Embed Size (px)
Citation preview
Profª Gabriela Rezende FernandesDisciplina: Análise Estrutural 2

N0 TOTAL DE INCÓGNITAS = g =grau de hiperestaticidade da
INCÓGNITAS = ESFORÇOS HIPERESTÁTICOS (reações de apoio e/ou esforços em excesso que a estrutura possui)
N0 TOTAL DE INCÓGNITAS = g =grau de hiperestaticidade da estrutura
Conhecidos os esforços hiperestáticos obtêm-se as reações de apoio e os diagramas dos esforços solicitantes da estrutura
g = ge + gi
ge = grau hiperestático externo
gi = grau hiperestático interno
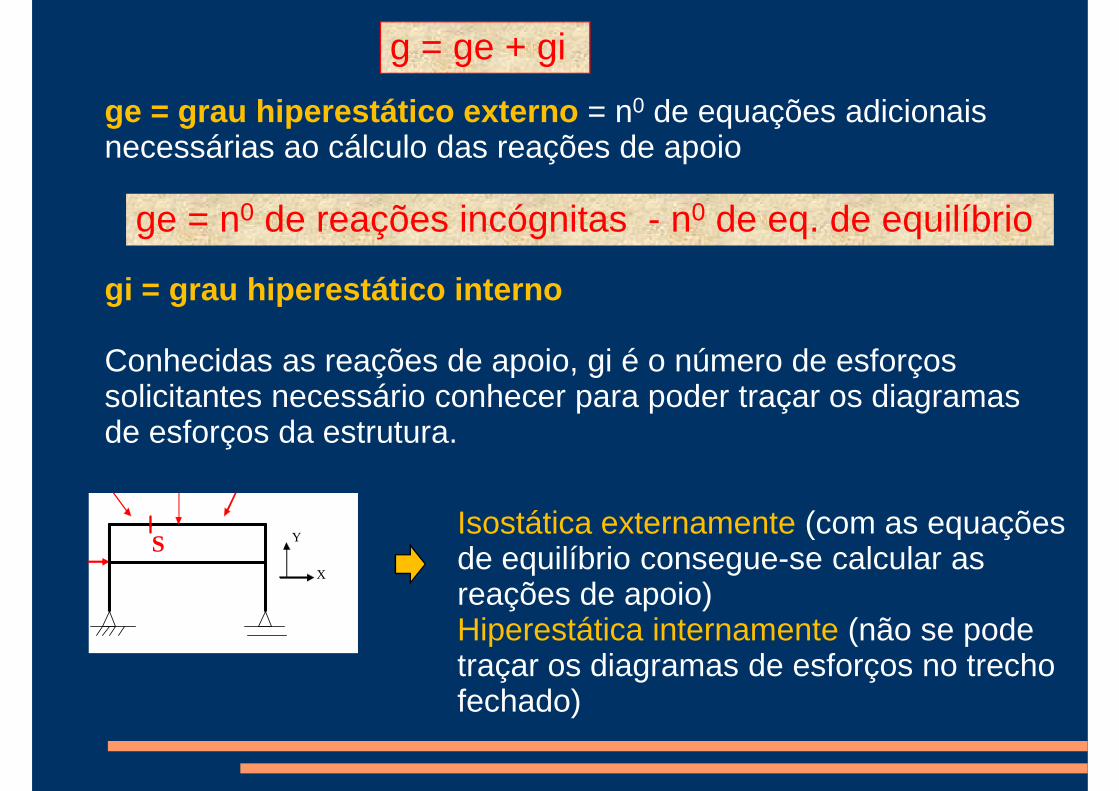
ge = grau hiperestático externo = n0 de equações adicionais necessárias ao cálculo das reações de apoio
g = ge + gi
ge = n0 de reações incógnitas - n0 de eq. de equilíbrio
gi = grau hiperestático interno
Conhecidas as reações de apoio, gi é o número de esforços solicitantes necessário conhecer para poder traçar os diagramas de esforços da estrutura.
Isostática externamente (com as equações
Y
X
S Isostática externamente (com as equações de equilíbrio consegue-se calcular as reações de apoio)Hiperestática internamente (não se pode traçar os diagramas de esforços no trecho fechado)

Fórmula prática para o cálculo de g
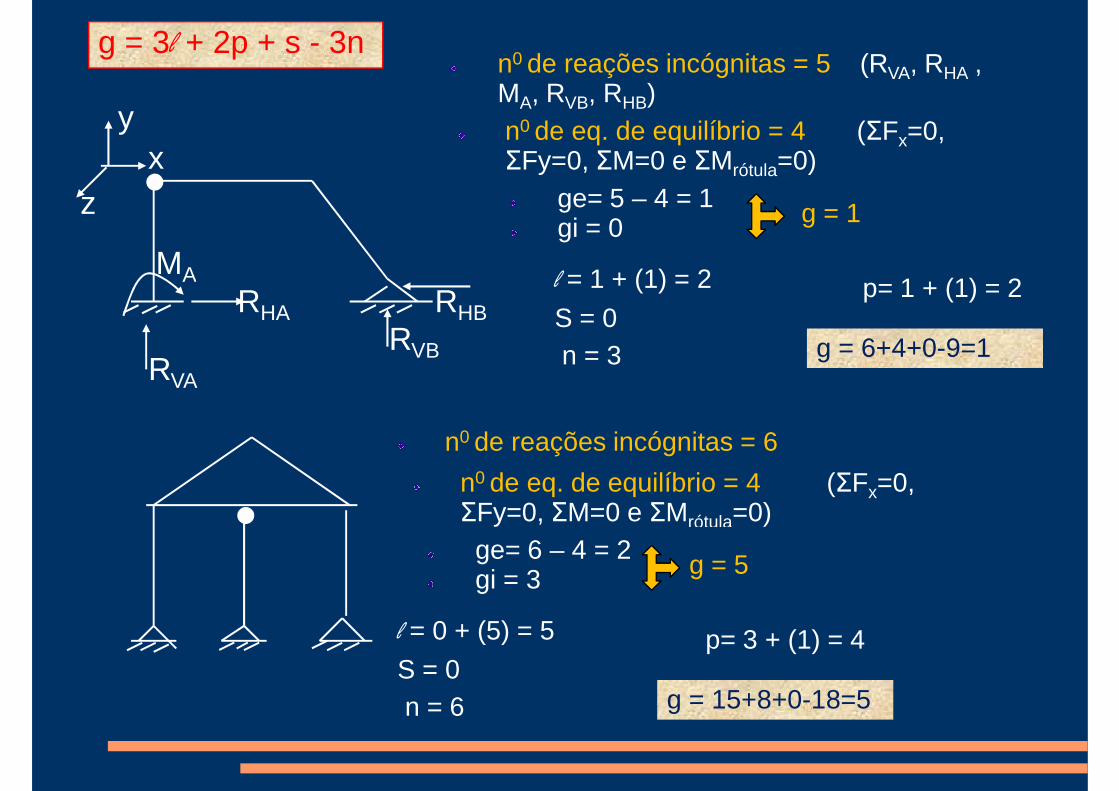
g = 3l + 2p + s - 3n
l : n º de engastes + nº engastes elásticosengaste elástico: ocorre no nó não articuladonº engastes elásticos em um nó = nº de barras que chegam no nó -1
l =1+(1+1+2)=5 chegam no nó -1
p: n º de apoios fixos + (para cada articulação: nº de barras que chegam na articulação -1)s: n º de apoios móveisn: n º de barras
Exemplo:
l =1+(1+1+2)=5
p=2+2=4
gi = 0 ge = 8 – (3+1) = 4
Nº de equações de equilíbrio
(3 + ΣM (rótula) = 0)
g = 0 +4 =4
l = 2 + (1+2) = 5 p= 1 + (1) = 2S = 0n = 5
g = 15+4+0-15=4
gi = 0 ge = 8 – (3+1) = 4
Nº de reações incógnitas
g = 0 +4 =4
MA
n0 de reações incógnitas = 5 (RVA, RHA , MA, RVB, RHB)n0 de eq. de equilíbrio = 4 (ΣFx=0, ΣFy=0, ΣM=0 e ΣMrótula=0)x
y
z ge= 5 – 4 = 1gi = 0 g = 1
g = 3l + 2p + s - 3n
MARHA
RVA
RHBRVB
n0 de reações incógnitas = 6
n0 de eq. de equilíbrio = 4 (ΣFx=0, ΣFy=0, ΣM=0 e ΣMrótula=0)
l = 1 + (1) = 2 p= 1 + (1) = 2S = 0n = 3 g = 6+4+0-9=1
ge= 6 – 4 = 2gi = 3 g = 5
l = 0 + (5) = 5 p= 3 + (1) = 4S = 0n = 6 g = 15+8+0-18=5
EXEMPLOS PRÁTICOS
DE ESTRUTURAS HIPERESTÁTICAS

PórticosA)EXEMPLOS DE PÓRTICOS EM PONTES
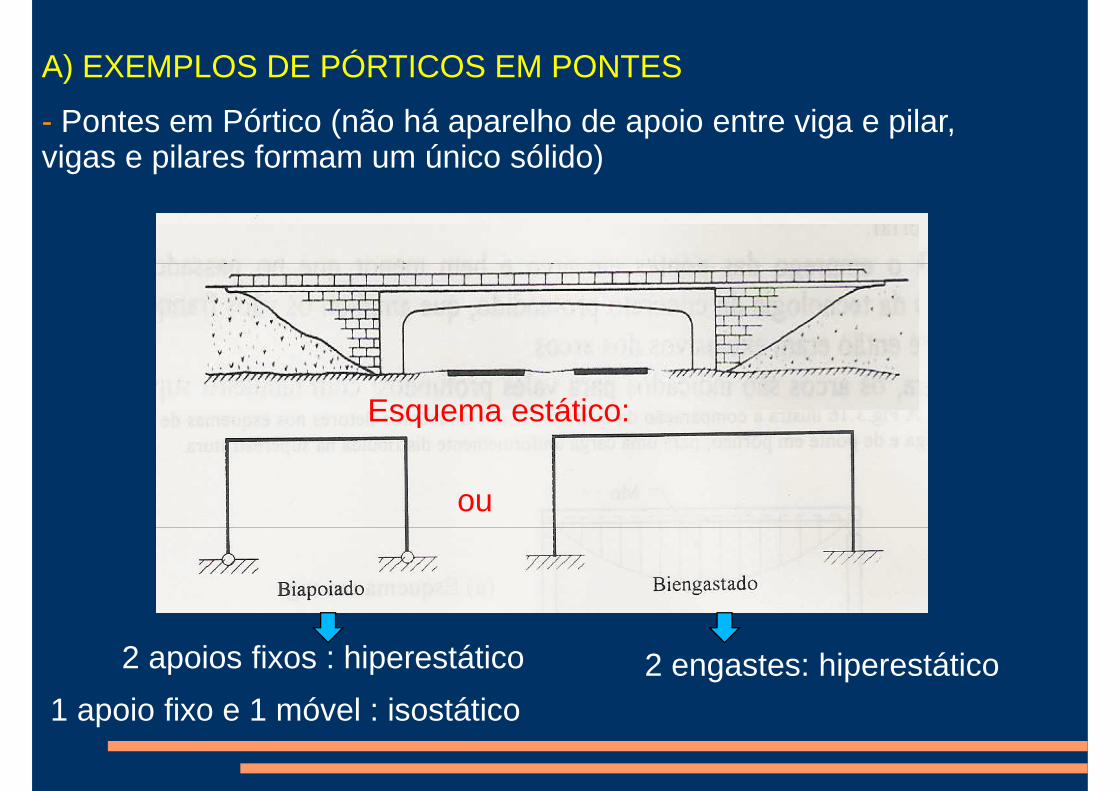
- Pontes em Pórtico (não há aparelho de apoio entre viga e pilar, vigas e pilares formam um único sólido)
Esquema estático: considera as vigas junto com os pilares formando um pórtico:
PÓRTICO
Considera esses apoios como apoio fixo ou engaste dependendo da rigidez do solo onde o pórtico está apoiado
PÓRTICO
A) EXEMPLOS DE PÓRTICOS EM PONTES
- Pontes em Pórtico (não há aparelho de apoio entre viga e pilar, vigas e pilares formam um único sólido)
ou
Esquema estático:
2 apoios fixos : hiperestático
1 apoio fixo e 1 móvel : isostático2 engastes: hiperestático
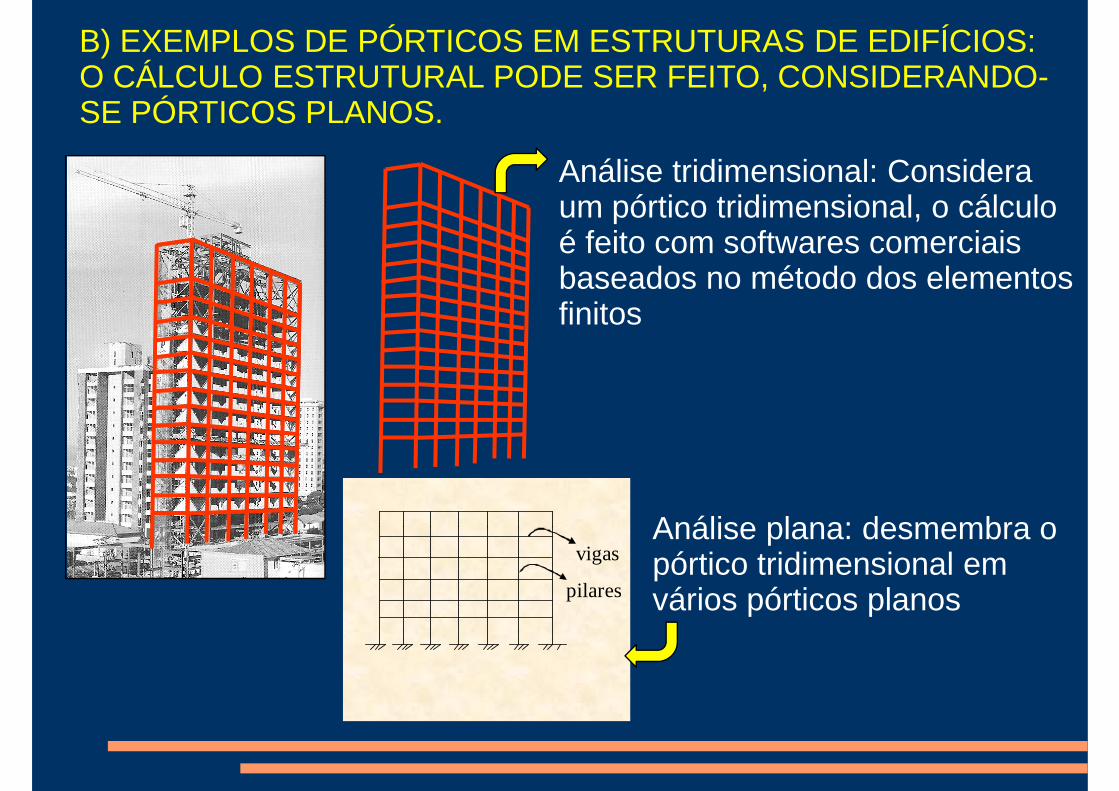
B) EXEMPLOS DE PÓRTICOS EM ESTRUTURAS DE EDIFÍCIOS: O CÁLCULO ESTRUTURAL PODE SER FEITO, CONSIDERANDO-SE PÓRTICOS PLANOS.
Análise tridimensional: Considera um pórtico tridimensional, o cálculo é feito com softwares comerciais baseados no método dos elementos baseados no método dos elementos finitos
Análise plana: desmembra o vigas
pilares
Análise plana: desmembra o pórtico tridimensional em vários pórticos planos

Ponte em viga contínua
Há um aparelho de apoio entre a viga e o pilar. As vigas contínuas são calculadas primeiro (cada apoio da viga representa contínuas são calculadas primeiro (cada apoio da viga representa o apoio sobre um pilar ). As reações calculadas nas vigas serão cargas atuantes nos pilares.
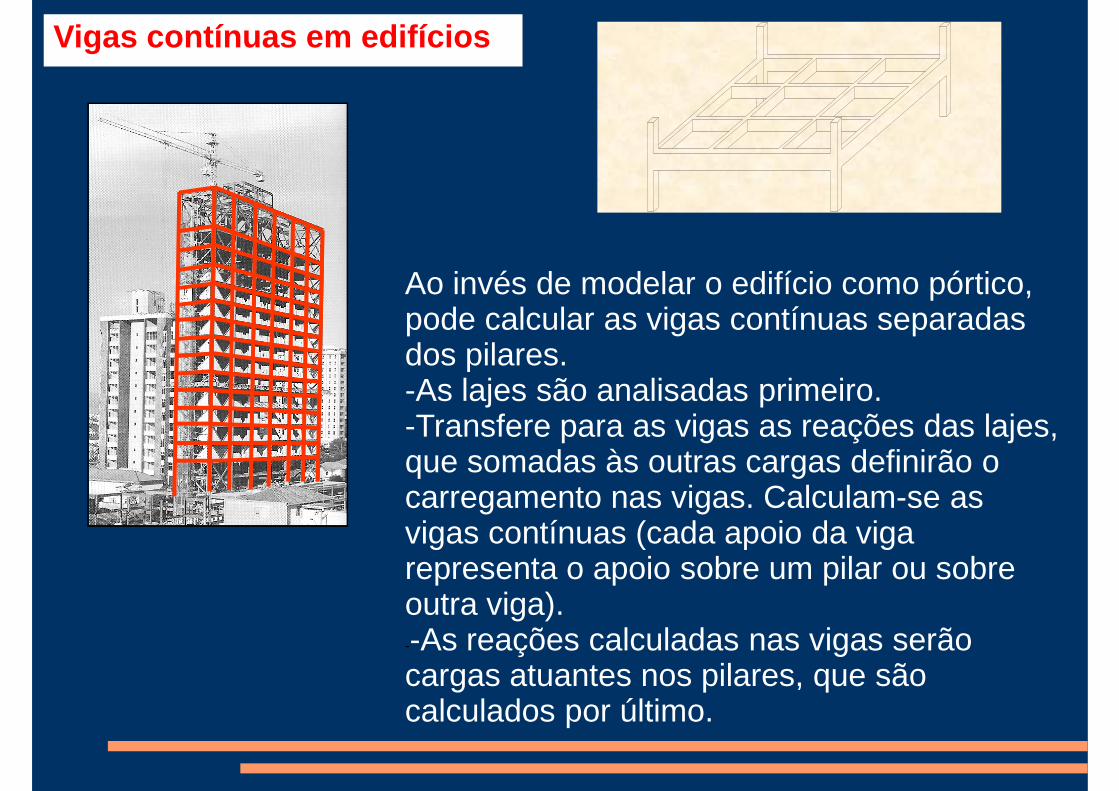
Vigas contínuas em edifícios
Ao invés de modelar o edifício como pórtico, pode calcular as vigas contínuas separadas dos pilares. -As lajes são analisadas primeiro.-Transfere para as vigas as reações das lajes, que somadas às outras cargas definirão o carregamento nas vigas. Calculam-se as vigas contínuas (cada apoio da viga vigas contínuas (cada apoio da viga representa o apoio sobre um pilar ou sobre outra viga). --As reações calculadas nas vigas serão cargas atuantes nos pilares, que são calculados por último.
V1
V2
V3 V4 V1
A B
Rpilar Rpilar
RV3 RV4
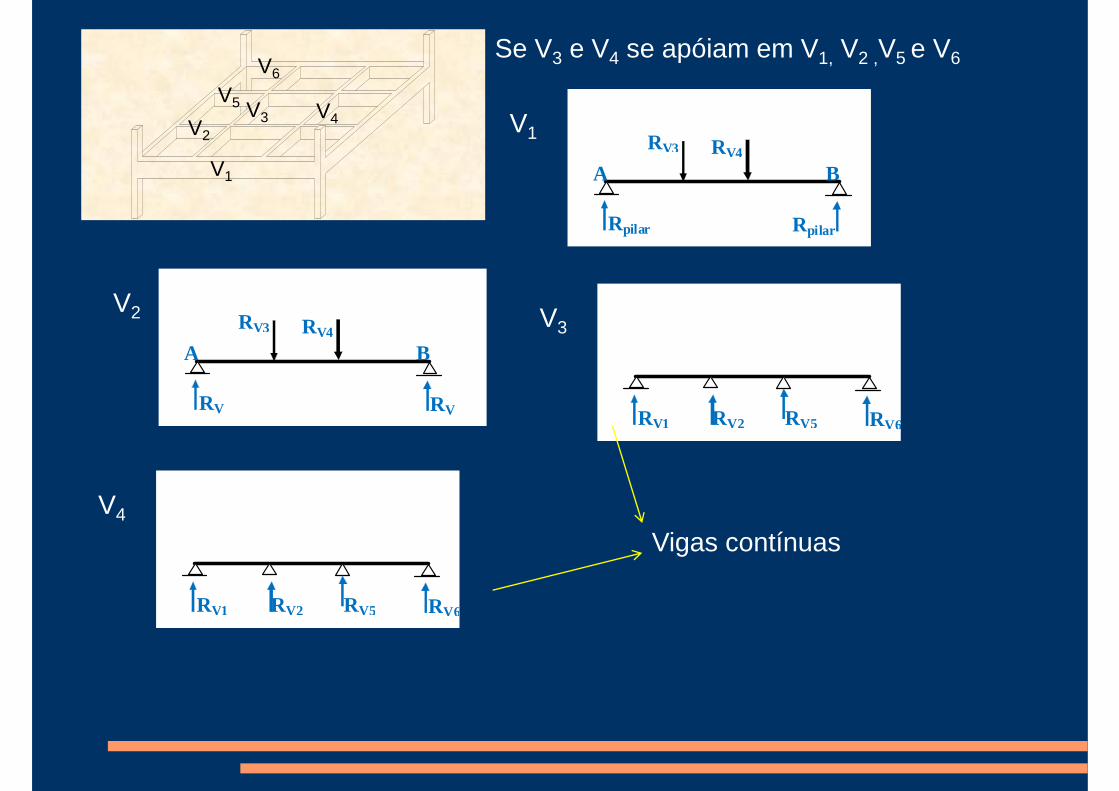
Se V3 e V4 se apóiam em V1, V2 ,V5 e V6
V5
V6
V2
A B
RV RV
RV3 RV4 V3
RV1 RV6RV2 RV5
V4
Vigas contínuas
RV1 RV6RV2 RV5
Vigas contínuas
V1
V2
V3 V4
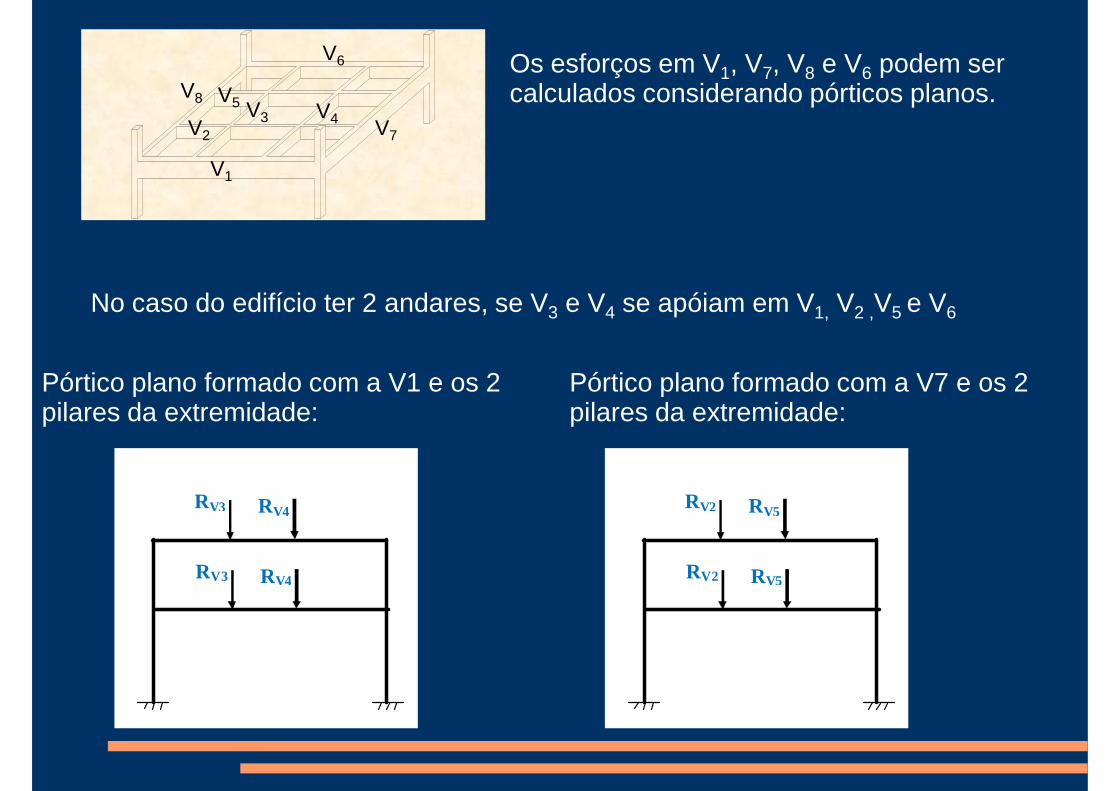
Os esforços em V1, V7, V8 e V6 podem ser calculados considerando pórticos planos.V5
V6
V7
V8
RV3 RV4
No caso do edifício ter 2 andares, se V3 e V4 se apóiam em V1, V2 ,V5 e V6
Pórtico plano formado com a V1 e os 2 pilares da extremidade:
RV2 RV5
Pórtico plano formado com a V7 e os 2 pilares da extremidade:
RV3 RV4 RV2 RV5

Exemplo de grelhas em pavimentos de edifícios:
Se o pavimento estiver sujeito apenas a cargas transversais ao seu plano, os esforços nas vigas podem ser calculados considerando-se a grelha:
Y
X
z
RV RV
RV
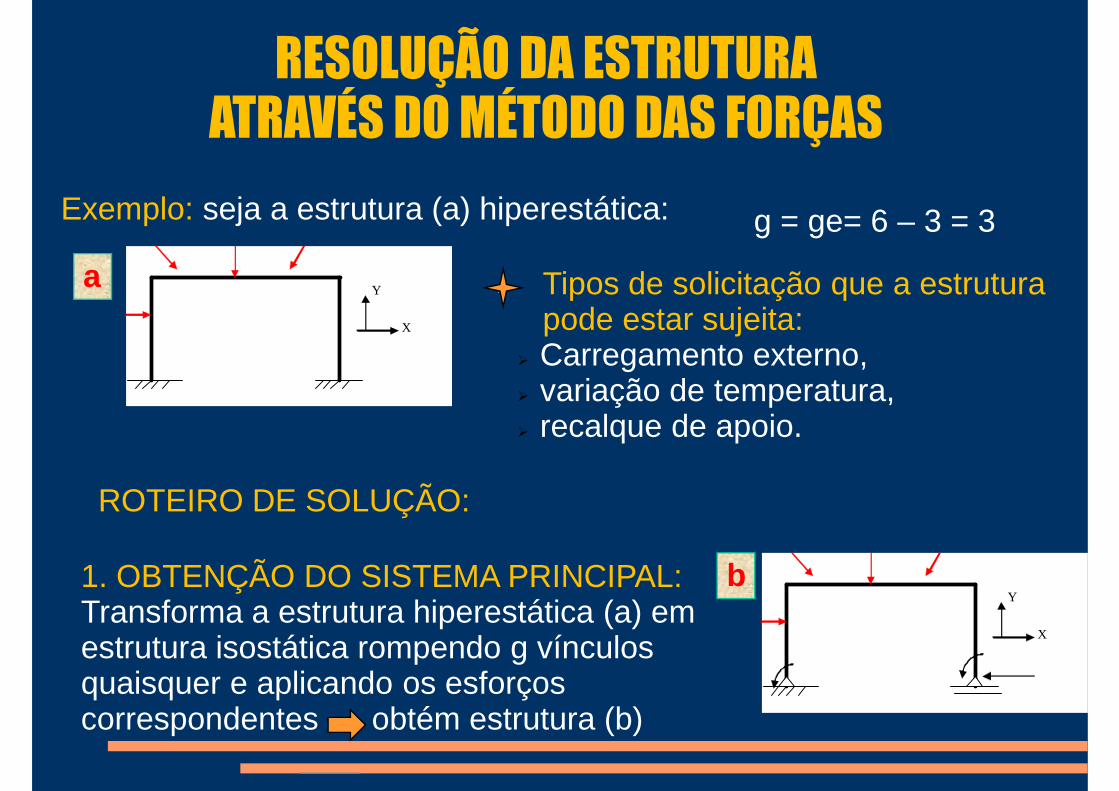
Exemplo: seja a estrutura (a) hiperestática: g = ge= 6 – 3 = 3 a Tipos de solicitação que a estrutura
pode estar sujeita:� Carregamento externo,� variação de temperatura,� recalque de apoio.
Y
X
a
ROTEIRO DE SOLUÇÃO:
1. OBTENÇÃO DO SISTEMA PRINCIPAL:Transforma a estrutura hiperestática (a) em estrutura isostática rompendo g vínculos quaisquer e aplicando os esforços correspondentes obtém estrutura (b)
b
Y
X
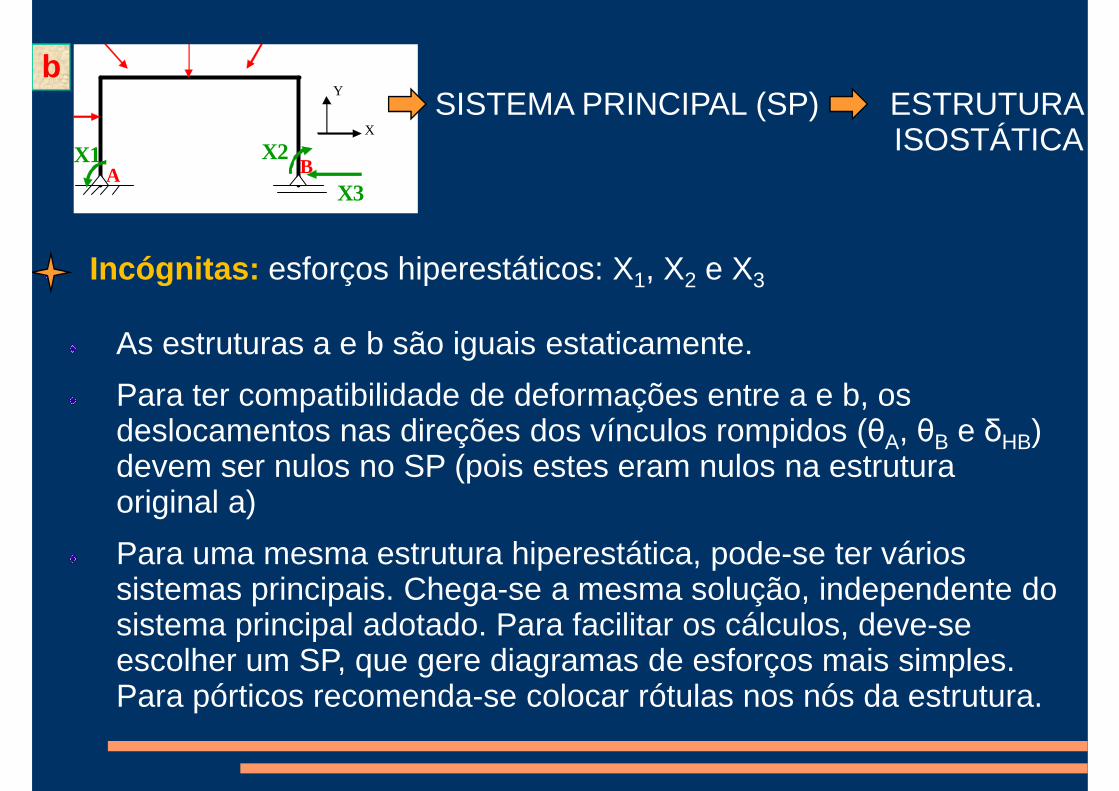
SISTEMA PRINCIPAL (SP) ESTRUTURA ISOSTÁTICA
Incógnitas: esforços hiperestáticos: X , X e X
b
Y
X
X1 X2
X3 A B
Incógnitas: esforços hiperestáticos: X1, X2 e X3
As estruturas a e b são iguais estaticamente.
Para ter compatibilidade de deformações entre a e b, os deslocamentos nas direções dos vínculos rompidos (θA, θB e δHB)devem ser nulos no SP (pois estes eram nulos na estrutura original a)
Para uma mesma estrutura hiperestática, pode-se ter vários sistemas principais. Chega-se a mesma solução, independente do sistema principal adotado. Para facilitar os cálculos, deve-se escolher um SP, que gere diagramas de esforços mais simples. Para pórticos recomenda-se colocar rótulas nos nós da estrutura.
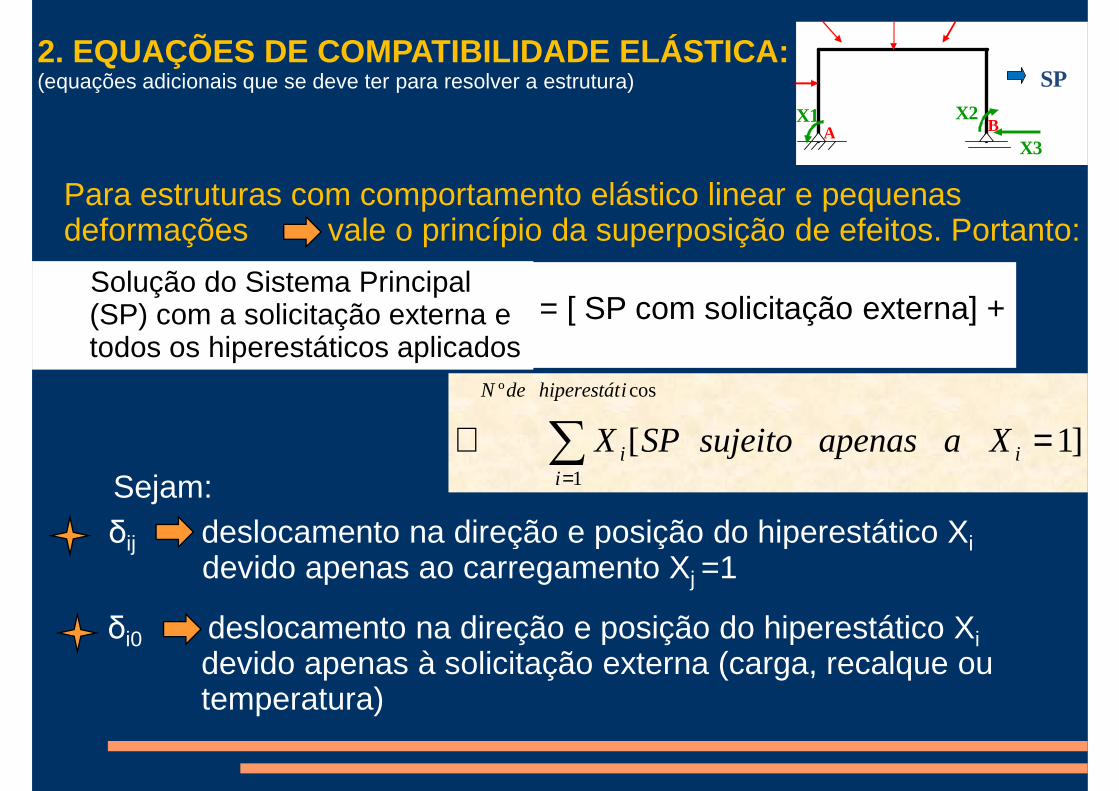
2. EQUAÇÕES DE COMPATIBILIDADE ELÁSTICA: (equações adicionais que se deve ter para resolver a estrutura)
Para estruturas com comportamento elástico linear e pequenas deformações vale o princípio da superposição de efeitos. Portanto:
X1 X2
X3 A B
SP
δ deslocamento na direção e posição do hiperestático XSejam:
]1[
cosº
1
=+ ∑=
i
ihiperestátdeN
ii XaapenassujeitoSPX
Solução do Sistema Principal (SP) com a solicitação externa e todos os hiperestáticos aplicados
= [ SP com solicitação externa] +
δij deslocamento na direção e posição do hiperestático Xi devido apenas ao carregamento Xj =1
δi0 deslocamento na direção e posição do hiperestático Xi devido apenas à solicitação externa (carga, recalque ou temperatura)

Solução do Sistema Principal com a solicitação externa e todos os hiperestáticos aplicados = a + b + c +d
X3
X2X1
a) b)+ X +
δ20
Y
X
X1 X2
X3 A B
Sistema Principal com a solicitação externa
c) d)
Sistema Principal com X1 =1 aplicado
X1=1δδδδ11 δδδδ21
δδδδ31
+ X1 +δ10
δ30
c) d)
Sistema Principal com X2 = 1 aplicado Sistema Principal com X 3 =1
aplicado
δδδδ12 δδδδ22
δδδδ32
+ X2+ X3
X3=1X2=1
δδδδ13 δδδδ23
δδδδ33

θA = δ10 + δ11 X1 + δ12 X2 + δ13 X3
θB = δ20 + δ21 X1 + δ22 X2 + δ23 X3
δHB = δ30 + δ31 X1 + δ32 X2 + δ33 X3
Portanto, considerando-se o princípio da superposição de efeitos:
Para ter compatibilidade de deformações entre a estrutura original e o
δ10 + δ11 X1 + δ12 X2 + δ13 X3 = 0
δ20 + δ21 X1 + δ22 X2 + δ23 X3 = 0
δ30 + δ31 X1 + δ32 X2 + δ33 X3 = 0
Para ter compatibilidade de deformações entre a estrutura original e o sistema principal θA = θB = δHB = 0. Portanto, obtém-se o seguinte sistema de equações:
Incógnitas do sistema: esforços hiperestáticos: X1, X2 e X3
Deslocamentos δij e δi0 : são valores conhecidos e são calculados através do PTV
3.1 Cálculo do deslocamento δij na direção i devido ao esforço X j = 1:
Estado de carregamento: estrutura sujeita à carga virtual na direção i . Resolve a estrutura obtêm
3. CÁLCULO DOS DESLOCAMENTOS δij e δi0 : através do PTV
FMD1=iP
Estado de deformação: estrutura sujeita ao carregamento real Xj = 1 Resolve a estrutura obtêm
3.2 Cálculo do deslocamento δi0 na direção i devido à
DMF
FMD
Combina os diagramas e , através das tabelas obtém δijDMF FMD
3.2 Cálculo do deslocamento δi0 na direção i devido à solicitação externa
Estado de carregamento: igual ao item 3.1
Estado de deformação: depende do tipo de solicitação externa
3.2 Cálculo do deslocamento δi0 na direção i devido à solicitação externa
Estado de deformação: estrutura sujeita ao carregamento externoResolve a estrutura obtêm
3.2.a)Solicitação externa = Carregamento externo
DMF
Combina os diagramas e , através das tabelas obtém δi0DMF FMDCombina os diagramas e , através das tabelas obtém δi0
3.2.b)Solicitação externa = Variação linear de temperatura ∆T δi0 = δit
Estado de deformação: estrutura sujeita a ∆T
Em estruturas isostáticas os deslocamentos devido a ∆T ocorrem sem que se desenvolvam esforços, há apenas deformações
Em estruturas hiperestáticas os deslocamentos devido a ∆T provocam deformações e esforços
Sistema principal estrutura isostática não há esforços devido a ∆T, apenas deformações

3.2.b)Solicitação externa = Variação linear de temperatura ∆T (continuação)
∆T = ti – te
h te t
Seja a estrutura, cujas fibras externas sofrem uma variação de temperatura diferente daquela que ocorre nas fibras internas:
te: variação de temperatura na fibras externasti: variação de temperatura nas fibras internas
te
ti
h
h ti
∆T é linear ao longo de hti
h: altura da seção transversal:h
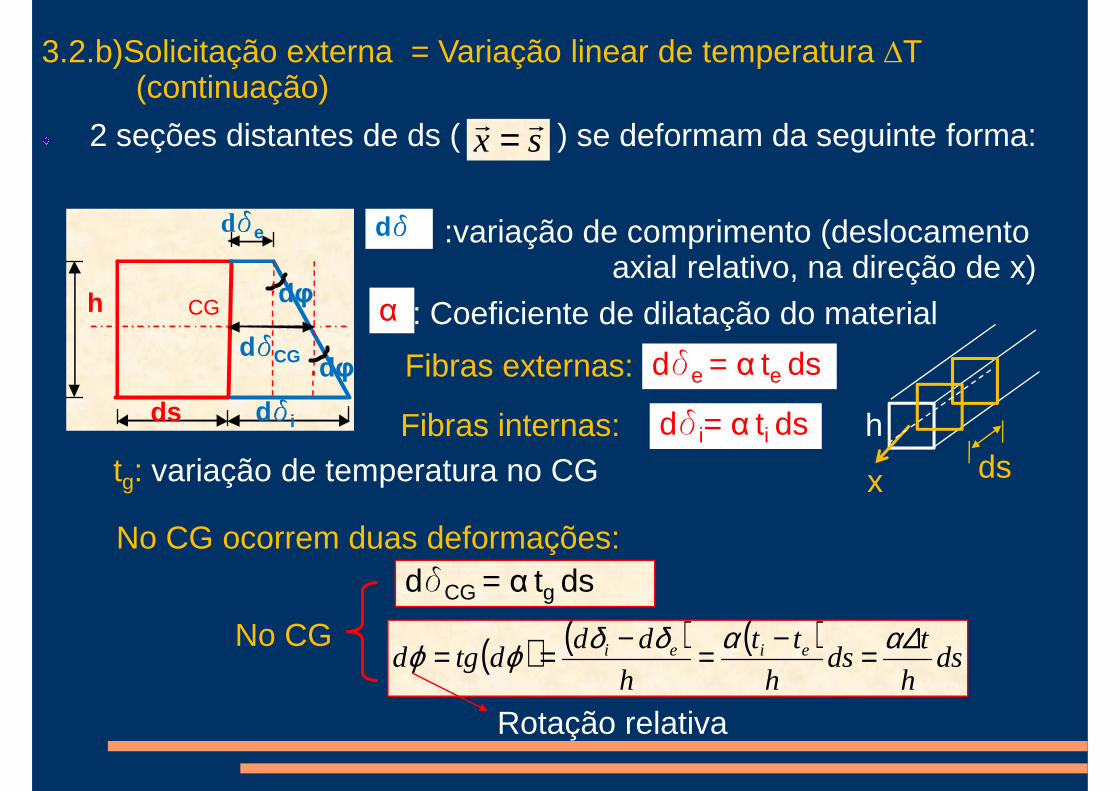
d: :variação de comprimento (deslocamento axial relativo, na direção de x)
2 seções distantes de ds ( ) se deformam da seguinte forma:
dδδδδe dδδδδ
sxrr =
3.2.b)Solicitação externa = Variação linear de temperatura ∆T (continuação)
No CG ocorrem duas deformações:
tg: variação de temperatura no CG
dδe = α te ds
dδi= α ti ds
Fibras externas:
Fibras internas:
axial relativo, na direção de x)
: Coeficiente de dilatação do material
ds
h
dδδδδi
dφ
dδδδδCG
CG α
h
x ds
dφ
No CG ocorrem duas deformações:dδCG = α tg ds
( ) ( ) ( )ds
h
tds
h
tt
h
dddtgd eiei ∆ααδδϕϕ =−=−==
Rotação relativa
No CG

dδCG = α tg ds
dsh
td
∆αϕ =sxrr =
dδCG = α tg dx
dxh
td
∆αϕ =
3.2.b)Solicitação externa = Variação linear de temperatura ∆T (continuação)
( ) ( ) ( )MNggCGit A
h
tAtdxM
h
tdxNtdMdN
∆+=∆+=+= ∫∫∫ααααϕδδ
O PTV em termos das deformações reais:
OBS: Se escrevesse o PTV em termos dos esforços reais, as integrais se anulariam. Então, nesse caso, deve-se escrever o PTV em termos das deformações reais.
xxx hh ∫∫∫
NA Área total do diagrama de
MA Área total do diagrama de M
N
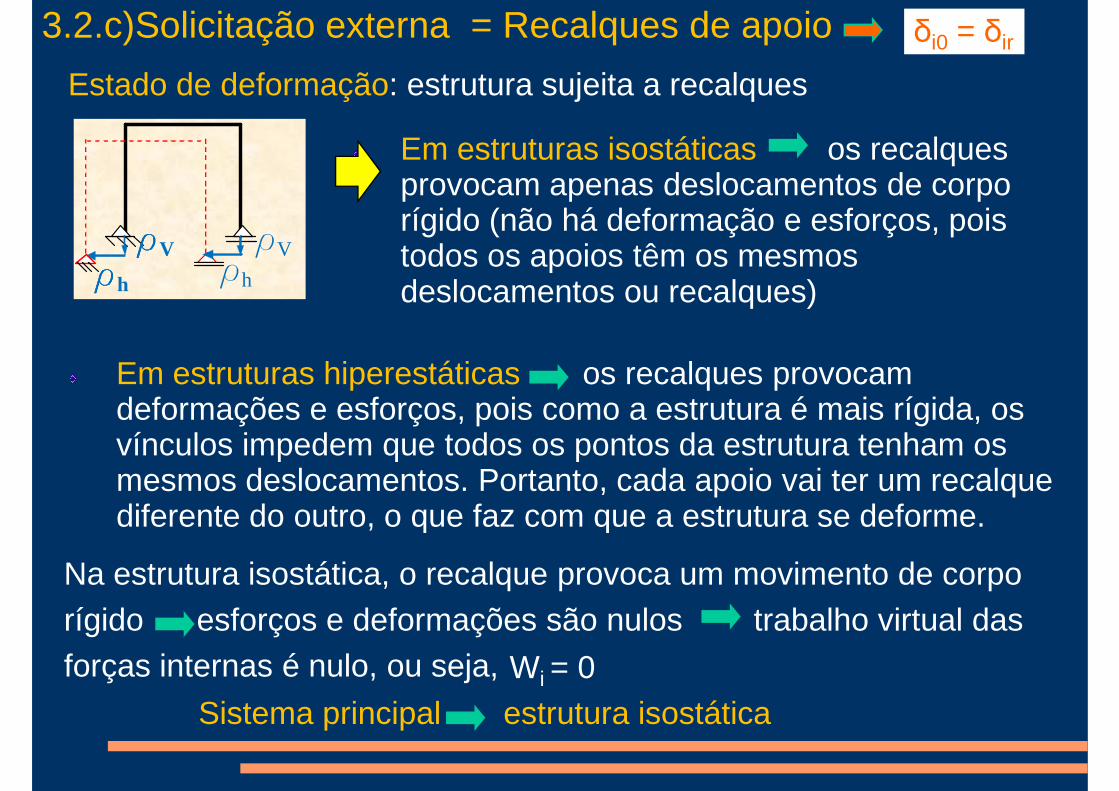
3.2.c)Solicitação externa = Recalques de apoio δi0 = δir
Em estruturas isostáticas os recalques provocam apenas deslocamentos de corpo rígido (não há deformação e esforços, pois todos os apoios têm os mesmos
ρρρρV ρρρρ
ρV ρ
Estado de deformação: estrutura sujeita a recalques
todos os apoios têm os mesmos deslocamentos ou recalques)
Em estruturas hiperestáticas os recalques provocam deformações e esforços, pois como a estrutura é mais rígida, os vínculos impedem que todos os pontos da estrutura tenham os mesmos deslocamentos. Portanto, cada apoio vai ter um recalque diferente do outro, o que faz com que a estrutura se deforme.
ρρρρh ρh
Na estrutura isostática, o recalque provoca um movimento de corpo rígido esforços e deformações são nulos trabalho virtual das forças internas é nulo, ou seja,
diferente do outro, o que faz com que a estrutura se deforme.
Wi = 0Sistema principal estrutura isostática
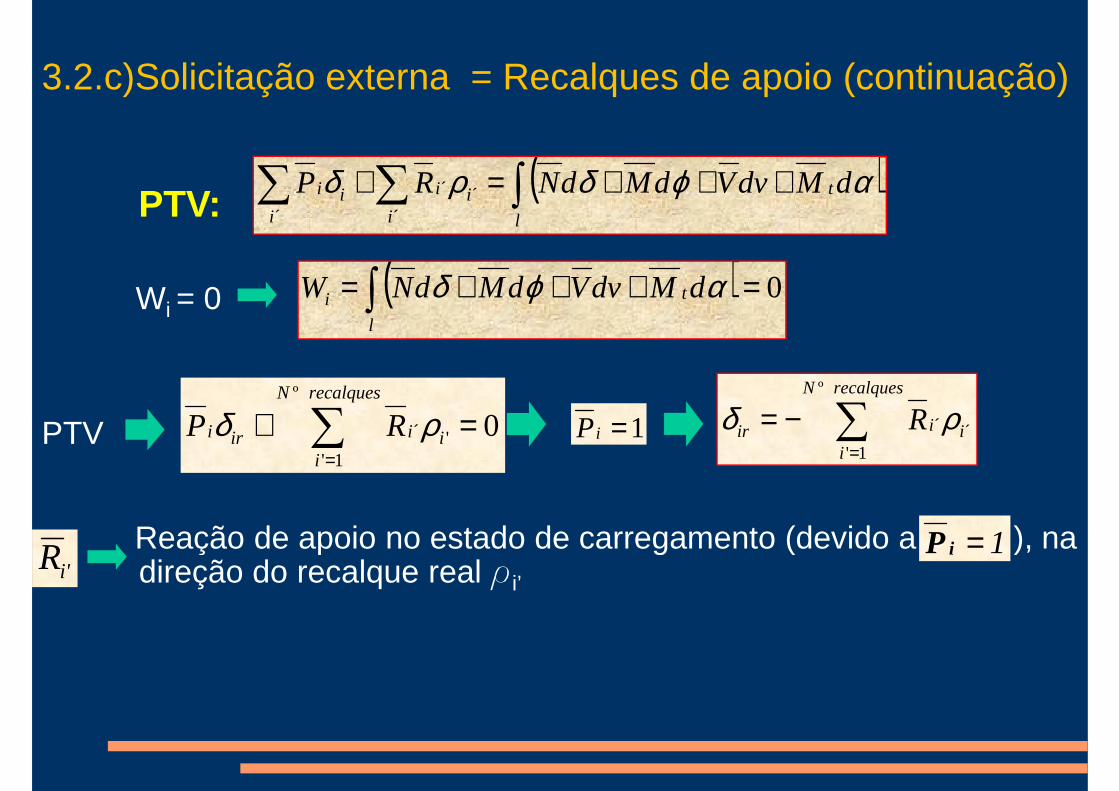
( )∫
( )∫∑∑ +++=+l
tii
i
iii dMdvVdMdNRP αϕδρδ ´
´
´
´PTV:
3.2.c)Solicitação externa = Recalques de apoio (continuação)
∑=
−=recalquesN
iiiir R
º
1'´´ρδ1=iP0
º
1''´ =+ ∑
=
recalquesN
iiiiri RP ρδ
1=P
PTV
Wi = 0 ( ) 0=+++= ∫l
ti dMdvVdMdNW αϕδ
Reação de apoio no estado de carregamento (devido a ), na 'iR 1=iPReação de apoio no estado de carregamento (devido a ), na
direção do recalque real ρi’
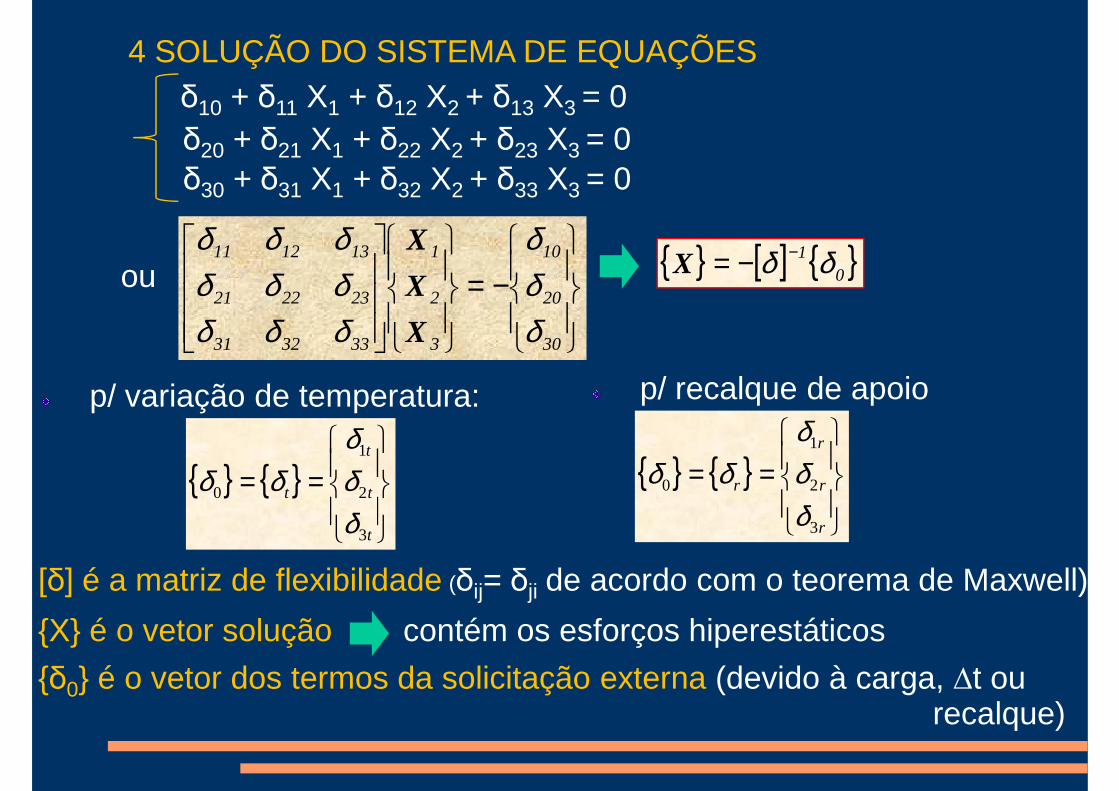
4 SOLUÇÃO DO SISTEMA DE EQUAÇÕES
101131211 δδδδ X { } [ ] { }1 δδ −−=X
δ10 + δ11 X1 + δ12 X2 + δ13 X3 = 0δ20 + δ21 X1 + δ22 X2 + δ23 X3 = 0δ30 + δ31 X1 + δ32 X2 + δ33 X3 = 0
ou
−=
30
20
3
2
333231
232221
δδ
δδδδδδ
X
X{ } [ ] { }0δδ−=X
p/ variação de temperatura:
{ } { }
==
t
t
t
t
3
2
1
0
δδδ
δδ
p/ recalque de apoio
ou
{ } { }
==
r
r
r
r
3
2
1
0
δδδ
δδ
[δ] é a matriz de flexibilidade (δij= δji de acordo com o teorema de Maxwell)
{X} é o vetor solução contém os esforços hiperestáticos
{δ0} é o vetor dos termos da solicitação externa (devido à carga, ∆t ou recalque)
t3δ r3δ
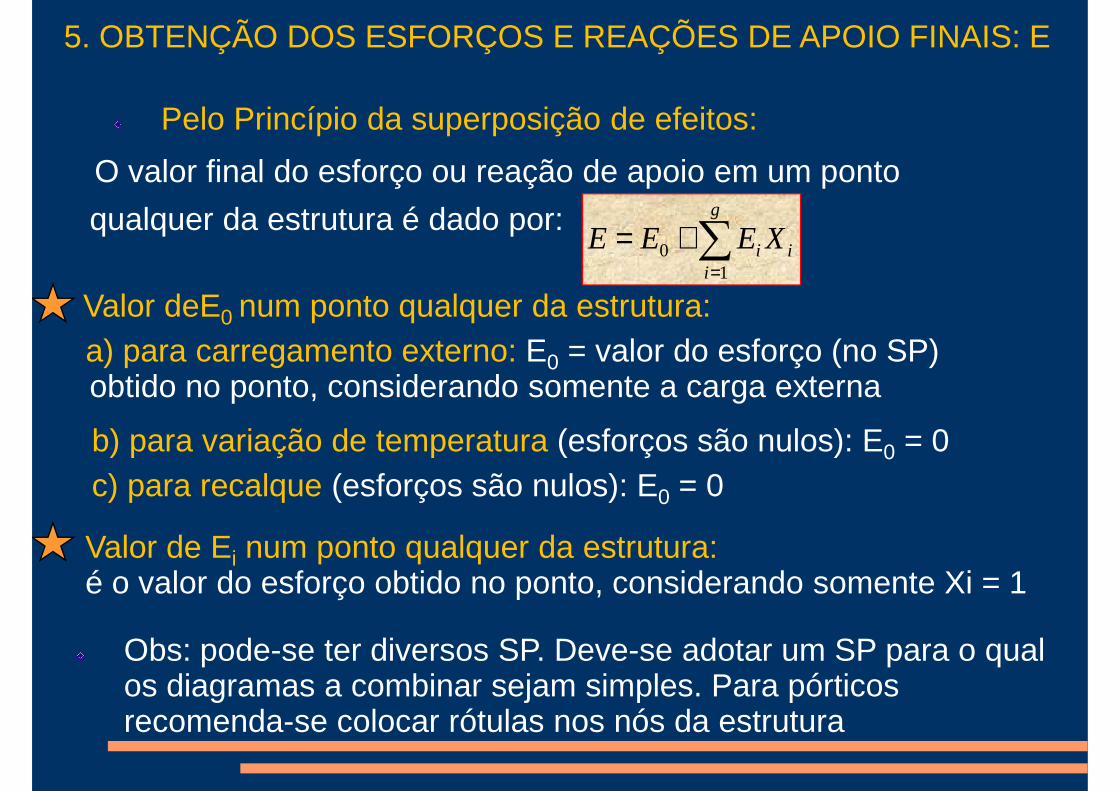
5. OBTENÇÃO DOS ESFORÇOS E REAÇÕES DE APOIO FINAIS: E
Pelo Princípio da superposição de efeitos:
∑=
+=g
iii XEEE
10
O valor final do esforço ou reação de apoio em um ponto
qualquer da estrutura é dado por:∑
=i 1
a) para carregamento externo: E0 = valor do esforço (no SP) obtido no ponto, considerando somente a carga externa
Valor deE0 num ponto qualquer da estrutura:
b) para variação de temperatura (esforços são nulos): E0 = 0 c) para recalque (esforços são nulos): E0 = 0
Valor de Ei num ponto qualquer da estrutura:é o valor do esforço obtido no ponto, considerando somente Xi = 1
Obs: pode-se ter diversos SP. Deve-se adotar um SP para o qual os diagramas a combinar sejam simples. Para pórticos recomenda-se colocar rótulas nos nós da estrutura

ROTEIRO DE CÁLCULO:
1. Cálculo do grau de hiperestaticidade (g = ge + gi)
2. Obtenção do Sistema Principal
3. Resolução do SP sujeito, separadamente, ao carregamento externo 3. Resolução do SP sujeito, separadamente, ao carregamento externo e cada um dos esforços hiperestáticos
4. Cálculo de δij e δi0 (ou δir ou δit)
5. Solução do sistema de equações de compatibilidade elástica
6. Obtenção dos esforços e reações de apoio finais
{ } [ ] { }01 δδ −−=X
6. Obtenção dos esforços e reações de apoio finais
∑=
+=g
iii XEEE
10
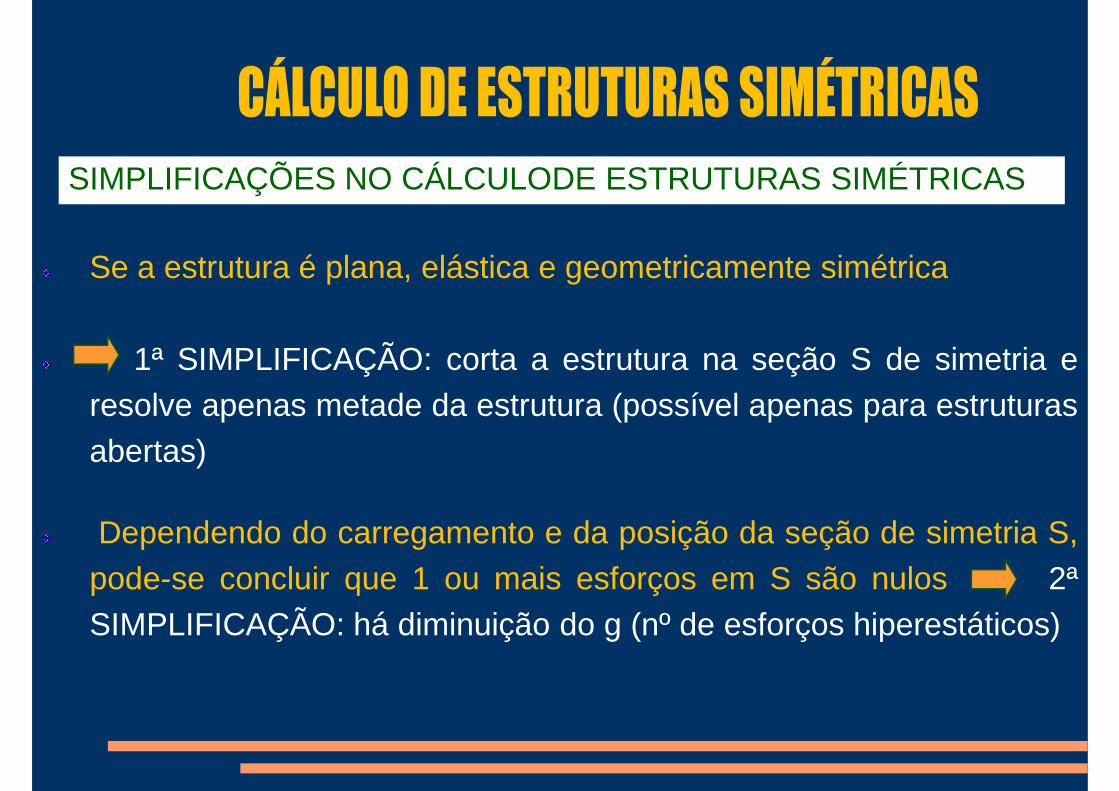
Se a estrutura é plana, elástica e geometricamente simétrica
SIMPLIFICAÇÕES NO CÁLCULODE ESTRUTURAS SIMÉTRICAS
Se a estrutura é plana, elástica e geometricamente simétrica
1ª SIMPLIFICAÇÃO: corta a estrutura na seção S de simetria eresolve apenas metade da estrutura (possível apenas para estruturasabertas)
Dependendo do carregamento e da posição da seção de simetria S,Dependendo do carregamento e da posição da seção de simetria S,pode-se concluir que 1 ou mais esforços em S são nulos 2ªSIMPLIFICAÇÃO: há diminuição do g (nº de esforços hiperestáticos)
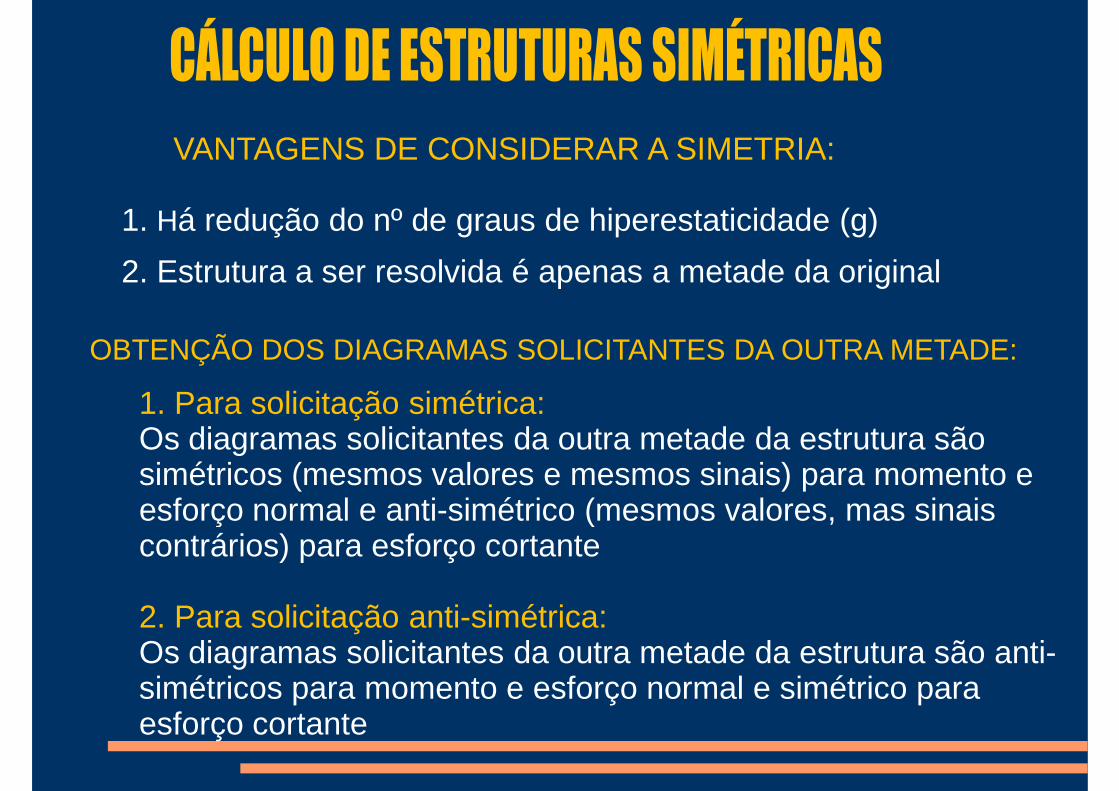
VANTAGENS DE CONSIDERAR A SIMETRIA:
1. Há redução do nº de graus de hiperestaticidade (g)
2. Estrutura a ser resolvida é apenas a metade da original2. Estrutura a ser resolvida é apenas a metade da original
1. Para solicitação simétrica: Os diagramas solicitantes da outra metade da estrutura são simétricos (mesmos valores e mesmos sinais) para momento e esforço normal e anti-simétrico (mesmos valores, mas sinais
OBTENÇÃO DOS DIAGRAMAS SOLICITANTES DA OUTRA METADE:
esforço normal e anti-simétrico (mesmos valores, mas sinais contrários) para esforço cortante
2. Para solicitação anti-simétrica: Os diagramas solicitantes da outra metade da estrutura são anti-simétricos para momento e esforço normal e simétrico para esforço cortante

1. Se o eixo de simetria intercepta ortogonalmente a barra na seção S de simetria:
Para estruturas planas, elásticas e geometricamente simétricas com solicitações simétricas:
Em S, o deslocamento horizontal e rotação são nulos (δH e θprovocados pelo lado da esquerda são anulados pelos δH e θ
Portanto, na seção S de simetria há apenas deslocamentos verticais:
0=θ
0V ≠δ
0NS ≠0H =δ 0M S ≠
provocados pelo lado da esquerda são anulados pelos δH e θprovocados pelo lado da direita):
0QS =
� Exemplos:
Em S
Exemplos:
S Como :0QS = Sist. Principal =S
X1
X2a a
a)
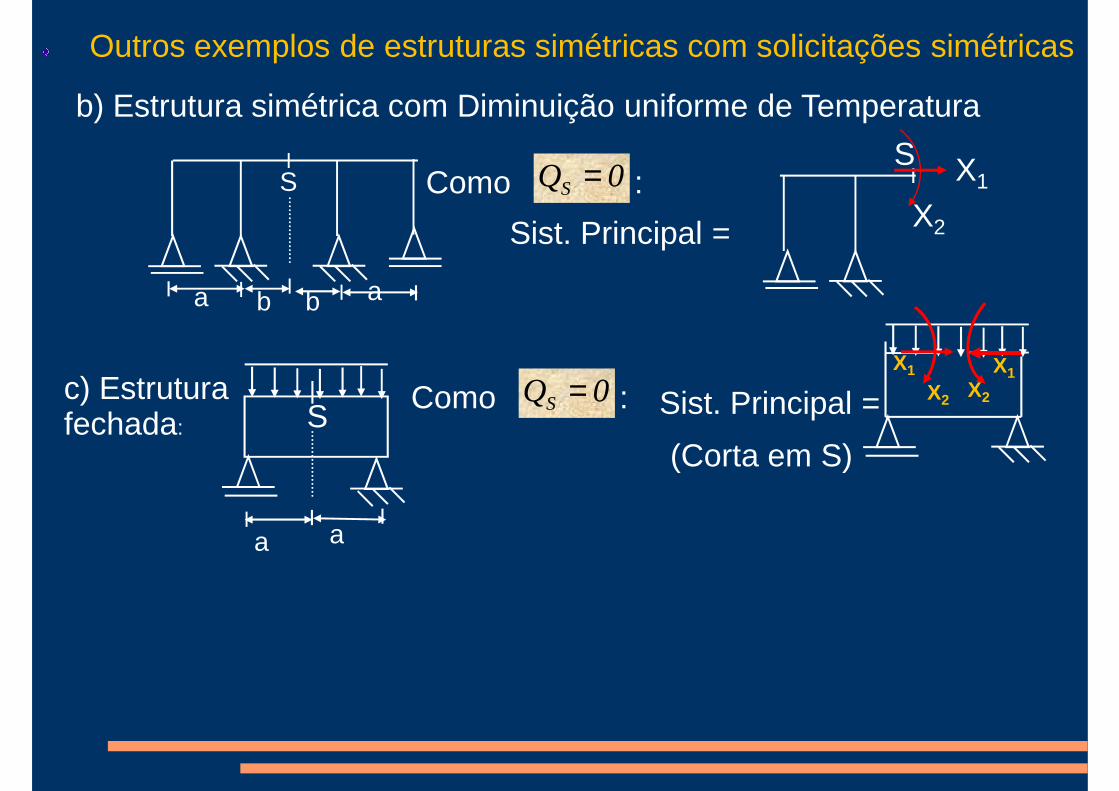
b) Estrutura simétrica com Diminuição uniforme de Temperatura
SS X1
X2
Outros exemplos de estruturas simétricas com solicitações simétricas
Como :0QS =
Sist. Principal =
c) Estrutura fechada: S
X1
X2
X1X2
(Corta em S)
a ab b
a a
Como :0QS = Sist. Principal =
a a
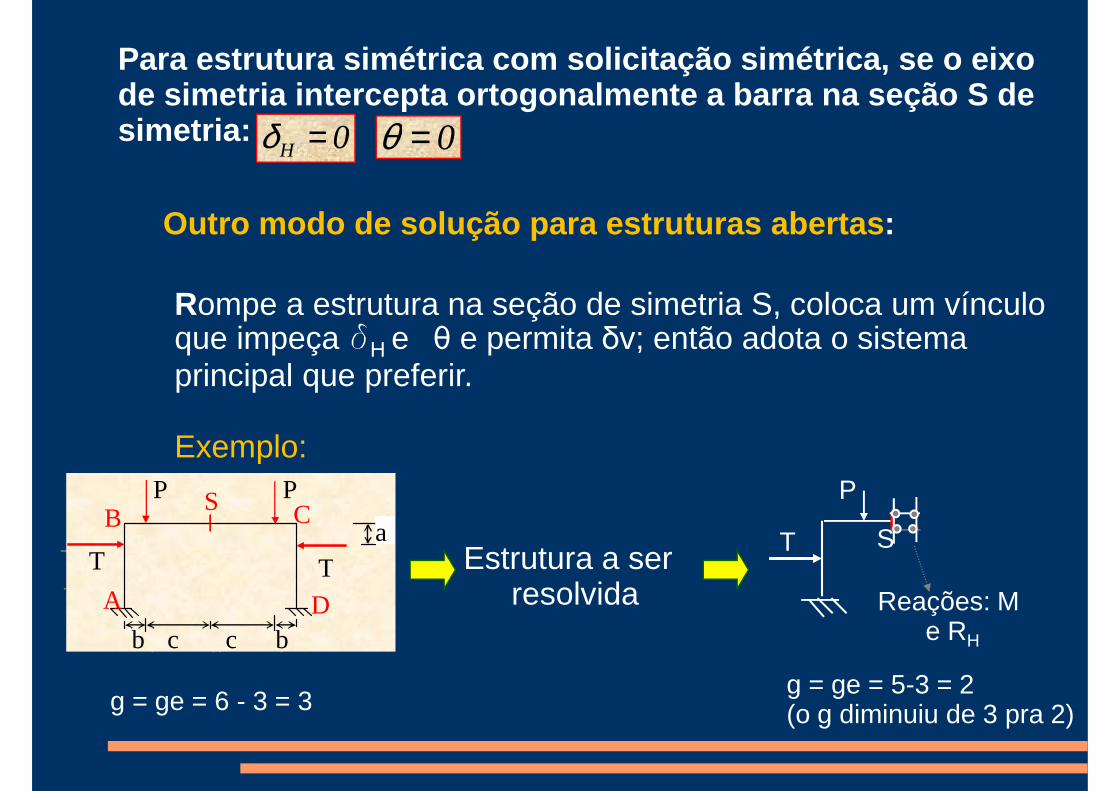
0=θ0H =δ
Para estrutura simétrica com solicitação simétrica, se o eixo de simetria intercepta ortogonalmente a barra na se ção S de simetria:
Outro modo de solução para estruturas abertas :
S
PP
TT S
P
T
Rompe a estrutura na seção de simetria S, coloca um vínculo que impeça δH e θ e permita δv; então adota o sistema principal que preferir.
Exemplo:
a S P P
B C
a
S TT
a
b
c c
b
g = ge = 6 - 3 = 3
STEstrutura a ser resolvida Reações: M
e RH
g = ge = 5-3 = 2(o g diminuiu de 3 pra 2)
a
b c c b
T T
A
B C
D
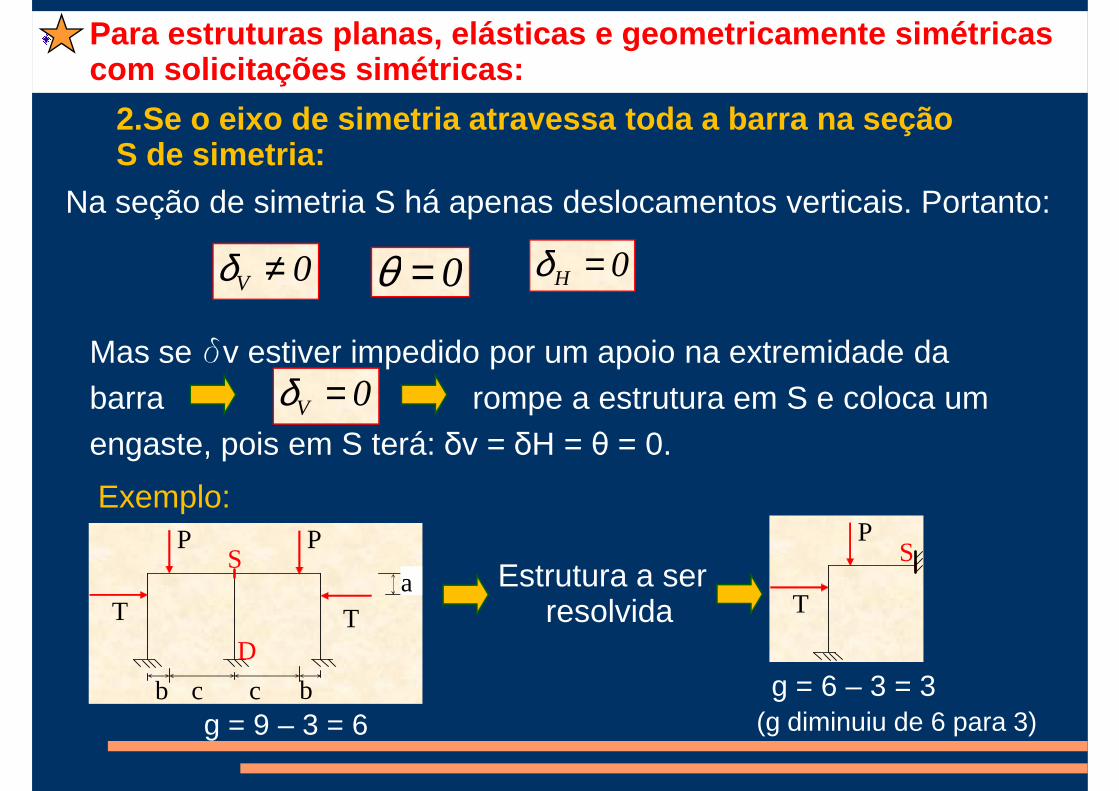
2.Se o eixo de simetria atravessa toda a barra na s eção S de simetria:
Na seção de simetria S há apenas deslocamentos verticais. Portanto:
0=θ0≠δ 0=δ
Para estruturas planas, elásticas e geometricamente simétricas com solicitações simétricas:
0=θ0V ≠δ 0H =δ
Mas se δv estiver impedido por um apoio na extremidade da barra rompe a estrutura em S e coloca um engaste, pois em S terá: δv = δH = θ = 0.
0V =δ
P P
Exemplo: P
a
b c c b
S P P
T T
D
S P
T Estrutura a ser
resolvida
g = 9 – 3 = 6g = 6 – 3 = 3
(g diminuiu de 6 para 3)
a
b c c b
S P P
T T
D
Exemplo:
S P
T Estrutura a ser
resolvida
g = 9 – 3 = 6g = 6 – 3 = 3
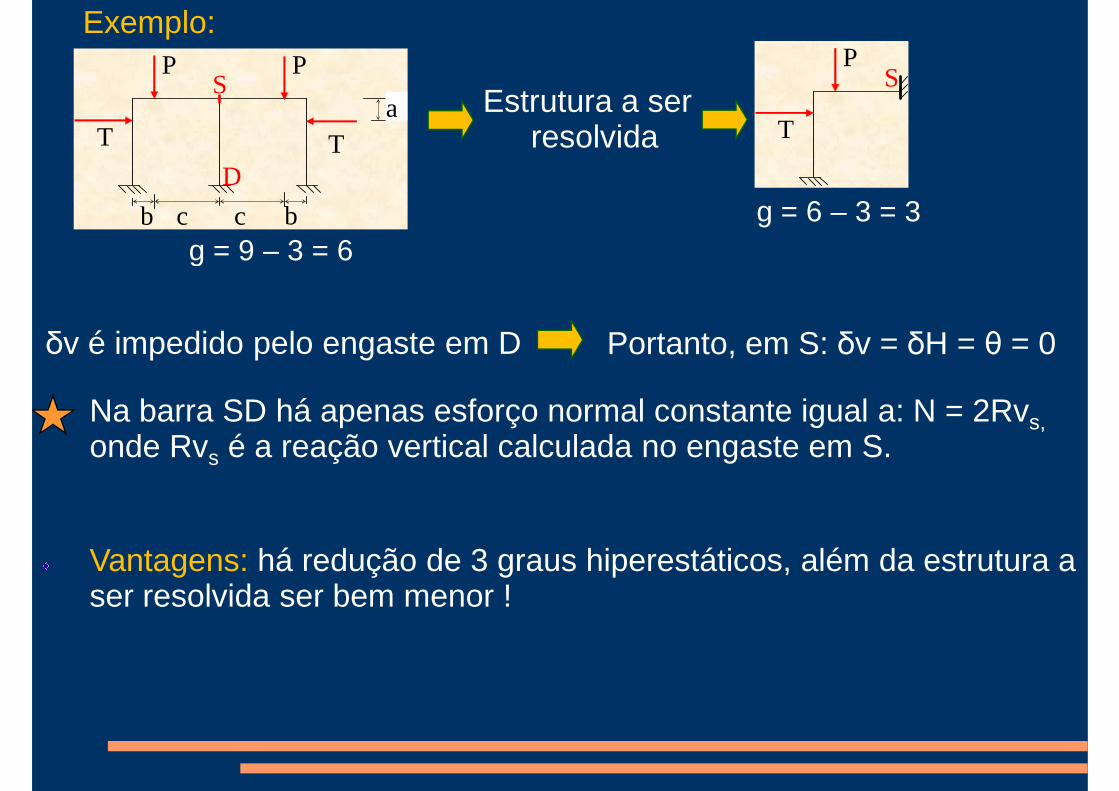
g = 9 – 3 = 6
δv é impedido pelo engaste em D Portanto, em S: δv = δH = θ = 0
Na barra SD há apenas esforço normal constante igual a: N = 2Rvs, onde Rvs é a reação vertical calculada no engaste em S.
Vantagens: há redução de 3 graus hiperestáticos, além da estrutura a ser resolvida ser bem menor !
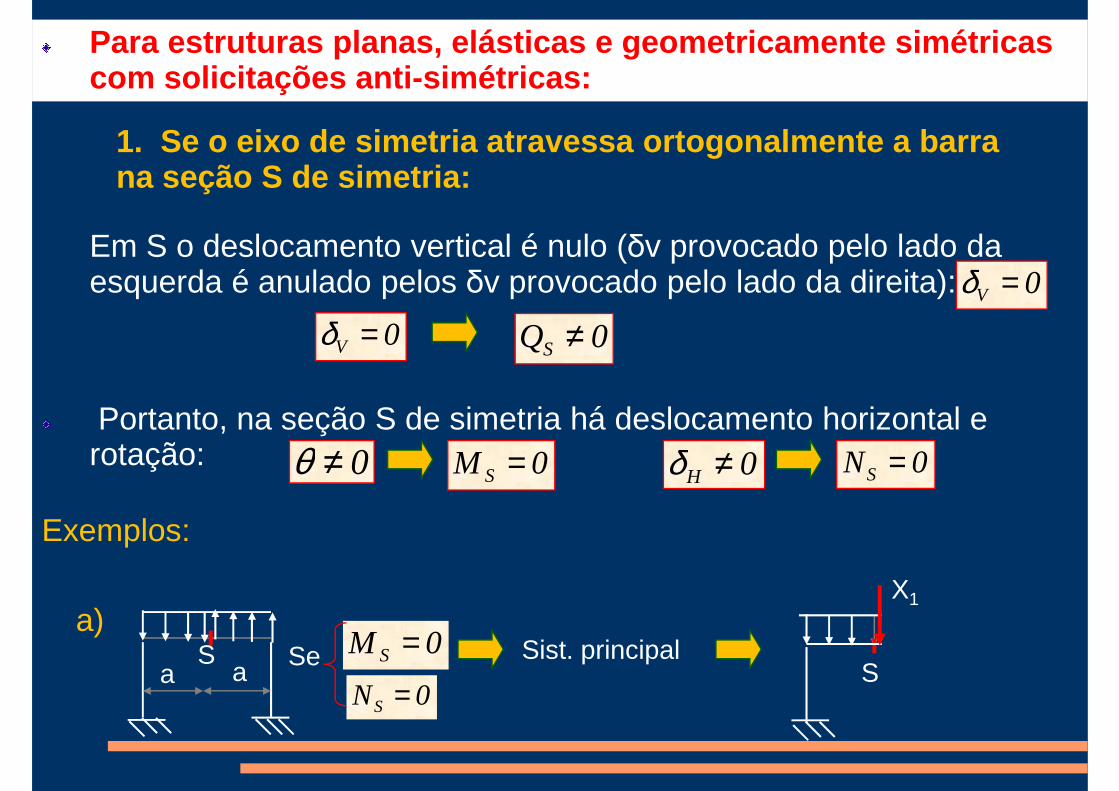
1. Se o eixo de simetria atravessa ortogonalmente a barra na seção S de simetria:
Para estruturas planas, elásticas e geometricamente simétricas com solicitações anti-simétricas:
=δEm S o deslocamento vertical é nulo (δv provocado pelo lado da
0V =δEm S o deslocamento vertical é nulo (δv provocado pelo lado da esquerda é anulado pelos δv provocado pelo lado da direita):
Exemplos:
0V =δ 0QS ≠
Portanto, na seção S de simetria há deslocamento horizontal e rotação: 0≠θ 0NS =0H ≠δ0M S =
Exemplos:
S Se Sist. principalS
X1
a a0M S =
0NS =
a)
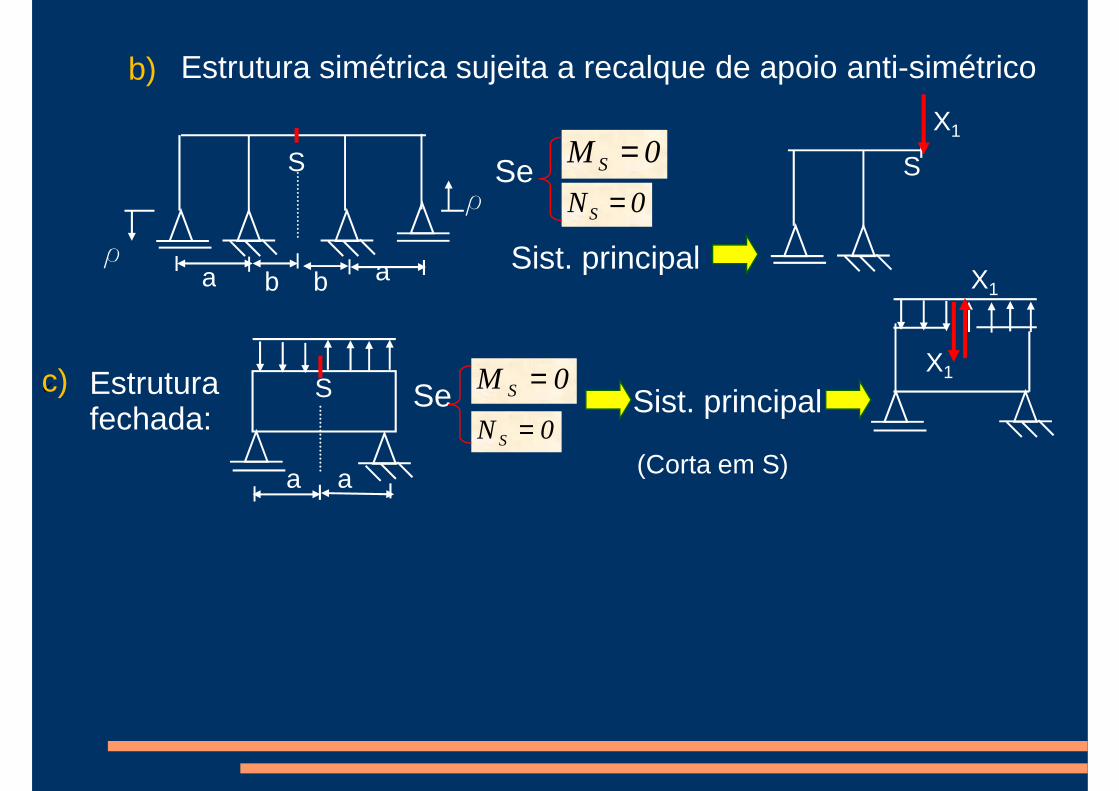
Estrutura simétrica sujeita a recalque de apoio anti-simétrico
S SSe
Sist. principal
X1
a a
ρ
ρ
0M S =0NS =
b)
� Estrutura fechada:
S Se Sist. principalX1
X1
(Corta em S)
Sist. principala ab b
a a
ρ
0M S =
0NS =
c)

Para estruturas simétricas com solicitações anti-si métricas, se o eixo de simetria atravessa ortogonalmente a barra n a seção S de simetria : 0V =δ
Outro modo de solução para estruturas abertas :
Rompe a estrutura na seção de simetria S, coloca um vínculo Rompe a estrutura na seção de simetria S, coloca um vínculo que impeça δv e permita δH e θ; então adota o sistema principal que preferir.
SPP
TTbb
SP
TEstrutura a ser
Exemplo:
a S P P
T T
a a
b
c cb
g = ge = 6 - 3 = 3
Estrutura a ser resolvida
g = ge = 4 - 3 = 1
b c c b
T T
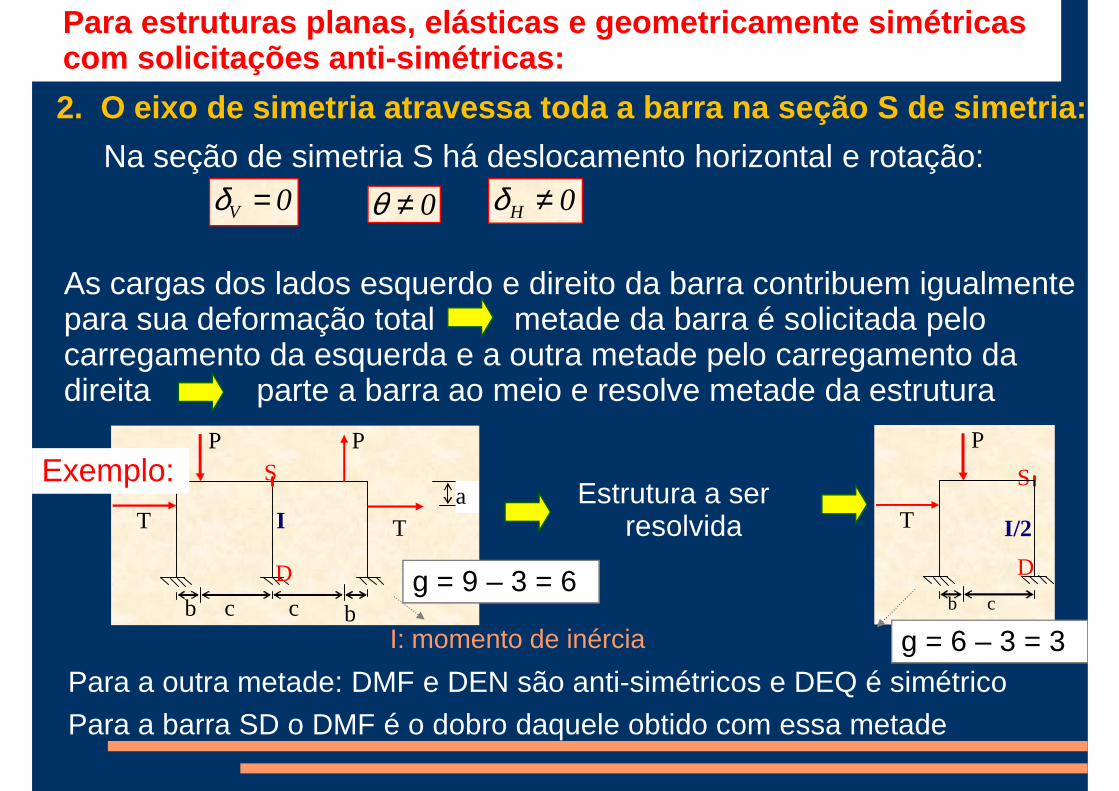
2. O eixo de simetria atravessa toda a barra na se ção S de simetria:
Para estruturas planas, elásticas e geometricamente simétricas com solicitações anti-simétricas:
Na seção de simetria S há deslocamento horizontal e rotação:
0≠θ0V =δ 0H ≠δ
a S
P P
T T I
As cargas dos lados esquerdo e direito da barra contribuem igualmente para sua deformação total metade da barra é solicitada pelo carregamento da esquerda e a outra metade pelo carregamento da direita parte a barra ao meio e resolve metade da estrutura
S
P
T I/2 Estrutura a ser
resolvida
Exemplo:
b c c b
T T
D
I
b c
T I/2
D
resolvida
g = 9 – 3 = 6
g = 6 – 3 = 3Para a outra metade: DMF e DEN são anti-simétricos e DEQ é simétrico
Para a barra SD o DMF é o dobro daquele obtido com essa metade
I: momento de inércia
Para estruturas planas, elásticas e geometricamente simétricas com solicitação qualquer, para facilitar o cálculo pode-se resolvê-la da seguinte maneira:
1. Decompõe o carregamento em parcelas simétrica e anti-simétrica
2. Resolve metade da estrutura com o carregamento simétrico (Para 2. Resolve metade da estrutura com o carregamento simétrico (Para a outra metade: DMF e DEN são simétricos e DEQ é anti-simétrico)
3. Resolve metade da estrutura com o carregamento anti-simétrico (Para a outra metade: DMF e DEN são anti-simétricos e DEQ é simétrico)
4. Os diagramas solicitantes finais são obtidos somando os 4. Os diagramas solicitantes finais são obtidos somando os diagramas dos itens 2 e 3.
VANTAGEM: apesar de ter que resolver a estrutura para 2 carregamentos diferentes, a estrutura a ser resolvida é a metade da original, além de haver redução do g.
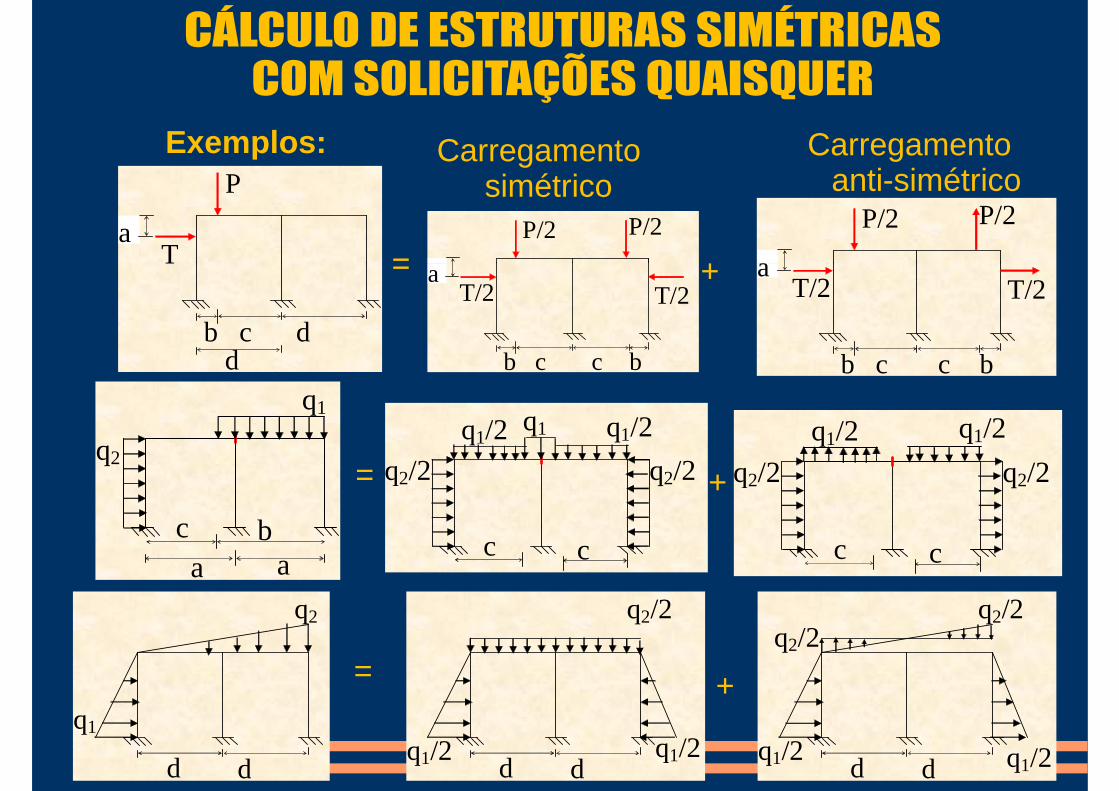
a
P
T
a
P/2 P/2
Exemplos:
= +
a
P/2 P/2
Carregamento simétrico
Carregamento anti-simétrico
b c d
T
d q1
q2
b c
a
b c
T/2 T/2
b c
= + a
b c
T/2 T/2
b c
= +
q1/2
q2/2 q2/2
q1/2 q1 q1/2
q2/2 q2/2
q1/2
a a b c
c c c c
d d
q1
q2
d d q1/2
q2/2
q1/2
d d q1/2
q2/2
q1/2
q2/2 = +

![AVALIAÇÃO DA RIGIDEZ ROTACIONAL EM ESTRUTURAS PLANAS DE … · M] - Matriz de rigidez considerando apenas o efeito rotacional [S jj] - Matriz de rigidez modificada [0] S M - Matriz](https://img.document.onl/doc/110x75/5f345d5f9cad421a306e8925/avaliafo-da-rigidez-rotacional-em-estruturas-planas-de-m-matriz-de-rigidez.jpg)



























