′′(γi)
=1
N3
∑i∈Z
η2i (s)
2A2φ( i
N) +O(N−3)∗,
onde vamos ter o operador linear A2φ = σ2
2φ′′, com σ2 sendo a variância de uma variável
com distribuição de probabilidade p(·) e m3 seu momento de terceira ordem.
Observe que, se tomamos limite quandoN →∞,Mt → 0 em probabilidade (Lema 2.2)
e o terceiro termo na direita vai se anular. Nesse caso, o possível limite para αN vai
satisfazer uma relação trivial não observando-se evolução temporal no nível macroscópico.
Para esta situação, precisamos de uma escala temporal adequada que permita observar
a evolução macroscópica de interesse. Portanto, reescalamos o tempo em N2 vezes†,
considerando um novo processo com gerador infinitesimal dado por N2L, assim
Mt = αNt {φ} − αN0 {φ} −∫ t
0
[1
N2
∑i∈Z
η2i (s)
2A2φ( i
N) +O(N−2)
]ds.
∗Na notação de Landau, dizemos que f(x) = O(g(x)) se, e somente se, existe M > 0 e x0, tal que|f(x)| ≤M |g(x)|, para cada x ≥ x0.†Esta escala temporal é conhecida como escala difusiva.

32 2. Limite Hidrodinâmico
Vejamos agora quando m =R∑
j=−Rp(j)j 6= 0. Fazendo expansão de φ no termo de
primeira ordem,
LαNs {φ} =1
N
∑i∈Z
R∑j=−R
p(j)η2i (s)
2
[φ′( i
N)j
N+
j2
2N2φ′′(γi)
]
=1
N2
∑i∈Z
η2i (s)
2
R∑j=−R
p(j)jφ′( iN
) +σ2
2N3
∑i∈Z
φ′′(γi)
=1
N2
∑i∈Z
η2i (s)
2A1φ( i
N) +O(N−2),
sendo o operador linear A1φ = mφ′.
Quando substituímos na equação (2.3), analogamente ao caso anterior, vamos precisar
agora reescalar o tempo por N , tendo-se assim,
Mt = αNt {φ} − αN0 {φ} −∫ t
0
1
N
∑i∈Z
η2i (s)
2A1φ( i
N)ds+O(tN−1).
2.1.1 Solução fraca
Considere o problema de Cauchy ∂tu+ Lx(u2)=0
u(0, x)=u0(x),(2.5)
onde Lx é um operador diferencial em x de primeira ou segunda ordem. Seja φ ∈
C1,2c (R+,R), uma função de suporte compacto sobre R+ × R que é continuamente di-
ferenciável e duas vezes continuamente diferenciável com respeito a primeira e segunda
variável respectivamente. Se multiplicamos a equação (2.5) por φ e integramos,
∫ ∞−∞
∫ t
0
φ(s, x)∂su(s, x)dsdx+
∫ ∞−∞
∫ t
0
φ(s, x)Lx(u2(s, x))dtdx = 0,

§2.1. Preliminares 33
integrando por partes, obtemos
∫ ∞−∞
φ(t, x)u(t, x)dx−∫ ∞−∞
φ(0, x)u0(x)dx−∫ ∞−∞
∫ t
0
∂sφ(s, x)u(s, x)dsdx
=
∫ ∞−∞
∫ t
0
L∗xφ(s, x)u2(s, x)dtdx, (2.6)
onde L∗x e o operador diferencial adjunto de Lx.
Deste modo, dizemos que u é uma solução fraca (ou generalizada) do problema (2.5) se
satisfaz a relação (2.6) para cada φ ∈ C1,`c (R+,R), onde ` é a ordem do operador diferencial
Lx. Em particular se φ somente depende da variável espacial x, isto é φ ∈ C`(R) a equação
(2.6) vai ficar na forma
∫ ∞−∞
φ(x)u(t, x)dx−∫ ∞−∞
φ(x)u0(x)dx =
∫ ∞−∞
∫ t
0
L∗xφ(x)u2(s, x)dtdx. (2.7)
No decorrer do capítulo vamos a considerar solução fraca no sentido da equação (2.7),
ou seja, vamos a usar funções teste dependendo só da variável espacial.
Quando L∗xφ(x) = A2φ(x) = σ2
2φ′′(x) estamos na presença de nosso primeiro caso
(média zero). Vários trabalhos, por exemplo, Dahlberg and Kenig (1984) e Andreucci and
DiBenedetto (1992), mostraram a existência e unicidade da solução fraca. Este resultado
vai ser usado neste capítulo na prova da primeira parte do Teorema 2.1. Porém no caso
em que L∗xφ(x) = A1φ(x) = mφ′(x), (média não nula) é conhecida a não existência de
unicidade da solução fraca. No trabalho de Kružkov (1970) é mostrado que a classe das
soluções satisfazendo a condição de entropia (3.2), discutida no capítulo seguinte, é única
no sentido fraco (2.6). Uma solução fraca satisfazendo (3.2) é dita uma solução fraca
entrópica.

34 2. Limite Hidrodinâmico
2.2 Limite hidrodinâmico
Tomamos um perfil inicial u0(x) ∈ L∞(R) Borel mensurável não negativo, definimos
para cada N , uma configuração inicial η = (ηi)i∈Z sob a medida µ0 = µN0 sobre Y onde as
variáveis ηi são exponenciais independentes com média dada por
υ(i) = µ0{ηi} =N
2
∫ i+1N
i−1N
u0(ξ)dξ. (2.8)
Nesse caso denotamos como µ0 ∼ u0. Vemos que desta forma µ0{ηi} ≤ C0, com C0 =
‖u0‖∞.
Seja ν sobre Y de forma que a configuração ζ = (ζi)i∈Z, satisfaz que os ζi são i.i.d.
exponenciais com media C0. Onde a distribuição do par (ηi, ζi) é tal que ηi = υ(i)C0ζi e as
correspondentes marginais são µ0 e ν respectivamente. Vemos que existe uma medida de
probabilidade sobre Y × Y , tal que se η ≤ ζ quase certamente
P (η,ζ){(η(·), ζ(·)) : η(·) ≤ ζ(·)} = 1, (2.9)
pela atratividade do processo (Proposição 1.11).
Portanto, µ0 é uma medida produto de exponenciais independentes e que αN0 →
u0(x)dx em µ0-probabilidade, quando N → ∞. Além disso, se supomos adicionalmente
que υ(i) > 0 para todo i ∈ Z, então µ0 restringida a compactos e absolutamente continua
com respeito a ν.
Teorema 2.1. Dados u0 ∈ L∞(R) não negativa e ηi exponenciais independentes com
média υ(i) sob µ0, então, para cada t > 0, φ ∈ C`c(R) e ε > 0,
limN→∞
P
{∣∣∣∣αNtN`{φ} −∫Rφ(x)u(t, x)dx
∣∣∣∣ > ε
}= 0. (2.10)
Onde,

§2.3. Prova do Teorema 2.1 35
(i) se m =R∑
j=−Rp(j)j = 0 e σ2 =
R∑j=−R
p(j)j2 > 0; ` = 2 e u(t, x) é a única solução
fraca da equação do meio poroso
∂tu =σ2
2∂2xx(u
2); (2.11)
(ii) se m =R∑
j=−Rp(j)j 6= 0; ` = 1 e u(t, x) é a única solução fraca entrópica da equação
de Burgers
∂tu+m∂x(u2) = 0. (2.12)
2.3 Prova do Teorema 2.1
A demonstração do Teorema 2.1 vai ser dividida em várias partes. Primeiramente
usamos a representação do processo no Problema de Martingal, Holley and Stroock (1976),
para estudar o comportamento da sequência αNq .Mt = MN
t (φ) = αNt {φ} − αN0 {φ} −∫ t
0
1
N
∑i∈Z
η2i (s)
2A`φ( i
N)ds+O(tN−1). (2.13)
Usando as estimativas obtidas na seção 2.1, vamos a seguir o seguintes passos:
Passo 1: Estimação do martingal. Mostraremos que o martingal Mt em (2.13) vai
para zero em probabilidade quando N →∞, obtendo que,
lim supN→∞
P
{∣∣∣∣∣αNt {φ} − αN0 {φ} −∫ t
0
1
N
∑i∈Z
η2i (s)
2A`φ( i
N)ds
∣∣∣∣∣ > ε
}= 0.
Passo 2: Compacidade relativa. Iremos mostrar que a família das medidas empíricas
αNq é relativamente compacta no espaço D([0,∞),M), onde consideramosM como
o espaço das medidas positivas de Borel finitas sobre R.

36 2. Limite Hidrodinâmico
Passo 3: Equilíbrio local. Veremos que o termo integral em (2.13) está próximo de
∫ t
0
∫RA`φ(x)u2(s, x)dxds,
o que permite concluir que as trajetórias dos pontos limites satisfazem a forma fraca
da equação diferencial. Esta substituição vai ser feita em dois passos principais:
primeiro vamos aproximar a expressão η2i pela media em blocos grandes ao nível
microscópico. Depois usaremos estes blocos para aproximar pequenos blocos ao
nível macroscópico.
Assumiremos a condição adicional que o perfil inicial seja estritamente positivo, mas
esta hipóteses sera removida no final da prova.
Passo 4: Distribuição dos Pontos limites. Neste passo, vai ser provado que as tra-
jetórias onde estão concentrados os pontos limites, são absolutamente contínuas com
respeito a Lebesgue. Juntando este resultado com o passo anterior, iremos concluir
que as densidades das trajetórias onde os pontos limites estão concentrados são
solução fraca da equação diferencial estudada.
Passo 5: Unicidade. Como foi observado na subseção 2.1.1, temos unicidade para a
solução fraca da equação diferencial (2.11). Portanto, podemos concluir que os pon-
tos limites estão concentrados em trajetórias com densidade a única solução fraca de
dita equação diferencial. Além disso, como esta trajetória é absolutamente contínua,
concluímos também, a convergência em probabilidade de αNq para u( q, x)dx, onde u
é dita solução.
Por outro lado, como em geral, a equação (2.12) não tem solução única, será utilizada
outra metodologia para concluir a segunda parte do Teorema 2.1. Este procedimento
vai ser feito separadamente no Capítulo 3. Mostraremos que nossa medida empírica
converge em probabilidade à única solução fraca entrópica da equação (2.12).
Passo 6: Removendo a hipóteses de estritamente positiva. O último passo da
prova consiste em, para um dado inicial u0 ≥ 0, fazer aproximação por meio de

§2.3. Prova do Teorema 2.1 37
soluções com dado inicial uε0 = u0 + ε. Desta forma concluímos a primeira parte da
prova do Teorema 2.1.
2.3.1 Estimação do martingal
Lema 2.2. Para cada T <∞ e ε > 0, P[
sup0≤t≤T
M2t > ε
]→ 0 quando N →∞.
Demonstração. Em virtude da Desigualdade de Chebyshev basta mostrar que
limN→∞
E
[sup
0≤t≤TM2
t
]= 0.
É conhecido que
Vt = M2t −
∫ t
0
γ(s)ds, (2.14)
com γ(s) = N ` L f 2(η(s)) − 2f(η(s))N ` L f(η(s)) é um martingal, para ` = 1, 2 segundo
corresponda com média zero ou não zero respectivamente, assim
γ(s) = N `∑i∈Z
R∑j=−R
p(j)
∫ ηi
0
[f 2(ηu,i,i+j)− 2f(ηu,i,i+j)f(η) + f 2(η)]du
= N `∑i∈Z
R∑j=−R
p(j)
∫ ηi
0
[f(ηu,i,i+j)− f(η)]2du
= N `∑i∈Z
R∑j=−R
p(j)
∫ ηi
0
u2
N2[φ( i+j
N)− φ( i
N)]2du
=∑i∈Z
R∑j=−R
p(j)η3i (s)
3N2−` [φ( i+jN
)− φ( iN
)]2
=∑
i±RN∈Sp(φ)
R∑j=−R
p(j)η3i (s)
3N2−` [φ( i+jN
)− φ( iN
)]2.

38 2. Limite Hidrodinâmico
Onde Sp(φ) representa o suporte de φ. Usando a condição de Lipschitz para a função φ
γ(s) ≤∑
i±RN∈Sp(φ)
R∑j=−R
p(j)η3i (s)
3N2−`Kj2
N2=
∑i±RN∈Sp(φ)
η3i (s) · O(N−4+`),
Aplicando a desigualdade maximal de Doob e o Teorema de Fubini
E[ sup0≤t≤T
M2t ] ≤ E[ sup
0≤t≤T|Mt|]2 ≤ 4E[M2
T ] = 4E
[∫ T
0
γ(s)ds
]≤ 4E
∫ T
0
∑i±RN∈Sp(φ)
η3i (s)ds · O(N−4+`)
= 4
∫ T
0
∑i±RN∈Sp(φ)
Eη3i (s)ds · O(N−4+`)
≤ 4
∫ T
0
∑i±RN∈Sp(φ)
Eζ3i ds · O(N−4+`) = O(TN−3+`),
(2.15)
pois Sp(φ) ⊂[−Kφ
2,Kφ2
]contendo no máximo KφN pontos da forma i/N e Eζp(t) é
constante para todo t, pois ζ são bastões i.i.d. exponenciais com média C0, como no
acoplamento em (2.9). Como ` < 3, tomando limite quando N → ∞ a expressão acima
vai para zero como se queria mostrar.
Observação. Como foi dito acima, o tempo foi reescalado por N no caso media não zero e
N2 no caso de média zero. Para reduzir notação na prova anterior foi introduzida a letra
` = 1, 2 para especificar cada caso em uma expressão só. Pela similaridade da prova em
ambos casos, usamos esta notação no restante do capítulo.
2.3.2 Compacidade relativa de (αN· )n∈N
Para provar a compacidade relativa da sequência αNq em D([0,∞),M) é suficiente
considerar que para cada φ ∈ C2c (R), αNq {φ} é relativamente compacta em D([0,∞),R).
Pois, o espaço C2c (R) é denso em C(R) na topologia uniforme.

§2.3. Prova do Teorema 2.1 39
Seja a sequência de probabilidade {PN} correspondente ao processo a valores reais
{αNt ; t ∈ [0, T ]}.
Lema 2.3. A sequência {PN} é relativamente compacta.
Demonstração. Primeiro devemos provar que, dado um ε > 0, existe um compacto K ⊂ R
tal que para cada t, P [αNt {φ} 6∈ K] ≤ ε. Seja B > 0,
P [αNt {φ} > B] ≤ 1
BN
∑iN∈Sp(φ)
Eηi(t)φ( iN
) ≤ 1
BN
∑iN∈Sp(φ)
Eζiφ( iN
) ≤ C0
B,
pois ζi são bastões exponenciais i.i.d. com média C0, como no acoplamento em (2.9).
Tomando B = C0/ε, definimos K = [−B,B] e temos o resultado desejado.
Agora, para cada ε > 0, devemos provar que
limδ→0
lim supN→∞
P
[sup|t−s|<δ
∣∣αNt {φ} − αNs {φ}∣∣ > ε
]= 0. (2.16)
Mas,
∣∣αNt {φ} − αNs {φ}∣∣ ≤ ∣∣MNt −MN
s
∣∣+
∫ t
s
∣∣N ` LαNs {φ}∣∣ ds.
Usando a desigualdade de Chebyshev em (2.16), é suficiente mostrar que
E
[sup|s−t|<δ
(MNt −MN
s )2
]e E
[sup|s−t|<δ
(∫ t
s
∣∣N ` LαNs {φ}∣∣ ds)2
],
vão para zero, quando N →∞. Desenvolvendo o quadrado e usando a desigualdade (2.15)
na primeira esperança
E
[sup|s−t|<δ
(MNt −MN
s )2
]≤ 4E
[sup
0≤t≤TM2
t
]≤ 16E
[M2
T
]= O(TN−3+`).

40 2. Limite Hidrodinâmico
Por outro lado, usando Cauchy-Schwarz na segunda esperança,
sup|s−t|<δ
(∫ t
s
∣∣N ` LαNs {φ}∣∣ ds)2
≤ sup|s−t|<δ
(t− s)∫ t
s
(N ` LαNs {φ})2ds
≤ δ
∫ T
0
(N ` LαNs {φ})2ds
≤ δ
∫ T
0
(1
N
∑i∈Z
R∑j=−R
p(j)η2i (s)
2N `∣∣φ( i+j
N)− φ( i
N)∣∣)2
ds
≤ δ
∫ T
0
1
N
∑i±RN∈Spφ
η2i (s)
2
R∑j=−R
p(j)N `∣∣φ( i+j
N)− φ( i
N)∣∣2
ds
≤ δK2φ
∫ T
0
1
N
∑i±RN∈Spφ
η2i (s)
2
2
ds ≤ δK2φ
∫ T
0
C
N
∑i±RN∈Spφ
η4i (s)
4ds,
onde Kφ é uma constante que depende da primeira e segunda derivada de φ e o primeiro
ou segundo momento de p( q), segundo seja assimétrica ou simétrica respectivamente. To-
mando esperança, a soma dos ηi está limitada pela soma dos ζi (exponenciais i.i.d., como
no acoplamento (2.9)). Portanto, dita esperança está limitada por C ′Tδ, onde C ′ é uma
constante que depende de Kφ, C0 = Eζi e o suporte de φ.
Juntando estas estimativas, obtemos que a probabilidade em (2.16), está limitada por
C ′′T (N−1 + δ), anulando-se o limite.
Observação. Seja αt trajetória de P ponto limite de {PN}, então, αt ∈ C([0, T ],M),
P-quase certamente, pois
limδ→0P
[sup|s−t|<δ
|αs{φ} − αt{φ}| > ε
]≤ lim
δ→0lim supN→∞
PN
[sup|s−t|<δ
|αNs {φ} − αNt {φ}| > ε
],
que se anula por (2.16).

§2.3. Prova do Teorema 2.1 41
2.3.3 Equilíbrio local
Para começar com a verificação do equilibro local, vamos seguir um roteiro similar ao
procedimento utilizado por Ekhaus and Seppäläinen (1996) para a prova das estimativas
de um e dois blocos. Adicionalmente vai ser necessário prestar atenção aos sítios dentro
do suporte da função teste pela natureza não compacta do espaço de estados. Além disso,
a igualdade (2.29) foi provada utilizando outra ideia; Ekhaus and Seppäläinen (1996) usa
estimados da entropia relativa.
O objetivo desta seção é mostrar que os pontos limites da sequência αN estão concen-
trados em trajetórias que são soluções facas. Para chegar neste resultado, vemos primeiro
que o termo integral em (2.13) pode ser aproximado por um mais apropriado. Ou seja,
temos o seguinte lema.
Lema 2.4 (Lema de Substituição). Para cada φ ∈ C2c (R) e δ > 0,
limε→0
lim supN→∞
PN
{∫ t
0
1
N
∑i∈Z
φ( iN
)∣∣∣η2i (s)− 2(αNs {χεi
N})2∣∣∣ ds > δ
}= 0, (2.17)
onde χεx(y) = (2ε)−11[x−ε,x+ε](y), para x, y ∈ R e ε > 0.
Fazendo substituição dada pelo Lema 2.4 no termo integral em (2.13), teremos
∫ t
0
1
N
∑i∈Z
A`φ( iN
)(αNs {χεiN
})2ds,
usando suavidade de φ ele é próximo, para N suficientemente grande, de
∫ t
0
∫RA`φ(x)(αNs {χεx})2dxds.
Usando o Lema 2.10, as trajetórias onde estão concentrados os pontos limites de{PN}
são absolutamente contínuas com respeito Lebesgue P⊗dt-quase certamente. Assim, exite
u : R+ × R→ R tal que
αt{φ} =
∫Rφ(x)u(t, x)dx. (2.18)

42 2. Limite Hidrodinâmico
Fazendo estas mudanças no martingal em (2.13),
P
{∣∣∣∣∣αt{φ} − α0{φ} −∫ t
0
∫RA`φ(x)
(1
2ε
∫ x+ε
x−εu(s, y)dy
)2
dxds
∣∣∣∣∣ > δ
}(2.19)
está limitada superiormente por
lim supN→∞
PN{∣∣∣∣∣αt{φ} − α0{φ} −
∫ t
0
1
N
∑i∈Z
η2i (s)
2A`φ( i
N)ds+O(tN−1)
∣∣∣∣∣ > δ
}= lim sup
N→∞PN {|Mt| > δ} = 0,
pelo Lema 2.2.
Além disso, pelo Teorema de diferenciação de Lebesgue, temos que,
limε→0
(1
2ε
∫ x+ε
x−εu(s, y)dy
)2
= u2(s, x),
para quase todo x. Por outro lado, seja u como em (2.18), para cada t ≥ 0 e x ∈ R e
0 ≤ φ ∈ Cc(R),
∫Rφ(x)u(t, x)dx = lim
N→∞ENαNt {φ} = lim
N→∞
1
N
∑i∈Z
φ( iN
)Eηi(t) ≤ C0
∫Rφ(x)dx,
onde C0 = Eζi = ‖u0‖∞, como no acoplamento (2.9), portanto, u(t, x) ≤ ‖u0‖∞. Usando
convergência dominada a probabilidade em (2.19), quando ε→ 0, coincide com
P
{∣∣∣∣∣αt{φ(x)} −∫Rφ(x)u0(x)dx−
∫ t
0
∫RA`φ(x)u2(s, x)dxds
∣∣∣∣∣ > δ
}.
Desta forma, vemos que os pontos limites P de {PN} estão concentrados em trajetórias
absolutamente contínuas com densidade u. Uma vez seja verificada a unicidade desta (que
será discutida na Subseção 2.3.6), teremos que αt = u(t, x)dx é limite fraco da sequência
αNt . Como este limite é absolutamente continuo com respeito a Lebesgue, decorre a
convergência em probabilidade αNt → αt, quando N →∞, onde αt tem densidade u(t, x).

§2.3. Prova do Teorema 2.1 43
2.3.4 Prova do Lema de Substituição (Lema 2.4)
A prova do Lema 2.4 vai ser dividida em vários passos. Primeiro para entender o termo
introduzido na integral em (2.17), vemos que pode ser escrito como,
αNs {χεiN} =
1
N
∑j∈Z
(2ε)−11[ iN−ε,iN
+ε](jN
)ηj(s)
=1
2Nε
∑|i−j|≤Nε
ηj(s)
=2bNεc+ 1
2Nε· 1
2bNεc+ 1
i+bNεc∑j=i−bNεc
ηj(s)
= [1 +O(N−1)]SbNεc(ηi(s)),
onde SL é definido como,
SL(ηi) =1
2L+ 1
i+L∑j=i−L
ηj.
Simplificando a notação, vamos escrever Nε em vez de bNεc. Assim, (2.17) no
Lema 2.4 pode ser escrito como,
limε→0
lim supN→∞
PN
{∫ T
0
1
N
∑i∈Z
φ( iN
)∣∣η2i (s)− 2S2
Nε(ηi(s))∣∣ ds > δ
}= 0. (2.20)
Para provar dita desigualdade vamos aproxima-la primeiro num bloco no nível micros-
cópico de tamanho grande L independente e menor do que N . Ou seja, vamos adicionar
e subtrair dentro do valor absoluto em (2.20) o termo
[SL(η2
i (s))− 2S2L(ηi(s))
]. (2.21)

44 2. Limite Hidrodinâmico
Desta forma,
limε→0
lim supN→∞
PN
{∫ T
0
1
N
∑i∈Z
φ( iN
)∣∣η2i (s)− 2S2
Nε(ηi(s))∣∣ ds > δ
}
≤ lim supN→∞
PN
{∫ T
0
1
N
∑i∈Z
φ( iN
)∣∣SL(η2
i (s))− 2S2L(ηi(s))
∣∣ ds > δ
}(2.22)
+ limε→0
lim supN→∞
PN
{∫ T
0
1
N
∑i∈Z
φ( iN
)∣∣η2i (s)− SL(η2
i (s))∣∣ ds > δ
}
+ limε→0
lim supN→∞
PN
{2
∫ T
0
1
N
∑i∈Z
φ( iN
)∣∣S2
L(ηi(s))− S2Nε(ηi(s))
∣∣ ds > δ
}.
Se tomamos limite quando L → ∞ em ambos membros, a probabilidade no lado
esquerdo de (2.22) não vai se alterar pois não depende de L. O primeiro termo na direita
está limitado por
limL→∞
lim supN→∞
PN
‖φ‖∞∫ T
0
1
N
∑iN∈Spφ
∣∣SL(η2i (s))− 2S2
L(ηi(s))∣∣ ds > δ
,
que vai-se anular, como será mostrado no Lema 2.6.
O segundo termo na direita em (2.22) também pode ser mostrado que se anula usando
o Lema 2.5 a seguir com p = 2. Por último, mostramos no Lema 2.9 que o terceiro também
se anula, o que finalmente mostra (2.20).
Lema 2.5. Seja p ≥ 0 e φ ∈ C1c (R), então quase certamente,
1
N
∑i∈Z
ηpi φ( iN
) =1
N
∑i∈Z
SL(ηpi )φ( iN
) +O(L
N
).

§2.3. Prova do Teorema 2.1 45
Demonstração.∣∣∣∣∣ ∑iN∈Spφ
[1
2L+ 1
i+L∑j=i−L
ηpj (s)
]φ( i
N)−
∑iN∈Spφ
ηpi (s)φ( iN
)
∣∣∣∣∣=
∣∣∣∣∣ 1
2L+ 1
L∑j=−L
∑iN∈Spφ
[ηpi+j(s)− η
pi (s)
]φ( i
N)
∣∣∣∣∣=
∣∣∣∣∣ 1
2L+ 1
L∑j=−L
∑iN∈Spφ
ηpi (s)[φ( i−j
N)− φ( i
N)] ∣∣∣∣∣
≤∑iN∈Spφ
ηpi (s)1
2L+ 1
L∑j=−L
∣∣φ( i−jN
)− φ( iN
)∣∣ .
Usando a suavidade de φ, seja K de forma que |φ(x)− φ(y)| ≤ K|x − y|, a expressão
acima está limitada por ∑iN∈Spφ
ηpi (s)2L+ 1
2L+ 1KL
N.
Deste modo,
1
N
∑iN∈Spφ
ηpi (s)φ( iN
) =1
N
∑iN∈Spφ
SL(ηpi )φ( iN
) +
1
N
∑iN∈Spφ
ηpi (s)
O( LN
).
Além disso, usando o acoplamento básico (2.9), sabemos que 1N
∑iN∈Spφ
ηpi (t) está limitado
uniformemente quase certamente.
2.3.4.1 Estimativas de um e dois blocos
Lema 2.6 (Estimativa de um bloco). Seja Λ ⊂ R compacto,
limL→∞
lim supN→∞
PN
∫ T
0
1
N
∑iN∈Λ
∣∣SL(η2i (s))− 2S2
L(ηi(s))∣∣ ds > δ
= 0. (2.23)

46 2. Limite Hidrodinâmico
Demonstração.
PN
∫ T
0
1
N
∑iN∈Λ
∣∣SL(η2i (s))− 2S2
L(ηi(s))∣∣ ds > δ
≤ 1
δEN
∫ T
0
1
N
∑iN∈Λ
∣∣SL(η2i (s))− 2S2
L(ηi(s))∣∣
=1
δT µN
{|SL(η2)− 2S2
L(η)|},
onde ηp = (ηpi )i∈Z e a medida de probabilidade µN é definida sobre Y como,
µN =1
T
∫ T
0
1
N
∑iN∈Λ
µt ◦ θidt, (2.24)
onde µt é a distribuição do processo no tempo t e (θiη)j = ηi+j. Note que como foi definida
µN é invariante por translações.
Esta mudança reduz nosso problema a provar,
limL→∞
lim supN→∞
µN{|SL(η2)− 2S2
L(η)|}
= 0. (2.25)
Considere q = (qi)i∈Z ∈ [0,∞)Z, p > 0 e η uma configuração de bastões, usando o
acoplamento (2.9),
µN(η > q) =1
T
∫ T
0
1
N
∑iN∈Λ
µt(ηi > qi)dt ≤1
T
∫ T
0
1
N
∑iN∈Λ
ν(ζi > qi)dt
≤ 1
N
∑iN∈Λ
1
qpiν{ζpi } =
1
N
∑iN∈Λ
1
qpip!Cp
0 → 0
(2.26)
quando ‖q‖ → ∞. Portanto, para cada ε > 0, existe q com norma suficientemente
grande, tal que, µ(η > q) < ε. Esta cota, uniforme em N , garante que a sequência {µN}
é relativamente compacta. Assim, para provar (2.25) é suficiente mostrar que para {µL}

§2.3. Prova do Teorema 2.1 47
uma coleção qualquer de pontos limites para de {µN},
limL→∞
µL{|SL(η2)− 2S2
L(η)|}
= 0. (2.27)
Si aplicamos limite em N →∞ em (2.26), analogamente, µL é relativamente compacta.
Para provar (2.27) vamos a considerar Γ ⊂ Z finito e denotamos por, ηΓ = {ηi : i ∈ Γ}.
Além disso, considere q ∈ [0,∞)Z, uma configuração fixa de bastões, para i, j ∈ Z e
0 ≤ u ≤ qi, definimos como
qu,i,jk =
qi − u, se k = i,
qi+j + u, se k = i+ j,
qk, outro caso.
(2.28)
Agora, precisamos primeiro supor que o perfil inicial u0 > 0, ou seja, é estritamente
positivo. Esta suposição garante que, para todo K ⊂ Z, finito µ0
∣∣K� ν
∣∣K; esta suposição
vai ser removida depois na Subseção 2.3.7. Pela atratividade do processo µt(ηΓ ≥ q) ≤
ν(ηΓ ≥ q), para cada, Γ ⊂ Z, assim µt∣∣K� ν
∣∣K
e, por conseguinte, µN � ν e µ � ν,
para µ ∈ {µL}.
Lema 2.7. Se µ ∈ {µL}, então, para cada Γ ⊂ Z, conjunto finito, i, i+j ∈ Γ, q ∈ [0,∞)Z
e 0 ≤ u ≤ qi. Então,
µ(ηΓ ≥ q) = µ(ηΓ ≥ qu,i,j), (2.29)
onde qu,i,j é definido em (2.28). Além disso, µ é intercambiável‡.
Demonstração. Notemos que primeiro que para µ(ηΓ ≥ q), onde Γ qualquer subconjunto
finito de Z, para i, j ∈ Γ, se são intercambiados os η em ditas posições, basta trocar q
por qqi−qj ,i,j, se qi ≥ qj, na expressão acima. Deste modo, só resta provar que se i, j ∈ Γ
e 0 ≤ u ≤ qi, µ(ηΓ ≥ q) = µ(ηΓ ≥ qu,i,j).‡Dizemos que uma sequência de variáveis aleatórias é intercambiável ou permutável se para qualquer
permutação finita de índices, a sequência permutada tem a mesma distribuição conjunta que a sequênciaoriginal

48 2. Limite Hidrodinâmico
Assim,
∣∣µ(ηΓ ≥ q)− µ(ηΓ ≥ qu,i,j)∣∣ ≤ ∫ ∣∣1{ηΓ≥q}(η)− 1{ηΓ≥qu,i,j}(η)
∣∣ dµ(η)
=
∫|1A(η)− 1B(η)| dµ(η)
=
∫1A4B(η)dµ(η) = µ(A4B),
onde A = {ηΓ ≥ q} e B = {ηΓ ≥ qu,i,j}. Por outra parte, se ν(A4 B) = 0, a integral
acima sempre vai ser zero, então
∣∣µ(η; ηΓ ≥ q)− µ(η; ηΓ ≥ qu,i,j)∣∣ = 0.
Para finalizar só falta provar que ν(A4B) = 0, mas
ν[A4B] = ν[(A ∩Bc) ∪ (Ac ∩B)] ≤ ν[A ∩Bc] + ν[Ac ∩B],
o primeiro termo da soma na direita, ν({ηΓ ≥ q} ∩ {ηΓ < qu,i,j}) = 0, pois, o valor ηi não
pode ser maior ou igual do que qi e ao mesmo tempo menor do que qi−u. Analogamente,
acontece com ηi+j no segundo termo e ν(Ac ∩B) = 0.
Corolário 2.8 (Corolário 3.11 em Ekhaus and Seppäläinen (1996)). Seja µ ∈ {µL} sob
as hipóteses do Lema 2.7, então µ é uma mistura de distribuições i.i.d. exponenciais.
Pelo Corolário acima seja µ =∫νrdρ(r), onde νr é produto de exponenciais i.i.d. com
media r, logo
νr{|SL(η2)− 2S2L(η)|} ≤ νr{|SL(η2)− 2r2|}+ 2νr{|r2 − S2
L(η)|} (2.30)
≤ [νr{|SL(η2)− 2r2|2}]1/2 + 2[νr{|r + SL(η)|2}]1/2 · [νr{|r − SL(η)|2}]1/2.
Usando as seguintes propriedades das variáveis i.i.d. exponenciais
(i) E
{∣∣∣∣ 1N
N∑i=1
Xi − EX1
∣∣∣∣2}
= 1NE{|X1 − EX1|2
};

§2.3. Prova do Teorema 2.1 49
(ii) E{|X2 − E(X2)|2
}= 20(EX)4;
(iii) E{|X − EX|2
}= (EX)2.
Desta forma, (2.30) está limitada por
√20(2L+ 1)−1/2r2 + 2(2L+ 1)−1/2r2 ≤ C(2L+ 1)−1/2r2 = C(2L+ 1)−1/2νr{η2
i }.
Portanto,
µ{|SL(η2)− 2S2L(η)|} ≤
∫C(2L+ 1)−1/2νr{η2
i }dρ(r) = C(2L+ 1)−1/2µ{η2i } → 0
quando L→∞, pois µ{η2i } ≤ 2KΛC
20 .
Lema 2.9 (Estimativa de dois Blocos).
limL→∞
limε→0
lim supN→∞
PN
[∫ T
0
1
N
∑i∈Z
φ( iN
)∣∣S2
L(ηi(s))− S2Nε(ηi(s))
∣∣ ds > δ
]= 0. (2.31)
Demonstração. Aplicando desigualdade de Chebyshev na probabilidade em (2.31)
PN
[∫ T
0
1
N
∑i∈Z
φ( iN
)∣∣S2
L(ηi(s))− S2Nε(ηi(s))
∣∣ ds > δ
]
≤ 1
δµ
{∫ T
0
1
N
∑i∈Z
φ( iN
)∣∣S2
L(ηi(s))− S2Nε(ηi(s))
∣∣ ds}
Aplicando agora a desigualdade de Cauchy-Schwarz, a esperança acima na direita está
limitada por
[µ
{∫ T
0
1
N
∑i∈Z
φ2( iN
) |SL(ηi(s)) + SNε(ηi(s))|2 ds
}]1/2
(2.32)
×
[µ
{∫ T
0
1
N
∑i∈Z
φ2( iN
) |SL(ηi(s))− SNε(ηi(s))|2 ds
}]1/2
.

50 2. Limite Hidrodinâmico
Usando a desigualdade (a+ b)2 ≤ 2(a2 + b2), o primeiro fator em (2.32), está limitado por
2T‖φ‖2∞
N
∑iN∈Spφ
(ν{S2
L(ζi)}+ ν{S2Nε(ζi)}
)1/2
≤√
8TKφ‖φ‖∞C0,
onde ν é tal que os bastões são exponenciais i.i.d. com media C0, como no acoplamento
(2.9) e Kφ tal que Spφ ⊂[−Kφ
2,Kφ2
].
Por outro lado, para provar que a esperança no segundo fator em (2.32) vai para zero,
vamos a somar e subtrair o termo
1
2Nε+ 1
i+Nε∑j=i−Nε
φ( jN
)SL(ηj(s)),
deste modo, o quadrado do segundo fator em (2.32) está limitado por
2µ
∫ T
0
1
N
∑i∈Z
∣∣∣∣∣φ( iN
)SL(ηi(s))−1
2Nε+ 1
i+Nε∑j=i−Nε
φ( jN
)SL(ηj(s))
∣∣∣∣∣2
ds
+ 2µ
∫ T
0
1
N
∑i∈Z
∣∣∣∣∣ 1
2Nε+ 1
i+Nε∑j=i−Nε
φ( jN
)SL(ηj(s))− φ( iN
)SNε(ηi(s))
∣∣∣∣∣2
ds
. (2.33)
Observe que pela suavidade de φ e |i − j| ≤ Nε, temos,∣∣φ( i
N)− φ( j
N)∣∣ ≤ γ = γ(ε),
onde γ(ε)→ 0 quando ε→ 0. Portanto,
φ( iN
)SNε(ηi(s))− 12Nε+1
i+Nε∑j=i−Nε
φ( jN
)ηj(s) = 12Nε+1
i+Nε∑j=i−Nε
[φ( iN
)− φ( jN
)](ηi(s))
≤ 12Nε+1
i+Nε∑j=i−Nε
γ(ε)(ηi(s))
= SNε(ηi(s))γ.

§2.3. Prova do Teorema 2.1 51
Assim, somando e subtraindo 12Nε+1
i+Nε∑j=i−Nε
φ( jN
)ηj(s) no segundo termo de (2.33), está
limitado por,
2µ
{∫ T
0
1
N
∑i±jNi∈Spφ
∣∣∣∣∣ 1
2Nε+ 1
i+Nε∑j=i−Nε
[φ( j
N)SL(ηj(s))− φ( j
N)ηj(s)
]
−SNε(ηi(s))γ
∣∣∣∣∣2
ds
}.
Que está limitado por,
4µ
∫ T
0
1
N
∑i±jNi∈Spφ
∣∣∣∣∣ 1
2Nε+ 1
i+Nε∑j=i−Nε
[φ( j
N)SL(ηj(s))− φ( j
N)ηj(s)
]∣∣∣∣∣2
ds
+4γ2µ
∫ T
0
1
N
∑i±jNi∈Spφ
|SNε(ηi(s))|2 ds
.
A expressão dentro do valor absoluto no primeiro termo é da ordem LN−1 pelo
Lema 2.5, portanto, dito termo vai para zero quando N →∞. Por outro lado, o segundo
termo está limitado por 4γ2TKφC20 , que vai para zero quando ε → 0, pois γ = γ(ε) → 0
quando ε→ 0.
Analogamente, o primeiro termo em (2.33) está limitado por
4µ
∫ T
0
1
N
∑i±jNi∈Spφ
∣∣∣∣∣ 1
2Nε+ 1
i+Nε∑j=i−Nε
[φ( j
N)SL(ηi(s))− φ( j
N)SL(ηj(s))
]∣∣∣∣∣2
ds
+4γ2µ
∫ T
0
1
N
∑i±jNi∈Spφ
|SL(ηi(s))|2 ds
,
onde o segundo termo vai para zero quando ε→ 0 e o primeiro está limitado por
4µ
∫ T
0
1
N
∑i±jNi∈Spφ
2Nε+ 1
(2Nε+ 1)2
i+Nε∑j=i−Nε
φ2( jN
) |SL(ηi(s))− SL(ηj(s))|2 ds

52 2. Limite Hidrodinâmico
= 4
∫ T
0
1
N
∑i±jNi∈Spφ
1
2Nε+ 1
Nε∑j=−Nε
φ2( i+jN
)µ{|SL(ηi(s))− SL(ηi+j(s))|2
}ds
=4
2Nε+ 1
Nε∑j=−Nε
∫ T
0
1
N
∑i±jNi∈Spφ
φ2( i+jN
)µ{|SL(ηi(s))− SL(ηi+j(s))|2
}ds
≤ 4‖φ2‖∞T
sup|j|≤Nε
1
T
∫ T
0
1
N
∑i±jNi∈Spφ
µ{|SL(ηi(s))− SL(ηi+j(s))|2
}ds.
Note que se |j| ≤ 2L, termos de SL(ηi(s)) e SL(ηi+j(s)) vão a ser cortados na diferencia
|SL(ηi(s))− SL(ηi+j(s))|, sendo esta menor o igual que a mesma diferencia tomando j′,
tal que, |j| < |j′|. Portanto, o supremo acima é atingido no conjunto 2L < |j| ≤ Nε.
Escrevendo esta expressão em termos de µN , definida em (2.24), o problema se reduz a
mostrar
limL→∞
limε→0
lim supN→∞
sup2L<|j|≤Nε
µN{|SL(η)− SL(θjη)|2
}= 0,
onde (θjη)i = ηi+j.
Note que, pela invariância sob translações de µN , é equivalente tomar ΓL e Γ′L dois
intervalos arbitrários disjuntos de Z de tamanho 2L + 1 a uma distancia não maior que
Nε e considerar
limL→∞
limε→0
lim supN→∞
µN{∣∣SΓL(η)− SΓ′L
(η)∣∣2} = 0,
Analogamente à prova do Lema 2.7, considere µ ∈ {µL} ponto limite de µN e definamos
Γ = ΓL ∪ Γ′L e q = (qi : i ∈ Γ) uma configuração fixa de bastões. Seguindo o mesmo
procedimento, teremos que para todo i, i+ j ∈ Γ e 0 ≤ u ≤ qi,
µ(η ≥ q) = µ(η ≥ qu,i,j). (2.29a)
Porem não é possível aplicar o Corolário 2.8 direitamente pois não podemos garantir
intercambiabilidade infinita sob µ.
Considere K � L e dividimos o conjunto ΓL na união disjunta Γ1K ∪ Γ2
K ∪ · · · ∪ ΓmK ,
onde os ΓiK , em analogia com ΓL, são intervalos de aproximadamente 2K + 1 elementos.

§2.3. Prova do Teorema 2.1 53
Assim,
SΓL(η) =1
2L+ 1
∑j∈ΓL
ηj =1
2L+ 1
∑j∈Γ1
K
ηj + · · ·+∑j∈ΓmK
ηj
=
2K + 1
2L+ 1
1
2K + 1
∑j∈Γ1
K
ηj + · · ·+ 1
2K + 1
∑j∈ΓmK
ηj
=
2K + 1
2L+ 1
[SΓ1
K(η) + · · ·+ SΓmK
(η)].
Analogamente, é feita a construção dos Γ′iK para Γ′L, portanto,
∣∣SΓL(η)− SΓ′L(η)∣∣2 =
∣∣∣∣∣2K + 1
2L+ 1
m∑k=1
[SΓkK
(η)− SΓ′kK(η)]∣∣∣∣∣
2
≤ (2K + 1)2
(2L+ 1)2m
m∑k=1
∣∣∣SΓkK(η)− SΓ′kK
(η)∣∣∣2
∼ 1
m
m∑k=1
∣∣∣SΓkK(η)− SΓ′kK
(η)∣∣∣2 ,
quando L→∞, pois 2L+ 1 = (2K + 1)m.
Desta forma, para obter o resultado do Lema é suficiente mostrar,
limK→∞
lim supL→∞
1
m
m∑k=1
µ
{∣∣∣SΓkK(η)− SΓ′kK
(η)∣∣∣2} = 0.
Pela intercambiabilidade finita é suficiente mostrar
limK→∞
lim supL→∞
µ{∣∣SΓK (η)− SΓ′K
(η)∣∣2} = 0.
Tomando L → ∞, teremos intercambiabilidade infinita sob cada ponto limite µK e
portanto, lhe podemos aplicar o Corolário 2.8. Então, µK é uma mistura de exponenci-
ais i.i.d.

54 2. Limite Hidrodinâmico
Seja νr produto de exponenciais i.i.d. com media r tal que µK =∫νrdQ(r). Assim
νr
{∣∣SΓK (η)− SΓ′K(η)∣∣2} ≤ 2νr
{|SΓK (η)− r|2
}+ 2νr
{∣∣SΓ′K(η)− r
∣∣2}=
4
2K + 1νr{|η − r|2
}≤ 4νr{η2}
2K + 1.
Portanto,
limK→∞
µK
{∣∣SΓK (η)− SΓ′K(η)∣∣2} ≤ lim
K→∞
4µK{η2}2K + 1
≤ limK→∞
8KφC20
2K + 1= 0,
que finalmente prova o Lema.
2.3.5 Distribuição dos Pontos limites
Para mostrar que os pontos limites são absolutamente contínuos com respeito a Le-
besgue vai ser adaptada da prova do Lema 3.5 em Ekhaus and Seppäläinen (1996). Em
particular vai ser necessário utilizar uma aproximação da medida empírica sobre conjuntos
compactos de maneira consistente. Obtida a derivada de Radon–Nikodym da aproximação
é utilizada convergência monótona para chegar na derivada procurada.
Lema 2.10. As trajetorias αt sob P, ponto limite de {PN}, são absolutamente contínuas
com respeito a Lebesgue P ⊗ dt-quase certamente.
Demonstração. Seja M > 0 e ψ ≥ 0 continua e limitada sobre R, definamos
αN,Mt {ψ} =1
N
∑|i|≤NM
ψ( iN
)ηi(t).

§2.3. Prova do Teorema 2.1 55
Dado p inteiro positivo, e ν é a medida onde os bastões ξi são exponenciais i.i.d. com
media C0, como no acoplamento (2.9),
∫ T
0
EN [(αN,Mt {ψ})p]dt =1
Np
∑−M≤i1,...,ip≤M
ψ( i1N
) · · ·ψ( ipN
)
∫ T
0
EN [ηi1(t) · · · ηip(t)]dt
≤ T
Np
∑−M≤i1,...,ip≤M
ψ( i1N
) · · ·ψ( ipN
)ν[ζi1 · · · ζip ]
≤ TCp0
Np
∑−M≤i1,...,ip≤M
ψ( i1N
) · · ·ψ( ipN
) = TCp0
1
N
∑|i|≤M
ψ( iN
)
p
Tomando limite quando N →∞ para cada p,
1
T
∫ T
0
∫(αMt {ψ})pdPdt ≤ Cp
0
(∫ M
−Mψ(x)dx
)p. (2.34)
Para concluir a prova so resta aplicar o Lema 2.11 a seguir e temos o resultado enun-
ciado.
Lema 2.11. Sejam D = D([0, T ],M) × [0, T ], λ a medida de Lebesgue sobre R e κ =
P ⊗T−1dt sobre D. Seja y = (α q, t) ∈ D e defina y 7→ αt uma função de D no espaço das
medidas positivas de Borel em R. Suponha que para cada M , 0 < p <∞ e ψ continua e
limitada, é satisfeita a desigualdade (2.34). Então αt � λ, κ-quase certamente.
Dado que a desigualdade (2.34) é válida para conjuntos compactos de R e para a família
de medidas αN,Mq , definida no começo da prova, precisamos de fazer uma aproximação para
a medida empírica αNq de nosso interesse. Com tal fim, provamos o seguinte resultado que
garante a consistência na aproximação de αNq por αN,Mq e de seus pontos limites.
Lema 2.12. A sequência αN,Mq é relativamente compacta em D([0,∞),M). Além disso,
se αMq é ponto limite quando N →∞, então, para cada ψ continua e limitada,
αMq {ψ} = αMq {ψ1[−M,M ]} = α q{ψ1[−M,M ]},
onde α q é ponto limite da sequência αNq .

56 2. Limite Hidrodinâmico
Demonstração do Lema 2.12. Para cada φ continua de suporte compacto, existeM grande
o suficiente para que Spφ ⊂ [−M,M ], desta forma
αN,Mt {φ} = αNt {φ},
portanto,
P (αN,M{φ} > Kε) = P (αN{φ} > Kε) < ε,
pois αNt {φ} é rígida e pelo Teorema de Prohorov (ver Billingsley (1999)) é relativamente
compacta. Além disso, se αMt {φ} ponto limite, quando N → ∞, αMt {φ} = αt{φ}. Por-
tanto, pela Proposição 4.1.7 em Kipnis and Landim (1999) a família αN,M é rígida em
D([0, T ],M).
Considere ψ continua e limitada e δ > 0, logo, existe φM continua de suporte contido
em [−M,M ] tal que∣∣φM(x)− (ψ1[−M,M ])(x)
∣∣ < δ/M , uniformemente em x ∈ [−M,M ].
Usando a desigualdade de Chebyshev,
P{∣∣αMt {ψ} − αt{φM}∣∣ > ε
}≤ lim inf
N→∞PN
{∣∣∣αN,Mt {ψ} − αNt {φM}∣∣∣ > ε
}≤ lim inf
N→∞
1
Nε
∑i∈Z
∣∣(ψ1[−M,M ])(iN
)− φM( iN
)∣∣Eηi(t)
< lim infN→∞
2MNC0
Nε
δ
M≤ 2C0
εδ −−→
δ→00.
Desta forma podemos escrever αMt {ψ} como αt{ψ1[−M,M ]}.
Demonstraçãodo Lema 2.11. Considere Bk uma sequência crescente de partições finitas
que geram BM = B[−M,M ] a σ-álgebra de Borel de [−M,M ]. Tomando ψ = 1A para
A ∈ ∪kBk na desigualdade (2.34) vemos αt � λ em cada Bk, P⊗T−1dt-quase certamente,
onde λ é a medida de Lebesgue sobre R. Seja
uk(t, x) =∑
A:A∈Bkλ(A)>0
1A(x)αt(A)
λ(A).

§2.3. Prova do Teorema 2.1 57
Observação. Note que para cada AM ∈ BM , AM = A ∩ [−M,M ], para algum A ∈ BR.
Além disso, αMt (AM) = αt(AM). Por conveniência tomamos Bk = BMk tal que para todo
k e M ≤ Q, BMk ⊂ BQk .
Dado Ak ∈ Bk,∫Ak
uk(t, x)dλ(x) =
∫1Ak(x)
αt(Ak)
λ(Ak)dλ(x) = αt(Ak),
logo, uyk =dαtdλ
∣∣∣∣Bk
e portanto, uk =d(αt ⊗ κ)
d(λ⊗ κ)
∣∣∣∣Bk×BD
.
Sob a medida λ⊗κ, uk é um martingal não negativo com respeito à σ-álgebra Bk×BD,
visto que, para cada A ∈ Bk × BD∫A
uk+1d(λ⊗ κ) =
∫A
ukd(λ⊗ κ),
pois A ∈ Bk+1 × BD. Desta forma, existe u(t, x) que é o limite λ ⊗ κ-quase certo de
uk(t, x) quando k → ∞. Além disso, se uk for uniformemente λ ⊗ κ-integrável uk → u
em L1(λ⊗ κ), portanto, para cada A ∈ BR ⊗BD, AM = A ∩ ([−M,M ]×D) ∈ BM ⊗BD,
teremos
αt ⊗ κ(AM) = limk→∞
∫AM
ukd(λ⊗ κ) =
∫AM
ud(λ⊗ κ).
Aplicando em ambos membros o Teorema da Convergência Monótona quandoM →∞,
obtemos
αt ⊗ κ(A) =
∫A
ud(λ⊗ κ).
Note que para cada M a filtração {Bk ⊗ BD} gera BM ⊗ BD, assim como a união em
M gera BR⊗BD que coincide com BR×D pela numerabilidade dos espaços. Como αt⊗κ e
λ⊗κ têm segunda marginal comum κ = P⊗T−1dt, αt � λ, P⊗T−1dt-quase certamente,
com u =dαtdλ
.

58 2. Limite Hidrodinâmico
Para completar a prova, resta mostrar que uk é uniformemente λ⊗κ-integrável, assim,
seja 1 < p <∞
∫∫upkdλdκ =
∫∫ ∑A:A∈Bkλ(A)>0
1A(x)αt(A)p
λ(A)pdλ(x)dκ(y) =
∑A:A∈Bkλ(A)>0
1
λ(A)p−1
∫αt(A)pdκ
≤ Cp0
∑A:A∈Bkλ(A)>0
λ(A)p
λ(A)p−1= Cp
0
∑A:A∈Bkλ(A)>0
λ(A) ≤ Cp0 (2.35)
pela desigualdade (2.34)
Corolário 2.13. Note que da desigualdade (2.35), decorre que a densidade u(t, x) =dαtdx
(x) pertence a Lploc(R× P × [0, T ]) quase certamente, isto é,
E
∫ T
0
∫K
up(t, x)dxdt <∞,
para cada K ⊂ R compacto.
2.3.6 Unicidade
Como foi mostrado anteriormente, os pontos limites P estão concentrados em trajetó-
rias absolutamente contínuas com respeito Lebesgue com densidade u( q, x) que satisfaz a
forma fraca da equação diferencial. Para concluir a convergência em distribuição, e por-
tanto em probabilidade, da sequência estudada só resta analisar a unicidade da solução
fraca da equação diferencial.
Como foi discutido na subseção 2.1.1, nos trabalhos de Dahlberg and Kenig (1984)
e Andreucci and DiBenedetto (1992), foi mostrada a existência e unicidade da solução
fraca (ou generalizada) da equação (2.11) com condições que incluem nosso dado inicial.
Portanto podemos concluir a primeira parte do Teorema 2.1, a qual se refere ao caso de
média zero. Porém, no caso da equação (2.12) é bem conhecido que não há unicidade da
solução. Nesse caso, é preciso mostrar que a solução que está sendo aproximada satisfaz

§2.3. Prova do Teorema 2.1 59
a condição de entropia (3.2), que fornece unicidade da solução fraca, como demonstrado
por Kružkov (1970).
Para mostrar a segunda parte do Teorema 2.1, vamos a seguir outra metodologia
baseada em aproximação por Medidas de Young como no trabalho de DiPerna (1985).
Por sua diferença metodológica, iremos desenvolve-la de forma independente no próximo
capítulo. Como foi comentado no inicio desta seção, usaremos alguns resultados obtidos
aqui.
2.3.7 Extensão ao caso u0 ≥ 0
Nosso objetivo agora é remover a suposição feita durante a demonstração de que u0
seja estritamente positiva. Para isso, vamos aproximar o caso mais geral u0 ≥ 0 usando
o resultado já obtido. Isto é, dada u0 ≥ 0 dado inicial em L∞(R) definamos uε0 = u0 + ε,
deste modo, uε0 ≥ ε > 0 e teremos uma distribuição inicial µε0 onde os ηεi vão a ser
exponenciais independentes tais que, µε0{ηi} = µ0{ηi}+ ε.
Para fazer a aproximação, é construído um acoplamento básico, como no começo do
capítulo, entre as duas configurações. Seja PN,ε a distribuição conjunta com marginais
processos de bastões com distribuições iniciais µ0 e µε0 respectivamente, de forma que
PN,ε {(η( q), ηε( q)) : η( q) ≤ ηε( q)}, pois η(0) ≤ ηε(0) e pela atratividade do processo a desi-
gualdade é mantida quase certamente.
2.3.7.1 Gerador para o acoplamento básico
Consideremos o processo acoplado definido no mesmo espaço de probabilidade, de
forma que as correspondente marginares são Processos de Bastões que evoluem pelos
mesmos pontos de Poisson {Pi}. Para cada f : Y ×Y → R cilíndrica limitada e continua,

60 2. Limite Hidrodinâmico
o gerador de este processo é definido como,
Lf(η, ξ) =∑i∈Z
R∑j=−R
p(j)
∫ ηi∨ξi
0
[f(ηu,i,i+j, ξu,i,i+j)− f(η, ξ)
]du
=∑i∈Z
R∑j=−R
p(j)
∫ ηi∧ξi
0
[f(ηu,i,i+j, ξu,i,i+j)− f(η, ξ)
]du
+∑i∈Z
R∑j=−R
p(j)
∫ (ηi−ξi)+
0
[f(ηu,i,i+j, ξ)− f(η, ξ)
]du
+∑i∈Z
R∑j=−R
p(j)
∫ (ξi−ηi)+
0
[f(η, ξu,i,i+j)− f(η, ξ)
]du
(2.36)
onde, neste caso por conveniência, definimos diferente ao capítulo anterior, para cada
k ∈ Z,
ηu,i,i+jk =
min{ηi, u} se k = i,
ηi+j + (ηi − u)+ se k = i+ j,
ηk outro caso.
(2.37)
Lema 2.14. Seja f(η, ξ) =∑k∈Z|ηk − ξk|, então, Lf(η, ξ) ≤ 0.
Demonstração. Consideremos o primeiro termo na direita de (2.36), deste modo
∑i
R∑j=−R
p(j)
∫ ηi∧ξi
0
[∣∣ηu,i,i+jk − ξu,i,i+jk
∣∣− |ηk − ξk|] du=
∫ ηk∧ξk
0
[|6 u− 6 u| − |ηk − ξk|] du
+k+R∑j=k−R
p(k − j)∫ ηj∧ξj
0
[|ηk + ηj− 6 u− ξk − ξj+ 6 u| − |ηk − ξk|] du
=− (ηk ∧ ξk) |ηk − ξk|+k+R∑j=k−R
p(k − j)(ηj ∧ ξj)[|ηk + ηj − ξk − ξj| − |ηk − ξk|]
≤− (ηk ∧ ξk) |ηk − ξk|+k+R∑j=k−R
p(k − j)(ηj ∧ ξj)[|ηk − ξk|+ |ηj − ξj| − |ηk − ξk|]
≤− (ηk ∧ ξk) |ηk − ξk|+k+R∑j=k−R
p(k − j)(ηj ∧ ξj) |ηj − ξj| .

§2.3. Prova do Teorema 2.1 61
Somando este resultado em k, teremos 2R+ 1 termos da forma p(k− j)(ηj ∧ ξj) |ηj − ξj|,
com k = j −R, . . . , j +R, portanto
∑k
k+R∑j=k−R
p(k − j)(ηj ∧ ξj) |ηj − ξj| =∑k
(ηk ∧ ξk) |ηk − ξk| ,
que simplifica o primeiro termo na direita acima sendo a soma em k menor ou igual que
zero.
Supondo que ηk ≤ ξk, tomemos agora o segundo termo em (2.36),
∑i
R∑j=−R
p(j)
∫ (ηi−ξi)+
0
[∣∣ηu,i,i+jk − ξu,i,i+jk
∣∣− |ηk − ξk|] du=
∫ (ηk−ξk)+
0
[|(u+ ξk)− ξk| − |ηk − ξk|] du
+k+R∑j=k−R
p(k − j)∫ (ηj−ξj)+
0
[|ηk + (ηj − ξj − u)− ξk| − |ηk − ξk|] du
≤− (ηk − ξk)2
2+
k+R∑j=k−R
p(k − j) [(ηj − ξj)+]2
2.
Somando em k e seguindo o mesmo raciocinio anterior, teremos que dita soma também é
não positiva.
Analogamente se supomos que ξk ≤ ηk, o terceiro termo em (2.36) é também não
positivo.
Seja agoraQN,ε a distribuição conjunta sobreD([0,∞),M)×D([0,∞),M) do processo
(αNq , αN,εq ) =
(1
N
∑i∈Z
ηi( q)δ iN,
1
N
∑i∈Z
ηεi ( q)δ iN
). (2.38)
Note de que a rigidez de αN decorre direitamente da rigidez de αN,ε, pois esta última
domina a primeira devido ao acoplamento básico. Desta forma temos a rigidez conjunta
do par (2.38). Denote por P e Pε as distribuições marginais dos pontos limites. Como

62 2. Limite Hidrodinâmico
foi demonstrado acima, Pε está concentrado em trajetórias absolutamente contínuas com
respeito Lebesgue com densidade uε, que é a única solução fraca da equação (2.11).
Como o Lema 2.10 não depende da suposição µ0 > 0, temos então que P também está
concentrada em trajetórias absolutamente contínuas com respeito a Lebesgue. Denotemos
por v dita densidade, assim, só resta mostrar que v, de fato, é solução fraca da equação
(2.11) porque coincide com o limite quando ε→ 0 de uε.
Para todo 0 ≤ a < b ≤ T e φ ≥ 0 continua de suporte compacto, usando o Teorema
de Pormanteu,
P{∫ b
a
∫Rφ(x)[v(t, x)− uε(t, x)]dxdt ≤ 0
}≥ lim sup
N→0PN
{∫ b
a
[αNt {φ} − αN,εt {φ}]dt ≤ 0
},
onde este último termo tem probabilidade total para todo N pelo acoplamento básico.
Considerando todos os pares a < b racionais e uma família completa numerável de φ,
vemos que P-quase certamente uε(t, x) ≥ v(t, x) ≥ 0. Além disso, podemos aplicar o
mesmo raciocinio acoplando qualquer par de valores de ε e teremos que uε é decrescente
em ε, portanto uε(t, x)↘ u(t, x) ≥ v(t, x). Aplicando convergência dominada em
∫Rφ(x)uε(t, x)dx−
∫Rφ(x)uε0(x)dx−
∫ t
0
∫RA2φ(x)[uε(s, x)]2dxdt
quando ε → 0, obtemos que u também é solução fraca da equação (2.11) com valor
inicial u0.
Para completar a demonstração vamos verificar que, de fato, u(t, x) coincide com
v(t, x) P-quase certamente, seja δ > 0 e φ contínua de suporte compacto em R, como

§2.3. Prova do Teorema 2.1 63
0 ≤ v ≤ u ≤ uε, deste modo, 0 ≤ u(t, x)− v(t, x) ≤ uε(t, x)− v(t, x), assim
P
{∫Rφ(x)[u(t, x)− v(t, x)]dx > δ
}≤ P
{∫Rφ(x)[uε(t, x)− v(t, x)]dx > δ
}≤ lim inf
N→0PN
{αN,εt {φ} − αNt {φ} > δ
}≤ lim inf
N→0
1
Nδ
∑i∈Z
φ( iN
)EN [ηεi (t)− ηi(t)]
≤ lim infN→0
‖φ‖∞Nδ
NKφ∑i=NKφ
EN [ηεi (t)− ηi(t)],
(2.39)
onde Kφ é tal que Spφ ∈ [−Kφ, Kφ].
Se denotamos por f(ηε, η) =NKφ∑i=NKφ
|ηεi (t)− ηi(t)|, usando a representação martingal
NKφ∑i=NKφ
[ηεi (t)− ηi(t)] =∑i∈Z
[ηεi − ηi] +
∫ t
0
N2LNKφ∑i=NKφ
|ηεi (s)− ηi(s)|ds,
como limN→∞
N LNKφ∑i=NKφ
|ηεi (s)− ηi(s)| ≤ 0, pelo Lema 2.14, a probabilidade na esquerda em
(2.39) está limitada por
lim infN→0
‖φ‖∞Nδ
NKφ∑i=NKφ
E[ηεi − ηi] = lim infN→0
‖φ‖∞Nδ
NKφ∑i=NKφ
[µ{ηi}+ ε− µ{ηi}]
= lim infN→0
‖φ‖∞Nδ
NKφ∑i=NKφ
ε ≤ 2‖φ‖∞Kφ
δε,
que vai para zero quando ε→ 0. Fazendo δ ↘ 0 em (2.39),
P
{∫Rφ(x)[u(t, x)− v(t, x)]dx > 0
}= 0
Portanto u(t, x) = v(t, x), P-quase certamente e podemos concluir que P está concentrado
na única trajetória absolutamente contínua com respeito Lebesgue com densidade u( q, x)


Capítulo 3
Caso de média não nula
Como foi explicado anteriormente, o objetivo deste Capítulo é dar uma prova para
a segunda parte do Teorema 2.1. Este caso precisa de um tratamento distinto ao caso
simétrico principalmente pela ausência de unicidade na solução da lei de conservação
(2.12). Seguindo os resultados de unicidade para este problema, é necessário mostrar que
dita solução satisfaz uma condição de entropia (3.2), o que usando a teoria de soluções
em valores de medidas de Young em DiPerna (1985) se obtém uma prova do resultado
desejado. Esta metodologia foi apresentado por Rezakhanlou (1991) para os processos de
Exclusão e Zero Range que usa fortemente sua propriedade de atratividade.
Visto que nosso processo também possui a propriedade de atratividade, usamos esta
metodologia para dar a prova mas com a dificuldade adicional que precisamos de que o
dado inicial seja estritamente positivo para usar a estimativa de um bloco (Lema 2.6).
Usando a mesma ideia do Capítulo anterior, primeiramente supomos que temos esta hi-
póteses que vai ser removida no final por aproximação.
65

66 3. Caso de média não nula
3.1 Leis de conservação
Neste capítulo estamos interessados no estudo do caso media não nula, segunda parte
do Teorema 2.1, onde devemos chegar no modelo macroscópico dado pelo problema de
Cauchy ∂tu(t, x) + ∂x(u2(t, x)) = 0,
u(0, x) = u0(x).(3.1)
Como foi observado no Capítulo anterior, neste problema, de forma geral, a solução fraca
não é única. Foram introduzidos critérios de admissibilidade que dão um sentido físico a
solução e garante a sua unicidade. Neste trabalho consideramos que uma solução u ∈ L∞
para o problema de Cauchy (3.1) é dita admissível se, para cada c ∈ R e 0 ≤ φ ∈
C1,1c (R+×R), uma função de suporte compacto sobre R+×R continuamente diferenciável
em ambas componentes,
∫ ∞0
∫R∂tφ(t, x)|u(t, x)− c|+ ∂xφ(t, x) sgn(u(t, x)− c)[u2(t, x)− c2]dxdt ≥ 0. (3.2)
Uma solução que satisfaz a condição (3.2) também é dita uma solução entrópica.
No trabalho de Kružkov (1970), u ∈ L∞ é dita uma solução generalizada do problema
de Cauchy (3.1) se satisfaz a condição da entropia (3.2) e para cada Br, bola de raio r, e
t ∈ [0, T ] quase certamente,
limt→0
∫Br
|u(t, x)− u0(x)|dx = 0.
Além disso, Kružkov (1970) mostra a unicidade e estabilidade da solução generalizada.
Observação. Se é tomando c = ± sup |u(t, x)| e φ constante com respeito ao tempo, uma
solução generalizada é também uma solução fraca no sentido (2.6).

§3.2. Soluções em valores de medidas de Young para Leis de Conservação 67
3.2 Soluções em valores de medidas de Young para Leis
de Conservação
Um enfoque mais apropriado para nosso problema é a teoria de medidas soluções para
as Leis de Conservação de DiPerna (1985), visto que, em geral, nossos pontos limites vivem
no espaço das medidas de probabilidade sobre trajetórias em D([0,∞),R). A teoria de
DiPerna (1985) nos permite concluir, sob certas condições, que as trajetórias soluções
fracas desta equação (como uma solução no espaço das medidas, que vão ser definidas na
Definição 3.1) são absolutamente contínuas com respeito a Lebesgue. Para poder usar este
resultado vai ser necessário definir uma transformação (Subseção 3.2.1) sobre a medida
empírica, para satisfazer as condições de solução da equação, mas primeiro vamos fazer
um breve esboço dos resultados de DiPerna (1985).
Definição 3.1. Seja (t, x) ∈ R+ ×R, e P(R), o espaço das medidas de probabilidade em
R. Dizemos que v(t,x) : (t, x) 7→ v(t,x) ∈ P(R) é uma solução no espaço das medidas do
problema de Cauchy (3.1), no sentido das distribuições se,
∫ ∞0
∫R[∂tφv(t,x){λ}+m∂xφv(t,x){λ2}]dxdt+
∫Rφ(0, x)u0(x)dx = 0, (3.3)
para cada φ ∈ C1,1c (R+ × R). Onde v(t,x){g(λ)} =
∫g(λ)dv(t,x)(λ).
Desta mesma forma a condição de entropia (3.2) pode ser generalizada como: para
cada c ∈ R e φ ∈ C1,1c (R+,R) não negativa,
∫ ∞0
∫R∂tφv(t,x){|λ− c|}+m∂xφv(t,x){sgn(λ− c)[λ2 − c2]}dxdt ≥ 0, (3.4)
Observação. Podemos supor, sem perda de generalidade, que m > 0, pois note que se
m < 0, podemos fazer uma simetria ao redor do zero no processo. Neste casso, fazendo
a mudança −u na equação teremos a nova equação ∂tu+ (−m)∂x(u2) = 0, onde −m > 0
que é o caso estudado.

68 3. Caso de média não nula
Em particular, uma solução fraca u pode ser vista como uma medida solução sendo
v(t,x) = δu(t,x), neste caso, v(t,x){g(λ)} = δu(t,x){g(λ)} = g(u(t, x)). Uma tal medida
solução é dita uma solução Dirac, pois seu suporte está concentrado em u(t, x). Note que
o dado inicial em (3.3) está dado pela medida de probabilidade concentrada em u0(x), ou
seja, δu0(x). É de interesse para este trabalho as medidas soluções Dirac, isto é, que são
absolutamente contínuas com respeito a Lebesgue.
No trabalho de DiPerna (1985) é feita uma generalização do resultado de Kružkov
(1970) para as medidas soluções
Theorem 3.1 (Teorema 4.2 em DiPerna (1985)). Se u0 ∈ L1 ∩ L∞ e v(t,x) uma medida
solução admissível no sentido (3.4) com suporte uniformemente contido num intervalo
compacto, então v(t,x) é uma solução de Dirac se,
∫Rv(t,x){|λ|}dx ≤ const.
e
limT→0
1
T
∫ T
0
∫Rv(t,x){|λ− u0(x)|}dxdt = 0.
Observação. A solução Dirac dada pelo Teorema 3.1 é única, pois, em particular é uma
solução generalizada no sentido de Kružkov (1970).
3.2.1 Medidas de Young
Para continuar com a prova da convergência devemos fazer uma transformação no
martingal definido em (2.13) que permita chegar em medidas soluções e usar a teoria de
DiPerna (1985). Com este objetivo, definimos a medida αN,L como,
αN,Lt {φ, g} =1
N
∑i∈Z
φ( iN
)g(SL(ηi(t))),
para cada φ ∈ Cc(R) e g ∈ L∞(R).

§3.2. Soluções em valores de medidas de Young para Leis de Conservação 69
Usando o Lema 2.5 com p = 1,
1
N
∑i∈Z
∂xφ( iN
)ηi(t) =1
N
∑i∈Z
∂xφ( iN
)SL(ηj(t)) +O(LN
), (3.5)
onde φ ∈ C1c (R). Juntando (3.5) com a estimativa de um bloco obtida no Lema 2.6,
podemos escrever (2.13) como,
Mφt ≈
1
N
∑i∈Z
φ( iN
)SL(ηj(t))−1
N
∑i∈Z
φ( iN
)SL(ηj)−m∫ t
0
1
N
∑i∈Z
∂xφ( iN
)S2L(ηj(s))ds
=αN,Lt {φ, λ} − αN,L0 {φ, λ} −m
∫ t
0
αN,Ls {∂xφ, λ2} ds, (3.6)
que define uma expressão fechada em αN,Lt .
Seja QN,L a distribuição da família αN,Lt em D([0, T ],M(R×R+)) ondeM(·) denota
o espaço das medidas finitas positivas de Borel.
3.2.1.1 Compacidade relativa de αN,Lt
Lema 3.2. A família de medidas αN,Lq é relativamente compacta em D([0, T ],M(R×R+)).
Demonstração. Como estamos interessados nos pontos limites da família de medidas pro-
babilidade QN,L, quando N →∞ e depois L→∞, devemos estudar a rigidez desta. Neste
espaço, αN,L converge para α na topologia fraca em L∞([0, T ]) se αN,L{F} converge para
α{F} para cada F ∈ Cc(R× R+). Esta topologia pode ser gerada tomando uma família
densa {Fk; k ≥ 1} ⊂ Cc(R× R+) e a métrica
dM(α, α) =∑k≥1
1
2k‖α{Fk} − α{Fk}‖∞
1 + ‖α{Fk} − α{Fk}‖∞.
Como a bola em L∞([0, T ]) é relativamente compacta na topologia fraca, teremos que
o conjunto {α : ‖α{Fk}‖∞ ≤ Ck para todo k ≥ 1} é compacto na topologia fraca, para

70 3. Caso de média não nula
cada Ck finito. Mas, para cada k ≥ 1,
supN,L
QN,L{‖αN,L{Fk}‖∞ ≥ Ck
}≤ sup
N,L
1
CkEQN,L‖αN,L{Fk}‖∞ ≤
Kk‖Fk‖∞Ck
,
onde Kk depende do suporte de Fk. Podemos tomar Ck suficientemente grande, de forma
que Kk‖Fk‖∞Ck
≤ ε. Esto significa que αN,L{Fk} é rígida para cada k ≥ 1 em D([0, T ],R)
e {Fk; k ≥ 1} uma família densa, portanto pela Proposição 4.1.7 em Kipnis and Landim
(1999), a sequência αN,L é rígida em D([0, T ],M+(R× R+)).
3.3 Distribuição dos pontos limites
Seja α um ponto limite da sequência αN,L queremos comprovar que αt(dx) = αt(x)dx.
Mas em nosso caso, se fixamos φ ∈ Cc(R) e g ∈ L∞(R+),
∣∣∣αN,Lt {φ(x), g(λ)}∣∣∣ =
∣∣∣∣∣ 1
N
∑i∈Z
φ( iN
)g(SL(ηi(t)))
∣∣∣∣∣ ≤ ‖g‖∞ 1
N
∑i∈Z
∣∣φ( iN
)∣∣
−−−→N→∞
‖g‖∞∫|φ(x)| dx,
pois φ é integrável.
Como o conjunto abaixo é fechado na topologia fraca de L∞([0, T ])
{αt ∈M+(R× R+) : sup
0≤t≤T|αt{φ(x), g(λ)}| ≤ ‖g‖∞
∫|φ(x)| dx
}
temos que para cada Q, ponto limite da sequência QN,L,
Q[
sup0≤t≤T
|αt{φ(x), g(λ)}| ≤ ‖g‖∞∫|φ(x)| dx
]≥ lim sup
N→∞QN,L
[sup
0≤t≤T
∣∣∣αN,Lt {φ(x), g(λ)}∣∣∣ ≤ ‖g‖∞ ∫ |φ(x)| dx
]= 1,

§3.3. Distribuição dos pontos limites 71
que prova que se αt é ponto limite de αN,Lt , então é absolutamente contínua respeito Le-
besgue em seu primeiro argumento Q-quase certamente, pois tomando φ como indicadora
de A, vemos que se dx(A) = 0, então αN,Lt {1A, g} = 0.
Visto que, os pontos limites α satisfazem uma relação do tipo (3.6), podemos usar o
Teorema 3.1 e o resultado de Kružkov (1970) para concluir que Q está concentrada na
única solução Dirac dada por estes resultado. Portanto, para chegar no resultado desejado,
devemos comprovar que Q está concentrada em trajetórias admissíveis, no sentido (3.4)
que satisfazem as seguintes condições: seja u0 ∈ L∞ ∩ L1,
supt,x
αt(R− [0, λ0]) = 0, (a)
supt≥0
∫Rαt{|λ|}dx <∞, (b)
limt→0
∫Rαt{|λ− u0(x)|}dx = 0. (c)
Observação. Vamos supor primeiro, por motivos técnicos, que nosso dado inicial u0 ∈
C20(R), ou seja, duas vezes diferenciável que converge a zero no infinito e além disso
supomos que u0 e u′0 são integráveis. Esta condição, além de u0 > 0, introduzida acima
ao ser utilizado o Lema 2.6 na dedução de (3.6), vai ser removida depois na Seção 3.4 por
meio de aproximação de forma similar a como foi feito no caso simétrico.
3.3.1 Desigualdades de entropia no nível microscópico
Nosso objetivo agora é mostrar que esta propriedade é passada aos pontos limites
através de uma desigualdade análoga para o nível microscópico, Proposição 3.3 a seguir.
Proposição 3.3. Para cada ε > 0, φ ∈ C1,1c ((0,∞)× R) não negativa e todo c ∈ R,
limL→∞
lim infN→∞
QN,L
{∫ ∞0
1
N
∑i∈Z
[∂sφ(s, i
N) |SL(ηi(s))− c|
+m∂xφ(s, iN
) sgn(SL(ηi(s))− c)[S2L(ηi(s))− c2]
]ds ≥ −ε
}= 1.
(3.7)

72 3. Caso de média não nula
Demonstração. Suponhamos primeiro que c > 0 e seja (η, ξ) o acoplamento básico com
marginais processos de bastões iniciando sob µ0 e νc respectivamente, onde a segunda é
definida como produto de exponenciais i.i.d. com media c.
Para provar esta desigualdade tomamos o martingal
Mφt = fφt(ηt, ξt)− fφt(η0, ξ0)−
∫ t
0
(∂s +N L)fφt(ηs, ξs)ds, (3.8)
com fφt(η, ξ) =∑φ(t, i
N) |ηi(t)− ξi(t)| e mostraremos que Mφ
t → 0 quando N → ∞
em probabilidade. Por outro lado, do membro direito de (3.8) obteremos os termos da
desigualdade desejada.
Quando c < 0 consideramos o acoplamento básico (η,−ξ′) iniciando sob µ0 e ν−c
respectivamente. Nesse caso, tomando ξ = −ξ′, consideramos o martingal (3.8) avaliado
em fφt(η, ξ) =∑φ(t, i
N) |ηi(t)− ξi(t)| =
∑φ(t, i
N) |ηi(t) + ξ′i(t)|
Seja L o gerador do acoplamento básico definido em (2.36), assim, o martingal Mφt
pode ser escrito como,
Mφt =
1
N
∑i∈Z
φ(t, iN
) |ηi(t)− ξi(t)| −1
N
∑i∈Z
φ(0, iN
) |ηi − ξi|
−∫ t
0
(∂s +N L)1
N
∑i∈Z
φ(s, iN
) |ηi(s)− ξi(s)| ds
onde os dois primeiros termos na direita se anulam para t suficientemente grande, pois o
suporte de φ é um compacto contido em (0,∞)× R, portanto, o martingal coincide com
−∫ ∞
0
(∂s +N L
) 1
N
∑i∈Z
φ(s, iN
) |ηi(s)− ξi(s)| ds
=−∫ ∞
0
1
N
∑i∈Z
[∂sφ(s, i
N) |ηi(s)− ξi(s)|+N Lφ(s, i
N) |ηi(s)− ξi(s)|
]ds.

§3.3. Distribuição dos pontos limites 73
Para o segundo termo, vamos a considerar os termos na soma do gerador tais que ηi ≤ ξi,
assim,
∑k∈Z
R∑j=−R
∫ ηk∧ξk
0
[f(ηu,k,k+j, ξu,k,k+j)− f(η, ξ)
]du = −φ(s, i
N)ηi(ξi − ηi)
+i+R∑j=i−R
p(i− j)φ(s, iN
)(ηj ∧ ξj)[|ξi + ξj − ηi − ηj| − |ηi − ξi|]
≤− φ(s, iN
)ηi(ξi − ηi) +i+R∑j=i−R
p(i− j)φ(s, iN
)(ηj ∧ ξj) |ξj − ηj| ,
se somamos em i, o segundo termo acima,
∑i
i+R∑j=i−R
p(i− j)φ(s, iN
)(ηj ∧ ξj) |ξj − ηj| =∑i
ηi |ξi − ηi|i+R∑j=i−R
p(i− j)φ(s, i+jN
).
E a soma em i da expressão anterior está limitada por
∑i∈Z
[i+R∑j=i−R
p(i− j)φ(s, i+jN
)− φ(s, iN
)
]ηi |ξi − ηi| .
Por outra parte
∫ (ξi−ηi)+
0
[f(η, ξu,i,i+j)− f(η, ξ)
]du =
∫ (ξi−ηi)+
0
φ(s, iN
)(u− ξi + ηi)du
+
∫ (ξj−ηj)+
0
i+R∑j=i−R
p(i− j) φ(s, iN
)(|ηi − ξi − ξj + u+ ηj| − |ηi − ξi|)]du
≤∫ (ξi−ηi)+
0
φ(s, iN
)(u− ξi + ηi)du
+
∫ (ξj−ηj)+
0
i+R∑j=i−R
p(i− j)φ(s, iN
) |−ξj + u+ ηj| du,
somando em i usando o mesmo raçocinio anterior, dita soma vai estar limitada por
∑i∈Z
[i+R∑j=i−R
p(i− j)φ(s, i+jN
)− φ(s, iN
)
](ξi − ηi)2
2.

74 3. Caso de média não nula
Somando ambos resultados
∑j
p(i− j)[φ(s, i+j
N)− φ(s, i
N)] ξ2
i − η2i
2.
Analogamente para os termo tais que ηi ≥ ξi, obtemos
∑j
p(i− j)[φ(s, i+jN
)− φ(s, iN
)]η2i − ξ2
i
2.
Juntando os resultados acima, obtemos a desigualdade
−Mφt ≤
∫ ∞0
1
N
∑i∈Z
[∂sφ(s, i
N) |ηi(s)− ξi(s)|
+i+R∑j=i−R
p(i− j)N[φ(s, i+j
N)− φ(s, i
N)]
sgn(ηi(s)− ξi(s))η2i (s)− ξ2
i (s)
2
]ds,
aproximando a derivada de φ por seu incremento obtemos,
−Mφt ≤
∫ ∞0
1
N
∑i∈Z
[∂sφ(s, i
N) |ηi(s)− ξi(s)|
+i+R∑j=i−R
p(i− j)(i− j)∂xφ(s, iN
) sgn(ηi(s)− ξi(s))η2i (s)− ξ2
i (s)
2
]ds+O
(N−1
).
Usando o desigualdade de Chebyshev,
QN,L
[∫ ∞0
1
N
∑i∈Z
[∂sφ(s, i
N) |ηi(s)− ξi(s)|
+m∂xφ(s, iN
) sgn(ηi(s)− ξi(s))η2i (s)− ξ2
i (s)
2
]ds < −ε
]≤QN,L[−Mφ
t −O(N−1
)< −ε] ≤ QN,L[|Mφ
t |+O(N−1
)> ε]
≤1
εEN,L
[∣∣∣Mφt
∣∣∣+O(N−1
)],
que vai para zero quando N →∞, pelo Lema 3.4.

§3.3. Distribuição dos pontos limites 75
O primeiro termo na integral pode ser substituído usando o Lema 2.5 por
1
N
∑i∈Z
∂sφ(s, iN
) |SL(ηi(s))− SL(ξi(s))| ,
com um erro da ordem O(LN
). Pela estimativa de um bloco (Lema 2.6) e novamente o
Lema 2.5 o segundo termo pode ser substituído por
∂xφ(s, iN
) sgn(SL(ηi(s))− SL(ξi(s)))[S2L(ηi(s))− S2
L(ξi(s))],
assim,
limL→∞
limN→∞
QN,L
[∫ ∞0
1
N
∑i∈Z
[∂sφ(s, i
N) |SL(ηi(s))− SL(ξi(s))|
+m∂xφ(s, iN
) sgn(SL(ηi(s))− SL(ξi(s)))[S2L(ηi(s))− S2
L(ξi(s))]]ds < −ε
]= 0.
(3.9)
Como suposto inicialmente, o processo ξ começa com bastões i.i.d. com media c. Pela
invariância do processo sob esta distribuição, teremos que para cada t, ξ(t) é um produto
de exponenciais i.i.d. com media c. Desta forma,
E
∫ T
0
1
N
∑i∈Z
∂xφ(s, iN
)∣∣S2
L(ξi(s))− c2∣∣ ≤ T‖φ‖∞Kφνc
∣∣S2L(ξi)− c2
∣∣≤ T‖φ‖∞Kφνc |SL(ξi) + c| |SL(ξi)− c|
que vai para zero quando L→∞ pela lei dos grades números. Igualmente,
E
∫ T
0
1
N
∑i∈Z
∂xφ(s, iN
) |SL(ξi(s))− c| ≤ T‖φ‖∞Kφνc |SL(ξi)− c| −−−→L→∞
0.
Analogamente se pose seguir este raciocinio em sgn(SL(ηi(s)) − SL(ξi(s))), pois ela é
contínua com exceção do caso SL(ηi(s)) = SL(ξi(s)). Mas se isso acontece para um número
infinito de valores de L, vamos chegar em u = c que trivialmente satisfaz a desigualdade
da entropia.

76 3. Caso de média não nula
Somando e subtraindo c e c2 no primeiro e segundo modulo em (3.9) respectivamente
e aplicando desigualdade triangular, chegamos no resultado desejado.
Lema 3.4. Seja Mφt como definido em (3.8), então,
limN→∞
E(Mφt )2 = 0.
Demonstração. Vamos a considerar o martingal
Nφt = (Mφ
t )2 −∫ t
0
[N Lf 2(η(s), ξ(s))− 2f(η(s), ξ(s))N Lf(η(s), ξ(s))
]ds,
onde f(η(s), ξ(s)) = N−1∑i∈Z
φ( iN
) |ηi(s)− ξi(s)|. Alem disso,
N Lf 2 − 2fN Lf =N∑i∈Z
R∑j=−R
p(j)
∫ ηi∧ξi
0
[f(ηu,i,i+, ξu,i,i+)− f(η, ξ)
]2du
+N∑i∈Z
R∑j=−R
p(j)
∫ (ηi−ξi)+
0
[f(ηu,i,i+, ξ)− f(η, ξ)
]2du
+N∑i∈Z
R∑j=−R
p(j)
∫ (ξi−ηi)+
0
[f(η, ξu,i,i+)− f(η, ξ)
]2du.
A integral no primeiro termo na direita pode ser escrita como,
1
N2
[∫ ηi∧ξi
0
φ2( iN
)(−|ηi − ξi|)2du
+i+R∑j=i−R
p(i− j)φ2( iN
)
∫ ηj∧ξj
0
[(|ηi − ηj − ξi − ξj| − |ηi − ξi|)]2du
]
≤ 1
N2
[∫ ηi∧ξi
0
φ2( iN
)(−|ηi − ξi|)2du+i+R∑j=i−R
p(i− j)φ2( iN
)
∫ ηj∧ξj
0
|ηj − ξj|2du
],
a soma em i desta expressão está limitada por
1
N2
[i+R∑j=i−R
p(i− j)φ2( i+jN
)− φ2( iN
)
](ηi ∧ ξi)|ηi − ξi|2.

§3.3. Distribuição dos pontos limites 77
Também podemos escrever a integral no segundo termo como,
1
N2
[∫ (ηi−ξi)+
0
[φ( iN
)(u− |ηi − ξi|)]2du
+i+R∑j=i−R
p(i− j)φ2( iN
)
∫ (ηj−ξj)+
0
(|ηi + ηj − ξj − u− ξi| − |ηi − ξi|)]2du
]
≤ 1
N2
[φ2( i
N)
∫ (ηi−ξi)+
0
(u− |ηi − ξi|)2du
+i+R∑j=i−R
p(i− j)φ2( iN
)
∫ (ηj−ξj)+
0
|ηj − ξj − u|2du
],
sendo limitada ao somar em i por
1
N2
[i+R∑j=i−R
p(i− j)φ2( i+jN
)− φ2( iN
)
](ηi − ξi)3
3.
Analogamente a integral no terceiro termo está limitada por
1
N2
[i+R∑j=i−R
p(i− j)φ2( i+jN
)− φ2( iN
)
](ξi − ηi)3
3.
Juntando estes três resultados acima e o fato que o somatório em i ∈ Z tem uma
quantidade de valores não nulos de ordem NKφ, a esperança de ηk está limitada por Ck0
(devido ao acoplamento básico) e a esperança de ξk é ck/k!, teremos
E[N Lf 2 − 2fN Lf ] ≤ 8KφC30 |c|3
∣∣∣∣∣i+R∑j=i−R
p(i− j)φ2( i+jN
)− φ2( iN
)
∣∣∣∣∣ ,que vai para zero quando N →∞, pela suavidade de φ.
Voltando a definição do martingal de media zero Nφt , temos
E(Mφt )2 = ENφ
t + E
∫ t
0
N Lf 2 − 2fN Lfds = E
∫ t
0
N Lf 2 − 2fN Lfds,
que prova o lema.

78 3. Caso de média não nula
3.3.2 Unicidade dos pontos limites
Agora, usando a Proposição 3.3, mostraremos que todo ponto limite Q de QN,L está
concentrado em uma solução admissível no sentido (3.4). Para isso, primeiro observamos
que o conjunto{αt ∈M+ :
∫ T
0
αs {∂sφ(s, x) |SL(ηi(s))− c|}
+mαs{∂xφ(s, x) sgn(SL(ηi(s))− c)[S2
L(ηi(s))− c2]}ds ≥ −ε
}
é fechado na topologia fraca de L∞([0, T ]). Portanto, se Q é um ponto limite da sequência
QN,L, a expressão
Q
[∫ T
0
[αs {∂sφ(s, x) |SL(ηi(s))− c|}
+mαs{∂xφ(s, x) sgn(SL(ηi(s))− c)[S2
L(ηi(s))− c2]} ]ds ≥ −ε
]
é sempre maior ou igual que
lim supN,L→∞
QN,L
[∫ T
0
[αN,Ls {∂sφ(s, x) |SL(ηi(s))− c|}
+mαN,Ls
{∂xφ(s, x) sgn(SL(ηi(s))− c)[S2
L(ηi(s))− c2]} ]ds ≥ −ε
]= 1,
onde este último limite se obtém da Proposição 3.3.
Fazendo agora ε → 0 e usando a propriedade de continuidade absoluta dos pontos
limites,
Q
[∫ T
0
∫R
[∂sφ(s, x)αs {|SL(ηi(s))− c|}
+m∂xφ(s, x)αs{
sgn(SL(ηi(s))− c)[S2L(ηi(s))− c2]
} ]dxds ≥ 0
]= 1.

§3.3. Distribuição dos pontos limites 79
Agora para continuar com a prova da unicidade só resta mostrar as três condições
dadas na página 71. Para provar (a), seja C0 < K <∞ e φ ∈ Cc(R),
EQ[∫ T
0
αt{φ(x),1{|λ|>k}}dt]≤ lim sup
N,L→∞EN,L
[∫ T
0
1
N
∑i∈Z
φ( iN
)1{SL(ηi(t))>K}
]≤ lim
L→∞‖φ‖∞KφTν[SL(ζi) > K] = 0,
pela lei forte dos grandes números, uniformemente em t e x.
A prova de (b), seja 0 < A <∞,
Q[supt≥0
∫Rαt{|λ|}dx > A
]≤ lim sup
N,L→∞QN,L
[supt≥0
1
N
∑i∈Z
SL(ηi(t)) > A
]
= lim supN,L→∞
QN,L
[supt≥0
1
N
∑i∈Z
ηi(t) > A
]
= lim supN,L→∞
QN,L
[1
N
∑i∈Z
ηi > A
],
dado γ qualquer, podemos tomar N suficientemente grande, tal que,∣∣∣∣∣ 1
N
∑i∈Z
ηi −∫Ru0(x)dx
∣∣∣∣∣ ≤ γ,
com probabilidade alta, portanto, o último termo acima à direita se anula quando A >
‖u0‖L1 + γ.
Só resta mostrar (c). Pela condições (a), (b) e u0 ser uniformemente limitado, podemos
usar o teorema da convergência dominada, assim,
EQ[lim supt→0
∫Rαt{λ− u0(x)}dx
]= lim sup
t→0EQ[∫
Rαt{λ− u0(x)}dx
],
por outro lado,
limt→0
EQ[∫
Rαt{|λ− u0(x)|}dx
]≤ lim
t→0lim supN,L→∞
EN,L
[1
N
∑i∈Z
∣∣SL(ηi(t))− u0( iN
)∣∣] .

80 3. Caso de média não nula
Seja (η, ξi, ξj) o acoplamento básico com marginais processos de bastões iniciando sob
as medidas µ0, νυ(i) e νυ(j) respectivamente, onde νυ(i) e νυ(j) são produto de exponen-
ciais i.i.d. com medias υ(i) e υ(j) respectivamente (υ definido em (2.8)), de forma que
P (ξi,ξj)(ξi ≤ ξj ou ξj ≤ ξi) = 1 e P (ξi,ξj)(ξii = ηi e ξjj = ηj) = 1.
Somando e subtraindo SL(ξii) na esperança da direita acima,
EN,L
[1
N
∑i∈Z
∣∣SL(ηi(t))− u0( iN
)∣∣] ≤EN,L
[1
N
∑i∈Z
∣∣SL(ηi(t))− SL(ξii(t))∣∣]
+ EN,L
[1
N
∑i∈Z
∣∣SL(ξii(t))− u0( iN
)∣∣]
o segundo termo na direita acima vai para zero, pela lei dos grandes números quando N e
depois L convergem para infinito. Agora, se sumamos e subtraímos SL(ξji (t))− SL(ξjj (t))
no primeiro termo na direita,
EN
[1
N
∑i∈Z
∣∣SL(ηi(t))− SL(ξii(t))∣∣] ≤ 1
N
∑i∈Z
1
2L+ 1
i+L∑j=i−L
EN∣∣ηj(t)− ξij(t)∣∣
≤ 1
N
∑i∈Z
1
2L+ 1
i+L∑j=i−L
EN∣∣ηj(t)− ξjj (t)∣∣
+1
N
∑i∈Z
1
2L+ 1
i+L∑j=i−L
EN∣∣ξjj (t)− ξij(t)∣∣ ,
pela invariância da exponencial, o segundo termo na direita acima,
EN∣∣ξjj (t)− ξij(t)∣∣ =
∣∣ENξjj (t)− ENξij(t)∣∣ =
∣∣ENξjj − ENξij∣∣ =
∣∣u0( jN
)− u0( iN
)∣∣ ,
a esperança pode trocar com o valor absoluto pois a ordem dos processos ξi e ξj definida
no acoplamento é conservada pela atratividade. Alem disso, u0 é Lipschitz contínua
integrável, portanto,∣∣u0( j
N)− u0( i
N)∣∣ ∼ i−j
Nu′0, como a derivada também é integrável,
esta soma vai para zero quando N → ∞. Por outro lado, o primeiro termo, como cada

§3.3. Distribuição dos pontos limites 81
expressão do tipo∣∣ηj(t)− ξjj (t)∣∣ vai aparecer no máximo 2L+ 1 vezes, está limitado por
1
N
∑i∈Z
EN∣∣ηi(t)− ξii(t)∣∣ =
1
N
∑i∈Z
EN∣∣ηi − ξii∣∣
+1
N
∑i∈Z
EN
[∫ t
0
N L|ηi(s)− ξii(s)|ds].
(3.10)
O primeiro termo na direita acima se anula por construção e o segundo pelo Lema 3.5 a
seguir.
Desta forma, todo ponto limite está concentrado na única solução entrópica Dirac
quando o dado inicial u0 é uma função duas vezes continuamente diferenciável e estrita-
mente positiva que vai para zero no infinito de forma que u0 e u′0 são inintegráveis. Usando
aproximação, que sera feita na seção 3.4, podemos estender este resultado para um dado
inicial em L∞(R) como suposto no Teorema 2.1.
Lema 3.5. Seja (η, ξi, ξj) o acoplamento como definido na prova de (c). Então,
limt→0
lim supN,L→∞
∑i∈Z
EN
[∫ t
0
L|ηi(s)− ξii(s)|ds]
= 0.
Demonstração. Seguindo a ideia na prova da Proposição 3.3,
∑i∈Z
∫ t
0
EN L|ηi(s)− ξii(s)|ds
≤∫ t
0
EN
[∑i∈Z
i+R∑j=i−R
p(i− j)|(ηj(s))2 − (ξij(s))
2|2
−∑i∈Z
|(ηi(s))2 − (ξii(s))2|
2
]ds.
Somando e subtraindo (ξjj (s))2 no primeiro termo,
∑i∈Z
i+R∑j=i−R
p(i− j)|(ηj(s))2 − (ξij(s))
2|2
≤∑i∈Z
i+R∑j=i−R
p(i− j)|(ηj(s))2 − (ξjj (s))
2|2
+∑i∈Z
i+R∑j=i−R
p(i− j)|(ξjj (s))2 − (ξij(s))
2|2

82 3. Caso de média não nula
mas na primeira soma, para cada i cada termo se repete ao máximo 2R + 1 com um
correspondente p(j), j = −R, . . . , R, portanto, está limitado por
∑i∈Z
|(ηi(s))2 − (ξii(s))2|
2,
que simplifica com o segundo termo. Assim,
∑i∈Z
EN
[∫ t
0
L|ηi(s)− ξii(s)|ds]≤∫ t
0
EN∑i∈Z
i+R∑j=i−R
p(i− j)|(ξjj (s))2 − (ξij(s))
2|2
ds
=
∫ t
0
∑i∈Z
i+R∑j=i−R
p(i− j)|EN(ξjj (s))
2 − EN(ξij(s))2|
2ds
= t∑i∈Z
i+R∑j=i−R
p(i− j)|EN(ξjj )
2 − EN(ξij)2|
2,
pois a ordem dos processos ξi e ξj definida no acoplamento é conservada. Como ξkj são
variáveis exponenciais, E(ξkj )2 = 2u20( kN
), onde k = i ou j, teremos
∑i∈Z
EN
[∫ t
0
L|ηi(s)− ξii(s)|ds]
= t∑i∈Z
i+R∑j=i−R
p(i− j)|u20( jN
)− u20( iN
)|
≤ 2t‖u0‖∞∑i∈Z
i+R∑j=i−R
p(i− j)|u0( jN
)− u0( iN
)|
Como u0 é diferenciável, |u0( jN
)− u0( iN
)| ∼ i−jNu′0(ι), com ι no intervalo formado por
iN
e jN, sento u′0 também integrável, juntando esta soma com este fator da ordem 1/N , a
expressão é limitada uniformemente em N e L, assim, vai para zero quando t→ 0.
3.4 Extensão ao caso geral
Para concluir com a prova do Teorema 2.1 vamos aproximar o cado geral, u0 ∈ L∞(R)
aproximando por funções que satisfazem nosso suposto durante a prova (u0 ∈ C20(R)
integrável com derivada integrável e estritamente positiva).

§3.4. Extensão ao caso geral 83
Seja uε ∈ C20(R) tal que uε(x) > 0, com uε e u′ε integráveis e para cada φ ∈ Cc(R),
∫Rφ(x) |uε(x)− u0(x)| dx −−→
ε→00.
Onde u0 ∈ L∞(R), como nas hipóteses do Teorema 2.1. Por exemplo, podemos tomar
uma função 0 ≤ uε ∈ C20(R) com a propriedades de integrabilidade de acima que aproxima
u0 e uε(x) = uε(x) + ε(x), onde o termo 0 < ε(x) ∈ C∞0 (R) é tal que supxε(x) ≤ ε e com
as correspondentes propriedades de integrabilidade.
Para cada ε > 0 e N , seja o acoplamento (η, ηε) com medida inicial µε,N e margi-
nais processos de bastões iniciando em µ0 e µε0 respectivamente, onde µε0 é o produto de
exponenciais independentes e para cada bastão, µε0{ηεi } = uε(iN
), de forma que se
µε,N(ηi ≤ ηεi ) =
1, se υ(i) ≤ uε(i/N)
0, caso contrário,(3.11)
para cada i ∈ Z e υ(·) como em (2.8). Assim,
PN
[∣∣∣∣αNtN{φ} − ∫Rφ(x)u(t, x)dx
∣∣∣∣ > δ
]≤ P µε,N
[∣∣∣∣∣ 1
N
∑i∈Z
φ(i/N)[ηi(t)− ηεi (t)]
∣∣∣∣∣ > δ
3
]
+ P µε,N
[∣∣∣∣∣ 1
N
∑i∈Z
φ(i/N)ηεi (t)−∫Rφ(x)uε(t, x)dx
∣∣∣∣∣ > δ
3
]
+ P µε,N[∫
Rφ(x) |uε(t, x)− u(t, x)| dx > δ
3
].
(3.12)
Tomando ε suficientemente pequeno, de forma que∫R φ(x) |uε(x)− u0(x)| dx < δ
3, o último
termino acima se anula pois toda solução entrópica satisfaz a desigualdade de contração
em L1, para cada 0 ≤ s ≤ t, (ver Kružkov (1970))
∫R|uε(t, x)− u(t, x)| dx ≤
∫R|uε(s, x)− u0(s, x)| dx.

84 3. Caso de média não nula
Como uε satisfaz as hipóteses da seção anterior, o segundo termo da direita em (3.12),
converge para zero quando N →∞ para cada ε > 0.
Por outro lado, o primeiro na direita em (3.12) termo está limitado por
3‖φ‖∞δN
KφN∑i=−KφN
E |ηi(t)− ηεi (t)| =3‖φ‖∞δN
KφN∑i=−KφN
E |ηi − ηεi |
+3‖φ‖∞δ
E
∫ t
0
LKφN∑
i=−KφN
|ηi(s)− ηεi (s)| ds,
onde Kφ é tal que Spφ ∈ [−Kφ, Kφ]. Tomando limite quando N → ∞ o segundo termo
na direita é não positivo pelo Lema 2.14, e o primeiro vai estar limitado por
3‖φ‖∞δN
KφN∑i=−KφN
E |ηi − ηεi | =3‖φ‖∞δN
KφN∑i=−KφN
|Eηi − Eηεi |
=3‖φ‖∞δN
KφN∑i=−KφN
|υ(i)− uε(i/N)| ,
(3.13)
pois o acoplamento definido por µε,N em (3.11) conserva a ordem e permite trocar espe-
rança com o modulo.
Seja uN0 : R→ R+ a função definida como uN0 (x) =∑i∈Z
Eηi1[ i−1/2N
,i+1/2N )(x), desta forma
o último termo em (3.13) está limitado por
3‖φ‖∞δ
∫ Kφ
−Kφ
∣∣uN0 (x)− uε(i/N)∣∣ dx ≤3‖φ‖∞
δ
∫ Kφ
−Kφ
∣∣uN0 (x)− u0(x)∣∣ dx
+3‖φ‖∞δ
∫ Kφ
−Kφ|u0(x)− uε(x)| dx
+3‖φ‖∞δN
KφN∑i=−KφN
∣∣∣∣∣uε ( iN )−N∫ i+1/2
N
i−1/2N
uε(x)dx
∣∣∣∣∣ .Por hipótese, a primeira integral acima à direita vai para zero quando N →∞, enquanto
a segunda se anula quando ε → 0. Por outra parte o terceiro termo, para cada ε > 0,
converge para zero quando N →∞, pois uε é continua.

§3.4. Extensão ao caso geral 85
Deste modo para cada φ ∈ Cc(R) não negativa e cada ε > 0,
lim supN→∞
PN
[∣∣∣∣αNtN{φ} − ∫Rφ(x)u(t, x)dx
∣∣∣∣ > ε
]= 0
como queríamos provar.


Referências Bibliográficas
D. J. Aldous. Stopping times and tightness. Ann. Probab., 6(2):335–340, 1978.
David Aldous and Persi Diaconis. Hammersley’s interacting particle process and longestincreasing subsequences. Probab. Th. Rel. Fields, 103:199–213, 1995.
D. Andreucci and E. DiBenedetto. Weak solutions of the type of nonstationary fil-tration. Nonlinear Analysis: Theory, Methods & Applications, 19(1):29 – 41, 1992.ISSN 0362-546X. doi: http://dx.doi.org/10.1016/0362-546X(92)90028-D. URL http://www.sciencedirect.com/science/article/pii/0362546X9290028D.
P. Billingsley. Convergence of Probability Measures. Wiley Series in Probability andStatistics. Wiley, 1999. ISBN 9780471197454.
Bjorn E.J. Dahlberg and Carlos E. Kenig. Non-negative solutions of theo porous mediumeqation. Communications in Partial Differential Equations, 9(5):409–437, 1984. doi:10.1080/03605308408820336.
Ronald J. DiPerna. Measure-valued solutions to conservation laws. Archive for Rati-onal Mechanics and Analysis, 88(3):223–270, 1985. ISSN 0003-9527. doi: 10.1007/BF00752112. URL http://dx.doi.org/10.1007/BF00752112.
Michael Ekhaus and Timo Seppäläinen. Stochastic dynamics macroscopically governedby the porous medium equation for isothermal flow. Annales Academiae ScientiarumFennicae. Mathematica, 21(2):309–352, 1996. URL http://eudml.org/doc/227803.
Stewart N. Ethier and Thomas G. Kurtz. Markov processes: characterization and conver-gence. Wiley series in probability and mathematical statistics. J. Wiley & Sons, NewYork, Chichester, 1986. ISBN 0-471-08186-8.
Gerald B. Folland. Real Analysis. Modern Techniques and their Applications. Wiley, NewYork, NY, second edition, 1999.
M. Z. Guo, G. C. Papanicolaou, and S. R. S. Varadhan. Nonlinear diffusion limit for asystem with nearest neighbor interactions. Communications in Mathematical Physics,118(1):31–59, 1988. URL http://projecteuclid.org/euclid.cmp/1104161907.
87

88 Referências Bibliográficas
J. M. Hammersley. A few seedlings of research. In Proceedings of the Sixth BerkeleySymposium on Mathematical Statistics and Probability, Volume 1: Theory of Statistics,pages 345–394, Berkeley, Calif., 1972. University of California Press. URL http://projecteuclid.org/euclid.bsmsp/1200514101.
R. A. Holley and D. W. Stroock. A martingale approach to infinite systems of interactingprocesses. Ann. Probab., 4(2):195–228, 04 1976. doi: 10.1214/aop/1176996130.
Claude Kipnis and Claudio Landim. Scaling limits of interacting particle systems. Grun-dlehren der mathematischen Wissenschaften. Springer, Berlin, New York, 1999. ISBN3-540-64913-1.
S N Kružkov. First order quasilinear equations in several independent variables. Mathema-tics of the USSR-Sbornik, 10(2):217, 1970. URL http://stacks.iop.org/0025-5734/10/i=2/a=A06.
Thomas Milton Liggett. Interacting particle systems. Classics in mathematics. Springer,New York, Berlin, Heidelberg, 2005. ISBN 3-540-22617-6.
Fraydoun Rezakhanlou. Hydrodynamic limit for attractive particle systems on zd.Communications in Mathematical Physics, 140(3):417–448, 1991. URL http://projecteuclid.org/euclid.cmp/1104248092.
Timo Seppäläinen. A microscopic model for the burgers equation and longest increasingsubsequences. Electron. J. Probab., 1:no. 5, 1–51, 1996. ISSN 1083-6489. doi: 10.1214/EJP.v1-5. URL http://ejp.ejpecp.org/article/view/5.
Yuki Suzuki and Kôhei Uchiyama. Hydrodynamic limit for a spin system on a multidimen-sional lattice. Probability Theory and Related Fields, 95(1):47–74, 1993. ISSN 0178-8051.doi: 10.1007/BF01197337. URL http://dx.doi.org/10.1007/BF01197337.

Topologia do espaço de estados
Lema .6. Dada a métrica em (1.6), Y é um subconjunto fechado de [0,∞).
Demonstração. Seja (ηk) uma sequência em Y que converge para η0 ∈ [0,∞)Z na métrica
(1.6). Assim,
supn≥1
δ
{1
n2
n∑i=−n
η0i ,
1
n2
n∑i=−n
ηki
}−→k
0
qualquer seja ε > 0, podemos achar N , independente do n, tal que para todo k ≥ N ,
1
n2
n∑i=−n
η0i ≤ ε+
1
n2
n∑i=−n
ηNi −→nε
como ε é arbitrário, o limite da parte esquerda tem que ser nulo, o que implica que
η0 ∈ Y .
Proposição .7. O espaço métrico (Y, d) é completo e separável.
Demonstração. Seja (ηn) uma sequência de Cauchy em Y , portanto é de Cauchy na
topologia produto, assim, para cada i ∈ Z, existe η0i ∈ [0,∞) tal que ηni → η0
i , e conse-
quentemente∞∑
i=−∞
δ(ηni , η0i )
2−|i|−−−→n→∞
0.
89

90 Topologia do espaço de estados
Qualquer seja ε > 0, para cada i ∈ Z, seja Ni tal que |ηni − η0i | < ε
6(1−ε) para cada
n ≥ Ni, logo,
supn≥1
δ
(1
n2
n∑i=−n
ηki ,1
n2
n∑i=−n
η0i
)≤ sup
n≥1δ
(1
n2
n∑i=−n
ηki ,1
n2
n∑i=−n
ηNii
)
+ supn≥1
δ
(1
n2
n∑i=−n
ηNii ,1
n2
n∑i=−n
η0i
).
Quando k e Ni são maiores ou iguais do que N , onde d(ηm, ηm′) < ε/2 para m,m′ ≥ N ,
o primeiro termo na direita acima é menor do que ε/2.
Agora
supn≥1
∣∣∣∣∣ 1
n2
n∑i=−n
ηNii −1
n2
n∑i=−n
η0i
∣∣∣∣∣ ≤ supn≥1
1
n2
n∑i=−n
∣∣ηNii − η0i
∣∣≤ sup
n≥1
1
n2
n∑i=−n
ε
6(1− ε)=
ε
2(1− ε).
Assim
supn≥1
δ
(1
n2
n∑i=−n
ηNii ,1
n2
n∑i=−n
η0i
)< ε
portanto d(ηk, η0) −−−→k→∞
0, e como Y é fechado, η0 ∈ Y .
Lema .8. Sejam η, ξ ∈ Y , então existe N tal que
sup1≤n
δ
(1
n2
n∑i=−n
ηi,1
n2
n∑i=−n
ξi
)= max
1≤n≤Nδ
(1
n2
n∑i=−n
ηi,1
n2
n∑i=−n
ξi
).
Demonstração. Como η, ξ ∈ Y temos que∣∣∣∣∣ 1
n2
n∑i=−n
ηi −1
n2
n∑i=−n
ξi
∣∣∣∣∣ ≤ 1
n2
n∑i=−n
ηi +1
n2
n∑i=−n
ξi −−−→n→∞
0,
portanto,
δ
(1
n2
n∑i=−n
ηi,1
n2
n∑i=−n
ξi
)−−−→n→∞
0.

Topologia do espaço de estados 91
Considerando n = 1, tomemos ε = δ (η−1 + η0 + η1, ξ−1 + ξ0 + ξ1), assim, existe N tal
que para todo n > N ,
δ
(1
n2
n∑i=−n
ηi,1
n2
n∑i=−n
ξi
)< ε
deste modo o supremo acima é atingido quando n ≤ N .
Lema .9. Para cada n, fn : (Y, d)→ (R, | · |), definida como
fn(η) =1
n2
n∑i=−n
ηi
é continua.
Demonstração. Seja ε > 0 e sejam η, ξ ∈ Y , tais que, d(η, ξ) < δ = ε1+ε
, assim
∣∣∣∣∣ 1
n2
n∑i=−n
ηi −1
n2
n∑i=−n
ξi
∣∣∣∣∣ ≤ ε
como queríamos demonstrar.
Lema .10. Um subconjunto K de Y é compacto se, e somente se, é compacto na topologia
produto e
limn
supη∈K
1
n2
n∑i=−n
ηi = 0. (14)
Demonstração. Se supomos primeiro que K é compacto na nossa métrica, trivialmente
ele é compacto na topologia produto. Alem disso, para cada n o supremo em (1.16) é
atingido para um elemento ηn ∈ K. Assim podemos tomar limite superior e obtemos
limn
supη∈K
1
n2
n∑i=−n
ηi ≤ lim supn
1
n2
n∑i=−n
ηni = 0,
pois todo ponto de acumulação para ηn pertence a K.
Suponhamos agora que K é compacto na topologia produto e que satisfaz a condição
(1.16). Seja (ηn)n∈N uma sequência em K, assim existe (ηn′) e η0 ∈ K de forma que
ηn′ → η0 na topologia produto.

92 Topologia do espaço de estados
Por outra parte, seguindo a ideia do Lema .8 existe N tal que,
sup1≤n
δ
(1
n2
n∑i=−n
ηki ,1
n2
n∑i=−n
η0i
)= max
1≤n≤Nδ
(1
n2
n∑i=−n
ηki ,1
n2
n∑i=−n
η0i
)
≤N∑n=1
δ
(1
n2
n∑i=−n
ηki ,1
n2
n∑i=−n
η0i
)
pois, para cada n,∣∣∣∣∣ 1
n2
n∑i=−n
ηki −1
n2
n∑i=−n
η0i
∣∣∣∣∣ ≤ supη∈K
1
n2
n∑i=−n
ηi +1
n2
n∑i=−n
η0i .
Para todo ε > 0 e cada i = 1, 2, . . . , N , existe Ni tal que |ηki −η0i | < N
2ε quando k ≥ Ni,
tomando N0 = max{N1, N2, . . . , NN}, temos que para k ≥ N0∣∣∣∣∣ 1
n2
n∑i=−n
ηki −1
n2
n∑i=−n
η0i
∣∣∣∣∣ ≤ 1
n2
n∑i=−n
∣∣ηki − η0i
∣∣ ,assim temos também convergência na métrica δ(·, ·).