Embed Size (px)
Citation preview

Disciplina Metodologia da Pesquisa Cientiacutefica
Professora Joelma De Riz
Cursos Engenharias [Ambiental Eleacutetrica Produccedilatildeo]
MODELO DE RESENHA CRIacuteTICA
Preste atenccedilatildeo agrave estrutura dessa resenha-modelo e leia atentamente os comentaacuterios que estatildeo nas laterais Se vocecirc fizer sua resenha conforme a
estrutura a seguir natildeo tem erro
IDENTIFICACcedilAtildeO DA OBRA CONFORME ABNT
Bazzo Walter Antonio Pereira Luiz Teixeira do Vale Pesquisa Tecnoloacutegica Livro Introduccedilatildeo a engenharia ndash Conceitos ferramentas e comportamentos Ed 2 p 110-129 2009
IDENTIFICACcedilAtildeO DOS AUTORES
Walter Antonio Bazzo e Luiz Antonio do Vale Pereira satildeo ligados agrave Editora da UFSC (Florianoacutepolis)
CARACTERIZACcedilAtildeO GERAL DA OBRA
No livro Introduccedilatildeo agrave Engenharia ndash Conceitos ferramentas e comportamentos do capiacutetulo 2 se integra um dos 10 capiacutetulos do livro Introduccedilatildeo agrave Engenharia ndash Conceitos ferramentas e comportamentos O texto retrataO capitulo 5 do livro X retrata o que eacute a pesquisa tecnologica como a tecnologia depende da ciecircncia qual o metodo usado para a pesquisa
cientifica
ESTRUTURA DA OBRA
No que diz respeito agrave estrutura a obra encontra-se dividida nas seguintes seccedilotildees
1 Introduccedilatildeo
2 O robocirc moacutevel
3 Arquitetura do sistema
4 Processamento do sonar
5 Planejamento de trajetoacuterias
6 Controle
7 Implementaccedilatildeo em tempo real
8 Resultados de simulaccedilatildeo
9 Resultados experimentais
10 Conclusatildeo
TEXTO DA RESENHA
Na seccedilatildeo ldquoBases da sociedade modernardquo os autores iniciam o capiacutetulo falando sobre o nascimento da ciecircncia moderna que surgiu a partir do seacuteculo XVII e hoje eacute um grande responsaacutevel pela evoluccedilatildeo dos meios de transportes comunicaccedilatildeo
ect Segundo eles essa eacute uma importante aacuterea da roboacutetica e eles satildeo assim chamados pois
devem aceitar descriccedilotildees de alto niacutevel das tarefas que eles devem desenvolver sem a necessidade de maiores intervenccedilotildees humanas As descriccedilotildees de entrada especificam o que o usuaacuterio deseja que seja feito e natildeo como proceder para fazecirc-lo (p 402)
Para fazer frente agrave falta de intervenccedilatildeo humana esses robocircs precisam de ser equipados com sensores controlados por um sistema de computaccedilatildeo
Conforme discorrem os autores o raciociacutenio automatizado percepccedilatildeo e controle satildeo ramificaccedilotildees necessaacuterias ao desenvolvimento desses robocircs no qual surgem diversos problemas Um desses problemas segundo eles estaacute relacionado ao processo de planejamento de trajetoacuterias Esse planejamento conforme a definiccedilatildeo dos autores do artigo ldquoconsiste em se descobrir de que forma se pode levar um objeto a partir de uma configuraccedilatildeo (posiccedilatildeo e direccedilatildeo) inicial ateacute uma configuraccedilatildeo finalrdquo (p 402) Esse objeto no caso do artigo em anaacutelise satildeo os proacuteprios robocircs
Diante disso o que os autores fazem eacute apresentar ldquomeacutetodos para a navegaccedilatildeo autocircnoma de robocircs moacuteveis em ambientes sobre os quais possui-se pouca ou nenhuma informaccedilatildeordquo (p 402) Eles explicam que ldquoo sistema opera em tempo real utilizando os sonares do robocirc para fazer a detecccedilatildeo dos obstaacuteculos e interage com o sistema de controle do robocirc para rastreamento das trajetoacuterias desejadasrdquo (p 402-403)
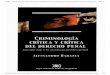
Na seccedilatildeo seguinte intitulada ldquoO robocirc moacutevelrdquo os autores apresentam a descriccedilatildeo do robocirc denominado Twil usado no trabalho relatado no artigo para identificar os obstaacuteculos Conforme relatam os autores
Este robocirc conta com uma seacuterie de perifeacutericos dentre eles dois sonares de ultra-som utilizados neste trabalho para identificaccedilatildeo de obstaacuteculos Ele possui duas rodas natildeo orientaacuteveis acopladas a motores e outras duas rodas apenas para apoio O computador eacute um PC com processador Pentium MMX utilizando sistema operacional Linux com kernel modificado pelos autores para suportar operaccedilatildeo em tempo-real Para comunicaccedilatildeo ele possui uma placa de rede Ethernet e um modem sem fio Quanto a sua geometria ele possui forma ciliacutendrica com 135m de altura e 030m de raio Outros dispositivos que este robocirc possui incluem duas cacircmeras de viacutedeo joystick e uma buacutessola digital (OTTONI LAGES 2003 p 403)
Um esquema graacutefico eacute exibido para mostrar como todos os elementos do robocirc interagem entre si
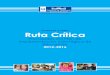
A seccedilatildeo posterior eacute denominada ldquoArquitetura do sistemardquo e descreve como eacute a arquitetura do sistema de navegaccedilatildeo proposto Ottoni e Lages (2003) datildeo essas explicaccedilotildees a partir de um esquema graacutefico no qual bolhas representam os moacutedulos implementados em software e retacircngulos representam os dispositivos fiacutesicos do robocirc que interagem com o ambiente
Assim sendo se observarmos o esquema graacutefico vamos ver que os moacutedulos implementados em software satildeo o leitor sonar o detector de obstaacuteculos o gerador de trajetoacuterias o fornecedor de trajetoacuterias e o controlador Nas extremidades do esquema temos o sonar e as rodas (formadas por motores e sensores) que satildeo os dois dispositivos fiacutesicos do robocirc que interagem com o ambiente
Os autores apresentam uma descriccedilatildeo detalhada das funccedilotildees realizadas por cada um desses elementos informando como se daacute a interaccedilatildeo entre eles Nesse sentido eles explicam por exemplo que o fornecedor de trajetoacuterias recebe do gerador de trajetoacuterias as trajetoacuterias a serem rastreadas pelo robocirc gerando as referecircncias e enviando essas referecircncias para o controlador que eacute o elemento que vai garantir ldquoo rastreamento da trajetoacuteria assim como a permanecircncia do robocirc em um ponto fixo ao final da trajetoacuteriardquo (p 404) Jaacute o detector de obstaacuteculos interage com o leitor de sonar recebendo deste leituras relacionadas a regiotildees de profundidade constantes com as quais faz a atualizaccedilatildeo dos obstaacuteculos encontrados no mapa de bits que segundo os autores eacute uma ldquoforma utilizada para representar o ambiente e seus obstaacuteculos eacute bastante simplesrdquo (p 406)
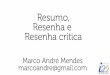
Na seccedilatildeo seguinte os autores discorrem sobre o ldquoProcessamento do sonarrdquo e comeccedilam explicando que esse meacutetodo de profundidade constante eacute usado para realizar a detecccedilatildeo dos obstaacuteculos atraveacutes do sonar Segundo eles a base do meacutetodo eacute o ldquotime-of-flight dos pulsos emitidos pelo sonar Mais especificamente define-se como time-of-flight o tempo entre a transmissatildeo de um pulso e a recepccedilatildeo do seu eco refletido pelo alvordquo (p 404)
Citando Masliah e Albrecht os autores explicam que um dos problemas nessa temaacutetica eacute que ldquoas distacircncias obtidas a partir de leituras dos sonares de ultrasom raramente constituem a reproduccedilatildeo em coordenadas polares do ambiente de prova como seria a princiacutepio esperadordquo (p 404) Segundo eles esse problema ocorre por causa da ldquoocorrecircncia de leituras falsas causadas pelos efeitos de divergecircncia difraccedilatildeo reflexotildees muacuteltiplas e absorccedilatildeordquo
Para ilustrar isso eles incluem no artigo a foto do corredor no qual foi feita a varredura do sonar mostrando esses efeitos Apesar dos problemas apontados os autores citando Lim e Leonard destacam que
[] a maioria das superfiacutecies existentes em ambientes construiacutedos pelo homem apresentam reflexatildeo especular Este tipo de reflexatildeo produz na varredura do sonar regiotildees onde a distacircncia ao obstaacuteculo eacute constante (ou seja profundidade constante) Assim determinaccedilatildeo dos obstaacuteculos atraveacutes da identificaccedilatildeo de regiotildees de profundidade constante (RPCs) permite uma maior robustez frente aos erros causados por estes fenocircmenos (p 404)
Os autores definem as RPCs como ldquo[] um conjunto de leituras do sonar tais que a diferenccedila nas profundidades natildeo seja maior do que um determinado
valor x e tal que a diferenccedila entre o acircngulo inicial 1048576 e o acircngulo final seja maior do que 10ordm rdquo (p 404)
A seccedilatildeo seguinte discorre sobre o ldquoPlanejamento de trajetoacuteriasrdquo com o uso do meacutetodo de decomposiccedilatildeo das ceacutelulas Os autores explicam o meacutetodo da seguinte forma
Este meacutetodo consiste em dividir o espaccedilo livre do robocirc em regiotildees simples (ceacutelulas) de forma que um caminho entre quaisquer duas configuraccedilotildees em uma mesma ceacutelula possa ser facilmente obtido Um grafo natildeo-dirigido representando a relaccedilatildeo de adjacecircncia entre as ceacutelulas eacute construiacutedo e eacute entatildeo efetuada uma busca no mesmo Este grafo eacute denominado grafo de conectividade Os veacutertices que compotildeem este grafo satildeo as ceacutelulas extraiacutedas do espaccedilo livre do robocirc Haacute uma aresta entre dois veacutertices se e somente se as ceacutelulas correspondentes a eles satildeo adjacentes O resultado da busca efetuada eacute uma sequumlecircncia de ceacutelulas denominada canal Um caminho contiacutenuo pode ser computado a partir do canal (p 406)
Tal meacutetodo conforme os autores (p 406) divide-se em
Exatos ldquodecompotildeem o espaccedilo livre em um conjunto de ceacutelulas cuja uniatildeo cobre exatamente o espaccedilo livrerdquo
Aproximados ldquodividem o espaccedilo livre em um conjunto de ceacutelulas de forma predefinida cuja uniatildeo estaacute estritamente contida no espaccedilo livrerdquo Nesse tipo as ceacutelulas satildeo da mesma forma forma essa que eacute bastante simples e definida a priori natildeo sendo possiacutevel modelar o ambiente tal como ele eacute sendo necessaacuterio fazer aproximaccedilotildees Poreacutem os autores salientam que essas aproximaccedilotildees devem ser feitas ldquode uma forma conservadora ou seja de maneira que garanta que o robocirc natildeo colida com os obstaacuteculosrdquo Eacute justamente por isso explicam eles que o espaccedilo modelado deve estar estritamente contido no espaccedilo livre em que realmente o robocirc vai se movimentar Do contraacuterio a colisatildeo aconteceraacute
A partir das descriccedilotildees que apresentam para cada tipo de meacutetodo os autores salientam que o meacutetodo aproximado eacute denominado natildeo completo enquanto o meacutetodo exato por sua vez eacute considerado completo Com essas denominaccedilotildees poderiacuteamos concluir falsamente que o meacutetodo aproximado natildeo tem benefiacutecios em relaccedilatildeo ao meacutetodo exato
Os autores no entanto salientam o contraacuterio Segundo eles ldquoa principal vantagem do meacutetodo aproximado sobre o exato eacute a de fazer a decomposiccedilatildeo do ambiente em ceacutelulas atraveacutes da iteraccedilatildeo da mesma computaccedilatildeo que seraacute simples por causa da forma das ceacutelulasrdquo (p 406) Como as ceacutelulas satildeo mais simples os sistemas de planejamento de trajetoacuterias gerados por esse meacutetodo tambeacutem satildeo mais simples e essa eacute a principal razatildeo que tem levado ao seu uso
Aleacutem disso esse meacutetodo tem outra facilidade ldquopode-se ajustar a precisatildeo conforme desejado mudando para tanto apenas o tamanho das ceacutelulasrdquo (p 406) embora eles salientem que ldquo[] possibilidade de ajuste da precisatildeo
deste meacutetodo estaacute intimamente relacionada agrave quantidade de espaccedilo e de tempo de execuccedilatildeo do planejador de trajetoacuteriasrdquo (p 406) Foi por esses benefiacutecios que os autores escolheram esse meacutetodo para planejar trajetoacuterias no projeto que estatildeo desenvolvendo
Segundo eles explicam o ambiente decomposto em bits incluindo os obstaacuteculos nele existentes eacute representado no mapa de bits segundo eles de forma bem simples Eles salientam que o nuacutemero de dimensotildees representadas no mapa deve ser igual ao da modelagem usada para o problema Como o problema que eles querem resolver eacute bidimensional o mapa de bits tambeacutem teraacute duas dimensotildees
Os autores ressaltam ainda (p 406) que ldquocom este meacutetodo natildeo haacute custo adicional em armazenar o grafo e o custo de testar se duas ceacutelulas satildeo adjacentes eacute muito baixordquo Segundo informam no artigo eles utilizaram a teacutecnica de expansatildeo de obstaacuteculos procedendo do seguinte modo ldquopara cada ponto onde se identifica a presenccedila de um obstaacuteculo eacute marcada no mapa de bits toda uma regiatildeo quadrada de lado igual ao diacircmetro do robocircrdquo que ldquo[] pode ser rotacionado sem que haja movimento de translaccedilatildeo o que permite que seja desconsiderada a sua orientaccedilatildeo no espaccedilo de configuraccedilotildees obtendo assim um problema com duas dimensotildeesrdquo
Com base em Aho et al os autores informam (p 407) que
para efetuar a busca de uma trajetoacuteria no espaccedilo de configuraccedilotildees foi utilizado um algoritmo de busca em largura Esta escolha foi feita com base em diversas caracteriacutesticas como eficiecircncia garantia de encontrar uma soluccedilatildeo sempre que possiacutevel e facilidade de implementaccedilatildeo
Enfim na seccedilatildeo intitulada ldquoPlanejamento de trajetoacuteriasrdquo os autores apresentam informaccedilotildees sobre como se daacute o planejamento das trajetoacuterias no sistema de navegaccedilatildeo que eles estatildeo propondo dando detalhes de como eacute a decomposiccedilatildeo do ambiente em que o robocirc vai se movimentar
Na seccedilatildeo ldquoControlerdquo os autores informam que o controlador usado no sistema que eles estatildeo propondo inspira-se no apresentado por Lages et al (1996) e que ele emprega linearizaccedilatildeo por realimentaccedilatildeo de estados Usando vaacuterias representaccedilotildees matemaacuteticas eles demonstram como seria o funcionamento desse controlador apresentam um sistema de coordenadas e salientam que a teacutecnica de controle linear usada no sistema que estatildeo projetando eacute a denominada ldquomodelo-referecircncia por facilitar o desenvolvimento de versotildees adaptativas desta lei de controlerdquo (p 408)
Por fim a estrutura de controle proposta para o sistema eacute apresentada em um diagrama Segundo os autores tal estrutura
[] eacute composta por duas malhas de controle A malha interna eacute
responsaacutevel por transformar o sistema em um sistema linear atraveacutes da realimentaccedilatildeo linearizante [] O sistema linear resultante com entrada v e saiacuteda y eacute controlado pela malha externa que implementa um controlador linear por modelo-referecircncia [] (p 408)
Na seccedilatildeo 7 denominada ldquoImplementaccedilatildeo em tempo realrdquo os autores explicam que a implementaccedilatildeo do sistema se deu com o uso do sistema operacional Linux e que eles fizeram mudanccedilas no moacutedulo kernel que gerencia o reloacutegio de tempo real do computador implementando dispositivos virtuais chamados temporizadores em tempo real
Eles ressaltam ainda que a modelagem de cada tarefa a ser executada foi feita com threads sincronizados atraveacutes de semaacuteforos Esse modelo eacute tratado por Leroy e os autores salientam que ele foi escolhido em detrimento do modelo Unix porque este causa um grande overhead na transferecircncia de dados Indicam que o funcionamento e a comunica entre os threads eacute descrita por Ottoni
Na seccedilatildeo 8 os autores apresentam os ldquoResultados de simulaccedilatildeordquo simulaccedilatildeo essa que foi feita para validar o sistema de navegaccedilatildeo proposto O simulador desenvolvido conforme mencionam os autores possuem threads de trecircs tipos da leitura do sonar de controle e da simulaccedilatildeo dos obstaacuteculos do ambiente que fornece os obstaacuteculos detectados a partir de cada posiccedilatildeo em que o robocirc se encontrar ldquo[] simula a movimentaccedilatildeo do robocirc e verifica se ocorre alguma colisatildeo do robocirc com os obstaacuteculos do ambienterdquo (p 409)
No artigo os autores apresentam as figuras que exemplificam a simulaccedilatildeo mostrando a trajetoacuteria do robocirc mostrando os vaacuterios obstaacuteculos detectados por ele nos vaacuterios pontos da trajetoacuteria A cada ponto em que o robocirc para o sonar do robocirc faz uma varredura do ambiente e gera uma nova trajetoacuteria com base nos obstaacuteculos que identifica Os autores lembram que esse processo eacute semelhante ao descrito por Foux et al
Conforme descrito na seccedilatildeo 9 intitulada ldquoResultados experimentaisrdquo o programa desenvolvido e testado na simulaccedilatildeo foi entatildeo testado no robocirc Twil Os autores consideram que
Os resultados obtidos foram bastante satisfatoacuterios sendo que o robocirc adquiriu assim capacidade de locomover-se autonomamente por entre obstaacuteculos detectados pelo uso de seus sonares Apenas alguns problemas na detecccedilatildeo dos obstaacuteculos foram identificados como jaacute era esperado dada a natureza do meacutetodo utilizado (uso de sonares) (p 409)
No entanto eles indicaram alguns problemas por exemplo na detecccedilatildeo dos obstaacuteculos identificados em razatildeo da natureza do uso do meacutetodo de sonares utilizado no sistema Aleacutem disso o programa usado fazia com que o robocirc tivesse de interromper seu movimento para identificar os obstaacuteculos por meio dos sonares o que gerou prejuiacutezo para o desempenho do modelo como um
todo
Os autores informam que os testes com o sistema foram feitos em um ambiente com muitos obstaacuteculos para o robocirc o que segundo eles ldquocausa ruiacutedo na detecccedilatildeo dos mesmos atraveacutes do uso de sonaresrdquo (p 409) O ambiente era o laboratoacuterio de eletrocircnica onde havia bancadas e armaacuterios nas paredes compondo um local bastante realiacutestico para o teste na opiniatildeo dos autores porque esses elementos por outro lado tornam o ambiente pouco favoraacutevel para o sonar
Eles apresentam os mapas de bit do ambiente em que foram feitos os testes e destacam que no primeiro teste (feito no Laboratoacuterio de eletrocircnica) ldquonenhum obstaacuteculo do ambiente foi informado a priori ao robocircrdquo (p 410) Um segundo teste foi feito no Laboratoacuterio de Eletroteacutecnica uma sala grande no qual os vaacuterios obstaacuteculos eram as diversas bancadas de concreto para ensaios de motores
Na ldquoConclusatildeordquo os autores destacam que o sistema eacute eficiente mas que dados os problemas observados ele
eacute suficientemente geneacuterico de forma que possa ser utilizado juntamente com outro meacutetodo de detecccedilatildeo de obstaacuteculos como atraveacutes de cacircmeras de viacutedeo ou ainda atraveacutes de meacutetodos hiacutebridos como o proposto por Song e Tang (p 411)
[CRIacuteTICA]
Aqui vocecirc deveraacute elaborar um paraacutegrafo contendo respostas agraves seguintes perguntas
O objetivo do capiacutetulo foi definido adequadamente objetivo Qual eacute o objetivo
O texto eacute claro e objetivo A forma como ele foi estruturado permitiu o cumprimento do objetivo a que o autor se propunha
O estudo do capiacutetulo traz contribuiccedilotildees significativas para seu conhecimento em Pesquisa na Engenharia Por quecirc

ect Segundo eles essa eacute uma importante aacuterea da roboacutetica e eles satildeo assim chamados pois
devem aceitar descriccedilotildees de alto niacutevel das tarefas que eles devem desenvolver sem a necessidade de maiores intervenccedilotildees humanas As descriccedilotildees de entrada especificam o que o usuaacuterio deseja que seja feito e natildeo como proceder para fazecirc-lo (p 402)
Para fazer frente agrave falta de intervenccedilatildeo humana esses robocircs precisam de ser equipados com sensores controlados por um sistema de computaccedilatildeo
Conforme discorrem os autores o raciociacutenio automatizado percepccedilatildeo e controle satildeo ramificaccedilotildees necessaacuterias ao desenvolvimento desses robocircs no qual surgem diversos problemas Um desses problemas segundo eles estaacute relacionado ao processo de planejamento de trajetoacuterias Esse planejamento conforme a definiccedilatildeo dos autores do artigo ldquoconsiste em se descobrir de que forma se pode levar um objeto a partir de uma configuraccedilatildeo (posiccedilatildeo e direccedilatildeo) inicial ateacute uma configuraccedilatildeo finalrdquo (p 402) Esse objeto no caso do artigo em anaacutelise satildeo os proacuteprios robocircs
Diante disso o que os autores fazem eacute apresentar ldquomeacutetodos para a navegaccedilatildeo autocircnoma de robocircs moacuteveis em ambientes sobre os quais possui-se pouca ou nenhuma informaccedilatildeordquo (p 402) Eles explicam que ldquoo sistema opera em tempo real utilizando os sonares do robocirc para fazer a detecccedilatildeo dos obstaacuteculos e interage com o sistema de controle do robocirc para rastreamento das trajetoacuterias desejadasrdquo (p 402-403)
Na seccedilatildeo seguinte intitulada ldquoO robocirc moacutevelrdquo os autores apresentam a descriccedilatildeo do robocirc denominado Twil usado no trabalho relatado no artigo para identificar os obstaacuteculos Conforme relatam os autores
Este robocirc conta com uma seacuterie de perifeacutericos dentre eles dois sonares de ultra-som utilizados neste trabalho para identificaccedilatildeo de obstaacuteculos Ele possui duas rodas natildeo orientaacuteveis acopladas a motores e outras duas rodas apenas para apoio O computador eacute um PC com processador Pentium MMX utilizando sistema operacional Linux com kernel modificado pelos autores para suportar operaccedilatildeo em tempo-real Para comunicaccedilatildeo ele possui uma placa de rede Ethernet e um modem sem fio Quanto a sua geometria ele possui forma ciliacutendrica com 135m de altura e 030m de raio Outros dispositivos que este robocirc possui incluem duas cacircmeras de viacutedeo joystick e uma buacutessola digital (OTTONI LAGES 2003 p 403)
Um esquema graacutefico eacute exibido para mostrar como todos os elementos do robocirc interagem entre si
A seccedilatildeo posterior eacute denominada ldquoArquitetura do sistemardquo e descreve como eacute a arquitetura do sistema de navegaccedilatildeo proposto Ottoni e Lages (2003) datildeo essas explicaccedilotildees a partir de um esquema graacutefico no qual bolhas representam os moacutedulos implementados em software e retacircngulos representam os dispositivos fiacutesicos do robocirc que interagem com o ambiente
Assim sendo se observarmos o esquema graacutefico vamos ver que os moacutedulos implementados em software satildeo o leitor sonar o detector de obstaacuteculos o gerador de trajetoacuterias o fornecedor de trajetoacuterias e o controlador Nas extremidades do esquema temos o sonar e as rodas (formadas por motores e sensores) que satildeo os dois dispositivos fiacutesicos do robocirc que interagem com o ambiente
Os autores apresentam uma descriccedilatildeo detalhada das funccedilotildees realizadas por cada um desses elementos informando como se daacute a interaccedilatildeo entre eles Nesse sentido eles explicam por exemplo que o fornecedor de trajetoacuterias recebe do gerador de trajetoacuterias as trajetoacuterias a serem rastreadas pelo robocirc gerando as referecircncias e enviando essas referecircncias para o controlador que eacute o elemento que vai garantir ldquoo rastreamento da trajetoacuteria assim como a permanecircncia do robocirc em um ponto fixo ao final da trajetoacuteriardquo (p 404) Jaacute o detector de obstaacuteculos interage com o leitor de sonar recebendo deste leituras relacionadas a regiotildees de profundidade constantes com as quais faz a atualizaccedilatildeo dos obstaacuteculos encontrados no mapa de bits que segundo os autores eacute uma ldquoforma utilizada para representar o ambiente e seus obstaacuteculos eacute bastante simplesrdquo (p 406)
Na seccedilatildeo seguinte os autores discorrem sobre o ldquoProcessamento do sonarrdquo e comeccedilam explicando que esse meacutetodo de profundidade constante eacute usado para realizar a detecccedilatildeo dos obstaacuteculos atraveacutes do sonar Segundo eles a base do meacutetodo eacute o ldquotime-of-flight dos pulsos emitidos pelo sonar Mais especificamente define-se como time-of-flight o tempo entre a transmissatildeo de um pulso e a recepccedilatildeo do seu eco refletido pelo alvordquo (p 404)
Citando Masliah e Albrecht os autores explicam que um dos problemas nessa temaacutetica eacute que ldquoas distacircncias obtidas a partir de leituras dos sonares de ultrasom raramente constituem a reproduccedilatildeo em coordenadas polares do ambiente de prova como seria a princiacutepio esperadordquo (p 404) Segundo eles esse problema ocorre por causa da ldquoocorrecircncia de leituras falsas causadas pelos efeitos de divergecircncia difraccedilatildeo reflexotildees muacuteltiplas e absorccedilatildeordquo
Para ilustrar isso eles incluem no artigo a foto do corredor no qual foi feita a varredura do sonar mostrando esses efeitos Apesar dos problemas apontados os autores citando Lim e Leonard destacam que
[] a maioria das superfiacutecies existentes em ambientes construiacutedos pelo homem apresentam reflexatildeo especular Este tipo de reflexatildeo produz na varredura do sonar regiotildees onde a distacircncia ao obstaacuteculo eacute constante (ou seja profundidade constante) Assim determinaccedilatildeo dos obstaacuteculos atraveacutes da identificaccedilatildeo de regiotildees de profundidade constante (RPCs) permite uma maior robustez frente aos erros causados por estes fenocircmenos (p 404)
Os autores definem as RPCs como ldquo[] um conjunto de leituras do sonar tais que a diferenccedila nas profundidades natildeo seja maior do que um determinado
valor x e tal que a diferenccedila entre o acircngulo inicial 1048576 e o acircngulo final seja maior do que 10ordm rdquo (p 404)
A seccedilatildeo seguinte discorre sobre o ldquoPlanejamento de trajetoacuteriasrdquo com o uso do meacutetodo de decomposiccedilatildeo das ceacutelulas Os autores explicam o meacutetodo da seguinte forma
Este meacutetodo consiste em dividir o espaccedilo livre do robocirc em regiotildees simples (ceacutelulas) de forma que um caminho entre quaisquer duas configuraccedilotildees em uma mesma ceacutelula possa ser facilmente obtido Um grafo natildeo-dirigido representando a relaccedilatildeo de adjacecircncia entre as ceacutelulas eacute construiacutedo e eacute entatildeo efetuada uma busca no mesmo Este grafo eacute denominado grafo de conectividade Os veacutertices que compotildeem este grafo satildeo as ceacutelulas extraiacutedas do espaccedilo livre do robocirc Haacute uma aresta entre dois veacutertices se e somente se as ceacutelulas correspondentes a eles satildeo adjacentes O resultado da busca efetuada eacute uma sequumlecircncia de ceacutelulas denominada canal Um caminho contiacutenuo pode ser computado a partir do canal (p 406)
Tal meacutetodo conforme os autores (p 406) divide-se em
Exatos ldquodecompotildeem o espaccedilo livre em um conjunto de ceacutelulas cuja uniatildeo cobre exatamente o espaccedilo livrerdquo
Aproximados ldquodividem o espaccedilo livre em um conjunto de ceacutelulas de forma predefinida cuja uniatildeo estaacute estritamente contida no espaccedilo livrerdquo Nesse tipo as ceacutelulas satildeo da mesma forma forma essa que eacute bastante simples e definida a priori natildeo sendo possiacutevel modelar o ambiente tal como ele eacute sendo necessaacuterio fazer aproximaccedilotildees Poreacutem os autores salientam que essas aproximaccedilotildees devem ser feitas ldquode uma forma conservadora ou seja de maneira que garanta que o robocirc natildeo colida com os obstaacuteculosrdquo Eacute justamente por isso explicam eles que o espaccedilo modelado deve estar estritamente contido no espaccedilo livre em que realmente o robocirc vai se movimentar Do contraacuterio a colisatildeo aconteceraacute
A partir das descriccedilotildees que apresentam para cada tipo de meacutetodo os autores salientam que o meacutetodo aproximado eacute denominado natildeo completo enquanto o meacutetodo exato por sua vez eacute considerado completo Com essas denominaccedilotildees poderiacuteamos concluir falsamente que o meacutetodo aproximado natildeo tem benefiacutecios em relaccedilatildeo ao meacutetodo exato
Os autores no entanto salientam o contraacuterio Segundo eles ldquoa principal vantagem do meacutetodo aproximado sobre o exato eacute a de fazer a decomposiccedilatildeo do ambiente em ceacutelulas atraveacutes da iteraccedilatildeo da mesma computaccedilatildeo que seraacute simples por causa da forma das ceacutelulasrdquo (p 406) Como as ceacutelulas satildeo mais simples os sistemas de planejamento de trajetoacuterias gerados por esse meacutetodo tambeacutem satildeo mais simples e essa eacute a principal razatildeo que tem levado ao seu uso
Aleacutem disso esse meacutetodo tem outra facilidade ldquopode-se ajustar a precisatildeo conforme desejado mudando para tanto apenas o tamanho das ceacutelulasrdquo (p 406) embora eles salientem que ldquo[] possibilidade de ajuste da precisatildeo
deste meacutetodo estaacute intimamente relacionada agrave quantidade de espaccedilo e de tempo de execuccedilatildeo do planejador de trajetoacuteriasrdquo (p 406) Foi por esses benefiacutecios que os autores escolheram esse meacutetodo para planejar trajetoacuterias no projeto que estatildeo desenvolvendo
Segundo eles explicam o ambiente decomposto em bits incluindo os obstaacuteculos nele existentes eacute representado no mapa de bits segundo eles de forma bem simples Eles salientam que o nuacutemero de dimensotildees representadas no mapa deve ser igual ao da modelagem usada para o problema Como o problema que eles querem resolver eacute bidimensional o mapa de bits tambeacutem teraacute duas dimensotildees
Os autores ressaltam ainda (p 406) que ldquocom este meacutetodo natildeo haacute custo adicional em armazenar o grafo e o custo de testar se duas ceacutelulas satildeo adjacentes eacute muito baixordquo Segundo informam no artigo eles utilizaram a teacutecnica de expansatildeo de obstaacuteculos procedendo do seguinte modo ldquopara cada ponto onde se identifica a presenccedila de um obstaacuteculo eacute marcada no mapa de bits toda uma regiatildeo quadrada de lado igual ao diacircmetro do robocircrdquo que ldquo[] pode ser rotacionado sem que haja movimento de translaccedilatildeo o que permite que seja desconsiderada a sua orientaccedilatildeo no espaccedilo de configuraccedilotildees obtendo assim um problema com duas dimensotildeesrdquo
Com base em Aho et al os autores informam (p 407) que
para efetuar a busca de uma trajetoacuteria no espaccedilo de configuraccedilotildees foi utilizado um algoritmo de busca em largura Esta escolha foi feita com base em diversas caracteriacutesticas como eficiecircncia garantia de encontrar uma soluccedilatildeo sempre que possiacutevel e facilidade de implementaccedilatildeo
Enfim na seccedilatildeo intitulada ldquoPlanejamento de trajetoacuteriasrdquo os autores apresentam informaccedilotildees sobre como se daacute o planejamento das trajetoacuterias no sistema de navegaccedilatildeo que eles estatildeo propondo dando detalhes de como eacute a decomposiccedilatildeo do ambiente em que o robocirc vai se movimentar
Na seccedilatildeo ldquoControlerdquo os autores informam que o controlador usado no sistema que eles estatildeo propondo inspira-se no apresentado por Lages et al (1996) e que ele emprega linearizaccedilatildeo por realimentaccedilatildeo de estados Usando vaacuterias representaccedilotildees matemaacuteticas eles demonstram como seria o funcionamento desse controlador apresentam um sistema de coordenadas e salientam que a teacutecnica de controle linear usada no sistema que estatildeo projetando eacute a denominada ldquomodelo-referecircncia por facilitar o desenvolvimento de versotildees adaptativas desta lei de controlerdquo (p 408)
Por fim a estrutura de controle proposta para o sistema eacute apresentada em um diagrama Segundo os autores tal estrutura
[] eacute composta por duas malhas de controle A malha interna eacute
responsaacutevel por transformar o sistema em um sistema linear atraveacutes da realimentaccedilatildeo linearizante [] O sistema linear resultante com entrada v e saiacuteda y eacute controlado pela malha externa que implementa um controlador linear por modelo-referecircncia [] (p 408)
Na seccedilatildeo 7 denominada ldquoImplementaccedilatildeo em tempo realrdquo os autores explicam que a implementaccedilatildeo do sistema se deu com o uso do sistema operacional Linux e que eles fizeram mudanccedilas no moacutedulo kernel que gerencia o reloacutegio de tempo real do computador implementando dispositivos virtuais chamados temporizadores em tempo real
Eles ressaltam ainda que a modelagem de cada tarefa a ser executada foi feita com threads sincronizados atraveacutes de semaacuteforos Esse modelo eacute tratado por Leroy e os autores salientam que ele foi escolhido em detrimento do modelo Unix porque este causa um grande overhead na transferecircncia de dados Indicam que o funcionamento e a comunica entre os threads eacute descrita por Ottoni
Na seccedilatildeo 8 os autores apresentam os ldquoResultados de simulaccedilatildeordquo simulaccedilatildeo essa que foi feita para validar o sistema de navegaccedilatildeo proposto O simulador desenvolvido conforme mencionam os autores possuem threads de trecircs tipos da leitura do sonar de controle e da simulaccedilatildeo dos obstaacuteculos do ambiente que fornece os obstaacuteculos detectados a partir de cada posiccedilatildeo em que o robocirc se encontrar ldquo[] simula a movimentaccedilatildeo do robocirc e verifica se ocorre alguma colisatildeo do robocirc com os obstaacuteculos do ambienterdquo (p 409)
No artigo os autores apresentam as figuras que exemplificam a simulaccedilatildeo mostrando a trajetoacuteria do robocirc mostrando os vaacuterios obstaacuteculos detectados por ele nos vaacuterios pontos da trajetoacuteria A cada ponto em que o robocirc para o sonar do robocirc faz uma varredura do ambiente e gera uma nova trajetoacuteria com base nos obstaacuteculos que identifica Os autores lembram que esse processo eacute semelhante ao descrito por Foux et al
Conforme descrito na seccedilatildeo 9 intitulada ldquoResultados experimentaisrdquo o programa desenvolvido e testado na simulaccedilatildeo foi entatildeo testado no robocirc Twil Os autores consideram que
Os resultados obtidos foram bastante satisfatoacuterios sendo que o robocirc adquiriu assim capacidade de locomover-se autonomamente por entre obstaacuteculos detectados pelo uso de seus sonares Apenas alguns problemas na detecccedilatildeo dos obstaacuteculos foram identificados como jaacute era esperado dada a natureza do meacutetodo utilizado (uso de sonares) (p 409)
No entanto eles indicaram alguns problemas por exemplo na detecccedilatildeo dos obstaacuteculos identificados em razatildeo da natureza do uso do meacutetodo de sonares utilizado no sistema Aleacutem disso o programa usado fazia com que o robocirc tivesse de interromper seu movimento para identificar os obstaacuteculos por meio dos sonares o que gerou prejuiacutezo para o desempenho do modelo como um
todo
Os autores informam que os testes com o sistema foram feitos em um ambiente com muitos obstaacuteculos para o robocirc o que segundo eles ldquocausa ruiacutedo na detecccedilatildeo dos mesmos atraveacutes do uso de sonaresrdquo (p 409) O ambiente era o laboratoacuterio de eletrocircnica onde havia bancadas e armaacuterios nas paredes compondo um local bastante realiacutestico para o teste na opiniatildeo dos autores porque esses elementos por outro lado tornam o ambiente pouco favoraacutevel para o sonar
Eles apresentam os mapas de bit do ambiente em que foram feitos os testes e destacam que no primeiro teste (feito no Laboratoacuterio de eletrocircnica) ldquonenhum obstaacuteculo do ambiente foi informado a priori ao robocircrdquo (p 410) Um segundo teste foi feito no Laboratoacuterio de Eletroteacutecnica uma sala grande no qual os vaacuterios obstaacuteculos eram as diversas bancadas de concreto para ensaios de motores
Na ldquoConclusatildeordquo os autores destacam que o sistema eacute eficiente mas que dados os problemas observados ele
eacute suficientemente geneacuterico de forma que possa ser utilizado juntamente com outro meacutetodo de detecccedilatildeo de obstaacuteculos como atraveacutes de cacircmeras de viacutedeo ou ainda atraveacutes de meacutetodos hiacutebridos como o proposto por Song e Tang (p 411)
[CRIacuteTICA]
Aqui vocecirc deveraacute elaborar um paraacutegrafo contendo respostas agraves seguintes perguntas
O objetivo do capiacutetulo foi definido adequadamente objetivo Qual eacute o objetivo
O texto eacute claro e objetivo A forma como ele foi estruturado permitiu o cumprimento do objetivo a que o autor se propunha
O estudo do capiacutetulo traz contribuiccedilotildees significativas para seu conhecimento em Pesquisa na Engenharia Por quecirc

Assim sendo se observarmos o esquema graacutefico vamos ver que os moacutedulos implementados em software satildeo o leitor sonar o detector de obstaacuteculos o gerador de trajetoacuterias o fornecedor de trajetoacuterias e o controlador Nas extremidades do esquema temos o sonar e as rodas (formadas por motores e sensores) que satildeo os dois dispositivos fiacutesicos do robocirc que interagem com o ambiente
Os autores apresentam uma descriccedilatildeo detalhada das funccedilotildees realizadas por cada um desses elementos informando como se daacute a interaccedilatildeo entre eles Nesse sentido eles explicam por exemplo que o fornecedor de trajetoacuterias recebe do gerador de trajetoacuterias as trajetoacuterias a serem rastreadas pelo robocirc gerando as referecircncias e enviando essas referecircncias para o controlador que eacute o elemento que vai garantir ldquoo rastreamento da trajetoacuteria assim como a permanecircncia do robocirc em um ponto fixo ao final da trajetoacuteriardquo (p 404) Jaacute o detector de obstaacuteculos interage com o leitor de sonar recebendo deste leituras relacionadas a regiotildees de profundidade constantes com as quais faz a atualizaccedilatildeo dos obstaacuteculos encontrados no mapa de bits que segundo os autores eacute uma ldquoforma utilizada para representar o ambiente e seus obstaacuteculos eacute bastante simplesrdquo (p 406)
Na seccedilatildeo seguinte os autores discorrem sobre o ldquoProcessamento do sonarrdquo e comeccedilam explicando que esse meacutetodo de profundidade constante eacute usado para realizar a detecccedilatildeo dos obstaacuteculos atraveacutes do sonar Segundo eles a base do meacutetodo eacute o ldquotime-of-flight dos pulsos emitidos pelo sonar Mais especificamente define-se como time-of-flight o tempo entre a transmissatildeo de um pulso e a recepccedilatildeo do seu eco refletido pelo alvordquo (p 404)
Citando Masliah e Albrecht os autores explicam que um dos problemas nessa temaacutetica eacute que ldquoas distacircncias obtidas a partir de leituras dos sonares de ultrasom raramente constituem a reproduccedilatildeo em coordenadas polares do ambiente de prova como seria a princiacutepio esperadordquo (p 404) Segundo eles esse problema ocorre por causa da ldquoocorrecircncia de leituras falsas causadas pelos efeitos de divergecircncia difraccedilatildeo reflexotildees muacuteltiplas e absorccedilatildeordquo
Para ilustrar isso eles incluem no artigo a foto do corredor no qual foi feita a varredura do sonar mostrando esses efeitos Apesar dos problemas apontados os autores citando Lim e Leonard destacam que
[] a maioria das superfiacutecies existentes em ambientes construiacutedos pelo homem apresentam reflexatildeo especular Este tipo de reflexatildeo produz na varredura do sonar regiotildees onde a distacircncia ao obstaacuteculo eacute constante (ou seja profundidade constante) Assim determinaccedilatildeo dos obstaacuteculos atraveacutes da identificaccedilatildeo de regiotildees de profundidade constante (RPCs) permite uma maior robustez frente aos erros causados por estes fenocircmenos (p 404)
Os autores definem as RPCs como ldquo[] um conjunto de leituras do sonar tais que a diferenccedila nas profundidades natildeo seja maior do que um determinado
valor x e tal que a diferenccedila entre o acircngulo inicial 1048576 e o acircngulo final seja maior do que 10ordm rdquo (p 404)
A seccedilatildeo seguinte discorre sobre o ldquoPlanejamento de trajetoacuteriasrdquo com o uso do meacutetodo de decomposiccedilatildeo das ceacutelulas Os autores explicam o meacutetodo da seguinte forma
Este meacutetodo consiste em dividir o espaccedilo livre do robocirc em regiotildees simples (ceacutelulas) de forma que um caminho entre quaisquer duas configuraccedilotildees em uma mesma ceacutelula possa ser facilmente obtido Um grafo natildeo-dirigido representando a relaccedilatildeo de adjacecircncia entre as ceacutelulas eacute construiacutedo e eacute entatildeo efetuada uma busca no mesmo Este grafo eacute denominado grafo de conectividade Os veacutertices que compotildeem este grafo satildeo as ceacutelulas extraiacutedas do espaccedilo livre do robocirc Haacute uma aresta entre dois veacutertices se e somente se as ceacutelulas correspondentes a eles satildeo adjacentes O resultado da busca efetuada eacute uma sequumlecircncia de ceacutelulas denominada canal Um caminho contiacutenuo pode ser computado a partir do canal (p 406)
Tal meacutetodo conforme os autores (p 406) divide-se em
Exatos ldquodecompotildeem o espaccedilo livre em um conjunto de ceacutelulas cuja uniatildeo cobre exatamente o espaccedilo livrerdquo
Aproximados ldquodividem o espaccedilo livre em um conjunto de ceacutelulas de forma predefinida cuja uniatildeo estaacute estritamente contida no espaccedilo livrerdquo Nesse tipo as ceacutelulas satildeo da mesma forma forma essa que eacute bastante simples e definida a priori natildeo sendo possiacutevel modelar o ambiente tal como ele eacute sendo necessaacuterio fazer aproximaccedilotildees Poreacutem os autores salientam que essas aproximaccedilotildees devem ser feitas ldquode uma forma conservadora ou seja de maneira que garanta que o robocirc natildeo colida com os obstaacuteculosrdquo Eacute justamente por isso explicam eles que o espaccedilo modelado deve estar estritamente contido no espaccedilo livre em que realmente o robocirc vai se movimentar Do contraacuterio a colisatildeo aconteceraacute
A partir das descriccedilotildees que apresentam para cada tipo de meacutetodo os autores salientam que o meacutetodo aproximado eacute denominado natildeo completo enquanto o meacutetodo exato por sua vez eacute considerado completo Com essas denominaccedilotildees poderiacuteamos concluir falsamente que o meacutetodo aproximado natildeo tem benefiacutecios em relaccedilatildeo ao meacutetodo exato
Os autores no entanto salientam o contraacuterio Segundo eles ldquoa principal vantagem do meacutetodo aproximado sobre o exato eacute a de fazer a decomposiccedilatildeo do ambiente em ceacutelulas atraveacutes da iteraccedilatildeo da mesma computaccedilatildeo que seraacute simples por causa da forma das ceacutelulasrdquo (p 406) Como as ceacutelulas satildeo mais simples os sistemas de planejamento de trajetoacuterias gerados por esse meacutetodo tambeacutem satildeo mais simples e essa eacute a principal razatildeo que tem levado ao seu uso
Aleacutem disso esse meacutetodo tem outra facilidade ldquopode-se ajustar a precisatildeo conforme desejado mudando para tanto apenas o tamanho das ceacutelulasrdquo (p 406) embora eles salientem que ldquo[] possibilidade de ajuste da precisatildeo
deste meacutetodo estaacute intimamente relacionada agrave quantidade de espaccedilo e de tempo de execuccedilatildeo do planejador de trajetoacuteriasrdquo (p 406) Foi por esses benefiacutecios que os autores escolheram esse meacutetodo para planejar trajetoacuterias no projeto que estatildeo desenvolvendo
Segundo eles explicam o ambiente decomposto em bits incluindo os obstaacuteculos nele existentes eacute representado no mapa de bits segundo eles de forma bem simples Eles salientam que o nuacutemero de dimensotildees representadas no mapa deve ser igual ao da modelagem usada para o problema Como o problema que eles querem resolver eacute bidimensional o mapa de bits tambeacutem teraacute duas dimensotildees
Os autores ressaltam ainda (p 406) que ldquocom este meacutetodo natildeo haacute custo adicional em armazenar o grafo e o custo de testar se duas ceacutelulas satildeo adjacentes eacute muito baixordquo Segundo informam no artigo eles utilizaram a teacutecnica de expansatildeo de obstaacuteculos procedendo do seguinte modo ldquopara cada ponto onde se identifica a presenccedila de um obstaacuteculo eacute marcada no mapa de bits toda uma regiatildeo quadrada de lado igual ao diacircmetro do robocircrdquo que ldquo[] pode ser rotacionado sem que haja movimento de translaccedilatildeo o que permite que seja desconsiderada a sua orientaccedilatildeo no espaccedilo de configuraccedilotildees obtendo assim um problema com duas dimensotildeesrdquo
Com base em Aho et al os autores informam (p 407) que
para efetuar a busca de uma trajetoacuteria no espaccedilo de configuraccedilotildees foi utilizado um algoritmo de busca em largura Esta escolha foi feita com base em diversas caracteriacutesticas como eficiecircncia garantia de encontrar uma soluccedilatildeo sempre que possiacutevel e facilidade de implementaccedilatildeo
Enfim na seccedilatildeo intitulada ldquoPlanejamento de trajetoacuteriasrdquo os autores apresentam informaccedilotildees sobre como se daacute o planejamento das trajetoacuterias no sistema de navegaccedilatildeo que eles estatildeo propondo dando detalhes de como eacute a decomposiccedilatildeo do ambiente em que o robocirc vai se movimentar
Na seccedilatildeo ldquoControlerdquo os autores informam que o controlador usado no sistema que eles estatildeo propondo inspira-se no apresentado por Lages et al (1996) e que ele emprega linearizaccedilatildeo por realimentaccedilatildeo de estados Usando vaacuterias representaccedilotildees matemaacuteticas eles demonstram como seria o funcionamento desse controlador apresentam um sistema de coordenadas e salientam que a teacutecnica de controle linear usada no sistema que estatildeo projetando eacute a denominada ldquomodelo-referecircncia por facilitar o desenvolvimento de versotildees adaptativas desta lei de controlerdquo (p 408)
Por fim a estrutura de controle proposta para o sistema eacute apresentada em um diagrama Segundo os autores tal estrutura
[] eacute composta por duas malhas de controle A malha interna eacute
responsaacutevel por transformar o sistema em um sistema linear atraveacutes da realimentaccedilatildeo linearizante [] O sistema linear resultante com entrada v e saiacuteda y eacute controlado pela malha externa que implementa um controlador linear por modelo-referecircncia [] (p 408)
Na seccedilatildeo 7 denominada ldquoImplementaccedilatildeo em tempo realrdquo os autores explicam que a implementaccedilatildeo do sistema se deu com o uso do sistema operacional Linux e que eles fizeram mudanccedilas no moacutedulo kernel que gerencia o reloacutegio de tempo real do computador implementando dispositivos virtuais chamados temporizadores em tempo real
Eles ressaltam ainda que a modelagem de cada tarefa a ser executada foi feita com threads sincronizados atraveacutes de semaacuteforos Esse modelo eacute tratado por Leroy e os autores salientam que ele foi escolhido em detrimento do modelo Unix porque este causa um grande overhead na transferecircncia de dados Indicam que o funcionamento e a comunica entre os threads eacute descrita por Ottoni
Na seccedilatildeo 8 os autores apresentam os ldquoResultados de simulaccedilatildeordquo simulaccedilatildeo essa que foi feita para validar o sistema de navegaccedilatildeo proposto O simulador desenvolvido conforme mencionam os autores possuem threads de trecircs tipos da leitura do sonar de controle e da simulaccedilatildeo dos obstaacuteculos do ambiente que fornece os obstaacuteculos detectados a partir de cada posiccedilatildeo em que o robocirc se encontrar ldquo[] simula a movimentaccedilatildeo do robocirc e verifica se ocorre alguma colisatildeo do robocirc com os obstaacuteculos do ambienterdquo (p 409)
No artigo os autores apresentam as figuras que exemplificam a simulaccedilatildeo mostrando a trajetoacuteria do robocirc mostrando os vaacuterios obstaacuteculos detectados por ele nos vaacuterios pontos da trajetoacuteria A cada ponto em que o robocirc para o sonar do robocirc faz uma varredura do ambiente e gera uma nova trajetoacuteria com base nos obstaacuteculos que identifica Os autores lembram que esse processo eacute semelhante ao descrito por Foux et al
Conforme descrito na seccedilatildeo 9 intitulada ldquoResultados experimentaisrdquo o programa desenvolvido e testado na simulaccedilatildeo foi entatildeo testado no robocirc Twil Os autores consideram que
Os resultados obtidos foram bastante satisfatoacuterios sendo que o robocirc adquiriu assim capacidade de locomover-se autonomamente por entre obstaacuteculos detectados pelo uso de seus sonares Apenas alguns problemas na detecccedilatildeo dos obstaacuteculos foram identificados como jaacute era esperado dada a natureza do meacutetodo utilizado (uso de sonares) (p 409)
No entanto eles indicaram alguns problemas por exemplo na detecccedilatildeo dos obstaacuteculos identificados em razatildeo da natureza do uso do meacutetodo de sonares utilizado no sistema Aleacutem disso o programa usado fazia com que o robocirc tivesse de interromper seu movimento para identificar os obstaacuteculos por meio dos sonares o que gerou prejuiacutezo para o desempenho do modelo como um
todo
Os autores informam que os testes com o sistema foram feitos em um ambiente com muitos obstaacuteculos para o robocirc o que segundo eles ldquocausa ruiacutedo na detecccedilatildeo dos mesmos atraveacutes do uso de sonaresrdquo (p 409) O ambiente era o laboratoacuterio de eletrocircnica onde havia bancadas e armaacuterios nas paredes compondo um local bastante realiacutestico para o teste na opiniatildeo dos autores porque esses elementos por outro lado tornam o ambiente pouco favoraacutevel para o sonar
Eles apresentam os mapas de bit do ambiente em que foram feitos os testes e destacam que no primeiro teste (feito no Laboratoacuterio de eletrocircnica) ldquonenhum obstaacuteculo do ambiente foi informado a priori ao robocircrdquo (p 410) Um segundo teste foi feito no Laboratoacuterio de Eletroteacutecnica uma sala grande no qual os vaacuterios obstaacuteculos eram as diversas bancadas de concreto para ensaios de motores
Na ldquoConclusatildeordquo os autores destacam que o sistema eacute eficiente mas que dados os problemas observados ele
eacute suficientemente geneacuterico de forma que possa ser utilizado juntamente com outro meacutetodo de detecccedilatildeo de obstaacuteculos como atraveacutes de cacircmeras de viacutedeo ou ainda atraveacutes de meacutetodos hiacutebridos como o proposto por Song e Tang (p 411)
[CRIacuteTICA]
Aqui vocecirc deveraacute elaborar um paraacutegrafo contendo respostas agraves seguintes perguntas
O objetivo do capiacutetulo foi definido adequadamente objetivo Qual eacute o objetivo
O texto eacute claro e objetivo A forma como ele foi estruturado permitiu o cumprimento do objetivo a que o autor se propunha
O estudo do capiacutetulo traz contribuiccedilotildees significativas para seu conhecimento em Pesquisa na Engenharia Por quecirc

valor x e tal que a diferenccedila entre o acircngulo inicial 1048576 e o acircngulo final seja maior do que 10ordm rdquo (p 404)
A seccedilatildeo seguinte discorre sobre o ldquoPlanejamento de trajetoacuteriasrdquo com o uso do meacutetodo de decomposiccedilatildeo das ceacutelulas Os autores explicam o meacutetodo da seguinte forma
Este meacutetodo consiste em dividir o espaccedilo livre do robocirc em regiotildees simples (ceacutelulas) de forma que um caminho entre quaisquer duas configuraccedilotildees em uma mesma ceacutelula possa ser facilmente obtido Um grafo natildeo-dirigido representando a relaccedilatildeo de adjacecircncia entre as ceacutelulas eacute construiacutedo e eacute entatildeo efetuada uma busca no mesmo Este grafo eacute denominado grafo de conectividade Os veacutertices que compotildeem este grafo satildeo as ceacutelulas extraiacutedas do espaccedilo livre do robocirc Haacute uma aresta entre dois veacutertices se e somente se as ceacutelulas correspondentes a eles satildeo adjacentes O resultado da busca efetuada eacute uma sequumlecircncia de ceacutelulas denominada canal Um caminho contiacutenuo pode ser computado a partir do canal (p 406)
Tal meacutetodo conforme os autores (p 406) divide-se em
Exatos ldquodecompotildeem o espaccedilo livre em um conjunto de ceacutelulas cuja uniatildeo cobre exatamente o espaccedilo livrerdquo
Aproximados ldquodividem o espaccedilo livre em um conjunto de ceacutelulas de forma predefinida cuja uniatildeo estaacute estritamente contida no espaccedilo livrerdquo Nesse tipo as ceacutelulas satildeo da mesma forma forma essa que eacute bastante simples e definida a priori natildeo sendo possiacutevel modelar o ambiente tal como ele eacute sendo necessaacuterio fazer aproximaccedilotildees Poreacutem os autores salientam que essas aproximaccedilotildees devem ser feitas ldquode uma forma conservadora ou seja de maneira que garanta que o robocirc natildeo colida com os obstaacuteculosrdquo Eacute justamente por isso explicam eles que o espaccedilo modelado deve estar estritamente contido no espaccedilo livre em que realmente o robocirc vai se movimentar Do contraacuterio a colisatildeo aconteceraacute
A partir das descriccedilotildees que apresentam para cada tipo de meacutetodo os autores salientam que o meacutetodo aproximado eacute denominado natildeo completo enquanto o meacutetodo exato por sua vez eacute considerado completo Com essas denominaccedilotildees poderiacuteamos concluir falsamente que o meacutetodo aproximado natildeo tem benefiacutecios em relaccedilatildeo ao meacutetodo exato
Os autores no entanto salientam o contraacuterio Segundo eles ldquoa principal vantagem do meacutetodo aproximado sobre o exato eacute a de fazer a decomposiccedilatildeo do ambiente em ceacutelulas atraveacutes da iteraccedilatildeo da mesma computaccedilatildeo que seraacute simples por causa da forma das ceacutelulasrdquo (p 406) Como as ceacutelulas satildeo mais simples os sistemas de planejamento de trajetoacuterias gerados por esse meacutetodo tambeacutem satildeo mais simples e essa eacute a principal razatildeo que tem levado ao seu uso
Aleacutem disso esse meacutetodo tem outra facilidade ldquopode-se ajustar a precisatildeo conforme desejado mudando para tanto apenas o tamanho das ceacutelulasrdquo (p 406) embora eles salientem que ldquo[] possibilidade de ajuste da precisatildeo
deste meacutetodo estaacute intimamente relacionada agrave quantidade de espaccedilo e de tempo de execuccedilatildeo do planejador de trajetoacuteriasrdquo (p 406) Foi por esses benefiacutecios que os autores escolheram esse meacutetodo para planejar trajetoacuterias no projeto que estatildeo desenvolvendo
Segundo eles explicam o ambiente decomposto em bits incluindo os obstaacuteculos nele existentes eacute representado no mapa de bits segundo eles de forma bem simples Eles salientam que o nuacutemero de dimensotildees representadas no mapa deve ser igual ao da modelagem usada para o problema Como o problema que eles querem resolver eacute bidimensional o mapa de bits tambeacutem teraacute duas dimensotildees
Os autores ressaltam ainda (p 406) que ldquocom este meacutetodo natildeo haacute custo adicional em armazenar o grafo e o custo de testar se duas ceacutelulas satildeo adjacentes eacute muito baixordquo Segundo informam no artigo eles utilizaram a teacutecnica de expansatildeo de obstaacuteculos procedendo do seguinte modo ldquopara cada ponto onde se identifica a presenccedila de um obstaacuteculo eacute marcada no mapa de bits toda uma regiatildeo quadrada de lado igual ao diacircmetro do robocircrdquo que ldquo[] pode ser rotacionado sem que haja movimento de translaccedilatildeo o que permite que seja desconsiderada a sua orientaccedilatildeo no espaccedilo de configuraccedilotildees obtendo assim um problema com duas dimensotildeesrdquo
Com base em Aho et al os autores informam (p 407) que
para efetuar a busca de uma trajetoacuteria no espaccedilo de configuraccedilotildees foi utilizado um algoritmo de busca em largura Esta escolha foi feita com base em diversas caracteriacutesticas como eficiecircncia garantia de encontrar uma soluccedilatildeo sempre que possiacutevel e facilidade de implementaccedilatildeo
Enfim na seccedilatildeo intitulada ldquoPlanejamento de trajetoacuteriasrdquo os autores apresentam informaccedilotildees sobre como se daacute o planejamento das trajetoacuterias no sistema de navegaccedilatildeo que eles estatildeo propondo dando detalhes de como eacute a decomposiccedilatildeo do ambiente em que o robocirc vai se movimentar
Na seccedilatildeo ldquoControlerdquo os autores informam que o controlador usado no sistema que eles estatildeo propondo inspira-se no apresentado por Lages et al (1996) e que ele emprega linearizaccedilatildeo por realimentaccedilatildeo de estados Usando vaacuterias representaccedilotildees matemaacuteticas eles demonstram como seria o funcionamento desse controlador apresentam um sistema de coordenadas e salientam que a teacutecnica de controle linear usada no sistema que estatildeo projetando eacute a denominada ldquomodelo-referecircncia por facilitar o desenvolvimento de versotildees adaptativas desta lei de controlerdquo (p 408)
Por fim a estrutura de controle proposta para o sistema eacute apresentada em um diagrama Segundo os autores tal estrutura
[] eacute composta por duas malhas de controle A malha interna eacute
responsaacutevel por transformar o sistema em um sistema linear atraveacutes da realimentaccedilatildeo linearizante [] O sistema linear resultante com entrada v e saiacuteda y eacute controlado pela malha externa que implementa um controlador linear por modelo-referecircncia [] (p 408)
Na seccedilatildeo 7 denominada ldquoImplementaccedilatildeo em tempo realrdquo os autores explicam que a implementaccedilatildeo do sistema se deu com o uso do sistema operacional Linux e que eles fizeram mudanccedilas no moacutedulo kernel que gerencia o reloacutegio de tempo real do computador implementando dispositivos virtuais chamados temporizadores em tempo real
Eles ressaltam ainda que a modelagem de cada tarefa a ser executada foi feita com threads sincronizados atraveacutes de semaacuteforos Esse modelo eacute tratado por Leroy e os autores salientam que ele foi escolhido em detrimento do modelo Unix porque este causa um grande overhead na transferecircncia de dados Indicam que o funcionamento e a comunica entre os threads eacute descrita por Ottoni
Na seccedilatildeo 8 os autores apresentam os ldquoResultados de simulaccedilatildeordquo simulaccedilatildeo essa que foi feita para validar o sistema de navegaccedilatildeo proposto O simulador desenvolvido conforme mencionam os autores possuem threads de trecircs tipos da leitura do sonar de controle e da simulaccedilatildeo dos obstaacuteculos do ambiente que fornece os obstaacuteculos detectados a partir de cada posiccedilatildeo em que o robocirc se encontrar ldquo[] simula a movimentaccedilatildeo do robocirc e verifica se ocorre alguma colisatildeo do robocirc com os obstaacuteculos do ambienterdquo (p 409)
No artigo os autores apresentam as figuras que exemplificam a simulaccedilatildeo mostrando a trajetoacuteria do robocirc mostrando os vaacuterios obstaacuteculos detectados por ele nos vaacuterios pontos da trajetoacuteria A cada ponto em que o robocirc para o sonar do robocirc faz uma varredura do ambiente e gera uma nova trajetoacuteria com base nos obstaacuteculos que identifica Os autores lembram que esse processo eacute semelhante ao descrito por Foux et al
Conforme descrito na seccedilatildeo 9 intitulada ldquoResultados experimentaisrdquo o programa desenvolvido e testado na simulaccedilatildeo foi entatildeo testado no robocirc Twil Os autores consideram que
Os resultados obtidos foram bastante satisfatoacuterios sendo que o robocirc adquiriu assim capacidade de locomover-se autonomamente por entre obstaacuteculos detectados pelo uso de seus sonares Apenas alguns problemas na detecccedilatildeo dos obstaacuteculos foram identificados como jaacute era esperado dada a natureza do meacutetodo utilizado (uso de sonares) (p 409)
No entanto eles indicaram alguns problemas por exemplo na detecccedilatildeo dos obstaacuteculos identificados em razatildeo da natureza do uso do meacutetodo de sonares utilizado no sistema Aleacutem disso o programa usado fazia com que o robocirc tivesse de interromper seu movimento para identificar os obstaacuteculos por meio dos sonares o que gerou prejuiacutezo para o desempenho do modelo como um
todo
Os autores informam que os testes com o sistema foram feitos em um ambiente com muitos obstaacuteculos para o robocirc o que segundo eles ldquocausa ruiacutedo na detecccedilatildeo dos mesmos atraveacutes do uso de sonaresrdquo (p 409) O ambiente era o laboratoacuterio de eletrocircnica onde havia bancadas e armaacuterios nas paredes compondo um local bastante realiacutestico para o teste na opiniatildeo dos autores porque esses elementos por outro lado tornam o ambiente pouco favoraacutevel para o sonar
Eles apresentam os mapas de bit do ambiente em que foram feitos os testes e destacam que no primeiro teste (feito no Laboratoacuterio de eletrocircnica) ldquonenhum obstaacuteculo do ambiente foi informado a priori ao robocircrdquo (p 410) Um segundo teste foi feito no Laboratoacuterio de Eletroteacutecnica uma sala grande no qual os vaacuterios obstaacuteculos eram as diversas bancadas de concreto para ensaios de motores
Na ldquoConclusatildeordquo os autores destacam que o sistema eacute eficiente mas que dados os problemas observados ele
eacute suficientemente geneacuterico de forma que possa ser utilizado juntamente com outro meacutetodo de detecccedilatildeo de obstaacuteculos como atraveacutes de cacircmeras de viacutedeo ou ainda atraveacutes de meacutetodos hiacutebridos como o proposto por Song e Tang (p 411)
[CRIacuteTICA]
Aqui vocecirc deveraacute elaborar um paraacutegrafo contendo respostas agraves seguintes perguntas
O objetivo do capiacutetulo foi definido adequadamente objetivo Qual eacute o objetivo
O texto eacute claro e objetivo A forma como ele foi estruturado permitiu o cumprimento do objetivo a que o autor se propunha
O estudo do capiacutetulo traz contribuiccedilotildees significativas para seu conhecimento em Pesquisa na Engenharia Por quecirc

deste meacutetodo estaacute intimamente relacionada agrave quantidade de espaccedilo e de tempo de execuccedilatildeo do planejador de trajetoacuteriasrdquo (p 406) Foi por esses benefiacutecios que os autores escolheram esse meacutetodo para planejar trajetoacuterias no projeto que estatildeo desenvolvendo
Segundo eles explicam o ambiente decomposto em bits incluindo os obstaacuteculos nele existentes eacute representado no mapa de bits segundo eles de forma bem simples Eles salientam que o nuacutemero de dimensotildees representadas no mapa deve ser igual ao da modelagem usada para o problema Como o problema que eles querem resolver eacute bidimensional o mapa de bits tambeacutem teraacute duas dimensotildees
Os autores ressaltam ainda (p 406) que ldquocom este meacutetodo natildeo haacute custo adicional em armazenar o grafo e o custo de testar se duas ceacutelulas satildeo adjacentes eacute muito baixordquo Segundo informam no artigo eles utilizaram a teacutecnica de expansatildeo de obstaacuteculos procedendo do seguinte modo ldquopara cada ponto onde se identifica a presenccedila de um obstaacuteculo eacute marcada no mapa de bits toda uma regiatildeo quadrada de lado igual ao diacircmetro do robocircrdquo que ldquo[] pode ser rotacionado sem que haja movimento de translaccedilatildeo o que permite que seja desconsiderada a sua orientaccedilatildeo no espaccedilo de configuraccedilotildees obtendo assim um problema com duas dimensotildeesrdquo
Com base em Aho et al os autores informam (p 407) que
para efetuar a busca de uma trajetoacuteria no espaccedilo de configuraccedilotildees foi utilizado um algoritmo de busca em largura Esta escolha foi feita com base em diversas caracteriacutesticas como eficiecircncia garantia de encontrar uma soluccedilatildeo sempre que possiacutevel e facilidade de implementaccedilatildeo
Enfim na seccedilatildeo intitulada ldquoPlanejamento de trajetoacuteriasrdquo os autores apresentam informaccedilotildees sobre como se daacute o planejamento das trajetoacuterias no sistema de navegaccedilatildeo que eles estatildeo propondo dando detalhes de como eacute a decomposiccedilatildeo do ambiente em que o robocirc vai se movimentar
Na seccedilatildeo ldquoControlerdquo os autores informam que o controlador usado no sistema que eles estatildeo propondo inspira-se no apresentado por Lages et al (1996) e que ele emprega linearizaccedilatildeo por realimentaccedilatildeo de estados Usando vaacuterias representaccedilotildees matemaacuteticas eles demonstram como seria o funcionamento desse controlador apresentam um sistema de coordenadas e salientam que a teacutecnica de controle linear usada no sistema que estatildeo projetando eacute a denominada ldquomodelo-referecircncia por facilitar o desenvolvimento de versotildees adaptativas desta lei de controlerdquo (p 408)
Por fim a estrutura de controle proposta para o sistema eacute apresentada em um diagrama Segundo os autores tal estrutura
[] eacute composta por duas malhas de controle A malha interna eacute
responsaacutevel por transformar o sistema em um sistema linear atraveacutes da realimentaccedilatildeo linearizante [] O sistema linear resultante com entrada v e saiacuteda y eacute controlado pela malha externa que implementa um controlador linear por modelo-referecircncia [] (p 408)
Na seccedilatildeo 7 denominada ldquoImplementaccedilatildeo em tempo realrdquo os autores explicam que a implementaccedilatildeo do sistema se deu com o uso do sistema operacional Linux e que eles fizeram mudanccedilas no moacutedulo kernel que gerencia o reloacutegio de tempo real do computador implementando dispositivos virtuais chamados temporizadores em tempo real
Eles ressaltam ainda que a modelagem de cada tarefa a ser executada foi feita com threads sincronizados atraveacutes de semaacuteforos Esse modelo eacute tratado por Leroy e os autores salientam que ele foi escolhido em detrimento do modelo Unix porque este causa um grande overhead na transferecircncia de dados Indicam que o funcionamento e a comunica entre os threads eacute descrita por Ottoni
Na seccedilatildeo 8 os autores apresentam os ldquoResultados de simulaccedilatildeordquo simulaccedilatildeo essa que foi feita para validar o sistema de navegaccedilatildeo proposto O simulador desenvolvido conforme mencionam os autores possuem threads de trecircs tipos da leitura do sonar de controle e da simulaccedilatildeo dos obstaacuteculos do ambiente que fornece os obstaacuteculos detectados a partir de cada posiccedilatildeo em que o robocirc se encontrar ldquo[] simula a movimentaccedilatildeo do robocirc e verifica se ocorre alguma colisatildeo do robocirc com os obstaacuteculos do ambienterdquo (p 409)
No artigo os autores apresentam as figuras que exemplificam a simulaccedilatildeo mostrando a trajetoacuteria do robocirc mostrando os vaacuterios obstaacuteculos detectados por ele nos vaacuterios pontos da trajetoacuteria A cada ponto em que o robocirc para o sonar do robocirc faz uma varredura do ambiente e gera uma nova trajetoacuteria com base nos obstaacuteculos que identifica Os autores lembram que esse processo eacute semelhante ao descrito por Foux et al
Conforme descrito na seccedilatildeo 9 intitulada ldquoResultados experimentaisrdquo o programa desenvolvido e testado na simulaccedilatildeo foi entatildeo testado no robocirc Twil Os autores consideram que
Os resultados obtidos foram bastante satisfatoacuterios sendo que o robocirc adquiriu assim capacidade de locomover-se autonomamente por entre obstaacuteculos detectados pelo uso de seus sonares Apenas alguns problemas na detecccedilatildeo dos obstaacuteculos foram identificados como jaacute era esperado dada a natureza do meacutetodo utilizado (uso de sonares) (p 409)
No entanto eles indicaram alguns problemas por exemplo na detecccedilatildeo dos obstaacuteculos identificados em razatildeo da natureza do uso do meacutetodo de sonares utilizado no sistema Aleacutem disso o programa usado fazia com que o robocirc tivesse de interromper seu movimento para identificar os obstaacuteculos por meio dos sonares o que gerou prejuiacutezo para o desempenho do modelo como um
todo
Os autores informam que os testes com o sistema foram feitos em um ambiente com muitos obstaacuteculos para o robocirc o que segundo eles ldquocausa ruiacutedo na detecccedilatildeo dos mesmos atraveacutes do uso de sonaresrdquo (p 409) O ambiente era o laboratoacuterio de eletrocircnica onde havia bancadas e armaacuterios nas paredes compondo um local bastante realiacutestico para o teste na opiniatildeo dos autores porque esses elementos por outro lado tornam o ambiente pouco favoraacutevel para o sonar
Eles apresentam os mapas de bit do ambiente em que foram feitos os testes e destacam que no primeiro teste (feito no Laboratoacuterio de eletrocircnica) ldquonenhum obstaacuteculo do ambiente foi informado a priori ao robocircrdquo (p 410) Um segundo teste foi feito no Laboratoacuterio de Eletroteacutecnica uma sala grande no qual os vaacuterios obstaacuteculos eram as diversas bancadas de concreto para ensaios de motores
Na ldquoConclusatildeordquo os autores destacam que o sistema eacute eficiente mas que dados os problemas observados ele
eacute suficientemente geneacuterico de forma que possa ser utilizado juntamente com outro meacutetodo de detecccedilatildeo de obstaacuteculos como atraveacutes de cacircmeras de viacutedeo ou ainda atraveacutes de meacutetodos hiacutebridos como o proposto por Song e Tang (p 411)
[CRIacuteTICA]
Aqui vocecirc deveraacute elaborar um paraacutegrafo contendo respostas agraves seguintes perguntas
O objetivo do capiacutetulo foi definido adequadamente objetivo Qual eacute o objetivo
O texto eacute claro e objetivo A forma como ele foi estruturado permitiu o cumprimento do objetivo a que o autor se propunha
O estudo do capiacutetulo traz contribuiccedilotildees significativas para seu conhecimento em Pesquisa na Engenharia Por quecirc

responsaacutevel por transformar o sistema em um sistema linear atraveacutes da realimentaccedilatildeo linearizante [] O sistema linear resultante com entrada v e saiacuteda y eacute controlado pela malha externa que implementa um controlador linear por modelo-referecircncia [] (p 408)
Na seccedilatildeo 7 denominada ldquoImplementaccedilatildeo em tempo realrdquo os autores explicam que a implementaccedilatildeo do sistema se deu com o uso do sistema operacional Linux e que eles fizeram mudanccedilas no moacutedulo kernel que gerencia o reloacutegio de tempo real do computador implementando dispositivos virtuais chamados temporizadores em tempo real
Eles ressaltam ainda que a modelagem de cada tarefa a ser executada foi feita com threads sincronizados atraveacutes de semaacuteforos Esse modelo eacute tratado por Leroy e os autores salientam que ele foi escolhido em detrimento do modelo Unix porque este causa um grande overhead na transferecircncia de dados Indicam que o funcionamento e a comunica entre os threads eacute descrita por Ottoni
Na seccedilatildeo 8 os autores apresentam os ldquoResultados de simulaccedilatildeordquo simulaccedilatildeo essa que foi feita para validar o sistema de navegaccedilatildeo proposto O simulador desenvolvido conforme mencionam os autores possuem threads de trecircs tipos da leitura do sonar de controle e da simulaccedilatildeo dos obstaacuteculos do ambiente que fornece os obstaacuteculos detectados a partir de cada posiccedilatildeo em que o robocirc se encontrar ldquo[] simula a movimentaccedilatildeo do robocirc e verifica se ocorre alguma colisatildeo do robocirc com os obstaacuteculos do ambienterdquo (p 409)
No artigo os autores apresentam as figuras que exemplificam a simulaccedilatildeo mostrando a trajetoacuteria do robocirc mostrando os vaacuterios obstaacuteculos detectados por ele nos vaacuterios pontos da trajetoacuteria A cada ponto em que o robocirc para o sonar do robocirc faz uma varredura do ambiente e gera uma nova trajetoacuteria com base nos obstaacuteculos que identifica Os autores lembram que esse processo eacute semelhante ao descrito por Foux et al
Conforme descrito na seccedilatildeo 9 intitulada ldquoResultados experimentaisrdquo o programa desenvolvido e testado na simulaccedilatildeo foi entatildeo testado no robocirc Twil Os autores consideram que
Os resultados obtidos foram bastante satisfatoacuterios sendo que o robocirc adquiriu assim capacidade de locomover-se autonomamente por entre obstaacuteculos detectados pelo uso de seus sonares Apenas alguns problemas na detecccedilatildeo dos obstaacuteculos foram identificados como jaacute era esperado dada a natureza do meacutetodo utilizado (uso de sonares) (p 409)
No entanto eles indicaram alguns problemas por exemplo na detecccedilatildeo dos obstaacuteculos identificados em razatildeo da natureza do uso do meacutetodo de sonares utilizado no sistema Aleacutem disso o programa usado fazia com que o robocirc tivesse de interromper seu movimento para identificar os obstaacuteculos por meio dos sonares o que gerou prejuiacutezo para o desempenho do modelo como um
todo
Os autores informam que os testes com o sistema foram feitos em um ambiente com muitos obstaacuteculos para o robocirc o que segundo eles ldquocausa ruiacutedo na detecccedilatildeo dos mesmos atraveacutes do uso de sonaresrdquo (p 409) O ambiente era o laboratoacuterio de eletrocircnica onde havia bancadas e armaacuterios nas paredes compondo um local bastante realiacutestico para o teste na opiniatildeo dos autores porque esses elementos por outro lado tornam o ambiente pouco favoraacutevel para o sonar
Eles apresentam os mapas de bit do ambiente em que foram feitos os testes e destacam que no primeiro teste (feito no Laboratoacuterio de eletrocircnica) ldquonenhum obstaacuteculo do ambiente foi informado a priori ao robocircrdquo (p 410) Um segundo teste foi feito no Laboratoacuterio de Eletroteacutecnica uma sala grande no qual os vaacuterios obstaacuteculos eram as diversas bancadas de concreto para ensaios de motores
Na ldquoConclusatildeordquo os autores destacam que o sistema eacute eficiente mas que dados os problemas observados ele
eacute suficientemente geneacuterico de forma que possa ser utilizado juntamente com outro meacutetodo de detecccedilatildeo de obstaacuteculos como atraveacutes de cacircmeras de viacutedeo ou ainda atraveacutes de meacutetodos hiacutebridos como o proposto por Song e Tang (p 411)
[CRIacuteTICA]
Aqui vocecirc deveraacute elaborar um paraacutegrafo contendo respostas agraves seguintes perguntas
O objetivo do capiacutetulo foi definido adequadamente objetivo Qual eacute o objetivo
O texto eacute claro e objetivo A forma como ele foi estruturado permitiu o cumprimento do objetivo a que o autor se propunha
O estudo do capiacutetulo traz contribuiccedilotildees significativas para seu conhecimento em Pesquisa na Engenharia Por quecirc

todo
Os autores informam que os testes com o sistema foram feitos em um ambiente com muitos obstaacuteculos para o robocirc o que segundo eles ldquocausa ruiacutedo na detecccedilatildeo dos mesmos atraveacutes do uso de sonaresrdquo (p 409) O ambiente era o laboratoacuterio de eletrocircnica onde havia bancadas e armaacuterios nas paredes compondo um local bastante realiacutestico para o teste na opiniatildeo dos autores porque esses elementos por outro lado tornam o ambiente pouco favoraacutevel para o sonar
Eles apresentam os mapas de bit do ambiente em que foram feitos os testes e destacam que no primeiro teste (feito no Laboratoacuterio de eletrocircnica) ldquonenhum obstaacuteculo do ambiente foi informado a priori ao robocircrdquo (p 410) Um segundo teste foi feito no Laboratoacuterio de Eletroteacutecnica uma sala grande no qual os vaacuterios obstaacuteculos eram as diversas bancadas de concreto para ensaios de motores
Na ldquoConclusatildeordquo os autores destacam que o sistema eacute eficiente mas que dados os problemas observados ele
eacute suficientemente geneacuterico de forma que possa ser utilizado juntamente com outro meacutetodo de detecccedilatildeo de obstaacuteculos como atraveacutes de cacircmeras de viacutedeo ou ainda atraveacutes de meacutetodos hiacutebridos como o proposto por Song e Tang (p 411)
[CRIacuteTICA]
Aqui vocecirc deveraacute elaborar um paraacutegrafo contendo respostas agraves seguintes perguntas
O objetivo do capiacutetulo foi definido adequadamente objetivo Qual eacute o objetivo
O texto eacute claro e objetivo A forma como ele foi estruturado permitiu o cumprimento do objetivo a que o autor se propunha
O estudo do capiacutetulo traz contribuiccedilotildees significativas para seu conhecimento em Pesquisa na Engenharia Por quecirc